MÉTODOAUTOMATIZADOPARADETERMINAÇÃODE ......de sua finalidade os modelos de cores podem ser...
59
SAULO MARTIELLO MASTELINI MÉTODO AUTOMATIZADO PARA DETERMINAÇÃO DE COR EM CARNE DE FRANGO E NORMALIZAÇÃO DE EFEITOS DE LUMINOSIDADE LONDRINA–PR 2015
Transcript of MÉTODOAUTOMATIZADOPARADETERMINAÇÃODE ......de sua finalidade os modelos de cores podem ser...

SAULO MARTIELLO MASTELINI
MÉTODO AUTOMATIZADO PARA DETERMINAÇÃO DECOR EM CARNE DE FRANGO E NORMALIZAÇÃO DE
EFEITOS DE LUMINOSIDADE
LONDRINA–PR
2015


SAULO MARTIELLO MASTELINI
MÉTODO AUTOMATIZADO PARA DETERMINAÇÃO DECOR EM CARNE DE FRANGO E NORMALIZAÇÃO DE
EFEITOS DE LUMINOSIDADE
Versão Preliminar de Trabalho de Conclusãode Curso apresentado ao curso de Bachare-lado em Ciência da Computação da Univer-sidade Estadual de Londrina para obtençãodo título de Bacharel em Ciência da Compu-tação.
Orientador: Prof. Dr. Sylvio Barbon Júnior
LONDRINA–PR
2015

Saulo Martiello MasteliniMétodo Automatizado para Determinação de Cor em Carne de Frango e Nor-
malização de Efeitos de Luminosidade/ Saulo Martiello Mastelini. – Londrina–PR,2015-
57 p. : il. (algumas color.) ; 30 cm.
Orientador: Prof. Dr. Sylvio Barbon Júnior
– Universidade Estadual de Londrina, 2015.
1. Visão Computacional. 2. Cor. I. Sylvio Barbon Júnior. II. UniversidadeEstadual de Londrina. III. Faculdade de xxx. IV. Método Automatizado para De-terminação de Cor em Carne de Frango e Normalização de Efeitos de Luminosidade
CDU 02:141:005.7

Dedicatória


AGRADECIMENTOS
Texto de agradecimento.


“Texto epígrafe.”


MASTELINI, S. M.. Método Automatizado para Determinação de Cor em Carnede Frango e Normalização de Efeitos de Luminosidade. 57 p. Trabalho de Con-clusão de Curso – Versão Preliminar (Bacharelado em Ciência da Computação) – Univer-sidade Estadual de Londrina, Londrina–PR, 2015.
RESUMO
Texto do Resumo.
Palavras-chave: Visão Computacional. Cor. Normalização de Luminosidade. Qualidadede Alimentos. Carne de Frango.


MASTELINI, S. M.. Automated Method for Poultry Meat Color Determinationand Normalization of Luminosity Effects. 57 p. Final Project – Draft Version (Ba-chelor of Science in Computer Science) – State University of Londrina, Londrina–PR,2015.
ABSTRACT
Abstract text.
Keywords: Computer Vision. Color. Luminosity Normalization. Food Quality. PoultryMeat.


LISTA DE ILUSTRAÇÕES
Figura 1 – Representação da vizinhança de 4 pixels . . . . . . . . . . . . . . . . . 28Figura 2 – Representação da vizinhança de 8 pixels . . . . . . . . . . . . . . . . . 28Figura 3 – Representação de alguns espaços de cor orientados à Hardware . . . . . 33Figura 4 – Representação de dois espaços de cor orientados à Percepção Humana. 34Figura 5 – Representação do espaço de cor L*a*b* . . . . . . . . . . . . . . . . . . 35Figura 6 – Cubo RGB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Figura 7 – Exemplo de Imagem obtida nos experimentos. . . . . . . . . . . . . . . 44Figura 8 – Visão geral da metodologia desenvolvida. . . . . . . . . . . . . . . . . . 45Figura 9 – Imagem da Amostra após a aplicação de Blur. . . . . . . . . . . . . . . 49Figura 10 – Imagem da Amostra após inversão de cores. . . . . . . . . . . . . . . . 49Figura 11 – Canal V (HSV) da imagem borrada e invertida. . . . . . . . . . . . . . 50Figura 12 – Comparação entre a imagem original e após Normalização de Lumino-
sidade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51


LISTA DE TABELAS
Tabela 1 – Cronograma de execução . . . . . . . . . . . . . . . . . . . . . . . . . . 53


LISTA DE ALGORITMOS
4.1 Iteração sobre todos os arquivos de uma dada pasta e leitura das imagens. 454.2 Primeira etapa da segmentação da carne. . . . . . . . . . . . . . . . . . . . 464.3 Segunda etapa da segmentação da carne. . . . . . . . . . . . . . . . . . . . 474.4 Segmentação dos Marcadores Remid. . . . . . . . . . . . . . . . . . . . . . 474.5 Aplicação de filtro de borramento Gaussiano. . . . . . . . . . . . . . . . . . 484.6 Extração do canal de brilho do espaço HSV. . . . . . . . . . . . . . . . . . 504.7 Aplicação da operação de Overlay de camadas na imagem original. . . . . . 504.8 Determinação dos coeficientes de calibração de cor. . . . . . . . . . . . . . 514.9 Aplicação dos coeficientes de calibração de cor. . . . . . . . . . . . . . . . . 52


LISTA DE ABREVIATURAS E SIGLAS
CV Computer Vision
CVS Computer Vision System
LANA Laboratório de Análise de Alimentos
Remid Redes e Mídias Digitais


SUMÁRIO
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.1 Objetivos e Contribuições . . . . . . . . . . . . . . . . . . . . . . . 251.2 Organização do Trabalho . . . . . . . . . . . . . . . . . . . . . . . 25
2 FUNDAMENTAÇÃO TEÓRICA . . . . . . . . . . . . . . . . . 272.1 Processamento de Imagens Digitais . . . . . . . . . . . . . . . . 272.1.1 Escala de Cinza e Imagens Coloridas . . . . . . . . . . . . . . . . 272.1.2 Vizinhança de Pixel . . . . . . . . . . . . . . . . . . . . . . . . . . 282.2 Histograma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.3 Segmentação de Objetos . . . . . . . . . . . . . . . . . . . . . . . 292.4 Crescimento de Região . . . . . . . . . . . . . . . . . . . . . . . . 292.5 Thresholding (limiarização) . . . . . . . . . . . . . . . . . . . . . 302.5.1 Segmentação pelo método de Otsu . . . . . . . . . . . . . . . . . 302.6 Cor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.6.1 Espaços de Cor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.6.2 Tipos de Espaços de Cor . . . . . . . . . . . . . . . . . . . . . . . 322.6.2.1 Espaços de Cor Orientados à Hardware . . . . . . . . . . . . . . . . . . 32
2.6.2.2 Espaços de Cor Orientados à Percepção Humana . . . . . . . . . . . . 33
2.6.2.3 Espaços de Cor Instrumentais . . . . . . . . . . . . . . . . . . . . . . . 34
2.6.3 Espaços de Cor Empregados no Trabalho . . . . . . . . . . . . . 352.6.3.1 RGB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6.3.2 HSV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.6.3.3 L*a*b* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3 TRABALHOS RELACIONADOS . . . . . . . . . . . . . . . . . 39
4 MATERIAIS E MÉTODOS . . . . . . . . . . . . . . . . . . . . 434.1 Amostras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2 Metodologia proposta . . . . . . . . . . . . . . . . . . . . . . . . . 444.2.1 Segmentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.2.1.1 Segmentação da Carne . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.2.1.2 Segmentação das Réguas Remid . . . . . . . . . . . . . . . . . . . . . . 47
4.2.1.3 Normalização de efeitos de iluminação . . . . . . . . . . . . . . . . . . 48
4.2.1.4 Coeficientes de Correção de Cor e Calibração de Cores . . . . . . . . . 51
4.2.1.5 Conversão para L*a*b* . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.2.1.6 Extração de Informações . . . . . . . . . . . . . . . . . . . . . . . . . . 52

5 PRÓXIMOS PASSOS . . . . . . . . . . . . . . . . . . . . . . . . 53
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . 55

23
1 INTRODUÇÃO
A Visão Computacional e de Máquina engloba o estudo da percepção visual, bemcomo as técnicas, métodos e mecanismos que podem ser empregados para a resolução deproblemas a partir da análise de cenas [1]. Um Sistema de Visão Computacional (ComputerVision System) engloba um série de etapas para a resolução de tarefas com processamentode imagens digitais, que vão desde a aquisição das imagens até a resposta do sistema [2].
O emprego de Visão Computacional aliada à técnicas de processamento de ima-gens permite a modelagem de sistemas para tomada de decisões e avaliação de objetose/ou processos. Dessa maneira, é possível simular a ação tomada por um ser humanoa partir da interação de seu sistema de visão e cérebro. Para tal, a cena é processada,visando a extração das regiões de interesse, bem como a eliminação de aspectos ruidososou irrelevantes para o problema em questão.
Tendo em posse os elementos de interesse na cena, o uso de um sistema de visãocomputacional permite a extração de características não-visuais dos objetos, tais comotamanho, dados estatísticos, entre outros aspectos. Além disso, a análise realizada é não-subjetiva, não está sujeita a cansaço ou fatores psicossociais, além de ser rápida e nãoexigir a manipulação do objeto de interesse [3, 4].
Com o avanço da tecnologia no decorrer dos anos, os dispositivos de hardwarealcançaram desempenho suficiente para criação de aplicações com tempos de respostapróximos ao real, e com custos relativamente baixos. Os dispositivos de aquisição deimagem digital passaram a possuir alta qualidade representativa, além de serem capazes decapturar além da faixa visível da luz, outras frequências úteis para análises (infravermelho,por exemplo). Por essa razão, o emprego de sistemas de visão computacional é umaalternativa viável para situações que envolvem a avaliação de características visuais deuma cena ou objeto de estudo.
Tomadas de decisão, medidas de classificação e identificação de objetos são reali-zados a todo tempo pelo ser humano com base em sua percepção visual. Por essa razão,as possibilidades para a aplicação de Sistemas de Visão Computacional que simulem essasações são muito amplas.
Nesse âmbito, a classificação de alimentos é uma área de grande relevância, levandoem conta a importância dos alimentos na vida humana. Rotinas para classificação e avali-ação de produtos estão presentes nas linhas de produção e, muitas vezes são realizadas demaneira não-automatizada, o que impacta de maneira negativa em termos de velocidadee subjetividade da análise, fatores que a implantação de um CVS tende a solucionar.
A carne é um dos produtos que requer grande controle de qualidade, uma vez

