ESTUDO E APLICAÇÃO DA FERRAMENTA xPC TARGET EM SIMULÇÃO EM TEMPO REAL DE … · 2015-08-24 ·...
10
ESTUDO E APLICAÇÃO DA FERRAMENTA xPC TARGET EM SIMULÇÃO EM TEMPO REAL DE SISTEMAS DINÂMICOS Bruno Borges Tsuchiya 1 , Sergio Ribeiro Augusto 2 1 Aluno de Iniciação Científica da Escola de Engenharia Mauá (EEM/CEUN-IMT); 2 Professor da Escola de Engenharia Mauá (EEM/CEUN-IMT). Resumo. Este Trabalho tem como objetivo criar uma aplicação HIL (Hardware in the Loop) de um levitador magnético utilizando a ferramenta xPC Target da Mathworks, interfaceando- a com um microcontrolador executando uma lei de controle compatível, através de uma pla- ca de aquisição de sinais analógico/digital. Introdução Na atualidade as ferramentas de simulação em tempo de máquina (off-line) são larga- mente usadas, não somente com objetivo econômico, visando corte de custos em testes, mas também como uma ferramenta de pré-validação e análise das soluções propostas. Entretanto, como conseqüência do avanço tecnológico, cada vez mais a complexidade dos problemas e soluções têm aumentado, e com ela a necessidade de ferramentas de simulação mais precisas cujos resultados sejam mais próximos possíveis aos obtidos em plantas reais. A partir desta necessidade justifica-se o estudo e desenvolvimento de simulações em tempo real (real time simulation). Diferente dos simuladores off-line que executam em tempo de máquina (tempo de computação), os simuladores em tempo real levam em conta o tempo de resposta da planta real, fornecendo desta forma resultados mais próximos à realidade. Um método usado para a execução da simulação em tempo real é o HIL (Hardware in the Loop) (BÉLANGER; VENNE; PAQUIN, 2010). Dentre as plataformas HIL disponíveis no mercado escolheu-se a ferramenta xPC Target (xPC TARGET, 2013) do software Matlab que é capaz de gerar simulações em tempo real através de modelos do Simulink sem a neces- sidade de programação/codificação específica (por exemplo, C, C++, Java, entre outros), além de permitir acesso virtual à I/Os por meio de uma placa de aquisição de dados. Nesta plata- forma são utilizadas duas máquinas, designadas como: Target e Host. O primeiro simula uma planta em tempo real e o segundo realiza o controle dos parâmetros de simulação do primeiro e gerencia a obtenção dos resultados. Neste trabalho, tal método é aplicado na simulação de um sistema de levitação magnética (OLIVEIRA; COSTA; VARGAS, 1999), controlado ex- ternamente por uma unidade microprocessada. A Figura 1 ilustra a arquitetura utilizada onde DAC representa a placa de aquisição de dados usada para interface entre o controlador real e a planta simulada.
Transcript of ESTUDO E APLICAÇÃO DA FERRAMENTA xPC TARGET EM SIMULÇÃO EM TEMPO REAL DE … · 2015-08-24 ·...
ESTUDO E APLICACcedilAtildeO DA FERRAMENTA xPC TARGET EM SIMULCcedilAtildeO
EM TEMPO REAL DE SISTEMAS DINAcircMICOS
Bruno Borges Tsuchiya1 Sergio Ribeiro Augusto
2
1Aluno de Iniciaccedilatildeo Cientiacutefica da Escola de Engenharia Mauaacute (EEMCEUN-IMT)
2Professor da Escola de Engenharia Mauaacute (EEMCEUN-IMT)
Resumo Este Trabalho tem como objetivo criar uma aplicaccedilatildeo HIL (Hardware in the Loop)
de um levitador magneacutetico utilizando a ferramenta xPC Target da Mathworks interfaceando-
a com um microcontrolador executando uma lei de controle compatiacutevel atraveacutes de uma pla-
ca de aquisiccedilatildeo de sinais analoacutegicodigital
Introduccedilatildeo
Na atualidade as ferramentas de simulaccedilatildeo em tempo de maacutequina (off-line) satildeo larga-
mente usadas natildeo somente com objetivo econocircmico visando corte de custos em testes mas
tambeacutem como uma ferramenta de preacute-validaccedilatildeo e anaacutelise das soluccedilotildees propostas Entretanto
como consequumlecircncia do avanccedilo tecnoloacutegico cada vez mais a complexidade dos problemas e
soluccedilotildees tecircm aumentado e com ela a necessidade de ferramentas de simulaccedilatildeo mais precisas
cujos resultados sejam mais proacuteximos possiacuteveis aos obtidos em plantas reais
A partir desta necessidade justifica-se o estudo e desenvolvimento de simulaccedilotildees em
tempo real (real time simulation) Diferente dos simuladores off-line que executam em tempo
