
Otimização da Produção em Tempo Real em Campos de … C... · ficial por bombeio mecânico e...
75
UNIVERSIDADE FEDERAL DE SANTA CATARINA CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO INDUSTRIAL Desenvolvimento de uma Plataforma para Otimização da Produção em Tempo Real em Campos de Petróleo Operados por Gas-Lift Monografia submetida à Universidade Federal de Santa Catarina como requisito para a aprovação da disciplina: DAS 5511 Projeto de Fim de Curso Anderson Carlos Faller Florianópolis, Abril de 2009
Transcript of Otimização da Produção em Tempo Real em Campos de … C... · ficial por bombeio mecânico e...
UNIVERSIDADE FEDERAL DE SANTA CATARINA CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO INDUSTRIAL
Desenvolvimento de uma Plataforma
para Otimização da Produção em Tempo Real em Campos de Petróleo
Operados por Gas-Lift
Monografia submetida à Universidade Federal de Santa Catarina como requisito para a aprovação da disciplina:
DAS 5511 Projeto de Fim de Curso
Anderson Carlos Faller
Florianópolis, Abril de 2009
Desenvolvimento de uma Plataformapara Otimização da Produção em
Tempo Real em Campos de PetróleoOperados por Gas-Lift
Monografia submetida à Universidade Federal de Santa Catarina comorequisito para a aprovação na disciplina:
DAS 5511: Projeto de Fim de Curso
Anderson Carlos Faller
Florianópolis, abril de 2009.

Desenvolvimento de uma Plataforma para Otimizaçãoda Produção em Tempo Real em Campos de Petróleo
Operados por Gas-Lift
Anderson Carlos Faller
Esta monografia foi julgada no contexto da disciplina
DAS 5511: Projeto de Fim de Curso
e aprovada na sua forma final pelo
Curso de Engenharia de Controle e Automação
Banca Examinadora:
Prof. Eduardo Camponogara
Orientador
Prof. Augusto Humberto Bruciapaglia
Responsável pela disciplina
Prof. Agustinho Plucênio
Avaliador
Tiago Correa
André Carvalho Bittencourt
Debatedores
I
Agradecimentos
À família, pelo apoio, pelo amor e toda a confiança.
À Morena, por todo o amor e carinho incondicionais.
Aos amigos, pela presença e por todos os momentos.
Ao professor Eduardo Camponogara, pela confiança.
Ao engenheiro Alex Teixeira, pela oportunidade.
À Agência Nacional do Petróleo, Gás Natural e
Biocombustíveis (ANP) e à Financiadora de Estudos e
Projetos (FINEP), pelo apoio financeiro prestado por
intermédio do Programa de Recursos Humanos da
ANP para o setor do Petróleo, Gás e Biocombustíveis
– PRH34 ANP/MCT.
ii
Resumo
Métodos de elevação artifical são muito utilizados em campos de petróleo semi-
depletados, quando a pressão estática dos reservatórios não é suficiente para assegu-
rar uma elevação natural do fluido. Entre tais métodos, encontra-se o gas-lift contínuo,
que consiste na injeção contínua de gás na base do tubo de produção a fim de ga-
seificar o fluido e facilitar a elevação. Poços que operam por esse método são mais
frequentes em campos offshore em ativos superprodutores. Devido aos altos custos
envolvidos e o elevado ganho econômico resultante da produção de óleo e gás, fazem-
se necessárias técnicas avançadas de controle e otimização desse tipo de processo.
Nesse trabalho é feita uma abordagem matemática para a formalização das carac-
terísticas do processo, bem como de suas restrições, resultando numa formulação
geral para o problema de otimização de gas-lift. Apesar dos fenômenos envolvidos
nesse processo serem bastante estudados na área de tecnologia de escoamento e
elevação, modelos analíticos das relações de desempenho para os poços são difí-
ceis de serem obtidos. Portanto, são apresentadas técnicas para a identificação dos
poços e são utilizadas ferramentas computacionais para a implementação de algorit-
mos de ajuste de curvas e otimização global e local. Ferramentas proprietárias para a
execução de algoritmos e procedimentos sistematizados são utilizadas. Por fim, são
apresentados resultados interpretados das técnicas aplicadas em modelos simulados
a partir de uma plataforma de testes desenvolvida, simulando o manifold de gás e o
comportamento dos poços.

iii
Abstract
Artificial lift methods are widely applied in semi-depleted oil fields when the
reservoir static pressure is not enough to ensure the fluid natural flow. Continuous
gas-lift is one of these methods, it consists in continuous gas injection in the base of
the production tube, in order to gasify the fluid, reducing the hydrostatic pressure and
facilitating the fluid lifting. Gas-lifted wells are frequently found in offshore fields, where
oil production rates are very high. Due to the elevated costs involved and the high pro-
fitability resulting from oil and gas production, advanced control and optimization tech-
niques are made necessary. In this work, a mathematical approach is used to formalize
general characteristics of the process, as well as its constraints, resulting in a general
formulation for the gas-lift optimization problem. Although the process’ phenomena are
widely studied in the flow technology area, analytical models for performance relations
are hard to be obtained. Therefore, well performance curves identification techniques
are presented, within the utilization of software tools for curve fitting and global/local
optimization. Proprietary tools for algorithms and procedures execution are used. Fi-
nally, interpreted results of the developed techniques are presented, using a testing
platform to simulate the gas-lift manifold and the wells behavior.
iv
Sumário
1 Introdução 1
1.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Elevação Artificial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Gas-Lift Contínuo . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Objetivo do Projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Organização do Documento . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Problemática 8
2.1 Otimização de Gas-Lift Contínuo . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Obtenção de Modelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Ajuste de Curvas de Desempenho . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Ajuste Polinomial . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.2 Ajuste de Função Polinomial e Logarítmica . . . . . . . . . . . . 17
2.3.3 Ajuste Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3.4 Ajuste de Curva Pwf . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 Sistema de Otimização 22
Sumário v
3.1 Otimização offline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1.1 Equal-Slope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Ferramentas para Otimização em Tempo Real . . . . . . . . . . . . . . 24
3.2.1 MPA - Módulo de Procedimentos Automatizados . . . . . . . . . 24
3.2.2 Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.3 OPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Otimização Local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Otimização Global . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.4.1 Programação Quadrática Sequencial . . . . . . . . . . . . . . . 35
3.5 Identificação de Modelos . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.5.1 Detecção de Regime Permanente . . . . . . . . . . . . . . . . . 37
3.5.2 Verificação de Modelos . . . . . . . . . . . . . . . . . . . . . . . 37
3.5.3 Aquisição de Pontos (Qinj, Pwf ) . . . . . . . . . . . . . . . . . . . 38
3.6 Ajuste de Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.7 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Plataforma de Testes 44
4.1 GLM no Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1.1 Modelo Simplificado de um Poço . . . . . . . . . . . . . . . . . . 46
4.2 OLGA-OPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5 Estudo de Casos 50
5.1 Otimização Local no OLGA . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2 Otimização Global no Matlab . . . . . . . . . . . . . . . . . . . . . . . . 51
5.3 Ensaios com restrições . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6 Conclusões e Perspectivas 59
6.1 Interpretação dos Resultados Obtidos . . . . . . . . . . . . . . . . . . . 59
Sumário vi
6.2 Perspectivas e Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . 60
Referências 62
vii
Lista de Figuras
1.1 Contextualização do projeto. . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Esquemático de poço operando via gas-lift. . . . . . . . . . . . . . . . . 4
1.3 Características das curvas Pwf × Qinj e Qoil × Qinj . . . . . . . . . . . . 5
2.1 Região econômica de operação de um poço. . . . . . . . . . . . . . . . 9
3.1 Método gráfico para o equal-slope. . . . . . . . . . . . . . . . . . . . . . 24
3.2 Processo de configuração do MPA. . . . . . . . . . . . . . . . . . . . . . 25
3.3 Configuração de fluxos no MPA. . . . . . . . . . . . . . . . . . . . . . . 26
3.4 Arquitetura básica do Laplace. . . . . . . . . . . . . . . . . . . . . . . . 27
3.5 Interface gráfica do Laplace. . . . . . . . . . . . . . . . . . . . . . . . . 27
3.6 Estrutura OPC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.7 Situações do algoritmo de otimização local com passo fixo. . . . . . . . 29
3.8 Fluxograma de busca de mínima Pwf implementado no MPA. . . . . . . 30
3.9 Sucessivas aproximações quadráticas do algoritmo de passos variáveis. 32
3.10 Aplicação de otimização global GLOPTIM. . . . . . . . . . . . . . . . . 42
3.11 Cooperação entre os elementos do sistema. . . . . . . . . . . . . . . . 43
4.1 Controle do manifold com ação feed-foward . . . . . . . . . . . . . . . . 45
4.2 Bloco de otimização no Matlab. . . . . . . . . . . . . . . . . . . . . . . . 46
4.3 Modelo modificado de Hammerstein . . . . . . . . . . . . . . . . . . . . 46
4.4 Arquitetura básica do Linker OLGA-OPC . . . . . . . . . . . . . . . . . . 48
Sumário viii
4.5 Interface gráfica do Linker OLGA-OPC . . . . . . . . . . . . . . . . . . . 48
5.1 Otimização local em um poço modelado no OLGA: Qinj e Pwf . . . . . . 51
5.2 Otimização local em um poço modelado no OLGA: Qinj e Qoil. . . . . . 52
5.3 Queda da produção com um modelo errado. . . . . . . . . . . . . . . . 52
5.4 Distribuição de gás entre os poços. . . . . . . . . . . . . . . . . . . . . . 53
5.5 Tabela de alocação para o cenário de 8 poços. . . . . . . . . . . . . . . 54
5.6 Tabela de alocação com restrição de separação de água. . . . . . . . . 55
5.7 Tabela de alocação com restrição de separação de óleo. . . . . . . . . 56
5.8 Tabela de alocação considerando exportação de gás a um baixo preço. 56
5.9 Tabela de alocação considerando exportação de gás a um alto preço. . 57
5.10 Alocação com restrição de separação de água e exportação de gás. . . 57
5.11 Restrições de igualdade para a disponibilidade de gás. . . . . . . . . . 58
ix
Lista de Tabelas
3.1 Critérios para tomada de decisão no algoritmo de otimização local. . . . 29
1
Capı́tulo 1Introdução
Este projeto surgiu no contexto da rede temática GeDIg - Gerenciamento Digital
Integrado de Campos de Petróleo - que visa a gradual implantação de elementos de
automação, controle, otimização e supervisão em campos de petróleo com a filosofia
dos Campos Inteligentes (Smart Fields). O objetivo é aumentar o grau de automação
em campos produtores com a finalidade de melhorar a eficiência de processos de
elevação e processamento dos fluidos.
O processo começa com novas técnicas de completação inteligente de poços,
onde são instalados sensores de fibra óptica durante a fase de completação dos
poços, permitindo que sejam incorporadas novas medições às técnicas de controle e
otimização atuais. Um exemplo disso é a instalação de sensores de pressão e tempe-
ratura no fundo dos poços, agregando muito valor ao conhecimento do funcionamento
do processo.
No CENPES, o Centro de Pesquisa e Desenvolvimento Leopoldo Américo Mi-
guez de Mello da Petrobras (Petróleo Brasileiro S/A), são conduzidas atividades de
pesquisa e desenvolvimento relacionadas a todas as atividades fins da empresa,
desde a prospecção à distribuição de derivados de petróleo, além linhas de pesquisa
em alternativas energéticas ligadas à eficiência de seus processos.
O Departamento de Automação e Sistemas (DAS-UFSC) possui uma parce-
ria com o CENPES através dessa rede temática GeDIg, abrindo as portas para a
transferência mútua de conhecimento, desenvolvendo a cultura do petróleo dentro da
Universidade e, por outro lado, contribuindo com a indústria utilizando o know-how em
otimização e controle existente dentro do Departamento.
1. Introdução 2
GeDIg
DAS CENPES
Projeto
Figura 1.1: Contextualização do projeto.
A Figura 1.1 insere o projeto no círculo de atividades DAS-GeDIg-CENPES.
O projeto que originou este trabalho é chamado "Desenvolvimento de Algorit-
mos de Controle para Métodos de Elevação Artificial", que contempla a elevação arti-
ficial por bombeio mecânico e gas-lift contínuo, sempre voltado para a filosofia GeDIg.
Neste trabalho, são desenvolvidas técnicas para a Otimização em Tempo Real
de campos que operam por gas-lift contínuo, baseando-se no conhecimento já de-
senvolvido dentro do Departamento com relação a técnicas de otimização, controle e
simulação de processos.
1.1 Motivação
Em vista das grandes somas de dinheiro envolvidas no processo, altos custos
de produção, alto valor do petróleo no mercado e campos com poços superprodutores,
tornam-se interessantes técnicas que são capazes de otimizar a produção, com a
possibilidade de aumentar substancialmente o ganho econômico.
Atualmente, a maior parte do óleo produzido no Brasil é proveniente do método
de elevação artificial conhecido como gas-lift (elevação por injeção contínua de gás),
com uma fatia de 71% da produção total, seguida pela produção de poços surgentes
(15%). Campos que possuem poços operados por gas-lift e surgentes entrarão na for-
mulação geral, pois compartilham instalações de superfície e recursos, caracterizando
restrições.
Os reservatórios possuem dinâmicas (causadas até pela sua depleção) que
provocam mudanças de parâmetros [1] como a sua pressão estática, o seu índice de
produtividade, o BSW, o GOR, as características fluidodinâmicas do fluido produzido,

1. Introdução 3
entre outros, invalidando os modelos anteriormente utilizados para otimização. Isso
demanda uma otimização em tempo real, que envolve reidentificações automáticas de
modelos, medições virtuais de variáveis do processo, com o auxílio de simuladores,
além de módulos de software capazes de conectar algoritmos com a rede de au-
tomação.
Os ganhos em produção em campos que adotam técnicas de otimização podem
ser bastante notáveis, principalmente com o alto valor do petróleo no mercado. Em [2]
é descrita uma experiência onde são obtidos ganhos de produção e maior estabilidade
através de controles ativos nos chokes.
Além de propiciar medições virtuais de variáveis não acessíveis no processo,
os simuladores transientes podem informar conseqüências de tomadas de ação, aju-
dando a evitar instabilizações do processo decorrentes de pontos de operação im-
próprios, impondo restrições aos algoritmos.
Através da implementação desse sistema, espera-se obter um ganho em de-
sempenho, redução das perdas de produção, maior estabilidade, segurança e confia-
bilidade.
1.2 Elevação Artificial
Quando a pressão no reservatório é suficiente para superar a pressão resultante
da coluna hidrostática do fluido e das instalações da superfície, o óleo flui naturalmente
e atinge a superfície. Nesse caso, é dito que o poço é surgente.
No entanto, quando um poço já está parcialmente depletado ([1] e [4]), por já
estar produzindo há muito tempo ou simplesmente não produzir de forma natural, é
necessária a aplicação de métodos de elevação artificial, que fornecem energia ao
sistema e auxiliam na elevação do fluido.
Dependendo do caso e do tipo de poço (onshore ou offshore), pouco ou muito
produtor, etc.), são aplicados diferentes métodos. Poços não surgentes em terra que
produzem muito pouco normalmente são operados por bombeio mecânico ou gas-lift
intermitente.
Os poços offshore, que normalmente possuem uma produção maior, são ope-
rados por gas-lift contínuo, BCS (bombeio centrífugo submerso) ou uma combinação
de ambos.
1. Introdução 4
Nesse trabalho, serão abordados os casos onde os campos operam com eleva-
ção por injeção contínua de gás, ou gas-lift contínuo.
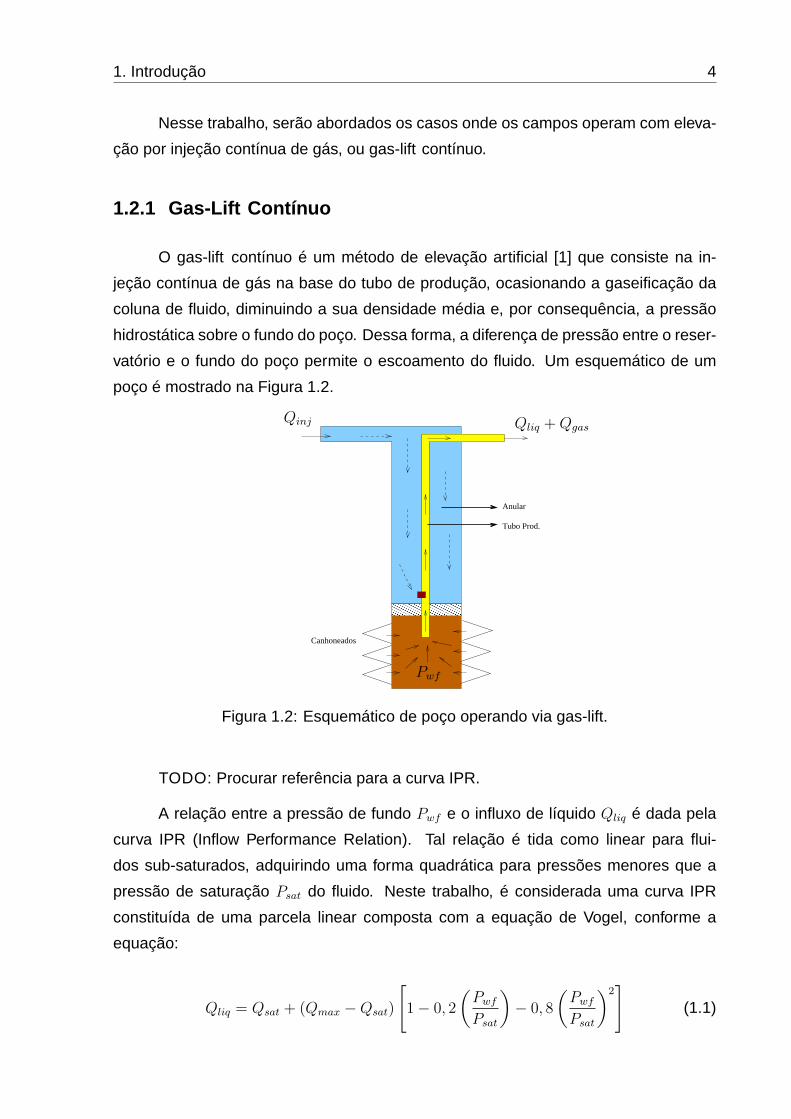
1.2.1 Gas-Lift Contínuo
O gas-lift contínuo é um método de elevação artificial [1] que consiste na in-
jeção contínua de gás na base do tubo de produção, ocasionando a gaseificação da
coluna de fluido, diminuindo a sua densidade média e, por consequência, a pressão
hidrostática sobre o fundo do poço. Dessa forma, a diferença de pressão entre o reser-
vatório e o fundo do poço permite o escoamento do fluido. Um esquemático de um
poço é mostrado na Figura 1.2.
���������������������
���������������������
Canhoneados
Tubo Prod.
Anular
Pwf
Qinj Qliq + Qgas
Figura 1.2: Esquemático de poço operando via gas-lift.
TODO: Procurar referência para a curva IPR.
A relação entre a pressão de fundo Pwf e o influxo de líquido Qliq é dada pela
curva IPR (Inflow Performance Relation). Tal relação é tida como linear para flui-
dos sub-saturados, adquirindo uma forma quadrática para pressões menores que a
pressão de saturação Psat do fluido. Neste trabalho, é considerada uma curva IPR
constituída de uma parcela linear composta com a equação de Vogel, conforme a
equação:
Qliq = Qsat + (Qmax − Qsat)
[
1 − 0, 2
(
Pwf
Psat
)
− 0, 8
(
Pwf
Psat
)2]
(1.1)
1. Introdução 5
Onde Qsat é a vazão quando Pwf = Psat e Qmax é a vazão máxima do poço.
A vazão de óleo Qoil é obtida a partir do conhecimento de BSW (Basic Sedi-
ments and Water - fração de água e sedimentos do líquido), sendo:
Qoil = (1 − BSW )Qliq (1.2)
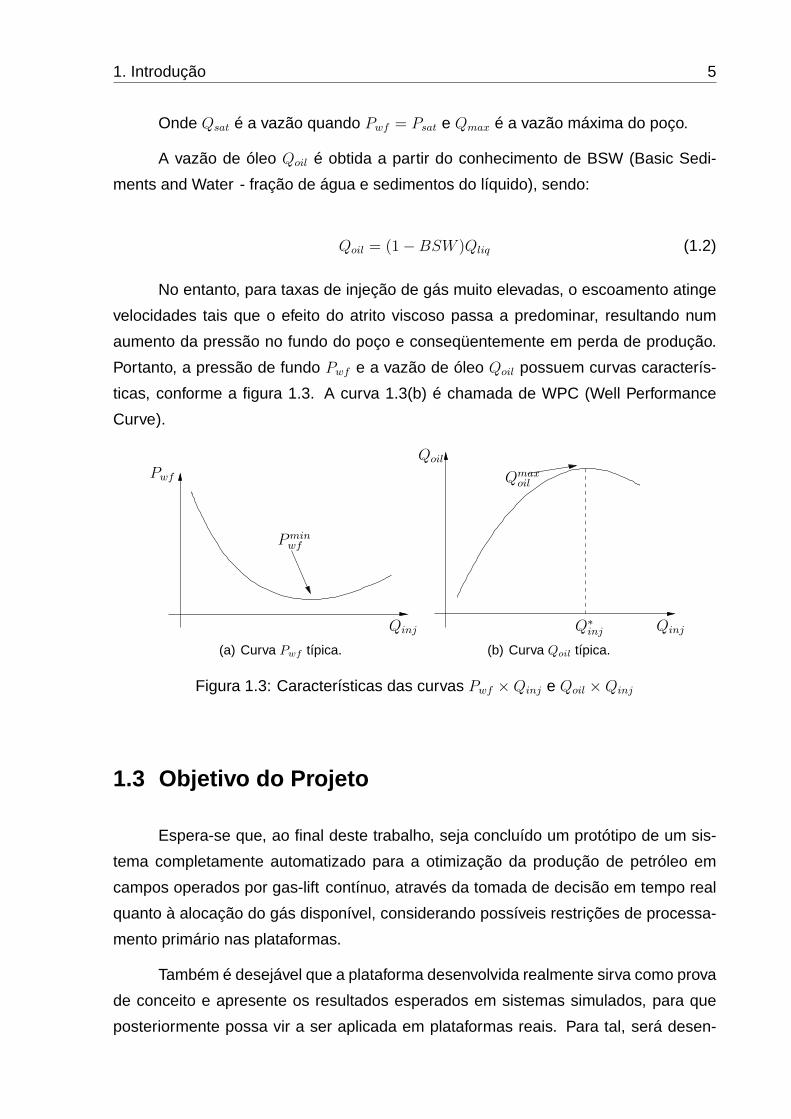
No entanto, para taxas de injeção de gás muito elevadas, o escoamento atinge
velocidades tais que o efeito do atrito viscoso passa a predominar, resultando num
aumento da pressão no fundo do poço e conseqüentemente em perda de produção.
Portanto, a pressão de fundo Pwf e a vazão de óleo Qoil possuem curvas caracterís-
ticas, conforme a figura 1.3. A curva 1.3(b) é chamada de WPC (Well Performance
Curve).
Pwf
Qinj
Pminwf
(a) Curva Pwf típica.
Qoil
Qinj
Qmaxoil
Q∗
inj
(b) Curva Qoil típica.
Figura 1.3: Características das curvas Pwf × Qinj e Qoil × Qinj
1.3 Objetivo do Projeto
Espera-se que, ao final deste trabalho, seja concluído um protótipo de um sis-
tema completamente automatizado para a otimização da produção de petróleo em
campos operados por gas-lift contínuo, através da tomada de decisão em tempo real
quanto à alocação do gás disponível, considerando possíveis restrições de processa-
mento primário nas plataformas.
Também é desejável que a plataforma desenvolvida realmente sirva como prova
de conceito e apresente os resultados esperados em sistemas simulados, para que
posteriormente possa vir a ser aplicada em plataformas reais. Para tal, será desen-
1. Introdução 6
volvida uma plataforma de simulação para testes com interface semelhante à encon-
trada na indústria, garantindo uma portabilidade do sistema desenvolvido.
Podem ser enumerados alguns objetivos específicos:
• Um levantamento das características do processo e uma formulação geral do
problema;
• Um sistema portável de otimização em tempo real implementado para as ferra-
mentas já disponíveis na empresa;
• Uma plataforma de simulação para validação, calibração e testes de algoritmos.
1.4 Metodologia
Como as atividades foram desenvolvidas em laboratório (Laboratório de Otimi-
zação da Produção), trabalhou-se com modelos de simulação no OLGA, leitura de
dados históricos de historiadores e simulações de modelos simplificados no Matlab.
Para o desenvolvimento da plataforma de simulação, foram estudadas tecnolo-
gias de integração de simuladores, com a implementação de algumas camadas de
protocolos [3] para realizar a interface do OLGA com o restante do sistema.
O desenvolvimento do projeto proposto inclui a implementação de diversos sis-
temas em linguagens diferentes. Especificamente, são utilizadas as seguintes lingua-
gens: Lua 1, para a implementação dos blocos de função do MPA; C/C++, para a
implementação de algoritmos de otimização; Java2, para a integração de sistemas e
implementação de protocolos de rede; e Matlab3, para a implementação de modelos
de simulação e prototipagem de controles locais.
As atividades foram ordenadas de forma lógica, algumas ocorrendo em paralelo.
Inicialmente, deveria ser implementada a plataforma de simulação, para que fossem
realizados testes e a posterior implementação definitiva dos algoritmos.
1Lua - http://www.lua.org2Java Technology - http://java.sun.com3Mathworks Matlab - http://www.mathworks.com
1. Introdução 7
1.5 Organização do Documento
Segue a organização proposta para o documento. No Capítulo 2 são levantados
os problemas a serem resolvidos com a plataforma de otimização, explicitando todas
as suas formulações.
No Capítulo 3 é apresentada a solução proposta, através de um conjunto de fer-
ramentas utilizadas para a implementação de algoritmos e procedimentos. Também é
descrito o método de otimização utilizado atualmente em campos de gas-lift contínuo.
No Capítulo 4, é descrita a plataforma de simulação desenvolvida para a apli-
cação dos algoritmos de otimização global e local e para a realização de testes.
No Capítulo 5, são expostos resultados dos algoritmos e procedimentos pro-
postos aplicados à plataforma de simulação.
Por fim, o Capítulo 6 traz uma breve interpretação dos resultados atingidos,
fazendo uma previsão da continuidade desse trabalho em paralelo com o contínuo
avanço da tecnologia.

