Norma Balanceamento NBR8008-03.pdf
17
C6pia impressa pelo Sistema CENWIN . .~ BALANCEAMENTO DE CORPOS RfGIDOS ROTATIVOS 64.048 QUALIDADE NBR 8008 Procedimento MA1011983 SUMARIO 1 Objetivo 2 Normas e/au documentos complementares 3 Definicees 4 Desbalanceamento residual 5 Aspectos pertinentes ao problema de balanceamem 6 Massa do rotor e desbalanceamento residual admissivel 7 Velocidade de opera@0 e desbalanceamento residual admissivel 8 Qualidade de balanceamento 9 Fontes de erros no balanceamento 10 Dados em desenhos ou folhas de process0 11 Classes de qualidade de balanceamento e tipos de rotoreb ANEXO - Figuras 1 OBJETIVO 1.1 Esta Norma fixa as condisoes exigiveis ao balanceamento de corpos rigidos rotat i vos, particularmente o relacionamento do desbalanceamento residual admissi - vel coma fut$o da maxima velocidade de operaG;o. 1.2 lnclui uma classificagao de virios tipos de rotores representativos,na qua1 OS grupos de rotores estao associados em intervalos 5s classes de qualidade de balanceamento recomendadas. 1.3 As p-rescri@ks desta Norma t-60 pretendem servir coma especifica@es de acei - te pat-a qualquw- grhpo de rotores, mas apenas dar indica@es de coma evitar gran - des deficikcias, bem coma requisitos exagerados ou inatingiveis. Por outro lade, elas podem scrvir coma base para mais profundas investiga@es, por exemplo quan- do.em cases especiais for necessiria a determinaG& exata de qualidade de balan- ceamento requerida. Se OS limites recomendadds forem levados em considera$o, pg de-se esperar condi@es satisfatorias de opera$o corn maior probabilidade. Origem: ABNT - 4:01.04-603/83 CB-4 - ComitQ Brasileiro de M&nica CE-4:01.04 - Comissgo de Estudo de Vibra@es Me&micas e Choques I SISTEMA NACIONAL DE ABNT - ASSOCIACAO BRASILEIRA METROLOGIA, NORMALIZACAO E QUALIDADE INDUSTRIAL D,E NORMAS TECNICAS 0 Palavras-chave: balanceamento qualidade de balanceamento NBR 3 NORMA BRASILEIRA REGISTRADA CDIJ: 621-755 I Todos OS direitos reservados 17 phginas
-
Upload
gliciel-rodrigo -
Category
Documents
-
view
1.278 -
download
126
Transcript of Norma Balanceamento NBR8008-03.pdf
C6pia impressa pelo Sistema CENWIN .
.~
BALANCEAMENTO DE CORPOS RfGIDOS ROTATIVOS 64.048
QUALIDADE NBR 8008
Procedimento MA1011983
SUMARIO
1 Objetivo 2 Normas e/au documentos complementares 3 Definicees 4 Desbalanceamento residual 5 Aspectos pertinentes ao problema de balanceamem 6 Massa do rotor e desbalanceamento residual admissivel 7 Velocidade de opera@0 e desbalanceamento residual admissivel 8 Qualidade de balanceamento 9 Fontes de erros no balanceamento 10 Dados em desenhos ou folhas de process0 11 Classes de qualidade de balanceamento e tipos de rotoreb
ANEXO - Figuras
1 OBJETIVO
1.1 Esta Norma fixa as condisoes exigiveis ao balanceamento de corpos rigidos
rotat i vos, particularmente o relacionamento do desbalanceamento residual admissi -
vel coma fut$o da maxima velocidade de operaG;o.
1.2 lnclui uma classificagao de virios tipos de rotores representativos,na qua1
OS grupos de rotores estao associados em intervalos 5s classes de qualidade de
balanceamento recomendadas.
1.3 As p-rescri@ks desta Norma t-60 pretendem servir coma especifica@es de acei -
te pat-a qualquw- grhpo de rotores, mas apenas dar indica@es de coma evitar gran -
des deficikcias, bem coma requisitos exagerados ou inatingiveis. Por outro lade,
elas podem scrvir coma base para mais profundas investiga@es, por exemplo quan-
do.em cases especiais for necessiria a determinaG& exata de qualidade de balan-
ceamento requerida. Se OS limites recomendadds forem levados em considera$o, pg
de-se esperar condi@es satisfatorias de opera$o corn maior probabilidade.
Origem: ABNT - 4:01.04-603/83 CB-4 - ComitQ Brasileiro de M&nica CE-4:01.04 - Comissgo de Estudo de Vibra@es Me&micas e Choques
I
SISTEMA NACIONAL DE ABNT - ASSOCIACAO BRASILEIRA METROLOGIA, NORMALIZACAO
E QUALIDADE INDUSTRIAL D,E NORMAS TECNICAS
0
Palavras-chave: balanceamento qualidade de balanceamento NBR 3 NORMA BRASILEIRA REGISTRADA
CDIJ: 621-755
I
Todos OS direitos reservados 17 phginas
C6pia impressa pelo Sistema CENWIN 2 . f#lR 8008183
1.4 Podem existir cases em que desvios das prescri@es desta Norma se tornam ne - cess&-io.
2 NORMAS E/OU DOCUMENfOS COMPLEMENTARES
Na apl icac$o desta Norma*6 neceskio consul tar:
NBR 8007 - Balanceamento - Terminologia
3 DEFINIC6ES
OS termos tecnicos utilizados nesta Norma estsosdefinidos na NBR 8007, complemen - tados por 3.1.
3.1 Baihceamento
Process0 que procura melhorar a distribui$o de massas de urn co’rpo, de modo
este gire em seus mancais sem for-Gas de desbalanceamento.
4 DESBALANCEAMENTO RESIDUAL
4.1 0 balanceamento pode ser atingido ate urn certo limite, ja’ que apes o mesmo
o rotor possuira urn desbalanceamento residual. As recomendacoes desta Norma refe -
rem-se ao desbalanceamento residual admissivel.
4.2 Corn o auxilio dos equipamentos de medisao disponiveis atualmente, o desba-
lanceamento pode ser reduzido a limites razoavelmente baixos. Entretanto, seria
antiecon6mico exagerar OS requisitos de qualidade. Deve ser estabelecido ate on -
de o desbalanceamento deve ser reduzido e onde existe o compromisso otimo do pon -
to de vista econ6mico e teorico sobre a qualidade do balanceamento. Em cases in -
dividuais pode-se determinar corretamente somente por medicoes aplicadas em labo -
rat&-i0 ou campo.
4.3 Ngo 6 possivel concluir prontamente que OS desbalanceamentos residuais :ad-
missiveis procedem de recomenda@es existentes sobre comportamento vibratorio da
maquina, pois muitas vezes nio 6 ficil reconhecer a relacao entre o desbalancea-
mento do rotor e as vibrasoes da msquina sob condisoes de opera$o. A amplitude
das vibrasoes 6 influenciada por varies fatores, tais coma:
a) massa vibratoria da carcaca da miquina e sua fundacao;
b) a rigidez dos mancais e fundasao;
c) aproximacao da velocidade de operaSso em rela$o as vi%-ias freqG&cias
de ressonsncia, etc. Ainda mais, o efeito dos desbalanceamentos varia
corn suas posi@es angulares relativas (ver 5.2), e finalmente as vibra
@es da maquina podem provir apenas parcialmente da preseya do desbalan -
ceamento do rotor.
