Engenharia de Sistemas de Controle - UnB | FT | ENE
25
Capítulo 1 Introdução
Transcript of Engenharia de Sistemas de Controle - UnB | FT | ENE
Capítulo 1
Introdução
Capítulo 1: Introdução
2Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Fig. 1.1Descrição simplificada deum sistema de controle
Entrada; estímulo
Resposta desejada
Sistemade controle
Saída; resposta
Resposta real
Capítulo 1: Introdução
3Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
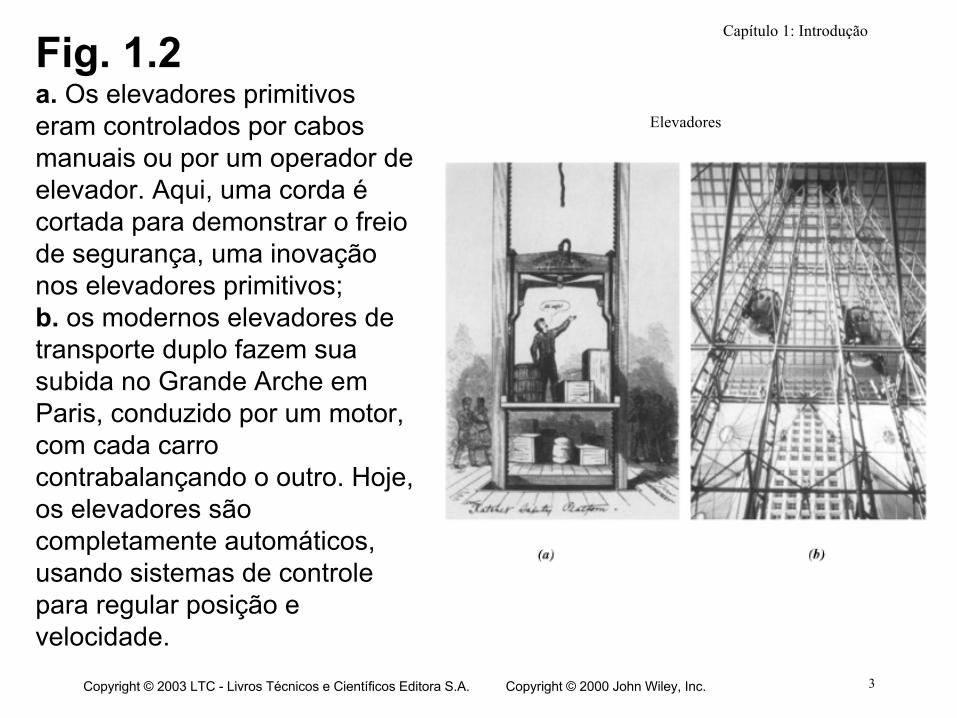
Elevadores
Fig. 1.2a. Os elevadores primitivoseram controlados por cabosmanuais ou por um operador deelevador. Aqui, uma corda écortada para demonstrar o freiode segurança, uma inovaçãonos elevadores primitivos;b. os modernos elevadores detransporte duplo fazem suasubida no Grande Arche emParis, conduzido por um motor,com cada carrocontrabalançando o outro. Hoje,os elevadores sãocompletamente automáticos,usando sistemas de controlepara regular posição evelocidade.
Capítulo 1: Introdução
4Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Fotografia © Hank Morgan/Rainbow/PNI.
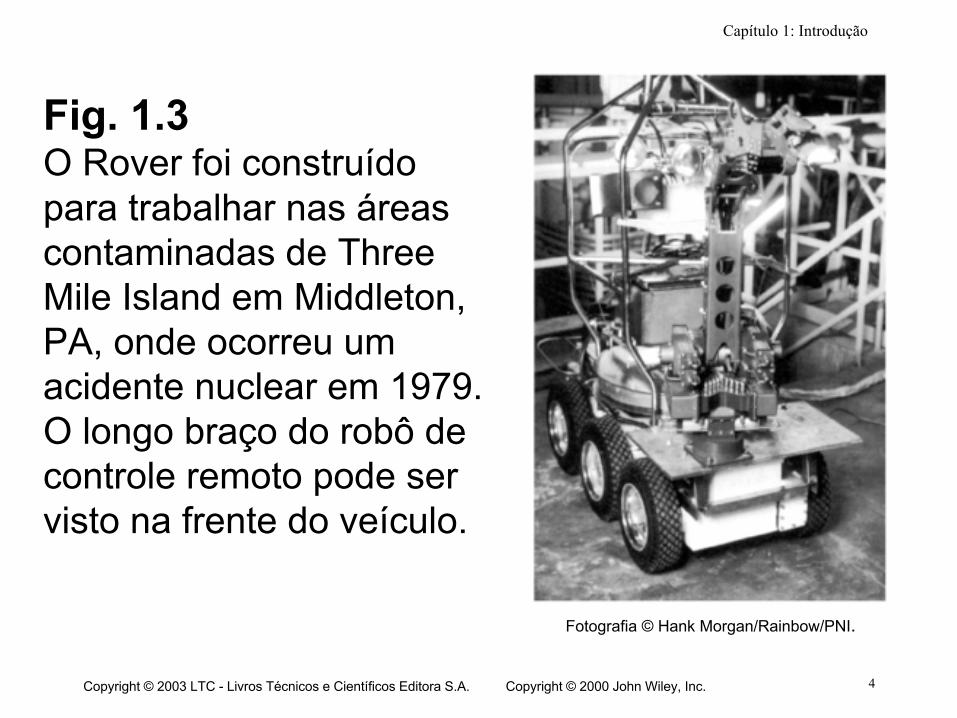
Fig. 1.3O Rover foi construídopara trabalhar nas áreascontaminadas de ThreeMile Island em Middleton,PA, onde ocorreu umacidente nuclear em 1979.O longo braço do robô decontrole remoto pode servisto na frente do veículo.
Capítulo 1: Introdução
5Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
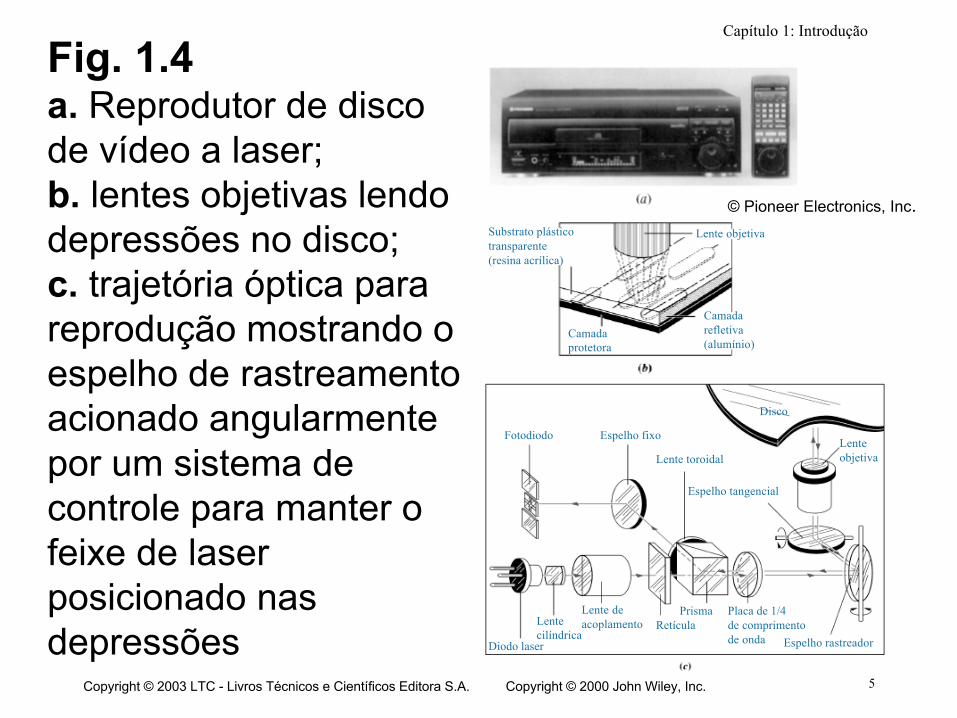
Substrato plásticotransparente(resina acrílica)
Lente objetiva
Camadaprotetora
Camadarefletiva(alumínio)
Fotodiodo Espelho fixo
Lente toroidal
Disco
Lenteobjetiva
Espelho tangencial
Diodo laser
Lente cilíndrica
Lente deacoplamento Retícula
Prisma Placa de 1/4 de comprimentode onda Espelho rastreador
© Pioneer Electronics, Inc.
