MÁQUINAS HIDRÁULICAS PROF.: KAIO DUTRA AULA 1 – INTRODUÇÃO À MAQUINAS DE FLUXO PARTE 2.
KAIO GEOVANNE DE MEDEIROS DANTAS
CÁLCULO AUTOMÁTICO DE ESTRUTURAS
RETICULADAS
NATAL-RN
2017
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL

Kaio Geovanne de Medeiros Dantas
Cálculo automático de estruturas reticuladas
Trabalho de Conclusão de Curso na modalidade
Monografia, submetido ao Departamento de
Engenharia Civil da Universidade Federal do Rio
Grande do Norte como parte dos requisitos
necessários para obtenção do Título de Bacharel em
Engenharia Civil.
Orientador: Prof.ª . Dra. Fernanda Rodrigues
Mittelbach.
Natal-RN
2017
Universidade Federal do Rio Grande do Norte - UFRN
Sistema de Bibliotecas - SISBI
Catalogação de Publicação na Fonte. UFRN - Biblioteca Central Zila Mamede
Dantas, Kaio Geovanne de Medeiros.
Cálculo automático de estruturas reticuladas / Kaio Geovanne de Medeiros Dantas. - 2017.
79 f.: il.
Monografia (Graduação) - Universidade Federal do Rio Grande do Norte, Centro de Tecnologia, Departamento de Engenharia Civil.
Natal, RN, 2017.
Orientadora: Profª. Drª. Fernanda Rodrigues Mittelbach.
1. Estruturas reticuladas - Monografia. 2. Análise matricial - Monografia. 3. Estruturas planas - Monografia. 4. Estruturas
espaciais - Monografia. 5. Mecânica computacional - Monografia.
I. Mittelbach, Fernanda Rodrigues. II. Título.
RN/UF/BCZM CDU 624
Kaio Geovanne de Medeiros Dantas
Cálculo automático de estruturas reticuladas
Trabalho de conclusão de curso na modalidade
Monografia, submetido ao Departamento de
Engenharia Civil da Universidade Federal do Rio
Grande do Norte como parte dos requisitos
necessários para obtenção do título de Bacharel em
Engenharia Civil.
Aprovado em 01 de junho de 2017:
___________________________________________________
Prof.ª. Dra. Fernanda Rodrigues Mittelbach - Orientador
___________________________________________________
Prof. Pedro Medeiros Pitombeira Cunha – Examinador interno
___________________________________________________
Eng. Me. Paulo Henrique Araújo Bezerra – Examinador externo
Natal-RN
2017

DEDICATÓRIA
Dedico este trabalho a minha família, que
me incentivou e me deu forças em todos os
momentos e decisões de minha vida.
AGRADECIMENTOS
Agradeço primeiramente a Deus, que com certeza sempre esteve onipresente em
minha vida e foi minha fortaleza em todos os momentos bons e difíceis pelos quais passei até
a realização deste sonho.
À meu pai, Francisco de Assis, e principalmente minha mãe, Maria das Vitórias, por
todo o amor, carinho e suporte necessário para que eu enfrentasse todos os desafios que me
foram impostos. Aos meus avós paternos Manoel e Edite (in memorian), e de forma especial
aos meus avós maternos João Capistrano e Maria do Carmo, por serem pra mim muito mais
que avós e por sempre me incentivarem em tudo o que eu faço.
À minha professora e orientadora Fernanda Mittelbach, pelo carinho, disposição de
tempo e paciência em repassar para mim todos os conhecimentos necessários à realização
deste trabalho e também à minha formação profissional. Meu interesse em seguir na área de
Estruturas se deu graças às suas aulas.
À minha tia Ana Raquel e minha irmã Anna Karla por todos os momentos de
descontração e por todas as vezes que se dispuseram a me ajudar em diversos momentos, não
só da graduação, como também da minha vida.
À minha sobrinha e meus primos, que tantas vezes me alegraram quando eu chegava
em casa depois de passar dias distante de minha família.
À minha bisavó Patrocínia Costa (in memorian) por todo o amor, carinho e
aprendizado que meu deu durante os anos em que tive a graça de conviver com a mesma,
sempre me cercando de cuidados e buscando o melhor para mim. Sou eternamente grato!
Aos tantos amigos que fiz ao longo deste tempo: Allan, Breno, Itajá, Keven, Luiza e
Vanderson, que no início do curso foram minhas companhias na UFRN. De forma especial a
Adryano, Ana Carolina, Bárbara, Daniel, Eduardo, Francisco Eudo, Gustavo, Isabela, Isabele,
Lisyanne, Lucas, Luciano, Maria Lopes, Nicole, Rafael e Renata, que com suas amizades
ajudaram a tornar os anos de curso mais agradáveis e menos difíceis.
Aos meus amigos e duplas de trabalho Ewerton Alves e Amanda Sousa, por desde os
primeiros semestres estarem ao meu lado e me ajudarem em momentos difíceis, pelas
conversas e pelas risadas ao longo de tantos anos.
Às minhas amigas e companheiras de apartamento, Ana Isa e Izabella Regina, pelo
companheirismo e por todos os momentos que vivemos e compartilhamos ao longo desses
cinco anos de convivência.
RESUMO
Cálculo automático de estruturas reticuladas
O presente trabalho aborda o cálculo automático de estruturas reticuladas planas e espaciais,
através do desenvolvimento e implementação de um código computacional em linguagem
Fortran, com formulação baseada no Método da Rigidez. Foram desenvolvidas sub-rotinas
para resolução de treliças planas e espaciais, pórticos planos e espaciais e grelhas, objetivando
a determinação de suas reações de apoio, deslocamentos e esforços internos nodais. Para os
casos de pórticos planos também foram desenvolvidas sub-rotinas capazes de considerar a
inserção de articulações (rótulas) nas extremidades das barras. São apresentados exemplos de
aplicação para cada um dos tipos de estruturas abordadas, fazendo-se posteriormente a
comparação dos resultados obtidos pelo código computacional desenvolvido e aqueles obtidos
na literatura e em outros programas de análise estrutural já validados. Diante dos resultados,
foi possível verificar a eficácia do código desenvolvido, com valores de reações,
deslocamentos e esforços nodais satisfatórios de acordo com o critério estabelecido.
Palavras-chave: Estruturas reticuladas, Análise matricial, Estruturas planas, Estruturas
Espaciais, Mecânica computacional.

ABSTRACT
Title: Automatic Analysis of Framed Structures
This work presents an automatic treatment by means of the Matrix Stiffness Method
applied to planes frames and space frame structures. A computational code was developed
and implementation, using Fortran. Subroutines were developed to solve plane trusses, space
trusses, plane frames, space frames and grids. The results are expressed by the values of the
nodal displacements, the support reactions and nodal internal forces in each frame. In plane
frame, the elements might have hinges (rotation liberation) on its initial and/or final nodes.
Examples are considered in order to verify the efficiency of the numerical approach proposed
for frames structures, by comparing the present approach results with those obtained by the
validated academic programs (Ftool and Salt) and analytical solutions. The results testify the
efficiency of the developed computational code, that presented almost the same results of
nodal displacements, the support reactions and nodal internal forces in each frame of the
comparison parameters.
Keywords: Framed structures, Matrix analysis, Plane structures, Space structures,
Computational mechanics.
ÍNDICE GERAL
1-INTRODUÇÃO ................................................................................................................... 16
1.1– Classificação das estruturas reticuladas ....................................................................... 16
1.2– Objetivos 17
1.2.1– Objetivo geral ......................................................................................................... 17
1.2.2– Objetivos específicos .............................................................................................. 17
1.3– Estrutura do trabalho .................................................................................................... 18
2– FUNDAMENTAÇÃO TEÓRICA .................................................................................... 19
2.1– Classificação das estruturas reticuladas ....................................................................... 19
2.2– Método da Rigidez ....................................................................................................... 22
2.3– Análise matricial de estruturas ..................................................................................... 24
2.3.1– Sistema de referência global e local das estruturas ................................................ 25
2.3.2– Matriz de rotação dos elementos ............................................................................ 30
2.3.3– Matriz de rigidez dos elementos ............................................................................. 34
2.3.4– Vetor de cargas nodais equivalentes dos elementos ............................................... 36
2.3.5– Aplicação das condições de contorno..................................................................... 38
3– METODOLOGIA .............................................................................................................. 39
3.1– Considerações gerais sobre o programa ....................................................................... 39
3.2– Montagem das matrizes de rigidez locais .................................................................... 40
3.2.1– Matriz de rigidez local para elementos de treliça plana e espacial ......................... 41
3.2.2– Matriz de rigidez local para elementos de grelha ................................................... 42
3.2.3– Matriz de rigidez local para elementos de pórtico plano ........................................ 43
3.2.4– Matriz de rigidez local para elementos de pórtico espacial .................................... 45
3.3– Montagem das matrizes de rotação dos elementos ...................................................... 46
3.3.1– Matriz de rotação para elementos de estruturas planas .......................................... 46
3.3.2– Matriz de rotação para elementos de estruturas espaciais ...................................... 47
3.4– Montagem do vetor de cargas nodais equivalentes ..................................................... 50
3.5– Montagem da matriz de rigidez global e do vetor de forças global da estrutura ......... 52
3.6– Resolução do sistema de equações .............................................................................. 54
3.7– Determinação dos esforços nodais ............................................................................... 57
4– RESULTADOS .................................................................................................................. 58
4.1– Treliça plana ................................................................................................................ 58
4.2– Pórtico plano ................................................................................................................ 60
4.3– Pórtico plano com rótula .............................................................................................. 63
4.4– Grelha.......................................................................................................................... 65
4.5– Treliça espacial ............................................................................................................ 68
4.6– Pórtico espacial ............................................................................................................ 70
5– DISCUSSÕES .................................................................................................................... 75
5.1– Discussões acerca dos resultados ................................................................................. 75
5.2– Limitações .................................................................................................................... 76
5.3– Sugestões para continuidade do trabalho ..................................................................... 76
6– CONCLUSÃO .................................................................................................................... 78
7– REFERÊNCIAS................................................................................................................. 79
ÍNDICE DE FIGURAS
Figura 1 - Subdivisão de um pórtico plano em barras ............................................................. 17
Figura 2 - Treliças plana e espacial ......................................................................................... 19
Figura 3- Pórtico plano ............................................................................................................ 20
Figura 4 – Viga ........................................................................................................................ 20
Figura 5 - Pórtico espacial ....................................................................................................... 20
Figura 6- Grelha....................................................................................................................... 21
Figura 7 - Configuração deformada de pórtico plano através da superposição de
configurações deformadas elementares .................................................................................... 22
Figura 8- Numeração global dos nós e elementos de um pórtico plano .................................. 25
Figura 9- Numeração global das deslocabilidades e cargas nodais de um pórtico plano ........ 26
Figura 10- Sistema de referência global e local de uma barra plana ....................................... 27
Figura 11 - Numeração local dos deslocamentos e esforços nodais em barra de treliça plana28
Figura 12 - Numeração local dos deslocamentos e esforços nodais em barra de treliça
espacial ..................................................................................................................................... 28
Figura 13 - Numeração local dos deslocamentos e esforços nodais em barra de pórtico
espacial ..................................................................................................................................... 29
Figura 14 - Numeração local dos deslocamentos e esforços nodais em barra de pórtico
espacial ..................................................................................................................................... 29
Figura 15 - Numeração local dos deslocamentos e esforços nodais de barra de grelha .......... 30
Figura 16- Rotação de eixos no plano ..................................................................................... 31
Figura 17- Rotação dos eixos no espaço tridimensional ......................................................... 33
Figura 18- Determinação dos coeficientes de rigidez local em barra bi-engastada ................ 35
Figura 19 - Reações de engastamento perfeito em barras de pórtico plano ............................ 37
Figura 20 - Arquivo de entrada para um pórtico plano ........................................................... 40
Figura 21 - Ponto auxiliar nos referenciais global e local com os respectivos vetores
unitários .................................................................................................................................... 48
Figura 22 - Cargas nodais equivalentes para barras bi-engastadas ......................................... 51
Figura 23 - Montagem da matriz de rigidez e vetor de forças da estrutura ............................. 54
Figura 24 - Convenção de sinais para esforços e deslocamentos nodais ................................. 57
Figura 25 - Exemplo 1 - Treliça plana ..................................................................................... 58
Figura 26- discretização e numeração dos nós e elementos da treliça plana ........................... 59
Figura 27 - Exemplo 2 - Pórtico plano .................................................................................... 61
Figura 28 - Discretização e numeração dos nós e elementos do pórtico plano ....................... 61
Figura 29 - Exemplo 3 - Pórtico plano com rótula .................................................................. 63
Figura 30 - Discretização e numeração dos nós e elementos do pórtico plano com rótula ..... 63
Figura 31 - Exemplo 4 - Grelha ............................................................................................... 65
Figura 32 - Discretização e numeração dos nós e elementos da grelha .................................. 66
Figura 33 - Exemplo 5 - Treliça espacial ................................................................................ 68
Figura 34 - Discretização e numeração dos nós e elementos da treliça espacial ..................... 69
Figura 35 - Exemplo 6 - Pórtico espacial ................................................................................ 71
Figura 36 - Discretização e numeração dos nós e elementos do pórtico espacial ................... 72
ÍNDICE DE TABELAS
Tabela 1 - Deslocamentos nodais para a treliça plana .............................................................. 59
Tabela 2 - Reações de apoio para a treliça plana ...................................................................... 60
Tabela 3- Esforços nodais para treliça plana ............................................................................ 60
Tabela 4 - Deslocamentos nodais do pórtico plano .................................................................. 62
Tabela 5 - Reações de apoio para o pórtico plano .................................................................... 62
Tabela 6 - Esforços nodais para o pórtico plano ...................................................................... 62
Tabela 7 - Deslocamentos nodais para o pórtico plano com rótula .......................................... 64
Tabela 8 - Reações para o pórtico plano com rótula ................................................................ 64
Tabela 9 - Esforços nodais para o pórtico plano com rótula .................................................... 65
Tabela 10 - Deslocamentos nodais para a grelha ..................................................................... 66
Tabela 11 - Reações para a grelha ............................................................................................ 67
Tabela 12 - Esforços nodais para a grelha ................................................................................ 67
Tabela 13 - Deslocamentos nodais para a treliça espacial ........................................................ 69
Tabela 14 - Reações para a treliça espacial .............................................................................. 70
Tabela 15 - Esforços nodais para a treliça espacial .................................................................. 70
Tabela 16 - Deslocamentos nodais para o pórtico espacial ...................................................... 73
Tabela 17 - Reações para o pórtico espacial ............................................................................. 73
Tabela 18 - Esforços nodais para o pórtico espacial ................................................................ 74
SIMBOLOGIA
SÍMBOLO SIGNIFICADO
A Área da seção transversal da barra
𝑎𝑖 Vetor de esforços nodais do elemento (𝑖) no referencial local
�⃗�(𝑖)𝐺 Vetor de esforços nodais do elemento (𝑖) no referencial global
𝐶𝑖 Carregamento externo aplicado na direção do grau de liberdade (𝑖)
𝑐(𝑖) Vetor de cargas nodais equivalentes do elemento no referencial local
𝑐(𝑖)𝐺 Vetor de cargas nodais equivalentes do elemento no referencial global
𝑑
𝑑𝑖
𝐷𝑡𝑖
𝐷𝑡𝑒
E
𝑒𝑋
𝑒𝑌
𝑒𝑍
𝑒𝑥
𝑒𝑦
𝑒𝑧
f
𝑓𝑖
FX
FY
FZ
G
ℎ𝑦
ℎ𝑧
𝐼𝑦
𝐼𝑧
𝐽𝑡
j
Vetor de deslocamentos nodais da estrutura
Deslocamento na direção do grau de liberdade (𝑖)
Variação de temperatura na face inferior do elemento
Variação de temperatura na face superior do elemento
Módulo de elasticidade longitudinal do material
Vetor unitário na direção do eixo global 𝑋
Vetor unitário na direção do eixo global 𝑌
Vetor unitário na direção do eixo global 𝑍
Vetor unitário na direção do eixo local 𝑥
Vetor unitário na direção do eixo local 𝑦
Vetor unitário na direção do eixo local 𝑧
Vetor global de forças da estrutura
Elemento do vetor de forças relativo à deslocabilidade (𝑖)
Força na direção do eixo global 𝑋
Força na direção do eixo global 𝑌
Força na direção do eixo global 𝑍
Módulo de elasticidade transversal do material
Dimensão da seção transversal paralela ao eixo 𝑦 local
Dimensão da seção transversal paralela ao eixo 𝑧 local
Momento de inércia à flexão em torno do eixo 𝑦
Momento de inércia à flexão em torno do eixo 𝑧
Momento de inércia à torção
Nó inicial do elemento
𝐾
k
𝑘(𝑖)
𝑘(𝑖)𝐺
Matriz de rigidez global da estrutura
Nó final do elemento
Matriz de rigidez do elemento (𝑖) no referencial local
Matriz de rigidez do elemento (𝑖) no referencial global
l
mt
Comprimento do elemento (barra)
Momento torçor
𝑀𝑦 Momento fletor em torno do eixo local 𝑦
𝑀𝑧 Momento fletor em torno do eixo local 𝑧
𝑀𝑥 Momento torçor em torno do eixo local 𝑥
𝑁 Esforço normal
�⃗⃗� Vetor unitário da direção do nó inicial j para o ponto auxiliar
noi Nó inicial do elemento
nof Nó final do elemento
𝑃 Carga concentrada
p Carga distribuída
px Carga distribuída no eixo local x
py Carga distribuída no eixo local y
pz Carga distribuída no eixo local z
Qx Esforço cortante no eixo local x
Qy Esforço cortante no eixo local y
Qz Esforço cortante no eixo local z
R Vetor de reações de apoio da estrutura
𝑅𝑡(𝑖) Matriz de rotação do elemento (i)
tc Carga triangular crescente
td Carga triangular decrescente
�⃗⃗�(𝑖) Vetor de deslocamentos nodais do elemento (i) no referencial local
�⃗⃗�(𝑖)𝐺 Vetor de deslocamentos nodais do elemento (i) no referencial global
X Eixo X global
x Eixo x local
𝑋𝑗 Coordenada X global do nó inicial j do elemento
𝑋𝑘 Coordenada X global do nó final k do elemento
𝑋𝐾 Coordenada X global do ponto auxiliar
Y Eixo 𝑌 global
y Eixo 𝑦 local
𝑌𝑗 Coordenada 𝑌 global do nó inicial j do elemento
𝑌𝑘 Coordenada 𝑌 global do nó final k do elemento
𝑌𝐾 Coordenada 𝑌 global do ponto auxiliar
Z Eixo 𝑍 global
z Eixo 𝑧 local
𝑍𝑗 Coordenada 𝑍 global do nó inicial j do elemento
𝑍𝑘 Coordenada 𝑍 global do nó final k do elemento
𝑍𝐾 Coordenada 𝑍 global do ponto auxiliar
𝜌 Recalque de apoio
∆ Variação de temperatura uniforme
16
1- INTRODUÇÃO
1.1 – Classificação das estruturas reticuladas
A análise estrutural permite a determinação de algumas grandezas fundamentais para
avaliar o comportamento das estruturas frente às ações solicitantes (cargas, variações de
temperatura, recalques de apoio etc.), bem como realizar seu correto dimensionamento. De
acordo com Moreira (1977), essas grandezas são de quatro tipos: as ações mecânicas externas
(solicitações e reações de apoio), as ações mecânicas internas (esforços seccionais e tensões),
os deslocamentos dos pontos da estrutura e as deformações.
Geralmente, o objetivo da análise de estruturas reticuladas é a determinação dos
deslocamentos nodais, das reações de apoio e dos esforços internos solicitantes. Para se
chegar a esse objetivo é necessário criar um modelo estrutural, que é o modelo analítico pelo
qual se representa matematicamente a estrutura real, fazendo assim uma idealização do
comportamento da mesma. Isso se dá através da modelagem geométrica da estrutura, das
ações externas e internas, bem como da adoção de hipóteses simplificadoras (MARTHA,
2010; MITTELBACH, 2011).
Com o desenvolvimento da tecnologia e, consequentemente, a evolução dos
computadores e das técnicas computacionais, a análise de estruturas por métodos numéricos
tornou-se cada vez mais utilizada. Isso permitiu que estruturas mais complexas, cuja
resolução analítica seria muito dispendiosa, pudessem ser resolvidas de maneira prática.
Para que a implementação computacional das estruturas seja possível, é necessário
fazer a discretização das mesmas. Dentre os métodos computacionais destaca-se o Método
dos Elementos Finitos (MEF), no qual a discretização é obtida pela subdivisão do domínio da
estrutura em uma malha de elementos finitos com a consideração de um número finito de
variáveis (graus de liberdade) nos seus pontos nodais. Em se tratando de estruturas
reticuladas, que são aquelas formadas por barras ligadas por nós nas suas extremidades, o
domínio já se encontra naturalmente discretizado, visto que essas estruturas são resolvidas
através do conhecimento dos deslocamentos e esforços nodais, tratando cada uma das barras
como um elemento finito (MARTHA, 2010; MITTELBACH, 2011).
As barras que constituem as estruturas reticuladas se caracterizam por possuírem uma
dimensão preponderante em relação às demais. São representadas por um segmento de reta,
também chamado de elemento, cujas extremidades são denominadas de pontos nodais (nós).

