Melhoria do Sistema de Automação e do Funcionamento de Esteira Transportadora … · um sistema...
131
Universidade Federal de Pernambuco Centro de Tecnologia e Geociências Curso de Especialização em Automação Industrial Melhoria do Sistema de Automação e do Funcionamento de Esteira Transportadora de Volumes Rafael Bastos Pimenta Orientador: Prof. João Paulo Cerquinho Cajueiro Monografia apresentada ao Centro de Tecnologia e Geociências da Universidade Federal de Pernambuco como parte dos requisitos para obtenção do Certificado de Especialista em Automação Industrial Recife, 2016
Transcript of Melhoria do Sistema de Automação e do Funcionamento de Esteira Transportadora … · um sistema...
Universidade Federal de Pernambuco Centro de Tecnologia e Geociências
Curso de Especialização em Automação Industrial
Melhoria do Sistema de Automação e do Funcionamento de Esteira Transportadora de Volumes
Rafael Bastos Pimenta
Orientador: Prof. João Paulo Cerquinho Cajueiro
Monografia apresentada ao Centro de Tecnologia e Geociências da Universidade Federal de Pernambuco como parte dos requisitos para obtenção do Certificado de Especialista em Automação Industrial
Recife, 2016
2
Resumo
Melhoria do Sistema de Automação e do Funcionamento de Esteira Transportadora de Volumes
Rafael Bastos Pimenta
Fevereiro/2016
Orientador: Prof. João Paulo Cerquinho Cajueiro Área de concentração: Automação Industrial Palavras-chaves: automação, esteira, portinholas.
O presente trabalho tem como objetivo a melhoria do acionamento de uma esteira
transportadora de volumes através da implementação de um sistema de automação flexível via
Controlador Lógico Programável (CLP), otimização da partida do motor elétrico de acionamento da
esteira através da utilização de chave de partida suave (soft starter) e implementação de barreiras
físicas na esteira pela instalação de portinholas, de forma a prover a segurança no processamento de
volumes, e manter fechados os vãos de passagens dos mesmos, quando a esteira estiver desligada
ou quando não houver volume sobre ela. Atualmente, o acionamento da esteira transportadora é
realizado por meio de lógica de inter-travamento de contatores, constituindo-se num quadro de
comando de grandes dimensões, com cabeamento em excesso, com circuito de comando em tensão
110 Vca, constituindo num risco a equipe que realiza a manutenção do equipamento. Não obstante,
a esteira não possui dispositivo de partida suave, sendo acionada por partida direta, durante várias
vezes ao dia, gerando picos de corrente na rede elétrica do estabelecimento onde ela encontra-se
instalada. Ressalta-se que, o referido equipamento não possui diagrama elétrico. Por isso, foi
realizado levantamento de campo para elaboração de um diagrama que serviu de base para o projeto
elétrico da melhoria proposta neste trabalho. Estado de arte: com a melhoria executada obteve-se
um sistema composto de esteira transportadora e portinholas controlado por micro CLP no qual está
inserida a lógica de acionamento do sistema e toda modificação da lógica passou-se ser feita via
software. A partida da esteira ocorre com torque e corrente de partida reduzidos, ocasionando no
prolongamento da vida útil do motor da esteira.
3
Índice de ilustrações Figura 1.1: Esteira transportadora de volumes............................................................................ 3
Figura 1.2: Placa da esteira. ..................................................................................................... 3
Figura 1.3: Sistema de Sustentação das Placas da Esteira. ........................................................... 4
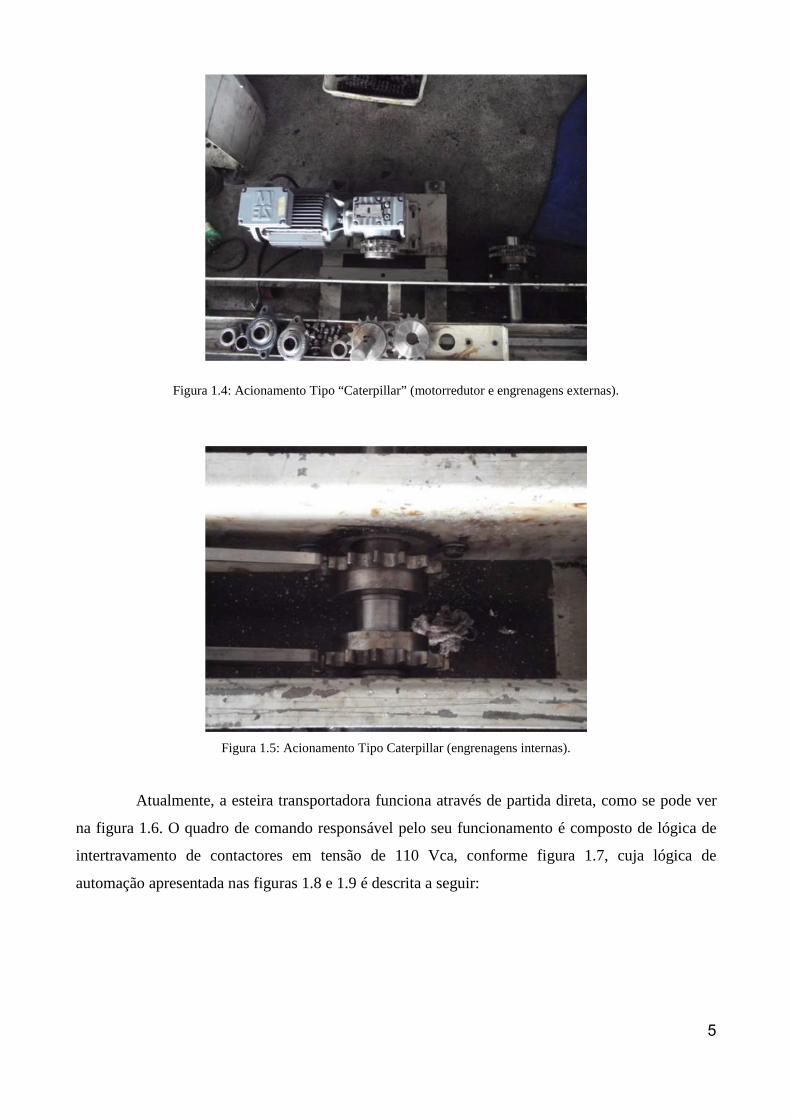
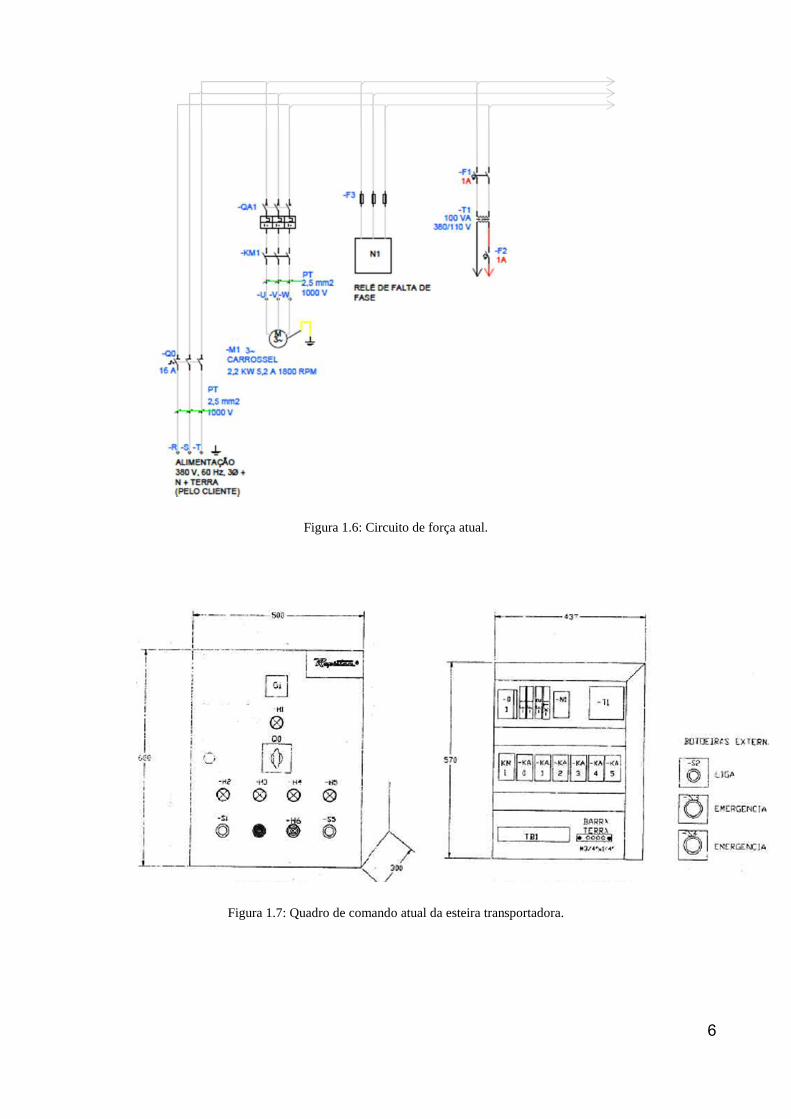
Figura 1.4: Acionamento Tipo “Caterpillar” (motorredutor e engrenagens externas). ..................... 5
Figura 1.5: Acionamento Tipo Caterpillar (engrenagens internas). ............................................... 5
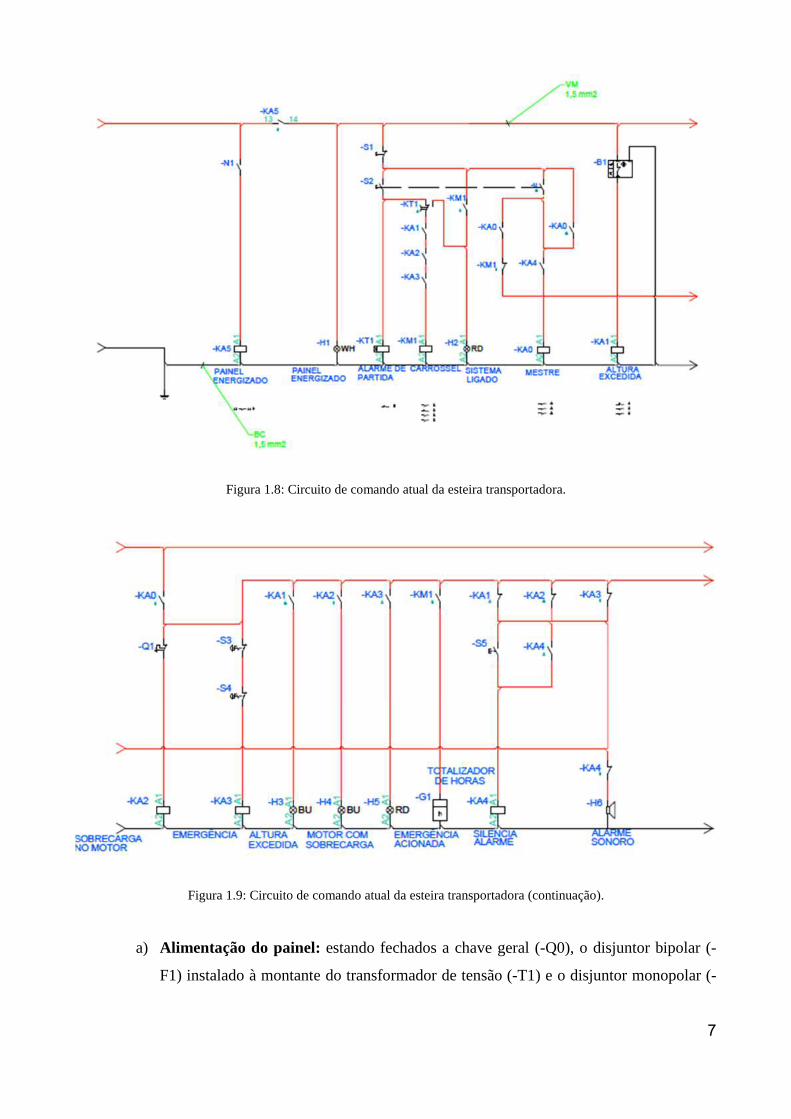
Figura 1.6: Circuito de força atual. ........................................................................................... 6
Figura 1.7: Quadro de comando atual da esteira transportadora. .................................................. 6
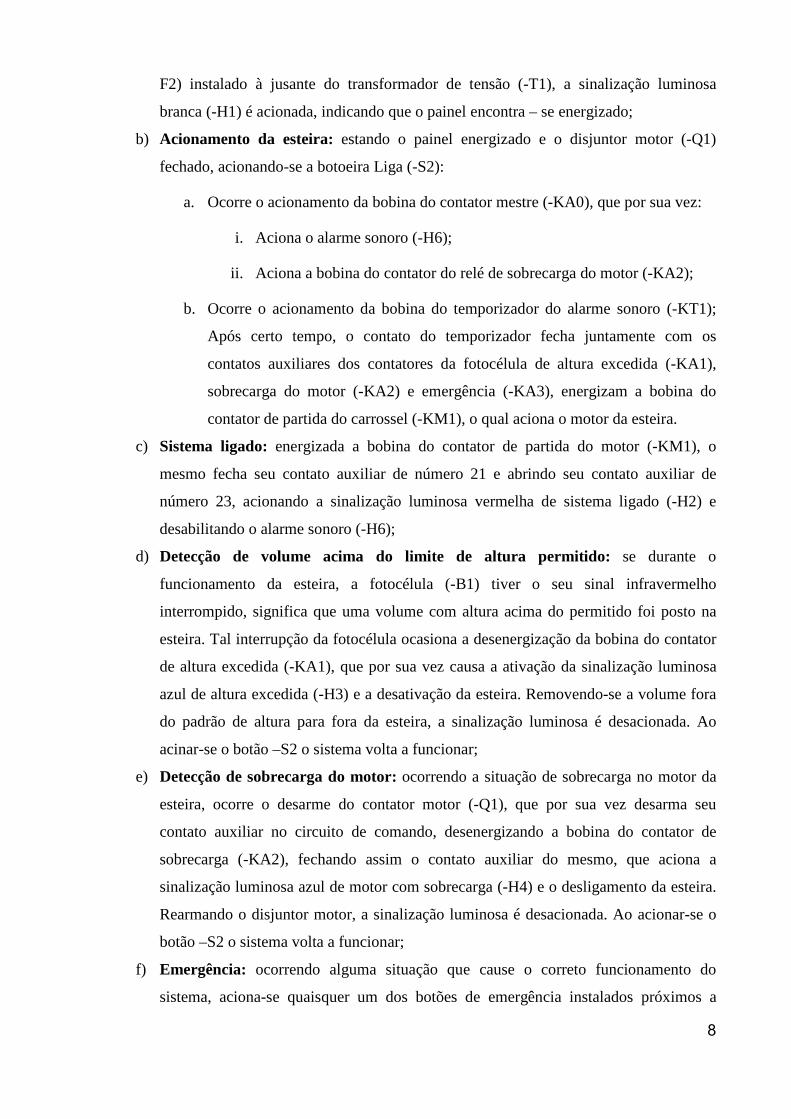
Figura 1.8: Circuito de comando atual da esteira transportadora. ................................................. 7
Figura 1.9: Circuito de comando atual da esteira transportadora (continuação). ............................. 7
Figura 1.10: Curva do comportamento da corrente de partida do motor em função do tempo. ....... 10
Figura 1.11: Curva do comportamento do torque de partida do motor em função do tempo. ......... 11
Figura 1.12: Disposição das portinholas na esteira transportadora de volumes. ............................ 12
Figura 1.13: Pirâmide da automação industrial......................................................................... 12
Figura 2.1: Diagrama esquemático de proposta de melhoria para a esteira. ................................. 20
Figura 3.1: Vão livre do túnel da esteira. ................................................................................. 22
Figura 3.2: Portinhola a ser instalada na esteira transportadora. ................................................. 23
Figura 3.3: Disposição da guia de nylon sobre o trilho de alumínio. ........................................... 24
Figura 3.4: Acionamento da portinhola: conjunto motorredutor + fuso. ...................................... 25
Figura 3.5: Porca do fuso do acionamento da portinhola contendo ímãs. .................................... 26
Figura 3.6: Trava articulada do braço acionador da portinhola. .................................................. 27
Figura 3.7: Remoção do pino travado por cavilha..................................................................... 27
Figura 3.8: Remoção do pino travado por chave....................................................................... 28
Figura 3.9: Trava articulada aberta. ........................................................................................ 28
Figura 3.10: Disposição dos sensores de detecção de volume fora do padrão. ............................. 30
Figura 3.11: Sensor óptico de reflexão difusa O5H500. ............................................................ 30
Figura 3.12: Disposição dos sensores de detecção de volume sobre a esteira. .............................. 32
Figura 3.13: Sensor óptico de barreira OH5001 (emissor) e OH5002 (receptor). ......................... 32
Figura 3.14: Sensor de proximidade magnético 50FR2-3-1. ...................................................... 33
Figura 3.15: Disposição dos sensores reed switch no acionador da portinhola. ............................ 34
Figura 3.16: Chave seccionadora. ........................................................................................... 35
Figura 3.17: Sinalização sonora.............................................................................................. 39
Figura 3.18: Canaleta para armazenamento de condutores no interior do quadro de comando. ...... 44

4
Figura 3.19: Trilho DIN liso .................................................................................................. 45
Figura 3.20: Régua de bornes. ................................................................................................ 45
Figura 3.21: Esquema de montagem do novo quadro de comando.............................................. 49
Figura 3.22: Caixa de sobrepor e placa de montagem do quadro de comando. ............................. 50
Figura 3.23: Esquema externo do novo quadro de comando. ..................................................... 51
Figura 3.24: Vista frontal da esteira transportadora. ................................................................. 52
Figura 3.25: Vista posterior da esteira transportadora. .............................................................. 52
Figura 4.1: Diagrama de estados do sistema, no funcionamento sem portinholas. ........................ 60
Figura 4.2Transição entre os estados 0 e 1 (T01). ..................................................................... 61
Figura 0.1: Tabela de condutores padrão. ................................................................................ 65
5
Índice de tabelas
Tabela 3-1: Disposição dos pesos dos componentes que compõem a portinhola as portinholas da
esteira transportadora. ........................................................................................................... 29
Tabela 3-2: Disposição das cargas a serem alimentadas no quadro de comando da esteira
transportadora. ..................................................................................................................... 34
Tabela 3-3: Disposição das características das cargas existentes no sistema composto pela esteira e
as portinholas. ...................................................................................................................... 37
Tabela 3-4: Disposição das cargas a serem instaladas no circuito de comando após o enrolamento
secundário do transformador. ................................................................................................. 40
Tabela 3-5: Disposição das potências elétricas de consumo dos módulos que compõem o micro do
CLP LOGO!. ....................................................................................................................... 42
Tabela 3-6: Disposição das correntes dos dispositivos do circuito de comando do quadro da esteira.
........................................................................................................................................... 43

6
Conteúdo
Capítulo 1 ............................................................................................................................................ 1
INTRODUÇÃO .................................................................................................................................. 1
1.1 Situação atual ..................................................................................................................... 2 1.2 Motivação ............................................................................................................................ 9 1.3 Objetivos ........................................................................................................................... 10 1.4 Organização da monografia ............................................................................................ 13
Capítulo 2 .......................................................................................................................................... 14
ESPECIFICAÇÃO DO PROBLEMA ........................................................................................... 14
2.1 Restrições do projeto ....................................................................................................... 14
2.2 Especificação preliminar da solução: ............................................................................. 15
2.3 Considerações finais ......................................................................................................... 20 Capítulo 3 .......................................................................................................................................... 21
PROJETO DO EQUIPAMENTO .................................................................................................. 21
3.1 Portinholas para a esteira: .............................................................................................. 21
3.2 Acionamento das portinholas: ........................................................................................ 24
3.3 Sensores: ........................................................................................................................... 29 3.3.1 Detecção de presença na esteira de volume com dimensões excedidas: .................. 29 3.3.2 Detecção de presença de volume sobre a esteira transportadora: ........................... 31
3.3.3 Detecção de abertura e fechamento das portinholas: ............................................... 33
3.4 Quadro de comando: ....................................................................................................... 34
3.4.1 Dispositivos do circuito de força: ................................................................................ 34
3.4.2 Dispositivos do circuito de comando: ......................................................................... 38 3.4.3 Materiais suplementares para o quadro de comando: ............................................. 44
3.4.4 Etiquetas (tag’s) dos dispositivos: ............................................................................... 45
3.4.5 Esquema de montagem:............................................................................................... 48
3.5 Disposição final do sistema: ............................................................................................ 51
3.6 Considerações finais ......................................................................................................... 53 Capítulo 4: ........................................................................................................................................ 54
ELABORAÇÃO E REALIZAÇÃO DO SISTEMA DE CONTROLE ....................................... 54
4.1 Linguagem de programação utilizada para implementação da lógica de automação no CLP: ......................................................................................................................................... 54
4.2 Diagrama de estados do sistema: .................................................................................... 54
4.3 Verificação de melhoria de desempenho ........................................................................ 61 4.4 Considerações finais ......................................................................................................... 62
Capítulo 5 .......................................................................................................................................... 63
CONCLUSÕES E TRABALHOS FUTUROS .............................................................................. 63
5.1 Melhorias possíveis, trabalhos futuros: ......................................................................... 64 ANEXO A ......................................................................................................................................... 65
APÊNDICE B .................................................................................................................................... 66
APÊNDICE C .................................................................................................................................... 70
REFERÊNCIAS BIBLIOGRÁFICAS ......................................................................................... 124
1
Capítulo 1
INTRODUÇÃO
A palavra automação é um neologismo cujo significado busca enfatizar a participação do
computador no controle automático industrial. Entende-se por automação qualquer sistema, apoiado
em computadores, que substitua o trabalho humano em favor da segurança das pessoas, da
qualidade dos produtos, da rapidez da produção ou da redução de custos, assim aperfeiçoando os
complexos objetivos das indústrias e dos serviços [1].
O trabalho em questão consistiu na melhoria do sistema de automação de uma esteira
transportadora de volumes através da utilização de controlador lógico programável (CLP) e de
projeto de um quadro de comando que passou a comportá-lo. Em paralelo, procedeu-se também
com a melhoria do funcionamento da esteira, a partir da instalação de chave de partida eletrônica
(soft starter) para o motor de acionamento da mesma e implementação de barreiras físicas pelo
projeto de portinholas que funcionaram em conjunto com a esteira.
O processo automatizado consiste de uma esteira transportadora de volumes, instalada no
setor de expedição de uma indústria. Sobre ela, é depositado o produto final da empresa, já
embalado em caixas de dimensões pré-determinadas (volume). A esteira tem por função, transportar
os volumes até o lado de fora do depósito, onde se encontram as empresas transportadoras, que de
posse deles, irão proceder com o transporte do produto até o seu destino final. O formato cíclico da

2
esteira permite que os volumes fiquem transitando sobre ela, para que os funcionários das empresas
transportadoras possam proceder com a sua retirada, sem realização de maiores esforços. Quando
um determinado volume excede a altura ou a largura do vão de saída do depósito, a esteira tem seu
funcionamento interrompido, para que o volume de dimensões irregulares seja removido do
equipamento. Depois da retirada do volume, a esteira funciona novamente, com o acionamento da
botoeira de reset do sistema.
Anteriormente às melhorias, a esteira possuía acionamento realizado por lógica de inter-
travamento de contatores; motor acionado por partida direta; a tensão de comando do sistema era de
110 Vca; não havia dispositivo que separasse o setor de armazenagem do setor de expedição no
qual a esteira encontrava-se instalada, havendo risco de acesso de pessoas não autorizadas; a esteira
não possuía documentação técnica alguma que se refira ao seu funcionamento.
Após as melhorias, a esteira passa a funcionar com portinholas que separam o setor de
armazenagem do setor de expedição, estando este conjunto controlado por um sistema de
automação flexível obtido a partir do CLP, estando as curvas de corrente e torque do motor de
partida da esteira suavizadas pela soft starter.
1.1 Situação atual
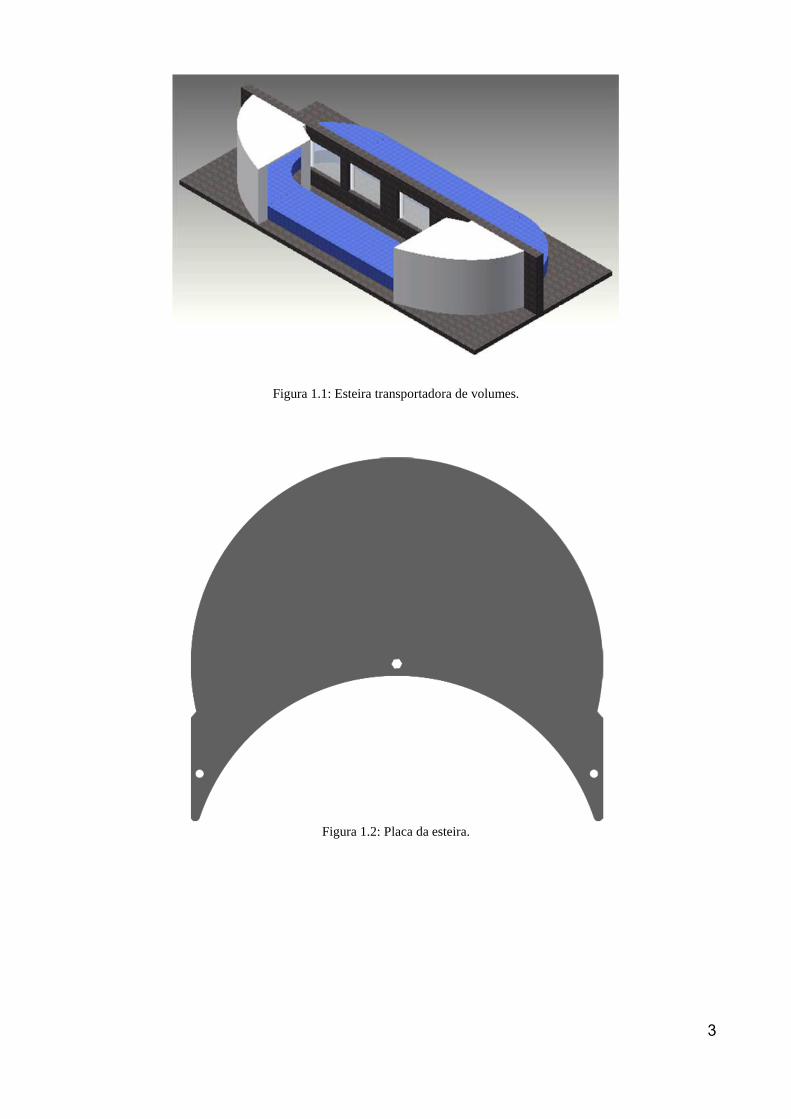
A esteira em questão trata-se de um transportador de circuito fechado e operação contínua,
como é mostrado na figura 1.1. O volume é transportado sobre placas de aço recobertas de borracha
(figura 1.2), que por sua vez são suportadas por travessas acopladas aos elos da corrente de
transmissão. Cada segmento de transporte do equipamento é formado de um elo superior e de um
elo inferior com uma roda guia entre eles que se desloca sobre trilhos aparafusados à estrutura fixa
do equipamento, conforme ilustrado na figura 1.3. Cada segmento é ainda dotado de blocos de
tração (também chamados de blocos de engate), os quais são tracionados por um sistema de
acionamento do tipo Caterpillar. As placas de transporte são aparafusadas à travessas, as quais são
por sua vez, aparafusadas aos elos da corrente de tração. As travessas são suportadas em cada
extremidade por roda com banda de rodagem em poliuretano. Cada segmento de corrente é dotado
de duas placas de nylon que permitem o escorregamento das placas de transporte nas curvas [2].
3
Figura 1.1: Esteira transportadora de volumes.
Figura 1.2: Placa da esteira.
4
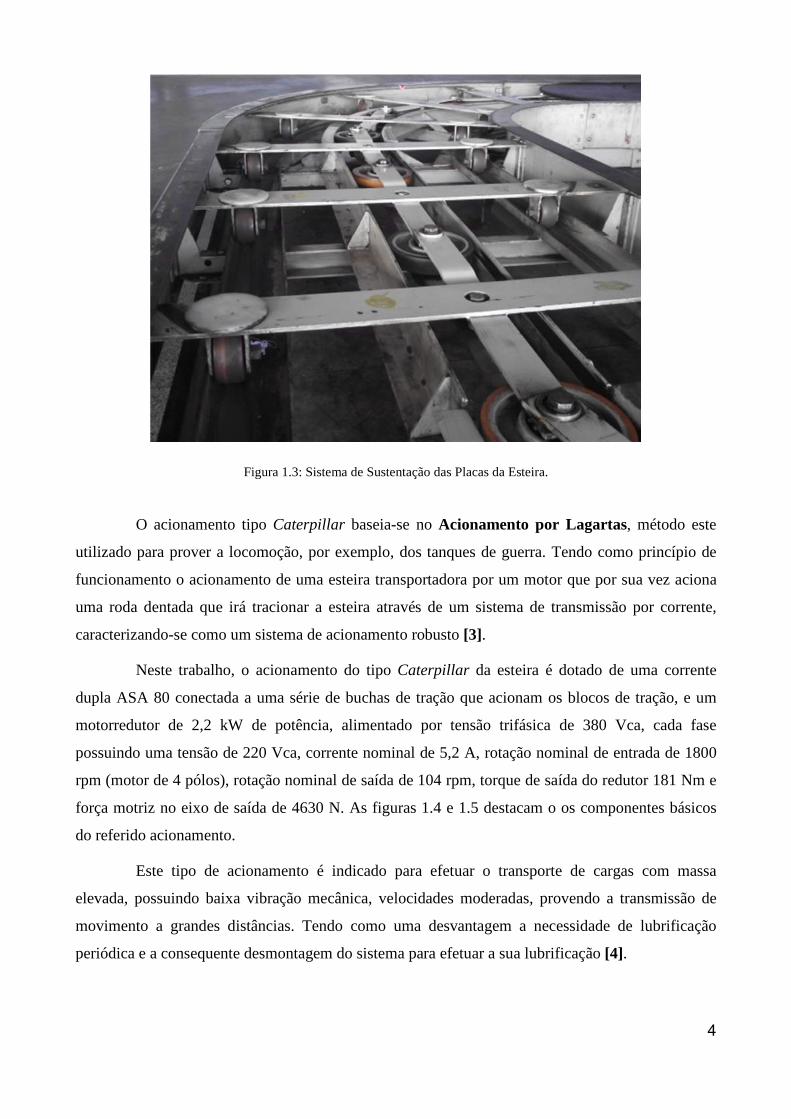
Figura 1.3: Sistema de Sustentação das Placas da Esteira.
O acionamento tipo Caterpillar baseia-se no Acionamento por Lagartas, método este
utilizado para prover a locomoção, por exemplo, dos tanques de guerra. Tendo como princípio de
funcionamento o acionamento de uma esteira transportadora por um motor que por sua vez aciona
uma roda dentada que irá tracionar a esteira através de um sistema de transmissão por corrente,
caracterizando-se como um sistema de acionamento robusto [3].
Neste trabalho, o acionamento do tipo Caterpillar da esteira é dotado de uma corrente
dupla ASA 80 conectada a uma série de buchas de tração que acionam os blocos de tração, e um
motorredutor de 2,2 kW de potência, alimentado por tensão trifásica de 380 Vca, cada fase
possuindo uma tensão de 220 Vca, corrente nominal de 5,2 A, rotação nominal de entrada de 1800
rpm (motor de 4 pólos), rotação nominal de saída de 104 rpm, torque de saída do redutor 181 Nm e
força motriz no eixo de saída de 4630 N. As figuras 1.4 e 1.5 destacam o os componentes básicos
do referido acionamento.
Este tipo de acionamento é indicado para efetuar o transporte de cargas com massa
elevada, possuindo baixa vibração mecânica, velocidades moderadas, provendo a transmissão de
movimento a grandes distâncias. Tendo como uma desvantagem a necessidade de lubrificação
periódica e a consequente desmontagem do sistema para efetuar a sua lubrificação [4].
5
Figura 1.4: Acionamento Tipo “Caterpillar” (motorredutor e engrenagens externas).
Figura 1.5: Acionamento Tipo Caterpillar (engrenagens internas).
Atualmente, a esteira transportadora funciona através de partida direta, como se pode ver
na figura 1.6. O quadro de comando responsável pelo seu funcionamento é composto de lógica de
intertravamento de contactores em tensão de 110 Vca, conforme figura 1.7, cuja lógica de
automação apresentada nas figuras 1.8 e 1.9 é descrita a seguir:
6
Figura 1.6: Circuito de força atual.
Figura 1.7: Quadro de comando atual da esteira transportadora.
7
Figura 1.8: Circuito de comando atual da esteira transportadora.
Figura 1.9: Circuito de comando atual da esteira transportadora (continuação).
a) Alimentação do painel: estando fechados a chave geral (-Q0), o disjuntor bipolar (-
F1) instalado à montante do transformador de tensão (-T1) e o disjuntor monopolar (-
8
F2) instalado à jusante do transformador de tensão (-T1), a sinalização luminosa
branca (-H1) é acionada, indicando que o painel encontra – se energizado;
b) Acionamento da esteira: estando o painel energizado e o disjuntor motor (-Q1)
fechado, acionando-se a botoeira Liga (-S2):
a. Ocorre o acionamento da bobina do contator mestre (-KA0), que por sua vez:
i. Aciona o alarme sonoro (-H6);
ii. Aciona a bobina do contator do relé de sobrecarga do motor (-KA2);
b. Ocorre o acionamento da bobina do temporizador do alarme sonoro (-KT1);
Após certo tempo, o contato do temporizador fecha juntamente com os
contatos auxiliares dos contatores da fotocélula de altura excedida (-KA1),
sobrecarga do motor (-KA2) e emergência (-KA3), energizam a bobina do
contator de partida do carrossel (-KM1), o qual aciona o motor da esteira.
c) Sistema ligado: energizada a bobina do contator de partida do motor (-KM1), o
mesmo fecha seu contato auxiliar de número 21 e abrindo seu contato auxiliar de
número 23, acionando a sinalização luminosa vermelha de sistema ligado (-H2) e
desabilitando o alarme sonoro (-H6);
d) Detecção de volume acima do limite de altura permitido: se durante o
funcionamento da esteira, a fotocélula (-B1) tiver o seu sinal infravermelho
interrompido, significa que uma volume com altura acima do permitido foi posto na
esteira. Tal interrupção da fotocélula ocasiona a desenergização da bobina do contator
de altura excedida (-KA1), que por sua vez causa a ativação da sinalização luminosa
azul de altura excedida (-H3) e a desativação da esteira. Removendo-se a volume fora
do padrão de altura para fora da esteira, a sinalização luminosa é desacionada. Ao
acinar-se o botão –S2 o sistema volta a funcionar;
e) Detecção de sobrecarga do motor: ocorrendo a situação de sobrecarga no motor da
esteira, ocorre o desarme do contator motor (-Q1), que por sua vez desarma seu
contato auxiliar no circuito de comando, desenergizando a bobina do contator de
sobrecarga (-KA2), fechando assim o contato auxiliar do mesmo, que aciona a
sinalização luminosa azul de motor com sobrecarga (-H4) e o desligamento da esteira.
Rearmando o disjuntor motor, a sinalização luminosa é desacionada. Ao acionar-se o
botão –S2 o sistema volta a funcionar;
f) Emergência: ocorrendo alguma situação que cause o correto funcionamento do
sistema, aciona-se quaisquer um dos botões de emergência instalados próximos a
9
esteira (-S3 ou –S4). Feito isto, ocorre a desenergização da bobina do contator de
emergência (-KA3), causando o fechamento do seu contato auxiliar, que aciona a
sinalização luminosa vermelha de emergência acionada (-H5), causando a parada da
esteira. Desacionando-se os botões de emergência, a sinalização luminosa é
desacionada. Ao acionar-se o botão –S2 o sistema volta a funcionar;
g) Silenciar alarme sonoro: durante o acionamento da esteira, acionando-se a botoeira –
S5, ocorre a desativação do alarme sonoro, independentemente do funcionamento do
temporizador (-KT1), dando procedimento à partida da esteira;
h) Horímetro: ao ser acionado, o o contato auxiliar do contator de partida do carrossel (-
KM1) aciona o horímetro, que permanece acionado até ocorrer o desligamento
(normal ou anormal) da esteira, contabilizando o tempo em que a mesma esteve
funcionando;
i) Desligamento normal do sistema: estando a esteira em pleno funcionamento,
desacionando-se o botão desliga (-S1), a alimentação do circuito de comando é
cortada, causando a parada de todo o sistema.
Devido às suas características construtivas e às características da aplicação a que se
destina, a esteira possui dois pontos nos quais interferem no isolamento entre os setores de
expedição e armazenagem da empresa na qual se encontra instalada, sendo estes pontos justamente
os túneis de entrada e saída de volumes, os quais permanecem abertos a todo o momento, o que dá
margem para acesso de pessoas não autorizadas ao setor de armazenagem dos volumes.
1.2 Motivação
O presente trabalho focou-se em: evitar picos de corrente durante o acionamento da
esteira, uma vez que este equipamento é acionado várias vezes ao dia. Além disso, substituir o
sistema de automação atual da esteira, realizado por meio de lógica de intertravamento de
contactores, por um sistema de automação baseado em micro CLP, simplificando o sistema de
comando da esteira. Elaborar documentação técnica (projeto elétrico do funcionamento da esteira,
projeto eletromecânico do quadro de comando da esteira, lista de componentes, programação
LADDER do micro CLP), hoje inexistente para este equipamento, que sirva de apoio para a equipe
técnica para realização da manutenção do equipamento. No tocante às portinholas, seria manter um
isolamento entre o depósito onde os volumes encontram-se armazenados e o seu destino final, de
10
forma a evitar o acesso de pessoas não autorizadas ao depósito de volumes da indústria. E por
último, prover a automação da esteira em conjunto com a automação das portinholas.
1.3 Objetivos
Com a implantação do conjunto de melhorias, os objetivos alcançados foram:
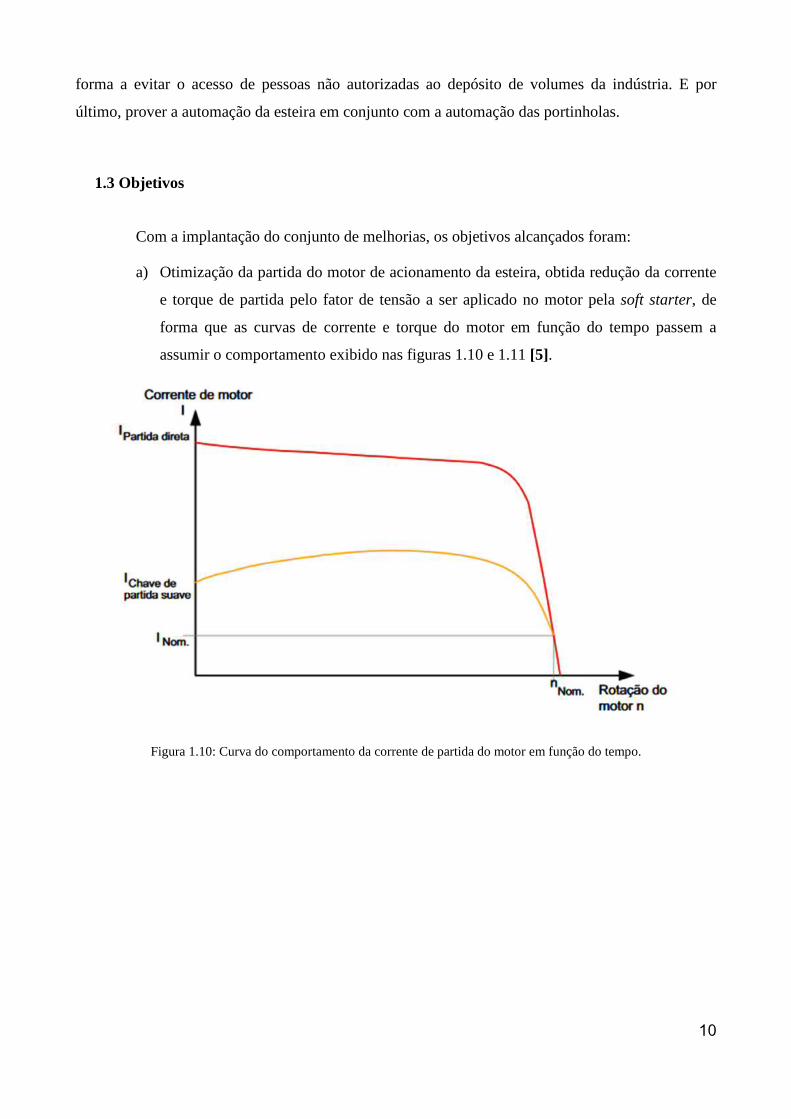
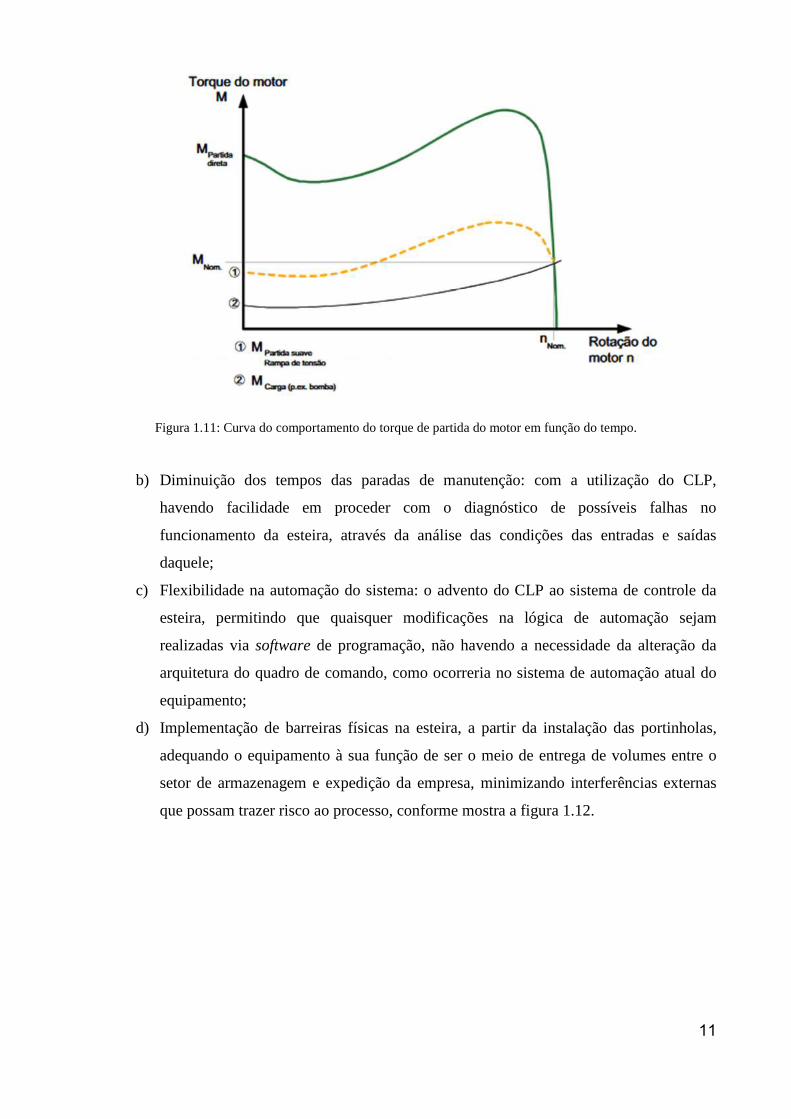
a) Otimização da partida do motor de acionamento da esteira, obtida redução da corrente
e torque de partida pelo fator de tensão a ser aplicado no motor pela soft starter, de
forma que as curvas de corrente e torque do motor em função do tempo passem a
assumir o comportamento exibido nas figuras 1.10 e 1.11 [5].
Figura 1.10: Curva do comportamento da corrente de partida do motor em função do tempo.
11
Figura 1.11: Curva do comportamento do torque de partida do motor em função do tempo.
b) Diminuição dos tempos das paradas de manutenção: com a utilização do CLP,
havendo facilidade em proceder com o diagnóstico de possíveis falhas no
funcionamento da esteira, através da análise das condições das entradas e saídas
daquele;
c) Flexibilidade na automação do sistema: o advento do CLP ao sistema de controle da
esteira, permitindo que quaisquer modificações na lógica de automação sejam
realizadas via software de programação, não havendo a necessidade da alteração da
arquitetura do quadro de comando, como ocorreria no sistema de automação atual do
equipamento;
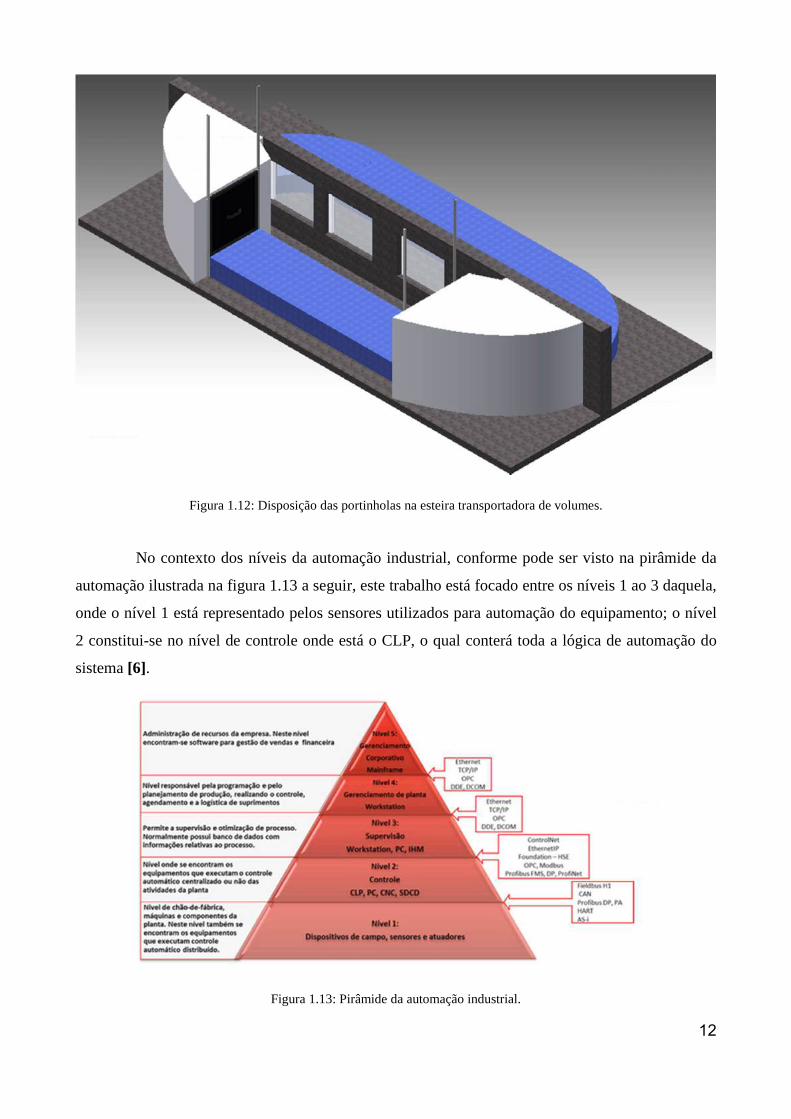
d) Implementação de barreiras físicas na esteira, a partir da instalação das portinholas,
adequando o equipamento à sua função de ser o meio de entrega de volumes entre o
setor de armazenagem e expedição da empresa, minimizando interferências externas
que possam trazer risco ao processo, conforme mostra a figura 1.12.
12
Figura 1.12: Disposição das portinholas na esteira transportadora de volumes.
No contexto dos níveis da automação industrial, conforme pode ser visto na pirâmide da
automação ilustrada na figura 1.13 a seguir, este trabalho está focado entre os níveis 1 ao 3 daquela,
onde o nível 1 está representado pelos sensores utilizados para automação do equipamento; o nível
2 constitui-se no nível de controle onde está o CLP, o qual conterá toda a lógica de automação do
sistema [6].
Figura 1.13: Pirâmide da automação industrial.
13
1.4 Organização da monografia
Este trabalho está organizado da seguinte maneira:
O capítulo 1 tratou do resumo de toda a monografia, apresentando a situação atual do
sistema que sofreu melhoria, bem como os parâmetros de desempenho que mostraram onde houve
êxito na implementação das melhorias, além da apresentação dos parâmetros de medição das
mesmas.
O capítulo 2 descreve as restrições do projeto. Ou seja, determina os fatores nos quais se
baseia a concepção do novo quadro de comando que controlará a esteira e das portinholas, com
posterior descrição das tecnologias utilizadas.
O capítulo 3 consiste na apresentação do projeto mecânico das portinholas e do projeto
elétrico do quadro de comando que comportará o CLP.
O capítulo 4 detalha a elaboração e realização do sistema de controle, onde serão
apresentados os princípios norteadores para determinação da lógica de automação do sistema e o
tipo de linguagem de programação utilizada.
O capítulo 5 consiste na conclusão da monografia, exibindo sugestões de melhorias
futuras que poderão ser implementadas no sistema, que neste caso foi a implementação de um
sistema supervisório composto de um software de Supervisão, Controle e Aquisição de dados
(SCADA), constituindo-se no nível 3 da pirâmide da automação da figura 1.13 [6].

