MATRIZES E VETORES
26
PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO ÁLGEBRA VETORIAL E MATRICIAL MATRIZES E VETORES 1) CONCEITOS BÁSICOS Os cálculos/operações assim como conceitos envolvendo matrizes e vetores constituem a base dos métodos numéricos que tratam da solução de sistemas lineares e não lineares de equações algébricas ou diferenciais. A representação destes sistemas em termos matriciais/vetoriais é extremamente mais compacta e é corrente na literatura técnica. Como visa-se neste curso apresentar os conceitos básicos deste assunto especialmente relacionados com aplicações em Engenharia Química, os elementos de matrizes e vetores serão em princípio números ou variáveis reais a não ser quando explicitamente especificados como complexos. Uma matriz é um arranjo retangular de números em m linhas e n colunas, m x n , sendo representada como A (letras maiúsculas em negrito) pertencente a m x n , isto é: . O elemento da linha i A mxn e coluna j de A é representado por a ij (correspondente letra minúscula com o sub-índice ij ) ou (A) ij . A matriz completa é geralmente escrita na forma: ou, 11 12 1 21 22 2 1 2 n n m m mn a a a a a a a a a A em forma mais compacta,por: ij a A com i= 1, ..., m e j=1, ...n. Se duas matrizes A e B apresentam o mesmo número de linhas e o mesmo número de colunas são ditas do mesmo tipo. Se é tal que a ij = 0 para todo i e j então a matriz A é dita nula e é representada por 0. ij a A Se n=m a matriz A é dita quadrada . Se n=m e para i,j = 1, ... n a matriz quadrada A é dita a a ij ji simétrica . Se n=1 tem-se um vetor coluna ou simplesmente vetor designado por v (letra minúscula em negrito) e representado por: 1 2 m m v v v v Se m= 1 tem-se um vetor linha designado por v T (letra minúscula em negrito com o sobre- índice T de transposto) e representada por: 1 1 2 T x n v v v n v Se m=n= 1 tem-se um escalar (real) (letra minúscula grega), ou seja: . A matriz pode ser mxn A particionada por: a) Colunas na forma: 1
Transcript of MATRIZES E VETORES

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
MATRIZES E VETORES
1) CONCEITOS BÁSICOS Os cálculos/operações assim como conceitos envolvendo matrizes e vetores constituem a base dos métodos numéricos que tratam da solução de sistemas lineares e não lineares de equações algébricas ou diferenciais. A representação destes sistemas em termos matriciais/vetoriais é extremamente mais compacta e é corrente na literatura técnica. Como visa-se neste curso apresentar os conceitos básicos deste assunto especialmente relacionados com aplicações em Engenharia Química, os elementos de matrizes e vetores serão em princípio números ou variáveis reais a não ser quando explicitamente especificados como complexos. Uma matriz é um arranjo retangular de números em m linhas e n colunas, m x n, sendo representada como A (letras maiúsculas em negrito) pertencente a m x n, isto é:
. O elemento da linha iA mxn e coluna j de A é representado por aij (correspondente letra minúscula com o sub-índice ij ) ou (A)ij . A matriz completa é geralmente escrita na
forma: ou,
11 12 1
21 22 2
1 2
n
n
m m mn
a a a
a a a
a a a
A
em forma mais compacta,por: ijaA com i= 1, ..., m e j=1, ...n. Se duas matrizes A e B
apresentam o mesmo número de linhas e o mesmo número de colunas são ditas do mesmo tipo.
Se é tal que aij = 0 para todo i e j então a matriz A é dita nula e é
representada por 0.
ijaA
Se n=m a matriz A é dita quadrada. Se n=m e para i,j = 1, ... n a matriz quadrada A é dita a aij ji simétrica.
Se n=1 tem-se um vetor coluna ou simplesmente vetor designado por v (letra minúscula em
negrito) e representado por:
1
2 m
m
v
v
v
v
Se m=1 tem-se um vetor linha designado por vT (letra minúscula em negrito com o sobre-índice T de transposto) e representada por: 1
1 2T x
nv v v n v
Se m=n=1 tem-se um escalar (real) (letra minúscula grega), ou seja: . A matriz pode ser mxnA particionada por: a) Colunas na forma:
1

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
2 1 nA a a a onde
1
2
j
j m
mj
a
a
a
ja
para j = 1, ... , n são os n vetores
colunas da matriz A; b) Linhas na forma:
onde a para i = 1, ... , m são os m
1
2
T
T
Tm
a
aA
a
1
1 2T xni i i ina a a vetores
linhas da matriz A. 2) OPERAÇÕES ENTRE MATRIZES As operações de adição ou subtração são definidas apenas para matrizes do mesmo tipo, assim se A e B são matrizes (m x n ) então a matriz C , também (m x n ), soma ou subtração de A com B, representada por C = A B, tem como termo geral : cij = aij bij para i = 1, ... , m e j = 1, ... , n . Se é um escalar qualquer, a matriz A é uma matriz cujo termo geral é aij. A operação de multiplicação de matrizes está intimamente relacionada a transformações de coordenadas. Assim sejam as seguintes transformações lineares:
para i = 1, ..., m e 1
n
i ijj
z a y
j1
p
j jk kk
y b x
para j = 1, ..., m.,
expressando zi em temos de xk , por substituição tem-se:
1 1 1 1
p pn n
i ij jk k ij jk kj k k j
z a b x a b x
kdefinindo: tem-se: 1
n
ik ij jkj
c a b
1
m
i ikk
z c x
, o que induz à definição da matriz:
onde A é (m,n) , B é (n,p) e C é (m,p) que apresenta como termo geral:
para i = 1, ..., m e k = 1, ..., p. Verificando-se assim que a operação
C A B
1
n
ik ijj
c
jka b A B só
é definida se o número de colunas de A (primeira parcela do produto) for igual ao número de linhas de B (segunda parcela do produto). É importante ressaltar que a lei de comutatividade não é satisfeita pelo produto entre matrizes, mesmo que seja definida, isto é m=p e mesmo que seja do mesmo tipo que
B AB A A B , o que só ocorrerá se m=p=n
(isto é ambas as matrizes são quadradas e de mesma dimensão), assim de uma forma geral tem-se: . B AA B
2

