Miguel Angel Ahumedo Grimaldos IMPLEMENTAÇÃO DE … · controle de temperatura. vi Implementation...
88
Universidade Federal de Sergipe Pró-Reitoria de Pós-Graduação e Pesquisa Coordenação de Pós-Graduação Programa de pós-graduação de Engenharia Elétrica Miguel Angel Ahumedo Grimaldos IMPLEMENTAÇÃO DE SISTEMAS DE CONTROLE DIFUSO EM UMA PLANTA DIDÁTICA São Cristóvão - SE 2016
Transcript of Miguel Angel Ahumedo Grimaldos IMPLEMENTAÇÃO DE … · controle de temperatura. vi Implementation...
Universidade Federal de Sergipe
Pró-Reitoria de Pós-Graduação e Pesquisa
Coordenação de Pós-Graduação
Programa de pós-graduação de Engenharia Elétrica
Miguel Angel Ahumedo Grimaldos
IMPLEMENTAÇÃO DE SISTEMAS DE CONTROLE
DIFUSO EM UMA PLANTA DIDÁTICA
São Cristóvão - SE
2016
Miguel Angel Ahumedo Grimaldos
IMPLEMENTAÇÃO DE SISTEMAS DE CONTROLE
DIFUSO EM UMA PLANTA DIDÁTICA
Dissertação de mestrado apresentada ao Programa
de Pós-graduação em Engenharia Elétrica –
PROEE da Universidade Federal de Sergipe como
parte dos requisitos necessários à obtenção do
título de Mestre em Engenharia Elétrica.
Orientador: Dr. Carlos Alberto Villacorta
Cardoso
São Cristóvão - SE
Agosto de 2016
IMPLEMENTAÇÃO DE SISTEMAS DE CONTROLE DIFUSO EM
UMA PLANTA DIDÁTICA
Miguel Angel Ahumedo Grimaldos
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO PROGRAMA DE PÓS-
GRADUAÇÃO EM ENGENHARIA ELÉTRICA PROEE DA UNIVERSIDADE
FEDERAL DE SERGIPE COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA
A OBTENÇÃO DO GRAU DE MESTRE EM ENGENHARIA ELÉTRICA.
Examinada por:
________________________________________
Prof. Dr. Oscar Alberto Zanabria Sotomayor
______________________________________
Prof. Dr. Andrés Ortiz Salazar
_____________________________________
Prof. Dr. Lucas Molina
SÃO CRISTÓVÃO – SE
AGOSTO DE 2016
FICHA CATALOGRÁFICA ELABORADA PELA BIBLIOTECA CENTRAL UNIVERSIDADE FEDERAL DE SERGIPE
G861i
Grimaldos, Miguel Angel Ahumedo Implementação de sistemas de controle difuso em uma planta didática / Miguel Angel Ahumedo Grimaldos ; orientador Carlos Alberto Villacorta Cardoso. – São Cristóvão, 2016.
88 f. : il.
Dissertação (mestrado em Engenharia Elétrica)– Universidade Federal de Sergipe, 2016.
1. Engenharia elétrica. 2. Sistemas difusos. 3. Lógica difusa. 4. Controle de temperatura. I. Cardoso, Carlos Alberto Villacorta. III. Título.
CDU 621.3.011.716
iv
Agradecimentos
Pelo apoio incondicional, compreensão e incentivo agradeço e expresso minha
gratidão a minha mãe e irmã, distantes geograficamente, a minha esposa Maya e minha
filha Valeria pela paciência compreensão e amor fatores que ajudaram na realização desse
trabalho.
Ao meu orientador, Prof. Dr. Carlos Alberto Villacorta, pela paciência, respeito,
bom relacionamento baseado na honestidade, pela confiança e sempre mostrando o
caminho na condução deste trabalho.
Ao acadêmico Klaus Cavalcante Barros, estudante de Engenharia Eletrônica na
UFS e parceiro na fase final da pesquisa, pela competência, presteza, colaboração,
celeridade e pela capacidade de realização de trabalhos em equipe. Sua contribuição foi
de muita importância para o andamento das atividades.
A toda a equipe de técnicos do departamento e à secretaria do PROEE, pela
colaboração, celeridade, boa vontade e disposição para resolver as dificuldades técnicas
e rotineiras que se apresentam neste tipo de pesquisas.
À equipe de professores que diretamente e indiretamente colaboraram com seus
conhecimentos e aconselhando o melhor caminho a seguir ou com seu apoio
incondicional.
À ilustre Banca Examinadora conformada pelo o Prof. Dr. Andrés Ortiz Salazar,
Prof. Dr. Oscar Alberto Zanabria Sotomayor e Prof. Dr. Lucas Molina, pelas valiosas,
pertinentes e enriquecedoras sugestões e contribuições dadas para o enriquecimento deste
trabalho de pesquisa.

v
Resumo da Dissertação apresentada ao PROEE/UFS como parte dos requisitos
necessários para a obtenção do grau de Mestre (Me.)
Implementação de sistemas de controle difuso em uma planta didática
Miguel Angel Ahumedo Grimaldos
Agosto/2016
Orientador: Prof. Dr. Carlos Alberto Villacorta Cardoso
Programa: Engenharia Elétrica
O presente trabalho tem como objetivos ampliar as possibilidades de
implementação de estratégias de controle da PD 3 e avaliar de forma prática diferentes
estratégias de aplicação da lógica difusa no controle de processos de uma planta didática
(PD 3). Isto foi realizado adicionando estratégias de controle difusas às estratégias
convencionais de controle industrial, com as quais o sistema da PD 3 vem configurado
de fábrica. As estratégias convencionais utilizam controladores do tipo PID e suas
variações (P, PI e PD) cujos parâmetros são pré-ajustados e “implantados” nos
instrumentos. Foram realizadas três estratégias de controle difuso com a temperatura
como variável principal a controlar e a vazão como variável secundaria a controlar. A
primeira estratégia foi o controle de temperatura difuso-PID, na qual foi utilizado o
controlador PID local da PD 3 e foi desenvolvida uma estratégia em lógica difusa, em
uma estação de trabalho externa, para a sintonia em tempo real dos parâmetros PID. O
controlador da PD 3 atua diretamente sobre a potência das resistências de aquecimento,
sendo esta a variável manipulada. Desta maneira se realizou o controle da temperatura no
processo. A segunda estratégia, denominada temperatura difuso-PID + vazão, continuou
usando o mesmo controlador de temperatura difuso-PID, mas foi adicionado um controle
difuso para regular a variável vazão do processo. Este controle difuso foi desenvolvido
na estação de trabalho e manipula diretamente o atuador da válvula de controle inteligente
de entrada de agua ao tanque de aquecimento. Por último, foi desenvolvida uma estratégia
totalmente difusa para controlar as variáveis temperatura e vazão do processo. Das três
estratégias implementadas, a que apresentou melhor performance foi a do controlador
totalmente difuso quando observadas as métricas e índices de desempenho.
Palavras-Chaves: Controle Difuso; controle Difuso-PID; OPC-HSE planta didática;
controle de temperatura.

vi
Implementation of Fuzzy control systems in a didactic plant
Miguel Angel Ahumedo Grimaldos
August /2016
Advisor: PhD. Carlos Alberto Villacorta Cardoso
Department: Electrica lEngineering
The present work aims to expand the possibilities of PD 3 control strategies
implementation and to evaluate, in a practical way, different strategies of fuzzy logic
application in the control of processes of a didactic plant (PD 3). This was accomplished
by adding fuzzy control strategies to the conventional industrial control strategies with
which the PD 3 system is factory configured. The conventional strategies use PID
controllers and its variations (P, PI and PD) which parameters are preset and "implanted"
in the instruments. Three fuzzy control strategies were performed with temperature as the
main process variable to be controlled and flow as the secondary variable to be controlled.
The first strategy was the fuzzy-PID temperature control; it was used the local PID
controller of PD 3 and a strategy was developed in fuzzy logic in an external workstation,
for tuning of the PID parameters in real time. The PD 3 controller acts directly on the
power of the heating resistances, which is the manipulated variable. This way, the
temperature was controlled in the process. The second strategy, called temperature fuzzy-
PID + flow, continued using the same fuzzy-PID temperature controller but was added a
fuzzy control to regulate the process flow variable. This fuzzy control was developed at
the work station and directly manipulates the actuator of the intelligent water inlet control
valve to the heating tank. Finally, a completely fuzzy strategy was developed to control
temperature and flow variables of the process. Of the three strategies implemented,
completely fuzzy controller presented the best response when observed all metrics and
performance indicators.
Key Words: Fuzzy control; Fuzzy-PID control; OPC-HSE; didactic plant; temperature
control.
vii
Sumário
Lista de Figuras ................................................................................................................ ix
Lista de Tabelas ............................................................................................................... xi
Lista de Abreviaturas e Siglas ........................................................................................ xii
Lista de Símbolos ........................................................................................................... xiii
Capítulo 1 .......................................................................................................................... 1
Apresentação ..................................................................................................................... 1
Introdução .......................................................................................................... 1
Motivação ........................................................................................................... 6
Objetivos ............................................................................................................ 6
Justificativa ........................................................................................................ 7
Estrutura do trabalho .......................................................................................... 7
Escopo do trabalho ............................................................................................. 8
Capítulo 2 .......................................................................................................................... 9
Lógica Difusa .................................................................................................................... 9
2.1 Lógica difusa e sistemas de controle .................................................................. 9
2.2 Blocos funcionais de um controlador difuso ......................................................... 10
2.2.1 Bloco de fuzzificação (Codificação) .............................................................. 10
2.2.2 Bloco base de conhecimento .......................................................................... 11
2.2.3 Bloco de lógica de tomada decisão (Raciocínio difuso) ................................ 11
2.2.4 Bloco de defuzzificação (Decodificação). ...................................................... 12
2.3.2 Processo de fuzzificação ................................................................................. 15
2.3.3 Processo da base do conhecimento e tomada de decisão ............................... 16
2.3.4 Processo de defuzzificação ............................................................................. 17
Capítulo 3 ........................................................................................................................ 20
Planta Didática PD 3 ....................................................................................................... 20
3.1 Circuito de aquecimento da PD 3 .......................................................................... 21
3.1.1 Controlador usado no circuito de aquecimento da PD 3 ................................ 23
3.1.2 Equipamentos presentes no circuito de aquecimento ..................................... 24
Capítulo 4 ........................................................................................................................ 30
Estratégias de Controle ................................................................................................... 30
4.1 Controlador PID ............................................................................................... 30
4.2 Controlador difuso-PID .................................................................................... 34
viii
4.2.1 Controlador difuso-PID implementado .......................................................... 35
4.2.2 Variáveis linguísticas e funções de pertinência de entrada e saída ................ 36
4.2.3 Algoritmo difuso proposto ............................................................................. 39
4.2.4 Controlador difuso-PID + vazão implementado............................................. 41
4.3 Controlador difuso ........................................................................................... 44
4.3.1 Variáveis linguísticas de entrada e saída e suas funções de pertinência ........ 45
Capítulo 5 ........................................................................................................................ 49
Resultados ....................................................................................................................... 49
5.1 Respostas das estratégias utilizadas ................................................................. 50
5.1.1 Controle PID da PD 3 ..................................................................................... 50
5.1.2 Controle difuso-PID ....................................................................................... 51
5.1.3 Controle difuso-PID + Vazão ......................................................................... 53
5.1.4 Controle totalmente difuso ............................................................................. 54
5.2 Apresentação de todas as respostas obtidas ..................................................... 56
5.3 Analise das respostas PID teórica, real e difusa ............................................... 61
Teste de rejeição a perturbações do controlador totalmente difuso ................. 64
Capítulo 6 ........................................................................................................................ 66
Conclusões ...................................................................................................................... 66
Referências Bibliográficas .............................................................................................. 68
ANEXO A ....................................................................................................................... 72
ANEXO B ....................................................................................................................... 73
ANEXO C ....................................................................................................................... 74
ix
Lista de Figuras
Figura 1-1 Estrutura completa de um controlador difuso (Fonte: CAMPOS e SAITO,
2004, modificada) ............................................................................................................. 4
Figura 2-1 Arquitetura básica de um controlador difuso (GOMIDE et al., 1995) e
(CAMPOS e SAITO, 2004) ............................................................................................ 10
Figura 2-2 Exemplos de funções de pertinência a) gaussiana b) triangular c) trapezoidal
d) fuzzy-tom .................................................................................................................... 13
Figura 2-3 Funções de pertinência das variáveis linguísticas temperatura “fria”, “morna”
e “quente” ....................................................................................................................... 14
Figura 2-4 Funções de pertinência da variável linguística “temperatura ........................ 15
Figura 2-5 Defuzzificação pelo método Centro-do-Máximo (C-o-M ) .......................... 19
Figura 3-1 Esquema geral da Planta PD 3 ...................................................................... 21
Figura 3-2 Diagramas do circuito de aquecimento e vazão utilizados ........................... 22
Figura 3-3 Diagrama de blocos do controlador PID do tanque de aquecimento (TQ-01)
da PD 3 ............................................................................................................................ 24
Figura 3-4 Imagem da bomba 01 do circuito de aquecimento da PD 3 .......................... 24
Figura 3-5 Imagem da válvula de controle do circuito de aquecimento da PD 3 ........... 25
Figura 3-6 imagem do rotâmetro da PD 3 ...................................................................... 25
Figura 3-7 Imagens do medidor de vazão da PD 3 ......................................................... 26
Figura 3-8 Imagem do sensor de temperatura tipo PT100 do tanque de aquecimento da
PD 3 ................................................................................................................................ 26
Figura 3-9 Imagem do conversor estático da PD 3 ......................................................... 27
Figura 3-10 Imagem do tipo de resistências de aquecimento instaladas na PD 3 .......... 27
Figura 3-11 Imagem do tipo de termostato instaladas na PD 3 ...................................... 28
Figura 3-12 Imagem do tipo de chave de nível instaladas na PD 3 ................................ 28
Figura 3-13 Imagem do medidor de nível do tanque de aquecimento da PD 3 .............. 29
Figura 4-1 Estimação de 1ª ordem para o sistema real do TQ-01 com potência (u) 90 %
e vazão de 300 l/h ........................................................................................................... 33
Figura 4-2 Modelo modificado do controlador Difuso-PID (WEI-JIE, Y.; YONG-XIN,
L) ..................................................................................................................................... 35
Figura 4-3 Diagrama do sistema de controle implementado .......................................... 36
Figura 4-4 Variáveis linguísticas de entrada e de saída do sistema Difuso-PID
desenvolvido. .................................................................................................................. 36
x
Figura 4-5 Funções de pertinência de entrada do Erro (erro) e da Tendência (variação do
erro) ................................................................................................................................. 37
Figura 4-6 Funções de pertinência de saída dos ganhos PID representadas pelo ganho –
P ...................................................................................................................................... 38
Figura 4-7 Diagrama de blocos do controlador difuso-PID + vazão implementado ...... 42
Figura 4-8 Variáveis linguísticas de entrada e de saída do sistema difuso desenvolvido
........................................................................................................................................ 43
Figura 4-9 Funções de pertinência de entrada do erro .................................................... 43
Figura 4-10 Diagrama de blocos do controlador totalmente difuso implementado ....... 45
Figura 4-11 Variáveis linguísticas de entrada e de saída do sistema difuso desenvolvido
........................................................................................................................................ 45
Figura 4-12 Funções de pertinência de entrada do erro do sistema ................................ 46
Figura 4-13 Funções de pertinência da entrada da tendência do erro do si .................... 46
Figura 5-1 Resposta da temperatura aos degraus aplicados como controlador PID da PD
3 ...................................................................................................................................... 51
Figura 5-2 Respostas da potência nas resistências aos degraus aplicados com o
controlador PID ............................................................................................................... 51
Figura 5-3 Resposta da temperatura com o controlador Difuso-PID ............................. 52
Figura 5-4 Potência nas resistências com o controlador Difuso-PID ............................. 52
Figura 5-5 Comportamento dos paramentos PID sintonizados em tempo real (On-Line)
........................................................................................................................................ 52
Figura 5-6 Resposta da temperatura com o controlador Difuso-PID + vazão ................ 53
Figura 5-7 Vazão e potência nas resistências com o controlador Difuso-PID + vazão .. 53
Figura 5-8 Comportamento dos paramentos PID sintonizados em tempo real (On-Line).
........................................................................................................................................ 54
Figura 5-9 Resposta da temperatura com o controlador totalmente difuso .................... 55
Figura 5-10 Vazão e potência nas resistências com o controlador difuso. ..................... 55
Figura 5-11 Sintonia do controlador Totalmente Difusa de 5 s para 2 s. ....................... 56
Figura 5-12 Comportamento das respostas de cada estratégia de controle testada ........ 58
Figura 5-13 Comportamento das respostas PID teórico, real e totalmente difusa nos três
degraus ............................................................................................................................ 63
Figura C-1Diagrama do sistema de controle difuso-PID+ vazão implementado ........... 74
Figura C-2 Diagrama do controlador totalmente difuso implementado ......................... 74
xi
Lista de Tabelas
Tabela 4-1 Efeitos das ações do controlador PID sobre o processo e a função do ganho
(ANDRADE, SOUSA, 2010) ......................................................................................... 31
Tabela 4-2 Parâmetros de aproximação de primeira ordem com tempo morto para as três
vazões .............................................................................................................................. 33
Tabela 4-3 Fórmulas para o cálculo dos parâmetros PID, método de Ziegler e Nichols
em malha aberta (CAMPOS; TEIXEIRA, 2006) ........................................................... 33
Tabela 4-4 Parâmetros iniciais de sintonia de controle do tanque de aquecimento ....... 33
Tabela 4-5 Parâmetros das funções de pertinência das variáveis Difusas de entrada .... 38
Tabela 4-6 Parâmetros das funções de pertinência das variáveis Difusas de saída dos
ganhos PID. ..................................................................................................................... 39
Tabela 4-7 Base de regras do controlador Difuso-PID ................................................... 41
Tabela 4-8 Parâmetros das funções de pertinência das variáveis difusas de entrada ..... 43
Tabela 4-9 Parâmetros das funções de pertinência das variáveis difusas de saída ......... 44
Tabela 4-10 Base de regras do controlador Difuso de vazão ......................................... 44
Tabela 5-1 Condições das variáveis para realizar os ensaios ......................................... 50
Tabela 5-2 Métricas da resposta transitória para o 1º degrau 26,5° a 30° C .................. 57
Tabela 5-3 Métricas da resposta transitória para o 2º degrau 30° a 35° C ..................... 57
Tabela 5-4 Métricas da resposta transitória para o 3º degrau 35° a 30° C ..................... 58
Tabela 5-5 Desempenho das estratégias no índice IAE nos 3º degraus aplicados ......... 59
Tabela 5-6 Desempenho das estratégias no índice ITAE nos 3º degraus aplicados ....... 59
Tabela 5-7 Dados totais de consumo de energia e água do processo ............................. 61
Tabela 5-8 Métricas do controlador PID teórico nos três degraus para 300 l/h de vazão
........................................................................................................................................ 62
Tabela 5-9 Desempenho das estratégias PID teórico, real e totalmente difusa no índice
IAE nos 3º degraus aplicados ......................................................................................... 63
Tabela 5-10 Desempenho das estratégias PID teórico, real e totalmente difusa no índice
ITAE nos 3º degraus aplicados ....................................................................................... 64
Tabela 5-11 Dados totais de consumo de energia e água do processo ........................... 64
Tabela B-1 TAG dado às válvulas Manuais da Planta PD 3 .......................................... 73

xii
Lista de Abreviaturas e Siglas
ANFIS Adaptive neuro fuzzy inference system
C-o-A Centro-da-Área
C-o-M Centro-do-Máximo
et al. Abreviação da locução latina et alii [= e outros]
ex: Exemplo
FF Fieldbus Foundation
HSE High Speed Ethernet
IAE Integral do valor Absoluto do Erro [em inglês,
Integral of Absolute Error]
ITAE Integral do produto do Tempo pelo valor Absoluto do
Erro[em inglês, Integral of Time multiplied by
Absolute Error]
MV Variável Manipulada
OPC OLE for ProcessControl
P Proporcional
PC Personal Computer
PD Proporcional e Derivativo
PD3 Planta Didática 3 da Smar
pH Potencial Hidrogeniônico
PI Proporcional e Integrativo
PID Proporcional, Integrativo e Derivativo
PT-100 Sensor de temperatura, Termorresistencia
PV Variável de Processo [em inglês, Process Variable]
SP Valor de referência [ em inglês Set-Point]
TQ-01 Tanque um
UFS Universidade Federal de Sergipe
VM Válvula Manual
xiii
Lista de Símbolos
°C Grau Celsius
e(t) Sinal de erro
ess Erro de regime permanente
K Ganho da planta
Kd Ganho derivativo
Ki Ganho integral
Kp Ganho proporcional
L Atraso do sistema
MP Sobressinal máximo percentual
t Tempo
td Tempo de atraso
tp Tempo do primeiro pico
tr Tempo de subida
ts Tempo de acomodação
T Constate de tempo
Ti Tempo integrativo
Td Tempo derivativo
μo,k(ui) Pontos em que ocorrem os máximos
u(t), u(k) Sinal de saída
1
Capítulo 1
Apresentação
Introdução
As plantas didáticas e plantas piloto, daqui em diante denominadas Pd e Pp, são
uma representação em escala menor de uma planta industrial real e de seus processos.
São desenvolvidas para realizar estudos mais detalhados de particularidades dos
processos, também permitem a manipulação, uso e testes de instrumentos existentes ou
novos com novas tecnologias, a implementação de controladores e estratégias de controle,
o aumento do nível de automação de um processo e a familiarização com os softwares
usados nos processos industriais para comunicação e supervisão. Tudo isto em um
ambiente didático de laboratório que permite reproduzir problemas comuns, presentes nas
plantas industriais e levar os desafios de solução para o campo acadêmico avaliar,
implementar uma solução testada a rigor, padronizar e voltar ela para sua aplicação
industrial.
Nos últimos anos vários trabalhos científicos têm usado Pd ou Pp, alguns têm
utilizado estes equipamentos para testar metodologias nas áreas do controle de processos
como modelagem, identificação e controle de sistemas (BALOCH et al., 2010, PEREIRA
et al., 2014). Alguns outros trabalhos específicos usaram estratégias de controle difusas
(SKRJANC e MATKO, 2000, MAZLAN e IBRAHIM, 2012, AL-QUTAMI e IBRAHIM
2015). Outros tem ido mais longe na realização de testes com estes equipamentos
construindo-os também (GOSMANN, 2002, MICHEL et al., 2010), alguns outros autores
têm buscado a integração e familiarização dos alunos com os ambientes de software de
trabalho industrial através do uso de Pd ou PP (SANTOS et al., 2006, MENENDEZ et
al., 2008). Encontramos também alguns trabalhos no âmbito do ensino de controle de
processos, mas visando a integração destes recursos acadêmicos disponibilizando-os à
comunidade através de acesso remoto on-line (ECKHARD et al., 2006) e adicionando
2
ambientes de realidade virtual integrados ao ambiente real, como realizado (PEREIRA et
al., 2012)
A seguir será apresentado resumidamente o estado da arte mostrando alguns
detalhes de trabalhos científicos realizados nos últimos anos, tendo alguns deles sido
citados no parágrafo anterior, para desta forma identificar os aportes tendências do uso
de Pd ou Pp no processo acadêmico educativo.
O trabalho da equipe de BALOCH (2010), usou dados reais de entrada e saída de
um Pp de destilação binária e com o uso de uma técnica de ANFIS (Adaptive neuro fuzzy
inference system) realizou um modelo MISO da Pp, usando uma rede adaptativa de
inferências difusas que por etapas também no modelo MISO foi reduzindo e afunilando
até chegar ao modelo MISO final da Planta. Este modelo foi testado apresentando ótimos
resultados. Já PEREIRA (2014) trabalhou com uma Pd de tanques acoplados e
implementou um sistema de controle preditivo multivariado controlando nível e pressão,
o qual foi sintonizado usando um simulador baseado em algoritmo genético e este
controlador foi comparado com um controle PID de ciclos múltiplos.
Agora falando um pouco de trabalhos em Pd ou Pp com aplicação de estratégias
difusas, encontramos o trabalho de SKRJANC e MATKO (2000) que usou uma Pp de
troca de calor manipulando a vazão de água através da abertura de uma válvula no sistema
primário e medindo a temperatura no sistema secundário. O trabalho desenvolveu um
algoritmo de predição baseado em regras que apresentaram melhores resultados que o
controle convencional e melhorou a rejeição à perturbação do processo. Outro trabalho
com aplicação difusa foi em uma Pp de neutralização de pH, onde Ibrahim e MURRAY
(2007) implementaram uma estratégia difusa usando o conceito de um controle
antecipativo e realimentado, no qual através do controle da vazão é realizada a
neutralização mantendo o pH no valor ajustado. Outro trabalho foi a implementação em
uma Pd de medição e controle de vazão que usa diferentes tipos de sensores, nesta planta
foi desenvolvido por MAZLAN e IBRAHIM (2012) um controle PID difuso adaptativo,
no qual são ajustados os parâmetros do controlador PID de vazão, com lógica difusa
realizada em um PC e comunicada através de uma placa DAQ Card, mostrando que
melhorou o desempenho da planta nas respostas de estado.
Também acima citamos o trabalho de GOSMANN (2002) que construiu uma Pd
para avaliação de técnicas de controle multivariável de tanques acoplados onde ele
controlou o nível de três tanques acoplados, manipulando a vazão de duas bombas e para
isto usou uma técnica de linearização exata para permitir que se faça uma linearização em
toda a faixa de operação de um processo não-linear. Um outro trabalho que construiu uma
Pd, foi o de MICHEL et al., (2010) que também trabalhou com tanques acoplados, mas
também era possível desacoplar eles. Esta planta foi desenvolvida para realizar estudos
de modelagem e controle de nível. Para este último foi implementado um controle PID
incremental com dois graus de liberdade.
Outros desenvolvimentos no campo da educação envolvendo Pd ou Pp é o
trabalho de SANTOS et al., (2006), onde foi desenvolvido um sistema SCADA
3
educacional (EDUSCA) que consiste em um sistema de controle supervisório com
aquisição de dados desenvolvido para ser usado em Pd e simuladores para facilitar o
ensino do controle de processos. Com ele podem-se criar sinópticos, monitorar alarmes,
criar perturbações com sinais rampa, degraus, ruído branco e ainda dar treinamentos de
capacitação no uso de sistemas SCADA. Também no campo da educação foi
desenvolvida por MENENDEZ et al., (2008) uma ferramenta de software para realizar
aulas usando uma metodologia de integração de sistemas de software e equipamentos
industriais via RS 232/485, alcançando bons resultados dos alunos, uma vez que estes
adquiriram mais rápido e profundo entendimento sobre o controle de processos com a
experiência prática e foi aproveitada a capacidade que as ferramentas de software de
simulação oferecem para implementar várias estratégias de controle em tempo real.
E para finalizar esta revisão bibliográfica de trabalhos científicos envolvendo Pd
e Pp, é interessante citar os trabalhos de ECKHARD et al., (2006), PEREIRA et al.,
(2012) e BARRIOS et al., (2013), os três autores desenvolveram trabalhos para acesso
remoto a Pd. Eckhard e sua equipe criaram uma plataforma de experimentação que usa
os protocolos de instrumentação industrial para controlar o nível de alguns tanques
acoplados, manipulando a abertura das válvulas com controladores PID. Os alunos
desenvolvem remotamente as práticas de controle em malha aberta e malha fechada,
realizando a sintonia dos parâmetros dos controladores, estes parâmetros podem ser
calculados e logo inseridos remotamente nos controladores locais da Pd. Já no trabalho
de Pereira existe um laboratório remoto, em que os alunos têm que carregar seus
programas de controle numa placa de micro controlador que serve de interface com uma
usina térmica didática virtual onde são feitos os testes das estratégias, tudo remotamente
disponível. E a pesquisa de Barrios é um projeto que se destina a compartilhar recursos
de laboratórios entre universidades (Laboratório Acadêmico Remoto Multiusuário), bem
como avaliar os níveis de aquisição de conhecimentos obtidos pelos alunos quando
comparado ao processo de aprendizagem em laboratório convencional. As aulas de
laboratório, são executados remotamente na Pd durante o tempo do teste os alunos
realizam práticas de simulação da mesma experiência para posteriores comparações dos
resultados. O sistema que busca a integração entre processos piloto e práticas reais de
controle através da internet, permitindo testar algoritmos de controle remotamente, o
laboratório é acompanhado visualmente via webcam. Este trabalho também avaliou os
desempenhos das plataformas computacionais utilizadas. De modo geral a experiência foi
boa para os alunos e para o sistema como um todo.
Todo este ciclo de aproximação acadêmica, experimental e industrial através da
manipulação e uso das Pd e Pp, permite ao aluno assimilar mais o conhecimento
acadêmico adquirido e cria mais confiança no aprendizado ao ver materializados os
resultados de forma prática, o que ajuda a consolidar a transmissão do conhecimento para
o aluno vendo convergir os conhecimentos teóricos, simulações e práticos. Também é
gerado no aluno um aumento da confiança ao ingressar no mercado profissional para o
qual está sendo formado, com conhecimentos dos equipamentos e softwares que o
mercado utiliza, o que facilita o acoplamento profissional para ambas as partes.
4
Alternativamente ao controle regulatório convencional, baseado nos
controladores clássicos como o PID (Proporcional Integral e Derivativo), nas últimas
décadas têm surgido controladores inteligentes. Estes têm por objetivo resolver
problemas de controle inspirados no raciocínio lógico humano, por meio do
conhecimento do operador ou expert, e, através deste conhecimento heurístico do
processo, é possível modelar o funcionamento do sistema de controle, relacionando as
variáveis de entrada e saída da planta.
Dentre esses controladores inteligentes, podemos citar o controle neuronal,
controle Difuso, controle neuro-difuso e ANFIS. Nesta pesquisa o foco será o controle
Difuso, técnica que não trata de valores exatos, mas sim de informações qualitativas e
descritas linguisticamente, o que permite a existência de valores imprecisos e
aproximados (COELHO e ALMEIDA, 2003). Além disso, a teoria difusa possui uma fase
de elaboração do projeto simplificada, desta forma não se faz necessária a utilização de
equações matemáticas complexas ou tabelas, tarefas estas que consomem grande parte do
tempo de projeto nas técnicas de controle que as utilizam (CARVALHO, et al. 2010).
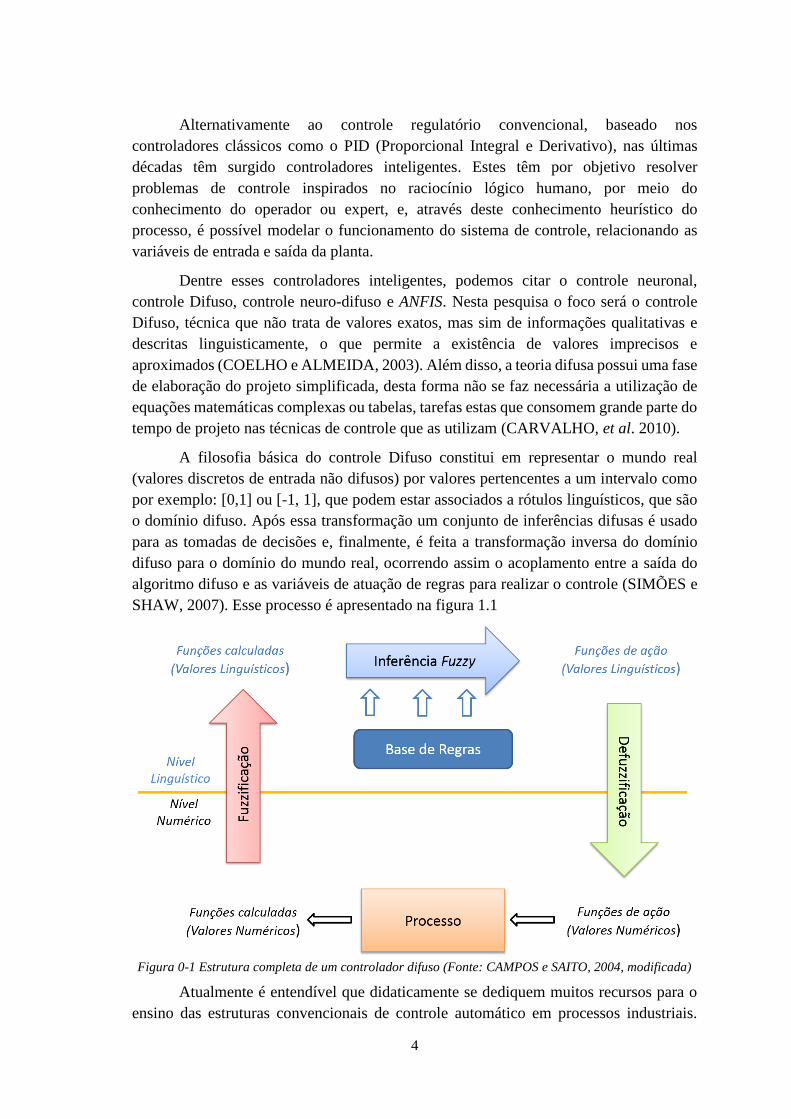
A filosofia básica do controle Difuso constitui em representar o mundo real
(valores discretos de entrada não difusos) por valores pertencentes a um intervalo como
por exemplo: [0,1] ou [-1, 1], que podem estar associados a rótulos linguísticos, que são
o domínio difuso. Após essa transformação um conjunto de inferências difusas é usado
para as tomadas de decisões e, finalmente, é feita a transformação inversa do domínio
difuso para o domínio do mundo real, ocorrendo assim o acoplamento entre a saída do
algoritmo difuso e as variáveis de atuação de regras para realizar o controle (SIMÕES e
SHAW, 2007). Esse processo é apresentado na figura 1.1
Figura 0-1 Estrutura completa de um controlador difuso (Fonte: CAMPOS e SAITO, 2004, modificada)
Atualmente é entendível que didaticamente se dediquem muitos recursos para o
ensino das estruturas convencionais de controle automático em processos industriais.