24
que se trata de um produto perecível e, passível de influências do ambiente, condições demanejo, enfermidades, entre outros aspectos. Além disso, grandes importadores aplicamregras rigorosas de controle, de modo a garantir a qualidade e procedência do produtoadquirido [4].
O mercado de carnes, como a de Frango, movimenta anualmente uma grandequantidade de dinheiro. O Brasil nesse cenário está situado como o maior exportador decarne de Frango e o terceiro maior produtor1. A carne brasileira alcança 142 países, sendoque gerou ao país, somente no primeiro trimestre de 2015, cerca de 1354, 568 milhões dedólares 2. Esses dados reforçam a importância de medidas de controle de qualidade desseproduto.
A avaliação da carne de frango é feita levando em consideração a análise da cor,entre outros aspectos [5]. Quadros de PSE [6] (Pale, Soft, Exudative) na carne estãorelacionados com a cor, além de grandezas como o PH e a capacidade de retenção de água[5, 6]. De fato, a cor é uma das primeiras características percebidas pelos consumidores nosalimentos, sendo que geralmente a coloração de um produto é relacionada com aspectoscomo sabor, textura, valor nutricional, tempo de armazenamento e grau de satisfação [7].
Frequentemente, a análise de cores é realizada através de uma abordagem instru-mental, com o emprego de um aparelho chamado colorímetro, que a partir de um processode calibração em um padrão conhecido, mede o valor das cores a partir do contato de umsensor com a amostra. O colorímetro possui uma fonte de luz que ao ser emitida entra emcontato com a superfície do objeto em análise e é refletida, sendo medida pelo aparelhoe, assim gerando um valor de coloração.
Esse tipo de abordagem não cobre toda a superfície da amostra, uma vez que a áreade amostragem do aparelho é uma área circular com cerca de 11 milímetros de diâmetro[8]. Além disso, existe a possibilidade de amostragem em regiões fora do interesse (comopele e gordura), ou mesmo escolhas tendenciosas, de maneira a se evitar regiões comcoloração anormal, por exemplo. Vale ressaltar ainda, que esse tipo de análise envolve ocontato e manipulação da amostra, ou seja, degradando-a.
Para rotinas de larga escala, como frigoríficos, o emprego da abordagem instrumen-tal acaba tornando o processo de avaliação lento, atrelado a possíveis erros de amostragem,além de impossibilitar a análise individual de cada amostra. O uso de um Sistema de VisãoComputacional pode possibilitar a resolução dos problemas apresentados, uma vez queatinge velocidades próximas a real, não envolve contato com as amostras, parte de umaanálise de toda a superfície da carne (a nível de pixel), e é aplicável à rotinas de grandeescala, além de apresentar custos reduzidos em relação à aquisição de um colorímetro.
1 <http://www.agricultura.gov.br/animal/especies/aves> (Acesso em 25/03/2015)2 <http://www.ibge.gov.br/home/estatistica/indicadores/agropecuaria/producaoagropecuaria/
abate-leite-couro-ovos_201501_publ_completa.pdf> (Acesso em 29/09/2015)

25
Aplicações na área tem sido desenvolvidas utilizando diferentes tipos de fontespara a aquisição das imagens e abordagens para obtenção dos valores de cor. Todavia, umaspecto ainda pendente na área é o tratamento de condições adversas de iluminação noambiente. Trabalhos laboratoriais tem sido desenvolvidos utilizando ambientes isolados deluz externa, bem como com iluminação controlada, buscando o máximo de uniformidadena incidência de luz sobre a superfície das amostras. Esse tipo de análise obtém resultadossatisfatórios quanto aos valores obtidos, mas ainda não é adequada para ambientes deprodução em larga escala. O desenvolvimento de uma abordagem para Normalização dosEfeitos de Luminosidade provenientes do ambiente aumenta a aplicabilidade do sistema,possibilitando sua implantação em ambientes diversos, sem a existência de um controlerígido da iluminação incidente.
1.1 Objetivos e Contribuições
Este trabalho objetiva desenvolver uma metodologia automatizada para a deter-minação de cor em pedaços de carne de frango, através do uso de Visão Computacionale técnicas de processamento de imagens digitais, de modo a apresentar uma alternativaao uso do colorímetro. O sistema proposto, além de ser automático, deve apresentar umdesempenho próximo ao tempo real, de modo a permitir sua implantação em ambientesde produção, e deve separar somente os objetos de interesse na cena para a análise, nocaso a carne.
Além disso, o sistema deve tratar efeitos de luminosidade adversos provenientes doambiente onde a imagem é adquirida, normalizando e balanceando a luz incidente sobrea cena capturada, dessa forma oferecendo robustez na análise da cor e, permitindo assim,sua implantação em locais de produção com iluminação não-controlada.
A partir do momento que a metodologia proposta ofereça robustez, um processoautomático, sem contato com as amostras e com velocidade de processamento satisfatória,esta é adequada para implantação em um ambiente de produção de larga escala, comoum frigorífico, sem que haja a necessidade de intervenção de um especialista treinado, queestá sujeito a efeitos do cansaço, bem como situações psicológicas adversas.
1.2 Organização do Trabalho
O Trabalho está organizado da seguinte forma:
(A TERMINAR DE SE DEFINIR)


27
2 FUNDAMENTAÇÃO TEÓRICA
Para a execução desse trabalho, fez-se necessário a compreensão de conceitos cor-relatos à área de processamento de imagens, Visão Computacional, Percepção de Cores,Normalização de Efeitos de Luminosidade e análise de qualidade em carne de Frango.
Para melhor entendimento, as seções a seguir apresentam um conjunto de técnicase conceitos correlatos ao trabalho.
2.1 Processamento de Imagens Digitais
Uma imagem pode ser definida como um função 𝑓(𝑥, 𝑦), onde 𝑥 e 𝑦 são as variáveisespaciais e 𝑓 representa a amplitude da função, também chamada de intensidade ou nívelde cinza da imagem no ponto (𝑥, 𝑦).
Quando 𝑥, 𝑦 e a amplitude de 𝑓 são todos discretos e finitos, a imagem é chamadade imagem digital [9].
A expressão processamento de imagens digitais se refere à manipulação, aplica-ção de modificações e processamentos diversos em uma imagem digital, através de umcomputador.
Uma imagem é formada por um número finito de pontos, cada um com uma loca-lização e valor particulares; esses pontos são denotados como elementos da imagem/fotoe pixels. O termo Pixel é o mais amplamente utilizado [9].
Quanto à aquisição das imagens, comumente é feita através sensores RGB, queestão presentes em câmeras digitais, smartphones, entre outros. Todavia, abordagens di-ferenciadas podem ser empregadas, como por exemplo, o uso de imagens multi-espectrais,infravermelho, etc [3].
2.1.1 Escala de Cinza e Imagens Coloridas
Em relação à representação das tonalidades nas imagens, normalmente se tem duasformas representativas: imagens em tons/escala de cinza e imagens coloridas.
O primeiro grupo é referente à imagens onde as tonalidades são representadasatravés da variação tonal de intensidades, que vão geralmente do 0 (preto) até o 255(branco), abrangendo os valores de cinza intermediários, ou tons de cinza. Imagens podemconter menor variação tonal, ou seja, menos do que 256 tons de cinza; isso implica emmenor possibilidade de representação de variações de intensidades.
Além de imagens em tons de cinza, uma cena pode ser representada através de

28
cores, as chamadas imagens coloridas. Para tal, geralmente três valores de estímulo tonalou valores de tristimulus são empregados para representar a cor [9]. Esses valores estãorelacionados aos espaços de cores que serão descritos mais adiante.
2.1.2 Vizinhança de Pixel
Quanto à localização espacial dos pixels, um conceitos recorrente é o termo vizi-nhança. Pixels imediatamente adjacentes a um dado pixel em análise são chamados depixels vizinhos.
Para um dado pixel 𝑝(𝑥, 𝑦) em uma imagem bidimensional, onde 𝑥 e 𝑦 representamas coordenadas espaciais do mesmo, são definidos dois tipos de vizinhança: de 4 e 8 pixels.
A vizinhança de 4 pixels é formada pelos pontos imediatamente adjancentes aoponto (𝑥, 𝑦) na vertical (variação em 𝑦) e horizontal (variação em 𝑥). Assim, os pontoslevados em consideração na vizinhança são: 𝑝(𝑥−1, 𝑦), 𝑝(𝑥, 𝑦 −1), 𝑝(𝑥+1, 𝑦) e 𝑝(𝑥, 𝑦 +1).
A figura 1 é uma representação da vizinha de 4 pixels. O retângulo central (emcinza) representa o ponto 𝑝(𝑥, 𝑦), enquanto que os retângulos em preto são os seus vizinhos.
Figura 1 – Representação da vizinhança de 4 pixels
A vizinhança de 8 pixels leva em consideração além dos vizinhos na horizontal evertical, os pontos nas diagonais. Dessa forma, as coordenadas levadas em consideraçãosão: 𝑝(𝑥 − 1, 𝑦), 𝑝(𝑥 − 1, 𝑦 − 1), 𝑝(𝑥, 𝑦 − 1), 𝑝(𝑥 + 1, 𝑦 − 1), 𝑝(𝑥 + 1, 𝑦) e 𝑝(𝑥, 𝑦 + 1).
A figura 2 apresenta uma representação da vizinha de 8 pixels. Os retângulos pretosrepresentam a vizinhança.
Figura 2 – Representação da vizinhança de 8 pixels

