Dina Mica
64
Captulo 1 Introduªo 1.1 Nota histrica O campo da dinmica complexa analtica tem sofrido um rÆpido desenvolvimento nos œlti- mos 20 anos. Depois de um perodo de relativa dormŒncia, o campo de estudo resurgiu em 1980 devido a algumas imagens, bastante intrigantes, obtidas com o auxlio de computa- dores do conjunto de Mandelbrot assim como a novos avanos na matemÆtica preconizados por Douady, Hubbard, Sullivan e outros. Assim, este campo experimentou dois perodos de evoluªo de curta duraªo, mas com um crescimento vigoroso e profcuo. As suas origens remontam aos nais do sØculo XIX e incio do sØculo XX. Nesta altura, matemÆticos como Leau, Schroder, Koenings, Bottcher, entre outros, interessaram-se pelo comportamento das funıes complexas quando iteradas. O trabalho inicialmente focava-se no comportamento das mesmas junto aos pontos xos. Nos anos 1918-20 uma dramÆtica mudana ocorreu quando, graas aos esforos de dois matemÆticos franceses Julia e Fatou, se comeou a estudar nªo apenas o comportamento local das funıes mas tambØm o comportamento global das mesmas, ao estudar a dinmica das funıes fora dos pontos xos. Por vezes os resultados das iteraıes eram quase pre- visveis e outras vezes o comportamento assumia-se como altamente instÆvel, e que agora conhecemos como comportamento catico. Em memria da contribuiªo dada por estes dois matemÆticos franceses no estudo da dinmica, designamos o conjunto estÆvel no plano complexo de conjunto de Fatou, enquanto que a regiªo catica Ø conhecida por conjunto de Julia. Numa sØrie de trabalhos, nos anos vinte, Fatou e Julia, descreveram de forma fascinante muitas das propriedades destes conjuntos para transformaıes racionais. No entanto, na tentativa de classicar toda a dinmica do conjunto de Fatou eles chegaram a um impasse. Eles nªo consideraram a hiptese de existirem domnios errantes, os quais eles nªo podiam provar a sua existŒncia ou nªo. Estes domnios sªo agora conhecidos por discos de Siegel. Com este entrave o trabalho na dinmica complexa abrandou, e nªo houve mais algum trabalho que se destacasse na Ærea durante os quinze anos seguintes. Em 1940, Siegel mostrou que os discos de Siegel existem de facto na dinmica complexa. Esta descoberta veio contribuir para uma melhor classicaªo das regiıes estÆveis. Mais 1
-
Upload
reinaldo-silva-costa -
Category
Documents
-
view
10 -
download
0
Transcript of Dina Mica

Capítulo 1
Introdução
1.1 Nota histórica
O campo da dinâmica complexa analítica tem sofrido um rápido desenvolvimento nos últi-mos 20 anos. Depois de um período de relativa dormência, o campo de estudo resurgiu em1980 devido a algumas imagens, bastante intrigantes, obtidas com o auxílio de computa-dores do conjunto de Mandelbrot assim como a novos avanços na matemática preconizadospor Douady, Hubbard, Sullivan e outros.
Assim, este campo experimentou dois períodos de evolução de curta duração, mas comum crescimento vigoroso e profícuo. As suas origens remontam aos �nais do século XIX einício do século XX. Nesta altura, matemáticos como Leau, Schroder, Koenings, Bottcher,entre outros, interessaram-se pelo comportamento das funções complexas quando iteradas.O trabalho inicialmente focava-se no comportamento das mesmas junto aos pontos �xos.
Nos anos 1918-20 uma dramática mudança ocorreu quando, graças aos esforços de doismatemáticos franceses Julia e Fatou, se começou a estudar não apenas o comportamentolocal das funções mas também o comportamento global das mesmas, ao estudar a dinâmicadas funções fora dos pontos �xos. Por vezes os resultados das iterações eram quase pre-visíveis e outras vezes o comportamento assumia-se como altamente instável, e que agoraconhecemos como comportamento caótico. Em memória da contribuição dada por estesdois matemáticos franceses no estudo da dinâmica, designamos o conjunto estável no planocomplexo de conjunto de Fatou, enquanto que a região caótica é conhecida por conjuntode Julia.
Numa série de trabalhos, nos anos vinte, Fatou e Julia, descreveram de forma fascinantemuitas das propriedades destes conjuntos para transformações racionais. No entanto, natentativa de classi�car toda a dinâmica do conjunto de Fatou eles chegaram a um impasse.Eles não consideraram a hipótese de existirem domínios errantes, os quais eles não podiamprovar a sua existência ou não. Estes domínios são agora conhecidos por discos de Siegel.Com este entrave o trabalho na dinâmica complexa abrandou, e não houve mais algumtrabalho que se destacasse na área durante os quinze anos seguintes.
Em 1940, Siegel mostrou que os discos de Siegel existem de facto na dinâmica complexa.Esta descoberta veio contribuir para uma melhor classi�cação das regiões estáveis. Mais
1

2 Introdução
tarde, Baker estendeu o trabalho de Julia e Fatou a outras classes de funções, mostrandodurante a sua investigação que outros tipos de comportamento estável podem ocorrer parafunções inteiras e funções holomór�cas.
O segundo maior período de actividade da dinâmica complexa começou em 1980quando Mandelbrot usou grá�cos obtidos por computador para estudar a dinâmica com-plexa. A sua descoberta do conjunto de Mandelbrot catapultou a área e promoveu o in-teresse de outros matemáticos em retomar os estudos neste campo. Numa rápida sucessãode eventos, veri�cou-se a introdução de transformações quase-conformes, o que permitiua Sullivan provar o teorema dos domínios não errantes, que veio completar a classi�caçãode dinâmicas estáveis, classi�cação essa que foi iniciada por Fatou e Julia. Com o aparec-imento do espaço dos parâmetros para polinómios quadráticos, introduzido por Douady,surge o desenvolvimento de técnicas que permitiram a classi�cação de quase todas asdinâmicas quadráticas, �cando por resolver a questão da conectividade do conjunto deMandelbrot.
Logo após estes trabalhos estendeu-se o estudo a outros tipos de sistemas dinâmicoscomplexos, incluindo transformações racionais e polinómios de grau superior, que surgemdo método de Newton, e a funções inteiras e holomór�cas.
1.2 A esfera de Riemann
Ao analisarmos a função Q(z) = z2 , com jzj < 1, podemos veri�car que a iteração destafunção leva a que Qn(z) �! 0, e que Qn(z) �! 1 caso jzj > 1. Assim, neste caso, ozero e o in�nito podem ser vistos como dois pontos �xos atractores, mas temos de juntarQ(1) =1 para que de facto o in�nito seja considerado de ponto �xo. A questão é que oponto in�nito não pertence a C. Consideremos H(z) = 1
z : A transformação H transformao zero no in�nito e vice versa, e ainda H �Q�H�1 = Q. Pela conjugação anterior podemosveri�car que o comportamento de Q junto ao zero será o mesmo do que junto ao in�nito.Ou seja, podemos considerar o in�nito como sendo mais um ponto do plano complexo, eassim considerar o plano complexo estendido C1 = C [ f1g . Se identi�carmos cadaponto do plano com um único ponto de uma esfera de�nimos a esfera de Riemann.
Para obter uma métrica em C1 identi�quemos C com o plano horizontal f(x1; x2; x3) 2R3 : x3 = 0g em R3 e constroi-se C1 compacti�cando o plano com o ponto in�nito.
Seja S a esfera no espaço tridimensional com raio unitário e centro na origem, e de-notemos o ponto da esfera (0; 0; 1) por �. Projectamos agora cada ponto z de C de formalinear, em direcção a � e obtemos um ponto z� na esfera S distinto de �. A transformação� : z �! z� é designada de projecção estereográ�ca de C em S. Se jzj for su�cientementegrande, então veri�ca-se que z� aproxima-se de �, e assim de�nimos �(1) = �. Comesta de�nição � é uma transformação bijectiva de C1 em S e vamos usar este facto paraconstruir a métrica � em C1 à custa da métrica euclidiana em R3.
Consideremos dois pontos z e w em C, então
�(z; w) = j�(z)� �(w)j = jz� � w�j = 2jz � wj(1 + jzj2)1=2 (1 + jwj2)1=2
:

1.2 A esfera de Riemann 3
Podemos concluir que enquanto z estiver em C e se �zermos w a tender para o ponto1 podemos deduzir que
�(z;1) = limw!1
�(z; w) =2
(1 + jzj2)1=2:
Como �(z; w) é o comprimento euclidiano do arco que une z� a w�, � é designada demétrica esférica em C1.
A métrica euclidiana em C não é su�ciente para lidar com o ponto in�nito, mas amétrica esférica trabalha com todos os pontos em C1 da mesma forma, e aí o pontoin�nito é visto como um outro ponto qualquer perdendo qualquer signi�cado especial.

4 Introdução

Capítulo 2
Dinâmica das funções racionais
2.1 Transformações racionais
Uma transformação racional é uma função da forma R(z) = P (z)Q(z) , onde P e Q são
polinómios não simultâneamente nulos. Se P é o polinómio nulo, então R é a funçãoconstante R(z) = 0. Se Q é o polinómio nulo, então R é a função constante R(z) = 1.Se Q(z) = 0 e P não é o polinómio nulo, então R(z) é de�nida como sendo 1 e de�nimosR(1) como o limite de R(z) quando z �!1.
Suponhamos agora que P e Q são polinómios não nulos. Diz-se que o quociente R(z)está reduzido se P e Q não têm factores comuns, e trabalha-se com R(z) depois de sim-pli�car os factores comuns aos dois polinómios. O grau de R pode ser de�nido como onúmero máximo de pré-imagens de um dado ponto z, ou então como o valor máximo dosgraus de P e Q, ou seja
grau(R) = maxfgrau(P ); grau(Q)g:
Se R for uma transformação constante R(z) = �, com � 6= 0;1 teremos grau(R) = 0, valor esse que vamos adoptar por convenção para os casos R(z) = 0 ou R(z) =1.
As transformações racionais são caracterizadas como transformações analíticas de C1em C1, sendo as únicas a possuir esta propriedade. No conjunto C1 usaremos a métricaesférica, já que nos permite trabalhar com o1 como se de qualquer outro ponto se tratasse.
2.1.1 Órbitas
Consideremos uma função racional e um ponto inicial z0, de C1. Tomemos por convençãoque R0 = I, com I a representar a função identidade.
A órbita de z0 é o conjunto das sucessivas imagens por composição sucessiva de R doponto z0,
z0; z1 = R(z0); z2 = R(z1); :::; zn = R(zn�1)
ou seja,z0; z1 = R(z0); z2 = R(R(z0)); :::; zn = Rn�1(R(z0))
5

6 Dinâmica das funções racionais
z0 = R0(z0); z1 = R1(z0); z2 = R2(z0); :::; zn = Rn(z0):
De�nição 2.1.1 A órbita futura de z0 é o conjunto de pontos O+(z0) = fzk = Rk(z0);k = 0; 1; 2; :::; ng. Se R for um homeomor�smo podemos de�nir a órbita total de z0 comoo conjunto de pontos zn = Rn(z0) para n 2 Z; e a órbita passada de z0, O�(z0) = fzk =Rk(z0); k = 0;�1;�2; :::;�ng.
Uma função do tipo R(z) = az+bcz+d , ad � bc 6= 0, conhecida como transformação de
Möbius, é um exemplo de uma transformação de grau 1, onde convencionamos R(1) = ac
e R��dc
�=1 com c 6= 0, enquanto que R(1) =1, com c = 0:
Estas transformações pertencem ao pequeno grupo de funções cuja iteração pode serdeterminada explicitamente e onde podemos observar que, para a vasta maioria destasfunções, zn converge para um ponto independentemente do valor inicial. Podemos dar oexemplo da função R(z) = 3z�2
2z�1 que por indução vemos que
Rn(z) =(2n+ 1)z � 2n2nz � (2n� 1)
em que Rn(z) �! 1, n �!1, para todo o z. Isto mostra que os pontos zn eventualmenteretornam a uma vizinhança de 1 e convergem para este ponto. Como nota podemosdestacar que ao tomarmos um ponto da vizinhança de 1, de raio �; com � > 0 e muitopequeno, a iteração afasta-se de 1, pelo que o ponto 1 não pode ser visto como um pontoque atrai as órbitas de outros pontos.
2.1.2 Pontos �xos
Ao iterarmos diversos pontos em C de uma função racional observamos que alguns pontostêm uma órbita sempre constante, estes pontos são designados de pontos �xos.
De�nição 2.1.2 Um ponto � é designado de ponto �xo de R quando R(�) = �.
Os pontos �xos numa dada transformação racional são então obviamente as soluçõesda equação R(z) � z = 0; e pelo Teorema Fundamental da Álgebra, esta equação teráexactamente n soluções, não necessariamente distintas, com n = grau[P (z) � zQ(z)].Caso P (z) = zQ(z) então n = 1, como convencionamos acima, e o ponto �xo será o 1.
Considerando R(z) a transformação de Möbius, n assumirá o valor 2. Assim estatransformação poderá ter um ponto �xo único, quando a solução é repetida, ou então doispontos �xos, quando as soluções são distintas.
Vamos supor que R tem apenas um ponto �xo � = 1. Então R(z) = z + �; � 6= 0;e assim Rn(z) = z + n�, e teremos que, para todo o z, Rn(z) ! 1; quando n ! 1:Consideremos agora que o ponto �xo único é � 6= 1. Fazendo g(z) = 1
z�� , note-se queg(�) = 1; e S(z) = gRg�1(z), com esta última transformação a �xar apenas o in�nito ea representar uma translação dos valores z, daí que Sn(z) ! 1, quando n ! 1, sendo

2.1 Transformações racionais 7
Sn(z) = gRng�1(z): Efectuando uma substituição de z por g(z), teremos
Sn(g(z)) = gRng�1(g(z)),, Sng(z) = gRn(z),, g�1Sng(z) = Rn(z)
e daqui Rn(z) �! g�1(1) = �: Ou seja, para uma transformação de Möbius que tenhaum único ponto �xo � teremos, para todo o z; Rn(z) �! �.
Vamos supor agora que R tem dois pontos �xos diferentes, isto é, �1 6= �2. Consid-eremos inicialmente que estes dois pontos �xos são o 0 e o 1. Então R assume a formaR(z) = kz e Rn(z) = knz: Os pontos �xos de Rn(z) são 0 e 1, enquanto que para osoutros z teremos, Rn(z) �! 0 se jkj < 1; Rn(z) �! 1 se jkj > 1; e, jRn(z)j = jzj sejkj = 1; com este último caso a rami�car-se em dois, pois se k for uma raiz enésima daunidade Rn é a identidade, se k não for uma raiz enésima da unidade, Rn(z) são densosna circunferência com centro na origem e raio jzj.
Se os dois pontos �xos forem agora diferentes do zero e do in�nito, construemos umafunção g(z) = z��1
z��2que transforma o �1 no zero e �2 no in�nito. Seja S = gRg�1, S �xa o
zero e o in�nito. Como o transformado de g são círculos, vemos que se R tem dois pontos�xos então, ou Rn converge para um destes pontos, ou move-se ciclicamente num conjunto�nito de pontos, ou formam um subconjunto denso de alguma circunferência [Beardon].
Assim a dinâmica das transformações racionais de grau 1 é facilmente perceptível, e porisso o grosso do estudo das transformações racionais recai sobre as que têm grau superiorou igual a 2.
A localização dos pontos �xos de uma função torna-se num mero processo de cálculo,sendo assim, o trabalho �cará mais facilitado se soubermos de antemão quantos existem,logo é importante saber quantos pontos �xos terá uma transformação de grau d; comd � 1.
Consideremos f , uma transformação com k pontos �xos em �; e a igualdade seguinte
'f'�1(z)� z[z � '(�)]k
=
�'f'�1(z)� ''�1(z)f'�1(z)� '�1(z)
� f'�1(z)� '�1(z)['�1(z)� �]k
!: �
'�1(z)� '�1'(�)�k
[z � '(�)]k
!:
Cada factor do membro da direita desta igualdade tende para um valor não nulo quandoz tende para '(�), pois, por exemplo, o primeiro factor é da forma
'(u)� '(v)u� v ;
e uma utilização da Fórmula Integral de Cauchy aplicada a um contorno fechado centradoem '(�), mostra que este tende para um valor não nulo, nomeadamente '0(�), quandoambos u e v tendem para �. No segundo factor, a própria de�nição de k implica que ztende para '(�); e assim tende também para uma valor não nulo. O terceiro factor porsua vez tende para ['0(�)]�k. Este raciocínio prova o lema seguinte.

