
Introduc˜ao - Departamento de Engenharia Civil | · A frequˆencia as aulas pr´aticas ´e...
45
Introdu¸ c˜ ao Normas da disciplina A disciplina de Resistˆ encia de Materiais ser´a leccionada na sequˆ encia da dis- ciplina de Mecˆanica, e tem como principal objectivo introduzir os conceitos de tens˜ao, extens˜ ao e seguran¸ ca de elementos estruturais. A carga lectiva ´ e distribu´ ıda em aulas te´ oricas e pr´aticas: Aulas te´ oricas Duas aulas por semana Aulas pr´ aticas Duas aulas por semana A frequˆ encia ` as aulas pr´aticas ´ eobrigat´oria. A avalia¸ c˜ ao baseia-se na resolu¸ c˜ ao de problemas online, num relat´ orio sobre um ensaio laboratorial e num exame final. A resolu¸ c˜ ao correcta de, pelo menos, 80% dos exerc´ ıcios disponibilizados online ´ e obrigat´oria paraobter frequˆ encia. O exame final pode ser substitu´ ıdo por dois testes durante o semestre. O peso de cada um destes momentos de avalia¸ c˜ ao ´ e: Relat´orio 10% da nota final Exerc´ ıcios online 10% da nota final Exame ou testes 80% da nota final i
-
Upload
truongduong -
Category
Documents
-
view
213 -
download
0
Transcript of Introduc˜ao - Departamento de Engenharia Civil | · A frequˆencia as aulas pr´aticas ´e...
Introducao
Normas da disciplina
A disciplina de Resistencia de Materiais sera leccionada na sequencia da dis-ciplina de Mecanica, e tem como principal objectivo introduzir os conceitosde tensao, extensao e seguranca de elementos estruturais.
A carga lectiva e distribuıda em aulas teoricas e praticas:
Aulas teoricas Duas aulas por semana
Aulas praticas Duas aulas por semana
A frequencia as aulas praticas e obrigatoria.A avaliacao baseia-se na resolucao de problemas online, num relatorio sobre
um ensaio laboratorial e num exame final. A resolucao correcta de, pelo menos,80% dos exercıcios disponibilizados online e obrigatoria para obter frequencia.
O exame final pode ser substituıdo por dois testes durante o semestre.O peso de cada um destes momentos de avaliacao e:
Relatorio 10% da nota final
Exercıcios online 10% da nota final
Exame ou testes 80% da nota final
i


Capıtulo 1
Introducao ao
comportamento de corpos
1.1 Peca linear
O principal objecto da resistencia dos materiais sao as pecas lineares. Umapeca linear e um objecto tridimensional gerado por uma figura plana que edeslocada ao longo de uma linha com grande raio de curvatura que passano centroide da area plana. Para que seja considerada uma peca linear, ocomprimento da linha tem que ser muito maior que as dimensoes da areaplana. A area plana e denominada por seccao transversal, enquanto a geratrize denominada eixo da barra.
Eixo da barra
Secção transversal
x
y z
Figura 1.1:
Se a seccao transversal for de geometria constante, diz-se que a peca temseccao constante. Se o eixo for um segmento de recta, diz-se que a peca
1

2 CAPITULO 1. INTRODUCAO AO COMPORTAMENTO DE CORPOS
linear e rectilınea. Se for rectilınea e de seccao constante, a peca linear diz-seprismatica.
Para representar uma peca linear e comum representar-se apenas o seueixo.
Em geral e importante referir um referencial da peca linear. Se esta nao forprismatica, o referencial muda de seccao transversal para seccao transversal.Em todo o caso, e comum definir-se o eixo perpendicular a seccao transversalcomo sendo o eixo dos xx, enquanto os outros dois eixos sao referidos comoeixos yy e zz, como se representa na Figura 1.1
1.2 Grandezas fundamentais
Os conceitos mais fundamentais para a resistencia dos materiais sao a tensaoe a deformacao.
Considere-se como exemplo a situacao representada na Figura 1.2.
Figura 1.2: Adaptado de Beer et al. (2003)
O cabo inclinado apenas esta sujeito a forcas segundo o seu eixo. Estasforcas sao denominadas por forcas axiais ou esforcos axiais. Sujeita a umesforco axial, uma barra aumenta ou dimimui de comprimento, como se re-presenta na Figura 1.3.
Embora este aumento de comprimento possa ser muito pequeno, e dificil-mente observavel, esta sempre presente e e de importancia crucial na analisede solidos.
1.2. GRANDEZAS FUNDAMENTAIS 3
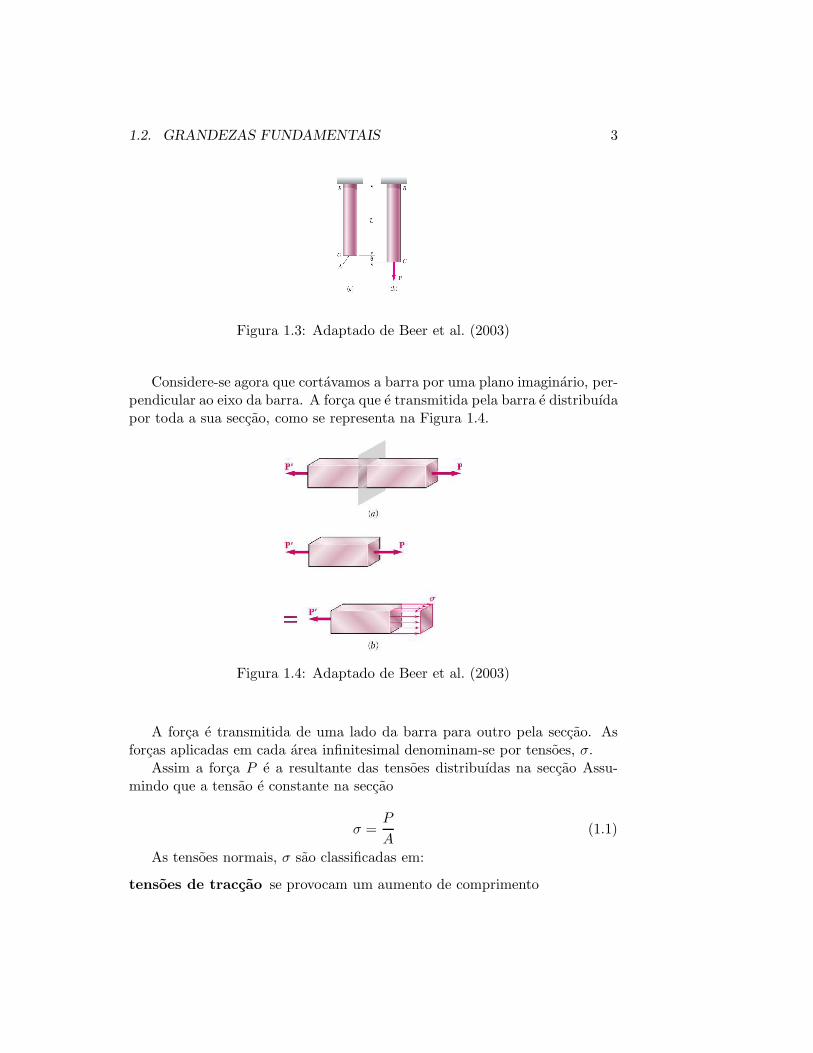
Figura 1.3: Adaptado de Beer et al. (2003)
Considere-se agora que cortavamos a barra por uma plano imaginario, per-pendicular ao eixo da barra. A forca que e transmitida pela barra e distribuıdapor toda a sua seccao, como se representa na Figura 1.4.
Figura 1.4: Adaptado de Beer et al. (2003)
A forca e transmitida de uma lado da barra para outro pela seccao. Asforcas aplicadas em cada area infinitesimal denominam-se por tensoes, σ.
Assim a forca P e a resultante das tensoes distribuıdas na seccao Assu-mindo que a tensao e constante na seccao
σ =P
A(1.1)
As tensoes normais, σ sao classificadas em:
tensoes de traccao se provocam um aumento de comprimento

