
Dinâmica e afinação de uma viatura de competição · suspensões, Centro de Gravidade,...
123
Dinâmica e afinação de uma viatura de competição Pedro Jorge Ferreira Espinheira Rio Relatório do Projecto Final / Dissertação do MIEM Orientador na Toyota Caetano Portugal, S.A.: Eng.º João Pedro Marques Orientador na FEUP: Eng.º José Ferreira Duarte Faculdade de Engenharia da Universidade do Porto Mestrado Integrado em Engenharia Mecânica Fevereiro 2009
Transcript of Dinâmica e afinação de uma viatura de competição · suspensões, Centro de Gravidade,...
Dinâmica e afinação de uma viatura de competição
Pedro Jorge Ferreira Espinheira Rio
Relatório do Projecto Final / Dissertação do MIEM
Orientador na Toyota Caetano Portugal, S.A.: Eng.º João Pedro Marques
Orientador na FEUP: Eng.º José Ferreira Duarte
Faculdade de Engenharia da Universidade do Porto
Mestrado Integrado em Engenharia Mecânica
Fevereiro 2009

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
i
Pelo desporto automóvel…
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
ii
Abstract
This report is the result of the cooperation between Faculdade de Engenharia da Universidade do Porto and the company Toyota Caetano Portugal, SA that consisted in a training period of 5 months. This training was part of the final “Project” of the Mestrado Integrado em Engenharia Mecânica of the Faculdade de Engenharia of Universidade do Porto (FEUP), in the option of Produção Desenvolvimento e Engenharia Automóvel.
The project developed with the company was called “Dinâmica e Afinação de uma Viatura de Competição” and consisted in the study and development of a car´s dynamic behavior. The vehicle studied was the Toyota Starlet KP62 from 1981 that will participate in the “Campeonato de Portugal de Clássicos 1300 (Circuitos)” and “Taça de Portugal de Clássicos 1300 (Circuitos)”, competitions of classic cars organized by Federação Portuguesa de Automobilismo e Karting (FPAK).
This study was taken in several areas of the vehicle particularly in suspensions geometry, Center of Gravity, Instant Centers of Rotation, Roll Centers, weight transfer, springs, shock absorbers and anti-roll bars of the suspension system, and the alignment of the vehicle wheels.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
iii
Resumo
O presente trabalho é o resultado da cooperação entre a Faculdade de Engenharia da Universidade do Porto e a empresa Toyota Caetano Portugal, SA sob a forma de um estágio de 5 meses no âmbito da disciplina de “Projecto” do 5º ano do Mestrado Integrado em Engenharia Mecânica da Faculdade de Engenharia da Universidade do Porto (FEUP), na opção de Produção Desenvolvimento e Engenharia Automóvel.
O projecto desenvolvido na empresa foi intitulado por “Dinâmica e Afinação de uma Viatura de Competição” e tem como objectivo o estudo e melhoramento do comportamento dinâmico de um automóvel. O veículo objecto de estudo foi o Toyota Starlet KP62 de 1981, automóvel que irá participar no “Campeonato de Portugal de Clássicos 1300 (Circuitos)” e na “Taça de Portugal de Clássicos 1300 (Circuitos)”, competições organizadas pela Federação Portuguesa de Automobilismo e Karting (FPAK).
Este estudo incidiu em diversas características do veículo em especial na geometria das suspensões, Centro de Gravidade, determinação dos Centros Instantâneos de Rotação, determinação dos Centros de Rolamento, transferências de massa, molas, amortecedores e barras estabilizadoras do sistema de suspensão e alinhamento das rodas do veículo.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
iv
Agradecimentos
Ao meu orientador Eng. José Ferreira Duarte pela dedicação e trabalho realizado na implementação do estudo automóvel na FEUP, e na orientação deste trabalho.
Ao meu orientador na Toyota Caetano Portugal, SA Eng. João Pedro Marques pela oportunidade de estágio assim como pela forma como me recebeu na empresa.
Ao meu amigo e colega de curso Luís Costa pela ajuda na elaboração deste relatório.
Aos meus amigos e colegas de curso Pedro Fernandes, Cristiano Amaro, João Guimarães.
Aos funcionários da Toyota Caetano Portugal – Departamento de Competições pela forma como sempre me trataram na duração do período de estágio.
A todos aqueles que directa ou indirectamente lutam pela consolidação do estudo automóvel na FEUP.
Á minha família e á Patrícia pelo apoio que sempre me deram quer na realização deste trabalho, assim como na minha devota paixão pelos automóveis.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
v
Índice
1. Introdução............................................................................................................................ 1
1.1. A empresa .................................................................................................................... 1
1.1.1 História da empresa .............................................................................................. 3
1.1.2 Missão ................................................................................................................... 4
1.1.3 Departamento de Competições ............................................................................. 4
2. Objectivos do trabalho ........................................................................................................ 6
2.1 Temas abordados ......................................................................................................... 6
2.1.1 Plano de trabalho .................................................................................................. 7
3. Revisão bibliográfica........................................................................................................... 8
3.1 Dinâmica do veículo .................................................................................................... 8
3.2 Subviragem, Sobreviragem e Comportamento Neutro ................................................ 9
3.3 Slip angle ..................................................................................................................... 9
3.4 Aderência dos Pneus .................................................................................................. 10
3.5 Classificação dos movimentos do veículo ................................................................. 17
3.5.1. Heave .................................................................................................................. 19
3.5.2. Pitch .................................................................................................................... 19
3.5.3. Roll ..................................................................................................................... 20
3.5.4. Warp ................................................................................................................... 21
3.6 Factores que influenciam o comportamento dinâmico .............................................. 21
3.6.1 Suspensão ........................................................................................................... 22
3.6.2. Movimentos da suspensão .................................................................................. 27
3.6.3. Molas e barras estabilizadoras ............................................................................ 28
3.6.4. Amortecedores .................................................................................................... 32
3.6.5. Largura de vias ................................................................................................... 35
3.6.6. Distância entre eixos ........................................................................................... 36
3.6.7. Localização do Centro de Gravidade.................................................................. 37
3.6.8. Distribuição de massas ....................................................................................... 40
3.6.9. Centros instantâneos de rotação ......................................................................... 41
3.6.10. Centros de rolamento ...................................................................................... 44
3.6.11. Transferência lateral de massas ...................................................................... 47
3.6.12. Geometria da direcção .................................................................................... 51
3.6.13. Camber, Caster e Toe ..................................................................................... 51

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
vi
3.7. Setup ........................................................................................................................... 54
4. Caso de estudo ................................................................................................................... 55
4.1. Descrição da viatura ................................................................................................... 56
4.2. Enquadramento do projecto ....................................................................................... 57
4.3. Análise Inicial ............................................................................................................ 58
4.4. Setup Inicial ............................................................................................................... 61
4.4.1. Sessão de Testes ................................................................................................. 62
4.4.2. Prova de Resistência ........................................................................................... 69
4.5. Análise Dinâmica ....................................................................................................... 70
4.5.1. Distribuição de massas ....................................................................................... 70
4.5.2. Massa Suspensa e massa não suspensa .............................................................. 76
4.5.3. Centro de Gravidade ........................................................................................... 77
4.5.4. Levantamento geométrico da suspensão ............................................................ 77
4.5.5. Centros de Rolamento ........................................................................................ 80
4.5.6. Molas .................................................................................................................. 81
4.5.7. Amortecedores .................................................................................................... 82
4.5.8. Transferência de massas ..................................................................................... 82
4.6. Previsão comportamento ........................................................................................ 83
4.7. Alterações propostas .................................................................................................. 84
4.8. Simulação Computacional ......................................................................................... 88
5. Discussão de Resultados ................................................................................................... 90
6. Conclusão .......................................................................................................................... 91
7. Propostas futuras ............................................................................................................... 91
8. ANEXOS ........................................................................................................................... 94

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
vii
Índice de tabelas Tabela 1 – Calendário das provas pontuáveis para o Campeonato de Portugal de Clássicos
1300 (Circuitos) 2009. .............................................................................................................. 58
Tabela 2 – Calendário das provas pontuáveis para a Taça de Portugal de Clássicos 1300
(Circuitos) 2009. ....................................................................................................................... 58
Tabela 3 – Localização do centro de gravidade. ...................................................................... 77
Tabela 4 – Localização geométrica dos pontos da suspensão frente esquerda. ....................... 80
Tabela 5 – Localização geométrica dos pontos da suspensão traseira esquerda. ..................... 80
Tabela 6 – Centro de rolamento da suspensão da frente. ......................................................... 81
Tabela 7 – Centro de rolamento da suspensão traseira. ............................................................ 81
Tabela 8 – Ensaio da mola da frente......................................................................................... 81
Tabela 9 – Ensaio da mola traseira. .......................................................................................... 81
Tabela 10 – Transferência de massas, aceleração lateral de 1 g. .............................................. 83
Tabela 11 – Transferência de massas, aceleração lateral de 1,2 g. ........................................... 83
Tabela 12 – Molas da frente para uma aceleração lateral de 1 g. ............................................. 85
Tabela 13 – Molas traseiras para uma aceleração lateral de 1 g............................................... 85
Tabela 14 – Amortecedores da frente para uma aceleração lateral de 1 g. .............................. 85
Tabela 15 – Amortecedores traseiros para uma aceleração lateral de 1g. ................................ 86
Tabela 16 – Molas da frente para uma aceleração lateral de 1,2 g. .......................................... 86
Tabela 17 – Molas traseiras para uma aceleração lateral de 1,2 g............................................ 87
Tabela 18 – Amortecedores da frente para uma aceleração lateral de 1,2 g. ........................... 87
Tabela 19 – Amortecedores traseiros para uma aceleração lateral de 1,2 g. ............................ 88

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
viii
Índice de figuras
Figura 1 – Metodologia para a evolução do comportamento de um veículo. ............................ 7
Figura 2 – Sobreviragem. ........................................................................................................... 9
Figura 3 – Subviragem. .............................................................................................................. 9
Figura 4 – Slip angle. .................................................................................................................. 9
Figura 5 – Sistema de eixos do pneu segundo a SAE, principais forças e momentos existentes,
direcção do pneu e slip angle. .................................................................................................. 10
Figura 6 – Cornering force e side force no pneu. ..................................................................... 11
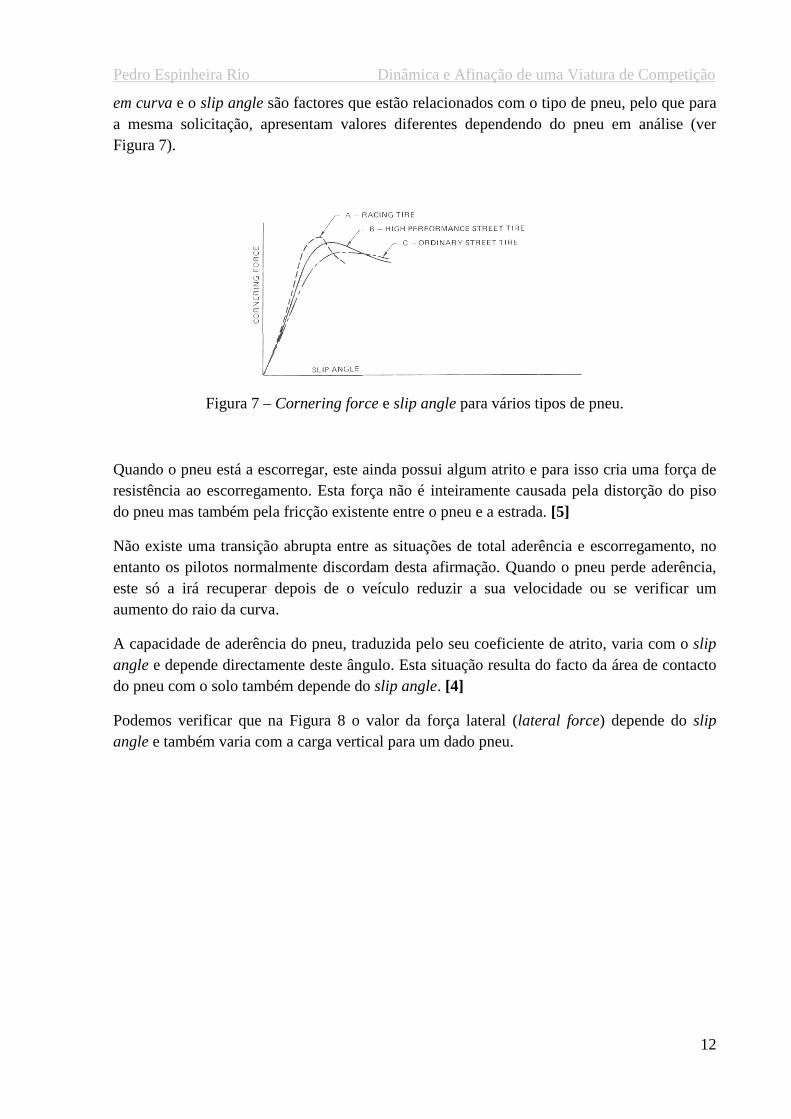
Figura 7 – Cornering force e slip angle para vários tipos de pneu. ......................................... 12
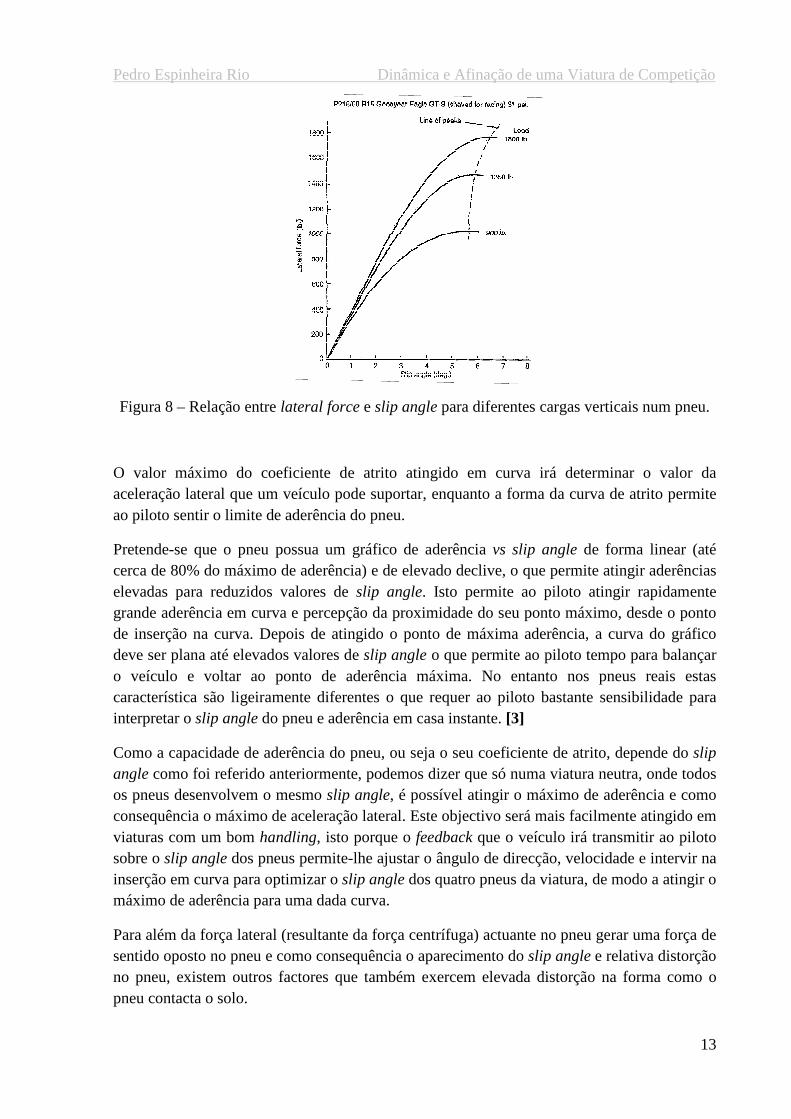
Figura 8 – Relação entre lateral force e slip angle para diferentes cargas verticais num pneu.
.................................................................................................................................................. 13
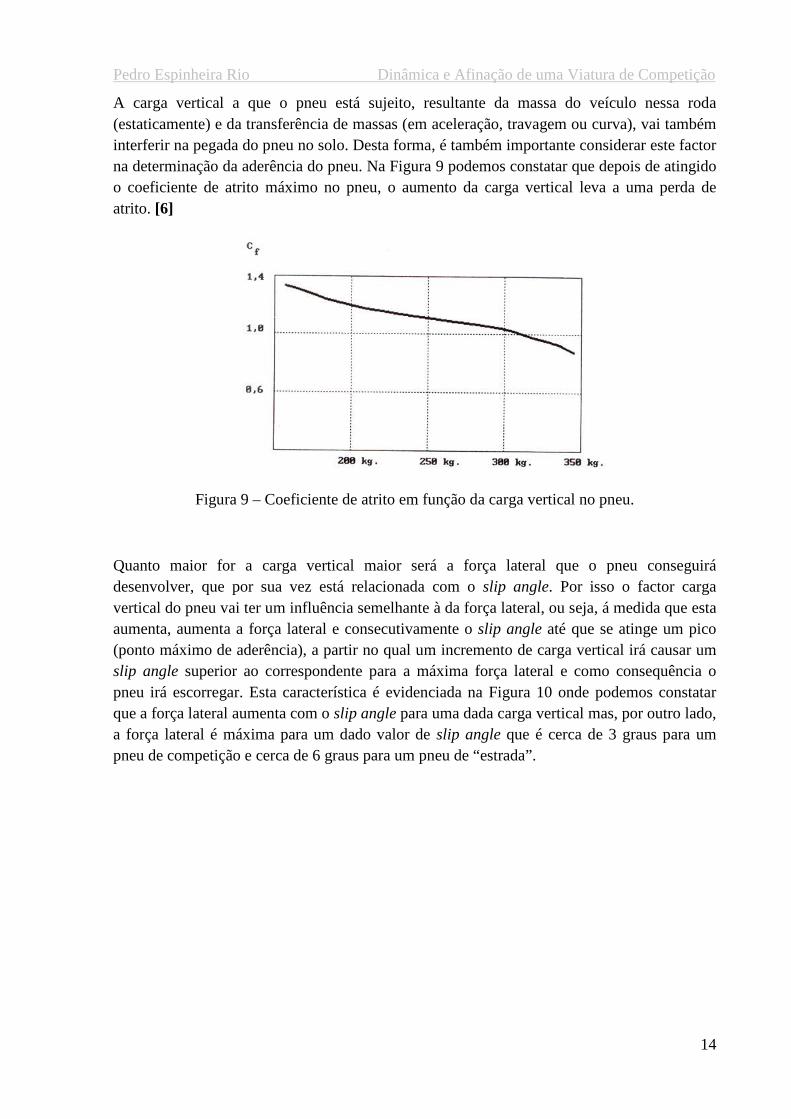
Figura 9 – Coeficiente de atrito em função da carga vertical no pneu. .................................... 14
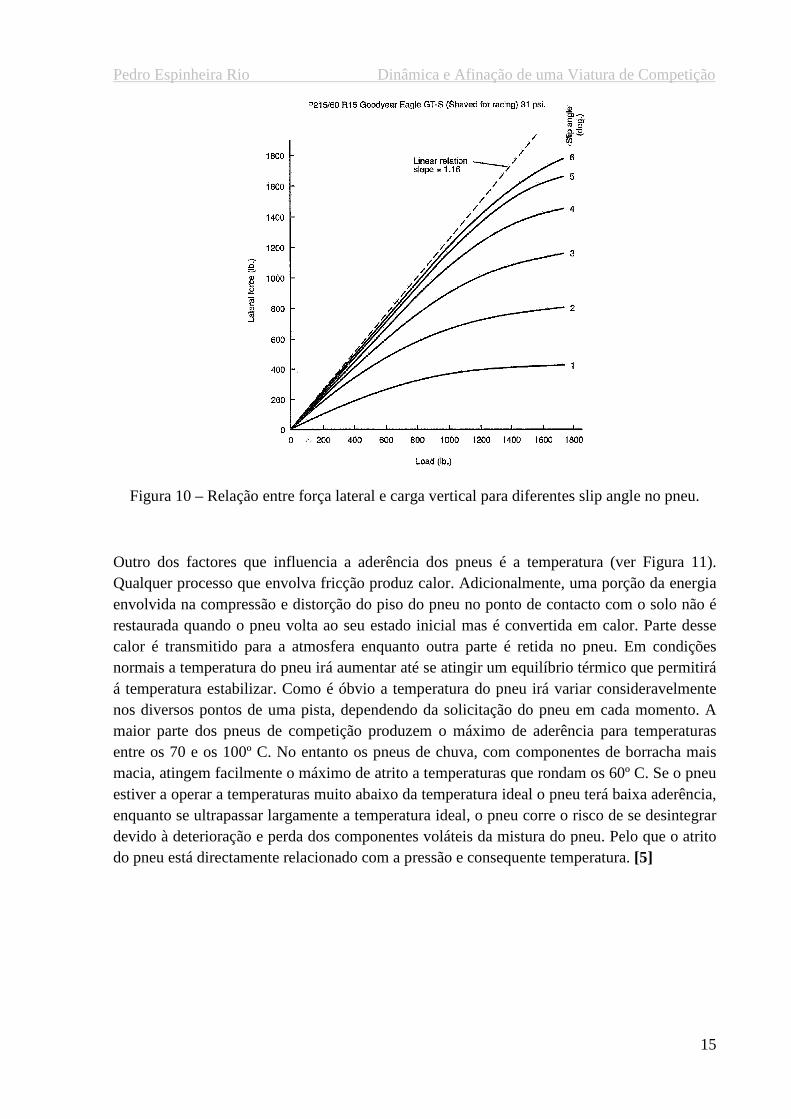
Figura 10 – Relação entre força lateral e carga vertical para diferentes slip angle no pneu. ... 15
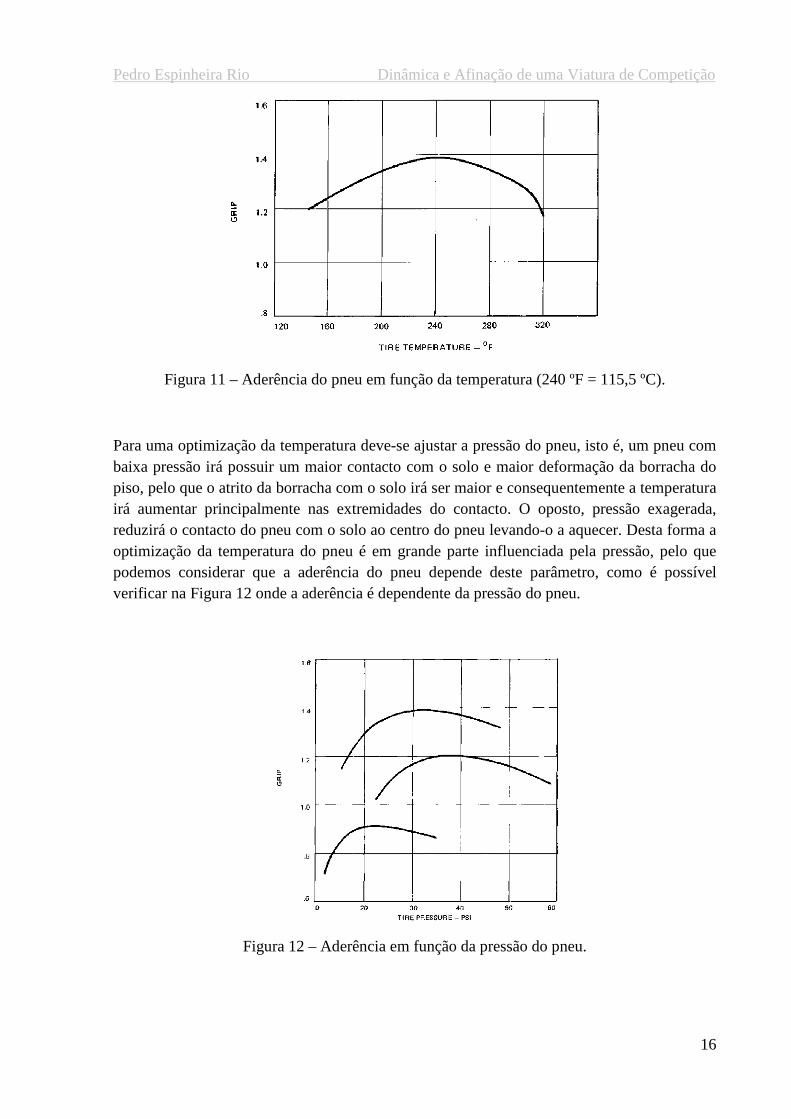
Figura 11 – Aderência do pneu em função da temperatura (240 ºF = 115,5 ºC). ..................... 16
Figura 12 – Aderência em função da pressão do pneu. ............................................................ 16
Figura 13 – Relação entre velocidade, coeficiente de atrito e tipo de piso. ............................. 17
Figura 14 – Sistemas de eixos do veículo segundo a SAE e classificação dos movimentos
segundo os eixos. ...................................................................................................................... 18
Figura 15 – Movimento de heave. ............................................................................................ 19
Figura 16 – Movimento de pitch. ............................................................................................. 20
Figura 17 – Movimento de roll . ............................................................................................... 20
Figura 18 – Movimento de warp. ............................................................................................. 21
Figura 19 – Hotchkiss live axle................................................................................................. 24
Figura 20 – Rear dead axle....................................................................................................... 24
Figura 21 – Eixo rígido com four link. ..................................................................................... 25
Figura 22 – Trailing arm. ......................................................................................................... 26
Figura 23 – Double wishbone. .................................................................................................. 26
Figura 24 – Estrutura McPherson. ............................................................................................ 27
Figura 25 – Detalhes e parâmetros das molas helicoidais de compressão. .............................. 29
Figura 26 – Acabamentos típicos das molas helicoidais de compressão. ................................ 29
Figura 27 – Suspensão sem resistência ao roll . ........................................................................ 30
Figura 28 – Suspensão com resistência ao roll. ........................................................................ 31
Figura 29 – Constante elástica k de uma barra estabilizadora em aço de secção circular........ 32

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
ix
Figura 30 – Esquema de funcionamento de um amortecedor hidráulico. ................................ 33
Figura 31 – Teste a um amortecer ao bump (força positiva) e rebound (força negativa), para
várias velocidades. .................................................................................................................... 33
Figura 32 – Amortecedor a gás regulável. ................................................................................ 34
Figura 33 – Modelo simplificado de uma suspensão, sistema amortecido. ............................. 35
Figura 34 – Largura da via da frente. ....................................................................................... 36
Figura 35 – Largura da via da traseira. ..................................................................................... 36
Figura 36 – Distância entre eixos. ............................................................................................ 37
Figura 37 – Localização centro de gravidade. .......................................................................... 37
Figura 38 – Localização no plano horizontal do CG. ............................................................... 38
Figura 39 – Procedimento para o cálculo da altura do CG. ...................................................... 39
Figura 40 – Conceito de Centro Instantâneo de Rotação. ........................................................ 41
Figura 41 – Conceito de Eixo Instantâneo de Rotação. ............................................................ 42
Figura 42 – Centro instantâneo de rotação na vista frontal, McPherson. ................................. 43
Figura 43 – Centro instantâneo de rotação numa estrutura McPherson. .................................. 43
Figura 44 – Localização do centro instantâneo de rotação num eixo rígido com four link...... 44
Figura 45 – Centros e eixo de rolamento no veículo. ............................................................... 45
Figura 46 – Localização do centro de rolamento, suspensão McPherson. ............................... 46
Figura 47 – Localização do centro de rolamento, eixo rígido com four link. .......................... 47
Figura 48 – Ângulos de camber, caster e toe. .......................................................................... 51
Figura 49 – Camber positivo e camber negativo. .................................................................... 52
Figura 50 – Relação entre camber e aderência do pneu. .......................................................... 52
Figura 51 – Ângulo de caster. .................................................................................................. 53
Figura 52 – Determinação do toe. ............................................................................................ 53
Figura 53 – Dois Toyota Starlet da Salvador Caetano, categoria B1. ...................................... 55
Figura 54 – Joaquim Moutinho no Circuito de Vila do Conde em 1982. ................................ 55
Figura 55 – Chassis do Toyota Starlet. ..................................................................................... 59
Figura 56 – Vista traseira do veículo. ....................................................................................... 59
Figura 57 – Compartimento do motor. ..................................................................................... 59
Figura 58 – Fase final de montagem. ....................................................................................... 59
Figura 59 – Braços traseiros. .................................................................................................... 60
Figura 60 – Braço com regulação de camber. .......................................................................... 60
Figura 61 – Braço com regulação de caster. ............................................................................. 60