de maacutequina (tempo de computaccedilatildeo) os simuladores em tempo real levam em conta o tempo
de resposta da planta real fornecendo desta forma resultados mais proacuteximos agrave realidade
Um meacutetodo usado para a execuccedilatildeo da simulaccedilatildeo em tempo real eacute o HIL (Hardware in
the Loop) (BEacuteLANGER VENNE PAQUIN 2010) Dentre as plataformas HIL disponiacuteveis
no mercado escolheu-se a ferramenta xPC Target (xPC TARGET 2013) do software Matlab
que eacute capaz de gerar simulaccedilotildees em tempo real atraveacutes de modelos do Simulink sem a neces-
sidade de programaccedilatildeocodificaccedilatildeo especiacutefica (por exemplo C C++ Java entre outros) aleacutem
de permitir acesso virtual agrave IOs por meio de uma placa de aquisiccedilatildeo de dados Nesta plata-
forma satildeo utilizadas duas maacutequinas designadas como Target e Host O primeiro simula uma
planta em tempo real e o segundo realiza o controle dos paracircmetros de simulaccedilatildeo do primeiro
e gerencia a obtenccedilatildeo dos resultados Neste trabalho tal meacutetodo eacute aplicado na simulaccedilatildeo de
um sistema de levitaccedilatildeo magneacutetica (OLIVEIRA COSTA VARGAS 1999) controlado ex-
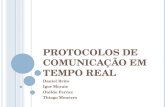
ternamente por uma unidade microprocessada A Figura 1 ilustra a arquitetura utilizada onde
DAC representa a placa de aquisiccedilatildeo de dados usada para interface entre o controlador real e a
planta simulada
Figura 1 - Esquema de desenvolvimento usando a ferramenta xPC Target
Como ponto inicial um modelo massa mola foi selecionado para os estudos com si-
mulador xPC Target devido a sua simplicidade de modelagem e comportamento
A equaccedilatildeo que descreve o comportamento do sistema massa-mola eacute dada por (OGA-
TA 2003)
onde F eacute a forccedila sobre a massa x a posiccedilatildeo da massa m k a constante elaacutestica da mola
e b o atrito viscoso entre a massa e superfiacutecie de deslizamento
Sendo F a entrada e x a saiacuteda do sistema podemos escrever
De forma a obter um sistema com tempo de acomodaccedilatildeo suficientemente pequeno pa-
ra um sinal de 50 Hz foram definidas as seguintes especificaccedilotildees de desempenho
Frequumlecircncia Natural 28999 rads-1
Coeficiente de Amortecimento 024366
resultando na escolha dos paracircmetros m = 00034 Kg b = 00017Nsm-1
k = 1 Nm
A partir das simulaccedilotildees do modelo massa-mola escolhido foram obtidos os resultados
mostrados na Figura 2 Para este sistema simples foram obtidos resultados compatiacuteveis entre o
modelo simulado usando a filosofia em tempo real (Figura 2 b) e usando simulaccedilatildeo offline
(Figura 2 a)
Figura 2 - Resultados da simulaccedilatildeo do sistema Massa Mola
Apoacutes estudo e anaacutelise do uso da ferramenta xPC Target como uma segunda etapa foi
feita a simulaccedilatildeo de um levitador magneacutetico usando a plataforma de desenvolvimento HIL A
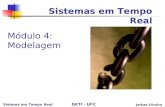
Figura 3 ilustra o levitador magneacutetico em estudo
Figura 3 - Esquema de um Levitador Magneacutetico
O sistema eacute composto por uma bobina enrolada com fio de cobre num nuacutecleo ferro-
magneacutetico (1) um sensor de posiccedilatildeo (2) uma interface de potecircncia para acionamento da bo-
bina um sistema de controle e uma esfera (3) ferromagneacutetica a ser levitada O sistema de
controle deve gerar uma corrente eleacutetrica para a bobina de acordo com a posiccedilatildeo da esfera de
maneira a criar uma forccedila para equilibrar o peso e assim mantecirc-la suspensa
A forccedila magneacutetica fmag que age sob o objeto levitado depende da corrente eleacutetrica i(t)
que flui atraveacutes da bobina do entreferro x(t) (distacircncia entre o eletroiacutematilde e o objeto) e da indu-
tacircncia L da bobina Tal forccedila pode ser calculada atraveacutes da seguinte expressatildeo (OLIVEIRA
COSTA VARGAS 1999)
Sabe-se que quanto menor o entreferro melhor o acoplamento magneacutetico Logo a in-
dutacircncia varia em funccedilatildeo de x L decresce com um comportamento logariacutetmico agrave medida que
o objeto se afasta do eletroiacutematilde ao passo que a indutacircncia eacute maacutexima para x = 0 Com o intuito