4 CAPITULO 1. INTRODUCAO AO COMPORTAMENTO DE CORPOS
tensoes de compressao se provocam uma diminuicao de comprimento
Mais tarde vamos falar de outro tipo de tensoes (tensoes tangenciais ou decorte).
E fundamental definir uma convencao para os sinais das tensoes normais.Normalmente define-se tensoes de traccao como positivas e de compressaocomo negativas.
As tensoes tem como unidades:
σ =F
A=
N
m2= Pa (1.2)
em Engenharia o Pascal (Pa) e uma unidade muito pequena (100 gramas pormetro quadrado).
E mais comum utilizar-se o kPa ou o MPa
1.3 Limitacoes
A equacao
σ =P
A(1.3)
e valida apenas se a tensao for uniformemente distribuıda na seccao. Con-siderando apenas forcas aplicadas segundo o eixo da barra, isto acontece se:
1. A forca for aplicada no centroide da seccao
2. a seccao for suficientemente distante dos apoios e dos pontos de aplicacaode forcas concentradas
3. nao ocorrerem mudancas de seccao transversal
4. o material for homogeneo e isotropico
Quando a area que se considera tende para zero, a tensao tende semprepara um valor constante. Assim, a definicao correcta de tensao normal e:
Definicao
σ = limA→0
F
A(1.4)
1.4. EXTENSOES 5
Concentracao de tensoes
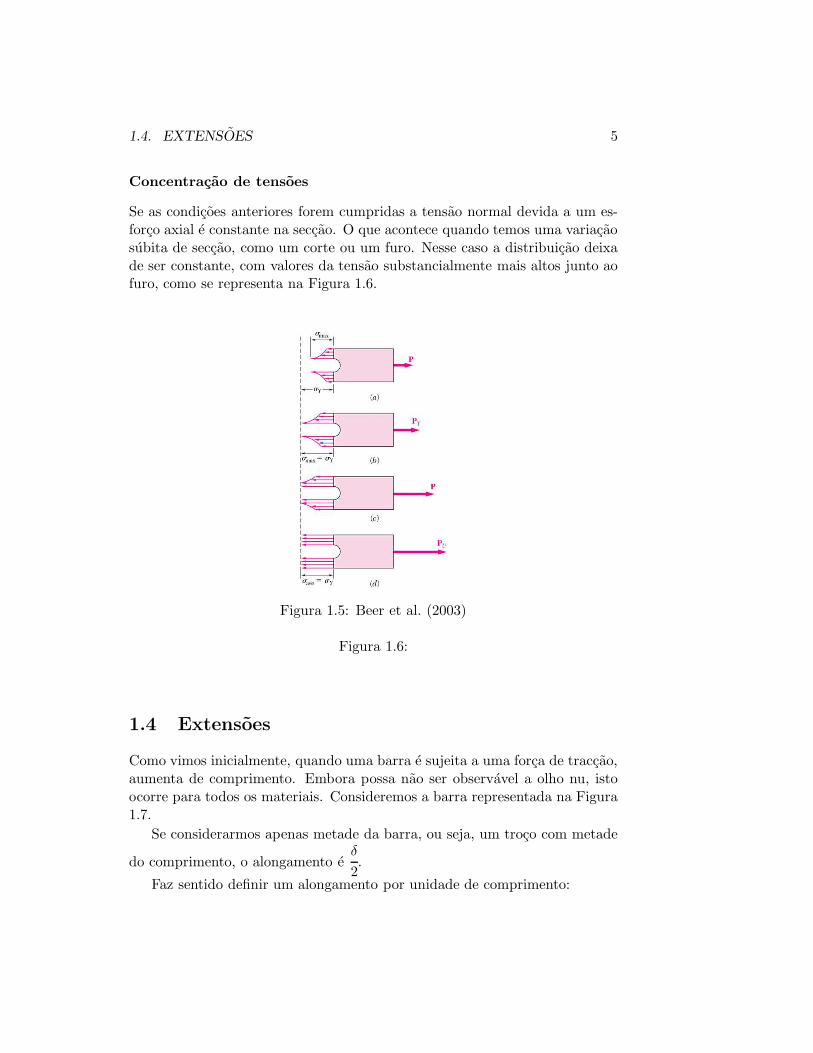
Se as condicoes anteriores forem cumpridas a tensao normal devida a um es-forco axial e constante na seccao. O que acontece quando temos uma variacaosubita de seccao, como um corte ou um furo. Nesse caso a distribuicao deixade ser constante, com valores da tensao substancialmente mais altos junto aofuro, como se representa na Figura 1.6.
Figura 1.5: Beer et al. (2003)
Figura 1.6:
1.4 Extensoes
Como vimos inicialmente, quando uma barra e sujeita a uma forca de traccao,aumenta de comprimento. Embora possa nao ser observavel a olho nu, istoocorre para todos os materiais. Consideremos a barra representada na Figura1.7.
Se considerarmos apenas metade da barra, ou seja, um troco com metade
do comprimento, o alongamento eδ
2.
Faz sentido definir um alongamento por unidade de comprimento:

6 CAPITULO 1. INTRODUCAO AO COMPORTAMENTO DE CORPOS
Figura 1.7: Adaptado de Beer et al. (2003)
ε =δ
L(1.5)
Tal como acontecia com as tensoes, devemos notar que a extensao podevariar de ponto para ponto. Devemos portanto definir a extensao como
Definicao
ε = limL→0
δ
L(1.6)
1.5 Propriedades mecanicas dos materiais
O comportamento real dos materiais e muito complexo. Depende fortementedo tipo de material, das condicoes de fabrico (no caso de materiais manu-facturados) ou das condicoes que levaram a sua formacao, das condicoes decarregamento, e ate da temperatura ou da humidade.
Por essa razao foram definidos testes padrao, que permitem comparar ocomportamento de diferentes materiais. Um dos testes mais uteis consiste emtraccionar um provete ate atingir a rotura, no que e denominado ensaio detraccao. Outros ensaios significativos sao os ensaios de compressao pura e deflexao.
Na Figura 1.9 e apresentado um esquema tradicional para o ensaio atraccao de elementos metalicos.
Um pequeno provete e preso pelas suas extremidades, e e traccionado (ouseja o seu comprimento e aumentado) a velocidade constante.

1.5. PROPRIEDADES MECANICAS DOS MATERIAIS 7
Figura 1.8: Adaptado de Beer et al. (2003)
Para um provete em aco, se tracarmos a relacao entre o aumento de compri-mento ∆L e a forca aplicada F , obtemos uma curva semelhante a representadana Figura 1.9.
Variação de comprimento, LD
Forç
a a
plic
ad
a, F
F
F
Figura 1.9: Adaptado de Beer et al. (2003)
Se considerarmos um provete com o dobro do comprimento obtemos odobro do alongamento. Se considerarmos um provete com o dobro da area da

8 CAPITULO 1. INTRODUCAO AO COMPORTAMENTO DE CORPOS
seccao obtemos o dobro da forca. Ou seja, os resultados assim obtidos naodependem apenas do material utilizado, mas tambem da geometria do provete.Se queremos obter resultados que sejam utilizaveis qualquer que sejam asdimensoes do provete, temos que converter os resultados para unidades detensao e extensao:
σ =F
A(1.7)
ε =∆L
L(1.8)
Nesse caso obtemos a curva representada na Figura 1.10.
Extensão, e
Tensã
o n
orm
al,
s
F
F
Figura 1.10:
Esta curva nao depende das dimensoes do provete, mas apenas do materialutilizado.
No entanto, este ensaio requer alguns cuidados especiais. De facto, seconsiderarmos a area da seccao inicial, obtemos o que se denomina por tensaonominal. Durante o ensaio, na zona proxima do rotura esta area diminui,como se representa na Figura 1.11. Como tal a tensao real e um pouco maisalta que a assim obtida.
Se se considerar o comprimento inicial, L, obtemos a extensao nominal.No entanto o comprimento aumenta durante o ensaio. Se corrigirmos paraesse comprimento, temos a extensao verdadeira.
A diferenca entre estas grandezas normalmente nao e significativa em pro-blemas de engenharia.

