Física Geral - Instituto de Fisica
51
Força e Torque Física Geral
Transcript of Física Geral - Instituto de Fisica
Força e Torque
Física Geral

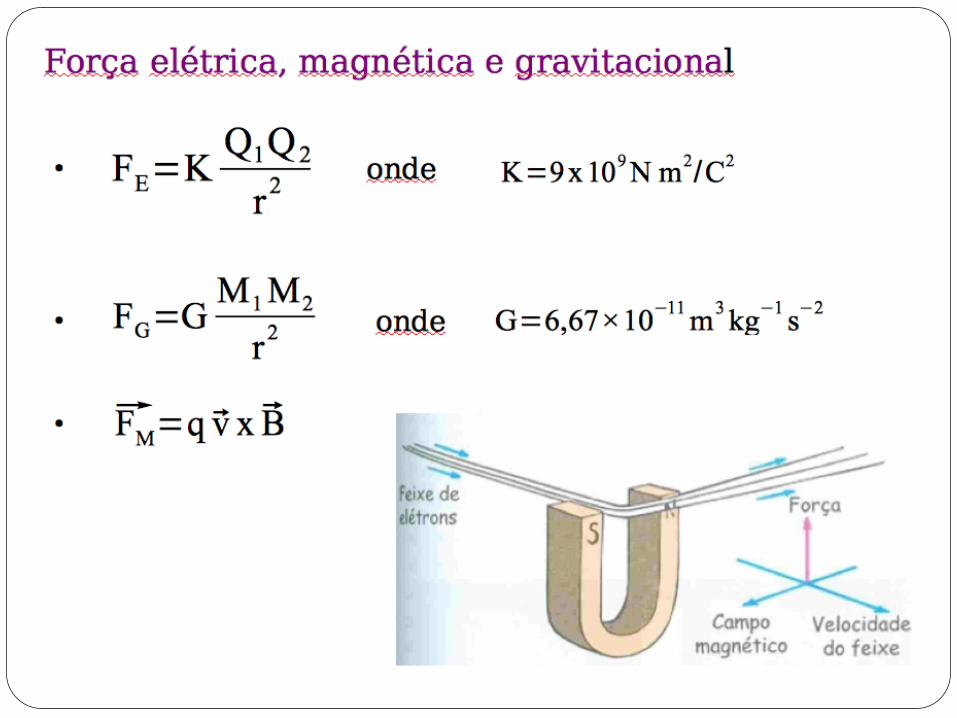
As forças que atuam diretamente nos sistemas com os quaisinteragimos, são manifestações das forças fundamentais,geralmente das forças gravitacionais ou eletromagnéticas.
Por exemplo a força de atrito tem origem nas interaçõesentre as moléculas dos corpos que estão em contato, sendoassim oriunda de interações eletromagnéticas.
Tratamos analiticamente os efeitos destas forças por meio deleis que descrevem perfeitamente os fenômenos físicosobservados sem, entretanto, lançar mão da sua origem.

ForçasSe há interação entre dois objetos, então existe uma força atuandosobre os dois objetos. Se a interação termina, os corpos deixam deexperimentar a ação de forças. Forças existem somente comoresultado de interações.
Tipos de forças:
- Forças de contato: São aquelas que surgem através do contato físicoentre os objetos interagentes. Por exemplo: forças mecânicasdiretamente aplicadas, forças de atrito, forças tensionais.
- Forças de longo alcance: São forças que agem mesmo quando osobjetos interagentes não estão em contato direto. Mesmo assim sãocapazes de atrair ou repelir um ao outro. Exemplos: força gravitacional,força elétrica e força magnética.
Do ponto de vista da mecânica, as ações que provocamalterações no movimento ou nas dimensões de um corpo, sãodescritas como forças ou pressões, tensões, compressões,trações, torções, fricções, etc.
Dependendo da natureza dos fenômenos que lhes dão origem,são classificadas também como elétricas, magnéticas,gravitacionais, elásticas, acústicas, dissipativas, etc.



Aplicação das Forças,Torque
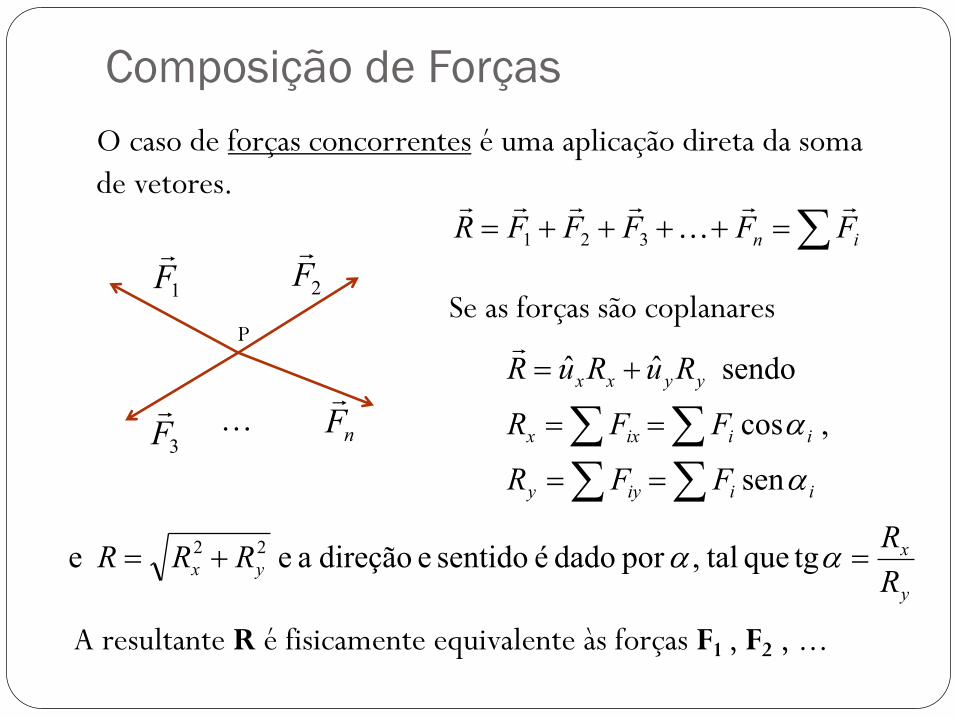
Composição de ForçasO caso de forças concorrentes é uma aplicação direta da soma de vetores.
P
1F!
2F!
3F!
nF!
...
å=++++= in FFFFFR!!
"!!!!
321
å åå å
==
==
+=
iiiyy
iiixx
yyxx
FFR
FFR
RuRuR
a
a
sen
, cos
sendo ˆˆ!
Se as forças são coplanares
y
xyx R
RRRR =+= aa tgque tal,por dado é sentido e direção a e e 22
A resultante R é fisicamente equivalente às forças F1 , F2 , ...
Composição de Forças
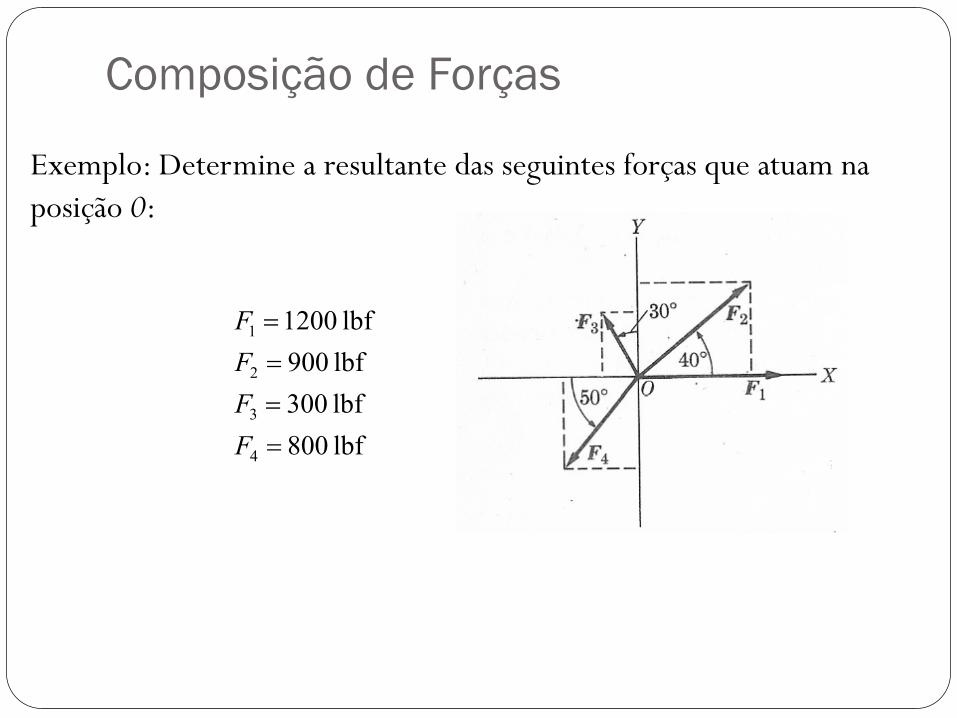
Exemplo: Determine a resultante das seguintes forças que atuam na posição 0:
lbf 800lbf 300lbf 900lbf 1200
4
3
2
1
====
FFFF

Composição de ForçasSolução:Decompondo nas componentes ortogonais teremos:
lbf 612,8ˆ514,2ˆ 230senˆ230cosˆ
lbf 259,8ˆ150,0ˆ120senˆ120cosˆ
lbf 578,5ˆ689,4ˆ40senˆ40cosˆ
lbf 1200ˆ
444
333
222
1
yxyx
yxyx
yxyx
x
uuFuFuF
uuFuFuF
uuFuFuF
uF
--=+=
+-=+=
+=+=
=
!!
