
MINISTÉRIO DA DEFESA EXÉRCITO BRASILEIRO DEPARTAMENTO DE ... · GPS Global Positioning System HF...
43
MINISTÉRIO DA DEFESA EXÉRCITO BRASILEIRO DEPARTAMENTO DE CIÊNCIA E TECNOLOGIA INSTITUTO MILITAR DE ENGENHARIA CURSO DE GRADUAÇÃO EM ENGENHARIA CARTOGRÁFICA EDUARDO DA SILVA LEMA DEL RIO INTERAÇÃO COM ALVOS POR GPS E TRANSMISSÃO DE RÁDIO- FREQUÊNCIA Rio de Janeiro 2009
Transcript of MINISTÉRIO DA DEFESA EXÉRCITO BRASILEIRO DEPARTAMENTO DE ... · GPS Global Positioning System HF...
MINISTÉRIO DA DEFESA
EXÉRCITO BRASILEIRO
DEPARTAMENTO DE CIÊNCIA E TECNOLOGIA
INSTITUTO MILITAR DE ENGENHARIA
CURSO DE GRADUAÇÃO EM ENGENHARIA CARTOGRÁFICA
EDUARDO DA SILVA LEMA DEL RIO
INTERAÇÃO COM ALVOS POR GPS E TRANSMISSÃO DE RÁDIO-
FREQUÊNCIA
Rio de Janeiro
2009

2
INSTITUTO MILITAR DE ENGENHARIA
EDUARDO DA SILVA LEMA DEL RIO
INTERAÇÃO COM ALVOS POR GPS E TRANSMISSÃO DE RÁDIO-FREQUÊNCIA
Iniciação à Pesquisa apresentada ao Curso de Graduação em
Engenharia Cartográfica do Instituto Militar de Engenharia, como
requisito parcial para a obtenção do título de Bacharel em
Engenharia Cartográfica.
Orientador: Luiz Felipe Coutinho Ferreira da Silva – D.C.
Rio de Janeiro
2009

3
“Imaginação é mais importante que conhecimento”
ALBERT EINSTEIN
4
SUMÁRIO
LISTA DE FIGURAS .............................................................................................................. 6
LISTA DE TABELAS.............................................................................................................. 7
LISTA DE SIGLAS.................................................................................................................. 8
RESUMO .................................................................................................................................. 9
ABSTRACT............................................................................................................................ 10
1 INTRODUÇÃO .................................................................................................................. 11
1.1 INTERAÇÃO COM ALVOS ................................................................................................. 11
1.2 GPS................................................................................................................................ 12
1.3 RFID .............................................................................................................................. 13
1.4 GPS X RFID................................................................................................................... 15
2 APLICAÇÕES DA INTERAÇÃO POR GPS E RFID................................................... 17
2.1 GPS................................................................................................................................ 17
2.2 RFID .............................................................................................................................. 17
2.3 CONSIDERAÇÕES ADICIONAIS......................................................................................... 18
3 ALTERNATIVA DE POSICIONAMENTO................................................................... 20
3.1 IMPLEMENTAÇÃO NA URCA............................................................................................ 21
3.2 AUMENTO DE PRECISÃO POR RESSECÇÃO ESPACIAL ...................................................... 24
4 IMPLEMENTAÇÃO......................................................................................................... 26
4.1 1KEG: 1° DIA.................................................................................................................. 27
4.2 1LSV: 2° DIA .................................................................................................................. 28
4.3 1KEG & 1LSV: 3° DIA .................................................................................................... 29
4.4 CONSIDERAÇÕES ............................................................................................................ 30
5 MAPEAMENTO DOS POSTES ...................................................................................... 31
5.1 TÉCNICAS CONVENCIONAIS............................................................................................ 31
5.2 NOVAS POSSIBILIDADES ................................................................................................. 32
5.2.1 Medição Automática e Manual de Postes .............................................................. 32
5
5.2.2 Fotogrametria Noturna.......................................................................................... 33
6 CONCLUSÕES E COMENTÁRIOS FINAIS ................................................................ 36
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 37
ANEXO A ............................................................................................................................... 39
ANEXO B................................................................................................................................ 40
APÊNDICE............................................................................................................................. 42

6
LISTA DE FIGURAS
FIG 1 SISTEMA DE INFORMAÇÕES RODOVIÁRIAS BASEADO NO RFID........................................ 16
FIG 2 ETIQUETA RFID ATIVA E LEITOR RFID, À ESQUERDA E À DIREITA RESPECTIVAMENTE. .. 23
FIG 3 RESSECÇÃO ESPACIAL EMPREGADA NO GPS.................................................................... 24
FIG 4 VISTA AÉREA DO IME COM A REGIÃO DE MEDIÇÕES E O MARCO DO IBGE EM DESTAQUE.
.......................................................................................................................................... 26
FIG 5 GRÁFICO RSSIXDISTÂNCIA COM A LINHA DE TENDÊNCIA PARA A ETIQUETA 1KEG......... 27
FIG 6 GRÁFICO RSSIXDISTÂNCIA COM A LINHA DE TENDÊNCIA PARA A ETIQUETA 1LSV. ........ 28
FIG 7 GRÁFICO RSSIXDISTÂNCIA RELATIVO À MEDIÇÃO SIMULTÂNEA COM AMBAS AS
ETIQUETAS. ....................................................................................................................... 29
FIG 8 IMAGEM ORBITAL DE VIA HOLANDESA COM POSTES EM DESTAQUE.................................. 32
FIG 9 FOTO AÉREA NOTURNA. ................................................................................................... 34
FIG 10 FOTO NOTURNA DE LONDRES TOMADA DE HELICÓPTERO............................................... 35
FIG 11 MAPA DE ILUMINAÇÃO VIÁRIA DA URCA, QUADRA RELATIVA AO FORTE SÃO JOÃO. .... 39

7
LISTA DE TABELAS
TABELA 1 DIFERENTES APLICAÇÕES DE ADESIVOS PASSIVOS EM FUNÇÃO DE SUA FREQÜÊNCIA.14
TABELA 2 DADOS RELATIVOS A ETIQUETA 1KEG E REPRESENTADOS NA FIGURA 4. .................. 27
TABELA 3 DADOS RELATIVOS A ETIQUETA 1LSV E REPRESENTADOS NA FIGURA 5.................... 28
TABELA 4 DADOS RELATIVOS A ETIQUETA 1KEG E REPRESENTADOS NA FIGURA 6. .................. 29
TABELA 5 DADOS RELATIVOS A ETIQUETA 1LSV E REPRESENTADOS NA FIGURA 6.................... 29
TABELA 6 PRECISÕES TEÓRICAS PARA DM=40M E H=10M ........................................................ 43

8
LISTA DE SIGLAS
DGPS Differential GPS
DoD Department of Defense
EPC Electronic Product Code
GLONASS Global’naya Navigatsionnaya Sputnikowaya Sistema
GNSS Global Navigation Satellite System
GPS Global Positioning System
HF High-frequency
IBGE Instituto Brasileiro de Geografia e Estatística
IME Instituto Militar de Engenharia
IrDA Infra-red Data Association
LBS Location Based Services
LF Low-frequency
NFC Near Field Communications
PPP Posicionamento Preciso por Ponto
RADAR Radio Detection and Ranging
RFID Radio-Frequency Identification
RSS Received Signal Strength
RSSI Received Signal Strength Indication
RTK Real Time Kinematics
RTLS Real Time Location System
SA Selective Availability
ToA Time of Arrival
UHF Ultra-High-frequency
9
RESUMO
É provável haver novas possibilidades a serem descobertas na interação com alvos
distantes que utilizem o GNSS ou apenas a transmissão de rádio-frequência. Afinal, houve
uma sucessão de importantes acontecimentos relacionados a esses segmentos. Cite-se: a
desativação da SA, o lançamento dos primeiros satélites do sistema Galileo e o
desenvolvimento dos primeiros satélites da constelação do sistema Beidou/Compass, a série
IIF de satélites do GPS a ser lançada, além do custo e dimensão cada vez menores das antenas
e das tags - etiquetas ou adesivos - RFID. Esses fatos são recentes demais e por isso podem
não ter sido plenamente explorados, o que justifica trabalhos como esse. Além de se realizar
uma breve abordagem das aplicações do GPS e do RFID, foi proposta uma alternativa de
posicionamento empregando RFID. Mostrou-se que a precisão desse sistema, em condições
ideais, seria de 22m. Também realizou-se testes preliminares com 2 etiquetas RFID ativas e
um leitor, obtendo-se de mais notório uma linearidade entre a indicação da intensidade do
sinal recebido pelo leitor e sua distância à etiqueta, para distâncias inferiores a 25m. Isso, se
verdadeiro, pode melhorar sensivelmente a precisão do sistema proposto, conforme exposto
no fim do capítulo 3. Para o funcionamento do sistema proposto é necessário,
preliminarmente, uma base cartográfica dos postes da região. Dada a escassez desse produto,
faz-se uma apresentação de possibilidades de atender esse propósito com técnicas
convencionais e propõe-se novos métodos para atingir esse fim.
10
ABSTRACT
It seems to be new possibilities to be discovered on the interaction with far targets by
GNSS or only radio-frequency transmission. After all, there was many important events
related to those fields. Some of them: the deactivation of the SA, the launch of the
firstsatellites of Galileo system and the development of the first satellites of the
Beidou/Compass constelation, the IIF series of GPS satellites about to be launched, and the
crescent reduction of both the cost and the dimensions of RFID tags and antennas. These facts
are too early and may not have been fully explored, which justify works like this. It was done
a quick presentation of the aplications of GPS and RFID. Also, it was proposed an alternative
positioning system with RFID. It was shown that the precision of this system would be 22m
in an ideal environment. It was done too, preliminary tests with 2 active tags and a reader, and
it was observed a linear relationship amongst the variables RSSI and tag-reader distance, for
distances lower than 25m. If this is really true, the precision of the system proposed could be
sensibly augmented as showned by the end of chapter 3. The establishment of the proposed
system demands a preliminary lamp-posts map of the region. Due to the sparseness of this
product, it was done a presentation of possible solutions with conventional techniques and
also a proposition of new methods to build such a map.

