MASSA ADICIONAL DE PETROLEIRO CALCULADA POR MEIO...
61
MASSA ADICIONAL DE PETROLEIRO CALCULADA POR MEIO DE FÓRMULAS SIMPLIFICADAS BASEADAS EM MEDIÇÕES DE VIBRAÇÃO Aloisio Caruso Trindade Rio de Janeiro Março de 2015 Projeto de Graduação apresentado ao Curso de Engenharia Naval e Oceânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Severino Fonseca da Silva Neto, D.Sc.-COPPE/UFRJ
Transcript of MASSA ADICIONAL DE PETROLEIRO CALCULADA POR MEIO...

MASSA ADICIONAL DE PETROLEIRO CALCULADA POR MEIO DE
FÓRMULAS SIMPLIFICADAS BASEADAS EM MEDIÇÕES DE VIBRAÇÃO
Aloisio Caruso Trindade
Rio de Janeiro
Março de 2015
Projeto de Graduação apresentado ao Curso de Engenharia Naval e
Oceânica da Escola Politécnica, Universidade Federal do Rio de Janeiro,
como parte dos requisitos necessários à obtenção do título de Engenheiro.
Orientador: Severino Fonseca da Silva Neto, D.Sc.-COPPE/UFRJ

ii
MASSA ADICIONAL DE PETROLEIRO CALCULADA POR MEIO DE
FÓRMULAS SIMPLIFICADAS BASEADAS EM MEDIÇÕES DE VIBRAÇÃO
Aloisio Caruso Trindade
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO.
Examinado por:
___________________________________________________
Severino Fonseca da Silva Neto, D.Sc.-COPPE/UFRJ
(Orientador)
___________________________________________________
Carl Horst Albrecht, D.Sc.-COPPE/UFRJ
___________________________________________________
Marcelo Igor Lourenço de Souza, D.Sc.-COPPE/UFRJ
Rio de Janeiro
Março de 2015

iii
Aloisio Caruso Trindade
DRE: 109048666
Trindade, Aloisio Caruso
MASSA ADICIONAL DE PETROLEIRO CALCULADA POR
MEIO DE FÓRMULAS SIMPLIFICADAS BASEADAS EM
MEDIÇÕES DE VIBRAÇÃO
X, 47 p.: il.; 29,7 cm.
Orientador: Severino Fonseca da Silva Neto, D.Sc.-
COPPE/UFRJ
Projeto de Graduação – UFRJ / Escola Politécnica / Curso de
Engenharia Naval e Oceânica, 2015.
Referências Bibliográficas: p. 47.
1. Massa adicional de Petroleiro. 2. Fórmulas simplificadas para
cálculo de massa adicional. 3. Fórmulas simplificadas baseadas
em medidas de vibração. 4. Cálculo de massa adicional do
Petroleiro Celso Furtado. I. Severino Fonseca da Silva Neto,
D.Sc.-COPPE/UFRJ. II. Universidade Federal do Rio de Janeiro,
UFRJ, Escola Politécnica, Engenharia Naval e Oceânica. III.
Massa Adicional de Petroleiro Calculada por Meio de Fórmulas
Simplificadas Baseadas em Medições de Vibração.

iv
Dedico este trabalho a minha família,
tanto a de laços sanguíneos assim como a que fui sendo
presenteado ao longo da minha vida, por todo apoio e dedicação
ao longo desta jornada e dedico especialmente
ao meu avô Francisco pelo exemplo de ser humano que é.
v
Agradecimentos
Em primeiro lugar gostaria de agradecer a Deus por toda a grandeza de sua
força e graça. Por estar sempre ao meu lado e me dar saúde e sabedoria para trilhar
este caminhando e poder chegar ao seu final com um sentimento de plena realização.
Obrigado pela companhia e conforto durante toda esta jornada.
Aos meus pais, Fernando Oliveira Trindade e Elizabeth Caruso Trindade, e a
minha irmã, Giulia Caruso Trindade, por estarem sempre disponíveis para me apoiar e
incentivar em todos os momentos. Por proporcionarem todas as condições para que eu
percorresse este caminho da maneira mais tranquila possível. Minha gratidão à vocês
é imensurável!
Ao Mestre, Conselheiro, Amigo, Professor Severino, meu orientador, por todo o
carinho, atenção e dedicação. Sem dúvida é uma figura fundamental e que tem grande
participação na minha formação como engenheiro e ser humano. Muito obrigado pela
orientação e suporte frente a todos os desafios desta trajetória. Gostaria que houvessem
mais Severinos, não só na UFRJ mas como em todo o mundo.
A Renata Veloso pelo tempo dedicado a me ouvir, pela paciência e compreensão
nos momentos de ausência. Pelas palavras de incentivo e pelo esforço em “estudar” ao
meu lado em diversos momentos.
Aos meus amigos e companheiros de jornada, obrigado pela contribuição e ajuda
de cada um em diversos momentos de dificuldade e angustia. Vocês são personagens
marcantes em episódios memoráveis! Na Engenharia Naval não existem turmas, existe
uma única unidade de futuros engenheiros que se apoia mutuamente em busca de um
objetivo maior. A Naval não tem limites!
Um agradecimento especial a todos aqueles que de certa forma participaram e
estiveram presentes durante este tempo e me ajudaram a atingir mais este objetivo com
sucesso.
Muito obrigado de verdade!

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica da UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Naval e
Oceânica.
MASSA ADICIONAL DE PETROLEIRO CALCULADA POR MEIO DE FÓRMULAS
SIMPLIFICADAS BASEADAS EM MEDIÇÕES DE VIBRAÇÃO
Aloisio Caruso Trindade
Março de 2015
Orientador: Severino Fonseca da Silva Neto
Curso: Engenharia Naval e Oceânica
Revisão de metodologia de cálculo de massa adicional apresentada nos OMAE
2012 e 2013 e correspondentes dissertações de mestrado e projetos de graduação, e
utilizada para Petroleiros de 19000t. Construção do modelo de elementos finitos
unidimensional do casco de um Petroleiro de 48000t, cuja massa adicional é calculada
por uma função quadrática na relação (calado/boca) em cada seção, na condição
medida em prova de mar no ano de 2011. As freqüências naturais determinadas por
medição de vibração são utilizadas como referência para minimização dos desvios
quadráticos numérico-experimentais. Os valores são comparados aos recentemente
obtidos para outros Petroleiros.
Palavras-chave: Massa adicional, Petroleiro Celso Furtado.

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Naval and Ocean Engineering.
MASS ADDITIONAL TANKER CALCULATED BY MEANS OF SIMPLIFIED FORMULA
BASED ON VIBRATION MEASUREMENTS
Aloisio Caruso Trindade
March 2015
Advisor: Severino Fonseca da Silva Neto
Course: Naval and Ocean Engineering
Review additional mass calculation methodology set out in OMAE 2012 and 2013 and
corresponding master's and undergraduate dissertations projects, and used for oil
tankers 19000t. Construction of the one-dimensional finite element model of the hull of
a tanker of 48000t, the additional mass is calculate by a quadratic function in the
relationship (silent/mouth) in each section, provided as proof Sea in 2011. The natural
frequencies determined by vibration measurement are used as a reference for
minimizing the numerical - experimental squared deviations. The values are compare to
recently obtain for other tankers.
Keywords: additional mass, Tanker Celso Furtado.

viii
Índice
1. Introdução ............................................................................................................. 1
2. Objetivo ................................................................................................................. 3
3. Objeto de Estudo .................................................................................................. 4
4. Revisão Teórica .................................................................................................... 8
4.1. Teoria de Vibração ......................................................................................... 8
4.2. Teoria de Viga Navio .................................................................................... 12
4.4. Teoria de Viga de Timoshenko ..................................................................... 15
4.4.1. Efeito de Distorção de Cisalhamento ................................................. 15
4.4.2. Efeito de Inércia Rotatória .................................................................. 16
4.5. Teoria de Massa Adicional ............................................................................ 18
5. Aquisição de Dados – Prova de Mar ................................................................... 23
6. Modelação Computacional .................................................................................. 26
7. Resultados Obtidos ............................................................................................. 35
8. Análise de Resultados e Conclusão .................................................................... 48
9. Referências ......................................................................................................... 50

