MÉTODO DOS DESLOCAMENTOS: BARRAS AXIALMENTE …jjscremin.com/aulas/teoria/TE_016_AP_03.pdf · A...
20
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 102 MÉTODO DOS DESLOCAMENTOS: BARRAS AXIALMENTE INDEFORMÁVEIS Seja uma estrutura hiperstática constituida por 3 barras axialmente indeformáveis: P p L 1 L 2 E, I, A L 3 ∆ 1 P p L 1 L 2 ∆ 2 ∆ 3 = E, I, A L 3 ∆ 4 Porque as barras são axialmente deformáveis, existem g.l. hipergeométricos que não precisamos de considerar, ∆ 2 = 0 e ∆ 3 = ∆ 4 : ∆ 1 P p L 1 L 2 ∆ 3 E, I, A L 3 que, por sobreposição dos efeitos, é igual à soma de duas estruturas: R 10 P p L 1 L 2 R 30 + E, I, A L 3 ∆ 1 L 1 L 2 ∆ 3 E, I, A L 3
Transcript of MÉTODO DOS DESLOCAMENTOS: BARRAS AXIALMENTE …jjscremin.com/aulas/teoria/TE_016_AP_03.pdf · A...

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 102
MÉTODO DOS DESLOCAMENTOS: BARRAS AXIALMENTE INDEFORMÁVEIS
Seja uma estrutura hiperstática constituida por 3 barras axialmente indeformáveis:
P
p L1
L2
E, I, A
L3
∆1
P
p L1
L2
∆2 ∆3 =
E, I, A
L3
∆4
Porque as barras são axialmente deformáveis, existem g.l. hipergeométricos que não
precisamos de considerar, ∆2 = 0 e ∆3 = ∆4:
∆1
P
pL1
L2
∆3
E, I, A
L3
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
R10
P
p L1
L2
R30 +
E, I, A
L3
∆1
L1
L2
∆3
E, I, A
L3

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 103
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
R10
P
p
R30
E, I, A
=
R’’’10 p
R’’’30
R’10
P
R’30
R’’10
R’’30
1) Assentamento ∆1:
E, I, A
K11
K31
∆1 =
K’’’11
K’’’31
K’11
K’31
K’’11
K’’31
∆1=1
2) Assentamento ∆3:
E, I, A
K13
K33
∆3 =
K’’’13 K’’’33 K’13
K’33
K’’13 K’’33
∆3=1
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 3, temos:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 104
∆∆
⋅
+
=
3
1
3331
1311
30
10
3
1
KKKK
RR
FF sendo ijijij KKK ′′+′= , com i , j = 1, 3.
Seja uma nova estrutura hiperstática constituida por 3 barras axialmente indeformáveis:
p
L1
E, I, A
L2
P1 P2
∆1
p
L1
∆2 ∆3 =
L2
∆6
E, I, A
∆4
∆5
P1 P2
Mais uma vez, porque as barras são axialmente deformáveis, existem g.l. hipergeométricos
que não precisamos de considerar, ∆2 = ∆5 = 0 e ∆3 = ∆6:
∆1
P1
p
L1
∆3
E, I, A
∆4
L2
P2
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
R10 p
L1
R30
E, I, A
R40
L2
+P1 P2
∆1
L1
∆3
E, I, A
∆4
L2

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 105
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
R10 p
R30
R40
= P1 P2
R’’10
p
R’’30
R’’40 R’’’40R’10
R’30 R’’’30
P1 P2
1) Assentamento ∆1:
K11
K31
K41
=
∆1 K’’11
K’’31
K’’41 K’’’41K’11
K’31
∆1=1
K’’’31
2) Assentamento ∆3:
K13
K33
K43
=
∆3 K’’13
K’’33
K’’43 K’’’43 K’13
K’33
∆3=1
K’’’33
3) Assentamento ∆4:
K14
K34
K44
=
∆4 K’’14
K’’34
K’’44 K’’’44K’14
K’34
∆4=1
K’’’34

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 106
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 3, 4, temos:
∆∆∆
⋅
+
=
4
3
1
444341
343331
141311
40
30
10
4
3
1
KKKKKKKKK
RRR
FFF
sendo ijijijij KKKK ′′′+′′+′= , com i , j = 1, 3, 4.
