LARA Laboratório de Redes e Sistemas Inteligentes Aplicados à área da Saúde Desde 1985

Laboratório de Técnicas Inteligentes - LTI
Universidade deSão Paulo – USP Escola Politécnica
Laboratório de Técnicas Inteligentes – LTI
SAURONLocalização e Navegação
de um Robô Móvel de Baixo Custo
Felipe GodoyPedro d’Aquino
Rafael da SilvaRafael Ruppel
Computex Corporation

2
Motivação Robôs-guias foram
empregados com sucessoem museus dos EUA eEuropa
Alto custo RoboX: US$ 400 000

3
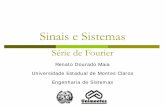
Objetivo Robô-guia de baixo custo Prédio da Engenharia Elétrica

4
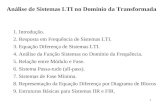
Arquitetura de Hardware
Cliente RemotoServidor Embarcado
WiFi
Serial USB
8 sonares
Odômetro
Webcam

5
Arquitetura de SW

6
LOCALIZAÇÃO
Filtro de Kalman Estendido (EKF)Modelos de Observação dos SonaresModelo de Observação da Visão

7
Filtro de Kalman Estendido Filtro Bayesiano recursivo
Modelo deDinâmica
Modelo deObservação
erro
Postura predita
EK
F
Observações Reais
(Sonares e câmera)
atraso Postura estimada atual
Postura estimada anterior
+
-
Observações
Esperadas
Odômetro
Mapa

Modelo de Observação do Sonar Baseado em
Associações Baseado em (BARRA, 2007) Associa leituras a uma parede
Histórico de medidas validadas Critérios rigorosos: robustez
88
D12
D23
R3R1 R2
aβ

Modelo Simples de Observação do Sonar
Motivação: mau desempenho do modelo de observação baseado em associações (baixa taxa de correções)
Sem histórico, validação e associação
Observação esperada
Observação real
Observação esperada
Observação real
Postura predita

10
Modelo Simples de Observação do Sonar
Resultado: alta taxa de correções, mas baixa robustez
Observação esperada
Obstáculo dinâmicoObservaçã
o real
Diferença
Solução: covariância da medida variável
Postura predita = postura real

12
Modelo de Observação: Visão Estímulo visual usado: retas verticais Modelo de câmera pinhole Uso de perfil de cor para
identificação Marcos:
Posição no mundo conhecida Perfil de cor conhecido
Associação entre projeções e marcos

13
Modelo da Visão

14
Modelo da Visão

15
Modelo da Visão

16
Modelo da Visão

17
NAVEGAÇÃO
Navegação intramapaNavegação intermapaExecução

Navegação
Posição atual
Waypoint
Destino
Portal
MAPA 1
MAPA 2 MAPA 3
Mesmo ponto no mundo real

19
Execução Controle da velocidade: 3 fases
0 0.5 1 1.5 2 2.50
100
200
300
400
500
600
700
800
Tempo (s)
Velo
cid
ade (
mm
/s)
)3(5.187)( 2 tttv
0102030405060700
100
200
300
400
500
600
Distância ao destino (cm)V
elo
cid
ade (
mm
/s)
Decolagem Pouso
100395.00013.0)( 23 xxxv
Voo de cruzeiro

Execução Evitar colisões
20
40 cm
Controle de Rota
10203040506070800
100
200
300
400
500
600
Distância ao obstáculo
Velo
cid
ade (
mm
/s)
)28,1114,0ln(879,262)( xxv
Zona permitida de navegação

21
RESULTADOS E CONCLUSÃO
Resultados simuladosResultados reaisConclusão

22
Resultados
C2-66 C2-13
e = 43cm

23
Resultados
C2-13 Secretaria
e = 21cm

24
Resultados
Secretaria
C2-43
e = 46cm

25
Resultados
C2-43 Rampa
e = 49cm

27
Conclusão É possível construir um robô guia de
baixo custo Localização com sonares é suficiente
para ambientes fechados e estáticos Modelo de sonar simples apresenta
melhor desempenho
Navegação simples é eficaz

28
Conclusão Trabalho futuro
Integração visão Rota adaptativa Navegação fluida Melhoria robustez em ambientes
dinâmicos