8 Dinâmica das funções racionais
Lema 2.1.1 Se � for um ponto �xo em C de uma transformação analítica f; e ' umatransformação analítica, injectiva e �nita em alguma vizinhança de �, então 'f'�1 temo mesmo número de pontos �xos em '(�) que f tem em �:
Para extendermos este resultado a C1 , basta conjugar a transformação em causapara que, por exemplo, o ponto �xo 1, quando surgir, se trans�ra para um ponto �xo�; e contar o número de pontos �xos da função conjugada. Pelo lema anterior vemosperfeitamente que a conjugação não afecta o número de pontos �xos. Assim podemosdeduzir o seguinte resultado para as transformações racionais.
Teorema 2.1.1 Seja � um ponto �xo de uma transformação racional R, e seja g umatransformação de Möbius. Então gRg�1 tem o mesmo número de pontos �xos em g(�) deque R tem em �:
Depois de assegurar que a conjugação não altera o número de pontos de uma transfor-mação racional podemos então deduzir o teorema seguinte.
Teorema 2.1.2 Se d � 1, uma transformação racional de grau d tem precisamente d+1pontos �xos.
Demonstração: Qualquer transformação racional R é conjugada com uma transfor-mação racional S que não �xe o 1, e o número de pontos �xos de R e de S é o mesmo,assim como os seus graus.
Assuma-se que R não �xa o 1: Façamos R = P=Q, na forma reduzida, e seja � umponto �xo qualquer de R, que tem de ser �nito. Como Q(�) 6= 0 o número de zeros deR(z)� z; em �; é exactamente o mesmo número de zeros de P (z)� zQ(z); em �. Então onúmero de pontos �xos de R em C é o número de soluções de P (z) = zQ(z); em C. ComoR não �xa o in�nito então temos
grau(P ) � grau(Q) = grau(R):
e assim o grau de P (z)� zQ(z) é exactamente grau(R) + 1 = d+ 1.A cada ponto �xo � de uma transformação racional R está associado um número
complexo, a que designamos de multiplicador m(R; �) de R em �: Se � 2 C o multiplicadoré R0(�). Este multiplicador é invariante sob conjugação, o que nos permite estabelecer
m(R;1) = m((gRg�1; g(1)));
sendo g uma transformação de Möbius que transforma o in�nito num valor de C.De acordo com a multiplicadorm(R; �) podemos classi�car os pontos �xos, classi�cação
esta que se aplica a qualquer função analítica, em particular às transformações racionaise à sua inversa local, caso exista.
De�nição 2.1.3 Supondo que � é um ponto �xo de uma função analítica f temos que �é:

2.1 Transformações racionais 9
(a) super-atractor se f 0(�) = 0;(b) atractor se 0 < jf 0(�)j < 1;(c) repulsor se jf 0(�)j > 1;(d) racionalmente indiferente se f 0(�) é uma raiz da unidade;(e) irracionalmente indiferente se jf 0(�)j = 1, mas f 0(�) não é uma raiz da unidade.
Por exemplo, P (z) = z2 tem grau dois, e logo tem três pontos �xos em C1. Estespontos �xos são o zero, a unidade e o in�nito, pois P (0) = 0; P (1) = 1 e P (1) = 1.Os respectivos multiplicadores são m(P; 0) = 0, o que indica que este ponto é um super-atractor, m(P; 1) = 2, sendo a unidade um ponto repulsor e m(P;1) = S0(�) com g(1) =� e S conjugada com R por g:
Continuemos a considerar P (z) = z2 e seja z0 um ponto fora do círculo unitário, jz0j >1. Ao iterarmos z0 por P veri�camos que o módulo de z0 vai aumentar exponencialmente,jznj = jz0j2
n �!1, enquanto que o argumento vai sempre duplicando. Assim a órbita dequalquer valor inicial, fora do círculo unitário, sujeita a uma iteração por P converge parao in�nito.
Seja z0 um ponto qualquer dentro do círculo unitário, jz0j < 1: Ao iterarmos, agora,z0 por P o módulo cresce da mesma forma do que no caso anterior, mas jznj� > 0 e assimas órbitas convergem para a origem.
2.1.3 Pontos periódicos
Do raciocínio anterior só faltou analisar os pontos que estão na circunferência unitáriade centro na origem, ou seja, os pontos do tipo z0 = e2�i�: A estrutura da órbita de-pende agora do valor �. Se � = 0, teremos uma órbita do tipo 1; 1; :::; 1, ou seja, z0é �xo por P . Se � = �, a órbita é do tipo -1, 1, 1, ..., ou seja, toma dois valoresdistintos. Se � = p
2k, para quaisquer inteiros positivos k e p, a órbita consiste em
ei�p=2k�1
; ei�p=2k�2
; :::;�1; 1; :::. Se � = pq ; com q impar, a órbita assume-se como per-
iódica.Ou seja, a partir de uma certa iteração, toma o valor inicial. Por exemplo, para� = 2=7; teremos a órbita e2�i=7; e4�i=7; e8�i=7; e2�i=7; :::; que volta ao valor inicial ao �mda 3a iteração. O valor e2�i=7 diz-se um ponto periódico de periodo 3 sob a iteração de P .
De�nição 2.1.4 Um ponto z0 diz-se periódico, de periodo n; sob R, se Rn(z0) = z0:
Se considerarmos � = 1=12, neste caso q é par, teremos a órbita e�i=6; e�i=3; e2�i=3; e4�i=3; e2�i=3; :::,e veri�camos que na 4a iteração obteve-se o valor da 2aiteração. O valor e�i=6 diz-se umponto pré-periódico ou eventualmente periódico, de periodo 2, sob a iteração de P .
De�nição 2.1.5 Um ponto z0 é pré-periódico, ou eventualmente periódico, de periodo n,se z0 não é periódico, mas existe um n > 0 tal que Rn+i(z0) = Ri(z0), com i > n. Isto é,Ri(z0) é periódica para i > n:
Quando � é irracional, a órbita é in�nita, e teremos sempre zn 6= zm, para qualquern 6= m. É de considerar que jzn � zmj aproxima-se de zero in�nitas vezes.

10 Dinâmica das funções racionais
Com este breve estudo veri�camos que a transformação z �! z2; permite aos valores,sob sua iteração, terem diferentes tipos de órbita: periódica, pré-periódica, in�nita e con-vergindo para um ponto �xo, e, in�nita e caótica. São estes tipos de órbita essencialmenteque podemos encontrar nas transformações racionais.
De�nição 2.1.6 Um ponto periódico z0 = Rn(z0) é designado de parabólico se m(R; z0) =1; mas Rn não é a transformação identidade.
Por exemplo os dois pontos �xos da transformação f(z) = zz�1 têm ambos multiplicador
�1 mas não são parabólicos já que R �R(z) = z.Um ponto periódico � de periodo n é classi�cado como um ponto �xo de Rn, mas mais
pode ser dito acerca disso. Por conjugação, podemos assumir que a órbita não contém o1 e escrever
�m = Rm(�); m = 0; 1; 2; :::
e assim �m+n = �m. Por n aplicações da regra da cadeia, obtemos
(Rn)0(�m) =n�1�k=0
R0(Rk(�m))
=n�1�k=0
R0(�k);
sendo o 2o produto um rearranjo do primeiro. Este facto mostra que a derivada (Rn)0
tem o mesmo valor em cada ponto �j da órbita, e assim cada ponto �j é classi�cadoexactamente da mesma maneira do que outro �k na órbita. Como consequência dissopodemos estender a classi�cação dada aos pontos periódicos e falar no multiplicador daórbita, órbitas atractoras, repulsoras, etc.
2.1.4 Pontos críticos
No estudo da dinâmica da transformações racionais existem uns pontos que são muitoimportantes, pois estes in�uenciam em muito a dinâmica da transformação, são os pontoscríticos de uma transformação.
De�nição 2.1.7 Os pontos críticos de uma transformação R são os pontos onde R não éhomeomor�smo, sendo R um homeomor�smo local, à excepção destes pontos em número�nito.Os pontos críticos no plano complexo são os zeros de R0(z), e para ver se o 1 éponto crítico basta efectuar uma mudança de variável.
Sendo z0 um ponto crítico de R, esta transformação racional não é injectiva em qual-quer vizinhança de z0, sendo o seu comportamento nesta vizinhança muito semelhante aocomportamento que tem numa vizinhança de zero a transformação z �! z2:
De�nição 2.1.8 Um valor crítico é a imagem de um ponto crítico.

2.1 Transformações racionais 11
Os valores críticos têm poucas pré-imagens e através do Teorema de Riemann-Hurwitzpodemos assegurar que uma transformação racional de grau d tem exactamente 2d � 2valores críticos.
Teorema 2.1.3 (Relação de Riemann-Hurwitz): Sendo vR(z) a valência de R emz, temos para qualquer transformação racional, não constante, R, que
P[vR(z)� 1] =
2 (grau(R)� 1).
Demonstração: Vamos mostrar que a igualdade se veri�ca para qualquer conjugadade R, já que ambos os membros são invariantes sob conjugação.
Selecionemos um ponto � tal que R(�) 6= �, vR(�) = 1 e que R(z) = � tenha ddistintas soluções, e construa-se uma transformação de Möbius g tal que g(�) = 1 eg(R(�)) = 1. Se escrevermos agora S = gRg�1 e transportando as propriedades de R paraS; e renomeando S como sendo R, veri�camos que podemos assumir que:
(i) R(1) = 1;(ii)R tem pólos distintos z1; z2; z3; :::; zd (todos em C);(iii) vR(1) = 1:Estas condições implicam que a valência de R em 1, e em cada zj , é um, então a
somaP[vR(z)� 1] ; efectuada sobre todos os complexos z excepto para os pontos zj , é o
número de zeros de R0(z):Considerando R(z) = P (z)
Q(z) , na forma reduzida, então
R0(z) =P 0(z)Q(z)� P (z)Q0(z)
Q(z)2;
e esta derivada também está na forma reduzida, caso contrário o numerador e o de-nominador têm um zero em comum, que terá de ser algum zj , e então 0 = P 0(z)Q(zj) =P (zj)Q
0(zj), mas ou P (zj) = 0 que é falso, pois P=Q está na forma reduzida, ouQ0(zj) = 0;que também é falso já que zj são os zeros simples de Q:
Assim a somaP[vR(z)� 1] ; além do número dos zeros de R0(z) é também o grau de
P 0Q�PQ0; ou de forma equivalente o grau do polinómio R0(z)Q(z)2, e vamos determinaro grau deste polinómio encontrando a sua ordem de crescimento para o 1. Primeiro,veri�ca-se que Q(z)2=z2d tende para um limite �nito não nulo quando z� > 1. Depois,constatando que vR(1) = 1, quer dizer que R é injectiva em alguma vizinhança de 1 eR(1=z) = 1 + Az + :::, junto à origem, onde A 6= 0: Diferenciando ambos os lados destaúltima igualdade, e substituindo z por 1=z, veri�camos que z2R0(z) tende para um limite�nito não nulo em 1 e assim X
[vR(z)� 1] = 2d� 2:
Deste teorema sai o seguinte corolário, que relaciona o grau das transformações racionaiscom o número dos seus pontos críticos.
Corolário 2.1.1 Uma transformação racional de grau positivo d tem no máximo 2d� 2pontos críticos em C1. Um polinómio de grau positivo d tem no máximo d � 1 pontoscríticos.

12 Dinâmica das funções racionais
Convenciona-se o valor vR(z)� 1 como sendo a multiplicidade do ponto crítico.Através dos pontos críticos de uma transformação R podemos localizar o conjunto dos
valores críticos de Rn da forma como nos mostra o seguinte teorema.
Teorema 2.1.4 Seja C o conjunto dos pontos críticos de uma transformação racional R.Então o conjunto dos valores críticos de Rn é o conjunto
R(C) [R2(C) [ ::: [Rn(C) = [nk=1Rk:
Demonstração: Seja z um elemento do conjunto [nk=1Rk, então existe uma sequência
z0; z1 = R(z0); :::; z = R(zn�1)
em que algum dos zj está em C. Como as valências respeitam a regra da cadeia, ou seja,
vfg(z0) = vf (g(z0))vg(z0);
teremos que a valência de Rn em z0 excede um. Então z é um valor crítico de Rn. Nooutro sentido, se z é um valor crítico de Rn, tem de existir alguma sequência em que avalência de Rn em z0 exceda um, e assim zj está em C.
2.1.5 Pontos excepcionais
De�nição 2.1.9 Um ponto z é designado de excepcional para R quando a classe de equiv-alência [z] é �nita, sendo [z] o conjunto mais pequeno e invariante que contém z. O con-junto dos pontos excepcionais é denotado por ER.
A classe [z] só é �nita em raras circunstâncias, por este facto o nome aplicado a estespontos z de excepcionais. Nas transformações racionais R é possível veri�car quantospontos destes iremos ter presentes.
Teorema 2.1.5 Uma transformação racional R de, pelo menos, grau 2 tem, quandomuito, dois pontos excepcionais. Se ER = f�g, então R é conjugada com um polinómioque faz corresponder � ao 1. Se ER = f�1; �2g, com �1 6= �2, então R é conjugada comalguma transformação z �! zd, onde �1 e �2 correspondem ao zero e ao in�nito.
Demonstração: A invariância de E = ER é fácil de ver pela sua de�nição e consti-tuição.
Vamos supor que E é �nito com k elementos. Como E é �nito, e R transforma-onele mesmo, a transformação actua como uma permutação de E, e assim para um inteiroadequado q, Rq é a transformação identidade de E nele mesmo. Agora supondo que Rq
tem grau d segue-se que para todo o w em E, a equação Rq(z) = w tem d soluções queestão todas em w, e assim, pela relação de Riemann-Hurwitz aplicada a Rq, temos
k(d� 1) � 2d� 2

2.2 Estabilidade 13
Como d � 2 temos k � 2: Assim E tem, quando muito, dois elementos. Logo R tem,quando muito, dois pontos excepcionais.
Segue-se, através de uma adequada conjugação, que existem quatro possibilidades aconsiderar,
(i) E = fg(ii) E = f1g = [1](iii) E = f0;1g; [0] = f0g; [1] = f1g(iv) E = f0;1g; [0] = [1]Se se veri�car (ii) então R é um polinómio, tendo R�1f1g = f1g. No caso de se
veri�car (iii), então R é também um polinómio, só que da forma z �! azd para alguminteiro positivo d: Finalmente se se veri�car (iv) então R(0) = 1; R(1) = 0, e R temtodos os seus zeros e pólos em f0;1g; e, então é da forma z �! azd; para algum inteironegativo d.
A prova anterior mostra, no sentido comum, que a maioria das transformações racionaisnão possuem pontos excepcionais.
Uma outra boa caracterização dos pontos excepcionais é dada pelo teorema seguinte,em que identi�camos os pontos excepcionais pela sua órbita passada.
Teorema 2.1.6 A órbita passada O�(z) de z é �nita se e só se z é um ponto excepcional.
Demonstração: Se z for excepcional a sua órbita é de facto �nita, e assim bastaprovarmos que se O�(z) é �nita então z é um ponto excepcional.
Primeiro de�nimos os conjunto não vazios
Bn = [m�n
R�mfzg
e assim R�1(Bn) = Bn+1 e
[z] � O�(z) = B0 � B1 � B2 � ::::
Agora assumimos que O�(z) é �nita. Então cada Bn é �nita, e então existe algum mcom Bm = Bm+1; isto signi�ca que R�1(Bm) = Bm e assim Bm é completamente invari-ante. Segue-se que Bm contém algumas classes de equivalência [w], e como subconjuntode [z], terá de ser [z], então [z] é �nita e [z] = O�(z).
2.2 Estabilidade
2.2.1 Familia normal
Vimos então que existem órbitas que se comportam de forma previsível e outras que secomportam de forma caótica e imprevisível. Tentemos clari�car melhor estes conceitos,introduzindo inicialmente o conceito de família normal de funções.

14 Dinâmica das funções racionais
De�nição 2.2.1 Uma família de funções analíticas complexas ff�g de�nidas num domínioD é chamada de família normal se cada subconjunto in�nito contém uma subsequênciaque converge uniformemente na métrica esférica, em qualquer subconjunto compacto deD.
Pelo Teorema de Arzelà-Ascoli isto é o mesmo que dizer que a família é equicontínua,na métrica esférica, em qualquer subconjunto compacto de D.
Montel na apresentação da sua tese (1907) explicitou o seguinte teorema, que é umaferramenta básica na descrição de famílias normais de funções.
Teorema 2.2.1 A família F de funções analíticas em D limitadas por alguma constanteé normal.
Demonstração: Tomemos o disco unitario jzj < 1. Se f 2 F satisfaz jf j � M e sejf j < r < 1; usando as desigualdades de Cauchy temos que jf 0(z)j � M
1�r . Considerando odomínio D coberto por discos temos então que a família é equicontínua, logo normal.
Um importante contributo para a caracterização das famílias normais é o teorema deMontel. Primeiro vejamos o seguinte teorema.
Teorema 2.2.2 Se D = Cnf0; 1g é a esfera de Riemann perfurada três vezes, então D1
é conformalmente equivalente ao disco unitário � = fjzj < 1g:
Demonstração: Já que � é conformalmente equivalente à parte superior do planoH = fz 2 C : Im(z) > 0g, é su�ciente encontrar uma transformação de cobertura de H emD. Vamos construir esta transformação, a função modular, da forma seguinte. Seja E =fz : 0 < Re(z) < 1; jz�1=2j > 1=2g: Então existe uma transformação que transforma Eem H �xando os valores 0; 1;1; pelo teorema de transformação de Riemann. Denotandopor E� a re�exão de E em fjz � 1=2j = 1=2g. Pelo princípio de re�exão de Schwarz,podemos estender a uma transformação conforme de E [ E� em Cn(�1; 0] [ [1;1):Continuando a re�exão podemos estender a todos os f0 < Re(z) < 1; Im(z) > 0gtomando os seus valores em Cnf0; 1g. Re�etindo através das linhas verticais fRe(z) = ngpara n inteiro, podemos estender a todo o semiplano H. Pela construção vemos que atransformação estendida é uma transformação de cobertura de H sobre D.
Teorema 2.2.3 (Montel) Seja F uma família de funções analíticas de�nidas num domínioD. Se a reunião [f2F f(D) omite três pontos em C1, então F é uma família normal.
Demonstração: Assumindo que D é um disco, e por composição por uma transfor-mação de Möbius, podemos assumir que todas as funções em F não assumem os valores0; 1 e1. Seja S = Cnf0; 1g: Pelo teorema anterior existe uma transformação de cobertura : � �! S: Seja f� o levantamento de f 2 F , de tal modo que f� � = f . Entãoff� : f 2 Fg é uma família normal já que é uma família limitada em D, logo F é umafamília normal.

