Gerenciador uma Célula Flexível de Manufatura · Gerenciador uma Célula Flexível de Manufatura...
6
Gerenciador de uma Célula Flexível de Manufatura Antonio Valerio Netto' Arthur José V. Porto! Departamento de Engenharia Mecânica - SEM Universidade de São Paulo - USP/EESC - Campus São Carlos Av. Dr. Carlos Botelho, 1465 Vila Pureza 13560-250 São Carlos SP - Brasil lavnett o@ s c.usp.br 2 a j vp or t o @s c . u s p . b r Abstract: !his paper describe a proposal of a software management of a flexible manufacturing cell developed in language C, which control at the same time four cell's components. The communication among the microcomputer management and the too components of cell is based at a type star data architecture, RS232-C standard that utilize specific protocol to each your equipments. Resumo: Este artigo descreve uma proposta de um software gerenciador de uma célula flexível de manufatura desenvolvido em linguagem C, que controla simultaneamente quatro componentes de uma célula. A comunicação entre o microcomputador gerenciador e os demais componentes da célula é baseada numa arquitetura de comunicação de dados tipo estrela, padrão RS232-C que utiliza protoco los específicos para cada um dos equipamentos. Introdução A automação industrial iniciou-se com o desenvolvimento, dentro das empresas de manufatura, das chamadas ilhas de automação. Estas ilhas são subsistemas que apresentam a automação de alguns processos organizacionais ou produtivos que, a principio, não possuíam características de interfaceamento ou comunicação com outros subsistemas para a exploração mais racional das novas tecnologias de automação . [Politano, (1993)] Uma das novas tecnologias de automação existentes hoje é chamada de FMS (Flexible Manufacturing System). Existem várias definições na literatura [Fine, (1989) ; Kochan , (1986); Kunzle, (1990) ; Lepikson, (1990.)] sobre sistemas flexíveis de manufatura; de um modo geral, trata-se de um sistema que conecta estações de trabalho automatizadas com um sistema de manipulação e armazenamento de materiais. Tem como objetivo fornecer uma capacidade de produção automatizada i em multiestágios para uma maior variedade de peças, que são tradicionalmente feitas em uma linha de transferência não flexível, altamente automatizada. Estes sistemas fornecem flexibilidade devido a possibilidade das operações serem executadas em diferentes estações de trabalho e o fluxo de peças entre as estações poder ser variado de acordo com o controle da produção, via software. Em função da complexidade do processo de fabricação , no FMS pode-se segmentar as etapas de processamento em algumas sub-etapas: diversos FMC's (Flexible Manufacturing Cell) se completam em sua respectiva especialidade, para fornecer a peça processada. [Lepikson, (1990)] De uma forma geral, uma célula flexível de manufatura pode ser definida como um grupo de recursos de manufatura, consistindo de máquinas e estações de trabalho que são organizados e programados como uma entidade para aceitar peças discretas, sub- montagens e materiais. A célula adiciona valor através do processamento criando um novo produto identificável como sua saída. As células podem ser automatizadas, semi-automatizadas, operadas manualmente, ou uma combinação de todos os três tipos. [Politano, (1993)] O departamento de Engenharia Mecânica da EESCIUSP, do campus de São Carlos, vêm desenvolvendo um plano para capacitação tecnológica nesta área. Uma das atividades de pesquisa é o uso de uma célula flexível de manufatura, constituída por quatro componentes, que é empregada na produção de peças individuais. Ela é extremamente versátil quanto a mudanças de peças; uma vez disparado o processo de 178
Transcript of Gerenciador uma Célula Flexível de Manufatura · Gerenciador uma Célula Flexível de Manufatura...

Gerenciador de uma Célula Flexível de ManufaturaAntonio Valerio Netto 'Arthur José V. Porto!
Departamento de Engenharia Mecânica - SEMUniversidade de São Paulo - USP/EESC - Campus São Carlos
Av. Dr. Carlos Botelho, 1465 Vila Pureza 13560-250 São Carlos SP - Brasillavnett o@ s c.usp.br2a j vp o r t o@s c . u s p . b r
Abstract: !his paper describe a proposal of a software management of a flexible manufacturing celldeveloped in language C, which control at the same time four cell's components. The communicationamong the microcomputer management and the too components of cell is based at a type star
data architecture, RS232-C standard that utilize specific protocol to each yourequipments.