17
Os pontos nodais também podem ser considerados internos à barra, o que consiste em dividi-
la em barras menores (SORIANO, 2005). Isso ocorre quando, por exemplo, se quer aplicar
uma carga concentrada em um ponto diferente da extremidade da barra original. A subdivisão
de uma estrutura (pórtico plano) em barras está ilustrada na Figura 1.
1.2 – Objetivos
1.2.1 – Objetivo geral
Desenvolver um código computacional em linguagem de programação Fortran, para
análise e resolução de estruturas reticuladas planas (pórticos e treliças) e espaciais (pórticos,
treliças e grelhas), com sistema isostático ou hiperestático, a fim de se conhecer o
comportamento estrutural das mesmas frente às diversas ações solicitantes a que podem estar
submetidas.
1.2.2 – Objetivos específicos
a) Detalhar e expor o método matricial utilizado na implementação computacional
para análise automática de estruturas reticuladas;
b) Discorrer sobre a modificação das matrizes e vetores das estruturas frente à
aplicação das condições de contorno geométricas, bem como a simplificação da
resolução dos sistemas de equações de equilíbrio, necessária para o conhecimento
do comportamento das estruturas;
c) Determinar as reações de apoio, deslocamentos e esforços internos nos pontos
nodais dos tipos de estruturas reticuladas tratadas ao longo do trabalho.
Figura 1 - Subdivisão de um pórtico plano em barras
Fonte: Adaptado de Moreira (1977)
P
18
1.3 – Estrutura do trabalho
O presente trabalho é composto por seis capítulos. No Capítulo 2 discorre-se sobre a
classificação das estruturas reticuladas, explicando suas propriedades e as hipóteses
consideradas na resolução das mesmas. Também apresenta-se o Método da Rigidez para
resolução dessas estruturas, sua formulação matricial e consequentemente a obtenção das
matrizes e vetores necessários aos cálculos. São ainda apresentadas as operações realizadas na
formulação matricial das estruturas.
No Capítulo 3 apresenta-se a metodologia empregada na resolução das estruturas
reticuladas pela análise matricial via implementação computacional. Neste capítulo
apresentam-se as considerações sobre o código computacional desenvolvido, explicando sua
estrutura geral (programa principal, sub-rotinas, arquivos de entrada e saída). São elencadas as
matrizes e os vetores utilizados no desenvolvimento do código, bem como as considerações,
os métodos e as técnicas que foram empregados durante tal procedimento.
No Capítulo 4 estão apresentados exemplos utilizados na obtenção dos resultados pelo
código computacional para os tipos de estruturas que o mesmo se propõe a resolver, como
pórticos planos (com e sem rótula) e espaciais, treliças planas e espaciais e grelhas. Também
são apresentados os resultados, para os mesmos exemplos, obtidos na literatura e em
programas de cálculo estrutural, tais como FTOOL (MARTHA, 2012) e SALT, para posterior
comparação.
No Capítulo 5 apresentam-se as discussões acerca dos resultados obtidos e a
comparação dos mesmos com aqueles obtidos na literatura ou em outros programas de análise
estrutural. Também discorre-se sobre as limitações do código computacional desenvolvido e
as sugestões para continuidade do trabalho.
Por fim, o Capítulo 6 apresenta as conclusões sobre o trabalho, apresentando uma
síntese e um parecer quanto ao atendimento de suas expectativas.
19
2 – FUNDAMENTAÇÃO TEÓRICA
2.1 – Classificação das estruturas reticuladas
Soriano (2005) classifica as estruturas em barras de acordo com dois critérios: quanto
aos esforços seccionais desenvolvidos nessas barras e quanto ao equilíbrio estático das
estruturas. De acordo com o primeiro critério as estruturas reticuladas podem ser classificadas
como treliças plana ou espacial, pórticos plano ou espacial, grelha e estruturas com escoras,
tirantes ou cabos.
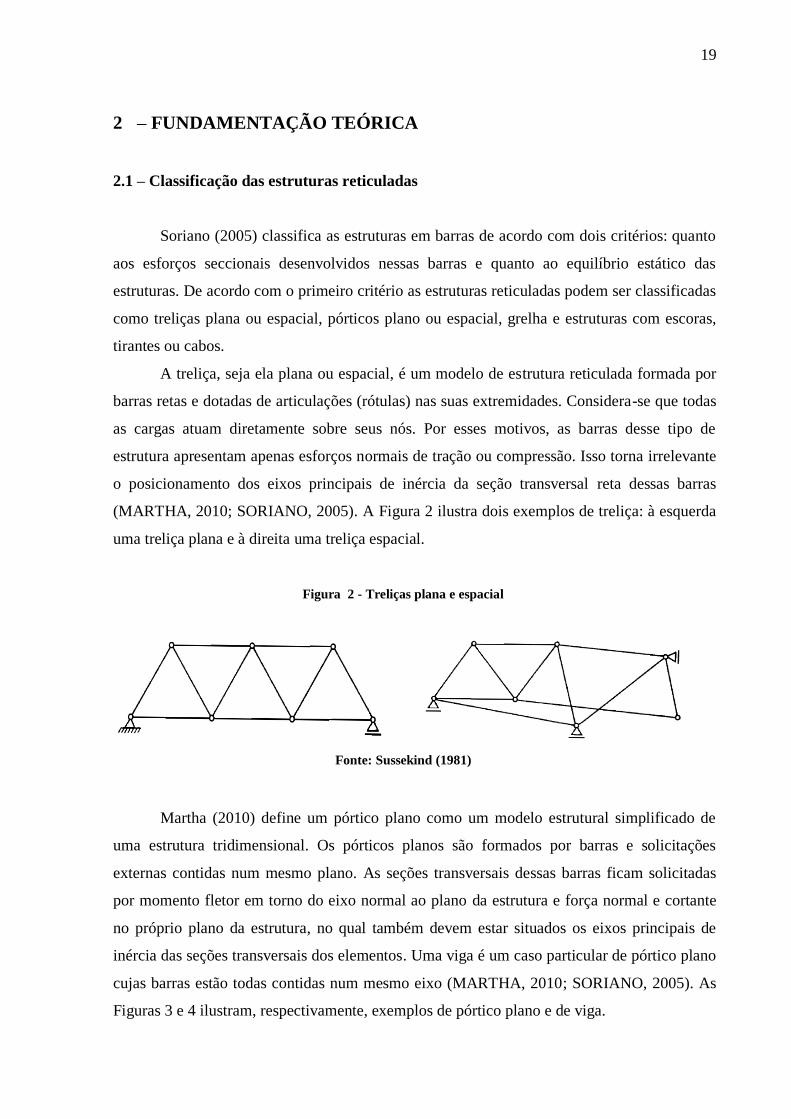
A treliça, seja ela plana ou espacial, é um modelo de estrutura reticulada formada por
barras retas e dotadas de articulações (rótulas) nas suas extremidades. Considera-se que todas
as cargas atuam diretamente sobre seus nós. Por esses motivos, as barras desse tipo de
estrutura apresentam apenas esforços normais de tração ou compressão. Isso torna irrelevante
o posicionamento dos eixos principais de inércia da seção transversal reta dessas barras
(MARTHA, 2010; SORIANO, 2005). A Figura 2 ilustra dois exemplos de treliça: à esquerda
uma treliça plana e à direita uma treliça espacial.
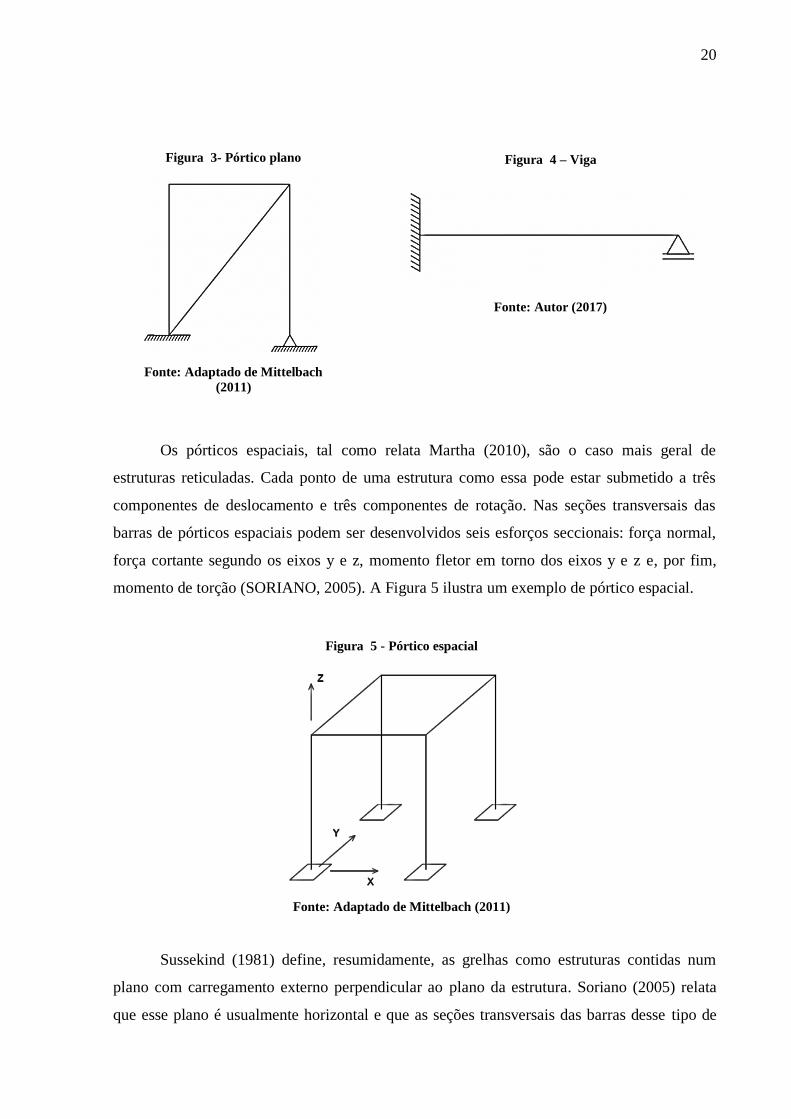
Martha (2010) define um pórtico plano como um modelo estrutural simplificado de
uma estrutura tridimensional. Os pórticos planos são formados por barras e solicitações
externas contidas num mesmo plano. As seções transversais dessas barras ficam solicitadas
por momento fletor em torno do eixo normal ao plano da estrutura e força normal e cortante
no próprio plano da estrutura, no qual também devem estar situados os eixos principais de
inércia das seções transversais dos elementos. Uma viga é um caso particular de pórtico plano
cujas barras estão todas contidas num mesmo eixo (MARTHA, 2010; SORIANO, 2005). As
Figuras 3 e 4 ilustram, respectivamente, exemplos de pórtico plano e de viga.
Figura 2 - Treliças plana e espacial
Fonte: Sussekind (1981)
20
Os pórticos espaciais, tal como relata Martha (2010), são o caso mais geral de
estruturas reticuladas. Cada ponto de uma estrutura como essa pode estar submetido a três
componentes de deslocamento e três componentes de rotação. Nas seções transversais das
barras de pórticos espaciais podem ser desenvolvidos seis esforços seccionais: força normal,
força cortante segundo os eixos y e z, momento fletor em torno dos eixos y e z e, por fim,
momento de torção (SORIANO, 2005). A Figura 5 ilustra um exemplo de pórtico espacial.
Sussekind (1981) define, resumidamente, as grelhas como estruturas contidas num
plano com carregamento externo perpendicular ao plano da estrutura. Soriano (2005) relata
que esse plano é usualmente horizontal e que as seções transversais das barras desse tipo de
Figura 3- Pórtico plano
Fonte: Adaptado de Mittelbach
(2011)
Figura 4 – Viga
Fonte: Autor (2017)
Figura 5 - Pórtico espacial
Fonte: Adaptado de Mittelbach (2011)

21
estrutura ficam solicitadas por momento fletor no plano da grelha, força cortante normal ao
plano da grelha e momento de torção. Sendo assim, é necessário que pelo menos um dos eixos
principais de inércia da seção transversal esteja situado no plano da estrutura. Um exemplo de
grelha está ilustrado na Figura 6.
Os tirantes e as escoras são modelos que apresentam elementos estruturais com eixos
bem definidos, submetidos, respectivamente, apenas à tração pura e à compressão pura. Os
cabos também estão submetidos à tração pura, porém diferem dos tirantes por poderem
apresentar eixo curvo em função das forças que lhe solicitam (MARTHA, 2010; SORIANO,
2005).
Quanto ao segundo critério (equilíbrio estático), Soriano (2005) classifica as estruturas
em hipostáticas, isostáticas ou hiperestáticas, sendo as hipostáticas as que não apresentam
vínculos externos (restrições de apoio) e internos suficientes para garantir seu equilíbrio ou de
suas partes (não possuem estabilidade). Martha (2010) define as estruturas isostáticas (ou
estaticamente determinadas) como aquelas nas quais o número de vínculos externos e internos
se iguala ao número de condições de equilíbrio. Dessa forma, fazendo-se uso das leis da
estática é possível determinar os esforços seccionais e as reações de apoio desse tipo de
estrutura. Por fim, as estruturas hiperestáticas (ou estaticamente indeterminadas) são aquelas
cujos vínculos externos e internos são excedentes em relação ao número de equações de
equilíbrio estático. Diante disso, além das equações de equilíbrio é necessário levar em
consideração a deformabilidade do modelo estrutural para se determinar suas reações de apoio
e seus esforços seccionais (MARTHA, 2010; SORIANO, 2005).
De acordo com White (1976, apud MARTHA, 2010), para resolver uma estrutura
hiperestática é necessário levar em consideração três condições básicas da análise estrutural:
condições de equilíbrio, condições de compatibilidade entre deslocamentos e deformações, e
Figura 6- Grelha
Fonte: Autor (2017)
22
condições impostas pelas leis constitutivas dos materiais. A partir desse pressuposto, é
necessário definir metodologias para a solução dessas estruturas.
Basicamente, existem dois métodos básicos de análise estrutural: o Método das Forças
e o Método dos Deslocamentos. No primeiro método, também conhecido como Método da
Flexibilidade quando o modelo estrutural é linear, as principais incógnitas do problema são as
forças e os momentos. Esse método objetiva encontrar, em um conjunto de soluções que
atendem ao equilíbrio do sistema, aquela que também satisfaz às condições de
compatibilidade de deformação (MARTHA, 2010). Já no Método dos Deslocamentos,
também conhecido como Método da Rigidez quando o modelo estrutural é linear, as
principais incógnitas são os deslocamentos e rotações.
2.2 – Método da Rigidez
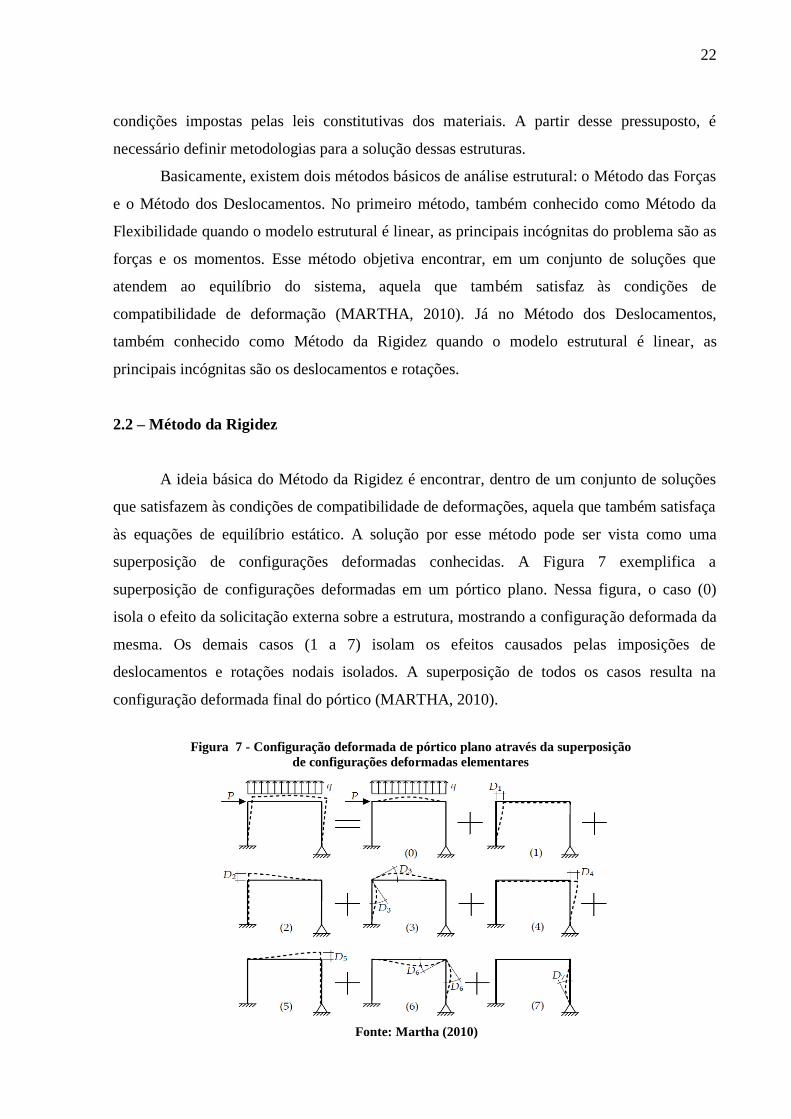
A ideia básica do Método da Rigidez é encontrar, dentro de um conjunto de soluções
que satisfazem às condições de compatibilidade de deformações, aquela que também satisfaça
às equações de equilíbrio estático. A solução por esse método pode ser vista como uma
superposição de configurações deformadas conhecidas. A Figura 7 exemplifica a
superposição de configurações deformadas em um pórtico plano. Nessa figura, o caso (0)
isola o efeito da solicitação externa sobre a estrutura, mostrando a configuração deformada da
mesma. Os demais casos (1 a 7) isolam os efeitos causados pelas imposições de
deslocamentos e rotações nodais isolados. A superposição de todos os casos resulta na
configuração deformada final do pórtico (MARTHA, 2010).
Figura 7 - Configuração deformada de pórtico plano através da superposição
de configurações deformadas elementares
Fonte: Martha (2010)
23
Diante disso, definem-se as deslocabilidades de uma estrutura como sendo as
componentes de deslocamentos e rotações nodais necessárias para se conhecer sua
configuração deformada. Essas deslocabilidades podem ser classificadas como internas
(rotações dos nós não rotulados) ou externas (deslocamentos lineares independentes dos nós).
De acordo com Soriano (2005), os deslocamentos nodais livres são denominados de graus de
liberdade, enquanto os deslocamentos nodais dos apoios são denominados deslocamentos
prescritos.
A aplicação do Método da Rigidez consiste em impedir todas as deslocabilidades da
estrutura através da inserção de vínculos fictícios. A estrutura modificada pela inserção dos
vínculos recebe o nome de Sistema Hipergeométrico (SH) e é única, visto que só existe uma
possibilidade para chegar até a mesma, que é impedindo todas as deslocabilidades. Aplicam-
se, isoladamente, rotações ou deslocamentos lineares unitários na direção de cada um das
deslocabilidades e avaliam-se os efeitos que essas rotações ou deslocamentos lineares
unitários causam na direção das outras deslocabilidades. Feito isso, é possível montar um
sistema de equações cuja resolução permite conhecer o valor que cada deslocabilidade deve
ter para recompor o equilíbrio da estrutura original sem o apoio fictício (MARTHA, 2010).
Para uma estrutura reticulada com 𝑛 deslocabilidades, o sistema de equilíbrio
resultante da aplicação do Método da Rigidez se escreve da seguinte forma:
𝛽10 + 𝛽11∆1 + 𝛽12∆2 + ⋯ + 𝛽1𝑛∆𝑛= 𝐶1 ⋮
𝛽𝑛0 + 𝛽𝑛1∆1 + 𝛽𝑛2∆2 + ⋯ + 𝛽𝑛𝑛∆𝑛= 𝐶𝑛
(1)
Onde:
𝛽𝑖𝑗 Força ou momento na direção do grau de liberdade 𝑖 devido a um deslocamento
ou rotação unitária na direção do grau de liberdade 𝑗. Pelo teorema dos trabalhos recíprocos,
tem-se que 𝛽𝑖𝑗 = 𝛽𝑗𝑖;
𝛽𝑖0 Força ou momento na direção do grau de liberdade 𝑖 devido à solicitação
externa;
𝛥𝑖 Deslocamento na direção do grau de liberdade 𝑖;
𝐶𝑖 Carregamento externo aplicado na direção do grau de liberdade 𝑖.
De acordo com Mittelbach (2011) o referido método é especialmente adequado para a
formulação matricial de uma estrutura. Dessa maneira, o sistema de equações (1) acima pode
ser reescrito na forma matricial como se segue:
24
[
𝛽11 𝛽12 … 𝛽1𝑛
𝛽21 𝛽22 … 𝛽2𝑛
⋮ ⋮ … ⋮𝛽𝑛1 𝛽𝑛2 … 𝛽𝑛𝑛
] [
𝛥1
𝛥2
⋮𝛥𝑛
] = [
−𝛽10
−𝛽20
⋮−𝛽𝑛0
] + [
𝐶1
𝐶2
⋮𝐶𝑛
] (2)
2.3 – Análise matricial de estruturas
Para que se possa realizar a implementação computacional de uma estrutura é
necessário trata-la de forma generalizada. De acordo com Mittelbach (2011), no caso de
estruturas reticuladas, isso é feito impedindo todos os deslocamentos nodais da estrutura para
calcular os coeficientes e aplicar as condições de contorno geométricas na resolução do
sistema de equilíbrio. Cadamuro Jr e Michelim (2003) falam que, além de permitir a
generalização desejada, a análise matricial tem a vantagem de se adaptar bem ao emprego em
computadores.
Para se realizar a implementação computacional é necessário considerar algumas
definições quanto aos parâmetros utilizados nos cálculos. Quando se trabalha com análise
matricial, o sistema de equações (2) mostrado anteriormente assume a forma a seguir
(MITTELBACH, 2011):
[
𝑘11 𝑘12 … 𝑘1𝑛
𝑘21 𝑘22 … 𝑘2𝑛
⋮ ⋮ … ⋮𝑘𝑛1 𝑘𝑛2 … 𝑘𝑛𝑛
] [
𝑑1
𝑑2
⋮𝑑𝑛
] = [
𝑓1
𝑓2
⋮𝑓𝑛
] + [
𝑅1
𝑅2
⋮𝑅𝑛
] (3)
Onde:
𝑘𝑖𝑗 Coeficientes de rigidez. A matriz formada por esses coeficientes é denominada
matriz de rigidez da estrutura. Cada coeficiente representa a reação na direção do grau de
liberdade 𝑖 causada por um deslocamento ou rotação unitária na direção do grau de liberdade
𝑗. Pelo teorema dos trabalhos recíprocos 𝑘𝑖𝑗 = 𝑘𝑗𝑖;
𝑑𝑖 Deslocamento na direção do grau de liberdade 𝑖. O conjunto dos deslocamentos
é denominado vetor de deslocamentos nodais da estrutura;
𝑓𝑖 Elemento do vetor de forças relativo à deslocabilidade 𝑖. O vetor de forças é
formado pelo somatório entre as cargas nodais equivalentes e as cargas nodais concentradas;
𝑅𝑖 Reação de apoio na direção do grau de liberdade 𝑖. O conjunto de reações forma
o vetor de reações de apoio da estrutura, computado separadamente do vetor de cargas nodais.
25
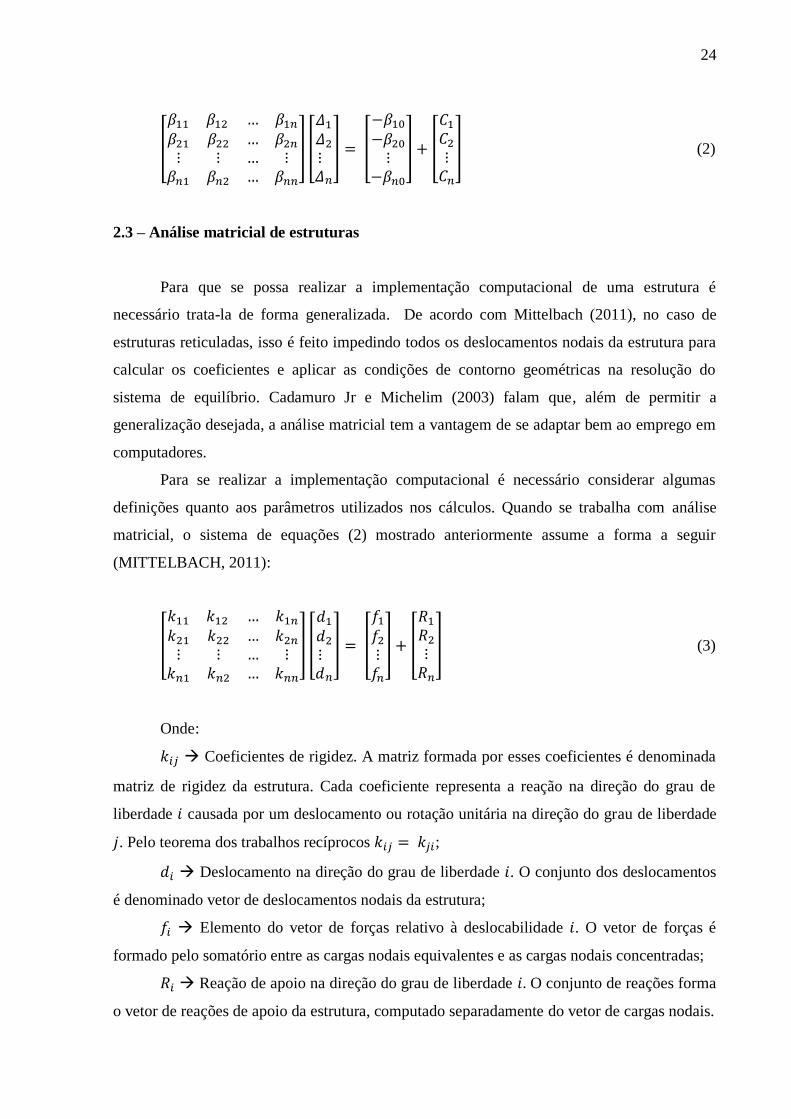
De maneira geral, o sistema de equações (3) tem a forma:
𝑲 ∗ 𝒅 = 𝒇 + 𝑹 (4)
Onde 𝐾 é a matriz de rigidez global da estrutura, 𝑑 é o vetor global de deslocamentos
nodais, 𝑓 é o vetor global das forças nodais e 𝑅 é o vetor de reações de apoio da estrutura.
2.3.1 – Sistema de referência global e local das estruturas
Com a finalidade de identificar e ordenar as ações mecânicas e os deslocamentos
existentes na estrutura, é fixado, inicialmente, um sistema de referência para a mesma
(MOREIRA, 1977). Esse sistema pode ser de dois tipos: global ou local.
O sistema de referência global trata a estrutura como um todo. De acordo com Soriano
(2005, apud Kummer, 2014) a esse sistema de referência ficam vinculadas as grandezas
relativas aos nós da estrutura, como coordenadas, deslocamentos, reações e cargas
concentradas. Mittelbach (2011) cita que, para analisar matricialmente uma estrutura é
necessário inicialmente numerar seus nós para que seja possível numerar e identificar as
deslocabilidades associadas a cada um deles. A numeração dos elementos também é
importante para definir os nós iniciais e finais de cada uma das barras. Essa numeração dos
nós, bem como a dos elementos, é feita inicialmente de acordo com o sistema de referência
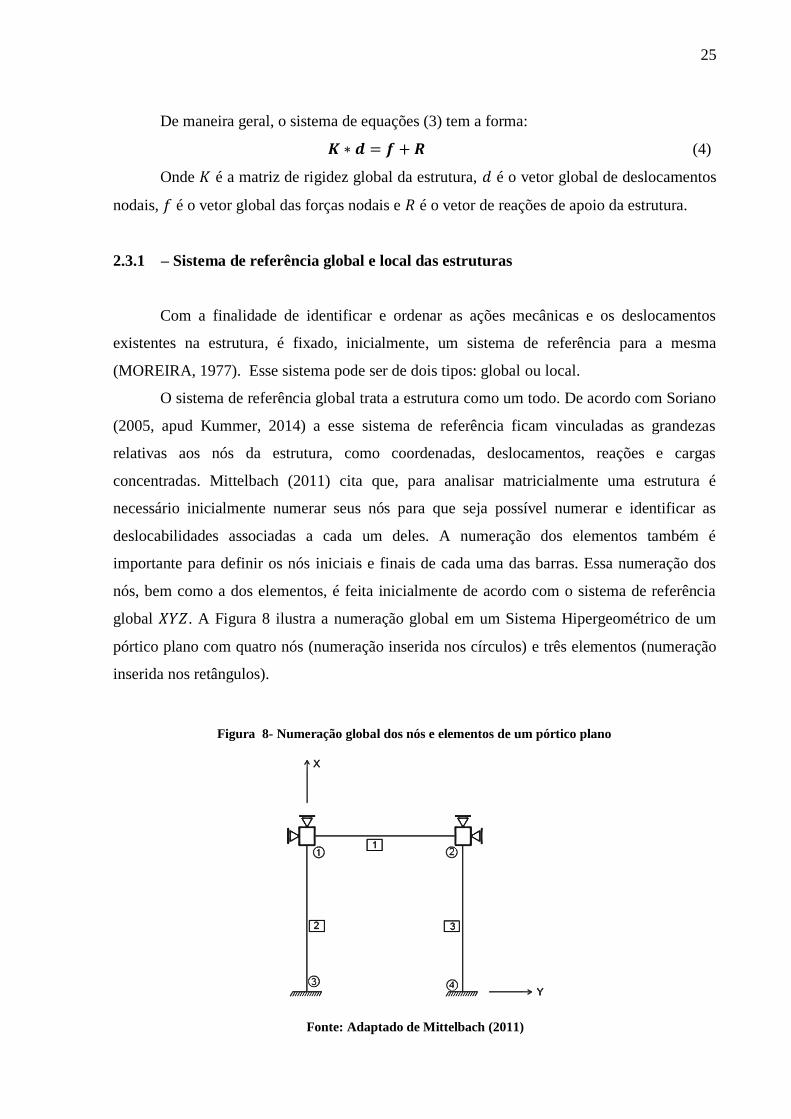
global 𝑋𝑌𝑍. A Figura 8 ilustra a numeração global em um Sistema Hipergeométrico de um
pórtico plano com quatro nós (numeração inserida nos círculos) e três elementos (numeração
inserida nos retângulos).
Figura 8- Numeração global dos nós e elementos de um pórtico plano
Fonte: Adaptado de Mittelbach (2011)
26
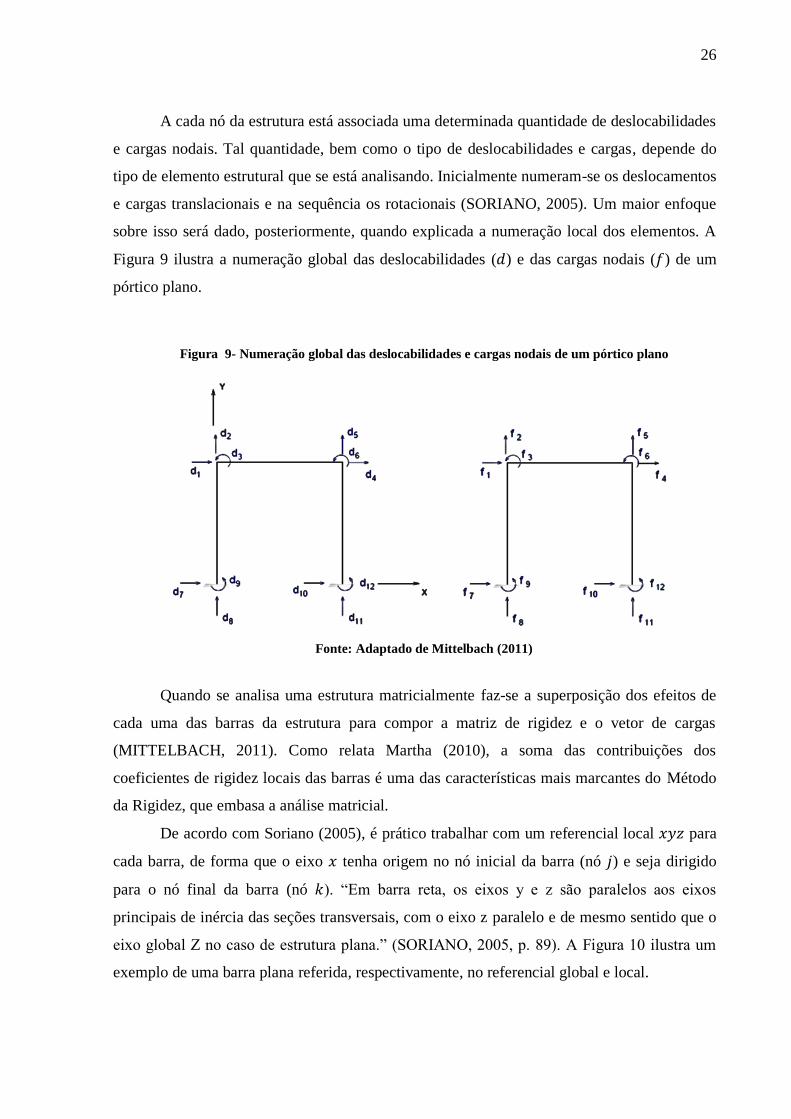
A cada nó da estrutura está associada uma determinada quantidade de deslocabilidades
e cargas nodais. Tal quantidade, bem como o tipo de deslocabilidades e cargas, depende do
tipo de elemento estrutural que se está analisando. Inicialmente numeram-se os deslocamentos
e cargas translacionais e na sequência os rotacionais (SORIANO, 2005). Um maior enfoque
sobre isso será dado, posteriormente, quando explicada a numeração local dos elementos. A
Figura 9 ilustra a numeração global das deslocabilidades (𝑑) e das cargas nodais (𝑓) de um
pórtico plano.
Quando se analisa uma estrutura matricialmente faz-se a superposição dos efeitos de
cada uma das barras da estrutura para compor a matriz de rigidez e o vetor de cargas
(MITTELBACH, 2011). Como relata Martha (2010), a soma das contribuições dos
coeficientes de rigidez locais das barras é uma das características mais marcantes do Método
da Rigidez, que embasa a análise matricial.
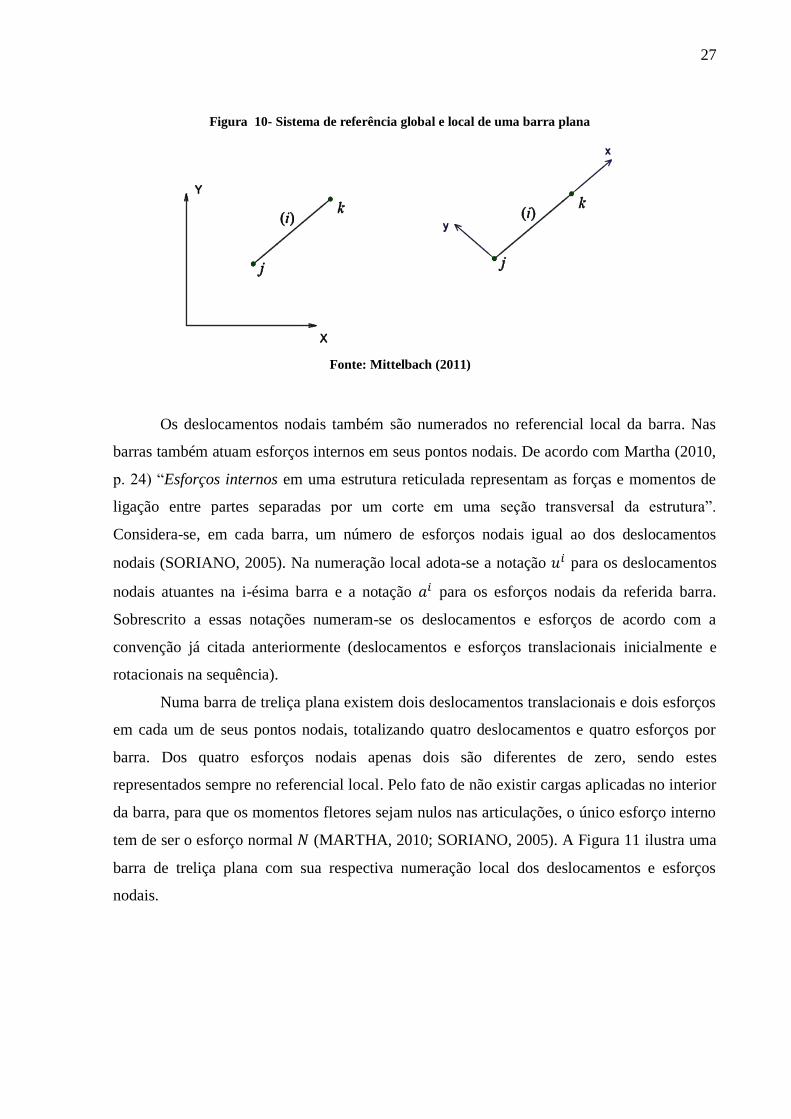
De acordo com Soriano (2005), é prático trabalhar com um referencial local 𝑥𝑦𝑧 para
cada barra, de forma que o eixo 𝑥 tenha origem no nó inicial da barra (nó 𝑗) e seja dirigido
para o nó final da barra (nó 𝑘). “Em barra reta, os eixos y e z são paralelos aos eixos
principais de inércia das seções transversais, com o eixo z paralelo e de mesmo sentido que o
eixo global Z no caso de estrutura plana.” (SORIANO, 2005, p. 89). A Figura 10 ilustra um
exemplo de uma barra plana referida, respectivamente, no referencial global e local.
Figura 9- Numeração global das deslocabilidades e cargas nodais de um pórtico plano
Fonte: Adaptado de Mittelbach (2011)
27
Os deslocamentos nodais também são numerados no referencial local da barra. Nas
barras também atuam esforços internos em seus pontos nodais. De acordo com Martha (2010,
p. 24) “Esforços internos em uma estrutura reticulada representam as forças e momentos de
ligação entre partes separadas por um corte em uma seção transversal da estrutura”.
Considera-se, em cada barra, um número de esforços nodais igual ao dos deslocamentos
nodais (SORIANO, 2005). Na numeração local adota-se a notação 𝑢𝑖 para os deslocamentos
nodais atuantes na i-ésima barra e a notação 𝑎𝑖 para os esforços nodais da referida barra.
Sobrescrito a essas notações numeram-se os deslocamentos e esforços de acordo com a
convenção já citada anteriormente (deslocamentos e esforços translacionais inicialmente e
rotacionais na sequência).
Numa barra de treliça plana existem dois deslocamentos translacionais e dois esforços
em cada um de seus pontos nodais, totalizando quatro deslocamentos e quatro esforços por
barra. Dos quatro esforços nodais apenas dois são diferentes de zero, sendo estes
representados sempre no referencial local. Pelo fato de não existir cargas aplicadas no interior
da barra, para que os momentos fletores sejam nulos nas articulações, o único esforço interno
tem de ser o esforço normal 𝑁 (MARTHA, 2010; SORIANO, 2005). A Figura 11 ilustra uma
barra de treliça plana com sua respectiva numeração local dos deslocamentos e esforços
nodais.
Figura 10- Sistema de referência global e local de uma barra plana
Fonte: Mittelbach (2011)

