Mecanismos_03 cinema
43
MECANISMOS CAPÍTULO 3 40 3. CAMES As cames desempenham um papel muito importante na maquinaria moderna e são extensivamente usadas em motores de combustão interna, máquinas operatrizes, computadores mecânicos, instrumentos e muitas outras aplicações. Uma came pode ser projetada de duas maneiras: (a) partindo-se do movimento desejado para o seguidor, projetar a came para dar este movimento, ou (b) partindo-se da forma da came, determinar que características de deslocamento, velocidade e aceleração serão obtidas pelo contorno da came. O primeiro método é um bom exemplo de síntese. De fato, projetar um mecanismo de came para o movimento desejado é uma aplicação de síntese que sempre poderá ser resolvida. Entretanto, depois de projetada a came, pode ser difícil a sua fabricação. Esta dificuldade de fabricação é eliminada no segundo método fazendo a came simétrica e usando para o contorno formas que possam ser geradas. Este é o tipo usado na indústria automobilística onde as cames devem ser produzidas com precisão e a baixo custo. . Será abordado somente o projeto de cames com movimento específico. Para os tipos empregados em automóveis onde o contorno é especificado, o leitor deverá consultar publicações especializadas. As cames com movimento especificado podem ser projetadas graficamente e em certos casos, analiticamente. Será abordado em primeiro lugar o método gráfico. 3.1. Classificação e nomenclatura das cames. A equação de mobilidade de Grubler (Eq. 1.3) pode ser usada para uma grande variedade de mecanismos contendo cames. Na prática, a maioria das cames são encontradas em mecanismos simples tipo came-seguidor, os quais contém apenas três peças, as duas peças relativas a came e ao seguidor e o suporte. O material desse capítulo tratará apenas de sistemas came-seguidor contendo três peças; esses são freqüentemente referidos simplesmente como mecanismo came. Mecanismos came podem ser classificados pelo tipo da came ou pela sua forma, movimento, ou localização do seguidor. O mecanismo came mais simples e mais freqüentemente utilizado é a came de disco rotativo com seguidor alternativo ou oscilante. Muitos outros tipos de cames são comumente utilizadas e serão discutidos mais tarde nesse capítulo. A Fig. 3.1 mostra uma came de disco com seis arranjos diferentes de seguidores. Figura 3.1 Arranjos comuns de mecanismo came-seguidor
-
Upload
leonardo-leome -
Category
Documents
-
view
56 -
download
5
description
mecanismos cinematica
Transcript of Mecanismos_03 cinema

MECANISMOS CAPÍTULO 3
40
3. CAMES As cames desempenham um papel muito importante na maquinaria moderna e são
extensivamente usadas em motores de combustão interna, máquinas operatrizes, computadores mecânicos, instrumentos e muitas outras aplicações. Uma came pode ser projetada de duas maneiras: (a) partindo-se do movimento desejado para o seguidor, projetar a came para dar este movimento, ou (b) partindo-se da forma da came, determinar que características de deslocamento, velocidade e aceleração serão obtidas pelo contorno da came.
O primeiro método é um bom exemplo de síntese. De fato, projetar um mecanismo de came para o movimento desejado é uma aplicação de síntese que sempre poderá ser resolvida. Entretanto, depois de projetada a came, pode ser difícil a sua fabricação. Esta dificuldade de fabricação é eliminada no segundo método fazendo a came simétrica e usando para o contorno formas que possam ser geradas. Este é o tipo usado na indústria automobilística onde as cames devem ser produzidas com precisão e a baixo custo. .
Será abordado somente o projeto de cames com movimento específico. Para os tipos empregados em automóveis onde o contorno é especificado, o leitor deverá consultar publicações especializadas. As cames com movimento especificado podem ser projetadas graficamente e em certos casos, analiticamente. Será abordado em primeiro lugar o método gráfico.
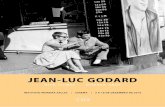
3.1. Classificação e nomenclatura das cames. A equação de mobilidade de Grubler (Eq. 1.3) pode ser usada para uma grande variedade de mecanismos contendo cames. Na prática, a maioria das cames são encontradas em mecanismos simples tipo came-seguidor, os quais contém apenas três peças, as duas peças relativas a came e ao seguidor e o suporte. O material desse capítulo tratará apenas de sistemas came-seguidor contendo três peças; esses são freqüentemente referidos simplesmente como mecanismo came. Mecanismos came podem ser classificados pelo tipo da came ou pela sua forma, movimento, ou localização do seguidor. O mecanismo came mais simples e mais freqüentemente utilizado é a came de disco rotativo com seguidor alternativo ou oscilante. Muitos outros tipos de cames são comumente utilizadas e serão discutidos mais tarde nesse capítulo. A Fig. 3.1 mostra uma came de disco com seis arranjos diferentes de seguidores.
Figura 3.1 Arranjos comuns de mecanismo came-seguidor

MECANISMOS CAPÍTULO 3
41
A Fig. 3.1a mostra uma came de disco com seguidor alinhado tipo ponta de agulha. O seguidor é considerado como sendo alinhado (ou radial) visto que sua linha de centro passa pelo centro de rotação da came. Esse tipo de seguidor é de interesse teórico, mas, não é de grande importância prática porque geralmente produz altas tensões de contato. A Fig. 3.1b mostra uma came de disco com seguidor de rolete alinhado. A Fig. 3.1c mostra uma came de disco com seguidor de rolete deslocado. Em cada um dos mecanismos came-seguidor das Figuras 3.1a, b e c, a came gira enquanto o seguidor se desloca com movimento alternativo. A Fig. 3.1d mostra uma came de disco com seguidor oscilante de rolete. A Fig. 3.1e mostra uma came de disco com seguidor alternativo de face plana. Nesse caso, não há necessidade de distinção entre seguidor alinhado ou deslocado porque eles são cinematicamente equivalentes; qualquer eixo seguidor paralelo ao mostrado produzirá o mesmo movimente de saída. Entretanto, pode ser necessário alterar o comprimento da face do seguidor quando o seguidor é deslocado. A Fig. 3.1f mostra uma came de disco com seguidor oscilante de face plana. Muitos outros arranjos de came-seguidor são possíveis.
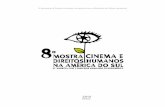
Figura 3.2 Nomenclatura da came
A Fig. 3.2 mostra a nomenclatura usada para descrever um mecanismo came típico. O ponto de traçado é o ponto no seguidor que corresponde ao ponto de contato de um seguidor tipo ponta de agulha fictício. O ponto de traçado de um seguidor com rolete é o centro do rolete. A curva primitiva é o caminho do ponto de traçado relativo a came. O círculo básico é o menor círculo tangente a came sobre o centro de rotação da came. O ângulo de pressão é o ângulo entre a direção de movimento do ponto de traçado e a normal comum (a linha de ação) das superfícies de contato. O ângulo de pressão é uma medida das propriedades da força instantânea de transmissão do mecanismo. O passo é a distância entre as duas posições extremas do seguidor.
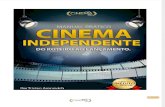
3.2. Came de Disco com Seguidor Radial (Projeto Gráfico). A Fig. 3.3 mostra uma came de disco com um seguidor radial de face plana. Quando a came gira com velocidade angular constante na direção indicada, o seguidor se desloca para cima de uma distância aproximada de 25 mm, de acordo com a escala marcada na haste, durante meia-volta da came. O movimento de retorno é o mesmo. A fim de determinar graficamente o contorno da came, será necessário inverter o mecanismo e manter a came estacionária enquanto o seguidor gira ao seu redor. Isto não afetará o movimento relativo entre a came e o seguidor e o procedimento é o seguinte:
1. Girar o seguidor em torno do centro da came no sentido oposto ao da rotação da came.
2. Deslocar o seguidor radialmente de acordo com o indicado na escala para cada ângulo de rotação.
3. Desenhar o contorno da came tangente ao polígono formado pelas várias posições da face do seguidor.

MECANISMOS CAPÍTULO 3
42
Figura 3.3 Came de disco com seguidor radial de face plana
Infelizmente, para este último passo, não há um processo gráfico para determinar o ponto de contato entre a came e o seguidor. Este ponto deve ser determinado a olho empregando-se a curva francesa. O comprimento da face do seguidor deve ser determinado por tentativas. Ocasionalmente pode ser escolhida uma escala de deslocamentos combinada com o raio mínimo da came de modo a se obter um contorno com uma ponta ou aresta. Esta aresta pode ser eliminada modificando-se a escala de deslocamentos ou aumentando-se o raio mínimo da came.
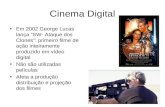
A Fig. 3.4a mostra o mesmo tipo de came com um seguidor de rolete. Com este tipo de seguidor o centro do rolete se deslocará com o movimento desejado. Os princípios de construção são idênticos aos do seguidor de face plana com exceção de que o contorno da came é tangente às várias posições do rolete. Na Fig. 3.4a pode-se ver, também, que a linha de ação entre a came e o seguidor não pode estar ao longo do eixo do seguidor, exceto quando este estiver em repouso (sem movimento de subida ou retorno). Isto produz uma força lateral no seguidor e pode causar uma deflexão ou quebra de sua haste. O ângulo existente entre a linha de ação e a linha de centros do seguidor é conhecido por angulo de pressão e seu valor máximo deve ser o menor possível, especialmente em mecanismos de pequeno porte. Atualmente, esse valor máximo é de 30°. Embora seja possível medir o ângulo de pressão máximo na construção gráfica de uma came, muitas vezes é difícil determiná-lo analiticamente. Por esta razão será apresentado, mais adiante, um nomograma para determinação do ângulo de pressão máximo em projetos analíticos de cames. O ângulo de pressão é constante para qualquer seguidor radial de face plana. O seguidor mostrado na Fig. 3.3 tem a face perpendicular ao eixo da haste, de modo que o ângulo de pressão é zero e a força lateral exercida sobre o seguidor é desprezível comparada com a existente nos seguidores com rolete. Pode-se reduzir o ângulo de pressão aumentando-se o raio mínimo da came de modo que a trajetória do seguidor em relação a came seja maior para a mesma elevação. Isto equivale a aumentar o comprimento de um plano inclinado para a mesma elevação, a fim de reduzir o ângulo de inclinação do plano. Também, numa came com seguidor de rolete, o raio de curvatura da superfície primitiva deve ser maior do que o raio do rolete, senão a superfície da came se tornará pontiaguda.

