
MOVIDRIVE® MDX61B Placa de sincronismo DRS11B · rança de nível superior para garantir a...
52
Motoredutores \ Redutores Industriais \ Conversores de freqüência \ Automação \ Service MOVIDRIVE ® MDX61B Placa de sincronismo DRS11B M anual Edição 10/2007 11671998 / BP
Transcript of MOVIDRIVE® MDX61B Placa de sincronismo DRS11B · rança de nível superior para garantir a...
Motoredutores \ Redutores Industriais \ Conversores de freqüência \ Automação \ Service
MOVIDRIVE® MDX61BPlaca de sincronismo DRS11B
ManualEdição 10/200711671998 / BP
SEW-EURODRIVE – Driving the world
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B 3
Índice
1 Informações Gerais................................................................................................ 41.1 Estrutura das indicações de segurança......................................................... 41.2 Reivindicação de direitos de garantia ............................................................ 41.3 Perda da garantia .......................................................................................... 4
2 Indicações de segurança....................................................................................... 52.1 Documentos válidos....................................................................................... 52.2 Funções de segurança .................................................................................. 52.3 Aplicações de elevação ................................................................................. 52.4 Nomes dos produtos e marcas registradas ................................................... 52.5 Reciclagem .................................................................................................... 5
3 Introdução............................................................................................................... 63.1 Descrição do sistema..................................................................................... 6
4 Planejamento de projeto........................................................................................ 84.1 Exemplos de aplicação .................................................................................. 84.2 Notas para o planejamento do projeto......................................................... 104.3 Operação em sincronismo com monitoração de ruptura de cabo
de encoder ................................................................................................... 114.4 Partida/parada em sincronismo ................................................................... 124.5 Operação em sincronismo com encoder síncrono....................................... 13
5 Instruções para montagem e instalação............................................................ 145.1 Montagem da placa opcional DRS11B ........................................................ 145.2 Conexão e descrição dos bornes da placa opcional DRS11B..................... 165.3 Instruções para instalação ........................................................................... 175.4 Exemplo de conexão MDX61B mestre - MDX61B escravo......................... 205.5 Conexão do encoder incremental como mestre .......................................... 21
6 Colocação em operação...................................................................................... 226.1 Introdução .................................................................................................... 226.2 Breve descrição da colocação em operação ............................................... 236.3 Trabalhos preliminares................................................................................. 246.4 Ativar a operação em sincronismo............................................................... 246.5 Teste da operação em sincronismo com acionamentos montados ............. 256.6 Exemplos para o cálculo de P221 e P222 ................................................... 26
7 Parâmetro ............................................................................................................. 297.1 Relação de valores de parâmetros e da rotação de saída .......................... 297.2 Funções de sinalização ............................................................................... 307.3 Descrições dos parâmetros ......................................................................... 32
8 Mensagens de irregularidades e lista de irregularidades ................................ 398.1 Placa opcional de sincronismo DRS11B...................................................... 39
9 Dados técnicos..................................................................................................... 419.1 Placa opcional de sincronismo DRS11B...................................................... 41
10 Índice Alfabético................................................................................................... 42
Índice de endereços............................................................................................. 43
1 formações Geraisstrutura das indicações de segurança
4
1 Informações Gerais1.1 Estrutura das indicações de segurança
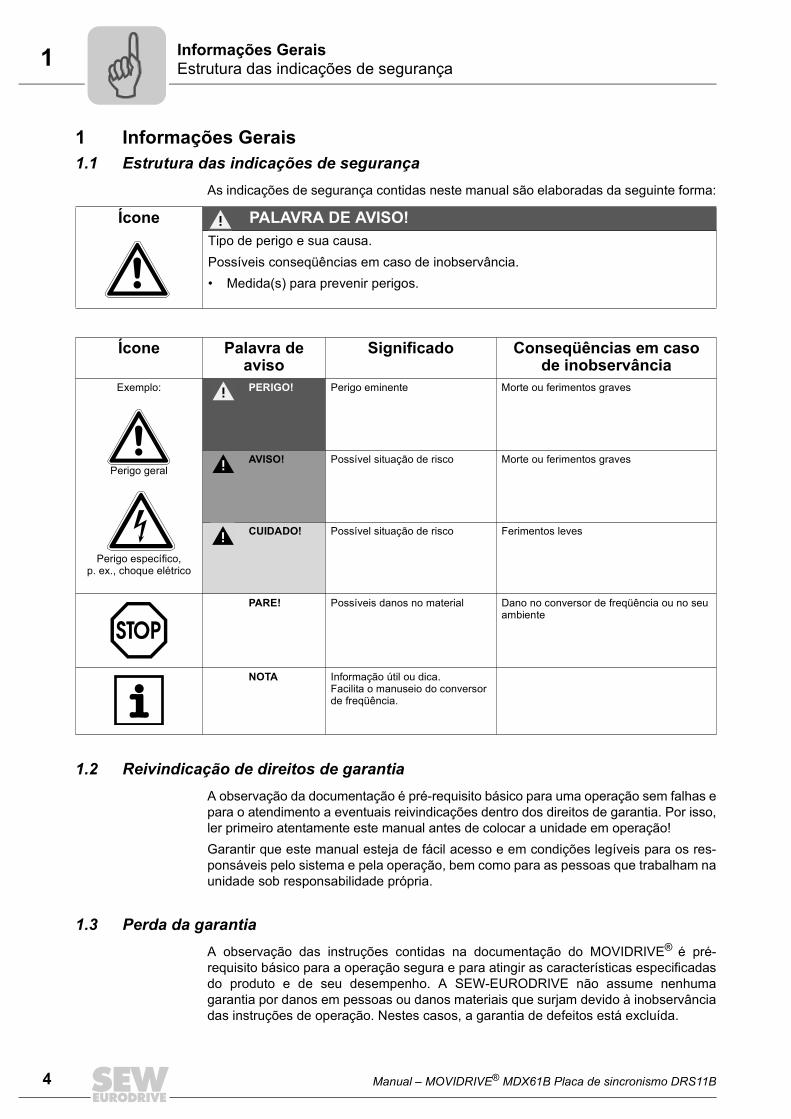
As indicações de segurança contidas neste manual são elaboradas da seguinte forma:
1.2 Reivindicação de direitos de garantiaA observação da documentação é pré-requisito básico para uma operação sem falhas epara o atendimento a eventuais reivindicações dentro dos direitos de garantia. Por isso,ler primeiro atentamente este manual antes de colocar a unidade em operação!Garantir que este manual esteja de fácil acesso e em condições legíveis para os res-ponsáveis pelo sistema e pela operação, bem como para as pessoas que trabalham naunidade sob responsabilidade própria.
1.3 Perda da garantiaA observação das instruções contidas na documentação do MOVIDRIVE® é pré-requisito básico para a operação segura e para atingir as características especificadasdo produto e de seu desempenho. A SEW-EURODRIVE não assume nenhumagarantia por danos em pessoas ou danos materiais que surjam devido à inobservânciadas instruções de operação. Nestes casos, a garantia de defeitos está excluída.
Ícone PALAVRA DE AVISO!Tipo de perigo e sua causa.Possíveis conseqüências em caso de inobservância.• Medida(s) para prevenir perigos.
Ícone Palavra de aviso
Significado Conseqüências em casode inobservância
Exemplo:
Perigo geral
Perigo específico,p. ex., choque elétrico
PERIGO! Perigo eminente Morte ou ferimentos graves
AVISO! Possível situação de risco Morte ou ferimentos graves
CUIDADO! Possível situação de risco Ferimentos leves
PARE! Possíveis danos no material Dano no conversor de freqüência ou no seu ambiente
NOTA Informação útil ou dica.Facilita o manuseio do conversor de freqüência.
InE
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
2Indicações de segurançaDocumentos válidos
2 Indicações de segurança 2.1 Documentos válidos
• Os trabalhos de instalação e colocação em operação devem ser realizados exclusi-vamente por pessoal técnico com treinamento nos aspectos relevantes da pre-venção de acidentes e de acordo com as instruções de operação do "MOVIDRIVE®
MDX60B/61B".• Ler estas publicações atentamente antes de começar os trabalhos de instalação e
colocação em operação da placa opcional DRS11B.• A leitura desta documentação é pré-requisito básico para uma operação sem falhas
e para o atendimento a eventuais reivindicações dentro do prazo de garantia.
2.2 Funções de segurançaO conversor de freqüência MOVIDRIVE® MDX60/61B não pode assumir funções desegurança sem estar subordinado a sistemas de segurança. Utilizar sistemas de segu-rança de nível superior para garantir a proteção de máquinas e pessoas.Garantir que as informações das seguintes documentações para aplicações de segu-rança sejam observadas:• Desligamento seguro do MOVIDRIVE® B
2.3 Aplicações de elevaçãoO MOVIDRIVE® MDX60B/61B não pode ser utilizado para aplicações de elevaçãocomo dispositivo de segurança. Utilizar sistemas de monitoração ou dispositivos de proteção mecânicos como disposi-tivos de segurança para evitar danos em pessoas ou bens materiais.
2.4 Nomes dos produtos e marcas registradasAs marcas e nomes dos produtos citados neste manual são marcas comerciais oumarcas registradas pelos respectivos proprietários.
2.5 Reciclagem
Favor seguir a legislação nacional mais recente!Caso necessário, eliminar as peças separadamente de acordo com a sua naturezae segundo as normas nacionais em vigor, p. ex.:• Sucata eletrônica • Plástico• Metal• Cobreetc.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
5
3 troduçãoescrição do sistema
6
3 Introdução3.1 Descrição do sistema
O opcional "Placa de sincronismo DRS11B" permite a operação de um grupo demotores em sincronismo angular em relação ao outro ou com uma relação proporcionalajustável (redutor eletrônico).O acionamento que faz a especificação de posição é caracterizado como "mestre". Estetambém pode ser um encoder incremental. O acionamento que deve seguir esta espe-cificação de posição é caracterizado como "escravo".Para tanto, os motores mestre e escravo devem estar equipados com encoders.O MOVIDRIVE® MDX61B com o opcional "Placa de sincronismo DRS11B" é utilizadocomo acionamento escravo.O opcional "Placa de sincronismo DRS11B" deve ser inserido no slot opcional e só podeser operado com o opcional DEH11B ou DER11B.
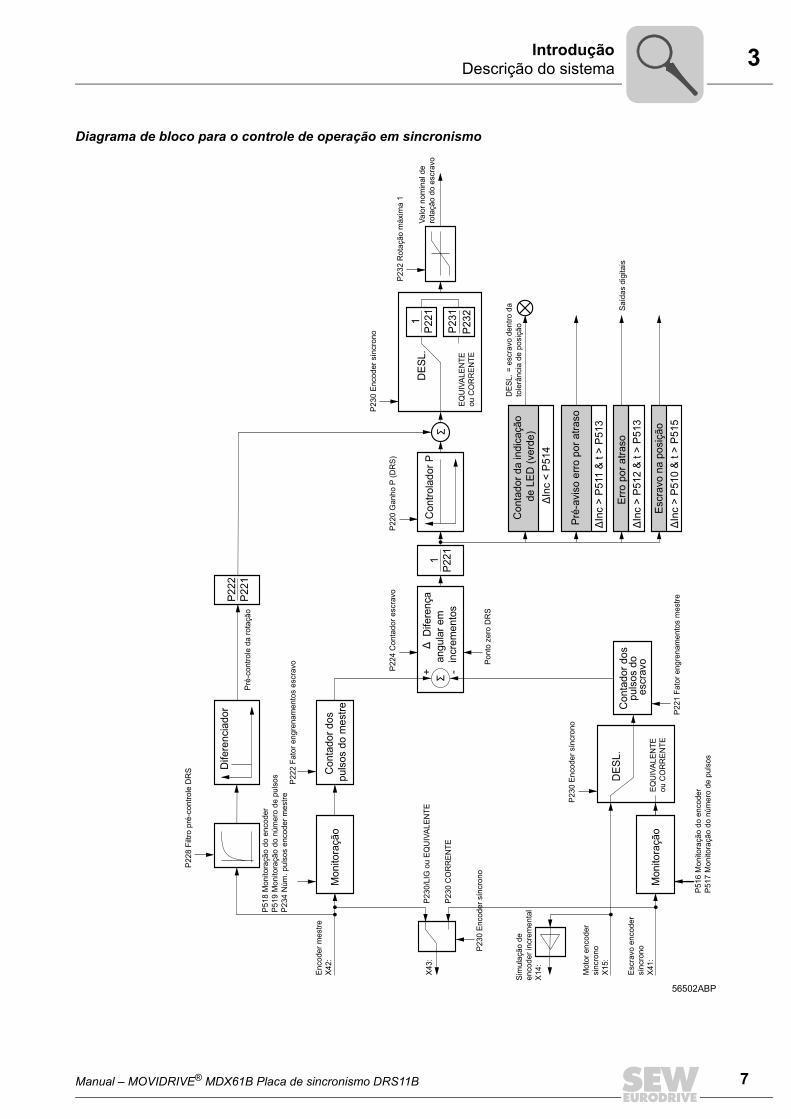
Os pulsos mestre e escravo contados são convertidos através dos parâmetrosP221/P222 (relação de sincronismo mestre e escravo) no lado de saída. Estes são umamedida para os pulsos contados por unidade de trajeto.O sistema identifica a diferença de distância entre mestre e escravo e salva este valorna forma de sinais de encoder incremental em um contador interno de diferenças.Dependendo desta diferença, são exibidos alarmes no conversor, p. ex., "ESCRAVODRS NA POS.", "ERRO POR ATRASO" etc. Este contador é avaliado diferenciada-mente para os diversos modos de operação (P223) (Æ cap. 7.3).
O controlador calcula o valor de correção de rotação para o acionamento escravo paraminimizar a diferença angular entre o mestre e o escravo. Para tanto, a atual diferençaangular é multiplicada pelo parâmetro P220 Ganho P. O resultado é um valor decorreção da rotação do escravo.• Mestre e escravo movem-se em sincronismo, valor de diferença = 0 Æ valor de
correção = 0• Escravo segue o mestre, valor de diferença > 0 Æ valor de correção > 0, escravo
acelera• Escravo move-se antes do mestre, valor de diferença < 0 Æ valor de correção < 0,
escravo desacelera
O desempenho de deslocamento do controle de operação em sincronismo é determi-nado especialmente pela altura do ganho P (P220).• Se o ganho P for configurado muito alto, o sistema tende a oscilar.• Se o ganho P for configurado muito baixo, não é possível reduzir a diferença angular
em estado transiente (aceleração ou desaceleração).
PARE!Para a operação em sincronismo do mestre e escravo, é necessário equipar o con-versor escravo com um resistor de frenagem. Dependendo da aplicação em operaçãoregenerativa, também é necessário um resistor de frenagem para o conversor mestre.
InD
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
3IntroduçãoDescrição do sistema
Diagrama de bloco para o controle de operação em sincronismo
56502ABP
Enco
der m
estre
X4
2:
P230
Enc
oder
sín
cron
o
P230
/LIG
ou
EQU
IVAL
ENTE
P230
Enc
oder
sín
cron
o
P516
Mon
itora
ção
do e
ncod
erP5
17 M
onito
raçã
o do
núm
ero
de p
ulso
s
P230
CO
RR
ENTE
P518
Mon
itora
ção
do e
ncod
erP5
19 M
onito
raçã
o do
núm
ero
de p
ulso
sP2
34 N
úm. p
ulso
s en
code
r mes
treP2
22 F
ator
eng
rena
men
tos
escr
avo
P228
Filt
ro p
ré-c
ontro
le D
RS
P224
Con
tado
r esc
ravo
P220
Gan
ho P
(DR
S)
P230
Enc
oder
sín
cron
o
P232
Rot
ação
máx
ima
1
Valo
r nom
inal
de
rota
ção
do e
scra
vo
EQU
IVAL
ENTE
ou
CO
RR
ENTE
EQU
IVAL
ENTE
ou
CO
RR
ENTE
Saíd
as d
igita
is
DES
L. =
esc
ravo
den
tro d
a to
lerâ
ncia
de
posi
ção
DES
L.
DES
L.
Pont
o ze
ro D
RS
P221
Fat
or e
ngre
nam
ento
s m
estre
Pré-
cont
role
da
rota
ção
Dife
renc
iado
r
Con
tado
r dos
pu
lsos
do
mes
tre Con
tado
r dos
pu
lsos
do
escr
avo
Con
trola
dor P
D
ifere
nça
angu
lar e
m
incr
emen
tos
Con
tado
r da
indi
caçã
o de
LED
(ver
de)
Erro
por
atra
so
Escr
avo
na p
osiç
ão
+ -
Mon
itora
ção
Mon
itora
ção
P222
P221
X43:
Sim
ulaç
ão d
e en
code
r inc
rem
enta
l X1
4: Escr
avo
enco
der
sínc
rono
X4
1:
Mot
or e
ncod
er
sinc
rono
X1
5:
1P2
21
1P2
21
P232
P231
Pré-
avis
o er
ro p
or a
traso
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
7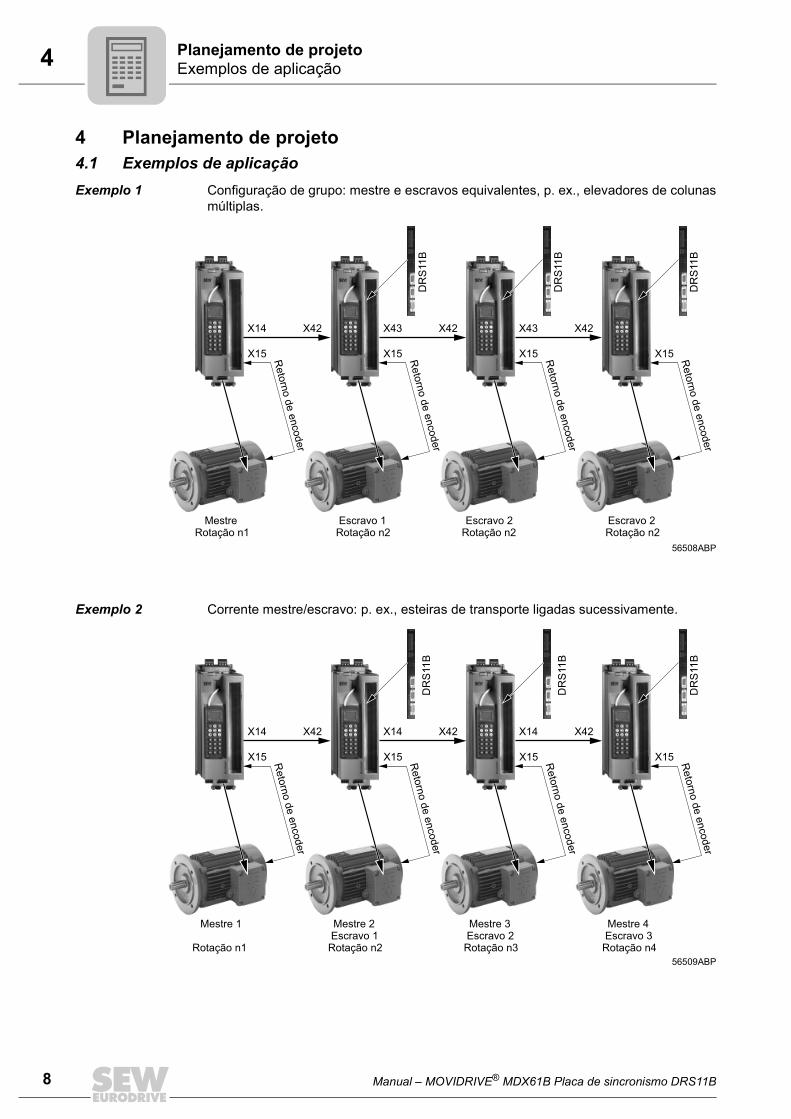
4 lanejamento de projetoxemplos de aplicação
8
4 Planejamento de projeto4.1 Exemplos de aplicaçãoExemplo 1 Configuração de grupo: mestre e escravos equivalentes, p. ex., elevadores de colunas
múltiplas.
Exemplo 2 Corrente mestre/escravo: p. ex., esteiras de transporte ligadas sucessivamente.