28
Numa barra de treliça espacial existem três deslocamentos translacionais e três
esforços em cada um de seus pontos nodais, perfazendo seis deslocamentos e seis esforços por
barra. Dos seis esforços, apenas dois são diferentes de zero (SORIANO, 2005). Dessa forma,
tal como ocorre nas barras de treliça plana, o único esforço interno que atua nas barras de
treliça espacial é o esforço normal 𝑁. A Figura 12 ilustra a numeração local dos
deslocamentos e esforços nodais de uma barra de treliça espacial.
Os pórticos planos possuem seis deslocamentos e seis esforços nodais em cada uma de
suas barras. Os deslocamentos correspondem a dois deslocamentos translacionais no plano 𝑥𝑦
local da barra e um deslocamento rotacional em torno do eixo 𝑧 perpendicular ao plano da
estrutura. Já os esforços nodais que atuam nas barras desse tipo de elemento estrutural
correspondem à força normal 𝑁, força cortante 𝑄𝑦 (𝑦 local) e momento fletor 𝑀𝑧 (𝑧 local) de
vetor representativo normal ao plano da estrutura (SORIANO, 2005). Uma barra de pórtico
plano, com a numeração de seus respectivos deslocamentos e esforços nodais, encontra-se
ilustrada na Figura 13.
Figura 11 - Numeração local dos deslocamentos e esforços nodais em barra de treliça plana
Fonte: Soriano (2005)
Fonte: Soriano (2005)
Figura 12 - Numeração local dos deslocamentos e esforços nodais em barra de treliça espacial

29
Como já foi mencionado anteriormente, o caso mais geral de estruturas reticuladas é o
pórtico espacial. A cada ponto nodal das barras desse tipo de elemento estrutural estão
associados seis deslocamentos e seis esforços nodais, totalizando doze deslocamentos e doze
esforços nodais por barra. Os deslocamentos correspondem a três componentes de translação
e três componentes de rotação. Já os esforços correspondem a esforço normal 𝑁, esforço
cortante 𝑄𝑦 (𝑦 local), esforço cortante 𝑄𝑧 (𝑧 local), momento fletor 𝑀𝑦 (em torno do eixo 𝑦
local), momento fletor 𝑀𝑧 (em torno do eixo 𝑧 local) e momento de torção 𝑇 em torno do eixo
local 𝑥 (MARTHA, 2010). A numeração dos deslocamentos e esforços nodais para o pórtico
espacial está ilustrada na Figura 14.
As barras de estruturas de grelha possuem em cada ponto nodal três deslocamentos,
sendo um deslocamento translacional transversal ao plano da estrutura e duas rotações de
vetores representativos no referido plano (SORIANO, 2005). A cada nó também estão
Fonte: Soriano (2005)
Figura 14 - Numeração local dos deslocamentos e esforços nodais em barra de pórtico espacial
Fonte: Soriano (2005)
Figura 13 - Numeração local dos deslocamentos e esforços nodais em barra de pórtico espacial
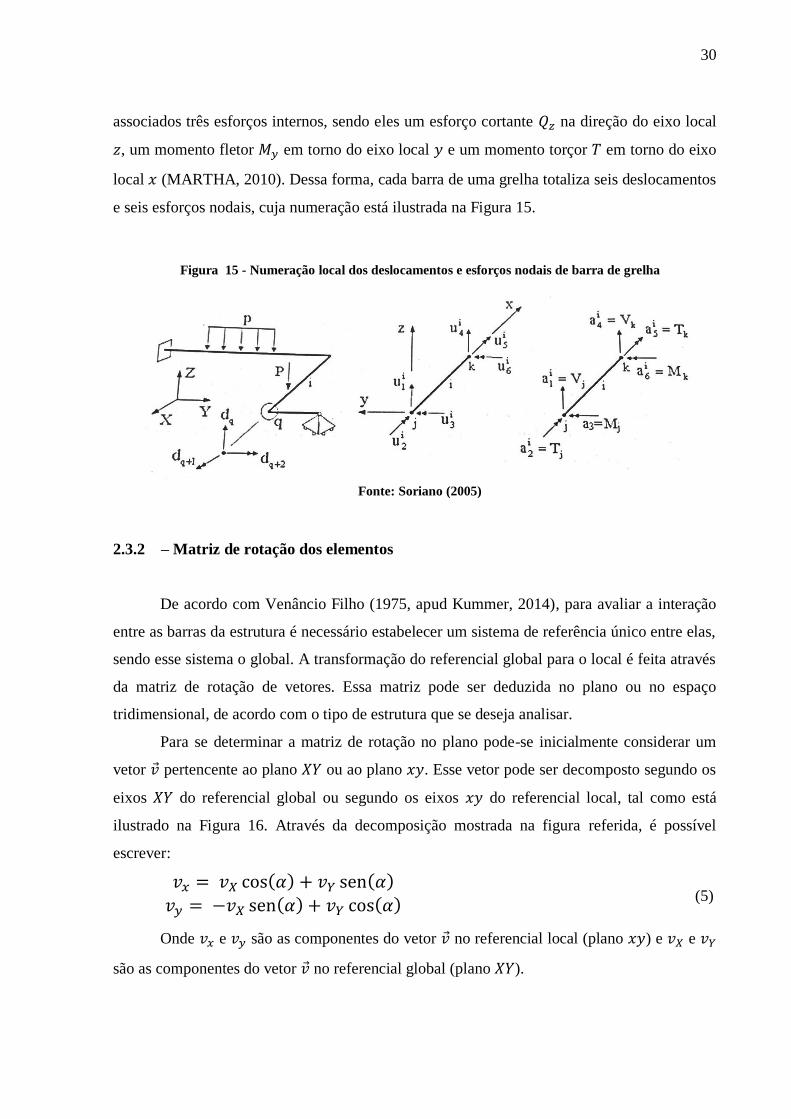
30
associados três esforços internos, sendo eles um esforço cortante 𝑄𝑧 na direção do eixo local
𝑧, um momento fletor 𝑀𝑦 em torno do eixo local 𝑦 e um momento torçor 𝑇 em torno do eixo
local 𝑥 (MARTHA, 2010). Dessa forma, cada barra de uma grelha totaliza seis deslocamentos
e seis esforços nodais, cuja numeração está ilustrada na Figura 15.
2.3.2 – Matriz de rotação dos elementos
De acordo com Venâncio Filho (1975, apud Kummer, 2014), para avaliar a interação
entre as barras da estrutura é necessário estabelecer um sistema de referência único entre elas,
sendo esse sistema o global. A transformação do referencial global para o local é feita através
da matriz de rotação de vetores. Essa matriz pode ser deduzida no plano ou no espaço
tridimensional, de acordo com o tipo de estrutura que se deseja analisar.
Para se determinar a matriz de rotação no plano pode-se inicialmente considerar um
vetor �⃗� pertencente ao plano 𝑋𝑌 ou ao plano 𝑥𝑦. Esse vetor pode ser decomposto segundo os
eixos 𝑋𝑌 do referencial global ou segundo os eixos 𝑥𝑦 do referencial local, tal como está
ilustrado na Figura 16. Através da decomposição mostrada na figura referida, é possível
escrever:
𝑣𝑥 = 𝑣𝑋 cos(𝛼) + 𝑣𝑌 sen(𝛼)
𝑣𝑦 = −𝑣𝑋 sen(𝛼) + 𝑣𝑌 cos(𝛼) (5)
Onde 𝑣𝑥 e 𝑣𝑦 são as componentes do vetor �⃗� no referencial local (plano 𝑥𝑦) e 𝑣𝑋 e 𝑣𝑌
são as componentes do vetor �⃗� no referencial global (plano 𝑋𝑌).
Figura 15 - Numeração local dos deslocamentos e esforços nodais de barra de grelha
Fonte: Soriano (2005)

31
As equações mostradas em (5) podem ser reescritas matricialmente, assumindo a
seguinte forma:
[𝑣𝑥
𝑣𝑦] = [
cos 𝛼 𝑠𝑖𝑛 𝛼−𝑠𝑖𝑛 𝛼 cos 𝛼
] [𝑣𝑋
𝑣𝑌] ou �⃗�𝑥𝑦 = 𝑅𝑡�⃗�𝑋𝑌 (6)
Onde �⃗�𝑥𝑦 corresponde ao vetor �⃗� na base 𝑥𝑦, �⃗�𝑋𝑌 corresponde ao vetor �⃗� na base 𝑋𝑌 e
𝑅𝑡 corresponde à matriz de rotação no plano. De acordo com Soriano (2005), a primeira linha
da referida matriz de rotação é formada pelos cossenos diretores em relação ao eixo 𝑥 e a
segunda linha é formada pelos cossenos diretores em relação ao eixo 𝑦. Tal autor ainda relata
que essa matriz é ortogonal.
Os valores de 𝑠𝑖𝑛 𝛼 e 𝑐𝑜𝑠 𝛼 podem ser determinados pelas coordenadas no referencial
global dos nós inicial e final da barra. Adotando-se a notação 𝑋𝑗 e 𝑌𝑗 para as coordenadas
globais no plano 𝑋𝑌 do nó inicial, bem como 𝑋𝑘 e 𝑌𝑘 para as coordenas globais do plano 𝑋𝑌
do nó final do elemento, os termos da matriz de rotação 𝑅𝑡 podem ser calculados como se
segue:
𝑐𝑜𝑠 𝛼 = 𝑋𝑘− 𝑋𝑗
𝑙 (7)
𝑠𝑖𝑛 𝛼 = 𝑌𝑘− 𝑌𝑗
𝑙 (8)
Figura 16- Rotação de eixos no plano
Fonte: Mittelbach (2011)

