PROJETO DE UM AEROGERADOR DE PEQUENO PORTE...
82
PROJETO DE UM AEROGERADOR DE PEQUENO PORTE PARA UTILIZAÇÃO NO LITORAL DA REGIÃO NORDESTE DO BRASIL Caio Victor Pavani Branco Projeto de Graduação apresentado ao Curso de Engenharia Mecânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Prof. Armando Carlos de Pina Filho, D.Sc. RIO DE JANEIRO, RJ - BRASIL SETEMBRO DE 2018
Transcript of PROJETO DE UM AEROGERADOR DE PEQUENO PORTE...
PROJETO DE UM AEROGERADOR DE PEQUENO PORTE PARA
UTILIZAÇÃO NO LITORAL DA REGIÃO NORDESTE DO BRASIL
Caio Victor Pavani Branco
Projeto de Graduação apresentado ao
Curso de Engenharia Mecânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos
necessários à obtenção do título de
Engenheiro.
Orientador:
Prof. Armando Carlos de Pina Filho, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2018

i
Branco, Caio Victor Pavani
Projeto de um Aerogerador de Pequeno Porte
para Utilização no Litoral da Região Nordeste do Brasil/
Caio Victor Pavani Branco - Rio de Janeiro: UFRJ /
Escola Politécnica, 2018.
VII, 73 p.: il.; 29,7 cm.
Orientador: Armando Carlos de Pina Filho
Projeto de Graduação – UFRJ / Escola
Politécnica / Curso de Engenharia Mecânica, 2018.
Referências bibliográficas: p. 59-61.
1. Energia Eólica. 2. Aerogerador. 3. Geração de
Energia. 4. Projeto Mecânico. I. Pina Filho, Armando
Carlos de. II. Universidade Federal do Rio de Janeiro,
Escola Politécnica, Engenharia Mecânica. III. Projeto
de um Aerogerador de Pequeno Porte para Utilização
no Litoral da Região Nordeste do Brasil.

ii
A Edmilson Rodrigues Branco e
Zilma Pavani Branco
(in memoriam)
iii
Agradecimentos
A minha irmã Ivy Camila Pavani Branco, que sempre me fez acreditar em mim,
apesar das dificuldades que surgiram durante a elaboração deste projeto.
A minha companheira Belisa de Quadros Correa Godoy, por todo incentivo e
auxílio, pelo carinho e dedicação, e por me reconduzir ao trabalho quando as demais
circunstâncias me distraíam.
Ao eterno amigo Rômulo de Carvalho Brito, por todo o apoio ao longo dos mais
de dez anos de amizade, pelos conselhos e pelo ombro amigo nas horas de
dificuldade.
iv
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
PROJETO MECÂNICO DE UM AEROGERADOR DE PEQUENO PORTE PARA
UTILIZAÇÃO NO LITORAL DA REGIÃO NORDESTE
Caio Victor Pavani Branco
Setembro/2018
Orientador: Armando Carlos de Pina Filho
Curso: Engenharia Mecânica
Com a crescente preocupação em se diminuir a dependência humana dos
combustíveis fósseis, as fontes alternativas, como a energia eólica e solar, têm
ganhado cada vez mais espaço na matriz energética global. Com isso em mente,
neste trabalho foi projetado um dispositivo aerogerador de pequeno porte para
instalação em áreas de potencial eólico elevado, mais especificamente, no litoral da
região Nordeste do Brasil. Uma das preocupações que norteou o projeto foi a
diminuição dos custos, utilizando, sempre que possível, elementos de padrão
comercial, facilmente substituíveis. Foram elaborados textos introdutórios,
explicitando o histórico desses equipamentos, seu princípio de funcionamento e
descrição de seus elementos. Segue-se a isso o projeto aerodinâmico do rotor, o
projeto mecânico de seus componentes, explicitando as etapas de cálculo e as
decisões tomadas ao longo do projeto. Não serão abordados os sistemas elétrico e
os mecanismos de controle do aerogerador e a sua fundação. Por fim, está anexada
a documentação gráfica do projeto.
Palavras-chave: Energia eólica, Aerogerador, Geração de Energia, Projeto Mecânico
v
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Mechanical Engineer.
MECHANICAL PROJECT OF A SMALL WIND TURBINE FOR USE ON BRAZIL’S
NORTHEASTERN COAST
Caio Victor Pavani Branco
September/2018
Advisor: Armando Carlos de Pina Filho
Course: Mechanical Engineering
With the growing concern on reducing human dependence on fossil fuels,
alternative energy sources, such as wind and solar, have been gaining grounds on the
global energy matrix. With that in mind, in this project a small wind turbine was
designed for installation on areas with high potential for wind energy, more specifically,
on Brazil’s northeastern coast. One of the concerns that guided this project was the
decrease in costs, using, whenever possible, commercial elements, easily replaceable.
Introductory texts were made, explaining the history of these devices, their working
principle and description of their components. This is followed by the aerodynamic
design of the rotor, the mechanical design of its components, explaining the calculation
steps and the decisions taken along this project. The electrical systems, control
mechanisms an its foundations will not be addressed. Finally, the graphical
documentation of the project is attached.
Keywords: Wind Power, Wind Turbine, Power Generation, Mechanical Project
vi
Sumário
1. Introdução .................................................................................................................................... 1
1.1. Motivação ............................................................................................................................... 2
1.2. Objetivo .................................................................................................................................. 2
1.3. Estrutura do Projeto ............................................................................................................. 2
2. Histórico e Uso da Energia ...................................................................................................... 3
2.1. Panorama Global .................................................................................................................. 3
2.1. Panorama Nacional .............................................................................................................. 5
3. Energia Eólica ........................................................................................................................... 10
3.1. Histórico ............................................................................................................................... 10
3.2. Classificação dos aerogeradores ..................................................................................... 11
3.3. Princípio Físico ................................................................................................................... 16
4. Projeto Aerodinâmico ............................................................................................................. 20
4.1. Parâmetros Iniciais ............................................................................................................. 20
4.2. Determinação da Geometria Ideal ................................................................................... 21
4.3. Geometria Proposta ........................................................................................................... 27
5. Componentes Mecânicos ....................................................................................................... 32
5.1. Cubo ..................................................................................................................................... 32
5.2. Pás ........................................................................................................................................ 33
5.3. Gerador ................................................................................................................................ 34
5.4. Freio ...................................................................................................................................... 36
5.5. Carcaça da Nacele ............................................................................................................. 37
5.6. Acoplamentos ..................................................................................................................... 38
5.7. Estrutura ............................................................................................................................... 38
6. Multiplicador de velocidades ................................................................................................ 40
6.1. Engrenagens ....................................................................................................................... 40
6.1.1. Resistência à Fadiga .................................................................................................. 44
6.2. Árvores ................................................................................................................................. 46
6.3. Rolamentos ......................................................................................................................... 51
6.4. Chavetas .............................................................................................................................. 53
7. Torre ............................................................................................................................................. 55
8. Conclusão .................................................................................................................................. 57
8.1. Sugestões de Trabalhos Futuros ..................................................................................... 57
9. Referências Bibliográficas ..................................................................................................... 59

vii
Apêndice ............................................................................................................................................. 62
Anexos: ............................................................................................................................................... 66
1
1. Introdução
O desenvolvimento da ciência climática nas últimas décadas deixou claro o
vínculo entre a queima de combustíveis fósseis e o processo de elevação das médias
de temperatura global. Desde então, a demanda por uma matriz energética mais limpa
e sustentável tem se tornado uma preocupação cada vez maior, mobilizando grandes
esforços da comunidade científica. Nesse cenário de busca por alternativas aos
combustíveis fósseis, a energia eólica se apresenta como alternativa cada vez mais
interessante, o que fica demonstrado pelo crescimento da indústria da energia eólica
e da capacidade instalada ao redor do mundo.
Quando comparada com outras fontes alternativas de energia, a energia eólica
é uma das que apresenta maior maturidade, tendo recebido pesados investimentos
ao longo dos anos. Os aerogeradores modernos tem atingido níveis de eficiência cada
vez maiores, diminuindo o custo da energia produzida, e tornando cada vez mais
atrativa essa fonte de energia.
Inspirado nessa conjuntura, esse trabalho busca a análise aerodinâmica e
mecânica dos componentes de um aerogerador, propondo uma solução que
apresente eficiência e baixo custo, e dimensionando seus elementos componentes
para uma aplicação doméstica na região de maior potencial eólico do Brasil, que é a
região Nordeste.
2
1.1. Motivação
Inspirado na crescente demanda mundial pela geração de energia através de
fontes renováveis e diminuição da dependência dos combustíveis fósseis, este
trabalho visa o desenvolvimento de um aerogerador de pequeno porte para o
aproveitamento do elevado potencial eólico da região Nordeste do Brasil.
1.2. Objetivo
Este trabalho tem como objetivo o desenvolvimento de um dispositivo capaz de
gerar energia elétrica através da transformação da energia contida no vento, tendo
como condições de contorno a disponibilidade do recurso eólico no litoral da região
Nordeste. Assim sendo, este projeto visa a concepção de um aerogerador e seus
componentes mecânicos, visando atender à demanda energética de uma residência,
que seja eficiente e de baixo custo, apresentando as etapas de cálculo, as motivações
que basearam as escolhas tomadas e os desenhos técnicos do equipamento.
1.3. Estrutura do Projeto
No segundo capítulo serão apresentadas informações sobre o histórico da
matriz energética mundial e nacional, o panorama atual, bem como informações que
ajudem a caracterizar sua evolução. O terceiro capítulo se dedica à descrição da
energia eólica, seu histórico, a estrutura básica de um aerogerador bem como suas
diferentes classificações e o princípio físico por trás da geração de energia através
dos ventos. No quarto capítulo é apresentado o dimensionamento aerodinâmico do
rotor, partindo das condições iniciais, obtendo-se uma geometria ideal da pá, e em
seguida se apresenta uma proposta de geometria de pá, baseada nas observações
feitas na literatura específica. O quinto capítulo apresenta a especificação de alguns
dos elementos mecânicos do aerogerador, definindo o critério para sua seleção no
caso dos elementos comerciais, e as escolhas feitas no caso de elementos a serem
fabricados. O sexto capítulo apresenta todo o dimensionamento dos componentes
internos do variador de velocidades. No sétimo capítulo está exposto o
dimensionamento da torre do aerogerador. E, finalmente, no oitavo capítulo são
apresentadas as conclusões deste projeto, e propostas de futuros trabalhos.
3
2. Histórico e Uso da Energia
Neste capítulo serão expostas informações que ajudem a qualificar o cenário
global em termos de geração e consumo de energia, bem como das fontes mais
utilizadas, num contexto global, e também nacional
2.1. Panorama Global
Considerando toda a história da humanidade, a fonte energética que nos
acompanha há mais tempo, sem dúvida, é a biomassa. O homem a utiliza há muito
tempo, da alimentação das primeiras fogueiras até o desenvolvimento dos mais
recentes biocombustíveis. Entretanto, a história recente nos mostra o surgimento de
uma necessidade energética que extrapola as simples necessidades básicas do ser
humano.
O processo de crescimento acelerado da demanda energética global tem início
em meados do século XIX, com a industrialização dos países europeus, acarretando
uma profunda mudança dos meios produtivos. Inicialmente movido a carvão mineral,
o modelo de produção industrial se espalhou pelo mundo, tendo papel central em
processos de desenvolvimento econômico e também de transformações sociais,
principalmente no crescimento das cidades e nas mudanças das relações de trabalho.
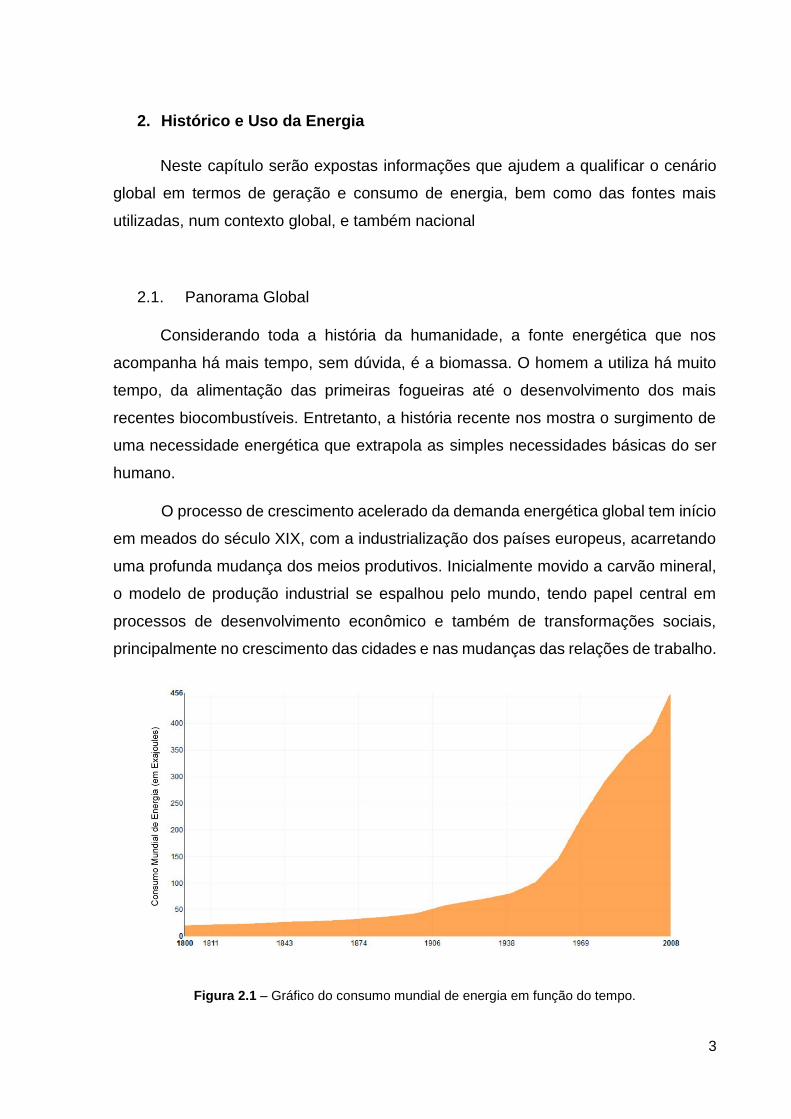
Figura 2.1 – Gráfico do consumo mundial de energia em função do tempo.
4
Com o passar dos anos, e com a demanda sempre crescente, conforme se vê
na figura 2.1, a humanidade foi buscando novas formas de satisfazer sua necessidade
de energia, que agora não mais se restringia ao setor industrial. A indústria do petróleo
desponta por volta de 1850, é acelerada na virada do século, e ganha destaque após
os esforços da Primeira Guerra Mundial, ocasião em que o petróleo se mostra um
recurso estratégico. O século XX ainda veria um expoente crescimento da indústria
automobilística, mais uma Grande Guerra, a criação da OPEP, as crises de 1973 e
1979 causando uma escalada de preços, e ainda assim, o petróleo entra no século
XIX como a principal fonte de energia primária. Em 1973, o petróleo sozinho respondia
por 46,2% da demanda mundial, seguido por carvão mineral, com 24,5%, e o gás
natural com 16,0%; todos combustíveis fósseis [6].
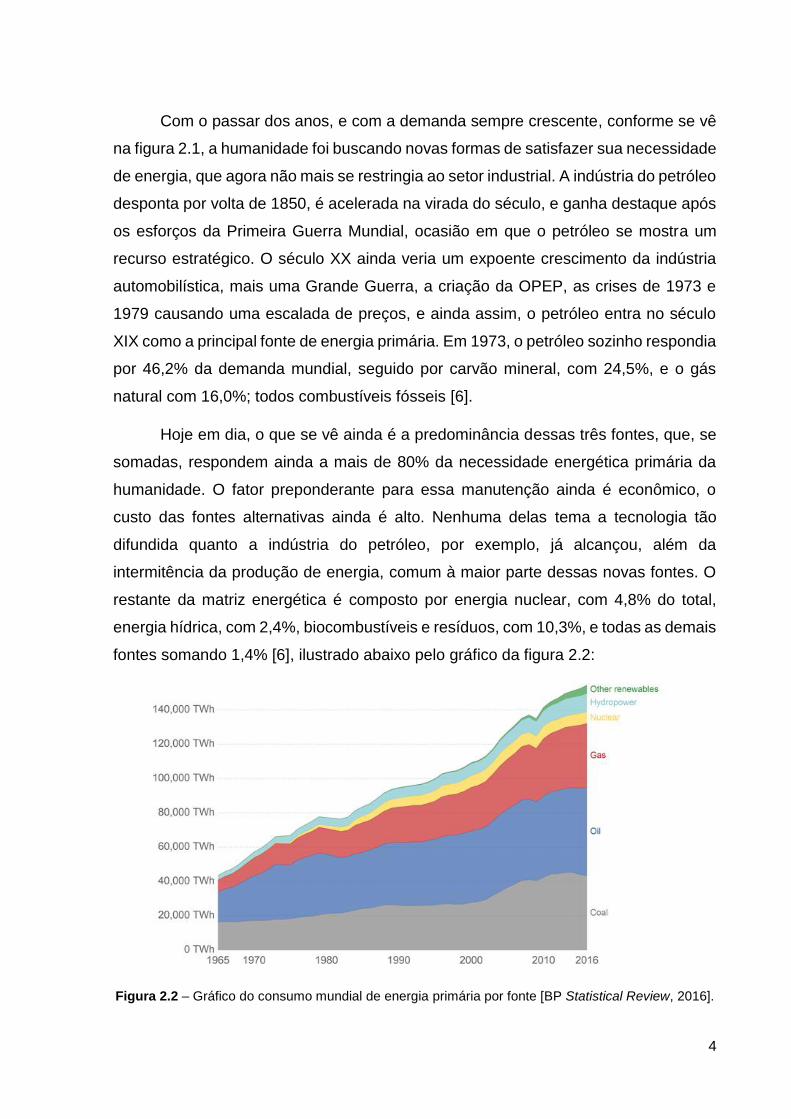
Hoje em dia, o que se vê ainda é a predominância dessas três fontes, que, se
somadas, respondem ainda a mais de 80% da necessidade energética primária da
humanidade. O fator preponderante para essa manutenção ainda é econômico, o
custo das fontes alternativas ainda é alto. Nenhuma delas tema a tecnologia tão
difundida quanto a indústria do petróleo, por exemplo, já alcançou, além da
intermitência da produção de energia, comum à maior parte dessas novas fontes. O
restante da matriz energética é composto por energia nuclear, com 4,8% do total,
energia hídrica, com 2,4%, biocombustíveis e resíduos, com 10,3%, e todas as demais
fontes somando 1,4% [6], ilustrado abaixo pelo gráfico da figura 2.2:
Figura 2.2 – Gráfico do consumo mundial de energia primária por fonte [BP Statistical Review, 2016].

