Prototipagem rápida de conteúdos e sua formalização para a Internet
Upload
ricardo-andrade-ranalCategory
view
227download
5description
CURSO DE ENGENHARIA ELÉTRICA
PROTOTIPAGEM RÁPIDA DE FUNÇÕES PARA
MÓDULO DE CONTROLE ELETRÔNICO (ECM)
RICARDO ANDRADE RANAL
ROBSON ALVES NASCIMENTO
DOUGLAS FERNANDES DA CUNHA
ANTÔNIO CATEGERÓ DE PAULA
SÃO PAULO
2008

ii
PROTOTIPAGEM RÁPIDA DE
FUNÇÕES PARA MÓDULO DE
CONTROLE ELETRÔNICO (ECM) RICARDO ANDRADE RANAL ROBSON ALVES NASCIMENTO DOUGLAS FERNANDES DA CUNHA ANTÔNIO CATEGERÓ DE PAULA
Trabalho de conclusão do Curso,
apresentado para obtenção do grau de
ENGENHEIRO no Curso de Engenharia Elétrica do Centro Universitário UniRadial. Orientador Prof. Sidney Fernandes da Luz. SÃO PAULO 2008

iii

iv
Dedicamos este trabalho às nossas
famílias. Aos nossos pais, esposas e filhos pelo apoio, amor e incentivo. Eles são as razões do
nosso empenho e dedicação na busca de nosso
desenvolvimento.
v
AGRADECIMENTOS
Agradecemos a Deus, pelas nossas vidas. Ao nosso orientador, Prof. Sidney Fernandes da Luz, pela ajuda nos momentos
necessários. Ao supervisor do Centro Tecnológico da MWM International, José Luiz
Calmazini, pelo incentivo e viabilização do projeto através da liberação do uso de
materiais e equipamentos. Aos amigos da MWM International, Agnaldo Roberto Okura, Wagner de
Camargo Orlof, Eduardo Torrigo, Anderson Almeida Carlos, João Rodrigues
Medeiros Neto, Eduardo Angelo Martins, pelo apoio e colaboração nas diversas
etapas da realização do projeto.

vi
RESUMO
Com a crescente demanda por novas funções de controle nos sistemas de injeção eletrônica de combustível, são requeridas freqüentes alterações no software
base desses sistemas, que tem longos prazos e elevados custos de desenvolvimento até que a função esteja validada e aprovada. Isso se deve ao fato de que o
desenvolvimento de hardware e software, na maioria das empresas fornecedoras de sistemas de injeção, é realizado nos centros de desenvolvimento espalhados pelo
mundo. Levando em conta tal premissa, e sabendo que o desenvolvimento de software possui, pelo menos, as seguintes etapas:
Descrição dos requisitos Modelagem Simulação Prototipagem Testes funcionais Codificação Implementação em módulos Testes de homologação Liberação final
O objetivo desse trabalho é abordar o tema de maneira a apresentar uma
proposta de baixo custo para simulação e prototipagem de funções de software para
sistemas de injeção eletrônica de combustível, baseado em um controlador
programável externo com tecnologia FPGA (Field Programable Gate Array) para implementação dos protótipos das funções. E somente após o modelo da função ter
alcançado um nível de maturidade satisfatório seria então encaminhado para sua
finalização nos centros de desenvolvimento, diminuindo os custos totais de projeto já
que a parte inicial do desenvolvimento seria realizada no local de origem da demanda.
Palavras-chave: prototipagem, modelagem, simulação, funções, controle.

vii
ABSTRACT
With the growing demand for new control functions for electronic fuel
injection systems, it is needed often changes in the software base of that systems, that expends long time for developing and high costs until the function be validated and approved. The reason for this is the fact of the software and hardware developing in the most of the suppliers of fuel injection systems are made in the developing centers spread in the world. Taking in count of this premise, and know how are the software developing basic phases:
Requirements description Modeling Simulation Prototyping Functional tests Coding Modules implementation Homologation tests Final release
The objective of this paper is to present a low cost proposal for a simulating
and prototyping of control software functions for electronic fuel injection systems, based in a programmable external controller with FPGA (Field Programmable Gate Array ) technology to implementing of prototype functions modeled, and only after the model reaches a good maturity level, it would be send to supplier to do the final development, then reducing the cost once the initial development would be made at the place where has generated demand for the software function.
Keywords: prototyping, modeling, simulation, functions, control.

viii
SUMÁRIO
1. INTRODUÇÃO ................................................................................................1 2. FUNDAMENTOS TEÓRICOS.........................................................................2
2.1. ECM � Módulo de Controle Eletrônico .....................................................2 2.1.1. Introdução .........................................................................................2 2.1.2. Controles de motor sofisticados .........................................................2 2.1.3. Componentes da ECM .......................................................................4 2.1.4. Diagnósticos avançados .....................................................................5 2.1.5. Padrão de comunicação como um facilitador .....................................5 2.1.6. Sensores inteligentes..........................................................................6 2.1.7. Multiplexação....................................................................................7 2.1.8. Segurança, conforto e conveniência ...................................................8
2.2. EGR - Recirculação de Gases de Escapamento ..........................................8 2.2.1. Função e funcionamento da válvula EGR...........................................9
2.3. MAF - Sensor de Massa de Ar.................................................................11 2.4. Emissões Veiculares ................................................................................12 2.5. CAN - Controller Area Network..............................................................13
2.5.1. Introdução .......................................................................................13 2.5.2. Histórico..........................................................................................14 2.5.3. Conceituação Básica ........................................................................14 2.5.4. Formatos das Mensagens .................................................................16 2.5.5. Padrões Existentes ...........................................................................17 2.5.6. Detecção de Falhas ..........................................................................18
2.5.6.1. Nível de Bit..............................................................................18 2.5.6.2. Nível de Mensagem .................................................................18 2.5.6.3. Nível Físico .............................................................................19
2.5.7. Aspectos de Implementação.............................................................20 2.5.7.1. Dicionário de Dados.................................................................20 2.5.7.2. Exemplo de Rede .....................................................................20 2.5.7.3. Montagem da Rede ..................................................................21
2.6. Linguagem de Programação do Software de Controle (LabVIEW) ..........22 2.6.1. Sobre o NI LabVIEW ......................................................................22
3. PROJETO DA ARQUITETURA DO SISTEMA ............................................23 4. BENEFÍCIOS DA APLICAÇÃO....................................................................25 5. ESTUDO DE CASO .......................................................................................25 6. DEFINIÇÃO DA ARQUITETURA DO SISTEMA ........................................29 7. CONCLUSÕES ..............................................................................................34 8. REFERÊNCIAS BIBLIOGRÁFICAS .............................................................34
ix
LISTA DE FIGURAS
Figura 2.1 � Circuito interno de uma ECM................................................................3 Figura 2.2 � Os pinos deste conector interagem com sensores e dispositivos de controle por todo o veículo........................................................................................3 Figura 2.3 � A porta de diagnóstico de uma ECM. ....................................................5 Figura 2.4 � Gráfico simplificado de emissões de modelos movidos a diesel.............9 Figura 2.5 � Detalhe de um sensor MAF. ...............................................................12 Figura 2.6 � Relação entre o comprimento da rede (barramento) e a taxa de
transmissão dos dados. ............................................................................................15 Figura 2.7 � Níveis de tensão em uma rede CAN. ...................................................16 Figura 2.8 � Quadro de mensagem CAN 2.0A. .......................................................16 Figura 2.9 � Quadro de mensagem CAN 2.0B.........................................................17 Figura 2.10 � CAN de um sistema automotivo. .......................................................21 Figura 2.11 � Medidas para desenvolvimento do chicote.........................................22 Figura 3.1 � Exemplo de um controlador PID implementado no ambiente de desenvolvimento. ....................................................................................................23 Figura 3.2 � Detalhe construtivo do controlador externo. ........................................24 Figura 3.3 � Algoritmo de controle implementado no controlador externo. .............25 Figura 5.1 � Diagrama de blocos dos requisitos da função protótipo........................26 Figura 5.2 � Esquema da recirculação dos gases de escapamento (EGR). ................26 Figura 5.3 � Proposta utilizada como referência no desenvolvimento da função
protótipo. Atuação da válvula EGR (verde) em função do evento transiente de
pressão de admissão (vermelho)..............................................................................27 Figura 5.4 � Máquina de Estados da função protótipo. ............................................27 Figura 5.5 � Diagrama de ligação controlador EGR. ...............................................28 Figura 6.1 � Arquitetura do Sistema de Simulação e suas interfaces. .......................29 Figura 6.2 � Tela do software do Host (PC). ...........................................................30 Figura 6.3 � Código fonte do software do Host (PC). ..............................................30 Figura 6.4 � Código fonte do software Real-Time (cRIO). ......................................31 Figura 6.5 � Sistema de prototipagem montado sobre acrílico para demonstrações..31 Figura 6.6 � Sinais de controle da válvula EGR via ECM (amarelo) e via cRIO
(verde). ...................................................................................................................32 Figura 6.7 � Medição do atraso de processamento entre a ECM e o controlador
externo através da defasagem dos sinais de controle da válvula EGR. .....................33
x
LISTA DE SIGLAS
ABS � Anti-lock Braking System ACK � Acknowledgment CAN � Control Area Network CAN_H � CAN High CAN_L � CAN Low CO � Monóxido de Carbono CRC � Cyclic Redundancy Check CSMA/CD � Carrier Sense Multiple Access / Collision Detection DIN � Deutsches Institut für Normung (Instituto Alemão para Normatização) DLC � Data Length Code ECM � Electronic Control Module EGR � Exhaust Gas Recirculation EOF � End Of Frame FPGA � Field Programmable Gate Array GPIB � General Purpose Interface Bus HC � Hidrocarbonetos I/O � Inputs / Outputs IDE � Identifier Extension ISO � International Organization for Standartization Kbps � Kilobits por segundo MAF � Mass Air Flow Mbps � Megabits por segundo MP � Material Particulado NDA � Non Destructive Arbitration NMEA � National Marine Electronics Association NOx � Óxidos de Nitrogênio NRZ � Non Return to Zero OSI � Open Systems Interconection PC � Personal Computer PCI � Peripheral Component Interconnect PID � Controle Proporcional, Integral e Derivativo PRODESP � Companhia de Processamento de Dados do Estado de São Paulo PWM � Pulse Width Modulation PXI � PCI Extensions for Instrumentation RTR � Remote Transmission Request SAE � Society of Automotive Engineers SOx � Óxidos de Enxofre SRR � Substitute Remote Request TEDS � Transducer Electronic Datasheet USB � Universal Serial Bus VXI � VME (Versa Module Europa) Extensions for Instrumentation
1
1. INTRODUÇÃO
Os fornecedores de sistemas de injeção eletrônica de combustível possuem toda
estrutura necessária para desenvolver as funções de software e circuitos específicos
de hardware, porém esses recursos estão espalhados ao redor do mundo, o que
dificulta o acesso aos mesmos. Quando um cliente solicita algum desenvolvimento em software ou hardware os custos são elevados e o prazo geralmente é muito longo,
o que muitas vezes inviabiliza o desenvolvimento do projeto na sua melhor forma. Esse é o paradigma da engenharia versus custos e prazos. O que acaba sendo
implementado, na prática, é um software com as funcionalidades reduzidas ou são
utilizados blocos prontos (black boxes) já desenvolvidos previamente para outras aplicações, onde nem sempre todas as funções serão utilizadas.
Cada vez mais o desenvolvimento de funções de software é considerado uma
questão estratégica pelas montadoras e fabricantes de motores de combustão, pois
aqueles que tiverem a capacidade de desenvolver e testar protótipos de funções
específicos para sua necessidade terão uma vantagem competitiva no mercado. Se
fosse possível realizar as etapas iniciais do desenvolvimento das funções (Descrição
dos Requisitos, Modelagem, Simulação, Prototipagem e Testes Funcionais) na
própria montadora ou no fabricante de motores, possivelmente, haveria uma redução
significativa nos custos totais juntamente com a propriedade intelectual da função
específica ou do algoritmo. Como seria possível realizar tal desenvolvimento em uma montadora ou fabricante de motores?
A descrição de requisitos e a modelagem de funções de software realizadas
utilizando as técnicas da engenharia de software através de abordagens de modelos
estruturados ou orientados a objetos são essenciais. Porém, sendo considerados pré-requisitos, não fazem parte desse estudo.
A simulação, a prototipagem de funções e os testes funcionais dependem de
softwares aplicativos e hardware para implantação. Para realizar essas etapas existem basicamente duas opções no mercado:
1ª) Utilizar o mesmo software e hardware do fornecedor de sistemas de injeção
para desenvolver a simulação e os protótipos de funções. É uma alternativa
excelente do ponto de vista técnico, pois possui integração total com a plataforma de hardware e software originais. Suas desvantagens são o elevado custo (US$ 100 mil em 2007) e a dificuldade de treinamento de pessoal (aplicativos altamente complexos). 2ª) Utilizar um controlador externo e uma plataforma de software aberta para realizar as simulações e testes com as funções protótipos. As maiores vantagens
são o baixo custo (US$ 3 mil em 2007) e a facilidade de implementação de
modelos em plataforma aberta. A desvantagem é a necessidade de utilizar um
controlador externo, não sendo possível implementar as funções no módulo
controlador do motor.
2
Esse trabalho irá abordar a segunda alternativa: utilizar um controlador externo e
uma plataforma de software aberta. Com essa configuração é possível construir um
sistema de baixo custo e fácil implementação, viabilizando assim, sua aplicação.
2. FUNDAMENTOS TEÓRICOS
2.1. ECM � Módulo de Controle Eletrônico
2.1.1. Introdução
A cada ano que passa, os veículos ficam mais complexos. Os carros de hoje podem ter aproximadamente 50 microprocessadores. [1]
Alguns dos principais motivos do aumento do número de
microprocessadores são:
A necessidade de sofisticados controles do motor para atender padrões
de emissões e consumo de combustível; Diagnósticos avançados; Simplificação da manufatura e do projeto dos carros; Redução da quantidade de fios nos carros; Novas características de segurança; Novas características de conforto e conveniência.
2.1.2. Controles de motor sofisticados
Antes das leis de emissões entrarem em vigor, era possível construir um
motor de carro sem microprocessadores. Com a lei cada vez mais rígida
quanto às emissões de poluentes, esquemas de controles sofisticados foram
necessários para regular a mistura ar-combustível de maneira que o
catalisador possa remover grande parte da poluição do escapamento.