11
1 INTRODUÇÃO
1.1 Interação com alvos
A interação com alvos visa obter informações a seu respeito. Essas informações podem
ser intrínsecas a eles, como suas propriedades físicas - radiância, cor, massa, etc - ou não. É o
caso, por exemplo, das suas coordenadas, uma informação da porção do espaço
tridimensional que num determinado instante encontra-se ocupada por esse alvo. Além disso,
essa interação pode se dar remotamente ou a pequenas distâncias.
Ao tatearmos um objeto desconhecido conhecemos sua textura, ao pesarmos ele numa
balança obtemos sua massa, ao instalarmos nele um receptor GPS, obtemos sua posição.
Nesses casos, para a aquisição dos dados foi necessário estar bem próximo ao alvo da
interação. Embora esses exemplos sejam muito comuns, eles não esgotam a semântica do
termo. Conforme dito essa interação pode ser feita à distância, como acontece na obtenção de
coordenadas de pontos inacessíveis - picos de morro por exemplo - via intersecção à vante,
onde a interação com o alvo se dá através de uma Estação Total. Ainda na Engenharia
Cartográfica, tem-se o sensoriamento remoto, o qual por definição consiste na interação com
alvos remotamente, e cuja importância e aplicações não carecem de comentários.
À medida que implementam-se novas técnicas de interação com alvos distantes, surgem
aplicações alternativas, e também novas possibilidades a serem descobertas. Por exemplo, o
aumento crescente da resolução espacial de sensores orbitais tem viabilizado novas aplicações
em serviços de inteligência além de ser uma alternativa para mapeamentos sistemáticos a
escalas menores. Outro caso é a obtenção das coordenadas de um alvo distante por GPS. Com
o desenvolvimento da internet 3G pode-se, por exemplo, obter as coordenadas de um celular
amigo dotado de GPS. Indo além, com uma base cartográfica instalada num celular com
conexão à internet 3G, pode-se locar “amigos” nessa base, independente de haver GPS no
celular realizando-se uma triangulação com torres de celular próximas. Esse serviço é
denominado páginas amarelas móvel, [GUIMARÃES, 2008], e possui um protótipo gratuito,
o GoogleLatitude.
É provável haver novas possibilidades a serem descobertas na interação com alvos
distantes que utilizem o GNSS ou apenas a transmissão de rádio-frequência. Afinal, houve
uma sucessão de importantes acontecimentos relacionados a esses segmentos. Cite-se: a

12
desativação da SA, o lançamento dos primeiros satélites do sistema Galileo e o
desenvolvimento dos primeiros satélites da constelação do sistema Beidou/Compass, a série
IIF de satélites do GPS a ser lançada, além do custo e dimensão cada vez menores das antenas
e das tags - etiquetas ou adesivos - RFID. Apesar disso, esses fatos são recentes demais e por
isso podem não ter sido plenamente explorados, o que justifica trabalhos como esse.
1.2 GPS
Originalmente concebido para fins militares, o GPS é uma tecnologia estratégica e
permanece sobre o controle do DoD. Por isso diversos países esforçam-se em desenvolver um
sistema alternativo de posicionamento, tal como o GLONASS russo.
Atualmente citam-se 4 sistemas globais de posicionamento por satélite: GPS, GLONASS,
Galileo e Beidou/Compass. Eles compõem o GNSS. Sendo a técnica empregada por esses
sistemas - grosso modo - a mesma, e considerando a consolidação das informações
disponíveis para o GPS, um estudo que vise a potencialidade de novas aplicações para o
GNSS pode ater-se sem perda de generalidade ao GPS.
Em português, GPS significa Sistema de Posicionamento Global. É uma sigla incompleta
por não fazer referência à técnica empregada, isto é, o posicionamento espacial. Ou seja, o
GPS é um sistema de posicionamento espacial que funciona, em teoria, em qualquer parte da
Terra.
Nominalmente é constituído de 24 satélites a 20000km de altitude, dispostos em seis
planos orbitais igualmente espaçados entre si e com 6 satélites cada. Os planos encontram-se
inclinados de 55° em relação ao Equador e o período de cada satélite é de 12h siderais.
Essa configuração permite que a todo momento e em qualquer lugar da Terra se visualize
pelo menos 4 satélites - considerando um cone de visada de 75° de abertura. Com isso, pode-
se obter as coordenadas de um ponto da Terra a qualquer instante.
A técnica de obtenção das coordenadas é a rádio-localização pelo método do tempo de
chegada - ToA. O receptor GPS calcula sua distância a cada satélite a partir do tempo que a
onda de rádio transmitida pelo satélite leva para chegar ao receptor. Sendo conhecidas as
coordenadas dos satélites, a coordenada do receptor necessitará de pelo menos 4 satélites para
poder ser estimada, pois ter-se-á um sistema de equações com 4 incógnitas, a saber: as 3
coordenadas φ, λ e h, e o tempo. O tempo surge como incógnita devido ao não-sincronismo
entre os relógios atômicos dos satélites e os relógios ordinários dos receptores.

13
Quando o GPS começou a funcionar com sua plena capacidade, em 1993, ele possuía o
mecanismo de disponibilidade seletiva - SA - que deteriorava a precisão dos levantamentos
para usuários não autorizados, o que inclui os brasileiros. Para se ter uma idéia, com a SA a
precisão horizontal dos receptores de navegação era de 150m a 200m.
Finalmente, em 1° de maio de 2000, o governo americano desativou a SA, elevando a
precisão fornecida para usuários comuns a um valor cerca de 10 vezes superior. Com isso,
atualmente obtém-se nos receptores de navegação coordenadas com precisão horizontal de
10m a 15m.
A abertura do GPS ao uso civil sem limitações na precisão fez surgir diversas aplicações
notáveis para esse sistema. Além disso, o rápido desenvolvimento tecnológico de diversos
setores e dos próprios receptores possibilitaram a adaptação do GPS a várias tecnologias.
Como exemplos há os relógios de pulso com GPS e a difusão dos celulares com GPS.
1.3 RFID
Uma tecnologia que vem ganhando espaço na mídia e no meio acadêmico. A
identificação por rádio-frequência - RFID - surge na Segunda Guerra Mundial, ao ser
utilizada em conjunto com o sistema RADAR para a identificação de aeronaves amigas e
inimigas - Identification Friend or Foe. As aeronaves possuíam uma caixa que alterava a
potência e a freqüência do sinal de RADAR recebido, retransmitindo à central o sinal
alterado, o que viabilizava a identificação de aliados.
Com o progresso da eletrônica as caixas reduziram de tamanho e de custo passando a ser
associadas a etiquetas ou adesivos - tags. Além disso, também se miniaturizaram as antenas, o
que gerou a portabilidade dos leitores dos sinais. De fato, hoje efetua-se a identificação por
rádio-frequência com leitores de mão de praticamente qualquer objeto, dada as dimensões
reduzidas das etiquetas RFID e das antenas.
Basicamente, um sistema de identificação por rádio-frequência consiste de adesivos, de
leitores e de um servidor. Os alvos da interação são marcados com os adesivos RFID. O leitor
detecta e lê as informações dos objetos baseados nas ondas de rádio transmitidas por seus
adesivos RFID. Em seguida o leitor transmite os alvos detectados e a informação coletada ao
servidor. Note-se que apesar de a sigla RFID citar apenas a identificação, na verdade a
interação entre adesivos e leitores não é restrita a isso, uma vez que diversas informações
podem ser transmitidas.

14
Todos os adesivos RFID baseiam-se na transmissão de seus dados via wi-fi. Todavia, eles
se dividem em ativos e passivos. Os passivos possuem alcance mais restrito e não necessitam
de baterias para funcionar. Isso porque a energia para emissão do sinal de rádio advém da
absorção do sinal transmitido pela antena. Já os adesivos ativos necessitam de baterias e por
isso podem transmitir sinais bem mais potentes e consequentemente possuem alcance maior.
Em contrapartida, sua vida útil é limitada à da bateria e possuem um custo maior.
O alcance de adesivos ativos basicamente está associado à potência de sua bateria,
situando-se em geral entre 20m e 30m, podendo superar esses valores. O alcance dos adesivos
passivos é mais previsível, variando de acordo com a sua freqüência de operação. A tabela a
seguir, adaptada de [GLOVER & BATT, 2006] contém informações relativas aos adesivos
passivos:
Tabela 1 Diferentes aplicações de adesivos passivos em função de sua freqüência. Frequência Alcance Uso corrente
LF 0,5m Identificação de animais
HF 3m Controle de acesso em edifícios
UHF 9m Caixas e Páletes
Microondas >10m Identificação de veículos de todos os tipos
O atual estado da arte restringe-se a identificação, e em alguns casos, a localização, ainda
precária, de alvos etiquetados por meio do EPC. Nesse âmbito substitui e supera o código de
barras, por ser capaz de transmitir dados wi-fi. Isso amplia a gama de dados possível de ser
armazenada, facilita a atualização dos dados armazenados, possibilita a leitura dos EPC a
distância, abre a possibilidade de estabelecimento de RTLS, além de resistir bem mais à
intempéries diversas. De fato, a rede Wal-Mart americana estabeleceu a 100 de seus principais
fornecedores que começassem a oferecer seus produtos etiquetados com o RFID no início de
2005, o que impulsionou o investimento em pesquisas para uso do RFID em cadeias de
suprimento.
Apesar de o RFID estar se popularizando como uma nova versão do código de barras
busca-se o uso pleno de suas potencialidades. Isso pode ser verificado na bibliografia deste
texto. Além disso, dentre todas as possibilidades citadas anteriormente, o estabelecimento de
sistemas de posicionamento possui ligação direta com a Engenharia Cartográfica.