Resumo: Este artigo descreve uma proposta de um software gerenciador de uma célula flexível demanufatura desenvolvido em linguagem C, que controla simultaneamente quatro componentes deuma célula. A comunicação entre o microcomputador gerenciador e os demais componentes da célulaé baseada numa arquitetura de comunicação de dados tipo estrela, padrão RS232-C que utilizaprotoco los específicos para cada um dos equipamentos.
IntroduçãoA automação industrial iniciou-se com odesenvolvimento, dentro das empresas demanufatura, das chamadas ilhas de automação.Estas ilhas são subsistemas que apresentam aautomação de alguns processos organizacionais ouprodutivos que, a principio, não possuíamcaracterísticas de interfaceamento ou comunicaçãocom outros subsistemas para a exploração maisracional das novas tecnologias de automação .[Politano, (1993)]
Uma das novas tecnologias de automaçãoexistentes hoje é chamada de FMS (FlexibleManufacturing System). Existem várias definiçõesna literatura [Fine, (1989) ; Kochan , (1986); Kunzle,(1990) ; Lepikson, (1990.)] sobre sistemas flexíveisde manufatura; de um modo geral , trata-se de umsistema que conecta estações de trabalhoautomatizadas com um sistema de manipulação earmazenamento de materiais. Tem como objetivofornecer uma capacidade de produção automatizada i
em multiestágios para uma maior variedade depeças, que são tradicionalmente feitas em uma linhade transferência não flexível, altamenteautomatizada. Estes sistemas fornecemflexibilidade devido a possibilidade das operações
serem executadas em diferentes estações de trabalho e ofluxo de peças entre as estações poder ser variado deacordo com o controle da produção, via software.
Em função da complexidade do processo defabricação , no FMS pode-se segmentar as etapas deprocessamento em algumas sub-etapas: diversos FMC's(Flexible Manufacturing Cell) se completam em suarespectiva especialidade, para fornecer a peçaprocessada. [Lepikson, (1990)]
De uma forma geral, uma célula flexível demanufatura pode ser definida como um grupo derecursos de manufatura, consistindo de máquinas eestações de trabalho que são organizados e programadoscomo uma entidade para aceitar peças discretas, sub-montagens e materiais. A célula adiciona valor atravésdo processamento criando um novo produto identificávelcomo sua saída. As células podem ser automatizadas,semi-automatizadas, operadas manualmente, ou umacombinação de todos os três tipos. [Politano, (1993)]
O departamento de Engenharia Mecânica daEESCIUSP, do campus de São Carlos, vêmdesenvolvendo um plano para capacitação tecnológicanesta área. Uma das atividades de pesquisa é o uso deuma célula flexível de manufatura, constituída por quatrocomponentes, que é empregada na produção de peçasindividuais. Ela é extremamente versátil quanto amudanças de peças; uma vez disparado o processo de
178

fabricação, ela realiza todas as operaçõesnecessárias, sendo que, para alterar o tipo da peça,basta alterar a programação de seus elementos.Espera-se que através da simulação desta célulaflexível, possa-se demonstrar e pesquisar oprocesso de informação entre seus componentes.
Descrição da célula flexível de manufaturaA célula flexível de manufatura é composta por umcentro de usinagem controlado por CN, ummanipulador mecânico (robô), um veículo auto-guiado (AGV) e um magazine automatizado, todoscontrolados por um microcomputador gerenciadorda célula (MGC) que por sua vez, se comunica como restante da Fábrica Integrada Modelo (FIM), .utilizando uma rede local, padrão ethemet. [ValerioNetto, (1995)]
O centro de usinagem citado é uma máquinaferramenta CNC para a usinagem de peçasprismáticas. Possui uma mesa para fixar peças comcapacidade de rotacionar em giros de 90 graus edispositivos para permitir a automatização dasoperações de carga, descarga e usinagem da peça.
