MODELAGEM E CONTROLE DE UM SISTEMA NÃO LINEAR EMPREGANDO A METODOLOGIA DE LINEARIZAÇÃO EXATA POR...
11
MODELAGEM E CONTROLE DE UM SISTEMA NÃO LINEAR EMPREGANDO A METODOLOGIA DE LINEARIZAÇÃO EXATA POR REALIMENTAÇÃO BRITO, P.V.G.C 1 & BRITO, L. E. 2 RESUMO O objetivo do trabalho é avaliar o desempenho do controle de nível de um tanque cônico, que apresenta uma dinâmica não linear, utilizando um Controlador Digital PID (Proporcional, Integral e Derivativo) modificado e utilizando a técnica de Linearização Exata por Realimentação para que o sistema atue em toda faixa de operação. Primeiramente, foi feita a obtenção do modelo matemático da planta, onde seus parâmetros podem ser prontamente atribuídos por suas constantes de acordo com os aspectos geométricos e físicos do tanque. Em seguida, efetuou-se uma substituição da variável de estado e introduziu-se uma variável de entrada auxiliar. Depois de ter o sistema não linear modificado de modo a que o todo se comporte como linear, foi possível utilizar técnicas de controle lineares, mais conhecidas e mais eficazes para realizar o controle do sistema original. Essa técnica tem sido utilizada com êxito numa grande gama de aplicações: controle de braços manipuladores, peças de artilharia, helicópteros, aviões e satélites. O principal resultado foi à obtenção de um modelo robusto e com parâmetros que podem ser prontamente substituídos por suas constantes de acordo com os aspectos físicos da planta. Além disso, a simulação computacional baseada no modelo analítico revelou que a metodologia da linearização aplicada é adequada para o projeto de controladores lineares em sistemas particularmente complexos, comumente encontrados na prática. Palavras-chave: controlador, pid, linearização, modelagem, nível ABSTRACT: Modeling and level control of a nonlinear system using the method of Exact Linearization The objective of this work is to evaluate the control performance of a conical tank level, which features a non-linear dynamics, using a modified Digital Controller PID (proportional, Integral and Derivative) and using the technique of Exact Linearization by Realimentation to the system acts on the whole range of operation. At first, mathematical model of the plant were obtained, where its parameters can be readily assigned by his constant according to the geometrical and physical aspects of the tank. After that, the state variable was replaced and an auxiliary input variable was introduced. Once you have the non-linear system modified so that all behave as linear, it was possible to use linear control techniques, easier to known and most effective to perform the control of the original system. This technique has been used successfully in a wide range of applications: control arms handlers, pieces of artillery, helicopters, airplanes and satellites. The main result was a robust model and parameters that can be readily replaced by his constant according to the physical aspects of the plant. In addition, the computer simulation based on analytical model revealed that the linearization methodology applied is suitable for the design of linear controllers in particularly complex systems, commonly found in practice. Keywords: controller, pid, linearization, modeling, level 1 Pesquisador bolsista - Iniciação Científica e Tecnológica - PICT – 2012/2013 - Faculdade ÁREA1 - Graduando de Engenharia Elétrica - [email protected] 2 Pesquisador e Orientador - Faculdade ÁREA1
-
Upload
pedro-victor-gomes -
Category
Technology
-
view
662 -
download
5
description
Artigo - Projeto de Iniciação Científica: MODELAGEM E CONTROLE DE UM SISTEMA NÃO LINEAR EMPREGANDO A METODOLOGIA DE LINEARIZAÇÃO EXATA POR REALIMENTAÇÃO - Pedro Victor Gomes
Transcript of MODELAGEM E CONTROLE DE UM SISTEMA NÃO LINEAR EMPREGANDO A METODOLOGIA DE LINEARIZAÇÃO EXATA POR...