29
2.2 Histograma
O histograma de uma imagem digital com níveis de intensidade entre [0, 𝐿 − 1],ou seja, 𝐿 níveis de intensidade; pode ser definido como uma função discreta ℎ(𝑔𝑘) = 𝑛𝑘,onde 𝑔𝑘 representa o 𝑘-ésimo valor de intensidade e, 𝑛𝑘 representa a quantidade de pixelsna imagem com o valor 𝑔𝑘.
É possível normalizar um histograma, dividindo cada um de seus componentes pelototal de pixels da imagem, denotado pelo produto 𝑀𝑁 , onde 𝑀 representa o número decolunas e 𝑁 o número de linhas da imagem. Dessa forma, um histograma normalizadoé dado por 𝑝(𝑔𝑘) = 𝑛𝑘
𝑀𝑁, para 0 ≤ 𝑘 < 𝐿. Portanto, 𝑝(𝑔𝑘) pode ser interpretado como
a probabilidade de ocorrência no nível de intensidade 𝑔𝑘 na cena. A soma de todos oscomponentes de um histograma normalizado é 1.
O emprego de histogramas é a base para diversas operações espaciais em imagens,dentre as quais pode-se citar o aumento de contraste, extração de informações estatísticas,segmentação de objetos, além de compressão de dados.
2.3 Segmentação de Objetos
Um dos principais problemas tratados no processamento de imagens é a separaçãode um objeto em uma cena de seu fundo. Esse processo é denominado segmentação.Quando um dado objeto não possui muitos detalhes em sua superfície, o processo desegmentação pode ser entendido como a separação de uma imagem em um número deregiões, cada qual tendo um alto nível de uniformidade em algum parâmetro, tal como cor,brilho, textura, entre outros [1]. Muitas vezes esse processo não é trivial, sendo influenciadopor aspectos do ambiente ou a própria complexidade dos objetos/fundo na imagem.
Como solução para esse tipo de problema, algumas técnicas tem sido empregadas,tais como Crescimento de Região e Thresholding (limiarização). Esses dois conceitos serãoabordados a seguir.
2.4 Crescimento de Região
Técnica utilizada na segmentação de objetos, consiste em agrupar pixels de umadada intensidade, ou outra propriedade de interesse, de forma sucessiva gerando regiõesmaiores até que o processo de segmentação esteja completo. Pontos adjacentes com valoresde intensidade muito diferentes não devem ser agrupados; todavia, deve ser permitido oagrupamento com um certo nível de variação de valores, lidando assim com variações deiluminação, e propriedades do objeto analisado [1]. Essa técnica tende a ser limitada pelaexistência de ruídos e regiões desconexas, além do fato de possuir custo computacional

30
elevado, uma vez que opera através da “expansão” de vizinhança, acabando por avaliarum dado pixel mais de uma vez.
Mesmo com as limitações envolvidas, a técnica de crescimento de região é larga-mente empregada, sendo muito útil em operações sobre máscaras binárias.
2.5 Thresholding (limiarização)
Quando um objeto, ou mesmo o fundo possui algum valor de intensidade, oupropriedade uniforme é possível se definir um limiar de intensidade para separação, atravésdo qual o(s) objeto(s) pode(m) ser separado(s) do fundo [1]. Esse tipo de técnica parasegmentação é chamada de Thresholding.
A partir do valor determinado para limiar, a imagem é binarizada (dois tons ape-nas, comumente preto e branco). O processo é realizado da seguinte maneira:
Imaginando um cenário com um valor 𝑡 de limiar, 𝑙0 e 𝑙𝑓 os valores mínimo emáximo de intensidade, respectivamente, utilizados para a binarização e 𝑝(𝑥, 𝑦) um pixelde posição (𝑥, 𝑦). Para cada pixel na imagem é feita a análise condicional
“Se o valor 𝑝(𝑥, 𝑦) é menor que 𝑡, 𝑝(𝑥, 𝑦) recebe 𝑙0, senão 𝑝(𝑥, 𝑦) recebe 𝑙𝑓”.
O desafio na área é encontrar um valor adequado de limiar. Para tal tipo de tarefa,existem diversos tipos de abordagens, sendo que podem ser divididas em três categorias[2]:
∙ Threshold global: um único valor aplicado à toda a imagem;
∙ Threshold local: um valor de limiar é definido para cada pixel;
∙ Threshold adaptativo: utiliza uma ideia de separação da imagem em subregiões e,para cada uma é determinado um valor de limiar.
Os valores de threshold são determinados através de metodologias variadas, queenvolvem a análise de histogramas (busca de picos e vales na distribuição de intensidade)e de propriedades estatísticas, tais como variância e entropia.
2.5.1 Segmentação pelo método de Otsu
Uma das abordagens mais conhecidas para a definição de um limiar para a seg-mentação de objetos em cenas é a técnica desenvolvida por Otsu [10]. Trata-se de umaabordagem global de limiarização, onde todos os valores possíveis de limiar são analisados

31
(para uma imagem em tons de cinza, por exemplo, todos os 𝐿 níveis possíveis). A escolhaé feita no valor que maximiza a variâncias entre as classes da imagem, a saber: background(fundo) e foreground (objeto(s)).
Uma vez escolhido, o valor de limiarização é aplicado a toda a imagem.
2.6 Cor
A cor é uma grandeza difícil de ser ser descrita, pois trate-se de uma sensaçãoperceptual atrelada às células fotossensíveis do olho humano e, à representação formadaatravés do cérebro [7]. É uma resposta perceptual ao espectro visível de luz que é refletidoou emitido por um objeto. Esse sinal “interage” com os olhos através da retina e, étransmitido para o cérebro através do nervo óptico, assim inferindo-se a sensação da cor.Dessa forma, a cor não uma propriedade intríseca de um objeto, uma vez que a cor sealtera com a mudança da fonte de iluminação de um objeto [11]. De fato, a percepção dacor é um fenômeno muito complexo, dependente da composição do objeto e a iluminaçãono local, além de estar ligada às propriedades dos olhos e cérebro que captam e processama cena percebida e, ainda, os ângulos de visão e iluminação existentes [3].
Independente da característica subjetiva da cor, percebida através da visão, surgea necessidade da definição de um formalismo matemático para a representação da cor, deforma à permitir sua mensuração e manipulação. Esse formalismo é denominado Espaçode Cor e, será abordado a seguir.
2.6.1 Espaços de Cor
A visão humana percebe as cores através da variação de sensibilidade à diferentescomprimentos de onda das células denominadas cones, presentes na retina. Existem trêstipos de células fotorreceptoras (cones), com picos de sensibilidade em comprimentos deonda curtos (cores “azuladas”, 420 − 440 nm), médios (cores “esverdeadas”, 530 − 540nm) e longos (cores “avermelhadas”, 560 − 580 nm) [12].
Uma sensação de cor, não importando quão complexa seja, pode ser descrita pelosolhos através de três componentes de cor. Esses componentes chamados de valores de“tristimulus”, estão relacionados aos três tipos de cones existentes na visão humana e aextensão em que cada tipo é estimulado [3]. Um espaço de cor, também chamado de modelode cor ou ainda sistema de cor representa a definição de um padrão para representaçãodas cores. De maneira geral, trata-se da definição de um sistema de coordenadas e umsubespaço dentro deste, de modo que uma cor é representada através de um (único) pontonesse subespaço [9]. Em um espaço de cor os valores de tristimulus estão relacionados acores [3].