5
Entretanto o cenário hoje é de estímulo ao desenvolvimento das energias de
fontes renováveis, basicamente, devido a três fatores: a demanda global por energias
limpas em um momento em que são sabidas as consequências da queima
indiscriminada de combustíveis fósseis, a certeza da finitude desses recursos, e a
necessidade de diversificação da matriz energética, diminuindo a dependência
estratégica de um único recurso. Tudo isso contribui para um ambiente de intensa
pesquisa e investimentos no setor, ilustrado pelo gráfico da figura 2.3:
Figura 2.3 – Gráfico do investimento em Fontes Renováveis por Região [IEA, 2017].
Atualmente, as fontes com maiores taxas de crescimento são a eólica e a solar
fotovoltaica, com taxas de crescimento anuais de 24,3% e 46,2%, respectivamente,
no intervalo de 1990 a 2014 [7]. Apesar dos números expressivos, menos de 15% da
energia mundial vem de fontes renováveis, o que ainda aponta um longo caminho a
ser percorrido até que tenhamos uma matriz energética em que essas fontes
predominem.
2.1. Panorama Nacional
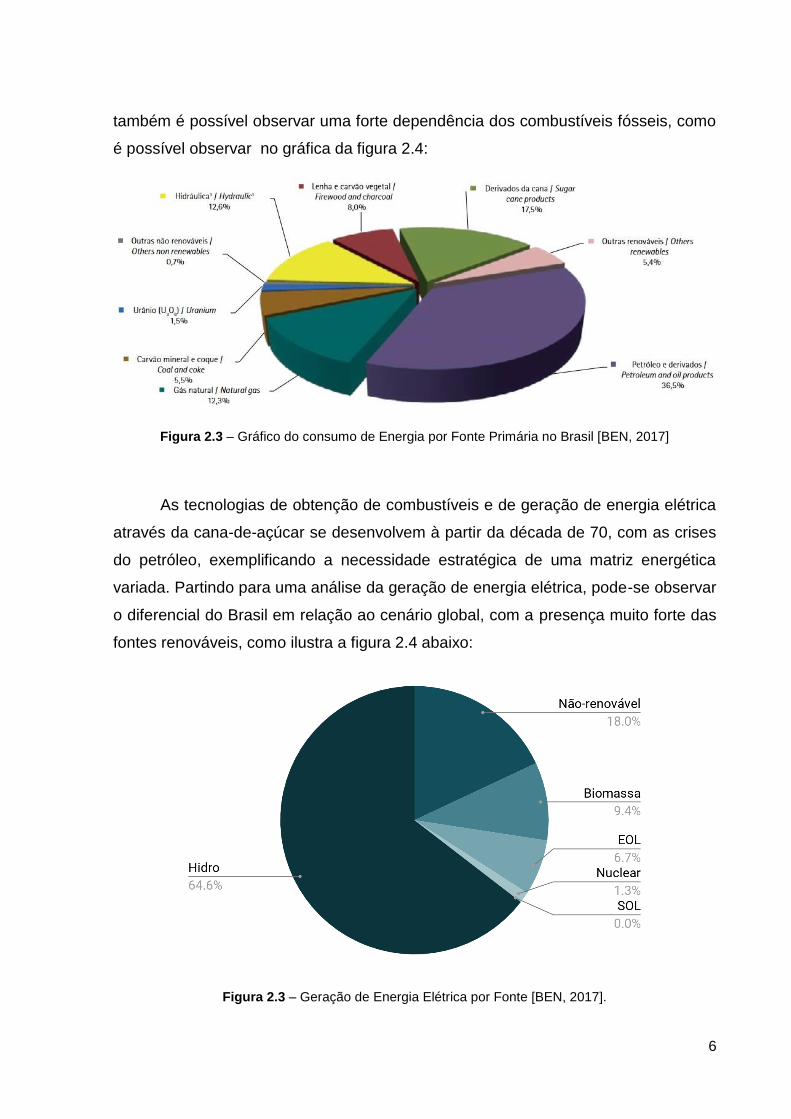
Considerando o cenário nacional, apesar da presença acima da média das
fontes renováveis, com destaque para a energia hidrelétrica e para a cana-de-açúcar,
6
também é possível observar uma forte dependência dos combustíveis fósseis, como
é possível observar no gráfica da figura 2.4:
Figura 2.3 – Gráfico do consumo de Energia por Fonte Primária no Brasil [BEN, 2017]
As tecnologias de obtenção de combustíveis e de geração de energia elétrica
através da cana-de-açúcar se desenvolvem à partir da década de 70, com as crises
do petróleo, exemplificando a necessidade estratégica de uma matriz energética
variada. Partindo para uma análise da geração de energia elétrica, pode-se observar
o diferencial do Brasil em relação ao cenário global, com a presença muito forte das
fontes renováveis, como ilustra a figura 2.4 abaixo:
Figura 2.3 – Geração de Energia Elétrica por Fonte [BEN, 2017].
7
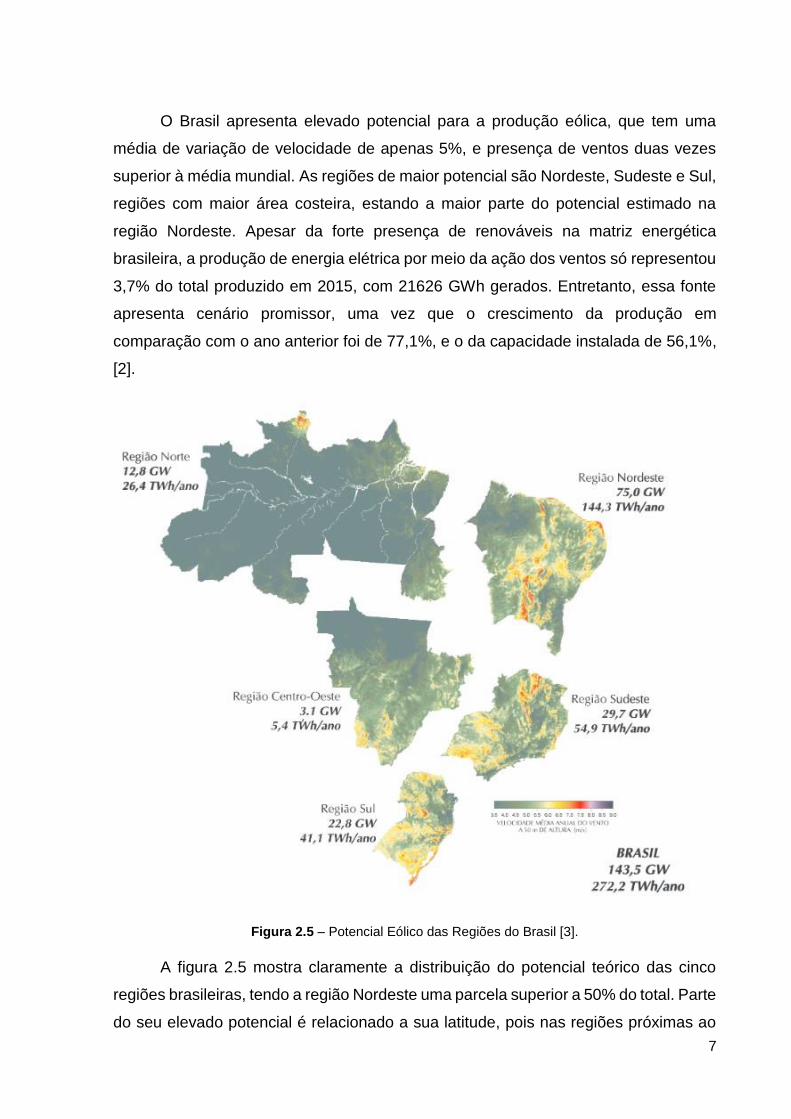
O Brasil apresenta elevado potencial para a produção eólica, que tem uma
média de variação de velocidade de apenas 5%, e presença de ventos duas vezes
superior à média mundial. As regiões de maior potencial são Nordeste, Sudeste e Sul,
regiões com maior área costeira, estando a maior parte do potencial estimado na
região Nordeste. Apesar da forte presença de renováveis na matriz energética
brasileira, a produção de energia elétrica por meio da ação dos ventos só representou
3,7% do total produzido em 2015, com 21626 GWh gerados. Entretanto, essa fonte
apresenta cenário promissor, uma vez que o crescimento da produção em
comparação com o ano anterior foi de 77,1%, e o da capacidade instalada de 56,1%,
[2].
Figura 2.5 – Potencial Eólico das Regiões do Brasil [3].
A figura 2.5 mostra claramente a distribuição do potencial teórico das cinco
regiões brasileiras, tendo a região Nordeste uma parcela superior a 50% do total. Parte
do seu elevado potencial é relacionado a sua latitude, pois nas regiões próximas ao
8
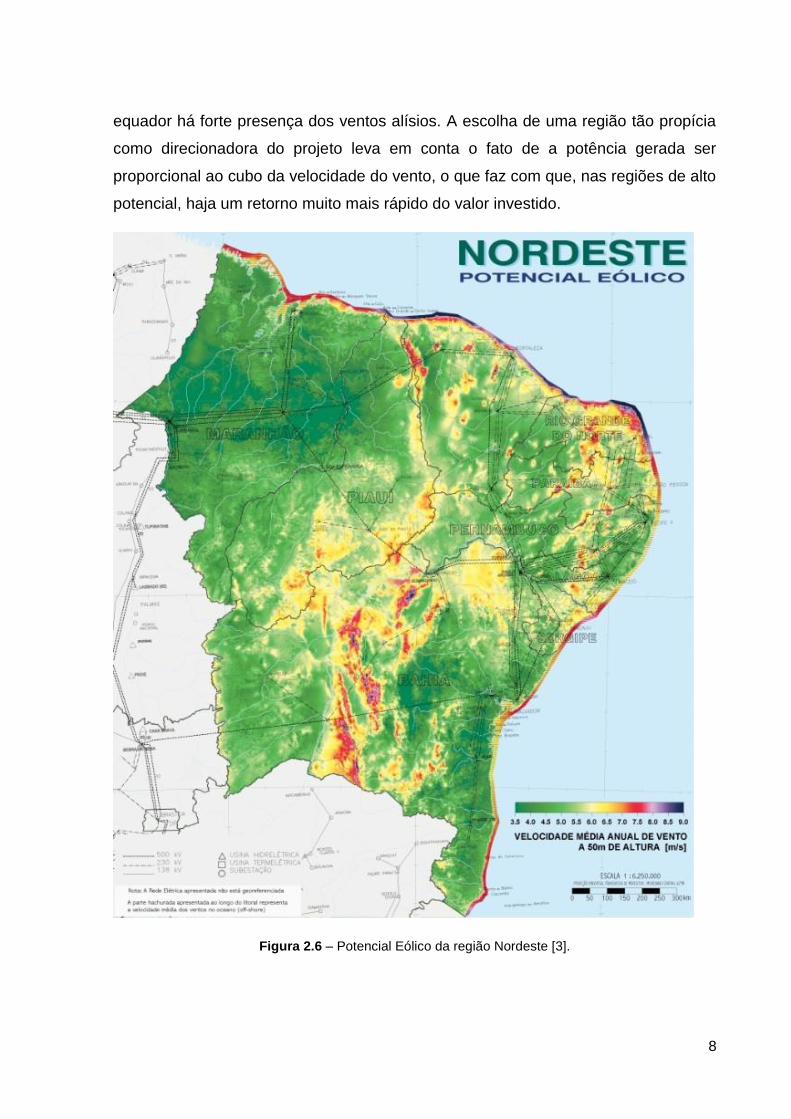
equador há forte presença dos ventos alísios. A escolha de uma região tão propícia
como direcionadora do projeto leva em conta o fato de a potência gerada ser
proporcional ao cubo da velocidade do vento, o que faz com que, nas regiões de alto
potencial, haja um retorno muito mais rápido do valor investido.
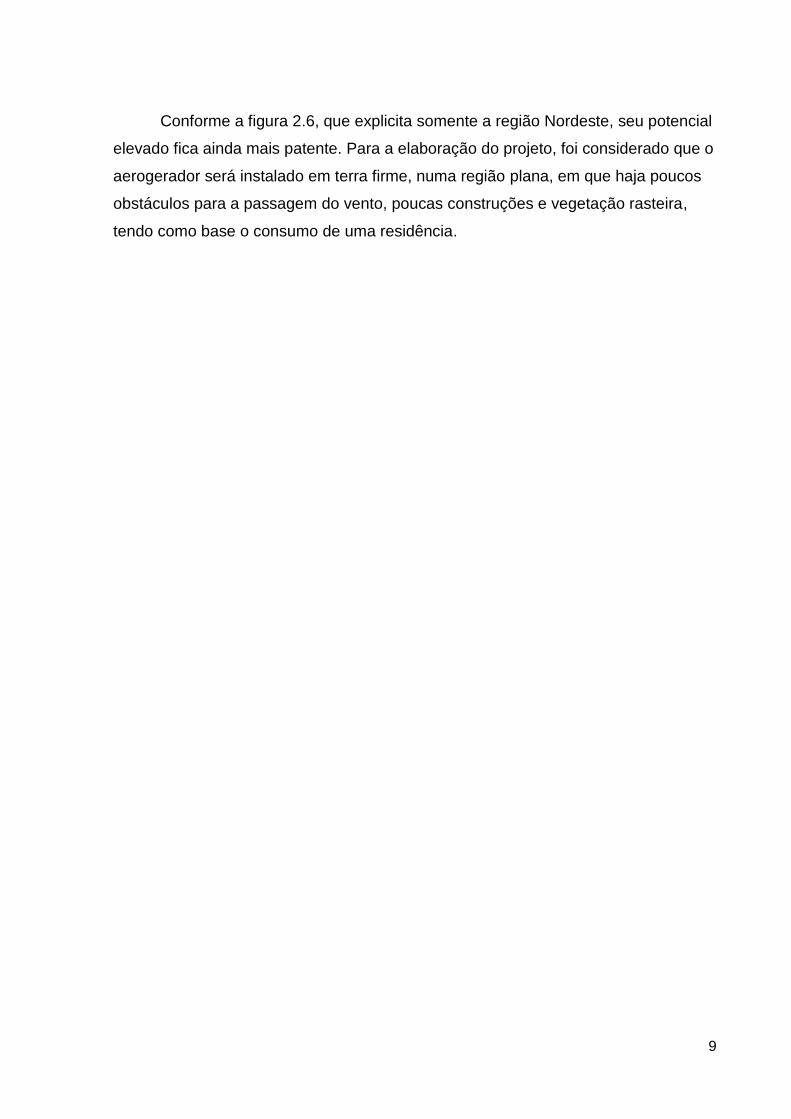
Figura 2.6 – Potencial Eólico da região Nordeste [3].
9
Conforme a figura 2.6, que explicita somente a região Nordeste, seu potencial
elevado fica ainda mais patente. Para a elaboração do projeto, foi considerado que o
aerogerador será instalado em terra firme, numa região plana, em que haja poucos
obstáculos para a passagem do vento, poucas construções e vegetação rasteira,
tendo como base o consumo de uma residência.
10
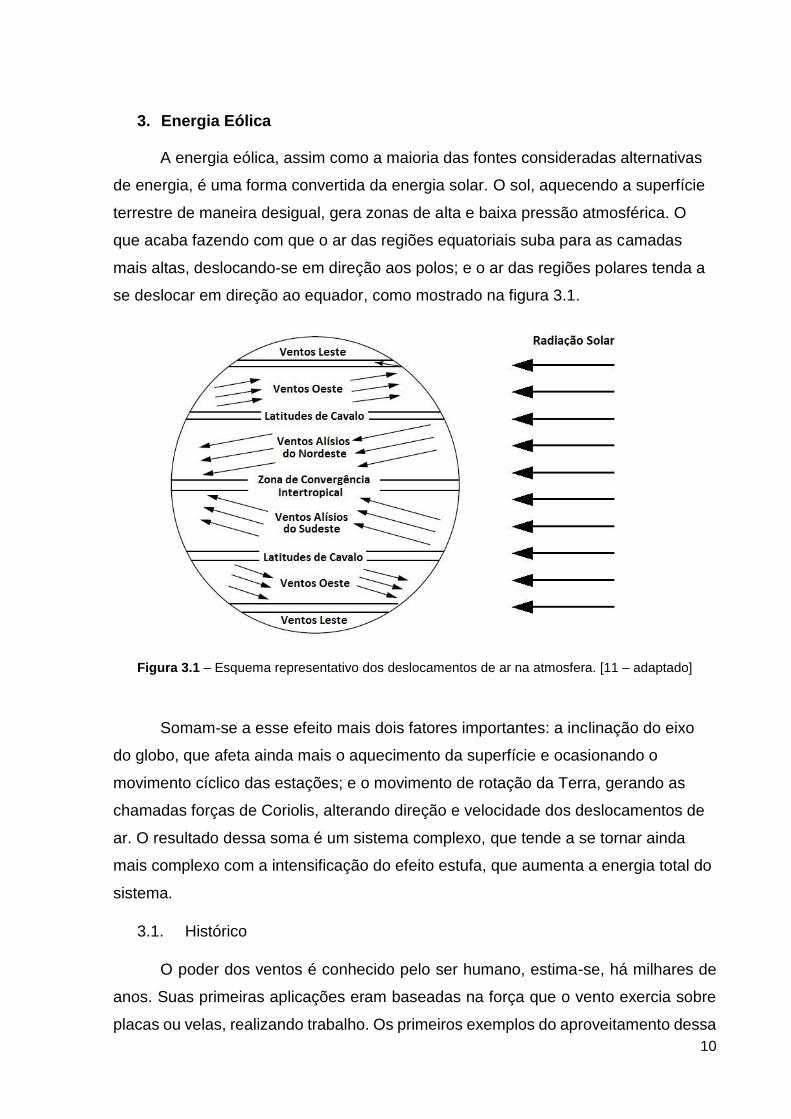
3. Energia Eólica
A energia eólica, assim como a maioria das fontes consideradas alternativas
de energia, é uma forma convertida da energia solar. O sol, aquecendo a superfície
terrestre de maneira desigual, gera zonas de alta e baixa pressão atmosférica. O
que acaba fazendo com que o ar das regiões equatoriais suba para as camadas
mais altas, deslocando-se em direção aos polos; e o ar das regiões polares tenda a
se deslocar em direção ao equador, como mostrado na figura 3.1.
Figura 3.1 – Esquema representativo dos deslocamentos de ar na atmosfera. [11 – adaptado]
Somam-se a esse efeito mais dois fatores importantes: a inclinação do eixo
do globo, que afeta ainda mais o aquecimento da superfície e ocasionando o
movimento cíclico das estações; e o movimento de rotação da Terra, gerando as
chamadas forças de Coriolis, alterando direção e velocidade dos deslocamentos de
ar. O resultado dessa soma é um sistema complexo, que tende a se tornar ainda
mais complexo com a intensificação do efeito estufa, que aumenta a energia total do
sistema.
3.1. Histórico
O poder dos ventos é conhecido pelo ser humano, estima-se, há milhares de
anos. Suas primeiras aplicações eram baseadas na força que o vento exercia sobre
placas ou velas, realizando trabalho. Os primeiros exemplos do aproveitamento dessa
11
fonte de energia são as embarcações à vela, e os moinhos de vento, utilizados na
moagem de grãos, no bombeamento de água, e em serrarias. Essa tecnologia, a partir
do século XV, já era bem difundida, ganhando novos usos à medida que a tecnologia
avançava, como na produção de papel, após a invenção da imprensa e até drenagem
de regiões pantanosas. Com a chegada das máquinas à vapor no século XIX, os
moinhos de vento caíram em desuso na Europa, embora fossem bastante populares
nos EUA [3]. A produção em larga escala de cata-ventos multipás tornava o dispositivo
acessível, o que teve papel fundamental na expansão da colonização do país.
Na década de 1930, também nos EUA, já eram vendidos pequenos
aerogeradores, que atendiam a população rural sem acesso à energia elétrica. O
dispositivo fez sucesso, chegando a ser exportado, mas foi perdendo popularidade
nas décadas de 50 e 60, à medida que a rede passava a atender as regiões mais
afastadas. Após a crise do petróleo, na década de 70, surgem os primeiros
aerogeradores de grande porte, baseados em experiências de décadas anteriores. O
modelo de competição, com incentivos do governo, favorece a produção e instalação
em larga de aerogeradores cada vez maiores [3]. A delimitação de áreas destinadas
à sua instalação também agilizou o processo de expansão, tornando desnecessários
os longos estudos ambientais que antes eram necessários.
3.2. Classificação dos aerogeradores
As turbinas eólicas podem ser classificadas de diferentes maneiras: turbinas de
arrasto ou de sustentação, de eixo vertical ou horizontal, e upwind ou downwind;
dependendo do aspecto analisado [7]. A primeira classificação diz respeito ao
princípio físico por trás da rotação da turbina, a segunda, a orientação do eixo de seu
rotor, e a terceira, à orientação do rotor em relação à direção do escoamento do ar.
As turbinas de arrasto apresentam superfícies que são literalmente empurradas pelo
vento, o que limita a velocidade de suas pás, que pode ser, no máximo, igual à
velocidade do escoamento. De forma a maximizar a energia extraída, nesse tipo de
turbina se busca maximizar a superfície a ser arrastada pelo vento, inclusive
aumentando-se o número de pás.
As turbinas de sustentação se utilizam de princípios aerodinâmicos. Suas pás
atuam como aerofólios, cuja geometria força o surgimento de diferenciais de pressão
entre sua região anterior e posterior, fazendo surgir uma força chamada de