2.2 Estabilidade 15
2.2.2 Conjuntos de Julia e Fatou
Usando as famílias normais podemos de�nir então o que se entende por comportamentocaótico ou previsível de uma órbita.
De�nição 2.2.2 O ponto z é um ponto estável para R se existe uma vizinhança U dez tal que fRng forma uma família normal em U: O conjunto dos pontos estáveis de Rdesigna-se de conjunto normal ou conjunto de Fatou, e vamos rapresentá-lo por FR.
De�nição 2.2.3 O conjunto instável é o complementar de FR, que é conhecido por con-junto de Julia, e vamos denotá-lo por JR.
O conjunto de Fatou é um conjunto aberto por de�nição; ele tem de ser ou vazio oudenso em C1 e frequentemente apresenta uma estrutura desconexa. O conjunto de Juliatem de ser, assim, um conjunto fechado e como veremos não é vazio. Pela iteração de umafunção as imagens de elementos do seu interior continuam no seu interior, sendo assimambos os conjuntos completamente invariantes.
Proposição 2.2.1 JR não é um conjunto vazio.
Demonstração: Vamos supor que o conjunto era vazio. Então para algum z, podemosencontrar uma vizinhança U e uma subsequência de interações fRnjg que convergem parauma função analítica f : U �! C1 que, pelo princípio da monodromia pode ser estendidaanaliticamente a C1. Então f tem de ser uma função racional de grau �nito. Mas já quef é o limite de funções cujo grau tendem para 1, esta tem de ter grau in�nito e temosuma contradição.
Nos exemplos seguintes vemos dois conjuntos de Julia muito simples, em que o conjuntode Julia, do segundo exemplo, é construído à custa do primeiro, usando a conjugaçãotopológica.
Exemplo 2.2.1 Consideremos R(z) = z2. Então Rn(z) = z2nconverge para zero se
fjzj < 1g e para 1 se fjzj > 1g. Logo o conjunto de Julia é o conjunto fjzj = 1g.
Exemplo 2.2.2 Consideremos R(z) = z2 � 2. Se usarmos o homeomor�smo H(z) =z+ 1
z , em que H : fjzj > 1g �! C1n[�2; 2], veri�camos que H�z2�= R (H(z)) para todo
o z e então z �! z2 e z �! z2 � 2 são topologicamente conjugadas. Logo o conjunto depontos que escapam para o 1 é C1n[�2; 2]. Assim o conjunto de Julia neste caso é oconjunto de pontos no eixo real [�2; 2].
Proposição 2.2.2 Se z 2 FR então a sua imagem e todas as suas pré-imagens estão emFR.
Demonstração: Seja U uma vizinhança de z na qual as iterações de R, de�nidas porRn; formam uma família normal. Como R é analítica então R(U) é aberto. Se Rnj éuma sequência convergente em U temos que Rnj�1 é uma sequência convergente em R(U).

16 Dinâmica das funções racionais
De forma semelhante R�1(U) é aberto e, em cada componente de R�1(U), Rnj+1 é umasequência convergente.
Assim, como F é invariante então, por J ser o seu complementar, temos que o conjuntode Julia, J; também é invariante.
O facto do conjunto de Julia ser completamente invariante conduz a que este possuaauto-semelhança. Isto é, sempre que R(z1) = z2; em JR, com R0(z1) 6= 0, existe umatransformação conforme, isomor�smo, de uma vizinhança N1; de z1; em uma vizinhançaN2, de z2; que transforma N1 \ JR precisamente em N2 \ JR.
Os pontos do conjunto de Julia exibem, também, a propriedade de que qualquer pontona sua vizinhança tem uma dinâmica em que existe uma dependência sensível às condiçõesiniciais. Ou seja, qualquer mudança nas condições iniciais levam a resultados muito difer-entes após um grande número de iterações.
Da proposição anterior tira-se a conclusão que FRK = FR e daí haver coincidênciatambém nos respectivos conjuntos de Julia.
Teorema 2.2.4 Para qualquer N � 1 o conjunto de Julia de R coincide com o conjuntode Julia de RN .
Demonstração: Os conjuntos de Fatou para R e RN são iguais, já que fRNg é normalnum conjunto aberto U se e só se fRnNg é normal em U .
Se z 2 JR não pode haver alguma vizinhança U para a qual as iterações de R formamuma família normal. Assim pelo Teorema de Montel,
SnRn(U) � C1 � ER, onde ER é o
conjunto excepcional e é completamente invariante.
Teorema 2.2.5 (Transitividade) Seja z1 um ponto arbitrário do conjunto de Julia JR� C1 e seja N uma vizinhança arbitrária de z1. Então a reunião U de imagens futurasRn(N) contém todo o conjunto de Julia, e contém todos os pontos de C1; à excepção de,quando muito, dois pontos.
Demonstração: Primeiro notamos que o conjunto complementar C1nU pode conter,quando muito, dois pontos. Caso contrário, como R(U) � U , segue do Teorema de Montelque U tem de estar contido no conjunto de Fatou, e isto é impossível pois z1 2 U \ JR.De novo, usando o facto de que R(U) � U; vemos que cada pré-imagem de um ponto z 2C1nU tem de pertencer ao conjunto �nito C1nU . Assim, alguma pré-imagem de z seráperiódica, já que z é periódico e pertence ao conjunto excepcional ER. Uma vez que oconjunto de Julia e ER são disjuntos, segue-se que JR � U . Assim, fazendo N pequeno osu�ciente tal que N � C1nER então U = C1nER:
Se ER = feg, podemos conjugar R de forma a que e = 1: Como ER é completa-mente invariante, e tem apenas a si mesmo como pré-imagem, assim e é ponto crítico commultiplicidade d� 1, onde d é o grau de R, logo R é um polinómio.
Pode-se veri�car que o ponto 1 é sempre estável para um polinómio pois jzj > M ,para M su�cientemente grande, jRn(z)j~jzjdn �!1.
Se ER = fa; bg podemos conjugar R de forma a que a = 0; b = 1. De novo, comoER é completamente invariante ambos os pontos são críticos com multiplicidade d � 1,

2.2 Estabilidade 17
e R = cz�d; para algum c 2 C1nf0g. Ambos os pontos de E são claramente estáveis.Qualquer transformação que não seja conjugada com uma destas duas transformações temum conjunto excepcional vazio.
Como resultado temos a seguinte proposição.
Proposição 2.2.3 Se J contém um subconjunto não vazio aberto então J = C1:
Demonstração: Seja U um conjunto aberto no interior de J . Pelo teorema de Montel,SnRn(U) � C1�ER e pela invariância de J , J � C1�ER. Como J é fechado e E contém,
quando muito, dois pontos, J = C1:
2.2.3 Conjunto de Fatou vazio
O primeiro caso, em que J = C1; sendo o conjunto de Fatou vazio, foi descoberto porLattès em 1918, com a transformação racional
z �! (z2 + 1)2
4z(z2 � 1)
Outros casos foram sendo detectados, como por exemplo, Guckenheimer descobriu que afunção
R(z) =(z � 2)2z2
também gozava da mesma propriedade.Se analizarmos esta última função veri�camos que possui dois pontos críticos, um em
z = 0 e o outro em z = 2. Através da iteração de R veri�camos a seguinte órbita 2 �!0 �! 1 �! 1 �! 1, o que indica que tanto 0, como 2, possuem órbitas eventualmenteperiódicas.
Esta última observação leva-nos ao seguinte teorema que estabelece a relação entre ospontos críticos e o facto do conjunto de Fatou ser o conjunto vazio.
Teorema 2.2.6 Se cada ponto crítico de uma transformação racional R é eventualmenteperiódico, então J = C1.
Também a transformação z �! 1� 2z2goza da mesma propriedade já que é conjugada
com a proposta por Guckenheimer, assim como todas as transformações do tipo
z �! 1 +w
z2
Para obtermos uma caracterização geral das transformações que possuem esta pro-priedade, de o conjunto de Julia ser toda a esfera de Riemann, podemos usar o seguinteteorema:
Teorema 2.2.7 Seja R uma transformação racional. Então JR = C1 se e só se existealgum z cuja órbita futura ffRn(z)g : n � 1g é densa na esfera de Riemann.

18 Dinâmica das funções racionais
Demonstração: Considere-se fBn : n � 1g uma base contável para a topologia emC1; e D o conjunto dos pontos z tais que a órbita futura O+(z) é densa na esfera: entãoz está em D se e só se para todo o k, existe algum n com Rn(z) 2 Bk e isto implica que
D =\k�1
[n�1
R�n(Bk):
Suponha-se agora que D = fg. Seja Ak = C1 �Bk e
Ek =\n�1
R�n(Ak);
assim, como D = fg; temosC1 =
[k�1
Ek
Pelo teorema de Baires, C1 não é a união contável de algum conjunto denso, logo,para algum k, o fecho de Ek tem um interior não vazio, e designemos este interior porW . No entanto, Ek é fechado, então existe algum subconjunto não vazio W de Ek. Istosigni�ca que para todo o n, Rn(W ) � Ak, assim em W , as funções Rn não tomam valoresem Bk e assim W � FR. Isto mostra que se JR = C1 então D 6= fg, e assim existe algumz cuja órbita futura é densa na esfera.
Agora suponhamos que J não é toda a esfera, assim FR 6= fg, e também que existealgum z cuja órbita futura O+(z) é densa na esfera. O valor z não está em J , pois seestivesse então teríamos O+(z) � J e assim O+(z) não podia ser densa na esfera. Assim, zestá em alguma componente do conjunto de Fatou. Assim considere-se as componentes
; R(); R2(); :::
de FR. Como O+(z) é densa na esfera então deve existir um N tal que RN () encontra, e podemos assumir que N é o mínimo inteiro em que isto acontece.
Se 1 é alguma componente de FR então, para algum n, Rn(z) 2 1 e assim Rn() =1. Deduzimos que
FR = [R() [ ::: [RN�1();
e que os conjuntos do membro direito desta última igualdade são disjuntos. Conclue-seque é completamente invariante, sob RN , e que o conjunto fRkN (z) : k � 1g é densoem :
2.2.4 Caracterizando o conjunto de Julia
De�nição 2.2.4 (Bacia de atração) Se O é uma órbita atractora periódica de periodo n,de�nimos bacia de atracção como sendo o conjunto aberto A � S, com S uma superfíciede Riemman compacta, o conjunto de todos os pontos z 2 S para os quais as sucessivasiterações Rn(z); R2n(z); ::: convergem para algum ponto de O.

2.2 Estabilidade 19
Consideremos um ponto �xo z0 com multiplicador m. Para o caso em que jmj >1 nenhuma sequência resultante da iteração de R pode convergir uniformemente numavizinhança de z0. A primeira derivada de Rn em z0 é �n, que converge para o in�nito.Por outro lado se jmj < 1, e escolhendo j�j < c < 1 teremos pelo teorema de Taylor quejf(z) � z0j � cjz � z0j para algum z su�cientemente próximo de z0. Assim as sucessivasiterações de R, restringidas a uma pequena vizinhança, convergem uniformemente para afunção z �! z0. Como um ponto periódico de R é um ponto �xo de alguma iteração fn
teremos o seguinte lema.
Lema 2.2.1 A bacia de atracção de uma órbita periódica atractora está toda contida noconjunto de Fatou, enquanto que toda a órbita repulsora periódica está contida no conjuntode Julia.
Proposição 2.2.4 Se A � C1 é a bacia de atracção de alguma órbita periódica atractora,então a fronteira topológica @A = AnA é igual a todo o conjunto de Julia. Cada compo-nente conexa do conjunto de Fatou C1nJ ou coincide com alguma componente conexa dabacia A ou então é disjunta de A.
Demonstração: Se N é alguma vizinhança de um ponto do conjunto de Julia entãopelo teorema da transitividade temos que algum Rn(N) intersecta A, então o próprio Nintersecta A: Logo J � A. Mas J é disjunto de A logo J � @A. Por outro lado se N éalguma vizinhança de um pronto da fronteira então algum limite das iterações RnjN têmde ter um ponto de descontinuidade entre A e @A, e assim @A � J . Finalmente, note-se,que cada componente conexa de Fatou intersecta A, já que não pode intersectar a suafronteira, tem de coincidir com alguma componente de A.
Proposição 2.2.5 Se w 2 J , entãoSnR�n(w) é denso em J:
Demonstração: Seja U uma vizinhança de algum elemento z 2 J . Existe um k talque w 2 Rk(U), e assim, para algum ramo de R�k; R�k(w) 2 U .
Esta proposição sugere um algoritmo para determinar e calcular conjuntos de Julia:Começando por um z0 2 J , primeiro calculamos todos os R(z1) = z0, depois para todosos z1 calculamos todos os z2 tal que R(z2) = z1, e assim sucessivamente, aproximamo-noseventualmente perto de cada ponto de J .
Este método é frequentemente usado no caso da família quadrática, já que as equaçõesquadráticas são muito fáceis de resolver. O método é muito insensível aos erros dearredondamento, já que R tende a ser expansiva no seu conjunto de Julia, e R�1 tendea ser contractiva. No entanto, traz uma desvantagem, o número dn cresce muito rapida-mente à medida que n cresce, assim são precisas muitas iterações para nos aproximarmosdos pontos do conjunto de Julia.
Lema 2.2.2 Se S é um conjunto não vazio e completamente invariante sob R então Scontém um, dois, ou in�nitos componentes.

20 Dinâmica das funções racionais
Demonstração: Suponha-se que S contém in�nitos pontos S = fa0; a1; :::; akg. Jáque S é completamente invariante, então existe alguma iteração Rp que �xa cada pontode S. Seja d o grau de Rp. Pela invariância cada ponto tem uma pré-imagem por Rp,que são eles mesmos, e assim cada um destes tem multiplicidade d� 1. Já que o total depontos críticos é 2d� 2, k é no máximo 2.
Proposição 2.2.6 J é um conjunto in�nito.
Demonstração: Um conjunto completamente invariante contendo apenas um ou doispontos tem de ser um conjunto excepcional de um polinómio. Já que os pontos do conjuntoexcepcional são sempre estáveis, o conjunto não vazio e completamente invariante J temde conter in�nitos pontos.
Proposição 2.2.7 Se R tem grau dois ou superior então JR não tem pontos isolados.
Demonstração: Se JR fosse um conjunto �nito este era formado por pontos ex-cepcionais, mas estes como são pontos periódicos superactractores, então pertenciam aoconjunto de Fatou. Então JR como é in�nito então só pode ser formado pelo menos porum ponto limite z0; cujas pré-imagens iteradas de z0 formam um conjunto denso de pontosnão isolados em JR.
O conjunto de Julia não é então formado por pontos isolados. Mas no entanto estepode ser formado por inumeráveis subconjuntos conexos ou então pode ser um peça únicaconexa.
Proposição 2.2.8 Para qualquer transformação racional de grau dois ou superior, o con-junto de Julia é conexo, ou tem inúmeras componentes conexas.
Demonstração: Supunhemos que J = J0[J1, sendo J0 e J1 dois conjuntos compactosdisjuntos não vazios. Qualquer um destes dois subconjuntos têm de ser in�nitos pois Jnão tem pontos isolados. Primeiro mostremos que nenhum destes dois conjuntos pode serconexo.
Comecemos por escolher um conjunto aberto U que intersecte J0 mas não J1: Paraalguma imagem de Rn(U) vai haver intersecção tanto com J0 como com J1. Caso contrário,dado uma sequência qualquer de iterações de Rn; podíamos escolher um subsequênciain�nita de iterações Rnj que transforme U num conjunto que falhe um do J�, omitindotrês pontos distintos de C1, e assim existe uma subsequência que converge de formauniforme localmente em U . Isto contradiz a hipótese de que U intersecta o conjunto deJulia.
Agora escolhendo n tal que Rn(U) intersecte tanto J0 com J1 segue, pela invariânciade J que Rn(J0) intersecta tanto J0 como J1. Assim J0 pode ser expresso como a reuniãodisjunta de subconjuntos compactos não vazios J00 = J0 \R�n(J0) e J01 = J0 \R�n(J1).
De forma semelhante, segue por indução em k que qualquer sequência �1; �2; :::; �kde peças, podemos construir um conjunto compacto não vazio J�1:::�k tal que J�1:::�k�1