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
Se a primeira parcela do produto é um vetor linha uT (1,n) e a segunda parcela é um
vetor coluna v (n,1) então o produto Tu v é um escalar: 1
n
j jj
u v
Tu v que é
comutável, isto é . Este produto é chamado de T Tu v v u produto escalar de dois vetores. Se A é uma matriz (m,n) e v um vetor (n,1) então o produto é um vetor u
(m,1) cujo termo geral é: para i = 1, ..., m. Este produto pode ser efetuado de
duas formas distintas:
A v
1
n
i ijj
u a v
j
Ti iu
(a) por linhas (método ij) considerando a partição por linhas da matriz A, isto é: ,
então: , isto é o elemento i de u é dado por
1
2
T
T
Tm
a
aA
a
1
2
T
T
Tm
a v
a vA v
a v
a v para i = 1, ..., m, que é
o produto escalar do vetor composto pelos elementos da linha i da matriz A com o vetor u. (b) por colunas (método ji): considerando a partição por colunas de A, isto é:
, então: 2 1 nA a a a
1
22 1 2 2
1
n
n n i ii
n
v
vv v v v
v
1 n 1u A v a a a a a a a
, isto é o vetor u é
uma combinação linear dos vetores coluna de A sendo os coeficientes desta combinação os elementos do vetor v.
Exemplo Ilustrativo
1 27
3 4 , 8
5 6
A v
(a)método ij: e 1 2
7 71 2 1 7 2 8 23 ; 3 4 3 7 4 8 53
8 8u u
3
75 6 5 7 6 8 83
8u
, logo:
23
53
83
u
3

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
(b) método ji: .
1 2 23
7 3 8 4 53
5 6 83
u
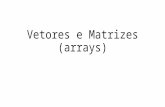
A designação dos métodos como ij e como ji deve-se à forma como os loops de programação são efetuados, assim no primeiro método tem-se o seguinte fluxograma:
Especificação de m e na e v
ij ju = 0
i
para i= 1,...., m e j=1,.....,n
i : mi > m
PARE
i < m_
j = j + 1
_j : n
j < n
u = u + a vi i
j > n
loopexterno
loopinterno
i = 1
i = i +1
j = 1
ij j
4

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
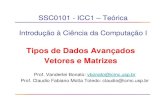
Note que neste caso o loop externo é em i (linha)e o loop interno é em j (coluna). O segundo método é descrito pelo fluxograma:
Especificação de m e na e v
ij ju = 0
i
para i= 1,...., m e j=1,.....,n
i > m
PARE
i < m_
_j < n
j > n
loopexterno
loopinterno
j=1
u = u + v ai i j ij
i = i + 1
i : m
i = 1
j : n
j = j + 1
Note que neste caso o loop externo é em j (coluna) e o loop interno é em i (linha).
5

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
Estes métodos podem também ser ilustrados acompanhando passo a passo o Exemplo Ilustrativo anterior segundo cada um dos algoritmos.
Método ij i 1 1 2 2 3 3j 1 2 1 2 1 2
u1 7 23 23 23 23 23u2 0 0 21 53 53 53u3 0 0 0 0 35 83
Método ji j 1 1 1 2 2 2i 1 2 3 1 2 3
u1 7 7 7 23 23 23u2 0 21 21 21 53 53u3 0 0 35 35 35 83
A operação de transposição de uma matriz A (m,n) consiste em trocar as linhas pelas colunas de A, esta nova matriz é chamada de matriz transposta de A , representada por AT, e é uma matriz (n,m) cujo termo da linha j e coluna i é T
ji ija a para j = 1, ... , n e i
= 1, ... , m. Se a matriz A é simétrica então: A = AT. As propriedades que serão descritas a seguir aplicam-se exclusivamente a matriz quadradas (n,n) e a vetores coluna (n,1) e a vetores linha (1,n). Define-se como matriz identidade a matriz I cujo elemento geral é:
, onde ij é chamado de delta de Kronecker, deste modo a
matriz identidade é uma matriz diagonal cujos termos da diagonal são todos unitários,
assim: , entendendo-se como
1 apenas se i=j
0 sempre que i jijij
I
1 0 0
0 1 0
0 0 1
I
matriz diagonal uma matriz quadrada em
que apenas os elementos da diagonal (também chamada de diagonal principal) são não
nulos, geralmente uma matriz diagonal é representada na forma
mais compacta: .
1
2
0 0
0 0
0 0 n
d
d
d
D
1 2 nd ddiag dD
Note que toda matriz diagonal é simétrica. Uma propriedade muito importante da matriz identidade é: I A A I A , isto é, a matriz identidade pré-multiplicada ou pós-multiplicada por qualquer matriz quadrada de mesma dimensão não altera o valor de elemento algum desta matriz.
6