A operação de abertura/fechamento da porta érealizada por um pistão pneumático fixado na portado centro de usinagem. Este pistão é acionado poruma eletro-válvula controlada pelo MGC. Estamesma eletro-válvula é responsável também pelodispositivo de fixação da peça instalado sobre amesa do centro de usinagem.
O manipulador mecânico é basicamente umrobô reprogramável e muItifuncional que possuiseis graus de liberdade e foi projetado paramovimentar materiais, peças, ferramentas oudispositivos especiais através de movimentosprogramáveis, que executam tarefas variadas.[Morandin Jr., (1994)] Sua função básica érealizar carga/descarga de peças paIletizadas entre oveículo auto-guiado (AGV) e o centro de usinagem
O veículo auto-guiado (AGV) é um sistema decarga, transporte e descarga, controlado por ummicrocomputador de bordo, sem a presença de umoperador. Ele é equipado para seguir uma guiaflexível, a qual pode ser facilmente modificada ouexpandida. [Gunsser, (1988)] Sua função étransportar ferramentas e/ou pallets de peças desdeos locais de armazenagem até os .locais de trabalhoou vice e versa, seguindo trajetóriaspreestabelecidas com base na otimização do layoutde trabalho do chão de fábrica.
Na célula foi utilizado um AGV do tipotransportador de carga unitária devido a ele permitircarregar, sobre si mesmo, cargas simples oumúltiplas, sendo usualmente bidirecional, isto é,pode trafegar em direções opostas ao longo da guia.Sua maior aplicação está em áreas onde há
movimentação de material aleatório, pouca ou médiaquantidade de carga, com múltiplos pontos de parada.[Morandin Jr., (1994)] .
O magazine automatizado é um sistema dearmazenagem de material para processos de fabricação.Ele é constituído de nichos onde o material éarmazenado sem a intervenção humana, com operaçõesde carga/descarga controlados por computador. Suasvantagens estão na possibilidade do controlecomputacional do material em processo; situação elocalização on-line do material (peças, ferramentas,palletsy nos subsistemas do FMS. Permite a redução deinventários, eliminação do manuseio repetitivo demateriais, aumento da produtividade, aumento dasegurança e redução das perdas por danificação e errosde localização.
No projeto da célula flexível de manufatura, foiimplementado um sistema automatizado de armaze-namento e entrega de paIlets chamado AR/RS.
O sistema AR/RS é basicamente formado porestantes de armazenamento, ao longo das quais move-seuma máquina de carga/descarga automatizada (máquinade CID) . Esta máquina de CID normalmente é umelevador, no qual é fixado um carro de transferência, eatravés da elevação/abaixamento deste carro, éselecionada uma linha de armazenamento. Após oposicionamento na localidade desejada, o carro detransferência se encarregará de : coletar/armazenar opallet. O armazenamento/entrega de materiais é feitonuma região denominada estação de entrada/saída,localizada no extremo das estantes de armazenamento.
Através da implementação de um controlecomputadorizado, o sistema opera automaticamente,sendo necessário apenas a troca de dados entre ocomputador controlador do magazine e o MGC.
Este sistema apresenta como característicasprincipais: operação automatizada, capacidade dearmazenamento de pallets nos dois lados do corredor,flexibilidade de disposição das localidades(compartimentos) de armazenamento, modularidade ,compatibilidade com o dispositivo de transferência decargas utilizado no manipulador e integração ao sistemade manipulação de materiais. [Tronco, (1992)]
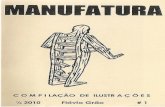
Na figura I é mostrado o layout da célula demanufatura flexível (FMC) desenvolvida noDepartamento de Eng. Mecânica da EESC/USP.
Funcionamento e monitoramento gráfico doscomponentes da célulaDentro do ambiente da célula, o controle,sequenciamento e sincronismo de operações doselementos componentes do sistema de manipulação demateriais (AGV, Magazine Automatizado eManipulador) e da estação de processamento (Centro deUsinagem) é realizado pelo MGC (MicrocomputadorGerenciador da Célula).
