Luis Alonso Salas Alvarado Simulação bidimensional de ... amiga Ana Roxo de quem estou eternamente...
154
Luis Alonso Salas Alvarado Simulação bidimensional de corridas de detritos usando o Método de Elementos Discretos Dissertação de Mestrado Dissertação apresentada ao Programa de Pós-graduação em Geotecnia da PUC-Rio como requisito parcial para obtenção do grau de Mestre em Engenharia Civil. Orientador: Prof. Eurípedes do Amaral Vargas Jr. Rio de Janeiro, junho de 2006
Transcript of Luis Alonso Salas Alvarado Simulação bidimensional de ... amiga Ana Roxo de quem estou eternamente...

Luis Alonso Salas Alvarado
Simulação bidimensional de corridas de detritos usando o Método de
Elementos Discretos
Dissertação de Mestrado
Dissertação apresentada ao Programa de Pós-graduação em Geotecnia da PUC-Rio como requisito parcial para obtenção do grau de Mestre em Engenharia Civil.
Orientador:
Prof. Eurípedes do Amaral Vargas Jr.
Rio de Janeiro, junho de 2006
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Luis Alonso Salas Alvarado
Simulação bidimensional de corridas de detritos usando o Método de
Elementos Discretos
Dissertação de Mestrado Dissertação apresentada ao Programa de Pós-graduação em Geotecnia da PUC-Rio como requisito parcial para obtenção do grau de Mestre em Engenharia Civil. Aprovada pela Comissão Examinadora abaixo assinada:
Eurípedes do Amaral Vargas Jr.
Orientador e Presidente PUC-Rio
Joao Luiz Elias Campos Tecgraf
Nelson Ferreira Fernadez IG/UFRJ
Cláudio Palmeiro do Amaral PUC-Rio
Rio de Janeiro, 30 junho de 2006
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Todos os direitos reservados. É proibida a reprodução total ou parcial do trabalho sem autorização do autor, do orientador e da universidade .
Luis Alonso Salas Alvarado Natural de Costa Rica. Gradou-se em Engenharia Civil (Universidad de Costa Rica-UCR) em 2003. Tem realizado estudos integrados em Sistemas de Informação Geográfica (SIG) no CIEDES (1997-2001) e de Geologia na Escola Centroamericana de Geologia da UCR (2000-2002). Tem participado em diversos projetos, seminários e congressos nas áreas de pavimentação, gestão integrada de riscos naturais, bases de dados georreferenciadas, estruturas de concreto sismo-resistentes e fundações tanto em Costa Rica como em El Salvador e no Brasil. Responsável da seção de pesquisa de materiais geológicos para uso industrial no LANAMME-UCR (2002-2003). É parte do corpo docente do Departamento de Geotecnia na Escola de Engenharia Civil da UCR.
Ficha Catalográfica
Alvarado, Luis Alonso Salas Simulação bidimensional de corridas de detritos usando o Método de Elementos Discretos / Luis Alonso Salas Alvarado; Orientador: Eurípedes Vargas do Amaral Jr.- Rio de Janeiro: PUC, Departamento de Engenharia Civil, 2006. 154 f.: il. ; 30 cm Dissertação (mestrado) – Pontifícia Universidade Católica do Rio de Janeiro, Departamento de Engenharia Civil. Inclui referências bibliográficas. 1. Engenharia civil – Teses. 2. Geotecnia. 3. Método de Elementos Discretos. 4. Relaxação dinâmica. 5. Simulação numérica. 6. Fluxo hiperconcentrado. 7. Corridas de massa. 8. Corridas de detritos. 9. Fluxos granulares. I. Vargas Jr, Eurípedes do Amaral. II. Pontifícia Universidade Católica do Rio de Janeiro. Departamento de Engenharia Civil. III. Título.
CDD:624
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Aos meus pais pelos seus grandes ensinos na luta
da vida e seu amor à longa distância.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Agradecimentos Ao professor Eurípedes A. Vargas Jr. pela sua direção e parceria na
realização deste trabalho, seus conselhos e ensinos do mundo da modelagem
numérica na Geotecnia. Também pela sua grata amizade.
Ao João Luiz E. Campos e Raquel Q. Velloso pelo seu apoio e conselhos
para eu conseguir entender programação de objetos. Principalmente pela sua
disposição a me ajudar nos momentos críticos.
Aos meus colegas e amigos de estudo: brasileiros, argentinos,
colombianos, peruanos, venezuelanos, cubanos, panamenhos, bolivianos,
nicaragüenses e outros ticos; cuja amizade e experiências de convivência nunca
esquecerei. Em especial à Tânia e família, Ygor, Adenilson, Renato, Vanessa,
Ana Lúcia, Leandro, Cristiano, Thaíse, Melchi, Anita, Yaneth, Marielos, Paco,
Francisco, Victor, Oscar, Laura, Karina, Viviana, Julio e Jackeline. Também aos
meus caros amigos Melvin e Adriana. Junto a vocês sempre “fiquei bem na foto”.
Aos meus amigos brasileiros que me ajudaram a compreender e aprender
mais sobre a cultura brasileira: família Teixeira, família Ayres, Sônia e família,
Raíssa e família, Judy, Leila, Ângelo, Alexandre, Betty, Daise, João e muitos
mais. Especial agradecimento a Cláudio Villaça. Obrigado a todos pelo
agradável convívio e baladas que me fizeram esquecer que era mais um
estrangeiro no Brasil.
Aos professores do Departamento da seção de Geotecnia pelas suas
novas contribuições ao meu saber profissional. Em especial a minha prezada
amiga Ana Roxo de quem estou eternamente agradecido pela sua ajuda.
A CAPES e FAPERJ pelo apoio econômico neste tempo todo enquanto
realizava minha dissertação.
Às pessoas que, ao longo da minha vida, emprestaram um pouco de seu
apoio, carinho, saber, entusiasmo e determinação para alcançar este sucesso
profissional. Em especial a todos os meus caros amigos ticos e familiares que,
ainda longe, nunca deixaram de acreditar em mim e sempre estiveram a
disposição para me poupar da saudade da terra.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

RESUMO
Alvarado, Luis Alonso Salas; Vargas Jr., Eurípedes do Amaral. Simulação bidimensional de corridas de detritos usando o Método de Elementos Discretos. Rio de Janeiro, 2006. 154 p. Dissertação de Mestrado- Departamento de Engenharia Civil, Pontifícia Universidade Católica do Rio de Janeiro.
Apresenta-se neste trabalho uma ferramenta numérica programada que
permite a simulação bidimensional de corridas de detritos usando o Método de
Elementos Discretos (DEM) desenvolvido por Cundall em 1979, cuja
metodologia resolve as equações do movimento simultaneamente de cada
elemento mediante a técnica numérica de Relaxação Dinâmica (MRD) por se
tratar de um problema transiente. Esta metologia parte da existência do
programa SAND desenvolvido na PUC (2002) para uma simulação da produção
de areia em poços de petróleo sob fluxo bifásico. Dois aspectos novos
incorporados neste tipo de análise são a representação gráfica de anteparos
mediante segmentação de curvas spline cúbicas e o uso da metodologia de
Munjiza na detecção de contatos com os propósitos de implementar o uso de
paramentos irregulares próximos à curva real do terreno e diminuir o tempo de
execusão do programa, respectivamente. Com diversos exemplos de
paramentos e variando os parâmetros de entrada do modelo numérico é
avaliada a idoneidade da ferramenta criada para simular os principais
mecanismos físicos característicos do movimento deste tipo de fenômeno. Além
disso, são descritas em detalhe as principais feições e terminologias usadas na
classificação e identificação das corridas de detritos e fenômenos similares, pois
estas são usualmente confundidas nas literaturas existentes e entre os
profissionais das áreas da Geologia, Geografia e Geotecnia.
Palavras chaves Engenharia Civil; Geotecnia; Método de Elementos Discretos; relaxação
dinâmica; simulação numérica; fluxo hiperconcetrado; corridas de massa;
corridas de detritos; fluxos granulares.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

ABSTRACT Alvarado, Luis Alonso Salas; Vargas Jr., Eurípedes do Amaral (Advisor). Two-dimensional simulation of debris flow using Distinct Element Method. Rio de Janeiro, 2006. 154 p. MSc Dissertation- Departamento de Engenharia Civil, Pontifícia Universidade Católica do Rio de Janeiro.
A programed numerical tool that allows two-dimensional simulation of
debris flows is presented in this dissertation. Cundall´s Distinct Element Method
(DEM) is used to this purpose, which was developed in 1979. Following this
methodology, motion equations are simultaneilly solved by the numerical method
of Dynamic Relaxation (MRD) for each distinct particle. This method is used in
order to the transient behavior of this particular problem. The numerical modeling
is based on the SAND program, developed at PUC (2002) for a numerical
application on sand production for petroleum extraction process considering
biphasic flow motion. Two new features incorporated in this kind of analyses are
the graphical representation of walls with cubic spline curves segmentation and
the implementation of the Munjiza´s method for contact detection. They attemp to
implement irregular curves that are closely to represent real sliding surface and to
decrease the total program executation time respectively. The idoneousness of
the programed numerical tool for the representation of the most caracteristic
phisical mechanisms of these kind of flows is tested using several curves
configurations as variation on the inicial parametrics values of the numerical
model. Moreover, main features and associated terminologies for identification
and classification of debris flows and similar events are largely described here
because of the usual confusion in the use of them within scientific literatures and
professional communications between technician of Geology, Geography and
Geotechnical Engineering.
Keywords Civil Engineering; Geotecnia; Distinct Element Method; dynamic relaxation;
numerical simulation; hyper-concentrated flow; lands flow; debris flows; granular
flows.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

RESUMEN
Alvarado, Luis Alonso Salas; Vargas Jr., Eurípedes do Amaral (Orientador). Simulación bidimensional de flujos de detritos com el uso del Método de Elementos Discretos. Rio de Janeiro, 2006. 154 p. Disertaión de Maestría- Departamento de Ingeniería Civil, Pontifícia Universidade Católica do Rio de Janeiro.
En este trabajo se disponibiliza una herramienta numérica para la
simulación bidimensional de flujos de detritos usando el Método de Elementos
Discretos (DEM) creado por Cundall en 1979, donde las ecuaciones del
movimiento para cada elemento son resueltas simultáneamente con la técnica
numérica de Relajación Dinámica (MRD) debido al comportamiento transiente
del fenómeno. La herramienta se basa en el programa SAND desarrollado en la
PUC (2002) para la simulación de producción de arena en la extracción de
petróleo en pozos considerando condiciones de flujo bifásico. Dos nuevos
aspectos se introducen en este tipo de análises: la representación gráfica de
paredes mediante la segmentación de curvas splina cúbicas y el uso de la
metodologia de Munjiza en la detección de contactos. Ambos son
implementados con la intención de hacer uso de paredes irregulares próximas a
la forma real de la curva del terreno y de disminuir el tiempo de ejecución del
programa respectivamente. Mediante varios ejemplos con diferentes superficies
y con variación en los valores de los parámetros de entrada del modelo numérico
fue posible evaluar la idoneidad de la herramienta aquí creada para simular los
principales mecanismos físicos característicos del movimiento de este tipo de
fenómenos. Además, se describen detalladamente las principales características
e terminologías utilizadas en la identificación y clasificación de los flujos de
detritos y fenómenos similares, pues estos son motivos de confusión en la
literatura existente y entre los profesionales de las ramas de Geología, Geografía
y Geotecnia.
Palabras claves Ingeniería Civil; Geotecnia; Método de Elementos Discretos; relajación
dinámica; simulación numérica; flujo hiperconcentrados; flujos; flujos de detritos;
flujos granulares.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

SUMÁRIO Listas de Figuras.…………………………….......……………………...........….…..12
Listas de Tabelas.................................................................................................15
Listas de Símbolos...............................................................................................16
CAPÍTULO 1
INTRODUÇÃO.....................................................................................................20 1.1. Importância e definição do problema........................................................20 1.1.1.Importância na Região Latino-americana............................................21 1.2. Objetivos do trabalho................................................................................23 1.2.1. Objetivo Geral....................................................................................24 1.2.2. Objetivos Específicos ........................................................................24 1.3. Alcance da Pesquisa ................................................................................25 1.3.1. Trabalhos Prévios..............................................................................26 1.3.2. Descrição Metodológica ....................................................................28 1.3.3. Limitações da pesquisa .....................................................................29 1.4. Conteúdo ..................................................................................................30
CAPÍTULO 2
CARACTERIZAÇÃO DAS CORRIDAS DE DETRITOS ......................................32
2.1.Classificação dos Movimentos de Massas ................................................32
2.1.1.Deslizamentos do Terreno (Landslides)..............................................32
2.1.2.Corridas de sedimentos (Sediment Flows)..........................................33
1. Corridas Fluidas (Slurry Flows) ............................................................34
2. Corridas de material granular (Granular Flows) ...................................35
2.2. Classificação e definição de corrida de detritos........................................36
2.2.1. Alguns critérios de classificação.........................................................38
2.2.2.Condições de ocorrência das corridas de massa................................42
1. Gradiente ou inclinação da encosta: ....................................................42
2. Conteúdo de Água:...............................................................................44
3. Materiais geológicos: ............................................................................44
2.2.3.Principais feições físicas das corridas de massa ................................45
2.2.4.Características das corridas de massa ...............................................47
2.2.4.1.Tamanho das partículas sólidas ....................................................48
2.2.4.2. Movimento interno de partículas...................................................49
2.2.4.3. Perfil de velocidades e espessuras ..............................................49
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

2.2.4.4. Distribuição da concentração de sedimentos .................................50
2.2.4.5. Zonas de tensões cisalhantes ........................................................50
2.2.4.6. Forças internas ...............................................................................51
2.2.4.7. Outros fatores de consideração......................................................51
2.2.5. Modelos reológicos das corridas de massa..........................................53
2.2.5.1. Eficiência energética nas corridas de massa .................................53
2.2.5.2. Alguns modelos reológicos para corridas de massa ......................55
CAPÍTULO 3
MÉTODO DE ELEMENTOS DISCRETOS NA SIMULAÇÃO DE CORRIDAS DE
DETRITOS...........................................................................................................62
3.1. Filosofia da Modelagem............................................................................62
3.1.1. Modelos Estatísticos...........................................................................63
3.1.2. Modelos Determinísticos ....................................................................67
3.1.2.1. Método dos Elementos Finitos (FEM) ..........................................68
3.1.2.2. Métodos de Elementos Discretos (DEM)......................................73
3.1.2.3. Algumas características comparativas dos métodos....................77
3.2. Modelo de Elementos Discretos de Cundall .............................................78
3.2.1. Escolha dos parâmetros do modelo ...................................................85
3.2.1.1. Convergência Numérica ...............................................................85
3.2.1.2. Estabilidade Numérica..................................................................89
CAPÍTULO 4
IMPLEMENTAÇÃO COMPUTACIONAL NA SIMULAÇÃO DE CORRIDAS DE
DETRITOS.......................................................................................................... 91
4.1. Estruturação básica do programa SAND..................................................91
4.1.1. Geometria das Partículas. ..................................................................92
4.1.2. Detecção de Contatos. .......................................................................97
4.1.3. Aplicação das Leis Físicas ...............................................................102
4.1.4. Visualização .....................................................................................103
CAPÍTULO 5
RESULTADOS E DISCUSSÕES ......................................................................104
5.1. Resultados ..............................................................................................104
5.1.1. Condições Padrão ............................................................................104
5.1.2. Parâmetros considerados.................................................................106
1. Tipo de Amortecimento........................................................................107
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

2. Rigidez..............................................................................................107
3. Fração de tempo crítica ....................................................................108
4. Atrito .................................................................................................109
5. Tipo de superfície .............................................................................109
6. Número de Partículas .......................................................................110
5.1.3. Aplicação da metodologia do DEM ..................................................110
1. Geração da malha inicial de partículas e massa instável inicial........110
2. Simulação da corrida e visualização de variáveis. ............................111
5.2. Exemplos de Aplicação...........................................................................118
5.2.1. Exemplo com superfície irregular complexa.....................................118
5.2.2. Exemplo com variação repentina no ângulo de atrito......................121
5.3. Discussão de Resultados........................................................................124
CAPÍTULO 6
CONCLUÇÕES E RECOMENDAÇÕES ...........................................................126
6.1. Conclusões.............................................................................................126
6.2. Recomendações e propostas para futuros trabalhos .............................129
REFERÊNCIAS BIBLIOGRÁFICAS...........................................................131
ANEXOS…………………………………………………………………………………………….....137
ANEXO I: Classificação de Varnes para movimentos de massa (1978) .......138
ANEXO II: Diagramas de algumas classificações dos fluxos de detritos ......139
ANEXO III: Descrição dos modelos reológicos mais usados na modelagem do
movimento das corridas de massa [7], [9], [12]. ...................................................141
ANEXO IV: Método tridimensional de Elementos Discretos de Cundall (1988) ..
..............................................................................................................145
ANEXO V: Algoritmo de curvas bidimensionais spline cúbicas [54] ................149
ANEXO VI: Algoritmos de detecção de contatos ...........................................152
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Listas de Figuras
CAPÍTULO 1
FIGURA 1.1- Evolução comparativa da freqüência de desastres na América
Latina e o Caribe, e o Mundo no século passado [2] ....................................22
CAPÍTULO 2
FIGURA 2.1- Classificação reológica de Pierson e Costa (1987) para misturas
água-sedimento e sua correlação com termologias típicas [10] . ...................41
FIGURA 2.2- Partes de uma corrida de massa e sua relação com o gradiente [9]
..................................................................................................................43
FIGURA 2.3- Caracterização do gradiente e o movimento de uma corrida [9] ....43
FIGURA 2.4- Processos envolvidos na ocorrência de corridas [9] . .....................45
FIGURA 2.5- Possíveis feições de uma corrida durante sua ocorrência [12] .......46
FIGURA 2.6- Taxonomia de uma corrida de massa [19].......................................47
FIGURA 2.7- Granulometria típica de uma corrida de detritos [18] . .....................48
FIGURA 2.8- Movimentos internos das partículas dentro do corpo de uma corrida [9] . .................................................................................................................49
FIGURA 2.9- Caracterização do perfil de velocidade e espessura de um fluxo [9] .
....................................................................................................................50
FIGURA 2.10- Distribuição da concentração de sólidos no corpo do fluxo [9] . ...50
FIGURA 2.11- Caracterização da taxa de cisalhamento dentro do corpo do fluxo [9] . .................................................................................................................51
FIGURA 2.12- Efeitos da gradação direta e inversa no desenvolvimento do
movimento fluxo de detritos [9] . ....................................................................52
FIGURA 2.13- Transferência de energia de uma corrida de massa [14] . .............53
FIGURA 2.14. Diagrama de relação com início e deposição da corrida de massa
na determinação da transferência de energia. .............................................54
FIGURA 2.15. Relação H/L versus volume para corridas de massa ocorridas na
Serra do Mar, SP-RJ, Brasil [21] . .................................................................55
FIGURA 2.16. Reogramas característicos de alguns modelos reológicos para a
modelagem de corridas de massa [7]. ...........................................................56
FIGURA 2.17. Reogramas característicos de alguns modelos reológicos para a
modelagem de corridas de massa [14] ..........................................................60
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 3
FIGURA 3.1- Métodos numéricos comummente usados na modelagem de
corridas de detritos. ......................................................................................62
FIGURA 3.2- Precipitação acumulada versus tempo relacionada à ocorrência de
corridas de detritos e grandes deslizamentos [21]. ........................................66
FIGURA 3.3- Volume de controle infinitesimal da massa....................................69
FIGURA 3.4- Volume de controle infinitesimal da massa....................................70
FIGURA 3.5- Saída da simulação da corrida de detritos Frank, 1917 [37]............73
FIGURA 3.6- Etapas da lógica dos Métodos de Elementos Discretos................74
FIGURA 3.7- Simulações usando celas autômatas uni e bidimensionais [24]. .....75
FIGURA 3.8- Simulação sob o enfoque newtoniano de DEM. ............................76
FIGURA 3.9- Ciclo de cálculos segundo a metodologia DEM.............................79
FIGURA 3.10- Ciclo de cálculos seguindo a metodologia de MRD.....................80
FIGURA 3.11- Modelo usado para os contatos entre partículas. ........................81
FIGURA 3.12- Notação usada na dedução das equações de movimento. .........82
FIGURA 3.13- Correção do ângulo entre sistemas de coordenadas. .................84
CAPÍTULO 4
FIGURA 4.1- Interface gráfica do Programa SAND mostrando os contatos entre
elementos. ....................................................................................................92
FIGURA 4.2- Etapas de implementação computacional do DEM. ......................92
FIGURA 4.3- Esquema para a geração de elementos discretos.........................93
FIGURA 4.4- Hierarquia de classes para a definição geométrica do elemento
discreto. ........................................................................................................93
FIGURA 4.5- Hierarquia de classes para a definição dos tipos de anteparos no
programa SAND. ..........................................................................................94
FIGURA 4.6.a- Esquema da rotina SPLINE. .......................................................95
FIGURA 4.6.b- Esquema da rotina SPLINE (continuação). ................................96
FIGURA 4.7- Representação gráfica de anteparo (a) linear (b) Spline cúbico
linearizado com 5 segmentos.......................................................................96
FIGURA 4.8- Etapas na detecção de contatos seguindo as hierarquias de
objetos usadas no SAND. ............................................................................98
FIGURA 4.9- Sistema de celas usado na busca de contatos segundo o algoritmo
Mujinza. ........................................................................................................99
FIGURA 4.10- Exemplo de detecção de contatos na cela (i,j) segundo o
algoritmo de Mujinza. ...................................................................................99
FIGURA 4.11- Ciclo de cálculo para determinar velocidades e deslocamentos
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

das partículas a partir da detecção de contatos seguindo a algoritmo
Mujinza e sua relação com a etapa de aplicação das leis físicas. .............100
FIGURA 4.12- Esquema de programação do mapeamento dos paramentos para
seu uso no algoritmo de Munjiza ...............................................................101
FIGURA 4.13- Hierarquia de classes para a definição dos tipos de
amortecimento............................................................................................102
FIGURA 4.14- Esquema da atualização das variáveis no ciclo de cálculo. ......103
CAPÍTULO 5
FIGURA 5.1- Perfis patrões utilizados na avaliação de parâmetros de entrada do
programa SAND. ........................................................................................105
FIGURA 5.2- Processo de sedimentação e densificação das partículas na
geração da massa instável inicial para a simulação da corrida. ................111
FIGURA 5.3- Perfis de profundidade para a configuração padrão com a
identificação das suas principais feições taxonómicas...............................113
FIGURA 5.4. Classificação do fluxo segundo o perfil de profundidade para
algumas configurações...............................................................................114
FIGURA 5.5-. Feições de segregação na simulação da corrida de detritos no
programa SAND para diferentes configurações.........................................116
FIGURA 5.6. Perfis de velocidade característicos para a configuração patrão no
ciclo 10000. ................................................................................................117
FIGURA 5.7. Perfil irregular de exemplo na aplicação do programa SAND na
simulação de uma corrida de detritos.........................................................119
FIGURA 5.8. Perfis de profundidades para o exemplo de corrida detritos sobre
uma superfície irregular simulada com o programa SAND. .......................119
FIGURA 5.9.Tipo de segregação nas distintas zonas de deposição da corrida. ....
...............................................................................................................120
FIGURA 5.10- Configurações da massa instável usadas na simulação de
redução repentina do coeficiente de atrito. ................................................121 FIGURA 5.11- Desenvolvimento da corrida a patir da redução do coeficiente de
atrito. ........................................................................................................123
ANEXOS
FIGURA IV.a. Notação usada nas equações do DEM-3D. ...............................145
FIGURA VI.a. Técnicas de detecção de contatos para elementos discretos [54]. ....
..................................................................................................................142
FIGURA VI.b. Esquema da técnica da cela adjunta..........................................143
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

FIGURA VI.c. Esquema da técnica da partícula mais próxima ou cutoff. .........143
FIGURA VI.d. Técnica de Triangulação dinâmica de Delauny..........................144
Listas de Tabelas
CAPÍTULO 2
Tabela 2.1- Descrição dos mecanismos de falha dos movimentos de massas. .33
Tabela 2.2- Classificação dos fluxos de sedimentos segundo a velocidade e
conteúdo de água [7]. ....................................................................................34
Tabela 2.3- Síntese dos tipos de corridas de massa agrupados segundo
características do material, tipo de movimento e velocidade [7]. ..................36
Tabela 2.4- Caracterização dos fluxos hiperconcentrados [8]. .............................37
Tabela 2.5.a- Principais classificações dos fluxos hiperconcentrados usado nas
pesquisas. ....................................................................................................38
Tabela 2.6- Relação entre o gradiente e características do movimento uma
corrida de massa [12]. ....................................................................................43
Tabela 2.7- Principais características dos diversos tipos de fluxos [9]. ................46
Tabela 2.8- Valores típicos das propriedades básicas das corridas de massa [14]. .
....................................................................................................................47
Tabela 2.9- Classificação da fração sólida das corridas de massa proposta por
Znamensky e Gramani [7]..............................................................................48
Tabela 2.10- Classificação qualitativa dos fluxos detríticos por Jan e Shen (1997) [7]. ..................................................................................................................55
Tabela 2.11- Relação cinemática com as propriedades reológicas do fluxo
propostas por Lee (1994) [9]..........................................................................61
CAPÍTULO 3
Tabela 3.1- Valores de coeficientes e expoentes da equaçao (3.3.a) para
corridas de detritos [19]. .................................................................................64
CAPÍTULO 5
Tabela 5.1- Principais parâmetros avaliados na idoneidade da simulação de
corridas do programa SAND. .....................................................................106
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Lista de Símbolos
CV concentração volumétrica de sólidos.
Vsol volume da fração sólida.
Vliquid volume da fração liquida.
R coeficiente de resistência adimensional.
τMC tensão cisalhante por atrito dado pelo critério de Coulomb.
τC tensão cisalhante que considera o efeito da coesão dos sedimentos
finos.
τµ tensão cisalhante devida à viscosidade.
τT tensão cisalhante dos efeitos turbulentos.
τD tensão dispersiva que considera as colisões interpartículas.
P componente vertical da força dispersiva do fluxo.
φD ângulo de atrito dinâmico.
M coeficiente empírico (0.042)
f(λ) função da concentração volumétrica linear.
ρs densidade das partículas sólidas.
ds diâmetro médio das partículas sólidas.
du/dy taxa de deformação ou o gradiente de velocidade.
µ viscosidade dinâmica do fluido.
λ concentração linear, relacionada com a concentração volumétrica CV e
a concentração máxima volumétrica de sólidos CV* (≈ 0.6 -0.7):
µB viscosidade Bingham dinâmica do fluido.
τy tensão ao cisalhamento Mohr-Coulomb ( CMC ττ + )
ζ parâmetro que caracteriza o comportamento dispersivo e turbulento.
µC parâmetro de dispersão definido por Bagnold.
µT parâmetro de turbulência.
ρm densidade da mistura.
ρf densidade do fluido.
ρs densidade das partículas sólidas.
lm cumprimento de mistura de Prandt, ≈ kh, (com k=0.4, constante de Von
Karma, e h= espessura do fluxo).
a constante empírica (≈ 0.01).
sγ& gradiente de velocidades (du/dy).
h espessura do fluxo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

χ ângulo medido respeito à horizontal da linha que une o topo da zona
inicial e da zona de deposição.
S inclinação do fundo do canal (m/m).
ξ coeficiente que depende da concentração e dimensões das partículas
(s.m-1/2).
n coeficiente de Manning (s/m1/3).
C* coeficiente de Chezy (m1/2/s).
C1 coeficiente empírico (m0,7/s).
Q* Relação entre dois eventos similares QP2/ QP1
i intensidade (mm/h) da precipitação iniciadora.
dt duração (h) da precipitação.
Zt quantidade de água retida no solo que provoca a instabilidade por
saturação.
Kd coeficiente de drenagem (1/s).
φu ângulo mínimo de atrito entre partículas.
µ atrito no contato entre partícula-partícula ou partícula-paramento.
KN, KT rigidezes normal e tangencial respectivamente no contato (N/m).
CN, CT coeficientes de amortecimento normal e tangencial respectivamente no
contato.
CTR, CR coeficientes de amortecimento traslacional e rotacional respectivamente
aplicado a cada partícula.
∑i
iF somatória de forças nos contatos da partícula.
∑i
iM somatória de momentos devido às forças tangenciais nos pontos
de contato da partícula.
δθ deslocamento rotacional da partícula.
αC coeficiente de amortecimento local adimensional.
Ac área de contacto entre partículas.
{Φ} matriz normalizada de autovalores do sistema dinâmico amortecido
{U} vetor deslocamento nas coordenadas normalizadas.
ωang freqüência angular do sistema linear (mola).
ς razão de amortecimento Ci /CCRITICO, geralmente usada no valor crítico
de 1,0.
fT freqüência do sistema dinâmico amortecido.
sig(x,y) operador no qual o signo da magnitude x é dado pelo valor y.
Et energia cinética instantânea.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

∆E variação de energia cinética acumulada.
ε fração de amortecimento correspondente à freqüência máxima.
∆t0 passo de tempo sem efeitos viscosos.
θ ângulo interno do polígono regular formado pelos centros de partículas.
RMAX variação máxima de raio de um elemento discreto tipo disco.
RMIN variação máxima de raio de um elemento discreto tipo disco.
rand() número aleatório entre 0 e 1.
κCURV curvatura da função em estudo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