ix
Índice de Figuras
Figura 1 - Navio de Produtos Claros - Celso Furtado ................................................ 4
Figura 2 - Arranjo Geral (Corte Longitudinal) ............................................................ 5
Figura 3 - Seção Típica ............................................................................................. 6
Figura 4 - Seção Mestra (Reforços Longitudinais) .................................................... 7
Figura 5 - Diagrama de Corpo Livre ........................................................................ 11
Figura 6 - Diagrama de Corpo Livre de um Elemento Infinitesimal de Viga ............. 15
Figura 7 - Efeito de Distorção de Cisalhamento ...................................................... 16
Figura 8 - Efeito de Inércia Rotatória ....................................................................... 17
Figura 9 - Primeiros Modos Naturais de Vibração de uma Viga .............................. 18
Figura 10 - Seção de um Navio imerso em um fluido .............................................. 19
Figura 11 - Cilindro Oscilando Verticalmente .......................................................... 20
Figura 12 - Pontos de Aquisição de Dados ............................................................. 23
Figura 13 - Gráfico Cascata - Ponto 01V ................................................................ 24
Figura 14 - Teste de Redução de Rotação - Ponto 01V .......................................... 25
Figura 15 - Seção Mestra - Tela do PROSEC ......................................................... 28
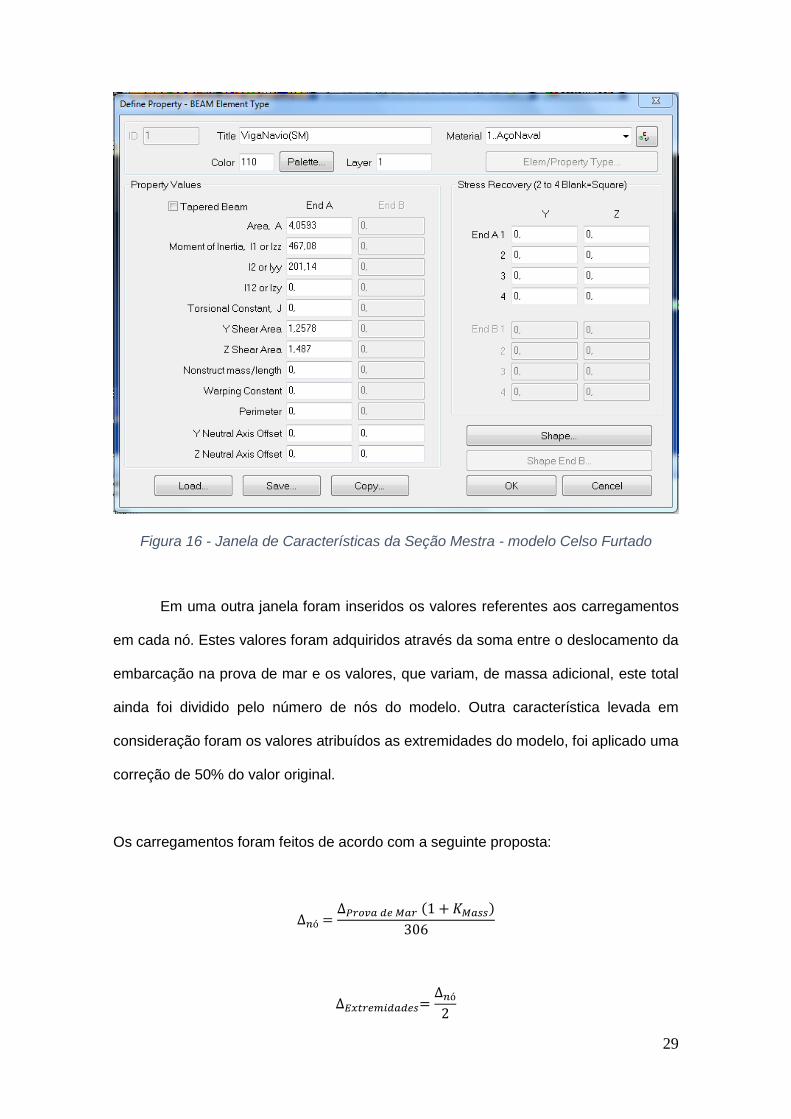
Figura 16 - Janela de Características da Seção Mestra - modelo Celso Furtado .... 29
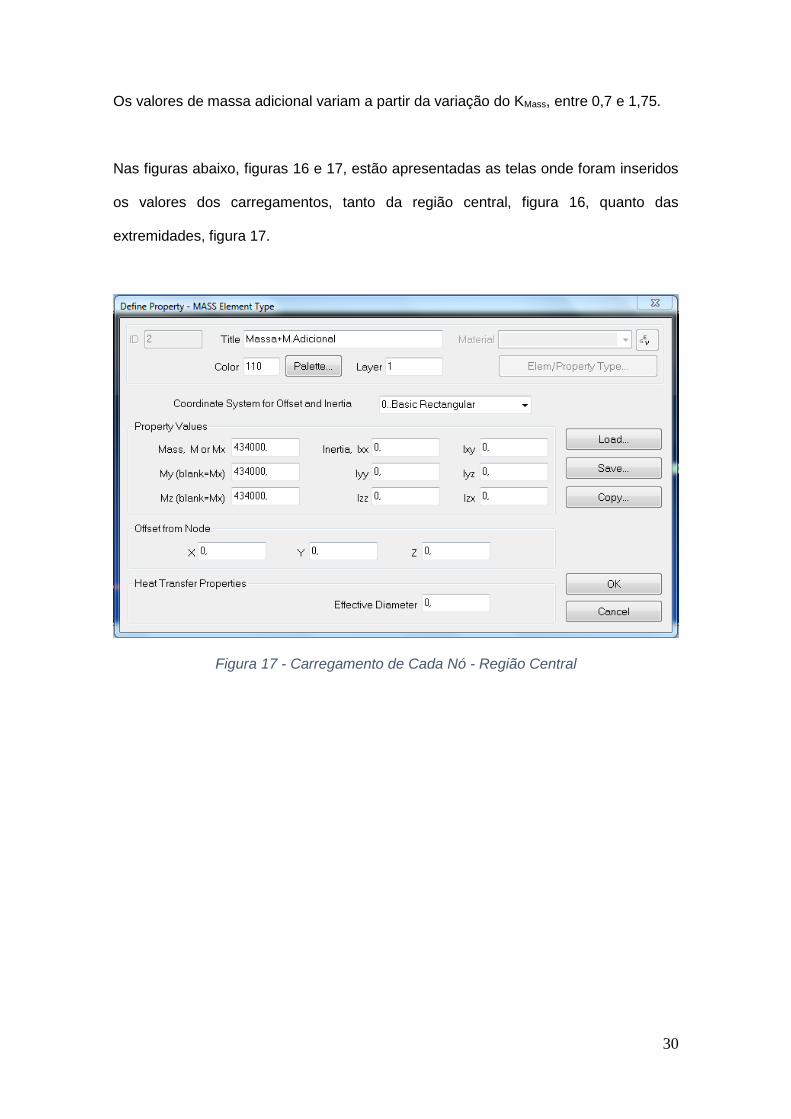
Figura 17 - Carregamento de Cada Nó - Região Central ........................................ 30
Figura 18 - Carregamento de Cada Nó - Região das Extremidades........................ 31
Figura 19 - Primeiro Modo de Vibração – Modelação ............................................. 33
Figura 20 - Segundo Modo de Vibração – Modelação ............................................ 33
Figura 21 - Terceiro Modo de Vibração – Modelação .............................................. 34
Figura 22 - Quarto Modo de Vibração – Modelação ................................................ 34

x
Índice de Tabelas
Tabela 1 - Dimensões Principais: Celso Furtado ....................................................... 5
Tabela 2 – Modos de Vibração ............................................................................... 25
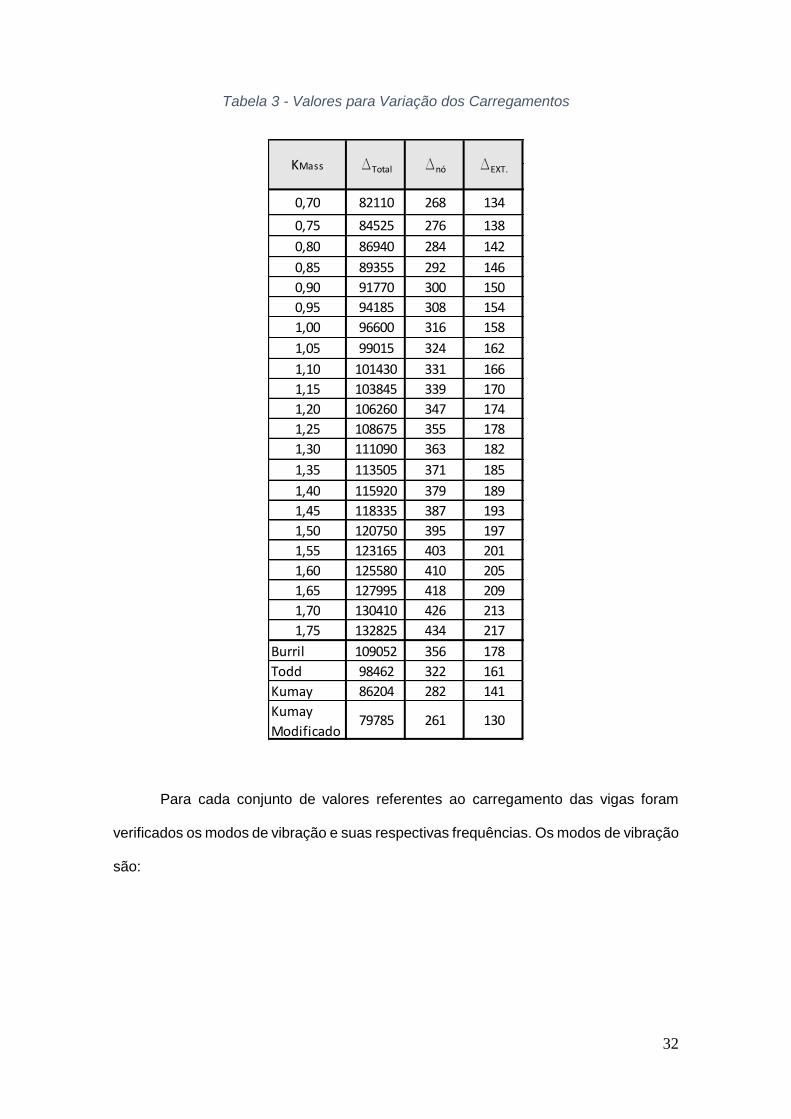
Tabela 3 - Valores para Variação dos Carregamentos ............................................ 32
Tabela 4 - Resumo dos Resultados Obtidos ........................................................... 36
Tabela 5 - Resultados Obtidos - 1º Modo de Vibração ............................................ 37
Tabela 6 - Resultados Obtidos - 2º Modo de Vibração ............................................ 38
Tabela 7 - Resultados Obtidos - 3º Modo de Vibração ............................................ 39
Tabela 8 - Resultados Obtidos - 4º Modo de Vibração ............................................ 40
Tabela 9 - Erros Quadráticos .................................................................................. 41
Tabela 10 - Resumo de Resultados Obtidos – Área Corrigida ................................ 42
Tabela 11 - Resultados Obtidos - 1º Modo de Vibração - Área Corrigida ................ 43
Tabela 12 - Resultados Obtidos - 2º Modo de Vibração - Área Corrigida ................ 44
Tabela 13 - Resultados Obtidos - 3º Modo de Vibração - Área Corrigida ................ 45
Tabela 14 - Resultados Obtidos - 4º Modo de Vibração - Área Corrigida ................ 46
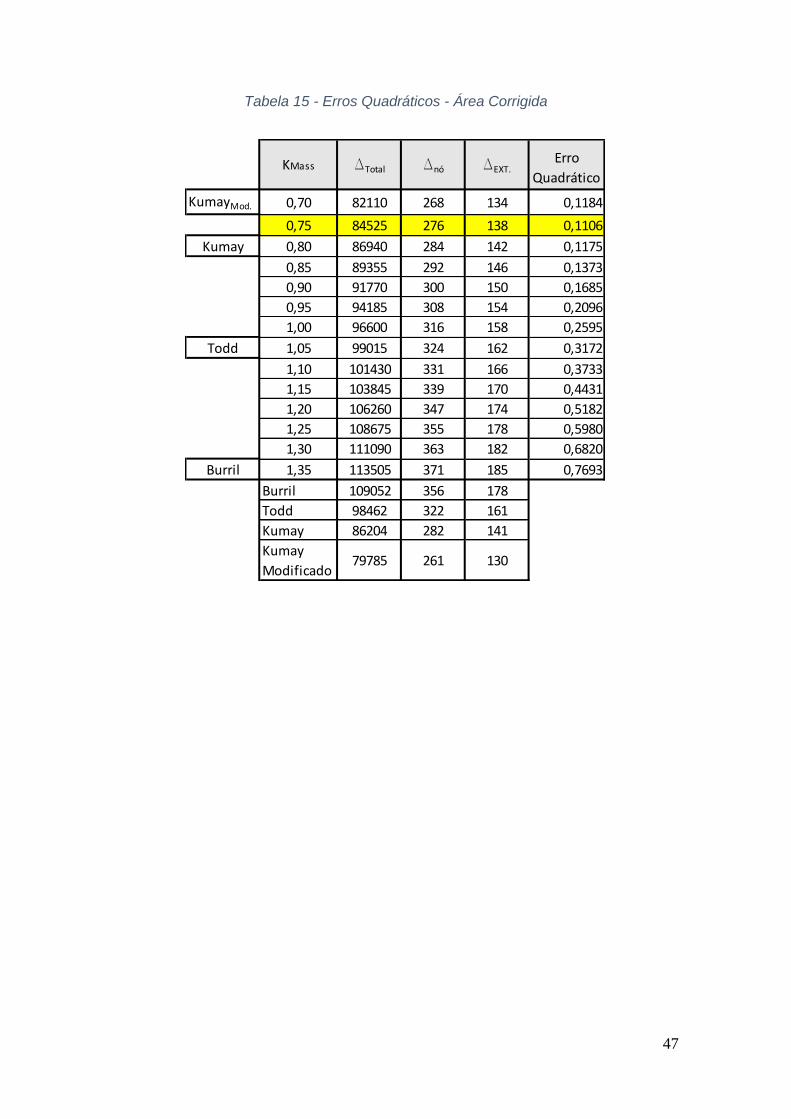
Tabela 15 - Erros Quadráticos - Área Corrigida ...................................................... 47

