Principio Trabalho Virtual 1
83
- 1 - ANÁLISE ESTRUTURAL I NOTAS DE AULA Assunto: Princípio dos Trabalhos Virtuais
-
Upload
marcio-assuncao-8792 -
Category
Documents
-
view
1.065 -
download
0
Transcript of Principio Trabalho Virtual 1

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 1/83
- 1 -
AN ÁLI SE ESTRUTURAL I
NOTAS DE AULA
Assun to:
Pr inc íp io d osTr aba lhos V ir t ua is
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 2/83
- 2 -
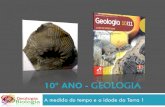
1- Força Generalizada, Deformações e Deslocamentos
O conceito de força generalizada deve ser entendido com o significado de
uma força, um binário de forças, ou um conjunto de forças e binários atuando em
uma estrutura. Ao longo do texto este conceito é utilizado freqüentemente
usando-se apenas a palavra força. Às vezes este conceito é encontrado na
literatura sob a denominação de ação. Uma força generalizada pode ser interna
ou externa, e uma força externa pode ser ativa ou reativa. A Fig.1 ilustra o
significado de forças generalizadas externas (F 1, e F 2 ) atuando na extremidade
livre B de uma viga em balanço, sendo F 1 uma carga concentrada vertical e F 2
um momento. As forças F 1, e F 2 são forças externas ativas, enquanto as reações
de apoio em A, R 1(componente vertical), e R 2 (momento) são forças externasreativas.
R1
F1
F2
R2
A BC
Forças externas:
• Ativas: F1, F2
• Reativas: R1, R2
Fig. 1 – Viga em Balanço: forças externas e internas
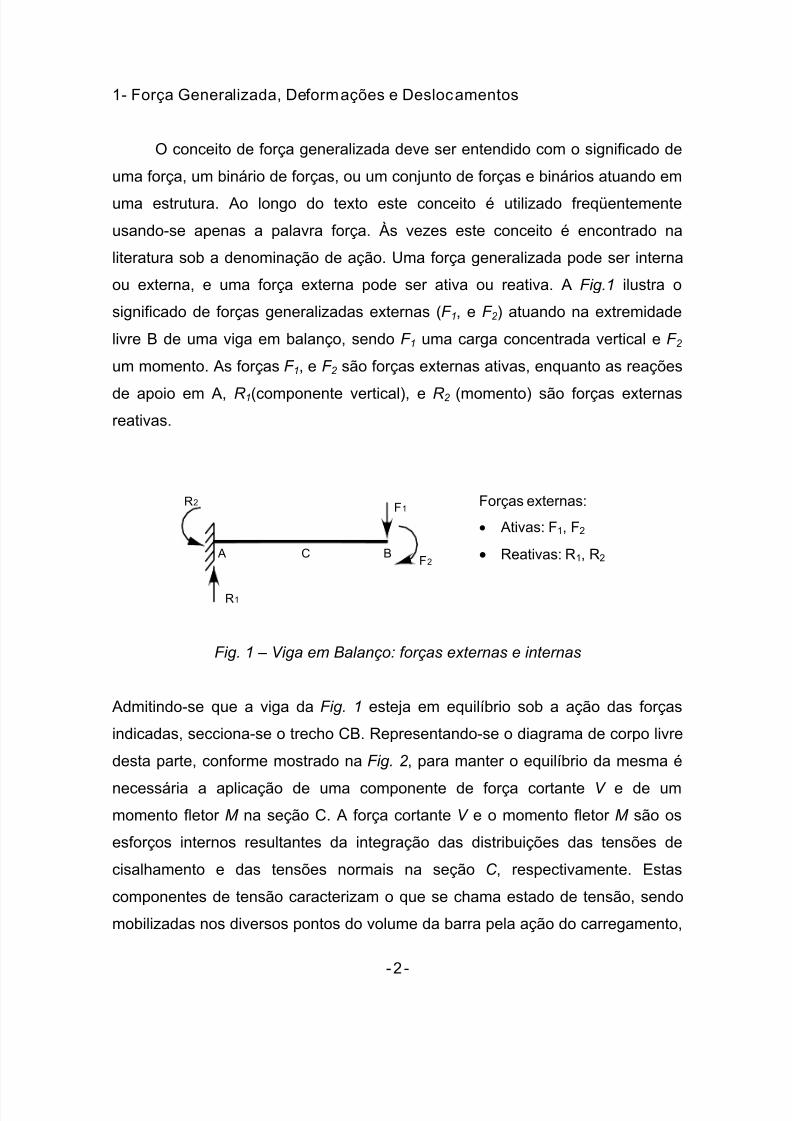
Admitindo-se que a viga da Fig. 1 esteja em equilíbrio sob a ação das forças
indicadas, secciona-se o trecho CB. Representando-se o diagrama de corpo livre
desta parte, conforme mostrado na Fig. 2 , para manter o equilíbrio da mesma é
necessária a aplicação de uma componente de força cortante V e de um
momento fletor M na seção C. A força cortante V e o momento fletor M são os
esforços internos resultantes da integração das distribuições das tensões de
cisalhamento e das tensões normais na seção C , respectivamente. Estas
componentes de tensão caracterizam o que se chama estado de tensão, sendo
mobilizadas nos diversos pontos do volume da barra pela ação do carregamento,
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 3/83
- 3 -
e podem ser calculadas conforme considerações desenvolvidas nos textos de
Resistência dos Materiais. Os esforços internos na seção C serão também
entendidos como for ças generalizadas, neste caso serão for ças internas
generalizadas. Os valores máximos destas for ças internas, isto é, os valores
máximos que a viga suporta, dependem das características geométricas da
seção transversal e da resistência do material da viga, sendo chamados
genericamente de resistência da seção a for ça cortante e ao momento fletor.
Durante a fase de projeto, um dos objetivos fundamentais é a definição de
dimensões suficientes para as seções transversais e a especificação de
materiais com resistência adequada para que a estrutura suporte com segurança
os carregamentos atuantes.
M
V
C BF2
F1
Forças internas:
V, M
Fig. 2 - Diagrama de corpo livre de um trecho de viga
Uma estrutura solicitada por um sistema de forças sofre mudança de
forma, o que é chamado de deformação. Neste processo os pontos da estrutura
sofrem deslocamentos, ou seja, mudanças de posição em relação às suas
posições iniciais e em relação uns aos outros. As deformações são definidas
matematicamente por meio de considerações geométricas em cada ponto do
volume do corpo ou da barra a partir das funções que descrevem os
deslocamentos dos pontos segundo as direções dos eixos de referência. Esta
definição é encontrada para os casos mais simples nos livros de Resistência dos
Materiais, ou de forma mais rigorosa nos livros de Teoria da Elasticidade. As
componentes de deformação são grandezas adimensionais e caracterizam
completamente a mudança de forma de um elemento infinitesimal em torno de

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 4/83
- 4 -
um ponto. A deformação, ou estado de deformação, tal como a tensão, é uma
grandeza tensorial, e para o caso de estruturas planas, contidas no plano xy ,
pode ser definida basicamente pelas componentes: ε x ε y ε z e γ xy.
Os deslocamentos decorrem do efeito acumulado das deformações nos
pontos do corpo ou da estrutura. Um deslocamento deve ser entendido
genericamente como uma translação ou rotação de algum ponto da estrutura. A
translação de um ponto costuma também ser referida como deslocamento linear
e a rotação como deslocamento angular ou giro.
Na realidade, os pontos de uma estrutura submetida a um carregamento
qualquer ficam sujeitos a estados de tensão e se deformam em maior ou menor
grau, conseqüentemente se deslocam. Durante o projeto estrutural, outro
objetivo fundamental a ser atingido é especificar as peças da estrutura com
dimensões e materiais adequados, para que sejam evitados deslocamentos
excessivos quando a estrutura estiver em funcionamento sob ação dos
carregamentos. As estruturas usuais, depois de acabadas, trabalham em regime
de pequenos deslocamentos, conforme hipótese rotineira na análise das
mesmas. Assim, em geral, estes deslocamentos não são facilmente perceptíveis
ao usuário, a não ser em casos de comportamento anormal da estrutura. Na Fig.
3 é mostrada uma viga em balanço, deformada sob a ação de uma força verticalP aplicada a extremidade B, e os deslocamentos possíveis: translação ∆ e
rotação θ .
P
A B
Viga indeformada
Viga deformada
Fig. 3 – Deslocamentos numa viga em balanço
O conceito de deslocamento decorrente das deformações, conforme
exposto anteriormente, não deve ser confundido com deslocamento de corpo
rígido (deslocamento geométrico), isto é, deslocamentos que ocorrem devido a
movimentos de corpo rígido de uma estrutura. Estes podem surgir quando a
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 5/83
- 5 -
estrutura tem vinculação insuficiente em número ou devido a má disposição dos
vínculos como é o caso das formas críticas, ou ainda em trechos de uma
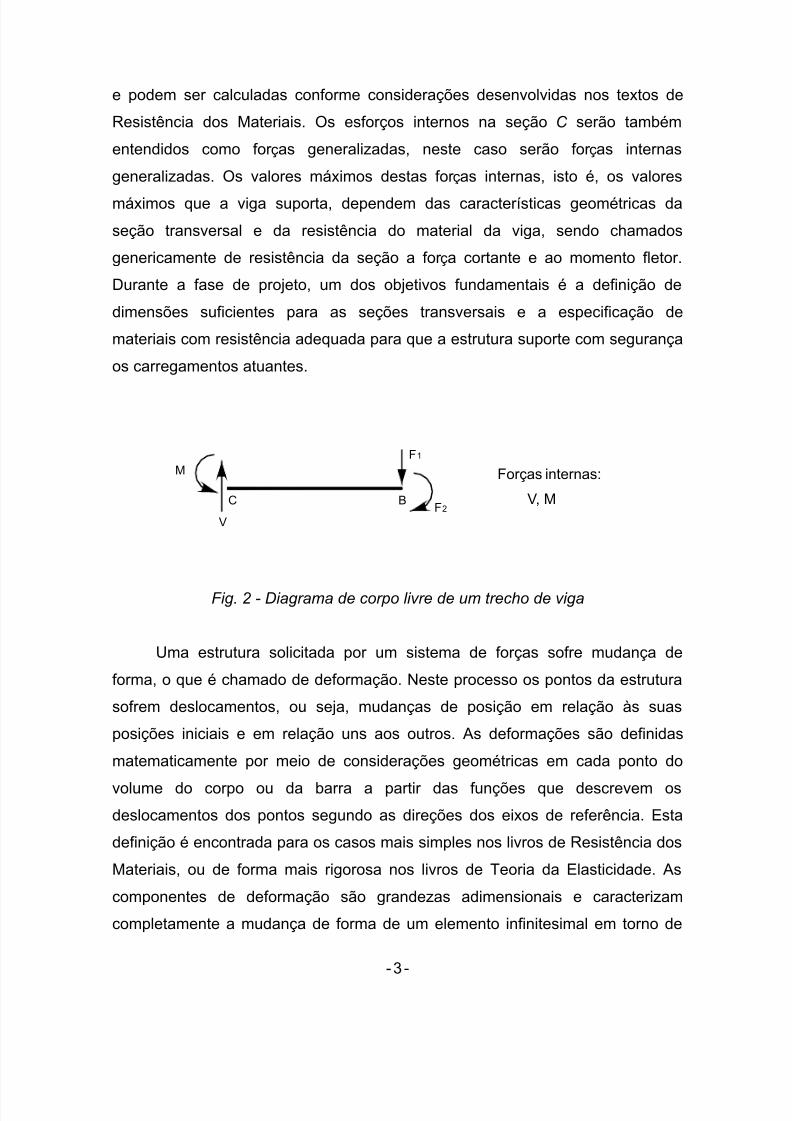
estrutura corretamente vinculada. Na Fig. 4, por exemplo, o trecho em balanço
AB, da viga ABC , se desloca rigidamente quando a viga, corretamente vinculada,
é carregada ao longo do vão BC . Os deslocamentos de corpo rígido em geral
não estão associados à deformação da estrutura, e devem ser evitados a todo
custo quando puderem advir de vinculação deficiente.
2 - Condições de Compatibilidade de Deslocamentos
Na análise estrutural, além das condições de equilíbrio, devem ser
satisfeitos todos os requisitos de compatibilidade de deslocamento. As condiçõesde compatibilidade dizem respeito à continuidade dos deslocamentos e dos
requisitos de vinculação da estrutura nos apoios. Assim, em geral, numa seção
qualquer de uma barra da estrutura, sendo esta seção definida por um ponto
sobre o eixo barra, tomando-se um ponto localizado um infinitésimo à esquerda e
outro ponto situado um infinitésimo à direita, os deslocamentos destes pontos
vizinhos à esquerda e à direita devem ser iguais ao deslocamento do ponto da
seção para que haja continuidade de deslocamentos, desde que nesta seçãonão exista nenhum tipo especial de conexão que permita a ocorrência de
descontinuidades de deslocamento. Assim, na Fig. 4, a flecha no ponto Se e no
ponto Sd devem ser iguais à flecha ∆ no ponto S.
A
B
P2P1
Se
1
S Sd C1 2
2
Fig. 4 – Linha Elástica de Uma Viga Biapoiada

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 6/83
- 6 -
Na viga mostrada na Fig. 4, está representada uma linha elástica
compatível com a vinculação da viga para um carregamento genérico no vão BC .
O trecho em balanço AB supõe-se descarregado e, portanto não se deforma,
mas gira rigidamente em torno de B. Os pontos B e C estão impedidos de se
deslocarem na direção vertical e o ponto B também não pode se deslocar na
direção horizontal, pois os respectivos deslocamentos estão impedidos de
ocorrer pela ação dos apoios. Portanto, uma elástica compatível, tal como
esboçada na Fig. 4, deve apresentar continuidade de deslocamentos ao longo da
estrutura e satisfazer as condições de contorno nos apoios. As rotações θ 1 e θ 2 ,
respectivamente, à esquerda e à direita do apoio B, devem ter mesmo valor
numérico e mesmo sentido. No ponto B não existe articulação interna entre os
trechos AB e BC da viga, devendo-se observar que a viga aí se articula
externamente.
Na viga da Fig. 3 deve-se notar que o engastamento em A impede todos
os deslocamentos possíveis da seção, isto é, deslocamento horizontal, vertical e
giro, enquanto na extremidade B nenhuma componente de deslocamento está
restringida.
As condições de compatibilidade são muito importantes na análise
estrutural pois permitem complementar o número de equações de equilíbrioestático quando se analisa uma estrutura hiperestática pelo método da for ças.
3 - Comportamentos Básicos dos Materiais: Linearidade, Não-linearidade,
Elasticidade, Plasticidade
O comportamento físico de um material é definido pelas relações
existentes entre as tensões atuantes e as correspondentes deformações por elasprovocadas. Os conceitos de linearidade e elasticidade são teoricamente
independentes, mas na prática muitas vezes se confundem. O entendimento
correto destes conceitos relacionados ao material da estrutura é de fundamental
importância, pois deles vai depender o comportamento global da estrutura.
A linearidade física corresponde a uma relação diretamente proporcional
entre tensões e deformações, conforme ilustrado na Fig. 5-a. Na Fig. 5-b mostra-

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 7/83
- 7 -
se o caso de um material cuja relação tensão-deformação é não-linear, isto é, as
tensões não são diretamente proporcionais às deformações.
σ
ε a - Linearidade
Física
(a)
ε
σ
b - Não-linearidade
Física
(b)
σ - Tensão
ε- Deformação
Fig. 5 – Comportamento Linear e Não-linear do Material
Diz-se que um material é elástico quando, uma vez deformado sob um
determinado carregamento, ao se retirar este carregamento há um retorno à
situação inicial (indeformada), isto é, sem deformações residuais. A trajetória
percorrida no descarregamento é a mesma percorrida no carregamento.
Portanto, elasticidade é a propriedade que certos materiais idealizados possuem
de se deformarem quando submetidos a tensões, e de voltarem à condição
inicial indeformada, quando o estado de tensão que causou a deformação é
removido.
No caso de não haver retorno à situação inicial, isto é, permanecerem
deformações residuais, quando o material é carregado e em seguida
descarregado, o material é dito elastoplástico. Neste caso uma parte da
deformação é recuperável e outra não. Parte da energia absorvida durante o
processo de carregamento é dissipada internamente para produzir deformações
plásticas permanentes, alterando assim a estrutura interna do material em nívelmicroscópico, e conseqüentemente as propriedades de rigidez e resistência do
mesmo. Na Fig. 6 são apresentados os diagramas tensão x deformação típicos
para material elástico não-linear, material elástico linear e material elastoplástico.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 8/83
- 8 -
εε εε
εMaterialelástico
Materialelástico perfeito
(linear)Material elasto-plástico
ε = εe + εp
εp εe
σσ
σ σσ
σcarga
descarga
εp = Deformação plástica residual εe = Deformação elástica
Fig.6 – Diagramas Tensão x Deformação Típicos
Deve-se observar que no caso de material elastoplástico, a trajetória de
descarregamento não é a mesma do carregamento. A utilização de materiais dotipo elástico não-linear ou elastoplástico induz a estrutura a se comportar de
forma não-linear, isto é, a relação entre as cargas e os deslocamentos não é
neste caso diretamente proporcional.
Uma aproximação teórica muitas vezes utilizada para simular os materiais
elastoplásticos é o chamado comportamento elastoplástico perfeito, no qual
abaixo de um certo limite de solicitação f y assume-se que o material apresenta
comportamento elástico-linear; acima deste limite o comportamento éelastoplástico. Este comportamento é ilustrado pelo diagrama tensão x
deformação da Fig.7 , onde a tensão de escoamento f y é admitida como
coincidente com a tensão limite de proporcionalidade do material.
εeεp
εε
f y
σpatamar de escoamento
Fig. 7 – Material Elastoplástico Perfeito
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 9/83
- 9 -
Para valores de tensão σ abaixo da tensão de escoamento f y o
comportamento é elástico-linear, enquanto para valores acima de f y o material se
comporta como perfeitamente plástico, sendo f y o valor máximo de tensão que o
material suporta. Quando a tensão atinge o valor f y o material começa a se
deformar indefinidamente sob tensão constante.
Os modelos de comportamento descritos acima são aproximações
idealizadas do comportamento real dos materiais. Na realidade, os materiais com
aplicação estrutural não apresentam o mesmo comportamento para todos os
níveis de tensão. Para solicitações baixas, o comportamento é quase sempre
aproximadamente elástico, assimilável a linear. Acima de certos níveis de tensão
o comportamento passa a ser elastoplástico.
Na maioria dos casos, nos projetos estruturais, os fatores de segurança
aplicados sobre solicitações e resistências fazem com que os materiais quase
sempre trabalhem em um nível de tensão abaixo de 40 % da sua tensão de
escoamento. Por esta razão na maioria das vezes considera-se o material com
comportamento elástico-linear para fins de análise estrutural, com isto obtém-se
uma simplificação muito significativa na modelagem matemática do
comportamento da estrutura. Isto vai significar no final do processo que o
comportamento da estrutura vai ser descrito por um sistema linear de equaçõesalgébricas em termos das for ças internas e externas incógnitas e dos
carregamentos no caso do Método das Forças, ou em termos dos
deslocamentos incógnitos e dos carregamentos no caso do Método dos
Deslocamentos. Caso a hipótese de comportamento linear da estrutura não
possa ser aplicada recai-se num sistema de equações não-lineares cuja solução
é muito mais elaborada e dispendiosa. Neste caso os coeficientes das incógnitas
do sistema de equações são dependentes dos valores das incógnitas e asolução do sistema em geral se baseia num esquema de solução incremental e
iterativo.
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 10/83
- 10
Comportamento Geométrico das Estruturas: Linearidade e Não-linearidade
Geométrica
O comportamento geométrico de uma estrutura é definido pelas relações
entre for ças e efeitos estruturais correspondentes. A linearidade geométrica
existe quando os efeitos são combinações lineares das causas.
Exemplo:
P
2
2P
P
Fig. 8 – Comportamento Linear
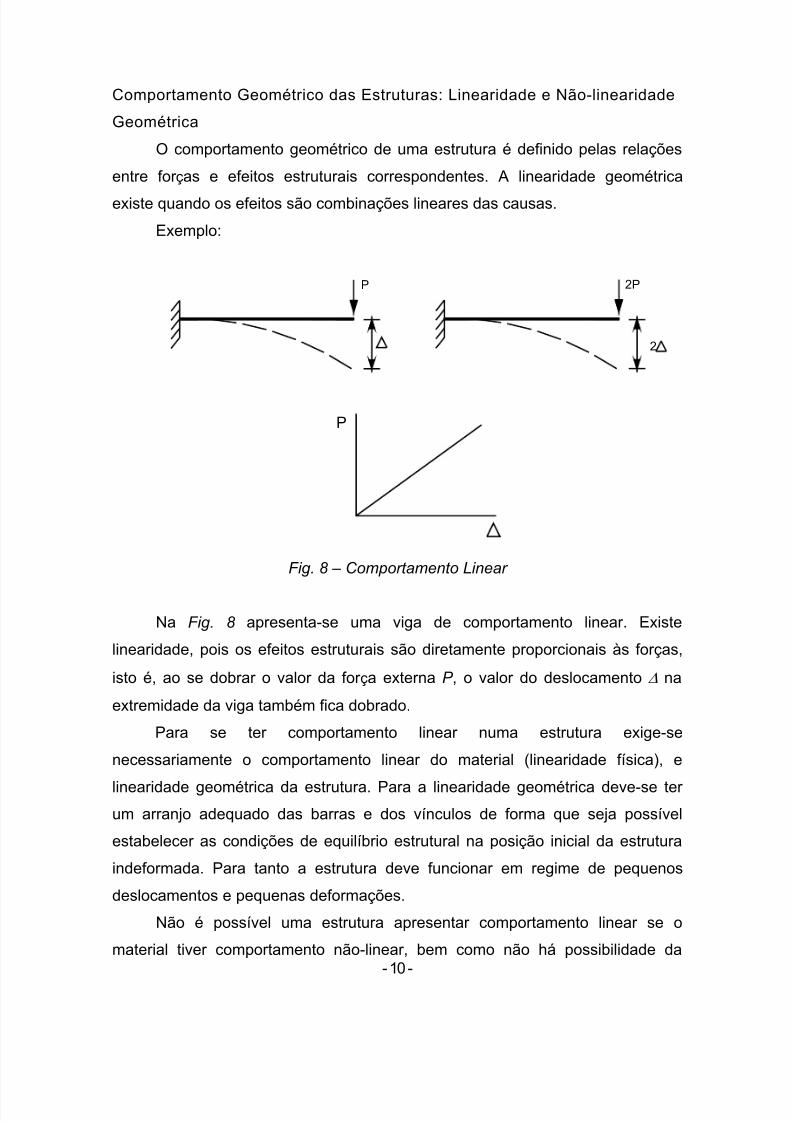
Na Fig. 8 apresenta-se uma viga de comportamento linear. Existe
linearidade, pois os efeitos estruturais são diretamente proporcionais às forças,
isto é, ao se dobrar o valor da for ça externa P , o valor do deslocamento ∆ na
extremidade da viga também fica dobrado.
Para se ter comportamento linear numa estrutura exige-se
necessariamente o comportamento linear do material (linearidade física), e
linearidade geométrica da estrutura. Para a linearidade geométrica deve-se ter
um arranjo adequado das barras e dos vínculos de forma que seja possível
estabelecer as condições de equilíbrio estrutural na posição inicial da estrutura
indeformada. Para tanto a estrutura deve funcionar em regime de pequenos
deslocamentos e pequenas deformações.
Não é possível uma estrutura apresentar comportamento linear se o
material tiver comportamento não-linear, bem como não há possibilidade da