8
Capı́tulo 2Problemática
Este capítulo traça os desafios inerentes ao problema de otimização de gas-
lift, expondo todos os problemas a serem resolvidos e o equacionamento envolvido.
Posteriormente, no Capítulo 3, serão expostas as ferramentas computacionais e os
métodos de solução para a problemática aqui desenvolvida.
A Seção 2.1 apresenta a modelagem matemática do problema de otimização de
gas-lift, sendo esta baseada em modelos. A Seção 2.2 apresenta possíveis métodos
para a obtenção de modelos de curvas de desempenho de poços para utilização na
solução do problema de otimização. Por fim, a Seção 2.3 expõe a questão do ajuste
de curvas, técnica utilizada nesse projeto para a obtenção de modelos de WPC’s a
partir de um conjunto de pontos experimentais.
2.1 Otimização de Gas-Lift Contínuo
O problema de alocação de gas-lift resume-se a otimizar a distribuição de gás
de elevação entre o conjunto de poços que compartilham um manifold de gás com-
primido, que também pode vir a ser exportado.
Na introdução desse documento foram expostos os princípios de funcionamento
do método de elevação por gas-lift, contextualizando o problema de otimização através
da introdução das curvas de desempenho (WPC’s) dos poços. A princípio, um poço
está produzindo de forma ótima quando este opera com máxima taxa de produção de
óleo Q∗
oil. No entanto, sabe-se que existem custos envolvidos, além de restrições do
processo.
2. Problemática 9
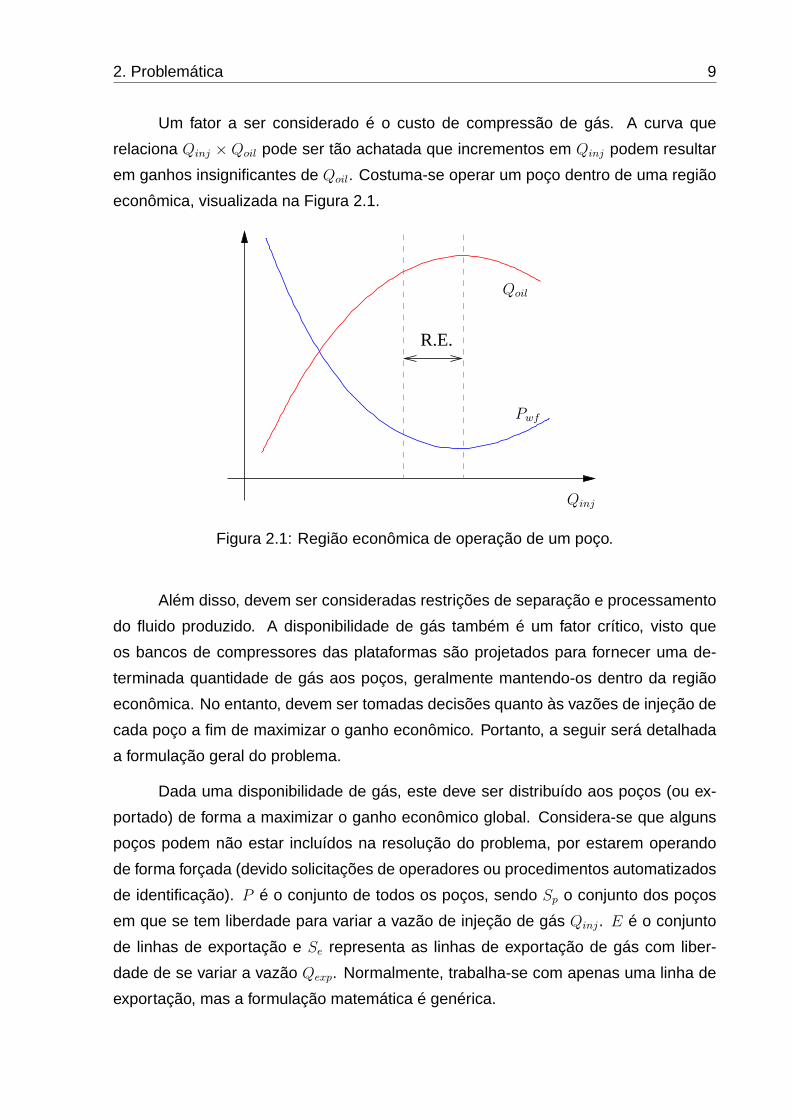
Um fator a ser considerado é o custo de compressão de gás. A curva que
relaciona Qinj × Qoil pode ser tão achatada que incrementos em Qinj podem resultar
em ganhos insignificantes de Qoil. Costuma-se operar um poço dentro de uma região
econômica, visualizada na Figura 2.1.
R.E.
Qoil
Pwf
Qinj
Figura 2.1: Região econômica de operação de um poço.
Além disso, devem ser consideradas restrições de separação e processamento
do fluido produzido. A disponibilidade de gás também é um fator crítico, visto que
os bancos de compressores das plataformas são projetados para fornecer uma de-
terminada quantidade de gás aos poços, geralmente mantendo-os dentro da região
econômica. No entanto, devem ser tomadas decisões quanto às vazões de injeção de
cada poço a fim de maximizar o ganho econômico. Portanto, a seguir será detalhada
a formulação geral do problema.
Dada uma disponibilidade de gás, este deve ser distribuído aos poços (ou ex-
portado) de forma a maximizar o ganho econômico global. Considera-se que alguns
poços podem não estar incluídos na resolução do problema, por estarem operando
de forma forçada (devido solicitações de operadores ou procedimentos automatizados
de identificação). P é o conjunto de todos os poços, sendo Sp o conjunto dos poços
em que se tem liberdade para variar a vazão de injeção de gás Qinj. E é o conjunto
de linhas de exportação e Se representa as linhas de exportação de gás com liber-
dade de se variar a vazão Qexp. Normalmente, trabalha-se com apenas uma linha de
exportação, mas a formulação matemática é genérica.

2. Problemática 10
A formulação para o problema, dada uma disponibilidade de gás Qdisp, é:
P: Maximize
∑
i∈Sp
Gip(Q
iinj) +
∑
j∈Se
Gje(Q
jexp)
(2.1a)
Sujeito a:∑
i∈Sp
Qiinj +
∑
j∈Se
Qjexp 6 Q′
disp (2.1b)
Qi,mininj 6 Qi
inj 6 Qi,maxinj ∀i ∈ Sp (2.1c)
Qj,minexp 6 Qj
exp 6 Qj,maxexp ∀j ∈ Se (2.1d)
Qminoil 6
∑
k∈P
Qkoil(Q
kinj) 6 Qmax
oil (2.1e)
Qmingas 6
∑
l∈E
Qlgas(Q
linj) 6 Qmax
gas (2.1f)
∑
k∈P
Qkwat(Q
kinj) 6 Qmax
wat (2.1g)
Q′
disp é a vazão disponível para otimização, sendo que Qdisp − Q′
disp é a vazão
total sob operação forçada:
Q′
disp = Qdisp −∑
k∈P−Sp
Qkinj +
∑
l∈E−Se
Qlexp (2.2)
Onde:
• P é o conjunto dos índices dos poços;
• E é o conjunto das linhas de exportação;
• Sp é o conjunto dos poços com liberdade de ação, tal que Sp ⊂ P ;
• Se é o conjunto das linhas de exportação com liberdade de ação, tal que Se ⊂ E;
• Gip é o ganho econômico com a produção do poço i;
• Gje é o ganho econômico com a exportação na linha j;
• Qi,mininj e Qi,max
inj são os limites operacionais do poço i;
• Qj,minexp e Qj,max
exp são os limites operacionais da linha de exportação j;
2. Problemática 11
• Qmaxoil , Qmax
gas e Qmaxwat são as capacidades de processamento (handling) de óleo,
gás e água, respectivamente;
• Qminoil e Qmin
gas são valores mínimos estabelecidos para produção de óleo e de gás,
atribuídos baseados em questões estratégicas.
Os ganhos econômicos com a produção (Gp) e a exportação (Ge) são dados da
seguinte forma:
Gip(Q
iinj) = poilQ
ioil(Q
iinj) + pgasQ
igas(Q
iinj) − pwatQ
iwat(Q
iinj) − pcompQ
iinj (2.3)
Gje(Q
jexp) = (pj
exp − pcomp)Qexp (2.4)
Tais ganhos são determinados a partir de valores de mercado ou relações de
valor de acordo com campanhas internas da empresa. Os valores a serem atribuídos
são:
• poil é o ganho com o óleo produzido;
• pgas é o ganho com o gás produzido;
• pwat é o custo de tratamento da água produzida;
• pcomp é o custo de compressão de gás;
• pjexp é o ganho com a exportação de gás pela linha j.
A fim de resolver o problema (2.1a)-(2.1g), deve-se introduzir modelos que re-
presentam a relação Qinj × Qoil, de onde podem ser tiradas as relações para Qwat e
Qgas. Tais modelos devem ser ajustados a dados de experimentais, como é tratado na
Seção 2.3.
A formulação do problema P é o modelo que foi desenvolvido de forma a aten-
der necessidades gerais de um problema genérico de otimização de gas-lift contínuo
em uma plataforma. Ela deve ser adaptada na implantação em alguma plataforma
específica, dependendo das especificações da gerência operacional.
Por exemplo, a restrição de compressão de gás Qdisp pode vir a demandar o
fechamento imediato de algum poço de forma a garantir o bom funcionamento dos de-
mais. Tal formulação introduziria variáveis binárias multiplicando as taxas de injeção
2. Problemática 12
Qinj de cada poço, além de demandar um tratamento matemático mais avançado.
Métodos mais sofisticados são necessários para resolver tal problema, como Progra-
mação Não-Linear Inteira Mista (MINLP) ou Programação Dinâmica. Tal consideração
sugere um trabalho futuro na área. Técnicas sofisticadas como estas são tratadas em
[7], [8], [9], [12] e [13].
Considerando o cenário simplificado aqui tratado, onde a função objetivo é sim-
plesmente maximizar o ganho econômico sem o fechamento de poços, podem ser
aplicados algoritmos que consideram variáveis de natureza contínua, como o de Pro-
gramação Quadrática Sequencial (SQP) [5], garantindo convergência global para a
solução. O detalhamento do método para resolver esse problema encontra-se na
Seção 3.4.
2.2 Obtenção de Modelos
Para a solução do problema de otimização detalhado na seção anterior, é evi-
dente a necessidade de utilização de modelos para as curvas de desempenho dos
poços, as WPC’s. Tais modelos não são conhecidos a priori, pois dados disponíveis
online são apenas as variáveis do processo, como algumas vazões, pressões e tem-
peraturas.
Os modelos das geometrias dos poços são conhecidos e bem documentados.
Isso permite a modelagem em simuladores de escoamento, tanto transientes quanto
de regime permanente. O simulador de regime permanente proprietário da Petrobras
é o Marlim.
O Marlim contempla toda a geometria dos poços, bem como as características
dos equipamentos do processo. Através de modelos fenomenológicos e empíricos é
realizada uma simulação que retorna os valores de regime permantente para algumas
variáveis, inclusive as vazões de óleo e as pressões de fluxo no fundo dos poços
(variáveis de interesse para otimização). Obtendo-se pontos para a relação Qoil ×Qinj
através de uma varredura da faixa operacional de Qinj, tem-se uma WPC. Uma curva
analítica pode ser aproximada através de métodos de ajuste de curvas (Seção 2.3).
O simulador transiente utilizado é o OLGA. Ele simula situações de escoamento
multifásico em geral, sendo de serventia para o gas-lift contínuo através de módulos
que permitem a modelagem de características de poços e dos efeitos da interação do
anular com o tubo de produção. O OLGA é utilizado quando o engenheiro de petróleo
2. Problemática 13
responsável pela otimização tem interesse em analisar a dinâmica do sistema no caso
da mudança do ponto de operação, também sendo útil para obter relações de regime
permanente. Os modelos são validados quando os resultados da simulação conferem
com os dados dos testes de produção e a dinâmica assemelha-se à observada em
dados históricos ou em visitas à plataforma.
Uma outra forma de obtenção de modelos de WPC’s seria através da aplicação
de sucessivos degraus em Qinj e medição da vazão da produção de óleo Qoil. No
entanto, tal medição ainda não é disponível, devido ao fato dos sensores de vazão para
escoamento multifásico ainda serem muito caros e pouco precisos. Portanto, deve-se
utilizar variáveis conhecidas do processo para a inferência de Qoil. Uma forma seria
ler a pressão de fluxo no fundo do poço (Pwf ) a cada degrau de injeção Qinj, traçar
uma relação Pwf ×Qinj e estimar a vazão de óleo através da curva IPR, detalhada na
Seção 1.2. Seus parâmetros Psat, Qsat e Qmax são dados atualizados a cada teste de
produção, que acontece periodicamente.
2.3 Ajuste de Curvas de Desempenho
Quando se tem disponibilidade dos valores de vazão de óleo produzido (através
de simuladores ou testes de produção), podem-se estabelecer relações a partir desses
dados, a fim de obter modelos de regime permanente a parâmetros concentrados para
cada poço.
É possível estabelecer diversos modelos de WPCs, que podem ser bastante
representativos no intervalo de interesse. Tratamos de quatro deles:
1. Linear por partes: são conhecidos os pontos das taxas de injeção de gás para as
respectivas taxas de produção. Tem-se um conjunto de pontos S = {(Q1inj, Q
1oil),
(Q2inj, Q
2oil), . . . , (Qm
inj, Qmoil)}, onde m é o número de pontos. A função Qoil =
fpwl(Qinj) é dada pela interpolação linear dos pontos de S.
2. Polinomial de terceira ordem: a relação é dada por um polinômio de terceira
ordem; Qoil = fp(Qinj) = a0 + a1Qinj + a2Q2inj + a3Q
3inj.
3. Polinomial composto com logarítmico: é um modelo constituído de um polinômio
de segunda ordem, com um termo logarítmico; Qoil = fl(Qinj) = ao + a1Qinj +
a2Q2inj + a3 ln (1 + Qinj).
2. Problemática 14
4. Exponencial: uma função exponencial, conforme [6]; Qoil = fe(Qinj) = a0(2 −
e−a1Qinj) − a2ea3Qinj . Essa curva possui uma melhor correlação que as demais,
também obtendo uma melhor extrapolação.
O objetivo é obter os modelos a parâmetros concentrados (modelos 2-4) a partir
do conjunto de pontos S, minimizando-se o erro quadrático da curva ajustada em
relação aos m pontos, ou seja:
Minimizem
∑
j=1
[
f(Qjinj) − Qj
oil
]2(2.5)
Para o problema de otimização global de gas-lift é interessante que as curvas
de desempenho sejam côncavas, o que garante que a solução ótima será global. Para
tal, devem ser aplicadas restrições de concavidade em todo o intervalo do ajuste de
curvas, ou seja:
d2Qoil
d(Qinj)2< 0,∀Qinj ∈ [Q1
inj, Qminj] (2.6)
Para cada tipo de ajuste, a formulação da função objetivo e das restrições pos-
suem características diferentes. Os casos particulares serão tratados a seguir. Al-
guns dos casos podem ser tratados como problemas de programação quadrática.
As restrições de concavidade assumem diferentes características, de acordo com
Q′′
oil = f ′′(Qinj).
No entanto, nesse projeto também é considerado um caso de ajuste de cur-
vas para a função Pwf (Qinj), que será bastante útil na inferência das vazões de óleo
através da curva IPR. Nesse caso, o problema de ajuste é bastante semelhante,
minimizando-se o erro quadrático dos pontos à curva:
Minimizem
∑
j=1
[
Pwf (Qjinj) − P j
wf
]2(2.7)
E para garantir a convexidade da curva (seu formato característico é o da Figura
1.3), também devem ser aplicadas as restrições correspondentes:

2. Problemática 15
d2Pwf
d(Qinj)2> 0,∀Qinj ∈ [Q1
inj, Qminj] (2.8)
O problema de ajuste de curvas Pwf (Qinj) é tratado de forma bastante especí-
fica, sendo sua solução apresentada no capítulo 3.
2.3.1 Ajuste Polinomial
Aqui será considerada uma abordagem que transforma o problema 2.7 com as
restrições da inequação 2.6 em um problema de programação quadrática para o ajuste
dos pontos de S à curva polinomial Qoil = fp(Qinj).
Se aplicarmos cada ponto de S à função polinomial fp, temos um sistema de
equações lineares, que escrevemos matricialmente como:
1 (Q1inj) (Q1
inj)2 (Q1
inj)3
1 (Q2inj) (Q2
inj)2 (Q2
inj)3
......
......
1 (Qminj) (Qm
inj)2 (Qm
inj)3
a0
a1
a2
a3
=
Q1o
Q2o
...
Qmo
(2.9)
(2.9) pode ser escrito da forma Ax = b, onde x = [ a0 a1 a2 a3 ]T . Como o
número de equações (linhas de A) é maior que o número de incógnitas, desejamos
minimizar o resíduo ‖ Ax − b ‖, ou seja:
Minimize1
2‖ Ax − b ‖2 (2.10)
Desenvolvendo (2.10) temos:
1
2‖ Ax − b ‖2 =
1
2(Ax − b)T (Ax − b) (2.11a)
=1
2(xT AT − bT )(Ax − b) (2.11b)
=1
2(xT AT Ax − xT AT b − bT Ax + bT b) (2.11c)
=1
2xT AT Ax − bT Ax +
1
2bT b (2.11d)
(2.11e)

2. Problemática 16
O problema consiste em minimizar 12xT AT Ax − bT Ax + 1
2bT b, onde 1
2bT b é uma
constante, portanto o problema resume-se a:
Minimize1
2xT AT Ax − bT Ax (2.12)
O problema (2.12) pode ser escrito da seguinte forma:
Minimize1
2xT Qx + cT x (2.13)
(2.13) é um problema de programação quadrática [11]. Note que Q > 0 (positiva
semi-definida), pois Q = AT A; xT Qx = xT AT Ax =‖ Ax ‖2> 0,∀x. Logo, Q é positiva
semi-definida. Q é inversível, pois rank(A) = 4, ou seja, A tem posto completo, o que
implica que Q = AT A tem inversa.
Deseja-se que fp(Qinj) seja côncava em todo o intervalo [Q1inj, Q
minj]. Para isso,
a segunda derivada de fp(Qinj) deve ser menor que zero nesse intervalo.
6a3Qinj + 2a2 < 0, Qinj ∈ [Q1inj, Q
minj] (2.14)
Proposição 2.3.1. Se for côncava em Q1inj e em Qm
inj, então fp(Qinj) será côncava
para qualquer Qinj ∈ [Q1inj, Q
minj].
Demonstração. Se 6a3Q1inj + 2a2 < 0, 6a3Q
minj + 2a2 < 0 e f ′′
p (Qinj) é sempre decres-
cente ou sempre crescente nesse intervalo (por ser de primeira ordem), não exis-
tem raízes (mudança de sinal) de f ′′
p (Qinj) em [Q1inj, Q
minj]. Portanto, 6a3Qinj + 2a2 <
0,∀Qinj ∈ [Q1inj, Q
minj].
Por consequência, podemos impor a restrição de concavidade apenas no pri-
meiro e no último ponto no ajuste da curva polinomial. No entanto, do ponto de vista
numérico, não podemos aplicar a restrição “<”, somente “6”. Mas podemos fazer a
aproximação “< 0” ∼= “ 6 −ε”, para ε suficientemente pequeno.

2. Problemática 17
Portanto, :
Minimize1
2xT Qx + cT x (2.15a)
Sujeito a: 6a3Q1inj + 2a2 6 −ε (2.15b)
6a3Qminj + 2a2 6 −ε (2.15c)
Onde: Q = AT A, cT = bT A e x = [ x0 x1 x2 x3 ]T = [ a0 a1 a2 a3 ]T .
Esta formulação desenvolvida aplicar-se-ia no caso da utilização de algoritmos de
programação quadrática. A formulação geral para o problema seria:
Minimizem
∑
j=1
[
fp(Qjinj) − Qj
oil
]2(2.16a)
Sujeito a: 6x3Q1inj + 2x2 6 0 (2.16b)
6x3Qminj + 2x2 6 0 (2.16c)
2.3.2 Ajuste de Função Polinomial e Logarítmica
Aplicando cada ponto de S à função logarítmica fl, temos um sistema de equa-
ções lineares, que escrevemos matricialmente como:
1 (Q1inj) (Q1
inj)2 ln (Q1
inj)
1 (Q2inj) (Q2
inj)2 ln (Q2
inj)...
......
...
1 (Qminj) (Qm
inj)2 ln (Qm
inj)
a0
a1
a2
a3
=
Q1o
Q2o
...
Qmo
(2.17)
Com um raciocínio análogo ao apresentado na seção anterior, chegamos ao
mesmo problema de programação quadrática, conforme as equações (2.12) e (2.13).
Como restrição, desejamos que fl(Qinj) seja côncava em todo o intervalo [Q1inj, Q
minj].
Portanto, a segunda derivada de fl(Qinj) deve ser menor ou igual a zero nesse inter-
valo.
2a2 − a31
(1 + Qinj)26 0, Qinj ∈ [Q1
inj, Qminj] (2.18)
2. Problemática 18
Proposição 2.3.2. Se fl(Qinj) for côncava em Q1inj e em Qm
inj, será côncava para
qualquer Qinj ∈ [Q1inj, Q
minj].
Demonstração. Se a3 for positivo, à medida que Qinj decresce, o lado esquerdo de
(2.18) também decresce, bastando que seja côncava em Qminj. Mas se a3 for negativo,
o lado esquerdo decresce à medida que Qinj cresce, por isso é necessário que seja
côncava em Q1inj. A princípio, não é conhecido o sinal de a3, portanto, é necessário
que fl(Qinj) seja côncava em Q1inj e em Qm
inj.
A consequência disso é que podemos aplicar a restrição de concavidade ape-
nas no primeiro e no último ponto para o ajuste da curva polinomial e logarítmica.
Da mesma maneira que o ajuste polinomial, o ajuste polinomial e logarítmico
pode ser feito aplicando um algoritmo de programação quadrática, utilizando a função
objetivo e as restrições deduzidas, assumindo a forma:
Minimize1
2xT Qx + cT x (2.19a)
Sujeito a: 2a2 − a31
(1 + Q1inj)
26 0 (2.19b)
2a2 − a31
(1 + Qminj)
26 0 (2.19c)
Onde: Q = AT A, cT = bT A e x = [ x0 x1 x2 x3 ]T = [ a0 a1 a2 a3 ]T .
Agora, A é a matriz do sistema (2.17). Assim como no caso da curva polinomial,
também pode-se estabelecer uma formulação mais geral para o problema, tornando-
se:
Minimizem
∑
j=1
[
fl(Qjinj) − Qj
oil
]2(2.20a)
Sujeito a: 2a2 − a31
(1 + Q1inj)
26 0 (2.20b)
2a2 − a31
(1 + Qminj)
26 0 (2.20c)

2. Problemática 19
2.3.3 Ajuste Exponencial
Neste caso, os parâmetros de ajuste (coeficientes da função Qoil = fe(Qinj))
não são lineares. Portanto, não se pode escrever o problema na forma matricial a
fim de colocar a formulação na forma dos casos anteriores, como um problema de
programação quadrática. A formulação geral é considerada:
Minimizem
∑
j=1
[fe(Qjinj) − Qj
oil]2 =
m∑
j=1
[a0(2 − e−a1Qjinj) − a2ea3Q
jinj − Qj
oil]2 (2.21)
Conforme já especificado, a função fe(Qinj) deve ser côncava em todo o inter-
valo [Q1inj, Q
minj]. Para tal, a sua derivada segunda deve ser menor ou igual a zero em
todo o intervalo, conforme (2.22):
−a0a21e
−a1Qinj − a2a23e
a3Qinj 6 0 (2.22)
Para tornar a compreensão das restrições mais simples, é possível dividi-las em
subproblemas, de acordo com os sinais de a0 e a2. Tais subproblemas são computa-
cionalmente mais simples de serem resolvidos.
Se a0 > 0 e a2 > 0, a desigualdade (2.22) é sempre verdadeira. Mas se a0 < 0
e a2 < 0, a desigualdade torna-se falsa, excluindo essa possibilidade.
Multiplicando-se ambos os lados de (2.22) por ea1Qinj , temos:
−a0a21 − a2a
23e
(a1+a3)Qinj 6 0 (2.23)
Se a0 > 0 e a2 < 0, há duas possibilidades quanto a a1 e a3. Se a1+a3 > 0, o lado
esquerdo de (2.23) é sempre crescente, bastando que haja a restrição de concavidade
em Qminj. Mas se a1 + a3 < 0, o lado esquerdo é sempre decrescente, bastando que se
aplique a restrição em Q1inj.
Por outro lado, se a0 < 0 e a2 > 0, as possibilidades quanto a a1 e a3 são as
seguintes: se a1 + a3 > 0, o lado esquerdo de (2.23) é sempre decrescente, sendo
suficiente o teste de concavidade em Q1inj; mas se a1 + a3 < 0, o lado esquerdo é
sempre crescente, bastando que se aplique a restrição em Qminj.
Em resumo, aplica-se a restrição (2.22) em Q1inj e em Qm
inj. As restrições a0 > 0
e a2 > 0 podem ser úteis para limitar o espaço de soluções, aumentando a eficiência
2. Problemática 20
do algoritmo. A formulação para o ajuste da curva exponencial fica:
Minimizem
∑
j=1
[
fe(Qjinj) − Qj
oil
]2(2.24a)
Sujeito a: − a0a21e
−a1Qinj − a2a23e
a3Qinj 6 0 (2.24b)
a0 > 0 (2.24c)
a2 > 0 (2.24d)
2.3.4 Ajuste de Curva Pwf
Um modelo para a curva Pwf (Qinj) é proposto por Plucênio no desenvolvimento
do projeto GeDIg. Seus termos foram concebidos pensando-se no formato da curva.
Esta é decrescente com o aumento de Qinj até um determinado valor. A partir do
ponto de Pwf mínima, esta começa a aumentar devido aos efeitos de fricção no tubo
de produção.
Portanto, o modelo possui um termo exponencial para o caimento de Pwf e
um termo linear para representar o princípio de seu crescimento (cobrindo a faixa
operacional do poço), ficando:
Pwf (Qinj) = θ1e−θ2(Qinj)m
+ θ3 + θ4Qinj (2.25)
O expoente m de Qinj no termo exponencial foi introduzido para permitir uma
transformação no alongamento horizontal da curva, sendo possível atingir melhores
coeficientes de ajuste (menores erros quadráticos). O método para a obtenção desse
expoente é detalhado na Seção 3.6.
A curva acima será convexa quando os parâmetros θ1, θ2 e θ4 forem maiores
que zero, fazendo com que esta mantenha o formato proposto acima (que é convexo).
2.4 Resumo
Este capítulo especificou os problemas a serem resolvidos nesse projeto através
do desenvolvimento de soluções computacionais. Deve-se utilizar ferramentas para a
2. Problemática 21
implementação de algoritmos de otimização global na alocação de gas-lift em platafor-
mas, através da utilização de modelos obtidos em procedimentos de otimização e
ferramentas de ajuste de curvas.
O capítulo subsequente descreve em detalhes as ferramentas utilizadas e as
implementações dos algoritmos e procedimentos.
22
Capı́tulo 3Sistema de Otimização
Este capítulo descreve em detalhes o sistema para otimização implementado,
traçando um paralelo com o estado da arte em otimização.
3.1 Otimização offline
Atualmente já é realizado um trabalho de otimização da produção em platafor-
mas. No entanto, esse procedimento é feito offline, conforme citado na Seção 1.1.
Os poços da plataforma são modelados no simulador de regime permanente
Marlim, que utiliza equacionamentos de modelos físicos para inferir os valores de
regime permanente das variáveis, como já é introduzido na Seção 2.2. A simulação
traça o perfil de produção de óleo para diversos pontos ao longo da faixa operacional
dos poços
Obtidas as vazões de óleo para diversos pontos de cada poço, pode-se traçar
as suas WPC’s. Usualmente são utilizados polinômios de segundo grau ajustados aos
pontos. Diferentes formulações para o problema de ajuste de curvas foram tratadas
na seção 2.3.
Tomando por base a capacidade do compressor de fornecer uma determinada
vazão de gás Qdispinj (vazão disponível), emprega-se um algoritmo simples para resolver
o problema (2.1a), que corresponde à alocação de gas-lift que maximiza a produção
considerando apenas a restrição de compressão de gás. Tal algoritmo chama-se
equal-slope e pode fornecer uma solução analítica para o problema. O método é
detalhado a seguir.
3. Sistema de Otimização 23
3.1.1 Equal-Slope
O algoritmo de equal-slope é bastante simples, mas muito utilizado na indústria.
Ele é utilizado para resolver problemas de alocação de gas-lift para a maximização da
produção de óleo, sob a restrição de gás disponível, ou seja:
P: Maximizen
∑
i=1
Qioil(Q
iinj) (3.1a)
Sujeito a:n
∑
i=1
Qiinj = Qdisp (3.1b)
A solução para o problema é {Q1inj, Q
2inj, · · · , Qn
inj}, tal que:
dQ1oil(Q
1inj)
dQ1inj
=dQ2
oil(Q2inj)
dQ2inj
= . . . =dQn
oil(Qninj)
dQninj
= λ (3.2)
n∑
i=1
Qiinj = Qdisp (3.3)
Ou seja, a solução é obtida quando todas as WPC’s possuem derivadas iguais
a λ, que é o multiplicador de Lagrange para a restrição de disponibilidade de gás, e é
satisfeita a relação (3.3).
As equações (3.2) e (3.3) representam um sistema de (n+1) equações e (n+1)
variáveis. Dependendo da natureza das funções Qoil(Qinj), o sistema é mais difícil
de resolver. No entanto, se forem curvas quadráticas, suas derivadas são lineares,
fazendo com que o sistema seja linear e de simples solução.
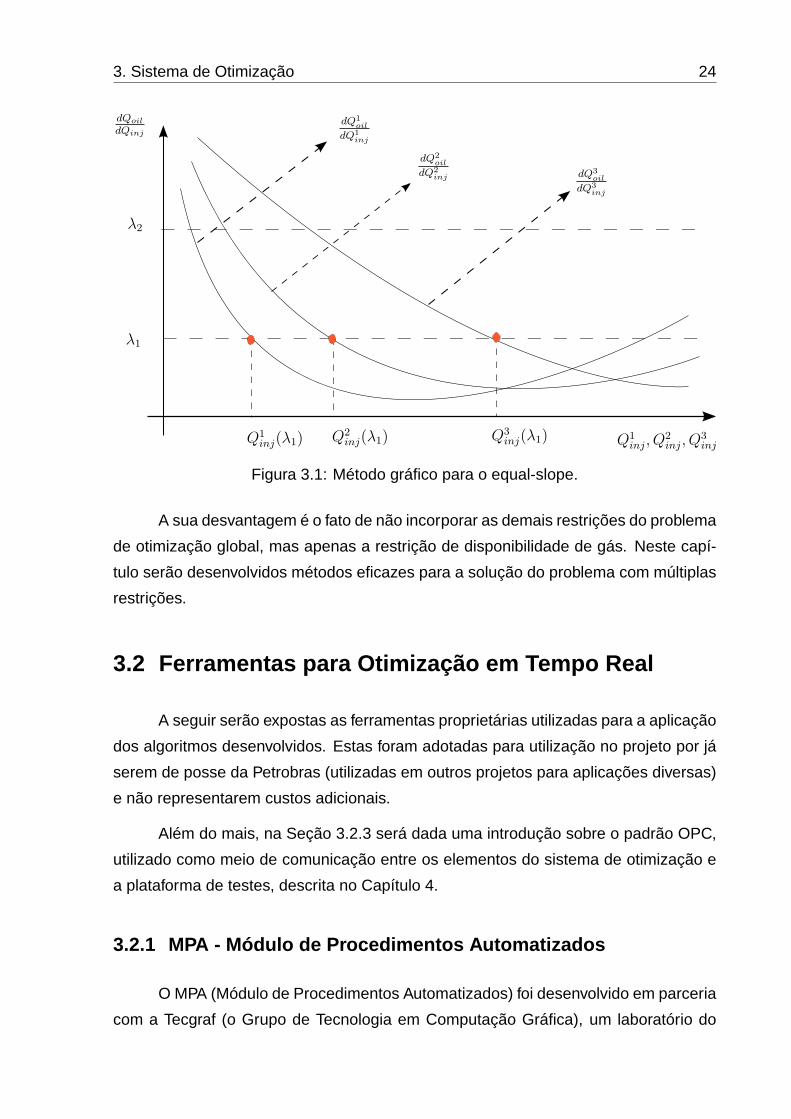
A Figura 3.1 é o método gráfico de resolução do equal-slope, onde podem ser
visualizadas as representações das equações que definem o problema.
Quando as WPC’s são curvas analíticas, como polinômios de segunda ordem,
o problema tem solução analítica e direta. Sua ampla utilização deve-se à sua simpli-
cidade e simples compreensão, além de ser capaz de resolver boa parte do problema
de otimização. O método é aplicado quando são feitos testes de produção e são ajus-
tados os modelos no Marlim, sendo então estabelecidas as taxas de injeção em cada
poço. E então são traçadas as metas de produção para o próximo período.
3. Sistema de Otimização 24
dQoil
dQinj
λ1
λ2
Q1inj(λ1) Q2
inj(λ1) Q3inj(λ1)
dQ1
oil
dQ1
inj
dQ2
oil
dQ2
inj dQ3
oil
dQ3
inj
Q1inj, Q
2inj, Q
3inj
Figura 3.1: Método gráfico para o equal-slope.
A sua desvantagem é o fato de não incorporar as demais restrições do problema
de otimização global, mas apenas a restrição de disponibilidade de gás. Neste capí-
tulo serão desenvolvidos métodos eficazes para a solução do problema com múltiplas
restrições.
3.2 Ferramentas para Otimização em Tempo Real
A seguir serão expostas as ferramentas proprietárias utilizadas para a aplicação
dos algoritmos desenvolvidos. Estas foram adotadas para utilização no projeto por já
serem de posse da Petrobras (utilizadas em outros projetos para aplicações diversas)
e não representarem custos adicionais.
Além do mais, na Seção 3.2.3 será dada uma introdução sobre o padrão OPC,
utilizado como meio de comunicação entre os elementos do sistema de otimização e
a plataforma de testes, descrita no Capítulo 4.
3.2.1 MPA - Módulo de Procedimentos Automatizados
O MPA (Módulo de Procedimentos Automatizados) foi desenvolvido em parceria
com a Tecgraf (o Grupo de Tecnologia em Computação Gráfica), um laboratório do
3. Sistema de Otimização 25
Departamento de Informática da PUC-Rio.
No princípio, o projeto do MPA visava uma ferramenta para a automação de
partidas de poços, sendo chamado de Módulo de Partidas Automáticas. Então, foi
desenvolvida uma ferramenta gráfica para a automatização de tais procedimentos com
base em fluxogramas, sendo a lógica do programa descrita com blocos funcionais e
tomadas de decisão. Os blocos de função são programados em Lua, uma linguagem
de script desenvolvida também na PUC-Rio.
O MPA possui uma arquitetura distribuída, no modelo cliente-servidor. O servi-
dor de execução efetivamente executa os fluxos e comunica-se com o processo via
OPC. A aplicação cliente é uma interface de engenharia, utilizada para a configuração
da planta, projeto dos fluxos e acompanhamento da execução, quando conectado ao
servidor de execução. Tal arquitetura é implementada em CORBA1.
Dada a sua flexibilidade da aplicação e a fácil integração com diferentes sis-
temas, por possuir interface OPC, o MPA passou a ser cogitado para utilização em
diferentes projetos. No caso, foi escolhido para a automação dos procedimentos uti-
lizados na otimização da produção.
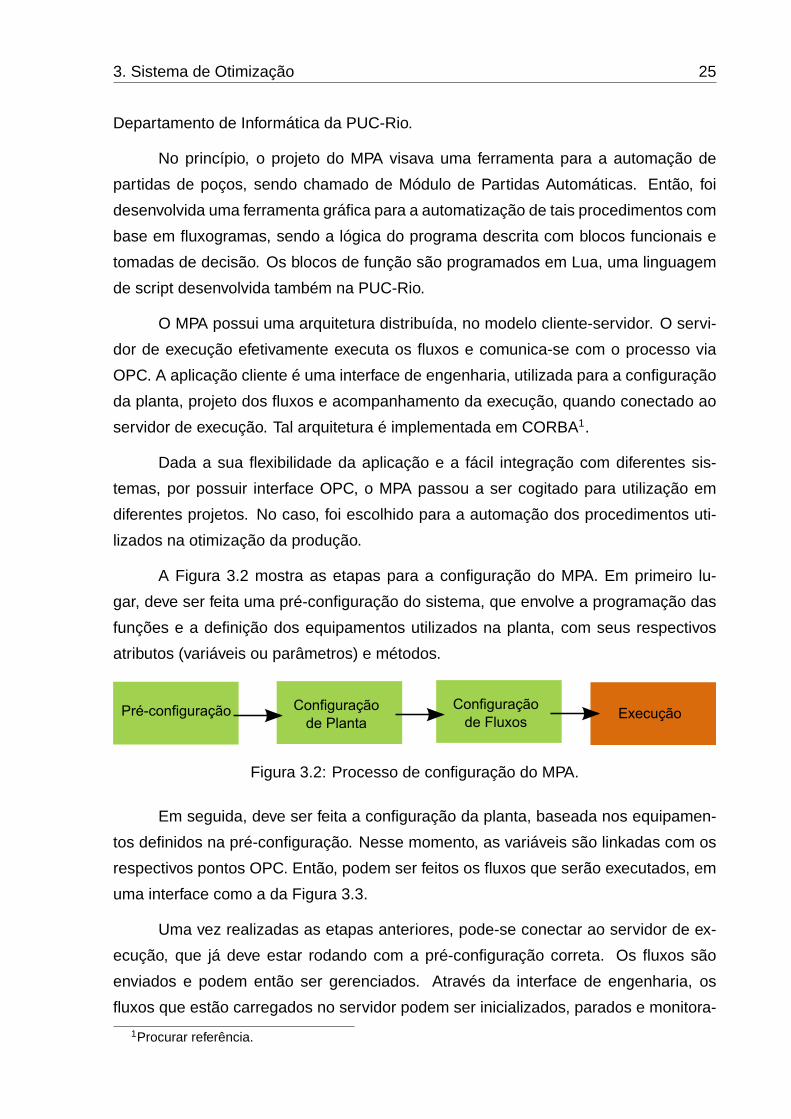
A Figura 3.2 mostra as etapas para a configuração do MPA. Em primeiro lu-
gar, deve ser feita uma pré-configuração do sistema, que envolve a programação das
funções e a definição dos equipamentos utilizados na planta, com seus respectivos
atributos (variáveis ou parâmetros) e métodos.
Figura 3.2: Processo de configuração do MPA.
Em seguida, deve ser feita a configuração da planta, baseada nos equipamen-
tos definidos na pré-configuração. Nesse momento, as variáveis são linkadas com os
respectivos pontos OPC. Então, podem ser feitos os fluxos que serão executados, em
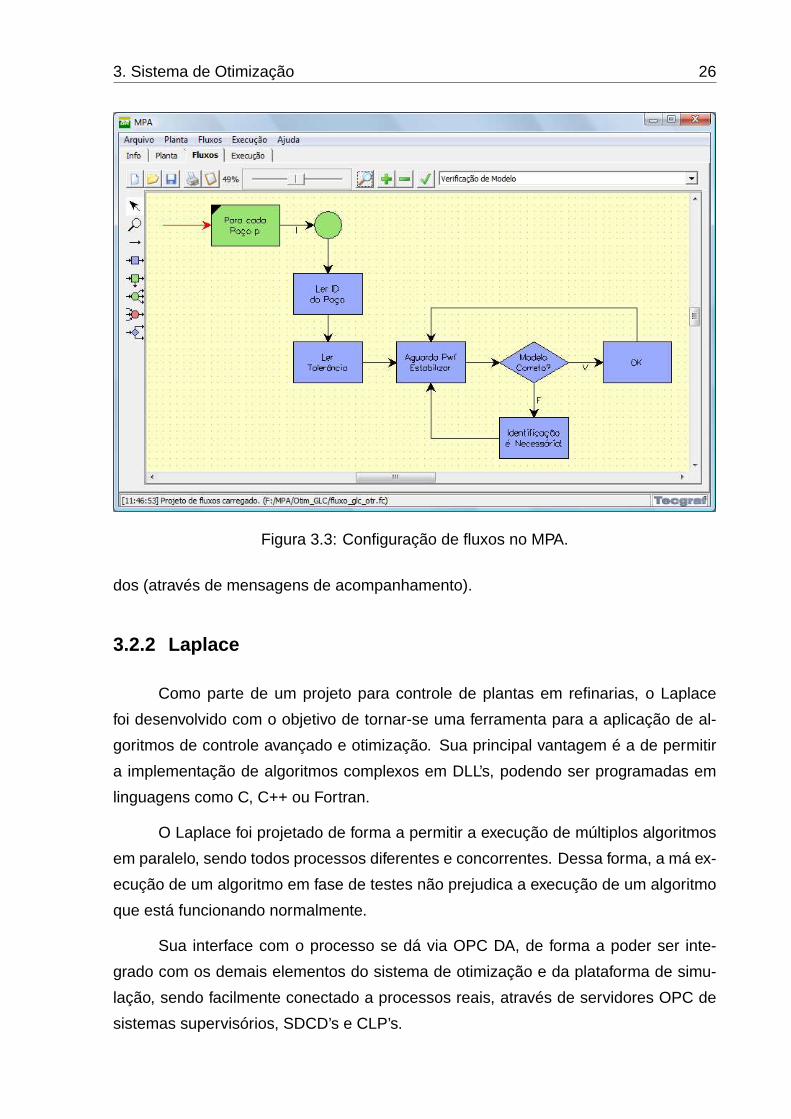
uma interface como a da Figura 3.3.
Uma vez realizadas as etapas anteriores, pode-se conectar ao servidor de ex-
ecução, que já deve estar rodando com a pré-configuração correta. Os fluxos são
enviados e podem então ser gerenciados. Através da interface de engenharia, os
fluxos que estão carregados no servidor podem ser inicializados, parados e monitora-
1Procurar referência.
3. Sistema de Otimização 26
Figura 3.3: Configuração de fluxos no MPA.
dos (através de mensagens de acompanhamento).
3.2.2 Laplace
Como parte de um projeto para controle de plantas em refinarias, o Laplace
foi desenvolvido com o objetivo de tornar-se uma ferramenta para a aplicação de al-
goritmos de controle avançado e otimização. Sua principal vantagem é a de permitir
a implementação de algoritmos complexos em DLL’s, podendo ser programadas em
linguagens como C, C++ ou Fortran.
O Laplace foi projetado de forma a permitir a execução de múltiplos algoritmos
em paralelo, sendo todos processos diferentes e concorrentes. Dessa forma, a má ex-
ecução de um algoritmo em fase de testes não prejudica a execução de um algoritmo
que está funcionando normalmente.
Sua interface com o processo se dá via OPC DA, de forma a poder ser inte-
grado com os demais elementos do sistema de otimização e da plataforma de simu-
lação, sendo facilmente conectado a processos reais, através de servidores OPC de
sistemas supervisórios, SDCD’s e CLP’s.