2.2 Estabilidade 21
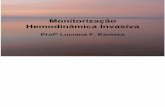
Figura 2.1: Conjunto de Julia para z3+0:706+0:52i com inúmeras componentes conexas
é a reunião de subconjuntos compactos disjuntos J�1:::�k0 e J�1:::�k1. As correspondentesintersecções in�nitas
J�1�2::: =\k
J�1�2:::�k
são disjuntas e não vazias, e cada uma contém pelo menos um componente conexo de J:
Assim, como fomos vemos ao longo desta secção uma transformação racional ao it-erar elementos do conjunto de Julia tem uma dependência sensível às condições inicias, étopologicamente transitiva e os pontos periódicos em J são densos, logo a transformaçãoracional tem um comportamento caótico em J:
De�nição 2.2.5 Seja V um conjunto e f : V �! V . A função f é dita de caótica emV se f tem dependência sensível às condições iniciais, é topológicamente transitiva e ospontos periódicos são densos em V .
2.2.5 O conjunto de Julia e os pontos periódicos
Teorema 2.2.8 Seja R uma transformação racional de grau d, com d � 2. Então oconjunto de Julia é o conjunto derivado do pontos periódicos de R.
Demonstração: Começa-se por escolher um conjunto aberto W qualquer que encon-tre J , e por escolher um ponto w em W \J tal que w não é um valor crítico de R2. EntãoR�2fwg contém pelo menos quatro pontos, já que o grau de R é maior do que dois, e assimpodemos escolher três deles, w1; w2 e w3, distintos de w. Agora toma-se vizinhanças dosmesmos pontos, compactas, disjuntas duas a duas, W1, W2 e W3 e ainda W em relação

22 Dinâmica das funções racionais
a w; de tal forma que para cada j, R2 é um homeomor�smo de Wj em W , e considere-seSj :W �!Wj a inversa de R2 :Wj �!W .
Se para todo o z 2W , todo o j 2 f1; 2; 3g e para todo n � 1, obtivermos
Rn(z) 6= Sj(z);
então fRng é normal em W . Mas isto não pode acontecer em W \ J , então existe algumz 2W , algum j, e algum n tal que Rn(z) = Sj(z), e assim
Rn+2(z) = R2Sj(z) = z:
Isto mostra-nos que z é um ponto periódico de R, que se encontra em W , e que J estácontido no conjunto derivado dos pontos periódicos de R.
Para mostrar o que o teorema a�rma, só nos falta veri�car que o conjunto derivadodos pontos periódicos de R está contido em J e assim termos a igualdade preconizada.Para conlcuir este facto, é su�ciente provar o seguinte lema.
Lema 2.2.3 Qualquer componente de F contém no máximo um ponto periódico de R .
Demonstração: Seja F0 um componente de F e suponha-se que � e � são pontosperiódicos em F0. Substituindo R por uma iteração adequada Rn, podemos assumir queambos os pontos são �xos por R. Se � é um ponto �xo super-atractor de R, então Rn �! �em F0 e assim como R �xa � teremos de ter � = �: Quando � é um ponto �xo indiferentede R, e então R : F0 �! F0 é analiticamente conjugada a uma rotação de ordem in�nitano disco unitário. Neste caso, � é o único ponto �xo de R em F0, e assim, � = �:
Teorema 2.2.9 O conjunto de Julia para qualquer transformação racional R de grausuperior ou igual a dois é igual ao fecho do conjunto dos pontos periódicos repulsores.
Demonstração: (Fatou)Recorde-se que o conjunto de Julia JR não tem pontos isolados. Assim podemos excluir
um número de pontos de JR, quantos quisermos, sem afectar o argumento.Seja z0 um ponto qualquer de J que não seja ponto �xo nem valor crítico. Por outras
palavras assumimos que existem d pré-imagens z1; z2; :::; zd que são distintas umas dasoutras e de z0, onde d � 2 é o grau de R: Pelo Teorema da Função Inversa, podemosencontrar d funções holomór�cas z �! 'j(z) que são de�nidas em alguma vizinhança Nde z0, e que satisfazem f('j(z)) = z; em que 'j(z0) = zj . Para algum n > 0 e para algumz 2 N a função fn(z) tem de tomar um dos três valores z; '1(z) ou '2(z). Caso contrárioa família das funções holomór�cas
gn(z) =(fn(z)� '1(z)) (z � '2(z))(fn(z)� '2(z)) (z � '1(z))
em N evitaria os valores 0; 1 e1, e assim seria uma família normal. Logo ffnjNg tambémseria uma família normal, contradizendo a hipótese de queN intersecta o conjunto de Julia.

2.3 A família quadrática 23
Assim podemos encontrar z 2 N que satisfaça fn(z) = z ou fn(z) = 'j(z). Assim segueque z é um ponto periódico de periodo n ou n+ 1, respectivamente.
Isto mostra que nos podemos aproximar de cada ponto de JR de forma arbitráriaatravés de pontos periódicos, pontos estes em número �nito e que têm de ser repulsores.
Os pontos periódicos parabólicos também são membros do conjunto de Julia.
Lema 2.2.4 Todos os pontos parabólicos periódicos estão no conjunto de Julia.
Demonstração: Seja w um parâmetro local de uniformização, com w = 0 correspon-dente ao ponto periódico. Então alguma iteração Rm corresponde a uma transformaçãolocal do plano-w com uma série de potências na forma w �! w + aqw
p + aq+1wp+1 + :::,
onde q � 2, aq 6= 0. Assim Rmk corresponde a uma série de potências w �! w+kaqwp+:::.
Logo a derivada de ordem q de Rmk em 0 é igual a q!kaq que tende para o in�nito à me-dida que k �!1. Pelo Teorema de Convergência Uniforme de Weierstrass, segue-se quenenhuma subsequência de fRmkjg pode convergir localmente de forma uniforme à medidaque kj �!1:
2.3 A família quadrática
Um caso particular das transformações racionais e que assume uma importância relevanteé a família de funções quadráticas Qc(z) = z2 + c, com z; c complexos.
2.3.1 O conjunto de Mandelbrot
Se analizarmos a iteração do ponto crítico desta função que é o z = 0, veri�camos quetemos O+(0) = f0; c; c+ c2; c+ (c+ c2)2; :::g.
A função Qc(z) admite uma órbita atractora de período n quando Qnc (z0) = z0 e��(Qnc (z0))0�� < 1.Calculemos, por exemplo,o conjunto dos valores c em que Qc(z) admite uma órbita
atractora de período 1.A função Qc(z) tem um ponto atractor �xo, de período um, quando Qc(z) = z e��(Qc(z))0�� = j2zj < 1. A fronteira desta região consiste nos valores c para os quais o valor
do módulo da derivada é um, isto é, 2z = eit.Logo, z = eit
2 e substituindo em z2+c = z temos c = 12eit� 1
4ei2t, que é a parametrização
de um cardióide, com 0 � t < 2�.De modo semelhante, se procurarmos a região onde Qc(z) tem um ciclo atractor de
periodo dois, podemos veri�car que se trata de uma região em forma de circunferência deraio 1
4 com centro em c = �1:Se continuarmos, iremos obter um retrato descritivo no plano-c do destino da órbita
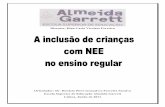
do ponto crítico sob iteração da função Qc(z). Este conjunto toma o nome de conjunto deMandelbrot em homenagem ao seu �descobridor�, Benoit Mandelbrot.
Apesar das aparências iludirem, Douady e Hubbard provaram que o conjunto de Man-delbrot é um conjunto conexo.

24 Dinâmica das funções racionais
Figura 2.2: Conjunto de Mandelbrot
Podemos ver que o valor c está no conjunto de Mandelbrot se a órbita do zero sobiteracção da função Qc(z) não tende para o in�nito, ou seja, os valores de c para os quaisa órbita crítica é limitada. Se a órbita de c tende para o in�nito então o valor c não estáno conjunto de Mandelbrot.
Neste conjunto podemos veri�car a existência dos conjuntos onde a função admiteórbitas de período um e de período dois, para além de outros conjuntos que estão anexadosao cardióide principal onde a função admite órbitas de períodos mais elevados.
Assim, ao passarmos do cardióide principal para os outros subconjuntos anexos, quesão designados de bolbos, passamos por um ponto em que a função altera o seu comporta-mento. Estes pontos são especiais, são pontos onde se assiste a uma bifurcação da função,onde nasce um novo ciclo atractor.
Cada um dos bolbos no conjunto de Mandelbrot consiste em valores de c; para os quaisQc admite uma órbita atractora periódica de algum período q associado a um número derotação p
q . Isto é, o ciclo atractor de Qc tende a ter uma rotação de centro num ponto�xo, rodando aproximadamente pq revoluções em cada iteração. Por esta razão, cada bolborecebe a designação de bolbo p
q , e vamos denotá-lo por Bp=q: Em cada um destes bolbos,cada valor de c tem essencialmente o mesmo comportamento dinâmico.
Assim, para os valores c em cada bolbo ligado ao cardióide em c(p=q); Qc tem um cicloatractor de período q.
É conhecido que à medida que c segue um percurso no cardióide principal passandopor cp=q em direcção a Bp=q; cp=q sofre uma bifurcação p=q: Isto signi�ca que quando oc está no cardióide principal perto de cp=q; Qc tem um ponto �xo atractor com um ciclorepulsor na sua vizinhança de período q.
Em cp=qo ponto �xo atractor e o ponto �xo repulsor, fundem-se para produzir umponto �xo neutral com derivada e2�ip=q: Quando c está em Bp=q; Qc tem agora um cicloatractor de periodo q e um ponto repulsor �xo.
Quando c = cp=q, as dinâmicas locais, linearizáveis, são dadas pela rotação atravésdo ângulo 2�p=q: Como consequência, para os valores de uma vizinhança de c 2 Bp=q; o

2.3 A família quadrática 25
Figura 2.3: Os períodos dos bolbos do conjunto de Mandelbrot
ciclo atractor roda com centro no ponto �xo repulsor saltando aproximadamente 2�p=qradianos em cada iteração.
A �gura 2.4 mostra o período de algumas dessas regiões periódicas para valores pe-quenos de q.
Como vimos os valores de c que estão dentro do cardióide principal, fornecem órbitasatractoras em que o período é um, sendo uma destas órbitas a órbita crítica de z = 0.Ou seja, a órbita crítica tende para uma destas órbitas atractoras a partir de uma certaiteração. Isto permite-nos avaliar que a órbita do ponto crítico tende sempre para a órbitaatractora de um dado c de Qc(z). Este facto é importante, pois se quisermos procurar porórbitas atractoras de uma dada função basta pesquisar as órbitas críticas da mesma. Ouseja, se estas órbitas atractoras existirem, estas ser-nos-ão dadas pelas órbitas críticas.
Uma das mais fascinantes características do conjunto de Mandelbrot, é que podemosretirar o número de rotação p=q directamente da geometria do bolbo correspondente.Cada bolbo p=q admite uma antena que consiste de um ponto de junção a partir do qualderivam q rami�cações. Uma dessas rami�cações está ligada directamente ao bolbo. Estarami�cação é designada de rami�cação principal. Para muitos desses bolbos, a rami�cação�mais pequena�ligada ao ponto de junção está localizado exactamente p=q voltas, em voltado ponto rami�cação da rami�cação principal na direcção anti-horária, também a �maiscomprida� está localizada exactamente p=q voltas da rami�cação principal na direcçãohorária. Este facto nem sempre é verdade, no entanto podemos usualmente julgar onde amais curta e a mais comprida rami�cação devia existir e assim determinar p=q:
Por exemplo, na �gura 2.5 está representado um bolbo 25 : Note-se que as 5 rami�cações
estão ligadas num ponto de junção, e assim podemos ver que a rami�cação mais curtaestá localizada de modo não rigoroso 2
5 de uma volta a partir da antena principal nadirecção anti-horária, enquanto que a mais comprida está localizada 2
5 de uma volta na

26 Dinâmica das funções racionais
Figura 2.4: Bolbo 25 com a respectiva antena
direcção oposta. No artigo de Devaney e Moreno-Rocha, Geometry of the Antennas in theMandelbrot Set, podemos encontrar uma de�nição rigorosa para �a mais comprida�e �amais curta�das rami�cações.
Raios externos
Considere-se E = fz 2 C : jz > 1jg : De acordo com Douady e Hubbard, existe um únicoisomor�smo analítico � que transforma E no exterior do conjunto Mandelbrot. A trans-formação � leva reais positivos em reais positivos. Esta transformação é a uniformizaçãodo exterior do conjunto de Mandelbrot, ou a transformação exterior de Riemann.
A importância de � resulta do facto que a imagem, sob �; dos raios � =constante emE têm uma dinâmica signi�cativa. No conjunto de Mandelbrot,M, de�nimos raio externode ângulo externo �0, como sendo a imagem, sob �; de � = �0.
É conhecido que o raio externo cujo ângulo �0 é racional cai emM: Isto é,
limr�>1
��re2�i�0
�existe e é um ponto único, c, na fronteira deM:
Este valor c é designado de ponto de chegada do raio com ângulo �0:Por exemplo, o raio com ângulo 0 está contido no eixo real e cai emM na in�exão do
cardeóide principal, nomeadamente em c = 14 : Também, o raio com ângulo 1
2 está contidono eixo real negativo e cai emM na ponta da cauda deM e pode-se mostrar que é c = �2:
Consideremos agora o interior deM. Este consiste em muitas in�nitas simples regiõesconexas. Um bolbo de M é um componente do interior de M em que cada valor ccorresponde a uma função quadrática que admite um ciclo atractor. O período deste cicloé constante em cada bolbo. Em muitos casos, um bolbo está ligado a uma componente deperíodo inferior num único ponto designado o ponto raiz da componente.
Um resultado importante de Douady e Hubbard é o seguinte teorema:

2.3 A família quadrática 27
Teorema 2.3.1 Supondo que um bolbo B consiste nos valores c para os quais a transfor-mação quadrática tem um ciclo atractor de período q, então o ponto raíz deste bolbo é oponto de chegada de exactamente dois raios, e os ângulos de cada um desses raios têmperíodo q sob o efeito da função D(�) = 2�mod1.
Na função D(�) = 2�mod1, o ângulo � é periódico sob d só e só se � é um racional daforma p=q, em forma de fracção reduzida, com q ímpar.
Por exemplo, a órbita de 13 sob D é
1
3�! 2
3�! 1
3�! :::
que tem período 2.O racional 17 tem período 3 sob a função D;
1
7�! 2
7�! 4
7�! 1
7�! :::
enquanto 15 tem período 4:
1
5�! 2
5�! 4
5�! 3
5�! 1
5�! :::
Os racionais com denominador par são eventualmente periódicos mas não periódicos.Por exemplo, 16 está num ciclo eventual de período 2,
1
6�! 2
6�! 4
6�! 2
6�! :::
e 18 é eventualmente �xo:
1
8�! 1
4�! 1
2�! 1 �! 1 �! :::
Assim, os ângulos dos raios externos de M determinam a ordem dos bolbos de M.Por exemplo, o bolbo grande ligado no lado esquerdo do principal cardeóide é um bolbo 1
2 ;logo, dois raios com período 2 sob o efeito da função D têm que cair aí. Os únicos ânguloscom período 2 são 1
3 e23 , e daí estes serem os ângulos que caem no ponto raíz de B 1
2.
Considerando agora o bolbo 13 , este está entre os raios 0 e
13 . Existem apenas dois
ângulos entre 0 e 13 que têm período 3, nomeadamente 17 e27 , assim, estes são os raios que
caem no ponto raiz B 13:
O bolbo 25 está entre o bolbo
13 e
12 , então os raios que caem em c(25) tem de ter
período 5; e estão entre 27 e
13 . Os únicos ângulos que possuem esta propriedade são 9
31 e1031 : Podemos ver na �gura 2.6 alguns desses raios.

28 Dinâmica das funções racionais
Figura 2.5: Raios externos do conjunto de Mandelbrot
2.3.2 O conjunto cheio de Julia
Agora, se para cada um dos valores c, na função Qc(z), coleccionarmos no mesmo conjuntotodos os valores iniciais z0 cuja órbita não escapam para o in�nito sob a iteração de Qc(z)obtemos um conjunto ao qual designamos de conjunto cheio de Julia, e representamo-lopor FJc.
A órbita do valor crítico desempenha um papel importante na estrutura de FJc. Estefacto foi registado na descoberta efectuada por Fatou e Julia, que �cou conhecido comodicotomia fundamental.
Teorema 2.3.2 (Dicotomia fundamental) Se a órbita crítica tende para o in�nito sobiteracção de Qc(z) então FJc é um conjunto de Cantor. Se a órbita crítica não escapapara o in�nito então FJc é um conjunto conexo.
Por outras palavras, podemos assim estabelecer uma relação directa entre o conjuntode Mandelbrot de Qc(z) e FJc: Se o valor c estiver dentro do conjunto de Mandelbrot,então FJc será um conjunto conexo, caso contrário é um conjunto de Cantor. Assim,se seguirmos um caminho qualquer ao longo do interior do conjunto de Mandelbrot, e àmedida que nos vamos aproximando da sua fronteira, o conjunto FJc vai-se fragmentando.
Por exemplo FJ0 é um disco unitário com centro na origem.Se c estiver dentro do cardióide principal do conjunto de Mandelbrot o máximo que
podemos assistir no conjunto FJc são deformações do círculo unitário, �gura 2.7.A deformação aumenta à medida que c se aproxima de um dos pontos de bifurcação,
tendo FJc tendência para se fragmentar em �guras que estão intimamente relacionadas

2.3 A família quadrática 29
Figura 2.6: Conjunto FJc para c = �0; 2685� 0; 01419i
Figura 2.7: Conjunto FJc para c = 0; 2302 + 0; 496i
com o período do ciclo atractor que estão mais próximas. Na �gura 2.8 podemos veri�caruma proximidade com um ciclo atractor de período quatro.
Quando passamos para um dos bolbos do conjunto de Mandelbrot em que o período équatro, por exemplo a �gura 2.9, o conjunto conexo FJc já apresenta uma fragmentação,em que surje uma subdivisão em quatro subconjuntos a partir de um ponto.
Quando c está fora do conjunto de Mandelbrot, FJc torna-se num conjunto de Cantor,completamente desconexo, �gura 2.10.
Para os polinómios de grau dois p(w) = a2w2 + a1w + a0, podemos obter uma clas-
si�cação quase completa dos conjuntos de Julia a partir do conjunto de Mandelbrot. Opolinómio p(w) é conjugado com Qc(z) = z2 + c através de uma transformação de coor-denada w �! z = a2w +
a12 , com
c = a0a2 �a12
�1� a1
2
�:
Esta transformação muda o ponto crítico x = � a12a2
para a origem. É assim su�cienteestudar a natureza dos conjuntos de Julia de Qc(z) para compreender a dinâmica dospolinómios de grau dois.