56508ABP
X15
X14 X42
Retorno de encoder
MestreRotação n1
X15
X43 X42
Retorno de encoder
Escravo 1Rotação n2
DR
S11
B
DR
S11
B
DR
S11
B
X15
X43 X42
Retorno de encoder
Escravo 2Rotação n2
X15 Retorno de encoder
Escravo 2Rotação n2
56509ABP
X15
X14 X42
Retorno de encoder
Mestre 1
Rotação n1
X15
X14 X42
Retorno de encoder
Mestre 2Escravo 1
Rotação n2
DR
S11
B
DR
S11
B
DR
S11
B
X15
X14 X42
Retorno de encoder
Mestre 3Escravo 2
Rotação n3
X15 Retorno de encoder
Mestre 4Escravo 3
Rotação n4
PE
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
4Planejamento de projetoExemplos de aplicação
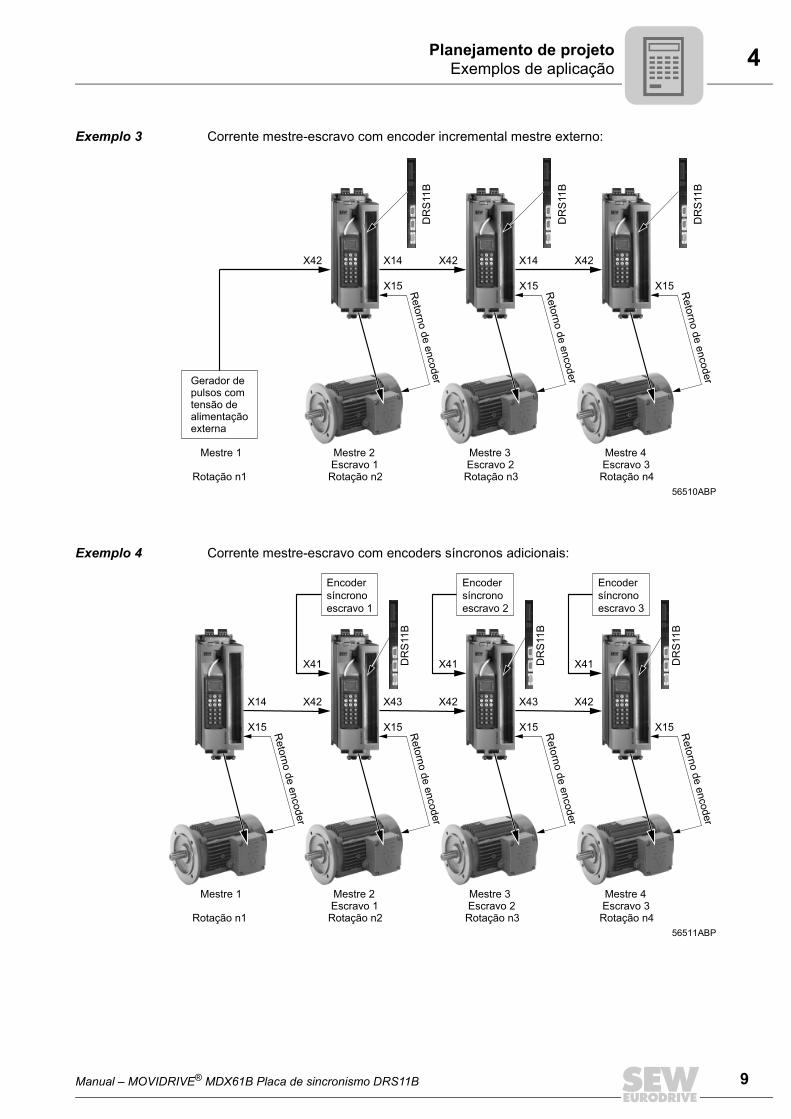
Exemplo 3 Corrente mestre-escravo com encoder incremental mestre externo:
Exemplo 4 Corrente mestre-escravo com encoders síncronos adicionais:
56510ABP
X42
Mestre 1
Rotação n1
X15
X14 X42
Retorno de encoder
Mestre 2Escravo 1
Rotação n2
DR
S11
B
DR
S11
B
DR
S11
B
X15
X14 X42
Retorno de encoder
Mestre 3Escravo 2
Rotação n3
X15 Retorno de encoder
Mestre 4Escravo 3
Rotação n4
Gerador de pulsos com tensão de alimentação externa
56511ABP
X15
X14 X42
Retorno de encoder
Mestre 1
Rotação n1
X41
X15
X43 X42
Retorno de encoder
Mestre 2Escravo 1
Rotação n2
DR
S11
B
X15
X43 X42
Retorno de encoder
Mestre 3Escravo 2
Rotação n3
X15 Retorno de encoder
Mestre 4Escravo 3
Rotação n4
Encoder síncrono escravo 1
X41 DR
S11
B
Encoder síncrono escravo 2
X41 DR
S11
B
Encoder síncrono escravo 3
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
9
4 lanejamento de projetootas para o planejamento do projeto
10
4.2 Notas para o planejamento do projetoObservar as seguintes instruções para o planejamento do projeto:• Não utilizar a operação em sincronismo com sistemas que tenham uma conexão
mecânica rígida.• Equipar os conversores escravos com um resistor de frenagem.• Só é possível ativar um novo offset quando um desalinhamento angular anterior foi
processado.• No planejamento do projeto de uma aplicação de operação em sincronismo,
observar que o escravo deve ser capaz de reduzir a diferença angular relativa aomestre a qualquer momento. Por isso, ajustar a rotação máxima (P302) do escravosuperior à rotação máxima do mestre.Se configurar a rotação máxima nos motores assíncronos CA maior que a rotaçãonominal do motor, o torque máximo do motor não poderá ser fornecido na faixa deenfraquecimento do campo. Em algumas combinações mestre-escravo podemocorrer erros por atraso (F42).Ainda é possível que a sincronização entre mestre e escravo ocorra com a máximaaceleração possível ou através de uma rampa ajustável (P24_ Synchronous opera-tion with synchronization).
• Utilizar a operação em sincronismo sempre com monitoração de ruptura de caboativada (Æ cap. 4.3).
• Se possível, sempre utilizar o mesmo tipo de acionamentos para a operação emsincronismo.
• No caso de elevadores de colunas múltiplas, sempre utilizar motores iguais e redu-tores iguais (reduções idênticas).
• Em configuração de grupos (1 mestre e n escravos equivalentes), é possívelconectar no máximo 5 entradas digitais do conversor escravo em uma saída digitaldo mestre.
• Se o mestre estiver parado quando estiver ligado à rede elétrica e se o escravo fordesligado e religado à rede elétrica, o escravo estará no estado operacional"SEM LIBERAÇÃO":
• Se o mestre deslocar-se quando estiver ligado à rede elétrica e o escravo for desli-gado da rede elétrica, o mestre exibirá a irregularidade "BORNE EXTERNO" (F26).Se o escravo for religado à rede elétrica, o escravo pode reconhecer a irregularidade"ERRO POR ATRASO" (F42), dependendo do limite de erro por atraso ajustado(P512).
• Observar as instruções de operação para MOVIDRIVE® MDX60B/61B ao conectarum encoder de motor aos opcionais DEH11B / DER11B:X15.
• Observar o seguinte durante operação com os opcionais DEH11B / DER11B:– DEH11B: O número de pulsos (X14) é idêntico com a entrada do encoder do
motor em X15– DER11B: O número de pulsos é sempre 1024 pulsos por rotação
• É possível conectar os seguintes encoders nas entradas X41 e X42:– Encoder 5VCC TTL, encoder com propriedades de sinal RS422, encoder sen/cos
• A freqüência de entrada máxima permitida para as entradas de encoder é de 200 kHz.• Durante a utilização de encoders síncronos, a relação da resolução de desloca-
mento entre o encoder do motor e o encoder síncrono deve permanecer na faixa0,1 ... 10.
• Instalar o encoder síncrono com conexão positiva (= sem escorregamento) na partemóvel da máquina.
PN
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
4Planejamento de projetoOperação em sincronismo com monitoração de ruptura de cabo de encoder
• Se o mestre for um encoder incremental externo, empregar o encoder incrementalcom a resolução mais alta possível. Porém, a freqüência de entrada máxima de200 kHz não pode ser ultrapassada.
• Parâmetro P350 Mudança de sentido de rotação 1:Se o controle de operação em sincronismo estiver ativado, P350 deve estar ajustadoem NÃO. Se o mestre e o escravo tiverem que operar em direções contrárias derotação, troca-se a ordem de conexão das trilhas A/A e B/B na entrada de escravo(DRS11B:X42) aos pares.
• A conexão 24 VCC na DRS11B:X44 é obrigatória nos seguintes casos:– A tensão de alimentação do encoder é feita através do opcional DRS11B.– As saídas digitais (X40:9, X40:10) da DRS11B são utilizadas.– Utiliza-se X40:8 como saída de tensão.
• A monitoração de encoder em X41/X42 só é possível com a utilização de encodersTTL.
4.3 Operação em sincronismo com monitoração de ruptura de cabo de encoderPara uma operação em sincronismo bem sucedida entre o mestre e o escravo, é neces-sária uma monitoração de ruptura de cabo da conexão mestre DEH11B/DER11B:X14(simulação de encoder incremental) para o escravo DRS11B:X42. Para tanto, asseguintes funções estão disponíveis:• "PARADA DO MOTOR" e "MESTRE DRS PARADO"• "IRREGULARIDADE EXT." e "/IRREGULARIDADE"Apenas com o mestre parado não há transferência de nenhum pulso de encoder parao escravo. Por essa razão, este estado é enviado ao escravo através de uma conexãodigital. Porém, se o mestre não comunicar nenhuma parada e se o escravo não contarnenhum pulso de encoder, então há uma ruptura de fio ou um defeito no encodermestre. Por conseqüência, o escravo desliga e envia seu estado ao mestre através deuma conexão adicional.
Conexões obrigatórias
• Programar uma saída digital do mestre na função "PARADA DO MOTOR". Conectaresta saída com uma entrada digital do escravo que esteja programada na função"MESTRE DRS PARADO".
• Programar uma entrada digital do mestre na função "IRREGULARIDADE EXT.".Conectar esta entrada com uma saída digital do escravo que esteja programada nafunção "/IRREGULARIDADE".
NOTAA monitoração de encoder adicional pode ser ativada com P516 ou P519 (Æ cap. 6).
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
11
4 lanejamento de projetoartida/parada em sincronismo
12
4.4 Partida/parada em sincronismoPara operação em sincronismo MOVIDRIVE®, a seguinte operação mista é possível:• Mestre é menos ou tão dinâmico quanto o escravo• Mestre é um encoder incremental
• Função do freio DESL.:Sem regulador bloqueado (DI00 "/REG. BLOQUEADO" = "1") e sem LIBERAÇÃO(DI03 = "0") Æ escravo é regulado por rotação e fica na rotação 0.Sem regulador bloqueado (DI00 "/REG. BLOQUEADO" = "1") e LIBERAÇÃO(DI03 = "1") Æ escravo sincroniza-se para a posição do mestre.
• Função do freio LIG.:Quando mestre e escravo estão em sincronização na rotação 0, o freio do escravoé aplicado.
A tabela abaixo lista as configurações e/ou conexões de fio nas combinaçõesmestre/escravo citadas acima relativas à partida/parada em sincronismo e monitoraçãode ruptura de fio ativada.
NOTAUma partida/parada em sincronismo entre o mestre e o(s) escravo(s) deve ser pos-sível nas duas áreas de aplicação. Isto é o pré-requisito para uma operação correta.Por isso, não são admissíveis as combinações em que o mestre é mais dinâmico queo escravo.
Parâmetros do mestre Parâmetros do escravo Observação
Monitoração de ruptura de fio:DO01 = "PARADA DO MOTOR"Partida/parada em sincronismo:DO02 = "ESTÁGIO DE SAÍDA LIG."
Monitoração de ruptura de fio:Borne DI = "MESTRE DRS PARADO"Partida/parada em sincronismo:Borne DI = "INICIALIZAÇÃO ESCRAVO DRS"
Liberar escravo permanen-temente.Saídas digitais DO01 e DO02 não estão mais dis-poníveis no mestre.
PARE!Se a função do freio estiver ligada, é indispensável que o borne de escravo "INICIALI-ZAÇÃO ESCRAVO DRS" esteja programado e ligado. Isto também se aplica quandoo mestre só é um encoder incremental. Neste caso, um controlador externo deve espe-cificar o sinal "INICIALIZAÇÃO ESCRAVO DRS".Se a função do freio estiver desligada, a posição é parada com controle de posição aorevogar o sinal "INICIALIZAÇÃO ESCRAVO DRS" ou ao atingir a faixa de parada(P510).
PP
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
4Planejamento de projetoOperação em sincronismo com encoder síncrono
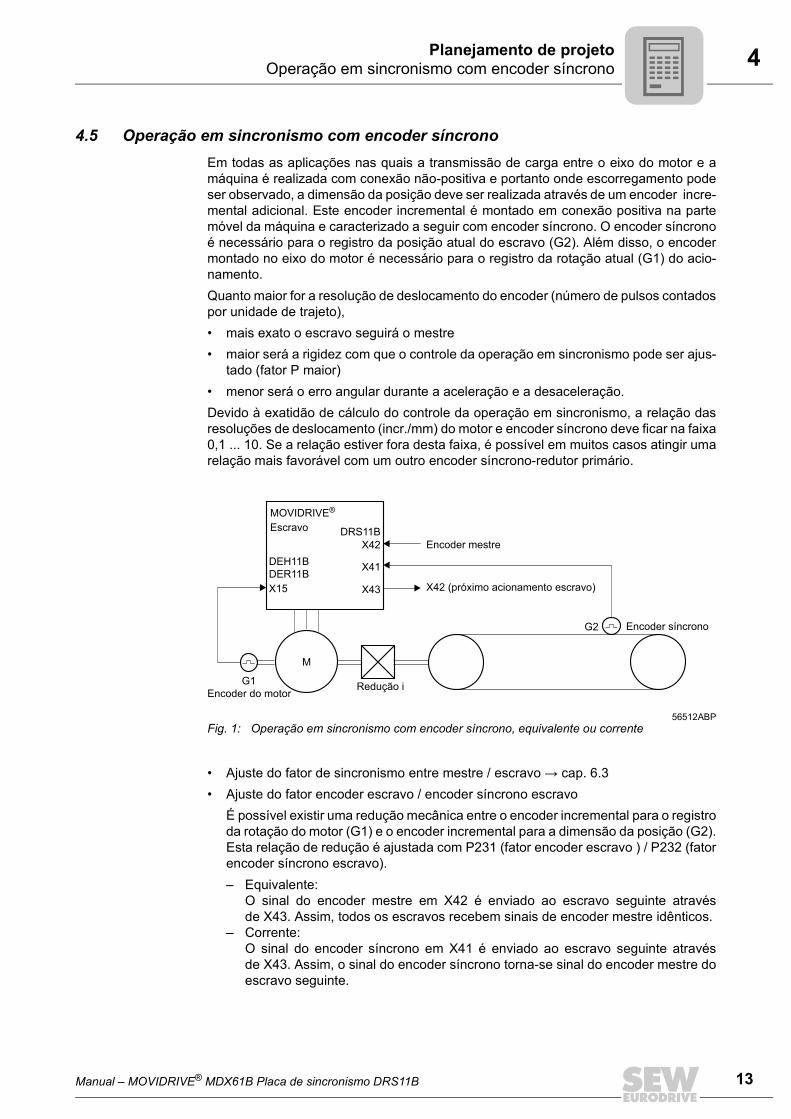
4.5 Operação em sincronismo com encoder síncronoEm todas as aplicações nas quais a transmissão de carga entre o eixo do motor e amáquina é realizada com conexão não-positiva e portanto onde escorregamento podeser observado, a dimensão da posição deve ser realizada através de um encoder incre-mental adicional. Este encoder incremental é montado em conexão positiva na partemóvel da máquina e caracterizado a seguir com encoder síncrono. O encoder síncronoé necessário para o registro da posição atual do escravo (G2). Além disso, o encodermontado no eixo do motor é necessário para o registro da rotação atual (G1) do acio-namento.Quanto maior for a resolução de deslocamento do encoder (número de pulsos contadospor unidade de trajeto),• mais exato o escravo seguirá o mestre• maior será a rigidez com que o controle da operação em sincronismo pode ser ajus-
tado (fator P maior)• menor será o erro angular durante a aceleração e a desaceleração.Devido à exatidão de cálculo do controle da operação em sincronismo, a relação dasresoluções de deslocamento (incr./mm) do motor e encoder síncrono deve ficar na faixa0,1 ... 10. Se a relação estiver fora desta faixa, é possível em muitos casos atingir umarelação mais favorável com um outro encoder síncrono-redutor primário.
• Ajuste do fator de sincronismo entre mestre / escravo Æ cap. 6.3• Ajuste do fator encoder escravo / encoder síncrono escravo
É possível existir uma redução mecânica entre o encoder incremental para o registroda rotação do motor (G1) e o encoder incremental para a dimensão da posição (G2).Esta relação de redução é ajustada com P231 (fator encoder escravo ) / P232 (fatorencoder síncrono escravo).– Equivalente:
O sinal do encoder mestre em X42 é enviado ao escravo seguinte atravésde X43. Assim, todos os escravos recebem sinais de encoder mestre idênticos.
– Corrente:O sinal do encoder síncrono em X41 é enviado ao escravo seguinte atravésde X43. Assim, o sinal do encoder síncrono torna-se sinal do encoder mestre doescravo seguinte.
56512ABPFig. 1: Operação em sincronismo com encoder síncrono, equivalente ou corrente
MOVIDRIVE®
Escravo
X15
DEH11BDER11B
M
G2
X41
X42DRS11B
X43
G1Encoder do motor
Redução i
Encoder síncrono
X42 (próximo acionamento escravo)
Encoder mestre
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
13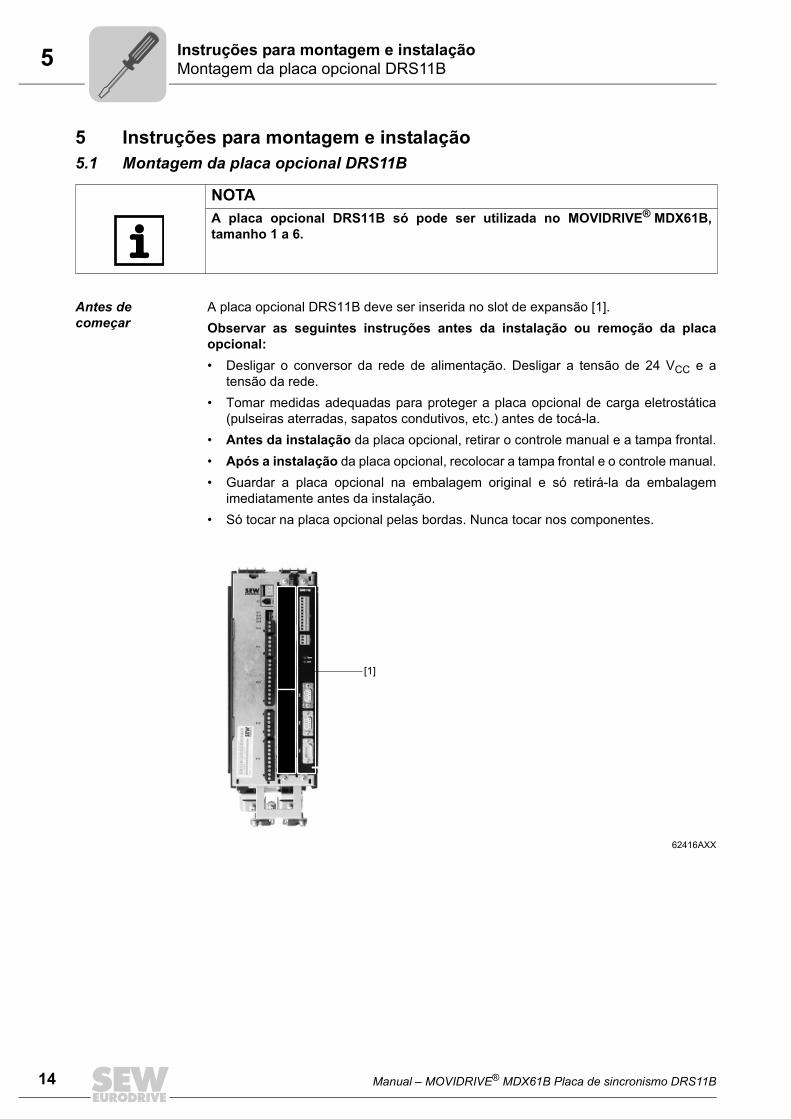
5 struções para montagem e instalaçãoontagem da placa opcional DRS11B
14
5 Instruções para montagem e instalação5.1 Montagem da placa opcional DRS11B
Antes de começar
A placa opcional DRS11B deve ser inserida no slot de expansão [1].Observar as seguintes instruções antes da instalação ou remoção da placaopcional:• Desligar o conversor da rede de alimentação. Desligar a tensão de 24 VCC e a
tensão da rede.• Tomar medidas adequadas para proteger a placa opcional de carga eletrostática
(pulseiras aterradas, sapatos condutivos, etc.) antes de tocá-la.• Antes da instalação da placa opcional, retirar o controle manual e a tampa frontal.• Após a instalação da placa opcional, recolocar a tampa frontal e o controle manual.• Guardar a placa opcional na embalagem original e só retirá-la da embalagem
imediatamente antes da instalação.• Só tocar na placa opcional pelas bordas. Nunca tocar nos componentes.
NOTAA placa opcional DRS11B só pode ser utilizada no MOVIDRIVE® MDX61B,tamanho 1 a 6.
62416AXX
[1]
InM
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
5Instruções para montagem e instalaçãoMontagem da placa opcional DRS11B
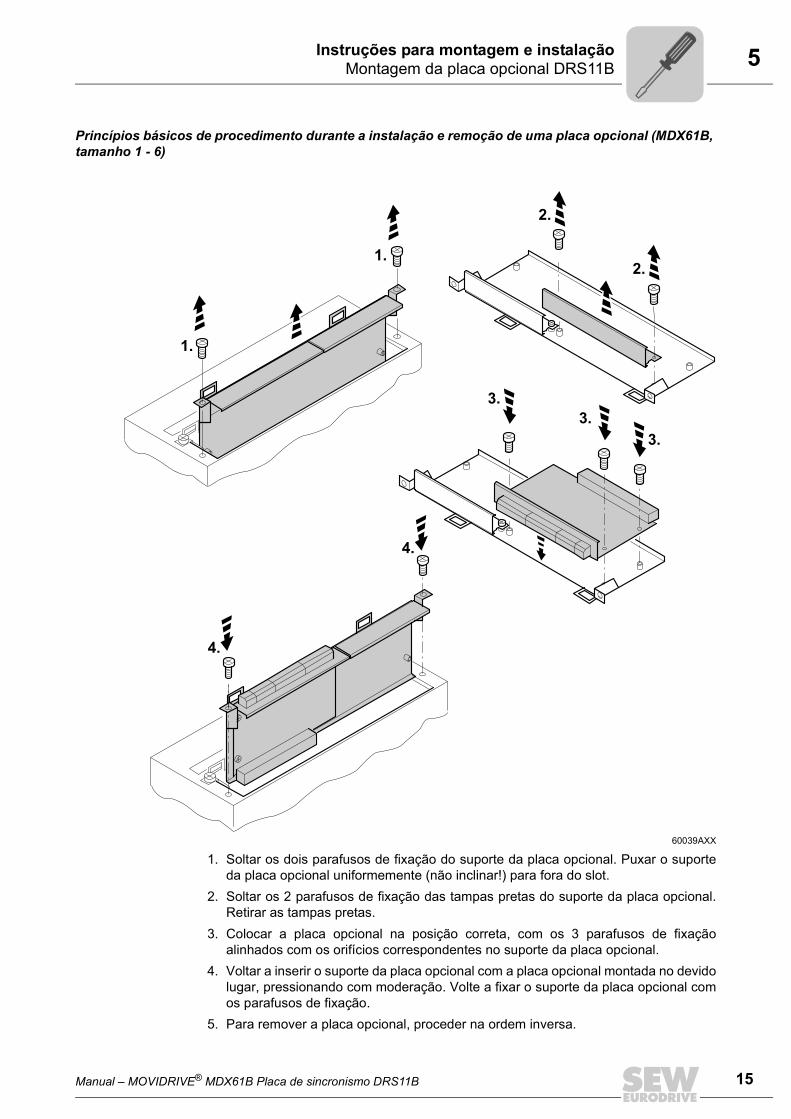
Princípios básicos de procedimento durante a instalação e remoção de uma placa opcional (MDX61B, tamanho 1 - 6)
1. Soltar os dois parafusos de fixação do suporte da placa opcional. Puxar o suporteda placa opcional uniformemente (não inclinar!) para fora do slot.
