Fábio Balbo - SMNC · solução dos problemas de Engenharia e de problemas reais de uma forma...
70
Transcript of Fábio Balbo - SMNC · solução dos problemas de Engenharia e de problemas reais de uma forma...

i
Fábio Balbo
Guilherme Pianezzer
Marco Argenta
Marina Vargas
Sandro Rodrigues
Tatiane Cazarin
LIVRO DE RESUMOS O livro de resumos contém os resumos expandidos e resumos dos posterês apresentados durante o II Simpósio de Métodos
Numéricos Computacionais da UFPR 2012
Programa de Pós-Graduação em Métodos Numéricos em Engenharia (PPGMNE)
Universidade Federal do Paraná (UFPR)
2012

ii
Informações Básicas
O objetivo principal do Simpósio de Métodos Numéricos Computacionais da UFPR é propor um espaço para divulgação e
debate dos trabalhos acadêmicos, bem como a apresentação de trabalhos desenvolvidos pelos professores, alunos e demais
participantes.
A proposta do simpósio é disseminar a pesquisa em métodos numéricos em engenharia e viabilizar um local para a discussão
das pesquisas e trabalhos desenvolvidos na área
O livro de resumos contém os resumos expandidos, posterês e as palestras apresentadas durante o evento.
Direitos Autorais
Os conceitos emitidos em artigos são de exclusiva responsabilidade de seus autores, não refletindo, necessariamente, a opinião
da redação. Não se permite a reprodução total ou parcial dos trabalhos, apenas utilizar como fonte de dados desde que seja
indicada, na forma de citação, explicitamente a sua fonte.
Corpo Editorial
Editora responsável
Editora UFPR
Coordenação Editorial
Marco André Argenta
Marina Vargas Reis de Paula Gonçalves
Organização
Fábio André Negri Balbo
Guilherme Augusto Pianezzer
Sandro Rodrigues
Tatiane Cazarin da Silva
Comitê Científico
Ademir Alves Ribeiro
Andrea Sell Diminski
Anselmo Chaves Neto
Arinei Carlos Lindbeck da Silva
Carlos Henrique Marchi
Cláudio Ávila
Deise Maria Bertholdi Costa
Eduardo Del Avanzi
Jair Mendes Marques
Liliana Madalena Gramani
Luciano Araki
Luzia Vidal de Souza
Marcio Villela
Marco André Argenta
Marcos Arndt
Maurício Felga Gobbi
Neida Maria Patias Volpe
Nelson Dias
Paulo Henrique
Paulo Justiniano Ribeiro Junior
Ricardo Almeida
Roberto Dalledone Machado
Sérgio Scheer
Volmir Eugênio Wilhelm
Concepção do projeto gráfico
Marco André Argenta
Web design
Marco André Argenta

3
Sumário
Informações Básicas ...................................................................................................................................................................... ii
Direitos Autorais ........................................................................................................................................................................... ii
Corpo Editorial .............................................................................................................................................................................. ii
Sumário .......................................................................................................................................................................................... 3
Apresentação .................................................................................................................................................................................. 5
RESUMOS EXPANDIDOS........................................................................................................................................................... 6
MODELO MECANOBIOLÓGICO DE REMODELAMENTO ÓSSEO ................................................................................. 7
MODELO NUMÉRICO MICROMECÂNICO PARA SCAFFOLD DE HIDROXIAPATITA ............................................... 9
SOLUÇÃO DA EQUAÇÃO DE DIFUSÃO-ADVECÇÃO UNIDIMENSIONAL EM UM CANAL ................................... 11
ANÁLISE DA EQUAÇÃO DA DIFUSÃO COM FONTE VARIÁVEL NO TEMPO A PARTIR DO MÉTODO DOS
ELEMENTOS DE CONTORNO ............................................................................................................................................ 13
CONTROLE DO TAMANHO DO PARÂMETRO DA MALHA PELA APROXIMAÇÃO POR ELEMENTOS FINITOS
PARA A EQUAÇÃO DE HELMHOLTZ EM UMA DIMENSÃO ........................................................................................ 15
DESENVOLVIMENTO DE UM MODELO UNIDIMENSIONAL DE EVOLUÇÃO TÉRMICA DE UM
RESERVATÓRIO SUBTROPICAL ....................................................................................................................................... 17
SIMILARIDADE ENTRE ESCALARES NA CAMADA-LIMITE ATMOSFÉRICA UTILIZANDO LARGE-EDDY
SIMULATION......................................................................................................................................................................... 19
SIMULAÇÃO NUMÉRICA DA CAMADA LIMITE ATMOSFÉRICA SUPERFICIAL COM O EMPREGO DO
MÉTODO DE FILTRAGEM LAGRANGEANA – MFL ....................................................................................................... 21
CONTROLE DE QUALIDADE EM DADOS MICROMETEOROLÓGICOS ..................................................................... 23
GERAÇÃO DO ELEMENTO REPRESENTATIVO DO CONCRETO COM AGREGADOS GRAÚDOS EM FORMATO
ELÍPTICO ................................................................................................................................................................................ 25
DESENVOLVIMENTO DE MODELO HIPERBÓLICO PARA PREVISÃO DA RELAÇÃO TENSÃO X
DEFORMAÇÃO X BIODEGRADAÇÃO EM RESÍDUOS SÓLIDOS URBANOS ............................................................. 27
RESOLUÇÃO DE SISTEMAS LINEARES ESPARSOS COM APLICAÇÕES EM GEOFÍSICA DE EXPLORAÇÃO .... 29
ANÁLISE ESTATÍSTICA MULTIVARIADA DOS ACIDENTES DAS RODOVIAS FEDERAIS PARANAENSES NO
PERÍODO DE 2009 A 2012 .................................................................................................................................................... 31
ESTUDO DE SÉRIES TEMPORAIS PELO MÉTODO SUPPORT VECTOR MACHINE – SVM ....................................... 33
ANÁLISE DO RISCO DE INSOLVÊNCIA DE COMPANHIAS DO SETOR DE ENERGIA USANDO METODOLOGIA
MULTICRITÉRIO PROMETHEE II ...................................................................................................................................... 35
IDENTIFICAÇÃO DE FATORES DE RISCO E ESTIMAÇÃO DA PROBABILIDADE DE INADIMPLÊNCIA EM
TELECOMUNICAÇÕES ........................................................................................................................................................ 37
ESTUDO DA VELOCIDADE DE CONVERGÊNCIA DO MÉTODO DE CAUCHY PARA MINIMIZAÇÃO
IRRESTRITA .......................................................................................................................................................................... 39
CONVERGÊNCIA DE UM ALGORITMO SEM DERIVADAS PARA OTIMIZAÇÃO RESTRITA ................................. 41
PROPOSTA DE UM ALGORITMO DE OTIMIZAÇÃO BASEADO EM ENXAMES DE PARTÍCULAS ....................... 43
TRATAMENTO DE INCERTEZAS UTILIZANDO PROGRAMAÇÃO DINÂMICA DETERMINÍSTICA ...................... 45
UM SISTEMA PARA REPOSIÇÃO DO ESTOQUE EM UMA EMPRESA PÚBLICA ...................................................... 47
PROGRAMAÇÃO LINEAR BINÁRIA NO PROBLEMA DA PROGRAMAÇÃO DE HORÁRIOS ESCOLARES: UM
ESTUDO DE CASO EM UM CURSO DO ENSINO SUPERIOR ......................................................................................... 49
AVALIAÇÃO DO DESEMPENHO DE ALGORITMOS GENÉTICOS EM OTIMIZAÇÃO DE PORTFÓLIOS............... 51
MODELAGEM MATEMÁTICA DO ESCALONAMENTO DE JOGOS NA GRADE HORÁRIA DO CAMPEONATO
BRASILEIRO .......................................................................................................................................................................... 53
SIMULAÇÃO DA MOVIMENTAÇÃO DE PEDESTRES ASSUMINDO VARIÁVEIS PSICOCOMPORTAMENTAIS . 55

4
RESUMO DOS POSTERS .......................................................................................................................................................... 57
COMPARAÇÃO DE PARÂMETROS BIOMECÂNICOS NA RETRAÇÃO INICIAL DE CANINO INFERIOR ENTRE A
ORTODONTIA CONVENCIONAL E LINGUAL ATRAVÉS DA ANÁLISE POR ELEMENTOS FINITOS ................... 58
ANÁLISE DE TENSÕES A PARTIR DE FORÇAS ORTODÔNTICAS BASEADA NO MÉTODO DOS ELEMENTOS
FINITOS .................................................................................................................................................................................. 59
ANÁLISE NUMÉRICA DO ESCOAMENTO LAMINAR SOBRE UM AQUECEDOR 3D PROTUBERANTE
MONTADO EM UMA PLACA DE CIRCUITO IMPRESSO ............................................................................................... 60
DESENVOLVIMENTO DE UM MODELO COMPUTACIONAL PARA O CÁLCULO DE CONFIABILIDADE DE
VIGAS DE CONCRETO ARMADO ...................................................................................................................................... 61
OTIMIZAÇÃO DO CONSUMO DE LOCOMOTIVAS: UMA ABORDAGEM REATIVA ................................................ 62
UM APLICATIVO PARA O PROBLEMA DE CORTE DE BARRAS UNIDIMENSIONAL ............................................. 63
COMPARAÇÃO ENTRE OS MÉTODOS DE INTEGRAÇÃO NUMÉRICA PARA ESTIMAÇÃO DOS PARÂMETROS
DE UM MODELO BINOMIAL COM EFEITO ALEATÓRIO ............................................................................................. 64
ESTUDO COMPARATIVO DE DIFERENTES MÉTODOS NUMÉRICOS PARA A DETERMINAÇÃO DE
AUTOVALORES E AUTOVETORES ................................................................................................................................... 65
ANÁLISE ESTATÍSTICA DA DISTRIBUIÇÃO DE RESÍDUOS URBANOS EM TERRENOS BALDIOS NA CIDADE
DE FAZENDA RIO GRANDE ............................................................................................................................................... 66
ALGORITMO PARA MEDIÇÃO DE ERRO DE CIRCULARIDADE E EXCENTRICIDADE E CONSTRUÇÃO DE
GRÁFICO POLAR DE PERFIL DE CIRCULARIDADE ...................................................................................................... 67

5
Apresentação
O Programa de Pós-Graduação em Métodos Numéricos em Engenharia (PPGMNE), da Universidade Federal do
Paraná, criado pelo Departamento de Construção Civil (Setor de Tecnologia) e pelo Departamento de Matemática (Setor de
Ciências Exatas), tem por objetivo congregar as áreas de concentração de Mecânica Computacional e de Programação
Matemática num único curso, por perceber a inter-relação entre as mesmas e por acreditar que, num trabalho conjunto, multi e
interdisciplinar, é possível o desenvolvimento e aplicação dos métodos numérico-computacionais na busca de novas formas de
solução dos problemas de Engenharia e de problemas reais de uma forma geral. O PPGMNE iniciou atividades em 1994 com o
curso de mestrado e em 2003 passou a oferecer também o curso de doutorado. O Programa não tem a pretensão de cobrir todo
o conhecimento das áreas mencionadas, mas considera-se apto a desenvolver trabalhos em algumas das áreas mais
importantes, conforme a natureza de seu corpo docente, que envolve professores de diversos departamentos: Construção Civil,
Engenharia Mecânica, Engenharia Elétrica, Matemática, Estatística, Informática e Desenho.
A proposta do simpósio é disseminar a pesquisa em métodos numéricos em engenharia e viabilizar um local para a
discussão das pesquisas e trabalhos desenvolvidos na área.
O evento proporcionará:
Divulgar a produção científica desenvolvida pela comunidade acadêmica do Curso de Pós-Graduação de Métodos
Numéricos em Engenharia, e demais instituições de ensino participantes;
Promover o intercâmbio entre pesquisadores, alunos e professores, visando a troca de informações científicas;
Realizar a integração das pesquisas concluídas e/ou em andamento possibilitando uma complementação dos
resultados e direcionamento das propostas;
Construir um ambiente de discussão dos desafios enfrentados pelo desenvolvimento da pesquisa sob o ponto de vista
empresarial e acadêmico.

6
RESUMOS EXPANDIDOS Trabalhos apresentados na forma de resumos expandidos.
7
MODELO MECANOBIOLÓGICO DE REMODELAMENTO ÓSSEO
André Luiz Daniel, Emílio G. F. Mercuri, Mildred B. Hecke.
Palavras-Chave: Remodelamento ósseo, elementos finitos, modelo biológico.
1 INTRODUÇÃO
O remodelamento é um fenômeno biológico de
manutenção e reparo do tecido ósseo. O processo é
coordenado por pelo menos três grupos celulares que são
essenciais para o remodelamento: os osteoblastos,
osteoclastos e os osteócitos. Os osteoblastos produzem o
osteóide que, após sua mineralização, forma o tecido
ósseo. Os osteoclastos reabsorvem o tecido e precedem os
osteoblastos durante o remodelamento. A detecção e
desencadeamento do processo é regido pelos osteócitos,
que ficam imersos na matriz extracelular e se conectam
uns aos outros por uma intricada rede de extensões das
suas membranas.
Evidências experimentais sugerem que os osteócitos e os
osteoblastos controlam a sinalização do início do
remodelamento. Ambos são capazes de detectar
perturbações mecânicas na matriz extracelular, como
deformações e a presença de microdanos, e de produzirem
sinais bioquímicos de controle que incluem o fator de
crescimento (TGF- ), o RANKL e o ligante da
osteoprotegerina (OPG) (Herinksen et al., 2009).
Os modelos matemáticos são uma ferramenta valiosa para
testar hipóteses e analisar causas e efeitos de perturbações
em sistemas complexos (Pivonka et al., 2008). Diversos
modelos do remodelamento ósseo foram criados nas
últimas décadas e a tendência tem sido incluir dados
experimentais da biologia óssea na forma de variáveis,
parâmetros e estrutura do modelo. A construção de
modelos com esse conceito possibilita o estudo de doenças
e a influência de fármacos.
2 OBJETIVOS
O objetivo principal do trabalho é acoplar um modelo de
interações células-proteínas que incorpore os dados da
literatura da biologia óssea em um modelo linear elástico
de elementos finitos, capaz de modificar sua rigidez
conforme o histórico de deformações.
3 MÉTODOS
O método dos elementos finitos (MEF) é um procedimento
numérico para resolução de problemas de valor de
contorno. O MEF é empregado para resolver o problema
elasto-estático linear e obter a energia de deformação w
que é o dado de entrada para o modelo biológico.
O modelo biológico adotado é um sistema de equações
diferenciais elaborado por Lemaire et al. (2004) e
modificado por funções de controle sugeridas por Scheiner
et al. (2012). Quatro equações diferenciais representam a
evolução temporal de osteoblastos responsivos ou
préosteoblastos (R), osteoblastos maduros (B), osteoclastos
(C) e da densidade óssea (O). As equações são acopladas
de forma que um sinalizador produzido por um tipo celular
influencia no desenvolvimento de outra célula,
depois reabs
. . . . ,
. . ,
. . . ,
. .
BR C R
C
B
B
C
C L A C
DdRD P R R
dt
DdBR k B
dt
dCD D C
dt
dOk B k C
dt
(1)
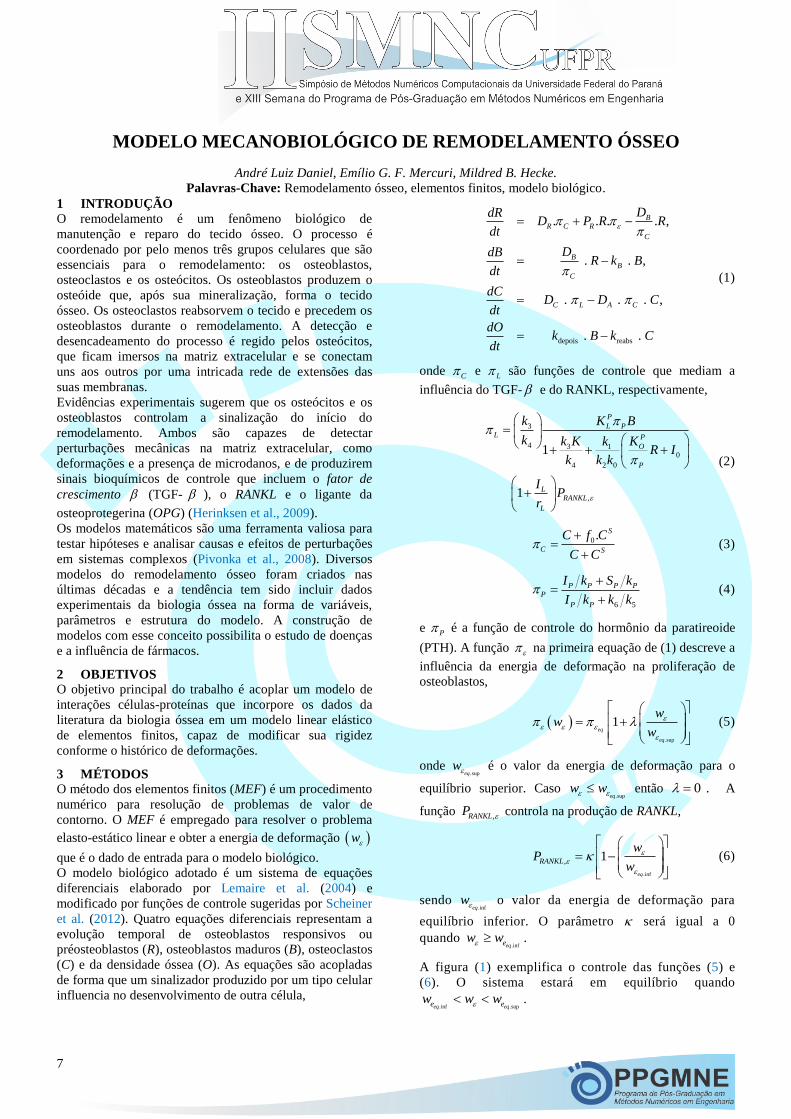
onde C e L são funções de controle que mediam a
influência do TGF- e do RANKL, respectivamente,
3
4 3 10
4 2 0
,
1
1
P
L P
L P
O
P
L
RANKL
L
k K B
k k K KkR I
k k k
IP
r
(2)
0 . S
C S
C f C
C C
(3)
6 5
P P P PP
P P
I k S k
I k k k
(4)
e P é a função de controle do hormônio da paratireoide
(PTH). A função na primeira equação de (1) descreve a
influência da energia de deformação na proliferação de
osteoblastos,
.sup
1eq
eq
ww
w
(5)
onde .supeq
w é o valor da energia de deformação para o
equilíbrio superior. Caso .supeq
w w então 0 . A
função ,RANKLP controla na produção de RANKL,
.inf
, 1
eq
RANKL
wP
w
(6)
sendo .infeq
w o valor da energia de deformação para
equilíbrio inferior. O parâmetro será igual a 0
quando .infeqew w .
A figura (1) exemplifica o controle das funções (5) e
(6). O sistema estará em equilíbrio quando
.inf .supeq eqe ew w w .

8
Figura 1: Influencia da energia de deformação na produção de
RANKL pela e na proliferação de osteoblastos.
4 RESULTADOS
O modelo foi avaliado durante 100 dias em uma geometria
de fêmur proximal. O resultado obtido pode ser analisado
na figura (2).
5 DISCUSSÃO
O modelo estudado atingiu um padrão de distribuição de
densidade que se assemelha as encontradas em
radiografias ósseas (2, a)), com a região cortical e algumas
porções de osso trabecular mais densas, e as demais áreas
com menos massa e menos rigidez. Esta aproximação leva
a duas conclusões: a corroboração do modelo biológico de
Lemaire e que a utilização da energia de deformação como
sinal de mecanotransdução é adequada.
Figura 2: a) Radiografia da região proximal do fêmur, Doblaré
and García (2002), b)Condições de contorno e
distribuição da densidade (g/cm3) após 100 dias. fc =
3000N, 24o
C , fc=1800N, 28o
t .
6 CONCLUSÕES
A evolução temporal do modelo, partindo de uma
condição inicial de rigidez uniforme ao longo do tecido,
foi satisfatória pois atingiu uma conformação
qualitativamente similar as encontradas em radiologias da
região proximal do fêmur.
REFERÊNCIAS
Doblaré M. and García J.M. Anisotropic bone remodeling
model based on a continuum damagerepair theory.
Journal of Biomechanics, pages 293–309, 2002.
Herinksen K., Neutzsky-Wulff A.V., Bonewald L.F., and
Karsdal M.A. Local communication on and within
bone controls bone remodeling. Bone, pages 1026–
1033, 2009.
Lemaire V., Tobin F., Greller L., Cho C., and Suva L.
Modeling the interactions between osteoblast and
osteoclast activities in bone remodeling. Journal of
Theoretical Biology, pages 293–309, 2004.
Pivonka P., Zimak J., Smith D.W., Gardiner B.S., Dunstan
C.R., Sims N.A., Martin T.J., and Mundy G.R. Model
structure and control of bone remodeling: a
theoretical study. Bone, 2008.
Scheiner S., Pivonka P., Hellmich C., and Smith D.W.
Mechanobiological regulation of bone remodeling -
theoretical development of a coupled system biolgy-
micromechanical approach. Cornell University
Library: arXiv:1201.2488v1, 2012.

9
MODELO NUMÉRICO MICROMECÂNICO PARA SCAFFOLD DE
HIDROXIAPATITA
Emílio Graciliano Ferreira Mercuri, André Luiz Daniel, Roberto Dalledone Machado, Mildred Ballin Hecke.
Palavras-Chave: Biomaterial de hidroxiapatita, Micromecânica do contínuo, Tensor de Eshelby
1 INTRODUÇÃO
A reconstrução e reparo de tecido ósseo fraturado é um
processo complexo que demanda um longo período de
tempo e muitas vezes reduz a funcionalidade da estrutura
do osso. Uma intervenção possível que facilita a
regeneração é a utilização de scaffolds para preencher os
defeitos e conferir suporte às cargas naturais do tecido. O
objetivo deste estudo é o desenvolvimento de um modelo
computacional representativo do comportamento mecânico
de um scaffold de hidroxiapatita com cultura de células
ósseas (osteoclastos e osteoblastos). O estudo trata da
simulação de um carregamento distribuído na superfície de
um scaffold e a distribuição de tensões e deformações em
uma seção transversal do mesmo com o enfoque da
micromecânica do contínuo.
2 MICROMECÂNICA
2.1 Elemento de Volume Representativo
Na micromecânica do contínuo (Hill, 1963; Suquet, 1997;
Zaoui, 2002), o material como um todo é entendido como
macro-homogêneo, porém na sua estrutura interna ele é
entendido como microheterogêneo, nos elementos de
volume representativos (EVR). Em geral, são escolhidos
subdomínios quase homogêneos com grandezas físicas
conhecidas (frações de volume f ou propriedade
constitutivas). Os subdomínios são conhecidos como as
fases do material.
Figura 1: EVR do Scaffold
O comprimento característico do EVR (comprimento das
heterogeneidades dentro do EVR do scaffold, Figura 1)
deve ser considerado grande quando comparado às
dimensões das heterogeneidades dentro do EVR, o
comprimento d, e suficientemente pequeno comparado ao
comprimento característico da geometria ou do
carregamento da estrutura na qual está definido o EVR, o
comprimento ℒ . Matematicamente, essa separação de
escalas pode ser escrita como ld ℒ .
O biomaterial em questão é descrito como um meio poroso
constituído de policristais de hidroxiapatita contendo poros
vazios e poros preenchidos de matéria orgânica não
colagenosa com células ósseas em ambiente líquido. A
hidroxiapatita está presente em formato cilíndrico (tipo
agulhas) com rigidez ℂ𝐻𝐴 e fração de volume fHA. A
orientação das inclusões de hidroxiapatita é aleatórea. Já
os poros podem ser caracterizados como esferas com
fração de volume fPV (poros vazios) ou fMO (poros com
matéria orgânica), como mostra a Figura 1.
A porosidade total é definida como:
MOPV ff (1)
A Tabela 1 mostra as propriedades elásticas dessas fases.
Fase Módulo Fase Volumétrico k
Cisalhante µ
Hidroxiapatita KHA = 82:6 GPa 𝜇HA = 44:9 GPa Células Ósseas KMO = 2:3 GPa 𝜇MO = 0 GPa Poros Vazios KPV = 0 GPa 𝜇PV = 0 GPa
Tabela 1: Tabela das propriedades constitutivas
elásticasHellmich et al. (2004).
O tensor de rigidez para qualquer uma das fases r descritas
acima em função de K e 𝜇 é:
ℂ𝑟 = 𝑘𝑟𝕁 + 𝜇𝑟𝕂 (2)
sendo 𝕁 a parte volumétrica do tensor identidade de
quarta-ordem 𝕀 (Iijkl= ½( 𝛿𝑖𝑘𝛿𝑗𝑙 + 𝛿𝑖𝑙𝛿𝑘𝑗 )), e 𝕂 a parte
desviadora do mesmo tensor, 𝕂 = 𝕀 − 𝕁. As componentes
de 𝕁 são Jijkl = 1/3𝛿𝑖𝑗𝛿𝑘𝑙.
2.2 Localização
A deformação em uma fase r dentro do EVR do
biomaterial pode ser obtida pela expressão:
휀𝑟 = 𝔸𝑟𝑒𝑠𝑡: 𝑬𝑠𝑐𝑎𝑓 (3)
O tensor de concentração 𝔸𝑟𝑒𝑠𝑡 pode ser adequadamente
estimado através do problema de matrizinclusão de
Eshelby (1957). Para policristais deve-se utilizar o
esquema auto-consistente Zaoui (2002); Benveniste
(1987).
𝔸𝑟𝑒𝑠𝑡 = [𝕀 + ℙ𝑟
𝑚𝑜: (ℂ𝑟 − ℂ𝑚𝑜)]−1:
{∑ 𝑓𝑠𝑠 [𝕀 + ℙ𝑠𝑚𝑜: (ℂ𝑠 − ℂ𝑚𝑜)]
−1}−1 (4)
O tensor de Hill de quarta ordem ℙ𝑟𝑚𝑜 representa o
formato da fase r, considerada como uma inclusão
elipsoidal incorporada na matriz de rigidez ℂ𝑚𝑜 . Para
matrizes isotrópicas (que serão consideradas nesse
trabalho), ℙ𝑟𝑚𝑜 r é escrito através do tensor de Eshelby

10
Eshelby (1957). Para maiores detalhes no tensor de Hill
ver (Fritsch et al., 2006).
2.3 Homogeneização
A estimativa das propriedades elásticas de um material a
partir das propriedades das fases é um procedimento
conhecido como homogeneização. As microdeformações
compatíveis cinematicamente no EVR são
homogeneizadas segundo a Equação 5.
𝑬𝑠𝑐𝑎𝑓 = 1
𝑉 ∫ 휀 𝑑𝑉 = 𝑓𝑀𝑂휀𝑀𝑂𝑉𝐸𝑉𝑅
+ 𝑓𝐻𝐴휀𝐻𝐴
(5)
As tensões (macroscópicas) homogeneizadas ∑ são
definidas como média espacial, dentro do EVR,
das microtensões 𝜎
∑ = 𝑠𝑐𝑎𝑓1
𝑉 ∫ 𝜎 𝑑𝑉 = 𝑓𝑀𝑂𝜎𝑀𝑂𝑉𝐸𝑉𝑅
+ 𝑓𝐻𝐴𝜎𝐻𝐴 (6)
As tensões e deformações (macroscópicas)
homogeneizadas, ∑ 𝑠𝑐𝑎𝑓 𝑒 𝑬𝑠𝑐𝑎𝑓 , são relacionadas pelo
tensor de rigidez (macroscópico) homogeneizado:
∑ = 𝑠𝑐𝑎𝑓 ℂ𝑠𝑐𝑎𝑓ℎ𝑜𝑚 : 𝑬𝑠𝑐𝑎𝑓 (7)
Podemos identificar a relação entre os tensores de rigidez
das fases ℂ𝑟 e a rigidez homogeneizada global C do EVR
como:
ℂ𝑠𝑐𝑎𝑓ℎ𝑜𝑚 = ∑ 𝑓𝑟ℂ𝑟: 𝔸𝑟
𝑒𝑠𝑡𝑟 (8)
3 DISCUSSÃO E CONCLUSÕES
Os estudo de Scaffolds e do fenômeno de remodelamento
ósseo são assuntos de natureza multidisciplinar e estão
numa área de fronteira relativamente nova na literatura.
Trata-se, portanto, de um tema bastante complexo e esse
trabalho está em fase de desenvolvimento.
REFERÊNCIAS
Benveniste Y. A new approach to the application of mori-
tanaka’s theory in composite materials. Mechanics of
Materials, 6(2):147 – 157, 1987.
ISSN 0167-6636.
Eshelby J.D. The determination of the elastic field of an
ellipsoidal inclusion, and related problems.
Proceedings of the Royal Society of London. Series
A. Mathematical and Physical Sciences,
241(1226):376–396, 1957.
Fritsch A., Hellmich C., and Dormieux L. Porous
polycrystals built up by uniformly and
axisymmetrically oriented needles: Homogenization
of elastic properties. pages 198–198, 2006.
Hellmich C., Ulm F.J., and Dormieux L. Can the diverse
elastic properties of trabecular and cortical bone be
attributed to only a few tissueindependent phase
properties and their interactions? Biomechanics and
Modeling in Mechanobiology, 2:219–238, 2004.
ISSN 1617-7959. 10.1007/s10237-004-0040-0.
Hill R. Elastic properties of reinforced solids: Some
theoretical principles. Journal of the Mechanics and
Physics of Solids, 11(5):357 – 372, 1963. ISSN 0022-
5096.
Suquet P., editor. Continuum micromechanics. Springer-
Verlag New York, Inc., New York, NY, USA, 1997.
ISBN 3-211-82902-4.
Zaoui A. Continuum micromechanics: Survey. Journal of
Engineering Mechanics, 128(8):808– 816, 2002.