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
x
Figura 62 – Alinhamentos iniciais. ........................................................................................... 62
Figura 63 – Temperatura dos pneus Michelin após 5 voltas, piloto João Ramos. ................... 63
Figura 64 – Temperatura dos pneus Michelin após 10 voltas, piloto João Ramos. ................. 64
Figura 65 – Temperatura dos pneus Michelin após 4 voltas, piloto João Barbosa. ................. 65
Figura 66 – Temperatura dos pneus Avon após 6 voltas, piloto João Barbosa. ....................... 66
Figura 67 – Temperatura dos pneus Avon após 5 voltas, piloto João Barbosa. ....................... 68
Figura 68 – Alinhamentos para a prova de resistência. ............................................................ 69
Figura 69 – Distribuição de massas, veículo a “seco”. ............................................................. 71
Figura 70 – Distribuição de massas, veículo com 5 litros de combustível. .............................. 72
Figura 71 – Distribuição de massas, veículo com 10 litros de combustível. ............................ 73
Figura 72 – Distribuição de massas, veículo com 15 litros de combustível. ............................ 74
Figura 73 – Distribuição de massas veículo sem combustível e com piloto de 84 kg. ............ 75
Figura 74 – Distribuição de massas, massa suspensa e não-suspensa do veículo. ................... 76
Figura 75 – Linha longitudinal definida no chassis. ................................................................. 78
Figura 76 – Linha transversal de referência para o eixo da frente ........................................... 78
Figura 77 – Linha transversal de referência para o eixo traseiro.............................................. 79
Figura 78 – Sistema de eixos adoptado. ................................................................................... 79
Figura 79 – Vista de frente da suspensão dianteira no Susprog 3D. ........................................ 89
Figura 80 – Vista lateral da suspensão dianteira no Susprog 3D. ............................................ 89
Figura 81 – Vista de trás da suspensão traseira no Susprog 3D. .............................................. 89
Figura 82 – Vista lateral da suspensão traseira no Susprog 3D................................................ 90
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
1
1. Introdução
No âmbito da disciplina de “Projecto” do 5º ano do Mestrado Integrado em Engenharia Mecânica da Faculdade de Engenharia da Universidade do Porto (FEUP), na opção de Produção Desenvolvimento e Engenharia Automóvel, foi realizado um projecto em empresa na Toyota Caetano Portugal, SA do grupo Salvador Caetano durante um período de 5 meses.
O projecto foi intitulado de “Dinâmica e Afinação de Uma Viatura de Competição”, e teve orientação do Eng.º João Pedro Marques por parte da empresa, e pelo Prof. José Ferreira Duarte por parte da Faculdade.
1.1. A empresa
A Toyota Caetano Portugal - S.A. (até ao final de 2006 com a designação Salvador Caetano IMVT-SA), foi fundada em 1946, com a visão de um jovem de apenas 20 anos que transformou a empresa num grupo sólido.
Actualmente desenvolve a sua actividade em Vila Nova de Gaia onde está representada a área comercial (importação de automóveis ligeiros comerciais e de passageiros Toyota; importação e comercialização de peças e assistência técnica; importação, comercialização e assistência pós-venda de máquinas de movimentação de cargas (Toyota); distribuição, comercialização e assistência pós-venda de miniautocarros Caetano (Toyota) em Portugal; e em Ovar montagem de mini-autocarros (Caetano); montagem de comerciais ligeiros Toyota (Dyna e Hiace); incorporação de componentes em veículos comerciais.
O grupo Salvador Caetano está actualmente concentrado numa holding designada por Grupo Salvador Caetano, SGPS, SA, e tem um turnover superior a 1.5 bilião de Euros. É responsável por mais de 6.000 postos de trabalho, distribuídos por diversos países (além de Portugal): Reino Unido, Moçambique, Espanha, Alemanha, Cabo Verde e Angola. O Grupo Salvador Caetano (SGPS), SA, é a empresa mãe que controla o Grupo e é responsável pela gestão das participações, bem como na definição da estratégia e na coordenação de todas as actividades de negócio, sendo constituído por três grandes unidades de negócio, organizadas por três sub-holdings:
• Toyota Caetano Portugal S.A., que agrega o negócio industrial e da representação automóvel Toyota;
A sua actividade económica está focada na gestão importação Toyota, na fabricação e exportação para Europa do modelo comercial Toyota Dyna, bem como na produção de mini-autocarros Caetano Óptimo.
• Salvador Caetano Auto (SGPS), S.A., que agrega, o negócio de retalho automóvel multimarca para o mercado ibérico;
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
2
Representa o forte investimento que o Grupo tem vindo a efectuar no retalho automóvel com o objectivo de ser líder no retalho multimarca ao nível da Península Ibérica, através de um crescimento sustentado assente num plano de aquisições e joint ventures, pelo que, em Portugal e em Espanha, comercializa as mais diversas marcas automóveis: Alfa Romeo, Audi, BMW, Chevrolet, Chrysler, Citroen, Dacia, Daihatsu, Doge, Fiat, Ford, Honda, Hyundai, Jeep, Kia, Lancia, Lexus, Mazda, Mercedes-Benz, Mini, Nissan, Opel, Peugeot, Renault, Seat, Skoda, Smart, Ssangyong, Subaru, Tata, Toyota, Volkswagen.
• Salvador Caetano.Com (SGPS), S.A., que constitui o negócio na área das tecnologias de informação.
Sub-holding que concentra a actividade do grupo na área das Tecnologias da Informação através da aquisição de participações sociais estratégicas que permitam o fornecimento de soluções verticais a diferentes sectores de actividade, que vão desde o sector automóvel às comunicações e Internet.
Detém ainda três empresas na unidade de negócios da indústria:
• Caetano Bus, SA: produção de Autocarros COBUS e CAETANO para todo o mundo, (esta empresa resulta de uma joint-venture com a Evobus (do Grupo Daimler Chrysler)). • Caetano Coatings, SA, especializada no tratamento de superfícies, protecção de aço e betão e pinturas e lacagem de componentes automóveis; • IPE, SA,: produção de componentes para indústria automóvel;
O Grupo Salvador Caetano, apesar do longo caminho que percorreu desde 1946 até aos dias de hoje, continua determinado em crescer, e seguindo sempre de perto o lema do seu Fundador, o Sr. Salvador Caetano “sempre presente na construção do futuro”, está de olhos postos no novo século, determinado a afirmar-se no contexto da exigente Comunidade Europeia e da globalização do mercado mundial.
A Salvador Caetano, pretender ter uma Missão sempre assente no posicionamento líder do mercado onde trabalha: “Assumimos a nossa responsabilidade e o equilíbrio em todos os momentos da nossa actuação, através da inovação e melhoria constante dos nossos produtos e serviços, sustentados em bons relacionamentos e em justas propostas de valor.”
O grupo referência que os seus principais valores são:
• Confiança; • Solidez; • Evolução; • Responsabilidade; • Relacionamento;
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
3
1.1.1 História da empresa
1946: Fundação da empresa "Martins, Caetano & Irmão, Lda.", fabrica de carroçarias para autocarros, que foi o embrião da Salvador Caetano.
1967/1968: Surge o primeiro contracto de exportação de autocarros para Inglaterra. Torna-se distribuidor exclusivo Toyota em Portugal. (Automóveis e Empilhadores).
1971: Inaugurada a 1ª unidade Fabril de Ovar para montagem de automóveis, e dez anos depois viria a atingir a montagem de 100 mil viaturas;
1972: Constituída a rede de concessionários Toyota em Portugal
1981: Fundada a holding da família Caetano - Fogeca SGPS, SA (actualmente Grupo Salvador Caetano SGPS).
1982: Aquisição da Baviera e a representação da marca BMW.
1999: O grupo Salvador Caetano, através da subholding Fogeca Multiauto (actualmente Salvador Caetano Auto SGPS) constitui um Grupo de empresas, para venda de automóveis usados em megastores, aluguer de viaturas, gestão de frotas e centros de serviços rápidos.
2002: Desenvolvimento do conceito multimarca em Espanha. Joint venture com a DaimlerChrysler para a produção de autocarros para o mercado europeu.
2003: Inicio da operação de retalho em Espanha através da aquisição de concessionários Mercedes-Benz no Sul de Espanha (Andaluzia).
2004: Aquisição do Grupo Interestoril, concessionários Volkswagen, Seat e Skoda no Estoril. Desenvolvimento do conceito multimarca no distrito do Porto. Reforço da operação de retalho em Espanha através da aquisição de um concessionário multimarca no Norte da Galiza.
2005: Aquisição do Grupo VDR - concessionários Volkswagen, Audi e Skoda, no distrito de Aveiro.
Reforço da operação de retalho em Espanha através da Cuzco Motors, concessionário BMW e MINI em Madrid.
Aquisição do Grupo Setucar (concessionários Peugeot, Audi, Volkswagen e Mazda no distrito de Setúbal).
2006: Reforço da estratégia de retalho automóvel em Espanha com a aquisição da Reicomsa, empresa afiliada da Nissan em Madrid, tendo a Nissan nomeado o Grupo Salvador Caetano responsável pela área NW de Madrid. Aquisição do Grupo Quer, com uma rede de concessionários Opel, Honda e Mazda em Madrid.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
4
2007: Inicio das operações de retalho na Catalunha e em Granada.
2008: A Renault passa a fazer parte do lote de marcas disponíveis do Grupo Salvador Caetano com a integração dos concessionários Autogarme e Stand Clemente.
1.1.2 Missão
No que diz respeito a Visão, a Salvador Caetano pretende ser a referência em todos os mercados “Acreditamos que a solidez das nossas relações garante negócios de sucesso”.
1.1.3 Departamento de Competições
Há mais de duas décadas que a Salvador Caetano/ Toyota Portugal está envolvida oficial e activamente no desporto automóvel nacional. Uma história de novos valores, muita emoção e constantes vitórias. Desde os ralis, passando pela velocidade, autocross e todo-o-terreno. Uma paixão assumida pelos mais altos responsáveis da empresa e também pelas muitas pessoas que integram a equipa de funcionários. Uma aposta que tem redundado em sucesso, não só pelo rigor e consistência dos resultados alcançados, mas também pela convicção de que o desporto automóvel é o cenário perfeito para promover, divulgar e comprovar a tradicional fiabilidade e competitividade da Toyota.
Como forma de satisfazer o desejo da empresa em levar a Toyota de forma oficial até ao desporto automóvel, foi criado em 1981 o departamento de competições, departamento esse que é responsável pela preparação, manutenção e desenvolvimento das viaturas de competição oficiais da empresa e ainda organização, regulamentação e desenvolvimento dos troféus Toyota.
1.1.3.1. Os factos mais marcantes
1974 – 1ª época de envolvimento no Automobilismo Nacional.
Apoio semi-oficial ao Team Dalva para o CNV.
Incentivos aos privados com Toyota.
1980 – Início do projecto Toyota Starlet nos Ralis.
1981 – Criação da equipa oficial Salvador Caetano/Toyota.
1982 – Campeonato e Vice-Campeonato Nacionais de Velocidade (Agrup. B1).
4º Lugar Absoluto no Campeonato Nacional de Ralis.
1983 – Campeonato, Vice-Campeonato e 3º lugar no Nacional de Velocidade (Agrup. B1).
3º Lugar Absoluto, 1º Grupo 2, no Campeonato Nacional de Ralis.
1º Ano do Troféu Starlet.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
5
1984 – Campeonato Nacional de Ralis/Turismo e Vice-Campeonato Absoluto.
1985 – Campeonato Nacional e Vice-Campeonato de Ralis/Turismo.
1ª Época do Troféu Starlet para Iniciados.
1ª Época do Troféu Corolla.
1986 – Campeonato Nacional de Ralis/Turismo.
1992 – Campeonato Nacional de Ralis Absolutos.
Campeonato Nacional de Autocross.
1993 – Campeonato Nacional de Autocross.
1994 – Campeonato Nacional de Velocidade e Super-turismo.
Vice-Campeonato Nacional de Ralis Iniciados.
1995 – 1ª Época do Troféu Carina E.
1998 – Campeonato Nacional de Todo-o-Terreno
1º Diesel a vencer uma prova da Taça do Mundo de TT.
1999 – Campeonato Nacionais de Ralis
Campeonato Nacional de Marcas.
Campeonato Nacional de Todo-o-Terreno (Agrup. T2)
2000 – Campeonato Nacional de Ralis.
Campeonato Nacional de Marcas.
Campeonato Nacional de Todo-o-Terreno (Agrup. T3).
1ª Época do Yaris Cup.
2001 – 1ª Época de envolvimento na Taça FIA de Bajas de Todo-o-Terreno.
1ª Época da Taça T-Sport.
2002 - Arranque do projecto Toyota RAV4 Proto para Todo-Terreno.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
6
2. Objectivos do trabalho
Este estudo tem como objectivo a análise, compreensão e desenvolvimento da dinâmica e afinação de chassis de uma viatura de competição automóvel existente na Toyota Caetano Portugal. Assim, pretende-se perceber quais as variáveis que afectam o desempenho dinâmico da viatura e a sua relação com a performance em competição.
O fundamento da competição automóvel é promover uma “simbiose” entre o homem e a máquina capaz de percorrer um dado trajecto mais rápido do que qualquer outra combinação, desta forma a dinâmica e afinação de chassis surge como uma disciplina que pretende explorar todas a capacidades e potencialidades do veículo tendo em vista um melhor desempenho dinâmico, ou seja, obter o máximo de aceleração na direcção pretendida. Para se atingir esse patamar teremos que considerar as soluções adoptadas na construção do veículo e promover uma adaptação destas á capacidade, qualidade e experiência do piloto.
Teremos que admitir que o automóvel é apenas umas “ferramenta” para o piloto, pelo que um dado setup de afinação pode não ser o mais favorável para que todos os pilotos consigam levar ao limite quer as suas capacidades quer as capacidades da viatura, pelo que este trabalho de dinâmica e afinação de chassis não deve ser compreendido como definitivo e inquestionável, mas como forma de conseguir uma boa base dinâmica para poder ser facilmente analisada e evoluída pelo piloto e equipa técnica.
O objectivo final deste estudo será um aumento da capacidade do veículo em transmitir a energia gerada pelo seu propulsor para o solo, em linha recta e principalmente em curva. Procura-se assim um melhor comportamento do veículo e “handling”, característica essa que está directamente ligada á forma como as forças em análise vão ser transmitidas aos pneus do veículo que por sua vez dependem dos itens que vão ser objecto de estudo.
2.1 Temas abordados
Neste estudo serão abordados os seguintes temas relacionados com o comportamento global do veículo:
• Avaliação geral da viatura; • Funcionamento da geometria das suspensões; • Posição do Centro de Gravidade;
• Determinação dos Centros Instantâneos de Rotação; • Determinação dos Centros de Rolamento;
• Cálculo da transferência de massas; • Avaliação das características das molas, amortecedores e barras estabilizadoras;
• Alinhamento das rodas; • Afinação de suspensões; • Adaptação do veículo ao piloto.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
7
2.1.1 Plano de trabalho
Na Figura 1 pode identificar-se a metodologia necessária a uma correcta abordagem à afinação do comportamento de um veículo.
Figura 1 – Metodologia para a evolução do comportamento de um veículo.
Esta metodologia assenta, como se pode observar na figura 1, num processo iterativo que vai desde os necessários testes em pista para validação de alterações até estudos teóricos de interpretação de resultados tendo em vista uma nova configuração final de afinações e resultados mais satisfatórios.
Sessão de testes
•Simulação Computacional
•Testes em pista
Recolha e Análise de dados•Alinhamentos
•Pressão/Temperatura e desgaste dos Pneus
•Tempos por volta
Avaliação Dinâmica•Centro de Gravidade
•Distribuição de massas
•Transferência de massas
•Características da Suspensão
Trade-offs
•Relacionamento entre variáveis
•Alterações propostas
•Previsão resultados
Alteração Setup•Molas, amortecedores, barras
estabilizadoras
•Alinhamentos
•Distribuição de massas
•etc.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
8
3. Revisão bibliográfica
Neste capítulo serão abordados alguns conceitos teóricos necessários á compreensão e definição do comportamento automóvel.
Nos capítulos seguintes serão usados diversos termos em inglês, uma vez que o estudo dinâmico do automóvel teve a sua origem no Reino Unido. Assim, existem termos técnicos inerentes ao estudo do automóvel que só fazem sentido quando usados na sua nomenclatura original, pelo que tentaremos descrevê-los o quanto possível.
3.1 Dinâmica do veículo
Antes de abordarmos a dinâmica do automóvel, pormenores de construção e conceitos chave, surge a necessidade de definir de que modo se pode expressar o comportamento de um veículo e o significado de “handling”. A performance de um veículo – os movimentos de aceleração, travagem e comportamento em curva – é uma resposta às forças em acção, pelo que a maior parcela do estudo dinâmico de um veículo passa pelo estudo da origem e efeitos dessas forças. As forças, principal objecto deste estudo, são desenvolvidas no contacto dos pneus com o solo, por esse motivo é essencial perceber e interpretar o comportamento dos pneus, caracterizado pelas forças e momentos gerados segundo um elevado número de situações distintas nas quais estes operam.
Frequentemente é usado o termo handling para descrever o comportamento dinâmico de um veículo a curvar, a evitar um obstáculo ou simplesmente como resposta a uma acção do piloto, no entanto existem algumas diferenças na definição destes dois termos. A forma como o veículo se comporta nas mudanças de direcção ou em curva apenas depende da capacidade do veículo suportar a aceleração lateral resultante de cada manobra. Por exemplo, a capacidade de descrever uma determinada curva pode ser quantificada pela quantidade de aceleração lateral que o veículo consegue suportar de uma forma estável, ou a resposta a um movimento do volante pode ser medida pelo tempo necessário à resposta do veículo a esse estímulo. Por outro lado, o handling acrescenta a estas características a capacidade do veículo conseguir transmitir ao piloto esse comportamento facilitando a sua tarefa e permitindo que este mais facilmente consiga manter o controlo do veículo. O handling implica, desta forma, não apenas a capacidade do veículo responder a uma solicitação mas a combinação de performances do piloto e veículo. [1]
O prazer de condução é assim a forma como o piloto utiliza ao máximo o handling de uma viatura nas mais diversas situações, permitindo explorar todas as potencialidades do automóvel de forma segura e natural. A frase “o homem e a máquina unidos num só” é a melhor forma de descrever um bom handling e assim todas as intenções do piloto são precisamente obedecidas pela viatura, e as reacções da viatura totalmente previstas pelo piloto, dentro dos limites da física.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
9
3.2 Subviragem, Sobreviragem e Comportamento Neutro
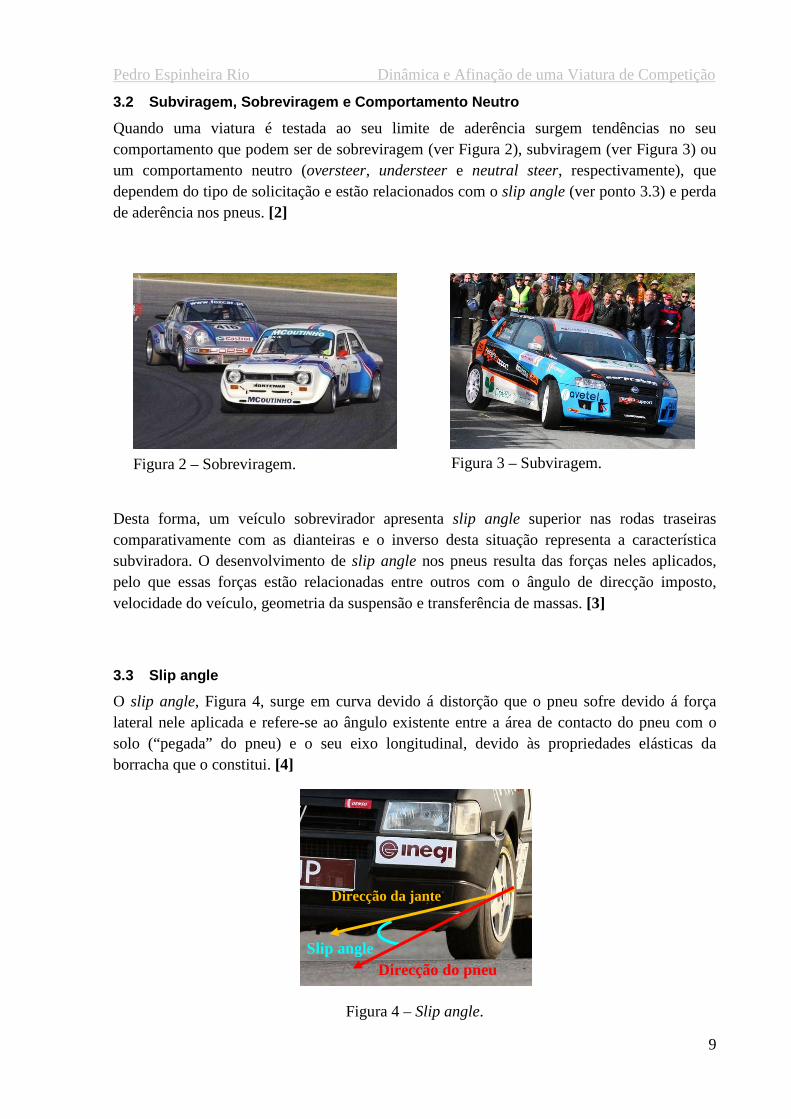
Quando uma viatura é testada ao seu limite de aderência surgem tendências no seu comportamento que podem ser de sobreviragem (ver Figura 2), subviragem (ver Figura 3) ou um comportamento neutro (oversteer, understeer e neutral steer, respectivamente), que dependem do tipo de solicitação e estão relacionados com o slip angle (ver ponto 3.3) e perda de aderência nos pneus. [2]
Desta forma, um veículo sobrevirador apresenta slip angle superior nas rodas traseiras comparativamente com as dianteiras e o inverso desta situação representa a característica subviradora. O desenvolvimento de slip angle nos pneus resulta das forças neles aplicados, pelo que essas forças estão relacionadas entre outros com o ângulo de direcção imposto, velocidade do veículo, geometria da suspensão e transferência de massas. [3]
3.3 Slip angle
O slip angle, Figura 4, surge em curva devido á distorção que o pneu sofre devido á força lateral nele aplicada e refere-se ao ângulo existente entre a área de contacto do pneu com o solo (“pegada” do pneu) e o seu eixo longitudinal, devido às propriedades elásticas da borracha que o constitui. [4]
Figura 4 – Slip angle.
Figura 3 – Subviragem. Figura 2 – Sobreviragem.
Slip angle
Direcção da jante
Direcção do pneu
Pedro Espinheira Rio
Pode dizer-se que o slip angledirecção real para a qual ele se desloca.
Para uma melhor performance o automóvel não deve demonstrar forte tendência para sobrevirar nem subvirar, pelo que o comportamento ideal deve estar compreendido entre estas duas características – comportamento neutro ou da viatura desenvolvem slip angle
Nos capítulos seguintes serão abordados outros aspectos relacionados com aângulo com o recurso a alguns
3.4 Aderência dos Pneus
Os pneus fazem o contacto do veículo com o solo pelo queum factor fundamental para se alcançarem boas performances. A capacidade do pneu aguentar as forças resultantes dos movimentos do veíccontacto do pneu com o solo em cada instante. Dessa forma, poderia pensarmais largo fosse o pneu melhor seria o comportamento da viatura. Esta situação não é verdadeira porque um pneu demasiadase numa exagerada resistência ao grande dificuldade em acelerarestabelecer um compromissveículo tais como a sua massa, largura de vias, transferência de motor, etc., para obter o máximo de aderência para um mínimo de largura do pneu.
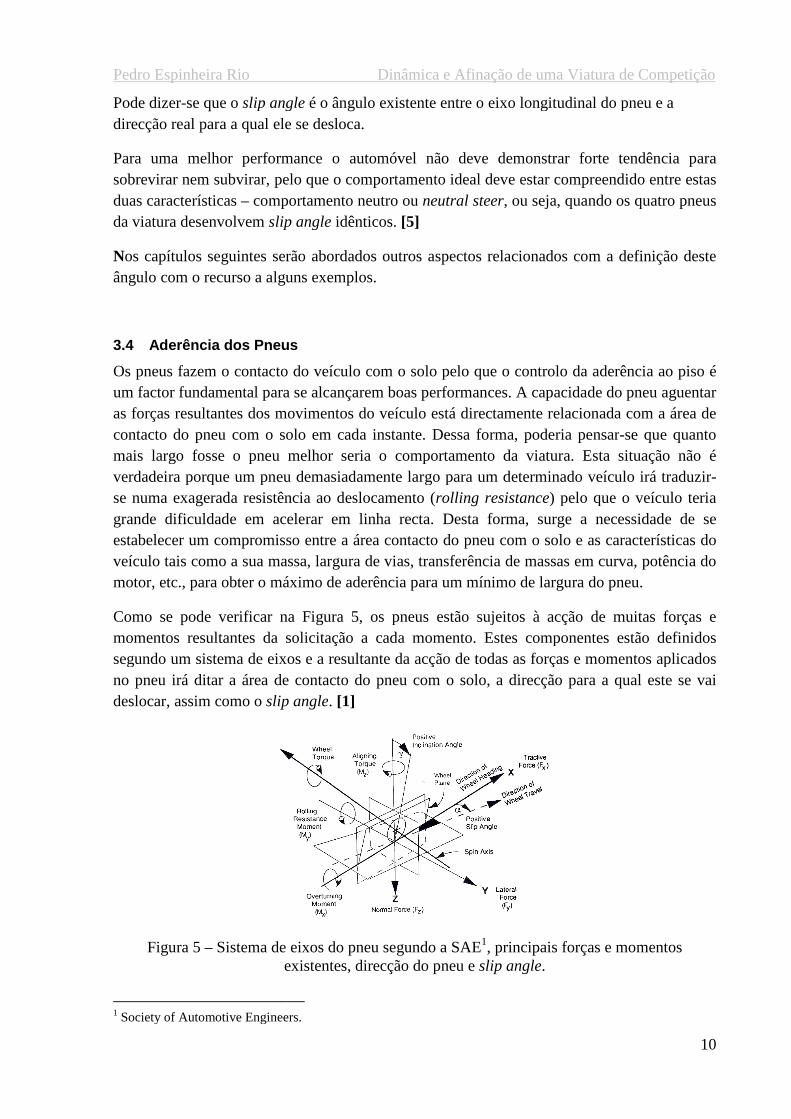
Como se pode verificar namomentos resultantes da solicitação a cada momento. Estes componentes estão definidos segundo um sistema de eixos e a resultante da acção de todas as forças e momentos aplicados no pneu irá ditar a área de contacto do pneu com o solo, a direcção para a qual este se deslocar, assim como o slip angle
Figura 5 – Sistema de eixos do pneu segundo a SAEexistentes
1 Society of Automotive Engineers
Dinâmica e Afinação de uma Viatura de Competição
slip angle é o ângulo existente entre o eixo longitudinal do pneu e a direcção real para a qual ele se desloca.
Para uma melhor performance o automóvel não deve demonstrar forte tendência para sobrevirar nem subvirar, pelo que o comportamento ideal deve estar compreendido entre estas
comportamento neutro ou neutral steer, ou seja, quando os quatro pneus slip angle idênticos. [5]
seguintes serão abordados outros aspectos relacionados com acom o recurso a alguns exemplos.
Aderência dos Pneus
contacto do veículo com o solo pelo que o controlo da aderência ao piso é um factor fundamental para se alcançarem boas performances. A capacidade do pneu aguentar as forças resultantes dos movimentos do veículo está directamente relacionada com a área de contacto do pneu com o solo em cada instante. Dessa forma, poderia pensarmais largo fosse o pneu melhor seria o comportamento da viatura. Esta situação não é verdadeira porque um pneu demasiadamente largo para um determinado veículo irá traduzir
resistência ao deslocamento (rolling resistance) pelo que o veículo teria grande dificuldade em acelerar em linha recta. Desta forma, surge a necessidade de se
tabelecer um compromisso entre a área contacto do pneu com o solo e as características do veículo tais como a sua massa, largura de vias, transferência de massas em curva,
o máximo de aderência para um mínimo de largura do pneu.
erificar na Figura 5, os pneus estão sujeitos à acção de muitas forças e momentos resultantes da solicitação a cada momento. Estes componentes estão definidos segundo um sistema de eixos e a resultante da acção de todas as forças e momentos aplicados
de contacto do pneu com o solo, a direcção para a qual este se slip angle. [1]
istema de eixos do pneu segundo a SAE1, principais forças e momentos existentes, direcção do pneu e slip angle.
Society of Automotive Engineers.
Dinâmica e Afinação de uma Viatura de Competição
10
eixo longitudinal do pneu e a
Para uma melhor performance o automóvel não deve demonstrar forte tendência para sobrevirar nem subvirar, pelo que o comportamento ideal deve estar compreendido entre estas
, ou seja, quando os quatro pneus
seguintes serão abordados outros aspectos relacionados com a definição deste
o controlo da aderência ao piso é um factor fundamental para se alcançarem boas performances. A capacidade do pneu aguentar
ulo está directamente relacionada com a área de contacto do pneu com o solo em cada instante. Dessa forma, poderia pensar-se que quanto mais largo fosse o pneu melhor seria o comportamento da viatura. Esta situação não é
mente largo para um determinado veículo irá traduzir-pelo que o veículo teria
surge a necessidade de se contacto do pneu com o solo e as características do
s em curva, potência do o máximo de aderência para um mínimo de largura do pneu.
, os pneus estão sujeitos à acção de muitas forças e momentos resultantes da solicitação a cada momento. Estes componentes estão definidos segundo um sistema de eixos e a resultante da acção de todas as forças e momentos aplicados
de contacto do pneu com o solo, a direcção para a qual este se vai
, principais forças e momentos
Pedro Espinheira Rio
Os pneus apresentam um comportamento levar a uma deformação. Essa deformação irá repercutirseja, na pegada do pneu.
Depois de seleccionado o pneu de acordo com as perceber que a sua capacidade de aderência está intimamente relacionada com a área de contacto do pneu com o solo (pegada), como foi anteriormente referido. Assim, identificar os factores que influenciadesta área de contacto traduzirá das mudanças de direcção.
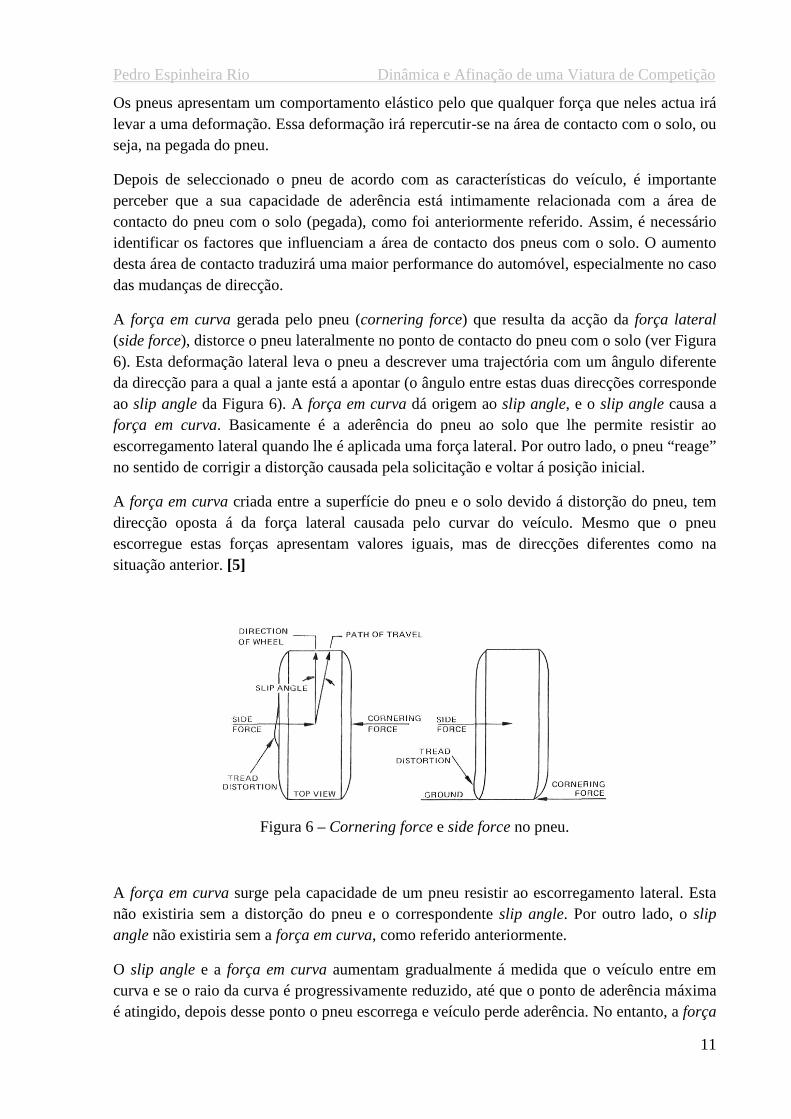
A força em curva gerada pelo pneu ((side force), distorce o pneu lateralmente no ponto de contacto do pneu com o solo6). Esta deformação lateral leva o da direcção para a qual a jante está a apontar (o ângulo entre estas duas direcções corresponde ao slip angle da Figura 6). A força em curva. Basicamente é a aderência do pneu escorregamento lateral quando no sentido de corrigir a distorção causada pela solicitação e voltar á posição inicial.
A força em curva criada entre direcção oposta á da força lateral causada pelo curvar do veículo. Mesmo que o escorregue estas forças apresentam valores situação anterior. [5]
Figura
A força em curva surge pela não existiria sem a distorção do pneu e o angle não existiria sem a força em curva
O slip angle e a força em curvacurva e se o raio da curva é progressivamente reduzido, até que o ponto de aderência máxima é atingido, depois desse ponto o pneu
Dinâmica e Afinação de uma Viatura de Competição
apresentam um comportamento elástico pelo que qualquer força que neles actua irá levar a uma deformação. Essa deformação irá repercutir-se na área de contacto com o solo, ou
Depois de seleccionado o pneu de acordo com as características do veículo, é importante perceber que a sua capacidade de aderência está intimamente relacionada com a área de
o pneu com o solo (pegada), como foi anteriormente referido. Assim, factores que influenciam a área de contacto dos pneus com o solo.
desta área de contacto traduzirá uma maior performance do automóvel, especialmente no caso
gerada pelo pneu (cornering force) que resulta da acção da ), distorce o pneu lateralmente no ponto de contacto do pneu com o solo
. Esta deformação lateral leva o pneu a descrever uma trajectória com um ângulo a qual a jante está a apontar (o ângulo entre estas duas direcções corresponde
. A força em curva dá origem ao slip angle, e o . Basicamente é a aderência do pneu ao solo que lhe permite resistir ao
quando lhe é aplicada uma força lateral. Por outro lado, o pneu “reage” a distorção causada pela solicitação e voltar á posição inicial.
entre a superfície do pneu e o solo devido á distorção do pneu, tem direcção oposta á da força lateral causada pelo curvar do veículo. Mesmo que o
apresentam valores iguais, mas de direcções difere
Figura 6 – Cornering force e side force no pneu.
pela capacidade de um pneu resistir ao escorregamento não existiria sem a distorção do pneu e o correspondente slip angle. Por outro lado, o
força em curva, como referido anteriormente.
força em curva aumentam gradualmente á medida que o veículo eno raio da curva é progressivamente reduzido, até que o ponto de aderência máxima
é atingido, depois desse ponto o pneu escorrega e veículo perde aderência
Dinâmica e Afinação de uma Viatura de Competição
11
qualquer força que neles actua irá se na área de contacto com o solo, ou
características do veículo, é importante perceber que a sua capacidade de aderência está intimamente relacionada com a área de
o pneu com o solo (pegada), como foi anteriormente referido. Assim, é necessário m a área de contacto dos pneus com o solo. O aumento
uma maior performance do automóvel, especialmente no caso
acção da força lateral ), distorce o pneu lateralmente no ponto de contacto do pneu com o solo (ver Figura
ória com um ângulo diferente a qual a jante está a apontar (o ângulo entre estas duas direcções corresponde
, e o slip angle causa a o solo que lhe permite resistir ao
Por outro lado, o pneu “reage” a distorção causada pela solicitação e voltar á posição inicial.
do pneu e o solo devido á distorção do pneu, tem direcção oposta á da força lateral causada pelo curvar do veículo. Mesmo que o pneu
iguais, mas de direcções diferentes como na
o escorregamento lateral. Esta . Por outro lado, o slip
aumentam gradualmente á medida que o veículo entre em o raio da curva é progressivamente reduzido, até que o ponto de aderência máxima
escorrega e veículo perde aderência. No entanto, a força
Pedro Espinheira Rio
em curva e o slip angle são factores que estão relacionados coa mesma solicitação, apresentam valores diferentes Figura 7).
Figura 7 – Cornering force
Quando o pneu está a escorregarresistência ao escorregamento. Esta forçado pneu mas também pela fricção existente entre o
Não existe uma transição abrupta entanto os pilotos normalmente discordaeste só a irá recuperar depois de oaumento do raio da curva.
A capacidade de aderência do pneu, angle e depende directamente deste ângulo. Esta situação resulta do facto da área de contacto do pneu com o solo também depende do
Podemos verificar que na angle e também varia com a carga vertical para um dado pneu.
Dinâmica e Afinação de uma Viatura de Competição
são factores que estão relacionados com o tipo de pneu, pelo que para a mesma solicitação, apresentam valores diferentes dependendo do pneu em análise (ver
ornering force e slip angle para vários tipos de pneu.
escorregar, este ainda possui algum atrito e para isso cria uma força de resistência ao escorregamento. Esta força não é inteiramente causada pela distorção do piso do pneu mas também pela fricção existente entre o pneu e a estrada. [5]
Não existe uma transição abrupta entre as situações de total aderência e normalmente discordam desta afirmação. Quando o pneu perde aderência,
ste só a irá recuperar depois de o veículo reduzir a sua velocidade ou se verificar um
A capacidade de aderência do pneu, traduzida pelo seu coeficiente de atrito, varia com o e depende directamente deste ângulo. Esta situação resulta do facto da área de contacto
do pneu com o solo também depende do slip angle. [4]
ficar que na Figura 8 o valor da força lateral (lateral forcee também varia com a carga vertical para um dado pneu.
Dinâmica e Afinação de uma Viatura de Competição
12
m o tipo de pneu, pelo que para dependendo do pneu em análise (ver
para vários tipos de pneu.
atrito e para isso cria uma força de não é inteiramente causada pela distorção do piso
entre as situações de total aderência e escorregamento, no desta afirmação. Quando o pneu perde aderência,
locidade ou se verificar um
seu coeficiente de atrito, varia com o slip e depende directamente deste ângulo. Esta situação resulta do facto da área de contacto
lateral force) depende do slip
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
13
Figura 8 – Relação entre lateral force e slip angle para diferentes cargas verticais num pneu.
O valor máximo do coeficiente de atrito atingido em curva irá determinar o valor da aceleração lateral que um veículo pode suportar, enquanto a forma da curva de atrito permite ao piloto sentir o limite de aderência do pneu.
Pretende-se que o pneu possua um gráfico de aderência vs slip angle de forma linear (até cerca de 80% do máximo de aderência) e de elevado declive, o que permite atingir aderências elevadas para reduzidos valores de slip angle. Isto permite ao piloto atingir rapidamente grande aderência em curva e percepção da proximidade do seu ponto máximo, desde o ponto de inserção na curva. Depois de atingido o ponto de máxima aderência, a curva do gráfico deve ser plana até elevados valores de slip angle o que permite ao piloto tempo para balançar o veículo e voltar ao ponto de aderência máxima. No entanto nos pneus reais estas característica são ligeiramente diferentes o que requer ao piloto bastante sensibilidade para interpretar o slip angle do pneu e aderência em casa instante. [3]
Como a capacidade de aderência do pneu, ou seja o seu coeficiente de atrito, depende do slip angle como foi referido anteriormente, podemos dizer que só numa viatura neutra, onde todos os pneus desenvolvem o mesmo slip angle, é possível atingir o máximo de aderência e como consequência o máximo de aceleração lateral. Este objectivo será mais facilmente atingido em viaturas com um bom handling, isto porque o feedback que o veículo irá transmitir ao piloto sobre o slip angle dos pneus permite-lhe ajustar o ângulo de direcção, velocidade e intervir na inserção em curva para optimizar o slip angle dos quatro pneus da viatura, de modo a atingir o máximo de aderência para uma dada curva.
Para além da força lateral (resultante da força centrífuga) actuante no pneu gerar uma força de sentido oposto no pneu e como consequência o aparecimento do slip angle e relativa distorção no pneu, existem outros factores que também exercem elevada distorção na forma como o pneu contacta o solo.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
14
A carga vertical a que o pneu está sujeito, resultante da massa do veículo nessa roda (estaticamente) e da transferência de massas (em aceleração, travagem ou curva), vai também interferir na pegada do pneu no solo. Desta forma, é também importante considerar este factor na determinação da aderência do pneu. Na Figura 9 podemos constatar que depois de atingido o coeficiente de atrito máximo no pneu, o aumento da carga vertical leva a uma perda de atrito. [6]
Figura 9 – Coeficiente de atrito em função da carga vertical no pneu.
Quanto maior for a carga vertical maior será a força lateral que o pneu conseguirá desenvolver, que por sua vez está relacionada com o slip angle. Por isso o factor carga vertical do pneu vai ter um influência semelhante à da força lateral, ou seja, á medida que esta aumenta, aumenta a força lateral e consecutivamente o slip angle até que se atinge um pico (ponto máximo de aderência), a partir no qual um incremento de carga vertical irá causar um slip angle superior ao correspondente para a máxima força lateral e como consequência o pneu irá escorregar. Esta característica é evidenciada na Figura 10 onde podemos constatar que a força lateral aumenta com o slip angle para uma dada carga vertical mas, por outro lado, a força lateral é máxima para um dado valor de slip angle que é cerca de 3 graus para um pneu de competição e cerca de 6 graus para um pneu de “estrada”.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
15
Figura 10 – Relação entre força lateral e carga vertical para diferentes slip angle no pneu.
Outro dos factores que influencia a aderência dos pneus é a temperatura (ver Figura 11). Qualquer processo que envolva fricção produz calor. Adicionalmente, uma porção da energia envolvida na compressão e distorção do piso do pneu no ponto de contacto com o solo não é restaurada quando o pneu volta ao seu estado inicial mas é convertida em calor. Parte desse calor é transmitido para a atmosfera enquanto outra parte é retida no pneu. Em condições normais a temperatura do pneu irá aumentar até se atingir um equilíbrio térmico que permitirá á temperatura estabilizar. Como é óbvio a temperatura do pneu irá variar consideravelmente nos diversos pontos de uma pista, dependendo da solicitação do pneu em cada momento. A maior parte dos pneus de competição produzem o máximo de aderência para temperaturas entre os 70 e os 100º C. No entanto os pneus de chuva, com componentes de borracha mais macia, atingem facilmente o máximo de atrito a temperaturas que rondam os 60º C. Se o pneu estiver a operar a temperaturas muito abaixo da temperatura ideal o pneu terá baixa aderência, enquanto se ultrapassar largamente a temperatura ideal, o pneu corre o risco de se desintegrar devido à deterioração e perda dos componentes voláteis da mistura do pneu. Pelo que o atrito do pneu está directamente relacionado com a pressão e consequente temperatura. [5]
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
16
Figura 11 – Aderência do pneu em função da temperatura (240 ºF = 115,5 ºC).
Para uma optimização da temperatura deve-se ajustar a pressão do pneu, isto é, um pneu com baixa pressão irá possuir um maior contacto com o solo e maior deformação da borracha do piso, pelo que o atrito da borracha com o solo irá ser maior e consequentemente a temperatura irá aumentar principalmente nas extremidades do contacto. O oposto, pressão exagerada, reduzirá o contacto do pneu com o solo ao centro do pneu levando-o a aquecer. Desta forma a optimização da temperatura do pneu é em grande parte influenciada pela pressão, pelo que podemos considerar que a aderência do pneu depende deste parâmetro, como é possível verificar na Figura 12 onde a aderência é dependente da pressão do pneu.
Figura 12 – Aderência em função da pressão do pneu.

Pedro Espinheira Rio
Devido à inconstância da geometria das suspensões e como o pneu sofre deformações devido á direcção e intensidade das forças que lhe são aplicadas os fabricantes deprincipalmente em competição, adoptaram mecanismos de afinação do posicionamento da roda para possibilitar um maior contacto do pneu do slip angle dos pneus. Estes mecanismos permitem definir caster e toe (ver capítulo 3.6.13uma uniformização da temperatura dos pneus, t[3]
Por fim, temos que evidenciar que o coeficiente de atrito é um coeficiente adimensional que expressa a oposição ao escorregamento contacto, pelo que é imposscaracterísticas do piso. Desta forma o coeficiente de atrito do pneu superfície onde o pneu se desloca, por isso, referidos, o coeficiente de atrito de um pneu a circular numa pista de asfalto seco é totalmente diferente do coeficiente de atrito desse mesmo pneu a verificar na Figura 13. [1]
Figura 13 – Relação entre velocidade, coeficiente de atrito e tipo de piso.
3.5 Classificação dos movimentos do veículo
Na dinâmica de veículos estudamengenheiro fixar algumas variáveis em acção. eixos e denominações para os diferentes movimentos do veículo. Esses movimentosser relativos ao referencial do próprio veículo (movimentos da suspensão) ou relativamente ao referencial considerado com fixo (referencial do solorelacionadas com as irregularidades ou inclinação
O movimento da suspensão de um automóvel pode ser distintas de movimento. Essa
Dinâmica e Afinação de uma Viatura de Competição
inconstância da geometria das suspensões e como o pneu sofre deformações devido á direcção e intensidade das forças que lhe são aplicadas os fabricantes deprincipalmente em competição, adoptaram mecanismos de afinação do posicionamento da roda para possibilitar um maior contacto do pneu quando este é mais solicitado
Estes mecanismos permitem definir alinhamentos como3.6.13). Estes alinhamentos podem também ser ajustados
uma uniformização da temperatura dos pneus, trazendo as vantagens anteriormente
Por fim, temos que evidenciar que o coeficiente de atrito é um coeficiente adimensional que ao escorregamento existente entre as superfícies de dois corpos em
contacto, pelo que é impossível falar do coeficiente de atrito do pneu sem falar das características do piso. Desta forma o coeficiente de atrito do pneu
onde o pneu se desloca, por isso, considerando todos os factores anteriormente iente de atrito de um pneu a circular numa pista de asfalto seco é totalmente
diferente do coeficiente de atrito desse mesmo pneu a mesma pista com chuva
elação entre velocidade, coeficiente de atrito e tipo de piso.
Classificação dos movimentos do veículo
Na dinâmica de veículos estudam-se os movimentos do automóvel, pelo que é usual para o engenheiro fixar algumas variáveis em acção. Desta forma é necessário definir sistemas de eixos e denominações para os diferentes movimentos do veículo. Esses movimentosser relativos ao referencial do próprio veículo (movimentos da suspensão) ou relativamente ao referencial considerado com fixo (referencial do solo) que também pode sofrer perturbações
irregularidades ou inclinação do piso.
imento da suspensão de um automóvel pode ser definido pordistintas de movimento. Essas componentes são o heave, pitch, roll e
Dinâmica e Afinação de uma Viatura de Competição
17
inconstância da geometria das suspensões e como o pneu sofre deformações devido á direcção e intensidade das forças que lhe são aplicadas os fabricantes de automóveis, e principalmente em competição, adoptaram mecanismos de afinação do posicionamento da
quando este é mais solicitado e do controlo alinhamentos como camber,
também ser ajustados de modo a anteriormente referidas.
Por fim, temos que evidenciar que o coeficiente de atrito é um coeficiente adimensional que as superfícies de dois corpos em
ível falar do coeficiente de atrito do pneu sem falar das características do piso. Desta forma o coeficiente de atrito do pneu depende, também, da
todos os factores anteriormente iente de atrito de um pneu a circular numa pista de asfalto seco é totalmente
mesma pista com chuva, como se pode
elação entre velocidade, coeficiente de atrito e tipo de piso.
se os movimentos do automóvel, pelo que é usual para o Desta forma é necessário definir sistemas de
eixos e denominações para os diferentes movimentos do veículo. Esses movimentos podem ser relativos ao referencial do próprio veículo (movimentos da suspensão) ou relativamente ao
que também pode sofrer perturbações
definido por quatro componentes e warp. A posição do
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
18
sistema de suspensão no seu funcionamento pode a cada instante ser descrita pela sobreposição destas quatro componentes de movimento. [7]
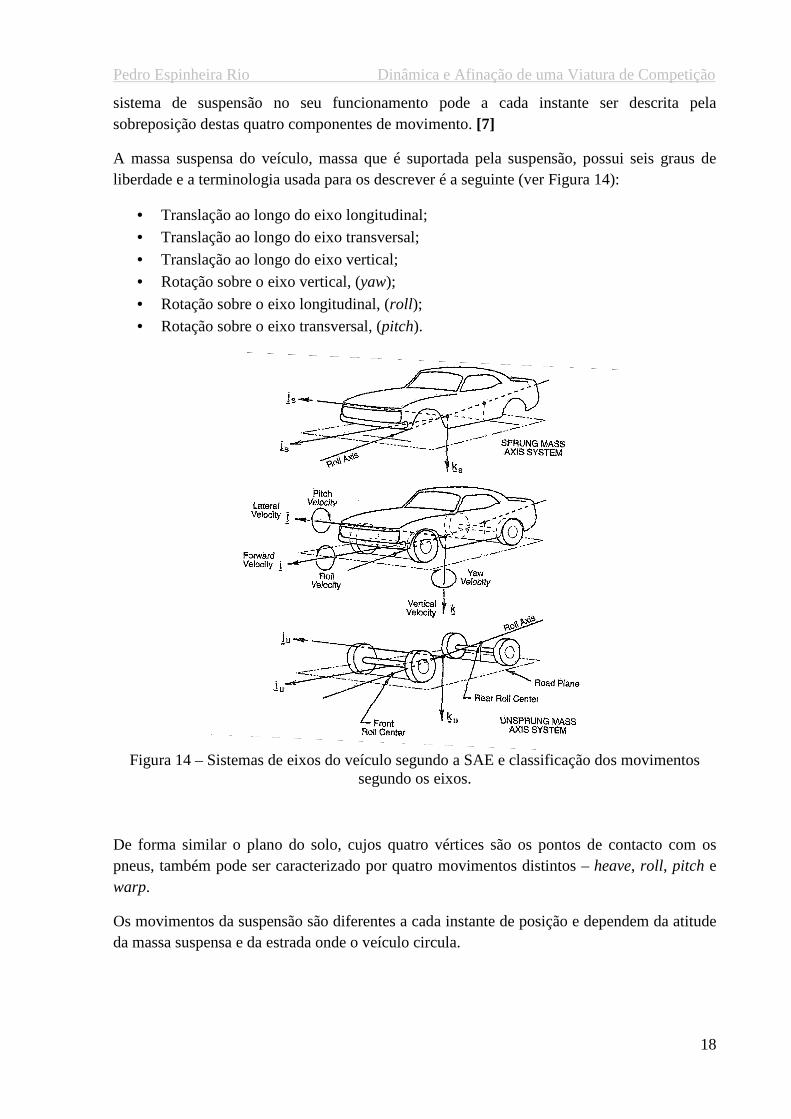
A massa suspensa do veículo, massa que é suportada pela suspensão, possui seis graus de liberdade e a terminologia usada para os descrever é a seguinte (ver Figura 14):
• Translação ao longo do eixo longitudinal; • Translação ao longo do eixo transversal;
• Translação ao longo do eixo vertical; • Rotação sobre o eixo vertical, (yaw);
• Rotação sobre o eixo longitudinal, (roll ); • Rotação sobre o eixo transversal, (pitch).
Figura 14 – Sistemas de eixos do veículo segundo a SAE e classificação dos movimentos
segundo os eixos.
De forma similar o plano do solo, cujos quatro vértices são os pontos de contacto com os pneus, também pode ser caracterizado por quatro movimentos distintos – heave, roll , pitch e warp.
Os movimentos da suspensão são diferentes a cada instante de posição e dependem da atitude da massa suspensa e da estrada onde o veículo circula.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
19
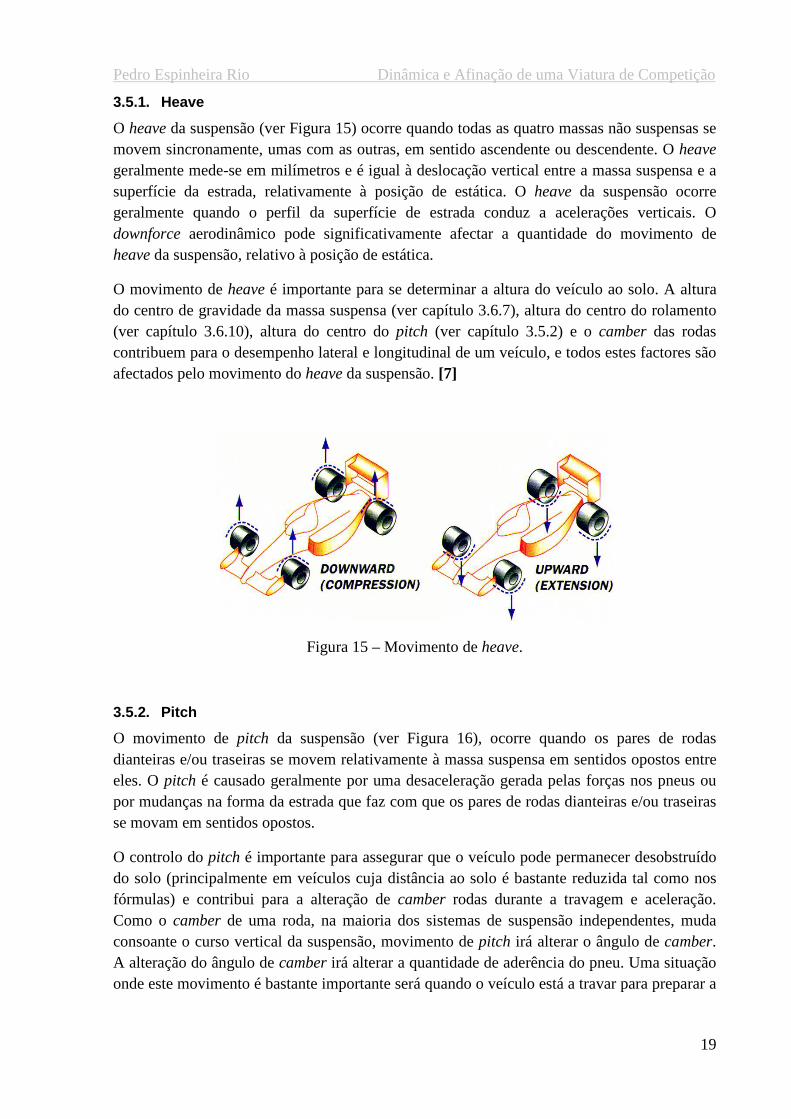
3.5.1. Heave
O heave da suspensão (ver Figura 15) ocorre quando todas as quatro massas não suspensas se movem sincronamente, umas com as outras, em sentido ascendente ou descendente. O heave geralmente mede-se em milímetros e é igual à deslocação vertical entre a massa suspensa e a superfície da estrada, relativamente à posição de estática. O heave da suspensão ocorre geralmente quando o perfil da superfície de estrada conduz a acelerações verticais. O downforce aerodinâmico pode significativamente afectar a quantidade do movimento de heave da suspensão, relativo à posição de estática.
O movimento de heave é importante para se determinar a altura do veículo ao solo. A altura do centro de gravidade da massa suspensa (ver capítulo 3.6.7), altura do centro do rolamento (ver capítulo 3.6.10), altura do centro do pitch (ver capítulo 3.5.2) e o camber das rodas contribuem para o desempenho lateral e longitudinal de um veículo, e todos estes factores são afectados pelo movimento do heave da suspensão. [7]
Figura 15 – Movimento de heave.
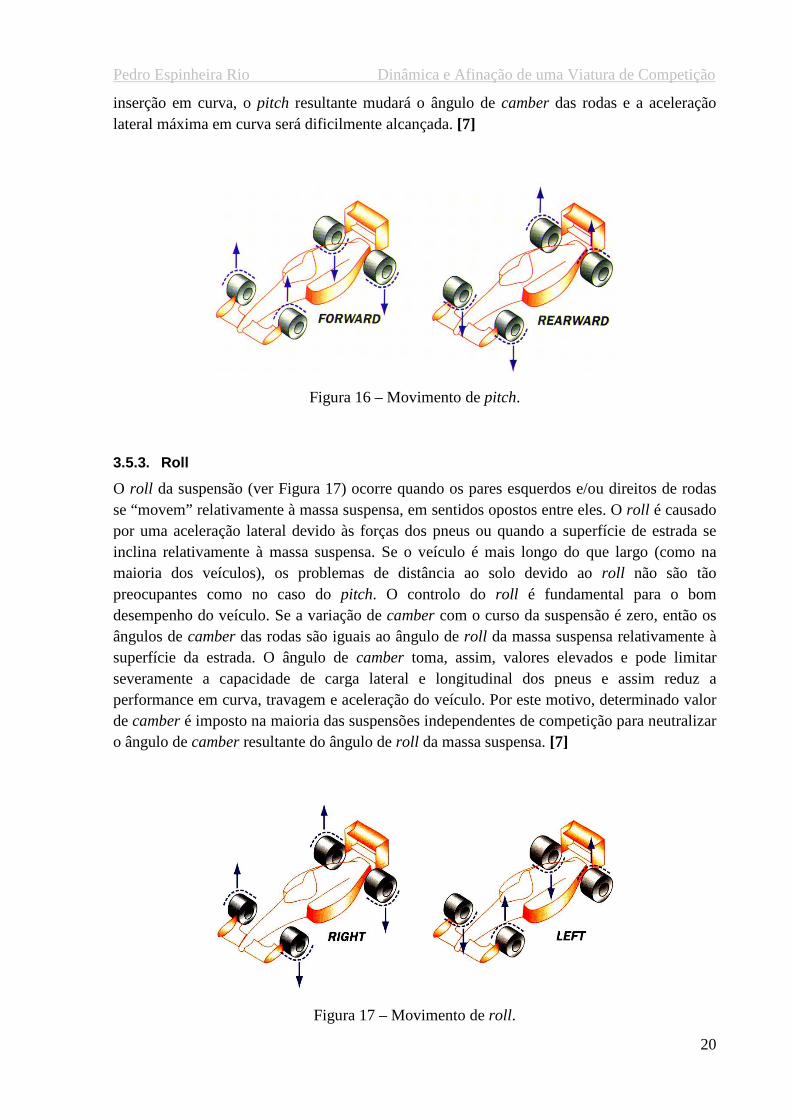
3.5.2. Pitch
O movimento de pitch da suspensão (ver Figura 16), ocorre quando os pares de rodas dianteiras e/ou traseiras se movem relativamente à massa suspensa em sentidos opostos entre eles. O pitch é causado geralmente por uma desaceleração gerada pelas forças nos pneus ou por mudanças na forma da estrada que faz com que os pares de rodas dianteiras e/ou traseiras se movam em sentidos opostos.
O controlo do pitch é importante para assegurar que o veículo pode permanecer desobstruído do solo (principalmente em veículos cuja distância ao solo é bastante reduzida tal como nos fórmulas) e contribui para a alteração de camber rodas durante a travagem e aceleração. Como o camber de uma roda, na maioria dos sistemas de suspensão independentes, muda consoante o curso vertical da suspensão, movimento de pitch irá alterar o ângulo de camber. A alteração do ângulo de camber irá alterar a quantidade de aderência do pneu. Uma situação onde este movimento é bastante importante será quando o veículo está a travar para preparar a
Pedro Espinheira Rio
inserção em curva, o pitchlateral máxima em curva será dificilmente
3.5.3. Roll
O roll da suspensão (ver Figura se “movem” relativamente por uma aceleração lateral devido às forças doinclina relativamente à massa maioria dos veículos), os problemas dpreocupantes como no caso do desempenho do veículo. Se a ângulos de camber das rodas são iguais ao ângulo desuperfície da estrada. O ângulo de severamente a capacidade de carga laterperformance em curva, travagem ede camber é imposto na maioria daso ângulo de camber resultante do
Dinâmica e Afinação de uma Viatura de Competição
pitch resultante mudará o ângulo de camber das rodas e será dificilmente alcançada. [7]
Figura 16 – Movimento de pitch.
Figura 17) ocorre quando os pares esquerdos e/ou direitos de à massa suspensa, em sentidos opostos entre eles. O
por uma aceleração lateral devido às forças dos pneus ou quando a superfície de estrada se massa suspensa. Se o veículo é mais longo do que
), os problemas de distância ao solo devido apreocupantes como no caso do pitch. O controlo do roll é fundamental
. Se a variação de camber com o curso da suspensão das são iguais ao ângulo de roll da massa suspensa relativamente
estrada. O ângulo de camber toma, assim, valores elevadosa capacidade de carga lateral e longitudinal dos pneuem curva, travagem e aceleração do veículo. Por este motivo, determinad
a maioria das suspensões independentes de compresultante do ângulo de roll da massa suspensa. [7]
Figura 17 – Movimento de roll .
Dinâmica e Afinação de uma Viatura de Competição
20
das rodas e a aceleração
pares esquerdos e/ou direitos de rodas sentidos opostos entre eles. O roll é causado
do a superfície de estrada se é mais longo do que largo (como na
distância ao solo devido ao roll não são tão fundamental para o bom
com o curso da suspensão é zero, então os suspensa relativamente à
toma, assim, valores elevados e pode limitar al e longitudinal dos pneus e assim reduz a
ste motivo, determinado valor suspensões independentes de competição para neutralizar
Pedro Espinheira Rio
3.5.4. Warp
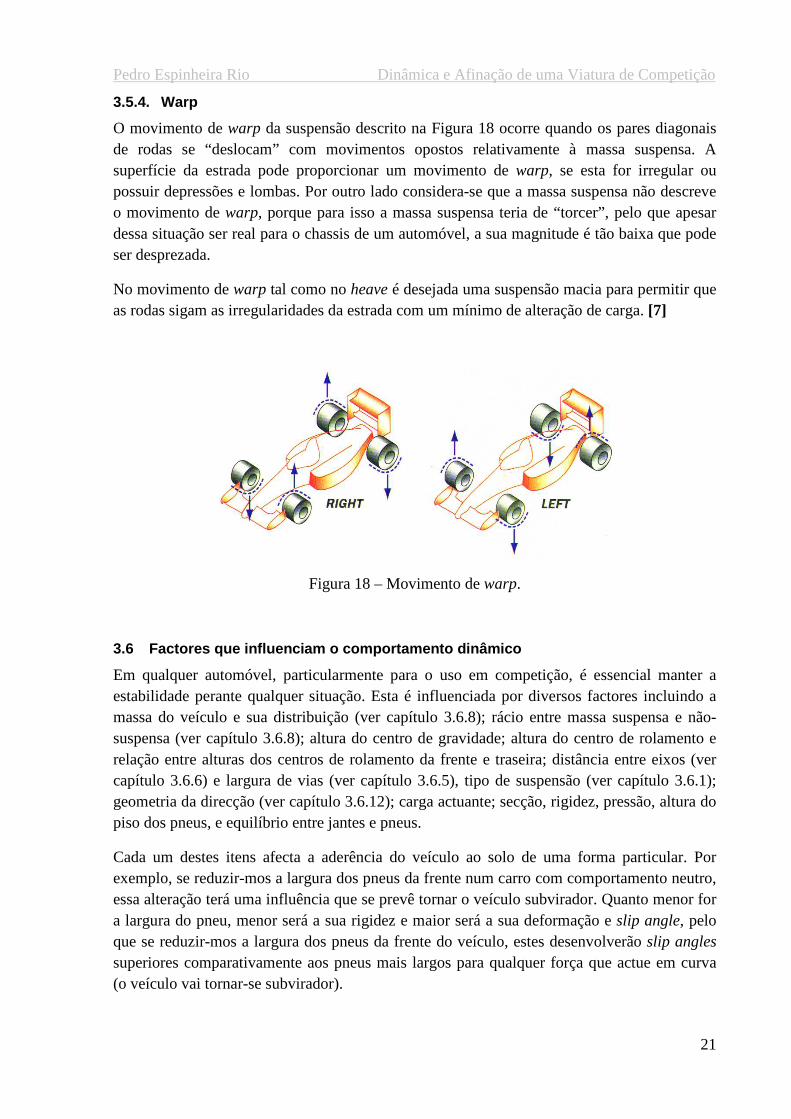
O movimento de warp da suspensão de rodas se “deslocam” comsuperfície da estrada pode proporcionar um movimento de possuir depressões e lombas. Por outro lado considerao movimento de warp, porque para isso a massa suspensa teria de “torcer”, pelo que apesar dessa situação ser real para o chassis de um automóvel, a sua magnser desprezada.
No movimento de warp tal como no as rodas sigam as irregularidades da estrada com um mínimo de alteração de carga.
3.6 Factores que influenciam o comportamento dinâmico
Em qualquer automóvel, particularmente para o uso em competição, é essencial manter a estabilidade perante qualquer situação. Esta é influenciada por diversos factores incluindo massa do veículo e sua distribuiçãosuspensa (ver capítulo 3.6.8relação entre alturas dos centros de rolamento da frente e traseira; distância entre eixoscapítulo 3.6.6) e largura de viasgeometria da direcção (ver capítulopiso dos pneus, e equilíbrio entre jantes e pneus.
Cada um destes itens afecta a aderência do veículo ao solo de uma forma particular. Poexemplo, se reduzir-mos a largura dos pneus da frente num carro com comportamento neutro, essa alteração terá uma influência a largura do pneu, menor será a sua rigidez e maior será a sua que se reduzir-mos a largura dos pneus da frente superiores comparativamente aos (o veículo vai tornar-se subvirador).
Dinâmica e Afinação de uma Viatura de Competição
da suspensão descrito na Figura 18 ocorre quando os pares diag“deslocam” com movimentos opostos relativamente à massa
superfície da estrada pode proporcionar um movimento de warp, se esta for irrepossuir depressões e lombas. Por outro lado considera-se que a massa suspensa não descreve
, porque para isso a massa suspensa teria de “torcer”, pelo que apesar dessa situação ser real para o chassis de um automóvel, a sua magnitude é tão baixa que pode
tal como no heave é desejada uma suspensão macia para permitir que as rodas sigam as irregularidades da estrada com um mínimo de alteração de carga.
Figura 18 – Movimento de warp.
influenciam o comportamento dinâmico
Em qualquer automóvel, particularmente para o uso em competição, é essencial manter a estabilidade perante qualquer situação. Esta é influenciada por diversos factores incluindo
e sua distribuição (ver capítulo 3.6.8); rácio entre massa3.6.8); altura do centro de gravidade; altura do centro de rolamento e
relação entre alturas dos centros de rolamento da frente e traseira; distância entre eixose largura de vias (ver capítulo 3.6.5), tipo de suspensão
(ver capítulo 3.6.12); carga actuante; secção, rigidez, pressão, altura do piso dos pneus, e equilíbrio entre jantes e pneus.
Cada um destes itens afecta a aderência do veículo ao solo de uma forma particular. Pomos a largura dos pneus da frente num carro com comportamento neutro,
essa alteração terá uma influência que se prevê tornar o veículo subvirador. Quanto menor for a largura do pneu, menor será a sua rigidez e maior será a sua deforma
mos a largura dos pneus da frente do veículo, estes desenvolverão superiores comparativamente aos pneus mais largos para qualquer força que actue em curva
se subvirador).
Dinâmica e Afinação de uma Viatura de Competição
21
ocorre quando os pares diagonais à massa suspensa. A
, se esta for irregular ou se que a massa suspensa não descreve
, porque para isso a massa suspensa teria de “torcer”, pelo que apesar itude é tão baixa que pode
é desejada uma suspensão macia para permitir que as rodas sigam as irregularidades da estrada com um mínimo de alteração de carga. [7]
Em qualquer automóvel, particularmente para o uso em competição, é essencial manter a estabilidade perante qualquer situação. Esta é influenciada por diversos factores incluindo a
massa suspensa e não-; altura do centro de gravidade; altura do centro de rolamento e
relação entre alturas dos centros de rolamento da frente e traseira; distância entre eixos (ver , tipo de suspensão (ver capítulo 3.6.1);
; carga actuante; secção, rigidez, pressão, altura do
Cada um destes itens afecta a aderência do veículo ao solo de uma forma particular. Por mos a largura dos pneus da frente num carro com comportamento neutro,
virador. Quanto menor for deformação e slip angle, pelo
veículo, estes desenvolverão slip angles para qualquer força que actue em curva
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
22
Assim, pretende-se perceber e analisar as linhas gerais que definem o comportamento da viatura que será estudada. Para a realização desse estudo é necessária a compreensão de alguns conceitos relacionados com a mecânica e física do automóvel e que serão apresentados sucintamente nos capítulos seguintes.
3.6.1 Suspensão
Se as estradas e pistas onde os veículos circulam fossem perfeitamente lisas as suspensões não seriam necessárias, pelo que existem alguns veículos de competição tais como os karts que prescindem destes componentes. No entanto, para além de possibilitar o conforto, as suspensões são usadas para afinar o chassis para o melhor comportamento numa dada situação. [5]
As funções essenciais da suspensão são:
• Assegurar conformidade vertical para que as rodas condigam seguir sobre piso irregular, isolando o chassis das deformações da estrada;
• Manter as rodas com direcção e camber adequados á superfície do piso;
• Reagir às forças de controlo produzidas nos pneus – forças longitudinais (aceleração e travagem), laterais (em curva), e aos momentos gerados pela aceleração e travagem.
• Resistir ao roll do chassis;
• Manter os pneus em contacto constante com a estrada com o mínimo de variação de carga.
A suspensão e sua correcta afinação são um factor fundamental para o comportamento de uma viatura, uma vez que esta tem que estabelecer a ligação entre as rodas e o chassis, suportar as irregularidades do piso e oscilações da carroceria. Uma suspensão é constituída essencialmente por um elemento capaz de armazenar energia potencial e um dissipador de energia, mola e amortecedor respectivamente. A mola suporta toda a massa suspensa e liga-a à massa não-suspensa, enquanto o amortecedor dissipa a energia resultante das deformações da mola. [1]
A massa do chassis e de todos os componentes nele acoplados na qual se incluem os ocupantes é designada por massa suspensa, esta massa é suportada pelas molas que têm a função de isolar o chassis das irregularidades do piso conferindo um maior conforto aos ocupantes. Os restantes componentes são considerados não-suspensos e estão ligados às rodas (travões caso sejam outboard, jantes, pneus, etc.) por isso acompanham as irregularidades do solo. No entanto alguns componentes que fazem a ligação entre estes dois grupos não se incluem totalmente em nenhum dos dois pelo que a massa desses componentes distribui-se pelos dois grupos consoante a sua posição e característica.
A relação entre a massa suspensa e não-suspensa tem um grande efeito no comportamento dinâmico do veículo pelo que essa característica pode ser definida por um rácio, dividindo a massa total suspensa pela massa não-suspensa nas quatro rodas do veículo, ou calculando separadamente para cada extremidade do veículo a massa suspensa na frente ou traseira do