5
Quase 90% dos controladores ainda se baseiam no PID e suas variações (P, PI e PD)
(SILVA et al., 2002; OGATA, 2002). Neste contexto a planta didática de controle, PD 3,
tem como objetivo demonstrar de forma prática a operação e os tipos de malhas de
controle mais comumente encontrados na indústria, utilizando os mesmos instrumentos e
equipamentos de tecnologia disponíveis no mercado, junto com as ferramentas de
configuração, em software, desenvolvidos para aplicação em controle industrial.
A característica fundamental da PD 3 é ser uma estrutura iterativa que possibilita
recriar de forma didática as estratégias convencionais de controle encontradas na indústria
como por exemplo: cascata, PID e feedforward. A planta didática PD 3, fabricada pela
Smar, além de possuir estas características permite realizar o controle de variáveis como
a temperatura, nível e vazão, que estão dentro das variáveis mais controladas nos
ambientes industriais reais. Assim, este sistema cumpre bem seus objetivos no contexto
do ensino técnico e para as matérias introdutórias de controle regulatório nos cursos de
engenharia.
Embora as estratégias de controle convencionais sejam suficientes para os
objetivos da planta, a sua estrutura física e fenomenológica oferece mais alternativas de
implementação, sendo possível, por exemplo, aplicar técnicas de controle não linear que
permitam ter um desempenho otimizado numa faixa de operação maior. A ideia do
presente trabalho é tornar a PD 3, um caso de estudo para matérias mais avançadas e até
uma ferramenta útil para a pesquisa. Neste contexto, um dos objetivos principais deste
trabalho é justamente, proporcionar à PD 3 esta característica, sendo neste caso utilizado
como experimento inicial a implementação de um controle utilizando a lógica Difusa.
É importante salientar que muitos trabalhos de pesquisa, dissertações ou até
mesmo teses, são desenvolvidos apenas sobre simulações utilizando modelos
matemáticos (SHAKYA et al., 2014; ONOFRE,2011). Assim, um sistema real capaz de
implementar estratégias de controle inteligente ou avançado será de muito valor também
nos cursos de pós-graduação.
Para tornar a PD 3 adequada para a realização de controles avançados utilizou-se
o padrão OPC, com o qual é possível fazer a interface entre o Ambiente computacional,
software de simulação matemática, com os transmissores inteligentes dos sensores e
atuadores da PD 3. Na primeira abordagem, aplicando a lógica Difusa no controle da
temperatura do tanque de aquecimento da planta PD 3, foi realizada a sintonia em tempo
real dos parâmetros P, I e D do controlador PID da PD 3. A fuzzificação de variáveis
como o sinal de erro, bem como a variação do erro seguidas das regras permitiram
identificar dinamicamente os parâmetros com os quais se realiza a sintonia do PID de
controle de temperatura da PD 3. Na segunda abordagem, foi adicionado à estratégia
anterior o controle da válvula de água do tanque de aquecimento em função da
temperatura do processo. Para finalizar a pesquisa, na estratégia final foi desenvolvido
um controle totalmente difuso, dispensando o PID, sendo o controle totalmente
processado no ambiente de simulação.
6
Desta forma foi iniciado o caminho de ampliação das estratégias de controle da
planta didática com uma aplicação de controle Difuso que realiza os ajustes dos
parâmetros PID do controlador e outra aplicação de um controlador Difuso para uma
válvula de controle e o controle finalmente Totalmente Difuso. Posteriormente serão
implementadas outras estratégias de controle avançado e inteligente.
Motivação
As Plantas didáticas possibilitam o acesso a conhecimento dos problemas
inerentes aos sistemas reais, os quais muitas vezes são difíceis de recriar nos poderosos
sistemas de simulação, e que são necessários incorporar no processo de aprendizagem
para, desta forma, juntar os conceitos teóricos, simulados e sua aplicação em uma situação
prática real, dentro de um ambiente acadêmico supervisionado e controlado, que permite
analisar, testar e repetir as experiências para corroborar os resultados.
Observando o estado da arte de trabalhos científicos usando Pd e Pp, foram
identificados trabalhos que levaram à implementação de estratégias de controle para fora
dos controladores locais das plantas realizando as interfases de comunicação via RS
232/485 ou com o uso de placas como DAQ Card e até OPC. Mas, normalmente foi
desenvolvido no PC e com ajuda de outras aplicações realizando algo similar a um
sistema supervisório implementando telas de sinópticos, coleta de dados, criação de
alarmes, intertravamentos e outras utilidades. Atividades todas que precisam de tempo e
testes quando são feitas modificações para novas configurações de provas ou estratégias,
o que desvia o foco da pesquisa ou dificulta novas implementações para dar continuidade
à mesma. Na revisão bibliográfica não foram identificados trabalhos com perfil híbrido,
ou seja, que juntem os potenciais das tecnologias proprietárias de supervisão existentes
nas plantas didáticas configuradas com instrumentação industrial e os programas
acadêmicos iterativos e de simulação. Também não foram identificados muitos trabalhos
aplicando lógica difusa ao controle da variável temperatura, vendo que isto poderia ser
implementado na PD 3 existente no laboratório de Automação da UFS foi desenvolvido
este trabalho.
Objetivos
Implementar um sistema de controle inteligente em uma planta didática aplicando
lógica difusa.
7
Ampliar o potencial acadêmico da planta didática PD 3, permitindo o
desenvolvimento de estratégias de controle mais complexas que o tradicional PID, através
da habilitação da comunicação da planta com uma estação de trabalho (PC) onde se pode
recorrer às estratégias de controle desenvolvidas nos ambientes computacionais.
Desenvolver em ambiente computacional as estratégias de controle difuso
utilizando regras de inferência do método clássico Mamdanie e Larsen e outras estratégias
de controle desenvolvidas com o uso de regras de inferência do método de interpolação
ou parametrização Takagi-Sugeno e Tsukamoto.
Observar o desempenho dos controles realizados em lógica difusa com o controle
tradicional PID e entre eles, através das métricas das respostas transitória ao degrau e de
estabilidade em regime permanente, junto com alguns índices de desempenho como
Integral do valor Absoluto do Erro (IAE) e Integral do produto do Tempo pelo valor
Absoluto do Erro (ITAE) e ver se existe uma tendência à melhora a cada estratégia de
controle implementada, testada e avaliar seu custo benefício de implementação.
Justificativa
Como visto na introdução, as Pd e Pp têm proporcionado grandes aportes na área
do conhecimento e na transmissão do mesmo. Elas permitem pesquisar novas tecnologias,
técnicas de controle, permitem também testar tecnologias e técnicas de controle
existentes, para ensinar as novas gerações e continuar mantendo o conhecimento,
permitem aprimorar esse conhecimento e expandi-lo. Os esforços deste trabalham visam
este último e aproveitando o potencial tecnológico da PD 3 existente no LAA da UFS se
deu início à expansão da PD 3, que permite o desenvolvimento de novas estratégias de
controle além das já implementadas nela. Para tal, foi testada a implementação de uma
técnica de controle inteligente, do tipo difusa, que foi levando gradualmente o controle
para fora do sistema proprietário. Ao fim, o mesmo processo foi realizado externamente
à planta, em um programa acadêmico e de simulação. Desta forma se abre um novo
caminho, talvez com uma linha de pesquisa institucional em controles inteligentes que
beneficie aos futuros acadêmicos, permitindo testar de forma prática seus
desenvolvimentos acadêmicos.
Estrutura do trabalho
A organização deste trabalho é apresentada da seguinte forma: o Capítulo 2
fundamenta o trabalho proposto com uma introdução sobre a lógica difusa e citando o
8
que será aplicado nesta pesquisa. O Capítulo 3 apresenta a planta didática 3 (PD 3),
descreve o circuito de aquecimento usado neste trabalho, o tipo de controlador que a PD
3 usa para controlar o circuito e os equipamentos e instrumentos envolvidos nele. No
Capítulo 4 encontra-se uma descrição das estratégias de controle que foram
implementadas e utilizadas na planta. Os resultados dos testes experimentais são
apresentados no capítulo 5. E concluindo com o Capítulo 6 onde expõem-se as conclusões
deste trabalho e as perspectivas para continuação e pesquisas futuras.
Escopo do trabalho
O processo estudado consistiu em usar o circuito de aquecimento da PD 3,
apresentado mais adiante na figura 3-2, a entrada principal do processo é a potência
aplicada as resistências instaladas no tanque de aquecimento, e a saída principal do
processo é a temperatura da água contida nesse tanque a qual deve ser mantida no valor
de referência ajustado. Uma segunda entrada ao processo é a vazão da água no tanque de
aquecimento, a qual pode ser aumentada ou diminuída até que o processo chegue próximo
da temperatura de referência, e nesse momento a vazão deve ser mantida constante até
uma nova mudança de referência da temperatura. O controle da vazão foi inserido como
um aperfeiçoamento ao processo e é usado por algumas estratégias.
O desenvolvimento das estratégias foi sequencial, iniciando pelo uso de um
controlador PID da própria PD 3, este controlador monovariavel foi sintonizado e usado
para ter uma referência, posteriormente foi desenvolvido um algoritmo difuso para
realizar a sintonia em tempo real dos parâmetros do controlador PID da PD 3 e chamado
ele de difuso-PID, a seguinte implementação foi adicionar ao controlador difuso-PID um
controlador difuso para controlar a vazão de entrada da agua e assim tentar agilizar o
processo usando dois controladores independentes e por último foi desenvolvido um
único controlador difuso multivariavel que através de regras controla o processo térmico
e ajusta a vazão para agilizar o mesmo. Os resultados de todas as estratégias foram
observados, mas não com o intuito de definir uma estratégia melhor e sim ver se foram
obtidas melhoras ou deficiências a cada implementação, porém a ideia deste trabalho é
mostrar a facilidade que a técnica de controle inteligente tem de resolver razoavelmente
problemas de controle de forma fácil, rápida e sem envolve muitos recursos físicos e de
tempo no desenvolvimento do modelo matemático para obter resultados aceitáveis.
Para utilizar o ambiente, o usuário implementa suas estratégias de controle nos
softwares de simulação, identifica os instrumentos com os quais vai trabalhar, seleciona
seus blocos e parâmetros, para realizar as configurações e realizar a comunicação via
OPC, e pode usar o sistema proprietário configurando um hibrido aproveitando telas do
supervisório, intertrabamentos, recursos de arquivamento.
9
Capítulo 2
Lógica Difusa
Como citado na introdução, os controladores inteligentes buscam resolver os
problemas de controle simulando o raciocínio lógico humano. Este tipo de raciocínio
usualmente é composto por definições ambíguas e imprecisas (SANCHEZ, 2009). Por
exemplo, se uma pessoa diz “vai chover”, temos interesse em saber em que medida isto
é verdade, em que momento isto vai se suceder e que intensidade poderá ter essa chuva.
Como se pode ver, ao contrário da lógica clássica, que é bivalente, as afirmações humanas
podem ser incertas e com pontos de vista diferentes dependendo de cada indivíduo. A isto
chamamos lógica Difusa.
Também se observa que é uma lógica multivalores. Por exemplo, a chuva: ela
pode ser [fraca até 5 mm/h, moderada de 5 a 25 mm/h, forte de 25 a 50 mm/h, muito forte
igual ou superior a 50 mm/h]. É uma lógica que pode definir grandezas convencionais
como fraco/forte através de valores intermediários como visto no exemplo anterior. Estas
propriedades permitem que frases ou palavras normalmente expressadas pelas pessoas
possam ser definidas matematicamente, associadas a valores de controle e processadas
(HELLMAN, 2001).
2.1 Lógica difusa e sistemas de controle
A lógica é uma característica humana que trata o estudo do raciocínio verdadeiro
e que usamos para resolver problemas. Explicando de forma simples, a Lógica difusa em
sistemas de controle, trata de determinar, de maneira lógica, o que se deve fazer para
alcançar os objetivos de controle de um sistema da melhor forma possível, usando como
base o conhecimento e experiências adquiridas de um operador experiente.
Como citado na introdução por Simões e Shaw (2007) e apresentando aqui de
maneira resumida: Uma estrutura de controle difuso, toma informações do mundo real,
as transforma em informações do domínio difuso e a partir de inferências difusas são
tomadas as decisões. Através de uma transformação inversa, essas decisões são levadas
do domínio difuso para o mundo real, ocorrendo assim o acoplamento das entradas e a
10
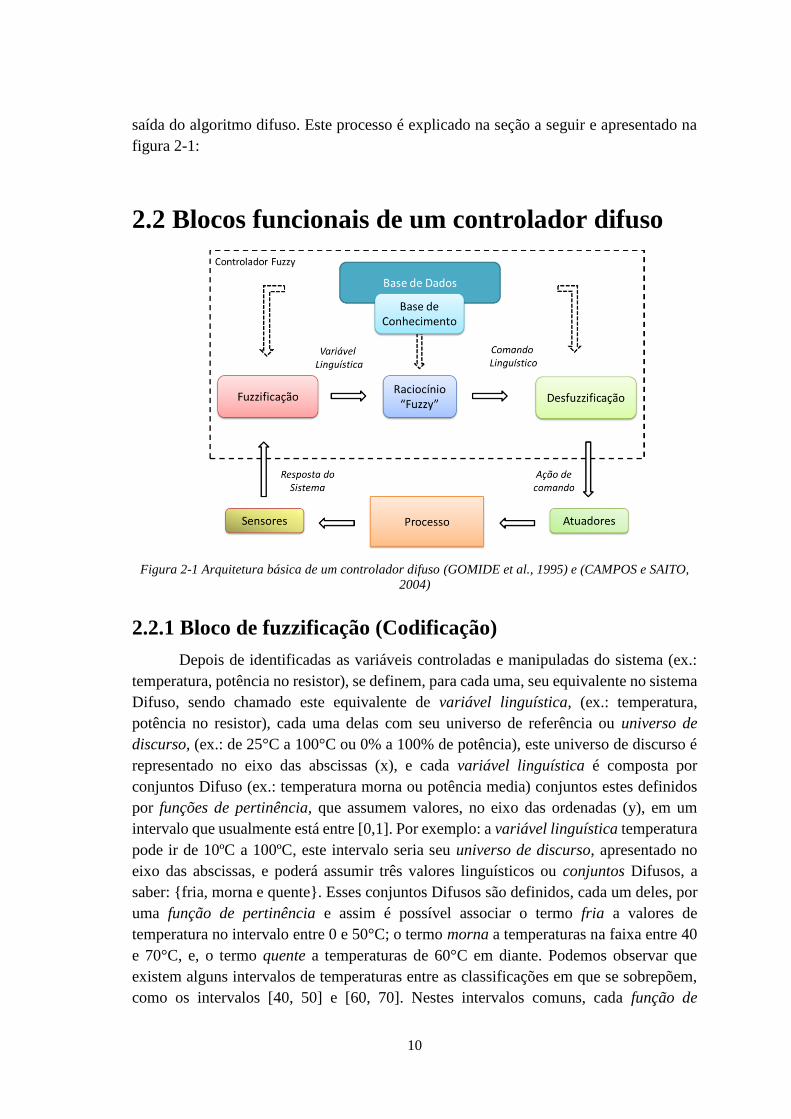
saída do algoritmo difuso. Este processo é explicado na seção a seguir e apresentado na
figura 2-1:
2.2 Blocos funcionais de um controlador difuso
Figura 2-1 Arquitetura básica de um controlador difuso (GOMIDE et al., 1995) e (CAMPOS e SAITO,
2004)
2.2.1 Bloco de fuzzificação (Codificação)
Depois de identificadas as variáveis controladas e manipuladas do sistema (ex.:
temperatura, potência no resistor), se definem, para cada uma, seu equivalente no sistema
Difuso, sendo chamado este equivalente de variável linguística, (ex.: temperatura,
potência no resistor), cada uma delas com seu universo de referência ou universo de
discurso, (ex.: de 25°C a 100°C ou 0% a 100% de potência), este universo de discurso é
representado no eixo das abscissas (x), e cada variável linguística é composta por
conjuntos Difuso (ex.: temperatura morna ou potência media) conjuntos estes definidos
por funções de pertinência, que assumem valores, no eixo das ordenadas (y), em um
intervalo que usualmente está entre [0,1]. Por exemplo: a variável linguística temperatura
pode ir de 10ºC a 100ºC, este intervalo seria seu universo de discurso, apresentado no
eixo das abscissas, e poderá assumir três valores linguísticos ou conjuntos Difusos, a
saber: {fria, morna e quente}. Esses conjuntos Difusos são definidos, cada um deles, por
uma função de pertinência e assim é possível associar o termo fria a valores de
temperatura no intervalo entre 0 e 50°C; o termo morna a temperaturas na faixa entre 40
e 70°C, e, o termo quente a temperaturas de 60°C em diante. Podemos observar que
existem alguns intervalos de temperaturas entre as classificações em que se sobrepõem,
como os intervalos [40, 50] e [60, 70]. Nestes intervalos comuns, cada função de
11
pertinência muda seu grau de pertinência, no eixo das ordenadas, dentre as classificações
de “0” para “1” ou vice-versa, e fora desses intervalos a variável se mantém constante em
“0” ou em “1”. Nos intervalos das mudanças a variável deve ser mantida na sua
classificação de {fria, morna ou quente} e seu grau de pertinência está normalizado entre
“0” e “1”. Para melhor entendimento este assunto será novamente abordado e ilustrado
na secção 2.3
Caso a aplicação do exemplo acima, requeira um ajuste mais fino no controle,
mais valores linguísticos ou conjuntos Difusos podem ser adicionados {como muito baixa
e muito alta} e, por conseguinte podem ser redefinidas as funções de pertinência. Porém,
isso acarretará consequências nas etapas posteriores, como, por exemplo a definição de
um número maior de regras a executar, o que pode levar à sobrecarga do sistema.
Usualmente a escolha do número de valores linguísticos é heurística, na prática, em
controladores Difuso são usados entre 3 e 12 valores linguísticos (CAMPOS e SAITO,
2004).
2.2.2 Bloco base de conhecimento
O bloco base de conhecimento é a parte mais importante do sistema é onde está
localizada a inteligência do mesmo. Aqui está a base do conhecimento que representa o
modelo de sistema a ser controlado. (SIMÕES e SHAW, 2007)
Neste bloco encontra-se toda a base do conhecimento adquirido pelo operador, é
um banco de dados com as informações linguísticas das funções de pertinência, as regras
Difuso, seus equivalentes numéricos e todas as informações que definem os objetivos de
controle a serem atingidos e a estratégia de controle a ser seguida.
2.2.3 Bloco de lógica de tomada decisão (Raciocínio difuso)
Com as informações em tempo real vindas das variáveis medidas do processo
(antecedentes), são selecionadas as regras de inferência ou regras de controle da base do
conhecimento, que atendem parcialmente o comportamento das variáveis recém-entradas
e em seguida são feitas as operações lógicas difusas. Como existem vários antecedentes
em uma regra, deve se usar um operador difuso para calcular o consequente desta regra
que irá para o bloco seguinte.
Nota: O operador difuso usado define o consequente dessa regra ou a possível
saída do controlador.
Como todas as regras do controlador Difuso são avaliadas em paralelo e
independentemente, para cada regra existirá um resultado diferente para a variável de
controle. Por isso, deve existir um modo de ponderar todos estes resultados e escolher a
saída do controlador e, isto é feito no bloco de defuzzificação. (CAMPOS e SAITO, 2004)
12
2.2.4 Bloco de defuzzificação (Decodificação).
A defuzzificação é um processo usado para converter um resultado Difuso em um
número real. O resultado deste processo é representativo de todo o conjunto de regras de
controle avaliadas no processo de raciocínio difuso.
O processo de defuzzificação pode ser dispensado, se a saída no formato Difuso
puder ser interpretada de modo qualitativo, por exemplo: a qualidade de um café torrado,
a qual depende de certos aspectos qualitativos gerados por experimentadores humanos,
que usam o olfato e o paladar para avaliar a qualidade do café. Neste caso uma saída
subjetivamente linguística seria aceitável. (SIMÕES e SHAW, 2007)
Depois de visto de forma geral como funciona um controlador Difuso, veremos o
conceito de função de pertinência e o detalhamento de alguns blocos funcionais para
entender melhor como é realizado o processo pelo bloco.
2.3 Função de pertinência e descrição dos blocos
funcionais
2.3.1 Funções de pertinência difusas
Um dos principais componentes de um sistema Difuso são as funções de
pertinência difusas. Como toda função, ela representa a posição de uma variável em seu
universo de discurso, recordando o exemplo da temperatura no item 2.2.1, vemos que o
universo de discurso é o intervalo de temperatura entre 10 °C a 100 °C; agora, para
representar algumas funções de pertinência vejamos as figuras 2-2. O eixo horizontal é o
universo de discurso e o eixo vertical representa o intervalo [0,1] indicando o grau de
pertinência da variável.
13
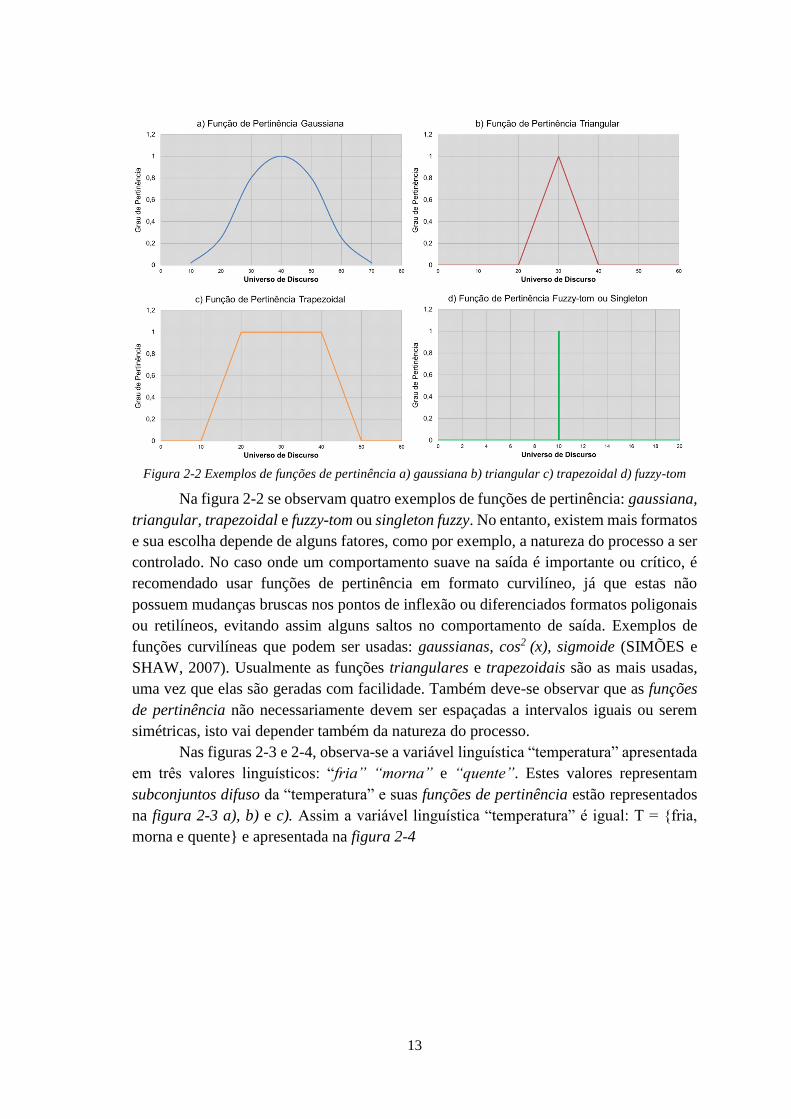
Figura 2-2 Exemplos de funções de pertinência a) gaussiana b) triangular c) trapezoidal d) fuzzy-tom
Na figura 2-2 se observam quatro exemplos de funções de pertinência: gaussiana,
triangular, trapezoidal e fuzzy-tom ou singleton fuzzy. No entanto, existem mais formatos
e sua escolha depende de alguns fatores, como por exemplo, a natureza do processo a ser
controlado. No caso onde um comportamento suave na saída é importante ou crítico, é
recomendado usar funções de pertinência em formato curvilíneo, já que estas não
possuem mudanças bruscas nos pontos de inflexão ou diferenciados formatos poligonais
ou retilíneos, evitando assim alguns saltos no comportamento de saída. Exemplos de
funções curvilíneas que podem ser usadas: gaussianas, cos2 (x), sigmoide (SIMÕES e
SHAW, 2007). Usualmente as funções triangulares e trapezoidais são as mais usadas,
uma vez que elas são geradas com facilidade. Também deve-se observar que as funções
de pertinência não necessariamente devem ser espaçadas a intervalos iguais ou serem
simétricas, isto vai depender também da natureza do processo.
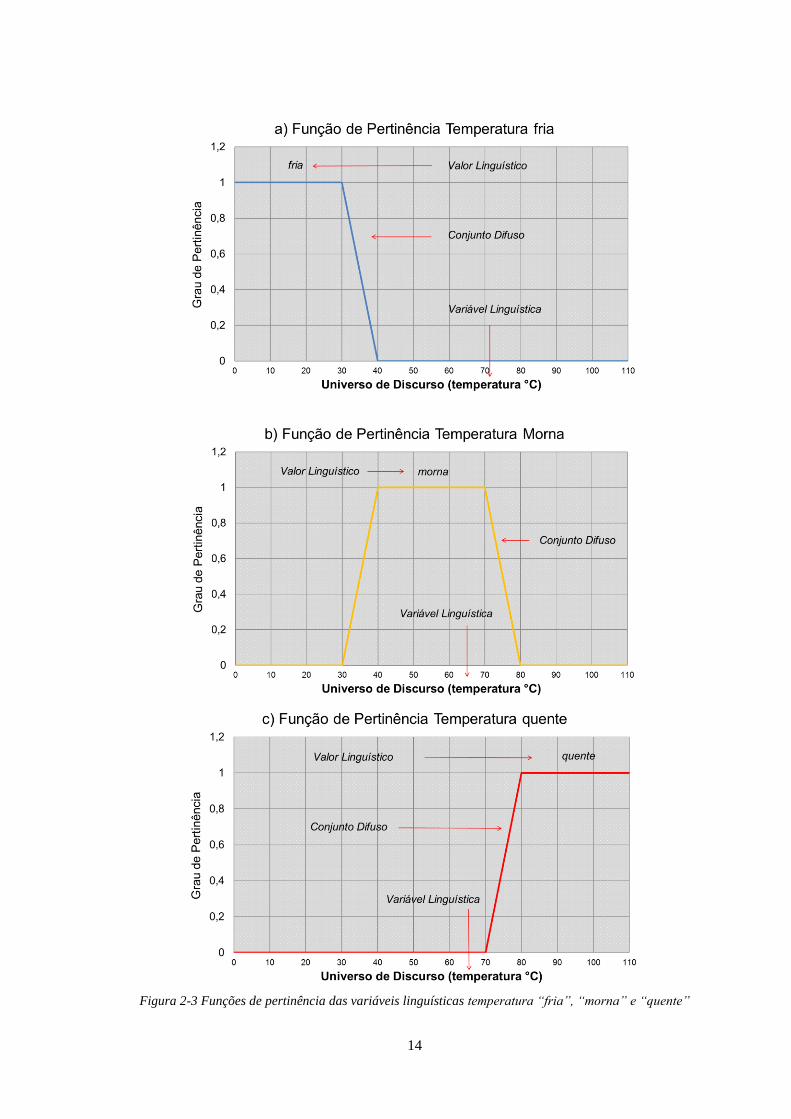
Nas figuras 2-3 e 2-4, observa-se a variável linguística “temperatura” apresentada
em três valores linguísticos: “fria” “morna” e “quente”. Estes valores representam
subconjuntos difuso da “temperatura” e suas funções de pertinência estão representados
na figura 2-3 a), b) e c). Assim a variável linguística “temperatura” é igual: T = {fria,
morna e quente} e apresentada na figura 2-4
14
Figura 2-3 Funções de pertinência das variáveis linguísticas temperatura “fria”, “morna” e “quente”
15
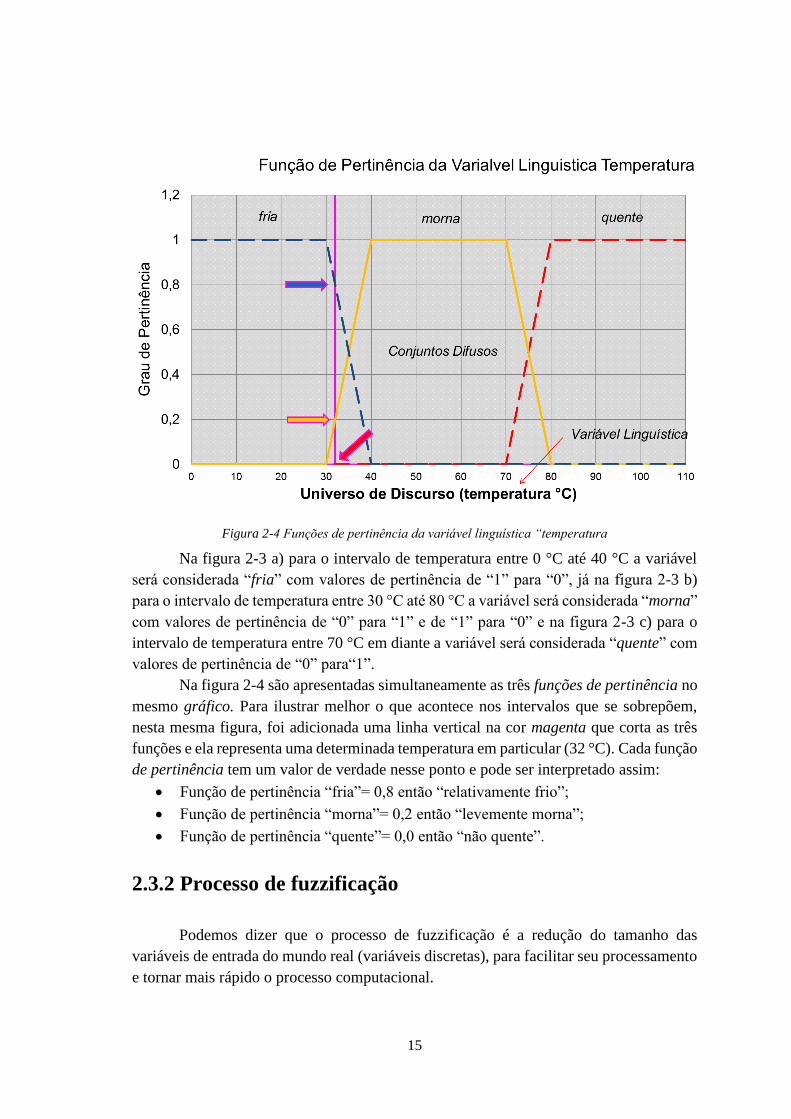
Figura 2-4 Funções de pertinência da variável linguística “temperatura
Na figura 2-3 a) para o intervalo de temperatura entre 0 °C até 40 °C a variável
será considerada “fria” com valores de pertinência de “1” para “0”, já na figura 2-3 b)
para o intervalo de temperatura entre 30 °C até 80 °C a variável será considerada “morna”
com valores de pertinência de “0” para “1” e de “1” para “0” e na figura 2-3 c) para o
intervalo de temperatura entre 70 °C em diante a variável será considerada “quente” com
valores de pertinência de “0” para“1”.
Na figura 2-4 são apresentadas simultaneamente as três funções de pertinência no
mesmo gráfico. Para ilustrar melhor o que acontece nos intervalos que se sobrepõem,
nesta mesma figura, foi adicionada uma linha vertical na cor magenta que corta as três
funções e ela representa uma determinada temperatura em particular (32 °C). Cada função
de pertinência tem um valor de verdade nesse ponto e pode ser interpretado assim:
Função de pertinência “fria”= 0,8 então “relativamente frio”;
Função de pertinência “morna”= 0,2 então “levemente morna”;
Função de pertinência “quente”= 0,0 então “não quente”.
2.3.2 Processo de fuzzificação
Podemos dizer que o processo de fuzzificação é a redução do tamanho das
variáveis de entrada do mundo real (variáveis discretas), para facilitar seu processamento
e tornar mais rápido o processo computacional.
16
Explicaremos este processo, usando o exemplo visto nos parágrafos anteriores.
No exemplo da temperatura no universo de discurso entre 10 °C e 100 °C, existem vários
valores numéricos que foram reduzidos para alguns valores linguísticos através do uso de
umas poucas funções de pertinência, as quais tiveram suas amplitudes normalizadas entre
[0,1]. Um valor discreto pode ser fuzzificado como apresenta a figura 2-3 d) como
observado a seguir:
Que esse valor discreto (32 °C) tem um grau de 0,8 da função de pertinência
“fria”, 0,2 graus da função de pertinência “morna” e grau 0,0 da função de
pertinência “quente”;
Que o vetor Difuso equivalente ao número discreto +32 °C é {0,8;0,2;0};
Que a soma dos componentes não nulos é igual a 1 por causa da superposição das
funções.
Ou seja, o processo facilita e agiliza o processamento computacional das
variáveis, além de também diminuir o universo de discurso.
2.3.3 Processo da base do conhecimento e tomada de decisão
A seguir explicaremos o processo: A base do conhecimento são regras criadas
usando um ou mais conjuntos difusos que estão associados às funções de pertinência
anteriormente vistas.
Esses conjuntos de entrada são chamados de antecedentes ou premissas e, não são
mais que condições associadas a um conjunto difuso de saída, chamado de consequente
ou consequência, que é nada mais que uma conclusão. As ditas associações são
afirmações do tipo “SE<condição>ENTÃO<conclusão>”, ou “SE<condição
1>E<condição 2>ENTÃO<conclusão>”. Os conjuntos antecedentes são associados
usando operadores lógicos difuso do tipo “E”, “OU” etc. Exemplos:
1. SE temperatura <fria>ENTÃO resistor <potência máxima>;
2. SE temperatura <morna>E nível <baixo>ENTÃO válvula de entrada <abrir um
pouco>
A base do conhecimento usualmente é apresentada em formato de tabelas de
regras linguísticas, cada regra tem um peso ponderado entre [0,1] e isto é importante por
que mostra quando uma regra tem menor força que outras da base de regras.
