DESENVOLVIMENTO DE UM GERADOR DE FUNÇÕES … · dispensa do desenvolvimento do hardware de IHM,...
80
CRISTIANO JASPER SILVA DESENVOLVIMENTO DE UM GERADOR DE FUNÇÕES PORTÁTIL MICROCONTROLADO COM INTERFACE HOMEM-MÁQUINA EM DISPOSITIVO ANDROID FLORIANÓPOLIS, 2015
-
Upload
trinhthuan -
Category
Documents
-
view
214 -
download
0
Transcript of DESENVOLVIMENTO DE UM GERADOR DE FUNÇÕES … · dispensa do desenvolvimento do hardware de IHM,...

CRISTIANO JASPER SILVA
DESENVOLVIMENTO DE UM GERADOR DE FUNÇÕES PORTÁTIL MICROCONTROLADO COM INTERFACE HOMEM-MÁQUINA EM DISPOSITIVO
ANDROID
FLORIANÓPOLIS, 2015


INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA
CURSO DE PÓS-GRADUAÇÃO LATO SENSU
ESPECIALIZAÇÃO EM DESENVOLVIMENTO DE PRODUTOS ELETRÔNICOS
CRISTIANO JASPER SILVA
DESENVOLVIMENTO DE UM GERADOR DE FUNÇÕES PORTÁTIL MICROCONTROLADO COM INTERFACE HOMEM-MÁQUINA EM DISPOSITIVO
ANDROID
Trabalho de Conclusão de Curso submetido ao Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina como parte dos requisitos para obtenção do Certificado de Conclusão de Curso de Pós-graduação Lato Sensu, Especialização em Desenvolvimento de Produtos Eletrônicos
Professor orientador: Samir Bonho, Me. Eng.
FLORIANÓPOLIS, 2015
DESENVOLVIMENTO DE UM GERADOR DE FUNÇÕES PORTÁTIL MICROCONTROLADO COM INTERFACE HOMEM-MÁQUINA EM DISPOSITIVO
ANDROID
CRISTIANO JASPER SILVA
Este trabalho foi julgado adequado para obtenção do Certificado de Especialista em Desenvolvimento de Produtos Eletrônicos e aprovado na sua forma final pela banca examinadora do Curso de Pós-graduação Lato Sensu - Especialização em Desenvolvimento de Produtos Eletrônicos do Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina.
Florianópolis, 04 de junho de 2015
Banca examinadora:
________________________
Samir Bonho, Me. Eng.
Orientador
________________________
Clóvis Antônio Petry, Dr. Eng.
________________________
Luis Carlos Martinhago Schlichting, Dr. Eng.
RESUMO
Um gerador de sinais de áudio simples, de baixo custo e de fácil reposição de peças, é uma alternativa viável para testes de circuitos de telefonia, onde geralmente os fabricantes oferecem equipamentos de bancada com custo elevado. Este trabalho consiste no desenvolvimento de um hardware original de um gerador de sinais portátil de audiofreqüência. Softwares específicos de simulação eletrônica e layout de placas de circuito impresso são utilizados no desenvolvimento do hardware. Um firmware, em linguagem C, é desenvolvido para controlar o hardware. A interface homem-máquina é um aplicativo para o sistema operacional Android que, via Bluetooth, controla o gerador em formas de ondas quadrada, senoidal, triangular e dente de serra, com freqüências desde 80 Hz a 4000 Hz, amplitudes desde 600 mV a 6000 mV. A resistência da carga pode ser de 600 Ω ou maior. Explorando o potencial dos smartphones e se restringindo ao uso de componentes disponíveis em lojas varejistas de eletrônica no mercado catarinense, os custos de aquisição e manutenção são reduzidos.
Palavras-chave: Gerador de funções. Gerador de sinais. Gerador de audiofreqüência. Gerador de audio.

ABSTRACT
A simple, easy spare parts and low cost signal generator, is a viable alternative to test telephone circuits, where generally main manufacturers offer high-cost options. This work consists of development of an original portable signal audio generator´s hardware. Specific schematic, simulation and PCB layout design software is used to hardware development. A code C language firmware was developed in order to control the hardware. The man-machine interface is an application for Android operational system that, remotely via Bluetooth, controls the generator in square, triangle, sine and sawtooth waveforms, frequencies from 80 Hz to 4000 Hz, peak-to-peak output level from 600 mV to 6000 mV. Output load resistence can be 600 Ω or higher. Exploring the power of smartphones and using only components of the local electronic shops, acquisition and manteinance costs are reduced.
Key-words: Function generator. Audio generator. Audiofrequency generator. Signal generator.

