Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das...
33
1 Cap.5 – ESTÁTICA • Equações de equilíbrio estático O movimento de um corpo é função das equações: Em que m é a massa do corpo, F as forças que actuam no corpo, e a c é a aceleração no seu centro de massa. M é a resultante do momento. O princípio da conservação do momento em relação a um ponto é: em que r é a posição e v a velocidade do elemento de massa. A aceleração do centro de massa é nula quando o corpo está em repouso ou em movimento constante. Assim as equações de equilíbrio estático são: Para que exista equilíbrio, as forças devem possuir a mesma magnitude, direcção oposta e a mesma linha de acção. dt H d M a m F c 0 0 dm v r H 0 0 0 O M F F x = 0 F y = 0 F z = 0 M x = 0 M y = 0 M z = 0
Transcript of Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das...
![Page 1: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/1.jpg)
1
Cap.5 – ESTÁTICA• Equações de equilíbrio estático
O movimento de um corpo é função das equações:
Em que m é a massa do corpo, F as forças que actuam no corpo, e ac é a aceleração no seu centro demassa. M é a resultante do momento. O princípio da conservação do momento em relação a um ponto é:
em que r é a posição e v a velocidade do elemento de massa.A aceleração do centro de massa é nula quando o corpo está em repouso ou em movimento constante.
Assim as equações de equilíbrio estático são:
Para que exista equilíbrio, as forças devem possuir a mesma magnitude,direcção oposta e a mesma linha de acção.
dtHdM
amF c
00
dmvrH 0
0
0
OM
F Fx = 0 Fy = 0 Fz = 0
Mx = 0 My = 0 Mz = 0
![Page 2: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/2.jpg)
2
Cap.5 – ESTÁTICA• Equações de equilíbrio estático
O momento criado por uma força externa é definido como:
O produto desta relação produz um momento perpendicular ao planoda força e do vector posição, que vale:
é o vector que liga o ponto onde vai ser calculado o momentoe qualquer ponto da linha de acção da força.
Por vezes a notação vectorial (produto vectorial) pode ser útil nadeterminação do momento:
PAP
A FPAFrM
/
APr /
P
Q
V = P x Q
P = Px i + Py j + Pz k Q = Qx i + Qy j + Qz k
iPxQx
jPyQy
kPzQz
= Vx i + Vy j + Vz k
Vx = Py Qz - Pz QyVy = Pz Qx - Px QzVz = Px Qy - Py Qx
+
sin/ FrM APA
QPV
QPV
![Page 3: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/3.jpg)
3
Cap.5 – ESTÁTICA
• Equações de equilíbrio estático:Momento no braço
O momento do músculo do braço é perpendicular àdistância entre a linha do músculo e o centro daarticulação. O maior momento corresponde a umaposição angular da força de 90º.
Sentido:“counterclockwise” (+) anti-horário
“clockwise” (-) horário F
d MM = F · d┴ [ N.m]
e1
e2
![Page 4: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/4.jpg)
4
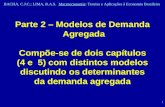
Determine as componentes rectangulares dasreacções em A e B do sistema representado, sefor aplicada uma força de 267 [N] em D.
267
RAx
RAy
RBx
RBy
NRBNRA
RBRA
RBRBRA
RBRA
M
FF
MF
y
y
xx
y
yy
xx
zPQ
y
x
6,480213
0
06,2282671270267
0
0
00
00
RBx
RBy
RCx
RCy
NRCNRC
RB
RCRBRCRBRC
M
FF
MF
x
y
x
x
yy
xx
zPQ
y
x
06,480
0
02,7600
0
00
00
1º representar diagrama(s) de corpo livre.
Solução: RAx=RBx=0; RAy=-213 [N], RBy=480,6 [N].
2º estabelecer equações de equilíbrio.
Exercício 5.1Sistema estrutural
Cap.5 – ESTÁTICA
![Page 5: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/5.jpg)
5
• Exercício 5.2Um balancé
Calcule o momento provocado pelacriança A no apoio ou rótula do balancé.Efectue o mesmo cálculo para a criançaB. Verifique se há equilíbrio nesse apoio.
Cap.5 – ESTÁTICA
• Exercício 5.3Contacto entre o solo e a planta do pé
Conforme a figura, ao caminhar, os músculos queactuam num pé ficam submetidos a um conjunto deforças musculares. Determine o momento de cadauma dessa forças no ponto de contacto A entre aplanta do pé e o solo.