1
1. Introdução
O fenômeno da vibração é inerente a todas as embarcações, independentemente
das características, aplicação ou até mesmo do meio circundante. Diversas formas de
excitação são aplicadas ao longo de toda a sua vida útil e deste modo proporcionam
uma constante reação das estruturas as solicitações.
Por se tratar de uma resposta dinâmica a diversos modos de perturbação, de maior
ou menor intensidade, o navio apresenta maneiras distintas de vibração. Este cenário
complexo permite uma interpretação diferente para cada movimento.
Para movimentos de pitch, heave e roll é comum e aceitável submeter a embarcação
a um tratamento dispendido à um corpo rígido [6]. Em outros momentos é feita uma
abordagem através das aplicações de teorias para corpos elásticos, uma vez que
existem movimentos relativos entre os elementos e flexão da estrutura.
A ocorrência de vibrações está associada as forças interagindo sobre o navio, como
já foi dito anteriormente, são diferentes agentes que proporcionam diferentes
solicitações. Estas forças podem ser devidas aos agentes naturais, como ondas,
correntezas e ventos, como podem ser devidas aos movimentos dos equipamentos
presentes na embarcação, como motor principal, motores auxiliares e outros tantos que
estão em funcionamento. Sendo que as principais fontes de vibração são causadas pelo
movimento de combustão e desbalanceamento do motor principal e ainda pela indução
de pressão no propulsor.
Existem inúmeros problemas associados a alta incidência de vibrações aplicadas as
embarcações. Vibrações em níveis mais altos causam ruídos e podem afetar a
integridade da estrutura da embarcação ou ainda a durabilidade dos equipamentos
instalados. Além disso proporcionam um grande desconforto a tripulação, muitas vezes
ocasionando problemas de saúde que comprometem a funcionalidade e rotina da
mesma.

2
O estudo de vibrações incidentes em embarcações, neste caso em um petroleiro, é
fundamental para mitigar seus efeitos e prever o comportamento da estrutura de um
navio petroleiro quando submetido a diferentes condições.
3
2. Objetivo
O objetivo deste Projeto de Graduação é dar continuidade aos projetos previamente
desenvolvidos e apresentados nos OMAE 2012 e 2013, realizando uma revisão
metodológica de cálculo de massa adicional para navios petroleiros.
Para verificar a utilização de fórmulas simplificadas, e validar esta utilização, será
realizada uma comparação dos valores calculados a partir de uma simulação
computacional e os valores obtidos na prova de mar. Realizando assim uma busca pelos
coeficientes ótimos e desvios quadráticos mínimos.
A construção de um modelo de elementos finitos unidimensional do casco do
Petroleiro Celso Furtado, 48000 ton., proporciona uma modelação mais simples do
problema e desta maneira validar formulações empíricas propostas adotando hipóteses
simplificada.
4
3. Objeto de Estudo
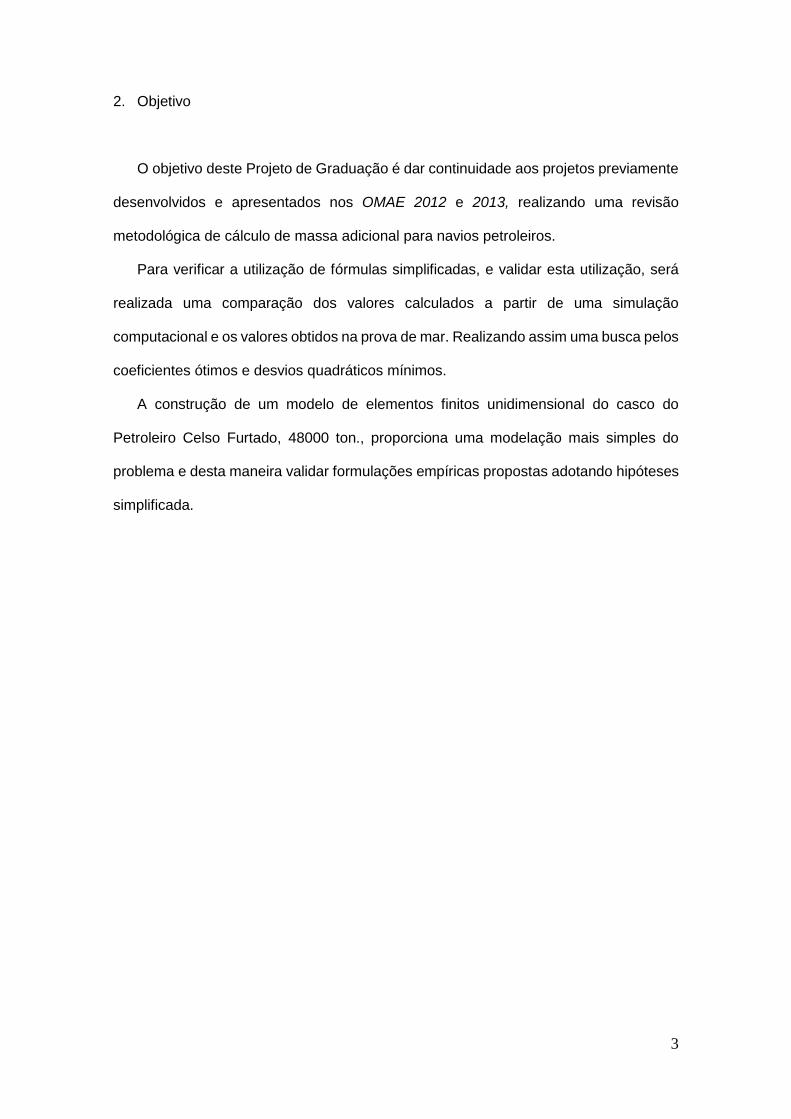
Figura 1 - Navio de Produtos Claros - Celso Furtado
O objeto de estudo, como já foi revelado anteriormente, é o navio do tipo Petroleiro
de Produtos Claros - Celso Furtado. Este navio é o primeiro de uma série de 49
embarcações prometidos ao Programa de Modernização e Expansão da Frota –
PROMEF.
O Celso Furtado é um projeto inteiramente brasileiro, projetado e construído no
Brasil, é um navio símbolo do desenvolvimento e consolidação da indústria naval
nacional e fluminense, uma vez que sua construção foi realizada no Estaleiro Mauá em
Niterói. É motivo de orgulho para toda o segmento brasileiro pois recebeu o prêmio
Significant Ships of 2011 concedido pela RINA – Royal Institution of Naval Architects,
onde são premiadas as embarcações que mais se destacaram em qualidade,
performance e design.

5
Esta embarcação é destinada a navegação de cabotagem transportando produtos
derivados de petróleo, como gasolina, querosene e óleo diesel. Tem uma capacidade
de transporte de 56 milhões de litros por viagem. Abaixo estão algumas das principais
informações do navio:
Tabela 1 - Dimensões Principais: Celso Furtado
Nas próximas imagens deste trabalho podem ser visualizados alguns recortes do
arranjo da embarcação:
Figura 2 - Arranjo Geral (Corte Longitudinal)
182,88 m
174 m
177,5 m
32,2 m
18,6 m
48.300 ton
7,1 m
12,8 m
0,819 -
Capacidade
Calado em Lastro
Calado em Plena Carga
Coeficiente de Bloco
Dimensões Principais do Navio Celso Furtado
Comprimento Entre Perpendiculares
Comprimento Total
Comprimento de Escantilhões
Boca
Pontal
6
Figura 3 - Seção Típica

7
Figura 4 - Seção Mestra (Reforços Longitudinais)

8
4. Revisão Teórica
Nesta seção será feita uma revisão teórica dos principais fundamentos que
permeiam este projeto e possibilitam um entendimento melhor dos valores e resultados
encontrados.
Serão apresentados os conceitos de Teoria de Vibração aplicada a vigas, Viga
Navio, vigas de Euller-Bernoulli, vigas de Timoshenko, e por fim Massa Adicional.
4.1. Teoria de Vibração
O estudo da vibração nos corpos leva em consideração as seguintes características
associadas ao mesmo [3]: massa do corpo, rigidez do corpo e a perda de energia
através do amortecimento. Partindo da seguinte equação:
𝑀 ∗ 𝑥 ̈ + 𝐶 ∗ �̇� + 𝐾 ∗ 𝑥 = 𝑓(𝑡) (1)
Onde:
𝑀 − 𝑚𝑎𝑠𝑠𝑎
𝐶 − 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑎𝑚𝑜𝑟𝑡𝑒𝑐𝑖𝑚𝑒𝑛𝑡𝑜
𝐾 − 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑟𝑖𝑔𝑖𝑑𝑒𝑧
𝑓(𝑡) = 𝐹0 ∗ cos (𝑤𝑡)
𝑤 − 𝑓𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎
𝐹0 − 𝑓𝑜𝑟ç𝑎
𝑥 ̈ – 𝑎𝑐𝑒𝑙𝑒𝑟𝑎çã𝑜
�̇� − 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒
𝑥 − 𝑑𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜
Para solucionar a equação (1) é proposta uma solução particular:

9
𝑥𝑝(𝑡) = 𝑋 ∗ cos(𝑤 ∗ 𝑡 − 𝜎) (2)
Onde:
𝜎 − â𝑛𝑔𝑢𝑙𝑜 𝑑𝑒 𝑓𝑎𝑠𝑒
𝑋 − 𝑎𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒
Para determinar o ângulo de fase e a amplitude pode-se substituir (2) e suas derivadas,
primeira e segunda, em (1) e assim obter:
𝑋 ∗ [(𝑘 − 𝑚 ∗ 𝑤2) ∗ 𝑐𝑜𝑠(𝑤 ∗ 𝑡 − 𝜎) − 𝑐 ∗ 𝑤 ∗ 𝑠𝑒𝑛(𝑤 ∗ 𝑡 − 𝜎)] = 𝐹0 ∗ 𝑐𝑜𝑠(𝑤𝑡) (3)
Afim de simplificar a equação encontrada acima (3) pode-se utilizar as seguintes
relações trigonométricas:
cos(𝑤 ∗ 𝑡 − 𝜎) = 𝑐𝑜𝑠(𝑤 ∗ 𝑡) ∗ 𝑐𝑜𝑠(𝜎) + 𝑠𝑒𝑛(𝑤 ∗ 𝑡) ∗ 𝑠𝑒𝑛(𝜎)
sen(𝑤 ∗ 𝑡 − 𝜎) = 𝑠𝑒𝑛(𝑤 ∗ 𝑡) ∗ 𝑐𝑜𝑠(𝜎) + 𝑐𝑜𝑠(𝑤 ∗ 𝑡) ∗ 𝑠𝑒𝑛(𝜎)
Empregando as relações trigonométricas discretizadas acima, obtém-se:
[(𝑘 − 𝑚 ∗ 𝑤2) ∗ 𝑐𝑜𝑠(𝜎) + 𝑐 ∗ 𝑤 ∗ 𝑠𝑒𝑛(𝜎)] = 𝐹0 (4)
𝑋[(𝑘 − 𝑚 ∗ 𝑤2) ∗ 𝑠𝑒𝑛(𝜎) − 𝑐 ∗ 𝑤 ∗ 𝑐𝑜𝑠(𝜎)] = 0 (5)
Através das equações obtidas e ainda utilizando a equação (2), pode-se determinar o
valor da amplitude:
𝑋 =𝐹0
√[(𝑘 − 𝑐 ∗ 𝑤2)2 + 𝑐2 ∗ 𝑤2] (6)