32
Outras grandezas utilizadas para a caracterização da cor são o brilho (Brightness),a Matiz (Hue) e a Saturação (Saturation). O brilho se relaciona à uma noção acromáticade intensidade, que não possui uma unidade de medida definida, sendo empregado, porexemplo, na representação de imagens em tons de cinza. A matiz se relaciona com ocomprimento de onda dominante entre todos que compõem a percepção da cor, ou seja,a cor dominante. Quando um dado objeto é denominado azul, vermelho, ou de qualqueroutra cor, refere-se à sua matiz. Por fim, a saturação está relacionada a pureza da cor, ouà quantidade de luz branca misturada à matiz. As cores de espectro puro são totalmentesaturadas, enquanto que cores com adição de branco possuem saturação inversamenteproporcional à quantidade de branco adicionada [9].
Composições entre cores, além do uso de componentes como a Matiz, Saturaçãoe Brilho são empregados em diversos espaços de cor para representação das variadascolorações. Dependendo da finalidade às quais são aplicados e/ou o modo como as coressão representadas, os sistemas de cores podem ser categorizados. Essa forma forma deseparação será comentada a seguir.
2.6.2 Tipos de Espaços de Cor
Alguns espaços de cor foram desenvolvidos de maneira a facilitar a manipulaçãodas diferentes colorações por humanos, outros são voltados à aplicações científicas, outrosainda, voltados à dispositivos ou meios de exibição e processamento de dados. Dependendode sua finalidade os modelos de cores podem ser divididos em três categorias, a saber:espaços Orientados à Hardware, Orientados à Visão (Percepção) Humana e Espaços deCor Instrumentais [3]. Cada categoria será descrita nas subseções seguintes.
2.6.2.1 Espaços de Cor Orientados à Hardware
Os espaços de cor orientados à hardware são propostos para tarefas processamentode hardware, tais como aquisição, armazenamento e exibição de imagens. São capazesde detectar pequenas variações de coloração e são voltados para aplicações específicas.Como o espaço orientado à hardware mais popular, o espaço RGB (Red, Green, Blue), édefinido por coordenadas em três eixos (Vermelho, Verde e Azul), essa é a maneira comocâmeras câmeras tendem a representar as cenas capturadas, assim como as imagens sãoexibidas em telas de televisores, monitores, smartphones e nos projetores. Outros espaçosnotáveis nessa categoria são os modelos de cor YIQ (Luminance, in-phase, quadrature)e CMY/CMYK (Cyan, Magenta, Yellow, Black), que são empregados principalmente natransmissão de sinais de televisão e dispositivos de impressão, respectivamente [3]. Parao espaço CMYK, um valor extra de preto (black) é adicionado, devido à natureza dosmateriais onde as imagens são impressos, bem como os pigmentos utilizados, de formaque a cor preta não é obtida através de misturas.

33
Na figura 3 é apresentada a representação dos espaços RGB (3a) e YIQ (3b) eCMY (3c).
(a) Espaço de Cor RGB (b) Espaço de cor YIQ
(c) Espaço de cor CMY
Figura 3 – Representação de alguns espaços de cor orientados à Hardware1.
2.6.2.2 Espaços de Cor Orientados à Percepção Humana
Espaços de cor orientados à visão humana estão relacionados à conceitos comocoloração e tonalidade, que são definidos de forma intuitiva por um artista. De maneirageral, são baseados nas grandezas Matiz e Saturação, descritas anteriormente, e um com-ponente de brilho ou iluminação. São exemplos nessa categoria os espaços HSV (Hue,Saturation, Value), HSB (Hue, Saturation, Brightness), HSI (Hue, Saturation, Intensity)e HSL (Hue, Saturation, Lightness). Diferentemente dos espaços orientados à Hardware,que utilizam coordenadas cuboidais para a definição das cores, os espaços do tipo “HS”(Hue, Saturation) utilizam coordenadas cilíndricas. Uma vez que são desenvolvidos combase na percepção visual dos olhos humanos, as mensurações de cores são mais intuitivas
1 Adaptado de [3]

34
ao observador, assim como a variação dos parâmetros dos espaços. No entanto, assimcomo a visão humana, não são sensíveis à pequenas variações nas cores [3].
A figura 4 apresenta uma representação dos espaços HSV (4a) e HSL (4b).
(a) Espaço de Cor HSV2 (b) Espaço de cor HSL3
Figura 4 – Representação de dois espaços de cor orientados à Percepção Humana.
2.6.2.3 Espaços de Cor Instrumentais
Espaços instrumentais são empregados em instrumentos de mensuração de cor.Muitos dos espaços instrumentais são padronizados pelo CIE (Commission Internationaled’Eclairage), sob uma série de condições padrão, tais como: iluminantes e observadores[13].
Diferentemente dos espaços orientados à hardware, que possuem saídas diferentesdependendo do dispositivo, as cores nos espaços instrumentais possuem as mesmas coor-denadas independente do dispositivo de saída. O CIE XYZ é um espaço matematicamentedefinido criado pelo CIE em 1931, baseado na percepção fisiológica da luz. No espaço XYZtrês funções de correspondência de cores, coletivamente denominadas Observador Padrão,são relacionados aos cones vermelhos, verdes e azuis dos olhos humanos. Foi criado pararesolver o problema da incapacidade de se estimular apenas um tipo de cone e o fato denão haver componente para descrever o brilho percebido [14]. Nesse espaço, o Y representaa iluminação/claridade, enquanto que X e Z são componentes primários virtuais, que se“comportam” como a curva de sensibilidade dos cones vermelhos e azuis [3].
A variação de cores no espaço XYZ não atua de maneira uniforme e, por essarazão, dois espaços foram desenvolvidos a partir de transformações não-lineares do espaçoXYZ. Esses espaços são denominados CIE 1976 (L*a*b*), também chamado de CIELAB2 Disponível em: <https://upload.wikimedia.org/wikipedia/commons/0/00/HSV_color_solid_cone_
chroma_gray.png>3 Disponível em: <https://upload.wikimedia.org/wikipedia/commons/2/2d/HSL_color_solid_
dblcone.png>

35
e, o CIE 1976 (L*u*v*), ou CIELUV, que são adotados em muitos instrumentos paramensuração de cor. O espaço de cor L*a*b é muito utilizado em aplicações para avaliaçãode cor, devido à sua uniformidade na distribuição das cores, ou seja, a distância Euclidianaentre duas cores diferentes corresponde aproximadamente à diferença de cor percebida peloolho humano [3].
A figura 5 apresenta uma representação do espaço CIE L*a*b.
Figura 5 – Representação do espaço de cor L*a*b*4.
2.6.3 Espaços de Cor Empregados no Trabalho
A seguir são descritas, de maneira mais detalhada, as características de três espaçosde cor empregados na metodologia desenvolvida no trabalho. A saber: RGB, HSV, L*a*b*.
2.6.3.1 RGB
No modelo de cores RGB, cada cor é representada em termos das cores primárias:Vermelho (Red), Verde (Green) e Azul (Blue). Este modelo é baseado em um sistemacartesiano, sendo que o subespaço de interesse consiste em um cubo, como demonstraa figura 6. As cores primárias estão em três cantos, enquanto que as cores secundárias(Ciano, Magenta e Amarelo), obtidas a partir de misturas de pares das cores primárias,estão nos outros três cantos.
4 Disponível em: <http://www.artec-test-equipment.com/content/artec/producten/lab-sphere2.jpg>

36
Figura 6 – Representação do Espaço RGB no sistema cartesiano5.
Na origem se encontra o preto, enquanto que no canto mais distante da origem, ovalor é branco. A diagonal entre a cor preta e branca contém os tons de cinza, ou seja,valores as três coordenadas iguais.
As outras cores estão contidas dentro do cubo e, são representadas por vetores apartir da origem. Por conveniência os valores das cores/coordenadas estão normalizadosno intervalo de [0, 1] [9].
Uma cena representada no espaço RGB é composta por três imagens: uma paracada cor primária, sendo que estas são combinadas para a reprodução em dispositivoqualquer, como um monitor. O número de bits utilizados para representar cada pixel édenominado pixel depth, ou profundidade de pixel. Tomando-se como exemplo um cenárioonde cada componente RGB é formado por 8 bits, tem-se uma imagem de 24 bits, ou seja,cada pixel é representado através de 24 bits, com valores que variam de 0 à 255 para cadacomponente. Nesse cenário, existe a possibilidade de representação de (28)3 = 16, 777, 216cores. Em aplicações práticas, tais como cores utilizadas em sites da internet, utiliza-seum número mais limitado de valores, levando em conta a capacidade de representação devariação das cores dos dispositivos de saída, bem como a incapacidade de diferenciaçãode cores muito semelhantes pelo ser humano [9].
Como comentado anteriormente, o espaço RGB é um dos mais largamente em-pregados, sendo utilizado em monitores, televisores, câmeras, projetores, entre muitosoutros.
5 Disponível em: <http://zone.ni.com/images/reference/en-XX/help/372916P-01/rgb_cube_localize.gif>

37
2.6.3.2 HSV
Diferentemente do espaço RGB, o modelo HSV separa a cromaticidade dos valoresde intensidade e vivacidade da cor, se aproximando mais da maneira como o ser humanopercebe as cores. De fato, descrever uma cor no sistema HSV tende a ser mais simples doque se definir porcentagens das cores primárias (Vermelho, Verde e Azul) de maneira a seformar um dado tom [9].
O espaço de cor HSV é formado pela Matiz (Hue – H), a Saturação (Saturation– S) e Valor (Value – V). Nesse modelo o valor de H descreve o principal comprimentode onda da cor, ou seja, a principal coloração percebida. A Saturação define a pureza dacor ou quantidade de branco adicionado à cor, que de maneira intuitiva pode ser descritacomo a “vivacidade” da cor: cores mais vivas possuem menor adição de branco. Por fim,o Valor descreve uma noção acromática de intensidade, que pode ser relacionada com obrilho [9].
Segundo a representação do modelo, apresentada na figura 4a, o componente Hpode ser descrito como um ângulo, com domínio entre [0, 2𝜋]. A Saturação pode sercompreendida como a distância radial (a partir do centro) do cone que representa osistema HSV, sendo que assume valores entre [0, 1]. O componente de intensidade podeser compreendido como o eixo vertical do cone e possui valores pertencentes ao intervalo[0, 1] [15].
2.6.3.3 L*a*b*
O espaço CIE L*a*b*, como comentado anteriormente é um modelo instrumental,sendo empregado em análises de coloração diversas. É, também um espaço que independede dispositivos, ou seja, independente do hardware no qual é representado, o valor tonalé o mesmo [3]. É adotado como um padrão internacional para medição de cor [7], sendoempregado em vários dispositivos para esse fim.
O modelo em questão representa de forma separada a cromaticidade e a lumino-sidade de uma cor. O componente L* (Lightness) representa a luminosidade da cor, e vaide 0 (preto) até 100 (branco). Os parâmetros 𝑎* (que vai do verde, se negativo, até overmelho, quando positivo) e 𝑏* (do azul, se negativo, até o amarelo, se positivo) são oscomponentes cromáticos, e variam entre −120 e 120 [7].
A partir dos componentes desse sistema, representado na figura 5 é possível secalcular duas grandezas muito utilizadas na avaliação e mensuração da cor: chroma e oângulo de tonalidade (Hue Angle). Sendo que o valor de chroma é obtido a partir da
expressão arctan(
𝑏*
𝑎*
)e o Hue Angle é obtido a partir de
√𝑎2
* + 𝑏2* [7].


