
Caad deer rnnoo dee PProovvaass REEFFRIIGGEERAAÇÇÃÃOO EE ...
Transformada Z
ENGC33: Sinais e Sistemas II
Departamento de Engenharia Eletrica - DEEUniversidade Federal da Bahia - UFBA
23 de janeiro de 2017
Prof. Tito Luís Maia Santos 1/ 23

Sumario
1 Apresentacao
2 Introducao
3 Transformada Z
4 Transformada Inversa
5 Comentarios Finais
Prof. Tito Luís Maia Santos 2/ 23

Sumario
1 Apresentacao
2 Introducao
3 Transformada Z
4 Transformada Inversa
5 Comentarios Finais
Prof. Tito Luís Maia Santos 3/ 23
Apresentacao
Objetivos da aula de hoje:
Apresentar a transformada Z como ferramenta para analise desistemas de tempo discreto.
Prof. Tito Luís Maia Santos 4/ 23

Sumario
1 Apresentacao
2 Introducao
3 Transformada Z
4 Transformada Inversa
5 Comentarios Finais
Prof. Tito Luís Maia Santos 5/ 23
IntroducaoAspectos gerais
A Transformada Z corresponde a transformada de Laplace para ossistemas de tempo discreto.
Permite analisar sinais que nao sao absolutamente somaveis.
Extensao da transformada de Fourier de tempo discreto (DTFT).
Para tanto, vamos considerar uma exponencial complexa na forma
x [n] = zn = (rejΩ)n,
com z = rejΩ.
Prof. Tito Luís Maia Santos 6/ 23
IntroducaoAspectos gerais
A Transformada Z corresponde a transformada de Laplace para ossistemas de tempo discreto.
Permite analisar sinais que nao sao absolutamente somaveis.
Extensao da transformada de Fourier de tempo discreto (DTFT).
Para tanto, vamos considerar uma exponencial complexa na forma
x [n] = zn = (rejΩ)n,
com z = rejΩ.
Prof. Tito Luís Maia Santos 6/ 23
IntroducaoAspectos gerais
A Transformada Z corresponde a transformada de Laplace para ossistemas de tempo discreto.
Permite analisar sinais que nao sao absolutamente somaveis.
Extensao da transformada de Fourier de tempo discreto (DTFT).
Para tanto, vamos considerar uma exponencial complexa na forma
x [n] = zn = (rejΩ)n,
com z = rejΩ.
Prof. Tito Luís Maia Santos 6/ 23
IntroducaoAspectos gerais
A Transformada Z corresponde a transformada de Laplace para ossistemas de tempo discreto.
Permite analisar sinais que nao sao absolutamente somaveis.
Extensao da transformada de Fourier de tempo discreto (DTFT).
Para tanto, vamos considerar uma exponencial complexa na forma
x [n] = zn = (rejΩ)n,
com z = rejΩ.
Prof. Tito Luís Maia Santos 6/ 23
IntroducaoAspectos gerais
A Transformada Z corresponde a transformada de Laplace para ossistemas de tempo discreto.
Permite analisar sinais que nao sao absolutamente somaveis.
Extensao da transformada de Fourier de tempo discreto (DTFT).
Para tanto, vamos considerar uma exponencial complexa na forma
x [n] = zn = (rejΩ)n = rn cos(Ωn) + jrnsen(Ωn)
com z = rejΩ.
Prof. Tito Luís Maia Santos 7/ 23

Sumario
1 Apresentacao
2 Introducao
3 Transformada Z
4 Transformada Inversa
5 Comentarios Finais
Prof. Tito Luís Maia Santos 8/ 23
Transformada ZCaracterizacao de um sistema
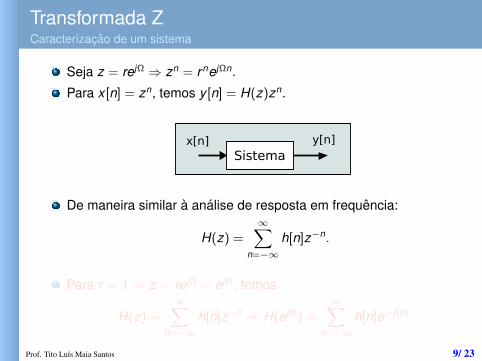
Seja z = rejΩ ⇒ zn = rnejΩn.