30 Dinâmica das funções racionais
Figura 2.8: Conjunto FJc para c = 0; 2893 + 0; 5382i
Figura 2.9: Conjunto FJc para c = �1; 293� 0; 119i

Capítulo 3
Superfícies de Riemann eAplicações Holomór�cas
3.1 As super�cies de Riemann
As superfícies de Riemann são variedades bidimensionais com uma estrutura adicional,que de�nimos a seguir. Uma variedade n-dimensional é um espaço topológico de Hausdor¤X, de tal forma que cada ponto pertencente a este espaço possui uma vizinhança que éhomeomór�ca a um conjunto aberto em Rn.
De�nição 3.1.1 Seja X uma variedade bidimensional. Um mapa complexo em X é umhomeomor�smo ' : U �! V de um subconjunto aberto U � X em um subconjunto abertoV � C. Dois mapas complexos '1 : U1 �! V1 e '2 : U2� > V2 dizem-se holomor�camentecompatíveis se a transformação
'2o'�11 : '1(U1 \ U2) �! '2(V1 \ V2)
é bi-holomór�ca.
De�nição 3.1.2 Um atlas complexo em X é um sistema U = f'i : Ui �! Vi; i 2 Ig demapas que são holomor�camente compatíveis e que cobrem X, isto é, [i2IUi = X:
Dois atlas complexos U e U 0 são designados analiticamente equivalentes se cada mapade U é holomor�camente compatível com cada mapa U 0:
Se ' : U �! V é um mapa complexo, U1 é aberto em U e V1 = '(U1), então' : U1 �! V1 é um mapa que é holomor�camente compatível com ' : U �! V:
A noção de equivalência analítica de atlas complexo é uma relação de equivalência jáque a composição de transformações bi-holomór�cas é bi-holomór�ca.
De�nição 3.1.3 Um estrutura complexa numa variedade bidimensional X é uma classede equivalência de atlas analiticamente equivalentes em X:
31

32 Superfícies de Riemann e Aplicações Holomór�cas
Assim uma estrutura complexa em X pode ser dada por uma escolha de atlas com-plexo. Cada estrutura complexa � em X contém um único atlas maximal U�. Se U é umatlas arbitrário em �, então U� são todos os mapas complexos em X que são holomor�-camente compatíveis com cada mapa de U .
De�nição 3.1.4 Uma superfície de Riemann é um par (X;�) onde X é uma variedadeconexa bidimensional e � é uma estrutura complexa em X.
Normalmente escreve-se X no lugar de (X;�) sempre que é claro qual a estruturacomplexa � usada. Também se pode escrever (X;U) onde U é um representante de �:
Por convenção, se X é uma superfície de Riemann então por um mapa em X entende-secomo um mapa complexo pertencente ao atlas maximal da estrutura complexa em X.
Localmente uma superfície de Riemann é nada mais do que um conjunto aberto noplano complexo.
Se ' : U �! V em que V � C é um mapa em X; então ' transforma o conjunto abertoU � X bijectivamente em V . No entanto, qualquer ponto de X está contido em muitosmapas diferentes e nenhum deles é distinguível dos outros. Por esta razão apenas podemostrazer para as super�cies de Riemann as noções da Análise Complexa que permaneçaminvariantes sob transformações bi-holomór�cas, isto é, as noções que não dependem daescolha de um mapa em particular.
Podemos introduzir alguns exemplos de superfícies de Riemann.
Exemplo 3.1.1 O plano complexo C. A sua estrutura complexa é de�nida pelo atlas cujoúnico mapa é a transformação identidade C �! C.
Exemplo 3.1.2 (Domínios) Supondo que X é uma superfície de Riemann e que Y � X éum domínio, isto é, um subconjunto aberto conexo. Então Y tem uma estrutura complexanatural que o faz superfície de Riemann. Nomeadamente, a que leva todos os mapascomplexos ' : U �! V em X, onde U � Y: Em particular, cada domínio Y � C é umasuperfície de Riemann.
Exemplo 3.1.3 (A esfera de Riemann C1) Em C1 introduzimos a seguinte topologia.Os conjuntos abertos são os conjuntos abertos usuais U � C juntamente com os conjuntosda forma V [ f1g; onde V � C é o complementar do conjunto compacto K � C. Comesta topologia C1 é um espaço topológico compacto de Hausdor¤, homeomór�co à 2-esferaS2. Sejam
U1 = CU2 = Cnf0g [ f1g
e as transformações '1; a transformação identidade e
'2(z) =
�1z , z 2 Cnf0g0, z =1 :

3.2 Holomor�smo 33
As transformações '1 e '2 são homeomor�smos e assim C1 é uma variedade bidimen-sional. Já que U1 e U2 são conexos e a sua intersecção não é vazia C1 é também conexo.A estrutura complexa em C1 é de�nida pelo atlas consistindo nos mapas 'i : Ui �! C,i = 1; 2. Estes dois mapas são holomor�camente compatíveis, já que '1(U1 \ U2) ='2(U1 \ U2) = C1 e '2o'
�11 : Cnf0g �! Cnf0g; z � 1=z é bi-holomór�ca.
Exemplo 3.1.4 (O toro) Supondo que !1 e !2 2 C são linearmente independentes sobreR , de�nimos
� = Z!1 + Z!2 = fn!1 +m!2 : m;n 2 Zg:
� é designado de rede gerada por !1 e !2 . Dois números complexos são designados deequivalentes se a sua diferença pertence a �: O conjunto de todas as classes equivalentesé denotado por C=�. Seja � : C �! C=� a projeção canónica, isto, é, a transformaçãoque associa a cada ponto z 2 C a sua classe de equivalência mod �. Usemos a topologiaseguinte em C=�: Um subconjunto U � C=� é aberto precisamente se ��1(U) � C éaberto. Com esta topologia C=� é um espaço topológico de Hausdor¤ e a transformaçãoquociente � : C �! C=� é contínua. Já que C é conexo, C=� é também conexo, assimcomo compacto, pois é coberto pela imagem sob � do paralelogramo compacto
P = f�!1 + �!2 : �; � 2 [0; 1]g:
A imagem de todo o conjunto aberto V � C , por �, é aberto.A estrutura complexa em C=� é de�nida da seguinte maneira. Seja V � C um con-
junto aberto tal que nenhum par de pontos em V são equivalentes por �. Então U = �(V )é aberto e � : V �! U é um homeomor�smo. A sua inversa ' : U �! V é um mapa com-plexo em C=�. Seja U o conjunto de mapas obtidos dessa forma. Agora só resta mostrarque quaisquer dois mapas 'i : Ui �! Vi; i = 1; 2 pertencentes a U são holomor�camentecompatíveis. Consideremos a transformação
= '2o'�11 : '1(U1 \ U2) �! '2(U1 \ U2):
Para cada z 2 '1(U1 \ U2) temos �( (z)) = '�11 (z) = �(z) e assim (z)� z 2 �. Já que� é discreta e contínua, implica que (z)� z é constante em todo o componente conexode '1(U1 \ U2). Assim, é holomór�ca. Da mesma forma, �1 também é holomór�ca.
Seja S1 = fz 2 C : jzj = 1g. A transformação que associa o ponto de C=�, representadopor �!1 + �!2; ao ponto
�e2�i�; e2�i�
�2 S1xS1 é um homeomor�smo de C=� no toro
S1xS1.
3.2 Holomor�smo
De�nição 3.2.1 Seja X uma superfície de Riemann e Y � X um subconjunto aberto. Afunção f : Y �! C é designado de holomór�ca, se para cada mapa : U �! V em X afunção
f � �1 : (U \ Y ) �! C

34 Superfícies de Riemann e Aplicações Holomór�cas
é holomór�ca no sentido usual no conjunto aberto (U \ Y ) � C. O conjunto de todas asfunções holomór�cas em Y serão denotadas por O(Y ).
As funções holomór�cas gozam de algumas propriedades, como por exemplo, a somae o produto de funções holomór�cas ainda é holomór�ca. As funções constante tambémsão holomór�cas. Assim o conjunto O(Y ) é uma C�álgebra.
A condição presente na de�nição não tem que ser veri�cada para todos os mapas noatlas maximal em X, mas apenas para qualquer família de mapas que cobrem Y . Assim,automaticamente, a condição é preenchida por todos os outros mapas.
Cada mapa : U �! V em X é, em particular, uma função de variável complexa emU . Trivialmente esta é holomór�ca.
A função designa-se por coordenada local ou parâmetro uniformizador e (U; ) umavizinhança de coordenadas de qualquer ponto a 2 U . Neste contexto usa-se mais usual-mente a letra z no lugar de .
Teorema 3.2.1 (Teorema das Singularidades Removíveis de Riemann) Seja U um sub-conjunto aberto de uma superfície de Riemann e a 2 U . Supondo que a função f 2O(Unfag) é limitada em alguma vizinhança de a, temos que f pode ser estendida deforma única a uma função f� 2 O(U).
Este último resultado surge directamente do mesmo teorema mas aplicado no planocomplexo.
Agora passemos à de�nição de transformações holomór�cas entre superfícies de Rie-mann.
De�nição 3.2.2 Suponha-se X e Y duas superfícies de Riemann. Uma transformaçãocontínua f : X �! Y é holomór�ca se para cada par de mapas 1 : U1 �! V1 em X e 2 : U2 �! V2 em Y com f(U1) � U2 a transformação
2 � f � �1 : V1 �! V2
é holomór�ca no sentido usual.Uma transformação f : X �! Y é bi-holomór�ca se é bijectiva e ambas as transfor-
mações f : X �! Y e f�1 : Y �! X forem holomór�cas.Duas superfícies de Riemann X e Y são isomór�cas se existir um bi-holomor�smo
f : X �! Y .
No caso especial Y = C, as transformações holomór�cas f : X �! C são as funçõesholomór�cas.
SeX;Y e Z são superfícies de Riemann e f : X �! Y e g : Y �! Z são transformaçõesholomór�cas então a composição g � f : X �! Z é também holomór�ca.
Um critério, que nos permite averiguar a existência de um holomor�smo entre duassuper�cies de Riemann, que sai directamente da de�nição e do facto de cada função seruma função de variável complexa, e que, sendo Y = C teremos f como função holomór�causual, é o seguinte:

3.2 Holomor�smo 35
Lema 3.2.1 Uma transformação contínua f : X �! Y entre duas superfícies de Riemanné holomór�ca se para cada conjunto aberto V � Y e cada função holomór�ca 2 O(V ),a função � f : f�1(V ) �! C está contida em O(f�1(V )).
Neste sentido uma transformação holomór�ca f : X �! Y induz uma transformação
f� : O(V ) �! O(f�1(V )); f�( ) = � f:
Teorema 3.2.2 (Da identidade) Supondo X e Y duas superfícies de Riemann e f1; f2 :X �! Y dois holomor�smos que coincidem num dado conjunto A � X tendo um pontolimite a 2 X; então f1e f2 são identicamente iguais.
Demonstração: Seja G o conjunto de todos os pontos x 2 X tendo uma vizinhançaaberta W tal que f1 = f2 em W .
Por de�nição G é aberto. Vamos a�rmar que G é também fechado. Para o efeito,suponha-se b um ponto da fronteira de G: Então f1(b) = f2(b) já que f1 e f2 são contínuas.Vamos escolher mapas ' : U �! V em X e : U 0 �! V 0 em Y com b 2 U e fi(U) � U 0.Podemos também assumir que U é conexo.
As transformaçõesgi = � fi � '�1 : V �! V 0 � C
são holomór�cas. Já que U \G 6= fg, o Teorema da Identidade para funções holomór�casem domínios de C implica que g1 e g2 são iguais. Assim f1 = f2 em U . Já que b 2 Gtemos que G é fechado. Agora, já que X é conexo, ou G = fg ou G = X. Mas se a 2 Gtemos o primeiro caso excluído. Assim sendo, f1 e f2 coincidem em todo o X.
De�nição 3.2.3 Seja X uma superfície de Riemann e Y um subconjunto aberto de X.Uma função meromór�ca em Y é uma função holomór�ca f : Y 0 �! C, onde Y 0 � Y éum subconjunto aberto, cumprindo as seguintes condições:
(i) Y nY 0 contém apenas pontos isolados;(ii) Para cada ponto p 2 Y nY 0 teremos lim
x�>pjf(x)j =1:
Os pontos de Y nY 0 são designados de pólos de f . O conjunto de todas as funçõesmeromór�cas em Y é denotado por M(Y ):
Exemplo 3.2.1 Supondo n � 1 e F (z) = zn + c1zn�1 + ::: + cn, ck 2 C, temos que F :
C �! C de�ne uma transformação holomór�ca. Se pensarmos em C como um subconjuntode C1, então lim
z�>pjF (z)j =1: Assim F 2M(C1):
Agora vamos interpretar as funções meromór�cas como transformações holomór�casna esfera de Riemann.
Teorema 3.2.3 Considere�se X uma superfície de Riemann e f 2M(X): Para cada pólop de f de�nimos f(p) = 1. Então f : X �! C1 é uma transformação holomór�ca. Deforma recíproca se f : X �! C1 é uma transformação holomór�ca, então f é igual ao 1

36 Superfícies de Riemann e Aplicações Holomór�cas
ou f�1(1) é constituída apenas por pontos isolados e f : Xnf�1(1) �! C é uma funçãomeromór�ca em X.
Assim podemos identi�car a função meromór�ca f 2 M(X) com a transformaçãoholomór�ca correspondente f : X �! C1.
Demonstração: Seja f 2 M(X) e P o conjunto dos polos de f . Então f induzuma transformação f : X �! C1 que é contínua. Supondo agora que ' : U �! V e : U 0 �! V 0 são mapas em X e C1, respectivamente com f(U) � U 0. Temos de mostrarque
g = � f � '�1 : V �! V 0
é holomór�ca. Já que f é holomór�ca em XnP , segue-se que g é holomór�ca em V n'(P ).Então pelo teorema das Singularidades Removíveis de Riemann, g é holomór�ca em todoo V . Pelo teorema da Identidade temos o recíproco.
Juntando o teorema da Igualdade e o último teorema segue-se que o teorema da Iden-tidade também é válido para funções meromór�cas numa superfície de Riemann. Assimqualquer função f 2 M(X) que não seja nula só tem zeros isolados. Isto implica queM(X) é um campo.
3.3 Propriedades elementares das transformações holomór-�cas
Teorema 3.3.1 (Comportamento local de transformações holomór�cas) Supondo que Xe Y são duas superfícies de Riemann e que f : X �! Y é uma transformação holomór�canão constante, e que a 2 X assim como b = f(a). Então existe um inteiro k � 1 e mapas' : U �! V; em X, e : U 0 �! V 0, em Y , com as seguintes propriedades:
(i) a 2 U; '(a) = 0; b 2 U 0, (b) = 0.(ii) f(U) � U 0.(iii) A transformação F = � f � '�1 : V �! V 0 é dada por F (z) = zk para todo o
z 2 V .
Demonstração: Primeiro notamos que existem mapas '1 : U1 �! V1 em X e :U 0 �! V 0 em Y tal que as propriedades (i) e (ii) são satisfeitas se substituirmos (U;')por (U1; '1). Segue-se, agora, pelo teorema da Identidade que a função
f1 = � f � '�1 : V1 �! V � C
é não constante. Já que f1(0) = 0, existe um k � 1 tal que f1(z) = zkg(z), onde gé holomór�ca em V1 com g(0) 6= 0. Então existe uma vzinhança de 0 e uma funçãoholomór�ca h nesta vizinhança tal que hk = g. A correspondência z �! z:h(z) de�neuma transformação biholomór�ca � : V2 �! V de uma vizinhança aberta V2 � V1 de zeronuma vizinhança aberta V de zero.
Seja U = '�11 (V2). Substituindo o mapa '1 : U1 �! V1 pelo mapa ' : U �! V onde' = � � '1 temos então pela própria construção que a transformação F = � f � '�1satisfaz F (z) = zk.