Com a base de regras linguísticas de controle pronta, uma variável de entrada é
mapeada. Se for identificado que ela segue uma das regras linguísticas de controle
existente na base de conhecimento, essa regra selecionada faz uma inferência, este
processo é chamando de tomada de decisão. “Este processo involucra a utilização das
funções de pertinência e as regras geradas na base do conhecimento” (MAZA, 2009).
Maza (2009) afirma ainda que existem diferentes métodos de inferência sendo os mais
comuns os métodos de Mamdani e Takagi-Sugeno-Kang.
17
O método Mamdani utiliza regras de inferência do tipo SE-ENTÃO. Este formato
de regra tem duas partes, o antecedente e a conclusão. Como mostrado nos exemplos 1)
e 2) deste item acima, as regras que fazem parte da base do conhecimento e seguem este
formato, em que tanto o antecedente quanto o consequente são expressados de maneira
linguística, o sistema difuso pode ser considerado do tipo Mamdani. (SILER e
BUCKLEY, 2005)
Já as regras da base do conhecimento do sistema Difuso do tipo Sugeno são
diferentes das do sistema Mamdani, pois o consequente já não é uma expressão linguística
e sim uma função matemática da entrada do sistema no momento dado. Exemplo:
SE temperatura <fria>ENTÃO a saída igual <F>
Nos sistemas Difuso do tipo Sugeno, os valores que arrojam os consequentes das
diferentes regras que são ativadas em determinado momento, já são valores numéricos
por isso, não é preciso passar por uma etapa de defuzzificação. (SILER e BUCKLEY,
2005)
2.3.4 Processo de defuzzificação
Depois da tomada de decisão através de uma inferência linguística, temos uma
conclusão difusa. Esta é uma variável linguística cujos valores são assinados por graus de
pertinência, mesmo assim normalmente é necessário utilizar um escalar correspondente
ao dito grau de pertinência; este processo é chamado de defuzzificação (MAZA, 2009).
Para a defuzzificação, são usados vários métodos matemáticos simples, como o
método Centro-da-Área (C-o-A), o método Centro-do-Máximo (C-o-M) e o método
Média-do-Máximo (M-o-M) (PASSINO, YURKOVICH, 1998)
Segundo (SIMÕES E SHAW, 2007) aplicações de controle em malha fechada e
saltos na saída do controlador podem gerar instabilidades e oscilações, por este motivo é
recomendado usar métodos de defuzzificação que mantenham a propriedade de
continuidade no sinal de saída como o método de defuzzificação C-o-M.
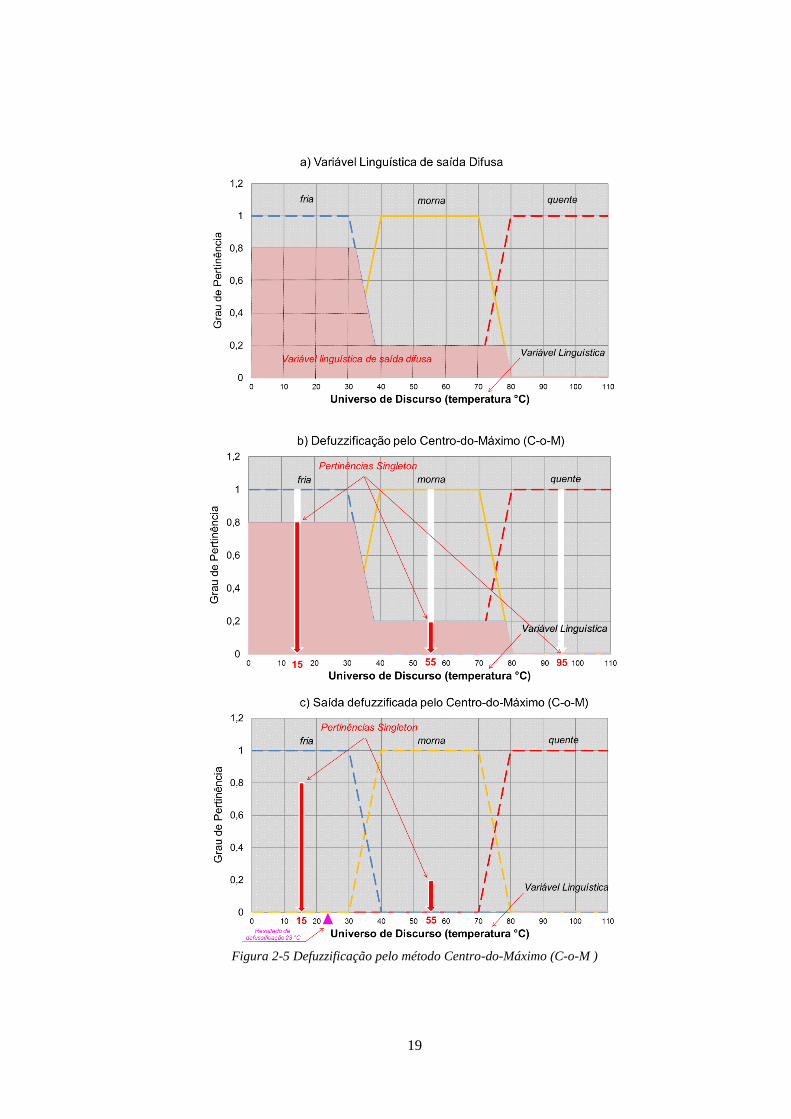
Como a aplicação desta pesquisa é o controle de um processo em malha fechada,
será usado o método de defuzzificação Centro-do-Máximo. Neste método somente são
considerados os valores não nulos da resposta de saída difusa e será explicada a
defuzzificação deste método através de um exemplo: observando uma saída difusa da
figura 2-4 a); nos centros das áreas de cada função de pertinência é inserida uma função
de pertinência singleton (setas brancas), figura 2-4 b) e na mesma figura, nas áreas não
nulas são identificados os picos ou picos das funções de pertinência que assumem o valor
mais alto da área nesse ponto. Este será o grau de pertinência da nova função singleton
(setas vermelhas) na figura 2-4 b), e o restante da área é desconsiderado; desta forma a
18
função de saída foi transformada por funções singleton com pesos equivalentes ao valor
máximo da área que transformaram (Ver figura 2-4 c).
Para realizar o cálculo do valor defuzzificado é usada a equação (2.1), onde
μo,k(ui)indica os pontos em que ocorrem os máximos (alturas) das funções de pertinência
de saída. Este método também é conhecido como método de defuzzificação pelas alturas
(SIMÕES e SHAW, 2007).
(2.1) 𝑢 =∑ 𝑢𝑖 ∑ 𝜇𝑂𝑈𝑇 (𝑢𝑖 )
𝑁𝑘=1
𝑁𝑖=1
∑ ∑ 𝜇𝑂𝑈𝑇 (𝑢𝑖 )𝑁𝑘=1
𝑁𝑖=1
Exemplo:
Na figura 2-5 a) é apresentada uma variável de saída Difuso que representa a
temperatura desejada para um ambiente, cujo vetor de possibilidade de saída Difuso
{fria, morna, quente} é igual a {0,8; 0,2; 0} como mostrado nas figuras 2-5 b) e c) e os
picos das funções de pertinência ocorrem nos valores discretos 15 (fria), 55 (morna) e 95
(quente) do universo de discurso da variável linguística “Temperatura” e o cálculo fica:
(0,8 . 1 . 15) + (0,2 . 1 . 55) + (0 . 1 . 95)
0,8 + 0,2
𝑢 = 23 °C
19
Figura 2-5 Defuzzificação pelo método Centro-do-Máximo (C-o-M )
20
Capítulo 3
Planta Didática PD 3
A planta PD 3 é um sistema que representa um processo a ser controlado de forma
didática, no qual é possível implementar subsistemas de controle (malhas) com variáveis
como: temperatura, nível e vazão.
A PD 3 possui dois circuitos básicos de circulação d’água os quais, segundo a
configuração das válvulas manuais, podem ser ou não alimentados por um único tanque
reservatório, além disso, cada circuito d’água possui uma bomba, uma válvula de controle
pneumática e um medidor de vazão. O primeiro circuito d’água, tem como objetivo
alimentar o tanque de aquecimento (TQ-01), onde existem dois conjuntos de resistências
responsáveis por aquecer a água. Neste circuito é possível controlar a temperatura, vazão
e nível. Este circuito foi o utilizado nesta pesquisa e será detalhado no subitem 3.2.
O segundo circuito d’água consiste em um tanque de mistura (TQ-02), onde não
existem resistências e sim uma conexão com o tanque de aquecimento (TQ-01) que
fornece a água quente para o tanque de mistura (TQ-02). Assim, a temperatura deste
tanque pode ser controlada através da alimentação de água fria proveniente do
reservatório e bombeada pela bomba 02 como ilustra a figura 3-1.
É importante salientar que quando se tem os dois processos em andamento o
setpoint de temperatura do tanque de mistura (TQ-02) deverá sempre ser menor que o
setpoint de temperatura do tanque de aquecimento (TQ-01).
A planta possui várias opções de configurações do processo, ela tem caminhos
alternativos para a água através de tubulações e válvulas manuais instalados, que podem
ser fixadas em posição aberta ou fechadas. Neste trabalho, as válvulas manuais foram
etiquetadas para assim registrar suas posições e replicar a futuro as novas práticas de
laboratório realizadas. Ver Anexos A e B com o formulário de experiências e TAG das
válvulas manuais.
21
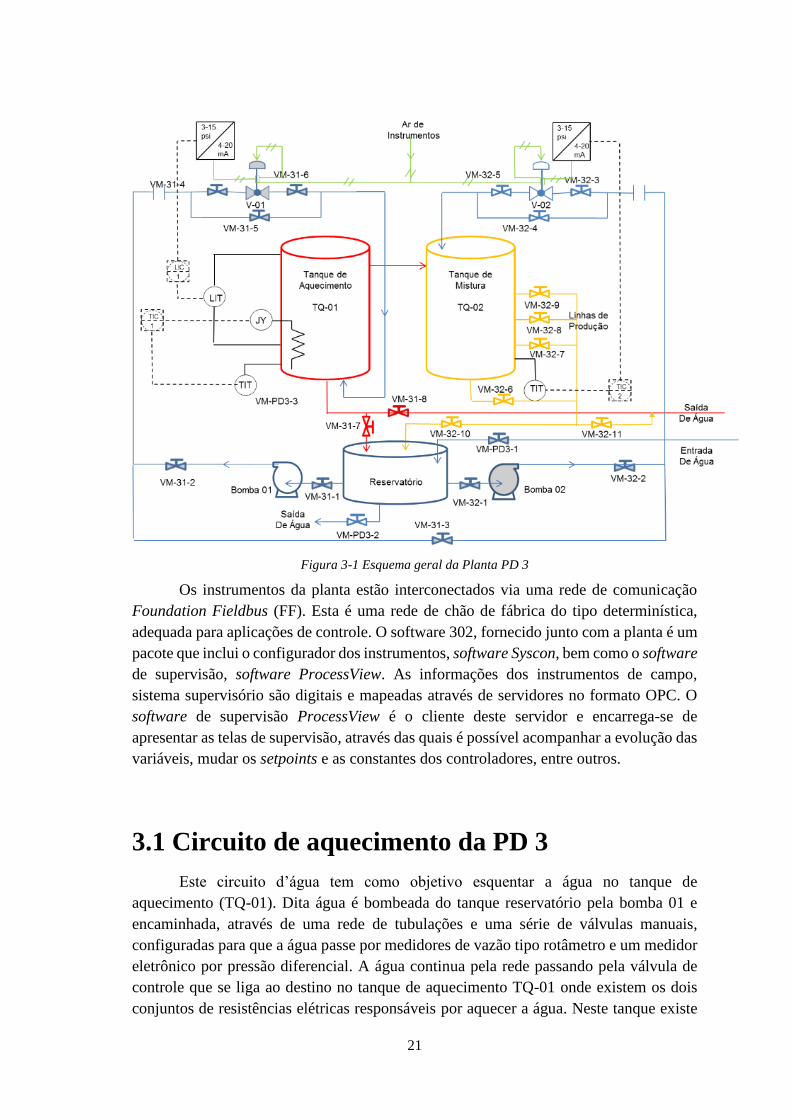
Figura 3-1 Esquema geral da Planta PD 3
Os instrumentos da planta estão interconectados via uma rede de comunicação
Foundation Fieldbus (FF). Esta é uma rede de chão de fábrica do tipo determinística,
adequada para aplicações de controle. O software 302, fornecido junto com a planta é um
pacote que inclui o configurador dos instrumentos, software Syscon, bem como o software
de supervisão, software ProcessView. As informações dos instrumentos de campo,
sistema supervisório são digitais e mapeadas através de servidores no formato OPC. O
software de supervisão ProcessView é o cliente deste servidor e encarrega-se de
apresentar as telas de supervisão, através das quais é possível acompanhar a evolução das
variáveis, mudar os setpoints e as constantes dos controladores, entre outros.
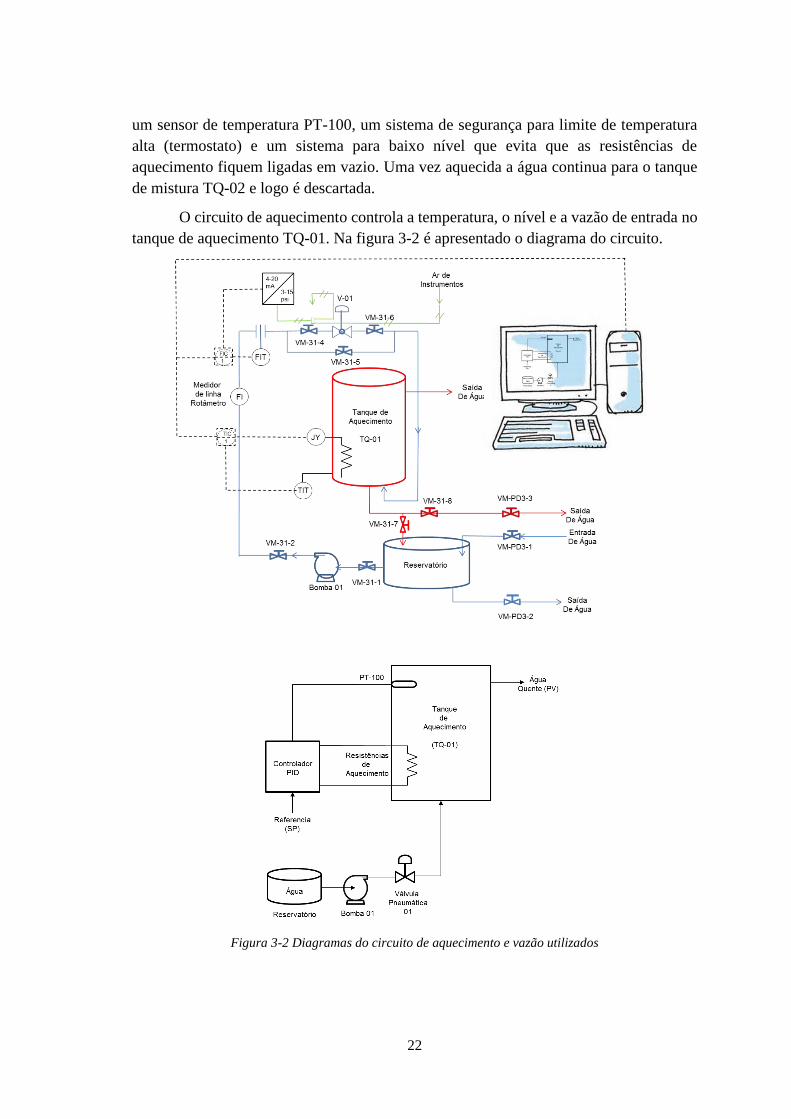
3.1 Circuito de aquecimento da PD 3
Este circuito d’água tem como objetivo esquentar a água no tanque de
aquecimento (TQ-01). Dita água é bombeada do tanque reservatório pela bomba 01 e
encaminhada, através de uma rede de tubulações e uma série de válvulas manuais,
configuradas para que a água passe por medidores de vazão tipo rotâmetro e um medidor
eletrônico por pressão diferencial. A água continua pela rede passando pela válvula de
controle que se liga ao destino no tanque de aquecimento TQ-01 onde existem os dois
conjuntos de resistências elétricas responsáveis por aquecer a água. Neste tanque existe
22
um sensor de temperatura PT-100, um sistema de segurança para limite de temperatura
alta (termostato) e um sistema para baixo nível que evita que as resistências de
aquecimento fiquem ligadas em vazio. Uma vez aquecida a água continua para o tanque
de mistura TQ-02 e logo é descartada.
O circuito de aquecimento controla a temperatura, o nível e a vazão de entrada no
tanque de aquecimento TQ-01. Na figura 3-2 é apresentado o diagrama do circuito.
Figura 3-2 Diagramas do circuito de aquecimento e vazão utilizados
23
3.1.1 Controlador usado no circuito de aquecimento da PD 3
Como a maioria das plantas industriais a PD 3 também usa o típico controlador
PID e suas variações (P, PI, PD), isto graças a seu bom desempenho, baixo custo,
facilidade de implementação e a sintonia que permite que seja feita com o processo em
andamento.
O PID é um controlador temporal, no qual a sua saída depende do sinal instantâneo
de entrada, e cuja função contínua de entrada e saída para controle é:
(3.1) 𝑢(𝑡) = 𝐾𝑝. 𝑒(𝑡) + 𝐾𝑖. ∫ 𝑒(𝑡)𝑑𝑡 + 𝐾𝑑 𝑑𝑒(𝑡)
𝑑𝑡
Onde:
u(t) = sinal de saída
e(t) = erro
Kp = ganho proporcional
Ki= ganho integral
Kd = ganho derivativo
O controlador PID é um controlador que trabalha bem se o processo for
razoavelmente linear. Uma mudança no processo gera uma resposta do controlador
equivalente na saída. Se a relação de entrada e saída do processo for levemente não-linear,
ajustes periódicos dos parâmetros do controlador são necessários. Existem vários
métodos de sintonia para controladores PID, dentre estes, os mais utilizados são os
baseados na resposta ao degrau como: Ziegler-Nichols (ZIEGLER, NICHOLS, 1942),
Cohen-Coon (COHEN, COON, 1953), López et al. (1967) apud (CAMPOS, TEIXEIRA,
2006). Mesmo que novos procedimentos tenham surgido e venha ganhando aceitação
como, por exemplo: método da alocação de polos, método do modelo de controle interno
e métodos usando algoritmo genético (AMARAL et al. 2010), os métodos tradicionais
ainda são marcos de referência usados.
Embora a sintonia de seus parâmetros tenha sido adequada, geralmente ela é feita
para um determinado ponto de operação ou valor de referência e normalmente apresenta
um bom desempenho em condições operacionais semelhantes.
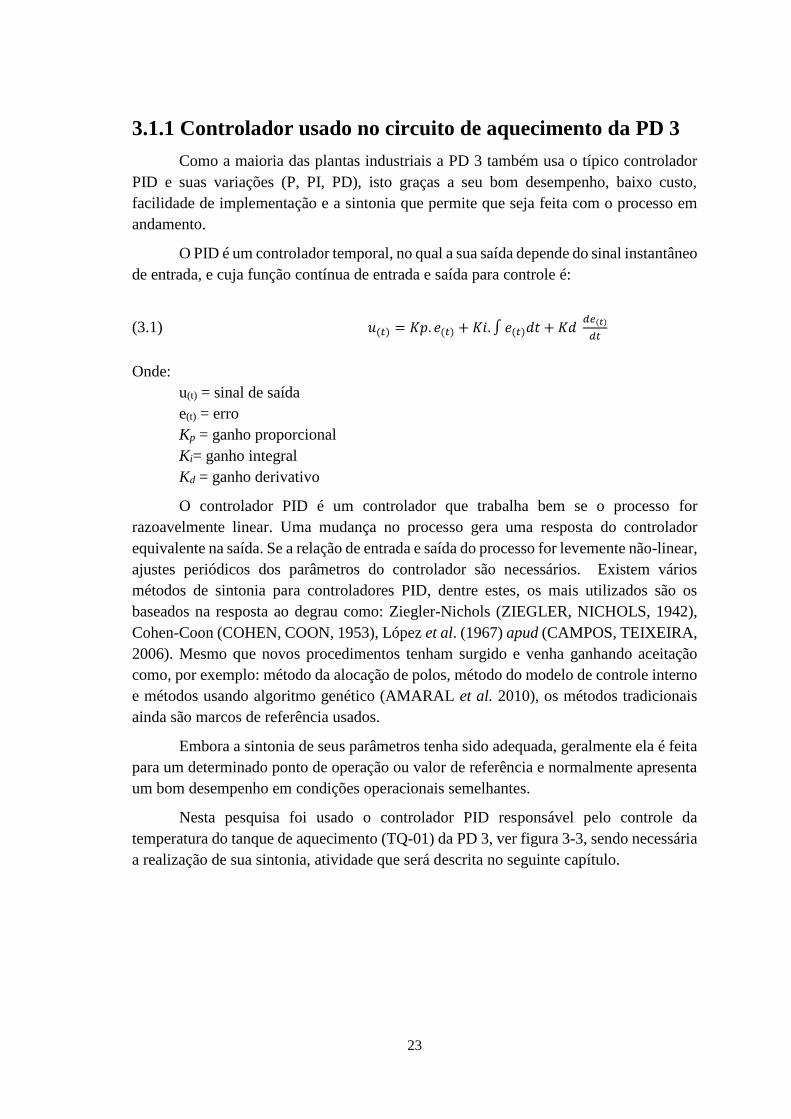
Nesta pesquisa foi usado o controlador PID responsável pelo controle da
temperatura do tanque de aquecimento (TQ-01) da PD 3, ver figura 3-3, sendo necessária
a realização de sua sintonia, atividade que será descrita no seguinte capítulo.
24
Figura 3-3 Diagrama de blocos do controlador PID do tanque de aquecimento (TQ-01) da PD 3
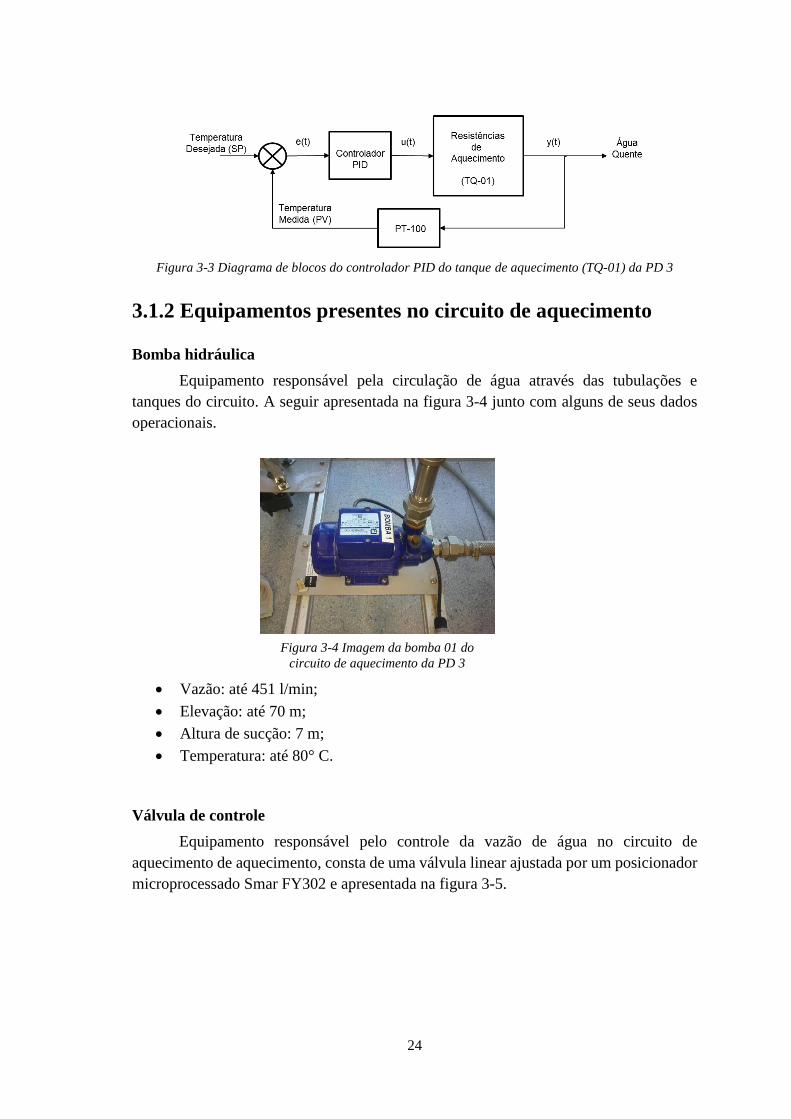
3.1.2 Equipamentos presentes no circuito de aquecimento
Bomba hidráulica
Equipamento responsável pela circulação de água através das tubulações e
tanques do circuito. A seguir apresentada na figura 3-4 junto com alguns de seus dados
operacionais.
Vazão: até 451 l/min;
Elevação: até 70 m;
Altura de sucção: 7 m;
Temperatura: até 80° C.
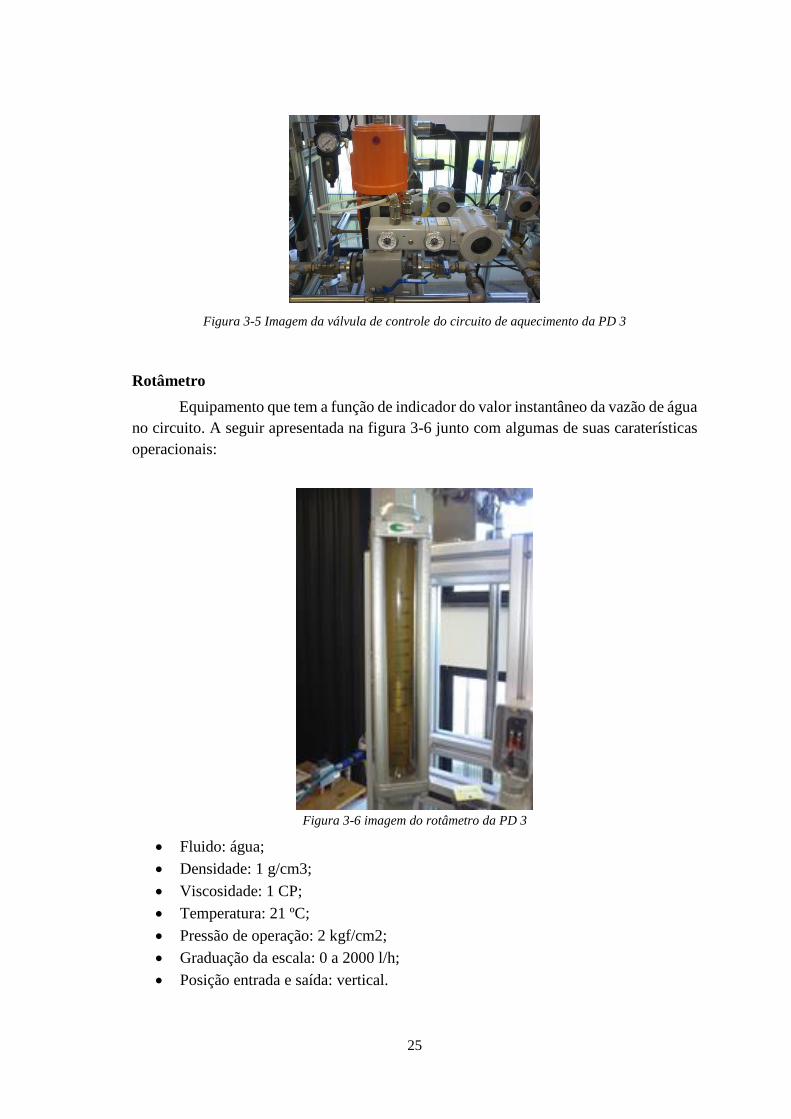
Válvula de controle
Equipamento responsável pelo controle da vazão de água no circuito de
aquecimento de aquecimento, consta de uma válvula linear ajustada por um posicionador
microprocessado Smar FY302 e apresentada na figura 3-5.
Figura 3-4 Imagem da bomba 01 do
circuito de aquecimento da PD 3
25
Figura 3-5 Imagem da válvula de controle do circuito de aquecimento da PD 3
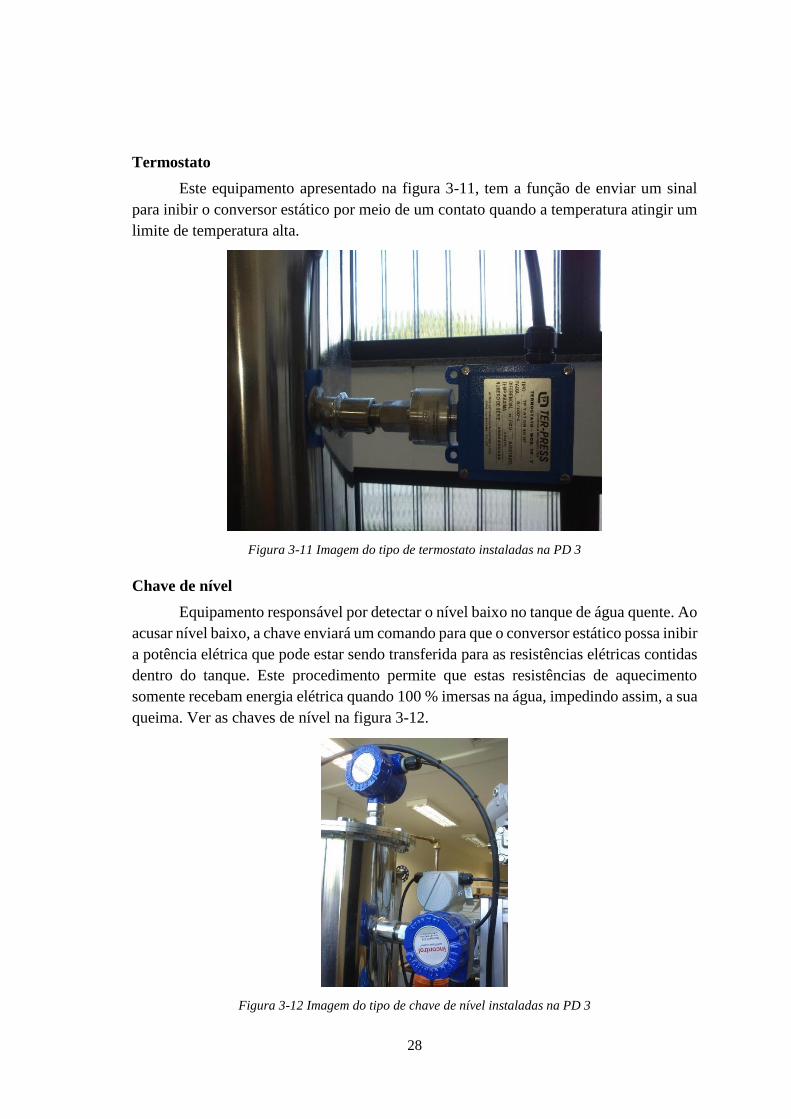
Rotâmetro
Equipamento que tem a função de indicador do valor instantâneo da vazão de água
no circuito. A seguir apresentada na figura 3-6 junto com algumas de suas caraterísticas
operacionais:
Figura 3-6 imagem do rotâmetro da PD 3
Fluido: água;
Densidade: 1 g/cm3;
Viscosidade: 1 CP;
Temperatura: 21 ºC;
Pressão de operação: 2 kgf/cm2;
Graduação da escala: 0 a 2000 l/h;
Posição entrada e saída: vertical.

26
Medidor de vazão
É realizada por um instrumento inteligente da Smar, LD302, o qual realiza a
medição da vazão através de o princípio de medição de pressão diferencial através de uma
platina de orifício instalada como apresentado na figura 3-7.
Sensor de temperatura tipo termo resistência
Um sensor de temperatura tipo PT100 é um sensor que mede a temperatura da
água no tanque de água quente ou de aquecimento e está apresentada na figura 3-8.
Figura 3-8 Imagem do sensor de temperatura tipo PT100 do tanque de aquecimento da PD 3
Figura 3-7 Imagens do medidor de vazão da PD 3

27
Conversor estático
Equipamento utilizado para controlar a potência entregue às resistências elétricas
responsáveis por aquecer a água e pode ser visto na figura 3-9.
Figura 3-9 Imagem do conversor estático da PD 3
Resistências de imersão
São duas resistências que ficam imersas no tanque, como mostrado na figura 3-
10, e são as responsáveis pelo aquecimento da água nesse reservatório.
Figura 3-10 Imagem do tipo de resistências de aquecimento instaladas na PD 3
28
Termostato
Este equipamento apresentado na figura 3-11, tem a função de enviar um sinal
para inibir o conversor estático por meio de um contato quando a temperatura atingir um
limite de temperatura alta.
Figura 3-11 Imagem do tipo de termostato instaladas na PD 3
Chave de nível
Equipamento responsável por detectar o nível baixo no tanque de água quente. Ao
acusar nível baixo, a chave enviará um comando para que o conversor estático possa inibir
a potência elétrica que pode estar sendo transferida para as resistências elétricas contidas
dentro do tanque. Este procedimento permite que estas resistências de aquecimento
somente recebam energia elétrica quando 100 % imersas na água, impedindo assim, a sua
queima. Ver as chaves de nível na figura 3-12.
Figura 3-12 Imagem do tipo de chave de nível instaladas na PD 3

29
Medidor de nível
É realizada por meio de um instrumento inteligente da Smar, LD302, que realiza
a medição da vazão através do princípio de medição de pressão diferencial entre a pressão
no fundo do tanque e o topo do mesmo. Ver o instrumento na figura 3-13.