3
Figura 2.1 � Circuito interno de uma ECM.
Controlar o motor é o trabalho mais intenso do computador em seu carro e
o módulo de controle eletrônico (ECM) é o computador mais potente na
maioria dos carros. A ECM usa controle de retroalimentação do circuito,
método que monitora as saídas e entradas de um sistema para ter um controle
efetivo desse sistema, gerenciando as emissões e o consumo de combustível
do motor (assim como um hospedeiro de outros parâmetros). Juntando os
dados dos vários diferentes sensores, a ECM sabe de tudo, desde a temperatura da água do radiador até a quantidade de oxigênio no
escapamento. Com isso, executa milhões de cálculos a cada segundo,
incluindo a observação de valores em tabelas e cálculos dos resultados de equações longas para decidir qual é o melhor avanço de ignição e determinar
por quanto tempo o injetor de combustível deve ficar aberto. A ECM faz tudo isso para assegurar uma emissão mais baixa e obter um melhor consumo.
Figura 2.2 � Os pinos deste conector interagem com sensores e dispositivos
de controle por todo o veículo.

4
Uma ECM moderna pode ter um processador de 40 MHz e 32 bits. Isto
pode não parecer rápido comparado com o processador de 500 a 1000 MHz
que você provavelmente tem em seu PC, mas lembre-se que o processador do seu carro usa um código muito mais eficiente do que o do seu computador. O
tamanho médio do código em uma ECM usa menos de 1 megabyte (MB) de memória. Comparado a isso, você provavelmente tem pelo menos 2 gigabytes
(GB) de programas em seu computador - isso equivale a 2 mil vezes a quantidade em uma ECM. 2.1.3. Componentes da ECM
O processador é instalado em um módulo com centenas de outros
componentes em uma placa de circuitos multicamadas. Alguns dos outros componentes que auxiliam o processador em uma ECM são:
Conversores analógico-digitais - estes dispositivos lêem alguns
sensores do carro, como o de oxigênio. A saída de um sensor de
oxigênio é uma voltagem analógica, normalmente entre 0 e 1,1 volts
(V). O processador só entende números digitais, assim o conversor
analógico-digital muda esta voltagem para um número digital de 10
bits. Saída digital de alto nível - em muitos carros modernos, a ECM ativa
as velas de ignição, abre e fecha o injetor de combustível e liga e
desliga o ventilador. Todas essas tarefas exigem saídas digitais. Uma
saída digital fica ligada ou desligada - não há meio termo. Por
exemplo, uma saída para controlar o ventilador de resfriamento pode
fornecer 12 V e 0,5 ampères para o relé do ventilador quando está
ligado, e 0 V quando está desligado. A saída digital é como um relé. A
pequena quantidade de energia que o processador libera energiza o transistor na saída digital, permitindo que seja fornecida uma
quantidade bem maior de energia para o relé do ventilador de resfriamento, que por sua vez fornece uma quantidade ainda maior de energia para o ventilador.
Conversores digital-analógicos - algumas vezes, a ECM tem que
fornecer uma saída de voltagem analógica para acionar alguns
componentes do motor. Como o processador na ECM é um
dispositivo digital, ele precisa de um componente que possa converter um número digital em uma voltagem analógica.
Condicionadores de sinal - algumas vezes, as entradas ou saídas
precisam ser ajustadas antes de serem lidas. Por exemplo, o conversor analógico-digital que lê a voltagem do sensor de oxigênio pode ser
ajustado para ler um sinal de 0 a 5 V, mas o sensor de oxigênio libera
um sinal de 0 a 1,1 V. Um condicionador de sinal é um circuito que
5
ajusta o nível dos sinais que entram e saem. Por exemplo, se usássemos um condicionador de sinal que multiplicasse por 4 a
voltagem vinda de um sensor de oxigênio, teríamos um sinal de 0 a
4,4 V, o que maximizaria sua resolução de leitura, aumentando a
sensibilidade do sistema.
Chips de comunicação - estes chips implementam os vários padrões
de comunicação que são usados em carros. Há vários padrões em uso,
mas o que mais usado nas comunicações em carros é chamado CAN
(rede de controle de área). Este padrão permite comunicação com velocidade de até 1 megabit por segundo (1 Mbps). É muito mais
rápido do que os antigos. Essa velocidade está se tornando necessária
porque alguns módulos enviam dados para o barramento centenas de
vezes por segundo. O barramento CAN envia dados usando dois fios.[1]
2.1.4. Diagnósticos avançados
Outro benefício em possuir um bus de comunicação é que cada módulo
pode comunicar falhas a um módulo central, que armazena as falhas e pode
relatá-las a uma ferramenta de diagnóstico externa. [1]
Figura 2.3 � A porta de diagnóstico de uma ECM.
Isto pode facilitar o trabalho dos técnicos em diagnosticar problemas com o carro, especialmente problemas intermitentes, que são notórios por
desaparecerem assim que você leva o carro para ser consertado.
2.1.5. Padrão de comunicação como um facilitador
Ter padrões de comunicação tornou mais fácil o projeto e a construção de
carros. Um bom exemplo dessa simplificação é o painel de instrumentos.
O painel de instrumentos agrupa e mostra dados das várias partes do
veículo. A maior parte desses dados já é usada por outros módulos no carro.
Por exemplo, a ECM sabe a temperatura do radiador e a rotação do motor. O
controle de transmissão sabe a velocidade do veículo. O controlador para o
6
sistema antitravamento dos freios (ABS - Anti-lock Braking System) sabe se há algum problema com o sistema de frenagem.
Todos estes módulos simplesmente enviam dados para o barramento de
comunicação. Várias vezes por segundo, a ECM enviará um pacote de dados
que consiste em um cabeçalho e os dados. O cabeçalho é simplesmente um
número que identifica o pacote, como uma leitura de velocidade ou de
temperatura, e os dados trazem um número correspondente àquela velocidade
ou temperatura. O painel de instrumentos contém outro módulo que sabe
procurar por certos pacotes - sempre que encontra um e atualiza o mostrador ou indicador apropriado com o novo valor.
A maioria dos fabricantes compra o painel de instrumentos montado de
um fornecedor, que os projeta de acordo com as especificações do fabricante
do carro. Isso facilita o projeto de um painel de instrumentos, tanto para o fabricante quanto para o fornecedor.
É mais simples para o fabricante dizer para o fornecedor como cada
mostrador será usado, ao invés de ter que explicar que um fio específico irá
fornecer o sinal de velocidade, e que a voltagem vai variar entre 0 e 5 V sendo que 1,1 V corresponde a 48 km/h. O fabricante pode simplesmente fornecer uma lista de pacotes de dados e se responsabilizar por verificar se os dados corretos são enviados para o barramento de comunicação.
É também mais simples para o fornecedor projetar o painel de
instrumentos. Ele não precisa saber nenhum detalhe de como um sinal de
velocidade é gerado ou de onde ele está vindo. Ao contrário, o painel de
instrumentos simplesmente monitora o barramento de comunicação e atualiza
os mostradores quando recebe novos dados. Esses padrões de comunicação simplificam para os fabricantes a
terceirização na fabricação dos componentes: o fabricante não precisa se
preocupar com detalhes de como cada mostrador ou luz é alimentado e o
fornecedor, que faz o painel de instrumentos, não precisa se preocupar com o
local de onde vêm os sinais. 2.1.6. Sensores inteligentes
Atualmente, os quadros de instrumentos estão sendo usados em menor
escala para sensores. Um sensor de pressão tradicional, por exemplo, contém
um dispositivo que gera uma voltagem variável dependendo da pressão
aplicada ao dispositivo. Normalmente, a geração de voltagem não é linear.
Ela depende da temperatura e é uma voltagem de baixo nível que necessita amplificação. [1]
Alguns fabricantes estão fazendo um sensor inteligente que é integrado
junto a um microprocessador que permite que ele leia a voltagem, calibre-o
7
usando curvas de compensação de temperatura e envie digitalmente a pressão para o barramento de comunicação. [1]
Isso poupa o fabricante de ter que saber todos os detalhes do sensor e
economiza energia de processamento no módulo, o qual, em caso contrário,
teria que fazer esses cálculos. Isso faz com que o fornecedor, que de qualquer maneira sabe mais sobre os detalhes, seja responsável por fornecer uma
leitura precisa. Outra vantagem do sensor inteligente é que o sinal digital viajando pelo
bus de comunicação fica menos suscetível a interferências elétricas. Uma
voltagem analógica viajando por um fio pode adquirir ruídos na passagem por perto de certos componentes elétricos, ou até mesmo de fios de alta tensão.
Barramentos de comunicação e microprocessadores também ajudam a
simplificar a fiação através de multiplexação. 2.1.7. Multiplexação
A multiplexação é uma técnica que pode simplificar a fiação em um carro.
Em carros mais antigos, os fios de cada interruptor são ligados ao dispositivo
por eles acionado. A cada ano que passa, e com um número cada vez maior
de dispositivos sob comando do motorista, a multiplexação se faz necessária
para evitar que a fiação saia do controle. Em um sistema multiplexado, um
módulo contendo pelo menos um processador centraliza entradas e saídas
destinadas a uma área do carro. Carros que possuem diversos controles em uma porta, por exemplo, podem ter um módulo de controle da porta. Alguns
carros possuem controles de vidros elétricos, espelhos elétricos, trava elétrica
e até mesmo bancos elétricos na porta. Seria impraticável instalar um grosso
maço de fios para um sistema como este a partir de uma porta. Em vez disso, o módulo da porta do motorista monitora todos os comandos.
Se o motorista aperta o botão para abrir a janela, um módulo da porta
fecha um relê que fornece energia para o motor da janela. Se o motorista aperta o botão para ajustar o espelho retrovisor do passageiro, o módulo da
porta do motorista envia um pacote de dados para o barramento de comunicação do carro. Este pacote informa para um outro módulo energizar
um dos motores do espelho elétrico. Dessa maneira, a maioria dos sinais que
são transmitidos a partir da porta do motorista são consolidados nos dois fios
que formam o barramento de comunicação. O desenvolvimento de novos sistemas de segurança também aumentou o
número de microprocessadores nos carros.
8
2.1.8. Segurança, conforto e conveniência
No decorrer da década passada, vimos sistemas de segurança como ABS e
air bags se tornarem comuns em carros. Outras características de segurança
como controle de tração e sistemas de controle de estabilidade estão
começando a ficar comuns também. Cada um desses sistemas acrescenta um
novo módulo ao carro e este módulo contém múltiplos microprocessadores.
No futuro, haverá mais desses módulos por todas as partes do carro,
conforme novos sistemas de segurança forem sendo adicionados. Cada um desses sistemas de segurança necessita de capacidade de
processamento, normalmente inserido em seu próprio módulo eletrônico. Nos
próximos anos, aparecerão diversos tipos de novas características de
conveniência em veículos e cada uma delas necessitará de mais módulos que
contenham microprocessadores múltiplos. Não há limites para a quantidade de tecnologia que as fábricas irão usar
nos veículos. O acréscimo de todas essas características eletrônicas é um dos
fatores que leva as fábricas a aumentarem o sistema de voltagem nos carros
do sistema atual de 14 V para um sistema de 42 V. Isso ajudará a fornecer a
energia extra que estes módulos precisam. [1]
2.2. EGR - Recirculação de Gases de Escapamento Responsável pelo controle do fluxo dos gases produzidos pela combustão da
mistura dentro dos cilindros do motor, a válvula EGR (Exhaust Gas
Recirculation) ajuda a controlar e reduzir a emissão de poluentes. [2] Os motores veiculares mais modernos incorporam dispositivos destinados a
diminuir os poluentes lançados na atmosfera, sendo este um dos principais
motivos da utilização do gerenciamento eletrônico nos veículos atuais, nacionais
e importados. Basicamente, os três mais importantes poluentes produzidos por um motor de
combustão interna são, em ordem de importância, o Monóxido de Carbono (CO),
os Hidrocarbonetos (HC), e os Óxidos de Nitrogênio (NOx). [2] Falando especificamente sobre os Óxidos de Nitrogênio, eles são formados
quando a temperatura da câmara de combustão atinge níveis mais elevados, seja
pelo empobrecimento gradual da mistura, devido ao aquececimento do motor, seja por condições de trabalho mais críticas. Neste caso, devem ser controlados para se manterem dentro dos limites de emissões definidos por lei.
9
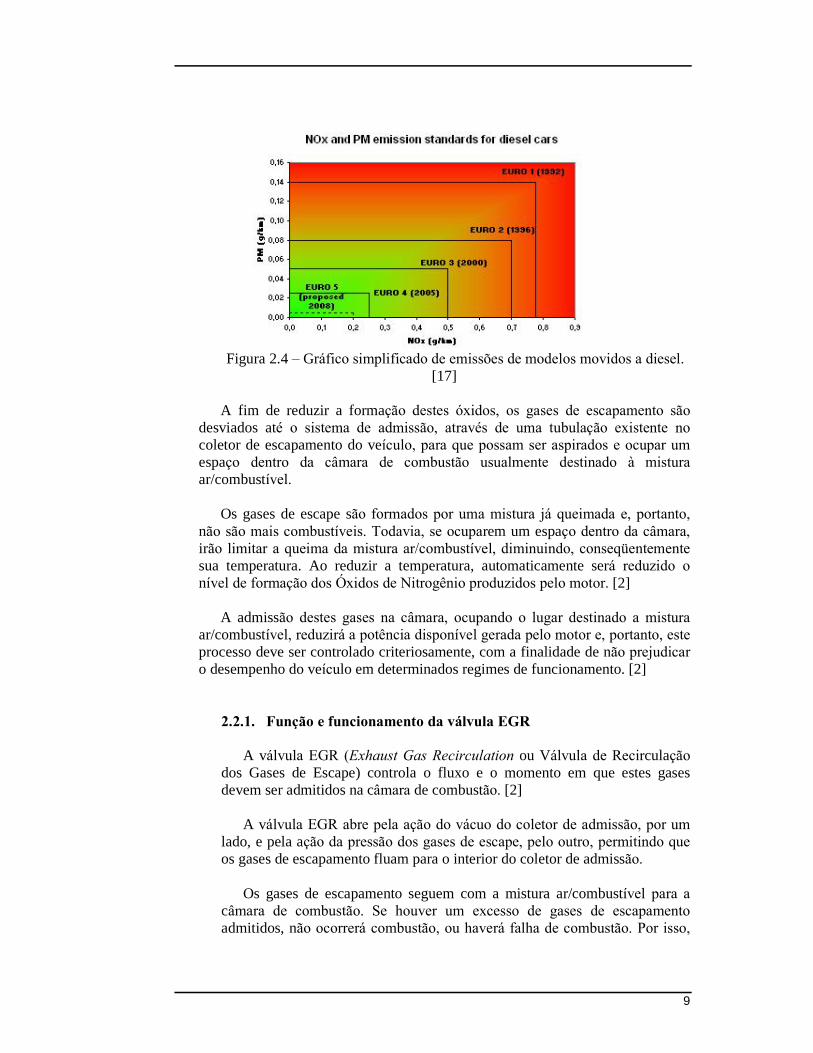
Figura 2.4 � Gráfico simplificado de emissões de modelos movidos a diesel.
[17] A fim de reduzir a formação destes óxidos, os gases de escapamento são
desviados até o sistema de admissão, através de uma tubulação existente no
coletor de escapamento do veículo, para que possam ser aspirados e ocupar um
espaço dentro da câmara de combustão usualmente destinado à mistura
ar/combustível. Os gases de escape são formados por uma mistura já queimada e, portanto,
não são mais combustíveis. Todavia, se ocuparem um espaço dentro da câmara,
irão limitar a queima da mistura ar/combustível, diminuindo, conseqüentemente
sua temperatura. Ao reduzir a temperatura, automaticamente será reduzido o
nível de formação dos Óxidos de Nitrogênio produzidos pelo motor. [2] A admissão destes gases na câmara, ocupando o lugar destinado a mistura
ar/combustível, reduzirá a potência disponível gerada pelo motor e, portanto, este
processo deve ser controlado criteriosamente, com a finalidade de não prejudicar
o desempenho do veículo em determinados regimes de funcionamento. [2] 2.2.1. Função e funcionamento da válvula EGR
A válvula EGR (Exhaust Gas Recirculation ou Válvula de Recirculação
dos Gases de Escape) controla o fluxo e o momento em que estes gases devem ser admitidos na câmara de combustão. [2]
A válvula EGR abre pela ação do vácuo do coletor de admissão, por um
lado, e pela ação da pressão dos gases de escape, pelo outro, permitindo que
os gases de escapamento fluam para o interior do coletor de admissão. Os gases de escapamento seguem com a mistura ar/combustível para a
câmara de combustão. Se houver um excesso de gases de escapamento
admitidos, não ocorrerá combustão, ou haverá falha de combustão. Por isso,