3.3 Propriedades elementares das transformações holomór�cas 37
O número k no teorema anterior pode ser caracterizado da seguinte maneira. Paracada vizinhança U0 de a existem vizinhanças U � U0 de a e W de b = f(a) tal que oconjunto f�1(y) \ U contém exactamente k elementos para cada ponto y 2 W , y 6= b:Chamamos a k a multiplicidade com a qual a transformação f leva o valor b no ponto a,ou simplesmente dizemos que f possui multiplicidade k no ponto a.
Exemplo 3.3.1 Seja f(z) = zk + c1zk�1+ :::+ ck um polinómio de grau k: Então f pode
ser considerada como uma transformação holomór�ca f : C1 �! C1 onde f(1) = 1.Neste caso a multiplicidade do 1 é k:
Através do Teorema do comportamento local das transformações holomór�cas podemosretirar algumas conclusões que a seguir são apresentadas sob a forma de corolário.
Corolário 3.3.1 Sejam X e Y duas superfícies de Riemann e seja f : X �! Y umatransformação holomór�ca não constante. Então f é aberta, isto é, a imagem de cadaconjunto aberto por f é um conjunto aberto.
Demonstração: Do teorema veri�camos que U é uma vizinhança de um ponto a 2 X,então f(U) é uma vizinhança do ponto f(a). Isto implica que f é aberta.
Corolário 3.3.2 Sejam X e Y duas superfícies de Riemann e seja f : X �! Y umatransformação holomór�ca injectiva. Então f é uma transformação bi-holomór�ca de Xem f(X).
Demonstração: Já que f é injectiva, na descrição local dada pelo teorema temossempre que k = 1. Então a transformação inversa f�1 : f(X) �! X é holomór�ca.
Corolário 3.3.3 (Princípio máximo) Supondo que X é uma superfície de Riemann e quef : X �! C é uma função holomór�ca não constante, então temos que o valor absolutode f não atinge o seu máximo.
Demonstração: Suponha-se que existiria um ponto a 2 X tal que
R = jf(a)j = supfjf(x)j : x 2 Xg:
Entãof(x) � K = fz 2 C : jzj � Rg:
Já que f(X) é aberto está no interior de K . Isto contradiz o facto de que f(a) 2 @K.
Se tomarmos f : X �! Y uma transformação holomór�ca não constante entre duassuperfícies de Riemann, esta ainda possui a capacidade de transformar conjuntos com-pactos em conjuntos compactos. Pois se considerarmos X como um conjunto compacto, ecomo uma transformação com estas características transforma conjuntos abertos em con-juntos abertos, então teremos que f(X) também é compacto. Como os únicos conjuntosque são abertos e fechados num dado espaço topológico são o conjunto vazio e o espaçoem si, então f(X) = Y e daqui conclui-se que f também é sobrejectiva.

38 Superfícies de Riemann e Aplicações Holomór�cas
Com esta observação, podemos ainda veri�car que, sendo C um conjunto não compacto,cada transformação holomór�ca numa superfície de Riemann compacta é uma transfor-mação constante.
Assim, tomando uma função f meromór�ca em C1 esta terá um número �nito depólos, pois se o número de pólos fosse in�nito teríamos um ponto limite pelo teorema daIdentidade f seria identicamente igual a 1. Assumindo que o ponto 1 não é um pólo def , caso contrário toma-se 1=f no lugar de f , supunhemos que a1; :::; an 2 C são os pólosde f e que
hv(z) =�1X
j=�kv
cvj(z � av)j ;
é a parte principal de f no polo av, para v = 1; :::; n. Então temos que a função g =f � (h1+ :::+ hn) é holomór�ca em C1 e assim constante. Logo pode-se concluir que f éuma função racional. Passemos este resultado a forma de teorema.
Teorema 3.3.2 Toda a função meromór�ca f em C1 é racional.
Ao considerarmos f : C �! C como uma função holomór�ca limitada, pelo Teoremadas singularidades removíveis de Riemann, f pode ser estendida analiticamente a umatransformação holomór�ca f : C1 �! C. Como C1 é compacto e f holomór�ca temoslogo que f é constante. Este resultado é conhecido como teorema de Liouville.
Teorema 3.3.3 (Liouville) Toda a função holomór�ca limitada f : C �! C é constante.
Teorema 3.3.4 (Fundamental da Algebra) Seja n � 1 e seja f(z) = zn+ c1zn�1+ :::+ cn
um polinómio com coe�cientes complexos. Então existe pelo menos um ponto a 2 C talque f(a) = 0.
Demonstração: O polinómio f pode ser considerado como uma transformação holomór-�ca f : C1 �! C1; onde f(1) =1. Temos assim que a função é sobrejectiva, já que éholomór�ca não constante, e assim 0 2 f(C).
De�nição 3.3.1 (Função duplamente periódica) Supondo que !1; !2 2 C são linear-mente independentes sobre R e � = Z!1 + Z!2 é a rede gerada por !1 e !2, uma funçãomeromór�ca f : C �! C1 é duplamente periódica em relação a �, se
f(z) = f(z + w) para qualquer z 2 C e ! 2 �:
Por causa da estrutura da rede � para que uma função seja duplamente periódica ésu�ciente que f(z) = f(z + !1) + f(z + !2) para todo o complexo z.
Vamos considerar � : C �! C=� como sendo a transformação canónica. Então afunção duplamente periódica f induz uma função F : C=��! C1 tal que f = F ��. Segue-se directamente da de�nição da estrutura complexa em C=� que F é uma função meromór-�ca em C=�: Reciprocamente, para qualquer função meromór�ca F : C=� �! C1; a com-posição f = F � � : F : C �! C1 é uma função meromór�ca que é duplamente periódica

3.3 Propriedades elementares das transformações holomór�cas 39
em relação a �. Assim as funções meromór�cas no toro C=� estão em correspondência bi-unívoca com as funções meromór�cas em C, duplamente periódicas em relação a �. Assimextraímos o seguinte teorema:
Teorema 3.3.5 Toda a função duplamente periódica f : C �! C é constante. Cadafunção meromór�ca duplamente periódica não constante f : C �! C1 atinge todo o valorc 2 C1.

40 Superfícies de Riemann e Aplicações Holomór�cas

Capítulo 4
Estrutura do Conjunto de Fatou
O conjunto estável FR está dividido numa colecção de mutuamente disjuntos componentesconexos maximizados pelo conjunto de Julia. D0 é uma destas componentes assim comoR(D0): Para cada uma das componentes D0 um dos seguintes argumentos tem de serválido:
(i) As iterações crescentes Rj(D0) são disjuntos, em que em cada caso D0 é designadode errante
ou(ii) Existem inteiros m;n � 0; com Rn(D0) = Rm(D0);e D0 é designado de eventual-
mente periódico.A classi�cação qualitativa e quantitativa dos domínios eventualmente periódicos começou
a ser efectuada por Fatou e Julia. Eles estudaram os domínios atractores, super-atractorese parabólicos. A sua análise mostrou que o único tipo de comportamento estável que podiaexistir seriam os domínios de rotação (os discos de Siegel e os anéis de Herman), mas noentanto não puderam provar a existência destes. A prova foi efectuada por Siegel e porHerman. Fatou conjecturou que os domínios errantes não existiam e assim o comporta-mento estável era só caracterizado pelos cinco modelos que passaremos a descrever. Aclassi�cação foi completa por Sullivan e Shishikura. Nos anos oitenta, Sullivan, viu que anão existência de domínios errantes para transformações racionais era análoga ao TeoremaFundamental da Finidade de Ahlfors para os grupos de Kleinianos, e ele deu uma provapara ambos os teoremas usando as transformações quase-conformes.
4.1 Classi�cação de Domínios Estáveis
O comportamento dos pontos periódicos estáveis da transformação quadrática é facilmenteentendido. Para generalizarmos, estudemos o comportamento local numa vizinhança deum ponto periódico para uma transformação racional arbitrária.
Assumindo que o ponto periódico é no zero escrevemos
f(z) = �z + akzk + :::; k � 2:
41

42 Estrutura do Conjunto de Fatou
Se � 6= 0 e jzj é pequeno então a transformação assemelha-se a g(z) = �z; se � = 0assemelha-se a g(z) = zk.
De�nição 4.1.1 As transformações f : U �! U e g : V �! V são designadas deconformalmente conjugadas se existe um homeomor�smo � : U �! V tal que ��f = g��.
A iteração e periodicidade são, assim, preservadas sob conjugação. Se f é conformal-mente conjugada à sua parte linear numa vizinhança de um ponto �xo diz-se que ela éaí linearizável. A ideia de usar a conjugação conforme para estudar a iteração remonta aSchröder. A ideia é de que podemos usar a conjugação para obtermos um comportamentolocal da dinâmica da transformação.
Teorema 4.1.1 (Schröder) Um ponto periódico de uma transformação racional com mul-tiplicador � 6= 0 é estável se e só se esta for linearizável.
4.1.1 Ciclos Atractores
Agora suponhamos que z0 é um ponto atractor de período p, de R.
Teorema 4.1.2 (Koenings) Se z0 é um ponto atractor de período p de uma transformaçãoracional R então a primeira função de retorno é linearizável em z0. Ainda temos que atransformação conjugada é única a menos da medida usada.
Demonstração: Como�n(z) = ��nfn(z);
temos�n � f = ��n+1
e, assim, �n converge uniformemente para algum � em U , e � é a desejada conjugada.Como j�j < 1 temos a convergência, e a unicidade surge do lema de Schwarz.Como nota temos que, se j�j > 1; podemos aplicar o argumento anterior ao ramo de
f�1 que �xa z0. Já que f transforma a vizinhança U fora desta a conjugação não estábem de�nida sob iteração nem nos indica nada sobre a dinâmica da função.
Do teorema de Koenings podemos ver que cada ponto zk; k = 0; :::; p� 1 de um cicloatractor periódico existe um domínio aberto maximal estável Ik contendo zk. O conjunto
I =p�1S0Ik é designado de bacia atractora imediata do ciclo.
O conjunto A =Sn>0
R�n(I) é designado de bacia atractora e o ciclo de domínios é
designado de ciclo atractor.
Proposição 4.1.1 A bacia atractora imediata de um ciclo atractor contém sempre umponto critico que é atraído para os pontos periódicos.
Demonstração: Sejam Ik; k = 0; :::; p � 1, as p componentes da bacia imediata deatracção tal que R(Ik) = Ik+1mod p. Se não existe nenhum ponto crítico em algum Ik,todas as transformações são transformações de cobertura e assim têm de ser isometrias namétrica de Poincaré. Assim existe uma contradição já que o ciclo é atractor.

4.1 Classi�cação de Domínios Estáveis 43
atractor
10:pdf
Figura 4.1: Ciclo atractor
4.1.2 Ciclos Super-Atractores
Supondo agora que z0; z1; :::; zp�1 é um ciclo super-atractor tal que o valor próprio � ézero. Assim temos:
Teorema 4.1.3 (Böttcher) Se o ponto �xo z0, da primeira função de retorno é super-atractor, e se as primeiras k � 1 derivadas desaparecem em z0, existe uma conjugaçãoconforme � de�nida numa vizinhança U de z0 tal que � � f = (�(z))k. A conjugação � éúnica a menos da multiplicação por uma (k � 1)� �esima raiz da unidade.
Demonstração: Seja�n(z) = fn(z)k
�n
tal que �n satisfaz
�n�1 � f = (fn�1 � f)k�n+1
= �1n:
A função �n converge para a conjugação desejada.Usando a conjugação é fácil de veri�car que os pontos super-atractivos são estáveis. As
bacias atractoras, inclusivé a imediata, são de�nidas como foram para os ciclos atractorese, neste caso, são designados de o ciclo dos dominios periódicos super-atractores.
4.1.3 Pontos Periódicos Neutrais
O caso racional
Suponha-se que z0 é um ponto periódico neutral cujo valor próprio � é uma n� �esima raizda unidade. Este ponto é designado de parabólico. Para determinar o comportamentolocal, podemos novamente assumir que z0 é um ponto �xo da primeira transformação de

44 Estrutura do Conjunto de Fatou
super atractor
11:pdf
Figura 4.2: Ciclo super-atractor
retorno f . Se z0 fosse estável, então pelo teorema de Schröder fn seria conjugada com atransformação identidade numa vizinhança de z0.
Usando a expansão em série é fácil notar que a única transformação conjugada coma identidade é ela própria e, assim, por continuação analitica, fn seria a identidade emqualquer região, o que não faz sentido.
Assim, não podemos modelar o comportamento dinâmico numa vizinhança completade um ponto parabólico usando a forma linear de uma transformação racional. No entanto,podemos fazê-lo em partes da vizinhança.
Assuma-se z0 = 0 e �n = 1;A primeira transformação de retorno toma a forma
f(z) = �z + akzk + :::
(i) Primeiro assume-se � = 1; k = 2: Podemos conjugar f por inversão e escalonamentousando a transformação de Möbius h para obter a seguinte expansão junto ao 1 para atransformação conjugada:
g(z) = z + 1 +b
z+ :::
(ii) Agora prova-se que algum semi-plano direito Re z > k, a transformação g é conju-gada por uma transformação � a uma transformação z �! z + 1.
A seguir mostra-se que o domínio de de�nição de � pode ser estendido a um domínio� limitado à esquerda pela parábola y = 4k(k � x); temos g(�) � �: Assim, se
P = h�1(�); f(P ) � P [ f0g
e P é um domínio invariante futuro, simétrico em relação ao eixo real, com o ponto �xona sua fronteira.

4.1 Classi�cação de Domínios Estáveis 45
atractora
12:pdf
Figura 4.3: Pétala atractora
\n�0
fn(P ) = f0g:
O domínio P é designado de pétala atractora.Note-se que ao longo do raio no eixo real, que surge do ponto �xo, que não está contido
na pétala, os pontos são repelidos. Se as mesmas ideias forem aplicadas à função inversaobtemos uma pétala repulsora. As pétalas atractoras estão contidas no domínio estável.As pétalas repulsoras contêm tanto pontos estáveis como instáveis.
(iii) A seguir assuma-se � = 1; k > 2: Neste caso fazemos uma mudança de variável z =�1=k. Obtemos uma sequência de 2(k� 1) alternadamente pétalas atractoras e repulsoras.
(iv) Finalmente, se � = e2�if=g, nós aplicamos a análise precedente a cada um dos qpontos �xos de f q. As pétalas atractoras não são invariantes de forma futura, mas sim,pontos num dado ciclo de pétalas atractoras próximos das pétalas atractoras de cada umdos pontos periódicos.
De�nição 4.1.2 A bacia atractora imediata do ciclo parabólico é o conjunto maximal dedomínios atraídos para o ciclo parabólico, cujas fronteiras contêm pontos do ciclo. Estasbacias contêm as pétalas atractoras. Estas componentes, que são periódicas, são designadasde domínios cíclicos parabólicos.
Proposição 4.1.2 A bacia imediata de atracção de um ciclo parabólico contém sempreum ponto crítico que é atraído para os pontos periódicos.
No caso descrito pela �gura 4.5, o ponto crítico está no centro do disco central e estásendo atraído para o ponto crítico superior onde as três regiões se encontram

46 Estrutura do Conjunto de Fatou
de leau fatou
13:pdf
Figura 4.4: Flor de Leau - Fatou , com k=3
parabolico
14:pdf
Figura 4.5: Ciclo Parabólico

4.1 Classi�cação de Domínios Estáveis 47
O caso irracional
Supõe-se que z0 é um ponto periódico neutral com valor próprio � = e2�i�, onde � éirracional. Para estes valores de �; em que o ponto é linearizável, foram-se desenvolvendomuitas questões ao longo dos tempos para os entender.
Siegel e depois Brjuno, e mais recentemente Yoccoz desenvolveram condições paraobtermos uma melhor compreensão destas questões.
Teorema 4.1.4 (Brjuno-Yoccoz) Uma condição su�ciente para que uma transformaçãoracional R, com ponto periódico neutral, com multiplicador � = e2�i�; � irracional, sejalinearizável numa vizinhança do ponto é
1Xn=1
log qn+1qn
<1
onde pn=qn são as fracções contínuas aproximadas a �. Se R é um polinómio quadráticoa condição também é necessária.
Discos de Siegel Quando z0 é um ponto periódico neutral linearizável para a primeiratransformação de retorno f , existe uma conjugação � : U �! � que leva uma vizinhançaU de z0 no disco unitário � e satisfaz
� � f = e2�i�z:
A vizinhança U é folheada por folhas invariantes de forma futura que são as pré-imagens do círculo j�j = r em �. O domínio maximal para o qual a conjugação pode serde�nida é designado de disco de Siegel.
O ciclo periódico neutral de�ne, assim, um ciclo periódico de discos de Siegel.Qualquer ponto crítico que caia num destes discos �ca preso na folha do �oreamento,
mas não é necessariamente verdade que um ponto crítico caia nesta folha. No entanto,suspeita-se apenas que estes domínios existam [Ke 94]. Fatou provou:
Proposição 4.1.3 Se uma transformação racional tem um ciclo de disco de Siegel, entãoa órbita crescente de alguns pontos críticos acumulam-se na sua fronteira.
A prova usa o facto que longe do conjunto pós-crítico, a transformação é uma coberturaregular e assim deve existir uma vizinhança U invariante de forma futura do ponto �xono disco de Siegel. Se a proposição fosse falsa podíamos encontrar ramos da inversa aolongo da fronteira do disco cuja órbita futura não contivesse U e isto é impossível já quea fronteira é instável. A �gura 4.6 mostra como a órbita crítica acumula na fronteira.
Um ponto crítico cuja órbita acumula na fronteira de um disco de Siegel tem de estarno conjunto de Julia. Herman mostrou que existem discos de Siegel cuja fronteira, defacto, contêm pontos críticos e encontrou outros que não.

