
Hélder Manuel Silva Vilas Boas Desenvolvimento de um ...
103
Hélder Manuel Silva Vilas Boas Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção Hélder Manuel Silva Vilas Boas dezembro de 2013 UMinho | 2013 Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção Universidade do Minho Escola de Engenharia
Transcript of Hélder Manuel Silva Vilas Boas Desenvolvimento de um ...

Hélder Manuel Silva Vilas Boas
Desenvolvimento de um Sistema de Testee Monitorização para Sensores de Direção
Héld
er M
anue
l Silv
a Vi
las
Boas
dezembro de 2013UMin
ho |
201
3De
senv
olvi
men
to d
e um
Sis
tem
a de
Tes
te e
Mon
itori
zaçã
o pa
ra S
enso
res
de D
ireç
ão
Universidade do MinhoEscola de Engenharia

dezembro de 2013
Tese de MestradoCiclo de Estudos Integrados Conducentes ao Grau deMestre emEngenharia Eletrónica Industrial e Computadores
Trabalho efetuado sob a orientação doProfessor Doutor Sérgio LopesUniversidade do Minho
e co-orientação doEngenheiro António LopesBosch Car Multimedia
Hélder Manuel Silva Vilas Boas
Desenvolvimento de um Sistema de Testee Monitorização para Sensores de Direção
Universidade do MinhoEscola de Engenharia

Aos meus Pais,


“O que nos distingue são os nossos sonhos
e o que fazemos para que se realizem”
Joseph Epstein


Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xi
Agradecimentos
As primeiras palavras de agradecimento vão sem dúvida alguma para os meus pais,
Manuel Vilas Boas e La Salete Silva, por todo o apoio, esforço e suporte que sempre
me deram, especialmente no meu percurso académico e também para os meus irmãos
Isabel e Miguel, que tiveram e têm um papel importante na minha vida.
Ao meu orientador, Professor Doutor Sérgio Lopes, pela disponibilidade,
cooperação e por me ter proporcionado a participação neste estágio.
Quero agradecer à empresa Bosch Car Multimedia, nomeadamente à secção
QMM7, a oportunidade de estágio, em especial ao Engº. Alexandre Cardoso pela
confiança depositada desde o início. Ao meu orientador na empresa, Engº. António
Lopes, pela disponibilidade, incentivo e compreensão ao longo do estágio.
Aos restantes engenheiros e técnicos do Laboratório de Fiabilidade, especialmente
ao Engº. Victor Silva pelo apoio, disponibilidade, dedicação, conselhos e críticas dadas
ao longo do desenvolvimento da aplicação. Ao técnico Paulo Franco pelo incentivo,
apoio e sugestões. À drª. Anabela Coutinho e à drª. Rosalina Ferreira pelos concelhos
durante a revisão paciente da escrita desta dissertação. Sem deixar de referir todos os
outros colaboradores da secção QMM7 pela ajuda, compreensão e pelo fantástico
ambiente existente no departamento. A todos eles o meu muito obrigado!
Aos meus amigos e colegas de curso Fábio Cunha, Carlos Almeida, André Pereira,
Bohdan Arzhanov e João Brito que desde o início acompanharam o meu percurso
académico.
A todos os meus familiares, com especial agradecimento ao meu tio Engº. Carlos
Silva e à minha prima Ana Silva pelo apoio.
A todas as pessoas não mencionadas, que ajudaram direta ou indiretamente na
elaboração desta dissertação.


Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xiii
Resumo
Ao longo dos últimos anos têm sido desenvolvidos sistemas ativos de segurança
que contribuem significativamente para a redução do número de acidentes rodoviários.
Um destes sistemas é designado por Electronic Stability Program, que é constituído por
sensores de direção, sensores de velocidade e atuadores. Esta Dissertação de Mestrado
descreve o desenvolvimento, em ambiente de estágio na empresa Bosch Car
Multimedia, de uma aplicação de teste e monitorização de sensores de ângulo de
direção.
Nesta tese, apresentam-se os requisitos da aplicação para que esta suporte a
realização de todos os testes pretendidos, bem como, especificações para o interface
com o operador e modos de operação dos testes. Relativamente à monotorização ao
longo do teste, deve ser recolhida e analisada toda a informação necessária para a
determinação dos erros dos sensores. Neste documento apresentam-se, também, os
vários componentes necessárias para a implementação da aplicação, nomeadamente, o
suporte físico e o suporte lógico do controlador, bem como o motor e a placa de
aquisição de dados dos sensores. Segue-se uma breve descrição de alguns testes de
fiabilidade efetuados na secção de Gestão da Qualidade e Métodos da empresa.
A aplicação foi desenvolvida em LabVIEW. No Capítulo de desenvolvimento é
detalhada a estrutura da aplicação, os menus de definições, bem como os modos de
operação. Finalmente, são apresentados os resultados dos testes efetuados à aplicação.
No final deste documento são retiradas as conclusões do desenvolvimento deste
projeto, bem como apresentadas algumas sugestões de trabalho futuro.
Palavras Chave: Sensor de Ângulo de Direção, Testes de Fiabilidade, LabVIEW

Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xv
Abstract
These last years active security systems have been developed which significantly
contribute to decrease the number of car crashes. One of these systems is the ESP
(Electronic Stability Program). This system is consists of: a steering angle sensor, wheel
speed sensors and actuators. This master degree thesis describes the development, in a
training environment at the Bosch Car Multimedia Company, of a test and monitoring
application system for steering angle sensors.
Throughout this document the different technologic devices needed to the
implementation of this application, will be shown such as, the hardware and the
software of the controller, as well as, the acquisition devices for the sensors data.
Subsequently a brief description of a few reliability tests performed by the Quality
Management Methods section, will be introduced as well as the requirements allowing
to handle the intended tests, user interface specifications and test operating modes.
The application was developed in LabVIEW, that consists of a graphic
programmable language specialized in monitoring and data acquisition. The
Development chapter details the application’s structure, menus setup and also the test
operating modes. Finally some test results of the application will be shown.
In the end of this document there will be some conclusions about this project, as
well as some suggestions for future improvements.
Keywords: Steering Angle Sensor, Reliability Tests, LabVIEW
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xvii
Índice de Conteúdos
Agradecimentos .................................................................................................... xi
Resumo ................................................................................................................ xiii
Abstract ................................................................................................................. xv
Índice de Conteúdos .......................................................................................... xvii
Glossário .............................................................................................................. xxi
Índice de Figuras .............................................................................................. xxiii
Índice de Tabelas ............................................................................................. xxvii
1. Introdução .................................................................................................... 1
1.1 Motivação ................................................................................................ 1
1.2 Enquadramento - ESP .............................................................................. 2
1.3 Objetivos .................................................................................................. 5
1.4 Estrutura da Dissertação .......................................................................... 6
2. Análise do Problema .................................................................................... 7
2.1 Sensor de Ângulo de Direção .................................................................. 7
2.2 Plataforma de Aquisição de Dados ........................................................ 10
2.3 Motor ...................................................................................................... 13
2.4 Controlador ............................................................................................ 14
2.4.1 Módulos de Controlo ...................................................................... 14
2.4.2 Hardware ........................................................................................ 16
2.4.3 Software .......................................................................................... 19
2.5 Câmara Climática ................................................................................... 20
2.6 Linguagens Utilizadas ............................................................................ 21
Índice de Conteúdos
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
xviii Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
2.6.1 Introdução ao LabVIEW ................................................................ 21
2.6.2 Introdução ao SDL .......................................................................... 24
2.7 Conclusão ............................................................................................... 25
3. Requisitos da Aplicação ............................................................................. 27
3.1 Testes de Fiabilidade .............................................................................. 27
3.2 Interface com o Utilizador ..................................................................... 29
3.3 Modos de Operação ............................................................................... 30
3.4 Arquitetura do Sistema .......................................................................... 31
4. Desenvolvimento da Aplicação ................................................................. 33
4.1 Arquitetura da Aplicação ....................................................................... 33
4.2 Menu de Definições ............................................................................... 37
4.2.1 Definições de Comando .................................................................. 38
4.2.2 Definições de Aquisição ................................................................. 39
4.2.3 Definições do Controlador .............................................................. 40
4.3 Modos de Operação ............................................................................... 40
4.3.1 Modo de Comando ......................................................................... 40
4.3.2 Modo de Aquisição ......................................................................... 45
4.3.3 Modo de Comando e Aquisição ..................................................... 49
4.4 Conclusão ............................................................................................... 54
5. Resultados ................................................................................................... 55
5.1 Modo de Comando ................................................................................. 57
5.2 Modo de Aquisição ................................................................................ 58
5.3 Modo de Comando e Aquisição ............................................................. 60
6. Conclusão .................................................................................................... 65
6.1 Conclusões do Trabalho Desenvolvido ................................................. 65

Índice de Conteúdos
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xix
6.2 Sugestões de Trabalho Futuro ................................................................ 66
7. Apêndices .................................................................................................... 67
Referências ........................................................................................................... 77


Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xxi
Glossário
ABS Antilock Braking System
API Application Programming Interface
ASIC Application Specific Integrated Circuit
BASIC Beginner's All-purpose Symbolic Instruction Code
CPU Central Processing Unit
DAQ Data Acquisition
DMA Direct Memory Access
ECU Engine Control Unit
ESP Electronic Stability Program
FIFO First in First Out
ICM Immediate Command Mode
LabVIEW Laboratory Virtual Instrument Engineering Workbench
LWS LenkWinkelSensor (Alemão), Steering Angle Sensor
MML Mint Motion Library
NI National Instruments
PCI Peripheral Component Interconnect
PFI Programmable Function Input
PI Proporcional e Integrativo
PID Proporcional Integrativo e Derivativo
PWM Pulse Width Modulation
QMM Quality Management Methods
TCS Traction Control System

Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xxiii
Índice de Figuras
Figura 1.1 - Constituintes do ESP e a sua distribuição no veículo [1]. .......................... 3
Figura 1.2 - Implementação do ESP ao longo dos anos [1]. .......................................... 4
Figura 2.1 - Sensor LWS6: a) Constituintes do sensor; b) Aspeto final do sensor. ....... 8
Figura 2.2 - Conetor do sensor. ...................................................................................... 8
Figura 2.3 - Sinais fornecidos pelo sensor [Bosch]. ....................................................... 9
Figura 2.4 - Modo de descodificação X1. .................................................................... 10
Figura 2.5 - Modo de descodificação X2. .................................................................... 10
Figura 2.6 - Modo de descodificação X4. .................................................................... 11
Figura 2.7 - Placa de aquisição de dados DAQ PXI-6624 [7]. .................................... 11
Figura 2.8 - Servo Motor Síncrono [3]. ....................................................................... 13
Figura 2.9 - Princípio de funcionamento de um Resolver [3][3]. ................................ 14
Figura 2.10 - Interligação dos módulos de controlo. ................................................... 15
Figura 2.11 - Interface do hardware do controlador [5]. ............................................. 16
Figura 2.12 - Ligações necessárias para o correto funcionamento do controlador [5].18
Figura 2.13 - Arquitetura do Software Mint. ................................................................ 19
Figura 2.14 - Aspeto exterior da Câmara. .................................................................... 20
Figura 2.15 - Aspeto interior da Câmara. .................................................................... 20
Figura 2.16 - Perfil de temperatura criado pela Câmara Climática. ............................ 20
Figura 2.17 - Ambiente de programação do Front Panel do LabVIEW. ..................... 22
Figura 2.18 - Ambiente de programação do Block Diagram do LabVIEW. ............... 22
Figura 2.19 - Guia para a escolha da arquitetura de uma aplicação [8]. ...................... 23
Figura 2.20 - Arquitetura da linguagem SDL. ............................................................. 24
Índice de Figuras
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
xxiv Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 2.21 - Interligação dos vários componentes. .................................................... 25
Figura 3.1 - Especificação dos movimentos aplicados aos sensores: a) Sequência de um
ciclo; b) Duração esperada para um bloco. .......................................................... 28
Figura 3.2 - Interligação dos vários componentes. ...................................................... 31
Figura 4.1 - Diagrama com a interligação entre os blocos do sistema. ....................... 33
Figura 4.2 - Diagrama SDL do processo "Botão Stop". .............................................. 35
Figura 4.3 - Conteúdo do Cluster “Definições”. .......................................................... 36
Figura 4.4 - Conteúdo do Cluster “Estado do Teste”. ................................................. 36
Figura 4.5 - Ambiente gráfico da janela “ Definições”. .............................................. 37
Figura 4.6 - Ambiente gráfico da janela “ Definições de Comando”. ......................... 38
Figura 4.7 - Associação do conceito canal da plataforma de aquisição com os sensores.
.............................................................................................................................. 39
Figura 4.8 - Ambiente gráfico da janela “ Definições de Aquisição”. ........................ 39
Figura 4.9 - Ambiente gráfico da janela “ Definições do Controlador”. ..................... 40
Figura 4.10 - Diagrama temporal da sequência de instruções para o comando do motor.
.............................................................................................................................. 41
Figura 4.11 – Componentes envolvidos no Modo de Comando. ................................. 41
Figura 4.12 - Diagrama temporal ilustrativo da sequência de instruções para a execução
de três movimentos. ............................................................................................. 42
Figura 4.13 - Comandos em LabVIEW para a execução de um movimento. ............. 43
Figura 4.14 - Implementação em LabVIEW da configuração do temporizador de
movimentos. ......................................................................................................... 44
Figura 4.15 - Implementação em LabVIEW da verificação do temporizador de
movimentos. ......................................................................................................... 45
Figura 4.16 – Componentes envolvidos no Modo de Aquisição. ................................ 45
Figura 4.17 - Diagrama de blocos do hardware utilizado no Modo de Aquisição. ..... 46
Figura 4.18 - Interligação do DAQ PXI-6624 com o módulo SCB-100 [7]. ............... 47
Índice de Figuras
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xxv
Figura 4.19 - Implementação em LabVIEW da configuração do gerador de pulsos. .. 48
Figura 4.20 - Sequência de estados no processo de aquisição de dados dos sensores. 49
Figura 4.21 – Componentes envolvidos no Modo de Comando e Aquisição. ............. 49
Figura 4.22 - Sequência de estados do modo de comando e aquisição. ...................... 50
Figura 4.23 - Sinal digital do controlador e os respetivos pulsos de um LWS. ........... 52
Figura 4.24 - Sinais adquiridos por um osciloscópio no modo de comando e aquisição.
.............................................................................................................................. 53
Figura 4.25 - Bancada de desenvolvimento do projeto. ............................................... 54
Figura 5.1 - Interação do equipamento no laboratório. ................................................ 55
Figura 5.2 - Organização do quadro elétrico que alimenta o motor. ........................... 56
Figura 5.3 - Aspeto gráfico da aplicação no Modo de Comando. ............................... 57
Figura 5.4 - Aspeto gráfico da aplicação no Modo de Aquisição ................................ 58
Figura 5.5 - Aspeto dos gráficos da aplicação no Modo de Aquisição. ....................... 59
Figura 5.6 - Aspeto dos gráficos da aplicação no Modo Comando e Aquisição. ........ 60
Figura 5.7 - Aspeto das tabelas de resultados da aplicação no Modo Comando e
Aquisição. ............................................................................................................ 61
Figura 5.8 - Organização do ficheiro de registo dos dados. ......................................... 62
Figura 5.9 - Organização do ficheiro de registo de erros. ............................................ 62
Figura 5.10 - Representação gráfica de algumas amostras do ficheiro de registo de erros.
.............................................................................................................................. 63
Figura 7.1 - Pinout NI PXI – 6624. ............................................................................ 71
Figura 7.2 - Distribuição dos terminais na Placa SCB – 100. ...................................... 72
Figura 7.3 - Front Panel da função responsável por determinar o próximo ângulo. ... 73
Figura 7.4 - Block Diagram da função responsável por determinar o próximo ângulo.
.............................................................................................................................. 74
Figura 7.5 - Front Panel do bloco "Registo de Dados". .............................................. 75

Índice de Figuras
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
xxvi Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 7.6 - Block Diagram do processo "Log" do bloco “Registo de Dados”. .......... 76
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia xxvii
Índice de Tabelas
Tabela 2.1 - Dados Técnicos do Sensor LWS 6. ........................................................... 8
Tabela 2.2 - Pinout do Conetor do Sensor. .................................................................... 8
Tabela 2.3 - Características da placa PXI - 6624. ........................................................ 11
Tabela 2.4 - Interface do hardware do controlador. .................................................... 16
Tabela 2.5 - Exemplos de estados do display 7-segmentos ......................................... 17
Tabela 2.6 - Pinout do Conetor X3 do Controlador. .................................................... 18
Tabela 3.1 - Requisitos do Operational Endurance Teste. .......................................... 28
Tabela 7.1 - Dados técnicos do motor. ........................................................................ 69
Tabela 7.2 - Dados técnicos do controlador. ................................................................ 69
Tabela 7.3 - Requisitos da fonte de alimentação externa. ............................................ 70
Tabela 7.4 - Parâmetros por defeito da comunicação RS232. ..................................... 70

Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 1
1. Introdução
Este Projeto de Dissertação surge no âmbito de um estágio na empresa Bosch Car
Multimedia Portugal S.A. localizada em Braga. O projeto tem como objetivo o
desenvolvimento de um sistema de teste e monitorização para sensores de direção
utilizados na indústria automóvel para a implementação do Electronic Stability
Program (ESP).
1.1 Motivação
Atualmente no setor industrial existe uma grande concorrência e competitividade
entre as empresas. Aspetos como o custo de produção e a qualidade dos produtos são
cruciais para o sucesso destas empresas. A empresa Bosch Car Multimedia encontra-se
ligada ao setor da indústria automóvel, no qual são exigidas características relacionadas
com a durabilidade, qualidade e fiabilidade dos equipamentos.
Neste sentido existe uma secção responsável pela Gestão da Qualidade e Métodos
(QMM – Quality Management Methods) na empresa. Das várias competências desta
secção destaca-se o teste da qualidade e fiabilidade dos produtos provenientes das linhas
de produção.
Sendo esta Dissertação realizada num ambiente industrial possibilitará uma
primeira abordagem ao mercado de trabalho, onde são exigidas maiores
responsabilidades e uma maior disciplina. Este estágio permitirá também aplicar muitos
dos conceitos adquiridos ao longo do curso, bem como aprofundar e aprender sobre
novas temáticas.
1. Introdução
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
2 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
1.2 Enquadramento - ESP
Ao longo dos últimos anos têm sido desenvolvidos sistemas ativos de segurança
que contribuem significativamente para a redução do número de acidentes, apesar do
aumento da densidade de tráfego. Dos vários sistemas ativos de segurança destacam-
se: o Sistema de Travagem Anti Bloqueio, também designado por ABS; o Sistema de
Controlo de Tração (TCS) e o Programa Eletrónico de Estabilidade (ESP).
O ABS previne o bloqueio das rodas durante a travagem, e por sua vez, o TCS evita
que as rodas percam tração nas acelerações. Enquanto estes sistemas intervêm na
dinâmica longitudinal do veículo, o ESP melhora a dinâmica lateral, garantindo, assim,
uma condução estável em todas as direções.
Em vários estudos internacionais assumidos pelos principais fabricantes de
automóveis e autoridades de segurança, concluiu-se que pelo menos 40% de todos os
acidentes com feridos mortais são causados por derrapagens. Estes estudos também
demonstraram que o ESP pode reduzir até 80% o número de mortes e feridos em
acidentes rodoviários, bem como, contribuir de forma importante na segurança
rodoviária. Uma análise macroeconómica efetuada em 2007 pela Universidade da
Colômbia demonstra que só na Europa poderiam ser salvas 4 mil vidas e 100 mil feridos
se todos os veículos estivessem equipados com o sistema ESP.
Na Europa 80% das marcas utilizam o acrónimo ESP, contudo este sistema também
pode ser designado por DSC (Dynamic Stability Control), VSA (Vehicle Stability
Assist) ou VSC (Vehicle Stability Control). As funcionalidades e o modo de operação,
bem como os benefícios adquiridos são os mesmos.
O principal objetivo do ESP consiste em corrigir situações de subviragem, (situação
em que o veículo numa curva tende a sair de frente), sobreviragem (situação em que o
veículo numa curva tende a sair de traseira) e problemas de falta de tração em
acelerações ou reduções bruscas [1]. Este programa é constituído por cinco elementos,
identificados na Figura 1.1.

1. Introdução
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 3
Figura 1.1 - Constituintes do ESP e a sua distribuição no veículo [1].
Legenda:
1. Unidade Hidráulica Integrada com a Unidade de Controlo;
2. Sensores de Velocidade das rodas;
3. Sensor de Ângulo de Direção (LWS);
4. Giroscópio e Acelerómetro;
5. Comunicação com a Unidade de Controlo do Motor (ECU).
A Unidade Hidráulica corresponde a um dos atuadores do ESP e é responsável por
regular a pressão nos travões das rodas, através de válvulas solenoides. A unidade de
controlo é responsável por processar toda a informação dos sensores e transmitir
comandos aos atuadores.
A unidade de controlo utiliza os sinais provenientes dos sensores de velocidade das
rodas para calcular a velocidade das mesmas. Para esta finalidade podem ser usados
dois tipos de sensores distintos: sensores passivos e sensores ativos. Ambos medem a
velocidade das rodas, sem contacto com as mesmas, através de campos magnéticos.
Atualmente os sensores ativos são os mais utilizados para este objetivo.
O Sensor de Ângulo de Direção é colocado na coluna de direção do veículo e
permite medir a posição do volante através do ângulo. Com base no ângulo do volante,
1. Introdução
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
4 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
na velocidade do veículo e na pressão de ambos os pedais (travão e acelerador) é
possível calcular a intenção de condução do condutor.
O giroscópio regista todos os movimentos do veículo em torno do seu eixo vertical.
A informação deste sensor e a sua conjugação com os sinais do acelerómetro lateral
permitem determinar a orientação do veículo e as forças a que o mesmo está sujeito.
O ESP comunica com o ECU através do barramento de dados, permitindo que o
torque do motor possa ser reduzido, tanto no caso em que condutor pretenda acelerações
bruscas, como no caso de deslizamento das rodas, sendo estas provocadas por excesso
de torque aplicado às rodas motrizes.
Resumidamente, o ESP verifica 25 vezes a cada segundo se a direção pretendida
pelo condutor corresponde à direção do veículo. Caso se verifique uma diferença nessas
direções (situação esta, vulgarmente conhecida como derrapagem) o ESP intervém
independentemente das ações do condutor, aplicando diferentes forças de travagem às
rodas e, caso seja necessário, reduz a potência do motor no sentido de estabilizar o
veículo [2].
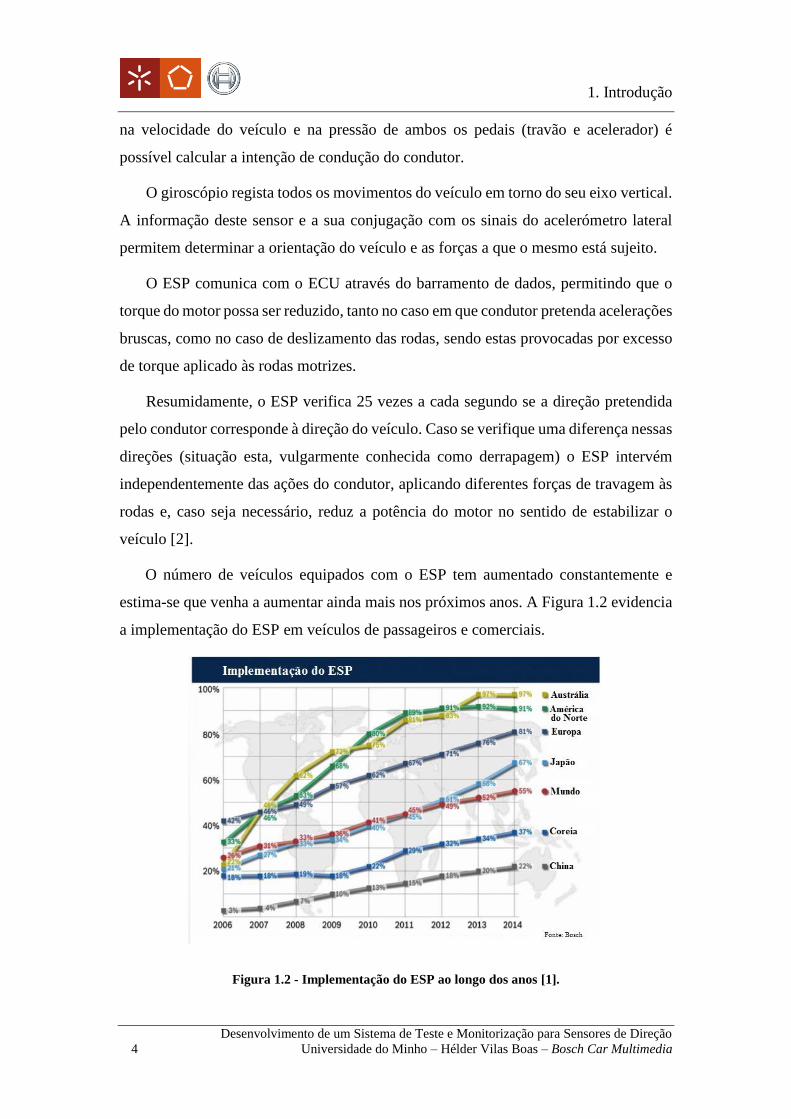
O número de veículos equipados com o ESP tem aumentado constantemente e
estima-se que venha a aumentar ainda mais nos próximos anos. A Figura 1.2 evidencia
a implementação do ESP em veículos de passageiros e comerciais.
Figura 1.2 - Implementação do ESP ao longo dos anos [1].
1. Introdução
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 5
Em Março de 2009 o Parlamento Europeu concordou em tornar obrigatória a
implementação do ESP em todos os novos veículos. De acordo com a legislação, a
partir de Novembro de 2011 todos os novos veículos de passageiros e comerciais
registados na União Europeia estão equipados com o sistema ativo de segurança ESP.
A partir de Novembro de 2014 esta legislação será aplicada a todos os novos veículos.
Os acidentes rodoviários são responsáveis por retirarem a vida a quase 1.3 milhões
de pessoas e ainda por ferirem um número superior todos os anos. A meta da década de
ação para a segurança rodoviária é reduzir e estabilizar o número de perdas humanas
em 2020, garantindo que a visão de um mundo em que a mobilidade é segura se torne
uma realidade.
1.3 Objetivos
O intuito deste projeto consiste em analisar o comportamento de sensores de ângulo
de direção ao longo de vários ciclos de utilização sob diferentes ambientes climáticos.
Assim, pretende-se comandar e monitorar uma sequência de testes efetuados a um
conjunto de 6 sensores aplicados a um sistema de teste de vida acelerado, composto por
um veio motorizado integrado numa câmara climática. Esta monitorização incide na
amostragem no valor do erro do sensor.
De forma a tornar o interface com o sistema mais amigável e intuitivo para o
utilizador pretende-se desenvolver uma aplicação que cumpra, não só, os requisitos dos
testes de fiabilidade, como também, os requisitos funcionais. Entende-se por requisitos
funcionais todos os aspetos que atribuem à aplicação uma maior flexibilidade e
funcionalidade. De forma a criar um sistema que suporte diferentes modos de operação,
nomeadamente, o comando do motor que permitirá acionar os sensores, a aquisição dos
dados disponibilizados pelos mesmos e a combinação dos dois modos anteriores.
A implementação destes modos é de extrema importância, uma vez que permite a
utilização da aplicação para realização de diferentes testes, bem como, o teste de
diferentes sensores.
1. Introdução
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
6 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
1.4 Estrutura da Dissertação
Esta Dissertação encontra-se organizada em seis capítulos distintos, descritos e
enumerados de seguida.
No Capítulo 1, designado por “Introdução”, é descrito o enquadramento do trabalho
e são apresentadas as motivações, os objetivos e a organização da dissertação.
No Capítulo 2 são apresentados os componentes utilizados neste projeto de
desenvolvimento de um sistema de teste e monitorização para sensores de direção,
nomeadamente, o hardware e software do controlador, o motor e a placa de aquisição
de dados.
No Capítulo 3 são descritos os requisitos da aplicação, nomeadamente, as
especificações do interface com o operador e os modos de operação da aplicação de
teste. Além disso, também se efetua uma breve abordagem aos testes de fiabilidade.
O Capítulo 4 descreve as etapas de desenvolvimento da aplicação de teste, desde
os menus de definições aos modos de operação, bem como a estrutura da aplicação.
O Capítulo 5 é dedicado à avaliação do desempenho da aplicação, onde se apresenta
o resultado de alguns testes, permitindo retirar conclusões sobre a fiabilidade e
estabilidade da aplicação desenvolvida.
Finalmente, o Capítulo 6 encontra-se reservado para as conclusões obtidas após a
realização do trabalho e que permitiram a elaboração desta dissertação. Além disso, são
apresentadas sugestões de trabalhos futuros de forma a melhorar os resultados obtidos.

Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 7
2. Análise do Problema
Neste capítulo pretende-se abordar todas as características físicas e lógicas dos
vários componentes necessários para a concretização do projeto. No final, e em jeito de
conclusão, mostra-se uma figura onde se conjugam as possíveis interligações entre os
vários equipamentos de forma a satisfazer os objetivos do projeto.
2.1 Sensor de Ângulo de Direção
Atualmente são produzidos na empresa dois tipos de sensores de ângulo de direção
(LWS - LenkWinkelSensor), distribuídos em duas classes. Na classe I encontram-se
agrupados os sensores com encoders incrementais, que apenas medem ângulos
relativos, no entanto, não possuem Interface CAN. Este tipo de sensores é designado
por LWS6, apresentado na Figura 2.1. Na classe II são agrupados os sensores com
encoders absolutos e com Interface CAN. Neste documento só serão abordados aspetos
relacionados com os sensores pertencentes à classe I, uma vez que para este projeto
apenas se pretende efetuar a aquisição de dados com este tipo de sensores.
Um encoder é um dispositivo eletromecânico que fornece na sua saída sinais
elétricos no formato de pulsos que podem, por sua vez, ser traduzidos em movimento,
direção e posição. O princípio de funcionamento do sensor LWS6 baseia-se no efeito
de Hall. Este fenómeno relaciona o surgimento de uma diferença de potencial num
condutor elétrico, transversal ao fluxo de corrente e um campo magnético perpendicular
à corrente.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
8 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
a) b)
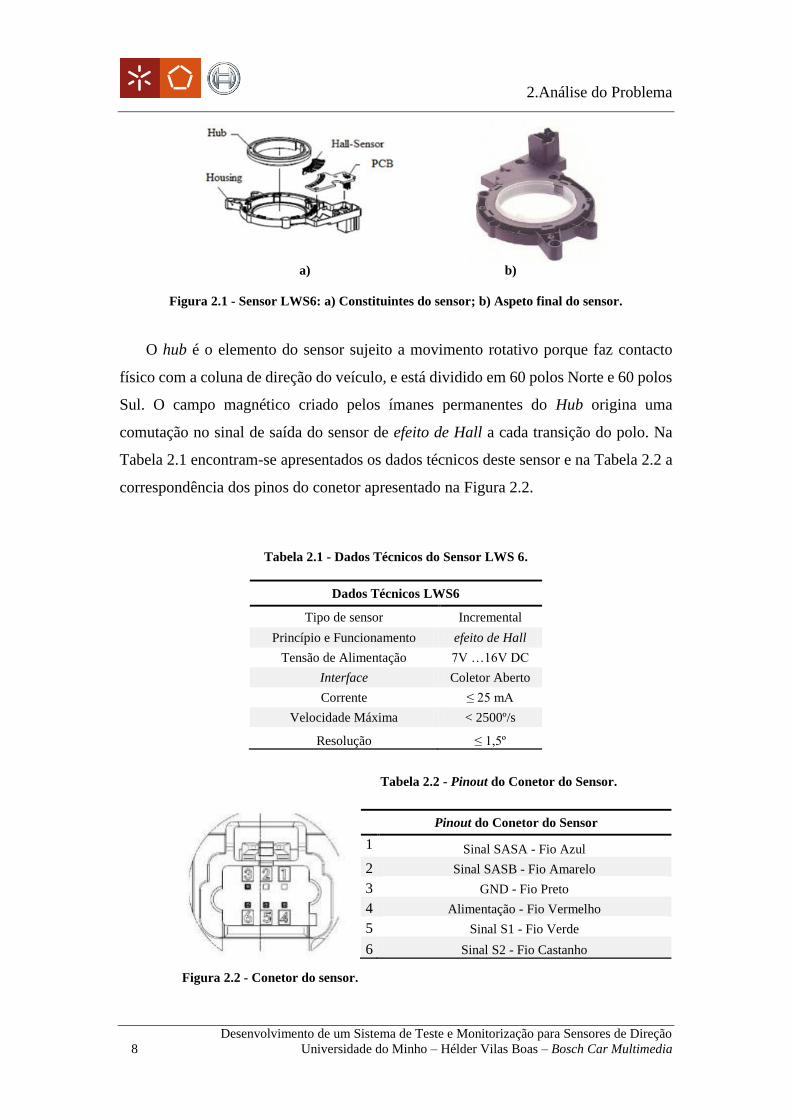
Figura 2.1 - Sensor LWS6: a) Constituintes do sensor; b) Aspeto final do sensor.
O hub é o elemento do sensor sujeito a movimento rotativo porque faz contacto
físico com a coluna de direção do veículo, e está dividido em 60 polos Norte e 60 polos
Sul. O campo magnético criado pelos ímanes permanentes do Hub origina uma
comutação no sinal de saída do sensor de efeito de Hall a cada transição do polo. Na
Tabela 2.1 encontram-se apresentados os dados técnicos deste sensor e na Tabela 2.2 a
correspondência dos pinos do conetor apresentado na Figura 2.2.
Tabela 2.1 - Dados Técnicos do Sensor LWS 6.
Dados Técnicos LWS6
Tipo de sensor Incremental
Princípio e Funcionamento efeito de Hall
Tensão de Alimentação 7V …16V DC
Interface Coletor Aberto
Corrente ≤ 25 mA
Velocidade Máxima < 2500º/s
Resolução ≤ 1,5º
Tabela 2.2 - Pinout do Conetor do Sensor.
Pinout do Conetor do Sensor
1 Sinal SASA - Fio Azul
2 Sinal SASB - Fio Amarelo
3 GND - Fio Preto
4 Alimentação - Fio Vermelho
5 Sinal S1 - Fio Verde
6 Sinal S2 - Fio Castanho
Figura 2.2 - Conetor do sensor.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 9
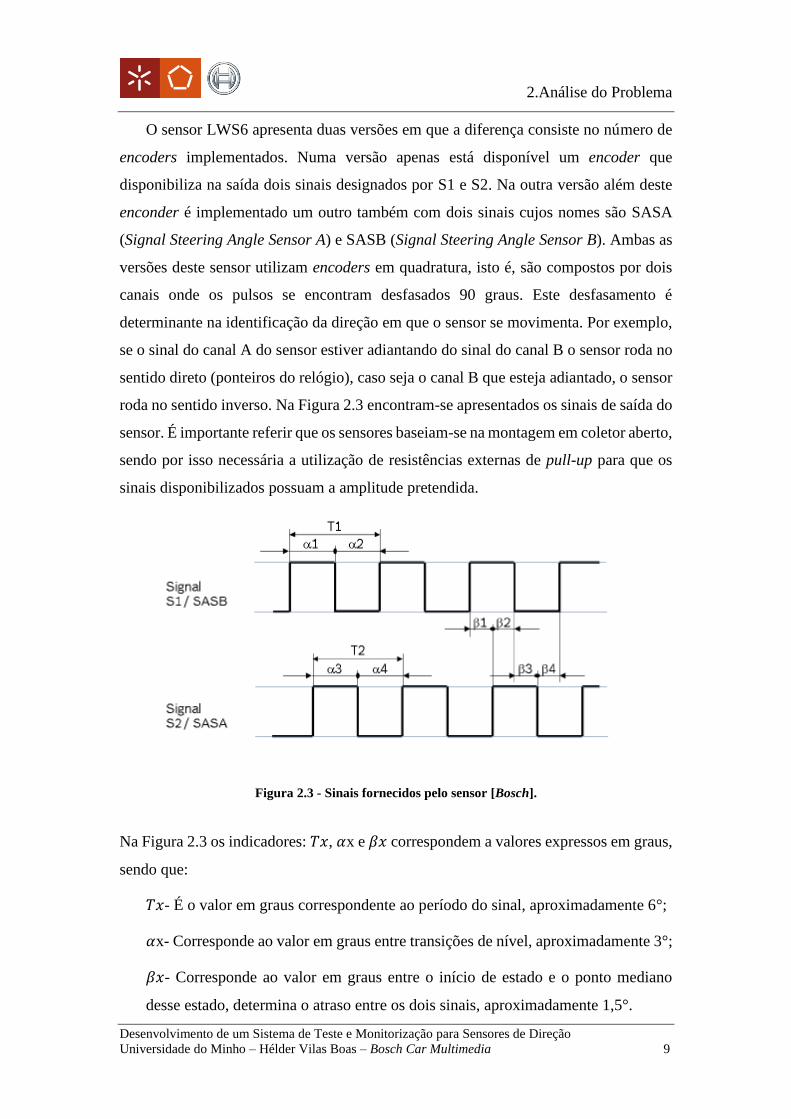
O sensor LWS6 apresenta duas versões em que a diferença consiste no número de
encoders implementados. Numa versão apenas está disponível um encoder que
disponibiliza na saída dois sinais designados por S1 e S2. Na outra versão além deste
enconder é implementado um outro também com dois sinais cujos nomes são SASA
(Signal Steering Angle Sensor A) e SASB (Signal Steering Angle Sensor B). Ambas as
versões deste sensor utilizam encoders em quadratura, isto é, são compostos por dois
canais onde os pulsos se encontram desfasados 90 graus. Este desfasamento é
determinante na identificação da direção em que o sensor se movimenta. Por exemplo,
se o sinal do canal A do sensor estiver adiantando do sinal do canal B o sensor roda no
sentido direto (ponteiros do relógio), caso seja o canal B que esteja adiantado, o sensor
roda no sentido inverso. Na Figura 2.3 encontram-se apresentados os sinais de saída do
sensor. É importante referir que os sensores baseiam-se na montagem em coletor aberto,
sendo por isso necessária a utilização de resistências externas de pull-up para que os
sinais disponibilizados possuam a amplitude pretendida.
Figura 2.3 - Sinais fornecidos pelo sensor [Bosch].
Na Figura 2.3 os indicadores: 𝑇𝑥, 𝛼x e 𝛽𝑥 correspondem a valores expressos em graus,
sendo que:
𝑇𝑥- É o valor em graus correspondente ao período do sinal, aproximadamente 6°;
𝛼x- Corresponde ao valor em graus entre transições de nível, aproximadamente 3°;
𝛽𝑥- Corresponde ao valor em graus entre o início de estado e o ponto mediano
desse estado, determina o atraso entre os dois sinais, aproximadamente 1,5°.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
10 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
2.2 Plataforma de Aquisição de Dados
A plataforma de aquisição de dados a ser implementada no projeto deverá suportar
a leitura dos sensores de ângulo de direção descritos anteriormente. Uma vez que estes
sensores incorporam encoders em quadratura segue-se uma breve explicação dos
modos de descodificação destes encoders.
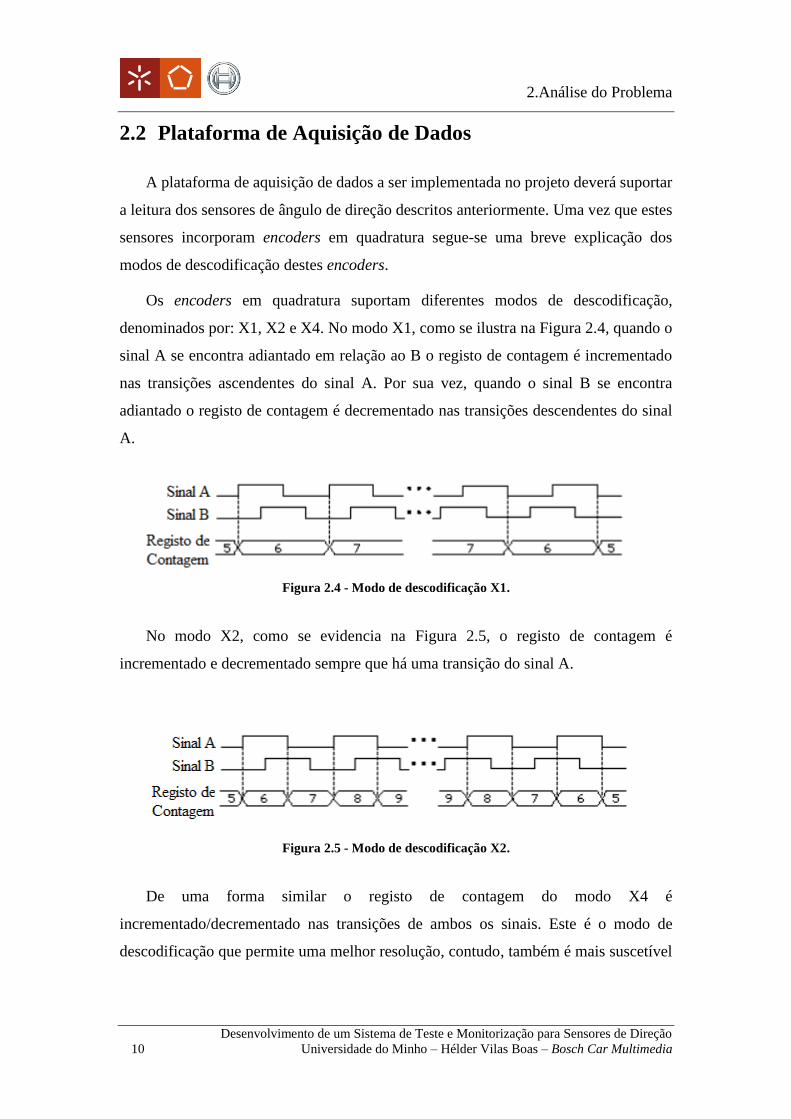
Os encoders em quadratura suportam diferentes modos de descodificação,
denominados por: X1, X2 e X4. No modo X1, como se ilustra na Figura 2.4, quando o
sinal A se encontra adiantado em relação ao B o registo de contagem é incrementado
nas transições ascendentes do sinal A. Por sua vez, quando o sinal B se encontra
adiantado o registo de contagem é decrementado nas transições descendentes do sinal
A.
Figura 2.4 - Modo de descodificação X1.
No modo X2, como se evidencia na Figura 2.5, o registo de contagem é
incrementado e decrementado sempre que há uma transição do sinal A.
Figura 2.5 - Modo de descodificação X2.
De uma forma similar o registo de contagem do modo X4 é
incrementado/decrementado nas transições de ambos os sinais. Este é o modo de
descodificação que permite uma melhor resolução, contudo, também é mais suscetível

2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 11
a falhas, caso existam vibrações no encoder. Na Figura 2.6 encontra-se demonstrado
um exemplo deste modo de descodificação.
Figura 2.6 - Modo de descodificação X4.
O registo de contagem referido na Figura 2.6 tem por base o funcionamento de um
contador que consiste num dispositivo que regista o número de transições de nível. Um
contador pode suportar além de funcionalidades de medição/contagem de pulsos, as
funcionalidades de gerador de pulsos. A National Instruments (NI) disponibiliza
dispositivos dedicados para a aquisição de dados (DAQ - Data Acquisition),
nomeadamente adequados para a contagem de pulsos. Um deles é o dispositivo PXI-
6624, que se encontra apresentado na Figura 2.7.
Tabela 2.3 - Características da placa PXI - 6624.
Figura 2.7 - Placa de aquisição de dados DAQ PXI-6624 [7].
Este tipo de placas são ideais para aplicações que exigem um elevado grau de
fiabilidade, desempenho e facilidade de integração com outros sistemas. Estas
características são requisitos para sistemas de monitorização industriais e aplicações de
Características da placa PXI-6624
Contadores/Temporizadores 8
Resolução 32 bits
Canais de Entrada 26 isolados
Canais de Saída 8 isolados
Tensão Máxima nos Canais 48V DC
Corrente Máxima de Entrada 10 mA
Clock 100kHz e 20MHz
Interface com barramentos PCI e PXI
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
12 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
teste de fabrico, como por exemplo, para a indústria automóvel, sistemas embebidos de
controlo e também para sistemas de verificação de linhas de produção.
Este equipamento é concebido para efetuar aquisição de dados com recurso a
temporizadores, contadores e buffers. Permite efetuar aquisição da posição através de
encoders em quadratura, contagem de pulsos, medição do período, medição da largura
de pulso e medição de frequência.
Como referido anteriormente, o dispositivo PXI-6624 permite um interface isolado
com os barramentos PCI ou PXI para a transferência dos dados. Existem 4 mecanismos
de transferência de dados através do barramento PCI: Direct Memory Access (DMA),
interrupções, entradas e saídas programadas e USB Bulk. Contudo, estes dois últimos
mecanismos não se encontram disponíveis neste dispositivo.
O DMA é um mecanismo que permite transferências de dados entre os vários
periféricos do sistema sem a utilização do CPU, fazendo uso de hardware dedicado para
este processo. Desta forma é possível atingir taxas de transferência altas e libertar o
processamento do CPU. Contudo, existe um número limitado de canais, que para o PXI
6624 é de três. No mecanismo por interrupções o dispositivo notifica o CPU que se
encontra disponível para efetuar a transferência e só depois de o CPU o permitir é
iniciada a transferência. A limitação deste mecanismo encontra-se na velocidade de
transferência dos dados, que no máximo pode ser igual ao clock do CPU.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 13
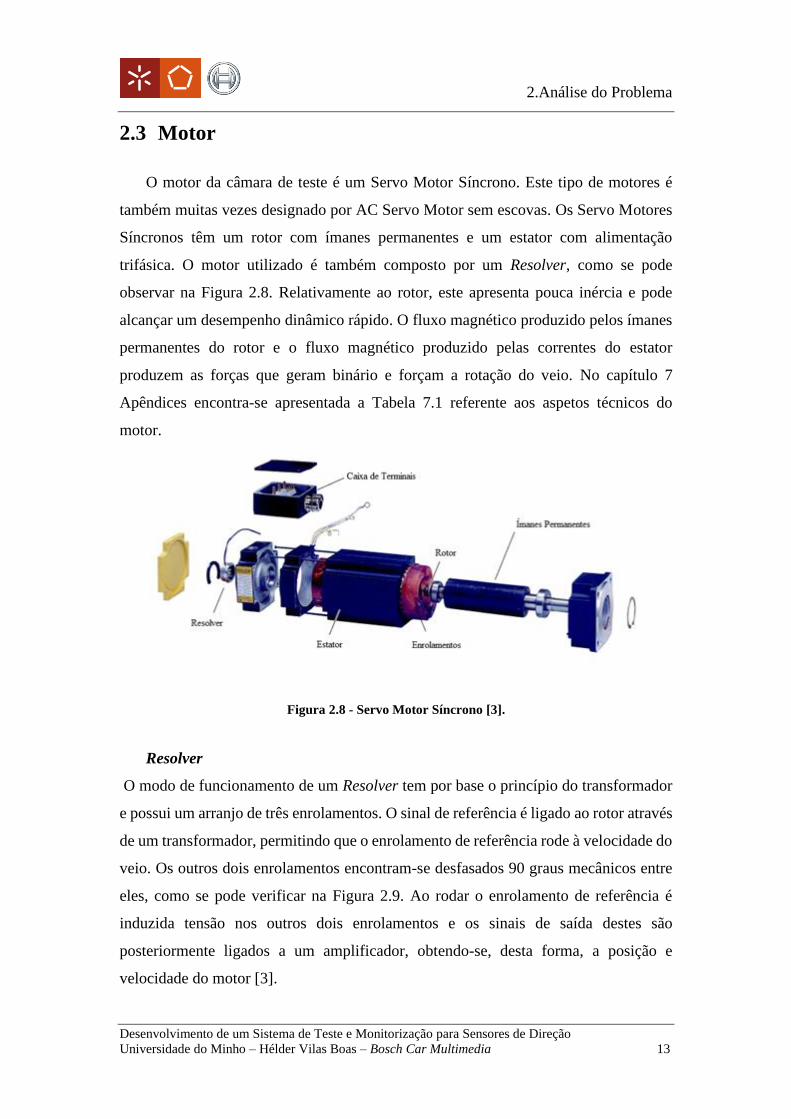
2.3 Motor
O motor da câmara de teste é um Servo Motor Síncrono. Este tipo de motores é
também muitas vezes designado por AC Servo Motor sem escovas. Os Servo Motores
Síncronos têm um rotor com ímanes permanentes e um estator com alimentação
trifásica. O motor utilizado é também composto por um Resolver, como se pode
observar na Figura 2.8. Relativamente ao rotor, este apresenta pouca inércia e pode
alcançar um desempenho dinâmico rápido. O fluxo magnético produzido pelos ímanes
permanentes do rotor e o fluxo magnético produzido pelas correntes do estator
produzem as forças que geram binário e forçam a rotação do veio. No capítulo 7
Apêndices encontra-se apresentada a Tabela 7.1 referente aos aspetos técnicos do
motor.
Figura 2.8 - Servo Motor Síncrono [3].
Resolver
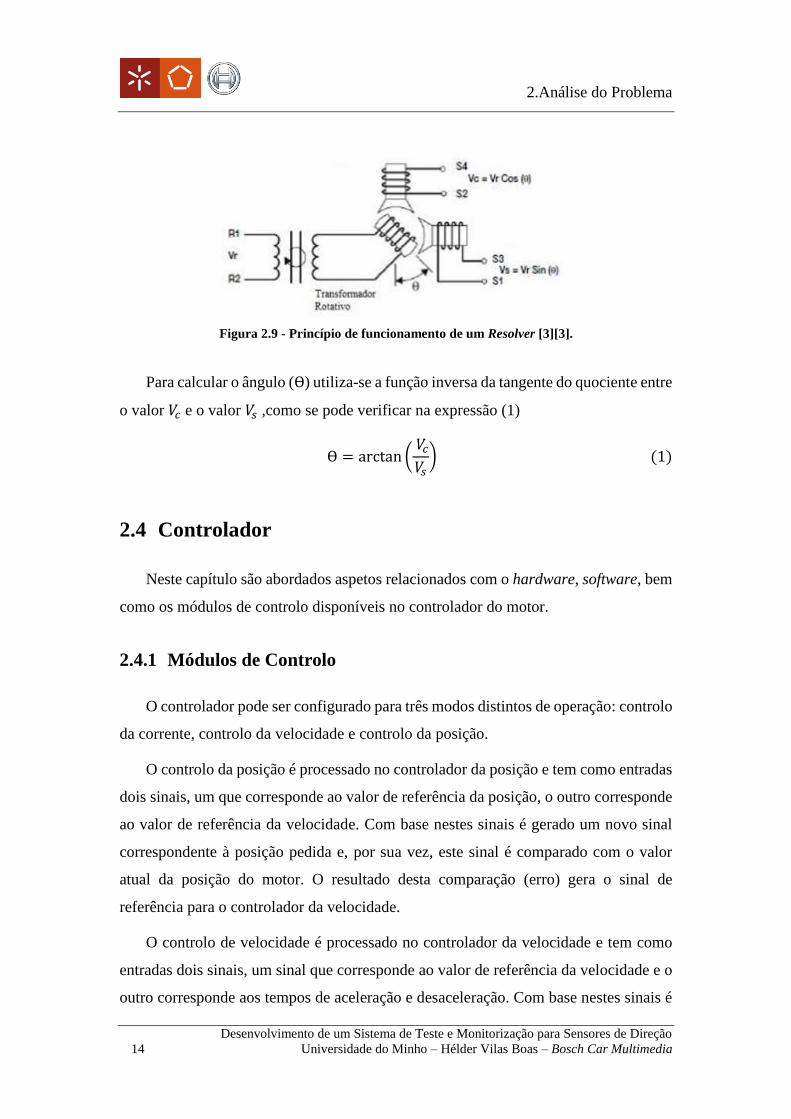
O modo de funcionamento de um Resolver tem por base o princípio do transformador
e possui um arranjo de três enrolamentos. O sinal de referência é ligado ao rotor através
de um transformador, permitindo que o enrolamento de referência rode à velocidade do
veio. Os outros dois enrolamentos encontram-se desfasados 90 graus mecânicos entre
eles, como se pode verificar na Figura 2.9. Ao rodar o enrolamento de referência é
induzida tensão nos outros dois enrolamentos e os sinais de saída destes são
posteriormente ligados a um amplificador, obtendo-se, desta forma, a posição e
velocidade do motor [3].
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
14 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 2.9 - Princípio de funcionamento de um Resolver [3][3].
Para calcular o ângulo (Ɵ) utiliza-se a função inversa da tangente do quociente entre
o valor 𝑉𝑐 e o valor 𝑉𝑠 ,como se pode verificar na expressão (1)
Ɵ = arctan ( 𝑉𝑐
𝑉𝑠) (1)
2.4 Controlador
Neste capítulo são abordados aspetos relacionados com o hardware, software, bem
como os módulos de controlo disponíveis no controlador do motor.
2.4.1 Módulos de Controlo
O controlador pode ser configurado para três modos distintos de operação: controlo
da corrente, controlo da velocidade e controlo da posição.
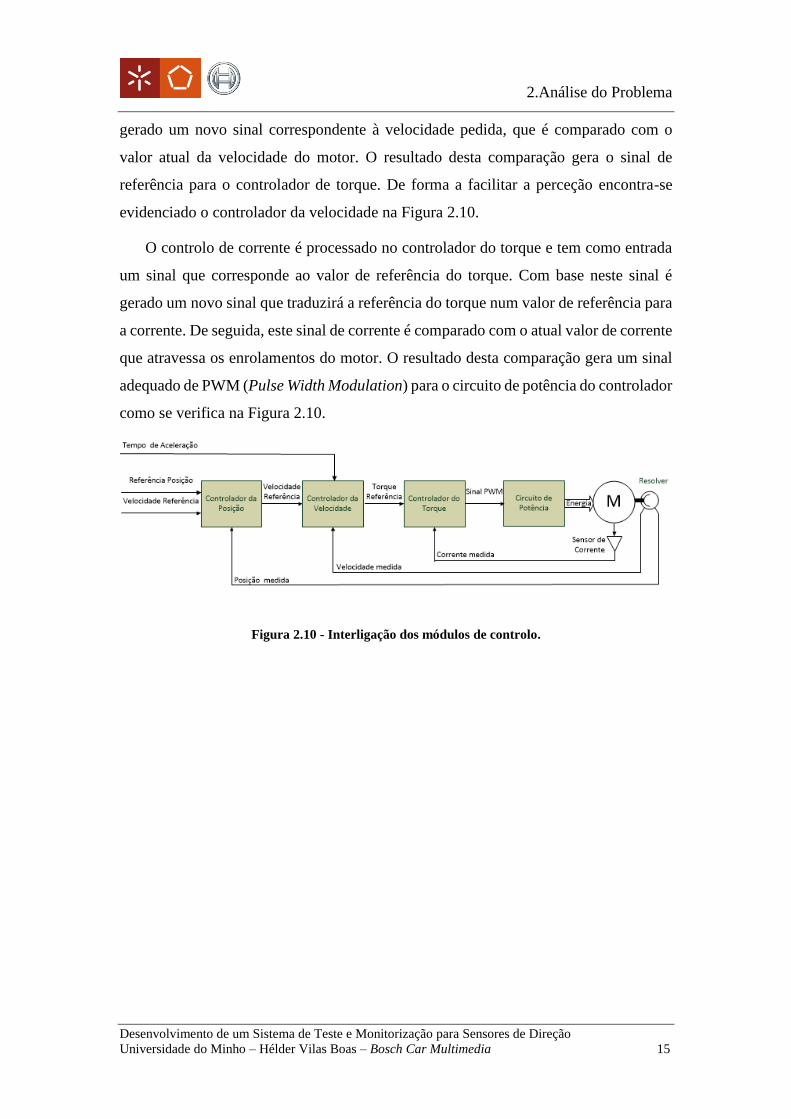
O controlo da posição é processado no controlador da posição e tem como entradas
dois sinais, um que corresponde ao valor de referência da posição, o outro corresponde
ao valor de referência da velocidade. Com base nestes sinais é gerado um novo sinal
correspondente à posição pedida e, por sua vez, este sinal é comparado com o valor
atual da posição do motor. O resultado desta comparação (erro) gera o sinal de
referência para o controlador da velocidade.
O controlo de velocidade é processado no controlador da velocidade e tem como
entradas dois sinais, um sinal que corresponde ao valor de referência da velocidade e o
outro corresponde aos tempos de aceleração e desaceleração. Com base nestes sinais é
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 15
gerado um novo sinal correspondente à velocidade pedida, que é comparado com o
valor atual da velocidade do motor. O resultado desta comparação gera o sinal de
referência para o controlador de torque. De forma a facilitar a perceção encontra-se
evidenciado o controlador da velocidade na Figura 2.10.
O controlo de corrente é processado no controlador do torque e tem como entrada
um sinal que corresponde ao valor de referência do torque. Com base neste sinal é
gerado um novo sinal que traduzirá a referência do torque num valor de referência para
a corrente. De seguida, este sinal de corrente é comparado com o atual valor de corrente
que atravessa os enrolamentos do motor. O resultado desta comparação gera um sinal
adequado de PWM (Pulse Width Modulation) para o circuito de potência do controlador
como se verifica na Figura 2.10.
Figura 2.10 - Interligação dos módulos de controlo.