32
Em que 𝑙 é o comprimento da barra, determinado pela equação (9):
𝑙 = √(𝑋𝑘 − 𝑋𝑗)2 + (𝑌𝑘 − 𝑌𝑗)2 (9)
Soriano (2005) explica que a matriz de rotação no espaço tridimensional é definida de
maneira semelhante ao que foi feito no plano. Essa matriz de rotação para elementos
tridimensionais tem a seguinte forma:
𝑅 = [
𝜆𝑥𝑋 𝜆𝑥𝑌 𝜆𝑥𝑍
𝜆𝑦𝑋 𝜆𝑦𝑌 𝜆𝑦𝑍
𝜆𝑧𝑋 𝜆𝑧𝑌 𝜆𝑧𝑍
] (10)
A primeira linha dessa matriz define os cossenos diretores das direções 𝑋, 𝑌 e 𝑍 em
relação ao eixo 𝑥, a segunda linha define os cossenos diretores das direções 𝑋, 𝑌 e 𝑍 em
relação ao eixo 𝑦 e a terceira linha define os cossenos diretores das direções 𝑋, 𝑌 e 𝑍 em
relação ao eixo 𝑧. Ainda de acordo com Soriano (2005), como o eixo 𝑥 passa pelos nós inicial
e final da barra, cujas coordenadas globais são, respectivamente, (𝑋𝑗, 𝑌𝑗 , 𝑍𝑗) e (𝑋𝑘, 𝑌𝑘 , 𝑍𝑘), os
cossenos diretores em relação a esse eixo podem ser determinados como:
𝜆𝑥𝑋 = 𝑋𝑘− 𝑋𝑗
𝑙 (11)
𝜆𝑥𝑌 = 𝑌𝑘− 𝑌𝑗
𝑙 (12)
𝜆𝑥𝑍 = 𝑍𝑘− 𝑍𝑗
𝑙 (13)
Onde 𝑙 corresponde ao comprimento da barra tridimensional, definido como se segue:
𝑙 = √(𝑋𝑘 − 𝑋𝑗)2 + (𝑌𝑘 − 𝑌𝑗)2 + (𝑍𝑘 − 𝑍𝑗)2 (14)
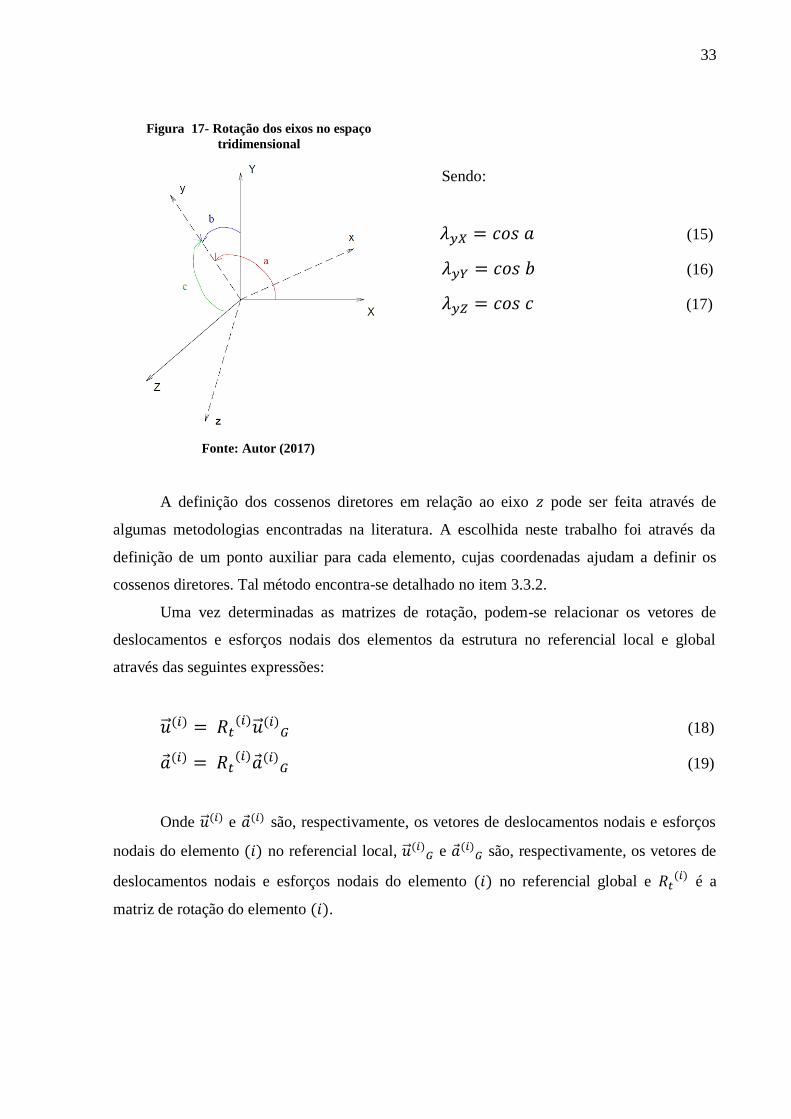
Os cossenos diretores em relação ao eixo 𝑦 podem ser determinados de acordo com a
Figura 17, que mostra a rotação dos eixos no espaço tridimensional (SORIANO, 2005):
33
Sendo:
𝜆𝑦𝑋 = 𝑐𝑜𝑠 𝑎 (15)
𝜆𝑦𝑌 = 𝑐𝑜𝑠 𝑏 (16)
𝜆𝑦𝑍 = 𝑐𝑜𝑠 𝑐 (17)
A definição dos cossenos diretores em relação ao eixo 𝑧 pode ser feita através de
algumas metodologias encontradas na literatura. A escolhida neste trabalho foi através da
definição de um ponto auxiliar para cada elemento, cujas coordenadas ajudam a definir os
cossenos diretores. Tal método encontra-se detalhado no item 3.3.2.
Uma vez determinadas as matrizes de rotação, podem-se relacionar os vetores de
deslocamentos e esforços nodais dos elementos da estrutura no referencial local e global
através das seguintes expressões:
�⃗⃗�(𝑖) = 𝑅𝑡(𝑖)�⃗⃗�(𝑖)
𝐺 (18)
�⃗�(𝑖) = 𝑅𝑡(𝑖)�⃗�(𝑖)
𝐺 (19)
Onde �⃗⃗�(𝑖) e �⃗�(𝑖) são, respectivamente, os vetores de deslocamentos nodais e esforços
nodais do elemento (𝑖) no referencial local, �⃗⃗�(𝑖)𝐺 e �⃗�(𝑖)
𝐺 são, respectivamente, os vetores de
deslocamentos nodais e esforços nodais do elemento (𝑖) no referencial global e 𝑅𝑡(𝑖) é a
matriz de rotação do elemento (𝑖).
Figura 17- Rotação dos eixos no espaço
tridimensional
Fonte: Autor (2017).
Fonte: Autor (2017)

34
2.3.3 – Matriz de rigidez dos elementos
Como já foi citado no item 2.2, no Método da Rigidez o comportamento de uma
estrutura pode ser obtido pela superposição de configurações deformadas elementares
conhecidas. Cada configuração deformada elementar é composta de configurações
deformadas elementares das barras que a compõem, denominadas de soluções fundamentais.
As soluções fundamentais podem ser de dois tipos: coeficientes de rigidez locais e reações de
engastamento perfeito (MARTHA, 2010). A matriz de rigidez dos elementos isolados,
também chamada de matriz de rigidez local, é composta pelos coeficientes de rigidez locais.
Estes, de acordo com Martha (2010, p. 269) “[...] correspondem a forças e momentos que
devem atuar nas extremidades de uma barra para equilibrá-la quando são impostos,
isoladamente, deslocamentos ou rotações unitárias nas suas extremidades”.
Os parâmetros fundamentais pelos quais se obtém os coeficientes de rigidez locais são
o coeficiente de rigidez axial, o coeficiente de rigidez à rotação e o coeficiente de rigidez à
torção. O primeiro corresponde à força axial que deve atuar em uma das extremidades da
barra ao se impor um deslocamento unitário na referida extremidade enquanto todas as outras
deslocabilidades são nulas. O segundo corresponde ao momento que deve atuar em umas das
extremidades da barra ao se impor uma rotação unitária na referida extremidade enquanto as
outras deslocabilidades são nulas. Nesse caso, os coeficientes variam de acordo com as
condições de apoio da barra (bi-engastada ou com articulação em uma ou nas duas
extremidades). O terceiro e último corresponde a um fator utilizado na determinação do
momento de torção que deve atuar na extremidade inicial de uma barra quando uma rotação é
imposta na extremidade final, mantendo a rotação da extremidade inicial nula. Todos os
outros parâmetros necessários podem ser obtidos a partir dos fundamentais. Os parâmetros
fundamentais citados são obtidos em função de propriedades dos materiais (como módulo de
elasticidade 𝐸 e módulo de cisalhamento 𝐺) e propriedades geométricas (como área da seção
𝐴, momento de inércia à flexão 𝐼, momento de inércia à torção 𝐽𝑡 e comprimento da barra 𝑙)
(MARTHA, 2010).
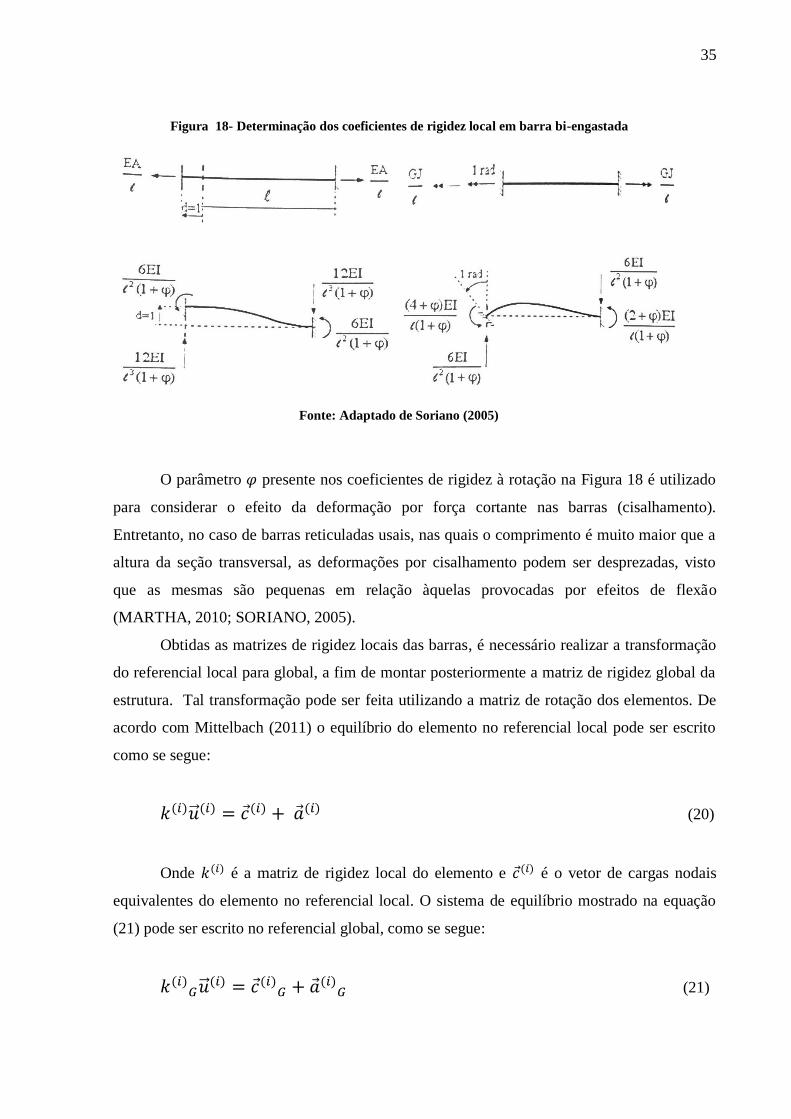
A Figura 18 ilustra a determinação dos coeficientes de rigidez local de barras retas bi-
engastadas com seção constante.
35
O parâmetro 𝜑 presente nos coeficientes de rigidez à rotação na Figura 18 é utilizado
para considerar o efeito da deformação por força cortante nas barras (cisalhamento).
Entretanto, no caso de barras reticuladas usais, nas quais o comprimento é muito maior que a
altura da seção transversal, as deformações por cisalhamento podem ser desprezadas, visto
que as mesmas são pequenas em relação àquelas provocadas por efeitos de flexão
(MARTHA, 2010; SORIANO, 2005).
Obtidas as matrizes de rigidez locais das barras, é necessário realizar a transformação
do referencial local para global, a fim de montar posteriormente a matriz de rigidez global da
estrutura. Tal transformação pode ser feita utilizando a matriz de rotação dos elementos. De
acordo com Mittelbach (2011) o equilíbrio do elemento no referencial local pode ser escrito
como se segue:
𝑘(𝑖)�⃗⃗�(𝑖) = 𝑐(𝑖) + �⃗�(𝑖) (20)
Onde 𝑘(𝑖) é a matriz de rigidez local do elemento e 𝑐(𝑖) é o vetor de cargas nodais
equivalentes do elemento no referencial local. O sistema de equilíbrio mostrado na equação
(21) pode ser escrito no referencial global, como se segue:
𝑘(𝑖)𝐺 �⃗⃗�(𝑖) = 𝑐(𝑖)
𝐺 + �⃗�(𝑖)𝐺 (21)
Figura 18- Determinação dos coeficientes de rigidez local em barra bi-engastada
Fonte: Adaptado de Soriano (2005)
36
Onde 𝑘(𝑖)𝐺 e 𝑐(𝑖)
𝐺 são, respectivamente, a matriz de rigidez do elemento no
referencial global e o vetor de cargas nodais equivalentes do elemento no referencial global.
Utilizando a transformação vetorial descrita na equação (18), pode-se escrever:
�⃗⃗�(𝑖) = 𝑅𝑡(𝑖)�⃗⃗�(𝑖)
𝐺 → �⃗⃗�(𝑖)𝐺 = [𝑅𝑡
(𝑖)]−1
�⃗⃗�(𝑖) (22)
Como a matriz de rotação é ortogonal, tem-se:
[𝑅𝑡(𝑖)]
−1= [𝑅𝑡
(𝑖)]𝑇 (23)
Onde [𝑅𝑡(𝑖)]
𝑇é a matriz de rotação transposta. Pré-multiplicando a equação (21) por
essa matriz de rotação 𝑅𝑡(𝑖), escreve-se:
𝑅𝑡(𝑖)𝑘(𝑖)
𝐺[𝑅𝑡(𝑖)]
𝑇�⃗⃗�(𝑖) = 𝑅𝑡
(𝑖)[𝑐(𝑖)𝐺 + �⃗�(𝑖)
𝐺] = 𝑐(𝑖) + �⃗�(𝑖) (24)
Sabendo que o sistema de equação de equilíbrio local pode ser escrito como mostra a
equação (20), tem-se:
𝑘(𝑖) = 𝑅𝑡(𝑖)𝑘(𝑖)
𝐺[𝑅𝑡(𝑖)]
𝑇 (25)
𝑘(𝑖)𝐺 = [𝑅𝑡
(𝑖)]𝑇
𝑘(𝑖)𝑅𝑡(𝑖) (26)
Determinadas as matrizes de rigidez dos elementos no referencial global, a matriz de
rigidez 𝐾 da estrutura pode ser montada a partir da correspondência entre a numeração local e
global das deslocabilidades.
2.3.4 – Vetor de cargas nodais equivalentes dos elementos
O segundo tipo de solução fundamental são as reações de engastamento perfeito das
barras, que correspondem às reações que surgem numa barra isolada devido à aplicação de
solicitações externas. Tais solicitações podem ser forças concentradas e distribuídas,

37
momentos concentrados e variação de temperatura. As reações de engastamento perfeito
podem ser provocadas por carregamentos axiais e/ou transversais (MARTHA, 2010).
A Figura 19 ilustra a determinação das reações de engastamento perfeito em barras de
um pórtico plano para uma força distribuída 𝑝 e uma força concentrada 𝑃, ambas genéricas.
As cargas nodais equivalentes são opostas às reações de engastamento perfeito,
correspondendo a aplicar apenas nos nós as solicitações externas que atuam nos elementos.
Geralmente essas cargas são encontradas tabeladas na literatura de acordo com os vários tipos
de solicitação externa. O vetor de cargas nodais equivalentes do elemento 𝑐(𝑖), analogamente
à matriz de rigidez dos elementos, pode ser escrito nos referenciais local e global. A
transformação do referencial local para o global pode se escrita da seguinte forma:
𝑐(𝑖)𝐺 = [𝑅𝑡
(𝑖)]𝑇
𝑐(𝑖) (27)
A correspondência entre a numeração local e global das cargas nodais, juntamente
com a contribuição das cargas concentradas aplicadas nos nós formam o vetor de forças 𝑓 da
estrutura.
Na presente aplicação, serão associados nós nos pontos de aplicação de cargas
concentradas, minimizando a necessidade do cálculo de forças nodais equivalentes nesses
casos específicos.
Figura 19 - Reações de engastamento perfeito em barras de pórtico plano
Fonte: Soriano (2005)

38
2.3.5 – Aplicação das condições de contorno
Determinada a matriz de rigidez e o vetor de forças da estrutura, é necessário aplicar
as condições de contorno geométricas da mesma, de modo a torna-la positiva definida,
permitindo a resolução do sistema de equações. De acordo com Gere e Weaver Junior (1981,
apud Kummer, 2014) as condições de contorno podem ser inicialmente de dois tipos:
deslocamentos nulos referentes aos vínculos ou deslocamentos com valores previamente
conhecidos. Para a aplicação das condições de contorno em procedimento automático é mais
eficiente numerar os deslocamentos na mesma ordem da numeração dos pontos nodais. Os
procedimentos mais utilizados são a técnica dos zeros e uns e a técnica do número grande
(SORIANO, 2005).
Determinadas a matriz de rigidez modificada 𝐾′ e o vetor de forças modificado 𝑓′ da
estrutura, os deslocamentos são facilmente determinados através da seguinte equação:
𝐾′𝑑 = 𝑓′ → 𝑑 = (𝐾′)−1𝑓′ (28)
De posse dos deslocamentos, o vetor de reações 𝑅 da estrutura pode ser determinado
como se segue:
𝑅 = 𝐾𝑑 − 𝑓 (29)
39
3 – METODOLOGIA
3.1 – Considerações gerais sobre o programa
A aplicação do cálculo automático das estruturas reticuladas foi realizada através de
um código computacional em linguagem Fortran, no formato “free form”, usando o
compilador PLATO IDE. O código é composto de um programa principal ao qual estão
associadas sub-rotinas que realizam a montagem das matrizes de rigidez e dos vetores de
cargas nodais equivalentes e de forças, montagem das matrizes de rotação, aplicação das
condições de contorno, resolução do sistema de equilíbrio e determinação dos vetores de
deslocamentos, reações e esforços nodais.
O programa foi desenvolvido para resolver cinco tipos de estruturas reticuladas, sejam
elas isostáticas ou hiperestáticas: treliças planas e espaciais, pórticos planos e espaciais, e
grelhas. A escolha do tipo de estrutura a ser calculada é feita no programa principal. No caso
dos pórticos planos, existe a possibilidade de considerar a existência de articulações (rótulas)
em seus elementos.
Como é necessária uma quantidade considerável de dados iniciais de entrada das
estruturas a serem calculadas, optou-se pelo uso de um arquivo de entrada em formato “txt”
no qual são inseridos os dados requeridos para cada tipo de estrutura:
a) Número de nós da estrutura e suas coordenadas globais;
b) Número de nós prescritos e suas características. O prefixo “1” indica a
existência de deslocamento prescrito na direção considerada, seguido do valor
do deslocamento prescrito. Já o prefixo “0” indica a inexistência de
deslocamento prescrito na direção considerada (deslocamento livre);
c) Número de elementos da estrutura, suas incidências (nós iniciais e finais) e
características relativas a material e propriedades geométricas.
d) Número de elementos rotulados, no caso de pórticos planos, e a localização da
rótula no elemento (nó inicial e/ou final). O prefixo “1” indica a existência de
rótula no nó considerado, enquanto o prefixo “0” indica a sua inexistência;
e) Número de materiais diferentes existentes na estrutura e suas respectivas
propriedades, como módulo de elasticidade (𝐸), coeficiente de Poisson (𝜈) e
coeficiente de dilatação térmica linear (𝛼).

40
f) Número de seções diferentes existentes na estrutura e suas respectivas
propriedades, como área, dimensões das seções transversais, momentos de
inércia à flexão em torno dos eixos 𝑦 e 𝑧 locais e momento de inércia à torção;
g) Número de elementos com carga e seus respectivos valores;
h) Número de nós com carga e seus respectivos valores;
i) Número de nós com apoios elásticos e suas propriedades (rigidez do apoio
elástico). O prefixo “1” indica a existência de apoio elástico para a
deslocabilidades e o prefixo “0” indica a sua inexistência.
A Figura 20 ilustra um exemplo de arquivo de entrada para um pórtico plano.
Após sua execução o programa retorna três arquivos de saída: o primeiro, um arquivo
apresentando todos os dados de entrada da estrutura (para uma possível conferência); o
segundo, apresentando as matrizes de rotação, matrizes de rigidez e vetores de cargas nodais
equivalentes (locais e globais) dos elementos, e a matriz de rigidez e vetor de forças da
estrutura (originais e modificados pelas condições de contorno); o terceiro, composto pelos
resultados calculados pelo programa, tais como deslocamentos nodais, reações de apoio e
esforços solicitantes nos elementos.
3.2 – Montagem das matrizes de rigidez locais
Definidos os dados de entrada, foram desenvolvidas duas sub-rotinas para a montagem
da matriz de rigidez local de cada elemento da estrutura, as quais são compostas pelos
Figura 20 - Arquivo de entrada para um pórtico plano
Fonte: Autor (2017)
41
coeficientes de rigidez 𝑘𝑖𝑗, conforme equação (3). Tais coeficientes, bem como a sua
determinação, estão descritos no item 2.3.3. Barras de tipos diferentes de estruturas possuem
matrizes de rigidez locais diferentes, de acordo com as deslocabilidades que atuam nos seus
pontos nodais.
A primeira sub-rotina monta as matrizes de rigidez locais das barras das estruturas
planas e espaciais, com exceção das barras de pórtico plano com articulações em seus nós. A
segunda sub-rotina é responsável pela montagem das matrizes de rigidez locais dos elementos
de pórticos planos que possuem rótulas em seus nós iniciais e/ou finais. Considerando a
numeração dos deslocamentos nodais das barras, bem como os esforços ilustrados na Figura
18, foram montadas as matrizes de rigidez para os elementos de cada um dos tipos de
estruturas reticuladas.
3.2.1 – Matriz de rigidez local para elementos de treliça plana e espacial
As barras de treliças, sejam elas planas ou espaciais, estão submetidas apenas a
esforços axiais de tração ou compressão. Por esse motivo, a matriz de rigidez local de uma
barra desses tipos de estruturas é composta apenas pelos coeficientes de rigidez axiais. Como
uma barra de treliça plana apresenta quatro graus de liberdade (dois em cada ponto nodal),
como ilustra a Figura 11, sua matriz de rigidez local resultante se escreve:
0000
00
0000
00
l
EA
l
EA
l
EA
l
EA
k i
(30)
Para as barras de treliça espacial, que possuem seis graus de liberdade (três em cada
ponto nodal), como ilustra a Figura 12, tem-se a seguinte matriz de rigidez local:
42
000000
000000
0000
000000
000000
0000
l
EA
l
EA
l
EA
l
EA
k i
(31)
Onde 𝐸, 𝐴 e 𝑙 são, respectivamente, o módulo de elasticidade do material constituinte,
a área da seção transversal e o comprimento da barra.
3.2.2 – Matriz de rigidez local para elementos de grelha
As barras de grelha estão submetidas a esforços translacionais e rotacionais. Como
cada barra de uma estrutura de grelha apresenta seis deslocamentos (três por ponto nodal),
como ilustra a Figura 15, a matriz de rigidez local resulta:
l
EI
l
EI
l
EI
l
EIl
GJ
l
GJ
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
JG
l
JG
l
EI
l
EI
l
EI
l
EI
k
yyyy
tt
yyyy
yyyy
tt
yyyy
i
40
620
6
0000
60
1260
12
20
640
6
0000
60
1260
12
22
2323
22
2323
(32)
Onde 𝐸, 𝐴 e 𝑙 são propriedades análogas às mostradas nas matrizes de rigidez das
barras de treliça, 𝐼𝑦 é o momento de inércia à flexão em relação ao eixo 𝑦 local do elemento,
𝐽𝑡 é o momento de inércia à torção pura da seção transversal do elemento e 𝐺 é o módulo de
elasticidade transversal do material constituinte, calculado de acordo com a equação abaixo:

43
𝐺 = 𝐸2 + (1 ∗ 𝜈)⁄ (33)
Onde 𝜈 é o módulo de Poisson do material.
3.2.3 – Matriz de rigidez local para elementos de pórtico plano
Para a montagem das matrizes de rigidez locais dos elementos de pórtico plano, foram
consideradas quatro situações diferentes: barra bi-engastada (sem articulação), barra com
articulação na extremidade inicial, barra com articulação na extremidade final e barra com
articulações nas duas extremidades.
Às barras de pórtico plano bi-engastadas estão associados seis deslocamentos, sendo
três em cada ponto nodal, tal como ilustra a Figura 13. A primeira linha da matriz de rigidez
local, composta pelos coeficientes de rigidez axiais, é igual para os outros três casos de barras
articuladas. Entretanto, nas barras bi-engastadas existe resistência à rotação imposta nas duas
extremidades. A equação (34) descreve a matriz de rigidez local das barras de pórticos planos
bi-engastadas, utilizada no desenvolvimento do código computacional.
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EA
l
EA
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EA
l
EA
k
zzzz
zzzz
zzzz
zzzz
i
460
260
6120
6120
0000
260
460
6120
6120
0000
22
2323
22
2323
(34)
Nos casos de barras com articulação no nó inicial estão associados cinco
deslocamentos às mesmas. Entretanto, o deslocamento rotacional no nó inicial é livre e,
portanto, as linhas e colunas correspondentes às rotações e reações de momento dessa
extremidade na matriz de rigidez local são nulas (MARTHA, 2010). A equação (35) mostra a
matriz de rigidez local para essa situação:
44
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EA
l
EA
l
EI
l
EI
l
EIl
EA
l
EA
k
zzz
zzz
zzz
i
3300
30
3300
30
0000
000000
3300
30
0000
22
233
233
(35)
Analogamente ao caso de barras com articulação no nó inicial, foi montada a matriz de
rigidez local para barras com articulação no nó final. Entretanto, neste caso o deslocamento
rotacional livre ocorre na extremidade final da barra e, portanto, a 6º linha e a 6ª coluna dessa
matriz passam a ser nulas. A equação (36) mostra a matriz de rigidez local utilizada para esse
tipo de barra.
000000
03
033
0
0000
03
033
0
03
033
0
0000
323
22
323
l
EI
l
EI
l
EIl
EA
l
EA
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EA
l
EA
k
zzz
zzz
zzz
i (36)
Onde 𝐼𝑧 é o momento de inércia à flexão em relação ao eixo 𝑧 local do elemento.
No último caso, no qual a barra possui articulações nas duas extremidades, apenas os
coeficientes de rigidez axiais são não nulos na matriz de rigidez local, a qual corresponde à
matriz de rigidez local de uma barra de treliça espacial, conforme a equação (37):
45
000000
000000
0000
000000
000000
0000
l
EA
l
EA
l
EA
l
EA
k i
(37)
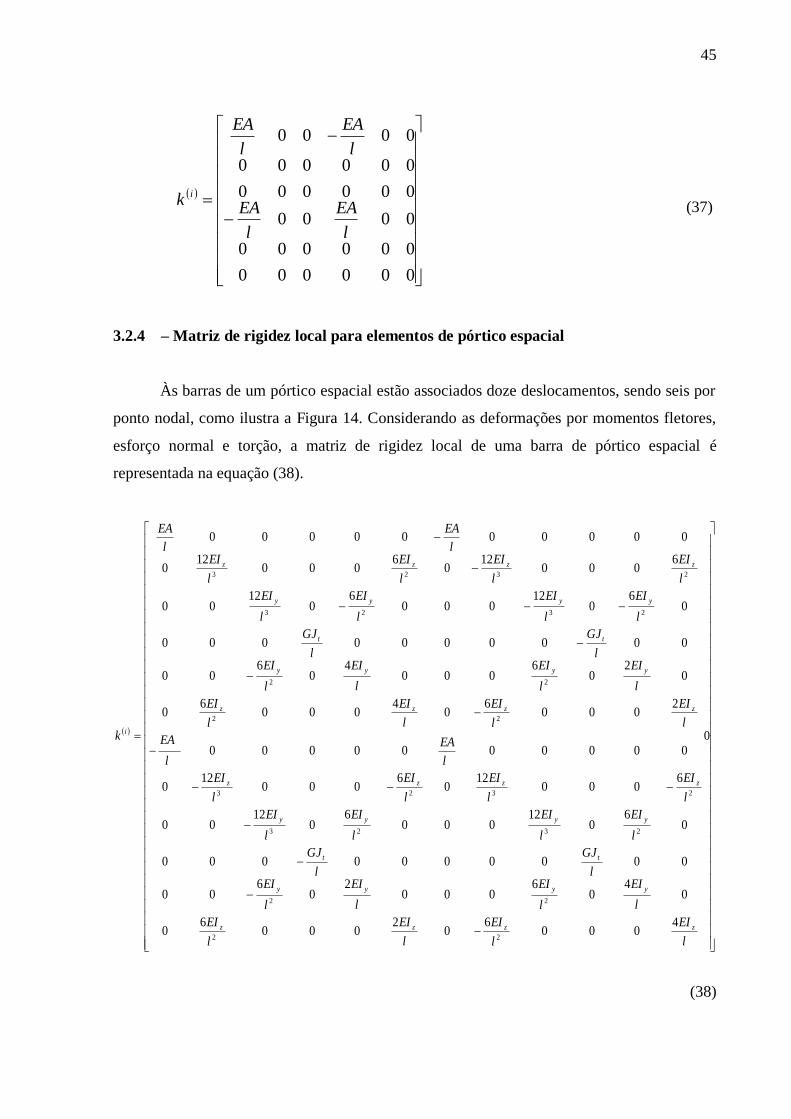
3.2.4 – Matriz de rigidez local para elementos de pórtico espacial
Às barras de um pórtico espacial estão associados doze deslocamentos, sendo seis por
ponto nodal, como ilustra a Figura 14. Considerando as deformações por momentos fletores,
esforço normal e torção, a matriz de rigidez local de uma barra de pórtico espacial é
representada na equação (38).
0
4000
60
2000
60
04
06
0002
06
00
0000000000
06
012
0006
012
00
6000
120
6000
120
0000000000
2000
60
4000
60
02
06
0004
06
00
0000000000
06
012
0006
012
00
6000
120
6000
120
0000000000
22
22
2323
2323
22
22
2323
2323
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
GJ
l
GJ
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EA
l
EA
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
GJ
l
GJ
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EA
l
EA
k
zzzz
yyyy
tt
yyyy
zzzz
zzzz
yyyy
tt
yyyy
zzzz
i
(38)

46
A transformação das matrizes de rigidez locais para o referencial global é realizada por
uma sub-rotina, fazendo-se uso da equação (26).
3.3 – Montagem das matrizes de rotação dos elementos
A montagem das matrizes de rotação dos elementos foi realizada através de uma sub-
rotina para todos os tipos de estruturas, sejam elas planas ou espaciais. Analogamente às
matrizes de rigidez locais, elementos de tipos de estruturas diferentes possuem matrizes de
rotação diferentes, de acordo com a definição dos eixos global e local de cada uma. As
matrizes de rotação dos elementos de treliça plana, pórtico plano e grelha são formadas pelos
cossenos diretores de 𝑋 e 𝑌, tanto em relação ao eixo 𝑥 quanto ao eixo 𝑦, conforme a equação
(6), obtida pela decomposição dos eixos ilustrada na Figura 16. Já as matrizes dos elementos
de treliça espacial e pórtico espacial são compostas pelos cossenos diretores de 𝑋, 𝑌 e 𝑍 em
relação aos eixos 𝑥, 𝑦 e 𝑧, de acordo com a equação (10).
3.3.1 – Matriz de rotação para elementos de estruturas planas
a) Treliça plana
Para elementos de treliça plana, o vetor de deslocamentos nodais no referencial local
pode ser escrito como se segue:
�⃗� = [𝑣𝑥
𝑣𝑦] (39)
A matriz de rotação dos elementos de treliça plana se escreve da seguinte forma:
ii
ii
ii
ii
i
t
sen
sen
sen
sen
R
cos00
cos00
00cos
00cos
(40)
b) Pórtico plano
Para elementos de pórticos planos, o vetor de deslocamentos nodais no referencial
local é dado por:
47
�⃗� = [
𝑣𝑥
𝑣𝑦
𝜃𝑧
] (41)
Nesse tipo de estrutura o eixo 𝑍 global coincide com o eixo 𝑧 local, de forma que a
componente de rotação 𝜃𝑧 é a mesma nos referenciais local e global. Dessa forma, a matriz de
rotação dos elementos de pórtico plano resulta em:
100000
0cos000
0cos000
000100
0000cos
0000cos
ii
ii
ii
ii
i
t
sen
sen
sen
sen
R
(42)
Onde 𝑐𝑜𝑠 𝛼 e 𝑠𝑒𝑛 𝛼 foram determinados de acordo com as equações (7) e (8).
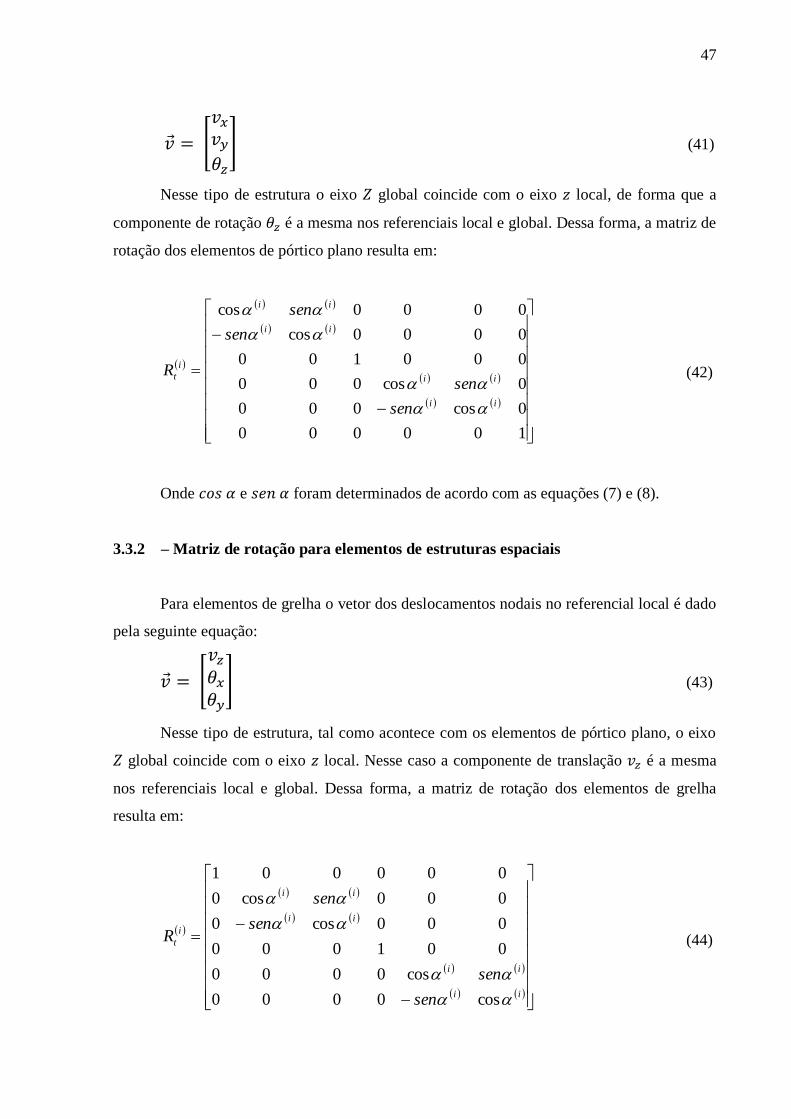
3.3.2 – Matriz de rotação para elementos de estruturas espaciais
Para elementos de grelha o vetor dos deslocamentos nodais no referencial local é dado
pela seguinte equação:
�⃗� = [
𝑣𝑧
𝜃𝑥
𝜃𝑦
] (43)
Nesse tipo de estrutura, tal como acontece com os elementos de pórtico plano, o eixo
𝑍 global coincide com o eixo 𝑧 local. Nesse caso a componente de translação 𝑣𝑧 é a mesma
nos referenciais local e global. Dessa forma, a matriz de rotação dos elementos de grelha
resulta em:
ii
ii
ii
ii
i
t
sen
sen
sen
sen
R
cos0000
cos0000
001000
000cos0
000cos0
000001
(44)

48
Para as barras de treliça espacial, Soriano (2005) relata que o posicionamento dos
eixos locais 𝑦 e 𝑧 são irrelevantes. Por esse motivo, basta calcular a primeira linha da matriz
de rotação definida na equação (10), composta pelos cossenos diretores de 𝑋, 𝑌 e 𝑍 em
relação ao eixo 𝑥 local. Tais cossenos foram calculados de acordo com as equações (11), (12)
e (13), de forma que a matriz de rotação dos elementos de treliça espacial assume a seguinte
forma:
000000
000000
000
000000
000000
000
xZxYxX
xZxYxX
i
tR
(45)
Para as barras de pórtico espacial, além dos cossenos diretores de 𝑋, 𝑌 e 𝑍 em relação
ao eixo 𝑥, também foi necessário calcular os cossenos diretores de 𝑋, 𝑌 e 𝑍 em relação aos
eixos 𝑦 e 𝑧 para formar a matriz de rotação. A determinação desses cossenos foi realizada a
partir da definição de um ponto auxiliar contido em um dos planos principais do elemento,
como está ilustrado na Figura 21.
Figura 21 - Ponto auxiliar nos referenciais global e local com os respectivos
vetores unitários
Fonte: Autor (2017)

49
Na figura, 𝐾 é o ponto auxiliar de coordenadas (𝑋𝐾, 𝑌𝐾, 𝑍𝐾), cuja função é estabelecer
o eixo 𝑦 local da barra. Para isso, tal ponto deve estar posicionado no primeiro quadrante do
plano, definido pelos eixos 𝑥 e 𝑦. O eixo 𝑦 deve ser escolhido paralelo a um dos eixos
principais de inércia da seção transversal do elemento, e a partir dele fica determinado o eixo
𝑧 (SORIANO, 2005). 𝑒𝑋, 𝑒𝑌 e 𝑒𝑍 são vetores unitários nas direções dos eixos globais 𝑋, 𝑌 e 𝑍,
e 𝑒𝑥, 𝑒𝑦 e 𝑒𝑧 são vetores unitários nas direções dos eixos locais 𝑥, 𝑦 e 𝑧.
Considerando um vetor unitário �⃗⃗� na direção do nó inicial 𝑗 da barra para a o ponto
auxiliar 𝐾, escrito como se segue:
�⃗⃗� = 𝛼 𝑒𝑋 + 𝛽 𝑒𝑌 + 𝛾 𝑒𝑍 (46)
Onde 𝛼, 𝛽 e 𝛾 são os cossenos diretores do vetor unitário �⃗⃗� em relação a 𝑋, 𝑌 e 𝑍,
determinados através das equações a seguir:
𝛼 = 𝑋𝐾− 𝑋𝑗
√(𝑋𝐾−𝑋𝑗)2+(𝑌𝐾−𝑌𝑗)2+(𝑍𝐾−𝑍𝑗)2 (47)
𝛽 = 𝑌𝐾− 𝑌𝑗
√(𝑋𝐾−𝑋𝑗)2+(𝑌𝐾−𝑌𝑗)2+(𝑍𝐾−𝑍𝑗)2 (48)
𝛾 = 𝑍𝐾− 𝑍𝑗
√(𝑋𝐾−𝑋𝑗)2+(𝑌𝐾−𝑌𝑗)2+(𝑍𝐾−𝑍𝑗)2 (49)
Onde 𝑋𝐾, 𝑌𝐾 e 𝑍𝐾 são as coordenadas do ponto auxiliar. Fazendo-se o produto vetorial
dos vetores unitários 𝑒𝑥 e �⃗⃗� obtém-se um vetor 𝑐𝑒𝑧 cujo módulo pode ser determinado através
da equação a seguir:
𝑐 = √(𝜆𝑥𝑌 𝛾 − 𝜆𝑥𝑍 𝛽)2 + (𝜆𝑥𝑍 𝛼 − 𝜆𝑥𝑋 𝛾)2 + (𝜆𝑥𝑋 𝛽 − 𝜆𝑥𝑌 𝛼)2 (50)
Dessa forma, é possível determinar o vetor unitário 𝑒𝑧 e consequentemente seus
cossenos diretores:

50
𝜆𝑧𝑋 = 𝜆𝑥𝑌 𝛾− 𝜆𝑥𝑍 𝛽
𝑐 (51)
𝜆𝑧𝑌 = 𝜆𝑥𝑍 𝛼− 𝜆𝑥𝑋 𝛾
𝑐 (52)
𝜆𝑧𝑍 = 𝜆𝑥𝑋 𝛽− 𝜆𝑥𝑌 𝛼
𝑐 (53)
Através do produto vetorial dos vetores unitários 𝑒𝑧 e 𝑒𝑥, define-se o vetor unitário 𝑒𝑦,
perpendicular aos outros dois, e consequentemente seus cossenos diretores:
𝜆𝑦𝑋 = 𝜆𝑥𝑍 𝜆𝑧𝑌 − 𝜆𝑥𝑌 𝜆𝑧𝑍 (54)
𝜆𝑦𝑌 = 𝜆𝑥𝑋 𝜆𝑧𝑍 − 𝜆𝑥𝑍 𝜆𝑧𝑋 (55)
𝜆𝑦𝑍 = 𝜆𝑥𝑌 𝜆𝑧𝑋 − 𝜆𝑥𝑋 𝜆𝑧𝑌 (56)
Dessa forma, determinou-se a matriz de rotação para os elementos de pórtico espacial,
ficando a mesma com a forma:
R
R
R
R
R i
t
000
000
000
000
(57)
Onde 𝑅 é a matriz apresentada anteriormente, na equação (10).
As coordenadas do ponto auxiliar 𝐾 devem ser fornecidas pelo usuário.
3.4 – Montagem do vetor de cargas nodais equivalentes
Para a montagem do vetor de cargas nodais dos elementos foram desenvolvidas duas
sub-rotinas. A primeira sub-rotina foi desenvolvida para as estruturas planas e espaciais cujas
barras não possuem articulações, ou seja, são consideradas bi-engastadas quando da aplicação
do Método da Rigidez. A segunda sub-rotina foi desenvolvida para os elementos de pórtico
plano que possuem articulações em um ou nos dois pontos nodais. As cargas nodais
equivalentes podem ser encontradas tabeladas na literatura, geralmente para barras bi-
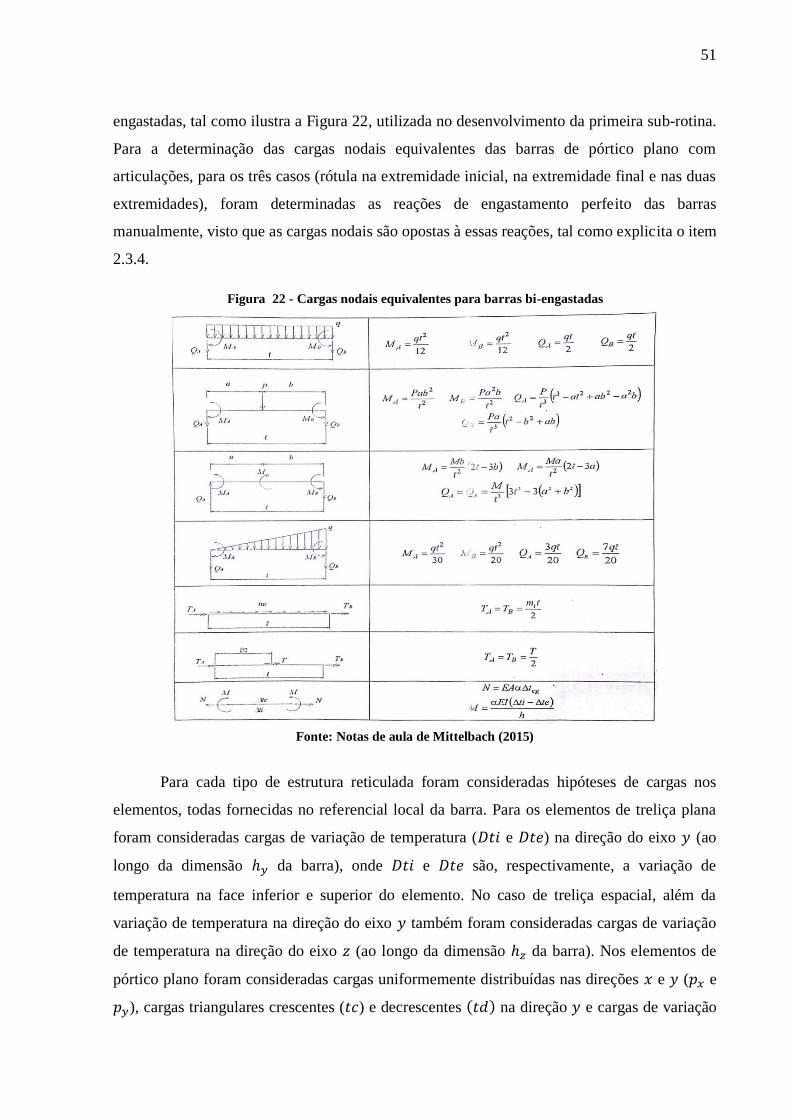
51
engastadas, tal como ilustra a Figura 22, utilizada no desenvolvimento da primeira sub-rotina.
Para a determinação das cargas nodais equivalentes das barras de pórtico plano com
articulações, para os três casos (rótula na extremidade inicial, na extremidade final e nas duas
extremidades), foram determinadas as reações de engastamento perfeito das barras
manualmente, visto que as cargas nodais são opostas à essas reações, tal como explicita o item
2.3.4.
Para cada tipo de estrutura reticulada foram consideradas hipóteses de cargas nos
elementos, todas fornecidas no referencial local da barra. Para os elementos de treliça plana
foram consideradas cargas de variação de temperatura (𝐷𝑡𝑖 e 𝐷𝑡𝑒) na direção do eixo 𝑦 (ao
longo da dimensão ℎ𝑦 da barra), onde 𝐷𝑡𝑖 e 𝐷𝑡𝑒 são, respectivamente, a variação de
temperatura na face inferior e superior do elemento. No caso de treliça espacial, além da
variação de temperatura na direção do eixo 𝑦 também foram consideradas cargas de variação
de temperatura na direção do eixo 𝑧 (ao longo da dimensão ℎ𝑧 da barra). Nos elementos de
pórtico plano foram consideradas cargas uniformemente distribuídas nas direções 𝑥 e 𝑦 (𝑝𝑥 e
𝑝𝑦), cargas triangulares crescentes (𝑡𝑐) e decrescentes (𝑡𝑑) na direção 𝑦 e cargas de variação
Fonte: Notas de aula de Mittelbach (2015)
Figura 22 - Cargas nodais equivalentes para barras bi-engastadas
52
de temperatura na direção 𝑦. Para os elementos de pórtico espacial, além das cargas citadas
nos elementos de pórtico plano foram consideradas cargas uniformemente distribuídas na
direção 𝑧 (𝑝𝑧), cargas triangulares crescentes e decrescentes na direção 𝑧, cargas momento
uniformemente distribuídas na direção 𝑥 (𝑚𝑡) e cargas de variação de temperatura na direção
𝑧. Por fim, nos elementos de grelha foram consideradas cargas uniformemente distribuídas na
direção 𝑧, cargas triangulares crescentes e decrescentes na direção 𝑧, cargas momento
distribuídas na direção 𝑥 e cargas de variação de temperatura na direção 𝑧. As cargas
trapezoidais, no caso dos pórticos e da grelha, foram consideradas como uma combinação das
cargas uniformemente distribuídas e das cargas triangulares crescentes ou decrescentes.
A transformação dos vetores do referencial local para o global foi feita de acordo com
a equação (27).
3.5 – Montagem da matriz de rigidez global e do vetor de forças global da estrutura
Determinadas as matrizes de rigidez e os vetores de cargas nodais dos elementos no
referencial local, e após a rotação para o referencial global, foram desenvolvidas sub-rotinas
responsáveis pela montagem da matriz de rigidez global e do vetor de forças das estruturas.
A matriz de rigidez global 𝐾 é formada pela superposição das contribuições das
matrizes de rigidez locais das barras (assemble). Para isso foi necessário que as coordenadas
locais e globais estivessem no mesmo sistema de eixos, o que explica a rotação das matrizes
de rigidez locais dos elementos para o referencial global conforme visto no item 2.3.4. De
forma geral, a um dado nó está associado um determinado número de deslocabilidades, de
acordo com o tipo de estrutura a qual esse nó pertence.
Para o caso de treliças planas, no qual a cada nó estão associadas duas
deslocabilidades, ao nó inicial de um elemento (𝑖) correspondem as deslocabilidades 𝑢1,𝐺(𝑖)
e
𝑢2,𝐺(𝑖)
e ao nó final do referido elemento correspondem as deslocabilidades 𝑢3,𝐺(𝑖)
e 𝑢4,𝐺(𝑖)
, onde o
sobrescrito 𝐺 denota o uso do sistema de coordenadas global da estrutura. Ao se fazer a
associação entre a numeração local e global, essas deslocabilidades locais estão relacionadas
às deslocabilidades globais (2 𝑛𝑜𝑖 − 𝑗) e (2 𝑛𝑜𝑓 − 𝑗), onde 𝑛𝑜𝑖 e 𝑛𝑜𝑓 são, respectivamente, o
nó inicial e final do elemento e 𝑗 varia de 1 a 0. As deslocabilidades 1 e 3 correspondem a
deslocamentos na direção do eixo 𝑋 global e as deslocabilidades 2 e 4 correspondem a
deslocamentos na direção do eixo 𝑌 global (MITTELBACH, 2011).
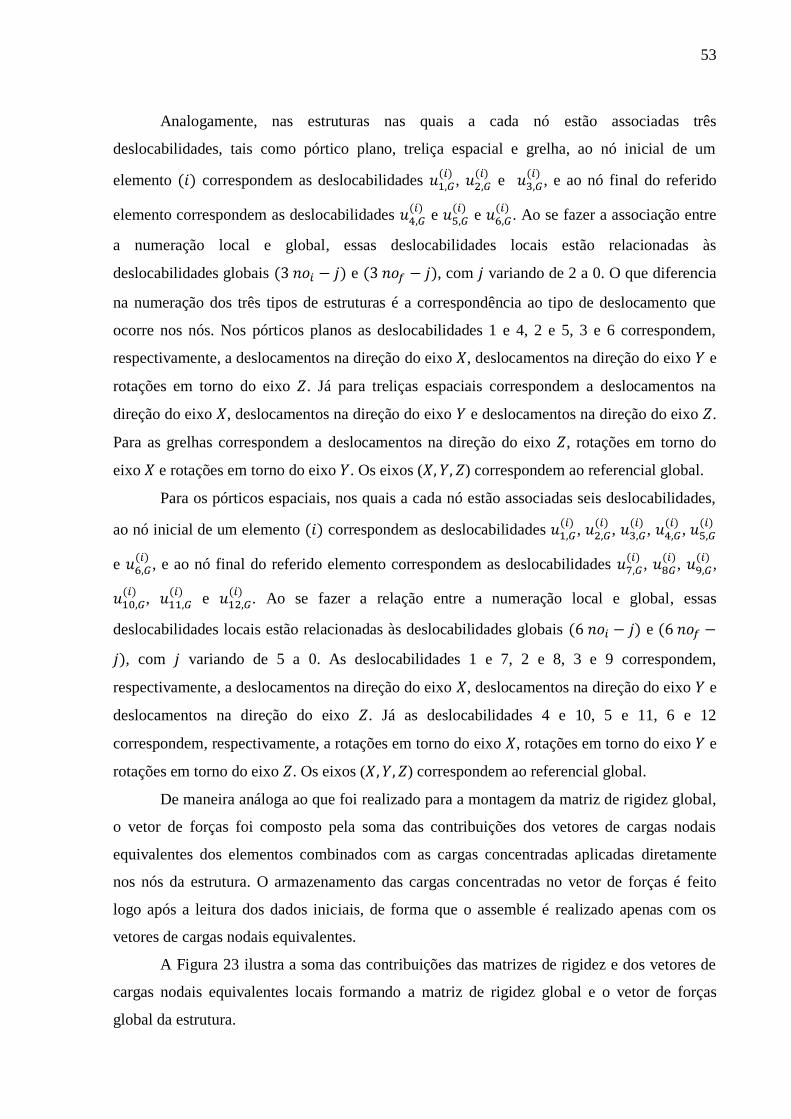
53
Analogamente, nas estruturas nas quais a cada nó estão associadas três
deslocabilidades, tais como pórtico plano, treliça espacial e grelha, ao nó inicial de um
elemento (𝑖) correspondem as deslocabilidades 𝑢1,𝐺(𝑖)
, 𝑢2,𝐺(𝑖)
e 𝑢3,𝐺(𝑖)
, e ao nó final do referido
elemento correspondem as deslocabilidades 𝑢4,𝐺(𝑖)
e 𝑢5,𝐺(𝑖)
e 𝑢6,𝐺(𝑖)
. Ao se fazer a associação entre
a numeração local e global, essas deslocabilidades locais estão relacionadas às
deslocabilidades globais (3 𝑛𝑜𝑖 − 𝑗) e (3 𝑛𝑜𝑓 − 𝑗), com 𝑗 variando de 2 a 0. O que diferencia
na numeração dos três tipos de estruturas é a correspondência ao tipo de deslocamento que
ocorre nos nós. Nos pórticos planos as deslocabilidades 1 e 4, 2 e 5, 3 e 6 correspondem,
respectivamente, a deslocamentos na direção do eixo 𝑋, deslocamentos na direção do eixo 𝑌 e
rotações em torno do eixo 𝑍. Já para treliças espaciais correspondem a deslocamentos na
direção do eixo 𝑋, deslocamentos na direção do eixo 𝑌 e deslocamentos na direção do eixo 𝑍.
Para as grelhas correspondem a deslocamentos na direção do eixo 𝑍, rotações em torno do
eixo 𝑋 e rotações em torno do eixo 𝑌. Os eixos (𝑋, 𝑌, 𝑍) correspondem ao referencial global.
Para os pórticos espaciais, nos quais a cada nó estão associadas seis deslocabilidades,
ao nó inicial de um elemento (𝑖) correspondem as deslocabilidades 𝑢1,𝐺(𝑖)
, 𝑢2,𝐺(𝑖)
, 𝑢3,𝐺(𝑖)
, 𝑢4,𝐺(𝑖)
, 𝑢5,𝐺(𝑖)
e 𝑢6,𝐺(𝑖)
, e ao nó final do referido elemento correspondem as deslocabilidades 𝑢7,𝐺(𝑖)
, 𝑢8𝐺(𝑖)
, 𝑢9,𝐺(𝑖)
,
𝑢10,𝐺(𝑖)
, 𝑢11,𝐺(𝑖)
e 𝑢12,𝐺(𝑖)
. Ao se fazer a relação entre a numeração local e global, essas
deslocabilidades locais estão relacionadas às deslocabilidades globais (6 𝑛𝑜𝑖 − 𝑗) e (6 𝑛𝑜𝑓 −
𝑗), com 𝑗 variando de 5 a 0. As deslocabilidades 1 e 7, 2 e 8, 3 e 9 correspondem,
respectivamente, a deslocamentos na direção do eixo 𝑋, deslocamentos na direção do eixo 𝑌 e
deslocamentos na direção do eixo 𝑍. Já as deslocabilidades 4 e 10, 5 e 11, 6 e 12
correspondem, respectivamente, a rotações em torno do eixo 𝑋, rotações em torno do eixo 𝑌 e
rotações em torno do eixo 𝑍. Os eixos (𝑋, 𝑌, 𝑍) correspondem ao referencial global.
De maneira análoga ao que foi realizado para a montagem da matriz de rigidez global,
o vetor de forças foi composto pela soma das contribuições dos vetores de cargas nodais
equivalentes dos elementos combinados com as cargas concentradas aplicadas diretamente
nos nós da estrutura. O armazenamento das cargas concentradas no vetor de forças é feito
logo após a leitura dos dados iniciais, de forma que o assemble é realizado apenas com os
vetores de cargas nodais equivalentes.
A Figura 23 ilustra a soma das contribuições das matrizes de rigidez e dos vetores de
cargas nodais equivalentes locais formando a matriz de rigidez global e o vetor de forças
global da estrutura.
54
3.6 – Resolução do sistema de equações
Para a resolução do sistema de equações determinado pela equação (4) foram
desenvolvidas três sub-rotinas. A primeira sub-rotina é responsável pela aplicação das
condições de contorno geométricas da estrutura. Para aplicar essas condições de contorno no
sistema de equações de equilíbrio, especificamente na matriz de rigidez 𝐾 e no vetor de forças
𝑓 da estrutura, fez-se uso da técnica dos zeros e uns. De acordo com Soriano (2005), a técnica
dos zeros e uns é bastante eficiente no cálculo automático de estruturas e permite a resolução
das mesmas com mais facilidade.
Quando se prescreve deslocamentos nulos, eliminam-se da matriz 𝐾 de rigidez global
da estrutura as colunas e linhas de mesma numeração que esses deslocamentos, reduzindo
assim as equações de equilíbrio e facilitando a resolução da estrutura. Se um grau de liberdade
𝑑𝑖 possui deslocamento ou rotação prescrita, a i-ésima linha da matriz assume valor “1” na
diagonal principal e “0” nos outros termos. Para manter a simetria da matriz, os termos da i-
ésima coluna também são anulados. A força nodal 𝑓𝑖 é substituída no vetor de forças 𝑓 pelo
valor do deslocamento prescrito (MARTHA, 2010).
Seja, por exemplo, o sistema de equações (58):
4
3
2
1
4
3
2
1
4
3
2
1
44434241
34333231
24232221
14131211
R
R
R
R
f
f
f
f
d
d
d
d
kkkk
kkkk
kkkk
kkkk
(58)
Figura 23 - Montagem da matriz de rigidez e vetor de forças da estrutura
Fonte: Mittelbach (2011)