11
SOLUÇÃO DA EQUAÇÃO DE DIFUSÃO-ADVECÇÃO UNIDIMENSIONAL EM
UM CANAL
Marcelo Franco de Oliveira, Cynara de Lourdes da Nóbrega Cunha.
Palavras-Chave: difusão-advecção, explícito, implícito, transporte
1 INTRODUÇÃO
A equação da difusão-advecção unidimensional (1D)
permite determinar o transporte de um soluto em um canal
devido à combinação do transporte difusivo e advectivo. A
solução analítica dessa equação só é possível em alguns
casos simplificados; para estudos onde a velocidade e
coeficiente de difusão turbulenta são variáveis, se faz
necessário uma solução numérica dessa equação.
Nesse trabalho é desenvolvida a solução numérica para a
equação da difusão-advecção utilizando dois métodos
numéricos, o método de diferenças finitas explicito e o
método de diferenças finitas implícito; os resultados
numéricos obtidos são comparados com a solução analítica
para um caso simplificado.
2 EQUAÇÃO DA DIFUSÃO-ADVECÇÃO
A equação da difusão-advecção 1D é uma equação
diferencial parcial de segunda ordem, a qual descreve um
fenômeno físico, onde partículas ou energia são
transportadas dentro de um sistema. A equação é dada por: 2
2
C C CD U
t xx
(1)
onde C(x,t) é a concentração do soluto, D é o
coeficiente de difusão turbulenta, e U é a velocidade
longitudinal de meio, isto é, velocidade longitudinal
do fluído. Considerando uma fonte contínua, as
seguintes condições de contorno podem ser definidas:
0(0, )C t C (2)
( ,0) 0C x (3)
*( , )C tU f
x
(4)
onde *f
é o fluxo. A equação 1 é utilizada na
modelação unidimensional de problemas de
qualidade de água, principalmente em rios. Para
simular o transporte de substâncias dissolvidas ao
longo de rios, estuários e reservas subterrâneas,
freqüentemente têm sido utilizados modelos
numéricos. Estes modelos são formados por uma ou
mais equações diferenciais que descrevem a evolução
de processos físicos como o de transferência por
advecção e por difusão (Meireles et al., 2004).
3 MODELO NUMÉRICO
Os modelos numéricos tem sido de fundamental
importância na solução de equações diferencias, pois em
muitos casos não é possível determinar a solução
analíticas, devido ao grau de complexidade do problema.
Existem diversos métodos numéricos para a solução de
equações diferencias, os mais conceituados atualmente
são: Métodos dos Elementos Finitos (MEF), Método dos
Elementos de Contorno (MEC), e o Métodos das
Diferenças Finitas (MDF), que é destacado por dois
esquemas de aproximação, o método explícito e implícito.
Nesse artigo a equação 1 é resolvida através do MDF.
3.1 Esquema Explícito O método de diferenças finitas explícito é o mais simples
de se utilizar, pois para calcular a concentração do soluto
em um determinado ponto em um tempo t t , é
necessário conhecer apenas valores correspondentes do
tempo anterior t . Utilizando esse método para diferenças
progressivas no tempo e no espaço, a equação 1 pode ser
discretizada como: 1
1 1
2
1
2j j j j j
i i i i i
j j
i i
C C C C CD
t x
C CU
x
(5)
para U e D são considerados constantes, onde o super-
índice j representa o tempo e o sub-índice i representa o
ponto do domínio. A equação 5 deve ser resolvida para 1j
iC :
1
1 1
1
( 2 )
( )
j j j j
i i i i
j j j
i i i
C E C C C
C C C
(6)
sendo 2
D tE
x
e U t
x
Com a equação 6 a solução do problema é obtida de forma
explícita. A principal vantagem desse método é o tempo de
processamento, e a desvantagem está relacionada às
restrições em relação a escolha de x e t . Um número
adimensional que caracteriza a extensão relativa das
oscilações numéricas é o número de Courant, que é
associado à discretização no tempo e no espaço, é obtido
por U tC
x
. Para uma boa estabilidade da solução o
número de Courant deve ser 1C .
3.2 Esquema Implícito O esquema implícito, também conhecido como método
explícito de Euler, as derivadas espaciais são
desenvolvidas de maneira semelhante ao explícito, mas as
diferenças são as discretizações feitas para um tempo
t t , e não mais função apenas do tempo anterior t ,
como é no método explícito. Assim, desenvolvendo a
equação 1 pelo método explícito tem-se:
12
1 1 1 1
1 1
2
1 1
1
2j j j j j
i i i i i
j j
i i
C C C C CD
t x
C CU
x
(7)
e resolvendo a equação 7 tem-se:
1 1
1
1
1
12
2
j j
i i
j j
i i
D t U t D tC C
x x x
D t U tC C
x x
(8)
ou de maneira mais resumida:
1 1 1
1 1
j j j j
i i i iC C C C
(9)
Nota-se na equação 9 que, em cada passo de tempo,
aparecem três termos que devem ser calculados,
formando um sistema de equações para solução
simultânea de todos os termos, a cada passo de
tempo.
4 SOLUÇÃO ANALÍTICA
A obtenção de soluções analíticas para equações
diferenciais é de fundamental importância, pois é possível
validar as soluções numéricas e calibrar parâmetros
utilizados nas equações, mas a obtenção de uma solução
analítica nem sempre é uma tarefa fácil. Técnicas para
resolver analiticamente uma equação diferencial podem
ser encontradas em livros de física-matemática,
matemática avançada; as técnicas usualmente envolvidas
na solução de equações diferenciais são frequentemente
descritas em livros de “matemática avançada”,
“matemática aplicada” ou “matemática para engenharia”,
(Dias, 2002). As vantagens da solução analíticas são:
rapidez na obtenção dos resultados, não sendo necessário a
discretização temporal ou espacial, a desvantagem é que é
possível obter solução analítica para poucos casos, com
várias simplificações.
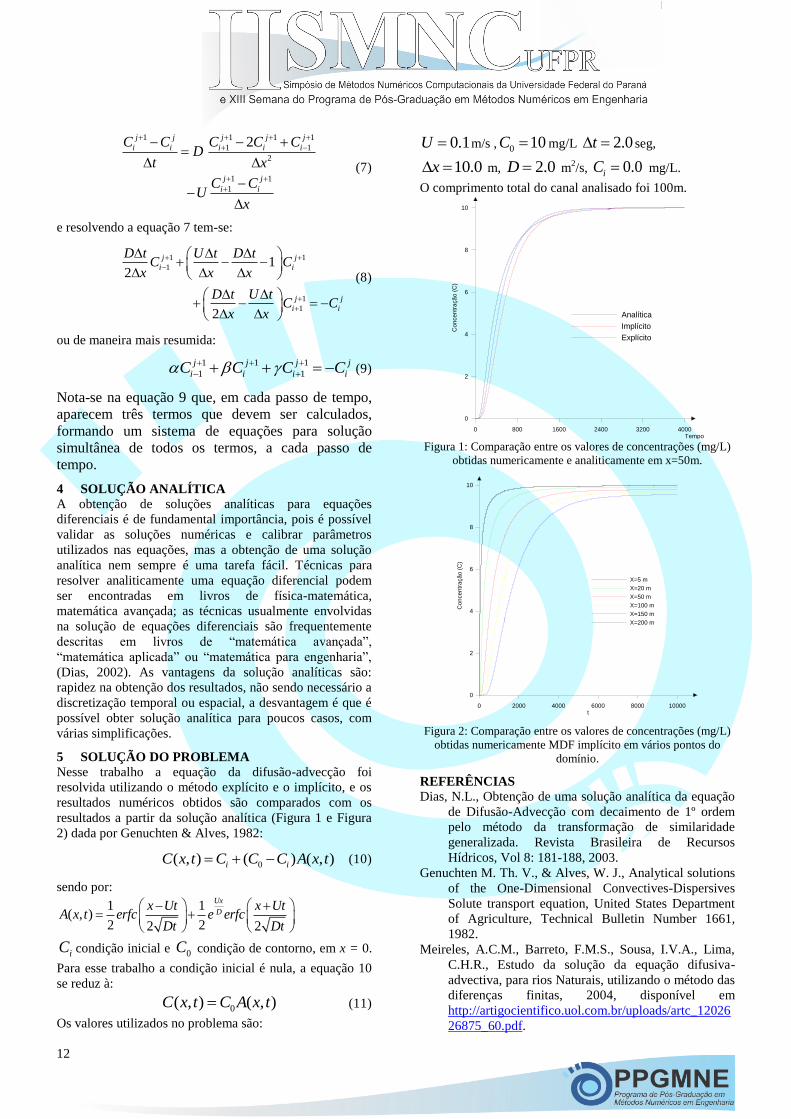
5 SOLUÇÃO DO PROBLEMA
Nesse trabalho a equação da difusão-advecção foi
resolvida utilizando o método explícito e o implícito, e os
resultados numéricos obtidos são comparados com os
resultados a partir da solução analítica (Figura 1 e Figura
2) dada por Genuchten & Alves, 1982:
0( , ) ( ) ( , )i iC x t C C C A x t (10)
sendo por:
1 1( , )
2 22 2
Ux
Dx Ut x Ut
A x t erfc e erfcDt Dt
iC condição inicial e 0C condição de contorno, em x = 0.
Para esse trabalho a condição inicial é nula, a equação 10
se reduz à:
0( , ) ( , )C x t C A x t (11)
Os valores utilizados no problema são:
0.1U m/s , 0 10C mg/L 2.0t seg,
10.0x m, 2.0D m2/s, 0.0iC mg/L.
O comprimento total do canal analisado foi 100m.
0 800 1600 2400 3200 4000Tempo
0
2
4
6
8
10
Co
nce
ntr
açã
o (
C)
Analítica
Implícito
Explícito
Figura 1: Comparação entre os valores de concentrações (mg/L)
obtidas numericamente e analiticamente em x=50m.
0 2000 4000 6000 8000 10000t
0
2
4
6
8
10
Co
nce
ntr
açã
o (
C)
X=5 m
X=20 m
X=50 m
X=100 m
X=150 m
X=200 m
Figura 2: Comparação entre os valores de concentrações (mg/L)
obtidas numericamente MDF implícito em vários pontos do
domínio.
REFERÊNCIAS
Dias, N.L., Obtenção de uma solução analítica da equação
de Difusão-Advecção com decaimento de 1º ordem
pelo método da transformação de similaridade
generalizada. Revista Brasileira de Recursos
Hídricos, Vol 8: 181-188, 2003.
Genuchten M. Th. V., & Alves, W. J., Analytical solutions
of the One-Dimensional Convectives-Dispersives
Solute transport equation, United States Department
of Agriculture, Technical Bulletin Number 1661,
1982.
Meireles, A.C.M., Barreto, F.M.S., Sousa, I.V.A., Lima,
C.H.R., Estudo da solução da equação difusiva-
advectiva, para rios Naturais, utilizando o método das
diferenças finitas, 2004, disponível em
http://artigocientifico.uol.com.br/uploads/artc_12026
26875_60.pdf.

13
ANÁLISE DA EQUAÇÃO DA DIFUSÃO COM FONTE VARIÁVEL NO TEMPO
A PARTIR DO MÉTODO DOS ELEMENTOS DE CONTORNO
Roberto Pettres, Luiz Alkimin de Lacerda.
Palavras-Chave: Método dos Elementos de Contorno, Solução Fundamental Independente do Tempo.
1 INTRODUÇÃO
Os primeiros registros que tratam da origem do Método
dos Elementos de Contorno (MEC) datam do ano de 1823,
em uma publicação do matemático norueguês Niels Henrik
Abel sobre o problema da tautócrona (‘tempo igual’)
(Simmons, 1987). Nesse trabalho, Abel se retrata ao
método, como técnica baseada em equações integrais para
resolução de problemas baseados em equações diferenciais
parciais. Tal método recebeu atenção de diversos
pesquisadores e foram necessárias mais oito décadas de
estudos para que o método recebesse a primeira teoria
clássica das equações integrais desenvolvida por Fredholm
em 1903 (Jacobs, 1979). Ainda no século XX, diversos
autores utilizaram a técnica de equações integrais e
oportunizaram importantes contribuições para a evolução
do método, sendo denominado Método dos Elementos de
Contorno a partir dos trabalhos de Brebbia em 1978
(Brebbia, 1978), o qual apresentou uma formulação
baseada em equações integrais e em técnicas de resíduos
ponderados. Atualmente, o MEC vem sendo empregado
para solucionar um número cada vez maior de problemas
em mecânica dos sólidos, eletromagnetismo entre outros, e
em determinadas formulações, acaba contando com o
acoplamento de outros métodos numéricos, como o
Método de Diferenças Finitas (MDF) (Kreyszig, 2006).
Dessa forma, acoplado ao MEC, emprega-se nesse
trabalho o MDF para solucionar a equação da difusão de
calor com um termo fonte variável no tempo contando
com uma solução fundamental independente do tempo. Ao
final do trabalho apresentam-se os resultados obtidos.
2 MODELO UNIDIMENSIONAL
O modelo matemático escolhido para este estudo é
Equação da Difusão com termo fonte (eq.1).
)(22 tFt
uu
(1)
O modelo geométrico é uma barra de comprimento igual a
L sob as seguintes condições de contorno (eq.2):
.),(;),0(
;),(;),0(
^^
^^
qtLqqtq
utLuutu
(2)
Onde u é o potencial. A condição inicial é dada por (eq.3):
0)0,( xu (3)
3 FORMULAÇÃO COM MEC
A partir do modelo matemático e do modelo geométrico
obtém-se a equação resultante denominada formulação
inversa de resíduos ponderados:
0),(
1
^_
0
_^_
0
0
_
20
_
0
_
2
2
0
_
Lx
Lx
Lx
x
L
LLx
x
Lx
x
L
wqqwuuwdxtxF
wdxdt
ud
dx
dwu
dx
udwdx
dx
wdu
(4)
Utilizando e aplicando as propriedades da função Delta de
Dirac (Kreyszig, 2006) para igualar ao diferencial presente
no primeiro integrando da (eq.4), pode-se obter o efeito no
ponto campo x de uma fonte concentrada aplicada no
ponto fonte . Então, substituindo (eq.5):
),(2
2
xdx
wd (5)
na (eq.4), obtém-se a equação:
0
),(1
),(
0
^
0
^
00
_
0
_
xLxxLx
LLL
wqwqwuwu
dxwtxFdxwdt
ud
kdxxu (6)
No Método dos Elementos de Contorno, a função de
ponderação w é a solução do problema singular
equivalente, isto é, é a função de Green (Greenberg, 1971)
para o operador diferencial. Assim, ),(* xuw ,
denominada solução fundamental, pode ser interpretada
como o efeito, no ponto campo x de uma fonte
concentrada aplicada no ponto fonte . Para o caso
unidimensional, a solução fundamental (Vladimirov,
1979) é dada por:
2
||),(*
xxu (12)
Substituindo a (eq.7) na (eq.6), obtêm-se:
0
^
0
^
00
_
),(1
),(
xLxxLx
LL
wqwqwuwu
wdxtxFwdxdt
ud
kxu
(13)
Fazendo ),(_
txuu e ),(_
txqq em (eq.8) e definindo
as condições de contorno essenciais de acordo com a
(eq.9), obtêm-se a equação constituinte do MEC (eq.10)
para o problema proposto.
0),(),0( tLutu (14)

14
Lx
x
L
L
txqx
dxx
txF
dxx
dt
txdutu
0
0
0
2
),(2
||
2
||),(
2
||),(1),(
(15)
No primeiro integrando da equação 10 está presente uma
derivada temporal. Como a solução fundamental utilizada
nesse trabalho é independente do tempo, faz-se necessário
o emprego de alguma técnica ou modelo numérico para o
processo de avanço no tempo.
3.1 Modelo Numérico de Avanço no Tempo
Várias abordagens têm sido propostas para a aplicação do
MEC em problemas parabólicos, onde se emprega como
solução do problema singular equivalente, uma solução
independente do tempo. Nesse tipo de formulação, faz-se
necessário o emprego de métodos de marcha no tempo, em
razão da integral que contém o termo diferencial no tempo.
Entre os métodos comumente utilizados, acoplado ao
MEC, está o Método de Diferenças Finitas (MDF).
O MDF visa obter a taxa de variação de uma grandeza de
um instante para o seguinte, sendo uma aproximação para
o valor da derivada no ponto quanto t torna-se
extremamente pequeno. Desta forma, a derivada no tempo
presente na (eq.10) é aproximada pelo quociente da
variação dos potenciais pelo intervalo de tempo
correspondente, conforme (eq.11).
t
txuttxu
dt
txdu
),(),(),( (16)
Substituindo a (eq.11) na (eq.10), tem-se:
Lx
x
L
L
txqx
dxx
txF
dxx
t
txuttxutu
0
0
0
2
),(2
||
2
||),(
2
||),(),(1),(
(17)
Discretizando em células o domínio do problema e
assumindo que as variações em cada qual são lineares
(Figura 1), pode-se montar um sistema linear para
determinar a solução do problema a partir das funções de
aproximação dadas por (eq.13 e eq.14):
Figura 1 – Discretização do domínio em células lineares.
1i
(18)
1i
(19)
3.2 Implementação Computacional
A formulação proposta foi implementada no software
Matlab R2011®, utilizando duas células lineares para
discretização do domínio, visando à obtenção da solução
com o menor esforço computacional.
4 RESULTADOS NUMÉRICOS
A análise numérica foi realizada utilizando os parâmetros
L = 1, 2 = 1.5 (condutividade), t = 0.0833 (critério de
estabilidade, Wrobel, 1981) em 100 passos de avanço no
tempo, sendo calculado o coeficiente R2 para identificar a
correlação entre as soluções ilustradas pela Figura 2:
Figura 2 – Comparação entre a solução analítica e o MEC para os
potenciais e fluxos ao longo do tempo.
5 CONCLUSÃO
Os resultados demonstraram que para o problema
proposto, a relação apresentada na (eq.12) produz
resultados precisos para os valores de fluxo, R2=1, e para
os valores potenciais, R2=0.99529. Analisando ambos os
resultados, observa-se que a resposta do modelo apresenta
grande precisão quando são analisados pontos pertencentes
ao contorno (onde são obtidos os fluxos), pois trata apenas
de valores de contorno, como sugere o nome do método, já
para o potencial calculado em um ponto do domínio, o
modelo apresenta um pequeno erro. Esse tipo de erro está
relacionado ao tamanho do incremento de tempo t , do
tipo de função de aproximação utilizada para as células e
suas dimensões (comprimento), necessitando de um
intervalo de tempo específico para o processo de difusão
de calor em toda a extensão da célula. Assim, os resultados
obtidos neste trabalho comprovam a potencialidade do
MEC e a eficácia da solução fundamental independente do
tempo para o problema de difusão proposto.
REFERÊNCIAS
Brebbia. C. A. The boundary element method for
engineers. Pentech Press, London, 1978.
Greenberg. M. D. Application of Green’s Functions in
Science and Engineering. P. Hall, New Jersey, 1971.
Jacobs, D. The State of the Art in Numerical Analysis,
Academic Press, New York, USA, 1979.
Kreyszig, E. Advanced Engineering Mathematics 9th
Edition. Wiley, Ohio, 2006.
Vladimirov, V. S. Generalized Functions in Mathematical
Physics. Nauka Publishers, Moscow, 1979.
Wrobel, L. C. Potential and Viscous Flow Problems Using
the Boundary Element Method, U.K. Ph.D. Thesis,
University of Southampton, 1981.
15
CONTROLE DO TAMANHO DO PARÂMETRO DA MALHA PELA
APROXIMAÇÃO POR ELEMENTOS FINITOS PARA A EQUAÇÃO DE
HELMHOLTZ EM UMA DIMENSÃO
Jean Eduardo Sebold, Luiz Alkimin de Lacerda, Jose Antonio Marques Carrer.
Palavras-Chave: Elementos Finitos, Base Hierárquica, Aproximação de Padé.
1 INTRODUÇÃO
Este artigo trata de um Método de Elementos Finitos
usando funções de base hierárquicas de Legendre para a
aproximação da solução da equação Helmholtz
unidimensional. As condições de contorno acústicas são
fracamente representadas, e é definido um problema
auxiliar com condições de contorno homogêneas
facilitando o caminho para a aproximação. Esta abordagem
auxiliar permite a formulação de um método de solução
geral. Elementos finitos de segunda ordem são usados
juntamente com um parâmetro de discretização com base
no número de onda fixado e da tolerância de erro
requerida. Uma fórmula explícita é definida para o
controle do tamanho do parâmetro da malha baseado na
aproximação de Padé. A análise paramétrica é conduzida
para validar a abordagem de elementos finitos e o
parâmetro de controle de malha. O controle da dispersão
nos resultados mostra que a formulação numérica é robusta
e pode ser estendida para ordens superiores na análise de
elementos finitos.
2 MODELO MATEMÁTICO FUNÇÕES DE BASE
HIERÁRQUICAS DE LEGENDRE
Nesta seção apresentaremos as funções de base
hierárquicas de Legendre, que são definidas, de acordo
com Harari and Thompson (1996), da seguinte forma:
Seja 𝒮𝑝 ⊂ 𝐻1(Ω) um subespaço de elementos
finitos do espaço dos polinômios contínuos por partes de
grau p denotado por 𝒫𝑝.
𝒮𝑝 = {𝜙|𝜙 ∈ 𝐶01(Ω), 𝜙 ∈ 𝒫𝑝(Ω𝑒)} (1)
onde 𝐶01(Ω) é o espaço de todas as funções que são uma
vez continuamente diferenciáveis, as quais juntamente
com suas derivadas, tem suporte compacto em (Ω) =(0,1), que é um aberto limitado de ℝ e Ω𝑒 = [−1,1] é o
elemento de referência. Seja {𝓝𝑘}𝑘=1
𝑝+1 um conjunto de funções de base,
em que a funções nodais são dadas pela variação k = 1, 2,
enquanto que para k = 3, p+1, temos as funções de base
internas. Podemos definir tal conjunto como segue:
{
𝓝𝑘(𝜉) =
1
2(1 + 𝜉𝑘𝜉), 𝑘 = 1,2
𝓝𝑘(𝜉) =1
‖𝐿𝑘−2‖∫ 𝐿𝑘−2(𝑡)𝑑𝑡𝜉
−1
(2)
Onde {Lk−2}k=3p+1
é o conjunto dos polinômios de Legendre,
‖𝐿𝑘−2‖2 =
2
2𝑘−3, 𝜉1 = 1, 𝜉2 = −1.
3 EXPERIMENTOS NUMÉRICOS
Pelo Método dos Elementos Finitos utilizando as funções
de bases hierárquicas de Legendre, aproximaremos o
seguinte problema proposto em Liu (2009): Encontrar
𝜙 ∈ 𝐻1(Ω), tal que
(𝜙′, 𝑤′) + 𝜉2(𝜙, 𝑤) = 0 (3)
Para todo w ∈ H01(Ω), sujeito às condições de contorno:
{
𝑃𝑟𝑒𝑠𝑠ã𝑜: 𝜙(𝑥) = �̃�(𝑥)
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒:𝑑𝜙
𝑑𝑥=𝑑 �̃�
𝑑𝑥= 𝑖𝜉𝜌𝑣(𝑥)
(4)
para todo 𝑥 ∈ Γ , onde Γ é o contorno de Ω , 𝜌 é a
densidade, v é a velocidade �̃� é uma função complexa
dada.
Para tanto, usaremos um problema auxilar, com
condições de contorno homogênea, baseado em ϕ̃.
4 RELAÇÃO DE DISPERSÃO DISCRETA
Com base nos experimentos numéricos veremos que o erro
na aproximação por elementos finitos pode causar uma
diferença de fase com respeito à solução exata. Este efeito
depende não somente no parâmetro de malha h, mas
também da frequência temporal 𝜔 e pode ser analisado
pelo estudo das propriedades dispersivas da solução
numérica. Neste momento, tomaremos emprestadas
ferramentas fundamentais exibidas num estudo feito por
Mark Ainsworth, Ainsworth (2003, 2004), das quais
destacamos o seguinte teorema:
Teorema 4.1 Sejam [2𝑁𝑒 + 2/2𝑁𝑒]𝜉 tan(𝜉) e [2𝑁0/2𝑁0 −
2]𝜉 cot(𝜉) as notações para a aproximação de Padé de
𝜉 tan(𝜉) e 𝜉 cot(𝜉) , respectivamente, onde 𝑁𝑒 = ⌊𝑝/2⌋ e
𝑁0 = ⌊(𝑝 + 1)/2⌋. Assim, 𝜔ℎ𝑝 satisfaz cos(ℎ𝜉) ≈
𝑅𝑝(ℎ𝜔ℎ𝑝), 𝑒𝑚 𝑞𝑢𝑒
𝑅𝑝(2𝜉)
= [2N0/2N0 − 2]ξ 𝑐𝑜𝑡(ξ) − [2Ne + 2/2Ne]ξ 𝑡𝑎𝑛(ξ)
[2N0/2N0 − 2]ξ 𝑐𝑜𝑡(ξ) + [2Ne + 2/2Ne]ξ 𝑡𝑎𝑛(ξ)
(5)
onde 𝑅𝑝 é a função racional, 𝜔ℎ𝑝 vem da relação de
dispersão discreta e p é a ordem do método Este teorema,
demonstrado em Ainsworth (2003), nos fornece
informações essenciais sobre a relação de dispersão
discreta para a equação escalar de Helmholtz em uma
dimensão na aproximação de ordem p,
16
e além disso, conduz à possibilidade de encontrarmos um
parâmetro adequado para a malha na aproximação por
elementos finitos.
5 SELEÇÃO DO PARÂMETRO DA MALHA
Vamos utilizar a teoria desenvolvida nas duas seções
anteriores para estabelecer um critério de seleção do
parâmetro da malha (ℎ =1
𝑛) para elementos de segunda
ordem, sendo n é o número de elementos na malha.
REFERÊNCIAS
Ainsworth M. Discrete dispersion for hp-version finite
element approximation at high wavenumber. SIAM J.
Numer. Analysis, 42, 2003.
Ainsworth M. Dispersive properties of high – order
nédélec/edge element approximation of the time -
harmonic maxwell equations. Philosophical
transactions of the The Royal Society of London,
362:471–491, 2004.
Harari I. and Thompson L. Recent developments in finite
element methods for structural acoustic. Archives of
Computational Methods in Engineering, 3:131–311,
1996.
Liu Y. Fast Multipole Boundary Element Method., volume
1. 2009.
17
DESENVOLVIMENTO DE UM MODELO UNIDIMENSIONAL DE EVOLUÇÃO
TÉRMICA DE UM RESERVATÓRIO SUBTROPICAL
Bruna Arcie Polli, Michael Mannich, Tobias Bleninger.
Palavras-Chave: Temperatura da água, estratificação térmica, modelo, lago, reservatório.
1 INTRODUÇÃO
A temperatura de um corpo d’água afeta diretamente a
qualidade desse recurso, devido a sua influência sobre os
processos físicos, químicos e biológicos (Esteves, 1989).
A estratificação da coluna d’água é o resultado da ação do
vento na superfície e trocas de energia – nas quais os
processos mais significativos são: a absorção de radiação
de ondas curtas e longas, evaporação, condução e emissão
pela superfície da água – que são fortemente influenciadas
por condições meteorológicas (Edinger, Duttweiler,
Geyer, 1968). No fundo e margens de reservatórios
também ocorre transferência de calor embora, em muitos
casos, seja comumente desprezada por ser pequena.
A utilização de um modelo de evolução térmica permite
simular e prever os processos de formação e manutenção
estratificação térmica do corpo d’água, sua evolução
temporal e é fundamental para simular transporte de
nutrientes e acoplamento com modelos ecológicos.
2 MODELO MATEMÁTICO
Um modelo unidimensional de temperatura para
reservatórios implicitamente assume que os gradientes de
temperatura horizontal são várias ordens de magnitude
superiores ao transporte vertical (Henderson-Sellers,
1984). Tal característica é típica de lagos estratificados. Os
processos energéticos ocorrem principalmente na interface
água-ar. A transferência de calor no sedimento ocorre, no
entanto, em lagos de profundidade moderada, essa
entrada/saída é pequena comparada à absorção direta
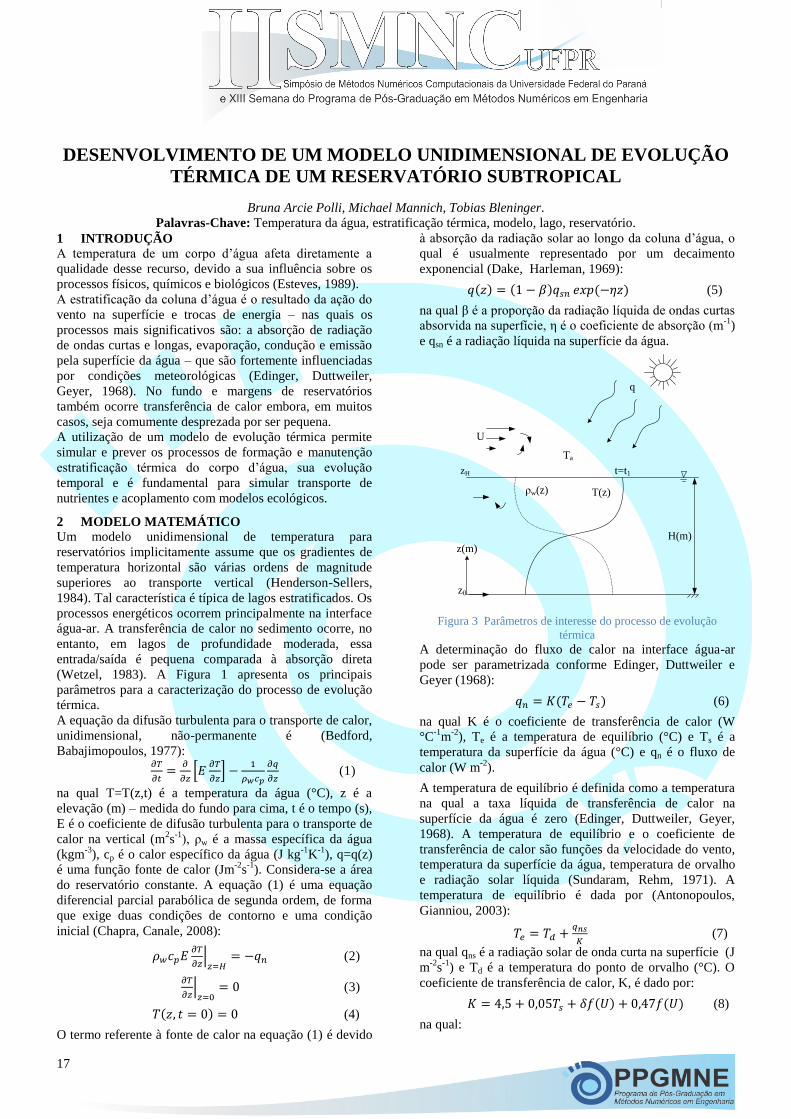
(Wetzel, 1983). A Figura 1 apresenta os principais
parâmetros para a caracterização do processo de evolução
térmica.
A equação da difusão turbulenta para o transporte de calor,
unidimensional, não-permanente é (Bedford,
Babajimopoulos, 1977):
𝜕𝑇
𝜕𝑡=
𝜕
𝜕𝑧[𝐸
𝜕𝑇
𝜕𝑧] −
1
𝜌𝑤𝑐𝑝
𝜕𝑞
𝜕𝑧 (1)
na qual T=T(z,t) é a temperatura da água (°C), z é a
elevação (m) – medida do fundo para cima, t é o tempo (s),
E é o coeficiente de difusão turbulenta para o transporte de
calor na vertical (m2s
-1), ρw é a massa específica da água
(kgm-3
), cp é o calor específico da água (J kg-1
K-1
), q=q(z)
é uma função fonte de calor (Jm-2
s-1
). Considera-se a área
do reservatório constante. A equação (1) é uma equação
diferencial parcial parabólica de segunda ordem, de forma
que exige duas condições de contorno e uma condição
inicial (Chapra, Canale, 2008):
𝜌𝑤𝑐𝑝𝐸𝜕𝑇
𝜕𝑧|𝑧=𝐻
= −𝑞𝑛 (2)
𝜕𝑇
𝜕𝑧|𝑧=0
= 0 (3)
𝑇(𝑧, 𝑡 = 0) = 0 (4)
O termo referente à fonte de calor na equação (1) é devido
à absorção da radiação solar ao longo da coluna d’água, o
qual é usualmente representado por um decaimento
exponencial (Dake, Harleman, 1969):
𝑞(𝑧) = (1 − 𝛽)𝑞𝑠𝑛 𝑒𝑥𝑝(−𝜂𝑧) (5)
na qual β é a proporção da radiação líquida de ondas curtas
absorvida na superfície, η é o coeficiente de absorção (m-1
)
e qsn é a radiação líquida na superfície da água.
U
Ta
ρw(z) T(z)
t=t1
z0
zH
z(m)
H(m)
q
Figura 3 Parâmetros de interesse do processo de evolução
térmica
A determinação do fluxo de calor na interface água-ar
pode ser parametrizada conforme Edinger, Duttweiler e
Geyer (1968):
𝑞𝑛 = 𝐾(𝑇𝑒 − 𝑇𝑠) (6)
na qual K é o coeficiente de transferência de calor (W
°C-1
m-2
), Te é a temperatura de equilíbrio (°C) e Ts é a
temperatura da superfície da água (°C) e qn é o fluxo de
calor (W m-2
).
A temperatura de equilíbrio é definida como a temperatura
na qual a taxa líquida de transferência de calor na
superfície da água é zero (Edinger, Duttweiler, Geyer,
1968). A temperatura de equilíbrio e o coeficiente de
transferência de calor são funções da velocidade do vento,
temperatura da superfície da água, temperatura de orvalho
e radiação solar líquida (Sundaram, Rehm, 1971). A
temperatura de equilíbrio é dada por (Antonopoulos,
Gianniou, 2003):
𝑇𝑒 = 𝑇𝑑 +𝑞𝑛𝑠
𝐾 (7)
na qual qns é a radiação solar de onda curta na superfície (J
m-2
s-1
) e Td é a temperatura do ponto de orvalho (°C). O
coeficiente de transferência de calor, K, é dado por:
𝐾 = 4,5 + 0,05𝑇𝑠 + 𝛿𝑓(𝑈) + 0,47𝑓(𝑈) (8)
na qual:
18
𝑓(𝑈) = 9,2 + 0,46𝑈2 (9)
𝛿 = 0,35 + 0,015𝑇𝑚 + 0,0012𝑇𝑚2 (10)
𝑇𝑚 =𝑇𝑠+𝑇𝑑
2 (11) [11]
em que: U é a velocidade do vento (ms-1
) e Tm em °C.
A temperatura de orvalho pode ser calculada conforme
(Stull, 2000):
𝑇𝑑 =237,3×𝑣𝑎𝑟
17,2694−𝑣𝑎𝑟 (12)
𝑣𝑎𝑟 =17,2694×𝑇𝑎
(237,3+𝑇𝑎)+ 𝑙𝑛(𝑈𝑅) (13)
em que UR é a umidade relativa e Ta é a temperatura do ar
(°C).
O coeficiente de difusão turbulenta é parametrizado
conforme (Henderson-Sellers, 1985):
𝐸 = 𝐸0𝑓 (14)
𝐸0 =𝜅𝑤𝑠
∗(𝑧𝐻−𝑧)
𝑃0𝑒𝑥𝑝 (−𝑘∗(𝑧𝐻 − 𝑧)) (15)
𝑓 = (1 + 37𝑅𝑖2)−1 (16)
𝑅𝑖 = 𝑁2(𝑧𝐻−𝑧)
2
𝑤∗2 (17)
𝑘∗ = 6,6√𝑠𝑒𝑛 ∅𝑈−1,84 (18)
nas quais: E0 é o coeficiente de difusão turbulenta em
estratificação neutra (m2s
-1), κ é a constante de von
Kárman (κ~0,4), zH é a profundidade total da coluna
d’água (m), z é a profundidade (m), ws* é a velocidade de
atrito do vento na superfície (ms-1
), k* é uma função da
latitude e da velocidade do vento, P0 é o valor neutro do
número de Prandtl turbulento, Ri é o número de
Richardson, N é a frequência de Brunt-Väisälä (s-1
) e ∅ é a
latitude.A vantagem das formulações parametrizadas para
a determinação do coeficiente de difusão turbulenta reside
no fato de que não há necessidade de calibração do
modelo. Futuramente o modelo de evolução térmica será
acoplado com modelo de transporte, balanço de oxigênio
dissolvido e produção/emissão de CO2.
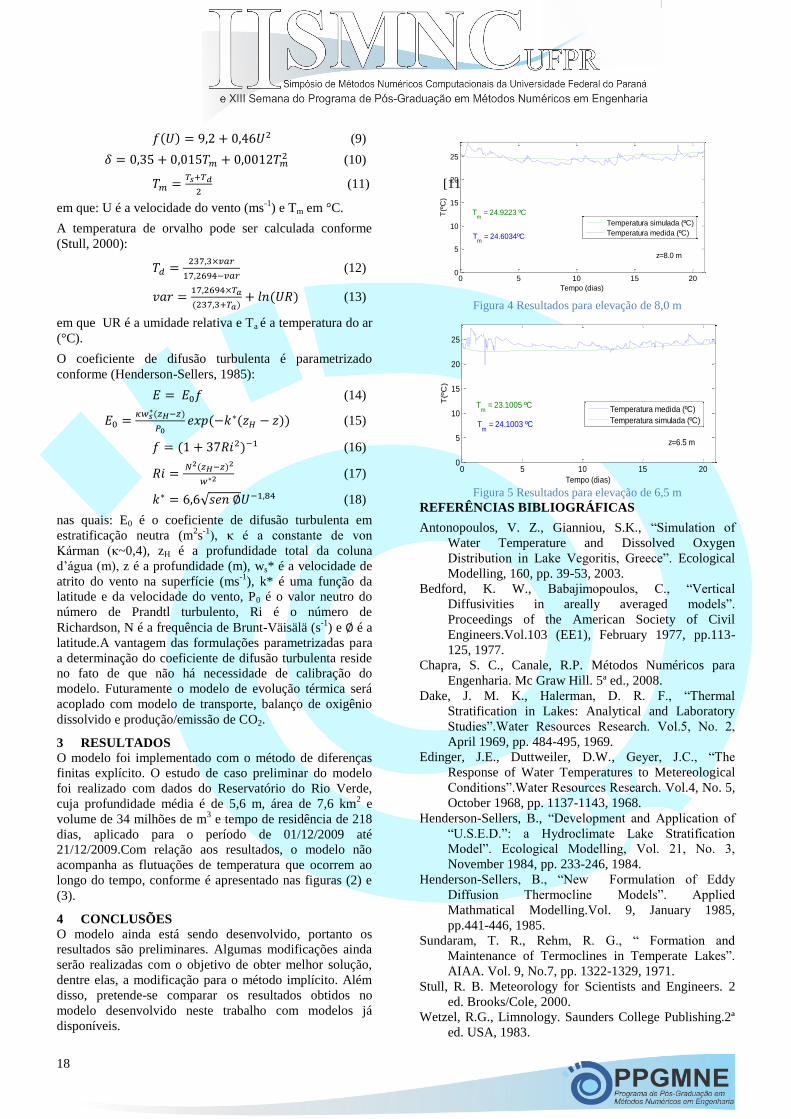
3 RESULTADOS
O modelo foi implementado com o método de diferenças
finitas explícito. O estudo de caso preliminar do modelo
foi realizado com dados do Reservatório do Rio Verde,
cuja profundidade média é de 5,6 m, área de 7,6 km2 e
volume de 34 milhões de m3 e tempo de residência de 218
dias, aplicado para o período de 01/12/2009 até
21/12/2009.Com relação aos resultados, o modelo não
acompanha as flutuações de temperatura que ocorrem ao
longo do tempo, conforme é apresentado nas figuras (2) e
(3).
4 CONCLUSÕES
O modelo ainda está sendo desenvolvido, portanto os
resultados são preliminares. Algumas modificações ainda
serão realizadas com o objetivo de obter melhor solução,
dentre elas, a modificação para o método implícito. Além
disso, pretende-se comparar os resultados obtidos no
modelo desenvolvido neste trabalho com modelos já
disponíveis.
Figura 4 Resultados para elevação de 8,0 m
Figura 5 Resultados para elevação de 6,5 m
REFERÊNCIAS BIBLIOGRÁFICAS
Antonopoulos, V. Z., Gianniou, S.K., “Simulation of
Water Temperature and Dissolved Oxygen
Distribution in Lake Vegoritis, Greece”. Ecological
Modelling, 160, pp. 39-53, 2003.
Bedford, K. W., Babajimopoulos, C., “Vertical
Diffusivities in areally averaged models”.
Proceedings of the American Society of Civil
Engineers.Vol.103 (EE1), February 1977, pp.113-
125, 1977.
Chapra, S. C., Canale, R.P. Métodos Numéricos para
Engenharia. Mc Graw Hill. 5ª ed., 2008.
Dake, J. M. K., Halerman, D. R. F., “Thermal
Stratification in Lakes: Analytical and Laboratory
Studies”.Water Resources Research. Vol.5, No. 2,
April 1969, pp. 484-495, 1969.
Edinger, J.E., Duttweiler, D.W., Geyer, J.C., “The
Response of Water Temperatures to Metereological
Conditions”.Water Resources Research. Vol.4, No. 5,
October 1968, pp. 1137-1143, 1968.
Henderson-Sellers, B., “Development and Application of
“U.S.E.D.”: a Hydroclimate Lake Stratification
Model”. Ecological Modelling, Vol. 21, No. 3,
November 1984, pp. 233-246, 1984.
Henderson-Sellers, B., “New Formulation of Eddy
Diffusion Thermocline Models”. Applied
Mathmatical Modelling.Vol. 9, January 1985,
pp.441-446, 1985.
Sundaram, T. R., Rehm, R. G., “ Formation and
Maintenance of Termoclines in Temperate Lakes”.
AIAA. Vol. 9, No.7, pp. 1322-1329, 1971.
Stull, R. B. Meteorology for Scientists and Engineers. 2
ed. Brooks/Cole, 2000.
Wetzel, R.G., Limnology. Saunders College Publishing.2ª
ed. USA, 1983.
0 5 10 15 200
5
10
15
20
25
Tempo (dias)
T(º
C)
Temperatura simulada (ºC)
Temperatura medida (ºC)
z=8.0 m
Tm
= 24.9223 ºC
Tm
= 24.6034ºC
0 5 10 15 200
5
10
15
20
25
Tempo (dias)
T(º
C)
Temperatura medida (ºC)
Temperatura simulada (ºC)
z=6.5 m
Tm
= 24.1003 ºC
Tm
= 23.1005 ºC