1.6. CLASSIFICACAO DOS MATERIAIS 9
Figura 1.11: Adaptado de Beer et al. (2003)
1.6 Classificacao dos materiais quanto ao seu
comportamento mecanico
Acima apresentou-se o comportamento do aco quando sujeito a forcas detraccao. No entanto, outros materiais tem comportamentos completamentediferentes deste.
A primeira distincao em termos de comportamentos mecanicos respeitaa capacidade de alguns materiais de recuperarem as deformacoes apos serretirado o carregamento. Diz-se que um material tem um comportamentoelastico se as deformacoes resultantes de um carregamento desaparecem umavez retirado o carregamento. Um exemplo deste tipo de materiais e a borracha.A curva de carga/descarga e apresentada na Figura 1.12.a.
Outros materiais apenas recuperam parte das deformacoes a que foramsujeitos. Diz-se que parte da deformacao e elastica, enquanto outra parte eplastica.
Um material com capacidade de sofrer grandes deformacoes plasticas antesde atingir a rotura diz-se ductil (barro, aco). Como oposto, temos materiaisque atingem a rotura para pequenas deformacoes plasticas, os materiais frageis(vidro, algumas pedras).
Muitos materiais apresentam, pelo menos no seu ramo elastico, uma pro-porcionalidade entre as tensoes e as deformacoes. Estes dizem-se materiaiselasticos lineares.
Esta lei de proporcionalidade pode ser escrita como:

10CAPITULO 1. INTRODUCAO AO COMPORTAMENTO DE CORPOS
Extensão, e
Tensã
o n
orm
al,
s
F
F
Extensão, e
Tensã
o n
orm
al,
s
F
F
{
Deformaçãoplástica
Figura 1.12:
σ = Eε (1.9)
em que E e o modulo de elasticidade de Young.
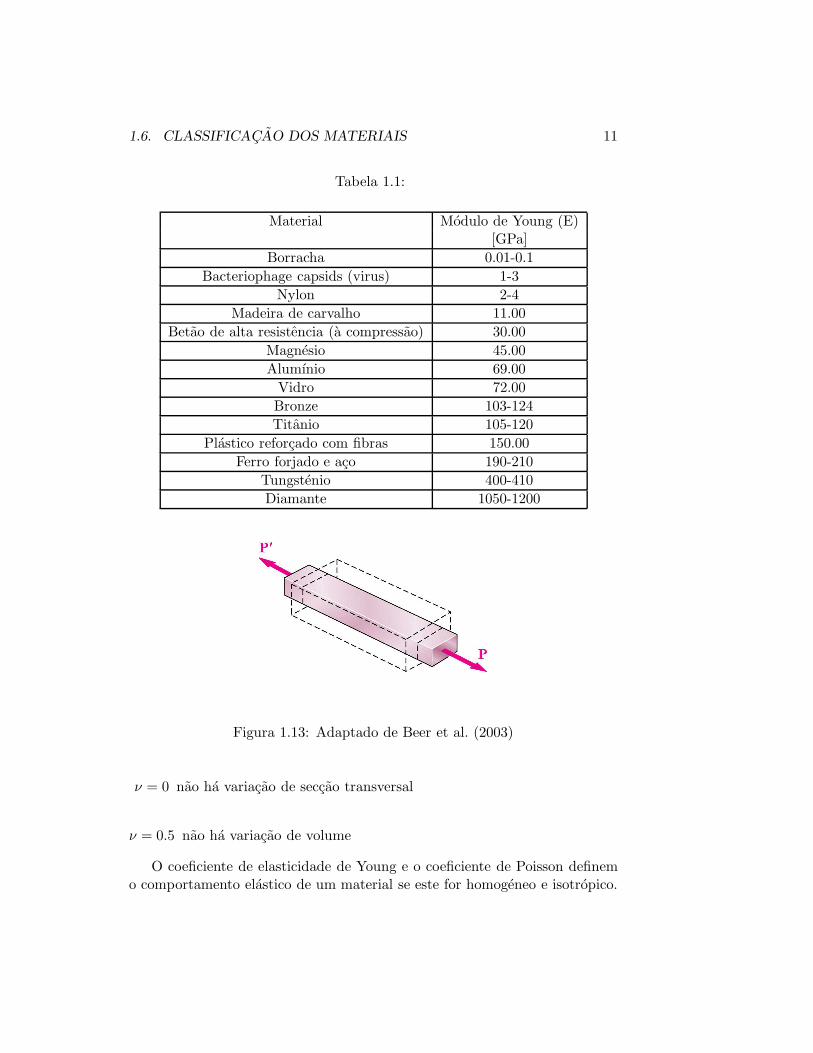
Assim, um maior valor do modulo de elasticidade de Young indica ummaterial que, para o mesmo nıvel de tensao, se deforma menos. Na Tabela1.1 apresentam-se valores do modulo de elasticidade de Young para variosmateriais comuns.
Coeficiente de Poisson
Quando o material e traccionado, alem de um aumento de comprimento, da-seuma reducao da seccao transversal, como representado na Figura 1.13.
A relacao entre a deformacao axial e a transversal e uma propriedade domaterial e e dada por:
ν = −ε′
ε= −
deformacao transversal
deformacao axial(1.10)
Na zona elastica, o coeficiente de Poisson e constante.
Os valores correntes do coeficiente de Poisson para a maioria dos materiaisvariam entre 0.25 e 0.35.
A cortica tem um coeficiente de Poisson proximo de 0, enquanto na bor-racha e proximo de 0.5.
1.6. CLASSIFICACAO DOS MATERIAIS 11
Tabela 1.1:
Material Modulo de Young (E)[GPa]
Borracha 0.01-0.1
Bacteriophage capsids (virus) 1-3
Nylon 2-4
Madeira de carvalho 11.00
Betao de alta resistencia (a compressao) 30.00
Magnesio 45.00
Alumınio 69.00
Vidro 72.00
Bronze 103-124
Titanio 105-120
Plastico reforcado com fibras 150.00
Ferro forjado e aco 190-210
Tungstenio 400-410
Diamante 1050-1200
Figura 1.13: Adaptado de Beer et al. (2003)
ν = 0 nao ha variacao de seccao transversal
ν = 0.5 nao ha variacao de volume
O coeficiente de elasticidade de Young e o coeficiente de Poisson definemo comportamento elastico de um material se este for homogeneo e isotropico.

12CAPITULO 1. INTRODUCAO AO COMPORTAMENTO DE CORPOS
Se o comportamento do material variar conforme a direccao, este diz-seanisotropico. Nesse caso temos um modulo de elasticidade para cada direccao.
Se tiver uma conjunto de propriedades numa direccao, e outro conjuntode propriedades em todas as direccoes paralelas diz-se ortotropico (caso dealgumas rochas).
1.7 Variacoes de temperatura
Quando ocorre um aumento de temperatura, os materiais aumentam de com-primento. Podemos considerar este aumento dizendo que:
ε =σ
E+ α ∆T (1.11)
Este aumento de comprimento ocorre em todas as direccoes. g
1.8 Tensoes tangenciais ou de corte
Ja falamos de tensoes normais, ou seja, tensoes perpendiculares a face queestamos a analisar.
No entanto, como vimos anteriormente, o vector da tensao numa face temtambem uma componente tangente a face.
Como exemplo, considere-se o parafuso.
Figura 1.14: Adaptado de Beer et al. (2003)
Ao traccionar as duas barras ligadas pelo parafuso, este esta sujeito a umatensao importante, paralela a sua seccao transversal. Podemos falar numatensao tangencial media dada por:
τmed =V
A(1.12)

1.8. TENSOES TANGENCIAIS OU DE CORTE 13
embora a tensao real nunca seja constante
Deformacao por corte
Vamos pensar num pequeno rectangulo sujeito a uma tensao tangencial comose representa na Figura 1.15.
Figura 1.15:
As tensoes tangenciais nao provocam um aumento de comprimento quersegundo x quer segundo y. Mas x e y, que inicialmente eram perpendiculares
(π
2) passam a ter formar um angulo
π
2− γ. O angulo γ e uma medida da
distorcao.Em materiais elasticos lineares a relacao entre a distorcao e linear:
τ = Gγ (1.13)
G =E
2 (1 + ν)(1.14)
em que G e o modulo de distorcao.