Para x [n] = zn, temos y [n] = H(z)zn.
Sistemax[n] y[n]
De maneira similar a analise de resposta em frequencia:
H(z) =∞∑
n=−∞h[n]z−n.
Para r = 1⇒ z = rejΩ = ejΩ, temos
H(z) =∞∑
n=−∞h[n]z−n ⇒ H(ejΩ) =
∞∑n=−∞
h[n]e−jΩn.
Prof. Tito Luís Maia Santos 9/ 23
Transformada ZCaracterizacao de um sistema
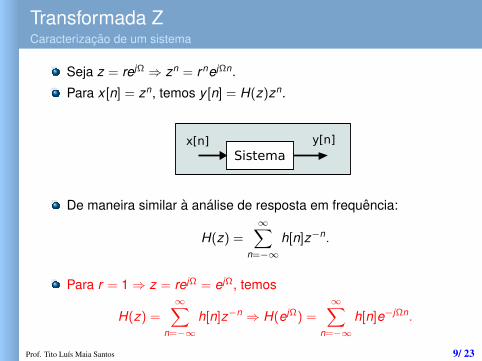
Seja z = rejΩ ⇒ zn = rnejΩn.
Para x [n] = zn, temos y [n] = H(z)zn.
Sistemax[n] y[n]
De maneira similar a analise de resposta em frequencia:
H(z) =∞∑
n=−∞h[n]z−n.
Para r = 1⇒ z = rejΩ = ejΩ, temos
H(z) =∞∑
n=−∞h[n]z−n ⇒ H(ejΩ) =
∞∑n=−∞
h[n]e−jΩn.
Prof. Tito Luís Maia Santos 9/ 23
Transformada ZCaracterizacao de um sistema
Seja z = rejΩ ⇒ zn = rnejΩn.
Para x [n] = zn, temos y [n] = H(z)zn.
Sistemax[n] y[n]
De maneira similar a analise de resposta em frequencia:
H(z) =∞∑
n=−∞h[n]z−n.
Para r = 1⇒ z = rejΩ = ejΩ, temos
H(z) =∞∑
n=−∞h[n]z−n ⇒ H(ejΩ) =
∞∑n=−∞
h[n]e−jΩn.
Prof. Tito Luís Maia Santos 9/ 23
Transformada ZCaracterizacao de um sistema
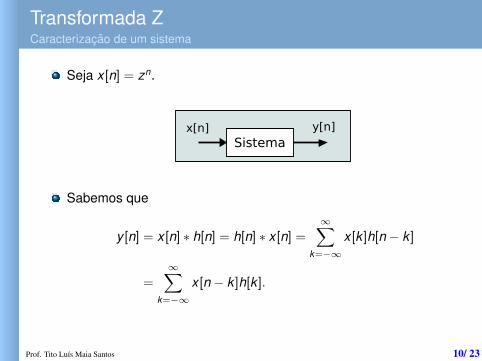
Seja x [n] = zn.
Sistemax[n] y[n]
Sabemos que
y [n] = x [n] ∗ h[n] = h[n] ∗ x [n] =∞∑
k=−∞
x [k ]h[n − k ]
=∞∑
k=−∞
x [n − k ]h[k ].
Prof. Tito Luís Maia Santos 10/ 23
Transformada ZCaracterizacao de um sistema
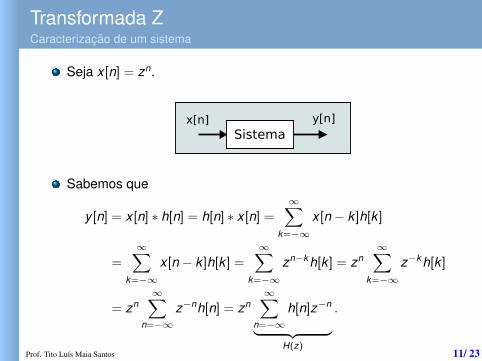
Seja x [n] = zn.
Sistemax[n] y[n]
Sabemos que
y [n] = x [n] ∗ h[n] = h[n] ∗ x [n] =∞∑
k=−∞
x [n − k ]h[k ]
=∞∑
k=−∞
x [n − k ]h[k ] =∞∑
k=−∞
zn−k h[k ] = zn∞∑
k=−∞
z−k h[k ]
= zn∞∑
n=−∞z−nh[n] = zn
∞∑n=−∞
h[n]z−n
︸ ︷︷ ︸H(z)
.