![Page 6: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/6.jpg)
6
Cap.5 – ESTÁTICA• Exercício 5.4
Máquina para exercícios
Na máquina de exercícios representada na figura, o cilindroexerce sobre a perna uma força de intensidade F, perpendicularà perna. O peso vertical da perna é W e actua no ponto A.Calcule, em função de W, F, , a e b, o momento resultante noao ponto O (articulação do joelho).
• Exercício 5.5Máquina para exercícios
Uma pessoa segura com o braço esquerdo um manípulo queestá ligado por um cabo a um peso de 200N. Admitindo queo comprimento do braço é a=25cm e o do antebraço éb=30cm, determine o valor de todas as componentes dosmomentos que aquela força produz em relação àsarticulações do cotovelo (B) e do ombro (A).
a
b
![Page 7: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/7.jpg)
7
Cap.5 – ESTÁTICA• Equações de equilíbrio estático: forças reactivas ou de contacto
3ª Lei de Newton ou Lei da reacção:‘’Para qualquer acção há uma força reactiva igual e de sentido oposto.’’
Força atrito (contrária movimento)
Força do corpo(s) (exteriores ou interiores)
Força de contacto (solo/corpo), normal ou reactiva
Força de contacto ou reactiva (resultante das anteriores)
![Page 8: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/8.jpg)
8
Cap.5 – ESTÁTICA• Equações de equilíbrio estático: forças atrito ou de fricção
Fricção, força que actua numa área de contacto entre 2 superfícies na direcção oposta ao movimento oucom tendência de movimento.
Fricção estática máxima: (Fm) gerada entre 2 superfícies Fa max = s R [N]Fricção cinética (Fk) gerada entre 2 superfícies em movimento Fk = k R [N]
Coeficiente de fricção, nº relativo à interacção de 2 superfícies:- Coeficiente de fricção estático (s) corpos em contacto sem movimento.- Coeficiente de fricção cinético (k) corpos em contacto em movimento.
Força normal reactiva (R) normal ou perpendicular às 2 superfícies em contacto.
P
R
P
R
Q1Fa
P
R
Q2Famax
Famax
Fa
Q1 Q2Movimento=dinâmicoestático
Famax=s x R
Corpo:
RF kk RF kk
![Page 9: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/9.jpg)
9
Nota 1: Os coeficientes de atrito dependem da naturezae da condição de contacto entre as superfícies.
Nota 2: A tribologia estuda a fricção entre corpos.
Cap.5 – ESTÁTICA• Equações de equilíbrio estático: forças atrito ou de fricção
Rugosidade nas superfícies
TABELA - Coeficiente de atrito estático TABELA - Coeficiente de atrito cinético
Material sJunta óssea lubrificada 0,003
Junta tendão e bainha do músculo 0,013
Aço sobre o gelo 0,03
Aço sobre aço lubrificado 0,10 - 0,15
Madeira sobre metal seco 0,2 - 0,6
Madeira sobre madeira seca 0,25 - 0,50
Couro sobre madeira 0,3 - 0,4
Couro sobre metal 0,6
Aço sobre aço seco 0,6
Borracha sobre sólidos em geral 1,0 - 4,0
Material k
Latão sobre gelo 0,02
Gelo sobre gelo 0,02
Aço sobre aço seco 0,23
Borracha sobre concreto 1,02
O atrito limita a eficiência da maioria das “máquinas”. Por outrolado, utiliza-se o atrito quando agarramos uma corda, quandoandamos ou corremos...
Nota 3: O coeficiente de atrito nas articulações ósseas égeralmente muito menor do que nos materiais utilizadosem engenharia estrutural.
![Page 10: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/10.jpg)
10
FaFa
NN
RR
a) b)
Cap.5 – ESTÁTICA• Equações de equilíbrio estático: forças atrito ou de fricção
Andando normalmente:a) O atrito entre o calcanhar e o solo evita o pé deslizar para frente.b) Quando o pé deixa o solo o atrito evita o pé deslizar para trás.
Nota 1: Em geral, a força de atrito é grande e suficiente de forma aevitar o deslizamento da pessoa quando o calcanhar toca o solo equando deixa a superfície.
Nota 2: Numa superfície gelada, húmida ou com óleo, µ é menor que 0.15, que significa a possibilidade deescorregamento. Logo possibilidade de queda associada a fractura de ossos!