Seja a nova estrutura hiperstática contínua, idêntica à anterior, constituida por 3 barras axialmente indeformáveis, mas não simultaneamente ortogonais entre si:
p
L1
E, I, A
L2
L3
P1 P2
∆1
L1
∆2 ∆3 =
L2
E, I, A p
∆6
∆4
∆5
L3
α
P1 P2
Mais uma vez, porque as barras são axialmente deformáveis, existem g.l. hipergeométricos
que não precisamos de considerar, ∆2 = ∆5 = 0 e (∆3 cos α = ∆6 cos α), i.e. ∆3 = ∆6:
∆1
L1
∆3
L2
E, I, A p ∆4
L3
α
P1 P2
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 107
R10
L1
R30
L2
E, I, A p R40
α
+L3
P1 P2
∆1
L1
∆3
L2
E, I, A ∆4
α
L3
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
p R40
α
P1 P2
R10
R30 =
P1 P2
R’’’40R’10
R’30
R’’10
R’’30
p R’’40
R’’’30
1) Assentamento ∆1:
K41
K11
K31
∆1
α
=
K’’11
K’’31
K’11
K’31
∆1=1
K’’’41
K’’41
2) Assentamento ∆3:
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 108
K43
K13
K33
∆3 α
=
K’’’43
K’13
K’33
K’’13
K’’33
∆3=1K’’43
K’’’33
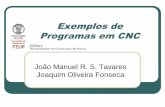
3) Assentamento ∆4:
K44
α
=
K14
K34
∆4
K’’14
K’’34
K’14
K’34
∆4=1
K’’’44
K’’44
K’’’34
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 3, 4, temos:
∆∆∆
⋅
+
=
4
3
1
444341
343331
141311
40
30
10
4
3
1
KKKKKKKKK
RRR
FFF
sendo ijijijij KKKK ′′′+′′+′= , com i , j = 1, 3, 4.
A determinação das forças na direcção de translação 3, R30, K31, K33 e K34, pode ser feita através da aplicação do T.T.V. Consideremos no exemplo anterior rótulas na extremidade de todas as barras. A estrutura transforma-se num mecanismo:
L1
L2
E, I, A
L3
α
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 109
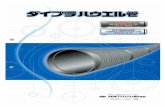
Provoquemos na direcção de translação 5 um deslocamento unitário, de tal modo que os nós não sofram qualquer rotação:
L1
L2
E, I, A
L3
1
θ1=1/L1 θ3=1/L3
θ2=0
Pretende-se então determinar, por exemplo, o valor K31. Logo, iremos considerar também as rótulas nas extremidades das barras e, consequentemente, os momentos flectores à esquerda e direita da rótula que imponham a condição de continuidade de deformação da estrutura.
K’’11K’11
K31
K’’41
K’a1
K41
K11
A aplicação do T.T.V. às forças e esforços internos desta estrutura e aos deslocamentos e deformações internas do movimento de mecanismo, i.e. o facto do trabalho das forças exteriores da estrtura nos deslocamentos do mecanismo ser igual ao trabalho dos esforços internos da estrutura nas deformações internas do mecanismo (nulas por definição de movimento de mecanismo), permite escrever:
( ) ( ) 01 24111111131 =⋅′′+′′+⋅′+′+⋅ θθ KKKKK a
, i.e.