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
Uma matriz diagonal é um caso particular de matrizes dita esparsas, que são matrizes que apresentam um grande número de elementos nulos, sendo os elementos não nulos mais a exceção do que a regra. Algumas destas matrizes são apresentadas abaixo: 1) matrizes tridiagonais são matrizes que apresentam apenas os elementos da diagonal, os elementos sobre a diagonal e os elementos sob a diagonal não nulos, sendo os demais nulos, assim se A é uma matriz tridiagonal então:
0 se i = j - diagonal
0 se i = j+1 (para i= 2,...,n)-sob a diagonal
0 se i = j - 1 (para i=1,...,n-1)- sobre a diagonal
=0 em qualquer outro caso
ija
2) matrizes bidiagonais são matrizes que apresentam apenas os elementos da diagonal e os elementos sobre a diagonal ou sob a diagonal não nulos, no primeiro caso diz-se que a matriz é bidiagonal superior e no segundo caso bidiagonal inferior. 3) matrizes triangulares são matrizes que apresentam todos os elementos sob (ou sobre) a diagonal nulos, sendo neste caso chamada de matriz triangular superior ou matriz U (ou triangular inferior ou matriz L), assim: 0
ijU se i > j e se j > i . 0
ijL
Algumas vezes para evitar ambigüidades representa-se a matriz identidade de dimensão n por In. O traço de uma matriz quadrada A é a soma dos elementos de sua diagonal, isto é:
. 1
n
iii
tr a
A
Uma matriz quadrada A é dita positiva definida se 0 Tx A x para todo vetor (isto é não nulo), caso x 0 0 Tx A x a matriz A é dita positiva semi-definida e se
para alguns vetores 0x Tx A x 0 e se 0 Tx A x para algum vetor a matriz A é dita
x 0não-definida. Além disto, A é dita negativa definida se 0 Tx A x para todo vetor e é dita x 0 negativa semi-definida caso 0 x A xT .
O determinante de uma matriz A é um escalar obtido através da soma de todos os produtos possíveis envolvendo um elemento de cada linha e cada coluna da matriz, com o sinal positivo ou negativo conforme o número de permutações dos índices seja par ou ímpar. Sua obtenção e sua representação, apesar de ser um dos conceitos mais preliminares envolvendo matrizes, não são tarefas triviais e o conceito de determinante será utilizado nestas notas apenas como base de outras propriedades de matrizes quadradas. Assim, o determinante de A designado por det(A) pode ser representado por:
1 21,i 2, ,det a
ni na a A i , ou então através do conceito de cofator do elemento ij da
matriz A (representado por Aij)que é o determinante da matriz obtida cancelando a linha i e a coluna j da matriz A com o sinal mais ou menos conforme i+j seja par ou ímpar, assim:
( 1) deti jij ijA onde é matriz quadrada (n-1,n-1) obtida pela eliminação da linha
i e a coluna j de A.. Tem-se então: ij
7

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
1
detn
ij ijj
a A
A
(expansão do determinante pela linha i),
1
detn
ij iji
a A
A
(expansão do determinante pela coluna j).
Além disto: (pois equivaleria a dizer que a matriz A apresenta duas
linhas iguais, no caso as linhas i e k); e
1
0 se k in
ij kjj
a A
1
0 se k jn
ij iki
a A
(pois equivaleria a dizer que a
matriz A apresenta duas colunas iguais, no caso as colunas j e k). Na prática, entretanto, é praticamente impossível calcular o determinante de matrizes através destas regras gerais por envolver um número muito grande de termos [na realidade n!, assim mesmo com matrizes relativamente pequenas como com n=10 tem-se 3 milhões de termos]. Felizmente, para os nossos propósitos, apenas as regras a seguir serão suficientes: O determinante de uma matriz A mantém-se inalterado se somarem-se a todos os elementos de qualquer linha (ou coluna) os correspondentes elementos de uma outra linha (ou coluna) multiplicados pela mesma constante ; se aij é o único elemento não nulo da linha i ou da coluna j então: ; det ij ija A A
se então : a b
c d
A det( )a b
a d b cc d
A .
Da regra verifica-se que se det(A) = 0 então A apresenta duas linhas (ou colunas) proporcionais entre si, ou ainda, de uma forma mais geral, pode-se afirmar que uma linha (ou coluna) de A pode ser escrita como combinação linear de alguma ou algumas linhas (ou colunas) da mesma matriz. Da regra demonstra-se que se A for uma matriz triangular então det(A) é simplesmente o produto dos elementos de sua diagonal (note que o mesmo vale para matrizes bidiagonais que são também matrizes triangulares). Se det(A) = 0 diz-se que a matriz A é singular, e caso det(A) 0 então A é dita regular. Se então det(C) = det(A) . det (B). C A B Se B = AT então det(B) = det(A), isto é det(AT) = det(A) A matriz adjunta de uma matriz A é a matriz transposta da matriz obtida substituindo cada elemento da matriz A pelo seu correspondente cofator, isto é se à é a matriz adjunta de A então o elemento da linha i e coluna j de à é Aji. A propriedade mais importante da matriz adjunta diz respeito aos produtos: P=A à e Q=à A o primeiro
produto tem com termo geral: 1 1
det( )n n
ij ik kj ik jk ijk k
p a a a A
8

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
e o segundo produto: , assim: 1 1
det( )n n
ij ik kj ki kj ijk k
q a a A a
det( ) A A A A A I . Deste modo se det(A) 0 (A é regular) define-se: 1
det( ) A
A1 A a chamada inversa de A que tem como propriedade:
A A A A I1 1 que existe apenas se det(A) 0. Note que 1 1
detdet
AA
Exemplo Ilustrativo: Considere a seguinte matriz (2x2): a b
c d
A , assim, seus cofatores são: 11 12
21 22
; A
; A
A d c
A b a
, permitindo determinar a
matriz adjunta: , note que: d b
c a
A
1 0 1( ) det( )
0 1 ( )
d ba d b c
c aa d b c
A A A A A I A 1 , isto é, para
determinar a inversa de uma matriz (2x2) basta trocar os elementos da diagonal principal, trocar o sinal dos elementos da diagonal secundária e dividir a matriz resultante pelo determinante da matriz original. Se , isto é a inversa da matriz é igual a sua transposta, então a matriz A é chamada de
T A A1
matriz ortogonal., e neste caso o det(A) = +1 ou -1 . Exemplo Ilustrativo - Considere a mudança de coordenadas em 2 resultante da simples rotação dos eixos, conforme mostrado abaixo:
x
x
1
2
y1
2y
P
v1
u1
v
u
2
2
O
r
vê-se da figura acima que no sistema original (x1 , x2 ) : v1 = r cos() e : v2 = r sen(), o vetor OP faz um ângulo igual a - com o eixo y1 e projeta-se na porção negativa do eixo
y2, assim: ou seja:
1
2
cos cos cos
cos cos
u r r r sen sen
u r sen r sen r sen
9