55
Analiticamente o sistema de equações de equilíbrio (58) se escreve:
44444343242141
33434333232131
22424323222121
11414313212111
Rfdkdkdkdk
Rfdkdkdkdk
Rfdkdkdkdk
Rfdkdkdkdk
(59)
De acordo com Mittelbach (2011), considerando que os graus de liberdade 𝑑2 e 𝑑3
possuem deslocamentos de valores, respectivamente, ∆2 e ∆3, o sistema pode ser reescrito da
seguinte forma:
4444343242141
34321
24321
1414313212111
0100
0010
fdkkkdk
dddd
dddd
fdkkkdk
(60)
Ou ainda:
343242444432141
34321
24321
313212141432111
00
0100
0010
00
kkfdkdddk
dddd
dddd
kkfdkdddk
(61)
O sistema de equações de equilíbrio (61) pode assumir a forma matricial, como se
segue:
3432424
3
2
3132121
4
3
2
1
444241
1411
0
0100
0010
00
kkf
kkf
d
d
d
d
kkk
kk
(62)
Para os casos em que na direção de certa deslocabilidade 𝑑𝑖 considerava-se um apoio
elástico, a condição de contorno referente a essa deslocabilidade foi tratada somando a rigidez

56
da mola 𝑘𝑚𝑜𝑙𝑎 ao coeficiente 𝑘𝑖𝑖 na matriz de rigidez da estrutura durante a aplicação da
técnica dos zeros e uns.
Depois de aplicada a técnica dos zeros e uns, há a sub-rotina para a resolução do
sistema de equações, a qual usa o método de eliminação de Gauss. De acordo com Soriano
(2005), esse método é aplicável a qualquer sistema que possua matriz de rigidez quadrada não
singular (determinante não nulo). Consiste em transformar o sistema original em um
simplificado de mesma solução, tal como mostra a equação a seguir (NUNES; FRANKLIN,
CARDOSO, 2006).
𝐴 𝑥 = 𝑏 → 𝐴′𝑥 = 𝑏′ (63)
Seja o sistema de equações mostrado abaixo:
nnnn
n
f
f
d
d
kk
kk
1
4
1
1
111
0 (64)
O método consiste em eliminar todos os coeficientes 𝑘𝑖𝑗, quando 𝑖 > 𝑗, de forma a
obter um sistema equivalente na qual a matriz de rigidez seja triangular superior.
nnn
n
f
f
d
d
k
kk
1
4
1111
00
0
0 (65)
A sequência de operações para se chegar ao sistema de equações (65) consiste em:
trocar duas equações, multiplicar uma equação por uma constante não nula e adicionar o
múltiplo de uma equação a outra equação. Para que a resolução seja possível não se pode ter
nenhum pivô (elemento 𝑘𝑖𝑖 da diagonal principal) nulo e nem muito próximo de zero, visto
que levaria a resultados imprecisos (NUNES; FRANKLIN, CARDOSO, 2006). No final da
sub-rotina determina-se o vetor de deslocamentos nodais da estrutura, utilizado,
posteriormente, na determinação do vetor de reações.
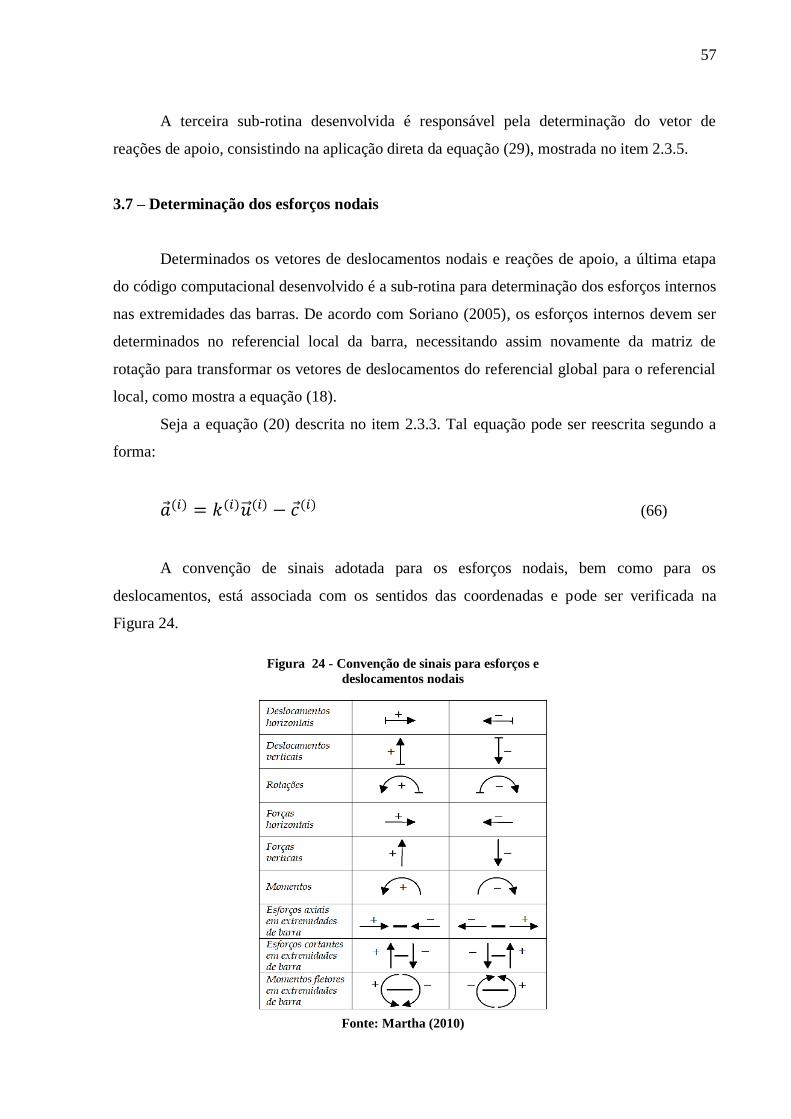
57
A terceira sub-rotina desenvolvida é responsável pela determinação do vetor de
reações de apoio, consistindo na aplicação direta da equação (29), mostrada no item 2.3.5.
3.7 – Determinação dos esforços nodais
Determinados os vetores de deslocamentos nodais e reações de apoio, a última etapa
do código computacional desenvolvido é a sub-rotina para determinação dos esforços internos
nas extremidades das barras. De acordo com Soriano (2005), os esforços internos devem ser
determinados no referencial local da barra, necessitando assim novamente da matriz de
rotação para transformar os vetores de deslocamentos do referencial global para o referencial
local, como mostra a equação (18).
Seja a equação (20) descrita no item 2.3.3. Tal equação pode ser reescrita segundo a
forma:
�⃗�(𝑖) = 𝑘(𝑖)�⃗⃗�(𝑖) − 𝑐(𝑖) (66)
A convenção de sinais adotada para os esforços nodais, bem como para os
deslocamentos, está associada com os sentidos das coordenadas e pode ser verificada na
Figura 24.
Figura 24 - Convenção de sinais para esforços e
deslocamentos nodais
Fonte: Martha (2010)
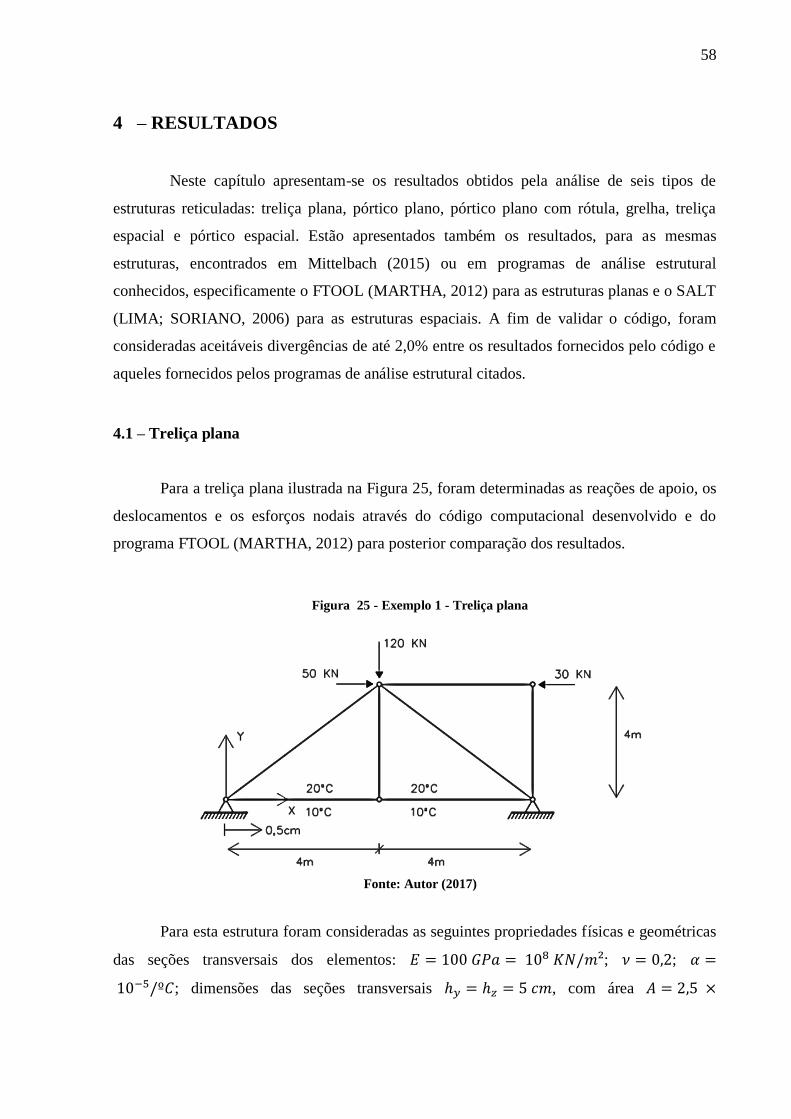
58
4 – RESULTADOS
Neste capítulo apresentam-se os resultados obtidos pela análise de seis tipos de
estruturas reticuladas: treliça plana, pórtico plano, pórtico plano com rótula, grelha, treliça
espacial e pórtico espacial. Estão apresentados também os resultados, para as mesmas
estruturas, encontrados em Mittelbach (2015) ou em programas de análise estrutural
conhecidos, especificamente o FTOOL (MARTHA, 2012) para as estruturas planas e o SALT
(LIMA; SORIANO, 2006) para as estruturas espaciais. A fim de validar o código, foram
consideradas aceitáveis divergências de até 2,0% entre os resultados fornecidos pelo código e
aqueles fornecidos pelos programas de análise estrutural citados.
4.1 – Treliça plana
Para a treliça plana ilustrada na Figura 25, foram determinadas as reações de apoio, os
deslocamentos e os esforços nodais através do código computacional desenvolvido e do
programa FTOOL (MARTHA, 2012) para posterior comparação dos resultados.
Para esta estrutura foram consideradas as seguintes propriedades físicas e geométricas
das seções transversais dos elementos: 𝐸 = 100 𝐺𝑃𝑎 = 108 𝐾𝑁/𝑚²; 𝜈 = 0,2; 𝛼 =
10−5/º𝐶; dimensões das seções transversais ℎ𝑦 = ℎ𝑧 = 5 𝑐𝑚, com área 𝐴 = 2,5 ×
Figura 25 - Exemplo 1 - Treliça plana
Fonte: Autor (2017)

59
10−3 𝑚²; variação de temperatura ∆𝑖= 10º𝐶 e ∆𝑒= 20º𝐶 nas barras horizontais; recalque
𝜌 = 0,5 𝑐𝑚 da esquerda para direita no apoio esquerdo.
A discretização adotada na utilização do código computacional, bem como a
numeração dos nós e elementos, estão apresentadas na Figura 26.
Os resultados dos deslocamentos nodais obtidos pelo código computacional e pelo
FTOOL estão apresentados na Tabela 1, para a convenção de sinais ilustrada na Figura 24.
Tabela 1 - Deslocamentos nodais para a treliça plana
Nó Código Computacional FTOOL
Translação X (m) Translação Y (m) Translação X (m) Translação Y (m)
1 5,000 x 10-3
0,000 5,000 x 10-3
0,000
2 2,500 x 10-3
0,000 2,500 x 10-3
1,184 x 10-18
3 0,000 0,000 0,000 0,000
4 2,812 x 10-3
0,000 2,812 x 10-3
1,184 x 10-18
5 2,332 x 10-3
0,000 2,332 x 10-3
2,524 x 10-38
Fonte: Autor (2017)
Os resultados das reações de apoio e dos esforços nodais estão apresentados,
respectivamente, nas Tabelas 2 e 3.
Figura 26- discretização e numeração dos nós e elementos da treliça plana
Fonte: Autor (2017)

60
Tabela 2 - Reações de apoio para a treliça plana
Nó Código Computacional FTOOL
FX (KN) FY (KN) FX (KN) FY (KN)
1 263,75 52,50 263,75 52,50
3 -283,75
67,50 -283,75 67,50
Fonte: Autor (2017)
Tabela 3- Esforços nodais para treliça plana
Elemento Nó Código Computacional FTOOL
Esforço Normal Esforço Normal
1 1 193,750 193,750
2 -193,750 -193,750
2 2 193,750 193,750
3 -193,750 -193,750
3 1 87,500 87,500
4 -87,500 -87,500
4 4 0,000 0,000
2 0,000 0,000
5 4 112,500 112,500
3 -112,500 -112,500
6 4 30,000 30,000
5 -30,000 -30,000
7 5 0,000 0,000
3 0,000 0,000
Fonte: Autor (2017)
Desta forma, verificou-se a validação do código desenvolvido para o caso de treliças
planas, visto que não houve divergência entre os resultados obtidos pelas duas ferramentas.
4.2 – Pórtico plano
Para o pórtico plano ilustrado na Figura 27 foram determinadas as reações de apoio, os
deslocamentos e os esforços nodais através do código computacional desenvolvido e do
programa FTOOL (MARTHA, 2012).
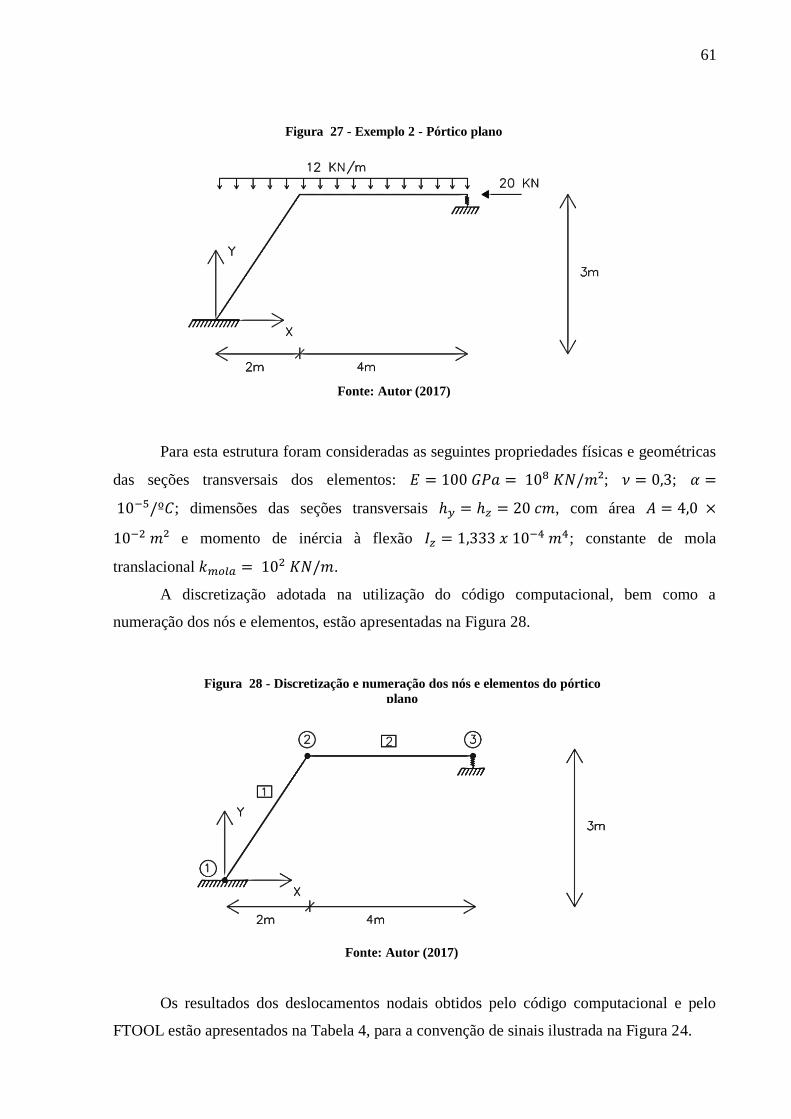
61
Para esta estrutura foram consideradas as seguintes propriedades físicas e geométricas
das seções transversais dos elementos: 𝐸 = 100 𝐺𝑃𝑎 = 108 𝐾𝑁/𝑚²; 𝜈 = 0,3; 𝛼 =
10−5/º𝐶; dimensões das seções transversais ℎ𝑦 = ℎ𝑧 = 20 𝑐𝑚, com área 𝐴 = 4,0 ×
10−2 𝑚² e momento de inércia à flexão 𝐼𝑧 = 1,333 𝑥 10−4 𝑚4; constante de mola
translacional 𝑘𝑚𝑜𝑙𝑎 = 102 𝐾𝑁/𝑚.
A discretização adotada na utilização do código computacional, bem como a
numeração dos nós e elementos, estão apresentadas na Figura 28.
Os resultados dos deslocamentos nodais obtidos pelo código computacional e pelo
FTOOL estão apresentados na Tabela 4, para a convenção de sinais ilustrada na Figura 24.
Figura 27 - Exemplo 2 - Pórtico plano
Fonte: Autor (2017)
Figura 28 - Discretização e numeração dos nós e elementos do pórtico
plano
Fonte: Autor (2017)