10
apenas uma quantidade controlada de gás passa pela válvula, que deverá estar
totalmente fechada na marcha lenta. [2] No regime de marcha lenta não deverá haver admissão de gases de escape
no coletor de admissão, pois não há geração de NOx nestas condições, sem
mencionar o fato de que na marcha lenta, pela baixa quantidade de combustões nos cilindros, haverá irregularidade em seu funcionamento,
oscilações e até mesmo apagamento do motor em casos extremos. [2] Nos sistemas mais avançados de gerenciamento eletrônico, as funções
desta válvula são controladas pelo Módulo de Controle Eletrônico (ECM), que se utiliza de atuadores para determinar o momento e o tempo em que ela deve operar, sendo sua real atuação monitorada por um potenciômetro
presente na própria válvula. Este, por sinal, será parte do tema abordado na
segunda parte desta matéria. A válvula EGR abre atendendo a uma das seguintes condições: Motor Aquecido; Rotação do motor superior à da marcha lenta; Condições diversas de aceleração e desaceleração do veículo. A quantidade dos gases de escape admitidos na câmara e o tempo que a
válvula permanece aberta dependerão das variações no vácuo e na pressão
dos gases de escapamento, de acordo com o regime de funcionamento do motor.
Identificação da Válvula EGR - Existe uma seqüência padrão nos códigos
de identificação da válvula EGR, com informações importantes para o
aplicador: As válvulas EGR de pressão positiva terão um �P� gravado na lateral
superior de sua carcaça, seguindo o número da peça; As válvulas EGR de pressão negativa terão um �N� estampado na
lateral superior da válvula em seguida à sua numeração; As válvulas EGR de passagem, ou seja, que trabalham tanto com
pressão negativa quanto com pressão positiva, não possuem nenhuma
identificação de seu regime de trabalho após seu número de peça. A substituição da EGR deverá ser feita observando-se estas indicações de
aplicação, uma vez que fisicamente todas elas são parecidas ou mesmo
idênticas. Não existe um teste eficiente para checar a eficiência das válvulas
EGR, uma vez que só se poderá comprovar se seu diafragma está perfeito
através da aplicação de vácuo. Porém, seu correto funcionamento depende
também da atuação da pressão positiva dos gases de escapamento, o que nem
sempre se pode confirmar. [2]
11
Quando forem observadas falhas no funcionamento do motor em altas rotações, marcha lenta irregular ou mesmo apagamento do motor após
desacelerações, bem como altos níveis de emissão de CO, o culpado pode ser a válvula EGR e deverá ser substituída por outra de mesma especificação.
Porém, mesmo motores idênticos, mas aplicados em veículos diferentes,
podem utilizar EGRs diferentes, embora fisicamente idênticas. [2] O técnico deverá estar atento quanto à aplicação específica do tipo de
componente correto, pois falhas de funcionamento ocorrerão se a EGR
inadequada for aplicada. Vale à pena lembrar também que, como as EGRs
trabalham utilizando o vácuo do coletor, um exame criterioso das tubulações
deverá ser feito, prevenindo, dessa forma, vazamentos e oscilações da marcha
lenta.
2.3. MAF - Sensor de Massa de Ar
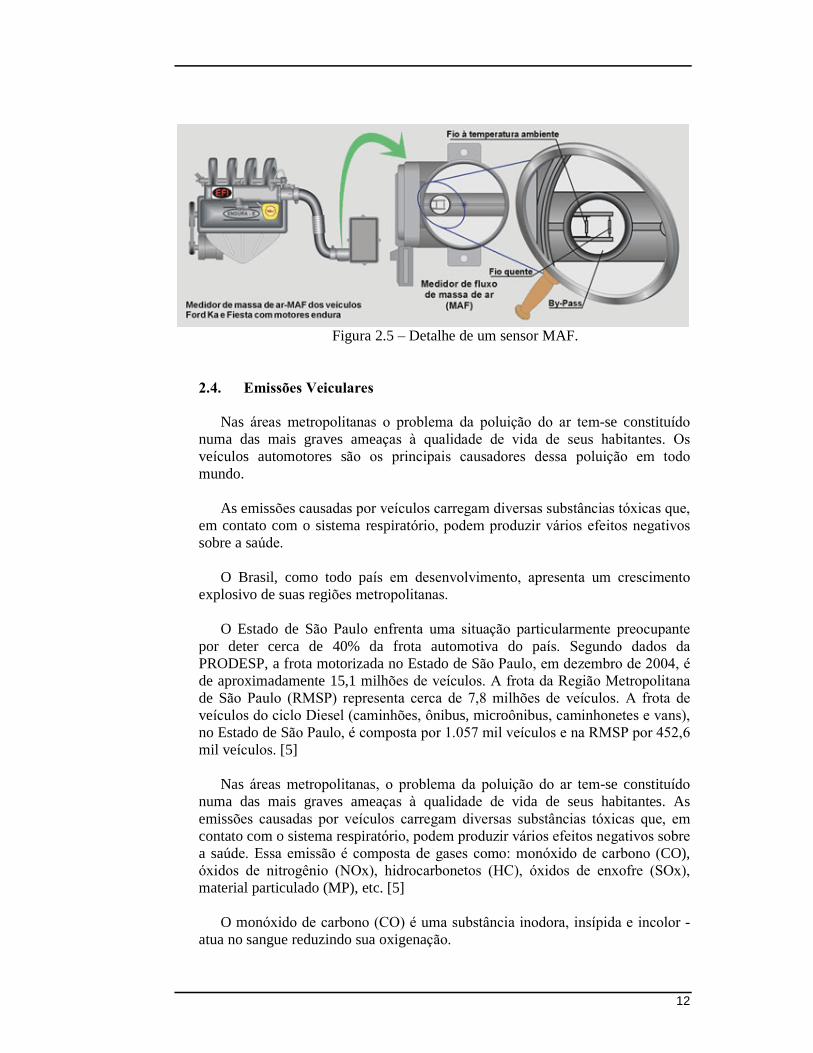
O sensor de massa de ar ou sensor mássico (MAF- Mass Air Flow) mede
diretamente a massa do ar admitida pelo motor. Está localizado na entrada da
tubulação de admissão junto ao suporte do filtro de ar. Pode ser analógico ou
digital (o digital ainda não está sendo empregado nos veículos nacionais). O sensor digital é alimentado pela ECM com uma tensão de referência de
aproximadamente 5 V e �devolve� um sinal de onda quadrada, cuja freqüência
varia com a massa de ar admitida pelo motor. [4] O sensor analógico consiste em um tubo cujo interior possui um desvio (by-
pass) onde existem 2 elementos sensores (fios ou filmes); um aquecido (sensor de massa) e um a temperatura ambiente. O fio aquecido é mantido a uma
temperatura de aproximadamente 200ºC maior que a do fio a temperatura ambiente. [4]
O fluxo de ar admitido pelo motor provoca o resfriamento do fio quente
(sensor), provocando uma variação de sua resistência elétrica e um aumento da
tensão medida pela ECM no fio de sinal do sensor. Quanto maior for o fluxo de ar, maior será a tensão enviada para a ECM. Portanto, a massa de ar admitida pelo motor é estimada em função do calor perdido pelo fio quente sensor.
Quando não há fluxo de ar, a tensão enviada pelo sensor é de aproximadamente
0V e em marcha lenta deve estar entre 0,6 e 1,3 V (com o motor aquecido). O medidor de massa de ar é de grande confiabilidade, eficiência e precisão,
porque além de medir diretamente a massa do ar admitido, não possui
mecanismos (palhetas, cames etc.) que obstruem o fluxo do ar, diminuindo a capacidade de admissão do motor.
12
Figura 2.5 � Detalhe de um sensor MAF.
2.4. Emissões Veiculares
Nas áreas metropolitanas o problema da poluição do ar tem-se constituído
numa das mais graves ameaças à qualidade de vida de seus habitantes. Os
veículos automotores são os principais causadores dessa poluição em todo
mundo. As emissões causadas por veículos carregam diversas substâncias tóxicas que,
em contato com o sistema respiratório, podem produzir vários efeitos negativos
sobre a saúde. O Brasil, como todo país em desenvolvimento, apresenta um crescimento
explosivo de suas regiões metropolitanas. O Estado de São Paulo enfrenta uma situação particularmente preocupante
por deter cerca de 40% da frota automotiva do país. Segundo dados da
PRODESP, a frota motorizada no Estado de São Paulo, em dezembro de 2004, é
de aproximadamente 15,1 milhões de veículos. A frota da Região Metropolitana
de São Paulo (RMSP) representa cerca de 7,8 milhões de veículos. A frota de
veículos do ciclo Diesel (caminhões, ônibus, microônibus, caminhonetes e vans),
no Estado de São Paulo, é composta por 1.057 mil veículos e na RMSP por 452,6
mil veículos. [5] Nas áreas metropolitanas, o problema da poluição do ar tem-se constituído
numa das mais graves ameaças à qualidade de vida de seus habitantes. As emissões causadas por veículos carregam diversas substâncias tóxicas que, em
contato com o sistema respiratório, podem produzir vários efeitos negativos sobre
a saúde. Essa emissão é composta de gases como: monóxido de carbono (CO), óxidos de nitrogênio (NOx), hidrocarbonetos (HC), óxidos de enxofre (SOx),
material particulado (MP), etc. [5] O monóxido de carbono (CO) é uma substância inodora, insípida e incolor -
atua no sangue reduzindo sua oxigenação.
13
Os óxidos de nitrogênio (NOx) são uma combinação de nitrogênio e oxigênio
que se formam em razão da alta temperatura na câmara de combustão dos motores - participa na formação de dióxido de nitrogênio e na formação do smog
fotoquímico (smog: smoke + fog = fumaça + neblina). Os hidrocarbonetos (HC) são combustíveis não queimados ou parcialmente
queimados que é expelido pelo motor - alguns tipos de hidrocarbonetos reagem na atmosfera promovendo a formação do smog fotoquímico.
A fuligem (partículas sólidas e líquidas), sob a denominação geral de material
particulado (MP), devido ao seu pequeno tamanho, mantém-se suspensa na atmosfera e pode penetrar nas defesas do organismo, atingir os alvéolos
pulmonares e ocasionar: Mal estar; Irritação dos olhos, garganta, pele etc.; Dor de cabeça, enjôo; Bronquite; Asma; Câncer de pulmão. Outro fator a ser considerado é que essas emissões causam grande incômodo
aos pedestres próximos às vias de tráfego. No caso da fuligem (fumaça preta), a coloração intensa e o profundo mau cheiro desta emissão causam de imediato uma atitude de repulsa e pode ainda ocasionar diminuição da segurança e
aumento de acidentes de trânsito pela redução da visibilidade. [5]
2.5. CAN - Controller Area Network
2.5.1. Introdução
A primeira parte deste artigo procurou explicar os dois principais
conceitos de Arquitetura Eletro-Eletrônica existentes � o Centralizado e o Distribuído. Além de destacadas as vantagens e desvantagens de ambos os
conceitos, foram mencionados dois exemplos de aplicação, um fundamentado
no sistema Centralizado e outro no Distribuído. Percebeu-se que, para a viabilização do sistema, especialmente no
conceito Distribuído, é extremamente necessária a utilização de um Protocolo
de Comunicação. Neste sentido, o CAN Bus mostra-se o mais adequado se considerada a aplicação em questão: Eletrônica Embarcada em veículos
automotivos.

