Embedded Systems Design: A Unified Hardware/Software...
45
1 Embedded Systems Design: A Unified Hardware/Software Introduction Capítulo 3 Processadores de Propósito Geral: Software
Transcript of Embedded Systems Design: A Unified Hardware/Software...

1
Embedded Systems Design: A Unified Hardware/Software Introduction
Capítulo 3 Processadores de Propósito Geral: Software

2Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Introdução
• Processador de Propósito Geral– Processador projetado para uma grande variedade de tarefas
computacionais– Baixo custo unitário, em parte devido à diluição do custo NRE sobre
grande quantidade de unidades produzidas• A Motorola vendeu, somente em 1996, meio bilhão de unidades do
microcontrolador 68HC05– Cuidadosamente desenvolvido em virtude de um alto custo NRE ser
aceitável• Pode oferecer bom desempenho, tamanho e consumo de energia
– Baixo custo NRE (diluído na grande quantidade de unidades vendidas), curto time-to-market/prototipagem, alta flexibilidade
• O usuário (final) simplesmente escreve softwares; não há necessidade de desenvolvimento do processador (parte física).
– a.k.a. “microprocessor” – o termo “micro” começou a ser utilizado quando os processadores passaram a ser implementados em um ou mais chips e não mais em salas inteiras

3Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Arquitetura Básica
• Unidade de controle e datapath– Note a semelhança com
o processador dedicado
• Diferenças chaves– Datapath é genérico
– A unidade de controle não armazena o algoritmo – o algoritmo é programado na memória (compartilhada)
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status

4Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Operações no Datapath
• Load– Transfere o conteúdo de
uma posição de memória para um registrador
• ALU operation– Operando e o resultado
de uma operação lógico-aritmética estão armazenados em registradores
• Armazenamento– Transfere o conteúdo
de um registrador para uma posição de memória
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
10
+1
11
11

5Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Unidade de Controle
• Unidade de controle: determina as operações realizadas no datapath
– A seqüência das operações desejadas (“instruções”) são armazenadas na memória – “programa”
• Ciclo de instrução – quebra das operações em diversas sub-operações, uma para cada ciclo de relógio, e.g.:
– Aquisição de Instrução (Fetch): lê instrução da memória e armazena no registrador de instruções
– Decodificação: determina o significado da instrução
– Aquisição dos operandos (Fetch operands): move dados da memória para o registrador do datapath
– Execução: move dados através da ULA
– Armazena os resultados: escreve dados do registrador na memória
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1
6Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
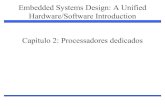
Sub-Operações da Unidade de Controle
• Aquisição de Instrução (Fetch)– Lê próxima
instrução dentro do IR
– PC (program counter): sempre aponta para a próxima instrução
– IR: armazena a instrução a ser executada
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1100 load R0, M[500]
7Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
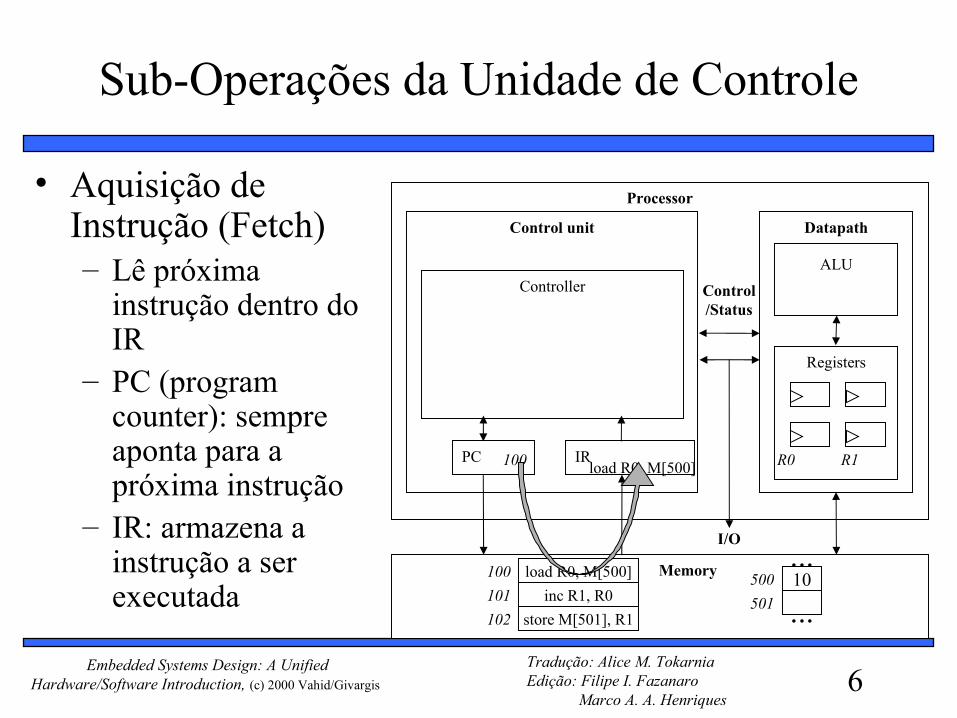
Sub-Operações da Unidade de Controle
• Decodificação– Determina o
significado de cada instrução
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1100 load R0, M[500]

8Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Sub-Operações da Unidade de Controle
• Aquisição de operandos (Fetch operands)– Transfere dados da
memória para o registrador do datapath
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1100 load R0, M[500]
10

9Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
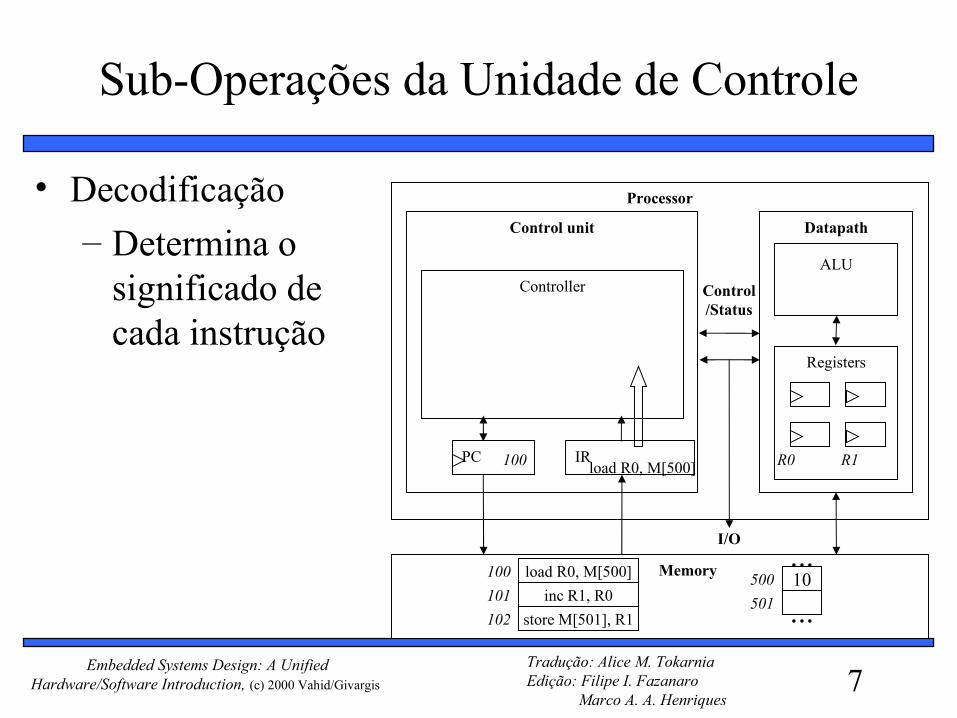
Sub-Operações da Unidade de Controle
• Execução– ULA executa a
operação requerida– A instrução load
mostrada neste exemplo não requer uma operação lógica aritmética
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1100 load R0, M[500]
10

10Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Sub-Operações da Unidade de Controle
• Armazenamento dos resultados– Escrita de resultados
armazenados em registradores
– A instrução load mostrada neste exemplo não requer uma operação lógica aritmética
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1100 load R0, M[500]
10

11Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
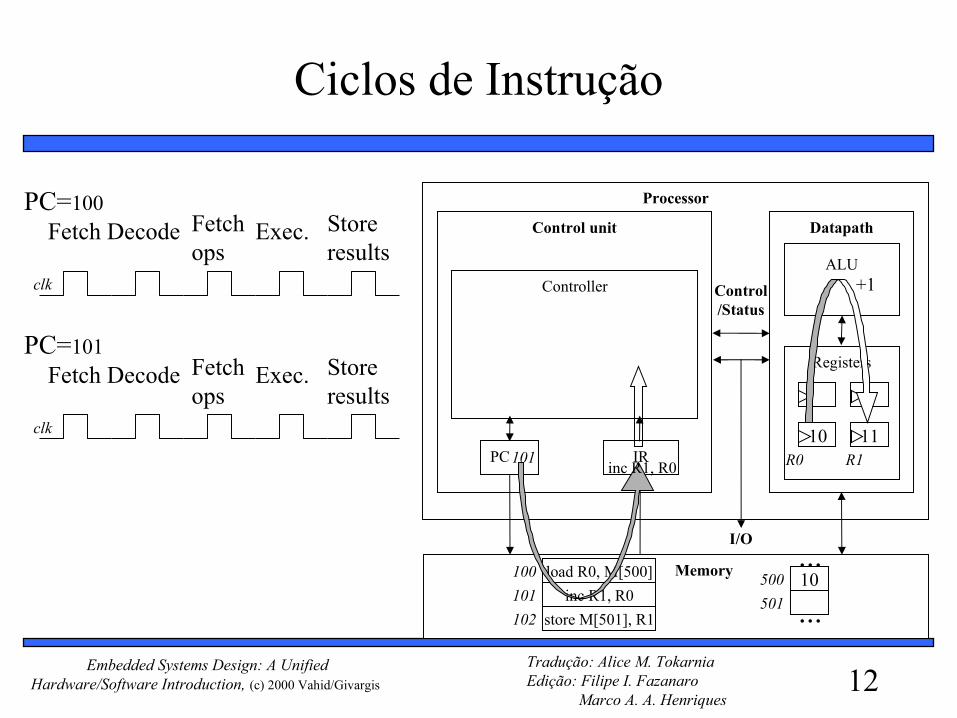
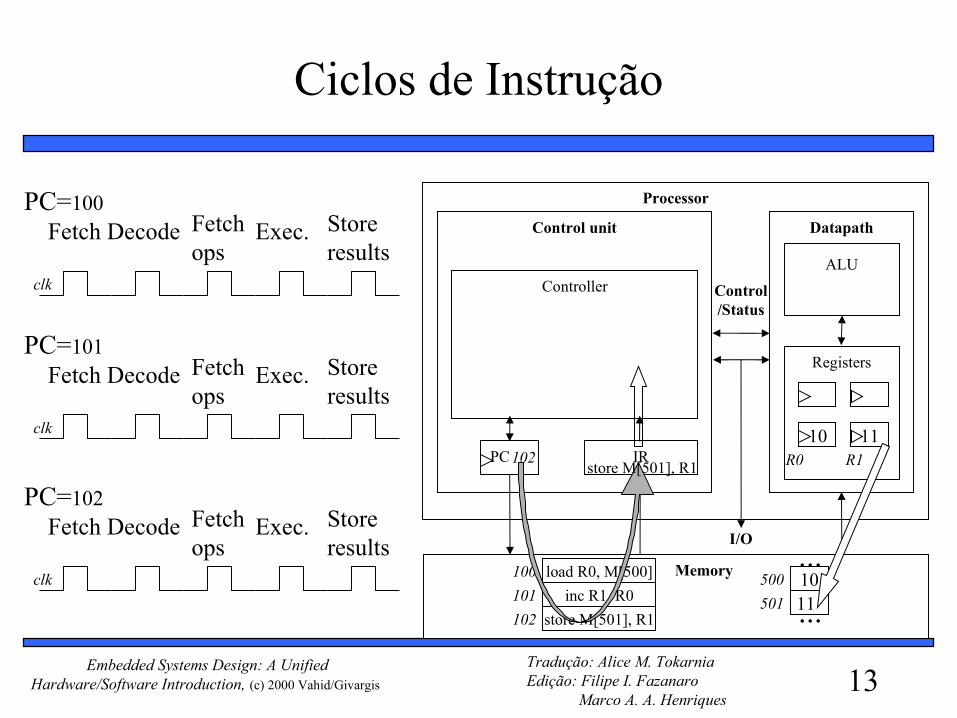
Ciclos de Instrução
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1
PC=100
10
Fetch ops
Exec. Store results
clk
Fetch
load R0, M[500]
Decode
100
12Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Ciclos de Instrução
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1
10
PC=100Fetch Decode Fetch
opsExec. Store
resultsclk
PC=101
inc R1, R0
Fetch Fetch ops
+1
11
Exec. Store results
clk
101
Decode
13Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Ciclos de Instrução
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
10...
...
load R0, M[500] 500
501
100
inc R1, R0101
store M[501], R1102
R0 R1
1110
PC=100Fetch Decode Fetch
opsExec. Store
resultsclk
PC=101Fetch Decode Fetch
opsExec. Store
resultsclk
PC=102
store M[501], R1
Fetch Fetch ops
Exec.
11
Store results
clk
Decode
102
14Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
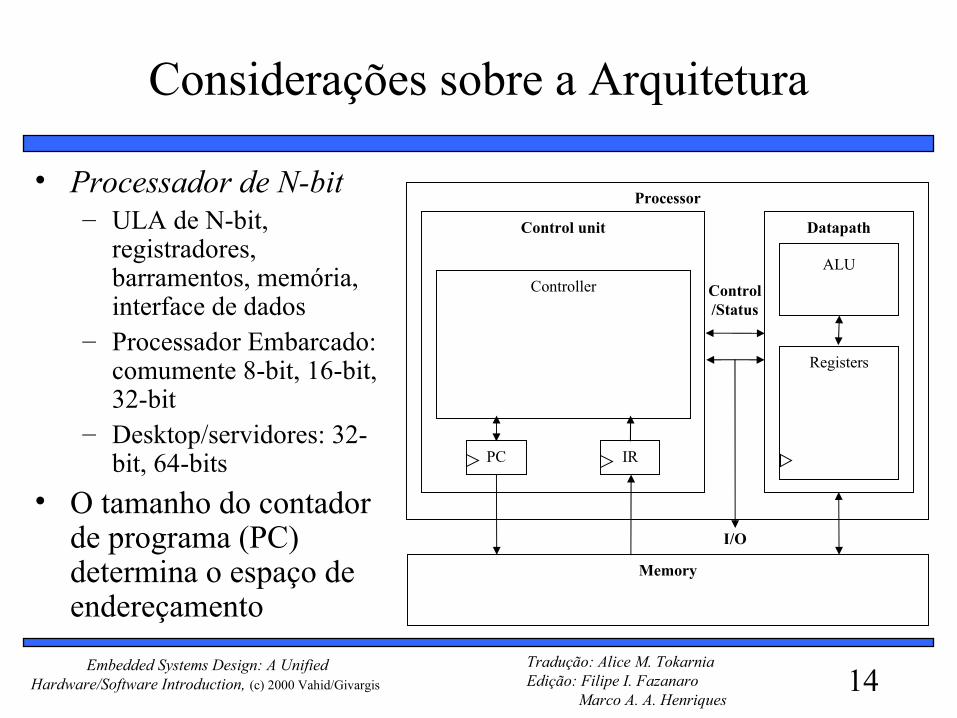
Considerações sobre a Arquitetura
• Processador de N-bit – ULA de N-bit,
registradores, barramentos, memória, interface de dados
– Processador Embarcado: comumente 8-bit, 16-bit, 32-bit
– Desktop/servidores: 32-bit, 64-bits
• O tamanho do contador de programa (PC) determina o espaço de endereçamento
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
15Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
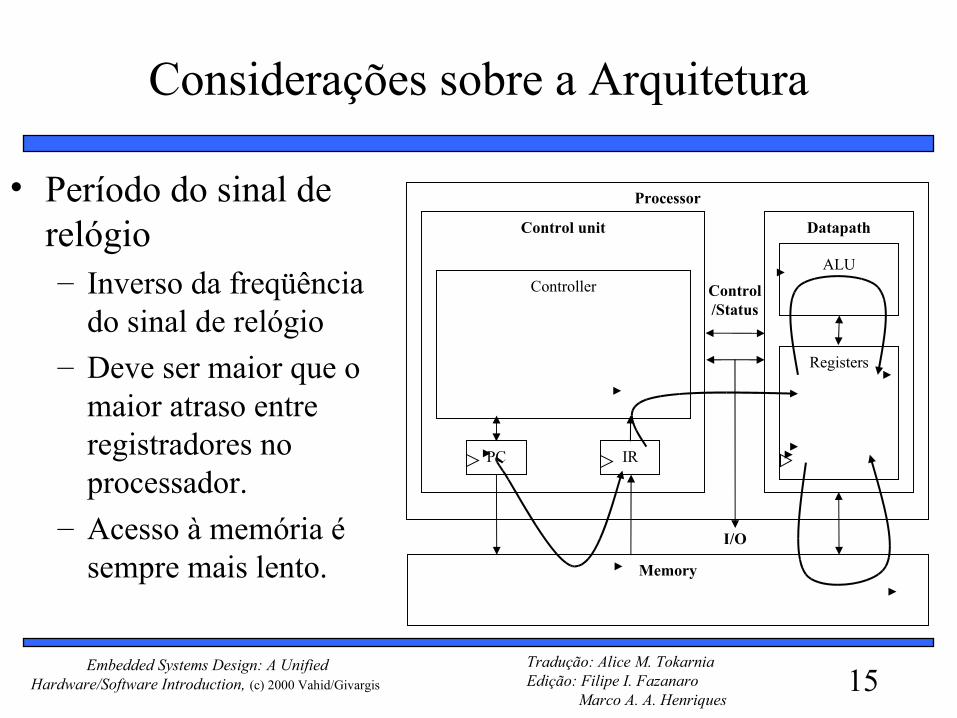
Considerações sobre a Arquitetura
• Período do sinal de relógio– Inverso da freqüência
do sinal de relógio– Deve ser maior que o
maior atraso entre registradores no processador.
– Acesso à memória é sempre mais lento.
Processor
Control unit Datapath
ALU
Registers
IRPC
Controller
Memory
I/O
Control/Status
16Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
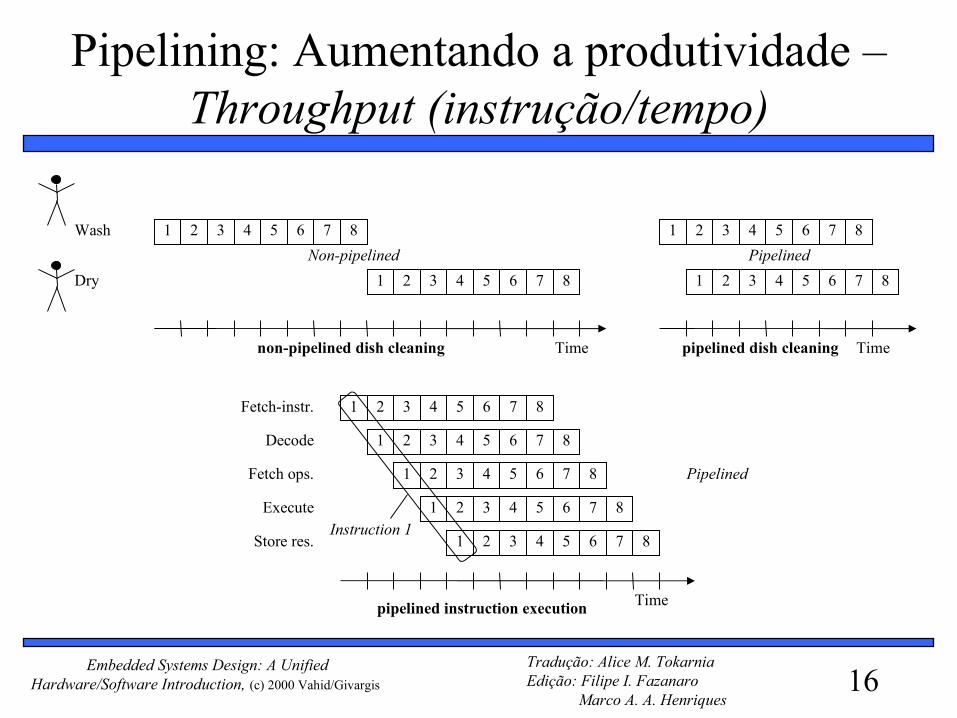
Pipelining: Aumentando a produtividade – Throughput (instrução/tempo)
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
Fetch-instr.
Decode
Fetch ops.
Execute
Store res.
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
Wash
Dry
Time
Non-pipelined Pipelined
Time
Time
Pipelined
pipelined instruction execution
non-pipelined dish cleaning pipelined dish cleaning
Instruction 1

17Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Arquiteturas Superescalar e VLIW
• Desempenho pode ser melhorado por meio de:– Relógios mais rápidos (contudo existe um limite)
– Pipelining: divisão da execução das instruções em estágios e sobreposição de estágios
– Múltiplas ULAs para suportar mais de uma seqüência de instruções• Superescalar
– Escalar: operações não-vetorizadas– Aquisição de instruções (fetches) em lotes; execução de quantas forem possíveis
• Pode necessitar de hardware para detectar instruções independentes– VLIW: cada palavra na memória possui múltiplas instruções independentes
• Conta com o compilador para detectar e escalonar as instruções

18Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Duas arquiteturas de memória
Processor
Program memory
Data memory
Processor
Memory(program and data)
Harvard Princeton
• Princeton– Menor quantidade
de conexões à memória
• Harvard– Acesso simultâneo
a dados e programa nas memórias
19Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
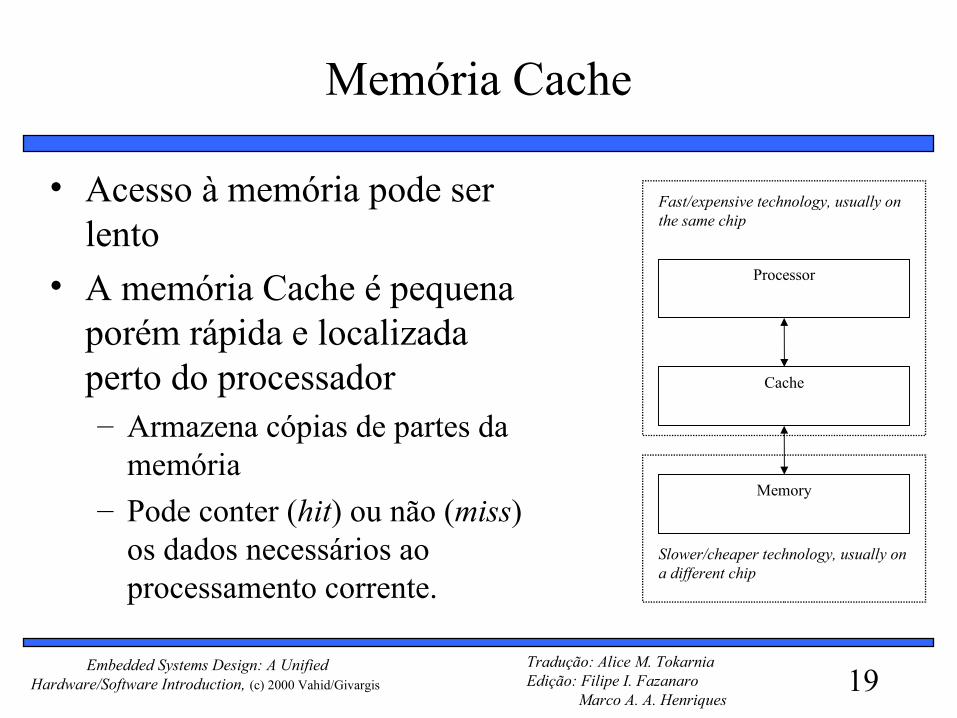
Memória Cache
• Acesso à memória pode ser lento
• A memória Cache é pequena porém rápida e localizada perto do processador– Armazena cópias de partes da
memória– Pode conter (hit) ou não (miss)
os dados necessários ao processamento corrente.
Processor
Memory
Cache
Fast/expensive technology, usually on the same chip
Slower/cheaper technology, usually on a different chip

20Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Visão do Programador
• O programador não necessita entender detalhes da arquitetura– Em vez disso, necessita saber quais instruções podem ser executadas
• Dois níveis de instruções:– Nível Assembly – Linguagens estruturadas (C, C++, Java, etc.)
• A maior parte do desenvolvimento hoje é realizado utilizando linguagens estruturadas– Porém, programação em linguagem assembly pode ser necessária– Drivers: partes do programa que comunicam com e/ou controlam
(acionam) outros dispositivos• Frequentemente têm considerações temporais detalhadas e grande
manipulação de bits• Assembly pode ser melhor opção nestes casos
21Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
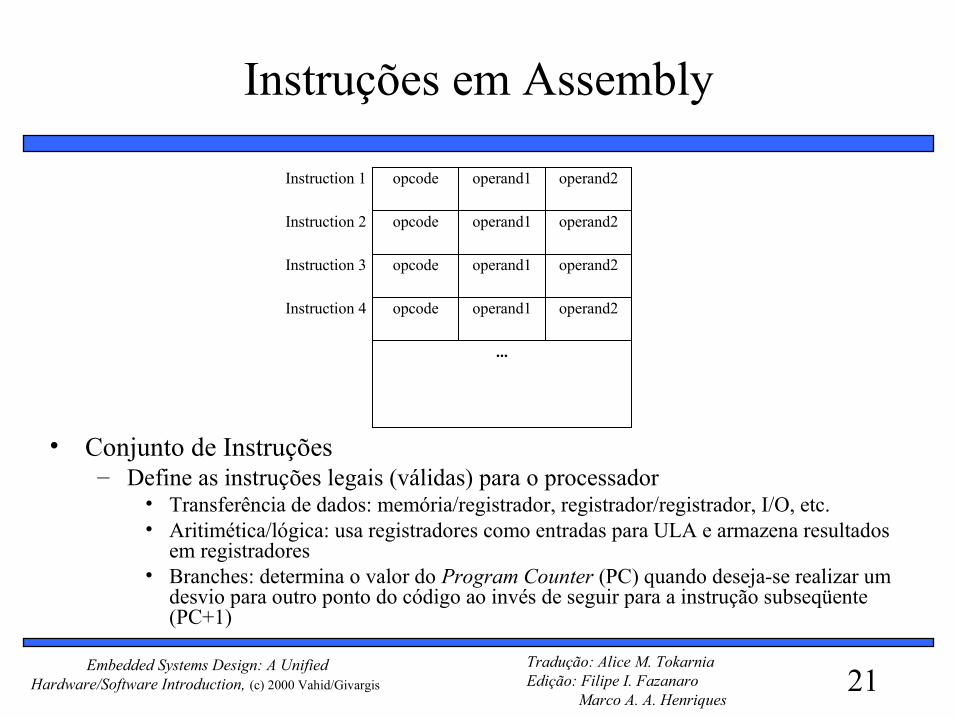
Instruções em Assembly
opcode operand1 operand2
opcode operand1 operand2
opcode operand1 operand2
opcode operand1 operand2
...
Instruction 1
Instruction 2
Instruction 3
Instruction 4
• Conjunto de Instruções– Define as instruções legais (válidas) para o processador
• Transferência de dados: memória/registrador, registrador/registrador, I/O, etc.• Aritimética/lógica: usa registradores como entradas para ULA e armazena resultados
em registradores• Branches: determina o valor do Program Counter (PC) quando deseja-se realizar um
desvio para outro ponto do código ao invés de seguir para a instrução subseqüente (PC+1)

22Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Exemplo de conjunto simples de instruções
opcode operands
MOV Rn, direct
MOV @Rn, Rm
ADD Rn, Rm
0000 Rn direct
0010 Rn
0100 RmRn
Rn = M(direct)
Rn = Rn + Rm
SUB Rn, Rm 0101 Rm Rn = Rn - Rm
MOV Rn, #immed. 0011 Rn immediate Rn = immediate
Assembly instruct. First byte Second byte Operation
JZ Rn, relative 0110 Rn relative PC = PC+ relative (only if Rn is 0)
Rn
MOV direct, Rn 0001 Rn direct M(direct) = Rn
Rm M(Rn) = Rm

23Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Modos de Endereçamento
Dados
Imediato
Registrador Direto
Registrador Indireto
Direto
Indireto
Dados
Campo do operando
Registrador de endereços
Registrador de endereços
Endereço de memória
Endereço de memória
Endereço de Memória Dados
Dados
Endereço de memória
Dados
Modo de Endereçamento
Conteúdo dos registradores Conteúdo de Memória
24Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
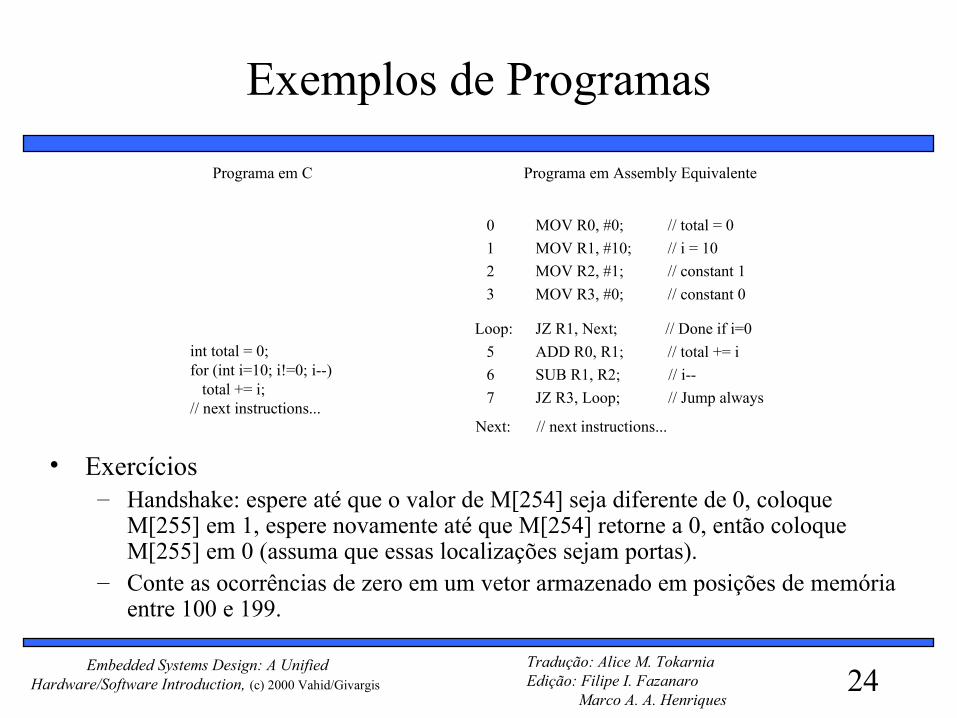
Exemplos de Programas
int total = 0;for (int i=10; i!=0; i--) total += i;// next instructions...
Programa em C
MOV R0, #0; // total = 0
MOV R1, #10; // i = 10
JZ R1, Next; // Done if i=0
ADD R0, R1; // total += i
MOV R2, #1; // constant 1
JZ R3, Loop; // Jump always
Loop:
Next: // next instructions...
SUB R1, R2; // i--
Programa em Assembly Equivalente
MOV R3, #0; // constant 0
0
1
2
3
5
6
7
• Exercícios– Handshake: espere até que o valor de M[254] seja diferente de 0, coloque
M[255] em 1, espere novamente até que M[254] retorne a 0, então coloque M[255] em 0 (assuma que essas localizações sejam portas).
– Conte as ocorrências de zero em um vetor armazenado em posições de memória entre 100 e 199.
25Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Considerações do Programador
• Espaços para programas e dados na memória– Processadores embarcados frequentemente são muito
limitados• e.g., 64 K bytes de programa, 256 bytes de RAM (expansível)
• Registradores: Quantos existem?– Somente é preocupação para programadores em assembly
• I/O– Como é realizada a comunicação com os sinais externos?
• Interrupções
26Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Visão Geral da Arquitetura do Microprocessador
• Se você está utilizando um microprocessador em particular, agora é um bom momento para revisar a sua arquitetura

27Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Exemplo: driver de porta paralela
• Utilizando programação em linguagem assembly, é possível configurar a porta paralela do PC para realizar comunicação digital com dispositivos de E/S.– No próximo exemplo, a leitura e escrita em três registradores especiais.
Conferir a tabela acima.
– Exemplo: porta paralela monitora a chave de entrada e acende ou apaga o LED de acordo com a posição da chave.
PC Parallel port
Pin 13
Pin 2
Switch
LED
LPT Connection Pin I/O Direction Register Address
1 Output 0th bit of register #2
2-9 Output 0th bit of register #2
14,16,17 Output 1,2,3th bit of register #2
10,11,12,13,15 Input 6,7,5,4,3th bit of register #1

28Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Exemplo de porta paralela
; This program consists of a sub-routine that reads; the state of the input pin, determining the on/off state; of our switch and asserts the output pin, turning the LED; on/off accordingly
.386
CheckPort procpush ax ; save the content
push dx ; save the contentmov dx, 3BCh + 1 ; base + 1 for register #1in al, dx ; read register #1and al, 10h ; mask out all but bit # 4cmp al, 0 ; is it 0?jne SwitchOn ; if not, we need to turn the LED on
SwitchOff:mov dx, 3BCh + 0 ; base + 0 for register #0in al, dx ; read the current state of the portand al, f7h ; clear first bit (masking)out dx, al ; write it out to the portjmp Done ; we are done
SwitchOn:mov dx, 3BCh + 0 ; base + 0 for register #0in al, dx ; read the current state of the portor al, 01h ; set first bit (masking)out dx, al ; write it out to the port
Done: pop dx ; restore the contentpop ax ; restore the content
CheckPort endp
extern “C” CheckPort(void); // defined in // assembly
void main(void) {while( 1 ) {
CheckPort();}
}
LPT Connection Pin I/O Direction Register Address
1 Output 0th bit of register #2
2-9 Output 0th bit of register #2
14,16,17 Output 1,2,3th bit of register #2
10,11,12,13,15 Input 6,7,5,4,3th bit of register #1
PC Parallel port
Pin 13
Pin 2
Switch
LED

29Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Sistema Operacional
• Camadas opcionais do software fornecem serviços de baixo-nível para o programa (aplicação).– Administração de arquivos, acesso aos
discos
– Interface com teclado/display
– Escalonamento de múltiplos programas para execução
• Ou mesmo somente para a execução de múltiplas threads de um programa
– Programa faz “chamadas de sistema” ao Sistema Operacional (OS) para ter acesso aos serviços disponíveis.
DB file_name “out.txt” -- store file name
MOV R0, 1324 -- system call “open” id
MOV R1, file_name -- address of file-name
INT 34 -- cause a system call
JZ R0, L1 -- if zero-> error
. . . read the fileJMP L2 -- bypass
error cond.L1: . . . handle the errorL2:

30Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Ambiente de Desenvolvimento
• Processador de Desenvolvimento– Processador no qual escrevemos e depuramos os programas
• Usualmente um PC
• Processador Alvo– Processador no qual o programa irá funcionar (no sistema
embarcado)• Frequentemente é diferente do processador de desenvolvimento
Processador de Desenvolvimento Processador Alvo
31Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
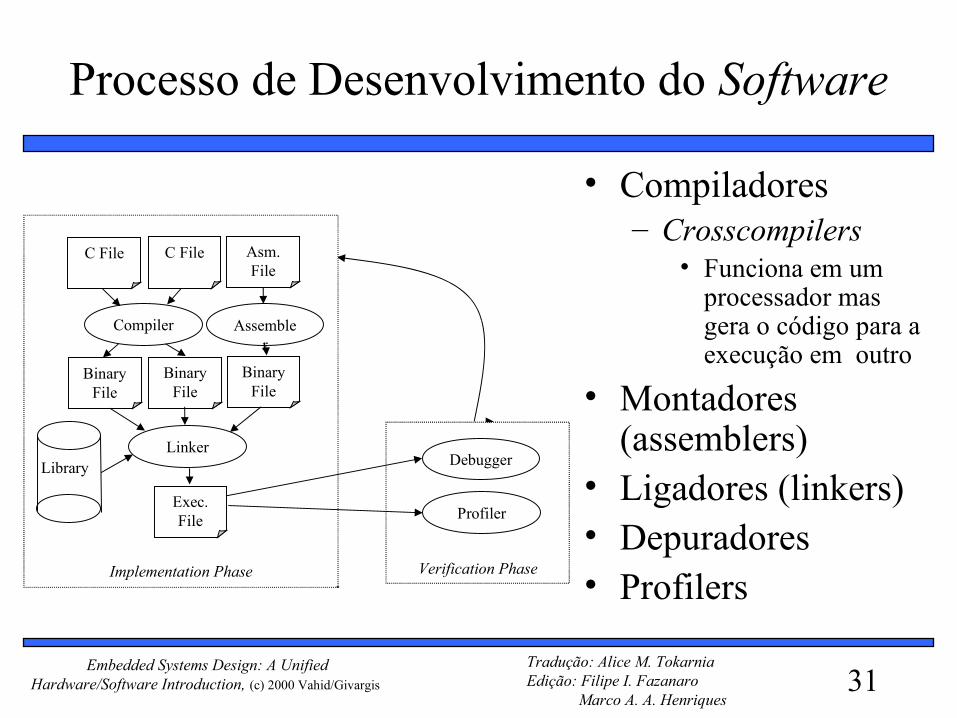
Processo de Desenvolvimento do Software
Compiler
Linker
C File C File Asm. File
Binary File
Binary File
Binary File
Exec. File
Assembler
Library
Implementation Phase
Debugger
Profiler
Verification Phase
• Compiladores– Crosscompilers
• Funciona em um processador mas gera o código para a execução em outro
• Montadores (assemblers)
• Ligadores (linkers)• Depuradores• Profilers

32Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Executando um Programa
• Se o processador de desenvolvimento é diferente do processador alvo, como é possível executar o código compilado? Existem duas opções:– executar em um sistema com o processador alvo
– simular o processador alvo no sistema de desenvolvimento
• Simulação– Primeiro método: Linguagem de Descrição de Hardware (HDL)
• lenta e nem sempre disponível
– Segundo método: Instruction set simulator (ISS)• executa no processador de desenvolvimento as instruções do processador
alvo por meio de uma tradução de um conjunto de instruções para outro

33Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Simulador de um conjunto de instruções para um processador simples
#include <stdio.h>typedef struct { unsigned char first_byte, second_byte;} instruction;
instruction program[1024]; //instruction memoryunsigned char memory[256]; //data memory
void run_program(int num_bytes) {
int pc = -1; unsigned char reg[16], fb, sb; while( ++pc < (num_bytes / 2) ) { fb = program[pc].first_byte; sb = program[pc].second_byte; switch( fb >> 4 ) { case 0: reg[fb & 0x0f] = memory[sb]; break; case 1: memory[sb] = reg[fb & 0x0f]; break; case 2: memory[reg[fb & 0x0f]] = reg[sb >> 4]; break; case 3: reg[fb & 0x0f] = sb; break; case 4: reg[fb & 0x0f] += reg[sb >> 4]; break; case 5: reg[fb & 0x0f] -= reg[sb >> 4]; break; case 6: pc += sb; break; default: return –1;
} } return 0;}
int main(int argc, char *argv[]) {
FILE* ifs;
If( argc != 2 || (ifs = fopen(argv[1], “rb”) == NULL ) { return –1; } if (run_program(fread(program, sizeof(program) == 0) {
print_memory_contents();return(0);
} else return(-1);}

34Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Testando e Depurando
Fase de Implementação
Fase de Implementação
Fase de Verificação
Fase de Verificação
Emulator
Debugger/ ISS
Programador
Processador de Desenvolvimento
(a) (b)
Ferramentas Externas
• ISS – Controle da execução no tempo –
define breakpoints, examina valores de registradores, define valores, executa código passo-a-passo, ...
– Mas não interage com o ambiente real
• Download para a placa teste– Usa dispositivo programador– Executado em ambiente real
porém sem controle
• Emulador: solução de compromisso
– Execução em ambiente real, em velocidade real ou próximo dela.
– Permite algum controle a partir do PC

35Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Processadores para Área de Aplicação Específicas (ASIPs)
• Processadores de Propósito Geral (GPP)– Em alguma ocasiões é muito genérico para ser efetivo em aplicações
exigentes• e.g., processamento de vídeo – exige buffers gigantescos e opera com
arranjos de dados extremamente longos; ineficiente em um GPP
– Mas, processadores dedicados possuem alto custo NRE e não são programáveis
• ASIPs – voltado para um campo particular de aplicação– Contém características de arquitetura específicas para aquele campo
• e.g., controle embarcado, processamento digital de sinais, processamento de vídeos, processamento de redes, telecomunicações etc
– Mais específico, porém ainda programável

36Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Exemplo comum de ASIP: Microcontrolador
Para aplicações de controle embarcadas– Leitura de sensores, ajustando atuadores– Na maioria das vezes lida com eventos (bits): o dado está presente, mas não em
grandes quantidades– e.g., VCR, acionador de discos, câmera digital (assumindo SPP para compressão
de imagem), máquina de lavar, forno de microondas• Características do microcontrolador
– Periféricos no chip• Temporizadores, conversores analógico-digital, comunicação serial, etc.• Fortemente integrados para o programador• São tipicamente uma parte do espaço de registradores
– Memória de programa e de dados no chip– Programas tem acesso direto aos pinos do chip– Instruções especializadas para a manipulação de bits e outras operações em
baixo nível

37Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Outro Exemplo de ASIP: Processador Digital de Sinais (DSP)
• Para aplicações de processamento de sinais– Grande quantidade de dados digitalizados, normalmente em
fluxos
– Transformação de dados deve ser realizada rapidamente
– e.g., filtro de voz para telefone celulares, TV digital, sintetizador de música
• Características do DSP– Várias unidades de execução de instruções
– Operações “multiplica-e-acumula” em uma única instrução
– Operações vetoriais eficientes – e.g., soma de dois arranjos• ULAs vetoriais, buffer para loops, etc.

38Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Tendência: ASIPs ainda mais customizados
• No passado, microprocessadores eram adquiridos como chips• Hoje, processadores estão sendo adquiridos como Propriedade
Intelectual (IP)– e.g., modelo VHDL
• Oportunidade de adicionar hardware de datapath customizado e umas poucas instruções, ou apagar algumas instruções– Pode ter impactos significativos no desempenho, tamanho e potência
consumida– Problema: necessidade de compilador/depurador para o ASIP
customizado• Lembre-se: a maioria dos desenvolvedores utiliza linguagem estrutural• Uma solução: geração automática de compiladores/depuradores
– e.g., www.tensillica.com• Outra solução: retargettable compilers
– e.g., www.improvsys.com (arquiteturas VLIW customizadas)

39Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Selecionando um Microprocessador
• Critérios– Técnicos: velocidade, potência consumida, tamanho, custo– Outros: ambiente de desenvolvimento, familiaridade, licenciamento etc
• Velocidade: como avaliar a velocidade do processador?– Velocidade do sinal de relógio – mas o número de instruções por ciclo
pode variar– Instruções por segundo – mas o trabalho realizado por instrução pode
variar– Continua ...

40Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Selecionando um Microprocessador (cont.)
• Velocidade: como avaliar a velocidade do processador? (continuação...)– Dhrystone: Synthetic Benchmark – Programas Sintéticos de Avaliação,
desenvolvido em 1984.
• Unidade de medida: Dhrystones/segundo.• MIPS: 1 MIPS = 1757 Dhrystones/segundo (baseado no VAX 11/780
de Digital). A.k.a. Dhrystone MIPS. Usado comumente hoje em dia.– Ex: 750 MIPS = 750*1757 = 1,317,750 Dhrystones/segundo
– SPEC: conjunto de programas mais realistas para a avaliação de processadores para desktops
– EEMBC – EDN Embedded Benchmark Consortium, www.eembc.org• Pacotes de benchmarks: setor automotivo, eletrônica de consumo,
áreas de redes, automação de escritórios e telecomunicações

41Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Processadores de Propósito Geral
Processor Clock speed Periph. Bus Width MIPS Power Trans. PriceGeneral Purpose Processors
Intel PIII 1GHz 2x16 KL1, 256KL2, MMX
32 ~900 97W ~7M $900
IBMPowerPC750X
550 MHz 2x32 KL1, 256KL2
32/64 ~1300 5W ~7M $900
MIPSR5000
250 MHz 2x32 K2 way set assoc.
32/64 NA NA 3.6M NA
StrongARMSA-110
233 MHz None 32 268 1W 2.1M NA
MicrocontrollerIntel8051
12 MHz 4K ROM, 128 RAM,32 I/O, Timer, UART
8 ~1 ~0.2W ~10K $7
Motorola68HC811
3 MHz 4K ROM, 192 RAM,32 I/O, Timer, WDT,SPI
8 ~.5 ~0.1W ~10K $5
Digital Signal ProcessorsTI C5416 160 MHz 128K, SRAM, 3 T1
Ports, DMA, 13ADC, 9 DAC
16/32 ~600 NA NA $34
LucentDSP32C
80 MHz 16K Inst., 2K Data,Serial Ports, DMA
32 40 NA NA $75
Sources: Intel, Motorola, MIPS, ARM, TI, and IBM Website/Datasheet; Embedded Systems Programming, Nov. 1998

42Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Projetando um Processador de Propósito Geral
• Não é um projeto que um projetista de sistemas embarcados faria– Entretanto, é interessante
observar como um processador genérico pode ser projetado de forma top-down
– Na prática, os processadores não são construídos desta maneira
• projetos muito mais otimizados
• desenvolvimento muito mais bottom-up
Declarations: bit PC[16], IR[16]; bit M[64k][16], RF[16][16];
Aliases: op IR[15..12] rn IR[11..8] rm IR[7..4]
dir IR[7..0] imm IR[7..0] rel IR[7..0]
Reset
Fetch
Decode
IR=M[PC];PC=PC+1
Mov1 RF[rn] = M[dir]
Mov2
Mov3
Mov4
Add
Sub
Jz01100101
01000011
00100001
op =
0000
M[dir] = RF[rn]
M[rn] = RF[rm]
RF[rn]= imm
RF[rn] =RF[rn]+RF[rm]
RF[rn] = RF[rn]-RF[rm]
PC=(RF[rn]=0) ?rel :PC
to Fetch
to Fetch
to Fetch
to Fetch
to Fetch
to Fetch
to Fetch
PC=0;
from states below
FSMD

43Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Arquitetura de um Microprocessador Simples
Dispositivos de armazenamento para cada variável declarada
– Conjunto de registradores armazena cada uma das variáveis
• Unidades funcionais para executar as operações FSMD
– Uma só ULA para todas as operações
• Conexões são adicionadas entre as portas dos componentes de acordo com as operações da FSM
• Criação de identificadores únicos para cada sinal de controle
Datapath
IRPC
Controller(Next-state and
controllogic; state register)
Memory
RF (16)
RFwa
RFwe
RFr1a
RFr1e
RFr2a
RFr2eRFr1 RFr2
RFw
ALUALUs
2x1 mux
ALUz
RFs
PCld
PCinc
PCclr
3x1 muxMsMweMre
To all input control signals
From all output control signals
Control unit
16Irld
2
1
0
A D
1
0

44Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Um Microprocessador Simples
FSM operations that replace the FSMD operations after a datapath is created
RFwa=rn; RFwe=1; RFs=01;Ms=01; Mre=1;
RFr1a=rn; RFr1e=1; Ms=01; Mwe=1;
RFr1a=rn; RFr1e=1; Ms=10; Mwe=1;
RFwa=rn; RFwe=1; RFs=10;
RFwa=rn; RFwe=1; RFs=00;RFr1a=rn; RFr1e=1;RFr2a=rm; RFr2e=1; ALUs=00RFwa=rn; RFwe=1; RFs=00;RFr1a=rn; RFr1e=1;RFr2a=rm; RFr2e=1; ALUs=01PCld= ALUz;RFrla=rn;RFrle=1;
MS=10;Irld=1;Mre=1;PCinc=1;
PCclr=1;Reset
Fetch
Decode
IR=M[PC];PC=PC+1
Mov1 RF[rn] = M[dir]
Mov2
Mov3
Mov4
Add
Sub
Jz0110
0101
0100
0011
0010
0001
op =
0000
M[dir] = RF[rn]
M[rn] = RF[rm]
RF[rn]= imm
RF[rn] =RF[rn]+RF[rm]
RF[rn] = RF[rn]-RF[rm]
PC=(RF[rn]=0) ?rel :PC
to Fetch
to Fetch
to Fetch
to Fetch
to Fetch
to Fetch
to Fetch
PC=0;
from states below
FSMD
Datapath
IRPC
Controller(Next-state and
controllogic; state
register)
Memory
RF (16)
RFwa
RFwe
RFr1a
RFr1e
RFr2a
RFr2eRFr1 RFr2
RFw
ALUALUs
2x1 mux
ALUz
RFs
PCld
PCinc
PCclr
3x1 muxMsMweMre
To all input control signals
From all output control signals
Control unit
16Irld
2
1
0
A D
1
0
Você acabou de construir um processador!!

45Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
Tradução: Alice M. TokarniaEdição: Filipe I. Fazanaro Marco A. A. Henriques
Resumo do Capítulo
• Processadores de Propósito Geral– Bom desempenho, baixo NRE, flexíveis (várias aplicações)
• Controladores, datapaths e memórias• Prevalecem linguagem estruturadas
– Mas programação em linguagem assembly ainda pode ser necessária• Grande disponibilidade de ferramentas
– Incluindo simuladores de conjuntos de instruções e emuladores de circuitos
• ASIPs– Microcontroladores, DSP, processadores de rede, ASIPs customizados
• A escolha entre os vários tipos de processadores disponíveis é um passo importante dentro do projeto
• O desenvolvimento de um processador de propósito geral é conceitualmente o mesmo que desenvolver um processador customizado de propósito único