39
3 TRABALHOS RELACIONADOS
Estudos relacionados à determinação de cor em carne tem sido realizados utilizandovariadas abordagens para aquisição das imagens, processamento e mensuração da cor.
Em [16] é investigado um procedimento para calibração de um Sistema de Vi-são Computacional para determinação de cor em presunto. Diversos ajustes na câmerautilizada são realizados, além de que um ambiente com iluminação controlada é empre-gado. Para a calibração, ou seja, adequar as cores obtidas nas imagens com um padrãoconhecido, são utilizados os chamados “Color Checkers”, que consistem em palhetas comdiversas cores, cujos valores no espaço L*a*b* são conhecidos. Os autores destacam quea heterogeneidade do material analisado influencia nos valores obtidos de cor.
Similarmente, no artigo [17] um modelo para calibração de um CVS e regressãode valores RGB para L*a*b*, utilizado na avaliação de presuntos, é proposto. Uma taxabaixa de erro é obtida, todavia, trata-se de um modelo com iluminação controlada e nemtoda a superficie da amostra é analisada, determinando uma área central de tamanho fixo.Color checkers são também empregados para a calibração do sistema.
Nos dois trabalhos apresentados anteriormente, o processo de calibração do sistemaé realizado previamente à aquisição das imagens, uma vez que ambientes controlados foramempregados, assim, teoricamente não estando sujeitos à variações de condições.
No trabalho apresentado em [18], os autores utilizam a Luminosidade da cor parabuscar um correlação com quadros de PSE (Pale, Soft, Exudative) em carne suína. Essetipo de situação está relacionada à desagregação de valores da carne, bem como ao graunegativo de aceitabilidade pelo consumidor. Os componentes R, G e B do espaço de corRGB e os componentes V e L, dos espaços HSV e HSL, respectivamente, são empregadospara buscar valores de correlação com o componentes L* (L*a*b*), bem como com valoresde PH e condutividade elétrica, obtidos de forma instrumental. Recentemente, em [19], osmesmos autores utilizam os mesmos componentes citados, de forma a classificar a carnesuína em duas classes: PSE e RFN (red, firm, normal, non-exudative). Os valores dePH e L* (obtidos por correlação com os componentes R, G, B, V e L) são empregadospara detecção de um quadro de PSE na carne suína. Vale ressaltar, que a segmentaçãodas amostras do fundo é feita de maneira empírica e, o processo geral de avaliação énão-automatizado.
O uso da dimensão fractal na análise da variação de coloração com relação aotempo, em carne bovina, é realizado em [20]. Neste trabalho, propõe-se uma análise al-ternativa à abordagem instrumental e a avaliação de valores médios de coloração, levandoem conta toda a distribuição de cor sob a amostra escolhida. Vale ressaltar que o ambiente

40
utilizado para a análise é não-controlado, todavia nenhuma metodologia para ajuste deinfluências de iluminação externa é adotada. Além disso, a porção utilizada para análisede cada pedaço de carne é pequena, não abrangendo toda a superfície do músculo emanálise, fato justificado pelos autores pela heterogeneidade do material. O método é ca-paz de descrever a variação da hemoglobina (responsável pela coloração avermelhada dacarne) no decorrer do tempo.
No trabalho desenvolvido em [7], uma análise não automatizada com o emprego doPhotoshop1 é realizada. A mensuração de cor é realizada em carne bovina, suína, de frangoe peru em um ambiente controlado. Para validação utiliza-se além de valores obtidos comuma abordagem instrumental, uma comparação com técnicos (painelistas) treinados. Otrabalho ressalta que as cores geradas através do Sistema de Visão Computacional estãomais próximas às cores percebidas pelos painelistas, enquanto que os valores gerados apartir do colorímetro possuem um aspecto mais “acinzentado”. O trabalho realiza tam-bém uma comparação entre o índice de penetração nas amostras da luz proveniente docolorímetro e da iluminação pertencente ao CVS, concluindo que dependendo da espes-sura da amostra analisada, a fonte de luz do colorímetro pode ser refletida pelo fundo,gerando valores errôneos de cor. Mais uma vez a heterogeneidade da superfície das carnesé ressaltada, apontando que está possui diferentes propriedades reflexivas para a luz, oque reforça a necessidade de uma análise por toda sua extensão, e não somente de maneirapontual (metodologia instrumental).
Uma análise de cor e porcentagem de gordura em “Salsichas Lucanianas” é reali-zada em [21]. A abordagem é manual e realizada, também, em ambiente com iluminaçãocontrolada. Os resultados são comparados com painelistas treinados, sendo que nova-mente demonstra-se que um Sistema de Visão Computacional retrata de maneira maisfiel a percepção da coloração percebida por um observador humano.
Outro trabalho que ressalta que as cores obtidas a partir do colorímetro são dife-rentes das percebidas pelo técnicos treinadas, em detrimento dos valores gerados por umCVS, é o estudo realizado em [22]. Neste, um sistema estruturado de iluminação é proje-tado, em ambiente isolado e, várias regressões consolidadas na literatura são empregadaspara obtenção de valores de L*a*b a partir de RGB.
Até agora, todos os trabalhos apresentados utilizam como fonte de obtenção dasimagens câmeras convencionais (RGB). Uma outra alternativa corrente é o emprego desistemas multi-espectrais e hiper-espectrais, onde imagens representando a distribuiçãode intensidade em diferentes comprimentos de onda são obtidas, aumentando muito afonte de informações para análise. A diferença básica entre sistema multi-espectrais ehiper-espectrais está na quantidade de bandas, ou comprimentos de onda, analisados: noprimeiro, um certo número de faixas discretas não-necessariamente contíguas são anali-
1 <http://www.adobe.com/products/photoshop.html>

41
sadas; no segundo um maior número de bandas é analisado, sendo que os comprimentostomados são contíguos [23].
No trabalho [24] um sistema multi-espectral é empregado para obtenção de valoresem CIELab de carnes bovina, suína, de frango, peru e vitela. São utilizadas regressõeslinear, não-linear, baseada em Kernel e esparsa para obtenção dos valores convertidos,após um processo de extração de características realizado de forma supervisionada. Osvalores obtidos pelos autores alcançam baixo índice de erro em relação a abordageminstrumental, sendo que é destacado que a predição de valores de luminosidade obtémníveis mais satisfatórios do que a cromaticidade.
Um ambiente com iluminação controlada, juntamente com um sistema multi-espectral de imagens é empregado no artigo [8]. O trabalho visa comparar os resultadosobtidos por um Sistema Multi-Espectral de Visão Computacional e o colorímetro. No tra-balho são utilizados vários tipos de carne frescas e processadas. Uma etapa intermediáriade obtenção de valores no espaço XYZ, para posterior conversão para L*a*b* é realizada.O estudo destaca as diferenças obtidas entre o Sistema proposto pelos autores e os valoresobtidos através do colorímetro.
Um sistema hiper-espectral é proposto em [25]. O trabalho busca determinar alémda cor, os valores de PH e maciez para carne bovina. O processo de segmentação é empíricoe, de maneira experimental, as melhores faixas para obtenção dos parâmetros buscadossão determinadas pelos autores. Os valores buscados são obtidos através regressões ecomparados com a abordagem instrumental, alcançando resultados satisfatórios.
Em relação ao emprego de sistemas hiper-espectrais, [25] aponta que esse tipo demetodologia é atualmente uma abordagem não-viável para rotinas de produção, devido aotamanho dos dispositivos necessários, bem como o tempo de análise dos dados. Reforça-se,ainda, que um dos principais desafios para abordagens hiper-espectrais e multi-espectraisé a determinação dos melhores comprimentos de onda para utilização na análise de carnes.
Ainda buscando embasamento para a realização do trabalho, em [3] é realizadoum estudo sobre o atual estado da arte em metodologias de mensuração de cor em di-versos tipos de alimentos, através de Visão Computacional. O cenário do uso de VisãoComputacional para avaliação de qualidade em carnes é revisado em [4].
Nos trabalhos encontrados nenhuma metodologia para normalização de efeitos deluminosidade foi empregada, uma vez que em sua maioria os ambientes eram controlados.Em alguns casos, quando não havia controle de iluminação incidente, nenhuma aborda-gem de correção via software foi empregada. Por essa razão, fez-se necessário um estudosobre técnicas de Normalização de Brilho e Luminosidade, aplicadas a outras áreas dedesenvolvimento e pesquisa.
Nos trabalhos [26, 27, 28, 29, 30] são apresentadas técnicas para compensação de