179

I ,
RI :
i IL'dMAGAZINE
AUTOMÁTICO
CENTRO DE
f\',\
INTERFACESMULTlSERIALE PARALELA
*
IA.G.v. .}
REDE L0::...cC:..cA-=L=-._ I-_
__1_MICROCOMPUTADOR l-i - :!
CERENCIADOR I !DA CÉLULA mTITIfJ)
t.....
Figura 1 - Célula de Manufatura Flexível do LAMAFE. [Morandin Jr., (1994)]
Este processo é realizado seguindo umasequencia padrão de trabalho ; apenas um doscomponente é acionado de cada vez.
Quando ocorrer uma liberação de uma ordemde fabricação, o MGC envia o programa deusinagem (programa CN) para o centro deUsinagem, em segu ida é acionado o magazineautomatizado para buscar uma peça bruta na estanteporta pallets, esta peça será depositada sobre oAGV, utilizando-se para isto, a máquina decarga/descarga.
O AGV por sua vez, levará a peça até asproximidades do manipulador, o qual irá retirá-Iada plataforma do veículo e colocá-Ia na mesa defixação do centro de usinagem . Posteriormente éacionado o dispositivo de fixação da peça na mesa(cilindro pneumático) e fechada a porta desegurança, permitindo assim a execução doprograma de usinagem.
Tão logo a peça esteja pronta, o movimentoinverso será feito, até a armazenagem . Comrelação' a este armazenamento foi padronizado quea peça usinada retome para o mesmo nicho de quefoi retirada anteriormente.
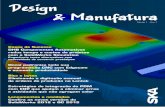
Todo este procedimento possui ummonitoramento gráfico realizado pelo MGC.
No canto superior esquerdo (figura 2) épossível saber qual dos componente da célula estáem funcionamento no momento, para isto bastaobservar qual deles está com a marcação A(Ativado), setada; no caso do exemplo da figura 2,o magazine automatizado é o que está em atividade .Pode-se saber também a localização do AGV, se
ele está perto do magazine ou do centro de usinagem,através das marcações próximas a estes componentes (nocaso do exemplo, ele está perto do magazine). Amarcação AI (Alerta), se estiver setada, indica aexistência de algum problema no componente da célulacorrespondente.
No canto inferior esquerdo é possível fazer essamesma visualização, porém em forma de porcentagemde utilização da máquina . Existe também um relógiomarcando o horário de início de cada processo.
No canto superior direito existe a visualização donúmero da ordem de fabricação da peça a ser usinada, eo código da unidade desta peça. Esses dados sãopassados como parâmetros no início da execução doprograma principal. Existe também a sinal ização dostatus da peça: E (Espera) indica que a peça estáesperando para ser usinada, D (Desenvolvimento)significa que esta peça está sendo usinada no momento eL (Liberada) indica que a peça finalizou sua usinagem eestá liberada. Este quadro, na verdade é um histórico dasdez últimas peças produzidas no sistema.
No canto inferior direito existe um quadro queservirá também para armazenar o histórico das dezúltimas peças supervisionadas, marcando quanto tempocada uma levou para ser usinada.
Unidade de controlePara a realização da integração dos componentes dacélula foi adotada uma arquitetura de comunicação cujatopologia segue a configuração estrela, isto é, uma redecom um único computador man ipulando a comunicaçãocom o resto do sistema.
180

AO A1
111 ....0.0 •AD AI C. O
AO A1
.......... ro d.Ord .. F.t3r.
001002
CoeSiva d.lJnld_
0089700987
St;.tus
E D Lo O OO O OO O OO O OO O OO O OO O OO O OO O O
'l. de ut;i-1izacao
10090ao7060:S040302010 O D O
"aquin.