MODELAGEM E CONTROLE DE UM SISTEMA NÃO LINEAR EMPREGANDO A
METODOLOGIA DE LINEARIZAÇÃO EXATA POR REALIMENTAÇÃO
BRITO, P.V.G.C1 & BRITO, L. E.
2
RESUMO
O objetivo do trabalho é avaliar o desempenho do controle de nível de um tanque cônico, que apresenta uma
dinâmica não linear, utilizando um Controlador Digital PID (Proporcional, Integral e Derivativo)
modificado e utilizando a técnica de Linearização Exata por Realimentação para que o sistema atue em toda
faixa de operação. Primeiramente, foi feita a obtenção do modelo matemático da planta, onde seus
parâmetros podem ser prontamente atribuídos por suas constantes de acordo com os aspectos geométricos
e físicos do tanque. Em seguida, efetuou-se uma substituição da variável de estado e introduziu-se uma
variável de entrada auxiliar. Depois de ter o sistema não linear modificado de modo a que o todo se
comporte como linear, foi possível utilizar técnicas de controle lineares, mais conhecidas e mais eficazes
para realizar o controle do sistema original. Essa técnica tem sido utilizada com êxito numa grande gama
de aplicações: controle de braços manipuladores, peças de artilharia, helicópteros, aviões e satélites. O
principal resultado foi à obtenção de um modelo robusto e com parâmetros que podem ser prontamente
substituídos por suas constantes de acordo com os aspectos físicos da planta. Além disso, a simulação
computacional baseada no modelo analítico revelou que a metodologia da linearização aplicada é
adequada para o projeto de controladores lineares em sistemas particularmente complexos, comumente
encontrados na prática.
Palavras-chave: controlador, pid, linearização, modelagem, nível
ABSTRACT: Modeling and level control of a nonlinear system using the method of Exact
Linearization The objective of this work is to evaluate the control performance of a conical tank level, which features a
non-linear dynamics, using a modified Digital Controller PID (proportional, Integral and Derivative) and
using the technique of Exact Linearization by Realimentation to the system acts on the whole range of
operation. At first, mathematical model of the plant were obtained, where its parameters can be readily
assigned by his constant according to the geometrical and physical aspects of the tank. After that, the state
variable was replaced and an auxiliary input variable was introduced. Once you have the non-linear system
modified so that all behave as linear, it was possible to use linear control techniques, easier to known and
most effective to perform the control of the original system. This technique has been used successfully in a
wide range of applications: control arms handlers, pieces of artillery, helicopters, airplanes and satellites.
The main result was a robust model and parameters that can be readily replaced by his constant according
to the physical aspects of the plant. In addition, the computer simulation based on analytical model revealed
that the linearization methodology applied is suitable for the design of linear controllers in particularly
complex systems, commonly found in practice.
Keywords: controller, pid, linearization, modeling, level
1 Pesquisador bolsista - Iniciação Científica e Tecnológica - PICT – 2012/2013 - Faculdade ÁREA1 -
Graduando de Engenharia Elétrica - [email protected]
2 Pesquisador e Orientador - Faculdade ÁREA1