“The geotechnical engineer should apply theory and experimentation but tempers them by putting
them into the context of the uncertainty of nature. Judgment enters through Engineering and Geology”
Karl Terzaghi, 1961.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 1
INTRODUÇÃO
1.1. Importância e definição do problema
A modelagem de fenômenos naturais é importante para o desenvolvimento de
um país. Os cientistas e técnicos ao terem maior conhecimento das ameaças naturais
permitem o desenvolvimento de obras ou medidas de prevenção que garantam um
menor impacto do evento, um melhor conhecimento sobre os setores mais vulneráveis
a esses eventos e maior estabilidade financeira para os investidores externos ou
internos contra perdas por desastres.
As corridas de massa são fenômenos imprevisíveis na sua ocorrência, rápidos e
os de maior impacto econômico direto. A caracterização destes fenômenos tem sido
considerada objeto de estudo especializado pela comunidade internacional por causa
do pouco entendimento dos mecanismos de início e da dinâmica do movimento deste
tipo de fluxo de massa. Além de que sua distribuição geográfica não é limitada aos
países em desenvolvimento, estes se apresentam até nos grandes centros urbanos
onde se têm um número grande de vidas expostas. Algumas medidas preventivas se
têm promovido, mas em alguns casos estas ampliaram os impactos (rompimento de
aterros ou barragens dissipadoras de energia). Atualmente, se está criando uma maior
consciência na aleatoriedade da natureza e das formulações simplistas das
modelagens na área geotécnica, em especial pela variação estatística dos parâmetros
dos modelos no que se refere à convergência numérica dos mesmos, o que leva a ter
uma grande gama de diferentes modelos segundo as preferências e habilidades
matemáticas dos pesquisadores e o propósito dos usuários. Por outro lado, o avanço
da tecnologia tem permitido realizar estudos mais realistas deste tipo de evento. A
criação e adaptação de novas ferramentas numéricas e gráficas fazem o processo de
gestão de risco contra corridas de massa mais eficaz e eficiente, mas uma adaptação
errada pode provocar o mesmo desastre ou ampliar seus efeitos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
21
Sob esta perspectiva, este trabalho apresenta uma aplicação numérica da
formulação lagrangiana para o movimento hidrodinâmico de partículas na
modelagem de corridas de massa (especialmente de corridas de detritos) usando
alguns algoritmos numéricos da dinâmica não-linear como o de Relaxação Dinâmica
e computação gráfica. Utilizam-se formatos que podem ser usados junto com outras
ferramentas clássicas da gestão de risco como os Sistemas de Informação
Geográfica (SIG), criando assim uma ferramenta complementar a algumas
metodologias existentes. O método numérico utilizado aqui (Método de Elementos
Discretos, MED) é de recente uso na área da simulação de materiais geotécnicos, o
qual vai ganhando maior popularidade por certas vantagens diante dos métodos
numéricos tradicionais (Elementos Finitos, FEM; Diferencias Finitas, DFM; etc.),
porém um não se mostra melhor do que os outros. Estes métodos parecem ser
complementares entre si.
As aplicações aqui introduzidas são consideradas pioneiras na área da
simulação de corridas de massa no Brasil assim como na Costa Rica, país da
origem do autor. A importância futura para o desenvolvimento de pesquisas no
Brasil e principalmente na região centro-americana é muito grande devido à
freqüência destes fenômenos, assim como de novas iniciativas na gestão de riscos
naturais a nível regional. A falta deste tipo de metodologia aumenta ano a ano o
risco associado às corridas de massa nas principais cidades latino-americanas.
Cabe mencionar que esta ferramenta não tem espaço físico ou temporal definido, é
uma ferramenta numérica criada para se adaptar à maioria das condições físicas de
ocorrência dos fluxos que possam ser considerados como corridas de detritos
principalmente.
1.1.1. Importância na Região Latino-americana
Ao longo do tempo, os países de América Latina e o Caribe têm tentado
desenvolver-se dentro dos seus próprios problemas políticos e econômicos,
acumulados desde os primeiros dias da colônia, indistintamente sejam estes de
origem espanhola, inglesa, portuguesa ou francesa.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
22
Incidência de desastres em América Latina, Caribe e o Mundo
Nos últimos anos os desastres naturais tenham marcado um retrocesso pauta
neste desenvolvimento, em alguns deles com maior força do que em outros,
propiciando o atraso econômico nacional ou até regional. Deste modo, os problemas
econômicos fundamentais da região estão diretamente ligados à vulnerabilidade
diante das catástrofes naturais. Alguns desses eventos provocam além dos danos
diretos (perdas de vidas, pessoas feridas e danos econômicos), outras
conseqüências como prejuízos no PIB (Produto Interno Bruto), na balança comercial,
no endividamento externo, no equilíbrio fiscal e nos índices de investimentos
internos.
FIGURA 1.1- Evolução comparativa da freqüência de desastres na América Latina e o Caribe, e o Mundo no século passado [2] .
Por isso, é importante que estes países comecem a adotar medidas de
prevenção e de diminuição dos impactos dos desastres. Assim, organismos
multilaterais como a Organização das Nações Unidas (ONU) e Organização dos
Estados Americanos (OEA), têm organizado diferentes atividades a nível
internacional (como a DIRDN, “Decênio Internacional para a Redução dos
Desastres Naturais” na década de 90), relacionadas a prevenção e gestão dos
riscos naturais para reduzir a forte tendência de subdesenvolvimento e desastres.
Destas iniciativas surgiram grandes avanços sobre a caracterização da ameaça e
da vulnerabilidade como os principais fatores do risco e a proposta de uma nova
visão sobre a gestão dos riscos como parte complementar dos planos políticos dos
países [1]. Mas também, ficou claro o acréscimo da freqüência dos desastres na
região (ver FIGURA 1.1), o maior impacto direto e indireto nas economias e as
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
23
grandes deficiências acumuladas através dos tempos no conhecimento geral sobre
o risco [2]
Por outro lado, no primeiro qüinqüênio deste século, tem-se visto os primeiros
frutos dessas iniciativas no avanço do estudo preliminar das ameaças naturais e
antropogênicas, assim como na determinação da vulnerabilidade dos aglomerados
urbanos. Mas por outro lado, ainda prevalecem evidentes algumas falhas do modelo
econômico tradicional, o fraco impacto da pesquisa no melhoramento do
conhecimento dos fatores de risco e a falta de informação do público em geral sobre
sua participação na gestão de riscos.
Recentemente, por desastres ocorridos na região, tem-se notado a falta de
maior conhecimento nos mecanismos prévios à manifestação do fenômeno natural
assim como da vulnerabilidade do meio urbano. A falta de modelagens físicas ou
metodologias qualitativas menos simplistas tem levado a acreditar em prognósticos
que resultaram muito conservadores e ajudaram a aumentar o impacto do desastre.
Um outro fator de consideração é o fato de como são manipuladas as
estatísticas dos desastres, pois na região os terremotos, furacões e erupções
vulcânicas aparecem como os maiores desastres quando na verdade sabe-se que
muitas das vítimas destas eventualidades foram afetadas por “eventos secundários”
ativados por fatores como a alta vibração do terreno, a saturação do solo, o
derretimento de gelo e a erosão de encostas pela atividade humana prévia à
manifestação do fenômeno natural [2]. Assim, os cientistas e técnicos têm procurado
desenvolver melhores metodologias para entender estes processos e contribuir ao
melhoramento da gestão de riscos.
1.2. Objetivos do trabalho
Os principais propósitos deste trabalho são descritos a seguir:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
24
1.2.1. Objetivo Geral
Fornecer uma ferramenta numérica para a análise bidimensional de corridas
de massa, especialmente as denominadas fluxo de detritos com o uso do Método de
Elementos Discretos (DEM).
1.2.2. Objetivos Específicos
Classificar e caracterizar os fenômenos de fluxos ou corridas de massa.
Caracterizar os principais métodos numéricos utilizados nas modelagens de
corridas de massa.
Atualizar as rotinas sobre o Método de Elementos Discretos (DEM) descritas
no programa SAND.
Avaliar o uso de superfícies curvas linearizadas mediante algoritmos de
interpolação cúbica Spline na corrida de massas.
Caracterizar o conceito de Relaxação Dinâmica para solução de sistemas
dinâmicos.
Aplicar os conceitos de programação de objetos da linguagem C++ para a
modelagem de corridas de massa.
Aperfeiçoar as rotinas de procura de contatos entre partícula-partícula e
partícula-paramento na procura de eficiência no tempo de corrida do
programa.
Avaliar a funcionalidade das rotinas implementadas no programa original
com um caso de superfície irregular complexa.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
25
1.3. Alcance da Pesquisa
O presente trabalho parte da existência de um programa desenvolvido na PUC
-Rio, inicialmente para aplicações na área da Geomecânica Computacional,
especificamente para problemas de contacto aplicado na Mecânica de Rochas. Este
programa está baseado no programa RBM desenvolvido por Cundall (1974). Mas,
uma aplicação homóloga ao programa aqui utilizado foi desenvolvida em parceria
com o CENPES/ PETROBRAS e o TECGRAF [3] para aplicações em produção de
areia em poços de petróleo. Deste último, é que se realizam as principais
modificações nas rotinas do programa para as aplicações na dinâmica do
movimento bidimensional das corridas de massas.
Nos projetos mencionados anteriormente uma porção do material geotécnico
era encaixotado para realizar a simulação. Trabalhou-se a uma escala reduzida
onde o material simulado encontrava-se relativamente confinado por paramentos
lineares ou segmentos de círculos (número pequeno de anteparos) e os
deslocamentos das partículas eram pequenos. Este trabalho atualiza as rotinas
existentes para conseguir usar um maior número de segmentos de anteparos e de
partículas na simulação, tentando evitar o aumento do tempo de corrida do
programa. Aliás, a massa simulada caracteriza-se por apresentar grandes
deslocamentos e sem confinamento. Para conseguir este propósito, trabalha-se
diretamente com as rotinas relacionadas à geração dos paramentos, malha inicial
de partículas e determinação de contatos.
A partir destas modificações realiza-se uma pequena análise de sensibilidade
dos outros parâmetros (como amortecimento, passo de tempo e rigidez) não
alterados do programa original durante as corridas das simulações para confirmar
suas validações para este tipo específico de eventos. Assim, pretende-se
disponibilizar uma nova ferramenta para a simulação de corridas de massa.
Finalmente, leva-se a avaliar a ferramenta para o caso de uma superfície
irregular complexa simulando condições reais vistas no campo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
26
Por outro lado, este trabalho incorpora uma breve recopilação bibliográfica
sobre informação já existente no âmbito internacional no tocante à modelagem
assim como da caracterização física destes eventos naturais cujas referências são
limitadas no Brasil. Além do mais as terminologias, tipologias e classificações de
estes eventos são comumente confundidas entre os estudiosos de diferentes áreas.
A maioria dos estudos disponíveis apresenta diversos pontos de vista evidenciando
a falta de um maior entendimento destes fenômenos e de consenso internacional na
nomenclatura e critérios de classificação. Não se pretende impor nenhum ponto de
vista neste aspecto no trabalho. Somente mostra-se os diversos contextos
existentes para se ter consideração deles em futuros trabalhos relacionados a
simulação, pois nenhum modelo numérico atual faz consideração da complexa
realidade destes fenômenos.
1.3.1. Trabalhos Prévios
As ferramentas numéricas existentes são caracterizadas por dissertações
anteriores disponíveis na biblioteca setorial de pós-graduação na PUC-Rio,
especialmente as referentes a soluções de sistemas dinâmicos não-lineares em
aplicações na Geotecnia com o Método de Relaxação Dinâmica [4], [5], [6]. Embora
estes possam ficar em alguns aspectos por fora dos objetivos da pesquisa, recorre-
se a monografias e artigos científicos de fácil acesso nos sites eletrônicos de jornais
ou revistas técnico-científicas reconhecidas nas áreas de Geotecnia, Computação
Gráfica e Análise Numérica. Este material é referenciado ao longo dos parágrafos
dos capítulos seguintes.
Entre estes trabalhos destacam-se duas linhas tradicionais de pesquisa, os
trabalhos sobre métodos numéricos sob o enfoque lagrangiano para o Método de
Elementos Finitos (FEM) e para o Método dos Elementos Discretos (DEM). Sob
estes enfoques têm-se criado escolas de pesquisadores das quais se podem
mencionar algumas de suas principais tendências e especialidades na área.
Sobre DEM, os trabalhos mais destacados são os da escola italiana, tanto na
área de simulação de condições de disparo e do movimento do fluxo propriamente
dito como relações estatísticas para aplicações de gestão do risco associado às
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
27
corridas de massa bidimensionais [7], [10], [18], [26], [40], [48]. A técnica numérica mais usada
nesta região é o Método de Celas Autômatas. Mas é o trabalho de Calvetti [10] que
faz referência a uma aplicação bidimensional com DEM para corridas de detritos e
menciona outros métodos numéricos existentes e aplicados de forma geral na
Europa. Este autor faz a simulação para um canal de inclinação constante, fazendo
análise de sensibilidade do modelo para a variação de tamanho das partículas,
principalmente na forma de deposição da massa, verificando que para partículas de
menor tamanho a massa tende a se acumular na base do paramento inclinado, ou
seja, simula o menor avance frontal da corrida comparado a simulação do mesmo
volume com partículas de maior tamanho.
A escola canadense, por outro lado, tem-se dedicado mais aos métodos
contínuos sob enfoque lagrangiano [35], [36], [37], [38]. Embora estes trabalhos sirvam de
referência só para a simulação destes fenômenos para os objetivos desta pesquisa.
Recentemente, tem-se evoluído aos problemas tridimensionais sobre superfícies
irregulares. O trabalho desenvolvido por Hungr [37] é o mais representativo e chega
até simulações tridimensionais sobre superfícies não-lineares. Porém, este enfoque
não deixa de ser complexo na programação, denso na modelagem numérica e com
certas limitações computacionais que o mesmo autor menciona nos seus artigos.
As escolas chinesa e japonesa talvez sejam as mais avançadas em
simulações bi e tridimensionais sob enfoques de elementos finitos e aplicação de
modelos reológicos complexos [9], [12], [23], [34], [47], [60] ou mais realistas segundo o
avanço e entendimento físico do processo. O trabalho de Takahashi [12] talvez seja a
melhor referência no estudo do comportamento reológico das corridas de detritos
disponível para a comunidade internacional. Este autor propõe um modelo por
camadas para simulações numéricas, o que ajuda a entender grandemente o
fenômeno de segregação, o que é impossível de simular com FEM.
Recentemente, a comunidade internacional tem-se interessado em pesquisar
mais nas aplicações do DEM, mas infelizmente não se tem tanta literatura
disponível sobre o tema. A informação é limitada, e geralmente só estão disponíveis
resultados finais das aplicações numéricas sem deixar claras hipóteses e valores
dos parâmetros utilizados no modelo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
28
1.3.2. Descrição Metodológica
De forma geral, a metodologia computacional de um processo simulado com
DEM segue as seguintes etapas: geração da geometria e malha de elementos
discretos, detecção de contatos, aplicação de leis físicas nos pontos de contatos e
visualização do processo. Neste caso a geometria dos elementos é constante e
representada por discos de uma unidade de profundidade.
Seguindo estas etapas foram feitas várias corridas com diversas
configurações de paramentos e variações nos valores dos parâmetros de entrada
do modelo numérico. Entre todas as configurações foi selecionada uma como a
padrão ou de comparação para as outras.
Primeiramente, para a malha inicial de partículas criou-se uma malha de 4022
discos com raio de 3,0 m em configuração densa, com densidade constante de
2,5t/m3. A distribuição densa de partículas permitiu a menor formação de espaços
vazios e menor tempo de demora do processo. Usou-se o processo de
sedimentação por camadas sucessivas para formar a massa inicial instável. A
simulação da massa instável inicial acontece em duas etapas: sedimentação e
densificação do material, como acontecem normalmente na natureza. Este processo
é demorado e nele foram usadas combinações de parâmetros que facilitassem o
processo (atrito nulo, rigidez de 104 N/m), pois a configuração espacial final de
partículas é o único que interessa desta etapa.
Usaram-se configurações lineares normais assim como curvas spline cúbicas
segmentadas para representar as diferentes configurações de paramentos. A
segmentação das curvas foi feita a partir de quatro a cinco segmentos lineares.
Para cada configuração foi extraído um perfil de profundidades para trinta
pontos e um outro perfil de velocidade cada cinco ou sete pontos ao longo do
comprimento da corrida. Estes pontos não são fixos, pois sua posição varia entre a
primeira partícula em avanço da corrida e a última. Vários testes prévios à escolha
final mostraram que alguns parâmetros deviam ser mudados por causa da escala da
configuração a simular e do número envolvido de partículas e paramentos. Assim
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
29
para cada configuração se variou um parâmetro enquanto que os outros ficaram
constantes cujos valores corresponderam aos valores patrão.
Finalmente, são usadas curvas irregulares nos paramentos como exemplos de
aplicação e de avaliação da idoneidade do programa para simulação destes eventos
que poderiam corresponder a casos generalizados que possam ser encontrados em
campo. Em especial para simular certos mecanismos típicos do movimento da
massa dos fluxos.
1.3.3. Limitações da pesquisa
Fica evidente que ao se tratar de um programa computacional existe a
limitante da capacidade para realizar o ciclo de cálculos numéricos num tempo
adequado o qual se quer determinar durante o desenvolvimento da pesquisa, pois
também se considera a existência de alguns algoritmos lógicos de programação que
ajudam a otimizar tanto o tempo quanto a capacidade de armazenamento de dados.
A pesquisa se limita ao espaço bidimensional por enquanto, pois o
desenvolvimento dos algoritmos em terceira dimensão requer maior tempo de teste
e conhecimento de técnicas numéricas e de programação mais avançadas. O
programa SAND pode ser tratado como um programa genérico que conforme
surgem aplicações vão-se adicionando nele novas rotinas, aumentado a sua
versatilidade e funcionalidade. Então, numa etapa inicial estas rotinas podem
conviver sem problemas maiores, mas se sugere que numa etapa da evolução do
programa seja feito um trabalho de otimização do programa tanto em uso de
memória dinâmica para não ir perdendo eficiência cada vez que se adiciona uma
rotina.
Este trabalho limita-se à criação da ferramenta numérica e a dar algumas
sugestões sobre a sensibilidade de alguns dos parâmetros de entrada e da
idoneidade do método para a simulação de corridas de detritos e de fenômenos
similares. Por enquanto, os mesmos parâmetros (rigidez e amortecimento) do
Método de Cundall não estão associados a parâmetros físicos reais, por isso não
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
30
podem ser facilmente comparados com métodos de Elementos Finitos e seus
parâmetros.
No caso dos exemplos numéricos realiza-se só a corrida para simular o
fenômeno sem fazer análises profundas qualitativas, pois se trata de uma análise
bidimensional de teste da idoneidade numérica deste método. Esta ferramenta deve
ser primeiramente aplicada em casos simples para ir conferindo e corrigindo suas
limitações numéricas para logo avançar a aplicações mais complexas ou reais.
Também não se requer de corroborações em campo de feições de corridas, pois o
programa ainda está muito limitado para incorporá-las na análise. O programa só
simula mecanismos do fenômeno dinâmico do movimento da massa de um fluxo.
1.4. Conteúdo
Este trabalho foi dividido em capítulos que permitissem um esclarecimento
gradual dos conceitos envolvidos na simulação numérica de corridas de detritos.
No segundo capítulo, após apresentar as principais características físicas e
taxonômicas das corridas de massa, assim como o esclarecimento da terminologia
usada, são descritos alguns aspectos básicos dos modelos reológicos mais
utilizados para a simulação destes eventos.
Apresentam-se no terceiro capítulo, de forma geral, os principais métodos
numéricos utilizados na modelagem dinâmica de corridas de detritos. Após uma
descrição do ciclo numérico do DEM, é introduzida a solução particular a estas
equações dadas pela metodologia de Relaxação Dinâmica. Assim, apresenta-se a
sistemática numérica do DEM dentro da modelagem proposta.
Também, neste mesmo capítulo são descritos os conceitos básicos para
considerar grumos de partículas circulares como elementos discretos dentro da
análise o que significa a incorporação da solução das equações do movimento para
corpos rígidos. No seguinte capítulo, descreve-se o programa SAND e as
modificações introduzidas para atingir os propósitos do trabalho. Na mesma
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 1: Introdução
31
caracterização, mostram-se alguns algoritmos que foram usados para aperfeiçoar a
capacidade do programa.
No quinto capítulo, mostra-se alguns resultados do programa SAND incluindo
as suas novas modificações. No capítulo final são listadas as conclusões obtidas do
estudo e sugestões para dar continuidade ao trabalho tanto na otimização de rotinas
quanto a sua aplicação a outros problemas.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 2 CARACTERIZAÇÃO DAS CORRIDAS DE DETRITOS
2.1. Classificação dos Movimentos de Massas
Os movimentos de massas são aqueles processos da geodinâmica superficial
onde um movimento ou queda apreciável de material ocorre na presença da força
gravitacional sobre uma superfície com determinado gradiente permitindo o acúmulo
do material. Mas esta definição envolve muitos processos que podem ser
diferenciáveis segundo a natureza do material da encosta (consolidado ou não
consolidado), além da velocidade e natureza do movimento que caracterizam o
evento [7]. Estes aspectos são bases para classificar os movimentos de massas em
dois grandes grupos: deslizamentos de terra (landslides) e fluxos de sedimentos
(sediment flows). Esta classificação está referida às pesquisas que sobre o tema a
escola italiana tem desenvolvido nos últimos anos e foi adotada neste trabalho, pois
eles também trabalham com alguns tipos de rochas e solos residuais semelhantes
aos achados no Brasil, assim como solos do quaternário e de origem vulcânica
achados em outras partes de América Latina.
2.1.1. Deslizamentos do Terreno (Landslides)
Este grupo se caracteriza pela presença de uma superfície ou área de ruptura
onde agem forças de cisalhamento na resistência máxima ou residual do solo ou
rocha, caracterizadas pelas propriedades e leis constitutivas próprias de materiais
porosos. Em outros casos só as forças gravitacionais agem.
Os principais mecanismos de ruptura destes fenômenos são: rotação (rolling),
escorregamento (sliding), queda (falling) e colapso (land collapsing). Daqui em
adiante, serão apresentados os termos em inglês para uniformizar os conceitos,
pois em alguns casos a tradução ao português é similar.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
Capítulo 2: Caracterização das corridas de detritos
33
Mecanismo Características Modelo
Deslizamento com rastejo
(Slump)
- Movimento repentino do material rodando (mm/ano, m/s) a jusante sobre uma superfície côncava de ruptura. Forças de cisalhamento responsáveis pela falha. - O topo dos blocos deslizantes permanece não-deformado. - Ativados por eliminação de material ao pé dos blocos por atividades humanas ou erosivas, chuvas intensas ou sismos.
Escorregamento (Slide)
- Movimento sobre superfícies de ruptura ou juntas pré-existentes. Forças de cisalhamento responsáveis pela falha. - Não apresenta rotação do material em movimento. - Movimento do material sob certo comportamento plástico com infiltração de água.
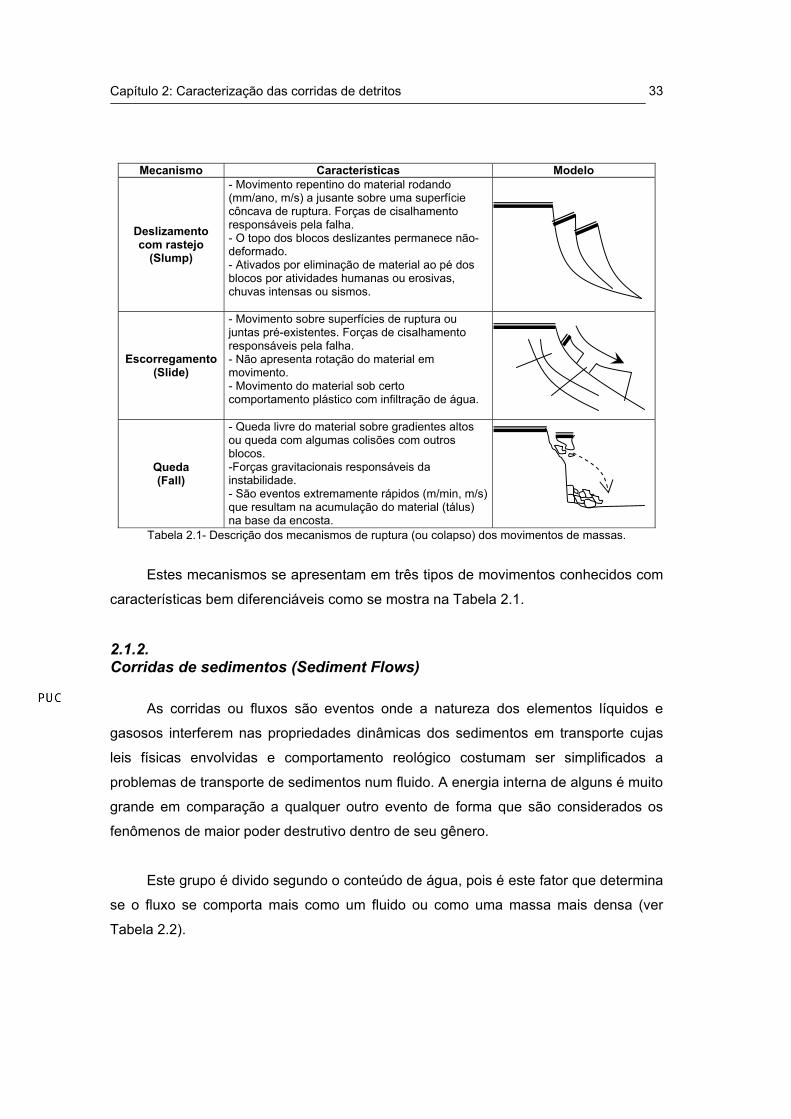
Queda (Fall)
- Queda livre do material sobre gradientes altos ou queda com algumas colisões com outros blocos. -Forças gravitacionais responsáveis da instabilidade. - São eventos extremamente rápidos (m/min, m/s) que resultam na acumulação do material (tálus) na base da encosta.
Tabela 2.1- Descrição dos mecanismos de ruptura (ou colapso) dos movimentos de massas.
Estes mecanismos se apresentam em três tipos de movimentos conhecidos com
características bem diferenciáveis como se mostra na Tabela 2.1.
2.1.2. Corridas de sedimentos (Sediment Flows)
As corridas ou fluxos são eventos onde a natureza dos elementos líquidos e
gasosos interferem nas propriedades dinâmicas dos sedimentos em transporte cujas
leis físicas envolvidas e comportamento reológico costumam ser simplificados a
problemas de transporte de sedimentos num fluido. A energia interna de alguns é muito
grande em comparação a qualquer outro evento de forma que são considerados os
fenômenos de maior poder destrutivo dentro de seu gênero.
Este grupo é divido segundo o conteúdo de água, pois é este fator que determina
se o fluxo se comporta mais como um fluido ou como uma massa mais densa (ver
Tabela 2.2).
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
34
Tabela 2.2- Classificação dos fluxos de sedimentos segundo a velocidade e conteúdo de água[7].
1. Corridas Fluidas (Slurry Flows) São fluxos rápidos de material desagregado ou material que virou desagregado
por saturação. Estes fluxos se caracterizam por um alto teor de saturação, apresentam
de 20% a 40% de volume de água. Além destes limites o evento é chamado de
corrente fluida (stream). Entre eles temos:
a. Solifluxão: Movimento lento (cm/ano) e contínuo de solo saturado formando
lóbulos sobre a encosta. Típico de zonas nórdicas que ano a ano são afetadas pelos
ciclos de congelamento e degelo.
b. Fluxos de Detritos: São misturas saturadas de ar ou água, que descem a
altas velocidades (1m/ano a 100 m/h), sob o efeito da gravidade. Caracterizam-se pela
variedade de tamanhos dos sedimentos transportados. Estes costumam se apresentar
depois de chuvas fortes quando o material se satura. Também, se apresentam num
deslizamento (“slump” ou “landslide”) quando a massa se desagrega e mistura com ar
e água. Durante o movimento estes tendem a incrementar seu volume (dilatação) e a
deposição se dá em forma de lóbulos tipo “dedos” com superfície irregular. Espalham-
se sobre grandes áreas quando o gradiente é constante na encosta.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
35
c. Fluxos de Lama: Estes contêm um alto teor de umidade assim como
conteúdo de sedimentos finos e coesivos (aprox. 50% de areia, silte e argila),
diminuindo a viscosidade do fluxo (~1 km/h) pelo que afetam grandes áreas, sendo
dentro de vales altamente destrutivos. São de composição mais uniforme do que os
fluxos de detritos.
2. Corridas de material granular (Granular Flows) Apresentam um baixo conteúdo de água (de 0% a 20%). Seu comportamento
semifluido deriva da mistura dos sólidos com ar. Alguns são iniciados por altas
vibrações ou sobre carregamento.
a. Rastejo (Creep): Movimento extremamente lento (cm/ano a mm/ano). De
grandes volumes de deposição e sensível às mudanças estacionais anuais.
b. Avalanches de Detritos: São um fenômeno extremo aos fluxos de detritos,
pois desenvolvem altas velocidades (~300 km/h), carregando grandes volumes de
material devido ao colapso total das laterais da encosta. São comparadas com as
avalanches de neve e se depositam em forma de língua cumprida por toda a encosta.
c. Fluxos de Solo: São eventos de comportamento cinético similar aos fluxos de
detritos, a diferença está no baixo conteúdo de água. Sua distribuição granulométrica é
variada.
d. Fluxos de Grãos: Eventos de granulometria grossa e uniforme, porem rápidos.
Desta forma podemos agora localizar os fluxos de detritos (debris flows) ou
corridas de detritos, como comumente são chamados no Brasil, dentro do amplo grupo
das corridas de massa (ver Tabela 2.3).
Lastimosamente, estes não são os únicos critérios usados para classificar os
fluxos de detritos ou corridas de massa. Observando outros critérios, alguns eventos
anteriores caem dentro da definição de outro. Atualmente existe uma falta de acordo
na comunidade internacional sobre a nomenclatura a usar nas pesquisas
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
36
principalmente por a falta de semiótica na hora de traduzir os termos de uma língua a
outra.
Tabela 2.3- Síntese dos tipos de corridas de massa agrupados segundo características do material, tipo de
movimento e velocidade [7].
Muitos trabalhos são feitos sob o lema de “fluxos gravitacionais”, “lahares”,
“fluxos granulares não-saturados”, etc.; e dentro do corpo do trabalho surge o conceito
de “debris flow” como sinônimo dos anteriores.
2.2. Classificação e definição de corrida de detritos
Nos últimos anos tem-se apreciado que se pode ter um melhor entendimento dos
fluxos de detritos se estes são estudados sob o ponto de vista reológico e as leis
constitutivas que caracterizam o fenômeno pois a hidrodinâmica não-linear tem ganho
importantes avanços teóricos nos últimos 50 anos em conjunto com a evolução da era
espacial.
Fica clara a diferença entre fluxo de detritos (pois a iteração sólido-fluido
determina o comportamento do fluxo) e outros fenômenos onde só uma fase domina o
comportamento do material como os deslizamentos (parte sólida) ou correntes de
enchentes (fluido). Mas isto não é suficiente, pois existem outros fenômenos similares
como os fluxos de lama, solo, rocha, etc. Assim surge o conceito de mistura de
sedimentos hiperconcentrada ou fluxo hiperconcetrado para descrever aqueles
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
37
fenômenos regidos por uma reologia determinada pela interação de partes sólidas e
líquidas em movimento.
Um fluxo hiperconcetrado é um fluido em movimento que transporta uma alta
porcentagem de material sólido. Dita mistura é chamada de fluxo bifásico. Mas o
problema é que nem sempre pode-se considerar as mistura como em bi-fase ou fases
separadas.
Um dos parâmetros básicas no estudo destes fluxos é concentração média de
sólidos CV. Este é um parâmetro para a grande maioria dos critérios de classificação
de corridas de massa e líquidos. Este parâmetro é determinado para uma mistura em
condições estáticas como:
liquidsol
solV VV
VC
+= (2.1)
Uma caracterização geral dos fluxos hiperconcentrados sob esta perspectiva é
dada por Dasgupta (2002) [8] na Tabela 2.4.
Tabela 2.4- Caracterização dos fluxos hiperconcentrados [8].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
Capítulo 2: Caracterização das corridas de detritos
38
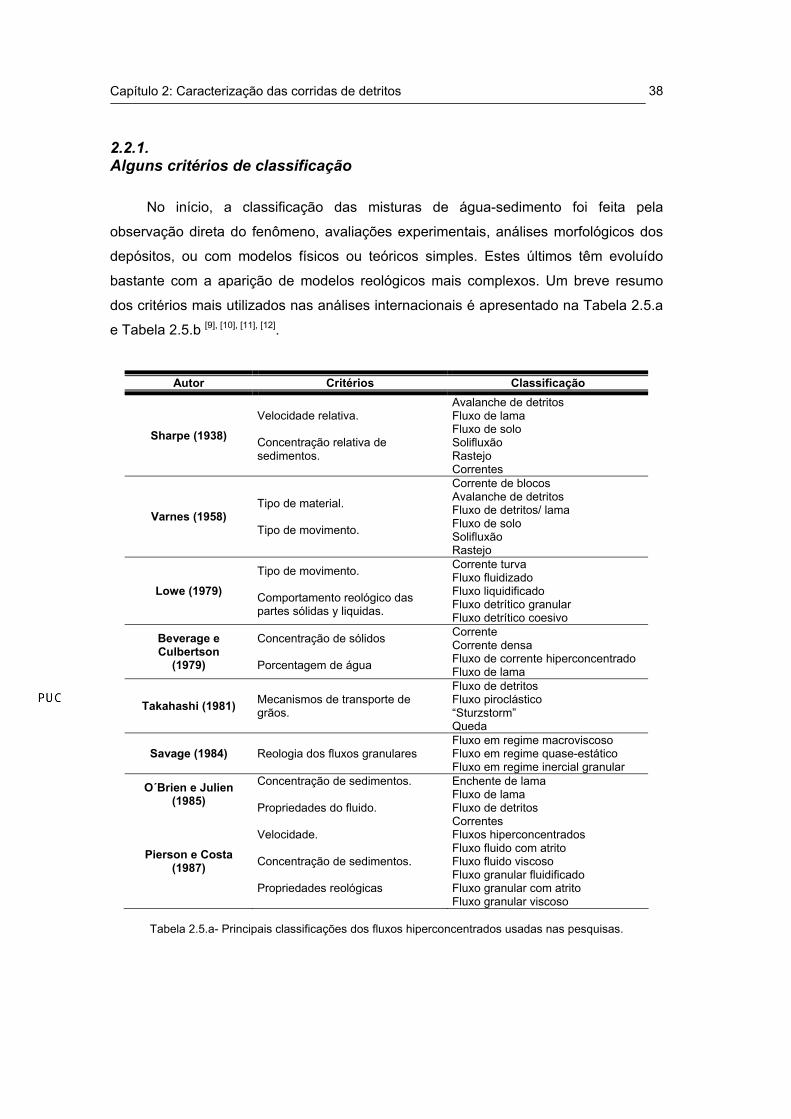
2.2.1. Alguns critérios de classificação
No início, a classificação das misturas de água-sedimento foi feita pela
observação direta do fenômeno, avaliações experimentais, análises morfológicos dos
depósitos, ou com modelos físicos ou teóricos simples. Estes últimos têm evoluído
bastante com a aparição de modelos reológicos mais complexos. Um breve resumo
dos critérios mais utilizados nas análises internacionais é apresentado na Tabela 2.5.a
e Tabela 2.5.b [9], [10], [11], [12].
Autor Critérios Classificação
Sharpe (1938) Velocidade relativa. Concentração relativa de sedimentos.
Avalanche de detritos Fluxo de lama Fluxo de solo Solifluxão Rastejo Correntes
Varnes (1958) Tipo de material. Tipo de movimento.
Corrente de blocos Avalanche de detritos Fluxo de detritos/ lama Fluxo de solo Solifluxão Rastejo
Lowe (1979) Tipo de movimento. Comportamento reológico das partes sólidas y liquidas.
Corrente turva Fluxo fluidizado Fluxo liquidificado Fluxo detrítico granular Fluxo detrítico coesivo
Beverage e Culbertson
(1979)
Concentração de sólidos Porcentagem de água
Corrente Corrente densa Fluxo de corrente hiperconcentrado Fluxo de lama
Takahashi (1981) Mecanismos de transporte de grãos.
Fluxo de detritos Fluxo piroclástico “Sturzstorm” Queda
Savage (1984) Reologia dos fluxos granulares Fluxo em regime macroviscoso Fluxo em regime quase-estático Fluxo em regime inercial granular
O´Brien e Julien (1985)
Concentração de sedimentos. Propriedades do fluido.
Enchente de lama Fluxo de lama Fluxo de detritos
Pierson e Costa (1987)
Velocidade. Concentração de sedimentos. Propriedades reológicas
Correntes Fluxos hiperconcentrados Fluxo fluido com atrito Fluxo fluido viscoso Fluxo granular fluidificado Fluxo granular com atrito Fluxo granular viscoso
Tabela 2.5.a- Principais classificações dos fluxos hiperconcentrados usadas nas pesquisas.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
39
Poucas destas classificações estabelecem os limites entre uma categoria e outra.
Entre as primeiras classificações, a de Varnes (1958) virou ponto de referência para a
terminologia internacional no estudo destes processos, pois esta permitiu comparar as
observações no campo com as experiências de laboratório destes fenômenos. Além
disso, este mesmo autor propôs em 1978 a classificação geral mais aceita dos
movimentos de massa (ver ANEXO I). Este autor definiu o fluxo de detritos como
aquela mistura cuja concentração de material grosso é maior do que 50%. Umas das
classificações incipientes em considerar aspectos mais reológicos da interação entre a
fase sólida e liquida foi proposta por Lowe em 1979. Este autor classificou os fluxos de
detritos segundo o mecanismo de suspensão das partículas sólidas e o
comportamento plástico do fluxo segundo o modelo reológico de Bingham que será
explicado nas próximas secções.
Autor Critérios Classificação
Davies (1988) Característica do movimento do fluido. Granulometria dos sedimentos
Corrente com carga de fundo/ carga suspensa. Fluxo fluidizado. Fluxo de lama Fluxo hiperconcetrado Fluxo de detritos
Granulometria dos sedimentos Fluxo detrítico rochosos. Fluxo de lama Fluxo de detritos
Chou (1991)
Natureza da força de arraste
Fluxo detrítico potenciado por sólidos. Fluxo detrítico potenciado por fluidos.
Coussot (1992) Concentração relativa da fração fina
Fluxo detrítico de finos Fluxo detrítico granular
Chen (1999) Fator de iniciação
Por deslizamentos Por falha de barragens Por erosão Por acréscimo de poro-pressão
Hungr (2001) Granulometria. Velocidade.
Avalanche de detritos Fluxo de detritos Deslizamento por fluxos de areia. Deslizamento por fluxo de argilas.
Tabela 2.5.b- Principais classificações dos fluxos hiperconcentrados usadas nas pesquisas.
Por outro lado, as experiências chinesas introduziram novas terminologias,
considerando fluxo hiperconcentrado como aquele fluxo com cisalhamento medível.
Assim, Takahashi propõe uma classificação onde se considera um maior
conhecimento das interações sólido-fluido do fluxo onde pressões dispersivas e forcas
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
40
viscosas agem segundo a predominância de uma fase sobre a outra. Sob esta
perspectiva, o fluxo de detritos é uma mistura de material granular disperso num fluido
intersticial de água e argilas ou material mais fino. Então, este fluxo pode ter diferentes
mecanismos de dissipar energia segundo a predominância do efeito das colisões entre
partículas grossas, densidade e viscosidade do fluido.
O´Brien e Julien desenvolveram experiências de laboratório onde determinavam
as concentrações assim como as tensões de escoamento, tensões das forças viscosas,
tensões devidas à turbulência e tensões dispersivas devidas às colisões internas das
partículas sólidas.
Estes autores determinaram que os fluxos de detritos fossem misturas com
grandes concentrações de material clástico grosso, onde as colisões entre estas
partículas e as tensões dispersivas são os principais mecanismos de dissipação de
energia. Então, definiu-se que os fluxos detríticos granulares sem coesão são
subcategorias dos fluxos de detritos onde o atrito e colisões internas são os
mecanismos que predominam no fluxo.
Pierson e Costa propuseram uma classificação a mais didática até agora
desenvolvida em forma de gráficos bidimensionais como se mostra na FIGURA 2.1.
Nesta proposta os limites A, B e C são dados segundo as propriedades das
partículas sólidas numa mistura padrão sem coesão, de granulometria grossa uniforme.
O ponto A é o ponto quando aparece a máxima tensão de iniciação de arraste de
material, o ponto B é onde se alcança a suspensão estática das partículas sólidas e o
início da fluidificação, e o ponto C marca o fim da fluidificação.
Por outra parte, as correntes se comportam como o típico fluido newtoniano a
não-newtoniano segundo o aumento das partículas sólidas. Neste caso, os fluxos de
correntes hiperconcentradas apresentam concentrações volumétricas de sedimentos
entre 20 e 60%, mas apresentam uma baixa tensão de escoamento pelo que são
diferenciados de fluxos hiperconcentrados. Maiores detalhes sobre esta classificação
serão dados na seguinte seção.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
41
Finalmente, os critérios usados por Coussot (1996) [11] subdividem os fluxos de
detritos em dois grandes grupos: granulares cuja porção fina (φ < 40 µm) é menor do
que 10% da fração total sólida e de finos cuja fração fina supera os 10%. Maiores
detalhes sobre algumas destas classificações são dados no ANEXO II.
FIGURA 2.1- Classificação reológica de Pierson e Costa (1987) para misturas água-sedimento e sua correlação com termologias típicas [10] .
Tendo conhecimento destes conceitos básicos, destacados pesquisadores têm
dado uma definição deste complexo fenômeno, entre os mais aceitos na literatura
científica estão:
“O fluxo de detritos é um fluxo gravitacional de solo, rocha e/ou água, iniciado por um deslizamento. Este processo se caracteriza por ter um início, transporte e deposição de todos estes materiais, cujas conseqüências não só são causadas pelo volume e velocidade dos materiais transportados, senão por sua inesperada ocorrência”
H. Chen, 1999
“Os fluxos de detritos são fluxos que variam suas propriedades cinemáticas de muito rápidos a extremamente rápidos de detritos não-plásticos sobre uma encosta inclinada”
Hungr, 2001
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
42
“Os fluxos de detritos são massas formadas por misturas de água, sedimentos finos, rocha e detritos originados nas encostas que correm a jusante em canais naturais para se depositarem em vales ou zonas abertas de baixo gradiente. As fortes interações entre a fase sólida e líquida influenciam o comportamento destes fluxos e diferenciam este evento de outros similares como avalanches de rochas e enchentes”
Iverson, 2001
2.2.2. Condições de ocorrência das corridas de massa
As corridas de massas iniciam sobre encostas inclinadas até se depositarem em
bacias abertas durante os períodos posteriores a grandes precipitações. O fluxo se
inicia com a movimentação a jusante da encosta de uma frente de grandes blocos
seguido pelo corpo e parte final da corrida. A deposição se dará quando a corrida
encontre gradientes baixos ou perda de confinamento lateral (espaços amplos) ainda
que o fluido continue a jusante em gradientes muitos baixos. Os elementos mais
importantes da corrida são sua velocidade e espessura, pois estes parâmetros
determinam a extensão e severidade dos danos. Tem-se reportado [9] fluxos de mais
de 5.0 m de espessura a 13.0 m/s, com uma peso específica de 2.5 t/m3.
Existe uma combinação crítica de fatores naturais e antrogênicos a qual dá
origem ao processo das corridas de massa. Alguns deles não são considerados nas
modelagens bidimensionais por limitação dimensional. Alguns como a curvatura da
encosta, área de contribuição e estrangulamento do canal de corrida só são
significativos e possíveis de considerar nos modelos numéricos e simulações
tridimensionais. Os fatores mais reconhecidos e considerados pelos pesquisadores
para simulações bidimensionais são:
1. Gradiente ou inclinação da encosta: Sabendo que a gravidade é a maior força de arraste na iniciação das corridas de
massa, então se identifica que a maior gradiente da encosta maior potencial
gravitacional de arraste ou iniciação. Sob este conceito, numa encosta podem se
identificar três zonas importantes segundo a estabilidade do material: zona de
ocorrência, zona de transporte e zona de deposição (Ver FIGURA 2.2). A zona de
ocorrência costuma ter gradientes maiores do que 25º, mas tem-se reportado até
gradientes de 15º. Por outro lado, a gradientes maiores o material não se acumula de
forma que não existe o fluxo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
43
As outras zonas se apresentam em gradientes maiores do que 10º. Durante o
transporte deve ter confinação suficiente para manter a velocidade caso contrário não
existe fluxo de detritos.
FIGURA 2.2- Partes de uma corrida de massa e sua relação com o gradiente [9] .
Ainda que aos 15º começa o depósito das bordas externas da massa e as
línguas do material de deposição aparecem após dos 10º quando o gradiente e
confinamento são quase nulos. (ver Tabela 2.6 e FIGURA 2.3).
Ângulo Características do movimento 20° < θ Ocorrência
15° < θ < 20° Início do fluxo
10° < θ < 15° Início de decréscimo da velocidade e continuação do fluxo.
3° < θ < 10° Diminuição de velocidades e parte frontal pára.
0° < θ < 3° Deposição
Tabela 2.6- Relação entre o gradiente e características do movimento uma corrida de massa [12].
FIGURA 2.3- Caracterização do gradiente e o movimento de uma corrida [9] .
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
44
2. Conteúdo de Água: Este é o mais importante fator na ocorrência das corridas. Existem três
mecanismos de ação mediante os quais a água poderia iniciar uma corrida:
precipitação, degelo da neve ou rompimento de uma barragem. O primeiro mecanismo
é o principal detonante das corridas, pois o fluxo de água em materiais porosos reduz
sua resistência (aumento da poro-pressão), além de servir de meio de transporte ou
lubrificador uma vez iniciado o movimento.
3. Materiais geológicos: Para a ocorrência de corridas de massa é importante ter grandes quantidades de
material geológico não-consolidado desacomodado. Formações geológicas complexas,
falhas e dobras intemperizadas e sujeitas à atividade sísmica, camadas não-
consolidadas e encostas instáveis são as fontes primárias para a ocorrência de
corridas de massa.
No Brasil, se apresentam freqüentemente em solos residuais ou maciços
rochosos altamente fraturados durante vários dias de chuvas contínuas.
Na Costa Rica, por exemplo, as condições mudam drasticamente em relação ao
Brasil, pois há predomínio de formações do Quaternário de origem vulcânica recente,
alta atividade sísmica com um alto regime de precipitações durante pelo menos nove
meses por ano, adicionando a temporada de furacões do Caribe nos meses de
setembro até novembro.
Apesar da importância destes fatores, são necessárias três condições para a
ocorrência de uma corrida que devem se apresentar simultaneamente [14], [15], [16], [17]:
• Colapso do material geológico.
• Saturação do material.
• Potencial para converter energia gravitacional em energia cinética interna para
passar da simples ruptura por cisalhamento do material a um estado de
deformação mais difusa reconhecida como fluxo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
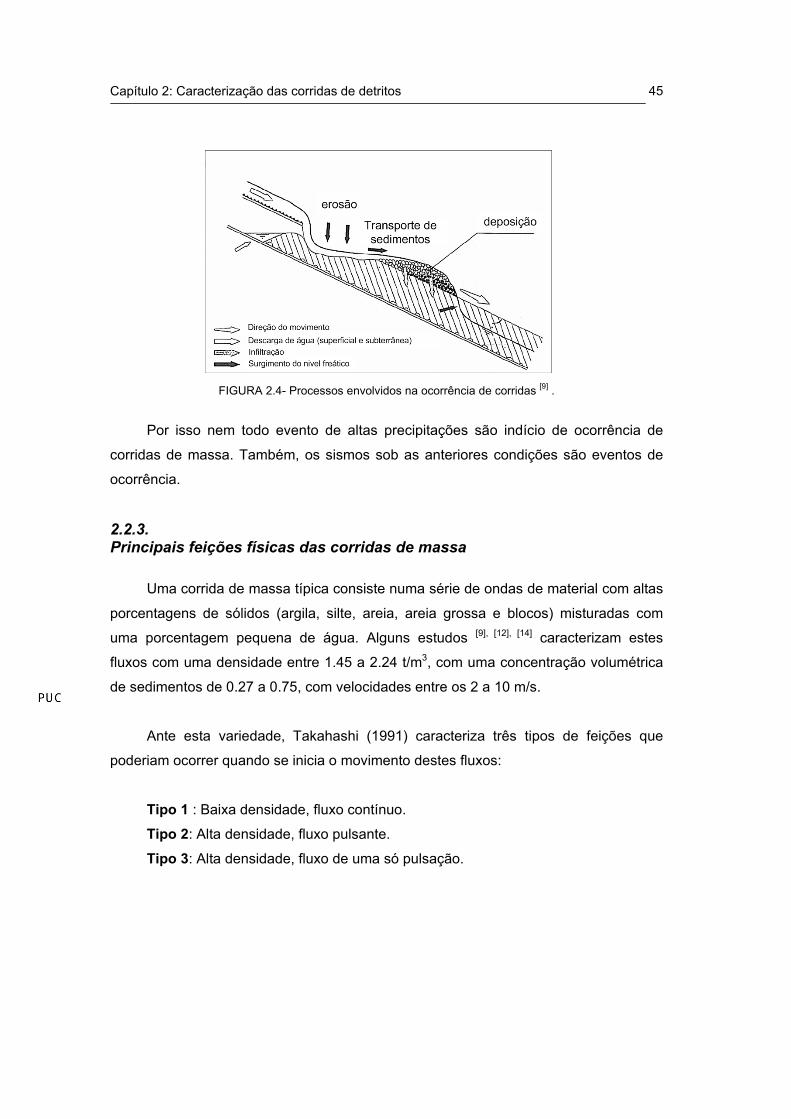
Capítulo 2: Caracterização das corridas de detritos
45
FIGURA 2.4- Processos envolvidos na ocorrência de corridas [9] .
Por isso nem todo evento de altas precipitações são indício de ocorrência de
corridas de massa. Também, os sismos sob as anteriores condições são eventos de
ocorrência.
2.2.3. Principais feições físicas das corridas de massa
Uma corrida de massa típica consiste numa série de ondas de material com altas
porcentagens de sólidos (argila, silte, areia, areia grossa e blocos) misturadas com
uma porcentagem pequena de água. Alguns estudos [9], [12], [14] caracterizam estes
fluxos com uma densidade entre 1.45 a 2.24 t/m3, com uma concentração volumétrica
de sedimentos de 0.27 a 0.75, com velocidades entre os 2 a 10 m/s.
Ante esta variedade, Takahashi (1991) caracteriza três tipos de feições que
poderiam ocorrer quando se inicia o movimento destes fluxos:
Tipo 1 : Baixa densidade, fluxo contínuo.
Tipo 2: Alta densidade, fluxo pulsante.
Tipo 3: Alta densidade, fluxo de uma só pulsação.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
46
TIPO 1 2 3
Característica do fluxo Permanente Pulsante Um pulso Tipo de Fluxo Turbulento Laminar Laminar
Granulometria sobre a camada do fundo Finos Finos + Grossos Grossos + Finos
Carga Grossa No fundo No corpo No corpo Densidade ≤ 1.6 t/m3 ≥ 1.8 t/m3 ≥ 1.8 t/m3
Viscosidade ≈ 10-100 x água ≥ 1000 x água ≥ 1000 x água Velocidade Baixa: ≈ 2 m/s Alta: ≈ 3-5 m/s Alta
Efeito no fundo Deposição Muito Erosivo Muito Erosivo
Tabela 2.7- Principais características dos diversos tipos de fluxos [9].
Tipo 1 Tipo2 Tipo3
FIGURA 2.5- Possíveis feições de uma corrida durante sua ocorrência [12] .
O fluxo em qualquer destes tipos pode ser divido taxonomicamente em três
partes:
• A cabeça composta principalmente por blocos. Apresenta uma protuberância
inversa à direção do movimento devido ao fenômeno de gradação inversa que
consiste na acumulação de grandes blocos onde existe uma forte tendência a
desacelerar pelo qual esta parte aumenta seu volume. Também pode dever-se
à inclusão de objetos durante o movimento (pontes, árvores, carros, etc.). Nesta
seção, há um decréscimo da pressão intragranular chegando a ser nula no
fundo da parte frontal e máxima na parte traseira, pois existe uma perda de
conteúdo de água.
• O corpo composto de grande variedade de detritos numa matriz mais ou
menos viscosa.
• O final ou rabo cuja influência é desprezível nos parâmetros característicos da
corrida.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
47
FIGURA 2.6- Taxonomia de uma corrida de massa [19].
A influência da cabeça vai decrescendo significativamente conforme se
desenvolve o movimento pelo que é considerado desprezível. Assim, o comportamento
do fluxo é tipificado principalmente pelas características do corpo. Vale remarcar que
estas duas partes se comportam como corpos plásticos enquanto o final se comporta
como um líquido [11].
2.2.4. Características das corridas de massa
Segundo observações feitas no campo tanto quanto no laboratório, as principais
características de uma corrida de massa que a diferenciam dos outros fenômenos são:
PROPRIEDADE SIMBOLOGIA VALORES TÍPICOS
PARTÍCULAS SÓLIDAS Densidade (kg/m3) ρs 2500 - 3000 Diâmetro meio (m) δ 10-5 - 10 Ângulo de Atrito (°) φs 25 - 45 Coef. de restituição e 0.1 – 0.5
FLUIDO INTERSTICIAL Densidade (kg/m3) ρf 1000 - 1200 Viscosidade (Pa.s) µ 0.001 – 0.1
MISTURA Volume fração sólida vs 0.4 – 0.8 Volume fração liquida vf 0.2 – 0.6 Permeabilidade (m/s) K 10-7 – 10 -2
Permeabilidade intríns. (m2) κ 10-13 – 10-9
Módulo Elástico (Pa) E 103 - 105
Ângulo de Atrito (°) φ 25 - 45 Tabela 2.8- Valores típicos das propriedades básicas das corridas de massa [14].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
48
2.2.4.1.Tamanho das partículas sólidas A fase sólida varia desde silte até grandes blocos. Assim, quando silte e argila
são misturados com água se forma um fluxo viscoplástico chamado às vezes de fluxo
fluido (slurry). Se for adicionado areia, então se fala de fluxo de lama (muddy) ou se
forem fragmentos de rocha (debris). Nestes casos o comportamento do fluxo pode
apresentar um comportamento de fluxo dispersivo ou dilatante como se explica mais
na frente. Durante sua trajetória, este tipo de fluxo age com seu ambiente
continuamente, seja pela erosão (adição de material) ou por processos de deposição
(perda de material) de forma que a análise granulométrica não é simples e às vezes
nem representativa. Uma outra dificuldade é que ao variar a concentração volumétrica
de sólidos, varia o comportamento reológico do fluxo durante o movimento.
Um outro aspecto relacionado ao movimento destes fluxos e sua granulometria é
o fato de que devido às colisões entre partículas e atrito interno, as mesmas partículas
tendem a diminuir de tamanho de forma exponencial durante o movimento [7].
Baseados no estudo detalhado de grande variedade de corridas dois pesquisadores,
Znamensky e Gramani (2000), propuseram a seguinte classificação:
INTERVALO
de até CLASSE d (mm) Descrição d (mm) Descrição
Micro (µm) 0.00024 Argila muito fina 0.062 Areia muito fina Meso (mm) 0.0062 Areia muita fina 16 Pedregulhos Macro (m) 16 Pedregulhos 4000 Matacões
Tabela 2.9- Classificação da fração sólida das corridas de massa proposta por Znamensky e Gramani [7].
Alguns estudos na Itália [18] têm caracterizado as partes do fluxo por sua
granulometria.
FIGURA 2.7- Granulometria típica de uma corrida de detritos [18] .
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
49
2.2.4.2. Movimento interno de partículas Mediante observações de laboratório, uso de traçadores, e comprovações
numéricas os pesquisadores têm determinado que o movimento interno das partículas
dentro da massa de uma corrida se caracteriza por um movimento caótico no final do
fluxo. Caso contrário ao das partículas do corpo que mostram só pequenas ou
nenhuma perturbação. A maioria das partículas apresenta um movimento à jusante da
encosta, só alguns grãos da camada em contacto com a superfície apresentam certos
desvios a montante.
FIGURA 2.8- Movimentos internos das partículas dentro do corpo de uma corrida [9] .
2.2.4.3. Perfil de velocidades e espessuras Velocidades típicas vão desde 0.5 m/s até 20 m/s devido à variação do tamanho
das partículas sólidas [16], da concentração de sedimentos, do gradiente, estreitamento
e curvatura da trajetória do fluxo.
De forma geral, diz-se que a velocidade no final é maior do que na região do
corpo do fluxo e que a velocidade é maior na superfície do fluxo do que no contato com
a superfície da trajetória. O máximo gradiente está presente no fundo enquanto que os
gradientes são quase uniformes perto da superfície.
A espessura é variável no fluxo, mas a tendência é de diminuir da cabeça ao final.
A espessura média característica do fluxo determina-se na parte central do corpo
quando o fluxo tem-se depositado (desconsideram-se os grandes blocos isolados).
Têm-se reportado espessuras acima dos cinco metros. A espessura durante a corrida
pode ser determinada aproximadamente no campo por observação direta das bordas
da trajetória sendo muito especulativo quanto maior tenha sido a porcentagem de finos
carregados.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
50
FIGURA 2.9- Caracterização do perfil de velocidade e espessura de um fluxo [9] .
2.2.4.4. Distribuição da concentração de sedimentos De forma geral, dentro do corpo do fluxo pode-se identificar uma baixa
concentração de sedimentos no fundo e na superfície. O coração do corpo apresenta
uma maior concentração de sedimentos com um decréscimo a meia espessura da
cabeça ao final do fluxo. Fica clara a complexidade espacial e temporal deste
parâmetro na caracterização do movimento do fluxo de forma que seu estudo deve ser
mais detalhado para se conseguir modelagens mais realistas.
FIGURA 2.10- Distribuição da concentração de sólidos no corpo do fluxo [9] .
2.2.4.5. Zonas de tensões cisalhantes Existem três zonas diferenciáveis dentro do fluxo: cabeça, corpo e final A parte
superior da cabeça e do corpo apresentam uma velocidade próxima à velocidade
média e os grãos cisalham-se um sobre o outro lentamente. Na parte inferior destas
zonas se desenvolve uma força de cisalhamento muito grande Enquanto ao final esta é
uma zona de comportamento similar a um líquido, onde os grãos são cisalhados
rapidamente apresentando gradientes de velocidades muito altos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
51
Na etapa inicial do movimento a densidade é similar à de um líquido. Conforme o
movimento se desenvolve as interações das partículas sólidas mudam este
comportamento totalmente até desacelerar. Quando se produz a deposição, a água se
filtra do esqueleto do material transportado.
FIGURA 2.11- Caracterização da taxa de cisalhamento dentro do corpo do fluxo [9] .
2.2.4.6. Forças internas As corridas de massa são misturas de areia grossa areia grossa e água, cujas
partículas sólidas colidem, roçam, rodam e até vibram dento da matriz líquida durante o
movimento. Dito comportamento faz com que estes processos tenham um
comportamento não-newtoniano.
Assim, as forças que agem são tanto externas como internas. Entre as externas
temos a pressão estática, gravidade, força de Arquimedes e a força de cisalhamento
na base. Por outro lado, as forças internas são as forças de arraste produto das
colisões e atrito entre partículas, viscosidade e turbulência. Como se pode notar, as
características dinâmicas das corridas são complexas e envolvem tanto a parte sólida
como líquida e suas interações. Esta qualidade faz com que a mecânica convencional
fique longe de uma análise realista. É por isso que modelar matematicamente o
comportamento completo de uma corrida é difícil. Os modelos existentes resolvem o
problema descartando as interações menos dominantes do comportamento e
considerando somente aquelas dominantes como se mostra nos modelos das
próximas seções.
2.2.4.7. Outros fatores de consideração Para realizar modelagens das corridas existem outras propriedades que
deveriam ser consideradas na análise:
• Dilatação: O movimento cisalhante entre grãos sob uma tensão normal faz a
massa aumentar de volume.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
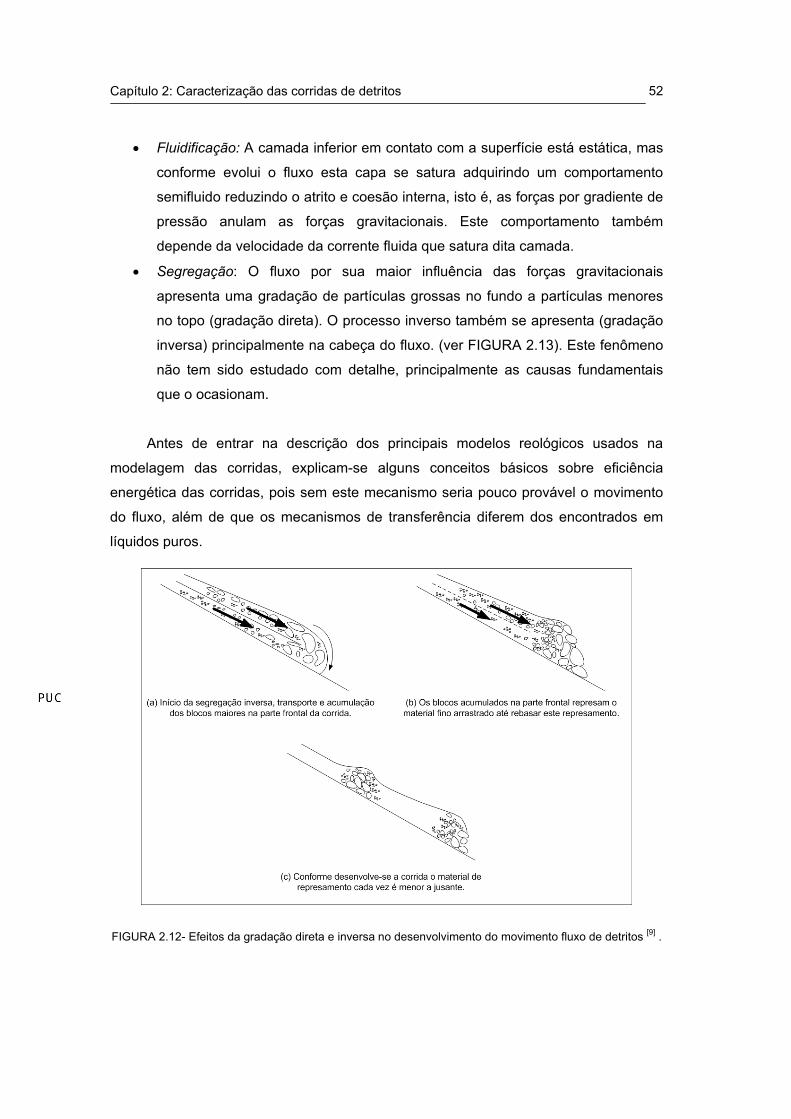
Capítulo 2: Caracterização das corridas de detritos
52
• Fluidificação: A camada inferior em contato com a superfície está estática, mas
conforme evolui o fluxo esta capa se satura adquirindo um comportamento
semifluido reduzindo o atrito e coesão interna, isto é, as forças por gradiente de
pressão anulam as forças gravitacionais. Este comportamento também
depende da velocidade da corrente fluida que satura dita camada.
• Segregação: O fluxo por sua maior influência das forças gravitacionais
apresenta uma gradação de partículas grossas no fundo a partículas menores
no topo (gradação direta). O processo inverso também se apresenta (gradação
inversa) principalmente na cabeça do fluxo. (ver FIGURA 2.13). Este fenômeno
não tem sido estudado com detalhe, principalmente as causas fundamentais
que o ocasionam.
Antes de entrar na descrição dos principais modelos reológicos usados na
modelagem das corridas, explicam-se alguns conceitos básicos sobre eficiência
energética das corridas, pois sem este mecanismo seria pouco provável o movimento
do fluxo, além de que os mecanismos de transferência diferem dos encontrados em
líquidos puros.
FIGURA 2.12- Efeitos da gradação direta e inversa no desenvolvimento do movimento fluxo de detritos [9] .
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
53
2.2.5. Modelos reológicos das corridas de massa
2.2.5.1. Eficiência energética nas corridas de massa
Sabe-se que num fluxo com partículas elásticas e de superfície lisa numa matriz
líquida as forças viscosas são as responsáveis por diminuir a energia cinética e
consequentemente o deslocamento total da massa. Pelo contrário, nas corridas de
massa (com partículas irregulares e inelásticas) ainda que as forças viscosas dissipem
energia, se incrementa o deslocamento total da massa. Para isto, Iverson (1997) [14]
estudou as transferências energéticas no movimento de uma corrida de massa.
FIGURA 2.13- Transferência de energia de uma corrida de massa [14] .
Integrando as equações básicas de conservação energia no centro de massa do
fluxo antes e após do movimento, tem-se que a energia potencial inicial dada por MgH
pode ser comparada com a energia dissipada na trajetória horizontal L do fluxo que é
equivalente às forças resistivas dadas por MgR:
MgRLMgH = (2.2)
Assim, da anterior relação podemos determinar que:
αtan==LHR (2.3)
Medições de campo dos parâmetros H e L têm mostrado [14] as seguintes
relações:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
54
• Os valores de L/H são maiores para fluxos com maior conteúdo de água do que
dos fluxos granulares ou similares.
• Corridas a grande escala são mais eficientes do que as de pequena escala.
• L/H depende da geometria da trajetória e as condições de fronteira do leito
(existência de erosão ou sedimentação).
• Para volumes maiores do que 105 m3, L/H aumenta mais ou menos
proporcionalmente ao logaritmo do volume. Mas para volumes menores o valor
fica entre 2 e 4.
Pela equação (2.3), L/H independe da massa, mas observações no campo e
laboratório contradizem este fato. Maiores pesquisas devem ser feitas para determinar
o tipo de relação entre R e a densidade específica do fluido.
FIGURA 2.14. Diagrama de relação com início e deposição da corrida de massa na determinação da
transferência de energia.
Para grandes eventos (km3), L/H mostrou ser igual ou menor do que 0,1 [20].
Estes tipos de eventos se têm registrado também no fundo marinho, na superfície da
Lua e Marte.
Algumas medições deste parâmetro já foram feitas no Brasil [21] para eventos da
Serra do Mar, entre os estados de São Paulo e Rio de Janeiro (ver FIGURA 2.15).
Estes autores analisaram principalmente os fluxos de detritos em solos residuais, para
os quais obtiveram a relação de L/H = 1.8 V0.15. Este tipo de relações são uma tentativa
qualitativa para caracterizar estes fenômenos devido ao complexo de sua dinâmica.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
55
FIGURA 2.15. Relação H/L versus volume para corridas de massa ocorridas na Serra do Mar, SP-RJ,
Brasil [21] .
2.2.5.2. Alguns modelos reológicos para corridas de massa
Uma equação reológica ou constitutiva na mecânica de fluidos é aquela que
relaciona a tensão de cisalhamento com a taxa de deformação cisalhante. Para as
corridas de massa existem muitos autores que já propuseram uma equação
relativamente adequada, pois se sabe que a presença da grande variedade de
tamanhos e formas das partículas sólidas dificulta a descrição do fluxo com uma só lei
constitutiva. Além de disso, uma grande maioria dos modelos até hoje desenvolvidos
são bidimensionais e cada modelo tem sua própria limitação teórica.
As principais feições a serem consideradas na determinação de uma relação
reológica para as corridas de massa são: viscosidade do fluido intersticial, turbulência,
atrito e colisões interpartículas. Assim vários autores têm tentado agrupar as diferentes
categorias de regimes. Uma delas é mostrada na Tabela 2.10. Maiores detalhes destes
modelos são apresentados no ANEXO III.
REGIME FLUXO DETRITICO EFEITOS
1. FRICCIONARIO 2. COLISIONAR
3. FRICCIONARIO-COLISIONAR Granular - Fluido intersticial desprezível.
- Iterações granulares dominam
4. MACROVISCOSO 5. VISCOPLÁSTICO Finos - Fluido intersticial domina.
- Iterações granulares desprezíveis 6. VISCOPLÁSTICO COLISIONAR Blocos - Dominam iterações fluido - partícula.
Tabela 2.10- Classificação qualitativa dos fluxos detríticos por Jan e Shen (1997) [7].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
56
De forma geral, estes modelos podem se agrupar em três grandes grupos
descritos por Laigle e Coussot (1997):
1. Modelo de fluxo granular onde predomina a inércia dos grãos. O modelo de
Bagnold tem sido a referência deste grupo.
2. Modelos de fluxos viscoplásticos onde os efeitos inerciais dos grãos
perdem importância. O modelo de Bingham é o mais conhecido.
3. Modelos dissipativos onde são consideradas tensões devidas à viscosidade
entre as partículas sólidas e o fluido, assim como as tensões dispersivas e produto da
turbulência.
Assim, nos fluxos hiperconcentrados a tensão cisalhante τ vem dada por:
DTCMC ττττττ µ ++++= (2.4)
FIGURA 2.16. Reogramas característicos de alguns modelos reológicos para a modelagem de corridas de
massa [7].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
57
Da equação (2.4), de forma geral, derivam a maioria dos modelos reológicos.
Talvez o modelo mais conhecido seja aquele que descreve o regime friccionário, pois é
de múltiplas aplicações em outras áreas relacionadas com resistência dos materiais.
1. Modelo Mohr–Coulomb
Este modelo é usado para predizer distribuição de tensões e velocidades de
certos experimentos de laboratório com material granular, mas para qualquer outra
situação não é recomendado. É dado por:
( )φστ tan+= cy (2.5)
Onde os parâmetros c e φ são os mesmos definidos na Mecânica de Solos, e σ é
a tensão vertical aplicada sobre o ponto de estudo no fundo do corpo do fluxo.
2. Modelo Dispersivo ou Dilatante (Modelo de Bagnold)
Bagnold (1954) [22] pesquisou a relação entre a taxa de deformação e a tensão
cisalhante de uma mistura de partículas em um fluido newtoniano dentro de um cilindro
rotativo. Na sua formulação ele assume colisões elásticas de forma que não há
dissipação de energia. Este fato não concorda com o que realmente acontece com
uma corrida de massa. Ele determinou a existência de uma região de predomínio
inercial e uma outra macro-viscosa. Para taxas altas de cisalhamento ele determinou
que a tensão pudesse ser atribuída pelo atrito e colisões entre partículas. No domínio
inercial, tanto a tensão normal como de cisalhamento dependem da taxa de
deformação de segunda ordem.
Muitas relações têm sido propostas para este comportamento, mas a fórmula
mais reconhecida é:
DP φσ tan= (2.6)
( ) ( )2
22
2cos
⋅=
⋅⋅⋅⋅⋅=
dydudCf
dydudfM ssssD ρρλλφτ (2.7)
Bagnold definiu NBAG (Número de Bagnold) como um parâmetro de classificação
do fluxo. Este número representa a taxa entre as forças inerciais e as viscosas.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
58
=
dydud
N ssBAG µ
λρ 221
(2.8)
Com: 1
31
1
−
∗
−
=
VCC
λ (2.9)
Bagnold determinou que se NBAG < 40 o fluxo estava no regime macroviscoso
(dependência linear das tensões respeito ao gradiente de velocidade), e se NBAG >450
então o fluxo tem predomínio das forças inerciais (regime friccional). Também
identificou a zona intermediária e chamou de zona de transição. A equação (2.8)
também já foi verificada para NBAG ≥ 450 e 0.14 ≤ CV ≥ 0.60 ou 1.4 ≤ λ ≥ 14.
3. Modelo Viscoplástico (Modelo de Bingham)
Este modelo está dado pela equação:
+=
dydu
By µττ para τ > τy (2.10)
0=dydu para τ < τy
Sob gradientes baixos este modelo consegue descrever o comportamento de
fluxo tipo “slurry” de silte e argilas com alguma porcentagem de areia. Este modelo tem
sido popular por modelar o comportamento de fluxos de lama e fluxos detríticos de
lama viscosos.
3. Modelo Viscoplástico-colisionar (Modelo de O´Brien e Julien)
Estes autores (1997) propuseram um modelo quadrático dado por: 2
+
+=
dydu
dydu
y ζµττ (2.11)
Onde:
CMCy τττ += (2.12)
222mmssTC lda ρλρµµζ +=+= (2.13)
( ) VsVfm CC ρρρ +−= 1 (2.14)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
59
Na equação (2.11), o termo τy é assumido como uma propriedade do material
que não depende da taxa de deformação. O segundo termo descreve as tensões
viscosas que agem com as partículas sólidas. O último termo caracteriza as tensões
dispersivas e turbulentas induzidas pelas colisões entre partículas. O propósito de
juntar estes dois efeitos é ressaltar o fato de que a altas concentrações de partículas
grossas as tensões dispersivas serão dominantes, enquanto que a grandes
concentrações de finos as tensões viscosas superarão as tensões turbulentas. Para
usar esta relação três requerimentos simultâneos são necessários:
• O fluxo tem alta concentração de sedimentos, tipicamente CV > 0.5.
• Altos gradientes de velocidade, tipicamente excedem 10 1/s.
• Uma boa quantidade de sedimentos grossos, aproximadamente com
dimensões maiores do que 5% da espessura do fluxo.
Por outro lado, Savage & Hutter (1989) [17] propuseram uma teoria para fluxos
granulares gravitacionais mediante análise adimensional, com a qual foi proposto um
parâmetro que caracteriza a relação entre o atrito e o peso das partículas (Usando a
simbologia da Tabela 2.9):
( )ghd
Nfs
ssSAV ρρ
γρ−
=
• 2
(2.15)
Se NSAV > 0.1/tanφ os efeitos das colisões têm maior influência e se NSAV <
0.01/tanφ dominam os efeitos do atrito. Por outro lado, considerando o parâmetro
descrito pela equação (2.8), se NBag < 40 o fluxo está no regime macroviscoso
(dependência linear das tensões respeito ao gradiente de velocidade), e se NBag > 450
então o fluxo tem predomínio das forças inerciais (regime friccional).
Iverson e LaHusen (1993) [15] propuseram um outro parâmetro para avaliar as
tensões por atrito das viscosas:
( )( ) µγ
φρρ•
−
−==
s
fss
SAV
BAGFRIC
V
ghVNN
N1
tan (2.16)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
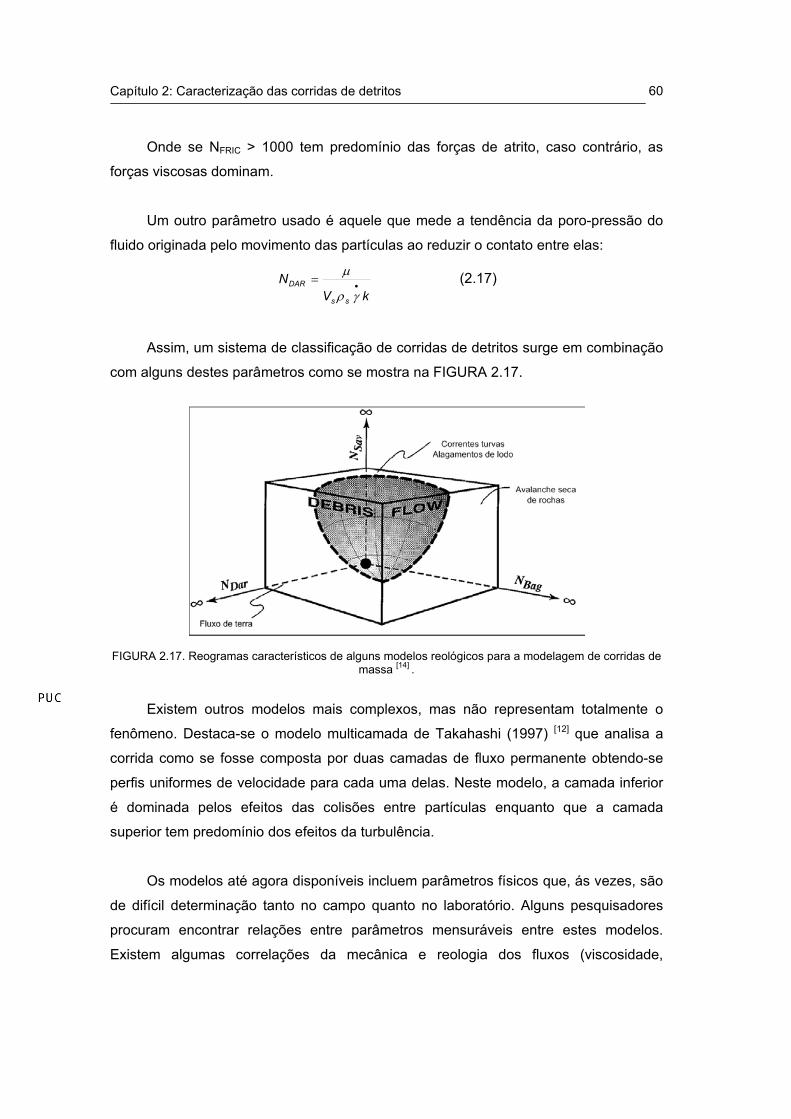
Capítulo 2: Caracterização das corridas de detritos
60
Onde se NFRIC > 1000 tem predomínio das forças de atrito, caso contrário, as
forças viscosas dominam.
Um outro parâmetro usado é aquele que mede a tendência da poro-pressão do
fluido originada pelo movimento das partículas ao reduzir o contato entre elas:
kVN
ss
DAR •=
γρ
µ (2.17)
Assim, um sistema de classificação de corridas de detritos surge em combinação
com alguns destes parâmetros como se mostra na FIGURA 2.17.
FIGURA 2.17. Reogramas característicos de alguns modelos reológicos para a modelagem de corridas de massa [14] .
Existem outros modelos mais complexos, mas não representam totalmente o
fenômeno. Destaca-se o modelo multicamada de Takahashi (1997) [12] que analisa a
corrida como se fosse composta por duas camadas de fluxo permanente obtendo-se
perfis uniformes de velocidade para cada uma delas. Neste modelo, a camada inferior
é dominada pelos efeitos das colisões entre partículas enquanto que a camada
superior tem predomínio dos efeitos da turbulência.
Os modelos até agora disponíveis incluem parâmetros físicos que, ás vezes, são
de difícil determinação tanto no campo quanto no laboratório. Alguns pesquisadores
procuram encontrar relações entre parâmetros mensuráveis entre estes modelos.
Existem algumas correlações da mecânica e reologia dos fluxos (viscosidade,
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 2: Caracterização das corridas de detritos
61
gradiente de velocidades, etc.) e a cinemática (velocidade, rigidez, dissipador, etc.) e
hidrodinâmica (vazão, longitude de dispersão, vazão, etc.) de partículas. Este ponto
será discutido em maior detalhe no capítulo seguinte.
Lee (1994) [9] propôs relações para a tensão cisalhante basal (τb) e a velocidade
média do fluxo ( u ), levando em conta a reologia do fluxo assim como o peso dos
parâmetros reológicos na determinação da tensão. Os detalhes se mostram na Tabela
2.11 (ver ANEXO III).
Modelo Reológico Tensão basal τb
Friccionário φστ tan+= cb
Colisionar 2__
425 u
hbατ =
Friccionário-Colisionar
2__
2yb u
5h2H1
1hα
49
−
⋅⋅+= ττ
Macroviscoso __
3 uhm
bµ
τ =
Viscoplástico
__
2
621
1 u
hHHyb
−
⋅+=µττ
Viscoplástico colisionar
η
ηη
ηµφφτ
__
1
121
11cos u
HhHpsencb
+
−
+
++=
H= espessura do fluxo sem considerar camada turbulenta.
Tabela 2.11- Relação cinemática com as propriedades reológicas do fluxo propostas por Lee (1994) [9].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 3 MÉTODO DE ELEMENTOS DISCRETOS NA SIMULAÇÃO DE CORRIDAS DE DETRITOS
3.1. Filosofia da Modelagem
A modelagem é a representação matemática de um sistema real, mas esta não
é perfeita, fora do caso de um sistema linear simples. Uma modelagem deve, dentro
do possível, ser validada com experiências práticas ou calibrada com observações no
campo ou laboratório.
Por outro lado, um conceito de grande confusão com a definição anterior é a
simulação que é a programação, manipulação e análise de resultados do modelo
num computador. Isto permite fazer avaliações dos parâmetros do modelo sem
maiores perdas de tempo, além do que o estado do sistema pode ser conhecido em
qualquer momento e até pode-se observar processos impossíveis de visualizar na
vida real. Então, falar-se-á agora sobre os enfoques mais usados na modelagem de
corridas de detritos. Em geral, o enfoque da modelagem destes fenômenos pode-se
dividir em três grandes grupos: enfoques estatísticos, determinísticos e modelos a
escala [23], [24].
FIGURA 3.1- Métodos numéricos comummente usados na modelagem de corridas de detritos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 63
3.1.1. Modelos Estatísticos
Estes modelos são usados principalmente na avaliação potencial da ameaça
por corridas, pois são métodos semiquantitativos. Um bom modelo empírico deve
tentar ser rápido, objetivo e reproduzível, que possa ser usado quando o tempo,
dados, orçamento o pessoal são inadequados para poder aplicar métodos
sofisticados [10]. Rickenmann (1999) debate que as corridas de detritos e fenômenos
similares são tão complexos que os métodos numéricos por mais avançados que
forem são limitados para as aplicações práticas. Este autor não considerou que as
simulações podem melhorar o entendimento do fenômeno e mecanismos de
ocorrência para produzir medidas preventivas eficazes ante este tipo de ameaça.
Nestes modelos, os autores tentam correlacionar algumas características
básicas das corridas como a máxima distância percorrida, vazão pico, velocidade
máxima ou volume com as observações de campo ou laboratório. Contudo, ditas
correlações são difíceis de obter, pois as observações diretas no campo ou provas a
escala são muito limitadas. A disponibilidade de um acervo estatístico de eventos
bem descrito ou de experiências de laboratório realista em muitos países é
inexistente, mas em outros é de uma cronologia muito recente. Assim, são poucos os
países que dispõem deste acervo. Cabe mencionar que as bases de dados do
Canadá, Estado Unidos, Japão e Comunidade Européia são invejáveis. Em especial,
a base de dados integrada dos países da Comunidade Européia (DOMODIS,
DOcumentation of MOuntain DISasters) [25], talvez seja a mais completa atualmente,
pois tem registrado eventos nos mais diversos ambientes e condições geológicas
possíveis, desde fluxos no fundo do Mar do Norte até nos Alpes para os últimos 20
anos.
Rickenmann (1995) propôs que primeiro deve ser avaliada a probabilidade de
ocorrência de corridas e depois se deve estimar quantitativamente os parâmetros
mais importantes mencionados anteriormente. São indispensáveis as bases de dados
de eventos passados assim como descrições sedimentodológicas e litológicas.
Os parâmetros mais usados são: a área da bacia hidrográfica, o gradiente, o
índice geológico entre outros, correlacionados com o volume da massa.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 64
Especificamente sob este enfoque, a escola suíça é a mais destacada dentre as
outras principalmente no uso das análises regressivas [19]. Zimmermann e
colaboradores (1997) acharam que a variável mais significativa na determinação da
distância de percurso da corrida era a área da bacia, A (em Km2): 26,02.0 −⋅= Aχ (3.1)
Estes autores determinaram que esta equação é diferente para aquela que
descreve avalanches de detritos, pois esta última depende da grandeza do gradiente
da trajetória seguida. Este foi o indício para que Rickenmann propusesse uma
relação onde demonstra a dependência com o volume de sedimentos (Vol, m3) com a
vazão pico (Qp) entre dois eventos similares:
1
265
1
26/5** 1,01,0
P
P
VolVol
VolQ =
⋅=⋅= (3.2)
Rickenmann (2000) propôs equações similares às usadas na hidráulica na
determinação da vazão máxima. Ainda que o fenômeno físico das corridas de detritos
não seja comparável com as equações para um fluido puro, as leis do regime
turbulento permitem algumas similitudes. Assim por exemplo, a típica equação de
resistência de Manning ou Chezy usada na hidráulica pode ser usada com as
seguintes mudanças:
βαSHCv r=__
(3.3.a)
Onde: Tipo de Fluxo Cr α β Relação Q* Fluxo laminar newtoniano µ
ρ3g 2 1 µ* = 20 Q* 3/5
Fluxo Dilatante ξ 1,5 0,5 ξ* = 150 Q* -2/5
Fluxo turbulento newtoniano: Manning n-1 0,67 0,5 n*=0,077 Q* -1/15
Fluxo turbulento newtoniano: Chezy
*C 0,5 0,5 C**=22
Fluxos de detritos transientes C1 0,3 0,5 C1*= 10 Q* 2/25
Tabela 3.1- Valores de coeficientes e expoentes da equação (3.3.a) para corridas de detritos [19].
Alguns autores russos, chineses e japoneses propõem variações da equação
(3.3.a) com os seguintes valores: 0,5 < α < 0,67 e 0,25 < β < 0,5. Uma outra relação
para a velocidade média do fluxo de detritos é [10]: 33,033,01,2 SQv ⋅= (3.3.b)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 65
Uma vez conhecida a largura aproximada do canal pelo qual ocorre o fluxo,
com a equação (3.3.a) ou (3.3.b) pode-se determinar a vazão máxima do fluxo.
Contudo isto, este autor propôs uma relação diferente entre a vazão máxima QP (m3/s)
e o volume (m3) para fluxos detríticos de lodo: 8,00225,0 VolQP ⋅= (3.4)
Enquanto que Misuyama (1992) estimara a vazão como: 78,0135,0 VolQP ⋅= para o fluxo detrítico granular (3.5.a)
79,00188,0 VolQP ⋅= para o fluxo detrítico de lama (3.5.b)
E como se pode apreciar nas equações anteriores, a vazão é maior nos fluxos
detríticos granulares do que nos de lama.
Por outro lado, Rickenmann também estudou a distância de percurso da corrida: 25,0350 VolL ⋅= (3.6.a)
Para materiais aluvionares, esta distância Lf é dado por: 3/1
*15 VolLf ⋅= (3.6.b)
Mas, na Itália, este autor determinou a seguinte relação: 275,0
*7 VolLf ⋅= (3.6.c)
Por outro lado, também têm sido caso de estudo as condições de ocorrência
destes eventos, principalmente originados por chuvas intensas. Neste caso, a escola
italiana recentemente apresentou trabalhos considerando propriedades da curva
característica para solos parcialmente saturados piroclásticos e a precipitação na
região sul da Itália [26]. Neste trabalho, os autores propõem duas relações para a
determinação de precipitações que poderiam iniciar a ocorrência de uma corrida de
detritos: a primeira só é feita por análise estatística das precipitações que
ocasionaram uma corrida de detritos, enquanto que a segunda é formulada
considerando a saturação do solo durante as precipitações até produzir a corrida: 39,082,14 −⋅= tdi (3.7.a)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 66
tdt
t ZKdZ
i ⋅⋅+= 48,0 (3.7.b)
No Brasil, Kanji e Massad (2002) propuseram uma relação similar para os
eventos ocorridos na Serra do Mar no Estado de São Paulo [21]. Esta relação
considera precipitações de larga duração (vários dias ou semanas) nas quais
aconteceram corridas de detritos principalmente para intensidades altas durante
curtos períodos de duração. 41,04,22 tdi ⋅= (3.7.c)
FIGURA 3.2- Precipitação acumulada versus duração de tormenta relacionada à ocorrência de corridas
de detritos e grandes deslizamentos [21].
Existem estudos mais detalhados sobre este aspecto com considerações
teóricas mais fortes [27]. Um outro fator de estudo estatístico tem sido a relação do
coeficiente de resistência e o volume da corrida como foi visto na secção 2.2.5.1 do
capítulo anterior.
Em geral, estes métodos enfocam-se sobre a taxa de perda do volume no fluxo
(vazão), geometria do canal por onde escoa o fluxo e geometria física do processo [23].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 67
3.1.2. Modelos Determinísticos
Sob este enfoque, os autores determinam relações físicas que caracterizam a
natureza da corrida. Assim, existem modelos muito simples aplicáveis a certos
experimentos sob condições muito controladas até os modelos que consideram a
natureza dinâmica não-linear do fenômeno das corridas.
Com isto, uma corrida de detritos é considerada um meio não-linear
viscoelastoplástico compressível que precisa de algumas simplificações para poder
ser modelado matematicamente [9]. De aí que algumas modelagens seguem uma das
seguintes suposições:
• O fluxo de detritos é um fluido contínuo isotrópico.
• O fluxo de detritos é um fluido incompressível.
• As tensões isotrópicas e deformações volumétricas são desprezíveis, só são
consideradas as deformações causadas por tensões desviadoras.
• A aceleração vertical é desprezível.
Segundo a natureza do sistema, o enfoque determinístico tem dois grandes
grupos. O primeiro considera o fluxo como um meio contínuo caracterizado pelas
velocidades (Enfoque Euleriano) ou pelas posições dos nós em estudo (Enfoque
Lagrangiano), no qual podem ser aplicadas as leis de continuidade física e o segundo
grupo considera o fluxo como uma composição de elementos unitários com geometria
definida As partículas agem entre si mediante leis físicas ou por simples imitação do
movimento natural do fluxo.
No primeiro grupo a técnica numérica de maior sucesso tem sido o Método dos
Elementos Finitos (FEM), com o qual o fluxo é considerado como um só elemento
pelo que sua caracterização é dada para a massa toda envolvida no movimento,
desprezando as particularidades internas desta. Assim por exemplo, o fenômeno de
segregação direta ou inversa não pode ser modelado dentro deste enfoque. Em geral,
neste grupo as técnicas de solução podem ser analíticas ou numéricas, sendo as
primeiras o grupo mais limitado nas aplicações práticas [23].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 68
Por outro lado, a técnica numérica mais usada do segundo grupo é o Método
dos Elementos Discretos (DEM). Sob este enfoque o fluxo é visto como um meio de
unidades geométricas definidas que agem entre si de tal forma que o comportamento
global é visto como o somatório destes comportamentos. O principal problema deste
método é a grandeza dos tempos nas simulações quando se trata de muitas
partículas tentando se aproximar ao caso real.
3.1.2.1. Método dos Elementos Finitos (FEM)
Neste método geralmente são usadas as equações de Navier-Stokes de
conservação de massa e as de conservação de momentum. Estas equações podem
ser tomadas sob distintos supostos, dos quais os mais utilizados são aqueles
relativos ao sistema em estudo: volume de controle integral ou diferencial.
Com o enfoque do volume integral não se requer muita informação sobre a
variação das pressões e velocidades no contorno pelo que o enfoque é muito pratico
e útil na solução de problemas de mecânica de fluxos. Porém as condições de
fronteira no volume de controle no problema de corridas de detritos é importante, pois
o comportamento deste varia segundo o gradiente de velocidades. Neste caso, usa-
se o enfoque do volume diferencial o qual estuda o equilibro num ponto do volume e
com técnicas de integração pode-se determinar as variações no contorno de dito
volume.
Ainda que este enfoque não seja o interesse principal deste trabalho, ao menos
se descreverão as equações básicas e se comentarão alguns casos de estudo, pois
estes métodos são os mais predominantes na literatura consultada e em alguns
casos os autores concluem no fato de considerar o DEM como um método alternativo
no estudo das corridas de detritos na simulação de certos processos que não podem
ser simulados com o FEM.
1. Equação de Continuidade (Conservação de massa)
Considerando um volume infinitesimal ρm com velocidade Vr
= u i + v j + w k .
Então, por conservação de massa no volume [28], [29]:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 69
( ) elementosaindoentrando mt
mm∂∂
=−∂ (3.8)
( ) ( ) ( )−
∂
∂−+
∂
∂+−
∂
∂− dxdzdy
yv
vdydzdxx
uudydzdx
xu
u mm
mm
mm 222
ρρ
ρρ
ρρ
( ) ( ) ( )=
∂
∂−+
∂
∂++
∂
∂− dxdydz
zw
wdxdzdzzw
wdxdzdyy
vv m
mm
mm
m 222ρ
ρρ
ρρ
ρ
( )dxdydzt mρ∂∂ (3.9)
Simplificando (3.9):
( ) ( ) ( ) ( )mmmm tw
zv
yu
xρρρρ
∂∂
−=∂∂
+∂∂
+∂∂ (3.10.a)
0=
∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
zw
yv
xu
zww
yvv
xuu
t mm ρ
ρ (3.10.b)
A equação (3.11) é formalmente apresentada como:
( ) 0=⋅∇+ VDt
Dm
m ρρ (3.11.a)
FIGURA 3.3- Volume de controle infinitesimal da massa.
Onde o diferencial do material é:
zw
yv
xu
tDtD
∂∂
+∂∂
+∂∂
+∂∂
= (3.11.b)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 70
2. Equação de Conservação de momentum (Equações Navier-Stokes)
Dada uma massa infinitesimal δm, sob o campo gravitacional g e aplicando a
segunda Lei de Newton, tem-se que [28], [29]:
amFFF CORPOSUPERFÏCIE ⋅=+=∑ δδδδ (3.12)
Seguindo a FIGURA 3.4 o equilíbrio de forças na direção x vem dado por:
( ) xmzxyxx
x gdxdydzdxdydzzyx
F ρττσ
δ +
∂∂
+∂
∂+
∂∂
=∑ (3.13.a)
Similarmente, nas outras direções tem-se:
FIGURA 3.4- Volume de controle infinitesimal da massa.
( ) ymzyyxy
y gdxdydzdxdydzzyx
F ρτστ
δ +
∂
∂+
∂
∂+
∂
∂=∑ (3.13.b)
( ) zmzyzxz
z gdxdydzdxdydzzyx
F ρσττ
δ +
∂∂
+∂
∂+
∂∂
=∑ (3.13.c)
Usando as equações (3.13) em (3.12), obtém-se:
( ) ( )DtDudxdydzgdxdydzdxdydz
zyx mxmzxyxx ρρ
ττσ=+
∂∂
+∂
∂+
∂∂ (3.14.a)
( ) ( )DtDvdxdydzgdxdydzdxdydz
zyx mymzyyxy ρρ
τστ=+
∂
∂+
∂
∂+
∂
∂ (3.14.b)
( ) ( )DtDwdxdydzgdxdydzdxdydz
zyx mzmzyzxz ρρ
σττ=+
∂∂
+∂
∂+
∂∂ (3.14.c)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 71
Sabendo que por simetria:
xyyx ττ = zyyz ττ = zxxz ττ = (3.15)
Então, finalmente obtém-se a equação de conservação de momentum na sua
forma mais geral:
i
ijjm
jm x
gDt
DV∂
∂+=
σρρ (3.16)
Com as equações (3.11.a) e (3.16), e fazendo uso das características
reológicas vistas na secção 2.2.5, alguns autores têm desenvolvido simulações de
corridas de detritos usando técnicas de integração numéricas especiais que são até
referência nesta área de pesquisa. A avaliação conjunta destas duas equações tem
sido resolvida levando em conta a natureza das condições inicias (enfoque euleriano
ou lagrangiano) e a dimensão da análise. As análises unidimensionais são muito
reducionistas, as análises bidimensionais ficam reservadas a certas condiciones ou
suposições simplificadores dos casos reais. Mas uma análise tridimensional integral
não tem sido alcançada a causa das limitações dos modelos reológicos nesta
dimensão. Aliás, a técnica mais usada considera o fluxo quase-tridimensional, pois o
volume de controle é suficientemente pequeno para supor que as variações verticais
são constantes.
O Método da Integração de Espessura Média (Depth Avaraged Method, DAM) [30], [31] tem sido a técnica numérica mais usada na solução das equações (3.11.a) e
(3.16), pois supõe variações nulas da velocidade na vertical o que permite simplificar
em um grau as equações anteriores. Geralmente a integração realiza-se mediante o
algoritmo de Garlekin [32].
Savage e Hutter (1989) [9] propõem a teoria das avalanches de detritos com a
aplicação deste método, descrevendo principalmente massas granulares contínuas
com comportamento friccionar de Coulomb, usando tanto o esquema de diferenças
finitas euleriano e lagrangiano. Mais tarde o último autor trataria o fluxo sobre
superfícies curvas [33].
O´Brien e Julien (1993) [9] comparam resultados da simulação numérica com
resultados produzidos no programa FLO-2D principalmente usado para análise de
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 72
ameaça de fluxos de lodos. Estes autores determinam o inflexível do FLO-2D para
simular segregação, salto hidráulico ou ondas de choques.
Hunt (1994) [9] analisa o fluxo de detritos como se fosse um fluido newtoniano
laminar. A principal contribuição deste autor está em tentar simular o fluxo como
laminar viscoso.
Wang e Shen (1999) [34] são os primeiros em apresentar uma simulação
unidimensional sob o enfoque lagrangiano para o fluxo resultante na ruptura de uma
barragem. Ao mesmo tempo introduzem o método Hidrodinâmico de Partículas
Suaves (SPH) ao analise de corridas de detritos.
Por outro lado, Hungr (2003) [35], [36], [37] propôs um método FEM lagrangiano bi e
tridimensional utilizando critérios do SPH para garantir continuidade na integração
para simular alguns eventos no Canadá. Tal vez este seja o modelo mais completo
deste gênero. Os resultados foram aplicados a simulações controladas de laboratório
e um caso real de avalanche de detritos com resultados promissórios.
Este, sem dúvida, é um dos autores mais destacados sobre o tema. Ele propõe
os objetivos a serem seguidos em qualquer ação para desenvolver uma modelagem
de corridas de detritos, os quais têm tido grande aceitação entre a comunidade
internacional. Eles são [35]:
• O modelo deveria permitir determinar tensões internas anisotrópicas, não-
hidrostáticas as quais podem ser controladas por uma reologia interna
diferente da reologia basal.
• Deve permitir a simulação de entrada e saída de material durante o fluxo.
• Deve permitir a utilização de mais de um modelo reológico que varie na
trajetória do fluxo ou dentro da massa do mesmo.
• Deve permitir grandes deslocamentos assim como ramificações da massa
sem problemas de distorção na malha dos elementos.
• Deve ser amigável para o usuário e eficiente para facilitar retroanálise e
calibrações com casos reais.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 73
FIGURA 3.5- Saída da simulação da corrida de detritos Frank de 1917 [37].
Também, Chen e Lee (2000) [38] descrevem uma formulação tridimensional para
a solução das equações de conservação de massa e momentum usando o esquema
de Galerkin e a quadratura Gaussiana do ponto intermédio para simulações de
eventos em Hong Kong. Este é a análises em FEM tridimensional sob o enfoque
euleriano mais completa até agora desenvolvida. Este trabalho remarca a importância
na representação do terreno, pois desta dependem as forças de gravidade e atrito
que agem sobre a massa em movimento. A integração é feita com algoritmos
eulerianos, mas a malha faz uso das metodologias espaciais lagrangianas para
grandes deslocamentos.
3.1.2.2. Métodos de Elementos Discretos (DEM)
Sob este enfoque, a massa do fluxo é vista como composta de unidades
uniformes geométricas descontinuas, cujo comportamento individual estatisticamente
determina o comportamento global. Podem-se destingir quatro etapas fundamentais
na construção da lógica do DEM [24], [39]. Primeiro, a seleção da geometria das
partículas (partículas bi ou tridimensionais; polígonos ou discos, poliedros ou esferas).
Neste caso são partículas tipo disco.
Segundo, o desenvolvimento de um algoritmo eficiente permanente na
detecção dos contatos. Esta é a etapa que consume mais tempo de cálculo. O
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 74
número de operações depende à vez do número de partículas e da forma destas.
Este ponto é o de maior interesse deste trabalho, onde é aplicado um algoritmo
unário de procura de contatos e um algoritmo de representação de paramentos
curvas linearizados.
Terceiro, a programação das leis físicas às quais obedecem as partículas para
a determinação dos seus deslocamentos. Podem ser as leis da mecânica clássica ou
leis adaptadas. O presente trabalho segue as leis físicas newtonianas. Finalmente, a
visualização da simulação propriamente dita e resultados.
FIGURA 3.6- Etapas da lógica dos Métodos de Elementos Discretos.
Uma descrição dos principais métodos deste grupo apresenta-se a continuação:
A. Celas Autômatas Uma cela autômata é um espaço geométrico que pode estar preenchido ou em
branco. Uma partícula, neste caso, é representada por uma cela preenchida. A
configuração das celas (estado autômata) evolui através do tempo e espaço sob
determinadas regras. Neste método o espaço e tempo são descontínuos.
O método foi descrito pela primeira vez por John Conway (1970) e uma das
suas principais características é que não precisa de leis físicas puras senão de
relações empíricas simples que reproduzem o comportamento natural do fenômeno.
Este é um método qualitativo com ênfase na reprodução visual de fenômenos.
A escola italiana é quem mais experiência tem no uso deste método,
principalmente na região sul da Itália [40]. Esta escola desenvolveu um modelo sobre
celas hexagonais bidimensionais.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 75
FIGURA 3.7- Simulações usando celas autômatas uni e bidimensionais [24].
B. Enfoques Empíricos Sob este enfoque estão aqueles métodos que não usam as leis da física
newtoniana, mas são definidas geralmente por relações estatísticas. O método de
Monte Carlo é o mais famoso e utilizado na mecânica estatística. A idéia é não
calcular as trajetórias das partículas senão usar feições aleatórias estatísticas que
reflitam a realidade do fenômeno. Assim, em vez de leis físicas usam-se leis
probabilísticas pelo qual é um método muito eficiente para simulações com um
número grande de partículas. Sua desvantagem radica no fato de desprezar os
efeitos de borda das partículas e sua pouca flexibilidade na visualização.
C. Enfoques Mistos Estes enfoques misturam a rapidez dos métodos empíricos com a flexibilidade
dos enfoques newtonianos.
D. Enfoques Newtonianos Sob esta perspectiva, o deslocamento e contatos são determinados pelas leis
da mecânica clássica. Neste enfoque estão agrupadas duas escolas: corpos
deformáveis e não-deformáveis. Nestes enfoques, o tempo de cálculo é muito
importante no desempenho do método.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 76
Escola de Corpos deformáveis
Fundada por Cundall em 1971, mas foi dada a conhecer em 1979 quando
Cundall e Strack publicaram o modelo de elementos distintos ou discretos [41]. Neste
enfoque, o contacto das partículas é modelado como uma composição de amolas e
amortecedores simulando o efeito de atrito e dissipação de energia pela colisão entre
partículas seguindo as leis de repulsão de Newton. Para determinar a variação
temporal do sistema precisa-se integrar um sistema de equações de segunda ordem.
Este modelo já tem avançado á enfoques tridimensionais com maior facilidade do que
os métodos desenvolvidos com FEM.
FIGURA 3.8- Simulação sob o enfoque newtoniano de DEM [33].
Escola de Corpos Não-Deformáveis
Sob esta escola, os contatos são pontuais e as partículas têm coeficientes de
atrito e de restituição mediante os quais são feitos os cálculos das velocidades destas
depois do choque. A probabilidade de que duas partículas vizinhas estejam em
contato é nula, caso contrário à da escola anterior. Por este motivo a primeira escola
se adapta à natureza real das massas densas quase estáticas, enquanto esta
segunda é ideal para as massas não muito densas e dinâmicas.
Trabalhos feitos sob este enfoque serão descritos na seguinte secção. É
importante considerar que a evolução deste modelo na simulação de corridas de
detritos é muito recente. O método tem sido muito usado na simulação de misturas
granulares de processos industriais e na área da suspensão de partículas.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 77
3.1.2.3. Algumas características comparativas dos métodos
Johansen e Laux (1998) [42], segundo a experiência norueguesa na simulação
de fluxos de materiais granulares, fazem uma comparação entre os modelos
lagrangiano (representado por DEM) e euleriano (representado por FEM). A
experiência deste país na simulação deste tipo de fluxo é similar quanto nos outros
países do mundo, pelo qual suas observações podem ser generalizadas.
Partindo do que os modelos lagrangianos determinam as trajetórias individuais
das partículas, estes permitem descrever uma grande variedade de efeitos físicos do
jeito mais fundamental. Em princípio pode ser modelado para qualquer tamanho e
forma de partícula, sendo forte principalmente na simulação de segregação,
fragmentação e aglomeração de partículas.
Para simulações com grande número de partículas não-esféricas que incluam
as forças viscosas nos contatos, o método vira nada prático. Contudo, este defeito
pode ser resolvido modelando as partículas como grumos, perdendo o enfoque
fundamental do fenômeno obtendo-se comportamentos aproximados segundo as
reologias utilizadas. A sua maior desvantagem está nos tempos de cálculo.
Por outro lado, quando na modelagem usa-se as equações de conservação
(massa, momentum ou energia) ou enfoque euleriano, as fases sólidas e liquidas são
consideradas interpenetráveis e o comportamento é uma representação física meia
do fluxo. O método é usado para sistemas que precisam de boas simulações
quantitativas, dependendo a sua qualidade do modelo físico e das experiências de
laboratório das quais foi gerado o modelo reológico.
A sua maior desvantagem, citada pelos autores, é a sua rigidez lógica, pois o
método considera comportamentos meios, eliminando as particularidades do
fenômeno das equações. Assim, por exemplo, o método tem problemas nas
interações partícula-parede. Especificamente, este método tem problemas na
simulação nos processos de erosão e deposição. Contudo, este problema pode ser
resolvido criando rotinas mais consistentes e robustas, aumentando grandemente sua
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 78
carga numérica e extensão. Isto faz do método euleriano ser vantajoso a respeito dos
métodos lagrangianos em muitos poucos casos.
Ambos os métodos podem a ser comparados desvantajosos para grandes
simulações considerando modelos complexos a causa do consumo de tempo ou
memória na hora de execução das rotinas. Mas, algumas experiências simuladas
parecem apontar aos métodos lagrangianos como os mais eficientes em aspectos de
representação fundamental dos fenômenos [42], [43].Tanto assim que os métodos
eulerianos complexos se baseiam em malhas eulerianos para aumentar sua
eficiência.
3.2. Modelo de Elementos Discretos de Cundall
Este método foi desenvolvido por Cundall (1971) para problemas
bidimensionais em Mecânica das Rochas, mas publicado em 1979 [41]. A popularidade
do método está não sua flexibilidade para sua extensão à terceira dimensão e a sua
versatibilidade para qualquer forma e tamanho de partículas. Aqui se descreverão as
equações para o caso específico de discos ou esferas para a análise bidimensional.
Este autor trata o problema das iterações partícula-partícula como um problema
transiente em estado de equilíbrio com as forças internas. Sob esta hipótese, o
sistema é resolvido usando um esquema explícito de diferencias centrais para análise
de transiente. Uma outra suposição é que o passo de tempo de cálculo é tão
pequeno que os distúrbios não se propagam para outras partículas que estejam além
da vizinhança da partícula em estudo. Deste jeito só são consideradas as forças de
contacto geradas com as partículas imediatas.
Por outro lado, a deformação individual das partículas é muito pequena em
comparação a deformação total da massa. Esta deformação é modelada como uma
interposição de partículas relacionada com as forças geradas no contato. Assim o
ciclo básico do método se descreve na seguinte figura.
O esquema numérico de integração descrito anteriormente é chamado de
Método de Relaxação Dinâmica (MRD) [4], [46], que foi desenvolvida a meados da
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 79
década dos sessenta quando alguns pesquisadores tentaram simplificar a análise
dinâmica transiente como uma sucessão discreta no tempo de soluções em regime
permanente. A sugestão desta possibilidade foi fundamentada no fato de que um
sistema oscilante excitado por uma perturbação constante no tempo com
amortecimento tende à posição final de equilíbrio sob ação da mesma.
FIGURA 3.9- Ciclo de cálculos segundo a metodologia DEM.
Figueiredo (1991) [4] fez uma descrição detalhada do método, da qual aqui só
serão tratados as aspectos teóricos básicos do método. O ciclo do MRD é similar ao
da FIGURA 3.9. Neste caso o ciclo inicia-se com as forças aplicadas no início da
análise, que sendo traduzidas a termos de deslocamentos e fazendo uso das
relações constitutivas obtêm-se as forças resultantes geradas nos contatos de cada
partícula. Estas forças resultantes são descontadas das forças iniciais, dando como
resultado a uma força desequilibrada com a qual inicia-se o novo ciclo. O ciclo
termina quando estas forças desequilibradas sejam nulas ou tenham sido transferidas
aos contatos. Dada a sua natureza explícita de solução, este método deve garantir a
estabilidade e convergência da solução.
A estabilidade pode ser garantida com a seleção adequada do passo de tempo
na realização das integrações. Enquanto à convergência, esta é garantida com a
utilização apropriada de parâmetros de amortecimento.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 80
Seguindo os lineamentos da mecânica clássica newtoniana sob o enfoque
lagrangiano, o ciclo detalhado dos cálculos se descreve como segue.
FIGURA 3.10- Ciclo de cálculos seguindo a metodologia de MRD.
Primeiramente, o contato é modelado como um sistema paralelo de uma massa
m, com uma amola de rigidez K [F/L2] e um amortecedor C [M/L], tanto no sentido
normal e tangencial ao ponto de contato. A força tangencial tem um limite dado por a
força de cisalhamento por descrita pelo coeficiente de atrito de Coulomb, µ. As forças
amortecedoras em ambas as direções são ativadas pelas velocidades relativas do
ponto de contato. Por outra parte, o movimento global da partícula tem dissipação de
energia mediante um amortecedor para o movimento rotacional e outro para a
translação. Mas, este é um dos modelos de contato mais simples [45], [47].
Agora, supondo um suposto contato entre duas partículas circulares com as
características mostradas na FIGURA 3.12, e considerando o sistema local de
coordenadas dado por os vetores n e t , define-se o contato como:
L * < 21 RR + (3.17)
O ponto de contato considera-se localizado na metade dos pontos P1 e P2
segundo a FIGURA 3.12. Assim, a velocidade relativa no ponto de contato é:
( ) ( )2221112121RVRVVVV PPPP ωω +−+=−=− (3.18)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 81
FIGURA 3.11- Modelo usado para os contatos entre partículas.
Considerando os vetores unitários globais e os locais, tem-se:
==
−=
11
coscos
yx
sensen
tn
ϕϕϕϕ ⇒ ( )ϕϕ senn ,cos= e ( )ϕϕ cos,−= sent (3.19)
Determinando as componentes normal e tangencial da velocidade relativa do
ponto de contato, temos que:
( ) ( ) ntRRnVVVN ⋅+−⋅−= 221121 ωω (3.20.a)
( ) nVVVN ⋅−= 21
( ) ( ) ttRRtVVVT ⋅+−⋅−= 221121 ωω (3.20.b)
( ) ( )221121 RRtVVVT ωω +−⋅−=
Que integrando por diferencias finitas, os deslocamentos relativos nas direções
normal e tangencial vêem dados por:
dtVNN ⋅=δ (3.21.a)
dtVTT ⋅=δ (3.21.b)
Assim, a força induzida por deslocamento e efeito do amortecedor viscoso no
ponto de contato (amortecimento local) e descrita por:
NNNNNK
NN VCKDFF +=+= δδ (3.22.a)
TTTTTK
TT VCKDFF +=+= δδ (3.22.b)
Então, as forças totais no ponto são para o novo ciclo de cálculo são:
Nt
Nt
N FFF δ+= −1 (3.23.a)
Tt
Tt
T FFF δ+= −1 (3.23.b)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 82
FIGURA 3.12- Notação usada na dedução das equações de movimento.
Estas forças são positivas no sentido contrario aos dos vetores n e t da
FIGURA 3.12.
Por outro lado, a força de cisalhamento está limitada pela força de atrito de
Coulomb, a saber:
cuNNT AcFFF ⋅+=≤ φµ tan (3.24.a)
A equação (3.24.a) é generalizada para materiais geológicos. Mas esta força é
limitada sob algumas hipóteses que seguem estes critérios:
Se FN < 0, então FT = 0 e FN=0, pois não são válidas forças de tração.
|FT| > µ|FN|, então FT = FN·tanφu + c·Ac e a força viscosa DT é constante (c·Ac = 0,
geralmente).
O momento no sentido anti-horário ocasionado por estas forças no centro
geométrico de da partícula i, é dado por:
( )∑∑ ⋅= iTii FRM (3.25)
Agora, considerando todas as forças induzidas nos pontos de contato de uma
partícula, se determinarão pela segunda Lei de Newton os novos valores de
acelerações. Deste jeito, considerando um efeito amortecedor no movimento geral da
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 83
partícula (amortecimento global) devido ao meio fluido, se considera os coeficientes
de amortecimento para a translação CTR e outro para o efeito rotacional CR, no
somatório de forças. Assim, considerando a variável bidimensional r(x,y) de
deslocamento e pela segunda Lei de Newton para uma partícula de massa m, tem-se:
∑+=+⋅i
iTR FmgrCrm &&& (3.26)
∑=+⋅i
iR MCI ωω& (3.27)
Onde a inércia pode ser a de um disco (mR2/2) ou esfera (2mR2/5). Usando o
algoritmo de diferenças centrais, as velocidades das equações anteriores podem ser
expressas em termo das velocidades nos tempos t - ½dt e t + ½dt como:
+=
+− dttdttt rrr2
12
121
&&& (3.28)
+=
+− dttdttt2
12
121 ωωω (3.30)
Por tanto, as acelerações são descritas como:
+=
+− dttdttt rrdt
r2
12
11
&&&& (3.31)
+=
+− dttdttt dt 21
21
1 ωωω& (3.32)
Substituindo as equações (3.31) e (3.32) nas equações (3.26) e (3.27), e logo
obtendo uma expressão para as velocidades no tempo t + ½dt, fica:
[ ]
+
++
−
=∑−
+
mdtC
gdtmdtF
mdtC
rr
TR
tii
TRdtt
dtt
21
21
21
21
&
& (3.33)
[ ]
+
+
−
=∑−
+
IdtC
IdtM
IdtC
R
tii
Rdtt
dtt
21
21
21
21
ωω (3.34)
Desta forma, estas velocidades podem ser integradas para obter os
deslocamentos no tempo t+dt como:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 84
dtrrr dtttdtt ⋅+=++
21&δδ (3.35)
dtdtttdtt ⋅+=++
21ωδθδθ (3.36)
Sob este esquema, Cundall determinou a introdução de um pequeno erro de
médio tempo na determinação nas componentes das forças amortecedoras D, mas
considerou-o desprezível. De fato:
( ) [ ] nrrCVCD dttNNNtN ⋅−=⋅= + 2121 && (3.37.a)
( ) ( ) ( )[ ] dttTTTtT RRtrrCVCD2
1221121 ++−⋅−=⋅= ωω&& (3.37.b)
Note-se que a energia no sistema, segundo as equações (3.33) e (3.34), é
dissipada através do atrito e o amortecimento: local e global. Se estes
amortecimentos fossem nulos, o sistema nunca estaria em equilíbrio.
Uma correção deve ser feita no ângulo entre os sistemas globais e locais de
coordenadas, pois este último incrementa seu ângulo cada passo de tempo como se
descreve na equação (3.36).
FIGURA 3.13- Correção do ângulo entre sistemas de coordenadas.
O ponto P (contato) tem coordenada global, segundo a Figura 3.13 dadas por:
ϕcos⋅+= RXX CP (3.38.a)
ϕsenRYY CP ⋅+= (3.38.b)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 85
O ângulo ϕ aumenta δθt, considerado uma porção muito pequena (< 0,01 rad),
então:
( ) tttt sensensen δθϕϕδθϕδθϕδθϕ ⋅−=⋅−⋅=+ coscoscoscos (3.39.a)
( ) tttt sensensensen δθϕϕδθϕδθϕδθϕ ⋅−=⋅+⋅=+ coscoscos (3.39.b)
Note-se que o ângulo ϕ + δθt é o novo ângulo, pelo que as equações anteriores
são as formas recursivas de atualização do ângulo entre os sistemas cada passo de
tempo.
3.2.1. Escolha dos parâmetros do modelo
Um dos problemas deste modelo é determinar o valor dos parâmetros que
representem corretamente o material. Assim, Cundall (1979) [41] deu algumas
recomendações na escolha destes parâmetros, mas através do tempo cada autor
utiliza valores diferentes para calibrar o modelo. Alguns pesquisadores seguem a
teoria da elasticidade, mas a Teoria Hertziana [48] proporciona valores mais
apropriados quando a geometria das partículas é mais próxima à geometria real dos
grãos. Contudo isto, os parâmetros das rigidezes e coeficientes de amortecedores
são os mais importantes para garantir a convergência do método, como já se
mencionou. Enquanto o passo de tempo é importante para garantir a estabilidade
numérica.
3.2.1.1. Convergência Numérica
Para materiais elásticos, a rigidez e coeficiente de amortecimento [24] são:
Eq
NN R
EK
2δ
= (3.40)
1
21
11−
+=
RRREq (3.41)
[ ] mKC NCRITICON ⋅= 2 (3.42)
Mas, a partir da equação (3.42), alguns outros autores tomam KN como:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 86
[ ]dt
CK CRITICON
N = (3.43)
Cundall propôs relações com os parâmetros anteriores para os parâmetros
tangenciais usando qualquer tipo de material:
=T
N
KK 1 ou
32 (3.44.a)
NT CC = (3.44.b)
Mas, no caso que as partículas em contato tenham parâmetros diferentes, usa-
se as relações:
21
111
NNEqN KKK
+= (3.45.a)
21
111
NNEqN CCC
+= (3.45.b)
Relações similares podem ser aplicadas às componentes tangenciais. As
magnitudes de rigidez podem variar de 106 até 109 N/m. Com as relações anteriores,
garantindo a existência do efeito dos amortecedores, o modelo terá a sua
convergência numérica, pois o equilíbrio do sistema estará garantido também.
Contudo, a iteração recursiva das equações (3.33) e (3.34) é complexa, mas
pode ser simplificada considerando o Teorema de Rayleigh para o amortecimento.
Esta é uma aplicação da RD na área de estruturas onde os coeficientes das forças
amortecedoras são descritos pela massa inercial e a rigidez do sistema. Estes dois
fatores caracterizam a relação do amortecimento com a freqüência do sistema. Assim:
KMC ⋅+⋅= βα (3.46)
As constantes α [L-1T-1] e β [T] são escolhidas como constantes de calibração
do modelo. M é a matriz de massas inerciais e K é a matriz de rigidez. Assim, para
o caso dos contatos internos, usa-se as relações:
NN KC ⋅= β (3.47.a)
TT KC ⋅= β (3.47.b)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 87
Ou a dada por (3.42) e (3.44.b). E para o caso do movimento de cada partícula,
usa-se a relação:
mCTR ⋅= α (3.48.a)
ICR ⋅= α (3.48.b)
Assim, para o primeiro caso as equações (3.22.a) e (3.22.b) simplificam-se a:
+=+=
dtKDFF NNN
KNN
βδδ 1 (3.49.a)
+=+=
dtKDFF TTT
KTT
βδδ 1 (3.49.b)
Amortecimento e Dissipação de Energia Cundall (1982) introduz dois tipos de mecanismos de dissipação da energia
para o sistema. Um deles, a nível local (amortecimento autolocal) para quando existe
muita variação na direção das velocidades das partículas o que é descrito por:
[ ]( ) [ ]( )( )( )Cii rmgFsigmgFrm α⋅++⋅+= ∑∑ &&& ,1 (3.50.a)
[ ]( )( ) dtrmgFsiggmF
rr Cii
dttdtt⋅
⋅++⋅
+
+= ∑∑−+
α&&& ,12
12
1 (3.50.b)
[ ]( )( )Cii MsigMI αωω ⋅+⋅= ∑∑ ,1& (3.51.a)
[ ]( )( ){ }I
dtMsigM Ciidttdttαωωω ⋅+⋅+= ∑∑−+
,12
12
1 (3.51.b)
O parâmetro αC (≈ 0.7) no programa SAND é chamado por “cadl”. Por outro
lado, a nível global (amortecimento autoglobal) relacionado com os parâmetros das
equações (3.48.a) e (3.48.b) substituídas nas equações (3.33) e (3.34):
[ ]
+
++
−
=∑−
+
21
21
21
21 dt
gdtmdtFdtr
r tiidtt
dtt α
α&
& (3.53)
[ ]
+
+
−=
∑−
+
21
21
21
21 dt
IdtMdt
tiidtt
dtt α
αωω (3.54)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 88
Em geral, os valores dos coeficientes de amortecimento obtêm-se considerando
análises dinâmicas matriciais [49]. Assim, o sistema matricial a resolver é dado por:
[ ]{ } [ ]{ } [ ]{ } { }ExtFXKXCXM =++ &&& (3.55)
Que fazendo uso de transformações ortogonais de matrizes, obtém-se:
{ } [ ]{ }{ } { } [ ]{ }{ } { } [ ]{ }{ } { } { }EXTTTTT FUKUCUM Φ=ΦΦ+ΦΦ+ΦΦ &&& (3.56)
O que se reduz a um sistema de n equações não-acopladas da forma,
considerando (3.46):
{ } { } { } ( ){ }iiiangiiangii tFUUU =++ 22 ωως &&& (3.57)
i
iiang m
K=2ω (3.58.a)
iangiangi22 βωαως += (3.58.b)
O que permite deduzir uma relação para os coeficientes de amortecimento:
ςωα ang2= (3.59)
angωςβ 2
= (3.60)
πω2
angTf = (3.61)
Onde ς [adimensional] y fT [Hz] são parâmetros de entrada no programa SAND,
representados pelas variáveis _frac e _freq respectivamente.
Contudo isto é necessário garantir a convergência da solução mediante a
medição da razão entre a potência dissipada pelos amortecedores viscosos e a taxa
de variação da energia cinética, pois isto é uma medida indireta para saber se o
trabalho dos amortecedores está adsorvendo a energia cinética momentânea do
sistema.
EEt
RAT ∆⋅
=∆α2 > AFAC (3.62)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 89
Esta razão ∆RAT deve manter um valor AFAC para todos os passos de tempo e
tipicamente AFAC ≅ 1,0. Figueiredo (1991) [4] encontra um valor ótimo de AFAC = 0,95
para aplicações na Mecânica de Rochas. Se a relação (3.57) se mantiver, o valor do
fator global de amortecimento deve ser corrigido em:
MUL
corrigido Aαα = (3.63.a)
Caso contrário:
MULcorrigido A⋅= αα (3.63.b)
Onde AMUL é uma constante para promover os ajustes de α. Comummente AMUL
≅ 1,1.
3.2.1.2. Estabilidade Numérica
Figueiredo (1991) [4] faz um estudo detalhado sobre as condições de
estabilidade numérica do MRD, demonstrando as mesmas limitantes que garantem a
estabilidade numérica feitas por Cundall em 1979.
Considerando o sistema amola-amortecedor com um só grau de liberdade,
Cundall [41] determina que o valor de passo de tempo crítico é:
{ }{ }MAXTN
MINCRITICO KK
mmdt
,,
2 21= (3.64)
Mas sabe-se que o sistema possui mais graus de liberdade (são vários pontos
de contato com sistema amola - amortecedor por cada contato). Por cada pondo de
contato deste tipo é lógico pensar que o sistema tende a enrijecer-se, pelo que o
passo de tempo tende a ser ainda menor ao dado pela equação (3.59). Para isso,
alguns pesquisadores propõem um valor limite para o passo do tempo considerando
a equação anterior:
CRITICOFRACADOTADO dttdt ⋅≤ (3.65)
Cundall [45] recomendou que fossem adotados valores de tFRAC não maiores a
0,1. Na verdade, para um sistema dinâmico linear com amortecedor, o tempo crítico
vem dado por [50]:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 3: Método de Elementos Discretos na simulação de corridas de detritos 90
( )εε −+⋅≤ 2* 12Kmdtcrítico (3.66)
0/
/
2 tKC
TN
TNcritico
∆⋅⋅=ε (3.67)
( )εε −+∝∴ 21FRACt (3.68)
Uma extensão tridimensional deste método foi apresentada por Cundall em
1988 [44], [45] para uma aplicação em maciços rochosos. Uma adaptação deste método
para partículas esféricas é apresentada no Anexo IV.
Esta versatilidade dimensional é uma das principais vantagens do DEM respeito
a outros métodos numéricos, pois suas leis físicas são de fácil extensão de dois a
três dimensões sem precisar de ferramentas ou métodos de integração numéricos
especiais. Uma outra característica do método é que sua lógica computacional é
simples comparada ao Método de Elementos Finitos, o que permite que o Método de
Elementos Discretos para simulações com grande número de partículas seja
modelado com a técnica de paralelização de ordenadores. Esta técnica permite que
um processo de fluxo granular seja simulado por dois ou mais computadores
simultaneamente, o que diminui o tempo de execução e a sobrecarga de memória.
Estas simulações são relativamente custosas, mas são baratas em comparação às
simulações deste tipo com FEM ou elementos de contorno.
A aplicação do Método de Elementos Discretos em Geotecnia é relativamente
recente, mas parece ser promissório no avanço do entendimento fundamental do
comportamento dos materiais porosos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 4 IMPLEMENTAÇÃO COMPUTACIONAL NA SIMULAÇÃO DE CORRIDAS DE DETRITOS
4.1. Estruturação básica do programa SAND
O programa SAND foi desenvolvido para aplicação a problemas relacionados à
produção de areia em poços de petróleo [3] considerando fluxo mono e bifásico. Na
verdade, SAND é a extensão gráfica de uma biblioteca programada na linguagem C++
que analisa os dados de entrada ao programa e faz os cálculos respectivos.
Usando a programação orientada a objetos (POO), Campos et al (2002) [3]
desenvolveram uma biblioteca (DEMlib) com a idéia de implementar o DEM e que de
vez facilitasse a manutenção e extensão da mesma para sua aplicação a outros
problemas relacionados com este método. Usando a definição de objetos, elementos e
classes [52], [53] conseguem-se atingir as mais diversas condições e geometrias dos
problemas a serem tratados com este método numérico. Assim, a biblioteca DEMlib
consiste em um conjunto de classes que definem objetos básicos que são usados na
implementação do DEM e uma extensão gráfica como já se mencionou.
SAND foi programado nas linguagens C e C++, com o toolkit de interface
IUP/LED e o sistema gráfico CD, proporcionando as seguintes facilidades:
• Interface gráfica para visualização dos passos de análise.
• Definição interativa das paredes que definem as condições de contorno do
problema e dos discos que representam o meio granular.
• Visualização das forças de contato e atuantes no centróide de cada partícula.
• Interface com a linguagem de programação interpretada LUA, que permite a
geração de discos com dimensões definidas segundo as regras definidas pelo
usuário.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 92
FIGURA 4.1- Interface gráfica do Programa SAND mostrando os contatos entre elementos.
De forma geral, pode-se falar que o programa SAND segue a metodologia
descrita no capítulo anterior para a implementação do DEM. Uma forma simplificada e
seguida no desenvolvimento do mesmo programa se mostra a continuação.
FIGURA 4.2- Etapas de implementação computacional do DEM.
4.1.1. Geometria das Partículas.
Nesta etapa consideram-se duas etapas. A primeira relacionada com a geração
da geometria dos elementos discretos e a determinação das propriedades geométricas.
A segunda referida à geometria dos anteparos (paredes) de escoamento ou condições
de contorno.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 93
A geração das partículas é feita com uma rotina simples que permite a geração
de uma malha regular ou densa. Aliás, permite-se gerar uma malha com diâmetro e
densidade variáveis (Vede FIGURA 4.3). O arquivo de saída está formatado para o
programa de interface LUA 5.0 que é utilizado pelo SAND para ler ditas propriedades.
FIGURA 4.3- Esquema para a geração de elementos discretos.
De forma geral, o programa armazena estas informações no objeto BLOCK que
representa um elemento discreto genérico (Vede FIGURA 4.4). As principais
características contidas neste objeto são: área, volume, inércia, coordenadas do
centróide, velocidade e deslocamentos do elemento. Métodos particulares de cálculo
de algumas propriedades segundo o tipo de partícula são contidas nas classes PBlock
e DBlock.
FIGURA 4.4- Hierarquia de classes para a definição geométrica do elemento discreto.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 94
Por outro lado, estabelecem-se as condições do contorno do problema definindo
os anteparos dos elementos discretos. Num início, SAND foi desenvolvido para o caso
de poucos anteparos confinantes, geralmente em forma de caixote. Os primeiros
elementos criados foram segmentos retos, polígonos e arcos de círculo. Estas classes
estão contidas no objeto WALL (Vede FIGURA 4.5).
Este trabalho incorpora uma nova sub-rotina para representar uma função curva
bidimensional mediante o algoritmo de interpolação curva spline cúbica. Foi
programada a sub-rotina SPLINE que segmenta a função cúbica, considerando a
definição de curvatura (κcurv) admissível em cada ponto (κcurv ≤ 0.25), em segmentos
lineares de menor tamanho conseguindo uma representação curva de um elemento de
parede. O arquivo de saída é formatado para ser usado pela classe LWall.
FIGURA 4.5- Hierarquia de classes para a definição dos tipos de anteparos no programa SAND.
O uso das Spline cúbicas se justifica respeito a outras ordens, pois os pontos de
inflexão para maiores ordens não fazem diferença visual apreciável e estes não se
apresentam em ordens menores pelo que dificulta a continuidade [54]. Em geral, uma
curva spline cúbica Sn3(x) tem as seguintes características [55]:
• É um polinômio cúbico para cada par sucessivo de pontos do conjunto total de
pontos dados n.
• A primeira e segunda derivada desta função são continuas no intervalo de
estudo.
• A tangente final em cada intervalo é igual à tangente inicial do intervalo
seguinte.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 95
• É preciso conhecer uma condição inicial para poder resolver o sistema de
incógnitas (coeficientes do polinômio cúbico). Se a segunda derivada do ponto
inicial ou final do conjunto for conhecida e nula, diz-se condição de contorno
natural. Se a tangente do ponto inicial ou final do conjunto for conhecida e não
nula, diz-se de condição de contorno fixa.
O algoritmo usado se mostra de forma esquemática na FIGURA 4.6.a e FIGURA
4.6.b. Maiores detalhes sobre este algoritmo são apresentados no Anexo V.
FIGURA 4.6.a- Esquema da rotina SPLINE.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 96
FIGURA 4.6.b- Esquema da rotina SPLINE (continuação).
Desta forma, representa-se qualquer tipo de curva mediante certo número de
segmentos lineares de tamanho variável segundo a curvatura do ponto em estudo.
Uma saída típica do programa SAND do algoritmo anterior se mostra na seguinte figura.
(a) (b)
FIGURA 4.7- Representação gráfica de anteparo (a) linear (b) Spline cúbico linearizado com 5 segmentos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 97
Existem alguns outros algoritmos de curvas spline até de quinta ordem
propriamente dito, ainda que a teoria permita ordens maiores estas são referidas a
outros algoritmos mais eficientes como polinômios de Hermite, polinômios de Bézier,
polinômios de Berstein ou NURBS [54]. Estes métodos são recomendados para
interpolações de curvas ou superfícies tridimensionais que representam o terreno.
4.1.2. Detecção de Contatos.
Uma vez conhecida a geometria do problema é preciso avaliar a potencial
existência de contato entre elementos e calcular dito ponto poder aplicar as leis físicas
respectivas. Esta é a etapa crítica do DEM, pois o algoritmo utilizado para a detecção
determina o tempo de cálculo e a capacidade de memória dinâmica consumida. Por
exemplo, para um arranjo de N partículas, o número de iterações uma a uma a serem
feitas para conferir a existência ou não de contato é de N(N-1)/2, pelo qual é preciso
algoritmos mais eficientes [24]. Aliás, o problema complica-se ainda mais para
geometrias não-circulares de partículas e paredes de forma irregular em grande
número.
Este problema tem sido objeto de estudo em aplicações de modelagem
geométrica, gráfica computacional e robótica [56]. Este processo usualmente é feito em
duas etapas. A primeira identifica o par de objetos que poderiam potencialmente estar
em contato em um determinado passo de tempo. As técnicas mais usadas têm sido a
da cela adjacente (consome muita memória) e da partícula mais próxima (para arranjos
grandes não é recomendado) as que são chamas de técnicas binárias pelo tipo de
estrutura encadeada de dados com que são programadas (Vede ANEXO VI).
Recentemente, a triangulação dinâmica tem mostrado alguns resultados muito
satisfatórios, mas é de uma alta complexidade programática [24], [56]. Para este efeito,
SAND originalmente usando a técnica da cela adjacente subdivide o domínio total do
problema geométrico em unidades menores (box) para reduzir o tempo de cálculo e o
aumento da memória armazenada na busca potencial de contactos entre partículas
muito distantes. Estes subdomínios são representados por caixas bidimensionais com
dimensões estabelecidas pelo usuário, mas como mínimo devem ser maiores o iguais
ao menor diâmetro existente de partícula. Caixas muito grandes ou muito pequenas
não são escolhas eficazes para reduzir o tempo de cálculo [56]. Desta forma, cada
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 98
partícula é referida a cada subdomínio com uma lista contendo também a localização
dos seus potenciais vizinhos. Na segunda etapa se verifica se o contato entre ditas
partículas existe usando o critério da equação (3.17). Logo depois se procede a
determinar o ponto de contato para efeitos de determinar as forças atuantes que
dependem da magnitude da interposição entres partículas.
A partir desta subdivisão o programa determina o tipo de contato, seja este entre
partícula-partícula ou partícula-anteparo como se mostra na FIGURA 4.8. Antes de
determinar o tipo de contato deve-se conferir a existência real do mesmo. Este
processo é dinâmico e demorado pelo que o consumo de memória é alto.
FIGURA 4.8- Etapas na detecção de contatos seguindo as hierarquias de objetos usadas no SAND.
Uma coisa importante de destacar é o fato de que o tempo de CPU na procura de
contatos é independente da distribuição espacial das partículas ao igual que o
armazenamento de memória [57].
Neste trabalho é usado o algoritmo de Munjiza de procura não-binária (NBS) [57].
Este método se baseia num mapeamento das partículas contidas numa janela por
colunas ou celas verticais (dimensão ny) cujas entradas contêm a primeira partícula
contida em cada cela. Logo, é feito um mapeamento das partículas em celas
horizontais (dimensão nx). A detecção dos contatos a partir da cela (i,j) realiza-se nas
celas adjacentes (i-1, j), (i-1, j-1), (i, j-1) e (i+1, j-1) e não em todas as celas adjacentes
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 99
como se faz nos métodos tradicionais. Desta forma o tempo diminui de Φ(N2) a
Φ(N⋅(Rmax/Rmin)2 ) [57].
FIGURA 4.9- Sistema de celas usado na busca de contatos segundo o algoritmo Mujinza.
Para determinar os possíveis contatos numa cela procuram-se a partir do
elemento j da cela ny as partículas contidas na cela nx. Nesta última cada partícula está
referida à seguinte partícula (por isto é chamada não-binário) contida na cela onde é
realizada a busca de possíveis contatos. Uma vez achadas as possíveis partículas
candidatas a estarem em contato se verifica a condição da equação (3.17) para
descartar contato provável de contato real. O tamanho das celas (nx, ny) deve ser como
mínimo 3 Rmin para garantir ao menos uma partícula em cada cela. A janela
(searching window) deve ter um tamanho mínimo de 2⋅Rmax.
FIGURA 4.10- Exemplo de detecção de contatos na cela (i,j) segundo o algoritmo de Mujinza.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 100
De forma geral, o ciclo do algoritmo de Mujinza é descrito como segue:
FIGURA 4.11- Ciclo de cálculo para determinar velocidades e deslocamentos das partículas a partir da
detecção de contatos seguindo a algoritmo Mujinza e sua relação com a etapa de aplicação das leis
físicas.
Por outro lado, para incluir os paramentos lineares dentro deste algoritmo devem-
se considerar os pontos extremos que definem dita reta como uma entidade só. O
problema é que uma linha contida na janela de procura estará contida
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 101
simultaneamente em várias celas. Propõe-se aqui um algoritmo de mapeamento de
paramentos com igual formato do que o usado para mapear as partículas. Mas neste
caso, os pontos iniciais do segmento linear definem os vértices opostos de uma área
retangular que será identificada como a linha dentro da janela de procura de contatos.
Deste jeito a procura de contato partícula-paramento se limita para aqueles
paramentos contidos dentro da janela de procura e não se faz procura entre todos os
paramentos como estava a rotina original, reduzindo o tempo de execução. Para
compreender melhor o algoritmo, vede a seguinte figura.
FIGURA 4.12- Esquema de programação do mapeamento dos paramentos para seu uso no algoritmo de
Munjiza .
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
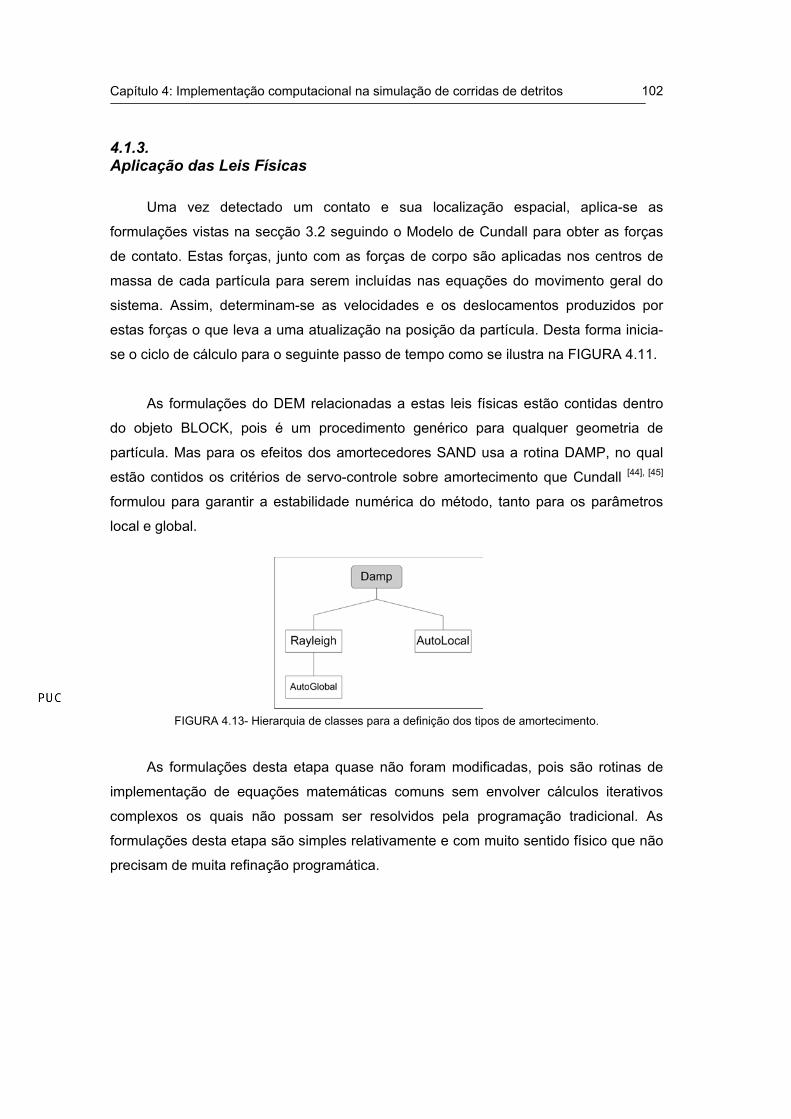
Capítulo 4: Implementação computacional na simulação de corridas de detritos 102
4.1.3. Aplicação das Leis Físicas
Uma vez detectado um contato e sua localização espacial, aplica-se as
formulações vistas na secção 3.2 seguindo o Modelo de Cundall para obter as forças
de contato. Estas forças, junto com as forças de corpo são aplicadas nos centros de
massa de cada partícula para serem incluídas nas equações do movimento geral do
sistema. Assim, determinam-se as velocidades e os deslocamentos produzidos por
estas forças o que leva a uma atualização na posição da partícula. Desta forma inicia-
se o ciclo de cálculo para o seguinte passo de tempo como se ilustra na FIGURA 4.11.
As formulações do DEM relacionadas a estas leis físicas estão contidas dentro
do objeto BLOCK, pois é um procedimento genérico para qualquer geometria de
partícula. Mas para os efeitos dos amortecedores SAND usa a rotina DAMP, no qual
estão contidos os critérios de servo-controle sobre amortecimento que Cundall [44], [45]
formulou para garantir a estabilidade numérica do método, tanto para os parâmetros
local e global.
FIGURA 4.13- Hierarquia de classes para a definição dos tipos de amortecimento.
As formulações desta etapa quase não foram modificadas, pois são rotinas de
implementação de equações matemáticas comuns sem envolver cálculos iterativos
complexos os quais não possam ser resolvidos pela programação tradicional. As
formulações desta etapa são simples relativamente e com muito sentido físico que não
precisam de muita refinação programática.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 4: Implementação computacional na simulação de corridas de detritos 103
4.1.4. Visualização
Seguindo a metodologia do ciclo de cálculo do DEM, só falta a visualização do
processo. As principais feições que podem ser mostradas no programa SAND são: os
contatos (link), as velocidades, os deslocamento e forças de contato. O ciclo da
atualização visual difere da etapa dos cálculos e geralmente usa-se freqüência maior à
da etapa numérica. Tipicamente é de 10dt a 500dt para mostrar um ciclo.
FIGURA 4.14- Esquema da atualização das variáveis no ciclo de cálculo.
Nesta fase fizeram-se mais aplicações do que implantações importantes como,
por exemplo, mostrar estratigrafia simbólica para ver efeitos de segregação e dos
parâmetros de amortecimento. Esta parte não deixa ser parte importante do processo,
pois uma análise de dados com DEM sem parte visual não tem sentido nenhum. O
problema radica para aplicações tridimensionais a grande escala o com muito detalhe
do fenômeno a ser simulado.
Outras rotinas implementadas no programa SAND estão relacionadas à extração
de informação durante a execução do programa como perfis de profundidade de fluxo,
velocidades e seguimento de uma partícula de interes. Toda modificação feita no
programa tem sido relatada de forma simples neste apartado com a intenção de que
sejam constatadas e consideradas em futuros trabalhos com este método.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 5 RESULTADOS E DISCUSSÕES
5.1 Resultados
Foram realizadas vinte e seis simulações as quais consideram variação nos
valores dos parâmetros de entrada do modelo quanto na configuração geométrica da
superfície de escoamento e no tamanho das partículas. Considerando a ausência de
um caso de comparação, escolheu-se uma destas configurações de parâmetros
como a configuração patrão para comparação. Estas simulações são feitas com a
intenção de avaliar intervalos de validade dos parâmetros assim como a idoneidade
da simulação para representar feições e mecanismos das corridas de detritos.
Além destas simulações, foram feitos alguns exemplos de aplicação simulando
algumas condições comuns de ocorrência destes fenômenos.
5.1.1 Condições Padrão
O perfil patrão tem superfície de escoamento linear, escolhido de forma
arbitrária, mas seguindo configurações similares às consultadas nas referências
bibliográficas. Os parâmetros patrões para os dados de entrada são:
• Razão KN/KT = 1,0 com KN = 1x105 N/m*.
• Densidade de partículas 2,5 ton/m3.*
• tFRAC de 0,1.
• Coeficiente de atrito µ= 0,1 (∼ 5,7°).
• fT de 300 Hz usando o método de amortecimento local (recomendado para
sistemas rígidos).
• 4022 partículas de raio constante de 3 m.
* Estes valores estão proporcionados, pois os valores reais são 1x108 N/m e 2500 N/m3.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 105
(a) Perfil linear patrão usado na simulação das diferentes configurações de parâmetros.
(b) Principais feições topográficas simuladas com o perfil patrão.
(c) Perfil spline patrão linearizado a partir de quatro segmentos usado na simulação de corridas.
FIGURA 5.1- Perfis patrões utilizados na avaliação de parâmetros de entrada do programa SAND.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 106
O perfil patrão permite simular as diferentes zonas de ocorrência [9] das corridas
descritas na secção 2.2.
Mas também, aplicou-se um perfil spline linearizado com 4 segmentos (número
de segmentos considerados na interpolação da curva cúbica spline).
A massa instável para todas as configurações é a mesma, isto é que o
paramento baixo a massa é o mesmo para o caso linear e spline. O mesmo acontece
para o caso de 4022 e 8500 partículas.
Também, simularam-se camadas de material usando diferentes cores para
efeitos de avaliar feições como segregação, fluidificação e outras feições
taxonômicas de corridas como identificação da cabeça, corpo e cola do fluxo.
5.1.2 Parâmetros em consideração
Em alguns casos puderam-se detectar algumas limitantes conferindo a validade
de alguns valores de parâmetros discutidos em trabalhos anteriores [3], [4], [5], [39], [41];
para serem consideradas em futuras modificações e aplicações do programa. Os
parâmetros avaliados foram:
Parâmetro Símbolo Intervalo de Variação Freqüência
(Amortecimento autolocal) fT 50-900 Hz
Coeficiente de amortecimento (Amortecimento autoglobal) αc 0,3-0,9
Rigidez Normal (KN/KT= 1,0) KN 103-107 N/m
Rigidez Tangencial (Razão KN/KT variável) KN/KT 3
2 -1
Fração de tempo critico tFRAC 0,01-0,1
Atrito interno µ 0,0-0,1
Atrito (partícula/paramento) µd/µp
0,1/0,3 0,03/0,1 0,1/0,03
Tipo de superfície - Linear Spline linearizada
Número de partículas N 4022 com raio constante 8500 com raio entre 1,5 a 3,0 m
Tabela 5.1- Principais parâmetros avaliados na idoneidade da simulação de corridas do programa SAND.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 107
1. Tipo de Amortecimento
O primeiro parâmetro analisado foi a freqüência fT do método autolocal, variada
entre os valores de 50, 100, 200, 300, 600 e 900 Hz. Notou-se que a maior freqüência
a massa apresentava um comportamento mais fluido pelos patrões registrados nos
perfis de profundidade e velocidade. Mas o tempo de execução destes seis perfis foi
muito similar entre 2 a 3 horas.
Enquanto ao parâmetro autoglobal (αc), este mostrou problemas na
determinação de contatos, para os valores testados de 0.3, 0.5, 0.7 e 0.9. Em
determinado ciclo, algumas partículas experimentavam uma força de contato muito
grande pelo qual no seguinte passo de tempo estavam muito separadas mantendo o
contato (link) anterior. Este problema se pôde corrigir reduzindo a fração de tempo
crítico o que aumenta o tempo de execução ou aumentando o tamanho das celas de
procura que foi considerada uma solução fácil, mas menos técnica.
2. Rigidez
Diminuindo a rigidez nos contatos se produz um colapso das partículas sob o
seu próprio peso. Então existe uma relação direta e de dependência entre densidade
e rigidez.
No caso contrário apresenta-se o problema similar ao do amortecimento
autoglobal, o sistema ao ser tão rígido de um passo de tempo a um outro, as
partículas se transmitem grandes forças pelo que se apresentam deslocamentos
exagerados entre partículas alterando o fluxo natural delas. Neste caso, uma solução
válida é o aumento da densidade ou diminuição da fração de tempo crítico como se
mencionou anteriormente, mas com o inconveniente do aumento do tempo de
execução.
Quando se variou a razão entre as rigidezes, não houve modificação importante
nos tempos de execução. Uma modificação importante deu-se na configuração dos
perfis de profundidade e velocidade como era esperado, pois a menor rigidez o fluxo
tende a apresentar comportamento de fluxo laminar com velocidade baixa e similar.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 108
3. Fração de tempo crítica
Constatou-se que ao diminuir este parâmetro evita-se alterações devidas aos
grandes deslocamentos que algumas partículas podem experimentar a causa de
grandes valores nas forças de contacto entre um ciclo e outro. Mais para determinado
valor desta fração, o sistema demora demais como para conseguir convergência até
o final da simulação. Este parâmetro é crítico na aplicação do método e do qual se
tem pouca informação qualitativa.
Toda bibliografia consultada usava uma magnitude inferior aos 10%
recomendado por Cundall sem uma justificativa clara. Na verdade este parece ser o
parâmetro inicial de calibração do modelo para cada simulação, que infelizmente
depende da massa e rigidezes usadas.
Um outro ponto de aclaração é o fato da relação entre o tamanho da cela de
procura de contatos e esta fração, pois no caso de 1% do tempo crítico se obteve
bons resultados para celas maiores aos dois raios mínimos, mas o tempo de
execução se aumenta significativamente. Os resultados mais aceitáveis foram para
frações entre 0,1 e 0,05 usando o mesmo tamanho de cela na procura de contatos
(2Rmin). Para tamanho de celas menores esta fração deve ser diminuída.
4. Atrito
Este parâmetro altera diretamente a cinemática das partículas. Suas alterações
importantes se notam na configuração da superfície da corrida e velocidades. Um fato
importante de notar foi que a menor ângulo de atrito maior é o tempo de execução da
simulação, pois a atribuição de forças cisalhantes nos contatos diminui, ficando o
deslocamento vertical regido pelo desequilíbrio entre as forcas de gravidade e forças
normais dos contatos.
Para simular o fato de que uma corrida acontece sobre uma superfície rugosa
ou com baixa rugosidade, executaram-se simulações onde o atrito entre o contato
partícula-partícula (µd) era diferente e menor ou maior ao existente entre partícula-
paramento (µp). Ao aumentar µp se aumenta o atrito paramento-partícula, dificultando
o deslocamento das camadas superiores como o efeito de um pingo de mel sobre
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 109
uma folha seca. No caso contrário, ao diminuir dito valor a camada em contato direto
com o paramento serve como camada de lubrificação para o resto das camadas
como o efeito do pingo de mel sobre uma folha umedecida. Com estas variações
simularam-se os fenômenos de fluidificação, segregação e dilatação descritas na
secção 2.2.4.7.
5. Tipo de superfície
Variando o tipo de superfície tentou-se avaliar a idoneidade do programa para a
simulação de superfícies muito irregulares e com grande número de segmentos, em
especial o algoritmo desenvolvido para a procura de contacto entre partículas e
paramentos para reduzir o tempo de procura destes contatos.
Seguindo as feições geradas nos perfis de profundidade entre ambos os tipos
de superfície, ficou evidente que as curvas spline linearizadas permitem obter
configurações tanto de distribuição de velocidades e profundidade mais acordes ao
descrito nas secções 2.2.2, 2.2.3 e 2.2.4. Como por exemplo, identificação total de
estratos ou camadas quando a superfície, perfis de profundidade menos
quebrantados e suaves devidos à mudança gradual da pendente do terreno.
6. Número de Partículas
Com as variações consideradas tentava-se avaliar as idoneidades do SAND
para simular o processo de sedimentação das partículas para obter a massa instável
inicial assim como a idoneidade do algoritmo de procura de contatos partícula-
partícula e partícula-paramento.
Neste caso os fenômenos de segregação foram mais contrastantes, pois ao
aumentar o numero de partículas com variação no raio, o acomodo do material
durante a sedimentação, fluxo e deposição foram com superfícies suaves
conseguindo configurações mais densificadas. Com isto, acredita-se que ainda se
esteja simulando a massa com elementos discretos, estes tendem a simular uma
massa mais homogênea e densa.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 110
Este fato não implica que para distribuições não-compactas de partículas o
modelo não seja representativo. Nesta aplicação em particular, devido à escala da
simulação em que um elemento discreto representa uma mistura de material sólido e
líquido, as propriedades do material misturado ficam regidas pelas magnitudes dos
parâmetros do modelo numérico. Aliás, estes parâmetros não estão correlacionados
de forma direta com propriedades físicas reais do material pelo que qualquer valor
que garanta estabilidade e convergência numérica tecnicamente é aceitável. É claro
que a intuição indica que entre menor for o tamanho dos elementos mais próximos ao
caso de médio contínuo, mas a um custo muito alto de consumo de memória e tempo
de execução ainda os cálculos pareçam mais simples dos que os realizados por
outros métodos numéricos como FEM.
5.1.3 Aplicação da metodologia do DEM
Seguindo a metodologia descrita na secção 1.3.2 e 4.1 sobre o Método de
Elementos Discretos, se mostram as principais observações.
1. Geração da malha inicial de partículas e massa instável inicial
Para gerar a massa inicial usa-se o processo de sedimentação em camadas.
(Vede FIGURA 5.2) Quando as partículas sedimentam inicia-se o processo de
reacomodo delas ou densificação. Durante este, notou-se a formação de algumas
feições próprias dos materiais geológicos como falhas pelo peso próprio das
camadas inferiores devidas às camadas superiores durante o processo. Uma outra
característica notada, ainda tentando garantir a distribuição mais densa possível, é
que as camadas inferiores sofreram interposições partícula-partícula maiores que as
superficiais. Isto é que usando este processo para grandes números de partículas é
impossível obter uma configuração muito densa e sem interposição grande de
partículas, mas para os propósitos deste trabalho este fato não afeta grandemente os
resultados.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 111
FIGURA 5.2- Processo de sedimentação e densificação das partículas na geração da massa instável
inicial para a simulação da corrida.
Antes de iniciar a corrida, todas as forças nos contatos são zeradas (forças,
velocidades, deslocamentos, etc.) e as interposições existentes nos primeiros ciclos
de execução geram forças de contato pré-existentes previas à corrida.
Enquanto a geração dos paramentos com curvas spline cúbicas linearizadas,
notou-se que a linearização com quatro ou cinco segmentos dava bons resultados.
Números menores não modificam muito os resultados respeito à configuração linear e
maiores só aumentam o tempo de procura de contatos partícula-paramento, sem
melhoras na configuração final de partículas.
2. Simulação da corrida e visualização de variáveis.
Seguindo a metodologia do DEM, se seguem duas etapas: detecção de
contatos e aplicação das leis físicas. Estes processos se analisam indiretamente e
em conjunto, analisando as feições registradas nos perfis de profundidade e
velocidade assim como a visualização gráfica. Aqui se mostrarão os resultados
obtidos para a configuração patrão, os das outras configurações foram obtidos com
procedimentos similares e comparados com os da configuração patrão e somente
alguns deles mostrar-se-ão.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 112
1. Perfis de Profundidade.
O programa permite determinar um perfil de profundidades cada determinado
ciclo para um número determinado de pontos, neste caso foi 30 pontos ao longo do
comprimento da massa em movimento. Para o caso patrão perfilaram-se ditas feições
cada 2000 ciclos que para o caso de partículas de igual diâmetro é equivalente a um
intervalo de dt ≅ 5,32 s. Destes perfis observa-se o tipo de superfície desenvolvida na
zona de fluxo (Vede FIGURA 5.1.b), a qual foi comparada com as feições descritas
na FIGURA 2.5.
Notando da FIGURA 5.3 que o fluxo pode ser classificado do Tipo 3, segundo a
classificação dada na secção 2.2.3 e pelos valores de velocidade registrados como
se verá mais adiante eram maiores a 3 m/s.
Comparando os perfis finais das diferentes configurações pode-se dizer que
para os diferentes valores de freqüência fT utilizados no método de amortecimento
autolocal, o alcance ou distancia horizontal percorrida pela massa desde o início da
zona de deposição diminui significativamente para valores cada vez maiores de fT.
Por outro lado, ao reduzir a razão de rigidezes (KN/KT), o alcance tende a
aumentar para as razões menores num tempo de execução menor à configuração
patrão. No caso da influência do atrito tem-se que a menor ângulo de atrito, o alcance
tende a ser maior, mas para chegar ao repouso o processo é demorado.
Em quanto ao tipo de superfície, sob superfícies spline cúbicas linearizadas a
massa consegue um alcance maior em um tempo de execução significativamente
menor à configuração patrão.
Estas relações são essenciais para considerar em simulações de retroanálises
de casos reais ou em futuras aplicações na planificação territorial, pois o alcance das
corridas é o parâmetro mais importante e significativo destes fenômenos, assim como
a profundidade e velocidade.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 113
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 114
Respeito ao formato da superfície na zona de fluxo das corridas notou-se que
ao aumentar a freqüência fT a superfície tende a passar do fluxo Tipo 3 a Tipo 2,
segundo a classificação de Takahashi. Quando se reduz a razão de rigidezes
acontece o mesmo, mas neste caso as feições são mais marcadas do que com a
variação de freqüência para o caso de amortecimento local. Por outro lado, quando
se reduz o atrito, a tendência neste caso é passar da corrida Tipo 3 à Tipo 1.
No caso em que a superfície de escoamento é uma curva spline linearizada a
corrida se classifica claramente como Tipo 1 . Mas quando o tamanho de partículas
não é constante se acontece um melhor acomodo delas quando em movimento,
então a corrida pela feição da superfície é classificada como Tipo 1.
FIGURA 5.4. Classificação do fluxo segundo o perfil de profundidade para algumas configurações. Perfil
(a) Tipo 2, (b) Tipo 2, (c) Tipo 2 e (d) Tipo 1.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 115
Mas como acontece na prática a classificação das corridas pelo perfil é difícil.
Alguns destas classificações complementaram-se com os valores de velocidade
seguindo os critérios dados na TABELA 2.7.
2. Segregação.
O fenômeno melhor representado e do qual não se tem muita referência é a
segregação que é precisamente o grande lance do DEM, assim como a dilatação
sem ter que recorrer a formulações nem alterações complexas nas relações básicas
do modelo numérico.
Estratificando a massa instável inicial em camadas coloridas observou-se a
segregação que se acontece nas primeiras camadas em contato com a superfície de
escoamento do mesmo jeito que se observou o processo de segregação com a
mudança de pendente como se mostra na FIGURA 5.6.
É importante notar que depois do movimento da massa é possível identificar
estratos seguindo o patrão da massa inicial como foi descrito na secção 2.2.4. Este
fato é de essencial importância para os geólogos e geógrafos para identificação e
estipulação das velocidades e movimentos internos da massa. Além disso, permite a
clara identificação das feições taxonômicas de uma corrida como se mostra na
FIGURA 5.6.(d).
Observou-se que para partículas de tamanho variado sobre superfície de
escoamento spline linearizada se produz o menor efeito de segregação das camadas.
Porém, para valores em aumento da freqüência fT o efeito diminui, pois parece que as
camadas são mais flexíveis (as partículas são mais amortecidas), evitando grandes
deslocamentos que causariam a segregação de algumas partículas.
3. Perfis de Velocidade
Os perfis de velocidade são usados como medidas qualitativas do
comportamento reológico da massa do fluxo, ainda que não exista uma relação clara
entre os parâmetros de entrada do modelo DEM e os modelos reológicos tradicionais.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 116
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
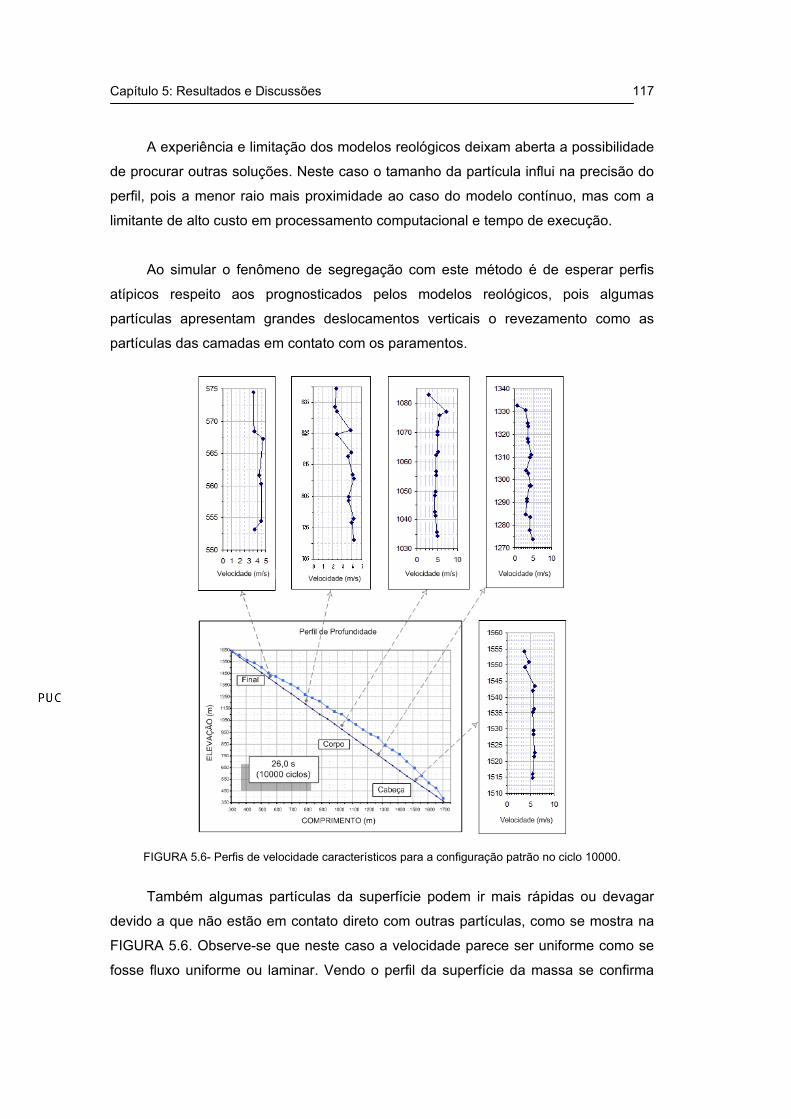
Capítulo 5: Resultados e Discussões 117
A experiência e limitação dos modelos reológicos deixam aberta a possibilidade
de procurar outras soluções. Neste caso o tamanho da partícula influi na precisão do
perfil, pois a menor raio mais proximidade ao caso do modelo contínuo, mas com a
limitante de alto custo em processamento computacional e tempo de execução.
Ao simular o fenômeno de segregação com este método é de esperar perfis
atípicos respeito aos prognosticados pelos modelos reológicos, pois algumas
partículas apresentam grandes deslocamentos verticais o revezamento como as
partículas das camadas em contato com os paramentos.
FIGURA 5.6- Perfis de velocidade característicos para a configuração patrão no ciclo 10000.
Também algumas partículas da superfície podem ir mais rápidas ou devagar
devido a que não estão em contato direto com outras partículas, como se mostra na
FIGURA 5.6. Observe-se que neste caso a velocidade parece ser uniforme como se
fosse fluxo uniforme ou laminar. Vendo o perfil da superfície da massa se confirma
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 118
dito comportamento e mais por que a massa escoa numa superfície de pendente
constante.
Lembre-se que ditos perfis são medidas qualitativas do comportamento
reológico da massa em movimento. Para uma configuração obtiveram-se estes perfis
para cada perfil de profundidade e pela irregularidade do trajeto resultaram diversos
perfis de velocidade que variam o comportamento reológico da massa com o tempo.
O importante aqui é notar que se dispõe de uma ferramenta para conferir esse
comportamento qualitativamente sem ter que usar modelos complexos.
5.2 Exemplos de Aplicação
5.2.1. Exemplo com superfície irregular complexa
Aplicou-se o valor padrão dos parâmetros de entrada aplicado a uma superfície
irregular complexa (Ver FIGURA 5.7) para simular uma corrida. Durante a simulação
observaram-se os seguintes fatos:
• No trecho de ocorrência o fluxo adquiriu as máximas velocidades, sendo estas de
até 17 m/s.
• No patamar depositou-se a maioria do material, este tem gradiente nulo reduzindo
ao máximo a capacidade de transformar a energia potencial da massa em cinética,
fato que explicaria a sedimentação quase total do material. No processo de
deposição se conservam muito bem as feições das camadas (estratigrafia) e
quase não se apresenta segregação na massa.
• No seguinte trecho inicia-se um segundo processo de corrida, mas este é de
menor velocidade, maior segregação e menor espessura de fluxo até se acumular
um pouco deste material no início da zona de deposição. Neste caso, a
segregação é total e o material acumulado é misturado totalmente.
• O alcance na zona de deposição, a pesar de apresentar pouco material é
significativamente maior ao obtido no caso linear simples. Claro que a espessura
deste é pequena.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 119
FIGURA 5.7- Perfil irregular de exemplo na aplicação do programa SAND na simulação de uma corrida de detritos.
FIGURA 5.8- Perfis de profundidades para o exemplo de corrida detritos sobre uma superfície irregular
simulada com o programa SAND.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
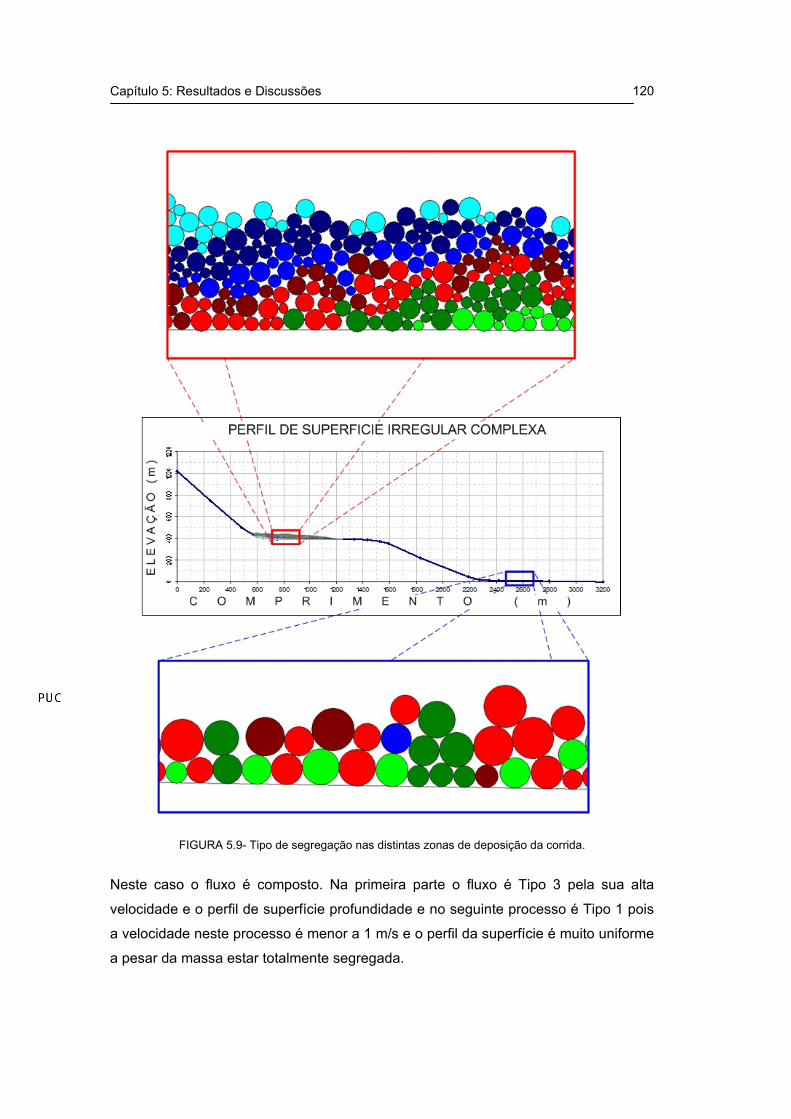
Capítulo 5: Resultados e Discussões 120
FIGURA 5.9- Tipo de segregação nas distintas zonas de deposição da corrida.
Neste caso o fluxo é composto. Na primeira parte o fluxo é Tipo 3 pela sua alta
velocidade e o perfil de superfície profundidade e no seguinte processo é Tipo 1 pois
a velocidade neste processo é menor a 1 m/s e o perfil da superfície é muito uniforme
a pesar da massa estar totalmente segregada.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 121
5.2.2. Exemplo com redução repentina no coeficiente de atrito
Para este caso usaram-se duas configurações: uma vertical e outra simulando
uma encosta com patamares. Em ambas as configurações simulou-se um coeficiente
de atrito inicial de 0,7 que é repentinamente reduzido a 0,25 valores correspondentes
a 35° e 15° respectivamente.
FIGURA 5.10- Configurações da massa instável usadas na simulação de redução repentina do
coeficiente de atrito.
Em ambos os casos, as magnitudes de velocidades obtidos são muito baixas,
não superam 1 m/s para os diferentes valores de freqüência fT usados (50, 100, 300 e
600 Hz). Neste caso o fluxo pode ser classificado como Tipo 1 segundo a
classificação de Takahashi.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 122
Por outro lado, os perfis de profundidade gerados são muito uniformes em
ambos os casos. Isto é que a profundidade da corrida ao longo da superfície de
movimento tende a ser constante o que confere a classificação dada a estas corridas
segundo os critérios de Takahashi.
Uma característica distintiva entre ambos as configurações é o fato de que no
primeiro caso a segregação da massa é mais apreciável do que no segundo caso.
Isto se explica pela maior capacidade que tem o primeiro caso (perfil vertical) de
poder transformar energia potencial em energia cinética como se descreve no
apartado 2.2.5.1. respeito ao segundo caso (perfil com patamar). Esta transformação
permite maior movimento interno das partículas produzindo os efeitos de segregação.
Também, note-se que no primeiro caso nem todo o material chega a se
movimentar, mas no segundo a massa toda escorrega no fluxo. Isto deve-se
principalmente a que no primeiro caso a mesma massa confina o material das
camadas inferiores em maior magnitudes do que no segundo.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
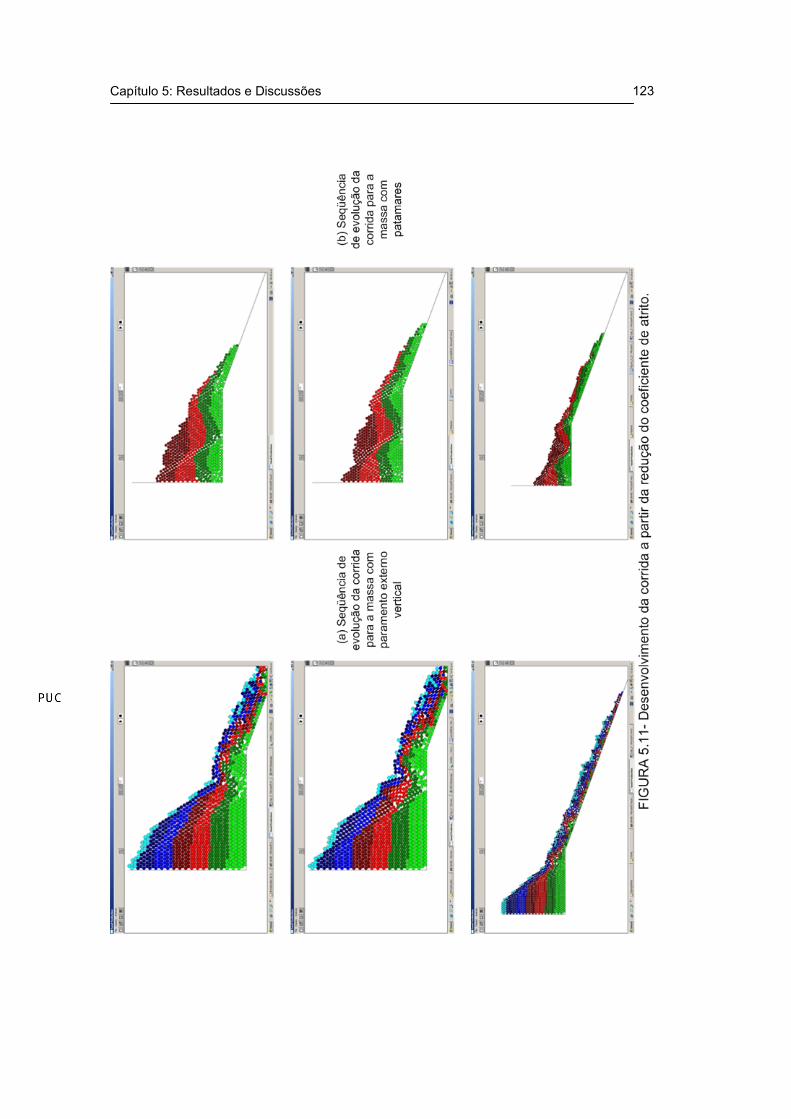
Capítulo 5: Resultados e Discussões 123
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 5: Resultados e Discussões 124
5.3 Discussão de Resultados
Dos parâmetros de entrada do programa que podem ser correlacionados
qualitativamente com o comportamento reológico das corridas são a rigidez, o atrito e
o tipo de amortecimento.
Primeiramente, analisando a variação da rigidez normal (KN) mantendo uma
razão de rigidez constante (KN/KT = 1.0), valores inferiores a 105 N/m provocam o
colapso da massa sob o seu próprio peso. Para valores maiores, tem-se de diminuir a
fração de tempo crítica, pois o método diverge em determinado passo de tempo onde
as forças internas entre partículas são grandes provocando deslocamentos
exagerados destas.
Mas quando se varia a razão entre rigidezes, mantendo constante a rigidez
normal (KN= 105 N/m) e dentro do intervalo sugerido pelo Cundall [41] (ver equação
3.44.a) o método fica estável como este autor argumentou. Pode-se dizer que para o
maior valor desta razão (1.0) e o menor valor (2/3), a massa passa de um
comportamento viscoso a um menos viscoso ou plástico. Com os perfis de
profundidade e as magnitudes das velocidades máximas (3 m/s e 7 m/s
respectivamente) obtidas na zona de fluxo, seguindo a classificação de Takahashi
(ver seção 2.2.3) as corridas podem ser classificadas do Tipo 2 e 3 respectivamente.
Comparando com a tabela 2.4 as corridas são classificadas como fluxos
hiperconcentrados, dos quais as corridas de massa são uns deles.
Variando os valores para o atrito, o comportamento da massa pode-se
comparar mais com o comportamento de corrida de detrito ou lama. Os perfis de
profundidade e de velocidade para valores maiores a 0,1 produzem fluxos com
superfícies muito irregulares como os de Tipo 1 e Tipo 2, com velocidades menores
aos 2 m/s, e os fenômenos de segregação direta e inversa são muito característicos
na massa da corrida como se mostra nas figuras 5.5.a e 5.5.c. Por isso, considerando
as descrições dadas na seção 2.1.2, estas simulações estão correlacionadas com
corridas de detritos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
Capítulo 5: Resultados e Discussões 125
Para valores menores a 0,1 no atrito as superfícies geradas são mais uniformes
ou com uma tendência a serem lisas seguindo o contorno dos paramentos.
Apresenta-se um comportamento similar a um líquido, os efeitos de segregação
quase que são desprezíveis, as velocidades na zona de fluxo chegaram a valores
muito altos como 11 m/s e apresentaram um alcance na zona de deposição maior às
simulações com valores maiores a 0,1. Estas simulações aqui podem ser
classificadas como do Tipo 3 da classificação de Takahashi e podem ser
considerados como fluxos de lama segundo as descrições da seção 2.1.2.
Mas com tudo isto, o parâmetro que mais modifica o comportamento da massa
é o tipo de mecanismo de amortecimento escolhido. Neste caso do tipo global
caracterizado pela freqüência fT. Para valores maiores aos 300 Hz, os perfis de
profundidade e de velocidade são típicos de massas viscosas a fluidas como o efeito
que produz a variação da razão de rigidez, mas neste caso as velocidades são muito
maiores entre 5 e 8 m/s. Os perfis podem ser identificados como de Tipo 2 e Tipo 3.
O alcance na zona de deposição destes é maior do que a produzida com valores de
atrito menores a 0,1. Os efeitos de segregação não são tão desprezíveis, são mais
visíveis do que no caso de valores menores a 0,1 de atrito.
No caso dos valores menores de freqüência, os perfis mudam caracterizando a
uma massa menos fluida, mais plástica. Os perfis neste caso são típicos das corridas
Tipo 1. Os efeitos de segregação são muito marcados dentro da massa em
movimentação quantos os produzidos com valores maiores a 0,1 de atrito. As
velocidades são baixas respeito ao caso anterior não passam de 1 m/s.
Nos casos anteriores, as revisões dos perfis de profundidade e de velocidade
foram feitos para o caso de paramentos lineares e de spline cúbica linearizada assim
como para partículas de igual raio quanto com variação de tamanho. Para a maioria
dos casos, foi necessário usar o perfil de spline cúbica linearizado com partículas de
tamanho variado para poder identificar melhor os tipos de corridas, pois nos outros
casos a mudança brusca no gradiente entre paramentos adjacentes afetava a feição
dos perfis de superfície de forma irregular. Então o uso de superfícies curvas
linearizada permitiu a identificação adequada das corridas e melhores simulações dos
mecanismos relacionados com corridas de massa.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