Capıtulo 2
Analise de tensoes
A fundamentacao para a analise de tensoes que vai ser realizada nesta disci-plina e bastante complexa. Efectivamente, a base teorica e aplicavel a todosos materiais e portanto muito geral.
Nesta disciplina apenas se analiza parte dessa teoria.
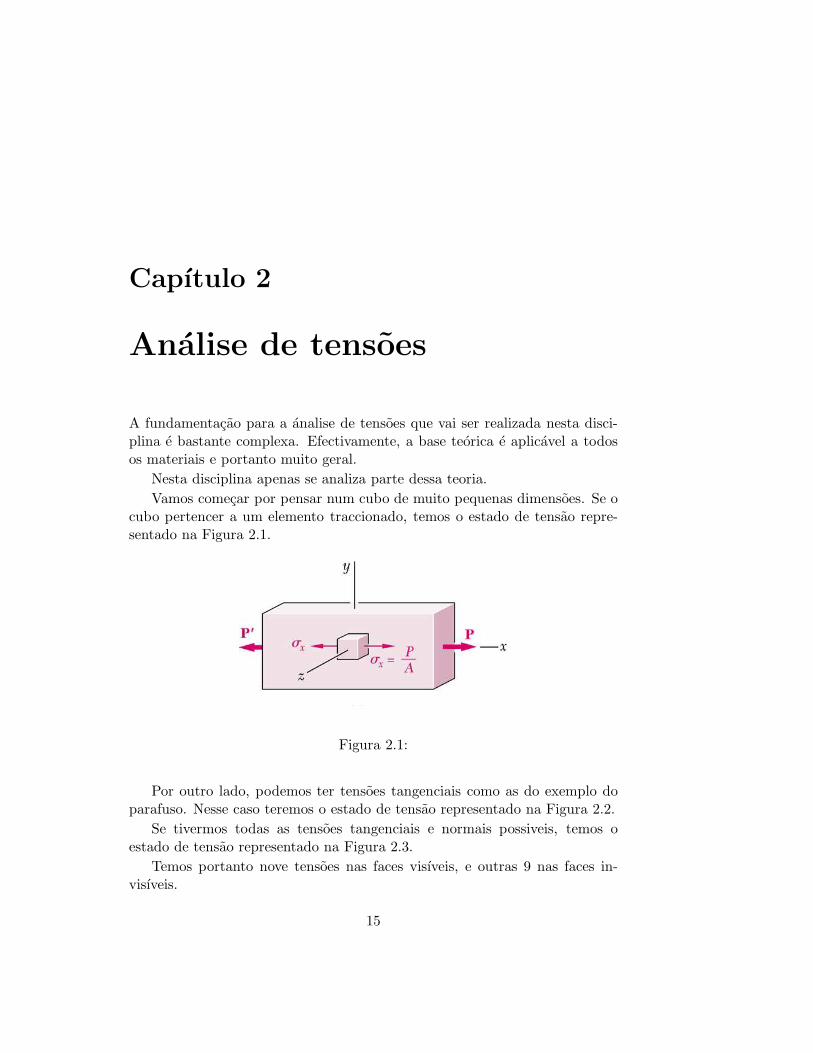
Vamos comecar por pensar num cubo de muito pequenas dimensoes. Se ocubo pertencer a um elemento traccionado, temos o estado de tensao repre-sentado na Figura 2.1.
Figura 2.1:
Por outro lado, podemos ter tensoes tangenciais como as do exemplo doparafuso. Nesse caso teremos o estado de tensao representado na Figura 2.2.
Se tivermos todas as tensoes tangenciais e normais possiveis, temos oestado de tensao representado na Figura 2.3.
Temos portanto nove tensoes nas faces visıveis, e outras 9 nas faces in-visıveis.
15

16 CAPITULO 2. ANALISE DE TENSOES
Figura 2.2:
Figura 2.3:
Por uma questao de equilibro, as tensoes nas faces invisıveis sao iguais masde sentido contrario as das faces visıveis.
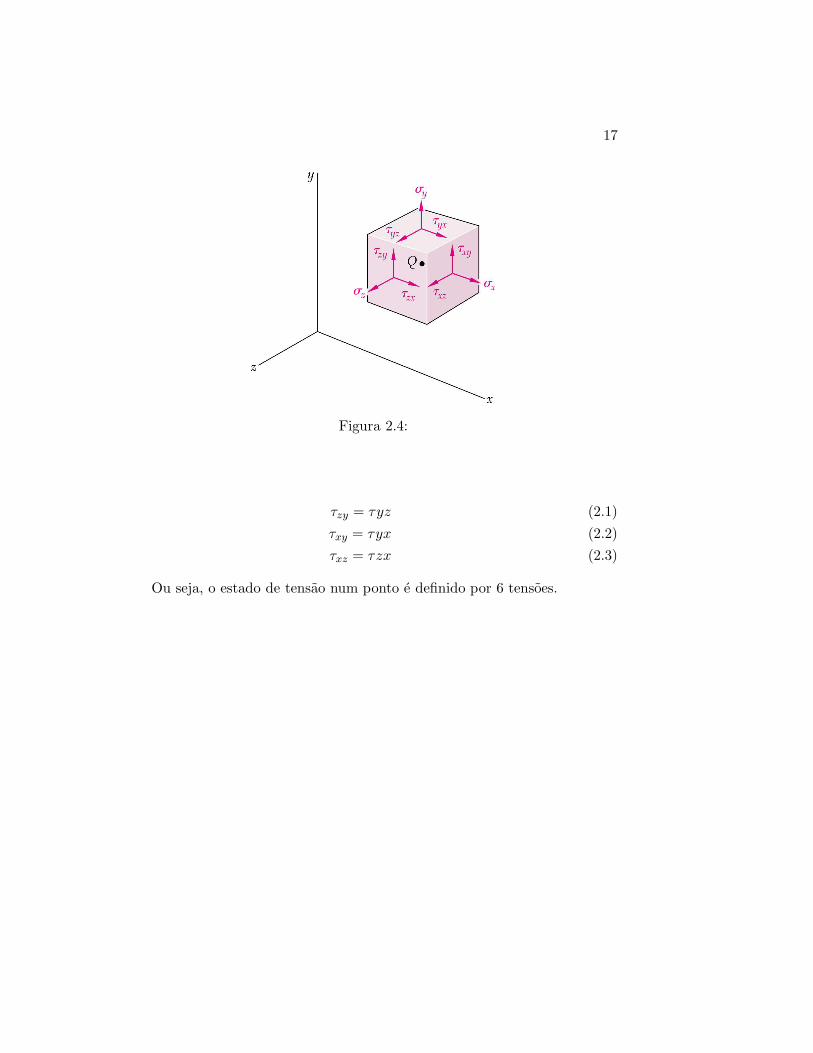
Vamos tentar comecar por dar um nome a cada uma destas tensoes. Oprimeiro passo consiste em definir um referencial como o representado naFigura 2.3.
Cada faceta tem o nome do eixo que lhe e perpendicular.
Se a normal exterior coincidir com um eixo, a faceta diz-se positiva. Casocontrario diz-se negativa.
As tensoes sao designadas por dois ındices. O primeiro indica a facetaonde ocorrem, o segundo a sua direccao.
Por equilibrio verifica-se que
17
Figura 2.4:
τzy = τyz (2.1)
τxy = τyx (2.2)
τxz = τzx (2.3)
Ou seja, o estado de tensao num ponto e definido por 6 tensoes.

18 CAPITULO 2. ANALISE DE TENSOES
2.1 Tensor das tensoes
O estado de tensao num ponto e dado por nove componentes, cada uma cor-respondente a tensao numa faceta (x,y,z) segundo uma direccao (x,y,z). Apartida esta parce ser a organizacao tıpida de uma matriz. Na realidade, oestado de tensao e definido por uma entidade um pouco mais geral que umamatriz.
Vamos portanto ver quais sao as entidades matematicas que normalmenteusamos:
Escalares definidos por um valor (massa, temperatura,...)
Vectores: definidos por 2 ou 3 valores (velocidade, forca)
Podemos definir uma grandeza que inclui todos estes e outros mais com-plexos, designada tensor.
De uma forma geral podemos definir:
escalar: tensor de ordem 0
vector: tensor de ordem 1
matriz: tensor de segunda ordem
O estado de tensao e definido por 3 componentes para cada faceta. Fazsentido defini-lo com um tensor de 2a ordem
[τ ] =
σx τxy τxz
τyx σy τyz
τzx τzy σz
(2.4)
Um caso particular de estados de tensao, e o caso em que uma linha e umacoluna tem todos os valores nulos.
[τ ] =
σx τxy 0τyx σy 00 0 0
(2.5)
Este estado de tensao e denominado estado plano de tensao. E relativa-mente comum e mais simples de analisar.
Devido a igualdade descritas nas equacoes (2.1) a (2.3) ambos os tensoressao simetricos.

