PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE … · processo de aprendizado pode ser prejudicado, uma...
11
PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE TORQUE DE UM MOTOR DE INDUÇÃO COMO FERRAMENTA DE AUXÍLIO AO ENSINO DE MÁQUINAS ELÉTRICAS William C. A. Pereira – [email protected] Manoel L. Aguiar – [email protected] Universidade de São Paulo, Departamento de Engenharia Elétrica Rua Trabalhador São-carlense, 400 13566-590 – São Carlos – São Paulo Gustavo H. Bazan – [email protected] Sérgio C. Mazucato Jr. – [email protected] Marcelo F. Castoldi – [email protected] Danilo S. Sanches – [email protected] Universidade Tecnológica Federal do Paraná, Departamento de Engenharia Elétrica Avenida Alberto Carazzai, 1640 86300-000 – Cornélio Procópio - Paraná Resumo: Este trabalho propõe uma plataforma virtual aplicada ao ensino, a alunos de graduação, de uma técnica de acionamento de motores de indução trifásicos (MIT). A técnica de acionamento conhecida como Controle Direto de Torque (Direct Torque Control – DTC) é apresentada e analisada, de uma maneira simples, usando a plataforma proposta. Tal plataforma utiliza a ferramenta GUIDE do Matlab juntamente com o Simulink. Os resultados simulados da estratégia DTC e a simplicidade do uso da plataforma são mostrados neste artigo. Palavras-chave: Ensino, Educação, Alunos, Motor de indução, DTC. 1. INTRODUÇÃO O desenvolvimento de ferramentas acadêmicas nos cursos de graduação pode fazer com que o processo de ensino e aprendizagem seja mais prazeroso, tanto por parte dos estudantes quanto por parte dos professores. Laboratórios virtuais e outros softwares são desenvolvidos para auxiliar no ensino, como um fator motivacional, atraindo o interesse dos estudantes para a pesquisa e para aplicação de conhecimento (JUNG, 2012). No curso de graduação em engenharia elétrica, as disciplinas relacionadas a máquinas elétricas estão, sem dúvidas, entre as mais importantes devido ao fato de as máquinas serem amplamente usadas na indústria, colocando-as como responsáveis por uma larga parcela do consumo industrial. As máquinas de indução trifásicas são as mais utilizadas na indústria devido a suas características robustas e ao seu baixo custo (KRISHNAN, 2001), fazendo-se indispensável seu bom entendimento por parte dos alunos de graduação. Plataformas
Transcript of PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE … · processo de aprendizado pode ser prejudicado, uma...

PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE TORQUE
DE UM MOTOR DE INDUÇÃO COMO FERRAMENTA DE AUXÍLIO AO ENSINO DE MÁQUINAS ELÉTRICAS
William C. A. Pereira – [email protected] Manoel L. Aguiar – [email protected] Universidade de São Paulo, Departamento de Engenharia Elétrica Rua Trabalhador São-carlense, 400 13566-590 – São Carlos – São Paulo Gustavo H. Bazan – [email protected] Sérgio C. Mazucato Jr. – [email protected] Marcelo F. Castoldi – [email protected] Danilo S. Sanches – [email protected] Universidade Tecnológica Federal do Paraná, Departamento de Engenharia Elétrica Avenida Alberto Carazzai, 1640 86300-000 – Cornélio Procópio - Paraná
Resumo: Este trabalho propõe uma plataforma virtual aplicada ao ensino, a alunos de graduação, de uma técnica de acionamento de motores de indução trifásicos (MIT). A técnica de acionamento conhecida como Controle Direto de Torque (Direct Torque Control – DTC) é apresentada e analisada, de uma maneira simples, usando a plataforma proposta. Tal plataforma utiliza a ferramenta GUIDE do Matlab juntamente com o Simulink. Os resultados simulados da estratégia DTC e a simplicidade do uso da plataforma são mostrados neste artigo. Palavras-chave: Ensino, Educação, Alunos, Motor de indução, DTC.