CAPÍTULO 6 CONCLUSÕES E RECOMENDAÇÕES
6.1 Conclusões
Uma vez provadas as rotinas implementadas e depois de se obter resultados
para alguns casos específicos, pode-se dizer que a metodologia do DEM é idônea
para a simulação de corridas de detritos. Este método permite simular algumas
feições físicas das corridas de maneira simples e sem muito cálculo numérico
complexo como é requerido em outras metodologias numéricas. A parte visual joga
um papel muito importante neste ponto, pois ao partir do conceito de partícula
fundamental o fenômeno deixa de ser visto de forma generalizada e podem-se
apreciar algumas irregularidades que outros métodos não permitem como a
segregação da massa, o efeito de fluidificação, o comportamento do material
superficial nas mudanças bruscas de pendente assim como os movimentos relativos
de um grupo de partículas respeito a outro. Nisto, diz-se que o método é considerado
eficaz, pois com um algoritmo regido por leis físicas simples consegue-se simular
feições de grande importância no estudo de corridas de detritos a um custo numérico
relativamente baixo. Mas também neste ponto poderia ser mais eficiente respeito a
outras metodologias numéricas que precisariam de programações complexas para
conseguir realizar ditas simulações.
Por outro lado, os parâmetros de entrada do método não são variáveis
complexas, mas podem apresentar confusão pelo fato de serem variáveis tomadas
de modelos físicos simples muito utilizados em outras áreas da Engenharia e que
neste caso, só têm significado para a convergência e estabilidade numérica do
método. Isto faz que a calibração do modelo possa ser complicada e demorada em
tempo de programação quanto de execução. Faltam maiores referencias
bibliográficas sobre intervalos de magnitude válidos para ditas variáveis (atrito, rigidez,
freqüência, coeficiente de amortecimento, entre outras).
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 6: Conclusões e Recomendações 127
Em especial, faltam correlações com variáveis do comportamento reológico
(viscosidade principalmente) que é a metodologia mais estudada, aplicada e aceita
para a simulação deste tipo de fenômenos físicos seguindo filosofias para médios
contínuos e cujos resultados têm sido de grande difusão científica.
Porém, deve advertir-se que segundo os perfis de velocidades aqui obtidos
(Vede FIGURA 5.5 e 5.6), a solução numérica proposta pela metodologia DEM pode
entrar encontra posição com alguns dos supostos básicos dos modelos reológicos
tradicionais. Como por exemplo, o fato a existência do fenômeno de segregação
interna da massa móvel e a possibilidade de revezamento das partículas pelo qual
poderia não ser válida uma comparação quantitativa entre os parâmetros de um
método e o outro. Por outro lado, os modelos reológicos usam parâmetros
diretamente associados a propriedades do material em quanto no DEM são só
variáveis do modelo numérico.
Ainda com tudo isso, a aplicação neste trabalho do método do DEM
demonstrou ser muito efetivo na simulação física das corridas para qualquer tipo de
superfície de escoamento. Mas neste ponto, a implementação de superfícies
linearizadas a partir de curvas spline cúbicas facilitou a idoneidade deste tipo de
superfície no método ao produzir resultados mais concordantes com as descrições de
campo e teóricas como as mencionadas por Lorenzini [7] e Cheng [9]
independentemente dos parâmetros de entrada utilizados. Com o programa original
ao tentar aumentar o número de paramentos impactou negativamente no tempo de
execução, pelo qual se programou uma rotina simples para reduzir dito impacto.
Respeito ao estado original do programa SAND, pode-se dizer que este foi otimizado
de certa forma, pois a rotina de procura de contatos reduziu quase em um terço o
tempo de execução inicial e de vez permitiu ampliar o trecho de aplicação deste até
agora conseguido na PUC-Rio.
Simulações pequenas e controladas permitiram avaliar as bondades dos
parâmetros de entrada principalmente na simulação de feições físicas (profundidade,
segregação) e cinemáticas (deslocamentos e velocidades). As principais variáveis do
modelo como rigidez normal e tangencial, coeficientes de amortecimento, atrito e
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
Capítulo 6: Conclusões e Recomendações 128
parâmetros de amortecimento autolocal e global mostraram serem influentes segundo
o tipo de feição a ser simulada.
Dentre elas a de maior importância é a fração do tempo crítico que leva
rapidamente à estabilidade ou instabilidade o modelo. Neste ponto parece existir uma
contradição técnica do método, pois para frações pequenas o método parece ficar
mais estável e de vez aumenta significativamente o tempo de execução. Por isso
recorre-se ao uso de algoritmos mais eficientes na procura de contatos. As outras
variáveis têm as suas limitantes, mas algumas delas podem ser controladas variando
dita fração de tempo. Este fato já tinha sido relatado pelo próprio Cundall [41], [44], [45].
De forma geral, observou-se que a variação de alguns parâmetros parecia
reproduzir algumas feições feitas pela variação de outros parâmetros. Entre eles cabe
mencionar que a variação da razão de rigidezes apresentou tendências similares às
produzidas pela variação proporcional inversa da freqüência fT ou à variação
proporcional direta do atrito, principalmente no tipo de superfície da massa móvel e
depositada, assim como as feições de segregação Porém, cada uma destas
configurações proporciona uma variação de velocidades distinta como era de esperar,
pois como já se mencionou a velocidade está ligada ao comportamento reológico.
Então se conclui que existe uma relação, ao menos qualitativa entre os parâmetros
reológicos e do modelo DEM. Esta relação deve ser estudada, não é fácil, mas
ajudaria a resolver algumas incongruências entre ambas as metodologias.
Por outro lado, as simulações mostraram o uso relevante do amortecimento
autolocal do que o autoglobal. Ainda este último seja parametricamente mais simples
do que o primeiro, durante a simulação este produziu inconveniências na simulação
(deslocamentos descontrolados em algumas partículas), cuja solução impactou
diretamente no tempo de execução do programa (como diminuir o valor da fração de
tempo crítico), fazendo pouco efetivo o uso deste tipo de amortecimento para a esta
simulação.
Então, diz-se que as rotinas implementadas ao programa original mostraram
aumento na eficiência e eficácia deste relativamente. Ainda que fique claro que
quando se aumenta o número de partículas e paramentos em demasia estas já não
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 6: Conclusões e Recomendações 129
seriam tão eficientes, pois na bibliografia consultada como Müller [24], Ferrez [56],
Munjiza [57], Nezami [58] e Schaller [59], fazem-se referência a outros métodos de
procura de contatos e geração de malha de partículas mais eficientes e até simulando
condições reais para grandes sistemas. Mas para chegar a este ponto precisa-se alta
destreza na programação e computadores de alta tecnologia como para reduzir
significativamente a sobrecarga de memória e o tempo de execução das simulações.
Também cabe aclarar que esta é uma limitação geral da metodologia DEM. Para
pensar em maiores aplicações a paralelização de processos e triangulação dinâmica
são as referências mais citadas.
Por experiência do autor deste trabalho no uso de sistemas de informação
geográfica e gestão de riscos, este considera possível e de grande idoneidade a
implementação deste programa dentro de uma metodologia conjunta de
planejamento urbano tradicional para delimitação de zonas de alto e baixo risco
contra este tipo de fenômenos naturais e ouros similares. Pois o parâmetro simulado
mais importante é o alcance da corrida na planície de deposição que é calculado com
grande facilidade sem grande número de cálculos complexos, nada que não possa
ser implementado nas rotinas de um sistema georeferenciado.
6.2 Recomendações e propostas para futuros trabalhos
O programa atual está ainda em etapa de desenvolvimento pelo qual suas
aplicações práticas podem ser ainda muito limitadas.
Existem algumas limitações na parte do uso geral do programa como para
pensar num uso generalizado do método. A interface de entrada de dados não é
muito versátil para um usuário não familiarizado na linguagem LUA 5.0, pois de
preferência qualquer usuário está mais familiarizado com o ambiente WINDOW.
Por outro lado, o programa atualmente no conta com um manual o espécie de
livro de ocorrências onde sejam descritas as modificações feitas. Isto facilitaria a
introdução de melhores efetivas, pois no presente trabalhos se deram por certas
algumas rotinas que logo depois com as primeiras simulações tiveram de serem
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