2. Soltar os 2 parafusos de fixação das tampas pretas do suporte da placa opcional.Retirar as tampas pretas.
3. Colocar a placa opcional na posição correta, com os 3 parafusos de fixaçãoalinhados com os orifícios correspondentes no suporte da placa opcional.
4. Voltar a inserir o suporte da placa opcional com a placa opcional montada no devidolugar, pressionando com moderação. Volte a fixar o suporte da placa opcional comos parafusos de fixação.
5. Para remover a placa opcional, proceder na ordem inversa.
60039AXX
1.
4.
4.
1.2.
3.
3.
3.
2.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
15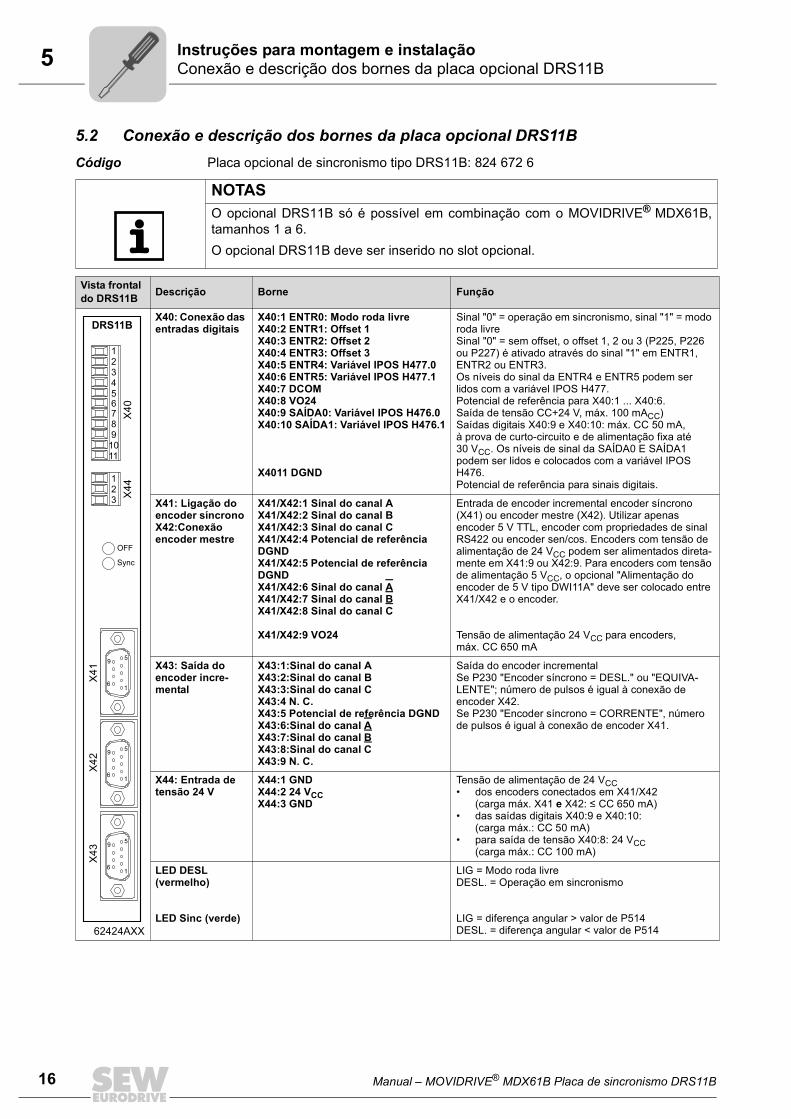
5 struções para montagem e instalaçãoonexão e descrição dos bornes da placa opcional DRS11B
16
5.2 Conexão e descrição dos bornes da placa opcional DRS11BCódigo Placa opcional de sincronismo tipo DRS11B: 824 672 6
NOTASO opcional DRS11B só é possível em combinação com o MOVIDRIVE® MDX61B,tamanhos 1 a 6.O opcional DRS11B deve ser inserido no slot opcional.
Vista frontal do DRS11B Descrição Borne Função
62424AXX
X40: Conexão das entradas digitais
X40:1 ENTR0: Modo roda livreX40:2 ENTR1: Offset 1X40:3 ENTR2: Offset 2X40:4 ENTR3: Offset 3X40:5 ENTR4: Variável IPOS H477.0X40:6 ENTR5: Variável IPOS H477.1X40:7 DCOMX40:8 VO24X40:9 SAÍDA0: Variável IPOS H476.0X40:10 SAÍDA1: Variável IPOS H476.1
X4011 DGND
Sinal "0" = operação em sincronismo, sinal "1" = modo roda livreSinal "0" = sem offset, o offset 1, 2 ou 3 (P225, P226 ou P227) é ativado através do sinal "1" em ENTR1, ENTR2 ou ENTR3.Os níveis do sinal da ENTR4 e ENTR5 podem ser lidos com a variável IPOS H477.Potencial de referência para X40:1 ... X40:6.Saída de tensão CC+24 V, máx. 100 mACC)Saídas digitais X40:9 e X40:10: máx. CC 50 mA, à prova de curto-circuito e de alimentação fixa até 30 VCC. Os níveis de sinal da SAÍDA0 E SAÍDA1 podem ser lidos e colocados com a variável IPOS H476.Potencial de referência para sinais digitais.
X41: Ligação do encoder síncrono X42:Conexão encoder mestre
X41/X42:1 Sinal do canal AX41/X42:2 Sinal do canal BX41/X42:3 Sinal do canal CX41/X42:4 Potencial de referência DGNDX41/X42:5 Potencial de referência DGNDX41/X42:6 Sinal do canal AX41/X42:7 Sinal do canal BX41/X42:8 Sinal do canal C
X41/X42:9 VO24
Entrada de encoder incremental encoder síncrono (X41) ou encoder mestre (X42). Utilizar apenas encoder 5 V TTL, encoder com propriedades de sinal RS422 ou encoder sen/cos. Encoders com tensão de alimentação de 24 VCC podem ser alimentados direta-mente em X41:9 ou X42:9. Para encoders com tensão de alimentação 5 VCC, o opcional "Alimentação do encoder de 5 V tipo DWI11A" deve ser colocado entre X41/X42 e o encoder.
Tensão de alimentação 24 VCC para encoders,máx. CC 650 mA
X43: Saída do encoder incre-mental
X43:1:Sinal do canal AX43:2:Sinal do canal BX43:3:Sinal do canal CX43:4 N. C.X43:5 Potencial de referência DGNDX43:6:Sinal do canal AX43:7:Sinal do canal BX43:8:Sinal do canal CX43:9 N. C.
Saída do encoder incrementalSe P230 "Encoder síncrono = DESL." ou "EQUIVA-LENTE"; número de pulsos é igual à conexão de encoder X42.Se P230 "Encoder síncrono = CORRENTE", número de pulsos é igual à conexão de encoder X41.
X44: Entrada de tensão 24 V
X44:1 GNDX44:2 24 VCCX44:3 GND
Tensão de alimentação de 24 VCC• dos encoders conectados em X41/X42
(carga máx. X41 e X42: Â CC 650 mA)• das saídas digitais X40:9 e X40:10:
(carga máx.: CC 50 mA)• para saída de tensão X40:8: 24 VCC
(carga máx.: CC 100 mA)
LED DESL (vermelho)
LED Sinc (verde)
LIG = Modo roda livreDESL. = Operação em sincronismo
LIG = diferença angular > valor de P514DESL. = diferença angular < valor de P514
DRS11B
X4
0X
44
X4
1X
42
X4
3
OFF
Sync
5
1
9
6
5
1
9
6
5
1
9
6
123456789
1011
123
InC
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
5Instruções para montagem e instalaçãoInstruções para instalação
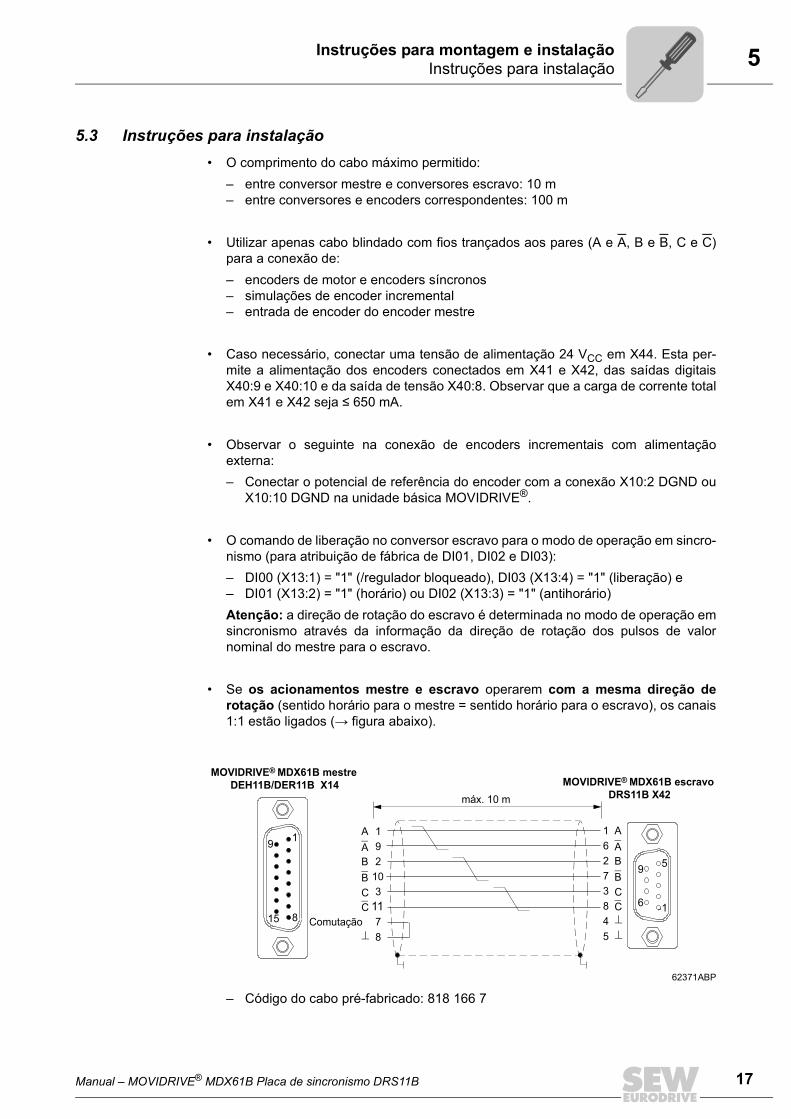
5.3 Instruções para instalação• O comprimento do cabo máximo permitido:
– entre conversor mestre e conversores escravo: 10 m– entre conversores e encoders correspondentes: 100 m
• Utilizar apenas cabo blindado com fios trançados aos pares (A e A, B e B, C e C)para a conexão de:– encoders de motor e encoders síncronos– simulações de encoder incremental– entrada de encoder do encoder mestre
• Caso necessário, conectar uma tensão de alimentação 24 VCC em X44. Esta per-mite a alimentação dos encoders conectados em X41 e X42, das saídas digitaisX40:9 e X40:10 e da saída de tensão X40:8. Observar que a carga de corrente totalem X41 e X42 seja  650 mA.
• Observar o seguinte na conexão de encoders incrementais com alimentaçãoexterna:– Conectar o potencial de referência do encoder com a conexão X10:2 DGND ou
X10:10 DGND na unidade básica MOVIDRIVE®.
• O comando de liberação no conversor escravo para o modo de operação em sincro-nismo (para atribuição de fábrica de DI01, DI02 e DI03):– DI00 (X13:1) = "1" (/regulador bloqueado), DI03 (X13:4) = "1" (liberação) e– DI01 (X13:2) = "1" (horário) ou DI02 (X13:3) = "1" (antihorário)Atenção: a direção de rotação do escravo é determinada no modo de operação emsincronismo através da informação da direção de rotação dos pulsos de valornominal do mestre para o escravo.
• Se os acionamentos mestre e escravo operarem com a mesma direção derotação (sentido horário para o mestre = sentido horário para o escravo), os canais1:1 estão ligados (Æ figura abaixo).
– Código do cabo pré-fabricado: 818 166 7
62371ABP
1
5
6
9
1
8
9
15
MOVIDRIVE® MDX61B mestre DEH11B/DER11B X14 MOVIDRIVE® MDX61B escravo
DRS11B X42máx. 10 m
A
B
C
A
B
C
A
B
C
⊥
A
B
C
192
103
117
1627384⊥⊥ 8 5
Comutação
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
17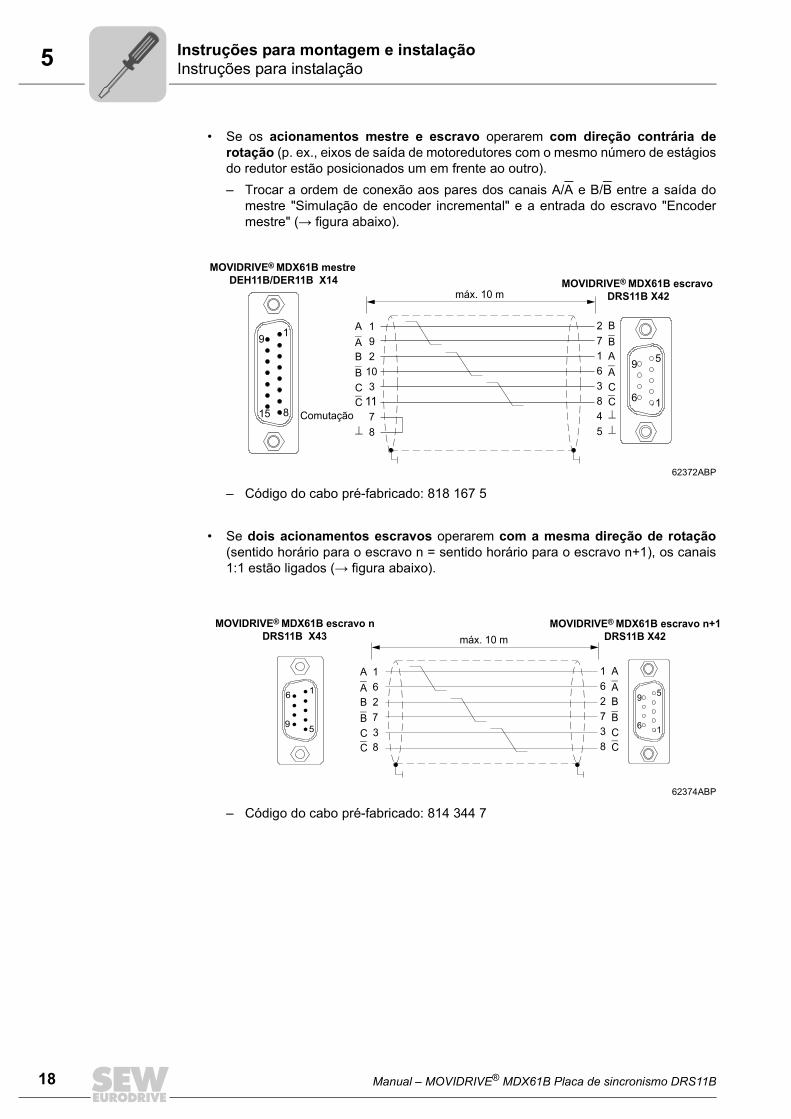
5 struções para montagem e instalaçãostruções para instalação
18
• Se os acionamentos mestre e escravo operarem com direção contrária derotação (p. ex., eixos de saída de motoredutores com o mesmo número de estágiosdo redutor estão posicionados um em frente ao outro).– Trocar a ordem de conexão aos pares dos canais A/A e B/B entre a saída do
mestre "Simulação de encoder incremental" e a entrada do escravo "Encodermestre" (Æ figura abaixo).
– Código do cabo pré-fabricado: 818 167 5
• Se dois acionamentos escravos operarem com a mesma direção de rotação(sentido horário para o escravo n = sentido horário para o escravo n+1), os canais1:1 estão ligados (Æ figura abaixo).
– Código do cabo pré-fabricado: 814 344 7
62372ABP
62374ABP
1
5
6
9
1
8
9
15
MOVIDRIVE® MDX61B mestre DEH11B/DER11B X14 MOVIDRIVE® MDX61B escravo
DRS11B X42máx. 10 m
A
B
C
A
B
C
B
A
C
⊥
B
A
C
192
103
117
2716384⊥⊥ 8 5
Comutação
1
5
6
9
MOVIDRIVE® MDX61B escravo nDRS11B X43
MOVIDRIVE® MDX61B escravo n+1DRS11B X42máx. 10 m
A
B
C
A
B
C
A
B
C
A
B
C
162738
162738
1
5
6
9
InIn
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
5Instruções para montagem e instalaçãoInstruções para instalação
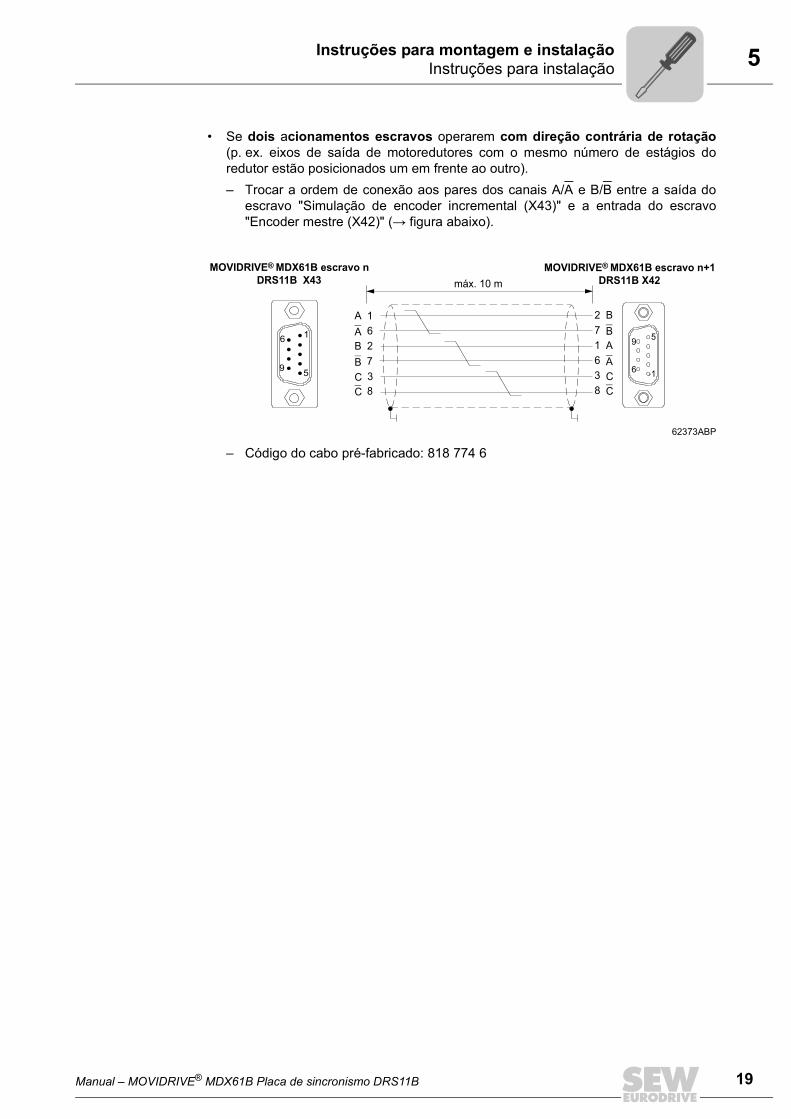
• Se dois acionamentos escravos operarem com direção contrária de rotação(p. ex. eixos de saída de motoredutores com o mesmo número de estágios doredutor estão posicionados um em frente ao outro).– Trocar a ordem de conexão aos pares dos canais A/A e B/B entre a saída do
escravo "Simulação de encoder incremental (X43)" e a entrada do escravo"Encoder mestre (X42)" (Æ figura abaixo).