Nota 3: O coeficiente de atrito nas articulações ósseas é geralmente muito menor do que nos materiaisutilizados em engenharia. Se surge uma doença numa articulação, o atrito pode tornar-se grande!
Nota 4: A saliva que adicionamos quando mastigamos os alimentos actua como um lubrificante. Seengolirmos uma torrada seca percebemos a falta dolorosa dessa lubrificação. A maioria dos grandes órgãosdo corpo humano estão em movimento mais ou menos constante (coração, pulmões, intestinos), sendolubrificados por capas mucosas escorregadias para minimizar o atrito.
![Page 11: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/11.jpg)
11
4 [m]
h A
B
C
Calcule a máxima distância h que um homem de 80[kg]pode alcançar em subida, sem que a escada atinja ocolapso. O coeficiente de fricção em ambos os pontos decontacto da escala ao solo (A e C) é de 0,5. Cada um doslados da escada (AB e BC) tem uma massa de 10[kg], peloque origina um peso da mesma, situado a meio da distânciada base de cada lado da escada.
h A
B
C
FaA
FaC
NA NC
PH
PE PE
Diagrama de corpo livre:5 variáveis desconhecidas para 3 equaçõesde equilíbrio
h A
FaA NA
PH
PE
BRBx
RBy
B
CFaC
NC
PE
RBx
RBy
Diagrama de corpo livre:7 variáveis desconhecidas para 6 equaçõesde equilíbrio
Problema:Saber qual dos suportes se movimenta primeiro o A ou o C, originando assim o colapso da estrutura.
3.46
• Exercício 5.6 Fricção
Cap.5 – ESTÁTICA
![Page 12: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/12.jpg)
12
1a hipótese – A estrutura tende amovimentar-se em A, pelo que sepode dizer que seria o 1º apoio aatingir o colapso.
01))º60(/2(2)º60(45.0
005.0
EHAA
ByEHA
BxA
PTanhPNSinN
RPPNRN
012)º60(4
00
ECC
ByEC
BxC
PNSinFa
RPNRFa
NRNRNN
By
Bx
A
5,3837,2494,499
NNNFmh
C
aC
6,4817,249
385.3
1ª – conclusão: A comparação do valor FaC com o máximo valor FaCmax=240.8[N] indicaque o 1º é maior que o segundo. Então a 1ªhipótese não é válida!!!!!!
hA
NA NA
PH
PE
B
RBx
RBy
B
CFaC
NC
PE
RBx
RBy 3.46
• Exercício 5.6 Fricção
Cap.5 – ESTÁTICA
![Page 13: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/13.jpg)
13
2ª hipótese – A estrutura tende amovimentar-se em C, pelo que se podedizer que seria o 2º apoio a atingir ocolapso.
01))º60(/2(2)º60(4
00
EHAA
ByEHA
BxA
PTanhPNSinFa
RPPNRFa
012)º60(45,0
005,0
ECC
ByEC
BxC
PNSinN
RPNRN
2ª – conclusão: A comparação do valor FaA com o máximo valor FaAmax=307.4[N] indicaque o 1º é mais pequeno que o 2º. Pelo que a hipótese é verdadeira!!!!!!
NRNNNFa
Bx
A
A
1,1838,6141,183
NN
NRmh
C
By
2,366
1,26837,2
h A
NA
PH
PE
BRBx
RBy
B
CNC
NC
PE
RBx
RBy
FaA
3.46
• Exercício 5.6 Fricção
Cap.5 – ESTÁTICA
![Page 14: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/14.jpg)
14
Cap.5 – ESTÁTICA• Exercício 5.7
Um atleta em exercício
Conforme a figura, um atleta estica os seus músculos inclinando-se numaparede, antes de uma prova. O atleta tem uma massa de 80kg e uma alturade 183cm. A distância entre os pontos DB (da cabeça aos ombros) é de30cm. A distância AC é de 101cm e a distância AG de 25cm. A fricçãoentre a parede e as mãos do atleta é desprezável. Determine as forçasexercidas no atleta através da parede e do solo em função do ângulo igual a 30º.
• Exercício 5.8Rotação iminente de uma cadeira
Uma criança com peso de 40kg está sentada numa cadeira. As pernas dacadeira estão afastados de 0,4m e a altura da cadeira é de 1,2m.Assumindo que as forças de fricção são elevadas para impedir odeslizamento, qual é a força horizontal necessária a ser exercida na partetraseira da cadeira, de forma a que, as pernas traseiras da cadeira nãolevantem?