de representar tal comportamento utiliza-se a seguinte relaccedilatildeo (OLIVEIRA COSTA VAR-
GAS 1999)
Em que L(0) e L(infin) denotam a indutacircncia da bobina para x = 0 e xrarrinfin respectiva-
mente
A constante a eacute usada para modelar o comportamento de L(x)
Seja ∆L = L(0) - L(infin) Ao substituir (1) em (2) pode-se escrever
Por fim podemos modelar o sistema atraveacutes da segunda lei de Newton onde g eacute a
gravidade x eacute a posiccedilatildeo da esfera e m a sua massa
Como eacute possiacutevel observar a forccedila magneacutetica que age sobre a esfera apresenta um
comportamento natildeo linear Neste caso faz-se necessaacuterio o uso de teacutecnicas de linearizaccedilatildeo
para simplificaccedilatildeo do modelo A teacutecnica de linearizaccedilatildeo usada para este modelo eacute a seacuterie de
Taylor (OGATA 2003) Linearizando em torno dos pontos nominais e podemos escrever
Considerando
e definindo as variaacuteveis incrementais
sendo v(t) a tensatildeo na bobina e R a resistecircncia da mesma obtemos
Analisando o ponto de equiliacutebrio temos que neste ponto mg = -fmag sendo assim
1
Do circuito eleacutetrico da bobina do levitador temos
Para variaccedilotildees muito proacuteximas do ponto de equiliacutebrio o valor de L(x) eacute pequeno neste
caso
Descrevendo o sistema no espaccedilo de estados e definindo o vetor de estados como
temos
onde y(t) eacute a posiccedilatildeo incremental da esfera medida indiretamente pelo sensor de posi-
ccedilatildeo em torno do ponto de equiliacutebrio nominal 25V Os paracircmetros usados para simulaccedilatildeo
obtidos de um levitador real satildeo dados na Tabela 1(Romano AR 2010)
Tabela 1 - Paracircmetros do Levitador Magneacutetico real
Descriccedilatildeo Siacutembolo Valor[SI]
Massa da esfera m 0028 Kg
Resistecircncia da Bobina R 74 W
Indutacircncia da Bobina L 006 H
Variaccedilatildeo da Indutacircncia ∆L 00042 H
Corrente no ponto de equiliacutebrio 10 A
Posiccedilatildeo no ponto de equiliacutebrio 0005 m
1 Para um melhor anaacutelise do modelo preferiu-se deixar o sinal negativo de k1 na equaccedilatildeo para que se po
ssa ver sua influencia no sistema
Constante de comportamento de L(x) a 000377
Ganho do sensor de Posiccedilatildeo c 00015 Vm
Estabelecidos os paracircmetros de simulaccedilatildeo do sistema foi gerado um controlador do ti-
po avanccedilo de fase para o controle da posiccedilatildeo da esfera levitada O controlador implementado
eacute dado pela equaccedilatildeo
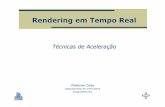
O lugar das raiacutezes do sistema eacute ilustrado na Figura 4
A partir da equaccedilatildeo do controlador e do modelo em espaccedilo de estados do levitador
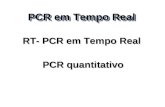
magneacutetico foi desenvolvido um modelo no Simulink do sistema completo onde em primeiro
estudo tanto o controlador quanto o modelo da planta foram simulados no computador Target
O modelo simulink desenvolvido eacute ilustrado na Figura 5 Nesta etapa apenas a realimentaccedilatildeo
realizada externamente O objetivo foi validar o funcionamento baacutesico do conjunto controla-
dor mais planta
(a)Sistema completo (b) planta simulada
Figura 4 - Lugar das Raiacutezes
Figura 5 - Modelo Simulink do sistema completo
Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Figura 1 - Esquema de desenvolvimento usando a ferramenta xPC Target
Como ponto inicial um modelo massa mola foi selecionado para os estudos com si-
mulador xPC Target devido a sua simplicidade de modelagem e comportamento
A equaccedilatildeo que descreve o comportamento do sistema massa-mola eacute dada por (OGA-
TA 2003)
onde F eacute a forccedila sobre a massa x a posiccedilatildeo da massa m k a constante elaacutestica da mola
e b o atrito viscoso entre a massa e superfiacutecie de deslizamento
Sendo F a entrada e x a saiacuteda do sistema podemos escrever
De forma a obter um sistema com tempo de acomodaccedilatildeo suficientemente pequeno pa-
ra um sinal de 50 Hz foram definidas as seguintes especificaccedilotildees de desempenho
Frequumlecircncia Natural 28999 rads-1
Coeficiente de Amortecimento 024366
resultando na escolha dos paracircmetros m = 00034 Kg b = 00017Nsm-1
k = 1 Nm