5 ASPECTOS PERTINENTES A0 PROBLEMA DE BALANCEAMENTO
5.1 Representaggo do estado de desbalanceamento
Urn certo estado de desbalanceamento dado pode ser representado de diversas manei -
C6pia impressa pelo Sistema CENWIN NBR 8008/83 3
ras, coma mostrado na Figura 3. Geralmente as medi@es fornecem valores anslogos,
correspondendo ao estado de desbalanceamento ilustrado na Figura 3a) ou 3b). 0
process0 de corre($o do desbalanceamento tambgm ocorre no local desta forma, ex
ceGZ0 feita em cases especiais , quando o procedimento de corre$o correspondente
a Figura 3~) deve ser aplicado. Quando se deseja investigar o efeito do desbalan-
ceamento no comportamento vibratorio de uma maquina completa, entao a decomposi-
$0 do desbalanceamento de acordo corn a Figura 3d) pode ser util, onde C denota -
o cent ro de massa do rotor ou da mGquina completa, de acordo corn a final i dade de
i nves t i gasso. As representa@es nas Figuras 3e) e 3f) podem ser prkicas quando
a transfekcia de desbalanceamento para diferentes planos de desbalanceamento 6
levada a efeito. A mais breve e geral designasao de desbalanceamento quase-esta-
tico e desbalanceamento de conjugado es& mostrado na Figura 3f). A possibilida-
de de se expressar o moment0 de desbalanceamento coma urn desbalanceamento de con -
jugado em dois planos arbitkios I e I I es& mostrado na Figura 3g).
5.2 Efeitos do desbalanceamento
Urn corpo rotativo desbalanceado causara nao somente forcas em seus mancais e fun -
dacao, mas tambem vibra$es da maquina. A qualquer rotacao dada, ambos OS efei-
tos dependem essencialmente das proporcoes geometricas e distribuicao de::.:.massa
do rotor e maquina, tanto coma da rigidez dos mancais e fundacso.
Em muitos cases, o desbalanceamento eststico 6 de importsncia prim&-ia quando
comparada corn desbalanceamento de conjugado, ou seja, OS dois desbalanceamentos,
(em planos diferentes) na mesma direcao causam uma perturbacao maior do que dois
desbalanceamentos iguais em direFoes opostas.
Simi larmente, hs cases em que o desbalanceamento de conjugado 6 especi almente
perturbado. Por exemplo, considere-se urn rotor onde a distsncia entre mancais 6
menor do que a distzncia entre OS planos de correcao, numa s i tuaG;o encont rada
num motor corn discos em balanGo em ambos extremos. Entao a carga no mancal, devi
do ao desbalanceamento de conjugado, 6 maior do que o causado pelo desbalancea
mento estatico, uma vez que a soma dos desbalanceamentos opostos nos planos de
correG$o representando o desbalanceamento de conjugado excede uma certa f ra$o
do desbalanceamento estatico assumido estar localizado no meio entre OS mancais.
Chamando-se par “1” a distsncia entre OS mancais e a distkcia entre OS pianos
de corres”ao por ‘la”, entao, se o desbalanceamento eststico residual s~admissivel
for YUR ‘I, OS desbalanceamentos residuais admissiveis ” U C ‘I, formando- se o
desbalanceamento de conjugado;sao reduzidos a UC = UR . l/2a.
5.3 Rotores corn wn plan0 de corre&o
Para rotores em forma de discos, o uso de somente urn plano de correCzo pode ser
suficiente, desde que a distkcia entre OS mancais seja suficientemente grande e
o disco gire corn deslocamento axiaJ suficientemente pequeno. Se estas condisoes,
C6pia impressa pelo Sistema CENWIN
4 N&i %008/83
szo plenamente satisfeitas precisa-se investigar em cada case. Apes o ba lllancea - mento por urn Gnico plano ter sido levado a efeito em urn nfimero suficiente de ro - tores de urn particular tipo, o moment0 de desbalanceamento residual maior (6 de - terminado e dividido pela distsncia entre OS mancais. Se OS desbalanceamentos en
contrados desta maneira szo aceitsveis mesmo no pior case, ou seja, se eles Go
maiores do que a metade do valor recomendado multiplicado pela massa do rotor,en - tzo pode-se esperar que o balanceamento por urn ktico plano 6 suficiente.
5.4 Rotores corn do%s pZanos de corre$o
Se o rotor nso satisfaz as condi@es mencionadas, em 5.3., para o rotor em forma
de disco, enfio dois planos de correszo sso necess&ios. Esse tipo de baI.ancea -
mento 6 chamado balanceamento em dois planos (dinsmico) em contraste corn o balan -
ceamento em urn Gnico plano (est&ico descrito em 5.3).
Para o balanceamento em urn unico plano, o equil ibrio estatico em qualquer posi-
cao angular do rotor 6 requerido. Para o balanceamento em dois planos e necessa-
rio que 0 rotor gire, sense o desbalanceamento de conjugado residual (ver 5.21,
nao se& detectado.
No case de rotores para OS quais o centro de gravidade est5 localizado no terco
intermedkio da distsncia entre OS mancais, metade do valor recomendado do des -
balanceamento residual admissivel na Figura 1 deve ser tornado para cada plano de
correc$o, se eles sso eqiiidistantes do centro de gravidade: Para outros rotores,
pode ser necesssrio dividir o valor recomendado de acordo corn a distribui$o de
massa do rotor, tanto quanto a principal parte de massa esteja situada entre OS
planos de correcao. Em cases nao usuais , a distribuicio do rotor recomendado,pre -
cisa ser especialmente investigada, levando-se em conta, por exemplo, as cargas
admissrveis nos mancais.
5.5 Montqem
Rotores podem ser fornecidos para o balanceamento coma componentes unit&ios in -
teiyos, ou em forma de montagens. Para cada montagem, OS desbalanceamentos das
partes componentes devem ser somados vetorialmente, e qualquer desbalanceamento
de imperfeicoes de montagem deve ser considerado. Deve-se dar particular atencao
ao fato que as partes podem ser montadas posteriormente em uma.posica”o diferente
daquela na mGquina de balancear.
0 desbalanceamento m;ximo devido a ajustes e toler&cias geomgtricas set-< en&o
a soma dos maiores deslocamentos radiais possiveis em ambos OS curses (na mGqui-
na de balancear e na condicao de montagem para serviGo, respectivamente) multi-
pl icado pela massa do componente referido. Esses deslocamentos podem ocorrer da
folga e batimento radiais, bem coma proveniente de batimento axial.
Portanto, OS desbalanceamentos residuais admissiveis, dos componentes indivi-
duais e OS 1 imites de ajustes, bem coma OS limites para batimento radial e a -
xial sao determinados pela condicao de que a soma dos desbalanceamentos devidos
C6pia impressa pelo Sistema CENWIN NBR 8008/83 5
a estas causas ngo deve ser maior do que o valor recomendado para o tipo de ro - tor a0 qua1 pertence a mont.agem. Naturalmente deve se observar uma sensikel re
la@o entre as quantidades dos desbalanceamentos residuais dos componentes in _
dividuais e dos desbalanceamentos devidos 5s imperfei@es de ajuste. Se a tole-
rsncia de desbalanceamento para uma montagem nso puder ser alcan$ada pelo balan
ceamento isolado das partes, entao as partes montadas devem ser balanceadas co -
mo uma un i dade.