![Page 15: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/15.jpg)
15
Cap.5 – ESTÁTICA• Exercício 5.9
Caminhar de muletas
Para a configuração representada na figura, uma mulher, devido aproblemas no joelho, utiliza muletas para caminhar e manter-se em pé.Determine as forças de contacto que actuam nas muletas e no pé.
• Exercício 5.10Cabo humano
Um jovem com peso W[kg], encontra-se suspenso por 2estudantes, cada um com peso Ws[kg], aguentando cada umdestes o mesmo esforço. O jovem suspenso descreve uma curvaparabólica e está sujeito a um estado de tensão. D é a distânciana horizontal entre os ombros dos 2 estudantes e d a altura maisbaixa a que se encontra o jovem suspenso. Os 2 estudantesinclinam-se de forma a suportar o jovem sem que este chegue aochão. Para que assim seja, pretende-se que determine o ângulo deinclinação e as forças reactivas ao solo que é feito pelos 2 jovens.
![Page 16: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/16.jpg)
16
Utilizando o teorema de Varignon o centro de massa fica localizado:
corpo
dPyPYG . corpo
dPzPZG . dVgdP
Cap.5 – ESTÁTICA• Geometria de massas: Centro de Massa (CM)
]kg/m[B]kg/m[Ase]kg/m[específicamassa
33
3
corpo
dPxPXG .
dVdm
n
ii
n
iii
total
corpo
total
corpo
total
corpoCM
m
mx
m
dmx
mg
dmgx
P
dPxX
1
1
.
.
...
n
ii
n
iii
CMn
ii
n
iii
CMn
ii
n
iii
CM
CMCMCM
m
mzz
m
myy
m
mxx
zyx
1
1
1
1
1
1 ;;
),,(MassaCentro
Desenvolvendo para x: O que permite concluir:
]kg/m[A 3
corpos 2CM
ACGCM BCGCM
]kg/m[B 3y
x
![Page 17: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/17.jpg)
17
Centróide é o centro geométrico de cada corpo
Cap.5 – ESTÁTICA• Geometria de massas: Centro Geométrico ou Centróide (C)
n
ii
n
iii
total
corpoC
L
Lx
L
dLxX
1
1
.
n
ii
n
iii
Cn
ii
n
iii
Cn
ii
n
iii
C
L
Lzz
L
Lyy
L
Lxx
zyxentróide
1
1
1
1
1
1 ;;
),,(C
n
ii
n
iii
Cn
ii
n
iii
Cn
ii
n
iii
C
V
Vzz
V
Vyy
V
Vxx
1
1
1
1
1
1 ;;
n
ii
n
iii
Cn
ii
n
iii
Cn
ii
n
iii
C
A
Azz
A
Ayy
A
Axx
1
1
1
1
1
1 ;;
ACGCM BCGCM
corpos 2CM
corpos 2CG
O que permite concluir:
Desenvolvendo para x:
Nota 1: Para corpos homogéneos com massa específica constante o centróide coincide com o centro de massa.Nota 2: Para corpos heterogéneos, a coincidência da nota 1 depende do valor da massa específica.
![Page 18: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/18.jpg)
18
n
ii
n
iii
CMn
ii
n
iii
CM
m
myy
m
mxx
1
1
1
1 ;
),(MassaCentro CMCM yx
Cap.5 – ESTÁTICA• Geometria de massas: Centro de Massa (CM) de segmentos anatómicos
(antropometria), em modelos biomecânicosOs sólidos mais utilizados na definição da morfologia humana são o elipsóide, a esfera e ocilindro.
![Page 19: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/19.jpg)
19
Cap.5 – ESTÁTICAPropriedades de figuras planas: Centróide
![Page 20: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/20.jpg)
20
Calcular a posição do centro de massa do corpocomposto, sabendo que o painel vertical tem umamassa específica de 25(kg/m2) e a base é de ummaterial diferente com 40(kg/m2) de massa específica.
Solução: Considerar 3 partes geométricas simples no corpo.