Fig. 1.4a. Reprodutor de discode vídeo a laser;b. lentes objetivas lendodepressões no disco;c. trajetória óptica parareprodução mostrando oespelho de rastreamentoacionado angularmentepor um sistema decontrole para manter ofeixe de laserposicionado nasdepressões
Capítulo 1: Introdução
6Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
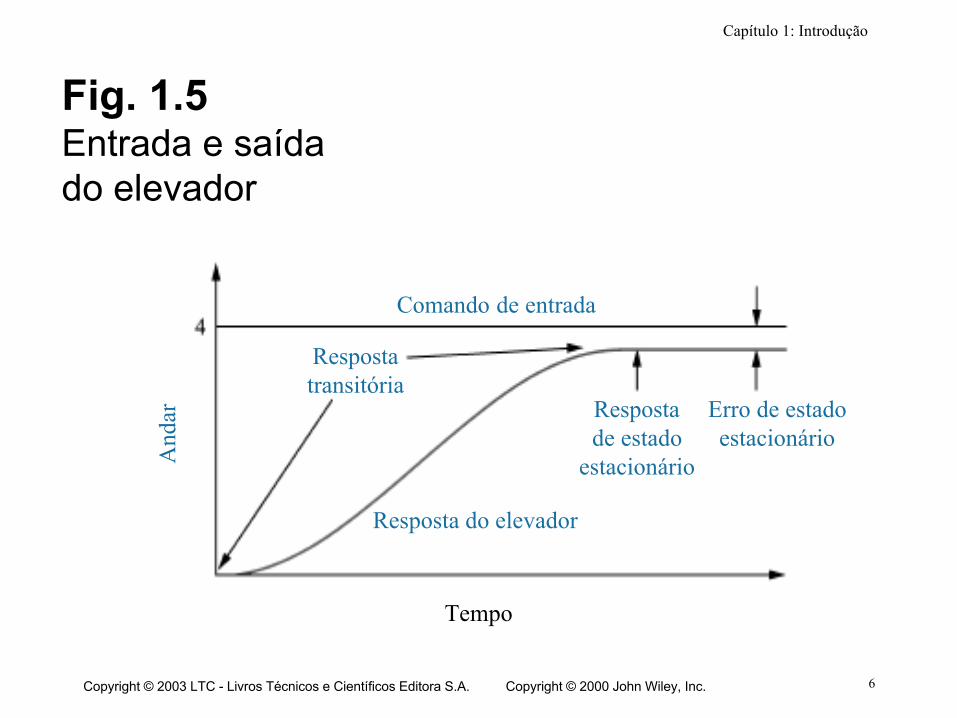
Comando de entrada
And
ar
Respostatransitória
Resposta do elevador
Erro de estadoestacionário
Respostade estado
estacionário
Tempo
Fig. 1.5Entrada e saídado elevador
Capítulo 1: Introdução
7Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
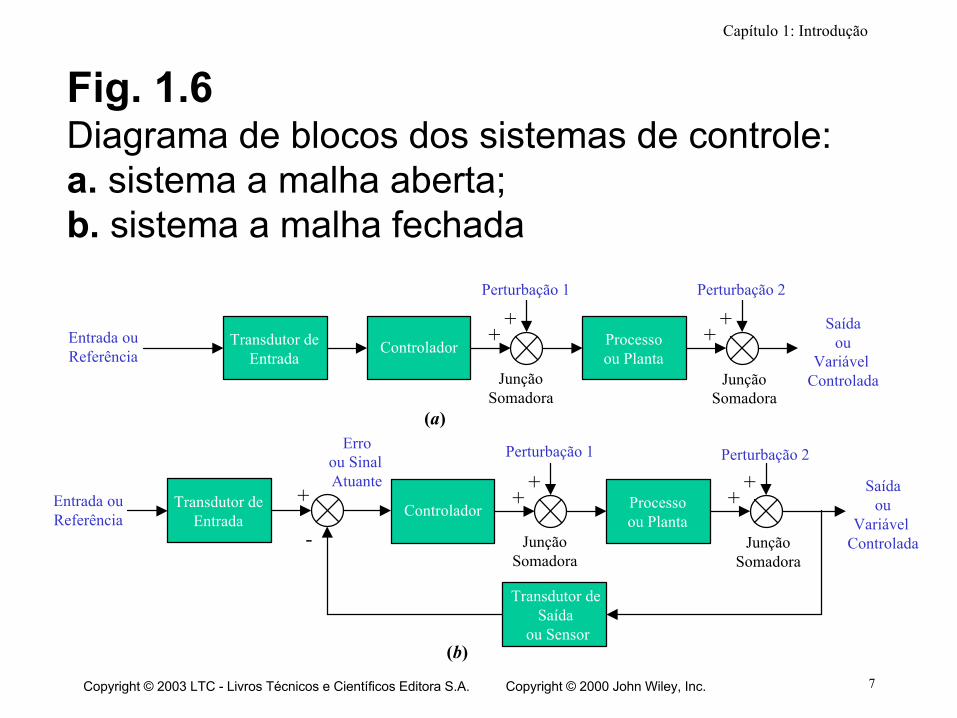
Transdutor deEntrada
Entrada ouReferência
JunçãoSomadora
++
Processoou Planta
++
JunçãoSomadora
Controlador
Perturbação 1 Perturbação 2
(a)
Saídaou
Variável Controlada
Transdutor deEntrada
Entrada ouReferência
JunçãoSomadora
++
Processoou Planta
++
JunçãoSomadora
Perturbação 1 Perturbação 2
(b)
Saídaou
Variável Controlada
+
-
Controlador
Transdutor de Saída
ou Sensor
Erroou Sinal Atuante
Fig. 1.6Diagrama de blocos dos sistemas de controle:a. sistema a malha aberta;b. sistema a malha fechada
Capítulo 1: Introdução
8Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
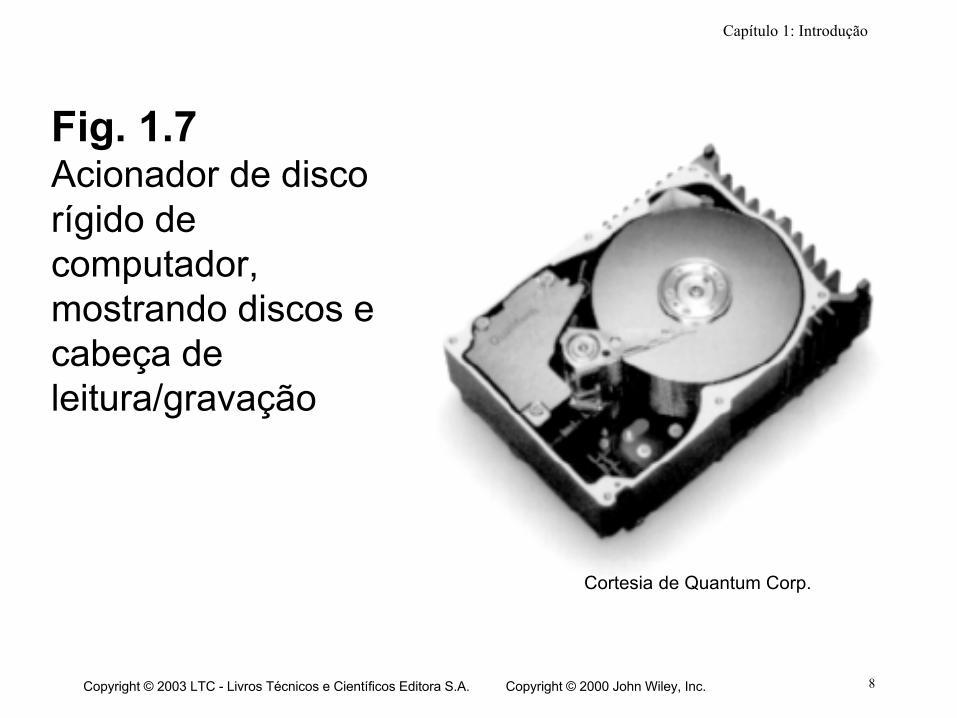
Cortesia de Quantum Corp.