Prof. Tito Luís Maia Santos 11/ 23
Transformada ZComentarios
A resposta ao impulso (h[n]) e um sinal especial - caracteriza umsistema linear invariante no tempo (SLIT).
A transformada Z bilateral tambem caracteriza um SLIT:
H(z) =∞∑
n=−∞h[n]z−n.
A transformada Z bilateral pode ser utilizada para um sinal x [n]:
X (z) =∞∑
n=−∞x [n]z−n.
Se comparada a transformada de Fourier, temos:
X (z) = X (rejΩ) =∞∑
n=−∞
x [n]r−ne−jΩn =∞∑
n=−∞
(x [n]r−n︸ ︷︷ ︸s[n]
)e−jΩn = Fx [n]r−n.
Prof. Tito Luís Maia Santos 12/ 23
Transformada ZComentarios
A resposta ao impulso (h[n]) e um sinal especial - caracteriza umsistema linear invariante no tempo (SLIT).
A transformada Z bilateral tambem caracteriza um SLIT:
H(z) =∞∑
n=−∞h[n]z−n.
A transformada Z bilateral pode ser utilizada para um sinal x [n]:
X (z) =∞∑
n=−∞x [n]z−n.
Se comparada a transformada de Fourier, temos:
X (z) = X (rejΩ) =∞∑
n=−∞
x [n]r−ne−jΩn =∞∑
n=−∞
(x [n]r−n︸ ︷︷ ︸s[n]
)e−jΩn = Fx [n]r−n.
Prof. Tito Luís Maia Santos 12/ 23
Transformada ZComentarios
A resposta ao impulso (h[n]) e um sinal especial - caracteriza umsistema linear invariante no tempo (SLIT).
A transformada Z bilateral tambem caracteriza um SLIT:
H(z) =∞∑
n=−∞h[n]z−n.
A transformada Z bilateral pode ser utilizada para um sinal x [n]:
X (z) =∞∑
n=−∞x [n]z−n.
Se comparada a transformada de Fourier, temos:
X (z) = X (rejΩ) =∞∑
n=−∞
x [n]r−ne−jΩn =∞∑
n=−∞
(x [n]r−n︸ ︷︷ ︸s[n]
)e−jΩn = Fx [n]r−n.
Prof. Tito Luís Maia Santos 12/ 23
Transformada ZComentarios
A resposta ao impulso (h[n]) e um sinal especial - caracteriza umsistema linear invariante no tempo (SLIT).
A transformada Z bilateral tambem caracteriza um SLIT:
H(z) =∞∑
n=−∞h[n]z−n.
A transformada Z bilateral pode ser utilizada para um sinal x [n]:
X (z) =∞∑
n=−∞x [n]z−n.
Se comparada a transformada de Fourier, temos:
X (z) = X (rejΩ) =∞∑
n=−∞
x [n]r−ne−jΩn =∞∑
n=−∞
(x [n]r−n︸ ︷︷ ︸s[n]
)e−jΩn = Fx [n]r−n.
Prof. Tito Luís Maia Santos 12/ 23
Introducao a soma de convolucaoComentarios
A Transformada Z e uma extensao da transformada de Fourier:
X (z) =∞∑
n=−∞(x [n]r−n︸ ︷︷ ︸
s[n]
)e−jΩn = Fx [n]r−n.
Para r = 1, a transformada Z recai na transformada de Fourier.
O fator r e utilizado para garantir que o sinal s[n] = x [n]r−n sejaabsolutamente somavel:
∞∑n=−∞
|x [n]r−n| <∞.
A faixa de valores de z tal que X (z) converge e chamada de regiaode convergencia (RDC).
Prof. Tito Luís Maia Santos 13/ 23
Introducao a soma de convolucaoComentarios
A Transformada Z e uma extensao da transformada de Fourier:
X (z) =∞∑
n=−∞(x [n]r−n︸ ︷︷ ︸
s[n]
)e−jΩn = Fx [n]r−n.
Para r = 1, a transformada Z recai na transformada de Fourier.
O fator r e utilizado para garantir que o sinal s[n] = x [n]r−n sejaabsolutamente somavel:
∞∑n=−∞
|x [n]r−n| <∞.
A faixa de valores de z tal que X (z) converge e chamada de regiaode convergencia (RDC).