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
2
2
1 1
2 1
cos
cos
u v sen v
u sen v v
ou, em termos matriciais: , 1 1
2 2
cos
cos
u vsen
u vsen
identificando a matriz da transformação : cos cos
cos cosTsen sen
sen sen
T T ,
tem-se:
e2 2
2 2
1 0cos cos cos
0 1cos cos cosT sen sen sen
sen sen sen
T T
. 2 2
2 2
1 0cos cos cos
0 1cos cos cosT sen sen sen
sen sen sen
T T
Verificando-se assim que a matriz T é uma matriz ortogonal. É interessante verificar que os vetores coluna da matriz T são exatamente os
componentes dos vetores no novo sistema de coordenadas, em acordo 2
1 0 e
0 1
1e e
com a figura abaixo:
x
x
1
2
y1
y2
O
r
e1
cos( )
-sen( )
x
x
1
2
y1
y2
O
e2
cos( )
sen( )
3) ALGUMAS PROPRIEDADES FUNDAMENTAIS DE OPERAÇÕES ENTRE MATRIZES As leis de associação e de comutação são válidas para as operações de adição/subtração, assim: (A+B)+C = A+(B+C) e A+B = B+A. São válidas também as leis de associação e de distribuição para a multiplicação, assim: (AB)C = A(BC) ; A(B+C) = AB + AC e (A+B)C = AC + BC Para a matriz transposta tem-se as seguintes propriedades:(A+B)T = AT + BT e (AB)T = BT AT
e para a matriz inversa: (AB)-1 = B-1 A-1 e (A-1)T= (AT)-1 Um menor de ordem p de uma matriz A (n,n) é o valor do determinante da matriz obtida eliminando-se n-p linhas e n-p colunas da matriz A. Se uma matriz A apresenta a propriedade de todos os menores de ordem (r + 1 ) serem nulos e de pelo menos um menor de ordem r ser não nulo então diz-se
10

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
que a matriz A é de posto (rank) r . Note que todo matriz quadrade (n,n) regular ( ou não singular) apresenta o posto igual a n. Um conjunto de n vetores u1, u2, ..., un com n elementos é dito linearmente independente se os únicos valores de c1 , c2 , ....cn tais que: c1 u1+c2 u2+ ....+cn un= 0 são:c1 =c2 = ...=cn = 0. Neste caso os vetores u1, u2, ..., un formam uma base de n e todo vetor deste espaço de dimensão n (que é o numero máximo de vetores linearmente independentes que pode existir neste espaço, que também é igual ao número de elementos destes vetores) pode ser expresso como uma combinação linear dos vetores da base, os coeficientes desta combinação linear são os componentes do vetor nesta base. Os componentes de um vetor qualquer do n apenas confundem-se com seus elementos quando adota-se a base canônica do n, que é a base composta pelos vetores unitários ei cujo único elemento não nulo é o i’ésimo, isto é : eij = ij, desta forma os vetores coluna ou os vetores linha da matriz identidade I são os vetores da base canônica do n. Em uma matriz de posto r todos seus vetores linha (ou coluna) podem ser escritos como uma combinação linear de r vetores linha (ou coluna), desta forma o posto de uma matriz é também o número máximo de vetores linha (ou coluna) linearmente independentes. Uma forma de determinar o posto de uma matriz é através do processo de ortogonalização de Gram-Schmidt aplicado aos vetores linha ou aos vetores coluna da matriz, este processo pode ser resumido na forma, sejam: v1 , v2 , ... , vn os vetores coluna (ou linha) de A, então adota-se: u1 = v1
u vv u
uu2
T1
1
2 2 2 1
u vv u
uu
v u
uu
T1
1
T
3 33
2 13 2
2
2 2
......................................................................
u vv u
uu
T
j jj k
k
kk
j
21
1
para j = 2, ..., n com u1 = v1
onde p p p pn12
22 2 (módulo de p)
Encontrando-se durante este processo algum vetor uk com módulo nulo ( ou menor que um valor pequeno preestabelecido) abandona-se este vetor e prossegue-se o procedimento renumerando-se os vetores subseqüentes, ao final do processo o número de vetores uk não nulos é igual ao posto da matriz. Este procedimento pode ser também aplicado a matrizes não-quadradas. Exemplos Ilustrativos :Calcular através do processo de ortogonalização de Garm-Schmidt o posto de cada uma das matrizes abaixo:
11

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
(a) ; (b) ; (c) . 2 3 74 6 24 0 1
1 2 32 4 11 2 45 10 6
1 2 3 12 4 1 31 2 4 45 10 6 10
(a) utilizando os vetores coluna da matriz, isto é: , v v v1 2 3
244
360
721
; e
tem-se: u v u u v u v1 1 2
1 1 1
244
6 1 ; T T3 8
u vv u
uu u2
T1
1
2 2 2 1 2 2 2 3
360
18
6
244
442
6 1
; Tu v 8
u vv u
uu
v u
uu u
T1
1
T
33 33
2 13 2
2
2 2 2 2
721
18
6
244
18
6
442
424
6
como os 3 vetores u1 , u2 e u3 são não nulos o posto da matriz é igual a 3.
utilizando os vetores linha da matriz, isto é: , v v v1 2 3
237
462
401
; e
tem-se: u v u u v u v1 1 2
1 1
237
62 4 1 ; T T; 1 3
u vv u
uu u u2
T1
1
2 2 2 1 2 2
462
4
62
237
3 8716 1941 548
7 466 13 935
,,,
, , ; T v 3
u vv u
uu
v u
uu
T1
1
T
3 33
2 13 2
2
2 2 2
401
1
62
237
13 935
7 466
3 8716 1941 548
,
,
,,,
31 51 5
13 5,,
,u3 , novamente tem-se os 3 vetores u1 , u2 e u3 não nulos e o posto da
matriz é igual a 3.
(b) utilizando os vetores coluna da matriz, isto é: , v v v1 2 3
1215
242
10
3146
; e
u v u u v u v1 1 2
1 1
1215
31 62 33 ; T T; 1 3
12