14
2.5.2. Histórico
O CAN Bus (ou Barramento Controller Area Network) foi desenvolvido
pela empresa alemã Robert BOSCH e disponibilizado em meados dos anos
80. Sua aplicação inicial foi realizada em ônibus e caminhões. Atualmente, é
utilizado na indústria, em veículos automotivos, navios e tratores, entre
outros. 2.5.3. Conceituação Básica
O CAN é um protocolo de comunicação serial síncrono. O sincronismo
entre os módulos conectados a rede é feito em relação ao início de cada
mensagem lançada ao barramento (evento que ocorre em intervalos de tempo
conhecidos e regulares). Trabalha baseado no conceito multi-mestre, onde todos os módulos
podem se tornar mestre em determinado momento e escravo em outro, além
de suas mensagens serem enviadas em regime multicast, caracterizado pelo envio de toda e qualquer mensagem para todos os módulos existentes na rede.
Outro ponto forte deste protocolo é o fato de ser fundamentado no
conceito CSMA/CD with NDA (Carrier Sense Multiple Access / Collision
Detection with Non-Destructive Arbitration). Isto significa que todos os módulos verificam o estado do barramento, analisando se outro módulo está
ou não enviando mensagens com maior prioridade. Caso isto seja percebido, o módulo cuja mensagem tiver menor prioridade cessará sua transmissão e o
de maior prioridade continuará enviando sua mensagem deste ponto, sem ter
que reiniciá-la. Outro conceito bastante interessante é o NRZ (Non Return to Zero), onde
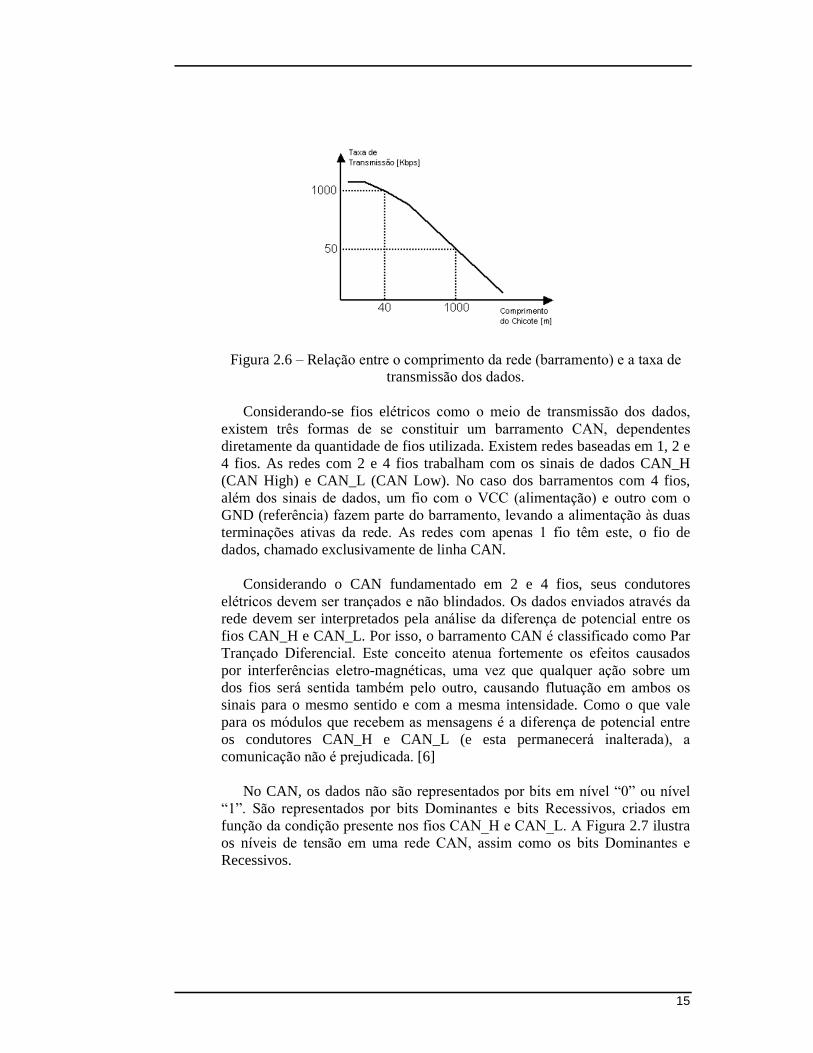
cada bit (0 ou 1) é transmitido por um valor de tensão específico e constante. A velocidade de transmissão dos dados é inversamente proporcional ao
comprimento do barramento. A maior taxa de transmissão especificada é de
1Mbps considerando-se um barramento de 40 metros. A Figura 2.6 representa a relação entre o comprimento da rede (barramento) e a taxa de transmissão
dos dados.
15
Figura 2.6 � Relação entre o comprimento da rede (barramento) e a taxa de
transmissão dos dados.
Considerando-se fios elétricos como o meio de transmissão dos dados,
existem três formas de se constituir um barramento CAN, dependentes
diretamente da quantidade de fios utilizada. Existem redes baseadas em 1, 2 e 4 fios. As redes com 2 e 4 fios trabalham com os sinais de dados CAN_H (CAN High) e CAN_L (CAN Low). No caso dos barramentos com 4 fios, além dos sinais de dados, um fio com o VCC (alimentação) e outro com o
GND (referência) fazem parte do barramento, levando a alimentação às duas
terminações ativas da rede. As redes com apenas 1 fio têm este, o fio de dados, chamado exclusivamente de linha CAN.
Considerando o CAN fundamentado em 2 e 4 fios, seus condutores
elétricos devem ser trançados e não blindados. Os dados enviados através da
rede devem ser interpretados pela análise da diferença de potencial entre os fios CAN_H e CAN_L. Por isso, o barramento CAN é classificado como Par
Trançado Diferencial. Este conceito atenua fortemente os efeitos causados
por interferências eletro-magnéticas, uma vez que qualquer ação sobre um
dos fios será sentida também pelo outro, causando flutuação em ambos os
sinais para o mesmo sentido e com a mesma intensidade. Como o que vale para os módulos que recebem as mensagens é a diferença de potencial entre
os condutores CAN_H e CAN_L (e esta permanecerá inalterada), a comunicação não é prejudicada. [6]
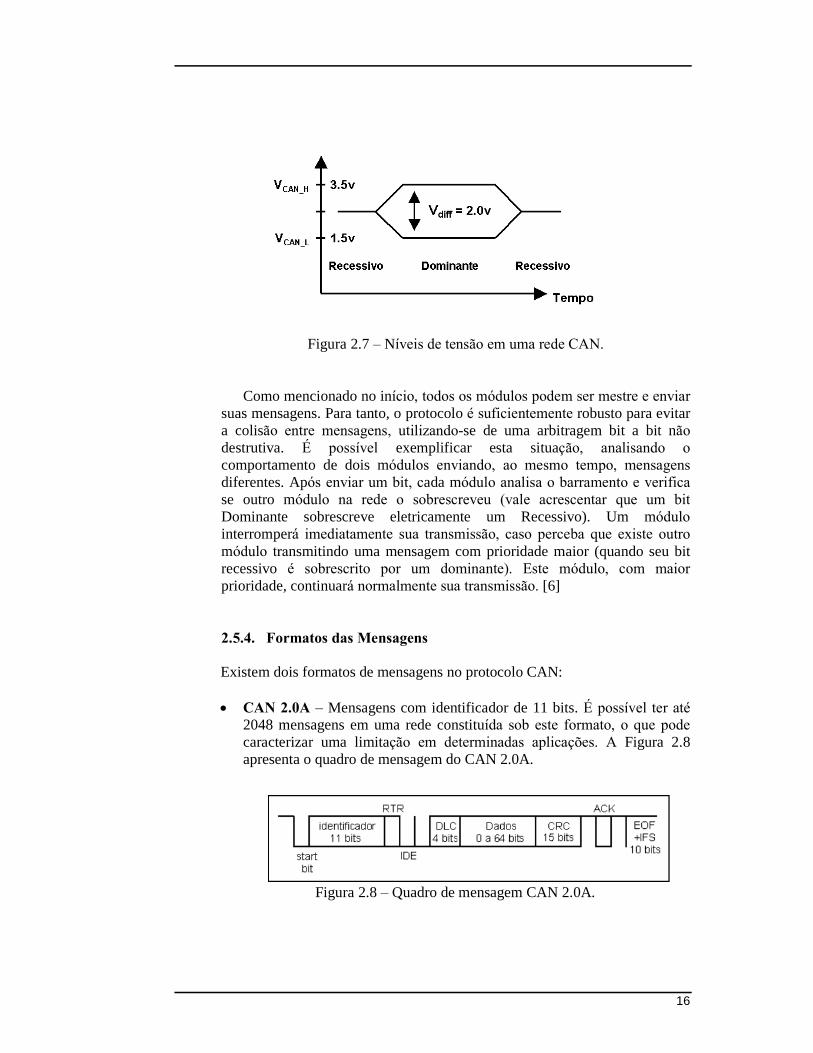
No CAN, os dados não são representados por bits em nível �0� ou nível
�1�. São representados por bits Dominantes e bits Recessivos, criados em
função da condição presente nos fios CAN_H e CAN_L. A Figura 2.7 ilustra os níveis de tensão em uma rede CAN, assim como os bits Dominantes e
Recessivos.
16
Figura 2.7 � Níveis de tensão em uma rede CAN.
Como mencionado no início, todos os módulos podem ser mestre e enviar
suas mensagens. Para tanto, o protocolo é suficientemente robusto para evitar a colisão entre mensagens, utilizando-se de uma arbitragem bit a bit não
destrutiva. É possível exemplificar esta situação, analisando o
comportamento de dois módulos enviando, ao mesmo tempo, mensagens
diferentes. Após enviar um bit, cada módulo analisa o barramento e verifica
se outro módulo na rede o sobrescreveu (vale acrescentar que um bit
Dominante sobrescreve eletricamente um Recessivo). Um módulo
interromperá imediatamente sua transmissão, caso perceba que existe outro
módulo transmitindo uma mensagem com prioridade maior (quando seu bit recessivo é sobrescrito por um dominante). Este módulo, com maior
prioridade, continuará normalmente sua transmissão. [6] 2.5.4. Formatos das Mensagens
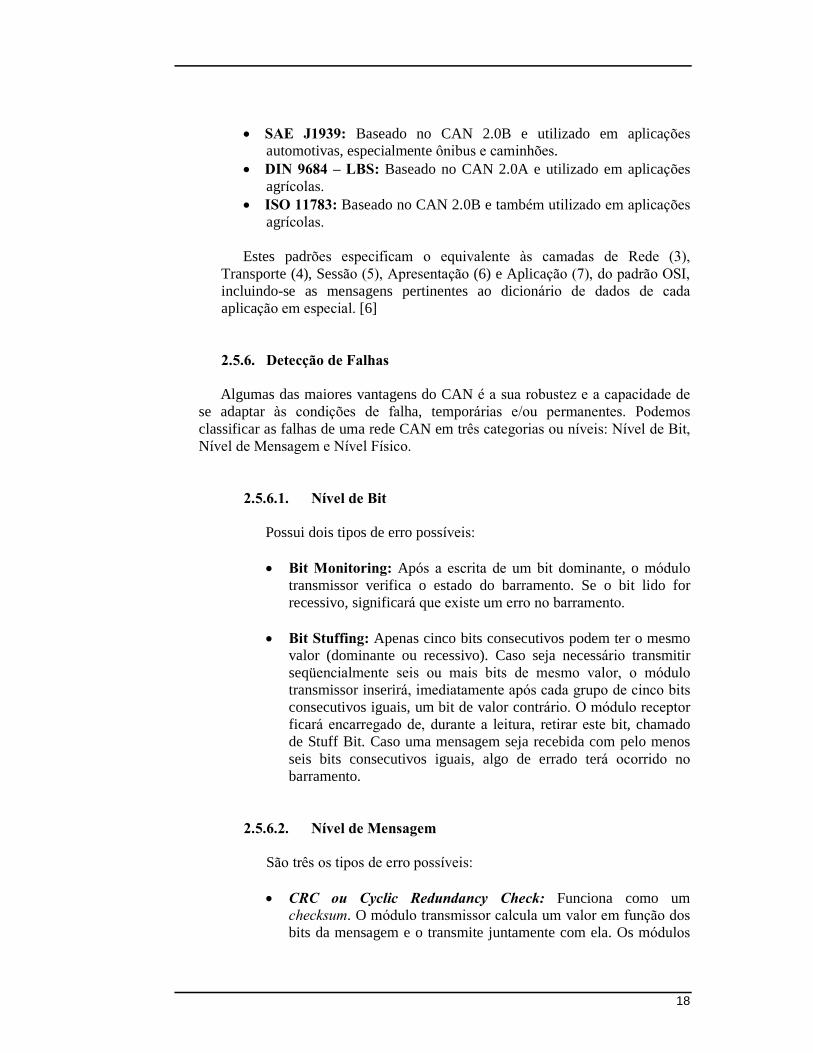
Existem dois formatos de mensagens no protocolo CAN: CAN 2.0A � Mensagens com identificador de 11 bits. É possível ter até
2048 mensagens em uma rede constituída sob este formato, o que pode
caracterizar uma limitação em determinadas aplicações. A Figura 2.8 apresenta o quadro de mensagem do CAN 2.0A.
Figura 2.8 � Quadro de mensagem CAN 2.0A.