10
E para determinar o ângulo de fase, utilizando a equação (4):
tan−1(𝜎) = 𝑐 ∗ 𝑤
𝑘 − 𝑚 ∗ 𝑤2
Todo este desenvolvimento só se aplica para modos de vibração com um único
grau de liberdade, utilizar este equacionamento para modos múltiplos de vibração é algo
que se tornaria bastante complexo. Por isso existem meios mais simples de solucionar
problemas que envolvam mais de um grau de liberdade, o emprego de matrizes é uma
estratégia bastante eficiente.
Neste caso a equação se apresenta da seguinte maneira:
[𝑀]{�̈�} + [𝐶]{�̇�} + [𝐾]{𝑥} = {𝑓(𝑡)}
Onde:
[𝑀] − 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑚𝑎𝑠𝑠𝑎𝑠
[𝐶] − 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒𝑠 𝑑𝑒 𝑎𝑚𝑜𝑟𝑡𝑒𝑐𝑖𝑚𝑒𝑛𝑡𝑜
[𝐾] − 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒𝑠 𝑑𝑒 𝑟𝑖𝑔𝑖𝑑𝑒𝑧
Para determinar as massas e os coeficientes das matrizes, para corpos mais
simples, pode-se fazer um diagrama de corpo livre.

11
Figura 5 - Diagrama de Corpo Livre
Como foi dito anteriormente, o diagrama de corpo livre é uma boa estratégia para
corpos mais simples. No caso de sistemas mais complexos [3] a determinação das
matrizes de massa [M], de amortecimento [C] e de rigidez [K] pode ser facilitada
realizando uma modelação através de elementos finitos.
Para determinar a solução de um problema com múltiplos graus de liberdade
emprega-se conceitos, tais como:
- Matriz Dinâmica
[𝐷] = [𝐾]−1 ∗ [𝑀]
- Matriz D
[Δ] = 𝜆 ∗ [𝐼] − [𝐷]
Onde:
𝜆 = 1𝑤2⁄
E finalmente fazendo:
𝑑𝑒𝑡([Δ]) = 0
Pode-se determinar os valores das frequências naturais e conseguinte os modos de
vibração, dados pela relação:
(𝜆𝑖 ∗ [𝐼] − [𝐷]) ∗ 𝑋𝑖⃗⃗⃗⃗ = 0

12
4.2. Teoria de Viga Navio
A viga navio é dito um sistema contínuo quando sua rigidez e massa são distribuídas
de maneira uniforme e continua.
Existem três tipos de vibração que esta viga pode estar submetida, torcional,
longitudinal e lateral (horizontal e vertical), e estas vibrações são resultado da ação de
forças dinâmicas atuantes nos elementos estruturais locais e no casco do navio, e a
resposta destes elementos é função do módulo das forças e da resposta dinâmica deste
sistema.
As frequências naturais de vibração da viga navio dependem não somente da rigidez
da estrutura do casco mas como também da distribuição de massa e da distribuição do
efeito do meio fluido sobre a viga. Como a embarcação é tratada como uma viga, cada
frequência natural corresponde a um modo natural de vibração.
No caso da ocorrência de problemas devidos as frequências naturais de vibração
existem poucos recursos capazes de modificar estas frequências, a rigidez da estrutura
e as condições de carregamento são algumas.
4.3. Teoria de Viga de Euller-Bernoulli
A teoria proposta por Euller-Bernoulli descreve o comportamento de uma viga
submetida a um determinado carregamento e para que esta viga possa ser
considerada de Euller-Bernoulli ela deve obedecer algumas premissas:
A viga é constituída de um material linearmente elástico;
O formato da viga é um prisma reto cujo comprimento é muito maior que as
outras dimensões;
A seção transversal é simétrica em relação ao plano vertical de forma que a linha
neutra está contida nele;
O Coeficiente de Poisson é negligenciável;

13
Planos perpendiculares à linha neutra permanecem planos e perpendiculares a
ele depois da deformação;
O ângulo de rotação é muito pequeno;
Os efeitos do momento de inércia de rotação são desprezados;
A energia envolvida no cisalhamento é desprezada;
A viga é constituída por um material homogêneo.
Obedecendo todas estas premissas, uma equação diferencial parcial linear de
quarta ordem descreve a variação do movimento transversal da viga ao longo de um
determinado tempo. Esta equação leva apenas em conta o momento fletor e se
apresenta da seguinte maneira:
𝐸𝐼(𝑥) =𝜕4𝑦(𝑥, 𝑡)
𝜕4𝑥= 𝑞(𝑥, 𝑡)
Onde:
𝐸 − 𝑀ó𝑑𝑢𝑙𝑜 𝑑𝑒 𝐸𝑙𝑎𝑠𝑡𝑖𝑐𝑖𝑑𝑎𝑑𝑒
𝐼(𝑥) − 𝐼𝑛é𝑟𝑐𝑖𝑎 𝑑𝑎 𝑣𝑖𝑔𝑎 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑖𝑑𝑎 𝑎𝑜 𝑙𝑜𝑛𝑔𝑜 𝑑𝑜 𝑐𝑜𝑚𝑝𝑟𝑖𝑚𝑒𝑛𝑡𝑜 (𝑥)
𝑞(𝑥, 𝑡) − 𝐶𝑎𝑟𝑔𝑎 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑖𝑑𝑎 𝑎𝑜 𝑙𝑜𝑛𝑔𝑜 𝑑𝑎 𝑣𝑖𝑔𝑎 𝑛𝑜 𝑡𝑒𝑚𝑝𝑜 (𝑡)
Existem ainda condições de contorno que devem ser aplicadas para diferentes
situações as quais a viga está aplicada:
Extremidade engastada, a posição e a inclinação da linha neutra são nulas:

14
Extremidade totalmente livre (ou em balanço)
Extremidade fixa por pino, a posição e o momento são nulos:
Extremidade com uma força F e um momento M aplicados:
Neste caso, para este projeto, o serão levadas em consideração as seguintes
hipóteses: seção transversal da viga constante ao longo de todo o comprimento e
carregamento constante ao longo de toda a viga e do tempo.
Desta forma e ainda assumindo que a resposta da viga é harmônica e transiente, tem-
se:
𝑌(𝑥, 𝑡) = 𝑌 (x) sin(𝑤𝑡)
Sendo Y(x) a curva de distribuição de amplitudes. Abaixo pode ser visualizado o
diagrama de corpo livre para um elemento infinitesimal de viga.

15
Figura 6 - Diagrama de Corpo Livre de um Elemento Infinitesimal de Viga
4.4. Teoria de Viga de Timoshenko
A teoria proposta por Timoshenko faz uma revisão da Teoria de Viga de Euller-
Bernoulli, adiciona os efeitos de distorção de cisalhamento e inércia rotatória ao modelo
previamente proposto.
4.4.1. Efeito de Distorção de Cisalhamento
Realizando uma análise preliminar para vigas esbeltas em flexão é
desconsiderado o efeito de força cortante. Este fato pode ser explicado porque assume-
se que após a flexão as seções permanecem planas, ou sem empeno.
Porém o que ocorre é que a força cortante provoca um cisalhamento no elemento
de viga, provocando uma distorção em um ângulo β, esta situação pode ser verificada
da figura abaixo.

16
Figura 7 - Efeito de Distorção de Cisalhamento
O elemento de viga já havia sofrido uma rotação ϕ(x,t) devido ao momento fletor
M(x,t), mas as forças cortantes antes e depois do elemento provocam a distorção β(x,t),
de forma que a rotação final da viga 𝑑𝑦(𝑥,𝑡)
𝑑𝑥 assume o seguinte valor:
𝑑𝑦(𝑥, 𝑡)
𝑑𝑥= 𝜑(𝑥, 𝑡) − 𝛽(𝑥, 𝑡)
4.4.2. Efeito de Inércia Rotatória
Para calcular a energia cinética do elemento de viga deve ser considerada a
parcela de energia cinética do deslocamento vertical da seção assim como a energia
cinética de rotação.
Estas seções sofrem uma rotação em torno do eixo que passa pelo ponto de
interseção do eixo neutro da viga com o plano da seção, como pode ser verificado na
figura abaixo.

17
Figura 8 - Efeito de Inércia Rotatória
Observando a figura acima pode ser verificado que em cada seção a rotação
máxima é diferente e que a seção central tem rotação nula. Esta parcela referente a
rotação das seções deve ser adicionada ao cálculo como inércia de rotação caso seja
utilizado o método aplicado a elástica, ou como energia cinética de rotação se for
empregado o método da energia.
Estas formulações utilizadas para o cálculo das frequências naturais, exigem o
reconhecimento da distribuição longitudinal de carga, peso e massa adicional, ao longo
do comprimento da viga.
Por levar em consideração o efeito do cisalhamento, a revisão proposta por
Timoshenko leva em consideração uma área na qual atua a força cortante. Esta área
corresponde a uma parcela percentual da área da seção plana e recebe a denominação
de Área Efetiva de Cisalhamento.
A figura abaixo apresenta os primeiros modos naturais de vibração de uma viga.