inicio 03:22:32
_"a9.z1n._AGU_Rabo_ceU
Figura 2 - Monitoramento gráfico do sistema. [Politano, (1993)]
.Cada componente foi conectado a unidade decontrole através de uma ligação ponto-a-ponto. Estetipo de transmissão de dados é a técnica maisconhecida e usada em aplicações de chão de fábricaquando se deseja fazer transmissão serialassíncrona entre uma estação de transmissão erecepção. [Politano, (1993)]
Neste tipo de transmissão um byte(geralmente um caracter ASCII) pode ser enviado erecebido de modo assíncrono. Um start bit égerado pelo transmissor no início de cada cadeiaseguido pelos bits que codificam o caracter ASCII eum ou mais stop bits. O sincronismo do receptor éiniciado pelo stop bit e serve como referência detemporização para que cada bit possa ter seu nívellógico identificado. Esta técnica está incorporadano padrão RS232-C definida pela ElA (ElectronicIndustrial Association). [Gaylord, (1987)]
O software controlador executado no MGC(Microcomputador Gerenciador da Célula) foidividido em dois módulos: controle e comunicação.O módulo de controle da célula corresponde a umalgoritmo de controle, que utiliza estruturas dedados em forma de tabelas. As tabelas contêm asespecificações da estratégia de controle da célula .Foram também desenvolvidos programas de ediçãopara manipular os dados das tabelas .
As principais tabelas usadas pelo algoritmo decontrole são: tabelas de estados, de eventos, deestados atuais, de próximos estados e de comandos.A tabela de estados contém todos os estadosprevistos em que cada componente pode seencontrar, e a cada estado está associada uma listade eventos . A tabela de eventos contém todos os
eventos possíveis de ocorrerem na célula . Cada eventopode possuir uma condição associada, isto é, o eventoocorre dependendo da condição do estado associado àtransição . Ocorrido o evento, o próximo estado é ativadoe o comando de alto nível associado a este estado (açãoque deve ocorrer) é enviado ao componente da célula.
A tabela de estados atuais representa os estadoscorrentes dos componentes da célula . Cada componentepossui um registro onde está indicado o seu estado atual,um flag que indica se o estado possui ou não umcomando de alto nível associado e o status destecomando . A tabela de próximos estados apresenta amesma estrutura da tabela de estados atuais . Ela épreenchida de acordo com a execução dos comandosassociados aos estados contidos na tabela de estadosatuais. Após a execução de todos os comandosassociados a tabela de estados atuais, esta é substitu ídapela tabela de próximos estados. Por fim a tabela decomandos contém os comandos de alto nível associadosaos estados de cada componente da célula.
No módulo de controle foi implementado umalgoritmo orientado para busca em tabelas, porque ébasicamente nas tabelas de estados e eventos que estárepresentada a especificação lógica do controle da célula .A seqüência dessas buscas é feita a partir de umacondição inicial do sistema (estados default) que estárepresentada nas tabelas de estados atuais.
O algoritmo usa a tabela de estados atuais paraenviar os comandos de alto nível associados ao módulode comunicação. Esses comandos são traduzidos pelomódulo de comunicação para então serem enviados naforma de comandos específicos para os componentes. Ostatus de comando executado é indicativo que um doseventos associados ao estado atual ocorreu. O algoritmo
181

então realiza uma busca na tabela de estados paralistar os possíveis eventos. De posse da lista, oalgoritmo seleciona um evento que satisfaça natabela de eventos, uma condição verdadeira paraque o evento tenha ocorrido. Uma vez o even todeterminado, o próximo estado e o próximocomando ficam determinados. O algoritmomodifica a tabela de estados atuais e uma novaconfiguração do estado é estabelecida para cadacomponente.
O módulo de controle da célula será ativado apartir do momento que exista uma ordem defabricação a ser executada e o setup (tempo depreparação) da célula já tenha sido realizado. Apósa ordem ter sido executada, o sistema deverá voltarà condição inicial a espera de uma nova ordem.
No modelo especificado, as condições iniciaise finais na realização da ordem de fabricação sãopreestabelecidas. No estado inicial do modelo,assume-se que já exista uma peça sendo usinada eno estado final considera-se que haja uma peçausinada no centro de usinagem. As condiçõesiniciais e finais para a fabricação de uma ordemserão tratados no algoritmo de controle comocond ições de inicialização, para a entrada daprimeira peça , e final ização, para a saída da últimapeça da ordem (lote).
O módulo de comunicação é o responsávelpela decodificação dos comandos enviados pelomódulo de controle, transformando-os em framesapropriados para a transmissão de dados para cadacomponente da célula. O módulo foi estruturadofuncionalmente em quatro sub-módulos: interfacede comandos, tradutor, protocolo de comandos eprotocolo de comunicação. Os três últimos sãoespecíficos para cada componente enquanto que ainterface de comandos é comum para todos.