– Código do cabo pré-fabricado: 818 774 6
62373ABP
1
5
6
9
MOVIDRIVE® MDX61B escravo nDRS11B X43
MOVIDRIVE® MDX61B escravo n+1DRS11B X42máx. 10 m
A
B
C
A
B
C
B
A
C
B
A
C
162738
271638
1
5
6
9
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
19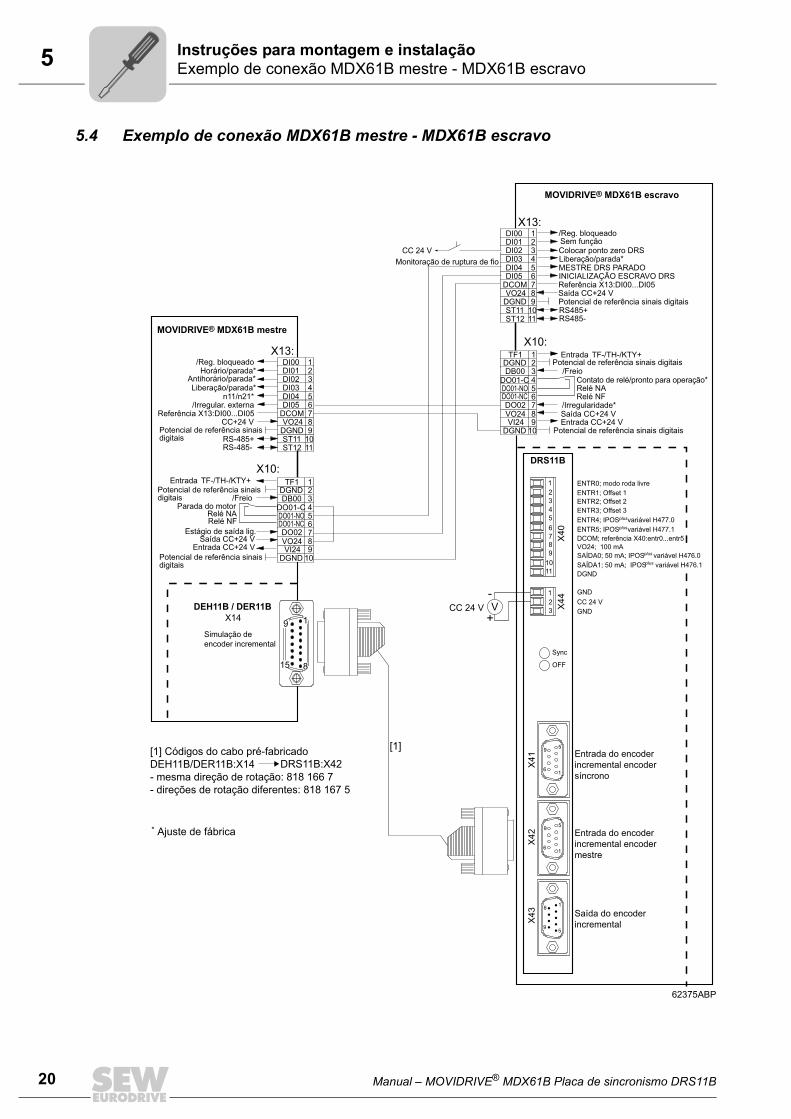
5 struções para montagem e instalaçãoxemplo de conexão MDX61B mestre - MDX61B escravo
20
5.4 Exemplo de conexão MDX61B mestre - MDX61B escravo
62375ABP
DRS11B
04X
44X
14X
24X
34X
Sync
OFF
1
5
6
9
5
1
9
6
5
1
9
6
123
123
456789
1011
ENTR0; modo roda livreENTR1; Offset 1ENTR2; Offset 2ENTR3; Offset 3ENTR4; IPOSplus variável H477.0ENTR5; IPOSplus variável H477.1DCOM; referência X40:entr0...entr5VO24; 100 mASAÍDA0; 50 mA; IPOS plus variável H476.0SAÍDA1; 50 mA; IPOS plus variável H476.1DGND
GNDCC 24 VGND
Entrada do encoder incremental encoder síncrono
Entrada do encoder incremental encoder mestre
Saída do encoder incremental
DI00 1 /Reg. bloqueado
/Freio
/Irregularidade*
DI01Colocar ponto zero DRSSem função2
DI02 3DI03 Liberação/parada*4DI04 MESTRE DRS PARADO5DI05 INICIALIZAÇÃO ESCRAVO DRS6
DCOM Referência X13:DI00...DI057VO24 Saída CC+24 V8
DGND Potencial de referência sinais digitais
Potencial de referência sinais digitais
Potencial de referência sinais digitais
9ST11 RS485+
RS485-10
ST12 11
X13:
X10:
X10:
TF1 Entrada TF-/TH-/KTY+1DGND 2DB00 3
DO01-C
DO02
Contato de relé/pronto para operação*Relé NARelé NF
4DO01-NODO01-NC
567
VO24 Saída CC+24 V8VI24 Entrada CC+24 V9
DGND 10
DI00 1/Reg. bloqueadoDI01Horário/parada*
Antihorário/parada*2
DI02 3DI03Liberação/parada* 4DI04n11/n21* 5DI05/Irregular. externa 6
DCOMReferência X13:DI00...DI05 7VO24CC+24 V 8
DGND 9ST11RS-485+
RS-485-10
ST12 11
X13:
/Freio
Estágio de saída lig.
Potencial de referência sinais digitais
Potencial de referência sinais digitais
TF1Entrada TF-/TH-/KTY+ 1DGND 2DB00 3
DO01-C
DO02
Parada do motorRelé NARelé NF
4DO01-NODO01-NC
567
VO24Saída CC+24 V 8VI24Entrada CC+24 V 9
DGND 10
MOVIDRIVE® MDX61B mestre
MOVIDRIVE® MDX61B escravo
Monitoração de ruptura de fio
[1][1] Códigos do cabo pré-fabricadoDEH11B/DER11B:X14 - mesma direção de rotação: 818 166 7- direções de rotação diferentes: 818 167 5
DRS11B:X42
-
+VCC 24 V
* Ajuste de fábrica
DEH11B / DER11BX14
Simulação de encoder incremental
19
815
CC 24 V
Potencial de referência sinais digitais
InE
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
5Instruções para montagem e instalaçãoConexão do encoder incremental como mestre
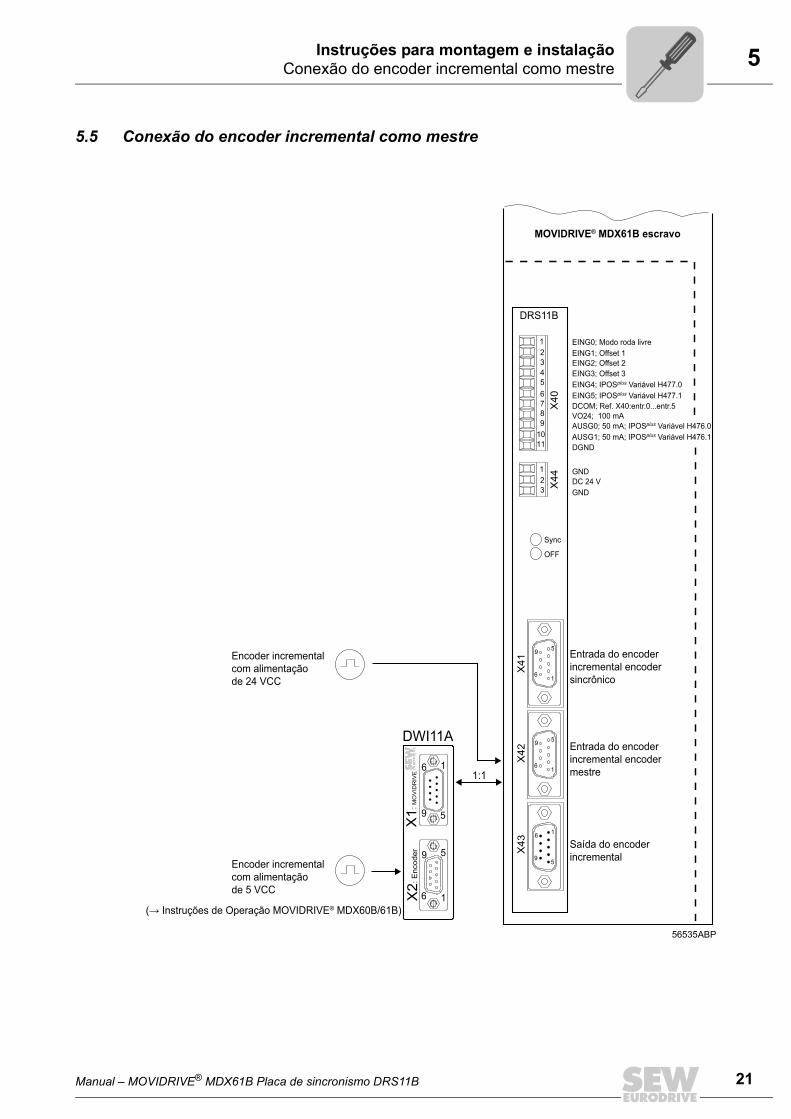
5.5 Conexão do encoder incremental como mestre
56535ABP
DRS11B
X40
X44
X41
X42
X43
OFF
Sync
1
5
6
9
5
1
9
6
5
1
9
6
123
123
456789
1011
Encoder incremental com alimentação de 24 VCC
Encoder incremental com alimentação de 5 VCC
(→ Instruções de Operação MOVIDRIVE® MDX60B/61B)
MOVIDRIVE® MDX61B escravo
1:1
EING0; Modo roda livreEING1; Offset 1EING2; Offset 2EING3; Offset 3EING4; IPOSplus Variável H477.0EING5; IPOSplus Variável H477.1DCOM; Ref. X40:entr.0...entr.5VO24; 100 mAAUSG0; 50 mA; IPOSplus Variável H476.0AUSG1; 50 mA; IPOSplus Variável H476.1DGND
GNDDC 24 VGND
Entrada do encoder incremental encoder sincrônico
Entrada do encoder incremental encoder mestre
Saída do encoder incremental
1
5
6
9
5
1
9
6X2:
Enc
oder
X1:
MO
VID
RIV
E
DWI11A
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
21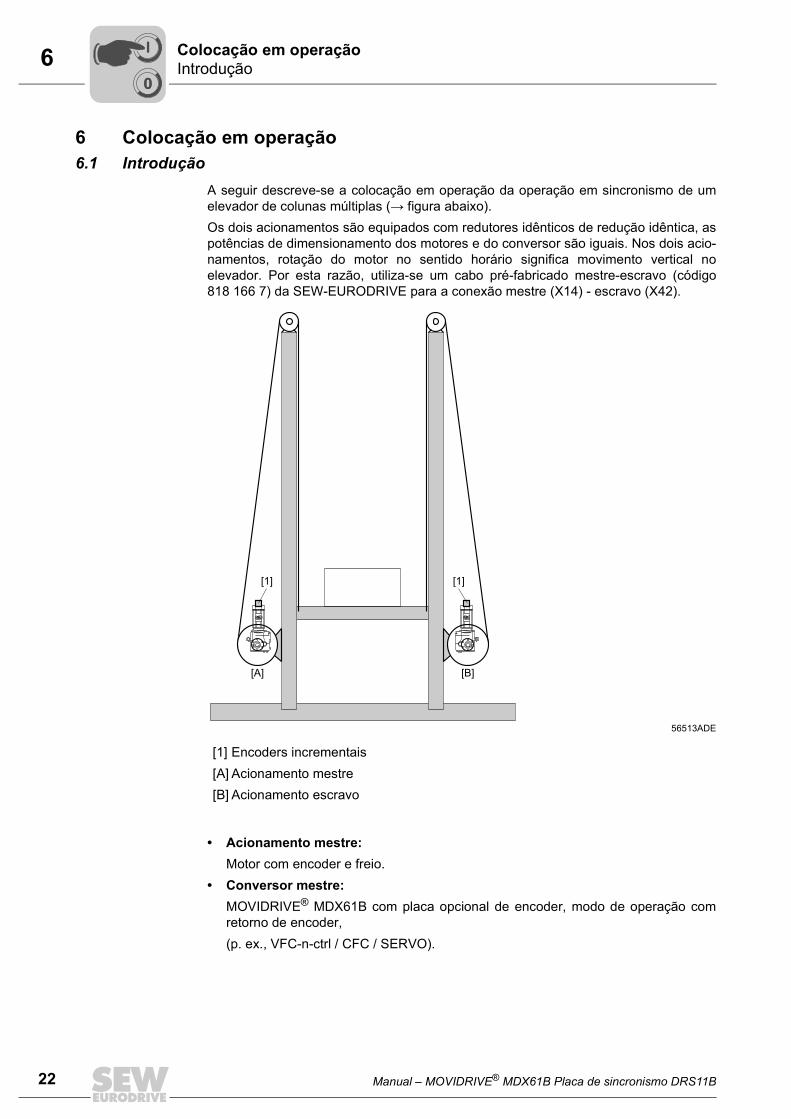
6 olocação em operaçãotrodução
22
6 Colocação em operação6.1 Introdução
A seguir descreve-se a colocação em operação da operação em sincronismo de umelevador de colunas múltiplas (Æ figura abaixo).Os dois acionamentos são equipados com redutores idênticos de redução idêntica, aspotências de dimensionamento dos motores e do conversor são iguais. Nos dois acio-namentos, rotação do motor no sentido horário significa movimento vertical noelevador. Por esta razão, utiliza-se um cabo pré-fabricado mestre-escravo (código818 166 7) da SEW-EURODRIVE para a conexão mestre (X14) - escravo (X42).
• Acionamento mestre:Motor com encoder e freio.
• Conversor mestre:MOVIDRIVE® MDX61B com placa opcional de encoder, modo de operação comretorno de encoder, (p. ex., VFC-n-ctrl / CFC / SERVO).
56513ADE
[1] Encoders incrementais[A] Acionamento mestre[B] Acionamento escravo
[B][A]
[1] [1]
CIn
00
I
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
6Colocação em operaçãoBreve descrição da colocação em operação
• Acionamento escravo:Motor com encoder e freio.
• Conversor escravo:MOVIDRIVE® MDX61B com placa opcional de encoder, modo de operação comretorno de encoder e operação em sincronismo, p. ex., VFC-n-ctrl.&SINC /CFC&SINC / SERVO&SINC com placa opcional de sincronismo DRS11B.
6.2 Breve descrição da colocação em operaçãoTrabalhos preliminares
• Verificar a cablagem, função dos bornes e comutação de segurança.• Remover acionamentos das máquinas.• Colocar mestre e escravo em operação regulada por rotação separadamente.• Programar entradas e saídas digitais de acordo com a aplicação.• Iniciar mestre e escravo e testar a operação regulada por rotação.
Verificar os sinais de encoder
• Zerar erro angular entre mestre e escravo usando "Set DRS Zero Point".• Colocar modo de operação P700 para escravo em "Operação em sincronismo".
– Motores assíncronos: VFC-n-CTRL.&SINC ou CFC&SINC– Motores síncronos: SERVO&SINC
• Bloquear escravo (/REG. BLOQUEADO DI00 = "0") e girar mestre.• LED SINC (verde) deve acender. Se não for assim, verificar conexão de encoder
mestre-escravo.• Caso necessário, ligar a monitoração de encoder.
Operação em sincronismo de mestre e escravo quando desmontados
• Zerar erro angular entre mestre e escravo usando "Set DRS Zero Point".• Liberar escravo e iniciar acionamento mestre. O escravo seguirá o mestre.
Ajuste dos parâmetros da operação em sincronismo
• Ajustar o fator engrenamentos mestre (P221) e o fator engrenamentos escravo(P222) de acordo com as reduções.
Operação em sincronismo de mestre e escravo com acionamentos montados
• Montar acionamentos e alinhar.• Zerar erro angular entre mestre e escravo usando "Set DRS Zero Point".• Liberar acionamentos.• Verificar se o erro angular durante os procedimentos de aceleração permanecem na
faixa permitida ( Æ MOVITOOLS® SCOPE ou LED SINC verde).
NOTASe o opcional DRS11B no MOVIDRIVE® MDX61B do acionamento escravo fortrocado, os acionamentos devem ser realinhados.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
00
I
23
6 olocação em operaçãorabalhos preliminares
24
6.3 Trabalhos preliminares
• Colocar o acionamento mestre e escravo em operação separadamente no modo deoperação (Æ P700) VFC-n-ctrl, CFC ou SERVO, de acordo com as observações nasinstruções de operação MOVIDRIVE® MDX60B/61B.
• Programar a função dos bornes do mestre e escravo de acordo com a sua aplicação.• Ativar e testar a operação regulada por rotação dos dois acionamentos.
6.4 Ativar a operação em sincronismoTeste dos sinais de encoder
• Zerar um possível erro angular (Æ LED verde "SINC" acende) entre mestre eescravo:– Programar uma entrada digital do conversor escravo na função "Colocar ponto
zero DRS". O sinal "1" está ativo.– Alterar esta entrada digital "0"Æ"1"Æ"0". O LED verde "SINC" apaga.
• Ativar o controle da operação em sincronismo do escravo ajustando um modo deoperação com retorno de encoder e operação em sincronismo, (p. ex., VFC-n-CTRL.&SINC, CFC&SINC, SERVO&SINC). A princípio, manter todos os parâmetrosdo controlador da operação em sincronismo no ajuste de fábrica.
• Bloquear o acionamento escravo com DI00 = "0" (regulador bloqueado).• Mover apenas o acionamento mestre e observar o LED verde "SINC" no DRS11B.
Após breve movimento do acionamento mestre, o LED deve acender.• Se o LED verde "SINC" não acender, verificar a conexão de encoder entre mestre e
escravo. Neste caso, o acionamento escravo não recebe nenhuma informação dedeslocamento do mestre.
Operação em sincronismo dos dois acionamentos quando desmontados
• Zerar um possível erro angular (Æ LED verde "SINC" acende) entre mestre eescravo:– Programar uma entrada digital do conversor escravo na função "Colocar ponto
zero DRS". O sinal "1" está ativo.– Alterar esta entrada digital "0"Æ"1"Æ"0". O LED verde "SINC" apaga.
• É possível liberar o escravo da seguinte maneira:– com DI00 = "1" (sem regulador bloqueado)– com DI01 = "1" (horário) ou DI02 = "1" (antihorário)– com DI03 = "1" (liberação)– com X40:1 = "0" (sem modo roda livre)
• Colocar o acionamento mestre em movimento; o acionamento escravo o seguirá.
PARE!Garantir que• a cablagem,• a função dos bornes e • as comutações de segurançaforam configuradas corretamente e de acordo com a aplicação.Remover os acionamentos da máquina de modo que os dois acionamentospossam ser operados mecanicamente independentemente um do outro. Assim,evita-se que a unidade seja danificada devido a deslocamentos imprevistosdurante a colocação em funcionamento da operação em sincronismo.
CT
00
I
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
6Colocação em operaçãoTeste da operação em sincronismo com acionamentos montados
Parametrização dos parâmetros de operação em sincronismo
• Parametrização dos fatores engrenamentos mestre e escravo (P221 e P222):– Em caso de configuração idêntica de acionamento (encoder, redutor, etc.),
os parâmetros P221 e P222 devem permanecer com o ajuste de fábrica.– Em qualquer outra configuração, é possível identificar P221 e P222 de acordo
com as seguintes fórmulas:
• Liberar os acionamentos mestre e escravo. Os dois acionamentos devem operarem sincronismo angular.
6.5 Teste da operação em sincronismo com acionamentos montados• Montar os dois acionamentos na máquina e fazer o alinhamento mecânico entre os
dois.• Zerar o erro angular com a função "Set DRS Zero Point".• Liberar os dois acionamentos conforme o esquema de ligação.• Durante o deslocamento, observar o LED "SINC" na placa de sincronismo. Desta
forma, é possível identificar o erro angular atual entre mestre e escravo:– Se o LED "SINC" acender durante a aceleração e desaceleração, o erro angular
encontra-se acima da tolerância ajustada no parâmetro P514.– É possível gravar e identificar o erro angular exato com a ajuda da função
"SCOPE" integrada no MOVITOOLS®.• Otimizar o ganho P do controle de operação em sincronismo (P220) da seguinte
forma:– Operar a unidade com a carga máxima de serviço permitida de operação.– Aumentar P220 em pequenos passos de 1 - 2. Observar o comportamento de
controle do escravo.– Aumentar P220 até que o acionamento escravo tenda a oscilar.– Reduzir P220 em 15% e tomar o resultado como valor para P220.É possível executar outra otimização com a ajuda da função "SCOPE" integrada noMOVITOOLS®.
• Adequar os parâmetros para a monitoração do controle da operação em sincro-nismo de acordo com suas necessidades.
56534ABP
AM, AS Resolução do encoder mestre, escravoiM, iS Redução do mestre, do escravoivM, ivS Reduções adicionais do mestre, do escravoUM, US Circunferência dos elementos de saída do mestre, do escravo
P221
P222= AM x iM ivM
AS x iS ivS
US
UM
xx
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
00
I
25
6 olocação em operaçãoxemplos para o cálculo de P221 e P222
26
6.6 Exemplos para o cálculo de P221 e P222Exemplo 1: Transportador de correntes
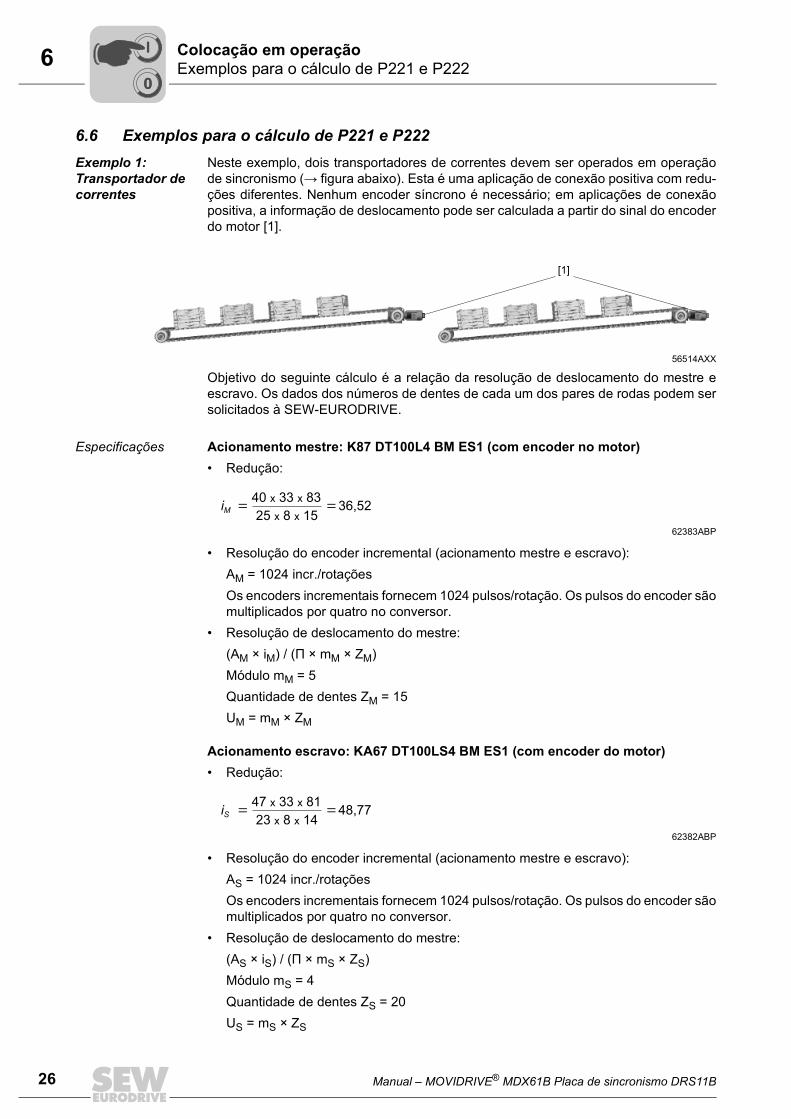
Neste exemplo, dois transportadores de correntes devem ser operados em operaçãode sincronismo (Æ figura abaixo). Esta é uma aplicação de conexão positiva com redu-ções diferentes. Nenhum encoder síncrono é necessário; em aplicações de conexãopositiva, a informação de deslocamento pode ser calculada a partir do sinal do encoderdo motor [1].