!!
!!
"
"
"
"
Como
)(ˆ)(ˆ 43214321
4321
yyyyyxxxxx FFFFuFFFFuFFFFR
+++++++=+++=!!!!!
De onde temos que
!
"
10,4por dados ficam sentido e direção a ,tg sendo e
lbf 7,1245 com 5,225ˆ2,1225ˆ
==
=+=
aax
y
yx
RR
RuuR

Torque (ou Momento da força)
Supondo uma força F agindo em um corpo C e capaz de girá-lo em torno de 0.
A efetividade da força aumenta com o aumento da distância b. A grandeza que quantifica essa percepção é o torque:
Fb=t
de onde podemos escrever também
.senqt Fr=

Torque
.senqt Fr=
.senqABBA =´!!
Logo, o torque pode ser expresso como uma grandeza vetorial dado pelo produto
Fr!!!
´=t
O torque será um vetor perpendicular ao plano que contém
Observa-se a direta relação com o produto vetorial, onde
. e rF !!
Braço da alavanca

Torque
Lembrando que zzyyxxzyx FuFuFuFzuyuxur ˆˆˆ e ˆˆˆ ++=++=!!
( ) ( ) ( )xyzzxyyzx
zyx
zyx
yFxFuxFzFuzFyFuFFFzyxuuu
Fr -+-+-==´ ˆˆˆˆˆˆ
!!
Temos a representação do produto pelo determinante
xy yFxF -=t
Sabendo que os dois vetores estão no plano XY, temos que o torque possuirá apenas a componente Z. Ou seja, em módulo,
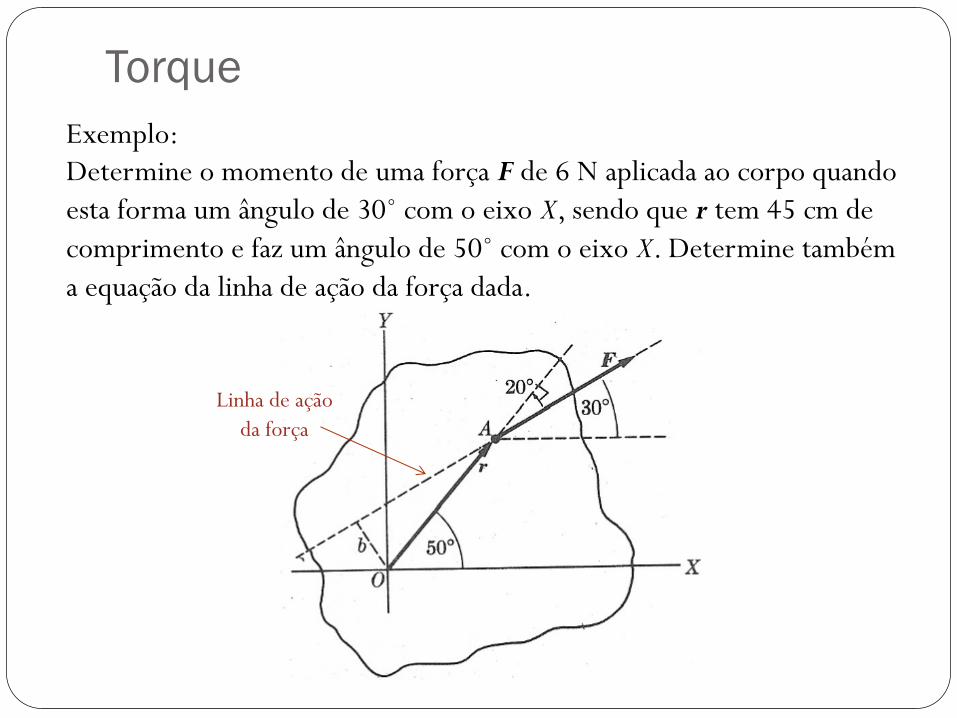
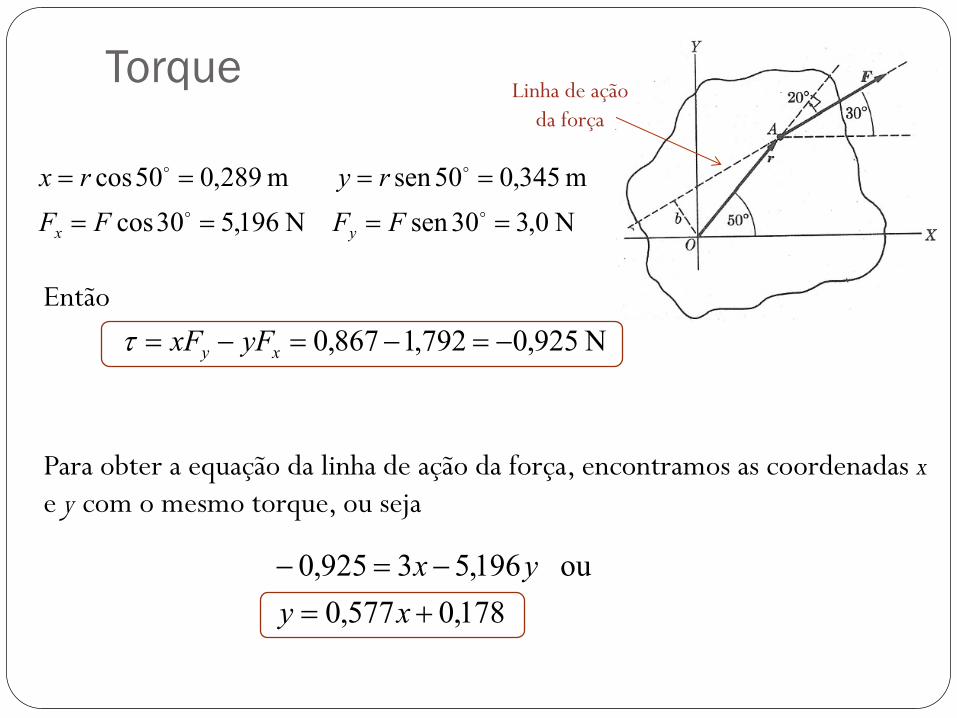
TorqueExemplo:Determine o momento de uma força F de 6 N aplicada ao corpo quando esta forma um ângulo de 30˚ com o eixo X, sendo que r tem 45 cm de comprimento e faz um ângulo de 50˚ com o eixo X. Determine também a equação da linha de ação da força dada.
Linha de açãoda força
Torque
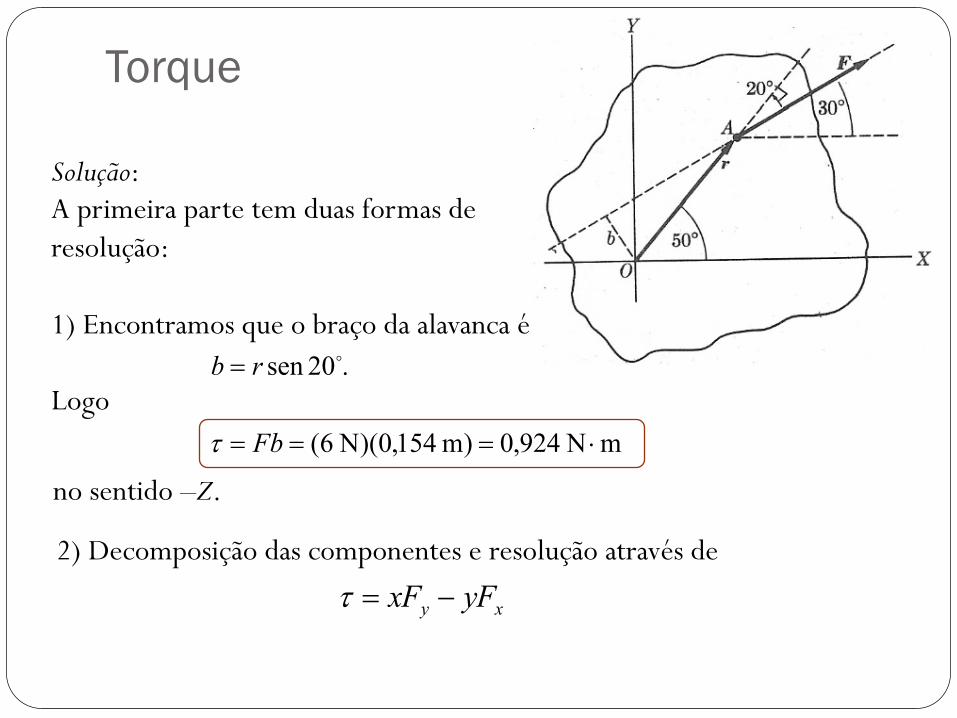
Solução:A primeira parte tem duas formas de resolução:
1) Encontramos que o braço da alavanca é
Logo .20sen !rb =
mN 924,0)m 154,0)(N 6( ×=== Fbt
no sentido –Z.