2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
16 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
2.4.2 Hardware
O hardware do controlador disponibiliza os conetores de entrada e saída apresentados na
Figura 2.11. A correspondência dos conetores está apresentada na Tabela 2.4.
Tabela 2.4 - Interface do hardware do controlador.
Figura 2.11 - Interface do hardware do controlador [5].
O conetor X1 permite a alimentação de todo o controlador, tanto para o circuito de
potência como para o circuito de controlo. No capítulo 7. Apêndices encontram-se
apresentadas as seguintes tabelas: Tabela 7.2, referente aos dados técnicos do
controlador e Tabela 7.3, referente aos requisitos da fonte de alimentação externa. Por
fim, o conetor X1, disponibiliza terminais para colocar uma resistência de regeneração
adicional para a travagem dinâmica. A resistência de regeneração permite dissipar
potência do barramento de tensão DC durante as desacelerações do motor. Quando
ocorre uma sobretensão no barramento de tensão DC a resistência é automaticamente
ligada bem como o Led “DB on”. O controlador utilizado já tem uma resistência interna
de 90 Ω e 400W [5].
No conector X3 encontram-se as entradas e saídas tanto analógicas como digitais
do controlador. Este conetor também disponibiliza os terminais para ligar os sinais de
controlo que permitem habilitar por hardware o controlador.
Interface do Hardware
X1 Alimentação
X3 Entrada e Saída de sinais
X6 RS232 / RS485
X7 Saída do Encoder
X8 Interface do Resolver do Motor
X9 Master Encoder
SW Switches
DB on Led Dinamic Break
Display Display de 7 segmentos
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 17
O terminal X6 é um conetor de 9 pinos do tipo D que permite ligar um porto de
comunicação RS232 ou RS485. As configurações por defeito da comunicação RS232
encontram-se apresentadas na Tabela 7.4.
O conetor X8 é um terminal de 9 pinos do tipo D e é o interface com o Resolver
interno do motor, cujos terminais são os da Figura 2.9. O conetor X7 é um terminal
auxiliar de saída do Encoder/Resolver interno do motor e pode ser utilizado para dar
feedback a outro controlador, utilizando o conetor X9 que é um terminal auxiliar de
entrada do Encoder/Resolver interno de um motor.
O terminal SW, ao lado do display de 7 segmentos, é composto por dez switches
on/off, que permitem algumas configurações por hardware. Neste salienta-se o switch
8 que corresponde ao Enable do Controlador e deve estar sempre na posição on.
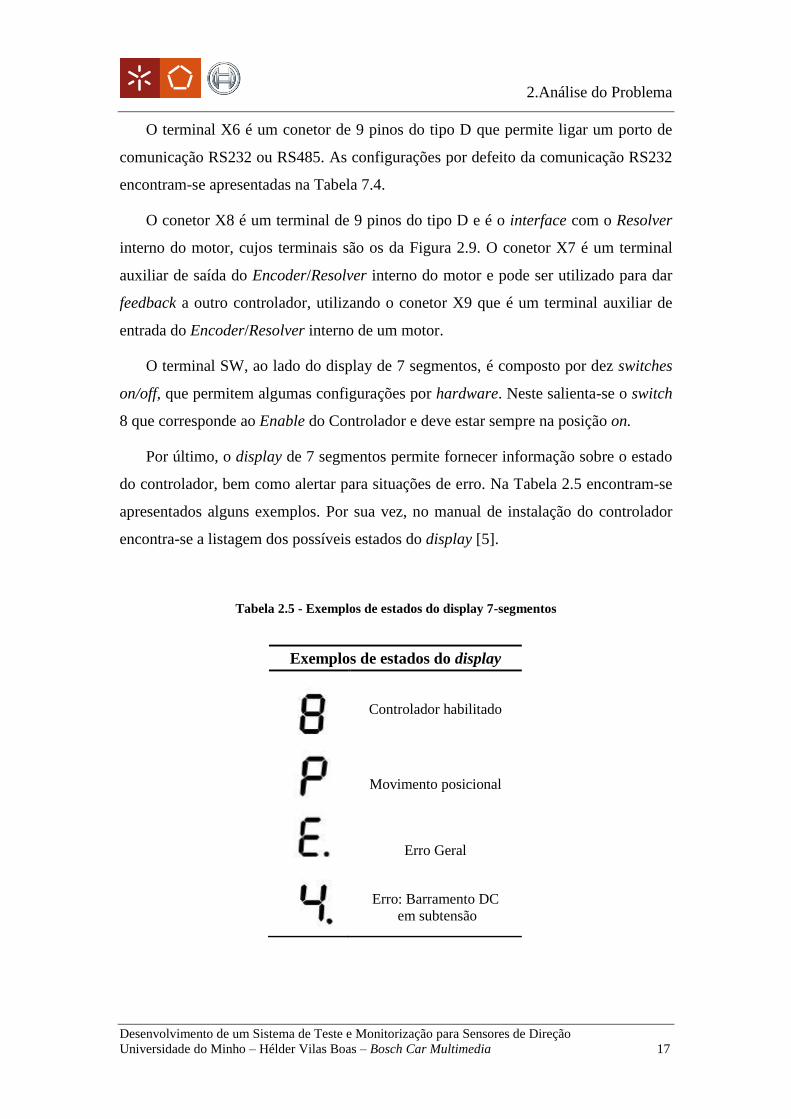
Por último, o display de 7 segmentos permite fornecer informação sobre o estado
do controlador, bem como alertar para situações de erro. Na Tabela 2.5 encontram-se
apresentados alguns exemplos. Por sua vez, no manual de instalação do controlador
encontra-se a listagem dos possíveis estados do display [5].
Tabela 2.5 - Exemplos de estados do display 7-segmentos
Exemplos de estados do display
Controlador habilitado
Movimento posicional
Erro Geral
Erro: Barramento DC
em subtensão
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
18 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
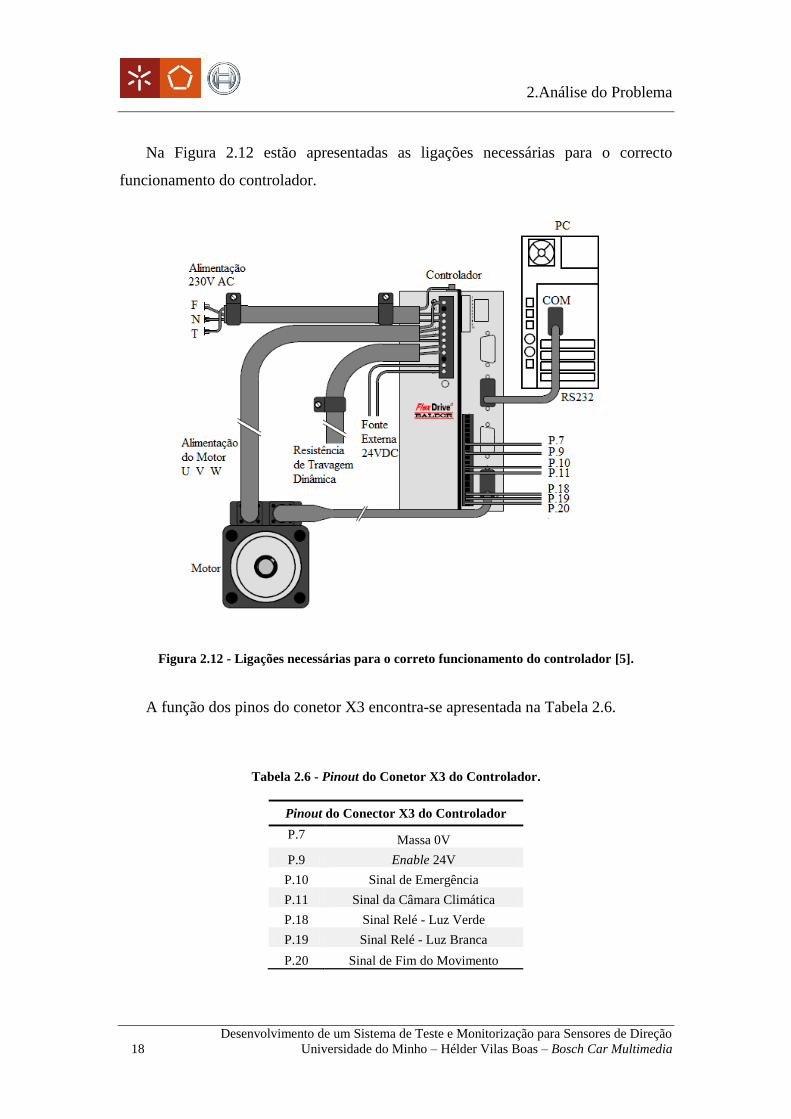
Na Figura 2.12 estão apresentadas as ligações necessárias para o correcto
funcionamento do controlador.
Figura 2.12 - Ligações necessárias para o correto funcionamento do controlador [5].
A função dos pinos do conetor X3 encontra-se apresentada na Tabela 2.6.
Tabela 2.6 - Pinout do Conetor X3 do Controlador.
Pinout do Conector X3 do Controlador
P.7 Massa 0V
P.9 Enable 24V
P.10 Sinal de Emergência
P.11 Sinal da Câmara Climática
P.18 Sinal Relé - Luz Verde
P.19 Sinal Relé - Luz Branca
P.20 Sinal de Fim do Movimento

2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 19
2.4.3 Software
O controlador é programado utilizando a plataforma MintMT (Motion INTeligence
Multi-Tasking) é uma linguagem estruturada de BASIC, projetada e otimizada como
principal propósito de tornar mais simples a programação de aplicações de controlo de
movimentos. Das várias funcionalidades do MintMT destacam-se o controlo da posição,
velocidade, torque e sincronização de múltiplos eixos.
O ambiente MintMT é composto por dois componentes principais: o WorkBench,
que é executado no computador anfitrião, e o firmware, que é executado no controlador.
O primeiro consiste num ambiente integrado de desenvolvimento, usado para
configurar, programar o controlador e comandar o motor. O firmware é baseado numa
Biblioteca de Movimentos (Mint Motion Library - MML).
A comunicação entre aplicações e o controlador é efetuada através de controlos
Mint ActiveX, que são instalados no PC juntamente com a instalação do WorkBench.
Estes controlos possibilitam a comunicação com a camada de Interface Immediate
Command Mode (ICM) através de tramas de dados. Assim, a camada ICM estabelece
o interface entre os controlos ActiveX e a MML [4] [5]. Na Figura 2.13 encontra-se
apresentada a arquitetura do software do controlador e a sua interligação com uma
aplicação no computador.
Figura 2.13 - Arquitetura do Software Mint.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
20 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
2.5 Câmara Climática
Uma câmara climática permite criar diferentes ambientes climáticos através da
variação das condições de temperatura e humidade. Neste projeto em particular, a
câmara climática permitirá simular os diversos ambientes aos quais um sensor pode
estar sujeito durante o seu período de utilização num veículo. Na Figura 2.14 e na Figura
2.15 é possível ver o aspeto exterior e interior, respetivamente, da câmara climática
utilizada.
Figura 2.15 - Aspeto interior da Câmara.
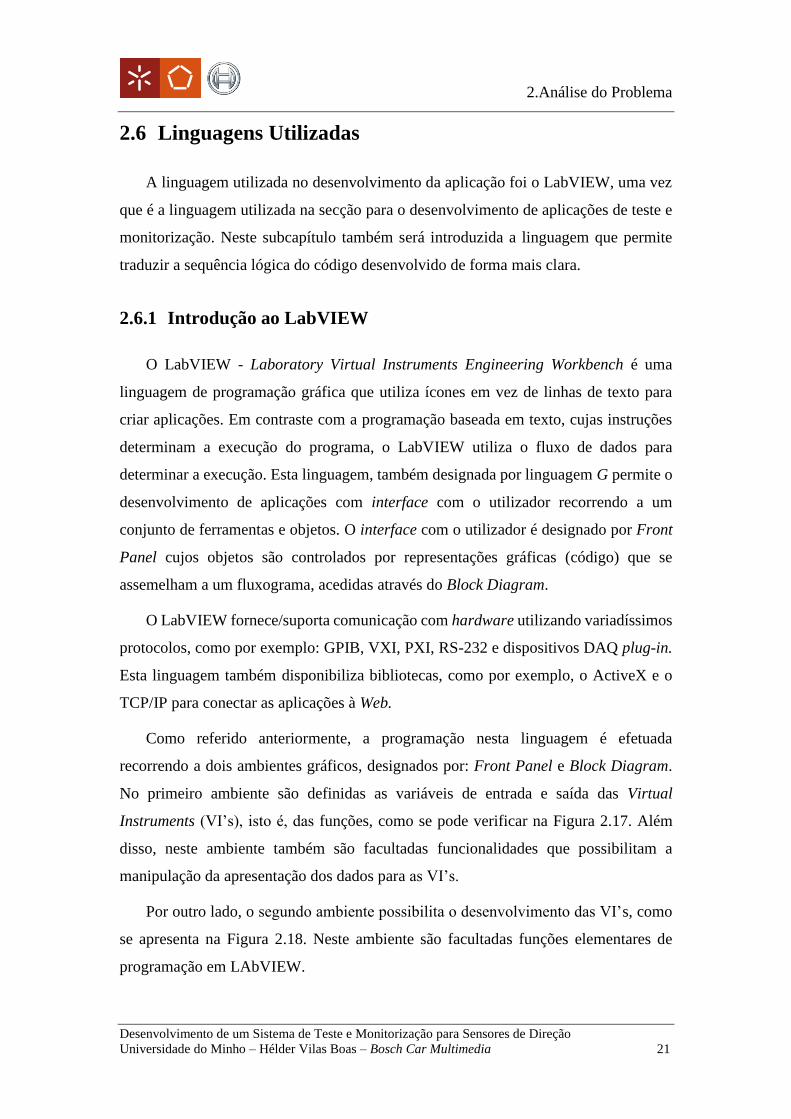
A conjugação do desgaste provocado pelo motor com as condições climáticas
criadas pela câmara permitem simular aproximadamente 15 anos de utilização do
sensor, em apenas alguns dias. Na Figura 2.16 encontra-se apresentado um perfil de
temperatura aplicado num dos testes de fiabilidade. No gráfico verifica-se que a
temperatura varia entre -40°C e 85°C ao longo de aproximadamente 960 horas. O tempo
total encontra-se dividido em 26 blocos, cada um com condições específicas. O perfil é
criado e editado através de uma aplicação e de seguida é enviado para a câmara. Durante
a execução do teste a câmara devolve feedback da temperatura e da humidade à mesma
aplicação.
Figura 2.14 - Aspeto exterior da Câmara.
Figura 2.16 - Perfil de temperatura criado pela Câmara Climática.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 21
2.6 Linguagens Utilizadas
A linguagem utilizada no desenvolvimento da aplicação foi o LabVIEW, uma vez
que é a linguagem utilizada na secção para o desenvolvimento de aplicações de teste e
monitorização. Neste subcapítulo também será introduzida a linguagem que permite
traduzir a sequência lógica do código desenvolvido de forma mais clara.
2.6.1 Introdução ao LabVIEW
O LabVIEW - Laboratory Virtual Instruments Engineering Workbench é uma
linguagem de programação gráfica que utiliza ícones em vez de linhas de texto para
criar aplicações. Em contraste com a programação baseada em texto, cujas instruções
determinam a execução do programa, o LabVIEW utiliza o fluxo de dados para
determinar a execução. Esta linguagem, também designada por linguagem G permite o
desenvolvimento de aplicações com interface com o utilizador recorrendo a um
conjunto de ferramentas e objetos. O interface com o utilizador é designado por Front
Panel cujos objetos são controlados por representações gráficas (código) que se
assemelham a um fluxograma, acedidas através do Block Diagram.
O LabVIEW fornece/suporta comunicação com hardware utilizando variadíssimos
protocolos, como por exemplo: GPIB, VXI, PXI, RS-232 e dispositivos DAQ plug-in.
Esta linguagem também disponibiliza bibliotecas, como por exemplo, o ActiveX e o
TCP/IP para conectar as aplicações à Web.
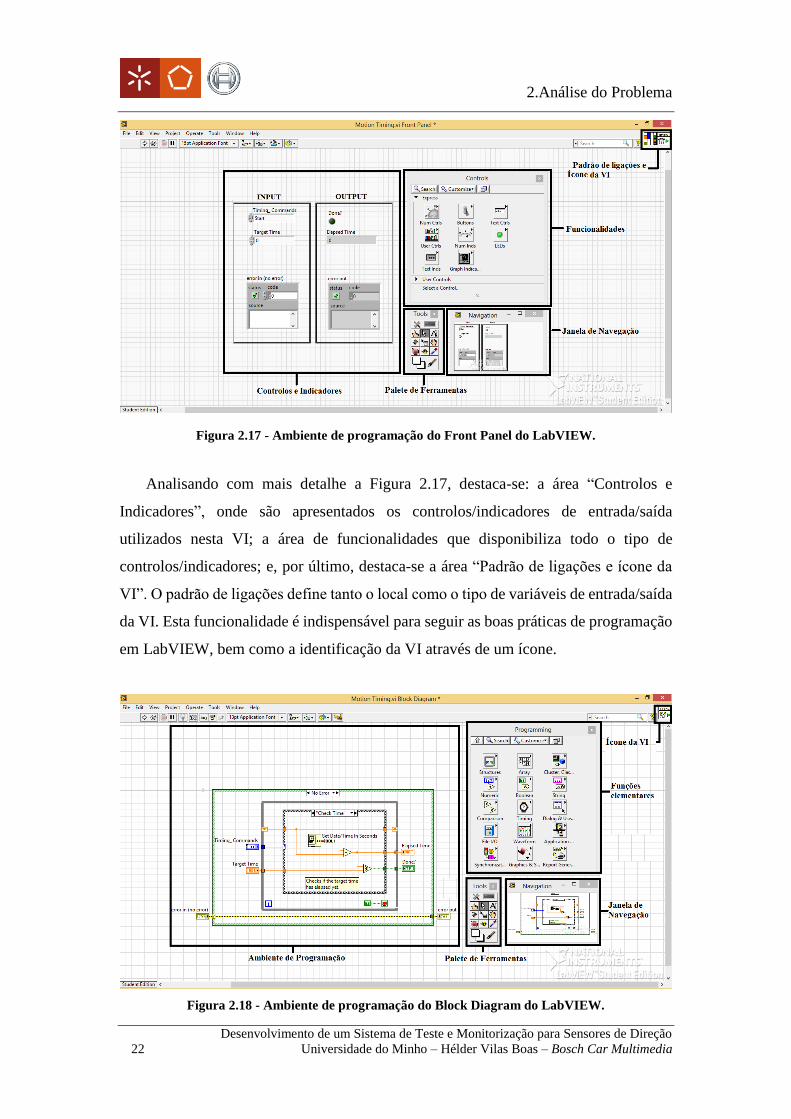
Como referido anteriormente, a programação nesta linguagem é efetuada
recorrendo a dois ambientes gráficos, designados por: Front Panel e Block Diagram.
No primeiro ambiente são definidas as variáveis de entrada e saída das Virtual
Instruments (VI’s), isto é, das funções, como se pode verificar na Figura 2.17. Além
disso, neste ambiente também são facultadas funcionalidades que possibilitam a
manipulação da apresentação dos dados para as VI’s.
Por outro lado, o segundo ambiente possibilita o desenvolvimento das VI’s, como
se apresenta na Figura 2.18. Neste ambiente são facultadas funções elementares de
programação em LAbVIEW.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
22 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Analisando com mais detalhe a Figura 2.17, destaca-se: a área “Controlos e
Indicadores”, onde são apresentados os controlos/indicadores de entrada/saída
utilizados nesta VI; a área de funcionalidades que disponibiliza todo o tipo de
controlos/indicadores; e, por último, destaca-se a área “Padrão de ligações e ícone da
VI”. O padrão de ligações define tanto o local como o tipo de variáveis de entrada/saída
da VI. Esta funcionalidade é indispensável para seguir as boas práticas de programação
em LabVIEW, bem como a identificação da VI através de um ícone.
Figura 2.18 - Ambiente de programação do Block Diagram do LabVIEW.
Figura 2.17 - Ambiente de programação do Front Panel do LabVIEW.

2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 23
Esta linguagem permite o desenvolvimento de aplicações de registo e aquisição de
dados, controlo de instrumentação, análise de medições e apresentação de resultados.
Além disso permite criar executáveis stand-alone e bibliotecas partilhadas, tais como
DLL’s. Assim, em função do propósito da aplicação deve ser escolhida a arquitetura,
mais adequada, de forma a atingir melhores resultados. Na Figura 2.19 encontra-se
esquematizado um fluxograma guia para a escolha da arquitetura.
Figura 2.19 - Guia para a escolha da arquitetura de uma aplicação [8].
A escolha da arquitetura é de extrema importância, por isso, e de forma a efetuar
uma escolha prudente é necessário ter em atenção os requisitos da aplicação.

2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
24 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
2.6.2 Introdução ao SDL
O Specification & Description Language (SDL) é uma linguagem com o propósito
de ser inequívoca na especificação, descrição da estrutura e comportamento, bem como,
nos dados de um sistema. O termo especificação na ótica desta linguagem traduz-se na
descrição dos requisitos comportamentais do sistema em questão. Por outro lado, o
termo descrição traduz-se na real descrição do comportamento do sistema após a sua
implementação. A estrutura da linguagem SDL é constituída essencialmente por três
tipos de elementos, designados por: sistema, bloco e processo, como se pode ver na
Figura 2.20. A comunicação entre os elementos é efetuada através de sinais. O sistema
representa o mais alto nível de abstração e é composto por um ou mais blocos. Os blocos
podem ser compostos por vários processos, bem como por outros blocos. Os processos
são essencialmente compostos por máquinas de estado, mas também podem ser
compostos por outros processos. É nos processos que se encontra definido a
comportamento dinâmico do sistema.
Figura 2.20 - Arquitetura da linguagem SDL.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 25
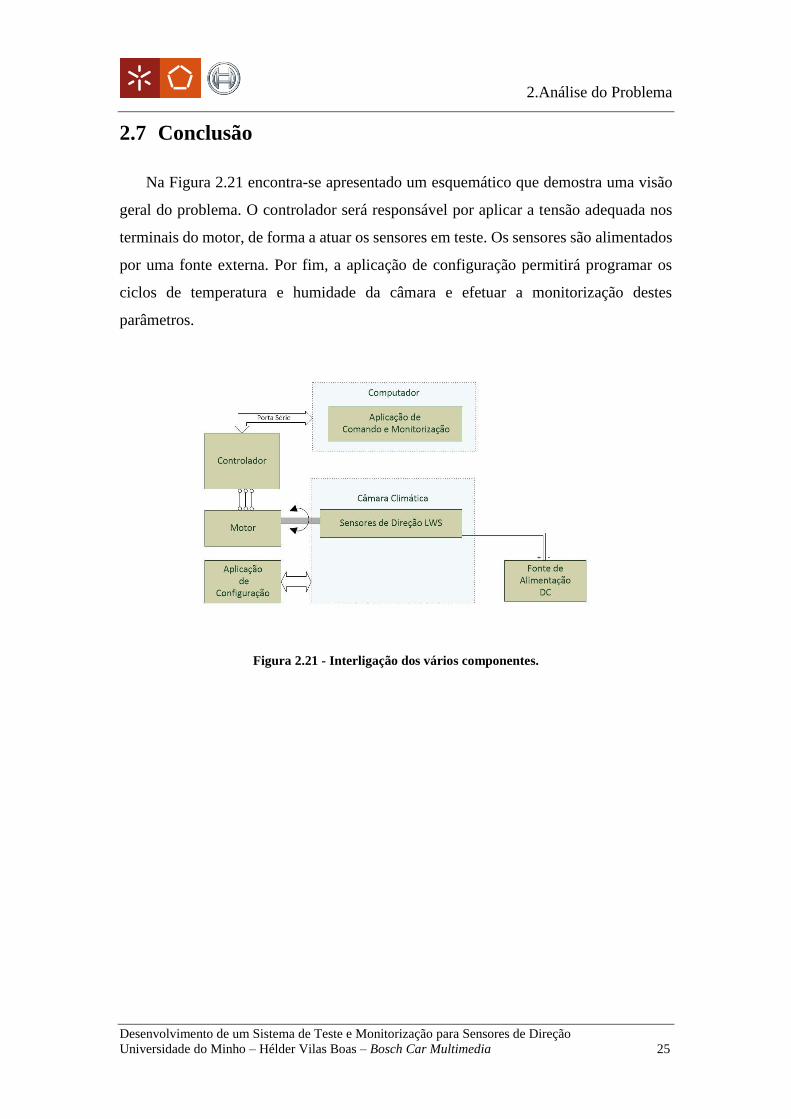
2.7 Conclusão
Na Figura 2.21 encontra-se apresentado um esquemático que demostra uma visão
geral do problema. O controlador será responsável por aplicar a tensão adequada nos
terminais do motor, de forma a atuar os sensores em teste. Os sensores são alimentados
por uma fonte externa. Por fim, a aplicação de configuração permitirá programar os
ciclos de temperatura e humidade da câmara e efetuar a monitorização destes
parâmetros.
Figura 2.21 - Interligação dos vários componentes.
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 27
3. Requisitos da Aplicação
Este capítulo tem como principal intuito detalhar os requisitos da aplicação, para
isso, e de forma a realizar uma análise mais pormenorizada, são inicialmente abordados
os testes de fiabilidade que se pretendem efetuar a partir da mesma. Posteriormente
apresentam-se aspetos relacionados com o user interface, e por fim, abordam-se
diferentes comportamentos/modos de operação que a aplicação deverá suportar em
função do tipo de teste requerido.
3.1 Testes de Fiabilidade
Os testes de fiabilidade efetuados aos sensores de ângulo de direção são divididos
em dois grupos: Testes Climáticos e Testes Mecânico-Dinâmicos. Os testes do primeiro
grupo são essencialmente testes que permitem monitorar os sinais fornecidos pelos
sensores quando sujeitos a alterações climáticas. Os Testes Mecânico-Dinâmicos
permitem testar o comportamento dos sensores quando os mesmos são sujeitos a
movimentos, vibrações e desgaste das partes móveis dos sensores.
Um dos testes que a aplicação deverá permitir efetuar é um Teste Climático
designado por Temperature Cycling. Neste teste o hub dos sensores é fixado à sua
própria estrutura e estes são submetidos a variações climáticas, em simultâneo
monitoriza-se os sinais disponibilizados pelos sensores através da aplicação. Um outro
tipo de teste é o Teste Mecânico-Dinâmico de desgaste, designado por Operational
Endurance Test, que consiste em aplicar movimento ao hub do sensor de forma a
provocar um desgaste. Neste teste, também, são alteradas as condições climáticas
através da câmara climática e, por fim, é efetuada a monitorização através da aplicação.
O principal objetivo deste teste é simular o período operacional do sensor em apenas
alguns dias. Na Tabela 3.1 são apresentados alguns requisitos deste tipo de teste.
3.Requisitos da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
28 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
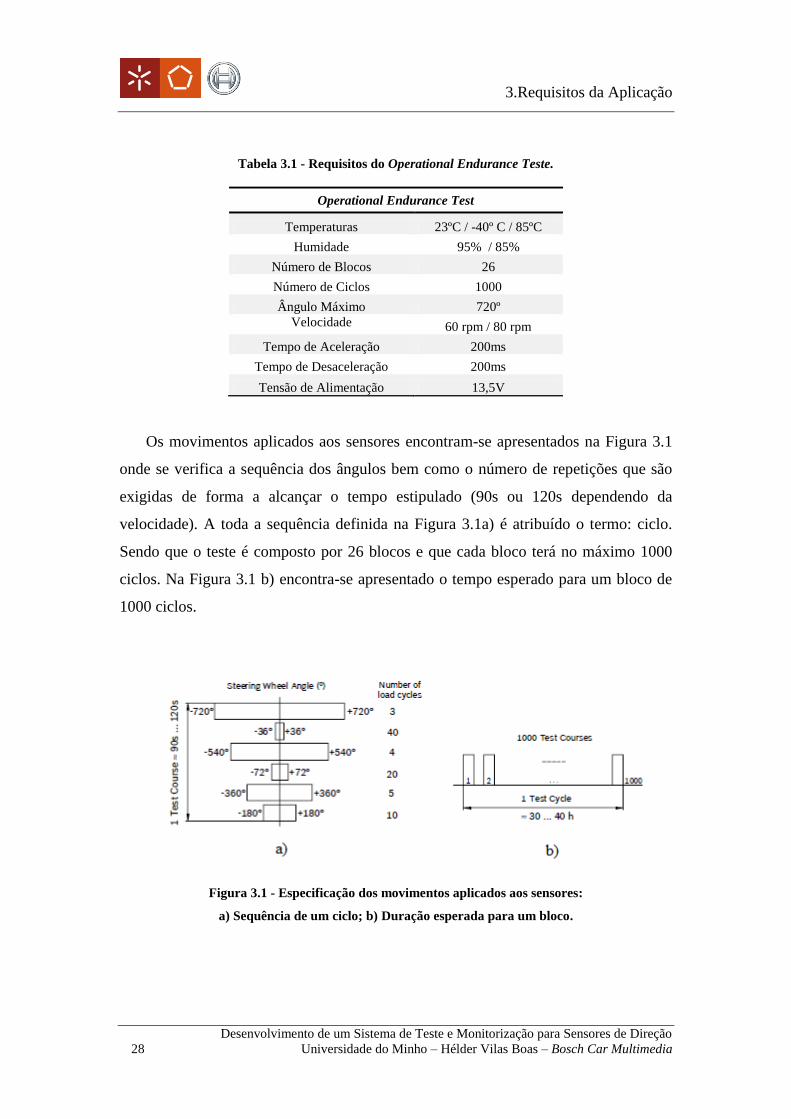
Tabela 3.1 - Requisitos do Operational Endurance Teste.
Operational Endurance Test
Temperaturas 23ºC / -40º C / 85ºC
Humidade 95% / 85%
Número de Blocos 26
Número de Ciclos 1000
Ângulo Máximo 720º
Velocidade 60 rpm / 80 rpm
Tempo de Aceleração 200ms
Tempo de Desaceleração 200ms
Tensão de Alimentação 13,5V
Os movimentos aplicados aos sensores encontram-se apresentados na Figura 3.1
onde se verifica a sequência dos ângulos bem como o número de repetições que são
exigidas de forma a alcançar o tempo estipulado (90s ou 120s dependendo da
velocidade). A toda a sequência definida na Figura 3.1a) é atribuído o termo: ciclo.
Sendo que o teste é composto por 26 blocos e que cada bloco terá no máximo 1000
ciclos. Na Figura 3.1 b) encontra-se apresentado o tempo esperado para um bloco de
1000 ciclos.
Figura 3.1 - Especificação dos movimentos aplicados aos sensores:
a) Sequência de um ciclo; b) Duração esperada para um bloco.