Fig. 1.7Acionador de discorígido decomputador,mostrando discos ecabeça deleitura/gravação
Capítulo 1: Introdução
9Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Fig. 1.8A procura por vidaextraterrena está sendorealizada com antenasde rádio como amostrada aqui. Umaantena de rádio é umexemplo de sistema comcontroles de posição.
Capítulo 1: Introdução
10Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Potenciômetro
Ângulo deazimute de
entrada desejado
Potenciômetro
Ângulo deazimute de
entrada desejado
Antena
Antena
PotenciômetroMotor
Ângulo deazimute de
saída
Ângulo de azimute de saída
Amplificador diferencial eamplificador de potência
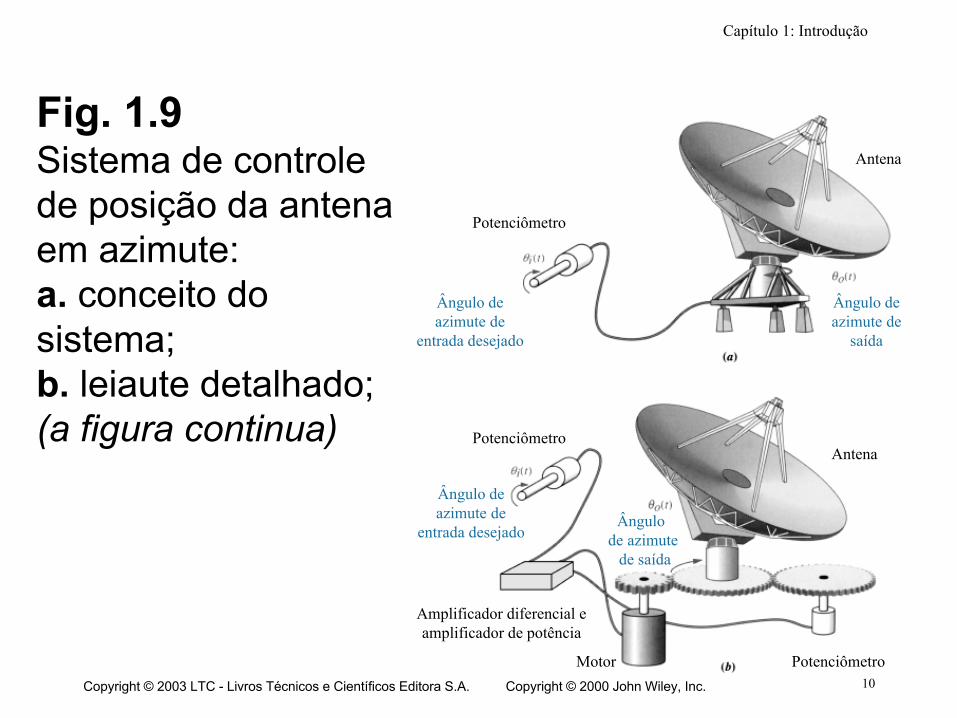
Fig. 1.9Sistema de controlede posição da antenaem azimute:a. conceito dosistema;b. leiaute detalhado;(a figura continua)
Capítulo 1: Introdução
11Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Potenciômetro
Amplificadores
Potenciômetro
Potenciômetro
Potenciômetro
Motor
Resistênciada armadura
Armadura
Campoconstante
Engrenagem
Engrenagem
EngrenagemInércia
Amortecimentoviscoso
Amplificadordiferencial