Se 0s componentes individuais szo balanceados separadamente, entzo OS elementos
de 1 iga$o, tais coma pinos e chavetas podem ser ligados todos a uma parte ou
distribuidos entre OS componentes. Entretanto, deve-se chegar a urn acordo para
a fixa$ao destes elementos de 1 iga$o.
6 MASSA DO ROTOR E DESBALANCEAMENTO RESIDUAL ADM!SSIj/EL
Geralmente, quanto maior for a massa do rotor, tanto maior 6 o desbalanceamento
admissivel. Portanto, 6 apropriado relacionar o desbalanceamento residual admis -
sivel U corn a massa do rotor m. - -
0 desbalanceamento especifico e = -!$ G equivalente ao deslocamento do centro de
gravidade quando este coincide corn o plano de desbalanceamento estitico.
7 VELOCIDADE DE OPERACAO E DESBALANCEAMENTO RESIDUAL ADMlSSiVEL
A experizncia prstica mostra que para rotores de mesmo tipo, em geral, o desba-
lanceamento admissive especiiico e U = --, varia inversamente corn a velocidade n -
do rotor dentro das faixas limitadas de velocidades consideradas na Figura 1 e
para a respectiva classe de qualidade de balanceamento. Em relacao a isto tam-
hem, dados estatisticos empiricos, para rotores de mesmo tipo, indicam a seguin -
te rela$o para a velocidade tangential:
en = constante
ou equivalentemente:
ew = constante
onde e pode ser tornado coma excentricidade do centro de gravidade para o casol )
de urn desbalanceamento est6tico.
Esta rela$ao procede tambern de considera@es pkicas da semelhaya me&i ca ,
porque nos rotores geometricamente semelhantes, girando 5 velocidades perif&-i-
cas iguais, as tens6es nos rotores e nos mancais rigidos sao iguais. As classes
de qualidade de balanceamento G (da Tabela e Figura 2f) sso baseados nesta rela -
siio.
8 QUALIDADE DE BALANCEAMENTO
8.1 Classes de quaZid.ade de balanceamento
Baseando-se em 11.4 e no capitulo 5, as classes de balanceamento foram estabele
cidas, o que permite uma classifica$o das exigkcias de qualidade. Cada classe
C6pia impressa pelo Sistema CENWIN 6 __ NBR 8008/83 I
de qualidade de balanceamento G compreende uma faixa de desbalanceamentos res i -
duais admissiveis, do limite superior que 6 dado por uma certa magnitude do pr2
duto eo ate zero. Registrando-se as classes de qualidade versus a mixima velocL
dade de operacao n-, obtem-se OS limites superiores de 5, conforme mostrado na
Figura 1.
As principais classes de qualidade de balanceamento G estso separadas entre si
pelo fator de 23. Uma graduacao menor pode ser necessaria em alguns cases, espe -
cialmente quando szo exigidas altas precisoes de balanceamento. As classes de
qualidade de balanceamento szo designadas corn o limite superior do produto ew,
onde: o = 2m/60 g n/l 0, para E medido em rotacoes por minuto e w em radianos -
por Segundo, e o produto eo 6 dado em milimetros por Segundo.
Exemplo: Para urn rotor de classe de qualidade de balanceamento G $,3 ,um valor
recomendado e = 20 pm e encontrado se sua msxima velocidade de ope;ag& 6 3 000
rpm. Portanto, para urn rotor simetrico de 40 kg, nos. .t.ermos de 5.4 o desbalancea -
mento residual admissivel em cada urn dos dois planos de correcao e 400 g.mm.
8.2 Classes de quaZidade de baZanceamento G 1 e G 0,4
Estas classes de qualidade de balanceamento extremas sso mais ligadas ao desen _
volvimento progressivo da tecnologia de balanceamento. Nestas faixas, a qualida
de de balanceamento final selecionada 6 urn compromisso entre as exiggncias tecni -
cas e a realidade que as mesmas possam ser atingidas. 0 limite selecionado 6 ge -
ralmente associado corn o estado de desbalanceamento minim0 que pode ser razoavel -
mente repetido.
OS valores recomendados nestas classes de qualidade de balanceamento podem ser
somente alcansados na pratica se a precisao dos munhoes da arvore (circularidade
etc.), nos mancais do rotor’e/ou a precisao dos mancais forem suficientemente li -
mi tadas. Para o balanceamento na classe de qualidade G 1, podera ser necessario
balancear o rotor nos seus proprios mancais de opera&o. A fim de satisfazer a
classe de qualidade de balanceamento G 0,4, o balanceamento deveria ser executa- - do corn o rotor em sua propria caixa de mancal esob condicoes de operacao, e ain -
da na temperatura do ambiente de operacso. Para a classe de qualidade de balan-
ceamento G 1, pelo menos para altas velocidades de operacao, 6 necess&-ia uma
transmissao de pot&cia sem juntas universais. Geralmente, para a classe de qua -
lidade de balanceamento G 0,4 6 necessario acionamento proprio.
8.3 De term$na&io experimen ta 2 da qualidade de ba Zanceamen to exigida
A fim de se determinar experimentalmente OS valores admissiveis do desbalancea -
mento residual , OS rotores do t ipo em consideracao, sao inicialmente balanceados
corn desbalanceamento residual minim0 atingivel, subsequentemente desbalanceamen-
tos artificiais (massas de prova) de magnitude crescente sao aplicados aos rot0 -
res (sob condicijes de operacao) at6 que o efeito dos desbalanceamentos possa ser
detectado acima do nivel de outras perturbacoes existentes, isto 6, ate que es -
C6pia impressa pelo Sistema CENWIN NBR 8008j83 7
tes desbalanceamentos afetem notadamente as vibracoes, a suavidade de operacao,
ou o funcionamento da maquina. No balanceamento em dois planos, OS diferentes e
feitos dos desbalanceamentos em fase e OS momentos de desbalanceamentos devem
ser considerados (ver 5.2 e 5.3). Se possivel, esta avaliacao deveria ser execu-
tada em loco. Adicionalmentebdeve-se tolerar as alteracoes que ocorrem em opera -
sao.
9 FgyTEs DE ERROS NO BALANCEAMEN,TO
9.1 Erros finais de Zeitura em instrumentos
No process0 de balanceamento executado pelo fabricante e durante o balanceamento
de verificacao executado no fornecimento (isto 6, pelo cliente) deve-se conside -
rar OS possiveis erros provenientes das imperfeicoes inerentes aos metodos de me -
dicio e equipamentos. Em primeira instsncia, e neces&io certificar-se que 0
desbalanceamento residual e menor do que-o maxim0 desbalanceamento apropriado ad -
missive1 enquanto que em segunda instsncia pode ser admitido urn valor maior.