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 11/83
- 11 -
estrutura apresentar comportamento linear se apresentar alguma não-linearidade
geométrica.
A
C
B
P
α α
Fig. 9 – Estrutura com não-linearidade geométrica
Para estrutura apresentada na Fig. 9, não se consegue o equilíbrio no
ponto C sem considerar a deformação das barras AC e BC e os conseqüentes
deslocamentos. Assim, para formular o equilíbrio do nó C , conforme Fig. 9, é
necessário levar em conta o ângulo α formado entre as barras na posição
deformada e na posição inicial. Esta estrutura apresenta comportamento não-
linear para qualquer valor de P e qualquer tipo de material, e é considerada uma
forma crítica da estrutura apresentada na Fig. 10 .
A
C
BP
∆
α α
Fig. 10 – Estrutura com Linearidade Geométrica
Na Fig. 10 apresenta-se uma estrutura derivada da estrutura da Fig. ,9
mas cuja disposição de barras e vínculos permite a ocorrência de linearidade
geométrica. Neste caso se a estrutura for composta de material elástico linear
apresentará comportamento elástico linear como um todo, neste caso há
proporcionalidade entre P e ∆.
Se a estrutura da Fig. 10 for composta de barras muito delgadas e material
muito deformável, de forma que os deslocamentos não possam ser considerados
como pequenos, e de tal forma que o equacionamento da estrutura na posição
indeformada leve a resultados significativamente diferentes daqueles obtidos

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 12/83
- 12
com o equacionamento para o equilíbrio na posição deformada, tem-se
comportamento não-linear geométrico. Isto significa que não se podem
desprezar os efeitos das rotações α das barras, e a variação dos comprimentos
das barras AC e CB. Caso se utilize, neste problema, a simplificação de
comportamento linear, os resultados serão muito diferentes do comportamento
real, aparecendo portanto a necessidade de se considerar as rotações α na
análise e configurando-se a necessidade de se considerar o comportamento não-
linear geométrico.
Quando é possível formular o equilíbrio considerando-se a configuração
inicial indeformada da estrutura, tem-se a chamada teoria de primeira ordem,
caso contrário, a formulação deve ser em teoria de segunda ordem.
4 - Princípio da Superposição dos Efeitos
Quando uma estrutura tem comportamento elástico-linear (linearidade
física e geométrica) pode-se considerar que os efeitos produzidos por várias
causas podem ser obtidos combinando-se os efeitos produzidos pelas causas
atuando individualmente.
O princípio enunciado acima é conhecido como princípio de
superposição dos efeitos e, na prática, pode ser aplicado quando o
comportamento da estrutura é elástico-linear, ou seja:
a) O material segue a Lei de Hooke (comportamento elástico-linear);
b) Deslocamentos e deformações nos pontos da estrutura são pequenos
(linearidade geométrica);
c) Não existe interação entre efeitos de força axial e momento fletor nas
barras (linearidade geométrica);d) A disposição das barras e de vínculos é tal que se pode formular o
equilíbrio na posição inicial da estrutura indeformada.
Como causas incluem-se forças e momentos externos aplicados,
deslocamentos de apoio, gradientes de temperatura, e quaisquer carregamentos
em geral. Como efeitos entendem-se reações de apoio, deslocamentos, tensões
e deformações.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 13/83
- 13
Na Fig. 11 apresenta-se um exemplo ilustrativo da aplicação do princípio
de superposição dos efeitos no caso de uma viga submetida a for ças externas F 1
e F 2 . O cálculo de um efeito qualquer pode ser realizado considerando-se a
aplicação simultânea de F 1 e F 2 , ou alternativamente, pode ser efetuado
aplicando-se cada uma das for ças isoladamente e calculando-se o respectivo
efeito parcial. O efeito total será a soma dos efeitos parciais se a estrutura tiver
comportamento elástico linear. Por exemplo, na Fig.11 (a), F 1 e F 2 são forças
externas aplicadas (causas) e considerando-se os efeitos R A, R B, M A (reações de
apoio) e ∆C (deslocamento vertical em C). Na Fig.11 (b) e 11 (c) aplicam-se F 1 e
F 2 , respectivamente, e obtêm-se os efeitos individuais: R’ A, R’ B, M’ A, ∆’ C
(causados por F 1) e R’’ A, R’’ B, M’’ A, ∆’’ C (causados por F 2 ), os efeitos totais podem
ser calculados por meio de:
R A = R’ A + R’’ A
M A = M’ A + M’’ A (1)
R B = R’ B + R’’ B
∆C = ∆’ C + ∆’’ C
F2F1M A
(a)
C
R A
A
RB
B
C
F1M' A
(b)
C
R' A
A
R'B
B
'C
F2M'' A
(c)
C
R'' A
A
R''B
B
"C
Fig. 11 – Princípio de Superposição dos Efeitos

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 14/83
- 14
Um outro caso de utilização do princípio de superposição dos efeitos é
mostrado na Fig. 12 , para uma viga submetida a um recalque ∆ A e a uma rotação
de apoio θ A em A. A situação é inteiramente análoga à do exemplo anterior e o
cálculo de um efeito qualquer pode ser efetuado aplicando-se cada um dos
deslocamentos de apoio especificados, separadamente, e avaliando-se o
respectivo efeito parcial, sendo o efeito total a soma dos efeitos parciais:
R A = R’ A + R’’ A
M A = M’ A + M’’ A (2)
R B = R’ B + R’’ B
∆C = ∆’ C + ∆’’ C
M A
R A
A
A B
(a)
C
C
RB
A
M' A
R' A
A B
(b)
C
C
R'B'
' A
M'' A
R'' A
A B
(c)
C
C
R''B
'' A
Fig. 12 - Princípio de Superposição dos Efeitos – Viga com Recalque de Apoio

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 15/83
- 15
5 - Correspondência entre Força e Deslocamento
Um conceito importante e muito útil em análise estrutural é o de
correspondência entre for ça e deslocamento. Considera-se que for ça e
deslocamento são correspondentes quando:
• São de mesma natureza, isto é, uma força corresponder á a um deslocamento
linear, e um momento a um deslocamento angular (rotação);
• Estão localizados no mesmo ponto da estrutura;
• Têm mesma direção e mesmo sentido considerado como positivo.
Por exemplo na Fig.13, a for ça vertical P na extremidade livre da viga em
balanço corresponde ao deslocamento vertical ∆ neste mesmo ponto e ambos
são considerados positivos quando estiverem dirigidos para baixo, sentido
adotado como positivo neste caso. O momento M aplicado naquela mesma
extremidade livre corresponde à rotação θ da extremidade e como têm o mesmo
sentido (horário) terão o mesmo sinal. Caso os sentidos sejam contrários
obviamente os sinais serão contrários. O sentido positivo pode ser arbitrado no
início da análise e deve ser mantido a partir de então.
P
M
P correspondente a ∆
M correspondente a θ
Fig.13 – Correspondência entre For ç a e Deslocamento
A relação de correspondência é diferente da relação de causa. No exemplo
anterior, ∆ e θ são ambos causados pela ação conjunta de P e M . Assim naFig.13, parte do deslocamento ∆ é causado pela for ça P e parte pelo momento
M , o mesmo raciocínio vale para a rotação θ . Por meio do conceito de
correspondência entre for ça e deslocamento pode-se estabelecer um sistema de
coordenadas (sistema referência) ao longo da estrutura, relacionando estas
grandezas às suas direções e sentidos e aos respectivos pontos de ocorrência.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 16/83
- 16
6 - Trabalho e Trabalho Complementar
O trabalho W realizado por uma força constante P atuando sobre uma
partícula durante a trajetória desta entre os pontos A e B, conforme Fig. 14, é
definido como o produto da força pela projeção da distância AB, na direção de
sua linha de ação. Portanto,
θ cos ABP W ×= (3)
θ
φ
θ
ds
A
BS
P
B´
Força constante P atuando sobre a
partícula na trajetória S do ponto A ao
ponto B
θ = ângulo entre a linha de ação da
força P e a direção AB.
Fig. 14 – Trabalho de uma força ao longo da trajetória de uma partícula
O trabalho realizado pela força P durante um deslocamento infinitesimal ds
medido sobre a trajetória percorrida entre A e B, é dado por:
dscosP dW φ = (4)
que integrado ao longo de S fornece o trabalho total produzido por P quando se
desloca de A até B.
∫=
B
A
dscosP W φ Se P é constante,
∫=B
A
dscosP W φ
Como cos φ ds é a componente de ds na direção de P ,
____ ____
BB`P cos ABP W == θ (5)

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 17/83
- 17
O trabalho, portanto, não depende da trajetória percorrida por P , mas
apenas da componente desta trajetória na direção dela própria ( ____
BB`).
Se a força P for aplicada lenta e gradativamente em um corpo elástico, a
relação entre a força aplicada e o deslocamento correspondente no ponto de
aplicação da força pode ser representado, de maneira geral, por um gráfico como
o seguinte:
P
v
Pe
Pe + dP
P
P
dvvf
v
Fig. 15 – Trabalho da força P durante o deslocamento v
Caso de comportamento não-linear
dscosdv φ = (6)
sendo dv a componente do deslocamento na direção de P .Com base na Fig. 15 , o trabalho será dado pela área entre a curva e o eixo
horizontal.
∫=f v
0
dv P W (7)
Se o comportamento é linear, o gráfico Carga X Deslocamento será conforme
ilustrado na Fig. 16 .

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 18/83
- 18
P
P
vf
.
v
P = kv
k= constante
Fig. 16 – Trabalho da força P no caso de comportamento linear
Neste caso, como P = kv e ∫=f v
0
dv P W
2
kv dv kv W
2
f
v
0
f
== ∫ Pv 2
1W :. = (8)
No caso da carga P , constante, já estar totalmente aplicada sobre o corpo e
ocorrer um deslocamento v provocado por outra ação qualquer, o trabalho
realizado por P durante a ocorrência de v será dado por Pv tal como se mostra
na Fig.17 .
P
vdv
Pf
P = constante
v f
Fig. 17 - Trabalho de carga integralmente aplicada durante um deslocamento
posterior à aplicação
∫∫ ==f f v
0
v
0
dv P dv P W Pv W :. = (9)
O trabalho complementar é definido como:
∫=P
0
C dP v W (10)
Conforme Fig. 18 , o trabalho complementar fica definido pela área entre a curva
e o eixo vertical.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 19/83
- 19
P
vvf dv
Pf
dP
W c
Caso de comportamento não-linear,
com P aplicada lenta e gradualmente.
Fig. 18 – Trabalho Complementar
Portanto observando-se as Fig. 17 e 18 conclui-se que:
W Pv W C −= (11)
No caso de comportamento elástico-linear, conforme Fig. 19,
Pf
P
Vf v
W
W
c
)12 ( Pv 2
1W W
W dP v dv P W
C
C P
0
v
0
==
=== ∫∫
Fig. 19 – Trabalho complementar para o caso de comportamento linear
Ou seja, o trabalho é igual ao trabalho complementar. Além disso, neste
caso é aplicável o Princípio da Superposição dos Efeitos. Então, se houver várias
cargas aplicadas, tal como se mostra na Fig. 20 , o trabalho total é a soma dos
trabalhos produzidos pelas cargas atuando individualmente.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 20/83
- 20
Exemplo 6.1 -
P4
P2P1 P3
v1v2
v3
v4
. Caso de aplicação lenta,
gradual e simultânea das
cargas.
Fig. 20 – Trabalho realizado por um sistema de várias cargas
)13( )4,3,2 ,1i ( v P 2
1W W i i
4
1i
C === ∑=
7- Princípio dos Trabalhos Virtuais (PTV)
7.1- Trabalho Virtual
Diz-se virtual algo que não é real; imaginário portanto. Um deslocamento
virtual ou uma força virtual são, respectivamente, um deslocamento imaginário
ou uma força imaginária, arbitrariamente impostos sobre um sistema estrutural.
O trabalho virtual pode ser considerado como o trabalho produzido em
uma das duas situações abaixo relacionadas:• Trabalho realizado por forças reais durante um deslocamento virtual;
• Trabalho realizado por forças virtuais durante um deslocamento real.
Pode-se considerar aqui como deslocamento virtual um deslocamento
provocado por alguma outra ação que não o sistema de carregamento em
questão atuante na estrutura. Força virtual, da mesma forma, pode ser
considerada uma outra força qualquer que não seja a que está provocando o
deslocamento real.Portanto, na expressão do trabalho virtual, a força e o deslocamento
envolvidos (virtual e real ou vice-versa) têm uma relação de correspondência,
mas nunca de causalidade.
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 21/83
- 21
7.2- Princípio dos Trabalhos Virtuais para Corpos Rígidos
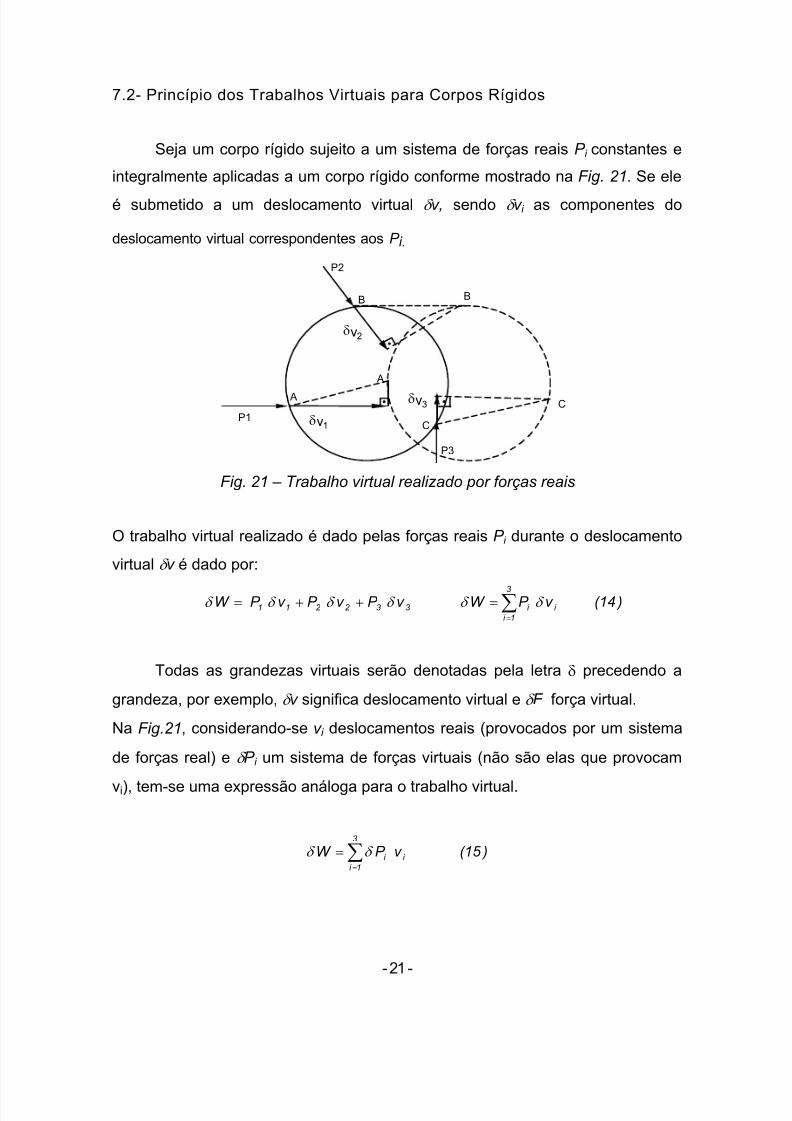
Seja um corpo rígido sujeito a um sistema de forças reais P i constantes e
integralmente aplicadas a um corpo rígido conforme mostrado na Fig. 21. Se ele
é submetido a um deslocamento virtual δ v, sendo δ v i as componentes do
deslocamento virtual correspondentes aos P i.
P1
P2
δv2
δ v1
A
B
P3
δv3
C
B
A
C
Fig. 21 – Trabalho virtual realizado por forças reais
O trabalho virtual realizado é dado pelas forças reais P i durante o deslocamento
virtual δ v é dado por:
)14( v P W v P v P v P W 3
1i
i i 332 2 11 ∑=
=++= δ δ δ δ δ δ
Todas as grandezas virtuais serão denotadas pela letra δ precedendo a
grandeza, por exemplo, δ v significa deslocamento virtual e δ F força virtual.
Na Fig.21, considerando-se v i deslocamentos reais (provocados por um sistema
de forças real) e δ P i um sistema de forças virtuais (não são elas que provocam
vi), tem-se uma expressão análoga para o trabalho virtual.
)15 ( v P W 3
1i
i i ∑=
= δ δ

