Modelagem em Sistemas Complexos - each.usp.br Aula 4.pdf · Modelagem em Sistemas Complexos...
24
Modelagem em Sistemas Complexos Bifurcação local de campos vetoriais Marcone C. Pereira Escola de Artes, Ciências e Humanidades Universidade de São Paulo São Paulo - Brasil Abril de 2012 [email protected] Sistemas Complexos - EACH - USP
Transcript of Modelagem em Sistemas Complexos - each.usp.br Aula 4.pdf · Modelagem em Sistemas Complexos...
Modelagem em Sistemas ComplexosBifurcação local de campos vetoriais
Marcone C. PereiraEscola de Artes, Ciências e Humanidades
Universidade de São PauloSão Paulo - Brasil
Abril de 2012
[email protected] Sistemas Complexos - EACH - USP
Nesta aula discutiremos o conceito de bifurcação em camposvetoriais que está diretamente associado a mudanças qualitativas nocomportamento do sistema. Veremos:
1 Estabilidade estrutural.
2 Bifurcações em compos vetoriais unidimensionais.
3 Bifurcações de Hopf em sistemas bidimensionais.
[email protected] Sistemas Complexos - EACH - USP

Estabilidade estrutural.
Quando se considera um modelo é necessário saber quão robustoele é com respeito a pequenas modificações em seus parâmetros.Para isto consideramos uma métrica ou distância no conjunto doscampos vetoriais definidos num determinado espaço de fase S.
Uma distância d sobre um espaço X é uma aplicaçãod : X × X 7→ R+ satisfazendo as seguintes condições:
d(x , y) = 0 ⇐⇒ x = y .
d(x , y) = d(y , x).
d(x , y) ≤ d(x , z) + d(z, y).
Observe que a função distância d nos dá a noção de proximidade,por meio dela podemos considerar vizinhanças de um determinadoponto do espaço.
[email protected] Sistemas Complexos - EACH - USP
Seja X o conjunto dos campos f : S 7→ S de classe C1 definidos numespaço de fase S ⊂ Rn limitado. Neste conjunto definimos adistância1 de classe C1 entre campos vetoriais f , g ∈ X por
d(f ,g) = supx∈S
{‖f (x) − g(x)‖, ‖df (x) − dg(x)‖
}onde
‖f (x)‖ =√
f1(x)2 + f2(x)
2 + ...+ fn(x)2
é a norma de vetores em Rn. 2
Em X definimos uma ε-vizinhança de um campo f por
Vε(f ) = {g ∈ X : d(f ,g) < ε}.
Assim, se g ∈ Vε(f ) dizemos que g está ε-C1-próxima a f ou é umaε-C1-perturbação de f .
1Classe C1 porque consideramos tanto a função como sua derivada.2f (x) = (f1(x), ..., fn(x)) ∈ S ⊂ Rn com x ∈ S.
[email protected] Sistemas Complexos - EACH - USP
Exemplo: Considere o sistema dado pelo pêndulo amortecido.
{ dxdt = y ,dydt = −ω2 sin x − 2 a y ,
t > 0.
O campo vetorial deste sistema é dado por
g(x , y) =(y , −ω2 sin x − 2 a y
)cujos os equilíbrios são (k π,0), k ∈ Z e o espaço de fase é S = R2.Note que este sistema é uma perturbação do pêndulo simples{ dx
dt = y ,dydt = −ω2 sin x ,
t > 0,
cujo campo é f (x , y) = (y ,−ω2 sin x) e satisfaz
‖f (x , y) − g(x , y)‖ = 2 |a| |y |, ‖Df (x , y) − Dg(x , y)‖ = 2 |a|.
[email protected] Sistemas Complexos - EACH - USP

Considere o sistema dinâmico abstrato
(∗)
{x = f (x), x ∈ Rn,
x(t0) = x0,t > t0,
definido pelo campo vetorial f de classe C1.
Dizemos que um equilíbrio xf de (∗) é hiperbólico se a parte real dosautovalores da matriz Jacobiana Df (xf ) é diferente de zero.
TeoremaSeja xf um equilíbrio hiperbólico de (∗). Então existe uma vizinhançaU ⊂ Rn de xf e uma vizinhança V ⊂ X do campo f tal que o sistemadefinido por cada g ∈ V possui apenas um equilíbrio xg ∈ U que éhiperbólico. Além disso, os operadores lineares Df (xf ) e Dg(xg)possuem o mesmo número de autovalores com parte real positiva enegativa sendo conjugados.
Tais campos vetoriais são chamados estruturalmente estáveis, já quepossuem o mesmo comportamento qualitativo numa vizinhança suae de seus pontos de equilíbrio.
[email protected] Sistemas Complexos - EACH - USP