15
1.4 GPS x RFID
Tanto o GPS como o RFID realizam a interação com alvos por transmissão de rádio-
frequência. Além disso, tanto um como o outro viabilizam a localização do alvo. Porém, o
GPS fornece apenas a posição de um alvo, ao passo que o RFID pode fornecer informações
diversas. Mas, ainda que o RFID não esteja restrito ao posicionamento, ele ainda não substitui
o GPS, pois a precisão da posição fornecida por GPS geralmente é superior - especialmente
para o caso de receptores de dupla-frequência.
A fim de comparar essas tecnologias que possuem semelhanças, segue uma situação
apresentada em [ASON, 2008], onde pode-se optar por uma delas exclusivamente, ou ambas.
Seja um Sistema de Informações Rodoviárias instalado previamente no computador de
bordo de um veículo. Com um receptor GPS pode-se locar em tempo real a posição desse
veículo na base cartográfica de seu sistema. Com isso o computador de bordo pode retornar
ao motorista as condições daquela rodovia tais como velocidade máxima permitida, taxa de
acidentes, condições da pista, risco de deslizamentos de terra, dentre outras. Um problema
desse sistema é que muitas dessas informações variam com o tempo. Por exemplo, no início
desse ano fortes chuvas causaram deslizamentos de terra e destruição de vários trechos de
rodovias em Santa Catarina. Nesse caso, apenas o GPS não é suficiente para atualizar essas
informações ao seu sistema. Pois a cada atualização dos dados, o usuário necessita reinstalar a
base com as últimas informações. Por isso apenas o GPS pode ser insuficiente para gerir
plenamente um sistema de informações dinâmico como o de rodovias.
Agora caso esse veículo, no lugar do receptor GPS, possua um leitor RFID, e a rodovia
tenha sido etiquetada com o RFID ao longo de sua extensão, não há necessidade de instalação
prévia das condições da rodovia para o sistema. Afinal, cada etiqueta armazenaria essas
informações, as quais requerem pouca memória. Assim, a medida que o veículo se deslocasse
pela rodovia o leitor RFID faria o download das condições da rodovia constantes do adesivo
RFID relativo ao trecho correspondente. Note-se que com a implementação do RFID a base
cartográfica não é mais necessária, pois no caso do GPS ao se atualizar a coordenada do
veículo havia necessidade de integrá-la à base para a obtenção das condições rodoviárias
previamente instaladas. Além de não necessitar realizar o prévio download das informações
da rodovia, caso se necessite atualizar qualquer das informações da rodovia, basta fazê-lo na
etiqueta RFID do trecho correspondente.

16
Nesse exemplo, o RFID substitui o GPS constituindo-se numa solução superior à
fornecida pelo GPS.
Segue uma ilustração do sistema:
Fig 1 Sistema de Informações Rodoviárias baseado no RFID.
FONTE: [ASON, 2008].
Ainda nesse exemplo rodoviário, uma desvantagem do RFID em relação ao GPS é a
qualidade do posicionamento fornecido. Ainda que nesse caso essa informação não seja
relevante, cabem alguns comentários. O RFID pode fornecer a posição do veículo
armazenando a quilometragem da rodovia nas etiquetas, ou as suas próprias coordenadas.
Assim, havendo uma base cartográfica previamente instalada pode-se locar nela a posição do
veículo baseado na última etiqueta lida. Por isso a precisão da posição locada com o RFID é
inferior à locada com o GPS. Contudo, note-se que o RFID é um sistema independente, uma
vez que a liberação do GPS encontra-se ligada ao DoD. Portanto o RFID também serviu aqui
como RTLS e uma alternativa ao GPS.
A qualidade da posição fornecida pelo RFID nesse RTLS pode ser incrementada
simplesmente aumentando a quantidade de etiquetas RFID na rodovia, ou, em outras palavras,
diminuindo o espaçamento entre elas. Esse RTLS funcionaria literalmente como um grid de
coordenadas. Afinal, tendo o sentido de deslocamento do veículo na rodovia, pode-se locá-lo
entre a etiqueta de quilometragem 100km e 101km por exemplo. Num sistema ideal, de erro
nulo, o RFID materializaria o grid.
17
2 APLICAÇÕES DA INTERAÇÃO POR GPS E RFID
Tanto o GPS como o RFID atravessam uma fase de crescente difusão e conseqüente
popularização pela sociedade. De fato, tem-se para o GPS, além dos receptores de navegação
de custos cada vez menores, os celulares com GPS. Além disso, o RFID também vem
ganhando importância na imprensa científica. Isso é observado pela crescente publicação de
livros e artigos relacionados.
Em decorrência desses fatos surge um amplo espectro de aplicações para ambas as
tecnologias. Esse capítulo fará uma breve apresentação delas.
2.1 GPS
Com a desativação da disponibilidade seletiva - SA - em 2000 ampliou-se sua gama de
aplicações. Além disso, o GPS já é ferramenta para diversos ramos da ciência.
Algumas das principais aplicações [MONICO, 2007]:
· Geodinâmica
· Navegação global e regional
· LBS
· Agricultura de precisão
· Estudos relacionados à atmosfera
· Fotogrametria
· Levantamentos Cadastrais
A explicação detalhada dessas aplicações foge ao escopo desse texto. Por isso, para
maiores esclarecimentos sobre essas aplicações consultar: [MONICO, 2007] e [EL-
RABBANY, 2002].
2.2 RFID
Algumas das aplicações encontradas além das apresentadas no capítulo 1 são:
18
· Transporte público
· Controle de estoque
· Gestão de pessoas
· Pagamento automático em lojas
· LBS
· RTLS
Novamente, o detalhamento dessas aplicações foge ao escopo desse texto. Para
explicações ou ainda, para alternativas a essas apresentadas consultar [ASON, 2008],
[GLOVER & BATT, 2006]. Uma referência para aplicações domésticas é [GRAAFSTRA,
2006].
2.3 Considerações Adicionais
Por meio das técnicas de rádio-localização há a possibilidade teórica de estabelecer
sistemas de posicionamento, RTLS, independentes, com o RFID. Todavia nada impeça a
agregação de dados GPS a um sistema desse tipo, a importância de se obter alternativas ao
GPS é estratégica dada sua subordinação ao DoD. Além disso, com o RFID a interação com
alvos pode não se restringir ao seu posicionamento, o que pode originar aplicações ainda mais
amplas que o GPS.
Mesmo com a possibilidade teórica de se integrar a um RTLS com RFID uma ou várias
das aplicações citadas no item anterior, deve-se ter em mente o caráter incipiente do
posicionamento com RFID. De fato, [GLOVER & BATT, 2006] e [GRAAFSTRA, 2006]
citam a deficiência atual do RFID ao ser utilizado com esse fim, dado o alcance limitado das
etiquetas e a falta de um padrão de propagação de sinal bem definido, sem considerar as
dificuldades naturais de qualquer sistema de rádio-localização. Tem-se ainda, em
[HALLBERG, 2002] uma comparação entre o desempenho do RFID, do IrDA e do Bluetooth
para fins de posicionamento; na concepção dos autores, o mais adequado para esse fim é o
Bluetooth, embora não seja apontada como inviável a solução via RFID.
Apesar das dificuldades apresentadas por diversas fontes bibliográficas, há de se
considerar o constante progresso científico que pode em algum momento solucionar ou
atenuar os problemas decorrentes do posicionamento com o RFID. Deve-se levar em conta
também que em várias aplicações não são necessárias coordenadas tão precisas quanto as de