Prof. Tito Luís Maia Santos 13/ 23
Transformada ZExemplos
Exemplo 10.1 (Oppenheim) Considere
x [n] = anu[n],
determine X (z).
Exemplo 10.2 (Oppenheim) Considere
x [n] = −anu[−n − 1],
determine X (z).
Exemplo 10.3 (Oppenheim) Considere
x [n] = 7(1/3)nu[n] + 6(1/2)nu[n],
determine X (z).
Prof. Tito Luís Maia Santos 14/ 23
Transformada ZExemplos
Exemplo 10.1 (Oppenheim) Considere
x [n] = anu[n],
determine X (z).
Exemplo 10.2 (Oppenheim) Considere
x [n] = −anu[−n − 1],
determine X (z).
Exemplo 10.3 (Oppenheim) Considere
x [n] = 7(1/3)nu[n] + 6(1/2)nu[n],
determine X (z).
Prof. Tito Luís Maia Santos 14/ 23
Transformada ZExemplos
Exemplo 10.1 (Oppenheim) Considere
x [n] = anu[n],
determine X (z).
Exemplo 10.2 (Oppenheim) Considere
x [n] = −anu[−n − 1],
determine X (z).
Exemplo 10.3 (Oppenheim) Considere
x [n] = 7(1/3)nu[n] + 6(1/2)nu[n],
determine X (z).
Prof. Tito Luís Maia Santos 14/ 23
Transformada Z IPropriedades da RDC
A regiao de convergencia nao contem polos.
Se x [n] tem duracao finita⇒ RDC e todo plano z, exceto,possivelmente, para z = 0 e/ou z =∞.
Considere uma transformada na forma:
X (z) =
N2∑n=N1
x [n]z−n.
Se o sinal possui “componentes causais” (N2 > 0), entaoz = 0 /∈ RDC.Se o sinal possui “componentes nao-causais” (N1 < 0), entaoz =∞ /∈ RDC.O sinal x [n] = cδ[n] e o unico no qual a RDC e todo plano z.
Prof. Tito Luís Maia Santos 15/ 23
Transformada Z IIPropriedades da RDC
Se x [n] e uma sequencia de lado direito e se a circunferencia|z| = r0 pertence a RDC, entao todos os valores finitos de z taisque |z| > r0 tambem pertencerao a RDC.
Se x [n] e uma sequencia de lado esquerdo e se a circunferencia|z| = r0 pertence a RDC, entao todos os valores finitos de z taisque 0 < |z| < r0 tambem pertencerao a RDC.
Se x [n] e uma sequencia de ambos os lados e se a circunferencia|z| = r0 pertence a RDC, entao a RDC consistira de um anel noplano z que contem |z| = r0.
Prof. Tito Luís Maia Santos 16/ 23
Transformada ZExemplos
Exemplo 10.5 (Oppenheim) Determinar a transformada Z de δ[n] ede δ[n − 1].
Exemplo 10.8 (Oppenheim) Determinar as possıveis RDC quepodem ser obtidas a partir da funcao a seguir:
X (z) =1
(1− (1/3)z−1)(1− 2z−1).
Prof. Tito Luís Maia Santos 17/ 23
Transformada ZExemplos
Exemplo 10.5 (Oppenheim) Determinar a transformada Z de δ[n] ede δ[n − 1].
Exemplo 10.8 (Oppenheim) Determinar as possıveis RDC quepodem ser obtidas a partir da funcao a seguir:
X (z) =1
(1− (1/3)z−1)(1− 2z−1).