2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 29
3.2 Interface com o Utilizador
A Aplicação deverá ter um interface amigável e intuitivo para o operador, e
possibilitar funcionalidades para a configuração e edição dos programas, bem como, a
paragem do teste sempre que necessário. Toda a informação importante sobre o teste
em execução deve ser apresentada de forma clara e em tempo real.
Relativamente ao menu de edição, o operador deve ter a possibilidade de abrir
ficheiros de programas já guardados, e conseguir edita-los de forma a satisfazer os
requisitos do teste. Na eventualidade de não ser possível abrir um ficheiro todos os
campos devem ser preenchidos com dados por defeito, de forma a evitar situações que
comprometam o bom funcionamento de todo o hardware envolvido, assim como o bom
funcionamento da aplicação. Concluída a fase de edição o operador deve ter a
possibilidade de guardar o novo programa.
A arquitetura da aplicação deve prever três modos de operação: o comando do
motor, a aquisição de dados e o comando do motor conjugado com a aquisição de dados.
Durante a execução de um teste o operador deve ter acesso à informação sobre o
estado atual deste, nomeadamente, tempo decorrido, modo de operação e indicadores
caso ocorram erros no sistema, entre outros. Nos modos de operação de “aquisição” e
“comando e aquisição” a aplicação deve facultar informação gráfica relativa aos erros
dos sensores em teste, além disso, deve disponibilizar funcionalidades para uma análise
mais detalhada sobre a informação apresentada, nomeadamente ajustes nas escalas dos
eixos.
Também durante a execução do teste e em simultâneo com o user Interface a
aplicação deve registar em ficheiros todos os dados obtidos, de modo a que no final do
teste seja possível analisar qualquer período.
3.Requisitos da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
30 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
3.3 Modos de Operação
Em função do tipo de teste a efetuar aos sensores a aplicação deverá ter
comportamentos diferentes. De forma a abranger todos os testes são necessários três
modos: “Comando”, “Aquisição” e a combinação dos dois anteriores, isto é, “Comando
e Aquisição”. Assim, a aplicação deverá possibilitar um campo para escolher o modo
de operação do teste.
O modo de Comando é o mais simples e apenas se pretende que a aplicação
possibilite o comando do motor. Por outro lado, no modo de aquisição, a aplicação
deverá possibilitar a aquisição dos dados dos sensores, a monitorização e o registo em
ficheiros de todos os dados adquiridos. Por último no modo de aquisição e comando
pretende-se que a aplicação permita efetuar ambos os modos anteriores em simultâneo.
2.Análise do Problema
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 31
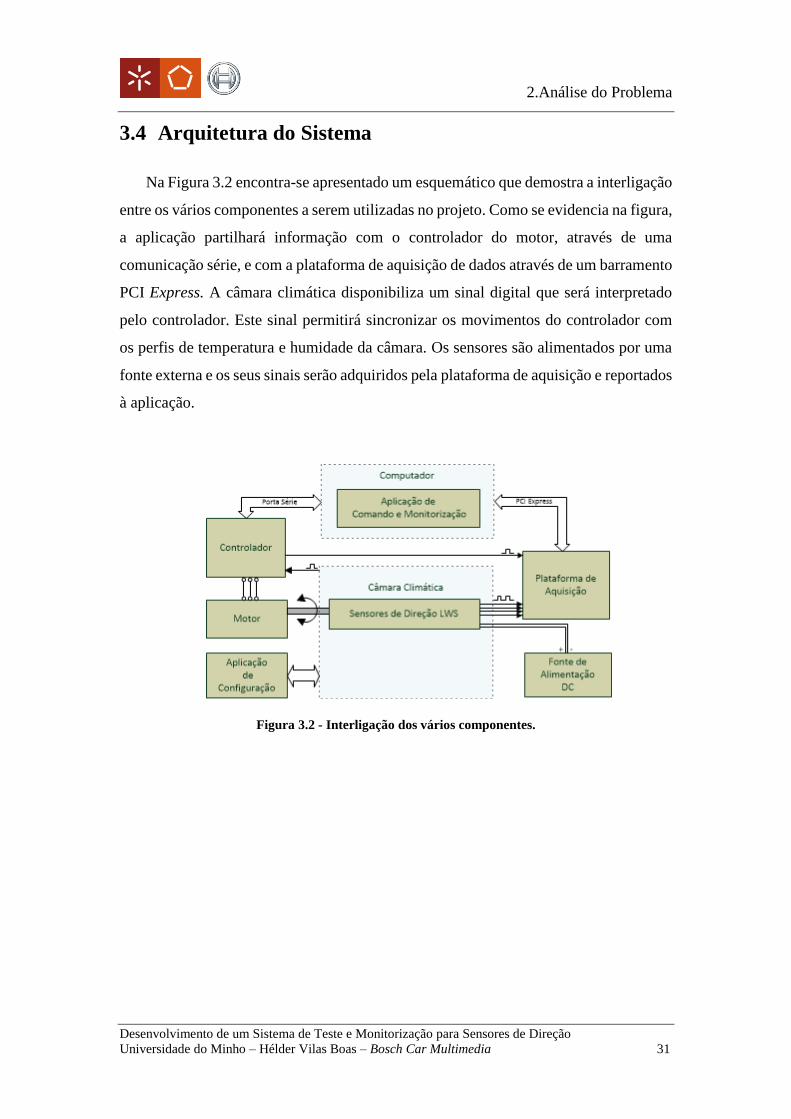
3.4 Arquitetura do Sistema
Na Figura 3.2 encontra-se apresentado um esquemático que demostra a interligação
entre os vários componentes a serem utilizadas no projeto. Como se evidencia na figura,
a aplicação partilhará informação com o controlador do motor, através de uma
comunicação série, e com a plataforma de aquisição de dados através de um barramento
PCI Express. A câmara climática disponibiliza um sinal digital que será interpretado
pelo controlador. Este sinal permitirá sincronizar os movimentos do controlador com
os perfis de temperatura e humidade da câmara. Os sensores são alimentados por uma
fonte externa e os seus sinais serão adquiridos pela plataforma de aquisição e reportados
à aplicação.
Figura 3.2 - Interligação dos vários componentes.

Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 33
4. Desenvolvimento da Aplicação
Neste capítulo é efetuada uma apresentação, com algum detalhe e de forma sucinta,
do desenvolvimento da aplicação. Este capítulo encontra-se subdividido em:
Arquitetura da Aplicação, Menu de Definições e Modos de Operação.
4.1 Arquitetura da Aplicação
Em função dos requisitos apresentados verifica-se que a aplicação não possui uma
sequência fixa de teste, sendo que, necessita responder a ações desencadeadas pelo
utilizador e terá bastante processamento de dados. Analisando a Figura 2.19 conclui-se
assim, que a melhor arquitetura para esta aplicação será Produtor/Consumidor com
eventos.
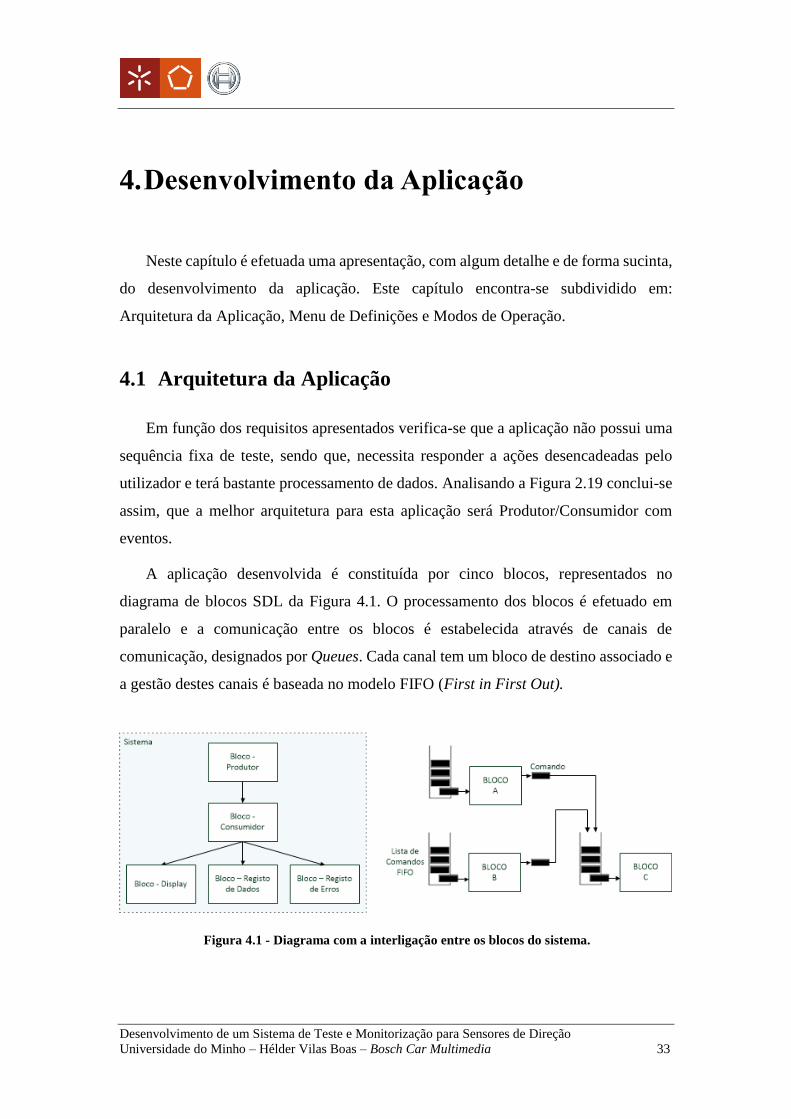
A aplicação desenvolvida é constituída por cinco blocos, representados no
diagrama de blocos SDL da Figura 4.1. O processamento dos blocos é efetuado em
paralelo e a comunicação entre os blocos é estabelecida através de canais de
comunicação, designados por Queues. Cada canal tem um bloco de destino associado e
a gestão destes canais é baseada no modelo FIFO (First in First Out).
Figura 4.1 - Diagrama com a interligação entre os blocos do sistema.
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
34 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
O “Bloco-Produtor” é responsável por interpretar os eventos, criados por ações do
utilizador, e proceder à criação de comandos que por sua vez serão transmitidos ao
“Bloco-Consumidor”, através do canal de comunicação. Por exemplo, caso o botão
“Settings” do menu de Interface com o utilizador seja pressionado, será gerado um
evento que é interpretado pelo “Bloco-Produtor”, que por sua vez, produzirá um
comando correspondente para o “Bloco-Consumidor”, que processará posteriormente
esse comando.
Devido ao contexto do problema, foi necessário criar duas flags: “Emergência” e
“Erro no Controlador”. A flag “Emergência” é ativada sempre que a botoneira de
emergência é pressionada. Esta ação gera uma interrupção no controlador com base
numa transição de estado da sua entrada digital associada à botoneira de emergência
(Figura 2.12 – Pino 10). Aquando desta situação a aplicação interromperá o normal
procedimento do teste e reportará esse estado ao operador. A nível elétrico, a botoneira
encontra-se ligada a um contactor que quando ativa abrirá os contactos que alimentam
o motor, desta forma é assegurado que o motor irá parar o movimento de qualquer das
formas. De forma análoga implementou-se a flag “Erro no Controlador”, cuja finalidade
consiste em reportar à aplicação qualquer tipo de erro que possa surgir no controlador
do motor, que colocará em causa o procedimento de teste. Existe uma lista de possíveis
erros fornecida pelo fabricante, a título de exemplo, podem surgir erros relacionados
com: o excesso de temperatura no motor, corrente consumida acima do estipulado ou
desconexão de uma das ligações do controlador. Quando uma destas situações, ou uma
análoga, surgir é gerada uma interrupção no controlador que reportará à aplicação o
respetivo erro no controlador. Da mesma forma, o procedimento de teste será
interrompido e o operador será notificado da situação. A função de monitorização
destas flags é atribuída ao “Bloco-Produtor”.
O “Bloco-Produtor” é composto por 7 processos. Por exemplo, na Figura 4.2
encontra-se ilustrado o processo “Botão Stop” inserido no “Bloco-Produtor”. Quando
o utilizador pressiona o botão “Stop” surge uma mensagem no ecrã questionando o
utilizador se realmente pretende parar o teste. Caso o utilizador confirme a paragem é
processada a instrução para limpar o buffer do canal e é produzido um comando “Stop”
para o “Bloco-Consumidor”.

4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 35
Figura 4.2 - Diagrama SDL do processo "Botão Stop".
O “Bloco-Consumidor” é o bloco mais complexo do sistema, uma vez que é
responsável por processar os comandos do “Bloco-Produtor”, bem como é responsável
pelo processo que permite a introdução das definições do teste e por todos os processos
que permitem a gestão da sequência de teste e ainda por criar comandos para os
restantes blocos. Este bloco encontra-se dividido num total de quinze processos onde
todos partilham dois Clusters de dados. Um Cluster relativo às definições do teste e
outro Cluster relativo ao estado do teste em si. Entende-se por Cluster um conjunto de
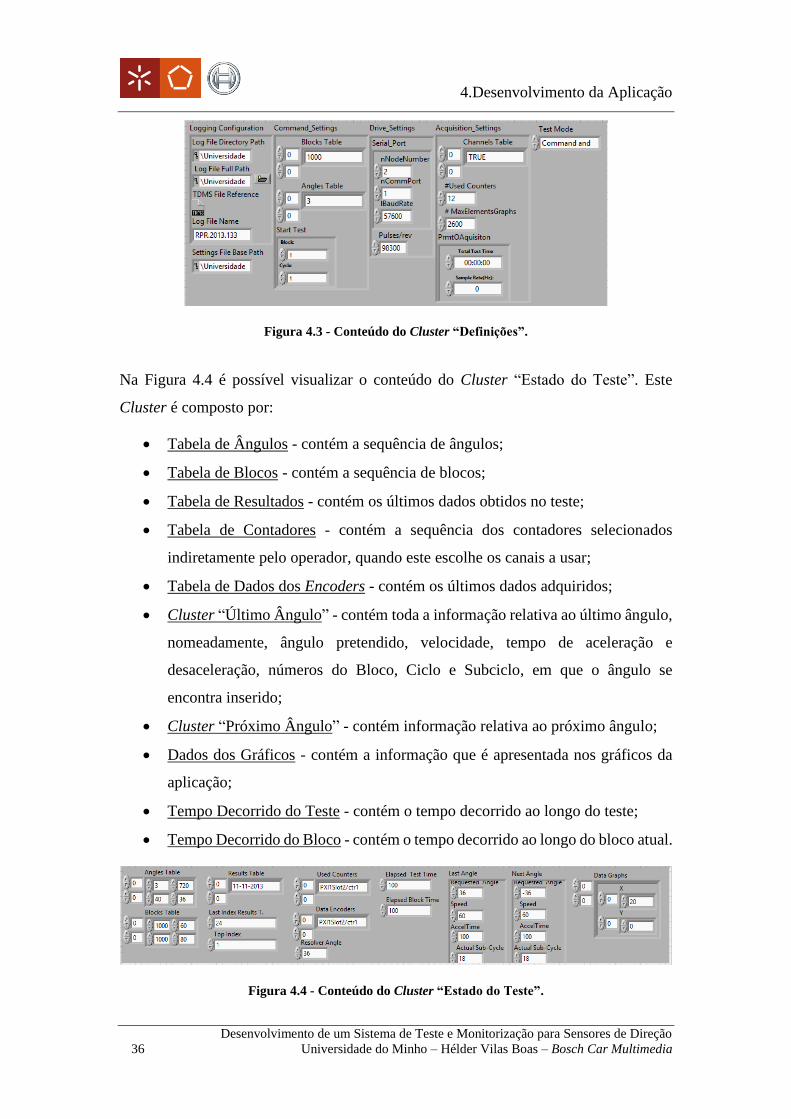
variáveis de qualquer tipo de dados. Na Figura 4.3 é possível visualizar o conteúdo do
Cluster “Definições”. Este Cluster encontra-se subdividido em quatro Clusters e em
mais dois campos:
Cluster ”Definições de Registo” - contém o nome, diretoria, caminho e
referência para os ficheiros de registo;
Cluster ”Definições de Comando” - contém a sequência de ângulos e
blocos, bem como o Bloco e o Ciclo iniciais do teste;
Cluster “Definições do Controlador” - contém um Cluster com os
parâmetros da porta série, bem como um campo relativo aos pulsos por
volta do veio acoplado ao motor, que movimenta os sensores;
Cluster ”Definições de Aquisição” - contém uma tabela com informação
relativa aos contadores usados, um campo para o número máximo de
elementos apresentados nos gráficos, um Cluster agrupando o tempo total
de teste e a frequência de aquisição para os testes onde apenas se efetua
aquisição;
Campo ” Caminho do Ficheiro de Configurações” - guarda o caminho para
o ficheiro onde é guardado todo o Cluster ” Definições”;
Campo “Modo de Operação do Teste” - guarda o modo de operação do
teste: pode ter três modos: “Comando”, “Comando e Aquisição” ou
“Aquisição”.
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
36 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 4.3 - Conteúdo do Cluster “Definições”.
Na Figura 4.4 é possível visualizar o conteúdo do Cluster “Estado do Teste”. Este
Cluster é composto por:
Tabela de Ângulos - contém a sequência de ângulos;
Tabela de Blocos - contém a sequência de blocos;
Tabela de Resultados - contém os últimos dados obtidos no teste;
Tabela de Contadores - contém a sequência dos contadores selecionados
indiretamente pelo operador, quando este escolhe os canais a usar;
Tabela de Dados dos Encoders - contém os últimos dados adquiridos;
Cluster “Último Ângulo” - contém toda a informação relativa ao último ângulo,
nomeadamente, ângulo pretendido, velocidade, tempo de aceleração e
desaceleração, números do Bloco, Ciclo e Subciclo, em que o ângulo se
encontra inserido;
Cluster “Próximo Ângulo” - contém informação relativa ao próximo ângulo;
Dados dos Gráficos - contém a informação que é apresentada nos gráficos da
aplicação;
Tempo Decorrido do Teste - contém o tempo decorrido ao longo do teste;
Tempo Decorrido do Bloco - contém o tempo decorrido ao longo do bloco atual.
Figura 4.4 - Conteúdo do Cluster “Estado do Teste”.
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 37
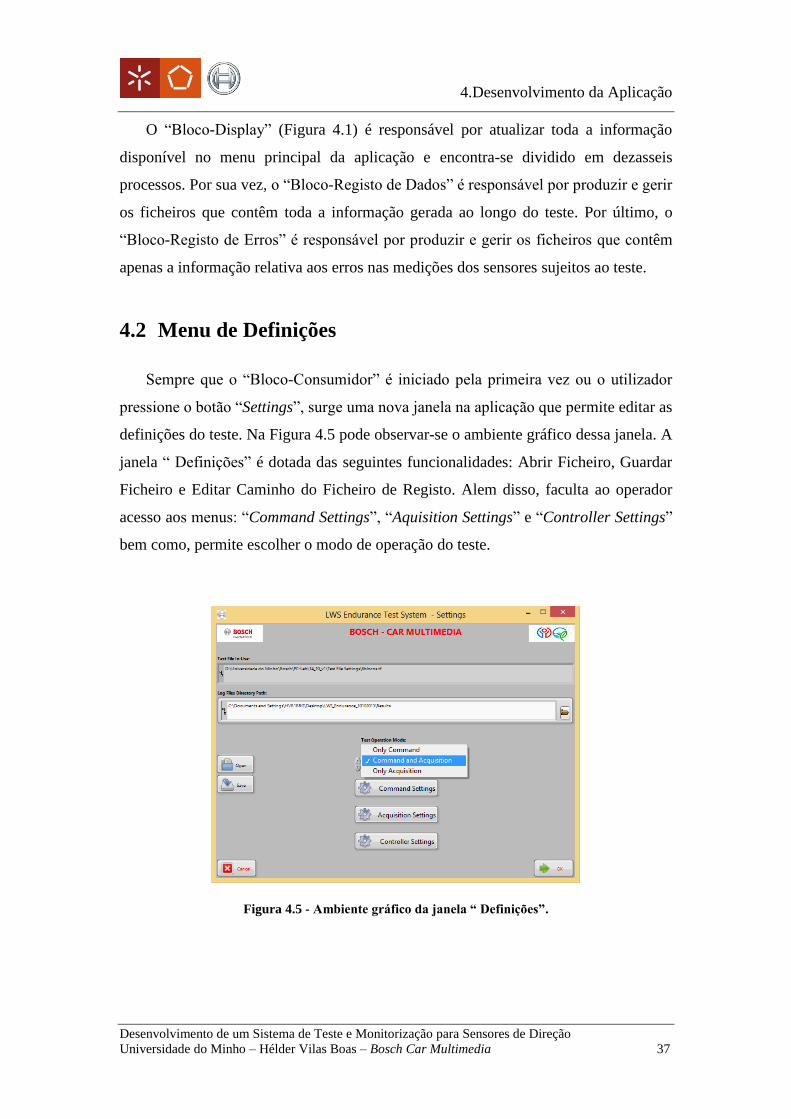
O “Bloco-Display” (Figura 4.1) é responsável por atualizar toda a informação
disponível no menu principal da aplicação e encontra-se dividido em dezasseis
processos. Por sua vez, o “Bloco-Registo de Dados” é responsável por produzir e gerir
os ficheiros que contêm toda a informação gerada ao longo do teste. Por último, o
“Bloco-Registo de Erros” é responsável por produzir e gerir os ficheiros que contêm
apenas a informação relativa aos erros nas medições dos sensores sujeitos ao teste.
4.2 Menu de Definições
Sempre que o “Bloco-Consumidor” é iniciado pela primeira vez ou o utilizador
pressione o botão “Settings”, surge uma nova janela na aplicação que permite editar as
definições do teste. Na Figura 4.5 pode observar-se o ambiente gráfico dessa janela. A
janela “ Definições” é dotada das seguintes funcionalidades: Abrir Ficheiro, Guardar
Ficheiro e Editar Caminho do Ficheiro de Registo. Alem disso, faculta ao operador
acesso aos menus: “Command Settings”, “Aquisition Settings” e “Controller Settings”
bem como, permite escolher o modo de operação do teste.
Figura 4.5 - Ambiente gráfico da janela “ Definições”.
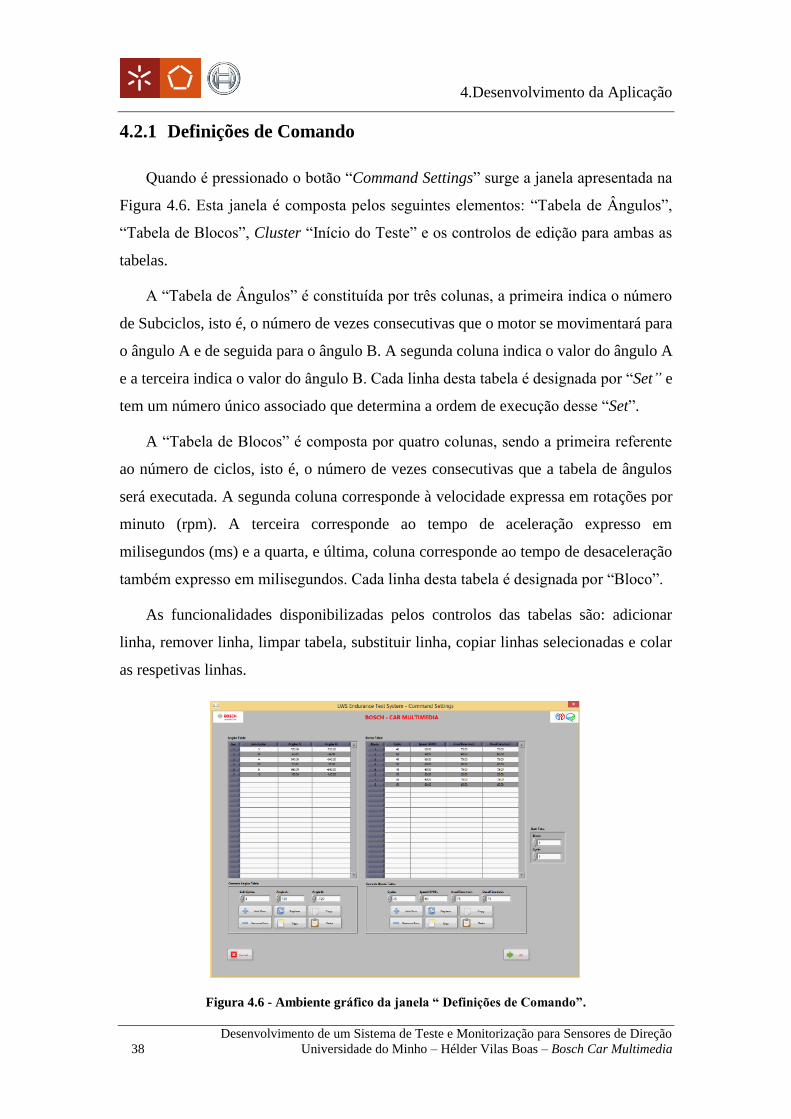
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
38 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
4.2.1 Definições de Comando
Quando é pressionado o botão “Command Settings” surge a janela apresentada na
Figura 4.6. Esta janela é composta pelos seguintes elementos: “Tabela de Ângulos”,
“Tabela de Blocos”, Cluster “Início do Teste” e os controlos de edição para ambas as
tabelas.
A “Tabela de Ângulos” é constituída por três colunas, a primeira indica o número
de Subciclos, isto é, o número de vezes consecutivas que o motor se movimentará para
o ângulo A e de seguida para o ângulo B. A segunda coluna indica o valor do ângulo A
e a terceira indica o valor do ângulo B. Cada linha desta tabela é designada por “Set” e
tem um número único associado que determina a ordem de execução desse “Set”.
A “Tabela de Blocos” é composta por quatro colunas, sendo a primeira referente
ao número de ciclos, isto é, o número de vezes consecutivas que a tabela de ângulos
será executada. A segunda coluna corresponde à velocidade expressa em rotações por
minuto (rpm). A terceira corresponde ao tempo de aceleração expresso em
milisegundos (ms) e a quarta, e última, coluna corresponde ao tempo de desaceleração
também expresso em milisegundos. Cada linha desta tabela é designada por “Bloco”.
As funcionalidades disponibilizadas pelos controlos das tabelas são: adicionar
linha, remover linha, limpar tabela, substituir linha, copiar linhas selecionadas e colar
as respetivas linhas.
Figura 4.6 - Ambiente gráfico da janela “ Definições de Comando”.
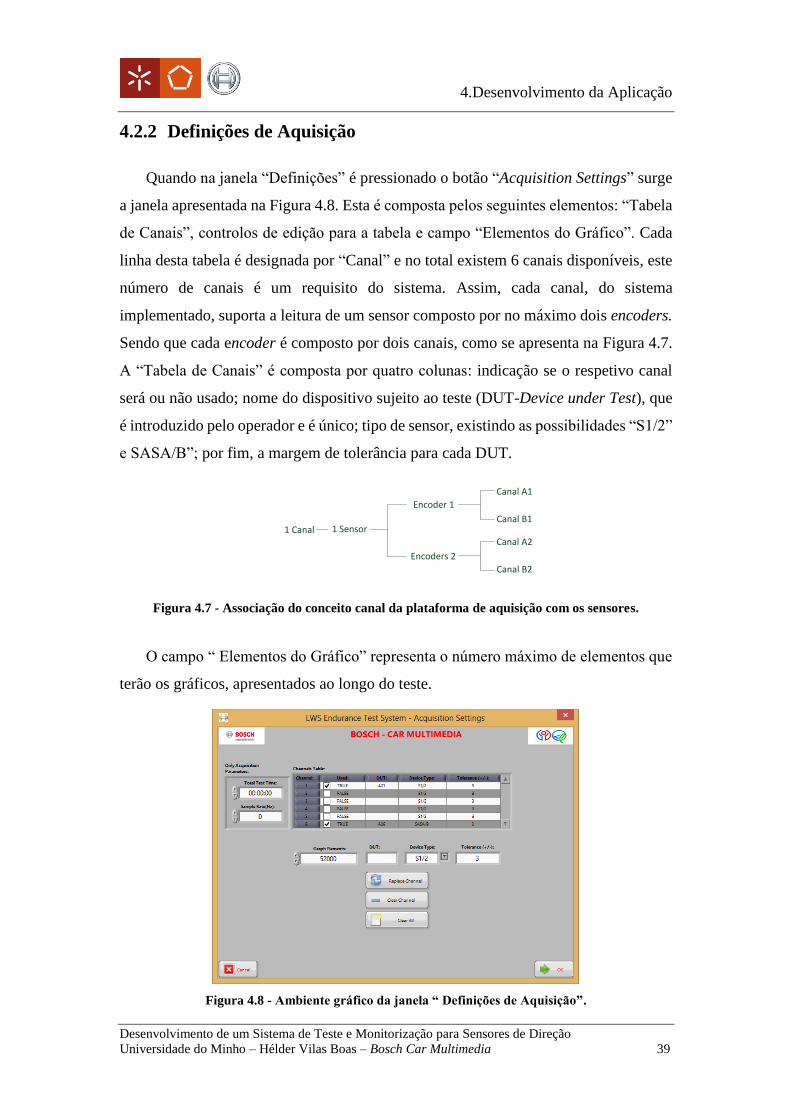
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 39
4.2.2 Definições de Aquisição
Quando na janela “Definições” é pressionado o botão “Acquisition Settings” surge
a janela apresentada na Figura 4.8. Esta é composta pelos seguintes elementos: “Tabela
de Canais”, controlos de edição para a tabela e campo “Elementos do Gráfico”. Cada
linha desta tabela é designada por “Canal” e no total existem 6 canais disponíveis, este
número de canais é um requisito do sistema. Assim, cada canal, do sistema
implementado, suporta a leitura de um sensor composto por no máximo dois encoders.
Sendo que cada encoder é composto por dois canais, como se apresenta na Figura 4.7.
A “Tabela de Canais” é composta por quatro colunas: indicação se o respetivo canal
será ou não usado; nome do dispositivo sujeito ao teste (DUT-Device under Test), que
é introduzido pelo operador e é único; tipo de sensor, existindo as possibilidades “S1/2”
e SASA/B”; por fim, a margem de tolerância para cada DUT.
1 Sensor 1 Canal
Encoder 1
Encoders 2
Canal B2
Canal A2
Canal B1
Canal A1
Figura 4.7 - Associação do conceito canal da plataforma de aquisição com os sensores.
O campo “ Elementos do Gráfico” representa o número máximo de elementos que
terão os gráficos, apresentados ao longo do teste.
Figura 4.8 - Ambiente gráfico da janela “ Definições de Aquisição”.
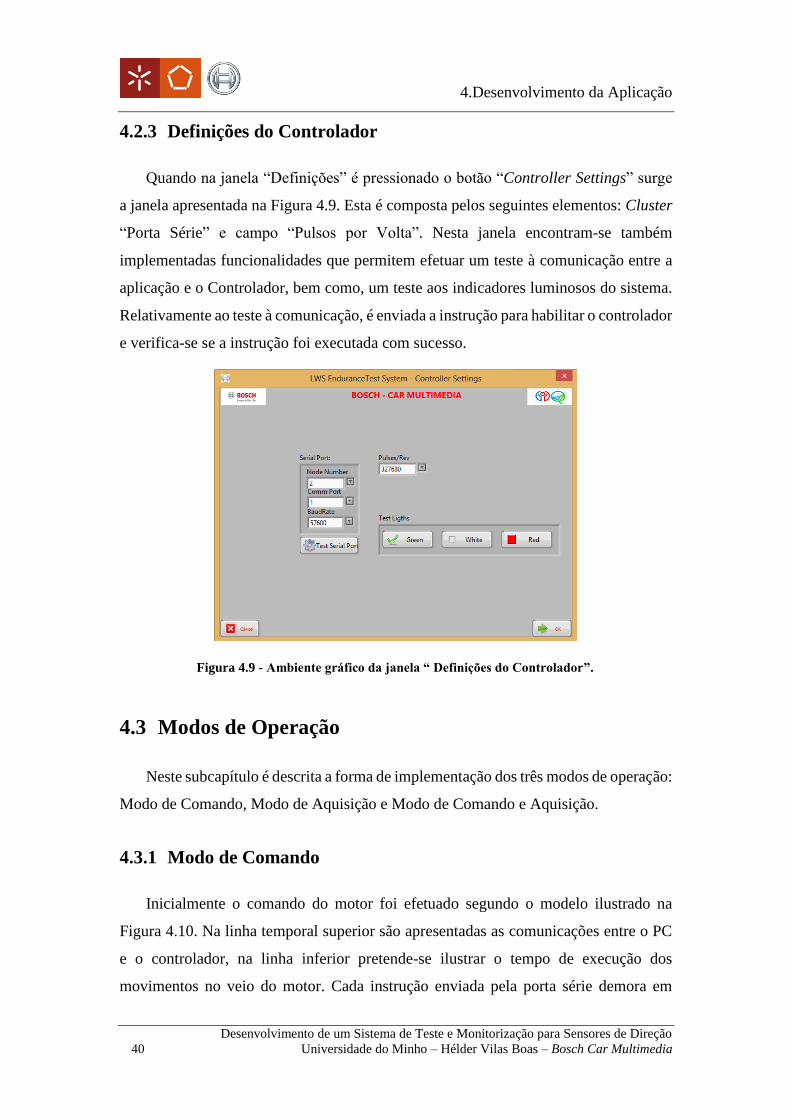
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
40 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
4.2.3 Definições do Controlador
Quando na janela “Definições” é pressionado o botão “Controller Settings” surge
a janela apresentada na Figura 4.9. Esta é composta pelos seguintes elementos: Cluster
“Porta Série” e campo “Pulsos por Volta”. Nesta janela encontram-se também
implementadas funcionalidades que permitem efetuar um teste à comunicação entre a
aplicação e o Controlador, bem como, um teste aos indicadores luminosos do sistema.
Relativamente ao teste à comunicação, é enviada a instrução para habilitar o controlador
e verifica-se se a instrução foi executada com sucesso.
Figura 4.9 - Ambiente gráfico da janela “ Definições do Controlador”.
4.3 Modos de Operação
Neste subcapítulo é descrita a forma de implementação dos três modos de operação:
Modo de Comando, Modo de Aquisição e Modo de Comando e Aquisição.
4.3.1 Modo de Comando
Inicialmente o comando do motor foi efetuado segundo o modelo ilustrado na
Figura 4.10. Na linha temporal superior são apresentadas as comunicações entre o PC
e o controlador, na linha inferior pretende-se ilustrar o tempo de execução dos
movimentos no veio do motor. Cada instrução enviada pela porta série demora em
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 41
média cerca de 15ms. Como se verifica na Figura 4.10, inicialmente é enviado para o
buffer de movimentos do controlador o primeiro ângulo, através da instrução “Load
Angle A” e de seguida é enviada a instrução que dá inicio ao movimento através do
comando Go. O motor inicia o movimento e quando este é concluído, é despoletada
uma interrupção na aplicação através do comando “Idle”, enviado pelo controlador. No
momento posterior efetua-se a leitura do Resolver do motor, de forma a garantir que o
ângulo requerido foi o ângulo executado pelo motor. A instrução seguinte corresponde
ao envio do próximo ângulo para o buffer. E de seguida é enviada a ordem para o início
desse movimento.
O modelo apresentado é bastante simples de implementar, contudo existe um tempo
de espera significativo durante o qual o motor se encontra parado entre movimentos.
De forma a contornar esta situação, acionou-se uma saída digital do controlador para
reportar à aplicação quando um movimento é concluído. Este sinal é recebido pela placa
de aquisição de dados e depois enviado para a aplicação. Esta alteração requer uma
alteração no processo de comando, dada a necessidade de monitorização deste sinal.
Assim é possível manipular o movimento do motor de forma mais eficiente. Na Figura
4.11. encontram-se apresentadas a interligações entre os diferentes componentes
envolvidos.
Figura 4.11 – Componentes envolvidos no Modo de Comando.
Figura 4.10 - Diagrama temporal da sequência de instruções para o comando do motor.