A magnitude dos d,esvios admissiveis dos s,aalores selecionados de msximo desbalan-
ceamento admissivel irao depender da qualidade do equipamento de teste. OS se -
guintes desvios de limites para cada urn dos dois cases podem ser usados coma e -
xemplos:
Classes de qualidade de desbalanceamento Desvio admissivel
G 2,5 - G 16 f 15%
G 1 + 30%
G 0,4 + 50%
Se a verificaczo do desbalanceamento residual de urn rotor balanceado e executada
corn urn minim0 de desvio possivel, pode-se seguir o seguinte procedimento (ver
Figura 4):
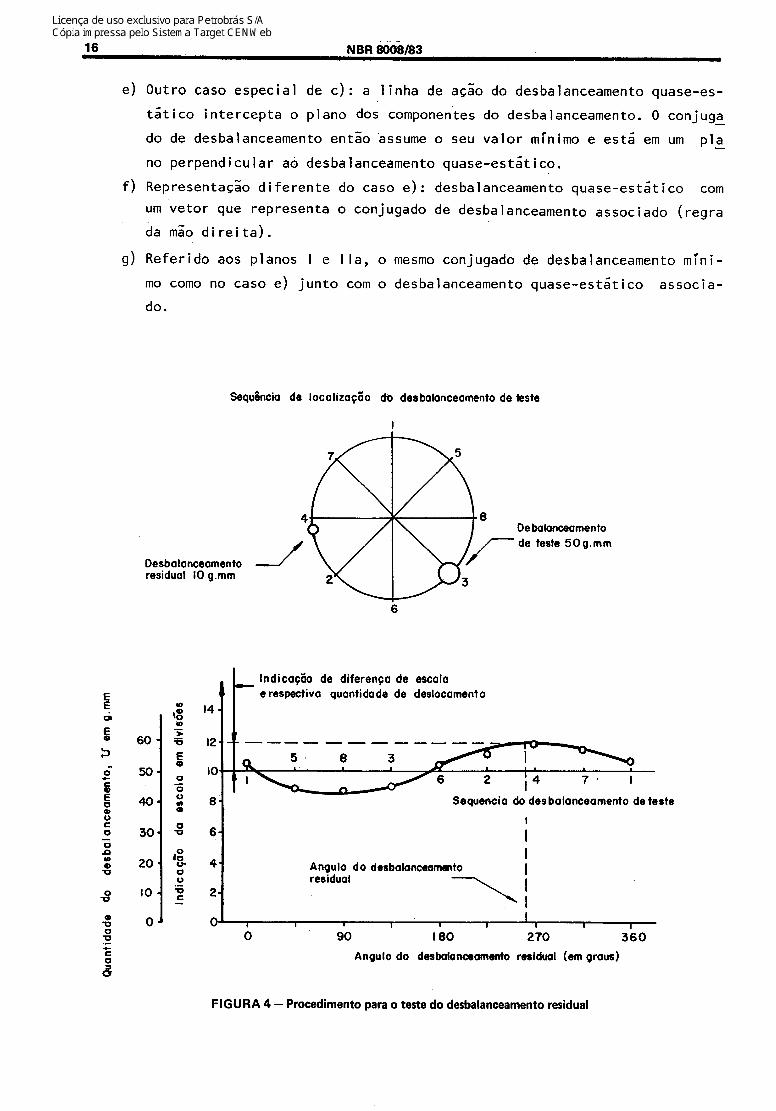
Uma massa de desbalanceamento de teste equivalente de cinco a dez vezes a quanti -
dade de desbalanceamento residual estimada e aplicada ao rotor em diferentes po
sicoes angulares. A fim de amenizar a dispersao de medicoes individuais, e vantc
joso escolher oito posicoes angulares igualmente espacadas (isto e, posicoes es-
pacadas de 45O entre si). OS valores de leitura de desbalanceamento sio registra -
dos em suas respectivas posicoes angulares (ver Figura 4) e a curva que passa a
traves destes, deve ter a forma aproximada de uma senoide. A media aritmetica
das leituras na escala produz a linha horizontal na Figura 4 que pode ser usada
coma medida do desbalanceamento de teste, enquanto que a amplitude da curva se -
noidal e a medida real de desbalanceamento residual. Se nao for obtida uma curva
senoidal, pode-se assumir que o desbalanceamento residual existente ja esta abai -
xo do limite de repetibilidade.
Se a linearidade da leitura de escala e question&el, entao a seq&cia de teste
pode ser repetida corn urn desbalanceamento de teste que foi reduzido (ou aumenta-
C6pia impressa pelo Sistema CENWIN
8 NBR 8008/83 _
do) pela quantidade do desbalanceamento residual suspeitado. A relacao entre as
duas curvas senoidais (isto 6, a diferenca no valor recomendado em cada pos i cS0
angular) enGo fornece urn critkio mais conf i&el. A verificacso deveria ser fei -
ta separadamente para OS dois planos de correcao.
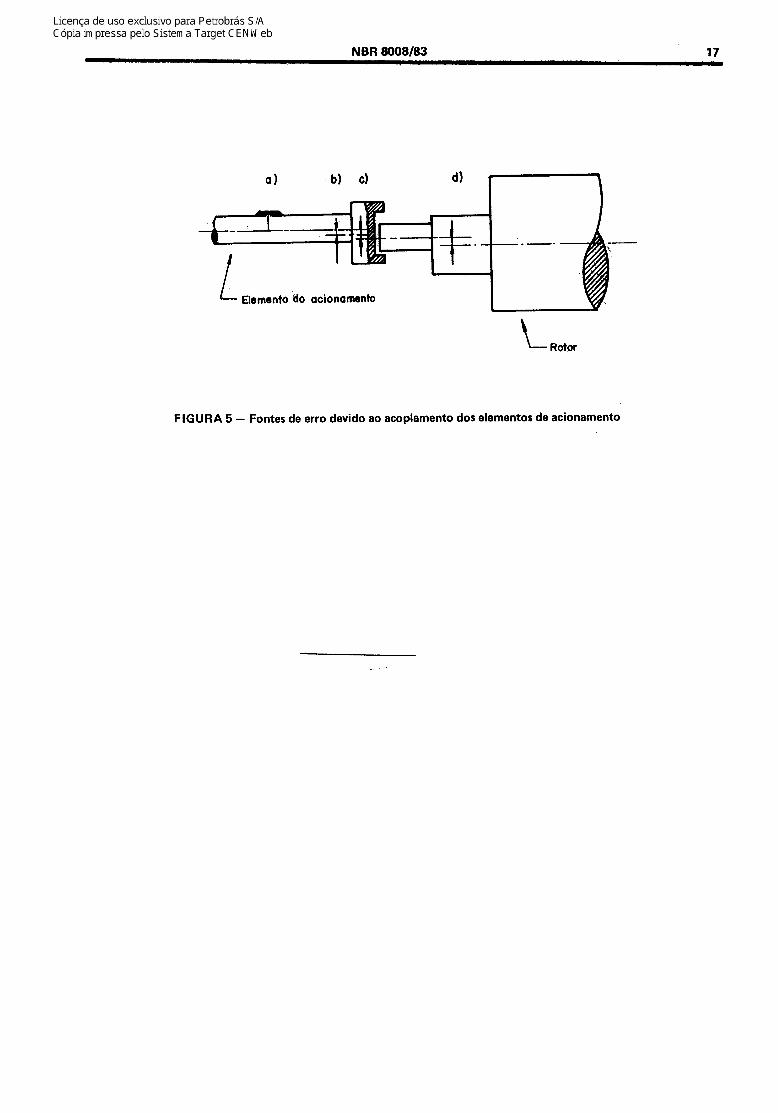
9.2 Erros devido ao acionamento
No process0 de balanceamento de maneira geral, e particularmente na verificacao
do desbalanceamento residual, deve-se ter em mente que set-ios erros podem ocor _
rer pelo fato de que elementos de acionamento (por exemplo, eixos cards) sso ace -
plados ao rotor, ou devido a dispositivos utilizados para suportar rotores em
seus proprios mancais.