1211
31 6142
⋅⋅−=⋅
⋅⋅+
⋅⋅−=
LIE
LLIE
LIEK
Pretende-se agora determinar o valor K33. Logo, iremos considerar também as rótulas nas extremidades das barras e, consequentemente, os momentos flectores à esquerda e direita da rótula que imponham a condição de continuidade de deformação da estrutura.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 110
K33 K’13
K’a3
K’’’43
K’’’a3
K43
K13
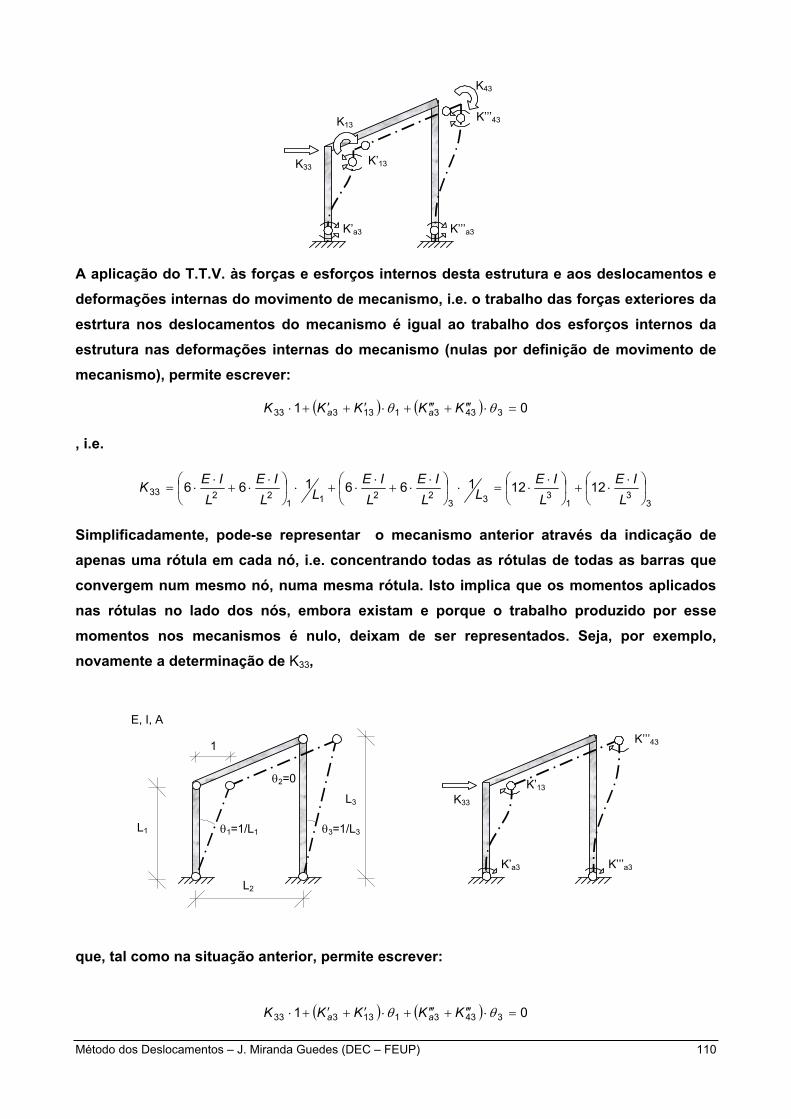
A aplicação do T.T.V. às forças e esforços internos desta estrutura e aos deslocamentos e deformações internas do movimento de mecanismo, i.e. o trabalho das forças exteriores da estrtura nos deslocamentos do mecanismo é igual ao trabalho dos esforços internos da estrutura nas deformações internas do mecanismo (nulas por definição de movimento de mecanismo), permite escrever:
( ) ( ) 01 3433113333 =⋅′′′+′′′+⋅′+′+⋅ θθ KKKKK aa
, i.e.