19
um receptor GPS e ainda, a possibilidade de se utilizar bases cartográficas construídas
anteriormente. Por exemplo, dependendo da aplicação podem-se incluir condições de
contorno. De fato, dado um veículo numa metrópole, isso, numa base, limita as suas possíveis
posições a vias urbanas. Unindo esse fato a estimativas do RTLS pode-se obter, ao invés da
coordenada precisa, talvez o bairro ou até mesmo o quarteirão desse bairro onde ele se
encontra, por exemplo.
Essa informação pode ser suficiente para emergências médicas, ou para algumas
operações de policiamento, por exemplo. Afinal, com isso, um oficial pode conhecer a
distribuição de seus homens no centro metropolitano ao saber o quarteirão onde eles se
encontram, podendo ter uma noção da força policial de uma dada região, além de ter um
controle maior e atualizado em tempo real sobre o seu efetivo. Em ambos os casos há uma
otimização da tomada de decisão, afinal o deslocamento e o controle dos homens ou a escolha
da ambulância mais próxima ao local da ocorrência é facilitada.
Ao procurarmos uma pessoa por seu endereço - para serviços de entrega, ou para vendas,
por exemplo - a seguinte condição de contorno é aplicada: Uma pessoa vive em sua casa. De
que interessa nesse caso saber se esta pessoa está na cozinha ou no quarto? Pois é o que se
obtém ao se buscar coordenadas altamente precisas. Afinal, a diferença entre ter as
coordenadas exatas dessa pessoa e saber seu endereço, nessa situação hipotética, é essa: saber
em qual cômodo ela se encontra. Além do que, em geral, coordenadas mais precisas implicam
um custo maior.
20
3 ALTERNATIVA DE POSICIONAMENTO
Tendo em vista o problema da localização de terminais móveis em situações como
emergências médicas ou ocorrências policiais, idealizou-se um sistema de posicionamento
para ser utilizado nas vias de centros urbanos. Por isso esse sistema possui diversos dados
preliminares como: extensa rede de distribuição da energia elétrica e da telefonia, além de
bases cartográficas feitas por órgãos estatais como prefeituras ou gratuitas como o
googlemaps. Unindo-se a isso o fato de que uma grande parcela da população de metrópoles
brasileiras possui celular, e que diversas tecnologias foram adaptadas com sucesso para esses
dispositivos, tais como GPS, câmeras digitais e mp4 players, não é nada absurdo admitir a
possibilidade de se adaptar a tecnologia de leitores RFID ou de etiquetas RFID para celulares.
Fazendo um paralelo da tecnologia GPS com a idéia do sistema idealizado com
tecnologia RFID, os satélites seriam os adesivos RFID e os receptores GPS seriam os leitores
RFID. Nesse sistema alternativo os leitores RFID poderiam estar acoplados a celulares,
semelhantemente ao que pode ocorrer com a recepção dos sinais GPS. Agora, precisa-se
distribuir as etiquetas pelas vias urbanas.
Como o alcance dos adesivos passivos ainda é muito limitado serão utilizados os ativos.
Além disso, esse primeiro sistema é uma alternativa que, em princípio, não empregará
técnicas de rádio-localização. Por isso eles precisam estar bem distribuídos ao longo das vias,
pois a idéia aqui é associar a sua identidade à sua coordenada num banco de dados, ou
armazenar a coordenada diretamente na memória do adesivo. Buscando a possibilidade de
futuramente associar o consumo de energia necessário não às baterias, mas à rede elétrica pré-
existente, escolheu-se como alvos das etiquetas os postes das vias urbanas.
Resumindo, todos os postes de uma região são etiquetados com o RFID ativo. As
identidades das etiquetas serão associadas às coordenadas dos respectivos postes. Os alvos da
localização seriam os leitores RFID, os quais poderiam ser acoplados a celulares, para
localizar pessoas, ou a veículos, como ambulâncias, patrulhas de polícia, bombeiros e
veículos ordinários. Planeja-se assim à semelhança do que já acontece com os receptores
GPS.
Portanto, dado um leitor RFID, ele detectaria a etiqueta mais próxima - em princípio,
aquela com sinal mais potente - e locaria sua posição numa base pré-existente
fundamentando-se na coordenada do poste etiquetado.
21
Um exemplo de aplicação seria uma situação de emergência médica. Supondo um
acidente num centro urbano, uma pessoa próxima ou a própria vítima com celular dotado de
leitor RFID, ao telefonar para a central de emergências médicas tem sua posição enviada
automaticamente para a central. Uma possível solução para o envio dessa informação seria
através de um torpedo. A central locaria essas etiquetas na sua base cartográfica tendo assim a
localização do telefonema - posteriormente será analisada a precisão. Além disso, caso todas
as ambulâncias também possuam os leitores RFID acoplados, isso implica a prévia
localização de cada uma delas nessa base. Assim, além de ter a localização da ocorrência,
pode-se otimizar a escolha da melhor ambulância para atender o chamado.
Outra aplicação seria para ocorrências policiais. Um oficial, por exemplo, teria a posição
dos seus homens numa base cartográfica da região policiada. Teoricamente os policiais
poderiam estar todos utilizando celulares com leitores RFID acoplados. Daí, sua posição
estaria associada à posição do poste etiquetado mais próximo. Quanto à atualização da
posição do policial, uma possibilidade seria o envio periódico, ou a cada mudança de
coordenada, de torpedos ao comando. Numa ocorrência o oficial poderia contactar o policial
mais próximo de maneira otimizada. Ou aumentar a eficiência de suas ordens, bem como
inibir atos de corrupção, por simplesmente ter maior controle sobre seu efetivo.
A fim de ter maiores informações sobre o desempenho desse sistema passe-se a um
projeto para implementação.
3.1 Implementação na Urca
Etiquetando-se os postes da quadra relativa ao Forte São João, com o RFID, a
distribuição dos sinais emitidos seria similar a distribuição da luz das suas lâmpadas, uma vez
que ambas são ondas eletromagnéticas. Por isso pode-se aproveitar algum mapa de
iluminação viária da região.
Em [LEMA, 2008] há uma breve análise da distribuição espacial dos postes, bem como o
mapa de iluminação viária da região de interesse. Nesse trabalho concluiu-se que os postes
estão bem distribuídos pelas vias, o que reitera a qualidade da associação postes/RFID. Além
disso, a distância entre os postes não supera a 35m, o que se situa dentro do limite de
operação das etiquetas ativas pesquisadas na web.
Supondo que o leitor RFID não erre ao identificar o poste mais próximo, a precisão da
posição obtida para o leitor terá para limite superior a maior dentre todas as semi-distâncias

22
entre os postes. Já que dada uma coordenada, o terminal móvel pode-se situar em qualquer
posição, a meio caminho entre o poste a ré ou o a vante. Afinal, caso o terminal se encontre
além do meio caminho entre o suposto poste associado e o poste a vante, por exemplo, isso
seria um absurdo, dado que o poste associado seria aquele com o sinal mais intenso, o que em
condições ideais corresponde ao mais próximo. Ou seja, supondo-se condições ideais, o erro
será menor que 0,5 35m× , ou seja, menor que 18m, o que é muito bom, pois ainda se situa
dentro do alcance do RFID ativo e é suficiente para as aplicações descritas anteriormente. O
caso de condições ideais implica não haver obstáculos entre os postes e os leitores e despreza-
se os efeitos de multicaminhamento, dentre outras simplificações. O fato é que a análise de
situações mais complexas foge ao escopo desse trabalho. Isso porque, dada a falta de
experiência nessa tecnologia e a dificuldade de obtenção dos componentes desse sistema, sua
implementação em condições ideais já constitui um desafio. Além disso, deve-se lembrar que
as etiquetas podem se localizar próximas às lâmpadas dos postes, e que os leitores estarão
próximos ao solo, o que pode atenuar bastante alguns desses problemas, especialmente devido
a não-obstrução da linha de visada. Afinal, [GUIMARÃES, 2004] aponta a obstrução da linha
de visada como o principal problema existente na rádio-localização de terminais móveis.
A precisão estimada é um valor autêntico desprezando o desnível entre o leitor e adesivo.
Caso o poste seja etiquetado nas proximidades de sua lâmpada, aí a distância a ser percorrida
pelo sinal da etiqueta será, pelo teorema de Pitágoras, considerando a altura dos postes de 5m,
2 218 5+ m, ou seja, 19m. Como margem de segurança considere-se a distância média entre
os postes de 40m e a sua altura de 10m. A precisão será de 22m o que continua dentro do
alcance das etiquetas RFID ativas.
Essa precisão de 22m ainda não considera a precisão das coordenadas utilizadas para os
postes. O cálculo teórico da precisão do sistema incluindo o erro da posição dos postes consta
no apêndice.
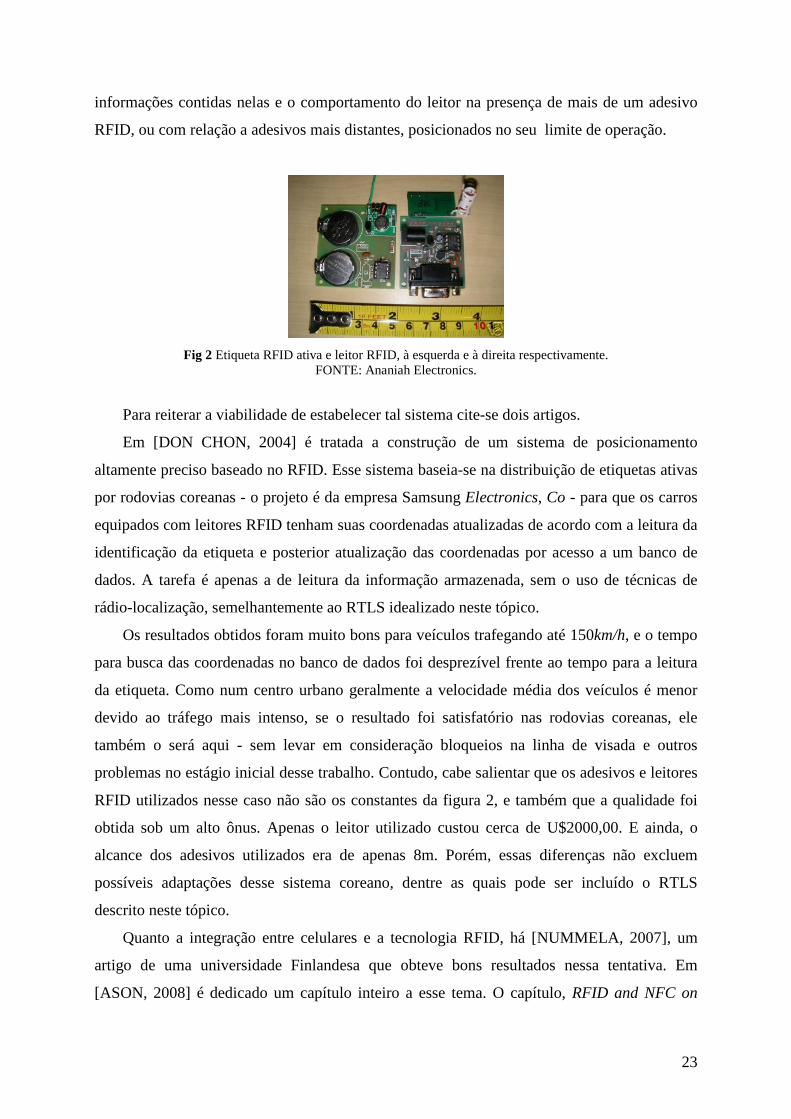
Para implementação adquiriu-se adesivos de 40m de alcance e leitores com indicação da
intensidade do sinal recebido - RSSI - de Ananiah Electronics, figura 2. A região de operação
do RTLS consta no mapa do anexo A. As especificações e o custo constam no anexo B.
Seria bom caso pudessem ser realizados previamente testes de desempenho com os
leitores e etiquetas desse fornecedor. Isso poderia ser feito com um número menor de
etiquetas num local aberto e tranqüilo, como uma praça, por exemplo. Afinal não foi atestado
o rigor do valor medido para o alcance dos RFID, tampouco sabe-se o tempo de leitura das
23
informações contidas nelas e o comportamento do leitor na presença de mais de um adesivo
RFID, ou com relação a adesivos mais distantes, posicionados no seu limite de operação.
Fig 2 Etiqueta RFID ativa e leitor RFID, à esquerda e à direita respectivamente.
FONTE: Ananiah Electronics.
Para reiterar a viabilidade de estabelecer tal sistema cite-se dois artigos.
Em [DON CHON, 2004] é tratada a construção de um sistema de posicionamento
altamente preciso baseado no RFID. Esse sistema baseia-se na distribuição de etiquetas ativas
por rodovias coreanas - o projeto é da empresa Samsung Electronics, Co - para que os carros
equipados com leitores RFID tenham suas coordenadas atualizadas de acordo com a leitura da
identificação da etiqueta e posterior atualização das coordenadas por acesso a um banco de
dados. A tarefa é apenas a de leitura da informação armazenada, sem o uso de técnicas de
rádio-localização, semelhantemente ao RTLS idealizado neste tópico.
Os resultados obtidos foram muito bons para veículos trafegando até 150km/h, e o tempo
para busca das coordenadas no banco de dados foi desprezível frente ao tempo para a leitura
da etiqueta. Como num centro urbano geralmente a velocidade média dos veículos é menor
devido ao tráfego mais intenso, se o resultado foi satisfatório nas rodovias coreanas, ele
também o será aqui - sem levar em consideração bloqueios na linha de visada e outros
problemas no estágio inicial desse trabalho. Contudo, cabe salientar que os adesivos e leitores
RFID utilizados nesse caso não são os constantes da figura 2, e também que a qualidade foi
obtida sob um alto ônus. Apenas o leitor utilizado custou cerca de U$2000,00. E ainda, o
alcance dos adesivos utilizados era de apenas 8m. Porém, essas diferenças não excluem
possíveis adaptações desse sistema coreano, dentre as quais pode ser incluído o RTLS
descrito neste tópico.
Quanto a integração entre celulares e a tecnologia RFID, há [NUMMELA, 2007], um
artigo de uma universidade Finlandesa que obteve bons resultados nessa tentativa. Em
[ASON, 2008] é dedicado um capítulo inteiro a esse tema. O capítulo, RFID and NFC on
24
Mobile Phones, apresenta os resultados da implementação de aplicações que usam leitores
RFID de curto alcance em celulares Nokia, para leitura de etiquetas passivas num raio inferior
a 20cm. Embora a necessidade seja por celulares com leitores de longo alcance, nada impede
que sejam realizadas leituras de etiquetas ativas com esses celulares. Todavia não encontrou-
se informações sobre possíveis leituras de adesivos ativos com esses celulares.
Sendo ainda muito incipiente, e dado o grande número de variáveis a serem analisadas, é
difícil aprofundar-se nas especificações desse RTLS sem testes preliminares com os
componentes propostos. Por isso o capítulo seguinte apresenta alguns testes realizados.
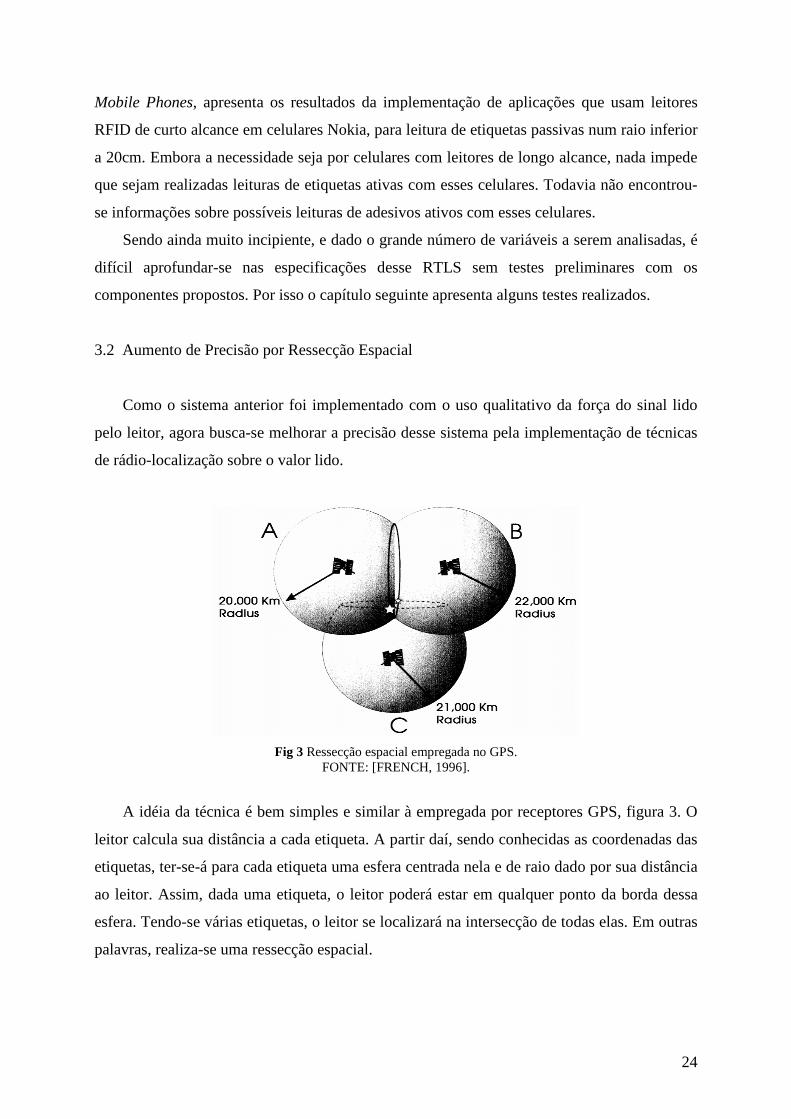
3.2 Aumento de Precisão por Ressecção Espacial
Como o sistema anterior foi implementado com o uso qualitativo da força do sinal lido
pelo leitor, agora busca-se melhorar a precisão desse sistema pela implementação de técnicas
de rádio-localização sobre o valor lido.
Fig 3 Ressecção espacial empregada no GPS.
FONTE: [FRENCH, 1996].
A idéia da técnica é bem simples e similar à empregada por receptores GPS, figura 3. O
leitor calcula sua distância a cada etiqueta. A partir daí, sendo conhecidas as coordenadas das
etiquetas, ter-se-á para cada etiqueta uma esfera centrada nela e de raio dado por sua distância
ao leitor. Assim, dada uma etiqueta, o leitor poderá estar em qualquer ponto da borda dessa
esfera. Tendo-se várias etiquetas, o leitor se localizará na intersecção de todas elas. Em outras
palavras, realiza-se uma ressecção espacial.