18
Figura 9 - Primeiros Modos Naturais de Vibração de uma Viga
4.5. Teoria de Massa Adicional
O fenômeno de massa adicional [5] surge quando há movimento acelerado de um
corpo parcialmente ou totalmente imerso em um meio fluido. Este fenômeno proporciona
um efeito de aumento, soma, de massa ao corpo, o que proporciona consequentemente
um aumento da inércia do mesmo. É o resultado da aceleração das partículas do fluido
circundante ao corpo, deste modo deve ser considerada uma parcela referente a energia
cinética pertencente a estas partículas.
Para obter a energia total de um sistema composto por uma embarcação oscilando
em um meio fluido é apresentada a equação abaixo, onde a segunda parcela desta
equação é atribuída a energia cinética do movimento das partículas do fluido.
𝐸𝑐 =𝑚𝑣2
2+
1
2∑𝑚𝑖 ∗ 𝑣𝑖

19
Esquematicamente falando tem-se a seguinte situação:
Figura 10 - Seção de um Navio imerso em um fluido
A parte do fluido próxima a região do casco move-se com a mesma velocidade
e aceleração da embarcação, portanto a equação da energia pode ser reescrita
simplificando as parcelas pertencentes a contribuição do movimento deste fluido.
𝐸𝑐 =𝑚𝑣2
2+
𝑚′𝑣2
2=
1
2(𝑚 + 𝑚′)𝑣2
Onde:
𝑚′ = ∑𝑚𝑖
∞
𝑖=0
− 𝑀𝑎𝑠𝑠𝑎 𝐴𝑑𝑖𝑐𝑖𝑜𝑛𝑎𝑙
Uma maneira mais simples de se entender o conceito de massa adicional [1] é
utilizar um casco cuja a forma submersa seja mais simples e ainda com todas as
condições ideais de posição desta forma.
Um cilindro de seção reta circular flutuando em uma superfície livre com seu eixo
centroidal paralelo à linha d’água e oscilando somente na vertical. Esta situação pode
ser verificada na figura abaixo.

20
Figura 11 - Cilindro Oscilando Verticalmente
A massa virtual do cilindro parcialmente submerso é metade da massa virtual
por unidade de comprimento para um cilindro totalmente submerso, esta informação
pode ser facilmente observada. Sendo assim, os cálculos se apresentam da seguinte
maneira:
𝑚𝑃𝑎𝑟𝑐. 𝑆𝑢𝑏. =𝑚𝑇𝑜𝑡𝑎𝑙 𝑆𝑢𝑏.
2=
𝜋𝜌𝑎2
2
Para calcular a massa adicional total do fluido adjacente a região submersa da forma:
𝑚′ =1
2∫ 𝜌𝜋𝑎2𝑑𝐿
𝐿/2
−𝐿/2
=1
2𝜌𝜋𝑎2𝐿
Sendo:
𝑎 − 𝑟𝑎𝑖𝑜
𝐿 − 𝑐𝑜𝑚𝑝𝑟𝑖𝑚𝑒𝑛𝑡𝑜
Do raciocínio apresentado acima pode-se observar que o valor da massa de
fluido deslocado é numericamente igual a massa do cilindro, o que significa um aumento
de cem por cento a massa do sistema.

21
A ideia central desta análise de massa adicional aplicada ao cilindro pode ser
aplicada a formas mais complexas, assim como as seções de um navio.
Portanto é bastante consistente supor que para cada seção em movimento
vertical, a massa adicional associada vai depender da sua área e do seu contorno na
direção do movimento, este contorno pode ser considerado através de uma simples
relação – boca/calado. Esta relação pode ser verificada abaixo:
𝑚′ =1
2𝜌𝐴
𝐵
𝑇
Sendo:
𝐴 − Á𝑟𝑒𝑎 𝑑𝑎 𝑆𝑒çã𝑜
𝐵 − 𝐵𝑜𝑐𝑎
𝑇 − 𝐶𝑎𝑙𝑎𝑑𝑜
A equação acima se ajusta melhor para embarcações com seções circulares e
tem como resultado uma aproximação razoável dependendo do formato de sua seção.
Para um cálculo aplicado a um conjunto de formas mais geral pode-se utilizar a equação
abaixo:
𝑚′ = ∫1
2𝜌𝐴(𝑥)
𝐵(𝑥)
𝑇(𝑥)𝑑𝑥
𝐿
0
Onde os valores referentes a área, boca e calado são referentes a cada seção
específica e por isso podem variar de uma seção para outra, tornando o cálculo mais
próximo da verdadeira forma apresentada.
Em uma outra abordagem para o cálculo de massa adicional alguns autores
propuseram diferentes equações. Algumas destas equações serão utilizadas neste
projeto, são elas:

22
I – Burril:
𝑚′ = 𝑚(1 +𝐵
2𝑇)
II – Todd:
𝑚′ = 𝑚(1,2 +𝐵
3𝑇)
III – Kumay:
𝑚′ = 𝑚(1 + 0,4𝐵
𝑇− 0,035(
𝐵
𝑇)2
)
IV – Kumay modificado:
𝑚′ = 𝑚(1 + 0,4𝐵
𝑇− 0,056(
𝐵
𝑇)2
)
Onde todas as equações apresentadas acima utilizam relações envolvendo
Boca/Calado (𝐵/𝑇).
A equação proposta por Kumay para navios tanque foi revisada para que fosse
aplicada a navios tanques mais novos (Kumay modificado).

23
5. Aquisição de Dados – Prova de Mar
Os dados experimentais da frequência de vibração global da embarcação, Celso
Furtado, foram obtidos através de uma medição realizada durante a prova de mar da
embarcação. Para obtenção destes dados foram medidos valores referentes a vibração
em oito pontos distintos da estrutura, esses pontos podem ser verificados na figura
abaixo.
Figura 12 - Pontos de Aquisição de Dados
Os dados obtidos durante a prova de mar que são interessantes para este projeto
são os dados e informações gerados pela medição no ponto 01V, localizado na região
de popa e sobre a linha de centro do navio.

24
Neste ponto, 01V, os resultados encontrados correspondem a vibração vertical
global para um teste de redução de rotação iniciando em 127 RPM e terminando em
uma rotação mínima.
Nas figuras abaixo, figuras 13 e 14, são apresentadas telas onde estão
discretizados os resultados para o teste supracitado no ponto de interesse.
Na figura 14 a curva em vermelho, “Ordem1”, os picos são referentes aos quatro
primeiros modos de vibração e os modos seguintes podem ser obtidos nos picos das
outras duas curvas, “Ordem2” e “Ordem3”, basta apenas multiplicar por fatores 2 e 3,
respectivamente.
Figura 13 - Gráfico Cascata - Ponto 01V

25
Figura 14 - Teste de Redução de Rotação - Ponto 01V
Abaixo são apresentados os valores encontrados para os quatro primeiros modos de
vibração aferidos na prova de mar do navio Celso Furtado no ponto 01V.
Tabela 2 – Modos de Vibração
1º Modo 1,165 Hz
2º Modo 1,970 Hz
3º Modo 3,065 Hz
4º Modo 4,515 Hz
Modos de Vibração

26
6. Modelação Computacional
Considerando [9] o conceito das vibrações elásticas, existem três maneiras de
calcular as características dinâmicas das estruturas dos navios: método da energia,
método da matriz de transferência e o método dos elementos finitos. O método
escolhido para este estudo é o método dos elementos finitos. Este método é o mais
popular dentre os três, pois possibilita fazer estudos de estruturas simples e complexas
e ainda permite realizar diversas análises como, análise estrutural, vibracional, entre
outros.
Dentro dos procedimentos para modelação por elementos finitos para análise de um
navio, tem-se análise unidimensional e análise tridimensional. As análises de vibrações
feitas a partir de modelos tridimensionais são por vezes exaustivas, necessitando de
muito tempo para serem concluídas e longo esforço para modelação. A modelação
unidimensional de navios permite a construção de modelos simples a partir dos
elementos estruturais de sua seção mestra, massa estrutural e massa adicional.
O modelo numérico computacional utilizado foi o mesmo utilizado no Projeto de
Graduação do Rodrigo de Souza Sobrinho [7]. A modelação da viga navio foi realizada
através do software Femap Nastran v.10. Este programa é amplamente empregado em
análises estruturais e modais em elementos finitos.
Porém devido a algumas ausências de dados da embarcação para o cálculo da
distribuição de massa e massa adicional algumas considerações foram feitas afim de
minimizar estas ausências e mesmo assim não perder a relação com a realidade. São
elas:
I – Distribuição de Massa: a massa real da embarcação varia, não linearmente, com o
seu comprimento, porém esta distribuição não está disponível para este projeto. Para
minimizar os efeitos desta falta de informação adota-se a hipótese de uma distribuição
de massa uniforme para todo o modelo. É justificável esta pratica pois mesmo que a

27
forma varie ao longo do comprimento, a região de proa é bem diferente da região de
corpo paralelo assim como a região da popa, existem algumas características que
“equilibram” estas variações na forma. As regiões da embarcação fora do corpo paralelo
possuem uma menor extensão de chapeamento porém são, geralmente, mais
reforçadas – a proa devido a necessidade de suportar os efeitos de slamming e popa
devido a necessidade de suportar os efeitos de carga gerados pela presença de grande
quantidade de equipamentos.
II – Distribuição de Massa Adicional: a massa adicional real da embarcação também
varia, não linearmente, com o comprimento. Esta variação é associada a variação da
geometria do volume submerso, e como não estão disponíveis os planos de baliza e
tabelas hidrostáticas da embarcação, é necessário propor uma simplificação para suprir
estas ausências de informação. As formulações propostas pelos autores anteriormente
citados utilizam os parâmetros que podem variar ao longo do comprimento o que
também prejudica as suas respectivas utilizações. Para realizar a distribuição da massa
adicional foi feita uma distribuição uniforme ao longo de todo o comprimento. Esta
pratica adotada é justificável pois durante a prova de mar as medições foram realizadas
com variações mínimas de calado e as regiões da embarcação, desconsiderando a
região de corpo paralelo, onde há maior variação da geometria da porção submersa do
casco representam em torno de 20% do comprimento total da embarcação, o que tem
uma relação de pouca influência no valor total de massa adicional.
O modelo de viga adota um espaçamento uniforme entre cavernas de 600
milímetros, menor espaçamento entre cavernas da embarcação, e um total de 306 nós.
As características físicas da estrutura da embarcação, no modelo da viga navio, foram
consideradas de maneira também uniforme utilizando as características da seção
mestra.
As características utilizadas foram obtidas no Projeto de Graduação do Gustavo
Ferreira Andrade [8]. Para que fossem definidas as características da seção mestra da

28
embarcação foi utilizado o programa PROSEC [10], desenvolvido por A.C.R Troyman e
C.A.L. da Conceição. Para obter o valor referente a Área Efetiva de Cisalhamento, a
seção completa é dividida e mapeada em Strings, Ramais e Células e ainda conhecendo
as espessuras dos chapeamentos e as áreas dos perfis utilizados na estrutura.
Na figura abaixo está a tela do PROSEC onde é apresentada a seção mestra completa
e os valores referentes a mesma.
Figura 15 - Seção Mestra - Tela do PROSEC
Na figura abaixo está a tela do Femap Nastran v.10. onde foram inseridas as
características da seção mestra do navio Celso Furtado.
29
Figura 16 - Janela de Características da Seção Mestra - modelo Celso Furtado
Em uma outra janela foram inseridos os valores referentes aos carregamentos
em cada nó. Estes valores foram adquiridos através da soma entre o deslocamento da
embarcação na prova de mar e os valores, que variam, de massa adicional, este total
ainda foi dividido pelo número de nós do modelo. Outra característica levada em
consideração foram os valores atribuídos as extremidades do modelo, foi aplicado uma
correção de 50% do valor original.
Os carregamentos foram feitos de acordo com a seguinte proposta:
∆𝑛ó =∆𝑃𝑟𝑜𝑣𝑎 𝑑𝑒 𝑀𝑎𝑟 (1 + 𝐾𝑀𝑎𝑠𝑠)
306
∆𝐸𝑥𝑡𝑟𝑒𝑚𝑖𝑑𝑎𝑑𝑒𝑠=∆𝑛ó
2
30
Os valores de massa adicional variam a partir da variação do KMass, entre 0,7 e 1,75.
Nas figuras abaixo, figuras 16 e 17, estão apresentadas as telas onde foram inseridos
os valores dos carregamentos, tanto da região central, figura 16, quanto das
extremidades, figura 17.
Figura 17 - Carregamento de Cada Nó - Região Central