2) Decomposição das componentes e resolução através de
xy yFxF -=t
Torque
N 0,330sen N 196,530cosm 345,050sen m 289,050cos
====
====!!
!!
FFFFryrx
yx
EntãoN 925,0792,1867,0 -=-=-= xy yFxFt
Para obter a equação da linha de ação da força, encontramos as coordenadas x e y com o mesmo torque, ou seja
178,0577,0ou 196,53925,0
+=-=-
xyyx
Linha de açãoda força
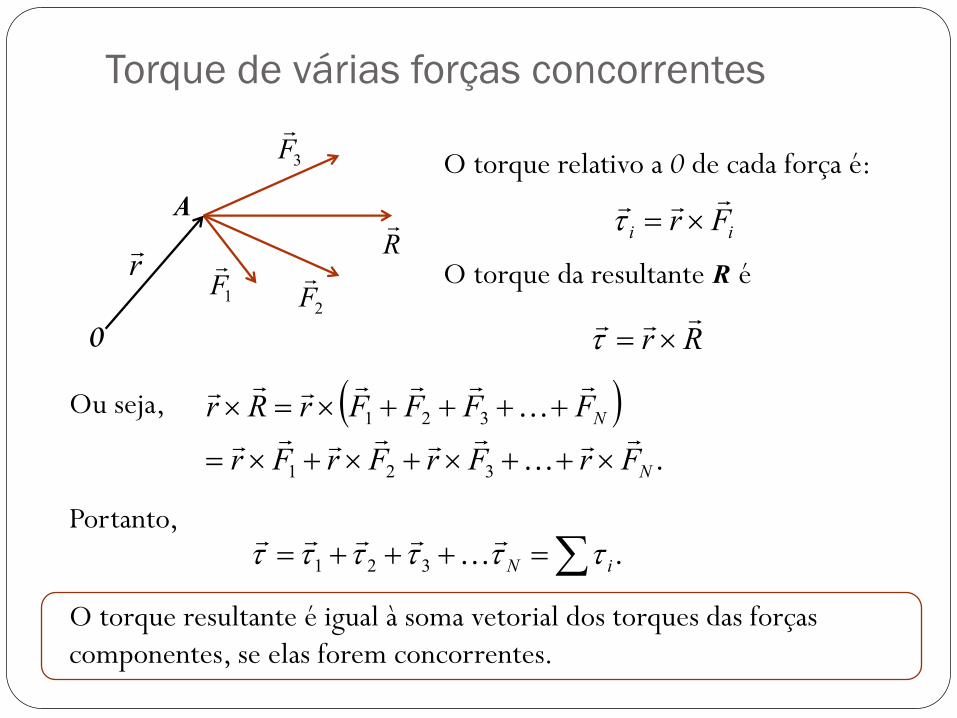
Torque de várias forças concorrentes
3F!
2F!
1F!
R!
A
0
r!
O torque relativo a 0 de cada força é:
ii Fr!!!
´=t
O torque da resultante R é
Rr!!!
´=t
Ou seja, ( ).321
321
N
N
FrFrFrFr
FFFFrRr!!
"!!!!!!
!"
!!!!!!
´++´+´+´=
++++´=´
Portanto, .321 å=+++= iN tttttt !
"!!!!
O torque resultante é igual à soma vetorial dos torques das forças componentes, se elas forem concorrentes.
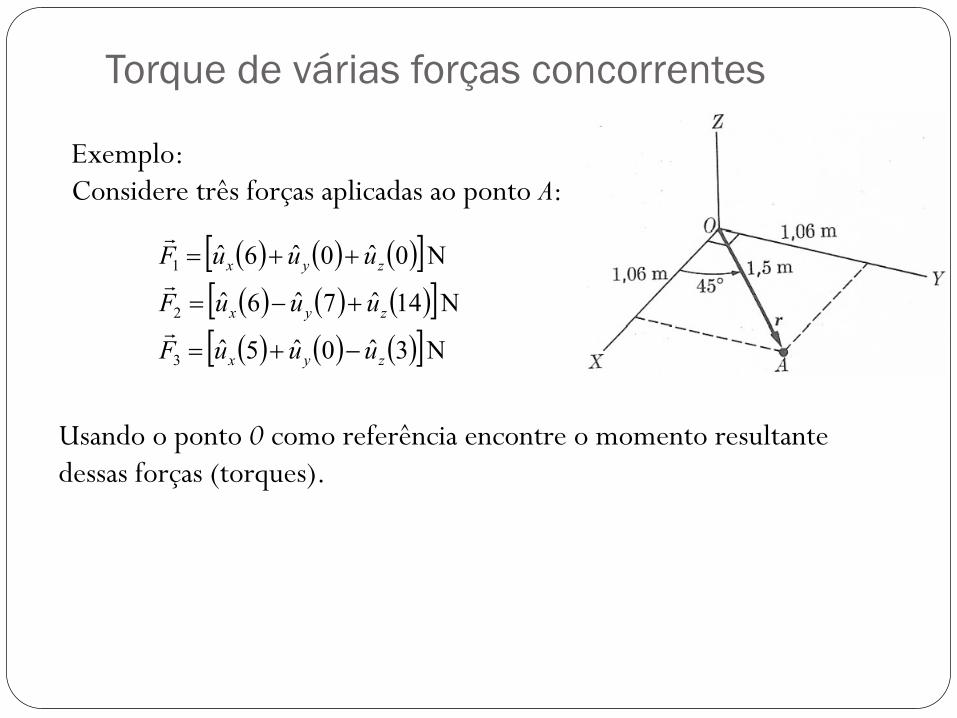
Torque de várias forças concorrentes
Exemplo:Considere três forças aplicadas ao ponto A:
( ) ( ) ( )[ ]( ) ( ) ( )[ ]( ) ( ) ( )[ ]N 3ˆ0ˆ5ˆ
N 14ˆ7ˆ6ˆ
N 0ˆ0ˆ6ˆ
3
2
1
zyx
zyx
zyx
uuuF
uuuF
uuuF
-+=
+-=
++=
!
!
!
Usando o ponto 0 como referência encontre o momento resultante dessas forças (torques).

Momento de várias forças concorrentes
Solução:Usando o conceito:
å=´= iFRRr!!!!! onde , t
Sendo( ) ( ) ( )[ ]( ) ( ) ( )[ ]( ) ( ) ( )[ ]N 3ˆ0ˆ5ˆ
N 14ˆ7ˆ6ˆ
N 0ˆ0ˆ6ˆ
3
2
1
zyx
zyx
zyx
uuuF
uuuF
uuuF
-+=
+-=
++=
!
!
!
( ) ( ) ( )11ˆ7ˆ17ˆ zyx uuuR +-=!
Sabendo que ( ) ( )06,1ˆ06,1ˆ yx uur +=!
( ) ( ) ( )44,25ˆ66,11ˆ66,11ˆ11717006,106,1ˆˆˆ
zyx
zyx
uuuuuu
R --=-
=´!!t
Forças aplicadas a um corpo rígidoQuando as forças não estão aplicadas num mesmo ponto, atuando porém, sobre o mesmo corpo rígido, é necessário distinguir dois efeitos: translação e rotação. A translação é determinada por
.321 å=++++= iN FFFFFR!!
"!!!!
A rotação é definida como a soma dos momentos das forças em relação ao mesmo ponto, tal que
.321 å=+++= iN tttttt !"
!!!!
Porém, em geral, não é possível utilizar a força resultante para descrever o torque produzido pelas forças componentes.