42
efeitos de iluminação para aplicações em reconhecimento de faces. Esse foi o primeiro seg-mento de aplicações para normalização de luminosidade encontrado. Todavia, de maneirageral, as características originais de intensidade não são mantidas, gerando-se ruído; alémdisso, as aplicações trabalham com imagens de baixa resolução, sendo que as operaçõesdesenvolvidas são complexas.
De fato, após buscas foi encontrado um Toolkit [31] para Matlab2 que implementavárias técnicas de Normalização de Iluminação, consolidadas na literatura, voltadas parareconhecimento facial. Algumas das técnicas citadas anteriormente estão incluídas naferramenta. Os testes realizados demonstraram que os resultados para o problema tratadonesse trabalho não foram satisfatórios, gerando muito ruído, além de apresentarem umtempo de processamento inviável para rotinas de produção.
Uma aplicação voltada para normalização de efeitos de luminosidade para imagenstextuais é apresentado em [32]. Os resultados são satisfatórios, além do aspecto visual dasimagens resultantes não apresentar ruídos. No entanto as imagens utilizadas no traba-lho revisado são praticamente monocromáticas, o que não reflete as características dasimagens de carne de frango.
2 <http://www.mathworks.com/products/matlab/>

43
4 MATERIAIS E MÉTODOS
As seções a seguir descrevem a base de dados empregada no trabalho e a metodo-logia de análise desenvolvida.
4.1 Amostras
Quarenta e quatro filés de peito de frango (pectoralis major muscle) foram adqui-ridos de um varejista local e transportados sob refrigeração para o laboratório de análisede alimentos (LANA), para realização das análises.
A cor dos músculos, expressa em L*a*b, foi obtida a partir de 3 medidas consecu-tivas tomadas em locais aleatórios sobre as amostras. Para tal, um colorímetro Minolta(CR 400, iluminante padrão D65 e observador a 10∘, Konica-Minolta Sensing Inc., Osaka,Japão) foi empregado, após ser calibrado em uma placa de calibração padrão de cerâmica.
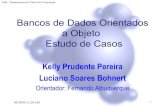
As imagens foram adquiridas através do sistema Doc L-Pix (Loccus Biotecnologia,Brasil) que possui iluminação padrão e um sistema de captura de imagens operado viasoftware (L-PIX IMAGE 7.1). O sistema foi configurado de modo a capturar imagenscom resolução de 1384x1038 pixels, 180 ppi (pixels por polegada), salvando-as no formatojpeg. As fotos foram obtidas com tempo de exposição de 0.1𝑠 e abertura 𝑓/4.5, sendo queo sensor esteve posicionado à uma distância de cerca de 37𝑐𝑚 das amostras.
Juntamente com as amostras, foram introduzidas na cena duas réguas Remid1
utilizadas posteriormente como fonte de informação para a calibração das cores na ima-gem. A escolha de utilização de duas réguas (posicionadas de maneira perpendicular, nahorizontal e vertical) foi motivada pela necessidade de captura do máximo de variaçãode intensidade de iluminação nas fotos, de modo a obter-se valores de calibração maisfidedignos.
Como forma de se simular a amostragem em três regiões da carne, separadoresplásticos de cor preta foram fixados nas amostras, dividindo-as em três áreas, correspon-dentes às regiões onde as medições via colorímetro foram realizadas.
Um sensor auxiliar de nível de luminosidade presente em um smartphone foi adi-cionado à cena, visando oferecer uma fonte extra de informação acerca das condiçõesde luminosidade no local, todavia, para os experimentos realizados essa informação foidescartada.
As imagens obtidas não passaram por qualquer ajuste, recorte ou processamento,1 <http://nitpar.pr.gov.br/catalogo-de-patentes/patente/regua-codificada-para-padronizacao-de-imagens/
>

44
sendo submetidas de forma original à metodologia de análise proposta.
O valor da região branca das réguas Remid foi mensurado através do coloríme-tro, sendo que estas foram posicionadas sobre uma prancheta (aproximadamente 2cmde espessura) plástica branca, de maneira a se evitar influências do fundo no valor dascores. Um valor único de cor foi determinado a partir da média das medições; a saber:𝐿*𝑎*𝑏*(90.3, 0, 1.5) que corresponde ao valor 𝑅𝐺𝐵(199, 196, 191). Esse valor, em RGB, foiempregado posteriormente na correção (calibração) das cores no sistema.
Na figura 7 um exemplo das imagens utilizadas nos experimentos é apresentado.
Figura 7 – Exemplo de Imagem obtida nos experimentos.
4.2 Metodologia proposta
A metodologia proposta consiste em, primeiramente, se isolar (segmentar) as re-giões de interesse na cena, que consistem do músculo e das réguas Remid. Tendo em posseesses objetos, um processo de normalização de efeitos de iluminação é realizado, para emseguida passar por um procedimento de calibração de cores na imagem, no qual coeficien-tes de correção de cor são determinados a partir das réguas e aplicados a imagem original;após esse passo se obtém os valores de L*a*b* para cada região da amostra, se extraindotambém informações estatísticas relevantes sobre as áreas analisadas.
A figura 8 apresenta de forma sintética os procedimentos realizados na metodologiaproposta.

45
Figura 8 – Visão geral da metodologia desenvolvida.
A metodologia criada foi totalmente escrita em Matlab, levando em consideraçãoa agilidade e facilidade de desenvolvimento, além da eficiência em processamento de ima-gens. Cada imagem na base de dados foi lida do disco e submetida ao processo descritoanteriormente. Para a leitura dos arquivos se utilizou a sequência de comandos descritano algoritmo 4.1.
Algoritmo 4.1 – Iteração sobre todos os arquivos de uma dada pasta e leitura das imagens.
1 base = d i r ( ’ . . / s r c / ’ ) ;2 % i t e r a sobre todos arqu ivos cont ido s na pasta " s r c /"3 f o r i=1 : l ength ( base )4 i f ( i >= 3)5 f i l ename = s t r c a t ( ’ . . / s r c / ’ , base ( i ) . name) ;6 %l e i t u r a da imagem7 imdata = imread ( f i l ename ) ;8 % . . . Outros procedimentos r e a l i z a d o s9 end
10 end
A seguir, cada etapa da metodologia será detalhada, destacando-se os passos rea-lizados e comandos em Matlab utilizados.
4.2.1 Segmentação
O primeiro passo na metodologia consiste em se obter as duas Regiões de Interesse(ROI s), correspondentes à carne e as Réguas Remid, o que é realizado de forma separada,utilizando como base conversões de espaços de cor, limiarização e crescimento de região.
Os procedimentos utilizados para a segmentação dos objetos relevantes na cenaserão descritos nas subseções a seguir.

46
4.2.1.1 Segmentação da Carne
O procedimento para segmentação da carne da cena está pautado no fato de existirgrande contraste entre a coloração do fundo empregado e o músculo propriamente dito.Todavia, a utilização do espaço RGB, onde as imagens estão originalmente representadas,não oferece meios facilitados para a determinação de um valor de corte, uma vez que amanipulação da tonalidade, ou Matiz, é realizada através da combinação de intensidadede três componentes (R, G e B) e, não existe contraste suficiente para binarização utili-zando somente um canal para análise. Por essa razão, a imagem é convertida para umarepresentação em HSV, onde o canal H é tomado e, sobre este, um valor de limiar é deter-minado, através da técnica desenvolvida por Otsu [10]. Um filtro de mediana é aplicadona imagem antes do processo de limiarização, de modo a eliminar possíveis ruídos.
O trecho de código 4.2 apresenta o processo de aplicação do filtro de mediana,conversão para HSV, separação do canal H, determinação e aplicação do limiar parabinarização.
Algoritmo 4.2 – Primeira etapa da segmentação da carne.
1 % separa ção dos cana i s2 R = imdata ( : , : , 1 ) ;3 G = imdata ( : , : , 2 ) ;4 B = imdata ( : , : , 3 ) ;5 % mediana6 R = med f i l t 2 (R, [ 3 3 ] ) ;7 G = med f i l t 2 (G, [ 3 3 ] ) ;8 B = med f i l t 2 (B, [ 3 3 ] ) ;9 % concatena ção dos cana i s
10 imdata = cat (3 ,R,G,B) ;11 % convers ão para HSV12 HSV = rgb2hsv ( imdata ) ;13 H = HSV( : , : , 1 ) ;14 S = HSV( : , : , 2 ) ;15 V = HSV( : , : , 3 ) ;16 % c r i a ção da má scara17 mask = imdata ( : , : , 1 ) ;18 % l i m i a r19 otsuH = graythresh (H) ;20 % b i n a r i z a ção21 mask(H > otsuH ) = 0 ;22 mask(mask ~= 0) = 255 ;