MECANISMOS CAPÍTULO 3
43
Figura 3.4a Came de disco com seguidor radial centrado de rolete
Figura 3.4b Came de disco com seguidor radial deslocado de rolete
Às vezes, as hastes dos seguidores de face plana ou de rolete são deslocadas lateralmente
ao invés de serem radiais conforme mostrado nas Figs. 3.3 e 3.4a. Isto é feito por razões estruturais, ou no caso do seguidor de rolete, com a finalidade de reduzir o ângulo de pressão no curso de elevação. Deve-se notar, entretanto, que embora o ângulo de pressão seja reduzido durante o curso de elevação, no curso de retorno ele será aumentado. A Fig. 3.4b mostra uma came e um seguidor deslocado, com a mesma escala de deslocamento e o mesmo raio mínimo usados na Fig. 3.4a. Se a direção do movimento de um seguidor deslocado, de face plana, for paralela a uma linha radial da came, resultará na mesma came obtida com um seguidor radial. Entretanto, o comprimento da face do seguidor deve ser aumentado devido ao deslocamento haste.

MECANISMOS CAPÍTULO 3
44
3.3. Came de Disco com Seguidor Oscilante (Projeto Gráfico). A Fig. 3.5 mostra uma came de disco com um seguidor de face plana oscilante. Usando o mesmo princípio de construção empregado para a came de disco com seguidor radial, gira-se o seguidor em torno da came. Ao mesmo tempo o seguidor deve ser girado em torno de seu centro de rotação, segundo os deslocamentos angulares correspondentes a cada posição indicada na escala. Há diversas maneiras de se girar o seguidor em torno de seu centro. O método indicado na Fig. 3.5 é usar a intersecção de dois arcos de circunferências (por exemplo, o ponto 3') para determinar um ponto da face do seguidor em sua nova posição, após girar em torno de seu centro e em torno da came. O primeiro desses dois arcos tem como raio a distância do centro da came até a posição 3 da escala de deslocamento e, como centro de curvatura, o centro de rotação da came. O segundo arco é traçado com centro de curvatura situado no centro de rotação do seguidor após ter girado até a posição 3 e usando para o raio a distância do centro do seguidor até a escala de deslocamento. A intersecção desses dois arcos será o ponto 3'. Devido ao número infinito de retas que podem passar pelo ponto 3', é necessário ter-se uma informação adicional para determinar a posição correta da face do seguidor correspondente ao ponto 3'. Conforme mostrado na figura, isto foi conseguido por uma circunferência tangente ao prolongamento da face do seguidor na posição zero. Na figura, houve coincidência dessa circunferência com o diâmetro externo do cubo do seguidor. Essa circunferência é, então, traçada em cada posição do centro do seguidor. Para se determinar a posição 3 da face do seguidor traça-se uma reta que passa pelo ponto 3' e é tangente à circunferência do cubo do seguidor em sua posição 3. Repetindo-se este processo, obtém-se um polígono formado pelas diversas posições da face do seguidor. A partir deste polígono desenha-se o contorno da came.
Figura 3.5 Came de disco com seguidor oscilante de face plana
A Fig. 3.6 mostra uma came de disco com seguidor oscilante de rolete. O procedimento para a determinação dos pontos 1', 2', 3' etc. é semelhante ao indicado na Fig. 3.5. Entretanto, neste caso, estes pontos são as posições do centro do rolete determinadas pela rotação do seguidor em torno da came. Traçam-se as circunferências correspondentes a cada posição do rolete e o contorno da came é tangente a essas circunferências. Deve-se notar que num projeto real seriam usadas divisões menores de modo a minimizar o erro do contorno da came. Deve-se mencionar também que o mesmo procedimento pode ser empregado no projeto de uma came com seguidor oscilante de rolete, como o usado para uma came com seguidor radial deslocado.
Embora a maioria das cames em uso seja dos tipos já mencionados, há muitos outros, alguns dos quais encontram grande aplicação. Nas seções seguintes serão abordados três desses tipos.

MECANISMOS CAPÍTULO 3
45
Figura 3.6 Came de disco com seguidor oscilante de rolete
3.4. Came de Retorno Comandado (Projeto Gráfico). Em uma came de disco com seguidor radial, freqüentemente é necessário que o retorno do seguidor seja comandado pela came e não sob a ação da gravidade ou de uma mola. A Fig. 3.7 mostra um mecanismo deste tipo em que a came comanda o movimento do seguidor não somente durante a elevação como também no curso de retorno. Necessariamente, o movimento de retorno deve ser o mesmo que o de elevação, porém, no sentido oposto. Essa came também é chamada de came de diâmetro constante.
Figura 3.7 Came de retorno comandado

MECANISMOS CAPÍTULO 3
46
Este tipo de came pode também ser projetada empregando dois seguidores de rolete no lugar dos seguidores de face plana. Se for necessário ter-se um movimento de retorno independente do movimento de elevação, devem-se usar dois discos, um para a elevação e outro para o retorno. Essas cames duplas podem ser usadas com seguidores de rolete ou de face plana.
3.5. Came Cilíndrico (Projeto Gráfico). Este tipo de came encontra muitas aplicações, particularmente em máquinas operatrizes. Talvez o exemplo mais comum, entretanto, seja a alavanca niveladora do molinete de vara de pescar. A Fig. 3.8 mostra um desenho onde o cilindro gira em torno de seu eixo e aciona um seguidor que é guiado por uma ranhura existente na superfície do cilindro.
Figura 3.8 Came cilíndrico
3.6. Came Invertido (Projeto Gráfico). Às vezes é vantajoso inverter o papel da came e do seguidor e deixar que o seguidor comande a came. Esta inversão encontra aplicação em máquinas de costura e outros mecanismos de natureza semelhante. A Fig. 3.9 mostra o esboço de uma came de placa onde o braço oscila, causando um movimento alternativo do bloco por ação de um rolete dentro da ranhura da came.
Figura 3.9 Came invertido

MECANISMOS CAPÍTULO 3
47
3.7. Curvas de Deslocamento de Cames. Antes de se determinar o contorno de uma came é necessário selecionar o movimento segundo o qual se deslocará o seguidor, de acordo com as exigências do sistema. Se a velocidade de operação deve ser baixa, o movimento pode ser qualquer um dos movimentos comuns, por exemplo, parabólico (aceleração e desaceleração constantes), parabólico com velocidade constante, harmônico simples ou cicloidal.
O movimento parabólico possui a mais baixa aceleração teórica para valores determinados de elevação do seguidor e a rotação da came, dentre os movimentos citados e por esta razão tem sido empregado em muitos contornos de cames. Entretanto, em trabalhos a baixas velocidades isto tem pouco significado. O movimento parabólico pode ou não ter intervalos iguais de aceleração e desaceleração, dependendo das exigências do problema. O movimento parabólico também pode ser modificado para incluir um intervalo de velocidade constante entre a aceleração e a desaceleração; este movimento é muitas vezes denominado de velocidade constante modificada.
O movimento harmônico simples apresenta uma vantagem de, ao empregar um seguidor radial de rolete, proporcionar um ângulo de pressão máximo menor do que no movimento parabólico com intervalos de tempo iguais ou no movimento cicloidal. Isto permitirá que o seguidor tenha apoios menos rígidos e maior trecho em balanço. Também menos potência será necessária para operar a came. Por estas razões, o movimento harmônico simples é o preferido entre os outros tipos.
Depois de selecionar o movimento do seguidor, é necessário determinar-se a escala de deslocamentos e marcá-la sobre a haste do seguidor, conforme mostrado na Fig. 3.3. As elevações podem ser calculadas, porém, são determinadas com mais facilidade graficamente, plotando-se uma curva deslocamento-tempo.
Plotando-se o gráfico deslocamento-tempo é necessário determinar primeiro o ponto de inflexão se o movimento for parabólico ou uma modificação deste. Para os movimentos harmônico simples e cicloidal, o ponto de inflexão é determinado automaticamente pelo método de geração da curva. O ponto de inflexão de um movimento parabólico estará no meio da escala de deslocamentos e da escala de tempos se os intervalos forem iguais. A determinação dos pontos de inflexão de um movimento parabólico modificado é um pouco mais complicada, como será visto a seguir.
Consideremos um ponto deslocando-se com movimento uniforme modificado, onde parte do repouso com aceleração constante, em seguida passa a ter velocidade constante e finalmente chega ao repouso com desaceleração constante. Os pontos de inflexão podem ser determinados especificando-se os intervalos de tempo ou de deslocamento correspondentes a cada tipo de movimento. A Fig. 3.10 indica uma construção gráfica para determinar os pontos de inflexão A e B quando são dados os intervalos de tempo. A Fig. 3.11 mostra a construção para intervalos de deslocamento. Das relações S = ½At2, V = At e S = Vt, é possível provar a validade da construção mostrada nas Figuras 3.10 e 3.11.
Figura 3.10

MECANISMOS CAPÍTULO 3
48
Figura 3.11
Depois que os pontos de inflexão foram determinados, como por exemplo na Fig. 3.11, o trecho OA de aceleração constante da curva do deslocamento pode ser construído conforme indicado na Fig. 3.12, onde o deslocamento L (correspondente a S1 da Fig. 3.11) está dividido no mesmo número de partes da escala de tempo, neste caso quatro. O trecho desacelerado BC da curva na Fig. 3.11 será construído de modo semelhante para o deslocamento S3 e o correspondente intervalo de tempo.
Figura 3.12
A Fig. 3.13 mostra o movimento harmônico simples [S = r (1 - cos ωrt)] para um deslocamento L com seis divisões na escala do tempo. Nesta figura deve-se notar que se a came gira de meia-volta enquanto o seguidor se move segundo o deslocamento L, a velocidade angular ωr do raio girante r se iguala à velocidade angular ω da came e a equação do deslocamento do seguidor pode ser escrita como S = r (1 - cos ωt) = r (1 - cos θ). Se a came gira somente de um quarto de volta para o deslocamento L, ωr = 2ω e S = r (1 - cos 2θ). Portanto, pode-se ver que a relação entre ωr e ω é expressa por
seguidordoLelevaçãoaparacamedorotaçãodeângulo
o
r180/ =ϖϖ
Figura 3.13 Movimento harmônico simples
Uma came circular (excêntrica) proporcionará um movimento harmônico simples a um seguidor radial de face plana porque o ponto de contato entre estas duas peças e o centro geométrico da came estarão sempre na direção do movimento do seguidor.