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
u vv u
uu u2
T1
1
2 2 2 1 2
242
10
62
31
1215
0000
0
novo: u vv u
uu u
T1
1
2 33
2 1 2
3146
33
31
1215
4 06511292 9350 677
5 184
,,,,
, , como há
apenas 2 vetores coluna linearmente independente o posto desta matriz é igual a 2; utilizando os vetores linha da matriz, isto é :
v v v v1 2 3 4
123
241
124
510
6
; ; e , tem-se:
u v u u v u v u v1 1 2
1 1 1 4 1 3
123
14 7 7; e T T T
u vv u
uu u u2
T1
1
2 2 2 1 2
241
7
14
123
1 53
2 517 5 17 5
,
,, , ; e T v2 3
u v2 4 52 5T ,
u vv u
uu
v u
uu u
T1
1
T
3 33
2 13 2
2
2 2 3
124
7
14
123
17 5
17 5
1 53
2 5
000
0
,
,
,
,n
ovo: u3:
u vv u
uu
v u
uu u
T1
1
T
3 44
2 14 2
2
2 2 3
5106
7
14
123
52 5
17 5
1 53
2 5
000
0
,
,
,
,
desta forma a matriz apresenta apenas 2 vetores linha linearmente independentes reconfirmando que a matriz tem posto = 2; (c) utilizando os vetores coluna da matriz, isto é:
v v v v1 2 3 4
1215
242
10
3146
134
10
; ; e ,
u v u u v u v u v1 1 2
1 1 1 3
1215
31 62 33 59 ; e T T T; 1 4
u vv u
uu u2
T1
1
2 2 2 1 2
242
10
62
31
1215
0000
0
13

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
novo: u vv u
uu u
T1
1
2 33
2 1 2
3146
33
31
1215
4 06511292 9350 677
5 184
,,,,
, ,
u v2 4 19 194T ,
u vv u
uu
v u
uu
T1
1
T
3 44
2 14 2
2
2 2 2
134
10
59
31
1215
19 194
5 184
4 06511292 9350 677
0000
,
,
,,,,
u 3 0 ;como há apenas 2 vetores coluna linearmente independente o posto desta matriz
é igual a 2, isto pode ser reconfirmado com os vetores linha da matriz. 4) FUNÇÕES DE MATRIZES De forma análoga a funções analíticas de variáveis escalares que podem, em um certo domínio, ser expandidas em séries de potências da forma:
f x c xii
i
( )
0
onde : ci
d f x
dxi
i
ix
1
0!
( ) tem-se as funções de matrizes que é um matriz
da forma: . Como exemplo tem-se a função exponencial de uma matriz A
definida , em analogia à função ex =
f ( ) c ii
i
A
0
A
1
0 ix i
i !
, pela série:
exp!
A A
ei
i
i
1
0
A , note que esta função apresenta as propriedades:
i-) exp(0) = I onde 0 é a matriz nula;
ii-) exp!
A At et
it
ii
i
0
A onde t é um escalar, assim:
d t
dt
it
i
t
it
ii
i
ii
i
exp
! !exp( )
AA A A A A
1
0 0
ou seja se t t exp A , tem-se:
e 0 I d t
dtt
A , ou seja a matriz t é solução da equação diferencial
ordinária matricial d t
dtt
A , sujeita à condição inicial 0 I .
Uma forma mais simples para determinar funções de matrizes pode ser desenvolvida através da aplicação do Teorema de Cayley-Hamilton que estabelece que todo a matriz quadrada A é raiz de seu polinômio característico, isto é se p c c cn n n
n 1
12
21 cn é o polinômio característico de A, então:
14

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
n
p c c c cn n nn nA A A A A I 0 1
12
21
C C C C1 n n
n1
22
1
. A demonstração deste teorema
pode ser feita definindo-se a matriz adjunta da matriz I- A, isto é: C = adj(I- A) que pode ser expressa na forma: , onde Ck k= 1, 2, ...,n são
matrizes do mesmo tipo de A, mas : (I- A)[adj(I- A)]=det(I- A)I = p()I, ou seja:
C
I A C C C C I1 1
n nn n
n n nn nc c c c1
22
11
22
1
igualando os termos eqüipotentes de , tem-se:
C I A A C AC A C I A A C A C AC A C I A A C A C A
C A C I A A C A C AA C I A I A C I
1 1
2 1 11 1
2 1 11
3 2 22 2
31
2 22
1 12
1 10
n n n
n n n n
n n n n
n n n n n n
n n n n
c cc c
c cc c
somando todos os termos
após tem-se: Ap A A A A In n nn nc c c c 1
12
21 0
I
A
.
Uma conseqüência do teorema de Cayley-Hamilton é que: A A A An n n
n nc c c c 1
12
21 , multiplicando membro a membro por A:
A A A An n nn nc c c c 1
1 21
12 substituindo a expressão de An, tem-se:
A A A An n nn n nc c c c c c c c c c 1
12
21
1 2 32
1 1 1 I
I
0
, e assim
sucessivamente, o que permite concluir que :
A A A Am n nn nd d d d 1
12
21 para m = 0, 1, 2,..... Além disto se A é
regular, multiplica-se membro a membro de p(A) por A-1, resultando em : A A A I An n n
n nc c c c
11
22
31
1 ou seja:
A A A A 1 1
12
23
1 - 1
c n
n n nnc c c I
I
A
{ note que cn =(-1)ndet(A) 0 pois
A é regular ou não-singular), assim sendo se A é regular: A A A Am n n
n nd d d d 1
12
21 para m = 0, 1, 2,......
A aplicação do Teorema de Cayley-Hamilton à série de potências
permite reescrevê-la na forma:
f c ii
i
( )A A
0
f ii
i
n
( )A
0
1
pois potências superiores à (n-1) da
matriz A pode, pelo teorema de Cayley-Hamilton, serem expressas em termos das (n-1) primeiras potências da matriz A, além disto de acordo com a propriedade anteriormente apresentada de que se é um valor característico e v o correspondente vetor característico de A, então q() é valor característico e v o correspondente vetor característico de q a a am m m
m m( )A A A A A I 1
12
21
f ii
i
n
( )
0
1
a tem-se que os valores característicos de
f(A) satisfazem a: , então para determinar os coeficientes i , assim
procede-se:
15