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
23
carro sobre a massa não-suspensa da frente ou traseira, respectivamente. Este rácio irá exprimir características intrínsecas ao veículo, por exemplo um rácio de cinco é próprio de um veículo luxuoso no qual a massa suspensa é elevada, pelo que o conforto dos ocupantes é beneficiado. No caso das viaturas de competição procura-se diminuir tanto a massa suspensa como a não-suspensa e obter rácios mais baixos. Desta forma o handling do veículo em piso irregular será beneficiado. [5]
A geometria de uma suspensão remete-nos para o estudo de uma área complexa sobre a forma como a massa não-suspensa está ligada com a massa suspensa. Esta ligação irá definir o movimento linear e angular que a jante e o pneu irão sofrer após uma alteração da posição estática, quer pelo efeito da irregularidade da estrada na massa não-suspensa ou pelo movimento da massa suspensa como resposta á transferência de massas que ocorre por acelerações em variadas direcções. [4]
A forma desse movimento e sua trajectória dependem do comprimento relativo e inclinação dos elementos que fazem a ligação entre a massa não-suspensa e suspensa (links), enquanto a magnitude das deflexões depende, por sua vez, do comprimento absoluto desses links, massas em jogo, força que está a ser aplicada e ainda pela localização das molas de suspensão e barras estabilizadoras (e suas características). [3]
Como em muitas outras áreas do veículo, a geometria das suspensões é um compromisso entre eficiência, massa e preço. O principal requerimento é manter todas as rodas, e particularmente as rodas direccionais, sempre em contacto com a estrada. É também importante que a suspensão beneficie o handling, isole o veículo das irregularidades do piso e permitam que o propulsor e sistema de transmissão consigam transmitir a potência disponível para o solo. A principal dificuldade surge no compromisso entre a aderência á estrada e o conforto dos ocupantes.
Num veículo desportivo ou de competição o principal interesse dos designers é, ou deveria ser, manter o máximo de contacto dos pneus com a estrada. Sumariamente, isto significa manter as rodas, e particularmente as rodas exteriores a uma curva, na vertical quando o veículo está a descrever essa mesma curva. Ao curvar, uma grande parte da massa do veículo é transferida para as rodas exteriores pelo que manter essas rodas na perpendicular (aumentando a área de contacto do pneu com o solo) é uma tarefa de grande importância.
Inicialmente suspensões muito rígidas eram consideradas essenciais no design de veículos de competição para limitar o roll e o pitch da carroceria, mas o uso de molas demasiado rígidas resulta no contacto intermitente das rodas com o solo, particularmente em superfícies irregulares. Actualmente a tendência é usar molas mais macias (e progressivas) aliadas a amortecedores muito eficientes, que permitem um movimento considerável das rodas em superfícies irregulares mas possibilitam também um contacto firme com o solo. [8]
O design da geometria do sistema de suspensão consiste primeiramente na escolha do tipo de suspensão a ser aplicada e seguidamente na definição dos pontos de ancoragem, comprimento absoluto e relativo e inclinação das conexões (links) e na distância entre eixos e largura de vias que deverão proporcionar no melhor compromisso da localização dos centros de
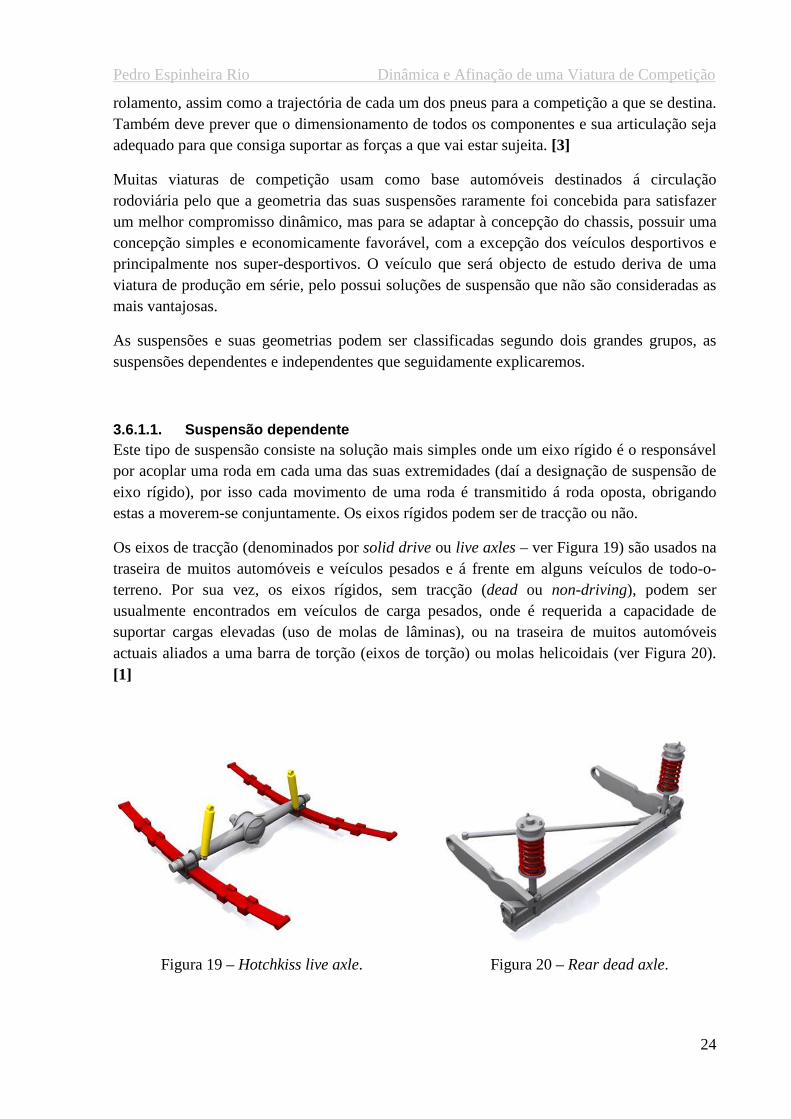
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
24
rolamento, assim como a trajectória de cada um dos pneus para a competição a que se destina. Também deve prever que o dimensionamento de todos os componentes e sua articulação seja adequado para que consiga suportar as forças a que vai estar sujeita. [3]
Muitas viaturas de competição usam como base automóveis destinados á circulação rodoviária pelo que a geometria das suas suspensões raramente foi concebida para satisfazer um melhor compromisso dinâmico, mas para se adaptar à concepção do chassis, possuir uma concepção simples e economicamente favorável, com a excepção dos veículos desportivos e principalmente nos super-desportivos. O veículo que será objecto de estudo deriva de uma viatura de produção em série, pelo possui soluções de suspensão que não são consideradas as mais vantajosas.
As suspensões e suas geometrias podem ser classificadas segundo dois grandes grupos, as suspensões dependentes e independentes que seguidamente explicaremos.
3.6.1.1. Suspensão dependente Este tipo de suspensão consiste na solução mais simples onde um eixo rígido é o responsável por acoplar uma roda em cada uma das suas extremidades (daí a designação de suspensão de eixo rígido), por isso cada movimento de uma roda é transmitido á roda oposta, obrigando estas a moverem-se conjuntamente. Os eixos rígidos podem ser de tracção ou não.
Os eixos de tracção (denominados por solid drive ou live axles – ver Figura 19) são usados na traseira de muitos automóveis e veículos pesados e á frente em alguns veículos de todo-o-terreno. Por sua vez, os eixos rígidos, sem tracção (dead ou non-driving), podem ser usualmente encontrados em veículos de carga pesados, onde é requerida a capacidade de suportar cargas elevadas (uso de molas de lâminas), ou na traseira de muitos automóveis actuais aliados a uma barra de torção (eixos de torção) ou molas helicoidais (ver Figura 20). [1]
Figura 19 – Hotchkiss live axle. Figura 20 – Rear dead axle.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
25
A vantagem dos eixos rígidos é que o câmber das rodas não é alterado devido ao roll da carroceria, no entanto possuem muito pouco câmber a curvar com excepção da deformação que é devido á excessiva compressão dos pneus exteriores a uma curva. Por outro lado, o alinhamento das rodas é raramente mantido, agravando o desgaste dos pneus e a performance do veículo.
A configuração dos eixos rígidos de tracção pode ser de vários tipos como por exemplo Hotchkiss (ver Figura 19), De Dion, Four link, entre outros.
Concretamente no caso do Four link, tipo de suspensão usada na traseira veículo que irá ser objecto de análise (ver Figura 21), a sua configuração deriva da Hotchkiss, representado na Figura 19, e as principais diferenças situam-se ao nível das molas que passam as ser helicoidais e a inclusão de quatro barras de ligação do eixo ao chassis (four links), duas delas inferiores e as restantes superiores. As barras inferiores controlam o posicionamento longitudinal enquanto as duas barras superiores actuam ao nível da deslocação lateral e momentos resultantes da aceleração e travagem no eixo. Apesar de este tipo de suspensão se revelar mais dispendiosa do que as suspensões com molas de lâmina, o design geométrico do four link possibilita um melhor controlo da localização do centro de rolamento, anti-squat (oposição ao movimento de pitch resultante da aceleração do veículo em linha recta) e anti-dive (oposição ao movimento de pitch resultante da travagem) e propriedades do roll steer (alteração do toe devido ao movimento de roll da carroceria). [1]
Figura 21 – Eixo rígido com four link.
Amortecedor
Mola
Four link
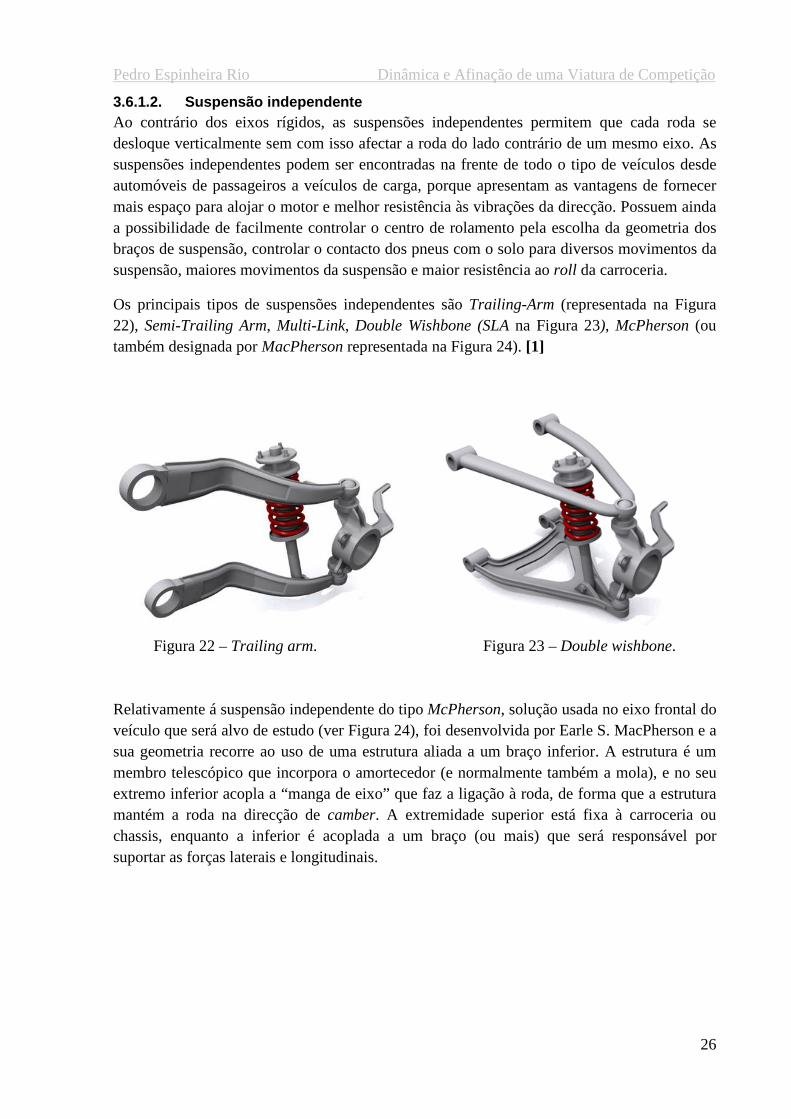
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
26
3.6.1.2. Suspensão independente Ao contrário dos eixos rígidos, as suspensões independentes permitem que cada roda se desloque verticalmente sem com isso afectar a roda do lado contrário de um mesmo eixo. As suspensões independentes podem ser encontradas na frente de todo o tipo de veículos desde automóveis de passageiros a veículos de carga, porque apresentam as vantagens de fornecer mais espaço para alojar o motor e melhor resistência às vibrações da direcção. Possuem ainda a possibilidade de facilmente controlar o centro de rolamento pela escolha da geometria dos braços de suspensão, controlar o contacto dos pneus com o solo para diversos movimentos da suspensão, maiores movimentos da suspensão e maior resistência ao roll da carroceria.
Os principais tipos de suspensões independentes são Trailing-Arm (representada na Figura 22), Semi-Trailing Arm, Multi-Link, Double Wishbone (SLA na Figura 23), McPherson (ou também designada por MacPherson representada na Figura 24). [1]
Figura 22 – Trailing arm. Figura 23 – Double wishbone.
Relativamente á suspensão independente do tipo McPherson, solução usada no eixo frontal do veículo que será alvo de estudo (ver Figura 24), foi desenvolvida por Earle S. MacPherson e a sua geometria recorre ao uso de uma estrutura aliada a um braço inferior. A estrutura é um membro telescópico que incorpora o amortecedor (e normalmente também a mola), e no seu extremo inferior acopla a “manga de eixo” que faz a ligação à roda, de forma que a estrutura mantém a roda na direcção de camber. A extremidade superior está fixa à carroceria ou chassis, enquanto a inferior é acoplada a um braço (ou mais) que será responsável por suportar as forças laterais e longitudinais.
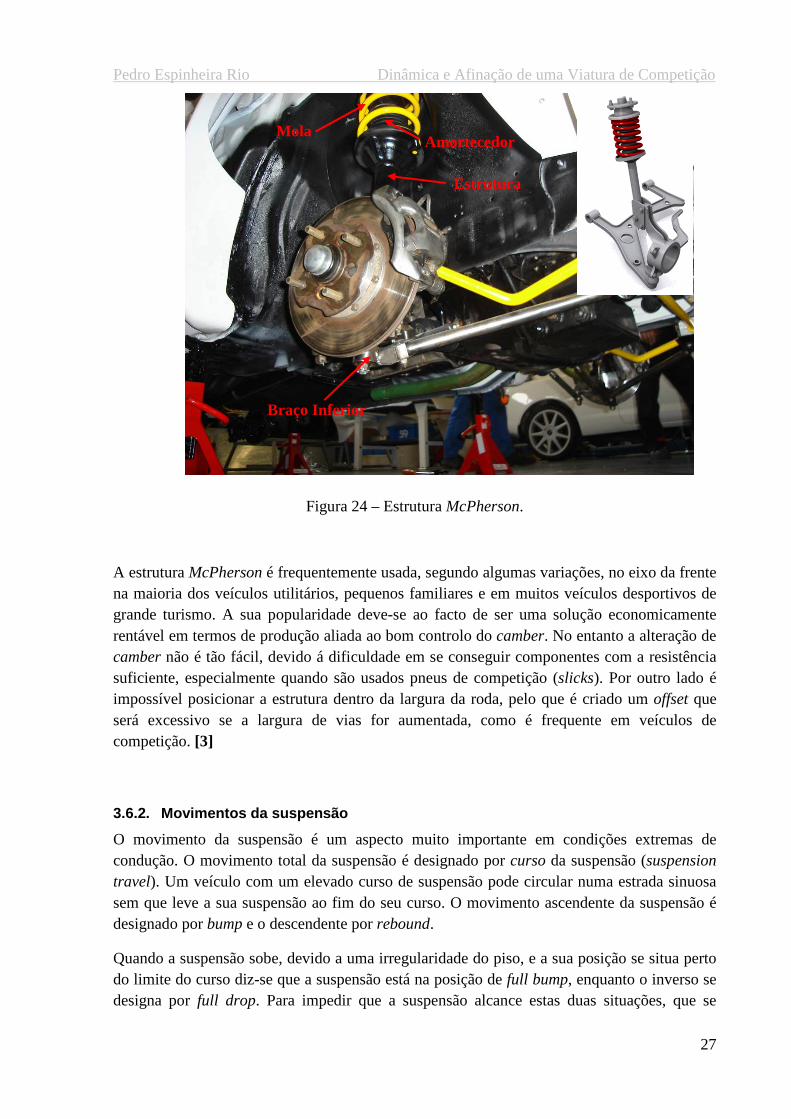
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
27
Figura 24 – Estrutura McPherson.
A estrutura McPherson é frequentemente usada, segundo algumas variações, no eixo da frente na maioria dos veículos utilitários, pequenos familiares e em muitos veículos desportivos de grande turismo. A sua popularidade deve-se ao facto de ser uma solução economicamente rentável em termos de produção aliada ao bom controlo do camber. No entanto a alteração de camber não é tão fácil, devido á dificuldade em se conseguir componentes com a resistência suficiente, especialmente quando são usados pneus de competição (slicks). Por outro lado é impossível posicionar a estrutura dentro da largura da roda, pelo que é criado um offset que será excessivo se a largura de vias for aumentada, como é frequente em veículos de competição. [3]
3.6.2. Movimentos da suspensão
O movimento da suspensão é um aspecto muito importante em condições extremas de condução. O movimento total da suspensão é designado por curso da suspensão (suspension travel). Um veículo com um elevado curso de suspensão pode circular numa estrada sinuosa sem que leve a sua suspensão ao fim do seu curso. O movimento ascendente da suspensão é designado por bump e o descendente por rebound.
Quando a suspensão sobe, devido a uma irregularidade do piso, e a sua posição se situa perto do limite do curso diz-se que a suspensão está na posição de full bump, enquanto o inverso se designa por full drop. Para impedir que a suspensão alcance estas duas situações, que se
Braço Inferior
Amortecedor Mola
Estrutura
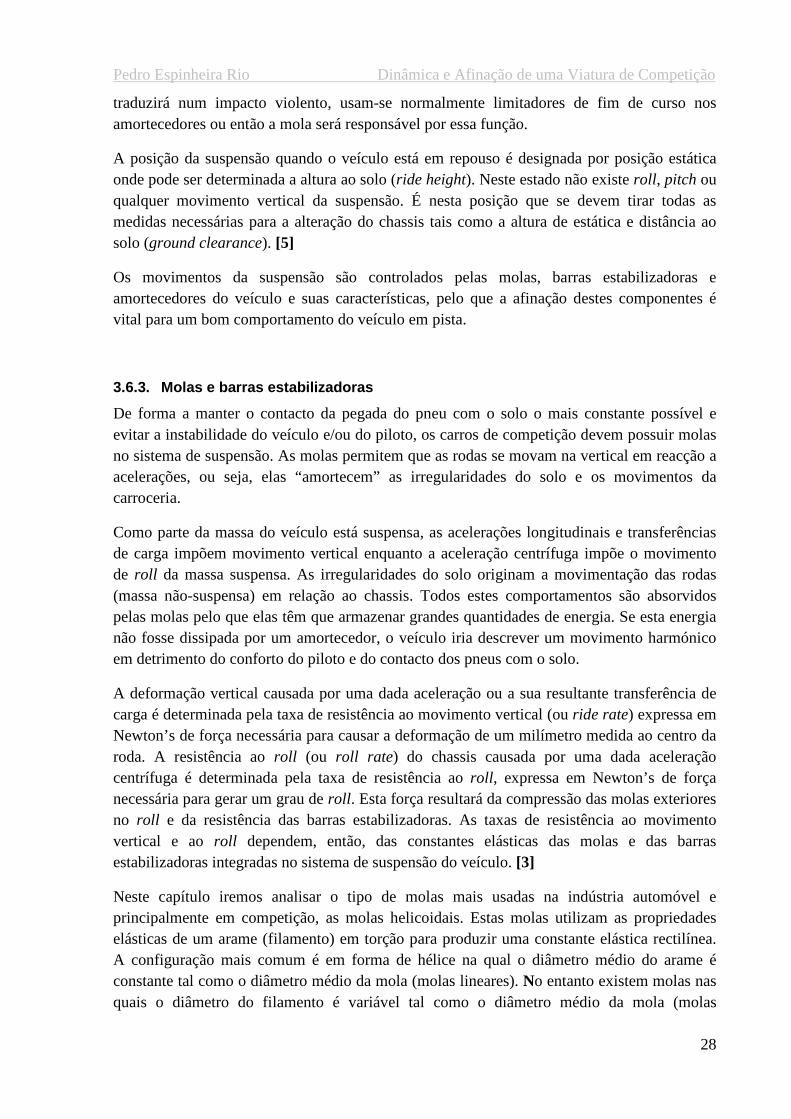
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
28
traduzirá num impacto violento, usam-se normalmente limitadores de fim de curso nos amortecedores ou então a mola será responsável por essa função.
A posição da suspensão quando o veículo está em repouso é designada por posição estática onde pode ser determinada a altura ao solo (ride height). Neste estado não existe roll , pitch ou qualquer movimento vertical da suspensão. É nesta posição que se devem tirar todas as medidas necessárias para a alteração do chassis tais como a altura de estática e distância ao solo (ground clearance). [5]
Os movimentos da suspensão são controlados pelas molas, barras estabilizadoras e amortecedores do veículo e suas características, pelo que a afinação destes componentes é vital para um bom comportamento do veículo em pista.
3.6.3. Molas e barras estabilizadoras
De forma a manter o contacto da pegada do pneu com o solo o mais constante possível e evitar a instabilidade do veículo e/ou do piloto, os carros de competição devem possuir molas no sistema de suspensão. As molas permitem que as rodas se movam na vertical em reacção a acelerações, ou seja, elas “amortecem” as irregularidades do solo e os movimentos da carroceria.
Como parte da massa do veículo está suspensa, as acelerações longitudinais e transferências de carga impõem movimento vertical enquanto a aceleração centrífuga impõe o movimento de roll da massa suspensa. As irregularidades do solo originam a movimentação das rodas (massa não-suspensa) em relação ao chassis. Todos estes comportamentos são absorvidos pelas molas pelo que elas têm que armazenar grandes quantidades de energia. Se esta energia não fosse dissipada por um amortecedor, o veículo iria descrever um movimento harmónico em detrimento do conforto do piloto e do contacto dos pneus com o solo.
A deformação vertical causada por uma dada aceleração ou a sua resultante transferência de carga é determinada pela taxa de resistência ao movimento vertical (ou ride rate) expressa em Newton’s de força necessária para causar a deformação de um milímetro medida ao centro da roda. A resistência ao roll (ou roll rate) do chassis causada por uma dada aceleração centrífuga é determinada pela taxa de resistência ao roll , expressa em Newton’s de força necessária para gerar um grau de roll . Esta força resultará da compressão das molas exteriores no roll e da resistência das barras estabilizadoras. As taxas de resistência ao movimento vertical e ao roll dependem, então, das constantes elásticas das molas e das barras estabilizadoras integradas no sistema de suspensão do veículo. [3]
Neste capítulo iremos analisar o tipo de molas mais usadas na indústria automóvel e principalmente em competição, as molas helicoidais. Estas molas utilizam as propriedades elásticas de um arame (filamento) em torção para produzir uma constante elástica rectilínea. A configuração mais comum é em forma de hélice na qual o diâmetro médio do arame é constante tal como o diâmetro médio da mola (molas lineares). No entanto existem molas nas quais o diâmetro do filamento é variável tal como o diâmetro médio da mola (molas

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
29
progressivas). As molas helicoidais podem ser concebidas para o uso á compressão ou á tracção mas neste ponto iremos focar o tipo de molas helicoidais usadas nas suspensões dos veículos, ou seja, molas de compressão e com diâmetro constante e filamento de secção circular. A Figura 25 fornece a nomenclatura para a mola helicoidal e a Figura 26 os tipos de acabamento do filamento usados nas molas helicoidais de compressão. [4]
Figura 25 – Detalhes e parâmetros das molas helicoidais de compressão.
Figura 26 – Acabamentos típicos das molas helicoidais de compressão.
Os parâmetros apresentados na Figura 25 que são relevantes para a determinação da constante elástica das molas são:
• O comprimento livre da mola não comprimida – L, milímetros.
• O diâmetro do filamento – d, milímetros. • O diâmetro médio da mola – D, milímetros. • Número de espiras activas – N (uma espira activa descreve um círculo completo).

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
30
No entanto, para a contabilização do número de espiras activas terão de ser considerados os parâmetros da Figura 26.
A máxima tensão de corte, f, da mola helicoidal devida a uma carga, W, é dada por:
� � 8��π�� � 2,55 � ���� � � ����
A constante elástica da mola é dada por:
� � ���8��� � �� � � ���
Frequência Natural da mola para uma dada massa m em kg:
ω� � � �� � ��
O posicionamento físico das molas da suspensão determina a resistência ao roll que elas fornecem. A Figura 27 ilustra uma única mola montada no centro do veículo. Obviamente neste caso a resistência ao roll é efectivamente zero e a massa suspensa é muito instável. No entanto, se substituir-mos a mola central da Figura 27 por um par de molas montadas nas extremidades tal como representado na Figura 28, seleccionando as constantes elásticas das molas podemos atingir o mesmo ride rate da suspensão anterior, mas agora as molas irão oferecer uma grande resistência ao roll assim como a estabilidade da massa suspensa. [5]
Figura 27 – Suspensão sem resistência ao roll .
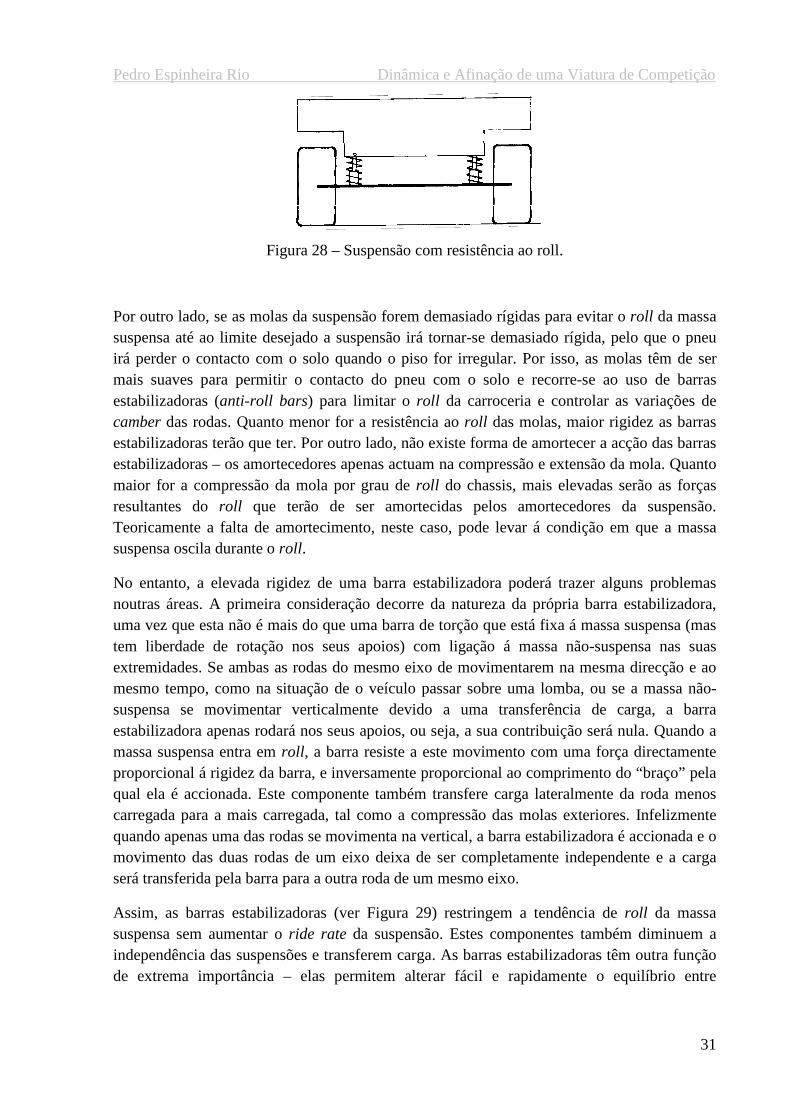
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
31
Figura 28 – Suspensão com resistência ao roll.
Por outro lado, se as molas da suspensão forem demasiado rígidas para evitar o roll da massa suspensa até ao limite desejado a suspensão irá tornar-se demasiado rígida, pelo que o pneu irá perder o contacto com o solo quando o piso for irregular. Por isso, as molas têm de ser mais suaves para permitir o contacto do pneu com o solo e recorre-se ao uso de barras estabilizadoras (anti-roll bars) para limitar o roll da carroceria e controlar as variações de camber das rodas. Quanto menor for a resistência ao roll das molas, maior rigidez as barras estabilizadoras terão que ter. Por outro lado, não existe forma de amortecer a acção das barras estabilizadoras – os amortecedores apenas actuam na compressão e extensão da mola. Quanto maior for a compressão da mola por grau de roll do chassis, mais elevadas serão as forças resultantes do roll que terão de ser amortecidas pelos amortecedores da suspensão. Teoricamente a falta de amortecimento, neste caso, pode levar á condição em que a massa suspensa oscila durante o roll .
No entanto, a elevada rigidez de uma barra estabilizadora poderá trazer alguns problemas noutras áreas. A primeira consideração decorre da natureza da própria barra estabilizadora, uma vez que esta não é mais do que uma barra de torção que está fixa á massa suspensa (mas tem liberdade de rotação nos seus apoios) com ligação á massa não-suspensa nas suas extremidades. Se ambas as rodas do mesmo eixo de movimentarem na mesma direcção e ao mesmo tempo, como na situação de o veículo passar sobre uma lomba, ou se a massa não-suspensa se movimentar verticalmente devido a uma transferência de carga, a barra estabilizadora apenas rodará nos seus apoios, ou seja, a sua contribuição será nula. Quando a massa suspensa entra em roll , a barra resiste a este movimento com uma força directamente proporcional á rigidez da barra, e inversamente proporcional ao comprimento do “braço” pela qual ela é accionada. Este componente também transfere carga lateralmente da roda menos carregada para a mais carregada, tal como a compressão das molas exteriores. Infelizmente quando apenas uma das rodas se movimenta na vertical, a barra estabilizadora é accionada e o movimento das duas rodas de um eixo deixa de ser completamente independente e a carga será transferida pela barra para a outra roda de um mesmo eixo.
Assim, as barras estabilizadoras (ver Figura 29) restringem a tendência de roll da massa suspensa sem aumentar o ride rate da suspensão. Estes componentes também diminuem a independência das suspensões e transferem carga. As barras estabilizadoras têm outra função de extrema importância – elas permitem alterar fácil e rapidamente o equilíbrio entre
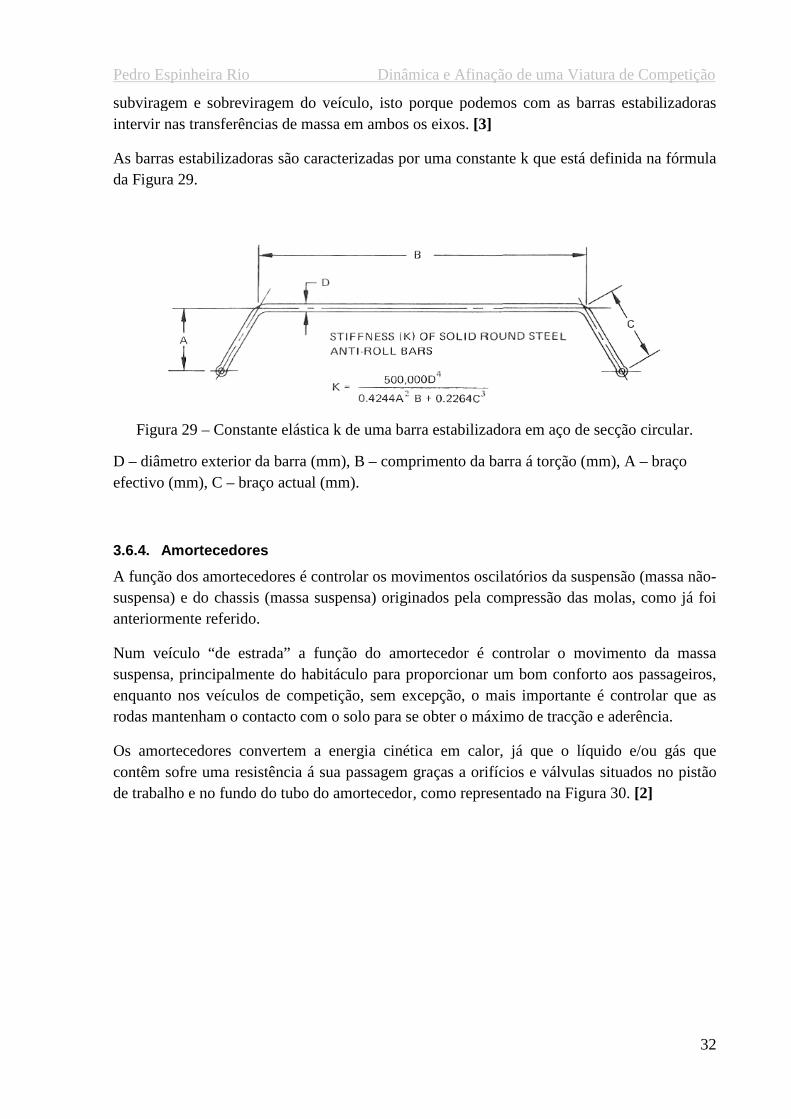
Pedro Espinheira Rio
subviragem e sobreviragemintervir nas transferências de massa e
As barras estabilizadoras são cda Figura 29.
Figura 29 – Constante elástica k de uma barra estabilizadora em aço de secção circular.
D – diâmetro exterior da barraefectivo (mm), C – braço actual (mm).
3.6.4. Amortecedores
A função dos amortecedores é controlar os movimentos oscilatórios da suspensão (massa nãosuspensa) e do chassis (massa suspensa) originados pela compressão das molas, como já foi anteriormente referido.
Num veículo “de estrada” a função do amortecedor é controlar o movimento da massa suspensa, principalmente do habitáculo para proporcionar um bom conforto aos passageiros, enquanto nos veículos de competição, sem excepção, o mais importante rodas mantenham o contacto com o solo para se obter o máximo de tracção e aderência.
Os amortecedores convertem a energia cinética em contêm sofre uma resistência á sua passagem graças a orifícios e vde trabalho e no fundo do tubo do amortecedor
Dinâmica e Afinação de uma Viatura de Competição
subviragem e sobreviragem do veículo, isto porque podemos com as barras estabilizadoras intervir nas transferências de massa em ambos os eixos. [3]
As barras estabilizadoras são caracterizadas por uma constante k que está definida na fórmula
onstante elástica k de uma barra estabilizadora em aço de secção circular.
diâmetro exterior da barra (mm), B – comprimento da barra á torçãobraço actual (mm).
A função dos amortecedores é controlar os movimentos oscilatórios da suspensão (massa nãosuspensa) e do chassis (massa suspensa) originados pela compressão das molas, como já foi
Num veículo “de estrada” a função do amortecedor é controlar o movimento da massa suspensa, principalmente do habitáculo para proporcionar um bom conforto aos passageiros,
nos veículos de competição, sem excepção, o mais importante rodas mantenham o contacto com o solo para se obter o máximo de tracção e aderência.
Os amortecedores convertem a energia cinética em calor, já que o líquido e/ou gás que contêm sofre uma resistência á sua passagem graças a orifícios e válvulas situados no pistão de trabalho e no fundo do tubo do amortecedor, como representado na Figura
Dinâmica e Afinação de uma Viatura de Competição
32
do veículo, isto porque podemos com as barras estabilizadoras
por uma constante k que está definida na fórmula
onstante elástica k de uma barra estabilizadora em aço de secção circular.
comprimento da barra á torção (mm), A – braço
A função dos amortecedores é controlar os movimentos oscilatórios da suspensão (massa não-suspensa) e do chassis (massa suspensa) originados pela compressão das molas, como já foi
Num veículo “de estrada” a função do amortecedor é controlar o movimento da massa suspensa, principalmente do habitáculo para proporcionar um bom conforto aos passageiros,
nos veículos de competição, sem excepção, o mais importante é controlar que as rodas mantenham o contacto com o solo para se obter o máximo de tracção e aderência.
, já que o líquido e/ou gás que álvulas situados no pistão
Figura 30. [2]
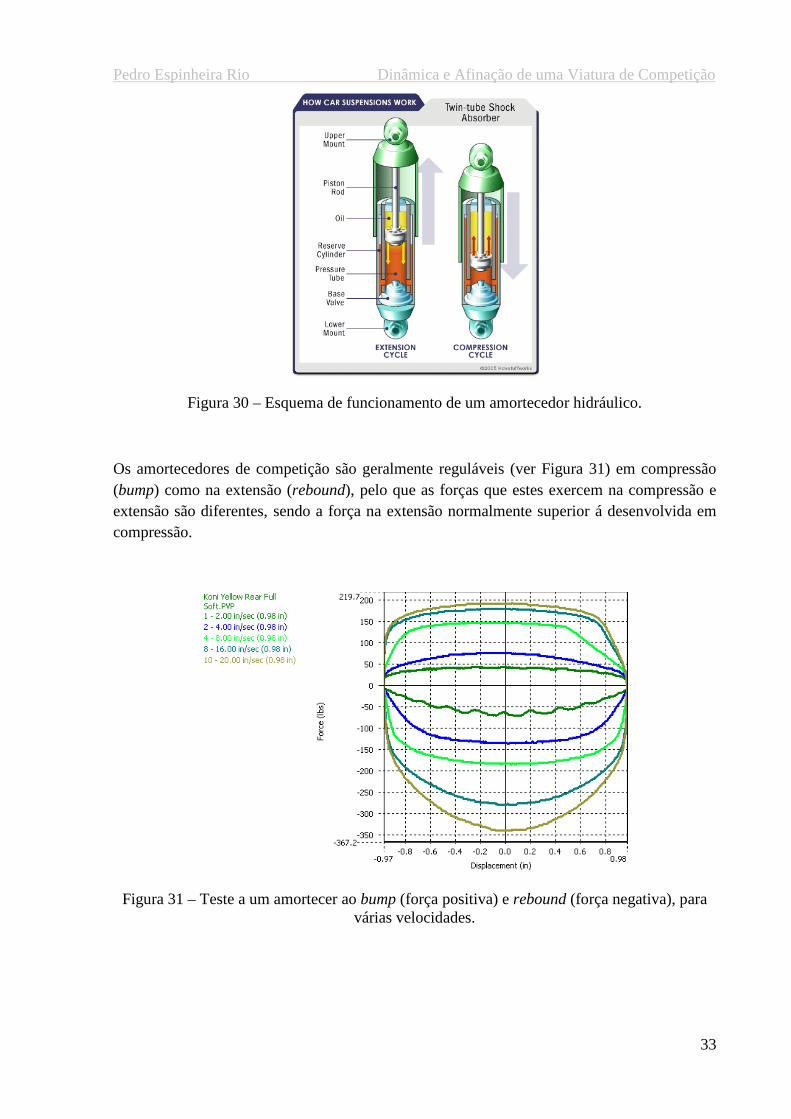
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
33
Figura 30 – Esquema de funcionamento de um amortecedor hidráulico.
Os amortecedores de competição são geralmente reguláveis (ver Figura 31) em compressão (bump) como na extensão (rebound), pelo que as forças que estes exercem na compressão e extensão são diferentes, sendo a força na extensão normalmente superior á desenvolvida em compressão.
Figura 31 – Teste a um amortecer ao bump (força positiva) e rebound (força negativa), para várias velocidades.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
34
Os amortecedores mais utilizados em competição são os amortecedores hidráulicos (ver Figura 30), a gás (ver Figura 32) ou mistos, pelo que o seu principio de funcionamento é o mesmo e apenas diferem do fluído(s) usado(s) no seu interior.
Figura 32 – Amortecedor a gás regulável.
A escolha, dimensionamento e afinação dos amortecedores para o chassis, pneus, circuito e características do piloto são um problema enorme e comum a todos os construtores e engenheiros de veículos de competição. A tarefa de ajustar os amortecedores tem sido uma tarefa assente em tentativas e testes seguindo alguns princípios básicos sugeridos pelos fabricantes ou por experiência dos intervenientes.
A forma de medição de uma dada afinação de um amortecedor é largamente subjectiva, uma vez que só pode ser avaliada pelo tempo necessário para o piloto percorrer uma volta ou um sector da pista. Esta é uma prática comum em todas as equipas de competição, ou seja, não existe uma fórmula chave para se calcular correctamente um amortecedor, para o fazer é necessário testar as afinações e bastante evolução em pista.
No entanto existem alguns princípios inerentes á disciplina de Vibrações e Ruído que nos podem dar alguma ajuda no cálculo teórico do amortecedor que seguidamente terá de ser testado e evoluído em pista.
Num sistema amortecido constituído por uma massa, uma mola e um amortecedor (modelo de uma suspensão automóvel desprezando o pneu representado na Figura 33), pretende-se que a massa volte o mais rapidamente á posição de equilíbrio estático depois de uma perturbação. Desta forma, o coeficiente de amortecimento terá de ter um valor de 1. Esta analogia irá fornecer um valor para o coeficiente de amortecimento necessário para uma suspensão usando o valor da massa suspensa e a constante elástica da mola dessa suspensão. [4]
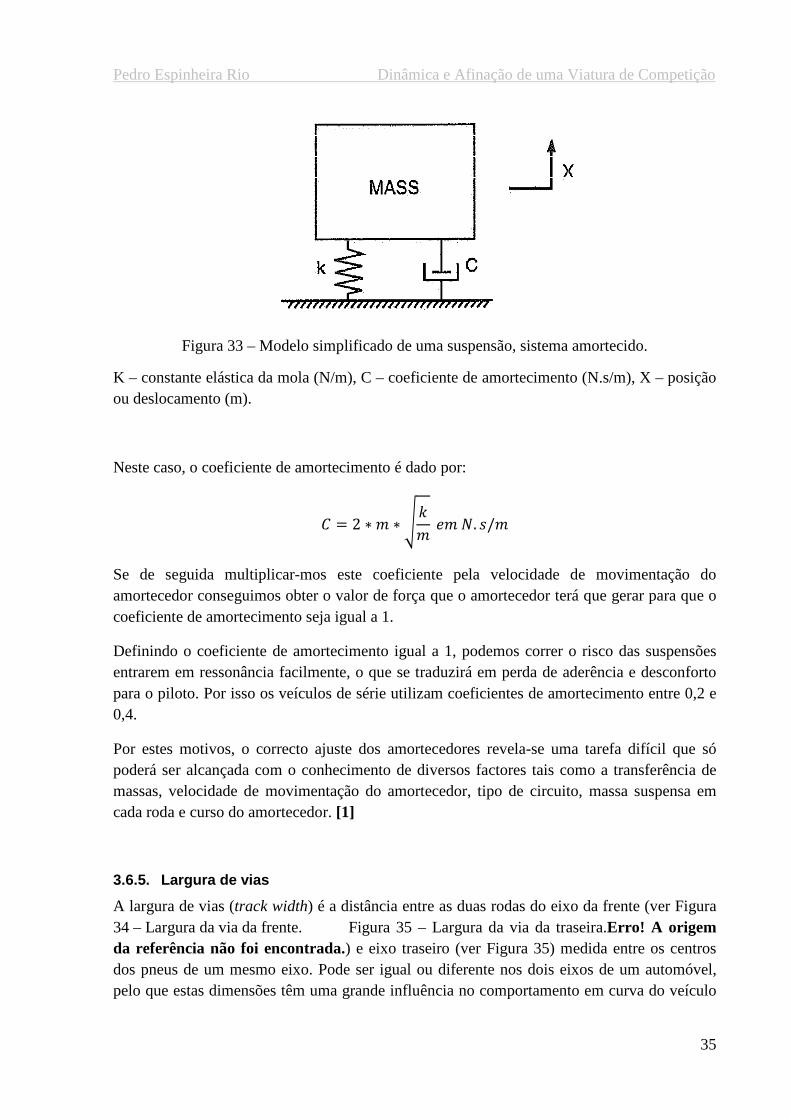
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
35
Figura 33 – Modelo simplificado de uma suspensão, sistema amortecido.
K – constante elástica da mola (N/m), C – coeficiente de amortecimento (N.s/m), X – posição ou deslocamento (m).
Neste caso, o coeficiente de amortecimento é dado por:
� � 2 � � � � �� � �. �/�
Se de seguida multiplicar-mos este coeficiente pela velocidade de movimentação do amortecedor conseguimos obter o valor de força que o amortecedor terá que gerar para que o coeficiente de amortecimento seja igual a 1.
Definindo o coeficiente de amortecimento igual a 1, podemos correr o risco das suspensões entrarem em ressonância facilmente, o que se traduzirá em perda de aderência e desconforto para o piloto. Por isso os veículos de série utilizam coeficientes de amortecimento entre 0,2 e 0,4.
Por estes motivos, o correcto ajuste dos amortecedores revela-se uma tarefa difícil que só poderá ser alcançada com o conhecimento de diversos factores tais como a transferência de massas, velocidade de movimentação do amortecedor, tipo de circuito, massa suspensa em cada roda e curso do amortecedor. [1]
3.6.5. Largura de vias
A largura de vias (track width) é a distância entre as duas rodas do eixo da frente (ver Figura 34 – Largura da via da frente. Figura 35 – Largura da via da traseira.Erro! A origem da referência não foi encontrada.) e eixo traseiro (ver Figura 35) medida entre os centros dos pneus de um mesmo eixo. Pode ser igual ou diferente nos dois eixos de um automóvel, pelo que estas dimensões têm uma grande influência no comportamento em curva do veículo
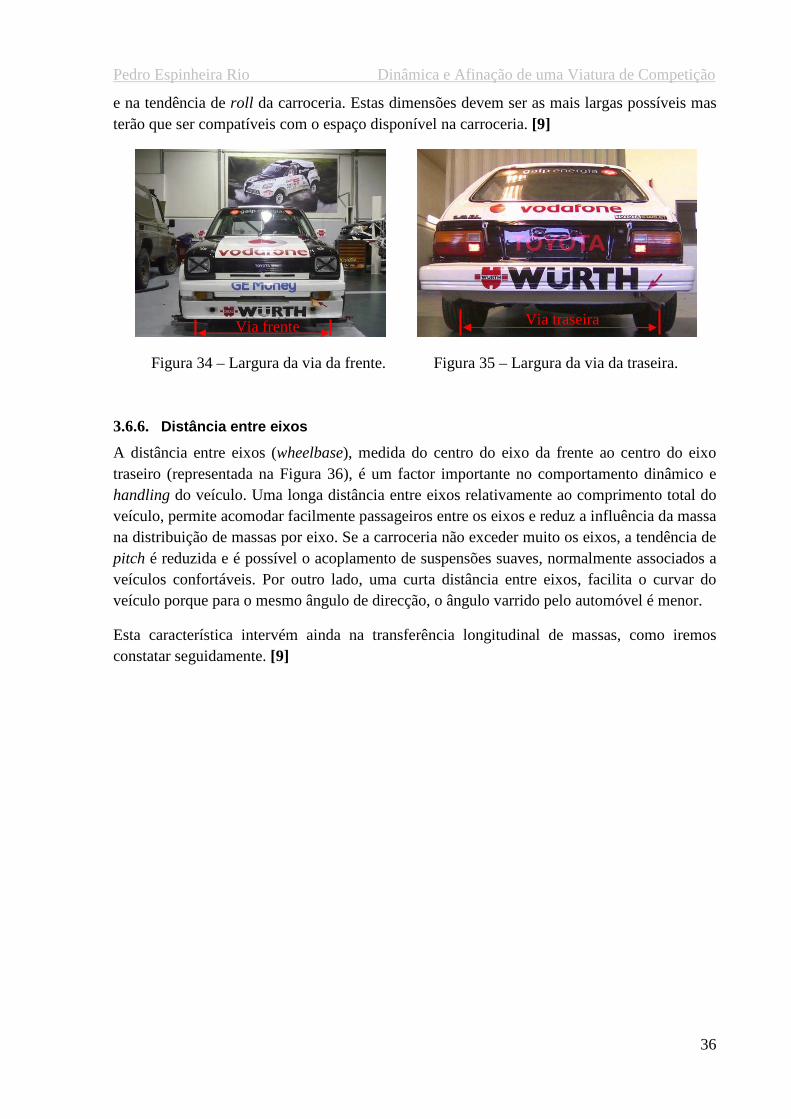
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
36
e na tendência de roll da carroceria. Estas dimensões devem ser as mais largas possíveis mas terão que ser compatíveis com o espaço disponível na carroceria. [9]
Figura 34 – Largura da via da frente. Figura 35 – Largura da via da traseira.
3.6.6. Distância entre eixos
A distância entre eixos (wheelbase), medida do centro do eixo da frente ao centro do eixo traseiro (representada na Figura 36), é um factor importante no comportamento dinâmico e handling do veículo. Uma longa distância entre eixos relativamente ao comprimento total do veículo, permite acomodar facilmente passageiros entre os eixos e reduz a influência da massa na distribuição de massas por eixo. Se a carroceria não exceder muito os eixos, a tendência de pitch é reduzida e é possível o acoplamento de suspensões suaves, normalmente associados a veículos confortáveis. Por outro lado, uma curta distância entre eixos, facilita o curvar do veículo porque para o mesmo ângulo de direcção, o ângulo varrido pelo automóvel é menor.
Esta característica intervém ainda na transferência longitudinal de massas, como iremos constatar seguidamente. [9]
Via frente Via traseira
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
37
Figura 36 – Distância entre eixos.
3.6.7. Localização do Centro de Gravidade
O centro de gravidade (CG) é o ponto onde podemos concentrar toda a massa do automóvel, funcionando como ponto de equilíbrio e está representado na Figura 37. Uma viatura se for suspensa pelo seu CG não descreve nenhum ângulo nem rotação, pelo que permanece paralela relativamente ao plano do solo. [5]
Figura 37 – Localização centro de gravidade.
A localização do centro de gravidade (CG) num carro de competição é um dos factores mais determinantes para a performance porque a capacidade de aderência dos pneus é muito dependente da carga vertical (ou normal) neles aplicada. A maior parte das alterações feitas no chassis dos automóveis de competição, para melhoria do handling e performance, de uma forma ou de outra estão relacionadas com as cargas nos pneus. Essas alterações normalmente intervêm na localização do CG e na sua posição em curva.
O primeiro passo para se determinar as cargas nas rodas em curva, aceleração ou travagem, passa pelo cálculo da localização do CG.
Distância entre eixos
Pedro Espinheira Rio
A forma de calcular a posição do Centro
Será assumido o caso geral, no qual a largura de vias do eixo da frente e traseiro não é necessariamente igual e que o CG Para este cálculo o eixo longitudinal do veículo foi definido como a linha que une o centro da via da frente com o centro da via traseira
Dados necessários:
• Massa individual em cada roda (e condição na qual foi medida, por exemplo com ou sem piloto, litros de combustível, etc.) (W1, W2, W3 e W4
• Largura de vias da frente e traseira • Distância entre eixos (l
A massa total do veículo é igual ao somatório das massas em cada uma das rodas determinada separadamente:
Figura
O primeiro passo é o cálculo da localização do CG
De seguida iremos determinar das duas vias e assim concluir a localização do CG no plano horizontal:
Dinâmica e Afinação de uma Viatura de Competição
forma de calcular a posição do Centro de Gravidade é descrita seguidamente.
Será assumido o caso geral, no qual a largura de vias do eixo da frente e traseiro não é necessariamente igual e que o CG não está obrigatoriamente na linha longitudinal do veículo. Para este cálculo o eixo longitudinal do veículo foi definido como a linha que une o centro da via da frente com o centro da via traseira (ver Figura 38). [5]
Massa individual em cada roda (e condição na qual foi medida, por exemplo com ou sem piloto, litros de combustível, etc.) (W1, W2, W3 e W4 em kg
Largura de vias da frente e traseira (tF e tR em mm); Distância entre eixos (l em mm).
A massa total do veículo é igual ao somatório das massas em cada uma das rodas determinada
Figura 38 – Localização no plano horizontal do CG.
lculo da localização do CG relativamente aos dois eixos
De seguida iremos determinar o seu posicionamento relativamente ao eixo que une o centro das duas vias e assim concluir a localização do CG no plano horizontal:
Dinâmica e Afinação de uma Viatura de Competição
38
de Gravidade é descrita seguidamente.
Será assumido o caso geral, no qual a largura de vias do eixo da frente e traseiro não é não está obrigatoriamente na linha longitudinal do veículo.
Para este cálculo o eixo longitudinal do veículo foi definido como a linha que une o centro da
Massa individual em cada roda (e condição na qual foi medida, por exemplo com ou em kg);
A massa total do veículo é igual ao somatório das massas em cada uma das rodas determinada
ocalização no plano horizontal do CG.
relativamente aos dois eixos:
relativamente ao eixo que une o centro
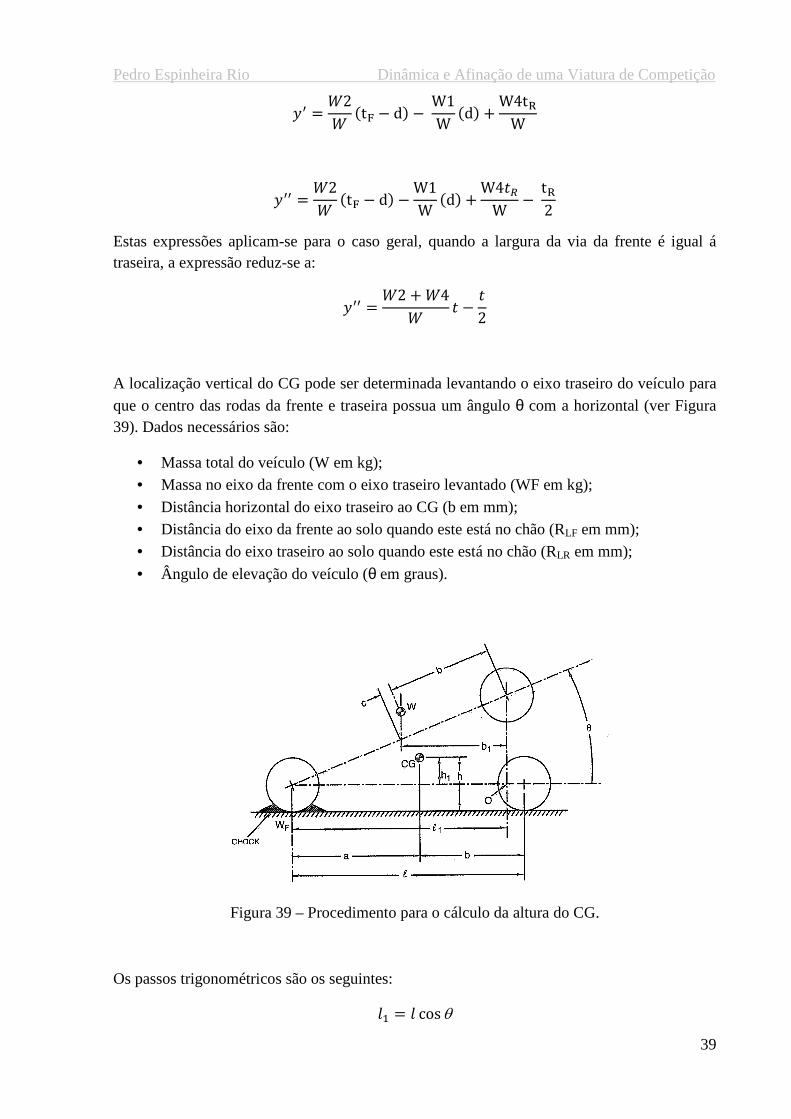
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
39
�� � �2� t" # d% # W1W d% ( W4t*W
��� � �2� t" # d% # W1W d% ( W4+,W # t*2
Estas expressões aplicam-se para o caso geral, quando a largura da via da frente é igual á traseira, a expressão reduz-se a:
��� � �2 ( �4� + # +2
A localização vertical do CG pode ser determinada levantando o eixo traseiro do veículo para que o centro das rodas da frente e traseira possua um ângulo θ com a horizontal (ver Figura 39). Dados necessários são:
• Massa total do veículo (W em kg); • Massa no eixo da frente com o eixo traseiro levantado (WF em kg);
• Distância horizontal do eixo traseiro ao CG (b em mm); • Distância do eixo da frente ao solo quando este está no chão (RLF em mm); • Distância do eixo traseiro ao solo quando este está no chão (RLR em mm);
• Ângulo de elevação do veículo (θ em graus).
Figura 39 – Procedimento para o cálculo da altura do CG.
Os passos trigonométricos são os seguintes:
-. � - cos θ