e depotência
K
Transdutorde entrada
Sensor(transdutor de saída)
Entradaangular
Tensãoproporcional
àentrada
Junçãode adição
Erroou
Sinalatuante
Controlador
Plantaou
Processo
Saída angular
Tensãoproporcional
à saída
Amplific.de sinal
e depotência
Motor,carga
e engre-nagens
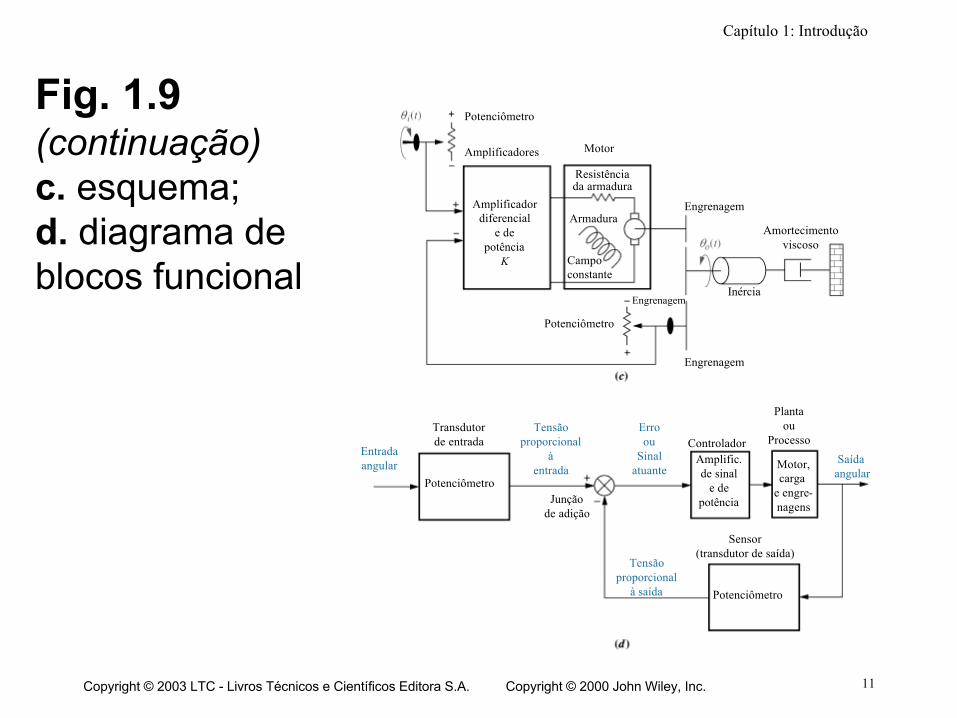
Fig. 1.9(continuação)c. esquema;d. diagrama deblocos funcional
Capítulo 1: Introdução
12Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Saída comganho alto
Saída comganho baixo
EntradaR
espo
sta
Tempo
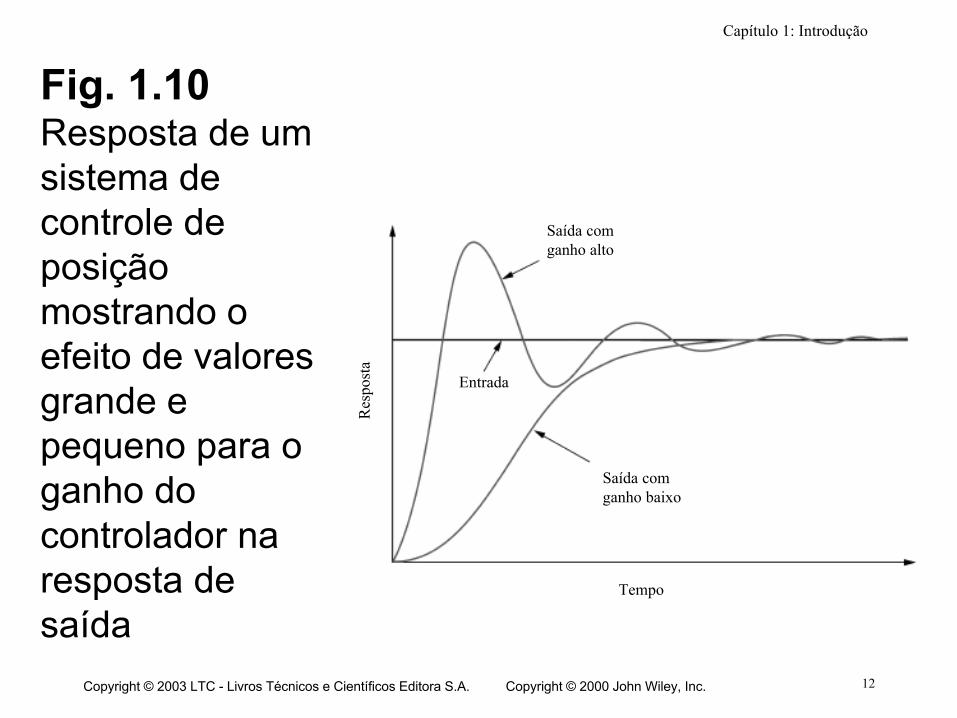
Fig. 1.10Resposta de umsistema decontrole deposiçãomostrando oefeito de valoresgrande epequeno para oganho docontrolador naresposta desaída
Capítulo 1: Introdução
13Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
Determine umsistema
físico e asespecificações
a partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, um
diagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduza
o diagrama deblocos em umúnico blocoou sistema a
malha fechada
Analise,projete e
teste para verque requisitos
e especificaçõessão compatíveis