31
Figura 18 - Carregamento de Cada Nó - Região das Extremidades
Em seguida estão apresentados os valores utilizados para variação dos carregamentos.
32
Tabela 3 - Valores para Variação dos Carregamentos
Para cada conjunto de valores referentes ao carregamento das vigas foram
verificados os modos de vibração e suas respectivas frequências. Os modos de vibração
são:
0,70 82110 268 134
0,75 84525 276 138
0,80 86940 284 142
0,85 89355 292 146
0,90 91770 300 150
0,95 94185 308 154
1,00 96600 316 158
1,05 99015 324 162
1,10 101430 331 166
1,15 103845 339 170
1,20 106260 347 174
1,25 108675 355 178
1,30 111090 363 182
1,35 113505 371 185
1,40 115920 379 189
1,45 118335 387 193
1,50 120750 395 197
1,55 123165 403 201
1,60 125580 410 205
1,65 127995 418 209
1,70 130410 426 213
1,75 132825 434 217
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado79785 261 130
DTotal Dnó DEXT.KMass

33
Figura 19 - Primeiro Modo de Vibração – Modelação
Figura 20 - Segundo Modo de Vibração – Modelação

34
Figura 21 - Terceiro Modo de Vibração – Modelação
Figura 22 - Quarto Modo de Vibração – Modelação
35
7. Resultados Obtidos
Nesta seção serão apresentados os resultados obtidos para os quatro primeiros
modos de vibração obtidos através da modelação e utilizando a variação dos
carregamentos assim como foi apresentado na seção anterior.
A maneira proposta para avaliação e determinação do melhor valor obtido para
modelação foi através de um somatório de erros quadráticos, calculados para cada
frequência encontrada.
- Cálculo de Erro Quadrático:
𝐸𝑟𝑟𝑜𝑄𝑢𝑎𝑑𝑟á𝑡𝑖𝑐𝑜 = ∑(𝑓𝑖−𝑃.𝑀
4
𝑖=1
− 𝑓𝑖−𝑀𝑜𝑑.)²
Onde:
𝑓𝑖−𝑃.𝑀 − 𝐹𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎 𝑑𝑜 𝑀𝑜𝑑𝑜 𝑖 𝑛𝑎 𝑃𝑟𝑜𝑣𝑎 𝑑𝑒 𝑀𝑎𝑟
𝑓𝑖−𝑀𝑜𝑑. − 𝐹𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎 𝑑𝑜 𝑀𝑜𝑑𝑜 𝑖 𝑛𝑎 𝑀𝑜𝑑𝑒𝑙𝑎çã𝑜
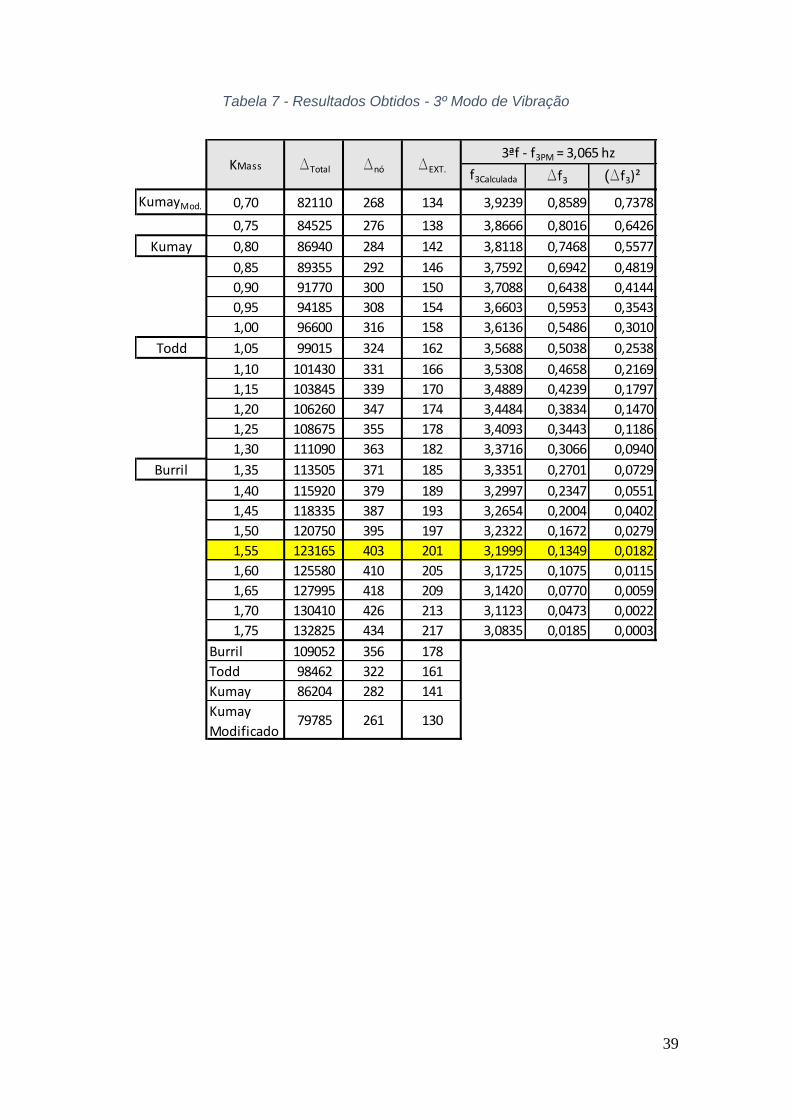
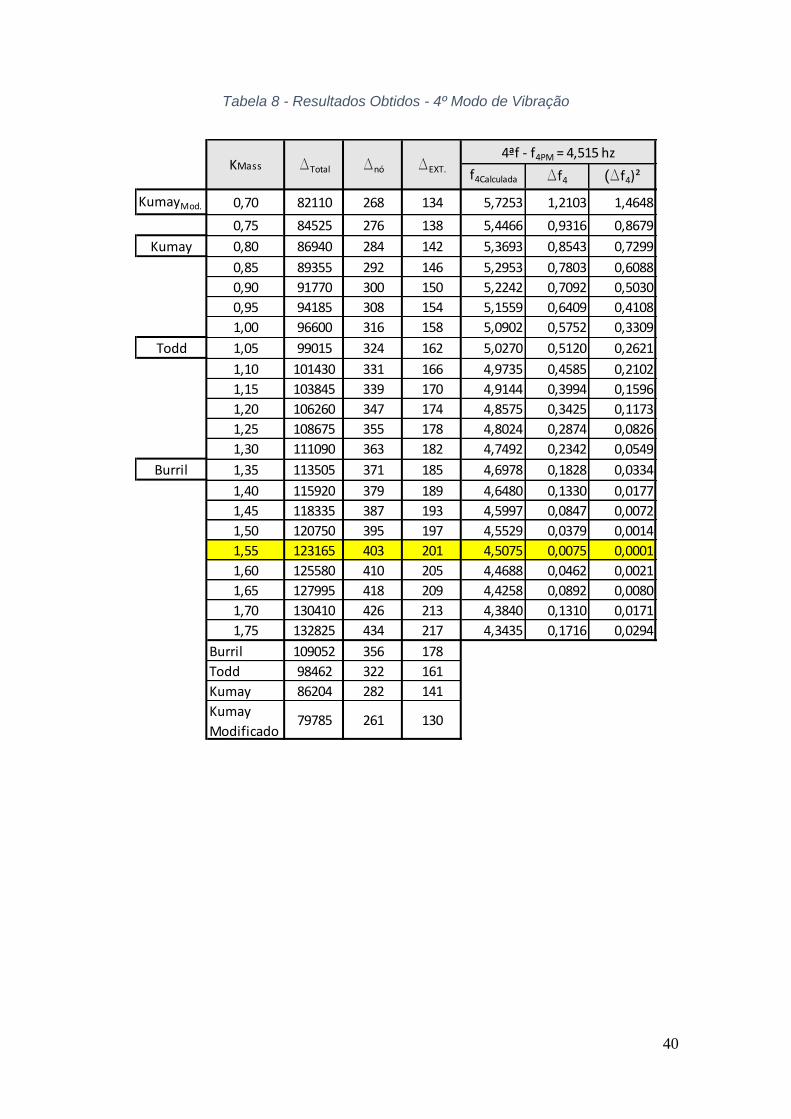
Os menores erros quadráticos encontrados determinam qual o melhor fator
representa o coeficiente de massa adicional a ser utilizado nas fórmulas simplificadas
baseadas em medições de vibração. Os melhores resultados estão grifados em
amarelo.

36
Tabela 4 - Resumo dos Resultados Obtidos
Abaixo estão as tabelas completas que apresentam os resultados obtidos.
1ªf - f1PM = 1,165 hz 2ªf - f2PM = 1,970 hz 3ªf - f3PM = 3,065 hz 4ªf - f4PM = 4,515 hz
f1Calculada f2Calculada f3Calculada f4Calculada
KumayMod. 0,70 0,9752 2,3383 3,9239 5,7253 2,3743
0,75 0,9609 2,3042 3,8666 5,4466 1,6638
Kumay 0,80 0,9473 2,2715 3,8118 5,3693 1,4259
0,85 0,9342 2,2402 3,7592 5,2953 1,2170
0,90 0,9217 2,2101 3,7088 5,2242 1,0342
0,95 0,9096 2,1812 3,6603 5,1559 0,8749
1,00 0,8981 2,1534 3,6136 5,0902 0,7368
Todd 1,05 0,8869 2,1267 3,5688 5,0270 0,6178
1,10 0,8775 2,1040 3,5308 4,9735 0,5278
1,15 0,8670 2,0790 3,4889 4,9144 0,4399
1,20 0,8570 2,0549 3,4484 4,8575 0,3664
1,25 0,8473 2,0317 3,4093 4,8024 0,3059
1,30 0,8379 2,0091 3,3716 4,7492 0,2574
Burril 1,35 0,8288 1,9874 3,3351 4,6978 0,2197
1,40 0,8200 1,9663 3,2997 4,6480 0,1918
1,45 0,8115 1,9459 3,2654 4,5997 0,1729
1,50 0,8033 1,9261 3,2322 4,5529 0,1622
1,55 0,7952 1,9069 3,1999 4,5075 0,1590
1,60 0,7884 1,8905 3,1725 4,4688 0,1618
1,65 0,7808 1,8723 3,1420 4,4258 0,1710
1,70 0,7735 1,8546 3,1123 4,3840 0,1860
1,75 0,7663 1,8375 3,0835 4,3435 0,2063
Erro
QuadráticoKMass