Prof. Tito Luís Maia Santos 17/ 23

Sumario
1 Apresentacao
2 Introducao
3 Transformada Z
4 Transformada Inversa
5 Comentarios Finais
Prof. Tito Luís Maia Santos 18/ 23

Transformada Z inversaDefinicao
Vimos que
X (rejΩ) = Fx [n]r−n ⇒ F−1X (rejΩ) = x [n]r−n
Assim temos
x [n] = rnF−1X (rejΩ) = rn 12π
ˆ2π
X (rejΩ)ejΩndΩ
=1
2π
ˆ2π
X (rejΩ)(rejΩ)ndΩ
Como z = rejΩ, temos dz = jrejΩdΩ e
x [n] =1
2π
ˆ2π
X (rejΩ)(rejΩ)ndΩ =j
2πj
ˆ2π
X (rejΩ)(rejΩ)n−1(rejΩ)dΩ
=1
2πj
ffiX (z)(z)n−1dz
Prof. Tito Luís Maia Santos 19/ 23
Transformada Z inversaDefinicao
Vimos que
X (rejΩ) = Fx [n]r−n ⇒ F−1X (rejΩ) = x [n]r−n
Assim temos
x [n] = rnF−1X (rejΩ) = rn 12π
ˆ2π
X (rejΩ)ejΩndΩ
=1
2π
ˆ2π
X (rejΩ)(rejΩ)ndΩ
Como z = rejΩ, temos dz = jrejΩdΩ e
x [n] =1
2π
ˆ2π
X (rejΩ)(rejΩ)ndΩ =j
2πj
ˆ2π
X (rejΩ)(rejΩ)n−1(rejΩ)dΩ
=1
2πj
ffiX (z)(z)n−1dz
Prof. Tito Luís Maia Santos 19/ 23
Transformada Z inversaDefinicao
Vimos que
X (rejΩ) = Fx [n]r−n ⇒ F−1X (rejΩ) = x [n]r−n
Assim temos
x [n] = rnF−1X (rejΩ) = rn 12π
ˆ2π
X (rejΩ)ejΩndΩ
=1
2π
ˆ2π
X (rejΩ)(rejΩ)ndΩ
Como z = rejΩ, temos dz = jrejΩdΩ e
x [n] =1
2π
ˆ2π
X (rejΩ)(rejΩ)ndΩ =j
2πj
ˆ2π
X (rejΩ)(rejΩ)n−1(rejΩ)dΩ
=1
2πj
ffiX (z)(z)n−1dz
Prof. Tito Luís Maia Santos 19/ 23
Transformada Z inversaExemplos
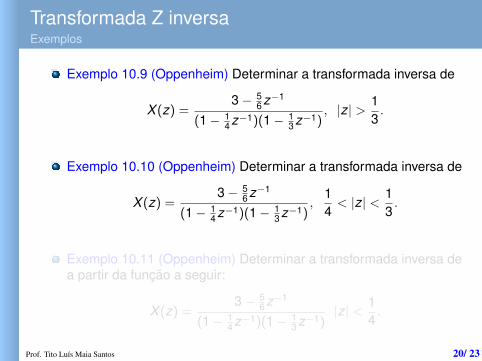
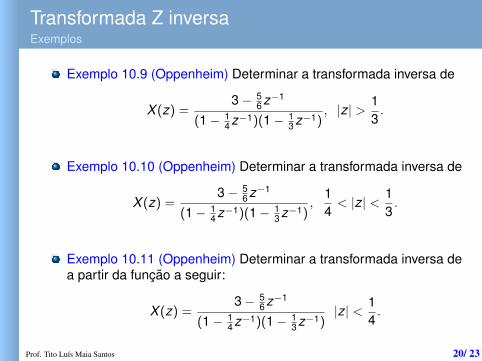
Exemplo 10.9 (Oppenheim) Determinar a transformada inversa de
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1), |z| > 1
3.
Exemplo 10.10 (Oppenheim) Determinar a transformada inversa de
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1),
14< |z| < 1
3.
Exemplo 10.11 (Oppenheim) Determinar a transformada inversa dea partir da funcao a seguir:
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1)|z| < 1
4.
Prof. Tito Luís Maia Santos 20/ 23
Transformada Z inversaExemplos
Exemplo 10.9 (Oppenheim) Determinar a transformada inversa de
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1), |z| > 1
3.
Exemplo 10.10 (Oppenheim) Determinar a transformada inversa de
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1),
14< |z| < 1
3.
Exemplo 10.11 (Oppenheim) Determinar a transformada inversa dea partir da funcao a seguir:
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1)|z| < 1
4.
Prof. Tito Luís Maia Santos 20/ 23
Transformada Z inversaExemplos
Exemplo 10.9 (Oppenheim) Determinar a transformada inversa de
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1), |z| > 1
3.
Exemplo 10.10 (Oppenheim) Determinar a transformada inversa de
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1),
14< |z| < 1
3.
Exemplo 10.11 (Oppenheim) Determinar a transformada inversa dea partir da funcao a seguir:
X (z) =3− 5
6 z−1
(1− 14 z−1)(1− 1
3 z−1)|z| < 1
4.