47
Até esse ponto, a máscara obtida pode conter pequenas regiões desconexas quenão fazem parte da máscara de carne e, que estão relacionadas a pequenos objetos nacena. Além disso, pixels pouco saturados correspondentes a áreas brancas e/ou de brilhopodem estar presentes na máscara. Por essa razão um procedimento de remoção de regiõespequenas com base no tamanho da imagem e, uma limiarização (via Otsu) no canal deSaturação da região da máscara é realizado. Esses passos estão descritos no algoritmo 4.3.
Algoritmo 4.3 – Segunda etapa da segmentação da carne.
1 % remoção de r e g i õ es pequenas da imagem2 mask = bwareaopen ( im_mask , f l o o r ( ( s i z e (mask , 1 ) * s i z e (mask , 2 ) )
*0 .003) , 4) ;3 % l i m i a r de satura ção e remoção de p i x e l s pouco saturados4 otsuS = graythresh (S(mask ) ) ;5 mask(S < otsuS ) = 0 ;
O uso de uma porcentagem de 0.3% para remoção de regiões pequenas foi deter-minado de maneira experimental.
Com o uso dos procedimentos descritos obtém-se uma máscara correspondente aporção de carne de frango na imagem.
4.2.1.2 Segmentação das Réguas Remid
Para obtenção da máscara correspondente à parte branca das réguas na imagem(que é utilizada para a calibração do sistema), parte-se do pressuposto que a cor branca noespaço de cor RGB corresponde ao nível máximo de intensidade nos três canais do sistema.Todavia, devido à propriedades do material que os marcadores são feitos e mesmo dascondições na captação da cena, a cor presente não imagem tende a ter uma cor com certonível de acinzentamento, não sendo puramente branca. Por essa razão, no processo desegmentação leva-se em consideração apenas as maiores áreas da imagem onde os valoresde R, G e B são maiores que as médias de intensidade dos canais correspondentes. Esseprocesso está representado no trecho de código 4.4. Novamente, a escolha da porcentagempara remoção de pequenas regiões conexas foi determinada de forma experimental.
Algoritmo 4.4 – Segmentação dos Marcadores Remid.
1 % Binar i za ção com base na mé dia de in t en s idade2 R(R < mean2(R) ) = 0 ;3 G(G < mean2(G) ) = 0 ;4 B(B < mean2(B) ) = 0 ;5 R(R ~= 0) = 255 ;6 G(G ~= 0) = 255 ;7 B(B ~= 0) = 255 ;

48
8 % Cria ção da má scara bin á r i a9 mask = R & G & B;
10 % Remoção de r e g i õ es pequenas11 mask = bwareaopen (mask , f l o o r ( ( s i z e (mask , 1 ) * s i z e (mask , 2 ) ) *0 .05 ) )
;
A partir da aplicação dos procedimentos apresentados obtém uma máscara corres-pondente à porção branca dos marcadores Remid.
4.2.1.3 Normalização de efeitos de iluminação
O procedimento desenvolvido visa homogeneizar o aspecto visual da iluminaçãoincidente na cena. Como pode ser observado na figura 7, principalmente nas regiões direitae central da foto, é possível perceber a presença de focos de luz, que afetam também aporção de carne na cena.
Para realizar essa normalização de percepção da iluminação, parte-se de uma abor-dagem utilizando uma cópia da mesma imagem analisada, sobre a qual se aplica operações,de forma a obter valores de atenuação ou acentuação (a cada pixel) de intensidade quandonecessário.
Primeiramente, a cópia da imagem é submetida a uma operação de borramentoGaussiano (Gaussian Blur), utilizando uma porcentagem do tamanho da imagem para adefinição das dimensões do Kernel utilizado na operação. Esse procedimento é ilustradono trecho de código 4.5.
Algoritmo 4.5 – Aplicação de filtro de borramento Gaussiano.
1 % Cø pia da imagem2 im_dup = im ;3 % Tamanho do f i l t r o como porcentagem do tamanho da imagem4 tamanho_fi l tro = f l o o r ( ( s i z e ( im , 1 ) * s i z e ( im , 2 ) ) *0 .00002) ;5 % Cria ção do f i l t r o Gaussiano6 gauss = f s p e c i a l ( ’ gauss ian ’ , [ tamanho_fi l t ro tamanho_fi l tro ] , 5 ) ;7 % Apl ica ção do f i l t r o8 im_blur = i m f i l t e r ( im_dup , gauss ) ;
Após esse passo a imagem possui o aspecto demonstrado na figura 9, sendo que osfocos de iluminação foram espalhados, devido ao borramento.

49
Figura 9 – Imagem da Amostra após a aplicação de Blur.
A imagem resultante é então invertida através da função imcomplement. Esse pro-cedimento corresponde a aplicar a operação:
𝐼𝑟 = 255 − 𝐼𝑏,
onde 𝐼𝑟 é a imagem resultante e 𝐼𝑏 é a imagem com Blur.
O aspecto resultante da inversão é demostrado pela figura 10. Nota-se que devidoao processo de complemento, ou inversão, as regiões com níveis altos de intensidade pas-saram a possuir baixos níveis, enquanto que as regiões com baixa intensidade passaram apossuir altos níveis.
Figura 10 – Imagem da Amostra após inversão de cores.

50
Nessa etapa, a imagem processada possui atenuação nas regiões com focos deiluminação. Todavia, somente a informação de brilho (luminância) é relevante para oprocesso de normalização. Por essa razão, o canal de intensidade (V) do espaço HSV éextraído da imagem invertida, como é demostrado no trecho 4.6.
Algoritmo 4.6 – Extração do canal de brilho do espaço HSV.
1 % Canal de Br i lho tomado2 HSV = rgb2hsv ( im_inv ) ;3 im_des = HSV( : , : , 3 ) ;
A figura 11 apresenta o canal V, extraído da imagem borrada e invertida, como jádescrito.
Figura 11 – Canal V (HSV) da imagem borrada e invertida.
Essa informação de Intensidade de brilho é combinada com a imagem original,através da equação de Overlay de camadas [33]:
𝐸 = 𝐼
255 ×(𝐼 + 2 × 𝑀
255 × (255 − 𝐼)),
onde 𝑀 é a camada superior e a camada inferior é 𝐼.
Para a aplicação em questão, toma-se como camada superior a representação deintensidade obtida do espaço HSV, e como camada inferior, a imagem original.
A aplicação da equação de Overlay é ilustrada no trecho de código 4.7.
Algoritmo 4.7 – Aplicação da operação de Overlay de camadas na imagem original.
1 % Conversão para ponto f lu tuante ,

51
2 % de forma a e v i t a r over f l ow de p i x e l .3 R = double ( im ( : , : , 1 ) ) ;4 G = double ( im ( : , : , 2 ) ) ;5 B = double ( im ( : , : , 3 ) ) ;6 % Apl ica ção da equa ção de Overlay a cada cana l7 R_eq = uint8 ( (R/255) . * (R+(2* im_des /255) .*(255 −R) ) ) ;8 G_eq = uint8 ( (G/255) . * (G+(2* im_des /255) .*(255 −G) ) ) ;9 B_eq = uint8 ( (B/255) . * (B+(2* im_des /255) .*(255 −B) ) ) ;
10 % Imagem r e s u l t a n t e11 im_eq = cat (3 , R_eq , G_eq , B_eq) ;
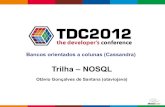
A figura 12 apresenta uma comparação entre a imagem original e a imagem nor-malizada. Como é possível perceber, após o processamento se obtém uma distribuiçãohomogênea de iluminação (12b), eliminando-se os focos incidentes de iluminação que po-dem ser percebidos em 12a.
(a) Imagem Original (b) Imagem Normalizada
Figura 12 – Comparação entre a imagem original e após Normalização de Luminosidade.
4.2.1.4 Coeficientes de Correção de Cor e Calibração de Cores
Após o processo de Normalização de Efeitos de Luminosidade, utilizado-se a más-cara correspondente aos marcadores Remid obtém-se o valor médio de branco nas réguaspresentes na cena. Esse valor é comparado então com a grandeza mensurada atravésdo colorímetro nos marcadores. Coeficientes correspondentes à cada canal RGB são de-terminados através de uma proporção entre os valores de cor branca comparados. Esseprocedimento é ilustrado no trecho de código 4.8.
Algoritmo 4.8 – Determinação dos coeficientes de calibração de cor.
1 % Mé dia dos v a l o r e s de branco na r égua2 media_R = mean2(R( ruler_mask ) ) ;

52
3 media_G = mean2(G( ruler_mask ) ) ;4 media_B = mean2(B( ruler_mask ) ) ;5 % C o e f i c i e n t e s de c a l i b r a ção v ia propor ção6 % Constantes p roven i en t e s da mensura ção das r é guas7 % via c o l o r í metro8 coef_R = 199.0/media_R ;9 coef_G = 196.0/media_G ;
10 coef_B = 191.0/media_B ;
Os coeficientes de calibração são aplicados nos canais RGB correspondentes, o quecorresponde a multiplicar cada valor de pixel pelo coeficiente determinado, acarretando oaumento ou diminuição de intensidade, de acordo com proporcionalidade entre o valor decalibração e o existente na cena. Esse procedimento é apresentado no a código fonte 4.9
Algoritmo 4.9 – Aplicação dos coeficientes de calibração de cor.
1 % Uso da fun ção p i s o para obten ção de va l o r i n t e i r o2 R = f l o o r (R*coef_R ) ;3 G = f l o o r (G*coef_G ) ;4 B = f l o o r (B*coef_B ) ;
4.2.1.5 Conversão para L*a*b*
A conversão de RGB para L*a*b é realizada utilizando-se um algoritmo desenvol-vido porMark Rufon para Matlab [34]. O algoritmo utiliza o iluminante padrão D65 e, estábaseado na recomendação BT.709 do ITU-R. A ordem de erro obtida na transformaçãode RGB para CIELAB e novamente RGB é de 10−5.
4.2.1.6 Extração de Informações
Tendo em posse a imagem já convertida para o espaço de cor L*a*b e a máscarana qual as três porções da carne estão divididas, informações estatísticas são extraídas decada região e canal (R, G, B, L*, a* e b*), para análise posterior. Dentre estas, a médiade cor (função nanmean), o desvio padrão de cor (função std2 ) e o tamanho da região empixels (função size).
O isolamento de cada área de interesse da amostra é realizado através de umcrescimento de região na máscara da carne, levando em consideração uma semente (pontode partida) obtida através da função find do Matlab. Uma vez que cada região é isoladae dela extraídas as informações descritas anteriormente, a área em questão é removida damáscara.