Capítulo 6: Conclusões e Recomendações 130
revisadas e corrigidas. Assim que este trabalho inicia este tipo de descrições para um
futuro trabalho mais detalhado do programa.
Seria importante procurar uma base de dados reais sobre ocorrências e
descrições de eventos ocorridos para calibrar o modelo, mas antes disto recomenda-
se fazer algumas melhoras antes de iniciar esta etapa.
Primeiro, deve trabalhar-se na programação do algoritmo de triangulação
dinâmica para o caso bidimensional. Pois vendo as referências consultadas, estas
apontam este método como o mais efetivo pelo momento disponível. Depois é
preciso adaptar do modelo de Cundall para o caso tridimensional junto com a
triangulação dinâmica. Que no caso de estarem ambas as rotinas disponíveis para o
caso 2D é mais fácil adaptar a estas novas condições. Simultaneamente deve
trabalhar-se no uso de interpolação de superfícies de terreno 3D para facilitar o seu
uso nas rotinas anteriores. Pero estas rotinas são usadas em outras áreas assim que
sua programação pode resultar trivial.
Outro ponto para trabalhar fortemente é a saída gráfica 3D e a geração da
malha inicial da massa instável, os processos de sedimentação e densificação em 3D
podem resultar muito demorados pelo aumento de cálculos e contatos numa partícula.
Associado a estas adaptações está implícito o uso de alta tecnologia pelo que é
requerido também certo investimento nada baixo em equipamento com
características especiais como rede para paralelização de processos. Com estas
adaptações pode-se pensar em calibrações com eventos reais ou simulações a
escala.
Fica aberta a aplicação para simulação de quedas de rochas e uso de outro
formato geométrico de partículas (elípticas, paralelepípedos ou grumos de partículas).
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
REFERÊNCIAS BIBLIOGRÁFICAS
[1] CARDONA, OMAR DARIO. Notas do Curso: Gestión del Riesgo Colectivo. Structuralia Consultores, Madrid, España. Setembro, 2005.
[2] KEIPI, K.; TYSON, J. Sobreviviendo los desastres: planificación y protección
financiera. Diálogo regional de política, Banco Interamericano de Desarrollo.
Washington, DF. 2002.
[3] CAMPOS, JOÃO LUIZ E., et al. Implementação numérica para simulação processos de produção de areia utilizando elementos discretos em condições de fluxo bifásico. Brasil, 2002. 12 p.
[4] FIGUEIREDO, RODRIGO P. Aplicação da técnica de relaxação dinâmica à solução de problemas geotécnicos. 1991. 187 f. Dissertação de Mestrado-
Departamento de Engenharia Civil, Pontifícia Universidade Católica do Rio de
Janeiro, Rio de Janeiro, setembro de 1991.
[5] MACIAS, JULIO E. Implementações computacionais para o estudo da estabilidade de maciços rochosos fraturados. 1995. 82 f. Dissertação de
Mestrado-Departamento de Engenharia Civil, Pontifícia Universidade Católica do
Rio de Janeiro, Rio de Janeiro, setembro de 1997.
[6] RODRIGUES, MÁRCIO. Procedimentos computacionais para reconstituição de seções geológicas. 2002. 131 f. Tese de doutorado-Departamento de
Engenharia Civil, Pontifícia Universidade Católica do Rio de Janeiro, Rio de
Janeiro, abril de 2002.
[7] LORENZINI, G; MAZZA, N. Debris Flow: phenomenology and rheological
modeling. Reino Unido: WIT press, 2004. 202 p., il., 16 cm x 25 cm.
[8] DASGUPTA, PRABIR. Sediment gravity flow- the conceptual problems. Earth Science Review. Vol 62, p. 265-281. 2003.
[9] YI WU, CHENG. Numerical Modelling on the motion and deposition behaviors of debris flow. 2003. 168 f. Em inglês. Dissertação de Mestrado-
Escola de Engenharia Civil, NCKU, Tainan, Taiwan, junho de 2003.
[10] CALVETTI, FRANCESCO; et al. Granular flows and numerical modeling of landslides. DAMOCLES: Itália, agosto de 2001.
[11] COUSSOT, P.; MEUNIER, M. Recognition, classification and mechanical
description of debris flows. Earth-Science Reviews. Vol. 40, p. 209-227. 1996.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