Na Figura 5, sso dados OS exemplos das seguintes fontes de erro:
a) efeitos de desbalanceamento atribuidos aos elementos de acionamento ou
de apoio;
b) erros de concentricidade e folgas dos elementos de acionamento ou de a -
poio;
c) folga entre element0 de acionamento ou de apoio e o rotor;
d 1
OS efe
se med
tos de erros citados nas alineas a) e b) podem ser demonstrados tomando-
toes em diferentes posicoes angulares de acoplamento, por exemplo, gi rafi
erros de concentricidade do rotor no ponto de ligacso relativamente ao
munhao.
do-se OS eixos cards em 180~ apes o primeiro ciclo de medicgo.
0 erro citado na alinea c) pode ser determinado por dois ciclos de balanceamento
nos quais a folga 6 eliminada em dois sentidos opostos.
0 erro citado na alinea d), entretanto, nso pode ser encontrado atraves do balan -
ceamen to. Aqui o unico recurso 6 melhorar a precisao de usinagem ou uma verifica -
cao nas condicoes de operacso sem acoplar OS elementos coma descrito para o us0
em c) (Figura 4).
10 DADOS EM DESENHOS OU FOLHAS DE PROCESS0
Complementarmente ao valoor do maxim0 desbalanceamento residual admissivel em ca -
da plano de correcao em grama-mili’metro (ou indicacao da massa do rotor, veloci-
dade de operacao e classe de qualidade de balanceamento), OS desvios de projeto
ou construcao, ou folhas de process0 devem mencionar tambern dados precisos sobre
tipo de mancal e sua localizacao na maquina de balancear, montagens de acionamen -
to, velocidade de balanceamento, planos de correcao, local onde deve ocorrer a
retirada de massas e outras informacoes de coma o material pode ser removido corn
seguranca, considerando-se a resistkcia exigida, ou outras consideracoes. Em al -
guns cases, podem ser dadas instru@es relativas ao estado de fabricas e grau
de montagem do rotor quando esti pronto para o balanceamento (por exemplo, corn
ou sem volante, chaveta ou semelhantes).
C6pia impressa pelo Sistema CENWIN NW? 8008/83 Q
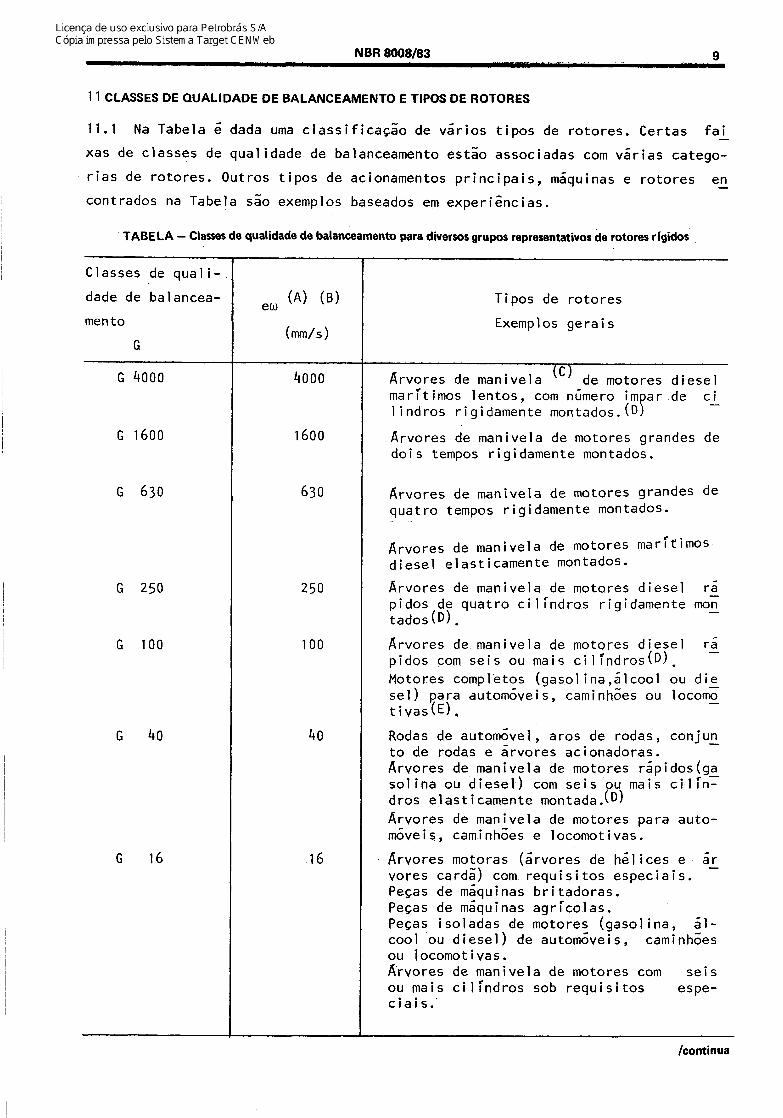
11 CLASSES DE QUALIDADE DE BALANCEAMENTO E TIPOS DE ROTORES
11.1 Na Tabela 6 dada uma classificacao de varies tipos de rotores. Certas fai - xas de classes de qualidade de balanceamento estzo associadas corn varias catego-
rias de rotores. Outros tipos de acionamentos principais, maquinas e rotores en - contrados na Tabela sso exemplos baseados em experi&cias.
TABELA - Classes de qualidade de balanceamento para diversos grupos representativos de rotores rigidos
Classes de quali-
dade de balancea-
men to
G
G 4000
G 1600
G 630
G 250
G 100
G 40
G 16
ew (A) (B)
(mm/s)
4000
1600
630
250
100
40
16
Tipos de rotores
Exemplos gerais
Arvores de manivela 03 de motores diesel maritimos lentos, corn numero im ar de ci lindros rigidamente montados.(D P
-
Arvores de manivela de motor-es grandes de dois tempos rigidamente montados.
Arvores de manivela de motores grandes de quatro tempos rigidamente montados.
Arvores de manivela de motores maritimos diesel elasticamente montados.
Arvores de manive pidos de quatro c tados (p) .
Arvores de manivel pidos corn seis ou
Motores completes
a de motores diesel ra 1 indros rigidamente rno; -
a de motores diesel t-a mais ci 1 indros(D). -
(gasolina,alcool ou die - sel) par-a automoveis, caminhoes ou locomo tivas(E),
-
Rodas de automovel, aros de rodas, conjuc to de rodas e arvores acionadoras. Arvores de manivela de motores rapidos(ga solina ou diesel) corn seis ou mais cilfn- dros elasticamente montada.(D)
Arvores de manivela de motores para auto- moveis, caminhoes e locomotivas.
Arvores motoras (arvores de he1 ices e at- vores cards) corn requisitos especiais. - Pecas de -maqu i nas br i tadoras. Pecas de maquinas agricolas. Pecas isoladas de motores (gasolina, al- cool ou diesel) de automoveis, cami nh6es ou locomotivas. Arvores de manivela de motores corn seis ou mais cilindros sob requisitos espe- ciais.’