19
SIMILARIDADE ENTRE ESCALARES NA CAMADA-LIMITE ATMOSFÉRICA
UTILIZANDO LARGE-EDDY SIMULATION
Diana M. Cancelli, Marcelo Chamecki, Nelson L Dias.
Palavras-Chave: Similaridade entre escalares, Teoria de Similaridade de Monin-Obukhov, Large-Eddy Simulation
1 INTRODUÇÃO
Em estudos envolvendo hidrologia, poluição do ar,
previsões meteorológicas, e mais recentemente efeito
estufa e mudanças climáticas, costuma-se supor que as
flutuações de dois escalares quaisquer (temperatura,
umidade, concentração de um gás ou de partículas)
possuem comportamento similar na camada-limite
superficial (CLS) da atmosfera. Esta suposição, implícita
ou não, deve-se à hipótese ou Teoria de Similaridade de
Monin-Obukhov (TSMO).
Com o intuito de verificar a validade dessa hipótese
estudos experimentais e analíticos tem sido realizados, por
exemplo Warhaft (1976), Hill (1989) e Dias and Brutsaert
(1996). Para que dois escalares sejam perfeitamente
similares é necessário que todas as funções de similaridade
entre eles sejam iguais; Cancelli et al. (2012) observam
que diferentes autores utilizam diferentes funções para
fazer essa verificação obtendo, muitas vezes, resultados
divergentes. A não-similaridade entre dois escalares, em
geral, é atribuída a fenômenos físicos. Uma vez que, em
campo, não é possível controlar nem identificar esses
fenômenos físicos, conjecturam-se como possíveis causas
a advecção local, não-estacionariedade, papel ativo/passivo
dos escalares e fluxo de entranhamento no topo da CLA.
Uma forma de verificar os efeitos desses fenônemos
físicos sobre a similaridade é através de simulação de
grandes vórtices - large-eddy simulation (LES). Neste tipo
de simulação é possível controlar as condições de contorno
do problema e reproduzir os efeitos conjecturados. Neste
trabalho são apresentados os resultados iniciais
relacionados à verificação do efeito do papel ativo/passivo
da umidade sobre sua similaridade com a temperatura.
2 LARGE-EDDY SIMULATION
O Em linhas gerais, em LES são resolvidas as equações de
Navier-Stokes tridimensionais para uma faixa de escalas
da turbulência determinada pelo tamanho de grade
utilizado na simulação. Todas as escalas turbulentas cujo
tamanho está entre o tamanho dos elementos da malha e do
domínio são chamadas de escalas resolvidas; escalas
menores que os elementos de malha são parametrizadas
por modelos de
subgrade e chamadas de não-resolvidas. Como resultado
da simulação são gerados campos tridimensionais de
velocidade e dos escalares em questão.
3 SIMULAÇÕES
A base do modelo utilizado neste trabalho, assim como o
código computacional, são descritos em Kumar et al.
(2006). Foi necessária a inclusão da umidade no código
computacional, uma vez que a temperatura era o único
escalar implementado. Quatro simulações com domínio
5120x yL L m e 2048zL m , grade com
80x y m e 16z m e 64x64x128 elementos de
malha foram realizadas; em cada simulação foram gerados
os campos 3D para um período de 6 horas com 0.1t s .
Um fluxo superficial de calor 1' ' 0.24w ms K e um
fluxo de umidade 1 1' ' 0.008w q ms gkg foram utilizados
como condições de contorno na superfície; para
caracterizar convecção livre, o vento geostrófico utilizado
foi 1, 1.0,0.0g gU V ms e supôs-se que não existe
troca de calor nem de umidade com a atmosfera acima do
topo do domínio.
Para a temperatura o perfil inicial utilizado foi o mesmo
nas quatro simulações; para a umidade foram adotados
dois perfis diferentes: um similar ao perfil de temperatura
e outro não similar. Os perfis, devidamente
adimensionalizados, são apresentados na Figura 1. Além
disso, foi considerado o fato da umidade atuar como
escalar passivo ou ativo; ela atua como escalar ativo
quando é incluída no cálculo do termo de empuxo, ou seja,
ela passa a ter influência sobre o campo de velocidades. As
denominações QAS, QPS, QAD, QPD referem-se às
simulações em que a umidade atua como escalar ativo (A)
e passivo (P); S e D indicam, respectivamente, que o perfil
inicial de umidade é similar ao perfil de temperatura, ou
dissimilar.
Figura 2: Perfis iniciais de temperatura e umidade.
4 RESULTADOS E CONSIDERAÇÕES FINAIS
Uma das formas mais comuns para a verificação da
similaridade é através do coeficiente de correlação entre os
dois escalares em questão, ou seja, o coeficiente de
correlação entre eles deve ser igual a 1.0 para o caso de
similaridade perfeita. Na Figura 2 observamos o
coeficiente de correlação entre temperatura e umidade qr
para cada uma das quatro simulações; os perfis se
diferenciam de acordo com a condição inicial utilizada
para a umidade. A influência ativo/passivo da umidade é
imperceptível.

20
Figura 2: Perfis verticais do coeficiente de correlação.
iz indica
a altura da CLA.
Uma outra maneira de observar a similaridade,
recentemente utilizada por Cancelli et al. (2012), é através
do coeficiente simétrico de eficiência de transferência
(STE), que pode ser obtido no domínio temporal ou
espectral, ou seja, é um valor entre 0.0 e 1.0, sendo 1.0
para similaridade perfeita em qualquer um dos domínios.
No domínio espectral, para uma altura de 40m acima da
superfície, o comportamento de STE é apresentado na
Figura 3. Esta é uma forma de verificação da similaridade
entre os fluxos e não entre os escalares.
Figura 3: Coeficiente simétrico de eficiência de
transferência.
Observando os dois indicadores de similaridade podemos
concluir que, para o caso de convecção livre, o efeito
ativo/passivo da umidade é praticamente irrelevante e que
as diferenças observadas nestes quatro casos são devidas à
condição inicial utilizada.
Salienta-se que os resultados apresentados aqui são
iniciais. Simulações com maior número de pontos de grade
e menores elementos de malha, assim como reprodução de
outros fenômenos considerados como causas de
similaridade, serão realizadas na sequência desse estudo.
REFERÊNCIAS
Cancelli D., Dias N.L., and Chamecki M. Dimensionless
criteria for the production-dissipation equilibrium of
scalar fluctuations and their implications for scalar
similarity. Water Resources Research, In press.,
2012. doi:doi:10.1029/ 2005WR003954.
Dias N.L. and Brutsaert W. Similarity of scalars under
stable conditions. Boundary Layer Meteoreology,
80:355-373, 1996.
Hill R.J. Implications of Monin-Obukhov similarity theory
for scalar quantities. Journal of Atmospheric
Sciences, 46:2236–2244, 1989.
Kumar V., Kleissl J., Meneveau C., and Parlange M.B.
Large-eddy simulation of a diurnal cycle of the
atmospheric boundary layer: Atmospheric stability
and scaling issues. Water Resources Research,
42:W06D09, 2006. doi:10. 1029/2005WR004651.
Warhaft Z. Heat and moisture flux in the stratified
boundary layer. Q J Roy Meteorol Soc, 102:703–707, 1976
21
SIMULAÇÃO NUMÉRICA DA CAMADA LIMITE ATMOSFÉRICA
SUPERFICIAL COM O EMPREGO DO MÉTODO DE FILTRAGEM
LAGRANGEANA – MFL
Ana Paula Kelm Soares, Ricardo Carvalho de Almeida.
Palavras-Chave: Camada limite atmosférica, Método de Filtragem Lagrangeana, Turbulência.
1 INTRODUÇÃO
O Método de Filtragem Lagrangeana (MFL) foi
desenvolvido com o objetivo de simular escoamentos
turbulentos na sua média. Este método consiste na
filtragem das equações de transporte escritas no referencial
Lagrangeano, no qual as não-linearidades das equações
não são explicitadas. Desta maneira, a forma funcional das
equações não se altera, e o número de incógnitas e
equações se mantém igual.
O MFL baseia-se na interpretação física de que o
escoamento de pequena escala é responsável pela
homogenização das propriedades físicas em escalas
menores. Este efeito é expresso através de um filtro
espacial implícito. Sabe-se que a grade de diferenças
finitas consiste em um filtro do tipo box (Sorbjan, 1989;
Wilcox, 2000). No MFL, a parte advectiva das equações é
resolvida através do Método Semi-Lagrangeano (MSL), e
as forçantes, através do Método das Diferenças Finitas
(MDF), de modo que o filtro utilizado no MFL é o próprio
introduzido pelo MDF.
O MFL foi apresentado por Almeida et al. (2011), o qual
foi aplicado ao caso bidimensional de escoamento ao redor
de uma placa plana com altos valores de número de
Reynolds. Os resultados mostraram que o método é capaz
de reproduzir resultados de soluções analíticas e empíricas,
além de ser numericamente estável e computacionalmente
eficiente.
O presenta trabalho mostra a proposta de uso do MFL na
simulação de camada limite atmosférica superficial
bidimensional, e alguns resultado preliminares. Na
atmosfera, os processos de troca de calor são de extrema
importância, sendo assim, o diferencial deste trabalho é a
inclusão da equação de conservação da energia no sistema
de equações.
2 METODOLOGIA
2.1 Modelo Matemático
Para aplicação do MFL, é necessário que as equações
sejam lineares, assim, utiliza-se as equações com
aproximação de Boussinesq. As equações a serem
resolvidas, nas suas versões bidimensionais, são as
seguintes (Arya, 1988):
𝜕𝑢
𝜕𝑥+𝜕𝑤
𝜕𝑥= 0 (1)
𝐷𝑢
𝐷𝑡= −
1
𝜌0
𝜕𝑝1𝜕𝑥
+ 𝑣𝛻2𝑢 = 0 (2)
𝐷𝑤
𝐷𝑡=𝑔
𝑇0𝑇1 −
1
𝜌0
𝜕𝑝1𝜕𝑧
+ 𝑣𝛻2𝑤 = 0 (3)
𝐷𝜃
𝐷𝑡= 𝛼ℎ𝛻
2𝜃 (4)
onde 𝑥, 𝑧 e 𝑡 correspondem, respectivamente, às
coordenadas horizontal, vertical, e ao tempo; 𝑢(𝑥, 𝑧, 𝑡) e 𝑤(𝑥, 𝑧, 𝑡) são as velocidades horizontal e vertical; 𝜌0 e
𝑇0 representam o estado hidrostático da densidade e da
temperatura (constantes), 𝑝1(𝑥, 𝑧, 𝑡) e 𝑇1(𝑥, 𝑧, 𝑡) são os
desvios do estado hidrostático para pressão e temperatura;
𝜃(𝑥, 𝑧, 𝑡) é a temperatura potencial; 𝑣 é a viscosidade
cinemática; 𝛼ℎ é a condutividade térmica; e 𝑔 é a
aceleração da gravidade.
Para se obter o desvio da temperatura (𝑇1) a partir da
temperatura potencial (𝜃) , não é possível utilizar a
tradicional equação de Poisson, por tratar-se de uma
equação não-linear. Assim, 𝑇1 é obtido a partir da
aproximação descrita a seguir.
Primeiramente, considera-se a seguinte equação:
𝜕𝜃
𝜕𝑧=𝑑𝑇
𝑑𝑧+ Γ𝑑
onde Γ𝑑 é o gradiente adiabático seco, e 𝑇 é a temperatura
total, ou seja, 𝑇 = 𝑇0 + 𝑇1. Separando a equação acima em
diferenças finitas, substituindo 𝜃(𝑧 = 0) = 𝑇(𝑧 = 0), e
rearranjando a equação, obtém-se finalmente que:
𝑇1 = 𝜃 − 𝑇0 + Γ𝑧 (5)
As condições de contorno assumidas na superfície são de
imposição da pressão, não-deslizamento e não-penetração.
A temperatura também é prescrita na superfície. No topo,
a velocidade, a temperatura e a pressão são prescritas. Nas
laterais, utilizou-se condição de contorno cíclica, assim,
espera-se que as variáveis tentam a ficar constantes na
direção 𝑥. Como as condições de contorno impostas são
constantes no tempo, espera-se que as condições iniciais
percam importância com o passar do tempo.
2.2 Modelo Matemático
A equação de transporte bidimensional de um escalar
genérico 𝜙(�⃗�(𝑡), 𝑡) pode ser escrita da seguinte forma:
𝐷𝜙(�⃗�(𝑡), 𝑡)
𝐷𝑡= 𝑆(�⃗�(𝑡), 𝑡) (6)
onde 𝑆(�⃗�(𝑡), 𝑡) representa as fontes e sumidouros aos
quais o escalar está submetido, e �⃗�(𝑡) = (𝑥(𝑡), 𝑧(𝑡)).

22
A derivada total de 𝜙(�⃗�(𝑡), 𝑡) é aproximada pelo MSL:
𝐷𝜙(�⃗�(𝑡), 𝑡)
𝐷𝑡≈𝜙+ − 𝜙−
2∆𝑡 (7)
onde ∆𝑡 é o intervalo de tempo. Na equação 7, 𝜙+ é o
valor de 𝜙 no ponto de grade, 𝜙− é o valor de 𝜙 no ponto
da partícula, estimado a partir do campo de velocidade. O
esquema escolhido para estimar o ponto de partida foi o
proposto por Almeida et al. (2009). Substituindo-se 7 em 6
e aplicando o filtro espacial do MFL, obtemos que:
⟨𝜙+⟩ − ⟨𝜙−⟩
2∆𝑡= ⟨S(�⃗�(𝑡), 𝑡)⟩ . (8)
Nota-se que a aplicação do filtro, como mostrado na
equação 8, não requer parametrização da subgrade, nem
esquema de fechamento. Entretanto, os termos que
compõem S(�⃗�(𝑡), 𝑡) devem ser lineares.
A fim de melhorar o desempenho computacional, o
espaçamento de grade na vertical tem uma distribuição
logarítmica, de modo que a grade seja mais fina próximo a
superfície. A pressão é obtida por uma equação elíptica,
resolvida implicitamente pelo método SOR (Succesive
Over Relaxation).
3 RESULTADOS PRELIMINARES
As figuras 1 e 2 mostram o aquecimento da superfície, e o
consequente movimento vertical em uma atmosfera não-
instável. Neste caso, foi imposto um gradiente vertical de
temperatura de −0,5𝐾/𝑘𝑚.
Figura 1: Velocidade vertical
Figura 2: Temperatura potencial
REFERÊNCIAS
Almeida R., Alves J., and Tanajura C. Simulation of two-
dimensional high Reynolds number wake flows with
the use of filtered Lagrangian Navier-Stokes
equations. Journal of the Brazilian Society of
Mechanical Sciences and Engineering, 33(1):86–98,
2011.
Almeida R.C., Costa G.A.S., Fonseca L.C.M., and Alves
J.L.D. Particle trajectory calculations with a two-step
three-time level semi-Lagrangian scheme well suited
for curved flows. International Journal for Numerical
Methods in Fluids, 61:995–1028, 2009.
Arya S. Introduction to micrometeorology, volume 42.
Academic Pr, 1988
Sorbjan Z. Structure of the atmospheric boundary layer.
Prentice Hall advanced reference series: Physical and
life sciences. Prentice Hall, 1989. ISBN
9780138535575.
Wilcox D. Turbulence modeling for CFD. DCW
Industries, Inc., 2nd edition, 2000. ISBN
9780963605108.

23
CONTROLE DE QUALIDADE EM DADOS MICROMETEOROLÓGICOS
Dornelles Vissoto Junior, Nelson Dias.
Palavras-Chave: Controle de Qualidade, Turbulência, Fluxos Superficiais, Evaporação
1 INTRODUÇÃO
O monitoramento micrometeorológico tem sido
amplamente utilizado como uma importante ferramenta na
análise dos dados ambientais, em especial a medição de
fluxos superficiais através do método eddy covariance, ou
Covariâncias Turbulentas (Dias et al., 2002; Aubinet et al.,
2012; Scientifc, 1996; Lee et al., 2004). Estudos ao longo
dos anos tem buscado melhorar a qualidade das medições
de eddy covariance, eliminando os efeitos devido a
sensibilidade dos sensores, em especial na análise dos
dados pós processamento. Após a aplicação de técnicas de
filtragem ainda restam nos dados medidos valores que não
são fisicamente aceitáveis, os outliers. Este trabalho
propõe uma abordagem simples para a filtragem dos
dados, analisando o perfil dos fluxos pela hora de medição.
2 DADOS MICROMETEOROLÓGICOS
Os dados foram obtidos pelo LEMMA-UFPR
(Laboratório de Monitoramento e Modelagem
Ambientais) durante o período de 22/07/2004 a
14/09/2004 em uma campanha realizada sobre o Lago de
Furnas. Foram utilizados os sensores anemômetro sônico
CAMPBELL CSAT e o Termohigrômetro LICOR
LI7500. Os dados foram obtidos a uma frequência de
20Hz, analisados e processados em médias de flutuações a
cada 30 minutos, para os quais são calculados os fluxos.
3 METODOLOGIA
Para estabelecer uma metodologia de detecção para os
outliers das séries temporais, foi separado o conjunto de
dados por blocos utilizando a própria relação temporal,
onde os blocos de dados foram subdivididos pela meia
hora correspondente ao seu período de medição. A figura 1
mostra a distribuição de frequências em cada meia hora e
o boxplot com os quartis de 25% e 75% para Fluxos de
Calor Latente (Evaporação).
Figura 6: Distribuição dos Dados em Blocos de 30 Min
Desta maneira, os blocos divididos em cada meia hora,
estabeleceram 48 blocos de controle para cada variável. A
estatística padrão considerando que a distribuição dos
dados medidos em cada meia hora correspondente
obedecem uma distribuição normal não foi aplicada,
porque a distribuição normal não se mostrou representativa
da distribuição dos blocos de dados. A própria estatística
esta influenciada pelos outliers. Neste sentido, há a
necessidade de uma nova abordagem para a medida de
dispersão dos dados em cada bloco.
Uma abordagem razoável é estabelecer a medidade
dispersão em função de uma variável
bastanterepresentativa da física dos fluxos medidos
naquela meia hora, sendo esta variável a mediana.
Resumidamente, a mediana representa o valor
intermediário dos valores de ocorrência da variável
naquele bloco de dados, ou seja, é uma valor confiável
para representar o comportamento médio.
Com esta informação se obtém, para cada medida,
o desvio com relação a mediana, que fisicamente vai
representar o quanto a variável está distante do valor
intermediário de ocorrência dentro daquele conjunto de
dados, e obtém-se o desvio mediano definido por:
𝑍(𝑖) = |𝑧(𝑖) − 𝑧𝑚𝑒𝑑𝑖𝑎𝑛| (1)
Para esta nova variável, em um conjunto de dados com N
valores, quanto mais próximo z(i) estiver do valor
esperado mediano 𝑧𝑚𝑒𝑑𝑖𝑎𝑛 , mais próximo de 0 estará o
valor de Z(i). Do contrário, quanto mais afastado o valor
estiver da mediana, maior será o valor de Z(i). Assim
sendo, os valores esperados para os outliers serão sempre
os maiores valores de Z(i). Para uniformizar a dispersão
dos dados de modo a não eliminar os valores de Z(i) que
são suficientemente grandes, mas que não são outliers,
deve-se determinar qual é a faixa de variação da disperão
válida para os dados. Colocando num gráfico a dispersão
Z(i) contra a frequência de ocorrência, o que se observa é
que os dados se comportam com distribuição próxima a
uma Distribuição de Weibull, que tem a expressão dada
por:
𝑓(𝑥) =𝑘
𝛾(𝑥
𝛾)𝑘−1
𝑒−(𝑥𝛾)𝑘
, (2)
Sendo a acumulada dada por:
𝑓(𝑥) = 1 − 𝑒−(
𝑥
𝛾)𝑘
. (3)
Para exemplificar o método, supondo um conjunto
hipotético de desvios medianos 𝑧(𝑖) − 𝑧𝑚𝑒𝑑𝑖𝑎𝑛 de um
conjunto de dados e extrapolando os valores extremos dos
desvios em set1 e set2, obtém-se:
Tabela 1: Z(i)
f z(i) − zmedian set1 set2
0.1 1 1 1

24
0.2 2 2 2
0.3 4 4 4
0.4 8 8 8
0.5 16 16 16
0.6 32 32 32
0.7 64 64 64
0.8 128 128 512
0.9 256 256 1024
1.0 512 1024 2048
Visualizando o gráfico de variação da função
contra a frequência acumulada de ocorrência (neste caso a
frequência é de 1=10 para cada variável) e confrontando
com o ajuste de uma equação 3 (através de mínimos
quadrados) para cada conjunto de dados, e ainda supondo
as linhas de determinação dos outliers como três vezes o
valor da função ajustada à frequência acumulada de 68%
(empírico), obtém-se a figura 2:
Figura 7: Distribuição Acumulada de Weibull
Como pode se observar, não importa quão distante os
outliers estarão da mediana, o seu impacto sobre este
critério estatístico é muito baixo, de modo que se pode
afirmar que a estatística pelo k desvio mediano não sofre
influência da magnitude dos outliers e pode ser utilizado
como um criterio de controle de qualidade válido.
4 CONCLUSÕES
O tratamento de outliers é uma questão ainda em aberto no
controle de qualidade de dados micrometeorológicos.
Como não é possível a determinação de equações físicas
em dados pós processados, o estabelecimento de critérios
empíricos tem sido uma saída muito versátil. O critério de
determinação pelo desvio mediano se apresentou como um
bom filtro para a limpeza da maioria dos outliers,
eliminando poucos dados de fluxos superficiais
considerados fisicamente aceitáveis.
REFERÊNCIAS
Aubinet M., Vesala T., and Papale D., editors. Eddy
Covariance: A Practical Guide to Measurement and
Data Analysis. Springer, Dordrecht, Heidelberg,
London, New York, 2012.
Dias N.L., Kan A., Grodzki L., Sanchez S.D., and Vissotto
Jr. D. O método de covariâncias turbulentas
atenuadas (MCTA) para medição dos fluxos de calor
sens ível e latente: aplicação ao lago de Itaipu e seu
redor. Revista Brasileira de Recursos Hídricos,
7(1):143–160, 2002.
Lee X., Massman W.J., and Law B.E., editors. Handbook
of Micrometeorology. A Guide for Surface Flux
Measurements. Kluwer, Dordrecht, 2004.
Scientifc C. Eddy correlation system: instruction manual.
Campbell Scientifc, Inc., Logan, Utah, USA, 9/96
edition, 1996.

25
GERAÇÃO DO ELEMENTO REPRESENTATIVO DO CONCRETO COM
AGREGADOS GRAÚDOS EM FORMATO ELÍPTICO
Guilherme Augusto Pianezzer, Fábio André Negri Balbo, Eloy Kavisky, Liliana Madalena Gramani, Marcelo Rassy Teixeira.
Palavras-Chave: Elemento Representativo do Concreto, Detecção de Colisão.
1 INTRODUÇÃO
O concreto é um material poroso, heterogêneo, que pode
ser estudado em diferentes escalas: Nanoscópica,
microscópica, mesoscópica e macroscópica Tulio (2001).
Em especial a escala mesoscópica é uma escala com
dimensões maiores que a das moleculares, de modo que o
domínio possui propriedades macroscópicas, mas com
dimensões menores que a dimensão macroscópica Teixeira
(2011).
Figura 8: Heterogeneidade do concreto Mehta e Monteiro
(2008)
Quando analisada a mesoestrutura (≅ 10-3
m) do concreto,
percebe-se a presença de dois constituintes: a pasta de
cimento endurecida (Argamassa) e as partículas de
agregado graúdo, como pode ser observada na Figura 2.
Na análise, também percebe-se a presença de vazios e
defeitos de aderência que justificam a heterogeneidade do
concreto.
Para estudar o comportamento do concreto é preciso lidar
com esta heterogeneidade e para isso surge a necessidade
de criar um elemento representativo do concreto (RVE).
Com este elemento representativo é possível estudar as
tensões e deformações, resultantes dos efeitos que o
concreto está sujeito, assim como é possível estimar as
propriedades do material estudado.
2 GERAÇÃO DO RVE
Para modelar este elemento representativo, baseia-se na
curva granulométrica dos agregados graúdos presentes no
concreto.
Segundo (Wriggers and Moftah, 2006), a geração da
configuração aleatória das partículas deve satisfazer as
características básicas do material real. Com este objetivo,
a distribuição deve ser tal que as partículas sejam o
máximo possível macroscopicamente homogêneas no
espaço. A ideia principal deste trabalho é escolher
partículas de agregado graúdo de uma fonte, cuja
distribuição segue uma certa curva representativa do
material e além disso alocar cada partícula seguindo
algumas regras de posicionamento, como, por exemplo,
não haver intersecção entre os agregados.
Cada forma das partículas depende do tipo de agregado
escolhido. Vários meios de caracterizar a geometria dos
agregados já foram publicados. (Wittmann et al., 1984) e
posteriormente (Wang et al., 1999) criaram um método
para gerar os agregados graúdos baseando-se na expressão:
𝑟 ≡ 𝑟(𝜃) = 𝐴0 + ∑ 𝐴𝑗 cos(𝑗𝜃 + 𝛼𝑗)𝑚𝑗=1 (1)
onde 𝐴0 representa o raio médio do agregado obtido a
partir da curva granulométrica, 𝐴𝑗 representa a amplitude
da frequência, 𝑗𝜃, de Fourier, m o total de vértices criado e
j o ângulo de fase. O resultado obtido foi a aproximação do
agregado por um polígono de m vértices.
Em trabalhos mais recentes, como (Wriggers and Moftah,
2006) e (Teixeira, 2011), cada agregado foi aproximado
por um círculo (para o caso 2-D) ou por esferas (para o
caso 3-D).
Para este trabalho cada agregado é aproximado por discos
elípticos. Para a geração do RVE são consideradas 3
hipóteses:
1. Os agregados devem estar inteiramente contidos no
domínio do concreto. 2. Não deve existir intersecção entre
os agregados. 3. Os agregados possuem formato elíptico.
A respeito da hipótese 1, um teste simples é realizado para
saber se os agregados estão inteiramente contidos no
domínio do concreto.
A respeito da hipótese 2, para detectar as colisões entre os
diversos agregados é necessário criar um procedimento
que, ao adicionar um novo agregado na matriz de
argamassa, verifique se há intersecção entre os elementos.
Os testes utilizados como referência estão contidos dentro
da área de computação gráfica e, em especial, o teste de
detecção de colisão entre elipses utilizado foi o proposto
por (Choi et al., 2005).
3 CONSIDERAÇÕES FINAIS
A tabela 1 mostra a curva granulométrica utilizada como
exemplo para gerar os primeiros modelos.
Para gerar diferentes RVE’s alterou-se a porcentagem de
área que os agregados ocupam no domínio do concreto,
dado pela taxa de área dos agregados (ap). Os resultados
obtidos estão na Figura 2.

26
Figura 9: Estruturas Aleatórias Geradas
Abertura da Peneira % Total Retirado (%)
12,70 0
9,50 23
4,75 74
2,36 100
Tabela 2: Resultado da análise de peneiramento Wriggers
e Moftah (2006)
REFERENCIAS
Choi Y., Wang W., and Liu Y. Continuous collision
detection for elliptic disks. HKU CS Tech Report,
2005.
Mehta P. and Monteiro P. Concreto-Microestrutura,
Propriedades e materiais. IBRACON, São Paulo,
2008.
Teixeira M.R. A Contribution to the numerical modeling
of the heterogeneity of concrete with the elements
free Galerkin method. Ph.D. thesis, São Paulo,
2011.
Tulio B.N. Experimental analysis of fracture processes in
concrete. Revista Brasileira de Ciências Mecânicas,
23:545–550, 2001.
Wang Z., Kwan A., and Chan H. Mesoscopic study of
concrete i: generation of random aggregate structure
and finite element mesh. Comput, 70:533 – 544,
1999.
Wittmann F., Roelfstra P., and Sadaouki H. Simulation
and analysis of composite structures.
Mater,Sci,Engng, 68:239– 248, 1984.
Wriggers P. and Moftah S.O. Mesoscale models for
concrete: Homogenisation and damage behavior.
Elsevier, 42:623 – 636, 2006. ISSN 1631 -
0721.doi:DOI:10.1016/j.finel.