Forças aplicadas a um corpo rígido
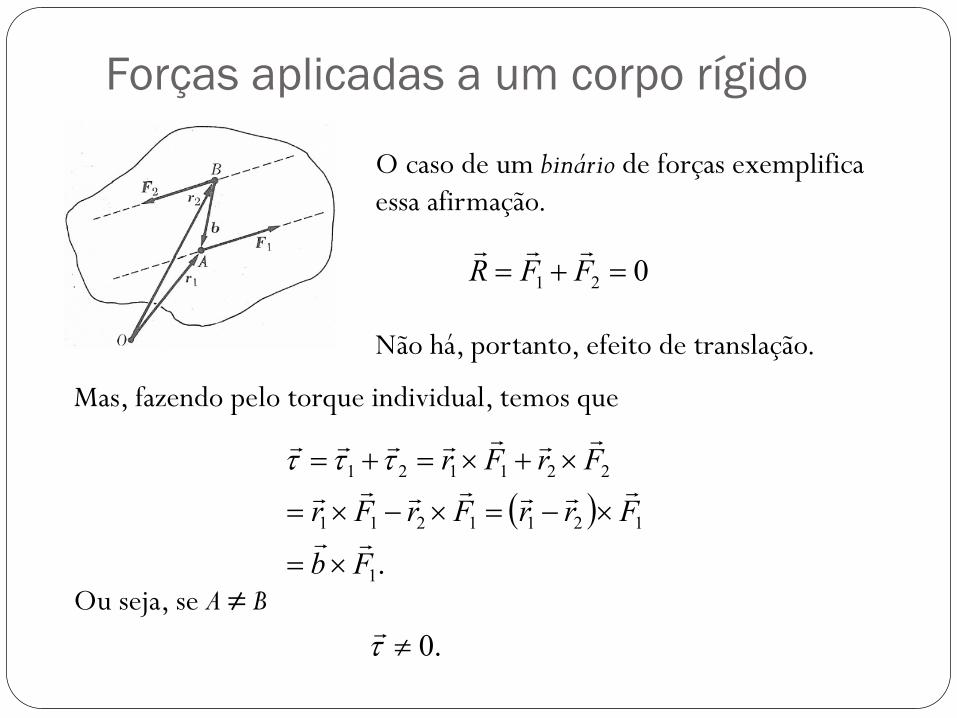
O caso de um binário de forças exemplifica essa afirmação.
021 =+= FFR!!!
Não há, portanto, efeito de translação.
Mas, fazendo pelo torque individual, temos que
( ).1
1211211
221121
Fb
FrrFrFr
FrFr
!!
!!!!!!!
!!!!!!!
´=
´-=´-´=
´+´=+= ttt
Ou seja, se A ≠ B.0¹t!
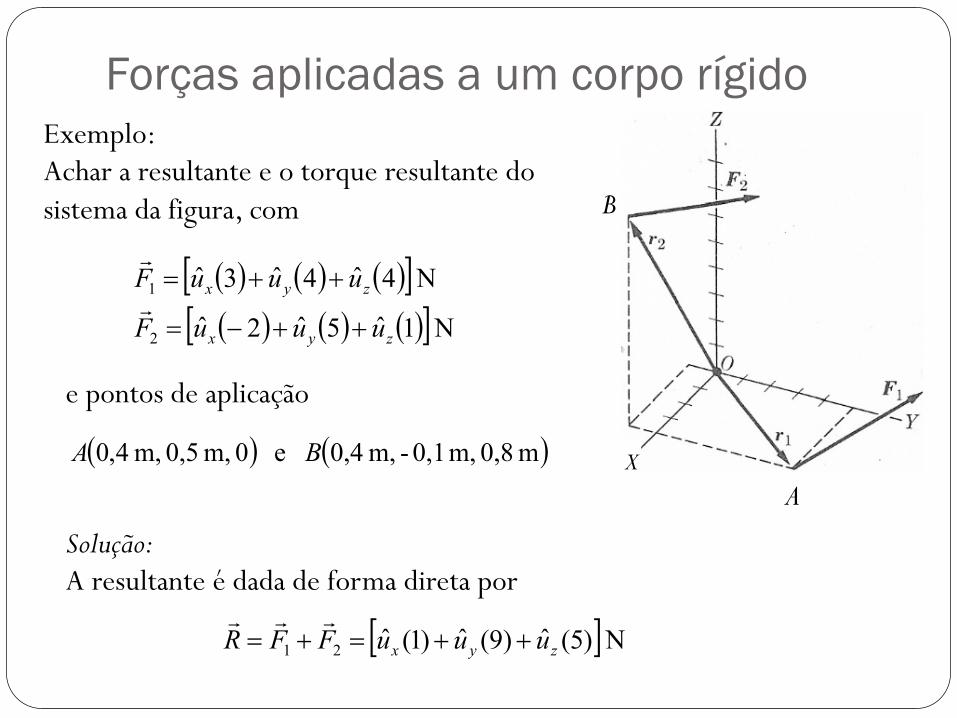
Forças aplicadas a um corpo rígidoExemplo:Achar a resultante e o torque resultante do sistema da figura, com
( ) ( ) ( )[ ]( ) ( ) ( )[ ]N1ˆ5ˆ2ˆ
N4ˆ4ˆ3ˆ
2
1
zyx
zyx
uuuF
uuuF
++-=
++=!
!
e pontos de aplicação
( ) ( )m 0,8 m, 0,1- m, 0,4 e 0 m, 0,5 m, 4,0 BA
Solução:A resultante é dada de forma direta por
[ ]N)5(ˆ)9(ˆ)1(ˆ21 zyx uuuFFR ++=+=!!!
A
B
X
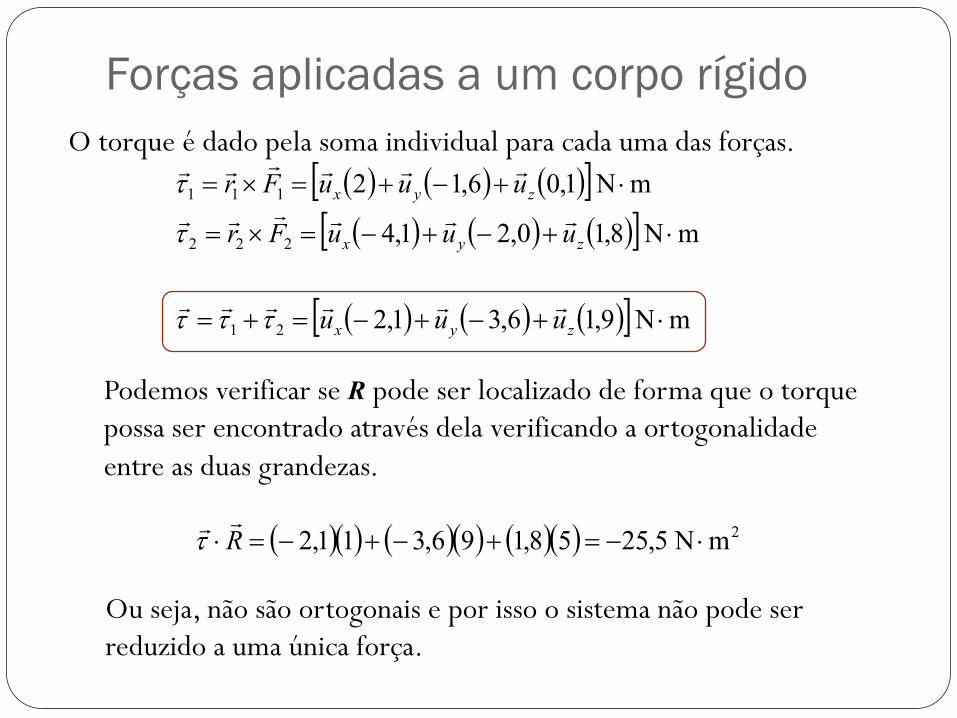
Forças aplicadas a um corpo rígidoO torque é dado pela soma individual para cada uma das forças.
( ) ( ) ( )[ ]( ) ( ) ( )[ ]
( ) ( ) ( )[ ] mN9,16,31,2
mN8,10,21,4
mN1,06,12
21
222
111
×+-+-=+=
×+-+-=´=
×+-+=´=
zyx
zyx
zyx
uuu
uuuFr
uuuFr
!!!!!!
!!!!!!
!!!!!!
ttt
t
t
Podemos verificar se R pode ser localizado de forma que o torque possa ser encontrado através dela verificando a ortogonalidade entre as duas grandezas.
( )( ) ( )( ) ( )( ) 2mN5,2558,196,311,2 ×-=+-+-=×R!!t
Ou seja, não são ortogonais e por isso o sistema não pode ser reduzido a uma única força.

Composição de forças coplanares• Todas as forças estão num plano.• Os torques serão perpendiculares ao plano.• Sempre será possível (exceto no caso de um binário) reduzir o
sistema a uma força resultante.• É possível colocar R a uma distância r de 0 tal que
t!!!=´Rr
Como todos os torques estão na mesma direção, podemos usar
xy yRxR -=t
Conhecendo-se as componentes da força, essa equação descreve a linha de ação da força resultante.