3. Sistema de Otimização 27
As DLL’s de cálculo devem ser implementadas contendo três funções principais:
uma de inicialização, uma de finalização e uma com o algoritmo que será executado a
cada amostragem. Também deve ser importada a estrutura de dados correspondente
ao projeto do Laplace, que contém todas as informações pertinentes.
Sua arquitetura básica pode ser visualizada na Figura 3.4. Um servidor gerencia
as instâncias dos algoritmos, podendo a execução destes ser acompanhada através
da interface gráfica do Laplace.
Figura 3.4: Arquitetura básica do Laplace.
A sua interface gráfica é visualizada na Figura 3.5.
Figura 3.5: Interface gráfica do Laplace.
3. Sistema de Otimização 28
3.2.3 OPC
OPC (OLE para controle de processos) é um conjunto de especificações padrão
que define a comunicação entre equipamentos de diferentes fornecedores, de dados
de tempo-real de uma planta. O OPC funciona como uma ponte entre os programas de
aplicação e os hardwares e softwares para controle de processos. Os servidores OPC
coletam dados de dispositivos de comunicação de disponibilizam esses dados através
de uma interface padrão, enquanto os clientes OPC conectam-se a esses servidores
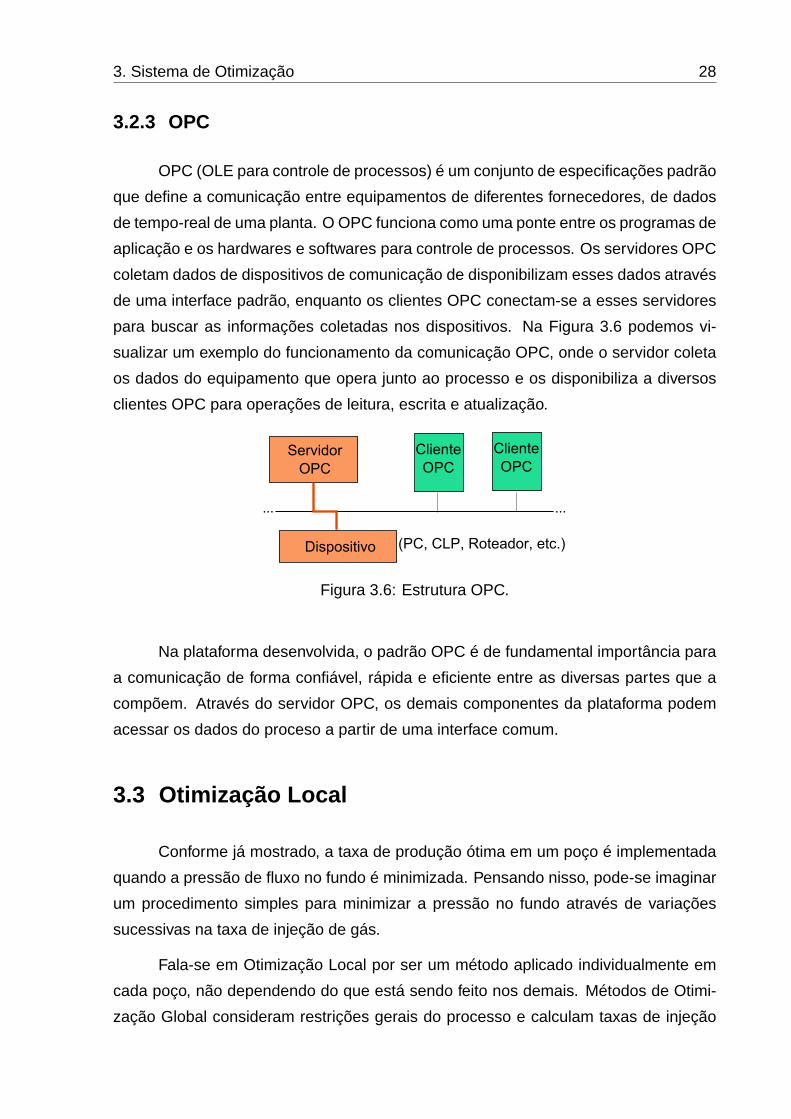
para buscar as informações coletadas nos dispositivos. Na Figura 3.6 podemos vi-
sualizar um exemplo do funcionamento da comunicação OPC, onde o servidor coleta
os dados do equipamento que opera junto ao processo e os disponibiliza a diversos
clientes OPC para operações de leitura, escrita e atualização.
Figura 3.6: Estrutura OPC.
Na plataforma desenvolvida, o padrão OPC é de fundamental importância para
a comunicação de forma confiável, rápida e eficiente entre as diversas partes que a
compõem. Através do servidor OPC, os demais componentes da plataforma podem
acessar os dados do proceso a partir de uma interface comum.
3.3 Otimização Local
Conforme já mostrado, a taxa de produção ótima em um poço é implementada
quando a pressão de fluxo no fundo é minimizada. Pensando nisso, pode-se imaginar
um procedimento simples para minimizar a pressão no fundo através de variações
sucessivas na taxa de injeção de gás.
Fala-se em Otimização Local por ser um método aplicado individualmente em
cada poço, não dependendo do que está sendo feito nos demais. Métodos de Otimi-
zação Global consideram restrições gerais do processo e calculam taxas de injeção
3. Sistema de Otimização 29
ótimas para cada poço, conforme será descrito na Seção 3.4. Portanto, a Otimização
Local só pode ser aplicada quando não existem restrições no fornecimento de gás.
Um primeiro método consiste em dar consecutivos degraus de tamanho fixo no
valor da taxa de injeção Qinj (passos de tamanho p), a cada vez lendo o valor da
pressão Pwf e inferindo a sua tendência de aumento ou diminuição. Baseando-se na
Tabela 3.1, é tomada a decisão para o sentido do passo de Qinj. Caso a variação de
Pwf observada seja muito pequena, menor que uma tolerância (∆Pwf < ǫ), o valor que
Qinj é mantido, pois considera-se que está atingida a região de Pwf mínima (∆Pwf ≈
0).
Caso ∆Qinj ∆Pwf Decisão0 Qualquer ‖∆Pwf‖ < ǫ Não se altera Qinj
1 ∆Qinj > 0 ∆Pwf < 0 Qinj = Qinj + p (incrementa-se Qinj)2 ∆Qinj > 0 ∆Pwf > 0 Qinj = Qinj − p (decrementa-se Qinj)3 ∆Qinj < 0 ∆Pwf < 0 Qinj = Qinj − p (decrementa-se Qinj)4 ∆Qinj < 0 ∆Pwf > 0 Qinj = Qinj + p (incrementa-se Qinj)
Tabela 3.1: Critérios para tomada de decisão no algoritmo de otimização local.
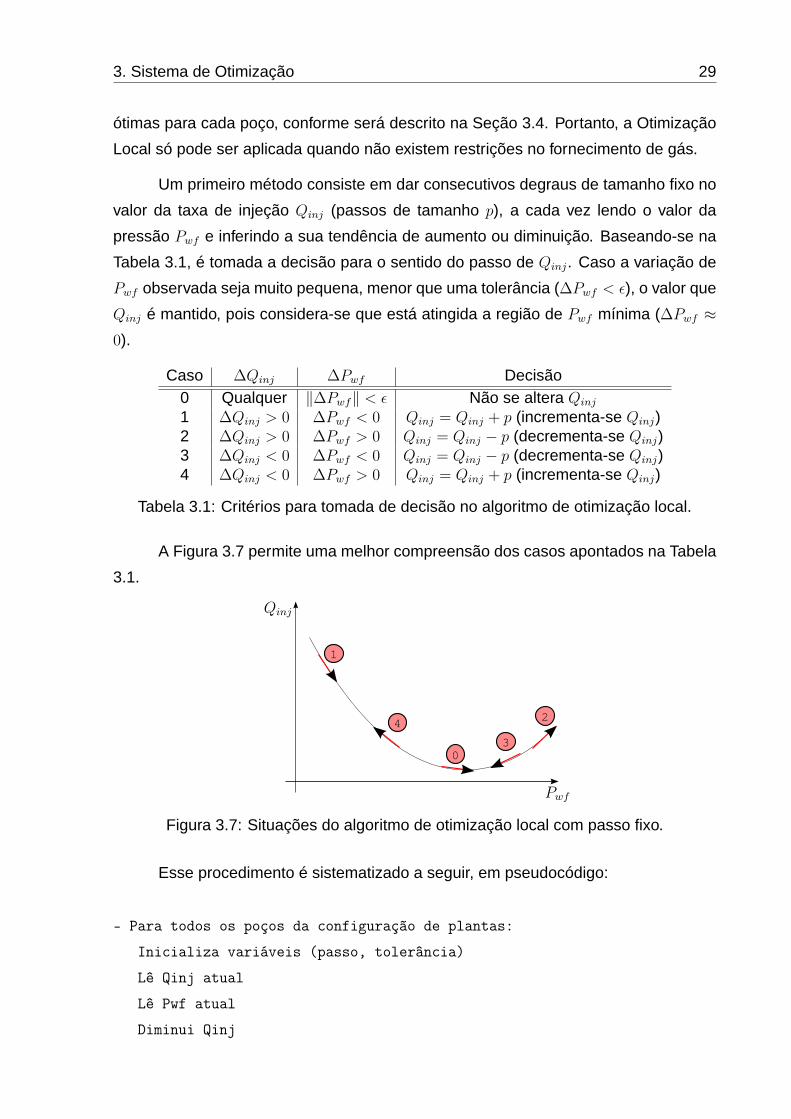
A Figura 3.7 permite uma melhor compreensão dos casos apontados na Tabela
3.1.
1
0
2
3
4
Qinj
Pwf
Figura 3.7: Situações do algoritmo de otimização local com passo fixo.
Esse procedimento é sistematizado a seguir, em pseudocódigo:
- Para todos os poços da configuração de plantas:
Inicializa variáveis (passo, tolerância)
Lê Qinj atual
Lê Pwf atual
Diminui Qinj
3. Sistema de Otimização 30
- Fazer para sempre:
Espera estabilizar
Lê Pwf
Calcula Delta_Qinj e Delta_Pwf
Verifica próxima ação (de acordo com a tabela)
Escreve novo Qinj
- Fim - Para sempre
- Fim - Para todos os poços
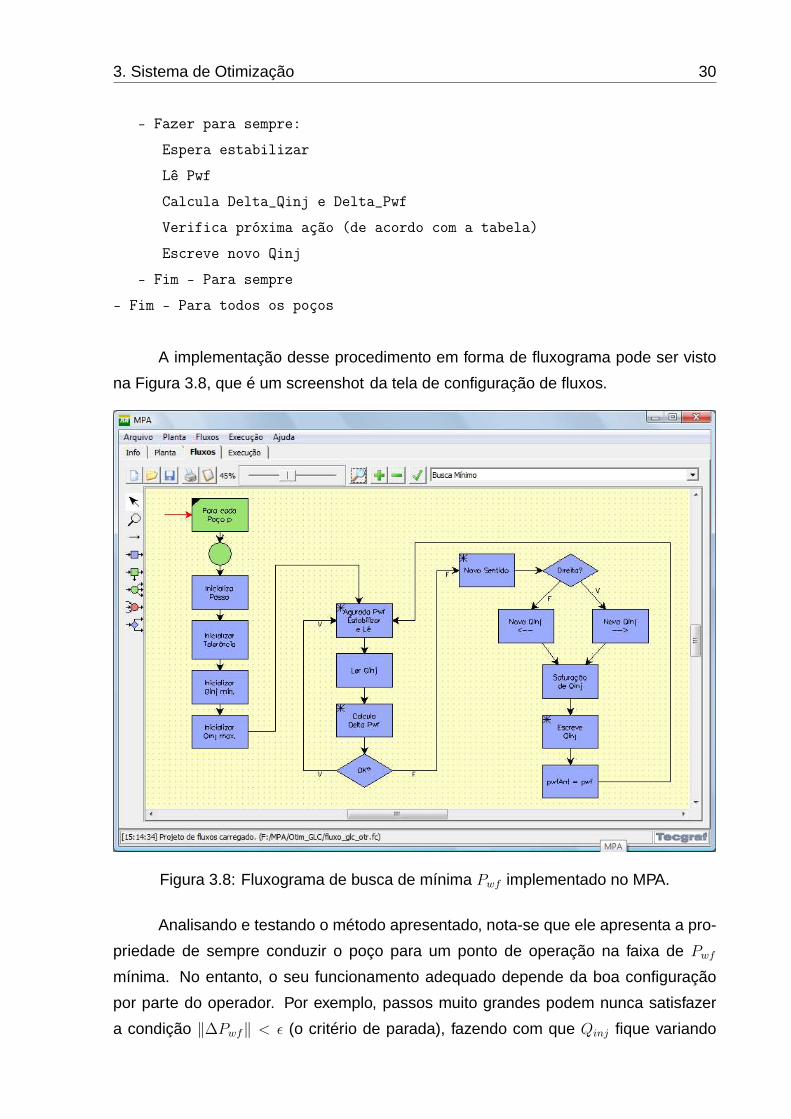
A implementação desse procedimento em forma de fluxograma pode ser visto
na Figura 3.8, que é um screenshot da tela de configuração de fluxos.
Figura 3.8: Fluxograma de busca de mínima Pwf implementado no MPA.
Analisando e testando o método apresentado, nota-se que ele apresenta a pro-
priedade de sempre conduzir o poço para um ponto de operação na faixa de Pwf
mínima. No entanto, o seu funcionamento adequado depende da boa configuração
por parte do operador. Por exemplo, passos muito grandes podem nunca satisfazer
a condição ‖∆Pwf‖ < ǫ (o critério de parada), fazendo com que Qinj fique variando
3. Sistema de Otimização 31
em torno de seu valor ótimo. Por outro lado, se o critério de parada ǫ for muito grande
(para garantir uma parada do procedimento), pode ser que este pare em um ponto
sub-ótimo.
Em vista dos possíveis problemas que podem surgir no procedimento de passo
fixo, foi feita uma investigação no sentido de encontrar um procedimento mais eficiente,
capaz de encontrar o ponto de operação ótimo de forma mais precisa e mais eficiente,
através da aplicação de degraus de tamanho variável em Qinj.
O método de passos variáveis consiste em constantemente serem calculadas
aproximações quadráticas com base nas medições de Pwf . Três pontos (Qiinj, P
iwf )
podem ser interpolados por um polinômio de segundo grau da forma Pwf = a0 +
a1Qinj + a2Q2inj. Os parâmetros a0, a1 e a2 são calculados resolvendo-se o sistema:
1 (Q1inj) (Q1
inj)2
1 (Q2inj) (Q2
inj)2
1 (Q3inj) (Q3
inj)2
a0
a1
a2
=
P 1wf
P 2wf
P 3wf
(3.4)
Sendo os pontos (Q1inj, P
1wf ), (Q2
inj, P2wf ) e (Q3
inj, P3wf ) os pontos utilizados para
a aproximação da curva.
Um bom passo em direção ao ponto de Pwf mínima pode ser calculado fazendo
dPwf/dQinj = 0, ou seja, Pwf é mínima quando a sua derivada é igual a zero. Ge-
neralizando o problema, pode-se especificar um slope (uma inclinação) para a curva,
baseando-se em objetivos econômicos, caso seja desejado um ponto de operação
ligeiramente à esquerda do ponto de Pwf mínima.
Ou seja, atingir um ponto de inclinação λ, calcula-se dPwf/dQinj = λ. Derivando
o polinômio quadrático, tem-se que dPwf/dQinj = a1 +2a2Qinj = λ. Portanto, um chute
razoável para o próximo valor de Qinj é:
Qk+1inj =
λ − a1
2a2
(3.5)
Devido ao fato da curva real não ser exatamente quadrática, o passo em direção
a Qk+1inj deve ser ponderado por um fator α. Ou seja, o passo p fica:
3. Sistema de Otimização 32
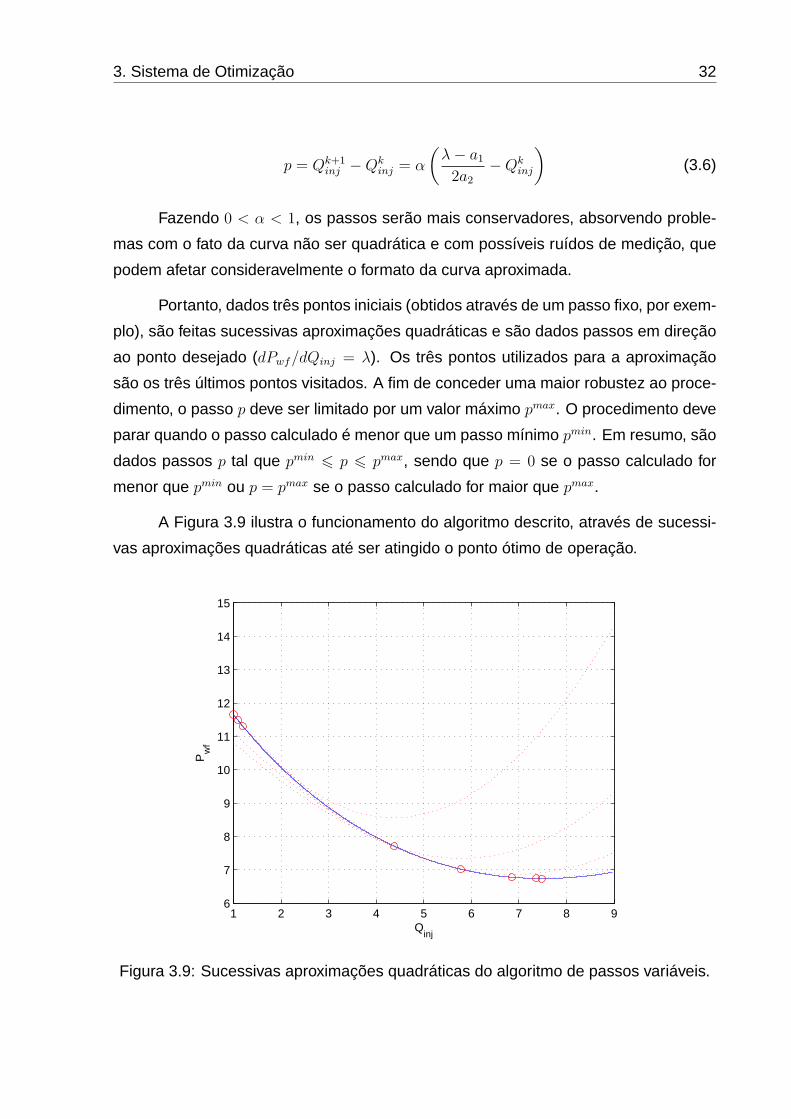
p = Qk+1inj − Qk
inj = α
(
λ − a1
2a2
− Qkinj
)
(3.6)
Fazendo 0 < α < 1, os passos serão mais conservadores, absorvendo proble-
mas com o fato da curva não ser quadrática e com possíveis ruídos de medição, que
podem afetar consideravelmente o formato da curva aproximada.
Portanto, dados três pontos iniciais (obtidos através de um passo fixo, por exem-
plo), são feitas sucessivas aproximações quadráticas e são dados passos em direção
ao ponto desejado (dPwf/dQinj = λ). Os três pontos utilizados para a aproximação
são os três últimos pontos visitados. A fim de conceder uma maior robustez ao proce-
dimento, o passo p deve ser limitado por um valor máximo pmax. O procedimento deve
parar quando o passo calculado é menor que um passo mínimo pmin. Em resumo, são
dados passos p tal que pmin 6 p 6 pmax, sendo que p = 0 se o passo calculado for
menor que pmin ou p = pmax se o passo calculado for maior que pmax.
A Figura 3.9 ilustra o funcionamento do algoritmo descrito, através de sucessi-
vas aproximações quadráticas até ser atingido o ponto ótimo de operação.
1 2 3 4 5 6 7 8 96
7
8
9
10
11
12
13
14
15
Qinj
Pw
f
Figura 3.9: Sucessivas aproximações quadráticas do algoritmo de passos variáveis.