17
CAN 2.0B � Mensagens com identificador de 29 bits. É possível ter,
aproximadamente, 537 milhões de mensagens em uma rede constituída
sob este formato. Percebe-se que a limitação em virtude da quantidade de
mensagens não mais existe. Por outro lado, o que pode ser observado em
alguns casos é que, os 18 bits adicionais no identificador aumentam o
tempo de transmissão de cada mensagem, o que pode caracterizar um
problema em determinadas aplicações que trabalhem em tempo-real (problema conhecido como overhead). A Figura 2.9 apresenta o quadro de mensagem do formato CAN 2.0B.
Figura 2.9 � Quadro de mensagem CAN 2.0B.
Legenda: SRR � Substitute Remote Request RTR � Remote Transmission Request IDE � Identifier Extension DLC � Data Length Code CRC � Cyclic Redundancy Check
ACK � Acknowledgment EOF � End Of Frame 2.5.5. Padrões Existentes
Os fundamentos do CAN são especificados por duas normas: a ISO11898
e a ISO11519-2. A primeira, ISO11898, determina as características de uma rede trabalhando com alta velocidade de transmissão de dados (de 125Kbps a
1Mbps). A segunda, ISO11519-2, determina as características de uma rede
trabalhando com baixa velocidade (de 10Kbps a 125Kbps). Ambos os padrões especificam as camadas Física e de Dados,
respectivamente 1 e 2 se considerado o padrão de comunicação OSI (Open
Systems Interconnection) de 7 camadas (ISO7498). As demais camadas, da 3 à 7, são especificadas por outros padrões, cada qual relacionado a uma
aplicação específica. [6] Existem diversos padrões fundamentados no CAN, dentre os quais
podemos destacar: NMEA 2000: Baseado no CAN 2.0B e utilizado em aplicações navais
e aéreas.
18
SAE J1939: Baseado no CAN 2.0B e utilizado em aplicações
automotivas, especialmente ônibus e caminhões. DIN 9684 � LBS: Baseado no CAN 2.0A e utilizado em aplicações
agrícolas. ISO 11783: Baseado no CAN 2.0B e também utilizado em aplicações
agrícolas. Estes padrões especificam o equivalente às camadas de Rede (3),
Transporte (4), Sessão (5), Apresentação (6) e Aplicação (7), do padrão OSI,
incluindo-se as mensagens pertinentes ao dicionário de dados de cada
aplicação em especial. [6] 2.5.6. Detecção de Falhas
Algumas das maiores vantagens do CAN é a sua robustez e a capacidade de
se adaptar às condições de falha, temporárias e/ou permanentes. Podemos
classificar as falhas de uma rede CAN em três categorias ou níveis: Nível de Bit,
Nível de Mensagem e Nível Físico.
2.5.6.1. Nível de Bit
Possui dois tipos de erro possíveis: Bit Monitoring: Após a escrita de um bit dominante, o módulo
transmissor verifica o estado do barramento. Se o bit lido for recessivo, significará que existe um erro no barramento.
Bit Stuffing: Apenas cinco bits consecutivos podem ter o mesmo
valor (dominante ou recessivo). Caso seja necessário transmitir seqüencialmente seis ou mais bits de mesmo valor, o módulo
transmissor inserirá, imediatamente após cada grupo de cinco bits
consecutivos iguais, um bit de valor contrário. O módulo receptor
ficará encarregado de, durante a leitura, retirar este bit, chamado de Stuff Bit. Caso uma mensagem seja recebida com pelo menos seis bits consecutivos iguais, algo de errado terá ocorrido no
barramento.
2.5.6.2. Nível de Mensagem
São três os tipos de erro possíveis: CRC ou Cyclic Redundancy Check: Funciona como um
checksum. O módulo transmissor calcula um valor em função dos
bits da mensagem e o transmite juntamente com ela. Os módulos
19
receptores recalculam este CRC e verificam se este é igual ao
transmitido com a mensagem. Frame Check: Os módulos receptores analisam o conteúdo de
alguns bits da mensagem recebida. Estes bits (seus valores) não
mudam de mensagem para mensagem e são determinados pelo
padrão CAN. Acknowledgment Error Check: Os módulos receptores
respondem a cada mensagem íntegra recebida, escrevendo um bit dominante no campo ACK de uma mensagem resposta que é
enviada ao módulo transmissor. Caso esta mensagem resposta não
seja recebida (pelo transmissor original da mensagem), significará
que, ou a mensagem de dados transmitida estava corrompida, ou nenhum módulo a recebeu.
Toda e qualquer falha acima mencionada, quando detectada por um
ou mais módulos receptores, fará com que estes coloquem uma
mensagem de erro no barramento, avisando toda a rede de que aquela mensagem continha um erro e que o transmissor deverá reenviá-la.
Além disso, a cada mensagem erroneamente transmitida ou recebida,
um contador de erros é incrementado em uma unidade nos módulos
receptores, e em oito unidades no transmissor. Módulos com estes
contadores iguais a zero são considerados Normais. Para os casos em que os contadores contêm valores entre 1 e 127, os módulos são considerados
Error Active. Contadores contendo valores entre 128 e 255 colocam os módulos em condição de Error Passive. Finalmente, para contadores contendo valores superiores a 255, os módulos serão considerados em Bus
Off e passarão a não mais atuar no barramento. Estes contadores também
são decrementados a medida que mensagens corretas são recebidas, o que
reduz o grau de incerteza em relação a atividade dos módulos com contadores contendo valores diferentes de zero e possibilitando novamente a plena participação deles no barramento.
2.5.6.3. Nível Físico
Para os barramentos com 2 e 4 fios, caso algo de errado venha a
ocorrer com os fios de dados CAN_H e CAN_L, a rede continuará
operando sob uma espécie de modo de segurança. Seguem abaixo
algumas das condições de falha nas linhas de comunicação que permitem
a continuidade das atividades da rede: Curto do CAN_H (ou CAN_L) para GND (ou VCC); Curto entre os fios de dados CAN_H e CAN_L; Ruptura do CAN_H (ou CAN_L);

20
2.5.7. Aspectos de Implementação
2.5.7.1. Dicionário de Dados
É a parte mais dedicada à aplicação quando se trabalha com um
protocolo como o CAN. O Dicionário de Dados (Data Dictionary) é o
conjunto de mensagens que podem ser transmitidas naquela determinada rede.
A forma mais interessante de se organizar um dicionário de dados é
criando uma matriz com todos os módulos da rede. Esta matriz mostrará
cada mensagem sob a responsabilidade de cada módulo, relacionando
quem a transmite e quem a recebe. Outros dados importantes nesta matriz são: o tempo de atualização dos valores da mensagem, o intervalo de
transmissão da mesma e o valor relativo ao seu identificador. Além desta
matriz, a documentação referente ao Dicionário de Dados deverá conter
uma descrição detalhada de cada mensagem, bit a bit. O Dicionário de Dados é implementado numa rede CAN via software
e deverá ser o mesmo (ter a mesma versão de atualização, inclusive) em
todos os módulos conectados à rede. Isto garantirá total compatibilidade entre os participantes do barramento. [6]
2.5.7.2. Exemplo de Rede
Uma rede CAN, dependendo da sua aplicação, poderá ter até centenas
de módulos conectados. O valor máximo para a conexão de módulos em
um barramento depende da norma que se utiliza na dada aplicação. Toda rede CAN possui 2 Terminadores. Estes terminadores nada mais
são que resistores com valores entre 120 e 124 ohms, conectados à rede
para garantir a perfeita propagação dos sinais elétricos pelos fios da
mesma. Estes resistores, um em cada ponta da rede, garantem a reflexão
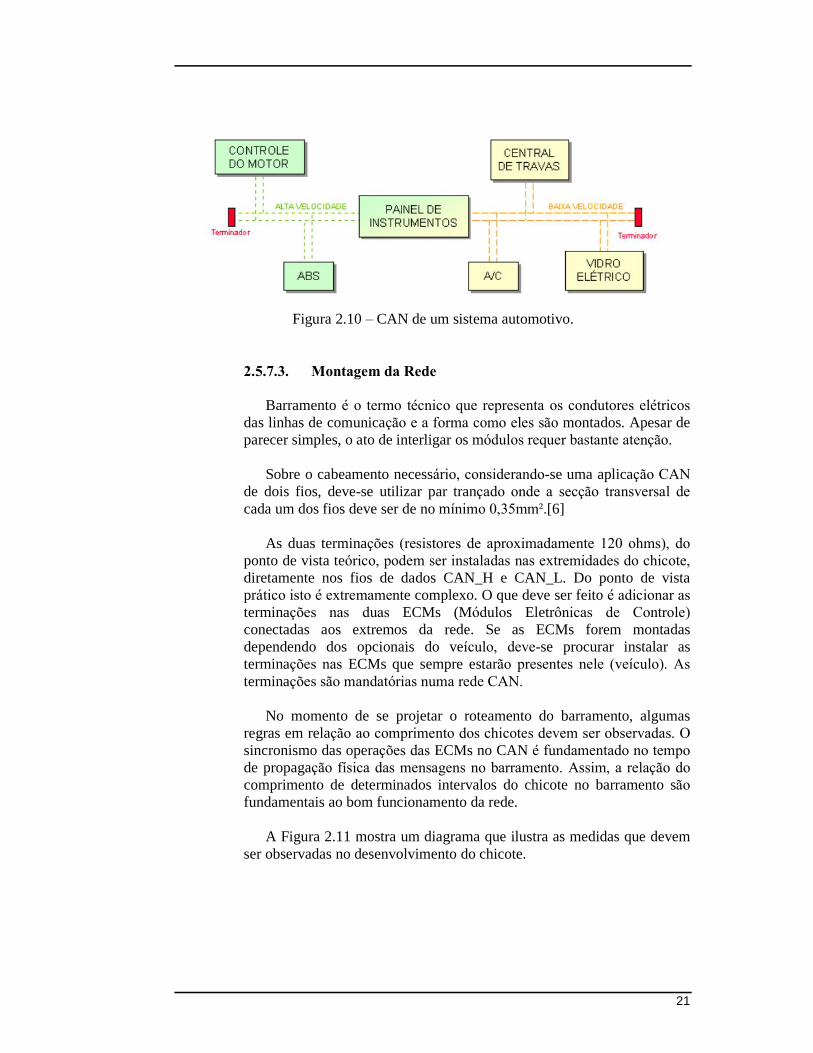
dos sinais no barramento e o correto funcionamento da rede CAN. Outra característica de determinadas aplicações fundamentadas no
CAN é que estas poderão ter duas ou mais sub-redes trabalhando, cada qual, em uma velocidade diferente. Os dados são transferidos de uma sub-rede para a outra através de módulos que atuam nas duas sub-redes. Estes módulos são chamados de Gateways. [6]
A Figura 2.10 ilustra a rede CAN de um sistema automotivo, com
duas sub-redes e dois terminadores. O Gateway desta aplicação é o Painel
de Instrumentos.
21
Figura 2.10 � CAN de um sistema automotivo.
2.5.7.3. Montagem da Rede
Barramento é o termo técnico que representa os condutores elétricos
das linhas de comunicação e a forma como eles são montados. Apesar de parecer simples, o ato de interligar os módulos requer bastante atenção.
Sobre o cabeamento necessário, considerando-se uma aplicação CAN
de dois fios, deve-se utilizar par trançado onde a secção transversal de
cada um dos fios deve ser de no mínimo 0,35mm².[6] As duas terminações (resistores de aproximadamente 120 ohms), do
ponto de vista teórico, podem ser instaladas nas extremidades do chicote,
diretamente nos fios de dados CAN_H e CAN_L. Do ponto de vista prático isto é extremamente complexo. O que deve ser feito é adicionar as
terminações nas duas ECMs (Módulos Eletrônicas de Controle)
conectadas aos extremos da rede. Se as ECMs forem montadas dependendo dos opcionais do veículo, deve-se procurar instalar as terminações nas ECMs que sempre estarão presentes nele (veículo). As
terminações são mandatórias numa rede CAN. No momento de se projetar o roteamento do barramento, algumas
regras em relação ao comprimento dos chicotes devem ser observadas. O
sincronismo das operações das ECMs no CAN é fundamentado no tempo
de propagação física das mensagens no barramento. Assim, a relação do
comprimento de determinados intervalos do chicote no barramento são
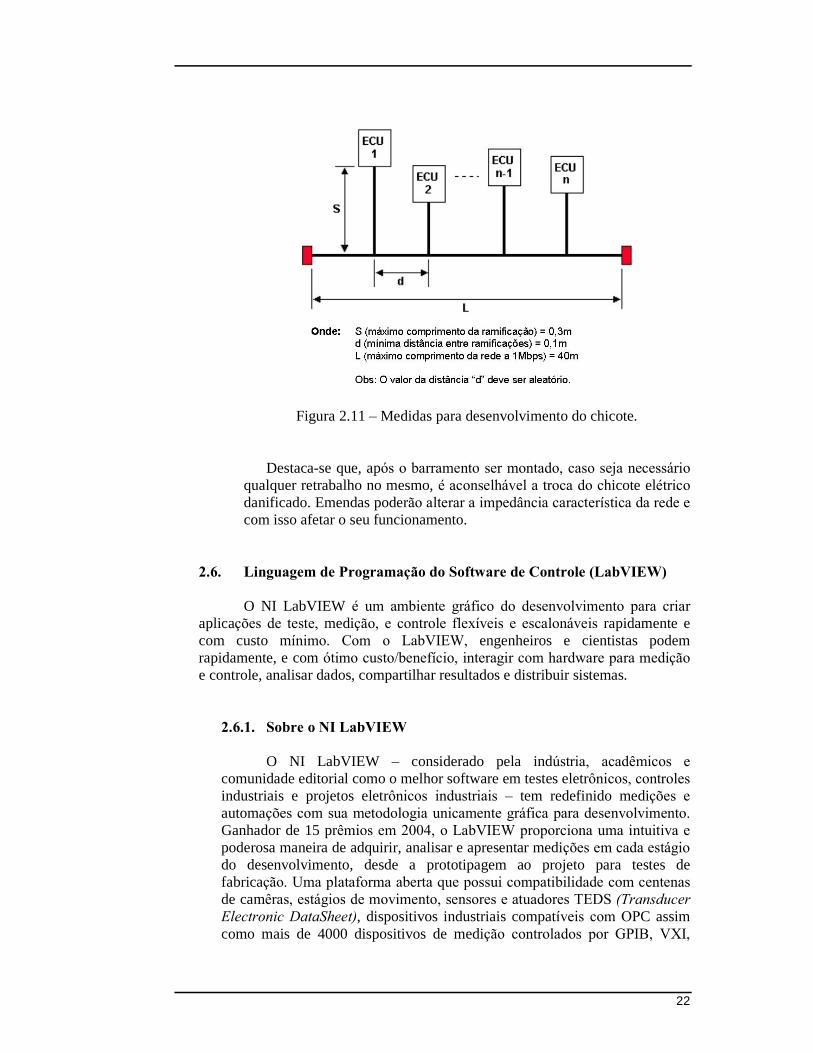
fundamentais ao bom funcionamento da rede. A Figura 2.11 mostra um diagrama que ilustra as medidas que devem
ser observadas no desenvolvimento do chicote.
22
Figura 2.11 � Medidas para desenvolvimento do chicote.
Destaca-se que, após o barramento ser montado, caso seja necessário
qualquer retrabalho no mesmo, é aconselhável a troca do chicote elétrico
danificado. Emendas poderão alterar a impedância característica da rede e
com isso afetar o seu funcionamento.
2.6. Linguagem de Programação do Software de Controle (LabVIEW)
O NI LabVIEW é um ambiente gráfico do desenvolvimento para criar
aplicações de teste, medição, e controle flexíveis e escalonáveis rapidamente e com custo mínimo. Com o LabVIEW, engenheiros e cientistas podem rapidamente, e com ótimo custo/benefício, interagir com hardware para medição
e controle, analisar dados, compartilhar resultados e distribuir sistemas.
2.6.1. Sobre o NI LabVIEW
O NI LabVIEW � considerado pela indústria, acadêmicos e
comunidade editorial como o melhor software em testes eletrônicos, controles
industriais e projetos eletrônicos industriais � tem redefinido medições e
automações com sua metodologia unicamente gráfica para desenvolvimento.
Ganhador de 15 prêmios em 2004, o LabVIEW proporciona uma intuitiva e
poderosa maneira de adquirir, analisar e apresentar medições em cada estágio
do desenvolvimento, desde a prototipagem ao projeto para testes de fabricação. Uma plataforma aberta que possui compatibilidade com centenas
de camêras, estágios de movimento, sensores e atuadores TEDS (Transducer
Electronic DataSheet), dispositivos industriais compatíveis com OPC assim como mais de 4000 dispositivos de medição controlados por GPIB, VXI,