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 22/83
- 22
Princípio dos Deslocamentos Virtuais - Para Corpos Rígidos
“Se é aplicado um deslocamento virtual a um corpo rígido sujeito a um
sistema de forças em equilíbrio, o trabalho virtual total realizado pelas forças é
igual a zero”. Na Fig. 21 se o sistema de forças P i estiver equilibrado, tem-se:
)16 ( 0 v P W 3
1i
i i == ∑=
δ δ
A recíproca também é verdadeira, ou seja:
“Se o trabalho virtual total realizado por um sistema de forças reais
atuando em um corpo rígido quando ele é submetido a um deslocamento virtual
é igual a zero, o sistema de forças está em equilíbrio”.
Exemplo 7.2.1-
Como nas estruturas isostáticas os deslocamentos de apoio não provocam
deformações na estrutura nem esforços internos, pode-se considerar que as
estruturas isostáticas funcionam como corpos rígidos. Utilizando este fato, as
reações de apoio de uma estrutura podem ser calculadas, como a que se segue,
usando o Princípio dos Trabalhos Virtuais aplicado aos corpos rígidos. Assim
propõe-se calcular a reação vertical V B
no apoio B.
P
a b
A C B
L
Fig. 22 – Exemplo 2
SOLUÇÃO:
Submetendo a viga ao deslocamento virtual em B, na direção vertical,
correspondente à reação V B, mostrado abaixo,

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 23/83
- 23
P
δvc
V A
H A
δvB
VB
O trabalho virtual total é dado por:
)17 ( 0 v P W n
1i
i i == ∑=
δ δ
Notar que o deslocamento virtual correspondente à carga P é dado por: δvC
Considerando que se pretende obter uma situação de equilíbrio de forças na
viga, impõe-se a condição de trabalho virtual total nulo, ou seja:
)18 ( 0 v V v P W BBC =−= δ δ δ
)19( 0 v V L
av P W ,
L
av v Como BBBBC =−== δ δ δ δ δ
Deve-se notar que o deslocamento virtual em B foi admitido para baixo, no
sentido contrário de VB, portanto o trabalho virtual desta fica negativo. Além disto,as forças V A e H A não produzem trabalho pois não há nenhum deslocamento
virtual correspondente a estas ações. Resolvendo a Equação 19 obtém-se:
)20 ( L
aP V B =
Exemplo 7.2.2 -
Usando o Princípio dos Trabalhos Virtuais, propõe-se calcular o momento M A noapoio A.
M A PL
L/2
δv3δv2
L/2
P 2P
δθ1
δθ4
Fig. 23 – Exemplo 3

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 24/83
- 24
SOLUÇÃO:
Impondo-se uma rotação virtual δ θ 4 no apoio A, a viga se desloca como um
corpo rígido, de acordo com o PTV para corpos rígidos o trabalho virtual total é
nulo, portanto:
)24( 2
PL7 M )23( 0 PLLP 2
2
LP M
)22 ( 0 PLLP 2 2
LP M
2
Lv eLv
L
v tg ;Como
)21( 0 PLv P 2 v P M 0 W
A A
4444 A
4342 2
441
12 34 A
==+++−
=+++−
====
=+++−=
δθ δθ δθ δθ
δθ δ δθ δ δ
δθ δθ δθ
δθ δ δ δθ δ
7.3 - Princípio dos Trabalhos Virtuais para Corpos Deformáveis
Nos corpos deformáveis, pontos do interior do corpo podem mover-se uns
em relação aos outros sem violar as condições de restrição. Portanto, neste
caso, tanto as forças externas quanto as internas (esforços solicitantes) realizam
trabalho.
Genericamente, uma estrutura como a mostrada abaixo pode sofrer
deformações deformando-se de forma compatível, isto é, sem apresentar
descontinuidades e respeitando-se a vinculação nos apoios.
dx
dx
Fig. 24 – Estrutura sujeita a deformações
O elemento de barra dx estará sujeito, também genericamente, a
resultantes de tensão representadas aqui pelos esforços solicitantes.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 25/83
- 25
q
dx
NTM
V
V +
N + T +
M +
q = força externa
genérica
V = esforço cortante
N = força normal
M = momento fletor
T=momento de torção
Fig. 25 – Esforços solicitantes num elemento infinitesimal
A deformação da estrutura provoca deslocamentos relativos entre as
seções transversais externas do elemento, mostradas a seguir:
d δ
dx
def. axial
dx
def. de
flexão
dθ
dx
def. decisalhamento
dλ A
A´
dφ
dx
def. detorção
(por simplicidade de representação, fixou-se a extremidade da esquerda do
elemento).

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 26/83
- 26
Nas ilustrações anteriores, devem ser notadas as seguintes relações de
correspondência:
N ↔ dδ (dδ = deslocamento relativo entre as seções extremas do elemento
de barra na direção do eixo da barra)
M ↔ dθ (dθ = rotação relativa entre as seções extremas do elemento de
barra no plano da mesma)
V ↔ dλ (dλ = deslocamento relativo no plano da barra entre as seções
extremas do elemento de barra na direção perpendicular ao eixo)
T ↔ dφ (dφ = rotação relativa entre as seções extremas do elemento em
torno do eixo da barra)
Portanto, existe um trabalho real interno produzido por estes esforços que,
no caso de comportamento elástico linear é dado por pela integral do trabalho
infinitesimal sobre cada elemento de barra dx . No caso das estruturas de
comportamento elástico linear, este trabalho interno é a energia de deformação
total que é igual ao trabalho realizado pelas forças externas durante o processo
de deformação da estrutura. Todo o trabalho realizado pelo carregamento real é
armazenado como energia de deformação e pode ser recuperado se o
carregamento for removido.
O trabalho interno total (energia de deformação) será:
)25 ( ] d T d V d M d N [ 2
1W
estr estr estr estr
int ∫ ∫ ∫ ∫+++= φ λ θ δ
Pelo Princípio da Conservação da Energia, o trabalho das forças internas é igual
ao trabalho das forças externas:
)26 ( W W int ext =

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 27/83
- 27
Princípio dos Deslocamentos Virtuais para Corpos Deformáveis
“Quando a uma estrutura deformável, em equilíbrio sob a ação de um
sistema de carregamento, é dada uma pequena deformação virtual compatível, o
trabalho virtual realizado pelas forças externas (carregamento) é igual ao
trabalho virtual realizado pelas forças internas (esforços solicitantes)”.
Chamando δWext o trabalho virtual das forças externas e δWint o trabalho
virtual das forças internas, tem-se de acordo com o referido princípio:
)27 ( W W int ext δ δ =
.
Observação:
Os deslocamentos ou deformações virtuais devem ser compatíveis com
as condições de contorno geométricas (apoios) e não devem violar a
continuidade das deformações da estrutura.
Considerando a estrutura seguinte:
δθBθB
P M
vc
A B
C
δvcδv
δv = elástica virtual
(ponto genérico).
Fig. 26 – Estrutura com deformações reais e virtuais
Onde:
P e M: força e momento externos
VC e θB: deslocamentos correspondentes a P e M, originados da
deformação (real) causada pelo carregamento (P e M)
δvC e δθB: deslocamentos virtuais correspondentes a P e M, impostos após
a deformação real da estrutura . Não são provocados por P e M,
mas sim da deformação virtual.
Neste caso, o trabalho virtual externo será BC ext M v P W θ δ δ δ +=

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 28/83
- 28
(notar que as reações de apoio não realizam trabalho pois os deslocamentos
virtuais correspondentes são nulos).
A deformação virtual imposta provoca deslocamentos virtuais das seções
transversais, correspondentes aos esforços solicitantes reais atuantes nestas
seções. Portanto, conforme figuras anteriores, o trabalho virtual das forças
internas realizado ao longo de todo o comprimento da estrutura pode ser
expresso por:
)28 ( d )dM M ( d )dV V ( W B
A
B
A
int θ λ δ ∫∫ +++=
pois, na viga em questão, os dois únicos esforços solicitantes existentes são V e
M . Na expressão acima e para o que se segue, φ δ θ λ d ,d ,d ,d representam asdeformações virtuais de um elemento de barra dx , associadas à deformação
virtual imposta na barra.
Aplicando o PTV, no equilíbrio tem-se δWext = δWint, portanto,
)29( d )dM M ( d )dV V ( M v P B
A
B
A
θ λ θ δ δ ∫∫ +++=+
A expressão geral para estruturas deformáveis planas, considerando-se a
existência dos quatro esforços solicitantes (N, M, V, T ) e um carregamento
externo qualquer, será:
)30 ( d )dT T ( d )dV V ( d )dM M ( d )dN N ( W ext ∫ ∫ ∫ ∫ +++++++= φ λ θ δ
Desprezando-se os produtos de dois infinitésimos, tem-se:
)31( d T d V d M d N W ext ∫ ∫ ∫ ∫+++= φ λ θ δ
δ W ext terá uma expressão para cada caso, genericamente:
)32 ( v P W i
n
1i
i ext δ δ ∑=
=

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 29/83
- 29
Princípio das Forças Virtuais para Corpos Deformáveis
De forma análoga ao PTV para deslocamentos virtuais, tem-se o Princípio
das Forças Virtuais, que pode ser enunciado como:
“Se a um corpo deformável que sujeito a deslocamentos reais provocados
por um sistema de forças em equilíbrio é aplicado um sistema equilibrado de
forças virtuais, o trabalho virtual externo (produzido pelas forças virtuais externas
quando ocorrem os deslocamentos reais) é igual ao trabalho virtual interno
(produzido pelos esforços virtuais internos quando ocorrem as deformações reais
das barras)”.
int ext W W δ δ = (δWext e δWint são trabalhos virtuais complementares)
Considerando-se a mesma viga anterior,
P M
v2
A B
δQ
θv1
Fig. 27 – Estrutura com deformações reais e carga virtual
Onde:P e M: força e momento externos reais
δQ: força virtual
v1, v2, θ : deslocamentos reais correspondentes a δQ, P, M (provocados
por P e M).
Tem-se então, neste caso, para o trabalho virtual externo, 1ext v QW ⋅= δ δ
A expressão para o trabalho virtual interno é a mesma anterior, sendo que, aqui,
os esforços solicitantes são virtuais (provocados pela força virtual δ Q) e osdeslocamentos são reais (provocados por P e M ):
)33( d )dM M ( d )V d V ( W B
A
B
A
int θ λ δ ∫∫ +++=
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 30/83
- 30
Generalizando e desprezando os produtos de dois infinitésimos, tem-se a
mesma uma expressão análoga à anterior para o PTV:
)34( d T d V d M d N W ext ∫ ∫ ∫ ∫+++= φ λ θ δ δ
Aqui também, δWext terá uma expressão para cada caso. Genericamente:
)35 ( v QW i
n
1i
i ext ∑=
= δ δ
Nota-se que, como nenhuma restrição foi feita ao comportamento da
estrutura, o PTV é aplicável a estruturas de comportamento elástico linear ounão-linear.
8 - Método da Carga Unitária (MCU)
A particularização do Princípio dos Trabalhos Virtuais (forças virtuais) na
qual se considera a força virtual (ou forças virtuais) com valor unitário é
conhecida como Método da Carga Unitária (MCU). Também conhecido comoMétodo do Trabalho Virtual, Método da Carga Substituta e Método de Maxwell-
Mohr, o MCU pode ser utilizado para calcular deslocamentos (devidos a
deformações reais causadas pelo carregamento) em estruturas isostáticas.
Como o MCU é uma sistematização do PTV, sua formulação geral pode
ser utilizada em estruturas de comportamento elástico linear e não-linear.
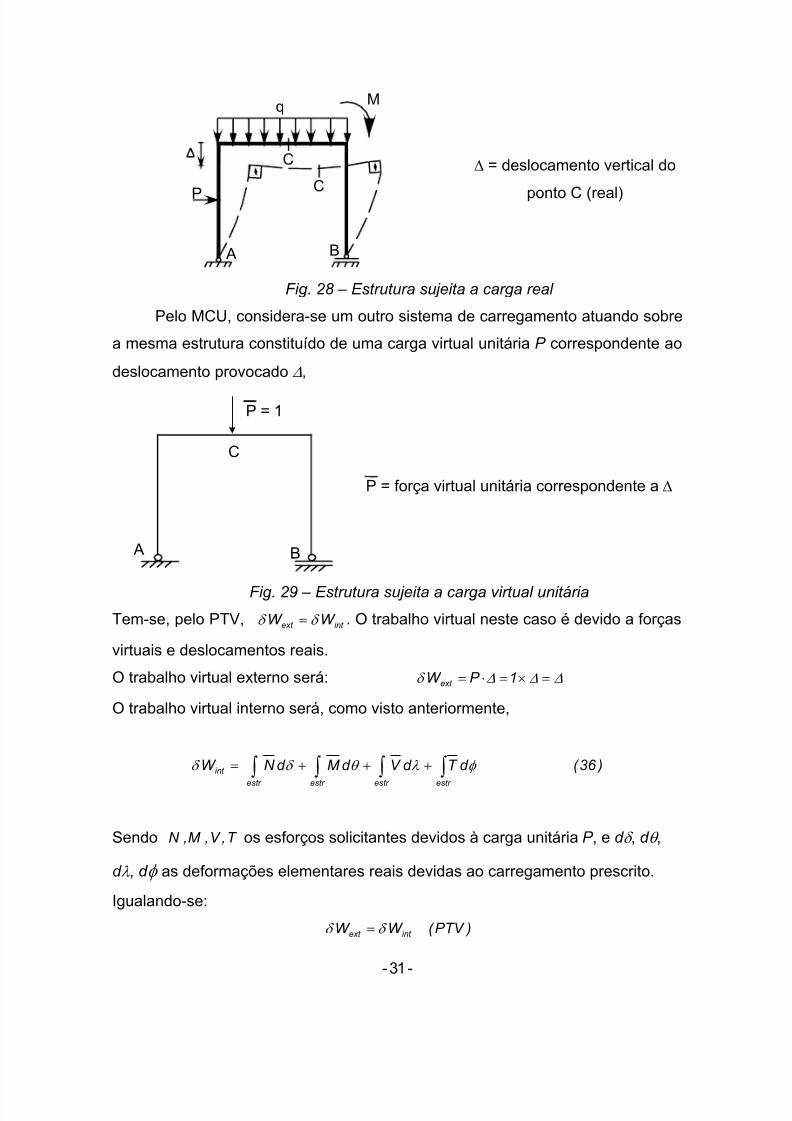
Seja calcular um determinado deslocamento ∆ , por exemplo o
deslocamento vertical no ponto C, em uma estrutura isostática sujeita a um
sistema de cargas qualquer.
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 31/83
- 31
M
C
A B
P
q
C
∆ = deslocamento vertical do
ponto C (real)
Fig. 28 – Estrutura sujeita a carga real
Pelo MCU, considera-se um outro sistema de carregamento atuando sobre
a mesma estrutura constituído de uma carga virtual unitária P correspondente ao
deslocamento provocado ∆,
A B
P = 1
C
P = força virtual unitária correspondente a ∆
Fig. 29 – Estrutura sujeita a carga virtual unitária
Tem-se, pelo PTV, int ext W W δ δ = . O trabalho virtual neste caso é devido a forças
virtuais e deslocamentos reais.
O trabalho virtual externo será: ∆∆∆δ =×=⋅= 1P W ext
O trabalho virtual interno será, como visto anteriormente,
)36 ( d T d V d M d N W
estr estr estr estr
int ∫ ∫ ∫ ∫+++= φ λ θ δ δ
Sendo T ,V ,M ,N os esforços solicitantes devidos à carga unitária P , e d δ , d θ ,
d λ , d φ as deformações elementares reais devidas ao carregamento prescrito.
Igualando-se:
)PTV ( W W int ext δ δ =