25
O problema então é calcular essa distância. Como as etiquetas, nesse caso, fornecem o
RSSI, a opção natural é por técnicas de rádio-localização baseadas no RSSI. Agora tem-se um
novo problema: obter a distância a partir de medições da intensidade do sinal recebido. Para
isso existem várias possibilidades e alguns testes preliminares foram realizados para verificar
a qualidade e a integridade do RSSI medido pelo leitor. Os resultados obtidos encontram-se
no próximo capítulo.
A título de exemplo cite-se [BENSKY, 2008]. Ele demonstra sistemas de rádio-
localização baseados no RSSI com precisões melhores que 10m. Embora ele aponte o RSSI
como sendo a técnica de mais fácil implementação, ele também a considera mais sensível aos
problemas inerentes à rádio-localização. Em especial, destaque-se que a obstrução da linha de
visada e o multicaminhamento são muito mais graves nesse caso do que em sistemas baseados
na medição do tempo de chegada. Todavia, destaque-se novamente a possibilidade de que a
alternativa por postes apresentada atenue esse problema, uma vez que as etiquetas podem ser
colocadas na parte mais alta dos postes.

26
4 IMPLEMENTAÇÃO
Com o leitor e a etiqueta da figura 2, realizou-se testes para verificar a qualidade do valor
da intensidade do sinal fornecido pelo leitor, tendo em vista a implementação da alternativa
de posicionamento apresentada no capítulo 3. Os testes foram desenvolvidos em um dos
telhados do IME - em amarelo na figura 3 - em três dias distintos, sempre após às 17:00h.
Fig 4 Vista aérea do IME com a região de medições e o marco do IBGE em destaque.
FONTE: flickr.com
Nos produtos adquiridos, a intensidade do sinal recebido é representada por um número
de 3 dígitos que varia de 0 a 255. Além disso, cada etiqueta desse fornecedor é representada
por um código composto de um número seguido de 3 letras. No caso, adquiriu-se um leitor e
duas etiquetas ativas de 40m de alcance e identidades 1Keg e 1Lsv - especificações no anexo
B. Para o teste propriamente dito, colocou-se a(s) etiqueta(s) sobre o marco do IBGE
SATGPS 91752 - em vermelho na figura 4. Daí, com a(s) etiqueta(s) estacionária(s), movia-se
o leitor pelo telhado estacionando-o por 5 a 10 minutos em cada ponto de medições.

