MODELOS CONSTITUTIVOS PARA MATERIAIS … · João Paulo Pascon & Humberto Breves Coda Cadernos de...
23
ISSN 1809-5860 Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009 MODELOS CONSTITUTIVOS PARA MATERIAIS HIPERELÁSTICOS: ESTUDO E IMPLEMENTAÇÃO COMPUTACIONAL João Paulo Pascon 1 & Humberto Breves Coda 2 Resumo O objetivo central deste trabalho é implementar modelos constitutivos hiperelásticos não lineares em um código computacional que faz análise não linear geométrica de cascas. São necessários, para este propósito, conceitos sobre álgebras linear e tensorial, cinemática, deformação, tensão, balanços, princípios variacionais, métodos numéricos e hiperelasticidade. Tal programa usa a formulação Lagrangiana posicional, o Método dos Elementos Finitos, o Princípio dos Trabalhos Virtuais e o método iterativo de Newton-Raphson para solução das equações não lineares. O elemento finito de casca possui sete parâmetros nodais e variação linear da deformação ao longo da espessura. Para dedução dos novos modelos usou-se a decomposição multiplicativa do gradiente da função mudança de configuração, o tensor deformação de Green-Lagrange e o tensor da tensão de Piola-Kirchhoff de segunda espécie. O código desenvolvido foi usado em simulações de diversos exemplos e apresentou boa precisão na análise mecânica de polímeros naturais altamente deformáveis. A ocorrência do fenômeno travamento não se manifestou. Nas análises realizadas a presente pesquisa confirmou outros trabalhos, reforçou a necessidade de se usar modelos hiperelásticos não lineares para simular o comportamento mecânico de polímeros naturais e apresentou resultados condizentes aos dados experimentais existentes na literatura científica e às respectivas soluções analíticas. Palavras-chave: Hiperelasticidade. Análise não linear geométrica. Cascas com sete parâmetros nodais. Método dos Elementos Finitos. Formulação Lagrangiana Posicional. Materiais poliméricos altamente deformáveis. CONSTITUTIVE MODELS FOR HYPERELASTIC MATERIALS: STUDY AND COMPUTATIONAL IMPLEMENTATION Abstract The objective of this work is to implement nonlinear hyperelastic constitutive models in a computational code which makes geometrically nonlinear analysis of shells. Are needed for this purpose, concepts of linear algebra and tensor, kinematics, strain, stress, balance equations, variational principles, numerical methods and hyperelasticity. This program uses the positional Lagrangian formulation, the Finite Element Method, the principle of virtual work and the iterative method of Newton-Raphson method for solution of nonlinear equations. The finite element shell has seven nodal parameters and linear variation of strain along the thickness. For deduction of the new models, were used the multiplicative decomposition of the gradient of the function change of configuration, the Green-Lagrange strain tensor and the second Piola-Kirchhoff stress tensor. The code developed was used in simulations of various examples and showed good precision in the mechanical analysis of highly deformable natural polymers. The occurrence of locking phenomenon did not arise. In tests carried out, this research confirmed other studies, reinforced the need to use non-linear hyperelastic models to simulate the mechanical behavior of natural polymers and showed consistent results with experimental data from the scientific literature and with their analytical solutions. Keywords: Hyperelasticity. Geometrically nonlinear analysis. Seven nodal parameters shells. Finite Element Method. Positional Lagrangian Formulation. Highly deformable polymeric materials. 1 Mestre em Engenharia de Estruturas - EESC-USP, [email protected] 2 Professor do Departamento de Engenharia de Estruturas da EESC-USP, [email protected]
Transcript of MODELOS CONSTITUTIVOS PARA MATERIAIS … · João Paulo Pascon & Humberto Breves Coda Cadernos de...

ISSN 1809-5860
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
MODELOS CONSTITUTIVOS PARA MATERIAIS HIPERELÁSTICOS: ESTUDO E IMPLEMENTAÇÃO COMPUTACIONAL
João Paulo Pascon1 & Humberto Breves Coda2
R e s u m o O objetivo central deste trabalho é implementar modelos constitutivos hiperelásticos não lineares em um código computacional que faz análise não linear geométrica de cascas. São necessários, para este propósito, conceitos sobre álgebras linear e tensorial, cinemática, deformação, tensão, balanços, princípios variacionais, métodos numéricos e hiperelasticidade. Tal programa usa a formulação Lagrangiana posicional, o Método dos Elementos Finitos, o Princípio dos Trabalhos Virtuais e o método iterativo de Newton-Raphson para solução das equações não lineares. O elemento finito de casca possui sete parâmetros nodais e variação linear da deformação ao longo da espessura. Para dedução dos novos modelos usou-se a decomposição multiplicativa do gradiente da função mudança de configuração, o tensor deformação de Green-Lagrange e o tensor da tensão de Piola-Kirchhoff de segunda espécie. O código desenvolvido foi usado em simulações de diversos exemplos e apresentou boa precisão na análise mecânica de polímeros naturais altamente deformáveis. A ocorrência do fenômeno travamento não se manifestou. Nas análises realizadas a presente pesquisa confirmou outros trabalhos, reforçou a necessidade de se usar modelos hiperelásticos não lineares para simular o comportamento mecânico de polímeros naturais e apresentou resultados condizentes aos dados experimentais existentes na literatura científica e às respectivas soluções analíticas. Palavras-chave: Hiperelasticidade. Análise não linear geométrica. Cascas com sete parâmetros nodais. Método dos Elementos Finitos. Formulação Lagrangiana Posicional. Materiais poliméricos altamente deformáveis.
CONSTITUTIVE MODELS FOR HYPERELASTIC MATERIALS: STUDY AND COMPUTATIONAL IMPLEMENTATION
A b s t r a c t The objective of this work is to implement nonlinear hyperelastic constitutive models in a computational code which makes geometrically nonlinear analysis of shells. Are needed for this purpose, concepts of linear algebra and tensor, kinematics, strain, stress, balance equations, variational principles, numerical methods and hyperelasticity. This program uses the positional Lagrangian formulation, the Finite Element Method, the principle of virtual work and the iterative method of Newton-Raphson method for solution of nonlinear equations. The finite element shell has seven nodal parameters and linear variation of strain along the thickness. For deduction of the new models, were used the multiplicative decomposition of the gradient of the function change of configuration, the Green-Lagrange strain tensor and the second Piola-Kirchhoff stress tensor. The code developed was used in simulations of various examples and showed good precision in the mechanical analysis of highly deformable natural polymers. The occurrence of locking phenomenon did not arise. In tests carried out, this research confirmed other studies, reinforced the need to use non-linear hyperelastic models to simulate the mechanical behavior of natural polymers and showed consistent results with experimental data from the scientific literature and with their analytical solutions. Keywords: Hyperelasticity. Geometrically nonlinear analysis. Seven nodal parameters shells. Finite Element Method. Positional Lagrangian Formulation. Highly deformable polymeric materials.
1 Mestre em Engenharia de Estruturas - EESC-USP, [email protected] 2 Professor do Departamento de Engenharia de Estruturas da EESC-USP, [email protected]