A partir das simulaccedilotildees do modelo massa-mola escolhido foram obtidos os resultados
mostrados na Figura 2 Para este sistema simples foram obtidos resultados compatiacuteveis entre o
modelo simulado usando a filosofia em tempo real (Figura 2 b) e usando simulaccedilatildeo offline
(Figura 2 a)
Figura 2 - Resultados da simulaccedilatildeo do sistema Massa Mola
Apoacutes estudo e anaacutelise do uso da ferramenta xPC Target como uma segunda etapa foi
feita a simulaccedilatildeo de um levitador magneacutetico usando a plataforma de desenvolvimento HIL A
Figura 3 ilustra o levitador magneacutetico em estudo
Figura 3 - Esquema de um Levitador Magneacutetico
O sistema eacute composto por uma bobina enrolada com fio de cobre num nuacutecleo ferro-
magneacutetico (1) um sensor de posiccedilatildeo (2) uma interface de potecircncia para acionamento da bo-
bina um sistema de controle e uma esfera (3) ferromagneacutetica a ser levitada O sistema de
controle deve gerar uma corrente eleacutetrica para a bobina de acordo com a posiccedilatildeo da esfera de
maneira a criar uma forccedila para equilibrar o peso e assim mantecirc-la suspensa
A forccedila magneacutetica fmag que age sob o objeto levitado depende da corrente eleacutetrica i(t)
que flui atraveacutes da bobina do entreferro x(t) (distacircncia entre o eletroiacutematilde e o objeto) e da indu-
tacircncia L da bobina Tal forccedila pode ser calculada atraveacutes da seguinte expressatildeo (OLIVEIRA
COSTA VARGAS 1999)
Sabe-se que quanto menor o entreferro melhor o acoplamento magneacutetico Logo a in-
dutacircncia varia em funccedilatildeo de x L decresce com um comportamento logariacutetmico agrave medida que
o objeto se afasta do eletroiacutematilde ao passo que a indutacircncia eacute maacutexima para x = 0 Com o intuito
de representar tal comportamento utiliza-se a seguinte relaccedilatildeo (OLIVEIRA COSTA VAR-
GAS 1999)
Em que L(0) e L(infin) denotam a indutacircncia da bobina para x = 0 e xrarrinfin respectiva-
mente
A constante a eacute usada para modelar o comportamento de L(x)
Seja ∆L = L(0) - L(infin) Ao substituir (1) em (2) pode-se escrever
Por fim podemos modelar o sistema atraveacutes da segunda lei de Newton onde g eacute a
gravidade x eacute a posiccedilatildeo da esfera e m a sua massa
Como eacute possiacutevel observar a forccedila magneacutetica que age sobre a esfera apresenta um
comportamento natildeo linear Neste caso faz-se necessaacuterio o uso de teacutecnicas de linearizaccedilatildeo
para simplificaccedilatildeo do modelo A teacutecnica de linearizaccedilatildeo usada para este modelo eacute a seacuterie de
Taylor (OGATA 2003) Linearizando em torno dos pontos nominais e podemos escrever
Considerando
e definindo as variaacuteveis incrementais
sendo v(t) a tensatildeo na bobina e R a resistecircncia da mesma obtemos
Analisando o ponto de equiliacutebrio temos que neste ponto mg = -fmag sendo assim
1
Do circuito eleacutetrico da bobina do levitador temos
Para variaccedilotildees muito proacuteximas do ponto de equiliacutebrio o valor de L(x) eacute pequeno neste
caso
Descrevendo o sistema no espaccedilo de estados e definindo o vetor de estados como
temos
onde y(t) eacute a posiccedilatildeo incremental da esfera medida indiretamente pelo sensor de posi-
ccedilatildeo em torno do ponto de equiliacutebrio nominal 25V Os paracircmetros usados para simulaccedilatildeo
obtidos de um levitador real satildeo dados na Tabela 1(Romano AR 2010)
Tabela 1 - Paracircmetros do Levitador Magneacutetico real
Descriccedilatildeo Siacutembolo Valor[SI]
Massa da esfera m 0028 Kg
Resistecircncia da Bobina R 74 W
Indutacircncia da Bobina L 006 H
Variaccedilatildeo da Indutacircncia ∆L 00042 H
Corrente no ponto de equiliacutebrio 10 A
Posiccedilatildeo no ponto de equiliacutebrio 0005 m
1 Para um melhor anaacutelise do modelo preferiu-se deixar o sinal negativo de k1 na equaccedilatildeo para que se po
ssa ver sua influencia no sistema
Constante de comportamento de L(x) a 000377
Ganho do sensor de Posiccedilatildeo c 00015 Vm
Estabelecidos os paracircmetros de simulaccedilatildeo do sistema foi gerado um controlador do ti-
po avanccedilo de fase para o controle da posiccedilatildeo da esfera levitada O controlador implementado