33
1333
22112233 1212166166
⋅⋅+
⋅⋅=⋅
⋅⋅+
⋅⋅+⋅
⋅⋅+
⋅⋅=
LIE
LIE
LLIE
LIE
LLIE
LIEK
Simplificadamente, pode-se representar o mecanismo anterior através da indicação de apenas uma rótula em cada nó, i.e. concentrando todas as rótulas de todas as barras que convergem num mesmo nó, numa mesma rótula. Isto implica que os momentos aplicados nas rótulas no lado dos nós, embora existam e porque o trabalho produzido por esse momentos nos mecanismos é nulo, deixam de ser representados. Seja, por exemplo, novamente a determinação de K33,
L1
L2
E, I, A
L3
1
θ1=1/L1 θ3=1/L3
θ2=0
K33
K’13
K’a3
K’’’43
K’’’a3
que, tal como na situação anterior, permite escrever:
( ) ( ) 01 3433113333 =⋅′′′+′′′+⋅′+′+⋅ θθ KKKKK aa

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 111
Seja uma quarta estrutura hiperstática contínua, constituida por 4 barras axialmente indeformáveis, mas não simultaneamente ortogonais entre si:
p
L1
E, I, A
L2
L3
P1 P2
pE, I, A
L2
P1 P2
∆1
∆2 ∆3 =
∆6 ∆4
∆5
∆9
∆7
∆8
Mais uma vez, porque as barras são axialmente deformáveis, existem g.l. hipergeométricos
que não precisamos de considerar, ∆2 = ∆8 = 0 e, dos restantes 4 g.l. hipergeométricos de
translação, só precisamos de considerar 2, sejam ∆3 e ∆6:
p
L1
E, I, A
L2
L3
P1 P2
∆1
∆3
∆6 ∆4
α ∆7
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
pE, I, A
P1 P2
R10
R30
R60 R40
R70
+
E, I, A
∆1
∆3
∆6 ∆4
∆7
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 112
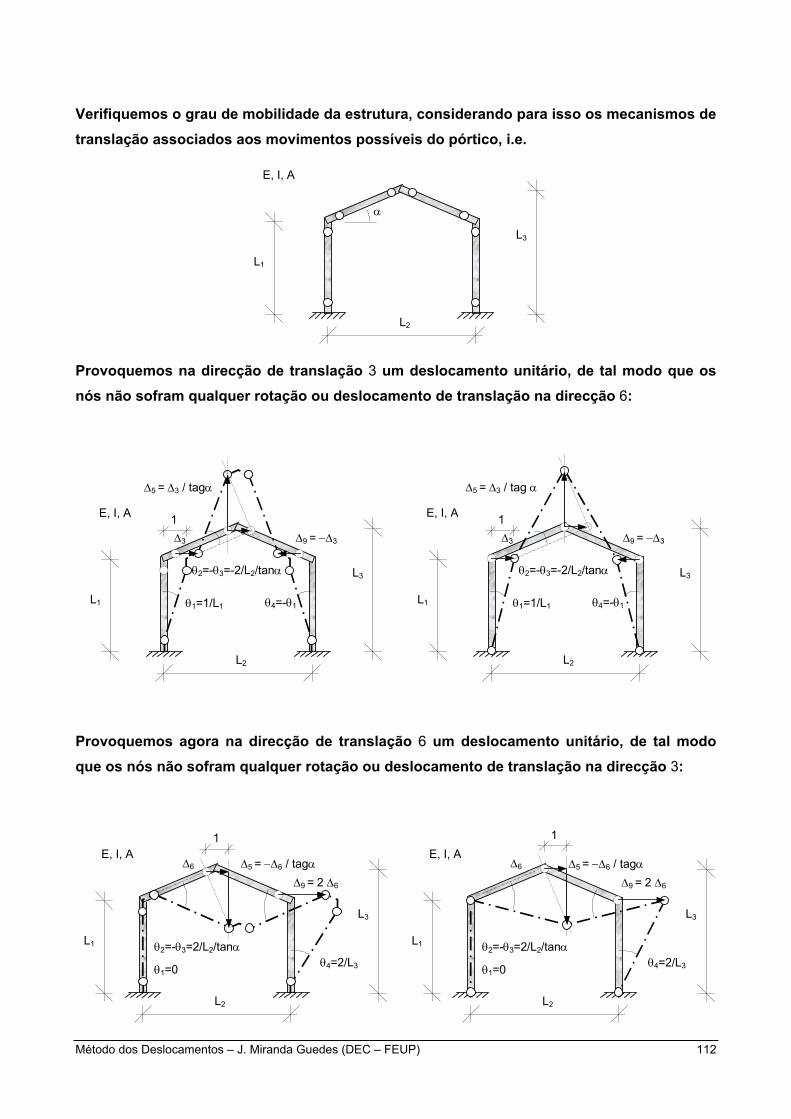
Verifiquemos o grau de mobilidade da estrutura, considerando para isso os mecanismos de translação associados aos movimentos possíveis do pórtico, i.e.