3. Sistema de Otimização 33
3.4 Otimização Global
O problema de otimização descrito na Seção 2.1 tem aqui uma solução com-
putacional baseada em ferramentas proprietárias. O Laplace foi escolhido como ferra-
menta para a execução do algoritmo de otimização global.
O algoritmo utilizado foi o de programação quadrática sequencial (SQP - Se-
quential Quadratic Programming), por apresentar boas propriedades e resolver prob-
lemas de otimização com função objetivo e restrições não lineares. Seu princípio de
funcionamento será detalhado na subseção subsequente.
Foi utilizada uma implementação pronta do algoritmo de SQP. Ela foi desen-
volvida na University of Maryland e é chamada CFSQP, implementada em ANSI C.
Em linhas gerais, esse algoritmo recebe como parâmetros ponteiros para funções de
avaliação da função objetivo, das restrições e de seus respectivos gradientes. Ele
executa um número limitado de iterações e assim que este termina, os ponteiros para
o valor da função objetivo e para o vetor de variáveis de decisão podem ser lidos.
Para rodar no Laplace, é preciso que o algoritmo seja compilado em uma DLL
contendo três funções básicas, conforme descrito em 3.2.2. Tais funções foram imple-
mentadas da seguinte forma:
• Inicialização: As definições do projeto do Laplace são lidas e é alocada a
memória necessária para a execução do algoritmo;
• Execução: As variáveis são lidas, o algoritmo executa e as saídas são escritas
nas variáveis correspondentes;
• Finalização: A memória alocada na inicialização é agora liberada.
Assim que a aplicação é inicializada no Laplace, o método de Inicialização é
executado. Em seguida, o método de Execução roda a cada amostragem (o período
é definido no projeto). A Finalização roda quando a aplicação é parada.
Portanto, a otimização global roda periodicamente, constantemente realizando
a alocação de gás de injeção, de acordo com a disponibilidade de gás calculada pela
malha de controle de pressão no manifold. Em geral, essa malha de controle é ra-
zoavelmente rápida, devido ao volume equivalente do manifold não ser muito grande.
O período de amostragem costuma ser em torno de 1 segundo, fazendo com que a
3. Sistema de Otimização 34
amostragem da aplicação de otimização global do Laplace também deva rodar com o
período de 1 segundo.
A DLL foi implementada em C++, devido a um padrão de implementação uti-
lizado no desenvolvimento das demais aplicações do Laplace. O código do CFSQP
compilou normalmente com o restante do código.
A aplicação implementada considera os seguintes aspectos:
• Apenas a distribuição de gás de um manifold é otimizada, havendo apenas uma
disponibilidade de gás para o tratamento do algoritmo. Os dados do manifold
são representados em uma estrutura (struct) geral ;
• Exite um conjunto de poços para os quais deve ser alocado o gás disponível.
Todos os seus dados estão representados em uma struct poco , que contém
todas as informações sobre a sua WPC, sua curva IPR, seus limites operacionais
e se ele está habilitado para otimização ou não;
• O gás do manifold pode eventualmente possuir ligação com uma linha de expor-
tação. Esta está representada na struct exportacao , que contém seus limites
operacionais e o pay-off do gás exportado.
Cada estrutura das supracitadas está associada a um objeto do Laplace. Na
criação do projeto, os objetos são criados conforme a configuração do campo. Durante
a execução do algoritmo, este possui acesso às informações do projeto, inclusive a
quantidade de cada tipo de objeto, a fim de poder dar a eles o tratamento adequado.
As funções cujos ponteiros são fornecidos como parâmetros para o CFSQP
foram implementadas exatamente conforme a definição do problema na Seção 2.1,
com seus respectivos gradientes. Ou seja, dado um problema de otimização:
P: Maximize f(x) (3.7)
s.a.: g(x) 6 0 (3.8)
São implementadas as funções f(x), ∇f(x), g(x) e ∇g(x).
Ademais, o algoritmo implementado também leva em consideração o fato dos
poços estarem ou não habilitados para otimização, o que pode permitir uma operação
forçada por parte do operador. Quando um poço i não está habilitado, a sua taxa de

3. Sistema de Otimização 35
injeção Qiinj pode ser estabelecida pelo usuário ou por algum procedimento do MPA,
por exemplo. O restante do gás disponível (Qdisp − Qiinj) é distribuído para os demais
poços.
Essa constante redistribuição do gás disponível garante uma flexibilidade na
aplicação do algoritmo. Motivos diversos podem levar os operadores da plataforma a
forçar a operação de um conjunto de poços, fazendo com que o algoritmo otimize o
restante deles. No caso do MPA estar aplicando algum algoritmo local em algum poço
(otimização local ou identificação de modelos, ver Seção 3.5), a aplicação no Laplace
garante a redistribuição ótima do gás.
3.4.1 Programação Quadrática Sequencial
O algoritmo de SQP (Sequential Quadratic Programming) é muito eficiente para
resolver a maioria dos problemas de programação não linear com restrições não lin-
eares da forma:
Minimize f(x) (3.9a)
Sujeito a: gi(x) 6 0 i = 1, . . . , p (3.9b)
gi(x) = 0 i = p + 1, . . . , q (3.9c)
O princípio do método de SQP consiste em realizar aproximações quadráticas
da função objetivo (matriz Hessiana) e aproximações lineares das restrições (gradi-
entes) em torno dos pontos de cada iteração. A cada aproximação é resolvido um
problema simples de programação quadrática a fim de retornar um bom passo em
direção à solução ótima.
As restrições são incorporadas à função objetivo através dos multiplicadores de
Lagrange λ. Se λ∗ é o multiplicador de Lagrange correspondente a x∗, que minimiza
f(x), o Lagrangiano L(.; λ∗) possui a propriedade de que L(x∗; λ∗) = f(x) para todo
x factível. Segundo [5], é possível utilizar uma formulação para o método de SQP
que consiste em considerar a Hessiana do Lagrangiano, conforme (3.10), ao invés de
considerar somente a Hessiana da função objetivo.
Minimize1
2pT∇2L(x(k); λ(k))p + ∇f(x(k)) (3.10)
3. Sistema de Otimização 36
O procedimento funciona iterativamente. Dados x(k) e λ(k), o método produz um
passo p(k) resolvendo (3.10). Então, x(k+1) = x(k) + p(k).
Essa formulação nos traz a vantagem de que o algoritmo também irá conside-
rar a concavidade da aproximação quadrática das restrições ao retornar o passo p(k)
em direção ao próximo iterando. A partir do passo calculado, é possível resolver o
sistema de equações lineares (3.11) (referente às condições de otimalidade [5], onde
g é a matriz das restrições) e obter o vetor ω, correspondente aos multiplicadores de
Lagrange λ(k+1) da próxima iteração:
∇2L(x(k); λ(k))p(k) + ∇f(x(k)) −∇g(x(k))T ω(k) = 0 (3.11)
As características apresentadas do método de SQP representam apenas uma
introdução a essa poderosa ferramenta. Implementações desse algoritmo levam em
conta heurísticas que podem garantir convergência e otimalidade global, sob certas
condições [11]. As funções do CFSQP, utilizado nesse projeto, são consideravelmente
complexas e possuem tais características. O código é robusto e foi originalmente
implementado em Fortran, sendo traduzido para ANSI C.
3.5 Identificação de Modelos
Para que possam ser obtidos os modelos das WPC’s dos poços que são uti-
lizados na formulação do problema de otimização global, é necessário que sejam le-
vantados dados dos poços. Conforme já discutido na Seção 2.2, os dados podem ser
obtidos a partir de modelos de simulação de regime permanente ou através de vari-
ações nos pontos de operação de Qinj para o levantamento dos valores das variáveis
em tais condições.
Como as medidas diretas da vazão de óleo Qoil não são disponíveis, são levan-
tados modelos da relação Qinj × Pwf para que a curva Qinj ×Qoil seja inferida a partir
do conhecimento da curva IPR.
Portanto, foi implementado no MPA um fluxograma que consiste num procedi-
mento de aquisição de pontos (Qinj, Pwf ) para o posterior ajuste de curvas. Tal pro-
cedimento é disparado quando é constatada uma discrepância entre o valor de Pwf
inferido pelo modelo atual e o valor de regime permanente observado em um poço.
3. Sistema de Otimização 37
Um fluxograma fica constantemente verificando se existe tal discrepância.
Para a leitura do valor de Pwf , o MPA aguarda a estabilização do processo. Para
tal, um procedimento de detecção de regime permanente foi implementado. A seguir,
serão detalhados tais procedimentos.
3.5.1 Detecção de Regime Permanente
Para observar os valores de regime permanente, foi criada essa função no MPA,
implementada em forma de fluxograma. Este fluxo lê periodicamente o valor da vari-
ável e armazena em um vetor. Esse vetor funciona como uma janela deslizante, de
onde podem ser extraídas informações como a média móvel e a variância móvel.
O critério para que seja sinalizado o regime permanente de uma variável con-
siste na variância móvel atingir um valor menor que uma dada tolerância. Tal tole-
rância pode ser projetada de acordo com a dinâmica do poço, fazendo com que o
regime permanente esteja de fato estabelecido quando a variância dos valores da
janela deslizante for menor que a tolerância, considerando a possível presença de
ruído.
Para amenizar os efeitos do ruído nesta análise, um outro critério foi conside-
rado: a variância da variância da janela deslizante. Cria-se uma outra janela deslizante
para serem armazenados os valores da variância de Pwf e então é calculada a variân-
cia dessa outra janela. Para um nível de ruído constante, a variância da variância não
é afetada.
Ou seja, dado um conjunto de pontos históricos de Pwf , representado por {P iwf},
sendo sua variância δ2({P iwf}) também armazenada em um conjunto {δ2
j ({Piwf})},
o regime permanente é atingido quando δ2({P iwf}) < tolvar e δ2({(δ2
j ({Piwf})}) <
tolvar_var.
Quando o regime permanente é verificado, é retornado o valor da média móvel
de {P iwf}.
3.5.2 Verificação de Modelos
Este fluxo fica constantemente verificando a validade do modelo atual de cada
poço. Ele chama a função que aguarda o regime permanente de Pwf , e quando este
é verificado, o valor de Pwf é confrontado com o modelo Pwf (Qinj) existente. Caso o

