Material de apoio: corpo rígido Corpo rígido sistema que mantêm fixas as distâncias entre as...
29
Transcript of Material de apoio: corpo rígido Corpo rígido sistema que mantêm fixas as distâncias entre as...


Material de apoio: corpo rígido
Corpo rígido sistema que mantêm fixas as distâncias entre as partículas que o
constituiem, mesmo sob a acção de forças e momentos de forças externos
Tipo de movimento a considerar translação – todas as partículas descrevem trajectórias
rectilíneas paralelas com a mesma velocidade
rotação – todas as partículas descrevem trajectórias circulares
em torno do eixo de rotação, com a mesma velocidade angular
combinação dos movimentos de translação e rotação em torno de um eixo que passa pelo CM
v

Material de apoio : corpo rígido
Energia cinética do movimento de translação
22
11
2
2
1
2
1
2
1MvvmvmE
N
ii
N
iiik
2
2
1CMk MvE 2
2
1CMk MvE
Nota: as demonstrações são feitas para sistemas discretos; para sistemas contínuos as demonstrações seriam absolutamente análogas, com os somatórios substituídos por integrais;
por simplicidade omitimos a dependência explícita no tempo das grandezas físicas
CM
CM
N
ii
N
iii
vv
vMP
vMvmvmP
11
CM move-se com a velocidade comum a todas as partículas
v

Material de apoio: corpo rígido
Energia cinética do movimento de rotação
22222
)(
)(
iii
iiziz
iiii
dRv
RRuau
Rarv
2
2
1 IEk 2
2
1 IEk
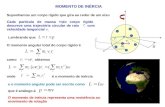
mi descreve uma trajectória circular com velocidade angular em torno de Oi - ponto de intersecção do eixo de rotação (eixo dos zz) com o plano de rotação (plano da trajectória)
zu
iv
iR
iv
distância ao eixo de rotação
N
iii
N
iii
N
iiik
dmI
dmvmE
1
2
2
1
2
1
2
2
1
2
1
momento de inércia referido ao eixo de rotação
iv
ir
z
xy
iR
ir
iaOi
iv
O

Material de apoio : corpo rígido
Energia cinética do movimento combinado translação relativamente a um sistema exterior S , com velocidade
rotação em torno de um eixo que passa pelo CM , com velocidade
angular
2
11
'
2
1
2
1
2
2
1
02
1
'2
1
2
1
CM
N
iiCM
N
iii
N
iii
N
iiik
v
M
mvvm
I
vm
vmE
CMv
CMii vvv
'
velocidade da partícula i em S’ – referencial do CM
velocidade da partícula i em S
energia cinética no referencial do CM, onde o objecto só tem movimento de rotação translaçãokk
CMk
EE
MvIE
rotação
22
2
1
2
1
translaçãokk
CMk
EE
MvIE
rotação
22
2
1
2
1
CMii rrr
'
CMr
irs
CM 'ir

Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
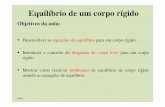
mi (i=1,2) descrevem trajectórias circulares com
velocidade angular em torno de Oi
distância ao eixo é
que é constante
m3 em repouso sobre o eixo de rotação
a distância ao eixo é
que é constante
zu
22iiii yxRd
1v
2v
2R
m1
m2
m3
03 d
222
211
3
1
2 dmdmdmIi
ii
222
211
3
1
2 dmdmdmIi
ii
z
1R
O1
O2
xy

Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples disco homogéneo de raio R, roda no plano xy, em
torno do eixo dos zz cada dm descreve um trajectória circular no
plano xy, em torno do ponto O, com a velocidade distância de cada dm ao eixo
rrryxd 2222 sincos
2224
2
00
3222
2
1
2
12
4
1MRRRR
ddrrdr rdrdSddmdIR
zu
2
2
1MRI 2
2
1MRI
O r
dm
z
yx
R

disco homogéneo de raio R, roda em torno do eixo dos zz que pertence ao seu plano e passa pelo seu centro
cada dm descreve um trajectória circular num plano paralelo ao plano xy, com a velocidade
distância de cada dm ao eixo é fixa e pode ser calculada quando se encontra no plano yz
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
22 cosryd
2224
2
0
2
0
32222
4
1
4
1
4
1
coscos
MRRRR
ddrrdr rdrdSddmdIR
zu
2
4
1MRI 2
4
1MRI
Or
dm
z
y
x
R

Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples placa homogénea de dimensões a e b, roda no
plano xy, em torno do eixo dos zz cada dm descreve um trajectória circular no
plano xy, em torno do ponto O, com a velocidade distância de cada dm ao eixo
22 yxd
22
332
2
32
2
2
2
2
2
3
2
2
22
2
2
2
2
2
2222
12
4433
1
3
1
baM
bab
ayxyx
dyydxdydx
dxdy yxdSddmdI
b
b
a
a
b
b
a
a
b
b
a
a
b
b
a
a
22
12ba
MI 22
12ba
MI
zu
O
r dm
z
yx a
b

placa homogénea de dimensões a e b, roda em torno do eixo dos zz que pertence ao seu plano e passa pelo seu centro
cada dm descreve um trajectória circular num plano paralelo ao plano xy, com a velocidade
distância de cada dm ao eixo é fixa e pode ser calculada quando se encontra no plano yz
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
2yd
2232
2
32
2
2
2
22
2
222
1212
1
12
1
3
1b
Mbababyx
dyydxdy dxydSydmdI
b
b
a
a
b
b
a
a
zu
2
12b
MI 2
12b
MI
r
z
y
x
a
bdm

Material de apoio: corpo rígido
Teorema dos eixos paralelos
dmyyxx
dmyxdmdI
CMCM22
222
''
z
xyO
x’ y’
z’ 2MDII CM 2MDII CM
momento de inércia relativo ao eixo paralelo ao eixo que passa pelo CM
momento de inércia relativo eixo que passa pelo CM
distância entre os dois eixos
CM
D
2
2
2222
0
'2
0
'2''
MDI
M
dm
D
yxdmyydmxx
I
dmyx
CM
CMCMCMCM
CM

Material de apoio : corpo rígido
Equações do movimento taxa de variação do momento linear
a taxa de variação do momento linear do corpo rígido é determinada pela resultantes das forças externas
a aceleração do CM do corpo rígido é determinada pela resultante das forças externas
Nota: a resultante é independente do ponto de aplicação das forças
i
CMextiCM
CM
N
iii aMF
dt
vdM
dt
PdvMvmP
1
CMi
exti aMdt
CM
iexti aM
dt
resultante das forças externas

Material de apoio : corpo rígido
Equações do movimento
taxa de variação do momento angular
a taxa de variação do momento angular do corpo rígido é determinada pelo momento resultante das forças externas
Nota: o momento resultante dependente do ponto de aplicação das forças
i
exti
N
iiii N
dt
LdvrmL
1
dt
LdN
iexti
dt
LdN
iexti
momento resultante das forças externas

Material de apoio : corpo rígido
Equações do movimento taxa de variação do momento angular
2
2sin iiz
i
i
i
iiiiii dmur
v
dir
rmvrmL
corpo plano que roda em torno de um eixo que lhe é perpendicular com velocidade angular
cada dm descreve um movimento circular em torno de O com
zu
zu
I
dt
LdN
iexti
Idt
LdN
iexti
Idt
dI
dt
LdN
iexti
aceleração angular
a aceleração angular do corpo rígido é determinada pelo momento resultante das forças externas
z
ivir
O
iL
IdmLL
iii
ii
2
IL
IL

Material de apoio : corpo rígido
Equações do movimento taxa de variação do momento angular
corpo de forma arbitrária (3 dimensões) que roda em torno de um eixo com velocidade angular
cada dm descreve um movimento circular num plano paralelo ao plano xy em torno de Oi com
zu
zu
I
dt
LdN
iexti
Idt
LdN
iexti
E
iv
iv
ir
ii rv
z
iviR
iO
iL
Oir
iiii vrmL
iv
iL
iL
ir
ILdmL iii 2