L1
E, I, A
L2
L3
α
Provoquemos na direcção de translação 3 um deslocamento unitário, de tal modo que os nós não sofram qualquer rotação ou deslocamento de translação na direcção 6:
L1
E, I, A
L2
L3
∆3
∆5 = ∆3 / tagα
∆9 = −∆3
1
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
L1
E, I, A
L2
L3
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
Provoquemos agora na direcção de translação 6 um deslocamento unitário, de tal modo que os nós não sofram qualquer rotação ou deslocamento de translação na direcção 3:
L1
E, I, A
L2
L3
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanαθ4=2/L3
L1
E, I, A
L2
L3
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanα θ4=2/L3

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 113
Regressando ao exercício e analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
p E, I, A
P1 P2
R10
R30
R60 R40
R70
=
P1
R’10 R’’10
p
R’’40
P2
R’’’’70
p
R’’’70 R’’’40
R30
R60
E, I, A
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
p E, I, A
P1 P2
R30
R60
R’10
R’a0 R’’’’a0
R’’’’70 R’’10
R’’40
R’’’40R’’’70
( ) ( ) ( ) ( ) 01 4''''0
''''703704024010110030 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa RRRRRRRRR

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 114
E, I, A
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanα θ4=2/L3
p E, I, A
P1 P2
R30
R60
R’10
R’a0 R’’’’a0
R’’’’70 R’’10
R’’40
R’’’40R’’’70
( ) ( ) ( ) ( ) 01 4''''0
''''703704024010110060 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa RRRRRRRRR