23
PXI, PCI, Serial, Ethernet e USB. O LabVIEW está disponível para os
sistemas operacionais Windows, Macintosh e Linux. Com o lançamento do LabVIEW em 1986, a National Instruments
introduziu o conceito de instrumentação virtual. Utilizando LabVIEW para
aplicações de medição e automação, pode-se adquirir dados ao conectar-se com vários dispositivos de hardware, definir uma aplicação para analisar ou
tomar decisões com base nestes dados e depois apresentar suas medições por
meio de interfaces gráficas, páginas Web, arquivos de banco de dados e
muito mais.
3. PROJETO DA ARQUITETURA DO SISTEMA
O sistema de simulação e prototipagem de funções de software proposto nesse
trabalho, é baseado na plataforma de software de desenvolvimento LabVIEW e no controlador externo compactRIO, ambos da National Instruments.
O software de desenvolvimento consiste em um ambiente gráfico, com várias
ferramentas para sistemas de medição, análise e controle, com uma linguagem de programação através de símbolos e blocos funcionais gráficos. Possui plataforma
aberta, o que facilita a sua interface com outros sistemas e equipamentos e suporta múltiplos protocolos de comunicação.
Figura 3.1 � Exemplo de um controlador PID implementado no ambiente de
desenvolvimento.
24
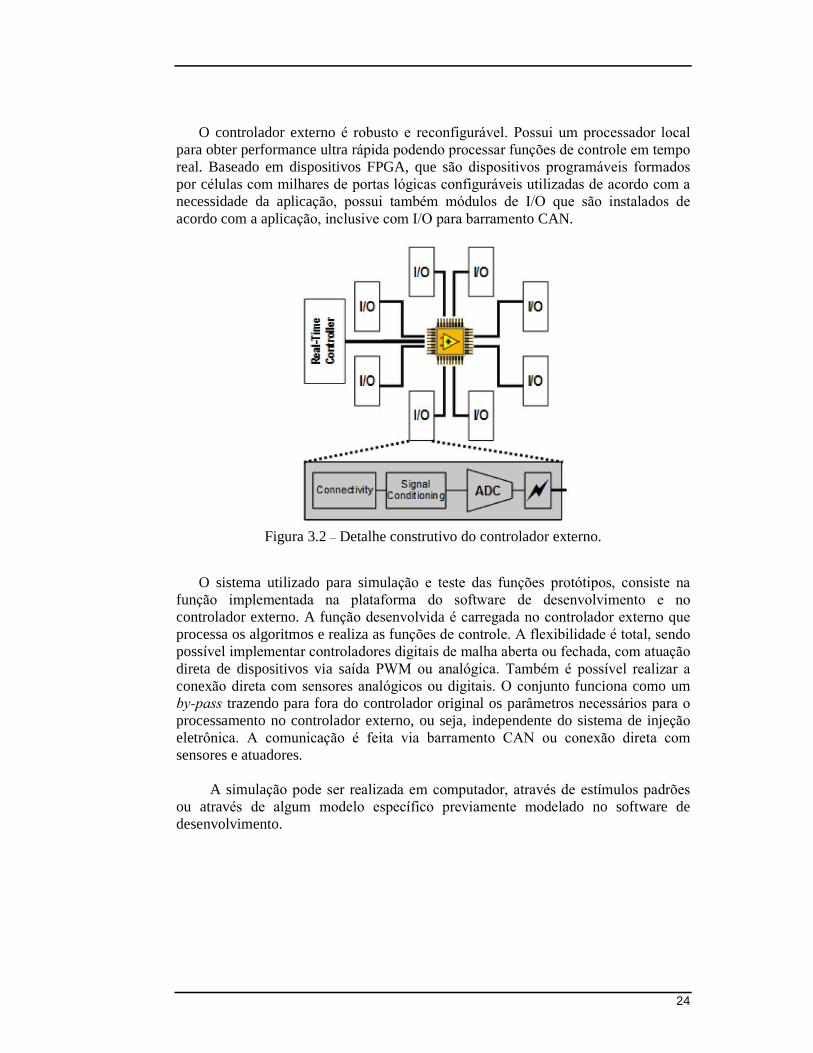
O controlador externo é robusto e reconfigurável. Possui um processador local
para obter performance ultra rápida podendo processar funções de controle em tempo
real. Baseado em dispositivos FPGA, que são dispositivos programáveis formados
por células com milhares de portas lógicas configuráveis utilizadas de acordo com a
necessidade da aplicação, possui também módulos de I/O que são instalados de
acordo com a aplicação, inclusive com I/O para barramento CAN.
Figura 3.2 � Detalhe construtivo do controlador externo.
O sistema utilizado para simulação e teste das funções protótipos, consiste na
função implementada na plataforma do software de desenvolvimento e no
controlador externo. A função desenvolvida é carregada no controlador externo que
processa os algoritmos e realiza as funções de controle. A flexibilidade é total, sendo
possível implementar controladores digitais de malha aberta ou fechada, com atuação
direta de dispositivos via saída PWM ou analógica. Também é possível realizar a
conexão direta com sensores analógicos ou digitais. O conjunto funciona como um by-pass trazendo para fora do controlador original os parâmetros necessários para o
processamento no controlador externo, ou seja, independente do sistema de injeção
eletrônica. A comunicação é feita via barramento CAN ou conexão direta com
sensores e atuadores. A simulação pode ser realizada em computador, através de estímulos padrões
ou através de algum modelo específico previamente modelado no software de desenvolvimento.
25
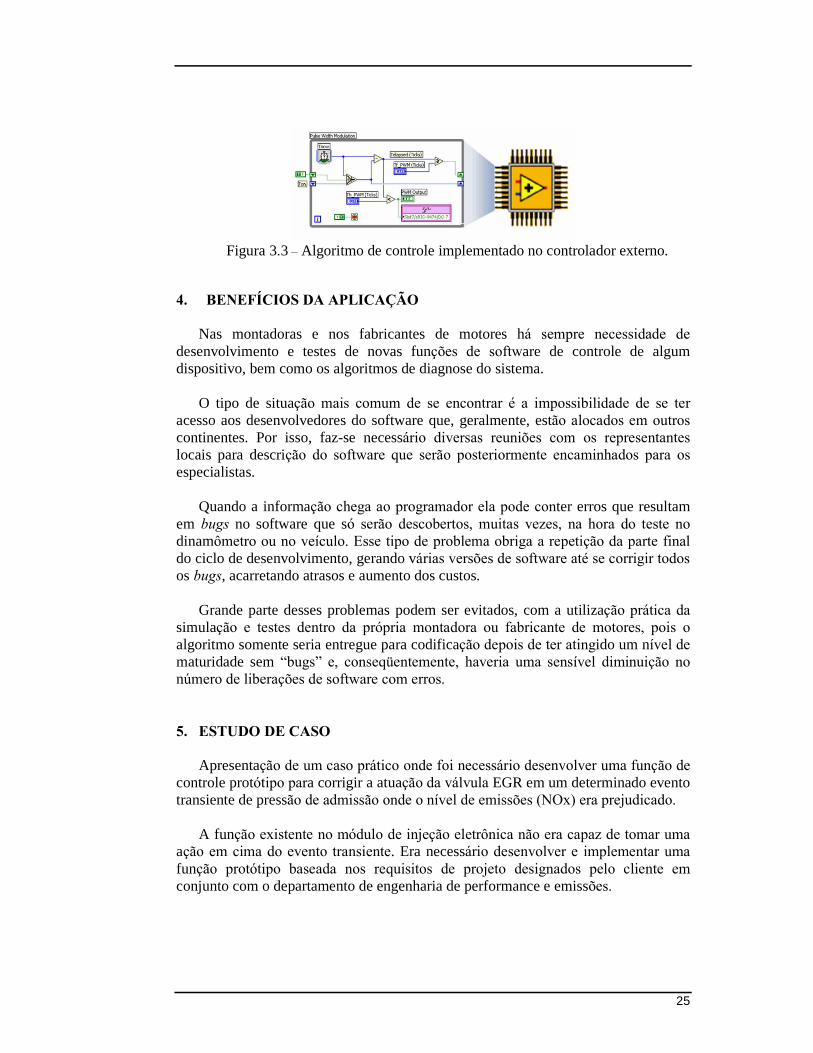
Figura 3.3 � Algoritmo de controle implementado no controlador externo. 4. BENEFÍCIOS DA APLICAÇÃO Nas montadoras e nos fabricantes de motores há sempre necessidade de
desenvolvimento e testes de novas funções de software de controle de algum dispositivo, bem como os algoritmos de diagnose do sistema.
O tipo de situação mais comum de se encontrar é a impossibilidade de se ter
acesso aos desenvolvedores do software que, geralmente, estão alocados em outros
continentes. Por isso, faz-se necessário diversas reuniões com os representantes
locais para descrição do software que serão posteriormente encaminhados para os
especialistas.
Quando a informação chega ao programador ela pode conter erros que resultam em bugs no software que só serão descobertos, muitas vezes, na hora do teste no
dinamômetro ou no veículo. Esse tipo de problema obriga a repetição da parte final
do ciclo de desenvolvimento, gerando várias versões de software até se corrigir todos
os bugs, acarretando atrasos e aumento dos custos.
Grande parte desses problemas podem ser evitados, com a utilização prática da
simulação e testes dentro da própria montadora ou fabricante de motores, pois o
algoritmo somente seria entregue para codificação depois de ter atingido um nível de
maturidade sem �bugs� e, conseqüentemente, haveria uma sensível diminuição no
número de liberações de software com erros. 5. ESTUDO DE CASO
Apresentação de um caso prático onde foi necessário desenvolver uma função de
controle protótipo para corrigir a atuação da válvula EGR em um determinado evento transiente de pressão de admissão onde o nível de emissões (NOx) era prejudicado. A função existente no módulo de injeção eletrônica não era capaz de tomar uma
ação em cima do evento transiente. Era necessário desenvolver e implementar uma
função protótipo baseada nos requisitos de projeto designados pelo cliente em
conjunto com o departamento de engenharia de performance e emissões.