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
40
�2-. � �3.
Pelo qual,
3. � �2 �%- cos θ⁄
3.3 ( 5 � cos θ
Sendo,
5 � 6�2� -7 # 3
Usando c/h1=tanθ, a expressão final é:
8. � �2- # �3� tan θ
No entanto h1 é a altura do centro de gravidade acima da linha que liga o centro dos dois eixos, que está a uma distância RL do solo. Se RL for igual nos dois eixos, a distância do CG ao solo é:
8 � R< ( h., em mm
Se a distância ao solo dos dois eixos for diferente temos o seguinte:
@A BC � @AD 63- 7 ( @A, EF- G
E a distância do CG ao solo será então dada por:
8 � @A BC ( 8., � ��
3.6.8. Distribuição de massas
A distribuição de massas numa viatura depende da localização do seu CG, e esta pode ser determinada em Frente/Traseira (longitudinal) ou Esquerdo/Direito (lateral). Normalmente a distribuição de massas é apresentada sob a forma de percentagem. Se uma viatura apresenta uma distribuição de massas de 60/40 (longitudinal) podemos dizer que 60% da massa da viatura está assente nas rodas dianteiras e 40% no eixo traseiro. Normalmente nas viaturas de competição pretende-se que a viatura apresente uma distribuição de massas de 50/50 e de preferência 25% da massa total do veículo suportada em cada roda (equilíbrio perfeito do veículo), no entanto existem veículos de competição como os F1 actuais que apresentam distribuições de massas diferentes propositadamente entre os eixos da frente e traseiro.
Exceptuando o caso de competições em pistas ovais, o equilíbrio lateral do veículo é sempre um objectivo a ser alcançado, ou seja, pretende-se que as duas rodas de um mesmo eixo

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
41
tenham a mesma carga. Apenas desta forma o veículo terá um comportamento igual em curvas para a esquerda e direita.
A distribuição de massas referida é determinada estaticamente pelo que é necessário considerar que estes valores se alteram quando o veículo descreve uma curva, por exemplo, devido á acção da força centrífuga que faz com que mais carga seja transferida para as rodas exteriores, ou ainda nos casos de aceleração ou travagem. [10]
3.6.9. Centros instantâneos de rotação
Neste capítulo será introduzido o conceito do centro instantâneo de rotação, ou em inglês instante center (IC), que será usado na determinação de alguns parâmetros da suspensão. Para ajudar á clarificação da definição do centro instantâneo de rotação podemos referir que “instantâneo” significa a posição das ligações entre componentes num dado instante, enquanto o “centro” é um ponto projectado e imaginário que é efectivamente o pivô do sistema nesse instante. Assim, o centro instantâneo de rotação será o pivô do movimento de uma suspensão para um determinado instante e a sua posição altera-se com o movimento da suspensão.
A Figura 40 sugere a forma como dois links podem ser substituídos por um de maiores dimensões. Á medida que o link se move, o centro instantâneo de rotação também se move, pelo que uma adequada análise geométrica permite não só localizar o IC na posição estática do automóvel como também controlar a velocidade e direcção que este irá tomar com o curso da suspensão.
Figura 40 – Conceito de Centro Instantâneo de Rotação.
Os centros instantâneos de rotação advêm do estudo da Cinemática em duas dimensões (num plano). Eles são uma conveniente ajuda gráfica para estabelecer as relações de movimento entre dois corpos. No estudo de uma suspensão é conveniente reduzir o problema

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
42
tridimensional em dois problemas bidimensionais, isto é, a vista da frente e lateral da geometria de uma suspensão, pelo que iremos estabelecer planos de corte (a 90º com o chão) pelo centro da roda, um paralelo á linha transversal e outro paralelo á linha longitudinal do veículo (ver Figura 41). De seguida será realizada a projecção dos pontos da suspensão nestes planos.
A projecção na vista da frente do centro instantâneo de rotação permite-nos definir a taxa de alteração de camber da roda, parte da informação da localização do centro de rolamento (roll center), movimento scrub e os dados necessários á determinação das características da direcção. A vista lateral permite-nos obter informação sobre o posicionamento da roda, variação de caster e propriedades de anti-lift e anti-dive/squat (propriedades geométricas da geometria das suspensões que contrariam os movimentos de levantar da frente do veículo quando este acelera – anti-lift, e abaixamento da frente quando trava – anti-dive/squat, seguidos do movimento contrário na traseira). Como em todos os objectos tridimensionais, é possível obter-se três vistas, no entanto a terceira é a vista de cima na qual pouca informação pode ser retirada.
No espaço tridimensional, os centros instantâneos de rotação são substituídos por eixos instantâneos de rotação. Se considerar-mos os centros instantâneos de rotação projectados nos planos anteriormente definidos, o eixo instantâneo de rotação é definido como a recta que une os dois centros instantâneos definidos no plano frontal e lateral, tal como na Figura 41. [4]
Figura 41 – Conceito de Eixo Instantâneo de Rotação.
A técnica para a obtenção dos centros instantâneos de rotação é particular ao tipo de geometria em análise, desta forma iremos particularizar para as geometrias de suspensão que serão objecto de estudo, ou seja, estrutura McPherson para a geometria da suspensão da frente e eixo rígido com four link para o eixo traseiro.
No caso da estrutura McPherson, a determinação do IC decorre do seguinte método:
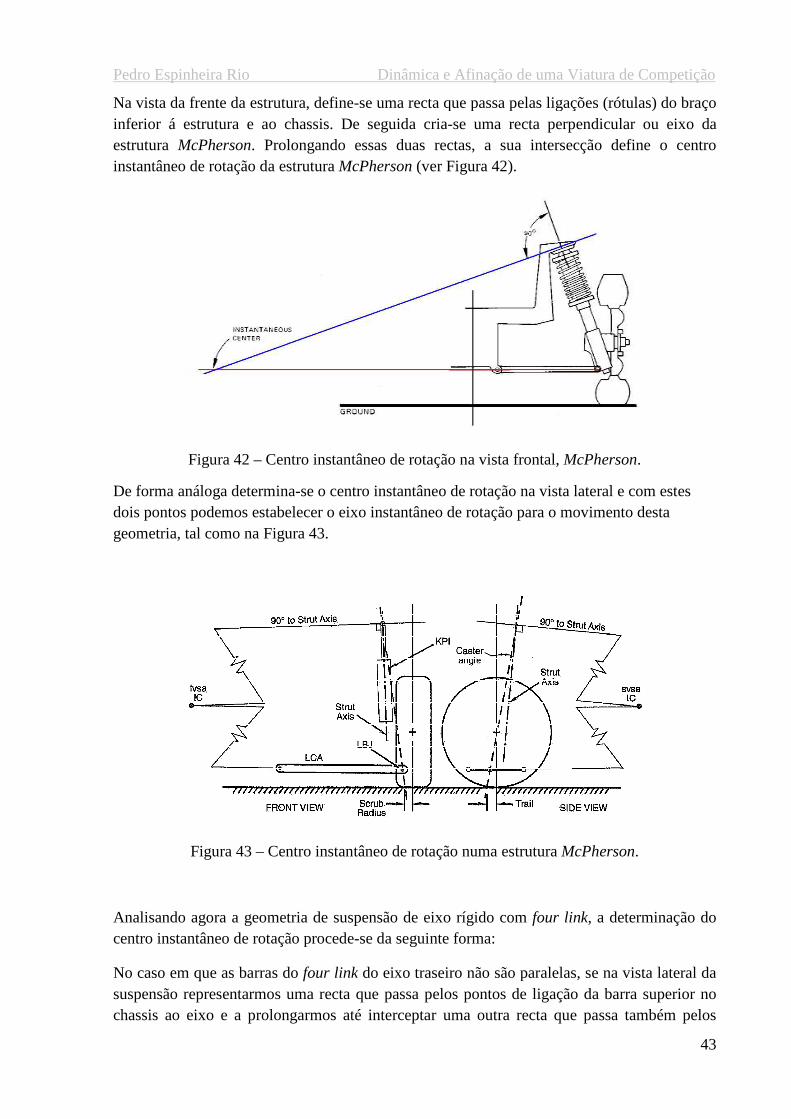
Pedro Espinheira Rio
Na vista da frente da estrutura, defineinferior á estrutura e ao chassis. De seguida criaestrutura McPherson. Prolongando essas duas rectas, a sua intersecção define o centro instantâneo de rotação da estrutura
Figura 42 – Centro instantâneo de rotação na vista frontal,
De forma análoga determinadois pontos podemos estabelecer o eixo instantâneo de rotação para o movimgeometria, tal como na Figura
Figura 43 – Centro instantâneo de rotação numa estrutura
Analisando agora a geometria de suspensão de eixo rígido com centro instantâneo de rotação procede
No caso em que as barras do suspensão representarmos uma recta que passa pelos pontos de ligação da barra superior no chassis ao eixo e a prolongarmos até interceptar uma outra recta que passa também pelos
Dinâmica e Afinação de uma Viatura de Competição
Na vista da frente da estrutura, define-se uma recta que passa pelas ligações (rótulas) do braço inferior á estrutura e ao chassis. De seguida cria-se uma recta perpendicular
. Prolongando essas duas rectas, a sua intersecção define o centro instantâneo de rotação da estrutura McPherson (ver Figura 42).
entro instantâneo de rotação na vista frontal, McPherson
De forma análoga determina-se o centro instantâneo de rotação na vista lateral e com estes dois pontos podemos estabelecer o eixo instantâneo de rotação para o movim
Figura 43.
entro instantâneo de rotação numa estrutura McPherson
Analisando agora a geometria de suspensão de eixo rígido com four linkcentro instantâneo de rotação procede-se da seguinte forma:
as barras do four link do eixo traseiro não são paralelassuspensão representarmos uma recta que passa pelos pontos de ligação da barra superior no chassis ao eixo e a prolongarmos até interceptar uma outra recta que passa também pelos
Dinâmica e Afinação de uma Viatura de Competição
43
se uma recta que passa pelas ligações (rótulas) do braço se uma recta perpendicular ou eixo da
. Prolongando essas duas rectas, a sua intersecção define o centro
McPherson.
se o centro instantâneo de rotação na vista lateral e com estes dois pontos podemos estabelecer o eixo instantâneo de rotação para o movimento desta
McPherson.
four link, a determinação do
do eixo traseiro não são paralelas, se na vista lateral da suspensão representarmos uma recta que passa pelos pontos de ligação da barra superior no chassis ao eixo e a prolongarmos até interceptar uma outra recta que passa também pelos

Pedro Espinheira Rio
pontos de ligação da barra superior, obtemos assim o centro instantâlateral (ver Figura 44). Na vista de frente este ponto encontrana vista lateral e ao centro do veículo, uma vez que orelativamente ao plano longitudinal do veículo (neste caso).
Figura 44 – Localização do centro instantâneo de rotação num eixo rígido com
3.6.10. Centros de rolamento
Depois de determinados os centros instantâneos de rotação de ambos os eixos, facilmente determinar a localização dos centros de rolamento. A determinação destes pontos é essencial ao estudo de qualquer sistema de suspensão, pelo que iremos demonstrimportância.
Referindo novamente a situação do veículo em curva, situação essa para a qual o estudo dinâmico é mais aliciante e de maior importância, a força centrífuga provoca o carroceria, obrigando esta a inclinarcomprimir as molas exteriores e permite
Em vários aspectos do design automóvel procuraequivalentes. Para a massa do veículo utilizado roll usa-se o roll center
Observando um veículo em curva, o suspensa) e esta deixa de estar horizontal relativamente ao solo, pelo queespaço no qual o veículo teve que rodar para assumir esse ângulo. Este ponto pode ser real ou
Dinâmica e Afinação de uma Viatura de Competição
pontos de ligação da barra superior, obtemos assim o centro instantâneo deNa vista de frente este ponto encontra-se á mesma altura determinada
na vista lateral e ao centro do veículo, uma vez que o sistema four linkrelativamente ao plano longitudinal do veículo (neste caso).
ocalização do centro instantâneo de rotação num eixo rígido com
de rolamento
Depois de determinados os centros instantâneos de rotação de ambos os eixos, facilmente determinar a localização dos centros de rolamento. A determinação destes pontos é essencial ao estudo de qualquer sistema de suspensão, pelo que iremos demonstr
Referindo novamente a situação do veículo em curva, situação essa para a qual o estudo dinâmico é mais aliciante e de maior importância, a força centrífuga provoca o carroceria, obrigando esta a inclinar-se para o exterior da curva. O movimento de
r as molas exteriores e permite às molas interiores á curva extender
design automóvel procura-se simplificar a análise e para tal usamequivalentes. Para a massa do veículo utiliza-se o centro de gravidade, pelo que para a análise
roll center (ou centro de rolamento).
Observando um veículo em curva, o roll provoca o movimento da carroceriae esta deixa de estar horizontal relativamente ao solo, pelo quequal o veículo teve que rodar para assumir esse ângulo. Este ponto pode ser real ou
Dinâmica e Afinação de uma Viatura de Competição
44
neo de rotação na vista se á mesma altura determinada
four link é simétrico
ocalização do centro instantâneo de rotação num eixo rígido com four link.
Depois de determinados os centros instantâneos de rotação de ambos os eixos, podemos facilmente determinar a localização dos centros de rolamento. A determinação destes pontos é essencial ao estudo de qualquer sistema de suspensão, pelo que iremos demonstrar a sua
Referindo novamente a situação do veículo em curva, situação essa para a qual o estudo dinâmico é mais aliciante e de maior importância, a força centrífuga provoca o roll da
curva. O movimento de roll tende a molas interiores á curva extenderem.
se simplificar a análise e para tal usam-se o centro de gravidade, pelo que para a análise
provoca o movimento da carroceria (massa e esta deixa de estar horizontal relativamente ao solo, pelo que existe um ponto no qual o veículo teve que rodar para assumir esse ângulo. Este ponto pode ser real ou
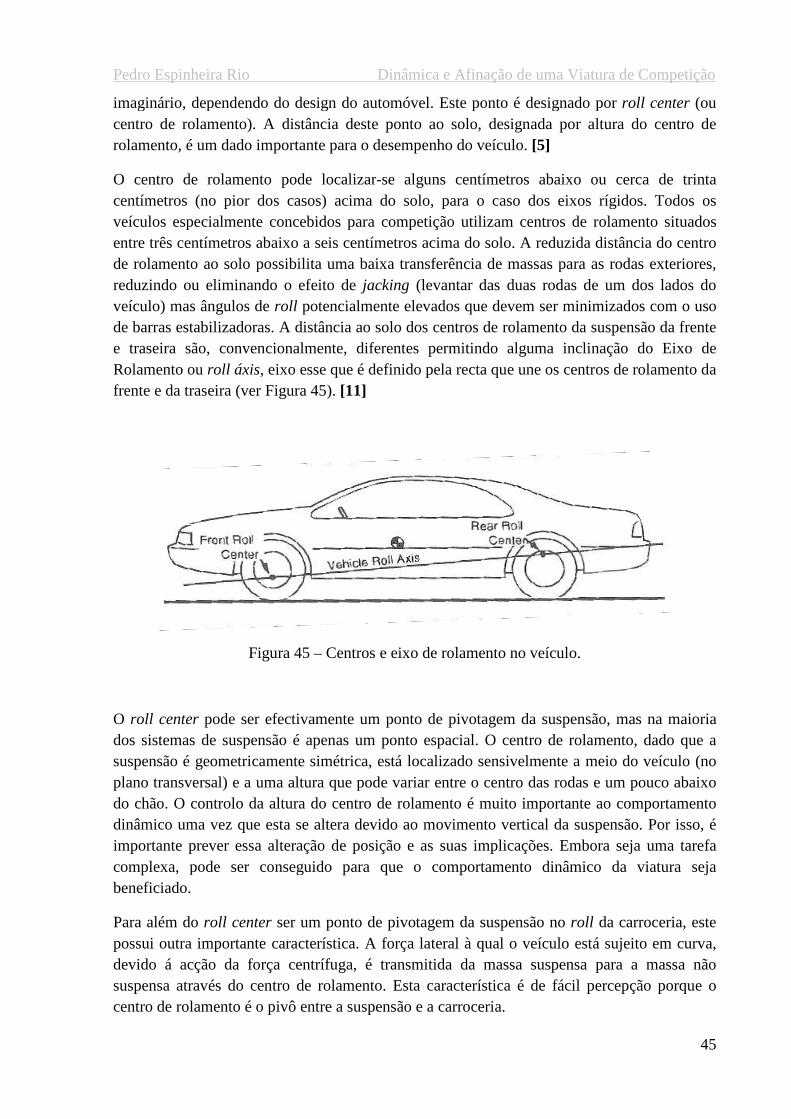
Pedro Espinheira Rio
imaginário, dependendo do design do automóvel. Este ponto é designado por centro de rolamento). A distância deste ponto ao solo, designada por altura do centro de rolamento, é um dado importante para
O centro de rolamento pode localizarcentímetros (no pior dos casos) acima do solo, para o caso dos eixos rígidos. Todos os veículos especialmente concebidos para competição utilizam centros de rolamento situados entre três centímetros abaixo a seis centímetros acima do solo. A reduzida distância do cende rolamento ao solo possibilita uma baixa transferência de massas para as rodas exteriores, reduzindo ou eliminando oveículo) mas ângulos de rollde barras estabilizadoras. A distância ao solo dos centros de rolamento da suspensão da frente e traseira são, convencionalmente, diferentes permitindo alguma inclinação do Eixo de Rolamento ou roll áxis, eixo frente e da traseira (ver Figura
Figura
O roll center pode ser efectivamente um ponto de pivotagem da suspensão, mas na maioria dos sistemas de suspensão é apenas um ponto espacial. O centro de rolamento, dado que a suspensão é geometricamente simétrica, está localizado sensivelmente a meio do plano transversal) e a uma altura que pode variar entre o centro das rodas e um pouco abaixo do chão. O controlo da altura do centro de rolamento é muito importante dinâmico uma vez que esta se altera devido ao movimento importante prever essa alteração de posição complexa, pode ser conseguidbeneficiado.
Para além do roll center ser um ponto de pivotagem da suspensão no possui outra importante característica. A força lateral à qual o veículo está sujeito em curva, devido á acção da força centrífuga, é transmitida da massa suspensa para a massa não suspensa através do centro de rolamento. Esta característica é de fácil percepção porque o centro de rolamento é o pivô
Dinâmica e Afinação de uma Viatura de Competição
imaginário, dependendo do design do automóvel. Este ponto é designado por centro de rolamento). A distância deste ponto ao solo, designada por altura do centro de rolamento, é um dado importante para o desempenho do veículo. [5]
de rolamento pode localizar-se alguns centímetros abaixo ou cerca de trinta (no pior dos casos) acima do solo, para o caso dos eixos rígidos. Todos os
veículos especialmente concebidos para competição utilizam centros de rolamento situados entre três centímetros abaixo a seis centímetros acima do solo. A reduzida distância do cen
possibilita uma baixa transferência de massas para as rodas exteriores, eliminando o efeito de jacking (levantar das duas rodas
roll potencialmente elevados que devem ser minide barras estabilizadoras. A distância ao solo dos centros de rolamento da suspensão da frente e traseira são, convencionalmente, diferentes permitindo alguma inclinação do Eixo de
eixo esse que é definido pela recta que une os centros de rolamento da Figura 45). [11]
Figura 45 – Centros e eixo de rolamento no veículo.
pode ser efectivamente um ponto de pivotagem da suspensão, mas na maioria dos sistemas de suspensão é apenas um ponto espacial. O centro de rolamento, dado que a suspensão é geometricamente simétrica, está localizado sensivelmente a meio do
transversal) e a uma altura que pode variar entre o centro das rodas e um pouco abaixo altura do centro de rolamento é muito importante
uma vez que esta se altera devido ao movimento vertical da suspensão.importante prever essa alteração de posição e as suas implicações. Embora seja um
pode ser conseguido para que o comportamento dinâmico da viatura
ser um ponto de pivotagem da suspensão no rollpossui outra importante característica. A força lateral à qual o veículo está sujeito em curva, devido á acção da força centrífuga, é transmitida da massa suspensa para a massa não
a através do centro de rolamento. Esta característica é de fácil percepção porque o pivô entre a suspensão e a carroceria.
Dinâmica e Afinação de uma Viatura de Competição
45
imaginário, dependendo do design do automóvel. Este ponto é designado por roll center (ou centro de rolamento). A distância deste ponto ao solo, designada por altura do centro de
abaixo ou cerca de trinta (no pior dos casos) acima do solo, para o caso dos eixos rígidos. Todos os
veículos especialmente concebidos para competição utilizam centros de rolamento situados entre três centímetros abaixo a seis centímetros acima do solo. A reduzida distância do centro
possibilita uma baixa transferência de massas para as rodas exteriores, rodas de um dos lados do
minimizados com o uso de barras estabilizadoras. A distância ao solo dos centros de rolamento da suspensão da frente e traseira são, convencionalmente, diferentes permitindo alguma inclinação do Eixo de
ta que une os centros de rolamento da
entros e eixo de rolamento no veículo.
pode ser efectivamente um ponto de pivotagem da suspensão, mas na maioria dos sistemas de suspensão é apenas um ponto espacial. O centro de rolamento, dado que a suspensão é geometricamente simétrica, está localizado sensivelmente a meio do veículo (no
transversal) e a uma altura que pode variar entre o centro das rodas e um pouco abaixo altura do centro de rolamento é muito importante ao comportamento
da suspensão. Por isso, é . Embora seja uma tarefa
dinâmico da viatura seja
roll da carroceria, este possui outra importante característica. A força lateral à qual o veículo está sujeito em curva, devido á acção da força centrífuga, é transmitida da massa suspensa para a massa não
a através do centro de rolamento. Esta característica é de fácil percepção porque o
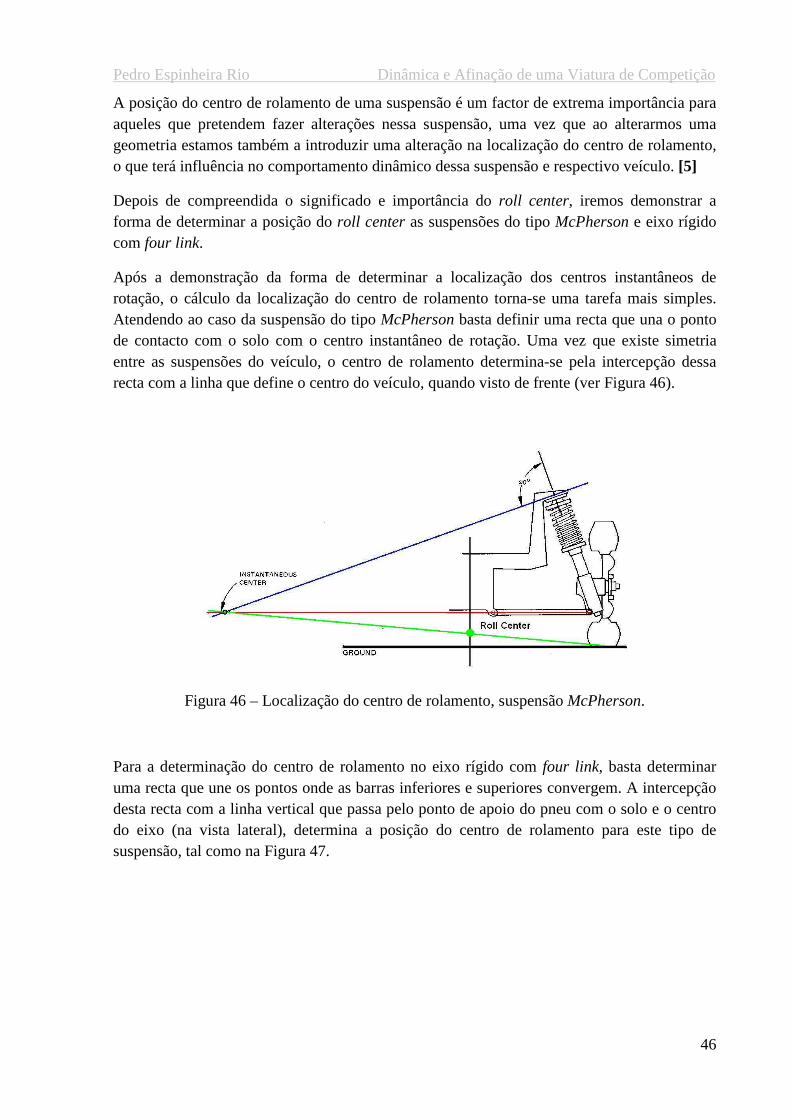
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
46
A posição do centro de rolamento de uma suspensão é um factor de extrema importância para aqueles que pretendem fazer alterações nessa suspensão, uma vez que ao alterarmos uma geometria estamos também a introduzir uma alteração na localização do centro de rolamento, o que terá influência no comportamento dinâmico dessa suspensão e respectivo veículo. [5]
Depois de compreendida o significado e importância do roll center, iremos demonstrar a forma de determinar a posição do roll center as suspensões do tipo McPherson e eixo rígido com four link.
Após a demonstração da forma de determinar a localização dos centros instantâneos de rotação, o cálculo da localização do centro de rolamento torna-se uma tarefa mais simples. Atendendo ao caso da suspensão do tipo McPherson basta definir uma recta que una o ponto de contacto com o solo com o centro instantâneo de rotação. Uma vez que existe simetria entre as suspensões do veículo, o centro de rolamento determina-se pela intercepção dessa recta com a linha que define o centro do veículo, quando visto de frente (ver Figura 46).
Figura 46 – Localização do centro de rolamento, suspensão McPherson.
Para a determinação do centro de rolamento no eixo rígido com four link, basta determinar uma recta que une os pontos onde as barras inferiores e superiores convergem. A intercepção desta recta com a linha vertical que passa pelo ponto de apoio do pneu com o solo e o centro do eixo (na vista lateral), determina a posição do centro de rolamento para este tipo de suspensão, tal como na Figura 47.
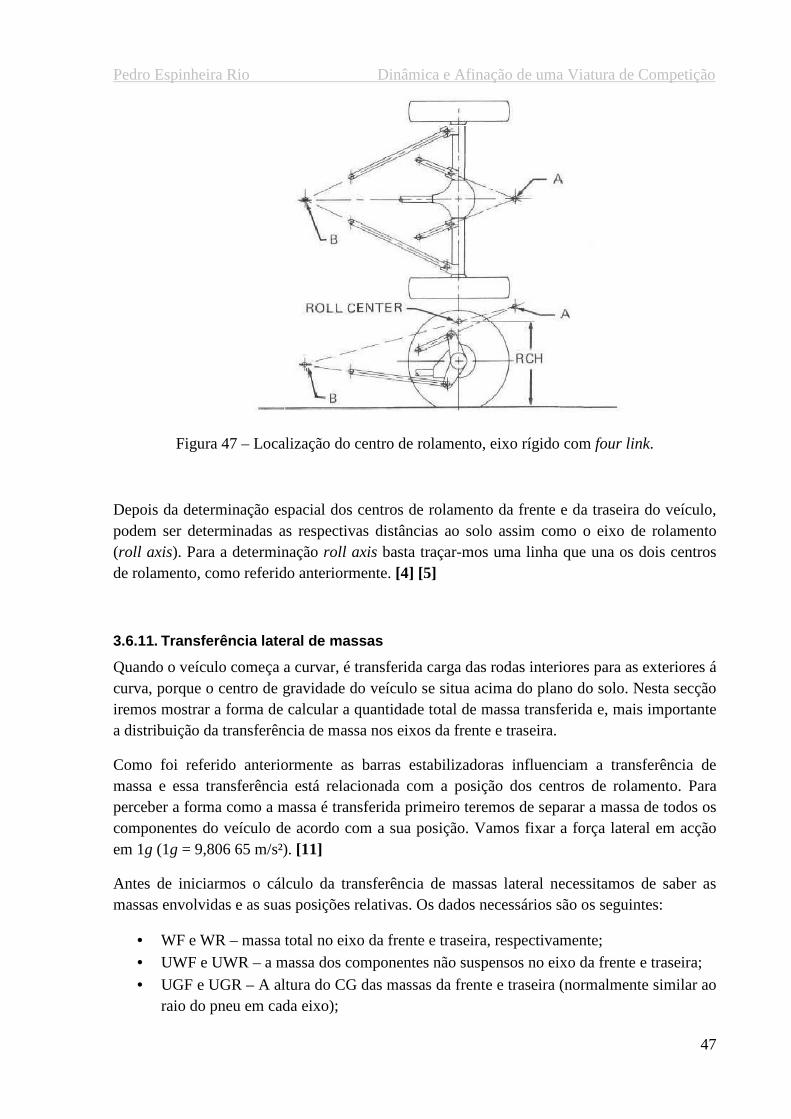
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
47
Figura 47 – Localização do centro de rolamento, eixo rígido com four link.
Depois da determinação espacial dos centros de rolamento da frente e da traseira do veículo, podem ser determinadas as respectivas distâncias ao solo assim como o eixo de rolamento (roll axis). Para a determinação roll axis basta traçar-mos uma linha que una os dois centros de rolamento, como referido anteriormente. [4] [5]
3.6.11. Transferência lateral de massas
Quando o veículo começa a curvar, é transferida carga das rodas interiores para as exteriores á curva, porque o centro de gravidade do veículo se situa acima do plano do solo. Nesta secção iremos mostrar a forma de calcular a quantidade total de massa transferida e, mais importante a distribuição da transferência de massa nos eixos da frente e traseira.
Como foi referido anteriormente as barras estabilizadoras influenciam a transferência de massa e essa transferência está relacionada com a posição dos centros de rolamento. Para perceber a forma como a massa é transferida primeiro teremos de separar a massa de todos os componentes do veículo de acordo com a sua posição. Vamos fixar a força lateral em acção em 1g (1g = 9,806 65 m/s²). [11]
Antes de iniciarmos o cálculo da transferência de massas lateral necessitamos de saber as massas envolvidas e as suas posições relativas. Os dados necessários são os seguintes:
• WF e WR – massa total no eixo da frente e traseira, respectivamente; • UWF e UWR – a massa dos componentes não suspensos no eixo da frente e traseira;
• UGF e UGR – A altura do CG das massas da frente e traseira (normalmente similar ao raio do pneu em cada eixo);
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
48
• TF e TR – larguras duas vias do automóvel;
Desta forma conseguimos obter:
Massa suspensa na frente: �2 # H�2 � I�2
Massa suspensa na traseira: �@ # H�@ � I�@
Massa total suspensa: I�2 ( I�@ � I�
Depois de calculados estes parâmetros, podemos agora dar início ao procedimento de cálculo o primeiro dos três tipos de transferência de massas.
a) Transferência de massa não-suspensa:
Transferência de massa não-suspensa na frente: H�2 � JCDKD � H+2
Transferência de massa não-suspensa na traseira: H�@ � JC,K, � H+@
Como é obvio, qual maior for a altura do CG e quantidade de massa, mais elevada será a massa transferida pelo que estas condições não podem ser totalmente alteradas sem se proceder a uma alteração em grande escala no veículo.
b) Transferência de massa pelos centros de rolamento:
O valor que se irá obter em seguida representa a quantidade de massa que é transferida directamente pelos centros de rolamento, e pode ser calculada da seguinte forma:
Transferência de massa na frente via centro de rolamento: I�2 � BDKD � �+2
Transferência de massa na traseira via centro de rolamento: I�@ � B,K, � �+@
Sendo o CF a altura do centro de rolamento da frente e o CR a altura do centro de rolamento na traseira. Assim, pode-se constatar que a transferência de massas pelos centros de rolamento é função da altura do centro de rolamento em cada um dos eixos, pelo que a alteração da altura do centro de rolamento de um dos eixos só irá afectar a transferência de massa nesse eixo. Outro ponto de interesse é o efeito desta transferência de massas pelos centros de rolamento quando estes se situam abaixo do nível do solo. Nesta situação a transferência de massas é negativa, isto é, as rodas exteriores transferem massa para as interiores.
c) Transferência da massa suspensa:
Esta é a massa do veículo que “roda” em torno do eixo definido pelos centros de rolamento da frente e traseira. É nestes componentes do veículo que actuam as molas e barras estabilizadoras para resistir ao movimento de roll . Esta é a área da transferência de massas para a qual devemos estar mais atentos, no entanto é a mais difícil de prever e calcular.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
49
Para uma melhor compreensão necessitamos de introduzir o conceito do Centróide de Massa. Quando visualizamos a massa suspensa não devemos considerar em função de eixo da frente e traseira, massas na frente e na traseira, alturas ao solo da frente e da traseira, alturas do centro de rolamento da traseira e da frente. Localizado num ponto mais ou menos no centro do veículo está uma massa cujo seu centro é o CG, ou seja, o centro de toda a massa suspensa do carro. Esta massa pode ser considerada como independente das características do veículo, se considerar-mos que possui o seu próprio centro de rolamento, largura e centro de gravidade.
Antes de os podermos calcular, necessitamos saber a porção de massa suspensa num dos eixos. Para o eixo traseiro o cálculo é o seguinte:
Distribuição de peso suspenso na traseira: LM,LM � ��@
Este valor indicará a localização do CG da massa suspensa (tal como para o cálculo da distribuição de massas).
Depois de obtido o valor acima indicado sabemos agora a localização do centro de massa entre os eixos do veículo. Podemos agora determinar a largura de vias média, altura média do centro de rolamento e do centro de gravidade usando a mesma proporção determinada e baseada nas medições efectuadas na frente e traseira do veículo.
Largura média de vias: N O@ # O2% � ��@P ( O2 � OQ
Altura média do Centro de Rolamento: N �@ # �2% � ��@P ( �2 � �Q
Antes de completarmos estes cálculos necessitamos de calcular a altura média do CG e precisamos de saber a altura do centro de gravidade da massa suspensa nos eixos da frente e traseira. A obtenção deste valor revela-se extremamente difícil de obter pelo que a dedução da localização dos itens principais que contribuem para a massa suspensa é normalmente o método escolhido para se obter esta informação.
Altura média do CG: N I�@ # I�2% � ��@P ( I�2 � �Q
Agora necessitamos o comprimento do braço (ou o momento) entre o centro de rolamento (pelo qual a massa irá descrever o movimento de roll ) e a altura média do centro de gravidade, que pode ser calculado da seguinte forma:
Momento de Roll médio: �Q # �Q � RQ
Agora temos todos os dados necessários para calcular a transferência de massa da massa suspensa, e a fórmula é a seguintes:
Transferência total de massa suspensa: I� � ASKS � I+
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
50
Pode-se constatar que o valor do Momento de Roll médio (mean roll moment) é dependente da altura e inclinação no eixo de rolamento, pelo que quanto mais alto ele for maior será a massa transferida pelos centros de rolamento e menor pelas molas.
Depois de uma análise podemos concluir que estes dois métodos de transferência de massas (pelos centros de rolamento e pelas molas) contrabalançam-se e a quantidade total de massa transferida permanece a mesma. Dessa forma alturas elevadas do centro de rolamento deixam menos massa para ser transferida pelas molas e vice-versa.
d) Transferência de massa total
A transferência de massa total pode ser determinada recorrendo ao somatório das transferências de massa calculadas individualmente.
Massa total transferida: H+2 ( H+@ ( �+2 ( �+@ ( I+ � �+
Através das equações anteriores podemos constatar que a transferência de massa é predeterminada pelas dimensões do veículo.
Revendo novamente a fórmula da transferência de massa total podemos identificar que a transferência de massa suspensa (termo St), ao contrário dos outros termos, não foi calculada separadamente para as suspensões da frente e da traseira. Isto porque é em parte partilhada pelo total de massa transferida e é inversamente proporcional á quantidade de massa transferida pelos centros de rolamento, pelo que a sua distribuição pela frente e traseira não é controlada por nenhum dos factores considerados. A regra de ouro é que o rácio da transferência de massa da frente para a traseira é directamente proporcional ao rácio entre a resistência ao roll (roll resistance) da frente e traseira. Por outras palavras o eixo do veículo com maior roll resistance irá receber a maior parte da massa suspensa transferida e essa quantidade irá ser determinada pela sua rigidez em relação á rigidez no outro eixo do veículo. [11]
3.6.11.1. Roll Resistance
Para poder concluir ao cálculo da transferência de massa da massa suspensa, teremos primeiro de determinar qual a rigidez da suspensão da frente e da suspensão traseira de um veículo (roll stiffness). Os factores que contribuem para a determinação dessa propriedade estão intimamente ligados às molas e barras estabilizadoras, suas características e forma como estão acopladas ao veículo. Para isso recomendo a consulta do livro Competition Car Suspension Capítulo 8, de Allan Stanifourth ([11]).
No entanto, a resistência ao movimento de roll da carroceria (roll resistance) que os eixos do veículo possuem é denominada por roll stiffness. Este valor pode ser alterado recorrendo ao ajuste das barras estabilizadoras, possibilitando uma alteração da forma como a transferência de massas vai ser distribuída por ambas as rodas do automóvel. Pode ainda ser alterada a transferência de massas mantendo o mesmo roll angle, aumentando para isso o roll stiffness num dos eixos e reduzindo no outro eixo segundo a mesma proporção. [5]
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
51
3.6.12. Geometria da direcção
O dimensionamento da direcção de um veículo requer um cuidado extremo, uma vez que uma direcção incorrecta trará problemas de bump steer. Pretende-se que o alinhamento conferido a uma direcção seja o mais estável possível durante os movimentos da suspensão, pelo que o bump steer designa-se pelo movimento involuntário da direcção devido ao movimento da suspensão. Este efeito é sempre indesejado. [5]
3.6.13. Camber, Caster e Toe
Neste capítulo tentaremos definir sucintamente a nomenclatura das afinações possíveis numa roda e demonstrar a sua importância para o comportamento final do veículo. Esses alinhamentos são o camber, caster e toe que estão representados na Figura 48.
Figura 48 – Ângulos de camber, caster e toe.
O câmber é o ângulo do eixo da pneu e o eixo vertical quando vistos de frente para o veículo. Toma valores positivos quando o eixo do pneu se desloca para o exterior (da viatura), valores negativos no caso oposto (o eixo desloca-se para o interior da viatura) e o valor de zero quando o pneu está perfeitamente alinhado com o eixo vertical (Figura 49). [5]
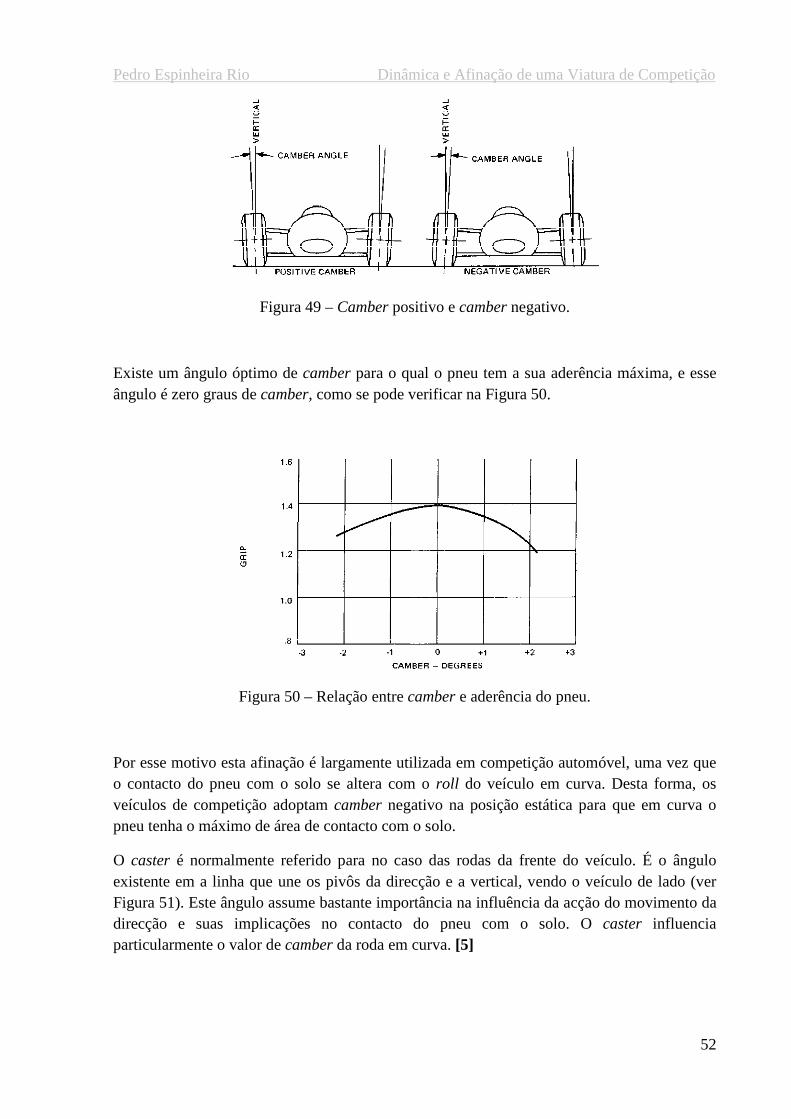
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
52
Figura 49 – Camber positivo e camber negativo.
Existe um ângulo óptimo de camber para o qual o pneu tem a sua aderência máxima, e esse ângulo é zero graus de camber, como se pode verificar na Figura 50.
Figura 50 – Relação entre camber e aderência do pneu.
Por esse motivo esta afinação é largamente utilizada em competição automóvel, uma vez que o contacto do pneu com o solo se altera com o roll do veículo em curva. Desta forma, os veículos de competição adoptam camber negativo na posição estática para que em curva o pneu tenha o máximo de área de contacto com o solo.
O caster é normalmente referido para no caso das rodas da frente do veículo. É o ângulo existente em a linha que une os pivôs da direcção e a vertical, vendo o veículo de lado (ver Figura 51). Este ângulo assume bastante importância na influência da acção do movimento da direcção e suas implicações no contacto do pneu com o solo. O caster influencia particularmente o valor de camber da roda em curva. [5]

Pedro Espinheira Rio
O valor de toe (ou convergênciaout e zero quando as rodas estão alinhadas, ou seja, não há convergência.o toe refere-se á convergência do eixo das rodas quando vistas de cima. linhas que passam pelos eixos dos pneus, na vista superior, e ao prolongarinterceptarem num ponto podemos dizer que esse par de rodas tem convergência ponto de intercepção estiver localizado á frente das rodas denominalado estiver localizado atrás das rodas a convergência toma o valor negativo de e denominatoe-out (ver Figura 52). Por outro ladozero, ou seja, não existe convergência
Tal como o camber, o toe é curva. Devido às deformações dos sistemas de suspensão em curva, principalmente nas rodas direccionais, o paralelismo entre as rodas de um eixo raramente é mantido. Assim, adoptamse valores de convergência definidos estaticamente que têm por objectivo reduzir a influência
Dinâmica e Afinação de uma Viatura de Competição
Figura 51 – Ângulo de caster.
convergência) toma valores positivos para o toe-in, negativos para o e zero quando as rodas estão alinhadas, ou seja, não há convergência.
se á convergência do eixo das rodas quando vistas de cima. linhas que passam pelos eixos dos pneus, na vista superior, e ao prolongarinterceptarem num ponto podemos dizer que esse par de rodas tem convergência ponto de intercepção estiver localizado á frente das rodas denomina-se lado estiver localizado atrás das rodas a convergência toma o valor negativo de e denomina
or outro lado, se as duas linhas definidas forem paralelas o zero, ou seja, não existe convergência.
Figura 52 – Determinação do toe.
é utilizado para optimizar a área de contacto do pneu com o solo em deformações dos sistemas de suspensão em curva, principalmente nas rodas
direccionais, o paralelismo entre as rodas de um eixo raramente é mantido. Assim, adoptamde convergência definidos estaticamente que têm por objectivo reduzir a influência
Dinâmica e Afinação de uma Viatura de Competição
53
, negativos para o toe-e zero quando as rodas estão alinhadas, ou seja, não há convergência. Por outras palavras,
se á convergência do eixo das rodas quando vistas de cima. Se definir-mos duas linhas que passam pelos eixos dos pneus, na vista superior, e ao prolongar-mos até estas se interceptarem num ponto podemos dizer que esse par de rodas tem convergência (toe). Se esse
se toe-in, se por outro lado estiver localizado atrás das rodas a convergência toma o valor negativo de e denomina-se
as duas linhas definidas forem paralelas o toe é
área de contacto do pneu com o solo em deformações dos sistemas de suspensão em curva, principalmente nas rodas
direccionais, o paralelismo entre as rodas de um eixo raramente é mantido. Assim, adoptam-de convergência definidos estaticamente que têm por objectivo reduzir a influência
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
54
das deformações do sistema de suspensão com o movimento e maximizar a área de contacto do pneu com o solo.
A afinação do toe é umas das principais condicionantes para o comportamento do veículo. Uma pequena alteração no toe pode ter uma grande influência no handling do veículo, pelo que este parâmetro deve ser sempre verificado na afinação das suspensões. [5]
3.7. Setup
Em todas as modalidades da competição automóvel as capacidades do veículo são levadas ao limite, pelo que encontrar a configuração ideal para que piloto consiga tirar o máximo de proveito do veículo denomina-se por setting up ou chassis tuning. Dessa forma, o setup é o conjunto de configurações do veículo para determinadas condições climatéricas, tipo de circuito e piloto.
Os objectivos principais de um setup são:
• Equilíbrio em curva sob a máxima aceleração lateral (neutral steer); • Compromisso entre eficiência em curva e velocidade máxima em recta;
• Eliminação de problemas de controlo e estabilidade em todos os pontos do circuito reportados pelo piloto.
O setup integra todos os temas referidos anteriormente e define-se como a combinação dessas variáveis para um propósito específico. [4]
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
55
4. Caso de estudo
O veículo que irá ser objecto de estudo é um Toyota Starlet KP62 de 1981 (ver Figura 53 e Figura 54). Este modelo preparado para uma das categorias mais competitivas da época, a classe B1 (viaturas até 1300cc), sagrou-se campeão nacional de velocidade em dois anos consecutivos 1982 e 83 mas este modelo não se afirmou apenas nas pistas em 79, 80 e 81 o Toyota Starlet foi campeão nacional de Ralis.
Figura 53 – Dois Toyota Starlet da Salvador Caetano, categoria B1.
Esta viatura que faz parte do património da empresa Salvador Caetano desde a data da sua aquisição á TRD2, depois dos títulos e dos anos consecutivos de sucesso desportivo, permaneceu no museu da empresa até que recentemente foi totalmente reconstruída com o propósito de participar no Campeonato de Portugal de Clássicos 1300 de 2009 (CPC - Circuitos) e como forma de comemoração dos 40 anos da presença da Toyota em Portugal.
Figura 54 – Joaquim Moutinho no Circuito de Vila do Conde em 1982.
2 Toyota Racing Development