MECANISMOS CAPÍTULO 3
49
A Fig. 3.14 mostra a construção para o movimento cicloidal
−=
βθπ
πβθ 2
21 senLS
para um deslocamento L com seis divisões na escala de tempo. O raio do circulo gerador é L/2π. A circunferência deste círculo é dividida no mesmo número de partes que a escala de tempo, neste caso seis. Os seis pontos marcados na circunferência são projetados horizontalmente sobre o diâmetro vertical do círculo. Estes pontos são então projetados paralelamente à diretriz OA até as linhas correspondentes marcadas no eixo do tempo.
Figura 3.14 Movimento cicloidal
Para cames de alta velocidade, a seleção do movimento do seguidor deve ser baseada não só nos deslocamentos, mas também nas forças que atuam sobre o sistema como resultado do movimento selecionado. Por muitos anos o projeto de cames dizia respeito somente ao movimento de um seguidor em um curso determinado, durante um certo tempo. As velocidades eram baixas de modo que as forças de inércia eram insignificantes. Com a tendência de uso de velocidades mais altas nas máquinas, entretanto, tornou-se necessário considerar as características dinâmicas do sistema e selecionar um contorno de came que minimizasse o carregamento dinâmico.
Como um exemplo da importância do carregamento dinâmico, consideremos o movimento parabólico. Em relação às forças de inércia este movimento pareceria ser desejável por causa de sua baixa aceleração. Entretanto, não se pode ignorar o fato de que a aceleração cresce de zero a seu valor constante quase que instantaneamente, resultando em uma alta taxa de aplicação da carga. Determina-se a taxa de variação da aceleração pela terceira derivada do deslocamento, conhecida por "jerk" ou segunda aceleração. Portanto, o "jerk" ou a segunda aceleração, é uma indicação da característica de impacto do carregamento: pode-se dizer que o impacto tem a segunda aceleração igual ao infinito. A falta de rigidez e as folgas do sistema também tendem a aumentar o efeito da carga de impacto. No movimento parabólico onde a segunda aceleração é infinita, este impacto ocorre duas vezes durante o ciclo e tem o efeito de uma pancada súbita no sistema, que poderá ocasionar vibrações indesejáveis bem como danos estruturais.
Como um modo de evitar o "jerk" infinito e seu efeito prejudicial em cames, um sistema de projeto de cames foi desenvolvido por Kloomok e Muffley, que utiliza três funções analíticas: (a) ciclóide (e meia-ciclóide), (b) harmônico (e meio-harmônico) e (c) polinômio de oitavo grau. Os diagramas de deslocamento, velocidade e aceleração dessas funções estão representados nas Figuras 3.15, 3.16 e 3.17. As curvas têm derivadas contínuas em todos os pontos intermediários. Portanto, a aceleração varia gradualmente e a segunda aceleração é finita. Evita-se o "jerk" infinito nos extremos igualando-se as acelerações. Deve-se notar que as velocidades serão concordantes porque não podem aparecer descontinuidades na curva de deslocamento em função do tempo. Como um exemplo, quando após um repouso seguir uma elevação, a aceleração nula no final do repouso é igualada selecionando-se uma curva que tenha aceleração nula no início da elevação. A aceleração exigida no final da elevação é determinada pela condição subseqüente. Se imediatamente se segue um retorno, a elevação pode terminar com um valor moderadamente alto de desaceleração porque este valor pode ser igualado exatamente por uma curva que tenha a mesma desaceleração no início do retorno.

MECANISMOS CAPÍTULO 3
50
A seleção de curvas para atender a exigências particulares é feita de acordo com os seguintes critérios:
1. A ciclóide proporciona aceleração nula nos extremos dos trechos da curva. Portanto, pode ser combinada com dois repousos em cada extremidade. Como o ângulo de pressão é relativamente grande e sua aceleração retorna a zero desnecessariamente nos extremos, duas ciclóides não devem ser usadas em seqüência.
2. O harmônico proporciona os menores picos de aceleração e os menores ângulos de pressão das três curvas. Portanto, é a curva preferida quando as acelerações no início e no fim do trecho podem ser igualadas com as acelerações do trecho vizinho. O meio-harmônico pode ser usado onde uma elevação à velocidade constante precede uma aceleração, porque a aceleração do ponto médio é zero. O meio-harmônico pode ser combinado com meia-ciclóide ou com um meio-polinômio.
3. O polinômio de oitavo grau tem uma curva de aceleração assimétrica e proporciona um pico de aceleração e ângulos de pressão intermediários entre o harmônico e a ciclóide.
Figura 3.15 Características do movimento cicloidal.
S = deslocamento (mm); V = velocidade (mm/grau); A = aceleração (mm/grau2)

MECANISMOS CAPÍTULO 3
51
Figura 3.16 Características do movimento harmônico
S = deslocamento (mm); V = velocidade (mm/grau); A = aceleração (mm/grau2)
Nas Figuras 3.15, 3.16 e 3.17, as unidades de velocidade e aceleração são dadas em milímetros por grau e milímetros por grau quadrado, respectivamente. A unidade de graus ao invés de segundos foi selecionada para tornar desnecessário considerar a velocidade angular da came até que o movimento do seguidor seja selecionado. Para obter a velocidade e a aceleração em termo do tempo, a velocidade das curvas V (mm/s) = (180/π)ωV (mm/grau), onde ω é a velocidade da came (rad/s). De maneira similar, A (mm/s2) = (180/π)2ω2A (mm/grau2).

MECANISMOS CAPÍTULO 3
52
Figura 3.17 Características do movimento polinomial de oitavo grau
S = deslocamento (mm); V = velocidade (mm/grau); A = aceleração (mm/grau2)
Exemplo 3.1. Um seguidor de rolete deverá se deslocar, com elevação e retorno, sem repouso, durante um ciclo. Devido à operação realizada pelo mecanismo, parte da elevação deverá ser feita com velocidade constante. Determine as curvas dos movimentos a serem usadas. Referindo-se à Fig. 3.18a:
AB: Use a meia-ciclóide C-1 a fim de proporcionar aceleração nula no início do movimento e em B, onde será feita a ligação com o trecho de velocidade constante.
BC: Velocidade constante.
CD: Use o meio harmônico H-2 que se ligará em C ao trecho de velocidade constante, com aceleração nula, e proporcionará um ângulo de pressão mínimo durante o resto da curva.
DE: Use o polinômio P-2 para combinar a desaceleração do harmônico em D e proporcionar aceleração nula no fim do retorno em E.

MECANISMOS CAPÍTULO 3
53
Figura 3.18
Combinam-se as velocidades e as acelerações de modo a não apresentarem descontinuidades. Estas curvas estão mostradas nas Figuras 3.18b e 3.18c. Na Fig. 3.18c, pode-se ver que não há "jerk" ou segunda aceleração em qualquer instante do ciclo.
3.8. Curvas de Deslocamento de Cames – Métodos Avançados. A criação de perfis suaves de cames sem descontinuidades em velocidade, aceleração, além de suas derivadas mais altas, é crítica para a operação satisfatória de qualquer came. Na seção prévia foi mostrado como segmentos de curvas simples como a cicloidal, a harmônica e a polinomial podem ser colocadas juntas para fornecer curvas de aceleração contínua. Em adição, foi discutida a importância da minimização de picos de aceleração e, conseqüentemente, a minimização de cargas dinâmicas. Entretanto, em algumas aplicações de alta velocidade, os métodos discutidos previamente podem não ser suficientes. Uma curva de aceleração contínua deve ter uma curva de “jerk” descontínua, como mostrado na Fig. 3.19. Essas descontinuidades tendem a induzir vibrações, o que pode resultar em ruído, e reduzir a precisão da operação. Descontinuidades em derivadas mais altas podem produzir efeitos indesejáveis.
Figura 3.19

MECANISMOS CAPÍTULO 3
54
Uma ampla variedade de métodos tem sido propostos para conduzir os problemas mencionados acima. Uma extensão lógica dos métodos examinados na seção prévia é o uso de polinômios algébricos de alto nível. Essas curvas polinomiais são muito versáteis, e, na maioria dos casos, a determinação de coeficientes é direta. A maior desvantagem das curvas polinomiais é que elas não possibilitam controle local do movimento. Uma outra extensão lógica do material da seção prévia é a criação de outros tipos de curvas compostas. Talvez a mais simples dessas é a chamada curva de aceleração trapezoidal mostrada na Fig. 3.20. Essa curva produz perfis de velocidade e deslocamento suaves, e resulta em “jerk” finito. Segmentos trapezoidais podem ser utilizados em composição com outros tipos de curvas para produzir cames de perfil suave com boas propriedades de aceleração. Como uma outra extensão dessa aproximação, é possível a construção de uma curva de “jerk” composta de segmentos retos. Isso produz “jerk” contínuo e curvas suaves de aceleração, velocidade e deslocamento.
Figura 3.20 Curva de aceleração trapezoidal e plotagens geradas por
computador das curvas de deslocamento e velocidade correspondentes Com o advento da calculadora programável e do computador digital, uma quantidade de
métodos numéricos tem sido desenvolvidos para criação e modificação de curvas de movimento de cames. Na maioria dos casos, isso é um processo efetivo de suavização de partes inaceitáveis de curvas de aceleração obtidas por outros métodos. Um número finito de pontos da curva original de aceleração são selecionados e uma curva aproximada é definida a partir desses pontos. Essa nova curva é então modificada pela movimentação de pontos ou adição de pontos por onde a curva deve passar. Métodos populares desse tipo incluem diferenças finitas, o método de Johnson, o método de integração finita e a técnica B-spline.
3.9. Came de Disco com Seguidor Radial de Face Plana (Projeto Analítico). A abordagem deste problema permite que o contorno da came seja determinado analiticamente. No método gráfico, os pontos de contato entre a came e o seguidor são desconhecidos e é difícil determinar sua localização exata quando se desenha o contorno da came. Também o raio mínimo da came, para evitar que seja pontiagudo, somente pode ser determinado por tentativas. No método analítico, que foi desenvolvido por Carver e Quinn, essas desvantagens são superadas e pode-se determinar três características valiosas da came: (a) equações paramétricas do contorno da came; (b) raio mínimo da came para evitar pontas e (c) localização do ponto de contato que determina o comprimento da face do seguidor. Dessas características, a primeira tem pouca aplicação prática, mas as outras duas dão informações que possibilitam a produção da came. O desenvolvimento dessas características é apresentado a seguir.
A Fig. 3.21 mostra uma came com seguidor radial de face plana. A came gira com velocidade angular constante. O ponto de contato entre a came e o seguidor tem coordenadas x e y e está a uma distância l da linha de centro do seguidor. O deslocamento do seguidor em relação à origem é dado pela seguinte equação:
R = C + f(θ) (3.1)
onde o raio mínimo da came é representado por C e f(θ) representa o movimento desejado para o seguidor como uma função do deslocamento angular da came.