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
(i) se os valores característicos de A são todos distintos, resolve-se o sistema linear de
equações: para k = 1, 2, ...n; i ki
ki
n
f
( )0
1
Se A é uma matriz (2,2), 0 , 1 é solução de :
0 1 1 1
0 1 2 2
02 1 1 2
2 1
12 1
2 1
f
f
f f
f f( )
( )
( ) ( )
( ) ( )
caso 1 = 2 tem-se:
02 1 1 2
2 11 1 1
12 1
2 11
2 1
2 1
lim
lim
f ff f
f ff
( ) ( )( ) ( )
( ) ( )( )
o mesmo resultado poderia ser obtido derivando-se a segunda equação do sistema em relação a 2 e, em seguida, fazer 21, assim:
0 1 1 1
1 1
0 1 1 1
1 1
f
f
f f
f
( )
( )
( ) ( )
( )
Exemplos Ilustrativos: (a) para calcule A-3 e ln(A); A
4 2
1 3
(b) para A calcule
5 3
2 2A .
(a) , assim: p( ) 21 27 10 2 5 2 5 e
0
1
5 2 2 5
35 2
3
f f
f f
( ) ( )
( ) ( ); para f(x)=x-3 tem-se:
0
1
5 8 2 125
30 203
1 125 1 8
30 039
,
, logo:
A
3 0 203
1 0
0 10 039
4 2
1 3
0 047 0078
0 039 0 086, ,
,
, , e
para f(x)=ln(x), tem-se
0
1
5 2 2 5
30 082287
5 2
30 30543
ln( ) ln( ),
ln( ) ln( ),
então:
B A
ln( ) , ,
, ,
, ,0 082287
1 0
0 10 305430
4 2
1 3
1 304008 0 610860
0 30543 0 998577, esta última
função matricial está correta se a função inversa também é verdadeira, isto é : A = exp(B), para isto deve-se inicialmente determinar os valores característicos de B que são
16

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
1=0,693147 e 2=1,609438 determina-se a seguir:
02 1
2 1
12 1
2 50 269412
5 23 27407
,
, e então:
exp( ) , ,, ,
, ,B A
0 269412
1 0
0 13 27407
1 304008 0 610860
0 30543 0 998577
4 2
1 3
(b) então como p( ) 21 23 4 1 4 1 4 e f x x( ) , tem-
se: f 1 1 4 2 i e f 2 logo:
0
1
4 2
50 4 0 8
2
50 4 0 2
ii
ii
, ,
, , e
A i ii i
i i
0 4 0 8
1 0
0 10 4 0 2
5 3
2 2
2 4 0 2 1 2 0 6
0 8 0 4 0 4 1 2, , , ,
, , , ,
, , , , note que:
Ai i
i i
i i
i iA
2 2 4 0 2 1 2 0 6
0 8 0 4 0 4 1 2
2 4 0 2 1 2 0 6
0 8 0 4 0 4 1 2
5 3
2 2
, , , ,
, , , ,
, , , ,
, , , ,
(ii) se a matriz A apresenta valores característicos múltiplos, por exemplo, , neste caso para levantar a indeterminação no cálculo 1 2 1 m m n
dos coeficientes i , deriva-se em relação a 1 m vezes a equação correspondente a 1 ,
assim: ; ; ; ....; ii
i
n
f
1 10
1
( ) i fii
i
n
11
11
1
( ) i i fii
i
n
( ) ( )
1 12
12
1
i i i md f
dii m
m
mi m
n
( ) ( )( )
1 1 1
1
1
sendo as demais equações:
i ki
ki
n
f
( )0
1
para k = m+1, m+2, ...n.
Exemplo Ilustrativo: para calcule exp(A); A
1 750 2 000 0 250
0 125 2 000 0 375
0 250 2 000 0 250
, , ,
, , ,
, , ,
p( ) det
, , ,
, , ,
, , ,
1750 2 000 0 250
0125 2 000 0 375
0 250 2 000 0 250
4 5 2 0 13 21 2
e 3 2 , assim:
0 1 2
1 2
0 1 2
1
2
2 4 2
exp( )
exp( )
exp( )
1 tem-se assim: logo:
0
1
2
0 871094
0 638550
0 135335
,
,
,
17

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
exp , ,
, , ,
, , ,
, , ,
,
, , ,
, , ,
, , ,
A
0 871094
1 0 0
0 1 0
0 0 1
0 638550
1 750 2 000 0 250
0 125 2 000 0 375
0 250 2 000 0 250
0 135335
1 750 2 000 0 250
0 125 2 000 0 375
0 250 2 000 0 250
2
= 0 193471 1 065512 0 358348
0 029068 0 435547 0 062902
0 058136 0 135335 0 242076
, , ,
, , ,
, , ,
Caso desejar-se determinar uma série de potências
onde a variável t é uma variável escalar real, esta função pode ser rescrita na forma:
onde é uma função escalar de t determinada através da
solução de:
f t c t tii i
i
( )A A
0
( )t tii
i
n
A0
1
i t
(i) para k = 1, 2, ...n se os valores característicos de A são todos
distintos;
i ki
ki
n
t f
( )0
1
t
t(ii) ; ii
i
n
t f
1 10
1
( )
i t tdf
dii
ti
n
11
1
1
1
( ) ;
i i t td f
dii
ti
n
( )( )
1 12 2
2
22
1
1
;
i i i m t td f
dii m m
m
m
ti m
n
( ) ( )( )
1 1 1
1
1
sendo as demais equações:
para k = m+1, m+2, ...n. se i ki
ki
n
t f
( )0
1
t
1 2 1 m m n
Exemplos Ilustrativos: (a) para calcule exp(At); A
4 2
1 3
(b) para A calcule. exp(At).
3 2
2 1
(a) , assim: p( ) 21 27 10 2 5 2 5 e
18