1. INTRODUÇÃO
O desenvolvimento de ferramentas acadêmicas nos cursos de graduação pode fazer com que o processo de ensino e aprendizagem seja mais prazeroso, tanto por parte dos estudantes quanto por parte dos professores. Laboratórios virtuais e outros softwares são desenvolvidos para auxiliar no ensino, como um fator motivacional, atraindo o interesse dos estudantes para a pesquisa e para aplicação de conhecimento (JUNG, 2012).
No curso de graduação em engenharia elétrica, as disciplinas relacionadas a máquinas elétricas estão, sem dúvidas, entre as mais importantes devido ao fato de as máquinas serem amplamente usadas na indústria, colocando-as como responsáveis por uma larga parcela do consumo industrial.
As máquinas de indução trifásicas são as mais utilizadas na indústria devido a suas características robustas e ao seu baixo custo (KRISHNAN, 2001), fazendo-se indispensável seu bom entendimento por parte dos alunos de graduação. Plataformas
virtuais têm sido propostas com intuito de melhorar a compreensão destas máquinas como, por exemplo, em (AYASUN & NWANKPA, 2005; SYAL et al., 2012). No entanto, nestes trabalhos e na maioria dos cursos de graduação, a Máquina de Indução Trifásica (MIT) é analisada apenas no estado estacionário, excluindo as propriedades dinâmicas de acionamento e controle da máquina do escopo da disciplina. Assim o processo de aprendizado pode ser prejudicado, uma vez que os estudantes não têm contato com técnicas de controle, podendo este conteúdo ser necessário para a resolução de problemas em ambiente industrial.
As técnicas de controle vetorial de motores de indução possuem certa complexidade de implementação, mesmo em simulações, e isso dificulta sua utilização durante a graduação. O objetivo deste trabalho é desenvolver uma plataforma virtual para auxiliar no ensino de alunos de graduação em engenharia elétrica uma técnica bem conhecida de controle vetorial de máquinas elétricas trifásicas.
As técnicas vetoriais visam transformar o a característica não linear de torque-velocidade do motor de indução em uma relação linear, semelhante aos motores DC (KUO-KAI et al., 2010). As duas principais técnicas de controle vetorial são: Controle Orientado de Campo (Field Oriented Control - FOC) e Controle de Torque Direto (Direct Torque Control - DTC). Neste trabalho apenas a técnica DTC é abordada.
A técnica DTC foi originalmente introduzida em 1986 por (TAKAHASHI & NOGUCHI, 1986), e tem sido utilizada pela indústria a desde 1995 pela empresa ABB Industrial Sytems (VAS, 1998). O princípio funcionamento da técnica DTC é baseado na aplicação de uma tabela lógica que calcula o chaveamento correto do inversor, corrigindo os valores de torque e de fluxo do estator. O resultado obtido com a aplicação da técnica DTC é uma resposta rápida de torque e um bom controle de velocidade em circuito fechado, quando esta malha de controle é desejada. No entanto, como desvantagens, a técnica DTC requer um intenso chaveamento do inversor e elevado ripple de torque (PANDYA & CHATTERJEE, 2010; MOHANTY, 2009; CASTOLDI et al., 2006).
Os ripples de torque podem ser minimizados por técnicas DTC modificadas, como por exemplo, Space Vector Width Modulation-DTC (BABU & USHKUMARI, 2011; KUMAR et al., 2012), entre outros. Muitas pesquisas recentes mostram o uso de controles baseados em técnicas inteligentes, como por exemplo, redes neurais artificiais, sistemas fuzzy, neuro-fuzzy, algoritmos genéticos, entre outros (VAS, 1999).