3. Sistema de Otimização 38
módulo da discrepância seja superior a uma dada tolerância, esse poço é sinalizado
com um flag que indica que uma identificação é necessária.
3.5.3 Aquisição de Pontos (Qinj, Pwf)
Caso um determinado poço esteja sinalizado para identificação, fica a cargo do
operador autorizar ou não a sua identificação, que é um procedimento delicado que
tira o poço de seu ponto de operação normal (possivelmente próximo ao ótimo) e este
opera com perda de produção durante o período de identificação.
No entanto, o algoritmo de otimização global do Laplace continua rodando, dis-
tribuindo o gás excedente entre os demais poços, reduzindo a perda de produção. Isso
se dá devido ao fato do procedimento de identificação inicialmente desabilitar o poço
para otimização global, fazendo com que o algoritmo o desconsidere no momento de
alocar automaticamente o gás disponível.
Então, é criado um vetor para o armazenamento dos pontos (Qiinj, P
iwf ). O valor
inicial de Qinj para a identificação é obtido através de uma aproximação do ponto que
resulta em um valor de mínima Pwf , a partir do modelo antigo. Tal suposição é razoável
se for considerado que a degeneração do modelo ocorre de forma lenta. Um método
de Newton é aplicado para que seja encontrado tal ponto.
A partir desse ponto, são dados passos fixos e negativos em Qinj, ou seja:
Qk+1inj = Qinj − p, onde p é o passo definido pelo operador. Caso o número de degraus
a serem aplicados extrapole os limites operacionais do poço, p é recalculado antes
de ser dado início ao procedimento. O número de pontos a serem obtidos deve ser
definido de antemão, de acordo com o projeto para a plataforma específica, depen-
dendo da flexibilidade para a aplicação de tal teste.
Uma vez preenchido o vetor {(Qiinj, P
iwf )}, é solicitado um ajuste de curvas para
o algoritmo do Laplace (detalhado na seção subsequente).
3.6 Ajuste de Curvas
Assim como o algoritmo de otimização global, o ajuste de curvas é uma apli-
cação que roda no Laplace, implementado em forma de DLL e possui as funções
básicas de interface com o executor do Laplace: inicialização, execução e finalização.
3. Sistema de Otimização 39
Também foi utilizado o pacote CFSQP para a implementação do ajuste de cur-
vas, generalizando a solução para todos os tipos de curvas. As formulações propostas
na Seção 2.3 consideram os casos particulares de cada tipo de modelo, em alguns
casos sendo aplicáveis algoritmos de programação quadrática. No entanto, como al-
guns deles são mais complexos e não possuem todos os coeficientes lineares, estes
são resolvidos por programação quadrática sequencial. A fim de simplificar a imple-
mentação, todos foram implementados com SQP.
A função objetivo é a seguinte:
Minimizem
∑
j=1
[
f(Qinj) − yj]2
(3.12)
Onde {yj} corresponde aos valores de Qoil ou Pwf , conforme a situação. E
f(Qinj) é a função correspondente a ser ajustada, sendo esta avaliada conforme o
tipo da curva especificada para o poço.
No caso do conjunto de pontos {(Qjinj, P
jwf )} obtidos através do procedimento
do MPA, é ajustado um modelo de curva Pwf (Qinj).
O modelo escolhido para a obtenção da relação Pwf ×Qinj, a partir de um con-
junto de dados experimentais obtidos ao redor da região de Pwf mínima, é o modelo
da equação (3.13), que possui as boas propriedades já discutidas: é representativo e
apresenta boa extrapolação.
Pwf (Qinj) = θ1e−θ2(Qinj)m
+ θ3 + θ4Qinj (3.13)
Essa representação considera um termo exponencial composto com um termo
linear. A parcela exponencial representa a diminuição da pressão de fundo com o
aumento da taxa de injeção Qinj, enquanto a parcela linear implica no aumento da
pressão de fundo para valores de Qinj superiores a Qinj∗.
Os coeficientes θ1, θ2, θ3 e θ4 são obtidos através de um ajuste de curvas. No en-
tanto, o expoente m deve ser fornecido previamente, devido à dificuldade de obtê-lo no
procedimento de ajuste (possui alta influência no comportamento da curva, tornando
o gradiente da função objetivo bastante agressivo).
Uma bateria de testes empíricos determinou que os valores de m que apresen-
3. Sistema de Otimização 40
tam melhores extrapolações da curva de pressão de fundo são uma função da mass
quality do fluido. A mass quality é a razão entre a vazão mássica de gás e a vazão
mássica total do fluido, ou seja:
x =Qgasρgas
Qgasρgas + Qliqρliq
(3.14a)
x =(1 − BSW )RGOρgas
RGOρgas + ρoil + BSW (ρwat − ρoil − RGOρgas)(3.14b)
Ficou definido que m = f(x), em função da análise feita por Plucênio [15] que
mostra os valores de m que melhor extrapolam a curva em função de x.
Para o ajuste, é fornecido um conjunto de n pontos S = {(Q1inj, P
1wf ), (Q
2inj, P
2wf ) . . .
(Qninj, P
nwf )}, além da constante m, obtida a partir do conhecimento do fluido do poço.
A partir desses dados, calcula-se o vetor θ = [θ1 θ2 θ3 θ4]T que minimiza o somatório
dos erros quadráticos dos pontos em relação à curva, conforme a função objetivo:
Minimizen
∑
j=1
[Pwf (Qjinj) − P j
wf ]2 =
n∑
j=1
[θ1e−θ2(Qjinj)
m
+ θ3 + θ4Qjinj − P j
wf ]2 (3.15)
De acordo com a definição da função Pwf ×Qinj, ela só faz sentido se θ1, θ2, θ4 ≥
0, o que garante sua convexidade em todo o intervalo de aplicação. Portanto, tais
restrições são aplicadas.
Além dessas restrições, devemos utilizar o conhecimento do valor aproximado
da pressão estática do reservatório. Supõe-se que a pressão do reservatório nominal
conhecida é Pest.N ±ǫPest.N . Pode-se utilizar esse conhecimento para quando Qinj = 0
implica em vazão produzida nula, que se estabelece quando a pressão no fundo é
igual à pressão estática do reservatório. Fazendo Qinj = 0 e Pwf = Pest, tem-se
Pest = θ1 + θ3. Substituindo na relação Pest.N(1 − ǫ) ≤ Pest ≤ Pest.N(1 − ǫ), obtém-se
mais duas restrições de desigualdade para o algoritmo.
As ordens de grandeza das variáveis envolvidas podem variar bastante, depen-
dendo inclusive das unidades de vazão e pressão adotadas. Isso reflete diretamente
na qualidade dos parâmetros do algoritmo de otimização, como passos, tolerâncias,
etc. Para minimizar esse efeito, trabalha-se com os dados normalizados, fazendo com
que os dados de cada caso apresentem as mesmas ordens de grandeza, utilizando
assim o mesmo ajuste dos parâmetros do algoritmo. A normalização é feita em torno
3. Sistema de Otimização 41
do ponto médio de Qinj e de Pwf . A identificação dos parâmetros é feita em cima dos
dados normalizados Q′
inj e P ′
wf , dados pelas seguintes relações:
Q′
inj = αqQinj (3.16)
P ′
wf = αpPwf (3.17)
Para que a normalização seja feita com relação aos valores médios de Qinj e
de Pwf , estes devem ser divididos pelas suas respectivas médias, ou seja:
αq = (Qinj)−1 =
n∑n
j=1 Qjinj
(3.18)
αp = (Pwf )−1 =
n∑n
j=1 P jwf
(3.19)
Dessa forma, é feito o ajuste dos dados normalizados, obtendo os coeficientes
θ′1, θ′2, θ′3 e θ′4. Para obter θ = [θ1 θ2 θ3 θ4]T , é feito o seguinte desenvolvimento:
P ′
wf = θ′1e−θ′
2(Q′
inj)m
+ θ′3 + θ′4Qinj (3.20a)
αpPwf = θ′1e−θ′
2(αqQinj)
m
+ θ′3 + θ′4αqQinj (3.20b)
Pwf =θ′1
αpe−θ′
2αm
q (Qinj)m
+θ′3
αp+ θ′4
αq
αpQinj (3.20c)
Por comparação:
θ1 = θ′1/αp (3.21a)
θ2 = θ′2αmq (3.21b)
θ3 = θ′3/αp (3.21c)
θ4 = θ′4αq/αp (3.21d)
Esse desenvolvimento representa exatamente o algoritmo implementado em
C++ em forma de DLL para a aplicação do Laplace. Essa aplicação funciona como
um serviço de ajuste de curvas. Ou seja, o Laplace executa a função principal da
aplicação periodicamente, a cada vez verificando a solicitação de algum ajuste de
curvas.
Caso a aplicação leia alguma solicitação na entrada, esta verifica o tipo da curva
para o poço, executa o ajuste da curva correspondente para os pontos fornecidos e
escreve os coeficientes da curva nas tags dos respectivos poços. Caso os pontos
tenham sido fornecidos pelo MPA, a curva a ser ajustada será uma do tipo Qinj ×Pwf .
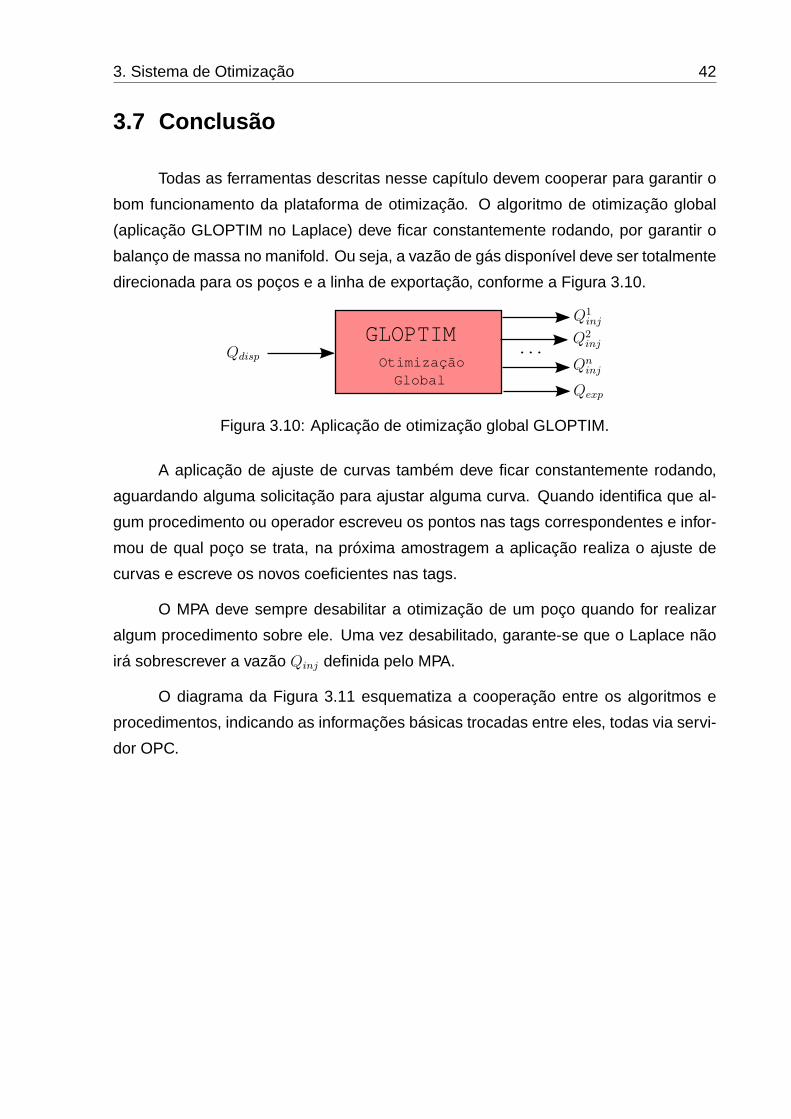
3. Sistema de Otimização 42
3.7 Conclusão
Todas as ferramentas descritas nesse capítulo devem cooperar para garantir o
bom funcionamento da plataforma de otimização. O algoritmo de otimização global
(aplicação GLOPTIM no Laplace) deve ficar constantemente rodando, por garantir o
balanço de massa no manifold. Ou seja, a vazão de gás disponível deve ser totalmente
direcionada para os poços e a linha de exportação, conforme a Figura 3.10.
GLOPTIM
Otimização
Global
...Qdisp
Q1inj
Q2inj
Qninj
Qexp
Figura 3.10: Aplicação de otimização global GLOPTIM.
A aplicação de ajuste de curvas também deve ficar constantemente rodando,
aguardando alguma solicitação para ajustar alguma curva. Quando identifica que al-
gum procedimento ou operador escreveu os pontos nas tags correspondentes e infor-
mou de qual poço se trata, na próxima amostragem a aplicação realiza o ajuste de
curvas e escreve os novos coeficientes nas tags.
O MPA deve sempre desabilitar a otimização de um poço quando for realizar
algum procedimento sobre ele. Uma vez desabilitado, garante-se que o Laplace não
irá sobrescrever a vazão Qinj definida pelo MPA.
O diagrama da Figura 3.11 esquematiza a cooperação entre os algoritmos e
procedimentos, indicando as informações básicas trocadas entre eles, todas via servi-
dor OPC.
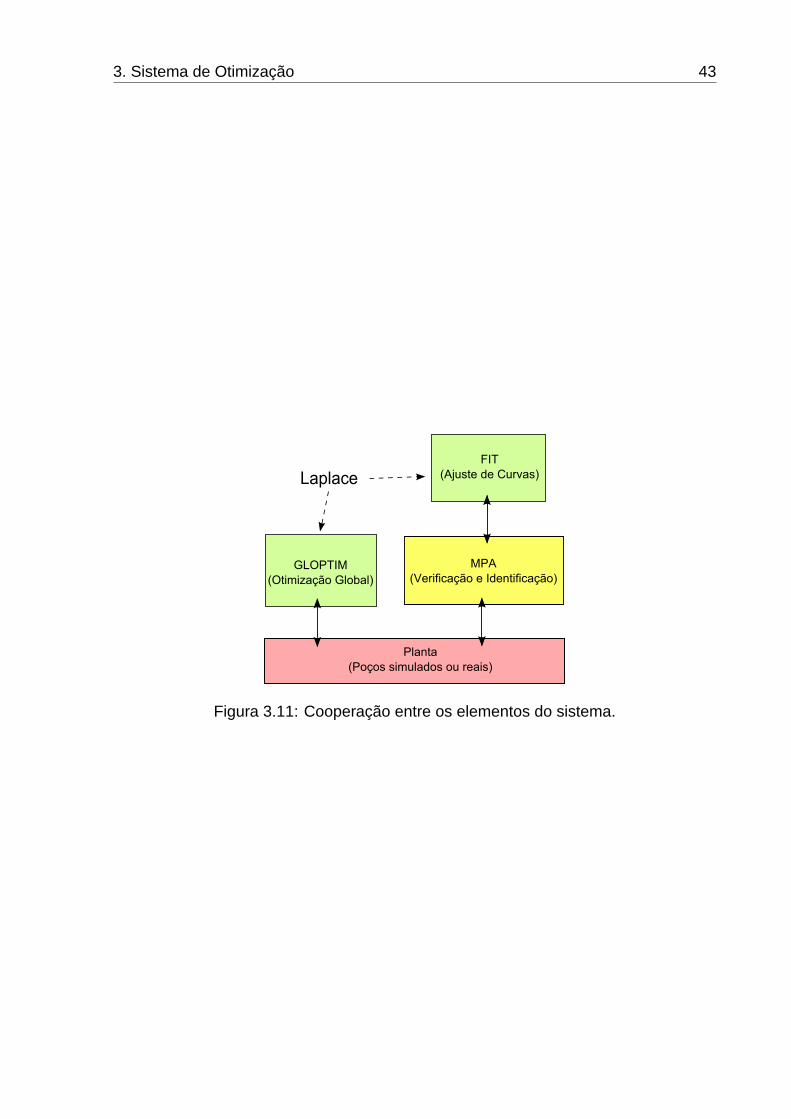
3. Sistema de Otimização 43
Figura 3.11: Cooperação entre os elementos do sistema.
44
Capı́tulo 4Plataforma de Testes
Para situar as ferramentas de otimização desenvolvidas, foi criada uma plata-
forma de simulação capaz de representar os fenômenos a serem observados por tais
ferramentas, tornando possível uma avaliação do seu funcionamento e servindo como
uma forma de validação dos algoritmos e procedimentos propostos.
Foi feita uma modelagem do gas-lift manifold (GLM) no Matlab-Simulink, com
os controles locais aplicados e o funcionamento básico dos poços modelado. Também
houve um esforço no sentido de integrar o simulado OLGA à plataforma de testes. Tais
elementos são detalhados nas seções a seguir.
4.1 GLM no Simulink
O gás disponível para alocação no algoritmo de otimização global é uma vari-
ável obtida por uma malha externa que calcula a vazão de gás necessária para esta-
bilizar o manifold. O manifold de gás, por não possuir um volume total muito grande,
pode ser modelado como um ponto único de pressão, que é proporcional à integral da
diferença entre o gás que entra (vindo do compressor) e o gás que sai (para os poços
e para a exportação). Conforme as equações:
(Qcomp − Qdisp) = kp
1
sPman (4.1a)
Qdisp = −kp
1
sPman + Qcomp (4.1b)
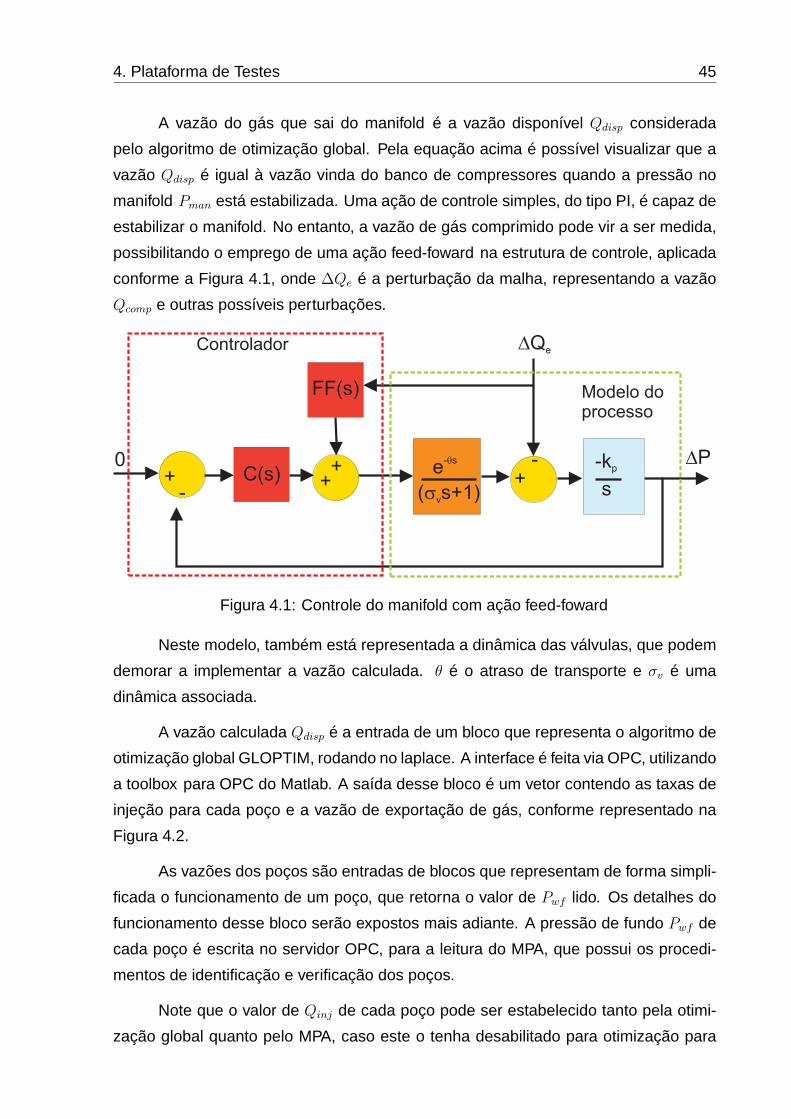
4. Plataforma de Testes 45
A vazão do gás que sai do manifold é a vazão disponível Qdisp considerada
pelo algoritmo de otimização global. Pela equação acima é possível visualizar que a
vazão Qdisp é igual à vazão vinda do banco de compressores quando a pressão no
manifold Pman está estabilizada. Uma ação de controle simples, do tipo PI, é capaz de
estabilizar o manifold. No entanto, a vazão de gás comprimido pode vir a ser medida,
possibilitando o emprego de uma ação feed-foward na estrutura de controle, aplicada
conforme a Figura 4.1, onde ∆Qe é a perturbação da malha, representando a vazão
Qcomp e outras possíveis perturbações.
+-
C(s)0 DP
DQe
+- -kp
s
FF(s)
++
Modelo doprocesso
Controlador
e- sq
( s+1)sv
Figura 4.1: Controle do manifold com ação feed-foward
Neste modelo, também está representada a dinâmica das válvulas, que podem
demorar a implementar a vazão calculada. θ é o atraso de transporte e σv é uma
dinâmica associada.
A vazão calculada Qdisp é a entrada de um bloco que representa o algoritmo de
otimização global GLOPTIM, rodando no laplace. A interface é feita via OPC, utilizando
a toolbox para OPC do Matlab. A saída desse bloco é um vetor contendo as taxas de
injeção para cada poço e a vazão de exportação de gás, conforme representado na
Figura 4.2.
As vazões dos poços são entradas de blocos que representam de forma simpli-
ficada o funcionamento de um poço, que retorna o valor de Pwf lido. Os detalhes do
funcionamento desse bloco serão expostos mais adiante. A pressão de fundo Pwf de
cada poço é escrita no servidor OPC, para a leitura do MPA, que possui os procedi-
mentos de identificação e verificação dos poços.
Note que o valor de Qinj de cada poço pode ser estabelecido tanto pela otimi-
zação global quanto pelo MPA, caso este o tenha desabilitado para otimização para
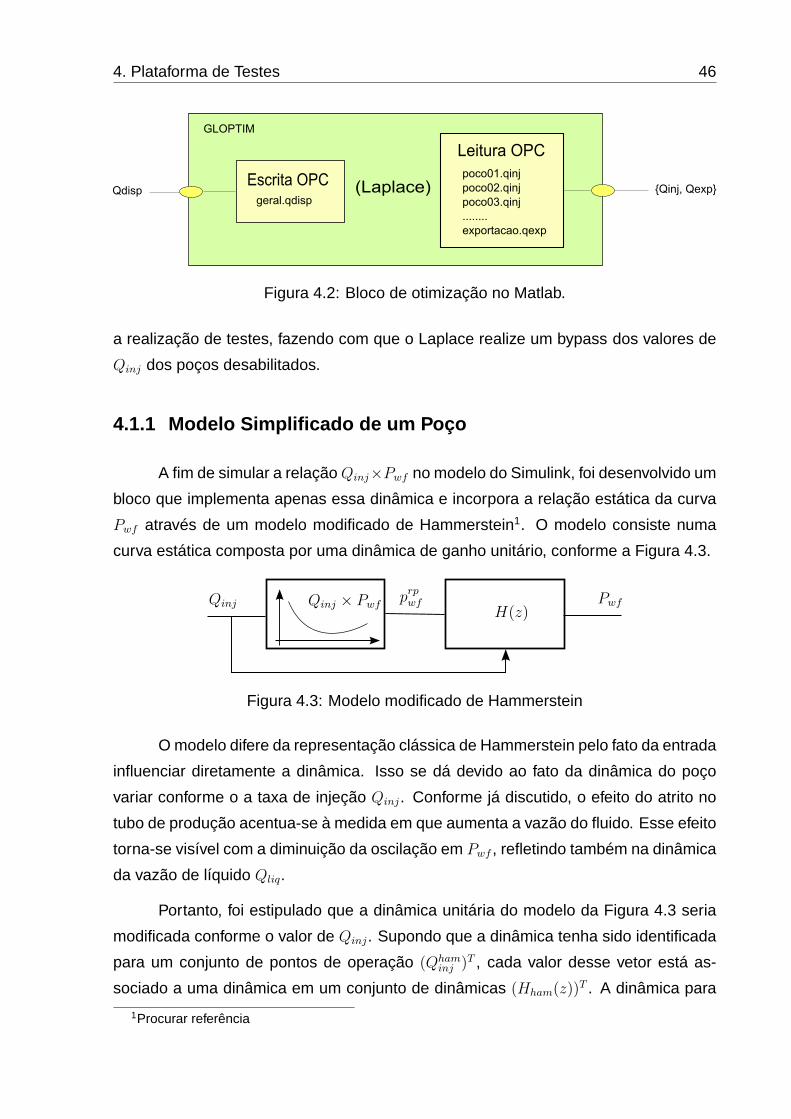
4. Plataforma de Testes 46
Figura 4.2: Bloco de otimização no Matlab.
a realização de testes, fazendo com que o Laplace realize um bypass dos valores de
Qinj dos poços desabilitados.
4.1.1 Modelo Simplificado de um Poço
A fim de simular a relação Qinj×Pwf no modelo do Simulink, foi desenvolvido um
bloco que implementa apenas essa dinâmica e incorpora a relação estática da curva
Pwf através de um modelo modificado de Hammerstein1. O modelo consiste numa
curva estática composta por uma dinâmica de ganho unitário, conforme a Figura 4.3.
Qinjprp
wf PwfH(z)
Qinj × Pwf
Figura 4.3: Modelo modificado de Hammerstein
O modelo difere da representação clássica de Hammerstein pelo fato da entrada
influenciar diretamente a dinâmica. Isso se dá devido ao fato da dinâmica do poço
variar conforme o a taxa de injeção Qinj. Conforme já discutido, o efeito do atrito no
tubo de produção acentua-se à medida em que aumenta a vazão do fluido. Esse efeito
torna-se visível com a diminuição da oscilação em Pwf , refletindo também na dinâmica
da vazão de líquido Qliq.
Portanto, foi estipulado que a dinâmica unitária do modelo da Figura 4.3 seria
modificada conforme o valor de Qinj. Supondo que a dinâmica tenha sido identificada
para um conjunto de pontos de operação (Qhaminj )T , cada valor desse vetor está as-
sociado a uma dinâmica em um conjunto de dinâmicas (Hham(z))T . A dinâmica para
1Procurar referência
4. Plataforma de Testes 47
qualquer ponto de operação Qinj é dada pela interpolação linear entre as dinâmicas
correspondentes.
Ou seja, para Qinj situado no intervalo [(Qhaminj )k, (Qham
inj )k+1], a dinâmica H(z)
será dada por:
H(z) = (1 − α)Hham(z)k + αHham(z)k+1 (4.2a)
α =Qinj − (Qham
inj )k
(Qhaminj )k+1 − (Qham
inj )k(4.2b)
Este modelo representa bem o comportamento de um poço em sua faixa ope-
racional, por incorporar a curva estática Qinj × Pwf e por variar a sua dinâmica de
acordo com o ponto de operação. Com a finalidade com que é apresentado, represen-
tar o comportamento básico de um poço para a realização de testes de otimização, o
modelo cumpre com a proposta.
O bloco apresentado foi implementado em forma de S-Function no Simulink.
4.2 OLGA-OPC
Desejava-se poder incluir o simulador OLGA na plataforma de testes, como
forma de se ter um elemento mais representativo incorporado ao conjunto apresen-
tado. O OLGA é um simulador de escoamento multifásico, neste projeto utilizado para
a modelagem de poços produtores.
Para tal, foi especificada uma ferramenta que fizesse transação dos dados da
simulação para um servidor OPC e vice-versa. A simulação é feita através do servidor
de simulação do OLGA, que possui uma interface TCP/IP. Portanto, a aplicação con-
siste em um cliente TCP/IP para comunicação com o OLGA e um cliente OPC para
comunicação com o servidor OPC da simulação. Sua arquitetura básica é represen-
tada na Figura 4.4.
Para o estabelecimento dos enlaces entre as variáveis da simulação e os dados
do servidor OPC, foi projetada uma interface gráfica intuitiva, capaz de ler o arquivo
de simulação do OLGA, interpretar as entradas e saídas, organizar as informações de
forma coerente e permitir a associação com as tags do servidor OPC.
Tal interface é visualizada na Figura 4.5. Note que a navegação entre os dados
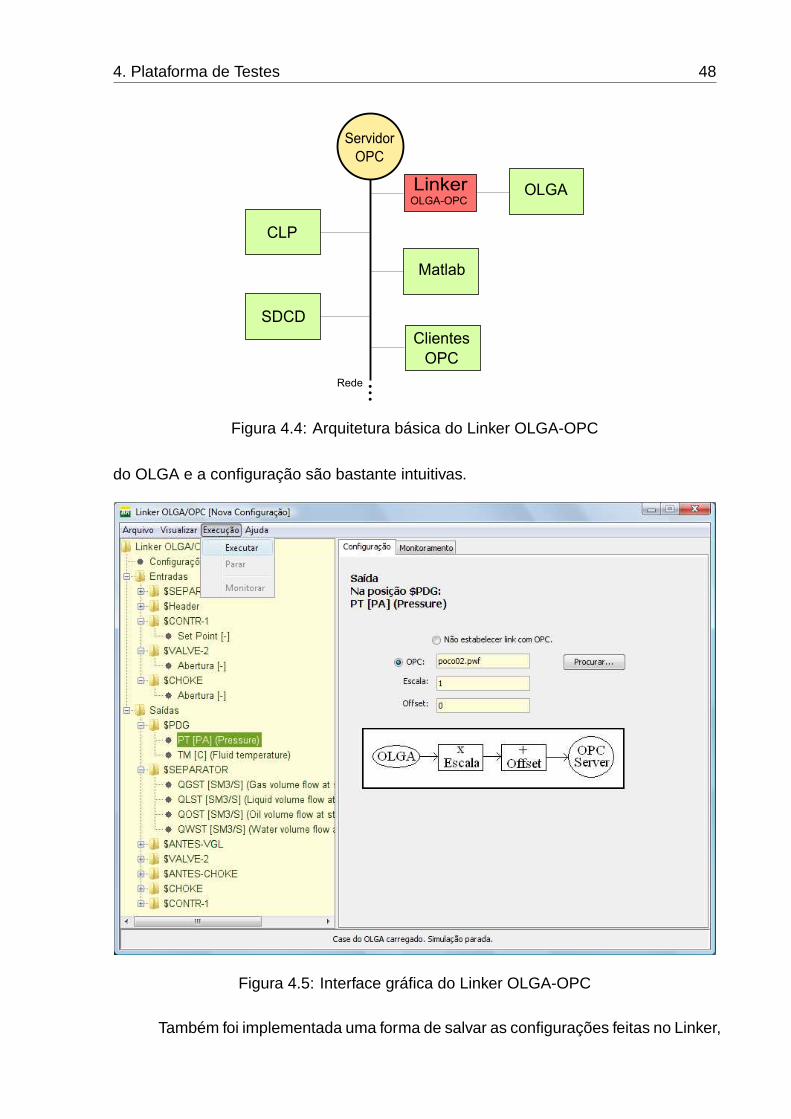
4. Plataforma de Testes 48
Figura 4.4: Arquitetura básica do Linker OLGA-OPC
do OLGA e a configuração são bastante intuitivas.
Figura 4.5: Interface gráfica do Linker OLGA-OPC
Também foi implementada uma forma de salvar as configurações feitas no Linker,