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
0
2 5
1
5 2
5 2
3
3
e e
e e
t t
t t ; logo: exp( )Ate e e et t t t
5 2
3
1 0
0 1 3
4 2
1 3
2 5 5 2
então:
d[exp( t
dt
e e e et t t tA )]
10
3
1 0
0 1
5 2
3
4 2
1 3
2 5 5 2
e
A A[exp( )]te e e et t t t
5 2
3
4 2
1 3 37
4 2
1 310
1 0
0 1
2 5 5 2
10
3
1 0
0 1
5 2
3
4 2
1 3
2 5 5 2e e e e d[exp( t
dt
t t t t A )] e
exp(A0)=I, comprovando que esta matriz exponencial está correta.
(b) deve-se assim resolver o sistema: p( ) 2 2
1 22 1 1 1
0 1 1
1
0 1
1
0
1
0
1
1
1
1
1
e
te
e
te
t e
te
d
dtte
d
dtt e
t
t
t
t
t
t
t
t assim:
exp( )At t e tet t
1
1 0
0 1
3 2
2 3; exp( )At
t
0
1 0
0 1 e
d t
dtte t et texp( )
( )A
1 0
0 11
3 2
2 3 e
A AA
[exp( )])]
t t e ted[exp( t
dtt t
1
3 2
2 32
3 2
2 3
1 0
0 1 ,
comprovando que a matriz exponencial está correta. 5) FORMAS QUADRÁTICAS Em 2 a expressão geral das formas quadráticas é:
f x x c b x b xa
x a x xa
x( , )1 2 1 1 2 211
12
12 1 222
22
2 2 ,
cujas derivadas parciais são:
f x x
xb a x a x
( , )1 2
11 11 1 12 2 e
f x x
xb a x a x
( , )1 2
22 22 2 12 1
21 2
12 11
f x x
xa
( , ) ;
f x x
x x
f x x
x xa
( , ) ( , )1 2
1 2
1 2
2 112 e
21 2
22 22
f x x
xa
( , ) .
Esta forma quadrada pode ser rescrita em forma matricial, segundo:
19

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
f x x c b bxx
x xa aa a
xx
( , )1 2 1 21
21 2
11 12
12 22
1
2
1
2
, ou seja, definindo:
x b A
x
xbb
aa a
x1
2
2 1
2
2 12
12 22
2 2 , e =a11 [ matriz simétrica], tem-se:
f c T Tx b x x A 1
2x
definindo o operador diferencial vetorial : =
x
x
1
2
(operador gradiente) , tem-se:
f(x) =
f x x
xf x x
x
( , )
( , )
1 2
1
1 2
2
b A x (vetor gradiente de uma função escalar f) e
2f(x) =
x x
f x x
xf x x
x
f x x
x
f x x
xa a tr
1 2
1 2
1
1 2
2
21 2
21
21 2
22
11 22
( , )
( , )( , ) ( , )
A
(Laplaciano de uma função escalar). Define-se também a matriz Hessiana por:
H x A
x
x
f x x
x
f x x
x
f x x
x
f x x
x x
f x x
x x
f x x
x
1
2
1 2
1
1 2
2
21 2
21
21 2
1 22
1 2
2 1
21 2
22
( , ) ( , )
( , ) ( , )
( , ) ( , ).
Estas definições podem ser generalizadas para n, segundo:
x b A
x
x
x
b
b
b
a a
a a a
a a an
n
n
n n
n nn
nxn
1
2
1
2
12 1n
12 22 2
1n 2
, e =
a11
[ matriz simétrica],
tem-se: f c c b x a x xT Ti i
i
n
ij i jj
n
i
n
x b x x A x 1
2
1
21 11
,
20

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
f(x) =
f
xf
x
f
x n
( )
( )
( )
x
x
x
b A x
1
2
,
2f(x) =
x x x
f
xf
x
f
x
a a a trn
n
nn1 2
1
2 11 22
( )
( )
( )
x
x
x
A
H xx x x
x x x
x x x
x x x
x
x
x
f
x
f
x
f
x
f
x
f
x x
f
x x
f
x x
f
x
f
x x
f
x x
f
x x
f
xn
n
n
n
n n n
1
21 2
2
21
2
1 2
2
12
2 1
2
22
2
2
2
1
2
2
2
2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
A
Hf
x x
f
x xHij
i j j iji( )
( ) ( )( )x
x xx
2 2
[matriz simétrica]. Note que caso a matriz A não seja
simétrica redefinem-se seus elementos na forma:
a ij,velha
a aij velha ji velha, ,
2ou, em termos matriciais, A A Anova velha velha
T 1
2
A forma quadrática acima pode ser simplificada, através de um translação do eixo, tal que o termo bTx desapareçam, assim sejam as novas coordenadas (y1 , y2, ..., yn) tais que:
x=y+d assim: b x e b y b dT T T
x A x y d A y A d y A y y A d d A y d A dT T T T T T T
y A y d A y d A dT T T2 pois : [ A é simétrica], logo: y A d d A yT T
f c T T T T Ty b y b d y A y d A y d A d 1
2
1
2
identificando : f c T Td b d d A d 1
2c e definindo b b A d
21