27
4.1 1Keg: 1° Dia
1KEG
96979899
100
101102103104
0 10 20 30 40
Distância(m)
RS
SI
Fig 5 Gráfico RSSIxDistância com a linha de tendência para a etiqueta 1Keg.
Tabela 2 Dados relativos a etiqueta 1Keg e representados na figura 4. Ponto RSS Distância(m) N° medições Desvio-Padrão
1 102,5 10,4 100 0,541 2 99,54 25,3 117 0,846 3 99,37 26,7 128 1,297 4 103,1 14,3 149 0,928 5 101,4 20,5 113 1,033 6 97,21 31,6 150 2,437 7 101,5 20,8 150 0,54
28
4.2 1Lsv: 2° Dia
1LSV
94
96
98
100
102
104
106
0 10 20 30 40
Distância(m)
RS
SI
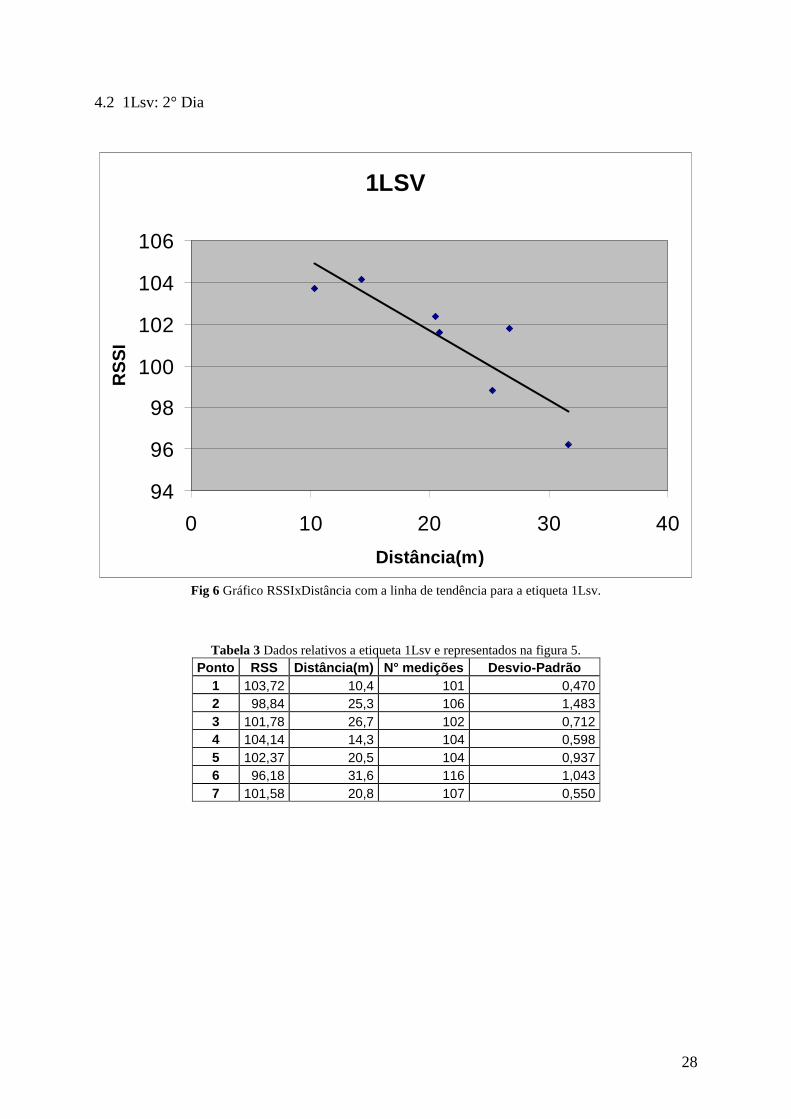
Fig 6 Gráfico RSSIxDistância com a linha de tendência para a etiqueta 1Lsv.
Tabela 3 Dados relativos a etiqueta 1Lsv e representados na figura 5. Ponto RSS Distância(m) N° medições Desvio-Padrão
1 103,72 10,4 101 0,470 2 98,84 25,3 106 1,483 3 101,78 26,7 102 0,712 4 104,14 14,3 104 0,598 5 102,37 20,5 104 0,937 6 96,18 31,6 116 1,043 7 101,58 20,8 107 0,550

29
4.3 1Keg & 1Lsv: 3° Dia
1KEG & 1LSV
96
98
100
102
104
106
0 10 20 30 40
Distância(m)
RS
SI 1keg
1lsv
Fig 7 Gráfico RSSIxDistância relativo à medição simultânea com ambas as etiquetas.
Tabela 4 Dados relativos a etiqueta 1Keg e representados na figura 6. Ponto RSS 1Keg Distância(m) N° medições Desvio-Padrão
1 102,5 10,4 120 0,643 2 99,54 25,3 131 0,923 3 99,37 26,7 122 0,597 4 103,1 14,3 124 0,708 5 20,5 6 97,21 31,6 113 0,841 7 101,5 20,8 116 0,956
8c1 97,76 33,8 127 0,947 8c2 99,93 29,6 122 0,810
Tabela 5 Dados relativos a etiqueta 1Lsv e representados na figura 6. Ponto RSS 1Lsv Distância(m) N° medições Desvio-Padrão
1 104,3 10,4 112 0,310 2 101,9 25,3 114 0,693 3 102,6 26,7 109 0,743 4 105,3 14,3 110 0,667 5 20,5 6 104,0 31,6 115 0,546 7 103,9 20,8 116 0,650
8c1 102,5 33,8 122 0,763 8c2 105,4 29,6 120 0,575
30
4.4 Considerações
Os dois primeiros experimentos indicam uma relação afim entre as variáveis envolvidas,
especialmente para a etiqueta 1Keg. Todavia, isso não foi observado no último experimento.
Utilizou-se no último dia, mais pontos, além de realizar-se medição simultânea, com ambas as
etiquetas colocadas sobre o marco do IBGE.
Ainda que a função afim entre as variáveis envolvidas não tenha sido confirmada,
observa-se um padrão similar de variação para ambas as etiquetas, especialmente para
distâncias inferiores a 25m - a precisão da alternativa apresentada no capítulo 3. Além disso,
ainda que os valores simultâneos fornecidos pelas etiquetas tenham sido distintos, também
parece haver um padrão para essa diferença. Postula-se que, a menos de erros aleatórios, a
diferença entre medições simultâneas seja constante, como se houvesse um erro sistemático
afetando apenas uma das etiquetas.
Deve-se salientar que o local de teste não era homogêneo, além de não poder ser
considerado como espaço aberto. Afinal, havia pontos com bloqueio da linha da visada,
pilares e mastros de ferro na visada de alguns pontos, e pontos mais próximos a telhados,
muros e paredes. Por esses fatores, ocorrem os erros sistemáticos devido à ausência de linha
de visada e de multicaminhamento. Além disso, as condições atmosféricas não foram
idênticas, sendo a do terceiro dia bem distinta comparada aos outros dois dias, o que também
afeta as medições [BENSKY, 2008].
Mesmo com esses erros sistemáticos, constata-se que de uma maneira geral o desvio-
padrão do RSSI é inferior a uma unidade de medida. Além disso, mesmo sendo o terceiro dia
o que apresentou valores mais dispersos, nele os desvios-padrões foram os menores e todos
inferiores a 1 unidade de medida. E, deve-se ressaltar que os erros sistemáticos que afetaram
essas medições são as maiores fontes de erros para rádio-localização baseada na potência do
sinal recebido [GUIMARÃES, 2004].
Uma observação final é que considerando-se apenas os pontos situados a menos de 25m
de distância, o ponto que mais foge à aproximação por uma função afim é o de número 1, o
mais próximo. Não apenas isso, há também um pilar de concreto próximo a ele, o que não
ocorre nos outros pontos. Portanto, pode-se repetir os testes em local mais aberto ou incluir a
atenuação do sinal devido a este objeto, com mais medições.

31
5 MAPEAMENTO DOS POSTES
A alternativa de posicionamento apresentada no capítulo 3 partiu do pressuposto que
houvesse um mapa de iluminação viária da região. Caso isso não ocorra, ou simplesmente se
deseje implementar essa alternativa em outra região, um mapeamento dos postes das vias
urbanas pode ser necessário.
Uma vez que as coordenadas do objeto a ser posicionado serão obtidas a partir das
coordenadas dos postes, a qualidade desse posicionamento estará diretamente relacionada à
qualidade do mapeamento dos postes. Dada essa ligação, e também a escassez de mapas de
postes, esse é um importante tópico e fundamental para a implementação da alternativa de
posicionamento apresentada no capítulo 3.
Portanto serão discutidas brevemente algumas possibilidades para a realização desse
mapeamento. Primeiro, serão apresentadas algumas técnicas convencionais. Em seguida,
algumas possibilidades a serem melhor pesquisadas.
5.1 Técnicas Convencionais
Caso não seja desejada uma grande precisão e sejam tolerados erros de cerca de 5m no
posicionamento dos postes, a melhor solução, seja em custo, seja em precisão, conforme
mostrado por [LEMA, 2008], é utilizar o passo duplo aferido. Isso supondo-se que já se
disponha de uma base cartográfica da região.
Para precisões superiores deve-se buscar outras soluções. Uma solução é utilizar o GPS.
Pode-se utilizar o DGPS, ou o RTK, ou ainda técnicas de posicionamento relativo estático,
pois não há problemas em não realizar o levantamento em tempo real.
Como não há restrições em se realizar o pós-processamento, pode-se utilizar o PPP
disponibilizado pelo IBGE, o que reduzirá os custos, pois este método não requer receptores
de dupla-frequência, e o IBGE o disponibiliza gratuitamente.
Contudo, os métodos apresentados, mesmo resolvendo o problema, requerem um tempo
que pode ser elevado demais, especialmente no caso do passo duplo. Mesmo com o GPS,
ainda é necessário que se percorra as vias urbanas uma a uma.
Para resolver esse problema, uma solução é aumentar a quantidade de membros da equipe
de levantamento. Isso é suficiente no caso do passo duplo, todavia, no caso do GPS, deve-se
32
também adquirir mais receptores. Independentemente da precisão desejada, as soluções
convencionais podem se tornar muito demoradas ou caras.
Tendo em vista a importância do mapeamento dos postes, seguem outras possibilidades a
serem melhor estudadas.
5.2 Novas Possibilidades
Dadas as crescentes resoluções espaciais dos sensores orbitais, bem como o
desenvolvimento tecnológico das câmaras aéreas, recorreu-se à Fotogrametria Digital em
busca de novas soluções. Apresentam-se duas possibilidades a serem analisadas.
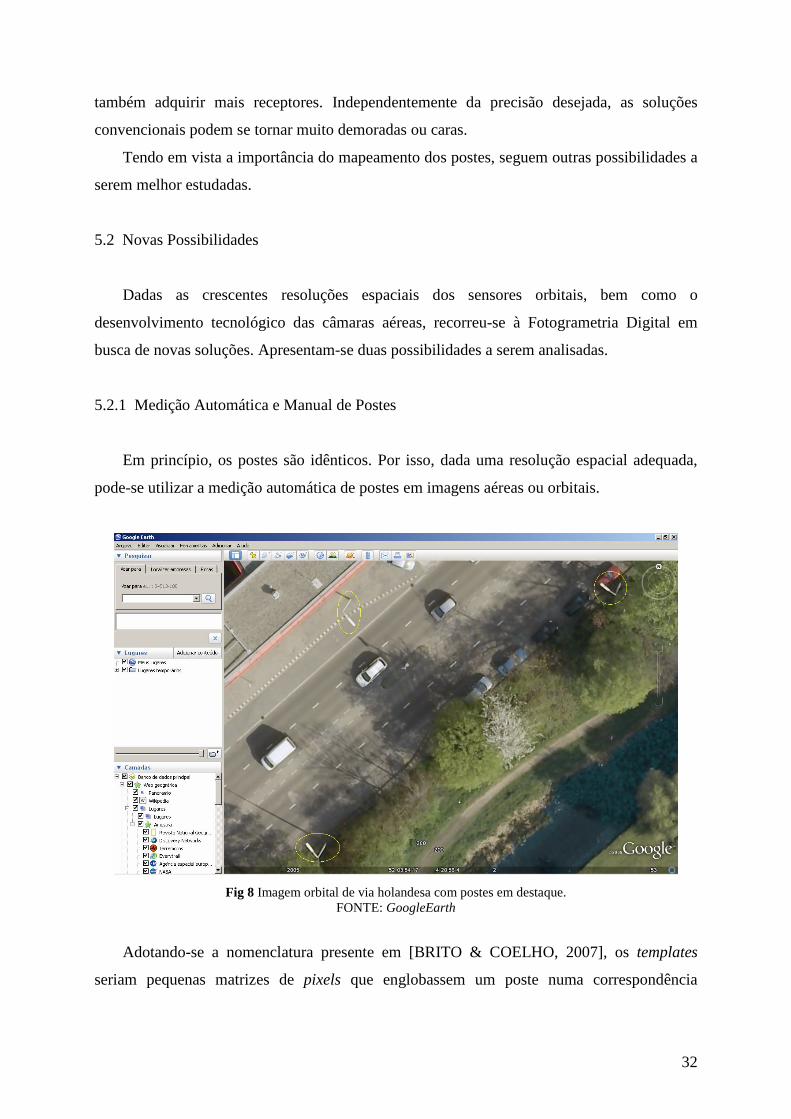
5.2.1 Medição Automática e Manual de Postes
Em princípio, os postes são idênticos. Por isso, dada uma resolução espacial adequada,
pode-se utilizar a medição automática de postes em imagens aéreas ou orbitais.
Fig 8 Imagem orbital de via holandesa com postes em destaque.
FONTE: GoogleEarth
Adotando-se a nomenclatura presente em [BRITO & COELHO, 2007], os templates
seriam pequenas matrizes de pixels que englobassem um poste numa correspondência