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
132
1 INTRODUÇÃO
Está cada vez mais amplo o uso de elementos estruturais altamente deformáveis e elásticos, como é o caso dos polímeros naturais ou vulcanizados preenchidos ou não com negro de carbono. Entre suas aplicações na engenharia, podem ser citados os seguintes casos: suportes para máquinas e construções, juntas estruturais e de dilatação flexíveis, vedações para portas de veículos automotivos, pneus, estruturas costeiras, arruelas de vedação, anéis elastoméricos e polímeros reforçados com fibra de carbono para o setor aeronáutico. É de extrema importância, para fins de projeto e dimensionamento, o conhecimento das propriedades dos elementos estruturais a serem utilizados, para que se possa prever a resposta do material frente às possíveis solicitações. O modelo que melhor se adapta aos componentes estruturais poliméricos é, segundo pesquisadores e estudiosos sobre o assunto, a chamada hiperelasticidade. Com o surgimento e a constante evolução dos micro-computadores, os quais possibilitam maior velocidade de processamento de dados e, portanto, maior eficiência na realização de cálculos, os métodos numéricos, também chamados de aproximados, têm recebido, a um bom tempo, grande atenção por parte de pesquisadores em todo o mundo. Uma das ferramentas numéricas desenvolvidas é o Método dos Elementos Finitos (MEF), que tem sido amplamente estudado e implementado em códigos computacionais para análise e simulação de várias estruturas. Devido à crescente utilização de materiais hiperelásticos em estruturas, torna-se necessário buscar melhorias no projeto e no dimensionamento destes componentes. Para isto, deve-se ampliar o conhecimento com relação ao comportamento mecânico destes materiais, desenvolver eficientes ferramentas numéricas de simulação de carregamento, as quais podem fornecer previsões mais realistas, e adaptar os modelos hiperelásticos existentes aos dados experimentais. O objetivo precípuo desta pesquisa foi a implementação de modelos constitutivos não lineares para materiais hiperelásticos, homogêneos e isotrópicos em um código computacional de análise não linear geométrica de cascas.
2 REVISÃO BIBLIOGRÁFICA
Os trabalhos de Malvern (1969), Coimbra (1981), Ogden (1984), Ciarlet (1993), Belytschki et al. (2000) e de Holzapfel (2000) reuniram vários conceitos e equações sobre álgebra linear e tensorial, cinemática, análise do movimento de um corpo, equações de balanço, deformações, tensões, elasticidade, hiperelasticidade, problemas de valor de contorno (PVC) e princípios variacionais. Para o tratamento matemático de sólidos sujeitos a deformações consideradas grandes, tais conceitos são bastante úteis para análise estrutural não linear geométrica. El-Abbasi & Meguid (2000) complementaram o trabalho de Büchter et al. (1994), ao propor uma formulação, para elementos finitos de casca, com sete parâmetros nodais e variação linear das tensões e deformações ao longo da espessura. Coda & Paccola (2006) estudaram a formulação posicional para análise não linear geométrica de cascas, considerando a variação linear da espessura e o possível uso de elementos finitos curvos. Assim como El-Abbasi & Meguid (2000), incluíram a taxa de variação linear da espessura.

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
133
3 NÃO LINEARIDADE GEOMÉTRICA (NLG)
A análise não linear geométrica busca a descrição do equilíbrio de forças na configuração atual ou final do corpo, isto é, leva em consideração os deslocamentos e deformações ocorridos. Portanto, apesar de apresentar uma complexa formulação matemática, a NLG é essencial para análises estruturais de problemas com grandes deslocamentos, nos quais as configurações de referência e atual podem ser bastante distintas.
4 DEFINIÇÕES DA MECÂNICA NÃO LINEAR DO CONTÍNUO
Cinemática é a descrição do movimento de um corpo ou de uma estrutura, sem consideração das causas desta mudança de configuração. A configuração ou posição desse corpo é uma função contínua que faz a correspondência única entre o ponto material e sua coordenada no espaço em relação a um referencial. A configuração inicial, indeformada ou de referência, é representada por X, e a atual ou deformada por x. Tais vetores recebem o nome de vetores posição. Uma forma de descrevê-los é a seguinte:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
3
2
1
XXX
X
ou ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
3
2
1
xxx
x
(1) Movimento, também chamado de alteração de forma ou mudança de configuração, é uma função que associa a posição inicial e a atual, no instante t, de um ponto material. Essa relação pode ser matematicamente expressa por:
( ) ( )XtXx tχχ == , (2.a)
ou ( )tXXXx ii ,,, 321χ= , para i = 1, 2 ou 3 (2.b) onde χ caracteriza movimento e χ(X,t) é a trajetória percorrida pelos pontos com coordenadas materiais X1, X2 e X3. Para se expressar o movimento, existem dois tipos de descrição. A Lagrangiana, ou material, caracteriza a mudança de configuração do corpo em relação às coordenadas materiais e ao tempo, e a Euleriana, ou espacial, caracteriza a alteração de forma em relação às coordenadas espaciais e ao tempo. Optou-se, neste trabalho, pela formulação Lagrangiana, pois as principais equações que descrevem o comportamento dos sólidos são escritas em função das coordenadas materiais.

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
134
e3
e2e1
X
x
X
x
Configuração Inicial
Configuração Atual
( instante t = 0 )
( instante t )
( Referencial )
Movimento
Figura 1 – Movimento de um corpo genérico.
4.1 Medidas de deformação
O chamado gradiente da função mudança de configuração, ou simplesmente gradiente, além de auxiliar na definição de outras medidas, fornece a variação, no espaço, da função mudança de posição:
( ) ( )j
i
j
iij X
tXX
tXxA
∂∂
=∂
∂=
,, χ
(para i,j = 1, 2, 3) (3)
onde χi são as componentes da função mudança de configuração, xi são as coordenadas espaciais e Xi são as materiais. Outra medida bastante útil é o alongamento à direita de Cauchy-Green, que é um tensor de segunda ordem positivo definido, dado por:
AAC T= ou ( )( )kjikT
ij AAC = (4)
onde AT é a matriz transposta do gradiente A. Há também a deformação de Green-Lagrange, dada pela seguinte expressão:
( )ICE −=21
ou ( )ijijij ICE −=
21
(5)
onde I é o tensor identidade de segunda ordem.