14
Capítulo 2
ESPECIFICAÇÃO DO PROBLEMA
2.1 Restrições do projeto
A esteira encontra-se disposta em forma de elo, fechada, estando metade da mesma
localizada no interior do setor de armazenagem, e a outra metade situada no setor de expedição,
onde se encontram os túneis nos quais serão instaladas as portinholas, de forma a serem uma
barreira física entre os dois setores, evitando o acesso de pessoas não autorizadas ao setor de
armazenagem.
O sistema de controle atual da esteira transportadora limita-se a um quadro de comando de
dimensões reduzidas, de componentes e cabeamento com tempo de uso elevado, não fornecendo
condições para instalação, em seu interior, de CLP e soft starter.
Além dos fatores apresentados, é sabido que a inserção de volumes de dimensões
irregulares na esteira ocasiona o encravamento destes nos túneis do equipamento, podendo
ocasionar dano ao sistema.
Sendo a esteira transportadora de volumes um equipamento industrial, se faz necessário
que a mesma atenda a uma série de requisitos previstos na Norma Regulamentadora Nº 12 (NR-12),
normativo de segurança elaborado pelo Ministério do Trabalho e Emprego (MTE) do Brasil, o qual
trata da segurança no trabalho em máquinas e equipamentos. São eles:
• Alínea “b” do item 36 da NR-12: “Os componentes de partida, parada,
acionamento e controles que compõem a interface de operação de máquinas e
equipamentos fabricados a partir de 24 de março de 2012 devem operar em extra
baixa tensão de até 25 Vca ou de até 60 Vcc, ou ser adotada outra medida de
proteção contra choques elétricos, conforme Normas Técnicas oficiais vigentes”;
15
• Alínea “a” do item 36 da NR-12:“Os componentes de partida, parada,
acionamento e controles que compõem a interface de operação das máquinas e
equipamentos fabricados a partir de 24 de março de 2012 devem possibilitar a
instalação e funcionamento do sistema de parada de emergência, quando
aplicável”;
• Item 12.40 da NR-12: “Os sistemas de segurança, de acordo com a categoria de
segurança requerida, devem exigir rearme, ou reset manual, após a correção da
falha ou situação anormal de trabalho que provocou a paralisação da máquina”;
• Item 12.63 da NR-12: “A parada de emergência deve exigir rearme ou reset
manual, a ser realizado somente após a correção do evento que motivou o
acionamento da parada de emergência.”;
• Item 33 da NR-12: “O acionamento e o desligamento simultâneo por um único
comando de um conjunto de máquinas e equipamentos ou de máquinas e
equipamentos de grande dimensão devem ser precedidos de sinal sonoro de
alarme”.
Para adequação do equipamento, de forma que sua automação atenda às normas vigentes e
aos princípios de segurança tanto pessoal (operadores da esteira) quanto patrimonial (setor de
armazenagem da empresa), se faz necessária a confecção de novo quadro de comando e portinholas
para a esteira transportadora e portinholas para realizarem a função de barreira física entre os
setores de armazenagem e expedição.
2.2 Especificação preliminar da solução:
As portinholas serão fabricadas em alumínio com guias de nylon, com sua abertura e
fechamento realizados por acionamento tipo fuso, que por sua vez será ativado por motorredutor
tipo sem-fim coroa alimentado por tensão monofásica. As guias das portinholas se movimentarão
linearmente em trilhos também fabricados em alumínio, instalados nos túneis.
A abertura e o fechamento das portinholas, por sua vez, serão controlados por sensores de
proximidade magnéticos, que servirão como chaves de fim de curso, havendo dois sensores para
cada portinhola.
Para evitar possíveis encravamentos de volumes nos túneis da esteira, o que poderia
ocasionar em dano aos volumes e obstrução dos túneis a ponto de ocasionar a sobrecarga da esteira,
16
serão utilizados sensores ópticos de reflexão difusa, a serem instalados na parede de interna do túnel
de saída da esteira.
A montagem do quadro de comando terá foco no dimensionamento de seus componentes
internos, determinação das dimensões da placa de montagem destes componentes e da caixa que
servirá como invólucro do quadro.
O quadro de comando de um será dividido em dois circuitos:
• Circuito de força: no qual se encontram os dispositivos de proteção e manobra dos
atuadores do equipamento a ser acionado. Por sua vez, os dispositivos de proteção são
aqueles cuja função é interromper a alimentação do quadro de comando em caso de
sobrecarga, curto-circuito ou simplesmente isolar o mesmo da rede elétrica do local onde
esteja instalado. Enquanto que os dispositivos de manobra são componentes de natureza
eletromecânica ou eletrônica com a função de habilitar ou desabilitar a passagem de corrente
elétrica entre a fonte de alimentação elétrica e a carga a ser acionada através de manobras
dos mesmos (ligar/desligar) [7].
• Circuito de comando: no qual ocorre o acionamento, quase sempre automático, do
equipamento. Neste circuito são instalados os autômatos, os dispositivos de comando e os
dispositivos de sinalização do sistema.
Os autômatos, também conhecidos como autômatos programáveis, são controladores de
estado sólido que analisa o estado dos equipamentos ligados a ele. Basicamente, um autômato é
composto por entradas: através das quais os equipamentos conectam-se ao autômato; processador
(CPU): no qual um programa foi escrito e armazenado na memória, o qual tem como função
controlar os estados dos equipamentos conectados às saídas dos autômatos; e as saídas: que são as
interfaces pelas quais o autômato altera os estados dos equipamentos a ele conectados [8]. Os
autômatos são representados pelos CLP’s e pelos relés programáveis.
Por sua vez, os dispositivos de comando e sinalização são componentes de um quadro de
comando responsáveis pela ativação e desativação, bem como pela sinalização da ativação e da
desativação dos equipamentos por ele controlados, garantindo o automatismo da aplicação e
conferindo segurança ao operador do quadro.
Os dispositivos de comando são instalados nas entradas dos autômatos. É por meio
daqueles que estes, após execução da lógica de acionamento (programação armazenada na memória
da CPU) que inter-relacionam os dispositivos ligados às suas entradas, atualizam os estados dos
17
componentes ligados às suas saídas, onde são instalados os dispositivos de sinalização e manobra de
acionamentos.
Além de diferirem nas funções as quais se destinam estes circuitos também diferem entre
si fisicamente. Num quadro de comando é possível observar, dentre outras, as seguintes
características:
• Ø do cabeamento do circuito de força > Ø do cabeamento do circuito de comando;
• Tensão elétrica do circuito de força > tensão elétrica do circuito de comando.
Na presente aplicação, a divisão entre os dois circuitos no quadro de comando se faz por
meio de um transformador de tensão (transformador de comando), o qual adapta a tensão do
circuito de comando responsável pela energização dos dispositivos de manobra, comando e
sinalização a partir da tensão trifásica do circuito de força, além de prover o isolamento entre o
circuito de força e o circuito de comando.
Assim, o quadro de comando deste trabalho será composto de:
• Dispositivos de proteção e manobra:
o Chave seccionadora, para permitir o seccionamento, por parte do operador, da
alimentação do quadro, mesmo estando o sistema sob acionamento da carga;
o Fusíveis, de forma a proteger os demais componentes do circuito de força e
consequentemente prolongar sua vida útil;
o Relé de monitoramento de fases, também chamado de relé de supervisão de fases,
cuja função será interromper a alimentação no quadro de comando nas situações de
falta, assimetria e inversão de fases, além de proteger contra subtensão e
sobretensão, uma vez que tais ocorrências ocasionam a queima dos enrolamentos dos
motores elétricos do sistema;
o Conjunto disjuntor motor, pois sendo este um dispositivo com funções simultâneas
de proteção, manobra e comando, constituindo-se num bloco de mecanismo
composto por três dispositivos: disjuntor magnético, contactor e relé térmico de
sobrecarga, o qual protegerá o motor contra curto circuito e aquecimento devido à
sobrecarga, ao mesmo tempo em que realizará a manobra de partida, além de prover
seccionamento com possibilidade de bloqueio mecânico para evitar religamento do
circuito de força antes da resolução do distúrbio que ocasionou a sua parada,
conferindo segurança aos técnicos que realizarão a manutenção na esteira
transportadora;
18
o Soft starter, Também conhecido como chave de partida eletrônica para motores, terá
como função, como o próprio nome indica, suavizar a curva corrente x tempo
durante a partida do motor de partida da esteira transportadora, diminuindo o pico de
corrente e consequentemente economizando energia e prolongando a vida útil dos
enrolamentos do motor;
• Dispositivos de comando e sinalização:
o Chave comutadora, para que o operador da esteira possa selecionar, de acordo com
sua necessidade, em qual modo a esteira deverá funcionar: em conjunto com as
portinholas ou sem as portinholas. Sendo este último a ser acionado quando as
portinholas vierem a apresentar algum problema em seu acionamento ou em sua
estrutura.
o Botão de emergência, que como o próprio nome já diz, será o botão que realizará a
parada da esteira transportadora em casa de emergência.
o Botão liga, que terá a função de acionamento da esteira, em ambos os modos de
funcionamento (com ou sem portinholas);
o Botão desliga, responsável pelo desligamento manual do equipamento;
o Botão para silenciar o alarme sonoro, que dará ao operador da esteira a opção de
desativar a sirene de partida e parada da esteira, se assim o desejar;
o Botão de reset, o qual efetuará o rearme do sistema após uma parada de emergência
ou uma parada do sistema devido a uma condição anormal de funcionamento, como
sobrecarga ou falha dos sensores.
o Sinaleiros, a serem instalados na parte frontal (porta) do quadro de comando, que
indicarão as várias situações que o sistema poderá vir a apresentar durante o
funcionamento: painel energizado, problemas com as fases de alimentação do
quadro, sistema ligado, parada de emergência, dimensões de volume excedidas,
sobrecarga dos motores, falha dos sensores e falha da soft starter do motor da
esteira;
o Sirene, para sinalizar para o operador e demais indivíduos no entrono da esteira que
a mesma realizará sua partida e a sua parada.
o Horímetro, que terá como função totalizar o tempo em horas que o sistema
funcionará, informação esta que servirá de base para programação de rotinas de
manutenção do equipamento.
• Autômatos:
19
o CLP: A automação do conjunto esteira + portinholas será provida por Controlador
Lógico Programável (CLP), o qual conterá toda a lógica de acionamento do sistema
em programação armazenada na CPU de seu módulo principal, conferindo maior
rapidez e confiabilidade na automação. Os botões de comando supracitados serão
conectados às entradas do CLP. Nas saídas deste, serão instalados relés de interface,
com o objetivo de acionar cargas de 220 Vca presentes no sistema de sinalização do
quadro de comando, a partir de tensão de 24 Vcc presente nas saídas do CLP.
Os relés de interface também terão a função de acionar as bobinas dos contactores
que realizarão a manobra dos motores da esteira e das portinholas bem como do
acionamento da soft starter. Cada portinhola será dotada de dois contactores, um
para realizar o acionamento no sentido de abertura e outro para o seu fechamento.
Para prover o CLP e seus módulos de expansão com a tensão contínua de 24 Vcc,
será necessária a implantação no quadro de comando de uma fonte de tensão.
Com o objetivo de solucionar a dificuldade existente de se obter no mercado dispositivos
de comando (sinaleiros, bobina de contactores, etc.) em tensão contínua de 24 Vcc, optou-se por
inserir em cada saída a ser utilizada no CLP um relé de interface.
O relé de interface, como o próprio nome indica, é um relé com função de isolar o trecho
de baixa tensão do trecho de extra baixa tensão em um circuito de comando. A sua bobina,
alimentada com extra baixa tensão, ao ser energizada aciona seus contatos conectados ao trecho de
baixa tensão, realizando a manobra e/ou o comando de vários dispositivos como contactores,
sinaleiros, etc.
A esteira funcionará em conjunto com as portinholas. Ao ser dado o comando de
acionamento da esteira, a mesma só iniciará sua partida através da chave de partida eletrônica, após
abertura das portinholas. O sensor de altura de volume excedido continuará fazendo parte da
automação da esteira. Será instalado sensor fotoelétrico que detecte a presença de volumes na
esteira, bem como sensor para detecção de largura de volume excedida. Se, contado o tempo que a
esteira realiza um ciclo, não for detectado volume sobre ela, será iniciado o procedimento de
desligamento automático da mesma e posterior fechamento das portinholas.
O desligamento automático será implementado pela utilização de sensor fotoelétrico por
barreira, que será responsável pela detecção de volume sobre a esteira a cada ciclo que esta realize.
Se após o tempo de ciclo da esteira não for detectado volume, proceder-se-á com o desligamento
daquela.
20
Além dos dispositivos mencionados, a montagem do quadro de comando contará também
com a instalação de materiais suplementares, que são:
• Calhas de material isolante para passagem dos condutores, para evitar fiação exposta no
interior do quadro de comando;
• Trilhos no padrão DIN, para fixação dos componentes na placa de montagem do quadro de
comando;
• Bornes para os terminais dos condutores de força e comando para obter sinais externos ao
quadro de comando, como alimentação elétrica e informações dos sensores instalados no
sistema.
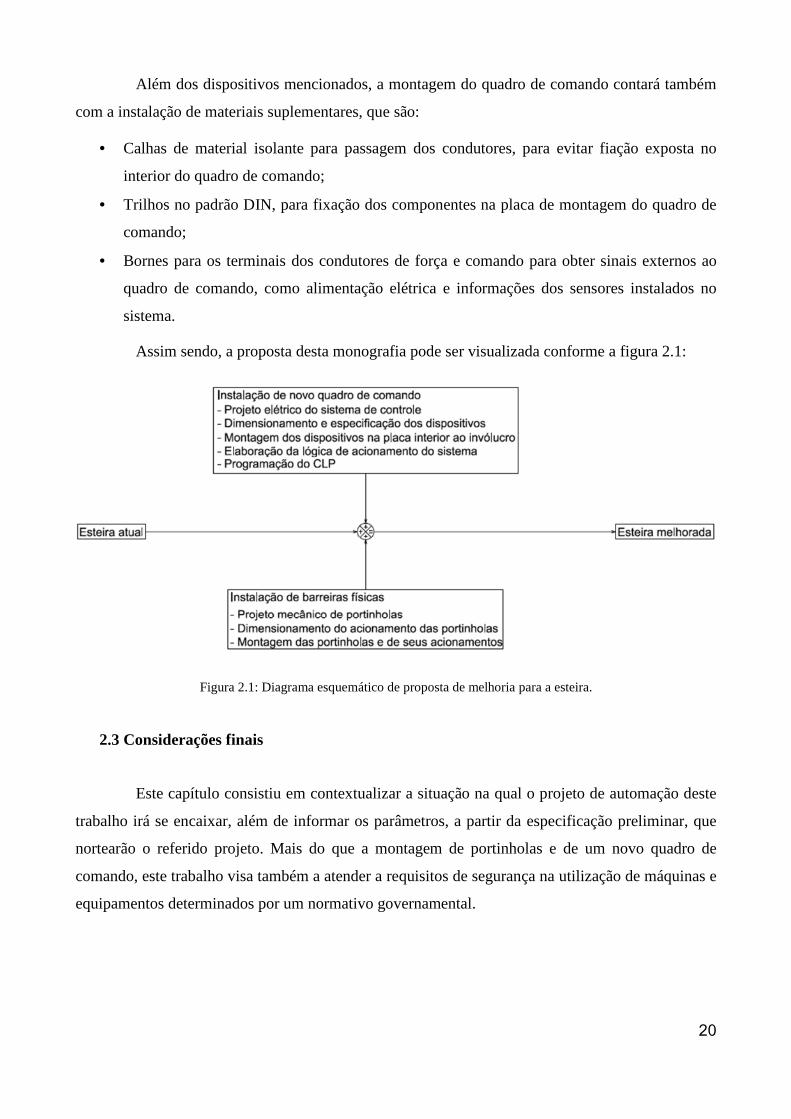
Assim sendo, a proposta desta monografia pode ser visualizada conforme a figura 2.1:
Figura 2.1: Diagrama esquemático de proposta de melhoria para a esteira.
2.3 Considerações finais
Este capítulo consistiu em contextualizar a situação na qual o projeto de automação deste
trabalho irá se encaixar, além de informar os parâmetros, a partir da especificação preliminar, que
nortearão o referido projeto. Mais do que a montagem de portinholas e de um novo quadro de
comando, este trabalho visa também a atender a requisitos de segurança na utilização de máquinas e
equipamentos determinados por um normativo governamental.

21
Capítulo 3
PROJETO DO EQUIPAMENTO
3.1 Portinholas para a esteira:
Devido ao fato de que o dimensionamento dos motores de acionamento das portinholas –
bem como seus respectivos dispositivos de proteção, manobra e comando – dependem das
características construtivas das portinholas, proceder-se-á primeiramente com o dimensionamento
destas.
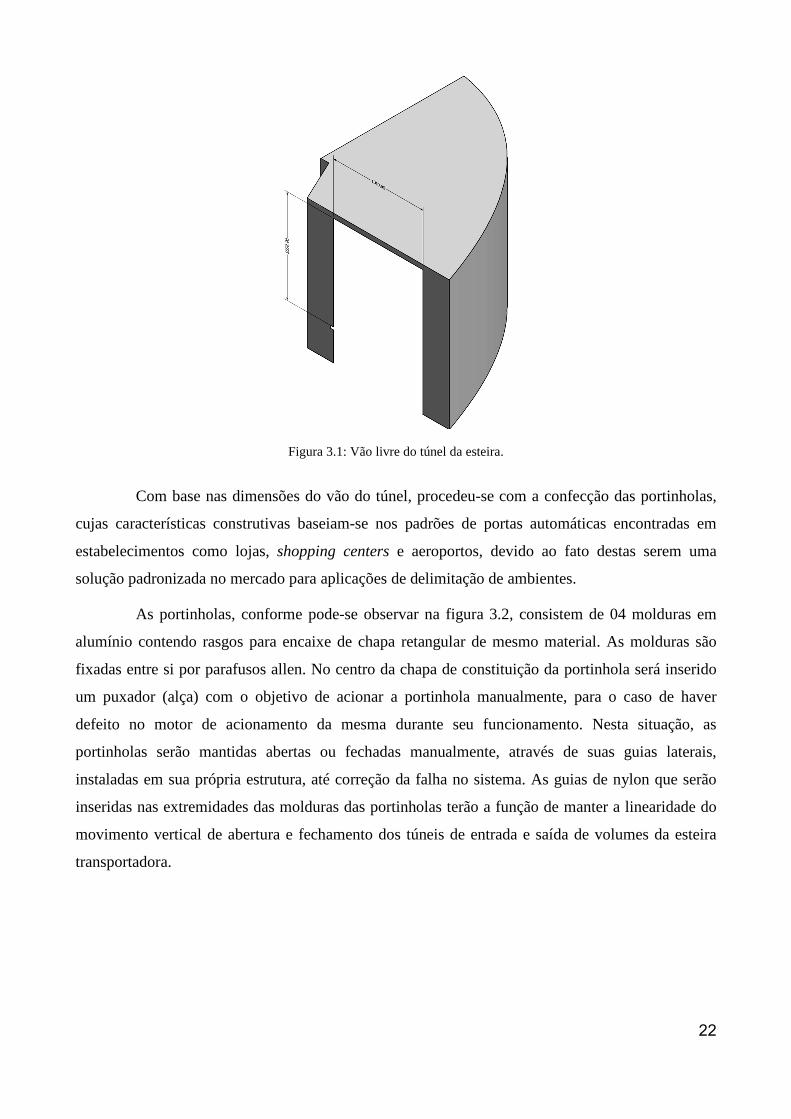
Primeiramente, procede-se com a determinação das dimensões principais (comprimento e
altura) da portinhola, com base no vão do túnel a ser fechado. Através de medições realizadas nas
instalações da esteira transportadora (figura 3.1), observou-se que cada portinhola deverá ter as
dimensões 1010 x 1058 mm. Ou seja, 1010 mm de comprimento e 1058 mm de altura.
22
Figura 3.1: Vão livre do túnel da esteira.
Com base nas dimensões do vão do túnel, procedeu-se com a confecção das portinholas,
cujas características construtivas baseiam-se nos padrões de portas automáticas encontradas em
estabelecimentos como lojas, shopping centers e aeroportos, devido ao fato destas serem uma
solução padronizada no mercado para aplicações de delimitação de ambientes.
As portinholas, conforme pode-se observar na figura 3.2, consistem de 04 molduras em
alumínio contendo rasgos para encaixe de chapa retangular de mesmo material. As molduras são
fixadas entre si por parafusos allen. No centro da chapa de constituição da portinhola será inserido
um puxador (alça) com o objetivo de acionar a portinhola manualmente, para o caso de haver
defeito no motor de acionamento da mesma durante seu funcionamento. Nesta situação, as
portinholas serão mantidas abertas ou fechadas manualmente, através de suas guias laterais,
instaladas em sua própria estrutura, até correção da falha no sistema. As guias de nylon que serão
inseridas nas extremidades das molduras das portinholas terão a função de manter a linearidade do
movimento vertical de abertura e fechamento dos túneis de entrada e saída de volumes da esteira
transportadora.
23
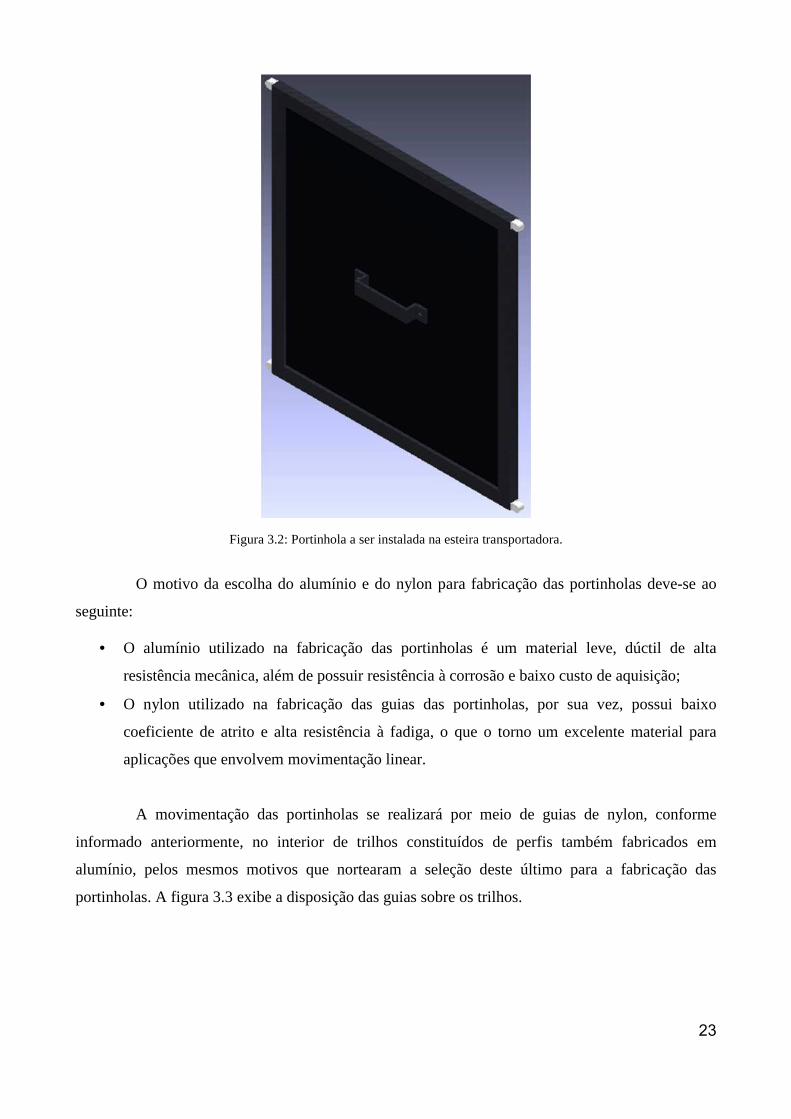
Figura 3.2: Portinhola a ser instalada na esteira transportadora.
O motivo da escolha do alumínio e do nylon para fabricação das portinholas deve-se ao
seguinte:
• O alumínio utilizado na fabricação das portinholas é um material leve, dúctil de alta
resistência mecânica, além de possuir resistência à corrosão e baixo custo de aquisição;
• O nylon utilizado na fabricação das guias das portinholas, por sua vez, possui baixo
coeficiente de atrito e alta resistência à fadiga, o que o torno um excelente material para
aplicações que envolvem movimentação linear.
A movimentação das portinholas se realizará por meio de guias de nylon, conforme
informado anteriormente, no interior de trilhos constituídos de perfis também fabricados em
alumínio, pelos mesmos motivos que nortearam a seleção deste último para a fabricação das
portinholas. A figura 3.3 exibe a disposição das guias sobre os trilhos.

24
Figura 3.3: Disposição da guia de nylon sobre o trilho de alumínio.
Sendo o nylon um material auto lubrificante, o conjunto trilho de alumínio + guia de nylon
não necessitará de numerosas e prolongadas rotinas de lubrificação, constituindo-se num sistema de
movimentação linear robusto para a presente aplicação.
3.2 Acionamento das portinholas:
As portinholas serão acionadas por fuso, que por sua vez será acionado por um conjunto
motorredutor de engrenagens sem-fim coroa cujo modelo é o mesmo utilizado na automação de
portões residenciais do tipo basculante (figura 3.4). Motivos:
• Robustez;
• Dimensões de instalação reduzidas;
• Baixo custo de aquisição.
• Simplicidade na instalação e no acionamento.
25
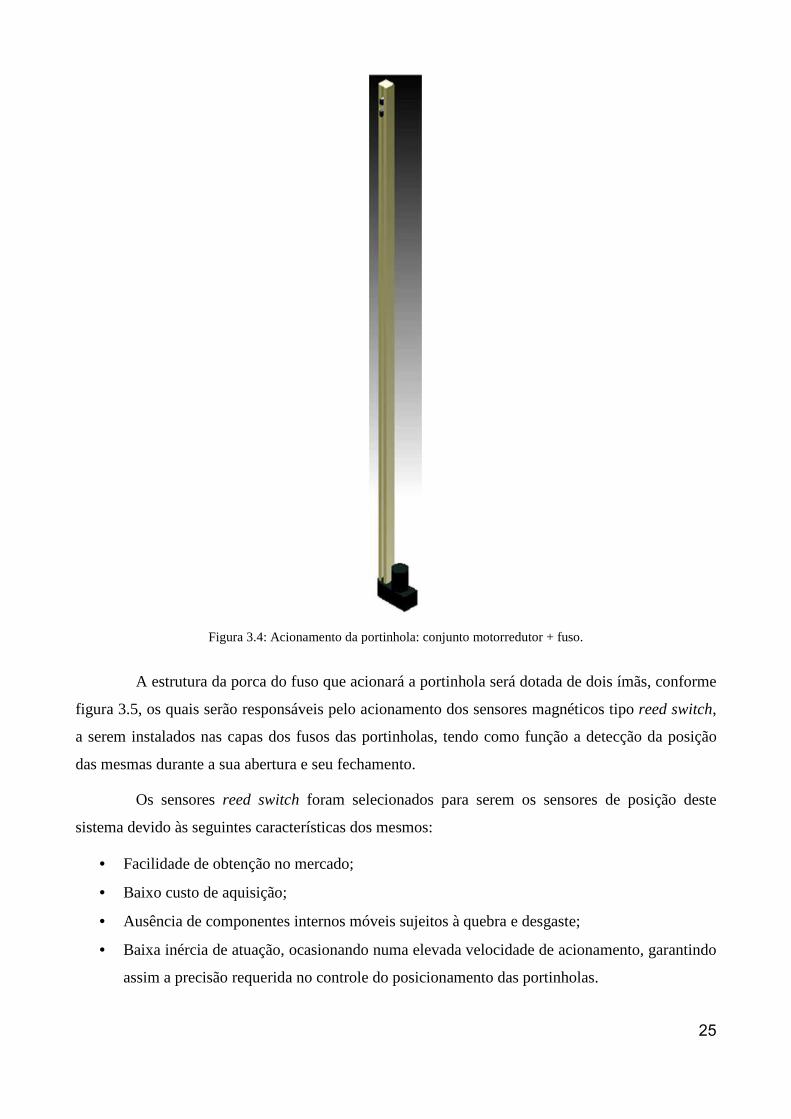
Figura 3.4: Acionamento da portinhola: conjunto motorredutor + fuso.
A estrutura da porca do fuso que acionará a portinhola será dotada de dois ímãs, conforme
figura 3.5, os quais serão responsáveis pelo acionamento dos sensores magnéticos tipo reed switch,
a serem instalados nas capas dos fusos das portinholas, tendo como função a detecção da posição
das mesmas durante a sua abertura e seu fechamento.
Os sensores reed switch foram selecionados para serem os sensores de posição deste
sistema devido às seguintes características dos mesmos:
• Facilidade de obtenção no mercado;
• Baixo custo de aquisição;
• Ausência de componentes internos móveis sujeitos à quebra e desgaste;
• Baixa inércia de atuação, ocasionando numa elevada velocidade de acionamento, garantindo
assim a precisão requerida no controle do posicionamento das portinholas.
26
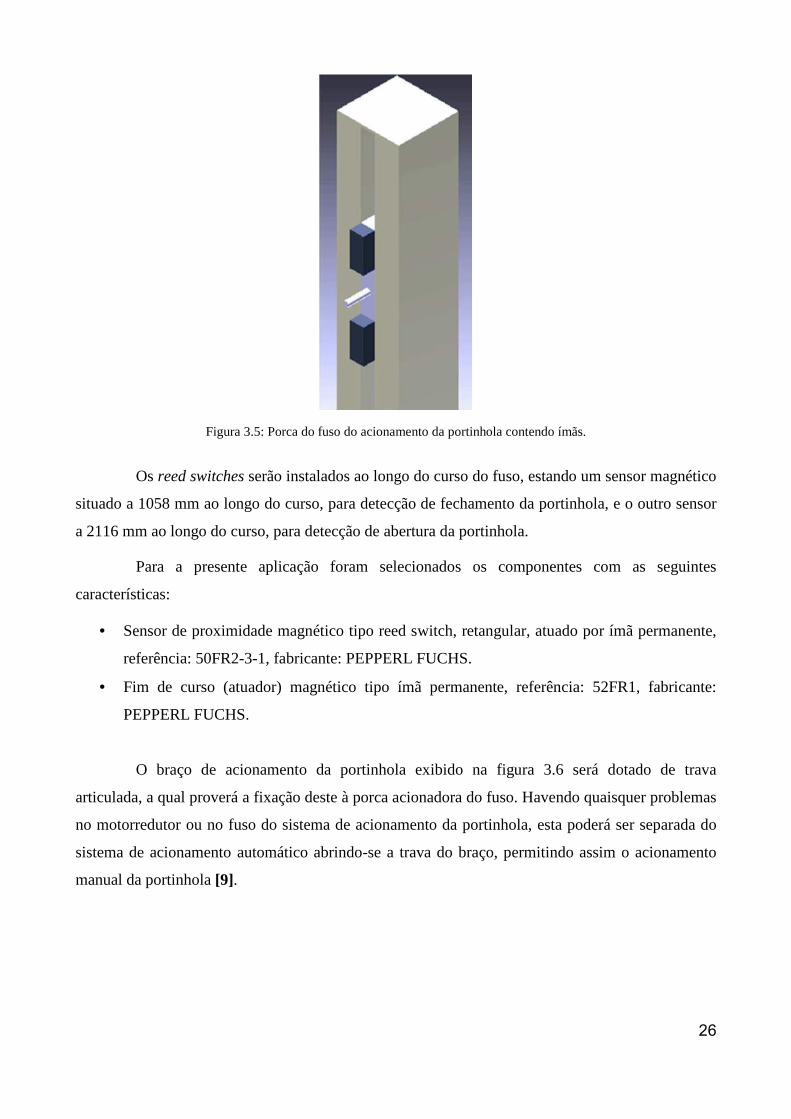
Figura 3.5: Porca do fuso do acionamento da portinhola contendo ímãs.
Os reed switches serão instalados ao longo do curso do fuso, estando um sensor magnético
situado a 1058 mm ao longo do curso, para detecção de fechamento da portinhola, e o outro sensor
a 2116 mm ao longo do curso, para detecção de abertura da portinhola.
Para a presente aplicação foram selecionados os componentes com as seguintes
características:
• Sensor de proximidade magnético tipo reed switch, retangular, atuado por ímã permanente,
referência: 50FR2-3-1, fabricante: PEPPERL FUCHS.
• Fim de curso (atuador) magnético tipo ímã permanente, referência: 52FR1, fabricante:
PEPPERL FUCHS.
O braço de acionamento da portinhola exibido na figura 3.6 será dotado de trava
articulada, a qual proverá a fixação deste à porca acionadora do fuso. Havendo quaisquer problemas
no motorredutor ou no fuso do sistema de acionamento da portinhola, esta poderá ser separada do
sistema de acionamento automático abrindo-se a trava do braço, permitindo assim o acionamento
manual da portinhola [9].

27
Figura 3.6: Trava articulada do braço acionador da portinhola.
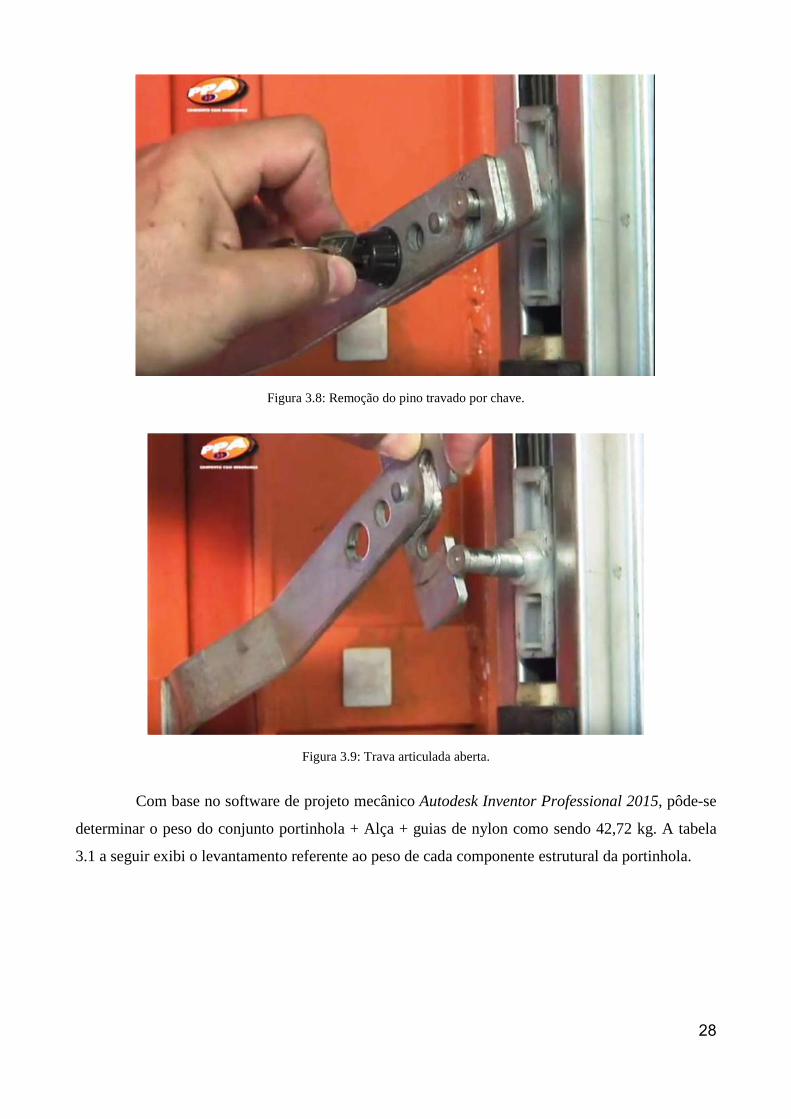
A abertura da trava articulada se faz pela remoção dos pinos de segurança – conforme
visto nas figuras 3.7, 3.8 e 3.9 – instalados na mesma, sendo um pino fixado por cavilha e o outro
fixado por chave de segurança. Tal redundância justifica-se no caso de ocorrer falha em um dos
pinos, o outro pino manteria a função de segurança da trava [9].
Figura 3.7: Remoção do pino travado por cavilha.
28
Figura 3.8: Remoção do pino travado por chave.
Figura 3.9: Trava articulada aberta.
Com base no software de projeto mecânico Autodesk Inventor Professional 2015, pôde-se
determinar o peso do conjunto portinhola + Alça + guias de nylon como sendo 42,72 kg. A tabela
3.1 a seguir exibi o levantamento referente ao peso de cada componente estrutural da portinhola.