12
sustentação ou lift. As grandes turbinas utilizadas em parques eólicos, e aquelas cuja
imagem vem à mente quando se fala em energia eólica, fazem uso desse princípio.
Figura 3.2 - À direita, uma turbina Darrieus, de de eixo vertical; à esquerda um aerogerador de eixo
horizontal [10].
A segunda classificação diz respeito à orientação do eixo da turbina em relação
à direção do escoamento do vento. O tipo mais comum de turbina eólica é a de eixo
horizontal, tendo larga maioria do mercado, e com tecnologia já num estágio bem
consolidado de maturação. As maiores representantes do grupo dos aerogeradores
de eixo vertical são os de Savonius, como na figura acima, e de Darrieus, sendo a
primeira de arrasto e a segunda de sustentação. Os dois tipos estão exemplificados
na figura 3.2.
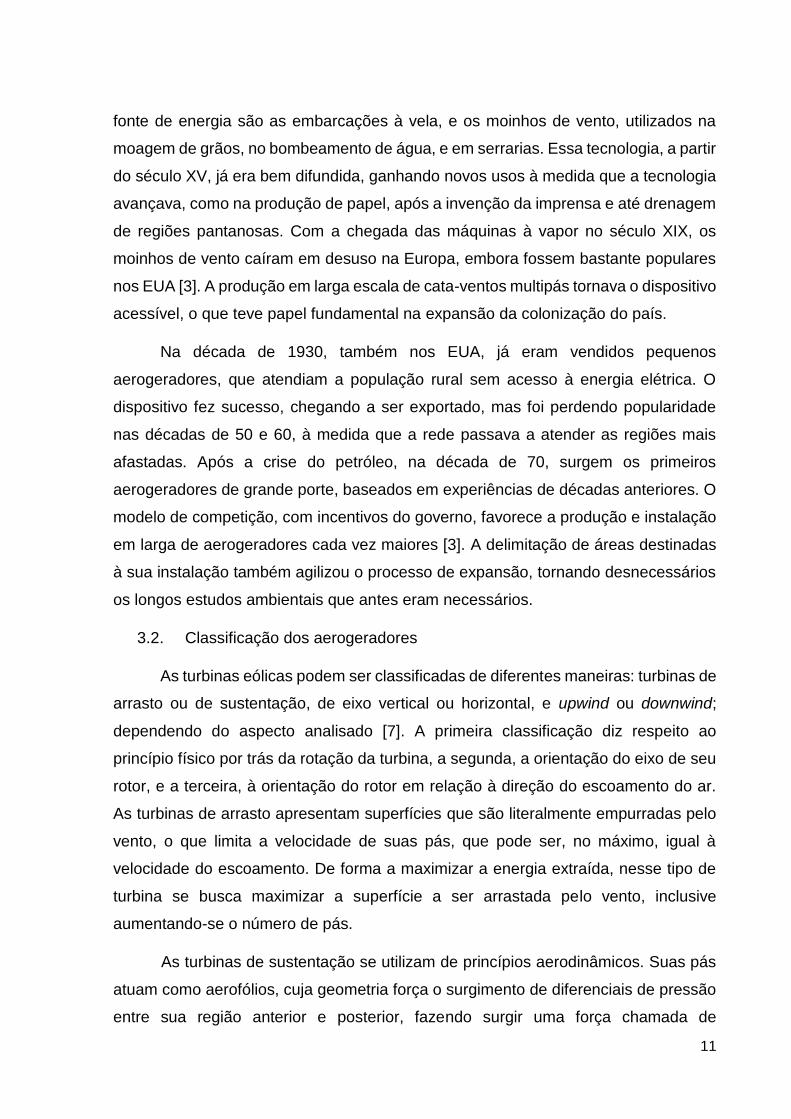
Finalmente a última classificação diz respeito ao posicionamento do rotor em
relação à torre: se recebem o vento pela frente são chamadas de upwind, e recebem
o vento pela parte posterior são chamadas de downwind, como demonstra a figura
3.3. As turbinas downwind possuem a vantagem de não precisarem de um sistema de
posicionamento ativo para se manterem na direção do vento, mas o fluxo de ar ao
redor da torre causa turbulências prejudiciais ao funcionamento do aerogerador. As
turbinas upwind não possuem o problema de turbulência devido ao fato de o vento
incidir primeiro nas pás do rotor, em compensação demandam um mecanismo que as
13
posicione adequadamente para receber o escoamento na melhor posição possível, o
que adiciona peso e complexidade a sua construção [7].
Figura 3.3 – À esquerda um aerogerador upwind; à direita um aerogerador downwind [11].
Para o acionamento do gerador elétrico, é desejável que o rotor desempenhe
altas rotações. Assim a transmissão pode utilizar menos estágios, o gerador também
pode ter seu tamanho reduzido, diminuindo tanto o custo quanto o peso total do
aerogerador. Uma alternativa para se conseguir esse efeito é a diminuição do número
de pás. Valendo-se desses argumentos, testes foram realizados com aerogeradores
de uma só pá. Contudo, para lidar com os esforços desbalanceados era necessário a
introdução de outros elementos mecânicos ao projeto, como amortecedores e juntas
especiais. Outro problema dessa construção é a emissão de ruído, que é proporcional
à sexta potência da velocidade de ponta da pá [7]. Uma menor velocidade de rotação
e baixa emissão de ruído são fatores importantes para a opinião pública da tecnologia
eólica. Ponderando esses e outros fatores, a indústria encontrou no aerogerador de
eixo horizontal e rotor com três pás a melhor solução para a geração de energia eólica,
por isso sua predominância mundial.
Abaixo, na figura 3.4, vê-se um aerogerador de grande porte, explicitando seus
componentes, segundo [4]. Além do rotor e do gerador, há uma série de outros
elementos que permitem um funcionamento seguro do aerogerador.

14
Figura 3.4 – Principais componentes de um aerogerador de grande porte [4].
● Pás da turbina: (1) As pás são responsáveis por transformar a energia cinética
do vento incidente em energia de rotação do eixo;
● Cubo da Turbina: (2) Peça responsável pela união das pás em torno do eixo,
feita de ferro fundido;
● Carcaça da Nacele: (3) É a peça que serve de elemento estrutural para os
demais elementos do aerogerador, deve apresentar rigidez e ductilidade, de
forma a absorver esforços e vibrações, fabricada em ferro fundido de qualidade;
● Rolamento do Eixo da Turbina: (4) Rolamento de esferas ou roletes em mancal
de ferro fundido;
● Eixo da Turbina: (5) Responsável pela condução do movimento de rotação
causada pelas pás para o sistema de transmissão, tem diâmetro relativamente
grande para suportar os esforços a que está submetido, trabalhando em baixas
rotações;
● Caixa de Transmissão: (6) Caixa de engrenagens possuindo, geralmente, dois
estágios (três nas maiores turbinas), que recebe a baixa rotação do eixo do
rotor e a multiplica para a obtenção de um valor compatível com a operação do
gerador;
● Freio do Eixo do Gerador: (7) Sistema de freio a disco para situações de
emergência ou manutenção, podendo ser auxiliado por um pino, travando o
eixo;
15
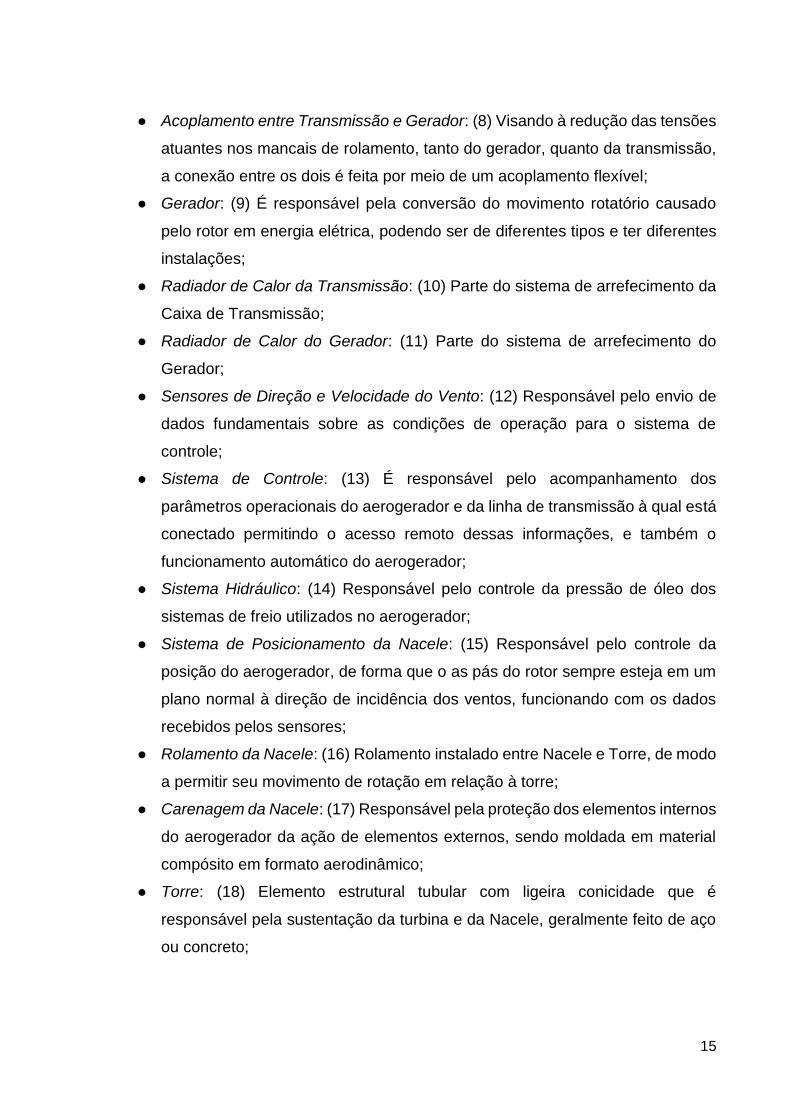
● Acoplamento entre Transmissão e Gerador: (8) Visando à redução das tensões
atuantes nos mancais de rolamento, tanto do gerador, quanto da transmissão,
a conexão entre os dois é feita por meio de um acoplamento flexível;
● Gerador: (9) É responsável pela conversão do movimento rotatório causado
pelo rotor em energia elétrica, podendo ser de diferentes tipos e ter diferentes
instalações;
● Radiador de Calor da Transmissão: (10) Parte do sistema de arrefecimento da
Caixa de Transmissão;
● Radiador de Calor do Gerador: (11) Parte do sistema de arrefecimento do
Gerador;
● Sensores de Direção e Velocidade do Vento: (12) Responsável pelo envio de
dados fundamentais sobre as condições de operação para o sistema de
controle;
● Sistema de Controle: (13) É responsável pelo acompanhamento dos
parâmetros operacionais do aerogerador e da linha de transmissão à qual está
conectado permitindo o acesso remoto dessas informações, e também o
funcionamento automático do aerogerador;
● Sistema Hidráulico: (14) Responsável pelo controle da pressão de óleo dos
sistemas de freio utilizados no aerogerador;
● Sistema de Posicionamento da Nacele: (15) Responsável pelo controle da
posição do aerogerador, de forma que o as pás do rotor sempre esteja em um
plano normal à direção de incidência dos ventos, funcionando com os dados
recebidos pelos sensores;
● Rolamento da Nacele: (16) Rolamento instalado entre Nacele e Torre, de modo
a permitir seu movimento de rotação em relação à torre;
● Carenagem da Nacele: (17) Responsável pela proteção dos elementos internos
do aerogerador da ação de elementos externos, sendo moldada em material
compósito em formato aerodinâmico;
● Torre: (18) Elemento estrutural tubular com ligeira conicidade que é
responsável pela sustentação da turbina e da Nacele, geralmente feito de aço
ou concreto;

16
● Sistema de Controle do Ângulo de Passo da Turbina: (19) Existente em alguns
modelos de aerogerador, permite o controle automático do ângulo de passo da
turbina segundo parâmetros pré-definidos;
Segundo [9], os aerogeradores na concepção de hoje estão próximos do seu
tamanho limite, e o principal argumento para isso é a chamada Lei do Quadrado-Cubo.
Segundo esse princípio, a potência recuperada pela turbina é proporcional à área
varrida pelo rotor - e portanto, ao quadrado do seu diâmetro -, e seu custo e peso são
proporcionais ao cubo dessa medida, diminuindo a viabilidade econômica de projetos
ainda maiores. A lei, no entanto, não leva em consideração as inovações nos
processos de fabricação e utilização de novos materiais. Ao contrário do que previa a
lei, o crescimento real do peso das pás se deu com expoente de 2,3; ao invés de 3.
Também segundo esses autores, à medida que as turbinas crescem, tem-se buscado
a utilização de menos estágios de transmissão, ou mesmo sistemas de transmissão
direta com geradores de ímã permanente com diversos polos.
3.3. Princípio Físico
A energia contida nos deslocamentos de ar é uma energia essencialmente
cinética, forma de energia inerente ao deslocamento dos corpos, calculável através
da equação:
𝐸𝑘 =
1
2 𝑚 𝑈2
(3.1)
Havendo o deslocamento de uma dada massa de ar, pode-se pensar no fluxo de
energia, ou seja, potência, associado a esse deslocamento:
𝑃 = 𝐸�̇� =
𝑑𝐸𝑘
𝑑𝑡=
1
2 �̇� 𝑈2
(3.2)
Tomando como referência uma área circular de área 𝐴, o fluxo de massa através
dessa seção é:
�̇� = 𝜌𝑎𝑟 𝐴 𝑈 (3.3)
Substituindo essa equação na anterior, tem-se:

17
𝑃 =
1
2 𝜌𝑎𝑟 𝐴 𝑈3
(3.4)
Considerando um rotor ideal, com número de pás infinito, ignorando as perdas
aerodinâmicas, e assumindo que a pressão estática muito antes do disco do rotor e
muito depois são iguais à pressão do escoamento não perturbado, pode-se fazer uma
análise conforme a figura 3.7:
Figura 3.7 – Volume de controle do escoamento através do disco do rotor [11 - adaptado].
O impulso axial sobre o disco do rotor pode ser representado por:
𝑇 = �̇� (𝑈1 − 𝑈4) (3.5)
Como essa expressão retorna um valor positivo, a velocidade do escoamento na saída
do volume de controle é inferior a velocidade na entrada, e nenhum trabalho é
realizado. Aplicando a equação de Bernoulli dos dois lados do rotor, tem-se:
𝑝1 +
1
2𝜌𝑎𝑟𝑈1
2 = 𝑝2 + 1
2𝜌𝑎𝑟𝑈2
2 (3.6)
𝑝3 + 1
2𝜌𝑎𝑟𝑈3
2 = 𝑝4 + 1
2𝜌𝑎𝑟𝑈4
2 (3.7)
É assumido que as pressões 𝑝1 e 𝑝4 são iguais, e que não há perda de velocidade
através do disco do rotor, ou seja, 𝑈2 = 𝑈3. A força 𝑇 exercida no rotor também pode
ser escrita em função das pressões antes e depois do rotor, ou seja:
𝑇 = 𝐴2 (𝑝2 − 𝑝3) (3.8)
18
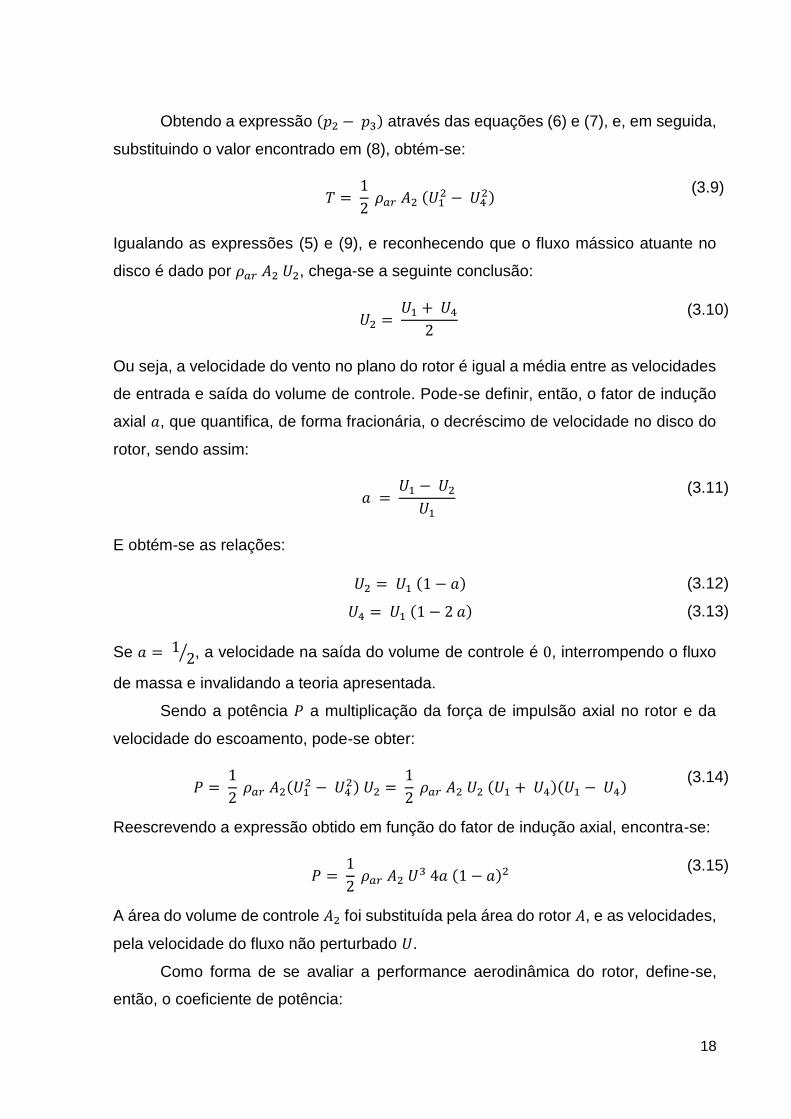
Obtendo a expressão (𝑝2 − 𝑝3) através das equações (6) e (7), e, em seguida,
substituindo o valor encontrado em (8), obtém-se:
𝑇 =
1
2 𝜌𝑎𝑟 𝐴2 (𝑈1
2 − 𝑈42)
(3.9)
Igualando as expressões (5) e (9), e reconhecendo que o fluxo mássico atuante no
disco é dado por 𝜌𝑎𝑟 𝐴2 𝑈2, chega-se a seguinte conclusão:
𝑈2 =
𝑈1 + 𝑈4
2
(3.10)
Ou seja, a velocidade do vento no plano do rotor é igual a média entre as velocidades
de entrada e saída do volume de controle. Pode-se definir, então, o fator de indução
axial 𝑎, que quantifica, de forma fracionária, o decréscimo de velocidade no disco do
rotor, sendo assim:
𝑎 =
𝑈1 − 𝑈2
𝑈1
(3.11)
E obtém-se as relações:
𝑈2 = 𝑈1 (1 − 𝑎) (3.12)
𝑈4 = 𝑈1 (1 − 2 𝑎) (3.13)
Se 𝑎 = 12⁄ , a velocidade na saída do volume de controle é 0, interrompendo o fluxo
de massa e invalidando a teoria apresentada.
Sendo a potência 𝑃 a multiplicação da força de impulsão axial no rotor e da
velocidade do escoamento, pode-se obter:
𝑃 =
1
2 𝜌𝑎𝑟 𝐴2(𝑈1
2 − 𝑈42) 𝑈2 =
1
2 𝜌𝑎𝑟 𝐴2 𝑈2 (𝑈1 + 𝑈4)(𝑈1 − 𝑈4)
(3.14)
Reescrevendo a expressão obtido em função do fator de indução axial, encontra-se:
𝑃 =
1
2 𝜌𝑎𝑟 𝐴2 𝑈3 4𝑎 (1 − 𝑎)2
(3.15)
A área do volume de controle 𝐴2 foi substituída pela área do rotor 𝐴, e as velocidades,
pela velocidade do fluxo não perturbado 𝑈.
Como forma de se avaliar a performance aerodinâmica do rotor, define-se,
então, o coeficiente de potência:

19
𝐶𝑃 =
𝑃
12 𝜌𝑎𝑟 𝐴2 𝑈3
(3.16)
Ou seja:
𝐶𝑃 = 4𝑎 (1 − 𝑎)2 (3.17)
Derivando-se a expressão obtida em relação a 𝑎 e igualando a 0, pode-se obter o
valor máximo de 𝐶𝑃, que ocorre em 𝑎 = 13⁄ :
𝐶𝑃𝑚𝑎𝑥
= 16
27= 0,5926
(3.18)
Esse valor obtido é denominado Limite de Betz, em homenagem ao físico
alemão Albert Betz, que desenvolveu esse método de análise.