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
135
Uma grandeza de interesse prático é o chamado alongamento relativo, também chamado de estiramento, razão de extensão ou, simplesmente, alongamento. Ele é definido como sendo a razão entre os comprimentos final e inicial de uma fibra ou linha material:
( ) uCuuAAudXdxu
ttt===λ
(6)
onde λ(u) é o alongamento de uma fibra que estava, inicialmente, na direção do vetor unitário u. Pode-se concluir, pelo fato do tensor C ser positivo definido, que 0 < λ(u) < ∞, para qualquer u. A deformação específica de engenharia é a razão entre a extensão de uma fibra, inicialmente na direção do vetor unitário u, e seu comprimento inicial:
( ) ( ) 1−=−
= udX
dXdxu λε (7)
Segundo Ogden (1984), para que possa quantificar, de fato, a mudança de configuração de um corpo, a medida de deformação adotada deve ser objetiva, isto é, deve fornecer valores nulos para movimentos nos quais ocorrem apenas rotação e translação do corpo.
4.2 Medidas de tensão
A mais importante grandeza para cálculo de esforços internos é a tensão. A tensão real de Cauchy mede a força por unidade de área na presente configuração. Tal grandeza pode ser descrita na forma tensorial com o Teorema da Tensão de Cauchy:
( ) ( ) jiji ntntxntxt σσ =⇒= ,,, (8) onde t é o vetor de tensão real, σ é o tensor das tensões de Cauchy e n o vetor normal à superfície deformada. Outra medida de tensão é o tensor simétrico de Piola-Kirchhoff de segunda espécie, que apesar de não ter interpretação física, é de grande importância para cálculo da energia e suas derivadas em problemas estruturais. Ele é definido pela seguinte fórmula:
TAJAS −−= σ1 ou ( )( )( )lj
Tklikij AAJS −−= σ1
(9) onde A-1 é a inversa do gradiente A. Por questões de praticidade, define-se a tensão de engenharia, que é a razão entre força atual e área inicial. Assim:
0dSds engreal σσ = (10) onde ds é a área superficial na posição atual e dS0 é a área superficial na configuração de referência.

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
136
4.3 Princípio dos Trabalhos Virtuais (PTV)
O PTV é de fundamental importância para formulações numéricas. Ele estabelece que, dado um deslocamento virtual compatível e admissível, o corpo analisado está em equilíbrio se, e somente se, o trabalho virtual das forças internas for igual ao das externas. Define-se, em problemas estáticos, a energia potencial total como sendo a soma das energias interna e externa:
0eext UTF +=Π (11.a)
∫∫Ω∂Ω
⋅−⋅−=00
000 dSuTdVuBTFext
(11.b)
∫Ω
=0
00 dVU e ψ
(11.c) onde TFext é o trabalho das forças externas, Ue
0 é a energia de deformação, B0 é o vetor material de forças de campo, T é o vetor material de forças de superfície e Ψ é a chamada energia específica de deformação por unidade de volume inicial.
4.4 Princípio da Mínima Energia Potencial Total (PMEPT)
O PMEPT, que é equivalente ao PTV, diz que a estrutura encontra-se em equilíbrio quando, dado um deslocamento virtual infinitesimal, a primeira variação do funcional Π, representada por δΠ, deve ser igual a zero:
( ) 00 =
∂Π∂
⇒=∂
Π∂=Π⇒Π=Π K
K
YY
YY
Y δδδ (12)
onde o funcional Π depende das componentes variáveis do vetor Y. Devido ao fato de δYK ser arbitrário, é válida a seguinte expressão:
0=
∂Π∂
KY , para qualquer K = 1, n (13)
5 MÉTODO DOS ELEMENTOS FINITOS (MEF)
Discretiza-se, no MEF, a estrutura em um número finito de regiões, denominadas elementos, e pontos, chamados de nós.
5.1 Formulação Lagrangiana Posicional
Usou-se, neste trabalho, a formulação Lagrangiana posicional, descrita por Coda (2003), na qual o campo incógnito é a posição final da estrutura, após a deformação, as tensões e deformações são calculadas em relação à configuração de referência e o equilíbrio é expresso pela minimização do

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
137
funcional energia de deformação, dada por expressões adequadas a cada material e escritas em função da deformação de Green-Lagrange. Para o sólido mostrado na Figura 2, são escolhidas, com o uso da configuração auxiliar, as funções aproximadoras das mudanças de posição inicial e final:
( ) ( )( ) ( )∑==⇒
⇒==
jjijii XXf
Xff
3213210
32132100
,,,,
,,,,
ξξξφξξξ
ξξξξξξ
( ) ( )( ) ( )∑==⇒
⇒==
jjijii YYf
Yff
3213211
32132111
,,,,
,,,,
ξξξφξξξ
ξξξξξξ
(14) onde ξ1, ξ2 e ξ3 são as coordenadas adimensionais de Gauss, X é o vetor posição inicial, Y é o vetor posição final, Xji é a coordenada inicial, na direção i, do nó j, Yji é a final, f0 é o mapeamento da configuração adimensional auxiliar para a inicial, f1 é da auxiliar para a final e Φj são as funções de forma relativas ao nó j.
Figura 2 – Mapeamento das configurações inicial, final e auxiliar.
Assim, é possível concluir, a partir da Figura 2 e da definição do gradiente da função mudança de configuração as seguintes equações:
( ) 1
01−
⎟⎠⎞⎜
⎝⎛⎟
⎠⎞⎜
⎝⎛== ffXff
(15.a)
( ) ( )⎥⎦
⎤⎢⎣⎡== 321
0321
00 ,,,, ξξξξξξ fGradAA (15.b)
( )
jfA i
ij ξ∂∂
=0
0
(15.c)
( ) ( )⎥⎦
⎤⎢⎣⎡== 321
1321
11 ,,,, ξξξξξξ fGradAA (15.d)