37
Tabela 5 - Resultados Obtidos - 1º Modo de Vibração
f1Calculada Df1 (Df1)²
KumayMod. 0,70 82110 268 134 0,9752 0,1898 0,0360
0,75 84525 276 138 0,9609 0,2041 0,0416
Kumay 0,80 86940 284 142 0,9473 0,2177 0,0474
0,85 89355 292 146 0,9342 0,2308 0,0533
0,90 91770 300 150 0,9217 0,2433 0,0592
0,95 94185 308 154 0,9096 0,2554 0,0652
1,00 96600 316 158 0,8981 0,2669 0,0713
Todd 1,05 99015 324 162 0,8869 0,2781 0,0773
1,10 101430 331 166 0,8775 0,2875 0,0827
1,15 103845 339 170 0,8670 0,2980 0,0888
1,20 106260 347 174 0,8570 0,3080 0,0949
1,25 108675 355 178 0,8473 0,3177 0,1009
1,30 111090 363 182 0,8379 0,3271 0,1070
Burril 1,35 113505 371 185 0,8288 0,3362 0,1130
1,40 115920 379 189 0,8200 0,3450 0,1190
1,45 118335 387 193 0,8115 0,3535 0,1249
1,50 120750 395 197 0,8033 0,3617 0,1309
1,55 123165 403 201 0,7952 0,3698 0,1367
1,60 125580 410 205 0,7884 0,3766 0,1418
1,65 127995 418 209 0,7808 0,3842 0,1476
1,70 130410 426 213 0,7735 0,3915 0,1533
1,75 132825 434 217 0,7663 0,3987 0,1590
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado79785 261 130
1ªf - f1PM = 1,165 hzDTotal Dnó DEXT.KMass

38
Tabela 6 - Resultados Obtidos - 2º Modo de Vibração
f2Calculada Df2 (Df2)²
KumayMod. 0,70 82110 268 134 2,3383 0,3683 0,1357
0,75 84525 276 138 2,3042 0,3342 0,1117
Kumay 0,80 86940 284 142 2,2715 0,3015 0,0909
0,85 89355 292 146 2,2402 0,2702 0,0730
0,90 91770 300 150 2,2101 0,2401 0,0576
0,95 94185 308 154 2,1812 0,2112 0,0446
1,00 96600 316 158 2,1534 0,1834 0,0336
Todd 1,05 99015 324 162 2,1267 0,1567 0,0245
1,10 101430 331 166 2,1040 0,1340 0,0180
1,15 103845 339 170 2,0790 0,1090 0,0119
1,20 106260 347 174 2,0549 0,0849 0,0072
1,25 108675 355 178 2,0317 0,0617 0,0038
1,30 111090 363 182 2,0091 0,0391 0,0015
Burril 1,35 113505 371 185 1,9874 0,0174 0,0003
1,40 115920 379 189 1,9663 0,0037 0,0000
1,45 118335 387 193 1,9459 0,0241 0,0006
1,50 120750 395 197 1,9261 0,0439 0,0019
1,55 123165 403 201 1,9069 0,0631 0,0040
1,60 125580 410 205 1,8905 0,0795 0,0063
1,65 127995 418 209 1,8723 0,0977 0,0095
1,70 130410 426 213 1,8546 0,1154 0,0133
1,75 132825 434 217 1,8375 0,1325 0,0176
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado79785 261 130
2ªf - f2PM = 1,970 hzDTotal Dnó DEXT.KMass
39
Tabela 7 - Resultados Obtidos - 3º Modo de Vibração
f3Calculada Df3 (Df3)²
KumayMod. 0,70 82110 268 134 3,9239 0,8589 0,7378
0,75 84525 276 138 3,8666 0,8016 0,6426
Kumay 0,80 86940 284 142 3,8118 0,7468 0,5577
0,85 89355 292 146 3,7592 0,6942 0,4819
0,90 91770 300 150 3,7088 0,6438 0,4144
0,95 94185 308 154 3,6603 0,5953 0,3543
1,00 96600 316 158 3,6136 0,5486 0,3010
Todd 1,05 99015 324 162 3,5688 0,5038 0,2538
1,10 101430 331 166 3,5308 0,4658 0,2169
1,15 103845 339 170 3,4889 0,4239 0,1797
1,20 106260 347 174 3,4484 0,3834 0,1470
1,25 108675 355 178 3,4093 0,3443 0,1186
1,30 111090 363 182 3,3716 0,3066 0,0940
Burril 1,35 113505 371 185 3,3351 0,2701 0,0729
1,40 115920 379 189 3,2997 0,2347 0,0551
1,45 118335 387 193 3,2654 0,2004 0,0402
1,50 120750 395 197 3,2322 0,1672 0,0279
1,55 123165 403 201 3,1999 0,1349 0,0182
1,60 125580 410 205 3,1725 0,1075 0,0115
1,65 127995 418 209 3,1420 0,0770 0,0059
1,70 130410 426 213 3,1123 0,0473 0,0022
1,75 132825 434 217 3,0835 0,0185 0,0003
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado79785 261 130
3ªf - f3PM = 3,065 hzDTotal Dnó DEXT.KMass
40
Tabela 8 - Resultados Obtidos - 4º Modo de Vibração
f4Calculada Df4 (Df4)²
KumayMod. 0,70 82110 268 134 5,7253 1,2103 1,4648
0,75 84525 276 138 5,4466 0,9316 0,8679
Kumay 0,80 86940 284 142 5,3693 0,8543 0,7299
0,85 89355 292 146 5,2953 0,7803 0,6088
0,90 91770 300 150 5,2242 0,7092 0,5030
0,95 94185 308 154 5,1559 0,6409 0,4108
1,00 96600 316 158 5,0902 0,5752 0,3309
Todd 1,05 99015 324 162 5,0270 0,5120 0,2621
1,10 101430 331 166 4,9735 0,4585 0,2102
1,15 103845 339 170 4,9144 0,3994 0,1596
1,20 106260 347 174 4,8575 0,3425 0,1173
1,25 108675 355 178 4,8024 0,2874 0,0826
1,30 111090 363 182 4,7492 0,2342 0,0549
Burril 1,35 113505 371 185 4,6978 0,1828 0,0334
1,40 115920 379 189 4,6480 0,1330 0,0177
1,45 118335 387 193 4,5997 0,0847 0,0072
1,50 120750 395 197 4,5529 0,0379 0,0014
1,55 123165 403 201 4,5075 0,0075 0,0001
1,60 125580 410 205 4,4688 0,0462 0,0021
1,65 127995 418 209 4,4258 0,0892 0,0080
1,70 130410 426 213 4,3840 0,1310 0,0171
1,75 132825 434 217 4,3435 0,1716 0,0294
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado79785 261 130
4ªf - f4PM = 4,515 hzDTotal Dnó DEXT.KMass

41
Tabela 9 - Erros Quadráticos
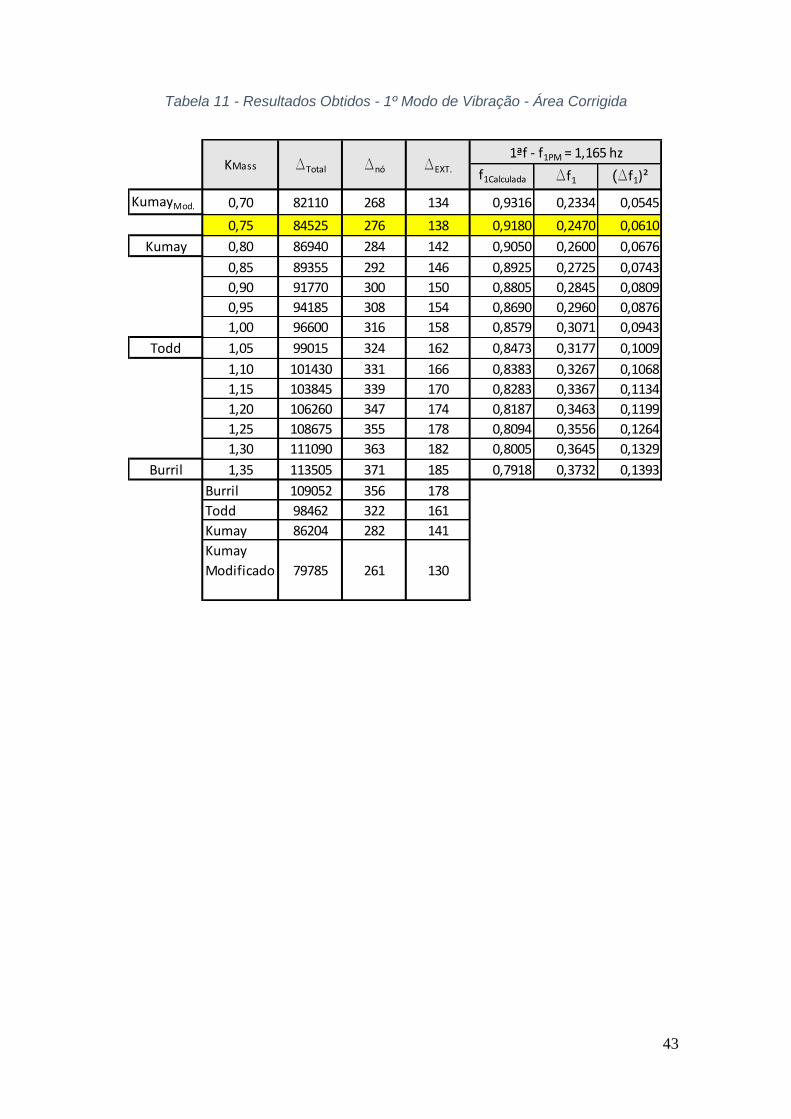
Os próximos resultados a serem apresentados são referentes a uma nova
modelação realizada para um novo valor das áreas efetivas de cisalhamento, desta vez
utilizando um valor de 20% da área da seção, que é um valor proporcional normalmente
encontrados em embarcações do mesmo tipo.
Novo valor para área efetiva de cisalhamento: 0,812 m²