27
DESENVOLVIMENTO DE MODELO HIPERBÓLICO PARA PREVISÃO DA
RELAÇÃO TENSÃO X DEFORMAÇÃO X BIODEGRADAÇÃO EM RESÍDUOS
SÓLIDOS URBANOS
Letícia Maria Nocko, Eduardo Dell’Avanzi.
Palavras-Chave: Resíduos sólidos urbanos, Aterros sanitários, Biodegradação, Modelo hiperbólico, Recalques.
1 INTRODUÇÃO
Fora a competência do engenheiro em desenvolver uma
modelagem computacional, cinco fatores que garantem a
acurácia do modelo numérico em prever o comportamento
de um determinado fenômeno de engenharia são: (a) a
adequação da equação governante em descrever o
fenômeno de interesse, (b) a acurácia dos modelos
matemáticos constitutivos em descreverem as
características hidro-mecânicas dos materiais envolvidos,
(c) a definição acurada das condições de contorno do
problema, incluindo o universo necessário de análise, (d) a
adaptabilidade do método de solução (e.g. métodos dos
elementos finitos vs. método das diferenças finitas), e (e) a
robustez do algoritmo matemático na solução do sistema
de equações. Dentre esses fatores, os modelos
constitutivos empregados possuem um papel relevante
uma vez que visam descrever o comportamento real do
material em estudo. Com relação ao universo da mecânica
dos solos, os modelos constitutivos em geral consideram
aspectos singulares do solo tais como a realidade
multifásica (sólidos, líquidos e gases), anisotrópica e
heterogênea de suas características hidro-mecânicas.
Entretanto, a geotecnia tem tradicionalmente considerado
o volume de sólidos do solo sempre constante, o que não
pode ser aplicado ao estudo do comportamento dos
resíduos sólidos urbanos (RSU), visto que esse material se
degrada e gera gases e líquidos, caracterizando-se como
um sistema não conservativo de massa. Visando
contemplar a estimativa de comportamento de sistemas de
massa não conservativos, Otsuka (2010) e Nocko (2010)
desenvolveram um modelo matemático para descrição do
comportamento mecânico dos RSU ao longo do tempo. O
modelo inclui equações constitutivas inter-relacionadas
acopladas ao processo de degradação da matéria orgânica e
respectiva geração de gases.
O objetivo deste trabalho é apresentar um resumo das
equações constitutivas que compõem o modelo de previsão
do comportamento mecânico dos RSU, incluindo alguns
resultados de curvas de previsão do comportamento
mecânico.
2 MODELO HIPERBÓLICO DE PREVISÃO DO
COMPORTAMENTO MECÂNICO DE RSU
2.1 Formulação
O modelo baseia-se na formulação hiperbólica proposta
originalmente por Kondner (1963) para descrever a curva
tensão-deformação de um solo submetido a um ensaio de
compressão triaxial sob tensão confinante constante.
Matematicamente, tem-se:
𝜎𝑑 =휀
𝑎 + 𝑏휀 ( 1 )
onde σd é a tensão desviadora, ε é a deformação, 1
𝑎 é o
módulo tangente inicial (Ei) e 1
𝑏 é a tensão de desvio na
ruptura (σult).Otsuka (2010), partindo da Equação (1) e
adotando o critério de ruptura de Mohr-Coulomb e a
formulação proposta por Janbu (1967) para descrição do
módulo de elasticidade tangente inicial, desenvolveu uma
formulação para descrição do módulo de elasticidade
tangente em função da variação de matéria orgânica ao
longo do tempo. Matematicamente, tem-se:
𝜕𝐸𝑡𝑔
𝜕𝑡= 𝑃0 [
𝜕𝑘
𝜕𝑀𝑂∙𝜕𝑀𝑂
𝜕𝑡∙ (𝜎3𝑃0)𝑛
+ 𝑘 ∙ (𝜎3𝑃0)𝑛
∙ 𝑙𝑛 (𝜎3𝑃0) ∙
𝜕𝑛
𝜕𝑀𝑂∙𝜕𝑀𝑂
𝜕𝑡] −
2∙𝑅𝑓∙𝜎𝑑
𝑆2 {𝑆
𝜕𝐸𝑖
𝜕𝑡− 𝐸𝑖
𝜕𝑆
𝜕𝑡} + (𝑅𝑓∙𝜎𝑑)
2∙(𝑆2
𝜕𝐸𝑖
𝜕𝑡−𝐸𝑖∙2∙𝑆
𝜕𝑆
𝜕𝑡)
𝑆4
(2)
Onde o termo ∂S
∂t na Equação (3) é igual a:
𝜕𝑆
𝜕𝑡=
2 ∙ cos𝜑 ∙ (𝜕𝑐𝜕𝑀𝑂
∙𝜕𝑀𝑂𝜕𝑡
+𝜕𝜑𝜕𝑀𝑂
∙𝜕𝑀𝑂𝜕𝑡
(𝜎3 − 𝑐 ∙ tan𝜑))
(1 − sin𝜑)+
cos𝜑 ∙𝜕𝜑𝜕𝑀𝑂
∙𝜕𝑀𝑂𝜕𝑡
∙ 𝑆
(1 − sin𝜑)
(3)
A Tabela 1 fornece o significado dos termos presentes nas
Equações (2) e (3). Etg Módulo tangente da curva hiperbólica
t Tempo
P0 Pressão de referência
MO Teor de matéria orgânica
k Parâmetro da equação de Janbu
n Parâmetro da equação de Janbu
σ3 Tensão confinante
Rf Razão de ruptura
S Pico de resistência do ensaio de compressão triaxial
Ei Módulo tangente inicial
φ Ângulo de atrito interno do material
c Coesão do material
Tabela 3: Significado dos termos presentes na equação
governante do modelo hiperbólico proposto.
A avaliação da Equação (2) é possível a partir da definição
de mais cinco equações constitutivas que descrevam a
relação entre os parâmetros do modelo de Janbu (1967) e
os parâmetros do critério de resistência com a variação da
matéria orgânica ao longo do tempo.
2.2 Calibração
A calibração do modelo foi realizada com dados de ensaios
triaxiais realizados com misturas solo-coloide (Sales, 2010).
Esse material é constituído por uma mistura de solo e coloide
gelatinoso e foi proposto por Otsuka et al (2010) para ser
utilizado no estudo de sistemas não-conservativos de massa. As
vantagens do uso desse material ao invés dos RSU são: (a)
permitir que os ensaios sejam feitos com amostras menores,
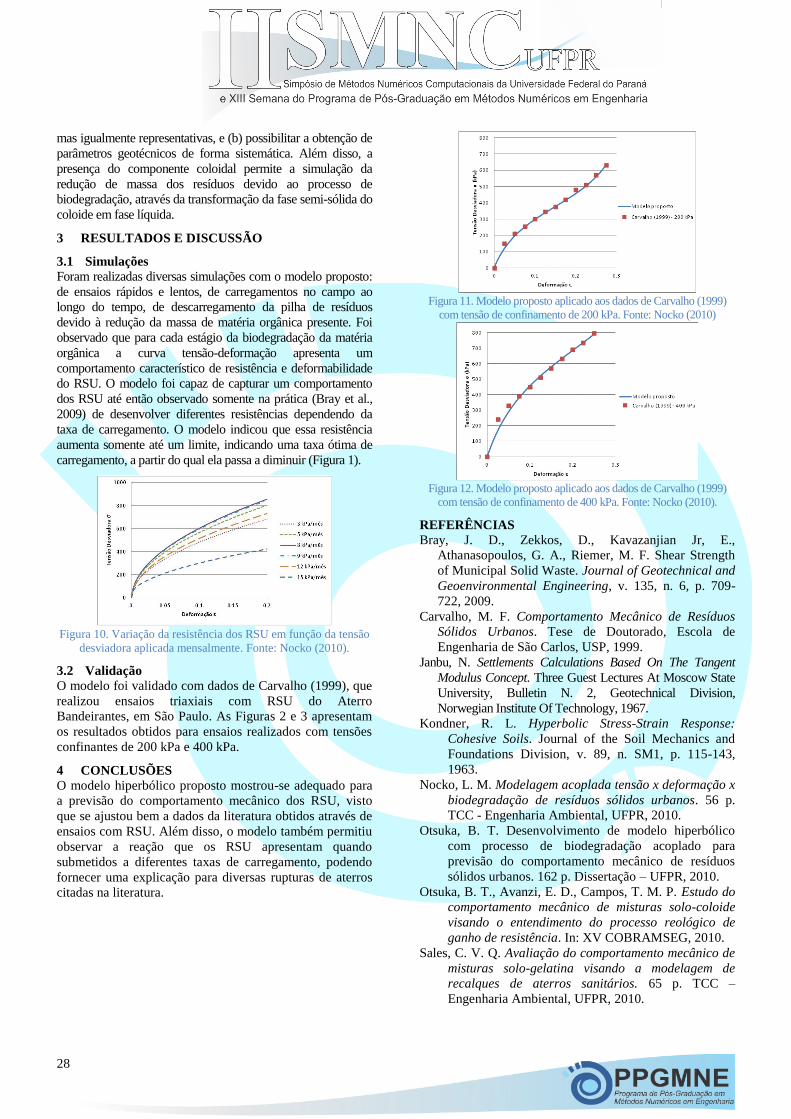
28
mas igualmente representativas, e (b) possibilitar a obtenção de
parâmetros geotécnicos de forma sistemática. Além disso, a
presença do componente coloidal permite a simulação da
redução de massa dos resíduos devido ao processo de
biodegradação, através da transformação da fase semi-sólida do
coloide em fase líquida.
3 RESULTADOS E DISCUSSÃO
3.1 Simulações
Foram realizadas diversas simulações com o modelo proposto:
de ensaios rápidos e lentos, de carregamentos no campo ao
longo do tempo, de descarregamento da pilha de resíduos
devido à redução da massa de matéria orgânica presente. Foi
observado que para cada estágio da biodegradação da matéria
orgânica a curva tensão-deformação apresenta um
comportamento característico de resistência e deformabilidade
do RSU. O modelo foi capaz de capturar um comportamento
dos RSU até então observado somente na prática (Bray et al.,
2009) de desenvolver diferentes resistências dependendo da
taxa de carregamento. O modelo indicou que essa resistência
aumenta somente até um limite, indicando uma taxa ótima de
carregamento, a partir do qual ela passa a diminuir (Figura 1).
Figura 10. Variação da resistência dos RSU em função da tensão
desviadora aplicada mensalmente. Fonte: Nocko (2010).
3.2 Validação
O modelo foi validado com dados de Carvalho (1999), que
realizou ensaios triaxiais com RSU do Aterro
Bandeirantes, em São Paulo. As Figuras 2 e 3 apresentam
os resultados obtidos para ensaios realizados com tensões
confinantes de 200 kPa e 400 kPa.
4 CONCLUSÕES
O modelo hiperbólico proposto mostrou-se adequado para
a previsão do comportamento mecânico dos RSU, visto
que se ajustou bem a dados da literatura obtidos através de
ensaios com RSU. Além disso, o modelo também permitiu
observar a reação que os RSU apresentam quando
submetidos a diferentes taxas de carregamento, podendo
fornecer uma explicação para diversas rupturas de aterros
citadas na literatura.
Figura 11. Modelo proposto aplicado aos dados de Carvalho (1999)
com tensão de confinamento de 200 kPa. Fonte: Nocko (2010)
Figura 12. Modelo proposto aplicado aos dados de Carvalho (1999)
com tensão de confinamento de 400 kPa. Fonte: Nocko (2010).
REFERÊNCIAS
Bray, J. D., Zekkos, D., Kavazanjian Jr, E.,
Athanasopoulos, G. A., Riemer, M. F. Shear Strength
of Municipal Solid Waste. Journal of Geotechnical and
Geoenvironmental Engineering, v. 135, n. 6, p. 709-
722, 2009.
Carvalho, M. F. Comportamento Mecânico de Resíduos
Sólidos Urbanos. Tese de Doutorado, Escola de
Engenharia de São Carlos, USP, 1999.
Janbu, N. Settlements Calculations Based On The Tangent
Modulus Concept. Three Guest Lectures At Moscow State
University, Bulletin N. 2, Geotechnical Division,
Norwegian Institute Of Technology, 1967.
Kondner, R. L. Hyperbolic Stress-Strain Response:
Cohesive Soils. Journal of the Soil Mechanics and
Foundations Division, v. 89, n. SM1, p. 115-143,
1963.
Nocko, L. M. Modelagem acoplada tensão x deformação x
biodegradação de resíduos sólidos urbanos. 56 p.
TCC - Engenharia Ambiental, UFPR, 2010.
Otsuka, B. T. Desenvolvimento de modelo hiperbólico
com processo de biodegradação acoplado para
previsão do comportamento mecânico de resíduos
sólidos urbanos. 162 p. Dissertação – UFPR, 2010.
Otsuka, B. T., Avanzi, E. D., Campos, T. M. P. Estudo do
comportamento mecânico de misturas solo-coloide
visando o entendimento do processo reológico de
ganho de resistência. In: XV COBRAMSEG, 2010.
Sales, C. V. Q. Avaliação do comportamento mecânico de
misturas solo-gelatina visando a modelagem de
recalques de aterros sanitários. 65 p. TCC –
Engenharia Ambiental, UFPR, 2010.

29
RESOLUÇÃO DE SISTEMAS LINEARES ESPARSOS COM APLICAÇÕES EM
GEOFÍSICA DE EXPLORAÇÃO
Tuanny Brufati, Saulo Pomponet, Amin Bassrei.
Palavras-Chave: Otimização, Sistemas Lineares, Geofísica.
1 INTRODUÇÃO
Neste trabalho estamos interesados no estudo da inversão,
cujos parâmetros a serem invertidos no problema de
tomografia sísmica, a saber, surgem da parametrização do
recíproco do campo de velocidades, a partir dos quais se
obtém o tempo de trânsito por meio da técnica de traçado
de raios.
Para isto, realizamos o estudo do comportamento de
alguns métodos iterativos para sistemas lineares na solução
de problemas discretos mal postos vindos da tomografia
sísmica. Consideramos o método de gradientes conjugados
e as variantes: métodos de gradientes conjugados para
equações normais, os métodos de gradientes conjugados
sugeridos por Polak e Ribière e por Fletcher e Reeves.
Para a resolução do sistema foi necessário utilizar a
Regularização de Tikhonov para o sistema linear
resultante, calculando o parâmetro de regularização com o
auxílio do pacote Regularization Tools.
Depois disso, mantivemos fixados esses parâmetros e
comparamos o número de iterações para a convergência de
cada método.
2 DESCRIÇÃO DO MODELO
Consideramos o modelo de um anticlinal não simétrico
com origem tectônica. Tal situação tem grande relevância
na exploração de óleo, pois ele apresenta espaços com
dobras que podem acumular hidrocarbonetos. O
reservatório é representado por um arenito poroso (1500
m/s) e a vedação por uma camada impermeável de xisto
(2500 m/s). O modelo foi discretizado em 800 blocos de
dimensões 10m x 10m. Para as simulações, consideramos
30 fontes em um poço e 30 receptores no outro, de forma a
ter 900 raios ou 900 equações.
3 ESPECIFICAÇÕES GERAIS
Estudamos o comportamento de alguns métodos iterativos
para sistemas lineares na solução de problemas discretos
mal postos vindos da tomografia sísmica.
Consideramos o método de gradientes conjugados (T. E.
B. Brufati. Método de gradientes conjugados, disponível
em http://people.ufpr.br/~ewkaras/ic/tuanny11.pdf , 2011.)
e, além disso, as seguintes variantes: métodos de
gradientes conjugados para equações normais (Y. Saad.
Iterative Methods for Sparse Linear Systems. Society for
Industrial and Applied Mathematics, Philadelphia, 2003.),
os métodos de gradientes conjugados sugeridos por Polak
e Ribière e por Fletcher e Reeves (J. Nocedal e S. J.
Wright, Numerical Optimization. Springer Verlag, New
York, 1999.).
O problema direto (H. A. Schots. Tomografia sísmica poço
a poço e poço a superfície utilizando ondas diretas.
Dissertação de Mestrado. Departamento de Geofísica,
Universidade Federal da Bahia, 1990.) foi resolvido com a
técnica de traçado de raios (Andersen and A. Kak. Digital
ray tracing in two-dimensional refractive yields. J. Acoust.
Soc.Am.,72:1593-1606,1982.), que gera as distâncias
viajadas por cada raio em um meio 2-D, resultando na
matriz de tomografia G. Os tempos de trânsito são
computados multiplicando a matriz G pelo vetor de
vagarosidade verdadeira s ,o inverso das velocidades
verdadeiras, e em seguida o vetor resultante é
randomicamente perturbado. Os dados de entrada da
inversão são a matriz G e o vetor de tempos de trânsito t, e
para o procedimento inverso usamos os algoritmos de
gradientes conjugados listados anteriormente. A inversão
gera os tempos de trânsito, os coeficientes para o modelo e
a vagarosidade do meio.
Nós usamos a regularização de Tikhonov (S. F. V. Bazán
and L. S. Borges. Métodos para problemas inversos de
grande porte. Volume 39. São Carlos. São Paulo, Brasil,
2009.) para o sistema linear perturbado resultante,
calculando o parâmetro de regularização com o auxílio do
pacote Regularization Tools (Christian Hansen.
Regularization Tools: A Matlab package for analysis and
solution of discrete ill-posed problems. Numerical
Algorithms, 6:1-15, 1994.).
Para uma tolerância de 10-10
para a norma residual, o
algoritmo de inversão produziu um modelo reconstruído
que se aproxima corretamente do original.
Depois disso, mantivemos fixados esses parâmetros e
comparamos o número de iterações para a convergência de
cada método. Para o modelo atual, as curvas de norma
residual versus o número de iterações para os métodos
iterativos foram similares.
4 TESTES COMPUTACIONAIS
Os testes computacionais foram realizados usando, até
então, dois modelos geofísicos. Apresentamos a seguir os
modelos verdadeiros (ver Figura 1), sendo o modelo 1 à
esquerda e o modelo 2 à direita.
Figura 1: Modelos verdadeiros.
Apresentamos agora os modelos estimados (ver Figura 2),
sendo o modelo 1 à esquerda e o modelo 2 à direita.

30
Figura 2: Modelos estimados.
Os métodos testados fornecem uma inversão muito
semelhante ao modelo verdadeiro.
5 CONCLUSÕES
Percebemos que os quatro métodos que foram
implementados, testados e analisados fornecem uma
inversão muito semelhante entre si e coerente com o
modelo verdadeiro.
Na próxima etapa do trabalho iremos montar uma coleção
de modelos geofísicos para estimar um perfil de
desempenho para cada variante do método GC.
6 REFERÊNCIAS
S. F. V. Bazán and L. S. Borges. Métodos para problemas
inversos de grande porte. Volume 39. São Carlos.
São Paulo, Brasil, 2009.
T. E. B. Brufati. Método de gradientes conjugados,
disponível em
http://people.ufpr.br/~ewkaras/ic/tuanny11.pdf ,
2011.
Christian Hansen. Regularization Tools: A Matlab package
for analysis and solution of discrete ill-posed
problems. Numerical Algorithms, 6:1-15, 1994.
Andersen and A. Kak. Digital ray tracing in two-
dimensional refractive yields. J. Acoust.
Soc.Am.,72:1593-1606,1982.
J. Nocedal e S. J. Wright, Numerical Optimization.
Springer Verlag, New York, 1999.
Y. Saad. Iterative Methods for Sparse Linear Systems.
Society for Industrial and Applied Mathematics,
Philadelphia, 2003.
H. A. Schots. Tomografia sísmica poço a poço e poço a
superfície utilizando ondas diretas. Dissertação de
Mestrado. Departamento de Geofísica, Universidade
Federal da Bahia, 1990.

31
ANÁLISE ESTATÍSTICA MULTIVARIADA DOS ACIDENTES DAS RODOVIAS
FEDERAIS PARANAENSES NO PERÍODO DE 2009 A 2012
Vanessa Ferreira Sehaber, Adriano Rodrigues de Melo, Jair Mendes Marques.
Palavras-Chave: Análise Fatorial Exploratória, Acidentes de Trânsito, Análise de Correlação Canônica, Análise de
Componentes Principais
1 INTRODUÇÃO
Cotidianamente, acompanha-se nos meios de comunicação
acidentes de trânsito com vítimas, dentre estas, algumas
que são levadas ao óbito.
O Departamento de Trânsito do Paraná (DETRAN-PR)
disponibiliza em anuários estatísticos informações sobre o
crescimento da frota e dos acidentes ao passar dos anos,
conforme a Fonte: Anuário Estatístico 2010 (DETRAN-
PR)
Tabela 2.
Ano Frota Acidentes ARF1
2005 3.432.367 97.918 13.519
2006 3.675.703 93.426 12.276
2007 3.999.483 100.624 12.707
2008 4.358.093 109.005 15.624
2009 4.683.631 106.321 17.680
2010 5.041.846 115.348 20.707 Fonte: Anuário Estatístico 2010 (DETRAN-PR)
Tabela 2: Crescimento da frota de veículos e acidentes de trânsito
no estado do Paraná.
Observa-se que no período compreendido de 2005 e 2010,
a frota de veículos, os acidentes e os acidentes nas
rodovias federais do Paraná aumentaram, respectivamente,
em torno de 47%, 18% e 54%.
Em CESVIBRASIL (2012) são apontados alguns motivos
que podem estar associados aos acidentes de trânsito,
como erro humano, condições da pista, velocidade
excessiva, distância insuficiente em relação ao veículo
dianteiro, desrespeito à sinalização, condições da pista,
dirigir sob efeito de drogas e/ou álcool, defeito mecânico
em veículo, dentre outros.
1.1 Descrição da malha rodoviária
Segundo o DER (2012), a malha rodoviária do Estado do
Paraná é constituída de 118.587,07 km, cuja jurisdição
distribui-se da seguinte forma: 3.958,93 km de rodovias
federais, 11.902,14 km de rodovias estaduais e 102.726,00
km de rodovias municipais. As rodovias podem ser
administradas pelas instituições públicas responsáveis:
Departamento de Estradas e Rodagem do Estado do Paraná
(DER), Departamento Nacional de Infraestrutura e
Transporte (DNIT) ou concedidas à iniciativa privada
(Empresas Concessionárias).
Assim, o presente trabalho se desenvolve na campo
estatístico multivariado para explorar as causas dos
acidentes ocorridos nas rodovias federais do Paraná.
1 Acidentes Rodovias Federais
2 ASPECTOS METODOLÓGICOS
Este trabalho está em desenvolvimento e visa utilizar
técnicas exploratórias de sintetização para verificar
possíveis relações entre as variáveis observáveis como
causas dos acidentes de trânsito das rodovias federais
paranaenses no período de 1 de janeiro de 2009 a 31 de
abril de 2012. Dentre tais técnicas, destacam-se a análise
de componentes principais, análise fatorial exploratória e
análise de correlação canônica (Mingoti, 2005). Deseja-se
encontrar variáveis latentes, não mensuradas no conjunto
de dados, que possam explicar melhor a ocorrência de
acidentes de trânsito em cada rodovia.
Com o banco de dados disponibilizado pela Polícia
Rodoviária Federal (PRF) estão sendo analisadas 15
rodovias. Este banco de dados dispõe de informações de,
aproximadamente, 65.000 acidentes, assim como dos
veículos, dos condutores e das pessoas envolvidas,
referentes aos 40 meses mencionados anteriormente.
Para realizar a análise dos dados, está sendo utilizado o
software R, o qual é ao mesmo tempo uma linguagem de
programação e um ambiente para computação estatística e
gráfica (R-Project, 2012).
Foram agrupadas as planilhas dos 40 meses e foram
separadas as observações pertinentes à cada rodovia. Cada
variável foi analisada a fim de verificar falhas de
preenchimento e foram excluídas as variáveis e as
observações que não pudessem ser analisadas devido às
tais falhas. Em virtude disso, a planilha referente às
pessoas não será utilizada na análise do banco de dados.
A maior parte das variáveis é composta por variáveis
qualitativas. Cada categoria foi considerada como variável
e discretizada como presente (1) ou não-presente (0). De
modo a simplificar a análise dos dados e os cálculos
computacionais, os quilômetros (em valores decimais)
onde incidiram os acidentes foram organizados por
intervalos de classe de 1 a 1 quilômetro e agrupadas as
observações correspondentes a cada variável dentro do
intervalo de 1 quilômetro.
No momento, estão sendo aplicadas as análises de
componentes principais e fatorial exploratória nos dados
da planilha acidentes e, após encontrar as variáveis que
sumarizem as informações principais das variáveis
originais, será aplicada a análise de correlação canônica
em tais variáveis a fim de buscar relações entre as
variáveis das planilhas de acidentes com veículos e de
acidentes com condutores em cada rodovia. Dessa forma,
este trabalho vem a contribuir com a sociedade de modo a
apontar as principais causas de acidentes de trânsito em
cada rodovia.

32
REFERÊNCIAS
CESVIBRASIL. Prováveis Causas de Acidentes.
Fevereiro, 2012. URL
www.cesvibrasil.com.br/segura
nca/biblioteca_dados.shtm
DER. Departamento de Estradas de Rodagem. Setembro,
2012. URL
http://www.infraestrutura.pr.gov.br/module
s/conteudo/conteudo.php?conteudo=186
DETRAN. Departamento de Trânsito do Paraná. Anuário
Estatístico 2010. Junho, 2012. URL
http://www.detran.
pr.gov.br/arquivos/File/estatisticasdetransito/anuario/
anuario2010.pdf
Mingoti, S. A. Análise de Dados Através de Métodos de
Estatística Multivariada: Uma Abordagem Aplicada.
Editora UFMG, Belo Horizonte, 2005.
R-Project. Setembro, 2012. URL http://www.r-project.org/

33
ESTUDO DE SÉRIES TEMPORAIS PELO MÉTODO SUPPORT VECTOR
MACHINE – SVM
André Luiz Emidio de Abreu, Anselmo Chaves Neto.
Palavras-Chave: Séries Temporais, Previsão, Support Vector Machine - SVM.
1 INTRODUÇÃO
Este trabalho apresenta o projeto do estudo de doutorado
desenvolvido a partir de 2011. O objetivo do estudo é,
baseado nos métodos já conhecidos, elaborar um novo
método de previsão de séries temporais alternativo aos já
existentes, podendo ser aplicado a qualquer tipo de série
temporal. Tal método utilizará, além dos métodos
tradicionais de previsão, a aplicação do método conhecido
como SVM (Support Vector Machine – Máquinas de
Vetores Suporte), neste caso o método Support Vector
Regression (derivado do SVM).
A perspectiva gerada pelo projeto é de elaborar um método
que utilize varias séries menores, ou secundarias, para a
previsão de séries temporais. Logo, ao se calcular a
previsão de uma série temporal, por exemplo, vazão de um
grande rio, pode-se utilizar as vazões de seus afluentes na
previsão da sua vazão, centralizando o estudo nos agentes
que modificam a sua vazão.
Com isso, uma nova técnica será apresentada e tendo seus
resultados comparados com os métodos já conhecidos e
consagrados.
2 REVISÃO BIBLIOGRAFICA
2.1 Support Vector Machine
O Support Vector Machine (SVM) é um sistema de
aprendizagem estatística muito utilizada tanto em
aplicações de classificação como em regressão.
Em 1965, Vladimir Vapnik propôs um algoritmo para
encontrar um hiperplano separador em uma classificação
linear. Entretanto, em 1992, Bernhard Boser, Isabelle
Guyon e Vapnik criaram uma classificação não linear,
aplicando as Funções Kernel. Em 1995, Corinna Cortes e
Vapnik sugeriram uma modificação no algoritmo,
introduzindo variáveis de folgas para obter uma margem
suave no hiperplano separador (CORTES e VAPNIK,
1995). O SVM minimiza a probabilidade de classificação
errada dos padrões.
O nome Support Vector Machine enfatiza a importância
que os vetores mais próximos da margem de separação
representam, uma vez que eles determinam à
complexidade do SVM (CARVALHO, 2005).
2.2 Modelagem primal com as margens rígidas
O objetivo do modelo do SVM é encontrar um hiperplano
ótimo com a maior margem de separação possível que
separe os vetores da classe −1 da classe +1.
Considerando-se, inicialmente, dois conjuntos linearmente
separáveis, como por exemplo, ilustrado na figura 1:
Figura 3: Ilustração de conjuntos linearmente separáveis.
Uma classificação linear pode ser obtida pela função que
considerada de classe +1 se f (x) 0 e caso contrário é
considerada de classe −1. Assim, a função decisão f (x) é
representada por:
.)( bxwxf t (20)
A figura 2 ilustra diversas separações dos conjuntos.
Figura 2: Ilustração de conjuntos linearmente separáveis.
O processo de treinamento do SVM consiste na obtenção
de valores para os pesos w e do termo bias b de forma a
maximizar a distancia entre as margens. Desta maneira, o
SVM se torna robusto a pequenas variações no conjunto de
treinamento, possibilitando uma melhor generalização,
conforme a figura 3:
Figura 3: Separação ótima de dois conjuntos
linearmente separáveis.
O problema primal do SVM é dado por:

34
1)(.
2
1min
bxwyas
ww
t
i
t (21)
2.3 Support Vector Regression – SVR
A extensão do SVM para o tratamento de problemas de
regressão se dá pela introdução de uma função de perda,
denominada do inglês loss function.
Em linhas gerais, o Support Vector Regression (SVR)
utiliza os mesmos princípios do algoritmo de classificação,
com exceção de alguns detalhes (PARRELLA, 2007).
Uma das principais diferenças é que o SVR, ao contrário
do SVM, propõe determinar um hiperplano ótimo do qual
as amostras de treinamento estejam as mais próximas
possíveis, não importando em qual lado da superfície os
pontos se localizem (LIMA, 2004).
Todavia, apesar dos propósitos de otimização serem
opostos, ambos os modelos visam estabelecer uma função
com máxima capacidade de generalização (LIMA, 2004).
Figura 4: Função de perda.
As variáveis de folga *, ii estão associadas
respectivamente aos dados localizados abaixo da margem
inferior e acima da margem superior. Assim, pode-se
escrever o problema primal como sendo:
li
ybxw
bxwyas
Cw
ii
iii
iii
l
i
ii
,,1,0,
.
)(||||2
1min
*
*
1
*2
(22)
Onde: nIRw , IRb são as incógnitas do problema e C é
denominada constante de regularização, pois pondera os
termos da função de minimização.
2.4 Séries Temporais
Série Temporal é um conjunto de observações geradas
seqüencialmente no tempo e que apresentam uma
dependência serial entre elas. Se o conjunto é contínuo, a
série temporal é dita contínua e se o conjunto é discreto, a
série é dita discreta (Chaves Neto, 2009).
O conceito de séries temporais está relacionado a um
conjunto de observações de uma determinada variável feita
em períodos sucessivos de tempo e ao longo de um
determinado intervalo. Podemos citar como exemplos as
cotações diárias da taxa do dólar, as vendas mensais de um
determinado produto, a taxa de desemprego de um país, e
etc. Os objetivos de se analisar uma série temporal são os
seguintes (Morettin e Toloi, 1981):
Descrição: propriedades da série como, por
exemplo, o padrão de tendência, a existência de
alterações estruturais, etc;
Explicação: construir modelos que permitam
explicar o comportamento da série no período
observado;
Controle de Processos: por exemplo, controle
estatístico de qualidade;
Previsão: prever valores futuros com base em
valores pasados.
Uma Série Temporal pode ser representada da seguinte
maneira: nnt ZZZZZZST ,...,,...,,,, 1321 ou como a
série nZST t ...,,2,1 e consideraremos aqui séries onde
as observações são feitas no mesmo intervalo de tempo
fixado h.
Formalmente pode-se definir Série Temporal como:
Definição: Uma série temporal Zt é uma realização do
processo estocástico Z(ω,t), onde tT ={t1, t2, …, tn} com
ti - tj = h, é o tempo.
3 CONCLUSÕES
Como este artigo apresenta apenas o inicio do estudo,
ainda existem resultados, e sim apenas uma previsão do
que é esperado.
Almeja-se ao fim do estudo, o desenvolvimento do método
e que ele seja capaz de, ao ser comparados com os demais
métodos, ser superior em eficácia na previsão.
REFERÊNCIAS
Carvalho, B. P. R. O Estado da Arte em Métodos de
Reconhecimento de Padrões: Support Vector
Machines. In: Congresso Nacional de Tecnologia e
Comunicação, 2005, Belo Horizonte, Minas Gerais.
Chaves Neto, A. Análise de séries temporais (notas de
aula). Departamento de Estatística, Universidade
Federal do Paraná, Curitiba, 2009.
Cortes, C. Vapnik, V. Support-Vector Networks. Machine
Learning, volume 20, número 3, setembro/1995, pg
273-297, editora Springer, 1995.
Lima, C. A. de M. Comitê de máquinas: uma abordagem
unificada empregando maquinas de vetores-suporte.
378 f. Tese (Doutorado em Engenharia Elétrica) –
Faculdade de Engenharia Elétrica e de Computação,
Universidade Estadual de Campinas, Campinas,
2004.
Morettin, P. A., Toloi, C. M. Modelos para Previsão de
Séries Temporais. Edgard Blucher, 1981.
Parrella, F. Online Support Vector Regression. Master
Science Thesis. Department of Information Science,
University of Genoa, Italy, 2007.

35
ANÁLISE DO RISCO DE INSOLVÊNCIA DE COMPANHIAS DO SETOR DE
ENERGIA USANDO METODOLOGIA MULTICRITÉRIO PROMETHEE II
Gerson Ulbricht, Moacir Manoel Rodrigues Junior, Adriana Kroenke, Neida M. Patias Volpi, Sander Joner.
Palavras-chave: Insolvência, PROMETHEE II, Plano GAIA, Correlação por Postos.
4 INTRODUÇÃO
Reconhecer e perceber a saúde financeira de uma empresa
é de fundamental importância para a manutenção de suas
atividades de forma lucrativa (BRESSAN; BRAGA;
LIMA 2004). Desta maneira a percepção de um cenário de
crise ou de turbulência nas atividades da mesma é de suma
importância para que a gestão se anteceda aos fatos,
mitigando assim os riscos financeiros envoltos na empresa,
que culminam no estado de insolvência e podendo chegar
na falência da empresa.
A Insolvência de uma empresa é o momento em que a
organização se percebe incapaz de honrar com seus
compromissos sem afetar o capital investido pelos seus
proprietários (LEV, 1968). Segundo Bressan, Braga e
Lima (2004, p. 557) a insolvência é um processo de
declínio prolongado e que não é discreto, ou seja, não é um
processo abrupto e sim uma situação que se estende por
alguns períodos de tempo. Analisar o desempenho
financeiro das empresas para Nascimento, Pereira e
Hoeltgebaum (2010) é caracterizá-las de acordo com sua
solvência ou insolvência.
Este trabalho se propõe a identificar as contribuições que
um modelo de Análise Multicritério de Apoio a Decisão
pode trazer para a verificação de um cenário crítico para as
empresas do setor de energia elétrica.
5 METODOLOGIA
A metodologia Preference Ranking Organization
METHod for Enrichment Evaluations – PROMETHEE
(Brans e Vincke, 1985) pode ser aplicada a problemas de
escolha, classificação ou ordenação das alternativas, onde
se tem um número conhecido de critérios que se deseja
otimizar, buscando soluções que atendam da melhor forma
possível aos critérios estabelecidos para as alternativas
consideradas. Neste trabalho foi utilizado o PROMETHEE
II, o qual permite inclusive uma visão gráfica da avaliação
das alternativas conforme os critérios avaliativos por meio
do Plano GAIA (BRANS e MARESCHAL, 1999).
Para a análise e obtenção dos resultados da pesquisa de
forma a responder o objetivo de pesquisa, utilizou-se de
cinco indicadores, apontados por Kanitz (1978) como
sendo os mais importantes em uma análise que busca
identificar as empresas com maior risco de insolvência.
Estes indicadores foram: Rentabilidade do Patrimônio
Líquido (RPL), Liquidez Geral (LG), Liquidez Seca (LS),
Liquidez Corrente (LC) e Endividamento Total (ET), os
quais formam os 5 critérios avaliativos utilizados.
Para aplicação da metodologia, foram atribuídos pesos e
limiares para cada critério conforme julgamento dos
decisores. Optou-se por utilizar a função de preferência 5
(BRANS e MARESCHAL, 1999), para todos os critérios
avaliados, de modo que a transição entre indiferença para a
preferência estrita entre alternativas ocorra de forma linear.
A partir daí, foram atribuídos parâmetros baseados em
discussões em equipe e levando-se em conta a
característica de variabilidade dos dados. Na tabela 1, são
apresentados os limiares de preferência e de indiferença
entre alternativas a serem comparadas, bem como o tipo de
função de preferência adotado em cada critério de
avaliação.
Critério RPL LG LS LC ET
Peso (w) 0,2 0,2 0,2 0,2 0,2
Limiar de
Indiferença 0,05 0,10 0,10 0,30 0,10
Limiar de
preferência 0,20 0,50 0,50 0,60 0,30
Min/Max Max Max Max Max Min
Função de
preferência 5 5 5 5 5
Tabela 1: Parâmetros atribuídos aos critérios de avaliação.
Após a definição dos parâmetros a serem utilizados, foi
aplicada a ordenação das alternativas com auxílio do
PROMETHEE II. Analisando o Plano GAIA gerado pela
primeira análise, conforme mostrado na figura 1, foi
possível verificar que os critérios de avaliação Liquidez
Seca e Liquidez Corrente, possuem projeção bastante
semelhante.
Figura 1: Plano GAIA.
Sendo assim, optou-se por retirar um desses critérios do
processo avaliativo e aplicar novamente a metodologia.
Optou-se por retirar o critério liquidez corrente e dessa
forma atribuir pesos iguais aos quatro critérios restantes.
Os resultados comparativos são apresentados na tabela 2
por meio de dois cenários. Cenário 1: Ordenação com 5
critérios de avaliação
Cenário 2: Ordenação com 4
critérios de avaliação

36
COMPANHIA Phi COMPANHIA Phi
COPEL 0,5839 COPEL 0,5355
NEOENERGIA 0,5388 NEOENERGIA 0,4713
FORPART 0,4651 521 PARTICIP 0,3946
521 PARTICIP 0,3993 FORPART 0,3314
ELETROBRAS 0,328 TRACTEBEL 0,2402
ENERGISA 0,2658 ELETROBRAS 0,2283
MPX ENERGIA 0,2417 UPTICK 0,2131
AGCONCESSO 0,2249 ENERGISA 0,2099
TRACTEBEL 0,2143 AGCONCESSOES 0,1843
LIGHT S/A 0,1619 MPX ENERGIA 0,1447
EQUATORIAL 0,1256 BONAIRE PART 0,1089
BONAIRE PART 0,1246 LIGHT S/A 0,1029
UPTICK 0,1179 AES TIETE 0,0779
CELESC 0,0974 CELESC 0,0661
AES TIETE 0,0169 EQUATORIAL 0,0389
ENERGIAS BR -0,024 TRAN PAULIST 0,0241
CEMIG -0,0425 ENERGIAS BR -0,0179
TRAN PAULIST -0,096 CEMIG -0,0242
CEMIG GT -0,115 CEMIG GT -0,0527
CPFL ENERGIA -0,1338 CPFL ENERGIA -0,0993
BRASILIANA -0,1574 VBC ENERGIA -0,1114
VBC ENERGIA -0,1756 BRASILIANA -0,1655
AES ELPA -0,2314 AES ELPA -0,2295
CEB -0,3427 TERNA PART -0,2918
CPFLGERACAO -0,3571 IENERGIA -0,3128
AMPLA INVEST -0,3752 CPFLGERACAO -0,3203
TERNA PART -0,3892 CEB -0,3271
REDE ENERGIA -0,4004 AMPLA INVEST -0,3742
IENERGIA -0,4253 REDE ENERGIA -0,4217
CELGPAR -0,6405 CELGPAR -0,6235
Tabela 2: Ordenação Considerando Dois Cenários
Para comparar a relação entre os ordenamentos obtidos nos
cenários 1 e 2, foi utilizada a correlação por postos, a qual
utiliza apenas da ordenação dos valores para definir o grau
de relacionamento entre as variáveis (BARBETTA, 2002).
Aplicando-se a correlação por postos aos dois cenários, foi
obtida uma correlação de 96,84%, confirmando um efeito
reduzido com a retirada de um dos critérios estudados. É
possível verificar por sua vez que as empresas que foram
os extremos tanto da análise com 5 critérios, quanto da
análise de 4 critérios se mantiveram.
Os resultados da ordenação das empresas de energia
elétrica apontaram a COPEL como a empresa com melhor
desempenho financeiro auferindo desta maneira menor
probabilidade de entrar em estado de insolvência nos
próximos períodos. Na outra extremidade os resultados
descrevem a CELGPAR como a empresa com maior
probabilidade de entrar em estado de insolvência. Os
resultados apresentados nesta análise não afirmam a
presença em um estado de insolvência por parte das
empresas com pior colocação, este fato mostra por sua vez
que estas empresas, dentro do âmbito setorial, são as
empresas com maiores chances de entrar nesta situação.
3 CONCLUSÕES
Através da aplicação da metodologia multicritério
PROMETHEE II, foi possível obter uma ordenação das
companhias conforme os indicadores contábeis
considerados.
A representação por meio do plano GAIA, permitiu de
forma visual, localizar 2 critérios que possuíam grande
grau de correlação em seus dados, onde ao eliminar um
esses critérios da análise, os resultados sofreram pequenas
alterações, conforme demonstrado através do índice de
correlação por postos.
Sendo assim, na aplicação de modelos multicritério de
decisão, torna-se importante a análise prévia dos dados o
que permite em muitos casos, reduzir os critérios de
avaliação, diminuindo consequentemente os julgamentos
necessários por parte dos decisores bem como a
complexidade do problema.
A classificação final das alternativas pelo PROMETHEE,
sofre variação conforme mudanças atribuídas nas funções
de decisão bem como nos parâmetros avaliativos. Assim, é
importante que o decisor, seja ele uma só pessoa ou uma
equipe, tenha conhecimento da problemática tratada,
podendo opinar baseado em experiências anteriores bem
como na análise detalhada do problema.
REFERÊNCIAS
Barbetta, Pedro Alberto. Estatística Aplicada às Ciências
Sociais. Ed. da UFSC. Florianópolis - SC, 2002.
Brans, J. P.; Vincke, P. H. A preference ranking
organization method: (The PROMETHEE Method for
Multiple Criteria Decision-Making). Management
Science, v. 31, p. 647-656, 1985.
Brans, Jean P., Mareschal. Multicriteria Decision Aid: The
PROMETHEE GAIA Solution. Pesquisa Operacional,
Vol. 19, 06/1999, p. 1-23.
Bressan, V. G. F.; Braga, M. J.; Lima, J. E. Análise de
Insolvência das cooperativas de crédito rural do estado
de Minas Gerais. Est. Economia. São Paulo v. 34 n. 3,
p. 553 – 585. Jul-set. 2004.
Kanitz, S. Como Prever Falências. São Paulo: McGraw
Hill, c1978. 174 p.
Lev, B. Análisis de Estados Financeiros, um Nuevo
Enfoque. Esic, Madrid. 1968.
Nascimento, S.; Pereira, A. M.; Hoeltgebaum, M.
Aplicação dos Modelos de Previsão de Insolvências
nas Grandes Empresas Aéreas Brasileiras. Revista de
Contabilidade do Mestrado em Ciências Contábeis, v.
15, p. 40-51, 2010.