132
[12] TAKAHASHI, TAMOTSO. Debris flow. Holanda: Internacional Association for
Hydraulics Research, 1991. 165 p., il., 17 cm x 25 cm. (Monograph Series).
[13] MALET, J. P.; et al. Triggering conditions and mobility of debris flows associated
to complex earthflows. Geomorphology (Em impressão). 21 p. 2005.
[14] IVERSON, RICHARD M. The Physics of debris flow. Reviews of Geophysics. Vol. 35, n° 3, p. 245-296. 1997.
[15] IVERSON, RICHARD M.; REID, MARK E.; LAHUSEN, RICHARD G. Debris flow
mobilization from landslides. Earth-Science Review. Vol. 25, p. 85-138. 1997.
[16] IVERSON, RICHARD M.; DENLINGER, ROGER P. Mechanics of debris flows
and debris-laden flash floods. ln: 7ª Federal Interagency Sedimentation Conference. Reno, Nevada. Março 2001.
[17] IVERSON, RICHARD M.; VALLANCE, JAMES W. New views of granular mass
flow. Geology. Vol. 29 n° 2, p. 115-118. 2001.
[18] BERTI, MATTEO; et al. Field observations of a debris flow event in the Dolomites. Geomorphology. Vol. 29, p. 265-274. 1999.
[19] ANCEY, CHRISTOPHE. Debris flows and related phenomena. CEMAGREF,
CEDEX, França. 2000.
[20] CAMPBELL, CHARLES S.; CLEARY, PAUL W.; HOPKINS, MARK. Large-scale
landslide simulations: global deformation, velocities and basal friction. Journal of Geophysical Research. Vol. 100, n° B5, p. 8267-8283. 1995.
[21] KANJI, MILTON A.; MASSAD, F.; CRUZ, P. T. Debris flow in areas of residual
soils: occurrence and characteristics. [s.n.]. 2002.
[22] HUNT, M. L.; et al. Revisiting the 1954 suspension experiments of R. A. Bagnold. Journal of Fluid Mechanic. Vol. 452, p. 1-24. 2002.
[23] CHEN, H.; LEE, C.F. Geohazards of slope mass movement and its prevention in
Hong Kong. Engineering Geology. Vol. 76, p. 3-25. 2004.
[24] MÜLLER, DIDIER. Techniques informatiques efficaces pour la simulation de milieux granulaires par dês méthodes d`éléments distincts. 1996. 181 f. Tese
de doutorado-Departamento de Matemática, École Polytechnique Fédérale de
Lausanne, Suíça, julho de 1996. Em francês.
[25] HUBL, JOHANNES; KIENHLZ, HANS; LOIPERSBERGER, ANTON. DOMODIS : Documentation of MOuntain DISasters. Comunidade Européia:
INTERPRAEVENT, 2002. 54 f., il.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