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
138
( )
jfA i
ij ξ∂∂
=1
1
(15.e)
( ) ( )( ) 101 −
=∂
∂== AA
XffGradA
(15.f) Calculado o gradiente, podem ser obtidos os tensores alongamento à direita de Cauchy-Green e deformação de Green-Lagrange:
( )( )[ ] ( )( )[ ]101101 −−== AAAAAAC
TT
(16.a)
( ) ( )( )[ ] ( )( )[ ]
⎭⎬⎫
⎩⎨⎧ −=−=
−− IAAAAICET 101101
21
21
(16.b) A energia específica de deformação, que é usada para descrever a lei constitutiva para materiais hiperelásticos, é útil para obtenção da tensão de Piola-Kirchhoff de segunda espécie, que é conjugada da deformação de Green-Lagrange, ou seja:
ES
∂∂
=ψ
ou ijij E
S∂∂
=ψ
(17) A energia potencial total é dada por:
( ) KK
Vexte YFdVTFUY −=+=Π=Π ∫
0
00 ψ
( k = 1, n ) (18) onde YK é um grau de liberdade, FK é a força correspondente a este parâmetro nodal e n é o número total de graus de liberdade do elemento finito. O equilíbrio estático de forças na posição final, via Princípio da Mínima Energia Potencial Total (PMEPT), e a consideração de forças conservativas, que não variam com a posição, resultam em:
[ ]
YYFdV
Y
YFY
dVYY
TFY
UY
KK
V
KKV
exte
∂
∂=⎥
⎦
⎤⎢⎣
⎡
∂
∂⇒
⇒∂
∂=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂⇒=
∂
∂+
∂
∂⇒=
∂
Π∂
∫
∫
0
0
0
0
0
00
ψ
ψ
(19) onde FK é o carregamento externo aplicado correspondente ao grau de liberdade K.

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
139
5.2 Método iterativo de Newton-Raphson
Devido ao caráter, geralmente, não linear da Equação (19), é extremamente difícil encontrar sua solução exata. Assim, é necessário usar uma estratégia numérica para resolver o problema. Optou-se neste trabalho pelo Método Iterativo de Newton-Raphson, cujo procedimento está descrito a seguir. Estima-se a posição final Y e calcula-se o chamado resíduo:
( ) ( )[ ] ( ) ( )iextiiiext FFYYggFFg −===⇒−= int000int0 (20) onde Y0 é a primeira posição final estimada, ou primeira tentativa, e g0 é o resíduo inicial. Calcula-se, em seguida, a matriz Hessiana:
( ) ( ) ( )0
2int00
0 00
dVYYY
FY
FYg
HV YYjiYYj
iext
j
i
j
iij ∫
==⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂∂
=⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
−∂
∂=
∂∂
=ψ
(21) Calcula-se, na tentativa de se anular o resíduo da próxima iteração, o incremento no vetor Y:
( ) ( ) ( ) ( ) ( ) ( ) 0
1000
10010 gHYgHYYY iijjjj
−−−=Δ⇒−=−=Δ
(22) Atualiza-se a posição final Y e repete-se a iteração até que o resíduo ou ΔY seja suficientemente pequeno. A partir dos sistemas locais, isto é, dos sistemas para cada elemento finito obtidos com as Equações (20), (21) e (22), montou-se o sistema global - de toda a estrutura - e introduziu-se as condições de contorno, ou seja, as vinculações do corpo.
6 HIPERELASTICIDADE
6.1 Modelos hiperelásticos
O modelo mais adequado para materiais elásticos altamente deformáveis é a hiperelasticidade. O material hiperelástico ou material elástico de Green postula, segundo Holzapfel (2000), a existência da função energia específica de deformação Ψ, chamada também de energia livre de Helmholtz, por unidade de volume inicial, que pode ser descrita, no caso de materiais homogêneos, isotrópicos e incompressíveis3 3, da seguinte forma:
( ) ( )1−−= JpCψψ ou (23.a)
( ) ( ) ( )∑
=
−−==N
ji
jiij IIcII
0,2121 33,ψψ
(23.b)
( ) ( ) 33221111 CCCCCtrCII ii ++==== (23.c)
3 Neste trabalho, material incompressível é aquele que não apresenta, na deformação, variação de volume.
João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
140
( )[ ] ( ){ }22
22 21)( CtrCtrCII −==
(23.d)
( ) ( ) 1det 233 ==== JCCII (23.e)
onde p é a pressão hidrostática a ser determinada pelas condições de contorno, I1, I2 e I3 são os invariantes de deformação e tr( ) indica o traço de uma matriz. Para o caso de materiais pouco compressíveis, isto é, com pequenas alterações volumétricas, pode-se usar o artifício da decomposição multiplicativa do gradiente:
AAA ˆ= (24.a)
( ) JAIJA =⇒⎟
⎟⎠
⎞⎜⎜⎝
⎛= ˆdetˆ 3
1
(parcela volumétrica) (24.b)
( ) 1det3
1
=⇒⎟⎟⎠
⎞⎜⎜⎝
⎛=
−AAJA
(parcela isocórica) (24.c)
Tal decomposição permite calcular o modificado alongamento à direita de Cauchy-Green e seus invariantes:
( ) CJAAJAAC TT
⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟
⎟⎠
⎞⎜⎜⎝
⎛==
−−32
32
(25.a)
( )CtrI =1 (25.b)
( ) ( ) ( )11
2 det−−
== CtrCtrCI (25.c)
( ) ( )[ ] 1detdet2
3 === ACI (25.d) É possível, segundo Düster et al. (2003), expressar a energia específica de deformação da seguinte maneira:
( ) ( ) ( )CJCJ isovol ψψψψ +== , (26) onde Ψvol se refere à parcela de deformação com alteração de volume e Ψiso àquela com preservação do mesmo. Devido à simplicidade matemática e à presença, em artigos encontrados durante a pesquisa, de comentários e gráficos obtidos de ensaios em laboratório, foram escolhidos, neste trabalho, os seguintes modelos hiperelásticos não-lineares:

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
141
( ) ( ) ( ) ( )313
2
121122 3332 −+−+−+−+= − IcIcIcJJk nnψ (27.a)
( ) ( ) ( ) ( )3332722/3
201110
3
155 −+−+−+−+= − IcIcIJJk αψ (27.b)
( ) ( ) ( ) ( )( ) ( )2202201
3
130
2
12011055
33
3332
−+−+
+−+−+−+−+= −
IcIc
IcIcIcJJkψ
(27.c)
( )[ ] ( )[ ]JJkJIC ln21
4ln23 2
110 −−+−−=ψ (27.d)
( )[ ] ( )[ ]2110 ln
2ln23 JkJIC +−−=ψ
(27.e) onde n, que é o coeficiente empírico, pode ser calibrado de acordo com o ensaio. A tensão de Piola-Kirchhoff de segunda espécie, para os referidos modelos, é obtida com uso das seguintes expressões:
( ) ( ) ( )isovol
isovol SSE
EE
EEES +=
∂∂
+∂
∂=
∂∂
=ψψψ
(28.a)
( ) ( )
ij
volijvol C
CS
∂∂
=ψ
2 (28.b)
( ) ( )
ij
isoijiso C
CS
∂∂
=ψ
2 (28.c)
Para se resolver, com o processo iterativo de Newton-Raphson, determinado problema estrutural não linear, é necessário calcular o tensor elástico material, também chamado por Düster et al. (2003) de operador tangente consistente, que é utilizado para cálculo da matriz Hessiana, na Equação (21). Os referidos tensor e cálculo são dados, respectivamente, pelas seguintes fórmulas:
( ) ( ) ( )
kl
ij
klijijkleisoevolee E
SEE
TES
EETTT
∂
∂=
∂∂∂
=⇒∂∂
=∂∂
∂=+=
ψψ 22
(29.a)
( )
CCEET volvol
vole ∂∂∂
=∂∂
∂=
ψψ 22
4 (29.b)
( )
CCEET isoiso
isoe ∂∂∂
=∂∂
∂=
ψψ 22
4 (29.c)
ji
kl
kl
esp
j
mn
i
kl
mnkl
esp
ji
esp
YYE
Eu
YE
YE
EEu
YYu
∂∂∂
∂
∂+
∂∂
∂∂
∂∂
∂=
∂∂
∂ 222
(29.d) Este tensor simétrico de quarta ordem quantifica a mudança na tensão provocada por uma alteração infinitesimal na deformação.

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
142
6.2 Estimativa dos coeficientes
Os coeficientes das relações constitutivas escolhidas, expressas em (27), foram obtidos com a interpolação pelo Método dos Mínimos Quadrados (MMQ). Foram utilizados, para isto, dados experimentais da literatura científica, os quais foram obtidos em ensaios de tração e compressão uniaxiais, tração biaxial, tração equi-biaxial e cisalhamento simples.
6.3 Existência de solução
Hartmann & Neff (2003) disseram que as chamadas condições de policonvexidade e coercividade são suficientes para garantir a existência de uma única solução, com a minimização do funcional de energia Π. Ademais, é possível mostrar que as relações (21) são policonvexas e respeitam as condições de coercividade.
7 CÓDIGO COMPUTACIONAL
7.1 Elemento finito de treliça plana
Foi desenvolvido um código computacional para análise não linear geométrica de barras de treliça plana. As aproximações usadas foram:
( ) ( ) ( ) 21
11
01 1 xxf ξξξ +−= (30.a)
( ) ( ) ( ) 22
12
02 1 xxf ξξξ +−= (30.b)
( ) ( ) ( ) 21
11
11 1 yyf ξξξ +−= (30.c)
( ) ( ) ( ) 22
12
12 1 yyf ξξξ +−= (30.d)
( ) ξξφ −= 11 (30.e)
( ) ξξφ =2 (30.f) onde ξ é a coordenada adimensional, Φ1(ξ) e Φ2(ξ) são as funções de forma, xi
j é a coordenada material ou inicial, na direção i, do nó j e yi
j é a coordenada espacial ou final, na direção i, do nó j. Nota-se facilmente, pela análise das Equações (30), que este elemento finito possui dois nós e dois parâmetros nodais. Foram utilizadas as seguintes leis constitutivas:
( )1−−= Jpisoψψ (31.a)
( ) ( )1ln32111 ++++=
∂
∂=== εεεε
εε
σσσ CDBEuespeng
(31.b)
( )1
00
0
01 −=
−=
Δ==
LL
LLL
LL ffengεε
(31.c) onde Ψiso é a parcela isocórica da energia específica de deformação, que pode ser uma das parcelas isovolumétricas das equações (27), σ é a tensão longitudinal de engenharia, ε é a deformação específica longitudinal de engenharia, Lf é o comprimento final da barra, L0 o inicial e os coeficientes E, B, D e C são as constantes elásticas do material.

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
143
7.2 Elemento finito de casca
A Figura 3 ilustra a superfície média do elemento finito de casca usado, que possui dez nós e sete parâmetros nodais.
Figura 3 – Elemento finito de casca.
As equações usadas na cinemática deste elemento finito são:
( ) 021
0 ,, iLimii gXxf += ξξ (32.1)
( ) 121
1 ,, iLimii gYyf += ξξ (32.2)
( ) 321
00 ,2
ξξξio
i eh
g =, -1 < ξ3 < 1 (32.3)
( ) ( ) LiLi Ne 21210 ,, ξξφξξ = (32.4)
( ) [ ]2
332101 ,
2ξξξξφ AG
hg LiLi +=
(32.5)
( ) ( ) LL AA 2121 ,, ξξφξξ = (32.6) onde f0 é o mapeamento da configuração auxiliar para a inicial, f1 para a final, g0 é o vetor generalizado na posição inicial, g1 na final, h0 é a espessura inicial, h é a atual, NL é o vetor normal à superfície média inicial referente ao nó L, e0 é o vetor unitário na direção de NL, e1 é o vetor unitário na direção de g1, GL é o vetor generalizado na presente configuração referente ao nó L, A é a taxa de variação linear da deformação ao longo da espessura e AL é valor dessa taxa no ponto correspondente ao nó L. Deve-se comentar que o vetor generalizado serve para mapear os pontos que não pertencem à superfície média da casca.