/continua
C6pia impressa pelo Sistema CENWIN
10 NBR 8008/83
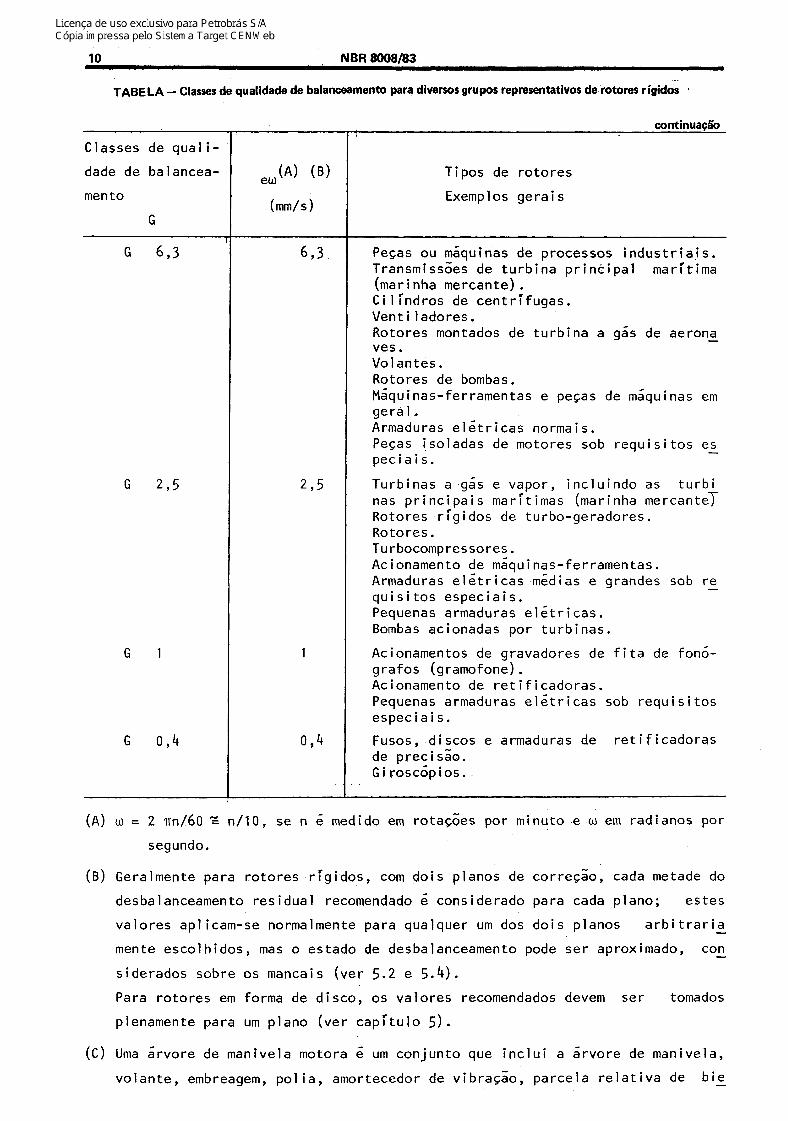
TABELA - Classes de qualidade de balanceamento para diversos grupos representativos de rotores r igidoi
Classes de quali-
dade de balancea-
men to
G
G 693
G 295
G 1
G 094
eu(A) (B)
(mm/s)
693
295
094
I continua@0
Tipos de rotores
Exemplos gerai s
Pecas ou maquinas de processes industriais. TransmissGes de turbina principal maritima (mar i nha mercante) . Ci 1 i’ndros de centrifugas. Venti ladores. Rotores montados de turbina a gas de aeronc ves. Volantes. Rotores de bombas. Maquinas-ferramentas e pecas de maquinas em geral. Armaduras eletricas normais. Pecas isoladas de motores sob requisitos es peciais.
-
Turbinas a gas e vapor, incluindo as turbi nas principais maritimas (marinha mercanter Rotores rigidos de turbo-geradores. Rotores. Turbocompressores. Acionamento de maquinas-ferramentas. Armaduras eletricas medias e grandes sob re - quisitos especiais. Pequenas armaduras eletricas. Bombas acionadas por turbinas.
Acionamentos de gravadores de fita de fono- grafos (gramofone). Acionamento de retificadoras. Pequenas armaduras eletricas sob requisitos especiais.
Fuses, discos e armaduras de retificadoras de precisao. Gi rosc6pios.
(A) o = 2 +m/bO g n/10, se n 6 medido em rotagoes por minuto e o em radianos por
Segundo.
(B) Geralmente para rotores rigidos, corn dois planos de correcao, cada metade do
desbalanceamento residual recomendado 6 considerado para cada plano; estes
valores aplicam-se normalmente para qualquer urn dos dois planos arbitraria -
mente escolhidos, mas o estado de desbalanceamento pode ser aproximado, con -
siderados sobre OS mancais (ver 5.2 e 5.4).
Para rotores em forma de disco, OS valores recomendados devem ser tomados
plenamente para urn plan0 (ver capitulo 5).
(C) Uma arvore de manivela motora 6 urn conjunto que inclui a &-vore de manivela,
volante, embreagem, polia, amortecedor de vibracao, parcela relativa de bie _
C6pia impressa pelo Sistema CENWIN
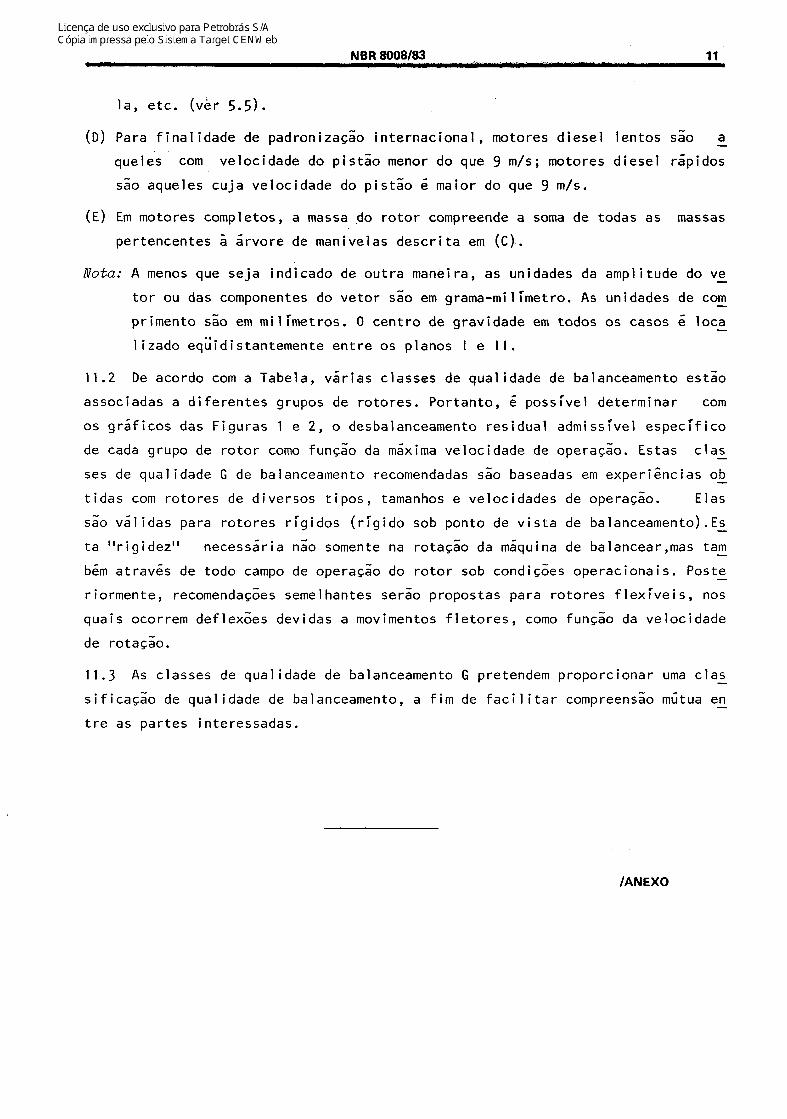
NBR 8008/83 11
la, etc. (v&r 5.5).