Análogico:Digital:
Capítulo 1 Capítulos 2, 3Capítulo 13
Capítulo 5Capítulo 13
Capítulos 4, 6-12Capítulo 13
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
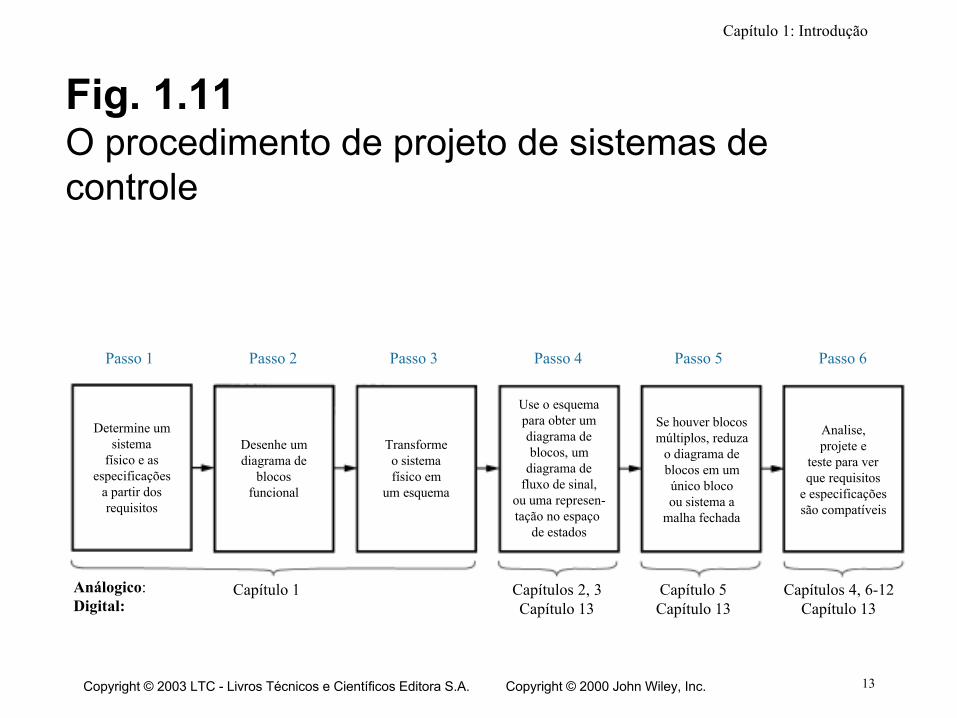
Fig. 1.11O procedimento de projeto de sistemas decontrole
Capítulo 1: Introdução
14Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
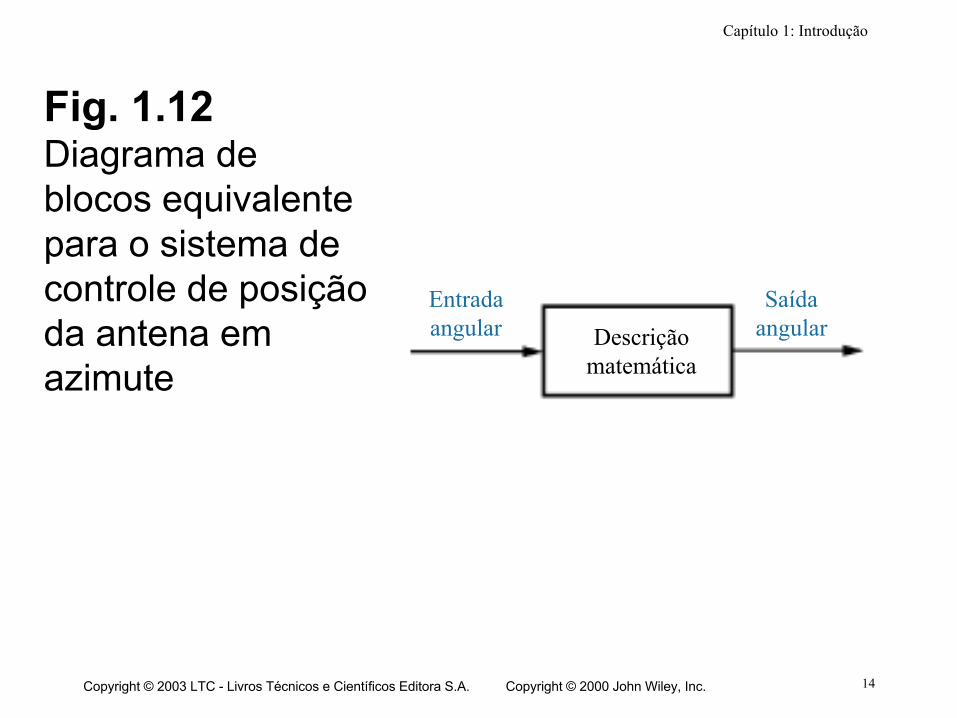
Descriçãomatemática
Entradaangular
Saídaangular
Fig. 1.12Diagrama deblocos equivalentepara o sistema decontrole de posiçãoda antena emazimute
Capítulo 1: Introdução
15Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
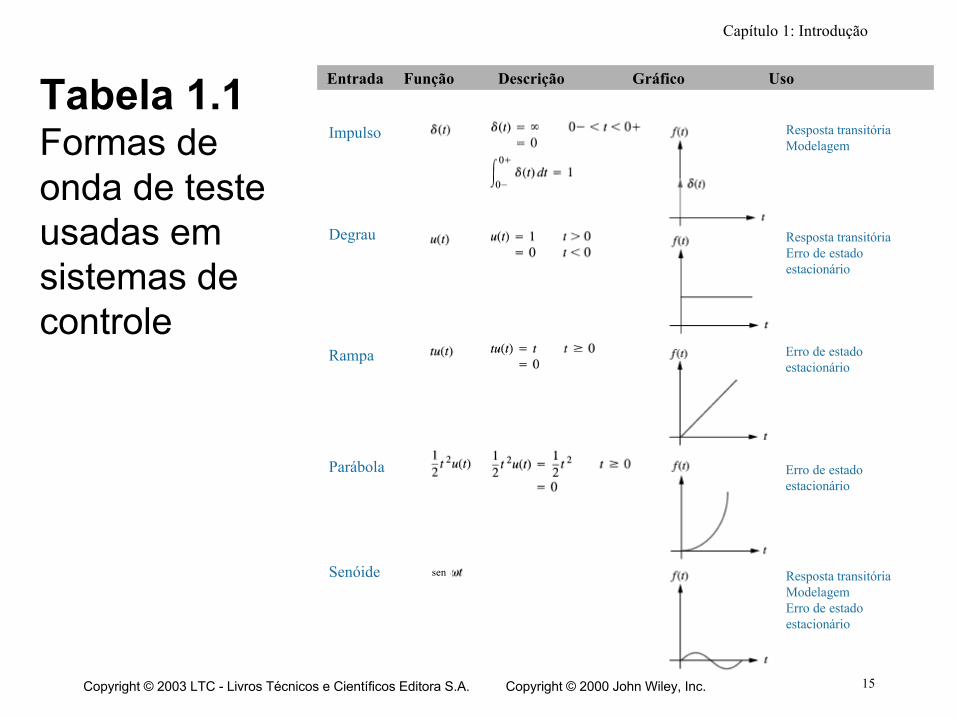
Tabela 1.1Formas deonda de testeusadas emsistemas decontrole
Impulso
Degrau
Rampa
Parábola
Senóide
Resposta transitóriaModelagem
Resposta transitóriaErro de estadoestacionário
sen
Erro de estadoestacionário
Erro de estadoestacionário
Resposta transitóriaModelagemErro de estado estacionário
Entrada Função Descrição Gráfico Uso
Capítulo 1: Introdução
16Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
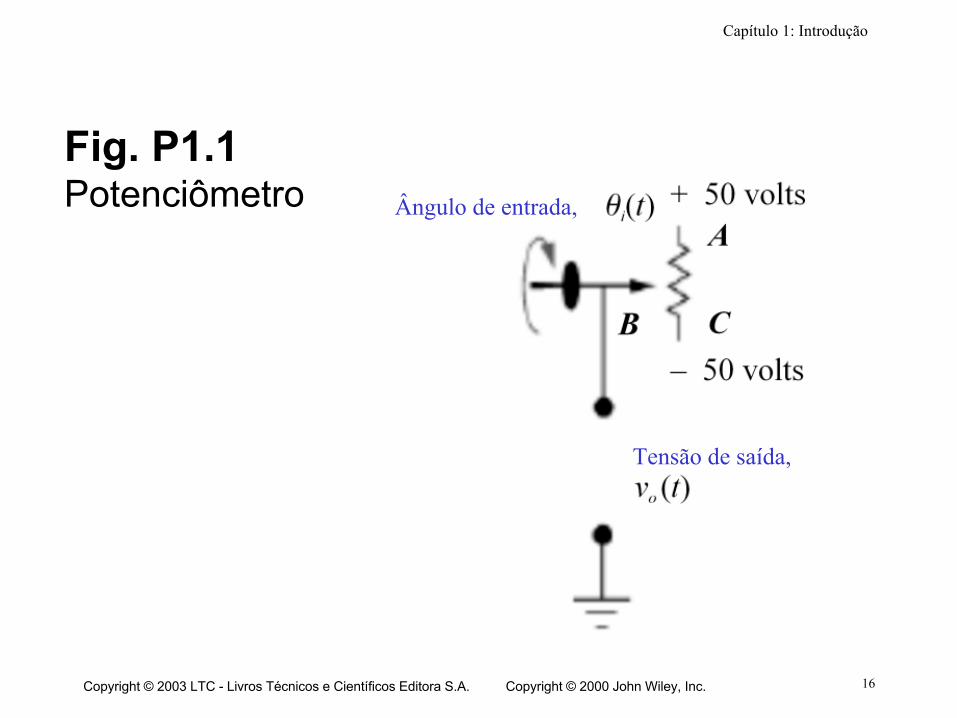