29
Tabela 3-1: Disposição dos pesos dos componentes que compõem a portinhola as portinholas da esteira transportadora.
Qtde22141
8,5769,00224,5530,080,509
4,2884,50124,5530,0200,509
Descrição do item
Peso total de 01 portinhola 42,72Alumínio
Moldura horizontalMoldura verticalChapa central
GuiaMaçaneta
Material de fabricaçãoAlumínioAlumínioAlumínioNylon
Peso unitário (kg) Peso total (kg)
Com base nesta informação, selecionou-se o acionamento para as portinholas:
• Especificação: automatizador para portão basculante, com motorredutor sem-fim coroa,
monofásico (220 Vca / 60 Hz), modelo Penta Predial, fabricante PPA.
A potência deste sistema de acionamento é a menor para este modelo fornecido pelo
fabricante do mesmo. Podendo-se observar que este conjunto motorredutor + fuso com potência de
½ HP consegue erguer até 370 kg de carga. Desta forma, observa-se que o acionamento selecionado
está devidamente dimensionado para suportar a carga da aplicação do presente trabalho, a qual é
aproximadamente 9 vezes menor que a carga nominal a ser suportada pelo acionamento.
3.3 Sensores:
3.3.1 Detecção de presença na esteira de volume com dimensões excedidas:
Para esta finalidade, optou-se pela utilização do sensor óptico por reflexão difusa, sensor
este que possui o emissor e receptor no mesmo invólucro, sendo este um fator que trará facilidade
de instalação, a qual será realizada na estrutura do túnel da esteira [10].
Serão instalados dois sensores ópticos por reflexão difusa na entrada do túnel por onde os
volumes serão entregues ao setor de expedição, conforme figuras 3.10 e 3.11, sendo: um sensor
para monitorar a altura e o outro para detectar a largura dos volumes [11].
30
Figura 3.10: Disposição dos sensores de detecção de volume fora do padrão.
Com base no catálogo do fabricante IFM, selecionou-se o seguinte sensor:
• Descrição: sensor óptico de reflexão difusa, série O5H500;
• Referência: O5H-FPKG/US100;
Figura 3.11: Sensor óptico de reflexão difusa O5H500.
31
3.3.2 Detecção de presença de volume sobre a esteira transportadora:
A lógica de detecção de presença de volume está baseada na utilização de um sensor
óptico transmissivo e de um temporizador do CLP. Após a detecção de volume pelo referido sensor,
passado o tempo de ciclo da esteira, se o sensor transmissivo não detectar presença de volume,
ocorrerá o desligamento da mesma.
O tempo de ciclo da esteira é o intervalo de tempo que leva para que a mesma realize seu
percurso. Para a presente aplicação, sabe-se que a esteira transportadora possui a forma de um elo
de corrente e que o seu percurso fechado (∆S) mede aproximadamente 22 m. sabendo-se que a
potência do motor de acionamento da esteira (Pm) é de 2,2 kW (2200 W) e que a força motriz no
eixo de saída (F) no seu redutor de velocidade é de 4630 N, a velocidade média de movimentação
da esteira (v) pode ser dada por:
�� = � × � ∴ � = ��
�∴ � =
2200
4630∴ � ≅ 0,5�/�
De posse da velocidade da esteira e do comprimento de seu percurso fechado, determina-
se o seu tempo de ciclo (∆t):
� = ∆�
∆� ∴ ∆� =
∆�
�∴ ∆� =
22
0,5∴ ∆� = 44�
Ou seja, após ocorrer uma detecção de volume sobre a esteira, passados 44 segundos e
outro volume não ter sido detectado, o equipamento será desligado automaticamente.
O sensor óptico por transmissão (transmissivo) também chamado de sensor óptico de
detecção por barreira de luz possui o emissor e o receptor montados em dispositivos separados. Ao
serem alinhados, criam entre sim uma barreira de luz. Um objeto que se interponha nesta barreira
acionará a saída do sensor [10].
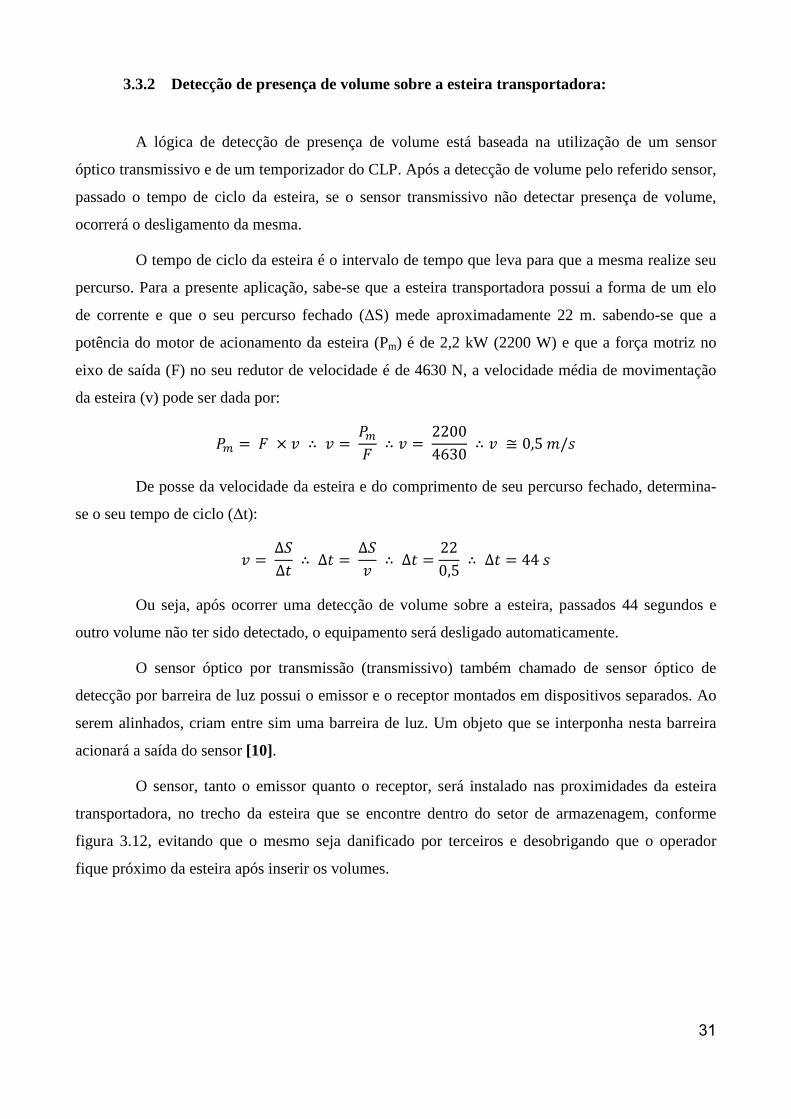
O sensor, tanto o emissor quanto o receptor, será instalado nas proximidades da esteira
transportadora, no trecho da esteira que se encontre dentro do setor de armazenagem, conforme
figura 3.12, evitando que o mesmo seja danificado por terceiros e desobrigando que o operador
fique próximo da esteira após inserir os volumes.
32
Figura 3.12: Disposição dos sensores de detecção de volume sobre a esteira.
Com base no catálogo do fabricante IFM, selecionou-se o seguinte sensor, o qual pode ser
visualizado na figura 3.13 [12]:
• Descrição: sensor fotoelétrico por barreira, série OH;
• Referência:
o Transmissor: OH5001 (OHS-OOKG/2M);
o Receptor: OH5002 (OHE-DPKG/2M).
Figura 3.13: Sensor óptico de barreira OH5001 (emissor) e OH5002 (receptor).
33
3.3.3 Detecção de abertura e fechamento das portinholas:
Conforme informado no item 3.2 deste trabalho, para monitoramento do estado das
portinholas (abertas ou fechadas) dos túneis da esteira transportadora, será utilizado o sensor de
proximidade magnético do tipo reed switch, referência 50FR2-3-1, fabricante PEPPERL FUCHS,
como pode ser visto na figura 3.14 [13].
Figura 3.14: Sensor de proximidade magnético 50FR2-3-1.
Estes sensores serão instalados na capa do fuso, conforme figura 3.15, de forma a serem
acionados pela passagem dos ímãs que serão inseridos no corpo da porca acionadora do braço
movimentará a portinhola.

34
Figura 3.15: Disposição dos sensores reed switch no acionador da portinhola.
3.4 Quadro de comando:
3.4.1 Dispositivos do circuito de força:
a) Chave seccionadora:
O dimensionamento da chave seccionadora é feito com base na corrente e potência das
cargas que se quer alimentar. Neste caso:
Tabela 3-2: Disposição das cargas a serem alimentadas no quadro de comando da esteira transportadora.
TOTAL 8,50 2,86
Motor da portinhola de entradaMotor da portinhola de saída
1,651,65
0,330,33
Motor da esteiraCARGA CORRENTE (A) POTÊNCIA (kW)
5,20 2,20
Com base na tabela 3.2 acima, observa-se que a chave seccionadora deverá ter a
capacidade de ser manobrada sob uma carga total de 8,5 A e 2,86 kW, estando a mesma ligada em
tensão trifásica de 380 Vca. A partir desta informação, selecionou-se a chave seccionadora de
referência 5TW3 020-1, do fabricante SIEMENS (figura 3.16), pois para uma tensão trifásica de
380 Vca, o dispositivo selecionado pode manobrar uma carga de até 12 A e 5,5 kW [14].
35
Figura 3.16: Chave seccionadora.
A partir do dimensionamento da chave seccionadora é possível proceder-se com o
dimensionamento do condutor do circuito de força e dos fusíveis de proteção do quadro. A
instalação destes últimos é feita na entrada dos condutores do circuito de força no quadro de
comando, à jusante da chave seccionadora.
b) Condutor de força:
Com base no catálogo da chave seccionadora especificada no item anterior, obtém-se a
seção do condutor a ser utilizado no circuito de força do quadro de comando, sendo esta área de 2,5
mm2, sendo o diâmetro deste condutor de aproximadamente 1,78 mm. A tabela de condutores de
cobre padrão anexa a este trabalho indica que este condutor trata-se do condutor 12 AWG, o qual
suporta uma corrente nominal de 22 A.
A tabela padrão de condutores de cobre onde se obteve a especificação deste item
encontra-se no anexo ao final deste trabalho.
c) Fusíveis:
Dispositivo de proteção geralmente instalado no início do circuito de força e após a chave
seccionadora. O dimensionamento de fusíveis obedece a dois critérios básicos [7]:
• Tempo de fusão virtual (tempo e corrente de partida) do fusível: critério que estabelece que
o fusível deve suportar o pico de corrente de partida do motor durante o intervalo de tempo
necessário para realização de seu acionamento. A partir dos valores da corrente de pico (Ip) e
tempo de partida (Tp) do motor é possível identificar a curva do fusível necessária para
dimensiona-lo no catálogo do fabricante;

36
• If ≥ 1,2 x In: este critério estabelece que a corrente nominal do fusível (If) deve ser
dimensionada de forma que o mesmo suporte uma corrente que seja no mínimo 20%
superior à corrente nominal (In) do motor.
Sabe-se que:
• (Ip/In) = 6;
• In = 5,20 A;
• Tp = 5 s, sendo este o tempo de partida adotado para a maioria dos motores.
A partir da curva de fusíveis diazed encontrada no catálogo do fabricante WEG, observa-
se que o fusível a ser selecionado encontra-se entre as curvas de 6 A e 10 A, estando mais próximo
da segunda. Desta forma, a corrente nominal do fusível selecionado será a da curva de 10 A.
Fazendo-se a verificação da corrente nominal do fusível pelo segundo critério tem-se:
�� = 1,2 × �� ∴ �� = 1,2 × 5,2 ∴ �� = 6,24�
Concluindo-se que o fusível de 10 A atende à presente aplicação.
Através do catálogo do fabricante WEG foram obtidas as especificações para o elemento
fusível e seus acessórios de instalação, selecionando-se o seguinte componente:
• Fusível tipo diametral (diazed), corrente nominal 10 A, tamanho DII, composto de tampa
(TFW25, PN 10409868), elemento fusível (FDW-10S, PN 10409859), anel de proteção
(APW25, PN 10409906), parafuso de ajuste (PAW10, PN 10409873), base (BAW25, PN
10409866) e capa de proteção (CPFW25, PN 10045367).
O catálogo do fabricante da chave seccionadora informa que o valor máximo de corrente
nominal do fusível deverá ser 25 A. Isto se deve ao fato de que o fusível também deve proteger os
condutores (cabos) do circuito. De forma que sua corrente nominal deve ser menor ou aproximar-se
do valor da corrente nominal do condutor, que no presente caso é de 22 A.
d) Relé de monitoramento de fases:
Para o dimensionamento de um relé de monitoramento de fases se faz necessário saber a
tensão de alimentação do motor que a mesma tensão de alimentação do quadro. Ou seja, 380 Vca,
trifásico, sendo a tensão de cada fase 220 Vca (tensão monofásica). Com esta informação e com
base no catálogo do fabricante ALTRONIC, selecionou-se o dispositivo conforme segue:
• Descrição: Relé supervisor de tensão trifásico;
• Referência: RST;
37
e) Conjunto disjuntor-motor:
O dimensionamento do disjuntor-motor é feito com base na tensão de alimentação,
potência e corrente do motor a ser acionado. Devendo cada carga ter seu próprio disjuntor-motor.
Para o caso da esteira transportadora, as cargas a serem acionadas estão dispostas
conforme disposto na tabela 3.3:
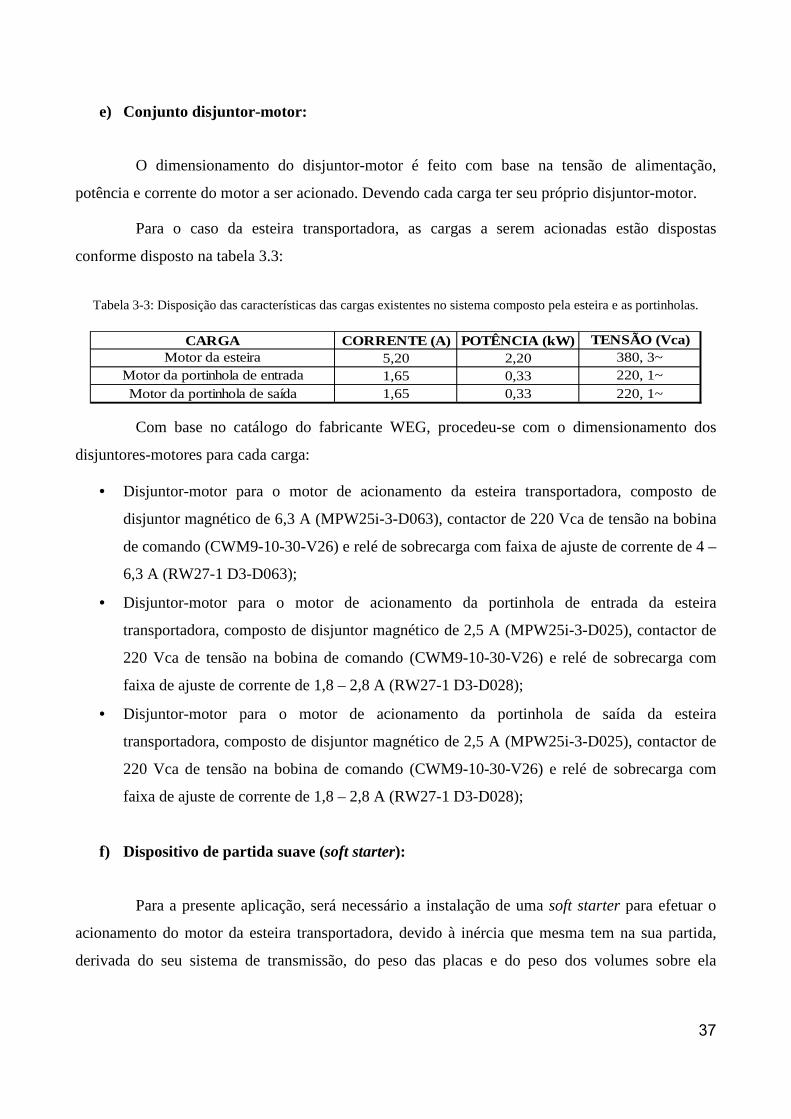
Tabela 3-3: Disposição das características das cargas existentes no sistema composto pela esteira e as portinholas.
TENSÃO (Vca)
380, 3~220, 1~220, 1~
Motor da esteiraCARGA CORRENTE (A) POTÊNCIA (kW)
5,20 2,20Motor da portinhola de entradaMotor da portinhola de saída
1,651,65
0,330,33
Com base no catálogo do fabricante WEG, procedeu-se com o dimensionamento dos
disjuntores-motores para cada carga:
• Disjuntor-motor para o motor de acionamento da esteira transportadora, composto de
disjuntor magnético de 6,3 A (MPW25i-3-D063), contactor de 220 Vca de tensão na bobina
de comando (CWM9-10-30-V26) e relé de sobrecarga com faixa de ajuste de corrente de 4 –
6,3 A (RW27-1 D3-D063);
• Disjuntor-motor para o motor de acionamento da portinhola de entrada da esteira
transportadora, composto de disjuntor magnético de 2,5 A (MPW25i-3-D025), contactor de
220 Vca de tensão na bobina de comando (CWM9-10-30-V26) e relé de sobrecarga com
faixa de ajuste de corrente de 1,8 – 2,8 A (RW27-1 D3-D028);
• Disjuntor-motor para o motor de acionamento da portinhola de saída da esteira
transportadora, composto de disjuntor magnético de 2,5 A (MPW25i-3-D025), contactor de
220 Vca de tensão na bobina de comando (CWM9-10-30-V26) e relé de sobrecarga com
faixa de ajuste de corrente de 1,8 – 2,8 A (RW27-1 D3-D028);
f) Dispositivo de partida suave (soft starter):
Para a presente aplicação, será necessário a instalação de uma soft starter para efetuar o
acionamento do motor da esteira transportadora, devido à inércia que mesma tem na sua partida,
derivada do seu sistema de transmissão, do peso das placas e do peso dos volumes sobre ela
38
depositados. Não serão instaladas chaves de partida suave nos motores de acionamento das
portinholas devido ao fato dos mesmos não possuírem carga elevada a ser acionada.
O dimensionamento de uma soft starter é realizado com base nos seguintes critérios:
• Tensão de alimentação do motor;
• Potência nominal do motor;
• Corrente nominal da soft starter (Iss) ≥ Corrente nominal do motor (In).
Geralmente, determina-se a corrente nominal da chave de partida como sendo de 20%
superior à corrente nominal do motor. Esse acréscimo de corrente seria uma compensação em
detrimento das perdas ocorridas no circuito da soft starter [15]. Desta forma:
��� = 1,20 ×�� ∴ ��� = 1,20 × 5,20 ∴ ��� = 6,24�
Sendo a tensão de alimentação do motor da esteira de 380 Vca trifásica e a potência do
mesmo de 2,2 kW (3 cv), com base no catálogo do fabricante SIMENS, seleciona-se a seguinte soft
starter:
• Especificação: soft starter linha SIRIUS;
• Referência: 3RW30 14-1BB04;
3.4.2 Dispositivos do circuito de comando:
a) Botões de comando: a partir do catálogo do fabricante WEG, procedeu-se com a
seleção dos seguintes botões que irão compor a lógica de acionamento do conjunto
esteira + portinholas, estando eles dimensionados para uma tensão de alimentação de
24 Vcc e uma corrente nominal de 10A:
a. Botão comutador de 02 posições: CSW-CK2F90 WK, PN 12882308;
b. Botoeira tipo cogumelo (emergência): CSW-BC11 WH, PN 12882302;
c. Botão de partida do sistema: CSW-BF2-10000000-3VF, PN 12923177;
d. Botão de desligamento do sistema: CSW-BF1-01000000-3VF, PN 12922955;
e. Botoeira de desativação do alarme sonoro: CSW-BF3-10000000-3VF, PN
12930985;
f. Botão de rearme do sistema: CSW-BF4-10000000-3VF, PN 12923199;