2.2. RELACAO TENSAO-EXTENSAO 19
2.2 Relacao tensao-extensao
Como vimos, a relacao tensao-extensao a traccao e constante para cada ma-terial, nao dependendo da forma do provete.
No entanto, esta relacao e extremamente complexa, e raramente pode serutilizada para efeitos praticos.
Na realidade, para aplicacoes correntes considera-se que os materiais temcomportamentos mais simples, como sejam o comportamento elastico linear..
Pode, em alguns casos, existir mais uma parcela nesta equacao. Comefeito, quando um material e sujeito a um aumento de temperatura, o seucomprimento aumenta. Assim:
ε =σ
E+ α × ∆T (2.6)
em que α e o coeficiente de expansao termica, e ∆T e a variacao de tem-peratura.
De um modo generalizado, e desprezando o efeito da temperatura, umabarra sujeita apenas a um esforco axial, apresenta, em cada ponto, as seguintesextensoes:
εx =σx
E(2.7)
εy = −ν ·σx
E(2.8)
εz = −ν ·σx
E(2.9)
Se, inves de uma tensao normal, tivermos tensoes normais nas tres di-reccoes, usamos o principio da sobreposicao de efeitos:
εx =1
E(σx − νσy − νσz) (2.10)
εy =1
E(σy − νσx − νσz) (2.11)
εz =1
E(σz − νσx − νσy) (2.12)
2.3 Equacoes constitutivas
Tal como as tensoes num ponto, as deformacoes podem ser apresentadas sobrea forma de tensor. Assim:

20 CAPITULO 2. ANALISE DE TENSOES
ε =
εx γxy γxz
γyx εy γyz
γzx γzy εz
(2.13)
em que εx e a extensao de uma fibra orientada segundo xx, e γxy e a variacaode angulo entre duas fibras, inicialmente orientadas segundo xx e yy.
O calculo das distorcoes, com base nas tensoes presentes, pode ser descritapor:
τ = Gγ (2.14)
em que G e o modulo de distorcao:
G =E
2(1 + ν)(2.15)
Juntado a componente devido as tensoes tangenciais, a componente devidoas tensoes normais, podemos relacionar tensoes e extensoes por:
������������
εx
εy
εz
γxy
γxz
γyz
������������
=1
E
�������
1 −ν −ν 0 0 0−ν 1 −ν 0 0 0−ν −ν 1 0 0 00 0 0 2(1 + ν) 0 00 0 0 0 2(1 + ν) 00 0 0 0 0 2(1 + ν)
�������
�������
σx
σy
σz
τxy
τxz
τyz
�������
(2.16)
NOTA: Esta expressao e valida para materiais homogeneos, elasticos li-neares e isotropicos
2.4 Tensoes - esforcos
Ate agora, o unico esforco considerado foi o esforco axial. Foi dito, que o es-forco normal era igual a resultante das tensoes normais na faceta. Na realidadetodos os esforcos correspondem a resultante das tensoes na seccao transversal.
Assim, considerando que a seccao transversal corresponde a face perpen-dicular a x:
N =
∫
A
σx (2.17)
O esforco transverso, segundo y, e igual a resultante das tensoes tangenciaissegundo yy. Ou seja,

2.5. FLEXAO 21
Vy =
∫
A
τxy (2.18)
O esforco transverso segundo z, e:
Vz =
∫
A
τxz (2.19)
O momento flector e igual ao momento de todas as tensoes em relacao aoeixo x. As tensoes tangenciais na face intersectam ou sao paralelas a este eixo,portanto o momento e provocado apenas pelas tensoes normais:
My =
∫
A
σxz (2.20)
O momento flector segundo Mz e dado por:
Mz =
∫
A
σxy (2.21)
Por ultimo consideremos o momento torsor.
As tensoes normais nao provocam momento, por serem paralelas ao eixode rotacao. Apenas as tensoes tangenciais provocam momentos. Estes saodados por:
T = Mt =
∫
A
τpρ (2.22)
em que ρ e a distancia ao centro de rotacao, e τp e a componente da tensaoperpendicular ao raio.
2.5 Flexao
Vamos considerar uma barra sujeita apenas a um esforco de flexao.
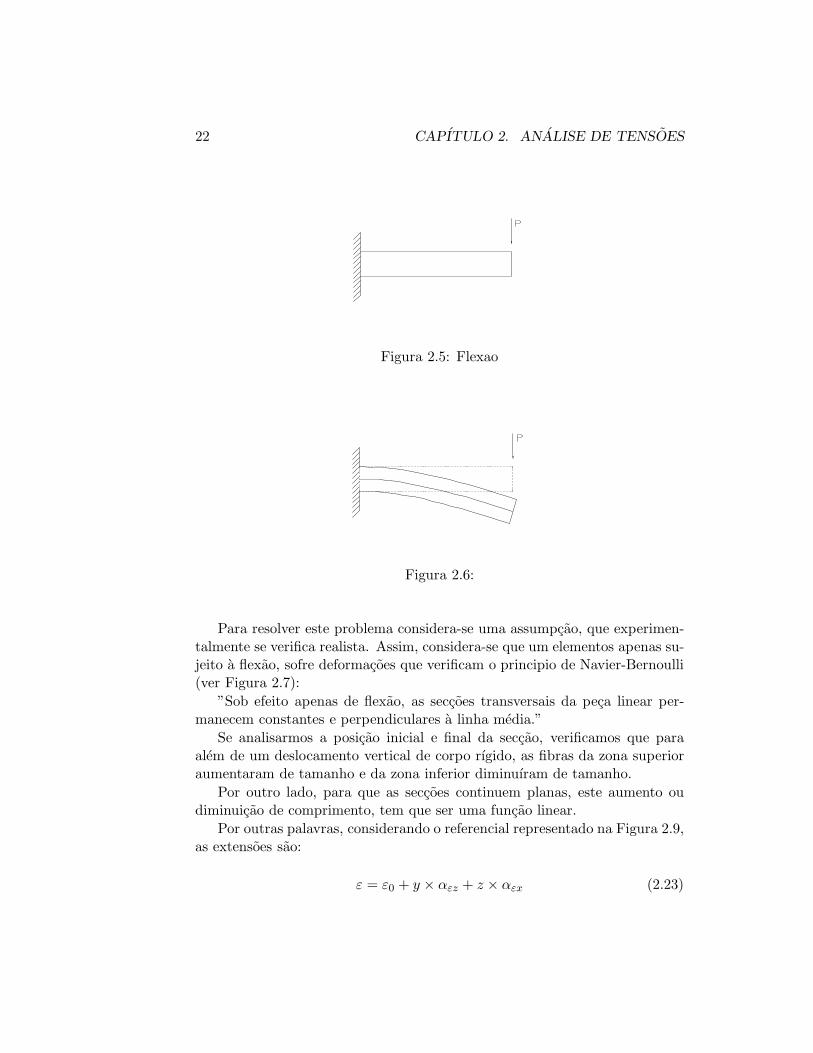
Vamos comecar por analisar um problema muito simples, como o repre-sentado na Figura 2.5.
A barra vai deformar-se, de um modo semelhante ao representado na Fi-gura 2.6.
Embora saibamos que a resultante das tensoes tem que ser igual ao mo-mento flector na seccao, existe uma infinidade de distribuicoes de tensoes queverificam esta condicao.
22 CAPITULO 2. ANALISE DE TENSOES
Figura 2.5: Flexao
Figura 2.6:
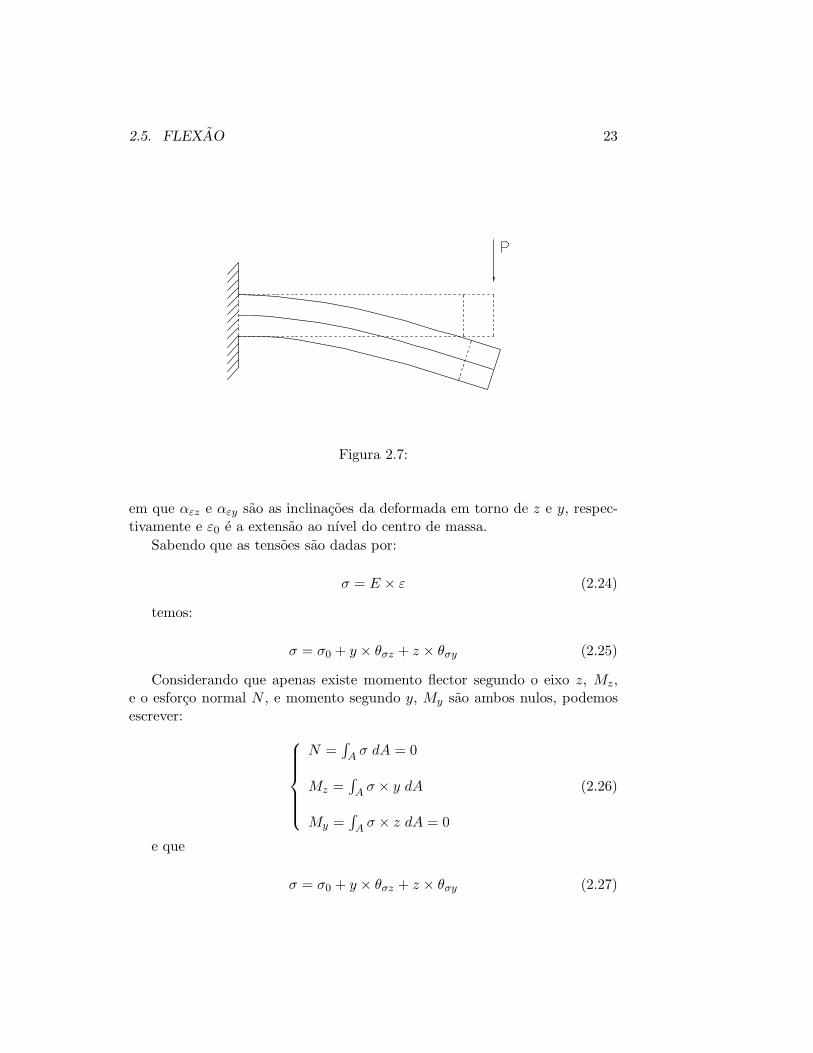
Para resolver este problema considera-se uma assumpcao, que experimen-talmente se verifica realista. Assim, considera-se que um elementos apenas su-jeito a flexao, sofre deformacoes que verificam o principio de Navier-Bernoulli(ver Figura 2.7):
”Sob efeito apenas de flexao, as seccoes transversais da peca linear per-manecem constantes e perpendiculares a linha media.”
Se analisarmos a posicao inicial e final da seccao, verificamos que paraalem de um deslocamento vertical de corpo rıgido, as fibras da zona superioraumentaram de tamanho e da zona inferior diminuıram de tamanho.
Por outro lado, para que as seccoes continuem planas, este aumento oudiminuicao de comprimento, tem que ser uma funcao linear.
Por outras palavras, considerando o referencial representado na Figura 2.9,as extensoes sao:
ε = ε0 + y × αεz + z × αεx (2.23)
2.5. FLEXAO 23
Figura 2.7:
em que αεz e αεy sao as inclinacoes da deformada em torno de z e y, respec-tivamente e ε0 e a extensao ao nıvel do centro de massa.
Sabendo que as tensoes sao dadas por:
σ = E × ε (2.24)
temos:
σ = σ0 + y × θσz + z × θσy (2.25)
Considerando que apenas existe momento flector segundo o eixo z, Mz,e o esforco normal N , e momento segundo y, My sao ambos nulos, podemosescrever:
N =∫
Aσ dA = 0
Mz =∫
Aσ × y dA
My =∫
Aσ × z dA = 0
(2.26)
e que
σ = σ0 + y × θσz + z × θσy (2.27)