62
Tabela 4 - Deslocamentos nodais do pórtico plano
Nó
Código Computacional FTOOL
Translação
X (m)
Translação
Y (m)
Rotação Z
(rad)
Translação
X (m)
Translação
Y (m)
Rotação Z
(rad)
1 0,00 0,00 0,00 0,00 0,00 0,00
2 3,048 x 10-2
-2,037 x 10-2
-1,859 x 10-2
3,048 x 10-2
-2,037 x 10-2
-1,859 x 10-2
3 3,046 x 10-2
-1,065 x 10-1
-2,180 x 10-2
3,046 x 10-2
-1,065 x 10-1
-2,180 x 10-2
Fonte: Autor (2017)
Os resultados das reações de apoio e dos esforços nodais encontram-se apresentados,
respectivamente, nas Tabelas 5 e 6.
Tabela 5 - Reações de apoio para o pórtico plano
Nó
Código Computacional FTOOL
FX (KN) FY (KN) MZ (KN.m) FX (KN) FY (KN) MZ (KN.m)
1 20,000 61,348 92,098 20,000 61,348 92,098
3 8,562 x 10-13
10,650 -1,599 x 10-14
0,000 10,650
0,000
Fonte: Autor (2017)
Tabela 6 - Esforços nodais para o pórtico plano
Elemento Nó
Código Computacional FTOOL
Esforço
Normal
(KN)
Esforço
Cortante
(KN)
Momento
Fletor
(KN.m)
Esforço
Normal
(KN)
Esforço
Cortante
(KN)
Momento
Fletor
(KN.m)
1 1 62,139 17,389 92,098 62,139 17,389 92,098
2 -42,171 -4,077 -53,400 -42,171 -4,077 -53,400
3 2 20,000 37,350 53,400 20,000 37,350 53,400
3 -20,000 10,650 -1,599 x 10-14
-20,000 10,650 0,000
Fonte: Autor (2017)
Para o caso de pórtico plano, o código computacional desenvolvido mostrou-se
igualmente satisfatório, visto que não foram verificadas divergências entre os resultados
obtidos pelas duas ferramentas.

63
4.3 Pórtico plano com rótula
Para o pórtico plano com rótula ilustrado na Figura 29, foram determinadas as reações
de apoio, os deslocamentos e os esforços nodais através do código computacional
desenvolvido e do programa FTOOL (MARTHA, 2012).
Para esta estrutura foram consideradas as seguintes propriedades físicas e geométricas
das seções transversais dos elementos: 𝐸 = 100 𝐺𝑃𝑎 = 108 𝐾𝑁/𝑚²; 𝜈 = 0,2; 𝛼 =
10−5/º𝐶; dimensões das seções transversais ℎ𝑦 = 30 𝑐𝑚 e ℎ𝑧 = 20 𝑐𝑚, com área 𝐴 =
6,0 × 10−2 𝑚² e momento de inércia à flexão 𝐼𝑧 = 4,50 𝑥 10−4 𝑚4.
A discretização adotada na utilização do código computacional, bem como a
numeração dos nós e elementos, estão apresentadas na Figura 30.
Fonte: Autor (2017)
Figura 29 - Exemplo 3 - Pórtico plano com rótula
Figura 30 - Discretização e numeração dos nós e elementos do pórtico plano com rótula
Fonte: Autor (2017).

64
Os resultados dos deslocamentos nodais obtidos pelo código computacional e pelo
FTOOL estão apresentados na Tabela 7, para a convenção de sinais ilustrada na Figura 24.
Tabela 7 - Deslocamentos nodais para o pórtico plano com rótula
Nó
Código Computacional FTOOL
Translação
X (m)
Translação
Y (m)
Rotação Z
(rad)
Translação
X (m)
Translação
Y (m)
Rotação Z
(rad)
1 0,000 0,000 0,000 0,000 0,000 0,000
2 0,000 0,000 -1,571 x 10-6
0,000 0,000 -1,571 x 10-6
3 0,000 0,000 0,000 0,000 0,000 0,000
4 6,282 x 10-6
-5,130 x 10-5
-1,571 x 10-6
6,282 x 10-6
-5,130 x 10-5
-1,571 x 10-6
5 -2,634 x 10-6
-1,381 x 10-5
3,391 x 10-4
-2,634 x 10-6
-1,381 x 10-5
3,391 x 10-4
6 9,415 x 10-5
-6,903 x 10-6
-8,378 x 10-5
9,415 x 10-5
-6,903 x 10-6
-8,378 x 10-5
Fonte: Autor (2017)
Os resultados das reações estão apresentados na Tabela 8.
Tabela 8 - Reações para o pórtico plano com rótula
Nó
Código Computacional FTOOL
FX (KN) FY (KN) MZ (KN.m) FX (KN) FY (KN) MZ (KN.m)
1 10,700 102,339 93,895 10,700 102,339 93,895
2 1,806 x 10-18
76,952 4,530x 10-18
0,000
76,952 0,000
3 -7,000 x 10-1
20,709 2,585 -7,00 x 10-1
20,709 2,585
Fonte: Autor (2017)
Os resultados dos esforços nodais estão apresentados na Tabela 9.
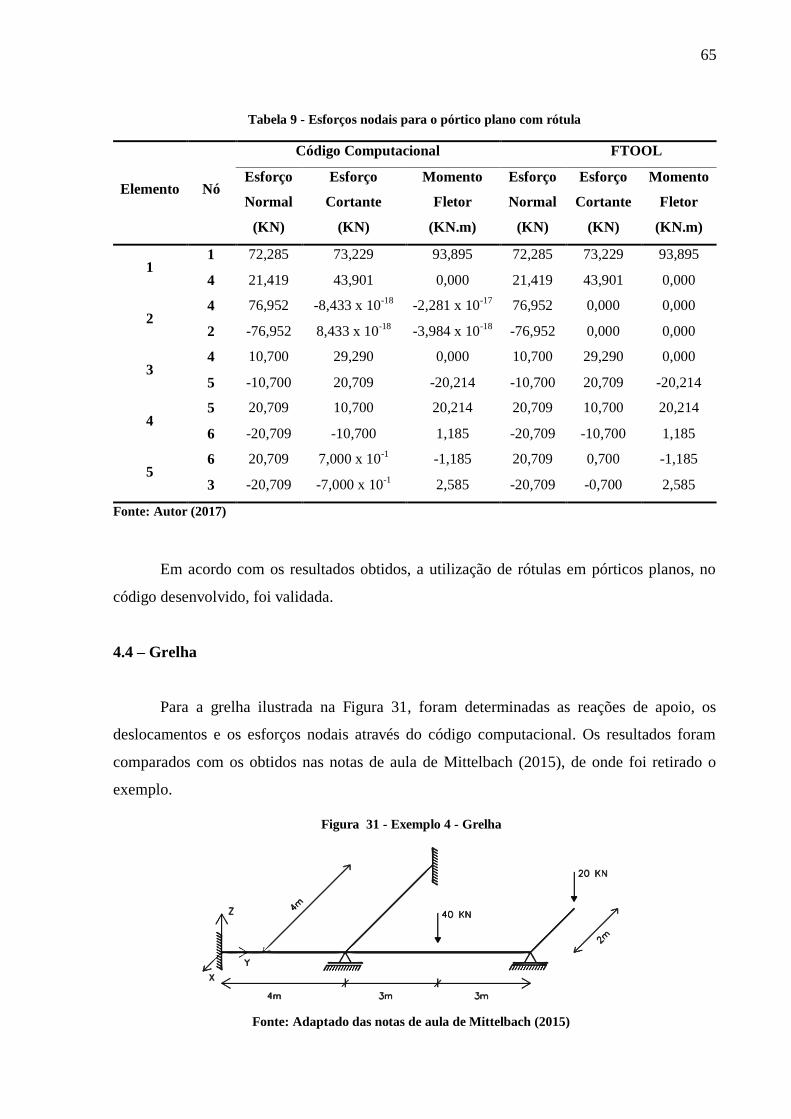
65
Tabela 9 - Esforços nodais para o pórtico plano com rótula
Elemento Nó
Código Computacional FTOOL
Esforço
Normal
(KN)
Esforço
Cortante
(KN)
Momento
Fletor
(KN.m)
Esforço
Normal
(KN)
Esforço
Cortante
(KN)
Momento
Fletor
(KN.m)
1 1 72,285 73,229 93,895 72,285 73,229 93,895
4 21,419 43,901 0,000 21,419 43,901 0,000
2 4 76,952 -8,433 x 10
-18 -2,281 x 10
-17 76,952 0,000
0,000
2 -76,952 8,433 x 10-18
-3,984 x 10-18
-76,952 0,000 0,000
3 4 10,700 29,290 0,000 10,700 29,290 0,000
5 -10,700 20,709 -20,214 -10,700 20,709 -20,214
4 5 20,709 10,700 20,214 20,709 10,700 20,214
6 -20,709 -10,700 1,185 -20,709 -10,700 1,185
5 6 20,709 7,000 x 10
-1 -1,185 20,709 0,700 -1,185
3 -20,709 -7,000 x 10-1
2,585 -20,709 -0,700 2,585
Fonte: Autor (2017)
Em acordo com os resultados obtidos, a utilização de rótulas em pórticos planos, no
código desenvolvido, foi validada.
4.4 – Grelha
Para a grelha ilustrada na Figura 31, foram determinadas as reações de apoio, os
deslocamentos e os esforços nodais através do código computacional. Os resultados foram
comparados com os obtidos nas notas de aula de Mittelbach (2015), de onde foi retirado o
exemplo.
Figura 31 - Exemplo 4 - Grelha
Fonte: Adaptado das notas de aula de Mittelbach (2015)
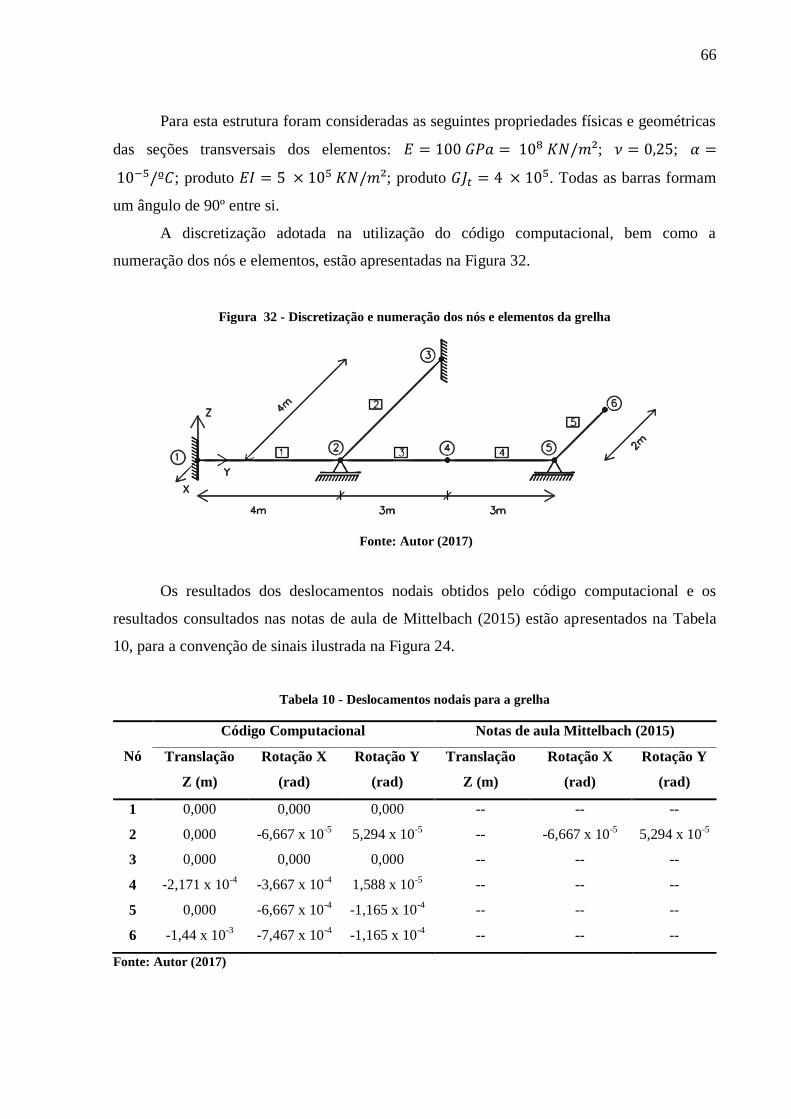
66
Para esta estrutura foram consideradas as seguintes propriedades físicas e geométricas
das seções transversais dos elementos: 𝐸 = 100 𝐺𝑃𝑎 = 108 𝐾𝑁/𝑚²; 𝜈 = 0,25; 𝛼 =
10−5/º𝐶; produto 𝐸𝐼 = 5 × 105 𝐾𝑁/𝑚²; produto 𝐺𝐽𝑡 = 4 × 105. Todas as barras formam
um ângulo de 90º entre si.
A discretização adotada na utilização do código computacional, bem como a
numeração dos nós e elementos, estão apresentadas na Figura 32.
Os resultados dos deslocamentos nodais obtidos pelo código computacional e os
resultados consultados nas notas de aula de Mittelbach (2015) estão apresentados na Tabela
10, para a convenção de sinais ilustrada na Figura 24.
Tabela 10 - Deslocamentos nodais para a grelha
Nó
Código Computacional Notas de aula Mittelbach (2015)
Translação
Z (m)
Rotação X
(rad)
Rotação Y
(rad)
Translação
Z (m)
Rotação X
(rad)
Rotação Y
(rad)
1 0,000 0,000 0,000 -- -- --
2 0,000 -6,667 x 10-5
5,294 x 10-5
-- -6,667 x 10-5
5,294 x 10-5
3 0,000 0,000 0,000 -- -- --
4 -2,171 x 10-4
-3,667 x 10-4
1,588 x 10-5
-- -- --
5 0,000 -6,667 x 10-4
-1,165 x 10-4
-- -- --
6 -1,44 x 10-3
-7,467 x 10-4
-1,165 x 10-4
-- -- --
Fonte: Autor (2017)
Figura 32 - Discretização e numeração dos nós e elementos da grelha
Fonte: Autor (2017)
67
Como o exemplo de comparação foi resolvido analiticamente, somente constam
informações de deslocamentos relativos ao nó 2.
Os resultados das reações estão apresentados na Tabela 11.
Tabela 11 - Reações para a grelha
Nó
Código Computacional Notas de aula Mittelbach (2015)
FZ (KN) MX (KN.m) MY (KN.m) FZ (KN) MX (KN.m) MY (KN.m)
1 -9,926 6,667 13,235 -9,930 6,667 13,235
2 22,721 4,430 x 10-15
-9,256 x 10-15
22,720 -- --
3 12,500 -16,667 -5,294 12,500 -16,667 -5,294
5 34,706 5,143 x 10-14
-2,40 x 10-14
34,710 -- --
Fonte: Autor (2017)
Os resultados dos esforços nodais estão apresentados na Tabela 12.
Tabela 12 - Esforços nodais para a grelha
Elemento Nó
Código Computacional Notas de aula Mittelbach (2015)
Esforço
Cortante
(KN)
Momento
Torçor
(KN.m)
Momento
Fletor
(KN.m)
Esforço
Cortante
(KN)
Momento
Torçor
(KN.m)
Momento
Fletor
(KN.m)
1 1 -9,926 6,667 13,235 -9,930 6,667 13,235
2 9,926 -6,667 26,471 9,930 -6,667 26,470
2 2 -12,500 5,294 33,333 -12,500 5,290 33,333
3 12,500 -5,294 16,667 12,500 -5,290 16,660
3 2 25,294 40,000 -31,765 25,300 40,000 -31,760
4 -25,294 -40,000 -44,118 -25,300 -40,000 -44,100
4 4 -14,706 40,000 44,118 -14,700 40,000 44,100
5 14,706 -40,000 -2,164 x 10-14
14,700 -40,000 0,000
5 5 20,000 -2,680 x 10
-15 -40,000 20,000 0,000 -40,000
6 -20,000 2,680 x 10-15
1,245 x 10-15
-20,000 0,000 0,000
Fonte: Autor (2017)

68
Comprova-se a validação do código desenvolvido para estruturas do tipo grelha. A
maior divergência verificada entre os resultados corresponde a 0,076%, menor que os 2,0%
estabelecidos no critério de validação.
4.5 – Treliça espacial
Para a treliça espacial ilustrada na Figura 33, foram determinadas as reações de apoio,
os deslocamentos e os esforços nodais através do código computacional e do programa SALT
(LIMA; SORIANO, 2006).
Para esta estrutura foram consideradas as seguintes propriedades físicas e geométricas
das seções transversais dos elementos: 𝐸 = 205 𝐺𝑃𝑎 = 2,05 × 108 𝐾𝑁/𝑚²; 𝜈 = 0,3;
𝛼 = 1,2 × 10−5/º𝐶; dimensões das seções transversais ℎ𝑦 = 6,0 𝑐𝑚 e ℎ𝑧 = 4,0 𝑐𝑚, com
área 𝐴 = 2,4 × 10−3 𝑚²; momentos de inércia à flexão 𝐼𝑦 = 3,20 𝑥 10−7 𝑚4 e 𝐼𝑧 =
7,20 𝑥 10−7 𝑚4; momento de inércia à torção 𝐽𝑡 = 7,512 𝑥 10−7 𝑚4; Variação de
temperatura uniforme em todas as barras com ∆ = 25º𝐶. Todos os apoios restringem as três
deslocabilidades translacionais.
A discretização adotada na utilização do código computacional, bem como a
numeração dos nós e elementos, estão apresentadas na Figura 34.
Figura 33 - Exemplo 5 - Treliça espacial
Fonte: Autor (2017)
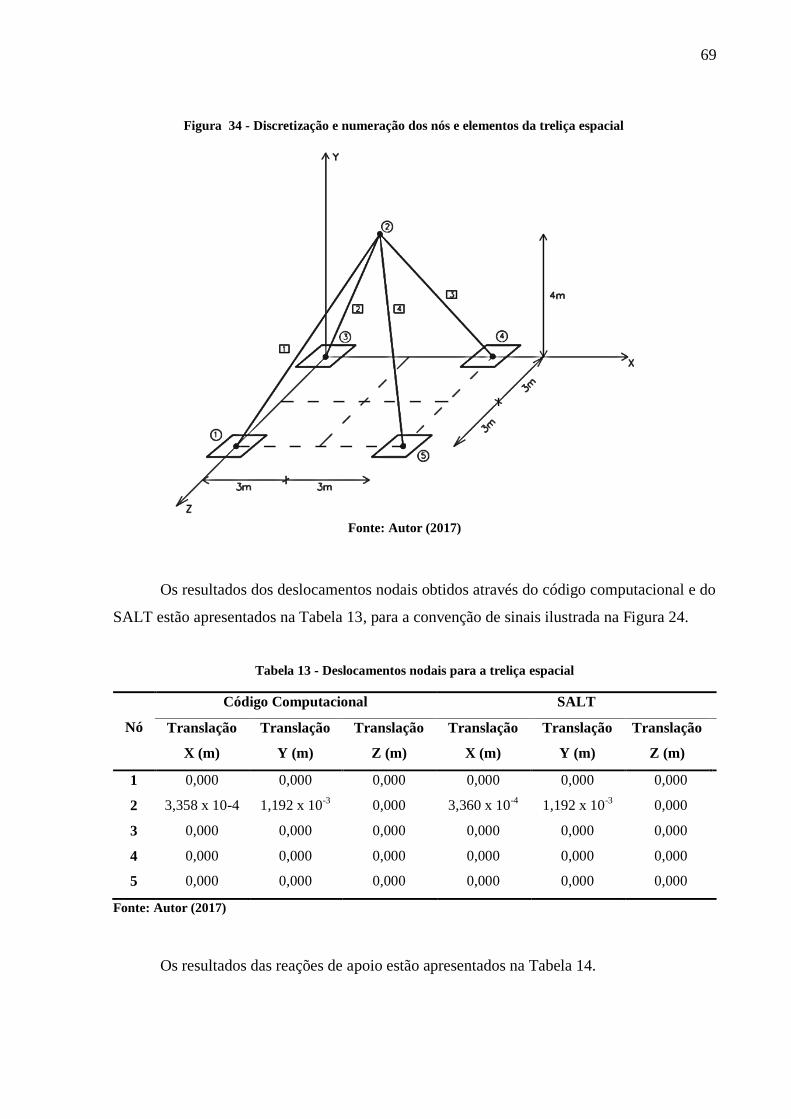
69
Os resultados dos deslocamentos nodais obtidos através do código computacional e do
SALT estão apresentados na Tabela 13, para a convenção de sinais ilustrada na Figura 24.
Tabela 13 - Deslocamentos nodais para a treliça espacial
Nó
Código Computacional SALT
Translação
X (m)
Translação
Y (m)
Translação
Z (m)
Translação
X (m)
Translação
Y (m)
Translação
Z (m)
1 0,000 0,000 0,000 0,000 0,000 0,000
2 3,358 x 10-4 1,192 x 10-3
0,000 3,360 x 10-4
1,192 x 10-3
0,000
3 0,000 0,000 0,000 0,000 0,000 0,000
4 0,000 0,000 0,000 0,000 0,000 0,000
5 0,000 0,000 0,000 0,000 0,000 0,000
Fonte: Autor (2017)
Os resultados das reações de apoio estão apresentados na Tabela 14.
Figura 34 - Discretização e numeração dos nós e elementos da treliça espacial
Fonte: Autor (2017)
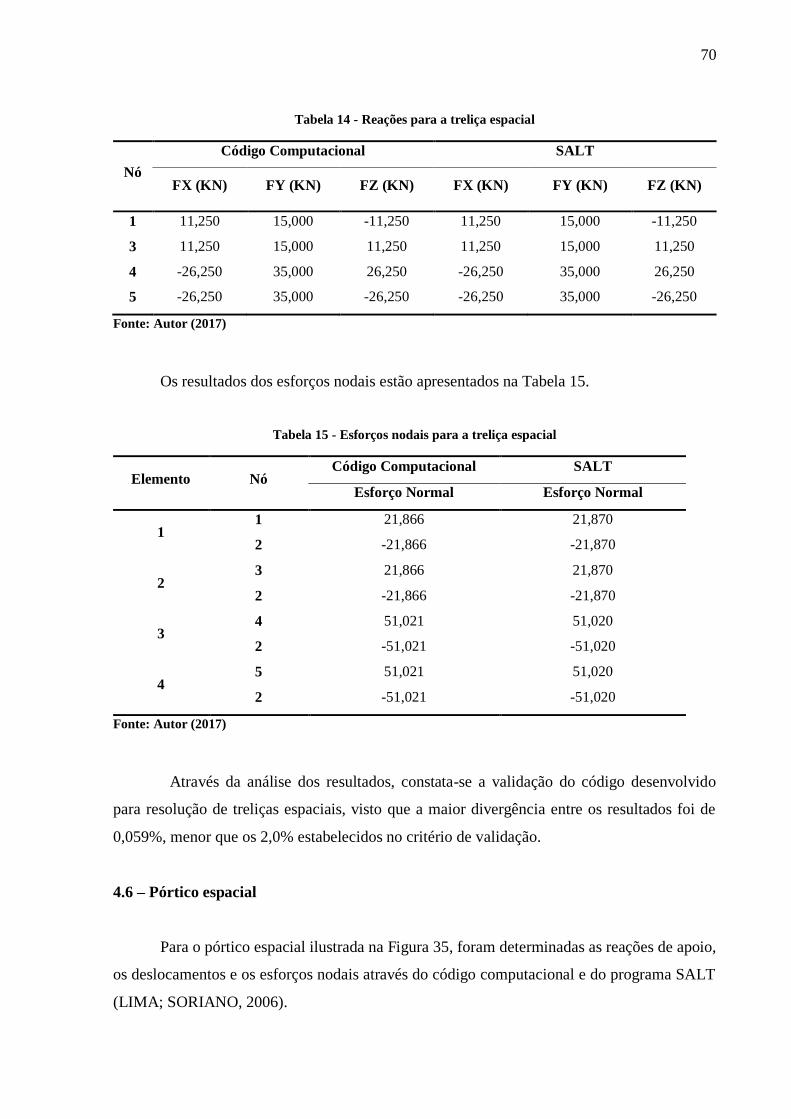
70
Tabela 14 - Reações para a treliça espacial
Nó
Código Computacional SALT
FX (KN) FY (KN) FZ (KN) FX (KN) FY (KN) FZ (KN)
1 11,250 15,000 -11,250 11,250 15,000 -11,250
3 11,250 15,000 11,250 11,250 15,000 11,250
4 -26,250 35,000 26,250 -26,250 35,000 26,250
5 -26,250 35,000 -26,250 -26,250 35,000 -26,250
Fonte: Autor (2017)
Os resultados dos esforços nodais estão apresentados na Tabela 15.
Tabela 15 - Esforços nodais para a treliça espacial
Elemento Nó Código Computacional SALT
Esforço Normal Esforço Normal
1 1 21,866 21,870
2 -21,866 -21,870
2 3 21,866 21,870
2 -21,866 -21,870
3 4 51,021 51,020
2 -51,021 -51,020
4 5 51,021 51,020
2 -51,021 -51,020
Fonte: Autor (2017)
Através da análise dos resultados, constata-se a validação do código desenvolvido
para resolução de treliças espaciais, visto que a maior divergência entre os resultados foi de
0,059%, menor que os 2,0% estabelecidos no critério de validação.
4.6 – Pórtico espacial
Para o pórtico espacial ilustrada na Figura 35, foram determinadas as reações de apoio,
os deslocamentos e os esforços nodais através do código computacional e do programa SALT
(LIMA; SORIANO, 2006).