1 INTRODUÇÃO
Controle de um sistema significa agir sobre o mesmo de modo a obter um resultado
arbitrariamente especificado. O modelo matemático do sistema é fundamental para o projeto do
controlador automático. O presente desafio é a modelagem e controle de sistemas modernos,
complexos e interligados, como sistemas de controle processos químicos, sistemas robóticos e de
automação industrial.
Os processos envolvendo controle de nível são muito importantes na indústria de petróleo,
química, alimentícia e muitas outras. Estes processos são responsáveis por manter a vazão de
entrada igual à vazão de saída, em um determinado ponto de operação. Em processos com este tipo
de controle, perturbações originadas em outra seção da planta industrial são transmitidas mais
lentamente a outras seções. Assim, os sistemas de controle de nível devem ser sintetizados de forma
a atenuar o ruído trazido de outro subsistema pertencente ao processo (CAMPOS e TEIXEIRA,
2006).
Para o desenvolvimento do controlador digital de nível é necessária a descrição completa
dos fenômenos físicos envolvidos. O conhecimento da dinâmica do processo envolvido e o modelo
matemático são essências para o desenvolvimento do protótipo e da simulação, capazes de
descrever, com razoável semelhança, o comportamento e desempenho das técnicas de controle
aplicadas.
Um modelo matemático que descreve a dinâmica do processo a ser controlado é essencial
para o desenvolvimento do controlador. Porém, os parâmetros do modelo vão depender da
composição do tanque e do fluido trabalhado. Esta é uma premissa para se desenvolver o projeto de
um controlador adaptativo, que possibilita um bom desempenho com uma grande variabilidade de
parâmetros que podem ser escolhidos de acordo com a estrutura física da planta. Foi proposto um
modelo baseado em controle de malha fechada onde o sistema verifica a ocorrência de desvios
associados à altura de referencia do fluido, pois contém um sensor, que monitora a saída (altura),
fornecendo um sinal que retorna à entrada, formando uma malha de realimentação. O principal
objetivo dessa estratégia de controle é utilizar a realimentação para obter um sistema que seja capaz
de manter um nível esperado de desempenho mesmo frente a perturbações e variações nas
características do sistema de controle (OGATA, 2003). Assim, é possível aproveitar os recursos de
um sistema microcontrolado, com um algoritmo que define a estratégia de controle do processo
com base nas informações de saída, fornecidas pelo transdutor de nível. Esses sistemas embarcados,
quando utilizados de forma interativa, tendem a corrigir imperfeições do sistema, pois facilitam a
implementação de intertravamentos lógicos para atuarem em situações que provocariam desgaste ou
instabilidade da planta. Dentro deste contexto o objetivo deste artigo é discorrer sobre a aplicação
de controladores lineares aplicados a sistemas não-lineares linearizados utilizando a técnica de
Linearização Exata por Realimentação e propor o projeto do protótipo utilizando um
microcontrolador contendo o algoritmo de controle.
2 DESENVOLVIMENTO
Em síntese, o sistema é caracterizado por controlar o nível de água do tanque. Serão
utilizadas duas bombas (atuadores) com o intuito de injetar um sinal de entrada positivo ou
negativo, possibilitando o controle do nível do líquido tanto no enchimento como no esvaziamento
do tanque. Um microcontrolador fará o papel de aquisição dos dados de referência através de uma
interface física (teclado numérico). Assim, a saída do sistema corresponde ao nível de água no
tanque. A Figura 1 ilustra o tanque cônico modelado.

Figura 1 – Esboço do tanque cônico com suas variáveis manipuladas e controladas
Fonte: BRITO, P.V.G.C, 2013
2.1 Metodologia Analítica
Dado a proposta de estratégia de controle, inicialmente foi realizada a modelagem
matemática do sistema, representando as principais características para uma determinada aplicação.
O primeiro estágio é a identificação do sistema, onde foi formulado o problema e examinado o
propósito do modelo. A partir daí, iniciou-se a modelagem caixa-branca, conhecida como
modelagem pela física ou natureza do processo ou ainda modelagem através da metodologia
analítica (AGUIRRE, 2000). Baseando-se na aplicação de leis físicas que atuam no sistema e
utilizando seus princípios fundamentais, foi possível determinar as equações diferenciais que
compõem o modelo. Nesta etapa, foram formuladas hipóteses simplificadores que reduziram a
complexidade do modelo mas manteram as características mais relevantes do comportamento
dinâmico do processo.
2.1.1 Modelagem Matemática
A variação de massa total do sistema é equivalente à diferença entre as vazões mássicas do
fluido através de seções na superfície de controle. Assim, o balanço macroscópico transiente de
massa é definido por:
(1)
Porém, no sistema em estudo, nota-se que o volume de líquido varia em cada instante e é,
portanto, função do tempo:
(2)
(3)

Como o reservatório funcionará com uma vazão de entrada manipulada pelas bombas
(atuadores) e uma vazão de saída fixa (não manipulada) no fundo do tanque, podemos simplificar a
Equação 3, fixando as condições de operação do tanque:
(4)
Representando a Equação 4 em termos da vazão volumétrica, obtemos:
(5)
O escape contínuo do fluido para um reservatório auxiliar, que depende da altura do líquido
no interior do tanque é modelado utilizando a equação cinética de Torriceli ,
fazendo . Sendo a área da seção de tubulação no qual o fluido escorrerá.
Substituindo por , variável de entrada manipulada que representa a vazão (positiva ou
negativa) através das bombas:
(6)
O volume de líquido variante no tempo foi determinado a partir da integração :
(7)
Ao realizar a integral acima obtemos o modelo final em termos da variável de altura
(saída do sistema) e sua derivada:
(8)
Analisando a Equação 8, verifica-se que o modelo determinado ainda depende dos
parâmetros estruturais da planta hipotética: altura do tanque ( ), raio menor ( ) e raio maior ( ).
Além de que, se o valor desejado para a altura (referência) estiver, por exemplo, a ½ do tanque, o
ganho ótimo para um controlador linear é bastante diferente do ganho ótimo para uma referência à
¼ de altura. Dessa forma é necessário gerar uma lei de controle que procure linearizar o processo.
Para isso, efetuou-se uma mudança de variável intermediária que conduz o sistema original a um
sistema linear.