20
4. Projeto Aerodinâmico
Este capítulo apresentará as etapas de cálculo e as considerações feitas para
a análise dimensionamento adequado das pás, bem como a proposição de uma
geometria alternativa à geometria ideal, considerada de fabricação complexa e
custosa.
4.1. Parâmetros Iniciais
Antes de começar as análises que levarão ao projeto do aerogerador e
dimensionamento de seus componentes, faz-se necessário o estabelecimento das
condições iniciais. O primeiro parâmetro estabelecido foi o diâmetro do rotor, e que
guiou as primeiras análises feitas foi o diâmetro desejado. O valor escolhido é
condizente com um aerogerador de pequeno porte, e, dado que ao se estabelecer o
tamanho do rotor, fica estabelecida a potência máxima do aerogerador, foi
determinado um diâmetro que gere uma potência compatível com uma demanda
doméstica:
𝐷 = 4 𝑚
Como esse projeto visa a implantação de um aerogerador em regiões de alto
potencial eólico da região Nordeste, baseado nas informações de [3], temos a média
de velocidades anuais do vento a 50 m de altura:
𝑈50 = 9 𝑚 𝑠⁄
Entretanto, a utilização de uma torre de 50 𝑚 é inviável para um aerogerador
de pequeno porte, logo, buscou-se compatibilizar a altura da torre, sabendo que isso
implicaria em uma menor velocidade do vento. Uma vez que se saiba a velocidade
do vento a uma dada altura, pode-se obter sua velocidade a uma altura de interesse
inferior a 100 𝑚 pela expressão abaixo, válida para superfícies planas:
𝑈 = 𝑈𝑟𝑒𝑓 (ln
𝑧𝑧0
ln𝑧𝑟𝑒𝑓
𝑧𝑜
)
(4.1)
21
em que 𝑈𝑟𝑒𝑓 e 𝑧𝑟𝑒𝑓são, respectivamente, a velocidade conhecida do vento e a que
altitude ela foi medida; e 𝑧0 é uma medida da “rugosidade do terreno”, ou seja, a
altura na qual a velocidade do vento é 0.
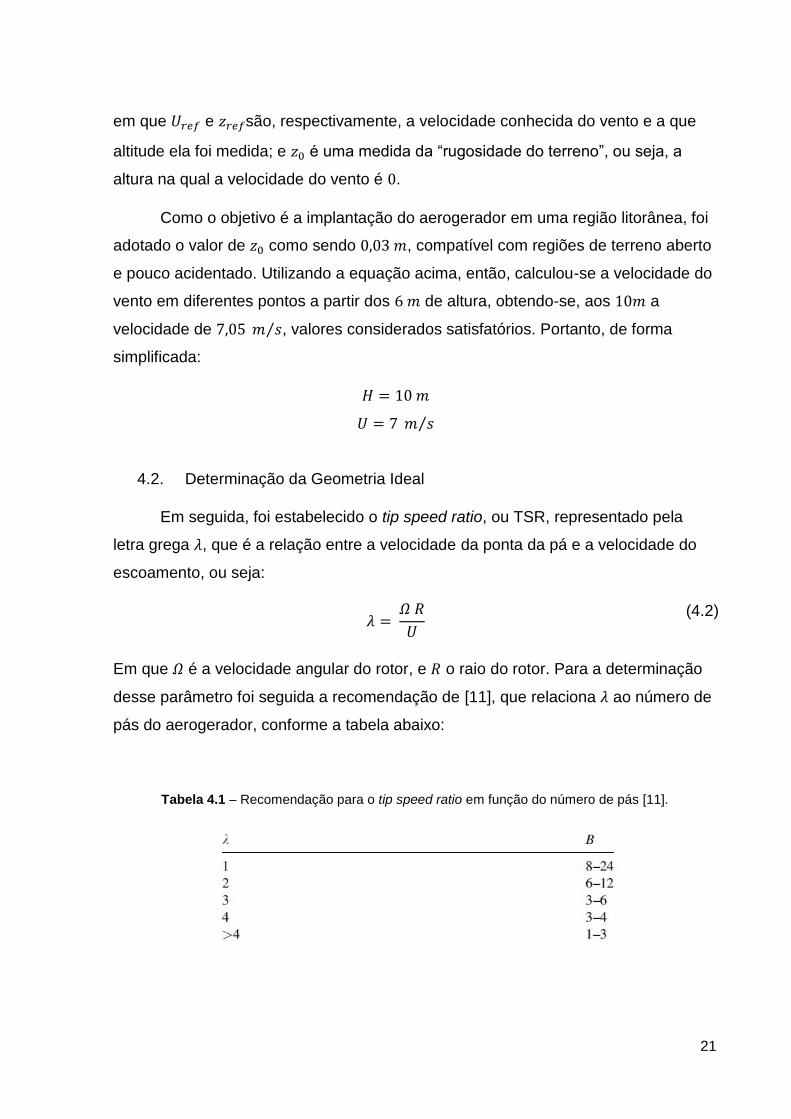
Como o objetivo é a implantação do aerogerador em uma região litorânea, foi
adotado o valor de 𝑧0 como sendo 0,03 𝑚, compatível com regiões de terreno aberto
e pouco acidentado. Utilizando a equação acima, então, calculou-se a velocidade do
vento em diferentes pontos a partir dos 6 𝑚 de altura, obtendo-se, aos 10𝑚 a
velocidade de 7,05 𝑚 𝑠⁄ , valores considerados satisfatórios. Portanto, de forma
simplificada:
𝐻 = 10 𝑚
𝑈 = 7 𝑚 𝑠⁄
4.2. Determinação da Geometria Ideal
Em seguida, foi estabelecido o tip speed ratio, ou TSR, representado pela
letra grega 𝜆, que é a relação entre a velocidade da ponta da pá e a velocidade do
escoamento, ou seja:
𝜆 =
𝛺 𝑅
𝑈
(4.2)
Em que 𝛺 é a velocidade angular do rotor, e 𝑅 o raio do rotor. Para a determinação
desse parâmetro foi seguida a recomendação de [11], que relaciona 𝜆 ao número de
pás do aerogerador, conforme a tabela abaixo:
Tabela 4.1 – Recomendação para o tip speed ratio em função do número de pás [11].
22
Dado os elevados custos de fabricação das pás, que assume porcentagem cada
vez maior do custo total do equipamento à medida que o diâmetro do rotor aumenta,
e como os projetos de sucesso, em grande e pequena escala, tem utilizado três pás,
esse projeto também utilizará esse número. Segundo [11], para a geração de energia
elétrica, o usual é a utilização de tip speed ratio entre 4 e 10.
A determinação de 𝜆 tem impacto direto em todas as etapas posteriores uma vez
que, quanto maior for seu valor, maior a velocidade da ponta da pá, o que reduz a
complexidade do multiplicador de velocidades do aerogerador, porém requer a
utilização de perfis aerodinâmicos cada vez mais delgados, fazendo com que sejam
necessários materiais cada vez mais nobres para a fabricação das pás, elevando os
custos totais do equipamento. Tendo isso em mente, para este projeto, então, foi
adotado 𝜆 = 6.
Uma vez determinado o valor de 𝜆, podemos obter a velocidade angular do rotor:
𝛺 =
𝑈 𝜆
𝑅= 21 𝑟𝑎𝑑 𝑠⁄ =̃ 201 𝑟𝑝𝑚
(4.3)
A seguir, foi definido o perfil aerodinâmico das pás. As análises se concentraram
nos aerofólios da família NACA 44XX, que apresentam elevados coeficientes de
sustentação (𝐶𝑙) e baixo arrasto. Os aerogeradores modernos utilizam diferentes
perfis ao longo da pá, mas uma vez que isso introduz uma maior complexidade na
quantificação do desempenho aerodinâmico do rotor, optou-se por utilizar apenas um
perfil ao longo de toda a pá e um ângulo de ataque fixo.
Para auxiliar na escolha do aerofólio foi utilizado o software QBlade, que se utiliza
do código XFOIL, programa voltado para a análise de aerofólios em regime subsônico,
e que é amplamente conhecido na indústria eólica. Com o QBlade foi possível verificar
o desempenho de diferentes aerofólios da família NACA 44XX em escoamentos de
baixo número de Reynolds, típico de pequenos aerogeradores.
Esta etapa do foi feita de forma iterativa, partindo de um valor arbitrado do número
de Reynolds e convergindo para os valores teóricos do projeto. O perfil escolhido para
as pás do aerogerador foi o Naca 4418, por apresentar bom desempenho
aerodinâmico e, sendo mais robusto que outros aerofólios da família, como o NACA
4412, ou o NACA 4415, permite a utilização de elementos estruturais de maiores
23
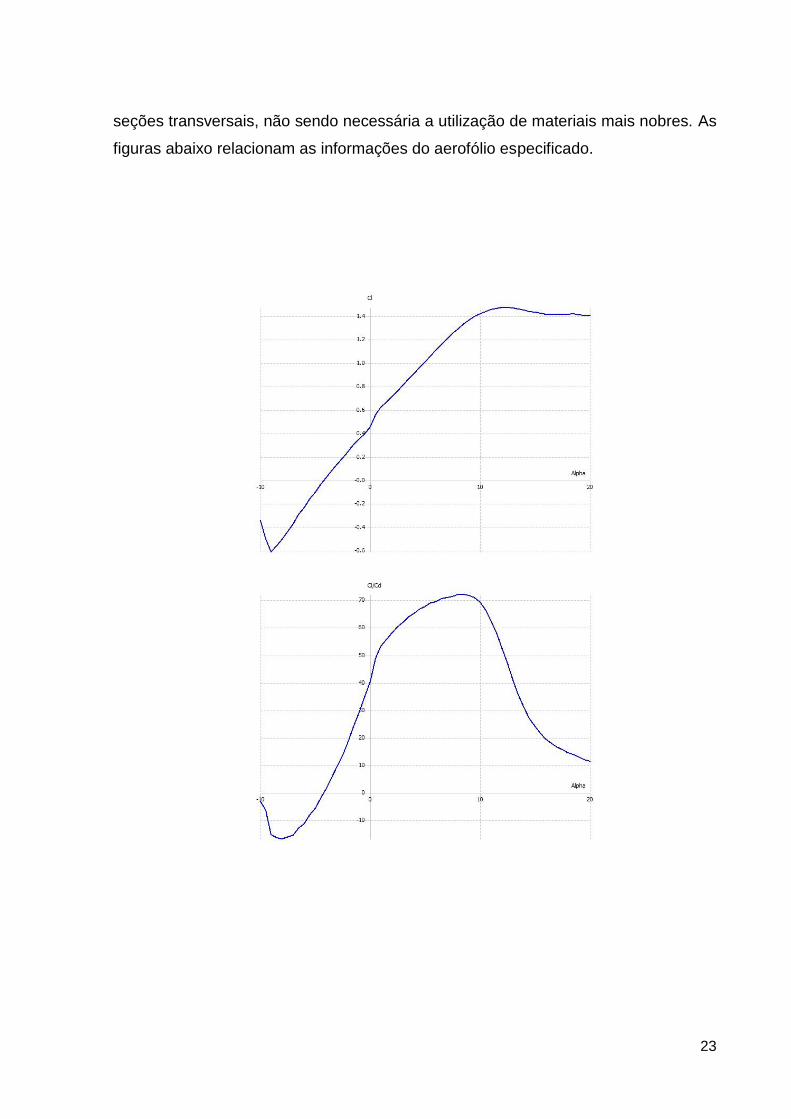
seções transversais, não sendo necessária a utilização de materiais mais nobres. As
figuras abaixo relacionam as informações do aerofólio especificado.
24
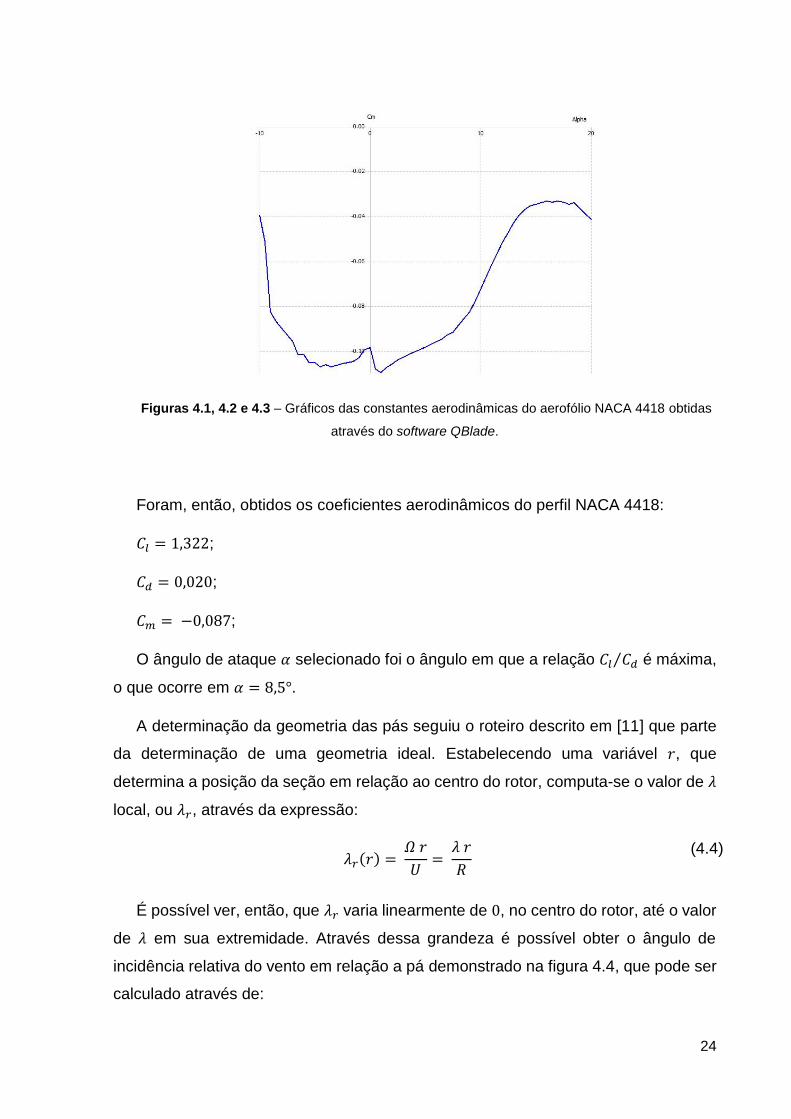
Figuras 4.1, 4.2 e 4.3 – Gráficos das constantes aerodinâmicas do aerofólio NACA 4418 obtidas
através do software QBlade.
Foram, então, obtidos os coeficientes aerodinâmicos do perfil NACA 4418:
𝐶𝑙 = 1,322;
𝐶𝑑 = 0,020;
𝐶𝑚 = −0,087;
O ângulo de ataque 𝛼 selecionado foi o ângulo em que a relação 𝐶𝑙 𝐶𝑑⁄ é máxima,
o que ocorre em 𝛼 = 8,5°.
A determinação da geometria das pás seguiu o roteiro descrito em [11] que parte
da determinação de uma geometria ideal. Estabelecendo uma variável 𝑟, que
determina a posição da seção em relação ao centro do rotor, computa-se o valor de 𝜆
local, ou 𝜆𝑟, através da expressão:
𝜆𝑟(𝑟) =
𝛺 𝑟
𝑈=
𝜆 𝑟
𝑅
(4.4)
É possível ver, então, que 𝜆𝑟 varia linearmente de 0, no centro do rotor, até o valor
de 𝜆 em sua extremidade. Através dessa grandeza é possível obter o ângulo de
incidência relativa do vento em relação a pá demonstrado na figura 4.4, que pode ser
calculado através de:
25
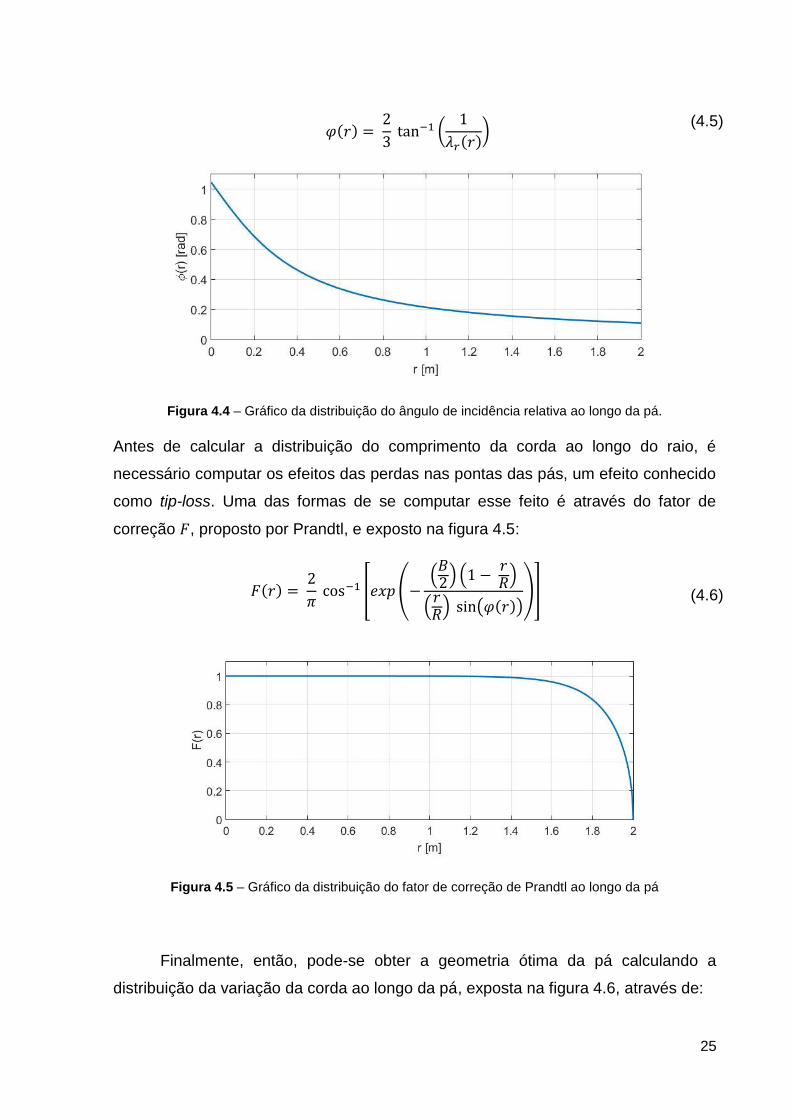
𝜑(𝑟) =
2
3 tan−1 (
1
𝜆𝑟(𝑟))
(4.5)
Figura 4.4 – Gráfico da distribuição do ângulo de incidência relativa ao longo da pá.
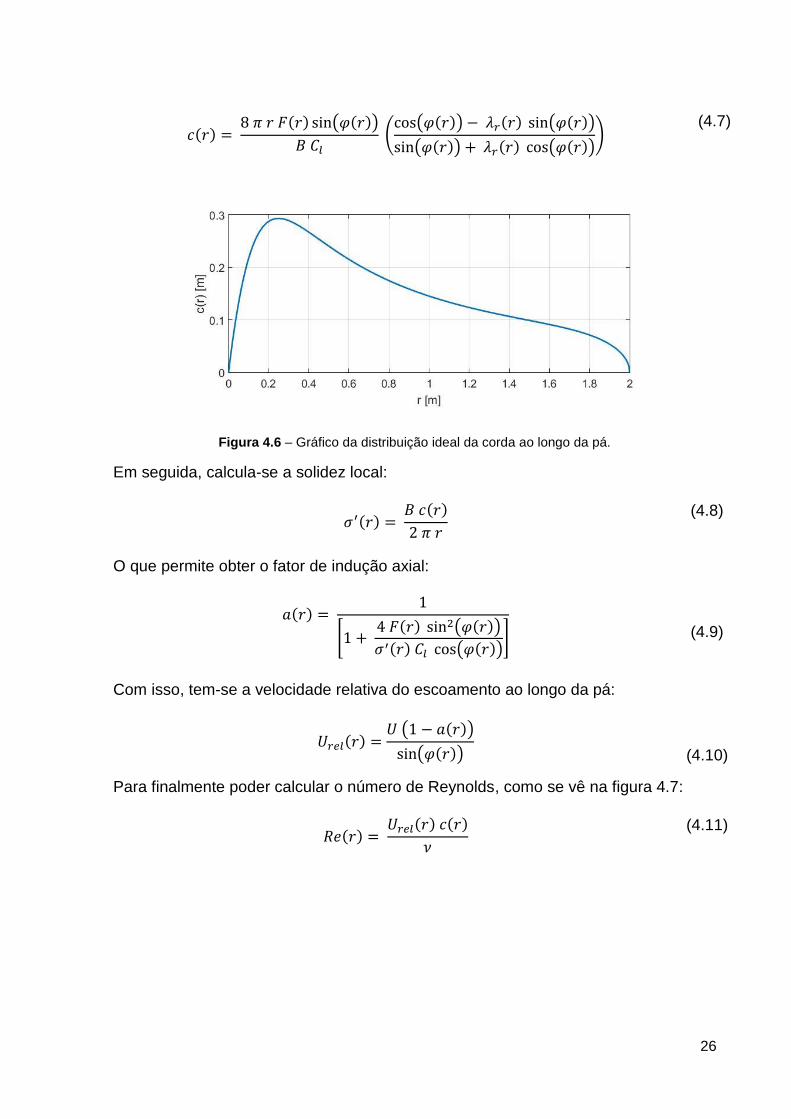
Antes de calcular a distribuição do comprimento da corda ao longo do raio, é
necessário computar os efeitos das perdas nas pontas das pás, um efeito conhecido
como tip-loss. Uma das formas de se computar esse feito é através do fator de
correção 𝐹, proposto por Prandtl, e exposto na figura 4.5:
𝐹(𝑟) = 2
𝜋 cos−1 [𝑒𝑥𝑝 (−
(𝐵2) (1 −
𝑟𝑅)
(𝑟𝑅) sin(𝜑(𝑟))
)]
(4.6)
Figura 4.5 – Gráfico da distribuição do fator de correção de Prandtl ao longo da pá
Finalmente, então, pode-se obter a geometria ótima da pá calculando a
distribuição da variação da corda ao longo da pá, exposta na figura 4.6, através de:
26
𝑐(𝑟) =
8 𝜋 𝑟 𝐹(𝑟) sin(𝜑(𝑟))
𝐵 𝐶𝑙 (
cos(𝜑(𝑟)) − 𝜆𝑟(𝑟) sin(𝜑(𝑟))
sin(𝜑(𝑟)) + 𝜆𝑟(𝑟) cos(𝜑(𝑟)))
(4.7)
Figura 4.6 – Gráfico da distribuição ideal da corda ao longo da pá.
Em seguida, calcula-se a solidez local:
𝜎′(𝑟) =
𝐵 𝑐(𝑟)
2 𝜋 𝑟
(4.8)
O que permite obter o fator de indução axial:
𝑎(𝑟) =
1
[1 + 4 𝐹(𝑟) sin2(𝜑(𝑟))
𝜎′(𝑟) 𝐶𝑙 cos(𝜑(𝑟))]
(4.9)
Com isso, tem-se a velocidade relativa do escoamento ao longo da pá:
𝑈𝑟𝑒𝑙(𝑟) =
𝑈 (1 − 𝑎(𝑟))
sin(𝜑(𝑟))
(4.10)
Para finalmente poder calcular o número de Reynolds, como se vê na figura 4.7:
𝑅𝑒(𝑟) =
𝑈𝑟𝑒𝑙(𝑟) 𝑐(𝑟)
𝜈
(4.11)

27
Figura 4.7 – Gráfico da distribuição do número de Reynolds ao longo da pá.
Sendo 𝜈 a viscosidade dinâmica do ar. Então, com o novo valor do número de
Reynolds dá-se início a uma nova iteração dos cálculos acima, até que os valores
convirjam, e se obtenha os valores dos coeficientes aerodinâmicos apresentados
inicialmente.
4.3. Geometria Proposta
A forma da pá obtida através dos cálculos apresenta elevado grau de
complexidade, sendo de difícil fabricação e custo elevado. Propõe-se, então, uma
simplificação tanto de 𝜑(𝑟) quanto de 𝑐(𝑟) de forma a minimizar os impactos citados,
sem que isso imponha perdas drásticas no rendimento aerodinâmico do rotor.
A forma construtiva mais simples seria a de corda constante e sem ângulo de
torção. Entretanto, segundo [16], essa forma só apresenta desempenho apreciável
em escoamentos de número de Reynolds elevado, acima de 3𝑥106, e, no caso de
aerogeradores de pequena escala, sofre com perda de sustentação – stall –
prematuramente.
Sendo assim, optou-se por seguir uma das proposições de [16], também
presente em [11], que é a linearização das distribuições, tanto da corda, quanto do
ângulo de torção.