4. Plataforma de Testes 49
em forma de arquivos XML, que podem garantir uma futura interoperabilidade desse
sistema. Planeja-se integrar à mesma ferramenta outros simuladores, como o HYSYS
(simulador de processos) e algum simulador de reservatório, fazendo com que todo o
processo de gas-lift possa ser modelado e considerado na simulação.
O Linker permite a execução da simulação em tempo real, ou seja, a simulação
é visualizada através do servidor OPC como se houvesse um poço real operando
por trás de um supervisório. O potencial de uma ferramenta como essas é bastante
grande, dadas todas as suas possíveis aplicações: testes de algoritmos de otimiza-
ção local e global, integração com algoritmos de controle avançado implementados
em ferramentas proprietárias como o Laplace, integração com supervisórios via OPC,
permitindo o treinamento de operadores em situações simuladas, etc.
50
Capı́tulo 5Estudo de Casos
Este capítulo exemplifica a aplicação das ferramentas de otimização desenvolvi-
das, através da utilização da plataforma de simulação descrita no capítulo anterior.
Também é feita uma análise dos efeitos da aplicação de múltiplas restrições no algo-
ritmo de otimização global.
5.1 Otimização Local no OLGA
Foram feitos testes do procedimento do MPA de otimização local (busca de
mínima Pwf ) em um poço modelado no OLGA, utilizando o Linker OLGA-OPC como
ferramenta para integrar o MPA com o modelo simulado.
O controle local da vazão de injeção Qinj é realizado pelo CLP eZAP-900,
através de seu servidor OPC. Tal aplicação demonstra a facilidade de integração dos
diferentes módulos da plataforma. Os set-points de Qinj são fornecidos pelo MPA e o
CLP implementa a abertura da válvula no OLGA.
Os parâmetros de configuração (tolerâncias) foram ajustados de acordo com
as ordens de grandeza das variáveis envolvidas (Qinj e Pwf ). O servidor OPC foi
configurado para comportar as variáveis necessárias e o MPA, o eZAP-900 e o Linker
OLGA-OPC foram configurados de acordo.
A Figura 5.1 é um gráfico da evolução da pressão de fundo Pwf do poço com
a aplicação do procedimento do MPA, juntamente com a injeção de gás Qinj. Nota-
se que a pressão cai até um patamar onde vazões de injeção maiores não são mais
realizáveis, pois a válvula de injeção já está saturada em sua abertura máxima.
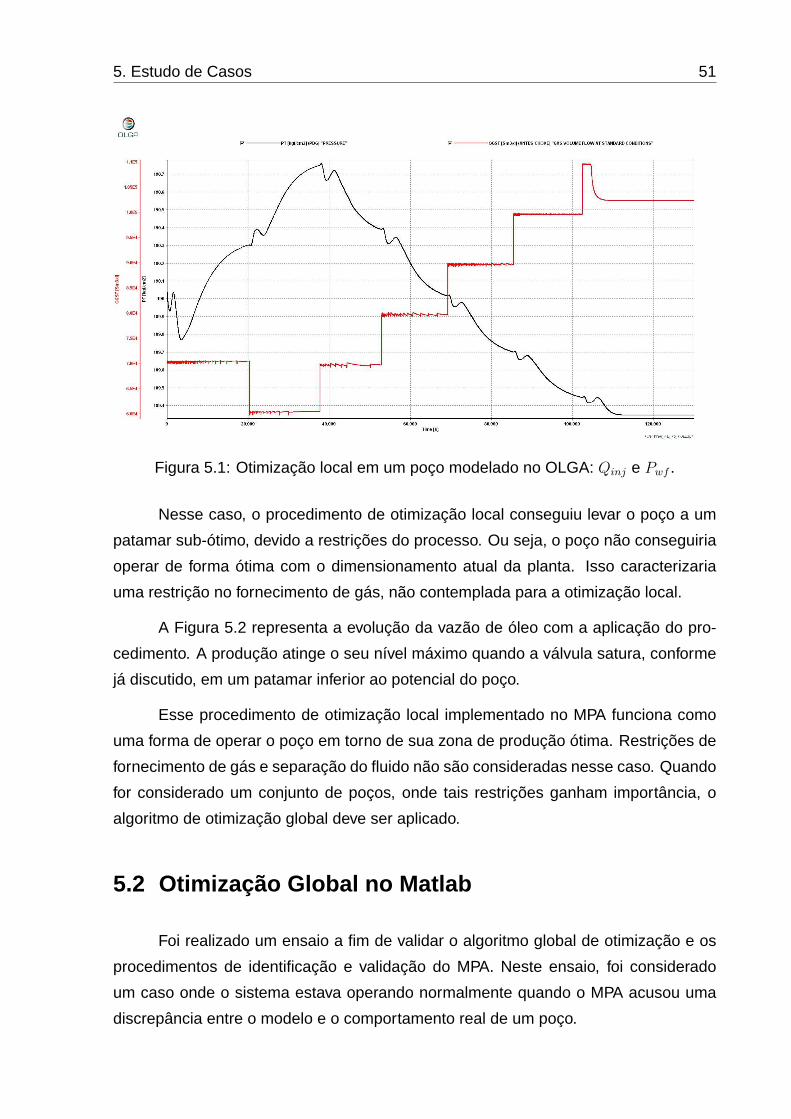
5. Estudo de Casos 51
Figura 5.1: Otimização local em um poço modelado no OLGA: Qinj e Pwf .
Nesse caso, o procedimento de otimização local conseguiu levar o poço a um
patamar sub-ótimo, devido a restrições do processo. Ou seja, o poço não conseguiria
operar de forma ótima com o dimensionamento atual da planta. Isso caracterizaria
uma restrição no fornecimento de gás, não contemplada para a otimização local.
A Figura 5.2 representa a evolução da vazão de óleo com a aplicação do pro-
cedimento. A produção atinge o seu nível máximo quando a válvula satura, conforme
já discutido, em um patamar inferior ao potencial do poço.
Esse procedimento de otimização local implementado no MPA funciona como
uma forma de operar o poço em torno de sua zona de produção ótima. Restrições de
fornecimento de gás e separação do fluido não são consideradas nesse caso. Quando
for considerado um conjunto de poços, onde tais restrições ganham importância, o
algoritmo de otimização global deve ser aplicado.
5.2 Otimização Global no Matlab
Foi realizado um ensaio a fim de validar o algoritmo global de otimização e os
procedimentos de identificação e validação do MPA. Neste ensaio, foi considerado
um caso onde o sistema estava operando normalmente quando o MPA acusou uma
discrepância entre o modelo e o comportamento real de um poço.
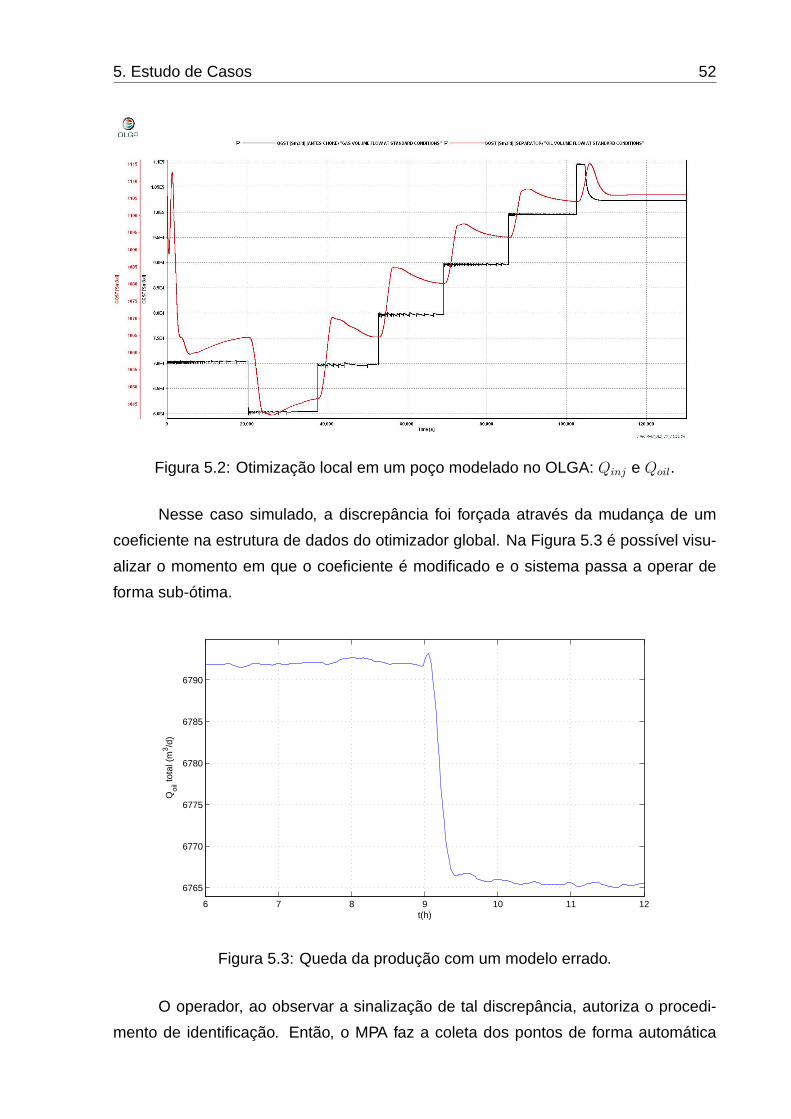
5. Estudo de Casos 52
Figura 5.2: Otimização local em um poço modelado no OLGA: Qinj e Qoil.
Nesse caso simulado, a discrepância foi forçada através da mudança de um
coeficiente na estrutura de dados do otimizador global. Na Figura 5.3 é possível visu-
alizar o momento em que o coeficiente é modificado e o sistema passa a operar de
forma sub-ótima.
6 7 8 9 10 11 12
6765
6770
6775
6780
6785
6790
t(h)
Qoi
l tota
l (m
3 /d)
Figura 5.3: Queda da produção com um modelo errado.
O operador, ao observar a sinalização de tal discrepância, autoriza o procedi-
mento de identificação. Então, o MPA faz a coleta dos pontos de forma automática
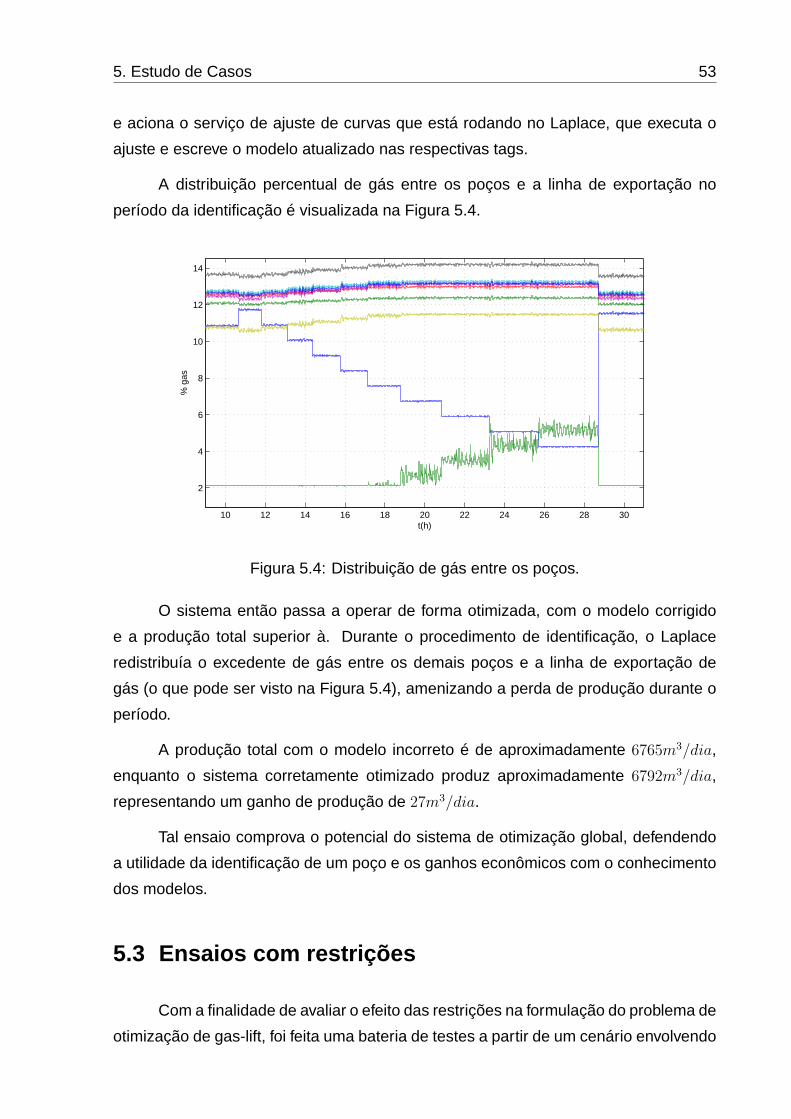
5. Estudo de Casos 53
e aciona o serviço de ajuste de curvas que está rodando no Laplace, que executa o
ajuste e escreve o modelo atualizado nas respectivas tags.
A distribuição percentual de gás entre os poços e a linha de exportação no
período da identificação é visualizada na Figura 5.4.
10 12 14 16 18 20 22 24 26 28 30
2
4
6
8
10
12
14
t(h)
% g
as
Figura 5.4: Distribuição de gás entre os poços.
O sistema então passa a operar de forma otimizada, com o modelo corrigido
e a produção total superior à. Durante o procedimento de identificação, o Laplace
redistribuía o excedente de gás entre os demais poços e a linha de exportação de
gás (o que pode ser visto na Figura 5.4), amenizando a perda de produção durante o
período.
A produção total com o modelo incorreto é de aproximadamente 6765m3/dia,
enquanto o sistema corretamente otimizado produz aproximadamente 6792m3/dia,
representando um ganho de produção de 27m3/dia.
Tal ensaio comprova o potencial do sistema de otimização global, defendendo
a utilidade da identificação de um poço e os ganhos econômicos com o conhecimento
dos modelos.
5.3 Ensaios com restrições
Com a finalidade de avaliar o efeito das restrições na formulação do problema de
otimização de gas-lift, foi feita uma bateria de testes a partir de um cenário envolvendo
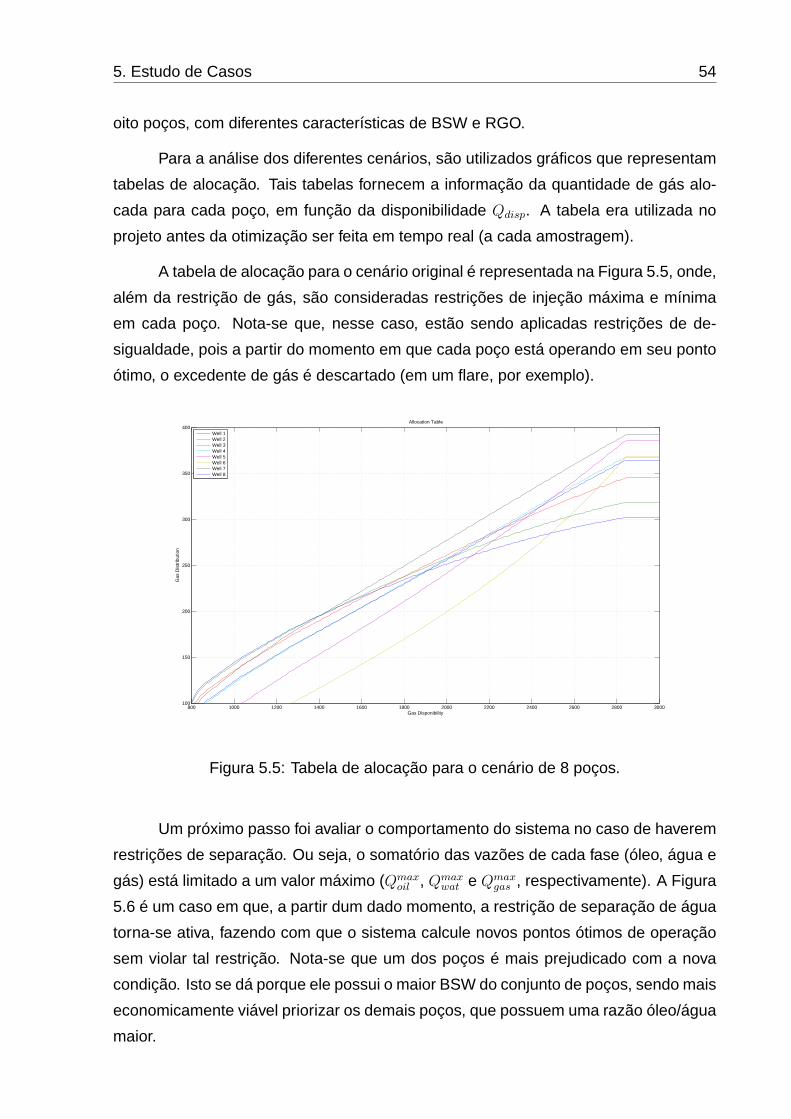
5. Estudo de Casos 54
oito poços, com diferentes características de BSW e RGO.
Para a análise dos diferentes cenários, são utilizados gráficos que representam
tabelas de alocação. Tais tabelas fornecem a informação da quantidade de gás alo-
cada para cada poço, em função da disponibilidade Qdisp. A tabela era utilizada no
projeto antes da otimização ser feita em tempo real (a cada amostragem).
A tabela de alocação para o cenário original é representada na Figura 5.5, onde,
além da restrição de gás, são consideradas restrições de injeção máxima e mínima
em cada poço. Nota-se que, nesse caso, estão sendo aplicadas restrições de de-
sigualdade, pois a partir do momento em que cada poço está operando em seu ponto
ótimo, o excedente de gás é descartado (em um flare, por exemplo).
800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000100
150
200
250
300
350
400
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8
Figura 5.5: Tabela de alocação para o cenário de 8 poços.
Um próximo passo foi avaliar o comportamento do sistema no caso de haverem
restrições de separação. Ou seja, o somatório das vazões de cada fase (óleo, água e
gás) está limitado a um valor máximo (Qmaxoil , Qmax
wat e Qmaxgas , respectivamente). A Figura
5.6 é um caso em que, a partir dum dado momento, a restrição de separação de água
torna-se ativa, fazendo com que o sistema calcule novos pontos ótimos de operação
sem violar tal restrição. Nota-se que um dos poços é mais prejudicado com a nova
condição. Isto se dá porque ele possui o maior BSW do conjunto de poços, sendo mais
economicamente viável priorizar os demais poços, que possuem uma razão óleo/água
maior.