2.1.2 Linearização do Modelo
Linearização é o processo de encontrar um modelo linear que seja uma boa aproximação do
sistema não-linear em questão Então, para projetar um sistema de controle para um sistema não-
linear, pode-se seguramente obter uma aproximação linear deste modelo, em torno de um ponto de
operação. Uma forma de verificar se um sistema é linear é observar se a relação entre entrada e a
saída atende ao princípio da superposição (OGATA, 2003):
(9)
Para aproximar o sistema não-linear por um sistema linear, é necessário que ele opere em
torno de um ponto de equilíbrio e que os sinais envolvidos sejam pequenos em relação ao ponto de
operação (OGATA, 2003).
O procedimento inicial utilizado foi a aplicação de técnicas de linearização didaticamente
conhecidas (Expansão em Série de Taylor e emprego de variáveis incrementais), mas que
restringem o controle do sistema à uma margem em torno de um ponto de operação. Essa
característica tornou necessária a implementação de uma nova abordagem de controle. A utilização
de controle por Linearização Exata elimina o problema do ponto de operação, permitindo um
satisfatório controle em toda a faixa de operação. Para tal, considera-se uma lei de controle:
(10)
Em que é uma nova variável manipulada intermediária. Como efeito, substituindo A Equação
10 na Equação 8, resulta:
(11)
Que é a equação que representa o modelo linearizado. Assim, utilizando essa técnica ao processo de
nível de líquidos torna-se possível projetar controladores lineares eficientes em toda a faixa de
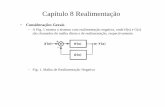
operação do sistema não-linear. O diagrama de blocos do sistema com a realimentação linearizante
é ilustrado na Figura 2.
Figura 2 – Diagrama de blocos simplificado do sistema
Fonte: BRITO, P.V.G.C, 2013

2.2 Sensores e Atuadores
2.2.1 Atuadores do sistema
Os atuadores do sistema, responsáveis pela alimentação do tanque hipotético, consistem em
duas moto-bombas DC (Direct Current) proporcionais que operam com tensões entre 0 a 12V.
Podendo ser bomba de limpador pára-brisa de automóveis ou bomba de sucção submersível de
aplicação náutica. A água drenada (ou injetada) no tanque proporcionará uma turbulência
acentuada, tornando a medição menos precisa, sendo necessário o projeto de filtros para atenuar o
ruído provocado.
2.2.2 Transdutor de nível
A medição do nível é feita por sensores ultrassônicos. Eles apresentam uma medição
contínua e precisa do nível de produtos líquidos ou sólidos armazenados em tanques ou
reservatórios. Fundamenta-se na emissão de pulsos ultrassônicos de alta frequência por um sensor
instalado em cima do tanque que são refletidos pelo fluido. O sensor utiliza cristais piezoeléctricos
de alto desempenho para gerar curtos impulsos de ultrassom, na forma de ondas sonoras. Estes
pulsos são direcionados para o fluido, de onde é refletida e retorna para o elemento receptor do
transdutor. O tempo de trânsito (ida e volta) das ondas sonoras de alta freqüência é convertido em
sinal de tensão. O microcontrolador irá receber o sinal de tensão vindo do transdutor de nível e
interpretá-lo em altura. Na calibração, implementada via software, foi criada uma região de
restrição da medição que tornará o controle inativo para determinadas alturas (muito baixas),
aumentando a confiabilidade do sistema sensor.
2.3 Simulação Computacional
O interesse na simulação é verificar como responde o modelo desenvolvido para uma
variedade de sinais de entrada aplicados ao sistema. Estes sinais, de grande utilização didaticamente
representam, com simplicidade, sinais que poderiam ser aplicados na prática. Para isso, a entrada do
sistema é justamente a altura de referência ao qual o fluido contido no tanque deve estacionar.
Objetivo da simulação é utilizar alguns dos muitos recursos da biblioteca do Matlab/Simulink para
melhor ajustar os parâmetros do modelo em questão à realidade. Outro ponto relevante é a
utilização de técnicas de controle para melhorar o desempenho da resposta do sistema, testando a
necessidade do emprego das ações de Controle Integral e/ou Derivativa, do Controlador Digital
PID. Como não é o foco do presente trabalho o ajuste ótimo do sistema, os parâmetros do PID
foram estimados a partir de ajustes, a cada simulação. O Controle PID (Proporcional, Integral e
Derivativo) é o algoritmo de controle mais tradicional na indústria. Um controlador PID calcula
inicialmente o “erro” entre a sua variável controlada e seu valor desejado, e em função deste “erro”
gera um sinal de controle, de forma eliminar este desvio. O algoritmo PID usa o erro em três
módulos distintos para produzir a sua saída ou variável manipulada. O PID gera a sua saída
proporcionalmente ao erro, proporcionalmente à integral do erro e proporcionalmente à derivada do
erro (OGATA, 2003).
Para a simulação se aproximar ainda mais do processo físico, foram adicionadas as não
linearidades intrínsecas dos sensores e atuadores: saturação e zona morta. Também foi acrescentado
um Delay, devido ao atraso computacional gerado pelo processamento numérico de cada cálculo
matemático da lei de controle e os efeitos de amostragem e quantização dos conversores A/D e D/A