26
válvula
admissão
válvula
escape
válvula
EGR
bomba
de vácuo
válvula
controle
fluxo de ar ECM
admissão
escape
válvula
Throttle
Figura 5.1 � Diagrama de blocos dos requisitos da função protótipo.
A válvula EGR (Exhaust Gas Recirculation) tem como objetivo reduzir as
emissões de NOx (óxidos de nitrogênio) mantendo a temperatura de combustão
abaixo da faixa crítica. Para isso, através dessa válvula, é introduzida uma pequena
quantidade de gases de escapamento (recirculação) na admissão de maneira a
"contaminar" a mistura ar-combustível.
Figura 5.2 � Esquema da recirculação dos gases de escapamento (EGR). Sendo assim, a função a ser prototipada precisaria corrigir a atuação da válvula
EGR simultaneamente com a atuação da válvula Throttle (admissão). Na ocorrência
do evento transiente, ambas as válvulas deveriam atuar de maneira inversa: a EGR
totalmente fechada e a Throttle totalmente aberta. Depois de transcorrido o evento, ambas deveriam retornar aos seus regimes normais de funcionamento. A função
original não poderia ser alterada.
27
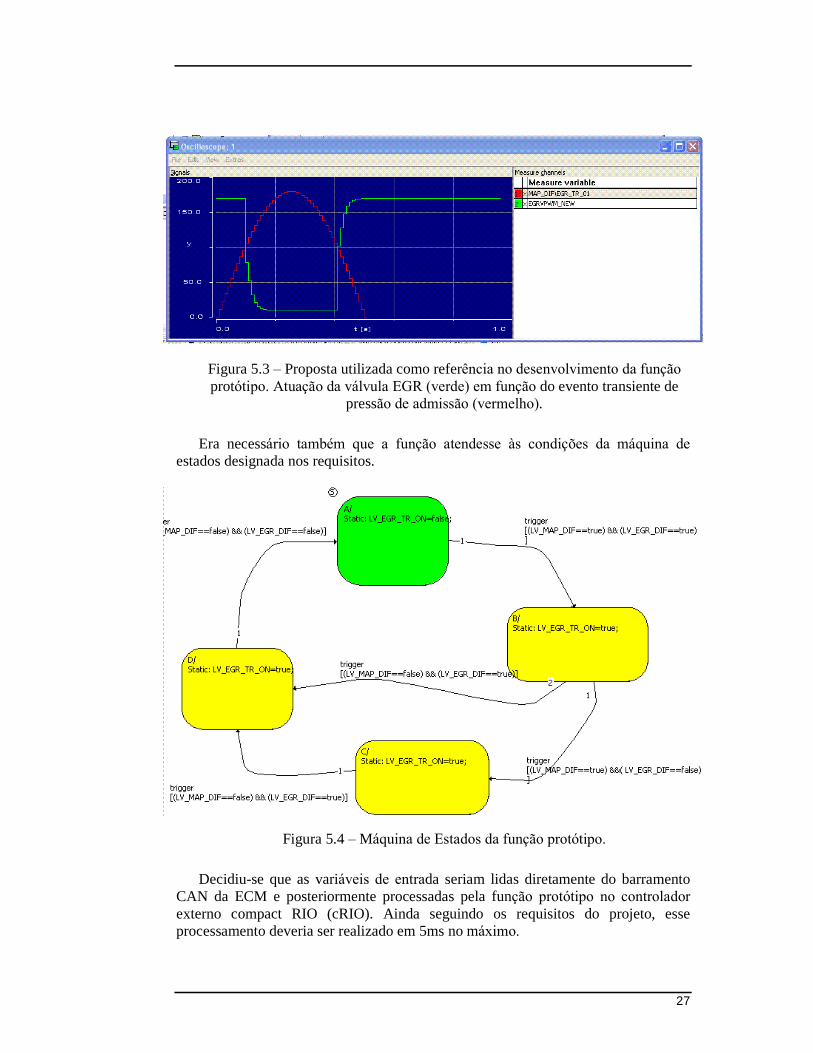
Figura 5.3 � Proposta utilizada como referência no desenvolvimento da função
protótipo. Atuação da válvula EGR (verde) em função do evento transiente de pressão de admissão (vermelho).
Era necessário também que a função atendesse às condições da máquina de
estados designada nos requisitos.
Figura 5.4 � Máquina de Estados da função protótipo.
Decidiu-se que as variáveis de entrada seriam lidas diretamente do barramento
CAN da ECM e posteriormente processadas pela função protótipo no controlador
externo compact RIO (cRIO). Ainda seguindo os requisitos do projeto, esse processamento deveria ser realizado em 5ms no máximo.