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 32/83
- 32
Tem-se
)37 ( d T d V d M d N estr estr estr estr
∫ ∫ ∫ ∫+++= φ λ θ δ ∆
Conforme mencionado esforços T eV ,M ,N referem-se à força virtual
unitária e daqui por diante serão denotados, no que se segue, por n, m, v , t .
Portanto, a equação geral do MCU será escrita:
)38 ( d t d v d md nestr estr estr estr
∫ ∫ ∫ ∫+++= φ λ θ δ ∆
Sendo válida para estruturas de comportamento elástico linear ou não-linear.
Os deslocamentos d δ , d θ , d λ e d φ são provocados por carregamento
externos em geral, bem como por variação de temperatura, recalques de apoio,
modificações impostas na montagem; isto é, qualquer tipo de solicitação externa
real que produza deformações na estrutura.
Nas análises cotidianas em geral, admite-se que a estrutura apresente
comportamento elástico-linear, isto é, estrutura constituída de material elástico-
linear seguindo Lei de Hooke (σ = E.ε), apresentando linearidade geométrica. As
cargas externas produzem tensões, representadas aqui por suas resultantes, os
esforços solicitantes reais N, M, V, T e deformações reais d δ , d θ , d λ e d φ
relacionadas entre si pelas expressões:
)39( dx GJ
T d dx
GA
V f d dx
EI
M d dx
EA
N d S ==== φ λ θ δ
Nos quais E = módulo de elasticidade longitudinal,G = módulo de elasticidade transversal,
A = área da seção transversal,
I = momento de inércia da seção transversal,
J = constante de torção da seção transversal,
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 33/83
- 33
f s = fator de forma para cisalhamento; depende da forma da
seção transversal e leva em conta a distribuição da tensão
de cisalhamento na seção.
As grandezas seguintes presentes nos denominadores da Eq.39, são
relacionadas abaixo com a respectiva nomenclatura :
EA = módulo de rigidez à deformação axial;
EI = módulo de rigidez à flexão;
GA = módulo de rigidez ao cisalhamento;
GJ = módulo de rigidez à torção;
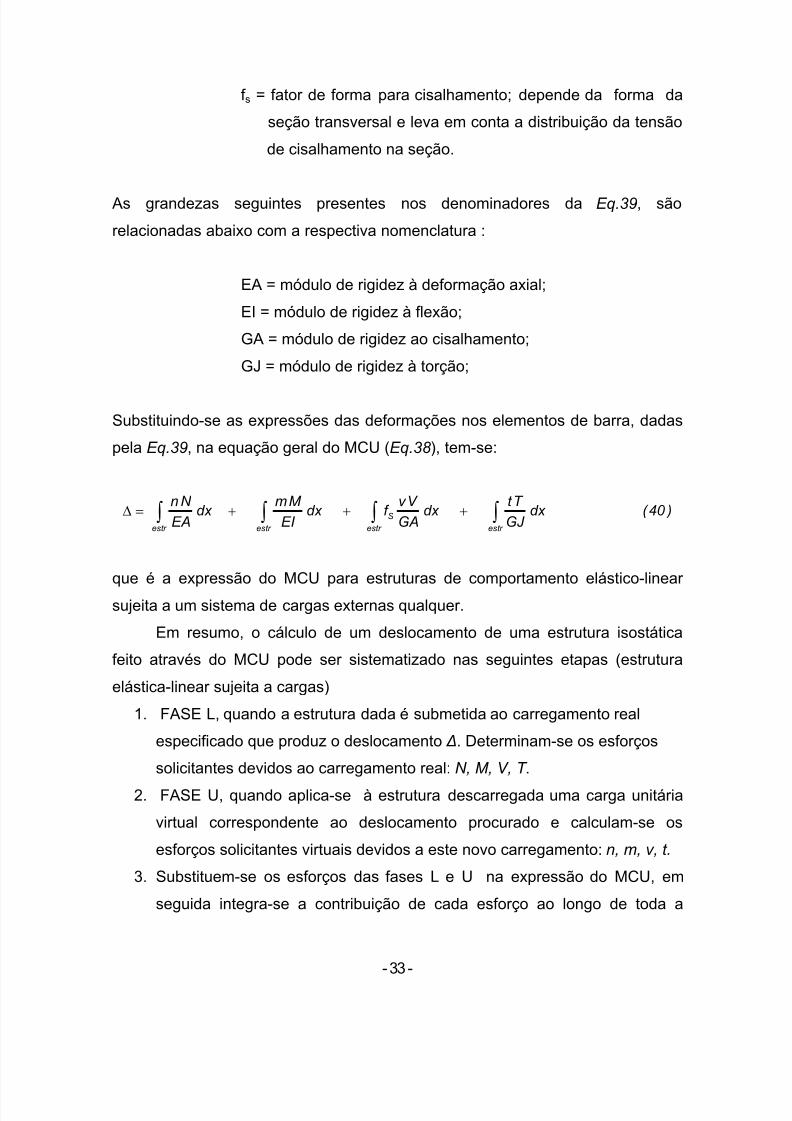
Substituindo-se as expressões das deformações nos elementos de barra, dadas
pela Eq.39, na equação geral do MCU (Eq.38 ), tem-se:
)40 ( dx GJ
T t dx
GA
V v f dx
EI
M mdx
EA
N n
estr estr estr estr
S∫ ∫ ∫ ∫+++=∆
que é a expressão do MCU para estruturas de comportamento elástico-linear
sujeita a um sistema de cargas externas qualquer.
Em resumo, o cálculo de um deslocamento de uma estrutura isostática
feito através do MCU pode ser sistematizado nas seguintes etapas (estrutura
elástica-linear sujeita a cargas)
1. FASE L, quando a estrutura dada é submetida ao carregamento real
especificado que produz o deslocamento ∆. Determinam-se os esforços
solicitantes devidos ao carregamento real: N, M, V, T .
2. FASE U, quando aplica-se à estrutura descarregada uma carga unitária
virtual correspondente ao deslocamento procurado e calculam-se os
esforços solicitantes virtuais devidos a este novo carregamento: n, m, v, t.
3. Substituem-se os esforços das fases L e U na expressão do MCU, em
seguida integra-se a contribuição de cada esforço ao longo de toda a
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 34/83
- 34
estrutura e no final somam-se todas as contribuições para a obtenção do
deslocamento procurado ∆.
A respeito da expressão do MCU podem ser feitas algumas observações:
a) Os esforços virtuais n, m, v, t devem ter dimensão de força (ou
momento) por unidade de carga para que se obtenha ∆ com
dimensão de comprimento linear (ou rotação).
)41( 1 ] [ :. ] [ 1 ÷=∆=∆ ∫∫
b) Devem ser usadas as mesmas convenções de sinal para osesforços solicitantes das fases L e U. Assim, por exemplo, se é
adotada a convenção de força normal considerando esforço de
tração (N ) com sinal positivo na Fase L, na Fase U deve-se adotar
tração com sinal positivo na determinação de n.
Conseqüentemente, o deslocamento ∆ terá sempre como sentido
positivo o sentido arbitrado para a carga unitária virtual.
c) A contribuição das deformações devidas a alguns esforçossolicitantes no cálculo dos deslocamentos pode ser desprezada, em
certas circunstâncias, visando reduzir trabalho de cálculo manual.
Nesse sentido, o efeito das deformações devidas à força cortante
costuma ser desprezado na determinação dos deslocamentos de
vigas, pórticos planos e grelhas, por ter em geral uma influência
secundária em comparação com as deformações decorrentes do
momento fletor. Da mesma forma, a desconsideração dadeformação axial das barras devida à força normal na análise de
pórticos planos costumava ser adotada. Estas simplificações são
encontradas com muita freqüência nos textos clássicos de Estática
e Análise Estrutural. Entretanto, atualmente, com os recursos
computacionais disponíveis, estas simplificações podem e devem
ser evitadas, principalmente no caso de análise de estruturas de
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 35/83
- 35
grande responsabilidade, ou com grande número de barras, ou
ainda quando não for possível se assegurar a adequação deste tipo
de simplificação. A disponibilidade de modernos programas
computacionais que incorporam todas estas deformações na análise
tornam totalmente dispensáveis estas simplificações e eliminam
quaisquer dúvidas na precisão dos resultados decorrentes de sua
aplicação.
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 36/83
- 36
Considerações sobre a escolha da carga unitária
a) Cálculo de Deslocamentos Absolutos
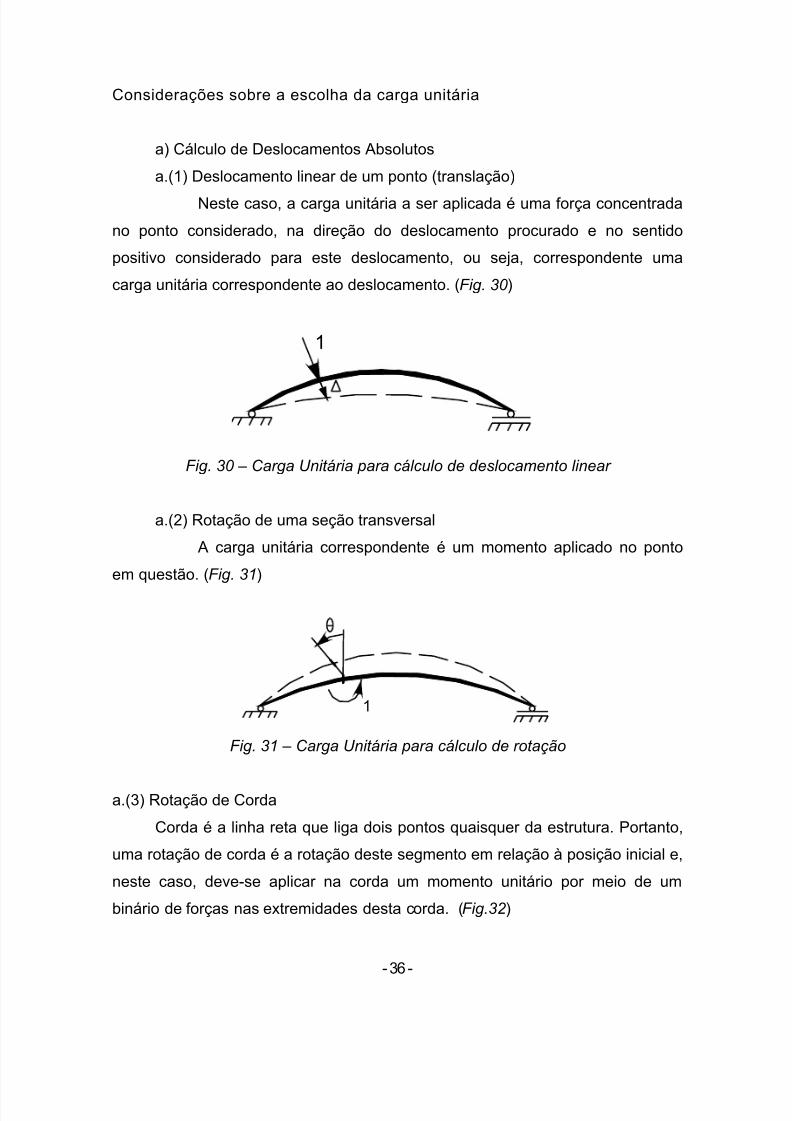
a.(1) Deslocamento linear de um ponto (translação)
Neste caso, a carga unitária a ser aplicada é uma força concentrada
no ponto considerado, na direção do deslocamento procurado e no sentido
positivo considerado para este deslocamento, ou seja, correspondente uma
carga unitária correspondente ao deslocamento. (Fig. 30 )
1
Fig. 30 – Carga Unitária para cálculo de deslocamento linear
a.(2) Rotação de uma seção transversal
A carga unitária correspondente é um momento aplicado no ponto
em questão. (Fig. 31)
1
Fig. 31 – Carga Unitária para cálculo de rotação
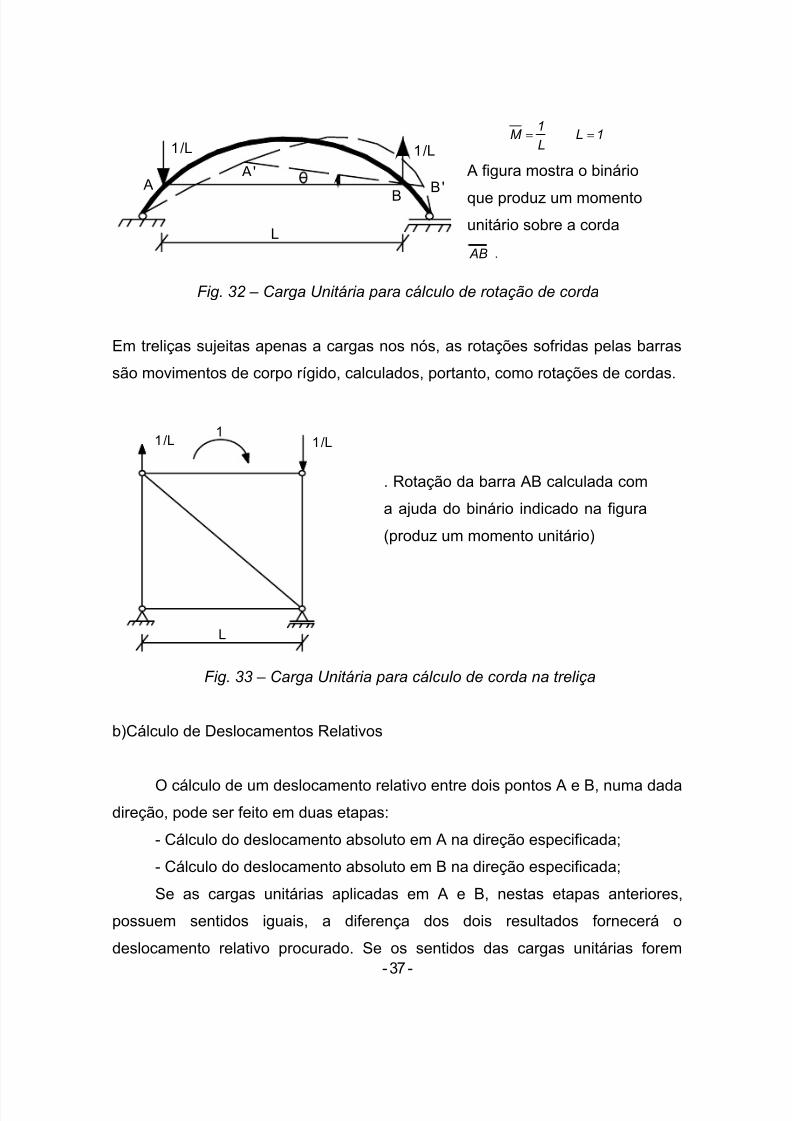
a.(3) Rotação de Corda
Corda é a linha reta que liga dois pontos quaisquer da estrutura. Portanto,
uma rotação de corda é a rotação deste segmento em relação à posição inicial e,
neste caso, deve-se aplicar na corda um momento unitário por meio de um
binário de forças nas extremidades desta corda. (Fig.32 )
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 37/83
- 37
A' A
L
1/L
BB'
1/L
1LL
1M ==
A figura mostra o binário
que produz um momentounitário sobre a corda
AB .
Fig. 32 – Carga Unitária para cálculo de rotação de corda
Em treliças sujeitas apenas a cargas nos nós, as rotações sofridas pelas barras
são movimentos de corpo rígido, calculados, portanto, como rotações de cordas.
L
1/L1
1/L
. Rotação da barra AB calculada com
a ajuda do binário indicado na figura
(produz um momento unitário)
Fig. 33 – Carga Unitária para cálculo de corda na treliça
b)Cálculo de Deslocamentos Relativos
O cálculo de um deslocamento relativo entre dois pontos A e B, numa dadadireção, pode ser feito em duas etapas:
- Cálculo do deslocamento absoluto em A na direção especificada;
- Cálculo do deslocamento absoluto em B na direção especificada;
Se as cargas unitárias aplicadas em A e B, nestas etapas anteriores,
possuem sentidos iguais, a diferença dos dois resultados fornecerá o
deslocamento relativo procurado. Se os sentidos das cargas unitárias forem

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 38/83
- 38
contrários, o deslocamento relativo será encontrado através da soma dos dois
deslocamentos.
O cálculo de deslocamentos relativos pode ser simplificado fazendo-se as
duas etapas de uma só vez, isto é, aplicando-se à estrutura, duas cargas
unitárias de sentidos contrários. O resultado final será o deslocamento
procurado.
b.(1) Variação da distância entre 2 pontos
Caso se queira calcular o deslocamento linear relativo entre dois pontos A
e B, na direção da linha que os une, o sistema de cargas virtuais aplicado será
como o mostrado na Fig.34.
1 A
A' B'B 1
Obtém-se desta maneira o
deslocamento ∆, cujo valor será
∆ = ∆´+ ∆´´
Fig. 34 – Deslocamento Relativo entre dois pontos
b.(2) Rotação relativa das extremidades de duas barras (em uma articulação)
A
1C
1
B
Obtém-se θ cujo valor será
θ = θ´ + θ´´
Fig. 35 – Rotação relativa entre as seções adjacentes numa rótula interna
No caso de uma rotação relativa entre duas seções tal como se mostra na
Fig.35 , pode ser aplicado um par de momentos unitários de sentidos opostos.
b.(3) Rotação relativa de cordas (ou de barras de treliça)

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 39/83
- 39
No caso de rotação relativa entre duas cordas da estrutura, aplicam-se dois
momentos unitários de sentido contrário, através dos binários correspondentes
(Fig.36 ).
A
L1 C
1
B
C'
L2
1
1/L1
1/L1
1/L2
1/L2
Fig. 36 – Carga unitária para cálculo de rotação relativa entre duas cordas
θ = θ´ + θ´´ é a rotação relativa entre as cordas AC e CB.
A Fig.37 mostra a diferença entre rotação relativa de cordas e de seções.
D A
B
γ
Cβ
D A
B
α
Cω
Fig. 37 – Rotação relativa entre duas seções e entre duas cordas
Rotação relativa entre barras na seção C φ = β - γ
Rotação relativa entre as cordas BC e CD θ = α - ω

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 40/83
- 40
9 - Exemplos de aplicação
9.1 – Solução por integração analítica
Nos exemplos seguintes vai-se aplicar a equação do MCU com as
simplificações tais como as mencionadas anteriormente visando a redução do
trabalho de cálculo e como forma de facilitar o entendimento global do processo.
Para efeito didático, atribuiu-se um número romano a cada termo da equação:
∫ ∫ ∫ ∫+++=estr estr estr estr
S dx GJ
T t dx
GA
V v f dx
EI
M mdx
EA
N n
)IV ( )III ( )II ( )I (
∆
Exemplo 9.1.1 –
Calcular o deslocamento vertical do ponto B da estrutura, desprezando-se o
efeito das deformações devidas à força cortante. EI = 2 x 105 kNm2 (constante)
B = ?
25 kN/m 50 kN
3 m
B A
SOLUÇÃO:
O deslocamento vertical (flecha) em B será considerado positivo se for para
baixo (afundamento do ponto B)
FASE L – Estrutura com carregamento real

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 41/83
- 41
A B
25 kN/m
3 m
V A =125 kN
M A =262,5 kN.m
x
262,5
50 kN
Diagrama de momento fletor (M)
3
0
2
2
x 25 x 50 M −−=
Observar que adotou-se a convenção clássica de momentos fletores,
considerando o momento que produz tração na face inferior (face de referência)
como momento fletor positivo.
FASE U - Cálculo dos esforços solicitantes virtuais :
Aplicando-se à estrutura uma força unitária virtual correspondente ao
deslocamento procurado (∆B):
A B
3 m
xV A =1
M A = 3
1

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 42/83
- 42
3
Diagrama de momento fletor (m) 3
0
x 1m −=
Observar que a carga vertical unitária foi aplicada para baixo conforme sentido
positivo assumido para a flecha em B e que a convenção de sinais de m é a
mesma utilizada na Fase L.
Na expressão do MCU, as integrais I e IV referem-se a esforços inexistentes (N e
T) neste caso, portanto se anulam. A integral III não será calculada pois será
desprezado o efeito de da força cortante conforme previsto no início do
problema. A expressão reduz-se então a:
m10 x 516 ,3:setemIntegrandodx ) x 5 ,12 x 50 ( ) x ( EI
1
dx EI
M m
3B
2 B
−=−−−−=
=
∫
∫
∆∆
∆
O sinal positivo de ∆B indica que o deslocamento tem o mesmo sentido da
carga unitária, isto é, para baixo. Se a carga unitária tivesse sido arbitrada para
cima, ∆B resultaria com sinal negativo o que indicaria, também, o sentido para
baixo.
Exemplo 9.1.2 –
Na viga do Exemplo 9.1.1, calcular a rotação da seção B, desprezando-se o
efeito das deformações devidas à força cortante.
SOLUÇÃO:
Como a estrutura e o carregamento são os mesmos do Exemplo 9.1.1, a
FASE L é a mesma. Portanto,
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 43/83
- 43
3
0
2
2
x 25 x 50 M −−=
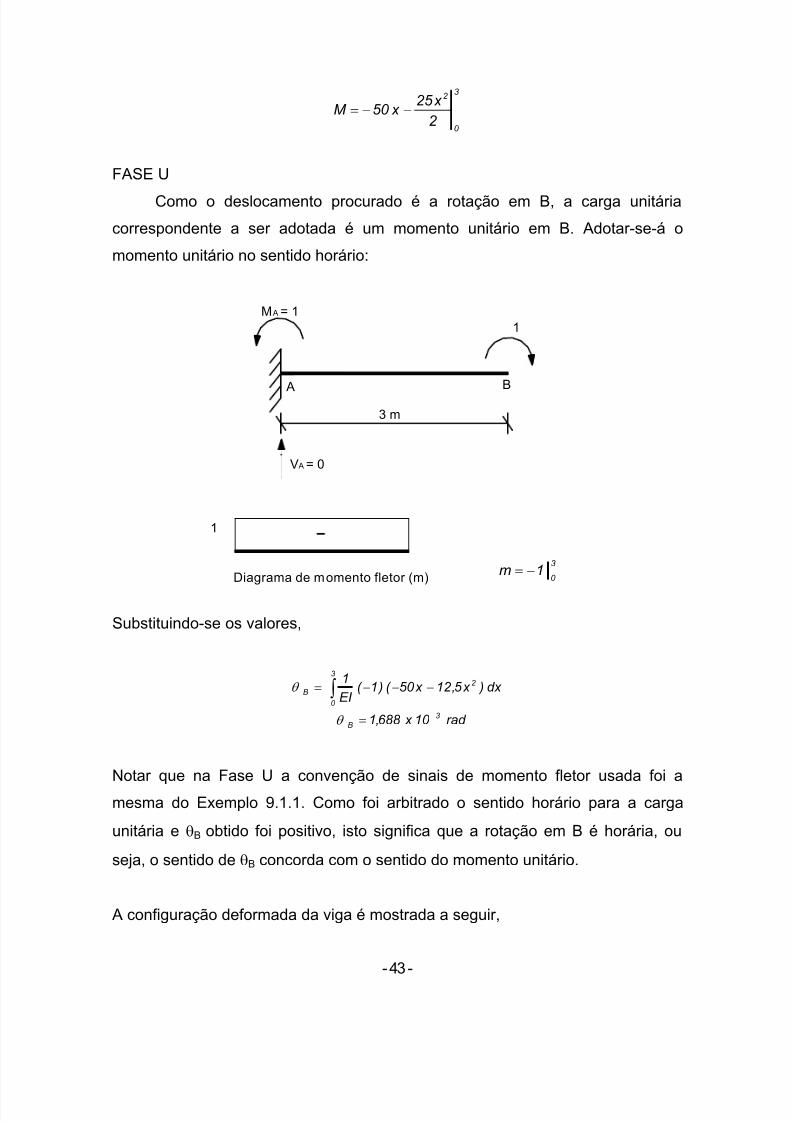
FASE U
Como o deslocamento procurado é a rotação em B, a carga unitária
correspondente a ser adotada é um momento unitário em B. Adotar-se-á o
momento unitário no sentido horário:
A B3 m
M A = 1
V A = 0
1
Diagrama de momento fletor (m)
1
3
0 1m −=
Substituindo-se os valores,
rad 10 x 688 ,1
dx ) x 5 ,12 x 50 ( )1( EI
1
3
B
3
0
2
B
−=
−−−= ∫θ
θ
Notar que na Fase U a convenção de sinais de momento fletor usada foi amesma do Exemplo 9.1.1. Como foi arbitrado o sentido horário para a carga
unitária e θB obtido foi positivo, isto significa que a rotação em B é horária, ou
seja, o sentido de θB concorda com o sentido do momento unitário.
A configuração deformada da viga é mostrada a seguir,

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 44/83
- 44
B = 3,516 x 10 m
B = 1,688 x 10 rad
-3
-3
Exemplo 9.1.3 –
Calcular o deslocamento vertical do ponto C da viga abaixo, desprezando o
efeito das deformações devidas à força cortante. Dado: EI = 2,0 x 10 5 kNm2
(constante)
A B
20 kN/m
5 m
C
3,5 m1,5 m
SOLUÇÃO:
FASE L
A B
20 kN/m
C
5 m
x
V A = 50 kN V B = 50 kN

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 45/83
- 45
(M)
Mmax = 62,5 kN.m5
0
2
2
x 20 x 50 M −=
FASE U
Notar que o deslocamento procurado é a flecha ∆C. Adota-se neste caso força
unitária vertical em C para cima. (força unitária virtual correspondente a ∆C).
A B
3,5 m
x
V A = - 0,70 V B = - 0,30
1
1,5 m
C
M max = 1,05
(m) 5
5 ,1
5 ,1
0
)5 ,1 x ( 1 x 70 ,0 m
x 70 ,0 m
−+−=
−=
Sendo força normal e momento de torção inexistentes e desprezando-se o
efeito da força cortante tem-se:
∫= dx
EI
M m∆
Substituindo-se as expressões de M e m obtém-se:
∫∫ −−+−+−−=∆5
5 ,1
2
5 ,1
0
2
C dx ) x 10 x 50 ( )5 ,1 x x 70 ,0 ( EI
1dx ) x 10 x 50 ( ) x 70 ,0 (
EI
1
Integrando-se:

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 46/83
- 46
m10 x 617 ,6 4
C
−−=∆
O sinal negativo indica que o deslocamento tem o sentido oposto ao arbitrado
para a carga unitária, isto é, para baixo.
Exemplo 9.1.4 –
Calcular o deslocamento horizontal do nó D do pórtico abaixo, desprezando-se
as influências das deformações axiais e da força cortante. EI = 2,0 x 10 5 kNm2
(constante)
D A
B C
5 m
3 m
50 kN
SOLUÇÃO:
FASE L
D A
B C
50 kNx
H A = 50 kN x x
VD = 30 kNV A = - 30 kN

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 47/83
- 47
(M)
150
150
5
0 BC
3
0 CD
3
0 AB
x 30 150 M
0 M
x 50 M
−=
=
=
FASE U
D A
B C
x
x x1
V A = 0 VD = 0
H A = -1
Deslocamento procurado:
∆D horizontal ↔ força
unitária horizontal em D
(arbitrada para a
esquerda)
3 3
3
(m )
30 CD
5 0 BC
30 AB x 1M 3M x 1m −=−=−=
Observar que foi adotada uma coordenada xi acompanhando o eixo de cada
barra, com os respectivos sentidos indicados no início da solução para se
formularem as expressões de momento fletor na Fase L (M ) e na Fase U (m).