24 CAPITULO 2. ANALISE DE TENSOES
Figura 2.8:
Figura 2.9:
Podemos substituir, chegando-se a:
N =∫
Aσ dA = σ0 + y × θσz + z × θσy = 0
Mz =∫
A(σ0 + y × θσz + z × θσy) × y dA
My =∫
A(σ0 + y × θσz + z × θσy) × z dA = 0
(2.28)
Do primeiro termo de (2.38), chegamos a:
N =
∫
A
σ0 + y × θσz + z × θσy dA = 0 (2.29)
⇔ N =
∫
A
σ0 dA +
∫
A
y × θσz dA +
∫
A
z × θσy dA (2.30)

2.5. FLEXAO 25
Passando para fora dos integrais, as constantes, ficamos com:
⇔ N = σ0
∫
A
1 dA + θσz
∫
A
y + θσy
∫
A
z dA (2.31)
⇔ N = σ0
∫
A
1 dA + θσz
∫
A
y + θσy
∫
A
z dA (2.32)
O primeiro integral corresponde a area, os segundo e terceiro termos corre-spondem aos momentos estaticos. Como nos estamos a referir a um referencialcentral estes dois integrais sao nulos.
Assim:
⇔ N = σ0A (2.33)
ou seja
σ0 = 0 (2.34)
Consideremos as outras duas condicoes de equilıbrio:
Mz =∫
A(σ0 + y × θσz + z × θσy) × y dA
My =∫
A(σ0 + y × θσz + z × θσy) × z dA = 0
(2.35)
Utilizando o metodo utilizado anteriormente, temos
Mz = θσz
∫
Ay2 A + θσy
∫
Ay · z dA
My = θσz
∫
Ayz dA + θσy
∫
Az2 dA = 0
(2.36)
⇔
Mz = θσz · Iz + θσyIyz
My = θσzIyz + θσyIz = 0(2.37)
⇔
Mz = θσz · Iz + θσyIyz
My = θσzIyz + θσyIz = 0(2.38)
Se o referencial considerado for um referencial central de inercia, o produtode inercia, Iyz, e nulo. Nesse caso:
⇔
Mz = θσz · Iz
My = θσyIz = 0(2.39)

26 CAPITULO 2. ANALISE DE TENSOES
⇔
θσz = Mz
Iz
θσy = 0
(2.40)
Neste caso o estado de tensao e:
σ = σ0 + y × θσz + z × θσy (2.41)
⇔ σ =Mz
Izy (2.42)
A situacao e algo mais complexa se o referencial nao for principal. Nessecaso, resolvendo o sistema de equacoes:
{
θσz =Iy ·M
Iz · Iy−Iyz2
θσy = −Iyz M
Iz Iy−Iyz2
(2.43)
Logo a tensao e dada por:
σ =Iy ·M
Iz · Iy − Iyz2 · y −
Iyz M
Iz Iy − Iyz2 · z (2.44)
Esta expressao e relativamente complexa, e portanto, por regra, considera-se um referencial central principal de inercia.
Quando se esta a analisar sistemas em que se pode considerar que todosos materiais sao elasticos lineares, podemos considerar o principio da sobre-posicao de efeitos.
Assim, uma seccao sujeita a um momento flector segundo um eixo principalapresenta o diagrama de tensoes representado na Figura 2.10.
Figura 2.10:
Assim, se tivermos mais que um esforco aplicado, podemos considerarque as tensoes resultantes de todos os esforcos sao iguais a soma das tensoesprovocadas por cada um deles.

