FOTOGRAMETRIA II (notas de aulas) TEORIA DAS ORIENTAÇÕES … · 2014. 10. 15. · Orientação...
12
FOTOGRAMETRIA II (notas de aulas) TEORIA DAS ORIENTAÇÕES (ANALÍTICA/DIGITAL): Dedução da equação de coplanaridade, Orientação Relativa e Orientação Absoluta. Júlio Kiyoshi Hasegawa Presidente Prudente 2013
Transcript of FOTOGRAMETRIA II (notas de aulas) TEORIA DAS ORIENTAÇÕES … · 2014. 10. 15. · Orientação...

FOTOGRAMETRIA II
(notas de aulas)
TEORIA DAS ORIENTAÇÕES (ANALÍTICA/DIGITAL): Dedução da equação de
coplanaridade, Orientação Relativa e Orientação Absoluta.
Júlio Kiyoshi Hasegawa
Presidente Prudente
2013

Orientação Relativa Analítica
A equação de Coplanaridade
Definindo três vetores ( )321 ,, VVV , a condição de coplanaridade entre eles pode ser definida
por:
( ) 0231 =•× VVV (01)
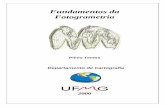
Considerando agora ao estereomodelo, a condição de coplanaridade pode ser definida
pelos 2 CP´s e o ponto Pi no espaço objeto.
V2
(V1 x V3)
V3
V1

VeVd
B
x
y
y
xe
e
d
d
Oe
Od
Pi
pdi
pei
Aplicando a Condição de coplanaridade: (
rVex
rVd ).
rB = 0
Onde o vetor
rVe pode ser dado por:
rVe = ( ) ( ) ( )X X i Y Y j Z Z kp c
e
p c
e
p c
e− + − + −r r r
(02)
Considerando a equação de transformação isogonal no espaço:
][ ´´
31
´´
21´
´´
11 pppe
e
cp zmymxmXX ++=− λ
][ ´´
32
´´
22´
´´
12 pppe
e
cp zmymxmYY ++=− λ (03)
][ ´´
33
´´
23´
´´
13 pppe
e
cp zmymxmZZ ++=− λ
Fazendo:

´´
31
´´
21´
´´
11 pppe zmymxmu ++= ;
´´
32
´´
22´
´´
12 pppe zmymxmv ++= ; (04)
´´
33
´´
23´
´´
13 pppe zmymxmw ++= .
Substituindo as equações 04 nas 03:
eeecp uXX λ=−
eeecp vYY λ=− (05)
eeecp wZZ λ=− .
O vetor dVr pode ser dado por:
dVr = kZZjYYiXX d
cpdcp
dcp
rrr)()()( −+−+− (06)
e realizando o mesmo tratamento matemático das equações 02, obtém-se:
dddcp uXX λ=−
dddcp vYY λ=− (07)

dddcp wZZ λ=− .
rB = ( ) ( ) ( )X X i Y Y j Z Z kc
d
c
e
c
d
c
e
c
d
c
e− + − + −r r r
(08)
dddddd
eeeeee
ec
dc
ec
dc
ec
dc
wvu
wvu
ZZYYXX
λλλ
λλλ
)()()( −−−
= 0
0))(())(())(( =−−+−−+−− eddeec
dcdedeed
ec
dcdeedde
ec
dcde vuvuZZwuwuYYwvwvXX λλλλλλ
Dividindo por deλλ , obtém:
0))(())(())(( =−−+−−+−− eddeec
dcdeed
ec
dcedde
ec
dc vuvuZZwuwuYYwvwvXX (09)