Exemplos:
a) Observe que o pêndulo simples dado por f (x , y) = (y ,−ω2 sin x)não é estruturalmente estável já que possui equilíbrios nãohiperbólicos. De fato, f (x , y) = (0,0) ⇐⇒ (kπ,0), k ∈ Z e
Df (kπ,0) =(
0 1ω2 (−1)k+1 0
)cujos autovalores são: ±ωi se k é par e ±ω se k é ímpar.
b) Já o pêndulo amortecido g(x , y) = (y ,−ω2 sin x − 2 a y) éestruturalmente estável e é obtido como perturbação dopêndulo simples. g(x , y) = (0,0) ⇐⇒ (kπ,0), k ∈ Z e
Dg(kπ,0) =(
0 1ω2 (−1)k+1
−2a
)cujos autovalores são: −a±
√
a2 − ω2 se k é par; −a±√
a2 + ω2
se k é ímpar. Assim seus equilíbrios são todos hiperbólicos.
[email protected] Sistemas Complexos - EACH - USP

c) Considere o oscilador harmônico de van der Pol dado pelaequação x + λ(x2
− 1)x + x = 0 cujo campo de vetoresassociado é f (x , y) = (y , −x − λ(x2
− 1)y). Observe que:
(0,0) é um equilíbrio não hiperbólico.Se consideramos a função V : R2
7→ R dada porV (x , y) = 1
2
(x2 + y2
)temos para (x(t), y(t)) ∈ R2/(0,0)
V (x , y) = x x + y y = −λ(x2− 1)y2.
Note que V é uma função de Liapunov para o campo quenos dá (0,0) equilíbrio estável se λ < 0 e instável se λ > 0.Como o disco unitário é uma bacia de atração para ocampo para todo λ, o caso λ > 0 implica na existência deuma órbita periódica pelo Teorema de Poincaré-Bendixson.
Aqui ocorre o surgimento de órbita periódica pela variação de λ.
[email protected] Sistemas Complexos - EACH - USP
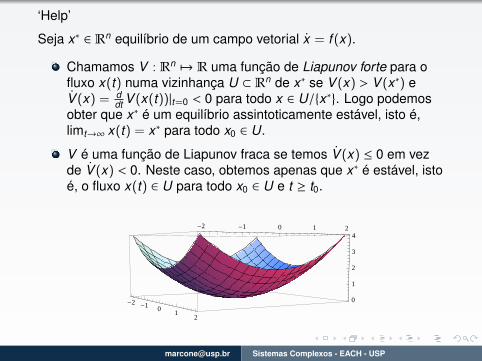
‘Help’
Seja x ∗ ∈ Rn equilíbrio de um campo vetorial x = f (x).
Chamamos V : Rn7→ R uma função de Liapunov forte para o
fluxo x(t) numa vizinhança U ⊂ Rn de x ∗ se V (x) > V (x ∗) eV (x) = d
dt V (x(t))|t=0 < 0 para todo x ∈ U/{x ∗}. Logo podemosobter que x ∗ é um equilíbrio assintoticamente estável, isto é,limt→∞ x(t) = x ∗ para todo x0 ∈ U.
V é uma função de Liapunov fraca se temos V (x) ≤ 0 em vezde V (x) < 0. Neste caso, obtemos apenas que x ∗ é estável, istoé, o fluxo x(t) ∈ U para todo x0 ∈ U e t ≥ t0.
-2-1 0
12
-2 -1 0 1 2
0
1
2
3
4
[email protected] Sistemas Complexos - EACH - USP
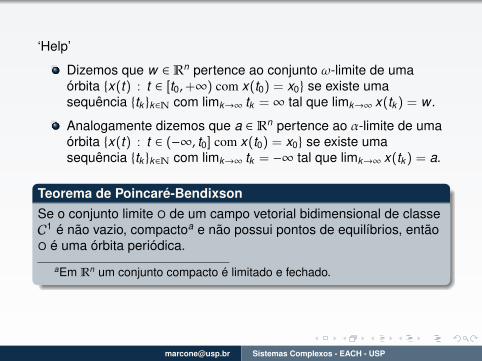
‘Help’
Dizemos que w ∈ Rn pertence ao conjunto ω-limite de umaórbita {x(t) : t ∈ [t0,+∞) com x(t0) = x0} se existe umasequência {tk }k∈N com limk→∞ tk = ∞ tal que limk→∞ x(tk ) = w .
Analogamente dizemos que a ∈ Rn pertence ao α-limite de umaórbita {x(t) : t ∈ (−∞, t0] com x(t0) = x0} se existe umasequência {tk }k∈N com limk→∞ tk = −∞ tal que limk→∞ x(tk ) = a.
Teorema de Poincaré-BendixsonSe o conjunto limite O de um campo vetorial bidimensional de classeC
1 é não vazio, compactoa e não possui pontos de equilíbrios, entãoO é uma órbita periódica.
aEm Rn um conjunto compacto é limitado e fechado.
[email protected] Sistemas Complexos - EACH - USP
Bifurcações locais de campos vetoriais.
Mudanças qualitativas em famílias de campos vetoriais associadas avariação de um determinado parâmetro é chamada de bifurcação.Seja (xµ0 , µ0) um equilíbrio da família de campos vetoriais Ck
(x , µ) 7→ f (x , µ), x ∈ Rn, µ ∈ Rm.
Aqui queremos responder a seguinte pergunta:
Podemos afetar a estabilidade do ponto de equilíbrio xµ0
quando variamos µ ≈ µ0?
[email protected] Sistemas Complexos - EACH - USP