37
IDENTIFICAÇÃO DE FATORES DE RISCO E ESTIMAÇÃO DA
PROBABILIDADE DE INADIMPLÊNCIA EM TELECOMUNICAÇÕES
Flaviane Peccin, Anselmo Chaves Neto.
Palavras-Chave: Regressão Logística, Inadimplência, Telecomunicações.
1 INTRODUÇÃO
O setor de telecomunicações brasileiro entrou num
processo contínuo de expansão após as privatizações que
ocorreram na década de 1990. Com esse processo,
entraram nesse mercado novos competidores e novas
tecnologias. Isso foi benéfico para o consumidor, que
atualmente tem mais opções de escolha de prestadoras do
serviço. Por outro lado, as empresas que oferecem esse
serviço precisam quantificar as probabilidades de esses
clientes pagarem pelo serviço prestado.
A inadimplência impacta diretamente o negócio de
telecomunicações e pode ser medido pela necessidade de
provisão, ou seja, a reserva financeira que as empresas
quem de fazer para os chamados devedores duvidosos
(PDD – Provisão para Devedores Duvidosos).
Nesse contexto, esse estudo visa mapear as variáveis que
podem ser consideradas fatores de risco para
inadimplência e construir um modelo preditivo para
estimar a probabilidade de pagamento das faturas mensais.
Para isso, foi utilizada uma amostra de 43.339 clientes de
uma empresa de telecomunicações. Esses clientes
adquiriram produtos entre janeiro e dezembro de 2007 e
foram acompanhados por doze meses para avaliar sua
performance quanto ao pagamento de suas faturas mensais.
Dessa forma, a amostra foi dividida em dois grupos,
denominados bons e maus. Clientes bons são aqueles que,
durante os doze meses, atingiram no máximo cinco dias
em atraso, no total de 23.095 clientes. Maus são aqueles
que atingiram 90 dias de atraso para pagamento de pelo
menos uma fatura no período observado, no total de
20.244 clientes.
2 DESENVOLVIMENTO
2.1 Variáveis Dummy
A variável dummy é também conhecida como variável
fictícia, muda e/ou indicadora. O uso de variáveis dummies
para representar regressoras qualitativas num modelo de
regressão é, em geral, mais indicado que proceder à
alocação de códigos quaisquer às categorias dessas
variáveis. A dificuldade básica com a alocação de códigos
é que eles definem uma métrica para os níveis da variável
qualitativa, métrica que pode não ser razoável (Giolo,
2006). Uma variável qualitativa com K classes será
representada por K-1 variáveis indicadoras, cada qual
tomando os valores 0 e 1.
2.2 Regressão Logística
De acordo com Paula (2010), a regressão logística tem se
constituído num dos principais métodos de modelagem
estatística de dados quando a variável é dicotômica.
Conforme Giolo (2006), essa técnica é apropriada para a
análise de experimentos que apresentam variáveis
respostas categóricas em que o interesse seja o de
descrever a relação entre a variável resposta e um conjunto
de variáveis explanatórias.
No contexto apresentado em Chaves Neto (2007), o
modelo linear logístico simples (uma variável explicativa)
é derivado da função matemática conhecida como
sigmoide.
Conforme Chaves Neto (2007), quando o interesse está em
estabelecer a relação entre a variável resposta Y e as
diversas variáveis explicativas X1, X2,..., Xp-1, que
podem representar fatores de interesse, o modelo logístico
linear múltiplo tem a forma:
𝜃(𝑥) = 𝑃(𝑌 = 1|𝑥) = 𝑒𝛽0+∑ 𝛽𝑘
𝑝−1𝑘=1
1+𝑒𝛽0+∑ 𝛽𝑘
𝑝−1𝑘=1
= 𝑒𝛽′𝑥
1+𝑒𝛽′𝑥 (23)
LOGIT p(x) = 0 + 1x1 + 2x2 +...+ p-1xp-1 (24)
3 MODELOS DE BEHAVIOUR SCORE
Conforme Sicsú (2010), Os modelos utilizados para
clientes ou ex-clientes de crédito do credor são chamados
de behaviour score e utilizam as informações relativas a
créditos anteriores. Por exemplo, se o cliente pagou em dia
eventuais parcelas anteriores, essa informação contribuirá
de forma positiva no cálculo do score. Em contrapartida,
se o cliente atrasou várias parcelas anteriores, seu score
será reduzido em razão dessa experiência negativa.
Segundo Thomas (2000), a metodologia para construção
desses modelos era originalmente julgamental. Andrade
(2004) ressalta que, embora algumas empresas ainda
utilizem modelos julgamentais, atualmente a vasta maioria
utiliza os modelos quantitativos, construídos a partir de
técnicas de análise estatística multivariada, tais como a
análise discriminante e a regressão logística, ou em
modelos de inteligência artificial, como redes neurais.
4 RESULTADOS E DISCUSSÃO
As variáveis foram discretizadas conforme o risco relativo
de inadimplência para criação das dummies. O modelo de
regressão logística foi ajustado a procedure PROC
LOGISTIC do software SAS. Para seleção inicial das
variáveis, aplicou-se o método backward. Após a seleção
inicial, avaliou-se o VIF (Fator de Inflação de Variância),
para avaliar a multicolinearidade no modelo final. O
modelo ajustado foi:
LOGIT p(x) = -7,73781 * Parcelamento = Sim
-1,25798 * Fraude = Sim + 1,88968 * Desconexão = Sim
+4,56403 * VlFatura = 01. ≤ 20,62
+1,02997 * VlFatura = 02. > 20,62 e ≤ 82,25
-0,85369 * VlFatura = 06. > 132,38 e ≤ 171,59
-2,96388 * VlFatura = 07. > 171,59
+0,35635 * VlAjuste = 02. > 1,49 e ≤ 5,28
-1,91493 * TotalPago = 01. ≤ 1,90
-1,56662 * TotalPago = 02. > 1,90 e ≤ 40,40
+2,5933 * TotalPago = 08. > 141,30 e ≤ 178,64
+4,05412 * TotalPago = 09. > 178,64
-2,21613 * MediaPago = 00. Missing
+0,28772 * MediaPago = 04. > 83,19 e ≤ 90,71
38
+0,68641 * MediaPago = 05. > 90,71 e ≤ 97,48
+0,90004 * MediaPago = 06. > 97,48 e ≤ 110,30
+1,12178 * MediaPago = 07. > 110,30 e ≤ 222,56
+0,68695 * MaiorVlPago = 03. > 47,21 e ≤ 101,91
+0,70164 * MaiorVlPago = 04. > 101,91 e ≤ 123,78
+0,30355 * MaiorVlPago = 05. > 123,78 e ≤ 242,26
+0,31406 * QtdeLinhas = 02. > 1
-0,7578 * VlFatAtrasoMax = 04. > 214,84 e ≤ 250,43
-0,50326 * VlFatAtrasoMax = 05. > 250,43 e ≤ 313,86
-0,68891 * VlFatAtrasoMax = 06. > 313,86 e ≤ 455,93
-1,30949 * VlFatAtrasoMax = 07. > 455,93
-1,74844 * SeqFatura = 01. ≤ 9
-0,60201 * SeqFatura = 02. > 9 e ≤ 10
+0,85615 * SeqFatura = 04. > 12 e ≤ 14
+2,06999 * SeqFatura = 05. > 14 e ≤ 17
+2,84824 * SeqFatura = 06. > 17
-0,33308 * L1feitos = 01. ≤ 96,55
+0,48088 * L1feitos = 04. > 236,58
-0,31485 * L2feitos = 03. > 44,80 e ≤ 516,14
-0,63125 * L2feitos = 04. > 516,14
+1,18921 * L7feitos = 01. ≤ 3,37
+0,88123 * L7feitos = 02. > 3,37 e ≤ 6,69
+0,4679 * L7feitos = 03. > 6,69 e ≤ 10,91
-0,38627 * L7feitos = 06. > 27,72 e ≤ 33,52
-0,66432 * L7feitos = 07. > 33,52 e ≤ 68,46
-0,719 * L7feitos = 08. > 68,46 e ≤ 100,67
-0,94312 * L7feitos = 09. > 100,67 e ≤ 186,54
-0,96637 * L7feitos = 10. > 186,54
-0,26586 * L8feitos = 03. > 3,56 e ≤ 9,85
-0,44218 * L8feitos = 04. > 9,85 e ≤ 15,83
-0,42863 * L8feitos = 05. > 15,83 e ≤ 31,89
-0,53862 * L8feitos = 06. > 31,89
+0,27949 * L9feitos = 03. > 12,02 e ≤ 29,96
+0,36556 * L9feitos = 04. > 29,96 e ≤ 52,86
+0,39817 * L9feitos = 05. > 52,86
+0,27563 * L10feitos = 01. ≤ 2,78
-0,15295 * L10feitos = 03. > 5,99
+0,18955 * L18feitos = 03. > 1,59 e ≤ 7,94
-0,19282 * L19feitos = 01. ≤ 0,48
+0,35136 * L20feitos = 03. > 1,68
+0,40968 * L7recebidos = 07. > 78,35
-0,30252 * L20recebidos = 03. > 0,87 e ≤ 2,16
-0,72417 * L20recebidos = 04. > 2,16 e ≤ 7,35
-0,48685 * L20recebidos = 05. > 7,35 e ≤ 12,98
-0,3392 * L20recebidos = 06. > 12,98
+0,21932 * L21recebidos = 04. > 20,02 e ≤ 58,59
-0,65273 * Feitos_total = 01. ≤ 144,94
+0,32836 * Feitos_total = 03. > 270,72 e ≤ 732,55
+0,77005 * Feitos_total = 04. > 732,55
-0,1397 * CanalVendas = BCENT
+0,33241 * CanalVendas = Outros
+0,68068 * CdProdVoz = 01-Excelente
-0,18787 * CEP = 06-Muito Mau
-0,29646 * CEP = 07-Horrível/Missing
+0,48966 * Cidade = 01-Excelente/Muito Bom
+0,20741 * Cidade = 05-Mau
+0,35518 * Cidade = 06-Muito Mau/Horrível/Missing
-0,53438 * DsProdVoz = 06-Muito Mau/Horrível/Missing
+0,46144 * NAT_OCUP = 02-Muito Bom/Missing
+0,25005 * OCUPACAO = 01-Excelente/Muito Bom
+0,28512 * OCUPACAO = 03-Bom
-0,25626 * OCUPACAO = 06-Muito Mau/Mau/Horrível
-0,46168 * UF = 05-Mau/Muito Mau/missing
+0,37885 * Migracao = 1) Sim
+1,57767 * WhiteList = 01 - 0 a 2
+0,82984 * WhiteList = 02 - 3 a 5
O modelo ajustado apresenta ajuste satisfatório. Todos os
parâmetros são significativos com valor-p p < 0,05,
considerando nível de significância de 0,05. Obteve-se,
também a Análise de Deviance. para concluir que existe
uma relação estatisticamente significativa entre a variável
resposta Y e as variáveis explicativas que compõem o
vetor x. A porcentagem do Desvio explicada pelo modelo
é igual a 80,83%. Esta estatística é semelhante ao R2 da
regressão linear. A análise do VIF não indicou problemas
de multicolinearidade. Além disso, o modelo ajustado tem
ídice de Kolmogorov-Smirnov KS= 89,9% e taxa aparente
de erro de 4,94%. Portanto é um modelo com bom poder
de discriminação.
5 CONCLUSÕES
Neste estudo, foi obtido um modelo para estimar a
probabilidade de pagamento das faturas de uma empresa
do setor de telecomunicações. Foram identificados como
principais fatores de risco de inadimplência: os
parcelamentos, os alertas de fraude, os altos valores de
fatura, os baixos valores de pagamentos históricos, os altos
valores da fatura paga com o maior número de dias em
atraso, o tempo de relacionamento (clientes novos
representam maior risco), determinadas regiões
identificadas por meio de estado, cidade e CEP, além do
tipo de serviço contratado e do perfil de consumo.
REFERÊNCIAS
ANDRADE, F. W. (2004). Desenvolvimento de modelo
de Risco de Portfólio para Carteiras de Crédito a
Pessoas Físicas. Tese de Doutorado. São Paulo, SP,
Brasil.
CHAVES NETO, A. (2007). Análise Multivariada II.
Notas de aula da disciplina Análise Multivariada II.
Curitiba, Paraná, Brasil.
GIOLO, S. R. (2006). Introdução a Análise de dados
Categóricos. Notas de aula da disciplina Introdução a
Análise de dados Categóricos..
PAULA, G. A. (2010). Modelos de Regressão com apoio
computacional.
http://www.ime.usp.br/∼giapaula/mlgs.html. São
Paulo, SP, Brasil.
SUCSÚ, A. L. (2010). Credit Scoring: desenvolvimento,
implantação, acompanhamento. São Paulo: Edgard
Blucher.
THOMAS, L. C. (2000). A survey of credit and
behavioural scoring: forecasting financial risk of
lending to consumers. International Journal of
Forecasting.
39
ESTUDO DA VELOCIDADE DE CONVERGÊNCIA DO MÉTODO DE CAUCHY
PARA MINIMIZAÇÃO IRRESTRITA
Tatiane Cazarin da Silva, Ademir Alves Ribeiro, Gislaine Aparecida Periçaro.
Palavras-Chave: Algoritmo, Velocidade de Convergência, Método de Cauchy.
1 INTRODUÇÃO
Os problemas de otimização estão relacionados às mais
diversas áreas, dentre as quais, destacam-se a engenharia,
logística, economia, medicina, transporte e demais
ciências.
Quando o modelo matemático que descreve o problema
em questão é estruturado significativamente torna-se
possível empregar técnicas matemáticas de otimização que
busquem determinar uma solução ótima para o estudo.
O problema de otimização irrestrita é definido como
𝑚𝑖𝑛𝑖𝑚𝑖𝑧𝑎𝑟 𝑓(𝑥) 𝑠𝑢𝑗𝑒𝑖𝑡𝑜 𝑎 𝑥 ∈ 𝑅𝑛 , (1)
e os métodos mais conhecidos para a sua resolução tratam
de informações relacionadas ao estudo da derivada da
função. Dentre tais métodos destacam-se o Método de
Cauchy, o Método de Newton, o Método das Direções
Conjugadas e os Métodos de Quase-Newton (Izmailov e
Solodov, 2007; Ribeiro e Karas, 2013).
Nesse sentido, realizamos um estudo sobre a velocidade de
convergência do algoritmo de Cauchy, em especial,
discutindo uma nova conjectura para a taxa de
convergência com base em alguns aspectos numéricos
abordados.
2 MÉTODO DE CAUCHY
O método do Gradiente, ou Método de Cauchy, é um
método clássico em Otimização. Tem como objetivo
minimizar a função objetivo por meio de um processo
iterativo, no qual, a cada etapa é feita uma busca na
direção oposta ao gradiente da função no ponto corrente,
conforme estruturado a seguir:
Dado: 𝑥0 ∈ 𝑅𝑛
𝑘 = 0
REPITA enquanto ∇𝑓(𝑥𝑘) ≠ 0
Defina 𝑑𝑘 = −∇𝑓(𝑥𝑘)
Obtenha tk > 0 tal que 𝑓(𝑥𝑘 + tk𝑑𝑘) < 𝑓(𝑥𝑘)
Faça 𝑥𝑘+1 = 𝑥𝑘 + 𝑡𝑘𝑑𝑘
𝑘 = 𝑘 + 1
Quando consideramos a função quadrática 𝑓: 𝑅𝑛 → 𝑅 dada
por:
𝑓(𝑥) =1
2 𝑥𝑇𝐴𝑥 + 𝑏𝑇𝑥 + 𝑐, (2)
com 𝐴 ∈ 𝑅𝑛 𝑥 𝑛, 𝐴 > 0, 𝑏 ∈ 𝑅𝑛 e 𝑐 ∈ 𝑅 podemos
estabelecer resultados relevantes acerca da taxa de
convergência já que o algoritmo, com tamanho de passo
𝑡𝑘 > 0, calculado pela busca exata tem convergência
global.
2.1 Abordagens para a taxa de convergência
Diversas são as caracterizações da taxa de convergência do
método de Cauchy. Alguns trabalhos destacam a forma
dita clássica e outros propõem novas taxas, que se
menores, garantem uma maior rapidez na convergência e
eficiência do método.
A seguir são apresentadas duas avaliações sobre a taxa de
convergência. A primeira clássica, e a segunda verificada
por Karas et al. (2005).
Bertsekas (1995) apresenta a taxa de convergência clássica
para o método de Cauchy, na norma euclidiana, dada por
‖𝑥𝑘+1 − 𝑥∗‖2‖𝑥𝑘 − 𝑥∗‖2
≤ λ𝑛 − λ1λ𝑛 + λ1
, (3)
onde λ1 e λ𝑛 , são respectivamente, o maior e menor
autovalor de 𝐴, com passo 𝛼 =2
λ1+λ𝑛.
Karas et al. (2005) provaram uma taxa de convergência
melhor para o algoritmo de Cauchy. Tomando 𝑥∗ =0 e 𝑓(𝑥∗) = 0, a função quadrática definida por
𝑓(𝑥) =1
2 𝑥𝑇𝐴𝑥, (4)
gera uma sequência que converge linearmente para 𝑥∗ com
taxa de convergência √1 −λ1
λ𝑛, estruturado em
Teorema 1. Considere a função quadrática dada em (4) e a
sequência gerada pelo algoritmo de Cauchy. Então, para
todo 𝑘 ∈ 𝑁, ‖𝑥𝑘+1‖2 ≤ 𝛾‖𝑥𝑘‖2, onde 𝛾 = √1 −
λ1
λ𝑛.
Tal resultado estabelece uma relação entre a velocidade de
convergência associada à norma euclidiana dos termos da
sequência gerada. Como o radicando pertence ao intervalo
[0,1), então temos que
√1 −λ1
λ𝑛≥ 1 −
λ1
λ𝑛. (5)
Nesse sentido, verificou-se a possibilidade de que a taxa de
convergência do método proposto seja dada por um valor
menor
𝛾 = 1 −λ1
λ𝑛 (6)
de acordo com os experimentos realizados.
3 CONJECTURA
Considerando a função quadrática (4), temos que a matriz
𝐴 é simétrica. Utilizando este fato, e realizando a
decomposição espectral podemos chegar a uma
equivalência para o cálculo do novo ponto 𝑥𝑘+1 = 𝑥𝑘 +𝑡𝑘𝑑𝑘. Tomando o caso (2 × 2), podemos, sem perda de
generalidade, considerar a matriz
𝐴 = (1 00 𝜆
), (7)

40
onde 𝜆 ≥ 1. Definindo o vetor unitário
𝑢 = (cos 𝑠sin 𝑠
) (8)
o passo ótimo é dado por 𝑡 =𝑢𝑇𝐴2𝑢
𝑢𝑇𝐴3𝑢. Dessa forma, a nossa
conjectura equivale a provar que a função
𝜑(𝑠) = 2𝑡𝑢𝑇𝐴𝑢 − 𝑡2𝑢𝑇𝐴2𝑢 −1
𝜆(2 −
1
𝜆) (9)
satisfaz relação
𝜑(𝑠) ≥ 0, ∀𝑠 ∈ [0,𝜋
2]. (10)
4 EXPERIMENTOS
A fim de reforçar o nosso palpite sobre esse resultado,
foram realizados alguns testes numéricos, com base no
valor mínimo da função 𝜑(𝑠) para diversos valores de 𝜆. A
seguir temos o gráfico da função tomando 𝜆 = 10 e os
correspondentes mínimos de 𝜑 para diferentes valores de
𝜆.
Figura 4: 𝜆 = 10.
Figura 2: min(𝜑).
Os testes numéricos realizados verificaram que a função 𝜑
é sempre positiva, e que o mínimo se aproxima de zero
para valores suficientemente grandes, ou seja, evidencia-se
o fato de que a melhor taxa de convergência do método de
Cauchy é a proposta na conjectura em (6).
Com isso, como continuidade do trabalho, procuramos
comprovar algebricamente que o caso 𝑛 × 𝑛 recai na
análise estabelecida 2 × 2 e provar a relação (10).
REFERÊNCIAS
Bertsekas, D. P. Nonlinear Programming. Athena
Scientific, 1995.
Izmailov A. e Solodov M. Otimização, volume 2. IMPA,
2007.
Karas E. W., Mota A.M., and Ribeiro A.A. On the
convergence rate of the cauchy algorithm in the 𝑙2
norm. 2005.
Ribeiro A. A. e Karas E. W. Um Curso de Otimização.
Cengage Learning Editora, a ser lançado, 2013.
41
CONVERGÊNCIA DE UM ALGORITMO SEM DERIVADAS PARA
OTIMIZAÇÃO RESTRITA
Conejo, P. D., Karas, E. W., Pedroso, L. G., Ribeiro, A. A., Sachine, M.
Palavras-Chave: Algoritmos sem derivadas, Otimização com restrições, Programação não linear.
1 INTRODUÇÃO
Neste trabalho discutimos a convergência global de um
algoritmo de região de confiança sem derivadas, para
resolver o problema de programação não linear
minimizar ( )
sujeita a ,
f x
x (25)
com n não vazio, fechado, convexo e : nf
uma função diferenciável. Apesar da função objetivo ser
diferenciável, assumimos que suas derivadas não estão
disponíveis. Esta situação é comum em várias aplicações
(Conn et al., 1998), particularmente quando a função
objetivo é fornecida por um pacote de simulação ou uma
caixa preta. Tais situações práticas tem motivado a
pesquisa em otimização sem derivadas nos últimos anos
(Conn et al., 1998, 2009).
2 ALGORITMO PROPOSTO
Apresentamos um algoritmo geral de região de confiança
para resolver o problema (1) e que gera uma sequência de
minimizadores aproximados para os subproblemas
restritos. O algoritmo permite grande liberdade nas
construções e resoluções dos subproblemas.
Para cada iteração k , consideramos o corrente
iterando kx e o modelo quadrático
1
,2
Tk k T
k kQ d f x g d d G d (26)
onde k ng e
xn n
kG é uma matriz simétrica.
Qualquer modelo quadrático desta forma pode ser utilizado, desde que forneça uma aproximação suficientemente precisa da função objetivo, no sentido de
que kG satisfaça a Hipótese H3 e 0k
kg Q satisfaça
H4 discutida à frente. Assumimos pouco sobre kG ,
somente simetria e limitação uniforme, permitindo que
modelos lineares possam ser utilizados. Não utilizamos
modelos obtidos por Taylor pois nos interessa o caso onde,
apesar de existentes, as derivadas não estão disponíveis.
Consideramos a medida de estacionariedade do problema
de minimizar kQ sobre o conjunto convexo e fechado
em kx definido por,
,k k k
k P x g x (27)
onde P denota a projeção ortogonal sobre o conjunto
. Note que o ponto *x é estacionário para o
problema original (1) se, e somente se,
* * * 0P x f x x .
Para provar convergência a pontos estacionários,
assumimos que as soluções aproximadas, k nd , dos
subproblemas de região de confiança
minimizar ( )
sujeita a
k
k
k
Q d
x d
d
(28)
satisfaçam a condição de decréscimo
10 min , ,1 ,1
k k
k k k k
k
Q Q d cG
(29)
onde 1 0c é uma constante independente de k.
Condições deste tipo são bem conhecidas na abordagem de
região de confiança em diferentes situações. No caso
irrestrito, a medida k é simplesmente kg e o clássico
passo de Cauchy a satisfaz (Nocedal e Wright, 1999; Conn
et al., 2009).
Em (Gonzaga et al., 2003), os autores provam
convergência global em um método de filtro assumindo
soluções aproximadas de subproblemas satisfazendo
condição análoga. Para otimização sem derivadas em
caixas, os autores em (Tröltzsch, 2011) também assumem
esta condição.
Depois de calculada uma solução aproximada do
subproblema, analisamos se a solução fornece um
decréscimo satisfatório no modelo. Como usual em
métodos de região de confiança, o passo tentativo é
avaliado por meio da razão
.0
k k k
k k
k k
f x f x d
Q Q d
(30)
Apresentamos agora o algoritmo de região de confiança
sem derivadas, sem especificar como o modelo é
atualizado e qual algoritmo interno é utilizado para
resolver os subproblemas.

42
Algoritmo Geral
0
0
1
1
3Dados: , 0, 0, 0, .
4
Defina 0.
REPITA
Se , então
, 0 e .2
Senão
Encontre uma solução aproximada do
subprobklema satisfazendo (2).
k k
k k kk
k
k
x
k
d x x
d
1
1
1
1
Se , então
e .
Senão
e .2
1
k
k k k
k k
k k k
k
x x d
x x
k k
2.1 Análise de Convergência
Provamos que, sob hipóteses razoáveis, todo ponto de
acumulação da sequência gerada pelo algoritmo é
estacionário. De agora em diante, assumimos que o
algoritmo gera uma sequência infinita kx .
As hipóteses a seguir são úteis na análise de convergência.
H1. 1f C e f Lipschitziana com constante de
Lipschitz 0L .
H2. f é limitada inferiormente no conjunto .
H3. As matrizes kG são limitadas superiormente,
isto é, existe 1 tal que para todo ,k
1.kG
H4. Existe uma constante 2 0c tal que
2
k k
kg f x c
para todo k .
As Hipóteses H1, H2 e H3 são comuns em análise de
convergência.
A Hipótese H4 impõe que o modelo represente
adequadamente a função objetivo. A Hipótese H4 é
omitida em alguns algoritmos práticos e com bons
resultados numéricos (Conn et al., 1998; Fasano et al.,
2009), mas para nosso algoritmo é uma propriedade
fundamental para esta- belecer convergência.
Supondo válidas as hipóteses anteriores, mostramos que a
sequência de regiões de confiança k e a sequencia de
mediadas k convergem para zero. Em seguida,
utilizando a não expansividade da projeção estabelecemos
a relação
3 4 ,k k k
k kP x f x x c c (31)
com 3c e
4c constantes positivas independentes de k.
Concluímos que a medida de estacionariedade,
k k kP x f x x , do problema original converge
para zero. Assim, todo ponto de acumulação da sequência
kx gerada pelo algoritmo é estacionário de primeira
ordem.
3 CONCLUSÕES
Com hipóteses naturais, provamos convergência a ponto
estacionário de primeira ordem para um algoritmo de
região de confiança sem derivadas com restrições
convexas. Pesquisas futuras são necessárias para estender a
análise em problemas com domínios gerais..
REFERÊNCIAS
Conn A.R., Scheinberg K., e Toint P.L. A Derivative Free
Optimization Algorithm in Practice. Em Proceedings
of the AIAA Conference. St Louis, 1998.
Conn A.R., Scheinberg K., e Vicente L.N. Introduction to
Derivative-Free Optimization. MPSSIAM Series on
Optimization. SIAM, Philadelphia, 2009.
Fasano G., Morales J.L., e Nocedal J. On the geometry
phase in model-based algorithms for derivative-free
optimization. Optimization Methods and Software,
24:145–154, 2009.
Gonzaga C.C., Karas E.W., e Vanti M. A globally
convergent filter method for nonlinear programming.
SIAM J. Optimization, 14(3):646–669, 2003.
Nocedal J. e Wright S.J. Numerical Optimization. Springer
Series in Operations Research. Springer-Verlag,
1999.
Tröltzsch A. An Active-set Trust-Region Method for
Bound-Constrained Nonlinear Optimization without
Derivatives Applied to Noisy Aerodynamic Design
Problems. Tese de Doutorado, Université de
Toulouse, 2011.