48 Estrutura do Conjunto de Fatou
siegel
15:pdf
Figura 4.6: Disco de Siegel
Pontos de Cremer Cremer encontrou os primeiros exemplos de pontos periódicos neu-trais que não são linearizáveis e assim o seu nome �cou ligado a eles.
Se U é uma vizinhança de um ponto de Cremer, a órbita crescente de alguns pontoscríticos têm de passar por U in�nitas vezes. Isto faz com que o conjunto de Julia sejamuito complicado em U .
Douady e Hubbard encontraram exemplos de transformações quadráticas cujos con-juntos de Julia não são localmente conexos na vizinhança dos pontos de Cremer.
Anéis de Herman O último tipo de componentes periódicamente estáveis ocorremapenas para transformações racionais que não são polinómios. Estas componentes sãodesignadas de anéis de Herman pois foi este autor que encontrou os primeiros exemplos.
Um anel de Herman é uma componente do conjunto estável que é topológicamente umacoroa circular e onde a primeira transformação de retorno é conformalmente conjugada auma rotação irracional numa coroa circular regular. As imagens dos círculos que provêmda coroa circular regular formam uma folheação invariante de forma futura no anel deHerman.
É claro que o anel, não pode conter pontos periódicos. A prova que a fronteira de umanel de Herman A está contida no conjunto de acumulação do conjunto pós-crítico é amesma do que para os discos de Siegel.
A componente limitada C1nA é limitada pelo conjunto de Julia e assim tem de conterum pólo da função. Os polinómios, no entanto, nunca têm anéis de Herman. Os exemplosde Herman pertencem à familia:
R(z) = e2�i�z2�z � a1� az
�para as escolhas derivadas de 0 < � < 1 e � > 1:

4.1 Classi�cação de Domínios Estáveis 49
herman
16:pdf
Figura 4.7: Anel de Herman
De�nição 4.1.3 Uma componente U do conjunto de Fatou C1nI(f) é chamada anel deHerman se U é conformalmente isomór�co a alguma coroa circular
Ar = fz : 1 < jzj < rg
e se f , ou alguma iteração de f , corresponde a uma rotação irracional desta coroa circular.
Existem dois métodos conhecidos para construir anéis de Herman.O método original,devido a Herman, é baseado numa análise cuidada de um difeomor�smo real do círculo.Umoutro método, devido a Shishikura, usa cirurgia quase-conforme, começando com duascópias da esfera de Riemann com um disco de Siegel em cada, cortando parte do centrode cada disco, e, colocando as fronteiras resultantes juntamente em ordem a fabricar oanel[Mi 99].
O método original pode ser descrito da seguinte forma:Se f : R=Z �! R=Z é um homeomor�smo que preserva a orientação, então podemos
elevar a um homeomor�smo F : R �! R que satisfaz a identidade
F (t+ 1) = F (t) + 1;
e é unicamente de�nido, a menos da adição por uma constante inteira.
De�nição 4.1.4 O número real
rot(F ) = limn�>1
Fn(to)
n
é independente da escolha de t0, e é designado de número de translação do levantamentoF . Segundo Poincaré, o número de rotação rot(f) 2 R=Z da transformação circular f éde�nido como sendo a classe residual de rot(F ) módulo Z.

50 Estrutura do Conjunto de Fatou
Esta construção é bem de�nida, e invariante sob a orientação que preserva a conjugaçãotopológica[Mi 99]. Podemos assim, deduzir as seguintes propriedades:
Lema 4.1.1 O homeomor�smo f tem um ponto periódico com período q se e só se o seunúmero de rotação é racional com denominador q.
Teorema 4.1.5 (Denjoy) Se f é um difeomor�smo de classe C2, e se o número de rotação� = rot(f) é irracional, então f é topologicamente conjugado à rotação
t �! t+ �(modZ)
Lema 4.1.2 Considere-se uma família com um único parâmetro de levantamentos daforma
F�(t) = F0(t) + �:
Então o número de translação rot(F�) aumenta continuamente e monoticamente com �,aumentanto +1 à medida que � aumenta também +1.
Para o caso real analítico o Teorema de Denjoy tem um análogo:
Teorema 4.1.6 (Herman-Yoccoz) Se f é um difeomor�smo real analítico de R=Z e seo número de rotações � é diofantino então f é conjugada analiticamente com a rotaçãot �! t+ �(mod 1):
Note-se que um número é diofantino se existe um n grande, e, " pequeno, tal que adistância de � de qualquer número racional p=q satisfaz
j� � p=qj > "
qn
De�nição 4.1.5 (Produto de Blaschke) Dada qualquer constante a 2 C1 com jaj 6= 1;não é difícil de mostrar que existe uma e uma só transformação fracionária linear z �!��(z) que transforma o círculo unitário @D nele mesmo, �xando o ponto base z = 1, eque transforma a em �a(a) = 0: Por exemplo, �0(z) = z; �1(z) =
1z ; e em geral
�a(z) =1� a1� a
z � a1� az ; a 6=1
Se jaj < 1; então �a preserva a orientação do círculo, e transforma o círculo nele mesmo.Por outro lado se jaj > 1 então �a muda a orientação em @D e transforma D no seucomplementar.
Lema 4.1.3 Uma transformação racional de grau d leva o disco unitário nele mesmo see só se esta puder ser descrita como um produto de Blaschke,
f(z) = e2�it��1(z):::�ad(z)
para algumas constantes e2�it 2 @D e a1; :::; ad 2 C1n@D.

4.1 Classi�cação de Domínios Estáveis 51
Esta expressão é única já que as constantes e2�it = f(1) e fa1; :::; adg = f�1(0) sãounicamente determinadas por f: Os a1 têm de satisfazer as condições de que ajak 6= 1para todo o j e k. Para ab = 1; um breve cálculo mostra que �a(z)�b(z) � 1:
Demonstração: Dada f; apenas escolhemos uma solução para f(a) = 0, e a seguirdividindo f(z) por �a(z) obtemos uma transformação racional de grau inferior e assimsucessivamente.
O produto de Blaschke transforma o disco unitário nele mesmo se e só se jaj j < 1.No entanto, interessa-nos o caso em que alguns aj estão dentro do disco e outros fora
do disco.
Teorema 4.1.7 Para qualquer grau ímpar, d � 3; nós podemos escolher um produto deBlashke f de grau d que transforma o disco unitário @D nele próprio, por uma orientaçãopreservando o difeomor�smo, com qualquer número de rotação � à nosssa escolha. Se onúmero de rotação � é diofantino, então f possui um anel de Herman.
Demonstração: Seja d = 2n + 1, e escolha-se aj de modo a que um número den+1 destes estejam perto de zero enquanto os restantes n estão próximos de 1: Então oproduto de Blaschke
z �! �a1(z):::�ad(z)
é C1- próximo à transformação identidade no círculo unitário @D: Em particular, esteinduz um difeomor�smo que preserva a orientação em @D. Agora multiplicando por e2�it;e, usando o lema 4.1.2 podemos ajustar o número de rotação para qualquer constantedesejada.
Se este número de rotação � é diofantino, então existe um difeomor�smo real e analíticoh em @D que conjuga f à rotação z �! e2�i�z.
Já que h é analítico e real, estende-se a um difeomor�smo analítico complexo emalguma pequena vizinhança de @D, e assim daí tira-se a conclusão.[Mi 99]
Como exemplo, a �gura 4.8 mostra o conjunto de Julia de
f(z) = e2�itz2(z � 4)=(1� 4z)
que tem como zeros: 0; 0; 4, onde a constante t = 0; 615132::: é ajustada de modo a que onúmero de rotação seja � =
p5�12
Existe um ponto crítico junto ao centro da �gura, com um anel de Herman à esquerda,rodeando uma bacia superactractora centrada no centro-esquerdo da �gura. Este é oexemplo mais simples que podemos encontrar, desde que Shishikura mostrou que este tipode anel só pode existir se o grau d; pelo menos, for 3.
Os anéis construídos desta forma são muito especiais já que são simétricos em relaçãoao disco unitário com
f(1
z) =
1
f(z)
No entanto a construção original de Herman, baseada no trabalho de Helson e Sarason,era mais �exível.[Mi 99]

52 Estrutura do Conjunto de Fatou
Figura 4.8: Conjunto de Julia para uma transformação racional cúbica, contendo um anelde Herman
A construção de Shishikura mostra claramente que os possíveis números de rotação,para os anéis de Herman, são exactamente os mesmos, para os possíveis números derotação, para os discos de Siegel.
Em particular, qualquer número satisfazendo a condição de Bryuno,Pn
log(qn+1)qn
<1,podem ocorrer. A ideia é começar com duas transformações racionais tendo discos de Siegelcom números de rotação +� e ��: Corta-se fora um pequeno disco concêntrico em cada,e depois cola-se as respectivas fronteiras. Depois de efectuar as respectivas modi�cações acorda com in�nitas pré-imagens iteradas dos discos de Siegel, Shishikura aplica o Teoremada Medida de Money-Ahlfors-Bers em ordem a conjugar a �gura topológica resultantenuma transformação racional. Embora os aneis de Herman não contenham pontos criticoseles estão muito associados a estes.
Lema 4.1.4 Se U é um anel de Herman, então todo o ponto da fronteira de U pertenceao fecho da órbita de algum ponto crítico. A fronteira @U tem duas componentes conexas,em que cada uma delas é um conjunto in�nito.
4.2 A classi�cação de Sullivan dos componentes de Fatou
O trabalho de classi�cação deve-se principalmente a Fatou e a Julia, mas com grandescontribuições de Sullivan.
Uma componente de Fatou, para uma transformação racional não linear, é designadacomo sendo qualquer componente do conjugado de Fatou C1nJ(f): Evidentemente ftransporta cada componente U em outra componente U 0 por uma transformação holomór-�ca.
Primeiro consideremos U = U 0:

4.2 A classi�cação de Sullivan dos componentes de Fatou 53
Teorema 4.2.1 (Classi�cação) Se f transforma a componente U do conjunto de Fatounele próprio, então existem quatro possibilidades:
i) U é bacia de atracção imediata para um ponto �xo atractor, ou para uma das pétalasdo ponto �xo parabólico que tem multiplicador � = 1;
ii) U é um disco de Siegel ou um anel de Herman.
Aqui estamos a juntar o caso do ponto �xo superatractor, com � = 0; e o caso doponto �xo atractor geométrico, � 6= 0:
Note-se que as bacias de atracção imediatas, ou bacias parabólicas, contêm semprepontos críticos, enquanto os domínios de rotação (discos de Siegel e anéis de Herman nãopodem conter pontos críticos).
Demonstração: Temos quatro possibilidades:(a) U contém um ponto �xo atractor;(b) todas as órbitas em U convergem para um ponto �xo na fronteira;(c) f é um automor�smo de ordem �nita;(d) f é conjugada com uma rotação irracional de um disco furado ou de uma coroa
circular.No caso (a) as componentes de Fatou contêm pontos �xos atractores, enqunato que
o caso (c) não pode ocorrer, já que por hipótese o grau é maior ou igual a dois, e isso,garante que existem, apenas, muitos pontos periódicos contáveis.
No caso (d) não podemos ter um disco furado, já que o ponto onde está o �furo�teriade ser um ponto �xo pertencente ao conjunto de Fatou, assim U seria um subconjunto dodisco de Siegel em vez de uma componente de Fatou completa.
Qunato ao caso (b); para provar o teorema, basta apenas mostrar que o ponto �xo nafronteira tem de ser parabólico com � = 1.
Este ponto �xo na fronteira, certamente, não pode ser um ponto atractor ou um discode Siegel já que pertence ao conjunto de Julia. Além de mais, não pode ser repulsor jáque atrai todas as órbitas de U , assim tem de ser indiferente, j�j = 1.
Para provar que é exactamente � = 1 vamos usar argumentos devidos a Douady eSullivan:
Sejaf(z) = �z + a2z
2 + a3z3 + :::
uma transformação que é de�nida e holomór�ca em alguma vizinhança V da origem, eque tem um ponto �xo, com multiplicador � em z = 0.
Lema 4.2.1 (Caracol) Supondo que existe um caminho p : [0;1] �! V nf0g que é trans-formado nele mesmo por f de tal forma que f(p(t)) = p(t + 1), e que converge para aorigem, à medida que t �!1: Então ou j�j < 1 ou � = 1:
Por outras palavras a origem tem de ser um ponto �xo atractor ou um ponto �xoparabólico com � = 1.
Assim para completar a prova do teorema precisamos apenas de considerar o seguinte:Escolha-se um ponto z0 em U , sendo U uma componente de Fatou que é transformada
nela mesma por uma transformação f de tal forma que todas as órbitas convergem para

54 Estrutura do Conjunto de Fatou
um ponto da fronteira w0, e escolha-se um caminho qualquer p : [0; 1] �! U de z0 = p(0)até f(z0) = p(1):
Estendendo para todo o t � 0; fazendo p(t + 1) = f(p(t)); obtemos um caminho emU que converge para o ponto da fronteira w0; t �! 1. Assim, de acordo com o lema doCaracol, o ponto �xo w0 tem de ser parabólico com � = 1 ou atractor. Mas como w0pertence ao conjunto de Julia w0 não pode ser atractor.
As componentes de Fatou caso sejam um membro do ciclo dos discos de Siegel ou deanéis de Herman são domínios unicamente de�nidos pela sua descrição, e são simplesmenteconexos, ou in�nitamente conexos, caso sejam a bacia de atracção imediata de algum pontoperiódico parabólico.
Pode haver, quando muito, um número �nito de bacias atractoras e discos de Siegel.Sullivan mostrou também que pode haver, quando muito, um número �nito de anéis deHerman, e assim existem em conjunto apenas �nitos conjuntos de Fatou periódicos. Maisprecisamente, de acordo com Shishikura, pode haver no máximo 2d� 2 ciclos distintos decomponentes de Fatou periódicas.
Teorema 4.2.2 (Domínios não errantes de Sullivan) Toda a componente U de Fatou parauma transformação racional é eventualmente periódica. Isto é, existem necessariamenteinteiros n � 0 e p � 1 tal que as n-ésimas imagens futuras fn(U) são transformadas nelasmesmas por fp.
Assim cada componente de Fatou é uma pré-imagem, sob alguma iteração de f; de umdos quatro tipos de componentes atrás descriminados.
Corolário 4.2.1 Se todas as órbitas críticas de uma transformação racional são �nitas ea transformação não tem nenhuma órbita super-atractiva, então o seu conjunto de Juliaé toda a esfera C1:
Tanto o teorema da classi�cação das componentes de Fatou como dos domínios nãoerrantes de Sullivan falham para funções não racionais f : C �! C. De facto surgemdois novos tipos de componentes de Fatou, que não podem ocorrer para transformaçõesracionais. Podem ocorrer domínios errantes e domínios invariantes U = f(U) tal quealguma órbita em U não tem qualquer ponto de acumulação no plano �nito C. Estesúltimos são conhecidos como domínios de Baker.