28
O primeiro passo na busca pelas melhores simplificações de 𝜑(𝑟) e 𝑐(𝑟) foi a
discretização da coordenada 𝑟. Segundo a orientação da literatura, a pá foi dividida
em 𝑁 elementos de igual comprimento como na figura 4.8 – nesse caso, 𝑁 = 10 – e
a análise se concentrou nos pontos centrais de cada segmento, com coordenada
genérica descrita por 𝑟𝑖.
Figura 4.8 – Coordenada r e exemplo das subdivisões da pá [11].
O próximo passo é a proposição de uma função linear que substitua a curva de
𝜑(𝑟), quantificando seu impacto em 𝐶𝑝, através da aproximação:
𝐶𝑝 =̃
8
𝜆 𝑁∑ (𝐹𝑖 sin2 𝜑𝑖 (cos 𝜑𝑖 − 𝜆𝑟,𝑖 sin 𝜑𝑖)(sin 𝜑𝑖 + 𝜆𝑟,𝑖 cos 𝜑𝑖) [1 − (
𝐶𝑑
𝐶𝑙
) cot 𝜑𝑖] 𝜆𝑟,𝑖2 )
𝑁
𝑖=𝑘
(4.12)
Em que 𝑘 é o índice do primeiro segmento composto pelo aerofólio, e que é aplicável
quando as 𝑁 divisões tem o mesmo tamanho.
As parcelas que mais contribuem para o valor do somatório acima são as das
seções mais próximas da ponta da pá, onde 𝜆𝑟 atinge valores mais elevados, portanto,
buscou-se propor funções que tivessem maior aderência à distribuição ideal nessa
região.
A primeira tentativa foi feita com uma interpolação linear dos dois últimos
pontos – 𝑟9 e 𝑟10 – em seguida foi calculado seu rendimento conforme a aproximação
acima. A segunda tentativa contemplou os três últimos pontos, e assim
sucessivamente, aumentando a quantidade de pontos. O valor máximo de 𝐶𝑝 foi obtido
com a reta que contempla os 6 últimos pontos, fornecendo ao seguinte expressão:
29
𝜑′(𝑟) = −0,12 𝑟 + 0,33 (4.13)
sendo o ângulo 𝜑′(𝑟) expresso em radianos. Através dessa expressão, podemos
obter a distribuição do ângulo de torção ao longo da pá 𝜃𝑇(𝑟), bastando subtrair o
ângulo de ataque 𝛼.
Já no caso da corda, a obtenção de uma reta 𝑐′(𝑟) foi através de um processo
de tentativa e erro, em que se buscou a compatibilidade geométrica de uma pá com
seção transversal decrescente e a utilização de um elemento estrutural em seu
interior. Assim, estimou-se um valor considerado razoável para a corda na ponta da
pá, e cada tentativa utilizou um valor inicial diferente até a obtenção de uma
distribuição aceitável.
𝑐′(𝑟) = −0,10 𝑟 + 0,32 (4.14)
O critério para validação da função encontrada foi, primeiramente, a concepção
de um elemento estrutural de seção transversal também decrescente e que fosse
capaz de sustentar os esforços calculados posteriormente. Outra forma de se validar
a função 𝑐′(𝑟), foi através do cálculo da solidez:
𝜎 =̃
𝐵
𝑁 𝜋 (∑
𝑐𝑖′
𝑅
𝑁
𝑖=𝑘
) = 0,090 = 9,0%
(4.15)
O valor obtido para a solidez foi compatível com o explicitado em [10] para um
rotor utilizando um aerofólio da família NACA 44XX, e com diâmetro inferior a 10m,
que seria de 8,9%.
Uma vez obtidas as distribuições 𝜃𝑇(𝑟) e 𝑐′(𝑟) fica definida a geometria da pá.
Esses valores são, então, utilizados nos cálculos das grandezas anteriores, obtendo-
se assim os valores relativos à forma construtiva escolhida. O próximo passo é o
cálculo das forças atuantes no rotor, como mostra a figura 4.9:

30
Figura 4.9 – Esforços atuantes na seção da pá [11 - adaptado].
𝐹𝑁 = 1
2 𝐵 𝜌𝑎𝑟 ∫[𝑈𝑟𝑒𝑙
2 (𝑟)(𝐶𝑙 cos(𝜑′(𝑟)) + 𝐶𝑑 sin(𝜑′(𝑟)))𝑐′(𝑟)]𝑑𝑟
𝑅
𝑟ℎ
= 310,4 𝑁
(4.16)
𝐹𝑇 = 1
2 𝜌𝑎𝑟 ∫[𝑈𝑟𝑒𝑙
2 (𝑟)(𝐶𝑙 sin(𝜑′(𝑟)) − 𝐶𝑑 cos(𝜑′(𝑟)))𝑐′(𝑟)]𝑑𝑟
𝑅
𝑟ℎ
= 17,0 𝑁
(4.17)
𝑄 =
1
2 𝐵 𝜌𝑎𝑟 ∫[𝑈𝑟𝑒𝑙
2 (𝑟)(𝐶𝑙 sin(𝜑′(𝑟)) − 𝐶𝑑 cos(𝜑′(𝑟)))𝑐′(𝑟) 𝑟]𝑑𝑟
𝑅
𝑟ℎ
= 58,3 𝑁. 𝑚
(4.18)
Através do valor de 𝑄, obtém-se a potência teórica do rotor:
𝑃𝑟𝑜𝑡 = 𝛺 𝑄 = 1,22 𝑘𝑊 (4.20)
e, dividindo esse valor pela potência total disponível, tem-se o coeficiente de potência
do rotor proposto:
𝑃𝑤 =
1
2 𝜌𝑎𝑟 (𝜋
𝐷2
4) 𝑈3 = 2,56 𝑘𝑊
(4.21)

31
𝐶𝑝 =
𝑃𝑟𝑜𝑡
𝑃𝑤= 0,477 = 47,7%
(4.22)
Através do valor obtido pode-se fazer uma análise qualitativa da geometria
proposta: tendo em vista o valor do seu limite teórico, 59,3%, o rendimento obtido foi
considerado satisfatório. Outro fator importante observado durante as etapas de
cálculo foi que, a perda teórica em relação a forma ideal é inferior a cinco pontos
percentuais, enquanto uma construção com corda e ângulo de torção constantes
apresentou perdas próximas aos vinte pontos percentuais.

32
5. Componentes Mecânicos
Neste capítulo serão apresentados os processos de seleção e especificação
de alguns dos elementos mecânicos do aerogerador. No caso dos elementos
comerciais – o gerador, o freio eletromagnético e os acoplamentos –, foram
observados catálogos e selecionados itens compatíveis com a aplicação e os esforços
calculados. No caso dos elementos a serem fabricados, foi proposta uma geometria,
e, através de simulação computacional, foi verificada sua adequação às condições
esperadas na operação do aerogerador.
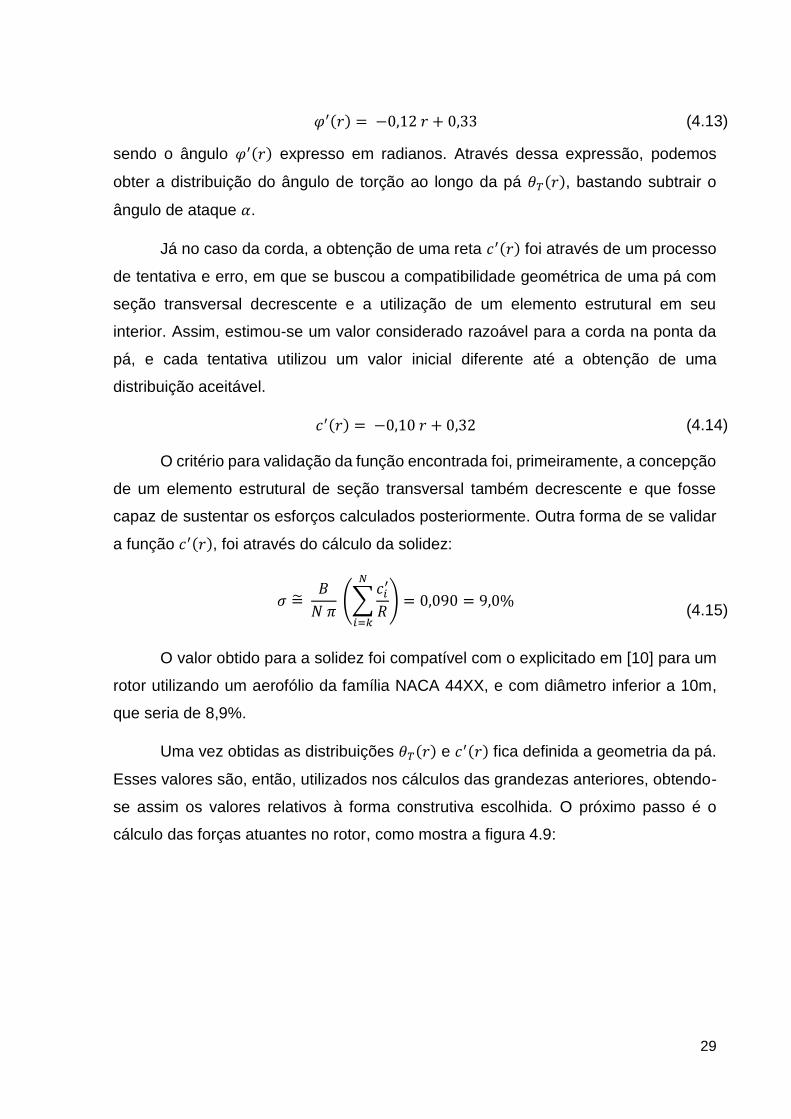
5.1. Cubo
O desenho do cubo foi inspirado no sistema utilizado em grandes
aerogeradores, em que a pá é fixada no cubo por meio de parafusos. A peça seria
fabricada por processo de fundição com ferro fundido cinzento, visando diminuir os
custos de usinagem, que devem se concentrar no acabamento dos furos e das faces
onde ocorrerá a união por parafusos M6. Os esforços desenvolvidos na operação
foram computados, mas são muito inferiores à resistência do material, tendo a
geometria se limitado às questões funcionais.
O cubo tem um diâmetro de 200 𝑚𝑚, e o furo central das faces de fixação das
pás permite que seja feito o encaixe de um ressalto previsto nas pás, diminuindo os
esforços cisalhantes na união aparafusada. Ele será fixado ao eixo principal através
de uma porca e uma contraporca M24, e também receberá uma cobertura de fibra de
vidro para acabamento. A peça também deverá receber pintura adequada a fim de
evitar sua corrosão. Abaixo, segue uma ilustração da geometria proposta, e da análise
dos esforços esperados em simulação computacional.
33
Figura 5.1 – Cubo do rotor.
5.2. Pás
O processo de obtenção da geometria das pás foi descrito anteriormente. Elas
serão fabricadas de espuma de poliuretano rígido, laminada com fibra de vidro,
conferindo maior resistência ao desgaste superficial. A fim de resistir aos esforços
calculados, foi concebido um elemento estrutural a ser fabricado de aço 1020 que
ficará localizado no centro aerodinâmico do perfil da pá.
A primeira ideia da geometria desse reforço interno foi na forma de uma barra
chata de dimensões comerciais, o que não apresentou resultados satisfatórios, tendo
em vista a diminuição da seção transversal da pá ao longo do raio e sua torção ao
longo do eixo aerodinâmico. O melhor resultado obtido foi com um elemento de seção
circular que varia em degraus até a ponta da pá. Uma vantagem dessa forma é
inexistência de uma direção preferencial de resistência à aplicação de uma força. Os
diferentes diâmetros especificados ao longo do elemento são todos padrões
comerciais, facilitando sua fabricação.
Com ajuda do programa SolidWorks, foi feita uma simulação da aplicação de
forças de igual intensidade às das calculadas anteriormente, através do módulo
Simulation Xpress. Nessa simulação, a resistência aos esforços se deve unicamente
ao elemento estrutural, desprezando os demais componentes da pá. Vale notar que o

34
material adotado foi um aço de baixo carbono, que foi adotado como ponto de partida
da análise dos esforços.
Figura 5.2 – Simulação da tensão de Von Mises atuantes no elemento estrutural da pá.
Considerando essa condição da aplicação das cargas, foi obtido um coeficiente
de segurança 2,7; o que foi considerado aceitável uma vez que, na prática, esse não
seria o único elemento a oferecer resistência às cargas aplicadas, o que aumenta a
confiabilidade do conjunto. A figura 5.2 apresenta a distribuição das tensões
esperadas ao longo do corpo do elemento central.
5.3. Gerador
Uma vez definida a potência teórica gerada pelo rotor, é necessário selecionar
um gerador adequado. Para tanto, foram consideradas as perdas na transmissão,
através dos rendimentos típicos de transmissão por engrenagens e também dos
mancais de rolamento, obtendo-se um rendimento estimado de 90%. Sendo assim, a
potência requerida pelo gerador é de:
𝑃𝑔𝑒𝑟 = 0,9 𝑃𝑟𝑜𝑡 = 1,10 𝑘𝑊 (5.1)
Baseado no valor acima, deu-se entrada no catálogo do fabricante de motores
elétricos WEG, e selecionou-se um motor de potência compatível com o consumo
esperado de uma residência. O motor escolhido foi da família W22 IR3 Premium, com
características conforme folha de dados abaixo. Muito embora a seleção de um motor
com uma maior quantidade de polos, 8 por exemplo, pudesse ser atrativa em um
35
primeiro momento, visto que seria necessária uma multiplicação menor, uma
comparação de custos através das ferramentas disponíveis no site do próprio
fabricante revelou uma diferença muito grande entre os preços dos diferentes
modelos. Sendo assim, optou-se pelo de menor custo, cujos dados estão
apresentados na figura 5.3.
Figura 5.3 – Folha de dados do motor elétrico selecionado [21].
36
5.4. Freio
Para que o aerogerador opere de forma segura, é necessário que ele seja
equipado com algum mecanismo de freio no caso de ventos com velocidade
consideravelmente superior à de projeto. Para a seleção adequada do torque nominal
requerido pelo mecanismo de freio, utilizando as equações já apresentadas na seção
descritiva da forma da pá, foi calculado o torque gerado pelo rotor numa situação de
vento acima da velocidade projeto. No caso, foi utilizada uma velocidade 50% maior,
arredondada para o inteiro superior mais próximo:
𝑄(𝑈 = 11 𝑚 𝑠⁄ ) = 143 𝑁. 𝑚 (5.2)
De posse desse valor, havia ainda uma decisão a ser tomada, no caso de um
aerogerador de pequeno porte, em que o eixo principal não apresenta dimensões tão
elevadas quanto o de um de grande porte, o freio pode ser instalado tanto no eixo
principal quanto no eixo de alta velocidade, na saída da transmissão. A vantagem de
colocá-lo no eixo de entrada é que ele protege os elementos da transmissão no caso
de sobrecarga, mas para isso é necessário um freio de proporções maiores.
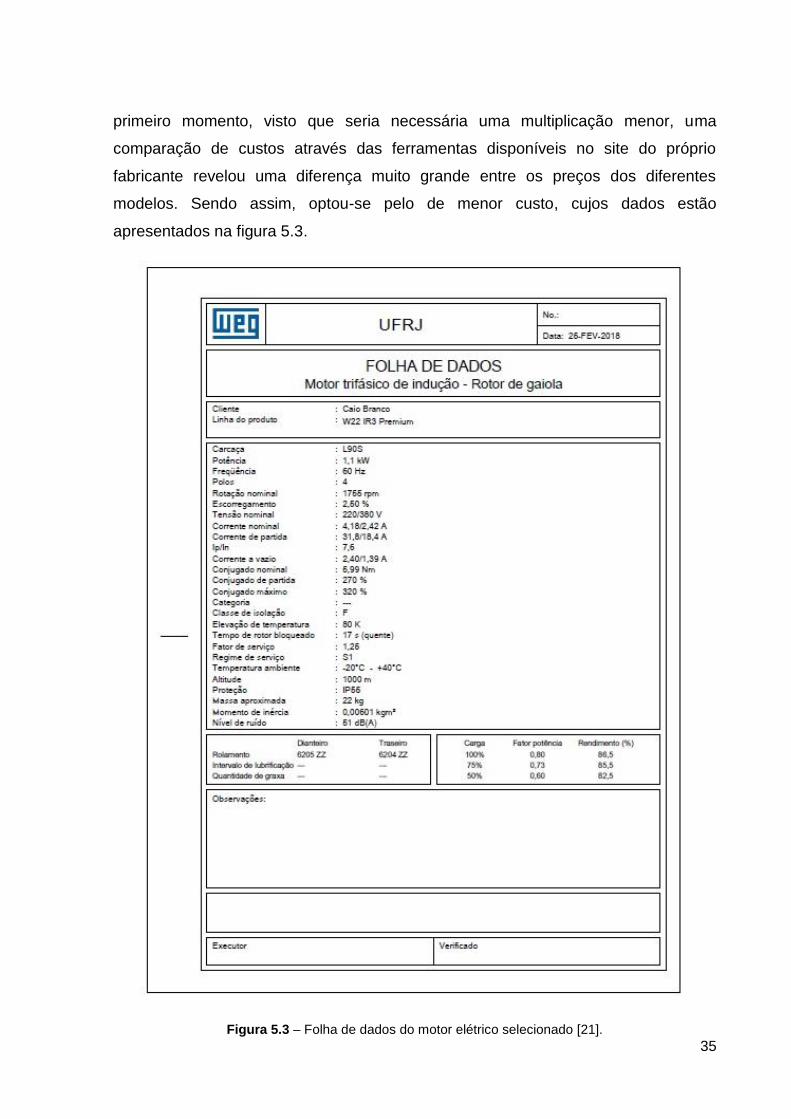
Sendo assim, utilizando o torque calculado acima, dando entrada no catálogo
do fabricante Mayr, modelo ROBA-quick, exemplificado na figura 5.4, e se selecionou
um freio eletromagnético compatível. Ele é constituído de uma parte acoplada ao eixo
através de chaveta, e outra que deve ser presa a um suporte transversal ao eixo.
Quando acionado, uma corrente elétrica percorre a bobina em seu interior, gerando
um campo magnético que atrai o disco acoplado ao eixo, fazendo com que ele entre
em atrito com a parte fixa do dispositivo, resistindo ao movimento.
Figura 5.4 – Representação do freio eletromagnético modelo ROBA-quick [19].
37
A escolha desse freio impõe algumas limitações à forma do eixo de entrada,
uma vez que o fabricante indica tanto uma faixa de diâmetros de eixo possíveis para
sua aplicação, bem como uma faixa de diâmetros preferenciais. Assim sendo,
seguindo uma abordagem conservadora para o dimensionamento geral dos
componentes, optou-se por seguir a recomendação do fabricante para um melhor
funcionamento do dispositivo.
5.5. Carcaça da Nacele
Para a proteção dos elementos mecânicos do aerogerador, foi concebida uma
carcaça feita de fibra de vidro, que apresenta boa resistência à intempérie. A carcaça
bipartida envolverá os componentes mecânicos, evitando a exposição excessiva às
condições climáticas. A parte inferior se apoiará sobre a extremidade do tubo da torre
e o encaixe entre as partes se dará por interferência.
Figura 5.5 – Carcaça da nacele.
38
5.6. Acoplamentos
Visando um melhor funcionamento do sistema como um todo, foram escolhidos
acoplamentos elásticos para a união dos eixos apresentados. A vantagem da
utilização desses elementos é uma maior tolerância aos desalinhamentos dos
componentes do aerogerador. O acoplamento absorve, até determinado limite,
desvios angulares e lineares entre os eixos, também atuando no amortecimento de
pequenas vibrações geradas no funcionamento do dispositivo.
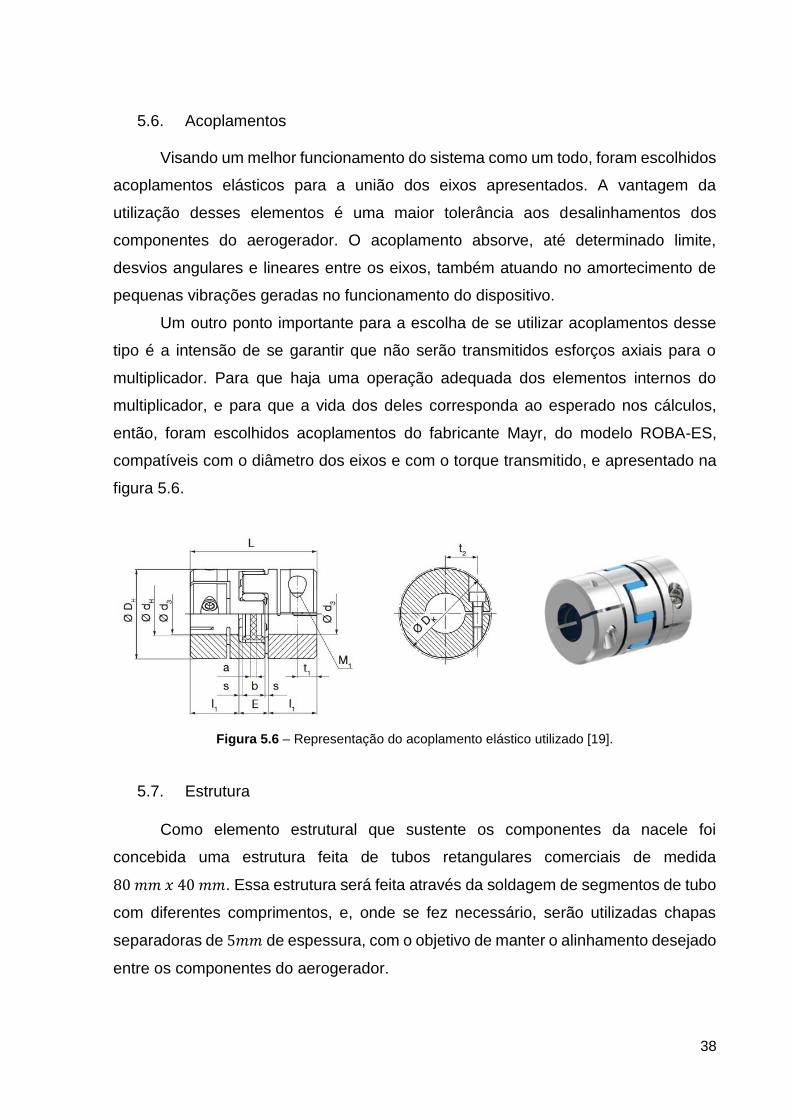
Um outro ponto importante para a escolha de se utilizar acoplamentos desse
tipo é a intensão de se garantir que não serão transmitidos esforços axiais para o
multiplicador. Para que haja uma operação adequada dos elementos internos do
multiplicador, e para que a vida dos deles corresponda ao esperado nos cálculos,
então, foram escolhidos acoplamentos do fabricante Mayr, do modelo ROBA-ES,
compatíveis com o diâmetro dos eixos e com o torque transmitido, e apresentado na
figura 5.6.
Figura 5.6 – Representação do acoplamento elástico utilizado [19].
5.7. Estrutura
Como elemento estrutural que sustente os componentes da nacele foi
concebida uma estrutura feita de tubos retangulares comerciais de medida
80 𝑚𝑚 𝑥 40 𝑚𝑚. Essa estrutura será feita através da soldagem de segmentos de tubo
com diferentes comprimentos, e, onde se fez necessário, serão utilizadas chapas
separadoras de 5𝑚𝑚 de espessura, com o objetivo de manter o alinhamento desejado
entre os componentes do aerogerador.
39
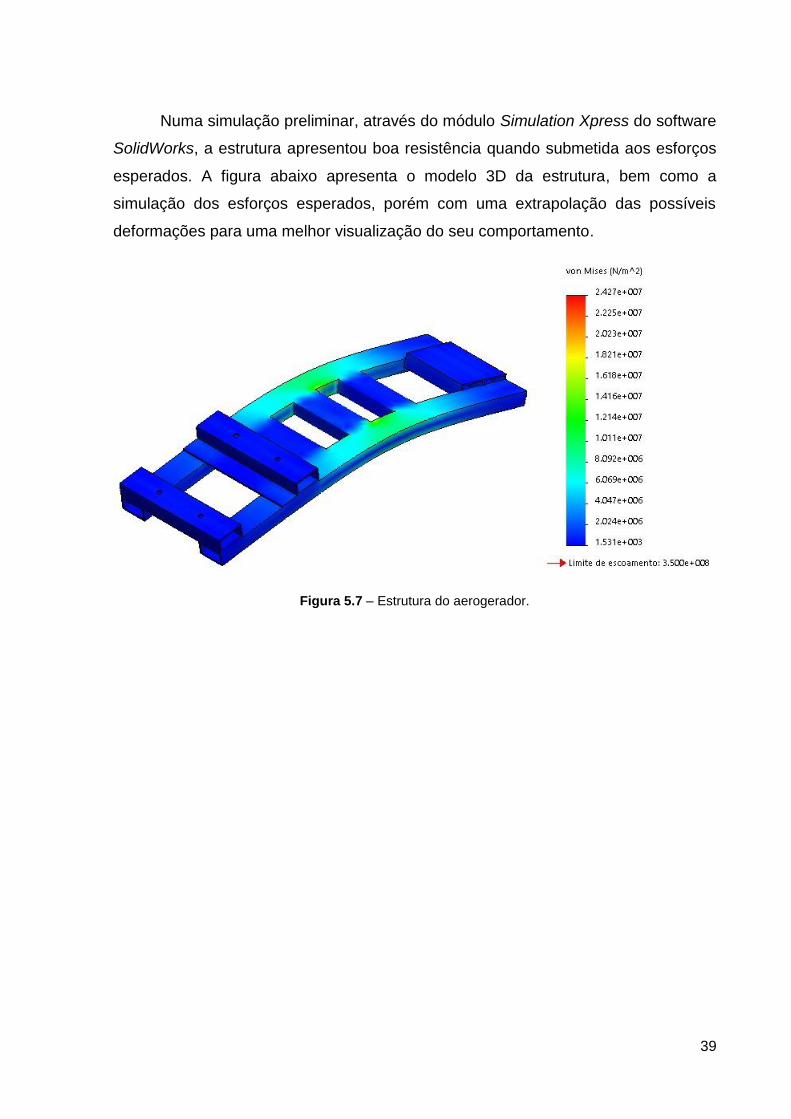
Numa simulação preliminar, através do módulo Simulation Xpress do software
SolidWorks, a estrutura apresentou boa resistência quando submetida aos esforços
esperados. A figura abaixo apresenta o modelo 3D da estrutura, bem como a
simulação dos esforços esperados, porém com uma extrapolação das possíveis
deformações para uma melhor visualização do seu comportamento.
Figura 5.7 – Estrutura do aerogerador.
40
6. Multiplicador de velocidades
6.1. Engrenagens
Para um desempenho adequado do motor elétrico escolhido, é necessário que
a sua rotação de trabalho esteja o mais próximo possível de sua rotação nominal.
Sendo assim, sabidas as rotações nominais tanto do rotor, quanto do motor elétrico,
pode-se dimensionar um multiplicador de velocidades capaz de elevar a rotação
obtida no rotor para o valor necessário à operação do gerador.
Temos, então, todos os parâmetros necessários para iniciar o
dimensionamento do multiplicador de velocidades:
𝑄 = 58,3 𝑁. 𝑚
𝛺𝑟𝑜𝑡 = 201 𝑟𝑝𝑚
𝛺𝑔𝑒𝑟 = 1755 𝑟𝑝𝑚
Com os valores das rotações nominais pode-se obter a relação de transmissão
desejada:
𝑒𝑡 =
𝛺𝑔𝑒𝑟
𝛺𝑟𝑜𝑡= 8,752
(6.1)
De forma a limitar o tamanho das engrenagens, serão utilizados dois estágios
com igual razão de transmissão por engrenagens cilíndricas de dentes retos, o que
também traz a vantagem de uma maior padronização. Então, calcula-se a relação de
transmissão para cada estágio:
𝑒 = √𝑒𝑡 = 2,958 (6.2)
Seguindo orientação da literatura consultada de utilizar número mínimo de 18
dentes no pinhão, por tentativa e erro, buscou-se obter um par de valores de número
de dentes para o pinhão e para a coroa que fornecesse uma relação de transmissão
suficientemente próxima do valor desejado. Assim sendo, depois de algumas
tentativas, foram escolhidos os valores:
𝑧𝑝 = 22
𝑧𝑐 = 65