Figura 3-13 Imagem do medidor de nível do tanque de aquecimento da PD 3
30
Capítulo 4
Estratégias de Controle
Com o objetivo de observar as respostas obtidas a partir da implementação das
estratégias de controle baseadas em lógica difusa, desenvolvidas no presente trabalho,
inicialmente se realizou um procedimento de sintonia tradicional no controlador PID
convencional da PD 3. Posteriormente foram implementadas as estratégias baseadas em
lógica difusa, propostas no presente trabalho. Como métricas de observação do
desempenho destas estratégias foram utilizados os parâmetros característicos das
respostas transitória, normalmente citadas na literatura clássica, sendo estes: tempo de
subida, sobressinal e tempo de assentamento ou estabilização (OGATA, 2001). De forma
a complementar a observação também serão usados os índices de desempenho do erro
como: IAE (Integral do valor Absoluto do Erro) e ITAE (Integral do produto do Tempo
pelo valor Absoluto do Erro). Índices que serão explicados no seguinte capitulo.
Neste capítulo serão descritas as estratégias de controle abordadas no presente
trabalho, começando pelo PID convencional embutido num dos transmissores da planta
PD 3, seguidamente serão descritas as estratégias de controle baseadas em lógica difusa
implementadas: Difuso-PID, Difuso-PID + vazão e por último Totalmente Difusa.
Estratégias implementadas de forma sequencial buscando aprimorar os desempenhos das
respostas a cada nova implementação, observando as métricas e índices citados.
4.1 Controlador PID
O controlador PID é sem dúvida o algoritmo de controle mais comum utilizado
nas aplicações de controle de processos, ele reúne as três ações de controle básicas,
proporcional, integral e derivativa (respectivamente: Kp, Ki, Kd). A seguir a equação do
controlador PID paralelo clássico, onde o ganho proporcional também multiplica o termo
integral e derivativo.
(4.1) u(𝑡) = 𝐾𝑝. 𝑒(𝑡) + 𝐾𝑝.1
𝑇𝑖. ∫ 𝑒(𝑡)𝑑𝑡 + 𝐾𝑝. 𝑇𝑑 .
𝑑𝑒
𝑑𝑡(𝑡)
Para entender os efeitos das ações do controlador PID sobre o processo e a função
do ganho, os mesmos são apresentados na tabela 4-1.
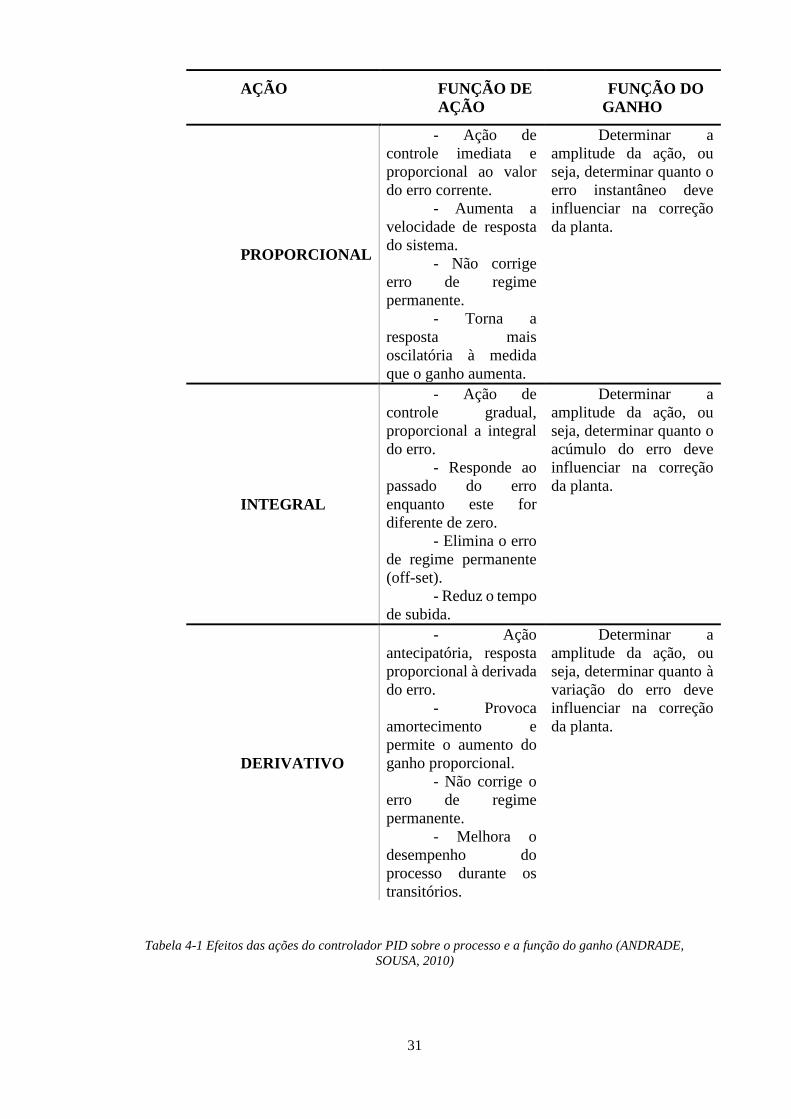
31
Tabela 4-1 Efeitos das ações do controlador PID sobre o processo e a função do ganho (ANDRADE,
SOUSA, 2010)
AÇÃO FUNÇÃO DE
AÇÃO
FUNÇÃO DO
GANHO
PROPORCIONAL
- Ação de
controle imediata e
proporcional ao valor
do erro corrente.
- Aumenta a
velocidade de resposta
do sistema.
- Não corrige
erro de regime
permanente.
- Torna a
resposta mais
oscilatória à medida
que o ganho aumenta.
Determinar a
amplitude da ação, ou
seja, determinar quanto o
erro instantâneo deve
influenciar na correção
da planta.
INTEGRAL
- Ação de
controle gradual,
proporcional a integral
do erro.
- Responde ao
passado do erro
enquanto este for
diferente de zero.
- Elimina o erro
de regime permanente
(off-set).
- Reduz o tempo
de subida.
Determinar a
amplitude da ação, ou
seja, determinar quanto o
acúmulo do erro deve
influenciar na correção
da planta.
DERIVATIVO
- Ação
antecipatória, resposta
proporcional à derivada
do erro.
- Provoca
amortecimento e
permite o aumento do
ganho proporcional.
- Não corrige o
erro de regime
permanente.
- Melhora o
desempenho do
processo durante os
transitórios.
Determinar a
amplitude da ação, ou
seja, determinar quanto à
variação do erro deve
influenciar na correção
da planta.

32
Destaca-se que os controladores P, PI e PD também podem ser obtidos a partir de
um controlador PID. Para isto basta que se alterem os parâmetros Ti (tempo integral) e/ou
Td (tempo derivativo).
A sintonia dos controladores PID consiste no ajuste dos ganhos das ações
proporcional, integral e derivativa. Os objetivos mais comuns da sintonia das constantes
do PID são: tornar o sistema mais rápido em atingir o valor desejado, setpoint; diminuir
o sobressinal, ou seja, quanto a resposta do sistema ultrapassa o setpoint no regime
transitório; e diminuir o tempo que o sistema leva para se estabilizar diante de um erro
normalmente aceito, nas faixas de +-2% ou +-5%. (SILVA, et al., 2005).
Para se obter a sintonia do controlador PID, pode-se utilizar diversos métodos.
Esses métodos podem ser classificados em empíricos heurísticos, analíticos ou obtidos
através de algum tipo de otimização (DUARTE, 2014).
Para a sintonia do controlador PID existente na PD 3, foi usado um dos métodos
de sintonia de controladores PID de Ziegler-Nichols, método conhecido como curva de
reação. Segundo este método, é aplicado um degrau na entrada do sistema em malha
aberta. Assim, uma vez que a variável manipulada (MV) é a potência elétrica nos
resistores de aquecimento, foi aplicado um degrau de potência passando de 0% para 90%,
o que gera uma resposta na variável de saída, a qual aumenta a temperatura da água no
tanque de aquecimento TQ-01 da temperatura ambiente (≈ 27º C). Este processo foi
repetido para três vazões diferentes de entrada da água 300, 600 e 900 l/h, optando para
este trabalho o uso da vazão de 300 l/h, já que este permite um maior intervalo de variação
da temperatura. A curva de reação que caracteriza este método pode ser aproximada a um
sistema de primeira ordem com atraso, que é o que caracteriza o processo de aquecimento
do TQ-01 e é representado pela equação (4.2)
(4.2) 𝐻(𝑠) =𝐾
𝑇𝑠+1𝑒−𝐿𝑠
Para a estimação foi necessário fazer uma aproximação desconsiderando o ruído
da resposta. Para isto foi utilizado o método de Gauss Newton o qual, de forma iterativa,
aproxima a resposta pela função que retorne o menor erro quadrático médio.
Na figura 4-1 é apresentada a resposta real do sistema a qual é caraterística de um
sistema de primeira ordem e pode ter seus parâmetros estimados a partir do ponto de
inflexão. Observando o comportamento da temperatura no tanque de aquecimento TQ-01
pode-se confirmar a viabilidade do uso do método da curva de reação de Ziegler-Nichols
para a sintonia do controlador PID da PD 3 (ZIEGLER, NICHOLS 1942; CARMO,
2006). Este procedimento foi realizado para o cálculo das três vazões testadas resultando
nos parâmetros mostrados na tabela 4-2.
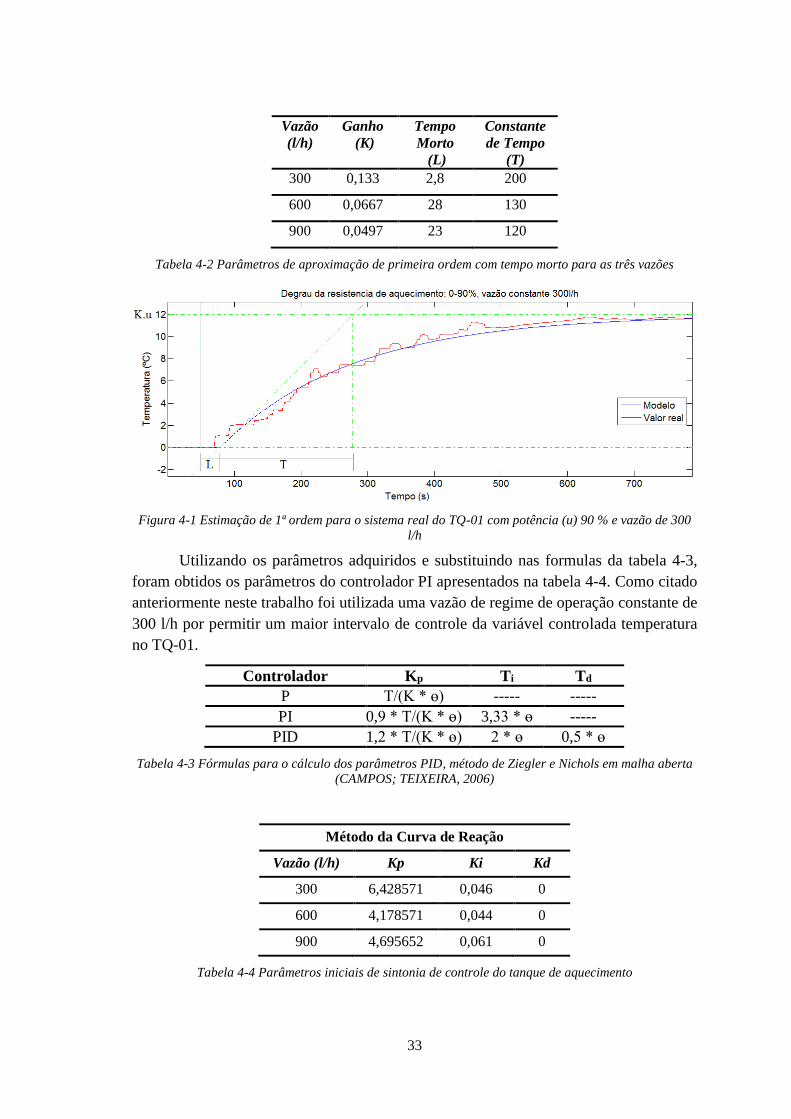
33
Vazão
(l/h)
Ganho
(K)
Tempo
Morto
(L)
Constante
de Tempo
(T)
300 0,133 2,8 200
600 0,0667 28 130
900 0,0497 23 120
Tabela 4-2 Parâmetros de aproximação de primeira ordem com tempo morto para as três vazões
Figura 4-1 Estimação de 1ª ordem para o sistema real do TQ-01 com potência (u) 90 % e vazão de 300
l/h
Utilizando os parâmetros adquiridos e substituindo nas formulas da tabela 4-3,
foram obtidos os parâmetros do controlador PI apresentados na tabela 4-4. Como citado
anteriormente neste trabalho foi utilizada uma vazão de regime de operação constante de
300 l/h por permitir um maior intervalo de controle da variável controlada temperatura
no TQ-01.
Controlador Kp Ti Td
P T/(K * ө) ----- -----
PI 0,9 * T/(K * ө) 3,33 * ө -----
PID 1,2 * T/(K * ө) 2 * ө 0,5 * ө
Tabela 4-3 Fórmulas para o cálculo dos parâmetros PID, método de Ziegler e Nichols em malha aberta
(CAMPOS; TEIXEIRA, 2006)
Método da Curva de Reação
Vazão (l/h) Kp Ki Kd
300 6,428571 0,046 0
600 4,178571 0,044 0
900 4,695652 0,061 0
Tabela 4-4 Parâmetros iniciais de sintonia de controle do tanque de aquecimento
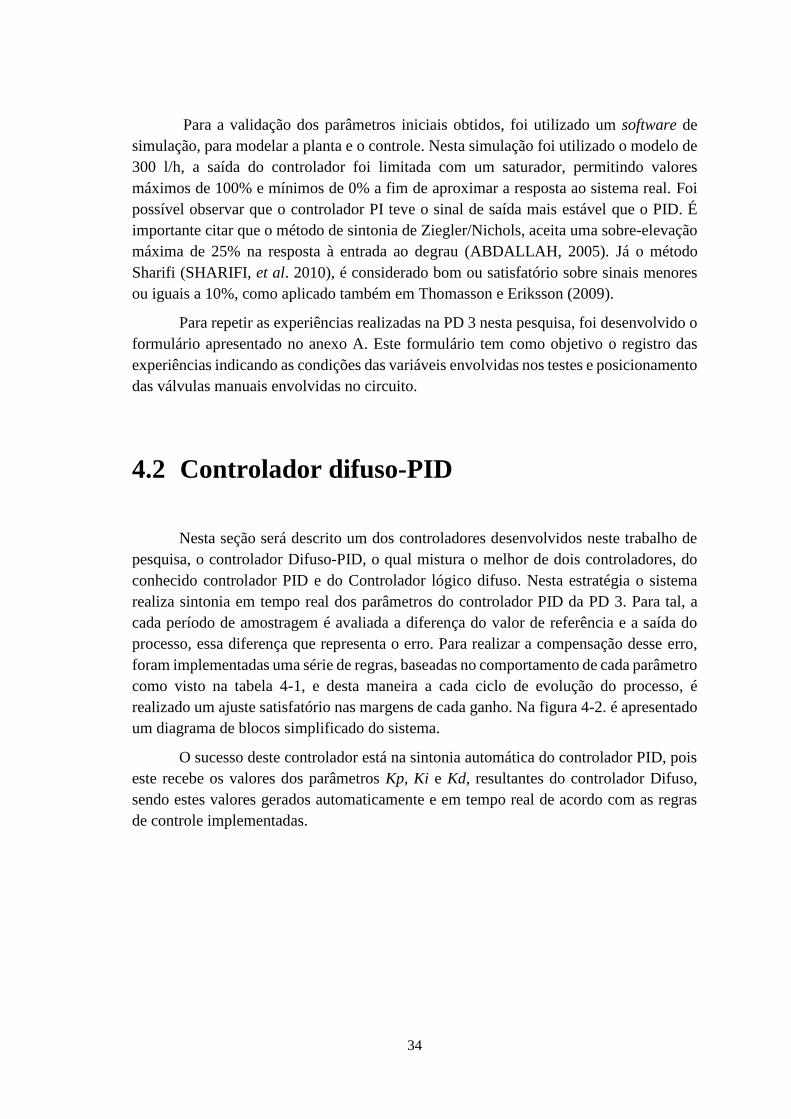
34
Para a validação dos parâmetros iniciais obtidos, foi utilizado um software de
simulação, para modelar a planta e o controle. Nesta simulação foi utilizado o modelo de
300 l/h, a saída do controlador foi limitada com um saturador, permitindo valores
máximos de 100% e mínimos de 0% a fim de aproximar a resposta ao sistema real. Foi
possível observar que o controlador PI teve o sinal de saída mais estável que o PID. É
importante citar que o método de sintonia de Ziegler/Nichols, aceita uma sobre-elevação
máxima de 25% na resposta à entrada ao degrau (ABDALLAH, 2005). Já o método
Sharifi (SHARIFI, et al. 2010), é considerado bom ou satisfatório sobre sinais menores
ou iguais a 10%, como aplicado também em Thomasson e Eriksson (2009).
Para repetir as experiências realizadas na PD 3 nesta pesquisa, foi desenvolvido o
formulário apresentado no anexo A. Este formulário tem como objetivo o registro das
experiências indicando as condições das variáveis envolvidas nos testes e posicionamento
das válvulas manuais envolvidas no circuito.
4.2 Controlador difuso-PID
Nesta seção será descrito um dos controladores desenvolvidos neste trabalho de
pesquisa, o controlador Difuso-PID, o qual mistura o melhor de dois controladores, do
conhecido controlador PID e do Controlador lógico difuso. Nesta estratégia o sistema
realiza sintonia em tempo real dos parâmetros do controlador PID da PD 3. Para tal, a
cada período de amostragem é avaliada a diferença do valor de referência e a saída do
processo, essa diferença que representa o erro. Para realizar a compensação desse erro,
foram implementadas uma série de regras, baseadas no comportamento de cada parâmetro
como visto na tabela 4-1, e desta maneira a cada ciclo de evolução do processo, é
realizado um ajuste satisfatório nas margens de cada ganho. Na figura 4-2. é apresentado
um diagrama de blocos simplificado do sistema.
O sucesso deste controlador está na sintonia automática do controlador PID, pois
este recebe os valores dos parâmetros Kp, Ki e Kd, resultantes do controlador Difuso,
sendo estes valores gerados automaticamente e em tempo real de acordo com as regras
de controle implementadas.
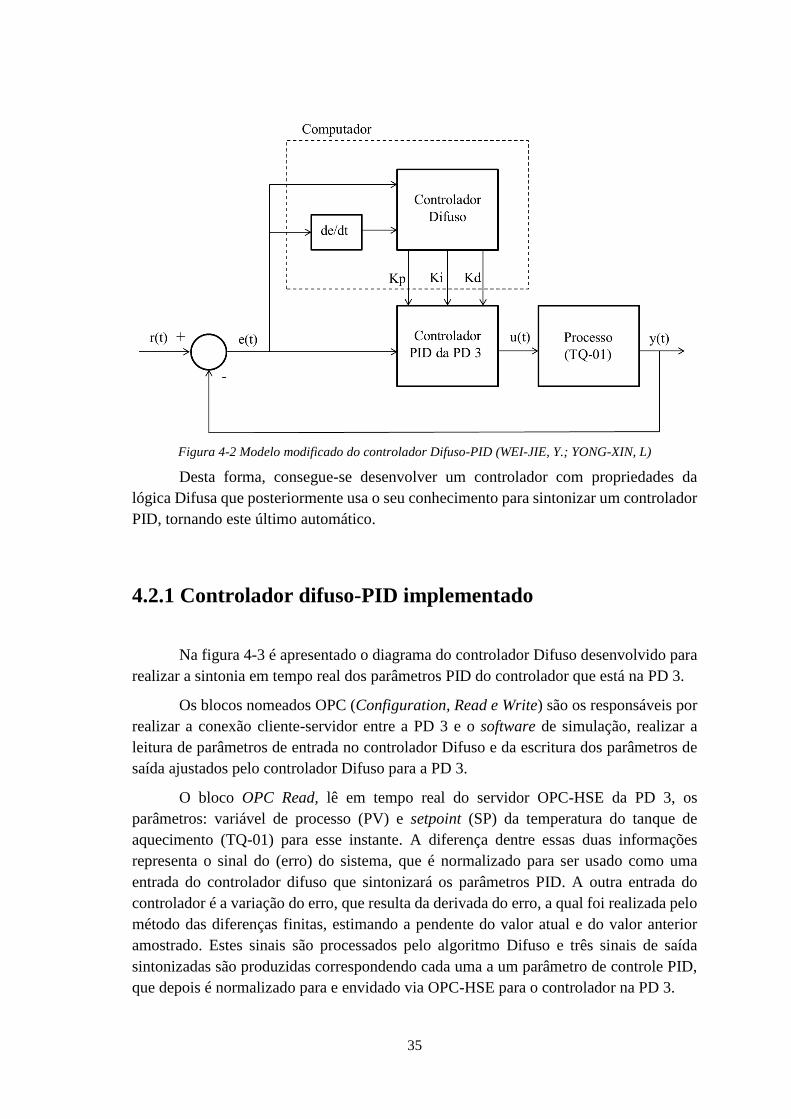
35
Figura 4-2 Modelo modificado do controlador Difuso-PID (WEI-JIE, Y.; YONG-XIN, L)
Desta forma, consegue-se desenvolver um controlador com propriedades da
lógica Difusa que posteriormente usa o seu conhecimento para sintonizar um controlador
PID, tornando este último automático.
4.2.1 Controlador difuso-PID implementado
Na figura 4-3 é apresentado o diagrama do controlador Difuso desenvolvido para
realizar a sintonia em tempo real dos parâmetros PID do controlador que está na PD 3.
Os blocos nomeados OPC (Configuration, Read e Write) são os responsáveis por
realizar a conexão cliente-servidor entre a PD 3 e o software de simulação, realizar a
leitura de parâmetros de entrada no controlador Difuso e da escritura dos parâmetros de
saída ajustados pelo controlador Difuso para a PD 3.
O bloco OPC Read, lê em tempo real do servidor OPC-HSE da PD 3, os
parâmetros: variável de processo (PV) e setpoint (SP) da temperatura do tanque de
aquecimento (TQ-01) para esse instante. A diferença dentre essas duas informações
representa o sinal do (erro) do sistema, que é normalizado para ser usado como uma
entrada do controlador difuso que sintonizará os parâmetros PID. A outra entrada do
controlador é a variação do erro, que resulta da derivada do erro, a qual foi realizada pelo
método das diferenças finitas, estimando a pendente do valor atual e do valor anterior
amostrado. Estes sinais são processados pelo algoritmo Difuso e três sinais de saída
sintonizadas são produzidas correspondendo cada uma a um parâmetro de controle PID,
que depois é normalizado para e envidado via OPC-HSE para o controlador na PD 3.
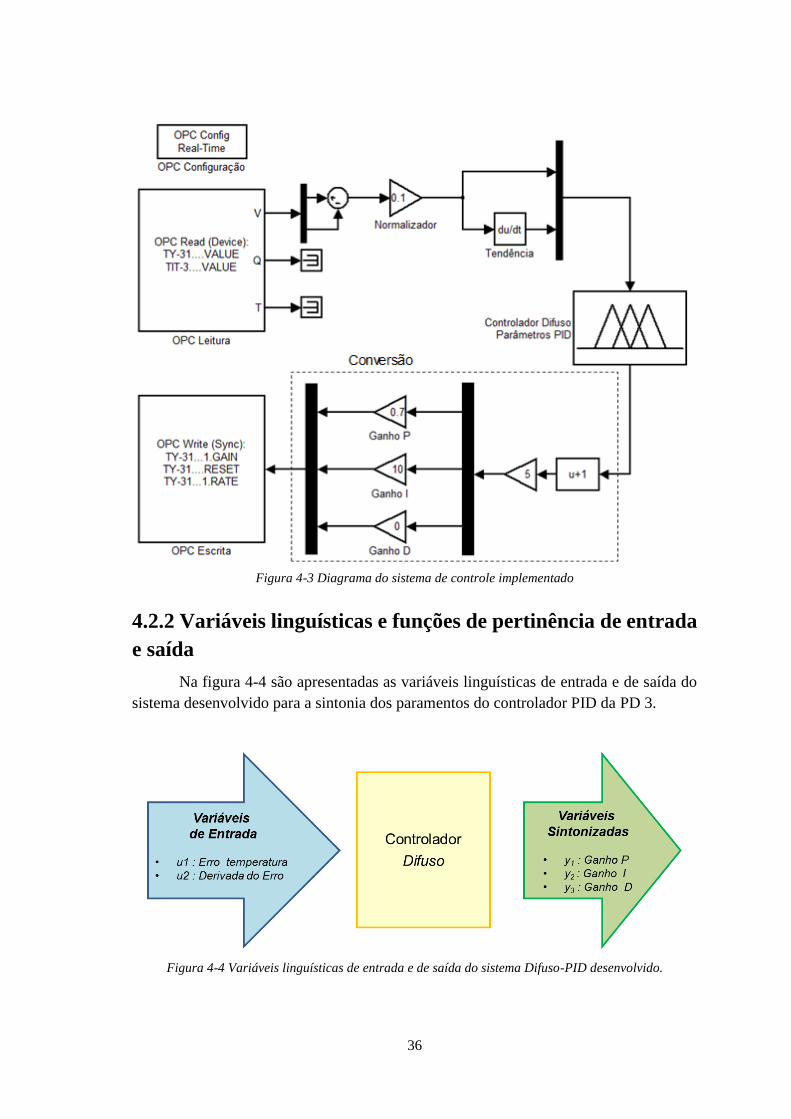
36
Figura 4-3 Diagrama do sistema de controle implementado
4.2.2 Variáveis linguísticas e funções de pertinência de entrada
e saída
Na figura 4-4 são apresentadas as variáveis linguísticas de entrada e de saída do
sistema desenvolvido para a sintonia dos paramentos do controlador PID da PD 3.
Figura 4-4 Variáveis linguísticas de entrada e de saída do sistema Difuso-PID desenvolvido.

37
As variáveis de entrada foram transformadas do universo real para o universo
Difuso seguindo as funções de pertinência apresentadas na figura 4-5 a seguir:
Figura 4-5 Funções de pertinência de entrada do Erro (erro) e da Tendência (variação do erro)
Como se pode observar, as funções de pertinência das variáveis de entrada (erro e
variação do erro) estão no mesmo universo de discurso, sendo seu intervalo entre [-1, 1].
Também se observa que são representadas pelas mesmas 7 funções de pertinência e seus
graus de pertinência estão no intervalo entre [0, 1]. Isto por que em termos práticos a
derivada do erro nada mais é mais do que o valor da inclinação dele em cada período de
amostragem. Este valor é bastante útil para o controle de sistemas porque é interpretado
pelo controlador como uma tendência, podendo ser ascendente, descendente ou estável,
o que permite tomar decisões antecipadamente de forma a evitar comportamentos
indesejados.
Na tabela 4-5 são apresentados todos os parâmetros e denominações das variáveis
Difusas de entrada.
0
0,2
0,4
0,6
0,8
1
1,2
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1
Gra
u d
e P
ert
inê
ncia
Universo de Discurso (Erro)
Função de Pertinência da Variável Linguística Erro
Médio Negativo
MuitoNegativo
ConjuntosDifuso
Zero
VariávelLinguística
Pouco Negativo
Pouco Positivo
Médio Positivo
Muito Positivo
0
0,2
0,4
0,6
0,8
1
1,2
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1
Gra
u d
e P
ert
inê
ncia
Universo de Discurso (Tendência)
Função de Pertinência da Variável Linguística Tendência
Caindo CaindoRápido
ConjuntosDifuso
Estável
VariávelLinguística
CaindoLento
Subindo Lento
Subindo SubindoRápido
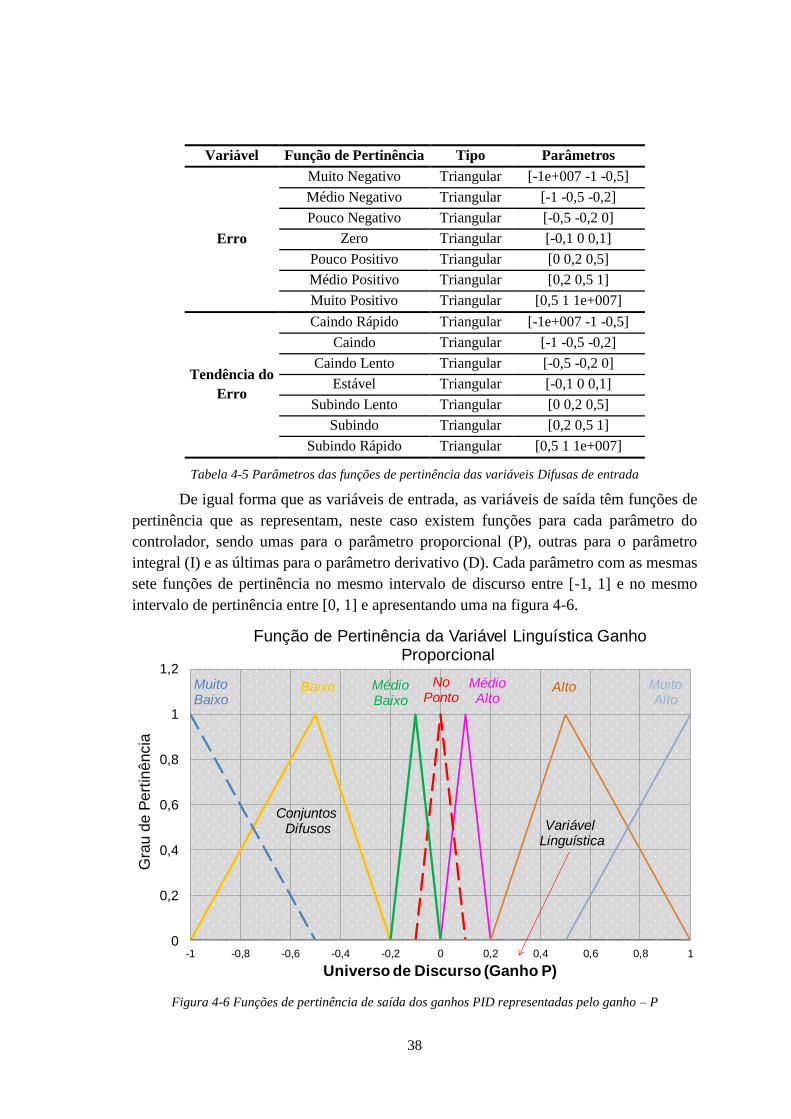
38
Variável Função de Pertinência Tipo Parâmetros
Erro
Muito Negativo Triangular [-1e+007 -1 -0,5]
Médio Negativo Triangular [-1 -0,5 -0,2]
Pouco Negativo Triangular [-0,5 -0,2 0]
Zero Triangular [-0,1 0 0,1]
Pouco Positivo Triangular [0 0,2 0,5]
Médio Positivo Triangular [0,2 0,5 1]
Muito Positivo Triangular [0,5 1 1e+007]
Tendência do
Erro
Caindo Rápido Triangular [-1e+007 -1 -0,5]
Caindo Triangular [-1 -0,5 -0,2]
Caindo Lento Triangular [-0,5 -0,2 0]
Estável Triangular [-0,1 0 0,1]
Subindo Lento Triangular [0 0,2 0,5]
Subindo Triangular [0,2 0,5 1]
Subindo Rápido Triangular [0,5 1 1e+007]
Tabela 4-5 Parâmetros das funções de pertinência das variáveis Difusas de entrada
De igual forma que as variáveis de entrada, as variáveis de saída têm funções de
pertinência que as representam, neste caso existem funções para cada parâmetro do
controlador, sendo umas para o parâmetro proporcional (P), outras para o parâmetro
integral (I) e as últimas para o parâmetro derivativo (D). Cada parâmetro com as mesmas
sete funções de pertinência no mesmo intervalo de discurso entre [-1, 1] e no mesmo
intervalo de pertinência entre [0, 1] e apresentando uma na figura 4-6.
Figura 4-6 Funções de pertinência de saída dos ganhos PID representadas pelo ganho – P
0
0,2
0,4
0,6
0,8
1
1,2
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1
Gra
u d
e P
ert
inê
ncia
Universo de Discurso (Ganho P)
Função de Pertinência da Variável Linguística Ganho Proporcional
Baixo MuitoBaixo
ConjuntosDifusos
NoPonto
VariávelLinguística
MédioBaixo
MédioAlto
Alto MuitoAlto
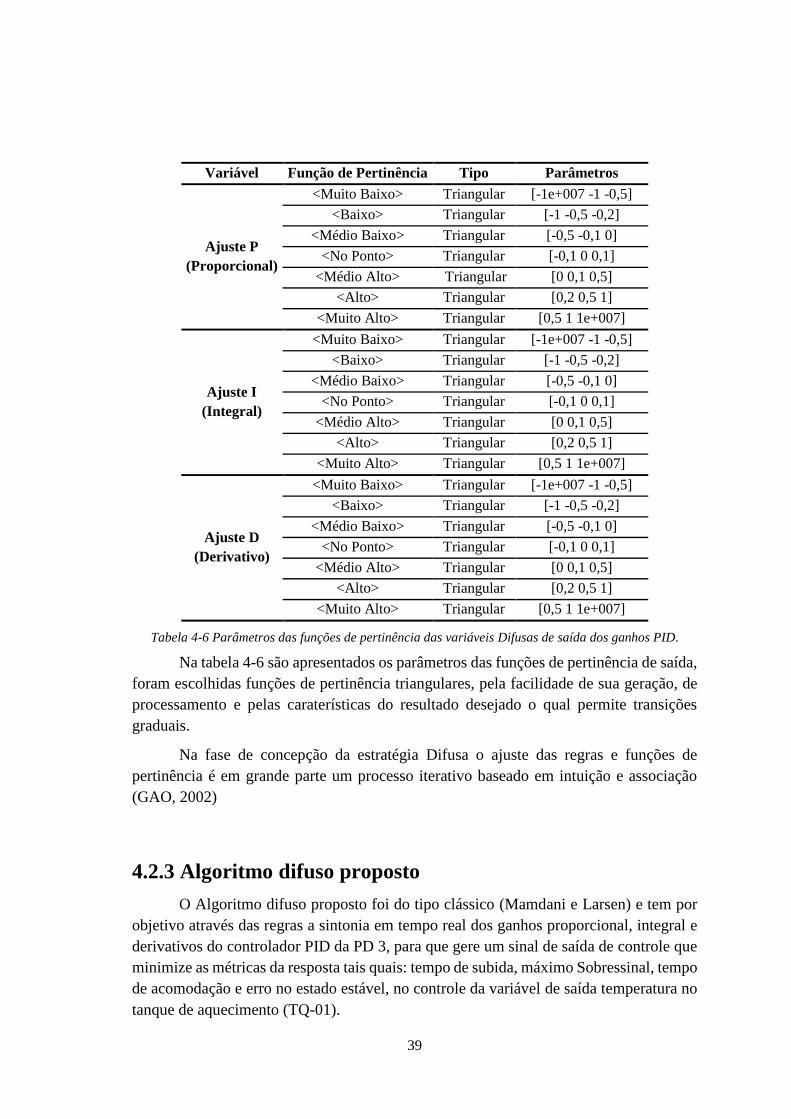
39
Variável Função de Pertinência Tipo Parâmetros
Ajuste P
(Proporcional)
<Muito Baixo> Triangular [-1e+007 -1 -0,5]
<Baixo> Triangular [-1 -0,5 -0,2]
<Médio Baixo> Triangular [-0,5 -0,1 0]
<No Ponto> Triangular [-0,1 0 0,1]
<Médio Alto> Triangular [0 0,1 0,5]
<Alto> Triangular [0,2 0,5 1]
<Muito Alto> Triangular [0,5 1 1e+007]
Ajuste I
(Integral)
<Muito Baixo> Triangular [-1e+007 -1 -0,5]
<Baixo> Triangular [-1 -0,5 -0,2]
<Médio Baixo> Triangular [-0,5 -0,1 0]
<No Ponto> Triangular [-0,1 0 0,1]
<Médio Alto> Triangular [0 0,1 0,5]
<Alto> Triangular [0,2 0,5 1]
<Muito Alto> Triangular [0,5 1 1e+007]
Ajuste D
(Derivativo)
<Muito Baixo> Triangular [-1e+007 -1 -0,5]
<Baixo> Triangular [-1 -0,5 -0,2]
<Médio Baixo> Triangular [-0,5 -0,1 0]
<No Ponto> Triangular [-0,1 0 0,1]
<Médio Alto> Triangular [0 0,1 0,5]
<Alto> Triangular [0,2 0,5 1]
<Muito Alto> Triangular [0,5 1 1e+007]
Tabela 4-6 Parâmetros das funções de pertinência das variáveis Difusas de saída dos ganhos PID.