50 50
25
75
150
150
100
xy
z
Corpos: 1- placa vertical, 2- placa triangular retirada, 3- placa horizontal
Cap.5 – ESTÁTICAExercício 5.10: Geometria de massas – centro de massa
n
ii
n
iii
CMn
ii
n
iii
CMn
ii
n
iii
CM
CMCMCM
m
mzz
m
myy
m
mxx
zyx
1
1
1
1
1
1 ;;
),,(MassaCentro
![Page 21: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/21.jpg)
21
Corpo massa [kg] xi(m) yi(m) zi(m) Pi (N)
1 25(Kg/m^2) 0,562 0 0 -0,075 5,518
2 25(Kg/m^2) -0,094 0 0 -0,100 -0,920
3 40(Kg/m^2) 0,6 0 0,05 -0,150 5,886
P total= 10.5
Cap.5 – ESTÁTICA
50 50
25
75
150
150
100
xy
z
1
2
3
m total= 1.068
0068.1
06.00094.00562.03
1
3
1
ii
iii
CM
m
mxx
028.0068.1
05.06.00094.00562.0
1
1
n
ii
n
iii
CM
m
myy
115.0068.1
15.06.01.0094.0075.0562.0
1
1
n
ii
n
iii
CM
m
mzz
mm)115,28,0(),,(CM CMCMCM zyx
Exercício 5.10: Geometria de massas – centro de massa
![Page 22: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/22.jpg)
22
Considere a perna de um indivíduo representada na figura,flectida segundo um ângulo recto. As coordenadas dos centrosde gravidade: entre a anca e a articulação do joelho, do joelho àarticulação do pé, e do pé, foram medidos através de segmentoslineares cujos resultados estão tabelados. O peso dessessegmentos anatómicos são expressos de forma percentual emrelação ao peso do indivíduo. Determine a localização do centrode gravidade considerando a perna flectida.
Cap.5 – ESTÁTICAExercício 5.11: Geometria de massas – centro de massa
n
ii
n
iii
CMn
ii
n
iii
CM
CMCM
m
myy
m
mxx
yx
1
1
1
1 ;
),(MassaCentro
3
1
2
W1
y
x
W2
W3
y1
y2
y3
x1 x2 x3
Parte x[cm] y[cm] %W
1 17.3 51.3 10.6
2 42.5 32.8 4.6
3 45.0 3.3 1.7
![Page 23: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/23.jpg)
23
Localize o centróide da figura plana combinada.y
x
20 mm 30 mm
36 mm
24 mm
Cap.5 – ESTÁTICAExercício 5.12: Geometria de massas - centróide
y
x
24 + 12
20 + 10
10
30
C1
C2
(mm)
Solução:1º identificar as figuras e os respectivos centróides.
n
ii
n
iii
Cn
ii
n
iii
Cn
ii
n
iii
C
A
Azz
A
Ayy
A
Axx
zyxentróide
1
1
1
1
1
1 ;;
),,(C
![Page 24: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/24.jpg)
24
2º Construir uma tabela
Cap.5 – ESTÁTICAExercício 5.12: Geometria de massas - centróide
y
x
24 + 12
20 + 10
10
30
C1C2
(mm)
n
ii
n
iii
Cn
ii
n
iii
C
A
Ayy
A
Axx
1
1
1
1 ;
)0,9.31,21.16(),,(C zyxentróide
A, mm2 x, mm y, mm xA, mm3 yA, mm3
1 20 x 60 =1200 10 30 12,000 36,0002 (1/2) x 30 x 36 =540 30 36 16,200 19,440 1740 28,200 55,440
X A = xAX (1740) = 28,200ou X = 16.21 mm
Y A = yAY (1740) = 55,440ou Y = 31.9 mm
![Page 25: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/25.jpg)
25
Os momentos de inércia rectangulares Ix e Iy de uma área sãodefinidos como:
Ix = y 2dA Iy = x 2dA x
y
y
dx
x
O momento polar de inércia numa área A em relação a O é definido como:y
xx
yr
A dA
O
JO = r 2dAA distância de O ao elemento de área dA é r.Observando que r 2 =x 2 + y 2 , estabelece-se a relação:
JO = Ix + Iy
Cap.5 – ESTÁTICA
• Momentos de inércia ou momentos de área de 2ª ordem
A
B’
A’
Bd
c
I = I + Ad 2
O teorema de eixos paralelos enuncia que o momento deinércia I de uma superfície em relação a um eixo AA’ é igualao momento de inércia I da superfície em relação ao eixobaricêntrico BB’ paralelo a AA’ mais o produto da área A peloquadrado da distância d entre os dois eixos.
• Teorema de Steiner
![Page 26: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/26.jpg)
26
Cap.5 – ESTÁTICAPropriedades:
![Page 27: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/27.jpg)
27
Calcule os momentos de inércia rectangulares Ix e Iy para a secção de área seguinte, bem comoo momento polar.