41
As relações de transmissão de cada estágio e total para esses números de
dentes são, respectivamente 𝑒𝑡 = 8,729 e 𝑒 = 2,955. Outro parâmetro importante para
o dimensionamento adequado das engrenagens é a escolha do ângulo de pressão 𝜃,
que neste projeto foi definido como sendo 20°.
A seguir, é necessário selecionar o módulo das engrenagens. A primeira
abordagem seguiu um roteiro de cálculo para determinação da largura do dente para
os diferentes valores de módulos da série 1, de fabricação mais comum, e sua
posterior comparação com a recomendação da literatura. Esse cálculo foi realizado
usando a expressão para a tensão na raiz do dente da AGMA – American Gear
Manufacturers Association. Seguindo recomendação de [15] o dimensionamento deu
ênfase ao pinhão do primeiro estágio, uma vez que é a engrenagem sujeita aos
maiores esforços.
O roteiro de cálculo tem início com o cálculo do diâmetro primitivo 𝑑𝑝 da
engrenagem, para os diferentes módulos:
𝑑𝑝 = 𝑚 𝑧𝑝 (6.3)
Em seguida, é necessário obter o valor da rotação do eixo intermediário, o que
é possível através das expressões:
𝛺𝑖𝑛𝑡 = 𝑒 𝛺𝑟𝑜𝑡 = 592 𝑟𝑝𝑚 (6.4)
Calcula-se, então, a velocidade no círculo primitivo:
𝑉 =
𝜋 𝑑𝑝𝛺𝑖𝑛𝑡
60
(6.5)
Que nos dá o resultado em metros por segundo. Dividindo a potência de
entrada pelo valor obtido da velocidade, obtém-se o valor da força tangencial aplicada
no dente, ou seja:
𝑊𝑡 =
𝑃
𝑉
(6.6)
Para dar prosseguimento aos cálculos, precisamos do valor do fator dinâmico
𝐾𝑣 (, que é calculado de diferentes formas dependendo do método de fabricação da
engrenagem. Assim sendo, assumiu-se que as engrenagens deste projeto teriam seus
dentes fresados, e com isso tem-se:
42
𝐾𝑣 =
50
50 + √200 𝑉
(6.7)
No próximo passo já se faz necessária a determinação do material de que serão
fabricadas as engrenagens, uma vez que serão computadas as tensões admissíveis.
Conforme ficará demonstrada nas etapas posteriores de cálculo, a resistência ao
desgaste superficial dos dentes da engrenagem está diretamente ligada a sua dureza,
o que motivou a escolha de um material que se destacasse nessa grandeza. Foi
escolhido então o aço AISI 1030 temperado e revenido em banho de água a 205℃,
que possui as seguintes propriedades:
𝑆𝑢𝑡 = 848 𝑀𝑝𝑎;
𝑆𝑦 = 648 𝑀𝑝𝑎;
𝐻𝐵 = 495;
Seguindo a recomendação de se utilizar um coeficiente de segurança 𝐶𝑆 entre
3 e 5, optou-se por se utilizar 𝐶𝑆 = 4. Então, a tensão admissível para o material
escolhido é:
𝜎𝑎𝑑𝑚 = 155,3 𝑀𝑝𝑎
Interpolando os dados da tabela para o fator de forma 𝐽 (Tabela 1 dos Anexos),
utilizando os valores dos dentes do pinhão e da coroa, obtém-se:
𝐽 = 0,373
Com todos os valores acima definidos, utiliza-se a expressão para o cálculo da
tensão na raiz do dente:
𝜎𝐴𝐺𝑀𝐴 =
𝑊𝑡
𝐾𝑣 𝐽 𝐹 𝑚
(6.8)
Manipulando a expressão acima, substituindo o valor de 𝜎𝐴𝐺𝑀𝐴 pelo valor de
𝜎𝑎𝑑𝑚 e isolando 𝐹 tem-se:
𝐹 =
𝑊𝑡
𝐾𝑣 𝐽 𝜎𝑎𝑑𝑚 𝑚
(6.9)
Obtidos os valores de largura da face como uma função do módulo, a análise
qualitativa dos valores obtidos foi através da recomendação de que a largura esteja
entre três e cinco vezes o valor do passo diametral, ou seja:
43
3
𝜋 𝑑𝑝
𝑧𝑝 ≤ 𝐹 ≤ 5
𝜋 𝑑𝑝
𝑧𝑝
(6.10)
O único valor de módulo da série 1 que se adequou à rotina de cálculo acima
foi 𝑚 = 1,5; e os cálculos seguinte do projeto seguiram algumas etapas com esse
valor. Entretanto, mais a frente, quando da determinação da geometria do eixo, não
foi possível obter uma compatibilidade geométrica entre o eixo e a menor
engrenagem, fazendo com que a distância entre a extremidade do rasgo de chaveta
e o círculo do dedendo fosse aproximadamente 3 𝑚𝑚, o que se julgou insuficiente.
Sendo assim, o valor do módulo adotado para as engrenagens foi o primeiro
valor da série 1 acima de 1,5; ou seja, 𝑚 = 2. Realizando, então, o mesmo
procedimento de cálculo, obtém-se a seguinte faixa de valores possíveis para 𝐹:
19 𝑚𝑚 ≤ 𝐹 ≤ 31 𝑚𝑚
Para este projeto foi definido 𝐹 = 20 𝑚𝑚. A escolha de um valor mais próximo
ao limite inferior da faixa obtida se deu em função de já se ter avançado algumas
etapas de cálculo antes de a necessidade da utilização de um módulo maior se tornar
patente. Tendo sido computada uma resistência ao desgaste considerada satisfatória
com esse valor de largura, não se julgou necessário a utilização de um valor maior.
Os valores obtidos são apresentados abaixo:
Diâmetro primitivo dos pinhões:
𝑑𝑝 = 44 𝑚𝑚
Diâmetro primitivo das coroas:
𝑑𝑝 = 130 𝑚𝑚
Velocidade no círculo primitivo do primeiro par de engrenagens:
𝑉 = 1,37 𝑚 𝑠⁄
Força tangencial no primeiro pinhão:
𝑊𝑡 = 896,22 𝑁
Fator dinâmico:
𝐾𝑣 = 0,75

44
Tensão na raiz do dente do primeiro pinhão:
𝜎𝐴𝐺𝑀𝐴 = 66,06 𝑀𝑃𝑎
6.1.1. Resistência à Fadiga
Uma vez obtida a forma das engrenagens, é necessário calcular sua resistência
à fadiga. Essa etapa seguiu o roteiro de cálculo apresentado em [17]
𝑆𝑒 = 𝑘𝑎 𝑘𝑏 𝑘𝑐 𝑘𝑑 𝑘𝑒 𝑘𝑓 𝑆𝑒′ (6.11)
𝑆𝑒
′ = {𝑆𝑢𝑡
2⁄ ; 𝑆𝑢𝑡 ≤ 1400 𝑀𝑝𝑎
700; 𝑆𝑢𝑡 > 1400 𝑀𝑝𝑎 ; logo 𝑆𝑒
′ = 424 𝑀𝑝𝑎
Fator de Acabamento Superficial 𝑘𝑎 (Tabela 2 dos Anexos):
𝑘𝑎 = 𝑎 𝑆𝑢𝑡𝑏 = 0,755
Fator de Tamanho ou Dimensão 𝑘𝑏 (Tabela 4 dos Anexos):
𝑘𝑏(𝑚 = 2,0) = 0,974
Fator de confiabilidade 𝑘𝑐 (Tabela 5 dos Anexos):
𝑘𝑐(𝑅 = 0,99) = 0,814
Fator de temperatura 𝑘𝑑 (Tabela 6 dos Anexos):
𝑘𝑑(𝑇 < 350℃) = 1
Fator de concentração de tensões 𝑘𝑒:
Este fator já é computado no cálculo do fator de forma 𝐽
Efeitos diversos 𝑘𝑓 (Tabela 7 dos Anexos):
𝑘𝑓(𝑆𝑢𝑡 ≤ 1400 𝑀𝑝𝑎) = 1,33
Logo o limite de resistência á fadiga é:
𝑆𝑒 = 𝑘𝑎 𝑘𝑏 𝑘𝑐 𝑘𝑑 𝑘𝑒 𝑘𝑓 𝑆𝑒′ = 338,53 𝑀𝑃𝑎
Agora, pode-se calcular os fatores de segurança estático e dinâmico através
das expressões:
45
𝐹𝑆𝑒𝑠𝑡 =
𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0𝐾𝑚
(6.12)
𝐹𝑆𝑑𝑖𝑛 =
2 𝑆𝑒 𝑆𝑢𝑡
(𝑆𝑒 + 𝑆𝑢𝑡)𝜎𝐴𝐺𝑀𝐴 𝐾0𝐾𝑚
(6.13)
O fator de sobrecarga 𝐾0 e o fator de distribuição de carga ao longo do dente 𝐾𝑚 são
obtidos através das tabelas 9 e 10 do apêndice, o que fornece 𝐾0 = 1,0 e 𝐾𝑚 = 1,3,
logo:
𝐹𝑆𝑒𝑠𝑡 = 6,24
𝐹𝑆𝑑𝑖𝑛 = 4,66
Segundo o material consultado, coeficientes de segurança entre 2 e 5 são
considerados médios, e acima de 5 considerados altos. De acordo com a proposta
conservadora de dimensionamento seguida ao longo de todo o projeto, os valores
acima foram considerados satisfatórios.
Uma última análise considerada interessante para o dimensionamento das
engrenagens é a quantificação do desgaste na superfície dos dentes, o que tem início
no cálculo da tensão de Hertz:
𝜎𝐻 = 𝐶𝑝√𝑊𝑇
𝐾𝑣 𝐹 𝑑𝑝 𝐼
(6.14)
Para um par de engrenagens de aço, como no caso presente, pode-se utilizar o valor
tabelado de 𝐶𝑝 que é 191 (Tabela 12 dos Anexos). A grandeza 𝐼 é um fator geométrico
que, no caso de engrenagens externas é obtido através de:
𝐼 =
cos 𝜃 sin 𝜃
2
𝑒
𝑒 + 1= 0,120
(6.15)
Obtido o valor de 𝐼, temos todos os valores necessários ao cálculo de 𝜎𝐻, logo:
𝜎𝐻 = 641,65 𝑀𝑃𝑎
Em seguida, calcula-se 𝑆𝐻:
𝑆𝐻 = 𝑆𝑐
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅
(6.16)
Sendo 𝑆𝑐 a resistência ao desgaste superficial para uma vida de até 108 ciclos de
carregamento em 𝑀𝑃𝑎, e os demais valores seus modificadores, obtidos através das
46
tabelas 15 a 17 dos anexos, o que fornece, 𝐶𝐻 = 1,0; 𝐶𝑇 = 1,0; 𝐶𝑅 = 0,8; e 𝐶𝐿 = 1,0. A
grandeza 𝑆𝑐 é calculada através da fórmula:
𝑆𝐶 = 2,76 𝐻𝐵 − 70 = 1296,2 𝑀𝑃𝑎 (6.17)
Logo:
𝑆𝐻 = 1620,3
Finalmente, pode-se calcular o valor do coeficiente de segurança para o
desgaste superficial nos dentes:
𝐹𝑆𝑑𝑒𝑠𝑔 =
𝑆𝐻
𝜎𝐻= 2,53
(6.18)
6.2. Árvores
O dimensionamento das árvores seguiu um mesmo roteiro, aqui representado
pela árvore intermediária do multiplicador de velocidades. No caso da árvore do rotor,
tendo em vista a utilização do freio eletromagnético, optou-se por seguir a
recomendação do fabricante que determinava uma faixa de valores para o seu
diâmetro, tendo sua geometria sido definida em função desse valor, muito embora o
valor recomendado seja superior ao encontrado no processo de cálculo. Os valores
obtidos são apresentados no Apêndice.
Para as árvores de entrada e saída do multiplicador de velocidades, optou-se
por utilizar árvores de igual geometria, tendo o cálculo sido feito apenas para
verificação no eixo de entrada pois, dentre os dois, é o que está sujeito aos maiores
esforços.
Dimensionadas as engrenagens, são sabidos os esforços a que está sujeita a
árvore intermediária: As cargas tangencial e radial do primeiro pinhão, e as cargas
axial e tangencial da segunda coroa, ou seja:
𝑊𝑇1 = 896,22 𝑁
𝑊𝑅
1 =𝑊𝑇
1
tan 𝜃= 326,20 𝑁
𝑊𝑇2 = 303,34 𝑁
47
𝑊𝑅
2 =𝑊𝑇
2
tan 𝜃= 110,41 𝑁
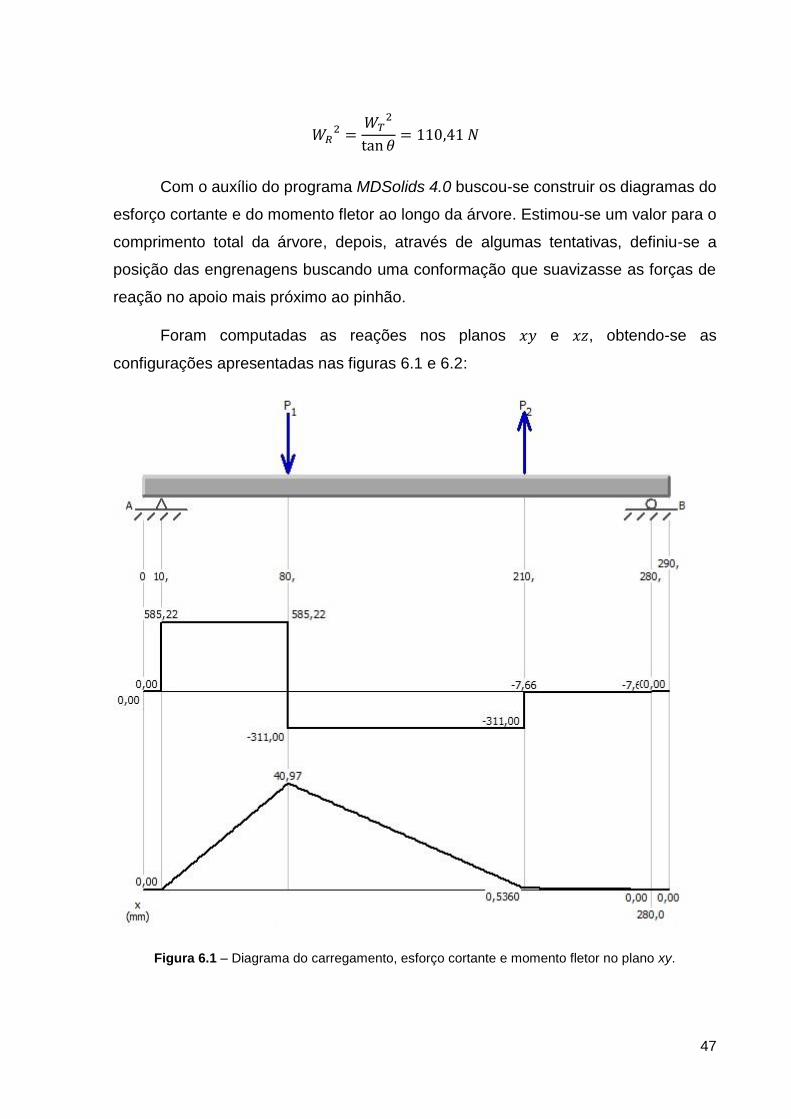
Com o auxílio do programa MDSolids 4.0 buscou-se construir os diagramas do
esforço cortante e do momento fletor ao longo da árvore. Estimou-se um valor para o
comprimento total da árvore, depois, através de algumas tentativas, definiu-se a
posição das engrenagens buscando uma conformação que suavizasse as forças de
reação no apoio mais próximo ao pinhão.
Foram computadas as reações nos planos 𝑥𝑦 e 𝑥𝑧, obtendo-se as
configurações apresentadas nas figuras 6.1 e 6.2:
Figura 6.1 – Diagrama do carregamento, esforço cortante e momento fletor no plano xy.