39
b) Sinalizadores de comando: recorrendo-se novamente ao catálogo do fabricante
WEG, selecionou-se os sinalizadores que farão parte da automação do sistema. Todos
dimensionados para uma tensão de alimentação de 220 Vca e uma corrente nominal de
20 mA:
a. Sinaleiro para indicação de painel energizado: CSW-SD2-D66;
b. Sinaleiro para monitoramento das fases de alimentação: CSW-SD3-D66;
c. Sinaleiro para indicação de sistema ligado: CSW-SD2-D66;
d. Sinaleiro para indicação de parada de emergência: CSW-SD1-D66;
e. Sinaleiro para indicação de detecção de presença na esteira de volume com
dimensão fora do padrão: CSW-SD1-D66;
f. Sinaleiro para indicação de sobrecarga nos motores: CSW-SD3-D66;
g. Sinaleiro para indicação de falha dos sensores das portinholas: CSW-SD3-D66;
h. Sinaleiro para indicação de falha da soft starter: CSW-SD3-D66.
c) Sinalização sonora: com base no catálogo do fabricante TUCANO, especificou-se
uma sirene com capacidade para 112 dB, com aplicações para uso externo e do tipo
multisom, sendo a mesma referenciada por TUCSG200-AC, conforme figura 3.17
[16]:
Figura 3.17: Sinalização sonora.
d) Horímetro: a partir do catálogo do fabricante SIEMENS, foi selecionado o totalizador
horário cujo modelo possui escala de totalização no formato 99.999,99, referência
7PV02 00-0AN00.
40
e) Transformador de comando: o dimensionamento do transformador de comando é
feito com base na determinação da sua potência aparente. Esta, por sua vez, é obtida a
partir do levantamento das cargas a serem utilizadas na saída do enrolamento
secundário do transformador, conforme pode ser visto na tabela 3.4:
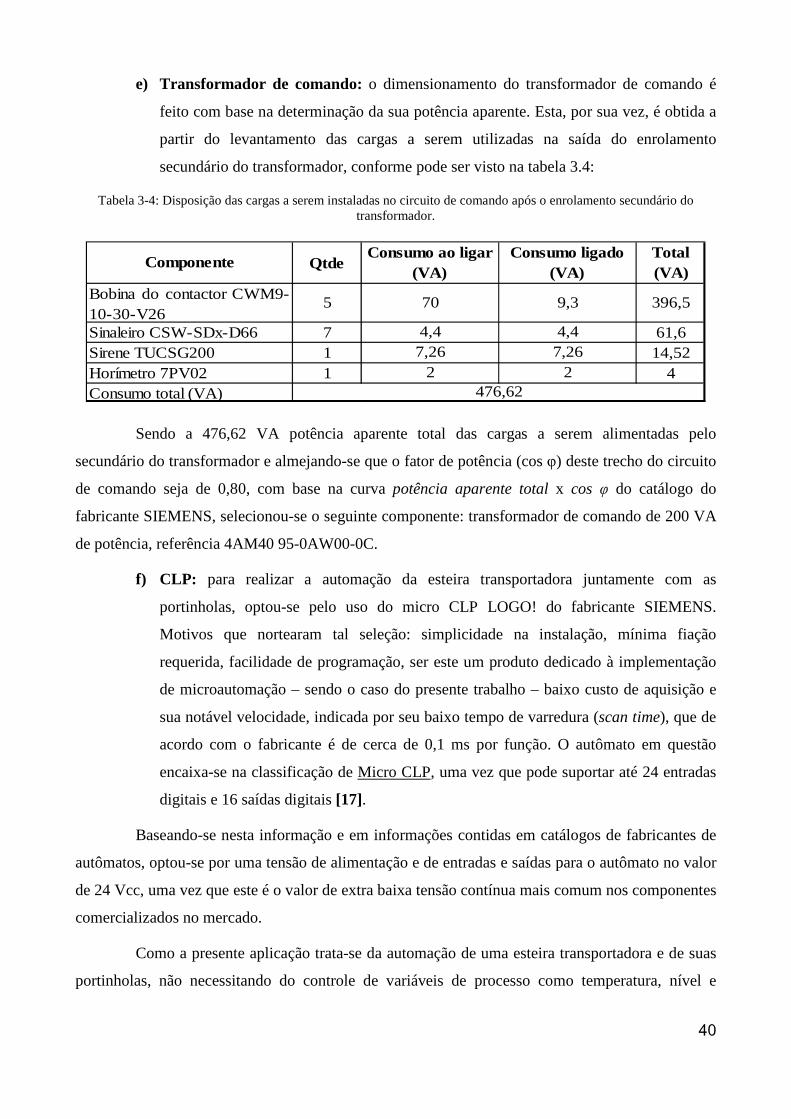
Tabela 3-4: Disposição das cargas a serem instaladas no circuito de comando após o enrolamento secundário do transformador.
QtdeTotal (VA)
5 396,5
7 61,61 14,521 42 2Horímetro 7PV02
Consumo total (VA) 476,62
ComponenteConsumo ao ligar
(VA)Consumo ligado
(VA)Bobina do contactor CWM9-10-30-V26
70 9,3
Sinaleiro CSW-SDx-D66 4,4 4,4Sirene TUCSG200 7,26 7,26
Sendo a 476,62 VA potência aparente total das cargas a serem alimentadas pelo
secundário do transformador e almejando-se que o fator de potência (cos φ) deste trecho do circuito
de comando seja de 0,80, com base na curva potência aparente total x cos φ do catálogo do
fabricante SIEMENS, selecionou-se o seguinte componente: transformador de comando de 200 VA
de potência, referência 4AM40 95-0AW00-0C.
f) CLP: para realizar a automação da esteira transportadora juntamente com as
portinholas, optou-se pelo uso do micro CLP LOGO! do fabricante SIEMENS.
Motivos que nortearam tal seleção: simplicidade na instalação, mínima fiação
requerida, facilidade de programação, ser este um produto dedicado à implementação
de microautomação – sendo o caso do presente trabalho – baixo custo de aquisição e
sua notável velocidade, indicada por seu baixo tempo de varredura (scan time), que de
acordo com o fabricante é de cerca de 0,1 ms por função. O autômato em questão
encaixa-se na classificação de Micro CLP, uma vez que pode suportar até 24 entradas
digitais e 16 saídas digitais [17].
Baseando-se nesta informação e em informações contidas em catálogos de fabricantes de
autômatos, optou-se por uma tensão de alimentação e de entradas e saídas para o autômato no valor
de 24 Vcc, uma vez que este é o valor de extra baixa tensão contínua mais comum nos componentes
comercializados no mercado.
Como a presente aplicação trata-se da automação de uma esteira transportadora e de suas
portinholas, não necessitando do controle de variáveis de processo como temperatura, nível e
41
pressão, o autômato a ser especificado não necessitará de entradas e saídas analógicas, constituindo-
se num caso de controle discreto. Consequentemente, serão selecionadas entradas e saídas discretas,
ou seja, digitais. Serão necessárias 18 entradas e 13 saídas digitais.
Com base no catálogo do fabricante SIEMENS, optou-se a seguinte arquitetura de
hardware para o micro CLP selecionado:
Módulo principal (CPU): LOGO! 24 CEo, com 08 entradas digitais, 04 saídas digitais,
relógio interno e sem display, com interface Ethernet. Referência: 6ED1052-2CC01-0BA8.
Quantidade: 01;
Módulo de expansão de entradas e saídas digitais:
• Módulo de expansão do micro CLP LOGO! com 08 entradas digitais e 08 saídas
digitais, tensão de alimentação 24 Vcc. Referência: 6ED1055-1CB10-0BA2.
Quantidade: 01;
• módulo de expansão do micro CLP LOGO! com 04 entradas digitais e 04 saídas
digitais, tensão de alimentação 24 Vcc. Referência: 6ED1055-1CB00-0BA2.
Quantidade: 01.
g) Relé de interface: novamente, utilizando-se do catálogo do fabricante SIEMENS,
selecionou-se o relé de interface para aplicações de isolação elétrica, amplificação de
sinal e conversão de tensão, 3TX7 014-1BM00;
h) Fonte de alimentação de tensão contínua: O dimensionamento deste componente se
faz pelo levantamento da corrente de consumo utilizada por cada componente
instalado nas saídas do autômato, bem como pelo consumo próprio de cada
componente (CPU e módulos de expansão) do CLP. Na presente aplicação, cada saída
do CLP que está sendo utilizada na automação do sistema possui uma potência de
consumo (P) de 0,5 W e tensão de alimentação (U) de 24 Vcc. Sabe-se que:
� = � × � ∴ � =�
�∴ � =
0,5
24∴ � ≅ 0,021� = 21��
Sendo 0,021 A o valor de corrente requerida para alimentar a bobina do relé de interface, e
tendo-se um total (n) de 13 relés de interface conectados ao CLP, a corrente mínima (Imín) que a
fonte deverá dispor nas saídas do CLP deverá ser de:
��í� = � × � ∴ ��í� = 13 × 0,021 ∴ ��í� = 0,273�
A partir do catálogo do fabricante SIEMENS, obteve-se as potências de consumos dos
módulos que compõem o CLP:
42
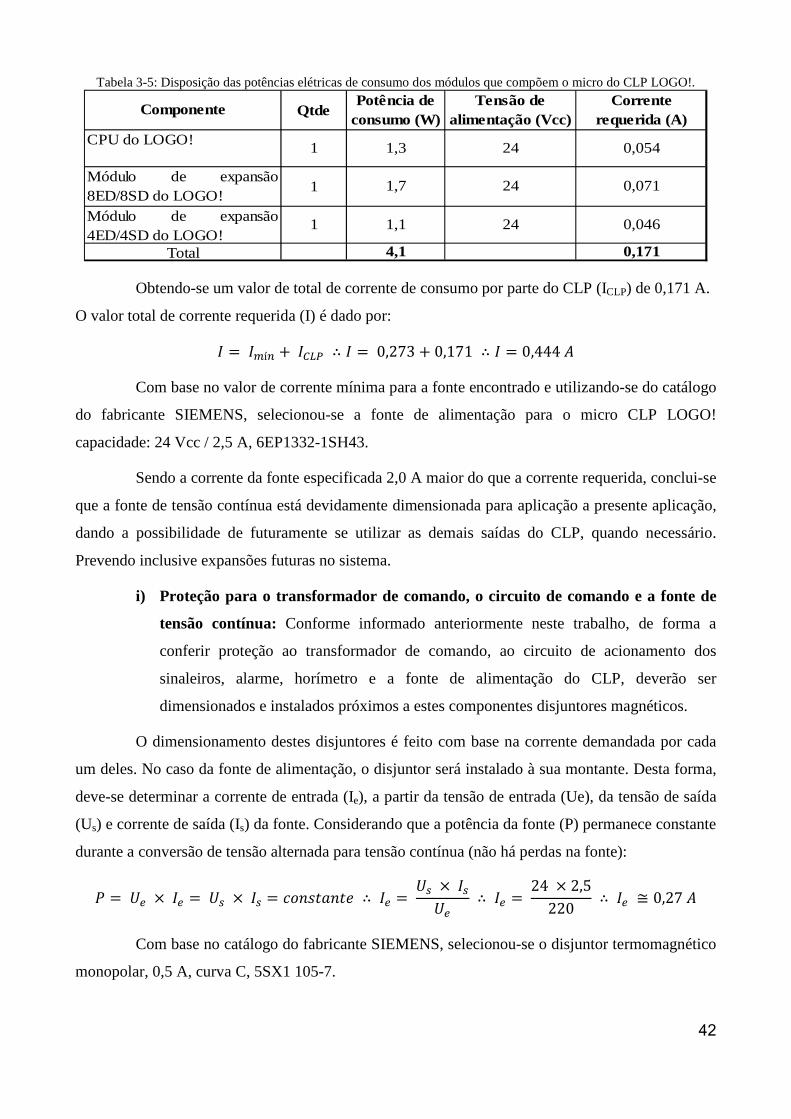
Tabela 3-5: Disposição das potências elétricas de consumo dos módulos que compõem o micro do CLP LOGO!.
Qtde
1
1
1
4,1Total
ComponentePotência de
consumo (W)Tensão de
alimentação (Vcc)CPU do LOGO!
1,3 24
Módulo de expansão8ED/8SD do LOGO!
1,7 24
Módulo de expansão4ED/4SD do LOGO!
1,1 24
Corrente requerida (A)
0,054
0,071
0,046
0,171
Obtendo-se um valor de total de corrente de consumo por parte do CLP (ICLP) de 0,171 A.
O valor total de corrente requerida (I) é dado por:
� = ��í� +�"#$ ∴ � = 0,273 + 0,171 ∴ � = 0,444�
Com base no valor de corrente mínima para a fonte encontrado e utilizando-se do catálogo
do fabricante SIEMENS, selecionou-se a fonte de alimentação para o micro CLP LOGO!
capacidade: 24 Vcc / 2,5 A, 6EP1332-1SH43.
Sendo a corrente da fonte especificada 2,0 A maior do que a corrente requerida, conclui-se
que a fonte de tensão contínua está devidamente dimensionada para aplicação a presente aplicação,
dando a possibilidade de futuramente se utilizar as demais saídas do CLP, quando necessário.
Prevendo inclusive expansões futuras no sistema.
i) Proteção para o transformador de comando, o circuito de comando e a fonte de
tensão contínua: Conforme informado anteriormente neste trabalho, de forma a
conferir proteção ao transformador de comando, ao circuito de acionamento dos
sinaleiros, alarme, horímetro e a fonte de alimentação do CLP, deverão ser
dimensionados e instalados próximos a estes componentes disjuntores magnéticos.
O dimensionamento destes disjuntores é feito com base na corrente demandada por cada
um deles. No caso da fonte de alimentação, o disjuntor será instalado à sua montante. Desta forma,
deve-se determinar a corrente de entrada (Ie), a partir da tensão de entrada (Ue), da tensão de saída
(Us) e corrente de saída (Is) da fonte. Considerando que a potência da fonte (P) permanece constante
durante a conversão de tensão alternada para tensão contínua (não há perdas na fonte):
� = �% × �% =�� × �� = &'���(��) ∴ �% =�� × ��
�%
∴ �% =24 × 2,5
220∴ �% ≅ 0,27�
Com base no catálogo do fabricante SIEMENS, selecionou-se o disjuntor termomagnético
monopolar, 0,5 A, curva C, 5SX1 105-7.
43
Para o circuito de comando, o disjuntor será dimensionado com base nas correntes de
consumo de cada um de seus componentes, conforme mostra a tabela 3.6:
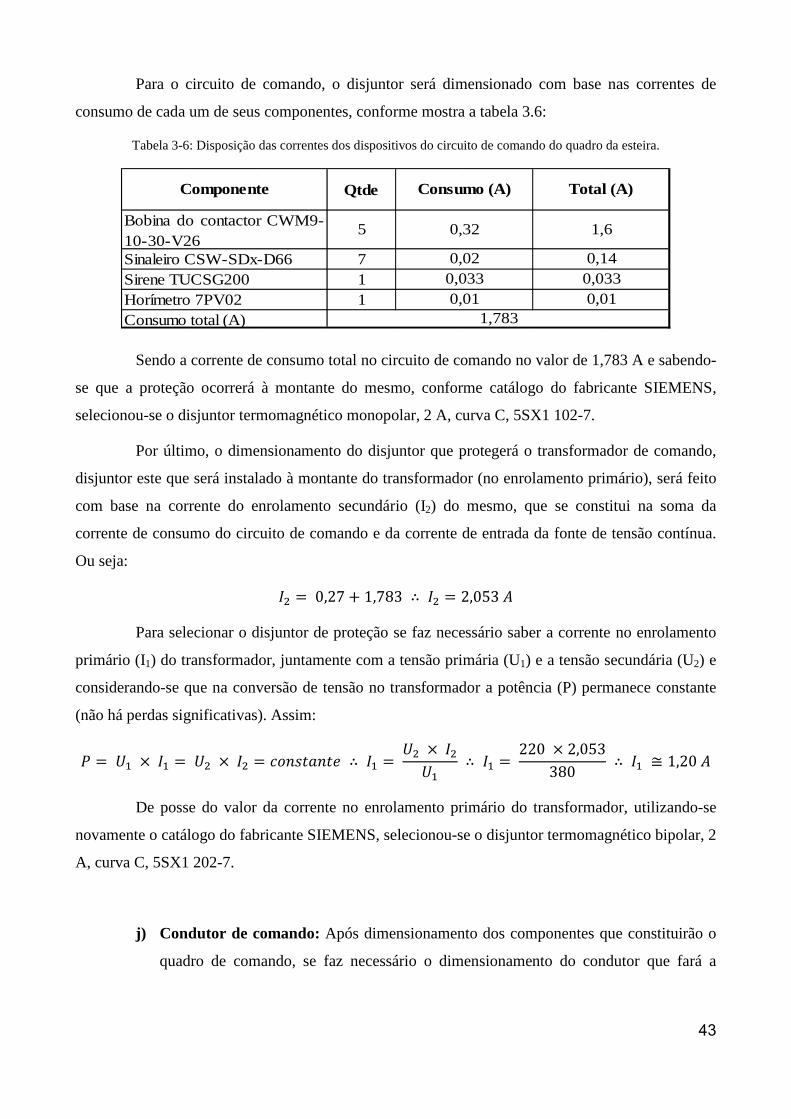
Tabela 3-6: Disposição das correntes dos dispositivos do circuito de comando do quadro da esteira.
Qtde
5
711Horímetro 7PV02
Consumo total (A)
Componente Consumo (A)
Bobina do contactor CWM9-10-30-V26
0,32
Sinaleiro CSW-SDx-D66 0,02Sirene TUCSG200 0,033
Total (A)
1,6
0,140,033
1,7830,01 0,01
Sendo a corrente de consumo total no circuito de comando no valor de 1,783 A e sabendo-
se que a proteção ocorrerá à montante do mesmo, conforme catálogo do fabricante SIEMENS,
selecionou-se o disjuntor termomagnético monopolar, 2 A, curva C, 5SX1 102-7.
Por último, o dimensionamento do disjuntor que protegerá o transformador de comando,
disjuntor este que será instalado à montante do transformador (no enrolamento primário), será feito
com base na corrente do enrolamento secundário (I2) do mesmo, que se constitui na soma da
corrente de consumo do circuito de comando e da corrente de entrada da fonte de tensão contínua.
Ou seja:
�* = 0,27 + 1,783 ∴ �* = 2,053�
Para selecionar o disjuntor de proteção se faz necessário saber a corrente no enrolamento
primário (I1) do transformador, juntamente com a tensão primária (U1) e a tensão secundária (U2) e
considerando-se que na conversão de tensão no transformador a potência (P) permanece constante
(não há perdas significativas). Assim:
� = �, × �, =�* × �* = &'���(��) ∴ �, =�* × �*
�, ∴ �, =
220 × 2,053
380∴ �, ≅ 1,20�
De posse do valor da corrente no enrolamento primário do transformador, utilizando-se
novamente o catálogo do fabricante SIEMENS, selecionou-se o disjuntor termomagnético bipolar, 2
A, curva C, 5SX1 202-7.
j) Condutor de comando: Após dimensionamento dos componentes que constituirão o
quadro de comando, se faz necessário o dimensionamento do condutor que fará a
44
conexão entre eles. Um dos métodos para dimensionamento de condutores de
comando baseia-se no seguinte critério [18]:
• Para o comando de bobinas de contactores e relés, utiliza-se 1,5 mm2 como seção
mínima de condutor;
• Para os sinais de sensores, saídas e entradas digitais de CLP’s, utiliza-se 1,0 mm2
como seção mínima de condutor.
Outro método muito utilizado para o dimensionamento de condutores de comando baseia-
se na seguinte prática [19]:
• Para dispositivos de comando e sinalização, utiliza-se condutor de cobre com 0,5
mm2 de seção mínima.
Com base nos dois métodos acima mencionados, de forma a se manter a padronização e a
segurança do circuito de comando da esteira transportadora, selecionou-se a seção de 1,5 mm2 para
os condutores de cobre a serem utilizados no circuito de comando.
A tabela de condutores de cobre padrão anexa a este trabalho indica que este condutor
trata-se do condutor 14 AWG, o qual suporta uma corrente nominal de 16 A.
3.4.3 Materiais suplementares para o quadro de comando:
a) Calhas (canaletas) para cablagem: Com base no catálogo do fabricante
DUTOPLAST, selecionou-se a canaleta rígida para quadro de comando, cor cinza
RAL 7035, dimensões 50 x 50 mm (Referência: 109.073), conforme apresentado na
figura 3.18 [20]:
Figura 3.18: Canaleta para armazenamento de condutores no interior do quadro de comando.
b) Trilho para componentes: com base no catálogo do fabricante LEGRAND,
selecionou-se o trilho DIN pré-galvanizado, altura 35 mm, liso (Referência: 936604),
como pode ser visto na figura 3.19 [21]:
45
Figura 3.19: Trilho DIN liso
c) Régua de bornes: com base no catálogo do fabricante SIEMENS, selecionou-se os
seguintes componentes, conforme exibido na figura 3.20 [22]:
o Poste final na cor bege, 10 mm, referência: 8WA1 808;
o Borne simples, 2,5 mm2, referência: 8WA1 011-1DF11.
Figura 3.20: Régua de bornes.
3.4.4 Etiquetas (tag’s) dos dispositivos:
Num quadro de comando, os dispositivos geralmente são identificados por placas de
identificação que traz informações referentes ao seu tipo, função que desempenha no circuito, etc.
Para cada dispositivo do quadro de comando é atribuído uma letra e um número, este
último referente à ordem na qual o componente surge no esquema de montagem do painel.
Para a presente aplicação:
• S1: chave seccionadora;
• S2: botão comutador para seleção de modo de funcionamento da esteira transportadora;
• S3: botão tipo cogumelo para efetuação de parada de emergência do sistema;
• S4: botão de partida do sistema;
• S5: botão de desligamento do sistema;
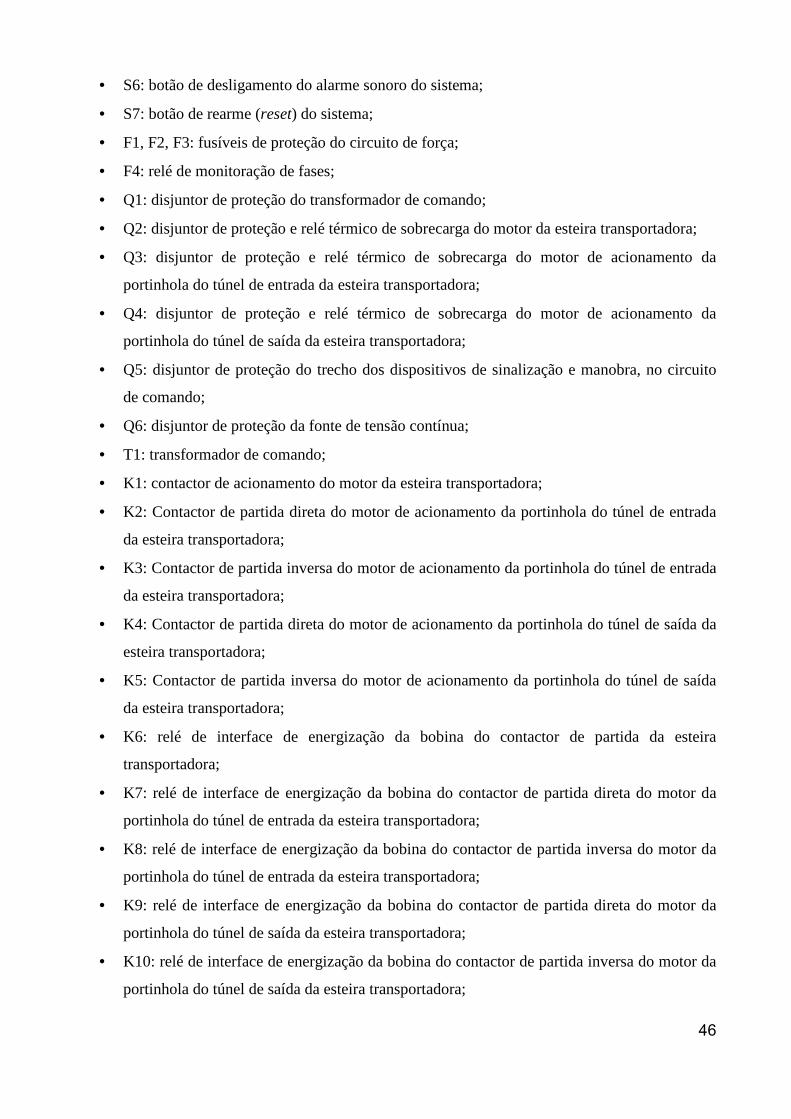
46
• S6: botão de desligamento do alarme sonoro do sistema;
• S7: botão de rearme (reset) do sistema;
• F1, F2, F3: fusíveis de proteção do circuito de força;
• F4: relé de monitoração de fases;
• Q1: disjuntor de proteção do transformador de comando;
• Q2: disjuntor de proteção e relé térmico de sobrecarga do motor da esteira transportadora;
• Q3: disjuntor de proteção e relé térmico de sobrecarga do motor de acionamento da
portinhola do túnel de entrada da esteira transportadora;
• Q4: disjuntor de proteção e relé térmico de sobrecarga do motor de acionamento da
portinhola do túnel de saída da esteira transportadora;
• Q5: disjuntor de proteção do trecho dos dispositivos de sinalização e manobra, no circuito
de comando;
• Q6: disjuntor de proteção da fonte de tensão contínua;
• T1: transformador de comando;
• K1: contactor de acionamento do motor da esteira transportadora;
• K2: Contactor de partida direta do motor de acionamento da portinhola do túnel de entrada
da esteira transportadora;
• K3: Contactor de partida inversa do motor de acionamento da portinhola do túnel de entrada
da esteira transportadora;
• K4: Contactor de partida direta do motor de acionamento da portinhola do túnel de saída da
esteira transportadora;
• K5: Contactor de partida inversa do motor de acionamento da portinhola do túnel de saída
da esteira transportadora;
• K6: relé de interface de energização da bobina do contactor de partida da esteira
transportadora;
• K7: relé de interface de energização da bobina do contactor de partida direta do motor da
portinhola do túnel de entrada da esteira transportadora;
• K8: relé de interface de energização da bobina do contactor de partida inversa do motor da
portinhola do túnel de entrada da esteira transportadora;
• K9: relé de interface de energização da bobina do contactor de partida direta do motor da
portinhola do túnel de saída da esteira transportadora;
• K10: relé de interface de energização da bobina do contactor de partida inversa do motor da
portinhola do túnel de saída da esteira transportadora;
47
• K11: relé de interface para energização do sinaleiro de sistema ligado;
• K12: relé de interface para energização do sinaleiro de parada de emergência;
• K13: relé de interface para energização de sinaleiro de presença de volume fora do padrão;
• K14: relé de interface para energização de sinaleiro para indicação de sobrecarga de
motores;
• K15: relé de interface para energização de sinaleiro para indicação de falha dos sensores;
• K16: relé de interface para energização de sinaleiro para indicação de falha na soft starter;
• K17: relé de interface para energização do alarme sonoro;
• K18: relé de interface para energização do horímetro;
• U1: chave de partida eletrônica (soft starter) de acionamento do motor da esteira
transportadora;
• M1: motor da esteira transportadora;
• M2: motor de acionamento da portinhola do túnel de entrada da esteira transportadora;
• M3: motor de acionamento da portinhola do túnel de saída da esteira transportadora;
• H1: Sinalização luminosa verde para indicação de painel energizado;
• H2: sinalização luminosa amarela para indicação de problemas com as fases de alimentação
do painel;
• H3: sinalização luminosa verde para indicação de sistema ligado;
• H4: sinalização luminosa vermelha para indicação de parada de emergência;
• H5: sinalização luminosa vermelha para indicação de presença de volume na esteira com
dimensões fora do padrão;
• H6: sinalização luminosa amarela para indicação de sobrecarga de motores;
• H7: sinalização luminosa amarela para indicação de falha dos sensores do sistema;
• H8: sinalização luminosa amarela para indicação de falha da soft starter do motor de
acionamento da esteira transportadora;
• B1: sensor de fim de curso inferior da portinhola do túnel de entrada da esteira
transportadora;
• B2: sensor de fim de curso inferior da portinhola do túnel de saída da esteira transportadora;
• B3: sensor de fim de curso superior da portinhola do túnel de entrada da esteira
transportadora;
• B4: sensor de fim de curso superior da portinhola do túnel de saída da esteira transportadora;
• B5: sensor de detecção de altura de volume fora do padrão;
• B6: sensor de detecção de largura de volume fora do padrão;
48
• B7: sensor de detecção de volume sobre a esteira transportadora;
• E1: alarme sonoro de partida e desligamento da esteira transportadora;
• E2: horímetro;
• E3: CPU do CLP do sistema;
• E4: módulo de expansão com 08 entradas e 08 saídas digitais para o CLP;
• E5: módulo de expansão com 04 entradas e 04 saídas digitais para o CLP;
• G1: fonte de tensão contínua;
• X1: régua de bornes de alimentação do motor da esteira transportadora;
• X2: régua de bornes de alimentação do motor da portinhola do túnel de entrada da esteira
transportadora;
• X3: régua de bornes de alimentação do motor da portinhola do túnel de saída da esteira
transportadora;
• X4: régua de bornes do botão de parada de emergência (externo ao quadro de comando);
• X5: régua de bornes dos sensores do sistema (externos ao quadro de comando).
3.4.5 Esquema de montagem:
O esquema de montagem (layout) de um quadro de comando é o conjunto de desenhos
que mostram como o profissional deve instalar os componentes do sistema de automação no painel
e como este ficará depois da montagem. Produzidos em escala reduzida, os desenhos representam
com exatidão as dimensões e posicionamentos dos componentes dentro do painel, na porta do
painel e algumas vezes conexões entre painéis [18].
A partir do esquema é possível obter as dimensões do quadro de comando que será
necessário para abrigar os dispositivos que realizarão a automação do conjunto esteira
transportadora + portinholas.
Geralmente, a disposição dos componentes em um quadro de comando é feita em linhas
horizontais, estando os dispositivos de proteção do circuito de força e comando na primeira linha,
os dispositivos de manobra, automação e sinalização do sistema nas linhas intermediárias e na
última linha encontram-se as réguas de bornes, responsáveis pela obtenção de alimentação e sinais
externos ao quadro de comando.
Com base nos componentes e etiquetas especificados, chegou-se ao seguinte esquema para
o quadro de comando do conjunto esteira transportadora + portinholas apresentado na figura 3.21:
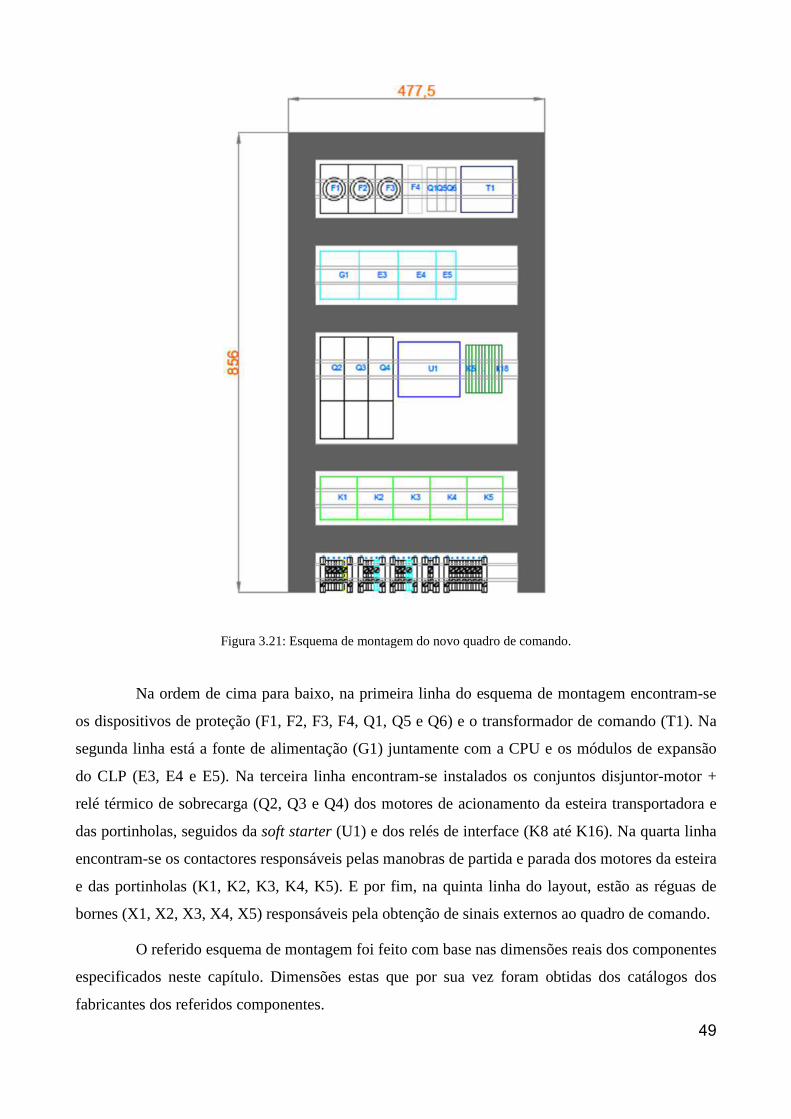
49
Figura 3.21: Esquema de montagem do novo quadro de comando.
Na ordem de cima para baixo, na primeira linha do esquema de montagem encontram-se
os dispositivos de proteção (F1, F2, F3, F4, Q1, Q5 e Q6) e o transformador de comando (T1). Na
segunda linha está a fonte de alimentação (G1) juntamente com a CPU e os módulos de expansão
do CLP (E3, E4 e E5). Na terceira linha encontram-se instalados os conjuntos disjuntor-motor +
relé térmico de sobrecarga (Q2, Q3 e Q4) dos motores de acionamento da esteira transportadora e
das portinholas, seguidos da soft starter (U1) e dos relés de interface (K8 até K16). Na quarta linha
encontram-se os contactores responsáveis pelas manobras de partida e parada dos motores da esteira
e das portinholas (K1, K2, K3, K4, K5). E por fim, na quinta linha do layout, estão as réguas de
bornes (X1, X2, X3, X4, X5) responsáveis pela obtenção de sinais externos ao quadro de comando.
O referido esquema de montagem foi feito com base nas dimensões reais dos componentes
especificados neste capítulo. Dimensões estas que por sua vez foram obtidas dos catálogos dos
fabricantes dos referidos componentes.
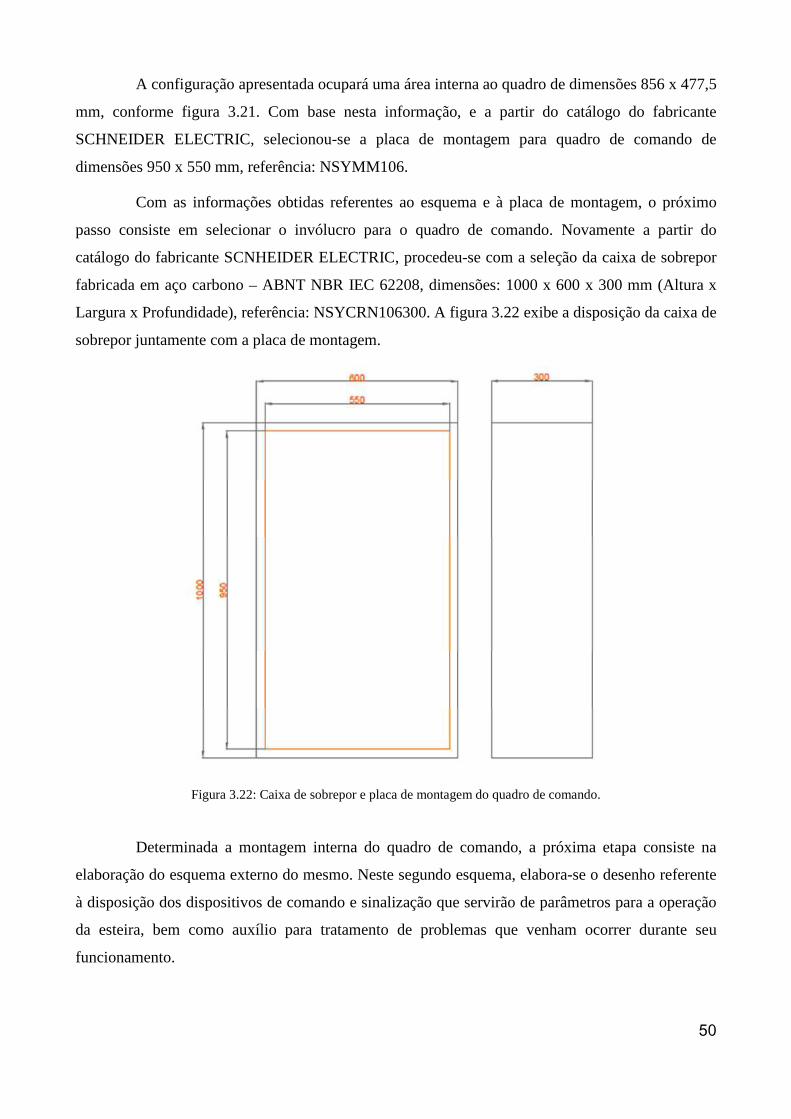
50
A configuração apresentada ocupará uma área interna ao quadro de dimensões 856 x 477,5
mm, conforme figura 3.21. Com base nesta informação, e a partir do catálogo do fabricante
SCHNEIDER ELECTRIC, selecionou-se a placa de montagem para quadro de comando de
dimensões 950 x 550 mm, referência: NSYMM106.
Com as informações obtidas referentes ao esquema e à placa de montagem, o próximo
passo consiste em selecionar o invólucro para o quadro de comando. Novamente a partir do
catálogo do fabricante SCNHEIDER ELECTRIC, procedeu-se com a seleção da caixa de sobrepor
fabricada em aço carbono – ABNT NBR IEC 62208, dimensões: 1000 x 600 x 300 mm (Altura x
Largura x Profundidade), referência: NSYCRN106300. A figura 3.22 exibe a disposição da caixa de
sobrepor juntamente com a placa de montagem.
Figura 3.22: Caixa de sobrepor e placa de montagem do quadro de comando.
Determinada a montagem interna do quadro de comando, a próxima etapa consiste na
elaboração do esquema externo do mesmo. Neste segundo esquema, elabora-se o desenho referente
à disposição dos dispositivos de comando e sinalização que servirão de parâmetros para a operação
da esteira, bem como auxílio para tratamento de problemas que venham ocorrer durante seu
funcionamento.
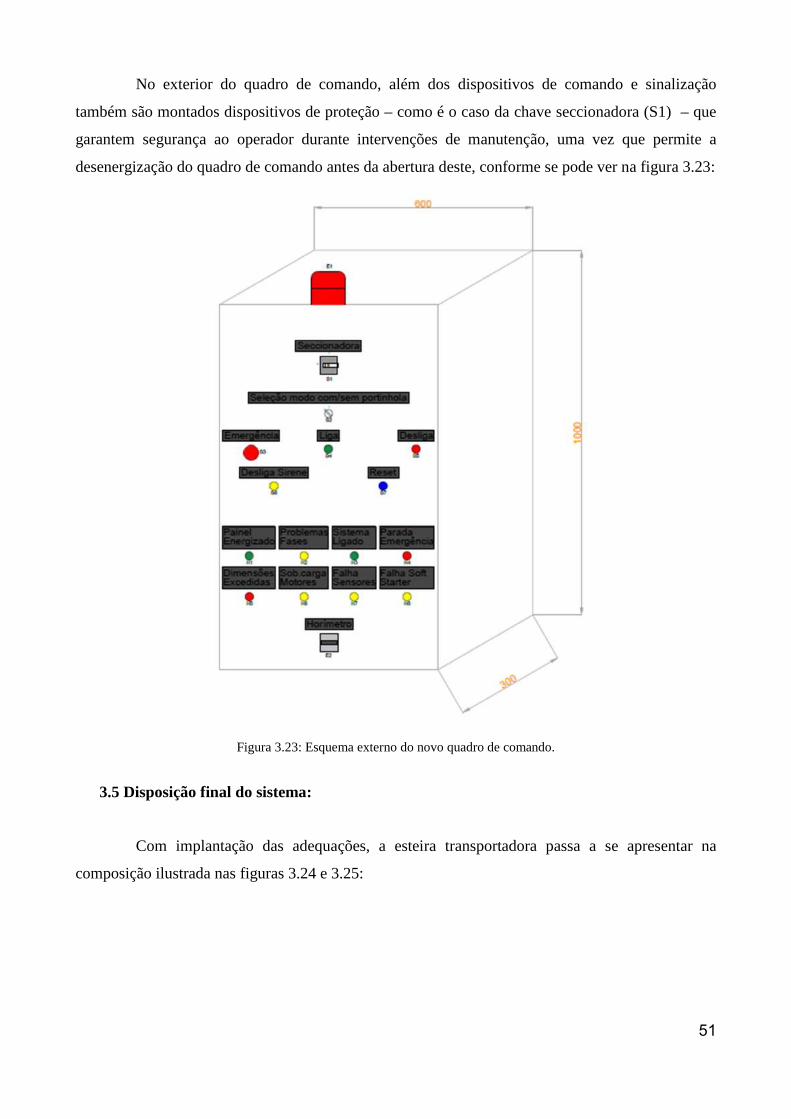
51
No exterior do quadro de comando, além dos dispositivos de comando e sinalização
também são montados dispositivos de proteção – como é o caso da chave seccionadora (S1) – que
garantem segurança ao operador durante intervenções de manutenção, uma vez que permite a
desenergização do quadro de comando antes da abertura deste, conforme se pode ver na figura 3.23:
Figura 3.23: Esquema externo do novo quadro de comando.
3.5 Disposição final do sistema:
Com implantação das adequações, a esteira transportadora passa a se apresentar na
composição ilustrada nas figuras 3.24 e 3.25:
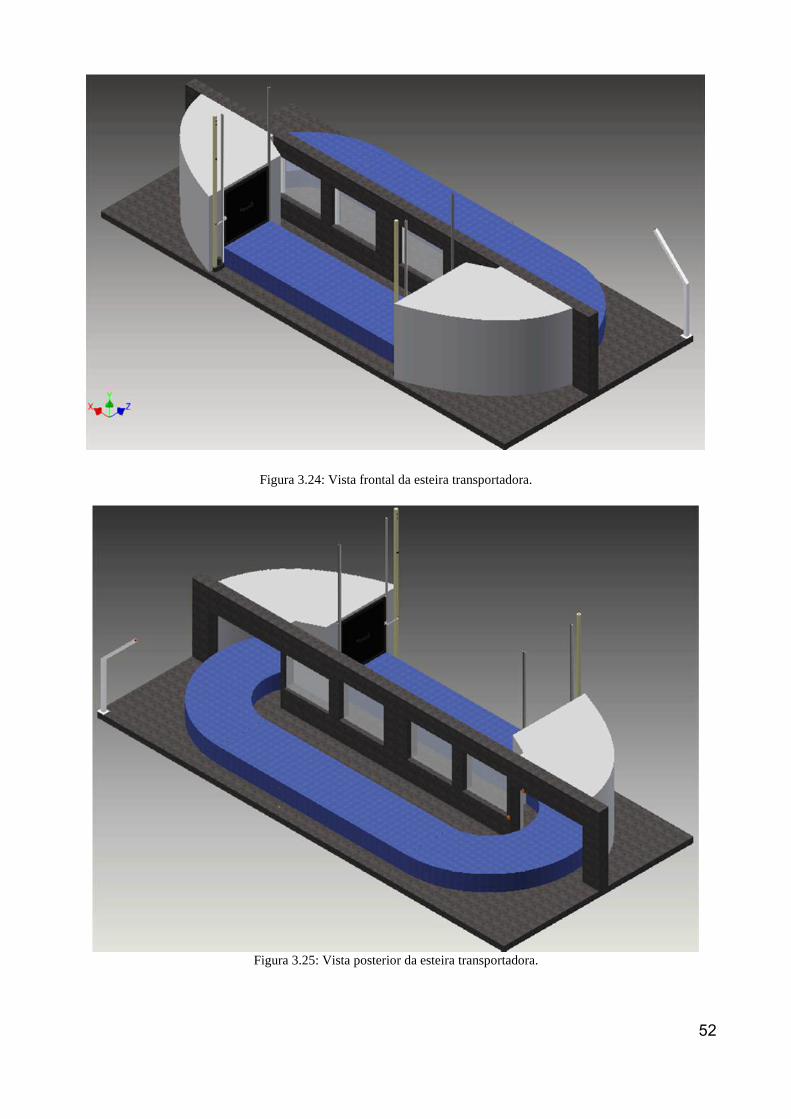
52
Figura 3.24: Vista frontal da esteira transportadora.
Figura 3.25: Vista posterior da esteira transportadora.
53
3.6 Considerações finais
A eficiência do funcionamento das portinholas e seus acionamentos, bem como do quadro
de comando está diretamente relacionada com seu correto dimensionamento. E no caso do presente
quadro de comando, o qual funcionará com CLP, foi o dimensionamento realizado neste capítulo
que serviu de base para a especificação deste último, evitando um superdimensionamento do CLP.
Nos apêndices B e C deste trabalho encontram-se os projetos mecânico e elétrico das
portinholas e do quadro de comando, respectivamente.
54
Capítulo 4 ELABORAÇÃO E REALIZAÇÃO DO SISTEMA DE CONTROLE
4.1 Linguagem de programação utilizada para implementação da lógica de automação no
CLP:
Para o presente trabalho foi selecionada a linguagem LADDER para proceder-se com a
programação da lógica do CLP que controlará a esteira transportadora e as portinholas.
Conhecida também por diagrama LADDER ou diagrama em escada, trata-se de uma
linguagem gráfica de programação definida pela norma europeia IEC 61131-3, que consiste na
representação de funções lógicas de automação de sistemas através de diagramas compostos de
contatos e bobinas, analogamente a um esquema elétrico composto de sensores e atuadores, o que a
torna numa linguagem de fácil compreensão para os profissionais de nível técnico, sendo esta a
característica que norteou a seleção desta linguagem para elaboração da lógica de automação do
presente sistema.
4.2 Diagrama de estados do sistema:
Devido ao fato de que a lógica de funcionamento do conjunto esteira transportadora +
portinholas ser de natureza sequencial, uma implementação eficiente da lógica de automação em
linguagem LADDER se faz, primeiramente, com a elaboração do diagrama de estados do sistema.
55
O diagrama de estados é uma representação gráfica da automação sequencial de um
determinado sistema, descrevendo a sequencia na qual as ações (estados) serão executadas mediante
variação dos valores das entradas do CLP.
No caso do sistema composto pela esteira transportadora e pelas portinholas, o diagrama
de estados deverá prever o funcionamento da esteira em dois modos: o modo de funcionamento
com as portinholas operando e o modo de funcionamento sem as portinholas. A seleção entre os
modos de funcionamento da esteira será feito através do botão comutador de duas posições S2,
especificado anteriormente. A chave S2 na posição “0” acionará o modo de funcionamento da
esteira sem as portinholas. com a chave S2 na posição “1” será acionado o modo de funcionamento
da esteira em conjunto com as portinholas.
Inicialmente, se faz necessário determinar o número de estados que o diagrama possuiria.
Sendo cada estado numerado conforme a ordem que é executado no diagrama. O estado inicial é
tido como E0 e os demais estados são chamados de E1, E2,...,Em. O salto entre os estados é feito
mediante atendimento às condições de cada transição (T) entre os mesmos. Txy seria a transição do
estado x para o estado y. Para este trabalho:
• E0: estado inicial, no qual o painel encontra-se energizado e sem problema algum com as
fases de alimentação do quadro de comando. Além dos disjuntores motores (Q2, Q3, Q4)
estarem armados, o botão de emergência (S3) fechado e a soft starter (U1) operando
normalmente, bem como não há volumes fora do padrão sobre a esteira (B5, B6). E no caso
do modo de funcionamento das portinholas, detecção dos fins de curso de fechamento das
portinholas (B1, B2).
� OBS: para ocorrer as transições no diagrama de estados descritos a seguir, as
condições características do E0 deverão ser satisfeitas também.
• T01: pondo o botão comutador (S2) na posição “0”;
• E1: esteira no modo de funcionamento sem as portinholas:
o Sinaleiro de sistema ligado (H3 energizado a partir de K11);
• T12: Acionamento do botão liga (S4);
• E2:
o Alarme sonoro (E1 a partir de K17);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização da sirene acionada (TON1).
• T23: acionamento do botão que silencia o alarme sonoro (S6);
• E3:

56
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização da sirene acionada (TON1).
• T24: acionamento da esteira decorrido a temporização (TON1);
• T34: acionamento da esteira decorrido a temporização (TON1);
• E4:
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização de ciclo da esteira acionada (TON2);
• T45: acionamento do sensor de presença de volume (B7) sobre a esteira;
• E5:
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização de ciclo da esteira acionada (TON2);
• T54: acionamento do sensor de presença de volume (B7) sobre a esteira antes do término da
temporização de ciclo (TON2);
• T56: início do procedimento de desligamento automático da esteira, após temporização de
ciclo (TON2) concluída;
• E6:
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Alarme sonoro (E1 a partir de K17);
o Temporização de sirene (TON1).
• T61: Desligamento da esteira após conclusão da temporização da sirene (TON1);
• T67: acionamento do botão que silencia a sirene (S6);
• E7:
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização de sirene (TON1).
• T71: Desligamento da esteira após conclusão da temporização da sirene (TON1);
57
• T08: pondo o botão comutador (S2) na posição “1”;
• E8: esteira no modo de funcionamento com as portinholas;
o Fins de curso B1 e B2 detectados, portinholas fechadas;
o Sinaleiro de sistema ligado (H3 energizado a partir de K11).
• T89: Acionamento do botão liga (S4);
• E9:
o Acionamento das portinholas no sentido de abertura (K2 a partir de K7, K4 a partir
de K9);
o Alarme sonoro (E1 a partir de K17);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização da sirene acionada (TON1).
• T910: acionamento do botão que silencia o alarme sonoro (S6);
• E10:
o Acionamento das portinholas no sentido de abertura (K2 a partir de K7, K4 a partir
de K9);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização da sirene acionada (TON1).
• T911: acionamento da esteira decorrido a temporização (TON1) e dos fins de curso de
portinholas abertas (B3, B4);
• T1011: acionamento da esteira decorrido a temporização (TON1) e dos fins de curso de
portinholas abertas (B3, B4);
• E11:
o Fins de curso B3 e B4 detectados, portinholas abertas;
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização de ciclo da esteira acionada (TON2);
• T1112: acionamento do sensor de presença de volume (B7) sobre a esteira;
• E12:
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização de ciclo da esteira acionada (TON2);
58
• T1211: acionamento do sensor de presença de volume (B7) sobre a esteira antes do término
da temporização de ciclo (TON2);
• T1213: início do procedimento de desligamento automático da esteira, após temporização de
ciclo (TON2) concluída;
• E13:
o Acionamento das portinholas no sentido de fechamento (K3 a partir de K8, K5 a
partir de K10);
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Alarme sonoro (E1 a partir de K17);
o Temporização de sirene (TON1).
• T138: Desligamento da esteira após conclusão da temporização da sirene (TON1) e detecção
dos fins de curso de fechamento das portinholas;
• T1314: acionamento do botão que silencia a sirene (S6);
• E14:
o Esteira acionada (K1 a partir de K6);
o Horímetro acionado (E2 a partir de K18);
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Temporização de sirene (TON1).
• T148: Desligamento da esteira após conclusão da temporização da sirene (TON1) e detecção
dos fins de curso de fechamento das portinholas;
• T115 até T1415: acionamento do botão de parada de emergência do sistema (S3);
• E15:
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Sinaleiro de parada da emergência (H4 a partir de K12).
• T116 a T1416: dimensões padrão do volume excedidas (B5, B6);
• E16:
o Sinaleiro de dimensões excedidas (H5 a partir de K13);
o Sinaleiro de sistema ligado (H3 a partir de K11);
• T16 até T56: desligamento manual do equipamento, através do botão desliga (S5);
• T813 até T1213: desligamento manual do equipamento, através do botão desliga (S5);