do microcontrolador. Além disso, foi utilizado um artifício que introduz um ruído branco no
sistema, o recurso Band-Limited White Noise, que possibilita simular o comportamento de uma
turbulência gerada pelas bombas ao injetar (ou drenar) água do tanque. O diagrama de blocos
completo do sistema simulado pode ser visto na Figura 3:
Figura 3 – Diagrama de blocos do sistema no MATLAB®/Simulink
Fonte: BRITO, P.V.G.C, 2013
O modelo matemático do tanque, concebido através da Equação 8, foi representado no
Simulink pelo diagrama de blocos da Figura 4, fornecendo as Equações 12 e 13, que serão
prontamente introduzidas na lei de controle da Equação 14.
Figura 4 - Diagrama de blocos do tanque cônico no MATLAB®/Simulink
Fonte: BRITO, P.V.G.C, 2013

(12)
(13)
(14)
Substituindo a Equação 14 na Equação 8, o sistema torna-se o sistema linear da Equação 11.
Essa substituição é feita através da realimentação notada na Figura 3. Na Figura 5, podemos
visualizar com mais detalhes a arquitetura do item “Controlador”. O diagrama de blocos do
Controlador Digital PID:
Figura 5 – Diagrama de blocos do Controlador Digital PID no MATLAB®/Simulink
Fonte: BRITO, P.V.G.C, 2013
Os parâmetros do controlador discreto foram escolhidos de acordo com as diversas
simulações, pois os mesmos seriam alterados de acordo com o protótipo a ser construído. Além da
simulação, que confirma a linearização da planta frente ao controlador digital genérico, foi
desenvolvido o algoritmo de controle em Linguagem C na IDE (Integrated Development
Environment) do microcontrolador utilizado. No código do controlador digital, foi possível calibrar
os sensores para um tanque hipotético e foram feitas algumas modificações na estrutura do PID
Digital para que o mesmo seja mais eficiente na prática.
No algoritmo do microcontrolador foram inseridas funções que propiciam uma IHM
(Interface Homem-Máquina) ao utilizar um computador comunicando com o microcontrolador.