Objetivo do seguinte cálculo é a relação da resolução de deslocamento do mestre eescravo. Os dados dos números de dentes de cada um dos pares de rodas podem sersolicitados à SEW-EURODRIVE.
Especificações Acionamento mestre: K87 DT100L4 BM ES1 (com encoder no motor)• Redução:
• Resolução do encoder incremental (acionamento mestre e escravo):AM = 1024 incr./rotaçõesOs encoders incrementais fornecem 1024 pulsos/rotação. Os pulsos do encoder sãomultiplicados por quatro no conversor.
• Resolução de deslocamento do mestre:(AM × iM) / (Π × mM × ZM)Módulo mM = 5Quantidade de dentes ZM = 15UM = mM × ZM
Acionamento escravo: KA67 DT100LS4 BM ES1 (com encoder do motor)• Redução:
• Resolução do encoder incremental (acionamento mestre e escravo):AS = 1024 incr./rotaçõesOs encoders incrementais fornecem 1024 pulsos/rotação. Os pulsos do encoder sãomultiplicados por quatro no conversor.
• Resolução de deslocamento do mestre:(AS × iS) / (Π × mS × ZS)Módulo mS = 4Quantidade de dentes ZS = 20US = mS × ZS
56514AXX
[1]
62383ABP
62382ABP
iM = =40 x 33 x 8336,52
25 x 8 x 15
iS = =47 x 33 x 8148,77
23 x 8 x 14
CE
00
I
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
6Colocação em operaçãoExemplos para o cálculo de P221 e P222
Cálculo Para este exemplo, os seguintes valores devem ser introduzidos:
Resultado:• P221 = 3420928• P222 = 4282875
Exemplo 2: Aplicação de encoder síncrono
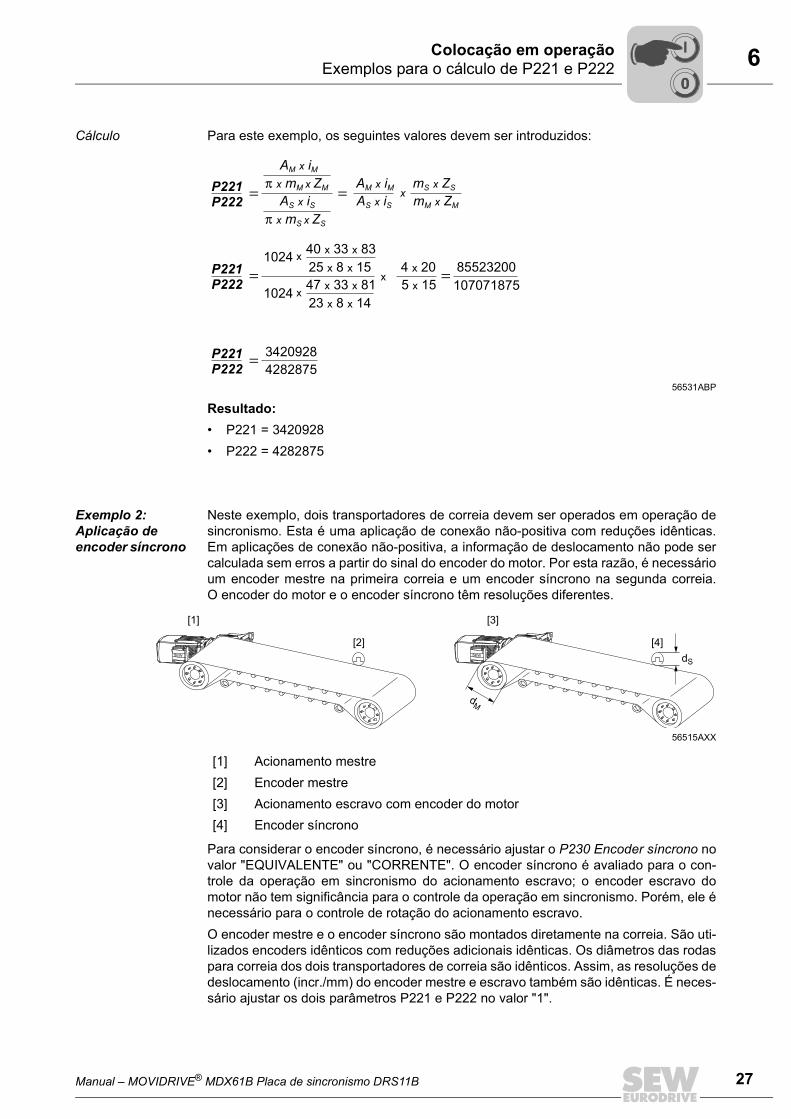
Neste exemplo, dois transportadores de correia devem ser operados em operação desincronismo. Esta é uma aplicação de conexão não-positiva com reduções idênticas.Em aplicações de conexão não-positiva, a informação de deslocamento não pode sercalculada sem erros a partir do sinal do encoder do motor. Por esta razão, é necessárioum encoder mestre na primeira correia e um encoder síncrono na segunda correia.O encoder do motor e o encoder síncrono têm resoluções diferentes.
Para considerar o encoder síncrono, é necessário ajustar o P230 Encoder síncrono novalor "EQUIVALENTE" ou "CORRENTE". O encoder síncrono é avaliado para o con-trole da operação em sincronismo do acionamento escravo; o encoder escravo domotor não tem significância para o controle da operação em sincronismo. Porém, ele énecessário para o controle de rotação do acionamento escravo.O encoder mestre e o encoder síncrono são montados diretamente na correia. São uti-lizados encoders idênticos com reduções adicionais idênticas. Os diâmetros das rodaspara correia dos dois transportadores de correia são idênticos. Assim, as resoluções dedeslocamento (incr./mm) do encoder mestre e escravo também são idênticas. É neces-sário ajustar os dois parâmetros P221 e P222 no valor "1".
56531ABP
P221
P222= =
AM x iM
AM x iMπ x mM x ZM
AS x iS AS x iS
mS x ZS
mM x ZM
π x mS x ZS
x
P221
P222= =x
102440 x 33 x 83
25 x 8 x 15
47 x 33 x 81
4 x 20
5 x 15
85523200
107071875
23 x 8 x 14
x
1024 x
P221
P222= 3420928
4282875
56515AXX
SEWSEW
dM
dS
[1] [3]
[2] [4]
[1] Acionamento mestre[2] Encoder mestre[3] Acionamento escravo com encoder do motor[4] Encoder síncrono
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
00
I
27
6 olocação em operaçãoxemplos para o cálculo de P221 e P222
28
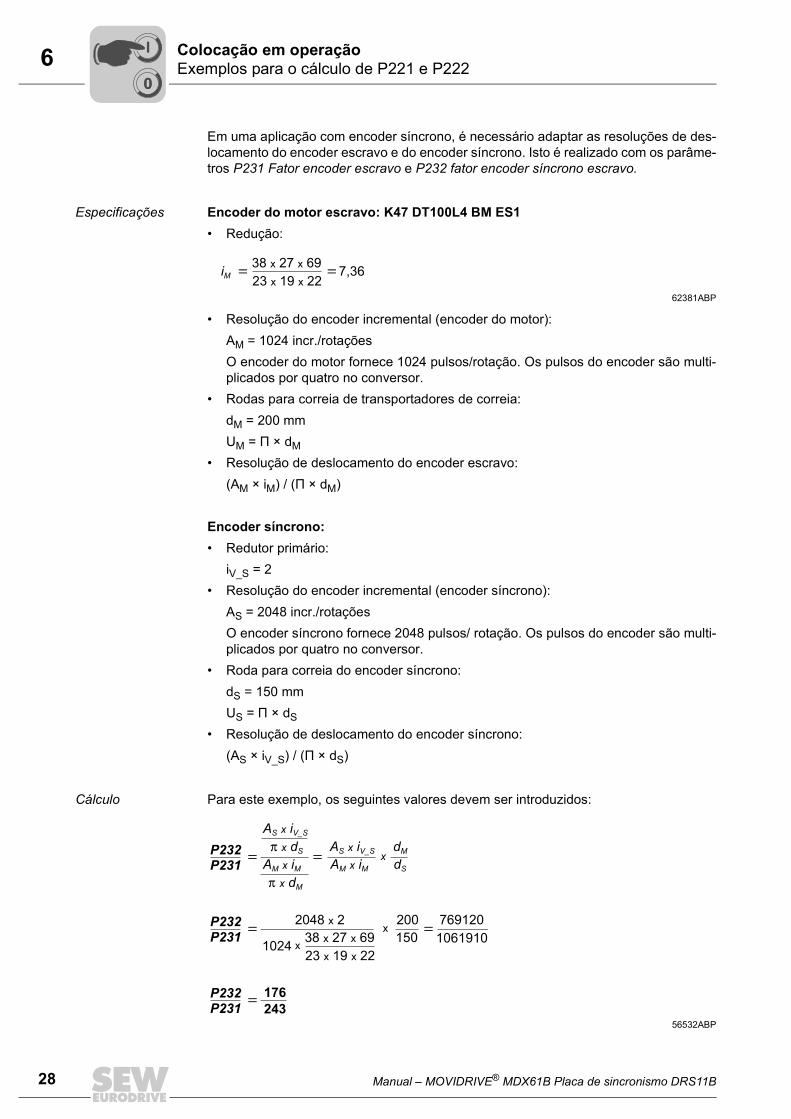
Em uma aplicação com encoder síncrono, é necessário adaptar as resoluções de des-locamento do encoder escravo e do encoder síncrono. Isto é realizado com os parâme-tros P231 Fator encoder escravo e P232 fator encoder síncrono escravo.
Especificações Encoder do motor escravo: K47 DT100L4 BM ES1• Redução:
• Resolução do encoder incremental (encoder do motor):AM = 1024 incr./rotaçõesO encoder do motor fornece 1024 pulsos/rotação. Os pulsos do encoder são multi-plicados por quatro no conversor.
• Rodas para correia de transportadores de correia:dM = 200 mmUM = Π × dM
• Resolução de deslocamento do encoder escravo:(AM × iM) / (Π × dM)
Encoder síncrono:• Redutor primário:
iV_S = 2• Resolução do encoder incremental (encoder síncrono):
AS = 2048 incr./rotaçõesO encoder síncrono fornece 2048 pulsos/ rotação. Os pulsos do encoder são multi-plicados por quatro no conversor.
• Roda para correia do encoder síncrono:dS = 150 mmUS = Π × dS
• Resolução de deslocamento do encoder síncrono:(AS × iV_S) / (Π × dS)
Cálculo Para este exemplo, os seguintes valores devem ser introduzidos:
62381ABP
iM = =38 x 27 x 697,36
23 x 19 x 22
56532ABP
P232
P231= =
AS x iV_S
AS x iV_Sπ x dS
AM x iM AM x iM
dM
dS
π x dM
x
P232
P231= =2048 x 2
38 x 27 x 69
200
150
769120
1061910
23 x 19 x 221024 x
P232
P231= 176
243
x
CE
00
I
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
7ParâmetroRelação de valores de parâmetros e da rotação de saída
7 ParâmetroExplicação dos parâmetros
Os nomes dos parâmetros correspondem à representação em MOVITOOLS® SHELL.O ajuste de fábrica foi sublinhado em cada caso.
Símbolo Estes parâmetros podem ser alterados apenas no estado do conversor BLOQUEADO(= estágio de saída em alta impedância).
7.1 Relação de valores de parâmetros e da rotação de saídaÉ necessário introduzir incrementos para os parâmetros ajustáveis (P224, P225, P226,P227, P510, P511, P512, P514) que estejam relacionados a um desalinhamentoangular ( p. ex., como desvio permitido ou como offset) entre o acionamento mestre eescravo. Eles se referem a um valor que o conversor calcula a partir dos pulsos doencoder. A quantidade de pulsos de encoder é multiplicado pelo fator 4 no conversor.A quantidade de incrementos a ser introduzida nos parâmetros é calculada a partir dodesalinhamento angular do motor conforme a seguinte fórmula:Valor incremental a ser introduzido = rotações do motor x 4 x número de pulsosdo encoder incremental
Exemplo Se a mensagem de irregularidade "/ATRASO DRS" for criada com um desvio de 5 rota-ções de motor e de encoders incrementais com o número de pulsos = 1024 incrementos/ rotação entre o acionamento mestre e o escravo, introduzir como valor incremental emP512 Limite de erro por atraso o seguinte:Valor do contador a ser introduzido = 5 × 4 × 1024 = 20480Este valor pode referir-se ao lado de saída do redutor.Rotações do motor = rotações de saída x iredutorAlém da rotação do motor e da redução, o redutor primário também atua sobre arotação de saída efetiva na máquina de saída. Neste caso, é possível calcular as rota-ções do motor da seguinte maneira:Rotações do motor = rotações de saída x iredutor × iredutor primário
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
P6..
P60.
P600
29
7 arâmetrounções de sinalização
30
7.2 Funções de sinalizaçãoOs seguintes estados de operação são sinalizados:• Indicação ótica através do LED "SINC" (verde) "LED de indicação do contador"
(P514):O LED "SINC" permite visualizar a diferença máxima ocorrida no momento entre oacionamento mestre e escravo durante a colocação em operação.– LIG = diferença angular > valor de P514– DESL. = diferença angular < valor de P514
• Indicação ótica do modo de operação através do LED "DESL." (vermelho) "MODORODA LIVRE ESCRAVO":– LIG = acionamento escravo está em modo roda livre– DESL. = acionamento escravo está na operação em sincronismo
• Mensagem de estado "DRS ESCRAVO EM POS":– em uma das saídas digitais programáveis (P60_/P61_)
• Mensagem "/PRÉ-AVISO DRS":– em uma das saídas digitais programáveis (P60_/P61_)
• Mensagem de irregularidade "/DRS ERRO POR ATRASO":– em uma das saídas digitais programáveis (P60_/P61_)– com escolha de resposta a irregularidade do acionamento (P834)
PF
P6..
P60.
P600
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
7ParâmetroFunções de sinalização
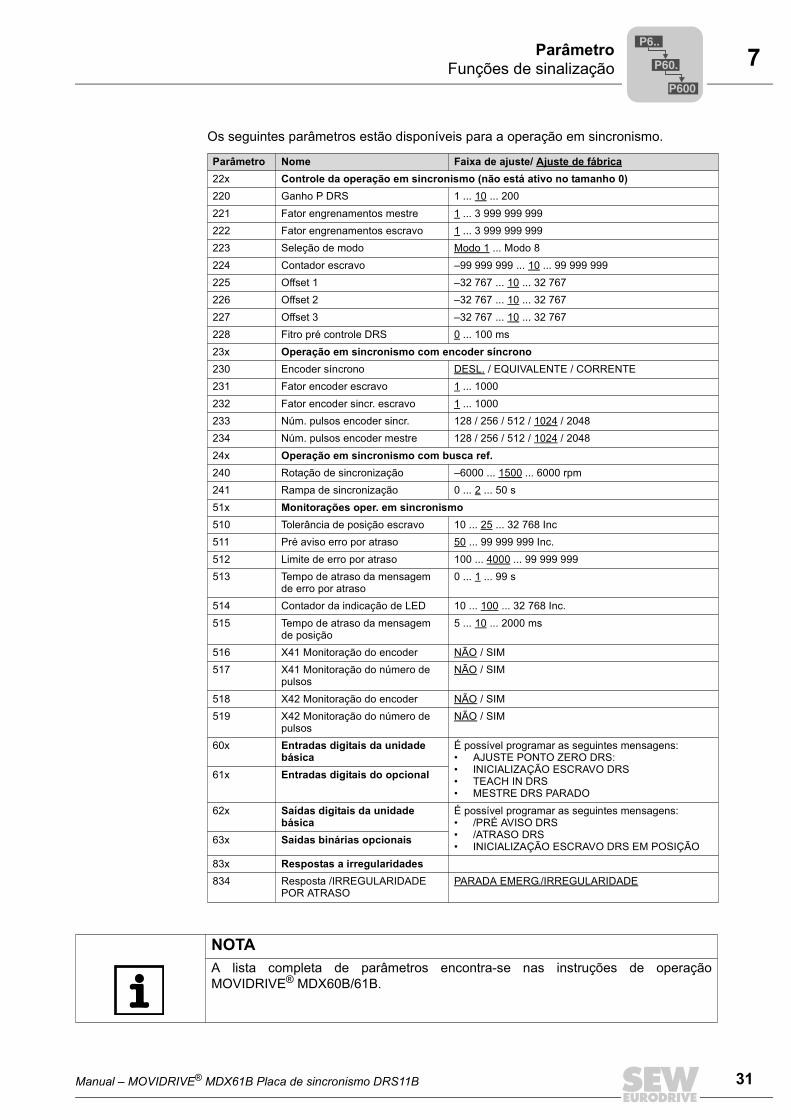
Os seguintes parâmetros estão disponíveis para a operação em sincronismo.
Parâmetro Nome Faixa de ajuste/ Ajuste de fábrica22x Controle da operação em sincronismo (não está ativo no tamanho 0)220 Ganho P DRS 1 ... 10 ... 200221 Fator engrenamentos mestre 1 ... 3 999 999 999222 Fator engrenamentos escravo 1 ... 3 999 999 999223 Seleção de modo Modo 1 ... Modo 8224 Contador escravo –99 999 999 ... 10 ... 99 999 999225 Offset 1 –32 767 ... 10 ... 32 767226 Offset 2 –32 767 ... 10 ... 32 767227 Offset 3 –32 767 ... 10 ... 32 767228 Fitro pré controle DRS 0 ... 100 ms23x Operação em sincronismo com encoder síncrono230 Encoder síncrono DESL. / EQUIVALENTE / CORRENTE231 Fator encoder escravo 1 ... 1000232 Fator encoder sincr. escravo 1 ... 1000233 Núm. pulsos encoder sincr. 128 / 256 / 512 / 1024 / 2048234 Núm. pulsos encoder mestre 128 / 256 / 512 / 1024 / 204824x Operação em sincronismo com busca ref.240 Rotação de sincronização –6000 ... 1500 ... 6000 rpm241 Rampa de sincronização 0 ... 2 ... 50 s51x Monitorações oper. em sincronismo510 Tolerância de posição escravo 10 ... 25 ... 32 768 Inc511 Pré aviso erro por atraso 50 ... 99 999 999 Inc.512 Limite de erro por atraso 100 ... 4000 ... 99 999 999513 Tempo de atraso da mensagem
de erro por atraso0 ... 1 ... 99 s
514 Contador da indicação de LED 10 ... 100 ... 32 768 Inc.515 Tempo de atraso da mensagem
de posição5 ... 10 ... 2000 ms
516 X41 Monitoração do encoder NÃO / SIM517 X41 Monitoração do número de
pulsosNÃO / SIM
518 X42 Monitoração do encoder NÃO / SIM519 X42 Monitoração do número de
pulsosNÃO / SIM
60x Entradas digitais da unidade básica
É possível programar as seguintes mensagens:• AJUSTE PONTO ZERO DRS:• INICIALIZAÇÃO ESCRAVO DRS• TEACH IN DRS• MESTRE DRS PARADO
61x Entradas digitais do opcional
62x Saídas digitais da unidade básica
É possível programar as seguintes mensagens:• /PRÉ AVISO DRS• /ATRASO DRS• INICIALIZAÇÃO ESCRAVO DRS EM POSIÇÃO63x Saídas binárias opcionais
83x Respostas a irregularidades834 Resposta /IRREGULARIDADE
POR ATRASOPARADA EMERG./IRREGULARIDADE
NOTAA lista completa de parâmetros encontra-se nas instruções de operaçãoMOVIDRIVE® MDX60B/61B.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
P6..
P60.
P600
31
7 arâmetroescrições dos parâmetros
32
7.3 Descrições dos parâmetrosP22x Controle da operação em sincronismo
Controle de operação em sincronismo (só no jogo de parâmetros 1).
P220 Ganho P DRS
Faixa de ajuste: 1 ... 10 ... 200Ganho do controle da operação em sincronismo no escravo. Assim, determina-se a res-posta de controle do escravo dependendo das diferenças angulares com relação aomestre.