4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
42 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Na Figura 4.12 encontra-se apresentado um diagrama temporal que demostra a
solução implementada. A figura tem uma terceira linha onde são apresentados os pulsos
enviados pelo controlador no fim de cada movimento através da saída digital.
Inicialmente é enviado para o buffer de movimentos do controlador o ângulo para
o primeiro movimento, e de seguida é enviada a instrução que dá inicio ao arranque do
motor através do comando “Go”. O motor inicia o movimento e é determinado o
próximo ângulo através da função “Get Next Angle”. No capítulo 7. Apêndices
encontram-se apresentadas as seguintes figuras, relativas a essa função: Figura 7.3,
relativa ao Front Panel e a Figura 7.4, relativa ao Block Diagram. Após ser determinado
o próximo ângulo procede-se ao envio via porta série desse ângulo para o buffer.
Quando o ângulo é alcançado o controlador coloca uma das suas saídas no nível lógico
1. Este pulso é interpretado pela aplicação, e de imediato é efeituada a leitura da posição
do resolver seguindo-se o envio do comando para iniciar o próximo movimento. O
processo repete-se até se executar o último ângulo.
Na Figura 4.13 estão apresentados unicamente os comandos em LabVIEW para a
execução de apenas um movimento. O fluxo de execução é processado da esquerda para
a direita. No lado esquerdo os quatro indicadores representam as variáveis de entrada,
sendo: “MintController” a referência para o controlador, “error in” o Cluster de erros,
Cluster “Angle” o ângulo pretendido, acedido pelo elemento “Requested Angle” e, por
fim, o Cluster “Drive Settings” que no elemento “Pulses/rev” contêm os pulsos por
volta, fornecidos pelo Resolver do motor, adequados para a configuração de redutoras
e correias acopladas ao veio do motor.
Figura 4.12 - Diagrama temporal ilustrativo da sequência de instruções para a execução de três
movimentos.

4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 43
O comando “MoveA” coloca no buffer de movimentos um movimento de posição
absoluta, e tem como entradas o movimento absoluto pretendido e o respetivo eixo,
nesta aplicação apenas foi utilizado um e este está definido como sendo o eixo zero. De
seguida é processado o comando “MoveOutX”. Este comando permite definir a
alteração de uma saída digital nos momentos imediatamente seguintes à conclusão de
um movimento. Este comando também fica acumulado no buffer de movimentos e têm
como entradas a correspondente saída que se pretende configurar e o respetivo estado
que se pretende definir nessa saída após a conclusão do movimento. Estes dois
comandos, “MoveOutX”.e “MoveA”, correspondem à instrução “Load Angle A”
apresentada na Figura 4.12. Por fim é processada a ordem de execução do movimento
que se encontra no buffer e inicia-se o movimento do motor. Os dois indicadores do
lado direito correspondem às variáveis de saída. A velocidade, o tempo de aceleração e
desaceleração para os movimentos é sempre definido no início de cada bloco e os
respetivos comando em LabVIEW para definir estes parâmetros são semelhantes aos
apresentados na Figura 4.13.
Os comandos apesentados na Figura 4.13, como referido anteriormente, apenas
traduzem as instruções para a execução de um movimento. De modo que quando são
executados sucessivos movimentos existe a execução de comandos intercalados entre
estes. Um dos comandos é o “Read Angle”, e este é processado entre o comando
“MoveOutX” e o “DoGo”.
Por motivos de segurança foi implementado na aplicação um temporizador de
movimentos, vulgarmente este tipo de temporizadores é designado por Watchdog
Timer. Este temporizador é iniciado aquando da instrução de início de movimento, e
caso o tempo decorrido seja superior ao tempo máximo de execução desse movimento,
o processo é interrompido. O tempo máximo de execução de um movimento é
determinado pela expressão (2):
Figura 4.13 - Comandos em LabVIEW para a execução de um movimento.
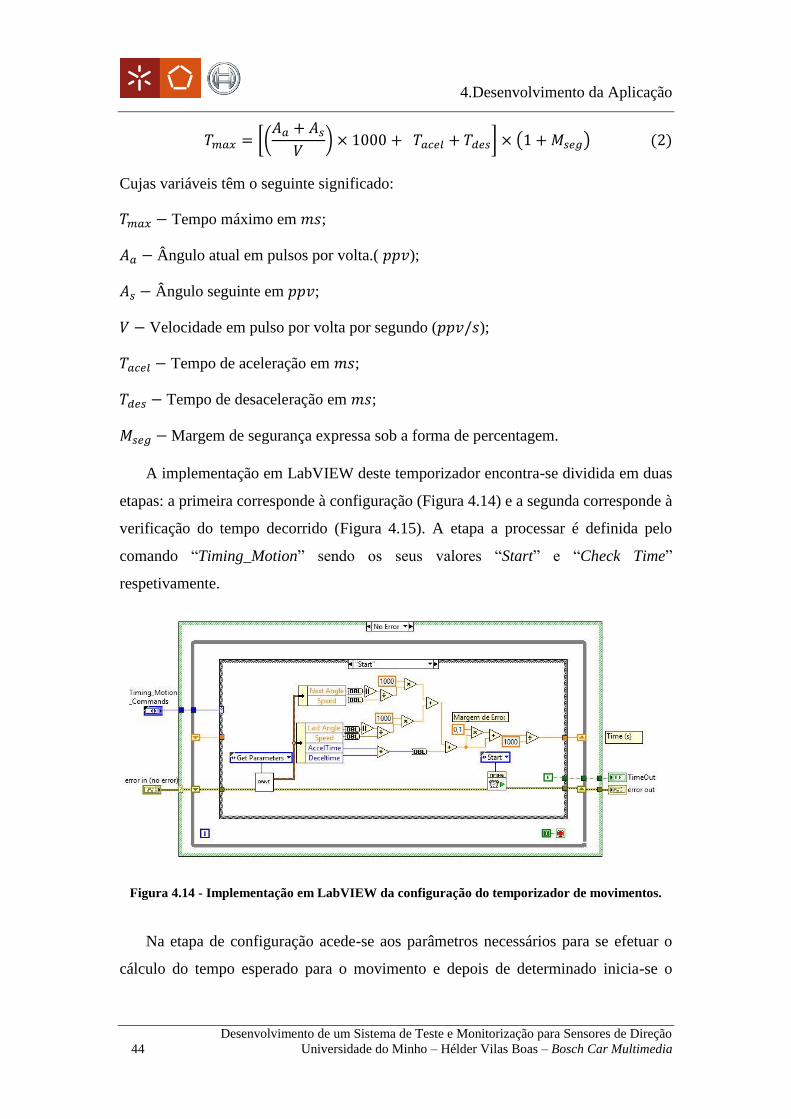
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
44 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
𝑇𝑚𝑎𝑥 = [(𝐴𝑎 + 𝐴𝑠
𝑉) × 1000 + 𝑇𝑎𝑐𝑒𝑙 + 𝑇𝑑𝑒𝑠] × (1 + 𝑀𝑠𝑒𝑔) (2)
Cujas variáveis têm o seguinte significado:
𝑇𝑚𝑎𝑥 − Tempo máximo em 𝑚𝑠;
𝐴𝑎 − Ângulo atual em pulsos por volta.( 𝑝𝑝𝑣);
𝐴𝑠 − Ângulo seguinte em 𝑝𝑝𝑣;
𝑉 − Velocidade em pulso por volta por segundo (𝑝𝑝𝑣/𝑠);
𝑇𝑎𝑐𝑒𝑙 − Tempo de aceleração em 𝑚𝑠;
𝑇𝑑𝑒𝑠 − Tempo de desaceleração em 𝑚𝑠;
𝑀𝑠𝑒𝑔 − Margem de segurança expressa sob a forma de percentagem.
A implementação em LabVIEW deste temporizador encontra-se dividida em duas
etapas: a primeira corresponde à configuração (Figura 4.14) e a segunda corresponde à
verificação do tempo decorrido (Figura 4.15). A etapa a processar é definida pelo
comando “Timing_Motion” sendo os seus valores “Start” e “Check Time”
respetivamente.
Figura 4.14 - Implementação em LabVIEW da configuração do temporizador de movimentos.
Na etapa de configuração acede-se aos parâmetros necessários para se efetuar o
cálculo do tempo esperado para o movimento e depois de determinado inicia-se o