eacute dado pela equaccedilatildeo
O lugar das raiacutezes do sistema eacute ilustrado na Figura 4
A partir da equaccedilatildeo do controlador e do modelo em espaccedilo de estados do levitador
magneacutetico foi desenvolvido um modelo no Simulink do sistema completo onde em primeiro
estudo tanto o controlador quanto o modelo da planta foram simulados no computador Target
O modelo simulink desenvolvido eacute ilustrado na Figura 5 Nesta etapa apenas a realimentaccedilatildeo
realizada externamente O objetivo foi validar o funcionamento baacutesico do conjunto controla-
dor mais planta
(a)Sistema completo (b) planta simulada
Figura 4 - Lugar das Raiacutezes
Figura 5 - Modelo Simulink do sistema completo
Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Figura 2 - Resultados da simulaccedilatildeo do sistema Massa Mola
Apoacutes estudo e anaacutelise do uso da ferramenta xPC Target como uma segunda etapa foi
feita a simulaccedilatildeo de um levitador magneacutetico usando a plataforma de desenvolvimento HIL A
Figura 3 ilustra o levitador magneacutetico em estudo
Figura 3 - Esquema de um Levitador Magneacutetico
O sistema eacute composto por uma bobina enrolada com fio de cobre num nuacutecleo ferro-
magneacutetico (1) um sensor de posiccedilatildeo (2) uma interface de potecircncia para acionamento da bo-
bina um sistema de controle e uma esfera (3) ferromagneacutetica a ser levitada O sistema de
controle deve gerar uma corrente eleacutetrica para a bobina de acordo com a posiccedilatildeo da esfera de
maneira a criar uma forccedila para equilibrar o peso e assim mantecirc-la suspensa
A forccedila magneacutetica fmag que age sob o objeto levitado depende da corrente eleacutetrica i(t)
que flui atraveacutes da bobina do entreferro x(t) (distacircncia entre o eletroiacutematilde e o objeto) e da indu-
tacircncia L da bobina Tal forccedila pode ser calculada atraveacutes da seguinte expressatildeo (OLIVEIRA
COSTA VARGAS 1999)
Sabe-se que quanto menor o entreferro melhor o acoplamento magneacutetico Logo a in-
dutacircncia varia em funccedilatildeo de x L decresce com um comportamento logariacutetmico agrave medida que
o objeto se afasta do eletroiacutematilde ao passo que a indutacircncia eacute maacutexima para x = 0 Com o intuito
de representar tal comportamento utiliza-se a seguinte relaccedilatildeo (OLIVEIRA COSTA VAR-
GAS 1999)
Em que L(0) e L(infin) denotam a indutacircncia da bobina para x = 0 e xrarrinfin respectiva-
mente
A constante a eacute usada para modelar o comportamento de L(x)
Seja ∆L = L(0) - L(infin) Ao substituir (1) em (2) pode-se escrever
Por fim podemos modelar o sistema atraveacutes da segunda lei de Newton onde g eacute a
gravidade x eacute a posiccedilatildeo da esfera e m a sua massa
Como eacute possiacutevel observar a forccedila magneacutetica que age sobre a esfera apresenta um
comportamento natildeo linear Neste caso faz-se necessaacuterio o uso de teacutecnicas de linearizaccedilatildeo
para simplificaccedilatildeo do modelo A teacutecnica de linearizaccedilatildeo usada para este modelo eacute a seacuterie de
Taylor (OGATA 2003) Linearizando em torno dos pontos nominais e podemos escrever
Considerando
e definindo as variaacuteveis incrementais
sendo v(t) a tensatildeo na bobina e R a resistecircncia da mesma obtemos
Analisando o ponto de equiliacutebrio temos que neste ponto mg = -fmag sendo assim
1
Do circuito eleacutetrico da bobina do levitador temos
Para variaccedilotildees muito proacuteximas do ponto de equiliacutebrio o valor de L(x) eacute pequeno neste
caso
Descrevendo o sistema no espaccedilo de estados e definindo o vetor de estados como
temos
onde y(t) eacute a posiccedilatildeo incremental da esfera medida indiretamente pelo sensor de posi-
ccedilatildeo em torno do ponto de equiliacutebrio nominal 25V Os paracircmetros usados para simulaccedilatildeo
obtidos de um levitador real satildeo dados na Tabela 1(Romano AR 2010)
Tabela 1 - Paracircmetros do Levitador Magneacutetico real
Descriccedilatildeo Siacutembolo Valor[SI]
Massa da esfera m 0028 Kg
Resistecircncia da Bobina R 74 W
Indutacircncia da Bobina L 006 H
Variaccedilatildeo da Indutacircncia ∆L 00042 H
Corrente no ponto de equiliacutebrio 10 A