Se o equilíbrio (xµ0 , µ0) é hiperbólico temos que o fluxo gerado pelocampo é estruturalmente estável numa vizinhança dele.
Consequentemente, pequenas variações de µ numa vizinhança deµ0 não afetam sua estabilidade.
Isto é uma consequência do Teorema da Função Implícita aplicado a
(x , µ) 7→ f (x , µ), x ∈ Rn, µ ∈ Rm,
já que ∂x f (xµ0 , µ0) é um isomorfismo. Nestas condições existe umaberto U ⊂ Rm e uma aplicação xµ ∈ Rn, µ ∈ U, tal que f (xµ, µ) = 0 ea parte real dos autovalores de ∂x f (xµ, µ) são todos não nulos. Logo,(xµ, µ) é uma curva de equilíbrios hiperbólicos para µ ∈ U.
Quando o ponto de equilíbrio (xµ0 , µ0) não é hiperbólico, o fluxo nãoé estruturalmente estável em (xµ0 , µ0) e assim, novas dinâmicaspodem ocorrer para µ ≈ µ0.
[email protected] Sistemas Complexos - EACH - USP

Bifurcações em campos vetoriais unidimensionais.
1) Bifurcação sela-nó.
É a bifurcação observada quando variamos µ na equação
x = µ − x2.
(a) Se µ < 0, o fluxo não possui equilíbrio algum.
(b) Se µ = 0, x = 0 é o único ponto de equilíbrio que não éhiperbólico já que d
dx
(−x2
)|x=0 = 0.
(c) Se µ > 0, o sistema possui dois equilíbrios hiperbólicos ±√µ.
De maneira geral, f (x , µ) possui uma bifurcação do tipo sela-nó numequilíbrio não hiperbólico (xµ0 , µ0) se
∂µf (xµ0 , µ0) , 0 e ∂xx f (xµ0 , µ0) , 0.
[email protected] Sistemas Complexos - EACH - USP
2) Bifurcação transcrítica.
É a bifurcação observada quando variamos µ na equação
x = µx − x2.
(a) Se µ < 0, o fluxo possui 0 como equilíbrio estável e µ instável,ambos hiperbólicos.
(b) Se µ = 0, x = 0 é o único ponto de equilíbrio que não éhiperbólico.
(c) Se µ > 0, 0 passa a ser um equilíbrio instável e µ estável.
Aqui os equilíbrios mudam sua estabilidade quando µ passa pelo 0.
De maneira geral, f (x , µ) possui uma bifurcação transcrítica numequilíbrio não hiperbólico (xµ0 , µ0) se
∂µf (xµ0 , µ0) = 0, ∂xx f (xµ0 , µ0) , 0 e ∂µx f (xµ0 , µ0) , 0.
[email protected] Sistemas Complexos - EACH - USP
3) Bifurcação do tipo pitchfork.
É a bifurcação observada quando variamos µ na equação
x = µx − x3.
(a) Se µ < 0, 0 é o único equilíbrio, que é também estável.
(b) Se µ = 0, x = 0 é o único ponto de equilíbrio que não éhiperbólico.
(c) Se µ > 0, 0 passa a ser um equilíbrio instável e ±µ sãoequilíbrios estáveis do sistema.
De maneira geral, f (x , µ) possui uma bifurcação pitchfork numequilíbrio não hiperbólico (xµ0 , µ0) se
∂µf (xµ0 , µ0) = 0, ∂xx f (xµ0 , µ0) = 0,∂xxx f (xµ0 , µ0) , 0 e ∂xµf (xµ0 , µ0) , 0.
[email protected] Sistemas Complexos - EACH - USP

3
3Livro do Boccara. Primeira figura de cima para baixo exibe bifurcaçãotipo sela-nó, a segunda uma transcrítica e a terceira pitchfork.
[email protected] Sistemas Complexos - EACH - USP