53
5 PRÓXIMOS PASSOS
A seguir, são apresentados os passos necessários para a conclusão deste trabalho,demonstrando também um cronograma esperado de execução, como forma de organizaçãode tarefas.
1. Realização de Testes;
2. Correção de Problemas;
3. Validação do Método e Avaliação de Resultados;
4. Conclusão da Escrita do Relatório Final.
Outubro Novembro Dezembro JaneiroTestes x xCorreção x xValidação x xEscrita x x
Tabela 1 – Cronograma de execução


55
REFERÊNCIAS
[1] DAVIES, E. Computer and Machine Vision: Theory, Algorithms, Practicalities.Elsevier, 2012. (Academic Press). ISBN 9780123869081. Disponível em:<http://books.google.com.br/books?id=AhVjXf2yKtkC>.
[2] CONCI, A. Computação Gráfica - Volume 2. [S.l.]: CAMPUS - GRUPO ELSEVIER,2007. ISBN 8535223290.
[3] WU, D.; SUN, D.-W. Colour measurements by computer vision for food qualitycontrol – a review. Trends in Food Science & Technology, v. 29, n. 1, p. 5–20, 2013.ISSN 0924-2244. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0924224412001835>.
[4] JACKMAN, P.; SUN, D.-W.; ALLEN, P. Recent advances in the use of computervision technology in the quality assessment of fresh meats. Trends in Food Science& Technology, v. 22, n. 4, p. 185 – 197, 2011. ISSN 0924-2244. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0924224411000094>.
[5] BARBIN, D. F. et al. Prediction of chicken quality attributes by near infraredspectroscopy. Food Chemistry, v. 168, p. 554 – 560, 2015. ISSN 0308-8146. Disponívelem: <http://www.sciencedirect.com/science/article/pii/S0308814614011492>.
[6] ZHANG, L.; BARBUT, S. Rheological characteristics of fresh and frozen pse, normaland dfd chicken breast meat. British Poultry Science, v. 46, n. 6, p. 687–693, 2005.PMID: 16428111. Disponível em: <http://dx.doi.org/10.1080/00071660500391516>.
[7] GIROLAMI, A. et al. Measurement of meat color using a computer vision system.Meat Science, v. 93, n. 1, p. 111 – 118, 2013. ISSN 0309-1740. Disponível em:<http://www.sciencedirect.com/science/article/pii/S030917401200277X>.
[8] TRINDERUP, C. H. et al. Comparison of a multispectral vision system and acolorimeter for the assessment of meat color. Meat Science, v. 102, n. 0, p. 1 –7, 2015. ISSN 0309-1740. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0309174014004999>.
[9] GONZALEZ, R. C.; WOODS, R. E. Digital Image Processing (3rd Edition). UpperSaddle River, NJ, USA: Prentice-Hall, Inc., 2006. ISBN 013168728X.
[10] OTSU, N. A threshold selection method from gray-level histograms. Systems,Man and Cybernetics, IEEE Transactions on, v. 9, n. 1, p. 62–66, Jan 1979. ISSN0018-9472.
[11] MELéNDEZ-MARTíNEZ, A. J.; VICARIO, I. M.; HEREDIA, F. J. Instrumentalmeasurement of orange juice colour: a review. Journal of the Science of Food andAgriculture, John Wiley & Sons, Ltd., v. 85, n. 6, p. 894–901, 2005. ISSN 1097-0010.Disponível em: <http://dx.doi.org/10.1002/jsfa.2115>.
[12] HUNT, R. W. G. The reproduction of colour. [S.l.]: John Wiley & Sons, 2005.

56
[13] ROSSEL, R. V. et al. Colour space models for soil science. Geoderma, Elsevier,v. 133, n. 3, p. 320–337, 2006.
[14] HUNT, R. W. G.; POINTER, M. R. Measuring colour. [S.l.]: John Wiley & Sons,2011.
[15] SURAL, S.; QIAN, G.; PRAMANIK, S. Segmentation and histogram generationusing the hsv color space for image retrieval. In: Image Processing. 2002. Proceedings.2002 International Conference on. [S.l.: s.n.], 2002. v. 2, p. II–589–II–592 vol.2.ISSN 1522-4880.
[16] VALOUS, N. A. et al. Colour calibration of a laboratory computer vision system forquality evaluation of pre-sliced hams. Meat Science, v. 81, n. 1, p. 132 – 141, 2009.ISSN 0309-1740. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0309174008002325>.
[17] JACKMAN, P.; SUN, D.-W.; ELMASRY, G. Robust colour calibration of animaging system using a colour space transform and advanced regression modelling.Meat Science, v. 91, n. 4, p. 402 – 407, 2012. ISSN 0309-1740. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0309174012000599>.
[18] CHMIEL, M.; SłOWIńSKI, M.; DASIEWICZ, K. Lightness of the color measuredby computer image analysis as a factor for assessing the quality of pork meat.Meat Science, v. 88, n. 3, p. 566 – 570, 2011. ISSN 0309-1740. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0309174011000714>.
[19] CHMIEL, M. et al. Use of computer vision system (cvs) for detection ofPSE pork meat obtained from m. semimembranosus. LWT - Food Scienceand Technology, v. 65, p. 532 – 536, 2016. ISSN 0023-6438. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0023643815301158>.
[20] QUEVEDO, R. et al. Color changes in the surface of fresh cut meat: A fractalkinetic application. Food Research International, v. 54, n. 2, p. 1430 – 1436, 2013.ISSN 0963-9969. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0963996913005449>.
[21] GIROLAMI, A. et al. Image analysis with the computer vision system andthe consumer test in evaluating the appearance of lucanian dry sausage. MeatScience, v. 96, n. 1, p. 610 – 616, 2014. ISSN 0309-1740. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0309174013004907>.
[22] TRINDERUP, C. H.; KIM, Y. H. B. Fresh meat color evaluation using a structuredlight imaging system. Food Research International, v. 71, n. 0, p. 100 – 107, 2015.ISSN 0963-9969. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0963996915000745>.
[23] CHANG, C.-I. Hyperspectral data exploitation: theory and applications. [S.l.]: JohnWiley & Sons, 2007.
[24] SHARIFZADEH, S. et al. Supervised feature selection for linear and non-linearregression of L*a*b* color from multispectral images of meat. EngineeringApplications of Artificial Intelligence, v. 27, n. 0, p. 211 – 227, 2014. ISSN

57
0952-1976. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0952197613001784>.
[25] ELMASRY, G.; SUN, D.-W.; ALLEN, P. Near-infrared hyperspectral imagingfor predicting colour, ph and tenderness of fresh beef. Journal of FoodEngineering, v. 110, n. 1, p. 127 – 140, 2012. ISSN 0260-8774. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0260877411006388>.
[26] WANG, C.; LI, Y.; WANG, C. An efficient illumination compensation based onplane-fit for face recognition. In: Control, Automation, Robotics and Vision, 2008.ICARCV 2008. 10th International Conference on. [S.l.: s.n.], 2008. p. 939–943.
[27] AN, G.; WU, J.; RUAN, Q. An illumination normalization model for facerecognition under varied lighting conditions. Pattern Recognition Letters,v. 31, n. 9, p. 1056 – 1067, 2010. ISSN 0167-8655. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0167865510000309>.
[28] FAN, C.-N.; ZHANG, F.-Y. Homomorphic filtering based illuminationnormalization method for face recognition. Pattern Recognition Letters,v. 32, n. 10, p. 1468 – 1479, 2011. ISSN 0167-8655. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0167865511001000>.
[29] LIAN, Z.; ER, M. J.; LIANG, Y. A novel efficient local illumination compensationmethod based on DCT in logarithm domain. Pattern Recognition Letters,v. 33, n. 13, p. 1725 – 1733, 2012. ISSN 0167-8655. Disponível em: <http://www.sciencedirect.com/science/article/pii/S0167865512001675>.
[30] CHUDE-OLISAH, C. et al. Illumination normalization for edge-based facerecognition using the fusion of rgb normalization and gamma correction. In: Signaland Image Processing Applications (ICSIPA), 2013 IEEE International Conferenceon. [S.l.: s.n.], 2013. p. 412–416.
[31] STRUC, V. The INface toolbox v2.0 for illumination invariant face recognition.2010. Disponível em: <http://www.mathworks.com/matlabcentral/fileexchange/26523-the-inface-toolbox-v2-0-for-illumination-invariant-face-recognition>.
[32] CHEN, K.-N.; CHEN, C.-H.; CHANG, C.-C. Efficient illumination compensationtechniques for text images. Digital Signal Processing, v. 22, n. 5, p. 726 – 733, 2012.ISSN 1051-2004. Disponível em: <http://www.sciencedirect.com/science/article/pii/S1051200412000826>.
[33] The GIMP Documentation Team. Layer Modes – GNU Image ManipulationProgram (Gimp) documentation. 2014. Disponível em: <http://docs.gimp.org/en/gimp-concepts-layer-modes.html>.
[34] RUZON, M. RGB and CIELAB Converters. 2009. Disponível em: <http://robotics.stanford.edu/~ruzon/software/rgblab.html>.







![ces11 grafos2.ppt [Modo de Compatibilidade]pauloac/ces11/grafos2_slides.pdf · 2 – Grafos orientados 3 – Problemas clássicos sobre grafos orientados 4 – Grafos não-orientados](https://static.fdocumentos.tips/doc/165x107/602215c31601985eab09d194/ces11-modo-de-compatibilidade-pauloacces11grafos2slidespdf-2-a-grafos.jpg)