Posiccedilatildeo no ponto de equiliacutebrio 0005 m
1 Para um melhor anaacutelise do modelo preferiu-se deixar o sinal negativo de k1 na equaccedilatildeo para que se po
ssa ver sua influencia no sistema
Constante de comportamento de L(x) a 000377
Ganho do sensor de Posiccedilatildeo c 00015 Vm
Estabelecidos os paracircmetros de simulaccedilatildeo do sistema foi gerado um controlador do ti-
po avanccedilo de fase para o controle da posiccedilatildeo da esfera levitada O controlador implementado
eacute dado pela equaccedilatildeo
O lugar das raiacutezes do sistema eacute ilustrado na Figura 4
A partir da equaccedilatildeo do controlador e do modelo em espaccedilo de estados do levitador
magneacutetico foi desenvolvido um modelo no Simulink do sistema completo onde em primeiro
estudo tanto o controlador quanto o modelo da planta foram simulados no computador Target
O modelo simulink desenvolvido eacute ilustrado na Figura 5 Nesta etapa apenas a realimentaccedilatildeo
realizada externamente O objetivo foi validar o funcionamento baacutesico do conjunto controla-
dor mais planta
(a)Sistema completo (b) planta simulada
Figura 4 - Lugar das Raiacutezes
Figura 5 - Modelo Simulink do sistema completo
Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Sabe-se que quanto menor o entreferro melhor o acoplamento magneacutetico Logo a in-
dutacircncia varia em funccedilatildeo de x L decresce com um comportamento logariacutetmico agrave medida que
o objeto se afasta do eletroiacutematilde ao passo que a indutacircncia eacute maacutexima para x = 0 Com o intuito
de representar tal comportamento utiliza-se a seguinte relaccedilatildeo (OLIVEIRA COSTA VAR-
GAS 1999)
Em que L(0) e L(infin) denotam a indutacircncia da bobina para x = 0 e xrarrinfin respectiva-
mente
A constante a eacute usada para modelar o comportamento de L(x)
Seja ∆L = L(0) - L(infin) Ao substituir (1) em (2) pode-se escrever
Por fim podemos modelar o sistema atraveacutes da segunda lei de Newton onde g eacute a
gravidade x eacute a posiccedilatildeo da esfera e m a sua massa
Como eacute possiacutevel observar a forccedila magneacutetica que age sobre a esfera apresenta um
comportamento natildeo linear Neste caso faz-se necessaacuterio o uso de teacutecnicas de linearizaccedilatildeo
para simplificaccedilatildeo do modelo A teacutecnica de linearizaccedilatildeo usada para este modelo eacute a seacuterie de
Taylor (OGATA 2003) Linearizando em torno dos pontos nominais e podemos escrever
Considerando
e definindo as variaacuteveis incrementais
sendo v(t) a tensatildeo na bobina e R a resistecircncia da mesma obtemos
Analisando o ponto de equiliacutebrio temos que neste ponto mg = -fmag sendo assim
1
Do circuito eleacutetrico da bobina do levitador temos
Para variaccedilotildees muito proacuteximas do ponto de equiliacutebrio o valor de L(x) eacute pequeno neste
caso
Descrevendo o sistema no espaccedilo de estados e definindo o vetor de estados como
temos
onde y(t) eacute a posiccedilatildeo incremental da esfera medida indiretamente pelo sensor de posi-
ccedilatildeo em torno do ponto de equiliacutebrio nominal 25V Os paracircmetros usados para simulaccedilatildeo
obtidos de um levitador real satildeo dados na Tabela 1(Romano AR 2010)
Tabela 1 - Paracircmetros do Levitador Magneacutetico real
Descriccedilatildeo Siacutembolo Valor[SI]
Massa da esfera m 0028 Kg
Resistecircncia da Bobina R 74 W
Indutacircncia da Bobina L 006 H
Variaccedilatildeo da Indutacircncia ∆L 00042 H
Corrente no ponto de equiliacutebrio 10 A
Posiccedilatildeo no ponto de equiliacutebrio 0005 m
1 Para um melhor anaacutelise do modelo preferiu-se deixar o sinal negativo de k1 na equaccedilatildeo para que se po
ssa ver sua influencia no sistema
Constante de comportamento de L(x) a 000377
Ganho do sensor de Posiccedilatildeo c 00015 Vm
Estabelecidos os paracircmetros de simulaccedilatildeo do sistema foi gerado um controlador do ti-
po avanccedilo de fase para o controle da posiccedilatildeo da esfera levitada O controlador implementado
eacute dado pela equaccedilatildeo
O lugar das raiacutezes do sistema eacute ilustrado na Figura 4
A partir da equaccedilatildeo do controlador e do modelo em espaccedilo de estados do levitador