33
biunívoca com as imagens da região a ser mapeada. As janelas de pesquisa seriam as imagens
que possuíssem vias urbanas.
Daí se implementaria algum algoritmo de medição automática de pontos. Um deles,
talvez o mais simples, é o baseado no coeficiente de correlação de Pearson e que é
apresentado em [BRITO & COELHO, 2007].
Atualmente, para algumas regiões há serviços gratuitos que oferecem imagens orbitais de
altas resoluções espaciais, o que pode viabilizar a implementação também gratuita do método
apresentado, segundo se constata na figura 8.
Numa análise preliminar pode-se apontar alguns problemas dessa solução. Por exemplo,
regiões de maior cobertura vegetal - caso da Urca - onde os postes não são visíveis,
independente da resolução espacial da imagem; as diferentes orientações dos postes na
imagem, devido tanto à direção das vias como as diferentes geometrias de aquisição das
imagens, também podem constituir um problema e tornar necessária a utilização de templates
adicionais ou uma medição manual em algumas regiões. Outro fato é que, por enquanto, para
o Brasil não há imagens gratuitas com resoluções espaciais próximas às da figura 8, que é
correspondente a um país europeu.
Para a região da figura 8, em vias onde haja problemas na medição automática, pode-se
proceder a medição manual dos postes. A ida à campo seria reservada às regiões onde os
postes não fossem visíveis na imagem digital.
Observe-se que deve ser realizada também uma análise da precisão das coordenadas
fornecidas pelo GoogleEarth, verificando se é adequada ao projeto.
Por fim, ressalte-se que para regiões brasileiras, provavelmente será necessária a compra
de imagens orbitais ou a realização de aerolevantamentos da região de interesse. Em ambos os
casos, além da medição dos postes, será necessário realizar a correção geométrica das
imagens.
5.2.2 Fotogrametria Noturna
De madrugada, apenas os luminares públicos encontram-se, em princípio, acesos. Por
isso, a aquisição de imagens noturnas também poderia ser uma solução.
Buscando-se imagens orbitais noturnas no GoogleEarth obtém-se qualidade precária. Há
uma agregação das fontes de luz em grandes manchas, o que degrada a resolução espacial da

34
imagem. Isso ocorre provavelmente devido à grande distância do sensor ao terreno. Daí
surgem, como alternativas naturais, os aerolevantamentos ou a fotogrametria terrestre.
Buscando-se no Google informações sobre fotogrametria noturna, nada foi encontrado.
Todavia, buscando-se fotos aéreas noturnas, obtém-se diversos resultados.
Fig 9 Foto aérea noturna.
FONTE: Federação Sergipana de Tênis.
A figura 9 mostra como torna-se simples e eficaz distinguir os postes em imagens
noturnas. Destaque-se porém, que essa vista, apesar de aérea, é inclinada, e não se sabe a
altura do centro perspectivo, a qual pode não ser tão elevada quanto a de levantamentos
aerofotogramétricos. Por isso, a implementação dessa técnica requer estudos preliminares.
Em busca de se aproximar da realidade dos aerolevantamentos pode-se citar o trabalho de
um fotógrafo que obteve imagens aéreas noturnas de Londres a partir de uma câmera digital a
bordo de um helicóptero. Conforme se constata na figura 10 os resultados foram muito bons,
e pode-se distinguir vários postes, mesmo com a foto inclinada.

35
Fig 10 Foto noturna de Londres tomada de helicóptero.
FONTE: Jason Hawkes.
Supondo-se que essa técnica seja realmente viável ou se torne viável em algum momento,
a medição dos postes seria feita de maneira semelhante ao subitem anterior. Primeiro uma
medição automática, dada a semelhança entre esses objetos, e depois para regiões mais
problemáticas, uma medição manual poderia ser efetuada. Note-se que talvez o algoritmo de
medição automática se torne mais eficiente nesse caso, dada a atenuação do problema da
orientação dos postes, e o contraste entre postes - claro - e vias - escuro. O não-
georreferenciamento da foto seria resolvido pela utilização de pontos de controle obtidos de
uma base cartográfica da região, ou, dependendo da precisão buscada, o próprio GoogleEarth
pode ser usado.
Portanto, a fotogrametria noturna, se viável, talvez se constitua na melhor alternativa para
o mapeamento dos postes. No entanto, observe-se que ela possui alguns dos problemas da
fotogrametria convencional como, regiões com bloqueio devido a vegetação e a necessidade
de se realizar a correção geométrica das imagens. Outro problema é que o uso dessa técnica
pode requerer lentes especiais e mais caras que as convencionais, como ocorreu para a tomada
da figura 6. Conforme dito anteriormente, a utilização dessa técnica pode ser muito difícil em
imagens orbitais ou talvez inviável, o que dificulta o uso de alternativas gratuitas. Portanto,
nessa solução haverá necessidade de se realizar um aerolevantamento noturno exclusivamente
para se mapear os postes, o que contribui para encarecer o uso dessa técnica.

36
6 CONCLUSÕES E COMENTÁRIOS FINAIS
Ao longo do texto se constatou o potencial dos transmissores de rádio-frequência para
solucionar vários problemas da interação com alvos. Além disso, mostrou-se que há casos em
que o RFID pode substituir o GPS como tecnologia de base, bem como funcionar de forma
integrada.
A possibilidade de implementar RTLS com dispositivos RFID, por si só compensa o
esforço dispendido. Dado tratar-se de sistemas independentes, isso representa uma grande
vantagem, ainda que não sejam globais como o GPS. Conforme mostrado ao longo do texto,
as possibilidades são maiores, pois é possível armazenar diversas informações num adesivo
RFID. Isso pode viabilizar a integração de um RTLS RFID com a gestão de pessoas, ou com
um banco de dados de uma cadeia de suprimento, por exemplo.
No que diz respeito à formulação do RTLS nos postes da Urca apresentada nesse
trabalho, necessita-se ainda de mais testes em campo, e se viável, com componentes de outros
fabricantes. Pois há diversas incógnitas inviáveis de serem analisadas teoricamente e cuja
modelagem é fundamental. Por exemplo, a precisão do leitor em identificar o sinal mais
próximo, afinal toda a estimativa realizada baseou-se na perfeição do leitor ao desempenhar
essa tarefa, o que pode não ocorrer. A contribuição do ambiente de testes para o
multicaminhamento, além da atenuação do sinal devido a obstrução da linha de visada, a qual
depende do tipo de obstáculo.
Quanto aos testes realizados, observou-se um padrão similar de dispersão da intensidade
do sinal entre as etiquetas. Mesmo sem a função afim entre o RSSI e a distância observada
nas etiquetas adquiridas, tem-se, além do padrão de variabilidade observado, desvios-padrão
inferiores a 1 unidade de medida. Além disso, em distâncias inferiores a 25m constatou-se a
função afim como uma boa aproximação para as variáveis.
Tendo em vista que na alternativa apresentada o erro calculado foi de 22m, tem-se que
uma função afim entre as variáveis para distâncias inferiores a 25m pode ser suficiente para a
implementação desse sistema, uma vez que os testes não foram realizados em local aberto.
Porém, os resultados e a análise realizada no capítulo 4 são simplórios demais para
conclusões definitivas. Portanto, mais testes devem ser realizados para confirmar e mensurar a
função afim entre as variáveis e os erros envolvidos nessa aproximação.