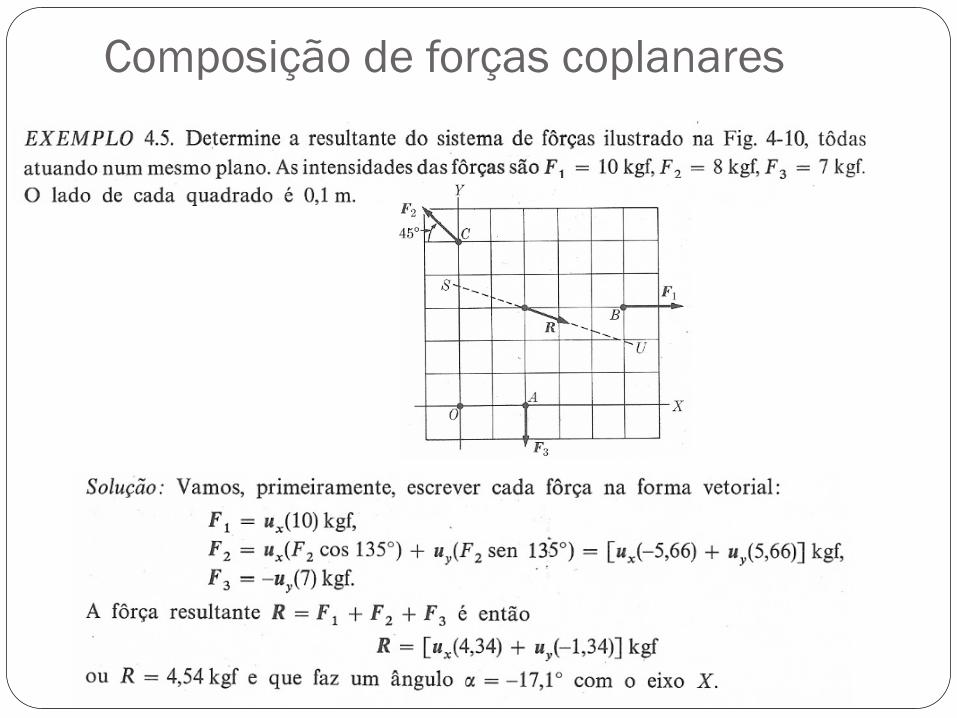
Composição de forças coplanares

Composição de forças coplanares
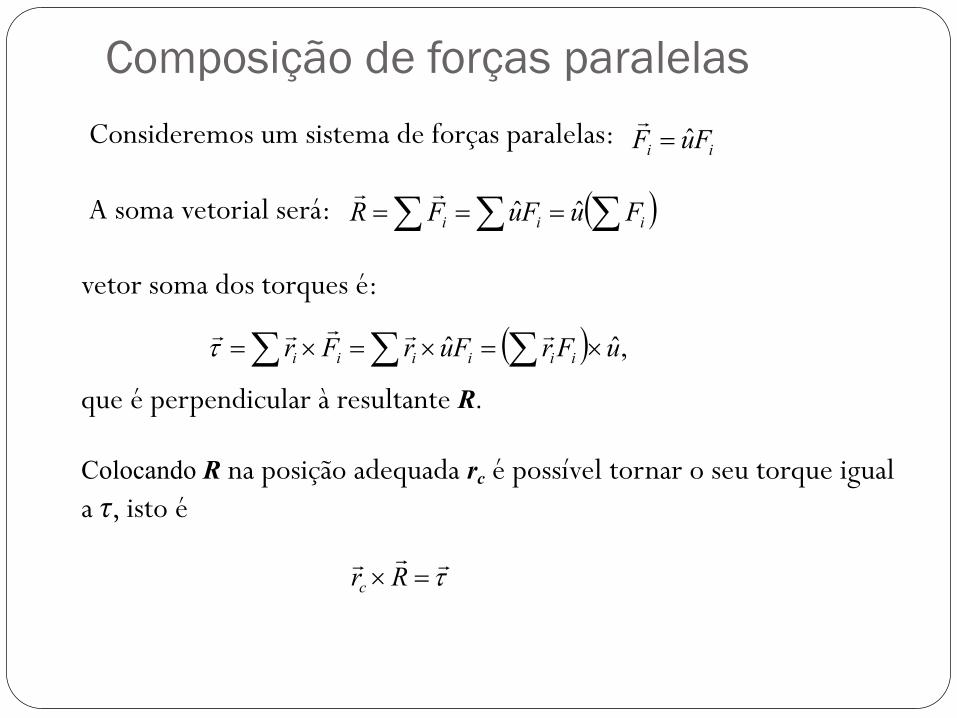
Composição de forças paralelasConsideremos um sistema de forças paralelas:
A soma vetorial será:
ii FuF ˆ=!
( )å åå === iii FuFuFR ˆˆ!!
vetor soma dos torques é:
que é perpendicular à resultante R.
Colocando R na posição adequada rc é possível tornar o seu torque iguala τ, isto é
( )å åå ´=´=´= ,ˆˆ uFrFurFr iiiiii!!!!!t
t!!!=´Rrc
Composição de forças paralelas
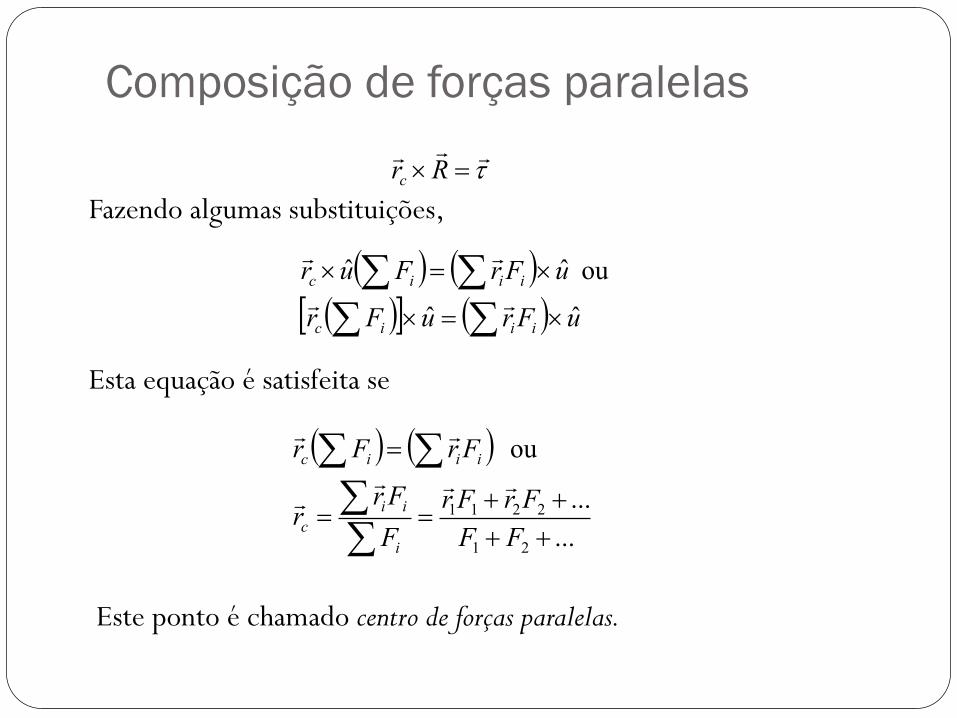
t!!!=´Rrc
Fazendo algumas substituições,
( ) ( )( )[ ] ( ) uFruFr
uFrFur
iiic
iiic
ˆˆ
ou ˆˆ
´=´
´=´
åååå!!
!!
Esta equação é satisfeita se
( ) ( )
......
ou
21
2211
++++
==
=
åå
åå
FFFrFr
FFr
r
FrFr
i
iic
iiic
!!!!
!!
Este ponto é chamado centro de forças paralelas.