Na tabela 4-6 são apresentados os parâmetros das funções de pertinência de saída,
foram escolhidas funções de pertinência triangulares, pela facilidade de sua geração, de
processamento e pelas caraterísticas do resultado desejado o qual permite transições
graduais.
Na fase de concepção da estratégia Difusa o ajuste das regras e funções de
pertinência é em grande parte um processo iterativo baseado em intuição e associação
(GAO, 2002)
4.2.3 Algoritmo difuso proposto
O Algoritmo difuso proposto foi do tipo clássico (Mamdani e Larsen) e tem por
objetivo através das regras a sintonia em tempo real dos ganhos proporcional, integral e
derivativos do controlador PID da PD 3, para que gere um sinal de saída de controle que
minimize as métricas da resposta tais quais: tempo de subida, máximo Sobressinal, tempo
de acomodação e erro no estado estável, no controle da variável de saída temperatura no
tanque de aquecimento (TQ-01).
40
O algoritmo do tipo escolhido chega a uma conclusão, através de um processo de
inferências realizado através do uso da base de regras e, posteriormente, uma etapa de
defuzzificação gera os valores numericos de saída para cada parâmetro do controlador.
A base de regras utilizadas está apresentada na tabela 4-7, e são regras da forma:
“SE<condição1>E<condição2>ENTÃO<conclusão>E<conclusão>E
<conclusão>”
As regras difusas irão, em conjunto, proporcionar as três componentes PID do
controlador, onde cada uma tem um papel distinto no efeito que têm sobre o sistema.
Sendo que, em conjunto, as 49 regras quando somadas representam um sinal contínuo de
controle que sintonizarão o controlador PID que, por sua vez, controlará o sistema de
aquecimento.
Como já antes mencionado, para o desenvolvimento das regras observou-se o
comportamento de cada parâmetro mostrado na tabela 4-1, e levou-se em consideração o
atraso observado durante o processo térmico no tanque de aquecimento da PD 3. Com
isto a primeira regra que o sistema vai utilizar ao aplicar um degrau na referência (SP)
será:
SE o erro for “Muito Positivo” E a tendência do erro for “Estável” ENTÃO a variável
de saída Proporcional vale “Médio Alto” E a Integral vale “Médio Alto” E a
Derivativa vale “Médio Alto” (Regra 4)
É importante que o valor de controle nos instantes iniciais não seja tão elevado
com vistas que o sistema não apresente sobressinal, após uns ciclos será identificada a
tendência e o sistema ajustara a saída conforme indique a seleção na base de regras. Outra
regra importante a se destacar é a última regra que o sistema utilizará quando o mesmo
se encontre estabilizado no valor de referência,
SE o erro for “Zero” E a tendência do erro for “Estável” ENTÃO a variável de saída
Proporcional vale “Médio Alto” E a Integral vale “Médio Alto” E a Derivativa vale
“Médio Alto” (Regra 25)
As demais regras apresentam todas as possíveis combinações que podem suceder
durante a operação do sistema e cada uma oferece uma resposta ao sistema que ajuste os
parâmetros PID do controlador.
Por último, lembrando a equação (3.1) que representa a saída de controle do
controlador PID. Onde “𝑲𝒑. 𝒆(𝒕)“ representa o erro, ” 𝑲𝒊. ∫ 𝒆(𝒕)𝒅𝒕 “ a integral do erro e
“𝑲𝒅 𝒅𝒆(𝒕)
𝒅𝒕“ a derivada do erro, sendo o erro a diferença de valores entre a referência (SP)
e o valor instantâneo do sistema a controlar (PV). A respectiva multiplicação destes
parâmetros pelos parâmetros gerados pelo controlador Difuso, P, I e D, resultam nos três
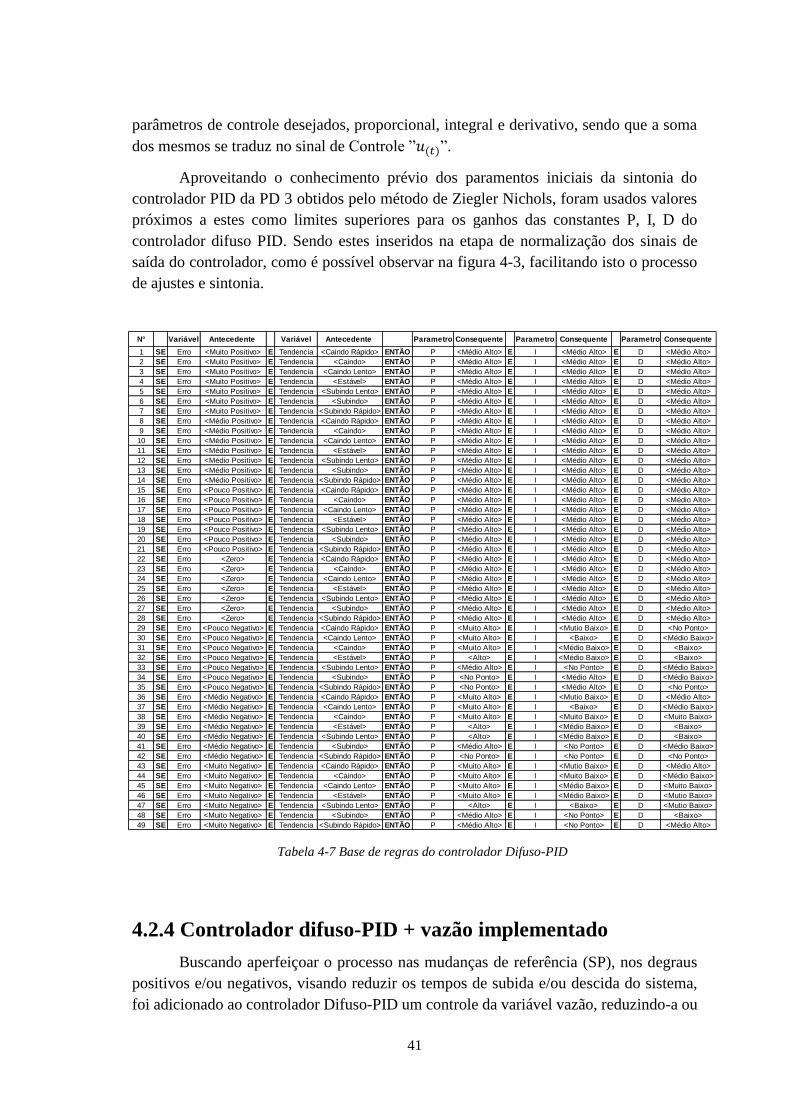
41
parâmetros de controle desejados, proporcional, integral e derivativo, sendo que a soma
dos mesmos se traduz no sinal de Controle ”𝑢(𝑡)”.
Aproveitando o conhecimento prévio dos paramentos iniciais da sintonia do
controlador PID da PD 3 obtidos pelo método de Ziegler Nichols, foram usados valores
próximos a estes como limites superiores para os ganhos das constantes P, I, D do
controlador difuso PID. Sendo estes inseridos na etapa de normalização dos sinais de
saída do controlador, como é possível observar na figura 4-3, facilitando isto o processo
de ajustes e sintonia.
4.2.4 Controlador difuso-PID + vazão implementado
Buscando aperfeiçoar o processo nas mudanças de referência (SP), nos degraus
positivos e/ou negativos, visando reduzir os tempos de subida e/ou descida do sistema,
foi adicionado ao controlador Difuso-PID um controle da variável vazão, reduzindo-a ou
N° Variável Antecedente Variável Antecedente Parametro Consequente Parametro Consequente Parametro Consequente
1 SE Erro <Muito Positivo> E Tendencia <Caindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
2 SE Erro <Muito Positivo> E Tendencia <Caindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
3 SE Erro <Muito Positivo> E Tendencia <Caindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
4 SE Erro <Muito Positivo> E Tendencia <Estável> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
5 SE Erro <Muito Positivo> E Tendencia <Subindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
6 SE Erro <Muito Positivo> E Tendencia <Subindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
7 SE Erro <Muito Positivo> E Tendencia <Subindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
8 SE Erro <Médio Positivo> E Tendencia <Caindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
9 SE Erro <Médio Positivo> E Tendencia <Caindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
10 SE Erro <Médio Positivo> E Tendencia <Caindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
11 SE Erro <Médio Positivo> E Tendencia <Estável> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
12 SE Erro <Médio Positivo> E Tendencia <Subindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
13 SE Erro <Médio Positivo> E Tendencia <Subindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
14 SE Erro <Médio Positivo> E Tendencia <Subindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
15 SE Erro <Pouco Positivo> E Tendencia <Caindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
16 SE Erro <Pouco Positivo> E Tendencia <Caindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
17 SE Erro <Pouco Positivo> E Tendencia <Caindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
18 SE Erro <Pouco Positivo> E Tendencia <Estável> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
19 SE Erro <Pouco Positivo> E Tendencia <Subindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
20 SE Erro <Pouco Positivo> E Tendencia <Subindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
21 SE Erro <Pouco Positivo> E Tendencia <Subindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
22 SE Erro <Zero> E Tendencia <Caindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
23 SE Erro <Zero> E Tendencia <Caindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
24 SE Erro <Zero> E Tendencia <Caindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
25 SE Erro <Zero> E Tendencia <Estável> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
26 SE Erro <Zero> E Tendencia <Subindo Lento> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
27 SE Erro <Zero> E Tendencia <Subindo> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
28 SE Erro <Zero> E Tendencia <Subindo Rápido> ENTÃO P <Médio Alto> E I <Médio Alto> E D <Médio Alto>
29 SE Erro <Pouco Negativo> E Tendencia <Caindo Rápido> ENTÃO P <Muito Alto> E I <Mutio Baixo> E D <No Ponto>
30 SE Erro <Pouco Negativo> E Tendencia <Caindo Lento> ENTÃO P <Muito Alto> E I <Baixo> E D <Médio Baixo>
31 SE Erro <Pouco Negativo> E Tendencia <Caindo> ENTÃO P <Muito Alto> E I <Médio Baixo> E D <Baixo>
32 SE Erro <Pouco Negativo> E Tendencia <Estável> ENTÃO P <Alto> E I <Médio Baixo> E D <Baixo>
33 SE Erro <Pouco Negativo> E Tendencia <Subindo Lento> ENTÃO P <Médio Alto> E I <No Ponto> E D <Médio Baixo>
34 SE Erro <Pouco Negativo> E Tendencia <Subindo> ENTÃO P <No Ponto> E I <Médio Alto> E D <Médio Baixo>
35 SE Erro <Pouco Negativo> E Tendencia <Subindo Rápido> ENTÃO P <No Ponto> E I <Médio Alto> E D <No Ponto>
36 SE Erro <Médio Negativo> E Tendencia <Caindo Rápido> ENTÃO P <Muito Alto> E I <Mutio Baixo> E D <Médio Alto>
37 SE Erro <Médio Negativo> E Tendencia <Caindo Lento> ENTÃO P <Muito Alto> E I <Baixo> E D <Médio Baixo>
38 SE Erro <Médio Negativo> E Tendencia <Caindo> ENTÃO P <Muito Alto> E I <Muito Baixo> E D <Muito Baixo>
39 SE Erro <Médio Negativo> E Tendencia <Estável> ENTÃO P <Alto> E I <Médio Baixo> E D <Baixo>
40 SE Erro <Médio Negativo> E Tendencia <Subindo Lento> ENTÃO P <Alto> E I <Médio Baixo> E D <Baixo>
41 SE Erro <Médio Negativo> E Tendencia <Subindo> ENTÃO P <Médio Alto> E I <No Ponto> E D <Médio Baixo>
42 SE Erro <Médio Negativo> E Tendencia <Subindo Rápido> ENTÃO P <No Ponto> E I <No Ponto> E D <No Ponto>
43 SE Erro <Muito Negativo> E Tendencia <Caindo Rápido> ENTÃO P <Muito Alto> E I <Mutio Baixo> E D <Médio Alto>
44 SE Erro <Muito Negativo> E Tendencia <Caindo> ENTÃO P <Muito Alto> E I <Muito Baixo> E D <Médio Baixo>
45 SE Erro <Muito Negativo> E Tendencia <Caindo Lento> ENTÃO P <Muito Alto> E I <Médio Baixo> E D <Muito Baixo>
46 SE Erro <Muito Negativo> E Tendencia <Estável> ENTÃO P <Muito Alto> E I <Médio Baixo> E D <Mutio Baixo>
47 SE Erro <Muito Negativo> E Tendencia <Subindo Lento> ENTÃO P <Alto> E I <Baixo> E D <Mutio Baixo>
48 SE Erro <Muito Negativo> E Tendencia <Subindo> ENTÃO P <Médio Alto> E I <No Ponto> E D <Baixo>
49 SE Erro <Muito Negativo> E Tendencia <Subindo Rápido> ENTÃO P <Médio Alto> E I <No Ponto> E D <Médio Alto>
Tabela 4-7 Base de regras do controlador Difuso-PID
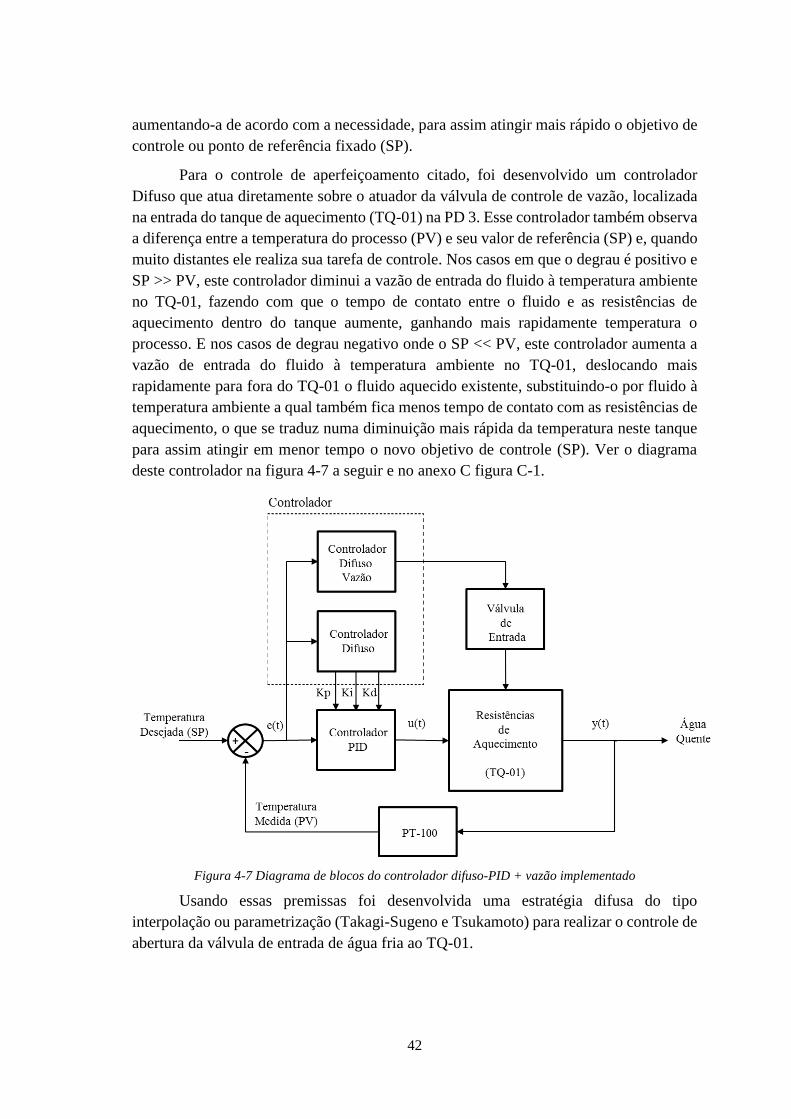
42
aumentando-a de acordo com a necessidade, para assim atingir mais rápido o objetivo de
controle ou ponto de referência fixado (SP).
Para o controle de aperfeiçoamento citado, foi desenvolvido um controlador
Difuso que atua diretamente sobre o atuador da válvula de controle de vazão, localizada
na entrada do tanque de aquecimento (TQ-01) na PD 3. Esse controlador também observa
a diferença entre a temperatura do processo (PV) e seu valor de referência (SP) e, quando
muito distantes ele realiza sua tarefa de controle. Nos casos em que o degrau é positivo e
SP >> PV, este controlador diminui a vazão de entrada do fluido à temperatura ambiente
no TQ-01, fazendo com que o tempo de contato entre o fluido e as resistências de
aquecimento dentro do tanque aumente, ganhando mais rapidamente temperatura o
processo. E nos casos de degrau negativo onde o SP << PV, este controlador aumenta a
vazão de entrada do fluido à temperatura ambiente no TQ-01, deslocando mais
rapidamente para fora do TQ-01 o fluido aquecido existente, substituindo-o por fluido à
temperatura ambiente a qual também fica menos tempo de contato com as resistências de
aquecimento, o que se traduz numa diminuição mais rápida da temperatura neste tanque
para assim atingir em menor tempo o novo objetivo de controle (SP). Ver o diagrama
deste controlador na figura 4-7 a seguir e no anexo C figura C-1.
Figura 4-7 Diagrama de blocos do controlador difuso-PID + vazão implementado
Usando essas premissas foi desenvolvida uma estratégia difusa do tipo
interpolação ou parametrização (Takagi-Sugeno e Tsukamoto) para realizar o controle de
abertura da válvula de entrada de água fria ao TQ-01.
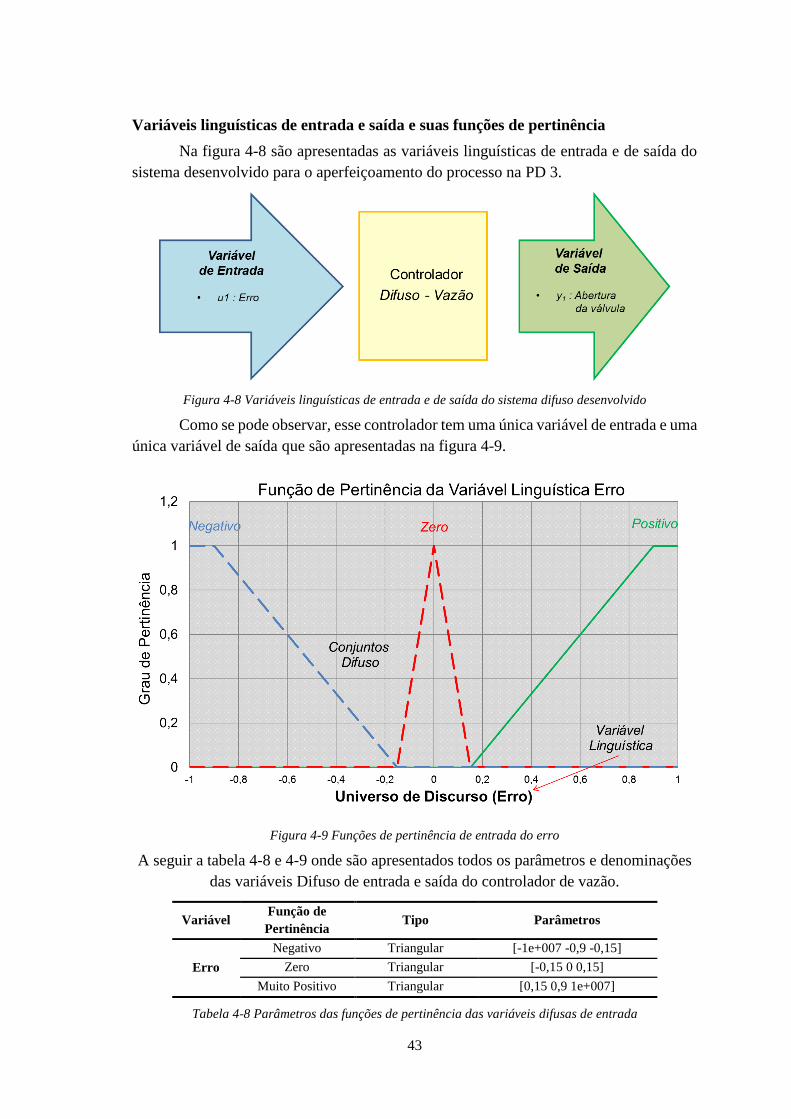
43
Variáveis linguísticas de entrada e saída e suas funções de pertinência
Na figura 4-8 são apresentadas as variáveis linguísticas de entrada e de saída do
sistema desenvolvido para o aperfeiçoamento do processo na PD 3.
Figura 4-8 Variáveis linguísticas de entrada e de saída do sistema difuso desenvolvido
Como se pode observar, esse controlador tem uma única variável de entrada e uma
única variável de saída que são apresentadas na figura 4-9.
Figura 4-9 Funções de pertinência de entrada do erro
A seguir a tabela 4-8 e 4-9 onde são apresentados todos os parâmetros e denominações
das variáveis Difuso de entrada e saída do controlador de vazão.
Variável Função de
Pertinência Tipo Parâmetros
Erro
Negativo Triangular [-1e+007 -0,9 -0,15]
Zero Triangular [-0,15 0 0,15]
Muito Positivo Triangular [0,15 0,9 1e+007]
Tabela 4-8 Parâmetros das funções de pertinência das variáveis difusas de entrada
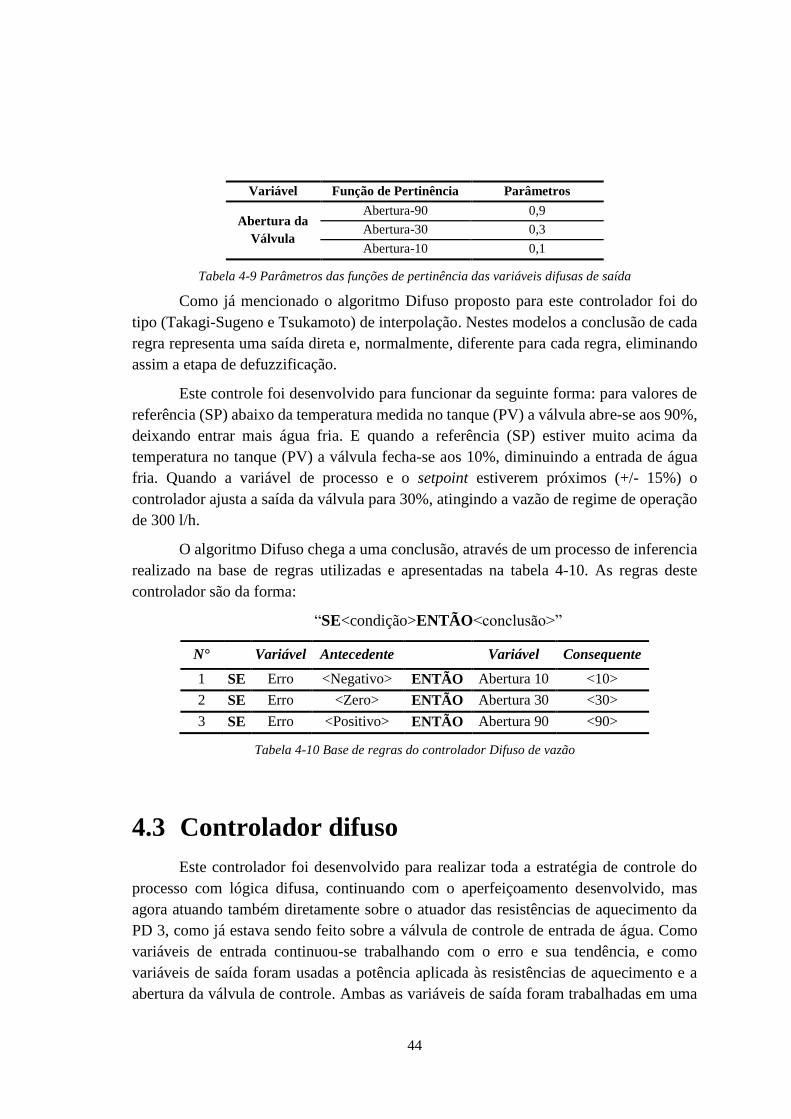
44
Variável Função de Pertinência Parâmetros
Abertura da
Válvula
Abertura-90 0,9
Abertura-30 0,3
Abertura-10 0,1
Tabela 4-9 Parâmetros das funções de pertinência das variáveis difusas de saída
Como já mencionado o algoritmo Difuso proposto para este controlador foi do
tipo (Takagi-Sugeno e Tsukamoto) de interpolação. Nestes modelos a conclusão de cada
regra representa uma saída direta e, normalmente, diferente para cada regra, eliminando
assim a etapa de defuzzificação.
Este controle foi desenvolvido para funcionar da seguinte forma: para valores de
referência (SP) abaixo da temperatura medida no tanque (PV) a válvula abre-se aos 90%,
deixando entrar mais água fria. E quando a referência (SP) estiver muito acima da
temperatura no tanque (PV) a válvula fecha-se aos 10%, diminuindo a entrada de água
fria. Quando a variável de processo e o setpoint estiverem próximos (+/- 15%) o
controlador ajusta a saída da válvula para 30%, atingindo a vazão de regime de operação
de 300 l/h.
O algoritmo Difuso chega a uma conclusão, através de um processo de inferencia
realizado na base de regras utilizadas e apresentadas na tabela 4-10. As regras deste
controlador são da forma:
“SE<condição>ENTÃO<conclusão>”
N° Variável Antecedente Variável Consequente
1 SE Erro <Negativo> ENTÃO Abertura 10 <10>
2 SE Erro <Zero> ENTÃO Abertura 30 <30>
3 SE Erro <Positivo> ENTÃO Abertura 90 <90>
Tabela 4-10 Base de regras do controlador Difuso de vazão
4.3 Controlador difuso
Este controlador foi desenvolvido para realizar toda a estratégia de controle do
processo com lógica difusa, continuando com o aperfeiçoamento desenvolvido, mas
agora atuando também diretamente sobre o atuador das resistências de aquecimento da
PD 3, como já estava sendo feito sobre a válvula de controle de entrada de água. Como
variáveis de entrada continuou-se trabalhando com o erro e sua tendência, e como
variáveis de saída foram usadas a potência aplicada às resistências de aquecimento e a
abertura da válvula de controle. Ambas as variáveis de saída foram trabalhadas em uma
45
faixa entre 0 e 100% para cada uma. Ver diagrama do controlador implementado na figura
4-10 e no anexo C figura C-2.
Figura 4-10 Diagrama de blocos do controlador totalmente difuso implementado
4.3.1 Variáveis linguísticas de entrada e saída e suas funções de
pertinência
Na figura 4-11 são apresentadas as variáveis linguísticas de entrada e de saída do
sistema desenvolvido para o controle do processo na PD 3.
Figura 4-11 Variáveis linguísticas de entrada e de saída do sistema difuso desenvolvido
Como citado anteriormente, as variáveis de entrada continuaram sendo as
mesmas, mas foram realizados alguns ajustes nas funções de pertinência tanto no
intervalo do universo de discurso quanto no formato triangular usado, tudo isto produto
dos ajustes intuitivos observados no processo de sintonização do controlador. Ver funções
de pertinência nas figuras 4-12 e 4-13 a seguir:
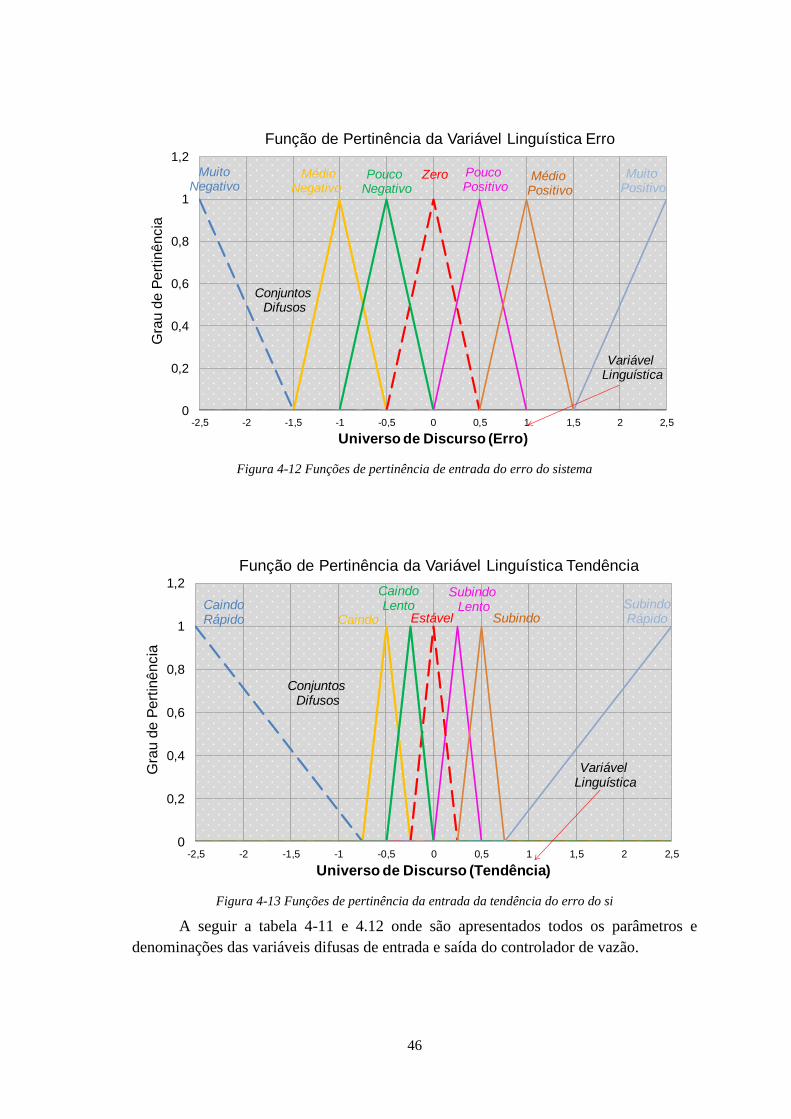
46
Figura 4-12 Funções de pertinência de entrada do erro do sistema
Figura 4-13 Funções de pertinência da entrada da tendência do erro do si
A seguir a tabela 4-11 e 4.12 onde são apresentados todos os parâmetros e
denominações das variáveis difusas de entrada e saída do controlador de vazão.