4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 45
temporizador. Na etapa de verificação a função retorna verdadeiro ou falso caso o
temporizador tenha atingido ou não, respetivamente, o tempo definido na etapa anterior.
Figura 4.15 - Implementação em LabVIEW da verificação do temporizador de movimentos.
4.3.2 Modo de Aquisição
Na Figura 4.16 apresenta-se de forma simplista a interligação entre os componentes
envolvidos no modo de aquisição.
Figura 4.16 – Componentes envolvidos no Modo de Aquisição.
Na Figura 4.17 são ilustrados com mais detalhe os módulos de hardware da
plataforma de aquisição. Os terminais dos sensores LWS encontram-se conectados aos
terminais disponibilizados pelos módulos Shielded Desktop Connector Block (SCB)
onde se efetua o acondicionamento do sinal, permitindo que o dispositivo de aquisição
possa receber os sinais de forma adequada. Uma vez que, os sensores não possuem
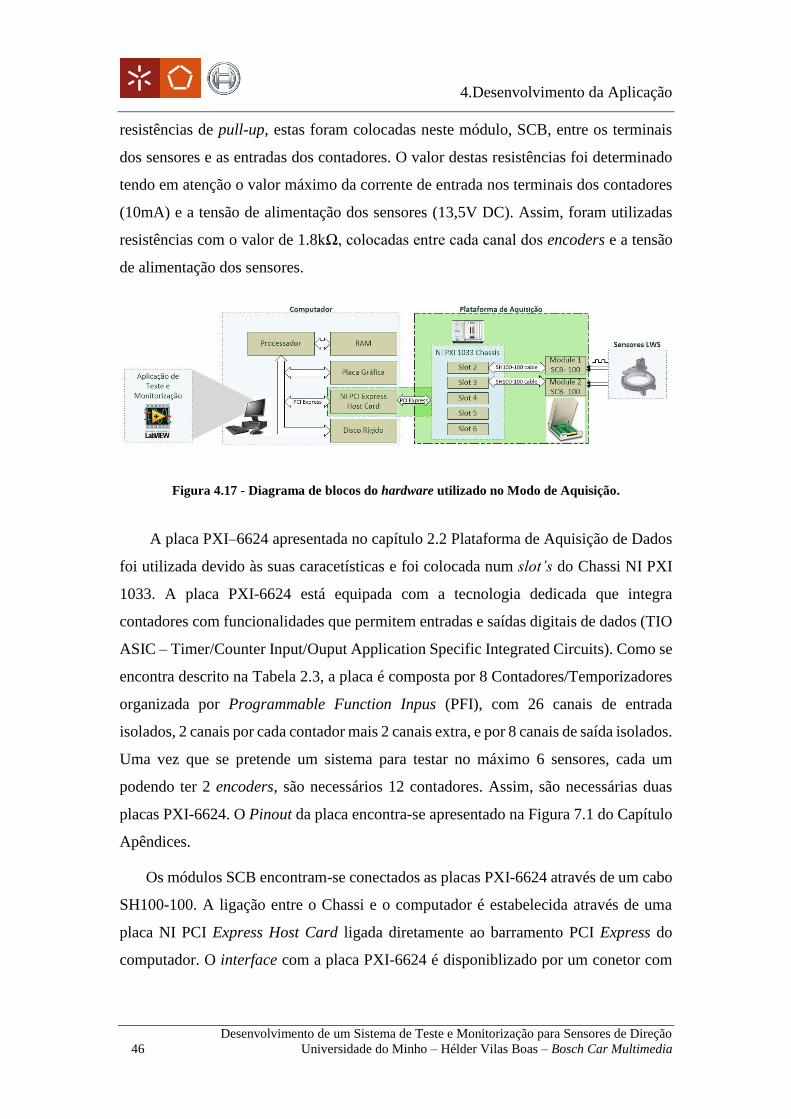
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
46 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
resistências de pull-up, estas foram colocadas neste módulo, SCB, entre os terminais
dos sensores e as entradas dos contadores. O valor destas resistências foi determinado
tendo em atenção o valor máximo da corrente de entrada nos terminais dos contadores
(10mA) e a tensão de alimentação dos sensores (13,5V DC). Assim, foram utilizadas
resistências com o valor de 1.8kΩ, colocadas entre cada canal dos encoders e a tensão
de alimentação dos sensores.
Figura 4.17 - Diagrama de blocos do hardware utilizado no Modo de Aquisição.
A placa PXI–6624 apresentada no capítulo 2.2 Plataforma de Aquisição de Dados
foi utilizada devido às suas caracetísticas e foi colocada num slot’s do Chassi NI PXI
1033. A placa PXI-6624 está equipada com a tecnologia dedicada que integra
contadores com funcionalidades que permitem entradas e saídas digitais de dados (TIO
ASIC – Timer/Counter Input/Ouput Application Specific Integrated Circuits). Como se
encontra descrito na Tabela 2.3, a placa é composta por 8 Contadores/Temporizadores
organizada por Programmable Function Inpus (PFI), com 26 canais de entrada
isolados, 2 canais por cada contador mais 2 canais extra, e por 8 canais de saída isolados.
Uma vez que se pretende um sistema para testar no máximo 6 sensores, cada um
podendo ter 2 encoders, são necessários 12 contadores. Assim, são necessárias duas
placas PXI-6624. O Pinout da placa encontra-se apresentado na Figura 7.1 do Capítulo
Apêndices.
Os módulos SCB encontram-se conectados as placas PXI-6624 através de um cabo
SH100-100. A ligação entre o Chassi e o computador é estabelecida através de uma
placa NI PCI Express Host Card ligada diretamente ao barramento PCI Express do
computador. O interface com a placa PXI-6624 é disponiblizado por um conetor com
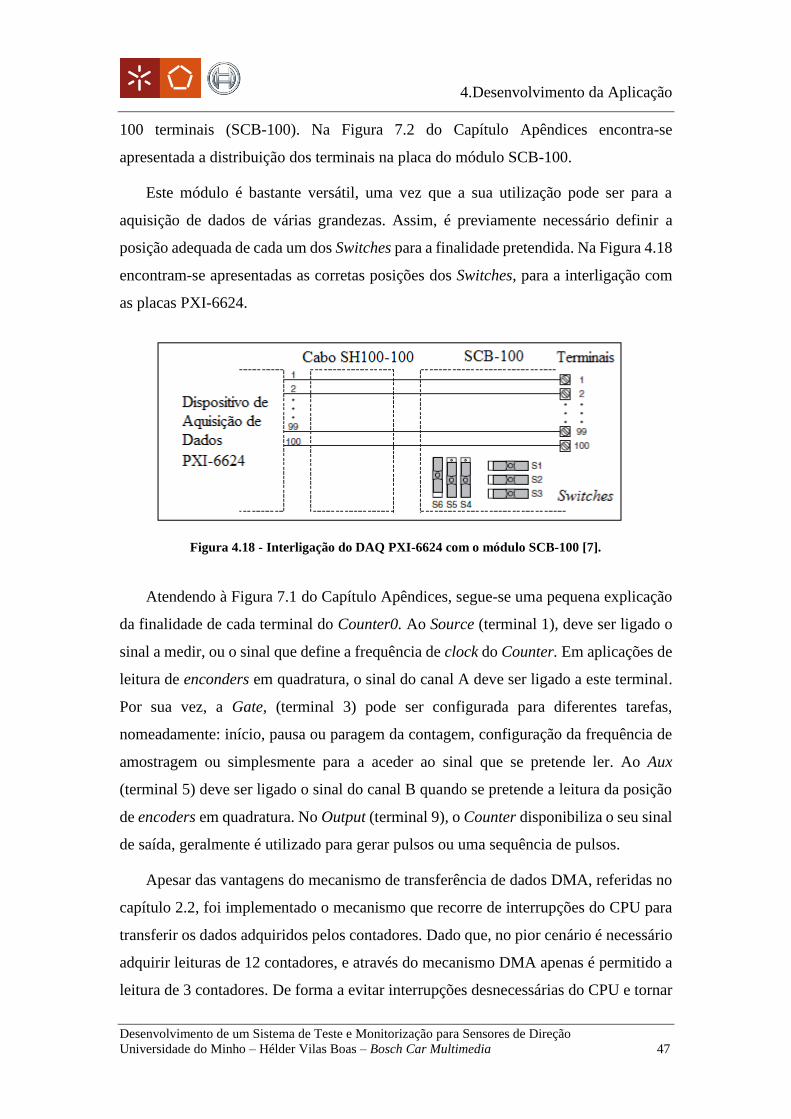
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 47
100 terminais (SCB-100). Na Figura 7.2 do Capítulo Apêndices encontra-se
apresentada a distribuição dos terminais na placa do módulo SCB-100.
Este módulo é bastante versátil, uma vez que a sua utilização pode ser para a
aquisição de dados de várias grandezas. Assim, é previamente necessário definir a
posição adequada de cada um dos Switches para a finalidade pretendida. Na Figura 4.18
encontram-se apresentadas as corretas posições dos Switches, para a interligação com
as placas PXI-6624.
Atendendo à Figura 7.1 do Capítulo Apêndices, segue-se uma pequena explicação
da finalidade de cada terminal do Counter0. Ao Source (terminal 1), deve ser ligado o
sinal a medir, ou o sinal que define a frequência de clock do Counter. Em aplicações de
leitura de enconders em quadratura, o sinal do canal A deve ser ligado a este terminal.
Por sua vez, a Gate, (terminal 3) pode ser configurada para diferentes tarefas,
nomeadamente: início, pausa ou paragem da contagem, configuração da frequência de
amostragem ou simplesmente para a aceder ao sinal que se pretende ler. Ao Aux
(terminal 5) deve ser ligado o sinal do canal B quando se pretende a leitura da posição
de encoders em quadratura. No Output (terminal 9), o Counter disponibiliza o seu sinal
de saída, geralmente é utilizado para gerar pulsos ou uma sequência de pulsos.
Apesar das vantagens do mecanismo de transferência de dados DMA, referidas no
capítulo 2.2, foi implementado o mecanismo que recorre de interrupções do CPU para
transferir os dados adquiridos pelos contadores. Dado que, no pior cenário é necessário
adquirir leituras de 12 contadores, e através do mecanismo DMA apenas é permitido a
leitura de 3 contadores. De forma a evitar interrupções desnecessárias do CPU e tornar
Figura 4.18 - Interligação do DAQ PXI-6624 com o módulo SCB-100 [7].
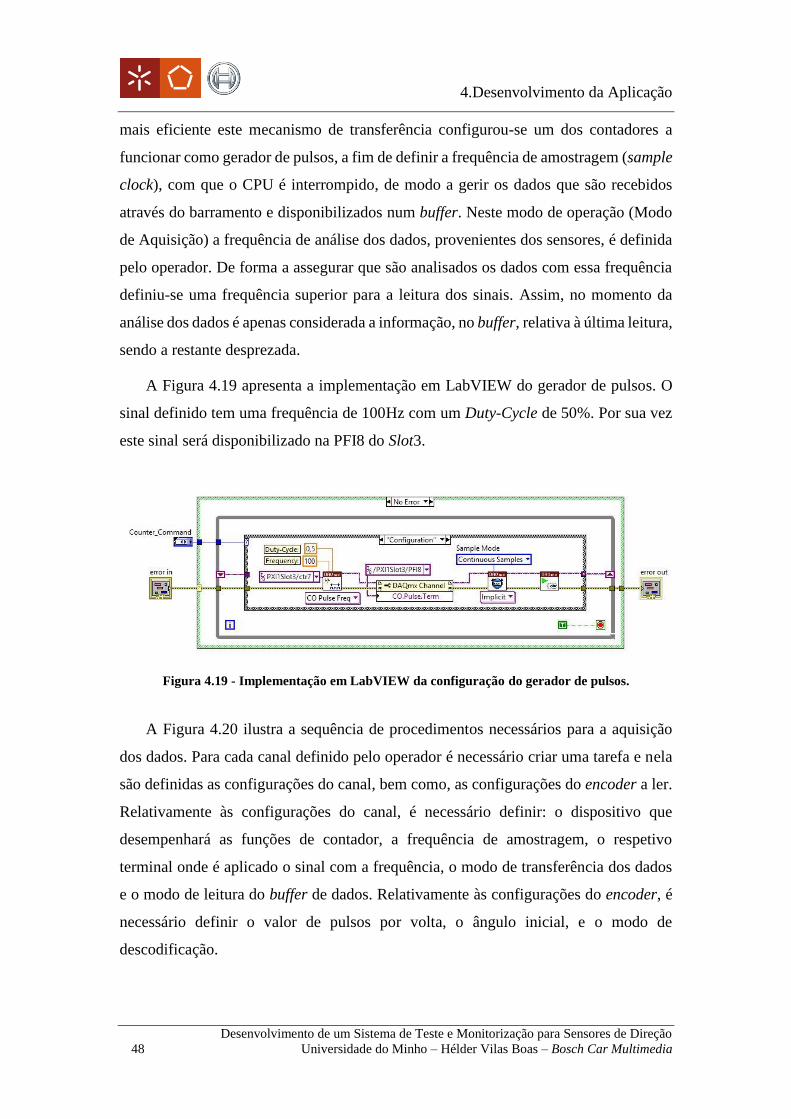
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
48 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
mais eficiente este mecanismo de transferência configurou-se um dos contadores a
funcionar como gerador de pulsos, a fim de definir a frequência de amostragem (sample
clock), com que o CPU é interrompido, de modo a gerir os dados que são recebidos
através do barramento e disponibilizados num buffer. Neste modo de operação (Modo
de Aquisição) a frequência de análise dos dados, provenientes dos sensores, é definida
pelo operador. De forma a assegurar que são analisados os dados com essa frequência
definiu-se uma frequência superior para a leitura dos sinais. Assim, no momento da
análise dos dados é apenas considerada a informação, no buffer, relativa à última leitura,
sendo a restante desprezada.
A Figura 4.19 apresenta a implementação em LabVIEW do gerador de pulsos. O
sinal definido tem uma frequência de 100Hz com um Duty-Cycle de 50%. Por sua vez
este sinal será disponibilizado na PFI8 do Slot3.
Figura 4.19 - Implementação em LabVIEW da configuração do gerador de pulsos.
A Figura 4.20 ilustra a sequência de procedimentos necessários para a aquisição
dos dados. Para cada canal definido pelo operador é necessário criar uma tarefa e nela
são definidas as configurações do canal, bem como, as configurações do encoder a ler.
Relativamente às configurações do canal, é necessário definir: o dispositivo que
desempenhará as funções de contador, a frequência de amostragem, o respetivo
terminal onde é aplicado o sinal com a frequência, o modo de transferência dos dados
e o modo de leitura do buffer de dados. Relativamente às configurações do encoder, é
necessário definir o valor de pulsos por volta, o ângulo inicial, e o modo de
descodificação.
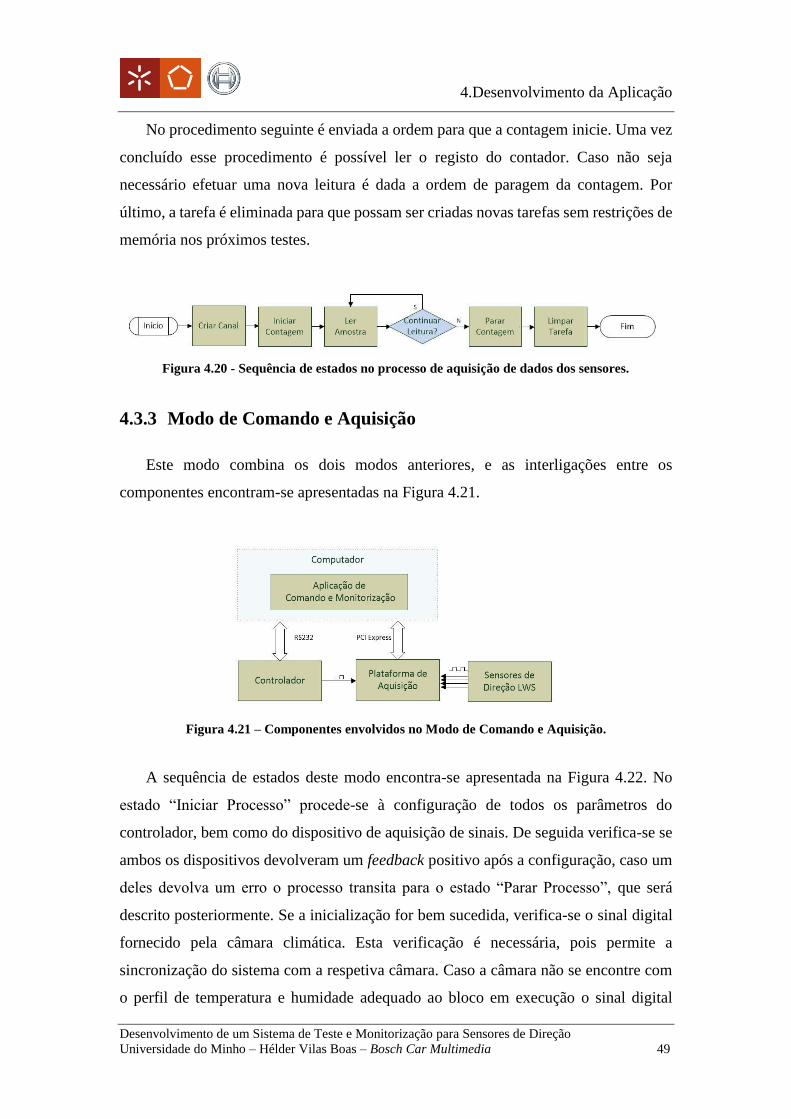
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 49
No procedimento seguinte é enviada a ordem para que a contagem inicie. Uma vez
concluído esse procedimento é possível ler o registo do contador. Caso não seja
necessário efetuar uma nova leitura é dada a ordem de paragem da contagem. Por
último, a tarefa é eliminada para que possam ser criadas novas tarefas sem restrições de
memória nos próximos testes.
Figura 4.20 - Sequência de estados no processo de aquisição de dados dos sensores.
4.3.3 Modo de Comando e Aquisição
Este modo combina os dois modos anteriores, e as interligações entre os
componentes encontram-se apresentadas na Figura 4.21.
Figura 4.21 – Componentes envolvidos no Modo de Comando e Aquisição.
A sequência de estados deste modo encontra-se apresentada na Figura 4.22. No
estado “Iniciar Processo” procede-se à configuração de todos os parâmetros do
controlador, bem como do dispositivo de aquisição de sinais. De seguida verifica-se se
ambos os dispositivos devolveram um feedback positivo após a configuração, caso um
deles devolva um erro o processo transita para o estado “Parar Processo”, que será
descrito posteriormente. Se a inicialização for bem sucedida, verifica-se o sinal digital
fornecido pela câmara climática. Esta verificação é necessária, pois permite a
sincronização do sistema com a respetiva câmara. Caso a câmara não se encontre com
o perfil de temperatura e humidade adequado ao bloco em execução o sinal digital
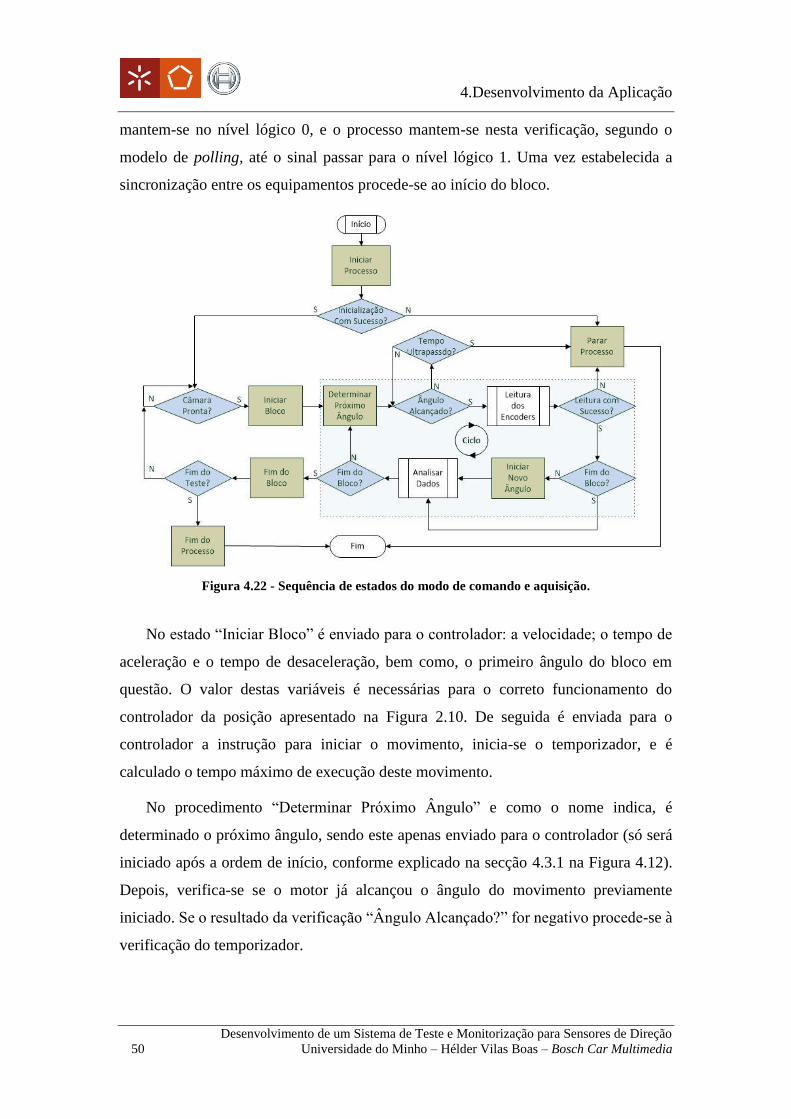
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
50 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
mantem-se no nível lógico 0, e o processo mantem-se nesta verificação, segundo o
modelo de polling, até o sinal passar para o nível lógico 1. Uma vez estabelecida a
sincronização entre os equipamentos procede-se ao início do bloco.
Figura 4.22 - Sequência de estados do modo de comando e aquisição.
No estado “Iniciar Bloco” é enviado para o controlador: a velocidade; o tempo de
aceleração e o tempo de desaceleração, bem como, o primeiro ângulo do bloco em
questão. O valor destas variáveis é necessárias para o correto funcionamento do
controlador da posição apresentado na Figura 2.10. De seguida é enviada para o
controlador a instrução para iniciar o movimento, inicia-se o temporizador, e é
calculado o tempo máximo de execução deste movimento.
No procedimento “Determinar Próximo Ângulo” e como o nome indica, é
determinado o próximo ângulo, sendo este apenas enviado para o controlador (só será
iniciado após a ordem de início, conforme explicado na secção 4.3.1 na Figura 4.12).
Depois, verifica-se se o motor já alcançou o ângulo do movimento previamente
iniciado. Se o resultado da verificação “Ângulo Alcançado?” for negativo procede-se à
verificação do temporizador.
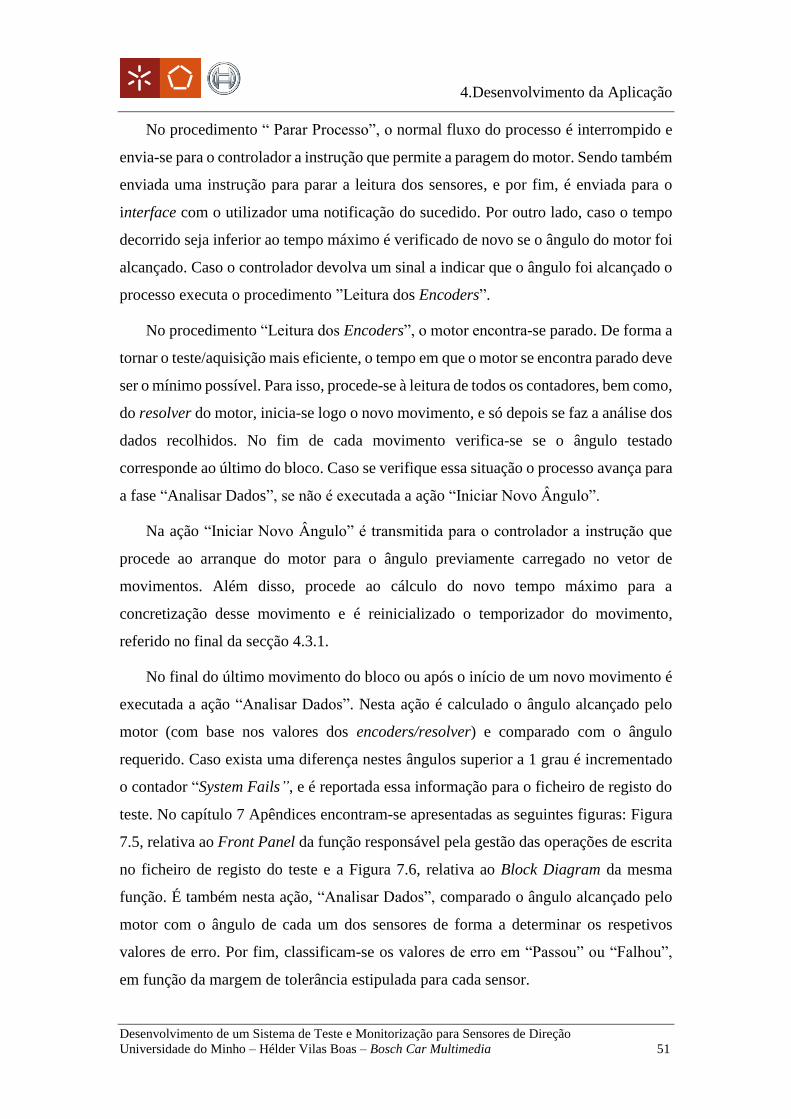
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 51
No procedimento “ Parar Processo”, o normal fluxo do processo é interrompido e
envia-se para o controlador a instrução que permite a paragem do motor. Sendo também
enviada uma instrução para parar a leitura dos sensores, e por fim, é enviada para o
interface com o utilizador uma notificação do sucedido. Por outro lado, caso o tempo
decorrido seja inferior ao tempo máximo é verificado de novo se o ângulo do motor foi
alcançado. Caso o controlador devolva um sinal a indicar que o ângulo foi alcançado o
processo executa o procedimento ”Leitura dos Encoders”.
No procedimento “Leitura dos Encoders”, o motor encontra-se parado. De forma a
tornar o teste/aquisição mais eficiente, o tempo em que o motor se encontra parado deve
ser o mínimo possível. Para isso, procede-se à leitura de todos os contadores, bem como,
do resolver do motor, inicia-se logo o novo movimento, e só depois se faz a análise dos
dados recolhidos. No fim de cada movimento verifica-se se o ângulo testado
corresponde ao último do bloco. Caso se verifique essa situação o processo avança para
a fase “Analisar Dados”, se não é executada a ação “Iniciar Novo Ângulo”.
Na ação “Iniciar Novo Ângulo” é transmitida para o controlador a instrução que
procede ao arranque do motor para o ângulo previamente carregado no vetor de
movimentos. Além disso, procede ao cálculo do novo tempo máximo para a
concretização desse movimento e é reinicializado o temporizador do movimento,
referido no final da secção 4.3.1.
No final do último movimento do bloco ou após o início de um novo movimento é
executada a ação “Analisar Dados”. Nesta ação é calculado o ângulo alcançado pelo
motor (com base nos valores dos encoders/resolver) e comparado com o ângulo
requerido. Caso exista uma diferença nestes ângulos superior a 1 grau é incrementado
o contador “System Fails”, e é reportada essa informação para o ficheiro de registo do
teste. No capítulo 7 Apêndices encontram-se apresentadas as seguintes figuras: Figura
7.5, relativa ao Front Panel da função responsável pela gestão das operações de escrita
no ficheiro de registo do teste e a Figura 7.6, relativa ao Block Diagram da mesma
função. É também nesta ação, “Analisar Dados”, comparado o ângulo alcançado pelo
motor com o ângulo de cada um dos sensores de forma a determinar os respetivos
valores de erro. Por fim, classificam-se os valores de erro em “Passou” ou “Falhou”,
em função da margem de tolerância estipulada para cada sensor.
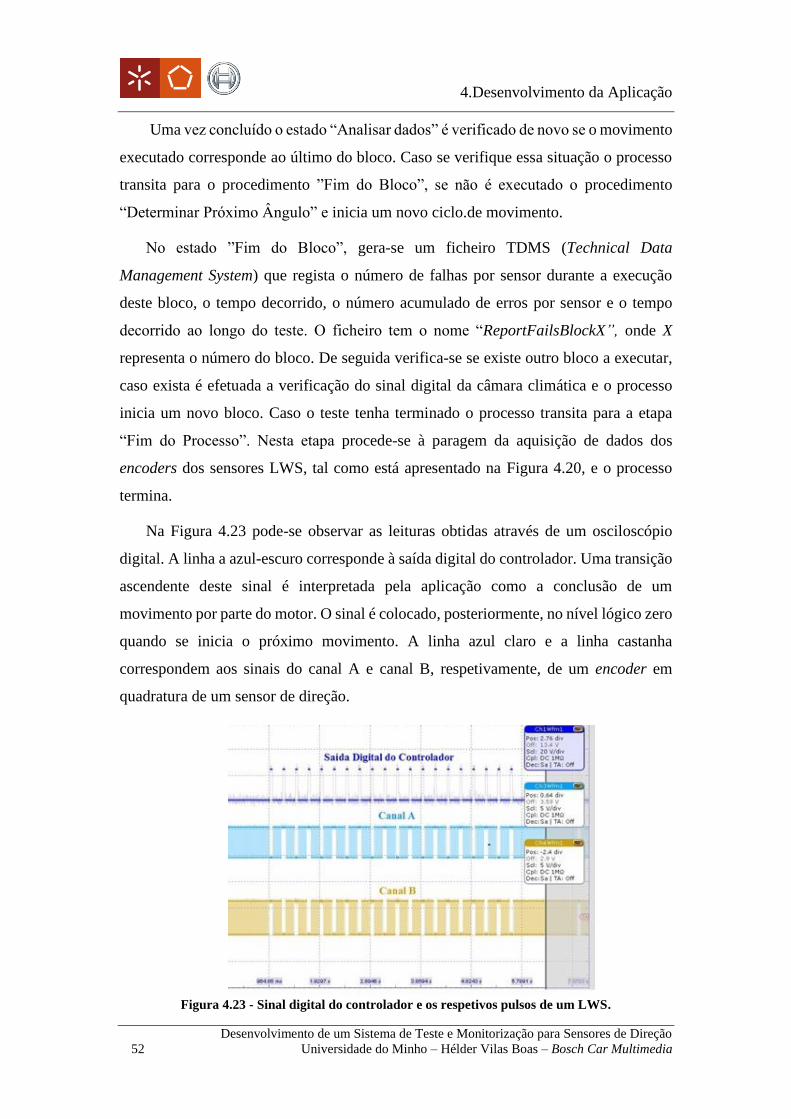
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
52 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Uma vez concluído o estado “Analisar dados” é verificado de novo se o movimento
executado corresponde ao último do bloco. Caso se verifique essa situação o processo
transita para o procedimento ”Fim do Bloco”, se não é executado o procedimento
“Determinar Próximo Ângulo” e inicia um novo ciclo.de movimento.
No estado ”Fim do Bloco”, gera-se um ficheiro TDMS (Technical Data
Management System) que regista o número de falhas por sensor durante a execução
deste bloco, o tempo decorrido, o número acumulado de erros por sensor e o tempo
decorrido ao longo do teste. O ficheiro tem o nome “ReportFailsBlockX”, onde X
representa o número do bloco. De seguida verifica-se se existe outro bloco a executar,
caso exista é efetuada a verificação do sinal digital da câmara climática e o processo
inicia um novo bloco. Caso o teste tenha terminado o processo transita para a etapa
“Fim do Processo”. Nesta etapa procede-se à paragem da aquisição de dados dos
encoders dos sensores LWS, tal como está apresentado na Figura 4.20, e o processo
termina.
Na Figura 4.23 pode-se observar as leituras obtidas através de um osciloscópio
digital. A linha a azul-escuro corresponde à saída digital do controlador. Uma transição
ascendente deste sinal é interpretada pela aplicação como a conclusão de um
movimento por parte do motor. O sinal é colocado, posteriormente, no nível lógico zero
quando se inicia o próximo movimento. A linha azul claro e a linha castanha
correspondem aos sinais do canal A e canal B, respetivamente, de um encoder em
quadratura de um sensor de direção.
Figura 4.23 - Sinal digital do controlador e os respetivos pulsos de um LWS.
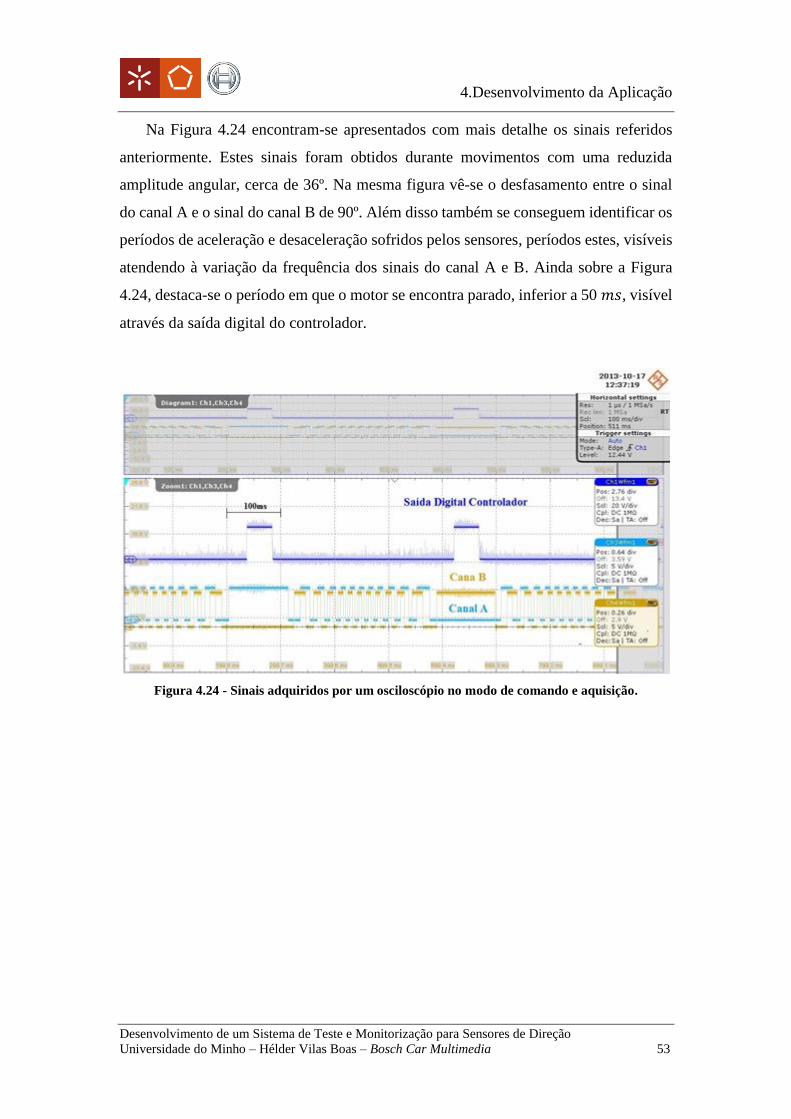
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 53
Na Figura 4.24 encontram-se apresentados com mais detalhe os sinais referidos
anteriormente. Estes sinais foram obtidos durante movimentos com uma reduzida
amplitude angular, cerca de 36º. Na mesma figura vê-se o desfasamento entre o sinal
do canal A e o sinal do canal B de 90º. Além disso também se conseguem identificar os
períodos de aceleração e desaceleração sofridos pelos sensores, períodos estes, visíveis
atendendo à variação da frequência dos sinais do canal A e B. Ainda sobre a Figura
4.24, destaca-se o período em que o motor se encontra parado, inferior a 50 𝑚𝑠, visível
através da saída digital do controlador.
Figura 4.24 - Sinais adquiridos por um osciloscópio no modo de comando e aquisição.
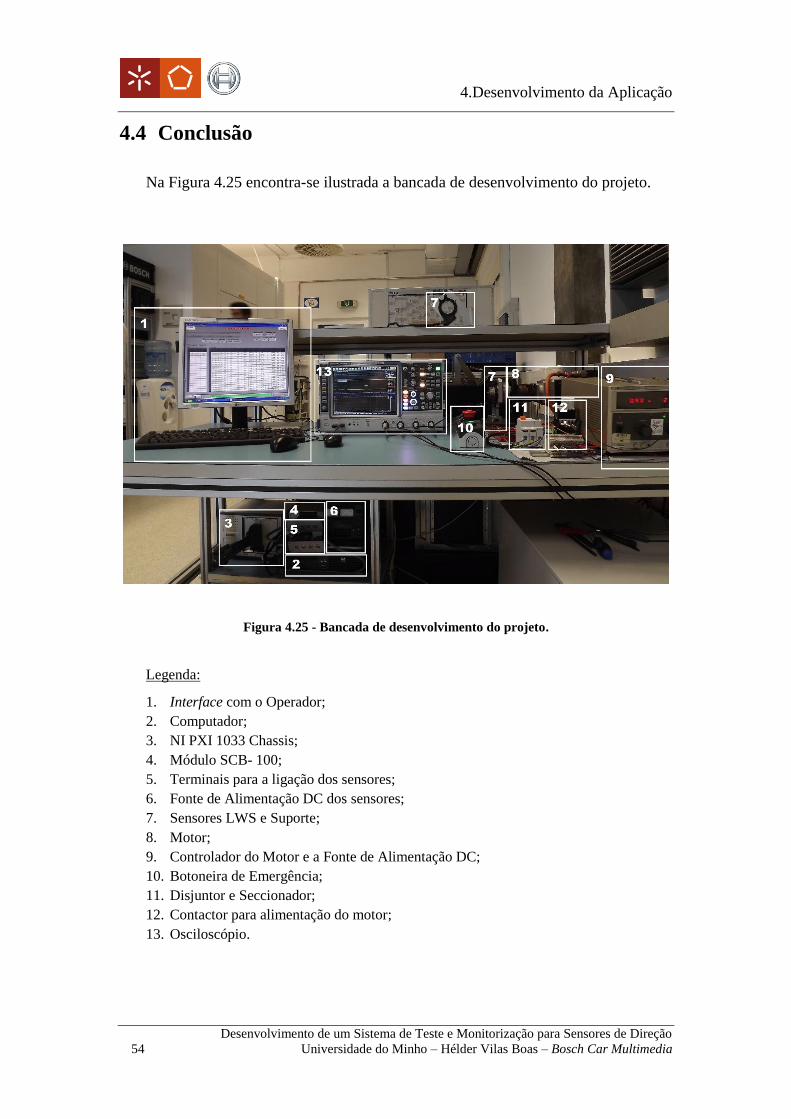
4.Desenvolvimento da Aplicação
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
54 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
4.4 Conclusão
Na Figura 4.25 encontra-se ilustrada a bancada de desenvolvimento do projeto.
Figura 4.25 - Bancada de desenvolvimento do projeto.
Legenda:
1. Interface com o Operador;
2. Computador;
3. NI PXI 1033 Chassis;
4. Módulo SCB- 100;
5. Terminais para a ligação dos sensores;
6. Fonte de Alimentação DC dos sensores;
7. Sensores LWS e Suporte;
8. Motor;
9. Controlador do Motor e a Fonte de Alimentação DC;
10. Botoneira de Emergência;
11. Disjuntor e Seccionador;
12. Contactor para alimentação do motor;
13. Osciloscópio.
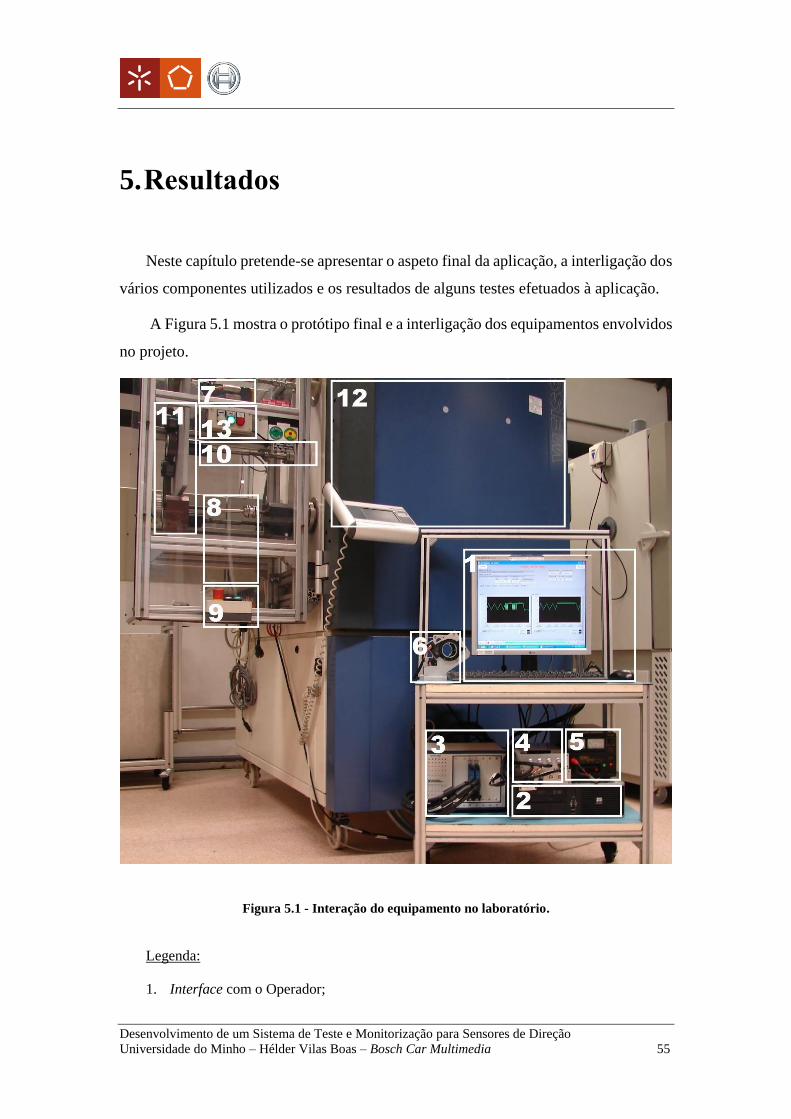
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 55
5. Resultados
Neste capítulo pretende-se apresentar o aspeto final da aplicação, a interligação dos
vários componentes utilizados e os resultados de alguns testes efetuados à aplicação.
A Figura 5.1 mostra o protótipo final e a interligação dos equipamentos envolvidos
no projeto.
Figura 5.1 - Interação do equipamento no laboratório.
Legenda:
1. Interface com o Operador;
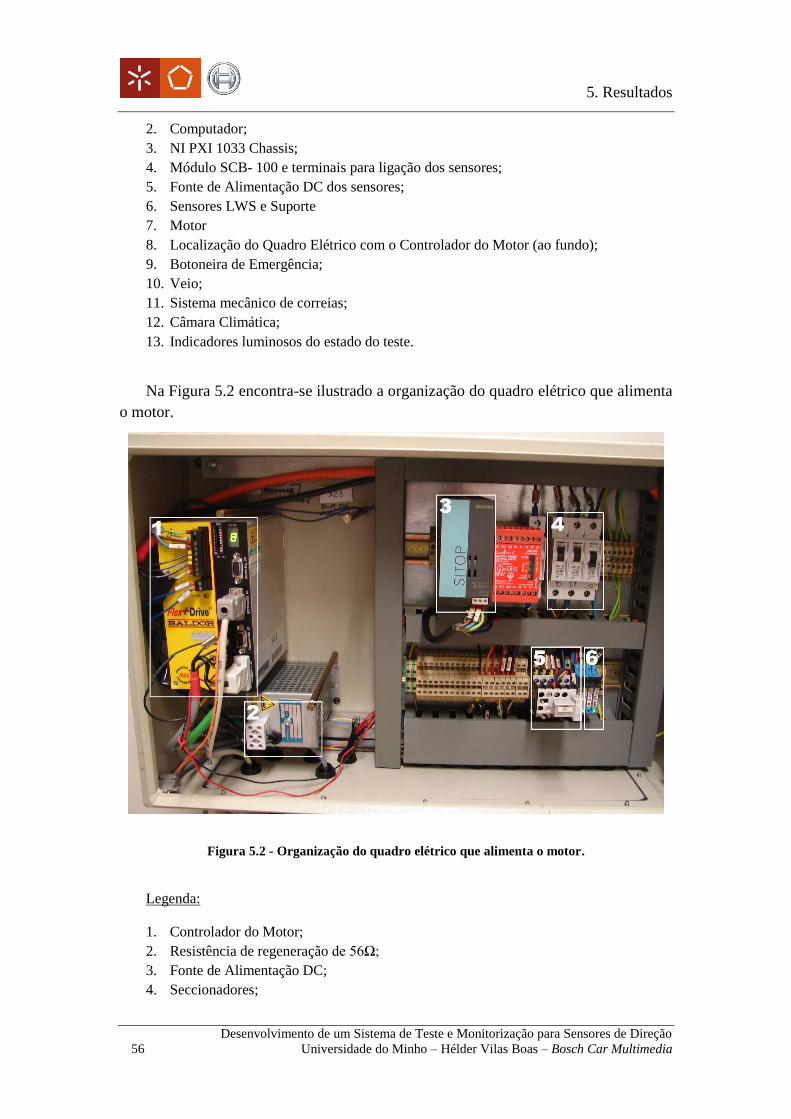
5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
56 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
2. Computador;
3. NI PXI 1033 Chassis;
4. Módulo SCB- 100 e terminais para ligação dos sensores;
5. Fonte de Alimentação DC dos sensores;
6. Sensores LWS e Suporte
7. Motor
8. Localização do Quadro Elétrico com o Controlador do Motor (ao fundo);
9. Botoneira de Emergência;
10. Veio;
11. Sistema mecânico de correias;
12. Câmara Climática;
13. Indicadores luminosos do estado do teste.
Na Figura 5.2 encontra-se ilustrado a organização do quadro elétrico que alimenta
o motor.
Figura 5.2 - Organização do quadro elétrico que alimenta o motor.
Legenda:
1. Controlador do Motor;
2. Resistência de regeneração de 56Ω;
3. Fonte de Alimentação DC;
4. Seccionadores;
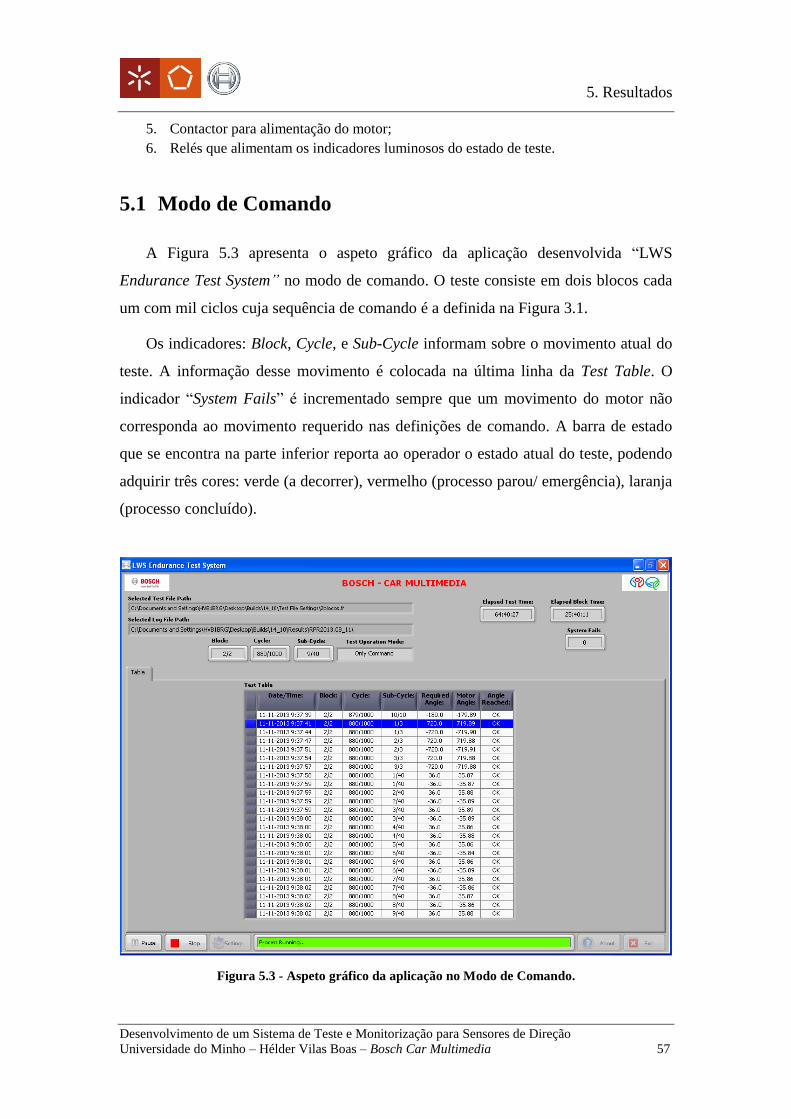
5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 57
5. Contactor para alimentação do motor;
6. Relés que alimentam os indicadores luminosos do estado de teste.
5.1 Modo de Comando
A Figura 5.3 apresenta o aspeto gráfico da aplicação desenvolvida “LWS
Endurance Test System” no modo de comando. O teste consiste em dois blocos cada
um com mil ciclos cuja sequência de comando é a definida na Figura 3.1.
Os indicadores: Block, Cycle, e Sub-Cycle informam sobre o movimento atual do
teste. A informação desse movimento é colocada na última linha da Test Table. O
indicador “System Fails” é incrementado sempre que um movimento do motor não
corresponda ao movimento requerido nas definições de comando. A barra de estado
que se encontra na parte inferior reporta ao operador o estado atual do teste, podendo
adquirir três cores: verde (a decorrer), vermelho (processo parou/ emergência), laranja
(processo concluído).
Figura 5.3 - Aspeto gráfico da aplicação no Modo de Comando.
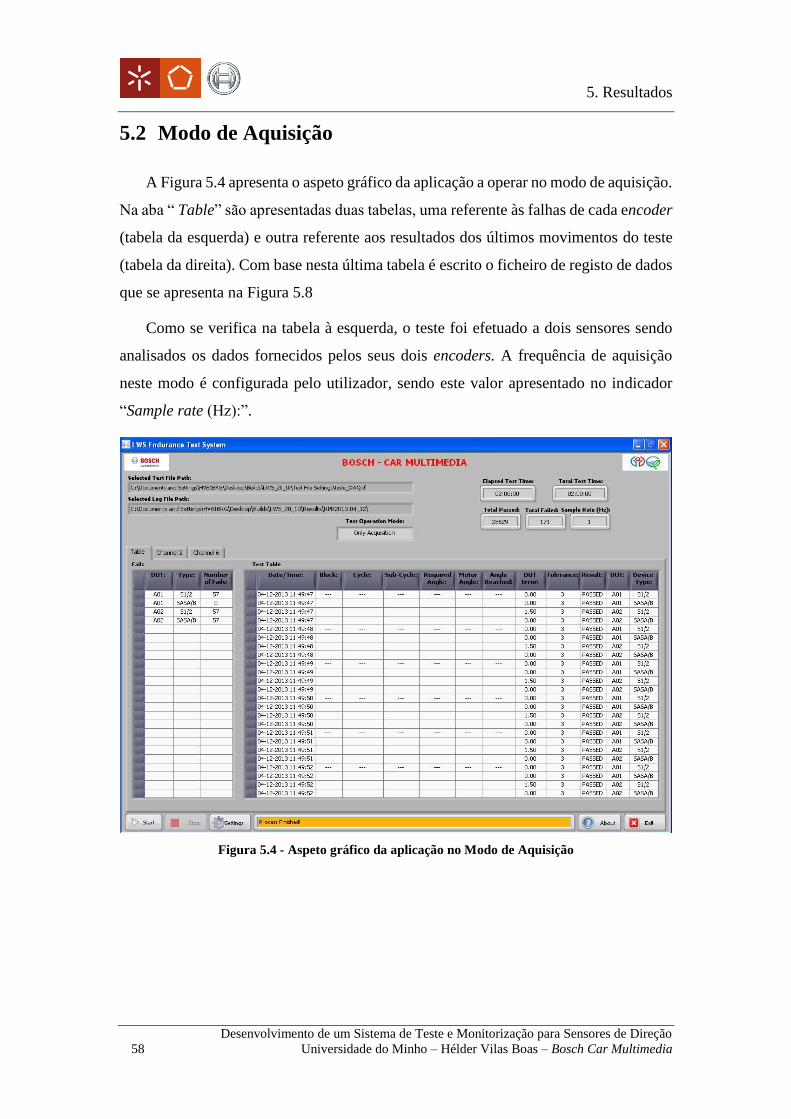
5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
58 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
5.2 Modo de Aquisição
A Figura 5.4 apresenta o aspeto gráfico da aplicação a operar no modo de aquisição.
Na aba “ Table” são apresentadas duas tabelas, uma referente às falhas de cada encoder
(tabela da esquerda) e outra referente aos resultados dos últimos movimentos do teste
(tabela da direita). Com base nesta última tabela é escrito o ficheiro de registo de dados
que se apresenta na Figura 5.8
Como se verifica na tabela à esquerda, o teste foi efetuado a dois sensores sendo
analisados os dados fornecidos pelos seus dois encoders. A frequência de aquisição
neste modo é configurada pelo utilizador, sendo este valor apresentado no indicador
“Sample rate (Hz):”.
Figura 5.4 - Aspeto gráfico da aplicação no Modo de Aquisição