3 RESULTADOS E DISCUSSÃO
O trabalho apresentou estudos para desenvolvimento de sistema de controle automático de
nível de um tanque cônico não-linear utilizando um controlador linear. Em (ZHANG e SINGH.
2001) são feitas aplicações de linearização exata adaptativa em sistemas não-lineares. Eles
apresentam aplicações de linearização exata com estimadores recursivos para adaptação dos
parâmetros. Em (POUSEN, KOUVARITAKIS, e CANNON, 2001) foi utilizado à linearização
exata associada a controle preditivo baseado em modelo linear para controlar um processo de dois
tanques acoplados.
O controle linear robusto aplicado a sistemas não-lineares foi objeto de estudo da tese de
doutorado de Franco em (FRANCO, 2006). Ele utilizou a técnica de linearização exata robusta,
capaz de gerar sistemas lineares para aplicação de controladores lineares robustos. A principal
deficiência da linearização exata clássica utilizada no presente trabalho é a dependência dos valores
dos parâmetros do processo. Porém, optou-se pela metodologia clássica pelo julgamento que o
projeto proposto tem qualidade estritamente didática, não havendo alterações significantes nos
parâmetros da planta
Na Figura 6 verificamos a característica dinâmica discreta do sistema linearizado com uma
aplicação de uma entrada em degrau desconsiderando o ruído que, na prática, pode ser eliminado
utilizando filtros digitais.
0 2 4 6 8 10 120
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Tempo (s)
Altura
(m
)
Resposta ao Degrau
Figura 6 – Gráfico de Resposta ao degrau no MATLAB®
Fonte: BRITO, P.V.G.C, 2013
As diferentes respostas são conseqüências nas mudanças dos parâmetros do Controlador
Digital PID, que poderão ser sintonizados sempre que necessário via software de acordo com os
pré-requisitos do sistema.
A facilidade de ajuste dos parâmetros torna os Controladores Digitais largamente utilizados
na prática e, por isso, foram aproveitados no presente trabalho. Essas alterações são examinadas na
Figura 7:

Figura 7 – Gráficos de resposta ao degrau com ajustes no Controlador PID
Fonte: BRITO, P.V.G.C, 2013
Os resultados da simulação evidenciaram que a linearização exata por realimentação clássica
é adequada para a concepção de controladores lineares, pois o sistema torna-se linear do ponto de
vista do controlador, não acarretando dificuldades nas suas características de projeto.
4 CONCLUSÃO
O desenvolvimento do projeto é um grande passo para produzir e incentivar novos
conhecimentos no assunto. A pesquisa na área de controle de processos é de grande importância
para o estudante de engenharia, pois tem o objetivo de proporcionar experiências práticas que se
agregam ao conhecimento teórico, propiciando ao acadêmico a assimilação de conceitos e técnicas
utilizadas fora das salas de aula.
Nesse cenário, o trabalho mostra-se promissor para a construção futura de sistemas de
controle automático para processos complexos, e o amadurecimento dos estudos voltados para os
mais diversos interesses, tanto no âmbito industrial, como acadêmico.

5 REFERÊNCIAS
OGATA, Katsuhiko. Engenharia de Controle Moderno. 4 Ed. São Paulo, SP, BRASIL. Prentice
Hall, 2003
CAMPOS, M.C.M.M. e TEIXEIRA, H.C.G. Controles típicos de equipamentos e processos
industriais. Rio de Janeiro: Edgard Blucher, 2006
SHUNTA, Nonlinear Control of Liquid Level, Instrumentation Technology, 1976.
AGUIRRE, L. A. Introdução à Identificação de Sistemas: Técnicas Lineares e Não-lineares
Aplicadas a Sistemas Reais. Universidade Federal de Minas Gerais, 2000.
ZUBEN, P. V. Tópicos Avançados: Controle Robusto, Controle Adaptativo e Controle Inteligente.
DCA/FEEC/Unicamp, 2003.
BENJAMIN C. K.. Automatic Control Systems. 7th Edition, 1995.
CHARLES L. Phillips & ROYCE D. Harbour. Sistemas de Controle e Realimentação. Editora
Makron Books do Brasil, Edição, 2000.
DORF, Richard C.; BISHOP Robert H. Sistemas de Controle Moderno. 8 Ed. Rio de Janeiro, RJ,
BRASIL. LTC, 2001.
ACHY, A. R. A. Avaliação de Técnicas de Controle Aplicado a um Kit Didático Multivariável de
Controle de Nível. Universidade Federal da Bahia, 2008.
POUSEN, N. K.; KOUVARITAKIS, B.; CANNON, M. Nonlinear constrained predictive control
applied to a coupled-tank apparatus. IEE Proceedings - Control Theory Applications, v. 148, n. 1,
January 2001.
FRANCO, A. Controle Não-linear Robusto: um método baseado em uma Linearização por
Realimentação. Tese (Doutorado) - Departamento de Automação e Sistemas, Universidade Federal
de Santa Catarina - UFSC, 2006.
ZHANG, R.; SINGH, S.N. Adaptive output feedback control of an aeroelastic system with
unstructured uncertainties. Journal of Guidance, Control, and Dynamics, 2001.