43
PROPOSTA DE UM ALGORITMO DE OTIMIZAÇÃO BASEADO EM
ENXAMES DE PARTÍCULAS
Sinvaldo R. Moreno, Eloy Kaviski.
Palavras-Chave: Otimização, Programação Matemática, Enxames de Partículas, Convergência
1 INTRODUÇÃO
Otimização por Enxame de Partículas, ou do original em
inglês Particle Swarm Optimization (PSO), foi proposto
por Kennedy e Eberhart (1995). Neste trabalho um novo
algoritmo é proposto visando resolver os problemas
existentes no PSO, relacionados a incapacidade do
coeficiente de inércia 𝜔 retornar ao seu valor inicial, a
explosão da velocidade das partículas e estagnação em
mínimos locais. O algoritmo foi aplicado a algumas
funções de teste e apresentou bons resultados.
2 ALGORITMO PSO PROPOSTO
O PSO possui a configuração 𝐿𝑏𝑒𝑠𝑡 e a 𝐺𝑏𝑒𝑠𝑡 , que se
distinguem pela forma e número de partículas que
compreendem a vizinhança de uma partícula. O esquema
𝐿𝑏𝑒𝑠𝑡 ou PSO Local está relacionado com a melhor
partícula na vizinhança do indivíduo 𝑥𝑖, já o 𝐺𝑏𝑒𝑠𝑡 ou PSO
Global com a melhor partícula em todo enxame (Kennedy
and Eberhart, 1995). O algoritmo desenvolvido combina o
coeficiente de inércia 𝜔, o coeficiente de constrição 𝜒 e o
algoritmo PSO Unificado (UPSO) proposto por
Parsopoulos and Vrahatis (2004). O algoritmo utiliza os
dois esquemas do PSO através de um coeficiente de
unificação 𝑢 combinando a habilidade de exploração local
do esquema 𝐿𝑏𝑒𝑠𝑡 e a capacidade de busca global do 𝐺𝑏𝑒𝑠𝑡 , chamado de PSO Unificado Modificado (M-UPSO), o
mesmo é descrito nas equações (1), (2) e (3).
𝐺𝑖𝑑𝑘+1 = 𝜔 𝑉𝑖𝑑
𝑘 + 𝜒[𝑐1 𝑟1𝑘(𝑃𝑖𝑑
𝑏𝑒𝑠𝑡 − 𝑋𝑖𝑑𝑘 )] +
+𝜒[𝑐2 𝑟2𝑘(𝐺𝑏𝑒𝑠𝑡
𝑘 − 𝑋𝑖𝑑𝑘 )] (1)
𝐿𝑖𝑑𝑘+1 = 𝜔 𝑉𝑖𝑑
𝑘 + 𝜒[𝑐1 𝑟1𝑘(𝑃𝑖𝑑
𝑏𝑒𝑠𝑡 − 𝑋𝑖𝑑𝑘 )] +
+𝜒[𝑐2 𝑟2𝑘(𝐿𝑏𝑒𝑠𝑡
𝑘 − 𝑋𝑖𝑑𝑘 )] (2)
𝐿𝑖𝑑𝑘+1 = 𝑢𝐺𝑖𝑑
𝑘+1 + (1 − 𝑢) 𝐿𝑖𝑑𝑘+1 (3)
Os indíces correspondentes representam: 𝑑 = 1,… , 𝐷; onde 𝐷 é a dimensão do espaço de busca da solução;
𝑖 = 1,… , 𝑁; com 𝑁 representando o tamanho do enxame;
𝑘 é o número de iterações; 𝜔 é o peso inercial; 𝑟1 e 𝑟2 são
números aleatórios, 𝑈 ∈ [0,1]; 𝑐1e 𝑐2 são os coeficientes
cognitivos individual e social e assumem valores iguais a
2,05. O M-UPSO ainda faz uso do coeficiente de
constrição 𝜒 que assume o valor igual à 0,729; o
coeficiente de unificação 𝑢 assume valores tais que
𝑢 ∈ [0,1]. Um novo método é proposto para a variação
linear da inércia 𝜔 e é descrito pela equação (4), onde i
representa a partícula avaliada na iteração atual e o total de
partículas no enxame é representado por 𝑁.
𝜔(𝑖) = 𝜔𝑚𝑎𝑥 − (𝜔𝑚𝑎𝑥−𝜔𝑚𝑖𝑛
𝑁) 𝑖 (4)
O processo de exploração do espaço de soluções realizado
pelo M-UPSO é descrito como um passo iterativo 𝑘 ≥ 0
na equação (3), com 𝑖 = 1,… , 𝑁; onde 𝑁 é finito e
𝑋𝑖𝑑𝑘 ∈ 𝑅𝑛 é a posição atual do 𝑖𝑡ℎ indíviduo da
população, a velocidade 𝑉𝑖𝑑𝑘 ∈ 𝑅𝑛 é a direção de busca,
𝐿𝑖𝑑𝑘+1 e 𝐺𝑖𝑑
𝑘+1compõem a nova posição no passo 𝑘 + 1.
2.1 Convergência do Algoritmo
A prova da convergência utilizou das equações (1) e (3)
com 𝑢 = 1, onde foi avaliada a trajetória de uma partícula
isolada em intervalo de tempo discreto, portanto 𝑥𝑡 representa o valor de 𝑥𝑖
𝑘, neste caso, pode-se eliminar o
subscrito 𝑖 e a notação vetorial. Fazendo a substituição da
equação (3) na equação (1), escrevendo a componente
estocástica 𝑐1𝑟1 = 𝜓1 e 𝑐2𝑟2 = 𝜓2 e adotando a relação
𝑥𝑡 = 𝑥𝑡−1 + 𝑣𝑡 , a velocidade no tempo 𝑡 pode ser escrita
como 𝑣𝑡 = 𝑥𝑡 − 𝑥𝑡−1, de onde se obtém a seguinte forma
de recorrência:
𝑥𝑡+1 = (1 + 𝜔 − 𝜒𝜓1 − 𝜒𝜓2)𝑥𝑡 −𝜔𝑥𝑡−1 +
+𝜒𝜓1𝑝𝑡 + 𝜒𝜓2 𝑔𝑏𝑒𝑠𝑡 (5)
[𝜆2 − 𝜆(1 + 𝜔 − 𝜒(𝜓1 +𝜓2)) + 𝜔]. (1 − 𝜆) = 0 (6)
Obtendo as três raízes deste polinômio, têm-se uma raiz
em 𝜆1 = 1 e as outras duas são obtidas das relações:
𝜆2 = 𝛼 =𝜔 − 𝜒(𝜓1 + 𝜓2) + 1 + 𝛾
2 (7)
𝜆3 = 𝛽 =𝜔 − 𝜒(𝜓1 + 𝜓2) + 1 − 𝛾
2 (8)
𝛾 = √[𝜔 − 𝜒(𝜓1 + 𝜓2) + 1]2 − 4𝜔 (9)
Os valores de 𝛾 são obtidos através da equação (9) e
deverão estar no domínio dos complexos (𝛾 ∈ 𝐶) ,
conforme será visto ulteriormente, para o M-UPSO
convergir. O algoritmo PSO Padrão não utiliza o
coeficiente de constrição 𝜒, podendo portanto, para
algumas condições iniciais ser satisfeita a condição de
𝛾 ∈ 𝑅 no PSO Padrão. Desta forma Clerc e Kennedy
(2002) fizeram uma análise das condições de convergência
quando 𝛾 ∈ 𝑅 e concluíram que não é uma condição
necessária para o PSO Padrão. Pode se observar que 𝛼 e 𝛽
são autovalores da matriz que representa a equação (5) e
uma forma explicita da relação de recorrência pode ser
escrita como:
𝜉1 =𝜔𝑥0 + 𝜒(𝜓1𝑝𝑡 + 𝜓2𝑔𝑡𝑏𝑒𝑠𝑡)
𝜔 + 𝜒(𝜓1 + 𝜓2) (10)
𝜉2 =𝛽(𝑥0 − 𝑥1) − 𝑥1 + 𝑥2
𝛾(𝛼 − 1) (11)
𝜉3 =𝛼(𝑥1 − 𝑥0) + 𝑥1 − 𝑥2
𝛾(𝛽 − 1) (12)
𝑥𝑡 = 𝜉1 + 𝜉2𝛼𝑡 + 𝜉3𝛽
𝑡 (13)
A equação (13) pode ser utilizada para calcular a trajetória

44
da partícula assumindo que 𝑝𝑡 , 𝑔𝑡𝑏𝑒𝑠𝑡 , 𝜉1, 𝜉2 e 𝜔
permanecem constantes. A sequência (𝑥𝑡)𝑡=0+∞ tem sua
convergência determinada pela magnitude dos valores de
𝛼 e 𝛽 obtidos através da equação (7) e (8). Considerando o
valor de 𝑥𝑡 no limite, tem-se:
lim𝑡→∞
𝑥𝑡 = lim𝑡→∞
𝜉1 + 𝜉2𝛼𝑡 + 𝜉3𝛽
𝑡 (14)
lim𝑡→∞
𝑥𝑡 = lim𝑡→∞
𝜉1 + 𝜉2𝛼𝑡 + 𝜉3𝛽
𝑡 = 𝜉1 (15)
A condição descrita na equação (15) ocorrerá desde que
lim𝑡→∞ 𝛼𝑡 = 0 se ‖𝛼‖ < 1 e limite lim𝑡→∞ 𝛽
𝑡 = 0 se
‖𝛽‖ < 1. Entretanto se ‖𝑧‖ = 1 , neste caso 𝑧 pode
representar 𝛼 ou 𝛽, o limite dado pela equação (14) não
existe e a sequência (𝑥𝑡)𝑡=0+∞ diverge.
3 RESULTADOS
O M-UPSO foi aplicado a algumas funções testes, obtendo
resultados superiores ao PSO Padrão, conforme tabela 1:
Função
Rosenbrock
PSO Padrão M-UPSO
𝐿𝑏𝑒𝑠𝑡 𝐺𝑏𝑒𝑠𝑡 𝑢 = 0.5 𝑢 = 1
Média 𝐹(𝑥) 3,2𝐸−21 0.0 0.0 0.0
RMSE 2.4𝐸−11 0.0 0.0 0.0
Média
Iterações
2.300 1.483 572 667
Média
Avaliações
72.024 59.628 13.759 16.009
Runtime(s) 21,20 17,50 4,00 4,51
Função
Rastrigin
PSO Padrão M-UPSO
𝐿𝑏𝑒𝑠𝑡 𝐺𝑏𝑒𝑠𝑡 𝑢 = 0.5 𝑢 = 1
Média 𝐹(𝑥) 3,0𝐸−15 2,4𝐸−15 6,2𝐸−16 8,4𝐸−16
RMSE 1,8𝐸−9 1,7𝐸−9 9,1𝐸−10 9,3𝐸−10
Média
Iterações
1.011 949 67 61
Média
Avaliações
24.306 22.812 1.651 1.494
Runtime(s) 8,3 7,8 4,15 1,81
Tabela 1: Resultados para funções teste do PSO
4 CONCLUSÕES
O algoritmo proposto apresenta rápida convergência além
de ter resolvido o problema relacionado ao coeficiente de
inércia não retornar ao valor inicial como no PSO Padrão.
O M-UPSO pode ainda ser utilizado sem o limitador de
velocidade máxima e a velocidade inicial adotada pode ser
nula. Este algoritmo é de fácil implementação além de
apresentar baixo custo computacional.
REFERÊNCIAS
Clerc M. and Kennedy J. The particle swarm - explosion,
stability, and convergence in a multidimensional
complex space. Evolutionary Computation, IEEE
Transactions on, 6(1):58–73, 2002. ISSN 1089-
778X.
Kennedy J. and Eberhart R.C. Particle swarm
optimization. pages 1942–1948. Proceedings IEEE,
1995. IEEE Service Center, Piscataway, NJ, pp. IV.
Parsopoulos K. and Vrahatis M. "upso": A unified particle
swarm optimization scheme. In Proceedings of the
International Conference of Computational Methods
in Sciences and Engineering (ICCMSE 2004),
volume 1, pages 868–873. 2004.
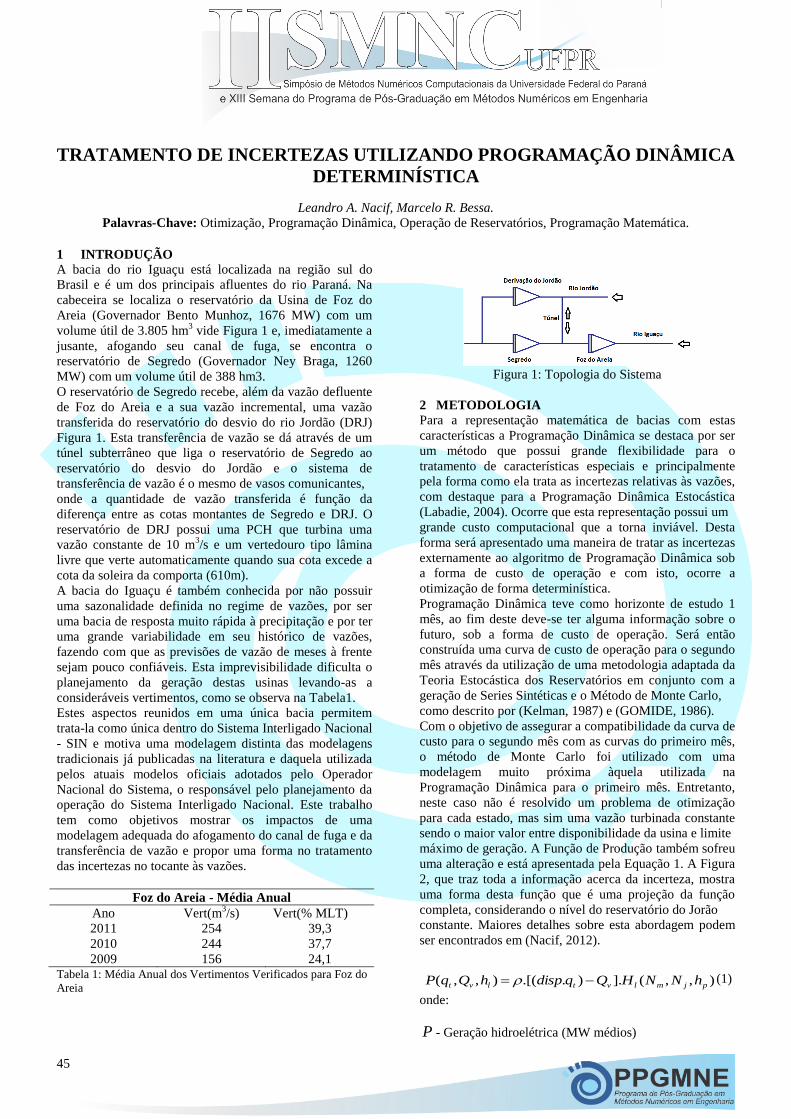
45
TRATAMENTO DE INCERTEZAS UTILIZANDO PROGRAMAÇÃO DINÂMICA
DETERMINÍSTICA
Leandro A. Nacif, Marcelo R. Bessa.
Palavras-Chave: Otimização, Programação Dinâmica, Operação de Reservatórios, Programação Matemática.
1 INTRODUÇÃO
A bacia do rio Iguaçu está localizada na região sul do
Brasil e é um dos principais afluentes do rio Paraná. Na
cabeceira se localiza o reservatório da Usina de Foz do
Areia (Governador Bento Munhoz, 1676 MW) com um
volume útil de 3.805 hm3 vide Figura 1 e, imediatamente a
jusante, afogando seu canal de fuga, se encontra o
reservatório de Segredo (Governador Ney Braga, 1260
MW) com um volume útil de 388 hm3.
O reservatório de Segredo recebe, além da vazão defluente
de Foz do Areia e a sua vazão incremental, uma vazão
transferida do reservatório do desvio do rio Jordão (DRJ)
Figura 1. Esta transferência de vazão se dá através de um
túnel subterrâneo que liga o reservatório de Segredo ao
reservatório do desvio do Jordão e o sistema de
transferência de vazão é o mesmo de vasos comunicantes,
onde a quantidade de vazão transferida é função da
diferença entre as cotas montantes de Segredo e DRJ. O
reservatório de DRJ possui uma PCH que turbina uma
vazão constante de 10 m3/s e um vertedouro tipo lâmina
livre que verte automaticamente quando sua cota excede a
cota da soleira da comporta (610m).
A bacia do Iguaçu é também conhecida por não possuir
uma sazonalidade definida no regime de vazões, por ser
uma bacia de resposta muito rápida à precipitação e por ter
uma grande variabilidade em seu histórico de vazões,
fazendo com que as previsões de vazão de meses à frente
sejam pouco confiáveis. Esta imprevisibilidade dificulta o
planejamento da geração destas usinas levando-as a
consideráveis vertimentos, como se observa na Tabela1.
Estes aspectos reunidos em uma única bacia permitem
trata-la como única dentro do Sistema Interligado Nacional
- SIN e motiva uma modelagem distinta das modelagens
tradicionais já publicadas na literatura e daquela utilizada
pelos atuais modelos oficiais adotados pelo Operador
Nacional do Sistema, o responsável pelo planejamento da
operação do Sistema Interligado Nacional. Este trabalho
tem como objetivos mostrar os impactos de uma
modelagem adequada do afogamento do canal de fuga e da
transferência de vazão e propor uma forma no tratamento
das incertezas no tocante às vazões.
Foz do Areia - Média Anual
Ano Vert(m3/s) Vert(% MLT)
2011 254 39,3
2010 244 37,7
2009 156 24,1 Tabela 1: Média Anual dos Vertimentos Verificados para Foz do
Areia
Figura 1: Topologia do Sistema
2 METODOLOGIA
Para a representação matemática de bacias com estas
características a Programação Dinâmica se destaca por ser
um método que possui grande flexibilidade para o
tratamento de características especiais e principalmente
pela forma como ela trata as incertezas relativas às vazões,
com destaque para a Programação Dinâmica Estocástica
(Labadie, 2004). Ocorre que esta representação possui um
grande custo computacional que a torna inviável. Desta
forma será apresentado uma maneira de tratar as incertezas
externamente ao algoritmo de Programação Dinâmica sob
a forma de custo de operação e com isto, ocorre a
otimização de forma determinística.
Programação Dinâmica teve como horizonte de estudo 1
mês, ao fim deste deve-se ter alguma informação sobre o
futuro, sob a forma de custo de operação. Será então
construída uma curva de custo de operação para o segundo
mês através da utilização de uma metodologia adaptada da
Teoria Estocástica dos Reservatórios em conjunto com a
geração de Series Sintéticas e o Método de Monte Carlo,
como descrito por (Kelman, 1987) e (GOMIDE, 1986).
Com o objetivo de assegurar a compatibilidade da curva de
custo para o segundo mês com as curvas do primeiro mês,
o método de Monte Carlo foi utilizado com uma
modelagem muito próxima àquela utilizada na
Programação Dinâmica para o primeiro mês. Entretanto,
neste caso não é resolvido um problema de otimização
para cada estado, mas sim uma vazão turbinada constante
sendo o maior valor entre disponibilidade da usina e limite
máximo de geração. A Função de Produção também sofreu
uma alteração e está apresentada pela Equação 1. A Figura
2, que traz toda a informação acerca da incerteza, mostra
uma forma desta função que é uma projeção da função
completa, considerando o nível do reservatório do Jorão
constante. Maiores detalhes sobre esta abordagem podem
ser encontrados em (Nacif, 2012).
),,(].)..[(),,( pjmlvtlvt hNNHQqdisphQqP (1)
onde:
P - Geração hidroelétrica (MW médios)

46
- Produtividade Específica
m
smMW // 3
tq - Vazão Turbinada (m3/s)
vQ - Vazão vertida (m3/s)
lH - Altura de queda Líquida (m)
disp - Disponibilidade da usina no segundo mês
As variáveis em letra maiúscula são aleatórias.
Figura 2: Função de Custo
3 RESULTADOS E CONCLUSÕES
Será apresentado uma simulação do despacho proposto
pela Programação Dinâmica, bem como uma comparação
com os dados observados. Foram então rodados os casos
referentes à todos os meses do ano 2011, com a
metodologia processando o horizonte de dois meses, sendo
utilizado apenas o despacho para o primeiro mês. Desta
forma, foram processados 12 casos com a Programação
Dinâmica sendo uma janela de 2 meses móvel a cada mês.
Os níveis finais de cada primeiro mês alimentaram os
respectivos meses subsequentes e a vazões utilizadas
foram as geradas para o 2 mês e previstas para o primeiro,
bem como as verificadas para utilização na simulação.
Cabe ressaltar que para o primeiro mês, janeiro de 2011, o
nível inicial provém da rodada da PDDD para dezembro
de 2010, com a finalidade de apresentar os resultados para
o ano de 2011 na sua totalidade.
2011 Ger(MWm) Vert.(m3/s)
GBM Ver. 908.4 254.5
GBM Sim. 1038.7 121.1
SGD Ver. 880.5 401.3
SGD Sim. 1119.9 408.2 Tabela 2: Comparação entre despacho proposto pela
PDDD com valores verificados em 2011.
A Tabela 2 mostra os resultados da simulação do despacho
proposto para 2011. Pode-se observar uma redução de
mais de 50% nos vertimentos em Foz do Areia, bem como
uma geração média anual 14 % maior para GBM e 27%
maior em Segredo.
REFERÊNCIAS
GOMIDE F.L.S. Teoria estocastica dos reservatórios
aplicada ao planejamento energetico de sistemas
hidreletricos. Ph.D. thesis, Universidade Federal do
Paraná., 1986. Tese (Titular), Departamento de
Hidráulica e Saneamento.
Kelman J. Modelos estocasticos no gerenciamento de
recursos hÃdricos. Modelos para gerenciamento de
recursos hÃdricos, ABRH, 1987. São Paulo: Nobel.
Labadie J.W. Optimal operation of multireservoir systems:
State-of-the-art review. Journal Of Water Resources
Planningand Management, 2004.
Nacif L.A. Operação energetica dos reservatórios de
foz do areia, segredo e derivação do jordão na
bacia do iguaçu. In booktitle. 2012. Congresso
Brasileiro de Planejamento EnergÃc tico, Curitiba,
2012.
47
UM SISTEMA PARA REPOSIÇÃO DO ESTOQUE EM UMA EMPRESA
PÚBLICA
Ednaldo de Oliveira Martins, Neida Maria Patias Volpi. Palavras-Chave: Estoque, Pesquisa Operacional, Otimização, Programação Matemática.
1 INTRODUÇÃO
A administração de estoque de materiais tem sido alvo de
inúmeros estudos por parte de gestores e acadêmicos. As
instituições públicas brasileiras devem utilizar ferramentas
modernas para melhor administrar os seus estoques de
materiais. Este trabalho propõe um modelo de
gerenciamento para o estoque de peças e equipamentos,
utilizando técnicas de Pesquisa Operacional. Controlar e
gerir peças de reposição significa encontrar respostas
viáveis e eficientes para questões básicas de qualquer
sistema de controle de estoque (BOTTER & FORTUIN,
2000, p. 656-674): quais peças devem ser estocadas?
Quando estas peças devem ser ressupridas? Qual deve ser
a quantidade do pedido? Com tantos requisitos essenciais
relacionados a estes tipos de itens, é natural que a gestão
das peças de reposição se torne uma importante área de
pesquisa dentro do controle de estoque (HUISKONEN,
2001, p. 125-133). Neste trabalho será apresentado um
sistema para ajudar nestas questões.
2. DESCRIÇÃO DO SISTEMA DE REPOSIÇÃO DE
ESTOQUE
O modelo proposto tem quatro etapas: a primeira consiste
na seleção dos itens que provocam o maior impacto no
orçamento; na segunda é feita uma previsão de demandas
destes itens; estas informações são utilizadas em uma
terceira etapa onde um programa foi desenvolvido para
planejar as compras dos itens nos períodos escolhidos em
função de um crédito previsto; na quarta etapa a compra é
feita em função do crédito recebido.
Propõe-se que na seleção dos itens seja utilizada a
classificação ABC (FILHO, 2004, p.35) e que a previsão
seja apoiada pelo estudo das séries históricas das
demandas dos materiais classificados como do tipo A.
Na terceira etapa, as informações da primeira e da segunda
etapas são empregadas numa planilha denominada
PLANEJATRI_COMPRAS (P_C), vinculada a um
programa de otimização (PLANEJATRI), desenvolvido no
ambiente do LINGO, que propõe a reposição, em cada
período, dos materiais com demanda e orçamento
previstos.
Na quarta etapa, um segundo programa (COMPRAS),
também desenvolvido no LINGO e vinculado àquela
mesma planilha atualiza o planejamento da compra
mediante o crédito disponível.
O planejamento de compras e estoque é feito inicialmente
em função da previsão da demanda de cada item e da
quantidade existente no estoque. Considerou-se reposição
trimestral, mas o programa pode ser alterado para atender
em períodos diferentes. Essa previsão de gastos é
informada ao órgão superior responsável pela liberação do
crédito, que responde com uma previsão de crédito.
De posse da previsão de crédito, o PLANEJATRI propõe a
reposição (compra) ótima para cada trimestre do ano
seguinte. Em algumas empresas públicas ocorre que o
crédito não chega conforme o previsto, isto é, nos prazos e
valores planejados. Dessa forma, o crédito pode ser maior
ou menor do que o previsto e, além disso, pode chegar em
períodos diferentes do planejado. Assim, faz-se necessário,
tomar decisões diferenciadas e, o programa COMPRAS
auxilia na decisão da compra ótima, após a chegada do
crédito, de fato.
2.1 Entrada de Dados
Nessa etapa a planilha P_C recebe as informações dos
itens selecionados pela classificação ABC e os respectivos
dados que serão empregadas no modelo. As informações
essenciais são:
Identificação dos itens;
Previsão trimestral de cada item do planejamento;
Estoque no ano anterior;
Valor de cada item j (vj);
Estoque mínimo; e
Previsão de crédito.
Além dessas informações, o programa admite informações
complementares que serão usadas como fatores de peso na
decisão da reposição:
Estoque de segurança;
Vida útil de cada item (ftempo);
Lead time (tempo entre a compra e a chegada do item); e
Prioridade (prioj que é um peso atribuído pelo gerente de
acordo com seu conhecimento estratégico).
Com a entrada dos dados a planilha gera automaticamente
outras informações que serão utilizados no planejamento,
inclusive um planejamento inicial que é utilizado como
referência.
2.2 Programa de Planejamento PLANEJATRI
O modelo de planejamento foi codificado no
PLANEJATRI, e desenvolvido no LINGO 12.0. É um
programa de otimização que interage com a P_C. O
PLANEJATRI utiliza as informações do estoque, da
previsão da demanda, das características dos materiais e da
disponibilidade de crédito para planejar a compra ótima,
em função do crédito previsto. O objetivo deste programa
é encontrar uma solução que maximiza o valor total da
compra, minimiza o valor total do estoque e minimiza o
número de itens não atendidos quando o crédito é menor
do que o previsto. As variáveis de decisão são:
i. xpcij: previsão da quantidade a ser adquirida do item j
no período i;
ii. prev_natij: previsão da quantidade não atendida do item
j no período i quando o crédito previsto é
menor do que o valor de referência;
iii. prev_eij: previsão do número de itens j que
permanecerá no estoque no final período i.
O fbomj associado ao item j é um parâmetro que é
diretamente proporcional à demanda anual do item, isto é,
quanto maior a sua demanda, maior é o peso dado à
decisão de comprá-lo. Considerou-se como fbomj a
demanda anual do item j. O fmauj associado ao item j é um

48
parâmetro que é inversamente proporcional ao valor do
item, isto é, quanto maior o seu valor menor é o peso dado
à decisão de comprá-lo. Considerou-se como fmauj o
inverso do valor do item j. Para compor, em fim, os
coeficientes das variáveis do modelo, o PLANEJATRI
utiliza as informações complementares fornecidas pelo
gerente, como pesos diretamente proporcionais aos
respectivos valores: ftempoj, leadtimej e prioj.
A função objetivo do modelo a ser maximizada foi
representada da forma:
t
1i
n
1j
ijjj
t
1i
n
1j
ijj
t
1i
n
1j
ijjjjj
nat_prev*prio*fbome_prev*v
xpc*ftempo*leadtime*fmau*fbom)x(z
onde n representa o número de itens e t o número de
períodos do planejamento.
As restrições utilizadas representam o fluxo de entrada e
saída de itens por período, o estoque mínimo de segurança
por item, o estoque máximo de cada item por período, a
compra máxima por item e período e o crédito previsto
para cada período. Os parâmetros e, ponderam a
função objetivo evitando que valores de ordem de
grandezas diferentes tendenciem as decisões.
Após a execução do PLANEJATRI é possível avaliar o
valor da compra efetuada VC e o valor do estoque VE em
cada período t.
2.3 Programa COMPRAS
Com a chegada do crédito emprega-se o programa
COMPRAS. É um programa semelhante ao
PLANEJATRI, isto é, um programa de otimização
desenvolvido no LINGO 12.0 que interage com a planilha
P_C. O COMPRAS utiliza as informações atualizadas dos
itens e do crédito que chegou de fato para efetuar a compra
ótima, para um período ou mais, dependendo da
quantidade recebida. Se o crédito for maior que o previsto
para o período o gerente pode acrescentar um percentual
acima do previsto inicialmente ou ainda, a demanda dos
próximos períodos. Se não houve compras em períodos
anteriores ao crédito, a demanda anterior é acrescida à
demanda atual. Se houve compras em períodos anteriores
que não atenderam totalmente a demanda, esse resíduo
(demanda não atendida) também é acrescido à demanda
atual. A decisão de comprar é tomada em função dos
mesmos objetivos do PLANEJATRI. As variáveis de
decisão são:
i. xcij: quantidade a ser adquirida do item j no período i;
ii. natij: previsão da quantidade não atendida do item j
no período i quando o crédito previsto é menor do
que o valor de referência;
iii. eij: previsão do número de itens j que permanecerá no
estoque no final período i.
As restrições são as mesmas utilizadas no programa
anterior, mas com os valores atualizados. Existe um
programa COMPRAS para cada período do planejamento.
A função objetivo do modelo a ser maximizada foi
representada da forma:
1
1 1
( ) * * * *
* * * ; 1
n
i j ij j j ij
j
n n
ij ij j j ij
j j
z x fbom fmau leadtime ftempo xc
v e fbom prio nat i t
3 ESTUDO DE CASO
Foi aplicado o sistema de gerenciamento de estoque em
um estudo de caso onde 8 itens foram considerados, esses
itens representaram 90% do custo total de uma empresa
com uma determinada “classe” de itens. A previsão da
demanda de cada item foi feita utilizando a previsão
automática de séries temporais do software Statgraphics.
Com os dados dos itens e a previsão de crédito foi
realizado o planejamento trimestral, onde houve uma
redução no valor do estoque de 2610,99 unidades
monetárias para 1917,52; redução de 26,56%. O programa
possibilita também aumentar quantidade de itens previstos
para serem adquiridos, neste caso foi utilizado o valor de
5%.
Com a chegada do crédito é acionado o programa
COMPRAS. Foram realizadas diversas simulações de
chegada de crédito a fim de analisar o comportamento do
programa diante de possíveis cenários.
4 CONCLUSÕES FINAIS
Após testes considerando vários tipos de cenários, tais
como, recebimento de crédito sem atraso, crédito atrasado,
valor disponível abaixo do previsto e acima do previsto e
mudanças de prioridades verificou-se que o sistema
mostrou-se amigável e flexível em função de vários
parâmetros que podem ser controlados pelo planejador e
executor das compras. Vale a pena frisar que os modelos
apresentados são úteis em dois momentos: o PLANETRI
para fazer a previsão de crédito necessário para as
demandas do próximo ano, o COMPRAS no momento que
o crédito é disponibilizado e não é exatamente o que foi
previsto no planejamento, que é o que acontece em muitos
casos.
REFERÊNCIAS BIBLIOGRÁFICAS BOTTER, R., & FORTUIN, L. Stocking strategy for
service parts: A case study. International Journal of
Operations & Production Management, 20 (6). p.
656-674, 2000.
FILHO, E. KERBER. Metodologia para Implementação de
um Sistema de Gestão de Estoques: Estudo do Caso
do Almoxarifado da Base Aérea de Canoas. p. 32-35,
2004.
HUISKONEN, J. Maintenance spare parts logistics:
special characteristics and strategic choices.
International Journal of Production Economics , 71.
p. 125-133, 2001.

49
PROGRAMAÇÃO LINEAR BINÁRIA NO PROBLEMA DA PROGRAMAÇÃO
DE HORÁRIOS ESCOLARES: UM ESTUDO DE CASO EM UM CURSO DO
ENSINO SUPERIOR
Pedro Rochavetz de Lara Andrade,Cassius Tadeu Scarpin, Maria Teresinha Arns Steiner.
Palavras-Chave: Programação Linear Binária, Geração da Grade Horária do Ensino Superior
1 INTRODUÇÃO
Neste trabalho é proposto um modelo matemático de
Programação Linear Binária (PLB), o qual tem como
objetivo construir a grade horária do curso de Engenharia
de Produção (EP) pertencente ao Departamento de EP
(DEP), da Universidade Federal do Paraná (UFPR). Serão
propostos os horários das disciplinas a serem ofertadas do
DEP para o curso de EP, ou seja, não serão consideradas
pelo modelo as disciplinas que o curso de EP recebe de
outros departamentos, nem as disciplinas que o DEP oferta
para outros cursos.
2 DESCRIÇÃO DO PROBLEMA
Em toda universidade, no início de cada semestre letivo
existe a necessidade de construir a grade horária de cada
curso. Essa tarefa consiste em definir os horários dos
professores que ministrarão as disciplinas a cada uma das
turmas do curso. Também existe a necessidade de se
realizar periodicamente reuniões administrativas, como
reuniões de departamento e de colegiado de curso. Para
agendá-las é preciso que todos os professores estejam
disponíveis simultaneamente.
As reuniões departamentais são mensais e as reuniões de
colegiado são, em geral, de duas por semestre. A fim de
permitir que exista um horário padrão para essas reuniões,
estipulou-se que o usuário deverá cadastrar um período de
duas horas, e nesse horário, o modelo não alocará
disciplina alguma para todos os professores.
3 METODOLOGIA
Será criado um modelo para cada semestre. O curso de EP
possui 11 professores, 24 disciplinas específicas, 12 por
semestre e 5 turmas. As variáveis do problema
representam um professor ministrando ou não, uma
disciplina para uma turma, em um horário do dia (Pereira,
Netto e Laracruz, 2007).
Criou-se um índice para as variáveis, o qual atrela
professores, disciplinas e turmas simultaneamente. Este
índice só será criado para conjuntos Professor-Disciplina-
Turma que representem um professor, as disciplinas que
ele ministra e as turmas que devem cursá-las. No caso
estudado, existem 32 conjuntos por semestre.
Considerando que cada conjunto pode ser alocado em um
dos 11 horários do dia, em um dos 5 dias da semana, o
número de variáveis do problema é de 1.760. As variáveis
são representadas conforme apresentado em (A):
𝑋𝑐,𝑑,ℎ (A)
Onde os três índices de X representam o conjunto
Professor-Disciplina-Turma, o dia e o horário que a
variável representa, respectivamente.
A Função Objetivo do problema é representada por (1).
𝑀𝑖𝑛 𝑍(𝑋) = ∑∑∑𝑃𝑐,𝑑,ℎ ∗ 𝑋𝑐,𝑑,ℎ
11
ℎ=1
5
𝑑=1
32
𝑐=1
(1)
Onde P traduz matematicamente a importância de uma
variável ser utilizada pelo modelo (Ribeiro Filho e Lorena,
2006). P é definido através do produto de outros três
coeficientes, cada um representa a importância de uma
situação específica, conforme apresentado em (2).
𝑃𝑐,𝑑,ℎ = 𝑃𝑐,𝑑,ℎ,1 ∗ 𝑃𝑐,𝑑,ℎ,2 ∗ 𝑃𝑐,𝑑,ℎ,3 (2)
O coeficiente P com índice 1 representa a preferência de
horários dos professores. Eles irão definir estes
coeficientes, variando de 1 a 10, colocando valores
menores para os horários de suas preferências.
O índice 2 representa a intenção de evitar aulas no período
das 11:30 às 12:30, horário de almoço. Este coeficiente
valerá 10 para as as variáveis que representem este horário,
para os outros casos, o valor será 1. (Pamplona e
Montevechi, 2005)
O índice 3 traduz a preferência por determinados horários
para cada turma, e com essa preferência, a intenção é criar
a tendência de que o modelo evite intervalos entre aulas
(janelas), e ainda intercale o período de oferta das
disciplinas específicas a cada ano.
As restrições do problema são as seguintes:
∑𝑋𝑐,𝑑,ℎ𝑐
≤ 1, ∀𝑑, ℎ. (4)
Restrição para impedir que um professor ministre duas
disciplinas no mesmo horário de um dia. Nessa restrição, c
varia entre os conjuntos que indicam um professor
específico, d varia de 1 (segunda-feira) a 5 (sexta-feira) e h
varia de 1 (7:30) a 11 (18:30).
∑𝑋𝑐,𝑑,ℎ𝑐
≤ 1, ∀𝑑, ℎ. (5)
Para impedir que sejam ofertadas para uma turma, duas
disciplinas no mesmo horário de um dia. Onde c varia
entre os conjuntos que representam uma turma específica.
∑∑𝑋𝑐,𝑑,ℎ
11
ℎ=1
5
𝑑=1
= 𝑊𝑐, ∀ 𝑐 (6)
∑∑𝑋𝑐,𝑑,ℎ
11
ℎ=1
5
𝑑=1
= 𝑌𝑐 ∗ 𝑊𝑐, ∀ 𝑐 (7)
Para alocar na grade horária, a carga horária total de todas
as disciplinas. Onde W é o valor da carga horária da
disciplina em questão, em horas aula. Para disciplinas
optativas, W é multiplicado por uma variável Y, também
binária, que valerá “1” caso a optativa seja ofertada, e “0”
caso contrário. Conforme apresentado em (7).
∑𝑋𝑐,𝑑,ℎ𝑐
+ 𝑋𝑐,𝑑,ℎ+1 = 0 (8)
Para garantir um horário de duas horas para as reuniões
administrativas. c varia entre todos os conjuntos, d e h são
definidos pelo usuário.
𝑋𝑐,𝑑,ℎ + 𝑋𝑐,𝑑,ℎ+𝐿 ≤ 1, ∀𝑐, 𝑑, ℎ (9)