48
Figura 6.2 – Diagrama do carregamento, esforço cortante e momento fletor no plano xz.
Estão determinadas, então, as reações nos apoios A e B do eixo nos dois planos:
𝑅𝐴𝑥𝑦 = 585,22 𝑁; 𝑅𝐴
𝑥𝑧 = −270,25 𝑁
𝑅𝐵𝑥𝑦 = 7,66 𝑁; 𝑅𝐵
𝑥𝑧 = −166,36 𝑁
Fazendo a soma vetorial das forças obtidas, tem-se:
𝑅𝐴 = √ (585,22)2 + (−270,25)2 = 644,61 𝑁
𝑅𝐵 = √ (7,66)2 + (−166,36)2 = 166,54 𝑁
Estes valores serão importantes posteriormente para o dimensionamento adequado
dos rolamentos, e determinação da sua vida útil. Combinando, então, os momentos
nos dois planos, obtém-se o valor do momento total atuante em cada seção.

49
𝑀(𝑥) = √ (𝑀𝑦)
2+ (𝑀𝑧)2
Figura 6.3 – Momento fletor total ao longo do eixo intermediário.
A seção mais crítica encontrada nos cálculos foi mesmo a seção de máximo
momento, onde se encontra o pinhão. Para as etapas subsequentes, faz-se
necessário a definição do material de que será fabricada a árvore, então, partindo de
aços de baixo carbono, foram feitas algumas tentativas até a definição pelo aço AISI
1050 temperado e revenido à 205℃, que apresenta as seguintes propriedades:
𝑆𝑢𝑡 = 1120 𝑀𝑃𝑎
𝑆𝑦 = 807 𝑀𝑃𝑎
Com esses valores, calcula-se a resistência à fadiga do elemento:
𝑆𝑒 = 𝑘𝑎 𝑘𝑏 𝑘𝑐 𝑘𝑑 𝑘𝑒 𝑘𝑓 𝑆𝑒′ (6.19)
Os fatores acima são calculados de maneira análoga aos apresentados no
dimensionamento das engrenagens, logo temos:
45,13
11,65
0
5
10
15
20
25
30
35
40
45
50
0 0,05 0,1 0,15 0,2 0,25
M(x
) [N
.m]
x [mm]

50
Fator de Acabamento Superficial 𝑘𝑎 (Tabela 2 dos Anexos – material usinado):
𝑘𝑎 = 𝑎 𝑆𝑢𝑡𝑏 = 0,702
Fator de Tamanho ou Dimensão 𝑘𝑏 (Tabela 3 dos Anexos – calculado de forma
iterativa):
𝑘𝑏(𝑑) = 0,916
Fator de confiabilidade 𝑘𝑐 (Tabela 5 dos Anexos):
𝑘𝑐(𝑅 = 0,99) = 0,814
Fator de temperatura 𝑘𝑑 (Tabela 6 dos Anexos):
𝑘𝑑(𝑇 < 350℃) = 1
Fator de concentração de tensões 𝑘𝑒 (Tabela 8 dos Anexos – rasgo de
chaveta):
𝑘𝑒 =
1
𝑘𝑓∗ = 0,5
Logo o limite de resistência á fadiga é:
𝑆𝑒 = 146,45 𝑀𝑃𝑎
De posse desse valor, e utilizando o coeficiente de segurança recomendado de
1,5; calcula-se através da equação de Soderberg:
𝑑𝑚𝑖𝑛 = {32 𝐶𝑆
𝜋 [(
𝑀
𝑆𝑒)
2
+ (𝑇
𝑆𝑦)
2
]
12
}
13
=̃ 17 𝑚𝑚
(6.20)
Tendo sido o calculado o diâmetro mínimo na seção para resistir aos esforços
atuantes na seção crítica, a seção onde será fixada o pinhão por meio de chaveta,
optou-se por se utilizar um diâmetro de 22 𝑚𝑚, pois, nesse caso, mesmo com o rasgo
de chaveta, o diâmetro da seção não é inferior à 17 𝑚𝑚.

51
6.3. Rolamentos
Nesta sessão será exposto o método utilizado para a escolha dos rolamentos,
e, de forma a melhor representar os cálculos envolvidos, serão apresentados os
rolamentos do eixo intermediário do variador de velocidade. No caso da árvore do
rotor, em virtude de se ter optado por diâmetros maiores do que os calculados, por
conta do freio e da concentração de tensões nas variações de seção, os rolamentos
foram escolhidos basicamente pelo diâmetro e pela adequação ao tipo de solicitação.
Foram então especificados rolamentos autocompensadores de duas carreiras de
esferas visando minimizar os esforços transmitidos para os demais componentes do
aerogerador.
No caso dos rolamentos utilizados no sistema de guinada, o caso é semelhante,
uma vez que sua função é apenas de conferir o grau de liberdade necessário à
orientação do rotor em relação a direção do vento, espera-se rotações inferiores ao
valor de 10 𝑟𝑝𝑚, seu dimensionamento se dá apenas através da capacidade de carga
estática. Assim sendo, foram utilizados dois rolamentos radiais de esferas, e um
rolamento axial de esferas que sustenta o peso da nacele sobre a torre. Os detalhes
dos rolamentos da árvore do rotor e do sistema de guinada estão apresentados no
Anexo.
Partindo, então, das reações de apoio calculadas anteriormente, tomando
como limitante a maior carga, aplicada na seção 𝐴. Os demais passos da seleção
seguiram as recomendações do catálogo do fabricante SKF. Não foram consideradas
cargas axiais, admitindo que esse tipo de carregamento seria absorvido pelos mancais
do eixo e pelo acoplamento utilizado. Não havendo carga axial, a carga dinâmica é a
própria reação de apoio em 𝐴. O rolamento escolhido foi o SKF 6203 ETN9, cujas
características estão apresentadas na figura 6.3.

52
Figura 6.4 – Dados do rolamento selecionado para o multiplicador de velocidades [18].
Para esse rolamento, então, tem-se um coeficiente de segurança estático:
𝑠0 =
𝐶0
𝑃0= 8,38
(6.21)
Uma vida nominal básica de:
𝐿10 = (
𝐶
𝑃)
3
= 5,53 𝑥 109 𝑟𝑒𝑣. (6.22)
53
Para o cálculo da vida nominal SKF, horas, utiliza-se a seguinte expressão:
𝐿𝑛𝑚𝐻 =
106
60 𝑛𝑎1 𝑎𝑆𝐾𝐹 𝐿10
(6.23)
sendo 𝑛 a rotação de operação, nesse caso, 592 𝑟𝑝𝑚. O fator 𝑎1está relacionado à
confiabilidade do resultado, e foi utilizado o valor 0,64; compatível com uma
confiabilidade de 95%. O fator 𝑎𝑆𝐾𝐹 está relacionado às condições de operação,
levando em conta, principalmente, a lubrificação do rolamento e a contaminação do
lubrificante devido às condições do ambiente. Seguindo os procedimentos
determinados no catálogo, foi estimado um valor de 0,5 para esse coeficiente. Então:
𝐿𝑛𝑚𝐻 =̃ 50.000 ℎ
O valor obtido acima foi considerado satisfatório de acordo com as
recomendações do fabricante, que apresenta uma faixa de valores, para a aplicação
em questão, entre 30.000 ℎ e 100.000 ℎ. O rolamento de mesma dimensão com
capacidade de carga superior ao escolhido possui vida calculada superior à faixa
apresentada.
6.4. Chavetas
As chavetas foram especificadas de acordo com as dimensões tabeladas em
função do diâmetro do eixo em que serão utilizadas. De acordo com a tabela 13 dos
anexos, temos as dimensões padronizadas de:
𝑏 = 6 𝑚𝑚
𝐻 = 6 𝑚𝑚
São elementos mecânicos de baixa complexidade e que atuam como fusíveis
mecânicos do projeto. Sendo assim, não é desejável que esses elementos
apresentem coeficientes de segurança elevados. Seguindo as orientações de [15] foi
utilizado 𝐶𝑆 = 1,5; e seu dimensionamento se deu através da análise de sua
compressão e de seu cisalhamento.
O material escolhido para a fabricação das chavetas foi o aço AISI 1020
estirado a frio, um aço com baixo teor de carbono e que apresenta as seguintes
propriedades relevantes:
54
𝑆𝑢𝑡 = 440 𝑀𝑃𝑎
𝑆𝑦 = 370 𝑀𝑃𝑎
Através das tensões admissíveis pode-se obter o comprimento 𝐿 das chavetas,
única dimensão faltante para seu completo dimensionamento, assim sendo, tem-se:
𝜎𝑎𝑑𝑚 =
𝑆𝑦
𝐶𝑆= 213,3 𝑀𝑃𝑎
(6.24)
𝜏𝑎𝑑𝑚 =
𝑆𝑠𝑦
𝐶𝑆=
0,577 𝑆𝑦
𝐶𝑆= 123,1 𝑀𝑃𝑎
(6.25)
As tensões de compressão e cisalhamento atuantes na chaveta, são respectivamente:
𝜎 =
2 𝑇
𝑑 𝐵 𝐿
(6.26)
𝜏 =
4 𝑇
𝑑 𝐻 𝐿
(6.27)
Isolando o comprimento 𝐿, tem-se:
𝐿𝜎 =
2 𝑇
𝑑 𝐵 𝜎𝑎𝑑𝑚= 5,46 𝑚𝑚
𝐿𝜏 =
4 𝑇
𝑑 𝐻 𝜏𝑎𝑑𝑚= 6,30 𝑚𝑚
Foi adotado, então o comprimento de 7 𝑚𝑚.

55
7. Torre
Para a determinação dos elementos da torre, buscou-se a utilização de tubos
de padrão comercial, e foram consultados catálogos de diferentes fabricantes a fim de
se escolher um tubo de fácil aquisição. Os cálculos que serão apresentados abaixo
foram feitos para tubos de diferentes dimensões até a obtenção de um coeficiente de
segurança considerado satisfatório. Não serão abordados aspectos relacionados ao
dimensionamento da fundação da torre.
O tubo selecionado foi o tubo de aço ASTM A-36 com costura, diâmetro externo
de 114,3 𝑚𝑚 e espessura de 4,75 𝑚𝑚. Este tubo é próprio para estruturas metálicas,
e a norma brasileira similar é a NBR 8261. Suas propriedades de interesse são:
𝑆𝑦𝑚í𝑛= 250 𝑀𝑃𝑎
400𝑀𝑃𝑎 ≤ 𝑆𝑢𝑡 ≤ 550 𝑀𝑃𝑎
𝐸 = 200 𝐺𝑃𝑎
𝑑𝑒 = 114,3 𝑚𝑚
𝑑𝑖 = 104,8 𝑚𝑚
Como os tubos de padrão mais comum são fornecidos com comprimento máximo de
6 𝑚, a torre será composta por um tubo inteiro mais uma seção de 3,5𝑚 de outro tubo.
As uniões, seja do tubo com a fundação, ou dos tubos entre si, serão feitas por flanges
de padrão comercial associados à norma ANSI B16.5, unidos por parafusos, porcas e
arruelas M16. O restante do comprimento da torre, ou seja, 0,5𝑚, corresponde à base
do sistema de guinada, onde se sustenta a nacele e se acomodam os rolamentos
especificados.
Para o cálculo da resistência da torre, ela será modelada como uma viga
engastada em sua base, atuando na outra extremidade a força normal ao plano do
rotor 𝐹𝑁 e o peso do conjunto da nacele. Com o auxílio do software SolidWorks,
estimou-se o peso do conjunto como sendo igual a 2000 𝑁. Logo:
𝑃 = 2000 𝑁
𝐹𝑁 = 310 𝑁
O momento de inércia da seção escolhida é calculado através de:
56
𝐼 =
𝜋(𝑑𝑒4 − 𝑑𝑖
4)
64= 2,46 𝑥 10−6 𝑘𝑔. 𝑚2
(6.28)
Para o cálculo da carga crítica de flambagem, retiramos da tabela 14 dos anexos o
valor da constante 𝑐 associada ao tipo de extremidade, assim, tem-se:
𝑃𝑐𝑟 =
𝑐 𝜋2𝐸 𝐼
𝐻2= 12,12 𝑘𝑁
(6.29)
Com esse valor calculado, pode-se obter, finalmente, o coeficiente de segurança para
a flambagem:
𝐶𝑆 =
𝑃𝑐𝑟
𝑃= 4,85
(6.30)
Sendo o valor acima considerado satisfatório, calcula-se a resistência à carga
𝐹𝑁, e ao momento fletor gerado por ela:
𝑀 = 𝐹𝑁 𝐻 = 3100 𝑁. 𝑚
As tensões normais e cisalhantes são, então:
𝜎 =
𝑀
[𝜋(𝑑𝑒
2 − 𝑑𝑖2)
32 𝑑𝑒]
= 72,11 𝑀𝑃𝑎 (6.31)
𝜏 = 1,33
𝑉
𝐴 (
𝑟𝑒2 + 𝑟𝑒𝑟𝑖 + 𝑟𝑖
2
𝑟𝑒2 + 𝑟𝑖
2 ) = 0,378 𝑀𝑝𝑎 (6.32)
Dada a diferença entre as ordens de grandeza das tensões acima, a tensão máxima
atuante calculada pelo critério de von Mises é aproximadamente igual a tensão
normal, senso assim:
𝐶𝑆 =
𝑆𝑦
𝜎= 3,47
Assim como no caso anterior, o valor obtido foi considerado satisfatório para a
aplicação.
57
8. Conclusão
Para a elaboração deste projeto foram utilizados diversos conhecimentos
adquiridos ao longo do curso de Engenharia Mecânica. Buscando sempre a tomada
de decisões embasadas, foram consultadas diferentes literaturas sobre variados
assuntos, exemplificando a complexidade do processo de se projetar. Também ficou
clara a importância dessa experiência para o processo de formação de um
engenheiro.
Ao longo da elaboração do presente texto, buscou-se não só expor os
resultados obtidos, mas as etapas do processo, incluindo algumas tentativas que não
obtiveram êxito. Isso foi feito com o intuito de evidenciar a não-linearidade do ato de
se projetar, ato complexo e em que, muitas vezes, é necessário que se avance por
uma série de etapas até que se descubra uma incompatibilidade entre as escolhas
feitas, sendo necessário percorrer as diversas etapas novamente.
Colocando em perspectiva os objetivos iniciais e os resultados obtidos, pode-
se dizer que o resultado foi satisfatório. Porém, para que o aerogerador desenvolvido
nesse projeto chegue à fase de produto pronto para a fabricação ainda há a
necessidade de uma série de etapas posteriores, como por exemplo, a análise dos
custos totais do projeto e em quanto tempo se obteria o retorno do valor investido.
Somado ao estágio em ambiente industrial, onde a vivência do dia-a-dia do
setor de engenharia apresentou as dificuldades da rotina do engenheiro, este projeto,
com certeza, é uma das experiências que mais contribuíram para a minha formação.
8.1. Sugestões de Trabalhos Futuros
Muito embora a geometria da pá apresentada nesse projeto tenha apresentado
bons resultados nas etapas de cálculo, uma forma de validar esses resultados seria
através de simulações do escoamento ao redor da pá. Uma proposta interessante
seria a realização desse tipo de simulação, não só para a forma de pá apresentada,
mas para diferentes geometrias, utilizando variados aerofólios e comparando os
resultados obtidos.
Outra possibilidade seria a inclusão dos sistemas elétrico e de controle,
aspectos que não foram abordados no presente trabalho. A inclusão de sensores para
58
a detecção da direção do vento, o mecanismo de guinada com motor de passo e a
modelagem da resposta do sistema considerando as variações de direção e
intensidade do vento também somariam bastante ao projeto como um tudo.
Ainda outra possibilidade seria a análise das respostas dinâmicas do sistema
apresentado, considerando a resposta dos elementos submetidos à diferentes
condições de operação, análise da rigidez dos elementos propostos e formas de se
mitigar os efeitos observados.
59
9. Referências Bibliográficas
[1] AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA (Brasil) (ANEEL). Atlas Nacional
de Energia Elétrica. 1. ed. – Brasília : Aneel, 2002. Disponível em:
<http://www2.aneel.gov.br/arquivos/pdf/livro_atlas.pdf> Acesso em: 26/11/2017
[2] AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA (Brasil) (ANEEL). Atlas Nacional
de Energia Elétrica. 3. ed. – Brasília : Aneel, 2008. Disponível em:
<http://www.aneel.gov.br/documents/656835/14876406/atlas3ed_.pdf/ad6dfab8-
d770-47fc-9472-2f80ee18c97f>. Acesso em: 28/11/2017
[3] AMARANTE, O. A. C.; et al. Atlas do Potencial Eólico Brasileiro. Brasília: MME;
Rio de Janeiro: Eletrobrás, 2001. Disponível em:
<http://www.cresesb.cepel.br/atlas_eolico_brasil/atlas-web.htm>. Acesso em 2016-
11-28
[4] AMÊNDOLA, C. A. M., Contribuição ao estudo de aerogeradores de velocidade
e passo variáveis com gerador duplamente alimentado e sistema de controle
difuso. 2007. Tese (Doutorado em Engenharia Elétrica) - Escola de Engenharia de
São Carlos, Universidade de São Paulo, São Carlos, 2007.
doi:10.11606/T.18.2007.tde-06122007-142431. Acesso em: 28/11/2016.
[5] INTERNATIONAL ENERGY AGENCY (IEA). Brazil: Balance (2014). Disponível
em: <https://www.iea.org/Sankey/#?c=Brazil&s=Balance> Acesso em: 28/11/2017
[6] INTERNATIONAL ENERGY AGENCY (IEA). Key World Energy Statistics. Paris,
2016a. Disponível em:
http://www.aneel.gov.br/documents/656835/14876406/atlas3ed_.pdf/ad6dfab8-d770-47fc-9472-2f80ee18c97f
60
<https://www.iea.org/publications/freepublications/publication/KeyWorld2016.pdf>.
Acesso em: 28/11/2017
[7] INTERNATIONAL ENERGY AGENCY (IEA). Key Renewable Trends, Excerpt
from: Renewables Information. Paris, 2016b. Disponível em:
<http://www.iea.org/publications/freepublications/publication/KeyRenewablesTrends.
pdf>. Acesso em: 28/11/2017
[8] MELO, M. S. de M., Energia Eólica: Aspectos Técnicos e Econômicos. 2012.
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de Planejamento Energético, Rio
de Janeiro, 2012. Disponível em:
<http://www.ppe.ufrj.br/ppe/production/tesis/marcelo_melo.pdf>. Acesso em:
28/11/2017
[9] THRESHER, R; ROBINSON, M; VEERS, P. Wind Energy Technology: Current
Status and R&D Future. In: PHYSICS OF SUSTAINABLE ENERGY CONFERENCE.
2008. University of California at Berkeley. Disponível em:
<http://www.nrel.gov/docs/fy08osti/43374.pdf>. Acesso em 28/11/2017
[10] E. HAU, Wind Turbines- Fundamentals, Technologies, Application,
Economics, 3. ed., Springer, 2012
[11] MANWELL, J, F. et. al., Wind Energy Explained Theory, Design and
Application, 2. ed., Wiley – 2009
[12] MCDONALD, A., T., FOX, R., W., PRITCHARD, P., J., Introduction to Fluid
Mechanics, 6. ed., John Wiley & Sons – EUA, 2004
[13] BURTON, T., et. al. Wind Energy Handbook, 1. ed., John Wiley & Sons – 2001
[14] DNV/Risø, Guidelines for Design of Wind Turbines, 2. ed., Dinamarca – 2002