MECANISMOS CAPÍTULO 3
55
Figura 3.21
A equação para o comprimento de contato l pode ser facilmente determinada pela geometria da Fig. 3.21. Dos triângulos mostrados,
R = y sen θ + x cos θ (3.2)
e
l = y cos θ - x sen θ (3.3)
O membro da direita da Eq. 3.3 é a derivada em relação a θ do membro da direita da Eq. 3.2. Portanto,
( )[ ]θθθ
fCdd
ddRl +==
e
( )θ'fl = (3.4)
Se o diagrama de deslocamento é dado por uma equação matemática S = f(θ), então R e l são determinados facilmente das Equações 3.1 e 3.4. Da Eq. 3.4, pode-se ver que o comprimento mínimo da face do seguidor independe do raio mínimo da came. Também, o ponto de contato está na posição mais afastada da linha de centro do seguidor quando a velocidade do seguidor é máxima. Quando o seguidor se afasta do centro da came com velocidade positiva, l é positivo e o contato ocorre acima do eixo do seguidor da Fig. 3.21. Quando o seguidor se move em direção ao centro da came, a velocidade é negativa e o valor negativo de l indica que o contato se realiza abaixo do eixo do seguidor.
Para determinar as equações de x e y para o contorno da came, é necessário somente resolver as Equações 3.2 e 3.3 simultaneamente, o que resulta
x = R cos θ - l sen θ
e
y = R sen θ + l cos θ
Substituindo os valores de R e l das Eqs. 3.1 e 3.4, respectivamente,
x = [C + f(θ)] cos θ - f ' (θ) sen θ (3.5)
y = [C + f(θ)] sen θ + f ' (θ) cos θ (3.6)

MECANISMOS CAPÍTULO 3
56
O raio mínimo C para evitar uma ponta ou bico sobre a superfície da came pode ser determinado analiticamente com facilidade. Uma ponta ocorre quando dx/dθ e dy/dθ forem iguais a zero. Quando isto acontece, forma-se uma ponta na came conforme mostrado em x, y na Fig. 3.22. Para demonstrar isto, consideremos que a linha de centro do seguidor tenha girado de um ângulo θ e que o contato entre a face do seguidor e a came ocorra no ponto (x, y). Mais adiante, quando o seguidor for girado de um pequeno ângulo dθ, o ponto de contato (x, y) não mudará por causa da ponta, ficando ainda em x, y. Assim, pode-se ver que dx/dθ = dy/dθ = 0.
Figura 3.22
Diferenciando as Equações 3.5 e 3.6,
dx/dθ = - [C + f(θ) + f''(θ)] sen θ (3.7)
dy/dθ = [C + f(θ) + f''(θ)] cos θ (3.8)
As Eqs. 3.7 e 3.8 podem se anular simultaneamente somente quando
C + f(θ) + f"(θ) = 0
Portanto, para evitar pontas,
C + f(θ) + f''(θ) > 0
A soma f(θ) + f"(θ) deve ser inspecionada para todos os valores de θ para determinar seu valor algébrico mínimo. É necessário usar o valor mínimo de modo que C seja suficientemente grande para assegurar que a Eq. 3.9 não se anule para qualquer valor de θ. Essa soma pode ser positiva ou negativa. Se for positiva, C será negativo e não terá significado prático. Neste caso, o raio mínimo será determinado pelo cubo da came ao invés de sê-Io pela função f(θ).
Pode-se determinar os pontos do contorno da came pelas Equações 3.5 e 3.6, que dão as coordenadas cartesianas, ou calculando R e l para diversos valores de θ. Em geral, o segundo método é mais fácil, mas em ambos os casos os pontos devem ser ligados com o auxílio de uma curva francesa para a obtenção do contorno da came. Na prática, entretanto, raramente é necessário desenhar o perfil da came em escala. Depois que o raio mínimo C tenha sido determinado e os deslocamentos R tenham sido calculados, a came pode ser confeccionada. Para tal, o comprimento da fresa deve ser maior do que o dobro do valor máximo de l. Durante a usinagem, o eixo da fresa deve estar paralelo ao plano da came.

MECANISMOS CAPÍTULO 3
57
Exemplo 3.2. A fim de ilustrar o método de escrever as equações de deslocamento, consideremos as seguintes condições: um seguidor de face plana é acionado em um deslocamento total de 37,5 mm. No início do ciclo (deslocamento zero), o seguidor repousa durante π/2 radianos. Em seguida eleva-se de 37,5 mm com movimento cicloidal (Curva C-5 de Kloomok e Muftley) em π/2 radianos. Depois repousa durante π/2 radianos e então retorna 37,5 mm com movimento cicloidal (C-6) em π/2 radianos. A Fig. 3.23 mostra um esboço do diagrama de deslocamento.
Figura 3.23
Para a ciclóide C-5 as curvas de Kloomok e Muffley fornecem
−=
βπθ
πβθ 2
21 senLS
Deve-se mencionar, ao se escrever a relação S = f(θ), que o valor de S sempre deve ser medido a partir do eixo das abscissas e o valor de θ a partir do eixo das ordenadas. Na equação precedente, entretanto, na Fig. 3.23 θ é medido a partir do ponto A ao invés do ponto O. Portanto, reescrevendo a equação usando θ conforme mostrado na Fig. 3.23:
′−
′=
βθπ
πβθ 2
21 senLS AB
É possível transladar a origem do ponto A para o ponto O, substituindo a relação
2πθθ −=′
Portanto,
−
−
−
=β
πθπ
πβ
πθ2
2
212 senLS AB
Substituindo L = 37,5 mm e β = π/2 radianos,
( )πθπ
πθπ
24475
275
−−
−= senS AB
Para a ciclóide C-6
′′+
′′−=
βθπ
πβθ 2
211 senLSCD
onde
23πθθ −=′′
L = 75 mm

MECANISMOS CAPÍTULO 3
58
2πβ =
Portanto,
( )πθππ
θ 6447575150 −+−= senSCD
Deve-se observar que com as combinações de repouso e movimento cicloidal usadas, as
velocidades e as acelerações são igualadas nas extremidades de cada trecho não havendo, portanto, segunda aceleração infinita em qualquer ponto do ciclo.
Exemplo 3.3. Como um exemplo de como são determinados o raio mínimo C e o comprimento da face do seguidor, consideremos um seguidor radial de face plana que se eleva de 50 mm e retorna, com movimento harmônico simples, durante meia-volta da came. Dois ciclos do seguidor ocorrem durante uma volta da came.
É necessária somente uma equação de deslocamento (H-5) para especificar o movimento do seguidor do começo ao fim do ciclo,
−=
βθπcos1
2LS
onde
L = 50 mm
e
β = π/2
Portanto,
S = f(θ) = 25 (1 – cos 2θ)
f’(θ) = 50 sen 2θ
e
f’’(θ) = 100 cos 2θ
Para determinar o raio mínimo, a soma C + f(θ) + f’’(θ) deve ser maior que zero. Substituindo os valores de f(θ) e f’’(θ) e simplificando,
C + 25 + 75 cos 2θ > 0
A soma de 25 + 75 cos 2θ será mínima quando θ = π/2, logo
C + 25 – 75 > 0
ou
C > 50 mm
O comprimento da face do seguidor é determinado por
l = f’(θ) = 50 sen 2θ
lmin = 50 mm
Como o movimento é simétrico, o comprimento teórico da face do seguidor é o dobro de lmin, ou seja, 100 mm. Deve-se dar um acréscimo ao comprimento da face do seguidor para evitar que o contato se realize na borda da face.

MECANISMOS CAPÍTULO 3
59
3.10. Came de Disco com Seguidor Radial de Rolete (Projeto Analítico). A determinação analítica da superfície primitiva de uma came de disco com seguidor radial de rolete não apresenta dificuldades. Na Fig. 3.24 a posição do centro do rolete em relação ao centro da came é dada pela seguinte equação:
R = R0 + f(θ) (3.10)
onde R0 é o raio mínimo da superfície primitiva da came e f(θ) é o movimento radial do seguidor em função do ângulo de rotação da came. Uma vez que se conhece o valor de R0 é fácil determinar as coordenadas do centro do rolete a partir das quais a came pode ser delineada.
Figura 3.24
Figura 3.25
Kloomok e Muffley desenvolveram um método para verificar a existência de pontas em cames deste tipo, considerando o raio de curvatura ρ da superfície primitiva e o raio do rolete Rr. Estes valores são mostrados na Fig. 3.25 junto com o raio de curvatura ρc da superfície da came. Se na Fig. 3.25 ρ for mantido constante e for aumentado Rr, ρ irá decrescer. Continuando-se a aumentar Rr até atingir o valor de ρ, o raio de curvatura da superfície da came ρc se reduzirá a um ponto e a came ficará pontiaguda, conforme indica a Fig. 3.26a. Aumentando-se ainda o raio Rr a superfície da came fica rebaixada e o movimento realizado pelo seguidor não será o desejado, conforme mostrado na Fig. 3.26b. Portanto, a fim de evitar o aparecimento de uma ponta ou um rebaixo no perfil da came, o raio do rolete Rr deve ser menor do que ρmin, onde ρmin é o valor mínimo do raio de curvatura da superfície primitiva em um determinado trecho da came. Havendo diversos tipos de curvas sobre a superfície da came pelas quais o seguidor irá passar, cada trecho deverá ser verificado separadamente. Como é impossível haver um rebaixo numa parte côncava da superfície da came, somente as partes convexas devem ser verificadas.

MECANISMOS CAPÍTULO 3
60
Figura 3.26
O raio de curvatura em um ponto de uma curva, expresso em coordenadas polares, é dado por
( )[ ]( ) ( )2222
2322
2 φφφρ
dRdRddRRddRR−+
+=
onde R = f(φ ) e as duas primeiras derivadas são contínuas. Pode-se usar esta equação para determinar o raio de curvatura da superfície primitiva da came. Para este caso, f(θ) = f(φ ). Da Eq. 3.10,
R = R0 + f(θ)
dR/dθ = f’(θ)
d2R/dθ 2 = f’’(θ)
Portanto,
( )[ ]( )θθ
θρfRfR
fR′−+
+= 22
2322
)(2 (3.11)
A Eq. 3.11 pode ser calculada para determinar a expressão de ρ para um tipo particular de movimento. Entretanto, a fim de evitar pontas e rebaixos no perfil da came, deve-se determinar ρmin. Para se obter este valor mínimo, deve-se derivar a Eq. 3.11 com suas várias funções, o que irá conduzir a equações transcendentais muito complexas. Por esta razão, são apresentados três conjuntos de curvas que mostram os valores de ρmin /R0 em função de β para as diversas relações de L/R0. Nestas curvas, β é o ângulo de rotação da came para cada trecho e L é a elevação correspondente. A Fig. 3.27 apresenta as curvas para o movimento cicloidal, a Fig. 3.28, para o movimento harmônico simples e a Fig. 3.29, para o movimento polinomial de 8° grau. Por meio dessas curvas pode-se determinar se ρmin é maior ou menor do que Rr.