Esta interface de comandos é responsável porreceber o comando ' enviado pelo módulo decontrole e selecionar através de uma lista decomandos cadastrados, o sub-módulo de traduçãoque será responsável pela interpretação etratamento do comando.
O tradutor contém a rotina e a base de dadoscom as informações necessanas para adecodificação e tratamento do comando. Esta basede dados possui a ,seqüência de comandosespecíficos para a operação de cada componente dacélula. .
O protocolo de comandos contém uma lista deformatos de dados (telegrama) para cada comando.Assim ; o tradutor selecionará o comando ou acadeia de comandos que deverão ser utilizadas peloprotocolo de comunicação. Este protocolo decomunicação determina o procedimento detransmissão e recepção de dados, gerenciando otrânsito deles pelo me io físico . Neste protocolo
reside a rotina que estabelece o acordo sobre oprocessamento de troca de dados com um componenteespecífico da célula.
O meio físico utilizado para a comunicação dedados entre MGC e os demais componentes da célula éconstituído por uma placa multiserial padrão RS232-C eduas interfaces paralelas. Uma paralela (Porta A) éresponsável pelo controle do manipulador; através delapode-se selecionar o programa que o robô vai executar,enviar seu start (inicio da execução do movimento) eposteriormente determinar a sua parada (slop). A outrainterface (Porta B) controla o ciclo de start do centro deusinagem , o abrir e fechar da porta pneumática desegurança e o acionamento do dispositivo de fixação dapeça dentro da máquina.
Com relação as seriais, uma (COMI) esta sendoutil izada para a descarga do programa CN no centro deusinagem, outra (COM2) está sendo utilizada para ocontrole do magazine automatizado e uma terceira serial(COM3) faz o controle do AGV .
Sobre o controle do magazine automatizado éimportante frisar que ele possui um microcomputadoronde se encontra um programa que controla osmovimentos da máquina de carga/descarga (busca erecuperação da peça) , isto é, o MGC através dacomunicação serial transmite os comandos para estemicrocomputador, e este posteriormente decodifica-os eos envia para máquina de carga/descarga executar osmovimentos requisitados. Movimentos como porexemplo, o de localizar e pegar o pallet que está numadeterminada coordenada x e y; levar este pallet até aposição de embarque; embarcar/desembarcar o pallet doAGV e recolher o carro de transferência para posição derepouso . [Tronco, (1992)]
Com relação a troca de informações entre o AGV eo MGC, ela é realizada através do modo contínuo, paragarantir a passagem de parâmetros em qualquer instante ,se necessário ou desejado. Para esse modo decomunicação, a técnica escolhida foi a comunicação porRádio-Frequência.
Dois níveis na comunicação deverão serdestacados: o nível físico, onde serão especificados opadrão elétrico e o meio físico de comunicação; e o nívellógico, onde serão apresentados o protocolo lógico e osdados ou informações a serem trocados.
Ao nível físico , serão utilizados dois conjuntosmodulares/demodulares de RF, um sendo conectado àinterface serial (RS232-C) do microcomputadorcontrolador de bordo do AGV e o outro à interface serial(COM3) do MGC.
Ao nível lógico, as informações trocadas serãosobre : o destino do AGV, tipo de carga, permissão paratráfego, parada de emergência (ocasionada por exemplopor colisão do veículo com algum obstáculo ou porsolicitação do MGC), estação atingida, presença ouausência de carga sobre a plataforma de trabalho eidentificação de eventuais defeitos (emergência por
182

colisão, emergência por solicitação através dobotão de stop do AGV ou escape da guia dereferência) . [Morandin Jr., (1994)]
ConclusõesA divisão em dois módulos principais do
software de controle localizado no MGC, permitesuportar , com a mínima alteração, modificações nacompos ição da célula . Por exemplo, a substituiçãode um novo componente por um existente queexecute as mesmas funções não implicará namodificação da especificação de controle jáestabelecida. Algumas mudanças poderão ocorrer anível do módulo de comunicação, para atender aosrequisitos do protocolo de comunicação específicodo fabricante.