133
[26] FIORILLO, FRANCESCO; WILSON, RAYMOND. Rainfall induced debris flows in
pyroclastic deposits, Camapnia (southern Italy). Engineering Geology. Vol. 75, p.
263-289. 2004.
[27] IVERSON, RICHARD M. Landslide triggering by rain infiltration. Water Resources Research. Vol. 36, n° 7, p. 1897-1910. 2000.
[28] JULIEN, PIERRE Y. River Mechanics. Reino Unido: Cambrigbe University Press:
2002. p. 13-30, il.,15 cm x 23 cm.
[29] IDELSON, SERGIO R.; STORTI, MARIO A.; OÑATE, EUGENIO. Lagrangian
formulations to solve free surface incompressible inviscid fluid flows. Comput.
Methods Appl. Mech. Engrg. Vol 191, p. 583-593. 2001.
[30] IVERSON, RICHARD M.; DENLINGER, ROGER P. Flow of variably fluidized
granular masses across tree-dimensional terrain. 1- Coulomb mixture theory.
Journal of Geophysical Research. Vol. 106, n° B1, p. 537-552. 2001.
[31] IVERSON, RICHARD M.; DENLINGER, ROGER P. Flow of variably fluidized
granular masses across tree-dimensional terrain. 2- Numerical predictions and
experimental test. Journal of Geophysical Research. Vol. 106, n° B1, p. 553-
566. 2001.
[32] JANKOWSKI, JACEK A. A non-hydrostatic model for free surface flows. 1998.
237 f. Tese de doutorado-Institut für Strömungsmechanik und Elektron, Rechnen
im Bauwesen der Universität Hannover, Alemanha, novembro de 1998.
[33] WIELAND, M.; GRAY, J. M. N. T.; HUTTER, K. Gravity-driven free surface flow of
granular avalanches over complex basal topography. The Royal Society. Vol.
455, p. 1841-1874. 1999.
[34] WANG, ZHILIANZ; SHEN, HUNG TAO. Lagrangian simulation of one-
dimensional dam-break flow. Journal of Hydraulic Engineering. Vol. 125, n° 11,
p. 1221-1217. 1999.
[35] HUNGR, OLDRICH. A model for the runout analysis of rapid flow slides, debris
flows and avalanches. Canadian Geotechnical Journal. Vol. 32, p. 610-623.
1995.
[36] HUNGR, OLDRICH; MCDOUGALL, S.D. Objetives for the development of an
integrated three-dimensional continuum model for the analysis of landslide runout..
2003. Comunicação pessoal do primeiro autor.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