61
[15] BUDYNAS, R. G., NISBETT, J. K., Elementos de Máquina de Shigley:
Projeto de Engenharia Mecânica, 8. ed., 2008.
[16] DE VRIES, O. Fluid Dynamic Aspects of Wind Energy Conversion. Advisory
Group for Aerospace Research and Development, North Atlantic Treaty Organization,
AGARD-AG-243, 1979
[17] DE MARCO, F., Notas de aula de Elementos de Máquina I e II, Departamento
de Engenharia Mecânica, UFRJ
[18] SKF, <http://www.skf.com>. Acesso em 28/11/2017
[19] MAYR, <http://www.mayr.com>. Acesso em 28/11/2017
[20] GERDAU, <http://www.gerdau.com.br>. Acesso em 28/11/2017
[21] WEG, <http://www.weg.net/br>. Acesso em 28/11/2017
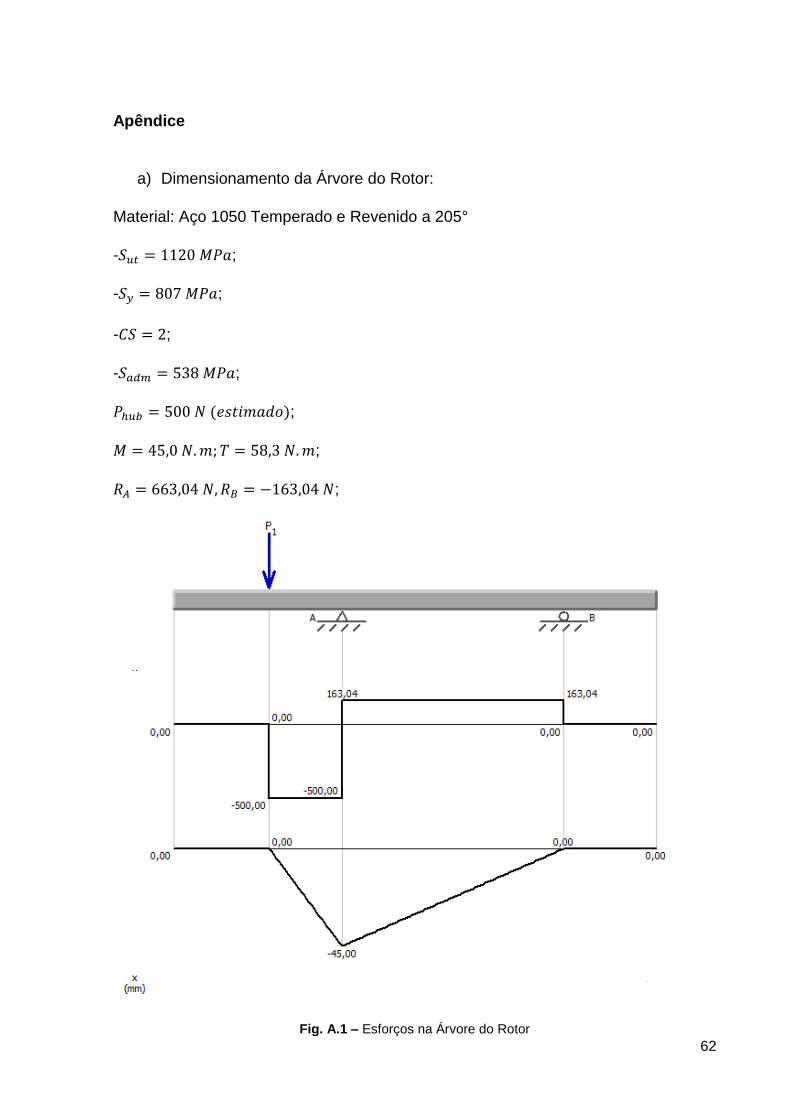
62
Apêndice
a) Dimensionamento da Árvore do Rotor:
Material: Aço 1050 Temperado e Revenido a 205°
-𝑆𝑢𝑡 = 1120 𝑀𝑃𝑎;
-𝑆𝑦 = 807 𝑀𝑃𝑎;
-𝐶𝑆 = 2;
-𝑆𝑎𝑑𝑚 = 538 𝑀𝑃𝑎;
𝑃ℎ𝑢𝑏 = 500 𝑁 (𝑒𝑠𝑡𝑖𝑚𝑎𝑑𝑜);
𝑀 = 45,0 𝑁. 𝑚; 𝑇 = 58,3 𝑁. 𝑚;
𝑅𝐴 = 663,04 𝑁, 𝑅𝐵 = −163,04 𝑁;
Fig. A.1 – Esforços na Árvore do Rotor

63
𝑆𝑒′ =
𝑆𝑢𝑡
2= 560 𝑀𝑃𝑎;
𝑘𝑎 = 4,51 𝑆𝑢𝑡−0,265 = 0,702;
𝑘𝑏 = 1,24 𝑑−0,107, iterativamente tem-se 𝑘𝑏 = 0,905;
𝑘𝑐 = 0,814;
𝑘𝑑 = 1;
𝑘𝑒 = 1
𝑘𝑓∗ ; 𝑘𝑓
∗ = 1 + 𝑞 (𝑘𝑡 − 1);
𝑞 = 0,9; 𝑘𝑡 = 2,2 → 𝑘𝑓∗ = 2,08 → 𝑘𝑒 = 0,481;
𝑆𝑒 = 𝑘𝑎 𝑘𝑏 𝑘𝑐 𝑘𝑑 𝑘𝑒 𝑆𝑒′ = 139,15 𝑀𝑃𝑎;
𝑑𝑚𝑖𝑛 = √ {32 𝐶𝑆
𝜋 [(
𝑀
𝑆𝑒)
2
+ (𝑇
𝑆𝑦)
2
]}3
≅ 19𝑚𝑚;
b) Dimensionamento da Árvore de Entrada do Variador de Velocidade:
Material: Aço 1050 Temperado e Revenido a 205°
-𝑆𝑢𝑡 = 1120 𝑀𝑃𝑎;
-𝑆𝑦 = 807 𝑀𝑃𝑎;
-𝐶𝑆 = 1,5;
-𝑆𝑎𝑑𝑚 = 538 𝑀𝑃𝑎;
𝑊𝑡 = 896,22 𝑁; 𝑊𝑟 = 326,22 𝑁; 𝑇 = 58,3 𝑁. 𝑚;
|𝑅𝐴| = 402,95 𝑁; |𝑅𝐵| = 550,79 𝑁;

64
Figura A.2 – Esforços no plano xy.
Figura A.3 – Esforços no plano xz.

65
Figura A.4 – Momento fletor combinado.
𝑆𝑒′ =
𝑆𝑢𝑡
2= 560 𝑀𝑃𝑎;
𝑘𝑎 = 4,51 𝑆𝑢𝑡−0,265 = 0,702;
𝑘𝑏 = 1,24 𝑑−0,107, iterativamente tem-se 𝑘𝑏 = 0,928;
𝑘𝑐 = 0,814;
𝑘𝑑 = 1;
𝑘𝑒 = 1
𝑘𝑓∗ ; 𝑘𝑓
∗ = 2 → 𝑘𝑒 = 0,5;
𝑆𝑒 = 𝑘𝑎 𝑘𝑏 𝑘𝑐 𝑘𝑑 𝑘𝑒 𝑆𝑒′ = 148,42 𝑀𝑃𝑎;
𝑑𝑚𝑖𝑛 = √ {32 𝐶𝑆
𝜋 [(
𝑀
𝑆𝑒)
2
+ (𝑇
𝑆𝑦)
2
]}3
≅ 15𝑚𝑚;
27,92
0
5
10
15
20
25
30
0 50 100 150 200
M [
N.m
]
x [mm]
Momento Total

66
Anexos:
Tabela 1 – Fator de forma J da AGMA para ângulo de pressão 20°
Tabela 2 – Fator de acabamento superficial 𝑘𝑎.

67
Tabela 3 – Fator de Tamanho 𝑘𝑏.
Tabela 4 – Fator de tamanho 𝑘𝑏 em função do módulo da engrenagem.

68
Tabela 5 – Fator de confiabilidade 𝑘𝑐 .
Tabela 6 – Fator de temperatura 𝑘𝑑.
Tabela 7 – Fator de efeitos diversos 𝑘𝑓 para engrenagens.

69
Tabela 8 – Fator 𝑘𝑓∗ para rasgos de chaveta.
Tabela 9 – Fator de sobrecarga 𝐾0.
Tabela 10 – Fator de distribuição de carga ao longo do dente 𝐾𝑚.

70
Tabela 11 – Fator dinâmico 𝐾𝑣.
Tabela 12 – Valor 𝐶𝑝em função dos materiais do pinhão e da coroa.
Tabela 13 – Dimensões padronizadas para chavetas em função do diâmetro do eixo.

71
Tabela 14 – Fator de vínculo 𝑐 em função do tipo de extremidade.
Tabela 15 – Valores de 𝐶𝑇.
Tabela 16 – Valores de 𝐶𝑅.
Tabela 17 – Valores de 𝐶𝐿.
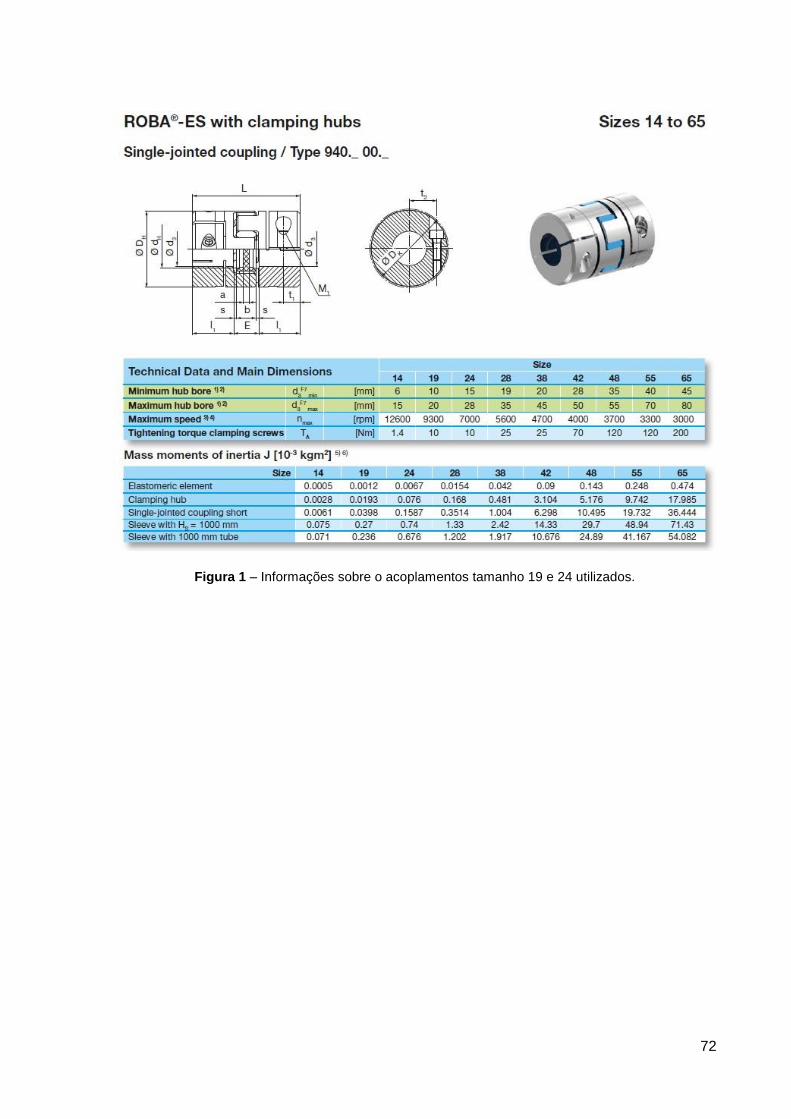
72
Figura 1 – Informações sobre o acoplamentos tamanho 19 e 24 utilizados.
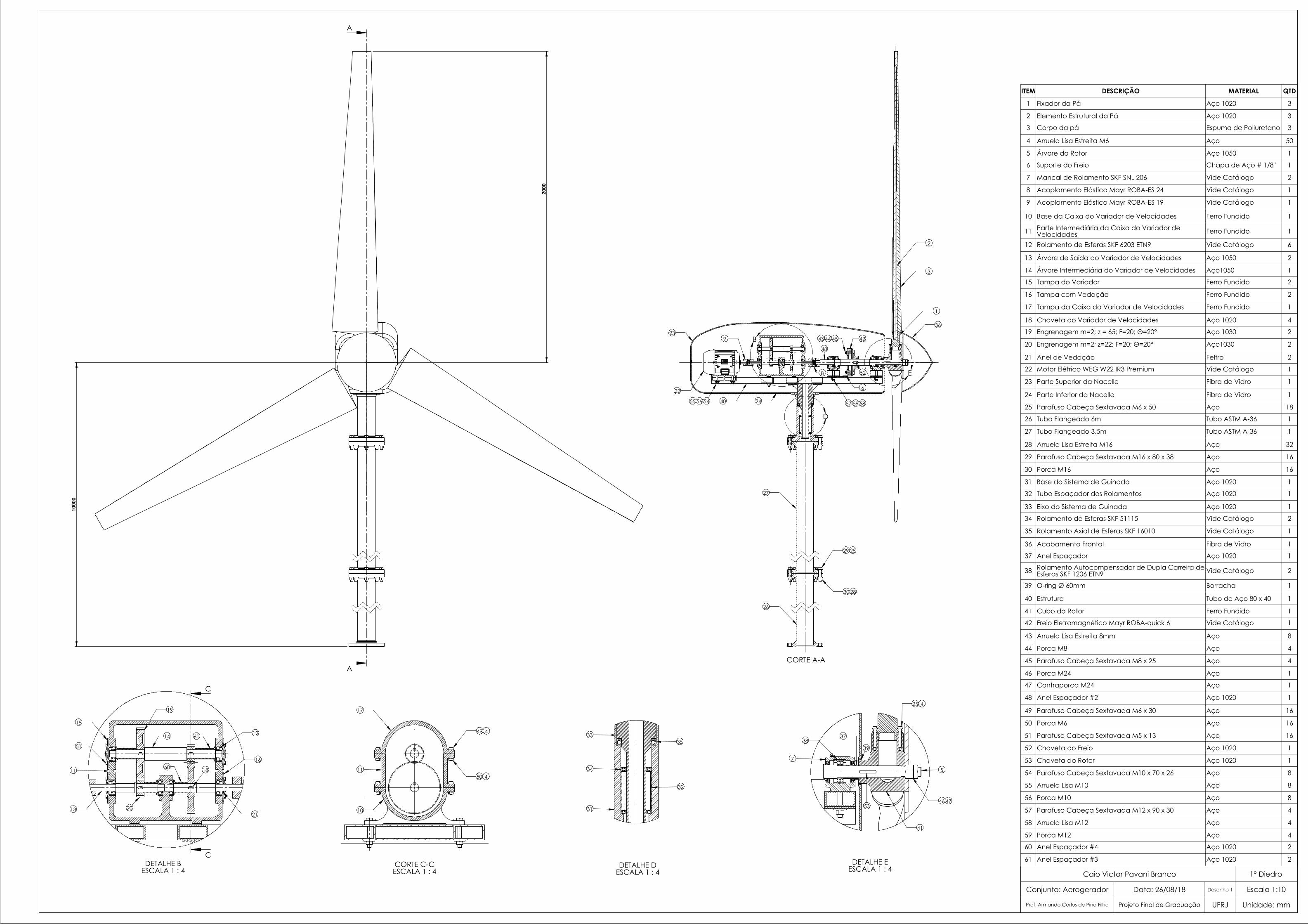
1° Diedro
200
0
100
00
A
A
B
D
E
CORTE A-A
36
42
22
2
29
30 28
1
3
40
23
24
9
52
4543
6
8
28
44
26
27
48
57 59 58545655
C
CDETALHE B
ESCALA 1 : 4
15
14
19
13 20
12
11
61
21
16
18
51
60
CORTE C-CESCALA 1 : 4
49 4
50 4
17
11
10
DETALHE DESCALA 1 : 4
35
34
32
31
33
DETALHE EESCALA 1 : 4
46
25 4
38
7
37
5
41
5347
39
ITEM DESCRIÇÃO MATERIAL QTD
1 Fixador da Pá Aço 1020 3
2 Elemento Estrutural da Pá Aço 1020 3
3 Corpo da pá Espuma de Poliuretano 3
4 Arruela Lisa Estreita M6 Aço 50
5 Árvore do Rotor Aço 1050 1
6 Suporte do Freio Chapa de Aço # 1/8" 1
7 Mancal de Rolamento SKF SNL 206 Vide Catálogo 2
8 Acoplamento Elástico Mayr ROBA-ES 24 Vide Catálogo 1
9 Acoplamento Elástico Mayr ROBA-ES 19 Vide Catálogo 1
10 Base da Caixa do Variador de Velocidades Ferro Fundido 1
11 Parte Intermediária da Caixa do Variador de Velocidades Ferro Fundido 1
12 Rolamento de Esferas SKF 6203 ETN9 Vide Catálogo 6
13 Árvore de Saída do Variador de Velocidades Aço 1050 2
14 Árvore Intermediária do Variador de Velocidades Aço1050 1
15 Tampa do Variador Ferro Fundido 2
16 Tampa com Vedação Ferro Fundido 2
17 Tampa da Caixa do Variador de Velocidades Ferro Fundido 1
18 Chaveta do Variador de Velocidades Aço 1020 4
19 Engrenagem m=2; z = 65; F=20; Θ=20° Aço 1030 2
20 Engrenagem m=2; z=22; F=20; Θ=20° Aço1030 2
21 Anel de Vedação Feltro 2
22 Motor Elétrico WEG W22 IR3 Premium Vide Catálogo 1
23 Parte Superior da Nacelle Fibra de Vidro 1
24 Parte Inferior da Nacelle Fibra de Vidro 1
25 Parafuso Cabeça Sextavada M6 x 50 Aço 18
26 Tubo Flangeado 6m Tubo ASTM A-36 1
27 Tubo Flangeado 3,5m Tubo ASTM A-36 1
28 Arruela Lisa Estreita M16 Aço 32
29 Parafuso Cabeça Sextavada M16 x 80 x 38 Aço 16
30 Porca M16 Aço 16
31 Base do Sistema de Guinada Aço 1020 1
32 Tubo Espaçador dos Rolamentos Aço 1020 1
33 Eixo do Sistema de Guinada Aço 1020 1
34 Rolamento de Esferas SKF 51115 Vide Catálogo 2
35 Rolamento Axial de Esferas SKF 16010 Vide Catálogo 1
36 Acabamento Frontal Fibra de Vidro 1
37 Anel Espaçador Aço 1020 1
38 Rolamento Autocompensador de Dupla Carreira de Esferas SKF 1206 ETN9 Vide Catálogo 2
39 O-ring Ø 60mm Borracha 1
40 Estrutura Tubo de Aço 80 x 40 1
41 Cubo do Rotor Ferro Fundido 1
42 Freio Eletromagnético Mayr ROBA-quick 6 Vide Catálogo 1
43 Arruela Lisa Estreita 8mm Aço 8
44 Porca M8 Aço 4
45 Parafuso Cabeça Sextavada M8 x 25 Aço 4
46 Porca M24 Aço 1
47 Contraporca M24 Aço 1
48 Anel Espaçador #2 Aço 1020 1
49 Parafuso Cabeça Sextavada M6 x 30 Aço 16
50 Porca M6 Aço 16
51 Parafuso Cabeça Sextavada M5 x 13 Aço 16
52 Chaveta do Freio Aço 1020 1
53 Chaveta do Rotor Aço 1020 1
54 Parafuso Cabeça Sextavada M10 x 70 x 26 Aço 8
55 Arruela Lisa M10 Aço 8
56 Porca M10 Aço 8
57 Parafuso Cabeça Sextavada M12 x 90 x 30 Aço 4
58 Arruela Lisa M12 Aço 4
59 Porca M12 Aço 4
60 Anel Espaçador #4 Aço 1020 2
61 Anel Espaçador #3 Aço 1020 2
Caio Victor Pavani Branco
Conjunto: Aerogerador
Prof. Armando Carlos de Pina Filho
Data: 26/08/18
Projeto Final de Graduação
Desenho 1
UFRJ
Escala 1:10
Unidade: mm