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 48/83
- 48
Como no caso não ocorre momento de torção, além disto desprezando-se
o efeito das deformações axiais e de cisalhamento da força cortante, tem-se para
a expressão do MCU:
∫= dx
EI
M m∆
Substituindo as expressões de M e m na expressão anterior obtém-se:
] dx )0 ( ) x ( dx ) x 30 x 150 ( )3( dx ) x 50 ( ) x ( [ 3
0
5
0
3
0
D ∫∫∫ ⋅−+−⋅−+⋅−=∆
Integrando-se, tem-se: ∆D = -7,875 x 10-3 m (sinal negativo, significando que o
deslocamento horizontal ∆D é para a direita).
9.2 – Solução Utilizando Tabelas de Integrais de Produto de Duas Funções
Ao observar-se a equação do MCU para estruturas com comportamento
elástico-linear sujeitas a cargas,
∫ ∫ ∫ ∫+++=estr estr estr estr
S dx GJ
T t dx
GA
V v f dx
EI
M mdx
EA
N n∆
Nota-se que, para estruturas (ou trechos de estruturas) com E, G, I e A
constantes, cada integral se resume a uma integral do produto de duas funções
polinomiais, ou seja,
∫ ∫ ∫ ∫+++=estr estr estr estr
S dx tT GJ 1dx vV
GAf dx mM
EI 1dx nN
EA1∆
Cada uma das integrais tem a forma:
∫ ⋅=Ι2
1
x
x
dx ) x ( g ) x ( f

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 49/83
- 49
Onde f(x), g(x) podem ser funções de x0, x1, x2, ..., x n .
Para facilitar o processo de integração, valores de integrais de produto de
diversas funções f(x) e g(x) foram tabeladas (tabela de Kurt-Bayer). Esta tabela
encontra-se no Anexo 1 (Tabela 1), assim como alguns exemplos de sua
utilização.
Exemplo 9.2.1 –
Calcular o deslocamento vertical do nó C do pórtico abaixo, considerando efeitos
de flexão e deformação axial. Dados: EA = 2,1 x 107 kN; EI = 4,375 x 105 kNm2
A B
3 m
C
80 kN
20 kN.m
2 m
1,5 m
Desprezando-se o esforço cortante: ∫ ∫+=estr estr
C dx mM EI
1dx nN
EA
1∆
SOLUÇÃO:
FASE L:
V A = 80 kN
80 kN
M A = 420 kN.m 20 kN.m
(N)(M)
48
420
160180
A B
C
FASE U:
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 50/83
- 50
A B
C
1
M A = 5 0,62
5
(n)(m)
2
1
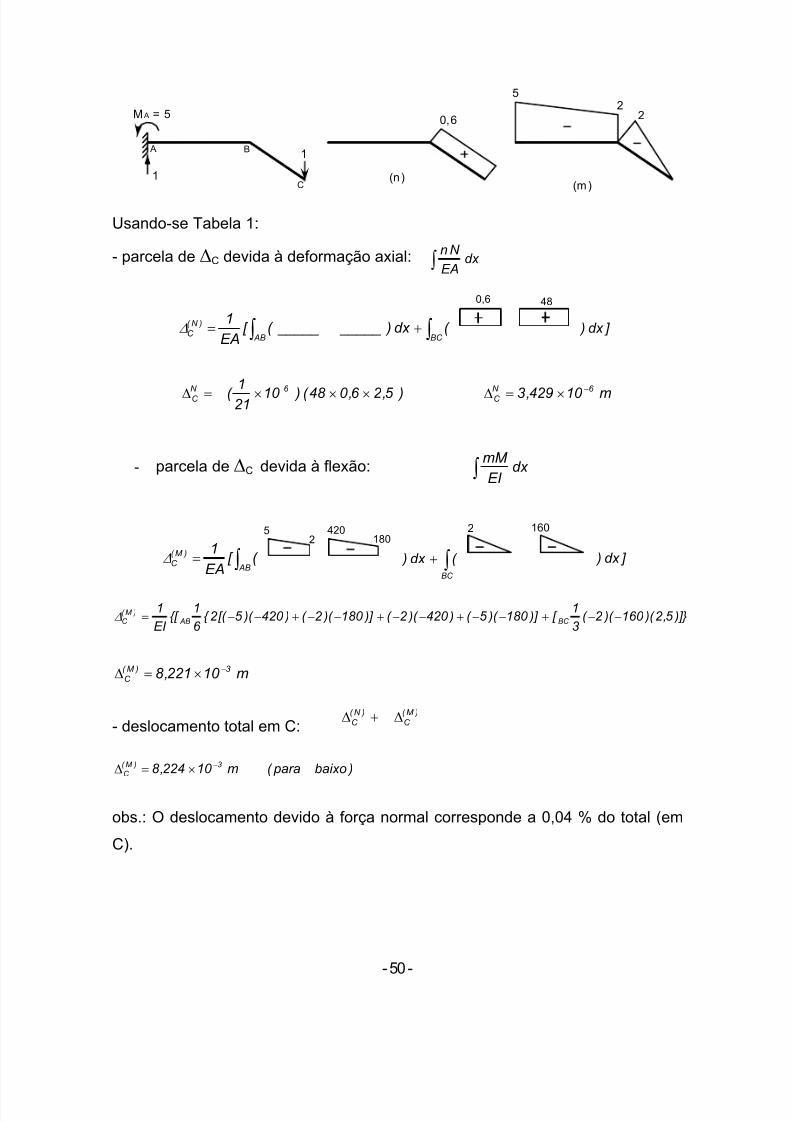
Usando-se Tabela 1:
- parcela de ∆C devida à deformação axial: ∫ dx EA
N n
∫∫ +=BC AB
)N (
C ( dx ) _____ _____( [ EA
1∆
0,6 48
] dx )
m10 429,3 )5 ,2 6 ,0 48 ( )10 211( 6 N
C 6 N
C −×=∆×××=∆
- parcela de ∆C devida à flexão: dx EI
mM ∫
∫= AB
)M (
C ( [ EA
1∆
52
420180
∫+BC
( dx )
1602
] dx )
)]}5 ,2 )( 160 )( 2 ( 3
1[ )] 180 )( 5 ( )420 )( 2 ( )] 180 )( 2 ( )420 )( 5 [( 2 {
6
1{[
EI
1BC AB
)M ( C −−+−−+−−+−−+−−=∆
m10 221,8 3 )M (
C
−×=∆
- deslocamento total em C: )M (
C
)N (
C ∆+∆
)baixo para( m10 224,8 3 )M (
C
−×=∆
obs.: O deslocamento devido à força normal corresponde a 0,04 % do total (em
C).
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 51/83
- 51
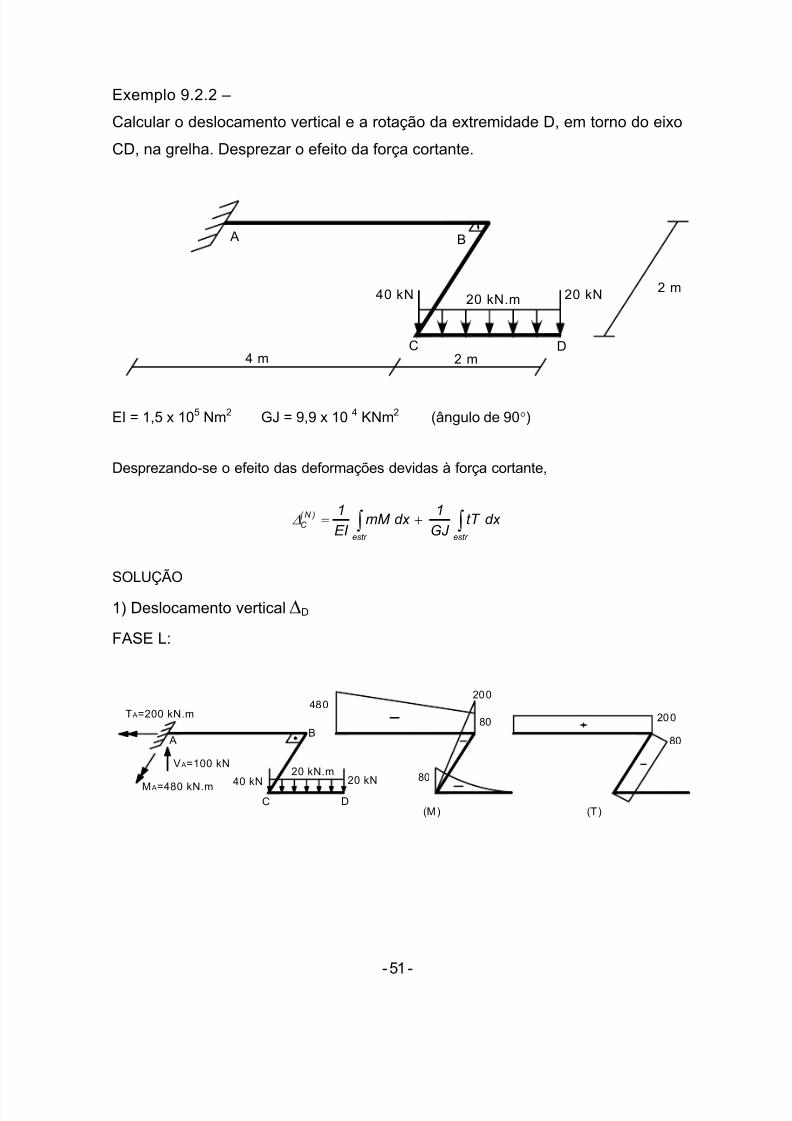
Exemplo 9.2.2 –
Calcular o deslocamento vertical e a rotação da extremidade D, em torno do eixo
CD, na grelha. Desprezar o efeito da força cortante.
A
40 kN 20 kN.m
4 m
20 kN
C D2 m
2 m
B
EI = 1,5 x 105 Nm2 GJ = 9,9 x 10 4 KNm2 (ângulo de 90°)
Desprezando-se o efeito das deformações devidas à força cortante,
∫∫ +=estr estr
)N (
C dx tT GJ
1dx mM
EI
1∆
SOLUÇÃO
1) Deslocamento vertical ∆D
FASE L:
C40 kNM A=480 kN.m
V A=100 kN
A
T A=200 kN.m
B
20 kND
20 kN.m
(M)
80
(T)
80
480
80
200
200

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 52/83
- 52
FASE U: (carga unitária correspondente a ∆D)
AB
1
C D
1
2
6
6
2
2
2
2
2
(m) (t)
∫= AB
C ( [ EI
1∆
62 80
480
∫+BC
( dx )
2 200
∫+*
CD
( dx )
2 80
] dx )
∫+ AB
( [ GJ
12002
∫+BC
( dx )
2 80
] dx )0 _____0 ____( dx )CD
∫+
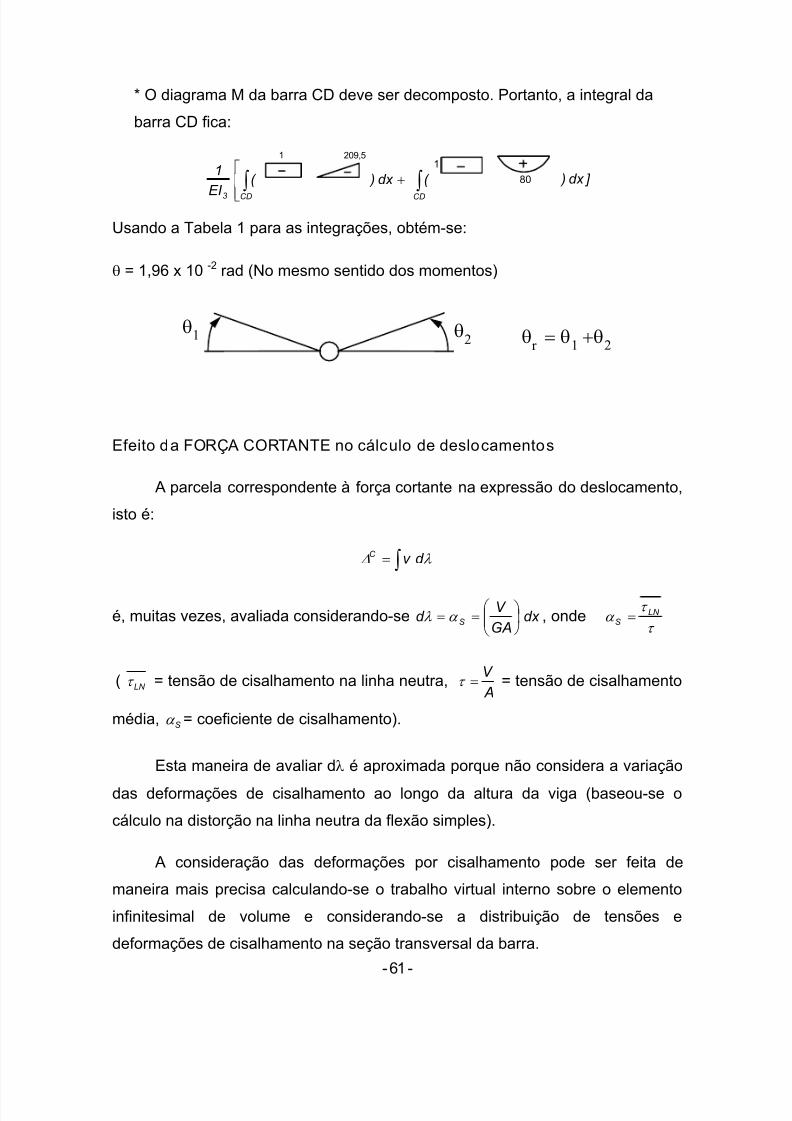
* O diagrama M da barra CD deve ser decomposto (a tangente não é nula em
D), e a integral na barra CD fica:
∫=ΙCD
(
2 80
∫+CD
( dx )
2
10 dx )
Usando-se a Tabela 1: ∆D = 0,0552 m (para baixo)
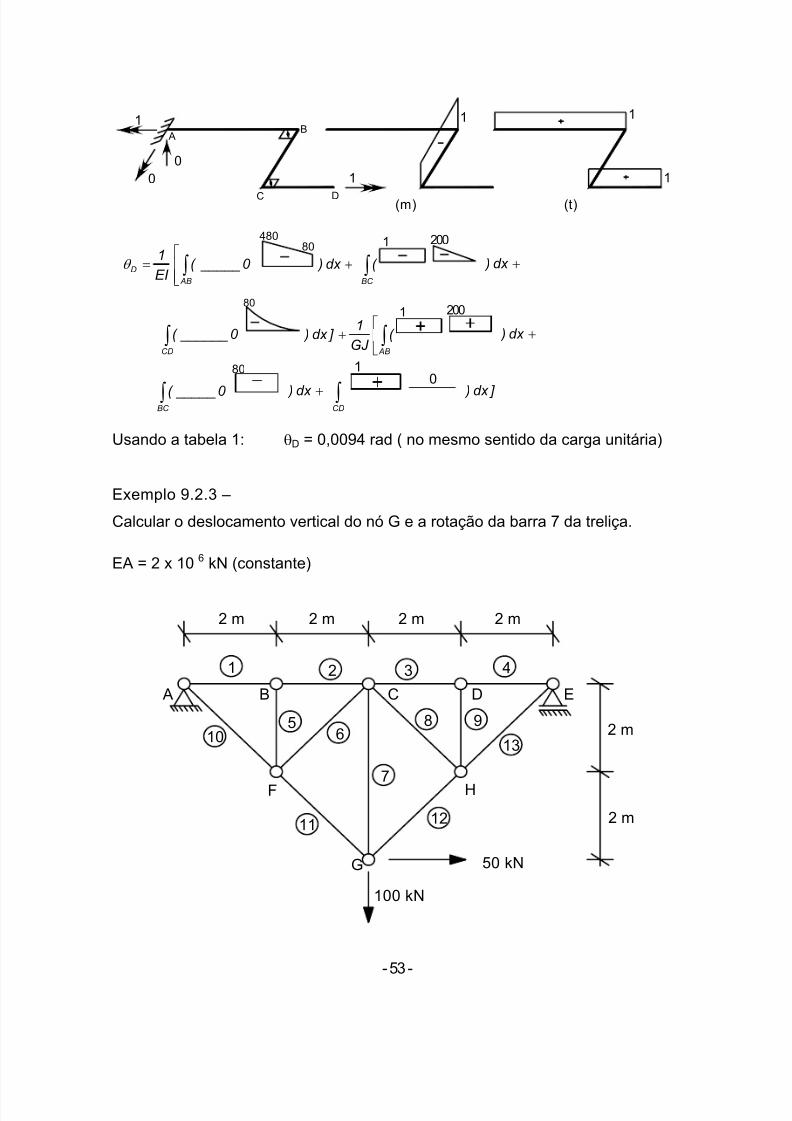
2) Rotação θ D ( em torno do eixo CD)
FASE L: a mesma do item B-1
FASE U: (carga unitária correspondente a θ D)
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 53/83
- 53
AB
C D (m) (t)
1
00 1
1 1
1
0 _____( EI
1
AB
D
⎢⎢⎣
⎡= ∫θ
48080
∫+BC
( dx )
1 200
+dx )
0 ______( CD
∫
80
⎢⎣
⎡+ ∫
AB
( GJ
1 ] dx )
1 200
+dx )
0 _____( BC ∫
80
+dx ) ∫CD
10
] dx )
Usando a tabela 1: θD = 0,0094 rad ( no mesmo sentido da carga unitária)
Exemplo 9.2.3 –
Calcular o deslocamento vertical do nó G e a rotação da barra 7 da treliça.
EA = 2 x 10 6 kN (constante)
A B C D E
11
510
F
1
2 m
8 9
100 kN
G
6
7
12
H
13
2 m
2 3
2 m
4
2 m
2 m
2 m
50 kN