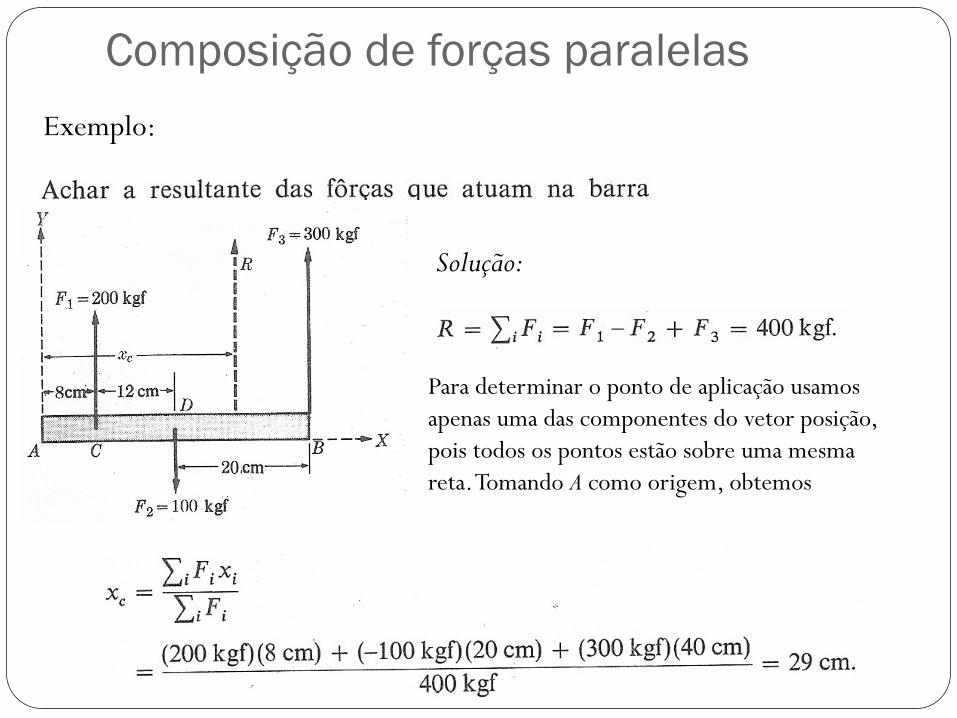
Composição de forças paralelasExemplo:
Solução:
Para determinar o ponto de aplicação usamosapenas uma das componentes do vetor posição, pois todos os pontos estão sobre uma mesmareta. Tomando A como origem, obtemos
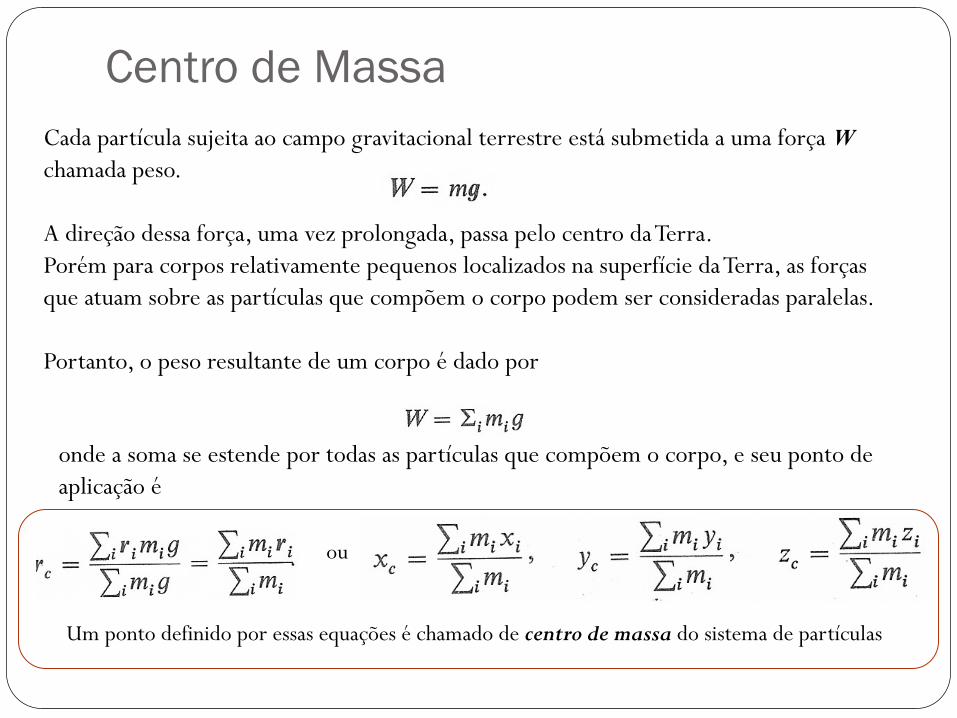
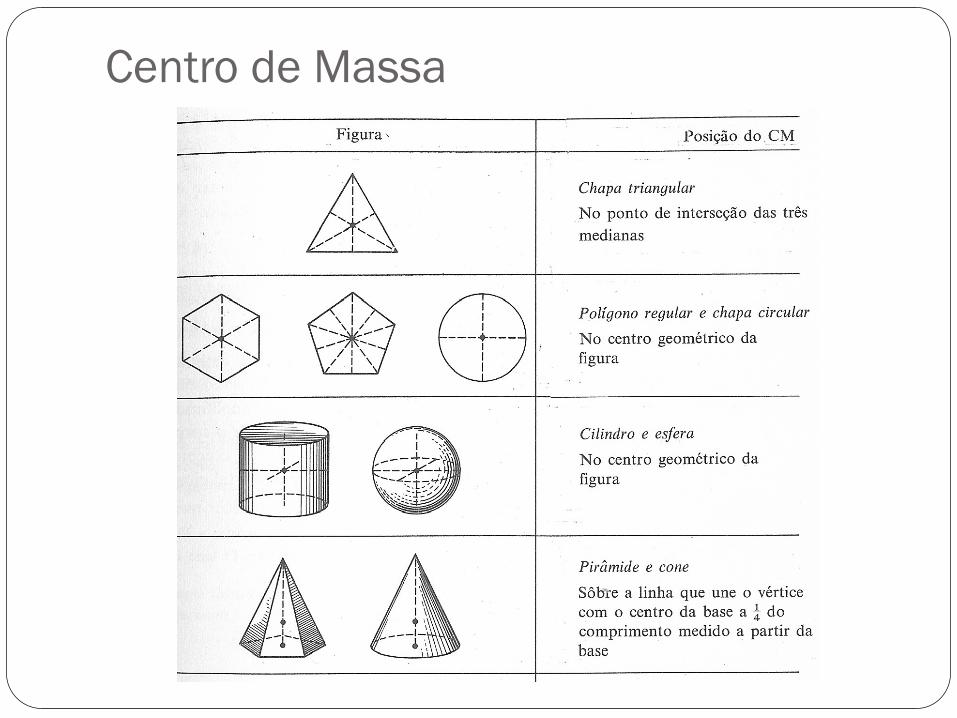
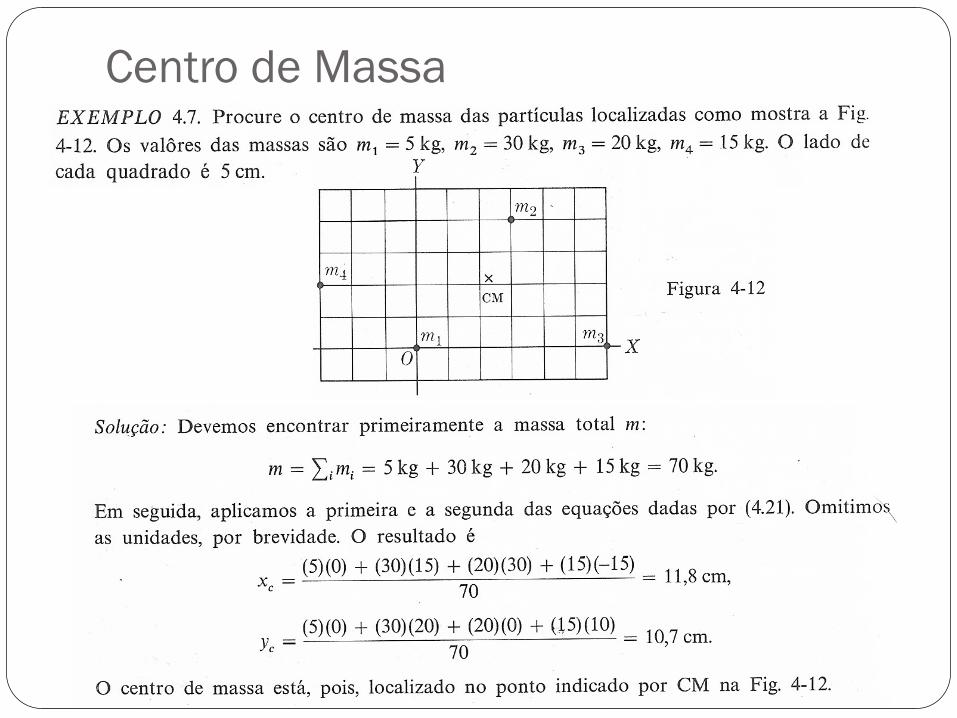
Centro de MassaCada partícula sujeita ao campo gravitacional terrestre está submetida a uma força Wchamada peso.
A direção dessa força, uma vez prolongada, passa pelo centro da Terra.Porém para corpos relativamente pequenos localizados na superfície da Terra, as forçasque atuam sobre as partículas que compõem o corpo podem ser consideradas paralelas.
Portanto, o peso resultante de um corpo é dado por
onde a soma se estende por todas as partículas que compõem o corpo, e seu ponto de aplicação é
ou
Um ponto definido por essas equações é chamado de centro de massa do sistema de partículas
Centro de Massa
Centro de Massa
Estática – Forças em Equilíbrio
A estática é o ramo da mecânica que trata do equilíbrio dos corpos: uma partícula está emequilíbrio se a soma de todas as forças que atuamsobre ele é zero.
Ou equivalentemente
“Estática” significa em repouso ou estacionário.