Fig. P1.1Potenciômetro Ângulo de entrada,
Tensão de saída,
Capítulo 1: Introdução
17Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
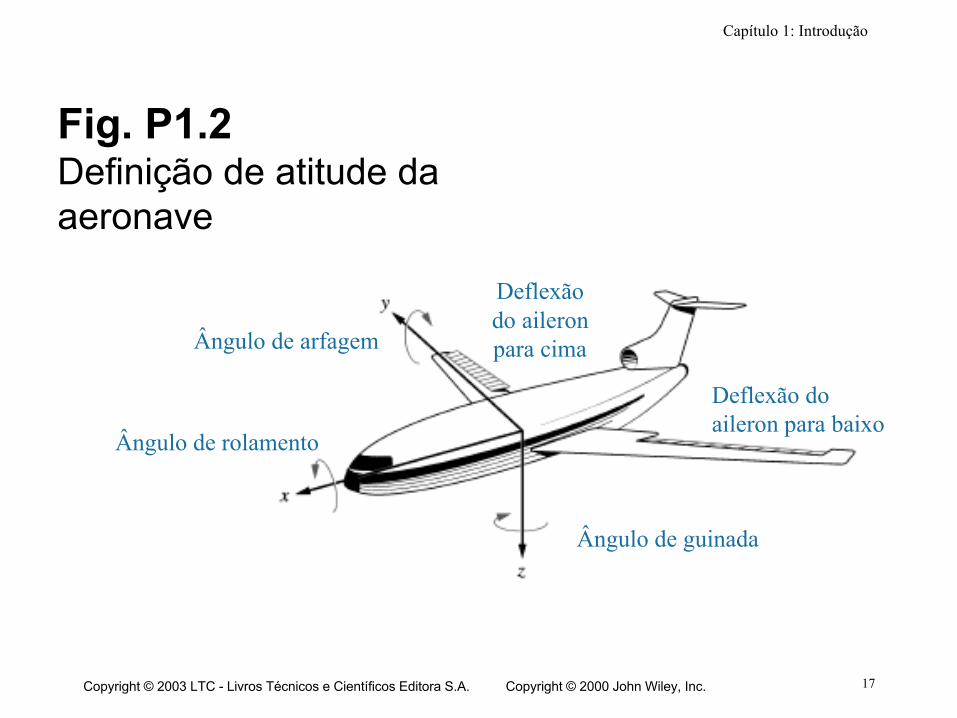
Fig. P1.2Definição de atitude daaeronave
Ângulo de arfagem
Ângulo de rolamento
Ângulo de guinada
Deflexãodo aileronpara cima
Deflexão doaileron para baixo
Capítulo 1: Introdução
18Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
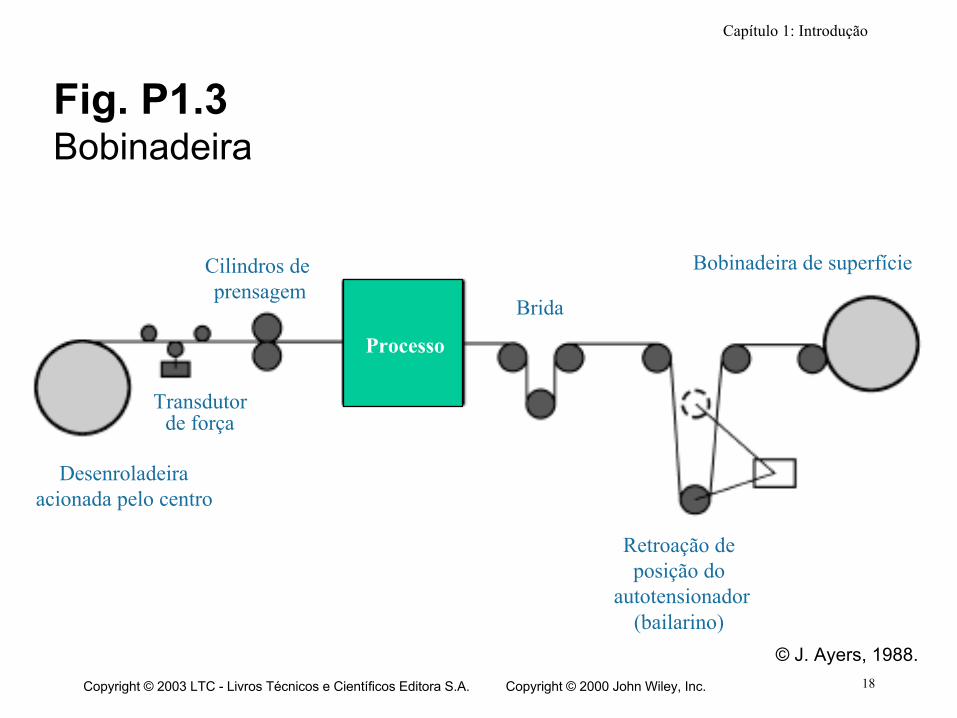
Fig. P1.3Bobinadeira
© J. Ayers, 1988.
Desenroladeiraacionada pelo centro
Transdutorde força
Cilindros de prensagem
Processo
Brida
Retroação deposição do
autotensionador(bailarino)
Bobinadeira de superfície
Capítulo 1: Introdução
19Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
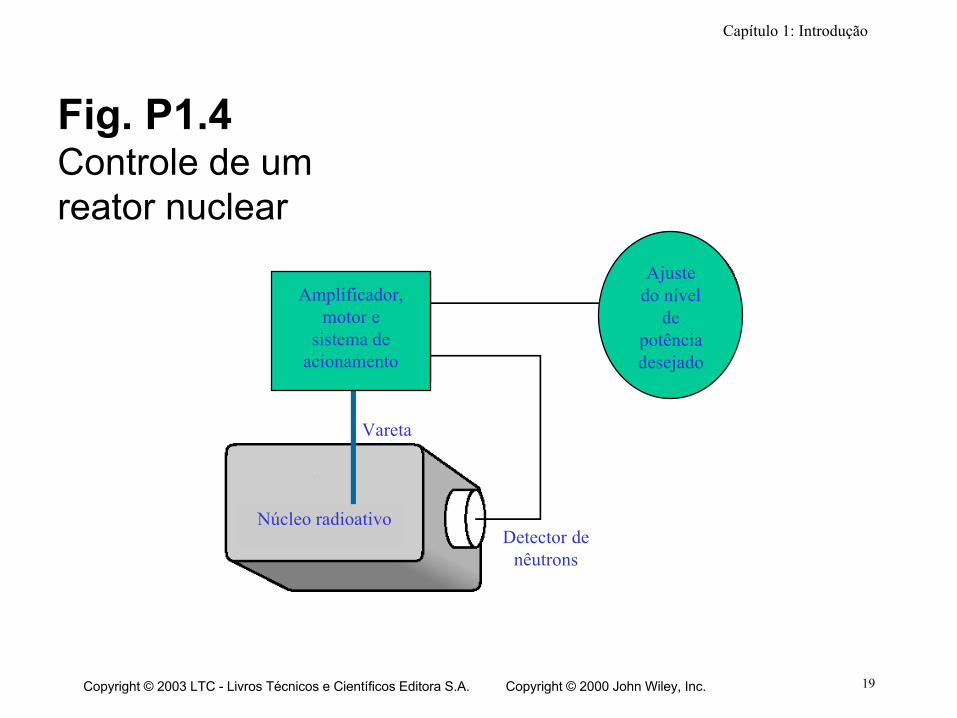
Fig. P1.4Controle de umreator nuclear
Amplificador,motor e
sistema deacionamento
Ajustedo nível
depotênciadesejado
Vareta
Detector denêutrons
Núcleo radioativo
Capítulo 1: Introdução
20Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
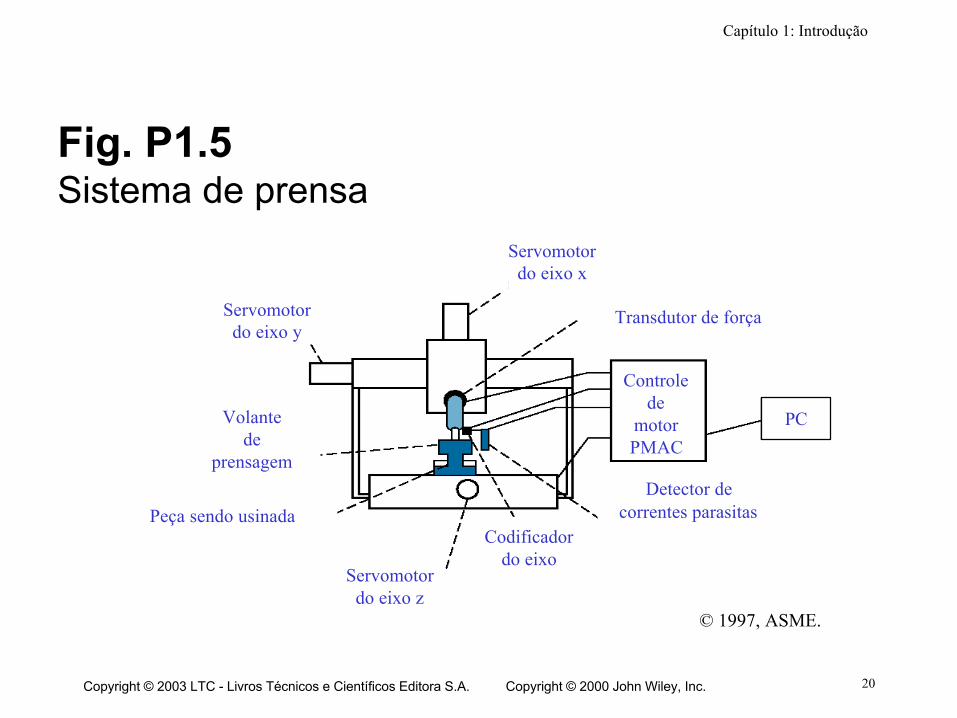
Fig. P1.5Sistema de prensa
© 1997, ASME.