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
56
4.1. Descrição da viatura
Construtor Toyota Racing Development. Modelo de Base Toyota Starlet KP62 1.2DL.
Motor
Longitudinal, 4 cilindros, 2 válvulas por cilindro, normal aspirado.
Diâmetro x curso: 75,0 x 73 mm.
Lubrificação: cárter húmido.
Potência máxima: cerca de 140 cv. às 8200 rpm.
Binário máximo: cerca de 133 N.m às 6400 rpm.
Alimentação: 2 carburadores duplos.
Transmissão: Tracção traseira. Caixa: manual sincronizada de 5 velocidades. Embraiagem: prato simples. Diferencial: autoblocante. Chassis
Suspensão frente: estrutura McPherson, molas helicoidais, amortecedores a óleo reguláveis, barra estabilizadora.
Suspensão traseira: Eixo rígido com four link, molas helicoidais, amortecedores a óleo reguláveis, barra estabilizadora.
Travões Sem assistência, repartidor de travagem frente/traseira. Frente: discos de 256 mm de diâmetro. Traseira: tambores. Dimensões: Distância entre eixos: 2300 mm. Largura via frente: 1513 mm. Largura via traseira: 1520 mm. Peso mínimo: 720 kg.
Homologação desportiva – CPP 1300: Grupo 2, Categoria 3 (Clássicos 81), Classe 6;
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
57
4.2. Enquadramento do projecto
Esta viatura destina-se ao Campeonato de Portugal de Clássicos 1300 (CPC 1300 Circuitos) e Taça de Portugal de Clássicos 1300 (TPC Circuitos) 2009. Estas duas competições são disputadas segundo 3 categorias que se estão organizadas do seguinte modo:
Categoria 1 – Clássicos 71 (H71)
a) Viaturas de Turismo de Série e de Grande Turismo de Série (Grupo 1 e Grupo3), Viaturas de Turismo Especiais e de Grande Turismo Especiais (Grupo 2 e Grupo 4) de cilindrada
inferior ou igual a 1300 cm3
, que tenham possuído homologação FIA até 31/12/1971 e disponham de Passaporte Técnico emitido pela FPAK3.
b) Viaturas de Grande Turismo e Desporto não homologadas até 1.300 cm3 entre 01.01.1966 e
31.12.1969 que tenham participado em provas internacionais (devidamente comprovadas por documentos da época) e que possuam uma ficha técnica FIA e disponham de Passaporte Técnico emitido pela FPAK.
Categoria 2 – Clássicos 74 (H74)
Viaturas de Turismo de Série e de Grande Turismo de Série (Grupo 1 – Artigos 255 a 257 e Grupo 3 – Artigos 261 a 263) Anexo “J” (74), Viaturas de Turismo e de Grande Turismo (Grupo 2 – Artigos 258 a 260 e Grupo 4 – Artigos 264 a 266) Anexo “J” (74) de cilindrada
inferior ou igual a 1 300 cm3, que tenham possuído homologação FIA até 31/12/1974 e
disponham de Passaporte Técnico emitido pela FPAK.
Categoria 3 – Clássicos 81 (H81)
Viaturas de Turismo de Série e de Grande Turismo de Série (Grupo 1 – Artigos 256 a 258 e Grupo 3 – Artigos 262 a 264) Anexo “J” (81) e Viaturas de Turismo e de Grande Turismo (Grupo 2 – Artigos 259 a 261 e Grupo 4 – Artigos 265 a 267) Anexo “J” (81) de cilindrada inferior ou igual a 1300 cc, que tiveram homologação FIA até 31/12/1981 e disponham de Passaporte Técnico emitido pela FPAK. [12]
Desta forma o Starlet irá competir para classificação geral do CPC 1300 e TPC 1300 assim como para a classificação da Categoria 3 – Clássicos 81 (H81).
As provas do CPCC 1300 e TPC 1300 serão obrigatoriamente disputadas em duas corridas, com a extensão aproximada em cada corrida de 45 km, sendo o número de voltas arredondado para o número inteiro imediatamente superior.
Uma vez que o Toyota Starlet irá participar numa competição na qual as viaturas admitidas se devem reger por regulamentos específicos, todas as alterações propostas terão de estar abrangidas pelos regulamentos em vigor. Os regulamentos pelos quais a preparação do veículo terá que respeitar são o “Anexo J ao CDI de 1981”, “ANEXO-1 aos Regulamentos dos Campeonatos de Portugal de Clássicos (CPCC 1300 e CPCC) 2009”, “Regulamento do
3 Federação Portuguesa de Automobilismo e Karting
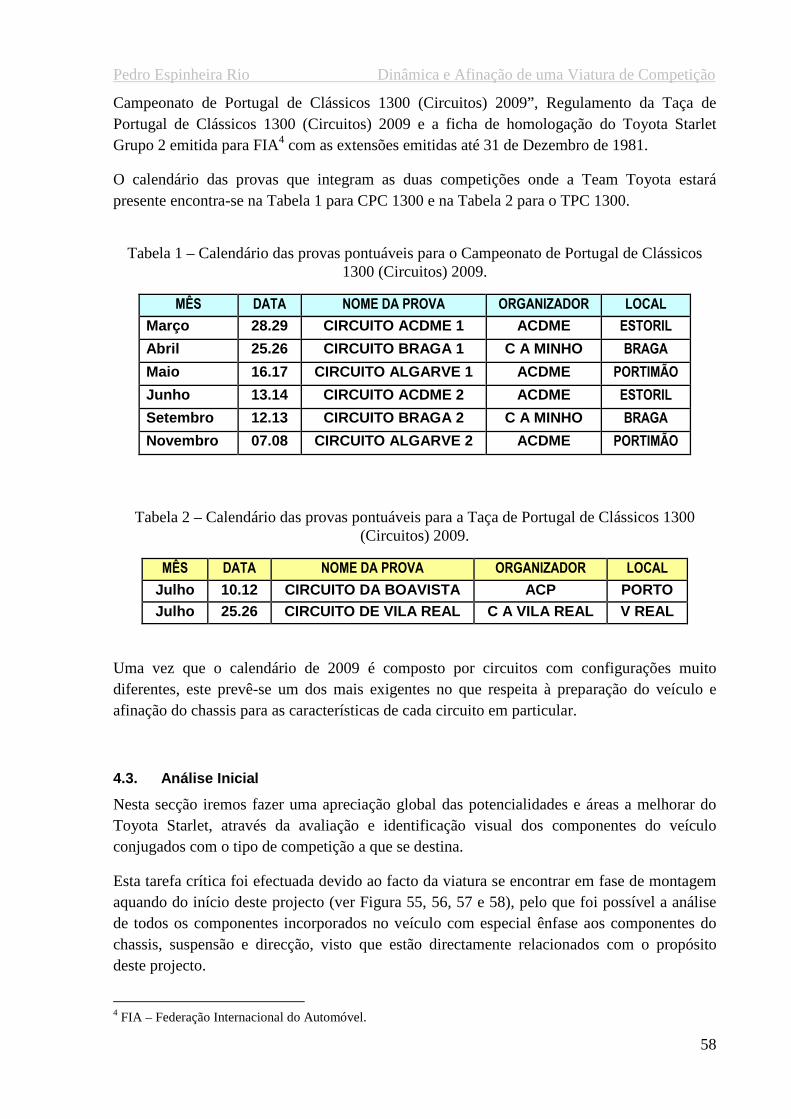
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
58
Campeonato de Portugal de Clássicos 1300 (Circuitos) 2009”, Regulamento da Taça de Portugal de Clássicos 1300 (Circuitos) 2009 e a ficha de homologação do Toyota Starlet Grupo 2 emitida para FIA4 com as extensões emitidas até 31 de Dezembro de 1981.
O calendário das provas que integram as duas competições onde a Team Toyota estará presente encontra-se na Tabela 1 para CPC 1300 e na Tabela 2 para o TPC 1300.
Tabela 1 – Calendário das provas pontuáveis para o Campeonato de Portugal de Clássicos 1300 (Circuitos) 2009.
MÊS DATA NOME DA PROVA ORGANIZADOR LOCAL
Março 28.29 CIRCUITO ACDME 1 ACDME ESTORIL
Abril 25.26 CIRCUITO BRAGA 1 C A MINHO BRAGA
Maio 16.17 CIRCUITO ALGARVE 1 ACDME PORTIMÃO
Junho 13.14 CIRCUITO ACDME 2 ACDME ESTORIL
Setembro 12.13 CIRCUITO BRAGA 2 C A MINHO BRAGA
Novembro 07.08 CIRCUITO ALGARVE 2 ACDME PORTIMÃO
Tabela 2 – Calendário das provas pontuáveis para a Taça de Portugal de Clássicos 1300 (Circuitos) 2009.
MÊS DATA NOME DA PROVA ORGANIZADOR LOCAL
Julho 10.12 CIRCUITO DA BOAVISTA ACP PORTO Julho 25.26 CIRCUITO DE VILA REAL C A VILA REAL V REAL
Uma vez que o calendário de 2009 é composto por circuitos com configurações muito diferentes, este prevê-se um dos mais exigentes no que respeita à preparação do veículo e afinação do chassis para as características de cada circuito em particular.
4.3. Análise Inicial
Nesta secção iremos fazer uma apreciação global das potencialidades e áreas a melhorar do Toyota Starlet, através da avaliação e identificação visual dos componentes do veículo conjugados com o tipo de competição a que se destina.
Esta tarefa crítica foi efectuada devido ao facto da viatura se encontrar em fase de montagem aquando do início deste projecto (ver Figura 55, 56, 57 e 58), pelo que foi possível a análise de todos os componentes incorporados no veículo com especial ênfase aos componentes do chassis, suspensão e direcção, visto que estão directamente relacionados com o propósito deste projecto.
4 FIA – Federação Internacional do Automóvel.
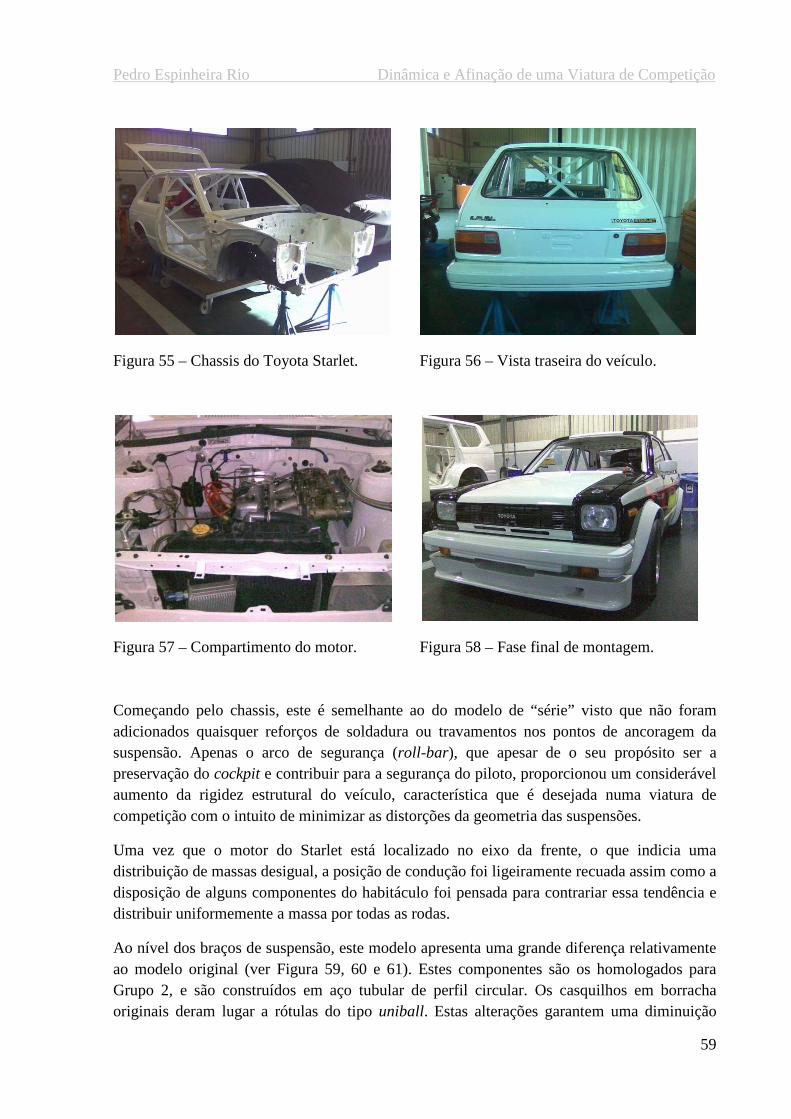
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
59
Figura 55 – Chassis do Toyota Starlet. Figura 56 – Vista traseira do veículo.
Figura 57 – Compartimento do motor. Figura 58 – Fase final de montagem.
Começando pelo chassis, este é semelhante ao do modelo de “série” visto que não foram adicionados quaisquer reforços de soldadura ou travamentos nos pontos de ancoragem da suspensão. Apenas o arco de segurança (roll-bar), que apesar de o seu propósito ser a preservação do cockpit e contribuir para a segurança do piloto, proporcionou um considerável aumento da rigidez estrutural do veículo, característica que é desejada numa viatura de competição com o intuito de minimizar as distorções da geometria das suspensões.
Uma vez que o motor do Starlet está localizado no eixo da frente, o que indicia uma distribuição de massas desigual, a posição de condução foi ligeiramente recuada assim como a disposição de alguns componentes do habitáculo foi pensada para contrariar essa tendência e distribuir uniformemente a massa por todas as rodas.
Ao nível dos braços de suspensão, este modelo apresenta uma grande diferença relativamente ao modelo original (ver Figura 59, 60 e 61). Estes componentes são os homologados para Grupo 2, e são construídos em aço tubular de perfil circular. Os casquilhos em borracha originais deram lugar a rótulas do tipo uniball. Estas alterações garantem uma diminuição
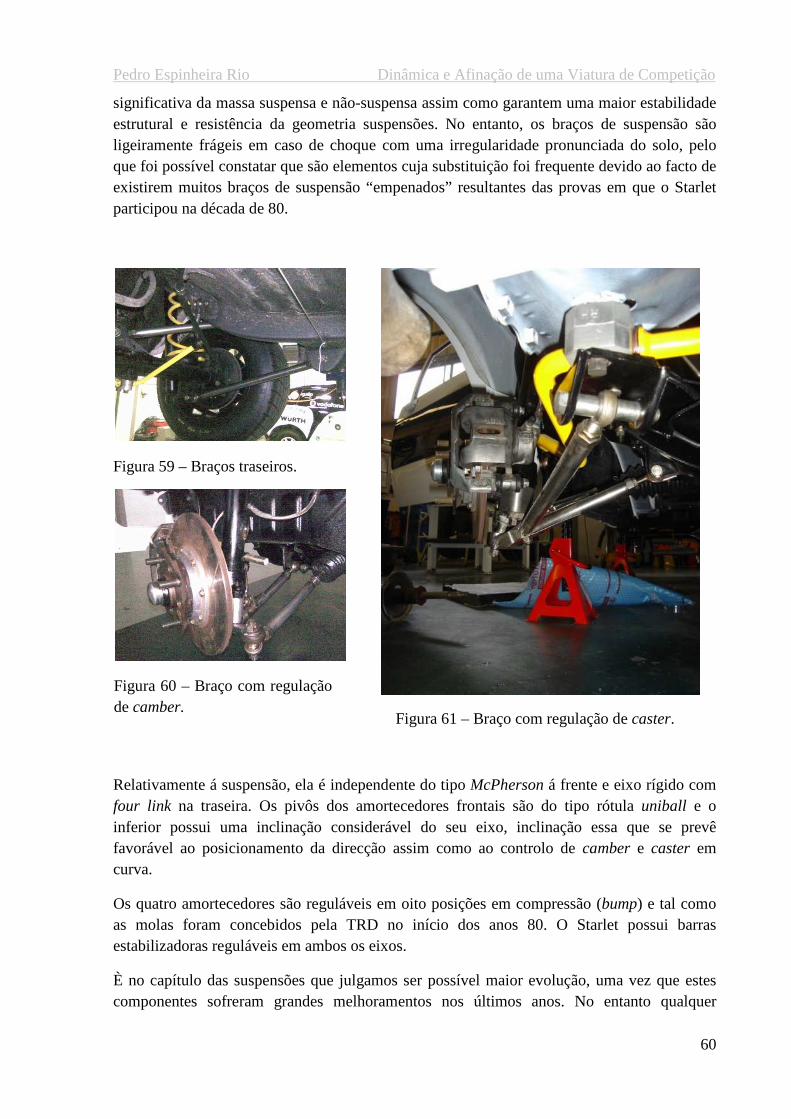
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
60
significativa da massa suspensa e não-suspensa assim como garantem uma maior estabilidade estrutural e resistência da geometria suspensões. No entanto, os braços de suspensão são ligeiramente frágeis em caso de choque com uma irregularidade pronunciada do solo, pelo que foi possível constatar que são elementos cuja substituição foi frequente devido ao facto de existirem muitos braços de suspensão “empenados” resultantes das provas em que o Starlet participou na década de 80.
Figura 59 – Braços traseiros.
Figura 61 – Braço com regulação de caster.
Relativamente á suspensão, ela é independente do tipo McPherson á frente e eixo rígido com four link na traseira. Os pivôs dos amortecedores frontais são do tipo rótula uniball e o inferior possui uma inclinação considerável do seu eixo, inclinação essa que se prevê favorável ao posicionamento da direcção assim como ao controlo de camber e caster em curva.
Os quatro amortecedores são reguláveis em oito posições em compressão (bump) e tal como as molas foram concebidos pela TRD no início dos anos 80. O Starlet possui barras estabilizadoras reguláveis em ambos os eixos.
È no capítulo das suspensões que julgamos ser possível maior evolução, uma vez que estes componentes sofreram grandes melhoramentos nos últimos anos. No entanto qualquer
Figura 60 – Braço com regulação de camber.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
61
alteração da suspensão terá de estar em conformidade com os regulamentos. Relativamente às molas “o material e as dimensões da mola principal são livres, desde que ela se mantenha como única mola na sua função. É permitido juntar molas auxiliares, desde que a mola principal de origem se conserve integralmente”. No que diz respeito aos amortecedores “é autorizada a montagem de articulações de tipo e/ou material diferente do original. Os eixos de articulação devem manter-se na posição original”. (Artigo 261, alínea n) do Anexo J de 1981)
Resumidamente a escolha de molas e amortecedores é livre e permitida pelo regulamento desportivo para o CPC 1300 desde que não se alterem os pontos de apoio originais.
Desta forma, o principal objectivo será o dimensionamento das molas e amortecedores, avaliação do seu posicionamento e intervir ao nível dos alinhamentos, comparando esses resultados com os do setup inicial do veículo de modo a se poder avaliar quais as principais diferenças e pontos que podem sofrer desenvolvimento.
4.4. Setup Inicial
Após o trabalho de montagem e afinação mecânica do Starlet, a equipa de competições da Toyota Caetano Portugal decidiu fazer uma preparação da época de 2009. Para tal foi confirmada a participação na prova “6 Horas de Resistência de Clássicos” organizada Clube Automóvel do Minho, no circuito Vasco Sameiro na cidade de Braga, prova essa que se previa bastante exigente para a mecânica deste veículo com 28 anos de idade, como tal seria uma forma de comprovar a rapidez e fiabilidade do pequeno carro nipónico demonstrada no passado.
Para preparar essa exigente prova de resistência foi marcada uma sessão de testes, nesse circuito, com o intuito e adaptar o veículo às características do traçado e pela primeira vez adquirir uma experiência com o carro em pista.
Para tal, procedeu-se a uma análise prévia do tipo de circuito e uma previsão de quais as afinações de amortecedores, barras estabilizadoras e alinhamentos. Essas afinações foram efectuadas de uma forma empírica e de acordo com o conhecimento e experiência da equipa técnica da Toyota Caetano Portugal – Competições.
Os alinhamentos foram efectuados numa máquina computorizada a lazer de alinhar direcções que se revelou inadequado á exactidão necessária ao alinhamento de uma viatura “clássica” de competição principalmente no alinhamento do eixo traseiro. Os valores finais de alinhamento encontram-se na Figura 62.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
62
Figura 62 – Alinhamentos iniciais.
(Alinhamentos realizados com a máquina BEISSBARTH ML 5000 TECH).
4.4.1. Sessão de Testes
A primeira sessão de testes com o Starlet foi realizada no dia 27 de Novembro de 2008 onde os pilotos João Ramos e João Barbosa desenvolveram a adaptação ao veículo e ao traçado do Circuito Vasco Sameiro. Foram recolhidos alguns dados com especial atenção para os pneus onde foram retiradas as temperaturas dos quatro pneus em três pontos distintos, pressões e correspondentes tempos por volta.
A análise dos dados recolhidos é uma ajuda preciosa para perceber o comportamento dinâmico do veículo e resultado das afinações, pelo que tentarei tirar algumas ilações a esse respeito.
Tenho no entanto que referir que o Circuito Vasco Sameiro é um traçado normalmente muito exigente para o pneu frente-direito, uma vez que a maior parte das curvas em apoio são para o lado esquerdo. Desta forma, temos que considerar esse factor na análise seguinte.
Começando pela análise dos dados retirados no primeiro teste da manhã, após o piloto em pista ter percorrido cinco voltas (ver Figura 63), podemos dizer que os pneus na sua generalidade se encontram a uma temperatura bastante abaixo da temperatura óptima, que segundo o fabricante é 70ºC. Este facto deveu-se à falta de conhecimento do traçado por parte do piloto João Ramos, pelo que as primeiras voltas foram efectuadas a um ritmo lento.
1,4 1,4
3,4 3,4
0,75 IN 0,75 IN
6 6
S.R. S.R.
S.R. S.R.
0 1 IN
4 4
S.R. - Sem regulação
Câmber (graus)
Caster (graus)
Convergência (mm)
Amortecedor (pos.)
Traseira Direita
Câmber (graus)
Caster (graus)
Convergência (mm)
Amortecedor (pos.)
Traseira Esquerda
Barra estabilizadora Traseira
Posição 1
Barra estabilizadora Frente
Posição 1
Frente Direita
Amortecedor (pos.)
Convergência (mm)
Caster (graus)
Câmber (graus)
Frente Esquerda
Amortecedor (pos.)
Convergência (mm)
Caster (graus)
Câmber (graus)