Técnicas inteligentes baseadas em controle têm em geral um desempenho superior, quando comparadas ao controle clássico, principalmente se o problema apresenta não linearidades ou se a planta é desconhecida. Neste trabalho apenas a estratégia DTC clássica é discutida, uma vez que o objetivo principal é apresentar este controle da máquina de indução para os alunos. O desempenho dinâmico elevado obtido na técnica DTC requer menos esforços computacionais do que as aplicações que utilizam técnicas de controle de campo orientado, pois a técnica DTC tem menos controladores e seu modelo matemático é mais simples que o FOC (CASADEI et al., 2002).
Este trabalho tem como objetivo a introdução de Controle de Torque Direto de máquinas de indução para alunos de graduação, com intuito de potencializar o aprendizado neste campo. Outro objetivo deste trabalho é estimular os alunos na área de pesquisa, uma vez que a área de controle de máquinas é promissor, principalmente com o advento de novos estudos envolvendo eficiência energética.

2. CONTROLE DE TORQUE DIRETO
Na Figura 1 é apresentado um diagrama de blocos resumido da técnica DTC usando comparadores de histerese, modelo de estimação de máquina e lógica de chaveamento, definidos no Matlab / Simulink. O objetivo principal dessa técnica é controlar o torque e o fluxo do estator utilizando os comparadores, garantindo uma resposta rápida de torque. A lógica de chaveamento é utilizada para selecionar o vetor de tensão a ser aplicado ao estator, determinado as chaves que devem ser ativadas no inversor (modu-lação de espaço). A escolha do vetor de tensão é feita de modo a manter o torque e o fluxo do estator dentro dos limites definidos pelos comparadores de histerese. Existem seis vetores de tensão possíveis, com amplitudes diferentes de zero e dois vetores de zero (Figura 2), que são escolhidos com base no erro entre os valores de referência de conjugado e de fluxo e no setor espacial do fluxo do estator.
Figura 1. Diagrama de blocos DTC.
Figura 2. Vetores espaciais de tensão e setores espaciais. Na implementação proposta, o bloco “MODELO DA MÁQUINA” calcula a
magnitude do fluxo de estator e do torque eletromagnético a partir da corrente de fase medida. O setor angular onde o vetor de fluxo está localizado também é calculado. Estes cálculos são baseados no modelo da máquina no referencial estacionário. Os cálculos necessários para a correta aplicação da estratégia DTC estão listados entre as equações

(1) e (8). É importante ressaltar que todas as quantidades nesta formulação estão relacionadas a grandezas do estator.
ai iα = (1)
( )a b
3i = i +2.i
3β (2)
( )DCa b c
EV = 2.Ch -Ch Ch
3α − (3)
( )DCb c
3.EV = Ch -Ch
3β (4)
sψ = (v -R i )dtα α α∫ (5)
sψ = (v -R i )dtβ β β∫ (6)
2 2ψ= ψ +ψ α β (7)
( )3
2d pm z i iα β β αψ ψ= − (8)
onde iα e iβ são as componentes direta e em quadratura das correntes, respectivamente;
ai e bi são as correntes das fases “ a ” e “ b ” medidas pelos sensores; Vα e Vβ são as
componentes de tensão direta e em quadradura, respectivamente; aCh , bCh e cCh são
os estados das chaves do inversor; DCE é a tensão CC no barramento do inversor; ψα e
ψβ são os fluxos alfa e beta, respectivamente; ψ é o módulo do fluxo total; dm é o
torque eletromagnético; pz é o número de pares de polos do motor.
Nas equações (3) e (4) foram usados os estados das chaves do inversor ao invés de sensores de tensão e, ainda, a tensão no barramento CC do inversor é considerada constante na simulação. A integral presente no cálculo do fluxo é feita pelo método de Euler.
Os valores do torque e fluxo estimados são comparados a seus valores de referência resultando em erros, os quais são entradas dos controladores de histerese. As saídas destes controladores de histerese são corresponsáveis por determinar o vetor de tensão a ser gerado pelo inversor. A saída da histerese de fluxo é determinada de acordo com o crescimento/decrescimento do fluxo (histerese de dois níveis). A saída da histerese de torque, diferentemente, é determinada de acordo com o crescimento/decrescimento e manutenção do valor de torque (histerese de três níveis). A lógica das duas histereses pode ser vista pelas equações (9) e (10).