Estática – Forças em Equilíbrio
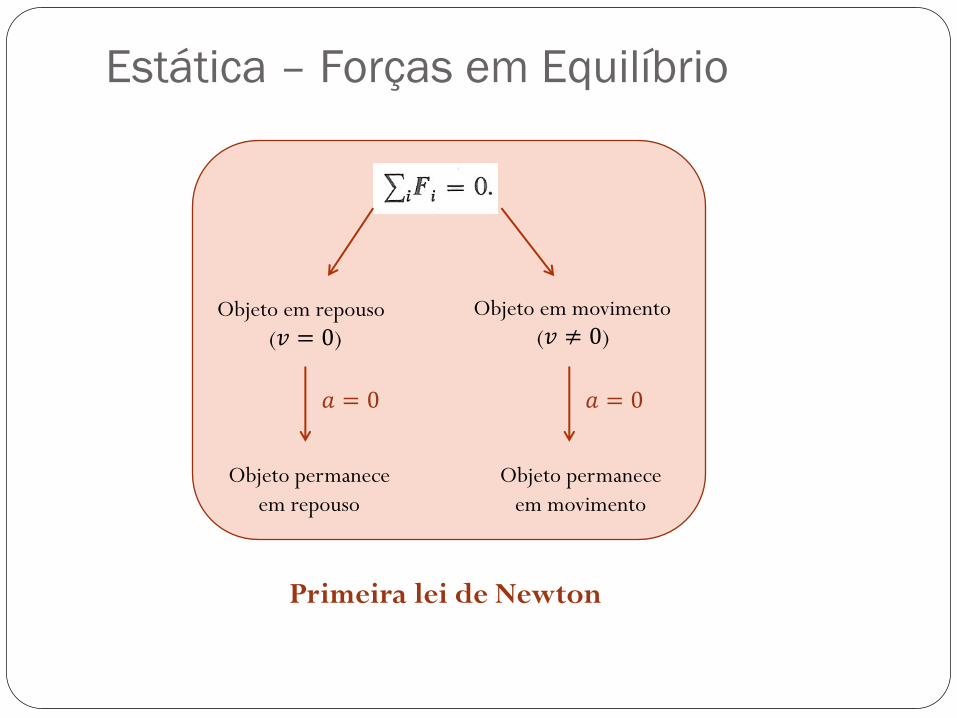
Objeto em repouso(𝑣 = 0)
Objeto em movimento(𝑣 ≠ 0)
𝑎 = 0 𝑎 = 0
Objeto permanece em repouso
Objeto permanece em movimento
Primeira lei de Newton
Estática – Equilíbrio de uma partícula
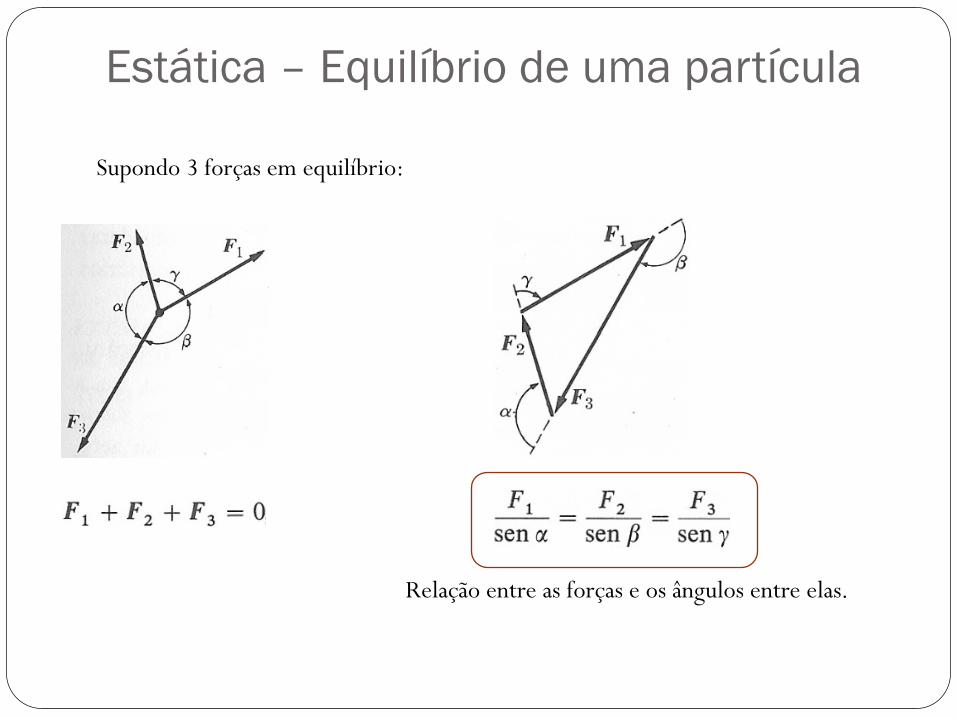
Supondo 3 forças em equilíbrio:
Relação entre as forças e os ângulos entre elas.

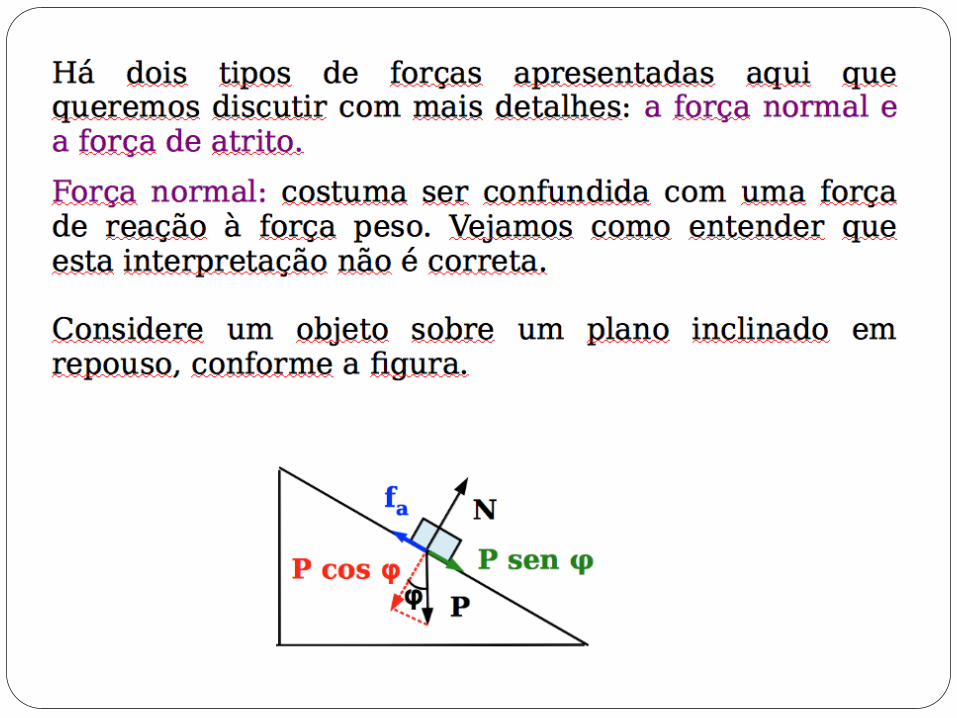
Estática – Equilíbrio de uma partículaCaso de uma partícula num plano inclinado, sem atrito.
Força de tração
Força peso
Força normal
Se as forças estão em equilíbrio sabemos que:
0=++ FNW!!!
a
N!
W!
F!
q-!90
q
a
qa ++!90
a-!180
( ) ( ) ( )
( )
( )q
qaqa
aqaq
aqaq
coscos e
cossen :se-obtém onde de
sencoscosou
180sen90sen90sen
+==
=+
=
-=
++=
-
WNWF
FNW
FNW!!!
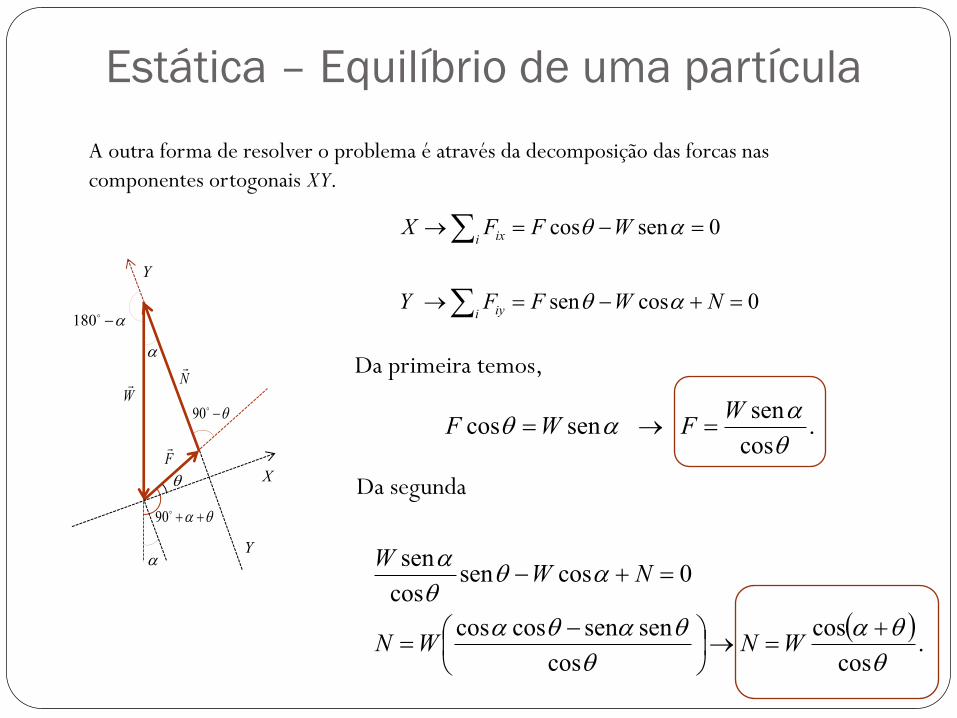
A outra forma de resolver o problema é através da decomposição das forcas nas componentes ortogonais XY.