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
63
No entanto, podemos através destes dados perceber que os pneus traseiros desenvolveram maior temperatura que os da frente, factor esse que sugere uma tendência sobreviradora.
Figura 63 – Temperatura dos pneus Michelin após 5 voltas, piloto João Ramos.
Na segunda entrada em pista do piloto João Ramos e percorridas mais dez voltas, foi notável a maior confiança do piloto reflectida na redução dos tempos por volta. Analisando a Figura 64 podemos concluir que após esta reentrada em pista a temperatura de todos os pneus subiu, reflectindo por isso o andamento mais rápido do piloto. A temperatura do pneu frente-direito apresenta-se estabilizada e a tendência ligeiramente sobreviradora é demonstrada pela superior temperatura dos pneus traseiros.
1,6 1,6
1,6 1,6
João Ramos
Céu Limpo
4 oC
17 oC
Pneus: MICHELIN - S308 - 20/54 - 13
Temperatura da Pista:
Temperatura do Ar:
Condições Climatéricas:
Piloto:
52
Pressão (bar)
Pressão (bar)
Temperatura (oC) dos pneus após 5 voltas
Pressão a frio
Pressão a quente
52 53 51
46 56 43 48 57
37 39 46
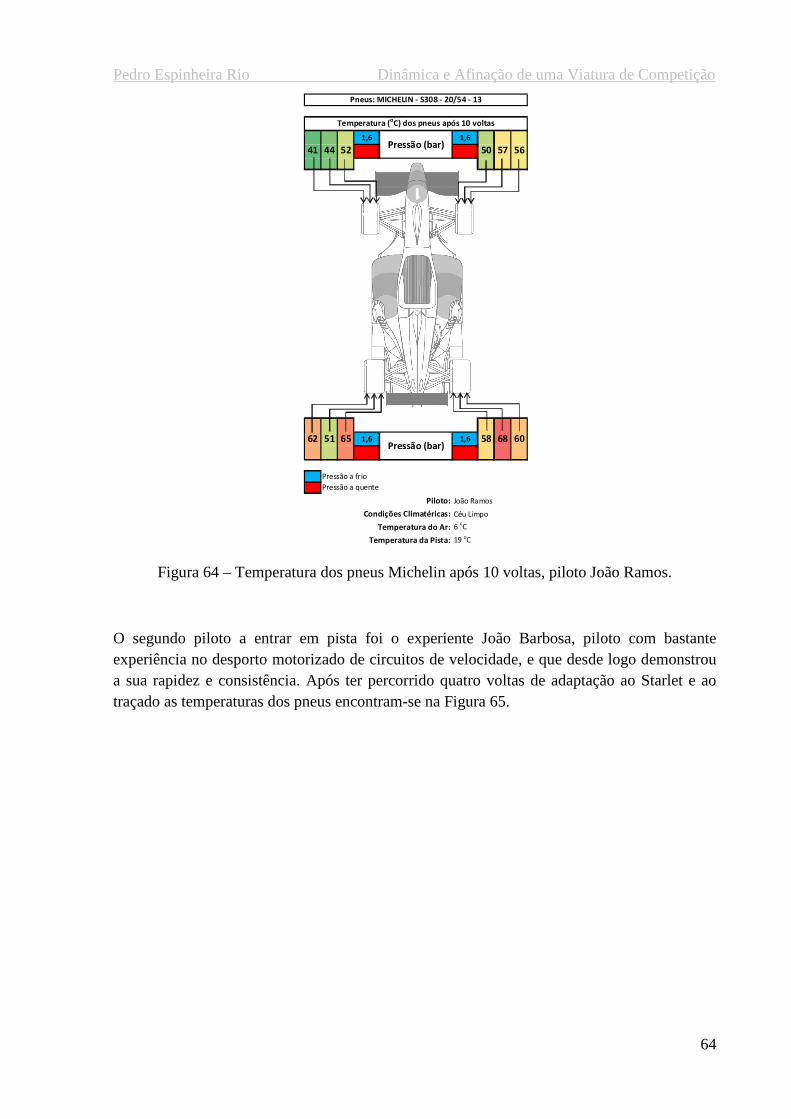
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
64
Figura 64 – Temperatura dos pneus Michelin após 10 voltas, piloto João Ramos.
O segundo piloto a entrar em pista foi o experiente João Barbosa, piloto com bastante experiência no desporto motorizado de circuitos de velocidade, e que desde logo demonstrou a sua rapidez e consistência. Após ter percorrido quatro voltas de adaptação ao Starlet e ao traçado as temperaturas dos pneus encontram-se na Figura 65.
1,6 1,6
1,6 1,6
João Ramos
Céu Limpo
6 oC
19 oC
Pneus: MICHELIN - S308 - 20/54 - 13
Temperatura da Pista:
Temperatura do Ar:
Condições Climatéricas:
Piloto:
Temperatura (oC) dos pneus após 10 voltas
50 57 56
62 51 65 58 68 60Pressão (bar)
41 44 52Pressão (bar)
Pressão a frio
Pressão a quente
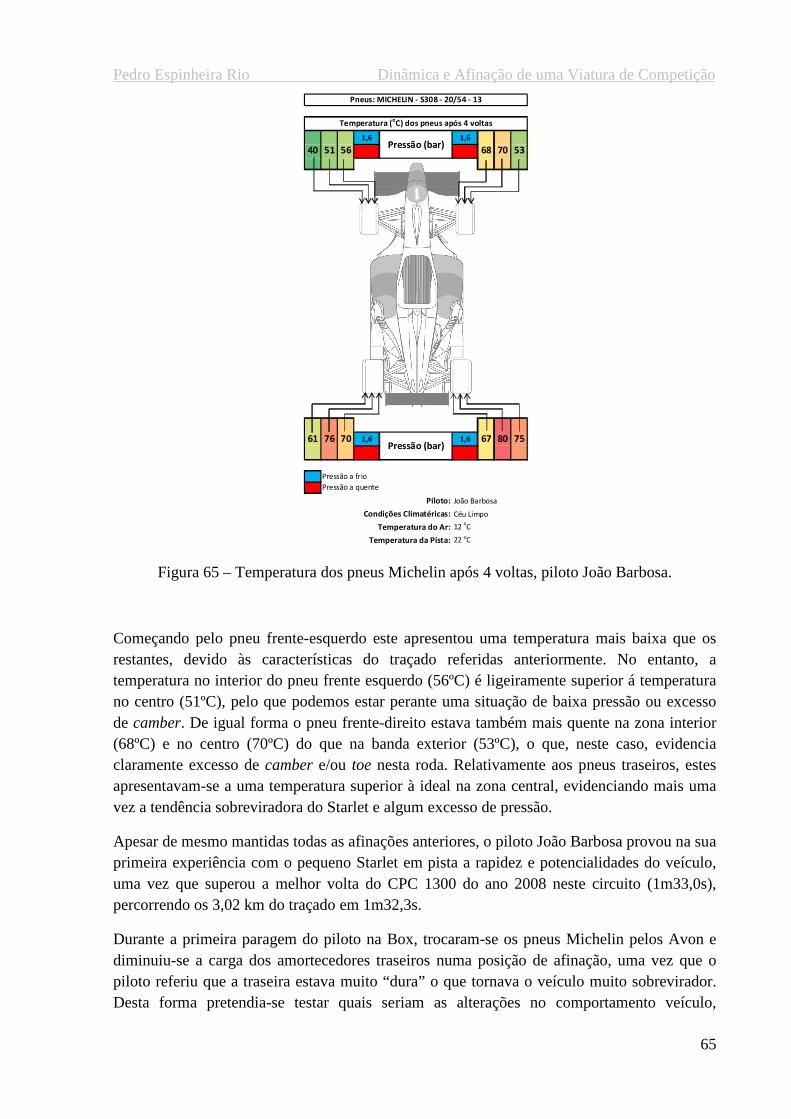
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
65
Figura 65 – Temperatura dos pneus Michelin após 4 voltas, piloto João Barbosa.
Começando pelo pneu frente-esquerdo este apresentou uma temperatura mais baixa que os restantes, devido às características do traçado referidas anteriormente. No entanto, a temperatura no interior do pneu frente esquerdo (56ºC) é ligeiramente superior á temperatura no centro (51ºC), pelo que podemos estar perante uma situação de baixa pressão ou excesso de camber. De igual forma o pneu frente-direito estava também mais quente na zona interior (68ºC) e no centro (70ºC) do que na banda exterior (53ºC), o que, neste caso, evidencia claramente excesso de camber e/ou toe nesta roda. Relativamente aos pneus traseiros, estes apresentavam-se a uma temperatura superior à ideal na zona central, evidenciando mais uma vez a tendência sobreviradora do Starlet e algum excesso de pressão.
Apesar de mesmo mantidas todas as afinações anteriores, o piloto João Barbosa provou na sua primeira experiência com o pequeno Starlet em pista a rapidez e potencialidades do veículo, uma vez que superou a melhor volta do CPC 1300 do ano 2008 neste circuito (1m33,0s), percorrendo os 3,02 km do traçado em 1m32,3s.
Durante a primeira paragem do piloto na Box, trocaram-se os pneus Michelin pelos Avon e diminuiu-se a carga dos amortecedores traseiros numa posição de afinação, uma vez que o piloto referiu que a traseira estava muito “dura” o que tornava o veículo muito sobrevirador. Desta forma pretendia-se testar quais seriam as alterações no comportamento veículo,
1,6 1,6
1,6 1,6
João Barbosa
Céu Limpo
12 oC
22 oC
Pneus: MICHELIN - S308 - 20/54 - 13
Pressão a frio
Pressão a quente
Temperatura da Pista:
Temperatura do Ar:
Condições Climatéricas:
Piloto:
53
61 76 70 67 80 75Pressão (bar)
Temperatura (oC) dos pneus após 4 voltas
40 51 56Pressão (bar)
68 70
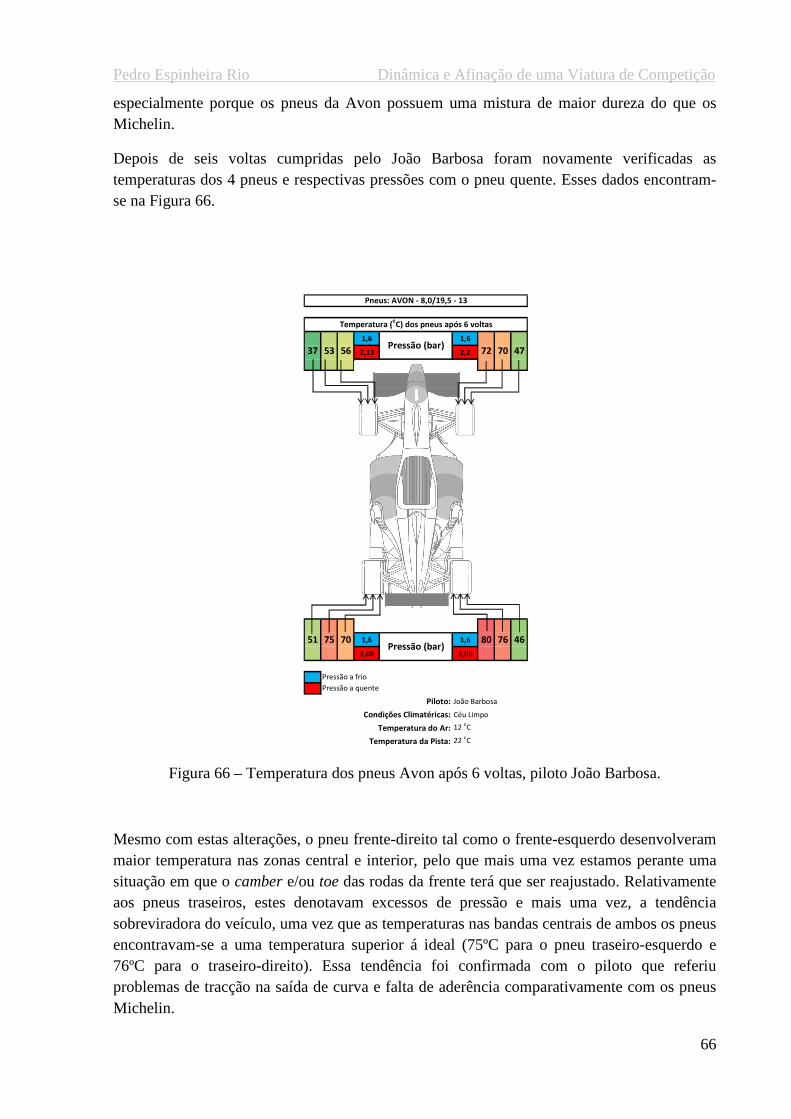
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
66
especialmente porque os pneus da Avon possuem uma mistura de maior dureza do que os Michelin.
Depois de seis voltas cumpridas pelo João Barbosa foram novamente verificadas as temperaturas dos 4 pneus e respectivas pressões com o pneu quente. Esses dados encontram-se na Figura 66.
Figura 66 – Temperatura dos pneus Avon após 6 voltas, piloto João Barbosa.
Mesmo com estas alterações, o pneu frente-direito tal como o frente-esquerdo desenvolveram maior temperatura nas zonas central e interior, pelo que mais uma vez estamos perante uma situação em que o camber e/ou toe das rodas da frente terá que ser reajustado. Relativamente aos pneus traseiros, estes denotavam excessos de pressão e mais uma vez, a tendência sobreviradora do veículo, uma vez que as temperaturas nas bandas centrais de ambos os pneus encontravam-se a uma temperatura superior á ideal (75ºC para o pneu traseiro-esquerdo e 76ºC para o traseiro-direito). Essa tendência foi confirmada com o piloto que referiu problemas de tracção na saída de curva e falta de aderência comparativamente com os pneus Michelin.
1,6 1,6
2,13 2,2
1,6 1,6
2,08 2,08
João Barbosa
Céu Limpo
12 oC
22 oC
51 75 70 80 76 46Pressão (bar)
Pressão a frio
Pressão a quente
Piloto:
Condições Climatéricas:
Temperatura do Ar:
Temperatura da Pista:
Temperatura (oC) dos pneus após 6 voltas
37 53 56Pressão (bar)
72 70 47
Pneus: AVON - 8,0/19,5 - 13
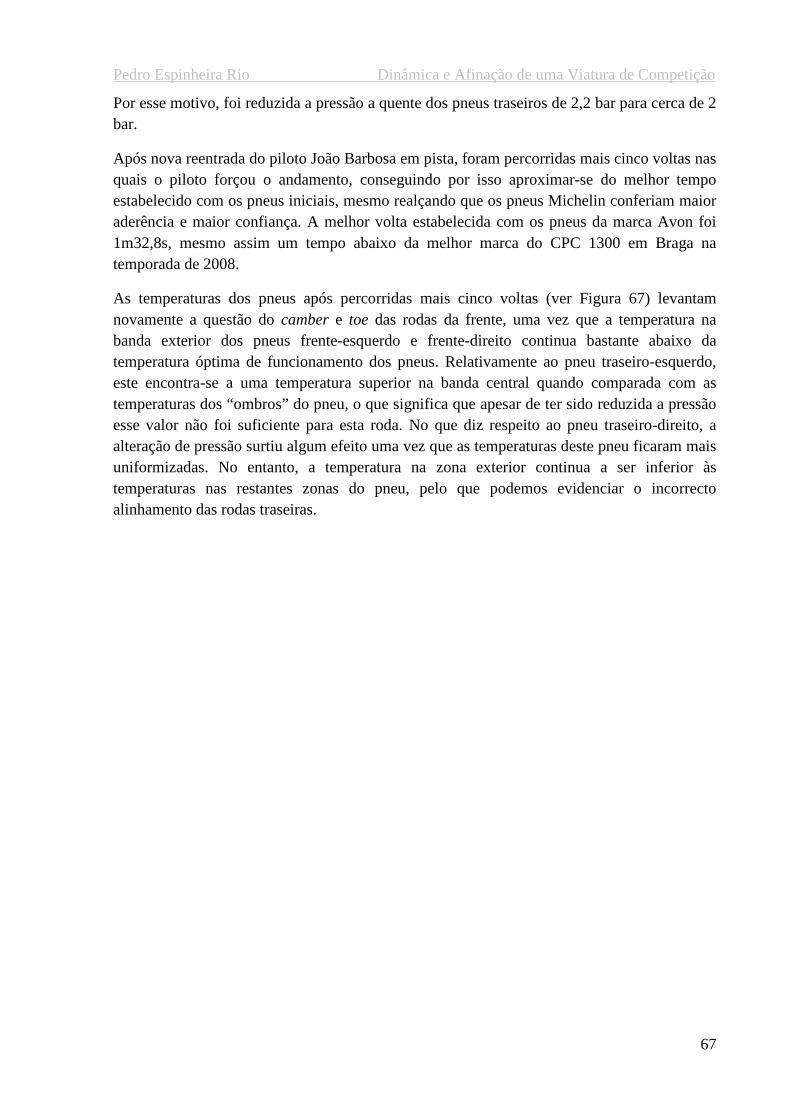
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
67
Por esse motivo, foi reduzida a pressão a quente dos pneus traseiros de 2,2 bar para cerca de 2 bar.
Após nova reentrada do piloto João Barbosa em pista, foram percorridas mais cinco voltas nas quais o piloto forçou o andamento, conseguindo por isso aproximar-se do melhor tempo estabelecido com os pneus iniciais, mesmo realçando que os pneus Michelin conferiam maior aderência e maior confiança. A melhor volta estabelecida com os pneus da marca Avon foi 1m32,8s, mesmo assim um tempo abaixo da melhor marca do CPC 1300 em Braga na temporada de 2008.
As temperaturas dos pneus após percorridas mais cinco voltas (ver Figura 67) levantam novamente a questão do camber e toe das rodas da frente, uma vez que a temperatura na banda exterior dos pneus frente-esquerdo e frente-direito continua bastante abaixo da temperatura óptima de funcionamento dos pneus. Relativamente ao pneu traseiro-esquerdo, este encontra-se a uma temperatura superior na banda central quando comparada com as temperaturas dos “ombros” do pneu, o que significa que apesar de ter sido reduzida a pressão esse valor não foi suficiente para esta roda. No que diz respeito ao pneu traseiro-direito, a alteração de pressão surtiu algum efeito uma vez que as temperaturas deste pneu ficaram mais uniformizadas. No entanto, a temperatura na zona exterior continua a ser inferior às temperaturas nas restantes zonas do pneu, pelo que podemos evidenciar o incorrecto alinhamento das rodas traseiras.
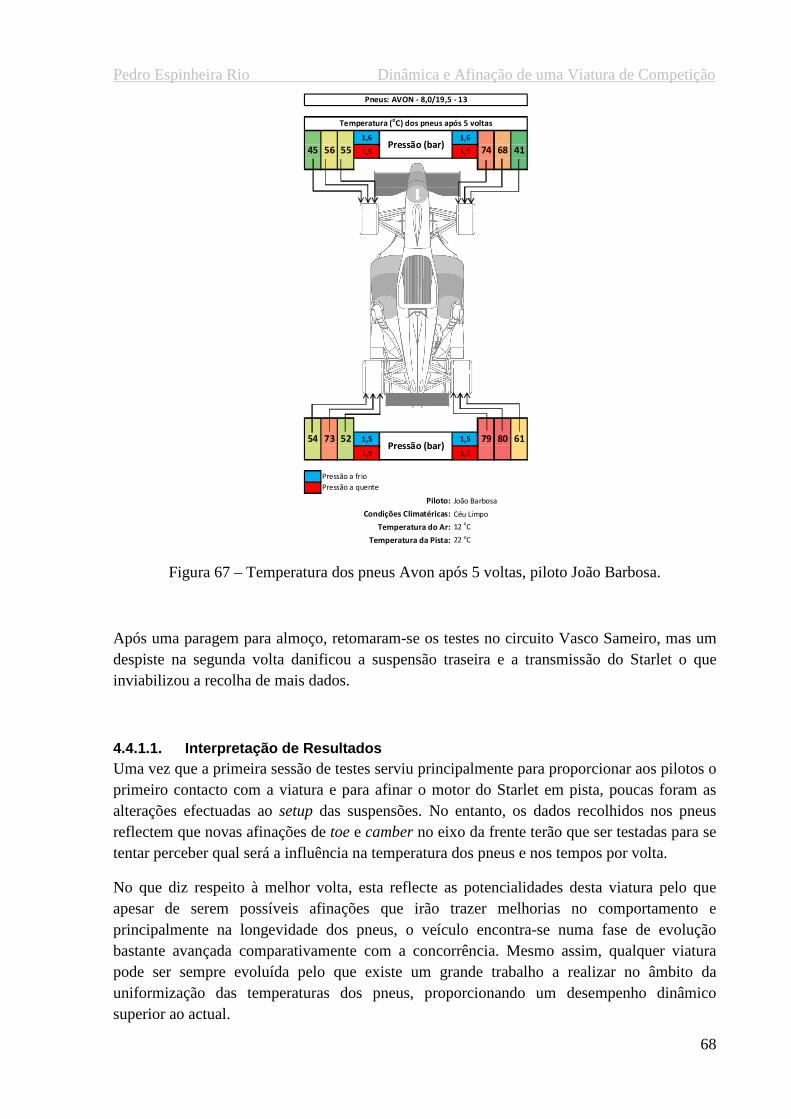
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
68
Figura 67 – Temperatura dos pneus Avon após 5 voltas, piloto João Barbosa.
Após uma paragem para almoço, retomaram-se os testes no circuito Vasco Sameiro, mas um despiste na segunda volta danificou a suspensão traseira e a transmissão do Starlet o que inviabilizou a recolha de mais dados.
4.4.1.1. Interpretação de Resultados Uma vez que a primeira sessão de testes serviu principalmente para proporcionar aos pilotos o primeiro contacto com a viatura e para afinar o motor do Starlet em pista, poucas foram as alterações efectuadas ao setup das suspensões. No entanto, os dados recolhidos nos pneus reflectem que novas afinações de toe e camber no eixo da frente terão que ser testadas para se tentar perceber qual será a influência na temperatura dos pneus e nos tempos por volta.
No que diz respeito à melhor volta, esta reflecte as potencialidades desta viatura pelo que apesar de serem possíveis afinações que irão trazer melhorias no comportamento e principalmente na longevidade dos pneus, o veículo encontra-se numa fase de evolução bastante avançada comparativamente com a concorrência. Mesmo assim, qualquer viatura pode ser sempre evoluída pelo que existe um grande trabalho a realizar no âmbito da uniformização das temperaturas dos pneus, proporcionando um desempenho dinâmico superior ao actual.
1,6 1,6
1,9 1,9
1,5 1,5
1,9 1,9
João Barbosa
Céu Limpo
12 oC
22 oC
Pneus: AVON - 8,0/19,5 - 13
Pressão a frio
Pressão a quente
Piloto:
Condições Climatéricas:
Temperatura do Ar:
Temperatura da Pista:
54 73 52 79 80 61Pressão (bar)
Temperatura (oC) dos pneus após 5 voltas
45 56 55Pressão (bar)
74 68 41
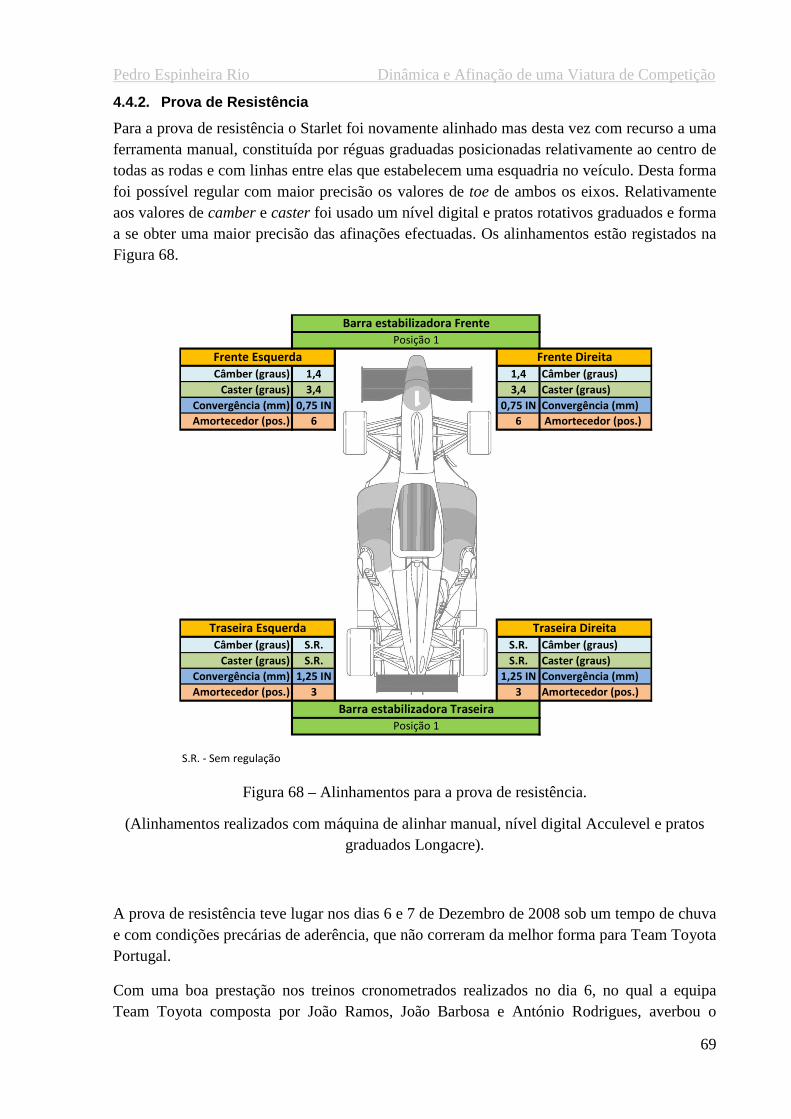
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
69
4.4.2. Prova de Resistência
Para a prova de resistência o Starlet foi novamente alinhado mas desta vez com recurso a uma ferramenta manual, constituída por réguas graduadas posicionadas relativamente ao centro de todas as rodas e com linhas entre elas que estabelecem uma esquadria no veículo. Desta forma foi possível regular com maior precisão os valores de toe de ambos os eixos. Relativamente aos valores de camber e caster foi usado um nível digital e pratos rotativos graduados e forma a se obter uma maior precisão das afinações efectuadas. Os alinhamentos estão registados na Figura 68.
Figura 68 – Alinhamentos para a prova de resistência.
(Alinhamentos realizados com máquina de alinhar manual, nível digital Acculevel e pratos graduados Longacre).
A prova de resistência teve lugar nos dias 6 e 7 de Dezembro de 2008 sob um tempo de chuva e com condições precárias de aderência, que não correram da melhor forma para Team Toyota Portugal.
Com uma boa prestação nos treinos cronometrados realizados no dia 6, no qual a equipa Team Toyota composta por João Ramos, João Barbosa e António Rodrigues, averbou o
1,4 1,4
3,4 3,4
0,75 IN 0,75 IN
6 6
S.R. S.R.
S.R. S.R.
1,25 IN 1,25 IN
3 3
S.R. - Sem regulação
Câmber (graus)
Caster (graus)
Convergência (mm)
Amortecedor (pos.)
Traseira Direita
Câmber (graus)
Caster (graus)
Convergência (mm)
Amortecedor (pos.)
Traseira Esquerda
Barra estabilizadora Traseira
Posição 1
Barra estabilizadora Frente
Posição 1
Frente Direita
Amortecedor (pos.)
Convergência (mm)
Caster (graus)
Câmber (graus)
Frente Esquerda
Amortecedor (pos.)
Convergência (mm)
Caster (graus)
Câmber (graus)
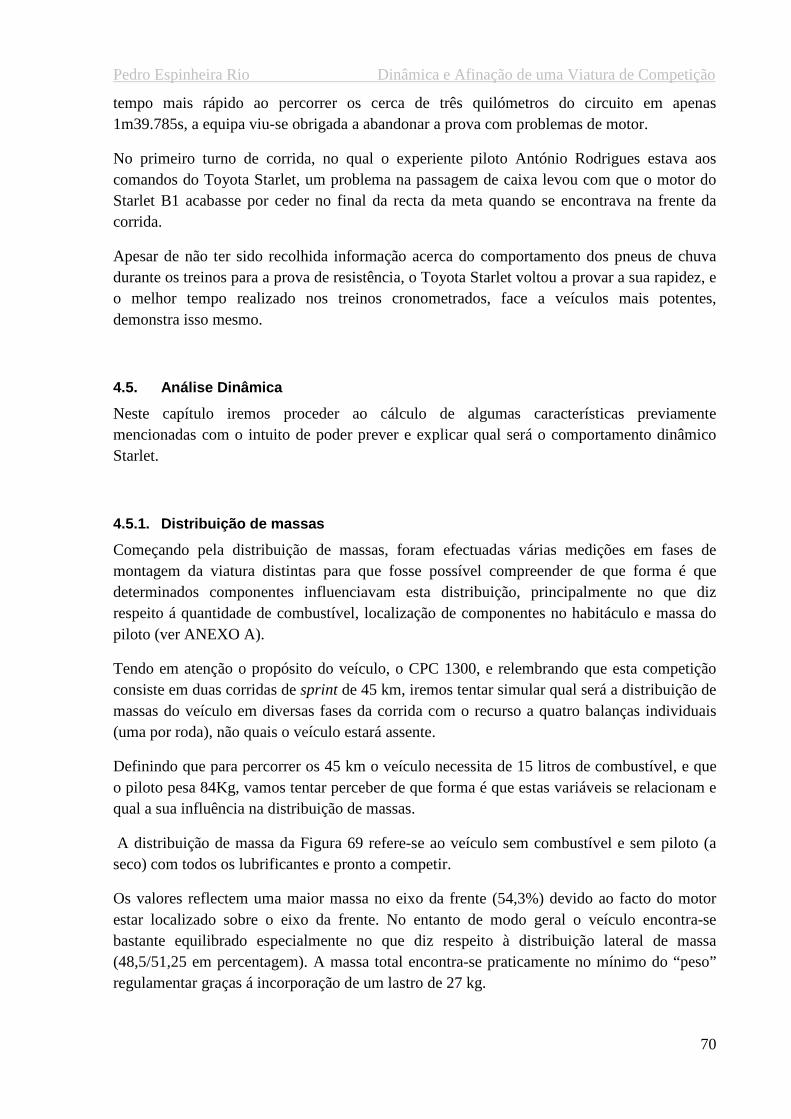
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
70
tempo mais rápido ao percorrer os cerca de três quilómetros do circuito em apenas 1m39.785s, a equipa viu-se obrigada a abandonar a prova com problemas de motor.
No primeiro turno de corrida, no qual o experiente piloto António Rodrigues estava aos comandos do Toyota Starlet, um problema na passagem de caixa levou com que o motor do Starlet B1 acabasse por ceder no final da recta da meta quando se encontrava na frente da corrida.
Apesar de não ter sido recolhida informação acerca do comportamento dos pneus de chuva durante os treinos para a prova de resistência, o Toyota Starlet voltou a provar a sua rapidez, e o melhor tempo realizado nos treinos cronometrados, face a veículos mais potentes, demonstra isso mesmo.
4.5. Análise Dinâmica
Neste capítulo iremos proceder ao cálculo de algumas características previamente mencionadas com o intuito de poder prever e explicar qual será o comportamento dinâmico Starlet.
4.5.1. Distribuição de massas
Começando pela distribuição de massas, foram efectuadas várias medições em fases de montagem da viatura distintas para que fosse possível compreender de que forma é que determinados componentes influenciavam esta distribuição, principalmente no que diz respeito á quantidade de combustível, localização de componentes no habitáculo e massa do piloto (ver ANEXO A).
Tendo em atenção o propósito do veículo, o CPC 1300, e relembrando que esta competição consiste em duas corridas de sprint de 45 km, iremos tentar simular qual será a distribuição de massas do veículo em diversas fases da corrida com o recurso a quatro balanças individuais (uma por roda), não quais o veículo estará assente.
Definindo que para percorrer os 45 km o veículo necessita de 15 litros de combustível, e que o piloto pesa 84Kg, vamos tentar perceber de que forma é que estas variáveis se relacionam e qual a sua influência na distribuição de massas.
A distribuição de massa da Figura 69 refere-se ao veículo sem combustível e sem piloto (a seco) com todos os lubrificantes e pronto a competir.
Os valores reflectem uma maior massa no eixo da frente (54,3%) devido ao facto do motor estar localizado sobre o eixo da frente. No entanto de modo geral o veículo encontra-se bastante equilibrado especialmente no que diz respeito à distribuição lateral de massa (48,5/51,25 em percentagem). A massa total encontra-se praticamente no mínimo do “peso” regulamentar graças á incorporação de um lastro de 27 kg.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
71
Esta distribuição evidencia que apesar da introdução de um roll-bar bastante complexo e de acordo com as normas em vigor, de um extintor automático e de todos os dispositivos de segurança obrigatórios, o veículo continua a ter um “peso” total abaixo do limite regulamentar, o que é bastante satisfatório.
Figura 69 – Distribuição de massas, veículo a “seco”.
Depois de introduzidos cinco litros de combustível (ver Figura 70), o veículo foi novamente sujeito às balanças, pelo que podemos constatar que esse combustível contribuiu ligeiramente para uma melhor distribuição de massas entre a frente e a traseira (passou de 54,3/45,7 para 53,9/46,1 em percentagem), uma vez que o depósito de combustível se situa atrás do eixo traseiro.
54,30%
Dif. Ideal 31 4,30%
6,25 0,87% 24,75 3,43%
-9 -1,25% 9 1,25%
-15,3 -2,12% -15,8 -2,18%
45,70%
Dif. Ideal -31 -4,30%
721não
51,32% não
27 kg
kg
%
Cross 48,68%
Outros
Lastro
Gasolina
CondiçõesPiloto
Dif. Ideal Dif. Ideal
Massa Traseira329,5
Massa Total
Dif. Ideal Dif. Ideal
Traseira Esquerda Traseira Direita
165 22,88% 22,82% 164,5
Dif. Ideal Dif. Ideal
Total Esquerda Total Direita351,5 48,75% 51,25% 369,5
Massa Frente391,5
Frente Esquerda Frente Direita186,5 25,87% 28,43% 205
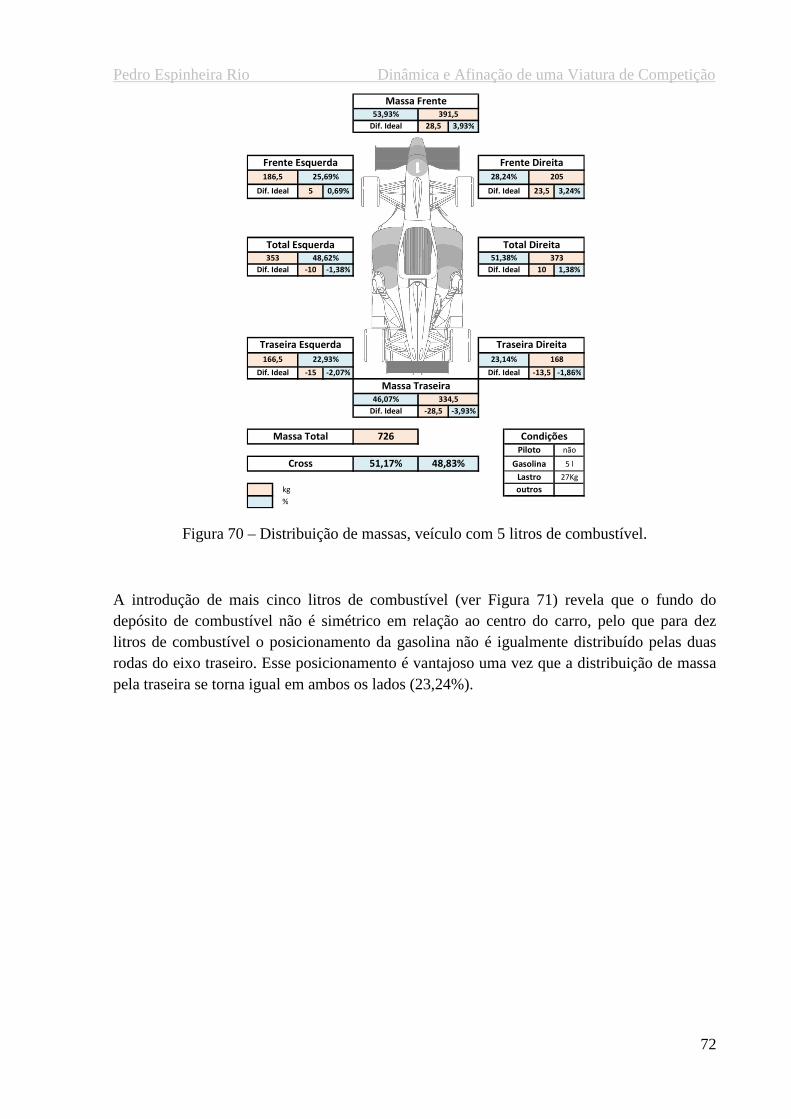
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
72
Figura 70 – Distribuição de massas, veículo com 5 litros de combustível.
A introdução de mais cinco litros de combustível (ver Figura 71) revela que o fundo do depósito de combustível não é simétrico em relação ao centro do carro, pelo que para dez litros de combustível o posicionamento da gasolina não é igualmente distribuído pelas duas rodas do eixo traseiro. Esse posicionamento é vantajoso uma vez que a distribuição de massa pela traseira se torna igual em ambos os lados (23,24%).
53,93%
Dif. Ideal 28,5 3,93%
5 0,69% 23,5 3,24%
-10 -1,38% 10 1,38%
-15 -2,07% -13,5 -1,86%
46,07%
Dif. Ideal -28,5 -3,93%
726não
51,17% 5 l
27Kg
kg
%
outros
Lastro
Gasolina
Piloto
Condições
Cross 48,83%
Dif. Ideal Dif. Ideal
Massa Traseira334,5
Massa Total
Dif. Ideal Dif. Ideal
Traseira Esquerda Traseira Direita
166,5 22,93% 23,14% 168
Dif. Ideal Dif. Ideal
Total Esquerda Total Direita353 48,62% 51,38% 373
391,5
Frente Esquerda Frente Direita186,5 25,69% 28,24% 205
Massa Frente
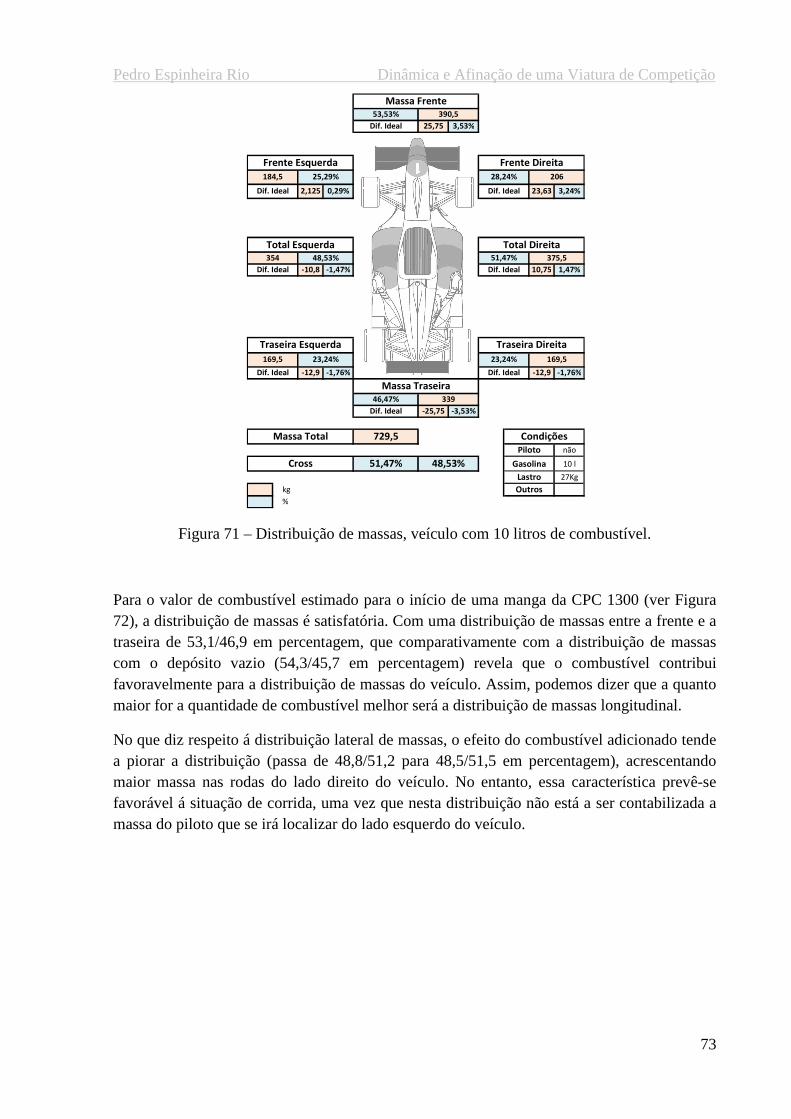
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
73
Figura 71 – Distribuição de massas, veículo com 10 litros de combustível.
Para o valor de combustível estimado para o início de uma manga da CPC 1300 (ver Figura 72), a distribuição de massas é satisfatória. Com uma distribuição de massas entre a frente e a traseira de 53,1/46,9 em percentagem, que comparativamente com a distribuição de massas com o depósito vazio (54,3/45,7 em percentagem) revela que o combustível contribui favoravelmente para a distribuição de massas do veículo. Assim, podemos dizer que a quanto maior for a quantidade de combustível melhor será a distribuição de massas longitudinal.
No que diz respeito á distribuição lateral de massas, o efeito do combustível adicionado tende a piorar a distribuição (passa de 48,8/51,2 para 48,5/51,5 em percentagem), acrescentando maior massa nas rodas do lado direito do veículo. No entanto, essa característica prevê-se favorável á situação de corrida, uma vez que nesta distribuição não está a ser contabilizada a massa do piloto que se irá localizar do lado esquerdo do veículo.
53,53%
Dif. Ideal 25,75 3,53%
2,125 0,29% 23,63 3,24%
-10,8 -1,47% 10,75 1,47%
-12,9 -1,76% -12,9 -1,76%
46,47%
Dif. Ideal -25,75 -3,53%
729,5não
51,47% 10 l
27Kg
kg
%
Outros
Lastro
Gasolina
Piloto
Condições
Cross 48,53%
Dif. Ideal Dif. Ideal
Massa Traseira339
Massa Total
Dif. Ideal Dif. Ideal
Traseira Esquerda Traseira Direita
169,5 23,24% 23,24% 169,5
Dif. Ideal Dif. Ideal
Total Esquerda Total Direita354 48,53% 51,47% 375,5
Frente Esquerda Frente Direita184,5 25,29% 28,24% 206
Massa Frente390,5
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
74
Figura 72 – Distribuição de massas, veículo com 15 litros de combustível.
Agora atendendo á influência do piloto na distribuição de massas (ver Figura 73) podemos referir que, obviamente, vai aumentar a percentagem de massa do lado esquerdo (51,4/48,6 em percentagem) no entanto o valor das massas cruzadas (cross) que é o resultado da adição das massas das rodas frente-esquerda com traseira-direita dividida pela massa total, e frente-direita com traseira-esquerda dividida pela massa total, toma valores próximos dos ideais (50%) o que é um factor bastante animador.
53,13%
Dif. Ideal 23 3,13%
1 0,14% 22 3,00%
-11 -1,50% 11 1,50%
-12 -1,63% -11 -1,50%
46,87%
Dif. Ideal -23 -3,13%
734não
51,36% 15 l
27Kg
kg
%
Cross 48,64%
Dif. Ideal Dif. Ideal
Massa Traseira344
Massa Total
Outros
Lastro
Gasolina
Piloto
Condições
Dif. Ideal Dif. Ideal
Traseira Esquerda Traseira Direita
171,5 23,37% 23,50% 172,5
Dif. Ideal Dif. Ideal
Total Esquerda Total Direita356 48,50% 51,50% 378
Frente Esquerda Frente Direita184,5 25,14% 28,00% 205,5
Massa Frente390
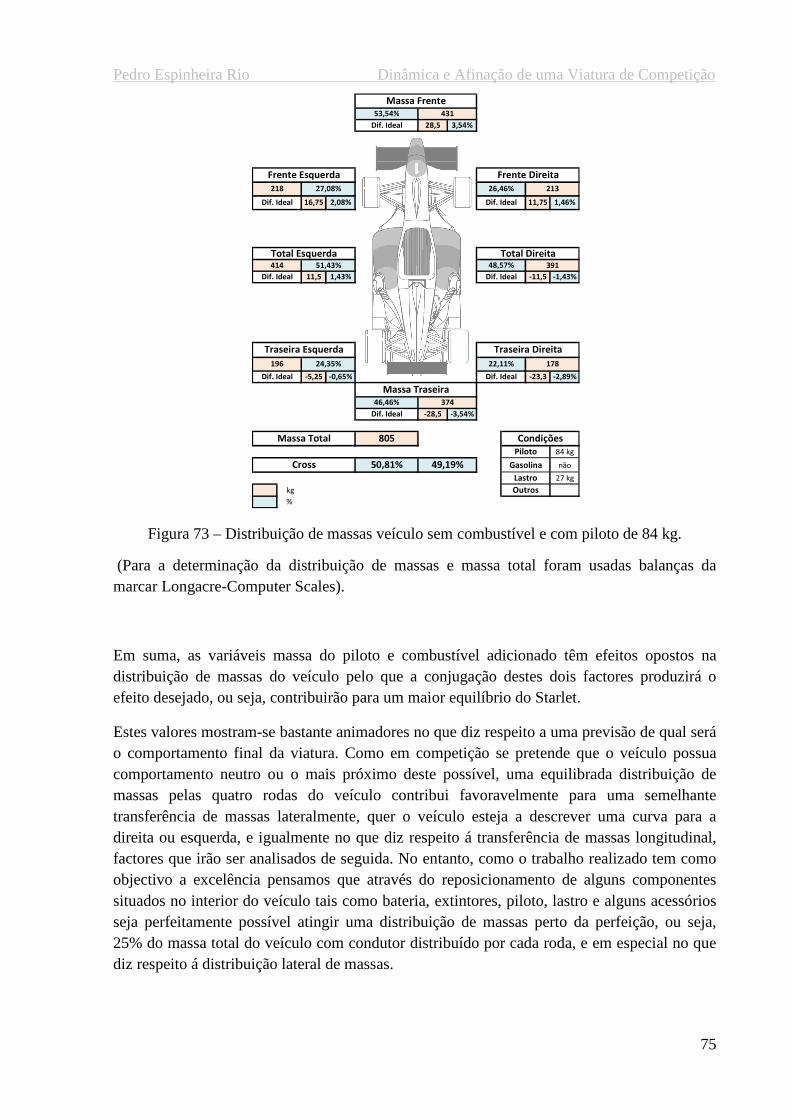
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
75
Figura 73 – Distribuição de massas veículo sem combustível e com piloto de 84 kg.
(Para a determinação da distribuição de massas e massa total foram usadas balanças da marcar Longacre-Computer Scales).
Em suma, as variáveis massa do piloto e combustível adicionado têm efeitos opostos na distribuição de massas do veículo pelo que a conjugação destes dois factores produzirá o efeito desejado, ou seja, contribuirão para um maior equilíbrio do Starlet.
Estes valores mostram-se bastante animadores no que diz respeito a uma previsão de qual será o comportamento final da viatura. Como em competição se pretende que o veículo possua comportamento neutro ou o mais próximo deste possível, uma equilibrada distribuição de massas pelas quatro rodas do veículo contribui favoravelmente para uma semelhante transferência de massas lateralmente, quer o veículo esteja a descrever uma curva para a direita ou esquerda, e igualmente no que diz respeito á transferência de massas longitudinal, factores que irão ser analisados de seguida. No entanto, como o trabalho realizado tem como objectivo a excelência pensamos que através do reposicionamento de alguns componentes situados no interior do veículo tais como bateria, extintores, piloto, lastro e alguns acessórios seja perfeitamente possível atingir uma distribuição de massas perto da perfeição, ou seja, 25% do massa total do veículo com condutor distribuído por cada roda, e em especial no que diz respeito á distribuição lateral de massas.
53,54%
Dif. Ideal 28,5 3,54%
16,75 2,08% 11,75 1,46%
11,5 1,43% -11,5 -1,43%
-5,25 -0,65% -23,3 -2,89%
46,46%
Dif. Ideal -28,5 -3,54%
80584 kg
50,81% não
27 kg
kg
%
Gasolina
Lastro
Outros
CondiçõesPiloto
49,19%
Dif. Ideal
Dif. Ideal
Dif. IdealDif. Ideal
Dif. Ideal
Cross
24,35%196
51,43%414
Dif. Ideal
17822,11%
Massa Total
Massa Traseira
Massa Frente
Total Esquerda Total Direita
Traseira Esquerda Traseira Direita
Frente Esquerda Frente Direita218 213
48,57% 391
27,08%
431
374
26,46%
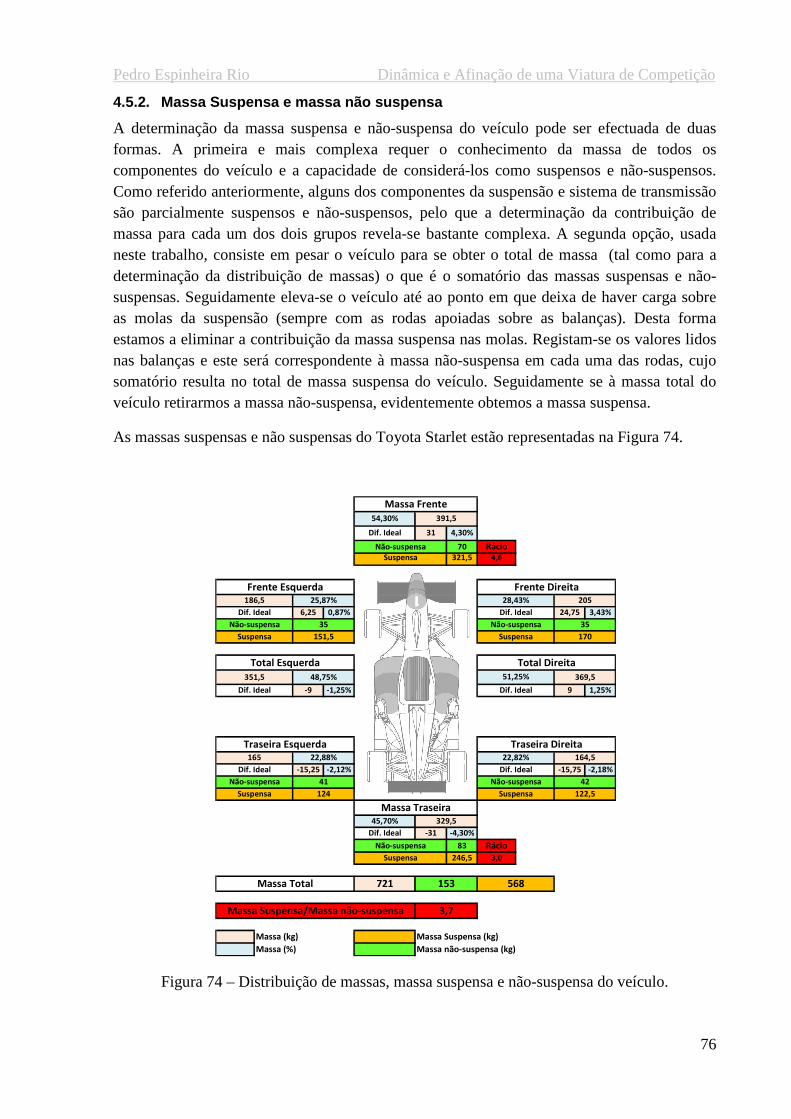
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
76
4.5.2. Massa Suspensa e massa não suspensa
A determinação da massa suspensa e não-suspensa do veículo pode ser efectuada de duas formas. A primeira e mais complexa requer o conhecimento da massa de todos os componentes do veículo e a capacidade de considerá-los como suspensos e não-suspensos. Como referido anteriormente, alguns dos componentes da suspensão e sistema de transmissão são parcialmente suspensos e não-suspensos, pelo que a determinação da contribuição de massa para cada um dos dois grupos revela-se bastante complexa. A segunda opção, usada neste trabalho, consiste em pesar o veículo para se obter o total de massa (tal como para a determinação da distribuição de massas) o que é o somatório das massas suspensas e não-suspensas. Seguidamente eleva-se o veículo até ao ponto em que deixa de haver carga sobre as molas da suspensão (sempre com as rodas apoiadas sobre as balanças). Desta forma estamos a eliminar a contribuição da massa suspensa nas molas. Registam-se os valores lidos nas balanças e este será correspondente à massa não-suspensa em cada uma das rodas, cujo somatório resulta no total de massa suspensa do veículo. Seguidamente se à massa total do veículo retirarmos a massa não-suspensa, evidentemente obtemos a massa suspensa.
As massas suspensas e não suspensas do Toyota Starlet estão representadas na Figura 74.
Figura 74 – Distribuição de massas, massa suspensa e não-suspensa do veículo.
54,30%
Dif. Ideal 31 4,30%
70 Rácio321,5 4,6
6,25 0,87% 24,75 3,43%
-9 -1,25% 9 1,25%
-15,25 -2,12% -15,75 -2,18%
45,70%
Dif. Ideal -31 -4,30%
83 Rácio
246,5 3,0
721
Massa (kg)
369,5
Massa Suspensa (kg)
329,5
3,7
Suspensa
Não-suspensa
Suspensa
153 568
Massa Traseira
Não-suspensa 41
Suspensa 124
22,88%
Traseira Esquerda Traseira Direita
Não-suspensa 42
Dif. Ideal
35
Dif. Ideal
122,5
Dif. Ideal
Não-suspensa
Massa Frente391,5
Frente Esquerda Frente Direita186,5 25,87% 28,43%
Dif. Ideal
205
Não-suspensaSuspensa
Suspensa 170
Massa não-suspensa (kg)Massa (%)
Não-suspensa 35
151,5Suspensa
Dif. Ideal
Massa Total
Dif. Ideal
Total Esquerda351,5 48,75%
Massa Suspensa/Massa não-suspensa
165 22,82% 164,5
Total Direita51,25%
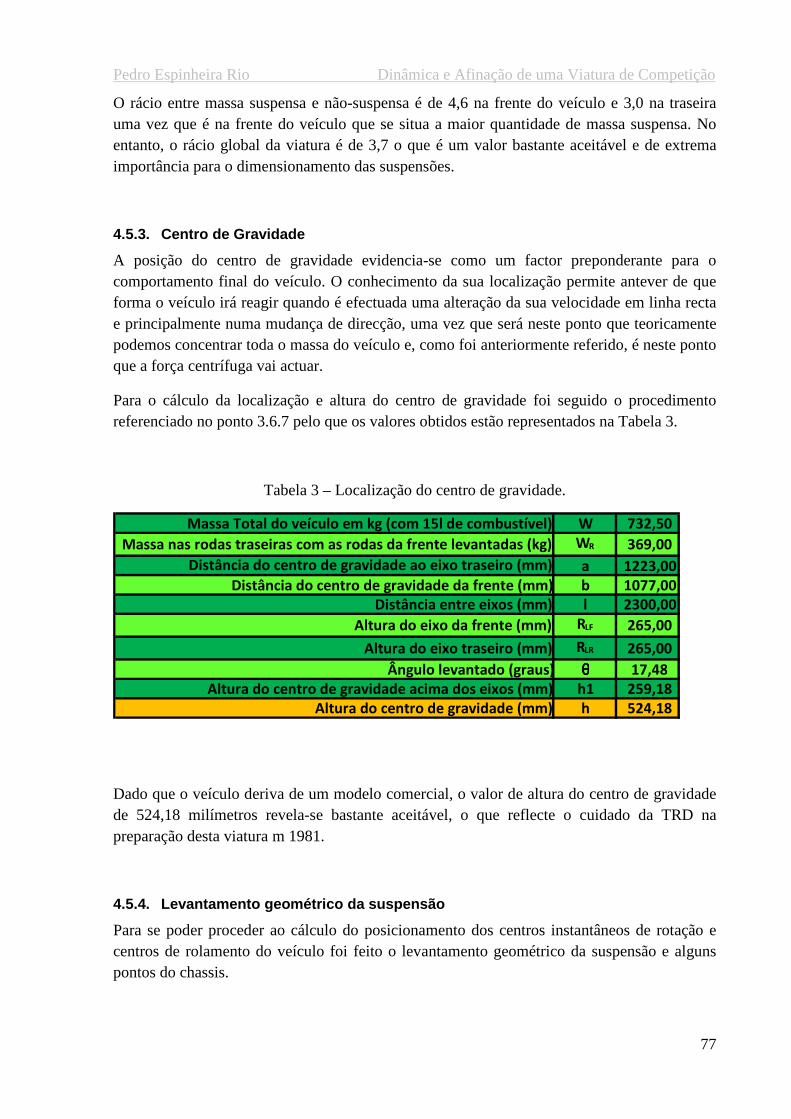
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
77
O rácio entre massa suspensa e não-suspensa é de 4,6 na frente do veículo e 3,0 na traseira uma vez que é na frente do veículo que se situa a maior quantidade de massa suspensa. No entanto, o rácio global da viatura é de 3,7 o que é um valor bastante aceitável e de extrema importância para o dimensionamento das suspensões.
4.5.3. Centro de Gravidade
A posição do centro de gravidade evidencia-se como um factor preponderante para o comportamento final do veículo. O conhecimento da sua localização permite antever de que forma o veículo irá reagir quando é efectuada uma alteração da sua velocidade em linha recta e principalmente numa mudança de direcção, uma vez que será neste ponto que teoricamente podemos concentrar toda o massa do veículo e, como foi anteriormente referido, é neste ponto que a força centrífuga vai actuar.
Para o cálculo da localização e altura do centro de gravidade foi seguido o procedimento referenciado no ponto 3.6.7 pelo que os valores obtidos estão representados na Tabela 3.
Tabela 3 – Localização do centro de gravidade.
Dado que o veículo deriva de um modelo comercial, o valor de altura do centro de gravidade de 524,18 milímetros revela-se bastante aceitável, o que reflecte o cuidado da TRD na preparação desta viatura m 1981.
4.5.4. Levantamento geométrico da suspensão
Para se poder proceder ao cálculo do posicionamento dos centros instantâneos de rotação e centros de rolamento do veículo foi feito o levantamento geométrico da suspensão e alguns pontos do chassis.
W 732,50WR 369,00
a 1223,00b 1077,00l 2300,00
RLF 265,00
R LR 265,00
θθθθ 17,48h1 259,18h 524,18
Massa nas rodas traseiras com as rodas da frente levantadas (kg)
Altura do centro de gravidade (mm)Altura do centro de gravidade acima dos eixos (mm)
Ângulo levantado (graus)
Altura do eixo traseiro (mm)
Altura do eixo da frente (mm)
Distância entre eixos (mm)Distância do centro de gravidade da frente (mm)
Distância do centro de gravidade ao eixo traseiro (mm)
Massa Total do veículo em kg (com 15l de combustível)
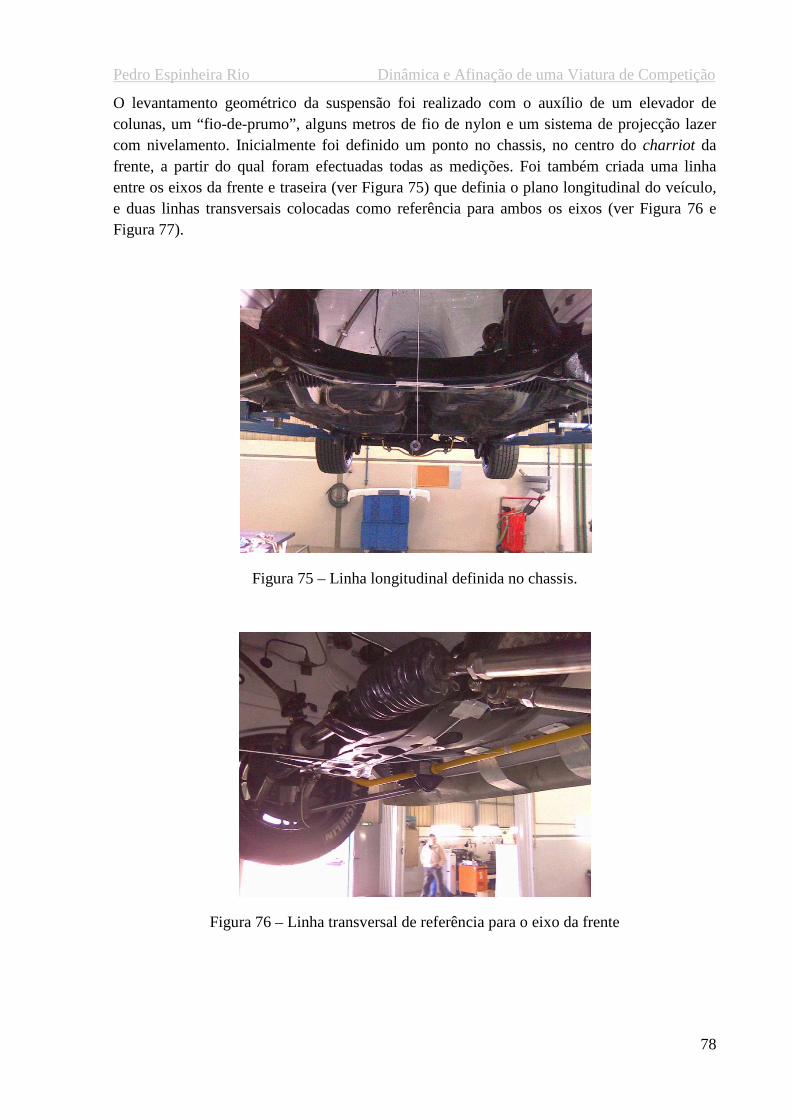
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
78
O levantamento geométrico da suspensão foi realizado com o auxílio de um elevador de colunas, um “fio-de-prumo”, alguns metros de fio de nylon e um sistema de projecção lazer com nivelamento. Inicialmente foi definido um ponto no chassis, no centro do charriot da frente, a partir do qual foram efectuadas todas as medições. Foi também criada uma linha entre os eixos da frente e traseira (ver Figura 75) que definia o plano longitudinal do veículo, e duas linhas transversais colocadas como referência para ambos os eixos (ver Figura 76 e Figura 77).
Figura 75 – Linha longitudinal definida no chassis.
Figura 76 – Linha transversal de referência para o eixo da frente
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
79
Figura 77 – Linha transversal de referência para o eixo traseiro.
Como o chassis do veículo é simétrico em relação ao plano longitudinal, foi efectuado o levantamento geométrico apenas do lado esquerdo do Starlet, e todas as medidas foram retiradas relativamente ao referencial estabelecido. O sistema de eixos escolhido está representado na Figura 78.
Figura 78 – Sistema de eixos adoptado.
Legenda:
Eixo X – sentido positivo para a esquerda.
Eixo Y – sentido positivo para cima.
Eixo Z – sentido positivo para a traseira.
O – origem do referencial escolhido (no solo). X
Y Z
O
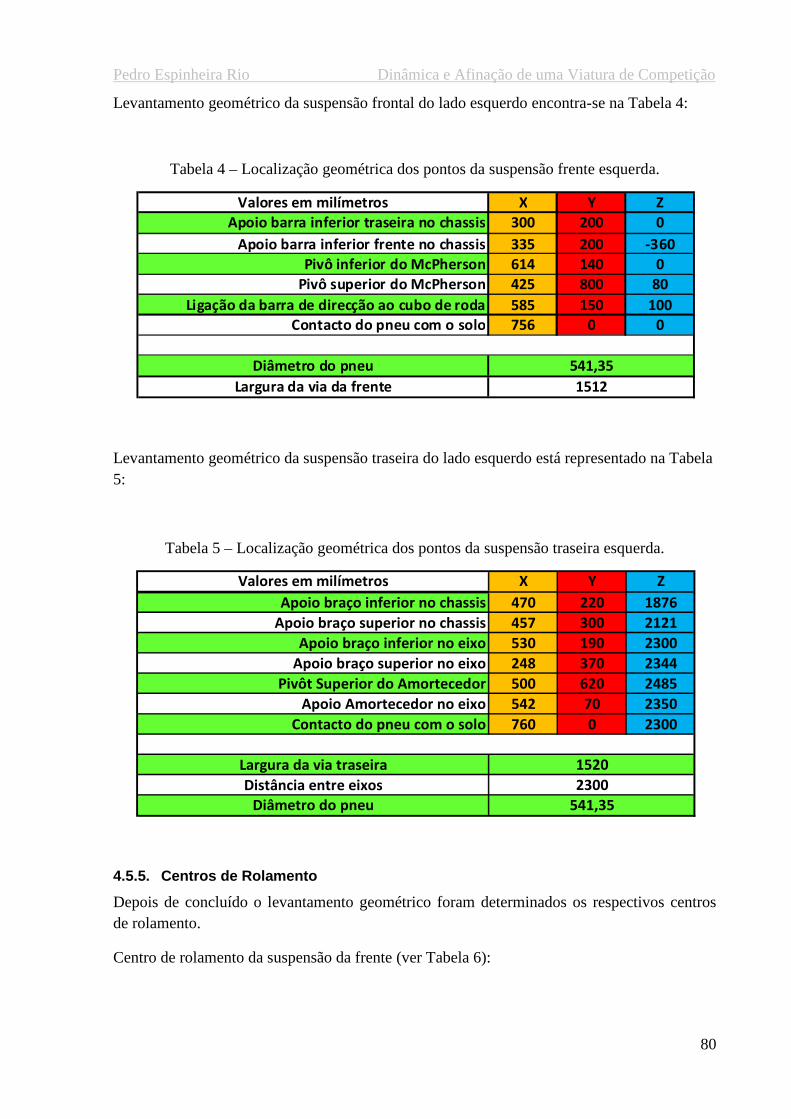
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
80
Levantamento geométrico da suspensão frontal do lado esquerdo encontra-se na Tabela 4:
Tabela 4 – Localização geométrica dos pontos da suspensão frente esquerda.
Levantamento geométrico da suspensão traseira do lado esquerdo está representado na Tabela 5:
Tabela 5 – Localização geométrica dos pontos da suspensão traseira esquerda.
4.5.5. Centros de Rolamento
Depois de concluído o levantamento geométrico foram determinados os respectivos centros de rolamento.
Centro de rolamento da suspensão da frente (ver Tabela 6):
Valores em milímetros X Y Z
Apoio barra inferior traseira no chassis 300 200 0
Apoio barra inferior frente no chassis 335 200 -360
Pivô inferior do McPherson 614 140 0
Pivô superior do McPherson 425 800 80
Ligação da barra de direcção ao cubo de roda 585 150 100Contacto do pneu com o solo 756 0 0
Diâmetro do pneu
Largura da via da frente 1512
541,35
Valores em milímetros X Y Z
Apoio braço inferior no chassis 470 220 1876
Apoio braço superior no chassis 457 300 2121
Apoio braço inferior no eixo 530 190 2300
Apoio braço superior no eixo 248 370 2344
Pivôt Superior do Amortecedor 500 620 2485
Apoio Amortecedor no eixo 542 70 2350
Contacto do pneu com o solo 760 0 2300
Largura da via traseira
Distância entre eixosDiâmetro do pneu
1520
541,35
2300
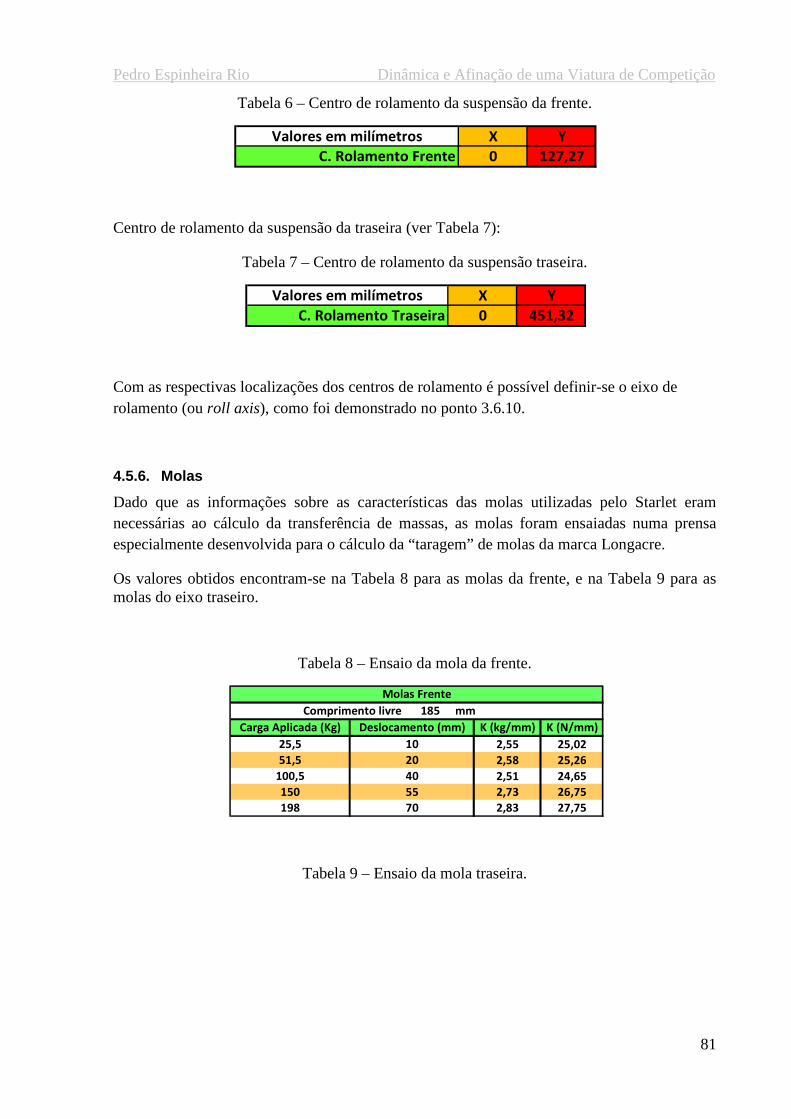
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
81
Tabela 6 – Centro de rolamento da suspensão da frente.
Centro de rolamento da suspensão da traseira (ver Tabela 7):
Tabela 7 – Centro de rolamento da suspensão traseira.
Com as respectivas localizações dos centros de rolamento é possível definir-se o eixo de rolamento (ou roll axis), como foi demonstrado no ponto 3.6.10.
4.5.6. Molas
Dado que as informações sobre as características das molas utilizadas pelo Starlet eram necessárias ao cálculo da transferência de massas, as molas foram ensaiadas numa prensa especialmente desenvolvida para o cálculo da “taragem” de molas da marca Longacre.
Os valores obtidos encontram-se na Tabela 8 para as molas da frente, e na Tabela 9 para as molas do eixo traseiro.
Tabela 8 – Ensaio da mola da frente.
Tabela 9 – Ensaio da mola traseira.
X Y0 127,27C. Rolamento Frente
Valores em milímetros
X Y
0 451,32C. Rolamento Traseira
Valores em milímetros
185 mm
K (kg/mm) K (N/mm)
2,55 25,02
2,58 25,26
2,51 24,65
2,73 26,75
2,83 27,75
Comprimento livre
Carga Aplicada (Kg) Deslocamento (mm)
198 70
Molas Frente
25,5
51,5
100,5
150
10
20
40
55
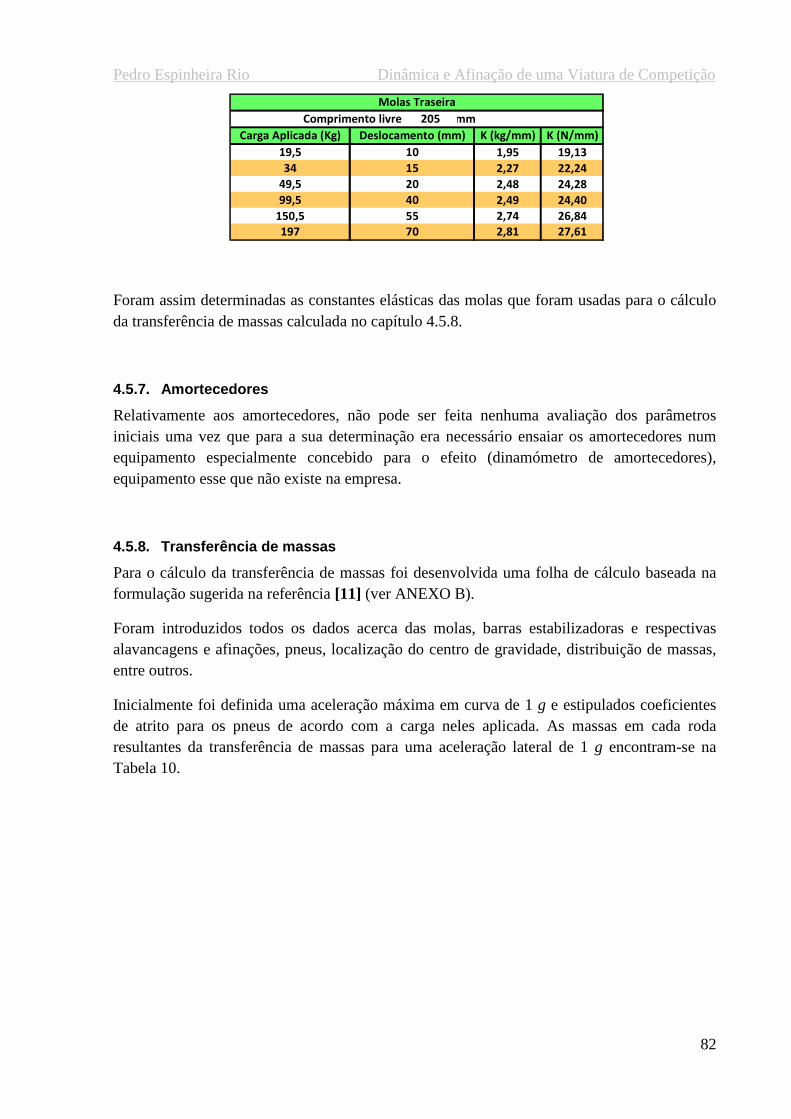
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
82
Foram assim determinadas as constantes elásticas das molas que foram usadas para o cálculo da transferência de massas calculada no capítulo 4.5.8.
4.5.7. Amortecedores
Relativamente aos amortecedores, não pode ser feita nenhuma avaliação dos parâmetros iniciais uma vez que para a sua determinação era necessário ensaiar os amortecedores num equipamento especialmente concebido para o efeito (dinamómetro de amortecedores), equipamento esse que não existe na empresa.
4.5.8. Transferência de massas
Para o cálculo da transferência de massas foi desenvolvida uma folha de cálculo baseada na formulação sugerida na referência [11] (ver ANEXO B).
Foram introduzidos todos os dados acerca das molas, barras estabilizadoras e respectivas alavancagens e afinações, pneus, localização do centro de gravidade, distribuição de massas, entre outros.
Inicialmente foi definida uma aceleração máxima em curva de 1 g e estipulados coeficientes de atrito para os pneus de acordo com a carga neles aplicada. As massas em cada roda resultantes da transferência de massas para uma aceleração lateral de 1 g encontram-se na Tabela 10.
205 mm
K (kg/mm) K (N/mm)
1,95 19,13
2,27 22,24
2,48 24,28
2,49 24,40
2,74 26,842,81 27,61
Molas Traseira
Carga Aplicada (Kg) Deslocamento (mm)
19,5 10
Comprimento livre
150,5 55197 70
34 15
49,5 20
99,5 40
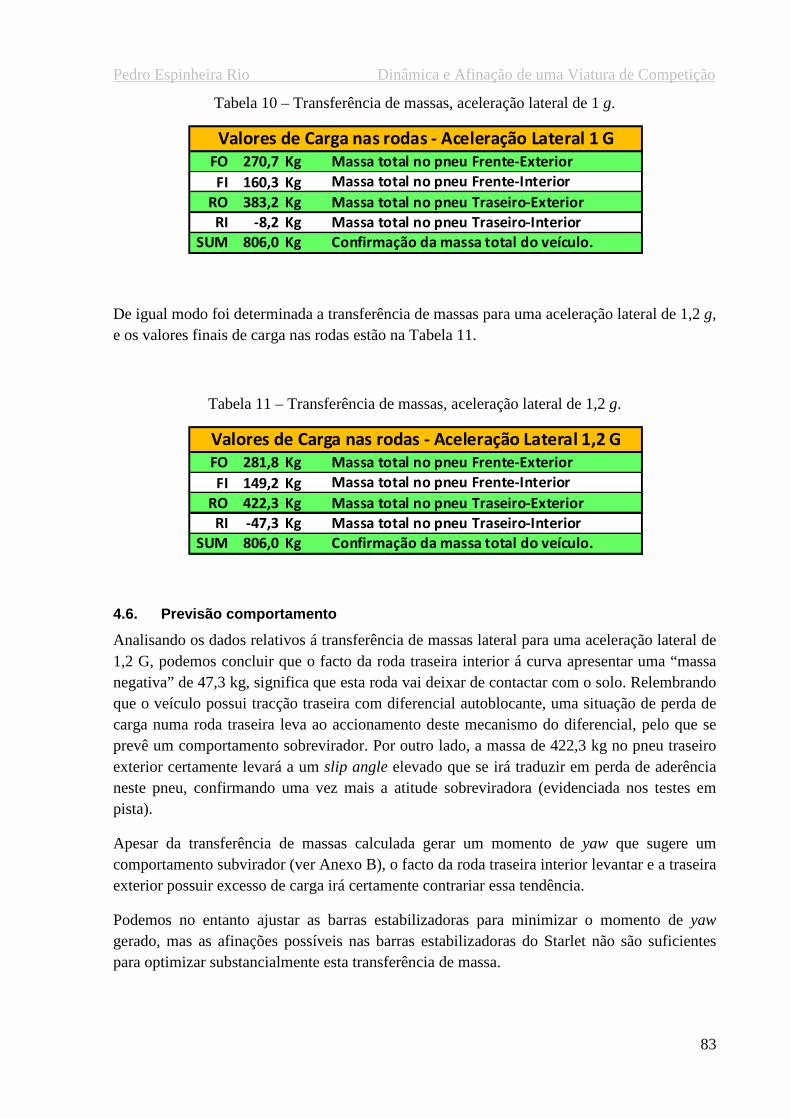
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
83
Tabela 10 – Transferência de massas, aceleração lateral de 1 g.
De igual modo foi determinada a transferência de massas para uma aceleração lateral de 1,2 g, e os valores finais de carga nas rodas estão na Tabela 11.
Tabela 11 – Transferência de massas, aceleração lateral de 1,2 g.
4.6. Previsão comportamento
Analisando os dados relativos á transferência de massas lateral para uma aceleração lateral de 1,2 G, podemos concluir que o facto da roda traseira interior á curva apresentar uma “massa negativa” de 47,3 kg, significa que esta roda vai deixar de contactar com o solo. Relembrando que o veículo possui tracção traseira com diferencial autoblocante, uma situação de perda de carga numa roda traseira leva ao accionamento deste mecanismo do diferencial, pelo que se prevê um comportamento sobrevirador. Por outro lado, a massa de 422,3 kg no pneu traseiro exterior certamente levará a um slip angle elevado que se irá traduzir em perda de aderência neste pneu, confirmando uma vez mais a atitude sobreviradora (evidenciada nos testes em pista).
Apesar da transferência de massas calculada gerar um momento de yaw que sugere um comportamento subvirador (ver Anexo B), o facto da roda traseira interior levantar e a traseira exterior possuir excesso de carga irá certamente contrariar essa tendência.
Podemos no entanto ajustar as barras estabilizadoras para minimizar o momento de yaw gerado, mas as afinações possíveis nas barras estabilizadoras do Starlet não são suficientes para optimizar substancialmente esta transferência de massa.
FO 270,7 Kg
FI 160,3 KgRO 383,2 KgRI -8,2 Kg
SUM 806,0 KgMassa total no pneu Traseiro-InteriorMassa total no pneu Traseiro-Exterior
Massa total no pneu Frente-InteriorMassa total no pneu Frente-Exterior
Valores de Carga nas rodas - Aceleração Lateral 1 G
Confirmação da massa total do veículo.
FO 281,8 Kg
FI 149,2 KgRO 422,3 KgRI -47,3 Kg
SUM 806,0 Kg
Valores de Carga nas rodas - Aceleração Lateral 1,2 G
Confirmação da massa total do veículo.Massa total no pneu Traseiro-InteriorMassa total no pneu Traseiro-Exterior
Massa total no pneu Frente-InteriorMassa total no pneu Frente-Exterior
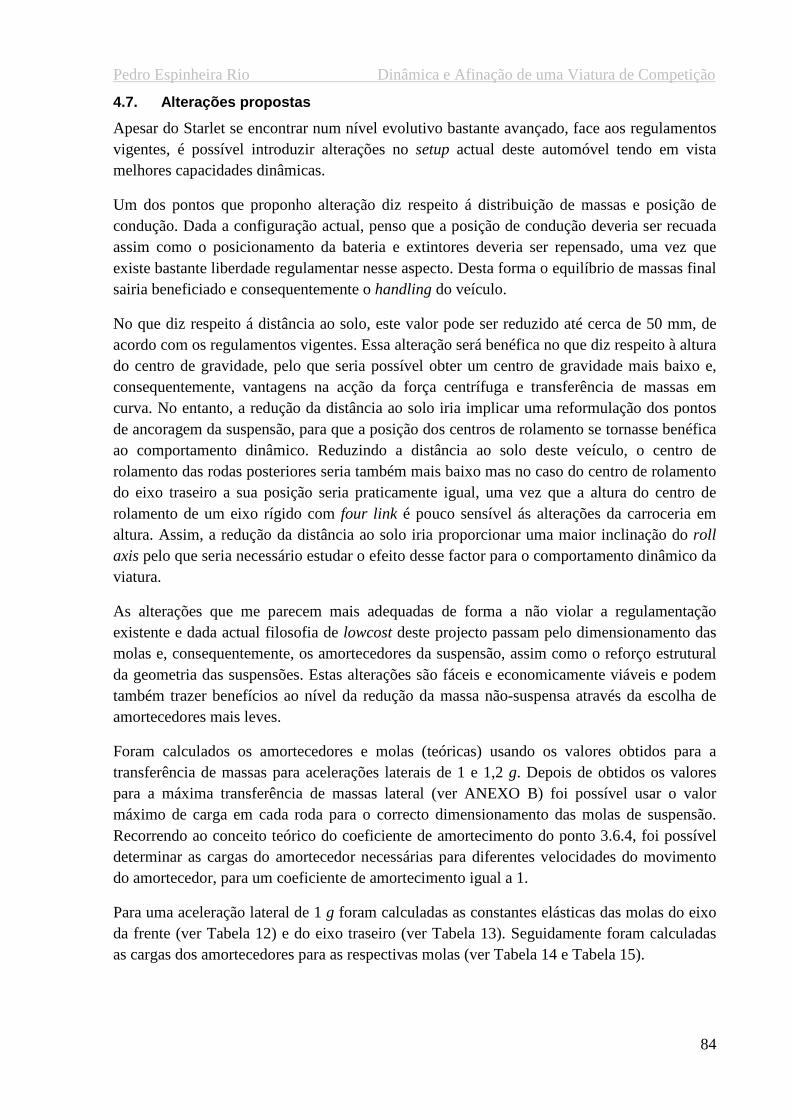
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
84
4.7. Alterações propostas
Apesar do Starlet se encontrar num nível evolutivo bastante avançado, face aos regulamentos vigentes, é possível introduzir alterações no setup actual deste automóvel tendo em vista melhores capacidades dinâmicas.
Um dos pontos que proponho alteração diz respeito á distribuição de massas e posição de condução. Dada a configuração actual, penso que a posição de condução deveria ser recuada assim como o posicionamento da bateria e extintores deveria ser repensado, uma vez que existe bastante liberdade regulamentar nesse aspecto. Desta forma o equilíbrio de massas final sairia beneficiado e consequentemente o handling do veículo.
No que diz respeito á distância ao solo, este valor pode ser reduzido até cerca de 50 mm, de acordo com os regulamentos vigentes. Essa alteração será benéfica no que diz respeito à altura do centro de gravidade, pelo que seria possível obter um centro de gravidade mais baixo e, consequentemente, vantagens na acção da força centrífuga e transferência de massas em curva. No entanto, a redução da distância ao solo iria implicar uma reformulação dos pontos de ancoragem da suspensão, para que a posição dos centros de rolamento se tornasse benéfica ao comportamento dinâmico. Reduzindo a distância ao solo deste veículo, o centro de rolamento das rodas posteriores seria também mais baixo mas no caso do centro de rolamento do eixo traseiro a sua posição seria praticamente igual, uma vez que a altura do centro de rolamento de um eixo rígido com four link é pouco sensível ás alterações da carroceria em altura. Assim, a redução da distância ao solo iria proporcionar uma maior inclinação do roll axis pelo que seria necessário estudar o efeito desse factor para o comportamento dinâmico da viatura.
As alterações que me parecem mais adequadas de forma a não violar a regulamentação existente e dada actual filosofia de lowcost deste projecto passam pelo dimensionamento das molas e, consequentemente, os amortecedores da suspensão, assim como o reforço estrutural da geometria das suspensões. Estas alterações são fáceis e economicamente viáveis e podem também trazer benefícios ao nível da redução da massa não-suspensa através da escolha de amortecedores mais leves.
Foram calculados os amortecedores e molas (teóricas) usando os valores obtidos para a transferência de massas para acelerações laterais de 1 e 1,2 g. Depois de obtidos os valores para a máxima transferência de massas lateral (ver ANEXO B) foi possível usar o valor máximo de carga em cada roda para o correcto dimensionamento das molas de suspensão. Recorrendo ao conceito teórico do coeficiente de amortecimento do ponto 3.6.4, foi possível determinar as cargas do amortecedor necessárias para diferentes velocidades do movimento do amortecedor, para um coeficiente de amortecimento igual a 1.
Para uma aceleração lateral de 1 g foram calculadas as constantes elásticas das molas do eixo da frente (ver Tabela 12) e do eixo traseiro (ver Tabela 13). Seguidamente foram calculadas as cargas dos amortecedores para as respectivas molas (ver Tabela 14 e Tabela 15).
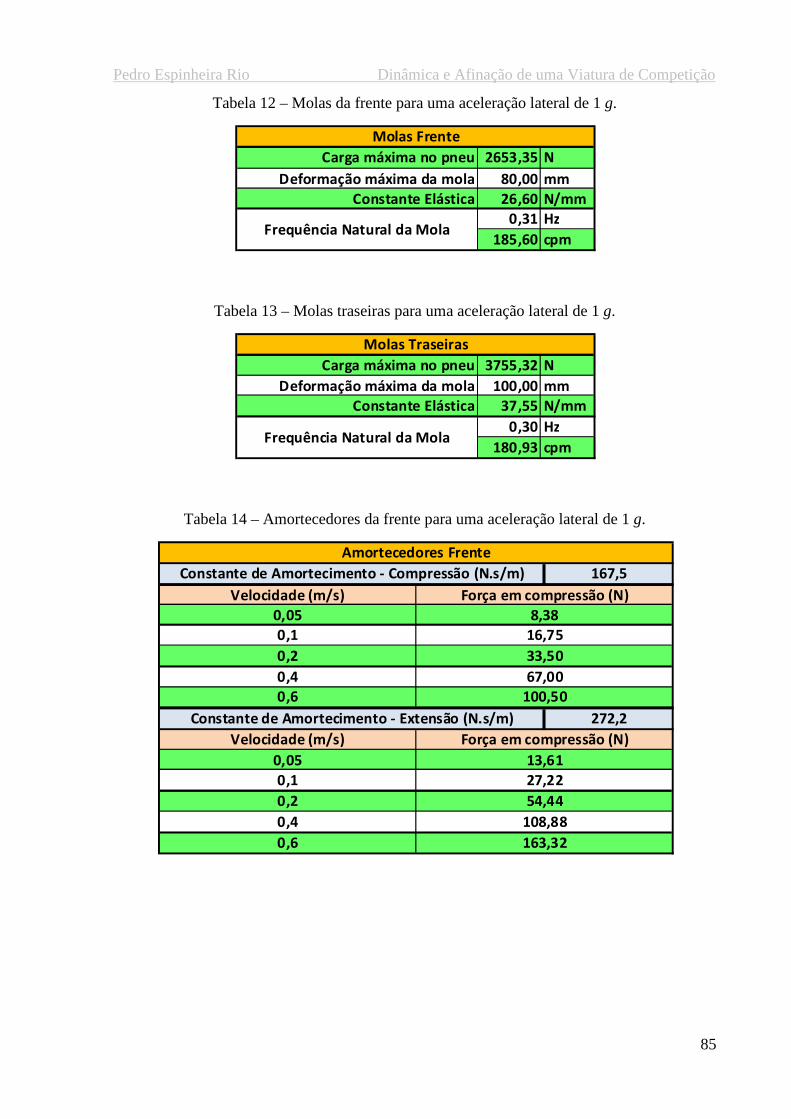
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
85
Tabela 12 – Molas da frente para uma aceleração lateral de 1 g.
Tabela 13 – Molas traseiras para uma aceleração lateral de 1 g.
Tabela 14 – Amortecedores da frente para uma aceleração lateral de 1 g.
2653,35 N
80,00 mm
26,60 N/mm0,31 Hz
185,60 cpm
Constante Elástica
Frequência Natural da Mola
Molas Frente
Carga máxima no pneu
Deformação máxima da mola
3755,32 N
100,00 mm37,55 N/mm
0,30 Hz
180,93 cpm
Constante Elástica
Frequência Natural da Mola
Molas Traseiras
Carga máxima no pneu
Deformação máxima da mola
167,5
272,2
Amortecedores Frente
Constante de Amortecimento - Compressão (N.s/m)
Velocidade (m/s) Força em compressão (N)
0,05 8,380,1 16,75
0,2 33,50
0,4 67,000,6 100,50
Constante de Amortecimento - Extensão (N.s/m)
Velocidade (m/s) Força em compressão (N)
0,05 13,61
0,1 27,22
0,2 54,44
0,4 108,88
0,6 163,32
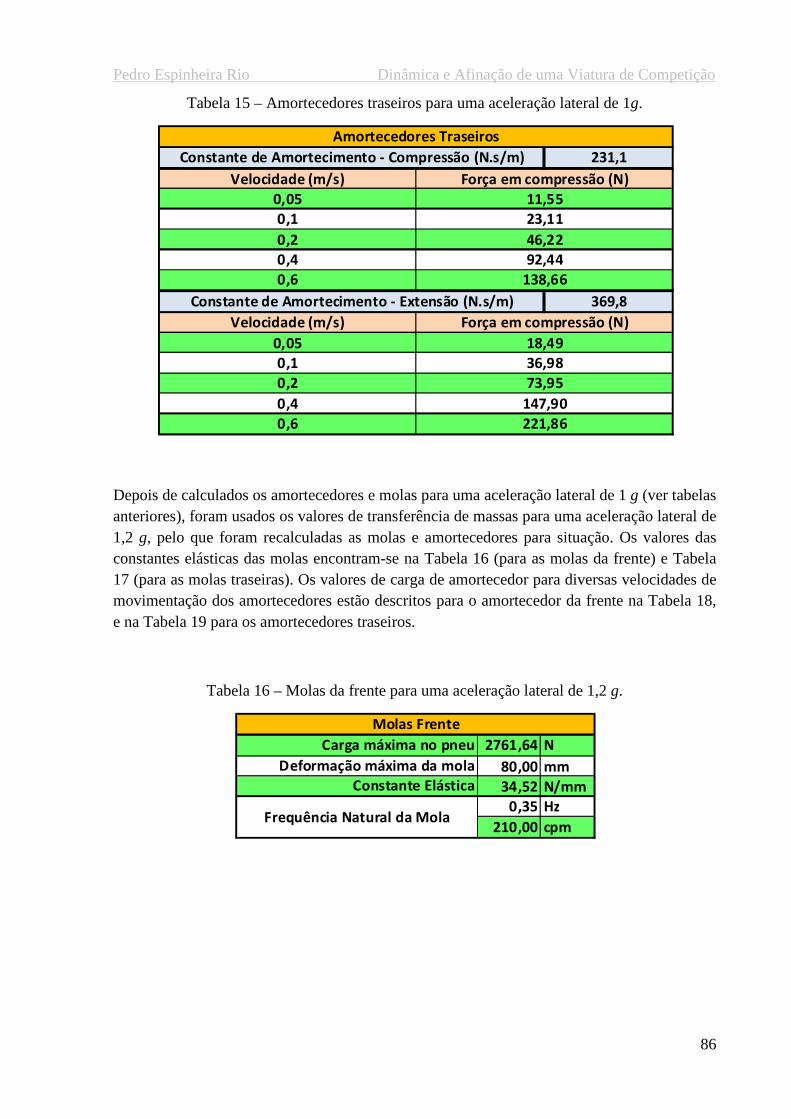
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
86
Tabela 15 – Amortecedores traseiros para uma aceleração lateral de 1g.
Depois de calculados os amortecedores e molas para uma aceleração lateral de 1 g (ver tabelas anteriores), foram usados os valores de transferência de massas para uma aceleração lateral de 1,2 g, pelo que foram recalculadas as molas e amortecedores para situação. Os valores das constantes elásticas das molas encontram-se na Tabela 16 (para as molas da frente) e Tabela 17 (para as molas traseiras). Os valores de carga de amortecedor para diversas velocidades de movimentação dos amortecedores estão descritos para o amortecedor da frente na Tabela 18, e na Tabela 19 para os amortecedores traseiros.
Tabela 16 – Molas da frente para uma aceleração lateral de 1,2 g.
231,1
369,8
Amortecedores Traseiros
Constante de Amortecimento - Compressão (N.s/m)
Velocidade (m/s) Força em compressão (N)
0,05 11,550,1 23,11
0,2 46,220,4 92,44
0,6 138,66
Constante de Amortecimento - Extensão (N.s/m)
Velocidade (m/s) Força em compressão (N)
0,4 147,90
0,6 221,86
0,05 18,490,1 36,98
0,2 73,95
2761,64 N
80,00 mm
34,52 N/mm0,35 Hz
210,00 cpm
Carga máxima no pneu
Deformação máxima da molaConstante Elástica
Molas Frente
Frequência Natural da Mola
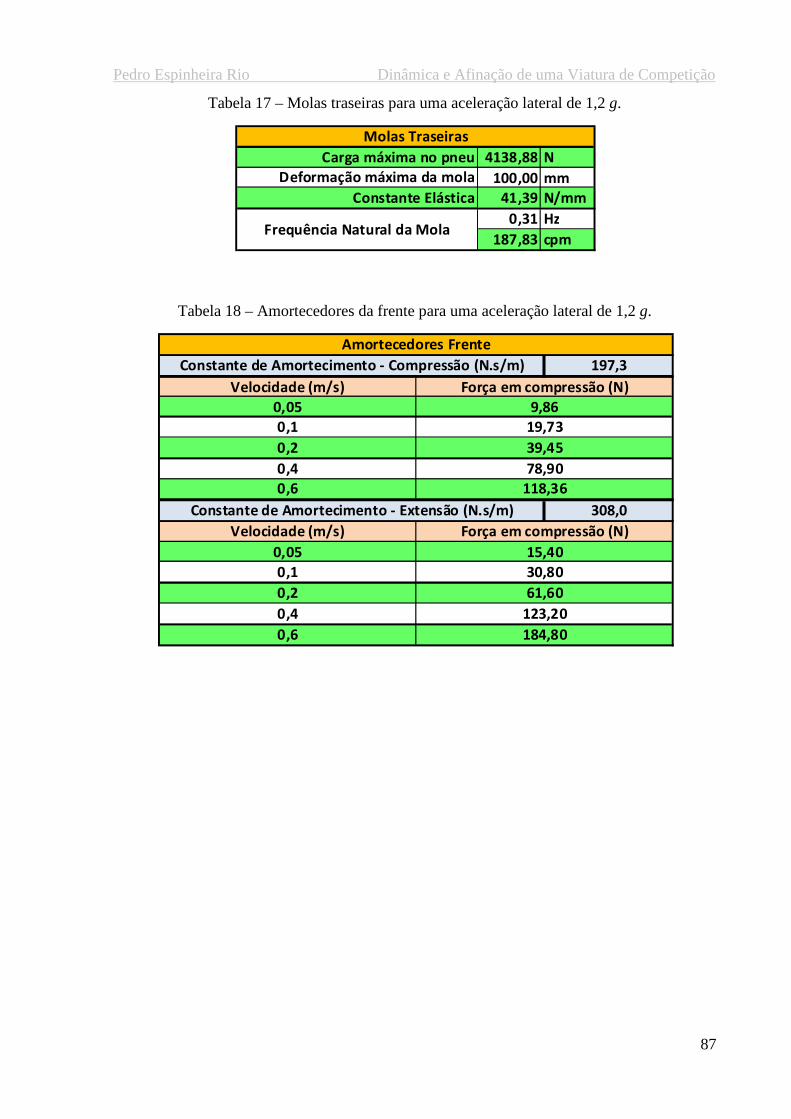
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
87
Tabela 17 – Molas traseiras para uma aceleração lateral de 1,2 g.
Tabela 18 – Amortecedores da frente para uma aceleração lateral de 1,2 g.
4138,88 N
100,00 mm41,39 N/mm
0,31 Hz
187,83 cpm
Constante Elástica
Carga máxima no pneuDeformação máxima da mola
Molas Traseiras
Frequência Natural da Mola
197,3
308,0
Constante de Amortecimento - Compressão (N.s/m)
Amortecedores Frente
Força em compressão (N)Velocidade (m/s)
0,6 118,36
0,050,1
0,2
0,4
9,8619,73
39,45
78,90
0,6 184,80
0,05 15,40
Constante de Amortecimento - Extensão (N.s/m)
30,80
Força em compressão (N)Velocidade (m/s)
0,1
0,2 61,60
0,4 123,20
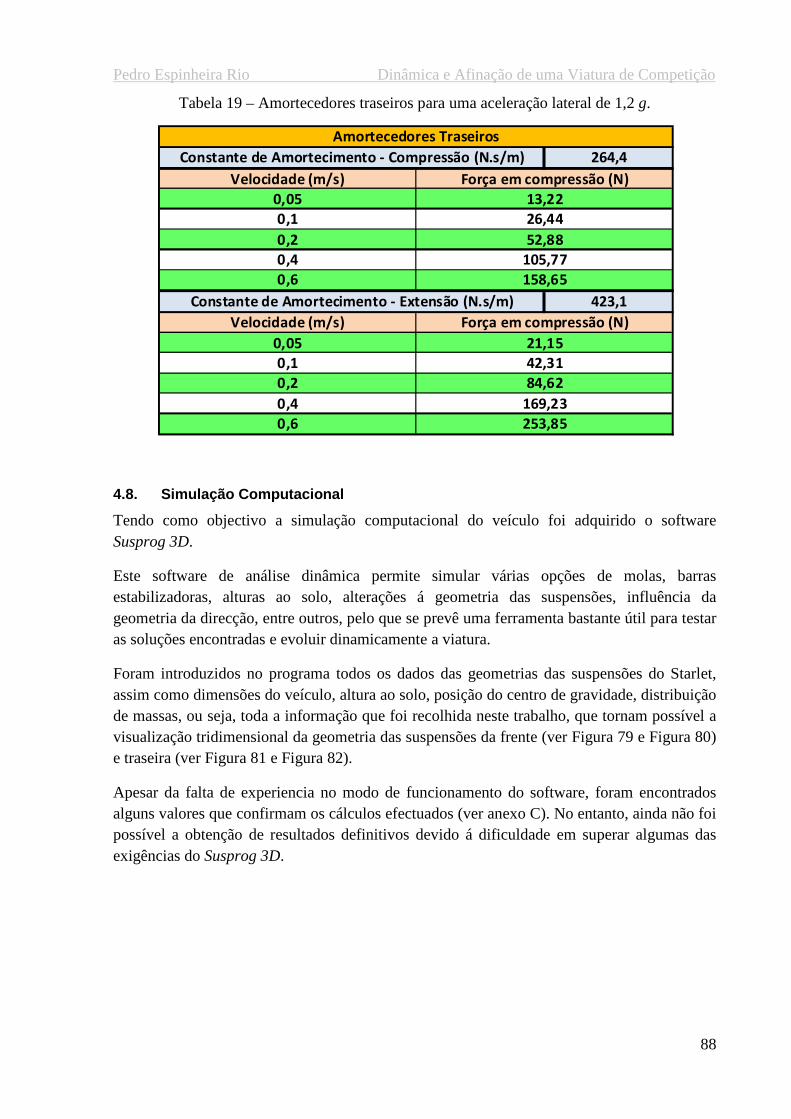
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
88
Tabela 19 – Amortecedores traseiros para uma aceleração lateral de 1,2 g.
4.8. Simulação Computacional
Tendo como objectivo a simulação computacional do veículo foi adquirido o software Susprog 3D.
Este software de análise dinâmica permite simular várias opções de molas, barras estabilizadoras, alturas ao solo, alterações á geometria das suspensões, influência da geometria da direcção, entre outros, pelo que se prevê uma ferramenta bastante útil para testar as soluções encontradas e evoluir dinamicamente a viatura.
Foram introduzidos no programa todos os dados das geometrias das suspensões do Starlet, assim como dimensões do veículo, altura ao solo, posição do centro de gravidade, distribuição de massas, ou seja, toda a informação que foi recolhida neste trabalho, que tornam possível a visualização tridimensional da geometria das suspensões da frente (ver Figura 79 e Figura 80) e traseira (ver Figura 81 e Figura 82).
Apesar da falta de experiencia no modo de funcionamento do software, foram encontrados alguns valores que confirmam os cálculos efectuados (ver anexo C). No entanto, ainda não foi possível a obtenção de resultados definitivos devido á dificuldade em superar algumas das exigências do Susprog 3D.
264,4
423,1
Amortecedores Traseiros
Constante de Amortecimento - Compressão (N.s/m)
Velocidade (m/s) Força em compressão (N)
0,05 13,220,1 26,44
0,2 52,880,4 105,77
0,6 158,65
Constante de Amortecimento - Extensão (N.s/m)
Velocidade (m/s) Força em compressão (N)
0,4 169,23
0,6 253,85
0,05 21,150,1 42,31
0,2 84,62