37
REFERÊNCIAS BIBLIOGRÁFICAS
ASON, Syed & ILYAS, Mohammad. RFID handbook: applications, technology, security,
and privacy. FL, EUA. CRC Press. 2008.
BENSKY, Alan. Wireless Positioning: Technologies and Applications. Boston, EUA.
Artech House, 2008.
BRITO, Jorge; COELHO, Luiz. Fotogrametria Digital. EdUERJ. Rio de Janeiro, RJ, 2007.
DON CHON, Hae; JUN, Sibum; JUNG, Heejae; WON AN, Sang. Using RFID for Accurate
Positioning. Journal of Global Positioning Systems (2004) Vol 3, No. 1-2: 32-39. Samsung
Electronics Co., LTD. 2004.
EL-RABBANY, Ahmed. Introduction to GPS: The Global Positioning System. MA, EUA.
Artech House, 2002.
FRENCH, Gregory T. Understanding the GPS, an introduction to the Global Positioning
System: What it is and how it works . GeoResearch, Inc, EUA, 1996.
GLOVER, Bill & BATT, Himanshu. RFID Essentials. CA – EUA. O’Reilly, 2006.
GRAAFSTRA, Amal. RFID Toys: 11 cool projects for home, office and entertainment.
IN, EUA. Wiley Publishing, Inc, 2006.
GUIMARÃES, Alberto; GRIVET, Marco Antonio. Rádio-Localização de Terminais de
Comunicações Móveis. Centro de Estudos em Telecomunicações, Pontifícia Universidade
Católica do Rio de Janeiro. RJ, 2004.
HALLBERG, Josef & NILSSON, Marcus. Positioning with Bluetooth, IrDA and RFID.
Dissertação de mestrado, Departamento de Ciência da Computação e Engenharia Elétrica.
Lulea University of Technology, Finlândia, 2002.

38
LEMA, Eduardo. Iluminação Viária da Urca. Seção de Engenharia Cartográfica, Instituto
Militar de Engenharia. Rio de Janeiro, RJ, 2008.
MONICO, João Francisco Galera. Posicionamento pelo GNSS: Descrição, fundamentos e
aplicações. Editora da Unesp, Pres. Prudente, SP, 2007.
NUMMELA, Jussi; UKKONEN, Leena; SYDÄNHEIMO, Lauri; KIVIKOSKI, Markku.
13,56 MHz RFID Antenna for Cell Phone Integrated Reader. Rauma Research Unity,
Tampere University of Technology. Rauma, Finland, 2007.

39
ANEXO A
Fig 11 Mapa de Iluminação viária da Urca, quadra relativa ao Forte São João.
FONTE: [LEMA, 2008]
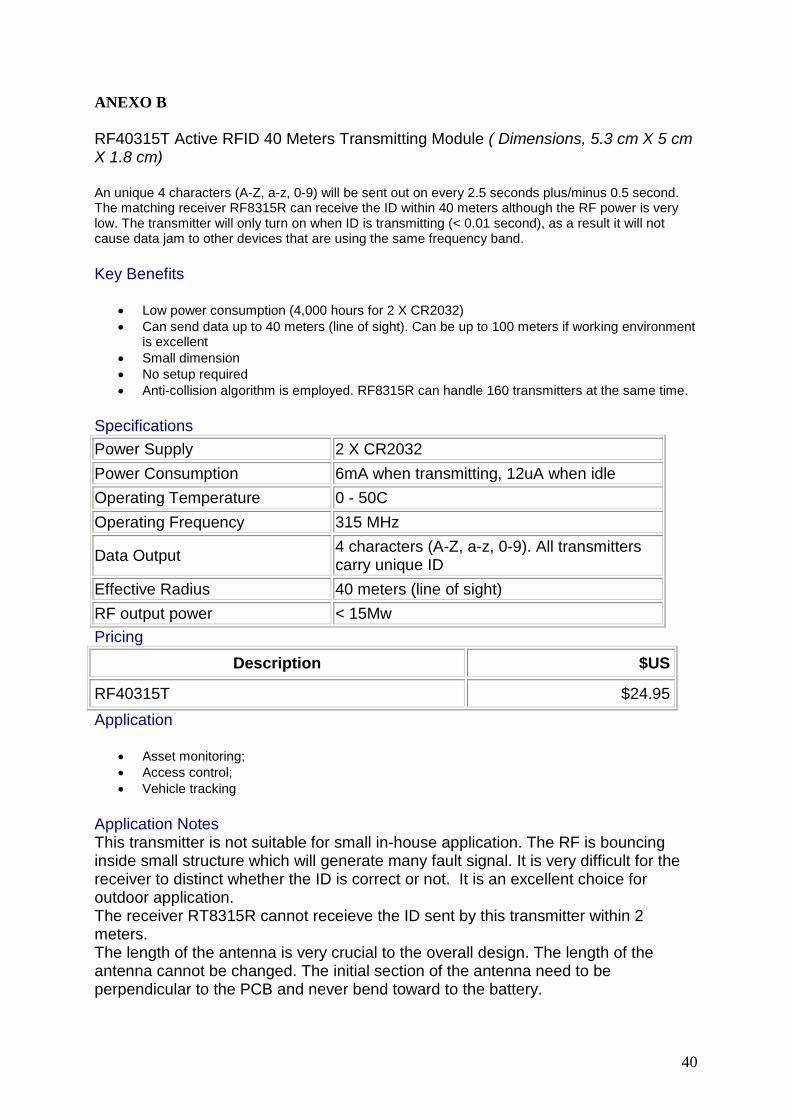
40
ANEXO B RF40315T Active RFID 40 Meters Transmitting Module ( Dimensions, 5.3 cm X 5 cm X 1.8 cm)
An unique 4 characters (A-Z, a-z, 0-9) will be sent out on every 2.5 seconds plus/minus 0.5 second. The matching receiver RF8315R can receive the ID within 40 meters although the RF power is very low. The transmitter will only turn on when ID is transmitting (< 0.01 second), as a result it will not cause data jam to other devices that are using the same frequency band.
Key Benefits
· Low power consumption (4,000 hours for 2 X CR2032) · Can send data up to 40 meters (line of sight). Can be up to 100 meters if working environment
is excellent · Small dimension · No setup required · Anti-collision algorithm is employed. RF8315R can handle 160 transmitters at the same time.
Specifications
Power Supply 2 X CR2032
Power Consumption 6mA when transmitting, 12uA when idle
Operating Temperature 0 - 50C
Operating Frequency 315 MHz
Data Output 4 characters (A-Z, a-z, 0-9). All transmitters carry unique ID
Effective Radius 40 meters (line of sight)
RF output power < 15Mw
Pricing
Description $US
RF40315T $24.95
Application
· Asset monitoring; · Access control; · Vehicle tracking
Application Notes This transmitter is not suitable for small in-house application. The RF is bouncing inside small structure which will generate many fault signal. It is very difficult for the receiver to distinct whether the ID is correct or not. It is an excellent choice for outdoor application. The receiver RT8315R cannot receieve the ID sent by this transmitter within 2 meters. The length of the antenna is very crucial to the overall design. The length of the antenna cannot be changed. The initial section of the antenna need to be perpendicular to the PCB and never bend toward to the battery.

41
RF9315R Active RFID 8 Meters Receiver Module with RSSI ( Dimensions, 4.5cm X 6.5 cm X 1.5 cm ) The RF9315R active RFID 8 meters receiver module with RSSI receives data sent from RF8315T modules. This low-cost receiver module requires no external power supply (some pc or notebook may require external 9V power input). Data received will be sent to RS232 com port. Standard communication software such as Hyperterninal can read the data. Custom program can read data from com port for system integration or application development. Key Benefits, RF9315R Active RFID 8 Meters receiver module with RSSI Plug and play. No need to send command to control the receiver Can read data within 8 meters with build in RF8315T antenna. If RF8315T antenna changed to 9" wire the effective radius can be 14 meters. RSSI data will be reported No power input is required for most desktop PC Superheterodyne design for maximum stability Reverse power input protection Specifications, RF9315R Active RFID 8 Meters receiver module with RSSI
Supply Voltage 9VDC via wall adaptor if necessary
Supply Current 4mA Typical
Operating Temperature 0 - 50C
Operating Frequency 315 Mhz
Data Output ID sent by RF8315T (4 characters) plus RSSI data (0 to 255) plus 1 space
Capacity 80 ID at the same time
Build-in Watchdog Yes. 2.3 seconds
SERIAL PORT ( RS232)
Type RS232, 9600 Baud, 8 bit words,1 stop bit,1 start bit, no parity
Pricing, RF8315R Active RFID 8 Meters receiver module
Description $US
RF8315R $39.95

42
APÊNDICE
A seguir será deduzida a precisão da alternativa de posicionamento apresentada no
capítulo 3 considerando-se a influência do erro das coordenadas dos postes.
Seja Ep a precisão das coordenadas da base dos postes, Dm a distância máxima entre
postes e h a altura de cada poste. Então, 2
212 mE D hæ ö= × +ç ÷
è ø será a precisão do sistema caso
Ep seja nulo, conforme já demonstrado no capítulo 3.
Se Ep não for nulo, então a componente horizontal do erro não será mais 12 mD× , pois a
posição do poste deixa de ser pontual para tornar-se um círculo centrado no valor estimado
para sua coordenada e de raio igual a Ep, ao passo que a componente vertical não se altera.
Sejam os segmentos com extremidades em algum ponto do círculo associado ao poste e
no ponto situado a 12 mD× do centro do mesmo círculo - considera-se sem perda de
generalidade, ambas as extremidades sobre o eixo da via respectiva. A componente horizontal
da precisão será dentre todos esses segmentos aquele de comprimento máximo.
Para determinar esse comprimento, tome-se um segmento genérico associado a algum
ponto genérico desse círculo. Assim, pela lei dos cossenos, o seu comprimento será:
221
( , ) cos2 m mX r D r r Dq qæ ö= × + + × ×ç ÷
è ø com 0 pr E< < e 0 2q p< <
Para um dado r , o valor máximo de X será obtido para o máximo valor de cosq , ou seja,
1. Portanto, seja mX esse valor máximo, então:
1( ) ( ,0)
2m mX r X R D r= = × + com 0 pr E< <
Daí, a componente horizontal hE do erro será o valor máximo de ( )mX r , ou seja,
( )m pX E . Assim, finalmente:

43
2 2
1( ,0)
2h p m p
h
E X E D E
E E h
ì = = × +ïíï = +î
Tabela 6 Precisões teóricas para Dm=40m e h=10m Ep(m) 10 5 3 2 1 0
Precisão Horizontal (m) 30 25 23 22 21 20
Precisão (m) 31,6 26,9 25,1 24,2 23,3 22,4


