Servomotordo eixo y
Servomotordo eixo x
Servomotordo eixo z
Volantede
prensagem
Peça sendo usinadaCodificador
do eixo
Transdutor de força
Detector de correntes parasitas
PC
Controlede
motorPMAC
Capítulo 1: Introdução
21Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
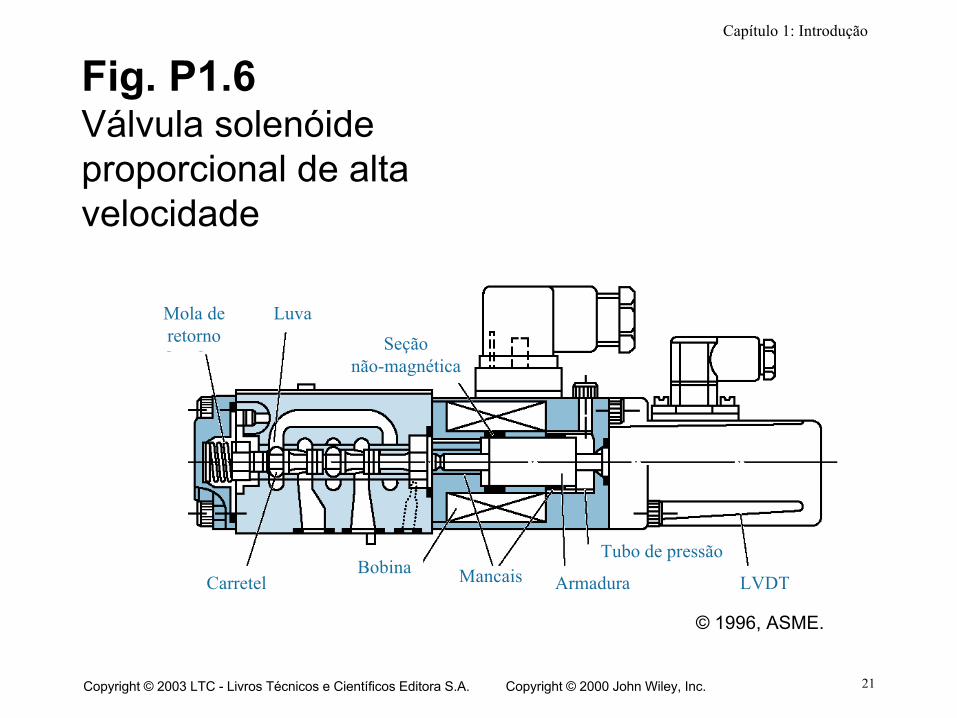
Fig. P1.6Válvula solenóideproporcional de altavelocidade
© 1996, ASME.
Mola deretorno
Luva
CarretelBobina Mancais Armadura
Tubo de pressão
LVDT
Seçãonão-magnética
Capítulo 1: Introdução
22Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
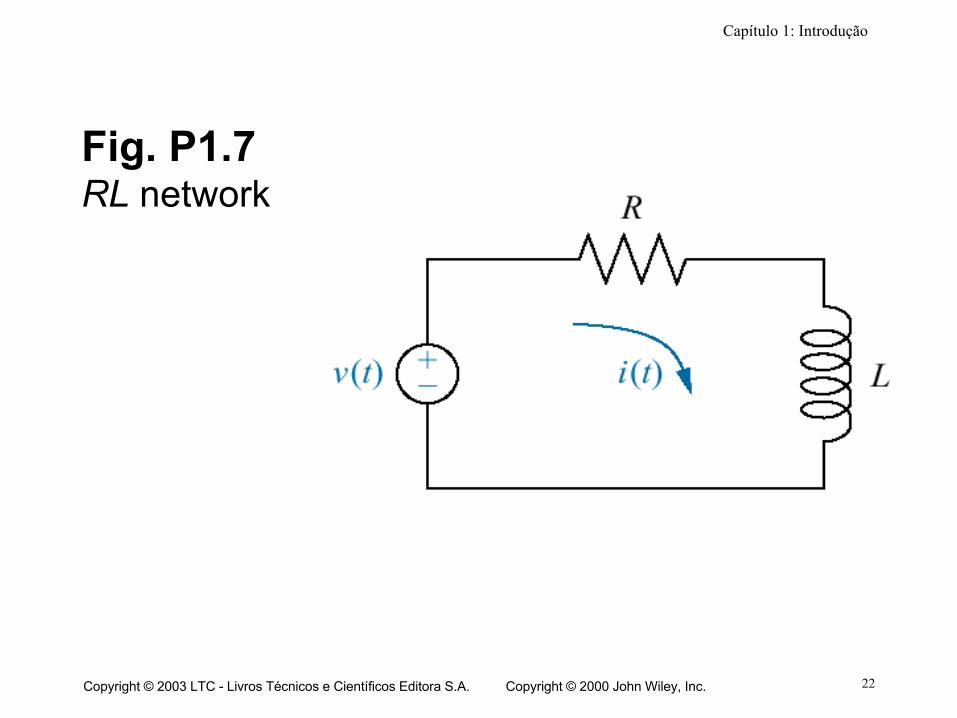
Fig. P1.7RL network
Capítulo 1: Introdução
23Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
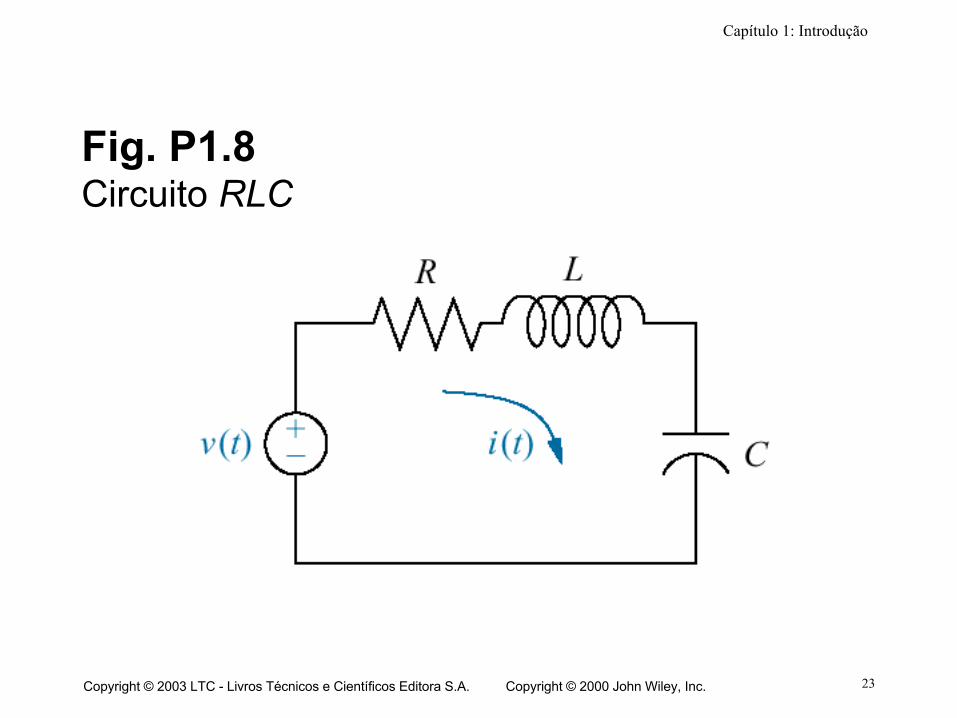
Fig. P1.8Circuito RLC
Capítulo 1: Introdução
24Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
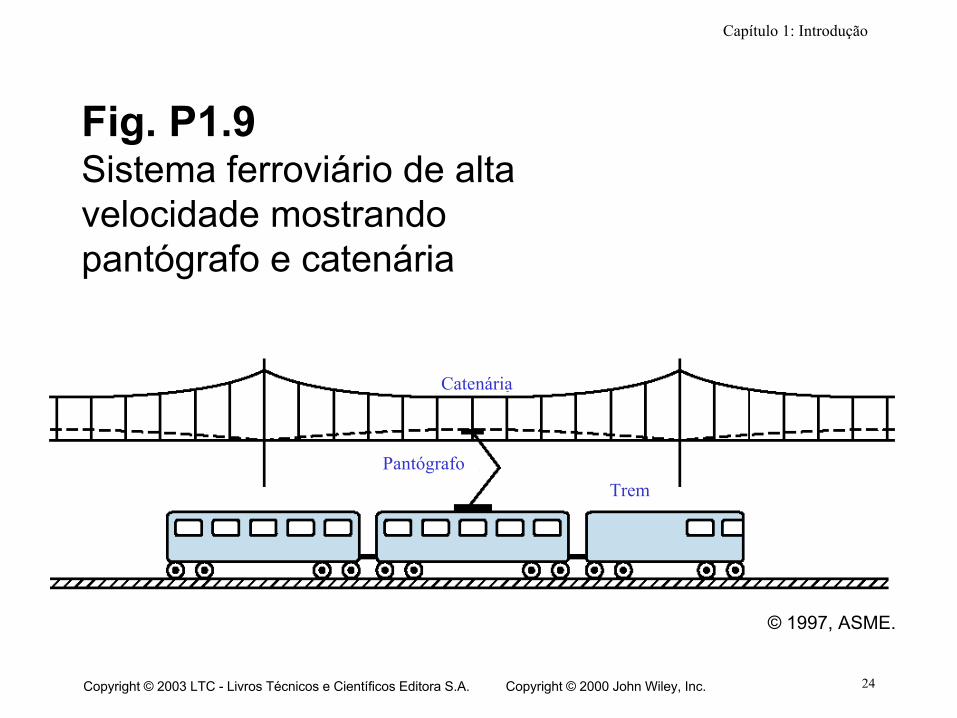