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
f c T Ty b y y A 1
2y , adotando d tal que : o que
só será possível se A for regular, assim chega-se a:
b b A d 0 d A b 1
f c Ty y A 1
2y onde : x=y+d , d A b 1 e c f c T T d b d d A
1
2d ,
neste novo sistema de coordenadas tem-se:
f(y) =
f
yf
y
f
yn
( )
( )
( )
y
y
y
A y
1
2
, neste novo sistema de coordenadas o valor da variável
independente y que anula o vetor gradiente é o valor nulo, isto é a origem : y=0 e neste ponto o valor da função f(y) é igual a : . Esta condição, f(y) =0 é uma condição necessária para o ponto ser um extremo da função (máximo ou mínimo) e é chamado de
c
ponto crítico, este ponto será um ponto de mínimo se para qualquer vizinhança de y =0 ,
isto é : y , a função é f(y) > f(0) = , ou seja : e, neste caso, a matriz A é
chamada de
c y A yT 0
positiva definida e caso em toda vizinhança de y=0 a é f(y) < f(0) = , ou seja :
e, neste caso, a matriz A é chamada de
cy A yT 0 negativa definida e o ponto é um ponto de máximo. Em qualquer outra situação o ponto não é nem de máximo nem de mínimo, e no caso da matriz ser não definida tem-se o chamado ponto de sela. A forma quadrática pode também ser rescrita em sua forma canônica, de forma análoga à apresentada no processo de diagonalização de matrizes, assim considerando y P z , onde P é a matriz cujos vetores coluna são os vetores característicos normalizados de A (por enquanto considerados n vetores característicos linearmente independentes e ortogonais entre si, isto é os valores característicos são todos reais e distintos - matriz A é simétrica ), tem-se assim:
f c c c zT T Ti i
i
n
z z P A P z z D z 1
2
1
2
1
22
1
, como à origem y=0
correspondente também a z=0, tem-se z=0 como ponto de mínimo se para
todo o domínio em que z 0 se
i ii
n
z 2
1
0
i 0 para todo i = 1, , n , z=0 é um ponto de
máximo se para todo o domínio em que z 0 se
e z=0 é um ponto de sela se não há vizinhança de z=0 na
i ii
n
z 2
1
0
= 1, , n i 0 para todo i
22

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
23
qual não muda de sinal o que ocorre se alguns i ii
n
z 2
1
0 e os demais são i i 0.
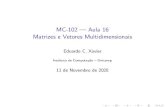
No 2 a forma canônica assume a forma:
f z z c z z( , ) 1 2 1 12
2 221
2 , neste caso a forma das curvas de nível caracterizam as
seguinte cônicas, de acordo com o sinal de = det (A) = , asssim
com > 0 :
a a11 22 a122
1 2 elipse; < 0 : hipérbole e = 0 : parábola .
(a) Elipse: neste caso os valores característicos têm o mesmo sinal, sendo z=0 um ponto de mínimo se ambos forem positivos e um ponto de máximo se ambos forem positivos. O
tamanho do eixo z1 é 2
1K c e do eixo z2 é c
2
2K , onde K=f(z1,z2) [ verificando
que se z=0 é um ponto de mínimo K c , e 1 2 0 0 e se z=0 é um ponto de máximo
, deste modo em ambos os casos: K c , e 1 2 0 0 01
K c 2
e 02
2K c ].
seguir representam-se s superfície f(z1,z2) e as correspondentes curvas de contorno: A
M
1
1 0.5 0 0.5 11
0.5
0.5
0
1.51.5
1.51.5
1
1 1
1
11
1
0.5
0.5
0.5
0.5
0.5
0.5
M
1
22
2121 5),( zzzzf
(b) Hipérbole: neste caso os valores característicos têm os sinais distintos, sendo z=0 um ponto de sela Abaixo representam-se a superfície f(z1,z2) e as correspondentes curvas de contorno

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
M
1 0.5 0 0.5 11
0.5
0
0.5
1
0.5
0.5
0.5
0.5
0
00
0
0
0
0
0
0.5
0.5
0.5
0.5
0.5
0.5
M
22
2121 5),( zzzzf
(c) Parábola: neste caso um dos valores característicos é nulo e portanto a matriz A é singular, desta forma não é possível fazer a translação de eixo que elimina o termo bTx. Então neste caso a rotação dos eixos é aplicada diretamente às variáveis (x1 , x2), isto é :
, obtendo-se : zPx
f z z c b z b z z( , )~ ~
1 2 1 1 2 21
12
2
se 2 = 0 ou:
35

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
f z z c b z b z z( , )~ ~
1 2 1 1 2 22
22
2
se 1 = 0, onde b P b b P b ~ ~ . Verifica-se
assim que a condição necessária não é obtida em nenhum dos casos, pois no primeiro caso
tem-se: f(z) =
f z z
zf z z
z
b zb
( , )
( , )
~~
1 2
1
1 2
2
1 1 1
2
segundo componente não nulo,
e no segundo caso tem-se: f(z) =
f z z
zf z z
z
bb z
( , )
( , )
~~
1 2
1
1 2
2
1
2 2 2
primeiro componente não
nulo. Deste modo em ambos os casos um dos componentes do vetor gradiente é constante não podendo ser anulado através da escolha de z1 ou z2, neste caso não se tem nem máximo nem mínimo. Abaixo, representa-se curvas de nível para cada um dos casos.
1 0.5 0 0.5 11
0.5
0
0.5
1
302525
20
20
15
1515
15
10
1010
10 5
5
5
5 0
00
0
5 5
5
10
10
curvas de nível (um dos val. caract. =0)M
f ,z 1 z 2 z 1.2 z 2
.5 z 22
1 0.5 0 0.5 11
0.5
0
0.5
1
25
25
20
20
15
15
15
10
10
10
5
5
5
0
0
0
5
5
5
10
10
15
curvas de nível (um dos val. caract. =0)M
f ,z 1 z 2 z 2.2 z 1
.5 z 12
41

PARTE DO CURSO DE NIVELAMENTO 2009 - PEQ/COPPE/UFRJ PROF. EVARISTO
ÁLGEBRA VETORIAL E MATRICIAL
42
Lista de Exercícios
1) Mostre que todo matriz ortogonal apresenta o determinante +1 ou -1. Sugestão: parta dos princípios que det(A)=det(AT) e que det(A-1)=1/det(A). 2) Mostre que (A.B)T=BT.AT 3) Mostre que (A.B)-1=B-1.A-1 4) Mostre que (A-1)T=( AT)-1