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
144
7.3 Integração numérica
Devido à extrema dificuldade de se fazer a integração exata, foi preciso usar a integração numérica para cálculo das Equações (20) e (21). Para isto, foram utilizados sete pontos nas superfícies paralelas à média e variável número de pontos ao longo da espessura da casca. Desta forma, calculou-se o resíduo e a Hessiana com as seguintes fórmulas:
∑∑= =
−⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂=
7
1 1 ,312
0
i
NP
jext
ji
esp FwwJY
ug
(33.a)
∑∑= =
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
∂=
7
1 1 ,
3120
2
i
NP
j ji
esp wwJYY
uH
(33.b) onde NP é o número de pontos de integração ao longo da espessura, w12 é o peso relativo ao ponto na superfície paralela à média e w3 é o peso relativo ao ponto na espessura da casca.
7.4 Algoritmo desenvolvido
Está descrito, a seguir, o algoritmo simplificado usado tanto no programa de treliça plana quanto no de casca: 1. INÍCIO DO PROGRAMA 1.1. Descrição das variáveis não alocáveis; 1.2. Descrição das variáveis alocáveis; 1.3. Alocação das variáveis; 2. LEITURA DOS DADOS 2.1. Abertura dos arquivos de entrada e saída; 2.2. Leitura do número de nós e de elementos finitos; 2.3. Leitura das coordenadas dos nós; 2.4. Leitura da incidência dos elementos; 2.5. Leitura das propriedades elásticas dos elementos; 2.6. Leitura das dimensões das seções transversais dos elementos; 2.7. Leitura do carregamento; 2.8. Leitura das condições de vinculação; 2.9. Leitura do valor da tolerância para o erro; 3. CÁLCULO 3.1. Divisão do carregamento em passos de carga; 3.2. Cálculo das deformações; 3.3. Cálculo das tensões; 3.4. Cálculo do tensor elástico; 3.5. Cálculo do resíduo para cada elemento;

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
145
3.6. Cálculo da Hessiana para cada elemento; 3.7. Montagem do sistema global; 3.8. Solução do sistema; 3.9. Atualização da posição; 3.10. Cálculo do erro; 3.11. Realização do teste: Se ERRO > TOLERÂNCIA => retorna ao item 3.2; Caso contrário => avança até o próximo passo de carga; 4. SAÍDA 4.1. Impressão dos dados nos arquivos de saída.
8 RESULTADOS
Estão descritos, neste capítulo, resultados dos principais exemplos simulados com os programas de treliça plana e casca.
8.1 Exemplo 1 – Barra de treliça plana sob tração uniaxial homogênea
A Figura 4 mostra a barra de treliça submetida à tração uniaxial homogênea com carga concentrada em uma das extremidades.
F
u
1
e2
e1
210,00 cm
Figura 4 – Treliça plana hiperelástica submetida à tração uniaxial (exemplo 1).
A interpolação dos coeficientes, com o MMQ, resultou em:
00006962,000054257,031237237,0
30
20
10
===
ccc
(modelo de Yeoh) (34.a)

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
146
01142455,029233813,0
00007671,0
01
10
===
ccα
(modelo de Hartmann-Neff) (34.b)
08792465,031022729,000014319,0
00271249,005997239,0
02
01
30
20
10
===−=
=
ccccc
(modelo de Bechir-Boufala-Chevalier) (34.c)
34175202,010 =c (modelo neo-Hookeano) (34.d)
03051485,033016537,0
01
10
==
cc
(modelo de Mooney-Rivlin) (34.e)
46668627,105322614,012186514,0
17031219,0
==−=
=
CDBE
(modelo elástico simplificado) (34.f) Deve-se ressaltar que os valores dos coeficientes supramencionados são dados em MPa, o módulo de compressão volumétrica utilizado é igual a 10000 MPa - para simular deformação isocórica - e o coeficiente empírico usado é igual a 1,0. As Figuras 5 e 6 ilustram, respectivamente, a comparação entre os resultados obtidos com as simulações realizadas com os dados experimentais existentes em Yeoh (1997) e a comparação entre a solução analítica e o modelo de Yeoh.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 4,50 5,00
Deformação de Engenharia
Tens
ão d
e En
genh
aria
(M
Pa)
Artigo Yeoh Hartmann Bechir neo-Hookeano Mooney-Rivlin Elástico
Figura 5 – Comparação entre as simulações e os dados experimentais do artigo (exemplo 1).

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
147
0,00
0,10
0,20
0,30
0,40
0,50
0,60
0,0 5,0 10,0 15,0 20,0 25,0 30,0 35,0 40,0 45,0 50,0
Deslocamento u (cm)
Forç
a A
plic
ada
F (k
N)
Solução Analítica Simulação
Figura 6 – Comparação entre o modelo de Yeoh e a solução analítica (exemplo 1).
8.2 Exemplo 2 – Casca sob cisalhamento simples
Para simulação do cisalhamento simples foram usados, de acordo com a Figura 7, 8 elementos finitos, 49 nós e 2 pontos de integração numérica na espessura. O módulo de compressão volumétrica e o coeficiente empírico adotados são os mesmos do exemplo 1.
1
2
12,50
1 3 4
65 7 8
2 3 4 5 6 7
89 10 11 12 13 14
1516 17 18 19 20 21
2223 24 25 26 27 28
2930 31 32 33 34 35
3637 38 39 40 41 42
43 44 45 46 47 48 49
4.1667
4.16
67
25,00
25,0
0
6,00
t
Figura 7 – Discretização da casca submetida ao cisalhamento simples (8 elementos finitos e 49 nós).
Os coeficientes interpolados são:
00645605,004627321,0
41491334,0
30
20
10
=−=
=
ccc
(modelo de Yeoh) (35.a)

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
148
01142455,029233813,0
00007671,0
01
10
===
ccα
(modelo de Hartmann-Neff) (35.b)
35732720,010 =c (modelo neo-Hookeano) (35.c) As Figuras 8 e 9 mostram, respectivamente, a comparação entre as simulações com os dados experimentais presente em Yeoh (1990) e a posição final do corpo para o modelo de Yeoh.
0,00
0,50
1,00
1,50
2,00
2,50
0,00 0,50 1,00 1,50 2,00 2,50
Deformação
Tens
ão C
isal
hant
e (M
Pa)
Artigo Yeoh neo-Hookeano Hartmann
Figura 8 – Comparação entre os dados experimentais do artigo com as simulações (exemplo 2).
Figura 9 – Deslocamentos horizontais, dados em cm, da casca sob cisalhamento simples para o modelo de Yeoh
para tensão cisalhante de 2,0 MPa (exemplo 2).