5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 59
De forma a facilitar a análise dos dados recolhidos ao longo do teste foi
desenvolvida a estrutura gráfica apresentada na Figura 5.5. A aba selecionada é
referente ao canal 6 que, neste exemplo em particular, está associado ao sensor “A02”.
O gráfico à esquerda é referente ao valor de erro dos sinais S1/2, deste sensor (sinais
estes mencionados na secção 2.1). Por sua vez, o gráfico à direita é referente ao valor
de erro dos sinais SASA/B do mesmo sensor. As linhas a vermelho representam as
margens de tolerância superiores e inferiores, enquanto a linha verde representa o erro
do sensor. O eixo vertical é expresso em graus, por sua vez, o eixo horizontal expressa
o tempo no formato HH:MM – DD/MM/AAA. Com base nos dados apresentados nos
gráficos é escrito o ficheiro de erros apresentado na Figura 5.9.
Figura 5.5 - Aspeto dos gráficos da aplicação no Modo de Aquisição.
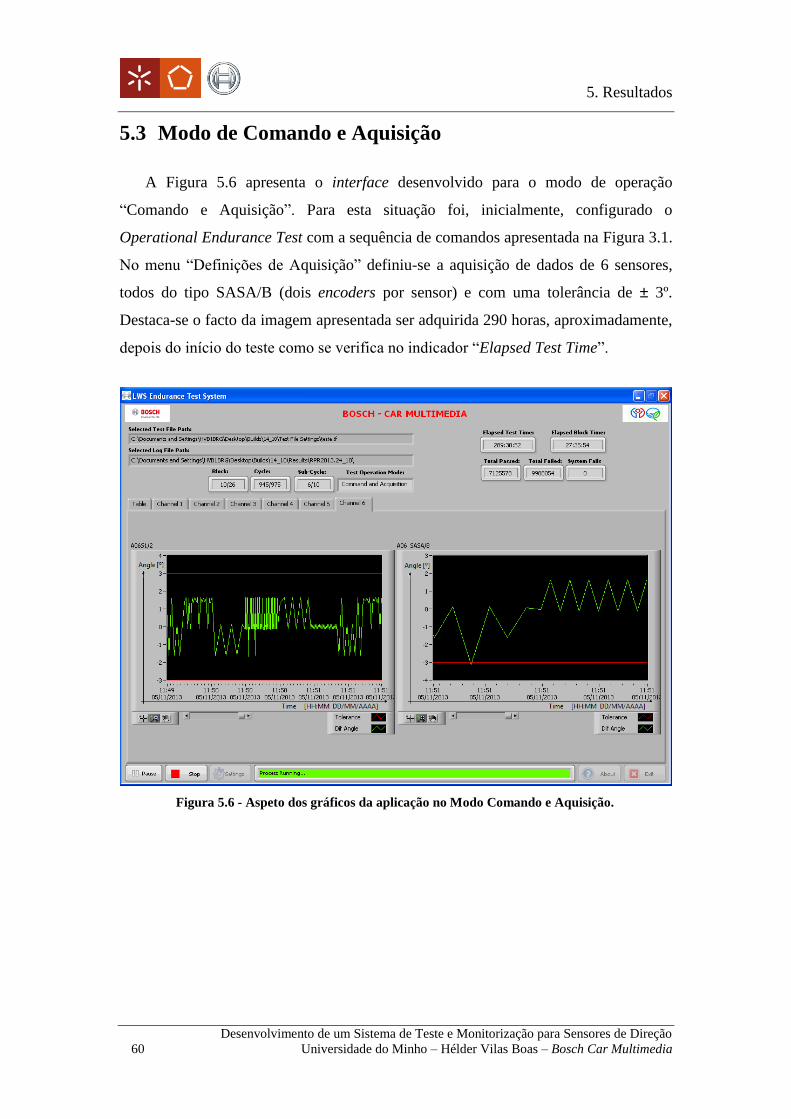
5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
60 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
5.3 Modo de Comando e Aquisição
A Figura 5.6 apresenta o interface desenvolvido para o modo de operação
“Comando e Aquisição”. Para esta situação foi, inicialmente, configurado o
Operational Endurance Test com a sequência de comandos apresentada na Figura 3.1.
No menu “Definições de Aquisição” definiu-se a aquisição de dados de 6 sensores,
todos do tipo SASA/B (dois encoders por sensor) e com uma tolerância de ± 3º.
Destaca-se o facto da imagem apresentada ser adquirida 290 horas, aproximadamente,
depois do início do teste como se verifica no indicador “Elapsed Test Time”.
Figura 5.6 - Aspeto dos gráficos da aplicação no Modo Comando e Aquisição.

5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 61
A janela Windows Task Manager da Figura 5.7 mostra a taxa de ocupação do CPU
e a memória RAM utilizada pelo sistema no momento em que o teste concretizava,
aproximadamente, 290 horas. A aplicação foi testada num PC com o sistema operativo
XP e a memória RAM utilizada antes da execução era na ordem dos 800 MB. Veja-se
que no instante em que é executado um ângulo de reduzida amplitude (36º),
consequentemente existe menos tempo para o processamento da informação, o que se
traduz numa maior taxa de utilização do CPU.
Figura 5.7 - Aspeto das tabelas de resultados da aplicação no Modo Comando e Aquisição.
Na Figura 5.8 apresenta-se a organização do ficheiro de registo de dados. Este
ficheiro tem o nome: RPR2013.NNN, onde o NNN representa o número do processo
associado aos sensores submetidos a teste. Todos os ficheiros de registo de dados
encontram-se limitados a 100 mil linhas, para não ocupar demasiada memória RAM,
dado que o ficheiro é aberto no início e apenas fechado quando é atingido o limite
definido. Esta abordagem oferece uma maior velocidade no processo de escrita, e
melhora a eficiência de todo o processo.
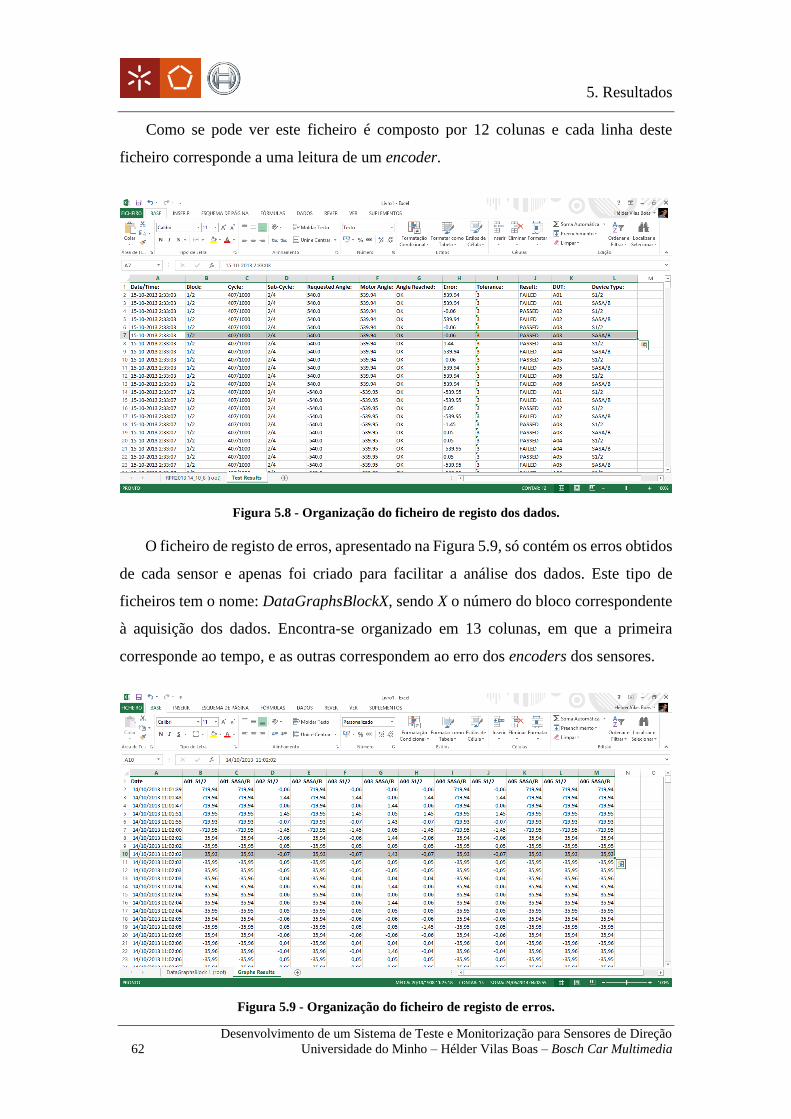
5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
62 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Como se pode ver este ficheiro é composto por 12 colunas e cada linha deste
ficheiro corresponde a uma leitura de um encoder.
O ficheiro de registo de erros, apresentado na Figura 5.9, só contém os erros obtidos
de cada sensor e apenas foi criado para facilitar a análise dos dados. Este tipo de
ficheiros tem o nome: DataGraphsBlockX, sendo X o número do bloco correspondente
à aquisição dos dados. Encontra-se organizado em 13 colunas, em que a primeira
corresponde ao tempo, e as outras correspondem ao erro dos encoders dos sensores.
Figura 5.9 - Organização do ficheiro de registo de erros.
Figura 5.8 - Organização do ficheiro de registo dos dados.
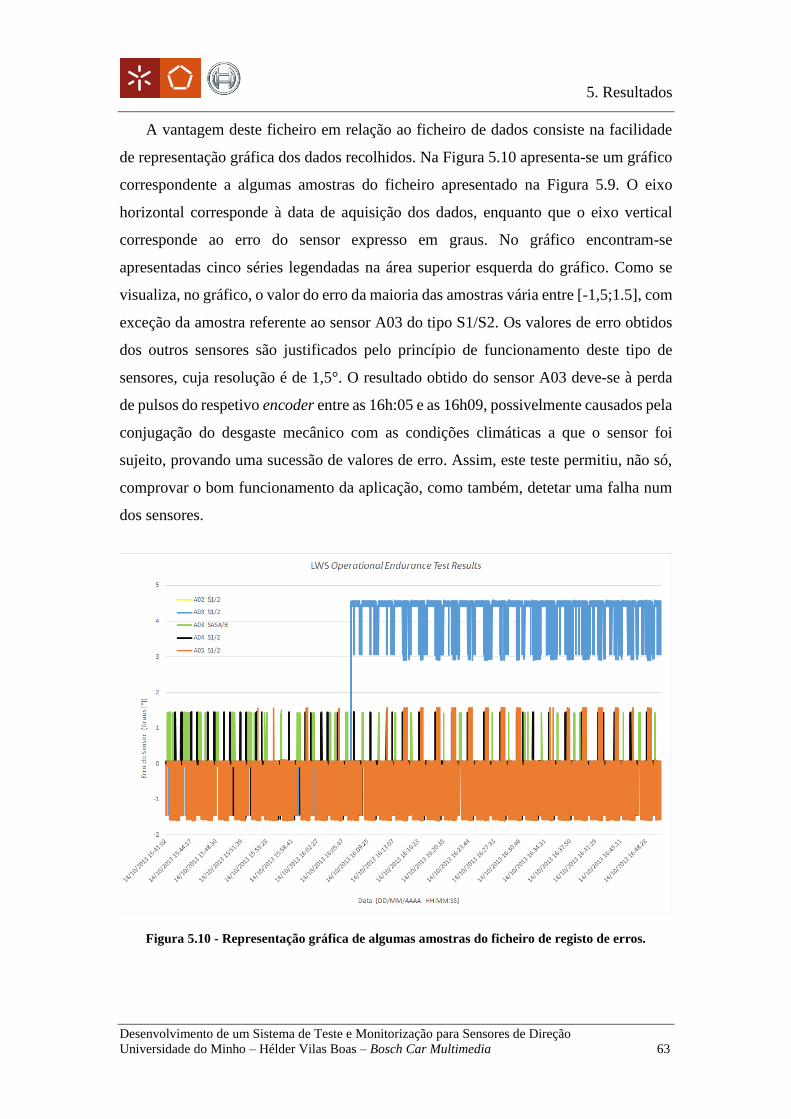
5. Resultados
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 63
A vantagem deste ficheiro em relação ao ficheiro de dados consiste na facilidade
de representação gráfica dos dados recolhidos. Na Figura 5.10 apresenta-se um gráfico
correspondente a algumas amostras do ficheiro apresentado na Figura 5.9. O eixo
horizontal corresponde à data de aquisição dos dados, enquanto que o eixo vertical
corresponde ao erro do sensor expresso em graus. No gráfico encontram-se
apresentadas cinco séries legendadas na área superior esquerda do gráfico. Como se
visualiza, no gráfico, o valor do erro da maioria das amostras vária entre [-1,5;1.5], com
exceção da amostra referente ao sensor A03 do tipo S1/S2. Os valores de erro obtidos
dos outros sensores são justificados pelo princípio de funcionamento deste tipo de
sensores, cuja resolução é de 1,5°. O resultado obtido do sensor A03 deve-se à perda
de pulsos do respetivo encoder entre as 16h:05 e as 16h09, possivelmente causados pela
conjugação do desgaste mecânico com as condições climáticas a que o sensor foi
sujeito, provando uma sucessão de valores de erro. Assim, este teste permitiu, não só,
comprovar o bom funcionamento da aplicação, como também, detetar uma falha num
dos sensores.
Figura 5.10 - Representação gráfica de algumas amostras do ficheiro de registo de erros.

Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 65
6. Conclusão
Neste último capítulo apresenta-se um resumo do trabalho desenvolvido e as
conclusões sobre o mesmo. Finalmente, são enumeradas algumas sugestões para
trabalho futuro.
6.1 Conclusões do Trabalho Desenvolvido
O objetivo deste trabalho era desenvolver um sistema de monitorização e teste de
sensores de direção LWS, com base numa câmara climática e um motor já existente na
empresa. Sendo a câmara climática controlada por uma rede Ethernet, o problema
consistia basicamente em comandar o motor e ler os sensores através de uma aplicação
baseada em PC.
Para ler os sinais de até 6 sensores com 2 encoders cada um, optou-se pela
utilização de uma placa de aquisição de dados da NI e a consequente escolha do
LabVIEW como ferramenta de desenvolvimento do software. A solução desenvolvida
incluiu a interligação dos vários componentes de hardware do sistema. Para além dos
sensores foi também ligado à placa de aquisição de dados o sinal digital proveniente do
controlador do motor. Para sinalizar que as condições climáticas pretendidas se
verificam dentro da câmara, foi estabelecida uma ligação de sincronização entre a
câmara climática e o controlador do motor.
A aplicação de monitorização e teste desenvolvida permite a criação, carregamento
e edição de programas de teste a partir de ficheiros, a configuração dos sensores a testar
e de parâmetros dinâmicos dos movimentos do teste, e as possibilidades de iniciar,
suspender e parar um teste. Durante a realização de um teste, são apresentados em
tempo-real todos os dados relevantes da monitorização e controlo e são gravados para
ficheiro.
O principal desafio no desenvolvimento da aplicação foi conseguir cumprir os
tempos requeridos para os movimentos e gerir a informação adquirida dos sensores.
6. Conclusão
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
66 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
De acordo com os objetivos estipulados aquando do início do trabalho, pretendia-
se uma aplicação bastante versátil de modo a suportar diferentes tipos de testes de
fiabilidade e a possibilidade de integração com outros equipamentos, permitindo assim,
o teste de diferentes tipos de sensores produzidos na empresa. Deste modo, é possível
afirmar que os objetivos foram cumpridos.
Analisando com mais detalhe alguns aspetos, conclui-se também que a escolha do
LabVIEW como linguagem de programação foi uma boa opção, dado que se revelou
ser uma linguagem bastante orientada para aplicações de monitorização. Por último,
nos testes finais à aplicação, verificou-se que a quantidade de dados recolhidos e
armazenados em memória era excessiva.
6.2 Sugestões de Trabalho Futuro
Como trabalho futuro, e de forma a reduzir o espaço ocupado em memória pelos
dados recolhidos ao longo dos testes, sugere-se a implementação de um campo nas
configurações e no processo de aquisição, de forma a possibilitar a definição de uma
frequência de aquisição menor, no modo comando e aquisição. Bem como, a
possibilidade de monitorização e registo dos dados apenas em situações de erro dos
sensores ou então em todas as situações (com e sem erro).
Com o intuito de tornar o sistema mais funcional, sugere-se também a
implementação de um mecanismo mais eficiente na seleção de canais a quando da
configuração do teste, de forma a permitir a utilização de um maior número de
contadores, das placas da NI, conseguindo-se dessa forma efetuar o mesmo teste a um
maior número de sensores.
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 67
7. Apêndices

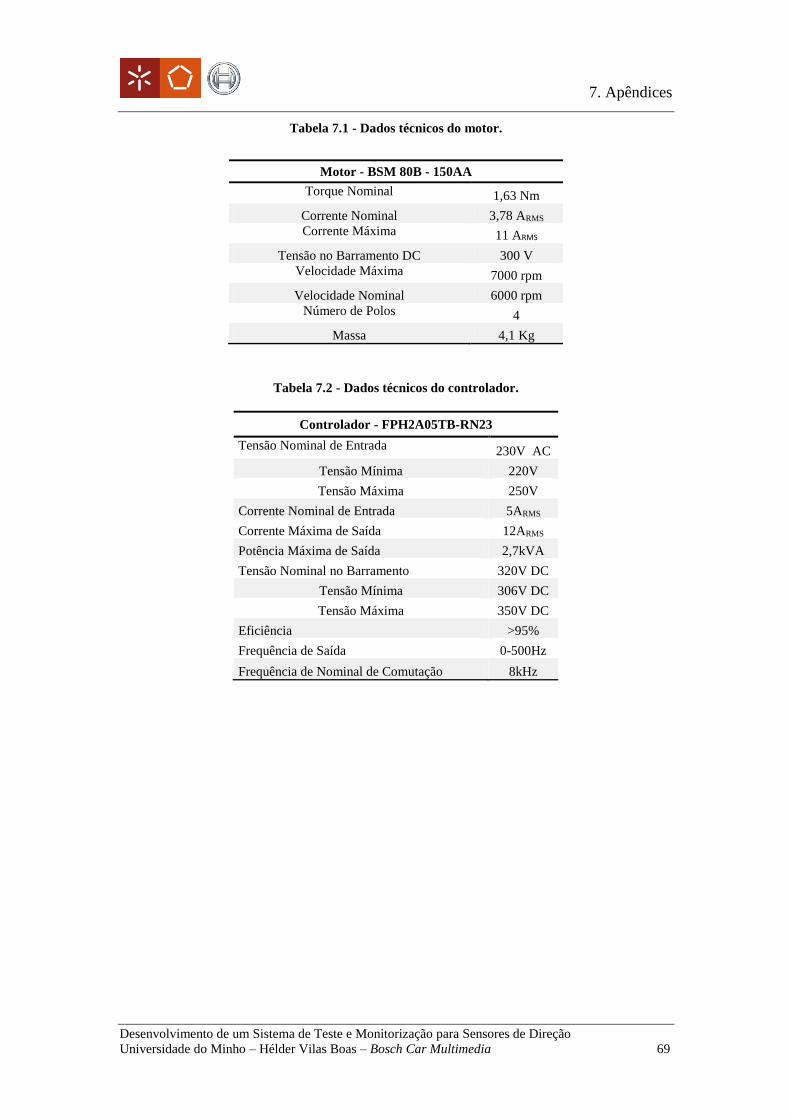
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 69
Tabela 7.1 - Dados técnicos do motor.
Motor - BSM 80B - 150AA
Torque Nominal 1,63 Nm
Corrente Nominal 3,78 ARMS
Corrente Máxima 11 ARMS
Tensão no Barramento DC 300 V
Velocidade Máxima 7000 rpm
Velocidade Nominal 6000 rpm
Número de Polos 4
Massa 4,1 Kg
Tabela 7.2 - Dados técnicos do controlador.
Controlador - FPH2A05TB-RN23
Tensão Nominal de Entrada 230V AC
Tensão Mínima 220V
Tensão Máxima 250V
Corrente Nominal de Entrada 5ARMS
Corrente Máxima de Saída 12ARMS
Potência Máxima de Saída 2,7kVA
Tensão Nominal no Barramento 320V DC
Tensão Mínima 306V DC
Tensão Máxima 350V DC
Eficiência >95%
Frequência de Saída 0-500Hz
Frequência de Nominal de Comutação 8kHz
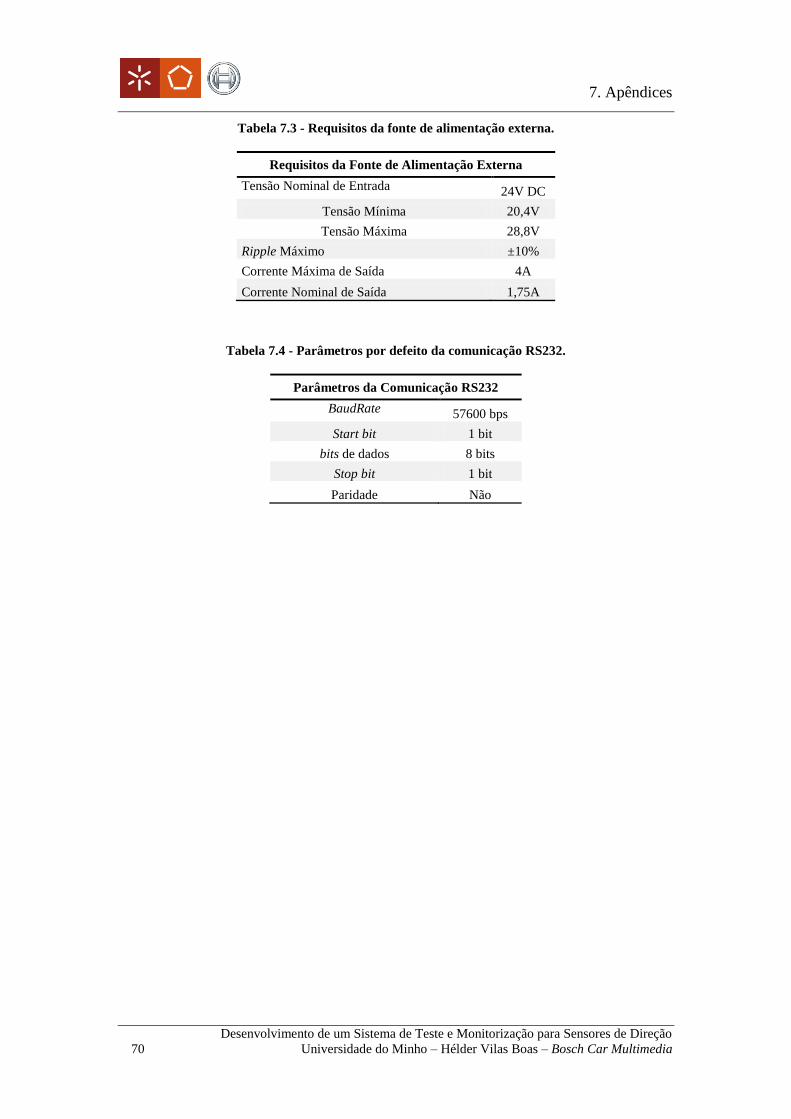
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
70 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Tabela 7.3 - Requisitos da fonte de alimentação externa.
Requisitos da Fonte de Alimentação Externa
Tensão Nominal de Entrada 24V DC
Tensão Mínima 20,4V
Tensão Máxima 28,8V
Ripple Máximo ±10%
Corrente Máxima de Saída 4A
Corrente Nominal de Saída 1,75A
Tabela 7.4 - Parâmetros por defeito da comunicação RS232.
Parâmetros da Comunicação RS232
BaudRate 57600 bps
Start bit 1 bit
bits de dados 8 bits
Stop bit 1 bit
Paridade Não
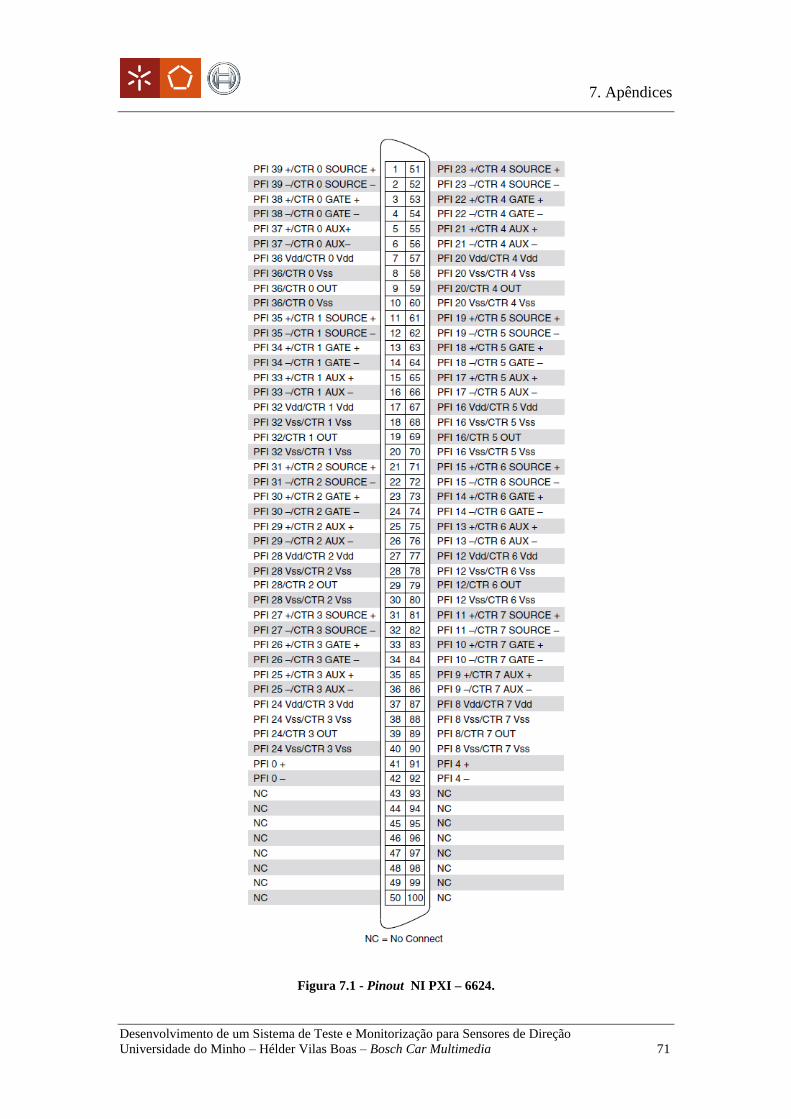
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 71
Figura 7.1 - Pinout NI PXI – 6624.
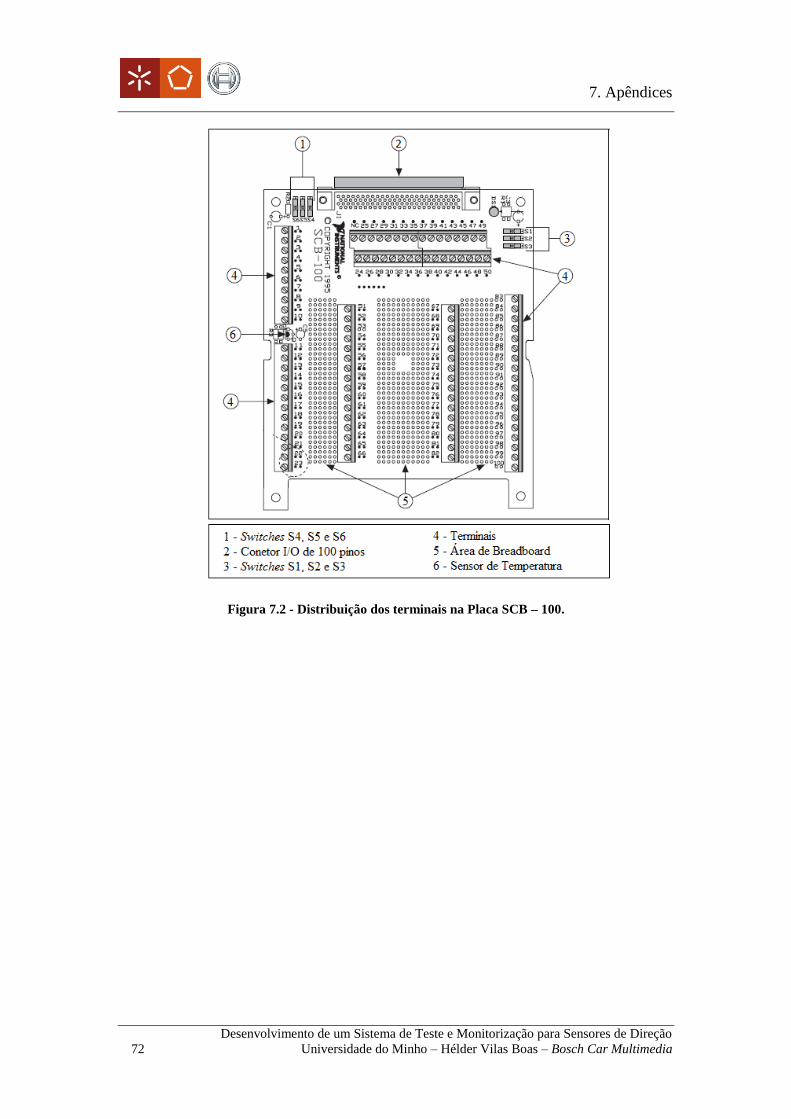
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
72 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 7.2 - Distribuição dos terminais na Placa SCB – 100.
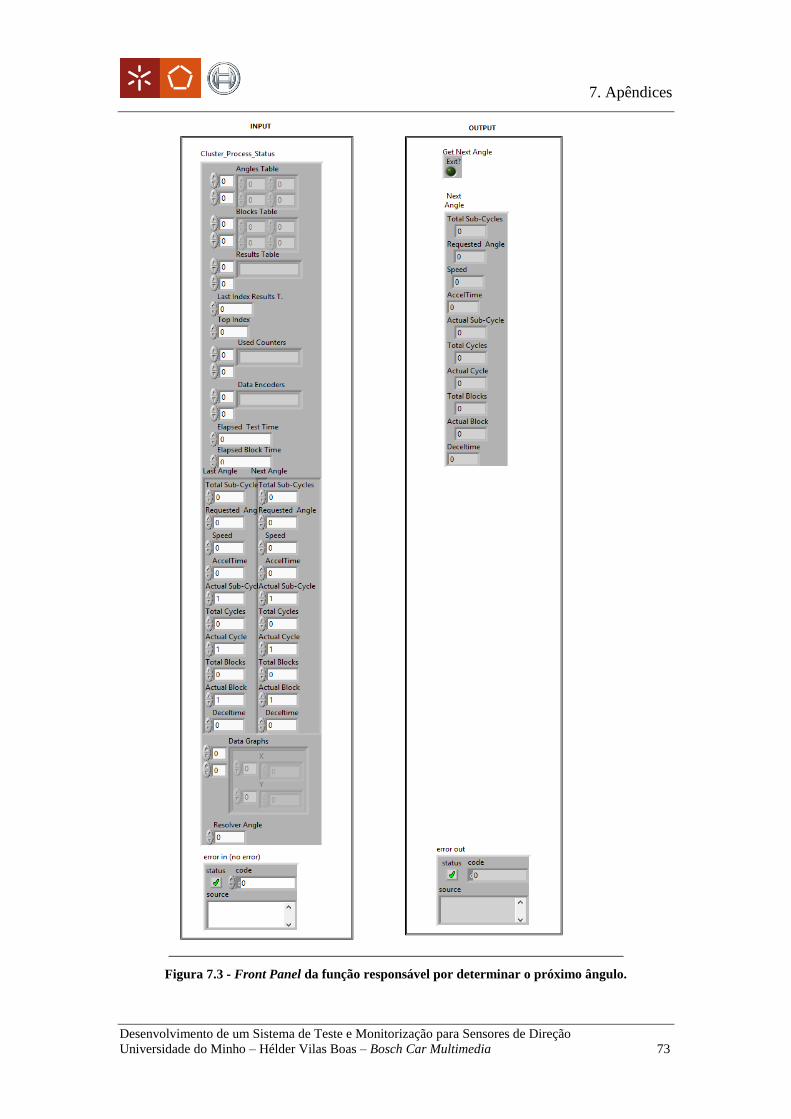
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 73
Figura 7.3 - Front Panel da função responsável por determinar o próximo ângulo.
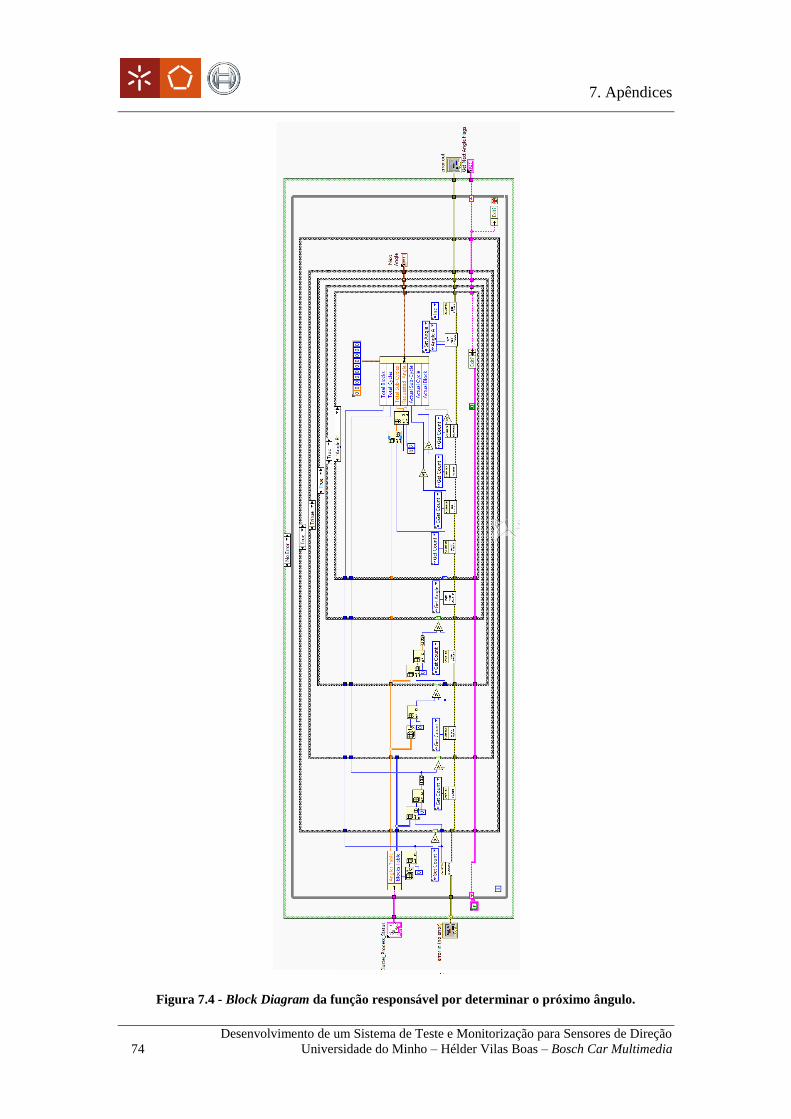
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
74 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 7.4 - Block Diagram da função responsável por determinar o próximo ângulo.
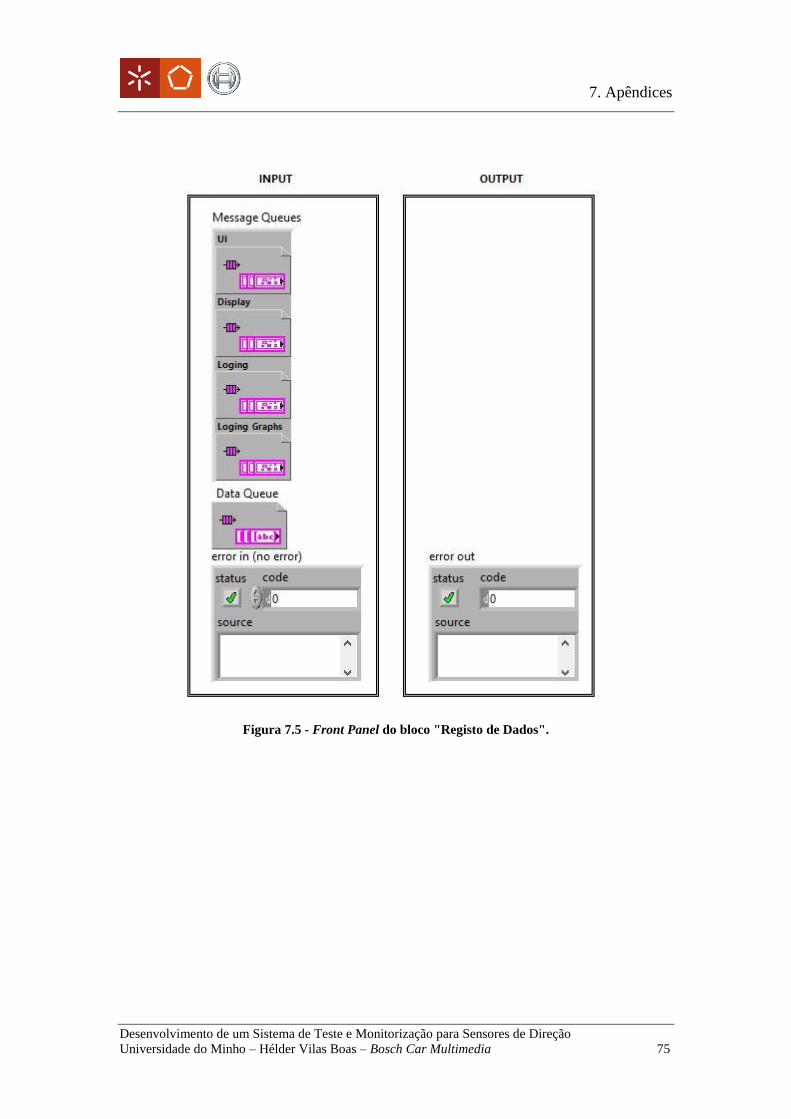
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 75
Figura 7.5 - Front Panel do bloco "Registo de Dados".
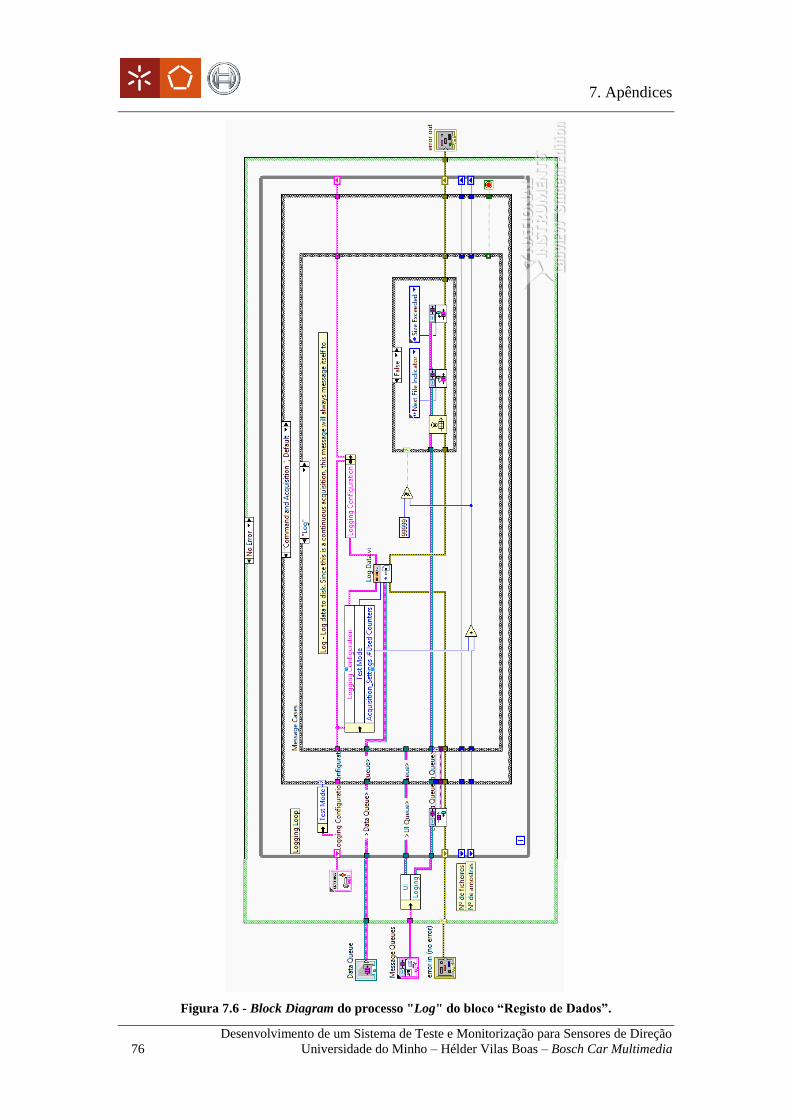
7. Apêndices
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
76 Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia
Figura 7.6 - Block Diagram do processo "Log" do bloco “Registo de Dados”.
Desenvolvimento de um Sistema de Teste e Monitorização para Sensores de Direção
Universidade do Minho – Hélder Vilas Boas – Bosch Car Multimedia 77
Referências
[1] “ESP” Disponível online no dia 21 de Outubro de 2013, em <http://www.car-
engineer.com/esp-electronic-stability-program/>;
[2] “How ESP Work” Disponível online no dia 21 de Outubro de 2013, em
<http://www.bosch-
automotivetechnology.com/en/de/specials/specials_for_more_driving_safety/bosc
h_esp_3/esp__facts_4/esp_technik_2/esp_questions_and_answers_16.html>;“Ho
w a Brushless Motor Operates” Disponível online no dia 21 de Outubro de 2013,
em <http://www.motioncontrolonline.org/files/public/BrushlessOperation.pdf>;
[3] “Guide to motion control drives” Disponível online no dia 21 de Outubro de 2013,
em<http://www.motioncontrolonline.org/files/public/ABB-Guide-to-Motion-
Control-Drives.pdf>, (64 páginas);
[4] “Mint ActiveX help” Disponível online no dia 21 de Outubro de 2013, em
<http://www.baldor.com/support/Literature/Load.ashx/BR1202-B?LitNumber=BR1202-
B>;
[5] “Controlador Baldor - FPH2A05TB-RN23” Disponível online no dia 21 de
Outubro de 2013, em
<http://www.baldor.com/support/Literature/Load.ashx/MN1902?ManNumber=M
N1902>, (164 páginas);
[6] “SCB-100” Disponível online no dia 21 de Outubro de 2013, em
http://www.ni.com/pdf/manuals/371224b.pdf>;
[7] “NI PXI-6624” Disponível online no dia 21 de Outubro de 2013, em
<http://sine.ni.com/nips/cds/print/p/lang/pt/nid/14530>;
[8] “Design Pattern” Disponível online no dia 21 de Outubro de 2013, em
<http://forums.ni.com/attachments/ni/170/284351/1/LabVIEW>, (452 páginas).

















![Aldeias, vilas e_cidades[1]](https://static.fdocumentos.tips/doc/165x107/559af5721a28ab2d2e8b45c2/aldeias-vilas-ecidades1.jpg)