P221 / P222 fator engrenamentos mestre / fator engrenamentos escravo
Faixa de ajuste: 1 ... 3 999 999 999Estes ajustes são necessários apenas no conversor escravo. A relação da dimensãoda posição entre mestre e o escravo é ajustada com estes parâmetros. Para poder rea-lizar reduções não inteiras, a redução pode ser introduzida como quociente do mestrepara o escravo.Deve-se observar que é possível realizar a dimensão da posição do mestre e doescravo apenas em conexão positiva (sem escorregamento). Em todas as aplica-ções nas quais a transmissão de carga entre o eixo do motor e a máquina é realizadacom conexão não positiva e portanto onde escorregamento pode ser observado, adimensão da posição deve ser realizada através de um encoder adicional (encoderexterno). Este encoder deve ser montado com conexão positiva na parte móvel damáquina.
P223 Seleção de modo
Faixa de ajuste: 1 / 2 / 3 / 4 / 5 / 6 / 7 / 8A seleção de modo determina a resposta do acionamento escravo a um sinal de modoroda livre.• Modo 1: Modo roda livre sem limites, novo ponto de referência
– O modo roda livre está ativado quando um sinal "1" está presente em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos no modo roda livre.– Um desalinhamento angular surgido no modo roda livre não é processado em
uma nova sincronização inicial.• Modo 2: Modo roda livre sem limites, processamento do desalinhamento surgido
– O modo roda livre está ativado quando um sinal "1" está presente em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos no modo roda livre.– Um desalinhamento angular surgido no modo roda livre é processado em uma
nova sincronização inicial.• Modo 3: Modo roda livre sem limites, processamento do desalinhamento surgido
+ P224– O modo roda livre está ativado quando um sinal "1" está presente em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos no modo roda livre.– Em caso de uma nova sincronização inicial, além do desalinhamento, processa-
se a posição síncrona antiga do desalinhamento de posição com sinal positivo ounegativo em P224.
• Modo 4: Modo roda livre limitado pelo P224 Contador escravo, processamento dodesalinhamento surgido– O modo roda livre é ativado através de um sinal "1" (>100 ms) em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos durante o modo roda livre.– O modo roda livre é concluído quando a diferença angular introduzida em P224
for atingida. O desalinhamento angular é reduzido para zero.
PD
P6..
P60.
P600
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
7ParâmetroDescrições dos parâmetros
• Modo 5: Modo roda livre limitado pelo P224 contador escravo, novo ponto de refe-rência– O modo roda livre é ativado através de um sinal "1" (>100 ms) em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos durante o modo roda livre.– O modo roda livre é concluído quando a diferença angular introduzida em P224
for atingida.– Se houver um novo sinal HIGH em X40:1 antes do término do modo roda livre, o
valor no qual o modo roda livre será concluído é aumentado para o valor introdu-zido em P224.
– O acionamento escravo sincroniza para a nova diferença angular.• Modo 6: Desalinhamento angular temporário, novo ponto de referência
– O modo roda livre está ativado quando um sinal "1" está presente em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos no modo roda livre.– Um desalinhamento angular surgido no modo roda livre não é processado em
uma nova sincronização inicial.– Um sinal "1" em X40:2, X40:3 ou X40:4 da DRS11B ativa um deslocamento
angular. O respectivo desalinhamento angular é depositado nos parâmetrosP225, P226 e P227.
– Se o borne de entrada X40:2, X40:3 ou X40:4 for ocupado mais uma vez com umsinal "0", o desalinhamento angular será recuperado.
• Modo 7: Desalinhamento angular constante (aparo de fases), novo ponto de refe-rência– O modo roda livre está ativado quando um sinal "1" está presente em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos no modo roda livre.– Um desalinhamento angular surgido no modo roda livre não é processado em
uma nova sincronização inicial.– Um sinal "1" em X40:2, X40:3 ou X40:4 da DRS11B ativa um deslocamento
angular. O respectivo desalinhamento angular é depositado nos parâmetrosP225, P226 e P227.
– Se o borne de entrada X40:2, X40:3 ou X40:4 for ocupado mais uma vez com umsinal "0", o desalinhamento angular permanece.
– Se o sinal de entrada permanecer por mais de 3 segundos, é corrigido comquatro passos por segundo.
• Modo 8: Modo roda livre sem limites, novo ponto de referência + P224– O modo roda livre está ativado quando um sinal "1" está presente em X40:1.– Os bornes de entrada e os valores nominais do acionamento escravo tornam-se
ativos no modo roda livre.– Se o borne de entrada X40:1 receber um sinal "0", o acionamento escravo sin-
croniza para a posição atual do acionamento mestre, acrescentando o desalinha-mento angular depositado em P224.
NOTASó é possível ativar um novo offset quando um desalinhamento angular anterior foiprocessado.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
P6..
P60.
P600
33
7 arâmetroescrições dos parâmetros
34
P224 Contador escravo
Faixa de ajuste: –99 999 999 ... 10 ... 99 999 999 IncO desalinhamento angular ativável em relação ao acionamento mestre nos modos 3, 4,5 e 8 é caracterizado como contador escravo. Ao contrário do offset, este desalinha-mento angular é ajustável através da função "Teach In". Dependendo do modo, eleserve como valor limite para o modo roda livre ou especifica um desalinhamentoangular constante relativo ao acionamento mestre para o acionamento escravo (= novoponto de referência).
P225 / P226 / P227 Offset 1 / 2 / 3
Faixa de ajuste: –32 767 ... 10 ... 32 767 Inc; atua somente no modo 6 ou no modo 7!Três diferenças angulares ajustáveis para as quais o acionamento escravo se ajustadurante o sinal "1" em X40:2 / X40:3 / X40:4.
P228 Filtro pré controle DRS
Faixa de ajuste: 0 ... 100 msFiltro de valor nominal para pré controle do controle da operação em sincronismoDRS11B. Para obter um pré controle otimizado da aceleração do acionamento escravo,a rotação mestre (registrada na DRS) deve ser filtrada. A constante de tempo de fil-tragem deve ser introduzida para a filtragem. Neste caso, o valor 0 significa umarotação mestre não filtrada.
P23x Operação em sincronismo com encoder síncrono
Operação em sincronismo com encoder síncrono (só no jogo de parâmetros 1).Em todas as aplicações nas quais a transmissão de carga entre o eixo do motor e amáquina é realizada com conexão não positiva e portanto onde escorregamento podeser observado, a dimensão da posição deve ser realizada através de um encoderexterno (= encoder síncrono).
P230 Encoder síncrono
Faixa de ajuste: DESL .. EQUIVALENTE ... CORRENTE• DESL.: Controle da operação em sincronismo com os sinais do encoder do motor
conectado. P231 e P232 não atuam.• EQUIVALENTE: Entrega do sinal X42: "Encoder mestre" em X43: "Saída do
encoder incremental". Avaliação de P231 e P232.• CORRENTE: Entrega do sinal X41: "Entrada do encoder síncrono" em X43: "Saída
do encoder incremental". Avaliação de P231 e P232.
P231 / P232 fator encoder escravo / fator encoder síncrono escravo
Faixa de ajuste: 1 .. 1000Entre os dois encoders, existe na maioria dos casos uma redução mecânica. Estaredução deve ser ajustada com os parâmetros.
P233 Núm. pulsos encoder sincr.
Faixa de ajuste: 128 / 256 / 512 / 1024 / 2048Ajuste do número de pulsos do encoder síncrono conectado.
P234 Resolução do encoder mestre
Faixa de ajuste: 128 / 256 / 512 / 1024 / 2048Ajuste do número de pulsos do encoder mestre conectado.
P24x Operação em sincronismo com busca ref.
Operação em sincronismo com busca ref. (só no jogo de parâmetros 1).Se o acionamento escravo for comutado para operação em sincronismo, o desalinha-mento angular atual em relação ao acionamento mestre será reduzido a cada vez, deacordo com o modo de operação ajustado. Para operar este procedimento de busca ref.de forma controlada, é possível parametrizar tanto a rotação de sincronização quantoa rampa de sincronização.
P240 Rotação síncrona
Faixa de ajuste: 0 ... 1500 ... 6000 rpmEste parâmetro fornece a rotação do procedimento de busca ref.
PD
P6..
P60.
P600
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
7ParâmetroDescrições dos parâmetros
P241 Rampa de sincronização
Faixa de ajuste: 0 ... 2 ... 50 sValor da rampa de aceleração para a sincronização do acionamento escravo no acio-namento mestre. Ajuste zero significa a máxima aceleração possível.
P51x Monitorações oper. em sincronismo
Monitorações oper. em sincronismo.
P510 Tolerância de posição escravo
Faixa de ajuste: 10 ... 25 ... 32 768 IncPara o posicionamento exato do acionamento escravo, são necessários vários pré-requisitos. O freio do acionamento escravo é aplicado quando as seguintes condiçõesforem cumpridas inteiramente:• A função do freio do acionamento escravo é ativada• Acionamento mestre está parado• Acionamento mestre sem corrente (= estado do conversor BLOQUEADO)• Acionamento escravo está parado e encontra-se na janela de posição
P511 Pré aviso erro por atraso
Faixa de ajuste: 50 ... 99 999 999 IncSe o desalinhamento angular ultrapassar o valor ajustado aqui, é criada uma men-sagem de pré-aviso. Isto independe do modo de operação do acionamento escravo.
P512 Limite de erro por atraso
Faixa de ajuste: 100 ... 4000 ... 99 999 999 IncSe o desalinhamento angular ultrapassar o valor ajustado aqui, é criada uma men-sagem de irregularidade F42 "Erro por atraso". Independentemente se o acionamentoescravo opera em modo roda livre ou em operação em sincronismo.
P513 Tempo de atraso da mensagem de erro por atraso
Faixa de ajuste: 0 ... 1 ... 99 sÉ possível suprimir as mensagens "Pré-aviso de erro por atraso" e "Limite de erro poratraso" de serem emitidas e/ou serem colocadas em uma saída digital por um períodode supressão de mensagens ajustável na transição do modo livre para a operação emsincronismo.
P514 Contador da indicação de LED
Faixa de ajuste: 10 ... 100 ... 32 768 IncSe o desalinhamento angular ultrapassar o valor ajustado aqui, isto é indicado com oLED V1 (verde) aceso. Deste modo, é possível visualizar imediatamente a diferençamáxima surgida durante a operação normal entre o acionamento mestre e escravo. Istoé bastante útil na colocação em operação.
P515 Tempo de atraso da mensagem de posição
Faixa de ajuste: 5 ... 10 ... 2000 msA mensagem da saída digital DRS ESCRAVO EM POS só é criada quando o aciona-mento mestre e o acionamento escravo se encontram dentro do P510 Tolerância deposição escravo pelo tempo ajustado aqui.
NOTAAjustar a aceleração ou desaceleração do acionamento escravo de operação em sin-cronismo para modo roda livre com os parâmetros P130 ... P134.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
P6..
P60.
P600
35
7 arâmetroescrições dos parâmetros
36
P516 X41 Monitoração do encoder
Faixa de ajuste: NÃO / SIM• NÃO: Uma ruptura de cabo entre o conversor de freqüência e um encoder TTL
conectado em X41 não é reconhecida diretamente. Em caso de problemas com aconexão, surge a irregularidade F42 "Erro por atraso" em estado liberado, a não serque esta tenha sido desativada.
• SIM: Uma ruptura de cabo entre o conversor de freqüência e um encoder TTLconectado em X41 é reconhecida diretamente. Em caso de irregularidade, surge amensagem de irregularidade F48 "Hardware DRS". Esta irregularidade também égerada em estado bloqueado.
P517 X41 Monitoração do número de pulsos
Faixa de ajuste: NÃO / SIMO número de pulsos do encoder conectado em X41 é verificado com o número depulsos ajustado em P233 através da avaliação do canal C. Se houver perda de incre-mentos, será emitida a mensagem de irregularidade F48 "Hardware DRS".• NÃO: A monitoração do número de pulsos não está ativa.• LIG: A monitoração do número de pulsos está ativa.
P518 X42 Monitoração do encoder
Faixa de ajuste: NÃO / SIM• NÃO: Uma ruptura de cabo entre o conversor de freqüência e um encoder TTL
conectado em X42 não é reconhecida diretamente. Em caso de problemas com aconexão, surge a irregularidade F42 "Erro por atraso" em estado liberado, a não serque tenha sido desativada.
• SIM: Uma ruptura de cabo entre o conversor de freqüência e um encoder TTLconectado em X42 é reconhecida diretamente. Em caso de irregularidade, surge amensagem de irregularidade F48 "Hardware DRS". Esta irregularidade também égerada em estado bloqueado.
P519 X42 Monitoração do número de pulsos
Faixa de ajuste: NÃO / SIMO número de pulsos do encoder conectado em X42 é verificado com o número depulsos ajustado em P234 através da avaliação do canal C. Se houver perda de incre-mentos, será emitida a mensagem de irregularidade F48 "Hardware DRS".• NÃO: A monitoração do número de pulsos não está ativa.• SIM: A monitoração do número de pulsos está ativa.
NOTAA monitoração do encoder não é relevante para o funcionamento seguro!
NOTAA monitoração do encoder não é relevante para o funcionamento seguro!
PD
P6..
P60.
P600
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
7ParâmetroDescrições dos parâmetros
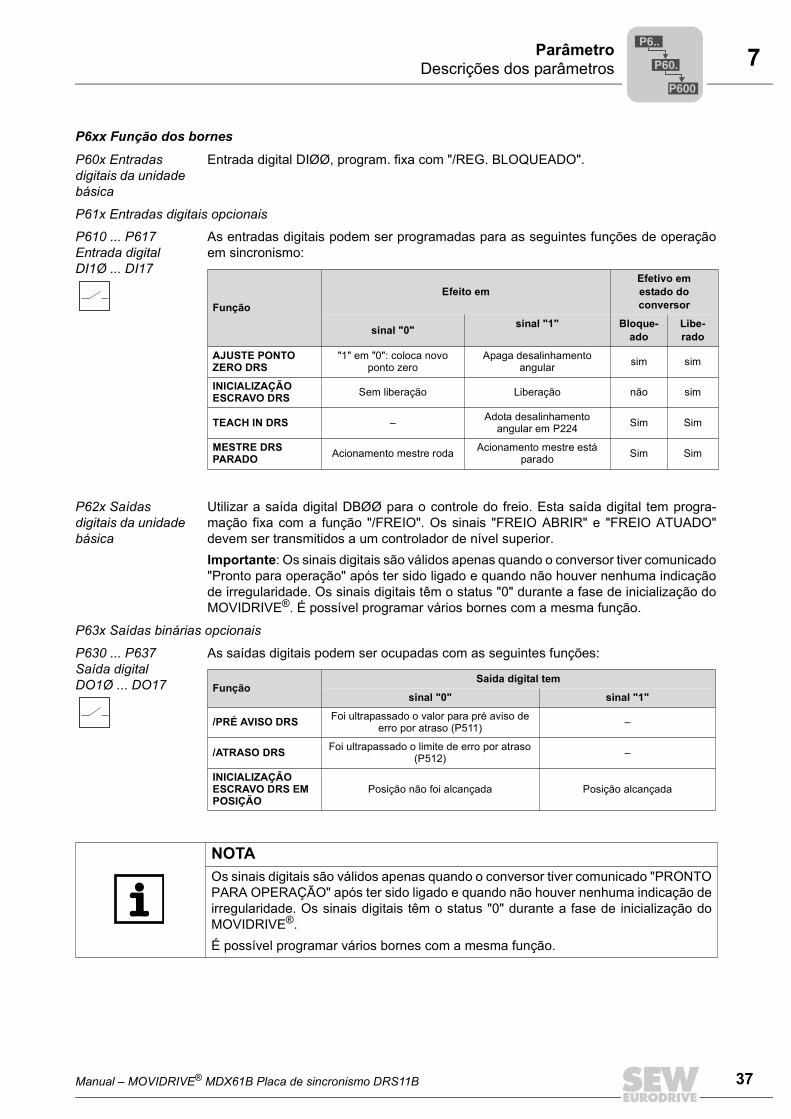
P6xx Função dos bornes
P60x Entradas digitais da unidade básica
Entrada digital DIØØ, program. fixa com "/REG. BLOQUEADO".
P61x Entradas digitais opcionais
P610 ... P617 Entrada digital DI1Ø ... DI17
As entradas digitais podem ser programadas para as seguintes funções de operaçãoem sincronismo:
P62x Saídas digitais da unidade básica
Utilizar a saída digital DBØØ para o controle do freio. Esta saída digital tem progra-mação fixa com a função "/FREIO". Os sinais "FREIO ABRIR" e "FREIO ATUADO"devem ser transmitidos a um controlador de nível superior.Importante: Os sinais digitais são válidos apenas quando o conversor tiver comunicado"Pronto para operação" após ter sido ligado e quando não houver nenhuma indicaçãode irregularidade. Os sinais digitais têm o status "0" durante a fase de inicialização doMOVIDRIVE®. É possível programar vários bornes com a mesma função.
P63x Saídas binárias opcionais
P630 ... P637 Saída digital DO1Ø ... DO17
As saídas digitais podem ser ocupadas com as seguintes funções:
FunçãoEfeito em
Efetivo emestado do conversor
sinal "0" sinal "1" Bloque-ado
Libe-rado
AJUSTE PONTO ZERO DRS
"1" em "0": coloca novo ponto zero
Apaga desalinhamento angular sim sim
INICIALIZAÇÃO ESCRAVO DRS Sem liberação Liberação não sim
TEACH IN DRS – Adota desalinhamento angular em P224 Sim Sim
MESTRE DRS PARADO Acionamento mestre roda Acionamento mestre está
parado Sim Sim
FunçãoSaída digital tem
sinal "0" sinal "1"
/PRÉ AVISO DRS Foi ultrapassado o valor para pré aviso de erro por atraso (P511) –
/ATRASO DRS Foi ultrapassado o limite de erro por atraso (P512) –
INICIALIZAÇÃO ESCRAVO DRS EM POSIÇÃO
Posição não foi alcançada Posição alcançada
NOTAOs sinais digitais são válidos apenas quando o conversor tiver comunicado "PRONTOPARA OPERAÇÃO" após ter sido ligado e quando não houver nenhuma indicação deirregularidade. Os sinais digitais têm o status "0" durante a fase de inicialização doMOVIDRIVE®.É possível programar vários bornes com a mesma função.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
P6..
P60.
P600
37

7 arâmetroescrições dos parâmetros
38
P83x Respostas a irregularidades
É possível programar as seguintes respostas:
P834 Resposta ERRO POR ATRASO
Resposta erro por atraso apenas com DRS11B ou IPOSplus®.Ajuste de fábrica: PARADA EMERG./IRREGULARIDADEA resposta a irregularidade é programada com P834 e é ativada através da monitoraçãode erro por atraso do opcional Operação em sincronismo (DRS11B) e do modo de ope-ração de posicionamento com IPOSplus®. Para tal, é possível realizar vários ajustes emP51x Monitorações oper. em sincronismo.
Resposta DescriçãoSEM RES-POSTA
Nenhum erro é indicado e nenhuma resposta a irregularidades é executada. A irregulari-dade detectada é completamente ignorada.
INDICA IRREGUL.
A irregularidade é indicada (no display de 7 segmentos e no SHELL), a saída de irregulari-dade é colocada (caso programada). Caso contrário, a unidade não executa nenhuma res-posta a irregularidade. A irregularidade pode ser resetada (borne, RS485, fieldbus, auto reset).
PARADA IMEDIATA/IRREGUL.
Há um desligamento imediato do conversor com a mensagem de irregularidade. O estágio de saída é bloqueado e o freio é aplicado. O sinal de pronto a funcionar é revogado e a saída de irregularidade é colocada, caso esteja programada. Um novo início só é possível após o reset de irregularidade tiver sido executado durante o qual o conversor é reiniciali-zado.
PARADA EMER-GÊNCIA/FALHA
O conversor freia o acionamento na rampa da parada de emergência ajustada. Após atingir a rotação de parada, o estágio de saída é bloqueado e o freio é aplicado. Surge a men-sagem de irregularidade imediatamente. O sinal de pronto para funcionar é revogado e a saída de irregularidade é colocada, caso esteja programada. Um novo início só é possível após o reset de irregularidade tiver sido executado durante o qual o conversor é reiniciali-zado.
PARADA RÁPIDA/FALHA
O conversor freia o acionamento na rampa da parada rápida ajustada. Após atingir a rotação de parada, o estágio de saída é bloqueado e o freio é aplicado. Surge a mensagem de irregularidade imediatamente. O sinal de pronto para funcionar é revogado e a saída de irregularidade é colocada, caso esteja programada. Um novo início só é possível após o reset de irregularidade tiver sido executado durante o qual o conversor é reinicializado.
PARADA IMEDIATA/AVISO
Há um desligamento imediato do conversor com a mensagem de irregularidade. O estágio de saída é bloqueado e o freio é aplicado. Surge uma mensagem de irregularidade através do borne, caso tenha sido programado para tal. A mensagem de pronto para operar não é revogada. Se a irregularidade for eliminada através de um procedimento interno ou de um reset de irregularidade, o acionamento volta a operar sem executar uma nova inicialização da unidade.
PARADA EMER-GÊNCIA/AVISO
O conversor freia o acionamento na rampa da parada de emergência ajustada. Ao atingir a rotação de parada, o estágio de saída é bloqueado e o freio é aplicado. Surge a mensagem de irregularidade imediatamente. Surge uma mensagem de irregularidade através do borne, caso tenha sido programado para tal. A mensagem de pronto para operar não é revogada. Se a irregularidade for eliminada através de um procedimento interno ou de um reset de irregularidade, o acionamento volta a operar sem executar uma nova inicialização da uni-dade.
PARRAP/AVISO
O conversor freia o acionamento na rampa da parada rápida ajustada. Ao atingir a rotação de parada, o estágio de saída é bloqueado e o freio é aplicado. Surge a mensagem de irre-gularidade imediatamente. Surge uma mensagem de irregularidade através do borne, caso tenha sido programado para tal. A mensagem de pronto para operar não é revogada. Se a irregularidade for eliminada através de um procedimento interno ou de um reset de irregula-ridade, o acionamento volta a operar sem executar uma nova inicialização da unidade.