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
89
Figura 79 – Vista de frente da suspensão dianteira no Susprog 3D.
Figura 80 – Vista lateral da suspensão dianteira no Susprog 3D.
Figura 81 – Vista de trás da suspensão traseira no Susprog 3D.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
90
Figura 82 – Vista lateral da suspensão traseira no Susprog 3D.
5. Discussão de Resultados
Começando pela discussão dos resultados obtidos com o veículo em pista foi possível evidenciar que o comportamento sobrevirador do veículo é evidenciado nos dados recolhidos. Como não foram efectuadas alterações no alinhamento das rodas durante a sessão de testes, não foi possível perceber qual a relação entre o alinhamento geral do carro e as temperaturas dos pneus. No entanto foram sugeridas alterações baseadas na bibliografia adoptada para este estudo, que devem ser respeitadas de modo a optimizar o comportamento do veículo.
No capítulo da distribuição de massas foi demonstrada a relação entre a massa do piloto e quantidade de combustível e suas influências para a distribuição de massas, pelo que será uma ajuda importante caso se pretenda mudar o posicionamento de alguns componentes do veículo.
Relativamente ao levantamento geométrico da suspensão, o método usado não possui a exactidão ideal para se definir com elevado rigor todos os pontos da suspensão e chassis, mas penso que o erro introduzido não foi significativo para a obtenção dos valores dos centros de rolamento, uma vez que estes valores foram de encontro ao esperado.
Para o cálculo da transferência de massas foram assumidos alguns valores principalmente no que diz respeito á aceleração lateral do veículo e aos coeficientes de atrito dos pneus em função da carga vertical, pelo que a determinação exacta da massa final em cada roda está inteiramente dependente da introdução de valores precisos. No entanto, o valor da aceleração lateral real que o veículo consegue suportar está certamente localizado entre os valores de 1 e 1,2 g.
A introdução dos valores das molas calculadas para acelerações laterais de 1g e 1,2g, revelaram-se ligeiramente benéficas para a transferência de massas mas estes valores ficaram abaixo das expectativas (ver Anexo B). Como os dados usados para o cálculo das molas e amortecedores foram baseados nos valores de transferência de massas, apenas a monitorização do comportamento dinâmico em curva (com o recurso á telemetria) poderá
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
91
introduzir os valores reais de aceleração lateral e transferência de massas. Desta forma podem ser calculadas correctamente as molas e amortecedores do veículo.
6. Conclusão
O estágio realizado no Departamento de Competições da Toyota Caetano Portugal, SA foi uma grande oportunidade pessoal para estabelecer uma relação mais aprofundada com o mundo da competição automóvel e com o desafio que é trabalhar numa empresa. Foi um período em que foi possível perceber as várias dificuldades e desafios que são impostos diariamente a todos aqueles que dedicam as suas vidas ao mundo das competições automóveis.
Durante este período que passei na empresa tive a oportunidade de aprender muito acerca do automóvel de competição e seu desenvolvimento e penso ter sido uma mais-valia para a construção, afinação e desenvolvimento Toyota Starlet.
Relativamente ao trabalho realizado acredito que teriam sido possíveis resultados mais ambiciosos, mas dado que estava a trabalhar num outro projecto que foi abandonado pela empresa a meio do período de estágio, acredito que tomei a opção correcta em apostar no projecto do Toyota Starlet uma vez que o considero muito aliciante e motivador, pelo será uma boa aposta da empresa para alcançar o sucesso na competição automóvel.
Para finalizar, é de salutar a aproximação da faculdade com o mundo empresarial, uma vez que torna possível a aplicação da engenharia a situações concretas e reais, tal como aconteceu neste trabalho.
7. Propostas futuras
Introdução de um sistema de telemetria no veículo que permita controlar os movimentos das suspensões de modo a se obtenham dados rigorosos do seu funcionamento, assim como a incorporação de um acelerómetro e/ou giroscópio que permitirão determinar correctamente os valores de aceleração lateral do veículo e ângulo de roll da carroceria.
Dimensionar e afinar a carga dos amortecedores e molas relativamente características dos diferentes circuitos.
Utilizar os valores da telemetria para simular e testar soluções num software de análise dinâmica, tal como o Susprog 3D.
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
92
Bibliografia
[1] GILLESPIE, THOMAS, Fundamentals of Vehicle Dynamics, SAE, 1992;
[2] URBIETA, JUAN, Amortiguadores y Suspension, Escuela Superior de Ingenieros;
[3] SMITH, CARROLL, Tune to win, Aero Publishers, Inc., 1978, ISBN 0-87938-071-3;
[4] MILLIKEN, WILLIAM, Race Car Vehicle Dynamics, SAE;
[5] PUHN, FRED, How To Make Your Car Handle, H. P. Books;
[6] RÍOS, ORLANDO, La Suspension - Automoviles de Competicion, Biblioteca CEAC
del Automovil, Madrid, 1992;
[7] MANHIRE, OLIVER, Suspension Geometry Design of the 2001 University of
Queensland Formula SAEA Racecar, University of Queensland, 2001;
[8] COSTIN, MICHAEL, Racing & Sports Car Chassis Design, B. T. Batsford, London,
1966;
[9] REMPELL, JORNSEN, The Automotive Chassis Engineering Principles, SAE, 2nd
Edition;
[10] GIBSON, JAMIE, Shifting Your Weight Distribution on a Race Car;
[11] STANIFORTH, ALLAN, Competition Car Suspension, Haynes Publishing, 3rd
Edition;
[12] www.fpak.pt consultado em 03/01/2009
[13] THEANDER, ADAM, Design of a Suspension for a Formula Student Car, Royal
Institute of Technology, Stockholm;
[14] Automobile Ride, Handling, and Suspension – www.rqriley.com consultado em
20/11/2008;
[15] CRAIG, K., Automotive Suspension Systems;
[16] http://www.carbibles.com/suspension_bible.html, consultado em 03/01/2009
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
93
[17] GAFFNEY III, EDMUND, Introduction to Formula SAE Suspension and Frame
Design, University of Missouri – Rolla;
[18] COMERFORD, LEE, Kit Car Chassis and Suspension Optimization;
[19] Mechanics of Pneumatic Tires;
[20] ROUELLE, CLAUDE, Race Car Engineering With Motec Data Acquision;
[21] Racecar Engineering Magazine, March 2006;
[22] TREMAYNE, DAVID, The Science Of F1 Design, 2004;
[23] LING, FREDERICK, Vehicle Dynamics and Control, Springer, 2006;
[24] ZIECH, JIM, Vehicle Dynamics, Mechanic and Aeronautical Engineering, Western
Michigan University;
[25] RILL, GEORGE, Vehicle Dynamics, 2007;
[26] Vehicle Dynamics In Motorsports, College of Technology, Purdue University, 2007;
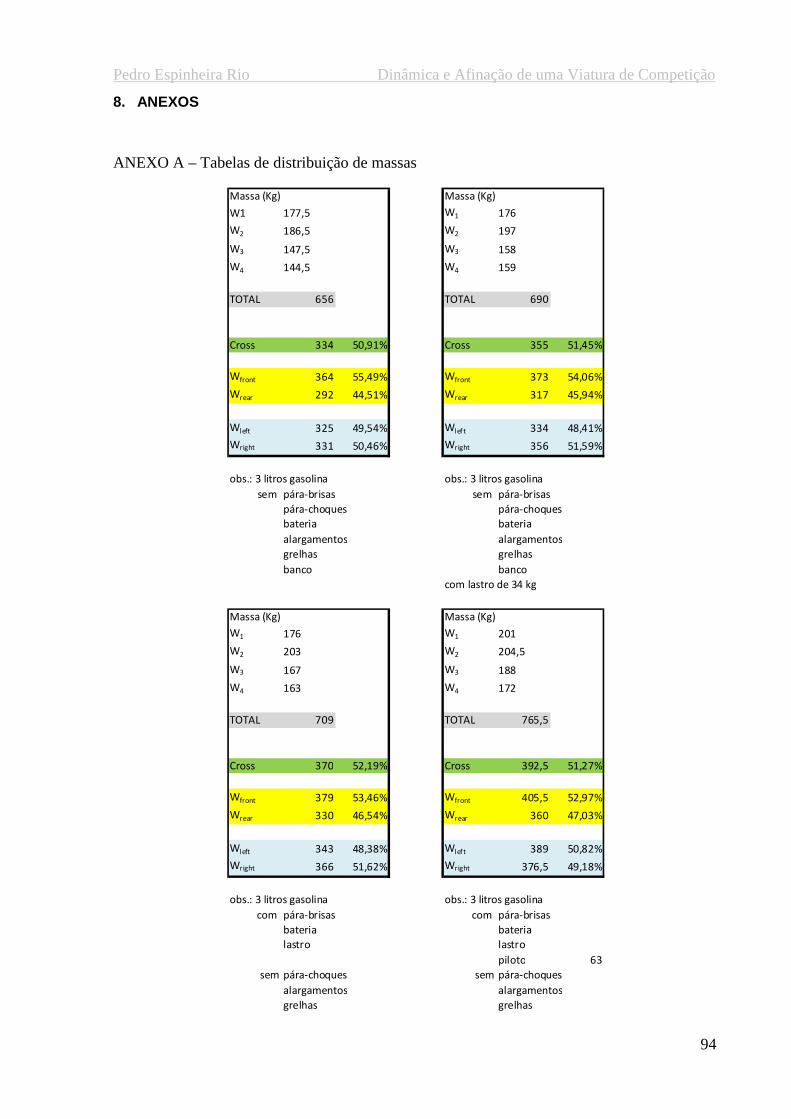
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
94
8. ANEXOS
ANEXO A – Tabelas de distribuição de massas
Massa (Kg) Massa (Kg)
W1 177,5 W1 176
W2 186,5 W2 197
W3 147,5 W3 158
W4 144,5 W4 159
TOTAL 656 TOTAL 690
Cross 334 50,91% Cross 355 51,45%
Wfront 364 55,49% Wfront 373 54,06%
Wrear 292 44,51% Wrear 317 45,94%
Wleft 325 49,54% Wlef t 334 48,41%
Wright 331 50,46% Wright 356 51,59%
obs.: 3 litros gasolina obs.: 3 litros gasolina
sem pára-brisas sem pára-brisas
pára-choques pára-choques
bateria bateria
alargamentos alargamentos
grelhas grelhas
banco banco
com lastro de 34 kg
Massa (Kg) Massa (Kg)
W1 176 W1 201
W2 203 W2 204,5
W3 167 W3 188
W4 163 W4 172
TOTAL 709 TOTAL 765,5
Cross 370 52,19% Cross 392,5 51,27%
Wfront 379 53,46% Wfront 405,5 52,97%
Wrear 330 46,54% Wrear 360 47,03%
Wleft 343 48,38% Wlef t 389 50,82%
Wright 366 51,62% Wright 376,5 49,18%
obs.: 3 litros gasolina obs.: 3 litros gasolina
com pára-brisas com pára-brisas
bateria bateria
lastro lastro
piloto 63
sem pára-choques sem pára-choques
alargamentos alargamentos
grelhas grelhas
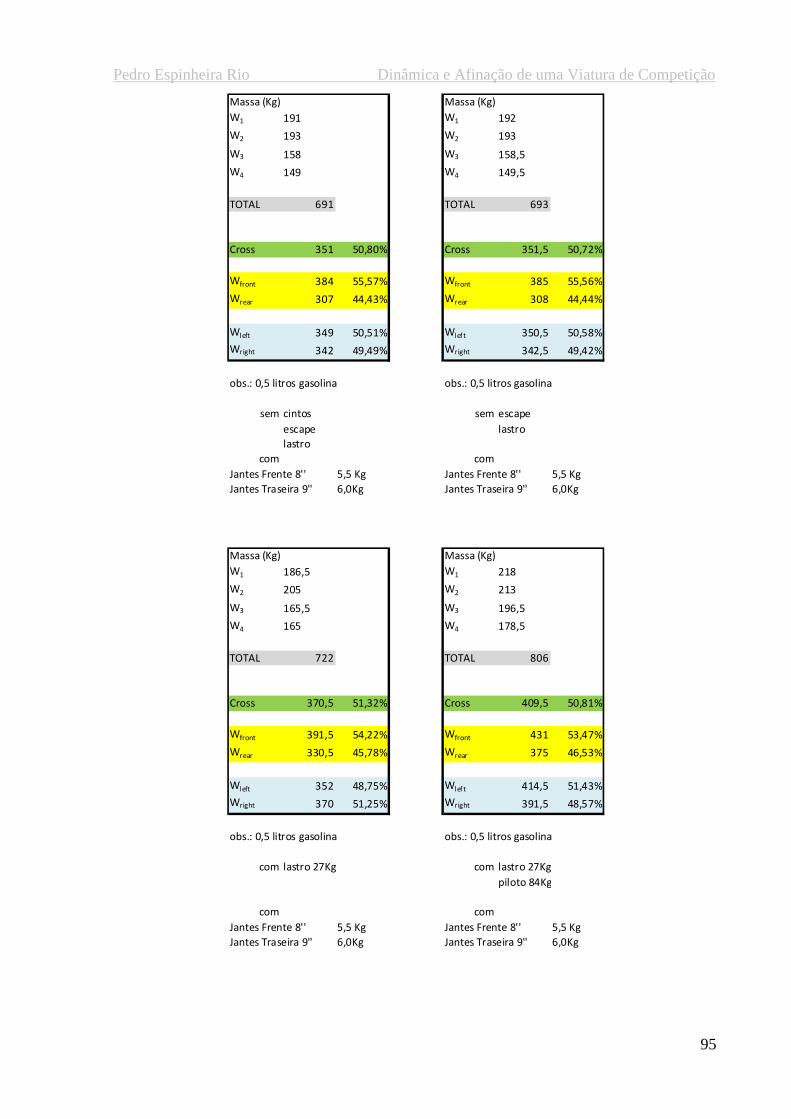
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
95
Massa (Kg) Massa (Kg)
W1 191 W1 192
W2 193 W2 193
W3 158 W3 158,5
W4 149 W4 149,5
TOTAL 691 TOTAL 693
Cross 351 50,80% Cross 351,5 50,72%
Wfront 384 55,57% Wfront 385 55,56%
Wrear 307 44,43% Wrear 308 44,44%
Wleft 349 50,51% Wlef t 350,5 50,58%
Wright 342 49,49% Wright 342,5 49,42%
obs.: 0,5 litros gasolina obs.: 0,5 litros gasolina
sem cintos sem escape
escape lastro
lastro
com com
Jantes Frente 8'' 5,5 Kg Jantes Frente 8'' 5,5 Kg
Jantes Traseira 9'' 6,0Kg Jantes Traseira 9'' 6,0Kg
Massa (Kg) Massa (Kg)
W1 186,5 W1 218
W2 205 W2 213
W3 165,5 W3 196,5
W4 165 W4 178,5
TOTAL 722 TOTAL 806
Cross 370,5 51,32% Cross 409,5 50,81%
Wfront 391,5 54,22% Wfront 431 53,47%
Wrear 330,5 45,78% Wrear 375 46,53%
Wleft 352 48,75% Wlef t 414,5 51,43%
Wright 370 51,25% Wright 391,5 48,57%
obs.: 0,5 litros gasolina obs.: 0,5 litros gasolina
com lastro 27Kg com lastro 27Kg
piloto 84Kg
com com
Jantes Frente 8'' 5,5 Kg Jantes Frente 8'' 5,5 Kg
Jantes Traseira 9'' 6,0Kg Jantes Traseira 9'' 6,0Kg
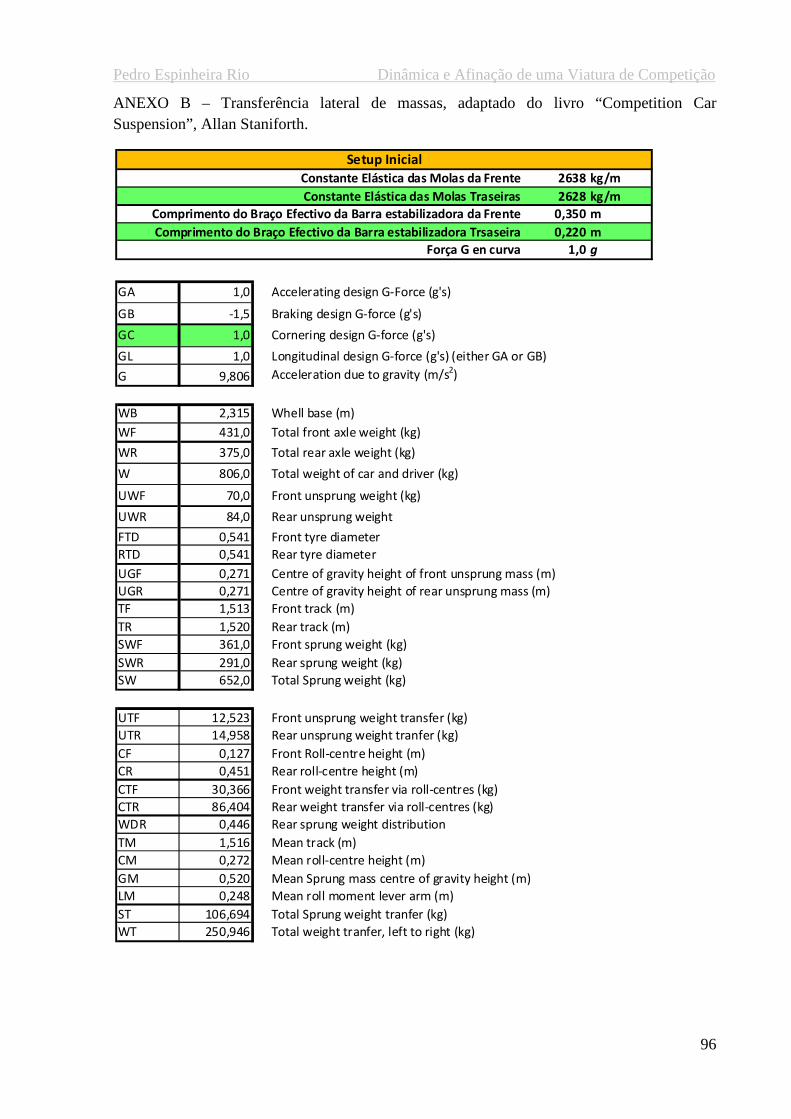
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
96
ANEXO B – Transferência lateral de massas, adaptado do livro “Competition Car Suspension”, Allan Staniforth.
2638 kg/m
2628 kg/m
0,350 m
0,220 m
1,0 g
GA 1,0 Accelerating design G-Force (g's)
GB -1,5 Braking design G-force (g's)
GC 1,0 Cornering design G-force (g's)
GL 1,0 Longitudinal design G-force (g's) (either GA or GB)
G 9,806 Acceleration due to gravity (m/s2)
WB 2,315 Whell base (m)
WF 431,0 Total front axle weight (kg)
WR 375,0 Total rear axle weight (kg)
W 806,0 Total weight of car and driver (kg)
UWF 70,0 Front unsprung weight (kg)
UWR 84,0 Rear unsprung weight
FTD 0,541 Front tyre diameter
RTD 0,541 Rear tyre diameter
UGF 0,271 Centre of gravity height of front unsprung mass (m)
UGR 0,271 Centre of gravity height of rear unsprung mass (m)
TF 1,513 Front track (m)
TR 1,520 Rear track (m)
SWF 361,0 Front sprung weight (kg)
SWR 291,0 Rear sprung weight (kg)
SW 652,0 Total Sprung weight (kg)
UTF 12,523 Front unsprung weight transfer (kg)
UTR 14,958 Rear unsprung weight tranfer (kg)
CF 0,127 Front Roll-centre height (m)
CR 0,451 Rear roll-centre height (m)
CTF 30,366 Front weight transfer via roll-centres (kg)
CTR 86,404 Rear weight transfer via roll-centres (kg)
WDR 0,446 Rear sprung weight distribution
TM 1,516 Mean track (m)
CM 0,272 Mean roll-centre height (m)
GM 0,520 Mean Sprung mass centre of gravity height (m)
LM 0,248 Mean roll moment lever arm (m)
ST 106,694 Total Sprung weight tranfer (kg)
WT 250,946 Total weight tranfer, left to right (kg)
Força G en curva
Setup InicialConstante Elástica das Molas da Frente
Constante Elástica das Molas Traseiras
Comprimento do Braço Efectivo da Barra estabilizadora da Frente
Comprimento do Braço Efectivo da Barra estabilizadora Trsaseira
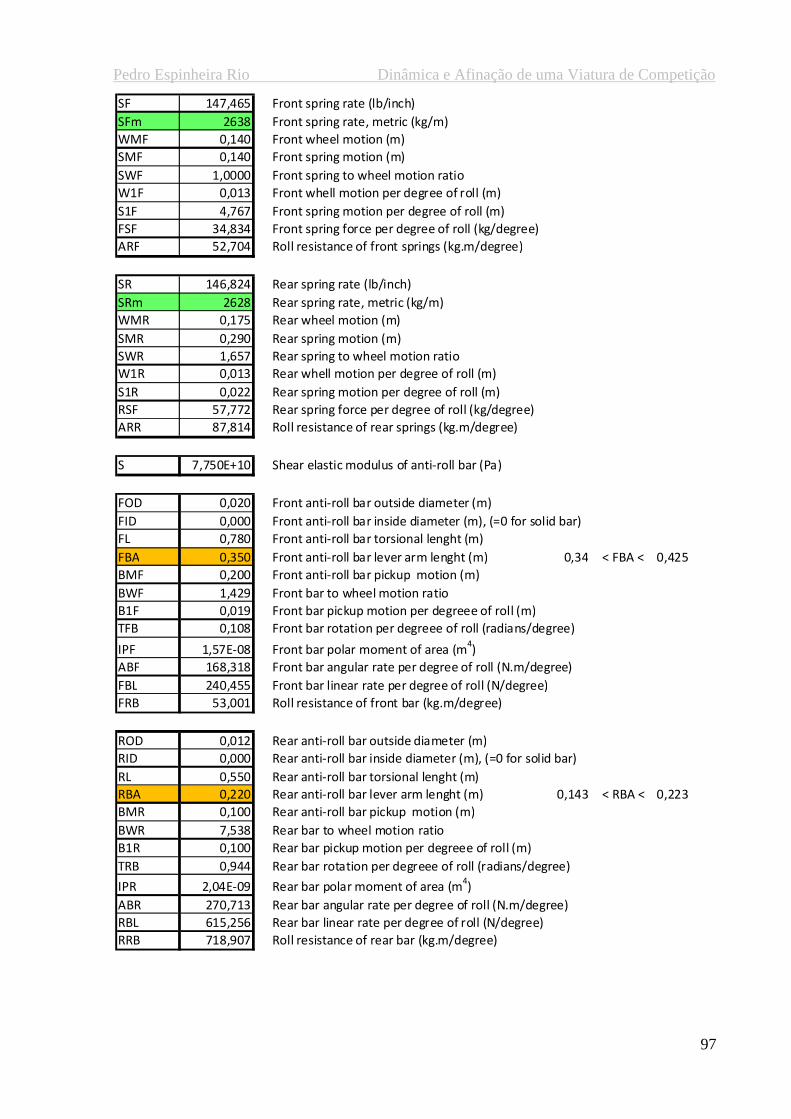
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
97
SF 147,465 Front spring rate (lb/inch)
SFm 2638 Front spring rate, metric (kg/m)
WMF 0,140 Front wheel motion (m)
SMF 0,140 Front spring motion (m)
SWF 1,0000 Front spring to wheel motion ratio
W1F 0,013 Front whell motion per degree of roll (m)
S1F 4,767 Front spring motion per degree of roll (m)
FSF 34,834 Front spring force per degree of roll (kg/degree)
ARF 52,704 Roll resistance of front springs (kg.m/degree)
SR 146,824 Rear spring rate (lb/inch)
SRm 2628 Rear spring rate, metric (kg/m)
WMR 0,175 Rear wheel motion (m)
SMR 0,290 Rear spring motion (m)
SWR 1,657 Rear spring to wheel motion ratio
W1R 0,013 Rear whell motion per degree of roll (m)
S1R 0,022 Rear spring motion per degree of roll (m)
RSF 57,772 Rear spring force per degree of roll (kg/degree)
ARR 87,814 Roll resistance of rear springs (kg.m/degree)
S 7,750E+10 Shear elastic modulus of anti-roll bar (Pa)
FOD 0,020 Front anti-roll bar outside diameter (m)
FID 0,000 Front anti-roll bar inside diameter (m), (=0 for solid bar)
FL 0,780 Front anti-roll bar torsional lenght (m)
FBA 0,350 Front anti-roll bar lever arm lenght (m) 0,34 < FBA < 0,425
BMF 0,200 Front anti-roll bar pickup motion (m)
BWF 1,429 Front bar to wheel motion ratio
B1F 0,019 Front bar pickup motion per degreee of roll (m)
TFB 0,108 Front bar rotation per degreee of roll (radians/degree)
IPF 1,57E-08 Front bar polar moment of area (m4)
ABF 168,318 Front bar angular rate per degree of roll (N.m/degree)
FBL 240,455 Front bar linear rate per degree of roll (N/degree)
FRB 53,001 Roll resistance of front bar (kg.m/degree)
ROD 0,012 Rear anti-roll bar outside diameter (m)
RID 0,000 Rear anti-roll bar inside diameter (m), (=0 for solid bar)
RL 0,550 Rear anti-roll bar torsional lenght (m)
RBA 0,220 Rear anti-roll bar lever arm lenght (m) 0,143 < RBA < 0,223
BMR 0,100 Rear anti-roll bar pickup motion (m)
BWR 7,538 Rear bar to wheel motion ratio
B1R 0,100 Rear bar pickup motion per degreee of roll (m)
TRB 0,944 Rear bar rotation per degreee of roll (radians/degree)
IPR 2,04E-09 Rear bar polar moment of area (m4)
ABR 270,713 Rear bar angular rate per degree of roll (N.m/degree)
RBL 615,256 Rear bar linear rate per degree of roll (N/degree)
RRB 718,907 Roll resistance of rear bar (kg.m/degree)
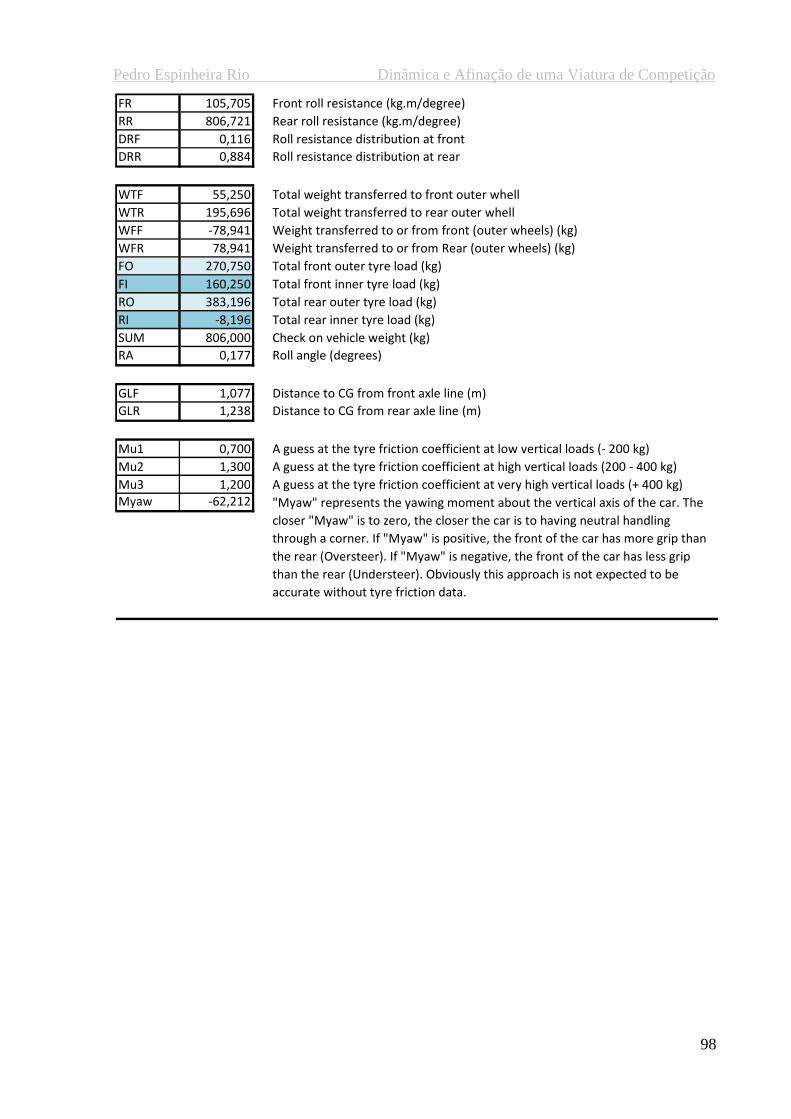
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
98
FR 105,705 Front roll resistance (kg.m/degree)
RR 806,721 Rear roll resistance (kg.m/degree)
DRF 0,116 Roll resistance distribution at front
DRR 0,884 Roll resistance distribution at rear
WTF 55,250 Total weight transferred to front outer whell
WTR 195,696 Total weight transferred to rear outer whell
WFF -78,941 Weight transferred to or from front (outer wheels) (kg)
WFR 78,941 Weight transferred to or from Rear (outer wheels) (kg)
FO 270,750 Total front outer tyre load (kg)
FI 160,250 Total front inner tyre load (kg)
RO 383,196 Total rear outer tyre load (kg)
RI -8,196 Total rear inner tyre load (kg)
SUM 806,000 Check on vehicle weight (kg)
RA 0,177 Roll angle (degrees)
GLF 1,077 Distance to CG from front axle line (m)
GLR 1,238 Distance to CG from rear axle line (m)
Mu1 0,700 A guess at the tyre friction coefficient at low vertical loads (- 200 kg)
Mu2 1,300 A guess at the tyre friction coefficient at high vertical loads (200 - 400 kg)
Mu3 1,200 A guess at the tyre friction coefficient at very high vertical loads (+ 400 kg)
Myaw -62,212 "Myaw" represents the yawing moment about the vertical axis of the car. The
closer "Myaw" is to zero, the closer the car is to having neutral handling
through a corner. If "Myaw" is positive, the front of the car has more grip than
the rear (Oversteer). If "Myaw" is negative, the front of the car has less grip
than the rear (Understeer). Obviously this approach is not expected to be
accurate without tyre friction data.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
99
2660 kg/m
3755 kg/m
0,340 m
0,223 m
1,0 g
GA 1,0 Accelerating design G-Force (g's)
GB -1,5 Braking design G-force (g's)
GC 1,0 Cornering design G-force (g's)
GL 1,0 Longitudinal design G-force (g's) (either GA or GB)
G 9,806 Acceleration due to gravity (m/s2)
WB 2,315 Whell base (m)
WF 431,0 Total front axle weight (kg)
WR 375,0 Total rear axle weight (kg)
W 806,0 Total weight of car and driver (kg)
UWF 70,0 Front unsprung weight (kg)
UWR 84,0 Rear unsprung weight
FTD 0,541 Front tyre diameter
RTD 0,541 Rear tyre diameter
UGF 0,271 Centre of gravity height of front unsprung mass (m)
UGR 0,271 Centre of gravity height of rear unsprung mass (m)
TF 1,513 Front track (m)
TR 1,520 Rear track (m)
SWF 361,0 Front sprung weight (kg)
SWR 291,0 Rear sprung weight (kg)
SW 652,0 Total Sprung weight (kg)
UTF 12,523 Front unsprung weight transfer (kg)
UTR 14,958 Rear unsprung weight tranfer (kg)
CF 0,127 Front Roll-centre height (m)
CR 0,451 Rear roll-centre height (m)
CTF 30,366 Front weight transfer via roll-centres (kg)
CTR 86,404 Rear weight transfer via roll-centres (kg)
WDR 0,446 Rear sprung weight distribution
TM 1,516 Mean track (m)
CM 0,272 Mean roll-centre height (m)
GM 0,520 Mean Sprung mass centre of gravity height (m)
LM 0,248 Mean roll moment lever arm (m)
ST 106,694 Total Sprung weight tranfer (kg)
WT 250,946 Total weight tranfer, left to right (kg)
Força G en curva
Setup
Constante Elástica das Molas da Frente
Constante Elástica das Molas Traseiras
Comprimento do Braço Efectivo da Barra estabilizadora da Frente
Comprimento do Braço Efectivo da Barra estabilizadora Trsaseira
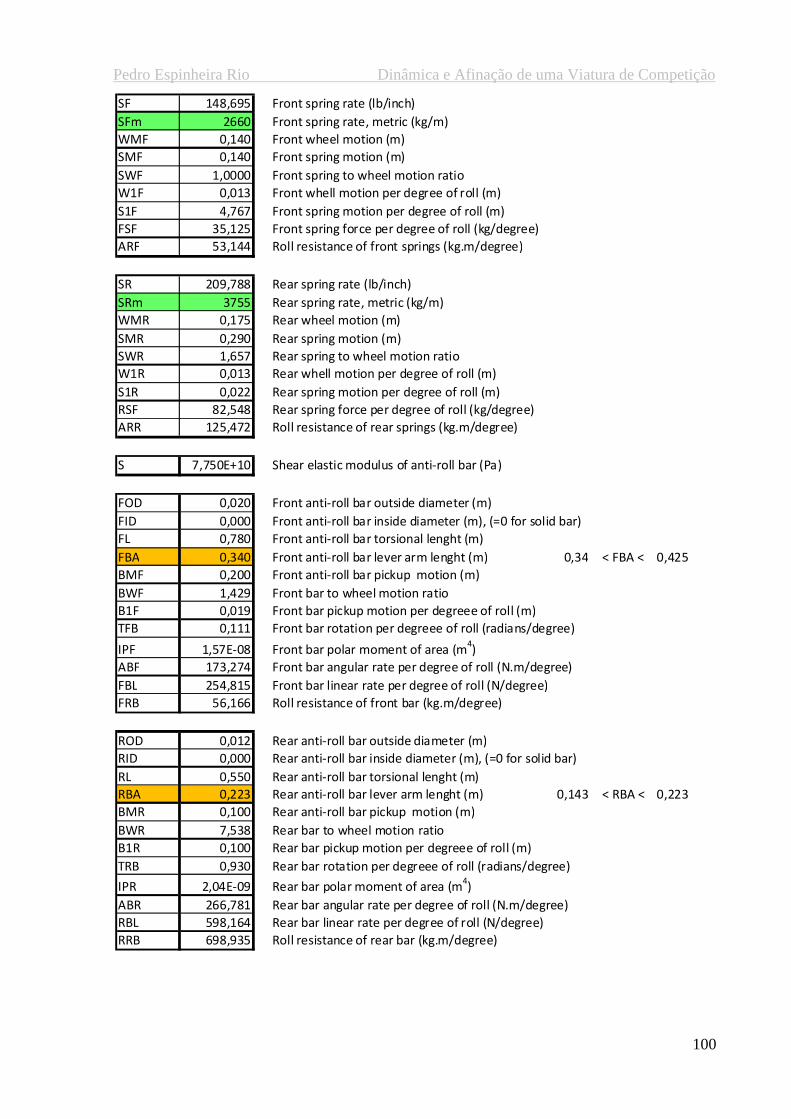
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
100
SF 148,695 Front spring rate (lb/inch)
SFm 2660 Front spring rate, metric (kg/m)
WMF 0,140 Front wheel motion (m)
SMF 0,140 Front spring motion (m)
SWF 1,0000 Front spring to wheel motion ratio
W1F 0,013 Front whell motion per degree of roll (m)
S1F 4,767 Front spring motion per degree of roll (m)
FSF 35,125 Front spring force per degree of roll (kg/degree)
ARF 53,144 Roll resistance of front springs (kg.m/degree)
SR 209,788 Rear spring rate (lb/inch)
SRm 3755 Rear spring rate, metric (kg/m)
WMR 0,175 Rear wheel motion (m)
SMR 0,290 Rear spring motion (m)
SWR 1,657 Rear spring to wheel motion ratio
W1R 0,013 Rear whell motion per degree of roll (m)
S1R 0,022 Rear spring motion per degree of roll (m)
RSF 82,548 Rear spring force per degree of roll (kg/degree)
ARR 125,472 Roll resistance of rear springs (kg.m/degree)
S 7,750E+10 Shear elastic modulus of anti-roll bar (Pa)
FOD 0,020 Front anti-roll bar outside diameter (m)
FID 0,000 Front anti-roll bar inside diameter (m), (=0 for solid bar)
FL 0,780 Front anti-roll bar torsional lenght (m)
FBA 0,340 Front anti-roll bar lever arm lenght (m) 0,34 < FBA < 0,425
BMF 0,200 Front anti-roll bar pickup motion (m)
BWF 1,429 Front bar to wheel motion ratio
B1F 0,019 Front bar pickup motion per degreee of roll (m)
TFB 0,111 Front bar rotation per degreee of roll (radians/degree)
IPF 1,57E-08 Front bar polar moment of area (m4)
ABF 173,274 Front bar angular rate per degree of roll (N.m/degree)
FBL 254,815 Front bar linear rate per degree of roll (N/degree)
FRB 56,166 Roll resistance of front bar (kg.m/degree)
ROD 0,012 Rear anti-roll bar outside diameter (m)
RID 0,000 Rear anti-roll bar inside diameter (m), (=0 for solid bar)
RL 0,550 Rear anti-roll bar torsional lenght (m)
RBA 0,223 Rear anti-roll bar lever arm lenght (m) 0,143 < RBA < 0,223
BMR 0,100 Rear anti-roll bar pickup motion (m)
BWR 7,538 Rear bar to wheel motion ratio
B1R 0,100 Rear bar pickup motion per degreee of roll (m)
TRB 0,930 Rear bar rotation per degreee of roll (radians/degree)
IPR 2,04E-09 Rear bar polar moment of area (m4)
ABR 266,781 Rear bar angular rate per degree of roll (N.m/degree)
RBL 598,164 Rear bar linear rate per degree of roll (N/degree)
RRB 698,935 Roll resistance of rear bar (kg.m/degree)
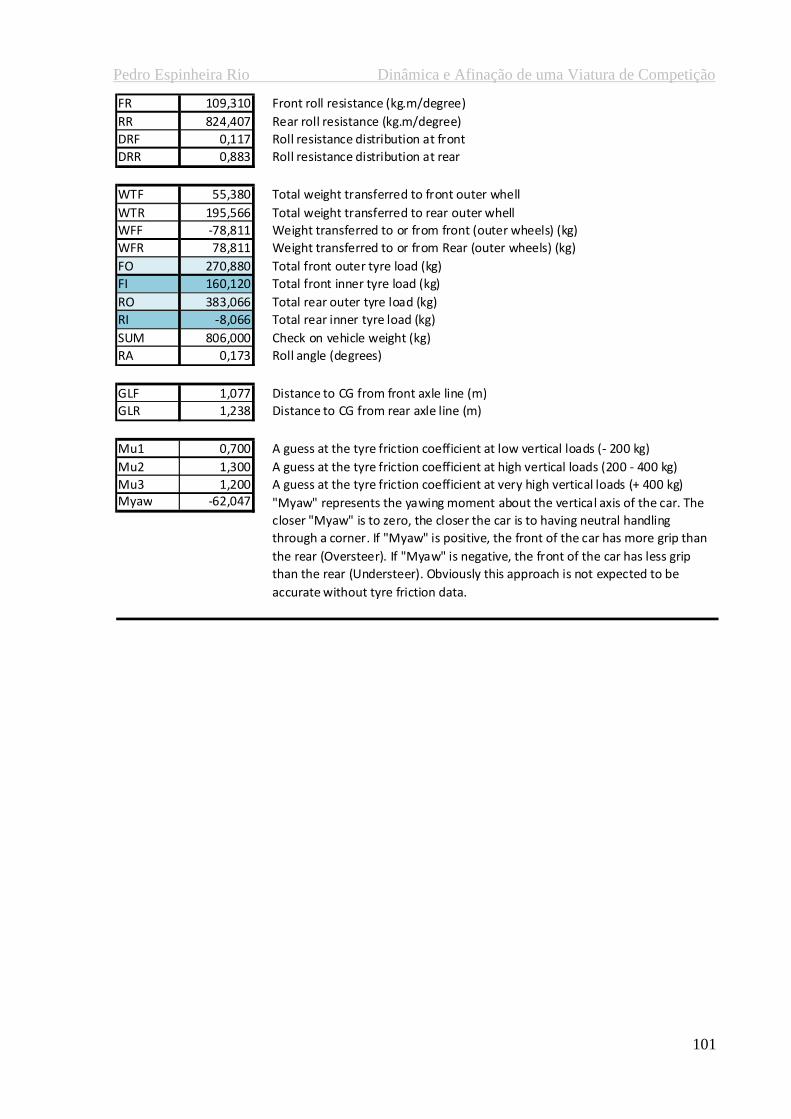
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
101
FR 109,310 Front roll resistance (kg.m/degree)
RR 824,407 Rear roll resistance (kg.m/degree)
DRF 0,117 Roll resistance distribution at front
DRR 0,883 Roll resistance distribution at rear
WTF 55,380 Total weight transferred to front outer whell
WTR 195,566 Total weight transferred to rear outer whell
WFF -78,811 Weight transferred to or from front (outer wheels) (kg)
WFR 78,811 Weight transferred to or from Rear (outer wheels) (kg)
FO 270,880 Total front outer tyre load (kg)
FI 160,120 Total front inner tyre load (kg)
RO 383,066 Total rear outer tyre load (kg)
RI -8,066 Total rear inner tyre load (kg)
SUM 806,000 Check on vehicle weight (kg)
RA 0,173 Roll angle (degrees)
GLF 1,077 Distance to CG from front axle line (m)
GLR 1,238 Distance to CG from rear axle line (m)
Mu1 0,700 A guess at the tyre friction coefficient at low vertical loads (- 200 kg)
Mu2 1,300 A guess at the tyre friction coefficient at high vertical loads (200 - 400 kg)
Mu3 1,200 A guess at the tyre friction coefficient at very high vertical loads (+ 400 kg)
Myaw -62,047 "Myaw" represents the yawing moment about the vertical axis of the car. The
closer "Myaw" is to zero, the closer the car is to having neutral handling
through a corner. If "Myaw" is positive, the front of the car has more grip than
the rear (Oversteer). If "Myaw" is negative, the front of the car has less grip
than the rear (Understeer). Obviously this approach is not expected to be
accurate without tyre friction data.
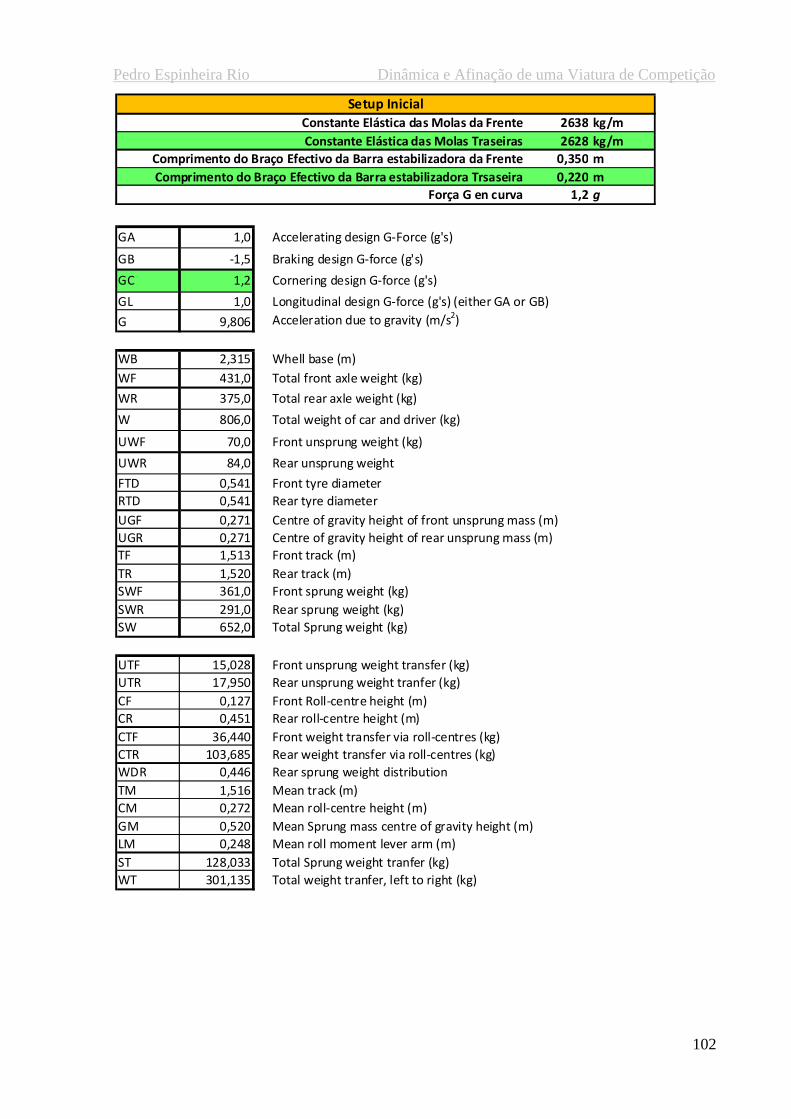
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
102
2638 kg/m
2628 kg/m
0,350 m
0,220 m
1,2 g
GA 1,0 Accelerating design G-Force (g's)
GB -1,5 Braking design G-force (g's)
GC 1,2 Cornering design G-force (g's)
GL 1,0 Longitudinal design G-force (g's) (either GA or GB)
G 9,806 Acceleration due to gravity (m/s2)
WB 2,315 Whell base (m)
WF 431,0 Total front axle weight (kg)
WR 375,0 Total rear axle weight (kg)
W 806,0 Total weight of car and driver (kg)
UWF 70,0 Front unsprung weight (kg)
UWR 84,0 Rear unsprung weight
FTD 0,541 Front tyre diameter
RTD 0,541 Rear tyre diameter
UGF 0,271 Centre of gravity height of front unsprung mass (m)
UGR 0,271 Centre of gravity height of rear unsprung mass (m)
TF 1,513 Front track (m)
TR 1,520 Rear track (m)
SWF 361,0 Front sprung weight (kg)
SWR 291,0 Rear sprung weight (kg)
SW 652,0 Total Sprung weight (kg)
UTF 15,028 Front unsprung weight transfer (kg)
UTR 17,950 Rear unsprung weight tranfer (kg)
CF 0,127 Front Roll-centre height (m)
CR 0,451 Rear roll-centre height (m)
CTF 36,440 Front weight transfer via roll-centres (kg)
CTR 103,685 Rear weight transfer via roll-centres (kg)
WDR 0,446 Rear sprung weight distribution
TM 1,516 Mean track (m)
CM 0,272 Mean roll-centre height (m)
GM 0,520 Mean Sprung mass centre of gravity height (m)
LM 0,248 Mean roll moment lever arm (m)
ST 128,033 Total Sprung weight tranfer (kg)
WT 301,135 Total weight tranfer, left to right (kg)
Força G en curva
Setup Inicial
Constante Elástica das Molas da Frente
Constante Elástica das Molas Traseiras
Comprimento do Braço Efectivo da Barra estabilizadora da Frente
Comprimento do Braço Efectivo da Barra estabilizadora Trsaseira