As equações de colinearidade
)()()(
)()()(
333231
131211
e
cp
ee
cp
ee
cp
e
e
cp
ee
cp
ee
cp
e
e
pZZmYYmXXm
ZZmYYmXXmfx
−+−+−
−+−+−−=
)()()(
)()()(
333231
232221
e
cp
ee
cp
ee
cp
e
e
cp
ee
cp
ee
cp
e
e
pZZmYYmXXm
ZZmYYmXXmfy
−+−+−
−+−+−−=
)()()(
)()()(
333231
131211
d
cp
dd
cp
dd
cp
d
d
cp
dd
cp
dd
cp
d
d
pZZmYYmXXm
ZZmYYmXXmfx
−+−+−
−+−+−−= (10)
)()()(
)()()(
333231
232221
d
cp
dd
cp
dd
cp
d
d
cp
dd
cp
dd
cp
d
d
pZZmYYmXXm
ZZmYYmXXmfy
−+−+−
−+−+−−=

Determinação dos elementos de orientação
Pode-se calcular de várias formas: - fixando os parâmetros de orientação dos projetores (injunção nos elementos de
orientação). Vamos considerar somente 2 casos dos 50 possíveis: 1
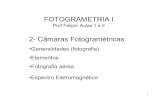
o caso: Quando o sistema de coordenadas do modelo coincide com o sistema da foto da
esquerda - dependente 1) Foto da esquerda fixa e orientada (orientação conhecida)
2) A componente bx da base é mantida conhecida ⇒ fixar a coordenadas X da foto da direita.

x'
y'
x"
y"
Y
P(X Y Z)
X
Z
C' C"
f bx = cte bz
by

2o caso: Quando os centros perspectivos estão sobre o eixo X do modelo. – rotina do B8.
1) by = bz = 0; ⇒ Yec = Yc
d e Z
ec = Zc
d
2) bx = cte; ⇒ Xcd = X
ec + base;
3) Fixar o elemento angular, por exemplo ωe = 0;
Z
X
Y
xL
yL zL
f
f
xR
yR
zR
P(X,Y,Z)
C

Equações de coplanaridade:
[ ][ ][ ][ ]
[ ][ ][ ][ ]
[ ][ ][ ][ ] 0)
)((
)
)((
)
)((
´´
32
´´
22´
´´
12
""
31
""
21´
""
11
""
32
""
22´
""
12
´´
31
´´
21´
´´
11
""
33
""
23´
""
13
´´
31
´´
21´
´´
11
´´
33
´´
23´
´´
13
""
31
""
21´
""
11
´´
33
´´
23´
´´
13
""
32
""
22´
""
12
""
33
""
23´
""
13
´´
32
´´
22´
´´
12
=++++
−++++−
+++++
−++++−
+++++
−++++−
pppppp
pppppp
e
c
d
c
pppppp
pppppp
e
c
d
c
pppppp
pppppp
e
c
d
c
zmymxmzmymxm
zmymxmzmymxmZZ
zmymxmzmymxm
zmymxmzmymxmYY
zmymxmzmymxm
zmymxmzmymxmXX
κ ϕ ω κ ϕ ωe e e
c
e
c
e
c
e d d d
c
d
c
d
c
dX Y Z X Y Z, , , , , , , , , , ,

2.3. Orientação Absoluta Terminada a orientação relativa - num sistema de coordenadas arbitrárias sem definição
de escala e o eixo z não está orientado em relação ao sistema de coordenadas terrestres
utilizadas.

Modelo matemático de transformação
X
Y
Z
M
X X
Y Y
Z Z
T
=
−
−
−
−λ 1
0
0
0
'
'
' e
X
Y
Z
M
X
Y
Z
X
Y
Z
'
'
'
'
'
'
=
+
λ0
0
0
(11)
X, Y e Z são as coordenadas “observadas” do modelo estereoscópico;
X’, Y’ e Z’ são as coordenadas 3D dos pontos de apoio;
X0, Y0 e Z0 são os parâmetros de translação da transformação;
λ é o fator de escala da transformação; e
M é a matriz de rotação.
X
Y
Z
a b c
d e f
g h i
X
Y
Z
j
k
l
=
′
′
′
+
e
X
Y
Z
a b c
d e f
g h i
X j
Y k
Z l
′
′
′
=
′−
′−
′−
−1
(11)