Prof. Tito Luís Maia Santos 20/ 23
Transformada Z inversaExemplos
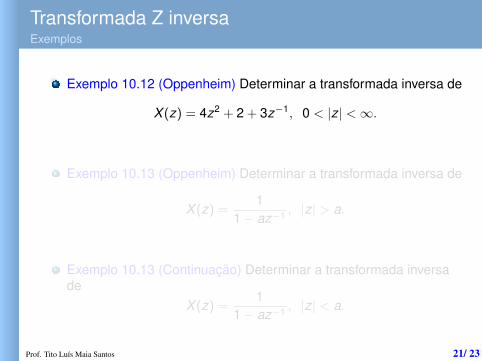
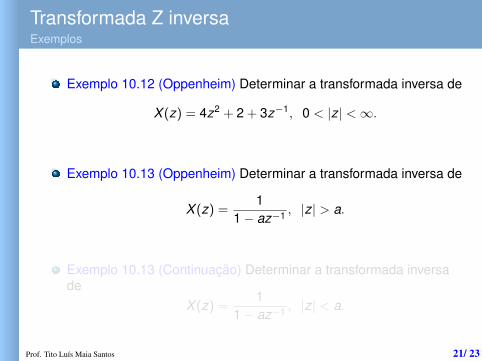
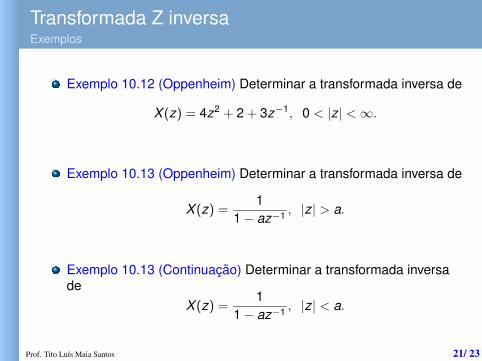
Exemplo 10.12 (Oppenheim) Determinar a transformada inversa de
X (z) = 4z2 + 2 + 3z−1, 0 < |z| <∞.
Exemplo 10.13 (Oppenheim) Determinar a transformada inversa de
X (z) =1
1− az−1 , |z| > a.
Exemplo 10.13 (Continuacao) Determinar a transformada inversade
X (z) =1
1− az−1 , |z| < a.
Prof. Tito Luís Maia Santos 21/ 23
Transformada Z inversaExemplos
Exemplo 10.12 (Oppenheim) Determinar a transformada inversa de
X (z) = 4z2 + 2 + 3z−1, 0 < |z| <∞.
Exemplo 10.13 (Oppenheim) Determinar a transformada inversa de
X (z) =1
1− az−1 , |z| > a.
Exemplo 10.13 (Continuacao) Determinar a transformada inversade
X (z) =1
1− az−1 , |z| < a.
Prof. Tito Luís Maia Santos 21/ 23
Transformada Z inversaExemplos
Exemplo 10.12 (Oppenheim) Determinar a transformada inversa de
X (z) = 4z2 + 2 + 3z−1, 0 < |z| <∞.
Exemplo 10.13 (Oppenheim) Determinar a transformada inversa de
X (z) =1
1− az−1 , |z| > a.
Exemplo 10.13 (Continuacao) Determinar a transformada inversade
X (z) =1
1− az−1 , |z| < a.
Prof. Tito Luís Maia Santos 21/ 23

Sumario
1 Apresentacao
2 Introducao
3 Transformada Z
4 Transformada Inversa
5 Comentarios Finais
Prof. Tito Luís Maia Santos 22/ 23
Comentarios Finais
Nesta aula apresentou-se a Transformada Z.
Na proxima aula discutiremos sobre:
Propriedades da Transformada Z.
Prof. Tito Luís Maia Santos 23/ 23









![Dee Brestin ● Uma Mulher Sábia [algumas páginas]](https://static.fdocumentos.tips/doc/165x107/579058781a28ab900ca162fd/dee-brestin-uma-mulher-sabia-algumas-paginas.jpg)



![Dee Brestin ● Uma Mulher Adoradora [algumas páginas]](https://static.fdocumentos.tips/doc/165x107/57906cb61a28ab68748cb6c4/dee-brestin-uma-mulher-adoradora-algumas-paginas.jpg)