2.5. FLEXAO 27
Assim, sabemos que um esforco axial provoca uma tensao dada por:
σN =N
A(2.45)
Considerando um referencial principal, (y, z):
σMz = ±Mz · y
Iz(2.46)
Por analogia
σMy = ±My · z
Iy(2.47)
Logo, se todos os esforcos existirem em simultaneo, temos
σ =N
A±
Mz · y
Iz
±My · z
Iy
(2.48)
Note-se que os sentidos das tensoes devidas aos momentos flectores depen-dem dos eixos definidos. Como tal e mais definir o sentido das tensoes emcada ponto considerando os esforcos na estrutura a ser analisada.
Em funcao dos esforcos presentes, diz-se que temos flexao:
simples Apenas momento flector segundo um dos eixos principais de inercia;
desviada Momento flector segundo um eixo qualquer, mas sem esforco axial;
composta Esforco axial e momento flector segundo um dos eixos principaisde inercia;
composta desviada Esforco axial e momento flector segundo um eixo qual-quer;
A flexao simples e comum em vigas de edifıcios, enquanto a flexao compostae a flexao composta desviada sao comuns em pilares de edifıcios.
28 CAPITULO 2. ANALISE DE TENSOES
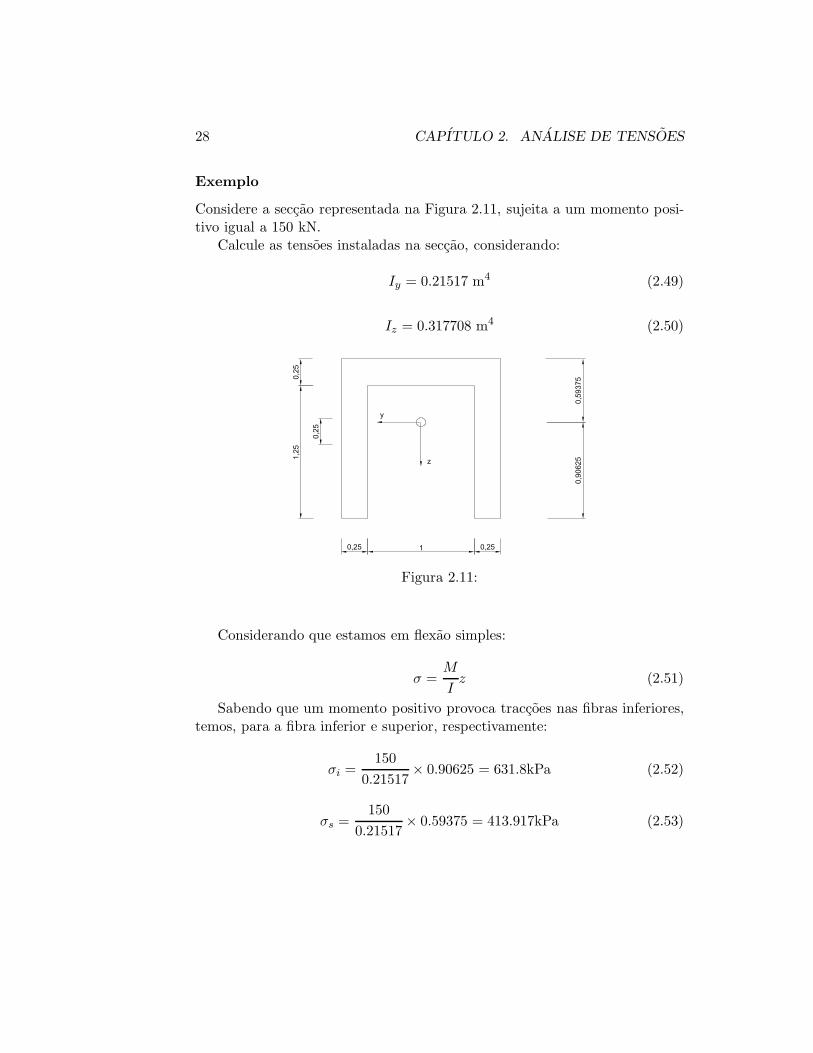
Exemplo
Considere a seccao representada na Figura 2.11, sujeita a um momento posi-tivo igual a 150 kN.
Calcule as tensoes instaladas na seccao, considerando:
Iy = 0.21517 m4 (2.49)
Iz = 0.317708 m4 (2.50)
Figura 2.11:
Considerando que estamos em flexao simples:
σ =M
Iz (2.51)
Sabendo que um momento positivo provoca traccoes nas fibras inferiores,temos, para a fibra inferior e superior, respectivamente:
σi =150
0.21517× 0.90625 = 631.8kPa (2.52)
σs =150
0.21517× 0.59375 = 413.917kPa (2.53)

2.5. FLEXAO 29
Figura 2.12:
Exemplo
Agora consideremos que temos dois momentos, como representado na Figura2.13.
Figura 2.13:
O momento de 150 kN.m provoca as tensoes que calculamos anteriormente.O outro momento provoca:
σ =M
Iz (2.54)
σe = σd =180
0.3177080.75 = 424.92kPa (2.55)

30 CAPITULO 2. ANALISE DE TENSOES
Figura 2.14:
Assim, a tensao em cada ponto da seccao e dada pela soma das tensoesprovocadas por cada um dos momentos. Assim, a tensao na extremidadesuperior direita e:
σ = −413.92 − 424.92 = −838.84kPa (2.56)
Na extremidade inferior esquerda, a tensao e:
σ = 631.77 + 424.92 = 1056.7kPa (2.57)
A verificacao da seguranca pode ser, em alguns materiais, feita comparandoa tensao maxima numa seccao com uma tensao resistente.
Em flexao simples a tensao maxima ocorre sempre na fibra mais afastadado centro de massa. Assim:
σmax =M
Iy
zmax (2.58)
Podemos definir um termo, designado modulo de flexao elastica, como:
Wel =Iy
zmax(2.59)

2.6. SECCOES EFICIENTES 31
e nesse caso a equacao acima passa para:
σmax =M
Wel
(2.60)
2.6 Seccoes eficientes
A seccao mais eficiente a flexao, seria aquela com um modulo de flexao elasticomais alto, para uma area transversal mais baixa. Uma analise relativamentesimples mostraria que a seccao mais eficaz seria semelhante a representada naFigura 2.15.
Figura 2.15: Seccao eficiente
Esta forma e semelhante a dos perfis metalicos mais comuns. No casodo betao uma forma deste tipo e quase impossıvel de produzir, e portantousam-se em geral formas menos eficientes, como sejam formas rectangulares.
2.7 Linha Neutra
Uma das propriedades mais importantes das seccoes submetidas a flexao, e alinha neutra ou eixo neutro.
A linha neutra corresponde ao lugar geometrico de todos os pontos queestao sujeitos a tensao normal nula.
Para calcular a linha neutra, basta igualar a equacao 2.67 a zero e resolverem ordem a y e z.
σ =N
A±
Mz · y
Iz±
My · z
Iy= 0 (2.61)

32 CAPITULO 2. ANALISE DE TENSOES
A resolucao e relativamente simples, no caso de flexao simples. Como N eMy sao nulas, temos:
Mz · y
Iz= 0 (2.62)
Obtendo-se:
y = 0 (2.63)
Ou seja, se apenas existir momento flector segundo um eixo principal, alinha neutra coincide com esse eixo.
No caso de flexao composta (ou seja, apenas um momento e esforco axial),temos:
σ =N
A±
Mz · y
Iz
= 0 (2.64)
ou seja,
σ = K1 + K2y = 0 (2.65)
Ou seja, a linha neutra e paralela ao eixo principal, mas nao passa nocentro de massa (y 6= 0).
No caso de flexao desviada, (My e Mz), temos:
σ = ±Mz · y
Iz±
My · z
Iy= 0 (2.66)
ou seja
σ = K1 z + k2 y = 0 (2.67)
Ou seja, a linha neutra passa pelo centro de massa, mas nao e paralela anenhum dos eixos principais.
Ate aqui assumimos:
• Tensao proporcional a distancia ao eixo neutroIsto so e verdade para elementos homogeneos no regime elastico. Nao everdade para elementos plastificados ou heterogeneos
• Seccoes permanecem planasCorrecto longe de variacoes de seccao, cargas concentradas, e efeito dascondicoes de fronteira

2.7. LINHA NEUTRA 33
Exemplo
Calcule a posicao da linha neutra de uma seccao rectangular de altura 0.5me largura 0.3m, a qual esta aplicado um momento segundo o eixo de maiorinercia de 100kN.m, como se representa na Figura 2.16.
0.3 m
0.5 m100 kN.m
Figura 2.16:
A inercia e dada por:
Iy =bh3
12= 0.003125m4 (2.68)
As tensoes na seccao sao dadas por:
σ =M z
I=
100z
0.003125(2.69)
A linha neutra e dada por
σ = 32000 z = 0 (2.70)
Ou seja
z = 0 (2.71)
Ou seja, como foi referido anteriormente, a linha neutra coincide com oeixo principal segundo o qual e aplicado o momento.