44
0
222
442
221
44212
3)(
328)4(
102
LadyaydAyI
LadyaydAyI
LaIIdAyI
a
Axx
a
aAxx
xxxxA
xx
442
222
442
2
221
44212
37)(
316)(
102
LadxaxdAxI
LadxaxdAxI
LaIIdAxI
a
aAyy
a
aAyy
yyyyA
yy
a a a aa
ax
y
2
1
x
y
4422 20 LaIIdAyxI yyxxA
P
Cap.5 – ESTÁTICA
• Momentos de inércia ou momentos 2ª ordem obtidos por integração directa
![Page 28: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/28.jpg)
28
a
a
a
a
x
y
Determine o momento de inércia daárea combinada seguinte, emrelação a x, quando a = 20 mm.
Cap.5 – ESTÁTICAExercício 5.11: Geometria de massas – momentos de inércia
1
2
3
x
y4 a3
x’
x’’4 a3
BBC’
C
C’’
Solução:1º identificar as áreas diferentes e centróides.
![Page 29: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/29.jpg)
29
58
Momento de inércia em relação a x:
Para a secção 2: (IBB)2 = a418
(IBB)2 = ( Ix’)2 + A d2
( Ix’)2 = (IBB)2_ A d2 = a4 _ a2 ( )2 = a4 _ a41
84 a3
12
89
18
12(Ix)2 = ( Ix’)2 + A d2 = a4 _ a4 + a2 ( a + )24 a
3 18
89
(Ix)2 = a4 + a443
1
2
3
x
y4 a3
x’
x’’4 a3
BBC’
C
C’’
Cap.5 – ESTÁTICAExercício 5.11: Geometria de massas – momentos de inércia
![Page 30: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/30.jpg)
30
(Ix)1 = (2a) (2a)3 = a4112
43
Secção 1:
Secção 3: (Ix)3 = (Ix)2 = a4 + a4
Momento de inércia da área combinada em x:
58
43
Ix = (Ix)1 + (Ix)2 + (Ix)3 = a4 + a4 + a4 + a4 + a443
58
43
58
43
Ix = 4 a4 + a4 = 1.268 x 106 mm454
(Para a = 20 mm)Ix = 1.268 x 106 mm4
1
2
3
x
y4 a3
x’
x’’4 a3
BBC’
C
C’’
Cap.5 – ESTÁTICAExercício 5.11: Geometria de massas – momentos de inércia
![Page 31: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/31.jpg)
31
r1
r2
m1
m2
r3m3
A
A’
Momentos de inércia de massa utilizados na dinâmica.Envolvem a rotação do corpo rígido em relação a um eixo. Édefinido em relação a um eixo AA’ com:
I = r 2dmonde r é a distancia de AA’ a um elemento de massa infinitesimal.
Ix = (y 2 + z 2 ) dm
Iy = (z 2 + x 2 ) dm
Iz = (x 2 + y 2 ) dm
Os momentos de inércia de massa em relação aos eixos coordenados:
O teorema de eixos paralelos teorema também é aplicável: mdII 2
A
A’
B
B’d
G
X Y
Z
x y
z
dm
Cap.5 – ESTÁTICA
• Momentos de inércia de massa
![Page 32: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/32.jpg)
32
Cap.5 – ESTÁTICA
• Centros de Massa e Momentos de inércia de massa em geometria simpleshomogéneas
![Page 33: Em que m F a M H r v dm - ipb.ptppiloto/pdf/cap5.pdf · Determine as componentes rectangulares das reacções em A e B do sistema representado, se for aplicada uma força de 267 [N]](https://reader030.fdocumentos.tips/reader030/viewer/2022011806/5bf616c309d3f27c7c8bdda8/html5/thumbnails/33.jpg)
33
Cap.5 – ESTÁTICA• Geometria de massas: Centro e Momentos de Inércia de Massa
em modelos biomecânicos







![Cap5 Vegeta..o atualiz17[1].10.4iepa.ap.gov.br/estuario/arq_pdf/vol_1/cap_5_vegetacao... · 2016. 5. 8. · Title: Microsoft Word - Cap5 Vegeta..o_atualiz17[1].10.4.doc Author: Marcell](https://static.fdocumentos.tips/doc/165x107/61186976dbd1e32ae54019e9/cap5-vegetao-atualiz171104iepaapgovbrestuarioarqpdfvol1cap5vegetacao.jpg)