MECANISMOS CAPÍTULO 3
61
Figura 3.27 Movimento cicloidal

MECANISMOS CAPÍTULO 3
62
Figura 3.28 Movimento harmônico

MECANISMOS CAPÍTULO 3
63
Figura 3.29 Movimento polinomial de 8° grau

MECANISMOS CAPÍTULO 3
64
Exemplo 3.4. Um seguidor radial de rolete deve mover-se com um deslocamento total de L = 15 mm com movimento cicloidal, enquanto a came gira de β = 30°. O seguidor repousa durante 45° e então retorna com movimento cicloidal em 70°. Verifique se a came apresenta ponta ou rebaixo para um raio de rolete Rr de 6,25 mm e raio mínimo Ro da superfície primitiva de 37,5 mm.
L / Ro = 15 / 37,5 = 0,40
Será examinada apenas a elevação, devido ao seu ângulo β menor. Portanto, da Fig. 3.23, para L/Ro = 0,40 e β = 30°,
ρmin / Ro = 0,22
e
ρmin = 0,22 x 37,5 = 8,25 mm
A came não terá ponta ou rebaixo, porque ρmin > Rr.
Conforme mencionado anteriormente, é importante considerar-se o valor do ângulo de pressão, no projeto de cames com seguidores de rolete. É necessário manter o ângulo de pressão máximo o menor possível e até hoje este máximo foi estabelecido arbitrariamente em 30°. Entretanto, são usados ocasionalmente valores maiores quando as condições permitirem. Embora seja possível desenhar o contorno da came e medir o ângulo de pressão máximo, é preferível empregar os métodos analíticos. Há diversos métodos disponíveis, um dos quais foi desenvolvido por Kloomok e MuffIey, pelo qual pode-se determinar analiticamente o ângulo de pressão tanto para o seguidor radial de rolete como para o oscilante de rolete. Aqui será abordado somente o caso do seguidor radial de rolete.
Para a came de disco e o seguidor radial de rolete mostrados na Fig. 3.30, o ângulo de pressão OCA é denominado α e o centro da came, O. Supõe-se que a came está preparada e o seguidor gira no sentido horário da posição C até C’ segundo um pequeno ângulo ∆θ. Da figura,
α’ = tg-1 (C’E / CE)
Figura 3.30

MECANISMOS CAPÍTULO 3
65
Quando ∆θ tende a zero, os ângulos OCE e ACC’ tendem para 90°. Ao mesmo tempo o segmento CD tende para o comprimento do arco CF, igual a R∆θ e ambos, CD e CF tendem para CE. Portanto,
lim α’ = tg-1 [ (1/R) (dR/dθ) ]
∆θ → 0
Como os lados de α e α' se tornam, respectivamente, perpendiculares quando ∆θ tende a zero, α' torna-se igual a α. Portanto,
α = tg-1 [ (1/R) (dR/dθ) ] (3.12)
Pode-se determinar uma expressão para α, em qualquer tipo de movimento, partindo-se da Eq. 3.12. Entretanto, a determinação do ângulo de pressão máximo é quase sempre muito difícil, porque leva a equações transcendentais complexas. Por isso, Kloomok e Muff1ey empregam um nomograma desenvolvido por E. C. Varnun, apresentado na Fig. 3.31; β e L/Ro são parâmetros já definidos anteriormente. Determina-se, usando-se o nomograma, o valor máximo do ângulo de pressão para os três tipos de movimento.
Pontos na superfície da came também podem ser determinados pelo uso da Fig. 3.31. As coordenadas do ponto C são dadas por
xC = R cos θ (3.13) yC = R sen θ
As coordenadas dos pontos de contato (ponto A) são obtidos da projeção do segmento de linha CA e das distancias xC e yC como segue:
xA = xC + Rr cos (π – θ – α)
yA = yC – Rr sen (π – θ – α)
onde Rr é o raio do rolete. Simplificando essas equações com a utilização de relações trigonométricas obtém-se
xA = xC – Rr cos (θ + α) (3.14) yA = yC – Rr sen (θ + α)
Figura 3.31 Nomograma para determinar o ângulo de pressão máximo

MECANISMOS CAPÍTULO 3
66
Exemplo 3.5. Um seguidor radial de rolete deve mover-se com um deslocamento total de 18,75 mm, com movimento cicloidal enquanto a came gira de 45°. O seguidor repousa por 30° e então retorna com movimento cicloidal em 60°. Determine o valor de Ro para limitar o αmáx em 30°. Será examinada somente a elevação, devido ao seu ângulo β menor.
Para β = 45° e αmáx = 30°,
L / Ro = 0,26 (da Fig. 3.31)
Portanto,
Ro = 18,75 / 0,26 = 72 mm
Se o espaço não permite tal valor de Ro, β pode ser aumentado e a came deve girar mais rápido para conservar o mesmo tempo de elevação.
3.11. Came de Disco com Seguidor Oscilante de Rolete (Projeto Analítico). Na Fig. 3.32 vê-se o início do traçado de uma came de disco com seguidor oscilante de rolete. O ângulo de elevação ψ é função do ângulo de rotação da came θ. Embora a came gire de θ para o ângulo de elevação ψ, o raio R gira segundo o ângulo φ. Especificando-se valores de R e φ, é possível obter-se o contorno da came.
Figura 3.32
Da Fig. 3.32 pode-se ver que
φ = θ - λ (3.15)
onde
λ = β - Γ (3.16)
O ângulo β é uma constante do sistema e pode-se obter sua equação usando-se o triângulo OAO'. Assim,
0
220
2
2cos
SRlRS −+
=β (3.17)
onde S, Ro e l têm dimensões fixas.
O ângulo Γ é função de R; sua equação pode ser obtida do triângulo OBO’ como
SRlRS
2cos
222 −+=Γ (3.18)
R2 = l2 + S2 – 2 l S cos (ψ + Σ) (3.19)

MECANISMOS CAPÍTULO 3
67
O ângulo Σ é uma constante determinada a partir do triângulo OAO’ como
lSRSl
2cos
20
22 −+=Σ (3.20)
e o ângulo ψ é o ângulo de elevação para um determinado ângulo de rotação da came θ. Portanto, das equações precedentes, os valores de R e φ podem ser calculados a partir de valores de θ e dos correspondentes ângulos de elevação ψ.
No projeto deste tipo de came, é necessário verificar se há rebaixos e conferir o ângulo de pressão máximo. As equações do raio de curvatura e do ângulo de pressão podem ser obtidas com mais facilidade pelo método de variáveis complexas de Raven. A Fig. 3.33 mostra o esboço de uma came de disco e um seguidor oscilante de rolete, com o raio de curvatura da superfície primitiva ρ e o ângulo de pressão α. O ponto O é o centro da came, o ponto D é o centro de curvatura e o ponto O', o centro de rotação do seguidor. A elevação angular do seguidor a partir da horizontal é σ, que é dada pela equação
σ = σ0 + f(θ) (3.21)
onde f(θ) é a elevação angular desejada para o seguidor, a partir de um ângulo de referência σ0 (não mostrado na figura). Da Fig. 3.33, o ângulo de pressão α é dado por
α = σ - π/2 - γ (3.22)
Substituindo a Eq. 3.22 por σ
α = [σ0 + f(θ)] - π/2 - γ (3.23)
A fim de se obter uma expressão para o ângulo γ, determinam-se duas equações de posição, independentes, para o ponto A, centro do rolete. A primeira equação é obtida seguindo-se o trajeto (O-D-A) e a outra, seguindo-se o trajeto (O-B-O'-A).
Figura 3.33
A equação para o primeiro trajeto é dada por
R = re’δ + ρe’γ
= r (cos δ + i sen δ) + ρ (cos γ + i sen γ) (3.24)
A equação para o segundo trajeto é dada por
R = a + bi + leiσ
= a + bi +l(cos σ + i sen σ) (3.25)

MECANISMOS CAPÍTULO 3
68
Separando-se as partes reais e imaginárias das Eqs. 3.24 e 3.25,
r cos δ + ρ cos γ = a + l cos σ (3.26)
r sen δ + ρ sen γ = b + l sen σ (3.27)
Derivando as equações 3.26 e 3.27 em relação a θ,
θσσ
θγγρ
θδδ
ddsenl
ddsen
ddsenr −=−−
θσσ
θγγρ
θδδ
ddl
dd
ddr coscoscos =+
Para uma rotação infinitesimal da came, ρ pode ser considerado como constante. Assim, o ponto D, o centro de curvatura da came no ponto de contato e r podem ser considerados como fixos à came para um acréscimo de rotação dθ. Portanto, o valor de dδ é igual a dθ e como δ diminui quando θ cresce, segue-se que dδ/dθ = - 1. Também, dσ/dθ = f’(θ). Portanto,
( ) σθθγγρδ senfl
ddsensenr '−=− (3.28)
( ) σθθγγρδ cos'coscos fl
ddr =−− (3.29)
Eliminando dγ/dθ nas Eqs. 3.28 e 3.29,
( )( ) σθδ
σθδγcos'cos
'flr
senflsenrtg++
=
Os termos r cos δ e r sen δ podem ser calculados das Eqs. 3.26 e 3.27, dando
( )[ ]( )[ ]θσθσγ
'1cos'1
flafsenlbtg
++++
= (3.30)
que, quando substituída na Eq. 3.??, dará o ângulo de pressão α. Para se determinar αmax, será necessário o emprego de gráficos semelhantes aos dados por Kloomok e Muffley.
Para se calcular o raio de curvatura ρ, é necessário primeiro derivar a Eq. 3.27 em relação a θ. Substituindo dγ/dθ da Eq. 3.26 e com o auxílio das Eqs. 3.19, 3.23 e 3.27, obtém-se a seguinte equação para ρ:
( )( ) ( )[ ] ( ) ( ) ( ) ( )θσσθθ
ρ'cos122
2322
lfbsenafbCaCfDCDC
−++−+++
= (3.28)
onde
C = a + l cos σ [1 + f’ (θ ) ]
D = b + l sen σ [1 + f’ (θ ) ]
Para evitar o rebaixo, ρ deve ser maior do que o raio do rolete. Portanto, é possível determinar-se ρmin para cada posição do perfil da came. Para isso, é necessário o emprego de gráficos semelhantes aos dados por Kloomok e Muffley.
Uma vez que o raio de curvatura foi encontrado, pontos na superfície da came são facilmente encontrados pela Fig. 3.33:
RS = reiδ + (ρ - Rr)eiγ
onde RS é o vetor que localiza o ponto de contato e Rr é o raio do rolete do seguidor.