0
0,2
0,4
0,6
0,8
1
1,2
-2,5 -2 -1,5 -1 -0,5 0 0,5 1 1,5 2 2,5
Gra
u d
e P
ert
inê
ncia
Universo de Discurso (Erro)
Função de Pertinência da Variável Linguística Erro
Médio Negativo
MuitoNegativo
ConjuntosDifusos
Zero
VariávelLinguística
Pouco Negativo
Pouco Positivo
Médio Positivo
Muito Positivo
0
0,2
0,4
0,6
0,8
1
1,2
-2,5 -2 -1,5 -1 -0,5 0 0,5 1 1,5 2 2,5
Gra
u d
e P
ert
inê
ncia
Universo de Discurso (Tendência)
Função de Pertinência da Variável Linguística Tendência
Caindo CaindoRápido
ConjuntosDifusos
Estável
VariávelLinguística
CaindoLento
Subindo Lento
SubindoSubindoRápido
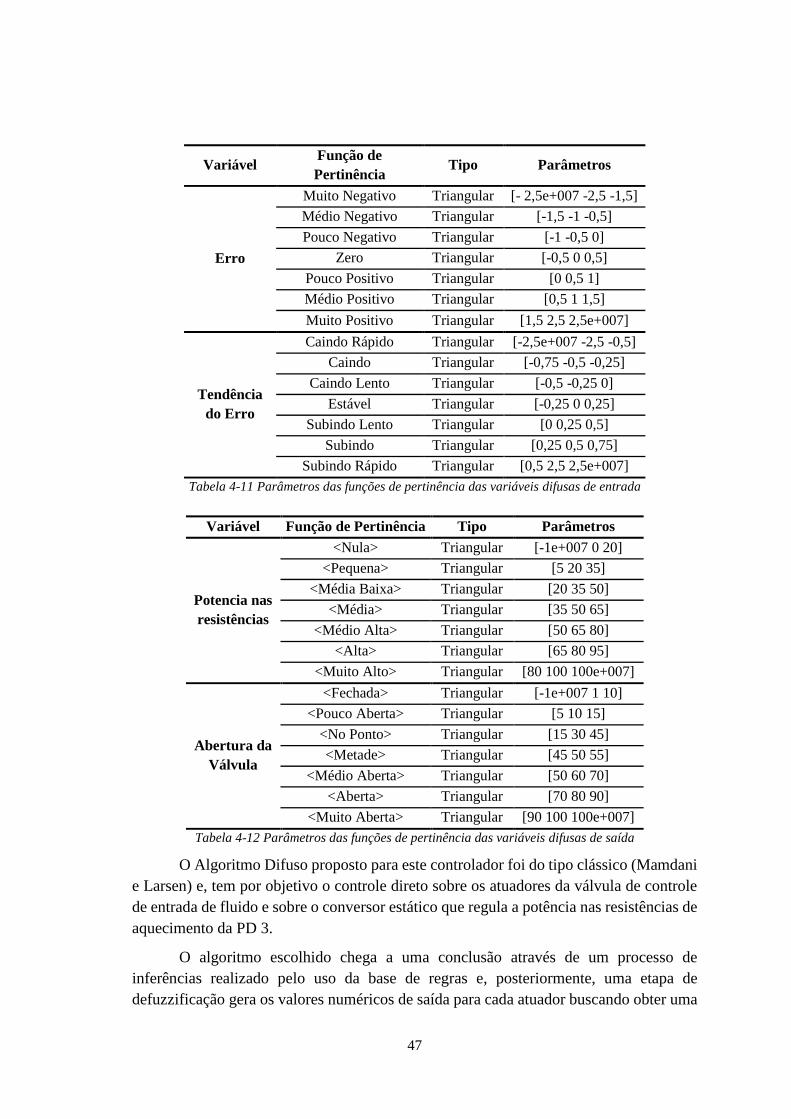
47
Variável Função de
Pertinência Tipo Parâmetros
Erro
Muito Negativo Triangular [- 2,5e+007 -2,5 -1,5]
Médio Negativo Triangular [-1,5 -1 -0,5]
Pouco Negativo Triangular [-1 -0,5 0]
Zero Triangular [-0,5 0 0,5]
Pouco Positivo Triangular [0 0,5 1]
Médio Positivo Triangular [0,5 1 1,5]
Muito Positivo Triangular [1,5 2,5 2,5e+007]
Tendência
do Erro
Caindo Rápido Triangular [-2,5e+007 -2,5 -0,5]
Caindo Triangular [-0,75 -0,5 -0,25]
Caindo Lento Triangular [-0,5 -0,25 0]
Estável Triangular [-0,25 0 0,25]
Subindo Lento Triangular [0 0,25 0,5]
Subindo Triangular [0,25 0,5 0,75]
Subindo Rápido Triangular [0,5 2,5 2,5e+007]
Tabela 4-11 Parâmetros das funções de pertinência das variáveis difusas de entrada
Variável Função de Pertinência Tipo Parâmetros
Potencia nas
resistências
<Nula> Triangular [-1e+007 0 20]
<Pequena> Triangular [5 20 35]
<Média Baixa> Triangular [20 35 50]
<Média> Triangular [35 50 65]
<Médio Alta> Triangular [50 65 80]
<Alta> Triangular [65 80 95]
<Muito Alto> Triangular [80 100 100e+007]
Abertura da
Válvula
<Fechada> Triangular [-1e+007 1 10]
<Pouco Aberta> Triangular [5 10 15]
<No Ponto> Triangular [15 30 45]
<Metade> Triangular [45 50 55]
<Médio Aberta> Triangular [50 60 70]
<Aberta> Triangular [70 80 90]
<Muito Aberta> Triangular [90 100 100e+007]
Tabela 4-12 Parâmetros das funções de pertinência das variáveis difusas de saída
O Algoritmo Difuso proposto para este controlador foi do tipo clássico (Mamdani
e Larsen) e, tem por objetivo o controle direto sobre os atuadores da válvula de controle
de entrada de fluido e sobre o conversor estático que regula a potência nas resistências de
aquecimento da PD 3.
O algoritmo escolhido chega a uma conclusão através de um processo de
inferências realizado pelo uso da base de regras e, posteriormente, uma etapa de
defuzzificação gera os valores numéricos de saída para cada atuador buscando obter uma
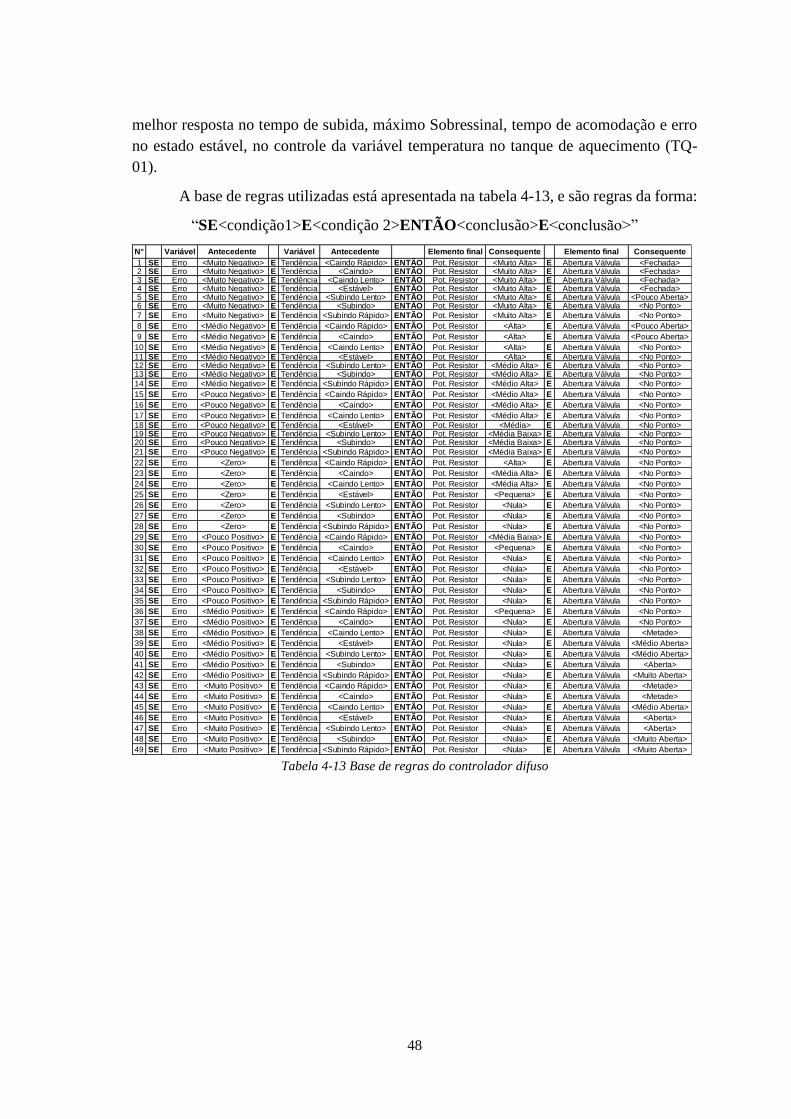
48
melhor resposta no tempo de subida, máximo Sobressinal, tempo de acomodação e erro
no estado estável, no controle da variável temperatura no tanque de aquecimento (TQ-
01).
A base de regras utilizadas está apresentada na tabela 4-13, e são regras da forma:
“SE<condição1>E<condição 2>ENTÃO<conclusão>E<conclusão>”
Tabela 4-13 Base de regras do controlador difuso
N° Variável Antecedente Variável Antecedente Elemento final Consequente Elemento final Consequente
1 SE Erro <Muito Negativo> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <Fechada>2 SE Erro <Muito Negativo> E Tendência <Caindo> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <Fechada>3 SE Erro <Muito Negativo> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <Fechada>4 SE Erro <Muito Negativo> E Tendência <Estável> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <Fechada>5 SE Erro <Muito Negativo> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <Pouco Aberta>6 SE Erro <Muito Negativo> E Tendência <Subindo> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <No Ponto>
7 SE Erro <Muito Negativo> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Muito Alta> E Abertura Válvula <No Ponto>
8 SE Erro <Médio Negativo> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Alta> E Abertura Válvula <Pouco Aberta>
9 SE Erro <Médio Negativo> E Tendência <Caindo> ENTÃO Pot. Resistor <Alta> E Abertura Válvula <Pouco Aberta>
10 SE Erro <Médio Negativo> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Alta> E Abertura Válvula <No Ponto>
11 SE Erro <Médio Negativo> E Tendência <Estável> ENTÃO Pot. Resistor <Alta> E Abertura Válvula <No Ponto>12 SE Erro <Médio Negativo> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Médio Alta> E Abertura Válvula <No Ponto>13 SE Erro <Médio Negativo> E Tendência <Subindo> ENTÃO Pot. Resistor <Médio Alta> E Abertura Válvula <No Ponto>
14 SE Erro <Médio Negativo> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Médio Alta> E Abertura Válvula <No Ponto>
15 SE Erro <Pouco Negativo> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Médio Alta> E Abertura Válvula <No Ponto>
16 SE Erro <Pouco Negativo> E Tendência <Caindo> ENTÃO Pot. Resistor <Médio Alta> E Abertura Válvula <No Ponto>
17 SE Erro <Pouco Negativo> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Médio Alta> E Abertura Válvula <No Ponto>
18 SE Erro <Pouco Negativo> E Tendência <Estável> ENTÃO Pot. Resistor <Média> E Abertura Válvula <No Ponto>19 SE Erro <Pouco Negativo> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Média Baixa> E Abertura Válvula <No Ponto>20 SE Erro <Pouco Negativo> E Tendência <Subindo> ENTÃO Pot. Resistor <Média Baixa> E Abertura Válvula <No Ponto>
21 SE Erro <Pouco Negativo> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Média Baixa> E Abertura Válvula <No Ponto>
22 SE Erro <Zero> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Alta> E Abertura Válvula <No Ponto>
23 SE Erro <Zero> E Tendência <Caindo> ENTÃO Pot. Resistor <Média Alta> E Abertura Válvula <No Ponto>
24 SE Erro <Zero> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Média Alta> E Abertura Válvula <No Ponto>
25 SE Erro <Zero> E Tendência <Estável> ENTÃO Pot. Resistor <Pequena> E Abertura Válvula <No Ponto>
26 SE Erro <Zero> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
27 SE Erro <Zero> E Tendência <Subindo> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
28 SE Erro <Zero> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
29 SE Erro <Pouco Positivo> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Média Baixa> E Abertura Válvula <No Ponto>
30 SE Erro <Pouco Positivo> E Tendência <Caindo> ENTÃO Pot. Resistor <Pequena> E Abertura Válvula <No Ponto>
31 SE Erro <Pouco Positivo> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
32 SE Erro <Pouco Positivo> E Tendência <Estável> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
33 SE Erro <Pouco Positivo> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
34 SE Erro <Pouco Positivo> E Tendência <Subindo> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
35 SE Erro <Pouco Positivo> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
36 SE Erro <Médio Positivo> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Pequena> E Abertura Válvula <No Ponto>
37 SE Erro <Médio Positivo> E Tendência <Caindo> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <No Ponto>
38 SE Erro <Médio Positivo> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Metade>
39 SE Erro <Médio Positivo> E Tendência <Estável> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Médio Aberta>
40 SE Erro <Médio Positivo> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Médio Aberta>
41 SE Erro <Médio Positivo> E Tendência <Subindo> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Aberta>
42 SE Erro <Médio Positivo> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Muito Aberta>
43 SE Erro <Muito Positivo> E Tendência <Caindo Rápido> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Metade>
44 SE Erro <Muito Positivo> E Tendência <Caindo> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Metade>
45 SE Erro <Muito Positivo> E Tendência <Caindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Médio Aberta>
46 SE Erro <Muito Positivo> E Tendência <Estável> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Aberta>
47 SE Erro <Muito Positivo> E Tendência <Subindo Lento> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Aberta>
48 SE Erro <Muito Positivo> E Tendência <Subindo> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Muito Aberta>
49 SE Erro <Muito Positivo> E Tendência <Subindo Rápido> ENTÃO Pot. Resistor <Nula> E Abertura Válvula <Muito Aberta>

49
Capítulo 5
Resultados
Neste capítulo apresentam-se os resultados dos testes aplicados aos diferentes
algoritmos difusos propostos para o controle das variáveis temperatura e vazão de entrada
do tanque de aquecimento TQ-01 da PD 3. Para a avaliação das estratégias desenvolvidas
serão apresentados os resultados das observações de todas as estratégias, incluindo a
estratégia clássica PID implementada de fábrica na planta.
Para a análise dos resultados foram usados alguns índices de desempenho como o
IAE (integral do valor absoluto do erro), cuja formula é apresentada em (5.1) e ITAE
(integral do produto do tempo pelo valor absoluto do erro) apresentada em (5.2)
(5.1) ∫ |𝒆(𝒕)|. 𝒅𝒕 )
(5.2) ∫ 𝒕. |𝒆(𝒕)|. 𝒅𝒕)
Ambos métodos utilizam como critério de desempenho a integral de uma função
do erro dentro de uma janela de tempo, suficiente para avaliar toda a curva de resposta do
sistema, em outras palavras, considera o erro da resposta transitória e da resposta
permanente. O IAE é um dos índices de desempenho mais utilizados (OGATA, 2001). O
critério ITAE apresenta menor sensibilidade aos erros que acontecem logo após a
perturbação e penaliza mais os erros ao passar o tempo. Uma outra análise feita, foi avaliar
o esforço realizado pelos controladores para minimizar esses erros.
Também como anteriormente citado para a avaliação dos resultados foram usadas
as métricas de desempenho das respostas transitórias e de estado estável como:
a) tempo de subida (tr): o tempo que o sistema leva para ir de 10% a 90% em
sistemas superamortecidos ou de 0% a 100% em sistemas subamortecidos, do
valor final (SP) ou do estado estacionário.
b) tempo do primeiro pico (tp): instante de tempo em que ocorre o sobressinal
máximo do sinal de saída.
c) sobressinal máximo percentual (MP): diferença entre o valor máximo de pico
atingido e o valor final (SP) em percentual do valor final.
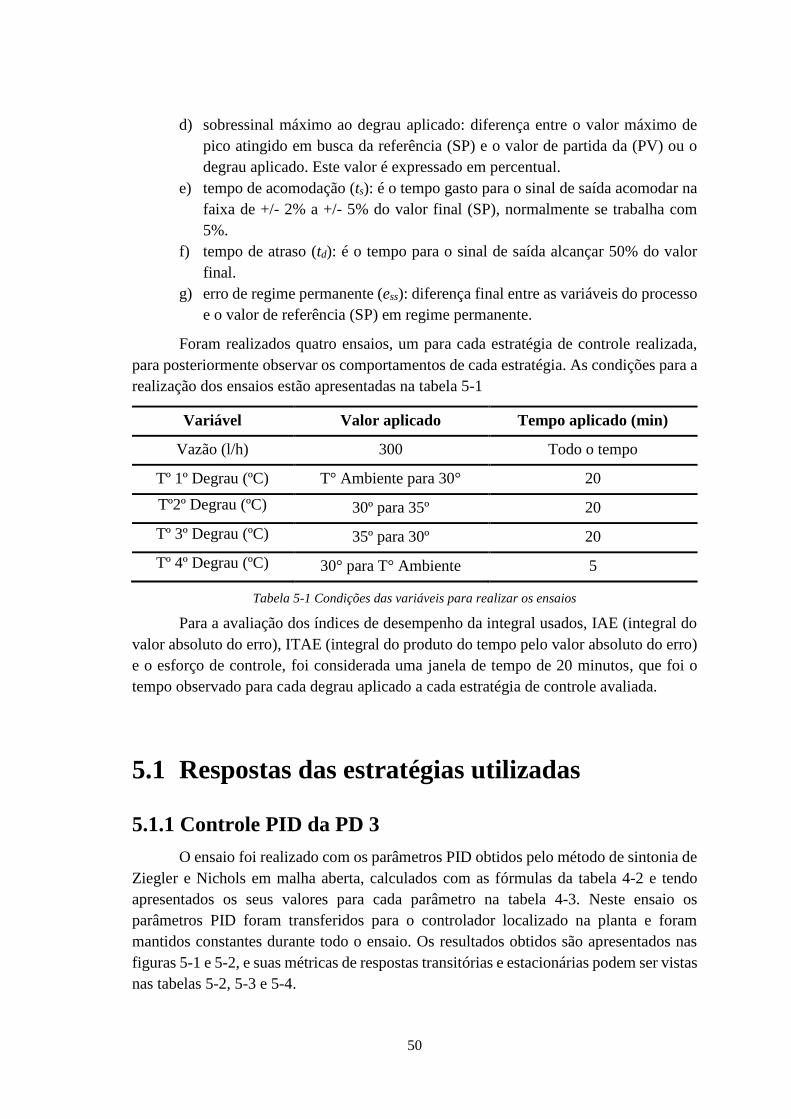
50
d) sobressinal máximo ao degrau aplicado: diferença entre o valor máximo de
pico atingido em busca da referência (SP) e o valor de partida da (PV) ou o
degrau aplicado. Este valor é expressado em percentual.
e) tempo de acomodação (ts): é o tempo gasto para o sinal de saída acomodar na
faixa de +/- 2% a +/- 5% do valor final (SP), normalmente se trabalha com
5%.
f) tempo de atraso (td): é o tempo para o sinal de saída alcançar 50% do valor
final.
g) erro de regime permanente (ess): diferença final entre as variáveis do processo
e o valor de referência (SP) em regime permanente.
Foram realizados quatro ensaios, um para cada estratégia de controle realizada,
para posteriormente observar os comportamentos de cada estratégia. As condições para a
realização dos ensaios estão apresentadas na tabela 5-1
Variável Valor aplicado Tempo aplicado (min)
Vazão (l/h) 300 Todo o tempo
Tº 1º Degrau (ºC) T° Ambiente para 30° 20
Tº2º Degrau (ºC) 30º para 35º 20
Tº 3º Degrau (ºC) 35º para 30º 20
Tº 4º Degrau (ºC) 30° para T° Ambiente 5
Tabela 5-1 Condições das variáveis para realizar os ensaios
Para a avaliação dos índices de desempenho da integral usados, IAE (integral do
valor absoluto do erro), ITAE (integral do produto do tempo pelo valor absoluto do erro)
e o esforço de controle, foi considerada uma janela de tempo de 20 minutos, que foi o
tempo observado para cada degrau aplicado a cada estratégia de controle avaliada.
5.1 Respostas das estratégias utilizadas
5.1.1 Controle PID da PD 3
O ensaio foi realizado com os parâmetros PID obtidos pelo método de sintonia de
Ziegler e Nichols em malha aberta, calculados com as fórmulas da tabela 4-2 e tendo
apresentados os seus valores para cada parâmetro na tabela 4-3. Neste ensaio os
parâmetros PID foram transferidos para o controlador localizado na planta e foram
mantidos constantes durante todo o ensaio. Os resultados obtidos são apresentados nas
figuras 5-1 e 5-2, e suas métricas de respostas transitórias e estacionárias podem ser vistas
nas tabelas 5-2, 5-3 e 5-4.

51
Figura 5-1 Resposta da temperatura aos degraus aplicados como controlador PID da PD 3
Figura 5-2 Respostas da potência nas resistências aos degraus aplicados com o controlador PID
5.1.2 Controle difuso-PID
O ensaio foi realizado usando o mesmo controlador PID localizado na planta, mas
desta vez com os parâmetros PID sendo sintonizados em tempo real (On-Line), pelo
algoritmo difuso desenvolvido no ambiente computacional que os ajusta a cada ciclo de
amostragem de 0,5s e os envia para o controlador em campo via OPC. Não foram
observados impactos no controle do processo devido ao tempo de processamento dos
parâmetros ajustados. Os resultados obtidos foram apresentados nas figuras 5-3, 5-4 e 5-
5, e suas métricas de respostas transitórias e estacionárias podem ser vistas nas tabelas 5-
2, 5-3 e 5-4.
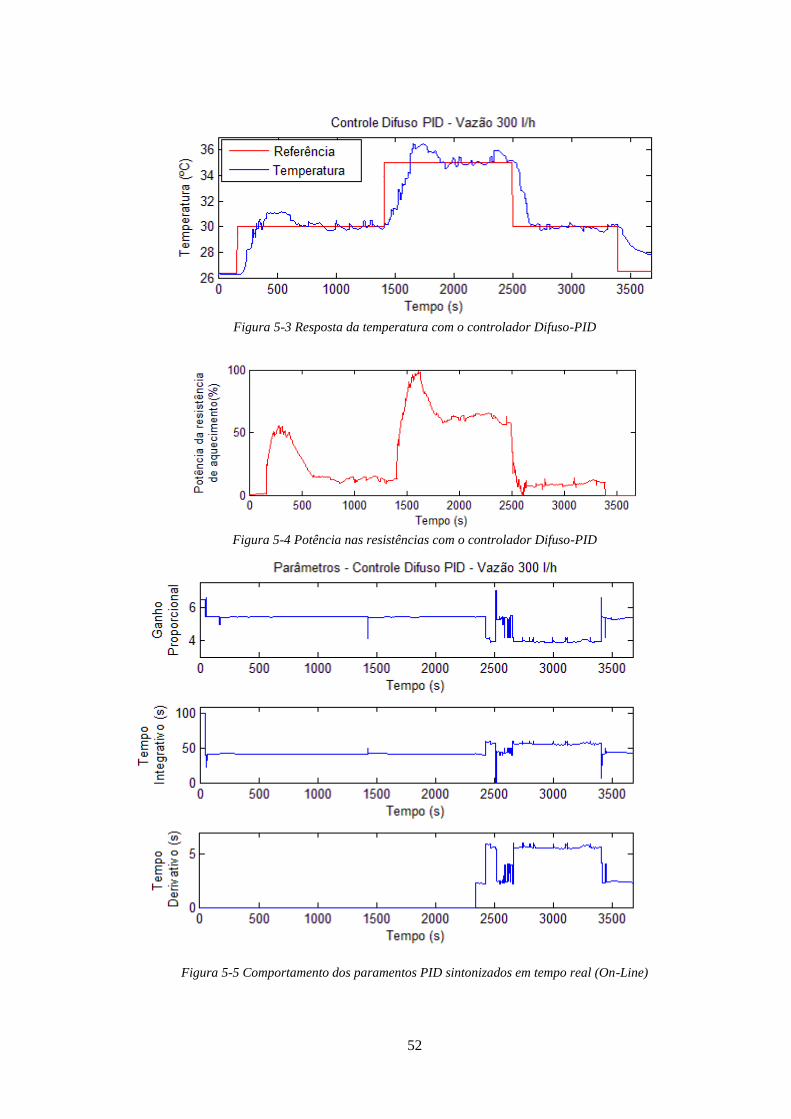
52
Figura 5-3 Resposta da temperatura com o controlador Difuso-PID
Figura 5-4 Potência nas resistências com o controlador Difuso-PID
Figura 5-5 Comportamento dos paramentos PID sintonizados em tempo real (On-Line)
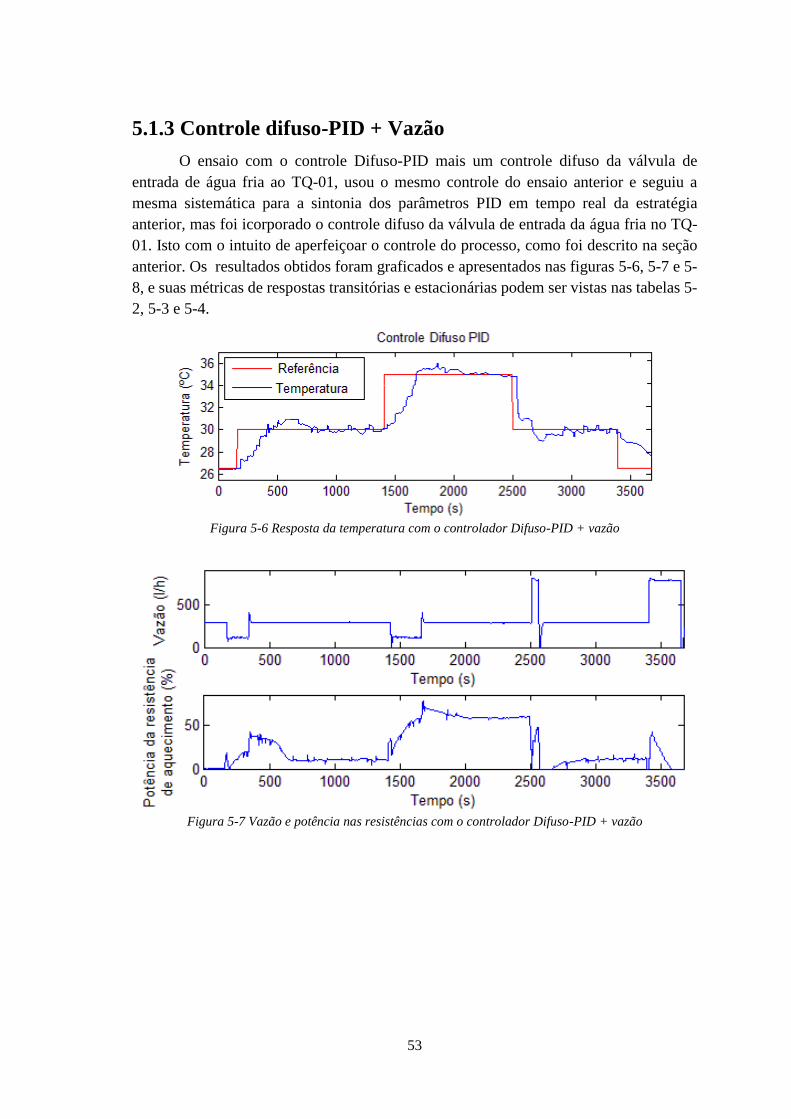
53
5.1.3 Controle difuso-PID + Vazão
O ensaio com o controle Difuso-PID mais um controle difuso da válvula de
entrada de água fria ao TQ-01, usou o mesmo controle do ensaio anterior e seguiu a
mesma sistemática para a sintonia dos parâmetros PID em tempo real da estratégia
anterior, mas foi icorporado o controle difuso da válvula de entrada da água fria no TQ-
01. Isto com o intuito de aperfeiçoar o controle do processo, como foi descrito na seção
anterior. Os resultados obtidos foram graficados e apresentados nas figuras 5-6, 5-7 e 5-
8, e suas métricas de respostas transitórias e estacionárias podem ser vistas nas tabelas 5-
2, 5-3 e 5-4.
Figura 5-6 Resposta da temperatura com o controlador Difuso-PID + vazão
Figura 5-7 Vazão e potência nas resistências com o controlador Difuso-PID + vazão
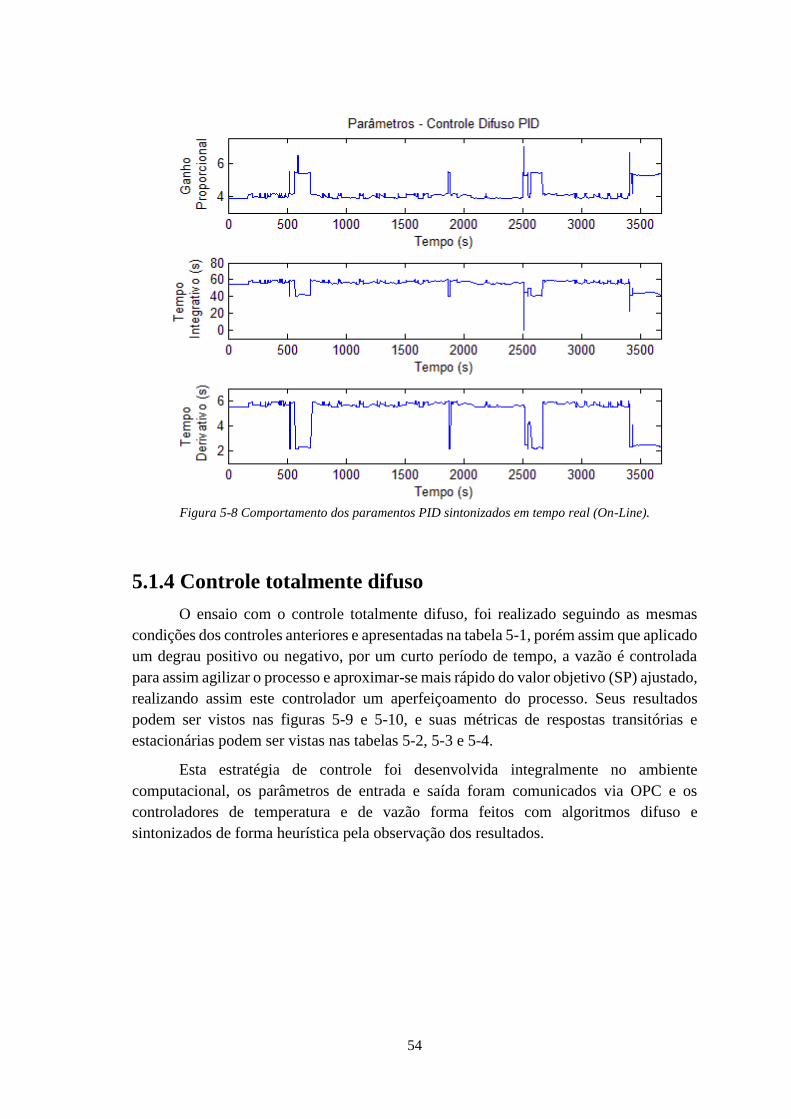
54
Figura 5-8 Comportamento dos paramentos PID sintonizados em tempo real (On-Line).
5.1.4 Controle totalmente difuso
O ensaio com o controle totalmente difuso, foi realizado seguindo as mesmas
condições dos controles anteriores e apresentadas na tabela 5-1, porém assim que aplicado
um degrau positivo ou negativo, por um curto período de tempo, a vazão é controlada
para assim agilizar o processo e aproximar-se mais rápido do valor objetivo (SP) ajustado,
realizando assim este controlador um aperfeiçoamento do processo. Seus resultados
podem ser vistos nas figuras 5-9 e 5-10, e suas métricas de respostas transitórias e
estacionárias podem ser vistas nas tabelas 5-2, 5-3 e 5-4.
Esta estratégia de controle foi desenvolvida integralmente no ambiente
computacional, os parâmetros de entrada e saída foram comunicados via OPC e os
controladores de temperatura e de vazão forma feitos com algoritmos difuso e
sintonizados de forma heurística pela observação dos resultados.
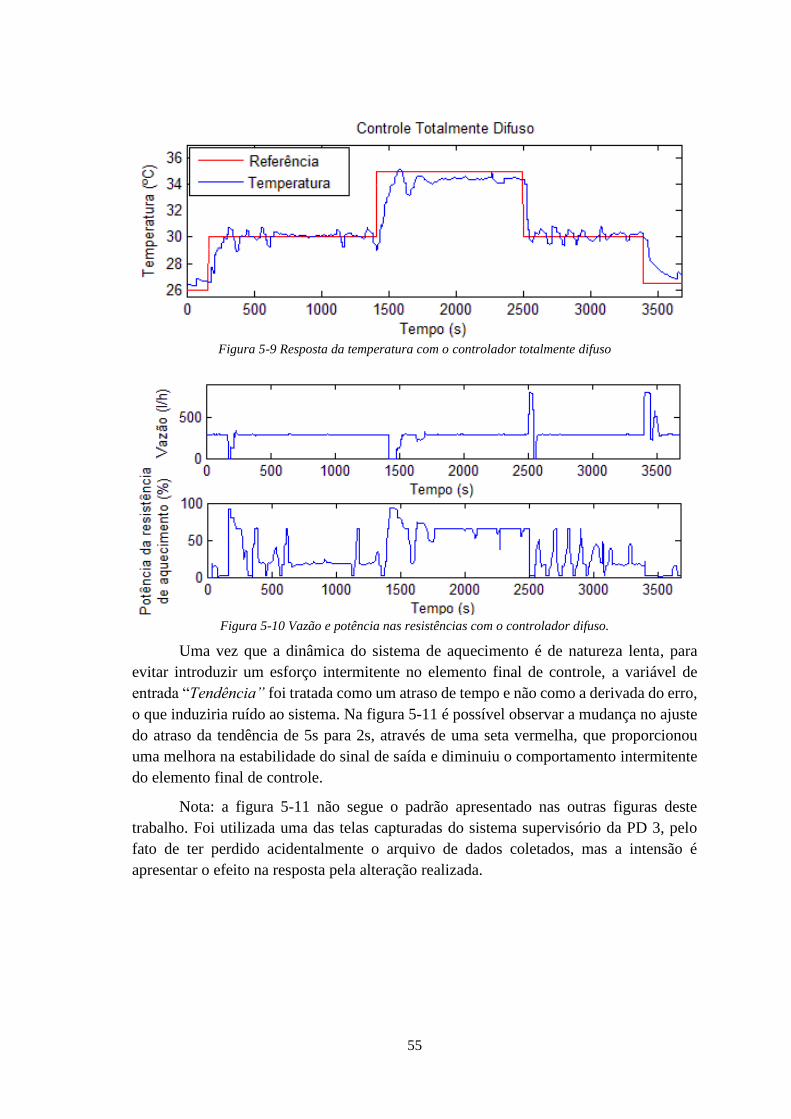
55
Figura 5-9 Resposta da temperatura com o controlador totalmente difuso
Figura 5-10 Vazão e potência nas resistências com o controlador difuso.
Uma vez que a dinâmica do sistema de aquecimento é de natureza lenta, para
evitar introduzir um esforço intermitente no elemento final de controle, a variável de
entrada “Tendência” foi tratada como um atraso de tempo e não como a derivada do erro,
o que induziria ruído ao sistema. Na figura 5-11 é possível observar a mudança no ajuste
do atraso da tendência de 5s para 2s, através de uma seta vermelha, que proporcionou
uma melhora na estabilidade do sinal de saída e diminuiu o comportamento intermitente
do elemento final de controle.