59
• T117 até T1417: desarme dos relés térmicos de sobrecarga dos motores da esteira e das
portinholas (Q2, Q3, Q4);
• E17:
o Sinaleiro de sobrecarga de motores (H6 a partir de K14);
o Sinaleiro de sistema ligado (H3 a partir de K11);
• T118 a T1418: falha dos sensores de fim de curso das portinholas (B1, B2, B3, B4);
• E18:
o Sinaleiro de falha dos sensores (H7 a partir de K15);
o Sinaleiro de sistema ligado (H3 a partir de K11);
• T119 a T1419: falha da soft starter do motor da esteira (U1);
• E19:
o Sinaleiro de falha da soft starter (H8 a partir de K16);
o Sinaleiro de sistema ligado (H3 a partir de K11);
• T120 a T1920: reabilitação das condições básicas de funcionamento do sistema;
• E20:
o Sinaleiro de sistema ligado (H3 a partir de K11);
o Acionamento das portinholas no sentido de fechamento (K3 a partir de K8, K5 a
partir de K10).
• T200: rearme do sistema através do acionamento do botão de reset (S7).
A figura 4.1 seguir é apresentado o diagrama de estados completo da automação do
sistema esteira transportadora + portinholas em seus modos de funcionamento com e sem as
portinholas.
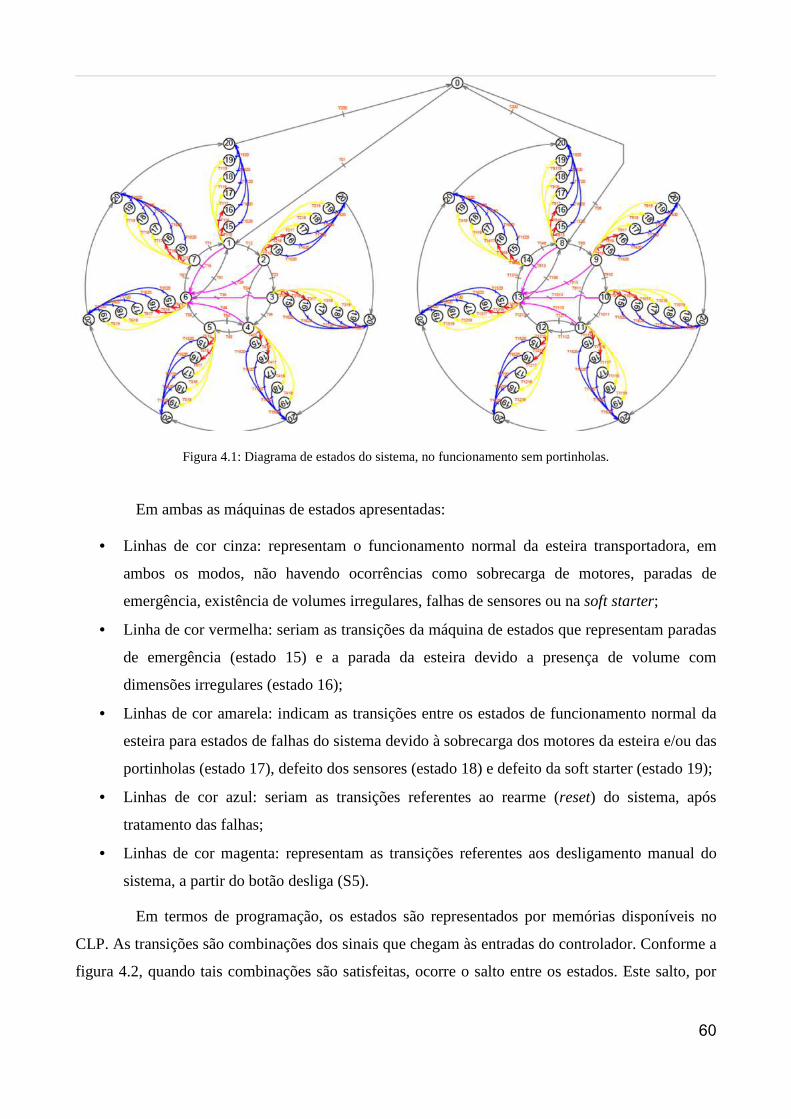
60
Figura 4.1: Diagrama de estados do sistema, no funcionamento sem portinholas.
Em ambas as máquinas de estados apresentadas:
• Linhas de cor cinza: representam o funcionamento normal da esteira transportadora, em
ambos os modos, não havendo ocorrências como sobrecarga de motores, paradas de
emergência, existência de volumes irregulares, falhas de sensores ou na soft starter;
• Linha de cor vermelha: seriam as transições da máquina de estados que representam paradas
de emergência (estado 15) e a parada da esteira devido a presença de volume com
dimensões irregulares (estado 16);
• Linhas de cor amarela: indicam as transições entre os estados de funcionamento normal da
esteira para estados de falhas do sistema devido à sobrecarga dos motores da esteira e/ou das
portinholas (estado 17), defeito dos sensores (estado 18) e defeito da soft starter (estado 19);
• Linhas de cor azul: seriam as transições referentes ao rearme (reset) do sistema, após
tratamento das falhas;
• Linhas de cor magenta: representam as transições referentes aos desligamento manual do
sistema, a partir do botão desliga (S5).
Em termos de programação, os estados são representados por memórias disponíveis no
CLP. As transições são combinações dos sinais que chegam às entradas do controlador. Conforme a
figura 4.2, quando tais combinações são satisfeitas, ocorre o salto entre os estados. Este salto, por
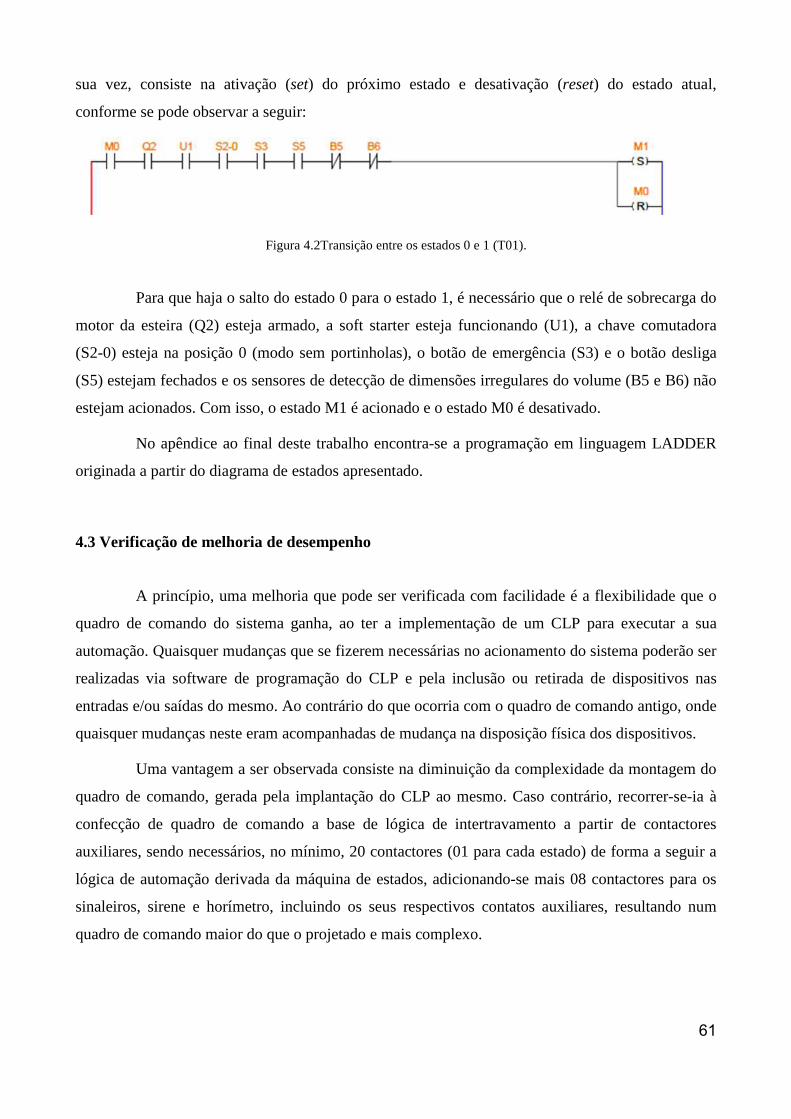
61
sua vez, consiste na ativação (set) do próximo estado e desativação (reset) do estado atual,
conforme se pode observar a seguir:
Figura 4.2Transição entre os estados 0 e 1 (T01).
Para que haja o salto do estado 0 para o estado 1, é necessário que o relé de sobrecarga do
motor da esteira (Q2) esteja armado, a soft starter esteja funcionando (U1), a chave comutadora
(S2-0) esteja na posição 0 (modo sem portinholas), o botão de emergência (S3) e o botão desliga
(S5) estejam fechados e os sensores de detecção de dimensões irregulares do volume (B5 e B6) não
estejam acionados. Com isso, o estado M1 é acionado e o estado M0 é desativado.
No apêndice ao final deste trabalho encontra-se a programação em linguagem LADDER
originada a partir do diagrama de estados apresentado.
4.3 Verificação de melhoria de desempenho
A princípio, uma melhoria que pode ser verificada com facilidade é a flexibilidade que o
quadro de comando do sistema ganha, ao ter a implementação de um CLP para executar a sua
automação. Quaisquer mudanças que se fizerem necessárias no acionamento do sistema poderão ser
realizadas via software de programação do CLP e pela inclusão ou retirada de dispositivos nas
entradas e/ou saídas do mesmo. Ao contrário do que ocorria com o quadro de comando antigo, onde
quaisquer mudanças neste eram acompanhadas de mudança na disposição física dos dispositivos.
Uma vantagem a ser observada consiste na diminuição da complexidade da montagem do
quadro de comando, gerada pela implantação do CLP ao mesmo. Caso contrário, recorrer-se-ia à
confecção de quadro de comando a base de lógica de intertravamento a partir de contactores
auxiliares, sendo necessários, no mínimo, 20 contactores (01 para cada estado) de forma a seguir a
lógica de automação derivada da máquina de estados, adicionando-se mais 08 contactores para os
sinaleiros, sirene e horímetro, incluindo os seus respectivos contatos auxiliares, resultando num
quadro de comando maior do que o projetado e mais complexo.
62
Outra melhoria derivada da adequação do sistema de automação da esteira é o
prolongamento da vida útil do motor de acionamento da esteira pela instalação da soft starter, que
suavizará a curva de corrente de partida do motor.
A inclusão de relés de interface no quadro de comando evita-se a aquisição de
componentes de sinalização que operem em tensões de 110 Vca e/ou 24 Vcc, componentes estes
que são difíceis de encontrar no mercado, quando comparados com os dispositivos (sinaleiros,
sirene, etc.) alimentados por tensão de 220 Vca, além de serem de maior valor aquisitivo.
4.4 Considerações finais
Vale ressaltar que, a boa operacionalidade do novo sistema também está ligada à sua
manutenção. Com rotinas de manutenção preventivas, a partir da utilização dos projetos mecânico e
elétrico elaborados, somadas à instauração de um serviço de substituição de componentes
desgastados devido ao uso, será possível proporcionar uma sobre vida ao sistema.
63
Capítulo 5
CONCLUSÕES E TRABALHOS FUTUROS Com base no que foi exposto no presente trabalho, procurou-se adequar o sistema de
acionamento da esteira transportadora de forma que, através de melhorias tanto na sua partida
quanto na sua automação, a mesma pudesse conferir segurança aos seus operadores e aos técnicos
que futuramente realizarão sua manutenção. Em condições normais de funcionamento do sistema de
automação projetado, o equipamento não chegará às condições extremas de atuação (sobrecarga,
funcionamento em ausência, inversão ou assimetria de fases, correntes de pico durante sua partida),
prolongando a vida útil da esteira transportadora.
Embora tenha havido um aumento nas dimensões do quadro, baseando-se nas dimensões
da caixa de comando antiga, o novo quadro de comando tenderá a manter suas dimensões
inalteradas por um longo período de tempo, uma vez possíveis mudanças em sua lógica de
acionamento poderão ser feitas via alteração na programação do CLP e de suas entradas e saídas
reservas, sem a necessidade de modificação em sua estrutura física, como ocorria anteriormente.
As entradas e saídas digitais dos módulos do CLP facilitarão o diagnóstico de possíveis
falhas do sistema durante as rotinas de manutenção, reduzindo o tempo destas. E o fato de estarem
sendo alimentadas em extra baixa tensão de 24 Vcc irá conferir segurança aos técnicos durante tal
análise.
64
Não se pode deixar de relatar a importância dos relés de interface nesta nova configuração
do quadro de comando da esteira. Estes componentes manterão o nível de tensão esperado para
alimentar os dispositivos de sinalização ao mesmo tempo que conferirá proteção contra sobretensão.
A documentação técnica contida nos apêndices desta monografia poderá ser utilizada
como norteador durante rotinas de manutenção da esteira transportadora e das portinholas, bem
como possibilitará o monitoramento do sistema via software, a partir da programação LADDER
elaborada para o CLP, podendo-se testar as entradas e saídas do autômato bem como os dispositivos
ligados a elas, observando seu comportamento através de um notebook.
Com a lista de componentes informada nos projetos elétrico (quadro de comando) e
mecânico (portinholas) pretende-se conferir à equipe que ficará responsável pela manutenção do
equipamento, informações básicas para que possam proceder com a aquisição de peças
sobressalentes, objetivando-se manter o sistema dentro dos índices de disponibilidade necessários
para seu funcionamento.
5.1 Melhorias possíveis, trabalhos futuros:
Uma possível melhoria para a solução apresentada neste trabalho seria a implementação
de um sistema supervisório, o qual faria o monitoramento da esteira, enviando para os técnicos
responsáveis pela manutenção da mesma, informações referentes ao seu funcionamento através de
um computador instalado em sua sala.
Este trabalho consistiria na implantação de um sistema SCADA, onde as telas de
supervisório seriam, basicamente, a imagem da esteira e de seu quadro de comando evidenciando os
dispositivos inerentes à sua automação:
• 1ª tela: imagem da esteira destacando o status dos sensores;
• 2ª tela: exibição do esquema externo do quadro de comando, apresentando o comportamento
dos sinaleiros, sirene e horímetro, bem como quais botões estão acionados / desacionados;
• 3ª tela: exibição do esquema interno do quadro de comando, exibindo a condição dos relés
de sobrecarga e supervisão de fases;
• 4ª tela: disposição da máquina de estados, apontando as transições que estão sendo
realizadas, para fins de análise de falhas.
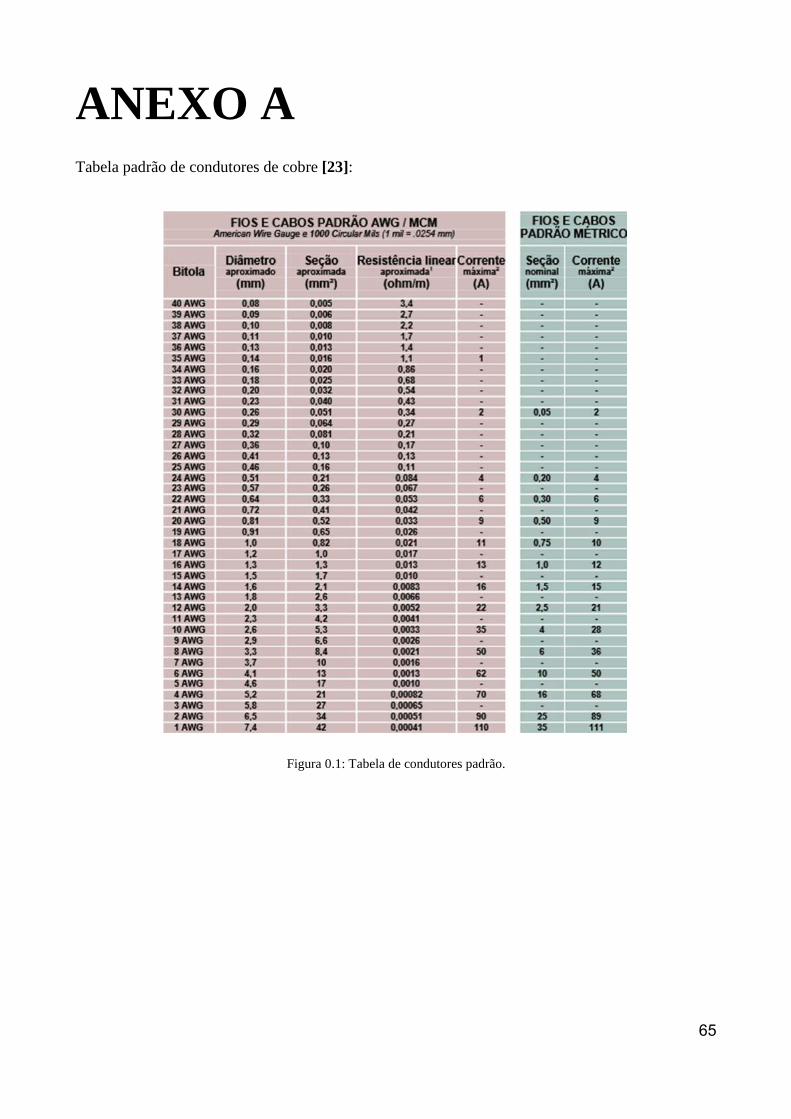
65
ANEXO A Tabela padrão de condutores de cobre [23]:
Figura 0.1: Tabela de condutores padrão.
66
APÊNDICE B Projeto mecânico das portinholas da esteira transportadora:
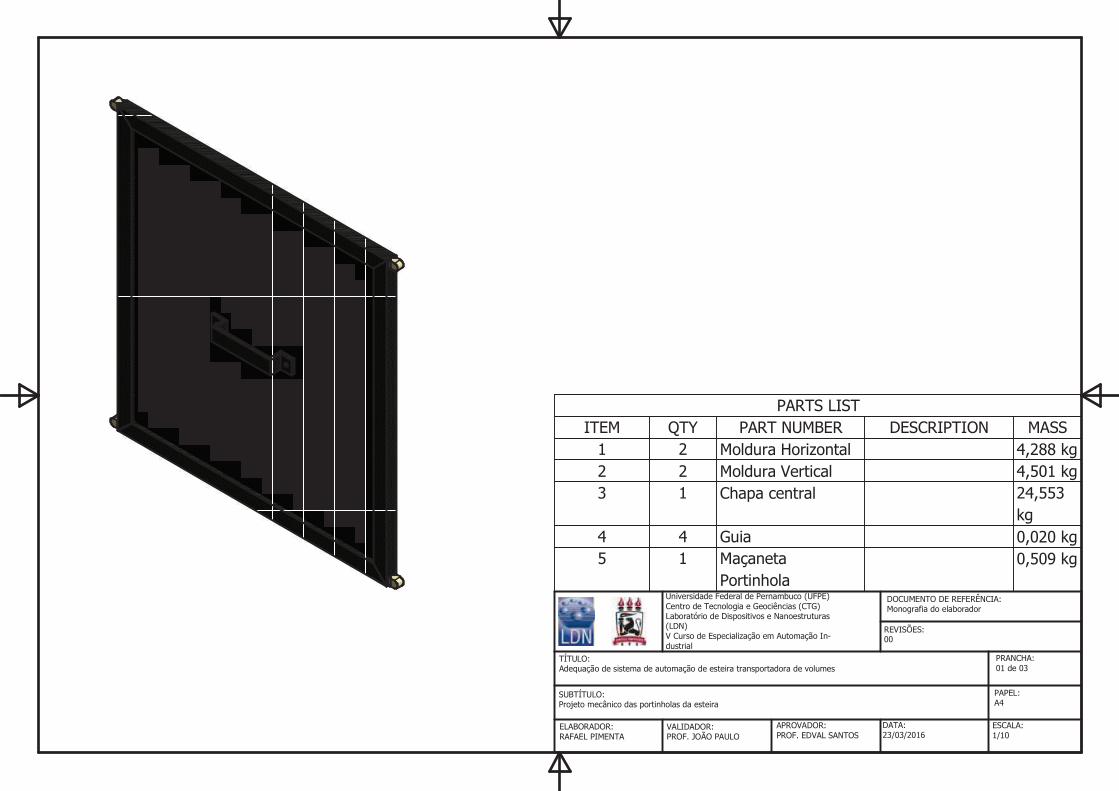
�������������
��� ��� ���� ������������� �
����� �������������� ! "�#�������"�#��������� "�!$��"$�% &�$"���$�����'�(�#�
�%!'�$ !���������$�(������$%�#)�*��+����,-�%"$�������*%�(�.!����/��*!0%*!� �+-�/,��)�$�"1$!������! &� !"!'� �����%�� "$�"�$� +���,��-�$ ������ &�*!�(!2������#���"�#�����3%4�� "$!�(
���3��� ���� ���5 6 �����
���7 ��� ����������38����
��-������
��7����� ��$�9�"��#�*:%!*���� �&�$"!%;�(� ����� "�!$�
�������<
����-=���������
���3�>�����
� -�8��� ���������?�-3��8�%�.$�@!������(�)�$���$
�������3��8������-�3��3 ��������87��A�B3��8
<C�DD�E.�8�(��$��=�$!2�%"�(�<CF��E.�8�(��$����$"!*�(���<CFF��E.
�-;�&��*�%"$�(�
�C����E.�/�!�<<�CF�G�E.�8���%�"��
��$"!%;�(�F
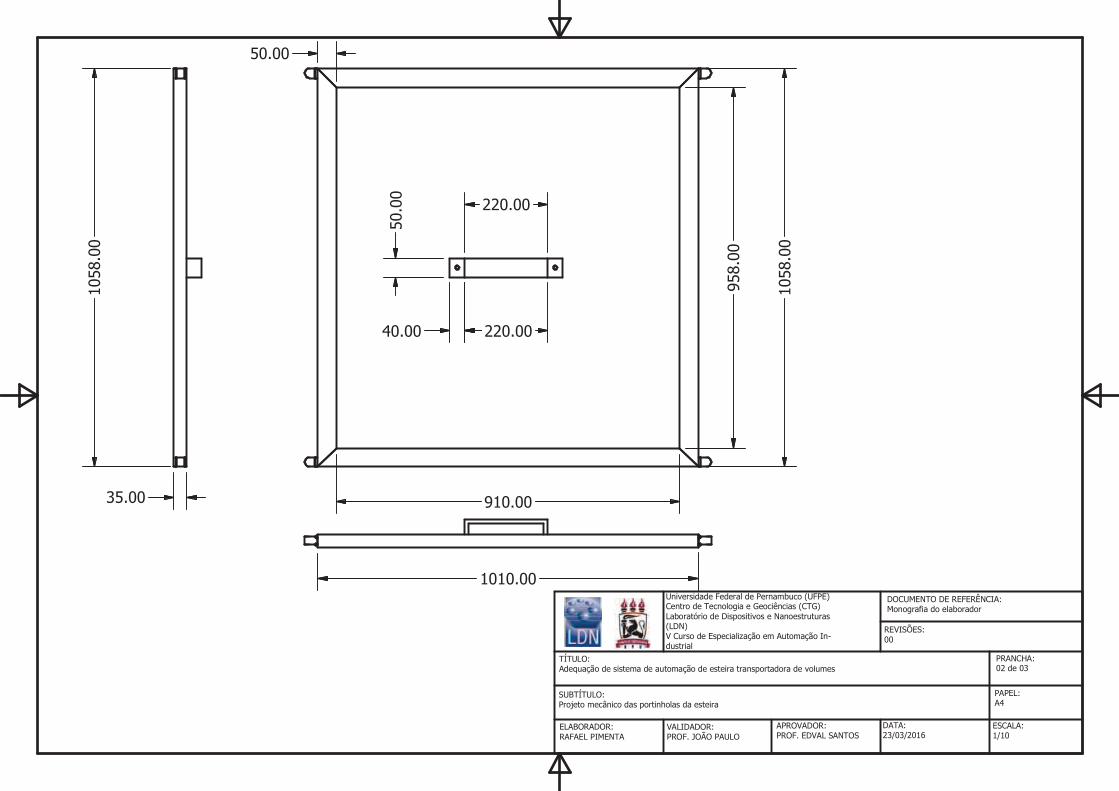
����������������� ������������������������
�� �������
������ ��������������!����"�#$�%��!�&���'������$��������(��$�)�$�� %��(&*�����'+������� ,� �'��� ������ '�#'#�� %*��&��#� ���� ,�$����-�./��"�#'�"�./� �0�# '����
��* �����!��12�3�!��*�
!���4���5���6
!�!�*��7
�8��*�����9#�./��� � '�"����#'�"�./���� '����'��� ,��'����������#"�
����*��:;:�
��<�8��*��!��=�'�"�$>��$��� ,��'��?��� ��� '����
�*�<���������*! �����
�!������!��1����*������
�����56;�6;5�:@
:�AB
1��
C:�1��
CAB1��
55�1��
A�1��
7�1�� 55�1��
A�1��
6A1��
:�AB
1��
:�:�1��

����������������
� �������� �����������������
�����������
��������������������������������� ��!"�#��� ��
���$!�%� � !��! !��"� !� !���&#'(��)�� �*!�+��� !��!(��"�����!�,!�(�-�(��%�)�,*��#���+.���� !���%/�%�+�$�%�!�����!%+�'+'��%)���*��'�%�� !��%/!(��"�0�12��!&��'+�&�12����3 '%+���"
�4������ !5'�12�� !�%�%+!&�� !��'+�&�12�� !�!%+!����+���%/��+� ���� !�$�"'&!%
������6�
� ����7
���8���9� !��9
�����:96�96:�;
��<�4����� ��=!+��&!(>��(�� �%�/��+��?�"�%� ��!%+!���
���������� �����@�A�� ����
���<�������������� ������
� �������� �����������������
�����������
��������������������������������� ��!"�#��� ��
���$!�%� � !��! !��"� !� !���&#'(��)�� �*!�+��� !��!(��"�����!�,!�(�-�(��%�)�,*��#���+.���� !���%/�%�+�$�%�!�����!%+�'+'��%)���*��'�%�� !��%/!(��"�0�12��!&��'+�&�12����3 '%+���"
�4������ !5'�12�� !�%�%+!&�� !��'+�&�12�� !�!%+!����+���%/��+� ���� !�$�"'&!%
������6�
� ����7
�����:96�96:�;
��<�4����� ��=!+��&!(>��(�� �%�/��+��?�"�%� ��!%+!���
���������� �����@�A�� ����
���<�������������� ������
�
97���
B���
:B���
:B���
:;���
:;���
9����
9����
9����
�7����:���
:���

70
APÊNDICE C Projeto elétrico resultante da adequação do sistema de automação da esteira transportadora:
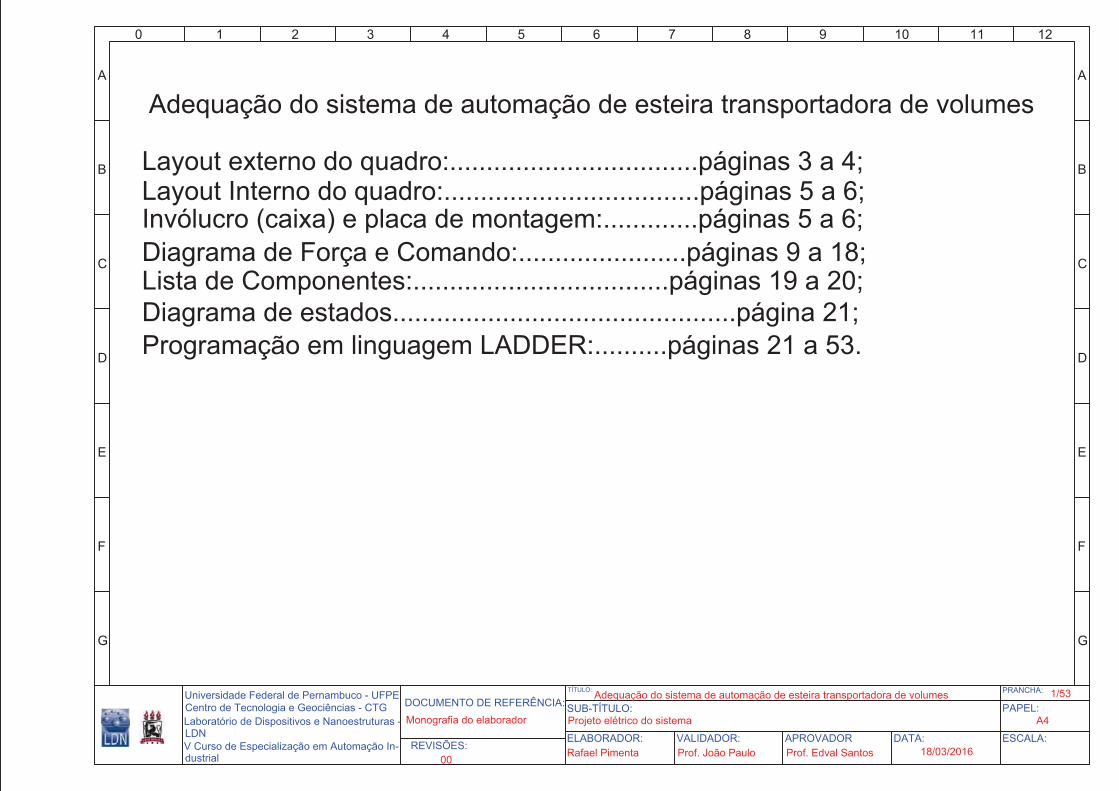
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
Adequação do sistema de automação de esteira transportadora de volumes
Diagrama de Força e Comando:.......................páginas 9 a 18;Lista de Componentes:...................................páginas 19 a 20;
Layout Interno do quadro:...................................páginas 5 a 6;Layout externo do quadro:..................................páginas 3 a 4;
Diagrama de estados...............................................página 21;
1/53
Programação em linguagem LADDER:..........páginas 21 a 53.
Invólucro (caixa) e placa de montagem:.............páginas 5 a 6;
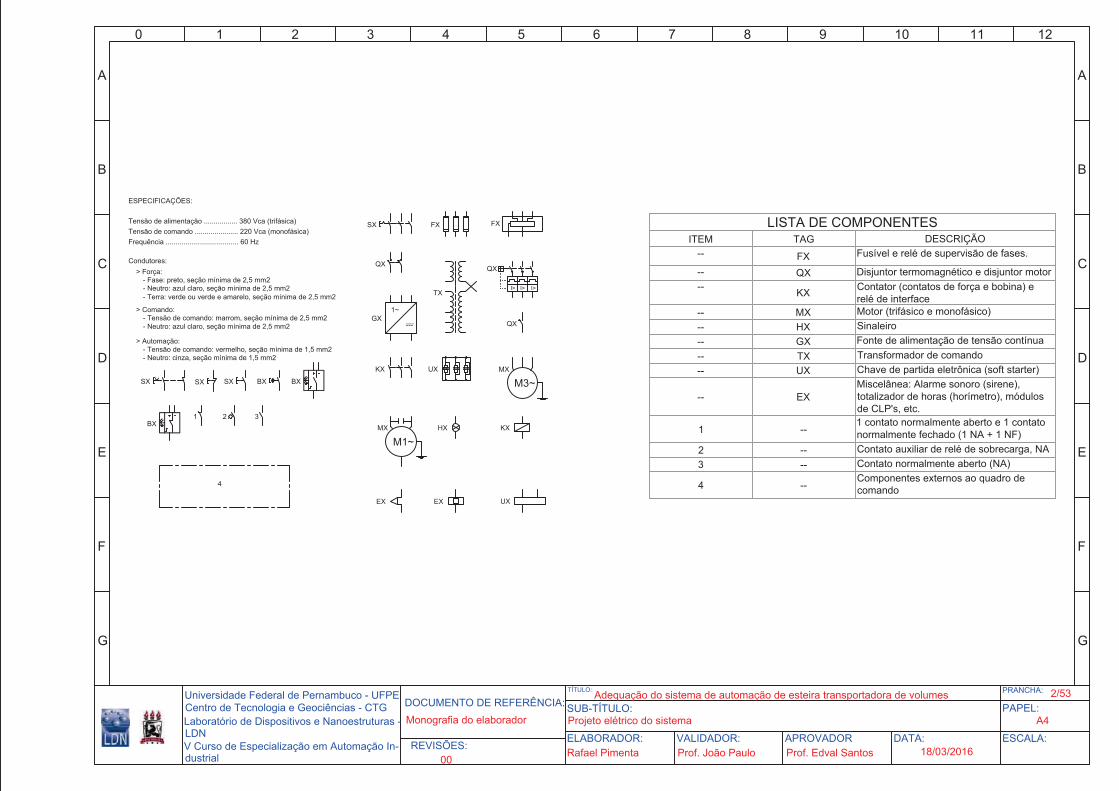
ESPECIFICAÇÕES:
Tensão de alimentação ................. 380 Vca (trifásica)
Tensão de comando ...................... 220 Vca (monofásica)
Condutores:
- Fase: preto, seção mínima de 2,5 mm2- Neutro: azul claro, seção mínima de 2,5 mm2- Terra: verde ou verde e amarelo, seção mínima de 2,5 mm2
> Força:
- Tensão de comando: marrom, seção mínima de 2,5 mm2- Neutro: azul claro, seção mínima de 2,5 mm2
> Comando:
Frequência ..................................... 60 Hz
FX FX LISTA DE COMPONENTESITEM TAG DESCRIÇÃO
-- FX Fusível e relé de supervisão de fases.
-- QX Disjuntor termomagnético e disjuntor motor
--KX
Contator (contatos de força e bobina) erelé de interface
-- MX Motor (trifásico e monofásico)
-- HX Sinaleiro
-- GX Fonte de alimentação de tensão contínua
-- TX Transformador de comando
-- UX Chave de partida eletrônica (soft starter)
-- EX
Miscelânea: Alarme sonoro (sirene),totalizador de horas (horímetro), módulosde CLP's, etc.
1 --1 contato normalmente aberto e 1 contato
normalmente fechado (1 NA + 1 NF)
2 -- Contato auxiliar de relé de sobrecarga, NA
3 -- Contato normalmente aberto (NA)
4 --Componentes externos ao quadro de
comando4
- Tensão de comando: vermelho, seção mínima de 1,5 mm2- Neutro: cinza, seção mínima de 1,5 mm2
> Automação:
SX
QX
TXI> I> I>
QX
KX UX
M3~
MX
M1~
MX HX KX
EX EX UX
1~
__---
GXQX
1
0 1
SX SX SX BX BX
2 3BX
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
2/53
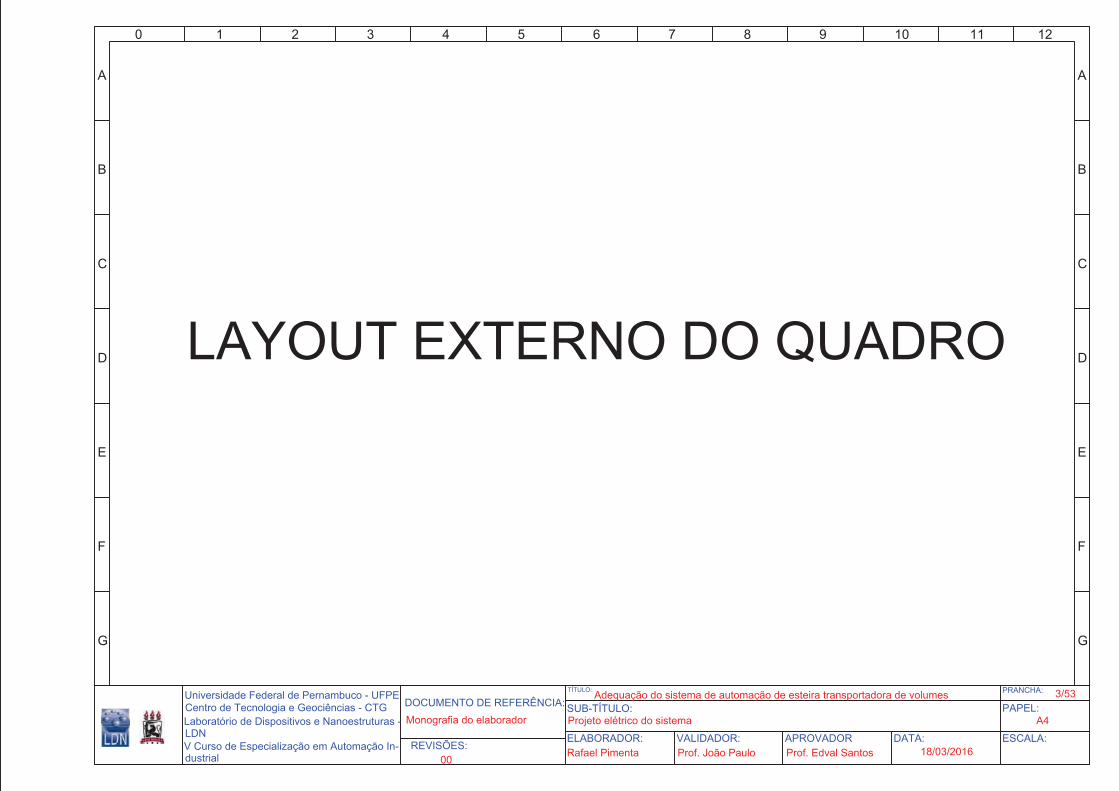
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
LAYOUT EXTERNO DO QUADRO
3/53

0
1
Seccionadora
01
Seleção modo com/sem portinhola
Emergência DesligaLiga
S1
S2
S3S4 S5
Reset
S6
Desliga Sirene
S7
H1 H2 H3 H4
PainelEnergizado
ParadaEmergência
ProblemasFases
SistemaLigado
H5 H6 H7 H8
DimensõesExcedidas
Falha SoftStarter
Sob.cargaMotores
FalhaSensores
E1
Horímetro
E2
600
1000
300
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
4/53
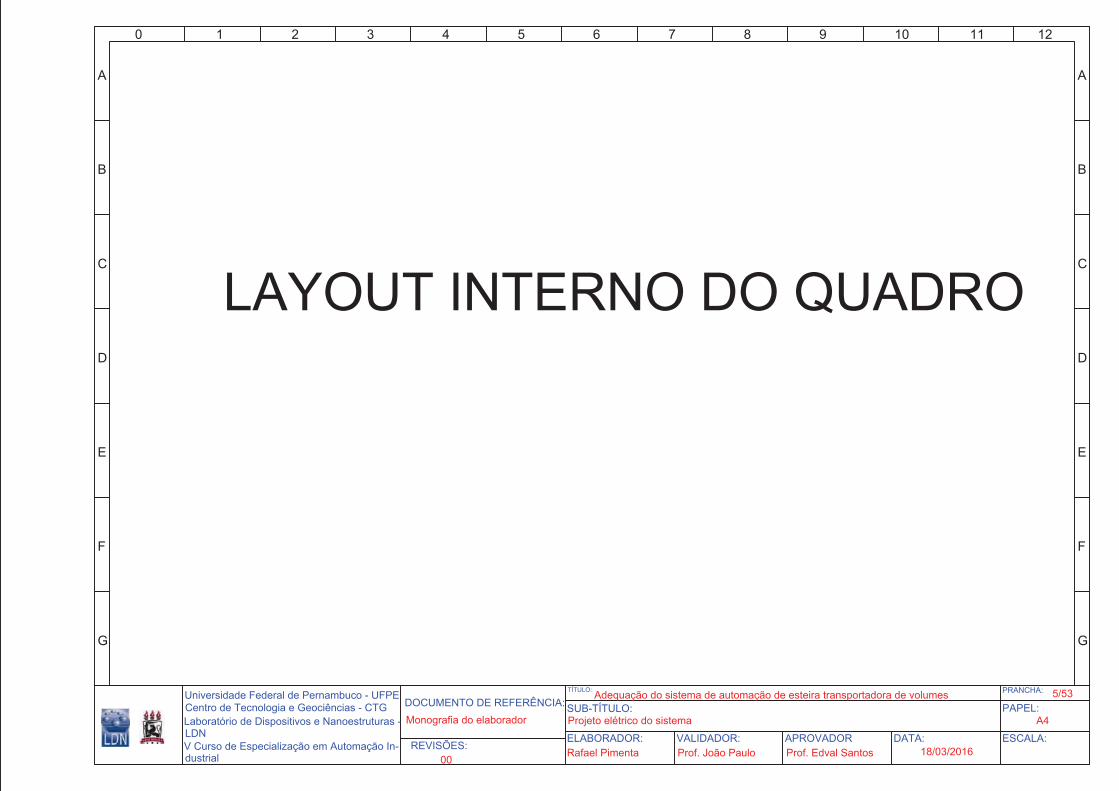
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
LAYOUT INTERNO DO QUADRO
5/53
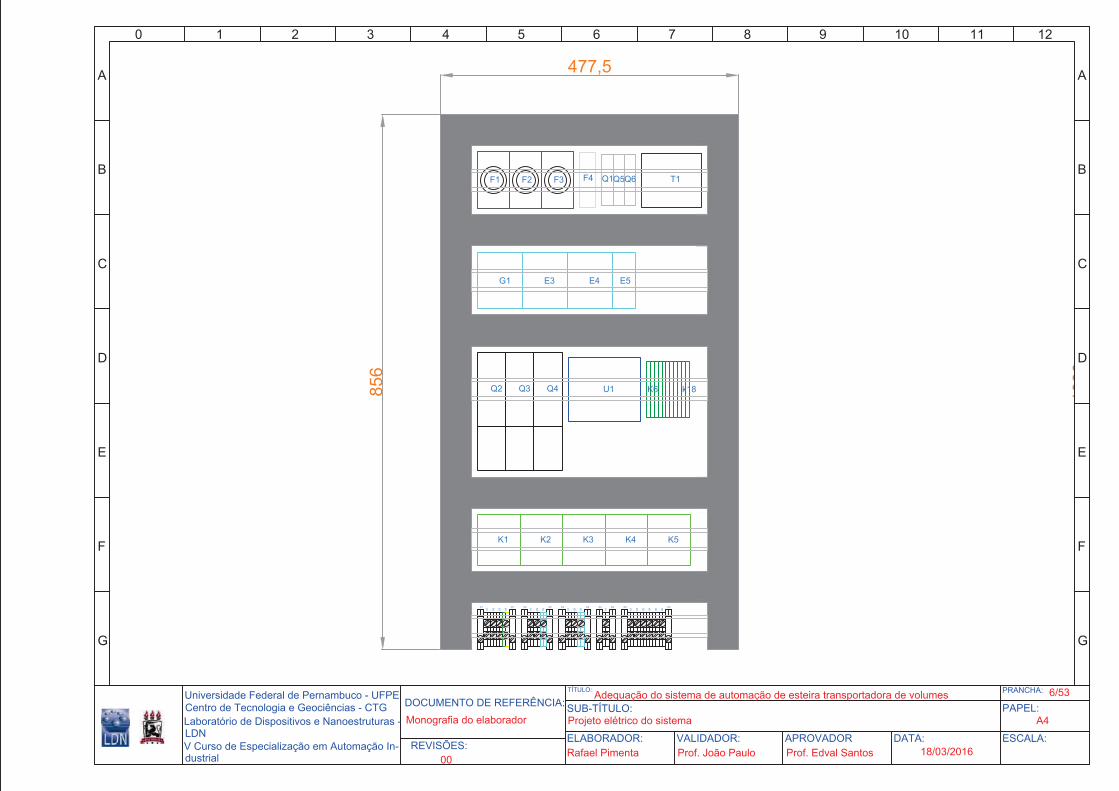
F1 F4 Q1Q5Q6 T1
G1 E3 E4 E5
U1Q2 Q3 Q4
K1 K2 K3 K4 K5
K6 k18...
X1 X1
01
02
03
04
X2 X2
01
02
03
X3 X3
01
02
03
X4 X401
X5
01
02
03
04
05
06
X5
477,5
85
6
10
00
F2 F3
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
6/53

TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
DISPOSIÇÃO DA CAIXA DO QUADRO
7/53
E DA PLACA DE MONTAGEM
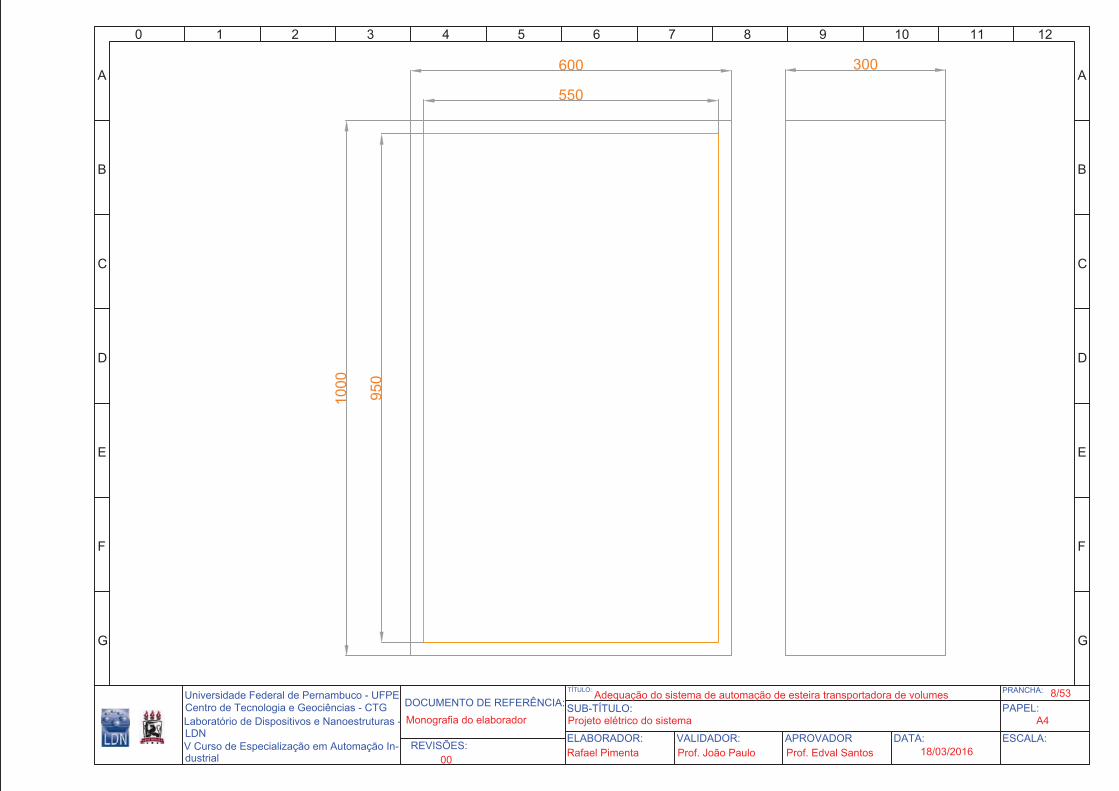
950
1000
550
600 300
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
8/53
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
DIAGRAMA DE FORÇA E COMANDO
9/53
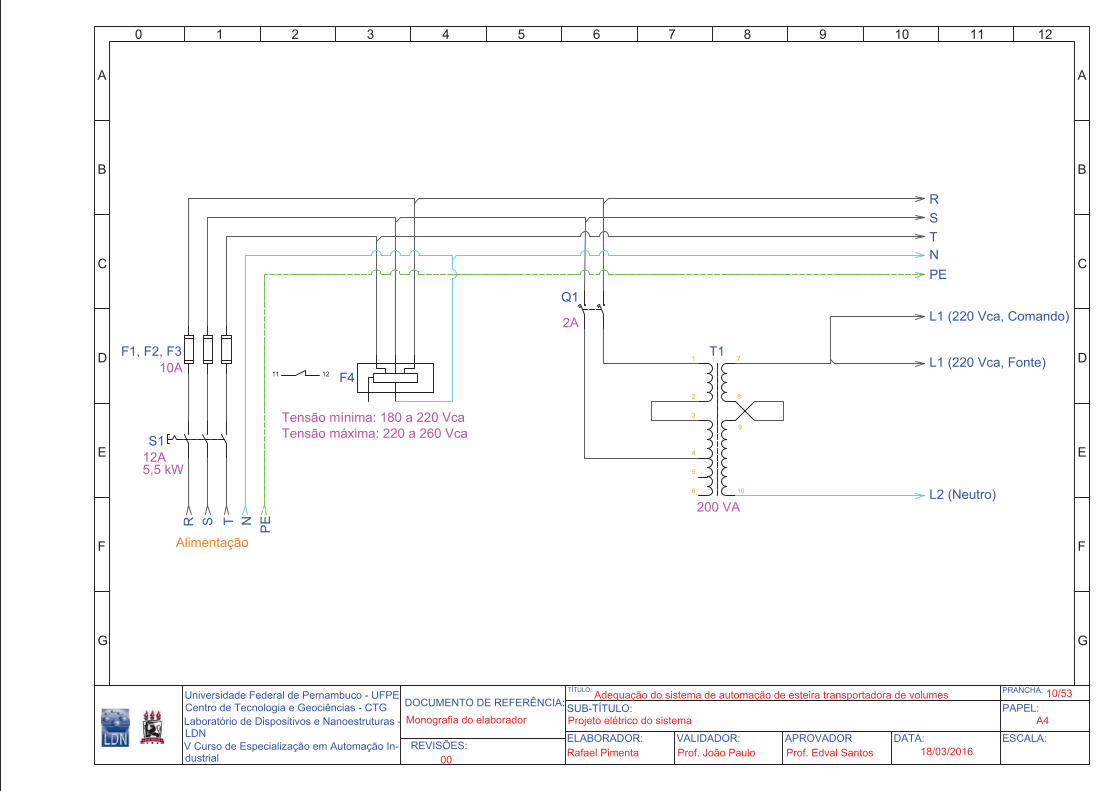
R S T N
PE
S1
12A5,5 kW
F1, F2, F3
10AF411 12
Tensão mínima: 180 a 220 VcaTensão máxima: 220 a 260 Vca
T1
200 VA
Q1
2A
L1 (220 Vca, Fonte)
L1 (220 Vca, Comando)
PE
N
T
S
R
L2 (Neutro)
1
2
3
4
5
6
7
8
9
10
Alimentação
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
10/53
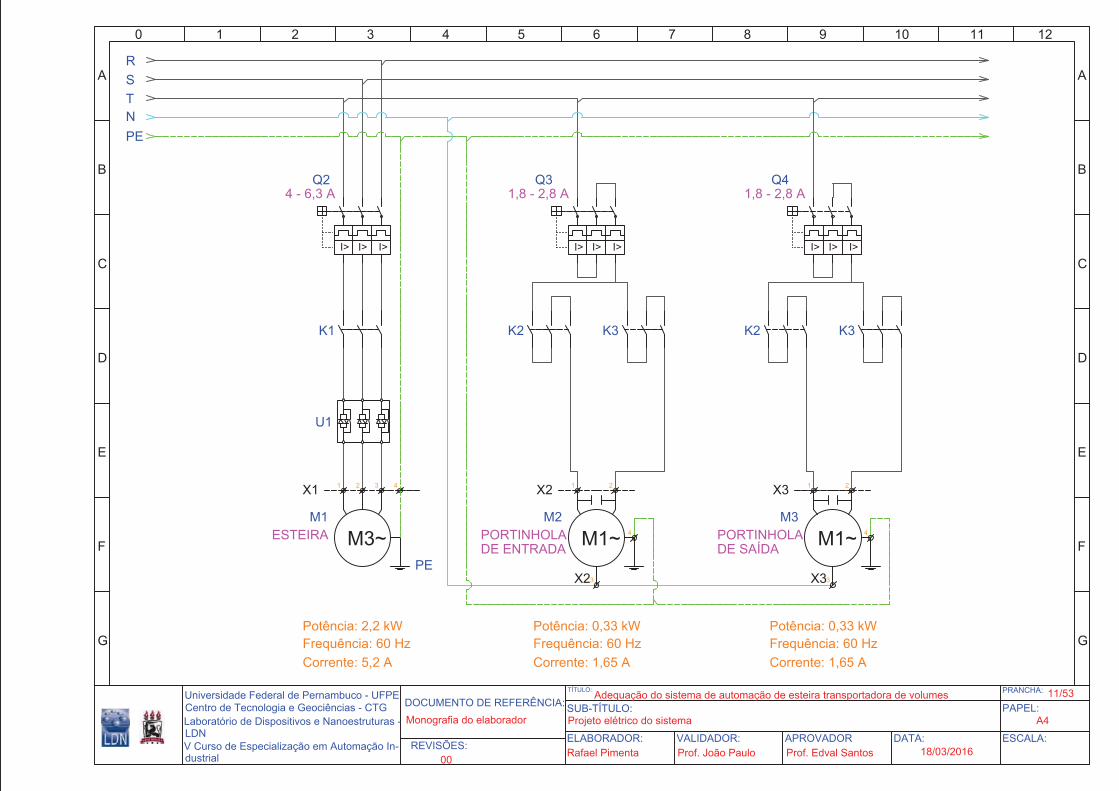
PE
N
T
S
R
I> I> I>
M3~
Potência: 2,2 kWFrequência: 60 Hz
Corrente: 5,2 A
PE
K1
Q2
M1
X1
4 - 6,3 A
U1
ESTEIRA
K2 K3
I> I> I>
Q31,8 - 2,8 A
M1~
M2
PORTINHOLADE ENTRADA
Potência: 0,33 kWFrequência: 60 Hz
Corrente: 1,65 A
K2 K3
I> I> I>
Q41,8 - 2,8 A
M1~
M3
PORTINHOLADE SAÍDA
Potência: 0,33 kWFrequência: 60 Hz
Corrente: 1,65 A
X2
X2
X3
X3
1 2 3 1 2
3
1 2
3
4
4 4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
11/53
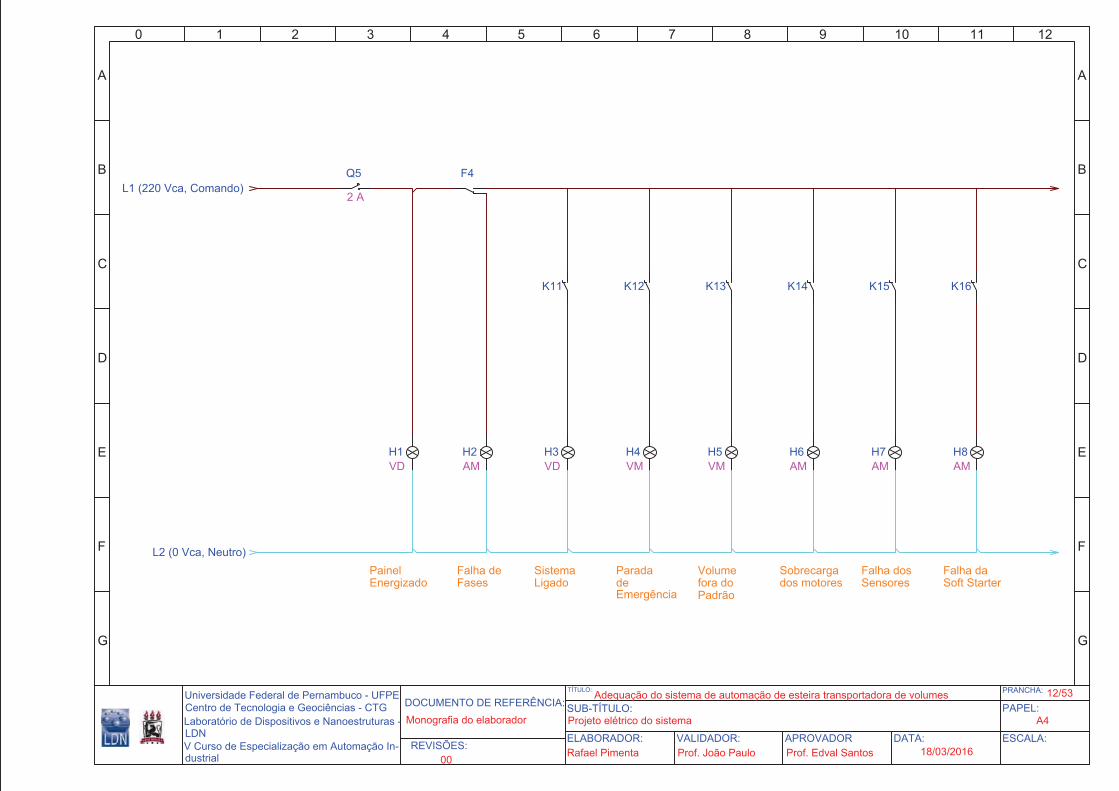
L1 (220 Vca, Comando)
Q5
2 A
L2 (0 Vca, Neutro)
F4
H1 H2 H3
VD AM VD
H4
VM
H5
VM
H6
AM
H7
AM
H8
AM
PainelEnergizado
Falha deFases
SistemaLigado
ParadadeEmergência
Volumefora doPadrão
Sobrecargados motores
Falha dosSensores
Falha daSoft Starter
K11 K12 K13 K14 K15 K16
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
12/53
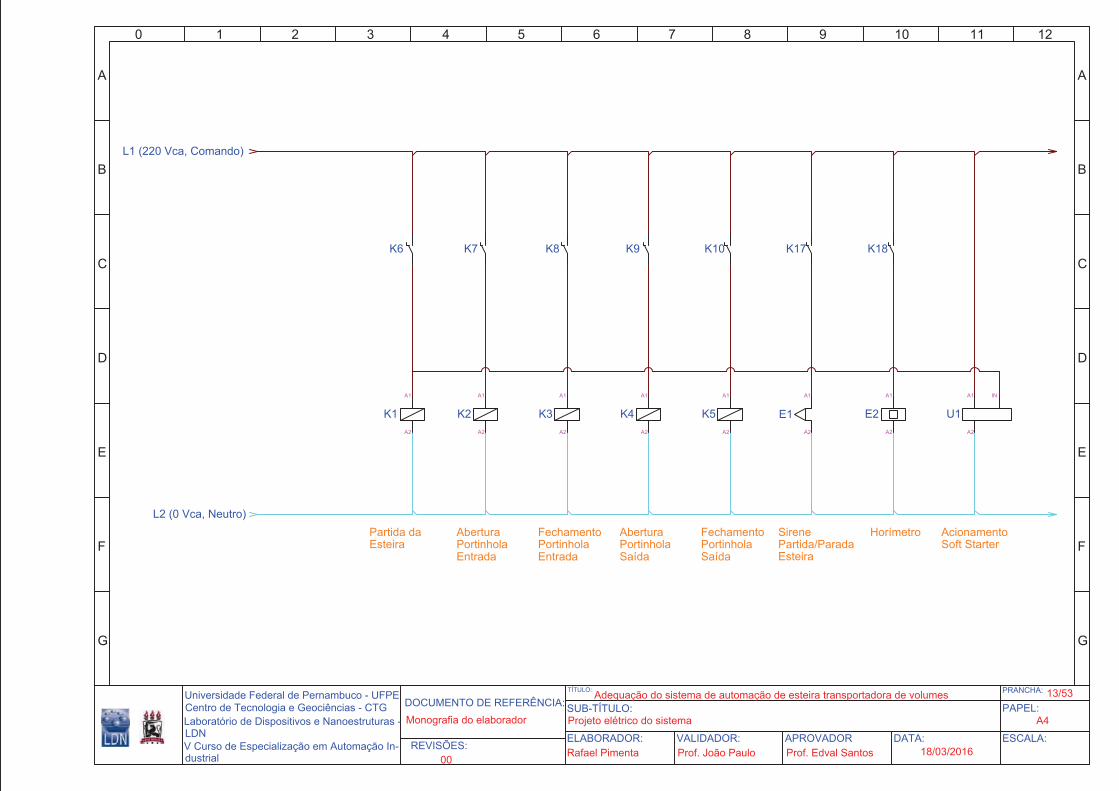
L1 (220 Vca, Comando)
L2 (0 Vca, Neutro)
K1
Partida daEsteira
AberturaPortinhola
SirenePartida/Parada
Horímetro AcionamentoSoft Starter
K8 K9 K10 K17 K18
K2 K3 K4 K5
K7K6
E2
Entrada
FechamentoPortinholaEntrada
AberturaPortinholaSaída
FechamentoPortinholaSaída Esteira
E1 U1
A1
A2
A1
A2
A1
A2
A1
A2
A1
A2
A1
A2
A1
A2
A1
A2
IN
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
13/53