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 54/83
- 54
Como o único esforço solicitante presente em treliças é a força normal, a
expressão para o deslocamento se reduz a:
dx EA
nN
estr
∫=∆
Como, além disso, a força normal em cada barra é constante, tem-se:
i
N
1i i
i i
i
N
1i i
i i LEA
N ndx
EA
N n∑∫∑
==
==∆
(Onde N é o número de barras da treliça e Li o comprimento da barra i)
SOLUÇÃO:
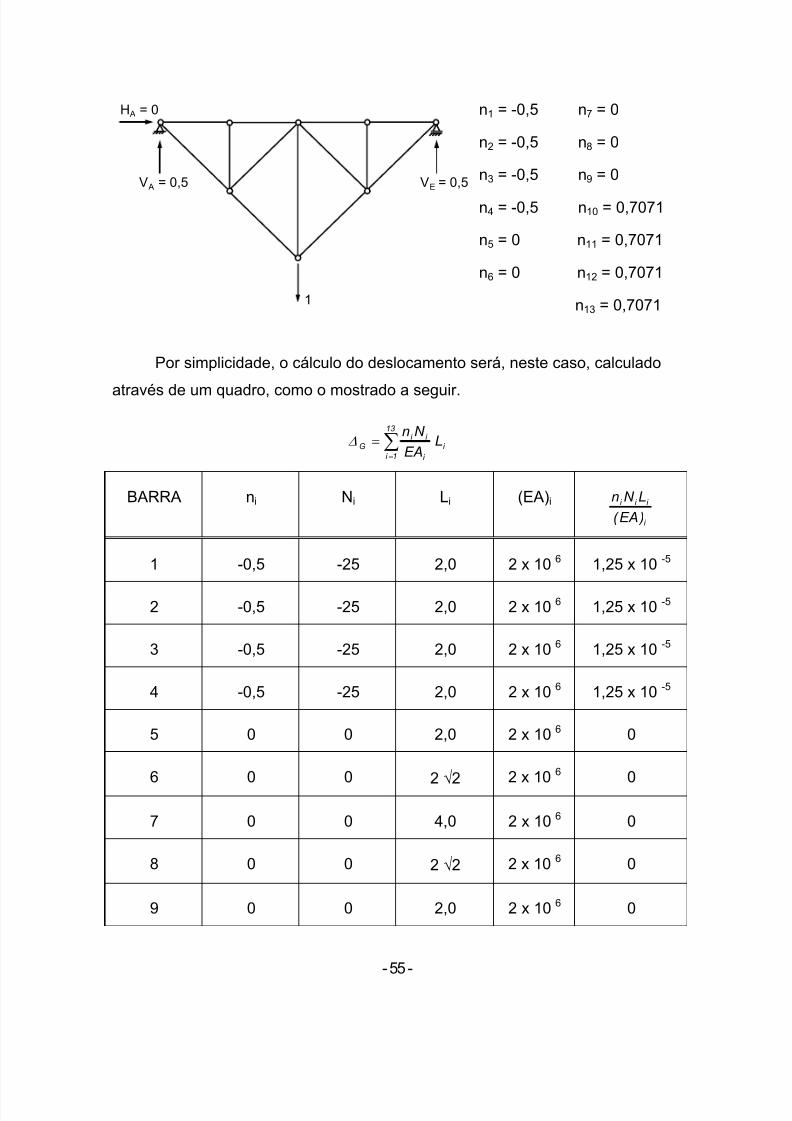
1) Deslocamento vertical ∆G
FASE L: Força normal nas barras (Ni)
50
100
H A = -50
V A = 75 VE = 25
N1 = -25 N7 = 0
N2 = -25 N8 = 0
N3 = -25 N9 = 0
N4 = -25 N10 = 106,07
N5 = 0 N11 = 106,07
N6 = 0 N12 = 35,36
N13 = 35,36
FASE U: (Carga unitária correspondente a ∆G) Força normal nas barras (ni):
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 55/83
- 55
1
H A = 0
V A = 0,5 VE = 0,5
n1 = -0,5 n7 = 0
n2 = -0,5 n8 = 0
n3 = -0,5 n9 = 0
n4 = -0,5 n10 = 0,7071
n5 = 0 n11 = 0,7071
n6 = 0 n12 = 0,7071
n13 = 0,7071
Por simplicidade, o cálculo do deslocamento será, neste caso, calculado
através de um quadro, como o mostrado a seguir.
i
13
1i i
i i G L
EA
N n∑
=
=∆
BARRA ni Ni Li (EA)i
i
i i i
)EA(
LN n
1 -0,5 -25 2,0 2 x 10 6 1,25 x 10 -5
2 -0,5 -25 2,0 2 x 10 6 1,25 x 10 -5
3 -0,5 -25 2,0 2 x 10 6 1,25 x 10 -5
4 -0,5 -25 2,0 2 x 10 6 1,25 x 10 -5
5 0 0 2,0 2 x 10 6 0
6 0 0 2 √2 2 x 10
6
0
7 0 0 4,0 2 x 10 6 0
8 0 0 2 √2 2 x 10 6 0
9 0 0 2,0 2 x 10 6 0
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 56/83
- 56
10 0,7071 106,07 2 √2 2 x 10 6 10,61 x 10 -5
11 0,7071 106,07 2 √2 2 x 10 6 10,61 x 10 -5
12 0,7071 35,36 2 √2 2 x 10 6 3,536 x 10 -5
13 0,7071 35,36 2 √2 2 x 10 6 3,536 x 10 -5
∑ = 33,281 x 10 -5
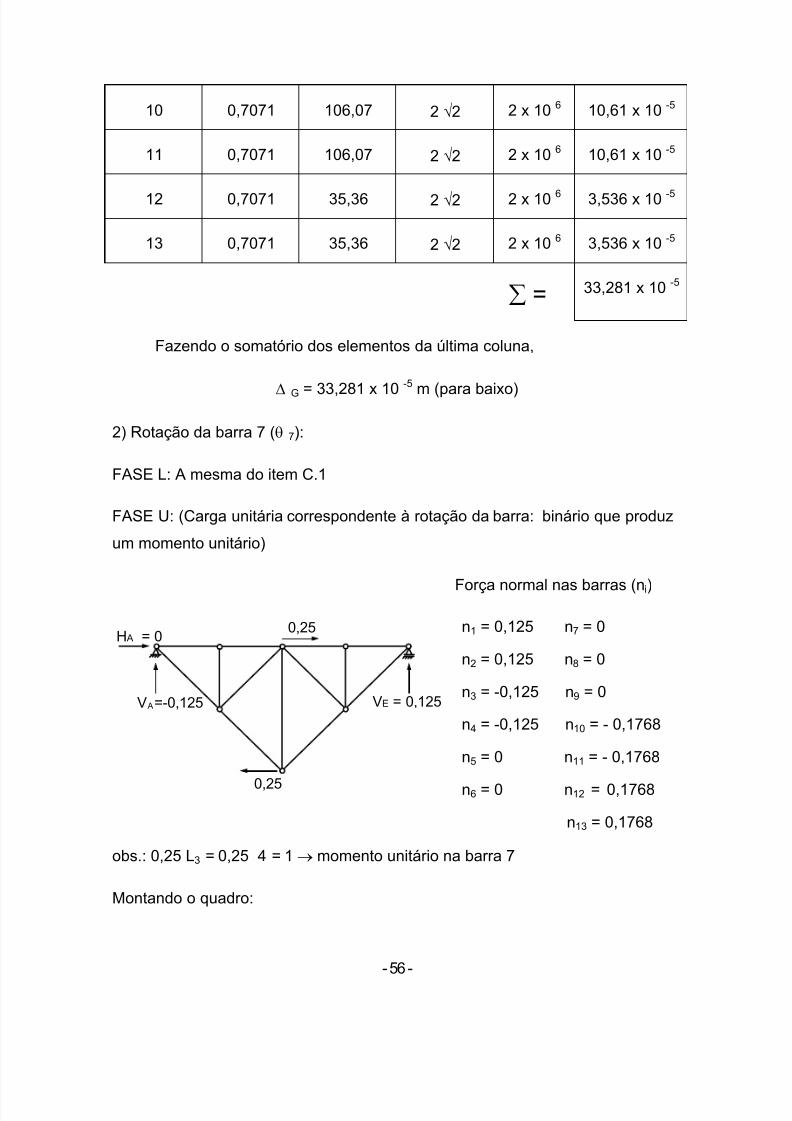
Fazendo o somatório dos elementos da última coluna,
∆ G = 33,281 x 10-5
m (para baixo)
2) Rotação da barra 7 (θ 7):
FASE L: A mesma do item C.1
FASE U: (Carga unitária correspondente à rotação da barra: binário que produz
um momento unitário)
Força normal nas barras (ni)
V A =-0,125
0,25
0,25H A = 0
VE = 0,125
n1 = 0,125 n7 = 0
n2 = 0,125 n8 = 0
n3 = -0,125 n9 = 0
n4 = -0,125 n10 = - 0,1768
n5 = 0 n11 = - 0,1768
n6 = 0 n12 = 0,1768
n13 = 0,1768
obs.: 0,25 L3 = 0,25 4 = 1 → momento unitário na barra 7
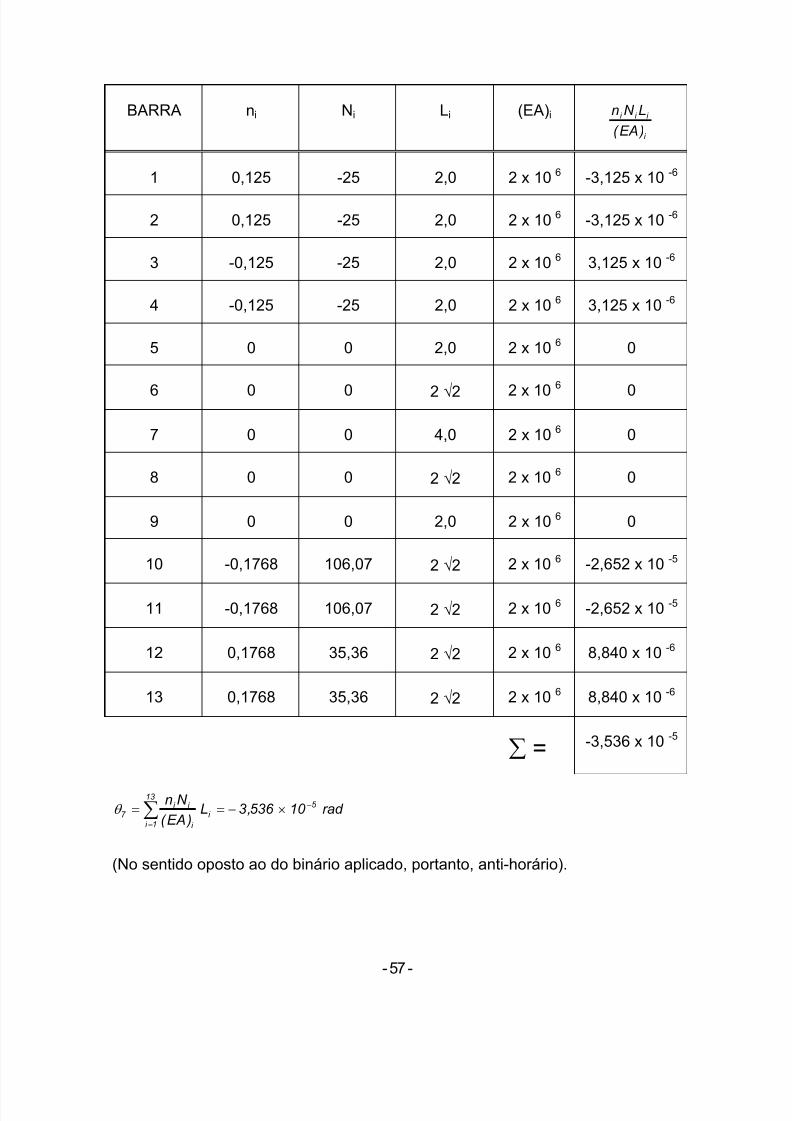
Montando o quadro:
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 57/83
- 57
BARRA ni Ni Li (EA)i
i
i i i
)EA(
LN n
1 0,125 -25 2,0 2 x 10 6 -3,125 x 10 -6
2 0,125 -25 2,0 2 x 10 6 -3,125 x 10 -6
3 -0,125 -25 2,0 2 x 10 6 3,125 x 10 -6
4 -0,125 -25 2,0 2 x 10 6 3,125 x 10 -6
5 0 0 2,0 2 x 10 6 0
6 0 0 2 √2 2 x 106
0
7 0 0 4,0 2 x 10 6 0
8 0 0 2 √2 2 x 10 6 0
9 0 0 2,0 2 x 10 6 0
10 -0,1768 106,07 2 √2 2 x 10 6 -2,652 x 10 -5
11 -0,1768 106,07 2 √2 2 x 10 6 -2,652 x 10 -5
12 0,1768 35,36 2 √2 2 x 10 6 8,840 x 10 -6
13 0,1768 35,36 2 √2 2 x 10 6 8,840 x 10 -6
∑ = -3,536 x 10 -5
rad 10 536 ,3L )EA(
N n 5
i
13
1i i
i i 7
−
=
×−== ∑θ
(No sentido oposto ao do binário aplicado, portanto, anti-horário).

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 58/83
- 58
Exemplo 9.2.4 –
Calcular a rotação relativa entre as barras 1 e 4 da treliça.
EA = 2,0 x 106
kN (constante)
2 m
30 kN
60 kN
1
2 43
5
A B
C D
2 m
SOLUÇÃO:
FASE L: FASE U:
30
60
A
H C = 30
V C = 90 VD = -30
0,5
A
HC = 0
VC = 0 V D = 0
0,5
0,5
0,5
Forças normais Ni das barras no
quadro
Forças normais ni das barras no quadro

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 59/83
- 59
Obs.: binários unitários (0,5 x 2 m) de sentidos contrários, nas barras 1 e 4 levam
ao valor da rotação relativa diretamente
BARRA ni Ni Li (EA)I
i
i i i
)EA(
LN n
1 0 30 2,0 2 x 10 6 0
2 -0,7071 -42,4 2,828 2 x 10 6 4,24 x 10 -5
3 0,5 -60 2,0 2 x 10 6 -3,0 x 10 -5
4 0 30 2,0 2 x 10 6 0
5 0,5 0 2,0 2 x 10 6 0
∑ = 1,24 x 10 -5
rad 10 24,1L )EA(
N n 5 i
5
1i i
i i 41
−
=− ×== ∑θ
(No sentido dos binários, isto é, aumentando o ângulo entre as barras).
Exemplo 9.2.5 –
Calcular a rotação relativa das seções da articulação do pórtico tri-articulado.
E = 2,1 x 10 8 kN/m2. Considerar apenas efeito de flexão.
Momentos de inércia: I1 = 39727 cm4 I2 = 19062 cm4 I3 = 55962 cm4
Áreas: A1= 100 cm2 A2 = 72,6 cm2 A3 = 118 cm2

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 60/83
- 60
5 m
8 m 8 m
20 kN
10 kN / m
B
A
C D
E
I 1 / A 1
I2 / A2 I3 / A3
I3 / A3
FASE L:
20
10
B
A
C D
EH A = 21,9
V A = 13,7 V E = 66,3
HE = 41,9
- -
- -
(M)
109,5109,5
209,5
209,5
A
B C D
E
FASE U: (dois momentos unitários de sentidos contrários no ponto C)
B
A
C D
EH A = 0,2
V A = 0 V E = 0
HE = 0,2
1 1
- -
-
(m)
1
1
1
1
∫= AB1
r ( EI
1θ
109,51
∫+BC 2
( EI
1dx )
109,51
+dx )
∫*
CD3
( EI
1
209,51
∫+DE 3
( EI
1dx )
209,51
dx )
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 61/83
- 61
* O diagrama M da barra CD deve ser decomposto. Portanto, a integral da
barra CD fica:
⎢
⎢
⎣
⎡∫
CD3
(
EI
1
209,51
∫+CD
( dx ) 80
1
] dx )
Usando a Tabela 1 para as integrações, obtém-se:
θ = 1,96 x 10 -2 rad (No mesmo sentido dos momentos)
Efeito da FORÇA CORTANTE no cálculo de deslocamentos
A parcela correspondente à força cortante na expressão do deslocamento,
isto é:
∫= λ ∆ d v C
é, muitas vezes, avaliada considerando-se dx GA
V d S ⎜⎜
⎝
⎛ ⎟
⎠
⎞== α λ , ondeτ
τ α LN
S =
( LN τ = tensão de cisalhamento na linha neutra, A
V =τ = tensão de cisalhamento
média, Sα = coeficiente de cisalhamento).
Esta maneira de avaliar dλ é aproximada porque não considera a variação
das deformações de cisalhamento ao longo da altura da viga (baseou-se o
cálculo na distorção na linha neutra da flexão simples).
A consideração das deformações por cisalhamento pode ser feita de
maneira mais precisa calculando-se o trabalho virtual interno sobre o elemento
infinitesimal de volume e considerando-se a distribuição de tensões e
deformações de cisalhamento na seção transversal da barra.
θ1 θ
2 θr
= θ1
+θ2

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 62/83
- 62
No MCU, δWext = δWint , onde o trabalho virtual externo é δWext = 1 x ∆ e o
trabalho virtual interno foi considerado como δWint = ( esforços solicitantes x
deformações correspondentes), integrados no comprimento da barra.
Para considerar-se a distribuição de tensões no cálculo, toma-se umelemento de volume dx dy dz de uma barra sujeita a flexão e força cortante.
dy
dx dz
dy dx
τ xy
τ xy
σ x σ x
σ x - tensão normal
τ xy - tensão de cisalhamento
- distribuição da tensão normal e deformação correspondente:
h
dx
σ
y
LN
d θ
ε dx
dx
h
- distribuição da tensão de cisalhamento e deformação correspondente:
z
y
b
xh
dx
τ
γ
h
dx
γ dx
No MCU, as tensões são virtuais e as deformações são reais. Portanto,
considerando validade da Lei de Hooke: σ = Eε e τ = G γ, tem-se:

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 63/83
- 63
. FASE L: (deformações causadas por
carregamento real)
GIb
VQ
EI
y M =
⋅= γ ε
Pelas figuras nota-se que:
dx GIb
VQdx d
dx EI
M
y EI
y M dx
y d
=≡
===
γ λ
ε θ
Onde:
M = momento fletor na seção
Y = distância do ponto à linha neutra
I = momento de inércia da seção
V = força cortante na seção
Q = momento elástico da área acimado ponto considerado.
B = largura da seção no ponto
E = módulo de elasticidade longitudinal
G = módulo de elasticidade transversal
. FASE U: (tensões causadas por carregamento virtual)
Ib
VQ
I
y m== τ σ
Onde m = momento fletor virtual na seção
v = força cortante virtual na seção.
O trabalho virtual interno realizado por σ e τ quando acorrem ε e γ no elemento
dx dy dz, é
δWint = (σ dydz) . (ε dx) + (τ dy dz) . ( γ dx)
= resultante = dδ = resultante = dλ
de de força na
força na seção seção
Substituindo os valores de σ, ε, τ, γ:
⎜⎜⎝
⎛ ⎟⎟
⎠
⎞+⎜
⎜⎝
⎛ ⎟⎟
⎠
⎞= dz dy dx
bGI
QV v dz dy dx
EI
mMy W
2 2
2
2
2
int δ