50
Para alocar as aulas organizadamente ao longo da semana.
Onde h+L é o conjunto de todos os horários que não
podem ser alocados em conjunto com a variável do horário
h.
∑∑∑𝑋𝑐,𝑑,ℎ
11
ℎ=1
5
𝑑=1𝑐
≥ 𝑇𝑡 (10)
Para garantir que as turmas recebam toda a carga horária
do período em que se encontram. O índice c varia entre os
que representam uma turma específica, e T é o valor da
soma das cargas horárias de todas as disciplinas que esta
turma deve receber em um semestre.
∑∑∑𝑋𝑐,𝑑,ℎ
11
ℎ=1
5
𝑑=1𝑐
≥ 𝑍𝑝 (11)
Para garantir que todos os professores cumpram sua carga
horária mínima em sala de aula. Onde c varia entre os que
representam um professor específico, e Z é o valor da
carga horária mínima que o professor deve cumprir.
∑𝑋𝑐,𝑑,ℎ𝑐
= 0 (12)
Para impedir que sejam alocadas aulas para uma turma em
horários que ela possua aulas de outros departamentos.
Onde d e h são definidos pelo usuário, e c varia entre os
conjuntos que representam uma turma específica. (Socha,
Knowles, Sampels, 2002).
4 IMPLEMENTAÇÃO E RESULTADOS
O modelo foi executado no LINGO 12.0, em um
computador com processador i3, 4 GB de memória RAM.
O tempo de execução foi 42 segundos. A Figura 1 ilustra a
grade horária das turmas no primeiro semestre. As
disciplinas azuis foram alocadas pelo modelo, as brancas
foram decididas por outros departamentos.
Figura 1: Grade horária do primeiro semestre
Pode-se notar que as aulas alocadas para o quinto ano
foram alocadas de acordo com os pesos estabelecidos, no
primeiro ou no último horário do dia. Nota-se também que
a restrição de alocar as aulas organizadamente na semana
cumpre corretamente seu papel, alocando sempre aulas no
mesmo horário de dias intercalados da semana. Nota-se
também que o horário estabelecidos para as reuniões,
quarta-feira 13:30-15:30, foi respeitado, já que nenhuma
disciplina específica foi alocada nesse horário.
5 CONCLUSÕES
Neste trabalho apresentou-se a análise da situação do curso
de EP da UFPR, no que diz respeito à geração da grade
horária, e construído um modelo matemático que gerou a
grade horária do curso de EP.
Concluiu-se que o modelo é capaz de gerar a grade horária
do curso satisfatoriamente, portanto é viável para
utilização prática. O modelo é capaz de reduzir o esforço
para se realizar esta tarefa, visto que o tempo para sua
realização de forma empírica é de vários dias, e através do
modelo, diminui para alguns minutos, somando-se tempo
de cadastro e de processamento.
Notou-se também que o modelo atendeu a todas as
restrições e que o sistema de pesos também funcionou
satisfatoriamente, pois a maior parte das disciplinas foram
alocadas dentro da preferência estabelecida. Outra
conclusão a que se chegou foi a de que a restrição gerada
para que as aulas fossem alocadas organizadamente ao
longo da semana cumpriu corretamente o seu papel, porém
também “tirou” a liberdade do modelo no que diz respeito
a ocupar horários vagos da semana.
Para trabalhos futuros, sugere-se que os resultados sejam
comparados com os fornecidos por métodos heurísticos,
também que seja feita uma interface gráfica para interação
com o usuário. Outra sugestão é que se leve em
consideração também a questão da alocação das
disciplinas em salas de aula.
REFERÊNCIAS
Pamplona, E. D. O.; Montevechi, J. A. B. Engenharia
Econômica II. Itajubá, Instituto De Engenharia De
Produção E Gestão - Universidade Federal De
Itajubá. Apostila. 2005.
Pereira, R. S.; Netto, P. O. B.; Laracruz, A. J. O Método
Grasp Aplicado A Um Problema De Coloração:
Estudo De Caso Em Uma Instituição De Ensino
Fundamental E Médio. In: X Simpósio De Pesquisa
Operacional E Logística Da Marinha, 2007, Rio De
Janeiro.
Ribeiro Filho, G.; Lorena, L. A. N. An Integer
Programming Model For The School Timetabling
Problem. In: XIII Congresso Latino-Ibero Americano
De Investigación Operativa (CLAIO), 2006, [S.L.]
(INPE 14397-PRE/9484).
Socha, K.; Knowles, J.; Sampels, M. Max-Min Ant System
For The University Course Timetabling Problem.
Springer-Verlag Berlin Heidelberg, P.1-13, Setembro
2002.
1 Segunda Terça Quarta Quinta Sexta 2 Segunda Terça Quarta Quinta Sexta
07:30 CM041 CM045 CM041 CM045 CM041 07:30 TP002 CE003 TP002 CE003
08:30 CM041 CM045 CM041 CM045 CM041 08:30 TP002 CE003 TP002 CE003
09:30 CI208 TP001-A CI208 TP001-A 09:30 TP053 CF060 TP053 CF060
10:30 CI208 TP001-A CI208 TP001-A 10:30 TP053 CF060 TP053 CF060
11:30 11:30
12:30 12:30
13:30 CD020-B CD020-A CD020-B CD020-A 13:30 CF063 TP003 CF063 TP003
14:30 CD020-B CD020-A CD020-B CD020-A 14:30 CF063 TP003 CF063 TP003
15:30 TP001-B TP001-B 15:30
16:30 TP001-B TP001-B 16:30
17:30 17:30
18:30 18:30
Primeiro Ano Segundo Ano
3 Segunda Terça Quarta Quinta Sexta 4 Segunda Terça Quarta Quinta Sexta
07:30 TH046 TM115 TH046 TM115 07:30 TP010 TP015 TP909 TP015 TP909
08:30 TH046 TM115 TH046 TM115 08:30 TP010 TP015 TP909 TP015 TP909
09:30 TM218 TE160 TM218 TE160 TM117 09:30 TP010 TP933 TP013 TP933 TP011
10:30 TM218 TE160 TM218 TE160 TM117 10:30 TP010 TP933 TP013 TP933 TP011
11:30 TM117 11:30
12:30 12:30
13:30 TM219 TM219 13:30 TP016 TP018
14:30 TM219 TM219 14:30 TP016 TP018
15:30 15:30 TP016 TP018
16:30 16:30 TP016 TP018
17:30 17:30
18:30 18:30
Terceiro Ano Quarto Ano
Almoço
AlmoçoAlmoço
Almoço

51
AVALIAÇÃO DO DESEMPENHO DE ALGORITMOS GENÉTICOS EM
OTIMIZAÇÃO DE PORTFÓLIOS
Thaís Mariane Biembengut, Simone Aparecida Miloca, Neida Maria Patias Volpi.
Palavras-Chave: Algoritmo Genético Multiobjetivo, Métricas C e S, Otimazação de Portfólios.
1 INTRODUÇÃO
Carteira de investimento (portfólio) é um conjunto de
ativos constituídos por um investidor, basicamente com
dois objetivos: maximizar seus lucros e minimizar os
riscos. O problema seguinte consiste em determinar a
quantidade ou a porcentagem do capital a ser investido em
cada ativo selecionado. Para este fim deve-se considerar o
retorno esperado de cada ativo e o risco que cada
investidor está disposto a aceitar em seu investimento.
A teoria moderna de portfólios assume que, para um dado
nível de risco, um investidor consciente deseja o máximo
de retorno, e para um dado nível de retorno esperado, o
investidor deseja minimizar o risco. Existem também
investidores extremos que querem somente maximizar o
retorno (desconsiderando o risco) ou minimizar o risco
(desconsiderando o retorno). Em geral, podemos descrever
as formulações dos problemas de otimização de portfolios
através de cinco diferentes formulações. Apresenta-se, a
seguir, o modelo proposto por Markowitz (1952)
𝑀𝑎𝑥 𝑓(𝑥) = ∑𝑙𝑖𝑥𝑖
𝑛
𝑖=1
(1)
𝑀𝑖𝑛 𝑓(𝑥) =∑
𝑛
𝑖=1
∑𝑥1𝑥𝑗𝜎𝑖𝑗
𝑛
𝑗=1
(2)
∑𝑥𝑖 = 1
𝑛
𝑖=1
𝑥𝑖 ≥ 0
onde
𝜎𝑖𝑗 é a covariância entre os ativos i e j
𝑙𝑖 é o retorno do ativo i depois de um período de tempo.
A decisão ótima é dada por um vetor (𝑥1, 𝑥2,, … , 𝑥𝑛,), onde
𝑥𝑖, i = 1, 2, ..., n, é o percentual do capital C a ser investido
no ativo i, sendo n o número de ativos.
Este problema pode ser resolvido por diferentes técnicas,
como Programação quadrática, Simulated annealing, e
Algoritimos evolutivos (Ehrgott, 2000).
Considerando que se tenha selecionado um conjunto de
ativos para constituir o portfólio, o objetivo deste trabalho
é avaliar o desempenho de dois algoritmos evolutivos para
ajudar na decisão do investimento em ativos de um
portfólio. A avaliação final é feita pelo investidor que, se
desejar o maior lucro, independentemente do risco que está
associado a esta escolha, selecionará opções que lhe
propiciem isto, deixando de lado aquelas que, embora
tenham menor risco, têm menor possibilidade de retorno.
2 ALGORITMO GENÉTICO MULTIOBJETIVO
Algoritmos Genéticos (AGs) assim como outros
algoritmos evolutivos têm seu mecanismo inspirado no
processo de evolução natural. Algumas ideias
fundamentais da evolução, tais como recombinação e
seleção são utilizadas na construção de algoritmos
robustos e que requerem um mínimo de informações sobre
o problema (Deb, 2001). Em problemas com mais de uma
função objetivo, onde a solução é dada pelo conjunto
ótimo de Pareto (fronteira eficiente), os algoritmos
genéticos multiobjetivo têm se destacado pela habilidade
de encontrar uma boa aproximação da solução exata. Por
esse motivo, um grande número de algoritmos têm sido
propostos, como por exemplo o MultiObjective Genetic
Algorithm (MOGA), o Niched-Pareto Genetic Algorithm
(NPGA) e o Non-dominated Sorting Genetic Algorithm
(NSGA) (Coelho, 2000). Uma nova geração de algorimtos
genéticos multiobjetivo introdurizam o elitismo, que
consiste em selecionar as melhores soluções para serem
utilizadas na iteração seguinte. Dentre os AGs elitistas
mais citados estão o Strength Pareto Evolutionary
Algorithm (SPEA, SPEA2)(Zitzler, 2001) e NSGAII (Deb,
2001).
2.1 Métricas
No intuito de comparar os diferentes métodos de
otimização multiobjetivo, diversas métricas foram criadas.
A métrica C, proposta Deb (2001), avalia a proporção de
soluções obtida em um método que são dominadas por
soluções obtidas em outro. Desta forma dados dois
conjuntos A e B de soluções obtidas por algoritmos
diferentes, a métrica C calcula a proporção de soluções em
B, que são fracamente dominadas por soluções de A e é
dada por:
𝐶(𝐴, 𝐵) = |𝑏 ∈ 𝐵|∃𝑎 ∈ 𝐴: 𝑎 ≽ 𝑏|
|𝐵|
Para avaliar a diversidade de um conjunto não dominado
de soluções, Schott (1995) sugere a métrica Spacing (S),
que considera a distância relativa entre soluções
consecutivas em um conjunto de pontos não dominados,
dada por:
𝑆 = √1
𝑄 ∑(𝑑𝑖 − �̅�)
2
|𝑄|
𝑖=1
onde 𝑑𝑖 = 𝑚𝑖𝑛𝑘∈𝑄^𝑘≠𝑖 ∑ |𝑓𝑚𝑖 − 𝑓𝑚
𝑘|𝑀𝑚=1 é o valor mínimo
dado pela soma da diferença absoluta dos valores da
função objetivo, entre a i-ésima solução e outra qualquer
pertence ao conjunto. O valor �̅� é a média das distâncias
definas acima, Q é o número de soluções no conjunto não
dominado e M é o número de funções objetivo.
A métrica S, mede os desvios padrões dos diferentes 𝑑𝑖𝑠. Quando as soluções são próximas e uniformemente
espaçadas o correspondente valor medido é menor. Logo,
um algoritmo que encontra um menor valor de S para o
conjunto não dominado, é melhor.

52
2.2 Aplicação Numérica e Resultados
O modelo apresentado nas equações 1 e 2 do item 1, foi
resolvido pelos algoritmos genéticos NSGA-II e SPEA2, e
obtidas as respectivas fronteiras eficientes. A fronteira
exata foi obtida pelo método dos pesos. Os dados
empregados nos experimentos, foram extraídos de um
conjunto de 26 ativos mais negociados no BOVESPA
entre período 01 de janeiro de 2004 a 31 de dezembro de
2007.
As fronteiras eficientes geradas pelos algoritmos SPEA2 e
NSGA-II, exibidas nas figuras 1 e 2 respectivamente, são
comparadas com a fronteira exata. O desempenho dos AGs
foi comparado por meio da avaliação das métricas C e S.
Os resultados obtidos pela métrica C, apontam que 61,54
% das soluções obtidas pela NSGA, são dominadas pelas
soluções obtidas pelo SPEA, e 7% das soluções do SPEA
são dominadas pelas do NSGA. Para a métrica S, não
houve diferença entre os valores obtidos.
Figura 5: Fronteira Eficiente - NSGA-II
Figura 2: Fronteira Eficiente - SPEA2
3 CONCLUSÕES.
Com relação à convergência, avaliada por meio
da métrica C, o SPEA2 apresenta um grande
número de soluções que são melhores do que as
obtidas pelo NSGA. Em ambos os algoritmos, a
fronteira obtida é bastante diversificada e os resultados
obtidos pela métrica S não diferem significativamente.
REFERÊNCIAS
Deb, K. Multi-objective optimization using evolutionary
algorithms. John Wiley and Sons , 2001.
Coello, C.A.C. An updated survey of GA-based
multiobjective optimization techniques. ACM
Computing Surveys, 32(2), 109-143, 2000.
Ehrgott,M., Gandibleux,X. A Survey and Annotated
Bibliography on Multiobjective Combinatorial
Optimization. OR Spectrun, 2000.
Markowitz, H.M. Portfolio selection. Journal of
Finance,77-91, 1952.
Schott, J.R. Fault toletant design using single and multi-
criteria genetic algorithms. Master’s Thesis,
Massachusetts Institute off Technology, 1995.
Zitzler, E. and Deb, K. and Thiele, L. and Coello, C. A.
and Corne, D. Evolutionary Multi-Criterion
Optimization (EMO 2001). Springer, 2001.
53
MODELAGEM MATEMÁTICA DO ESCALONAMENTO DE JOGOS NA
GRADE HORÁRIA DO CAMPEONATO BRASILEIRO
Guilherme Vinicyus Batista, Cassius Tadeu Scarpin, Gustavo Valentim Loch
Palavras-Chave: Campeonato Brasileiro, Programação Linear Inteira, horário, jogos
1 INTRODUÇÃO
As competições esportivas em todo o mundo envolvem
muito dinheiro. Os gastos são diversos, por exemplo:
atletas recebem salários altíssimos, transferências dos
mesmos entre clubes chegam a movimentar milhões de
reais, torcedores costumam ir ao estádio e compram
produtos de seu clube ou atleta favorito, além dos valores
envolvidos em patrocínios e os ganhos com imagem.
A Confederação Brasileira de Futebol (CBF) é a entidade
máxima do futebol no país, sendo responsável pelo
campeonato de futebol nacional. Este trabalho pretende
mostrar as principais restrições que um campeonato dessa
magnitude deve respeitar, conciliando os interesses dos
principais envolvidos para ter um campeonato justo,
equilibrado e que permita uma maior audiência de público.
Utilizando técnicas de Pesquisa Operacional, Nemhauser e
Trick (1997) trabalharam com a programação dos jogos da
liga universitária de basquete da Carolina do Norte nos
Estados Unidos, um campeonato onde todos os times se
enfrentavam entre si; Durán (2007) com o campeonato de
futebol chileno. A partir de 2005 começaram a se utilizar
técnicas de Programação Linear Inteira no campeonato
brasileiro (RIBEIRO; URRUTIA, 2011).
Todos os envolvidos no campeonato brasileiro, clubes,
CBF, emissoras de televisão, torcedores, patrocinadores,
entre outros, querem tirar o máximo proveito da estrutura
do campeonato e terem segurança de que estão fazendo um
bom investimento. Um escalonamento bem feito é o
principal interesse de todos os envolvidos, sendo que um
campeonato justo deve dar a mesma condição a todos os
competidores.
2 O CAMPEONATO BRASILEIRO DE FUTEBOL
O campeonato brasileiro de futebol ocorre anualmente, e
em 2011 foi disputado por 20 times. O regulamento da
competição prevê que a disputa deve ocorrer no sistema de
pontos corridos de forma contínua, em turno e returno,
com 190 jogos em cada fase, totalizando 380 jogos, são 38
rodadas, com 10 jogos por rodada onde todos os 20 times
se enfrentam entre si uma vez em cada fase alternando o
mando de campo. Além disso, a sequência de jogos na
primeira e segunda fase devem ser as mesmas, formando
um campeonato espelhado.
A disputa dura sete meses e cada equipe joga no máximo
duas vezes por semana (meio de semana ou final de
semana), sendo que existem certas peculiaridades no
torneio já que alguns jogos tem preferência por ocorrer em
datas específicas dependendo dos times que se enfrentam.
Por exemplo, quando times da mesma cidade se enfrentam
e tem grande rivalidade diz-se que é um clássico e deve
ocorrer no final de semana.
Analisando a tabela do campeonato de 2011 pode-se
perceber que os jogos, em geral, ocorrem em horários que
se repetem de semana em semana. Deste modo, uma
adaptação foi realizada quanto aos horários dos jogos,
estabelecendo que nas rodadas de meio de semana possam
vir a ocorrer em 3 ocasiões de horários:
Quarta feira às 19h50min
Quarta feira às 21h50min
Quinta feira sem horário definido
Nas rodadas de finais de semana também foram
consideradas 3 ocasiões de horários para ocorrerem os
jogos:
Sábado sem horário definido
Domingo às 16h00min
Domingo às 18h00min
Vale ressaltar que esse esquema de horários faz parte da
proposta do problema e podem ocorrer pequenas
variações.
3 MODELAGEM MATEMÁTICA
A fim de fazer com que o campeonato tenha uma
quantidade de jogos semelhante, em cada horário, para
cada um dos times foi desenvolvido um modelo
matemático de programação linear inteira.
Para isso, foi imprescindível uma entrada de dados do
escalonamento dos jogos do campeonato brasileiro com a
seguinte informação:
𝑥𝑖𝑗𝑘 =
Para dar continuidade ao modelo foi necessário criar mais
uma variável com 4 dimensões:
𝑥𝑖𝑗𝑘ℎ =
Sendo que h pode assumir os valores 1, 2, 3, 4 , 5, 6 que
representam os seis respectivos horários mostrados na
seção anterior.
Definindo-se uma quantidade mínima de jogos 𝑄𝑀𝐼𝑁ℎ para cada time em cada horário, e também uma quantidade
máxima 𝑄𝑀𝐴𝑋ℎ (essa não pode ser excedida). Cada vez
que essa quantidade mínima não é respeitada existe uma
punição com um custo 𝐶ℎ . Para saber a quantidade de vezes que uma restrição não foi
respeitada foi criada a seguinte variável inteira:
𝐻ℎ𝑖 =
Logo a função objetivo é a seguinte:
𝑚𝑖𝑛 𝑧 =∑∑𝐶ℎ ∗ 𝐻ℎ𝑖
6
ℎ=1
𝑛
𝑖=1
(1)
Como as rodadas 𝑘 podem ser tanto no final de semana
1, se o time i joga em casa contra o time j
na rodada k
0, caso contrário
1, se o time i joga em casa contra o time j
na rodada k no horário h
0, caso contrário
Quantidade de vezes que o time i não
respeitou a quantidade mínima de jogos
definida para h

54
como no meio de semana, existe dois conjuntos
independentes: 𝐹𝑆 para toda rodada 𝑘 que ocorre no fim de
semana onde os jogos podem ocorrer nos horários 4, 5, 6 e
o conjunto 𝑀𝑆 para toda rodada 𝑘 que ocorre no meio da
semana onde os jogos podem ocorrer nos horário 1,2,3.
A restrição abaixo iguala a variável 𝑥𝑖𝑗𝑘 às outras três
novas variáveis da seguinte forma:
𝑥𝑖𝑗𝑘 = ∑𝑥𝑖𝑗𝑘
3
ℎ=1
⩝ 𝑘, 𝑖, 𝑗 ∶ 𝑘 ∈ 𝑀𝑆 (2)
𝑥𝑖𝑗𝑘 = ∑𝑥𝑖𝑗𝑘
6
ℎ=4
⩝ 𝑘, 𝑖, 𝑗 ∶ 𝑘 ∈ 𝐹𝑆 (3)
Para garantir a quantidade mínima de jogos temos a
seguinte restrição:
∑∑𝑥𝑖𝑗𝑘ℎ
𝑛
𝑗=1
≥ 𝑄𝑀𝐼𝑁ℎ − 𝐻𝑖ℎ ,
𝑛−1
𝑘=1
⩝ 𝑖 , ℎ = 1,2,3 ,𝑖 ≠ 𝑗, 𝑘 ∈ 𝑀𝑆
(4)
∑∑𝑥𝑖𝑗𝑘ℎ
𝑛
𝑗=1
≥ 𝑄𝑀𝐼𝑁ℎ − 𝐻𝑖ℎ ,
𝑛−1
𝑘=1
⩝ 𝑖 , ℎ = 4,5,6 ,𝑖 ≠ 𝑗, 𝑘 ∈ 𝐹𝑆
(5)
A quantidade máxima:
∑∑𝑥𝑖𝑗𝑘ℎ
𝑛
𝑗=1
≤ 𝑄𝑀𝐴𝑋ℎ ,
𝑛−1
𝑘=1
⩝ 𝑖 , ℎ = 1,2,3, 𝑖≠ 𝑗 , 𝑘 ∈ 𝑀𝑆
(6)
∑∑𝑥𝑖𝑗𝑘ℎ
𝑛
𝑗=1
≤ 𝑄𝑀𝐴𝑋ℎ ,
𝑛−1
𝑘=1
⩝ 𝑖 , ℎ = 4,5,6, 𝑖≠ 𝑗 , 𝑘 ∈ 𝐹𝑆
(7)
Apenas essas restrições não garantiriam que ocorreriam
jogos em todos os possíveis horários em cada rodada então
foi estabelecido uma quantidade mínima para obrigar que
em todo horário haja alguém jogando e respeitando os
seguintes limites da tabela 1: Tabela 4 - Quantidade mínima de jogos em cada horário por
rodada
Horário Quantidade
Mínima (𝑀𝐼𝑁ℎ)
1 2
2 4
3 2
4 3
5 3
6 2
O novo grupo de restrições é o seguinte:
∑∑𝑥𝑖𝑗𝑘ℎ
𝑛
𝑗=1
≥ 𝑀𝐼𝑁ℎ , ⩝ 𝑘, 𝑖 ≠ 𝑗
𝑛
𝑖=1
4 CONCLUSÃO
Em poucos instantes um computador core i5 64 bits, 4Gb
de RAM no software LINGO 9, obteve uma solução
ótima. Ao analisar a distribuição nos jogos durante o
campeonato de futebol de 2011 observou-se uma grande
diferença na quantidade de jogos que cada time fazia nos
mais diversos horários, alguns times chegaram a jogar 11
vezes na primeira fase no horário do domingo as 4 horas
enquanto alguns jogavam menos de 4 vezes. Com a
aplicação desse modelo matemático a diferença entre a
quantidade de jogos de cada equipe nos horário baixou
drasticamente, podendo ser outro fato que ajude a tornar o
campeonato mais equilibrado. Num trabalho futuro seria
interessante ver o aproveitamento desses times nos
diversos horários, levanto em conta outros fatores como o
apoio da torcida para melhorar o modelo proposto nesse
trabalho.
O problema de programação inteira aplicada ao
campeonato brasileiro de futebol aqui exposto mostra que
o campeonato está pode atender ainda mais critérios para
ser justo para com todos os times e busca atender ao
interesse dos envolvidos. Além de demonstrar que a
técnica de programação inteira pode ser aplicada nas mais
diversas áreas.
5 REFERÊNCIAS
DURÁN,G. et al. – Scheduling the Chilean Soccer
League by Integer Programming. INFORMS 2009
NEMHAUSER, G. L.; TRICK M. A. SCHEDULING A
MAJOR COLLEGE BASKETBALL
CONFERENCE. Georgia Institute of Technology,
Atlanta, Georgia. 1997
RIBEIRO, C. C.; URRUTIA S. – Scheduling the
Brazilian Soccer Tounament: Solution Approach
and Practice. INFORMS 2011

55
SIMULAÇÃO DA MOVIMENTAÇÃO DE PEDESTRES ASSUMINDO
VARIÁVEIS PSICOCOMPORTAMENTAIS
Marina Vargas, Marco A. Argenta.
Palavras-Chave: Fluxo Pedonal; Variáveis Psicocomportamentais; Inteligência Artificial; Agentes.
1 INTRODUÇÃO
A otimização e controle do fluxo de tráfego de pedestres
ao longo de um ambiente de caminhada é um interessante
e abrangente campo de interação entre matemáticos,
engenheiros, psicólogos e programadores. O fluxo de
grandes multidões de pedestres está se tornando cada vez
mais importante com o crescimento das populações nas
cidades. Nesse contexto é necessário que os espaços
físicos também se desenvolvam.
Muitos estudos de fluxo de pedestres foram empreendidos,
em especial nas últimas três décadas, contudo o nosso
conhecimento sobre o fluxo de multidões ainda é
insuficiente e atrasado se comparado a outros modos de
transporte, justamente por existir um fator comportamental
que transforma esse tipo de estudo em algo extremamente
complexo.
Alguns autores, como Hughes (2002), defendem que o
movimento dos pedestres é regido por equações de fluxo
contínuo derivadas do fluxo de um único pedestre ou de
múltiplos pedestres. As teorias de Hughes derivam da idéia
de se relacionar o fluxo e a densidade de pedestres através
de um diagrama, conhecido como diagrama fundamental.
Muitos outros autores também consideram tal diagrama
como peça importante para a análise do fluxo de pedestres,
como Fruin (1971), Tanaboriboon et al. (1986), Helbing et
al. (2000); Helbing (2002), dentre outros. Contudo, há
diversas linhas de pesquisa quando o assunto é
movimentação de pedestres, onde as teorias variam desde
o uso de autômatos celulares (Schadschneider, 2002;
Burstedde et al., 2002) à comparação entre fluxo de
pedestres e campos potenciais (Dapper, 2007), etc.
Na década de 90, o governo dos EUA financiou um dos
mais intensivos estudos sobre evacuação de pessoas em
edifícios. O atentado ao edifício World Trade Center em
26 de fevereiro de 1993 foi estudado exaustivamente por
Fahy and Proulx (1995) utilizando como ferramentas de
pesquisa entrevistas e questionários relacionados com o
comportamento de ocupantes selecionados (Valentin and
Ono, 2006).
Observa-se com tudo isso que é possível associar a
movimentação de pedestres a modelos matemáticos e
dessa forma, realizar simulações computacionais com o
objetivo de descrever, e até predizer acontecimentos
envolvendo a segurança pública, evitando transtornos
decorrentes do planejamento e infraestrutura inadequados,
e possibilitando descrever o comportamento humano
diante de algumas situações.
Neste trabalho, três ferramentas formam a base de
conceituação básica: Cinemática e Dinâmica de sistemas
de partículas, Inteligência Artificial, mais especificamente,
agentes e Comportamento Psicossocial.
O desenvolvimento inicial do ambiente de simulação será
composto por partículas simples que se locomoverão com
regras de movimentação cinemática. Com a solidificação
desta etapa, haverá a introdução de agentes que possam
representar comportamentos humanos simples, como
desviar de obstáculos e escolher alguns caminhos
específicos. Logo após, serão incluídos os conceitos de
dinâmica de sistemas de partículas, como por exemplo
colisões.
Na sequência, serão incluídos os conceitos de Inteligência
Artificial, com toda a sua bagagem probabilística de redes
de Bayes e cadeias de Markov, através do uso de
Processos Decisão de Markov Parcialmente Observáveis
(POMDP), aliados a conhecimentos da sociologia, mais
especificamente conhecimentos psicossociais. Tais
conhecimentos serão avaliados probabilisticamente no
decorrer da simulação através do uso de agentes com
crenças, desejos e intenções, ou seja, agentes BDI (Nair
and Tambe, 2005; Pereira, 2008). Desta forma, será
trabalhado com um híbrido de políticas POMDP com
planos BDI, chamado de I-plan. Um I-plan é uma
sequência de ações construídas para alcançar um
determinado estado.
Figura 1: Sequência de ações para alcansar estados desejados.
O passo seguinte se dá com a inclusão de variáveis
comportamentais características do pânico, que serão
inicialmente validadas através de referências bibliográficas
e posteriormente serão realizadas consultas a técnicos e
psicólogos específicos da área psicocomportamental que
possam garantir a veracidade de tais variáveis.
Com relação à ferramenta de desenvolvimento, a escolha
se dá pela linguagem Python, por ser uma linguagem de
alto nível, otimizada para o programador ou seja, de fácil
implementação e aprendizado, possui vários ambientes
integrados e é portável a todos os sistemas operacionais,
além de ter módulos para processamento gráfico
(PETTELE, 2011).
Espera-se que esse trabalho possa simular e representar de

56
forma adequada situações com e sem pânico considerando
variáveis psicocomportamentais, de forma que o
movimento dos agentes se assemelhe ao movimento
humano nessas situações.
REFERÊNCIAS
Burstedde C., Kirchner A., Klauck K., Schadschneider A.,
and Zittartz J. Cellular automaton approach to
pedestrian dynamics - applications. Pedestrian and
Evacuation Dynamics, pages 87–98, 2002.
Dapper F. Planejamento de Movimento para Pedestres
utilizando Campos Potenciais. Master’s Thesis,
Universidade Federal do Rio Grande do Sul, 2007.
Fahy R.F. and Proulx G. Evacuation of the world trade
center: what went right? NFPA Journal, pages 60–67,
1995.
Fruin J.J. Designing for pedestrians. a level-of service
concept. Highway Research Record, 377:1–15, 1971.
Helbing D. Simulation of pedestrian crowds in normal and
evacuation situations. Most, 21:21–58, 2002.
Helbing D., Farkas I., and Vicsek T. Simulating dynamical
features of escape panic. Nature, 407:487, 2000.
Hughes R.L. A continuum theory for the flow of
pedestrians. Transportation Research Part B:
Methodological, 36(6):507-535, 2002.
Nair R. and Tambe M. Hybrid bdi-pomdp framework for
multiagent teaming. J. Artif. Int. Res., 23:367–420,
2005.
Pereira D.R. Construção de Planos BDI a partir de
Políticas Ótimas de POMDPs, com Aplicação na
Auto-Regulação de Trocas Sociais em Sistemas
Multiagentes. Master’s Thesis, Universidade Católica
de Pelotas, 2008.
PETTELE. Tutorial de Introdução ao Python. Engenharia
de Telecomunicações – Universidade Federal
Fluminense, Niterói-RJ, 2011.
Schadschneider A. Cellular automaton approach to
pedestrian dynamics - theory. Pedestrian and
Evacuation Dynamics, pages 75–86, 2002.
Tanaboriboon Y., Hwa S.S., and Chor C.H. Pedestrian
characteristics study in singapore. Journal of
Transportation Engineering - ASCE, 112(3), 1986.
Valentin M.V. and Ono R. Saídas de emergência e
comportamento humano: Uma abordagem histórica e
o estado atual da arte no brasil. In NUTAU. 2006.