å
å
=+-=®
=-=®
i iy
i ix
NWFFY
WFFX
0cossen
0sencos
aq
aq
a
N!
W!
F!
q-!90
q
a
qa ++!90
a-!180
Y
X
Y
Da primeira temos,
.cossen sencosqaaq WFWF =®=
Da segunda
( ) .cos
coscos
sensencoscos
0cossencossen
qqa
qqaqa
aqqa
+=®÷
øö
çèæ -
=
=+-
WNWN
NWW
Estática – Equilíbrio de uma partícula
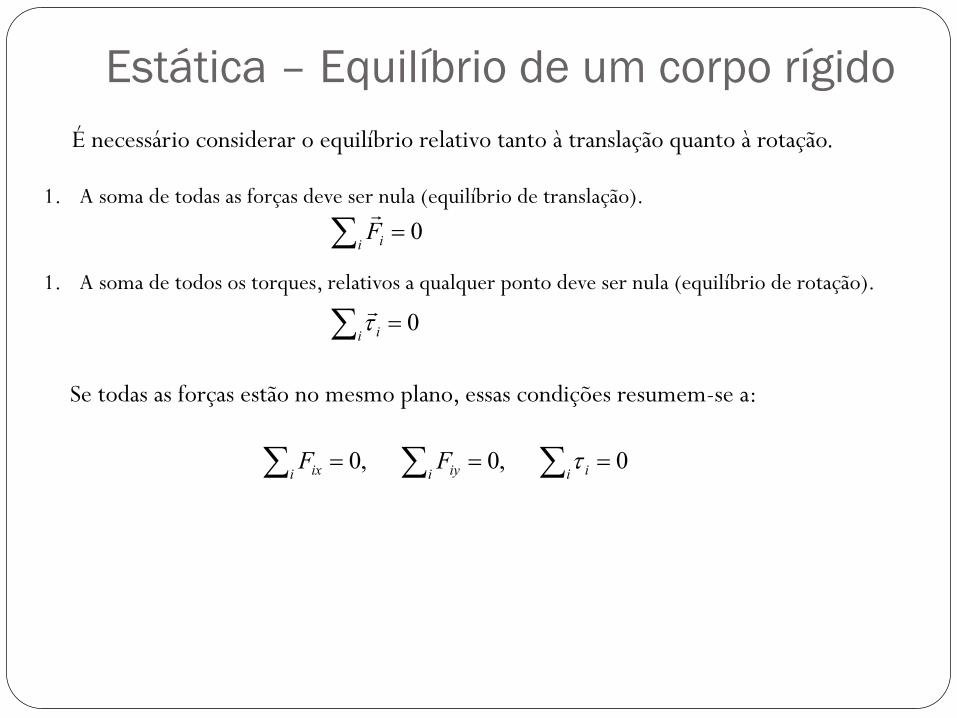
Estática – Equilíbrio de um corpo rígidoÉ necessário considerar o equilíbrio relativo tanto à translação quanto à rotação.
1. A soma de todas as forças deve ser nula (equilíbrio de translação).
1. A soma de todos os torques, relativos a qualquer ponto deve ser nula (equilíbrio de rotação).
å =i iF 0!
å =i i 0t!
Se todas as forças estão no mesmo plano, essas condições resumem-se a:
ååå ===i ii iyi ix FF 0 ,0 ,0 t
Estática – Equilíbrio de um corpo rígido
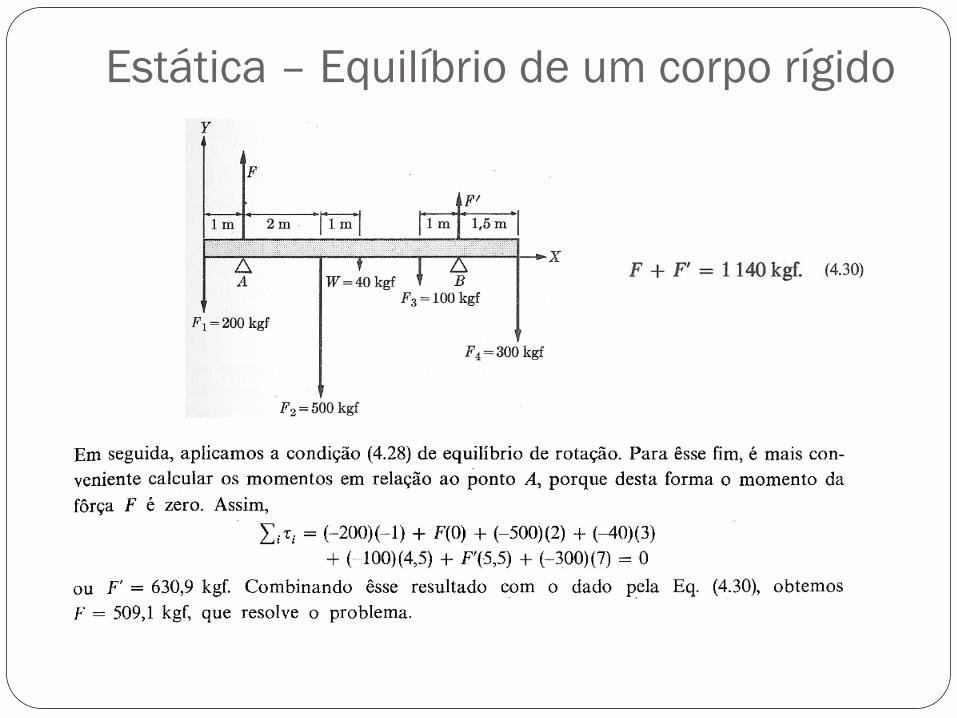
Estática – Equilíbrio de um corpo rígido
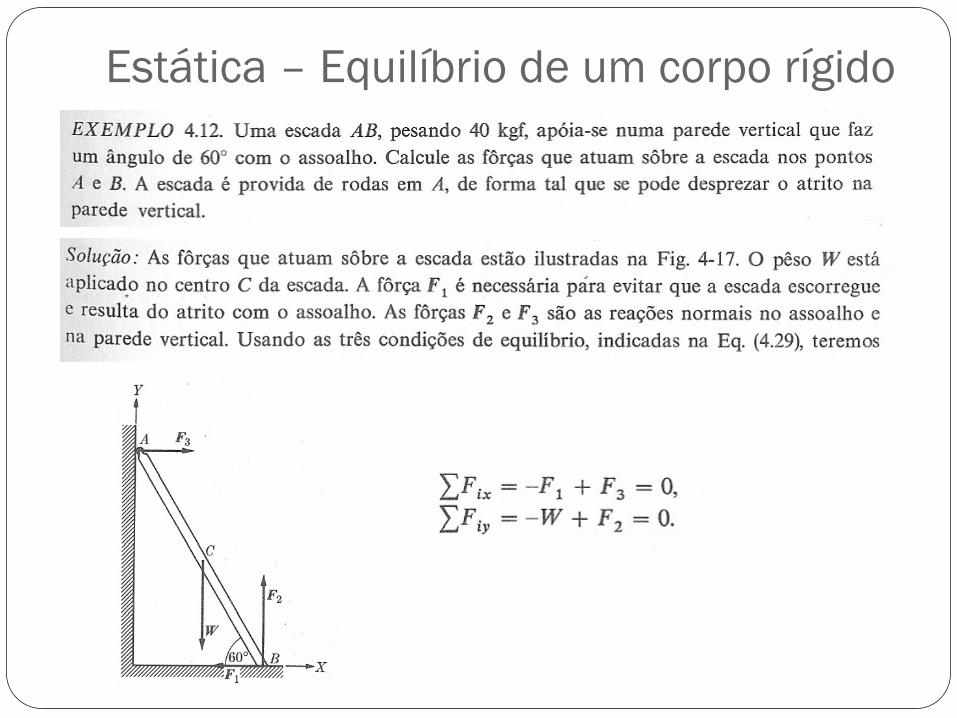
Estática – Equilíbrio de um corpo rígido

Estática – Equilíbrio de um corpo rígido
τi =W12Lcos60!
⎛
⎝⎜
⎞
⎠⎟∑ −F3 Lsen60!( ) = 0
ou
F3 =W cos60!
sen60!=11, 52 kgf
De onde se obtém:
kgf 40e
kgf 52,11
2
31
==
==
WF
FF