Capítulo 5
Dinâmica simbólica
5.1 O espaço das sequênciasP
2
Para representar simbolicamente a dinâmica das funções vamos precisar de um espaçoonde possamos facilmente reconhecer esta mesma dinâmica. Os pontos deste espaço serãoconstituídos por sequências de zeros e uns.
De�nição 5.1.1P2 = fs = (s0s1s2:::) : sj = 0 ou 1gP
2 é designado de espaço das sequências a dois símbolos 0 e 1. Mais genericamente,podemos considerar o espaço
Pn consistindo de sequências in�nitas de inteiros entre 0 e
n�1. Os elementos deP2 são cadeias numéricas de inteiros como por exemplo (0000:::) ou
(10101:::). EmP2 vamos de�nir uma métrica, e assim para duas sequências s = (s0s1s2:::)
e t = (t0t1t2:::) de�nimos uma distância entre estas por
d[s; t] =1Xi=0
jsi � tij2i
:
Como jsi � tij é zero ou um, esta série in�nita é dominada pela série geométrica1Xi=0
1
2i= 2
e assim é uma série convergente.A distância d constitui uma métrica, pois d[s; t] � 0, para qualquer s e t que pertença
aP2, e d[s; t] = 0 se e só se si = ti para todo o i. Já que jsi � tij = jti � sij segue-se que
d[s; t] = d[t; s]: Finalmente, se r, s e t são elementos deP2 temos que jri � sij+ jsi � tij �
jri � tij ; de onde se deduz que d[r; s] + d[s; t] � d[r; t].A métrica d permite-nos decidir quais dos subconjuntos de
P2 são abertos ou fechados,
assim como quais as sequências que estão mais próximas. A próxima proposição fornece-nos uma ferramenta que nos permite ver de uma forma bastante e�caz se estas sequênciasestão próximas umas das outras ou não, através da simples análise das primeiras entradasna sequência.
55

56 Dinâmica simbólica
Proposição 5.1.1 Seja s, t 2P2 e suponha-se si = ti para i = 0; 1; :::; n. Então d[s; t] �
12n . Reciprocamente, se d[s; t] <
12n , então si = ti para i � n:
Demonstração: Se si = ti para i � n, então
d[s; t] =nXi=0
jsi � tij2i
+1X
i=n+1
jsi � tij2i
�1X
i=n+1
1
2i=1
2n:
Por outro lado, se sj 6= tj para algum j � n, então teremos de ter
d[s; t] � 1
2j� 1
2n
consequentemente, se d[s; t] < 12n ; então si = ti para algum i � n:
De�nimos a seguir, emP2 a transformação que assume o papel mais propoderante na
dinâmica simbólica: a transformação deslocamento.
De�nição 5.1.2 A transformação deslocamento � :P2 �!
P2 é dada por �(s0s1s2:::) =
(s1s2s3:::):
Com a métrica d de�nida acima, � é uma transformação contínua, como a seguirmostramos.
Proposição 5.1.2 � :P2 �!
P2 é contínua.
Demonstração: Seja " > 0 e s = s0s1s2:::. Escolha-se um n de tal forma que 12n < ":
Seja � = 12n+1
. Se t = t0t1t2::: satisfaz d[s; t] < �, então teremos pela proposição anteriorsi = ti para i � n+1. Assim, as i� n�esimas entradas de �(s) e �(t) são as mesmas parai � n, e concluímos que d[�(s); �(t)] � 1
2n < ".A dinâmica de � pode ser facilmente entendida. Por exemplo, os pontos periódicos cor-
respondem às sequências repetidas, isto é, sequências da forma s = (s0; :::; sn�1; s0; :::; sn�1; s0; :::; sn�1; :::):Assim, existem 2n pontos periódicos de periodo n para �, cada um deles gerado por cadauma das 2n sequências de zeros e uns de comprimento n:
Os pontos eventualmente periódicos são igualmente abundantes e fáceis de reconhecer.Por exemplo, qualquer sequência da forma (s0:::sn1111:::) é eventualmente �xa, enquantoque qualquer sequência eventualmente repetida é eventualmente periódica para �.
Se produzirmos uma sequência de pontos periódicos �n que converge para um ponto ar-bitrário s = (s0s1s2:::) em
P2 provamos que o conjunto dos pontos periódicos de �; Per(�);
é um conjunto denso. Então, para isso, consideremos a sequência �n = (s0:::sn; s0:::sn; :::),ou seja, �n é uma sequência repetida cujas n entradas iniciais são iguais às de s. Assimd[�n; s] � 1=2n; e temos que �n �! s: Logo os pontos periódicos de � formam um conjuntodenso em
P2 :
Obviamente, nem todos os pontos emP2 são periódicos nem eventualmente periódicos.
Qualquer sequência que não se repita nunca será periódica, e estas ultrapassam em númeroas que são periódicas.

5.2 O conjunto S1 57
Existem pontos emP2 cujas órbitas estão arbitrariamente próximas de uma qualquer
dada sequência emP2 : Este fenómeno vai acontecer com as transformações que têm uma
órbita densa, as topologicamente transitivas.Assim, podemos resumir as propriedade de � na seguinte proposição.
Proposição 5.1.3 1. #Pern(�) = 2n
2. Per(�) é denso emP2
3. Existe uma órbita densa para � emP2 :
5.2 O conjunto S1
Para estudar a dinâmica da transformação da circunferência S1 = R=Z, o levantamento aR mostra-se útil. Isto é, de�nimos a transformação � : R �! S1 por �(x) = e2�ix.
A transformação � é um exemplo de uma transformação de cobertura já que envolveR à volta de S1 sem haver pontos críticos.
De�nição 5.2.1 F : R �! R é um levantamento de f : S1 �! S1 se � � F = f � �.
Se F é um levantamento de f então temos que ter F 0(x) > 0; e assim F é crescente.Para além disso, temos F (x+1) = F (x)+1, e mais genericamente F (x+k) = F (x)+k paraalgum inteiro k. Sublinhe-se que este facto é verdade, já que f é um difeomor�smo quepreserva a orientação na circunferência. Temos também que F (x+1)�(x+1) = F (x)�x, eassim, F�id é uma função periódica de periodo um, onde id(x) = x é a função identidade.De modo semelhante, Fn � id é periódica de período um, já que Fn é um levantamentode fn. Assim podemos concluir que se jx� yj < 1 então jFn(x)� Fn(y)j < 1.
O invariante mais importante associado à transformação da circunferência é o númerode rotação. Este número, compreendido entre 0 e 1, essencialmente, mede a quantidademédia de pontos que são rodados por uma iteração da transformação, como se viu numdos capítulos anteriores.
De�nição 5.2.2 O número de rotação de f , �(f), é a parte fraccionária de �0 = limn�>1
Fn(x)n
para qualquer levantamento F de f . Isto é, �(f) é o único número em [0; 1[ tal que�0(F )� �(f) é um inteiro.
Note-se que os números de rotação são bem de�nidos para transformações que sãoúnicamente homeomor�smos.
Podemos agora mostrar que o limite �0(f) realmente existe.Assumindo que f tem um ponto periódico, fm(�) = � e �(x) = �. Então Fm(x) = x+k
para algum inteiro k. Assim F jm(x) = x+ jk, e temos
limj�>1
��F jm(x)��jm
= limj�>1
�x
jm+k
m
�=
k
m:

58 Dinâmica simbólica
farey 12
18:pdf
Mais genericamente, podemos escrever qualquer inteiro n na forma n = jm + r onde0 � r < m. Note-se que existe uma constanteM tal que jF r(y)� yj �M para todo y 2 Re 0 � r < m. Então temos que��Fn(x)� F jm(x)��
n=
��F r �F jm(x)�� F jm(x)��n
� M
n:
Consequentemente,
limn�>1
jFn(x)jn
= limj�>1
��F jm(x)��jm
=k
m:
Isto mostra que o número de rotação �(f) existe sempre que f tem um ponto periódico,e acima de tudo �(f) é racional neste caso, sendo este valor irracional se e só se f nãotiver pontos periódicos.
5.3 A Árvore de Farey
A árvore de Farey é uma árvore contendo todos os números racionais entre 0 e 1. Emcada estágio da sua construção, a árvore de Farey consiste numa lista �nita de racionais.Racionais adjacentes nesta lista são designados de vizinhos Farey. O passo indutivo naconstrução desta árvore é o seguinte: cada par de vizinhos Farey produzem um �lho Farey,que é o racional que está entre os dois racionais cujo denominador é menor. Naturalmente,os racionais que produzem um �lho Farey são designados de pais Farey.
De�nição 5.3.1 (Adição de Farey) Sejam �� e
�� dois números racionais não negativos e
inferiores ou iguais a um. Então a adição de Farey obtém-se da forma seguinte:
�
�� �
�=�+ �
� + �:
Se somarmos pela adição de Farey dois vizinhos Farey vamos obter um �lho Farey.Começando por 0 e por 1 vamos obter o �lho Farey executando a adição de Farey e
�camos assim com o descrito pela �gura5.1.No próximo nível obtemos dois novos �lhos Farey, �gura 5.2, e assim sucessivamente,
resultando a lista completa de todos os racionais no intervalo [0; 1].Uma propriedade interessante dos números de Farey é a seguinte.

5.4 Descrição simbólica do conjunto de Mandelbrot 59
Proposição 5.3.1 Os racionais �� e
�� são vizinhos Farey se e só se �� � �� = �1.
Consequentemente, temos ������ � �
�
���� = 1
��:
5.4 Descrição simbólica do conjunto de Mandelbrot
O estudo da dinâmica de polinómios complexos conduz a alguns problemas que pertencemà Análise Combinatória e à Teoria dos Números. A dinâmica simbólica pode ser vistacomo uma poderosa ferramenta para resolver alguns destes problemas.
A transformação f0 : z �! zk no círculo unitário em C é equivalente à transformaçãoh : � �! k� em S1 = R=Z, ou ao deslocamento
s : (a1a2:::) �! (a2a3:::)
onde a1a2::: representa o número � na base k. Seja fc : z �! zk + c com c; z 2 C e Kc =fz : fnc (z)91g o conjunto cheio de Julia. Seja Mk = fc : Kc é conexog = fc : 0 2 Kcg:A transformação fc tem dois pontos �xos, u(c) e v(c). Seja D0 = fc : 0 é periódico parafcg, isto é, o centro das componentes hiperbólicas, D1 = fc : fc tem um ciclo racionalneutralg, isto é, as raízes das componentes hiperbólicas e seja D2 = fc : 0 é estritamentepreperiódicog, os pontos de Misiurewicz.
Douady and Hubbard mostraram que o complemento deM2 na esfera de Riemann C1é conformalmente equivalente ao disco C1�D2 ,onde D2 é o disco unitário fechado. Elesusaram a transformação
z �! �c(z) = limn�!1
[fnc (z)]1=2n ;
que é bem de�nida para todo o z 2 C1�Kc; se Kc é conexo, e a transformação conformec �! �c(c) dá-nos �c : C�M2 �! C�D2
:O argumento externo ou ângulo respeitante a Kc é argc(�c(z)): Para z 2 Jc = @Kc
podemos de�nir um valor para argc(z) para cada modo de acesso a z em C�Kc:Seja r(c; �) = fz : argc(z) = �g o raio externo. Nós escrevemos � � � se o raio
externo r(c; �) e r(c; �) tem como destino o mesmo ponto de Kc, isto é, se � e � são dois

60 Dinâmica simbólica
Figura 5.1: Os pares admissíveis dos ângulos externos
argumentos externos de um ponto em Jc. Os argumentos externos � de c em M2 são osargumentos externos de c em Kc.
Um ponto c0 2 D0 está no interior de M2, assim, não tem argumentos externos. Umponto c1 2 D1, a raiz da componente hiperbólica cujo centro é c0 tem dois argumentos ��e �+ que são racionais com denominadores impares. Se c 2 D2 o número dos argumentosexternos é �nito, sendo racionais com denominador par.
Agora consideremos o principal componente do interior de M2, o cardióide W1, que éconformalmente equivalente a um disco. O conjunto W1 consiste nos valores de c onde fctem um ponto atractor �xo para além do1. Os raios internos em W1 são parametrizadospela derivada de fc neste ponto �xo. Os pontos em @W1 dos raios internos dos argumentosracionais são também os pontos de chegada de dois raios externos. Assim, se um pontoc 2 @W1 tem um argumento racional interno na forma irredutível � = p
q , um componentede Wq de período q está ligado ao ponto c em W1. Assim c tem dois argumentos externos,ou ângulos externos:
�� =a�2q � 1 e �+ =
a+2q � 1
Se c 2 @W1 tem um argumento interno irracional � então existe um único número real0 < �(�) < 1 ponto �nal de um único raio externo. Os ângulos internos são parametrizadospela árvore de Farey.
5.4.1 Árvore dos ângulos externos no conjunto de Mandelbrot
Vamos considerar a árvore representada pela �gura XXX dos números racionais com de-nominador ímpar.
Os números racionais assumem a forma n2k�1 , onde n � 0 e k � 1 são inteiros. Depois
formamos os pares de cada nível, depois de retiradas as fracções não primitivas, por ex-

5.4 Descrição simbólica do conjunto de Mandelbrot 61
emplo 515 , depois fechamos ou formamos os pares de forma a que cada par esteja contido
ou inclua os pares dos níveis já de�nidos, �gura 5.3.Nós podemos escrever as fracções racionais de denominador ímpar n
2k�1 na forma0:a1a2:::aka1a2:::, onde ai 2 f0; 1g e k é o período do bloco na expansão binária periódica.Denotamo-lo por A = a1a2:::ak: O conjunto dos pares é designado por CM2.
Para os números racionais de denominador par temos a forma 0:b1b2:::bpa1a2:::aka1a2:::com bi; aj 2 f0; 1g, uma expansão binária preperiódica. Assim temos os blocos B =0:b1b2:::bpa1a2:::ak.
Se dois ângulos externos (�; �) formam um par, representamo-los pelos blocos naexpansão binária (A0; A1) 2 CM2. É-nos, assim, dado o conjunto das componentes hiper-bólicas de M2, que são de�nidos pelos pares admissíveis.
Exemplo 5.4.1 (13 ;23) =
�1
22�1 ;2
22�1
�= (0:01; 0:10) �! (01; 10)
Generalizando a sequência de amassamento, o itinerário da órbita do ponto crítico,quando c não está necessariamente no eixo real, apresentemos a seguinte codi�cação.
Seja (�0; �1) os ângulos do par (A0; A1): Seja � = �0 ou �1 então de�nimos a sequênciaS = S1S2:::Si::: onde:
Si =
8<:R se 2i� 2]�2 ;
�2 +
12 [= R�
L se 2i� 2]0; �2 [[]�2 +
12 ; 1[= L�
C se 2i� = �2 ou
�2 +
12
Por exemplo, consideremos o par (13 ;23) �! (01; 10):
Para � = 13 de�nimos os intervalos R1=3 =]
16 ;16 +
12 [ e L1=3 = [0;
16 [[]
16 +
12 ; 1] e para
� = 23 fazemos o mesmo. A seguir estudamos a órbita de h, h(�) = 2�mod1 nos intervalos
R�, L�:
13 �! 2
3 �! 13
R C R
23 �! 1
3 �! 23
R C R
Então a sequência de simbolos associada a este par é RC:Consideremos outro par, por exemplo, (37 ;
47) �! (011; 100):
37 �! 6
7 �! 57
R L C
47 �! 1
7 �! 27
R L C
Neste par a sequência associada é RLC.Os códigos dos pares duais próprios são os mesmos que nas sequências de amassamento,
para transformações iteradas no intervalo introduzidas por Milnor e Thurston.

62 Dinâmica simbólica
Estes pares admissíveis em CM2 tem um aspecto algébrico que nos permite através dacriação de uma operação �, operação estrela, obter outros pares admissíveis.
Vamos de�nir em CM2 esta operação bem como uma relação de ordem.Seja (A0; A1) o par representado por Aj = aj1a
j2:::a
jn =
`i = 1naji onde j = 0; 1 e
aji 2 f0; 1g: Induzimos em CM2 a ordem natural dos números racionais. Seja A e Bduas sequências binárias, uma com comprimento n e outra com comprimento m e seja
r = mmc(m;n) assim r = qn e r = tm; então A� =q̀
i=1Bi.
De�nição 5.4.1 Sejam (A0; A1); (B0; B1) 2 CM2 então(A0; A1) B (B0; B1) (maior do que) se A0 > B1
(A0; A1) A (B0; B1) (faz parte de) se A0 < B0 < B1 < A1
De�nição 5.4.2 Seja (A0; A1); (B0; B1) 2 CM2 então
(A0; A1) � (B0; B1) =
nai=1
a0i ;
nai=1
a1i
!�
0@ maj=1
b0j ;
maj=1
b1j
1A=
0@ maj=1
nai=1
ab0ji
!;
maj=1
nai=1
ab1ji
!1Aonde a0i ; a
1i ; b
0j ; b
1j 2 f0; 1g:
Este produto de pares admissíveis corresponde ao produto estrela na sequência deamassamento.
Assim, generaliza-se a teoria do amassamento para transformações complexas e obte-mos a caracterização de todos os pares admissíveis.
Exemplo 5.4.2 O produto (011; 100) � (01; 10) = (011100; 100011) que corresponde aRLC �RC = RLLRLC

Bibliogra�a
[Ba 88] Barnsley, M.F. et al (1988) �The science of Fractal Images�, Springer-Verlag
[Be 91] Beardon, Alan F. (1991) �Iteration of Rational functions. Complex Analytic Dy-namical Systems�, Springer-Verlag
[Ca 93] Carleson, Lennart, Gamelin, Theodore W. (1993) �Complex Dynamics�,Springer-Verlag
[Car 79] Carmo, Mafredo Perdigão (1979) �Geometria riemanniana�, Projecto Euclides
[De 89] Devaney, Robert L. (1989) �An Introduction to Chaotic Dynamical Systems�,2nd edition, Perseus Books
[De 90] Devaney, Robert L. (1990) �Chaos, Fractals, and Dynamics. Computer Experi-ments in Mathematics�,Addison-Wesley Publishing Company
[De 94] Devaney, Robert L. et al (1994) �Procedings of symposia in Applied Mathemat-ics�, Vol. 49, American Mathematical Society
[De 97] Devaney, Robert L. (1997) �The Mandelbrot Set and The Farey Tree�
[De 00] Devaney, Robert L., Moreno-Rocha, M. (2000) �Geometry of the Antennas inthe Mandelbrot Set�
[Fo 81] Forster,Otto, (1981) �Lectures on Riemann surfaces�, Springer-Verlag New YorkInc.
[Ke 94] Keen, L. (1994) �Procedings of symposia in Applied Mathematics�, Vol. 49, Amer-ican Mathematical Society
[Li 95] Lind, Douglas, Marcus, Brian (1995) �An introduction to symbolic dynamics andcoding�, Cambridge University Press
[Ma 99] Marsden, Jerrold E. et al (1999) �Basic Complex Analysis�,3rd edition,Freeman
[Mi 99] Milnor, John,(1999) �Dynamics in one Complex Variable, Introductory Lec-tures�,Vieweg
63

64 Dinâmica simbólica
[Pe 86] Peitgein, H.O., Richter P.H. (1986) �The beauty of Fractals�, Springer-Verlag
[Spr 81] Springer, George, (1981) �Introduction to Riemann surfaces�, Chelsea PublisingCompany New York, N.Y.
[So 92] Sorvali, Tuomas, Seppala, Mika (1992) �Geometry of Riemann surfaces and Te-ichmuller spaces�, North-Holland