PE
N
L1
1~
__---
24 Vcc
0 Vcc
Q6
0,5 A
G1
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
14/53
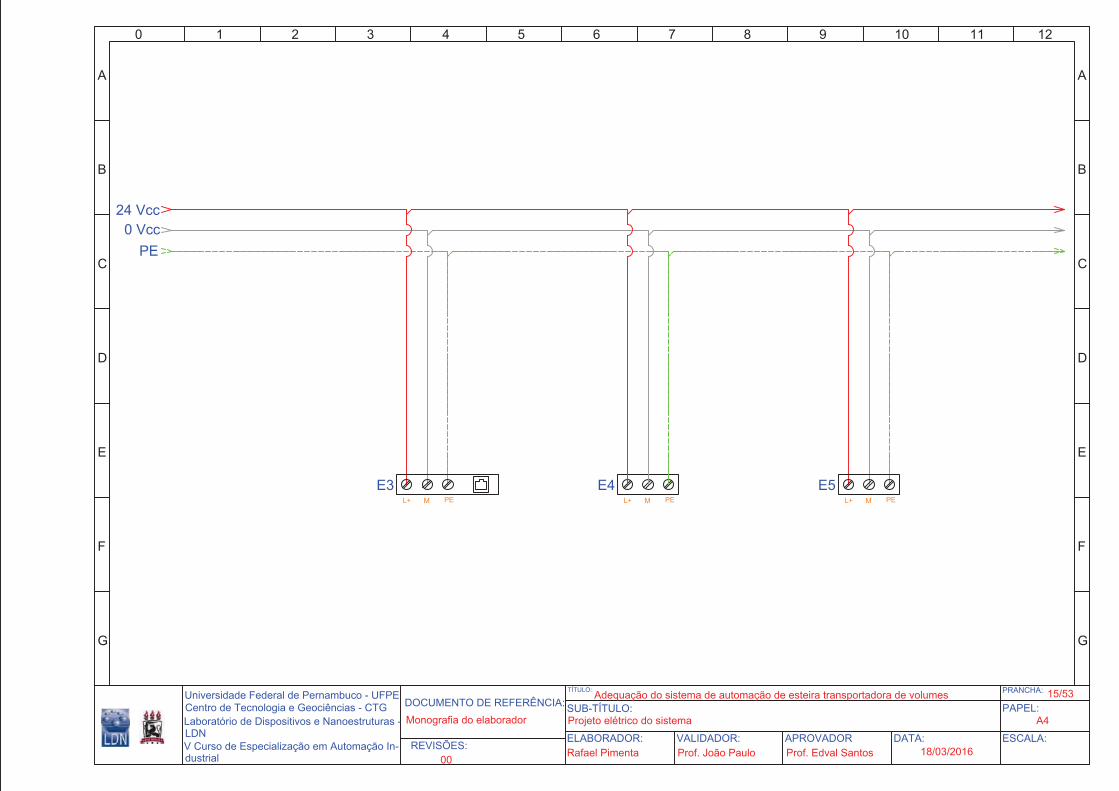
PE
0 Vcc
24 Vcc
E3 E4 E5L+ M PE L+ M PE L+ M PE
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
15/53

M
0 Vcc
24 Vcc
0 1
X4
X4
I1 I2 I3 I4 I5 I6 I7 I8 M I9 I10 I11 I12 I13 I14 I15 I16 M I17 I18 I19 I20
E3 E4 E5
S2
S3S4 S5 S6 S7 Q2 Q3 Q4 U1
B1 B2 B3 B4 B5 B6 B7
RE
SE
RV
A
RE
SE
RV
A
X5 X5 X5 X5
X5 X5 X5 X5
X5 X5
X5
X5 X5
X5
X5 X5
X5
1
2
1
2
3
4
5
6
7
8
9 11
10
12 14
13
15 17
16
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
16/53
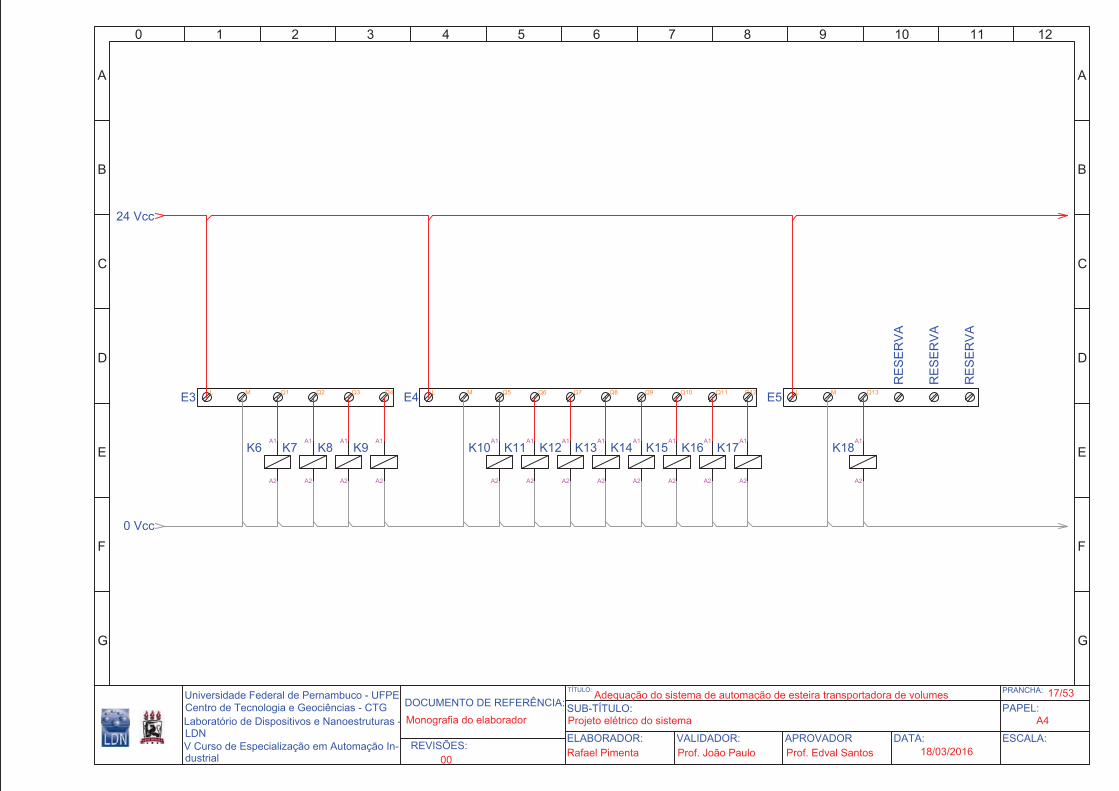
0 Vcc
24 Vcc
K6A1
A2
K7A1
A2
K8A1
A2
K9A1
A2
K10A1
A2
K11A1
A2
K12A1
A2
K13A1
A2
K14A1
A2
K15A1
A2
K16A1
A2
K17A1
A2
K18A1
A2
RE
SE
RV
A
RE
SE
RV
A
RE
SE
RV
A
E3 E4 E5L M Q1 Q2 Q3 Q4 L M Q5 Q6 Q7 Q8 Q9 Q10 Q11 Q12 L M Q13
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
17/53
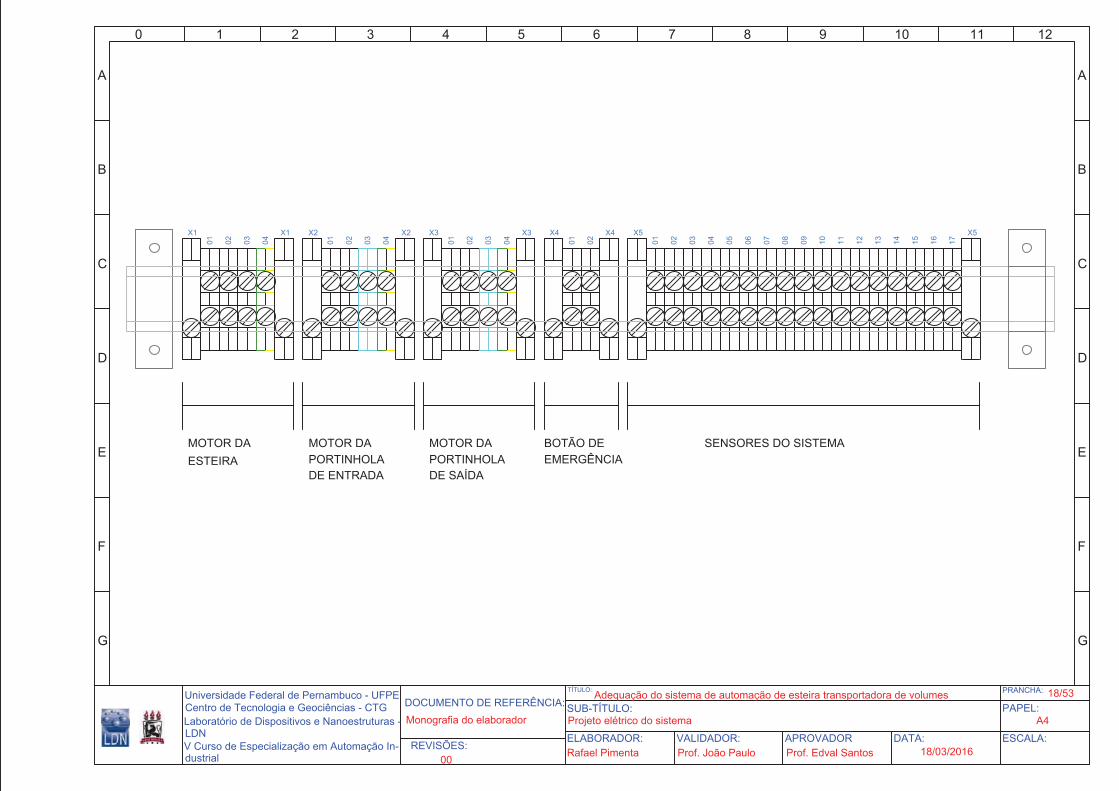
X1 X1
01
02
03
04
X2
01
02
03
04
X2 X3
01
02
03
04
X3 X4
01
02
X4 X5
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
X5
MOTOR DA MOTOR DA
ESTEIRA PORTINHOLA
DE ENTRADA
MOTOR DA
PORTINHOLA
DE SAÍDA
BOTÃO DE
EMERGÊNCIA
SENSORES DO SISTEMA
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
18/53

TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
LISTA DE COMPONENTES
19/53
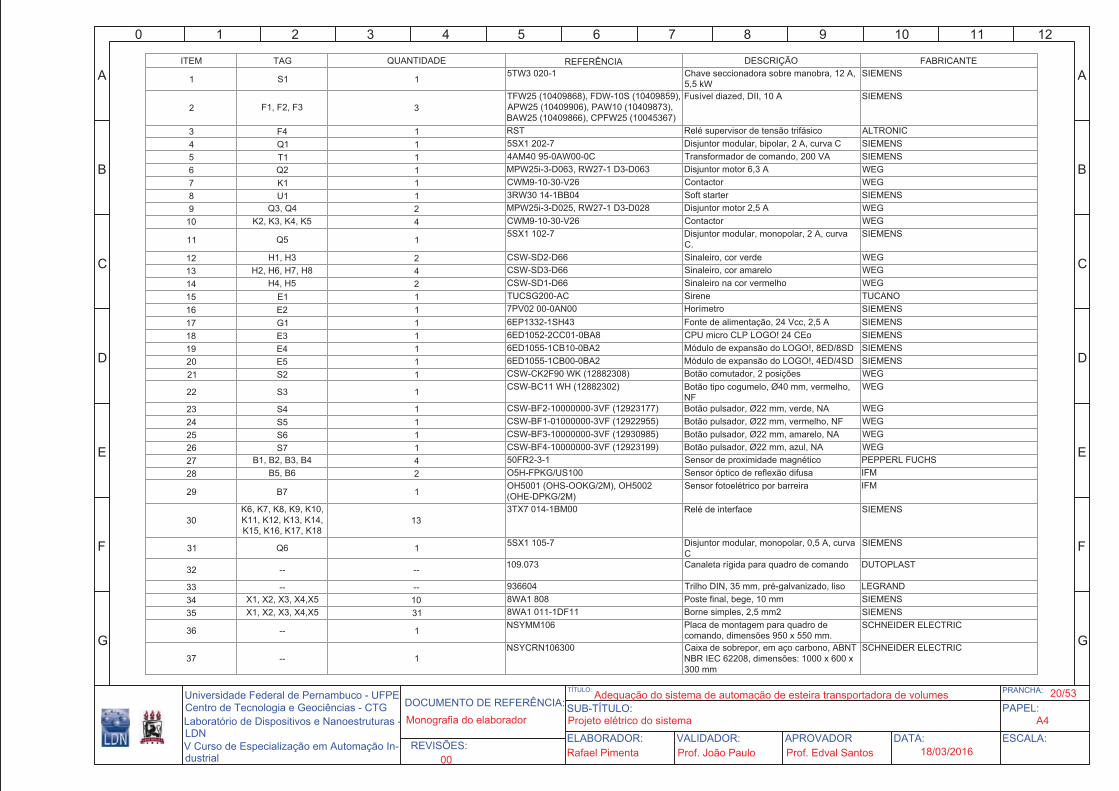
ITEM TAG QUANTIDADE REFERÊNCIA DESCRIÇÃO FABRICANTE
1 S1 15TW3 020-1 Chave seccionadora sobre manobra, 12 A,
5,5 kW
SIEMENS
2 F1, F2, F3 3
TFW25 (10409868), FDW-10S (10409859),
APW25 (10409906), PAW10 (10409873),
BAW25 (10409866), CPFW25 (10045367)
Fusível diazed, DII, 10 A SIEMENS
3 F4 1 RST Relé supervisor de tensão trifásico ALTRONIC
4 Q1 1 5SX1 202-7 Disjuntor modular, bipolar, 2 A, curva C SIEMENS
5 T1 1 4AM40 95-0AW00-0C Transformador de comando, 200 VA SIEMENS
6 Q2 1 MPW25i-3-D063, RW27-1 D3-D063 Disjuntor motor 6,3 A WEG
7 K1 1 CWM9-10-30-V26 Contactor WEG
8 U1 1 3RW30 14-1BB04 Soft starter SIEMENS
9 Q3, Q4 2 MPW25i-3-D025, RW27-1 D3-D028 Disjuntor motor 2,5 A WEG
10 K2, K3, K4, K5 4 CWM9-10-30-V26 Contactor WEG
11 Q5 15SX1 102-7 Disjuntor modular, monopolar, 2 A, curva
C.
SIEMENS
12 H1, H3 2 CSW-SD2-D66 Sinaleiro, cor verde WEG
13 H2, H6, H7, H8 4 CSW-SD3-D66 Sinaleiro, cor amarelo WEG
14 H4, H5 2 CSW-SD1-D66 Sinaleiro na cor vermelho WEG
15 E1 1 TUCSG200-AC Sirene TUCANO
16 E2 1 7PV02 00-0AN00 Horímetro SIEMENS
17 G1 1 6EP1332-1SH43 Fonte de alimentação, 24 Vcc, 2,5 A SIEMENS
18 E3 1 6ED1052-2CC01-0BA8 CPU micro CLP LOGO! 24 CEo SIEMENS
19 E4 1 6ED1055-1CB10-0BA2 Módulo de expansão do LOGO!, 8ED/8SD SIEMENS
20 E5 1 6ED1055-1CB00-0BA2 Módulo de expansão do LOGO!, 4ED/4SD SIEMENS
21 S2 1 CSW-CK2F90 WK (12882308) Botão comutador, 2 posições WEG
22 S3 1CSW-BC11 WH (12882302) Botão tipo cogumelo, Ø40 mm, vermelho,
NF
WEG
23 S4 1 CSW-BF2-10000000-3VF (12923177) Botão pulsador, Ø22 mm, verde, NA WEG
24 S5 1 CSW-BF1-01000000-3VF (12922955) Botão pulsador, Ø22 mm, vermelho, NF WEG
25 S6 1 CSW-BF3-10000000-3VF (12930985) Botão pulsador, Ø22 mm, amarelo, NA WEG
26 S7 1 CSW-BF4-10000000-3VF (12923199) Botão pulsador, Ø22 mm, azul, NA WEG
27 B1, B2, B3, B4 4 50FR2-3-1 Sensor de proximidade magnético PEPPERL FUCHS
28 B5, B6 2 O5H-FPKG/US100 Sensor óptico de reflexão difusa IFM
29 B7 1OH5001 (OHS-OOKG/2M), OH5002
(OHE-DPKG/2M)
Sensor fotoelétrico por barreira IFM
30
K6, K7, K8, K9, K10,
K11, K12, K13, K14,
K15, K16, K17, K1813
3TX7 014-1BM00 Relé de interface SIEMENS
31 Q6 15SX1 105-7 Disjuntor modular, monopolar, 0,5 A, curva
C
SIEMENS
32 -- --109.073 Canaleta rígida para quadro de comando DUTOPLAST
33 -- -- 936604 Trilho DIN, 35 mm, pré-galvanizado, liso LEGRAND
34 X1, X2, X3, X4,X5 10 8WA1 808 Poste final, bege, 10 mm SIEMENS
35 X1, X2, X3, X4,X5 31 8WA1 011-1DF11 Borne simples, 2,5 mm2 SIEMENS
36 -- 1NSYMM106 Placa de montagem para quadro de
comando, dimensões 950 x 550 mm.SCHNEIDER ELECTRIC
37 -- 1
NSYCRN106300 Caixa de sobrepor, em aço carbono, ABNTNBR IEC 62208, dimensões: 1000 x 600 x300 mm
SCHNEIDER ELECTRIC
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
20/53
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
PROGRAMAÇÃO DO CLP(Em linguagem LADDER)
21/53
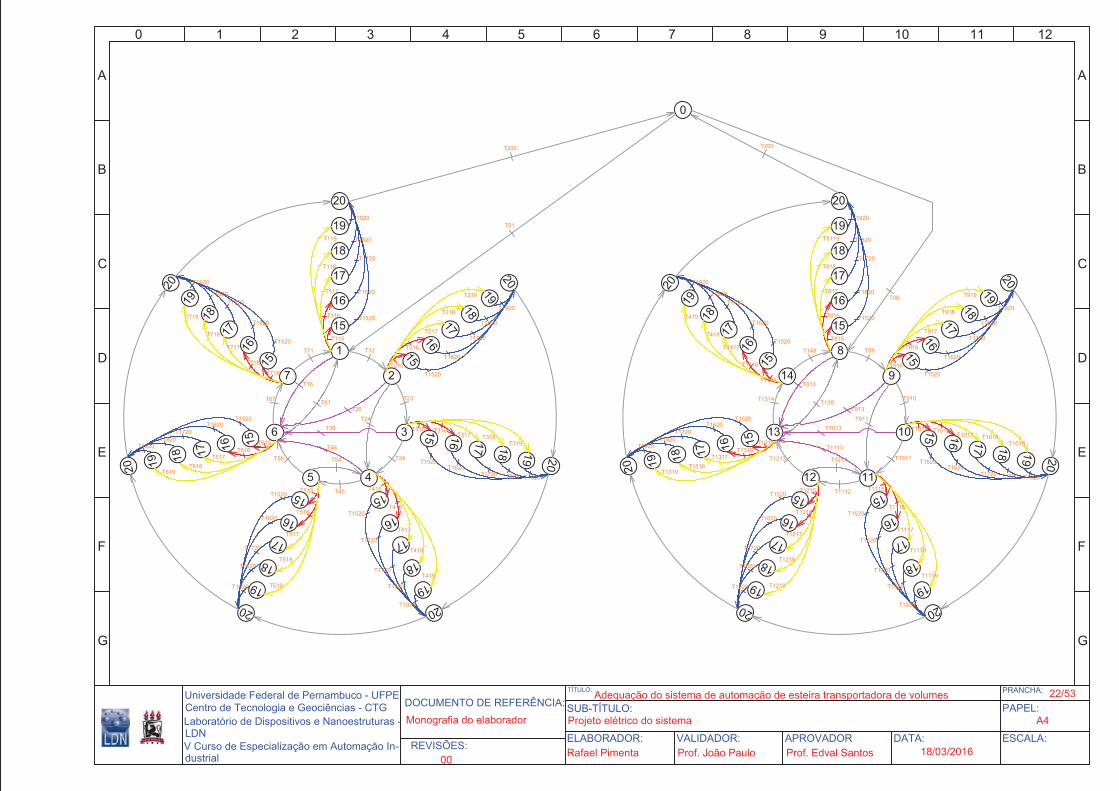
1
2
3
45
6
7
T12
T23
T34
T45
T54T56
T67
T71
T61
T24
8
14
13
12 11
10
9
T89
T910
T1011
T1112
T1211T1213
T1314
T148
T138
T911
18
17
16
15
19
18
17
16
15
1918 17 16 15
19
18
17
16
15
19
18
17
16
15
19
18
17
16
15
19
18
17
16
15
19
20
20
20
20 20
20
20
T115
T116
T117
T118
T119 T1820
T1720
T1620
T1520
T1920
T215
T216
T217
T218
T219
T1920
T1820
T1720
T1620
T1520
T315 T316T317 T318
T319
T1520T1620
T1720 T1820 T1920
T415
T416
T417
T418
T419
T1520
T1620
T1720
T1820
T1920
T515
T516
T517
T518
T519
T1520
T1620
T1720
T1820
T1920
T615
T616
T617
T618T619
T1920T1820
T1720
T1620T1520
T715
T716
T717
T718
T719
T1920
T1820
T1720
T1620
T1520
18
17
16
15
19
18
17
16
15
1918 17 16 15
19
18
17
16
15
19
18
17
16
15
19
18
17
16
15
19
18
17
16
15
19
20
20
20
20 20
20
20
T815
T816
T817
T818
T8119 T1820
T1720
T1620
T1520
T1920
T915
T916
T917
T918
T919
T1920
T1820
T1720
T1620
T1520
T1015 T1016T1017 T1018
T1019
T1520T1620
T1720 T1820 T1920
T1115
T1116
T1117
T1118
T1119
T1520
T1620
T1720
T1820
T1920
T1215
T1216
T1217
T1218
T1219
T1520
T1620
T1720
T1820
T1920
T1315
T1316
T1317
T1318T1319
T1920T1820
T1720
T1620T1520
T1415
T1416
T1417
T418
T419
T1920
T1820
T1720
T1620
T1520
T01
T200
T08
T200
T16
T26
T36
T46
T813
T913
T1013
T1113
0
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
22/53
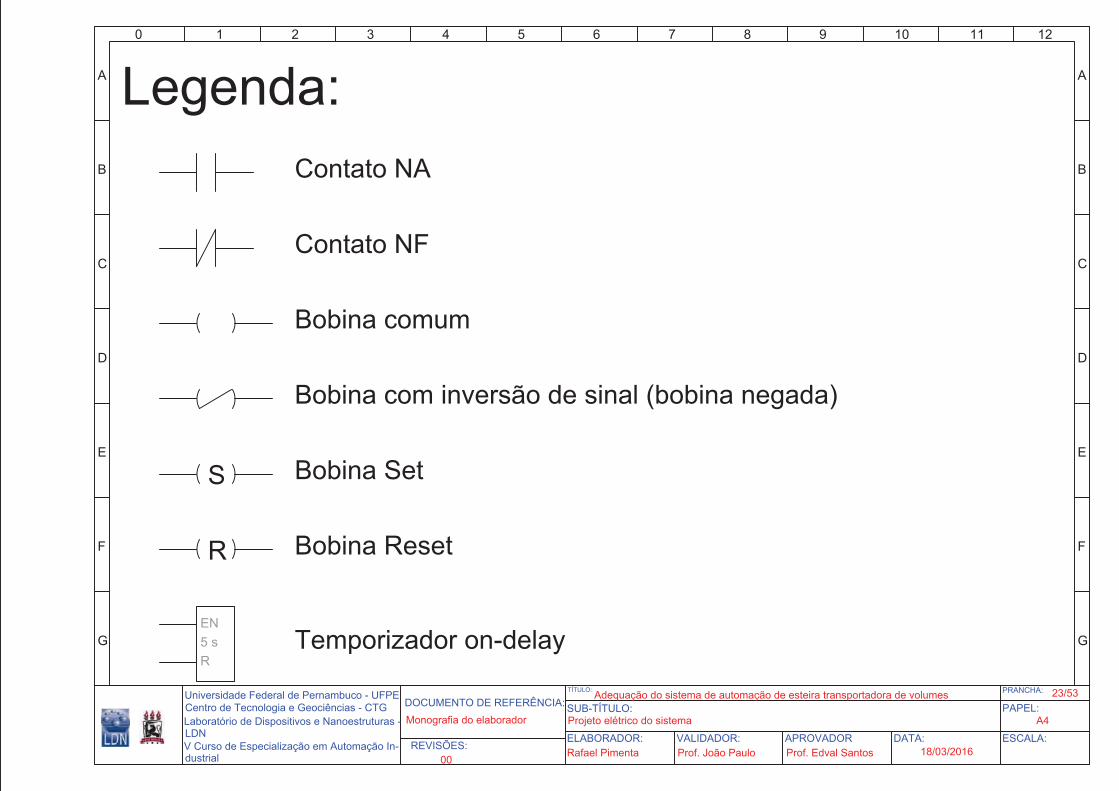
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
Legenda:
S
R
EN
R
5 s
Contato NA
Contato NF
Bobina comum
Bobina com inversão de sinal (bobina negada)
Bobina Set
Bobina Reset
Temporizador on-delay
23/53
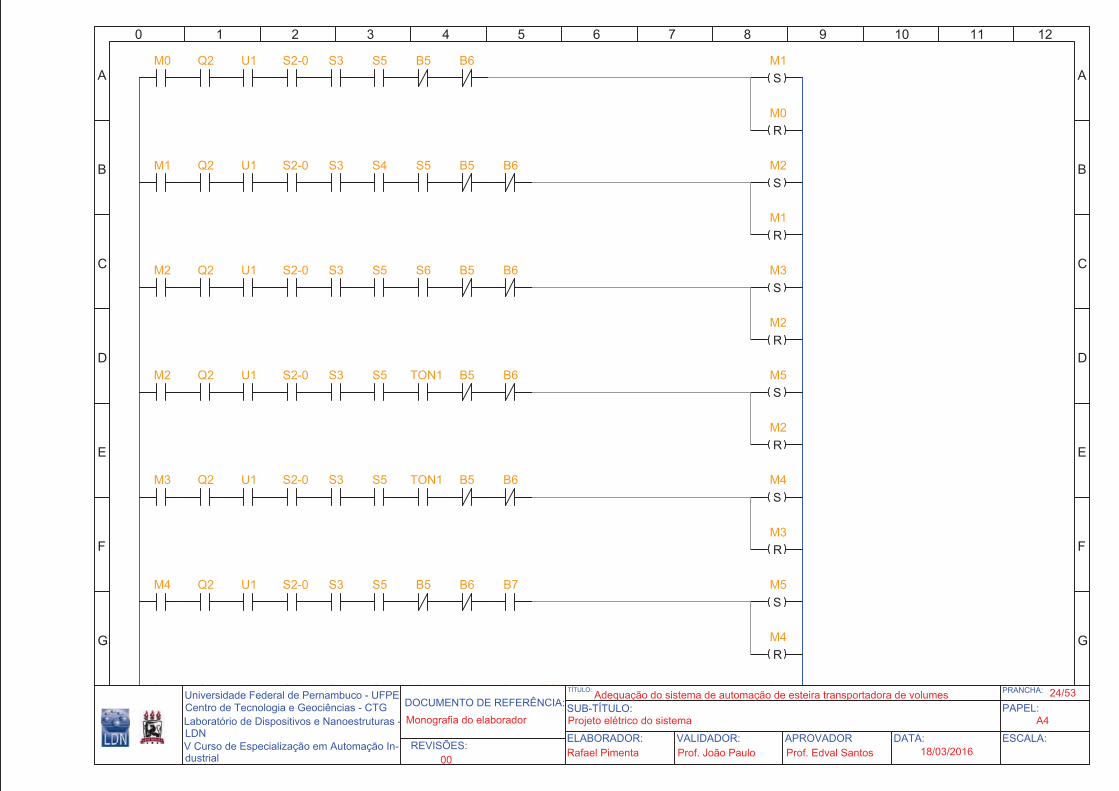
Q2 U1 S2-0 S3 S5 B5 B6
S4Q2 U1 S2-0 S3 S5 B5 B6
Q2 U1 S2-0 S3 S5 S6 B5 B6
M0
M1
M2
M3 Q2 U1 S2-0 S3 S5 TON1
B5 B6
B5 B6
Q2 U1 S2-0 S3 S5M2 TON1
M4 Q2 U1 S2-0 S3 S5 B7B5 B6
M5 Q2 U1 S2-0 S3 S5 B7B5 B6 TON2
S
R
M1
M0
S
R
M2
M1
S
R
M3
M2
S
R
M5
M2
S
R
M4
M3
S
R
M5
M4
M4TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
24/53
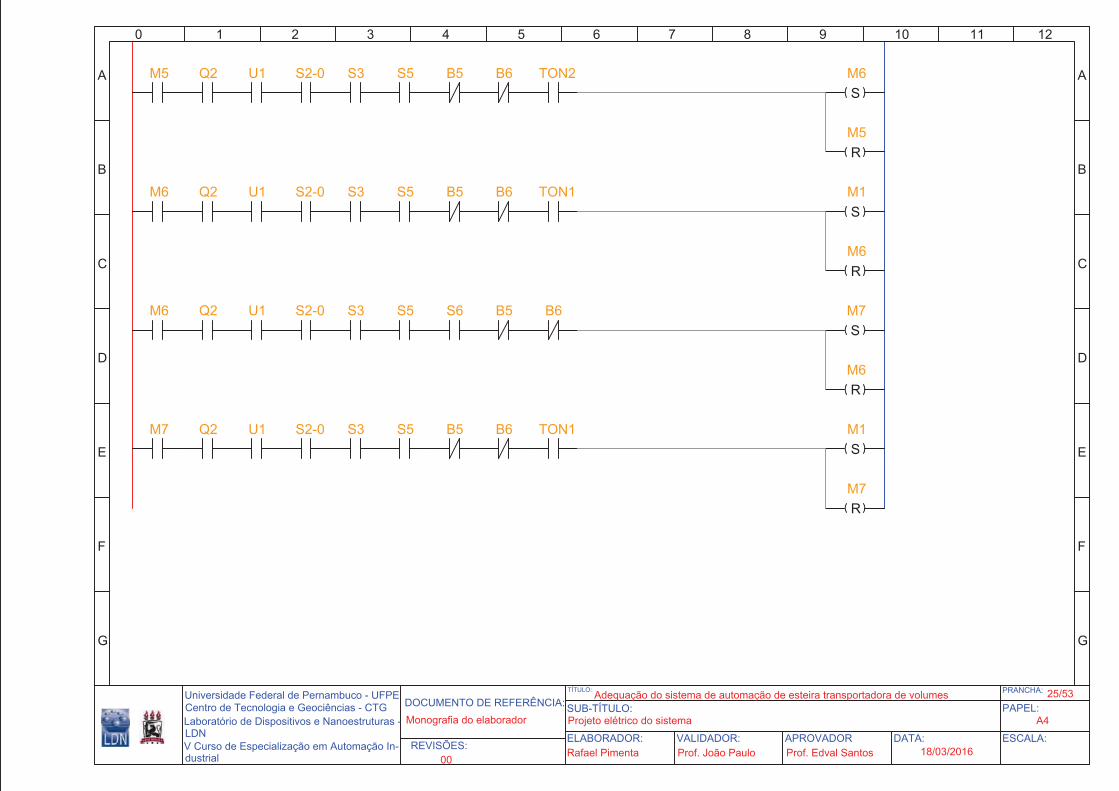
M5 Q2 U1 S2-0 S3 S5 B5 B6 TON2
M6 Q2 U1 S2-0 S3 S5 B5 B6 TON1
Q2 U1 S2-0 S3 S5 S6 B5 B6M6
M7 Q2 U1 S2-0 S3 S5 B5 B6 TON1
R
S
R
M6
M5
S
R
M1
M6
S
R
M7
M6
S
R
M1
M7
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
25/53
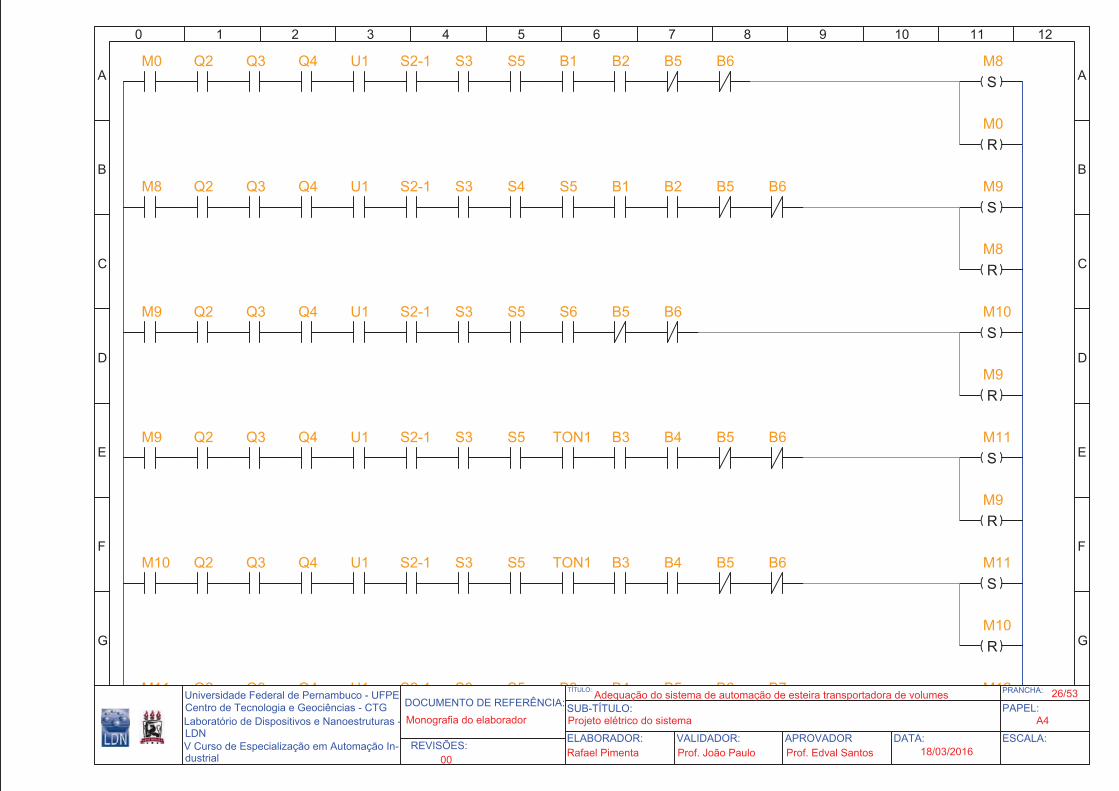
Q2 U1 S2-1 S3 S5 B5 B6
S4Q2 U1 S2-1 S3 S5 B5 B6
Q2 U1 S2-1 S3 S5 S6 B5 B6
M0
M8
M9
M10 Q2 U1 S2-1 S3 S5 TON1
B5 B6
B5 B6
Q2 U1 S2-1 S3 S5M9 TON1
M11 Q2 U1 S2-1 S3 S5 B7B5 B6
S
R
M8
M0
S
R
M9
M8
S
R
M10
M9
S
R
M11
M9
S
R
M11
M10
M12
B1 B2
B1 B2
Q3 Q4
Q3 Q4
Q3 Q4
Q3 Q4 B3 B4
B3 B4
B3 B4
Q3 Q4
Q3 Q4 TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
26/53
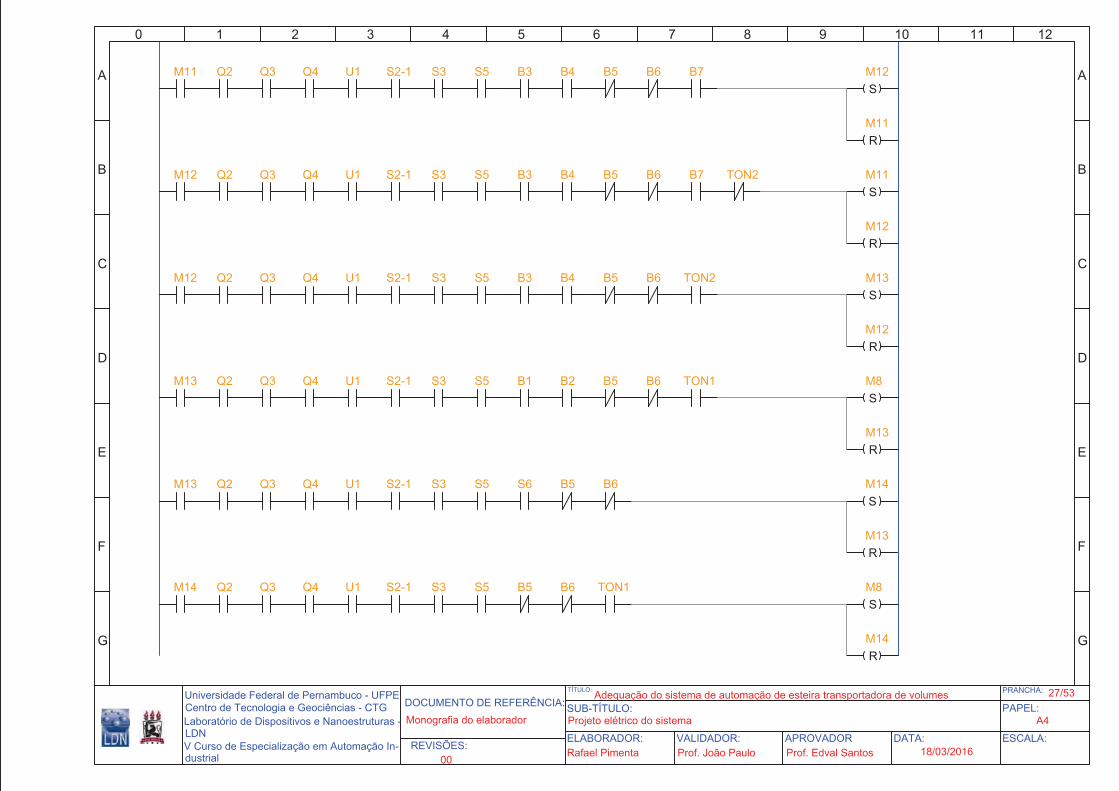
M11 Q2 U1 S2-1 S3 S5 B7B5 B6
M12 Q2 U1 S2-1 S3 S5 B7B5 B6 TON2
M12 Q2 U1 S2-1 S3 S5 B5 B6 TON2
M13 Q2 U1 S2-1 S3 S5 B5 B6 TON1
Q2 U1 S2-1 S3 S5 S6 B5 B6M13
M14 Q2 U1 S2-1 S3 S5 B5 B6 TON1
R
S
R
M12
M11
S
R
M11
M12
S
R
M13
M12
S
R
M8
M13
S
R
M14
M13
S
R
M8
M14
B3 B4
Q3 Q4
Q3 Q4
B3 B4
Q3 Q4 B4B3
Q3 Q4 B2B1
Q3 Q4
Q3 Q4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
27/53
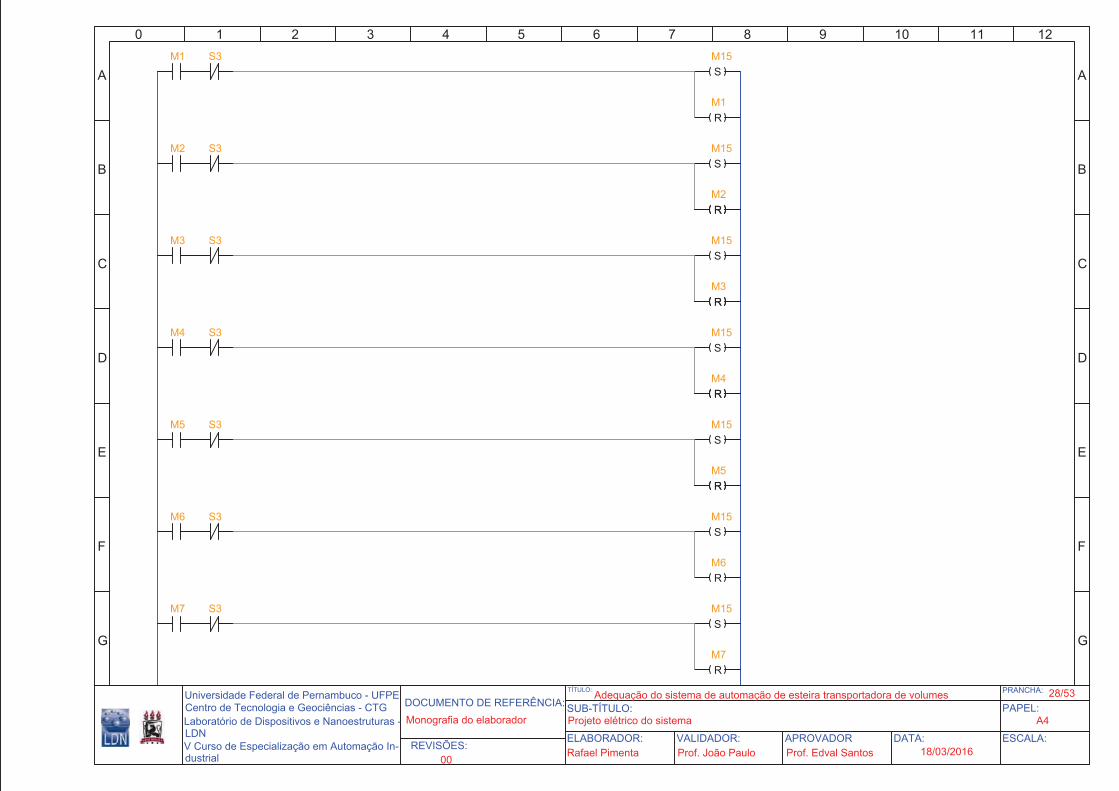
S3M1
S
R
M15
M1
M2
S
R
M15
M2
R
M3
S
R
M15
M3
R
M4
S
R
M15
M4
R
M5
S
R
M15
M5
R
M6
S
R
M15
M6
M7
S
R
M15
M7
S3
S3
S3
S3
S3
S3
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
28/53
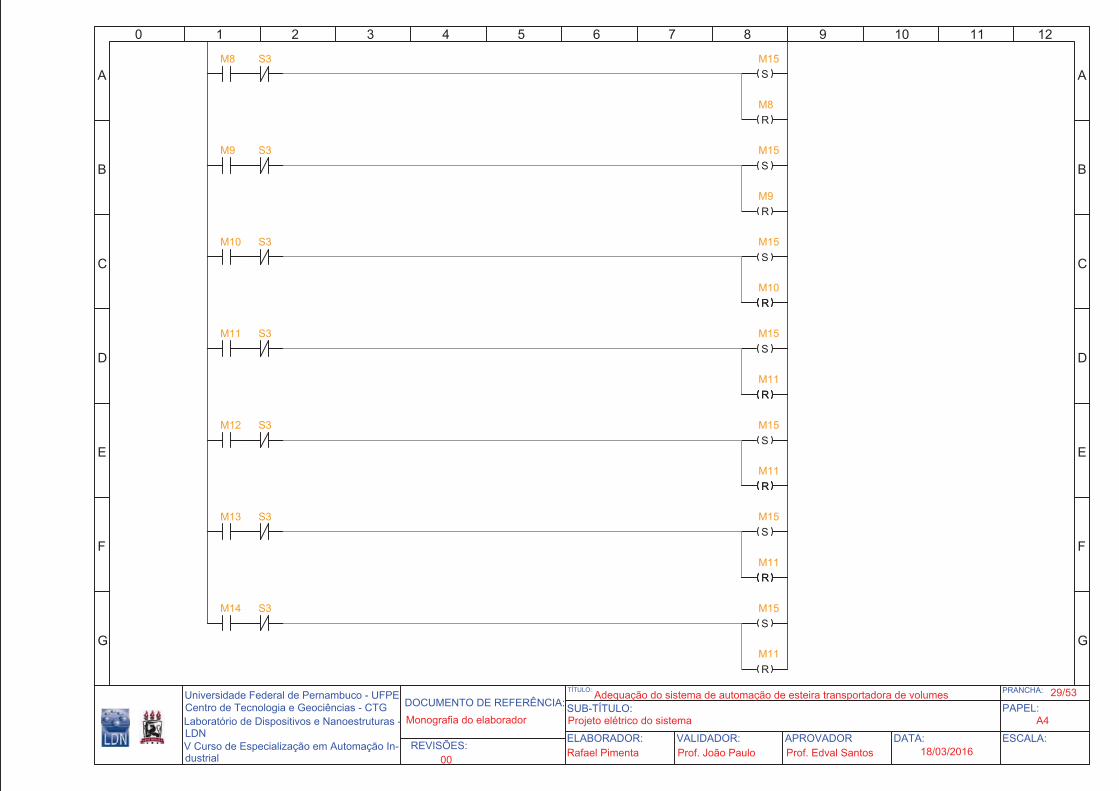
M8
S
R
M15
M8
M9
S
R
M15
M9
M10
S
R
M15
M10
S3
S3
S3
R
M11
S
R
M15
M11
S3
R
M12
S
R
M15
M11
S3
R
M13
S
R
M15
M11
S3
R
M14
S
R
M15
M11
S3
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
29/53
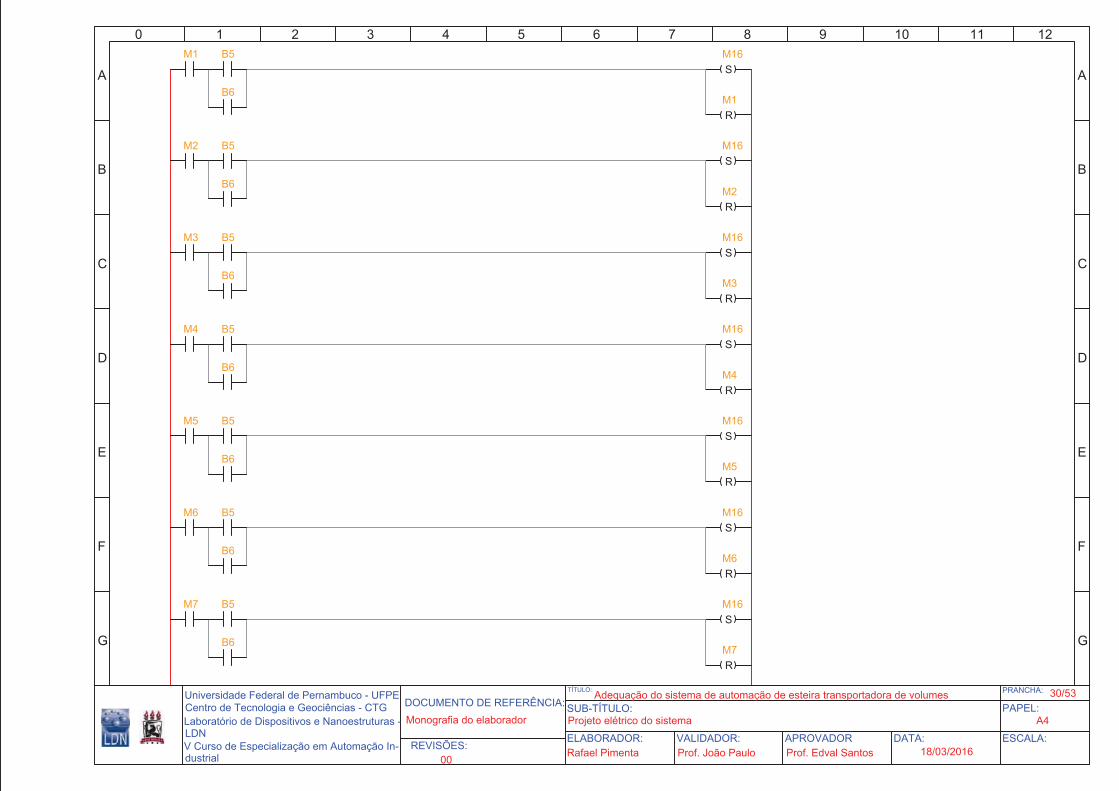
B5M1
S
R
M16
M1B6
B5M2
S
R
M16
M2B6
B5M3
S
R
M16
M3B6
B5M4
S
R
M16
M4B6
B5M5
S
R
M16
M5B6
B5M6
S
R
M16
M6B6
B5M7
S
R
M16
M7B6
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
30/53
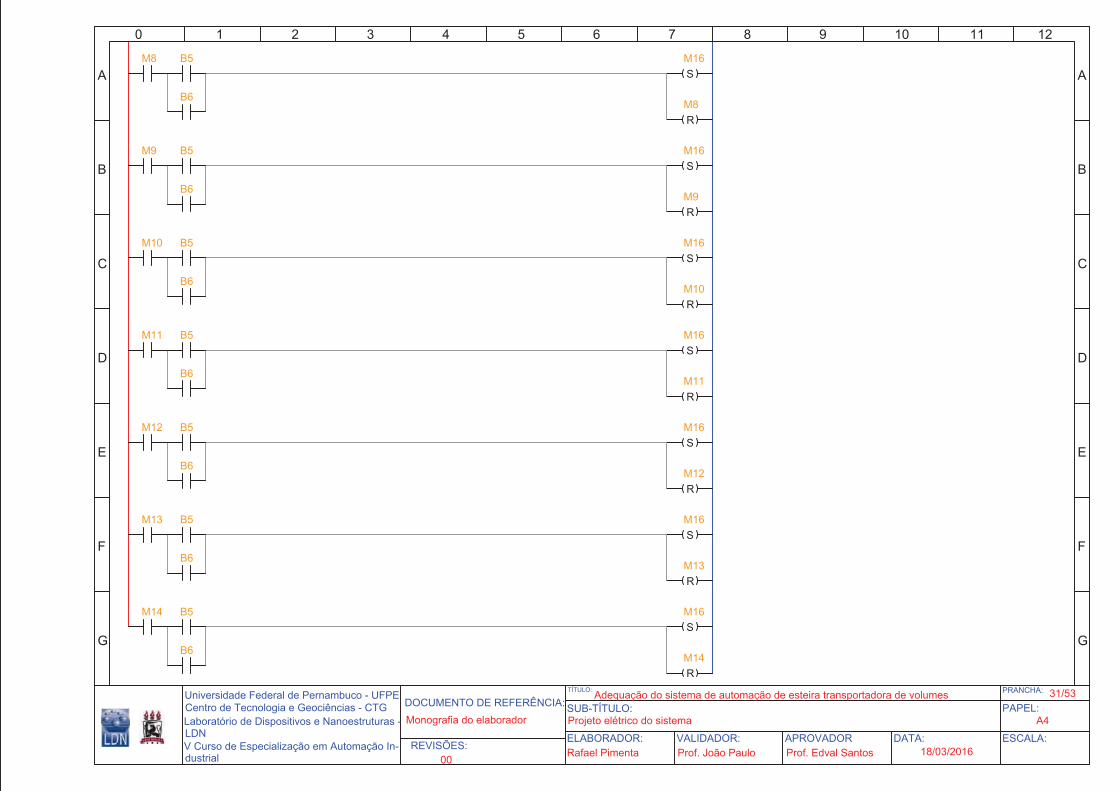
B5M8
S
R
M16
M8B6
B5M9
S
R
M16
M9B6
B5M10
S
R
M16
M10B6
B5M11
S
R
M16
M11B6
B5M12
S
R
M16
M12B6
B5M13
S
R
M16
M13B6
B5M14
S
R
M16
M14B6
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
31/53
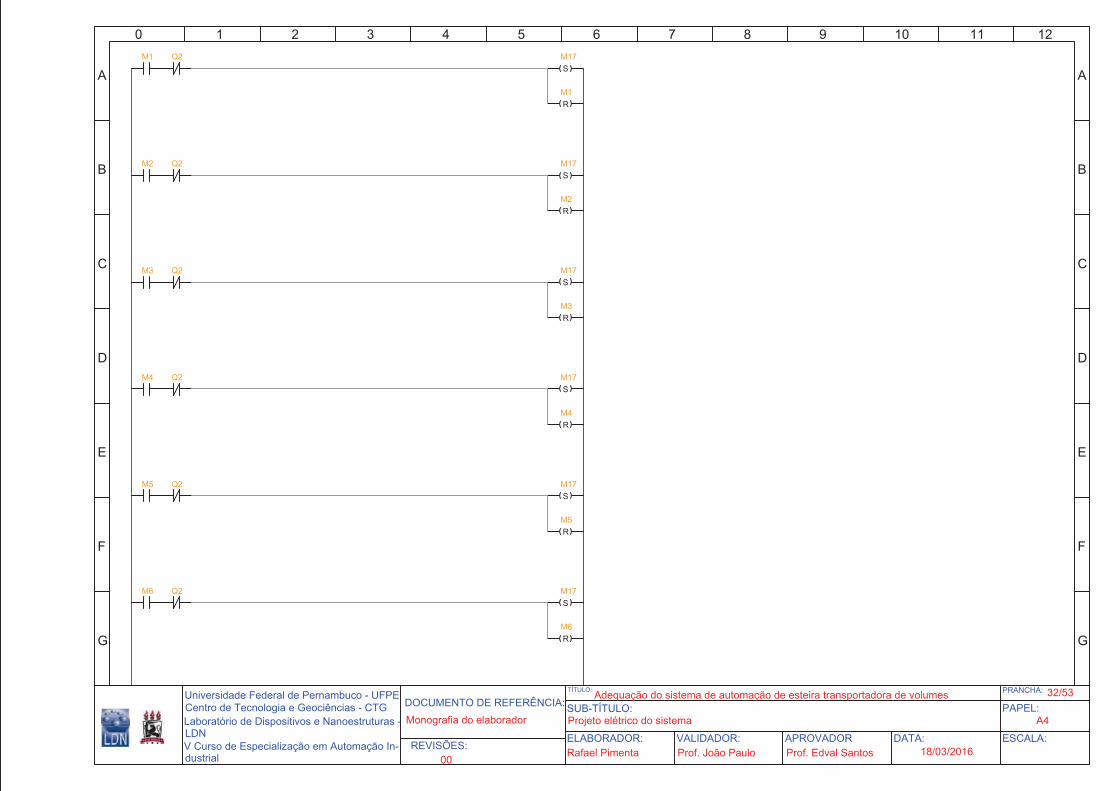
Q2M1
S
R
M17
M1
Q2M2
S
R
M17
M2
Q2M3
S
R
M17
M3
Q2M4
S
R
M17
M4
Q2M5
S
R
M17
M5
Q2M6
S
R
M17
M6
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
32/53
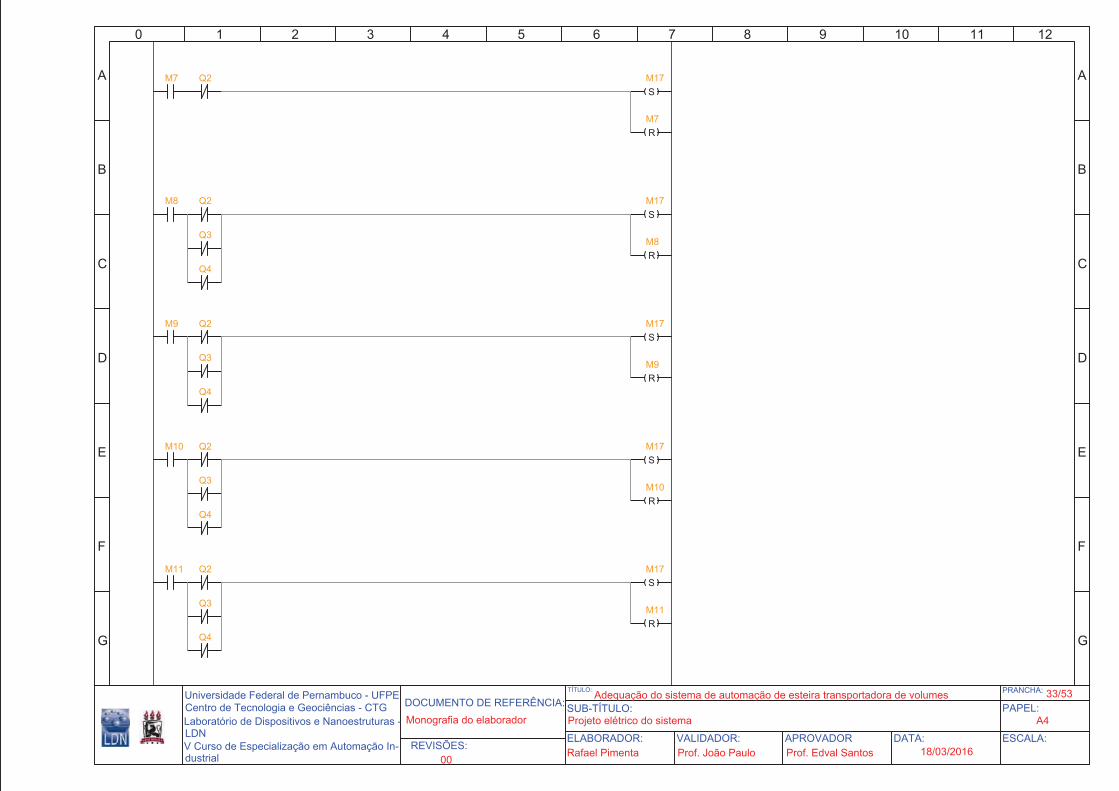
Q2M7
S
R
M17
M7
Q2M8
S
R
M17
M8Q3
Q4
Q2M9
S
R
M17
M9Q3
Q4
Q2M10
S
R
M17
M10Q3
Q4
Q2M11
S
R
M17
M11Q3
Q4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
33/53
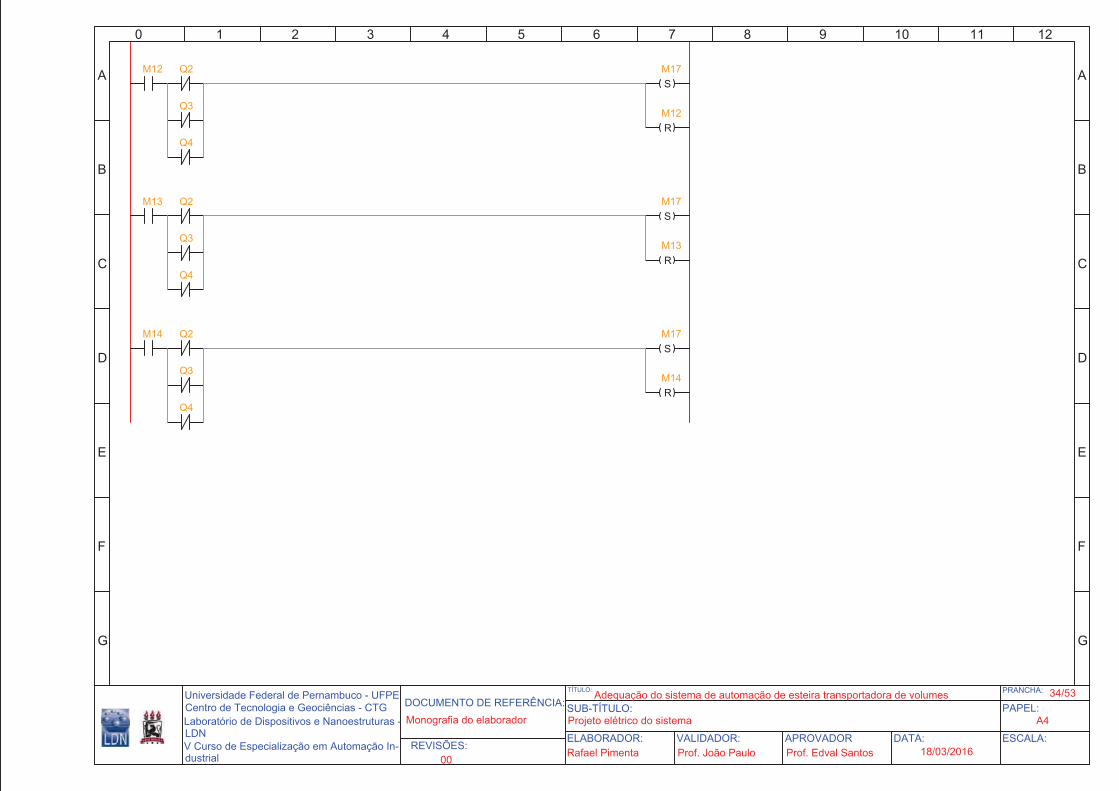
Q2M12
S
R
M17
M12Q3
Q4
Q2M13
S
R
M17
M13Q3
Q4
Q2M14
S
R
M17
M14Q3
Q4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
34/53
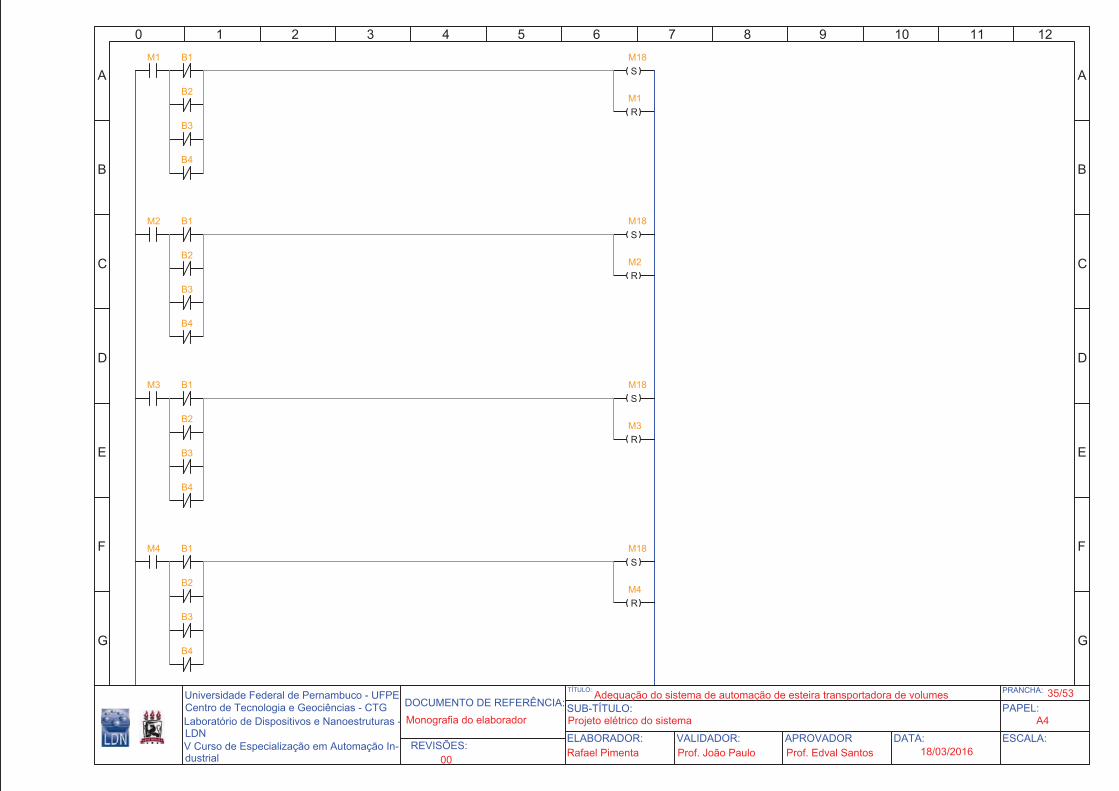
B1M1
S
R
M18
M1B2
B3
B4
B1M2
S
R
M18
M2B2
B3
B4
B1M3
S
R
M18
M3B2
B3
B4
B1M4
S
R
M18
M4B2
B3
B4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
35/53
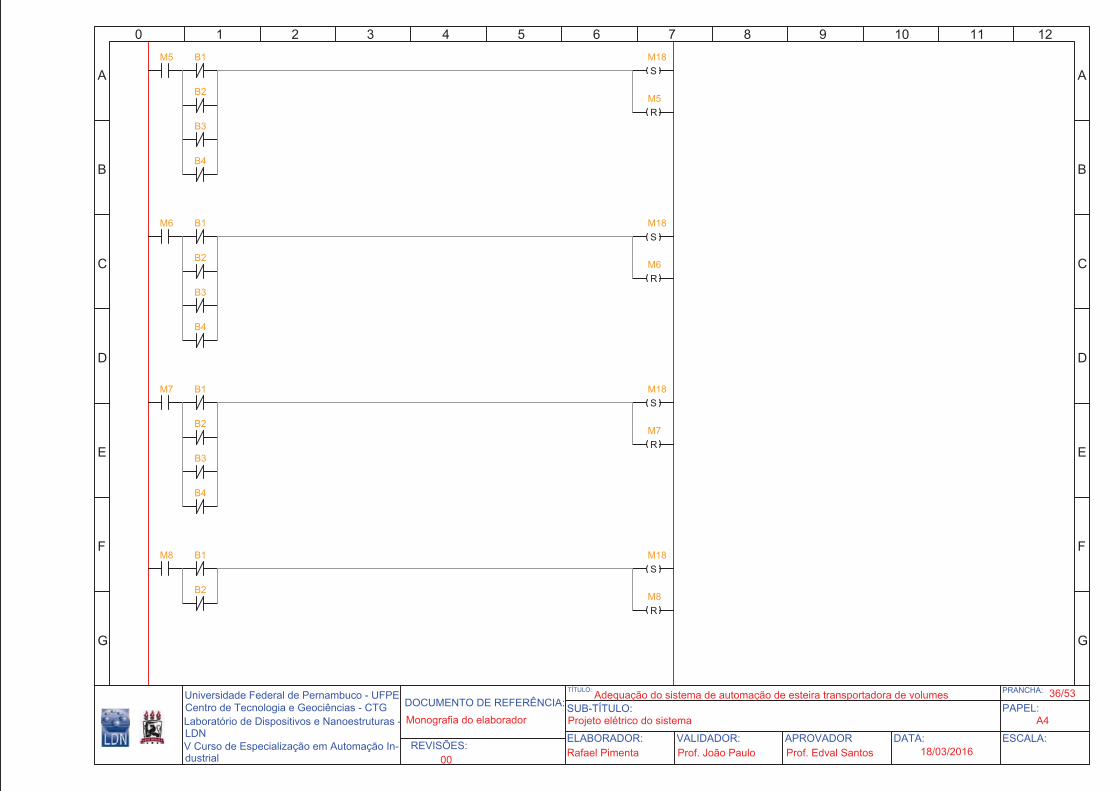
B1M5
S
R
M18
M5B2
B3
B4
B1M6
S
R
M18
M6B2
B3
B4
B1M7
S
R
M18
M7B2
B3
B4
B1M8
S
R
M18
M8B2
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
36/53
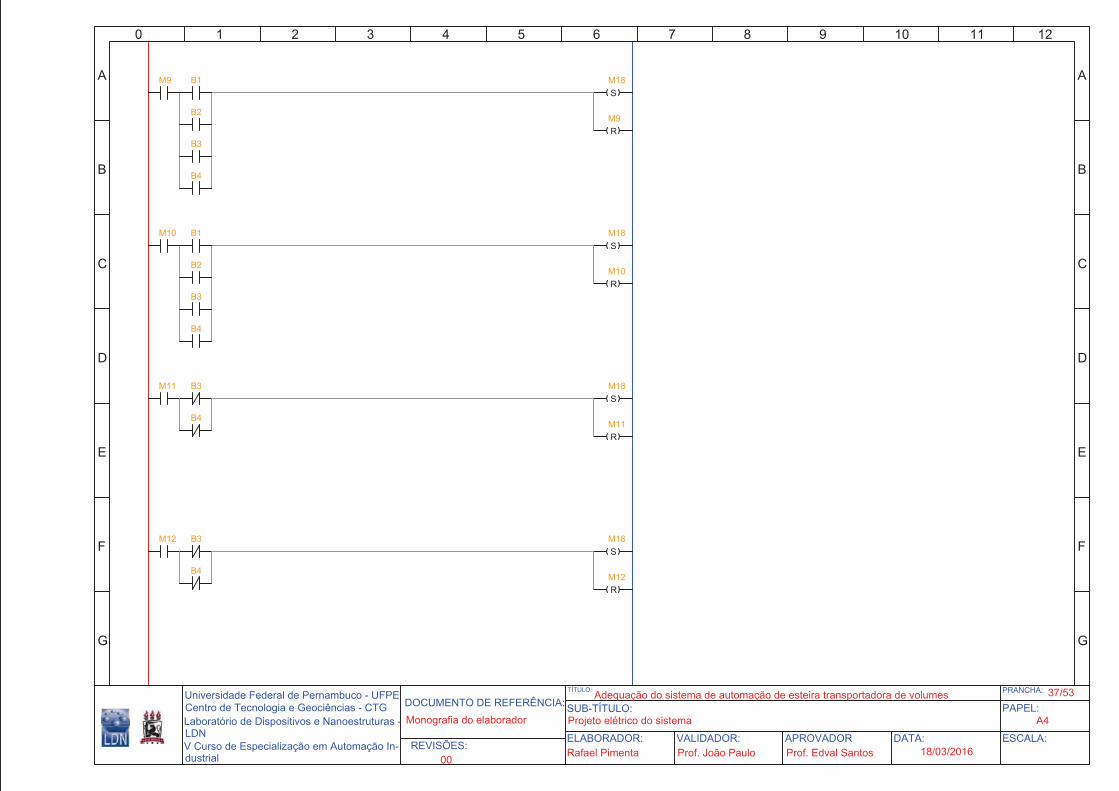
B1M9
S
R
M18
M9B2
B3
B4
B1M10
S
R
M18
M10B2
B3
B4
M11
S
R
M18
M11
B3
B4
M12
S
R
M18
M12
B3
B4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
37/53
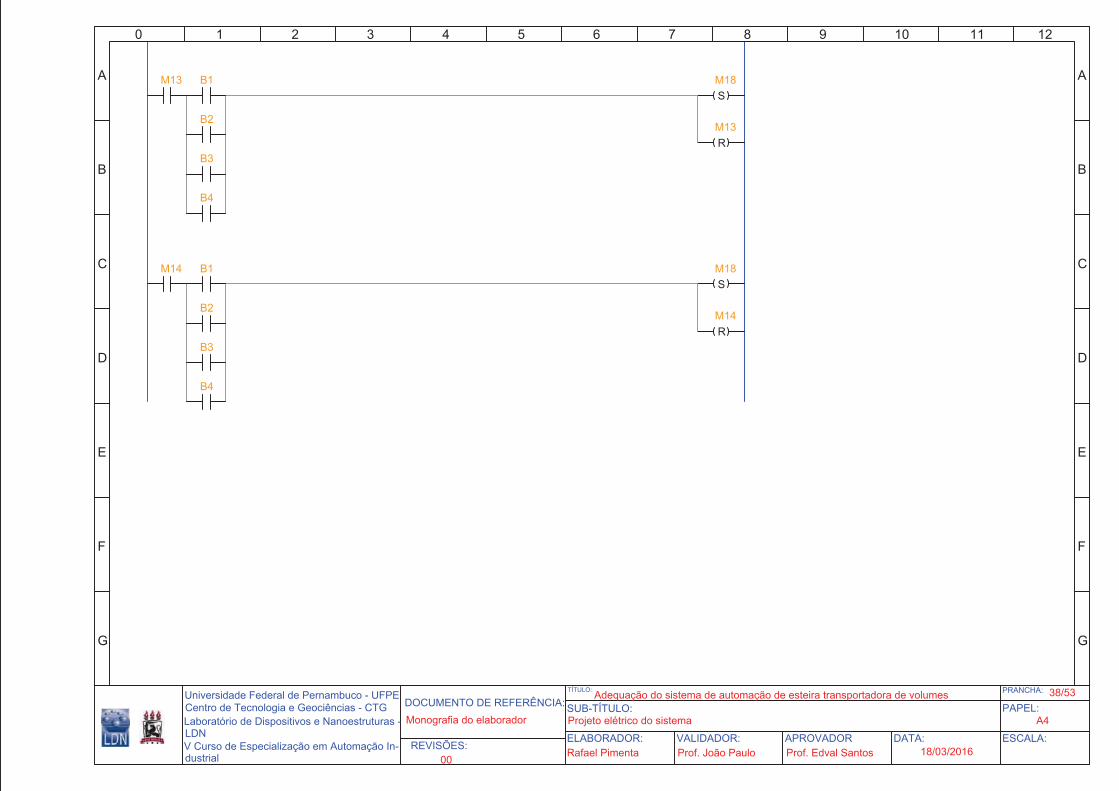
B1M13
S
R
M18
M13B2
B3
B4
B1M14
S
R
M18
M14B2
B3
B4
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
38/53
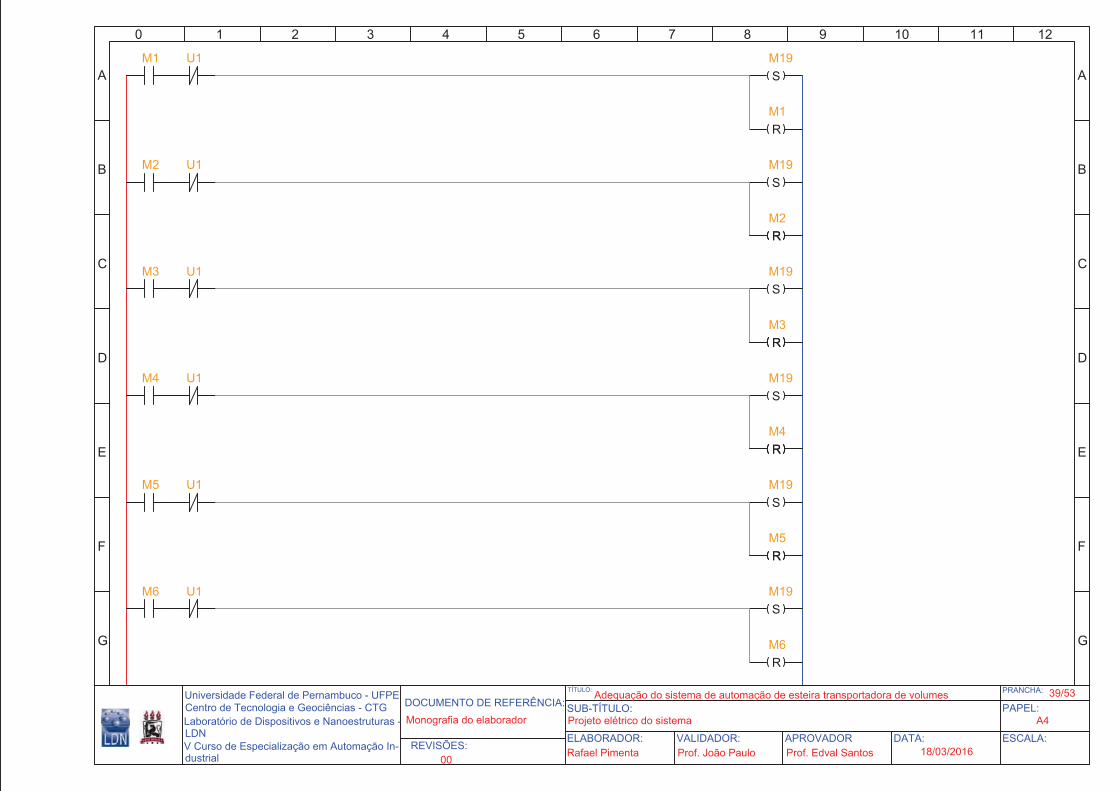
U1M1
S
R
M19
M1
M2
S
R
M19
M2
R
M3
S
R
M19
M3
R
M4
S
R
M19
M4
R
M5
S
R
M19
M5
R
M6
S
R
M19
M6
U1
U1
U1
U1
U1
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
39/53
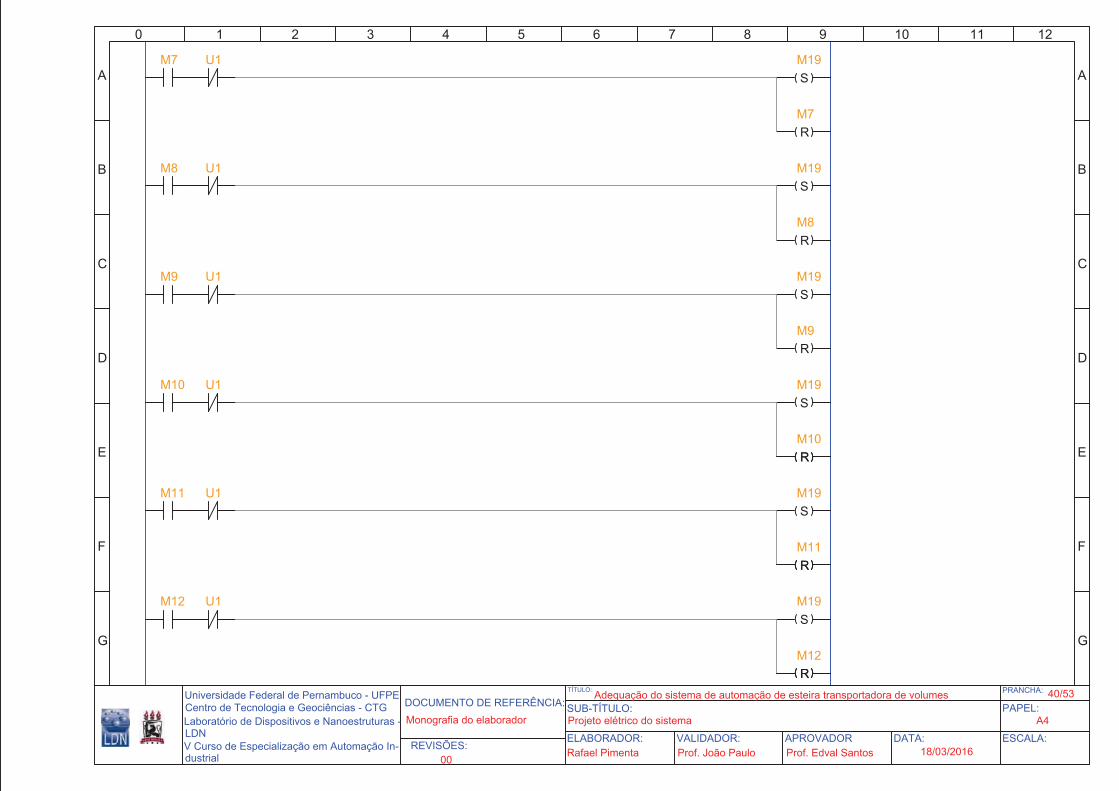
M7
S
R
M19
M7
M8
S
R
M19
M8
M9
S
R
M19
M9
M10
S
R
M19
M10
U1
U1
U1
U1
R
M11
S
R
M19
M11
U1
R
M12
S
R
M19
M12
U1
RTÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
40/53
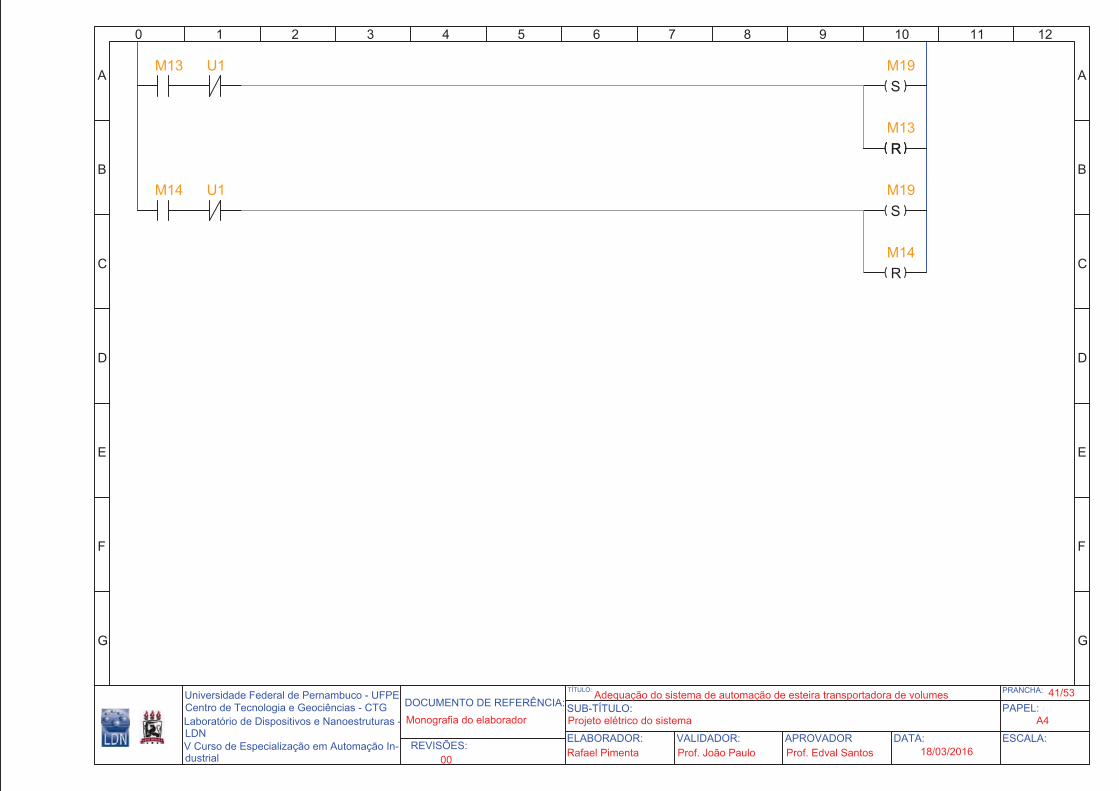
M13
S
R
M19
M13
U1
R
M14
S
R
M19
M14
U1
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
41/53
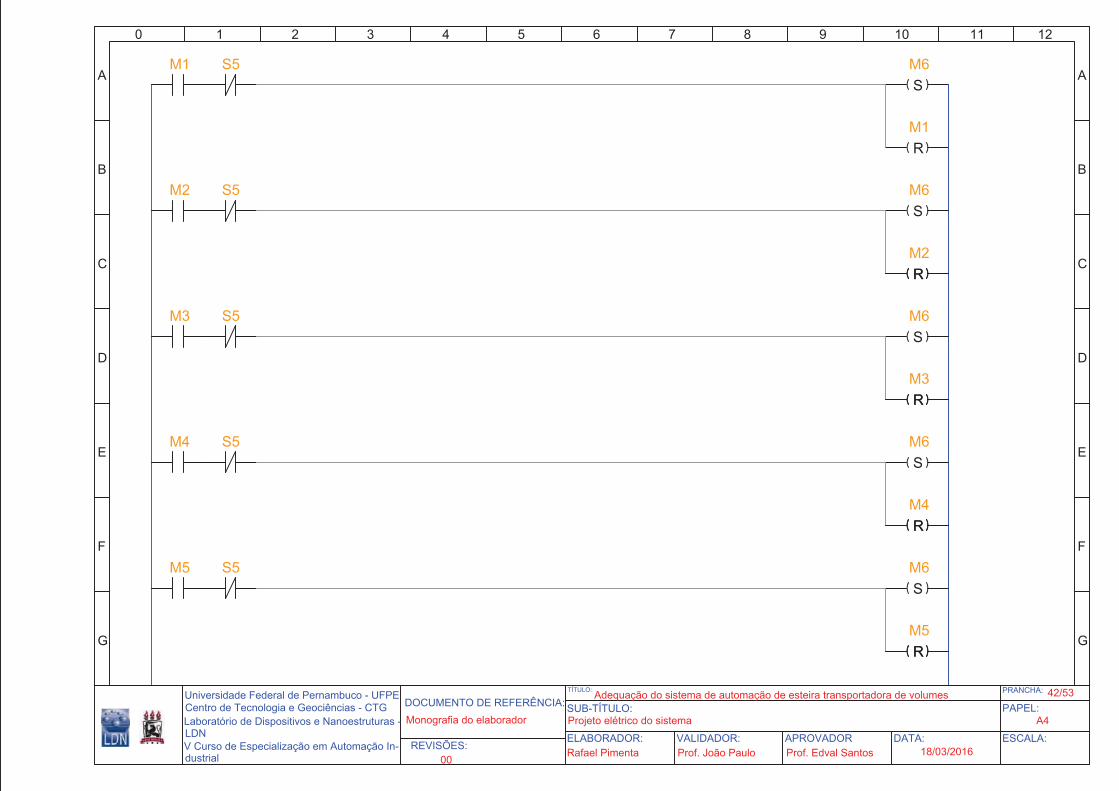
S5M1
S
R
M6
M1
M2
S
R
M6
M2
R
M3
S
R
M6
M3
R
M4
S
R
M6
M4
R
M5
S
R
M6
M5
R
M8 M13
S5
S5
S5
S5
S5 TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
42/53
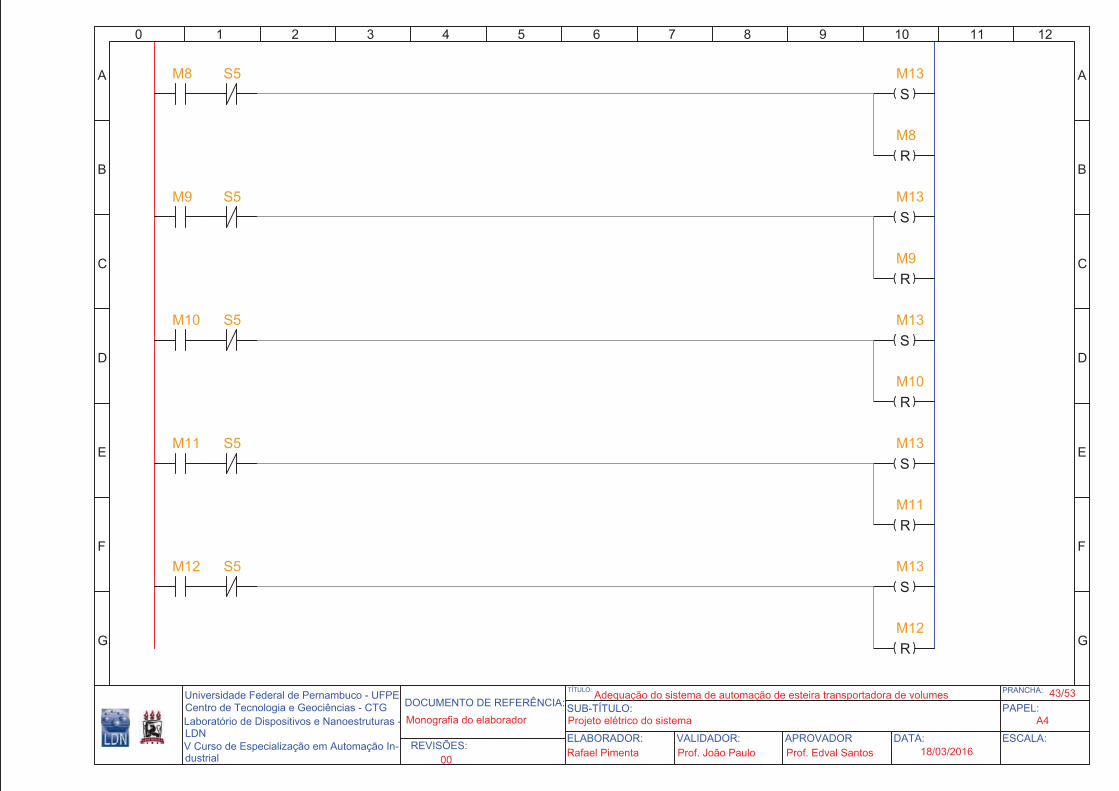
M8
S
R
M13
M8
M9
S
R
M13
M9
M10
S
R
M13
M10
M11
S
R
M13
M11
M12
S
R
M13
M12
S5
S5
S5
S5
S5
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
43/53