Nota: a figura 5-11 não segue o padrão apresentado nas outras figuras deste
trabalho. Foi utilizada uma das telas capturadas do sistema supervisório da PD 3, pelo
fato de ter perdido acidentalmente o arquivo de dados coletados, mas a intensão é
apresentar o efeito na resposta pela alteração realizada.
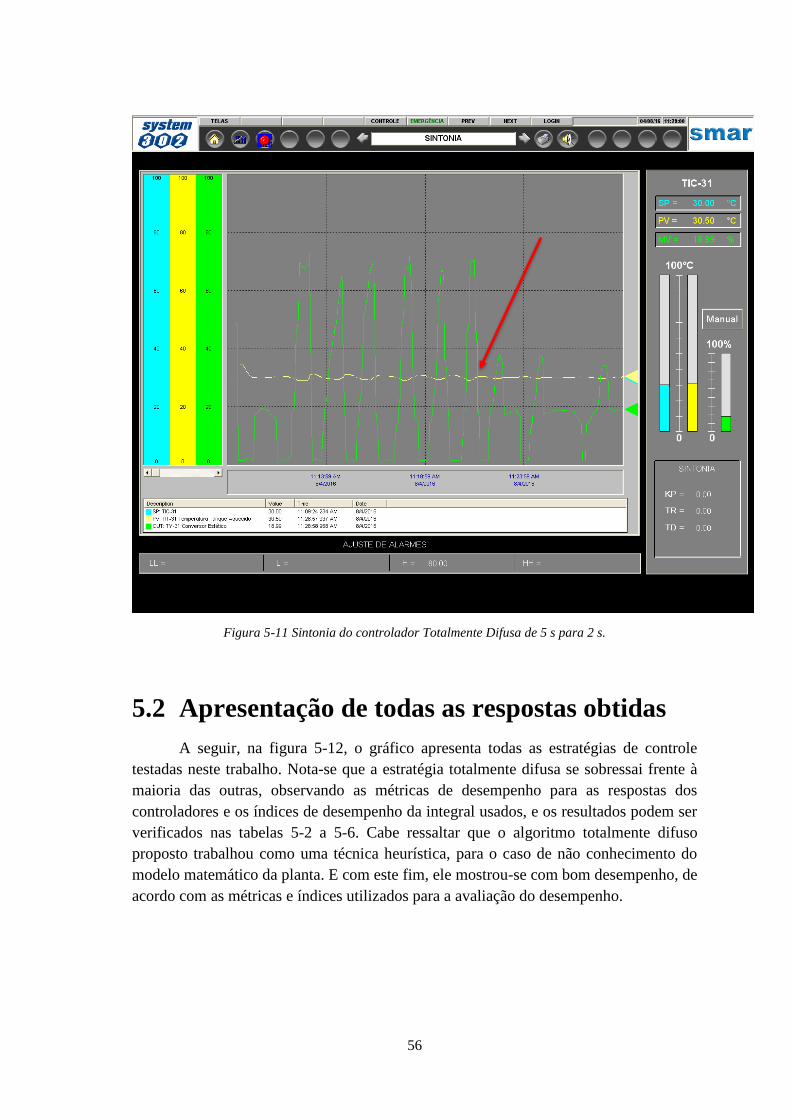
56
Figura 5-11 Sintonia do controlador Totalmente Difusa de 5 s para 2 s.
5.2 Apresentação de todas as respostas obtidas
A seguir, na figura 5-12, o gráfico apresenta todas as estratégias de controle
testadas neste trabalho. Nota-se que a estratégia totalmente difusa se sobressai frente à
maioria das outras, observando as métricas de desempenho para as respostas dos
controladores e os índices de desempenho da integral usados, e os resultados podem ser
verificados nas tabelas 5-2 a 5-6. Cabe ressaltar que o algoritmo totalmente difuso
proposto trabalhou como uma técnica heurística, para o caso de não conhecimento do
modelo matemático da planta. E com este fim, ele mostrou-se com bom desempenho, de
acordo com as métricas e índices utilizados para a avaliação do desempenho.
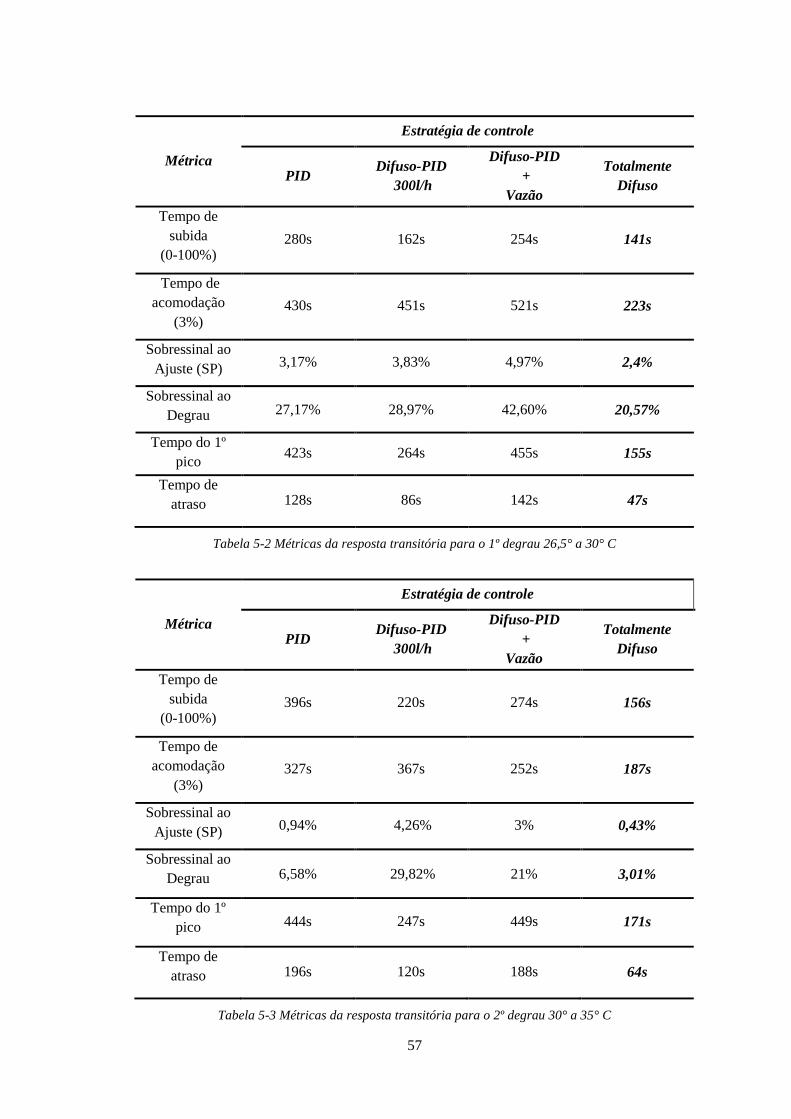
57
Métrica
Estratégia de controle
PID Difuso-PID
300l/h
Difuso-PID
+
Vazão
Totalmente
Difuso
Tempo de
subida
(0-100%) 280s 162s 254s 141s
Tempo de
acomodação
(3%) 430s 451s 521s 223s
Sobressinal ao
Ajuste (SP) 3,17% 3,83% 4,97% 2,4%
Sobressinal ao
Degrau 27,17% 28,97% 42,60% 20,57%
Tempo do 1º
pico 423s 264s 455s 155s
Tempo de
atraso 128s 86s 142s 47s
Tabela 5-2 Métricas da resposta transitória para o 1º degrau 26,5° a 30° C
Métrica
Estratégia de controle
PID Difuso-PID
300l/h
Difuso-PID
+
Vazão
Totalmente
Difuso
Tempo de
subida
(0-100%) 396s 220s 274s 156s
Tempo de
acomodação
(3%) 327s 367s 252s 187s
Sobressinal ao
Ajuste (SP) 0,94% 4,26% 3% 0,43%
Sobressinal ao
Degrau 6,58% 29,82% 21% 3,01%
Tempo do 1º
pico 444s 247s 449s 171s
Tempo de
atraso 196s 120s 188s 64s
Tabela 5-3 Métricas da resposta transitória para o 2º degrau 30° a 35° C
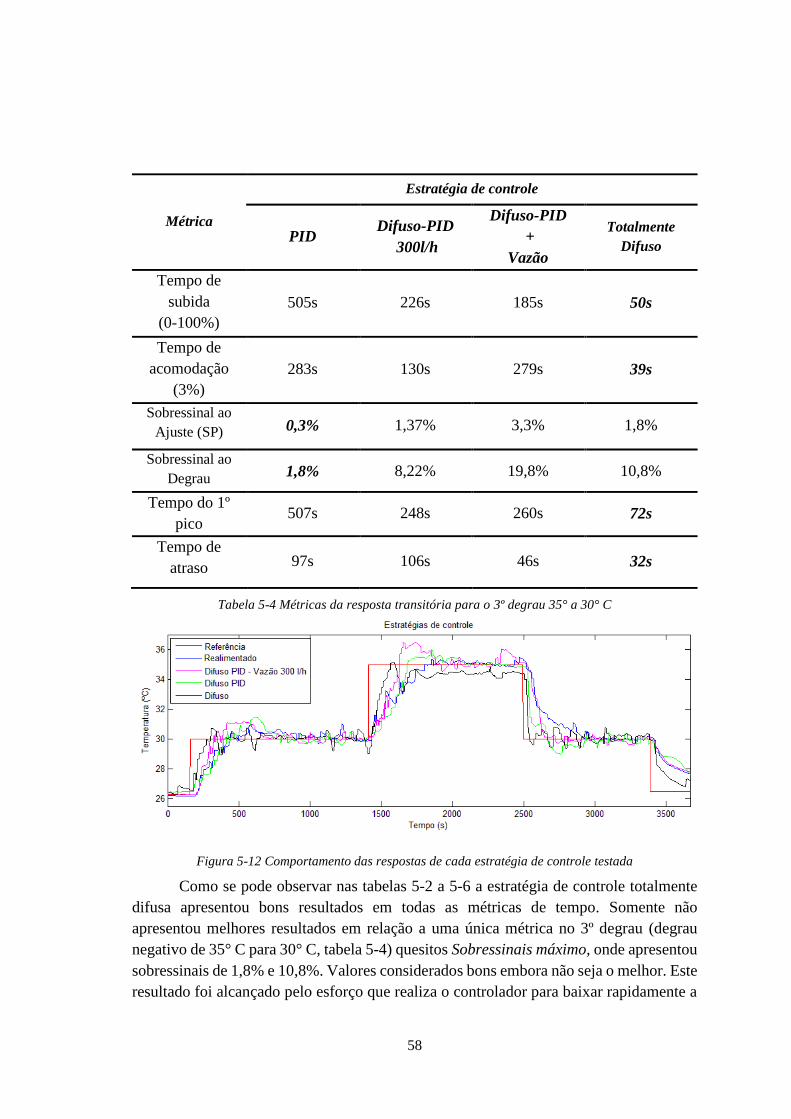
58
Métrica
Estratégia de controle
PID Difuso-PID
300l/h
Difuso-PID
+
Vazão
Totalmente
Difuso
Tempo de
subida
(0-100%)
505s 226s 185s 50s
Tempo de
acomodação
(3%)
283s 130s 279s 39s
Sobressinal ao
Ajuste (SP) 0,3% 1,37% 3,3% 1,8%
Sobressinal ao
Degrau 1,8% 8,22% 19,8% 10,8%
Tempo do 1º
pico 507s 248s 260s 72s
Tempo de
atraso 97s 106s 46s 32s
Tabela 5-4 Métricas da resposta transitória para o 3º degrau 35° a 30° C
Figura 5-12 Comportamento das respostas de cada estratégia de controle testada
Como se pode observar nas tabelas 5-2 a 5-6 a estratégia de controle totalmente
difusa apresentou bons resultados em todas as métricas de tempo. Somente não
apresentou melhores resultados em relação a uma única métrica no 3º degrau (degrau
negativo de 35° C para 30° C, tabela 5-4) quesitos Sobressinais máximo, onde apresentou
sobressinais de 1,8% e 10,8%. Valores considerados bons embora não seja o melhor. Este
resultado foi alcançado pelo esforço que realiza o controlador para baixar rapidamente a
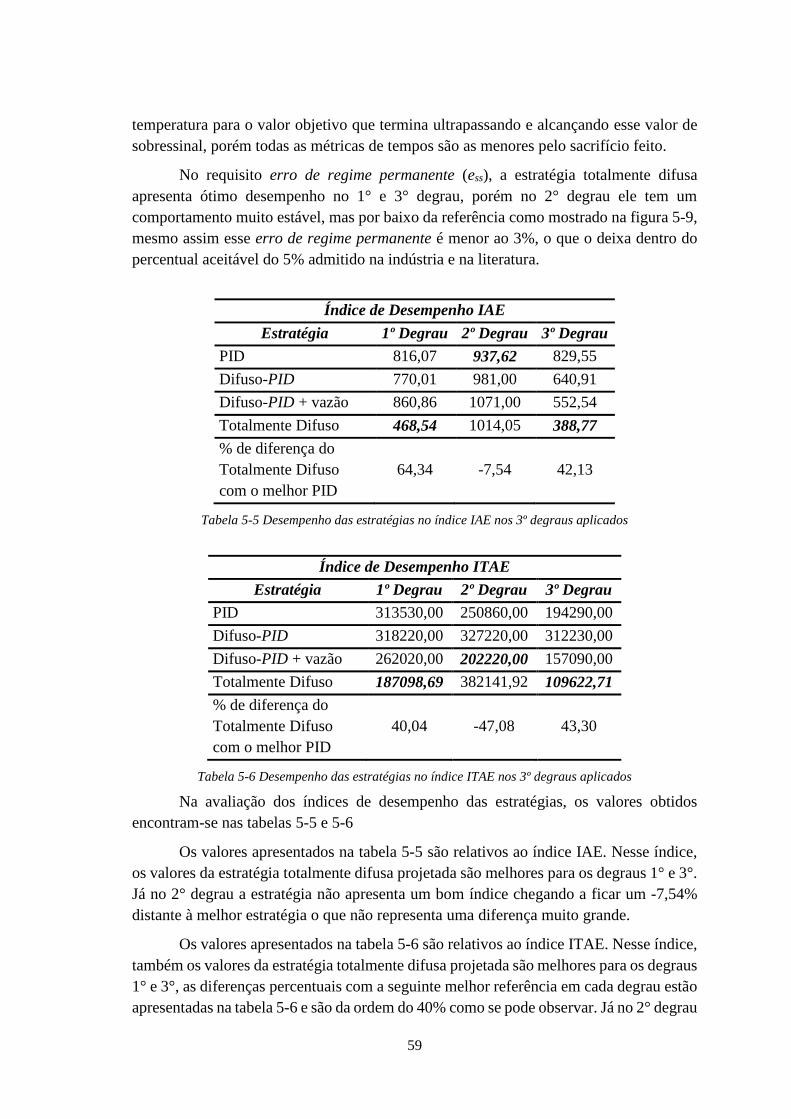
59
temperatura para o valor objetivo que termina ultrapassando e alcançando esse valor de
sobressinal, porém todas as métricas de tempos são as menores pelo sacrifício feito.
No requisito erro de regime permanente (ess), a estratégia totalmente difusa
apresenta ótimo desempenho no 1° e 3° degrau, porém no 2° degrau ele tem um
comportamento muito estável, mas por baixo da referência como mostrado na figura 5-9,
mesmo assim esse erro de regime permanente é menor ao 3%, o que o deixa dentro do
percentual aceitável do 5% admitido na indústria e na literatura.
Índice de Desempenho IAE
Estratégia 1º Degrau 2º Degrau 3º Degrau
PID 816,07 937,62 829,55
Difuso-PID 770,01 981,00 640,91
Difuso-PID + vazão 860,86 1071,00 552,54
Totalmente Difuso 468,54 1014,05 388,77
% de diferença do
Totalmente Difuso
com o melhor PID
64,34 -7,54 42,13
Tabela 5-5 Desempenho das estratégias no índice IAE nos 3º degraus aplicados
Índice de Desempenho ITAE
Estratégia 1º Degrau 2º Degrau 3º Degrau
PID 313530,00 250860,00 194290,00
Difuso-PID 318220,00 327220,00 312230,00
Difuso-PID + vazão 262020,00 202220,00 157090,00
Totalmente Difuso 187098,69 382141,92 109622,71
% de diferença do
Totalmente Difuso
com o melhor PID
40,04 -47,08 43,30
Tabela 5-6 Desempenho das estratégias no índice ITAE nos 3º degraus aplicados
Na avaliação dos índices de desempenho das estratégias, os valores obtidos
encontram-se nas tabelas 5-5 e 5-6
Os valores apresentados na tabela 5-5 são relativos ao índice IAE. Nesse índice,
os valores da estratégia totalmente difusa projetada são melhores para os degraus 1° e 3°.
Já no 2° degrau a estratégia não apresenta um bom índice chegando a ficar um -7,54%
distante à melhor estratégia o que não representa uma diferença muito grande.
Os valores apresentados na tabela 5-6 são relativos ao índice ITAE. Nesse índice,
também os valores da estratégia totalmente difusa projetada são melhores para os degraus
1° e 3°, as diferenças percentuais com a seguinte melhor referência em cada degrau estão
apresentadas na tabela 5-6 e são da ordem do 40% como se pode observar. Já no 2° degrau
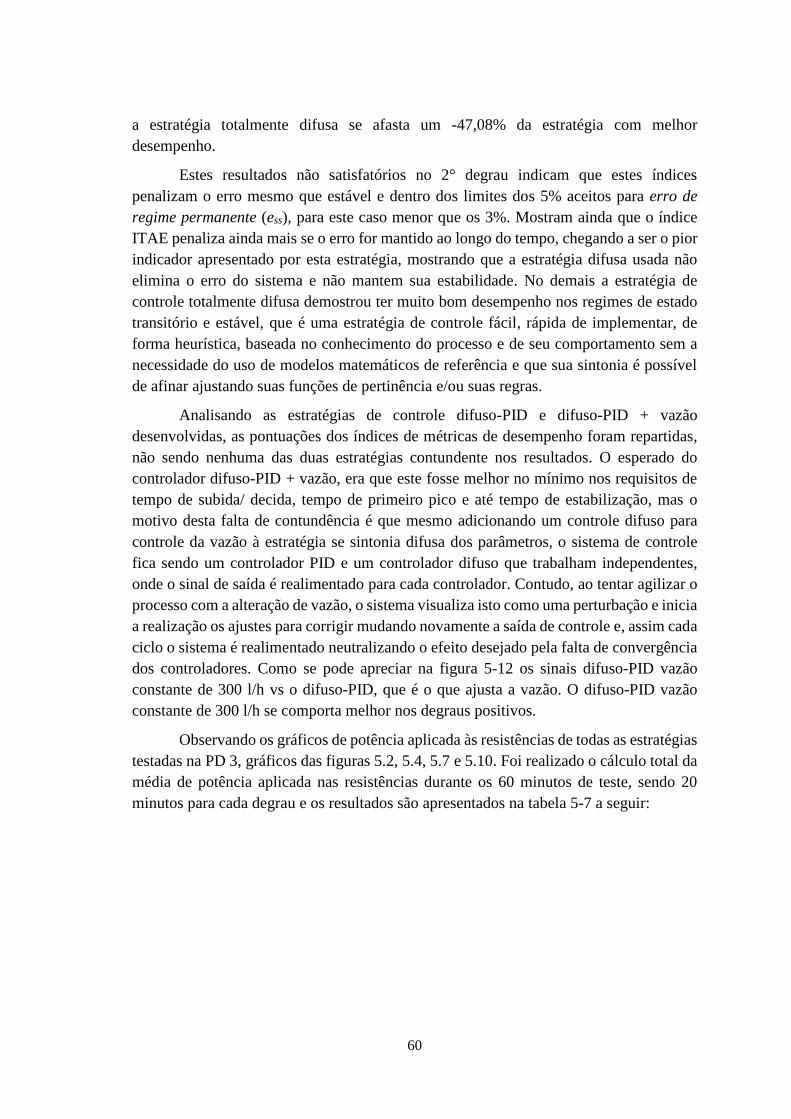
60
a estratégia totalmente difusa se afasta um -47,08% da estratégia com melhor
desempenho.
Estes resultados não satisfatórios no 2° degrau indicam que estes índices
penalizam o erro mesmo que estável e dentro dos limites dos 5% aceitos para erro de
regime permanente (ess), para este caso menor que os 3%. Mostram ainda que o índice
ITAE penaliza ainda mais se o erro for mantido ao longo do tempo, chegando a ser o pior
indicador apresentado por esta estratégia, mostrando que a estratégia difusa usada não
elimina o erro do sistema e não mantem sua estabilidade. No demais a estratégia de
controle totalmente difusa demostrou ter muito bom desempenho nos regimes de estado
transitório e estável, que é uma estratégia de controle fácil, rápida de implementar, de
forma heurística, baseada no conhecimento do processo e de seu comportamento sem a
necessidade do uso de modelos matemáticos de referência e que sua sintonia é possível
de afinar ajustando suas funções de pertinência e/ou suas regras.
Analisando as estratégias de controle difuso-PID e difuso-PID + vazão
desenvolvidas, as pontuações dos índices de métricas de desempenho foram repartidas,
não sendo nenhuma das duas estratégias contundente nos resultados. O esperado do
controlador difuso-PID + vazão, era que este fosse melhor no mínimo nos requisitos de
tempo de subida/ decida, tempo de primeiro pico e até tempo de estabilização, mas o
motivo desta falta de contundência é que mesmo adicionando um controle difuso para
controle da vazão à estratégia se sintonia difusa dos parâmetros, o sistema de controle
fica sendo um controlador PID e um controlador difuso que trabalham independentes,
onde o sinal de saída é realimentado para cada controlador. Contudo, ao tentar agilizar o
processo com a alteração de vazão, o sistema visualiza isto como uma perturbação e inicia
a realização os ajustes para corrigir mudando novamente a saída de controle e, assim cada
ciclo o sistema é realimentado neutralizando o efeito desejado pela falta de convergência
dos controladores. Como se pode apreciar na figura 5-12 os sinais difuso-PID vazão
constante de 300 l/h vs o difuso-PID, que é o que ajusta a vazão. O difuso-PID vazão
constante de 300 l/h se comporta melhor nos degraus positivos.
Observando os gráficos de potência aplicada às resistências de todas as estratégias
testadas na PD 3, gráficos das figuras 5.2, 5.4, 5.7 e 5.10. Foi realizado o cálculo total da
média de potência aplicada nas resistências durante os 60 minutos de teste, sendo 20
minutos para cada degrau e os resultados são apresentados na tabela 5-7 a seguir:
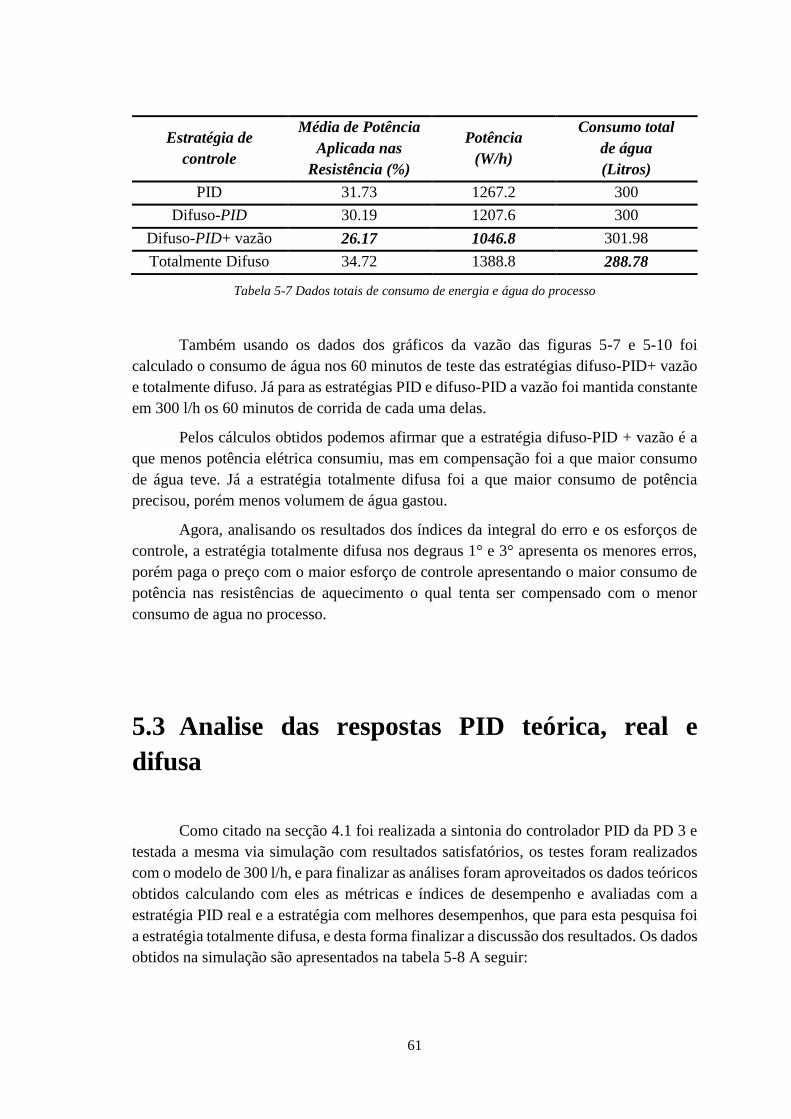
61
Estratégia de
controle
Média de Potência
Aplicada nas
Resistência (%)
Potência
(W/h)
Consumo total
de água
(Litros)
PID 31.73 1267.2 300
Difuso-PID 30.19 1207.6 300
Difuso-PID+ vazão 26.17 1046.8 301.98
Totalmente Difuso 34.72 1388.8 288.78
Tabela 5-7 Dados totais de consumo de energia e água do processo
Também usando os dados dos gráficos da vazão das figuras 5-7 e 5-10 foi
calculado o consumo de água nos 60 minutos de teste das estratégias difuso-PID+ vazão
e totalmente difuso. Já para as estratégias PID e difuso-PID a vazão foi mantida constante
em 300 l/h os 60 minutos de corrida de cada uma delas.
Pelos cálculos obtidos podemos afirmar que a estratégia difuso-PID + vazão é a
que menos potência elétrica consumiu, mas em compensação foi a que maior consumo
de água teve. Já a estratégia totalmente difusa foi a que maior consumo de potência
precisou, porém menos volumem de água gastou.
Agora, analisando os resultados dos índices da integral do erro e os esforços de
controle, a estratégia totalmente difusa nos degraus 1° e 3° apresenta os menores erros,
porém paga o preço com o maior esforço de controle apresentando o maior consumo de
potência nas resistências de aquecimento o qual tenta ser compensado com o menor
consumo de agua no processo.
5.3 Analise das respostas PID teórica, real e
difusa
Como citado na secção 4.1 foi realizada a sintonia do controlador PID da PD 3 e
testada a mesma via simulação com resultados satisfatórios, os testes foram realizados
com o modelo de 300 l/h, e para finalizar as análises foram aproveitados os dados teóricos
obtidos calculando com eles as métricas e índices de desempenho e avaliadas com a
estratégia PID real e a estratégia com melhores desempenhos, que para esta pesquisa foi
a estratégia totalmente difusa, e desta forma finalizar a discussão dos resultados. Os dados
obtidos na simulação são apresentados na tabela 5-8 A seguir:
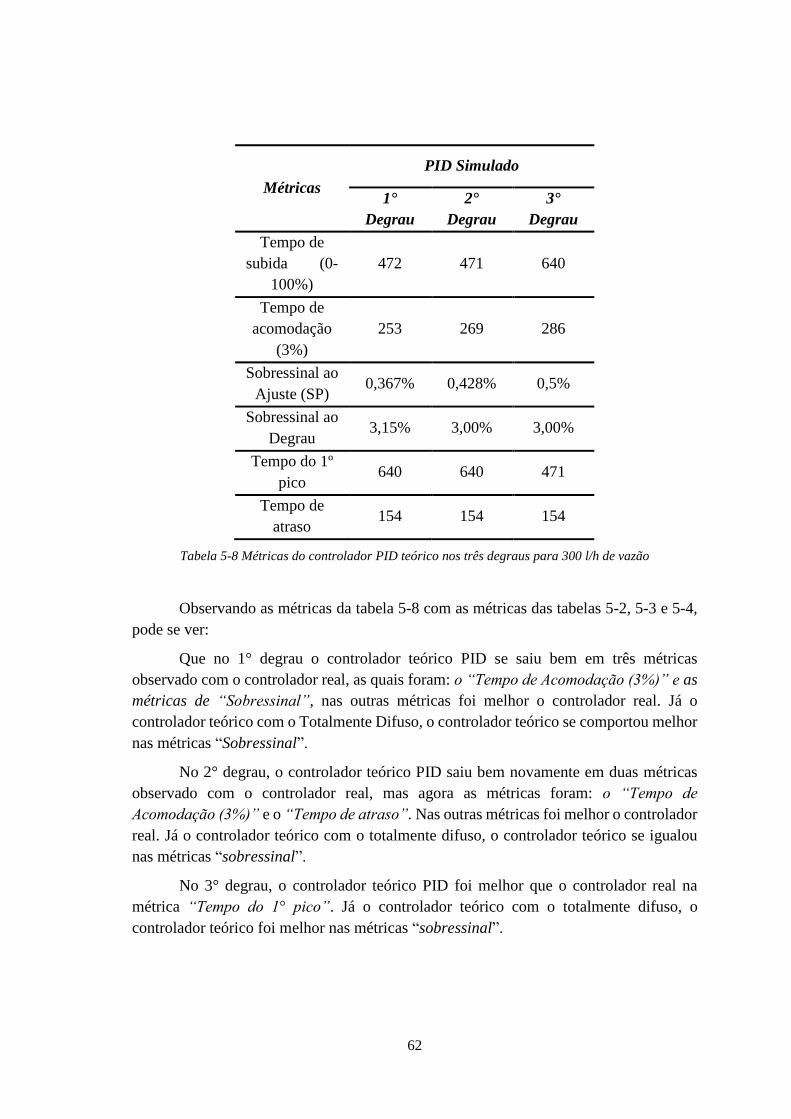
62
Métricas
PID Simulado
1°
Degrau
2°
Degrau
3°
Degrau
Tempo de
subida (0-
100%)
472 471 640
Tempo de
acomodação
(3%)
253 269 286
Sobressinal ao
Ajuste (SP) 0,367% 0,428% 0,5%
Sobressinal ao
Degrau 3,15% 3,00% 3,00%
Tempo do 1º
pico 640 640 471
Tempo de
atraso 154 154 154
Tabela 5-8 Métricas do controlador PID teórico nos três degraus para 300 l/h de vazão
Observando as métricas da tabela 5-8 com as métricas das tabelas 5-2, 5-3 e 5-4,
pode se ver:
Que no 1° degrau o controlador teórico PID se saiu bem em três métricas
observado com o controlador real, as quais foram: o “Tempo de Acomodação (3%)” e as
métricas de “Sobressinal”, nas outras métricas foi melhor o controlador real. Já o
controlador teórico com o Totalmente Difuso, o controlador teórico se comportou melhor
nas métricas “Sobressinal”.
No 2° degrau, o controlador teórico PID saiu bem novamente em duas métricas
observado com o controlador real, mas agora as métricas foram: o “Tempo de
Acomodação (3%)” e o “Tempo de atraso”. Nas outras métricas foi melhor o controlador
real. Já o controlador teórico com o totalmente difuso, o controlador teórico se igualou
nas métricas “sobressinal”.
No 3° degrau, o controlador teórico PID foi melhor que o controlador real na
métrica “Tempo do 1° pico”. Já o controlador teórico com o totalmente difuso, o
controlador teórico foi melhor nas métricas “sobressinal”.
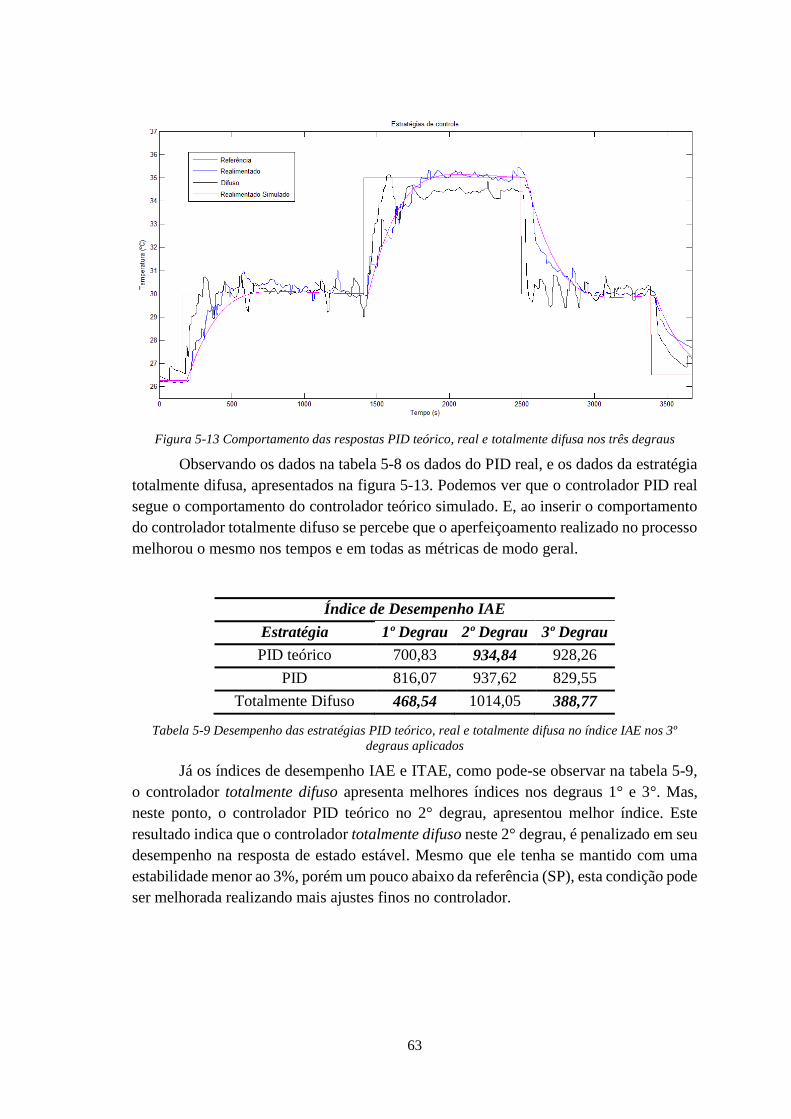
63
Figura 5-13 Comportamento das respostas PID teórico, real e totalmente difusa nos três degraus
Observando os dados na tabela 5-8 os dados do PID real, e os dados da estratégia
totalmente difusa, apresentados na figura 5-13. Podemos ver que o controlador PID real
segue o comportamento do controlador teórico simulado. E, ao inserir o comportamento
do controlador totalmente difuso se percebe que o aperfeiçoamento realizado no processo
melhorou o mesmo nos tempos e em todas as métricas de modo geral.