42
Tabela 10 - Resumo de Resultados Obtidos – Área Corrigida
Abaixo estão as tabelas completas que apresentam os resultados obtidos.
1ªf - f1PM = 1,165 hz 2ªf - f2PM = 1,970 hz 3ªf - f3PM = 3,065 hz 4ªf - f4PM = 4,515 hz
f1Calculada f2Calculada f3Calculada f4Calculada
KumayMod. 0,70 0,9316 2,0716 3,2916 4,4680 0,1184
0,75 0,9180 2,0414 3,2435 4,4028 0,1106
Kumay 0,80 0,9050 2,0124 3,1975 4,3403 0,1175
0,85 0,8925 1,9847 3,1534 4,2804 0,1373
0,90 0,8805 1,9580 3,1111 4,2230 0,1685
0,95 0,8690 1,9324 3,0704 4,1678 0,2096
1,00 0,8579 1,9078 3,0313 4,1147 0,2596
Todd 1,05 0,8473 1,8841 2,9937 4,0636 0,3172
1,10 0,8383 1,8641 2,9618 4,0203 0,3733
1,15 0,8283 1,8419 2,9266 3,9726 0,4431
1,20 0,8187 1,8206 2,8927 3,9265 0,5182
1,25 0,8094 1,8000 2,8599 3,8820 0,5981
1,30 0,8005 1,7800 2,8282 3,8390 0,6819
Burril 1,35 0,7918 1,7608 2,7976 3,7975 0,7693
KMassErro
Quadrático
43
Tabela 11 - Resultados Obtidos - 1º Modo de Vibração - Área Corrigida
f1Calculada Df1 (Df1)²
KumayMod. 0,70 82110 268 134 0,9316 0,2334 0,0545
0,75 84525 276 138 0,9180 0,2470 0,0610
Kumay 0,80 86940 284 142 0,9050 0,2600 0,0676
0,85 89355 292 146 0,8925 0,2725 0,0743
0,90 91770 300 150 0,8805 0,2845 0,0809
0,95 94185 308 154 0,8690 0,2960 0,0876
1,00 96600 316 158 0,8579 0,3071 0,0943
Todd 1,05 99015 324 162 0,8473 0,3177 0,1009
1,10 101430 331 166 0,8383 0,3267 0,1068
1,15 103845 339 170 0,8283 0,3367 0,1134
1,20 106260 347 174 0,8187 0,3463 0,1199
1,25 108675 355 178 0,8094 0,3556 0,1264
1,30 111090 363 182 0,8005 0,3645 0,1329
Burril 1,35 113505 371 185 0,7918 0,3732 0,1393
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado 79785 261 130
KMass DTotal Dnó DEXT.
1ªf - f1PM = 1,165 hz

44
Tabela 12 - Resultados Obtidos - 2º Modo de Vibração - Área Corrigida
f2Calculada Df2 (Df2)²
KumayMod. 0,70 82110 268 134 2,0716 0,1016 0,0103
0,75 84525 276 138 2,0414 0,0714 0,0051
Kumay 0,80 86940 284 142 2,0124 0,0424 0,0018
0,85 89355 292 146 1,9847 0,0147 0,0002
0,90 91770 300 150 1,9580 0,0120 0,0001
0,95 94185 308 154 1,9324 0,0376 0,0014
1,00 96600 316 158 1,9078 0,0622 0,0039
Todd 1,05 99015 324 162 1,8841 0,0859 0,0074
1,10 101430 331 166 1,8641 0,1059 0,0112
1,15 103845 339 170 1,8419 0,1281 0,0164
1,20 106260 347 174 1,8206 0,1494 0,0223
1,25 108675 355 178 1,8000 0,1700 0,0289
1,30 111090 363 182 1,7800 0,1900 0,0361
Burril 1,35 113505 371 185 1,7608 0,2092 0,0438
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado 79785 261 130
KMass DTotal Dnó DEXT.
2ªf - f2PM = 1,970 hz

45
Tabela 13 - Resultados Obtidos - 3º Modo de Vibração - Área Corrigida
f3Calculada Df3 (Df3)²
KumayMod. 0,70 82110 268 134 3,2916 0,2266 0,0513
0,75 84525 276 138 3,2435 0,1785 0,0319
Kumay 0,80 86940 284 142 3,1975 0,1325 0,0176
0,85 89355 292 146 3,1534 0,0884 0,0078
0,90 91770 300 150 3,1111 0,0461 0,0021
0,95 94185 308 154 3,0704 0,0054 0,0000
1,00 96600 316 158 3,0313 0,0337 0,0011
Todd 1,05 99015 324 162 2,9937 0,0713 0,0051
1,10 101430 331 166 2,9618 0,1032 0,0107
1,15 103845 339 170 2,9266 0,1384 0,0191
1,20 106260 347 174 2,8927 0,1723 0,0297
1,25 108675 355 178 2,8599 0,2051 0,0421
1,30 111090 363 182 2,8282 0,2368 0,0561
Burril 1,35 113505 371 185 2,7976 0,2674 0,0715
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado 79785 261 130
KMass DTotal Dnó DEXT.
3ªf - f3PM = 3,065 hz

46
Tabela 14 - Resultados Obtidos - 4º Modo de Vibração - Área Corrigida
f4Calculada Df4 (Df4)²
KumayMod. 0,70 82110 268 134 4,4680 0,0470 0,0022
0,75 84525 276 138 4,4028 0,1122 0,0126
Kumay 0,80 86940 284 142 4,3403 0,1747 0,0305
0,85 89355 292 146 4,2804 0,2346 0,0550
0,90 91770 300 150 4,2230 0,2920 0,0853
0,95 94185 308 154 4,1678 0,3472 0,1206
1,00 96600 316 158 4,1147 0,4003 0,1603
Todd 1,05 99015 324 162 4,0636 0,4514 0,2038
1,10 101430 331 166 4,0203 0,4947 0,2447
1,15 103845 339 170 3,9726 0,5424 0,2942
1,20 106260 347 174 3,9265 0,5885 0,3463
1,25 108675 355 178 3,8820 0,6330 0,4006
1,30 111090 363 182 3,8390 0,6760 0,4569
Burril 1,35 113505 371 185 3,7975 0,7175 0,5148
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado 79785 261 130
KMass DTotal Dnó DEXT.
4ªf - f4PM = 4,515 hz
47
Tabela 15 - Erros Quadráticos - Área Corrigida
KumayMod. 0,70 82110 268 134 0,1184
0,75 84525 276 138 0,1106
Kumay 0,80 86940 284 142 0,1175
0,85 89355 292 146 0,1373
0,90 91770 300 150 0,1685
0,95 94185 308 154 0,2096
1,00 96600 316 158 0,2595
Todd 1,05 99015 324 162 0,3172
1,10 101430 331 166 0,3733
1,15 103845 339 170 0,4431
1,20 106260 347 174 0,5182
1,25 108675 355 178 0,5980
1,30 111090 363 182 0,6820
Burril 1,35 113505 371 185 0,7693
Burril 109052 356 178
Todd 98462 322 161
Kumay 86204 282 141
Kumay
Modificado79785 261 130
KMass DTotal Dnó DEXT.Erro
Quadrático
48
8. Análise de Resultados e Conclusão
Em um primeiro momento os resultados obtidos estão bastante coerentes com os
valores obtidos na prova de mar, diferentemente dos resultados obtidos por outros
Projetos de Graduação supracitados, [7] e [8]. Este efeito é parte do trabalho de
avaliação e crítica dos valores fornecidos pela prova de mar – sem a experiência prévia
dos colegas e sem o auxílio do orientador não seria possível identificar uma leitura
incorreta das frequências encontradas e corrigi-las.
Outro importante resultado obtido que proporcionou uma reflexão foi a determinação
do melhor coeficiente de massa adicional (𝐾𝑀𝑎𝑠𝑠), na primeira modelação. Era esperado
que este valor estivesse entre 0,7 e 1,3, porém foi obtido como melhor valor, aquele que
apresentou o menor erro quadrático, um coeficiente de massa adicional de 1,55
(𝐾𝑀𝑎𝑠𝑠 = 1,55).
Diante deste resultado alguns fatores foram analisados e foi possível perceber que
devido a um alto valor das áreas de cisalhamento efetivas, o que denuncia uma alta
rigidez da seção-mestra, o coeficiente de massa adicional seria elevado para que as
frequências obtidas na simulação fossem mais próximas as frequências obtidas na
prova de mar.
Ainda para validar esta observação foi realizada uma busca em um conjunto de
navios que tiveram suas seções estudadas através das mesmas hipóteses e
ferramentas. Esta busca teve como objetivo determinar qual seria a parcela, a
porcentagem, da área total da seção que contribuiria para os valores das áreas efetivas
de cisalhamento. Estes valores estavam variando entre 17% até 20% da área total da
seção, porém no caso do navio deste projeto, o Celso Furtado, este valor atingia a marca
de 36%.
Após verificar esta característica anômala do Celso Furtado foi realizada uma nova
modelação da viga navio, desta vez corrigindo o valor das áreas de cisalhamento
efetivas, trazendo para 20% do valor da área total da seção. O resultado encontrado

49
para esta segunda modelação se enquadra perfeitamente nas expectativas inicias do
projeto, o melhor resultado obtido é para um coeficiente de massa adicional de 0,75 –
resultado este bastante próximo dos obtidos para as equações de Kumay (normal e
modificado).
Os resultados obtidos para este projeto são bastante satisfatórios e confiáveis, uma
vez que validam a utilização de fórmulas simplificadas baseadas em medições de
vibrações em navios petroleiros para o cálculo de massa adicional e valida as hipóteses
de distribuição uniforme de massa e de massa adicional ao longo de todo o comprimento
do navio. E ainda vai de encontro com os resultados obtidos em outros projetos que não
validaram a aplicação deste método para esta embarcação.
Os resultados obtidos neste projeto permitem e sugerem que novos projetos sejam
desenvolvidos tanto sobre a dinâmica da ocorrência de vibração no Celso Furtado assim
como para um estudo mais minucioso da topologia estrutural do navio.
50
9. Referências
[1] SILVA NETO, S. F. – “Apostila de Vibração do Navio 2ª parte”;
[2] SILVA NETO, S.F; LIMA, E. L.; NOVAES, F. – “Modelo Numérico Simplificado para
a análise de Vibração Excessiva Medidas no Casco, Superestrutura e Praça de
Máquinas do Navio” – 23º Congresso de Transporte Aquaviário, Construção e Offshore;
[3] RAO, SINGIRESU S. – “Mecanical Vibration” – Ed. Pearson Prentice Hall – 4ª edição;
[4] PALETTA PICORELLI, L. O. – “Analise Da Vibração De Navios Aplicando Modelação
Por Elementos Finitos Em Duas Dimensões” - 1991
[5] CAVALCANTI, L. F.- “Influência da Massa Adicional do Fluido Adjacente ao Casco
de Navio na Vibração Medida na Prova de Mar”
[6] COLONESE, L. C. - "Análise Numérica Unidimensional Da Vibração Do Casco De
PSV - Platform Supply Vessel"
[7] SOBRINHO, R. S. - " Análise da Influência da Massa Adicional do Fluido Adjacente
ao Casco de Petroleiro na Vibração Medida Durante Prova de Mar"
[8] Andrade, G. F. – “Influência Da Área Efetiva No Cisalhamento E Da Massa Adicional
Em Modelo Unidimensional Na Predição Da Vibração Livre De Petroleiro”
[9] Figueiredo, S.R. – “Modelo Numérico Unidimensional Para Análise De Vibração Do
Casco De Um Navio Petroleiro”

51
[10] TROYMAN, A.C.R., CONCEIÇÃO, C.A.L., “Área Efetiva no Cisalhamento e Centro
de Cisalhamento de Seções Transversais de Navios”, Revista Brasileira de Engenharia,
Vol. 4 N1.