5. Estudo de Casos 55
800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000100
150
200
250
300
350
400
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8
Restrição
Figura 5.6: Tabela de alocação com restrição de separação de água.
De forma semelhante à restrição de separação de água, na Figura 5.7 é apli-
cada uma restrição de separação de óleo no sistema. Nesse caso, o trabalho do algo-
ritmo resume-se a encontrar um ponto factível de operação, ou seja, alterar a política
de distribuição de gás de forma a limitar a produção total de óleo. Esta situação não é
observada na prática, visto que nunca é estabelecido um limite para a vazão de óleo,
tendo essa restrição sido removida do algoritmo definitivo.
Para generalizar o algoritmo, considerando a realidade da plataforma, incluiu-se
uma linha de exportação de gás no modelo. O gás comprimido para injeção também
pode vir a ser exportado, caso haja excesso ou seja mais econômico vendê-lo ao
invés de utilizá-lo todo para injeção nos poços. A Figura 5.8 mostra um caso onde
o excedente de gás é exportado. Foi considerado um preço baixo para a venda do
gás, fazendo com que ele comece a ser exportado somente quando todos os poços já
atingiram seus pontos de operação ótimos.
Repetindo o mesmo ensaio, mas aumentando o preço do gás para exportação,
nota-se que a linha de exportação passa a ganhar prioridade com relação aos poços
num determinado momento, conforme pode ser observado na Figura 5.9. O gás é
exportado antes que os poços atinjam seus pontos ótimos de operação. Assim que
é atingido o limite imposto para a exportação, o gás volta a ser distribuído entre os
poços.

5. Estudo de Casos 56
800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000100
150
200
250
300
350
400
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8
Restrição
Figura 5.7: Tabela de alocação com restrição de separação de óleo.
1000 1500 2000 2500 3000 35000
50
100
150
200
250
300
350
400
450
500
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8Exportation
Exportação
Figura 5.8: Tabela de alocação considerando exportação de gás a um baixo preço.
A Figura 5.10 mostra um caso onde há restrição de separação de água e ex-
portação de gás. Além disso, agora também está sendo considerado o custo de com-
pressão de gás, fazendo com que os pontos ótimos para os poços correspondam a
taxas de injeção de gás menores.
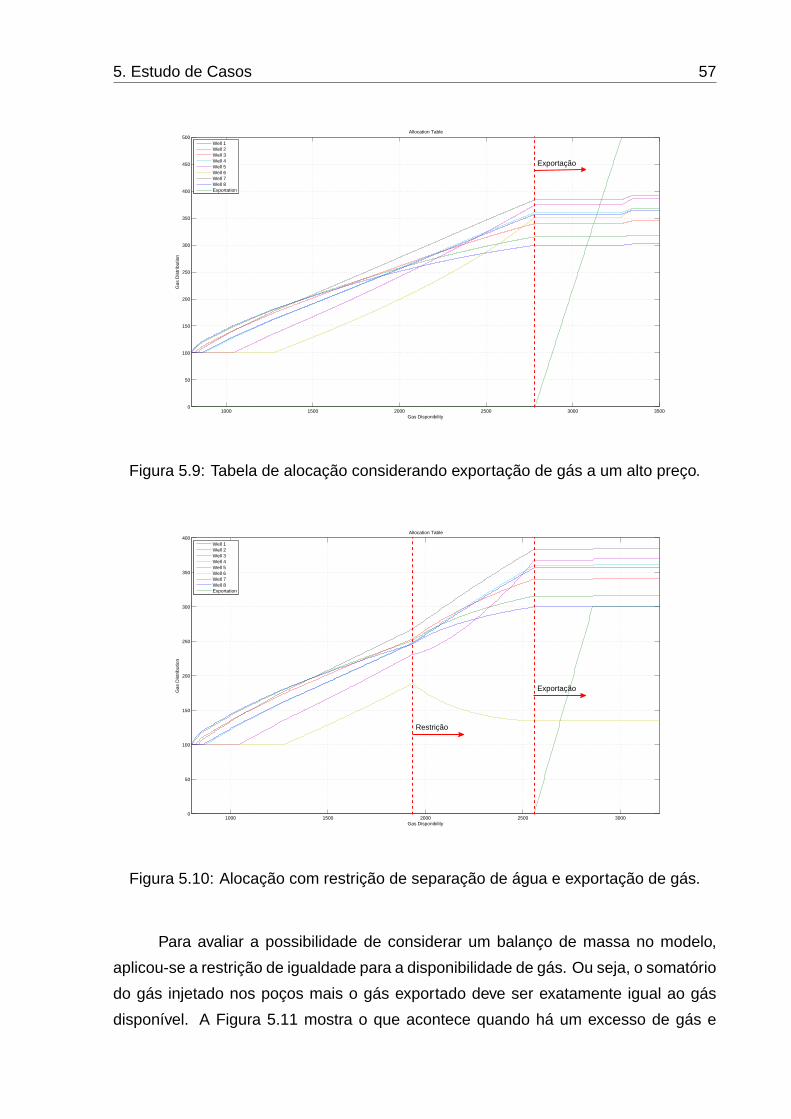
5. Estudo de Casos 57
1000 1500 2000 2500 3000 35000
50
100
150
200
250
300
350
400
450
500
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8Exportation
Exportação
Figura 5.9: Tabela de alocação considerando exportação de gás a um alto preço.
1000 1500 2000 2500 30000
50
100
150
200
250
300
350
400
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8Exportation
Exportação
Restrição
Figura 5.10: Alocação com restrição de separação de água e exportação de gás.
Para avaliar a possibilidade de considerar um balanço de massa no modelo,
aplicou-se a restrição de igualdade para a disponibilidade de gás. Ou seja, o somatório
do gás injetado nos poços mais o gás exportado deve ser exatamente igual ao gás
disponível. A Figura 5.11 mostra o que acontece quando há um excesso de gás e
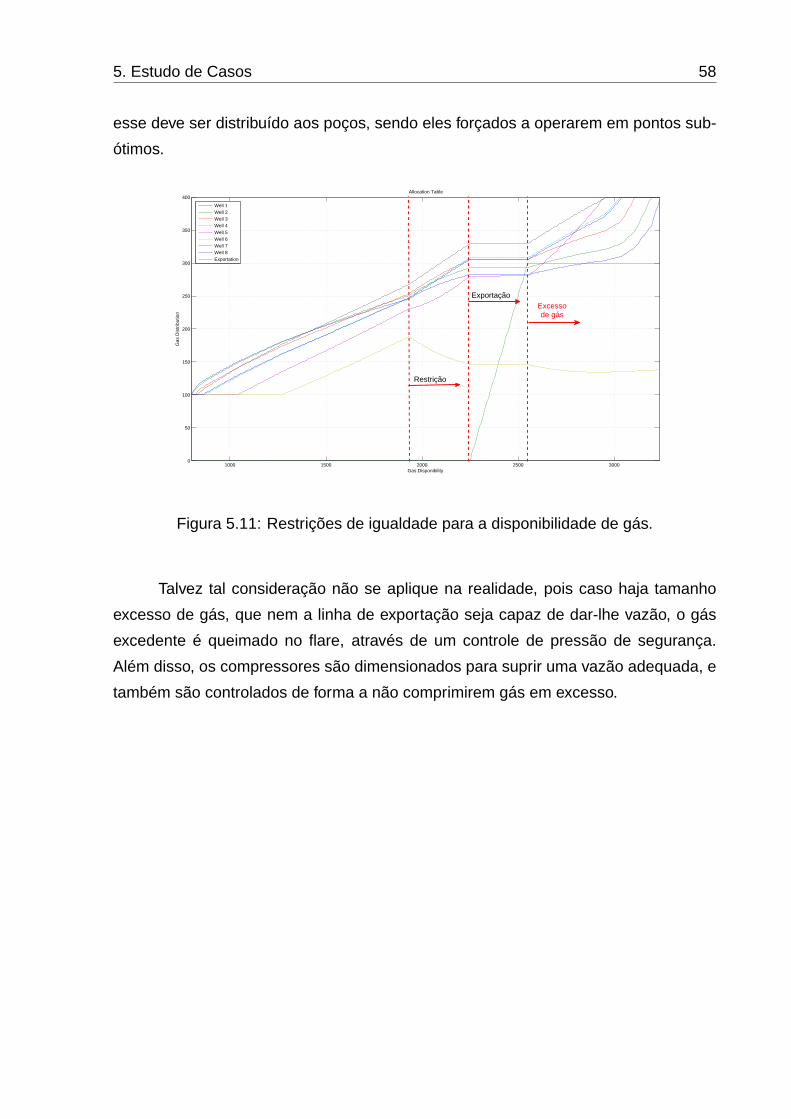
5. Estudo de Casos 58
esse deve ser distribuído aos poços, sendo eles forçados a operarem em pontos sub-
ótimos.
1000 1500 2000 2500 30000
50
100
150
200
250
300
350
400
Gas Disponibility
Gas
Dis
trib
utio
n
Allocation Table
Well 1Well 2Well 3Well 4Well 5Well 6Well 7Well 8Exportation
Restrição
ExportaçãoExcessode gás
Figura 5.11: Restrições de igualdade para a disponibilidade de gás.
Talvez tal consideração não se aplique na realidade, pois caso haja tamanho
excesso de gás, que nem a linha de exportação seja capaz de dar-lhe vazão, o gás
excedente é queimado no flare, através de um controle de pressão de segurança.
Além disso, os compressores são dimensionados para suprir uma vazão adequada, e
também são controlados de forma a não comprimirem gás em excesso.

59
Capı́tulo 6Conclusões e Perspectivas
Este capítulo traz uma síntese das atividades realizadas, destacando a im-
portância e a aplicação de cada resultado obtido. Além disso, ressalta alguns aspec-
tos que podem ser melhorados ou incrementados nesse trabalho. Algumas propostas
para possíveis trabalhos futuros na área são expostas.
6.1 Interpretação dos Resultados Obtidos
Foi desenvolvida uma plataforma de testes bastante representativa sob a pers-
pectiva dos procedimentos e algoritmos de otimização desenvolvidos. Tal plataforma
possui boa conectividade, uma vez que possui interface OPC, que vem se tornando
um padrão bem aceito na indústria de processos.
As aplicações do Laplace e do MPA implementadas como resultado desse tra-
balho são protótipos de um sistema completamente automatizado de otimização para
plataformas que operam por gas-lift contínuo. Suas futuras aplicações em plataformas
reais irão requerer adaptações nas formulações dos algoritmos e procedimentos, uma
vez que cada situação poderá demandar soluções bastante específicas.
No entanto, tal protótipo serve como piloto dentro do projeto de automação e
otimização nas plataformas, ajudando a quebrar o paradigma existente com relação à
automatização de processos produtores.
Os ganhos econômicos puderam ser evidenciados e quantificados para um caso
simulado particular, servindo como prova de conceito e validando o sistema desen-
volvido. Uma vez provado o conceito, a cultura de otimização pode vir a crescer dentro
6. Conclusões e Perspectivas 60
do ramo de exploração e produção.
6.2 Perspectivas e Trabalhos Futuros
Conforme já mencionado, este trabalho serviu como piloto no que diz respeito à
otimização automática em tempo real da produção. Futuramente, espera-se ver novas
versões desses algoritmos operando de fato em plataformas, integradas aos sistemas
já existentes de supervisão e controle.
O procedimento de otimização local do MPA, que faz a busca pelo ponto ótimo
de operação (mínima Pwf ), está em lenta fase de implantação. Primeiramente, é
necessário validar um algoritmo local em um poço real, para que gradualmente possa
ser implantado o algoritmo global. Isso se dá porque deve-se ir quebrando lentamente
o ceticismo existente contra a completa automação desse tipo de processo.
Como o algoritmo de otimização global é dependente de modelos para a rea-
lização dos cálculos para a alocação de gás, nesse trabalho a abordagem utilizada
é a da identificação dos modelos através de procedimentos que tiram o poço de seu
ponto de operação, o que é um tanto agressivo e faz com que ele opere com perda
de produção por um tempo. Isso é bastante difícil de se conseguir colocar na prática,
visto que as plataformas trabalham com metas de produção e o gerente da plataforma
dificilmente autorizaria tais perdas, mesmo que possam gerar bons resultados futuros.
Para contornar esse problema, espera-se que em breve todos os modelos dos
poços possam ser gerados via simulação, através da integração do simulador Marlim
ao restante do sistema. Já está sendo realizado um trabalho no sentido de estabelecer
comunicação com o Marlim via OPC. Ou seja, alimentando o simulador com os testes
de produção periódicos programados, pode-se garantir uma boa representatividade
dos modelos, resultando num bom funcionamento do algoritmo global de alocação de
gás de elevação.
Outro ponto crítico seria o fato desse algoritmo sobrescrever alguns controles
já existentes nas plataformas. Por exemplo, o controle da pressão no manifold é feito
através do estrangulamento da linha de exportação. No caso, seria o algoritmo que
decidiria qual vazão seria limitada no caso de uma restrição de gás, possivelmente a
vazão da própria linha de exportação, dependendo da faixa de operação e dos ganhos
econômicos utilizados para alimentar o algoritmo.

6. Conclusões e Perspectivas 61
Espera-se que as ferramentas utilizadas evoluam continuamente. Existe um
projeto para a criação de uma nova versão do Laplace, aumentando a sua flexibilidade
e torando o processo de configuração mais simples. Além disso, será criado um editor
de telas para os algoritmos desenvolvidos, facilitando a interação homem-máquina.
Também é desejado que todas as novas ferramentas passem a implementar
a nova especificação da OPC Foundation: OPC UA (Unified Architecture). Tal es-
pecificação torna o padrão OPC muito mais interoperável, por ser baseado em uma
arquitetura orientada a serviços (SOA), semelhante aos Web Services. As novas im-
plementações não serão mais dependentes do sistema operacional Windows, uma
vez que o OPC atual é implementado sobre a DCOM (middleware da Microsoft).
62
Referências
[1] ECONOMIDES, M.; HILL, A.; EHLIG-ECONOMIDES, C. Petroleum Production
Systems . [S.l.]: Prentice Hall, 1993.
[2] LEMETAYER, P.; MIRET, P. M., Tool of the 90s to Optimize Gas-Lift Efficiency
in the Gonelle Field , Gabon. Offshore Europe Conference, Aberden, 1991.
[3] TANENBAUM, A. S; Redes de Computadores. Editora Campus, 1997.
[4] THOMAS, J. Fundamentos de Engenharia de Petróleo . [S.l.]: Editora Interciên-
cia, 2001.
[5] GOCKENBACH, M. S., Introduction to Sequential Quadratic Programming .
[6] NAKASHIMA, P. H. R., Otimização de processos de produção de petróleo via
injeção contínua de gás , Exame de Qualificação de Doutorado, Programa de
Pós-Graduação em Engenharia Elétrica, UFSC, 2004.
[7] ALARCÓN, G. A.; TORRES, C. F.; GÓMEZ, L. E., Global optimization of gas
allocation to a group of wells in artificial lift using nonlin ear constrained pro-
gramming. ASME Journal of Energy Resources Technology. December, 2002.
[8] BERTSEKAS, D. P., Nonlinear Programming. Athena Scientific, 1995.
[9] CAMPONOGARA, E.; DE CONTO, A. M., Lift-gas allocation under precedence
constraints: piecewise-linear formulation and K-covers. In Proc. 44th IEEE
Conference on Decision and Control, Seville, Spain, 2005.
[10] LIANG, Y. D., Introduction to Java Programming , 1999. 2nd edition.
[11] NOCEDAL, J.; WRIGHT, S. J., Numerical Optimization . Springer Verlag, 1999.
Referências 63
[12] CAMPONOGARA, E.; NAKASHIMA, P., Applying dynamic programming to a
gas-lift optimization problem. Congresso Brasileiro de Pesquisa e Desenvolvi-
mento em Petróleo e Gás, Rio de Janeiro, Brasil, 2003.
[13] WOLSEY, L. A., Integer Programming. John Wiley & Sons, 1998.
[14] Scandpower Petroleum Technology - OLGA - http://www.olgaworld.com
[15] CAMPONOGARA, E.; PLUCENIO, A.; MORENO, U. F., Projeto: Desenvolvi-
mento de Algoritmos de Controle para Métodos de Elevação Arti ficial. Re-
latório da Fase II.


