1) Assentamento ∆1:
E, I, A
K11
K31
K61 K41
K71
=
∆1
K’11 K’’11
K’’41
K’’’’71K’’’71
K’’’41
K31
K61
∆1=1
E, I, A
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
E, I, A
K31
K61
K’11
K’a1 K’’’’a1
K’’’’71 K’’11
K’’41
K’’’41K’’’71
( ) ( ) ( ) ( ) 01 4''''1
''''713714124111111131 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 115
E, I, A
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanα θ4=2/L3
E, I, A
K31
K61
K’11
K’a1 K’’’’a1
K’’’’71 K’’11
K’’41
K’’’41 K’’’71
( ) ( ) ( ) ( ) 01 4''''1
''''713714124111111161 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
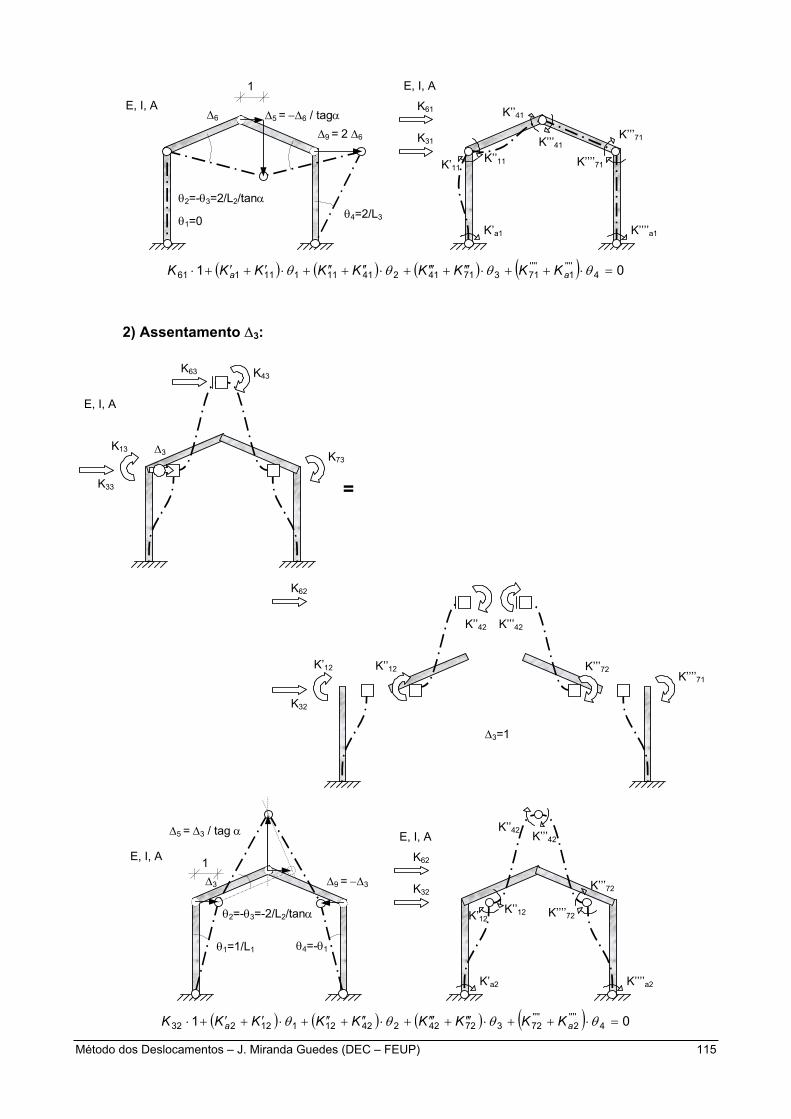
2) Assentamento ∆3:
E, I, A
K13
K33
K63 K43
K73
=
∆3
K’12 K’’12
K’’42
K’’’’71K’’’72
K32
K62
K’’’42
∆3=1
E, I, A
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
E, I, A
K32
K62
K’12
K’a2 K’’’’a2
K’’’’72 K’’12
K’’42 K’’’42
K’’’72
( ) ( ) ( ) ( ) 01 4''''2
''''723724224212112232 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 116
E, I, A
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanα θ4=2/L3
E, I, A
K32
K62
K’12
K’a2 K’’’’a2
K’’’’72 K’’12
K’’42 K’’’42
K’’’72
( ) ( ) ( ) ( ) 01 4''''2
''''723724224212112262 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
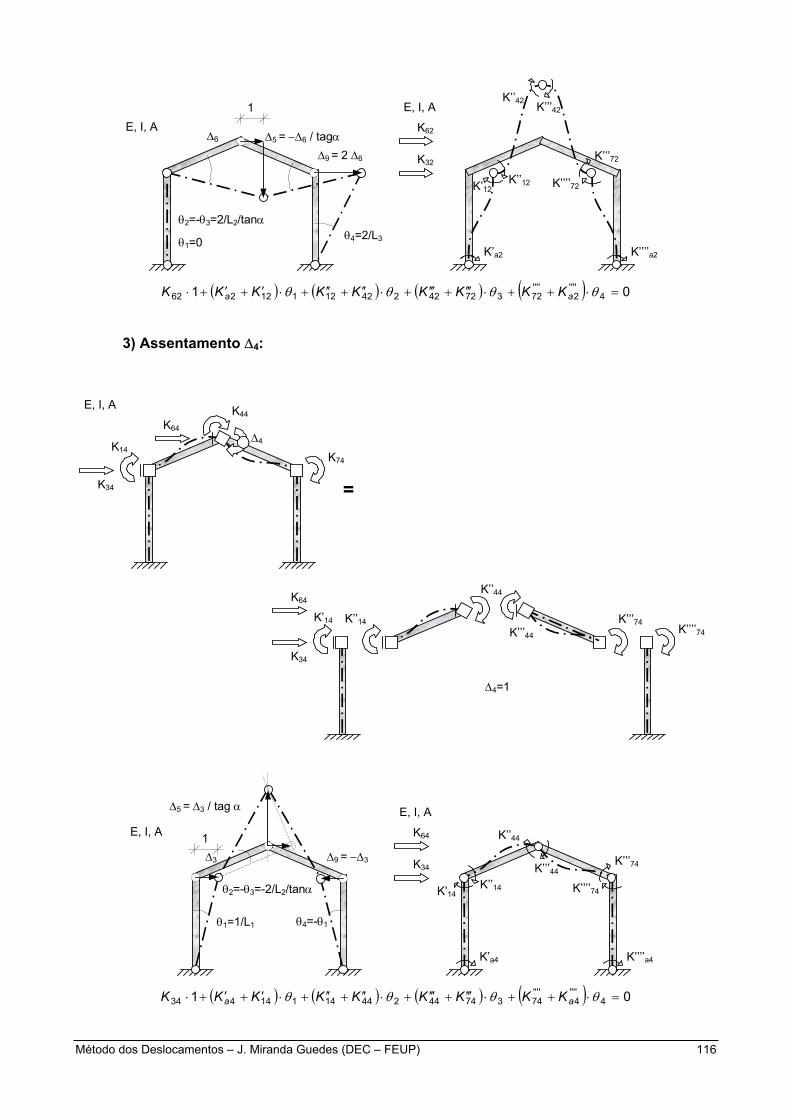
3) Assentamento ∆4:
E, I, A
K14
K34
K64 K44
K74
=
∆4
K’14 K’’14
K’’44
K’’’’74K’’’74
K’’’44
K34
K64
∆4=1
E, I, A
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
E, I, A
K34
K64
K’14
K’a4 K’’’’a4