34 CAPITULO 2. ANALISE DE TENSOES
0.3 m
0.5 m100 kN.m
Figura 2.17:
Exemplo
Calcule a posicao da linha neutra de uma seccao rectangular de altura 0.5me largura 0.3m, a qual esta aplicado um momento segundo o eixo de maiorinercia de 100kN.m e segundo o eixo de menor inercia de 50kN.m.
A inercia segundo o eixo de menor inercia e dada por:
Iy =b3h
12= 0.001125m4 (2.72)
As tensoes na seccao sao dadas por:
σ =My z
Iy+
Mz y
Iz=
100z
0.003125+
50y
0.001125(2.73)
A linha neutra e dada por
σ = 32000 z + 44444.44444 y = 0 (2.74)
Um dos pontos que verifica esta equacao e
(y, z) = (0, 0) (2.75)
outro pode ser obtido, admitindo que y = 0.25m, nesse caso:
σ = 32000 z + 44444.44444 · 0.25 = 0 (2.76)
Ou seja
z = −0.3472m (2.77)

2.8. FORCAS EXCENTRICAS 35
Ou seja, como foi referido anteriormente, a linha neutra passa no centrode massa, mas nao e paralelo a nenhum dos eixos principais.
A linha neutra tem algumas propriedades que a tornam particularmenteimportante para a engenharia civil, nomeadamente:
A linha neutra divide o espaco em duas regioes. Uma destas
zonas esta toda comprimida, enquanto a outra esta toda trac-
cionada.
Como o diagrama de tensoes normais numa seccao e linear, e
a linha neutra e uma isolinha, as tensoes num ponto sao propor-
cionais a distancia a linha neutra.
Como tal, se a linha neutra estiver fora da seccao, todos os pontos daseccao estao comprimidos ou traccionados.
O comportamento de muitos materiais e substancialmente diferente a traccaoe a compressao. Portanto e importante saber em que situacoes a linha neutraintersecta a seccao ou nao.
2.8 Forcas excentricas
Consideremos que temos apenas uma forca de compressao aplicada, mas queesta pode ser aplicada em qualquer ponto da seccao.
Figura 2.18: Accao de uma forca excentrica
Para converter esta forca em esforcos, temos que considerar que ela, alemde comprimir a barra tambem provoca flexao.

36 CAPITULO 2. ANALISE DE TENSOES
Figura 2.19:
Os esforcos na seccao sao:
N = −F (2.78)
My = F · ez (2.79)
Mz = F · ey (2.80)
(2.81)
σ =N
A±
Mz · y
Iz±
My · z
Iy= 0 (2.82)
Obtemos
F
A+
F · ey · y
Iz
+F · ez · z
Iy
= 0 (2.83)
Dividindo todos os termos por FA
temos:
1 +ey · y
i2z+
ez · z
i2y= 0 (2.84)

2.9. CALCULO DO NUCLEO CENTRAL 37
em que iy e o raio de giracao dado por:
iy =
√
Iy
A(2.85)
Conforme o ponto de aplicacao da carga se vai aproximando do centro demassa, a linha neutra vai-se afastando do centro de massa.
Isto quer dizer que para uma forca de compressao aplicada no centro demassa, toda a seccao esta comprimida.
Ao lugar geometrico dos pontos para os quais a linha neutra nao intersectaa seccao, chama-se nucleo central.
Quando uma carga e aplicada no nucleo central, toda a seccao esta com-primida ou traccionada.
2.9 Calculo do nucleo central
Se considerarmos todas as rectas que nao intersectam a seccao, vemos queestas sao limitadas pela contorno convexo da seccao.
O contorno convexo e a menor figura geometrica que incluindo a seccao, ee convexa. Uma figura e convexa se quaisquer dois pontos poderem ser unidos,sem que o segmento de recta que os une saia da figura.
A cada lado do contorno convexo corresponde um vertice do nucleo centrale a cada vertice do contorno corresponde uma lado do nucleo central.
Assim o calculo do nucleo central pode ser feito calculado qual o pontode aplicacao da carga cuja linha neutra corresponde a cada lado do contornoconvexo.
O nucleo central e sempre uma figura convexa, que inclui o centro demassa, e com tantos vertices quanto o numero de lados do contorno convexo.
O primeiro passo consiste em calcular o contorno convexo da figura a seranalisada.
Figura 2.20:

38 CAPITULO 2. ANALISE DE TENSOES
Figura 2.21:
Os vertices do nucleo central podem ser encontrados determinando o pontoonde deve ser aplicada uma forca excentrica de modo a que o linha neutracoincida com os lados no contorno convexo.
Exemplo
Calcule o nucleo central de um rectangulo de largura b e altura h.
Figura 2.22:
O contorno convexo corresponde ao proprio rectangulo.
Portanto o contorno convexo e definido por 4 rectas.
Consideremos o lado 1. A linha neutra e caracterizada pela equacao:
{
z = −h/2y qualquer
(2.86)

2.9. CALCULO DO NUCLEO CENTRAL 39
Figura 2.23:
Considerando a equacao da linha neutra
1 +ey · y
i2z+
ez · z
i2y= 0 (2.87)
Substituindo pela equacao da recta obtemos:
1 +ey · y
i2z+
ez ·h
2i2y= 0 (2.88)
Reorganizando, temos:
1 +ez · h
2i2y+
ey · y
i2z= 0 (2.89)
Os momentos de inercia da figura sao:
i2y =h2
12i2z =
b2
12(2.90)
Logo:
1 +ez · h
2h2
12
+ey · y
b2
12
= 0 (2.91)
Esta equacao tem a forma:
A + By = 0 (2.92)

40 CAPITULO 2. ANALISE DE TENSOES
E tem que se verificar para todos os valores de y.
Por exemplo tem que se verificar para y = 0. Nessa caso
1 +ez ·h
2h2
12
= 0 (2.93)
E para y = 1. Nesse caso:
ey · 1b2
12
= 0 (2.94)
Daqui verifica-se que:
{
ey = 0
ez = −2h2
12
h= −h
6
(2.95)
Repetindo para os outros 3 lados, obtemos:
Figura 2.24:

2.10. FLEXAO EM ELEMENTOS HETEROGENEOS 41
2.10 Flexao em elementos heterogeneos
Quando um elementos heterogeneo e sujeito a flexao, a hipotese de Bernoulliainda se verifica. Ou seja, a seccao continua plana e perpendicular ao eixo.Por outras palavras, as extensoes tem uma distribuicao linear, como vimospara as seccoes homogeneas. Ja as tensoes deixam de ter distribuicao linear.
Consideremos a seccao abaixo representada na Figura 2.25.
Figura 2.25:
Nesta figura considera-se que o elementos e constituıdo por dois materiais,em que o material a sombreado tem um modulo de elasticidade mais pequenoque o a branco.
Sabendo que o diagrama de extensoes e linear, e que a tensao e o produtoda extensao pelo modulo de elasticidade, podemos concluir que o diagrama deextensoes e tensoes vai ser semelhante ao representado na Figura 2.26.
Podemos analisar estas tensoes considerando uma seccao homogeneizada.Ou seja, a parte da seccao constituıda por um dos materiais e substituıda poruma regiao equivalente de outro material.
Vamos considerar que toda a seccao e constituıda pelo material 1. A zonaconstituıda pelo material dois e mais rıgida e para ter as mesmas propriedadese ser constituıda pelo material 2, devia ser mais larga.

42 CAPITULO 2. ANALISE DE TENSOES
Figura 2.26:
Figura 2.27:
Em que a nova largura e dada pela largura inicial multiplicada pelo factorde homogenizacao, m. O factor de homogenizacao e:
m =E2
E1(2.96)
Se calcularmos a inercia homogeneizada, temos:
I = I1 + I2 × m (2.97)
As tensoes no material 1 sao agora dadas por:
σ1 =M
Iz (2.98)
e no material 2 (o que foi substituıdo) por
σ2 = mM
Iz (2.99)
Este procedimento pode ser utilizado em flexao composta, ou compostadesviada.

2.10. FLEXAO EM ELEMENTOS HETEROGENEOS 43
Deve ter-se em atencao que no caso de flexao desviada a analogia dareducao da largura da seccao deixa de ser verdadeira.
Por outro lado, se a seccao nao for simetrica, e necessario calcular o centrode massa homogeneizado.
Basicamente o principio basico consiste em multiplicar todas as proprieda-des do material (area, inercias e tensoes) pelo coeficiente de homogenizacao.


















![APLICAC¸ AO DA OTIMIZAC¸˜ AO MULTIOBJETIVO NA RESOLUC¸˜ … · Vitória, ES, 27 a 30 de setembro de 2016. ... 1 se resume `a soma do ... ksk 1]: (6) Normalmente, neste tipo de](https://static.fdocumentos.tips/doc/165x107/5fed9b9eec0fa62c563f11bb/aplicac-ao-da-otimizacoe-ao-multiobjetivo-na-resolucoe-vitria-es-27-a.jpg)