magneacutetico foi desenvolvido um modelo no Simulink do sistema completo onde em primeiro
estudo tanto o controlador quanto o modelo da planta foram simulados no computador Target
O modelo simulink desenvolvido eacute ilustrado na Figura 5 Nesta etapa apenas a realimentaccedilatildeo
realizada externamente O objetivo foi validar o funcionamento baacutesico do conjunto controla-
dor mais planta
(a)Sistema completo (b) planta simulada
Figura 4 - Lugar das Raiacutezes
Figura 5 - Modelo Simulink do sistema completo
Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

sendo v(t) a tensatildeo na bobina e R a resistecircncia da mesma obtemos
Analisando o ponto de equiliacutebrio temos que neste ponto mg = -fmag sendo assim
1
Do circuito eleacutetrico da bobina do levitador temos
Para variaccedilotildees muito proacuteximas do ponto de equiliacutebrio o valor de L(x) eacute pequeno neste
caso
Descrevendo o sistema no espaccedilo de estados e definindo o vetor de estados como
temos
onde y(t) eacute a posiccedilatildeo incremental da esfera medida indiretamente pelo sensor de posi-
ccedilatildeo em torno do ponto de equiliacutebrio nominal 25V Os paracircmetros usados para simulaccedilatildeo
obtidos de um levitador real satildeo dados na Tabela 1(Romano AR 2010)
Tabela 1 - Paracircmetros do Levitador Magneacutetico real
Descriccedilatildeo Siacutembolo Valor[SI]
Massa da esfera m 0028 Kg
Resistecircncia da Bobina R 74 W
Indutacircncia da Bobina L 006 H
Variaccedilatildeo da Indutacircncia ∆L 00042 H
Corrente no ponto de equiliacutebrio 10 A
Posiccedilatildeo no ponto de equiliacutebrio 0005 m
1 Para um melhor anaacutelise do modelo preferiu-se deixar o sinal negativo de k1 na equaccedilatildeo para que se po
ssa ver sua influencia no sistema
Constante de comportamento de L(x) a 000377
Ganho do sensor de Posiccedilatildeo c 00015 Vm
Estabelecidos os paracircmetros de simulaccedilatildeo do sistema foi gerado um controlador do ti-
po avanccedilo de fase para o controle da posiccedilatildeo da esfera levitada O controlador implementado
eacute dado pela equaccedilatildeo
O lugar das raiacutezes do sistema eacute ilustrado na Figura 4
A partir da equaccedilatildeo do controlador e do modelo em espaccedilo de estados do levitador
magneacutetico foi desenvolvido um modelo no Simulink do sistema completo onde em primeiro
estudo tanto o controlador quanto o modelo da planta foram simulados no computador Target
O modelo simulink desenvolvido eacute ilustrado na Figura 5 Nesta etapa apenas a realimentaccedilatildeo
realizada externamente O objetivo foi validar o funcionamento baacutesico do conjunto controla-
dor mais planta
(a)Sistema completo (b) planta simulada
Figura 4 - Lugar das Raiacutezes
Figura 5 - Modelo Simulink do sistema completo
Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Constante de comportamento de L(x) a 000377
Ganho do sensor de Posiccedilatildeo c 00015 Vm
Estabelecidos os paracircmetros de simulaccedilatildeo do sistema foi gerado um controlador do ti-
po avanccedilo de fase para o controle da posiccedilatildeo da esfera levitada O controlador implementado
eacute dado pela equaccedilatildeo
O lugar das raiacutezes do sistema eacute ilustrado na Figura 4
A partir da equaccedilatildeo do controlador e do modelo em espaccedilo de estados do levitador
magneacutetico foi desenvolvido um modelo no Simulink do sistema completo onde em primeiro
estudo tanto o controlador quanto o modelo da planta foram simulados no computador Target
O modelo simulink desenvolvido eacute ilustrado na Figura 5 Nesta etapa apenas a realimentaccedilatildeo
realizada externamente O objetivo foi validar o funcionamento baacutesico do conjunto controla-
dor mais planta
(a)Sistema completo (b) planta simulada
Figura 4 - Lugar das Raiacutezes
Figura 5 - Modelo Simulink do sistema completo
Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Resultados e Discussatildeo
Usando a topologia da Figura 5 sendo v(t) a tensatildeo na bobina ou seja somado ao
valor de equiliacutebrio (74V) obteacutem-se o graacutefico da Figura 6 A Figura 6a mostra a posiccedilatildeo da
esfera ao longo do tempo (y(t)+25V) em funccedilatildeo da tensatildeo v(t) aplicada e indicada na Figura