MECANISMOS CAPÍTULO 3
69
3.12. Cames de Contorno. A aplicação desse tipo de cames é principalmente em sistemas mecânicos e computadorizados de controle. Um esquema é mostrado na Fig. 3.34. Com esse tipo de came, os componentes rolam um sobre o outro sem deslizamento; isso facilita o projeto por duas razões: (a) o ponto de contato P sempre estará na linha de centros e (b) ambas superfícies rolarão uma sobre a outra através da mesma distância. Pelo uso desses fatores, podem ser facilmente derivadas equações para a distância dos centros das cames ao ponto de contato.
Na Fig. 3.34, R2 e R3 são as distancias instantâneas dos centros das cames ao ponto de contato e C a distância fixa entre os centros. Se a came 2 gira de um pequeno ângulo dθ2 e a came 3 de dθ3, o ponto de contato na came 2 se movimentará de R2dθ2, e na came 3 de R3dθ3. Para rolamento puro,
R2dθ2 = R3dθ3
Também,
R2 + R3 = C
Portanto,
( )322 1 θθ dd
CR+
= (3.29)
Figura 3.34
e
( )233 1 θθ dd
CR+
= (3.30)
Essas cames podem ser usadas para gerar diversos tipos de funções, três das quais são descritas a seguir:
1. Função quadrada. Para gerar a função quadrada, 223 θθ k=
22
3 2 θθθ
kdd
=
e
23
2
21θθ
θkd
d=
Portanto,

MECANISMOS CAPÍTULO 3
70
2
22 21
2θθk
kCR+
=
e
23 21 θk
CR+
=
Das equações para R2 e R3, o contorno da came pode ser determinado, o qual gerará a função quadrada especificada.
2. Função Logarítmica. Para gerar o logaritmo,
2103 log θθ =
23 ln303,21 θθ =
22
3
303,21θθ
θ=
dd
e
23
2 303,2 θθθ
=dd
Portanto,
22 303,21 θ+=
CR
e
2
23 303,21
303,2θθ
+=
CR
A partir dessas equações, o contorno da came pode ser determinado, o qual gerará o logaritmo fornecido. A operação inversa fornecerá antilogaritmo.
3. Função Trigonométrica. Para ilustrar a geração de uma função trigonométrica, consideremos
23 tanθθ =
22
2
3 sec θθθ
=dd
e
22
22
3
2 cossec
1 θθθ
θ==
dd
Portanto,
222 cos1 θ+
=CR
e
22
22
3 cos1cos
θθ
+=
CR

MECANISMOS CAPÍTULO 3
71
Com referência às equações de R2 e R3 desenvolvidas para as três funções, é evidente que em (1), R2 = 0 quando θ2 = 0 e em (2), R3 = 0 quando θ2 = 0. Em (3), R3 = 0 quando θ2 = 90°. Quando um dos raios vai a zero, o resultado é um projeto impraticável. Com as funções ilustradas, o fato que a escala de θ2 não pode começar em zero nos primeiros dois casos nem estendido até 90° no terceiro caso, provavelmente não limitará a geração dessas funções. Existem casos, entretanto, onde essas limitações se provarão uma desvantagem e quando necessário algum meio deve ser encontrado para eliminar esse problema. Outro problema que algumas vezes aparece no projeto de contorno de cames é que com certas funções o valor de dθ3/dθ2 pode vir a ser igual a -1, o que leva os raios R2 e R3 a valor infinito. Ambos problemas devem ser evitados caso eles vierem a ocorrer durante o range de trabalho da função. Isto pode ser contornado por compensar a função através de uma constante que pode depois ser subtraída por diferenciação. Como exemplo, consideremos a função
22
3 θθ sen=
e
222
3 cos2 θθθθ
sendd
=
Portanto,
( )1cos2
cos2
22
222 +=
θθθθ
sensenCR
e
223 cos21 θθsen
CR+
=
Quando θ2 igual a zero, R2 = 0; quando θ2 igual a 135°, dθ3/dθ2 = -1. Para evitar essas condições, a função deverá se compensada com uma constante kθ2 como essa
222'
3 θθθ ksen +=
e
ksendd
+= 222
'3 cos2 θθ
θθ
Após a geração da nova função, kθ2 poderá ser subtraída para resultar a função original θ3 = sen2 θ2.
Se grandes torques devem ser transmitidos, as cames podem ser substituídas por engrenagens tendo a linha primitiva idênticas ao contorno das cames. Essa substituição é possível devido a ação de rolamento puro das cames. Essas engrenagens são conhecidas como engrenagens de contorno ou engrenagens não circulares. Uma fotografia de um par de engrenagens não circulares é mostrada na Fig. 3.35.
Figura 3.35 Engrenagens não circulares

MECANISMOS CAPÍTULO 3
72
3.13. Cames Tridimensionais. Um esquema de came tridimensional é mostrado na Fig. 3.36, onde o deslocamento z do seguidor é uma função da rotação y e da translação x da came.
Uma came tridimensional pode facilmente ser projetado para resolver a equação Q = 0,05a(h)1/2, que expressa o fluxo através de um orifício (pé3/s) em termos da área do orifício a (pol.2) e da pressão de coluna h (pé).
Figura 3.36 Came tridimensional
A tabela 3.1 foi desenvolvida para fornecer uma gama de valores para os parâmetros pelos quais a came pode ser projetado.
TABELA 3.1. Fluxo Q (pé3/s) a, pol.2 h
pé 1.00 1.05 1.10 1.15 1.20 1.25 1.30 1.30 1.35 1.45 1.50 1 0.0500 0.0525 0.0550 0.0575 0.0600 0.0625 0.0650 0.0675 0.0700 0.0725 0.07504 0.1000 0.1050 0.1100 0.1150 0.1200 0.1250 0.1300 0.1350 0.1400 0.1450 0.15009 0.1500 0.1575 0.1650 0.1725 0.1800 0.1875 0.1950 0.2025 0.2100 0.2175 0.225016 0.2000 0.2100 0.2200 0.2300 0.2400 0.2500 0.2600 0.2700 0.2800 0.2900 0.300025 0.2500 0.2625 0.2750 0.2875 0.3000 0.3125 0.3250 0.3375 0.3500 0.3625 0.375036 0.3000 0.3150 0.3300 0.3450 0.3600 0.3750 0.3900 0.4050 0.4200 0.4350 0.450049 0.3500 0.3675 0.3850 0.4025 0.4200 0.4375 0.4550 0.4725 0.4900 0.5075 0.5250
A Fig. 3.37 mostra a orientação dos valores do parâmetro a em torno da circunferência da came para o valor de a = 1.0 pol.2 tomada no topo da came. A Fig. 3.38 mostra uma seção axial vertical através da came que se estende de a = 1.0 pol.2 até a = 1.3 pol.2. As Fig. 3.39 e 3.40 mostram seções transversais da came para h = 25 pés e h = 49 pés, respectivamente. A seção axial mostra Q como uma função de h e a seção transversal mostra Q como uma função de a. O projeto da came pode ser completado pela geração de seções axiais e transversais adicionais.
Figura 3.37

MECANISMOS CAPÍTULO 3
73
Figura 3.38
Figura 3.38
Figura 3.39

MECANISMOS CAPÍTULO 3
74
A fabricação de uma came tridimensional é muito difícil devido às exigências de precisão e de acabamento manual. Depois de serem especificados os deslocamentos do seguidor para os acréscimos desejados de rotação e de translação da came, funde-se um bloco com o formato aproximado da came desejada. Usando-se uma ferramenta de corte, do mesmo tamanho e da mesma forma do seguidor, coloca-se o fundido em uma fresadora de cames e usina-se a superfície do bloco, em alguns pontos de referências, até chegar à superfície desejada sobre a came tridimensional. Através de rotações e translações apropriadas da came e deslocando-se a ferramenta de corte até chegar à elevação prevista para cada ponto da superfície desejada, essa ferramenta simulará o movimento do seguidor em relação a came. Deste modo, pode-se localizar com precisão um ponto na superfície da came. De acordo com Rothbart, às vezes, são necessários 15000 pontos com a precisão de ±0,010 mm. Depois de marcados todos os pontos, faz-se um acabamento manual com lima, seguido de um polimento com lixa de esmeril.
3.14. Métodos de Produção de Cames. O método gráfico de projeto de cames é limitado para aplicações de baixa velocidade. A produção desse tipo de cames depende da precisão do desenho do perfil e do método utilizado seguir esse desenho como modelo. Em um extremo, o desenho da came é traçado em uma chapa de aço e a came recortado com uma serra fita. E outro extremo, a produção da came é feita com uma fresadora, cujo movimento da ferramenta é guiado por um traçador que se movimenta a partir de um desenho do perfil da came. O desenho sobre o qual o traçador se move pode ser feito em escala muitas vezes maior que o tamanho original da came de forma a melhorar a precisão da cópia. Em ambos os casos, o perfil da came deve receber acabamento manual.
O projeto gráfico e o método resultante de produção não são suficientemente precisos para a produção de cames de alta velocidade. Por essa razão, a atenção tem se voltado para o projeto analítico de cames e para o método que este proporciona para a produção das cames. Se for possível calcular os deslocamentos do seguidor para pequenos incrementos de rotação da came, o perfil da came pode ser gerado em uma fresadora ou numa furadeira radial com a ferramenta assumindo o papel do seguidor. Se o seguidor for com rolete, o eixo da ferramenta de corte deverá ser perpendicular ao plano da came e o diâmetro da ferramenta deverá ter o mesmo diâmetro do rolete. Se o seguidor for de face plana, o eixo da ferramenta de corte deverá ser paralelo ao plano da came. Em cada caso, a ferramenta de corte deve atuar com o fornecimento da posição correta correspondente ao ângulo de rotação da came. Naturalmente, quanto menores os incrementos no ângulo de rotação da came, melhor será seu acabamento. Geralmente, são usados incrementos de 1°, o que deixa pequenos ressaltos no perfil da came que devem ser removidos manualmente. Máquinas automáticas controladas numericamente têm sido desenvolvidas para a usinagem de cames com precisão de frações de um grau, com avanços da ferramenta de corte da ordem de décimos ou centésimos de milímetro. Embora a máquina opere com avanços discretos, os avanços são tão pequenos que proporcionam a aparência de operação contínua. É esperado que o acabamento da superfície da came produzido por esse tipo de máquina tenha qualidade suficiente para eliminar a necessidade de acabamento manual. Esse tipo de máquina também produzirá cames com maior rapidez que uma furadeira radial, quando ambas estiverem utilizando o mesmo incremento de ângulo de rotação da came.
Nas discussões precedentes, foi assumido que a came sendo gerada seria a came a ser utilizada na aplicação final. Quando muitas máquinas do mesmo modelo estão sendo produzidas e muitas cópias de uma came são necessárias, é geralmente mais prático gerar uma came modelo e usar esse modelo em uma máquina copiadora. A came modelo é freqüentemente fabricada em escala muitas vezes maior que o tamanho original.