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 64/83
- 64
Integrando no volume, tem-se o trabalho interno total:
dz dy dx bGI
QV v dz dy dx
EI
mMy W
V
2 2
2
V
2
2
int ∫∫ +=
Como numa seção reta da barra m, M, v, V, E, G, I são constantes, a expressão
acima pode ser escrita:
dx dz dy b
Q
GI
V v dx dz dy y
EI
mM W
A
2
2
2
A
2
2 int
⎥⎥⎦
⎤⎢⎣
⎡+
⎥⎥⎦
⎤⎢⎣
⎡= ∫∫∫∫
Mas, I dz dy y A
2 =∫ (momento de inércia da seção)
Chamandodz dy
b
Q
I
Af
A
2
2
2 S ∫=,
Pode-se escrever: A
I f dz dy
b
Q 2
S
A
2
2
=∫
O valor f s é chamado fator de forma para cisalhamento (característica geométricada seção).
Então,
∫ ∫+=estr estr
Sint dx GA
V v f dx
EI
M mW
Observa-se que a parcela devida à flexão não teve o seu valor modificado
quando se integrou a tensão no volume.
Como Wext = Wint, para o caso de uma barra sujeita a força cortante e momento
fletor:
∫ ∫+=estr estr
S dx GA
V v f dx
EI
M m∆
Os valores de f s e de αs para algumas seções transversais comuns estão
listadas a seguir.
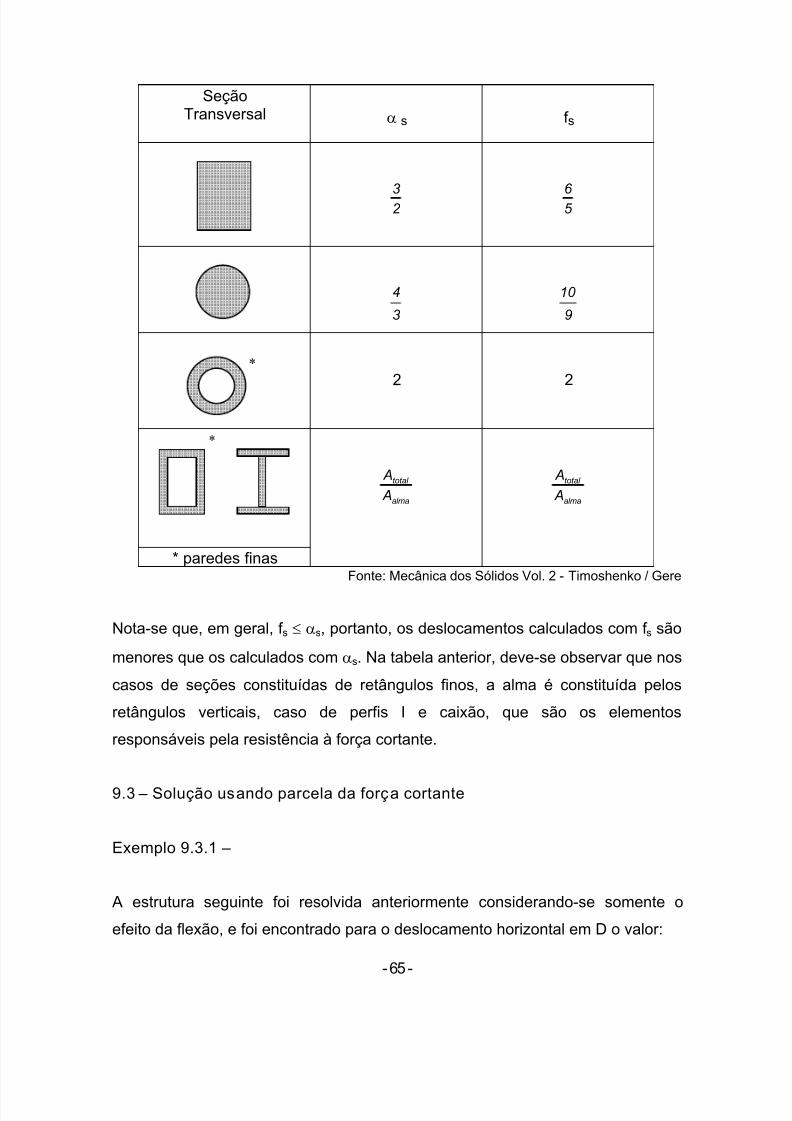
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 65/83
- 65
SeçãoTransversal α s f s
2 3 5
6
3
4
9
10
*
2 2
*
* paredes finas
alma
total
A
A
alma
total
A
A
Fonte: Mecânica dos Sólidos Vol. 2 - Timoshenko / Gere
Nota-se que, em geral, f s ≤ αs, portanto, os deslocamentos calculados com f s são
menores que os calculados com αs. Na tabela anterior, deve-se observar que nos
casos de seções constituídas de retângulos finos, a alma é constituída pelos
retângulos verticais, caso de perfis I e caixão, que são os elementos
responsáveis pela resistência à força cortante.
9.3 – Solução usando parcela da força cortante
Exemplo 9.3.1 –
A estrutura seguinte foi resolvida anteriormente considerando-se somente o
efeito da flexão, e foi encontrado para o deslocamento horizontal em D o valor:
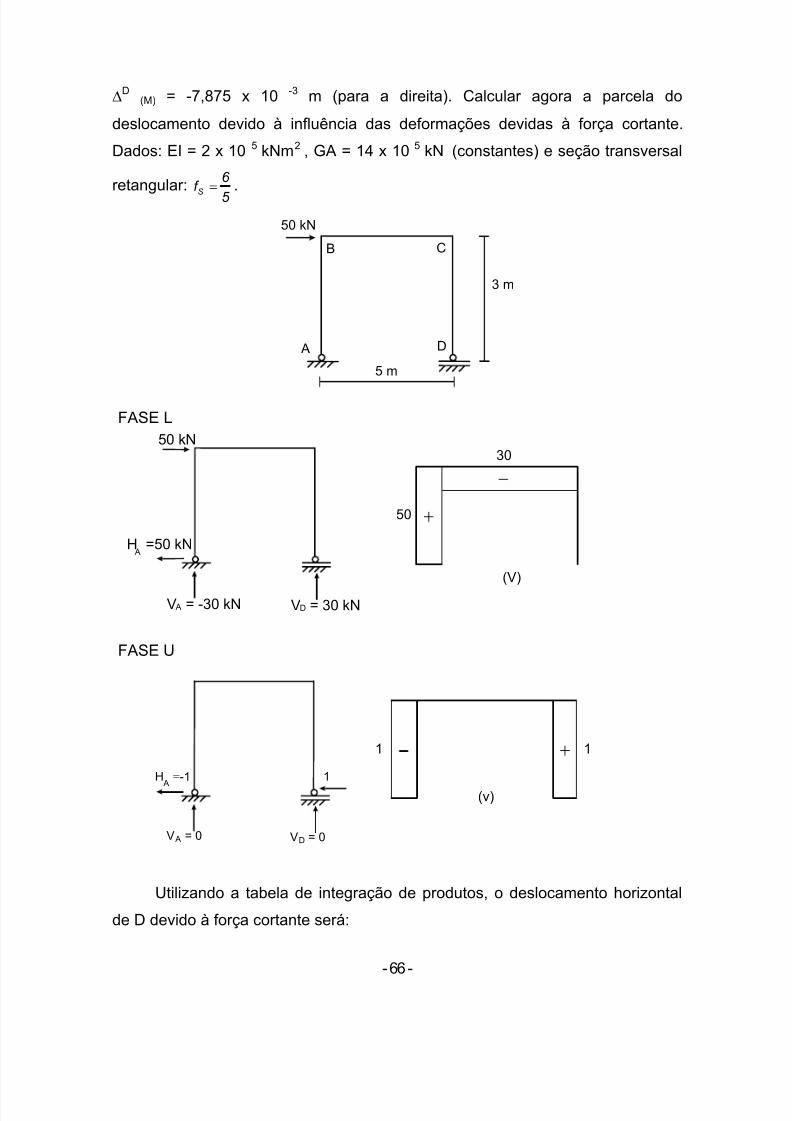
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 66/83
- 66
∆D (M) = -7,875 x 10 -3 m (para a direita). Calcular agora a parcela do
deslocamento devido à influência das deformações devidas à força cortante.
Dados: EI = 2 x 10 5 kNm2 , GA = 14 x 10 5 kN (constantes) e seção transversal
retangular:5
6 f S
= .
A
B
50 kN
D
C
3 m
5 m
50
(V)
30
AH =-1
V A = 0 VD = 0
FASE U
1
1 1
(v)
Utilizando a tabela de integração de produtos, o deslocamento horizontal
de D devido à força cortante será:
50 kN
H A
=50 kN
V A = -30 kN VD = 30 kN
FASE L

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 67/83
- 67
⎢⎣
⎡=∆ ∫
AB
S )V (
D ( GA
f 1 50
0 ____( dx )BC
∫30
∫CD
( dx )
1
]dx )0 ____
[ ] [ ]3 )50 )( 1( 10 145
6 )LV v (
GA
f 5 AB
S )V (
D ×−××
=⋅⋅=∆
m10 286 ,1 4 )V ( D
−×−=∆
O deslocamento total, devido ao momento e à força cortante, será
m10 004,8 3 )V ( D
)M ( DD
−×−=∆+∆=∆ . A parcela devida à cortante é portanto; 1,61 % do
deslocamento total.
Exemplo 9.3.2 –
Calcular a flecha no meio do vão da viga abaixo, considerando a contribuição
das deformações de flexão e do cisalhamento.
45 kN/m
10,0 m
A B
2 3
2 4
cm / kN 10 8 G
)aço( cm / kN 10 1,2 E
×=
×=
Seção transversal
Perfil VS - 800 x 111
(dimensões em mm)
- Propriedades geométricas:
4cm155074I = 2
mesa cm80 A = Fator de forma para cisalhamento * :
2 alma cm62 A = 29,2
62
142
A
Af
alma
total S ===
∴ 2
almamesatotal cm142 A A A =+= * obtido na tabela anterior
ll320
12,5
775
12,58
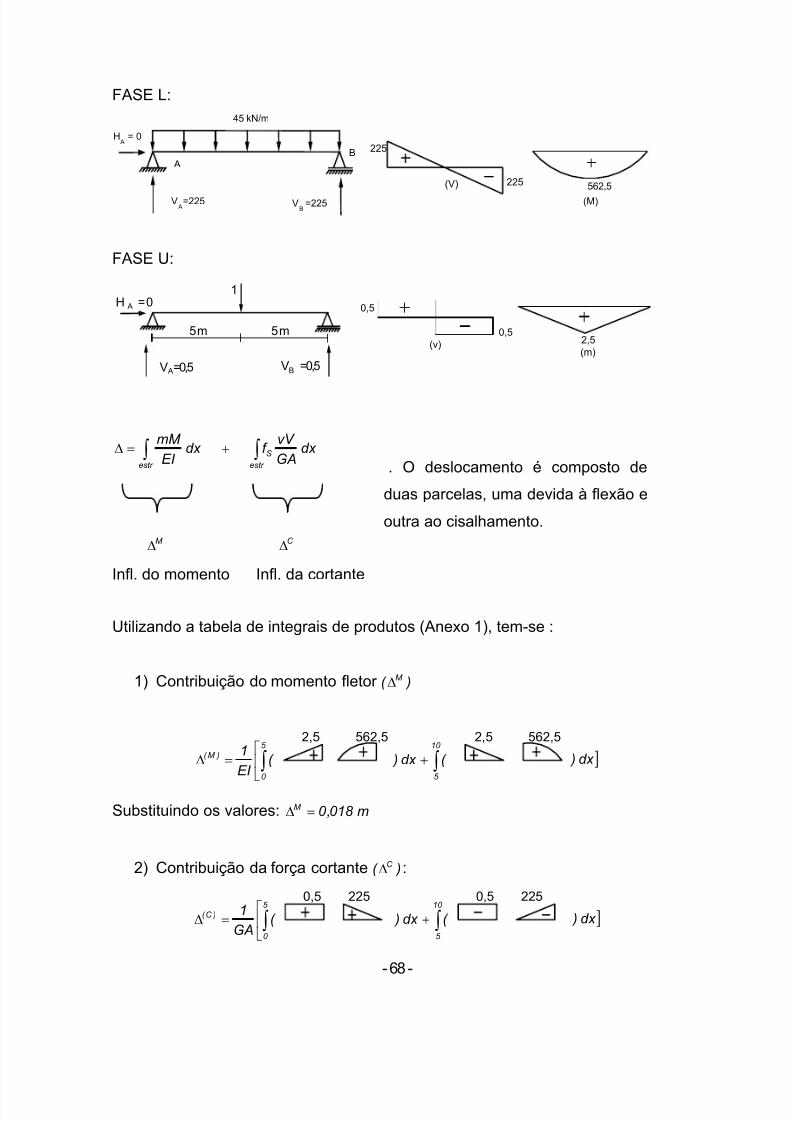
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 68/83
- 68
FASE L:
(V)
225
225
562,5
(M)
FASE U:
1
V A =0,5
H A = 0
V B =0,5
5 m 5 m (v)
0,5
0,5
(m)2,5
dx GA
vV f dx
EI
mM
estr
S
estr
∫∫ +=∆
C M ∆∆
Infl. do momento Infl. da cortante
. O deslocamento é composto de
duas parcelas, uma devida à flexão e
outra ao cisalhamento.
Utilizando a tabela de integrais de produtos (Anexo 1), tem-se :
1) Contribuição do momento fletor )( M ∆
⎢⎣
⎡=∆ ∫
5
0
)M ( ( EI
12,5 562,5
∫+10
5
( dx )
2,5 562,5
]dx )
Substituindo os valores: m018 ,0 M =∆
2) Contribuição da força cortante )( C ∆ :
⎢⎣
⎡=∆ ∫
5
0
)C ( ( GA
12250,5
∫+10
5
( dx )
0,5 225
]dx )
45 kN/m
V A =225
H A = 0
V B =225
A B
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 69/83
- 69
Substituindo os valores: m001134,0 C =∆
A flecha será então: m01913,0 001134,0 018 ,0 C M =∆+=∆+∆=∆
A influência da força cortante no deslocamento total é, então,
0593,0
C
=∆∆
→ ∆ C
corresponde a 5,93 % do deslocamento total

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 70/83
- 70
10- Deslocamentos devidos a Variações de Temperatura e Deformações
Prévias
As estruturas isostáticas, quando submetidas a variações de temperatura
ou quando algumas de suas partes são executadas com dimensões diferentes
das especificadas em projeto, podem sofrer deformações e, portanto,
deslocamentos de pontos devidos a estas deformações.
O cálculo destes deslocamentos envolve a determinação, para cada caso,
dos valores dos deslocamentos reais dδ e dθ na expressão geral do MCU:
∫∫ +=∆estr estr
d md n θ δ
É importante observar que não há o aparecimento de tensões emestruturas isostáticas sujeitas a estes tipos de agente, pelo fato de não haver
impedimento às deformações que ocorrem.
10.1- Deslocamentos devidos a Variações de Temperatura
Serão considerados aqui os seguintes tipos de variação de temperatura:
variação uniforme e variação linear ao longo da altura da seção da barra, que
provocam deformações distintas.
a) Variação Uniforme de Temperatura
Uma variação uniforme de temperatura provoca uma variação volumétrica
na barra com mudanças nas suas dimensões sem alteração nas relações entre
estas dimensões. O efeito é similar ao efeito produzido por três tensões normais
σx, σy, σz, de valores iguais, num estado triplo de tensões.
Tratando-se de estruturas reticuladas, pode-se simplificar a análise e
considerar como única deformação a deformação axial (variação no comprimento
da barra) análoga à produzida por uma força axial.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 71/83
- 71
AB B’
L
L
AB - comprimento inicial
AB’ - Comprimento final
- Barra AB sujeita a um aumento uniforme de temperatura ∆T
A variação no comprimento de um elemento dx da barra, devida a uma
variação uniforme de temperatura, pode ser calculado pela expressão:
dx T d ⋅∆⋅= α δ
dx dδ
Onde: α = coeficiente de dilatação térmica (comumente tomado como
10 -5 °C -1 para concreto e aço)
∆T = valor da variação de temperatura
Esta variação térmica axial é análoga à deformação axial provocada pela
força normal.
Obs: Por “variação uniforme” de temperatura entende-se que todas as
fibras da barra, numa seção, sofrem um mesmo valor de ∆T, isto é, numa seção
transversal, ∆T é constante. Mas, ao longo do eixo da barra, ∆T pode variar, o
que não muda o caráter axial da deformação.
Portanto, o valor de um determinado deslocamento devido a uma variação
uniforme de temperatura á, no MCU, obtido pela expressão:
dx T nestr
⋅∆⋅⋅=∆
∫α
A deformação térmica axial, sendo análoga à deformação axial da força
normal, deve ter convenção de sinais compatível com os sinais das deformações
da força normal. Assim, como em geral, considera-se força normal de tração com
sinal positivo, que tende a alongar a elemento de barra produzindo deformação
axial positiva, o acréscimo de temperatura ∆T tende a causar alongamento do
elemento de barra, deformação axial térmica que deverá ser considerada
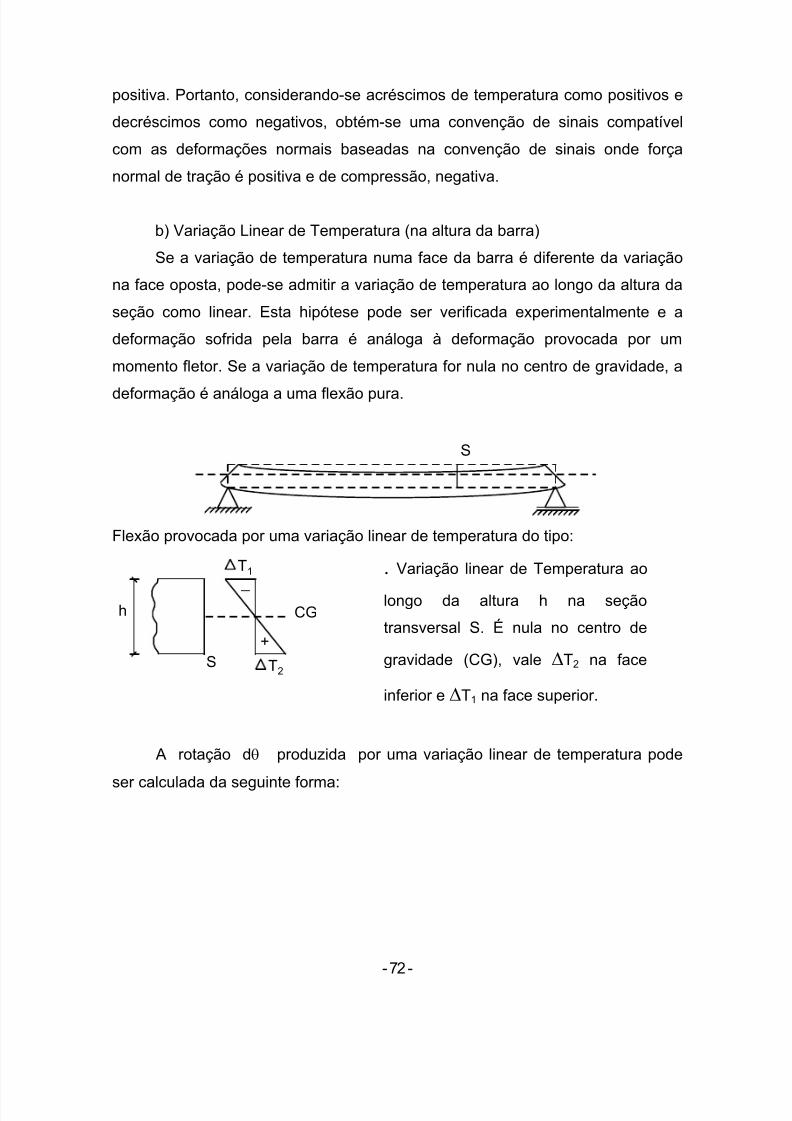
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 72/83
- 72
positiva. Portanto, considerando-se acréscimos de temperatura como positivos e
decréscimos como negativos, obtém-se uma convenção de sinais compatível
com as deformações normais baseadas na convenção de sinais onde força
normal de tração é positiva e de compressão, negativa.
b) Variação Linear de Temperatura (na altura da barra)
Se a variação de temperatura numa face da barra é diferente da variação
na face oposta, pode-se admitir a variação de temperatura ao longo da altura da
seção como linear. Esta hipótese pode ser verificada experimentalmente e a
deformação sofrida pela barra é análoga à deformação provocada por um
momento fletor. Se a variação de temperatura for nula no centro de gravidade, a
deformação é análoga a uma flexão pura.
S
Flexão provocada por uma variação linear de temperatura do tipo:
h
S
_
+
T1
T2
CG
. Variação linear de Temperatura ao
longo da altura h na seção
transversal S. É nula no centro de
gravidade (CG), vale ∆T2 na face
inferior e ∆T1 na face superior.
A rotação dθ produzida por uma variação linear de temperatura pode
ser calculada da seguinte forma:
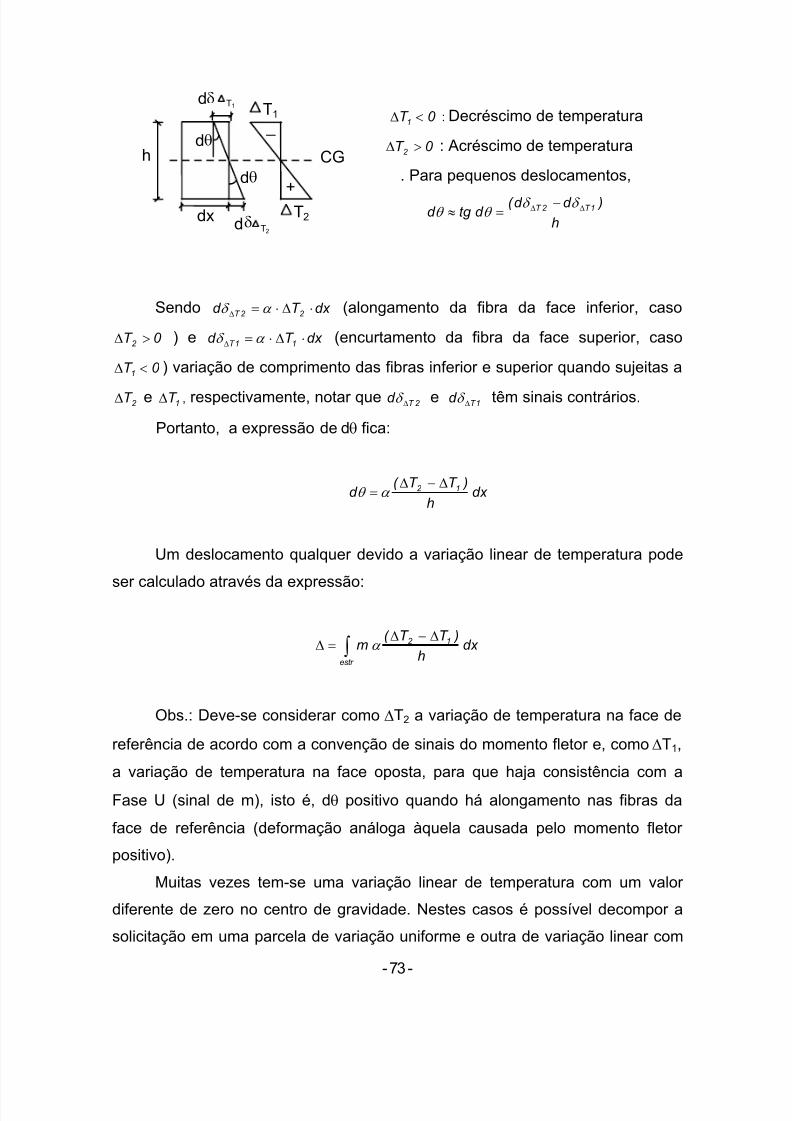
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 73/83
- 73
0 T 1 <∆ : Decréscimo de temperatura
0 T 2 >∆ : Acréscimo de temperatura
. Para pequenos deslocamentos,
h
)d d ( d tg d 1T 2 T ∆∆ −=≈
δ δ θ θ
Sendo dx T d 2 2 T ⋅∆⋅=∆ α δ (alongamento da fibra da face inferior, caso
0 T 2 >∆ ) e dx T d 11T ⋅∆⋅=∆ α δ (encurtamento da fibra da face superior, caso
0 T 1 <∆ ) variação de comprimento das fibras inferior e superior quando sujeitas a
2 T ∆ e 1T ∆ , respectivamente, notar que 2 T d ∆δ e 1T d ∆δ têm sinais contrários.
Portanto, a expressão de dθ fica:
dx h
)T T ( d 12 ∆−∆
= α θ
Um deslocamento qualquer devido a variação linear de temperatura pode
ser calculado através da expressão:
∫∆−∆
=∆estr
12 dx h
)T T ( m α
Obs.: Deve-se considerar como ∆T2 a variação de temperatura na face de
referência de acordo com a convenção de sinais do momento fletor e, como ∆T1,
a variação de temperatura na face oposta, para que haja consistência com a
Fase U (sinal de m), isto é, dθ positivo quando há alongamento nas fibras da
face de referência (deformação análoga àquela causada pelo momento fletor
positivo).
Muitas vezes tem-se uma variação linear de temperatura com um valor
diferente de zero no centro de gravidade. Nestes casos é possível decompor a
solicitação em uma parcela de variação uniforme e outra de variação linear com
h
_
+
T 1
T2
CGd θ
d θ
dx
d δ T1
d δ T2