28
A válvula Throttle deveria ser controlada por PWM (Pulse Width Modulation)
com o duty cycle variando de 5% a 95% e freqüência de 250 Hz. Já para a vávula EGR foi necessário construir um drive de potência na
configuração de ponte H com transistores Darlington de alto ganho para o acionamento de seu motor elétrico. Todo o controle (PID) foi desenvolvido e
implementado por software e descarregado na placa controladora do cRIO.
Figura 5.5 � Diagrama de ligação controlador EGR.
+ VCC
sensorpos. real
MAFRPMdo sistemade injeção
29
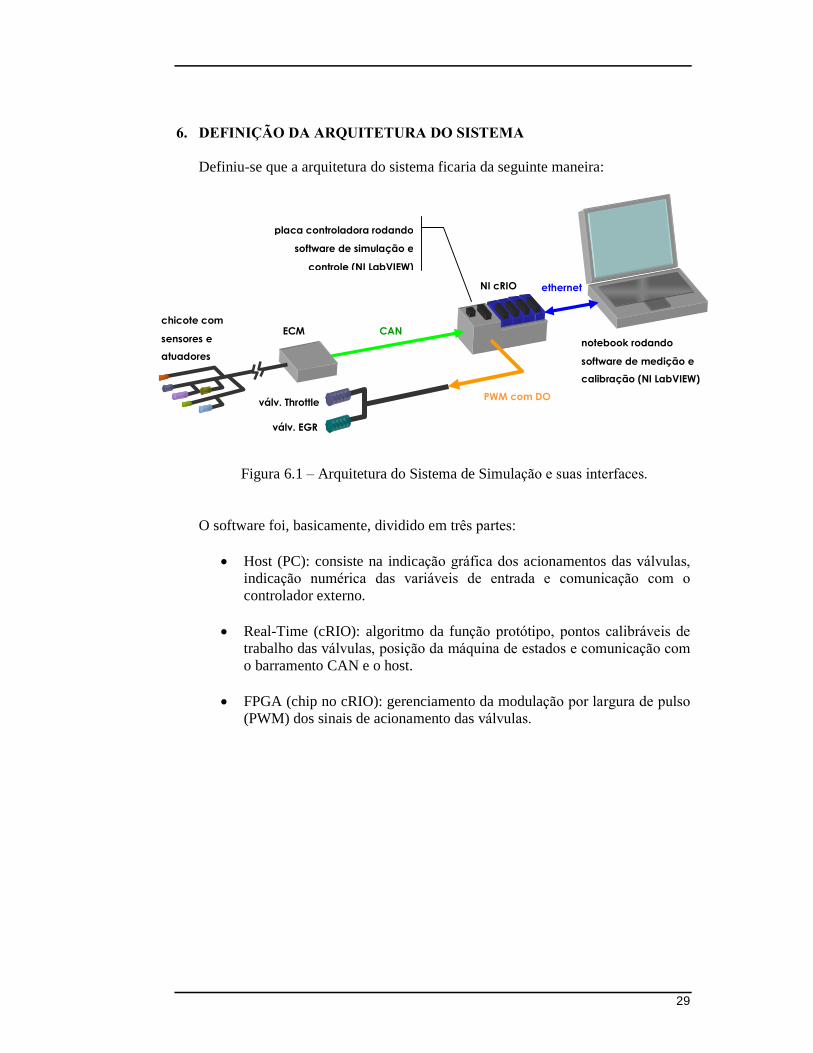
6. DEFINIÇÃO DA ARQUITETURA DO SISTEMA
Definiu-se que a arquitetura do sistema ficaria da seguinte maneira:
Figura 6.1 � Arquitetura do Sistema de Simulação e suas interfaces.
O software foi, basicamente, dividido em três partes:
Host (PC): consiste na indicação gráfica dos acionamentos das válvulas,
indicação numérica das variáveis de entrada e comunicação com o
controlador externo. Real-Time (cRIO): algoritmo da função protótipo, pontos calibráveis de
trabalho das válvulas, posição da máquina de estados e comunicação com
o barramento CAN e o host.
FPGA (chip no cRIO): gerenciamento da modulação por largura de pulso
(PWM) dos sinais de acionamento das válvulas.
chicote com
sensores e
atuadores
ECM
NI cRIO
CAN
ethernet
válv. Throttle
válv. EGR
notebook rodando
software de medição e
calibração (NI LabVIEW)
placa controladora rodando
software de simulação e
controle (NI LabVIEW)
PWM com DO
30
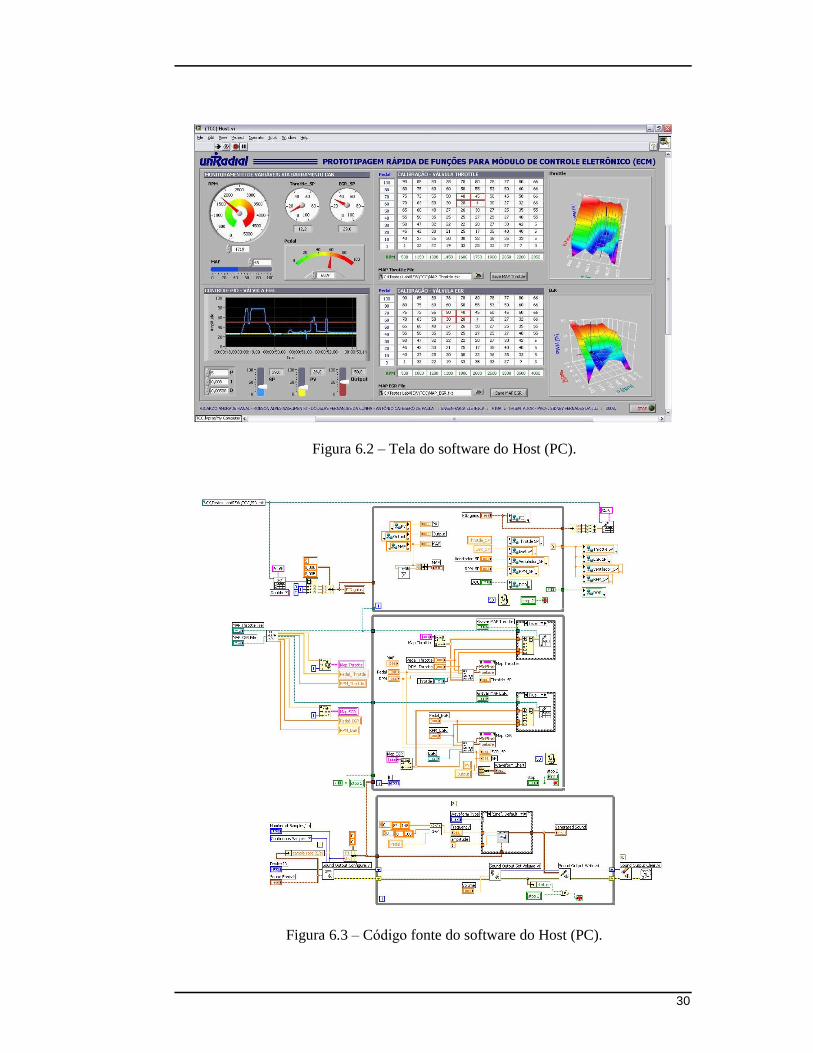
Figura 6.2 � Tela do software do Host (PC).
Figura 6.3 � Código fonte do software do Host (PC).
31
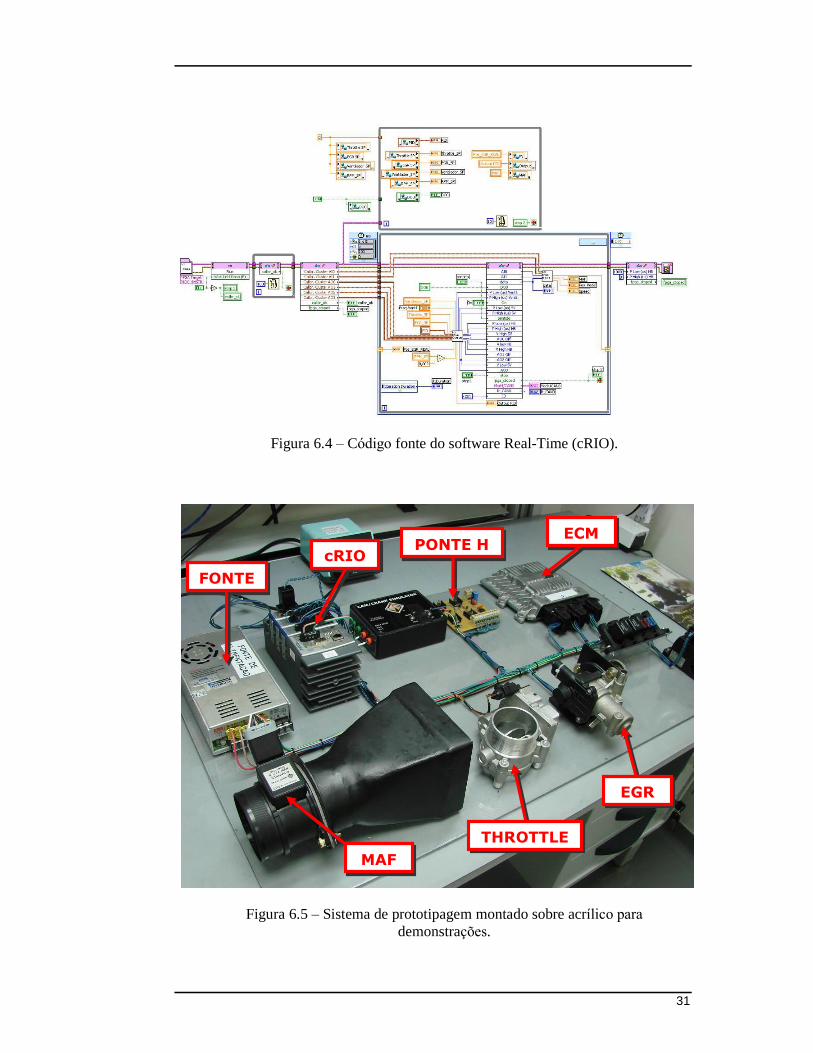
Figura 6.4 � Código fonte do software Real-Time (cRIO).
Figura 6.5 � Sistema de prototipagem montado sobre acrílico para
demonstrações.
FONTE
cRIO PONTE H
ECM
MAF
THROTTLE
EGR
32
Durante os testes realizados no veículo houve a necessidade de se realizar
alguns ajustes no algoritmo da função. É importante ressaltar que todas as
alterações ocorreram sem que fosse necessário qualquer manuseio do cRIO ou
qualquer alteração nas instalações do sistema de simulação. Todas as
modificações foram feitas apenas com a mudança do software via computador e o posterior �download� da função para o ambiente Real-Time da placa controladora do cRIO. Analisando-se os dados dos testes constatou-se uma pequena diminuição no
nível de NOx, porém nada representativo. Verificou-se a possibilidade da função
protótipo conter algum tipo de erro. Nada foi encontrado, estando a função
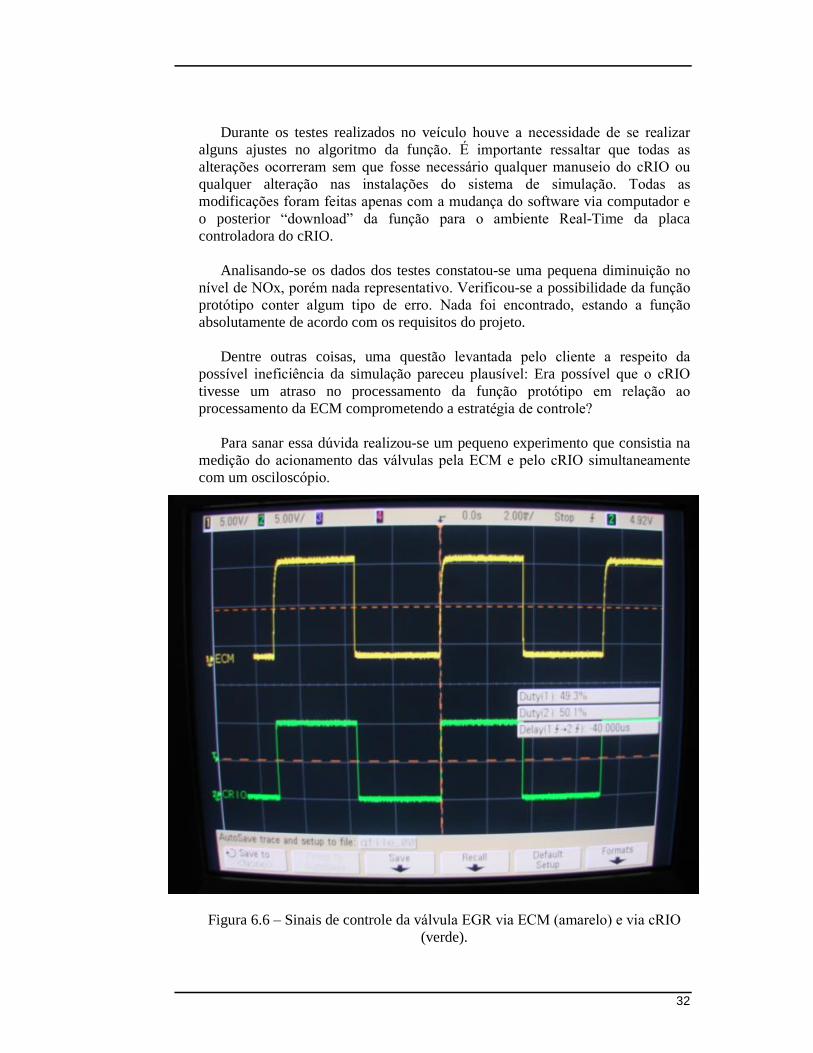
absolutamente de acordo com os requisitos do projeto. Dentre outras coisas, uma questão levantada pelo cliente a respeito da
possível ineficiência da simulação pareceu plausível: Era possível que o cRIO
tivesse um atraso no processamento da função protótipo em relação ao
processamento da ECM comprometendo a estratégia de controle? Para sanar essa dúvida realizou-se um pequeno experimento que consistia na medição do acionamento das válvulas pela ECM e pelo cRIO simultaneamente
com um osciloscópio.
Figura 6.6 � Sinais de controle da válvula EGR via ECM (amarelo) e via cRIO
(verde).
33
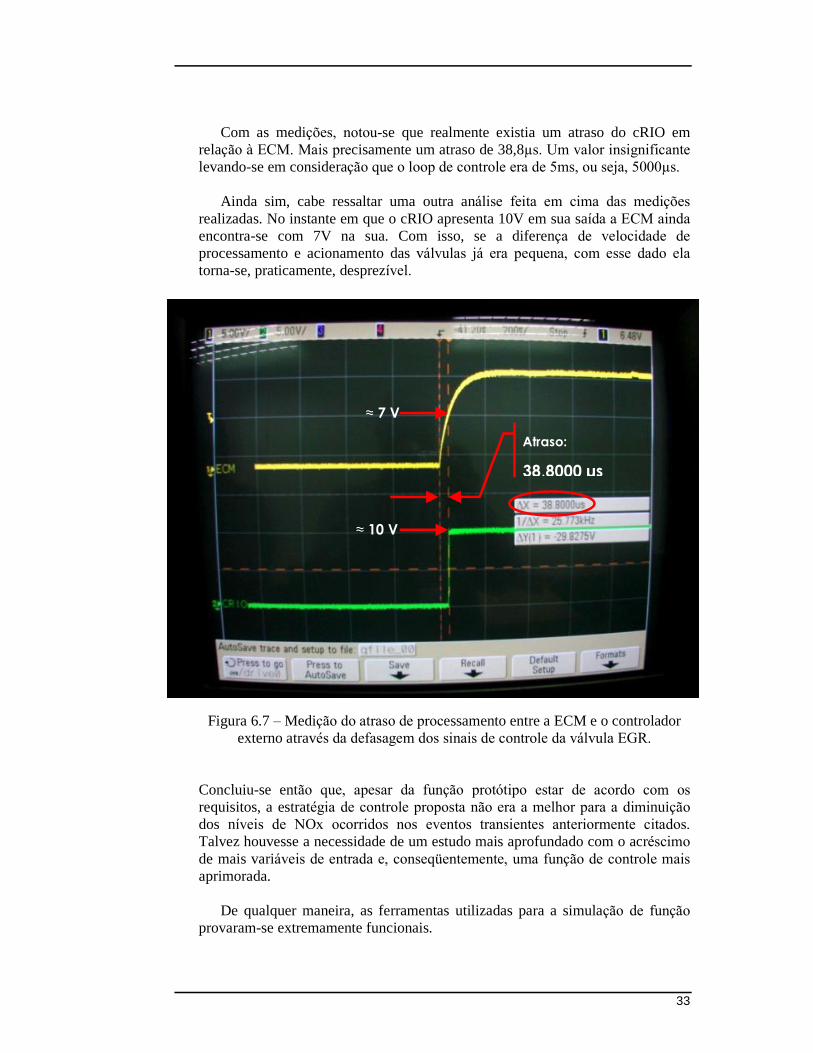
Com as medições, notou-se que realmente existia um atraso do cRIO em relação à ECM. Mais precisamente um atraso de 38,8µs. Um valor insignificante
levando-se em consideração que o loop de controle era de 5ms, ou seja, 5000µs. Ainda sim, cabe ressaltar uma outra análise feita em cima das medições
realizadas. No instante em que o cRIO apresenta 10V em sua saída a ECM ainda
encontra-se com 7V na sua. Com isso, se a diferença de velocidade de
processamento e acionamento das válvulas já era pequena, com esse dado ela
torna-se, praticamente, desprezível.
Figura 6.7 � Medição do atraso de processamento entre a ECM e o controlador
externo através da defasagem dos sinais de controle da válvula EGR. Concluiu-se então que, apesar da função protótipo estar de acordo com os
requisitos, a estratégia de controle proposta não era a melhor para a diminuição
dos níveis de NOx ocorridos nos eventos transientes anteriormente citados.
Talvez houvesse a necessidade de um estudo mais aprofundado com o acréscimo
de mais variáveis de entrada e, conseqüentemente, uma função de controle mais
aprimorada. De qualquer maneira, as ferramentas utilizadas para a simulação de função
provaram-se extremamente funcionais.
≈ 7 V
Atraso:
38,8000 µs
≈ 10 V

34
7. CONCLUSÕES
Utilizaram-se tecnologias já existentes na empresa e conhecimentos
adquiridos de outros projetos. Fora isso, os conhecimentos absorvidos nesse experimento são inestimáveis na utilização das próximas simulações. Do contrário, seria necessário um investimento de 50.000,00 euros (cotação
de 07/2007) para solicitar ao fabricante da ECM que prototipasse uma função
onde, posteriormente, concluiría-se não ser apropriada para a resolução do
problema. Um investimento altíssimo com os agravantes de não se reter os conhecimentos e o domínio da tecnologia e muito menos a conquista do projeto
solicitado pelo cliente.
8. REFERÊNCIAS BIBLIOGRÁFICAS
[1] COMO FUNCIONAM OS COMPUTADORES DO CARRO [on line]. <http://carros.hsw.uol.com.br/computadores-de-bordo.htm>. Setembro de 2008.
[2] NETO, Carlos Napoletano. RECIRCULAÇÃO DOS GASES DE
ESCAPAMENTO [on line]. <http://mitsumania.com/forum2/viewtopic.php?t=13311&sid=0dd0270b4794a12c62cd46cca522d809>. Setembro de 2008.
[3] PADRÃO EUROPEU DE EMISSÕES [on line].
<http://pt.wikipedia.org/wiki/Padr%C3%A3o_europeu_de_emiss%C3%B5es>. Setembro de 2008.
[4] SENSOR DE MASSA DE AR [on line].
<http://www.webmecauto.com.br/servicos/serv19_01.asp>. Setembro de 2008.
[5] CETESB - EMISSÕES VEICULARES [on line].
<http://www.cetesb.sp.gov.br/Ar/emissoes/introducao.asp>. Setembro de 2008.
[6] GUIMARÃES, Alexandre de A.. Can Bus � Barramento Controller Area
Network [on line]. <http://www.pcs.usp.br/~laa/Grupos/EEM/CAN_Bus_Parte_2.html>. Setembro de 2008.
[7] ENGENHARIA DE SOFTWARE � ROGER S. PRESSMAN � ISBN 85 346
0237 9, Pearson Makron Books, 1995.
[8] SISTEMAS DIGITAIS PRINCÍPIOS E APLICAÇÕES � RONALD J. TOCCI � NEAL S. WIDMER � ISBN 85 216 1179 X.

35
[9] AUTOMOBILE ELECTRICAL AND ELECTRONIC SYSTEMS � TOM DENTON � ISBN 0 7680 0271 0, SAE International, 2000.
[10] ELETRÔNICA EMBARCADA AUTOMOTIVA � ALEXANDRE DE
ALMEIDA GUIMARÃES � ISBN 978 85 365 0157 4, Editora Érica, 2007. [11] NI COMPACTRIO � RECONFIGURABLE CONTROL AND
ACQUISITION SYSTEM [on line]. <http://zone.ni.com/devzone/cda/tut/p/id/2856>. Setembro de 2008.
[12] LABVIEW FUNDAMENTALS MANUAL [on line].
<http://www.ni.com/pdf/manuals/374029a.pdf>. Setembro de 2008. [13] ENGINE CONTROL UNIT [on line].
<http://en.wikipedia.org/wiki/Engine_control_unit>. Setembro de 2008. [14] SISTEMA EGR � RECIRCULAÇÃO DOS GASES DE ESCAPE [on line].
<http://www.hmautotron.eng.br/artigos/EGR-Valvulas-pro.pdf>. Setembro de 2008.
[15] ÓXIDO NITROSO [on line].
<http://pt.wikipedia.org/wiki/%C3%93xido_nitroso>. Setembro de 2008. [16] ÓXIDO NÍTRICO [on line].
<http://pt.wikipedia.org/wiki/%C3%93xido_n%C3%ADtrico>. Setembro de 2008.
[17] NOx [on line]. <www.lete.poli.usp.br/teaching/pme-2520-emissoes-
atmosfericas/aula_16_NOx.ppt>. Setembro de 2008. [18] NOX � TÉCNICAS DE CONTROLE [on line].
<http://www.lete.poli.usp.br/teaching/pme-2520-emissoes-atmosfericas/a. ppt>. Setembro de 2008.
[19] WHAT'S ALL THIS ABOUT A COMPUTER IN MY CAR? [on line].
<http://carros.hsw.uol.com.br/framed.htm?parent=computadores-de-bordo.htm&url=http://www.enginesonly.com/stuf4.html>. Setembro de 2008.