134
[37] HUNGR, OLDRICH; MCDOUGALL, S.D. A model for the analysis of rapid
landslide motion across three-dimensional terrain. 2004. Comunicação pessoal
do primeiro autor.
[38] CHEN, H.; LEE C.F. Numerical Simulation of debris flow. Canadian Geotechnical Journal. Vol. 37, n° 1, p. 146-160. 2000.
[39] CUNDALL, Peter A.; HART, ROGER D. Numerical modeling of discontinua.
Engineering Computations. Vol 9, p. 101-113. 1992.
[40] IOVINE, G.; D`AMBROSIO, D.; DI GREGORIO, S. Applying genetic algoritms for
calibrating a hexagonal cellular autômata model for the simulation of debris flows
characterised by strong inertial effects. Geomorphology (Em impressão). 17 p.
2005.
[41] CUNDALL, Peter A.; STRACK, O. D. L. A discrete numerical model for granular
assemblies. Géotechnique. Vol 29, n° 1, p. 47-65. 1979.
[42] JOHANSEN, STEIN TORE; LAUX HARALD. Simulations of granular materials flow. Noruega: SINTEF Materials Technology, 1998. 10 p.
[43] GETHIN, D. T.; et al. Numerical comparison of a deformable discrete element
model and an equivalent continuum analysis for the compaction of ductile porous
material. Computers and Structures. Vol. 79, p. 1287-1294. 2001.
[44] CUNDALL, Peter A. Formulation of a three-dimensional distinct element model
−−Part I. A scheme to detect and represent contacts in a system composed of
many polyhedral blocks. Int. J. Rock Mech., Min. Sci. & Geomech. Abstr. Vol
25, n° 3, p. 107-116. 1988.
[45] CUNDALL, Peter A.; HART, ROGER D.; LEMOS, J. Formulation of a three-
dimensional distinct element model −−Part II. Mechanical calculations for motion
and interaction of a system composed of many polyhedral blocks. Int. J. Rock Mech., Min. Sci. & Geomech. Abstr. Vol 25, n° 3, p. 117-125. 1988.
[46] BARDET, J. P.; PROUBET, J. Adaptative dynamic relaxation for statics of
granular materials. Computers and Structures. Vol 39, n° 3/4, p. 221-229. 1991.
[47] VU-QUOC, L.; LESBURG, L.; ZHANG, X. An accurate tangencial force-
displacement model for granular-flow simulations : Contacting spheres with plastic
deformation, force-driven formulation. Journal of Computational Physics. Vol.
196, p. 298-326. 2004.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
135
[48] DI RENZO, ALBERTO; DI MAIO, FRANCESCO PAOLO. Comparison of contact-
force models for the simulation of collisions in DEM-based granular flow codes.
Chemical Engineering Science. Vol 59, p. 525-541. 2004.
[49] CHOWDHURY, INDRAJIT; et al. Computation of Rayleigh Damping Coefficients for large systems. Kharagpur, Índia: Indian Institute of Technology.
2000.
[50] OÑATE, E.; ROJEK, J. Combination of discrete element and finite element
methods for dynamic analysis of geomechanics problems. Computer Methods in Applied Mechanics and Engineering. Vol 193, p. 3087-3128. 2004.
[51] ITASCA CONSULTING GROUP, Inc. PFC2D: Theory and Background. 2ª ed.,
Minneapolis, Minnesota: Itasca Consulting Group, Inc. 2002, il.
[52] DEITEL, H. M.; DEITEL, P. J. C++: Como Programar. Tradução de Sergio Luis
Ma. Ruiz F. em espanhol, 2. ed. Juarez, México: Prentice-Hall Hispanoamericana,
S.A., 1999. 1130 p. Título original: C++: How to progam.
[53] BUSTAMANTE, PAUL; et al. Aprenda C++ como si estuviera en primero.
Navarra, España: Ingeniarien Goi Malaiko Eskola, Nafarroako Unibertsitateko
Campus Teknologikoa, 2004. 72 p.
[54] RESTREPO, JUAN. Cubic Splines. 2003. Disponível em:
<http://www.mathworld.com/trigonometricinterpolation/splineinterpolation.html>
Acesso em abril 2004.
[55] SCHNEIDER, PHILIP J.; EBERLY, DAVID H. Geometrics tools for computer graphics. São Francisco, Estados Unidos: Elsevier Science, 2003. 1007 p., il. 19
cm x 23 cm.
[56] FERREZ, JEAN-AL BERT. Dynamic Triangulations for efficient 3D simulation of granular materials. 2003. 181 f. Tese de doutorado-Departamento de
Matemática, École Polytechnique Fédérale de Lausanne, Suíça, 2001. Em inglês.
[57] MUNJIZA, ANTONIO. The combined finite- discrete element method. Reino
Unido: WILEY, 2004. 333 p., il., 17 cm x 25 cm.
[58] NEZAMI, ERFAN G.; HASHASH, YOUSSEF M.A.; JAMSHID GHABOUSSI,
DAWEI ZHAO. A fast detection algorithm for 3-D discrete element method.
Computers and Geotechnics. Vol 31, p. 575-587. 2004.
[59] SCHALLER, GERNOT; MEYER-HERMANN, MICHAEL. Kinetic and Dynamic
Delauny tetrahedralizations in three dimensions. Elsevier Science. 2005.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