M15
S
R
M20
M15
M16
S
R
M20
M16
R
M17
S
R
M20
M17
R
M18
S
R
M20
M18
R
M19
S
R
M20
M19
R
Q2 U1 S2-0 S3 S5 B5 B6Q3 Q4
S2-1
Q2 U1 S2-0 S3 S5 B5 B6Q3 Q4
S2-1
Q2 U1 S2-0 S3 S5 B5 B6Q3 Q4
S2-1
Q2 U1 S2-0 S3 S5 B5 B6Q3 Q4
S2-1
Q2 U1 S2-0 S3 S5 B5 B6Q3 Q4
S2-1
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
44/53
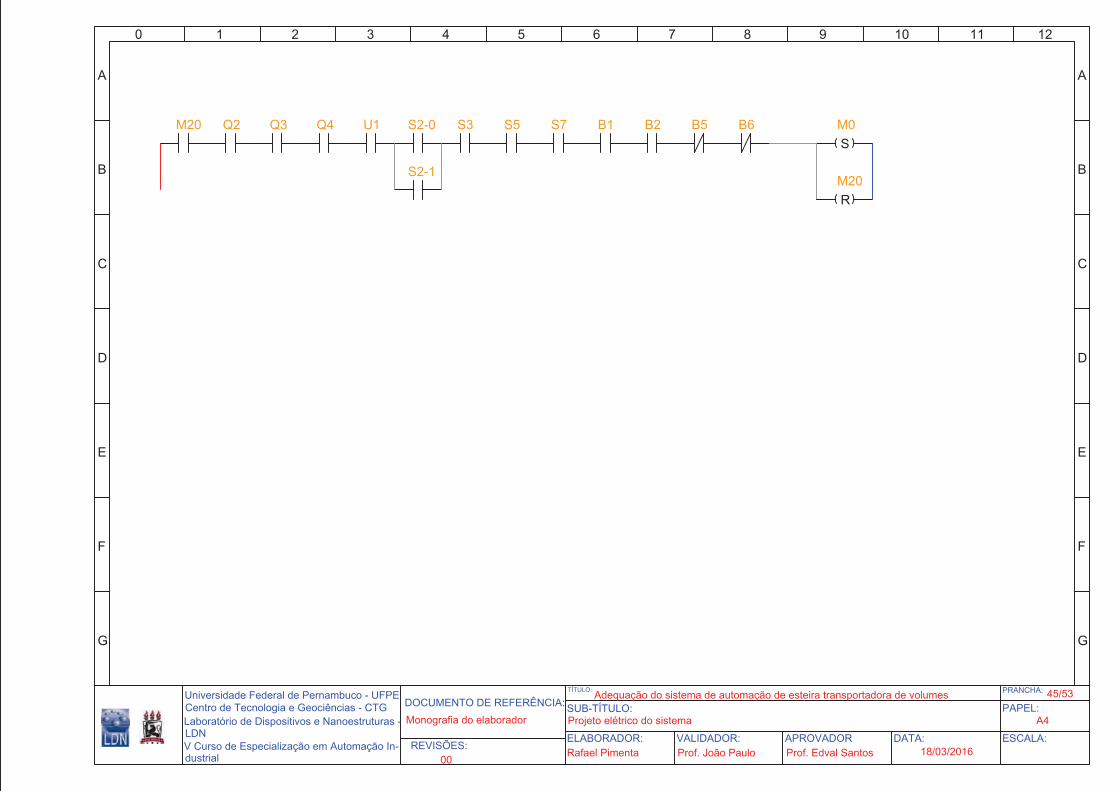
S7M20
S
M0
M20
R
Q2 U1 S2-0 S3 S5 B5 B6Q3 Q4
S2-1
B1 B2
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
45/53
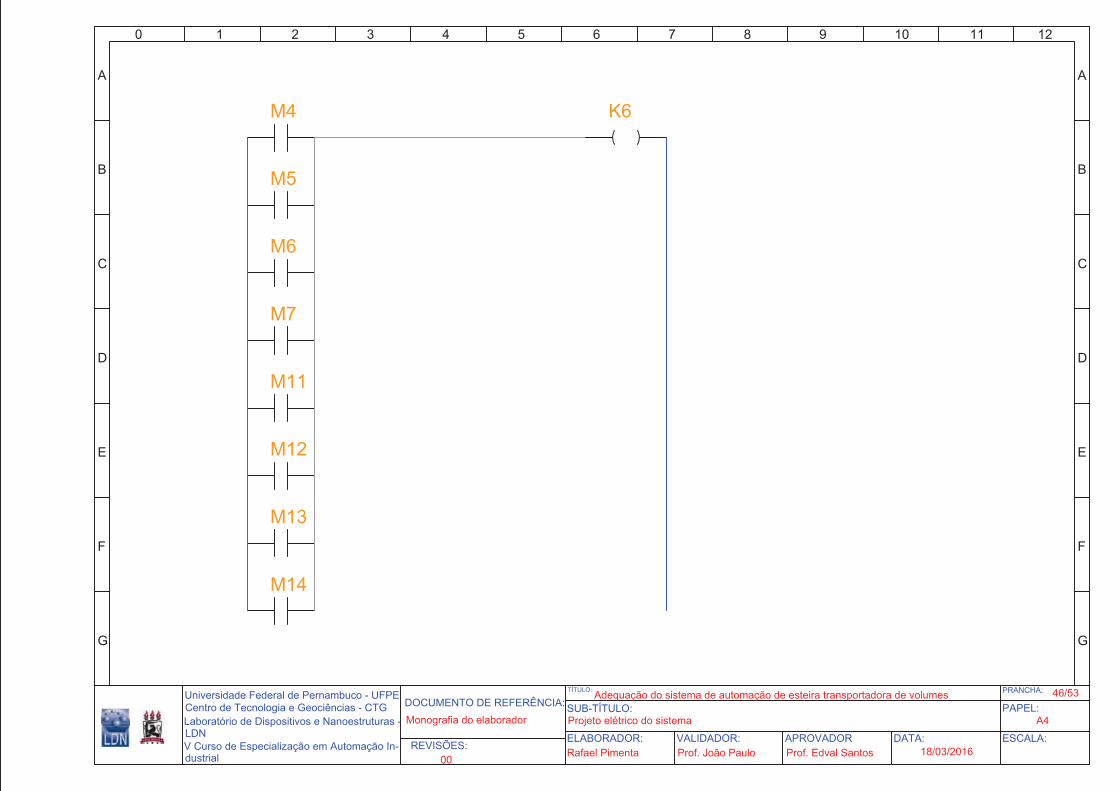
M4 K6
M5
M6
M7
M11
M12
M13
M14
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
46/53
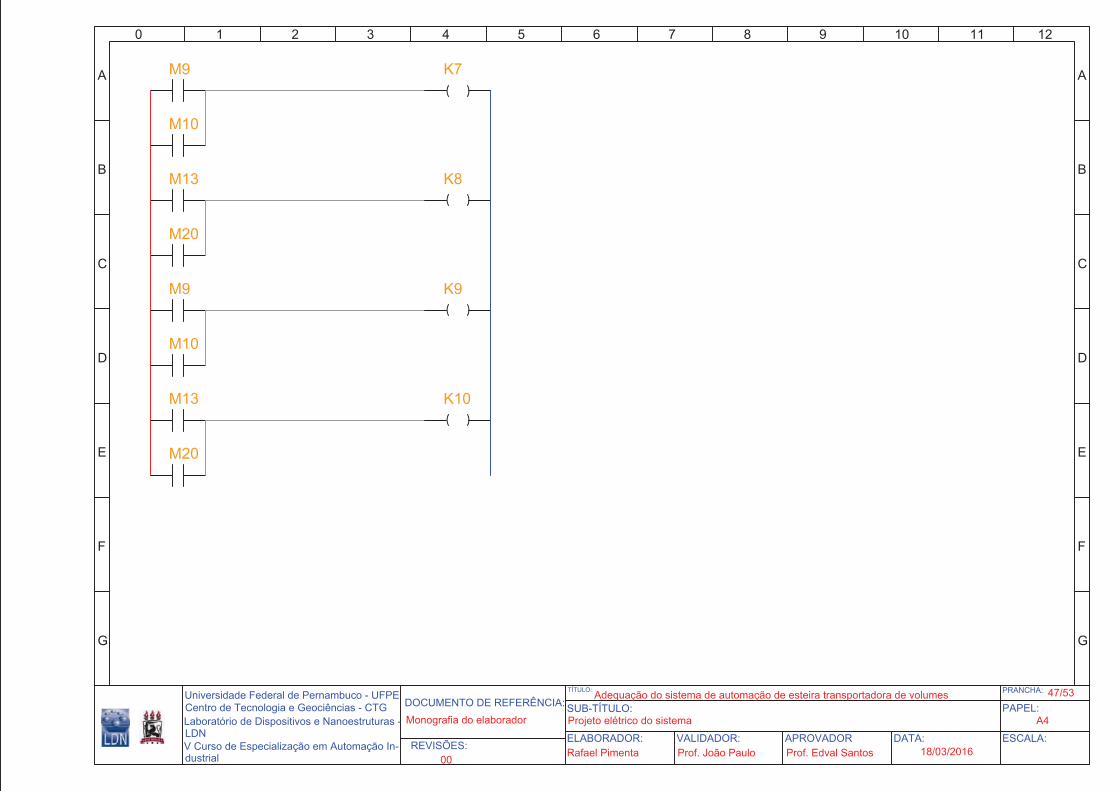
M9 K9
M9 K7
M10
M10
M13 K8
M13 K10
M20
M20
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
47/53
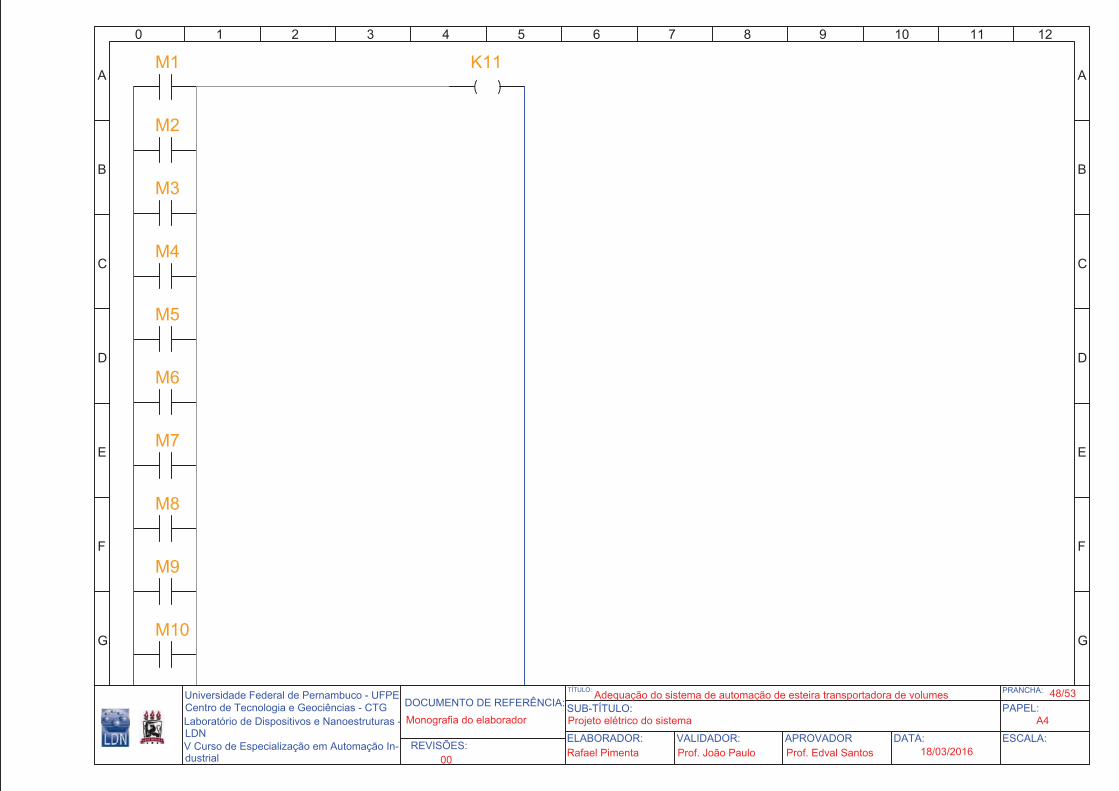
M1 K11
M2
M3
M4
M5
M6
M7
M8
M9
M10
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
48/53
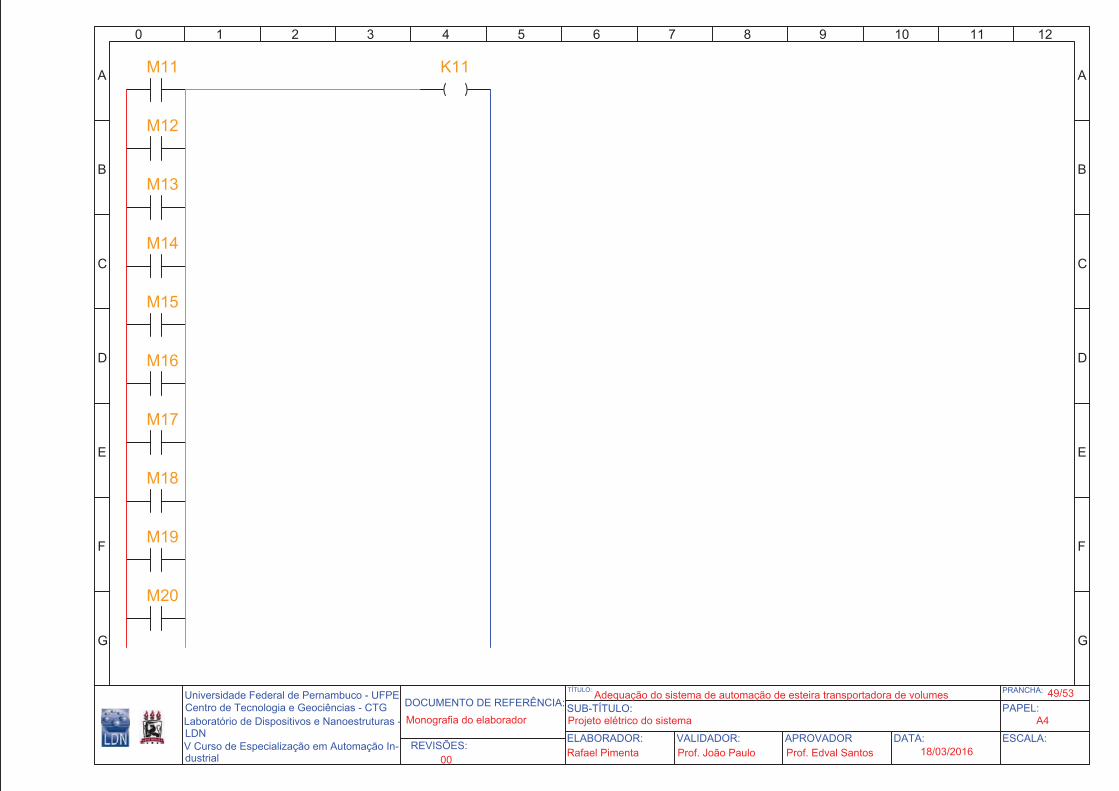
M11
M12
M13
M14
M15
M16
M17
M18
M19
M20
K11
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
49/53
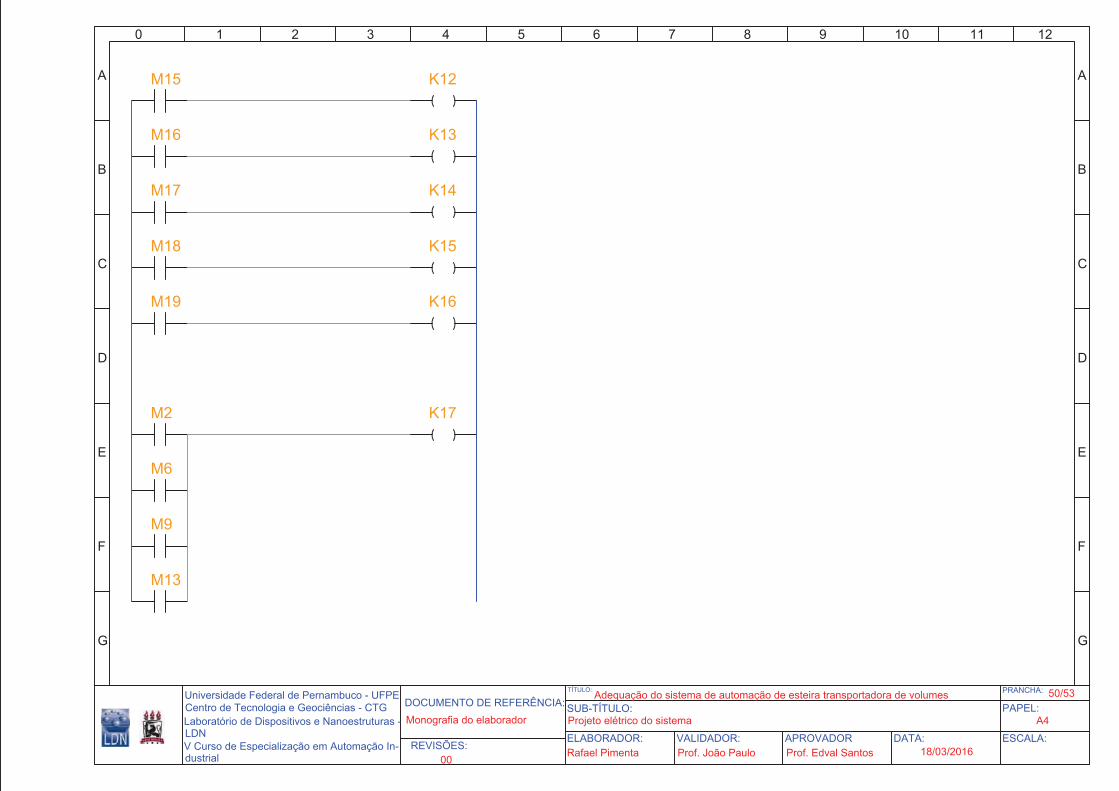
M2 K17
M6
M9
M13
M15 K12
M16 K13
M17 K14
M18 K15
M19 K16
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
50/53
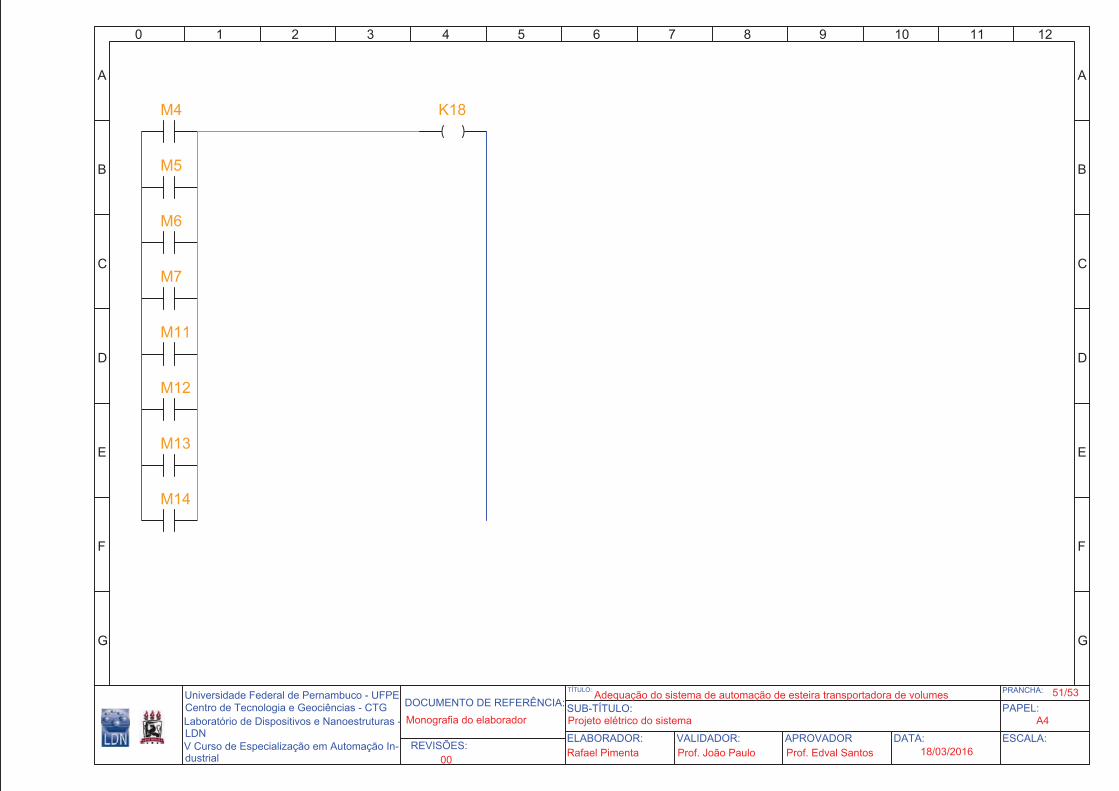
M4 K18
M5
M6
M7
M11
M12
M13
M14
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
51/53
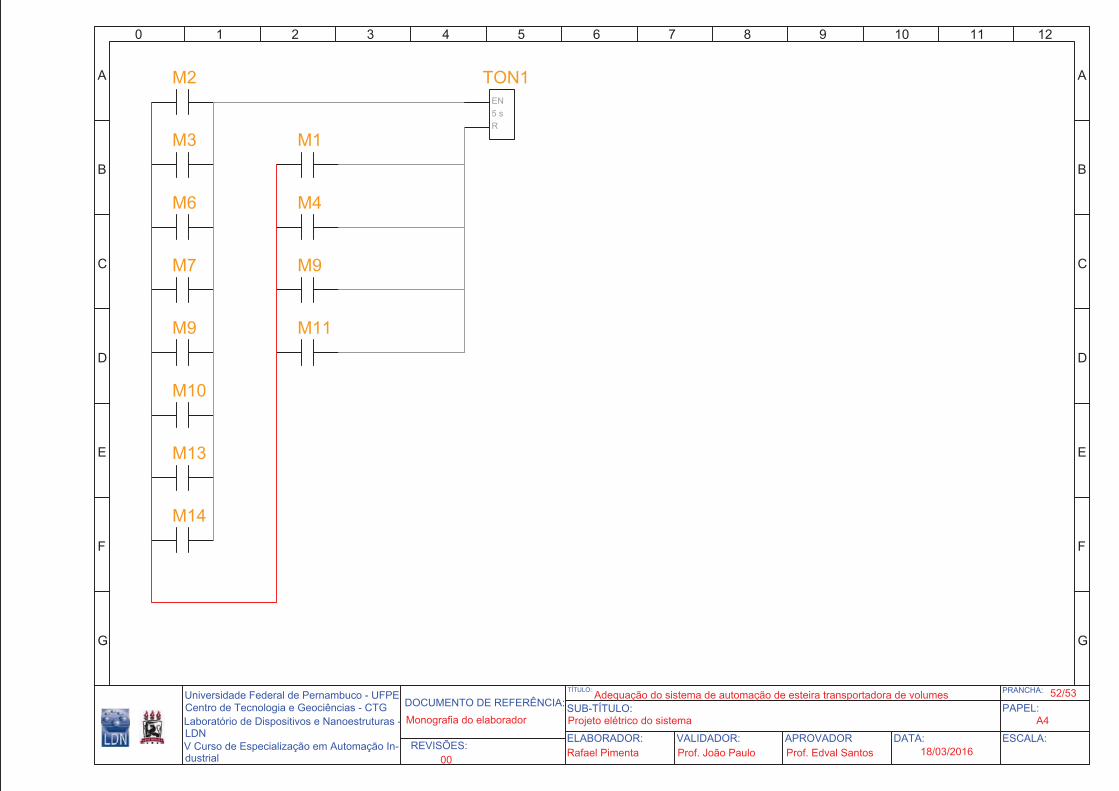
M2EN
R
5 s
M3
M6
M7
M9
M10
M13
M14
TON1
M1
M4
M9
M11
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
52/53
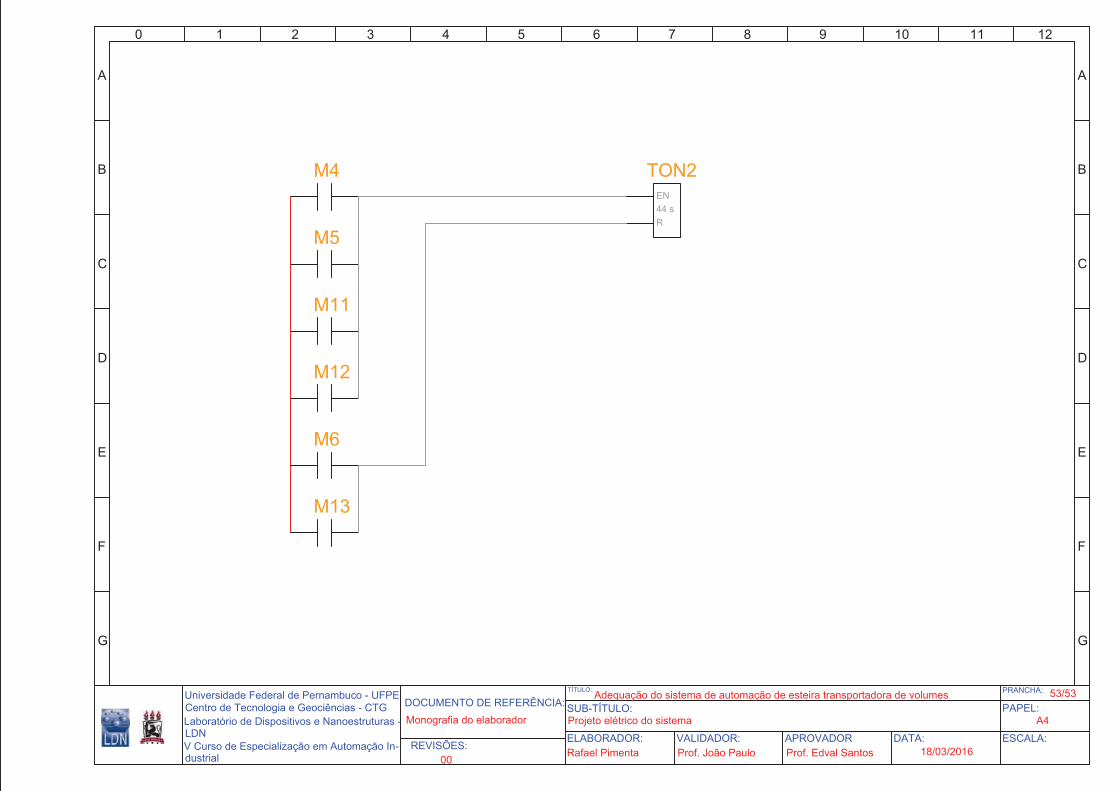
M4
EN
R
44 s
M5
M11
M12
TON2
M6
M13
TÍTULO:
SUB-TÍTULO:
ELABORADOR: VALIDADOR: APROVADOR DATA: ESCALA:
PRANCHA:
REVISÕES:
DOCUMENTO DE REFERÊNCIA:PAPEL:
Universidade Federal de Pernambuco - UFPE
Centro de Tecnologia e Geociências - CTG
V Curso de Especialização em Automação In-dustrial
Monografia do elaborador
00
A4
18/03/2016Rafael Pimenta Prof. João Paulo Prof. Edval Santos
Adequação do sistema de automação de esteira transportadora de volumes
Projeto elétrico do sistema
A
B
C
D
E
F
G
A
B
C
D
E
F
G
0 1 2 3 4 5 6 7 8 9 10 11 12
Laboratório de Dispositivos e Nanoestruturas -LDN
53/53
124
REFERÊNCIAS BIBLIOGRÁFICAS
[1] Cícero Couto de Morais, Plínio de Lauro Castrucci. Engenharia de Automação Industrial, Editora LTC, Rio de Janeiro (2012).
[2] Siemens Dematic, Manual do Transportador de Bagagem Crescent Plate,
Siemens Dematic, São Paulo (2005). [3] http://pt.wikipedia.org/wiki/Lagarta_%28mec%C3%A2nica%29, visitado em
05/10/2014. [4] http://ciencia.hsw.uol.com.br/tanques-m1.htm, visitado em 05/10/2014. [5] www.snumam.com.br/download-manuais/siemens/Softstarter-SIRIUS-3RW30-
e-3RW40_port.pdf, visitado em 25/04/2016. [6] www.automacaoindustrial.info/a-piramide-da-automacao-industrial/, visitado em
26/04/2016. [7] Claiton Moro Franchi. Acionamentos Elétricos, Editora Érica, São Paulo (2009).
[8] http://www.schneiderelectric.pt/documents/product-
services/training/plc_cfp2008.pdf, visitado em 03/03/2016. [9] https://www.youtube.com/watch?v=VFZEdlZROOo, visitado em 29/02/2016. [10] Daniel Thomazini, Pedro Urbano Braga de Albuquerque. Sensores Industriais
Fundamentos e Aplicações, Editora Érica, São Paulo (2011). [11] http://www.ifm.com/products/br/ds/O5H500.htm, visitado em 05/03/2016. [12] https://www.ifm.com/products/br/ds/OH5001.htm, visitado em 05/03/2016. [13] https://www.google.com.br/?gws_rd=ssl#q=50FR2-3-1, visitado em
06/03/2016. [14] https://w3.siemens.com.br/buildingtechnologies/br/pt/produtos-baixa-
tensao/protecao-eletrica/Chaves-Seccionadoras/s31/Documents/Catalogo%20Seccionadoras_JUN-12_net.pdf, visitado em 16/03/2016.
[15] Claiton Moro Franchi. Inversores de Frequência – Teoria e Aplicações, Editora
Érica, São Paulo (2008).
[16] http://www.tucanobrasil.com.br/intru/sir/sg200.pdf, visitado em 08/03/2016.
[17] https://cache.industry.siemens.com/dl/files/461/16527461/att_82574/v1/Logo_pt.pdf, visitado em 12/03/2016.
125
[18] G. Nascimento. Comandos Elétricos: Teoria e Atividades, Editora Érica, São
Paulo (2011). [19] Norberto Nery. Instalações Elétricas: Princípios e Aplicações, Editora Érica,
São Paulo (2014). [20] http://www.dutoplast.com.br/portal/index.php/produtos/canaletas, visitado em
14/03/2016. [21]
http://files.cemar.com.br/catalogo_digital/downloads/5_Processos_industriais.pdf, visitado em 14/03/2016.
[22] http://w3.siemens.com.br/buildingtechnologies/br/pt/produtos-baixa-
tensao/distribuicao-de-energia/conectores/8wa1/pages/8wa1.aspx, visitado em 16/03/2016. [23] http://www.mcm.ind.br/download/Tabela-condutores-cobre-AWG-x-MM.pdf,
visitado em 16/03/2016.