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 74/83
- 74
valor nulo no centro de gravidade. Cada parcela deve, então, ser tratada
separadamente. Este procedimento é mostrado na figura seguinte.
CG
(a) (b)(c)
T 1
T CG
T 2
=
TCG
+
( ∆T1 - ∆TCG )= T1
( ∆T2 - ∆TCG )= T2
A variação linear de temperatura mostrada em (a) é decomposta numa
variação uniforme com valor da variação igual ao valor de ∆TCG no centro de
gravidade da seção (b), e numa variação linear com valor nulo no centro de
gravidade (CG). Um deslocamento produzido por este tipo de solicitação será
então calculado através da soma dos dois efeitos:
∫∫∆−∆
+⋅∆⋅⋅=∆estr
12
estr
CG dx h
)T T ( mdx T n α α
Sendo: dx T d CG∆= α δ
dx h
)T T ( d 12 ∆−∆= α θ
Notar que considerando-se sempre os valores de ∆T2, ∆T1 e ∆TCG positivos
no caso de aumento de temperatura e negativos no caso de redução e, além
disto, ∆T2 a variação de temperatura na face de referência, ∆T1 a variação de
temperatura na face oposta, os sinais de δ d e θ d obtidos nas respectivas
expressões ficarão compatíveis com a convenção de sinais da força normal e do
momento fletor.
10.2- Deslocamentos devidos a Deformação Prévia
Quando uma ou mais barras de uma estrutura sofrem defeitos de
fabricação, tais como uma mudança no seu comprimento, estes efeitos
denominados deformações prévias, podem introduzir alterações na geometria da

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 75/83
- 75
estrutura montada e, conseqüentemente deslocamentos dos pontos em relação
à posição inicialmente projetada.
Nestes casos, a Fase L do MCU refere-se às deformações prévias, que já
constituem, diretamente, os valores de:
∫∫∫∫ ∆barrabarrabarrabarra
d ,d ,d ,d φ λ θ
No caso da estruturas isostáticas, estas deformações prévias das barras
não introduzem esforços nas estruturas, apesar da alteração da configuração
geométrica.
10.3 - Exemplos de aplicação
Exemplo 10.3.1–
Na treliça abaixo calcular o deslocamento vertical do nó C provocado por
um aumento uniforme de temperatura igual a 40 °C nas barras 1 e 2.
A B C
D
E
1 2
34 5
6
1,5 m 1,5 m
0,5 m
0,5 m
EA = 2 x 10 6 kN
α = 10-5 / °C
A expressão para o deslocamento será: ∫=∆estr
d n δ onde T d ∆= α δ
FASE L:
C º 40 T T 2 1 +=∆=∆
dx )T ( d ∆= α δ dx 10 4dx 40 10 dx T d 45 11
−− ×=×=∆= α δ
dx 10 4dx T d 42 2
−×=∆= α δ
Como ∆T das barras 3, 4, 5, 6 é zero, tem-se: 0 d d d d 6 443 ==== δ δ δ δ

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 76/83
- 76
FASE U: Resolvendo a treliça, tem-se:
A B
C
D
E
1 2
34 5
6
H Á = 3,0
V Á = 0
HE = 3,0
VE = 1,0
1
n1 = 3,0 n4 = 0
n2 = 3,0 n5 = -3,163
n3 = 0 n6 = -3,163
)barrasdenúmeroN ( d nd n i
N
1i i
estr
C ===∆ ∑∫=
δ δ
Como n e T d ∆= α δ são constantes em cada barra,
i barradaocompriment oéLondeL )T ( ndx )T ( n i i i
N
1i
i
)i (
i
N
1i
i C ∆=∆=∆ ∑∫∑==
α α
Portanto, substituindo-se os valores, tem-se:
)baixo para( m0036 ,0
2 )5 ,110 40 ,3(
L )T ( nL )T ( n
C
4C
2 2 2 111C
=∆
××××=∆
∆+∆=∆
−
α α
b) Calcular, na mesma treliça anterior, o deslocamento vertical do nó C
provocado por um aumento no comprimento da barra 6 de 1 cm, ocorrido em
função de um erro de fabricação.
∫=∆ δ d n
Neste caso a deformação média εx da barra é dada por i L
⎟ ⎠
⎞⎜⎝
⎛ δ e a
deformação axial do elemento de barra i, dx )d ( x i ε δ = e dx L
)d ( i
i ⎟ ⎠
⎞⎜⎝
⎛ =δ
δ , então:

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 77/83
- 77
i
i
i n
1i i
L
0 i
n
1i i i
n
1i i barra
i
estr
LL
ndx L
nd nd n1i δ δ
δ δ ∑∫∑∑ ∫∫===
=⋅⎟ ⎠
⎞⎜⎝
⎛ ===⋅∆
dx L
dx d x
δ ε δ ==
FASE L:
m01,0 dx L
ndx L
nd n
0 d nd nd nd nd n
6
0 6
6 6
)6 ( 6
6 6
)6 (
)5 ( )4( )3( )2 ( )1(
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
=====
∫∫∫
∫∫∫∫∫
δ δ δ
δ δ δ δ δ
FASE U:
Como o deslocamento procurado neste exemplo é o mesmo do exemplo
anterior (deslocamento vertical em C), a Fase U é a mesma anterior (carga
unitária vertical em C).
Substituindo os valores, como n é constante em cada barra,
)cima para( m0316 ,0
01,0 163,3
)zeroébarrasoutrasas parad ( d n
d n
C
C
)6 (
6 C
)i (
N
1i
i C
−=∆
×−=∆
=∆
=∆
∫∫
∫∑
=
δ δ
δ
c) Calcular, no pórtico da figura, o deslocamento de C produzido por umavariação linear de temperatura na barra AB como mostrada no esquema.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 78/83
- 78
A variação de temperatura existente pode ser decomposta nos efeitos de
∆T uniforme e linear conforme mostrado abaixo:
40 C
15 C
+ = + ++
_
TCG = 27,5 C(I)
T2 = -12,5 C(II)
T1 = 12,5 C
Tratando separadamente os efeitos de deformação axial e flexão, tem-se:
∫=∆estr
I C d n )I ( δ
FASE L:
B C
A
I
c
Efeito de (I)
α = 10 -5 C-1
variação de temperatura na barra AB:
T1 = 40 C
T2 = 15 C
Seção transversal 40 cm
15 cm
T2
T1
B C
A
* * 1,5 m
3 m
15
40
posição da barra
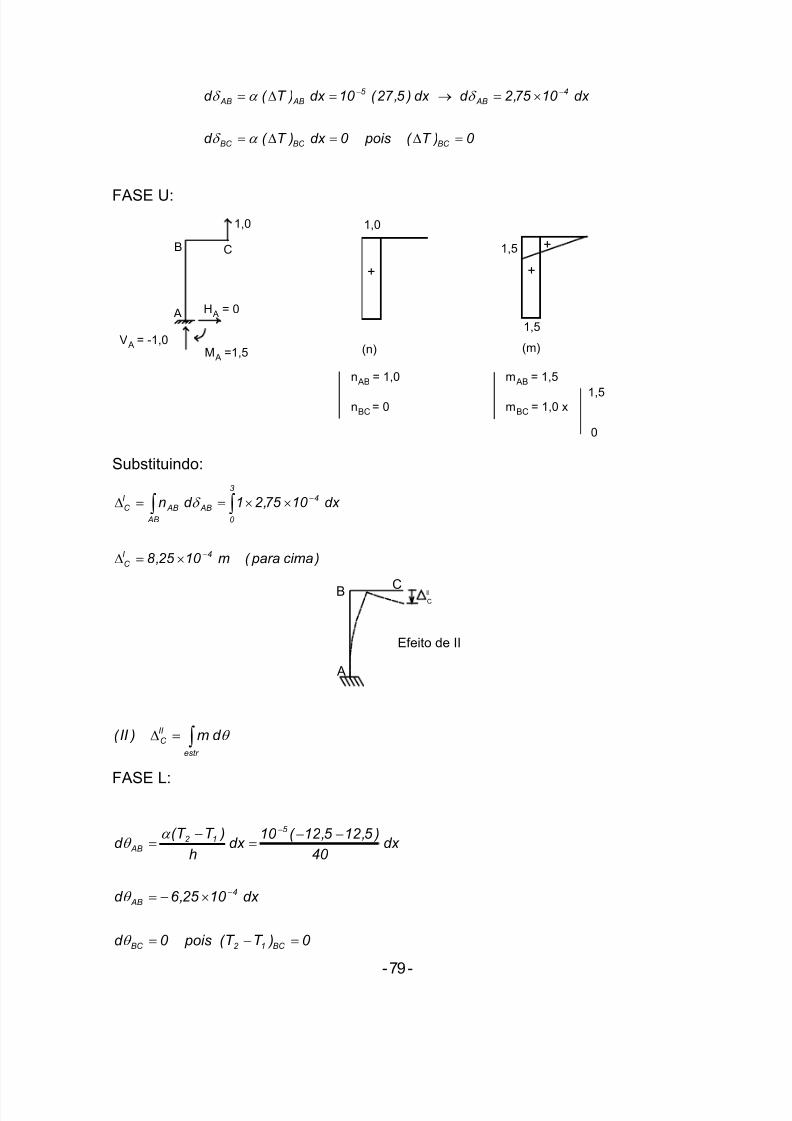
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 79/83
- 79
0 )T ( pois0 dx )T ( d
dx 10 75 ,2 d dx )5 ,27 ( 10 dx )T ( d
BC BC BC
4 AB
5 AB AB
=∆=∆=
×=→=∆= −−
α δ
δ α δ
FASE U:
B C
A
1,0
H A = 0
V A = -1,0M A =1,5
+
1,0
(n)
+
+1,5
1,5
(m)
n AB = 1,0
nBC = 0
m AB = 1,5
mBC = 1,0 x1,5
0
Substituindo:
)cima para( m10 25 ,8
dx 10 75 ,2 1d n
4I C
3
0
4
AB
AB ABI C
−
−
×=∆
××==∆ ∫∫ δ
A
B
Efeito de II
CCII
∫=∆estr
II
C d m )II ( θ
FASE L:
0 )T T ( pois0 d
dx 10 25 ,6 d
dx 40
)5 ,12 5 ,12 ( 10 dx
h
)T T ( d
BC 12 BC
4
AB
5 12
AB
=−=
×−=
−−=
−=
−
−
θ
θ
α θ

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 80/83
- 80
FASE U: (a mesma anterior)
5 ,1
0 AB AB x 0 ,1m5 ,1m ==∴
Substituindo:
)baixo para( m10 813,2 dx )10 25 ,6 ( 5 ,1 3II
C
AB
4II
C
−− ×−=∆×−×=∆ ∫
O deslocamento total será: II
C
I
C c ∆+∆=∆
)baixo para( m10 988 ,1 3
c
−×−=∆∴
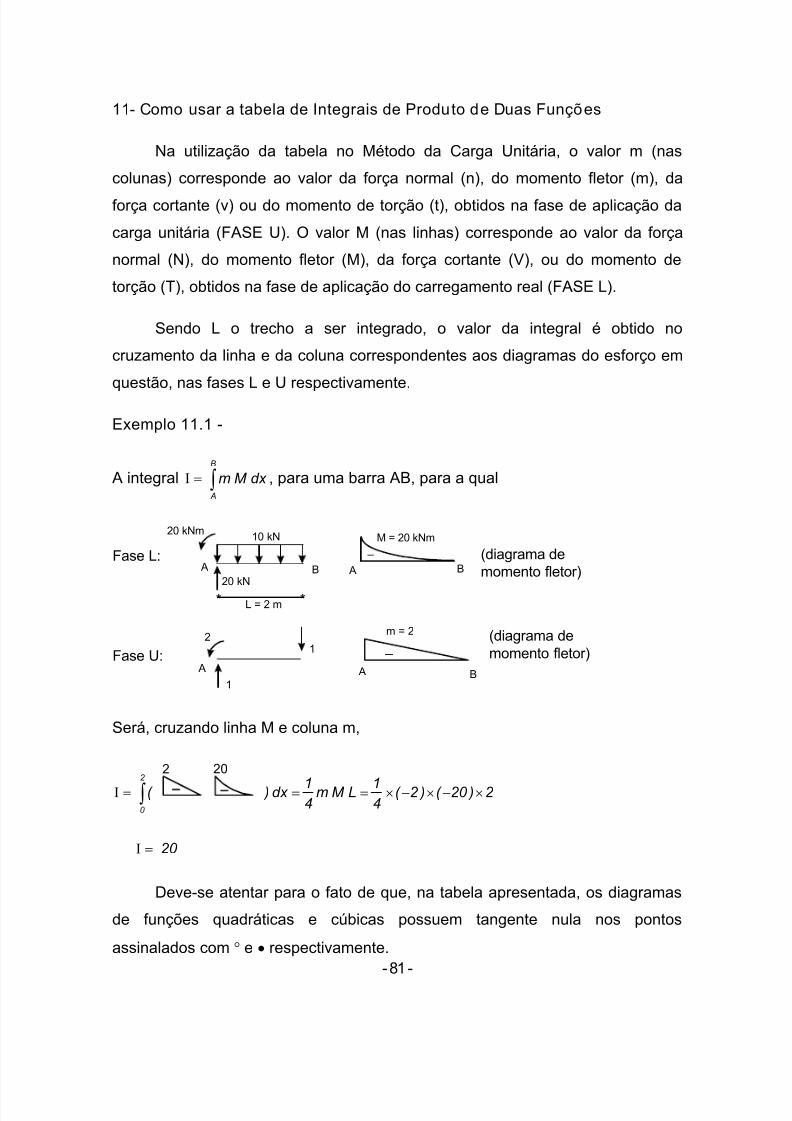
5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 81/83
- 81
11- Como usar a tabela de Integrais de Produto de Duas Funções
Na utilização da tabela no Método da Carga Unitária, o valor m (nas
colunas) corresponde ao valor da força normal (n), do momento fletor (m), da
força cortante (v) ou do momento de torção (t), obtidos na fase de aplicação da
carga unitária (FASE U). O valor M (nas linhas) corresponde ao valor da força
normal (N), do momento fletor (M), da força cortante (V), ou do momento de
torção (T), obtidos na fase de aplicação do carregamento real (FASE L).
Sendo L o trecho a ser integrado, o valor da integral é obtido no
cruzamento da linha e da coluna correspondentes aos diagramas do esforço em
questão, nas fases L e U respectivamente.
Exemplo 11.1 -
A integral ∫=ΙB
A
dx M m , para uma barra AB, para a qual
Fase L:
* *
10 kN 20 kNm
20 kN
L = 2 m
A B
_
A B
M = 20 kNm
(diagrama de
momento fletor)
Fase U: A
2
1
1
A B
_ m = 2 (diagrama de
momento fletor)
Será, cruzando linha M e coluna m,
∫=Ι2
0
(
2 20
2 )20 ( )2 ( 41LM m
41dx ) ×−×−×==
20 =Ι
Deve-se atentar para o fato de que, na tabela apresentada, os diagramas
de funções quadráticas e cúbicas possuem tangente nula nos pontos
assinalados com ° e • respectivamente.

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 82/83
- 82
Se a função a ser integrada não corresponde aos casos abordados na
tabela, deve-se decompor o diagrama de maneira a que se recaia na
combinação de casos simples constantes na tabela.
Prova-se que, no caso de parábolas quadráticas, qualquer diagrama podeser decomposto em dois, conforme mostrado abaixo:
LLL
a
b b
a
8
qLM
2
MAX =
(Quaisquer que sejam os valores de a, b positivos ou negativos).
Onde:
L = comprimento do trecho
q = carga distribuída no trecho
a, b = valores extremos da função
Exemplo 11.2 -
Deseja-se calcular ∫=ΙL
0
dx M m na barra AB.
Fase L:
A B
10 kN 20 kNm 30 kNm
2 m
5 kN 15 kN
+
- -
30 20
(M)
Fase U: 1 1
0 0
1 - (m)

5/17/2018 Principio Trabalho Virtual 1 - slidepdf.com
http://slidepdf.com/reader/full/principio-trabalho-virtual-1 83/83
- 83
∫=Ι2
0
(
1 3020
dx )
O diagrama de M não é encontrado na tabela. Desta forma, deve-se decompor o
mesmo:
+
- -
30 20
=
2030
_ + +
5 8
)2 ( 10
8
qLM
2 2
MAX =×
==
A integral, portanto, calcula-se:
∫=Ι2
0
(
201 30
∫+2
0
( dx )
1
5 dx )
33.43
2 5 )1( 3
2 2 )30 20 ( )1(
2
1LM m
3
2 L )M M ( m
2
12 1
=Ι
××−+×−−−=++=Ι