K’’’’74 K’’14
K’’44
K’’’44K’’’74
( ) ( ) ( ) ( ) 01 4''''4
''''743744424414114434 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 117
E, I, A
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanα θ4=2/L3
E, I, A
K34
K64
K’14
K’a4 K’’’’a4
K’’’’74 K’’14
K’’44
K’’’44 K’’’74
( ) ( ) ( ) ( ) 01 4''''4
''''743744424414114464 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
4) Assentamento ∆6:
E, I, A
K16
K36
K66 K46
K76
=
∆6
K’16 K’’16
K’’46
K’’’’76K’’’76 K’’’46
K36
K66
∆6=1
E, I, A
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
E, I, A
K36
K66
K’16
K’a6 K’’’’a6
K’’’’76 K’’16 K’’46
K’’’46
K’’’76
( ) ( ) ( ) ( ) 01 4''''6
''''763764624616116636 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
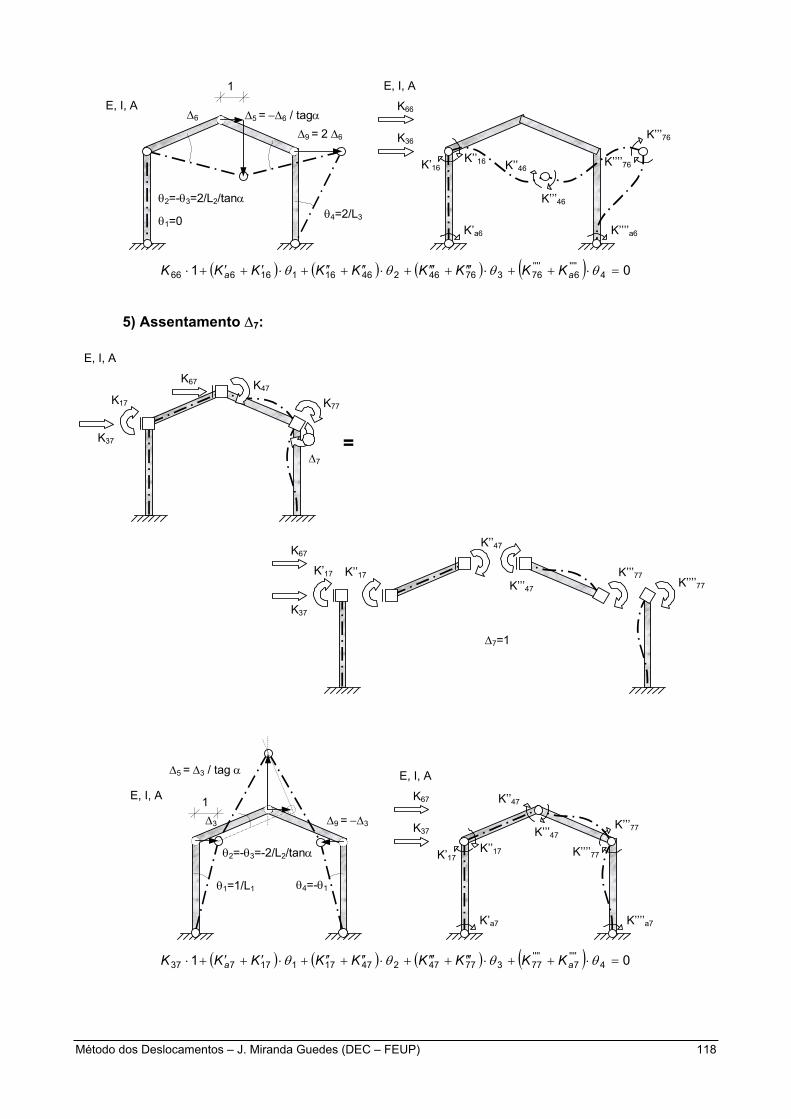
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 118
E, I, A
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanαθ4=2/L3
E, I, A
K36
K66
K’16
K’a6 K’’’’a6
K’’’’76 K’’16 K’’46
K’’’46
K’’’76
( ) ( ) ( ) ( ) 01 4''''6
''''763764624616116666 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
5) Assentamento ∆7:
E, I, A
K17
K37
K67 K47 K77
=∆7
K’17 K’’17
K’’47
K’’’’77K’’’77
K’’’47
K37
K67
∆7=1
E, I, A
∆3
∆5 = ∆3 / tag α
∆9 = −∆3
θ1=1/L1 θ4=-θ1
θ2=-θ3=-2/L2/tanα
1
E, I, A
K37
K67
K’17
K’a7 K’’’’a7
K’’’’77 K’’17
K’’47
K’’’47K’’’77
( ) ( ) ( ) ( ) 01 4''''7
''''773774724717117737 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 119
E, I, A
∆9 = 2 ∆6
∆6
1
θ1=0
∆5 = −∆6 / tagα
θ2=-θ3=2/L2/tanα θ4=2/L3