71
Para esta estrutura foram consideradas as seguintes propriedades físicas e geométricas
das seções transversais dos elementos: 𝐸 = 100 𝐺𝑃𝑎 = 108 𝐾𝑁/𝑚²; 𝜈 = 0,25; 𝛼 =
10−5/º𝐶; dimensões das seções transversais ℎ𝑦 = 40 𝑐𝑚 e ℎ𝑧 = 20 𝑐𝑚, com área 𝐴 =
8,0 × 10−2 𝑚²; momentos de inércia à flexão 𝐼𝑦 = 2,666 𝑥 10−4 𝑚4 e
𝐼𝑧 = 1,066 𝑥 10−3 𝑚4; momento de inércia à torção 𝐽𝑡 = 7,324 𝑥 10−4 𝑚4; Variação de
temperatura uniforme na barra 3 com ∆ = 30º𝐶. Todos os apoios restringem as seis
deslocabilidades e todas as barras formam ângulos de 90º entre si.
A discretização adotada na utilização do código computacional, bem como a
numeração dos nós e elementos, estão apresentadas na Figura 36.
Figura 35 - Exemplo 6 - Pórtico espacial
Fonte: Autor (2017)

72
Os resultados dos deslocamentos nodais obtidos através do código computacional e do
SALT estão apresentados na Tabela 16, para a convenção de sinais ilustrada na Figura 24.
Figura 36 - Discretização e numeração dos nós e elementos do pórtico espacial
Fonte: Autor (2017)
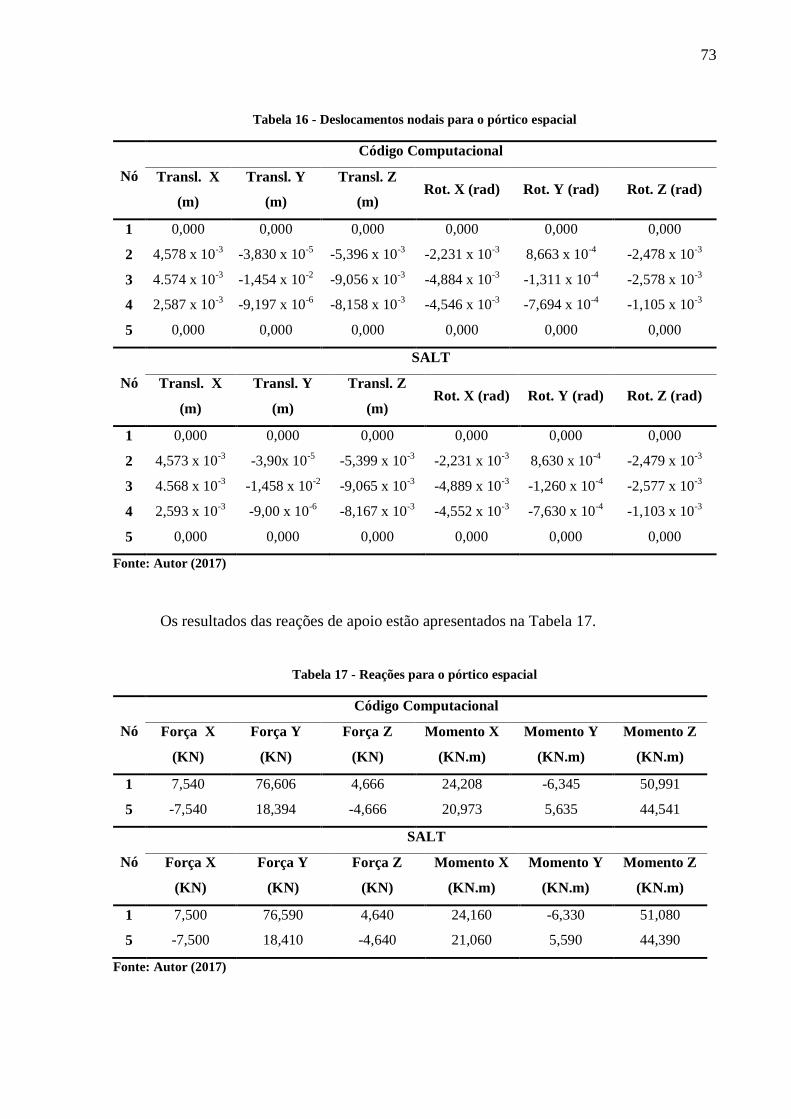
73
Tabela 16 - Deslocamentos nodais para o pórtico espacial
Nó
Código Computacional
Transl. X
(m)
Transl. Y
(m)
Transl. Z
(m) Rot. X (rad) Rot. Y (rad) Rot. Z (rad)
1 0,000 0,000 0,000 0,000 0,000 0,000
2 4,578 x 10-3
-3,830 x 10-5
-5,396 x 10-3
-2,231 x 10-3
8,663 x 10-4
-2,478 x 10-3
3 4.574 x 10-3
-1,454 x 10-2
-9,056 x 10-3
-4,884 x 10-3
-1,311 x 10-4
-2,578 x 10-3
4 2,587 x 10-3
-9,197 x 10-6
-8,158 x 10-3
-4,546 x 10-3
-7,694 x 10-4
-1,105 x 10-3
5 0,000 0,000 0,000 0,000 0,000 0,000
Nó
SALT
Transl. X
(m)
Transl. Y
(m)
Transl. Z
(m) Rot. X (rad) Rot. Y (rad) Rot. Z (rad)
1 0,000 0,000 0,000 0,000 0,000 0,000
2 4,573 x 10-3
-3,90x 10-5
-5,399 x 10-3
-2,231 x 10-3
8,630 x 10-4
-2,479 x 10-3
3 4.568 x 10-3
-1,458 x 10-2
-9,065 x 10-3
-4,889 x 10-3
-1,260 x 10-4
-2,577 x 10-3
4 2,593 x 10-3
-9,00 x 10-6
-8,167 x 10-3
-4,552 x 10-3
-7,630 x 10-4
-1,103 x 10-3
5 0,000 0,000 0,000 0,000 0,000 0,000
Fonte: Autor (2017)
Os resultados das reações de apoio estão apresentados na Tabela 17.
Tabela 17 - Reações para o pórtico espacial
Nó
Código Computacional
Força X
(KN)
Força Y
(KN)
Força Z
(KN)
Momento X
(KN.m)
Momento Y
(KN.m)
Momento Z
(KN.m)
1 7,540 76,606 4,666 24,208 -6,345 50,991
5 -7,540 18,394 -4,666 20,973 5,635 44,541
Nó
SALT
Força X
(KN)
Força Y
(KN)
Força Z
(KN)
Momento X
(KN.m)
Momento Y
(KN.m)
Momento Z
(KN.m)
1 7,500 76,590 4,640 24,160 -6,330 51,080
5 -7,500 18,410 -4,640 21,060 5,590 44,390
Fonte: Autor (2017)
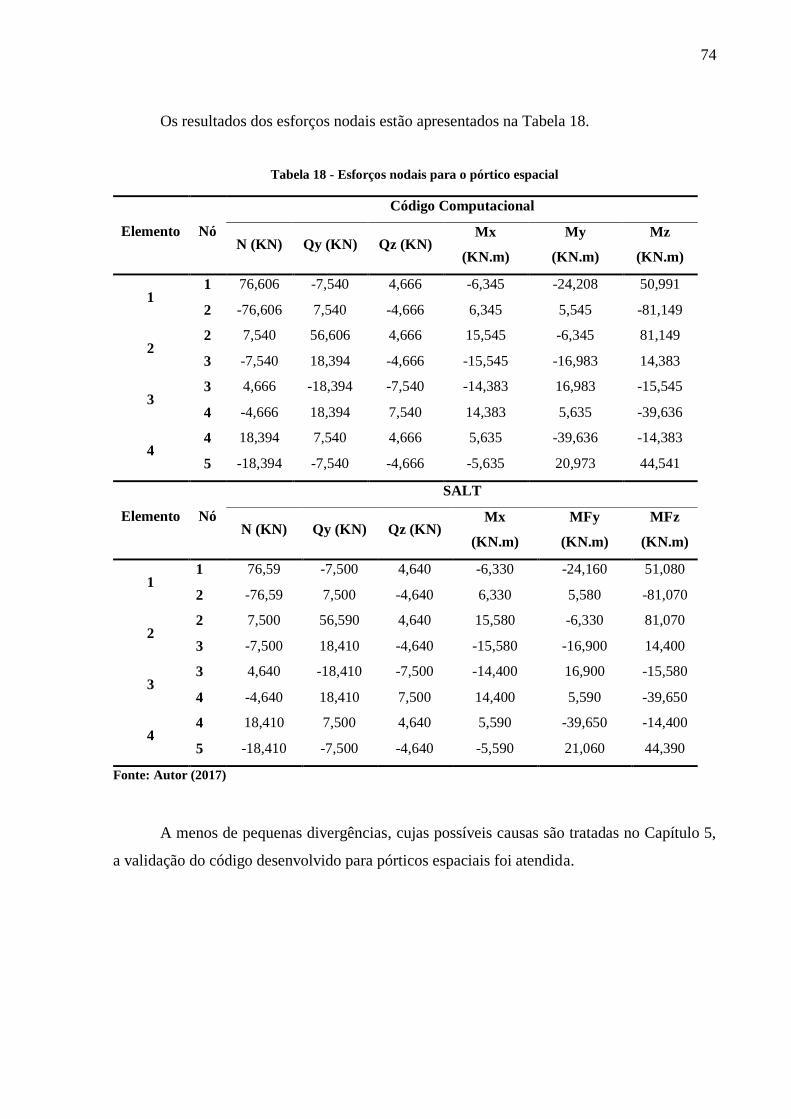
74
Os resultados dos esforços nodais estão apresentados na Tabela 18.
Tabela 18 - Esforços nodais para o pórtico espacial
Elemento Nó
Código Computacional
N (KN) Qy (KN) Qz (KN) Mx
(KN.m)
My
(KN.m)
Mz
(KN.m)
1 1 76,606 -7,540 4,666 -6,345 -24,208 50,991
2 -76,606 7,540 -4,666 6,345 5,545 -81,149
2 2 7,540 56,606 4,666 15,545 -6,345 81,149
3 -7,540 18,394 -4,666 -15,545 -16,983 14,383
3 3 4,666 -18,394 -7,540 -14,383 16,983 -15,545
4 -4,666 18,394 7,540 14,383 5,635 -39,636
4 4 18,394 7,540 4,666 5,635 -39,636 -14,383
5 -18,394 -7,540 -4,666 -5,635 20,973 44,541
Elemento Nó
SALT
N (KN) Qy (KN) Qz (KN) Mx
(KN.m)
MFy
(KN.m)
MFz
(KN.m)
1 1 76,59 -7,500 4,640 -6,330 -24,160 51,080
2 -76,59 7,500 -4,640 6,330 5,580 -81,070
2 2 7,500 56,590 4,640 15,580 -6,330 81,070
3 -7,500 18,410 -4,640 -15,580 -16,900 14,400
3 3 4,640 -18,410 -7,500 -14,400 16,900 -15,580
4 -4,640 18,410 7,500 14,400 5,590 -39,650
4 4 18,410 7,500 4,640 5,590 -39,650 -14,400
5 -18,410 -7,500 -4,640 -5,590 21,060 44,390
Fonte: Autor (2017)
A menos de pequenas divergências, cujas possíveis causas são tratadas no Capítulo 5,
a validação do código desenvolvido para pórticos espaciais foi atendida.

75
5 – DISCUSSÕES
5.1 – Discussões acerca dos resultados
Com base nos resultados obtidos através do código computacional e nos resultados
obtidos na literatura e aplicação de programas de análise estrutural, faz-se necessária uma
comparação entre os mesmos a fim de validar os procedimentos adotados durante o
desenvolvimento deste trabalho.
Para o primeiro exemplo estudado, que consiste em uma treliça plana, não foram
verificadas divergências entre os resultados de deslocamentos nodais, reações e esforços
internos nodais obtidos pelo código computacional desenvolvido e pelo software FTOOL. A
única observação a ser feita diz respeito aos resultados dos valores das translações dos nós 2,
4 e 5, ao longo do eixo 𝑌. Enquanto o código computacional forneceu tais valores como
sendo nulos, o FTOOL forneceu como sendo 1,1842 × 10−18 para os dois primeiros e
2,5244 × 10−38 para o último, o que pode ser considerado desprezível, validando assim o
código desenvolvido.
Para o segundo exemplo, que consiste num pórtico plano sem articulações, não foram
verificadas divergências entre os resultados obtidos através do código computacional e os
obtidos através do FTOOL. O mesmo pode-se dizer para o terceiro exemplo (pórtico plano
com articulações), de forma que foi verificada a validação do código, tanto para os pórticos
planos sem articulações, quanto para a utilização de rótulas nessas estruturas.
No quarto exemplo, os resultados obtidos para a grelha através do código foram
comparados com os obtidos nas notas de aula de Mittelbach (2015). Estes, por serem
provenientes de uma resolução analítica através do Método da Rigidez, não forneceram todos
os valores de deslocabilidades nos nós. Entretanto, os dois deslocamentos calculados nas
notas de aula (rotações em 𝑋 e 𝑌 no nó 2) coincidiram com os obtidos pelo código
computacional. Com isso, pressupõe-se que os demais deslocamentos, caso tivessem sido
calculados, coincidiriam com os do código, visto que as reações e os esforços nodais não
apresentaram grandes divergências nas duas situações, compreendendo apenas diferenças no
arredondamento das casas decimais.
Para a treliça espacial, mostrada no quinto exemplo, as únicas diferenças encontradas
entre os resultados fornecidos pelo código e o software SALT, tanto para os deslocamentos
quanto para as reações e esforços, dizem respeito apenas ao arredondamento das casas
76
decimais dos mesmos, de forma que a maior divergência encontrada corresponde a 0,059%,
menor que os 2,0% estabelecidos no critério de validação. Já para o pórtico espacial, mostrado
no sexto exemplo, os resultados divergiram em proporções um pouco maiores que nos demais
casos, mas ainda assim irrelevantes, podendo tais divergências estarem relacionadas ao fato
do SALT fornecer resultados com um número menor de casas decimais em relação ao código
computacional desenvolvido, à ordem dos cálculos desenvolvidos, ao fato de que o software
utiliza a técnica do número grande para a inserção de condições de contorno, e uma possível
consideração da deformabilidade por esforço cortante, prevista no SALT e não no código
computacional desenvolvido. A maior divergência encontrada se deu nos esforços de
momento em torno do eixo 𝑋 relativos ao elemento 4, representando uma diferença de apenas
0,80%, menor que os 2,0% estabelecidos no critério de validação.
5.2 – Limitações
As limitações encontradas no código computacional para análise de estruturas
reticuladas planas e espaciais são assim elencadas:
a) O código, diferentemente de outros programas de análise estrutural, não fornece os
esforços internos ao longo do comprimento da barra, mas apenas nos seus pontos
nodais. Dessa forma, nem sempre é possível, por exemplo, obter os esforços
máximos que atuam nos elementos;
b) A articulação é considerada apenas em pórticos planos;
c) O código não considera a existência de ligação excêntrica entre barras, o que,
Segundo Soriano (2005), usualmente ocorre em estruturas desse tipo;
d) As articulações tratadas no código são apenas de momento fletor (rótula), o que
libera apenas a rotação nas seções em que estão inseridas. Não são consideradas
articulações que anulam esforço normal, esforço cortante ou momento torçor.
e) Ao informar as condições dos apoios das estruturas, não existe a possibilidade de
inserir apoios inclinados.
5.3 – Sugestões para continuidade do trabalho
Como sugestões para continuidade deste trabalho, pode-se aprimorar o código
desenvolvido de forma a ser possível a consideração de mais condições de modelagem
77
geométrica, tais como: a consideração das ligações excêntricas entre as barras; consideração
de outros tipos de articulações, como as que anulam força normal, força cortante e momento
torçor, além da inserção dessas articulações nos nós (referencial global) e não apenas nas
extremidades dos elementos; inserção de tais articulações nos demais tipos de estruturas e a
consideração de apoios inclinados.
Pode-se também proceder à criação de uma interface gráfica para o código
computacional, de forma a facilitar o manuseio pelos usuários e permitir uma melhor
visualização da estrutura que se deseja analisar e de seus resultados, como deformações e
diagramas de esforços internos.
78
6 – CONCLUSÃO
Através do trabalho foi possível entender a análise de estruturas reticuladas através do
método matricial, estudando as principais etapas, metodologias e técnicas aplicadas na sua
implementação computacional. A ferramenta computacional desenvolvida se mostrou
bastante eficaz quanto aos seus objetivos de fornecer os deslocamentos nodais, reações e
esforços nodais das estruturas planas e espaciais as quais se propôs resolver. Os resultados
encontrados, em sua grande maioria foram coincidentes com os resultados encontrados na
literatura e em outros programas de análise estrutural. Os poucos resultados divergentes
consistiram em pequenas diferenças, todas menores que o estabelecido no critério de
validação, comprovando assim a eficiência da metodologia utilizada e das considerações
feitas na modelagem do programa.
A linguagem de programação Fortran se mostrou bastante adequada para formulação
matemática dos problemas. O fato de se utilizar um arquivo de entrada para os dados
necessários à resolução das estruturas foi vantajoso, visto que caso ocorra algum erro de
entrada, não é necessário informar todos os dados novamente, apenas modificá-los no referido
arquivo. A criação do arquivo de saída com as matrizes e vetores montados também
constituem uma vantagem, já que através deles é possível analisar mais a fundo o
comportamento das estruturas.
O código ainda é passível de melhorias, mas já consiste numa ferramenta capaz de
auxiliar estudantes de graduação e pós-graduação, principalmente no que diz respeito às
estruturas espaciais. Além disso, a apropriação do desenvolvimento de formulações numéricas
e de códigos computacionais é importante para os discentes que desejam ingressar em
programas de pós-graduação em mecânica das estruturas.
79
7 – REFERÊNCIAS
KUMMER, Fabricio Deives. Análise de pórticos espaciais pelo método da rigidez:
consideração dos efeitos por deformação por corte. 2014. 105 f. TCC (Graduação) - Curso de
Engenharia Civil, Universidade Federal do Rio Grande do Sul, Porto Alegre, 2014.
MARTHA, Luiz Fernando. Análise de estruturas: conceitos e métodos básicos. 2. ed. Rio de
Janeiro: Elsevier, 2010.
MARTHA, Luis Fernando. Ftool: um programa gráfico-interativo para ensino de
comportamento de estruturas. Versão 3.00. Rio de Janeiro, 2010.
MICHELIM, M.L.; CADAMURO JR, I.W. Resolução de pórticos planos através da análise
matricial de estruturas. In: ENCONTRO TECNOLÓGICO DA ENGENHARIA CIVIL E
ARQUITETURA, 4., 2003, Maringá. Anais eletrônicos... Maringá: UEM, 2003. Disponível
em: <www.dec.uem.br/eventos/enteca_2003/Temas/tema7/064.PDF>. Acesso em: 10 mar.
2017.
MITTELBACH, Fernanda Rodrigues. Notas de Aulas da Disciplina Análise Matricial de
Estruturas. Universidade Federal do Rio Grande do Norte, Natal, 2011.
MITTELBACH, Fernanda Rodrigues. Notas de Aulas da Disciplina Análise Estrutural II.
UFRN – Universidade Federal do Rio Grande do Norte, Natal, 2015.
MOREIRA, Domício Falcão. Análise matricial de estruturas. Rio de Janeiro, Livros Técnicos
e Científicos; São Paulo, Editora da Universidade de São Paulo, 1977.
NUNES, F.; FRANKLIN, Y.; CARDOSO, L. aplicação do método de eliminação de Gauss
em Matlab. In: SIMPÓSIO DE EXCELÊNCIA EM GESTÃO E TECNOLOGIA, 3., 2006,
Resende. Anais eletrônicos... Resende: Associação Educacional Dom Bosco, 2006.
Disponível em: < www.aedb.br/seget/arquivos/artigos08/465_Eliminacao_de_Gauss[1].pdf>.
Acesso em: 12 mar. 2017.
SORIANO, Humberto Lima. Análise de Estruturas: formulação matricial e implementação
computacional. Rio de Janeiro: Editora Ciência Moderna Ltda, 2005.
SUSSEKIND, José Carlos. Curso de Análise Estrutural: estruturas isostáticas. 6. ed. Porto
Alegre: Globo, 1981.