136
[60] VU-QUOC, L.; ZHANG, X.; WALTON, O. R. A 3D discrete-element method for dry
granular flows of ellipsoidal particles. Computer Methods in Applied Mechanics and Engineering. Vol 187, p. 483-528. 2000.
[61] LANGSTON, PAUL A.; et al. Distinct element modelling of non-spherical
frictionless particle flow. Chemical Engineering Science. Vol. 59, p. 425-435.
2004.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

ANEXOS
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

138
ANEXO I: Classificação de Varnes para movimentos de massa (1978)
TIPO DE MATERIAL Material altamente
intemperizado TIPO DE MOVIMENTO Maciços
Rochosos Detritos Solo
QUEDAS
Queda de detritos Queda de solo
TOMBAMENTOS
DESLOCAMENTOS LATERAIS
Rotacional*
DES
LIZA
MEN
TOS
Translacional
Avalanches Avalanche de Rochas
Rápidos Fluxo de rochas
FLUXOS
Lentos
Rastejo profundo Rastejo Superficial
COMPLEXOS Combinação de dois ou mais dos movimentos anteriores.
* No caso de rochas, este tipo de movimento se apresenta devido ao intenso fraturamento do maciço pelo qual pode se comportar como solo para efeitos de desenvolvimento de uma superfície curva de ruptura.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
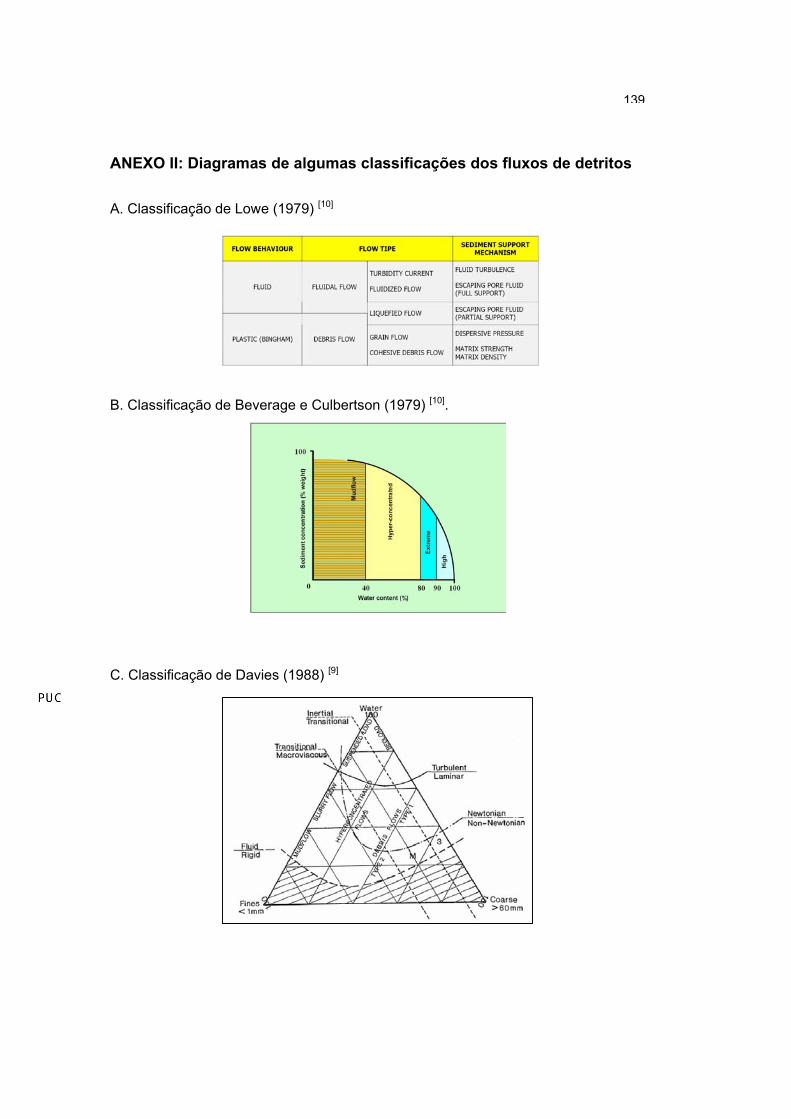
139
ANEXO II: Diagramas de algumas classificações dos fluxos de detritos
A. Classificação de Lowe (1979) [10]
B. Classificação de Beverage e Culbertson (1979) [10].
C. Classificação de Davies (1988) [9]
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

140
D. Classificação de Coussot (1996) [11].
E. Classificação reológica proposta por Iverson (2001) [10].
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

141
ANEXO III: Descrição dos modelos reológicos mais usados na modelagem do movimento das corridas de massa [7], [9], [12].
Modelo Friccionário (Mohr-Coulomb)
Equação Reológica ( )φστ tan+= cy
Tensões dominantes Atrito entre partículas, pois estas viajam muito juntas uma das outras.
Conveniência Regime plástico, quase-estático sob baixos gradientes de velocidades (baixa deformação). 0.51 ≤ CV ≤ 0.56
Característica da velocidade
- τ é independente da velocidade. - Efeitos desprezíveis dos esforços dinâmicos e do fluido intersticial.
-Não é adequado para fluxos de detrito.
Modelo Colisionar (Bagnold)
Equação Reológica 2
=
dyduατ
Tensões dominantes Colisões entre partículas e forças dispersivas
Conveniência
Regime inercial (totalmente dinâmico), fluxo granular a altos gradientes de velocidades (deformação rápida) e partículas espacejadas.
Característica da velocidade
Distribuição da velocidade:
( )
−−
⋅= 2
323
32 yhh
sengu m
αθρ
Velocidade superficial: 23
32 h
sengu ms ⋅
⋅=
αθρ
Velocidade Meia:
suU53__
=
Velocidade relativa à da superfície: 23
1
−=
−hy
uuu
s
s
- Proposto em 1954. - α é função da viscosidade (µ), dimensões, tamanho e concentração
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

142
de partículas sólidas e ângulo de atrito interno. - Também conhecido como modelo dilatante ou dispersivo.
Modelo Friccionário - Colisionar (Johnson)
Equação Reológica 2
+=
dydu
y αττ
Tensões dominantes Colisões e atrito entre partículas Conveniência Regime inercial misto, fluxo granular.
Característica da velocidade
Distribuição da velocidade:
( )
−−
⋅= 2
323
32 yHH
sengu m
αθρ 0 ≤ y ≤ H
θρτseng
hHm
y
⋅−=
Velocidade superficial: 23
32 H
sengu ms ⋅
⋅=
αθρ H ≤ y ≤ h
Velocidade Meia:
suhHU
⋅−=521
__
Velocidade relativa à da superfície: 23
1
−=
−Hy
uuu
s
s 0 ≤ y ≤ H
- Proposto em 1970. - τy e α são constantes.
Modelo Macroviscoso
Equação Reológica dydu
mµτ =
Tensões dominantes viscosas
Conveniência Regime viscoso; fluxo newtoniano de baixa concentração Cv ≤ 0.09.
Característica da velocidade
Distribuição da velocidade:
−
⋅=
223
2
21hy
hysengh
um
m
µθρ
Velocidade superficial:
m
ms
senghu
µθρ
2
2
=
Velocidade Meia:
suU32__
=
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

143
Velocidade relativa à da superfície: 2
1
−=
−hy
uuu
s
s
- µm é viscosidade aparente, 2.25λ1.5µw (Bagnold) ou 5,25.41−
⋅+ Vw
m CKπµ
µ
(Chu) com K = 2,5 para esferas rígidas.
Modelo Viscoplástico (Bingham)
Equação Reológica dydu
By µττ += τ > τy
Tensões dominantes Coesão entre partículas e viscosas.
Conveniência Regime viscoso com alta concentração de sólidos.
Característica da velocidade
Distribuição da velocidade:
−
⋅=
223
2
21Hy
HysengH
uB
m
µθρ 0 ≤ y ≤ H
θρτseng
hHm
y
⋅−=
Velocidade superficial:
B
ms
sengHu
µθρ
2
2
= H ≤ y ≤ h
Velocidade Meia:
suhHU
⋅−=311
__
Velocidade relativa à da superfície: 2
1
−=
−Hy
uuu
s
s 0 ≤ y ≤ H
- Aplicável para partículas sólidas pequenas (argila, silt).
Modelo Viscoplástico Colisionar (Chen)
Equação Reológica
η
µφφτ
++=
dydupsenc 1cos
η
µσ
+−=
dydup 2
Tensões dominantes Atrito e colisões entre partículas e viscosas.
Conveniência Regime em suspensão; fluxo de detritos (fluxo de alta concentração)
Característica da velocidade
Distribuição da velocidade:
−−
+
=
++ η
ηηη
µθρ
ηη
11
1
1*
111 H
ysengHu 0 ≤ y ≤ H
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
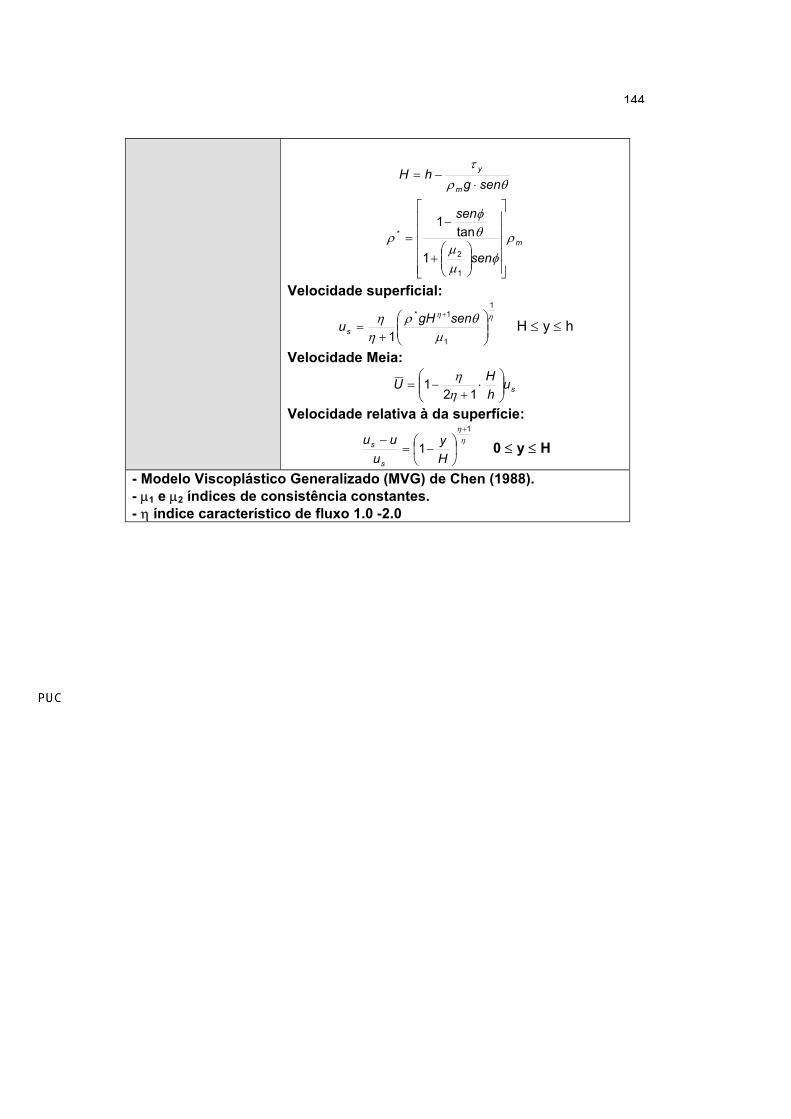
144
θρτseng
hHm
y
⋅−=
m
sen
sen
ρφ
µµ
θφ
ρ
+
−=
1
2
*
1
tan1
Velocidade superficial: ηη
µθρ
ηη
1
1
1*
1
+
=+ sengHus H ≤ y ≤ h
Velocidade Meia:
suhHU
⋅
+−=
121
__
ηη
Velocidade relativa à da superfície: ηη 1
1+
−=
−Hy
uuu
s
s 0 ≤ y ≤ H
- Modelo Viscoplástico Generalizado (MVG) de Chen (1988). - µ1 e µ2 índices de consistência constantes. - η índice característico de fluxo 1.0 -2.0
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

145
ANEXO IV: Método tridimensional de Elementos Discretos de Cundall (1988)
Cundall [44], [45] propôs a extensão de seu método para três dimensões. Neste
caso, o autor desenvolveu o método para blocos como uma aplicação na mecânica
das rochas. As principais diferenças deste método respeito ao desenvolvido para 2D
é que a velocidade angular deixa de ser um escalar e sim um vetor que segue o
Teorema de Euler para rotações em 3D [54] . Além de que o contato das esferas é
uma área; AC (não maior ao 1% da área superficial média das esferas). Um outro
aspecto de consideração nos cálculos é o fato de que somente o vetor normal n é
conhecido enquanto que o vetor tangencial t não. O modelo de contato utilizado é o
mesmo da seção 3.1.2.3. Assim, aplicando as modificações respectivas para
elementos esféricos, o método de Cundall para 3D é:
FIGURA IV.a. Notação usada nas equações do DEM-3D.
A velocidade das esferas em contato vem dada por:
( )izyxi rrrr &&&& ,,= (iv.1.a)
( )izyxi ωωωω ,,= (iv.1.b)
No ponto médio de contato das esferas, a velocidade relativa média v deste
é dada por:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

146
( ) ( ) nRRrrv ˆ221121 ×+−−= ωω&& (iv.2)
A força normal no plano normal definido na área de contato AC é:
( ) nnvCKF NNNN ˆˆ ⋅⋅−⋅−= δδr
(iv.3)
Com:
( ) dtnvN ⋅⋅= ˆδ (iv.4)
Desta forma a força tangencial é:
( )TTTTS vCKF −⋅−= δδr
(iv.5)
Com:
( ) ( ) nRRnnvvvT ˆˆˆ 2211 ×++⋅⋅−= ωω (iv.6)
e:
dtvTT ⋅=δ (iv.7)
Assim, considerando a força de cisalhamento seguindo a Lei de Coulomb, se:
TFr
> CN AcF ⋅+φtanr
(iv.8)
Então:
TFr
=( )
T
TCN F
FAcF
rr
⋅⋅+⋅ φtan (iv.9)
Finalmente, o somatório das forças e momentos devido a todos os contatos é:
( )∑ +=k
iTiNFFFrrr
(iv.10)
( )∑ ×⋅=k
iTExterno FnRMr)
(iv.11.a)
[ ] [ ] [ ] [ ]HIHMInercial ×+⋅== ωω rr& (iv.11.b)
[ ] [ ]ωr⋅= IH (iv.11.c)
Que no caso de partículas esféricas, o segundo termo de (iv.11.c) é nulo, pelo
que o caso 3D se reduz ao caso 2D. Por outro lado, as equações do movimento,
considerando o Teorema de Amortecimento de Rayleigh, para uma esfera são
dadas por:
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
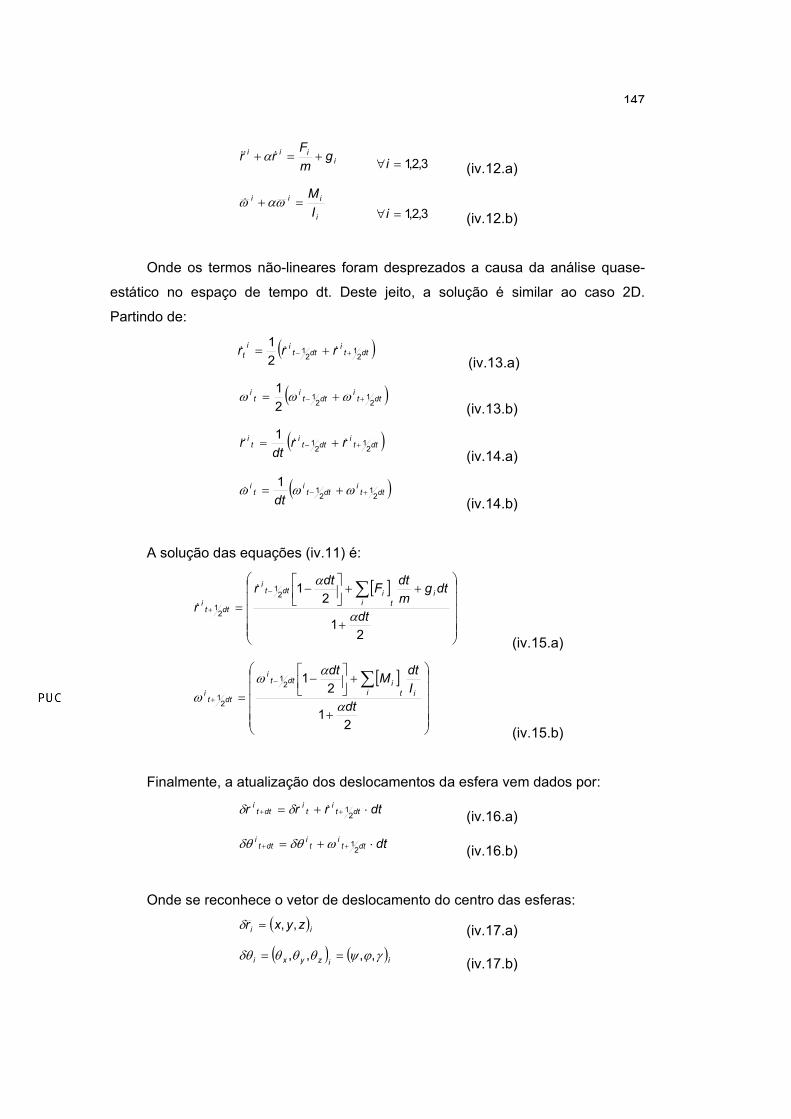
147
iiii gmF
rr +=+ &&& α 3,2,1=∀i (iv.12.a)
i
iii
IM
=+ ωαω& 3,2,1=∀i (iv.12.b)
Onde os termos não-lineares foram desprezados a causa da análise quase-
estático no espaço de tempo dt. Deste jeito, a solução é similar ao caso 2D.
Partindo de:
( )dtti
dttii
t rrr 21
21
21
+− += &&& (iv.13.a)
( )dtti
dtti
ti
21
21
21
+− += ωωω (iv.13.b)
( )dtti
dtti
ti rr
dtr 2
12
11
+− += &&&& (iv.14.a)
( )dtti
dtti
ti
dt 21
21
1+− += ωωω&
(iv.14.b)
A solução das equações (iv.11) é:
[ ]
+
++
−
=∑−
+
21
212
1
21
dt
dtgmdtFdtr
ri
tiidtt
i
dtti
α
α&
&
(iv.15.a)
[ ]
+
+
−
=∑−
+
21
212
1
21
dtIdtMdt
itiidtt
i
dtti
α
αωω
(iv.15.b)
Finalmente, a atualização dos deslocamentos da esfera vem dados por:
dtrrr dtti
ti
dtti ⋅+= ++ 2
1&δδ (iv.16.a)
dtdtti
ti
dtti ⋅+= ++ 2
1ωδθδθ (iv.16.b)
Onde se reconhece o vetor de deslocamento do centro das esferas:
( )ii zyxr ,,=δ (iv.17.a)
( ) ( )iizyxi γϕψθθθδθ ,,,, == (iv.17.b)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

148
Este último vetor corresponde aos ângulos do teorema de rotação de Euler.
Estes ângulos devem ser atualizados pela correção descrita na equação (3.39) no
Capítulo 3:
( ) iiiii sen δθθθδθθ ⋅−=+ coscos 3,2,1=∀i (iv.18.a)
( ) iiiii sensen δθθθδθθ ⋅−=+ cos 3,2,1=∀i (iv.18.b)
Agora, a relação entre coordenadas globais e locais não é tão simples quanto
no caso 2D. Partindo que a rotação de cada eixo global (x,y,z) é no sentido horário,
obtêm-se as matrizes de rotação (matrizes de rotação de Euler) dadas por:
ψψψψψ
cos0cos0
001
,
sensenRx
−=
ϕϕ
ϕϕ
ϕ
cos0010
0cos
,
sen
senRy
−=
1000cos0cos
, ψγγγ
γ sensen
Rz −=
(iv.19)
A combinação destas matrizes produz rotações diversas do corpo, mas a
mais utilizada nas modelações gráficas em 3D é dada pela ordem Rz,γ·Rx,ψ·Ry,ϕ.
Assim, as coordenadas locais vêem dadas por:
=
⋅⋅=
zyx
RRRttn
yxz ϕψγ ,,,
3
2
ˆ
(iv.20)
⋅−⋅⋅⋅+⋅⋅⋅⋅+⋅−⋅⋅+⋅−⋅⋅⋅+⋅
zyx
sensensensensensensensensensensensensensensen
ϕψγϕψϕψγϕγϕγϕψγϕγϕψγϕγϕγϕψγϕγ
coscoscoscoscoscoscoscoscoscoscoscoscoscos
Onde ),(ˆ 21 ttt = . Estes vetores estão contidos no plano comum de contato
como se observa na FIGURA IV.a.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

149
ANEXO V: Algoritmo de curvas bidimensionais spline cúbicas [54]
Sabendo da existência de um conjunto de pontos x0,y0; x1, y1 ....xn, yn; então
se diz que existe um conjunto de funções SP(x) contendo uma função típica
interpolante cúbica Sn3(x) para cada intervalo [xj, x j+1] para j=0, 1, ..., n-1; com as
seguintes características:
1. ( ) ( ) ( ) jjjj yxfxSxS === 33 ∀ j = 0, 1,..., n.
2. ( ) ( )13
13
1 +++ = jjjj xSxS ∀ j = 0, 1,..., n-2.
3. ( ) ( )13
13
1 +++ ∂=∂ jjxjjx xSxS ∀ j = 0, 1,..., n-2.
4. ( ) ( )132
13
12
+++ ∂=∂ jjxjjx xSxS ∀ j = 0, 1,..., n-2.
E deve-se satisfazer algum das seguintes condições de contorno:
5. ( ) ( ) 0320
32 =∂=∂ nxx xSxS (Condição de Contorno Natural)
6. ( ) 003 fxS xx ∂=∂ e ( ) nxnx fxS ∂=∂ 3 (Condição de Contorno Fixa)
A condição (1) e (2) garante a interpolação dos pontos contidos em cada
intervalo. A condição (3) garante uma transição suave das funções entre intervalos e
a (4) garante continuidade de ordem dois para polinômios cúbicos. Sabendo que
dito polinômio é dado por:
( ) ( ) ( ) ( )323jjjjjjjj xxdxxcxxbaxS −+−+−+= ∀ j= 0, 1,..., n-1. (v.1)
O sistema de algébrico a ser resolvido é de 4n incógnitas (coeficientes do
polinômio dos n pontos) contra:
• n+1 equações dadas por a condição (1).
• n-1 equações dadas por a condição (2).
• n-1 equações dadas por a condição (3).
• n-1 equações dadas por a condição (4).
• 2 condições de contorno dadas por (5) ou (6).
Aplicando as condições anteriores na equação (v.1), tem-se que aplicando (1)
e (2):
( ) ( ) jjjjj yxfaxS ===3 ∀ j= 0, 1,..., n-1. (v.2)
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

150
Então:
( ) ( ) ( ) ( )312
111111 jjjjjjjjjjjjjj xxdxxcxxbaxSSa −+−+−+=== +++++++
j= 0, 1,..., n-2. (v.3.a)
Tomando jjj xxh −= +1 j=0, 1, ..., n-1.
( ) ( )321 jjjjjjjj hdhchbaa +++=+ j=0, 1,..., n-1. (v.3.b)
Agora, aplicando (3):
( ) jjjx bxS =∂ (v.4.a)
21 3 jjjjjj hdhcbb ++=+ (v.4.b)
Finalmente, aplicando (4):
( ) ( )2
22
2 jjxjjjjx
xSccxS
∂=⇒=∂ (v.5.a)
jjjj hdcc 31 +=+ (v.5.b)
Tomando dj de (v.5.b) e substituindo em (v.4.b) e (v.3.b), tem-se que:
( )1
2
1 23 ++ +++= jjj
jjjj cch
hbaa j=0, 1,..., n-1. (v.6)
( )11 ++ ++= jjjjj cchbb (v.7)
Tomando ambas as equações para resolver para bj:
( ) ( )11 23
1++ +−−= jj
jjj
jj cc
haa
hb (v.8.a)
( ) ( )jjj
jjj
j cch
aah
b +−−=∴ −−
−−
− 11
11
1 23
1 (v.8.b)
Substituindo as equações (v.8.a) e (v.8.b) em (v.7), obtém-se:
( ) ( ) ( )11
11111332 −−
++−−− −−−=+++ jjj
jjj
jjjjjjj aah
aah
chchhch (v.9)
Aqui são conhecidos os hj e aj com os quais se podem conhecer os
coeficientes { }noj
c . Depois usando (v.8.a) serão conhecidos os coeficientes { }nojb e
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

151
com (v.5.b) os valores de { }nojd . Além, considerando as condições de contorno tem-
se que:
( ) ( ) 0320
32 =∂=∂ nxx xSxS 0=∴ nc e 00 =c (v.10.a)
ou
( ) 003 fxS xx ∂=∂ e ( ) nxnx fxS ∂=∂ 3
( )11
33 −−
−−∂⋅=∴ nnn
nxn aah
fc e ( ) 0010
0 33 faah
c x∂⋅−−= (v.10.b)
Desta forma, o sistema a resolver como bxA = , onde seguindo (v.10.a):
( )( )
( )
+
++
=
−−−−
1000002000
00000200002000001
1122
2211
1100
nnnn hhhh
hhhhhhhh
AOOO
=
nc
ccc
x
M
M2
1
0
( ) ( )
( ) ( )
−−−
−−−
=
−−−
−−
0
33
330
212
11
010
121
nnn
nnn
aah
aah
aah
aah
bM
M (v.11)
E para (v.10.b):
( )( )
( )
+
++
=
−−
−−−−
11
1122
2211
1100
00
200002000
0000020000200002
nn
nnnn
hhhhhh
hhhhhhhh
hh
AOOO
=
nc
ccc
x
M
M2
1
0
( )
( ) ( )
( ) ( )
( )
−−∂⋅
−−−
−−−
∂⋅−−
=
−−
−−−
−−
11
212
11
010
121
0010
33
33
33
33
nnn
nx
nnn
nnn
x
aah
f
aah
aah
aah
aah
faah
bM
M(v.12)
Assim, o sistema pode ser resolvido com qualquer método para matrizes
diagonais.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA
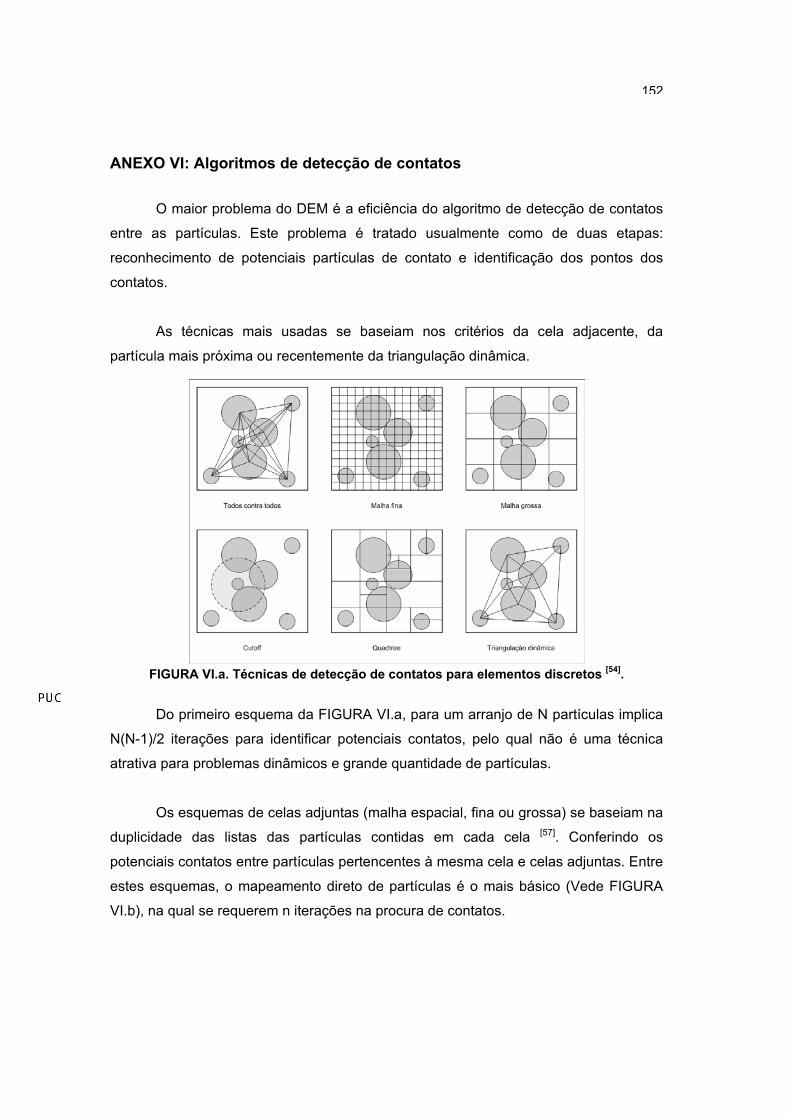
152
ANEXO VI: Algoritmos de detecção de contatos
O maior problema do DEM é a eficiência do algoritmo de detecção de contatos
entre as partículas. Este problema é tratado usualmente como de duas etapas:
reconhecimento de potenciais partículas de contato e identificação dos pontos dos
contatos.
As técnicas mais usadas se baseiam nos critérios da cela adjacente, da
partícula mais próxima ou recentemente da triangulação dinâmica.
FIGURA VI.a. Técnicas de detecção de contatos para elementos discretos [54].
Do primeiro esquema da FIGURA VI.a, para um arranjo de N partículas implica
N(N-1)/2 iterações para identificar potenciais contatos, pelo qual não é uma técnica
atrativa para problemas dinâmicos e grande quantidade de partículas.
Os esquemas de celas adjuntas (malha espacial, fina ou grossa) se baseiam na
duplicidade das listas das partículas contidas em cada cela [57]. Conferindo os
potenciais contatos entre partículas pertencentes à mesma cela e celas adjuntas. Entre
estes esquemas, o mapeamento direto de partículas é o mais básico (Vede FIGURA
VI.b), na qual se requerem n iterações na procura de contatos.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

153
FIGURA VI.b. Esquema da técnica da cela adjunta.
Por outro lado, as técnicas de partículas mais próximas ou cutoff, pode ser
mediante um raio de influência ou um quadrilátero. Neste esquema, cada partícula tem
uma lista para as outras partículas e somente aquelas que estejam dentro desta área
têm valores não nulos. Mas também, as partículas que ficam dentro de dita área são
atualizadas a cada passo de tempo pelo que cada partícula registra todas as partículas
que passaram por sua área de influência [58]. Esta técnica não é recomendada para
grande número de partículas. São necessárias n·log n iterações na procura.
FIGURA VI.c. Esquema da
técnica da partícula mais próxima ou cutoff.
O esquema de Quadtree é um sistema binário de procura ao igual que os
anteriores, mas neste esquema precisam-se N·log N iterações.
Atualmente, novos algoritmos estão sendo desenvolvidos para melhorar o tempo e
memória de armazenamento dos contatos nos programas de DEM.
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA

154
A técnica de triangulação dinâmica reduz as iterações de n(n-1)/2 a 3n para um
arranjo de n partículas, convertendo-se na técnica mais eficiente até agora
desenvolvida para o caso bidimensional [24]. Esta também é conhecida como
triangulação dinâmica de Delauny [57].
Müller (1996) [24] apresenta um trabalho extensivo sobre esta técnica e adverte
que a aplicação tridimensional da técnica é interessante, mas apresenta uma
programação tediosa e requer ferramentas matemáticas e computacionais potentes,
com as quais muitos modelos de interação entre partículas não seriam aplicáveis neste
caso.
FIGURA VI.d. Técnica de Triangulação dinâmica de Delauny.
Estes métodos aqui descritos aplicam para partículas disco ou esféricas. Para
outro tipo de geometria, os métodos viram mais complexos e de difícil programação [60],
[61], pois a este nível o problema vira mais uma encrenca da lógica computacional
(programação dinâmica, gráficos tridimensionais, etc.) do que problema físico (modelo
de contato, modelo reológico, etc.).
DBD
PUC-Rio - Certificação Digital Nº 0410780/CA







![[scan] Revista Faperj - Num 22 {mar_2013} - Algumas paginas selecionadas](https://static.fdocumentos.tips/doc/165x107/5590ba321a28abc5308b45af/scan-revista-faperj-num-22-mar2013-algumas-paginas-selecionadas.jpg)