(0) Para finalidade de padronizack international, motor-es diesel lentos sso a -
quel es- corn velocidade do pistao menor do que 9 m/s; motores diesel rspidos
sgo aqueles cuja velocidade do pistso 6 maior do que 9 m/s.
(E) Em motores completes, a massa .do rotor compreende a soma de todas as massas
pertencentes 5 it-vore de manivelas descrita em (C).
Nota: A menos que seja indicado de outra maneira, as unidades da amplitude do ve -
tor ou das componentes do vetor sso em grama-milimetro. As unidades de corn -
primento ~50 em milimetros. 0 centro de gravidade em todos OS cases 6 loca -
lizado eqiidistantemente entre OS planos I e II.
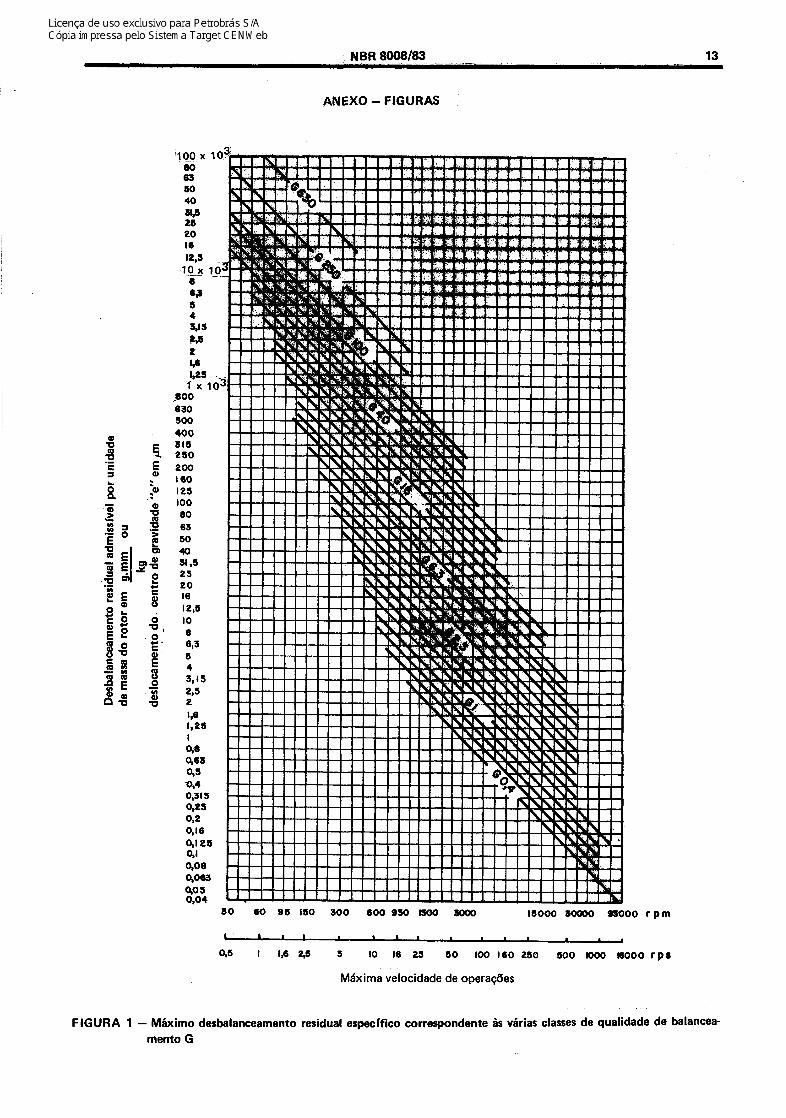
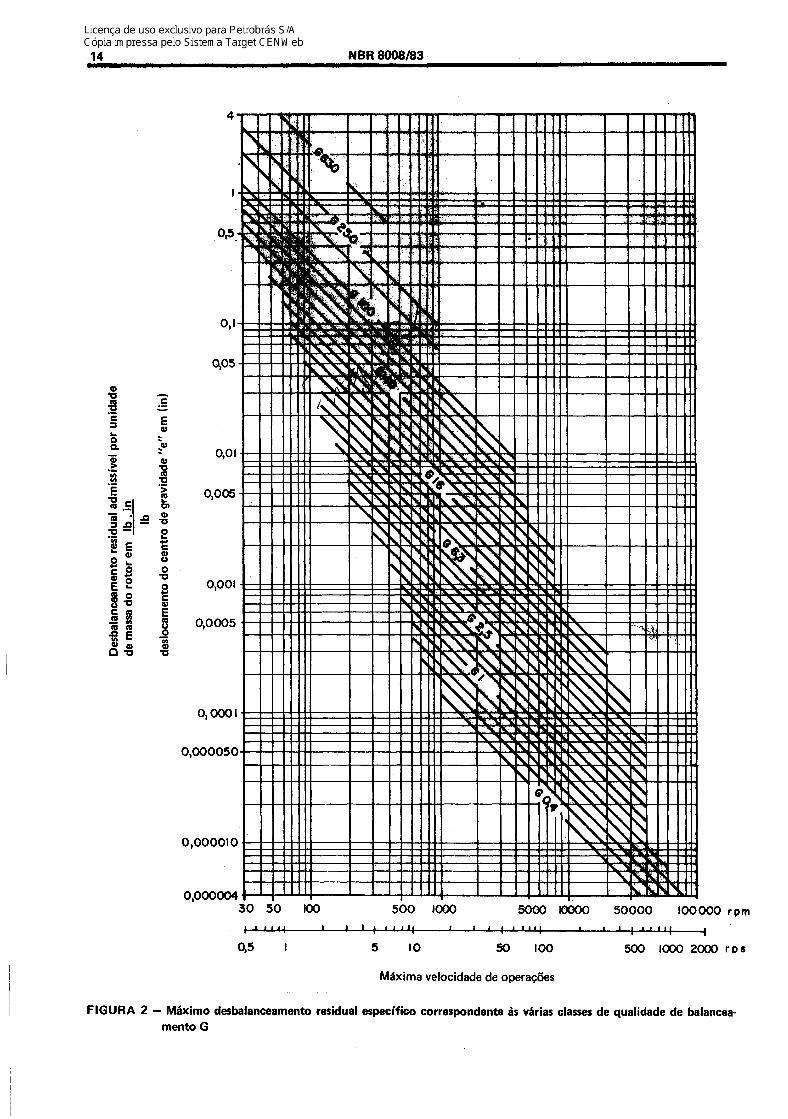
11.2 De acordo corn a Tabela, v&-ias classes de qualidade de balanceamento estzo
associadas a diferentes grupos de rotores. Portanto, 6 possivel determinar corn
OS graficos das Figuras 1 e 2, o desbalanceamento residual admissivel especifico
de cada grupo de rotor coma funcao da maxima velocidade de operacao. Estas clas -
ses de qualidade G de balanceamento recomendadas sso baseadas em experi&cias ob -
tidas corn rotores de diversos tipos, tamanhos e velocidades de operacso. Elas
sao validas para rotores rigidos (rigid0 sob ponto de vista de balanceamento).Es -
ta “rigidez” necesskia nzo somente na rotacao da maquina de balancear,mas tam
hem atraves de todo campo de operacao do rotor sob condic6es operacionais. Poste -
riormente, recomendacoes semelhantes serao propostas para rotores flexiveis, nos
quais ocorrem deflexoes devidas a movimentos fletores, coma funcao da velocidade
de rotacao.