Material de apoio : corpo rígido
MAS – a componente z do momento angular ainda é proporcional a
2
2
2
sin
sinsin
sin
2cos
ii
i
ii
ii
i
i
iiiiiii
iizizi
dm
d
Rm
r
v
R
rmvrmiivirim
LuLL
NOTA: é independente do ponto do eixo de rotação em relação ao qual o momento angular é calculado
z
iviR
iO
iL
Oiri
ziL
ILz ILz IdmLLi
iii
ziz 2
Idt
dLN z
izexti I
dt
dLN z
izexti
Idt
dI
dt
dLN z
izexti
)( zziLL

Material de apoio : corpo rígido
SE o sistema rodar em torno de um eixo principal de inércia (eixo de simetria do corpo) tem-se ainda
I
dt
LdN
iexti
Idt
LdN
iexti
IL
IL
Nota: a aceleração angular terá a mesma direcção e sentido da velocidade angular, se a velocidade angular mantiver constante a sua direcção e sentido: sistema roda em torno de um eixo fixo (apenas movimento de rotação) sistema roda em torno de um eixo com movimento de translação (movimento
combinado de translação e rotação)

Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo condição de não derrapagem: ponto de contacto em repouso
relativamente à superfície de contacto
xCMCMx
x
ati
exti ugaaMumg
u
FPFR
N
N0
CM
P
Ν
atF
C - ponto de contacto
x
y
z
R
1ª equação do movimento – movimento de translação
xCMCM u gtvtavtv 00)( xCMCM u gtvtavtv 00)(
condições iniciais movimento inicia-se com o movimento
de translação através da comunicação de
força de atrito estabelece-se e contraria o movimento de translação
xCM uvvv
00)0( 0)0(
0)0( vvCM
força de atrito confere aceleração de translação que faz diminui a velocidade de translação

Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo 2ª equação do movimento – movimento de rotação em torno de um
eixo principal de inércia: eixo de simetria que passa pelo CM (eixo dos zz)
zz
xy
F
yyy
Pi
exti
uI
mgRIumgR
umguR
N
umguR
N
umg
NNNat
)()(0)()()(0
N
zu tI
mgRt t
)(zu t
I
mgRt t
)(
força de atrito: única força que tem momento não nulo única força que confere a aceleração angular que põe o corpo a rodar
relativamente ao CM
INNi
exti

Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo cada ponto tem velocidade de translação e velocidade de rotação
PzxCMProtCMP rututvtvtvtv
)()()()()(
Condição de não derrapagem cumprida em
)()( rolrolCM tRtv )()( rolrolCM tRtv
xCM
yzxCMC
utRtv
uRututvtv
)()(
)()()()(
0)()(0)( xrolrolCMrolC u tRtvtv
ImR
g
vtrol 2
0
1
ImR
g
vtrol 2
0
1
)()(
2
0
rol
rol
rolCM
rol
tR
tI
mgR
tv
gtv
roltt
CM
C - ponto de contacto
x
y
z
R
CMv
Crotv
Cr

Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo e não realizam trabalho para a força de atrito não realiza trabalho: ponto de aplicação
em repouso relativamente ao solo energia mecânica conserva-se
constante0 kk EEE
roltt
constante1
2
1
2
1
2
12
2
2
22
R
Imv
Rv
Imv CMCM
CM
constante RvCM
movimento continuaria ideal e indefinidamente com
rolrol
rolrolCM
tI
mgRt
gtvtv
)(
)( 0
rolrol
rolrolCM
tI
mgRt
gtvtv
)(
)( 0
Exemplo: lançamento de uma bola de bowling
N
P

Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo condição de não derrapagem: ponto de contacto em repouso
relativamente à superfície de contacto
xCMCMx
x
ati
exti ugaaMumg
u
FPFR
N
N0
condições iniciais movimento inicia-se com o movimento
de rotação através da comunicação de
força de atrito estabelece-se e contraria o movimento de rotação
zu
00)0( 0)0( CMv
CM
P
Ν
atF
C - ponto de contacto
x
y
z
R
1ª equação do movimento – movimento de translação
xCMCM u gttatv )(xCMCM u gttatv
)(
0)0(
corpo adquire movimento de translação sob a acção da força de atrito

Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo 2ª equação do movimento – movimento de rotação em torno de um
eixo principal de inércia: eixo de simetria que passa pelo CM (eixo dos zz)
zz
xy
F
yyy
Pi
exti
uI
mgRIumgR
umguR
N
umguR
N
umg
NNNat
)()(0)()()(0
N
zu tI
mgRt t
0)0()(zu t
I
mgRt t
0)0()(
força de atrito: única força com momento não nulo única força que confere a aceleração angular que vai diminuir a velocidade angular inicial
relativamente ao CM

Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo cada ponto tem velocidade de translação e velocidade de rotação
PzxCMProtCMP rututvtvtvtv
)()()()()(
Condição de não derrapagem cumprida em
)()( rolrolCM tRtv )()( rolrolCM tRtv
xCM
yzxCMC
utRtv
uRututvtv
)()(
)()()()(
0)()(0)( xrolrolCMrolC u tRtvtv
ImR
g
Rtrol 2
0
1
ImR
g
Rtrol 2
0
1
)()(
0
rol
rol
rolCM
rol
t
tI
mgRR
tv
gt
roltt
CM
C - ponto de contacto
x
y
z
R
CMv
Crotv
Cr

Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo e não realizam trabalho para a força de atrito não realiza trabalho: ponto de aplicação
em repouso relativamente ao solo energia mecânica conserva-se
constante0 kk EEE
roltt
constante1
2
1
2
1
2
12
2
2
22
R
Imv
Rv
Imv CMCM
CM
constante RvCM
movimento continuaria ideal e indefinidamente com
rolrol
rolrolCM
tI
mgRt
gttv
0)(
)(
rolrol
rolrolCM
tI
mgRt
gttv
0)(
)(
Exemplo: roda que é posta a rodar e depois colocada numa superfície horizontal, sem lançamemto (sem velocidade de translação)
N
P

Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo condição de não derrapagem: ponto de contacto em repouso
relativamente à superfície de contacto
xCMyx
CM
CMati
exti
umau mgu
ma
mg
amFPFR
0
cossin NN
N
condições iniciais movimento inicia-se com o movimento
de translação sob a acção do peso força de atrito estabelece-se e contraria
o movimento de translação
0)0( CMv
0)0(
1ª equação do movimento – movimento de translação
xCM u ga cossin xCM u ga cossin
CM R
P
C - ponto de contacto
x
y
z
Ν
atF
xCM ut gtv cossin)( xCM ut gtv cossin)(

Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo 2ª equação do movimento – movimento de rotação em torno de um
eixo principal de inércia: eixo de simetria que passa pelo CM (eixo dos zz)
zz
xy
F
yyy
Pi
exti
uI
mgRIumgR
uuR
N
u uR
N
umg
NNNat
)()(0)()()(0 NN
N
zu tI
mgRt t
)(zu t
I
mgRt t
)(
força de atrito: única força com momento não nulo única força que confere a aceleração angular que põe o corpo a rodar
relativamente ao CM

Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo cada ponto tem velocidade de translação e velocidade de rotação
PzxCMProtCMP rututvtvtvtv
)()()()()(
t tRtvCM )()( t tRtvCM )()( 0)()(0)( xCMC u tRtvtv
tI
mgRt g
2
cossin
condição de não derrapagem cumprida para se t
xCM
yzxCMC
utRtv
uRututvtv
)()(
)()()()(
CMvCrotv
CM R
C - ponto de contacto
x
y
z
Cr
ImR2
1
tan
ImR2
1
tan

Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo não realiza trabalho realiza trabalho mas é conservativa se se cumprir a condição de não derrapagem, a força de atrito não
realiza trabalho: ponto de aplicação em repouso relativamente ao solo para todo o t energia mecânica conserva-se
constante0 pk EEE
constante1
2
1
2
1
2
12
2
2
22
mgh
R
Imvmgh
Rv
Imv CMCM
CM
a energia cinética aumenta, aumenta, enquanto a energia potencial diminui, h (altura da bola) diminuiCMv
Exemplo: bola de bowling largada no topo de um plano inclinado
N
P