Fig. P1.9Sistema ferroviário de altavelocidade mostrandopantógrafo e catenária
© 1997, ASME.
Catenária
PantógrafoTrem
Capítulo 1: Introdução
25Copyright © 2003 LTC - Livros Técnicos e Científicos Editora S.A. Copyright © 2000 John Wiley, Inc.
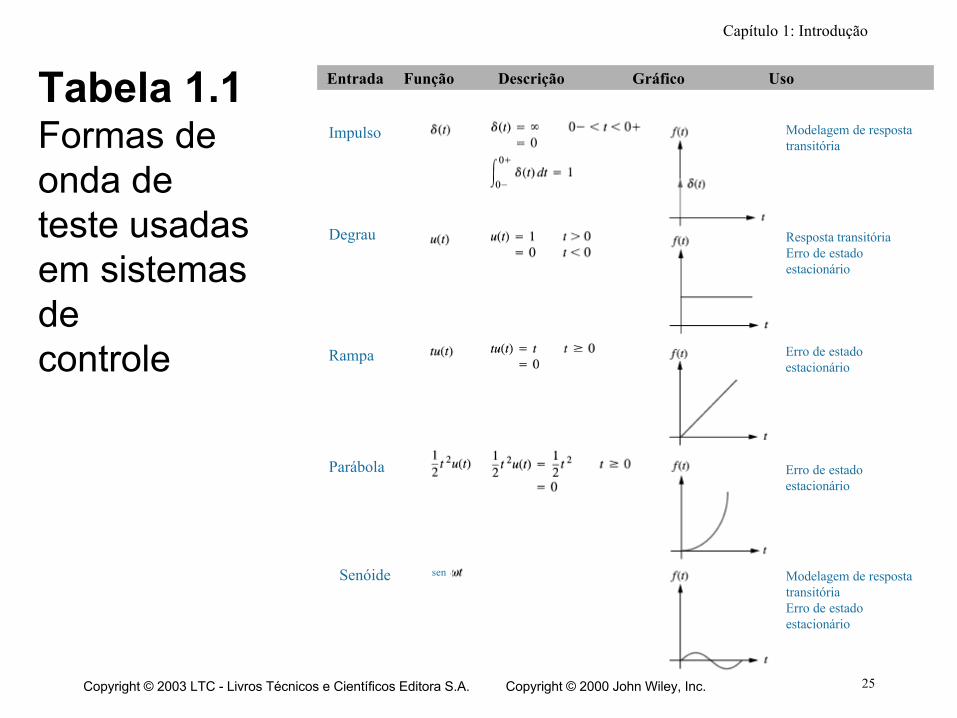
Tabela 1.1Formas deonda deteste usadasem sistemasdecontrole
Impulso
Degrau
Rampa
Parábola
Senóide
Modelagem de respostatransitória
Resposta transitóriaErro de estadoestacionário
sen
Erro de estadoestacionário
Erro de estadoestacionário
Modelagem de respostatransitóriaErro de estado estacionário
Entrada Função Descrição Gráfico Uso








![DINÂMICA DE CÉLULAS DE PONTOS QUANTICOS … · Dinâmica de Células de Pontos Quânticos Acopladas [Distrito Federal] 2007. xiii, 130p., 210 x 297 mm (ENE/FT/UnB, Mestre, Engenharia](https://static.fdocumentos.tips/doc/165x107/5c5fcb0709d3f2b9538b5ad3/dinamica-de-celulas-de-pontos-quanticos-dinamica-de-celulas-de-pontos-quanticos.jpg)