MECANISMOS CAPÍTULO 3
75
Problemas 3.1. Uma came de disco girando no sentido horário aciona um seguidor radial de face
plana segundo uma elevação total de 37,5mm, de acordo com os dados a seguir:
Ângulo de rotação da came (graus)
Elevação (mm)
0 0,00 30 2,50 60 9,25 90 18,75
120 28,25 150 35,00 180 37,50 210 35,00 240 28,25 270 18,75 300 9,25 330 2,50 360 0,00
Desenhe a came usando um raio mínimo de 25 mm. Determine o comprimento da face do seguidor (face simétrica). Depois de achar o comprimento da face, por tentativas, aumente 3 mm em cada extremidade para assegurar um contato adequado.
3.2. Uma came de disco gira no sentido anti-horário, comandando um seguidor radial de rolete, segundo uma elevação total de 37,5 mm. Desenhe a came usando os dados de movimento do problema 3.1 e empregando um raio mínimo de 25 mm. O diâmetro do rolete deve ser 22 mm. Determine, por tentativas, o ângulo de pressão máximo e o local onde ocorre este ângulo.
3.3. Uma came de disco girando no sentido horário comanda um seguidor de face plana deslocado segundo uma elevação total de 37,5 mm. Desenhe a came usando os dados de movimento do problema 3.1. A linha de centro do seguidor é deslocada de 12,5 mm para a esquerda, paralelamente à vertical que passa pelo centro da came. O raio mínimo da came deve ser 25 mm. Determine o comprimento da face do seguidor (face simétrica). Depois de determinar o comprimento da face, por tentativas, aumente 3 mm em cada extremidade para assegurar um contato adequado.
3.4. Uma came de disco gira no sentido anti-horário e aciona um seguidor de rolete segundo uma elevação total de 37,5 mm. A linha de centro do seguidor é deslocada de 12,5 mm para a direita, paralelamente à vertical que passa pelo centro da came. O raio mínimo deve ser 25 mm e o diâmetro do rolete, 22 mm. Desenhe a came empregando os dados de movimento do problema 3.1. Por tentativas determine o ângulo de pressão máximo durante os cursos de elevação e de retorno.
3.5. Uma came de disco gira no sentido horário e aciona um seguidor oscilante de face plana segundo um ângulo de elevação total de 20°, de acordo com os dados a seguir.

MECANISMOS CAPÍTULO 3
76
Ângulo de rotação da came (graus)
Ângulo do seguidor (graus)
0 0,0 30 1,5 60 5,5 90 10,0
120 14,5 150 18,5 180 20,0 210 18,5 240 14,5 270 10,0 300 5,5 330 1,5 360 0,0
Desenhe a came usando um raio mínimo de 30 mm. O centro de rotação do seguidor deve estar a 80 mm à direita e na horizontal que passa pelo centro da came, semelhante à Fig. 3.3. A distância do centro do cubo do seguidor ao arco da escala de elevações angulares é de 70 mm. Determine o comprimento da face do seguidor. Depois de achar o comprimento da face, por tentativas, aumente 3 mm em cada extremidade para assegurar um contato adequado.
3.6. Uma came de disco girando no sentido anti-horário aciona um seguidor oscilante de rolete segundo um ângulo de elevação total de 20°. Desenhe a came usando os dados de movimento do problema 3.5 e um raio mínimo de 25 mm. O centro do cubo do seguidor deve estar a 75 mm à direita e sobre a horizontal que passa pelo centro da came, semelhante à Fig. 3.4. O diâmetro do rolete mede 19 mm e a distância entre o centro do cubo do seguidor e o centro do rolete é de 72 mm. Usando um furo de 16 mm, um cubo de 25 mm e um rasgo de chaveta de 5 x 5 mm, desenhe o resto do seguidor em proporções razoáveis.
3.7. Uma came de retorno comandado gira no sentido horário e aciona um seguidor de face plana, tipo garfo, conforme mostrado na Fig. 3.5. Os dados para a elevação são os seguintes:
Ângulo de rotação da came (graus)
Elevação (mm)
0 0,00 30 1,27 60 4,32 90 9,65
120 17,00 150 23,40 180 25,40
Desenhe a came empregando um raio mínimo de 25 mm. Usando proporções razoáveis complete o esboço do seguidor.
3.8. Uma came de retorno comandado gira no sentido anti-horário e aciona um seguidor, tipo garfo, de roletes. Desenhe a came empregando os dados de movimento do problema 3.7 para a elevação. O raio mínimo deve ser 25 mm. O diâmetro dos roletes é de 19 mm. Usando proporções razoáveis, complete o esboço do garfo que suporta os roletes.

MECANISMOS CAPÍTULO 3
77
3.9. Um seguidor oscilante de rolete move-se segundo um ângulo total de 60° e aciona uma came invertida, como a mostrada na Fig. 3.7. Os dados do movimento são os seguintes:
Ângulo de rotação da came (graus)
Deslocamento da came (mm)
0,0 0,0 4,5 1,5
16,0 6,0 30,0 12,5 44,0 19,0 55,5 23,5 60,0 25,0
A came deve deslocar-se para cima e para a direita a um ângulo de 45°, quando o seguidor girar no sentido anti-horário. O movimento do seguidor é simétrico em relação à linha de centro vertical. A distância entre o centro do rolete e o centro de rotação do seguidor é de 75 mm e o diâmetro do rolete é de 16 mm. O bloco da came mede 75 mm por 100 mm. Desenhe a ranhura que deve existir no bloco da came.
3.10. Prove que é correto o método de determinação dos pontos de inflexão para intervalos de tempo conhecidos, conforme indicado na Fig. 3.10.
3.11. Prove que é correto o método de determinação dos pontos de inflexão para deslocamentos conhecidos, conforme mostrado na Fig. 3.11.
3.12. Prove que é correto o método de construção de movimento parabólico, conforme mostrado na Fig. 3.12.
3.13. Trace o gráfico deslocamento-tempo para um seguidor que deve ter uma elevação total de 37,5 mm. O movimento é iniciado com um trecho de aceleração constante em 67° de rotação da came, passando à velocidade constante em 90° e desaceleração constante em 90°: o seguidor repousa em 22,5° e então retorna com movimento harmônico simples em 90°. Use uma abscissa de 100 mm de comprimento.
3.14. Trace o gráfico deslocamento-tempo para um seguidor que se eleva de 19 mm com movimento harmônico simples em um quarto de volta da came, repousa durante 45°, torna a se elevar de 19 mm durante 90°, repousa durante 22,5° e então retorna 38 mm com movimento parabólico em um quarto de volta, seguindo-se um repouso de 22,5°. Use uma abscissa de 160 mm de comprimento.
3.15. Trace o gráfico deslocamento-tempo para um seguidor que se eleva de 38 mm em meia-volta da came de modo que nos primeiros 9,5 mm tenha aceleração constante, nos próximos 19 mm velocidade constante e aceleração constante nos 9,5 mm restantes. O retorno é um movimento harmônico simples em meia-volta da came. Use uma abscissa de 150 mm de comprimento.
3.16. Trace o gráfico deslocamento-tempo para um seguidor que tem uma elevação total de 32 mm com aceleração constante durante 90° e desaceleração constante para 45° de rotação da came. O seguidor retorna 16 mm com movimento harmônico simples durante 90°, repousa por 45° e retorna 16 mm com movimento harmônico simples em 90° de rotação da came. Use uma abscissa de 160 mm de comprimento.
3.17. O seguidor radial de face plana, mostrado na Fig. 3.40, tem movimento de translação alternativa sob a ação de uma came de disco circular que gira em torno do eixo O2. (a) Determine as expressões para o deslocamento R do seguidor e para a distância l entre o ponto de contato e a linha de centro, em função do ângulo θ, do raio r e do deslocamento b. (b) Trace um gráfico do deslocamento R em função do ângulo de rotação θ para uma volta da came. Chame de L a distância entre as posições extremas do curso do seguidor. Determine o valor de L. (c) Identifique o tipo de movimento realizado pelo seguidor.

MECANISMOS CAPÍTULO 3
78
Figura 3.40
3.18. Um seguidor radial é comandado por uma came girando a 1 rad/s. O seguidor parte do repouso e se eleva de 50 mm com movimento harmônico simples enquanto a came gira de 120°. O seguidor repousa nos próximos 120° e então retorna com movimento harmônico simples nos 120° restantes. Usando uma abscissa de 150 mm e intervalos de 30° para a rotação da came, trace as curvas de deslocamento, velocidade, aceleração e segunda aceleração, no mesmo eixo.
3.19. Partindo da equação do movimento harmônico simples, deduza a expressão do deslocamento S da curva H-5 mostrada na Fig. 3.16.
3.20. Deduza expressões que permitam o uso das equações de Kloomok e Muffley na determinação de velocidades e acelerações do seguidor quando a velocidade da came não for constante.
3.21. Um seguidor deve ter movimento cíclico de acordo com o diagrama de deslocamento mostrado na Fig. 3.41. As exigências para deslocamentos e velocidades são as seguintes:
Ponto A Ponto B Ponto C
S = L S = 0 S = L
V = 0 V = 0 V = 0
Recomende as curvas que devem ser usadas no diagrama de deslocamentos e a relação entre β1 e β2 para combinar as acelerações no ponto B e nos pontos A e C.
Figura 3.41

MECANISMOS CAPÍTULO 3
79
3.22. Um seguidor partindo do repouso desloca-se de acordo com o gráfico mostrado na Fig. 3.42 e repousa novamente. As exigências do movimento são as seguintes:
Ponto A Ponto B Ponto C
S = 0 S = L S = 0
V = 0 V = 0 V = 0
A = 0 A = A1 A = 0
Recomende as curvas que devem ser usadas no diagrama de deslocamento e a relação entre β1 e β2 para combinar acelerações no ponto B.
Figura 3.42
3.23. Um seguidor partindo do repouso eleva-se com movimento acelerado, em seguida passa a ter velocidade constante e depois desacelera até ficar em repouso, conforme indica a Fig. 3.43. As exigências do movimento são as seguintes:
Ponto A Ponto B Ponto C Ponto D
S = 0 S = L1 S = L1 + L2 S = L1 + L2 + L3
V = 0 V = V1 V = V1 V = 0
A = 0 A = 0 A = 0 A = 0
Recomende as curvas que devem ser usadas no diagrama de deslocamento e a relação entre β1, β2 e β3 para combinar velocidades nos pontos B e C.
Figura 3.43
3.24. No diagrama de deslocamento, mostrado na Fig. 3.16a, do exemplo 3.1, β1 é o ângulo de rotação da came correspondente ao trecho AB, β2 o ângulo de BC, β3 o ângulo de CD e β4 o ângulo de DE. Também L1 é a elevação do trecho AB, L2 a elevação de BC, L3 a elevação de CD e L4 a elevação de DE. Determine a relação que deve existir entre β3 e β4 para combinar as acelerações no ponto D.
3.25. Determine (a) a relação entre os ângulos β1 e β2 entre as elevações L1 e L2 para combinar uma curva cicloidal C-1 com uma curva de velocidade constante e (b) a relação para combinar uma curva de velocidade constante com uma curva C-4.