6b Uma anaacutelise qualitativa da Figura 6 mostra que o controlador manteacutem a esfera em suspen-
satildeo
Tendo em vista o objetivo de realizar uma simulaccedilatildeo na qual o controle seja embarca-
do em um controlador digital externo o compensador foi discretizado usando a Transformada
Z (OGATA 1999) com taxa de amostragem de 0001 segundos resultando
(a) - Sensor de posiccedilatildeo da esfera
(b) - Tensatildeo na bobina v(t)
Figura 6 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
Usando um microcontrolador PIC18F452 da Microchip (PIC18F452 2013) como con-
trolador e com a planta do levitador embarcada no computador Target o sistema pocircde ser
simulado em tempo real usado a filosofia HIL (Figura 7) com a interface entre a planta e o
controlador externo realizada por um placa PCI DAC 6251 (M SERIES 2013) da National
Instruments A plataforma xPC Target permite a monitoraccedilatildeo dos sinais atraveacutes de osciloscoacute-
pios virtuais Os resultados obtidos para a posiccedilatildeo medida da esfera pelo sensor de posiccedilatildeo
(y(t) +25V) e da saiacuteda do controlador (v(t)) satildeo ilustrados na Figura 8 onde o controlador real
manteve a esfera em equiliacutebrio A Figura 9 ilustra a bancada usada para teste A simulaccedilatildeo
obtida usado HIL permitiu uma validaccedilatildeo mais realiacutestica do controlador projetado
Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Uma levitador com a caracteriacutestica da Tabela 1 estava disponiacutevel (Figura 10) e a lei
controle tambeacutem equilibrou a esfera no levitador real
A arquitetura HIL estudada permite que controladores reais sejam avaliados sem a ne-
cessidade de se ter um planta fiacutesica disponiacutevel permitindo testes mais assertivos sob condi-
ccedilotildees diversas incluindo condiccedilotildees de falha
Figura 7 - Resultados da simulaccedilatildeo do sistema Levitador Magneacutetico
(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

(a) - Sensor de posiccedilatildeo com controlador externo
(b) - Tensatildeo na bobina v(t) com controlador externo
Figura 8 - Resultados da simulaccedilatildeo do sistema Levitador Magneacuteticos com controle embarcado
Figura 9 - Interfaceamento da planta simulada com o controle embarcado atraveacutes da
DAQ 6251
Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013

Figura 10 - Foto do levitador real
Conclusotildees
Estabeleceu-se uma arquitetura HIL baseada no aplicativo xPC Target para simulaccedilatildeo
e controle de plantas dinacircmicas voltada para o desenvolvimento de sistemas embarcados Tal
abordagem permite a simulaccedilatildeo de vaacuterias leis de controle sem a necessidade de uma planta
fiacutesica contribuindo para o estudo e desenvolvimento de teacutecnicas de controle e simulaccedilatildeo
Como planta alvo usou-se um sistema de levitaccedilatildeo magneacutetica tipicamente instaacutevel obtendo-
se resultados satisfatoacuterios e possibilitando o teste de controladores reais sem se ter a planta
disponiacutevel
Um Tutorial sobre a utilizaccedilatildeo e configuraccedilatildeo do aplicativo xPC Target foi tambeacutem
desenvolvido como resultado deste trabalho visando desenvolvimento de experimentos na
aacuterea de controle e simulaccedilatildeo em cursos de graduaccedilatildeo em Engenharia Eleacutetrica O desenvolvi-
mento de um modelo natildeo linear do levitador tambeacutem estaacute em andamento
Referecircncias Bibliograacuteficas
BEacuteLANGER J VENNE P PAQUIN J N The What Where and Why of Real-Time Sim-
ulation Planet RT 2010
M SERIES USERrsquoS GUIDE National Instruments Disponiacutevel emlt
httpsinenicomnipscdsgt Acesso em 25032013
OGATA Katsuhiko Engenharia de Controle Moderno 4 ed Rio de Janeiro Prentice Hall
2007
OLIVEIRA Vilma A COSTA Eduardo F VARGAS Jerson B Digital Implementation of
a Magnetic Suspension Control System for Laboratory Experiments Education IEEE
Transactions on v 42 n 4 p 315-322 1999
PIC18F452 Microchip 2008 Disponiacutevel em lthttpww1microchipcomgt Acesso em
18082013
Romano RA Levitador Magneacutetico Nota Teacutecnica Satildeo Caetano do Sul CEUN-IMT2010
xPC TARGET USERrsquoS GUIDE The Mathworks Inc Natick MA v 5 1998 Disponiacutevel
em lthttpwwwmathworkscomgt Acesso em 13042013