PD
P6..
P60.
P600
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
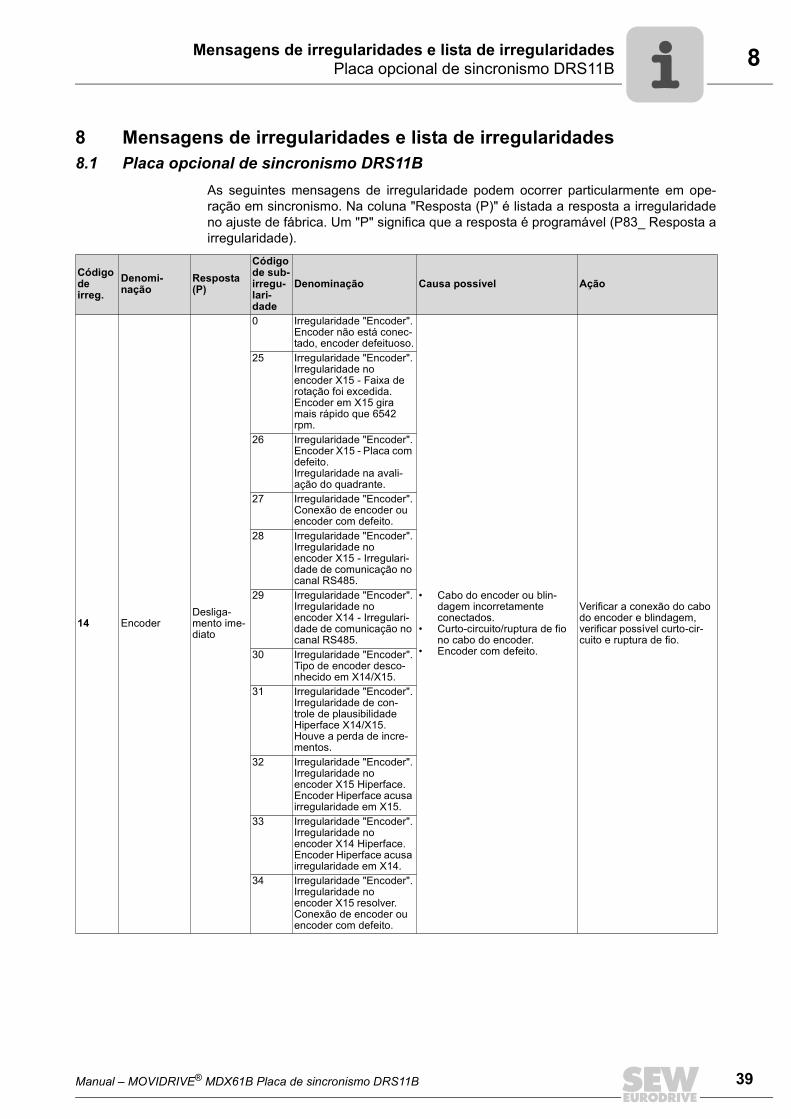
8Mensagens de irregularidades e lista de irregularidadesPlaca opcional de sincronismo DRS11B
8 Mensagens de irregularidades e lista de irregularidades8.1 Placa opcional de sincronismo DRS11B
As seguintes mensagens de irregularidade podem ocorrer particularmente em ope-ração em sincronismo. Na coluna "Resposta (P)" é listada a resposta a irregularidadeno ajuste de fábrica. Um "P" significa que a resposta é programável (P83_ Resposta airregularidade).
Código de irreg.
Denomi-nação
Resposta (P)
Código de sub-irregu-lari-dade
Denominação Causa possível Ação
14 EncoderDesliga-mento ime-diato
0 Irregularidade "Encoder".Encoder não está conec-tado, encoder defeituoso.
• Cabo do encoder ou blin-dagem incorretamente conectados.
• Curto-circuito/ruptura de fio no cabo do encoder.
• Encoder com defeito.
Verificar a conexão do cabo do encoder e blindagem, verificar possível curto-cir-cuito e ruptura de fio.
25 Irregularidade "Encoder".Irregularidade no encoder X15 - Faixa de rotação foi excedida.Encoder em X15 gira mais rápido que 6542 rpm.
26 Irregularidade "Encoder".Encoder X15 - Placa com defeito.Irregularidade na avali-ação do quadrante.
27 Irregularidade "Encoder".Conexão de encoder ou encoder com defeito.
28 Irregularidade "Encoder".Irregularidade no encoder X15 - Irregulari-dade de comunicação no canal RS485.
29 Irregularidade "Encoder".Irregularidade no encoder X14 - Irregulari-dade de comunicação no canal RS485.
30 Irregularidade "Encoder".Tipo de encoder desco-nhecido em X14/X15.
31 Irregularidade "Encoder".Irregularidade de con-trole de plausibilidade Hiperface X14/X15.Houve a perda de incre-mentos.
32 Irregularidade "Encoder".Irregularidade no encoder X15 Hiperface.Encoder Hiperface acusa irregularidade em X15.
33 Irregularidade "Encoder".Irregularidade no encoder X14 Hiperface.Encoder Hiperface acusa irregularidade em X14.
34 Irregularidade "Encoder".Irregularidade no encoder X15 resolver.Conexão de encoder ou encoder com defeito.
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
39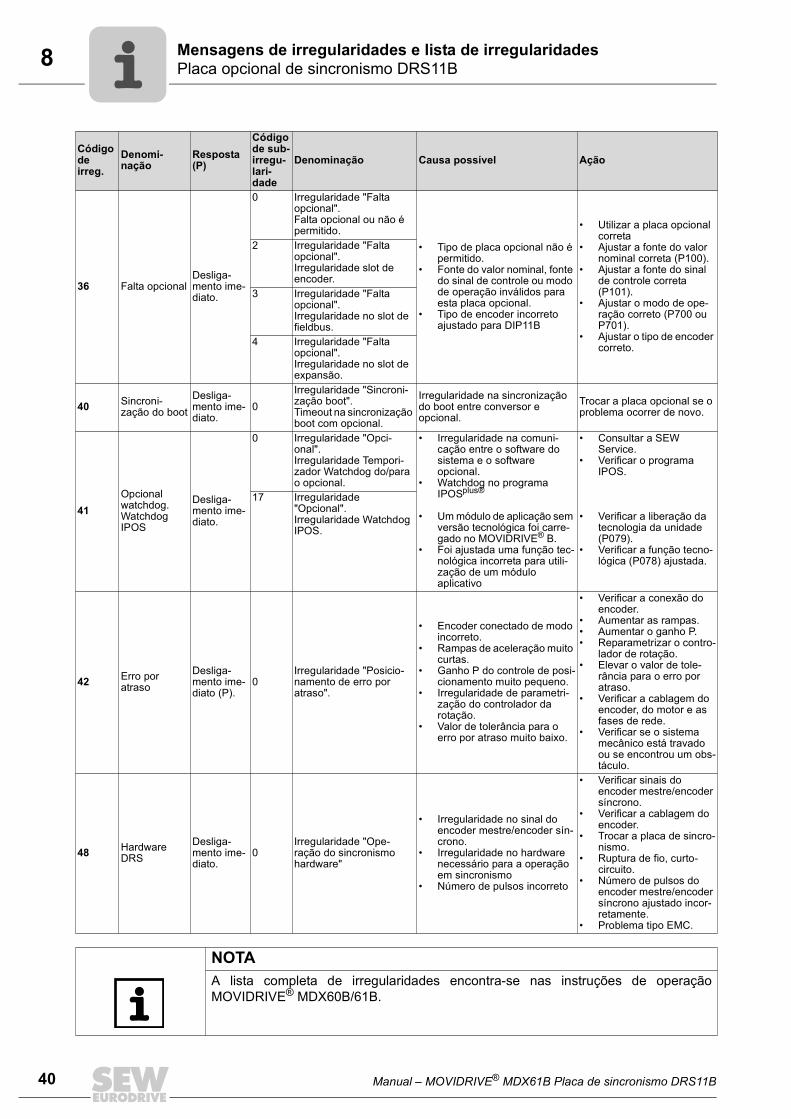
8 ensagens de irregularidades e lista de irregularidadeslaca opcional de sincronismo DRS11B
40
36 Falta opcionalDesliga-mento ime-diato.
0 Irregularidade "Falta opcional".Falta opcional ou não é permitido.
• Tipo de placa opcional não é permitido.
• Fonte do valor nominal, fonte do sinal de controle ou modo de operação inválidos para esta placa opcional.
• Tipo de encoder incorreto ajustado para DIP11B
• Utilizar a placa opcional correta
• Ajustar a fonte do valor nominal correta (P100).
• Ajustar a fonte do sinal de controle correta (P101).
• Ajustar o modo de ope-ração correto (P700 ou P701).
• Ajustar o tipo de encoder correto.
2 Irregularidade "Falta opcional".Irregularidade slot de encoder.
3 Irregularidade "Falta opcional".Irregularidade no slot de fieldbus.
4 Irregularidade "Falta opcional".Irregularidade no slot de expansão.
40 Sincroni-zação do boot
Desliga-mento ime-diato.
0Irregularidade "Sincroni-zação boot".Timeout na sincronização boot com opcional.
Irregularidade na sincronização do boot entre conversor e opcional.
Trocar a placa opcional se o problema ocorrer de novo.
41Opcional watchdog.Watchdog IPOS
Desliga-mento ime-diato.
0 Irregularidade "Opci-onal".Irregularidade Tempori-zador Watchdog do/para o opcional.
• Irregularidade na comuni-cação entre o software do sistema e o software opcional.
• Watchdog no programa IPOSplus®
• Um módulo de aplicação sem versão tecnológica foi carre-gado no MOVIDRIVE® B.
• Foi ajustada uma função tec-nológica incorreta para utili-zação de um módulo aplicativo
• Consultar a SEW Service.
• Verificar o programa IPOS.
• Verificar a liberação da tecnologia da unidade (P079).
• Verificar a função tecno-lógica (P078) ajustada.
17 Irregularidade "Opcional".Irregularidade Watchdog IPOS.
42 Erro por atraso
Desliga-mento ime-diato (P).
0Irregularidade "Posicio-namento de erro por atraso".
• Encoder conectado de modo incorreto.
• Rampas de aceleração muito curtas.
• Ganho P do controle de posi-cionamento muito pequeno.
• Irregularidade de parametri-zação do controlador da rotação.
• Valor de tolerância para o erro por atraso muito baixo.
• Verificar a conexão do encoder.
• Aumentar as rampas.• Aumentar o ganho P.• Reparametrizar o contro-
lador de rotação.• Elevar o valor de tole-
rância para o erro por atraso.
• Verificar a cablagem do encoder, do motor e as fases de rede.
• Verificar se o sistema mecânico está travado ou se encontrou um obs-táculo.
48 Hardware DRS
Desliga-mento ime-diato.
0Irregularidade "Ope-ração do sincronismo hardware"
• Irregularidade no sinal do encoder mestre/encoder sín-crono.
• Irregularidade no hardware necessário para a operação em sincronismo
• Número de pulsos incorreto
• Verificar sinais do encoder mestre/encoder síncrono.
• Verificar a cablagem do encoder.
• Trocar a placa de sincro-nismo.
• Ruptura de fio, curto-circuito.
• Número de pulsos do encoder mestre/encoder síncrono ajustado incor-retamente.
• Problema tipo EMC.
Código de irreg.
Denomi-nação
Resposta (P)
Código de sub-irregu-lari-dade
Denominação Causa possível Ação
NOTAA lista completa de irregularidades encontra-se nas instruções de operaçãoMOVIDRIVE® MDX60B/61B.
MP
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
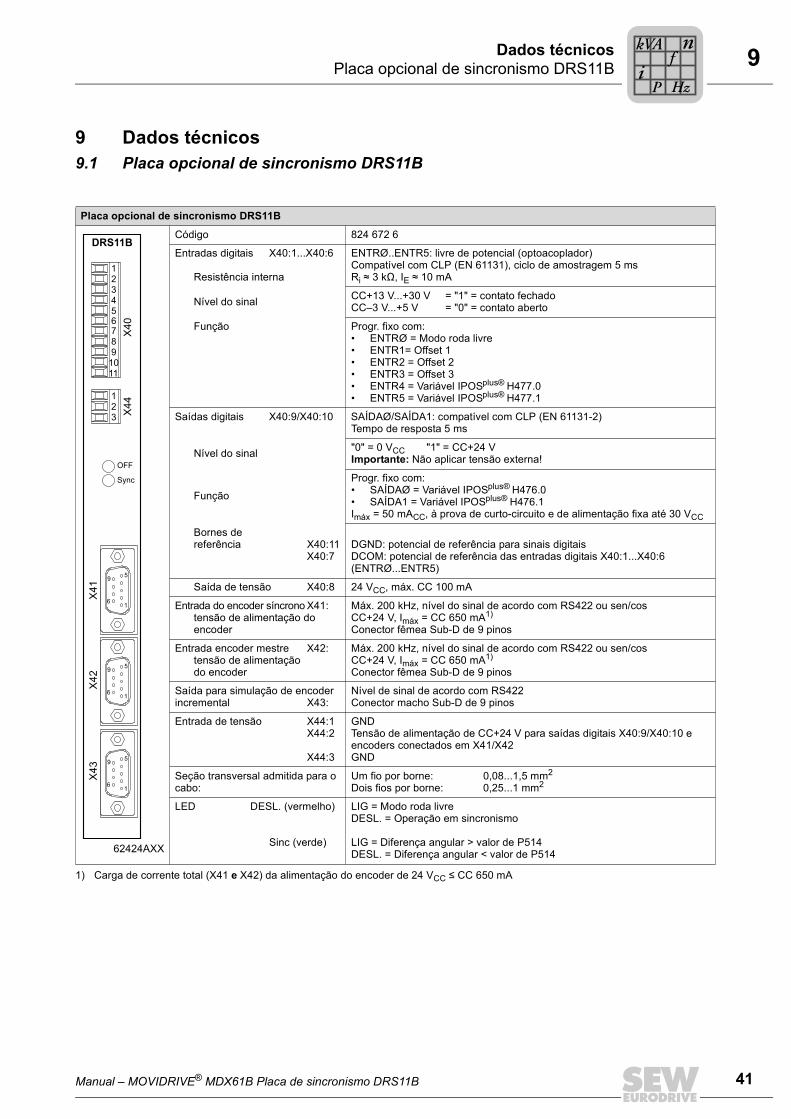
9Dados técnicosPlaca opcional de sincronismo DRS11B
9 Dados técnicos9.1 Placa opcional de sincronismo DRS11B
Placa opcional de sincronismo DRS11B
62424AXX
Código 824 672 6
Entradas digitais X40:1...X40:6
Resistência interna
ENTRØ..ENTR5: livre de potencial (optoacoplador)Compatível com CLP (EN 61131), ciclo de amostragem 5 msRi À 3 kÊ, IE À 10 mA
Nível do sinal CC+13 V...+30 V = "1" = contato fechadoCC–3 V...+5 V = "0" = contato aberto
Função Progr. fixo com:• ENTRØ = Modo roda livre• ENTR1= Offset 1• ENTR2 = Offset 2• ENTR3 = Offset 3• ENTR4 = Variável IPOSplus® H477.0• ENTR5 = Variável IPOSplus® H477.1
Saídas digitais X40:9/X40:10 SAÍDAØ/SAÍDA1: compatível com CLP (EN 61131-2)Tempo de resposta 5 ms
Nível do sinal "0" = 0 VCC "1" = CC+24 VImportante: Não aplicar tensão externa!
Função
Progr. fixo com:• SAÍDAØ = Variável IPOSplus® H476.0• SAÍDA1 = Variável IPOSplus® H476.1Imáx = 50 mACC, à prova de curto-circuito e de alimentação fixa até 30 VCC
Bornes de referência X40:11
X40:7DGND: potencial de referência para sinais digitaisDCOM: potencial de referência das entradas digitais X40:1...X40:6 (ENTRØ...ENTR5)
Saída de tensão X40:8 24 VCC, máx. CC 100 mA
Entrada do encoder síncrono X41:tensão de alimentação do encoder
Máx. 200 kHz, nível do sinal de acordo com RS422 ou sen/cosCC+24 V, Imáx = CC 650 mA1)
Conector fêmea Sub-D de 9 pinos
Entrada encoder mestre X42:tensão de alimentação do encoder
Máx. 200 kHz, nível do sinal de acordo com RS422 ou sen/cosCC+24 V, Imáx = CC 650 mA1)
Conector fêmea Sub-D de 9 pinos
Saída para simulação de encoder incremental X43:
Nível de sinal de acordo com RS422Conector macho Sub-D de 9 pinos
Entrada de tensão X44:1X44:2
X44:3
GNDTensão de alimentação de CC+24 V para saídas digitais X40:9/X40:10 e encoders conectados em X41/X42GND
Seção transversal admitida para o cabo:
Um fio por borne: 0,08...1,5 mm2
Dois fios por borne: 0,25...1 mm2
LED DESL. (vermelho)
Sinc (verde)
LIG = Modo roda livreDESL. = Operação em sincronismo
LIG = Diferença angular > valor de P514DESL. = Diferença angular < valor de P514
1) Carga de corrente total (X41 e X42) da alimentação do encoder de 24 VCC Â CC 650 mA
DRS11B
X4
0X
44
X4
1X
42
X4
3
OFF
Sync
5
1
9
6
5
1
9
6
5
1
9
6
123456789
1011
123
Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
Pi
fkVA
Hz
n
41
10
42 Manual – MOVIDRIVE® MDX61B Placa de sincronismo DRS11B
Índice Alfabético
10 Índice Alfabético
AAtivar a operação em sincronismo ......................24
BBreve descrição da colocação em operação ......23
CColocação em operação .....................................22
Ativar a operação em sincronismo ...............24Breve descrição ............................................23Exemplos de cálculo P221 e P222 ...............26Teste da operação em sincronismo com
acionamentos montados .................25Trabalhos preliminares .................................24
DDados técnicos ...................................................41Descrição do sistema ............................................6
Diagrama de bloco para o controle de operação em sincronismo ............7
Descrição dos bornes para DRS11B ..................16Descrições dos parâmetros ................................32DRS11B
Dados técnicos .............................................41Descrição dos bornes ...................................16Instruções para instalação ...........................17Lista de irregularidades ................................39
EEsquema de ligação
Acionamento mestre e escravo com a mesma direção de rotação .... 17, 18
Acionamento mestre e escravo com direção contrária de rotação ..... 18, 19
Encoder incremental como mestre ...............21MOVIDRIVE® MDX61B mestre –
MOVIDRIVE® MDX61B escravo .....20Estrutura das indicações de segurança ................4Exemplos de aplicação .........................................8Exemplos de cálculo P221 e P222 .....................26
FFunções de sinalização ......................................30
IIndicações de segurança
Aplicações de elevação ..................................5Documentos válidos .......................................5
Informações GeraisEstrutura das indicações de segurança ........ 4Perda da garantia .......................................... 4Reivindicação de direitos de garantia ............ 4
InstalaçãoDescrição dos bornes para DRS11B ........... 16Esquema de ligação do encoder
incremental como mestre ............... 21Esquema de ligação MOVIDRIVE® MDX61B
mestre – MOVIDRIVE® MDX61B escravo ........................................... 20
Montagem da DRS11B ................................ 14Notas de montagem antes da instalação ou
remoção de uma placa opcional ..... 14Instruções para montagem e instalação ............ 14Instruções para o planejamento de projeto ........ 10
LLista de parâmetros ........................................... 31
MMensagens de irregularidade ............................ 39
Lista de irregularidades ............................... 39
NNotas de montagem antes da instalação ou remoção de uma placa opcional ........................ 14
OOperação em sincronismo com encoder síncrono ............................................................. 13Operação em sincronismo com monitoração de ruptura de cabo de encoder .......................... 11
PPartida/parada em sincronismo ......................... 12Perda da garantia ................................................ 4Planejamento de projeto ...................................... 8
Exemplos de aplicação .................................. 8Instruções para o planejamento de projeto .... 10Operação em sincronismo com encoder
síncrono .......................................... 13Operação em sincronismo com monitoração
de ruptura de cabo de encoder ...... 11Partida/parada em sincronismo ................... 12
RReivindicação de direitos de garantia .................. 4Relação de valores de parâmetros e da rotação de saída ............................................................. 29
Índice de endereços
Índice de endereçosAlemanha
AdministraçãoFábricaVendas
Bruchsal SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 BruchsalCaixa postalPostfach 3023 • D-76642 Bruchsal
Tel. +49 7251 75-0Fax +49 7251 75-1970http://[email protected]
Service Competence Center
Centro SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 1 D-76676 Graben-Neudorf
Tel. +49 7251 75-1710Fax +49 7251 [email protected]
Norte SEW-EURODRIVE GmbH & Co KGAlte Ricklinger Straße 40-42 D-30823 Garbsen (próximo a Hanover)
Tel. +49 5137 8798-30Fax +49 5137 [email protected]
Leste SEW-EURODRIVE GmbH & Co KGDänkritzer Weg 1D-08393 Meerane (próximo a Zwickau)
Tel. +49 3764 7606-0Fax +49 3764 [email protected]
Sul SEW-EURODRIVE GmbH & Co KGDomagkstraße 5D-85551 Kirchheim (próximo a Munique)
Tel. +49 89 909552-10Fax +49 89 [email protected]
Oeste SEW-EURODRIVE GmbH & Co KGSiemensstraße 1D-40764 Langenfeld (próximo a Düsseldorf)
Tel. +49 2173 8507-30Fax +49 2173 [email protected]
Eletrônica SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 Bruchsal
Tel. +49 7251 75-1780Fax +49 7251 [email protected]
Drive Service Hotline / Plantão 24 horas +49 180 5 SEWHELP+49 180 5 7394357
Para mais endereços, consultar os serviços de assistência na Alemanha.