11.3 As classes de qualidade de balanceamento G pretendem proporcionar uma clas -
sificacao de qualidade de balanceamento; a fim de facilitar compreensao mutua en -
tre as partes interessadas.
/ANEXO

C6pia impressa pelo Sistema CENWIN
12 , NBR 8008/83
C6pia impressa pelo Sistema CENWIN
NBR 8008f83 13 ._-- _.
ANEXO - FIGURAS
IQ0 x
iii 50 40 w 26 20 I6
12,s
!!LlL 6
63 5 4 &IS @I5 t
60 95 150 600 950 IS00 15000 30000 65000 r pm
c I I I 1 I a * 1 1 I 1 . . )
w I I,6 2J5 5 IO I6 23 50 loo I60 250 500 loo0 I6000
Mdxima velocidade de operaties
rP6
FIGURA 1 - Mgximo desbalanceamento residual especifico correspondente is vhias classes de qualidade de balancea- mento G
C6pia impressa pelo Sistema CENWIN 14 NBR aoOa/ss
0,000010
0,000004
1 i iitii
30 so loo 500 looo 5000 loo00 50000 100000 rpm
k’ ‘I’! I I Ilrrllc I I I 1 I Il.1, I II411111 I a I 1
w 1 5 IO so loo SO0 1000 2000 rps
MAxima velocidade de opera@es
FIGURA 2 - MBximo desbalanceamento residual especifico correspondente 5s vhias classes de qualidade de balancea- mento G
C6pia impressa pelo Sistema CENWIN
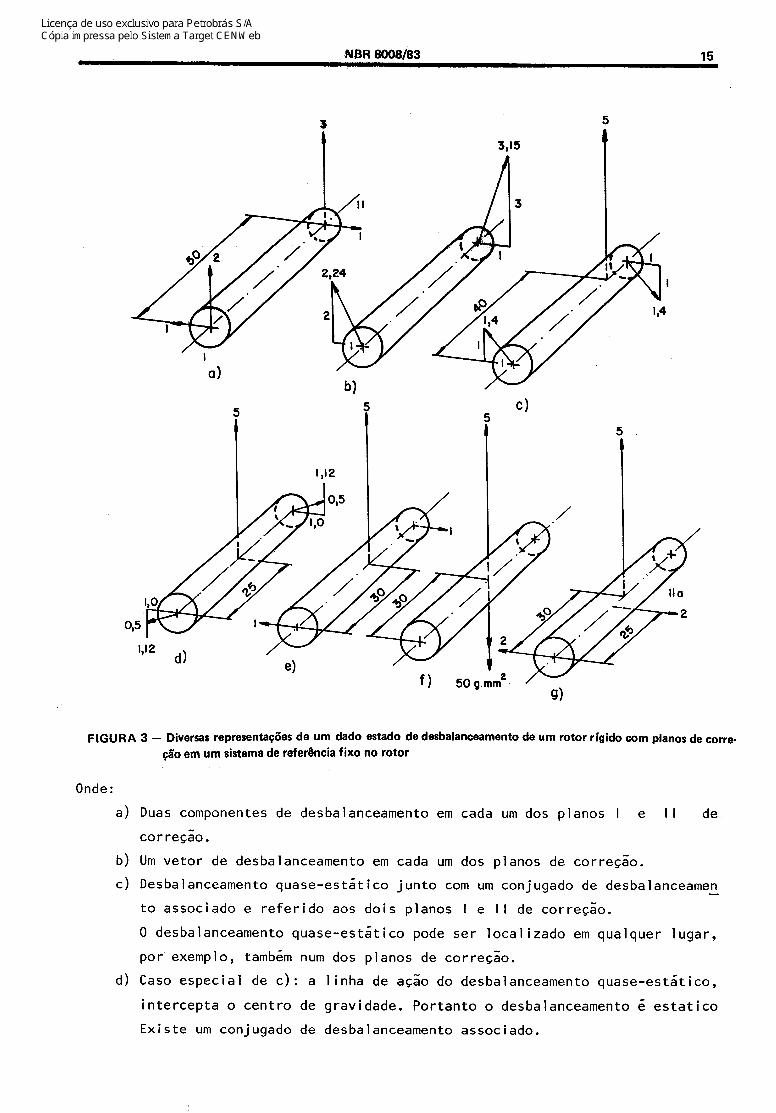
FlGURA 3 - Diversas representa$es de urn dado estado de desbalanceamento de urn rotor rigido corn pianos de corre @o em urn sistema de referhcia fixo no rotor
Onde:
a) Duas componentes de desbalanceamento em cada urn dos planos I e II de
correczo.
b) Urn vetor de desbalanceamento em cada urn dos planos de correcao.
c) Desbalanceamento quase-estatico junto corn urn conjugado de desbalanceamen - to associado e referido aos dois planos I e II de correcao.
0 desbalanceamento quase-estatico pode ser localizado em qualquer lugar,
por exemplo, tambem num dos planos de correcao.
d) Caso especial de c): a linha de acao do desbalanceamento quase-estatico,
intercepta o centro de gravidade. Portanto o desbalanceamento 6 estatico
Existe urn conjugado de desbalanceamento associado.
C6pia impressa pelo Sistema CENWIN
16 IUBR 8Oos/83
e) Outro case especial de c): a linha de acao do desbalanceamento quase-es-
tstico intercepta o plano dos componentes do desbalanceamento. 0 conjuga - do de desbalanceamento entso assume o seu valor minim0 e esta em urn pla
no perpendicular ao desbalanceamento quase-estatico.
f) Representacao diferente do case e> : desbalanceamento quase-estatico corn
urn vetor que representa o conjugado de desbalanceamento associado (regra
da mzo direi-ta).
g) Referido aos planos I e I la, o mesmo conjugado de desbalanceamento mini-
mo coma no case e) junto corn o desbalanceamento quase-est&ico associa-
do.
Sequhcia de localitaG6o do desbalanceamento de teste
Desbalanceamento residual IO g.mm
De balanceamento - de teste 50g.mm
6
lndicaqbo de diferenqa de escala e respectiva quantidade de deslocamento
8- Sequencia do des balanceamento de teste
Angulo do desbalanceamento residual
so 180 270 sbo
Angulo do desbalanceamento residual (em graus)
FIGURA 4 - Procedimento para o teste do desbalanceamento residual
C6pia impressa pelo Sistema CENWIN
NBR 8008/83 17
a) b) cl
Element0 a0 acionamentc
FIGURA 5 - Fontes de erro devido ao acoplamento dos elementos de acionamento