Outra vantagem nesta divisão é que cadamódulo poderá funcionar em estações distintas,dependendo da aplicação. A divisão poderá ocorrerquando o tempo de resposta do software decontrole se tomar crítico para algum componenteda célula, em função do aumento de complexidadedo controle, das análises que requerem um tempocomputacional maior e também quando otratamento da transmissão de dados requerer umamaior solicitação de tempo da CPU.
Através do uso do sistema pode-se identificarquestões de ordem técnicas , só possíveis através daprática da execução do mesmo . Problemas como:tempos de controle, protocolos de comunicação(velocidade de comunicação e características dosframes), velocidade de processamento dos equipa-mentos, características eletrônicas e mecânicas dohardware (principalmente do AGV e do MagazineAutomatizado) e sobretudo, problemas relacionadoao sistema computacional de controle do MGC.
Foi comprovado também através dos testespráticos que não existe a necessidade, de sedesenvolver mecanismos de detecção de erro nacomunicação de dados . Isto se deve, por se tratarde uma distância pequena entre o MGC e os demaiscomponentes da célula e também os dados que sãotransmitidos, são frames já conhecidos . pelarecepção . Se não chegar nenhum comandoconhecido, o componente não executará nenhumadas rotinas e assim não há perigo de umainterpretação errônea de comandos por parte docontrolador do mesmo. Não obtendo o retomo deêxito do comando enviado, o MGC, assim que otime-out é acionado, envia novamente o comandopara o controlador. Segue-se esta seqüência até quea resposta do comando seja positiva.
Com relação a topologia em estrela éimportante frisar que esta configuração tem adesvantagem de ter um único ponto, o computadorcentral (MGC), pode falhar e desabilitar o sistema
inteiro, prejudicando assim toda a célula, já que é a partir ,/do MGC que são enviados todos os comandos deacionamento do sistema.
ReferênciasFine, C. H. Strategic manufacturing - dinamic new
directions for the 1990 's, Dow-Jones Irwin;Homewood , IIIiois, USA, pg. 257-274, 1989.
Gaylord , 1. Factory information systems, New York,Marcel Dekker, 1987.
Gunsser, P. An automated guided vehicle systemssupplier 's view of fully integrated flexiblemanufacturing systems, Proc. 7th Intema-tionalConference on Flexible Manufacturing System,1988.
Kochan, D. CAM - developments in computer integratedmanufacturing, Springer-Verlag, Berlin Heidelberg,1986.
Kunzle, L. A. Controle de sistemas flexíveis demanufatura especificação dos níveis deequipamento e de estação de trabalho. Curitiba,1990, Dissertação (Mestrado), CEFET-PR.
Lepikson, H. A. Padronização e interação das unidadesde fabricação, inspeção e manipulação de umacélula flexível de manufatura, Florianópolis, 1990,Dissertação (Mestrado), Universidade Federal deSanta Catar ina - UFSC.
Morandin Jr., O. Projeto e Sonstrução de um veículoauto-guiado para siste,,\as flexíveis de manufatura.São Carlos, Julho, 1994, 123 Pp., Dissertação(Mestrado), Escola de Engenharia de São Carlos -EESC, Universidade de São Paulo - USP.
Politano, P. R. Especificação e Implementação de umaunidade de controle para célula flexível demanufatura. São Carlos, Agosto, 1993, 130 Pp.,Dissertação (Mestrado), Escola de Engenharia deSão Carlos - EESC, Universidade de São Paulo -USP.
Tronco, M. L. Estudo, projeto e construção de umsistema automatizado de coleta e armazenamentode 'pallets '. São Carlos, Novembro, 1992, 266 Pp.,Dissertação (Mestrado), Escola de Engenharia deSão Carlos - EESC, Universidade de São Paulo -USP.
Valerio Netto, A. Comunicação de dados entre umcontrolador de uma célula flexível de manufatura eum veículo auto-guiado. Anais do III SIMPÓSIODE INICIAÇÃO CIENTÍFICA DA UNIVERSI-DADE DE SÃO ·PAULO - USPIEESC, v.2, Pp.232, São Carlos, Dezembro, 1995.
183