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
149
8.3 Exemplo 3 – Membrana de Cook
Este exemplo foi extraído de Düster et al. (2003). A Figura 10 ilustra as dimensões da membrana, assim como o carregamento e as condições de vinculação.
Figura 10 – Membrana de Cook (exemplo 3).
Foi usado o modelo de Hartmann-Neff, descrito pela fórmula (27.b), e os coeficientes são os mesmos do artigo:
0,500019580,017880,0
00367,0
01
10
====
Kccα
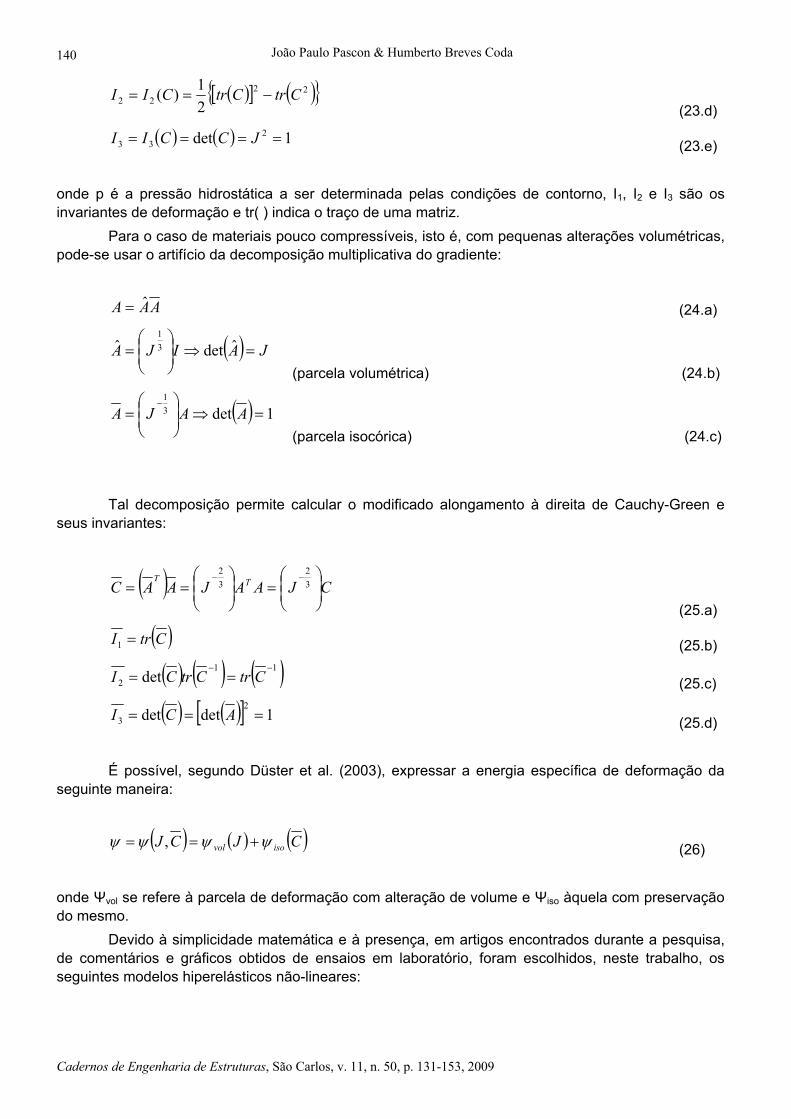
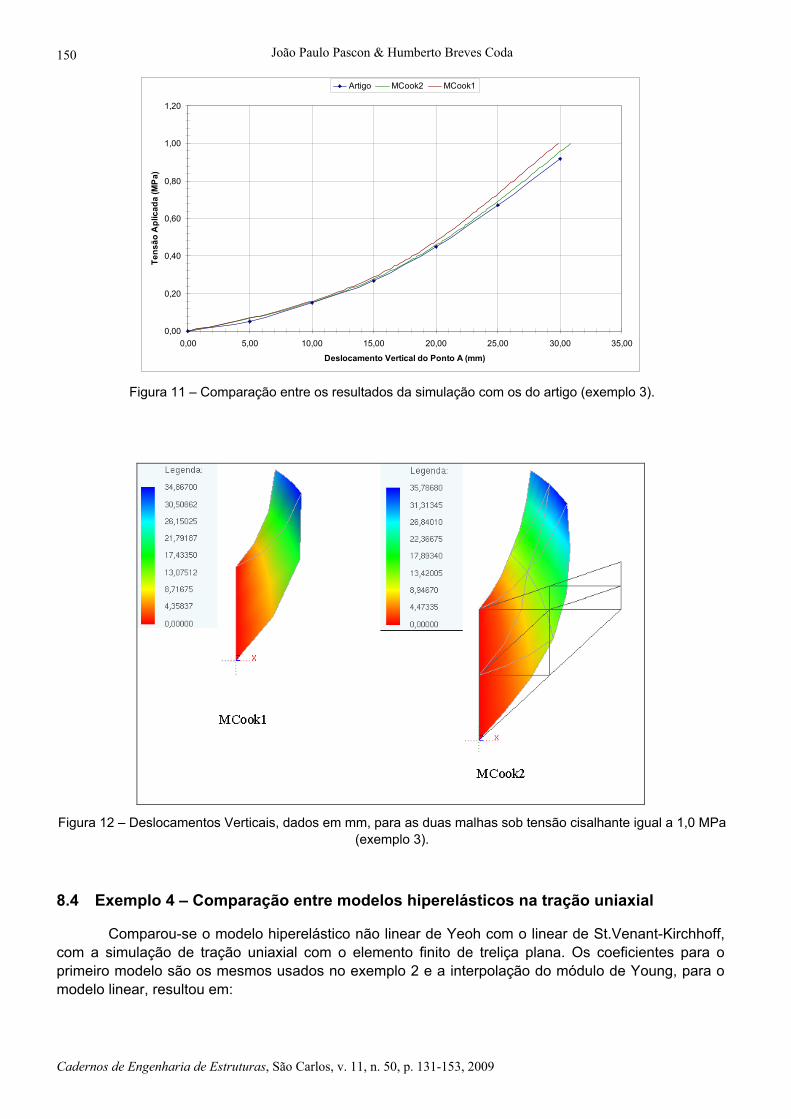
(36) Na simulação foram usados 2 pontos de integração numérica ao longo da espessura e foram impedidos os deslocamentos na direção normal ao plano da membrana. As Figuras 11 e 12 mostram, respectivamente, a comparação entre as simulações com os resultados do artigo e as posições finais para as duas discretizações usadas. A malha MCook1 possui 2 elementos finitos e 16 nós e a MCook2 possui 8 elementos e 49 nós.
João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
150
0,00
0,20
0,40
0,60
0,80
1,00
1,20
0,00 5,00 10,00 15,00 20,00 25,00 30,00 35,00
Deslocamento Vertical do Ponto A (mm)
Tens
ão A
plic
ada
(MPa
)
Artigo MCook2 MCook1
Figura 11 – Comparação entre os resultados da simulação com os do artigo (exemplo 3).
Figura 12 – Deslocamentos Verticais, dados em mm, para as duas malhas sob tensão cisalhante igual a 1,0 MPa
(exemplo 3).
8.4 Exemplo 4 – Comparação entre modelos hiperelásticos na tração uniaxial
Comparou-se o modelo hiperelástico não linear de Yeoh com o linear de St.Venant-Kirchhoff, com a simulação de tração uniaxial com o elemento finito de treliça plana. Os coeficientes para o primeiro modelo são os mesmos usados no exemplo 2 e a interpolação do módulo de Young, para o modelo linear, resultou em:

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
151
MPaE 10701725,0= (37.a)
1111 10701725,0 ES = (37.b) A Figura 13 mostra a comparação entre os dados experimentais do artigo, a simulação com o modelo não linear de Yeoh e o a simulação com o modelo linear de St.Venant-Kirchhoff.
0,0
1,0
2,0
3,0
4,0
5,0
6,0
0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00 4,50 5,00
Deformação de Engenharia
Tens
ão d
e En
genh
aria
(MPa
)
Artigo Yeoh St.Venant-Kirchhoff
Figura 13 – Comparação entre os dados experimentais e os modelos hiperelásticos linear e não linear na tração
uniaxial (exemplo 4).
9 CONCLUSÕES
Estão presentes, neste item, as principais conclusões do trabalho, baseadas nos resultados do capítulo anterior. Na tração uniaxial homogênea de polímeros naturais, os modelos de Yeoh, de Hartamann-Neff e de Bechir-Boufala-Chevalier mostraram excelente conformidade entre os resultados da simulação e os dados experimentais da literatura científica. Já os modelos neo-Hookeano e de Mooney-Rivlin foram adequados para pequenas e médias deformações. Tais considerações confirmam trabalhos de outros pesquisadores. O modelo de Yeoh também se mostrou eficiente, com relação à acurácia dos resultados da simulação, no caso de cisalhamento simples de polímeros preenchidos com negro de carbono na proporção, em massa, de 40 partes por centena de elastômero. O modelo de Hartamann-Neff não foi capaz de simular esta situação e o neo-Hookeano apresentou conformidade com os dados experimentais, apenas, para pequenas deformações, o que era esperado de acordo com a literatura científica. O código computacional desenvolvido mostrou-se adequado para simular, além dos casos supramencionados, a membrana de Cook, que é um caso extremo de cisalhamento. Pode-se comentar que a simulação realizada com o modelo hiperelástico não linear de Yeoh mostrou-se mais adequada do que o linear de St.Venant-Kirchhoff, com relação à precisão entre os resultados e os dados experimentais obtidos com ensaio de tração uniaxial. Por fim, o elemento finito de casca com sete parâmetros nodais, a formulação Lagrangiana posicional não linear geométrica, os métodos energético e iterativo usados, juntamente com os

João Paulo Pascon & Humberto Breves Coda
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
152
modelos hiperelásticos não lineares implementados, foram capazes de simular diversos casos de solicitação estrutural com grandes deformações sem ocorrência de travamento. Foi possível, no decorrer desta pesquisa, notar a complexidade da análise estrutural para materiais altamente deformáveis. Faz-se necessário, portanto, dar continuidade ao estudo destes componentes, que possuem grande potencial de utilização na engenharia, para que se possa prever com maior precisão seu comportamento estrutural em diversas situações.
10 AGRADECIMENTOS
Agradecemos à Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) pelo auxílio financeiro e ao Dr. Rodrigo Ribeiro Paccola pelo apoio concedido ao desenvolvimento desta pesquisa.
11 REFERÊNCIAS
BECHIR, H.; BOUFALA, K.; CHEVALIER, Y. Strain energy density function for carbon black filled rubber vulcanized for industrial applications. Mécanique & Industries, 3, p. 245-252, 2002.
BELYTSCHKO, T.; LIU, W. K.; MORAN, B. Nonlinear finite elements for continua and structures. Chichester, England: John Wiley & Sons Ltd., 2000.
BÜCHTER, N.; RAMM, E.; ROEHL, D. Three-dimensional extension of non-linear shell formulation based on the enhanced assumed strain concept. International Journal for Numerical Methods in Engineering 37, p. 2551-2568, 1994.
CIARLET, P. G. Mathematical elasticity: three dimensional elasticity. Amsterdam, The Netherlands: Elsevier Science Publishers B. V., 1993. v. 1.
CODA, H. B. Análise não linear geométrica de sólidos e estruturas: uma formulação posicional baseada no MEF. São Carlos: SET-EESC-USP, 2003. v. 2.
CODA, H. B.; PACCOLA, R. R. An alternative positional FEM formulation for geometrically non-linear analysis of shells - curved triangular isoparametric elements. Computational Mechanics, 2006. DOI: 10.1007/s00466-006-0094-1.
COIMBRA, A. L. Novas lições de mecânica do contínuo. São Paulo: Edgard Blucher, 1981.
DÜSTER, A.; HARTMANN, S.; RANK, E. p-FEM applied to finite isotropic hyperelastic bodies. Comput. Methods Appl. Mech. Engrg., 192, p. 5147-5166, 2003.
EL-ABBASI, N.; MEGUID, S. A. A new shell element accounting for through-thickness deformation. Comput. Methods Appl. Mech. Engrg. 189, p. 841-862, 2000.

Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 50, p. 131-153, 2009
153
HARTMANN, S.; NEFF, P. Polyconvexity of generalized polynomial-type hyperelastic strain functions for near-incompressibility. International Journal of Solids and Structures, 40, p. 2767-2791, 2003.
HOLZAPFEL, G. A. Nonlinear solid mechanics: a continuum approach for engineering. Chichester, England: John Wiley & Sons Ltd., 2000.
MALVERN, L. E. Introduction to the mechanics of a continuous medium. Englewood Cliffs, New Jersey, USA: Prentice-Hall, 1969.
PASCON, J. P. Modelos constitutivos para materiais hiperelásticos: estudo e implementação computacional. 2008. Dissertação (Mestrado em Engenharia de Estruturas) – Escola de Engenharia de São Carlos, Universidade de São Paulo, 2008.
OGDEN, R. W. Non-linear Elastic deformations. Chichester, England: Ellis Horwood Ltd., 1984.
YEOH, O. H. Characterization of elastic properties of carbon-black-filled rubber vulcanizates. Las Vegas, Nevada, American Chemical Society, Rubber Division, 1990.
YEOH, O. H. Hyperelastic material models for finite element analysis of rubber. J. Nat. Rubb. Res., v. 12, n. 3, p. 142-153, 1997.