( )
( )
0 ref
ref
se <
1 se
ψ ψ ψ
ψ ψ ψ
− ∆Φ =
> + ∆
(9)
( )
( ) ( )
( )
0
d dref d
d dref d d dref d
d dref d
1 if m m m
se m < m m and m m m
-1 if m m m
≤ − ∆
Γ = + ∆ > − ∆
≥ + ∆
(10)

onde Φ e Γ são as saídas das histereses de fluxo e de torque, respectivamente; refψ e
drefm são os valores de referência do fluxo e torque, respectivamente; ψ∆ e dm∆ são o
tamanho da banda de histerese de fluxo e torque, respectivamente. Os valores das saídas dos controladores de histerese de fluxo e torque são entradas do bloco “TABELA DE CHAVEAMENTO”, juntamente com uma terceira variável que indica o setor espacial de fluxo, e que pode ser calculada de acordo com a Figura 3, onde ( )30* sin ºβψ ψ= . A
Tabela 1 mostra a lógica de chaveamento que seleciona o vetor de tensão apropriado para ser acionado pelo inversor, de acordo com Φ , Γ e com o setor espacial onde o fluxo se encontra naquele instante específico.
Figura 3. Algoritmo para obter o setor espacial do fluxo.
Tabela 1. Vetor de tensões.
Setor
Φ Γ 1 2 3 4 5 6
1 2V
→
3V→
4V→
5V→
6V→
1V→
0 0 7V
→
0V→
7V→
0V→
7V→
0V→
-1 6V
→
1V→
2V→
3V→
4V→
5V→
1 3V
→
4V→
5V→
6V→
1V→
2V→
1 0 0V
→
7V→
0V→
7V→
0V→
7V→
-1 5V
→
6V→
1V→
2V→
3V→
4V→
3. PLATAFORMA DE SIMULAÇÕES
Com intuito de facilitar o contato dos estudantes com a técnica de simulação DTC, uma interface gráfica foi criada a partir da ferramenta de desenvolvimento gráfico, conhecida como GUIDE, do software Matlab. Esta interface tem como objetivo principal simplificar e facilitar a entrada dos parâmetros de simulação mantendo, assim, o estudante focado na compreensão de todos os princípios de funcionamento da técnica.
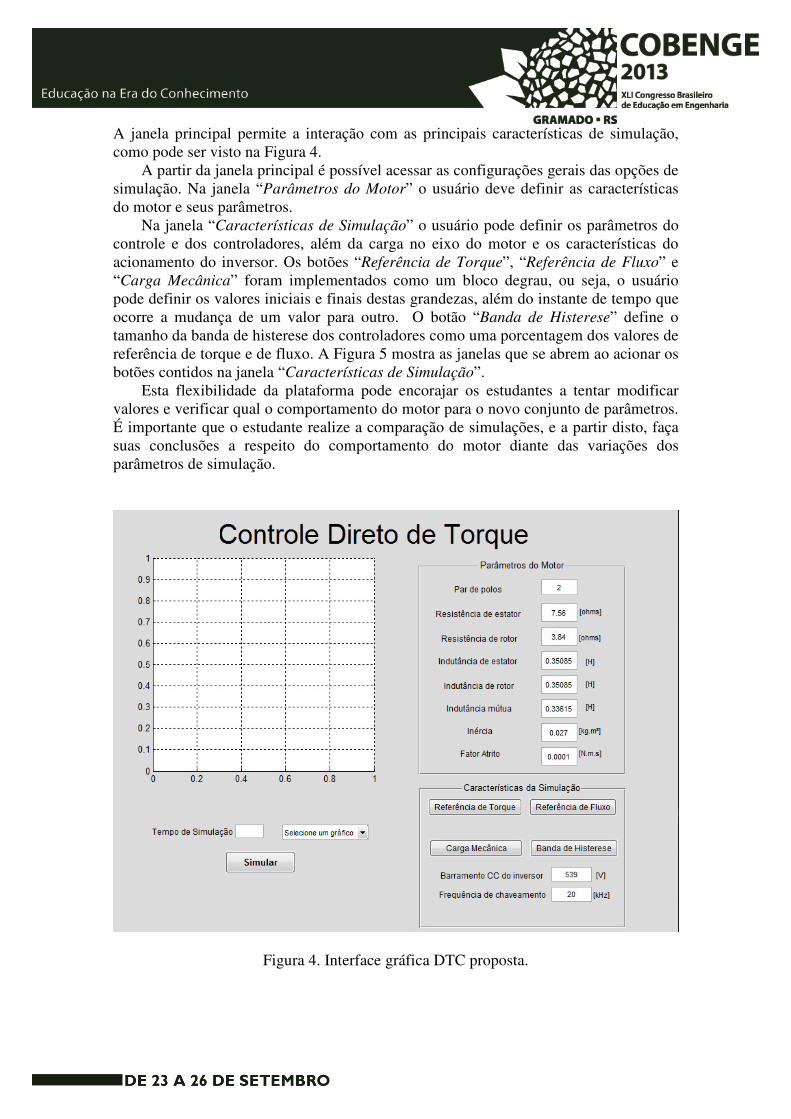
A janela principal permite a interação com as principais características de simulação, como pode ser visto na Figura 4.
A partir da janela principal é possível acessar as configurações gerais das opções de simulação. Na janela “Parâmetros do Motor” o usuário deve definir as características do motor e seus parâmetros.