MECANISMOS CAPÍTULO 3
80
3.26. Estabeleça as equações que relacionam as elevações L1 e L2 e os ângulos β1 e β2 para a combinação de: (a) movimento cicloidal com harmônico; (b) movimento cicloidal com velocidade constante; (c) movimento harmônico com cicloidal; (d) movimento harmônico com velocidade constante. A combinação deve ser feita quando as acelerações forem nulas.
3.27. Determine (a) a relação entre os ângulos β1 e β2 e entre as elevações L1 e L2 para combinar um movimento cicloidal C-1 com o harmônico H-2 e (b) a relação para combinar uma curva H-3 com uma C-4.
3.28. Determine (a) a relação entre os ângulos β1 e β2 e entre as elevações L1 e L2 para combinar um movimento harmônico H-1 com um cicloidal C-2 e (b) a relação para combinar uma curva C-3 com uma H-4.
3.29. Determine (a) a relação entre os ângulos β1 e β2 e entre as elevações para combinar o movimento harmônico H-1 com uma curva de velocidade constante e (b) a relação para combinar uma curva de velocidade constante com uma curva H-4.
3.30. Um seguidor deve se deslocar com velocidade constante durante um trecho da elevação e também do retorno. É possível combinar movimentos harmônicos com estas curvas de velocidade constante e não resultar segunda aceleração infinita? Caso afirmativo, recomende as curvas que devem ser usadas e esboce o diagrama de deslocamento mostrando as curvas.
3.31. Determine (a) a relação entre os ângulos β1 e β2 e entre as elevações L1 e L2 para combinar um movimento harmônico da curva H-5 com um movimento polinomial de oitavo grau da curva P-2 e (b) a relação para combinar o movimento harmônico da curva H-2 com o polinomial de oitavo grau da curva P-2.
3.32. Escolha uma combinação de movimentos cicloidal, harmônico e polinomial de oitavo grau que não resulte segunda aceleração infinita.
3.33. Determine (a) a relação entre os ângulos β1 e β2 e entre as elevações L1 e L2 para combinar o movimento polinomial de oitavo grau da curva P-1 com o harmônico da curva H-6 e (b) a relação para combinar o movimento polinomial de oitavo grau da curva P-1 com o harmônico da curva H-3.
3.34. Escolha uma combinação de movimento harmônico com polinomial de oitavo grau que não resulte segunda aceleração infinita.
3.35. Um seguidor se desloca com movimento harmônico H-1, elevando-se 25 mm em π/4 rad de rotação da came. O seguidor então se eleva de mais 25 mm com movimento cicloidal C-2, para completar o curso de elevação. O seguidor repousa e retorna 25 mm com movimento cicloidal C-3 e os 25 mm restantes com movimento harmônico H-4 em π/4 rad. (a) Determine os ângulos de rotação da came para os movimentos cicioidais e para o repouso combinando velocidades e acelerações. (b) Determine a equação para o deslocamento S em função de θ para cada tipo de movimento, tendo como origem das abscissas o ponto O, origem dos eixos coordenados, de modo que o deslocamento possa ser calculado para qualquer ângulo θ usando-se a equação adequada.
Figura 3.44

MECANISMOS CAPÍTULO 3
81
3.36. No diagrama de deslocamento da Fig. 3.44, deseja-se obter uma elevação total de 37,5 mm com um seguidor radial de face plana combinando o movimento cicloidal C-1 com o harmônico H-2. (a) Usando os dados do diagrama, determine o ângulo β2 referente ao movimento harmônico, a fim de que haja continuidade de velocidades e de acelerações em B, ponto de transição entre os dois movimentos. (b) Determine o comprimento máximo teórico da face do seguidor necessário para os dois movimentos.
3.37. Uma came de disco comanda um seguidor radial de face plana com movimento harmônico simples. O seguidor se eleva e retorna durante uma volta da came. Sendo o deslocamento total 50 mm e o raio mínimo 25 mm, determine as equações paramétricas (x e y) do contorno da came. Elimine o parâmetro para obter a equação do contorno da came. Determine o comprimento teórico da face do seguidor.
3.38. Um seguidor radial de face plana é acionado segundo um deslocamento total de 40 mm. O seguidor sobe 10 mm com aceleração constante durante 60° de rotação da came, 20 mm com velocidade constante durante 60° e os restantes 10 mm com desaceleração constante durante 60°. O seguidor repousa em 45° e retorna com movimento harmônico simples quando a came completa uma volta.
Para cada tipo de movimento escreva a equação do deslocamento S em função do ângulo β de rotação da came, usando como origem o ponto O, origem dos eixos coordenados de modo que o deslocamento possa ser calculado para qualquer ângulo β usando-se a equação adequada. Calcule o raio mínimo C e o comprimento máximo de contato lmáx para cada tipo de movimento. Especifique o raio mínimo da came e o comprimento da face do seguidor.
3.39. Um seguidor radial de face plana é acionado segundo um deslocamento total de 38 mm. O seguidor se eleva de 25 mm com aceleração constante durante 120° de rotação da came e os restantes 13 mm com desaceleração constante durante 60°. O seguidor retorna com movimento harmônico simples em 90° e repousa durante o restante da revolução da came. Complete a solução conforme o pedido do problema 3.38.
3.40. No desenho mostrado na Fig. 3.45, a came de disco é empregado para posicionar o seguidor radial de face plana em um mecanismo de cômputo. O perfil da came deve ser projetado para dar um deslocamento S ao seguidor, de acordo com a função S = kθ 2, partindo do repouso, quando a came girar no sentido anti-horário. Para 60° de rotação da came, a partir da posição inicial, a elevação do seguidor é de 10 mm. Determine analiticamente as distâncias R e I quando a came tiver girado de 45° a partir da posição inicial. Verifique a existência de pontas no contorno da came durante a rotação de 60°.
Figura 3.44

MECANISMOS CAPÍTULO 3
82
3.41. Um seguidor radial de rolete é acionado segundo um deslocamento total de 25 mm com movimento harmônico simples durante meia-volta da came. O movimento de retorno é o mesmo da elevação e também se realiza em meia-volta da came. Usando um raio mínimo R0 da superfície primitiva de 38 cm e um diâmetro do rolete de 19 mm, determine as posições do centro do rolete do seguidor utilizando intervalos de rotação de 15° para a came. Desenhe o contorno da came e calcule os ângulos de pressão para determinar os pontos de contato.
3.42. Um seguidor radial de rolete se desloca com uma elevação total de 50 mm em movimento cicloidal durante 180° de rotação da came. O seguidor repousa nos próximos 90° e então retorna 50 mm com movimento cicloidal durante 90° de rotação da came. Usando um raio mínimo R0 da superfície primitiva de 25 mm, calcule com um computador o deslocamento, a velocidade, a aceleração e o ângulo de pressão do seguidor, utilizando intervalos de rotação de 10° para a came.
3.43. Um seguidor radial de rolete se desloca com uma elevação total de 19 mm com movimento harmônico enquanto a came gira de 30°. Verifique a existência de pontas na superfície da came com raio do rolete de 6,25 mm e raio mínimo da superfície primitiva R0 igual a 46,875 mm.
3.44. Um seguidor radial de rolete se desloca com elevação total de 6,5 mm com movimento harmônico enquanto a came gira de 45°. O raio Rr do rolete é 6,5 mm. Determine o valor limite de R0 que ocasione um perfil pontiagudo durante esse movimento.
3.45. Um seguidor radial de rolete se desloca com uma elevação total de 19 mm com movimento cicloidal enquanto a came gira de 30°. Determine o raio de curvatura ρ da superfície primitiva quando θ for igual a 15°. O raio Rr do rolete é 6,25 mm e R0 é 46,875 mm.
3.46. Um seguidor radial de rolete se desloca com uma elevação total de 19 mm com movimento harmônico enquanto a came gira de 30°. Determine o valor de R0 para que o ângulo de pressão máximo seja 30°.
3.47. Usando a equação 3.12 e as expressões adequadas de R e dR/dθ, desenvolva a equação de α para o movimento cicloidal. Utilizando os dados do exemplo 3.5 calcule o ângulo de pressão α quando θ for igual a 22,5°.
3.48. Um seguidor radial de rolete se desloca com uma elevação total de 16 mm com movimento cicloidal enquanto a came gira de 30°. Supondo R0 = 38 mm, determine αmáx. Se αmáx for muito grande e se as exigências de dimensões não permitirem o aumento de R0, faça outras recomendações para limitar αmáx em 30°.
3.49. Utilizando os dados de deslocamento do problema 3.5, calcule os valores de R e φ para uma came de disco com seguidor oscilante de rolete. A came gira no sentido anti-horário e tem um raio mínimo de 25 mm. O diâmetro do rolete é 19 mm e a distância do centro do cubo do seguidor até o centro do rolete mede 72 mm. O centro do cubo está situado a 75 mm à direita do centro da came. Na posição inicial, o centro do rolete está na vertical que passa pelo centro da came. Desenhe a came usando os valores calculados de R e φ e comprove-os graficamente.
3.50. No problema 3.49, ψ = 0,174(1 – cos θ) radianos, aproximadamente. Usando esta expressão, calcule o ângulo de pressão na posição 3.
3.51. Usando a expressão de ψ como função de θ dada no problema 3.50 e utilizando os dados do problema 3.49, calcule o ângulo de pressão para a posição inicial e comprove graficamente.
3.52. Usando a expressão de ψ como função de θ do problema 3.50 e utilizando os dados do problema 3.49, calcule o raio de curvatura para a posição 2.