E, I, A
K37
K67
K’17
K’a7 K’’’’a7
K’’’’77 K’’17
K’’47
K’’’47 K’’’77
( ) ( ) ( ) ( ) 01 4''''7
''''773774724717117767 =⋅++⋅′′′+′′′+⋅′′+′′+⋅′+′+⋅ θθθθ aa KKKKKKKKK
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 3, 4, temos:
∆∆∆∆∆
⋅
+
=
7
6
4
3
1
7776747371
6766646361
4746444341
3736343331
1716141311
70
60
40
30
10
7
6
4
3
1
KKKKKKKKKKKKKKKKKKKKKKKKK
RRRRR
FFFFF
Calculados os deslocamentos ∆1, ∆3, ∆4, ∆6, e ∆7 e sabendo que os deslocamentos ∆2 e ∆8
são nulos, os restantes deslocamentos, i.e. ∆5 e ∆9, determinam-se através dos
mecanismos,
( )
639
635
2tan∆⋅+∆−=∆
∆−∆=∆ α
Conhecidos os deslocamentos, determinam-se os esforços transversos e os momentos flectores nas extremidades das barras através do procedimento já utilizado no caso das estruturas constituidas por barras deformáveis axialmente. Quanto ao esforço axial, a sua determinação é efectuada através da imposição do equilíbrio de forças nos nós:
M’’’fd
T’’’d
N’’’dM’’fd
T’e
M’fe
N’e
T’’d
N’’d
M’’’’fe
T’’’e
M’’’fe
N’’’’e
T’’’’’e
N’’’e
T’’e M’’fe
N’’e
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 120
0sincos0cossin
=⋅′′+⋅′′−′−
=⋅′′+⋅′′+′+
αααα
dde
dde
NTNNTT
0sincossincos0cossincossin
=⋅′′′−⋅′′′−⋅′′−⋅′′+
=⋅′′′+⋅′′′−⋅′′−⋅′′−
αααααααα
ddee
ddee
NTNTNTNT
0sincos
0cossin''''
''''
=−⋅′′′+⋅′′′+
=−⋅′′′−⋅′′′+
eee
eee
NNT
TNT
αα
αα

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 121
P2
p
P1
N’d
T’d
p
M’’fd
T’’e
T’’d
M’’fe
N’’e
N’’dM’fd
N’’’’d
T’’’’d
M’’’’fd M’’’fd
T’’’eT’’’d
M’’’fe
N’’’e
N’’’d