Na janela “Características de Simulação” o usuário pode definir os parâmetros do controle e dos controladores, além da carga no eixo do motor e os características do acionamento do inversor. Os botões “Referência de Torque”, “Referência de Fluxo” e “Carga Mecânica” foram implementados como um bloco degrau, ou seja, o usuário pode definir os valores iniciais e finais destas grandezas, além do instante de tempo que ocorre a mudança de um valor para outro. O botão “Banda de Histerese” define o tamanho da banda de histerese dos controladores como uma porcentagem dos valores de referência de torque e de fluxo. A Figura 5 mostra as janelas que se abrem ao acionar os botões contidos na janela “Características de Simulação”.
Esta flexibilidade da plataforma pode encorajar os estudantes a tentar modificar valores e verificar qual o comportamento do motor para o novo conjunto de parâmetros. É importante que o estudante realize a comparação de simulações, e a partir disto, faça suas conclusões a respeito do comportamento do motor diante das variações dos parâmetros de simulação.
Figura 4. Interface gráfica DTC proposta.

(a)
(b)
(c)
(d)
Figura 5. Blocos da janela “Características da Simulação”; (a) torque de referência;
(b) fluxo de referência, (c) carga mecânica; (d) bandas de histerese.
4. SIMULAÇÕES DO CONTROLE DE TORQUE DIRETO
Para verificar o comportamento do acionamento do motor pela técnica de controle proposta foi realizada uma simulação. O objetivo de tal simulação é verificar a capacidade de controle através da variação do torque de referência. Desta forma, o fluxo de referência foi fixado em 0,8 wb, enquanto que o valor do torque de referência sofreu alteração de 12 N.m para -10 N.m no instante de tempo 0,4s. Foi imposta ainda uma banda de histerese de fluxo de 2% do valor do fluxo de referência e uma banda de histerese de torque de 5% do valor do torque de referência. A tensão do barramento CC foi considerada de 539 V, enquanto a frequência de chaveamento foi assumida em 20 kHz. A Tabela 2 mostra os valores dos parâmetros do motor utilizado nesta simulação.
Tabela 2. Parâmetros do motor utilizado na simulação.