França
FábricaVendasService
Haguenau SEW-USOCOME 48-54, route de Soufflenheim B. P. 20185F-67506 Haguenau Cedex
Tel. +33 3 88 73 67 00 Fax +33 3 88 73 66 00http://[email protected]
Fábrica Forbach SEW-EUROCOME Zone Industrielle Technopôle Forbach SudB. P. 30269F-57604 Forbach Cedex
Tel. +33 3 87 29 38 00
Unidades de montagemVendasService
Bordeaux SEW-USOCOME Parc d'activités de Magellan62, avenue de Magellan - B. P. 182F-33607 Pessac Cedex
Tel. +33 5 57 26 39 00Fax +33 5 57 26 39 09
Lyon SEW-USOCOME Parc d'Affaires RooseveltRue Jacques TatiF-69120 Vaulx en Velin
Tel. +33 4 72 15 37 00Fax +33 4 72 15 37 15
Paris SEW-USOCOME Zone industrielle 2, rue Denis Papin F-77390 Verneuil I'Etang
Tel. +33 1 64 42 40 80Fax +33 1 64 42 40 88
Para mais endereços, consultar os serviços de assistência na França.
África do SulUnidades de montagemVendasService
Johannesburg SEW-EURODRIVE (PROPRIETARY) LIMITEDEurodrive House Cnr. Adcock Ingram and Aerodrome RoadsAeroton Ext. 2Johannesburg 2013P.O.Box 90004Bertsham 2013
Tel. +27 11 248-7000Fax +27 11 494-3104http://[email protected]
05/2008 43
44
Índice de endereços
Capetown SEW-EURODRIVE (PROPRIETARY) LIMITED Rainbow ParkCnr. Racecourse & Omuramba RoadMontague GardensCape TownP.O.Box 36556Chempet 7442 Cape Town
Tel. +27 21 552-9820Fax +27 21 552-9830Telex 576 [email protected]
Durban SEW-EURODRIVE (PROPRIETARY) LIMITED2 Monaceo PlacePinetownDurbanP.O. Box 10433, Ashwood 3605
Tel. +27 31 700-3451Fax +27 31 [email protected]
Argélia
Vendas Argel Réducom 16, rue des Frères ZaghnounBellevue El-Harrach16200 Alger
Tel. +213 21 8222-84Fax +213 21 [email protected]
Argentina
Unidade de montagemVendasService
Buenos Aires SEW EURODRIVE ARGENTINA S.A.Centro Industrial Garin, Lote 35Ruta Panamericana Km 37,51619 Garin
Tel. +54 3327 4572-84Fax +54 3327 [email protected]://www.sew-eurodrive.com.ar
AustráliaUnidades de montagemVendasService
Melbourne SEW-EURODRIVE PTY. LTD.27 Beverage DriveTullamarine, Victoria 3043
Tel. +61 3 9933-1000Fax +61 3 9933-1003http://[email protected]
Sydney SEW-EURODRIVE PTY. LTD.9, Sleigh Place, Wetherill Park New South Wales, 2164
Tel. +61 2 9725-9900Fax +61 2 [email protected]
Áustria
Unidade de montagemVendasService
Viena SEW-EURODRIVE Ges.m.b.H. Richard-Strauss-Strasse 24A-1230 Wien
Tel. +43 1 617 55 00-0Fax +43 1 617 55 00-30http://[email protected]
Belarus
Vendas Minsk SEW-EURODRIVE BYRybalkoStr. 26BY-220033 Minsk
Tel.+375 (17) 298 38 50Fax +375 (17) 29838 [email protected]
Bélgica
Unidade de montagemVendasService
Bruxelas SEW Caron-Vector S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Fax +32 10 231-336http://[email protected]
Service Competence Center
Redutores industriais
SEW Caron-Vector S.A.Rue de Parc Industriel, 31BE-6900 Marche-en-Famenne
Tel. +32 84 219-878Fax +32 84 219-879http://[email protected]
Brasil
FábricaVendasService
Administração e Fábrica
SEW-EURODRIVE Brasil Ltda.Avenida Amâncio Gaiolli, 152 - Rodovia Presidente Dutra Km 208Guarulhos - 07251-250 - SPSAT - SEW ATENDE - 0800 7700496
Tel. +55 11 6489-9133Fax +55 11 6480-3328http://[email protected]
SEW Service – Plantão 24 horas Tel. (11) 6489-9090Fax (11) 6480-4618Tel. (11) 6489-9030 Horário Comercial
Para mais endereços, consultar os serviços de assistência no Brasil.
África do Sul
05/2008
Índice de endereços
Bulgária
Vendas Sofia BEVER-DRIVE GmbHBogdanovetz Str.1BG-1606 Sofia
Tel. +359 2 9151160Fax +359 2 [email protected]
Camarões
Vendas Douala Electro-ServicesRue Drouot AkwaB.P. 2024Douala
Tel. +237 33 431137Fax +237 33 431137
Canadá
Unidades de montagemVendasService
Toronto SEW-EURODRIVE CO. OF CANADA LTD. 210 Walker Drive Bramalea, Ontario L6T3W1
Tel. +1 905 791-1553Fax +1 905 791-2999http://[email protected]
Vancouver SEW-EURODRIVE CO. OF CANADA LTD.7188 Honeyman Street Delta. B.C. V4G 1 E2
Tel. +1 604 946-5535Fax +1 604 [email protected]
Montreal SEW-EURODRIVE CO. OF CANADA LTD.2555 Rue Leger LaSalle, Quebec H8N 2V9
Tel. +1 514 367-1124Fax +1 514 [email protected]
Para mais endereços, consultar os serviços de assistência no Canadá.
Chile
Unidade de montagemVendasService
Santiago de Chile
SEW-EURODRIVE CHILE LTDA.Las Encinas 1295Parque Industrial Valle GrandeLAMPARCH-Santiago de ChileCaixa postalCasilla 23 Correo Quilicura - Santiago - Chile
Tel. +56 2 75770-00Fax +56 2 75770-01http://[email protected]
China
FábricaUnidade de montagemVendasService
Tianjin SEW-EURODRIVE (Tianjin) Co., Ltd.No. 46, 7th Avenue, TEDATianjin 300457
Tel. +86 22 25322612Fax +86 22 [email protected]://www.sew-eurodrive.cn
Unidade de montagemVendasService
Suzhou SEW-EURODRIVE (Suzhou) Co., Ltd.333, Suhong Middle RoadSuzhou Industrial ParkJiangsu Province, 215021
Tel. +86 512 62581781Fax +86 512 [email protected]
Guangzhou SEW-EURODRIVE (Guangzhou) Co., Ltd.No. 9, JunDa RoadEast Section of GETDDGuangzhou 510530
Tel. +86 20 82267890Fax +86 20 [email protected]
Shenyang SEW-EURODRIVE (Shenyang) Co., Ltd.10A-2, 6th RoadShenyang Economic Technological Development AreaShenyang, 110141
Tel. +86 24 25382538Fax +86 24 [email protected]
Wuhan SEW-EURODRIVE (Wuhan) Co., Ltd.10A-2, 6th RoadNo. 59, the 4th Quanli Road, WEDA430056 Wuhan
Tel. +86 27 84478398Fax +86 27 84478388
Para mais endereços, consultar os serviços de assistência na China.
Cingapura
Unidade de montagemVendasService
Cingapura SEW-EURODRIVE PTE. LTD. No 9, Tuas Drive 2 Jurong Industrial Estate Singapore 638644
Tel. +65 68621701Fax +65 68612827http://[email protected]
05/2008 45
46
Índice de endereços
Colômbia
Unidade de montagemVendasService
Bogotá SEW-EURODRIVE COLOMBIA LTDA. Calle 22 No. 132-60Bodega 6, Manzana BSantafé de Bogotá
Tel. +57 1 54750-50Fax +57 1 54750-44http://[email protected]
Coréia
Unidade de montagemVendasService
Ansan-City SEW-EURODRIVE KOREA CO., LTD. B 601-4, Banweol Industrial Estate 1048-4, Shingil-DongAnsan 425-120
Tel. +82 31 492-8051Fax +82 31 492-8056http://[email protected]
Busan SEW-EURODRIVE KOREA Co., Ltd.No. 1720 - 11, Songjeong - dongGangseo-kuBusan 618-270
Tel. +82 51 832-0204Fax +82 51 [email protected]
Costa do Marfim
Vendas Abidjan SICASte industrielle et commerciale pour l'Afrique165, Bld de MarseilleB.P. 2323, Abidjan 08
Tel. +225 2579-44Fax +225 2584-36
Croácia
VendasService
Zagreb KOMPEKS d. o. o.PIT Erdödy 4 IIHR 10 000 Zagreb
Tel. +385 1 4613-158Fax +385 1 [email protected]
Dinamarca
Unidade de montagemVendasService
Copenhague SEW-EURODRIVEA/SGeminivej 28-30DK-2670 Greve
Tel. +45 43 9585-00Fax +45 43 9585-09http://[email protected]
E.U.A.
FábricaUnidade de montagemVendasService
Greenville SEW-EURODRIVE INC. 1295 Old Spartanburg Highway P.O. Box 518Lyman, S.C. 29365
Tel. +1 864 439-7537Fax Sales +1 864 439-7830Fax Manuf. +1 864 439-9948Fax Ass. +1 864 439-0566Telex 805 550 http://[email protected]
Unidades de montagemVendasService
San Francisco SEW-EURODRIVE INC. 30599 San Antonio St.Hayward, California 94544-7101
Tel. +1 510 487-3560Fax +1 510 [email protected]
Philadelphia/PA SEW-EURODRIVE INC. Pureland Ind. Complex 2107 High Hill Road, P.O. Box 481Bridgeport, New Jersey 08014
Tel. +1 856 467-2277Fax +1 856 [email protected]
Dayton SEW-EURODRIVE INC.2001 West Main Street Troy, Ohio 45373
Tel. +1 937 335-0036Fax +1 937 [email protected]
Dallas SEW-EURODRIVE INC.3950 Platinum Way Dallas, Texas 75237
Tel. +1 214 330-4824Fax +1 214 [email protected]
Para mais endereços, consultar os serviços de assistência nos E.U.A.
Egito
VendasService
Cairo Copam Egypt for Engineering & Agencies33 EI Hegaz ST, Heliopolis, Cairo
Tel. +20 2 22566-299 + 1 23143088Fax +20 2 22594-757http://www.copam-egypt.com/ [email protected]
05/2008
Índice de endereços
Eslováquia
Vendas Bratislava SEW-Eurodrive SK s.r.o.Rybničná 40SK-83554 Bratislava
Tel. +421 2 49595201Fax +421 2 [email protected]://www.sew-eurodrive.sk
Žilina SEW-Eurodrive SK s.r.o.ul. Vojtecha Spanyola 33SK-010 01 Žilina
Tel. +421 41 700 2513Fax +421 41 700 [email protected]
Banská Bystrica SEW-Eurodrive SK s.r.o.Rudlovská cesta 85SK-97411 Banská Bystrica
Tel. +421 48 414 6564Fax +421 48 414 [email protected]
Eslovênia
VendasService
Celje Pakman - Pogonska Tehnika d.o.o.UI. XIV. divizije 14SLO - 3000 Celje
Tel. +386 3 490 83-20Fax +386 3 490 [email protected]
Espanha
Unidade de montagemVendasService
Bilbao SEW-EURODRIVE ESPAÑA, S.L. Parque Tecnológico, Edificio, 302E-48170 Zamudio (Vizcaya)
Tel. +34 94 43184-70Fax +34 94 43184-71http://[email protected]
Estônia
Vendas Tallin ALAS-KUUL ASReti tee 4EE-75301 Peetri küla, Rae vald, Harjumaa
Tel. +372 6593230Fax +372 [email protected]
Finlândia
Unidade de montagemVendasService
Lahti SEW-EURODRIVE OYVesimäentie 4FIN-15860 Hollola 2
Tel. +358 201 589-300Fax +358 3 [email protected]://www.sew-eurodrive.fi
FábricaUnidade de montagemService
Karkkila SEW Industrial Gears OYValurinkatu 6FIN-03600 Karkkila
Tel. +358 201 589-300Fax +358 201 [email protected]://www.sew-eurodrive.fi
Gabão
Vendas Libreville Electro-ServicesB.P. 1889Libreville
Tel. +241 7340-11Fax +241 7340-12
Grã-Bretanha
Unidade de montagemVendasService
Normanton SEW-EURODRIVE Ltd.Beckbridge Industrial Estate P.O. Box No.1GB-Normanton, West- Yorkshire WF6 1QR
Tel. +44 1924 893-855Fax +44 1924 893-702http://[email protected]
Grécia
VendasService
Atenas Christ. Boznos & Son S.A.12, Mavromichali StreetP.O. Box 80136, GR-18545 Piraeus
Tel. +30 2 1042 251-34 Fax +30 2 1042 251-59http://[email protected]
Holanda
Unidade de montagemVendasService
Rotterdam VECTOR Aandrijftechniek B.V. Industrieweg 175 NL-3044 AS RotterdamPostbus 10085NL-3004 AB Rotterdam
Tel. +31 10 4463-700Fax +31 10 4155-552http://[email protected]
05/2008
47
48
dice de endereços
Hong Kong
Unidade de montagemVendasService
Hong Kong SEW-EURODRIVE LTD.Unit No. 801-806, 8th FloorHong Leong Industrial ComplexNo. 4, Wang Kwong Road Kowloon, Hong Kong
Tel. +852 2 7960477 + 79604654Fax +852 2 [email protected]
Hungria
VendasService
Budapeste SEW-EURODRIVE Kft.H-1037 BudapestKunigunda u. 18
Tel. +36 1 437 06-58Fax +36 1 437 [email protected]
Índia
Unidade de montagemVendasService
Vadodara SEW-EURODRIVE India Private LimitedPlot No. 4, GIDCPOR Ramangamdi • Vadodara - 391 243Gujarat
Tel. +91 265 2831086Fax +91 265 2831087http://[email protected]@seweurodriveindia.com
Irlanda
VendasService
Dublin Alperton Engineering Ltd. 48 Moyle RoadDublin Industrial EstateGlasnevin, Dublin 11
Tel. +353 1 830-6277Fax +353 1 [email protected]://www.alperton.ie
Israel
Vendas Tel-Aviv Liraz Handasa Ltd. Ahofer Str 34B / 22858858 Holon
Tel. +972 3 5599511Fax +972 3 5599512http://[email protected]
Itália
Unidade de montagemVendasService
Milão SEW-EURODRIVE di R. Blickle & Co.s.a.s.Via Bernini,14 I-20020 Solaro (Milano)
Tel. +39 02 96 9801Fax +39 02 96 799781http://[email protected]
Japão
Unidade de montagemVendasService
Iwata SEW-EURODRIVE JAPAN CO., LTD 250-1, Shimoman-no,IwataShizuoka 438-0818
Tel. +81 538 373811Fax +81 538 373814http://[email protected]
Letônia
Vendas Riga SIA Alas-KuulKatlakalna 11CLV-1073 Riga
Tel. +371 7139253Fax +371 7139386http://[email protected]
Libano
Vendas Beirute Gabriel Acar & Fils sarlB. P. 80484Bourj Hammoud, Beirut
Tel. +961 1 4947-86 +961 1 4982-72+961 3 2745-39Fax +961 1 4949-71 [email protected]
Lituânia
Vendas Alytus UAB IrsevaNaujoji 19LT-62175 Alytus
Tel. +370 315 79204Fax +370 315 [email protected]://www.sew-eurodrive.lt
Luxemburgo
Unidade de montagemVendasService
Bruxelas CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Fax +32 10 231-336http://[email protected]
Ín
05/2008
Índice de endereços
Malásia
Unidade de montagemVendasService
Johore SEW-EURODRIVE SDN BHD No. 95, Jalan Seroja 39, Taman Johor Jaya81000 Johor Bahru, JohorWest Malaysia
Tel. +60 7 3549409Fax +60 7 [email protected]
Marrocos
Vendas Casablanca Afit5, rue Emir AbdelkaderMA 20300 Casablanca
Tel. +212 22618372Fax +212 [email protected]
México
Unidade de montagemVendasService
Queretaro SEW-EURODRIVE MEXIKO SA DE CVSEM-981118-M93Tequisquiapan No. 102Parque Industrial QueretaroC.P. 76220Queretaro, Mexico
Tel. +52 442 1030-300Fax +52 442 1030-301http://[email protected]
Noruega
Unidade de montagemVendasService
Moss SEW-EURODRIVE A/SSolgaard skog 71N-1599 Moss
Tel. +47 69 24 10 20Fax +47 69 24 10 40http://[email protected]
Nova Zelândia
Unidades de montagemVendasService
Auckland SEW-EURODRIVE NEW ZEALAND LTD. P.O. Box 58-428 82 Greenmount driveEast Tamaki Auckland
Tel. +64 9 2745627Fax +64 9 2740165http://[email protected]
Christchurch SEW-EURODRIVE NEW ZEALAND LTD. 10 Settlers Crescent, FerrymeadChristchurch
Tel. +64 3 384-6251Fax +64 3 [email protected]
Peru
Unidade de montagemVendasService
Lima SEW DEL PERU MOTORES REDUCTORES S.A.C.Los Calderos, 120-124Urbanizacion Industrial Vulcano, ATE, Lima
Tel. +51 1 3495280Fax +51 1 3493002http://[email protected]
Polônia
Unidade de montagemVendasService
ŁódÑ SEW-EURODRIVE Polska Sp.z.o.o.ul. Techniczna 5 PL-92-518 ŁódÑ
Tel. +48 42 67710-90Fax +48 42 67710-99http://[email protected]
Service 24 horas Tel. +48 602 739 739(+48 602 SEW SEW)[email protected]
Portugal
Unidade de montagemVendasService
Coimbra SEW-EURODRIVE, LDA.Apartado 15 P-3050-901 Mealhada
Tel. +351 231 20 9670Fax +351 231 20 3685http://[email protected]
República Tcheca
Vendas Praga SEW-EURODRIVE CZ S.R.O.Business Centrum Praha Lužná 591CZ-16000 Praha 6 - Vokovice
Tel. +420 255 709 601Fax +420 220 121 237http://[email protected]
Romênia
VendasService
Bucareste Sialco Trading SRL str. Madrid nr.4 011785 Bucuresti
Tel. +40 21 230-1328Fax +40 21 230-7170 [email protected]
05/2008
49
50
dice de endereços
Rússia
Unidade de montagemVendasService
São Petersburgo
ZAO SEW-EURODRIVE P.O. Box 36 195220 St. Petersburg Russia
Tel. +7 812 3332522 +7 812 5357142Fax +7 812 3332523http://[email protected]
Senegal
Vendas Dakar SENEMECA Mécanique GénéraleKm 8, Route de Rufisque B.P. 3251, Dakar
Tel. +221 338 494 770Fax +221 338 494 [email protected]
Sérvia
Vendas Belgrado DIPAR d.o.o.Ustanicka 128aPC Košum, IV floorSCG-11000 Beograd
Tel. +381 11 347 3244 / +381 11 288 0393Fax +381 11 347 [email protected]
Suécia
Unidade de montagemVendasService
Jönköping SEW-EURODRIVE ABGnejsvägen 6-8S-55303 JönköpingBox 3100 S-55003 Jönköping
Tel. +46 36 3442 00Fax +46 36 3442 80http://[email protected]
Suíça
Unidade de montagemVendasService
Basiléia Alfred lmhof A.G.Jurastrasse 10 CH-4142 Münchenstein bei Basel
Tel. +41 61 417 1717Fax +41 61 417 1700http://[email protected]
Tailândia
Unidade de montagemVendasService
Chonburi SEW-EURODRIVE (Thailand) Ltd.700/456, Moo.7, DonhuarohMuang Chonburi 20000
Tel. +66 38 454281Fax +66 38 [email protected]
Tunísia
Vendas Túnis T. M.S. Technic Marketing Service5, Rue El Houdaibiah 1000 Tunis
Tel. +216 71 4340-64 + 71 4320-29Fax +216 71 [email protected]
Turquia
Unidade de montagemVendasService
Istambul SEW-EURODRIVE Hareket Sistemleri San. ve Tic. Ltd. Sti. Bagdat Cad. Koruma Cikmazi No. 3 TR-34846 Maltepe ISTANBUL
Tel. +90 216 4419164, 3838014, 3738015Fax +90 216 3055867http://[email protected]
Ucrânia
VendasService
Dnepropetrovsk SEW-EURODRIVEStr. Rabochaja 23-B, Office 40949008 Dnepropetrovsk
Tel. +380 56 370 3211Fax +380 56 372 2078http://[email protected]
Venezuela
Unidade de montagemVendasService
Valencia SEW-EURODRIVE Venezuela S.A.Av. Norte Sur No. 3, Galpon 84-319Zona Industrial Municipal NorteValencia, Estado Carabobo
Tel. +58 241 832-9804Fax +58 241 838-6275http://[email protected]@cantv.net
Ín
05/2008
SEW-EURODRIVE – Driving the world

Como movimentar o mundo
Com pessoas que pensam rapidamente e que desenvolvem o futuro com você.
Com a prestação de ser-viços integrados acessí-veis a todo momento, em qualquer localidade.
Com sistemas de acionamentos e contro-les que potencializam automaticamente o seu desempenho.
Com o conhecimento abrangente nos mais diversos segmentos industriais.
Com elevados padrões de qualidade que simplificam a automa-tização de processos.
Com uma rede global de soluções ágeis e especificamente desenvolvidas.
Com idéias inovadoras que antecipam agora as soluções para o futuro.
Com a presença na internet, oferecendo acesso constante às mais novas informações e atualizações de software de aplicação.
Motoredutores \ Redutores Industriais \ Conversores de freqüência \ Automação \ Service
SEW-EURODRIVESolução em movimento
SEW-EURODRIVE Brasil Ltda.Av. Amâncio Gaiolli, 50 – Bonsucesso07251 250 – Guarulhos – [email protected]
→ www.sew.com.br


