57
RESUMO DOS POSTERS Resumo dos trabalhos apresentados na forma de posters.

58
COMPARAÇÃO DE PARÂMETROS BIOMECÂNICOS NA RETRAÇÃO
INICIAL DE CANINO INFERIOR ENTRE A ORTODONTIA CONVENCIONAL
E LINGUAL ATRAVÉS DA ANÁLISE POR ELEMENTOS FINITOS
Ricardo Sommerfeld, Marco A. Argenta, Emílio Graciliano Ferreira Mercuri, Lucila Largura, Ana Paula de Oliveira Gebert.
Palavras-Chave: Ortodontia convencional, Ortodontia lingual, Retração inicial de canino, Análise por elementos finitos.
RESUMO:
A extração de dentes permanentes, principalmente de primeiros pré-molares, tornou-se rotina no planejamento ortodôntico.
Devido à proximidade desses dentes ao centro de cada quadrante da arcada, tais exodontias são indicadas em situações de
apinhamento, biprotrusão e estética desfavorável (Mezomo B. M. et al 2010). O fechamento de espaço é possível através da
retração total do segmento anterior ou retração inicial de dentes caninos, sendo que, a retração canina pode ser empregada com
duas técnicas distintas, utilizando arco contínuo através de gancho, molas espirais e corrente elástica ou arco segmentado,
realizado a partir de alças de retração (Shimizu R. H. et al 2004). Diferentes movimentos dentários carecem de uma força
distinta, pois com o excesso da mesma poderá haver efeitos colaterais, como atraso no movimento dentário, dor, mobilidade
dentária e reabsorção radicular (Souza R. S. et al 2003). Por esses motivos e outros a ortodontia vem utilizando a metodologia
de análise por elementos finitos (AEF) que se caracteriza como uma forma de análise matemática, que determina o estado de
tensão e deformação inicial de estruturas, promovendo informações sobre deslocamento e grau de tensão (Lotti R. S. et al.,
2006). Este trabalho tem por objetivo avaliar as diferenças biomecânicas na retração inicial de um canino inferior entre a
utilização da técnica lingual e convencional em aparelhos ortodônticos através da AEF, uma vez que esta metodologia é pouco
discutida na literatura. Para realizar a simulação através da AEF, foi utilizado um sólido tridimensional gerado em um software
específico a partir de imagens tomográficas de uma mandíbula, contendo todos os dentes com exceção dos terceiros molares.
Com a intenção de simular forças mecânicas a partir de um fechamento de espaço, foi removido o primeiro pré-molar inferior,
remodelando sua área tornando-o homogêneo com osso cortical. Os brackets e fio ortodôntico, cujas propriedades são de aço
inoxidável, foram desenvolvidos dentro do programa de reconstrução Solidworks 2012 (Dassault Systemes, Solidworks Corps,
USA). No modelo foi aplicada uma força de 120g/f na parte interna da face distal no bracket canino e na porção interna da
face mesial no bracket do primeiro molar, porém, em sentido oposto simulando o tracionamento elástico. Com a perspectiva de
avaliar a diferença de tensões no posicionamento do aparelho, a força, os brackets e fio ortodôntico são idênticos na técnica
lingual e convencional. Considerando que a mecânica na movimentação ortodôntica é similar em ambos os lados da
mandíbula, foi aceitável avaliar apenas uma hemi-arcada. Essa redução possibilitou o refinamento da malha de elementos
finitos, o que forneceu um resultado mais apurado. Os resultados são visualizados em escalas de cores, onde cada coloração
corresponde á um grau de tensão ou deslocamento. Tendo esse modelo como aproximado, os dados encontrados indicaram que
nessa simulação houve uma diferença na distribuição de tensões em relação às técnicas ortodônticas vestibular e lingual. Os
resultados oferecidos por esses modelos são simplificados, pois oferecem apenas dados da tensão inicial após o carregamento e
não reproduzem características biológicas individuais como, força mastigatória e oclusão (Blatt M. et al., 2006).
REFERÊNCIAS
Blatt M., Butignon L. E. e Bonachela W. C., Análise de elementos finitos aplicados á implantodontia – uma nova realidade
virtual para o real. Innovations Implant Journal – Biomaterials and Esthetics, 01:53-61, 2006.
Lotti R. S., Machado A. W., Mazzieiro E. T. e Júnior J. L., Aplicabilidade científica do método dos elementos finitos. R Dental
Press Ortodon Ortop Facial, 11:35-43, 2006.
Mezomo B. M., Pierret M., Rosenbach G., Tavares C. A. E., A extração de segundos molares superiores para o tratamento
classe II. Dental Press J Orthod, 15:94-105, 2010.
Shimizu R. H., Staszak K. R., Shimizu I. A. e Ambrósio A. R., Retração dos dentes caninos com alças: Aspectos biomecânicos
indispensáveis para o sucesso deste procedimento. J Bras Ortodon Ortop Facial, 9:86-178, 2004.
Souza R. S., Pinto A. S., Shmizu R. H., Sakima M. T. e Júnior L. G. G., Avaliação do sistema de forças gerado pela alça T de
retração pré-ativada segundo o padrão UNESP-Araraquara. R Dental Press Ortodon Ortop Facial, 8:113-122, 2003.

59
ANÁLISE DE TENSÕES A PARTIR DE FORÇAS ORTODÔNTICAS BASEADA
NO MÉTODO DOS ELEMENTOS FINITOS
Cláudia Slongo, Marco André Argenta.
Palavras-Chave: Biomecânica, Método dos Elementos Finitos, Simulação Computacional, Bioengenharia.
RESUMO:
Um dos rumos de pesquisa de maior interesse para a ortodontia clínica é o estudo das respostas por forças aplicadas pelos
aparelhos dentários no tecido ósseo da face humana. Desde 1973, quando o método de elementos finitos foi apresentado à
pesquisa ortodôntica, o estilo da análise foi aplicável ao estudo dos campos de tensão e deformação nas estruturas de suporte
do dente (Huang et al, 2011). Logo, por sua análise favorável a geometrias complexas, o método de elementos finitos passou a
ser frequentemente utilizado em estudos biomecânicos (Middleton, Jones and Wilson, 1990). Neste estudo, o método dos
elementos finitos também será uma ferramenta essencial para a análise. A pesquisa em questão focará basicamente na
comparação das distribuições de tensões e deformações em distintos modelos montados; como um sistema de dente único e
outro de dentes múltiplos, contendo ou não um implante. Tal estudo constitui-se por modelos computacionais tridimensionais
construídos a partir de tomografias computadorizadas - processo feito utilizando o software de reconstrução virtual
SIMPLEWARE (Simpleware, United Kingdom). A construção do modelo também conta com os softwares MESHLAB (ISTI –
CNR, Italy), em que se determinará a malha de elementos finitos implantada, e ANSYS (Ansys, United States), na qual serão
definidas as condições de contorno e de carga, além das propriedades mecânicas aproximadas ao do tecido ósseo humano. Na
literatura, compreende-se que a influência de mais dentes ou de implantes no modelo causa impacto nas distribuições e
magnitudes de tensões e deformações além da rigidez do modelo. Field et al (2007), ao comparar as mudanças biomecânicas
provocadas por uma carga ortodôntica na região de suporte do dente entre um modelo de dente único e outro com mais dois
dentes adjacentes, provou a alteração de distribuição e magnitude da tensão entre os dois modelos. Esta pesquisa não só
questionará a diferença dos resultados nos distintos modelos simulados, mas também relacionará as forças ortodônticas com
suas respostas iatrogênicas. Sabe-se que as forças ortodônticas no sistema dentário remetem a remodelagem do osso alveolar –
provocando uma série derespostas complexas na interface do ligamento periodontal caracterizada como movimentação
ortodôntica do dente (Marangalou, Ghalichi and Mirzakouchaki, 2009). Além disso, foi provado que tensões excessivas de
cargas ortodônticas podem levar à reabsorção radicular, um problema grave durante o tratamento clínico (Huang et al, 2011).
REFERÊNCIAS
Middleton, J., Jones, M.L. and Wilson, A.N., Three-dimensional analysis of orthodontic tooth movement. Journal of
Biomedical Engineering, 1990.
Marangalou J. H., Ghalichi, F. and Mirzakouchaki, B., Numerical simulation of orthodontic bone remodeling. Orthodontic
Waves, 2009.
Huang, H. et al., Mechanical responses of periodontal ligament under a realistic orthodontic loading. Procedia Engineering,
2012.
Field, C. et al., Mechanical responses to orthodontic loading: A 3-dimensional finite element multi-tooth model. American
Journal of Orthodontics and Dentofacial Orthopedics, 2009.

60
ANÁLISE NUMÉRICA DO ESCOAMENTO LAMINAR SOBRE UM
AQUECEDOR 3D PROTUBERANTE MONTADO EM UMA PLACA DE
CIRCUITO IMPRESSO
Felipe Baptista Nishida, Thiago Antonini Alves.
Palavras-Chave: Simulação Numérica, Escoamento Laminar, Aquecedor 3D Protuberante, ANSYS/Fluent®
.
RESUMO:
Neste trabalho foi realizada uma investigação numérica das características do escoamento laminar sobre um aquecedor 3D
protuberante montado na placa inferior de um canal de placas paralelas utilizando o software comercial ANSYS/Fluent®. O
escoamento forçado foi considerado com propriedades constantes sob condições de regime permanente. Na entrada do canal, o
perfil de velocidade era uniforme. Este problema está associado ao escoamento sobre componentes eletrônicos montados em
uma placa de circuito impresso, caracterizando o Nível 2 de empacotamento eletrônico (Alves, 2010). As equações de
conservação com suas condições de contorno foram resolvidas numericamente dentro de um único domínio, que englobou as
regiões do aquecedor e do fluido, através de um procedimento acoplado. A discretização das equações governantes no domínio
foi baseada no Método de Volumes de Controle (Patankar, 1980). O algoritmo SIMPLE (Semi-Implicit Method for Pressure
Linked Equations) foi utilizado para tratar do acoplamento pressão-velocidade. Devido às não-linearidades na Equação do
Momentum, as componentes de velocidade e a correção da pressão foram sub-relaxadas para prevenir instabilidade e
divergência. O critério de parada do processo iterativo de resolução foi estabelecido para mudanças absolutas das variáveis
primitivas menores do que quatro algarismos significativos entre duas iterações consecutivas, enquanto a conservação global
de massa no domínio foi satisfeita em todas as iterações. Após um estudo de independência de grade computacional (Nishida
et al. 2012), os resultados numéricos foram obtidos com uma grade 3D não-uniforme no domínio de solução contendo 212.670
volumes de controle. Esta grade computacional foi mais concentrada nas regiões próximas às interfaces sólido-fluido devido
aos maiores gradientes das variáveis primitivas nestas regiões. Eventuais efeitos de oscilação do escoamento não foram
considerados. As resoluções numéricas foram executadas num microcomputador com processador Intel® Core
TM 2 Duo E7500
2,94GHz e 4GB de RAM. O tempo de processamento de uma solução típica foi de aproximadamente 5 (cinco) minutos. Para
obtenção destes resultados, foram utilizados valores típicos de geometria e propriedades encontrados nas aplicações de
resfriamento de componentes eletrônicos montados numa placa de circuito impresso (Alves and Altemani, 2012; Bar-Cohen et
al. 2003; Joshi and Nakayama, 2003). Os efeitos do número de Reynolds, baseado na altura do aquecedor protuberante, foram
investigados na faixa de 100 a 300, correspondendo a velocidades médias de entrada do ar no canal de 0,20 m/s a 0,63 m/s. De
acordo com Garimella and Eibeck (1991), nesta faixa de Reynolds o escoamento sobre o aquecedor protuberante permanece no
regime laminar. As principais características deste escoamento consistiram de uma pequena recirculação a montante do
aquecedor, da formação de um vórtice de ferradura ao redor das laterais da protuberância e de uma grande recirculação na
região a jusante do aquecedor. As linhas de corrente e os perfis de velocidade do escoamento laminar sobre o aquecedor
protuberante para diversas situações foram apresentados e comparados, quando possível, com os resultados disponíveis na
literatura (Hwang and Yang, 2004; Yaghoubi and Velayati, 2005).
REFERÊNCIAS
Alves, T.A., Resfriamento conjugado de aquecedores discretos em canais, Tese de Doutorado, Faculdade de Engenharia
Mecânica, Universidade Estadual de Campinas, Campinas, SP, Brasil, 129 p., 2010.
Alves, T.A., and Altemani, C.A.C. An invariant descriptor for heaters temperature prediction in conjugate cooling.
International Journal of Thermal Sciences, 58:92-101, 2012.
Bar-Cohen, A., Eatwe, A.A., and Prasher, R.S. Heat transfer in electronic equipment. In: Bejan, A., and Kraus, A.D. (Eds.).
Heat transfer handbook, John Wiley & Sons, Chap. 13:947-1027, 2003.
Garimella, S.V., and Eibeck, P.A. Enhancement of single phase convective heat transfer from protruding elements using vortex
generators. International Journal of Heat and Mass Transfer, 34:2431-2433, 1991.
Hwang, J.Y., and Yang, K.S., Numerical study of vertical structures around a wall-mounted cubic obstable in channel flow.
Physics of Fluid, 16:2382-2394, 2004.
Joshi, Y.; Nakayama, W., Forced convection: external flows. In: Bejan, A., and Kraus, A.D. (Eds.). Heat transfer handbook,
John Wiley & Sons, Chap. 6:653-661, 2003.
Nishida, F.B., Machado, V., Barbur, M.A., e Alves, T.A. Transferência de calor conjugada convecção forçada-condução de um
aquecedor 3D protuberante montado em uma placa de circuito impresso, Anais do XIX Congresso Nacional de
Estudantes de Engenharia Mecânica, São Carlos, SP, 2012.
Patankar, S.V. Numerical heat transfer and fluid flow. Hemisphere Publishing Corporation, 1980.
Yaghoubi, M., and Velayati, E., Undeveloped convective heat transfer from an array of cubes in cross-stream direction.
International Journal of Thermal Sciences, 44:756-765, 2005.

61
DESENVOLVIMENTO DE UM MODELO COMPUTACIONAL PARA O
CÁLCULO DE CONFIABILIDADE DE VIGAS DE CONCRETO ARMADO
Henrique Machado Kroetz, Jonathan da Maia Santos de Melo, Rodolfo Krul Tessari, Amacin Rodrigues Moreira.
RESUMO:
A ocorrência de uma falha ao longo da vida útil de uma estrutura de construção civil pode ocasionar graves perdas, não
somente de valor financeiro mas também humano. As recomendações normativas brasileiras referentes às estruturas de
concreto armado não possibilitam o conhecimento de suas reais probabilidades de falha, trazendo recomendações de segurança
que utilizam critérios semi-probabilísticos, através da utilização de coeficientes parciais de segurança, conforme Moreira
(2002). O presente trabalho trata do desenvolvimento de um software para a determinação da probabilidade de ruína e do
índice de confiabilidade de uma viga-pilar de concreto armado, submetida à flexocompressão e cisalhamento, através da
utilização de métodos numéricos. O procedimento consiste na entrada de dados sobre a viga, área de seção transversal, áreas de
armadura superiores e inferiores, resistência dos materiais e comprimento, calculando-se assim sua resistência de forma
determinística. São inseridos também dados sobre os esforços solicitantes, através de sua média, desvio padrão, e tipo de ação.
De acordo com o tipo de ação, é associada à solicitação um tipo de distribuição de probabilidade, conforme recomendado por
Soares e Venturini (2001). A integração da função densidade de probabilidade de cada tipo de distribuição foi aproximada pelo
método do trapézio, com o passo se relacionando a cada número de desvios padrão com relação à média, gerando-se assim
uma matriz bidimensional que relaciona uma quantidade de desvios padrão em relação à média a uma probabilidade de
ocorrência de um evento, representada pela área da curva. Entra-se então com os dados sobre a posição do carregamento com
relação à viga e sua distribuição, bem como a posição e condições de restrição dos apoios. A estrutura é então resolvida através
do método da rigidez direta, obtendo-se assim os esforços internos do elemento de barra. Em seguida, inicia-se um série de
comparações entre a resistência determinística do elemento e a solicitação aleatória. Para a solicitação, é gerado um número
aleatório entre 0 e 1, e ele é associado a uma probabilidade de ocorrência. Sendo assim, busca-se na matriz bidimensional os
dois valores mais próximos ao valor sorteado, através do método da bissecção. Com estes valores, é feita uma interpolação
linear utilizando os respectivos números de desvios padrão relacionados às áreas encontradas, para se determinar qual desvio
padrão será adotado para se aplicar à solicitação. É então comparada a solicitação aumentada ou mitigada pelo número de
desvios padrão obtido. Dessa forma, a função de desempenho da estrutura é definida como a subtração entre sua resistência
determinística e esforços internos gerados pela solicitação estatística. Caso o valor da função seja negativo, é incrementado um
contador de falha. Esta simulação se repete uma quantidade de vezes duas ordens de grandeza maior do que a ordem de
grandeza negativa da precisão de confiabilidade desejada, em simulações de Monte Carlo, como recomendado em Nogueira
(2005). A partir daí, é obtida diretamente a probabilidade de falha da estrutura, dividindo-se a quantidade de falhas pela
quantidade de simulações, e, daí, é obtido diretamente seu índice de confiabilidade.
REFERÊNCIAS
MOREIRA, Amacin Rodrigues. Metodologia para avaliação de estruturas de pontes usando a teoria de confiabilidade:
estudo de caso. 2002. 147 f. Dissertação (Mestrado) – Universidade Federal do Paraná. Curitiba, 2002.
NOGUEIRA, C.G. Um modelo de confiabilidade e otimização aplicado às estruturas de barras de concreto armado.
2005. 166 f. Dissertação (Mestrado) – Escola de Engenharia de São Carlos, Universidade de São Paulo. São Carlos, 2005.
SOARES, Rodrigo de Carvalho; VENTURINI, Wilson Sergio. Introdução à análise de confiabilidade. São Carlos:
Universidade de São Carlos, 2001.

62
OTIMIZAÇÃO DO CONSUMO DE LOCOMOTIVAS: UMA ABORDAGEM
REATIVA
Pâmela de Assis Beltrani, Fabrício Enembreck.
Palavras-Chave: Inteligência Artificial, Agentes reativos, Otimização do consumo de combustíveis.
RESUMO:
Está sendo desenvolvido no laboratório de Agente de Softwares da PUCPR o projeto CAT (Condução Automática de Trens)
com o objetivo de desenvolver ferramentas computacionais utilizando Inteligência Artificial para possibilitar o controle seguro
e eficiente de uma composição férrea. O objetivo deste projeto consiste em desenvolver um controlador automático e reativo
de trem com o mínimo de modelagem matemática e integrá-lo ao equipamento de simulação presente no laboratório de agentes
na PUCPR. Para o desenvolvimento deste trabalho foi feita uma revisão bibliográfica sobre o assunto, a aquisição dos dados e
a seleção dos cenários da simulação, a implementação do controlador reativo (Russel, 2004; Cossetin,2011) e a avaliação deste
controlador. Essa sequência foi necessária, pois para conduzir um trem são utilizadas regras de condução (Borges,2009;
Anaice,2011) muito diferentes das utilizadas para a condução de outros meios de transporte graças ao sistema de folgas
presente entre os vagões e a presença de um sistema de frenagem composto por freios que utilizam regras de aplicação e
soltura diferentes entre si. Além disso, durante a etapa de aquisição e implementação foi necessário construir um novo software
para capturar novos dados que não estavam disponíveis no início do projeto. A partir disso foi possível começar a
especificação e a codificação do projeto durante a etapa de implementação para finalmente ser possível obter os dados e avaliar
o desempenho deste agente. A partir dos dados obtidos é possível observar que a condução feita por um humano ainda é mais
eficiente para a redução do consumo de combustível. Ao final dos experimentos o agente apresentou 88,956% do tempo com
condução ótima enquanto o humano apresentou 90,528%. Entretanto, com relação ao conforto de condução (uso das folgas) a
diferença foi de apenas 0,03% entre o agente e o humano. Dessa forma, o agente se mostrou capaz de conduzir de maneira
reativa, o que é algo que não havia sido feito anteriormente utilizando o mínimo de modelagem matemática. A construção de
um agente reativo para a condução de trens se demonstra um desafio interessante, porém com o entendimento dos conceitos
necessários foi possível construir um agente com um desempenho interessante, comparável ao desempenho de um condutor
humano.
REFERÊNCIAS
Anaice, R. T. Estudo da Utilização de Agentes Autônomos para o Controle de Locomotivas. Curitiba. Pontifícia Universidade
Católica do Paraná – Relatório Final de Graduação,Pesquisa e Pós-Graduação, 2011.991.
Borges, A. P. Descoberta de Regras de Condução de Trens de Carga. Curitiba. Pontifícia Universidade Católica do Paraná –
Dissertação, 2009.
Cossetin, M. J. Integração de controle automático em um equipamento de simulação de locomotivas. Curitiba Pontifícia
Universidade Católica do Paraná – Relatório Final de Graduação, Pesquisa e Pós-Graduação,2011.
Russel,S. And Norvig. P. Artificial Inteligence: A Moderfn Approach, Prentice Hall, 2004.

63
UM APLICATIVO PARA O PROBLEMA DE CORTE DE BARRAS
UNIDIMENSIONAL
Cássia Larangeira Taborda Ribas, Neida Maria Patias Volpi.
Palavras-Chave: Pesquisa Operacional, Problema de corte unidimensional, Geração de colunas.
RESUMO:
Este é um estudo sobre o problema de corte que se baseia no Problema de Corte Unidimensional e utiliza técnicas de Geração
de Colunas, cuja teoria com maior repercussão e utilidade foi desenvolvida por Gilmore e Gomory em 1961 (Gilmore, P. &
Gomory R.: “A Linear Programming Approach to the Cutting Stock Problem”, 1961) e são consideradas até hoje eficazes.
Como o cenário real de uma empresa é instável e sujeito a alterações constantemente, considerou-se um problema comum para
tentar chegar mais próximo de determinada realidade escolhida. Tornando assim, possível a comparação com uma situação
real. Um aplicativo foi desenvolvido em MATLAB. Tal problema refere-se ao corte de peças maiores disponíveis em estoque,
em itens menores, visando atender a demanda e otimizar uma determinada função objetivo (Ex:minimizar quantidade de barras
utilizadas ou minimizar a perda total). Para a elaboração do aplicativo foram consideradas algumas restrições específicas para
o corte de bobinas de papel: (a). Número máximo de larguras em um padrão de corte, (b). Quantidade mínima de utilização de
um padrão, (c). Estoque máximo por item, perda considerada zero. Juntamente com essas informações, o Método de Geração
de Colunas foi inserido. Como este método trabalha com um subconjunto de padrões de corte, foi necessária também a
utilização do Problema da Mochila, como um subproblema. Com uma breve análise dos resultados, tem-se que a perda total
obtida pelo estudo real e a perda calculada pelo estudo realizado foram, respectivamente: 0.005% e 0.0006%. Tal diferença
pode parecer pequena quando aplicada em volumes pequenos, o que é um caso atípico. Os volumes são, constantemente,
grandes e esta diferença tem um importante significado. Sendo assim, o aplicativo criado não só atende as necessidades, como
melhora ainda mais os resultados, uma vez que a perda total analisada em determinado estudo teve uma significativa redução
REFERÊNCIAS
Gilmore, P. & Gomory R.: “A Linear Programming Approach to the Cutting Stock Problem”. Operations Research, Received
May, 1961.

64
COMPARAÇÃO ENTRE OS MÉTODOS DE INTEGRAÇÃO NUMÉRICA PARA
ESTIMAÇÃO DOS PARÂMETROS DE UM MODELO BINOMIAL COM
EFEITO ALEATÓRIO
Maurício Fernandes do Nascimento Junior, Bruna Isabelle Carpes Pereira, Wagner Hugo Bonat.
RESUMO:
Modelos Lineares Generalizados Mistos (MLGM) são uma classe de modelos que podem ser utilizados quando se possui mais
de uma medida em um mesmo indivíduo. Aplicações desta classe de modelos aparecem na análise de dados longitudinais, em
que determinada característica dos indivíduos são verificadas ao longo do tempo ou em estudos experimentais onde mais de
uma medida é tomada no mesmo bloco ou parcela. Esses modelos podem ser estimados com certa facilidade quando a
distribuição da variável resposta é Gaussiana (Verbeke and Molenberghs, 200), mas nos casos de respostas possuindo outras
distribuições a análise é mais complexa. Isso ocorre por que se faz necessário resolver integrais que não possuem solução
analítica (Diggle, Heagerty, LiangandZeger, 2002). A estimação nesses casos é feita com o uso de integração numérica. O
objetivo deste trabalho é comparar diferentes métodos de integração numérica, para a estimação dos parâmetros de um modelo
Binomial com intercepto aleatório. Para comparar a eficiência dos métodos de integração numérica, gerou-se uma amostra
aleatória de 20 repetições para 10 indivíduos com resposta binomial e uma covariável numérica X. Os parâmetros utilizados
foram um intercepto, 𝛽0 = 2 , um parâmetro para X, 𝛽1 = −4 , e um desvio-padrão para os efeitos aleatórios, 𝜎 = 0.5 .
Realizou-se a estimação com 8métodos de integração diferentes, método dos trapézios, método de Simpson, quadratura Gauss-
Hermite, Laplace, adaptativo Gauss-Hermite, Monte Carlo MC, Quase Monte Carlo – Sobol e Quase Monte Carlo-Halton. O
método que apresentou melhores resultados foi o método de quadratura Gauss-Hermite. Para investigar mais a fundo esse
método e compará-lo com os métodos Quase Monte Carlo, novas amostras com número de indivíduos maiores e número de
repetições menores foram geradas. Para essas amostras os métodos Quase Monte Carlo não apresentaram uma estimação
satisfatória. Usando poucos pontos de integração esses métodos não conseguiram estimar uma grande quantidade de vezes.
Mesmo aumentando a quantidade de pontos para mais de 300 houve várias amostras que não puderam ser estimadas. O método
de quadratura estimou todas as amostras usando poucos pontos de integração, 20, 50 e 70. Os intervalos de confiança
continham o real valor dos parâmetros em mais de 90% dos casos e o tempo de estimação é curto comparado aos métodos
Quase Monte Carlo. Entre esses três métodos de integração o que se mostrou mais fácil e mais eficiente foi o método da
quadratura Gauss-Hermite.
REFERÊNCIAS
Diggle, P.J.,Heagerty, P., Liang, K. Y., and Zeger,S.L., Analysis of Longitudinal Data, volume II. New York, 2002.
Verbeke, G., and Molenberghs, G., Linear Mixed Models for Longitudinal Data, New York, 2000.

65
ESTUDO COMPARATIVO DE DIFERENTES MÉTODOS NUMÉRICOS PARA A
DETERMINAÇÃO DE AUTOVALORES E AUTOVETORES
Guilherme Netto, Marcos Arndt.
Palavras-Chave: Autovalores, Autovetores, Métodos Numéricos.
RESUMO:
A determinação de autovalores e autovetores é necessária para muitos problemas de engenharia, como a análise dinâmica e a
análise de estabilidade de sistemas estruturais. Diversos métodos numéricos para solução destes problemas são encontrados na
literatura, com suas devidas particularidades, qualidades e defeitos. O objetivo deste trabalho é descrever e comparar os
principais métodos numéricos utilizados. As principais características de cada método são explicadas, sendo também discutida
a sua aplicabilidade para problemas descritos por diferentes tipos de matrizes (densas, esparsas, bandas, complexas). A
eficiência de cada método é avaliada sob os seguintes aspectos: precisão dos resultados, custo computacional (tempo de
processamento) e velocidade de convergência. Os principais métodos analisados são: Método da Potência Clássico (Hoffman,
2001), Iteração Inversa com deslocamento (inverse iteration with shift) (Datta, 1995), Método QR (Stoer and Bulirsch, 1983) e
Método de Arnoldi (Ainsworth Jr, 2003).
REFERÊNCIAS
Ainsworth Jr, G. O., Desenvolvimento de um algoritmo baseado no método de Arnoldi para solução de problemas de
autovalor generalizado, 2003. Tese (Doutorado), UFRJ.
Datta, B. N., Numerical linear algebra and applications. Brooks/Cole, 1995.
Hoffman, J. D., Methods for engineers and scientists, CRC Press, 2001.
Stoer, J., and Bulirsch, R., Introduction to numerical analysis. Springer, 1983.

66
ANÁLISE ESTATÍSTICA DA DISTRIBUIÇÃO DE RESÍDUOS URBANOS EM
TERRENOS BALDIOS NA CIDADE DE FAZENDA RIO GRANDE
Guilherme Parreira da Silva, Thiago de Farias Pires.
Palavras-Chave: Programação Estatística, Resíduos Urbanos, Testes Estatísticos, Gráficos Estatísticos.
RESUMO:
O objetivo geral deste trabalho é o estudo estatístico do destino de resíduos urbanos no município de Fazenda Rio
Grande, no estado do Paraná e tem como objetivos específicos:
I) O estudo e descrição das áreas com maior incidência de lixo;
II) Apontar os tipos de resíduos mais comuns em terrenos baldios na cidade;
III) A análise da percepção dos moradores em relação ao lixo nestas áreas.
Os dados foram cedidos pelo Laboratório de Estatística Aplicada da UFPR (LEA/UFPR) oriundos da base de
defesa de uma tese de doutorado do Setor de Ciências da Terra (no prelo). Estes traziam informações a respeito de
13 tipos de lixo (que posteriormente foram agrupados em quatro grandes categorias: domésticos e industriais,
orgânicos, perigosos e mistos) e suas respectivas coordenadas geográficas. Além disto, traziam informações
levantadas a respeito da incidência de insetos que transmitem doenças e problemas de saúde em habitações nas
proximidades dos focos de lixo. No presente trabalho foi realizada inferência estatística dos dados obtidos,
utilizando testes não paramétricos, como o Chi-Quadrado Simulado, Wilcoxon, Soma de Ranks de Kruskal-Wallis
e teste de correlação de postos de Spearman (Siegel, 1975). Para a realização dos testes, foi utilizado o software e
linguagem R dando ênfase na programação para geração de reportes automáticos (Ribeiro Jr, 2005), tornando ágil a
análise das informações. Grande parte dos resultados foi apresentada primeiramente em tabelas, posteriormente, os
resultados mais relevantes de forma gráfica. Ressalta-se o uso de grafos, metodologia gráfica amplamente utilizada
no campo da computação (Csárdi. G, 2012), aqui utilizada para verificar a relação entre os tipos de resíduos, além
de mapas, mostrando visualmente a distribuição dos resíduos urbanos no município. Esse estudo tem utilidade,
sobretudo no campo de engenharia ambiental e sanitária no gerenciamento de resíduos, podendo servir de base para
estratégias de atuação na área, além de servir como uma opção para o procedimento de análises estatísticas em
estudos semelhantes.
REFERÊNCIAS
Bussab, W.O.; Morettin, P.A. Estatística Básica. 5ª edição. Editora Saraiva. 2002
Csárdi. G.; Nepusz. T. R igraph Reference Manual. 2012. Disponível em: <http://igraph.sourceforge.net/doc/igraph-docs.pdf>
Último acesso em: 13/09/2012
Guimarães. Paulo Ricardo B. Notas de Aula: Estatística Não-paramétrica. 2011.
Ribeiro Jr, P. J. Introdução ao Ambiente Estatístico R. 2005. Disponível em:
<http://www.leg.ufpr.br/~paulojus/embrapa/Rembrapa/> Último acesso em: 13/09/2012
Siegel, S. Estatística Não-Paramétrica. Mc Graw-Hill, 1975.

67
ALGORITMO PARA MEDIÇÃO DE ERRO DE CIRCULARIDADE E
EXCENTRICIDADE E CONSTRUÇÃO DE GRÁFICO POLAR DE PERFIL DE
CIRCULARIDADE
Holisses Bellon. Palavras-Chave: Erro de circularidade, excentricidade, perfil de circularidade, metrologia dimensional avançada, UPR e filtro
gaussiano.
RESUMO:
O estudo da medição de circularidade é um dos ramos da metrologia dimensional avançada. O erro de circularidade e faixa que
contém o elemento geométrico medido entre dois círculos concêntricos. A diferença radial entre esses círculos nos dará o um
valor estimado para o erro de circularidade. Foram coletados pontos de um circularímetro da Taylor Robson e logo após foi
aplicado um algoritmo visando obter resultados semelhantes, devido à escassez literária sobre o assunto que geralmente se
concentra no processo de medição e não no processo matemático do software tive que inserir artifícios próprios para completar
tal algoritmo. Os resultados mostram-se bastante precisos sendo que obtivemos pequenos desvios na sétima casa decimal que
giravam em torno de duas unidades nesta respectiva casa. Com relação à excentricidade nossos dados foram precisos também
considerando o truncamento feito pelo software. Na geração do gráfico de perfil de circularidade quando comparado com o
software do circularímetro resulta numa semelhança gráfica que na comparação visual torna-se imperceptível qualquer
diferença. Utilizando um filtro gaussiano para o algoritmo foi possível a simulação de diferentes UPR para a transmissão dos
dados obtendo diferentes amplitudes de erro (rugosidade, ondulação e desvio de forma). Este trabalho ajudou a esclarecer
grande parte da matemática empregada pelos softwares de circularímetro o que possibilitará a obtenção de diversas simulações
para o processo de medição, bem como o melhor entendimento de seu processo o que possibilitará avanço no tratamento dos
dados, assim como o desenvolvimento de novas técnicas de medição.
REFERÊNCIAS
Muralikrishnan, Bala, and Raja Jay, Computational Surface and Roundness Metrology, 2009.
Meyer, E.S., Morrison, A.J., and Plummer, C.S., The finite element method: A good friend. Journal of Numerical Methods, .
Meyer, E.S., Morrison, A.J., and Plummer C.S., Finite differences and finite volumes. Two old friends. Journal of Numerical
Methods, 32:1223–1241, 1995b.
Zienkiewicz, O.C., and Taylor, R.L., The finite element method, volume II. McGraw Hill, 1991.

68
Sumário por primeiro autor
Ana Paula Kelm Soares, Ricardo Carvalho de Almeida. 21
André Luiz Daniel, Emílio G. F. Mercuri, Mildred B. Hecke. 7
André Luiz Emidio de Abreu, Anselmo Chaves Neto. 33
Bruna Arcie Polli, Michael Mannich, Tobias Bleninger. 17
Cássia Larangeira Taborda Ribas, Neida Maria Patias Volpi. 63
Cláudia Slongo, Marco André Argenta. 59
Conejo, P. D., Karas, E. W., Pedroso, L. G., Ribeiro, A. A., Sachine, M. 41
Diana M. Cancelli, Marcelo Chamecki, Nelson L Dias. 19
Dornelles Vissoto Junior, Nelson Dias. 23
Ednaldo de Oliveira Martins, Neida Maria Patias Volpi. 47
Emílio Graciliano Ferreira Mercuri, André Luiz Daniel, Roberto Dalledone Machado, Mildred Ballin Hecke. 9
Felipe Baptista Nishida, Thiago Antonini Alves. 60
Flaviane Peccin, Anselmo Chaves Neto. 37
Gerson Ulbricht, Moacir Manoel Rodrigues Junior, Adriana Kroenke, Neida M. Patias Volpi, Sander Joner. 35
Guilherme Augusto Pianezzer, Fábio André Negri Balbo, Eloy Kavisky, Liliana Madalena Gramani, Marcelo Rassy
Teixeira. 25
Guilherme Netto, Marcos Arndt. 65
Guilherme Parreira da Silva, Thiago de Farias Pires. 66
Guilherme Vinicyus Batista, Cassius Tadeu Scarpin, Gustavo Valentim Loch 53
Henrique Machado Kroetz, Jonathan da Maia Santos de Melo, Rodolfo Krul Tessari, Amacin Rodrigues Moreira. 61
Holisses Bellon. 67
Jean Eduardo Sebold, Luiz Alkimin de Lacerda, Jose Antonio Marques Carrer. 15
Leandro A. Nacif, Marcelo R. Bessa. 45
Letícia Maria Nocko, Eduardo Dell’Avanzi. 27
Marcelo Franco de Oliveira, Cynara de Lourdes da Nóbrega Cunha. 11
Marina Vargas, Marco A. Argenta. 55
Maurício Fernandes do Nascimento Junior, Bruna Isabelle Carpes Pereira, Wagner Hugo Bonat. 64
Pâmela de Assis Beltrani, Fabrício Enembreck. 62
Pedro Rochavetz de Lara Andrade,Cassius Tadeu Scarpin, Maria Teresinha Arns Steiner. 49
Ricardo Sommerfeld, Marco A. Argenta, Emílio Graciliano Ferreira Mercuri, Lucila Largura, Ana Paula de Oliveira
Gebert. 58
Roberto Pettres, Luiz Alkimin de Lacerda. 13
Sinvaldo R. Moreno, Eloy Kaviski. 43
Tatiane Cazarin da Silva, Ademir Alves Ribeiro, Gislaine Aparecida Periçaro. 39
Thaís Mariane Biembengut, Simone Aparecida Miloca, Neida Maria Patias Volpi. 51
Tuanny Brufati, Saulo Pomponet, Amin Bassrei. 29
Vanessa Ferreira Sehaber, Adriano Rodrigues de Melo, Jair Mendes Marques. 31