Parâmetro Valor Par de polos 2
Resistência do estator 7,56 Ω Resistência do rotor 3,84 Ω Indutância do estator 0,35085 H Indutância do rotor 0,35085 H Indutância mútua 0,33615 H
Inércia 0,027 Kg.m2 Fator de atrito 0,0001 N.m.s

A Figura 6 mostra o fluxo estimado pelo algoritmo DTC proposto e medido na máquina de indução. Além disso, exibe o comportamento das componentes αβ destes fluxos estimado e medido. Os resultados validam o algoritmo, uma vez que o fluxo estimado é muito próximo ao fluxo medido.
A Figura 7 apresenta o comportamento satisfatório do torque eletromagnético, estimado e medido, quando a referência é modificada. Pode-se perceber que o torque responde rapidamente, mesmo no caso de uma mudança no sentido do torque, característica esta inerente à técnica DTC, como mencionado anteriormente. O alto ripple de torque produzido devido ao intenso chaveamento do inversor, outra característica marcante da estratégia DTC, também pode ser observado na Figura 7.
A Figura 8 exibe o comportamento da velocidade da máquina e das correntes trifásicas durante a simulação. Como inicialmente o torque é constante positivo, a velocidade cresce de forma linear, decrescendo de forma também linear quando a referência de torque se torna constante negativa. A corrente de partida é alta e encontra um valor de regime, porém com um período cada vez menor com o crescimento da velocidade. Quando a referência de torque modifica seu sentido, a velocidade começa a decrescer, fazendo com que o período das correntes trifásicas aumente novamente, mostrando a relação entre a velocidade e o período das correntes trifásicas.
Analisando os resultados extraídos da simulação proposta verifica-se que a plataforma representa um acionamento DTC de forma bastante satisfatória. Além disso, seu fácil manuseio facilita o aprendizado desta técnica de controle, complementando os conhecimentos dos alunos em máquinas de indução trifásicas.
(a)
(b)
(c)
Figura 6. Fluxo do estator; (a) componente α ; (b) componente β ; (c) fluxo total.

(a)
(b)
Figura 7. Torque eletromagnético; (a) estimado; (b) medido.
(a) (b)
Figura 8. (a) Velocidade; (b) correntes trifásicas.
5. CONCLUSÕES
Este trabalho apresenta uma plataforma virtual aplicada ao ensino de um controle vetorial de máquina de indução, especificamente a estratégia DTC. Técnicas de controle vetorial são muito complexas, especialmente quando apresentadas para estudantes de graduação, se tornando necessário o desenvolvimento de ferramentas que facilitem sua compreensão. A ferramenta proposta neste trabalho tem grande potencial, principalmente devido a sua grande flexibilidade e simplicidade, de aumentar o interesse dos alunos devido à velocidade com que os resultados são gerados. Além disso, os estudantes podem fazer muitas simulações e observar o que ocorre quando alguns parâmetros de simulação são modificados, encorajando os estudantes nesta área de pesquisa.

O sistema foi validado por simulações baseadas em um modelo real da MIT, e os resultados apresentaram precisão do método de controle, mesmo com uma mudança súbita na referência de torque.
Um segundo aspecto importante a ser ressaltado é que o presente trabalho pode ser usado para encorajar estudantes e pesquisadores a utilizarem a técnica proposta. Em outras palavras, pode-se afirmar que a plataforma proposta representa os conceitos fundamentais da técnica DTC didaticamente. Assim, este trabalho pode também ser utilizado como uma poderosa ferramenta no aprendizado.