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
103
FR 105,705 Front roll resistance (kg.m/degree)
RR 806,721 Rear roll resistance (kg.m/degree)
DRF 0,116 Roll resistance distribution at front
DRR 0,884 Roll resistance distribution at rear
WTF 66,300 Total weight transferred to front outer whell
WTR 234,835 Total weight transferred to rear outer whell
WFF -94,729 Weight transferred to or from front (outer wheels) (kg)
WFR 94,729 Weight transferred to or from Rear (outer wheels) (kg)
FO 281,800 Total front outer tyre load (kg)
FI 149,200 Total front inner tyre load (kg)
RO 422,335 Total rear outer tyre load (kg)
RI -47,335 Total rear inner tyre load (kg)
SUM 806,000 Check on vehicle weight (kg)
RA 0,213 Roll angle (degrees)
GLF 1,077 Distance to CG from front axle line (m)
GLR 1,238 Distance to CG from rear axle line (m)
Mu1 0,700 A guess at the tyre friction coefficient at low vertical loads (- 200 kg)
Mu2 1,300 A guess at the tyre friction coefficient at high vertical loads (200 - 400 kg)
Mu3 1,200 A guess at the tyre friction coefficient at very high vertical loads (+ 400 kg)
Myaw -79,297 "Myaw" represents the yawing moment about the vertical axis of the car. The
closer "Myaw" is to zero, the closer the car is to having neutral handling
through a corner. If "Myaw" is positive, the front of the car has more grip than
the rear (Oversteer). If "Myaw" is negative, the front of the car has less grip
than the rear (Understeer). Obviously this approach is not expected to be
accurate without tyre friction data.
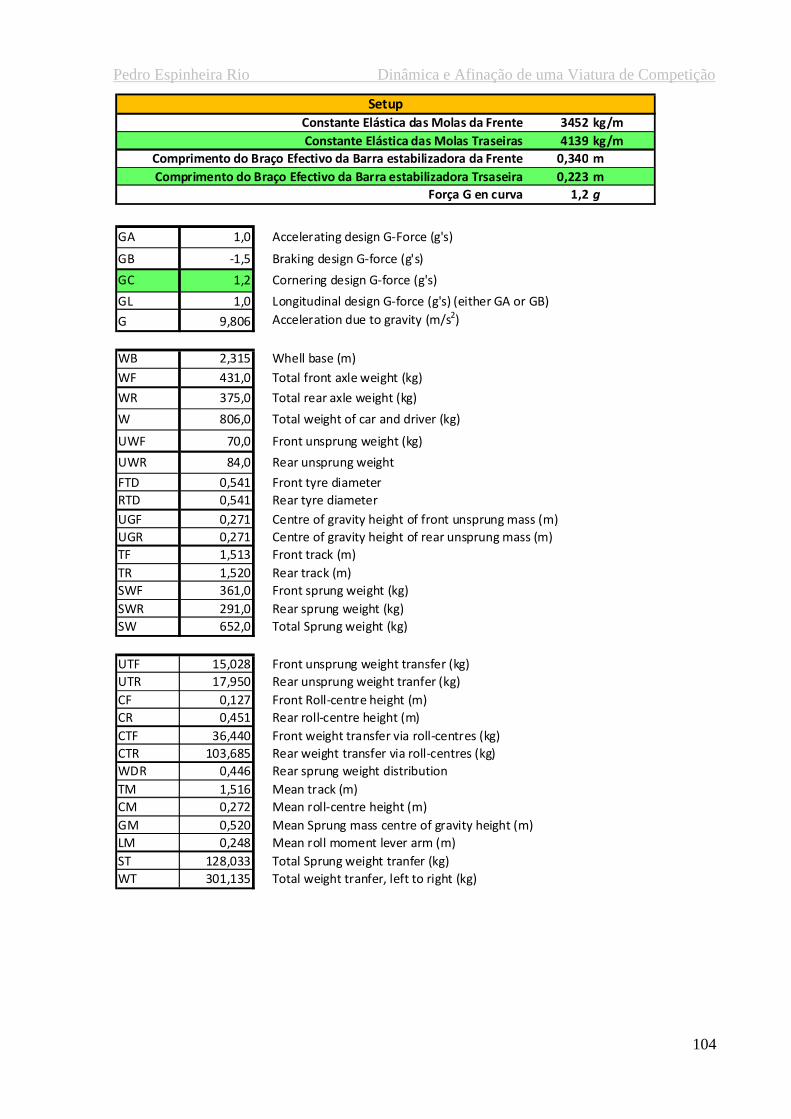
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
104
3452 kg/m
4139 kg/m
0,340 m
0,223 m
1,2 g
GA 1,0 Accelerating design G-Force (g's)
GB -1,5 Braking design G-force (g's)
GC 1,2 Cornering design G-force (g's)
GL 1,0 Longitudinal design G-force (g's) (either GA or GB)
G 9,806 Acceleration due to gravity (m/s2)
WB 2,315 Whell base (m)
WF 431,0 Total front axle weight (kg)
WR 375,0 Total rear axle weight (kg)
W 806,0 Total weight of car and driver (kg)
UWF 70,0 Front unsprung weight (kg)
UWR 84,0 Rear unsprung weight
FTD 0,541 Front tyre diameter
RTD 0,541 Rear tyre diameter
UGF 0,271 Centre of gravity height of front unsprung mass (m)
UGR 0,271 Centre of gravity height of rear unsprung mass (m)
TF 1,513 Front track (m)
TR 1,520 Rear track (m)
SWF 361,0 Front sprung weight (kg)
SWR 291,0 Rear sprung weight (kg)
SW 652,0 Total Sprung weight (kg)
UTF 15,028 Front unsprung weight transfer (kg)
UTR 17,950 Rear unsprung weight tranfer (kg)
CF 0,127 Front Roll-centre height (m)
CR 0,451 Rear roll-centre height (m)
CTF 36,440 Front weight transfer via roll-centres (kg)
CTR 103,685 Rear weight transfer via roll-centres (kg)
WDR 0,446 Rear sprung weight distribution
TM 1,516 Mean track (m)
CM 0,272 Mean roll-centre height (m)
GM 0,520 Mean Sprung mass centre of gravity height (m)
LM 0,248 Mean roll moment lever arm (m)
ST 128,033 Total Sprung weight tranfer (kg)
WT 301,135 Total weight tranfer, left to right (kg)
Força G en curva
SetupConstante Elástica das Molas da Frente
Constante Elástica das Molas Traseiras
Comprimento do Braço Efectivo da Barra estabilizadora da Frente
Comprimento do Braço Efectivo da Barra estabilizadora Trsaseira
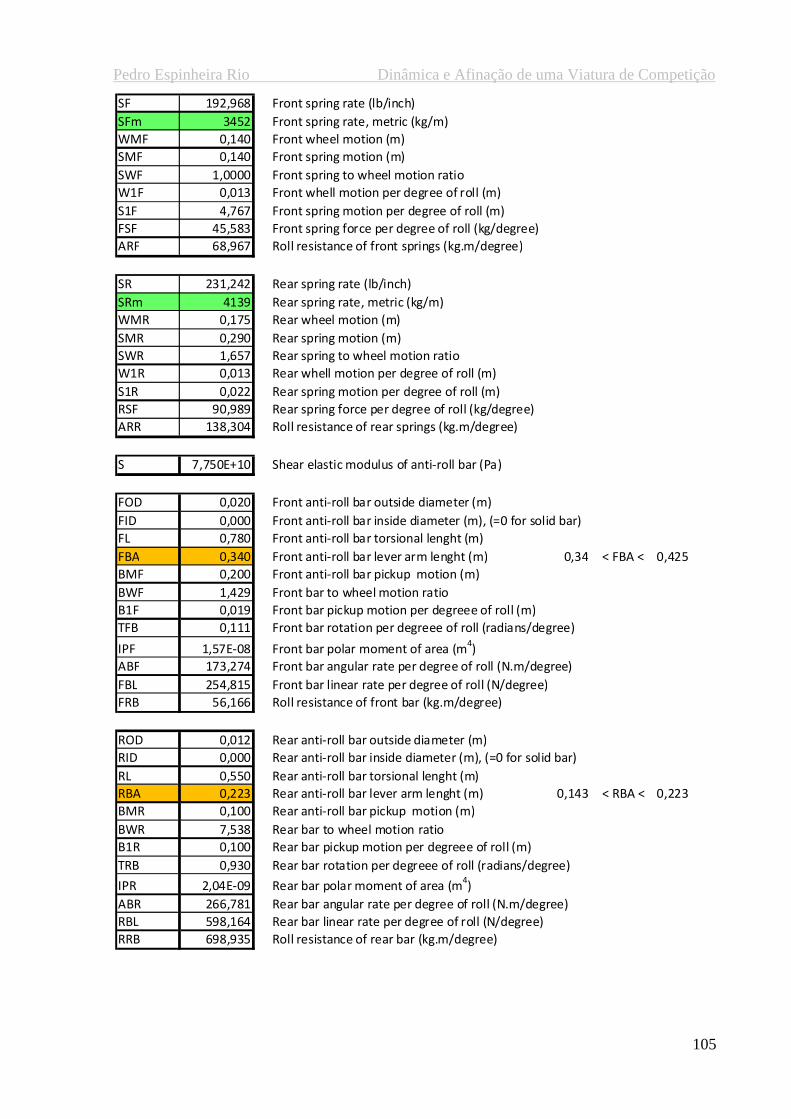
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
105
SF 192,968 Front spring rate (lb/inch)
SFm 3452 Front spring rate, metric (kg/m)
WMF 0,140 Front wheel motion (m)
SMF 0,140 Front spring motion (m)
SWF 1,0000 Front spring to wheel motion ratio
W1F 0,013 Front whell motion per degree of roll (m)
S1F 4,767 Front spring motion per degree of roll (m)
FSF 45,583 Front spring force per degree of roll (kg/degree)
ARF 68,967 Roll resistance of front springs (kg.m/degree)
SR 231,242 Rear spring rate (lb/inch)
SRm 4139 Rear spring rate, metric (kg/m)
WMR 0,175 Rear wheel motion (m)
SMR 0,290 Rear spring motion (m)
SWR 1,657 Rear spring to wheel motion ratio
W1R 0,013 Rear whell motion per degree of roll (m)
S1R 0,022 Rear spring motion per degree of roll (m)
RSF 90,989 Rear spring force per degree of roll (kg/degree)
ARR 138,304 Roll resistance of rear springs (kg.m/degree)
S 7,750E+10 Shear elastic modulus of anti-roll bar (Pa)
FOD 0,020 Front anti-roll bar outside diameter (m)
FID 0,000 Front anti-roll bar inside diameter (m), (=0 for solid bar)
FL 0,780 Front anti-roll bar torsional lenght (m)
FBA 0,340 Front anti-roll bar lever arm lenght (m) 0,34 < FBA < 0,425
BMF 0,200 Front anti-roll bar pickup motion (m)
BWF 1,429 Front bar to wheel motion ratio
B1F 0,019 Front bar pickup motion per degreee of roll (m)
TFB 0,111 Front bar rotation per degreee of roll (radians/degree)
IPF 1,57E-08 Front bar polar moment of area (m4)
ABF 173,274 Front bar angular rate per degree of roll (N.m/degree)
FBL 254,815 Front bar linear rate per degree of roll (N/degree)
FRB 56,166 Roll resistance of front bar (kg.m/degree)
ROD 0,012 Rear anti-roll bar outside diameter (m)
RID 0,000 Rear anti-roll bar inside diameter (m), (=0 for solid bar)
RL 0,550 Rear anti-roll bar torsional lenght (m)
RBA 0,223 Rear anti-roll bar lever arm lenght (m) 0,143 < RBA < 0,223
BMR 0,100 Rear anti-roll bar pickup motion (m)
BWR 7,538 Rear bar to wheel motion ratio
B1R 0,100 Rear bar pickup motion per degreee of roll (m)
TRB 0,930 Rear bar rotation per degreee of roll (radians/degree)
IPR 2,04E-09 Rear bar polar moment of area (m4)
ABR 266,781 Rear bar angular rate per degree of roll (N.m/degree)
RBL 598,164 Rear bar linear rate per degree of roll (N/degree)
RRB 698,935 Roll resistance of rear bar (kg.m/degree)
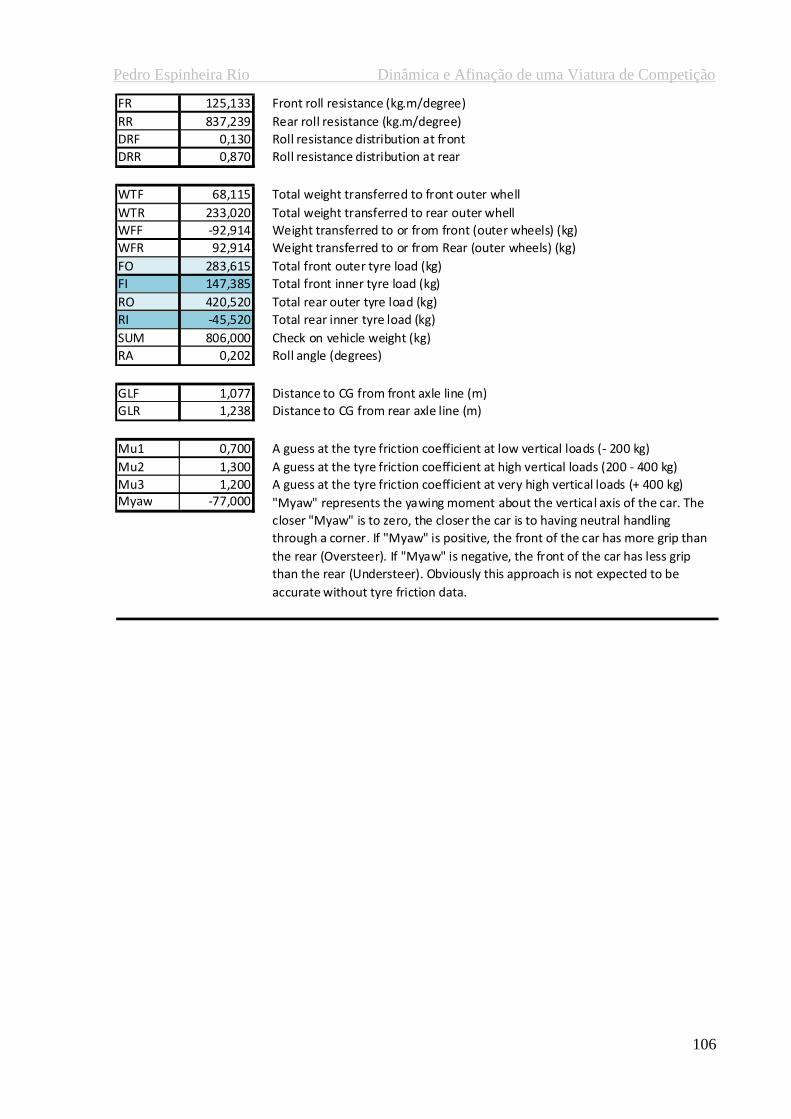
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
106
FR 125,133 Front roll resistance (kg.m/degree)
RR 837,239 Rear roll resistance (kg.m/degree)
DRF 0,130 Roll resistance distribution at front
DRR 0,870 Roll resistance distribution at rear
WTF 68,115 Total weight transferred to front outer whell
WTR 233,020 Total weight transferred to rear outer whell
WFF -92,914 Weight transferred to or from front (outer wheels) (kg)
WFR 92,914 Weight transferred to or from Rear (outer wheels) (kg)
FO 283,615 Total front outer tyre load (kg)
FI 147,385 Total front inner tyre load (kg)
RO 420,520 Total rear outer tyre load (kg)
RI -45,520 Total rear inner tyre load (kg)
SUM 806,000 Check on vehicle weight (kg)
RA 0,202 Roll angle (degrees)
GLF 1,077 Distance to CG from front axle line (m)
GLR 1,238 Distance to CG from rear axle line (m)
Mu1 0,700 A guess at the tyre friction coefficient at low vertical loads (- 200 kg)
Mu2 1,300 A guess at the tyre friction coefficient at high vertical loads (200 - 400 kg)
Mu3 1,200 A guess at the tyre friction coefficient at very high vertical loads (+ 400 kg)
Myaw -77,000 "Myaw" represents the yawing moment about the vertical axis of the car. The
closer "Myaw" is to zero, the closer the car is to having neutral handling
through a corner. If "Myaw" is positive, the front of the car has more grip than
the rear (Oversteer). If "Myaw" is negative, the front of the car has less grip
than the rear (Understeer). Obviously this approach is not expected to be
accurate without tyre friction data.

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
107
ANEXO C – Resultados obtidos com o Susprog 3D
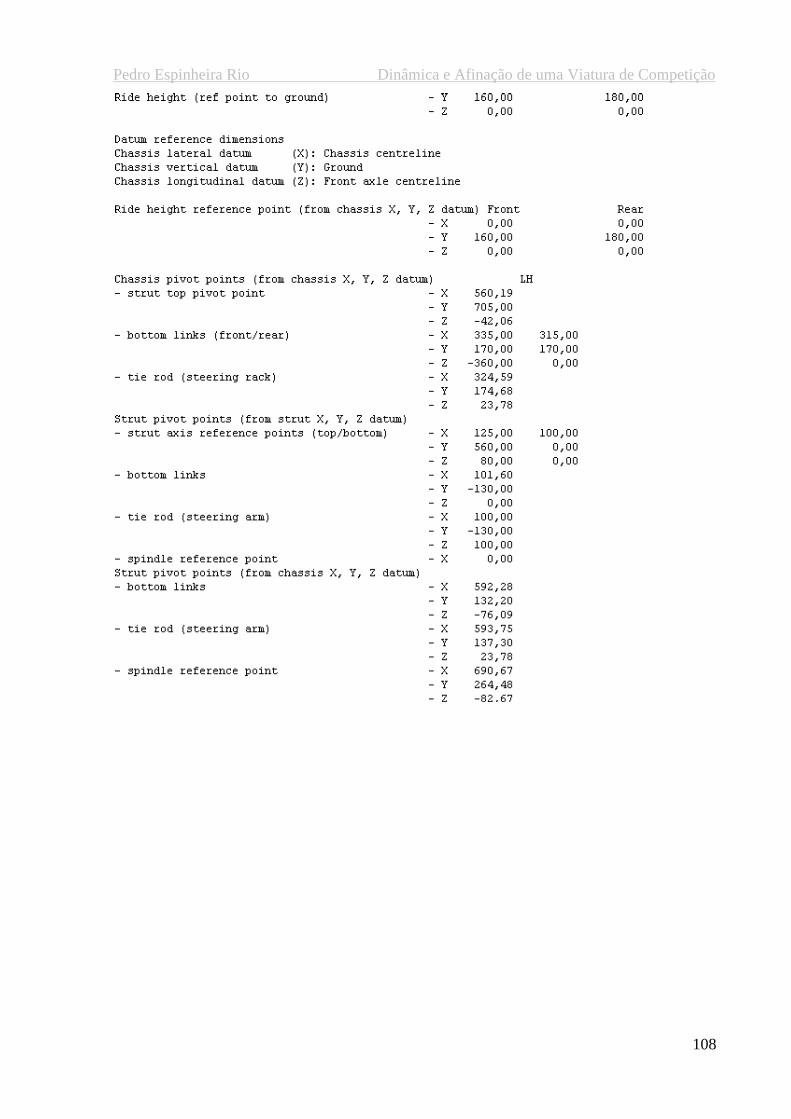
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
108
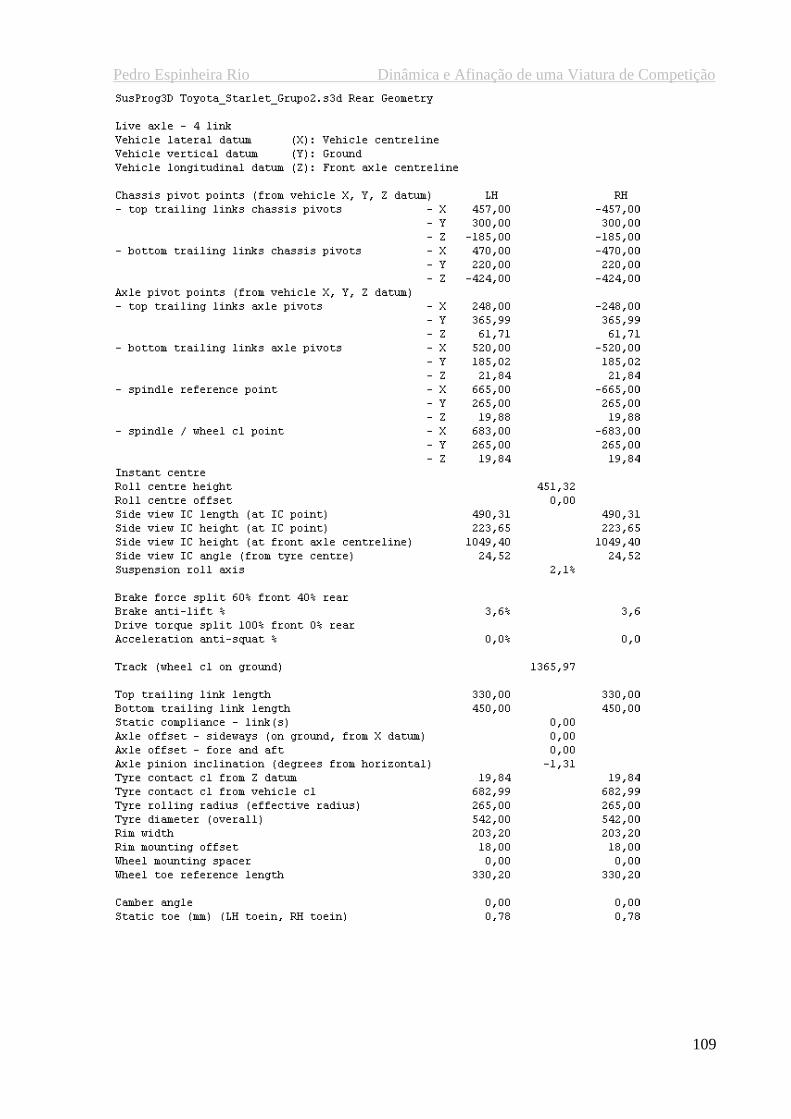
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
109

Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
110
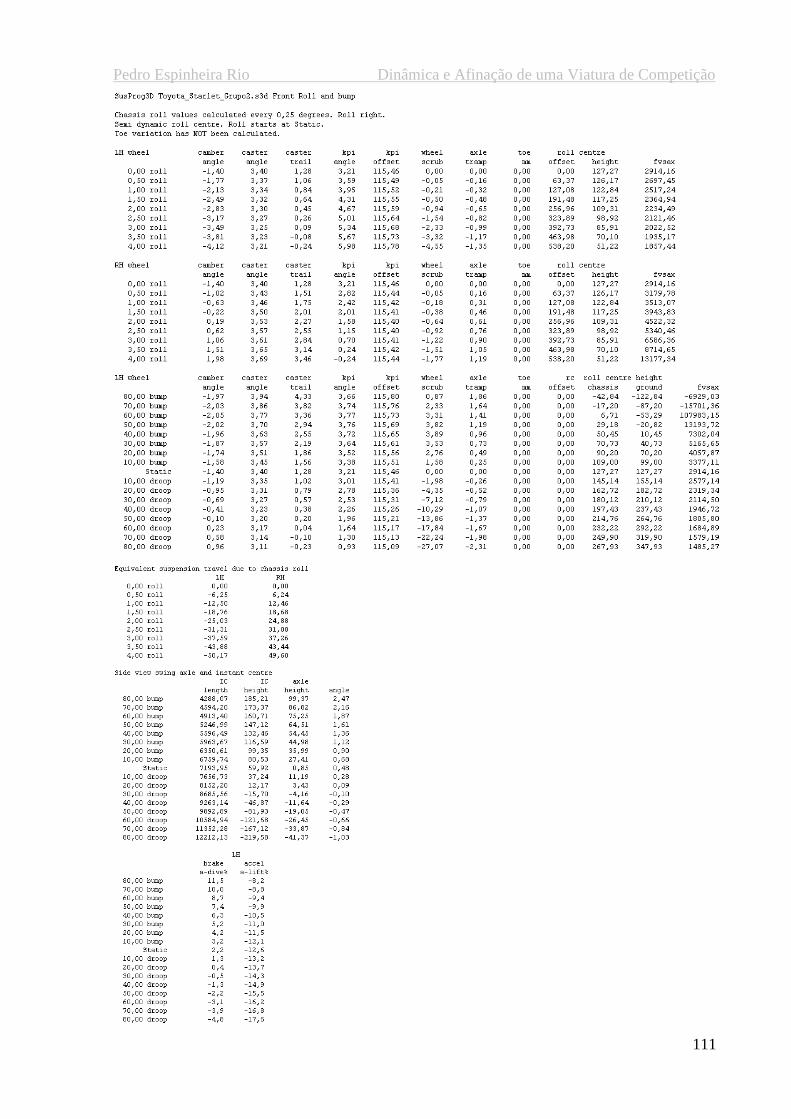
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
111
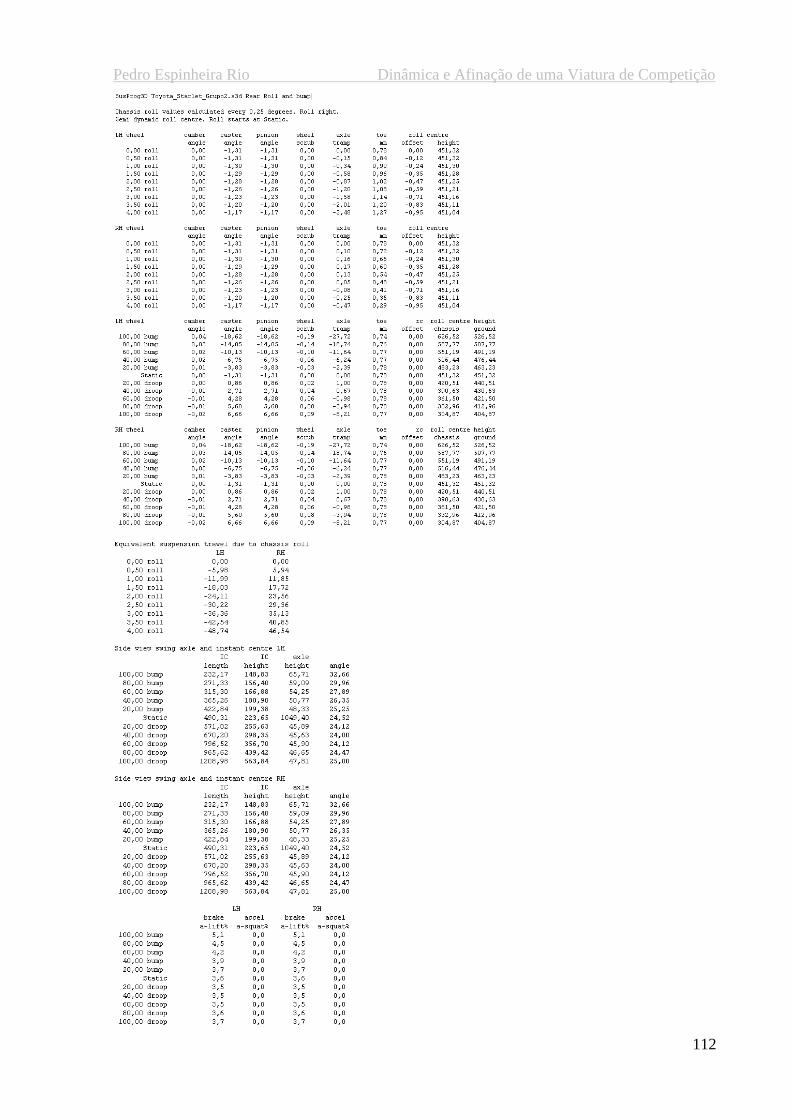
Pedro Espinheira Rio Dinâmica e Afinação de uma Viatura de Competição
112


