Índice de Desempenho IAE
Estratégia 1º Degrau 2º Degrau 3º Degrau
PID teórico 700,83 934,84 928,26
PID 816,07 937,62 829,55
Totalmente Difuso 468,54 1014,05 388,77
Tabela 5-9 Desempenho das estratégias PID teórico, real e totalmente difusa no índice IAE nos 3º
degraus aplicados
Já os índices de desempenho IAE e ITAE, como pode-se observar na tabela 5-9,
o controlador totalmente difuso apresenta melhores índices nos degraus 1° e 3°. Mas,
neste ponto, o controlador PID teórico no 2° degrau, apresentou melhor índice. Este
resultado indica que o controlador totalmente difuso neste 2° degrau, é penalizado em seu
desempenho na resposta de estado estável. Mesmo que ele tenha se mantido com uma
estabilidade menor ao 3%, porém um pouco abaixo da referência (SP), esta condição pode
ser melhorada realizando mais ajustes finos no controlador.
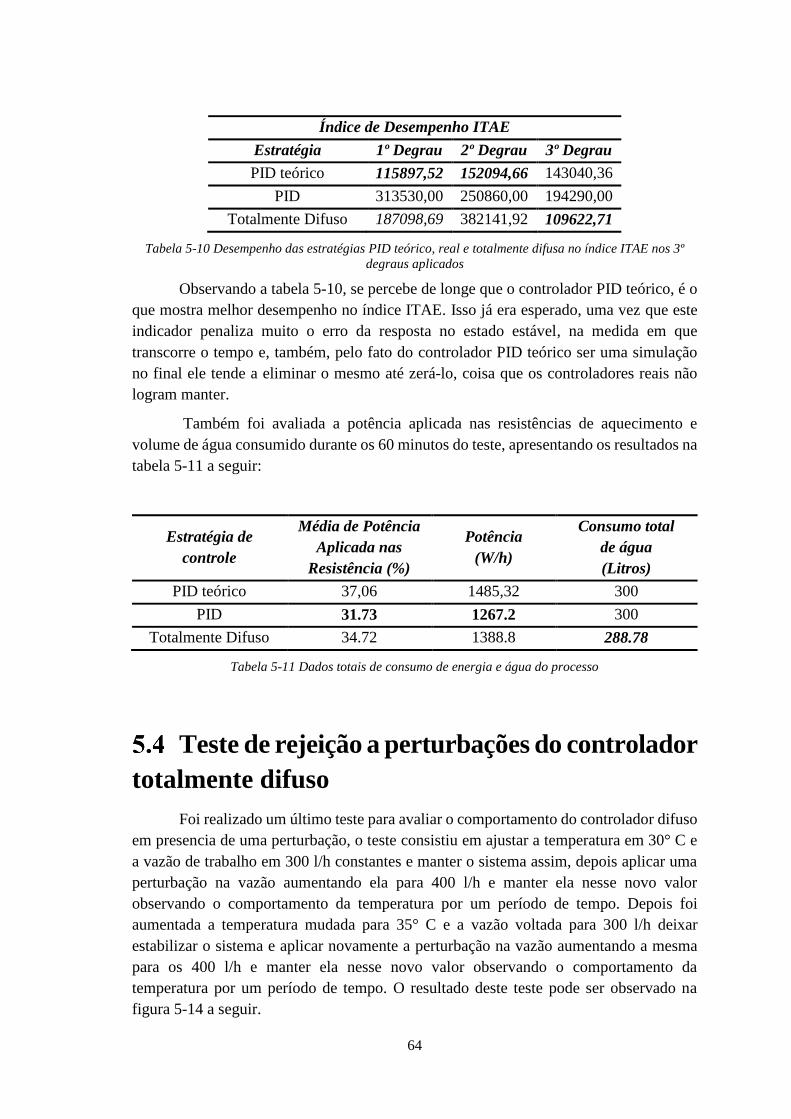
64
Índice de Desempenho ITAE
Estratégia 1º Degrau 2º Degrau 3º Degrau
PID teórico 115897,52 152094,66 143040,36
PID 313530,00 250860,00 194290,00
Totalmente Difuso 187098,69 382141,92 109622,71
Tabela 5-10 Desempenho das estratégias PID teórico, real e totalmente difusa no índice ITAE nos 3º
degraus aplicados
Observando a tabela 5-10, se percebe de longe que o controlador PID teórico, é o
que mostra melhor desempenho no índice ITAE. Isso já era esperado, uma vez que este
indicador penaliza muito o erro da resposta no estado estável, na medida em que
transcorre o tempo e, também, pelo fato do controlador PID teórico ser uma simulação
no final ele tende a eliminar o mesmo até zerá-lo, coisa que os controladores reais não
logram manter.
Também foi avaliada a potência aplicada nas resistências de aquecimento e
volume de água consumido durante os 60 minutos do teste, apresentando os resultados na
tabela 5-11 a seguir:
Estratégia de
controle
Média de Potência
Aplicada nas
Resistência (%)
Potência
(W/h)
Consumo total
de água
(Litros)
PID teórico 37,06 1485,32 300
PID 31.73 1267.2 300
Totalmente Difuso 34.72 1388.8 288.78
Tabela 5-11 Dados totais de consumo de energia e água do processo
Teste de rejeição a perturbações do controlador
totalmente difuso
Foi realizado um último teste para avaliar o comportamento do controlador difuso
em presencia de uma perturbação, o teste consistiu em ajustar a temperatura em 30° C e
a vazão de trabalho em 300 l/h constantes e manter o sistema assim, depois aplicar uma
perturbação na vazão aumentando ela para 400 l/h e manter ela nesse novo valor
observando o comportamento da temperatura por um período de tempo. Depois foi
aumentada a temperatura mudada para 35° C e a vazão voltada para 300 l/h deixar
estabilizar o sistema e aplicar novamente a perturbação na vazão aumentando a mesma
para os 400 l/h e manter ela nesse novo valor observando o comportamento da
temperatura por um período de tempo. O resultado deste teste pode ser observado na
figura 5-14 a seguir.
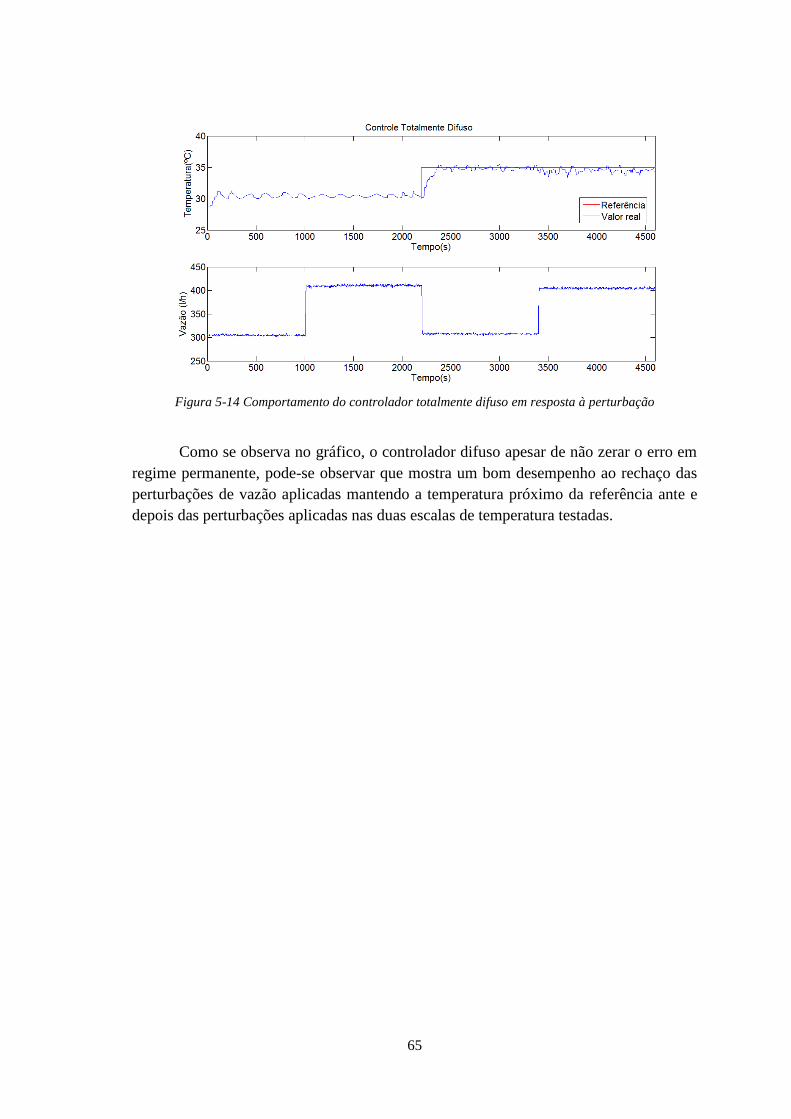
65
Figura 5-14 Comportamento do controlador totalmente difuso em resposta à perturbação
Como se observa no gráfico, o controlador difuso apesar de não zerar o erro em
regime permanente, pode-se observar que mostra um bom desempenho ao rechaço das
perturbações de vazão aplicadas mantendo a temperatura próximo da referência ante e
depois das perturbações aplicadas nas duas escalas de temperatura testadas.
66
Capítulo 6
Conclusões
No início deste trabalho foram propostos os seguintes objetivos aqui expostos
novamente de forma sucinta:
Implementar um sistema de controle inteligente em uma planta didática aplicando
lógica difusa.
Ampliar o potencial acadêmico da planta didática PD 3, permitindo o
desenvolvimento de estratégias de controle mais complexas que o tradicional PID.
Desenvolver estratégias de controle difuso pelo método de inferência Mamdanie
e Larsen e método de inferência de interpolação Takagi-Sugeno e Tsukamoto.
O presente trabalho de pesquisa conseguiu realizar os objetivos propostos, através
da utilização de estratégias de controle aplicando algoritmos difuso em um estudo de caso
real, o controle da temperatura do aquecimento da planta didática PD 3. O estudo também
cumpriu de maneira satisfatória o último objetivo realizando as observações do
desempenho de todas as respostas obtidas das diferentes variações de controle realizadas
com estratégias difusas, observando também com o controlador tradicional PID instalado
de fábrica na planta. Para tanto, foram utilizadas as métricas de resposta transitória ao
degrau e alguns índices de desempenho como IAE (Integral do valor absoluto do erro) e
ITAE (Integral do produto do tempo pelo valor absoluto do erro).
Foram observadas melhorias nas respostas a cada nova estratégia implementada e
testada, porem o melhor a destacar foi que os aperfeiçoamentos realizados a cada
estratégia, levaram a implementar na Pd, de forma fácil e rápida estratégias de controle
monovariável usando o controlador PID da PD 3, até terminar com uma estratégia
multivariável de controle inteligente implementada em um PC com software de
simulação.
Um outro aporte deste trabalho, é o fato de usar a Pd como um hibrido que
compartilha recursos acadêmicos de simulação que os estudantes dominam e os recursos
proprietários da PD 3, que a indústria manipula o que permitirá aos alunos integrar os
dois conhecimentos e a sua vez implementar e testar de forma pratica os conceitos
teóricos de controle aprendidos nas salas de aula.

67
Buscando a melhora do controlador totalmente difuso em todo o intervalo de
temperaturas que o tanque de aquecimento pode alcançar, se sugere inserir como variável
de entrada a referência (SP) e com o levantamento detalhado da relação potência vs.
temperatura aplicada nas resistências, seria possível levar a saída de potência próximo ao
valor de referência e com o erro e sua tendência minimizar as diferenças na resposta.
Uma outra recomendação e objetivando dar continuidade à pesquisa é explorar
mais a fundo a sintonia das estratégias difusa por algoritmos de otimização ou algoritmos
evolutivos.
68
Referências Bibliográficas
ABDALLAH, Y.M., Sintonia de controlador PID via procedimento adaptativo para
controle de atitude de veículos lançadores. Dissertação de M.Sc., INPE, São José dos
Campos, SP, Brasil, 2005.
AL-QUTAMI, T.A.H., IBRAHIM R. “Design of a Fuzzy Logic Process Controller for
Flow Applications and Implementation in Series Tanks Pilot Plant”. International
Conference on Industrial Instrumentation and Control (ICIC), College of
Engineering Pune, India, May. 2015.
AMARAL, J. F.M., PACHECO, M. A. C., TANSCHEIT, R. Sintonia de controladores
PID utilizando algoritmos genéticos. DEE-PUC-Rio, CP 38063, 22452-97, Rio de
Janeiro, 2010
ANDRADE, A. L., SOUZA, L. C. Sintonia de controladores PID utilizando
algoritmos genéticos. Monografia do curso de Engenharia de Controle e Automação,
Campos dos Goytacazes – RJ, IFF Campos Campus-Centro, 2010.
BALOCH M. A., ISMAIL I, HANIF N. H. et al., “ANFIS Identification Model of an
Advanced Process Control (APC) Pilot Plant”. Preceding for International Conference
on Intelligent and Advanced Systems (ICIAS), Fev. 2011
CAMPOS, Mario M., SAITO, Kaku. Sistemas inteligentes em controle e automação
de processos. Rio de Janeiro, Editora Ciência Moderna Ltda., 2004.
CAMPOS, M. C. M. M., TEIXEIRA, H. C. G. Controles típicos de equipamentos e
processos industriais. 1ª ed. São Paulo: Edgard Blücher, 2006
CARVALHO, A. S.; DE SOUSA, A. L.; FRANCISCO, L. E. Identificação e Controle
fuzzy de uma Planta Didática de Nível. VII SEGeT – Simpósio de Excelência em
Gestão e Tecnologia, 2010.
COELHO, L., ALMEIDA, O. Projeto e estudo de caso da implementação de um
sistema de controle nebuloso. Revista Controle & Automação, Vol.14 no.1, 2003.
COHEN, G. H.; COON, G.A. Theoretical considerations of retarded control, ASME
Transactions 75, p. 827-834, 1953
69
DA SILVA, M. G. Controlo não linear. Escola superior de tecnologia de Setúbal-
Portugal, 2003
DUARTE, M. Síntese de controlador PID para controle de pH em um reator com
otimização via algoritmos genéticos. Dissertação Mestrado em Engenharia de
Produção. Universidade Estadual do Norte Fluminense, 2014.
ECKHARD D., SCHAF F.M., GOMES J. M. et al., “Control and automation engineering
education: combining physical, remote and virtual labs”. XVI–Congresso Brasileiro de
Automatica (CBA), 2006.
GAO, Z. et al. A stable self-tuning fuzzy logic control system for industrial
temperature regulation. IEEE Transactions on Industry Applications, vol. 38, no. 2,
2002, pp 414-423.
GOMIDE, et al. Conceitos fundamentais da teoria de conjuntos fuzzy, lógica fuzzy e
aplicações. Proceedings of sexta Internacional Difuso Sistemas Associação World
Congress, 1995
GOSMANN H. L., 2002, Um sistema multivariável de tanques acoplados para
avaliação de técnicas de controle. Tese de M.Sc., UnB, Distrito Federal- DF.
HELLMANN, M. fuzzy logic introduction. Laboratorire Antennes Radar Telecom,
F.R.E CNRS 2272, Equipe radar polirimetrie, Universite de Rennes 1, UFR S.P.M,
Campus de Beaulineu – Bat. 22, France, 2001
MAZA, C. A. C. Diseño de un sistema experto para el enderezado de chasis en frío.
Tesis, Escuela de Ingeniería Mecatrónica, Universidad de las Américas Puebla, 2009.
MAZLAN Z., IBRAHIM R., “Development and Implementation of Adaptive Fuzzy
PID Controller (AFPIDC) for Flow Control Application”. 4th International Conference
on Intelligent and Advanced Systems (ICIAS), 2012.
MENENDEZ R. M., LÓPEZ T., RAM´IREZ R. A. et al., “Simplifying the practical
approach of the process control teaching” Proceedings of the 17th World Congress,
The International Federation of Automatic Control, Seoul, Korea, Julho, 2008.
MICHEL C. H., BRAGA A.R., POLITO B. C. et al., “Sistema de tanques acoplados e
descoplados (stad) para o estudo de controle e automação de processos: modelagem
e controle”. XVIII Congresso Brasileiro de Automática, Bonito-MS, Setembro, 2010.
70
NATIONAL INSTRUMENTS. Foundation Fieldbus Hardware and Software NI
USB-8486, NI PCI-FBUS/2, NI PCMCIA-FBUS Series. DataSheet. Disponível em:
<http://www.ni.com>. 2014.
NATIONAL INSTRUMENTS. FOUNDATIONTM Fieldbus NI-FBUS Hardware and
Software User Manual. Apostila. Disponível em: <http://www.ni.com>. Janeiro
2014.
NATIONAL INSTRUMENTS.FOUNDATIONTM Fieldbus Overview. Apostila.
Disponível em: <http://www.ni.com>. Janeiro 2014.
NATIONAL INSTRUMENTS.INSTALLATION GUIDE Foundation Fieldbus
Hardware and NI-FBUS Software. Apostila. Disponível em: <http://www.ni.com>.
Junho 2015.
NOGUCHI, M.T.G. Um Sistema Baseado em Regras fuzzy para Classificação
Supervisionada de Imagens Multiespectrais de alta resolução. Dissertação de M.Sc.,
UFPR, Curitiba, PR, Brasil, 2004.
OGATA, Katsuhiko. Modern Control Engineering, 4rd ed., Prentice-Hall. Inc,
Englewood Cliifss, N. J. USA, 2001.
ONOFRE, M. Lógica fuzzy para Controle de pH em um Processo Petrolífero,
Dissertação Mestrado, Universidade Federal de Rio Grande do Norte – UFRN, Natal,
RN,2011.
PASSINO, Kevin M.; YURKOVICH, Stephen. Fuzzy control. Addison-Wesley, 1998.
PEREIRA C. E., PALADINI S., SCHAF F., “Control and automation engineering
education: combining physical, remote and virtual labs”. 9th International Multi-
Conference on Systems, Signals and Devices, 2012.
PEREIRA, A. R., 2011 Implantação do controlador preditivo multivariável DMC em
uma planta piloto. Dissertação Mestrado em Engenharia Elétrica. UFES, Brasil.
PEREIRA, A. R., DE ALMEIDA G. M., CUADROS M. L., “Implementation of
predictive multivariable DMC controller in a pilot plant”. Latin American Applied
Research, 2014.
SANCHEZ, E. C. M., Controle por aprendizado acelerado e neuro-fuzzy de sistemas
servo-hidráulicos de alta frequência. Dissertação Mestrado, Pontifícia Universidade
Católica do Rio de Janeiro, PUC-Rio, 2009.
71
SANTOS R., RICO N. J., GÓMEZ M. A. et al., “EDUSCA (educational scada):
features and applications” 7th IFAC, Symposium on Advances in Control Education,
Junho, 2006.
SHAKYA, R. RAJANWAL, K. PATEL, S. DINKAR, S. C. Design and simulation of
PD, PID and fuzzy logic control for industrial application. International Journal of
Information and Computation Technology ISSN 0974-2239 v 4, p 363-368, 2014.
SHARIFI, A. ZHAO, H. KANDEMIR, M. PID control for providing QoS in NoC
based multicores. Pennsylvania State University, USA. EDAA.978-3-9810801-6-
2/DATE10.1384-1389. 2010.
SILER, William, BUCKLEY, James. Fuzzy expert system and fuzzy reasoning, Wiley-
Interscience, 2005
SILVA, G. J., DATTA, A. BHATTCHARYYA, S. New results on the synthesis of PID
controllers. IEEE Transaction on Automatic Control, v 47(2), p. 241-252, 2002.
SILVA, G. J., DATTA, A., BHATTACHARYYA, S. PID Controllers for Time-Delay
Systems. Boston - USA: Birkhäuser. 342p, 2005.
SIMÕES, M.G.; SHAW, I.S. Controle e modelagem fuzzy. São Paulo, SP, Brasil
Editora Blucher, 2ª edição 2007.
SKRJANC I., MATKO D., “Predictive Functional Control Based on Fuzzy Model for
Heat-Exchanger Pilot Plant”. IEEE Transactions on fuzzy systems, Dezembro, 2000.
THOMASSON, A. ERIKSSON, L. Model-based throttle control using static
compensators and IMC based PID-design. IFAC Workshop on Engine and Powertrain
Control, Simulation and Modeling. Paris – France, 2009.
WEI-JIE, Y.; YONG-XIN, L. Boiler drum level controlled by fuzzy self adapting PID.
College of Electronic Information Engineering, Inner Mongolia University, Hohhot,
China, 2009.
ZIEGLER, J.G.; NICHOLS, N.B. Optimum settings for automatic controllers.
Transaction softhe ASME, p. 759-768, 1942
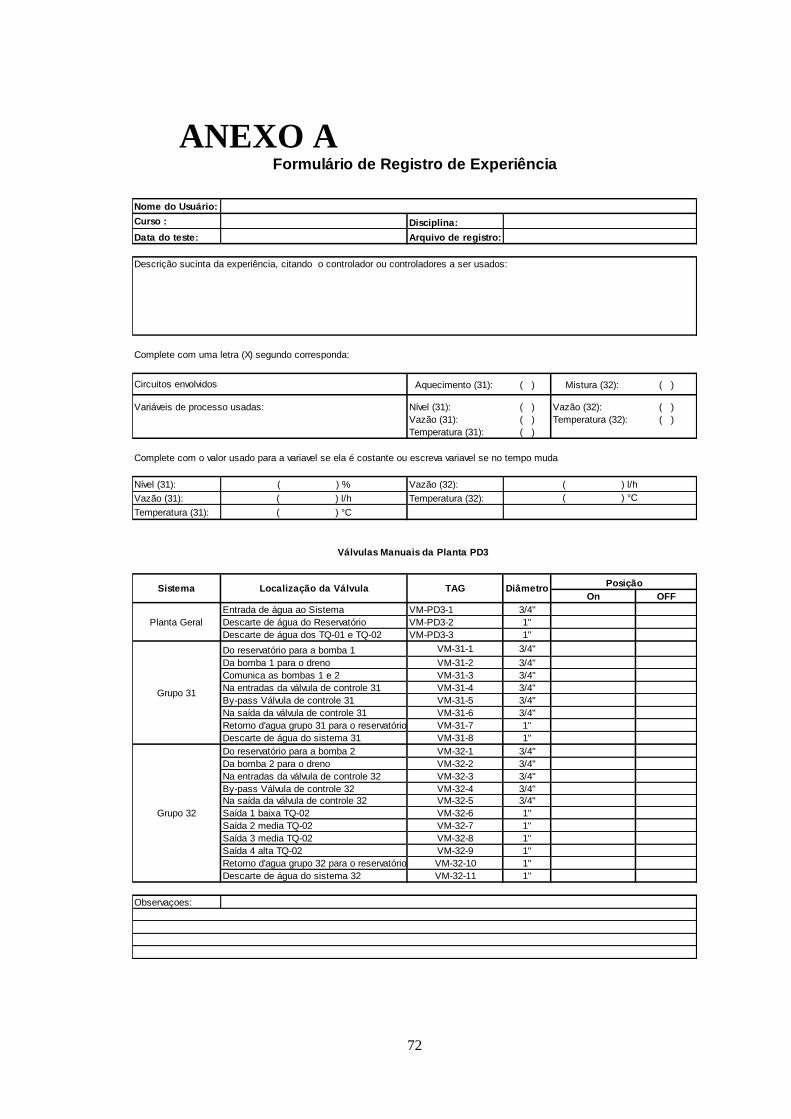
72
ANEXO A
Nome do Usuário:
Curso : Disciplina:
Data do teste: Arquivo de registro:
Complete com uma letra (X) segundo corresponda:
Aquecimento (31): ( ) Mistura (32): ( )
Variáveis de processo usadas: Nível (31): ( ) Vazão (32): ( )
Vazão (31): ( ) Temperatura (32): ( )
Temperatura (31): ( )
Complete com o valor usado para a variavel se ela é costante ou escreva variavel se no tempo muda
Nível (31): ( ) % Vazão (32):
Vazão (31): ( ) l/h Temperatura (32):
Temperatura (31): ( ) °C
On OFF
Entrada de água ao Sistema VM-PD3-1 3/4"
Descarte de água do Reservatório VM-PD3-2 1"
Descarte de água dos TQ-01 e TQ-02 VM-PD3-3 1"
Do reservatório para a bomba 1 VM-31-1 3/4"
Da bomba 1 para o dreno VM-31-2 3/4"
Comunica as bombas 1 e 2 VM-31-3 3/4"
Na entradas da válvula de controle 31 VM-31-4 3/4"
By-pass Válvula de controle 31 VM-31-5 3/4"
Na saída da válvula de controle 31 VM-31-6 3/4"
Retorno d'agua grupo 31 para o reservatório VM-31-7 1"
Descarte de água do sistema 31 VM-31-8 1"
Do reservatório para a bomba 2 VM-32-1 3/4"
Da bomba 2 para o dreno VM-32-2 3/4"
Na entradas da válvula de controle 32 VM-32-3 3/4"
By-pass Válvula de controle 32 VM-32-4 3/4"
Na saída da válvula de controle 32 VM-32-5 3/4"
Saída 1 baixa TQ-02 VM-32-6 1"
Saída 2 media TQ-02 VM-32-7 1"
Saída 3 media TQ-02 VM-32-8 1"
Saída 4 alta TQ-02 VM-32-9 1"
Retorno d'agua grupo 32 para o reservatório VM-32-10 1"
Descarte de água do sistema 32 VM-32-11 1"
Observaçoes:
Válvulas Manuais da Planta PD3
Formulário de Registro de Experiência
Circuitos envolvidos
( ) l/h
( ) °C
Descrição sucinta da experiência, citando o controlador ou controladores a ser usados:
Planta Geral
Grupo 31
Grupo 32
PosiçãoSistema Localização da Válvula TAG Diâmetro
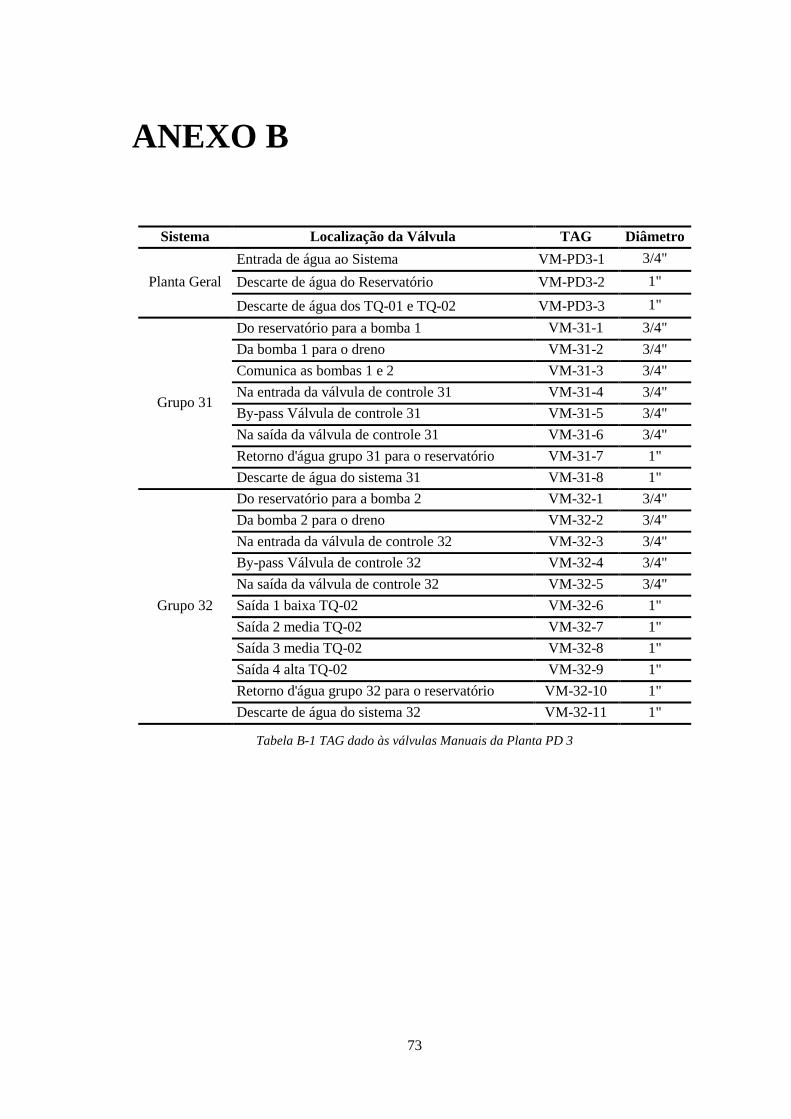
73
ANEXO B
Sistema Localização da Válvula TAG Diâmetro
Planta Geral
Entrada de água ao Sistema VM-PD3-1 3/4"
Descarte de água do Reservatório VM-PD3-2 1"
Descarte de água dos TQ-01 e TQ-02 VM-PD3-3 1"
Grupo 31
Do reservatório para a bomba 1 VM-31-1 3/4"
Da bomba 1 para o dreno VM-31-2 3/4"
Comunica as bombas 1 e 2 VM-31-3 3/4"
Na entrada da válvula de controle 31 VM-31-4 3/4"
By-pass Válvula de controle 31 VM-31-5 3/4"
Na saída da válvula de controle 31 VM-31-6 3/4"
Retorno d'água grupo 31 para o reservatório VM-31-7 1"
Descarte de água do sistema 31 VM-31-8 1"
Grupo 32
Do reservatório para a bomba 2 VM-32-1 3/4"
Da bomba 2 para o dreno VM-32-2 3/4"
Na entrada da válvula de controle 32 VM-32-3 3/4"
By-pass Válvula de controle 32 VM-32-4 3/4"
Na saída da válvula de controle 32 VM-32-5 3/4"
Saída 1 baixa TQ-02 VM-32-6 1"
Saída 2 media TQ-02 VM-32-7 1"
Saída 3 media TQ-02 VM-32-8 1"
Saída 4 alta TQ-02 VM-32-9 1"
Retorno d'água grupo 32 para o reservatório VM-32-10 1"
Descarte de água do sistema 32 VM-32-11 1"
Tabela B-1 TAG dado às válvulas Manuais da Planta PD 3
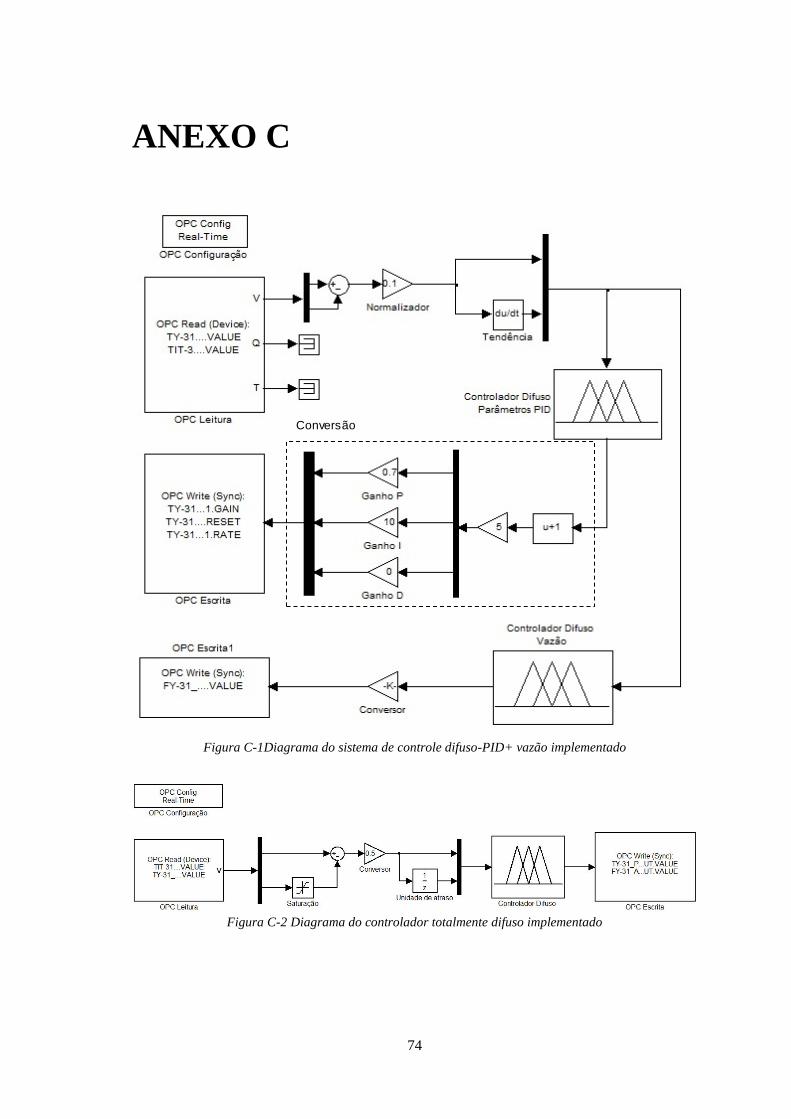
74
ANEXO C
Figura C-1Diagrama do sistema de controle difuso-PID+ vazão implementado
Figura C-2 Diagrama do controlador totalmente difuso implementado
Conversão