REFERÊNCIAS BIBLIOGRÁFICAS
AYASUN, S.; NWANKPA, C. O. Induction motor tests using MATLAB/Simulink and their integration into undergraduate electric machinery courses, IEEE Transactions on Education, v. 48, p. 37-46, 2005. BABU, P. S.; USHAKUMARI, S. Modified Direct Torque Control of Induction Motor Drives. Anais: IEEE Recent Advances in Intelligent Computational Systems, p. 937-940, 2011. CASADEI, D.; PROFUMO, F.; SERRA, G.; TANI, A. FOC and DTC: two viable schemes for induction motors torque control, IEEE Transactions on Power Electronics, v. 17, p. 779-787, 2002. CASTOLDI, M. F.; AGUIAR, M. L.; OLIVEIRA JR, A. A.; MONTEIRO, J. R. B. A. A Rapid Prototype Design to Investigate the FPGA-Based DTC Strategy Applied to the Speed Control of Induction Motors. Anais: IEEE International Conference on Industrial Technology, p. 955-960, 2006. JUNG, S. Experience in Developing na Experimental Robotics Course Program for Undergraduate Education, IEEE Transactions on Education, p. 1-8, 2012. KRISHNAN, R. Electric Motor Drives: Modeling, Analysis and Control. New York: Prentice Hall, 2001. KUMAR, M. S.; BABU, P. R.; RAMPRASATH, S. Four Quadrant Operation of Direct Torque Control-SVPWM Based Three Phase Induction Motor Drive in MATLAB/SIMULINK. Anais: IEEE International Conference on Advanced Communication Control and Computing Technologies, p. 397-402, 2012. KUO-KAI, S.; JUU-KUH, L.; VAN-TRUONG, P.; MING-JI, Y.; TE-WEI, W. Global Minimum Torque Ripple Design for Direct Torque Control of Induction Motor Drives, IEEE Transactions on Industrial Electronics, v. 57, p. 3148-3156, 2010. MOHANTY, K. B. A Direct Torque Controlled Induction Motor with Variable Hysteresis Band. Anais: International Conference on Computer Modeling and Simulation, p. 405-410, 2009. PANDYA, S. N.; CHATTERJEE, J. K. Torque ripple reduction in direct torque control based induction motor drive using novel optimal controller design technique. Anais: Joint International Conference on Power Electronics, Drives and Energy Systems & 2010 Power India, p. 1-7, 2010. SYAL, A.; GAURAV, K.; MOGER, T. Virtual laboratory platform for enhancing undergraduate level induction motor course using MATLAB/Simulink. Anais: IEEE International Conference on Engineering Education: Innovative Practices and Future Trends, p. 1-6, 2012. TAKAHASHI, I.; NOGUCHI, T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor, IEEE Transactions on Industry Applications, v. IA-22, p. 820-827, 1986.

VAS, P. Sensorless Vector and Direct Torque Control. Oxford University Press, 1998. VAS, P. Artificial Inteligence Based Electrical Machines and Drives. Application of Fuzzy, Neural, Fuzzy-Neural and Genetic Algorithm Based Techniques. Oxford University Press, 1999.
VIRTUAL PLATFORM OF DIRECT TORQUE CONTROL OF INDUCTION MOTOR TO ASSIST IN EDUCATION OF
UNDERGRADUATE STUDENTS
Abstract: This paper proposes a virtual teaching platform applied to undergraduate students concerning an induction motor drive technique. Such a technique is called as Direct Torque Control (DTC) and it is presented and analyzed, in a simple form, by using the proposed platform. This virtual platform uses a GUIDE tool from MATLAB jointly with the SIMULINK. Simulation results of DTC strategy and also its simplicity usage are shown in this work. Key-words: Teaching, Education, Students, Induction motor, DTC.







![Eu aínda vou podendo outro pouco [Prólogo]](https://static.fdocumentos.tips/doc/165x107/568bd77d1a28ab20349fe718/eu-ainda-vou-podendo-outro-pouco-prologo.jpg)

![Eu aínda vou podendo outro pouco [Overtura]](https://static.fdocumentos.tips/doc/165x107/568bf05d1a28ab89338f652a/eu-ainda-vou-podendo-outro-pouco-overtura.jpg)