Exercício: Use os gráficos abaixo para identificar as bifurcaçõesexibidas no modelo de Ludwing reescalado para surto de insetos.
dudt
= r u (1 − u/q) −u2
1 + u2.
1 2 3 4 5 6 7u
-0.4
-0.2
0.2
0.4
f
F Pelo gráfico do campo obtemos a estabilidade dos equilíbrios.
u10
u1 u2 u30
u30
[email protected] Sistemas Complexos - EACH - USP
Bifurcações em campos vetoriais bidimensionais.
Bifurcação de Hopf.
Este tipo de bifurcação não ocorre em campos vetoriaisunidimensionais e nos dá condições suficientes para a existência deórbitas periódicas não triviais para determinados valores de µ.
Teorema de Hopf
Seja x = f (µ, x) uma família de campos vetoriais bidimensionais aum parâmetro µ ∈ R satisfazendo:
(i) f (µ,0) = 0 para todo µ ∈ R;
(ii) f é uma função analítica em (µ, x) ∈ R ×R2;
(iii) ∂x f (0, µ) possui dois autovalores conjugados complexosα(µ) ± iβ(µ) com α(0) = 0, β(0) , 0 e dα
dµ (0) , 0.
Então em qualquer vizinhança U da origem em R2 e µ0 > 0 existeµ < µ0 tal que a equação x = f (µ, x) possui uma solução periódicanão trivial em U.
[email protected] Sistemas Complexos - EACH - USP

Exemplos de bifurcação de Hopf.
a) O oscilador de van der Pol em (x , y) = (0,0) e λ = 0:{ dxdt = y ,dydt = −x − λ(x2
− 1)y ,t > 0.
Quando λ < 0 temos que (0,0) é estável e hiperbólico. Em λ = 0ocorre uma bifurcação de Hopf que nos dá o surgimento de umaórbita periódica para λ > 0.
(0,0) é o único equilíbrio do sistema para todo λ ∈ R com
Df (λ, (0,0)) =(
0 1−1 λ
)cujos autovalores são λ ± i
√
4 − λ2. Logo se λ ∈ (−2,2) este sistemasatisfaz as hipóteses do teorema de bifurcação de Hopf.
[email protected] Sistemas Complexos - EACH - USP

Solução de valor inicial (x0, y0) = (1.3,0.2) e λ = −0.2.
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
[email protected] Sistemas Complexos - EACH - USP

Soluções com condições iniciais (x0, y0) = (2.3,2.2) e(x0, y0) = (1.3,0.2) e parâmetro λ = 0.2.
-2 -1 1 2 3
-2
-1
1
2
[email protected] Sistemas Complexos - EACH - USP

b) O sistema Lotka-Volterra em (h,p) = (1,1) e k = 2 + β: dhdt = h(1 − h/k) + αh p h
β+h ,dpdt =
αp p hβ+h − γp,
t > 0,
onde αh = (1 − 1/k)(β+ 1) e αp = γ(β+ 1).
A matriz Jacobiana em (1,1) é k−2−βk(1+β) −1 + 1
kβγ
1+β 0
cujos autovalores são dados por
k − 2 − β ± i√
4(k − 1)k2βγ − (k − 2 − β)2
2k(1 + β).
[email protected] Sistemas Complexos - EACH - USP

Note que em k = 2 + β ocorre uma bifurcação de Hopf. Se k < 2 + βtemos um equilíbrio estável e quando k > 2 + β temos o equilíbriotorna-se instável e uma órbita periódica estável aparece.
Aqui tomamos k = 5, β = 1, γ = 1.1 e condições iniciais(x0, y0) = (4.5,1.8) e (x0, y0) = (0.9,0.7).
0.5 1.0 1.5 2.0 2.5 3.0
0.5
1.0
1.5
2.0
[email protected] Sistemas Complexos - EACH - USP
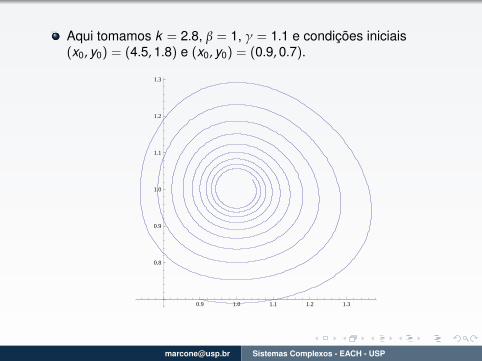
Aqui tomamos k = 2.8, β = 1, γ = 1.1 e condições iniciais(x0, y0) = (4.5,1.8) e (x0, y0) = (0.9,0.7).
0.9 1.0 1.1 1.2 1.3
0.8
0.9
1.0
1.1
1.2
1.3
[email protected] Sistemas Complexos - EACH - USP