LISTA DE ABREVIATURAS
AGP – amplificador de ganho programável
AMPOP – amplificador operacional
API – application programming interface
APP – aplicativo para smartphone
BNC – conector Bayonet Neill–Concelman
CAD – computer aided design
DA – digital-analógico
DIY – do it yourself
DHT - distorção harmônica total
EMC – electromagnetic compatibility
GPS – global posicioning system
ICSP – in-circuit serial programming
IDE – integrated development envirolment
IEC – international electrotechnical commission
IHM – interface homem-máquina
JFET – Field effect transistor
LDR – light dependent resistor
OTA – operational transcondutance amplifier
PCI – placa de circuito impresso
PWM – pulse width modulation
RCA – conector de áudio para cabo coaxial

R2R – rede de resistores para conversão DA
SENAI – Serviço Nacional de Aprendizagem Industrial
SMD – surface mount device
SO – sistema operacional
SPI – serial periferal interface
TCC – trabalho de conclusão de curso
UART –universal assyncronous receiver/transmmiter
USB – universal serial bus
VCA – voltage controlled amplifier
VM – virtual machine
WEB ou WWW – rede mundial de computadores

SUMÁRIO
1 INTRODUÇÃO ............................................................... 11
1.1Justificativa ............................................................... 12
1.2 Definição do problema............................................. 13
1.3 Objetivos .................................................................. 13
2 FUNDAMENTAÇÃO TEÓRICA ..................................... 15
2.1 Linguagem de programação da IHM ....................... 15
2.2 Sistema Operacional alvo da IHM ........................... 16
2.3 Microcontrolador ATMEGA328P ............................. 18
2.4 Voltage Controled Amplifier (VCA) .......................... 19
3 DESENVOLVIMENTO ................................................... 24
3.1 Revisão dos requisitos do protótipo ........................ 24
3.2 Diagrama de blocos do hardware ........................... 27
3.3 Módulo Bluetooth ..................................................... 29
3.4 Microcontrolador ...................................................... 30
3.5 Conversor DA (digital-analógico) ............................ 31
3.6 Circuito de tensão de referência ............................. 32
3.7 Amplificador de saída .............................................. 35
3.8 Amplificador de ganho programável (AGP) ............ 40
3.9 Interface homem-máquina (IHM) ............................ 46
3.10 Montagem do protótipo.......................................... 48
3.11 Programação e testes do protótipo ....................... 50
4 RESULTADOS ............................................................... 54
5 CONCLUSÕES .............................................................. 67

6 REFERÊNCIAS .............................................................. 70
7 ANEXO A – MÓDULO BLUETOOTH ............................ 73
8 ANEXO B – ATMEGA328P ............................................ 74
9 ANEXO C – LM13700 .................................................... 75
10 ANEXO D – USBASP ................................................... 77
11 ANEXO E – TL074 ....................................................... 78
12 ANEXO F – DURALOCK DA DURACELL ................... 79

11
1 INTRODUÇÃO
Este trabalho surgiu da constatação da proliferação recente de modelos de instrumentos com IHM (interface homem-máquina) embarcada nos computadores pessoais, ou ainda em smartphones e tablets, tais como osciloscópios, geradores e analisadores, possibilitando custos mais acessíveis em relação aos seus equivalentes tradicionais de bancada. Observa-se, principalmente no exterior, um número cada vez maior de modelos de osciloscópios, analisadores e geradores de sinais com IHM externa. A figura 1 abaixo ilustra a diversidade destes instrumentos com IHM externa.
Figura 1 – Diversidade de instrumentos com IHM externa
(fonte: www.wikipedia.com)
Restringindo o escopo do projeto, este trabalho apresenta o desenvolvimento de um gerador de sinais de formas de onda quadrada, senoidal, triangular e dente de serra, com IHM programada em Java para ser embarcada em dispositivos móveis (smartphones e tablets), gerando sinais com amplitudes desde 600 mV até 6000 mV e frequências desde 8 Hz até 4400 Hz. Este gerador poderá

12
ser utilizado para testar circuitos e auto-falantes utilizados em telefonia. O gerador será portátil, alimentado por uma bateria de 9 V, porém, o protótipo poderá ser adaptado para operar com fonte de alimentação externa de mesma tensão e corrente máxima de 100 mA.
1.1 JUSTIFICATIVA
Não foi encontrado no mercado catarinense um dispositivo específico que gere sinais para testes de circuitos de telefonia, que seja portátil e com IHM externa. Geralmente, para analisar peças e circuitos de telefonia fica-se restrito a equipamentos de bancada, com faixa de freqüência bem mais ampla do que o necessário e de custo elevado. Cita-se, como exemplo, o modelo GV-2002 da marca ICEL. Assim, um equipamento de custo relativamente elevado fica subutilizado, enquanto que se houvesse outra opção como a que será desenvolvida aqui, este custo seria reduzido. Além disso, este trabalho será um primeiro passo para o desenvolvimento de instrumentos de maior valor, mas ainda assim, com potencial de terem custo menor do que as opções atuais do mercado catarinense.
Algumas vantagens dos instrumentos com IHM embarcada em PCs ou smartphones são o custo reduzido, otimizando recursos ao aproveitar a IHM de outro dispositivo que o usuário já possui, e economia de espaço na bancada. Neste trabalho será desenvolvido um gerador de sinais de pequenas dimensões, alimentado por pilha, possibilitando portabilidade.
Projetar e construir um instrumento de bancada é uma opção legítima para se praticar e se aprimorar em eletrônica, principalmente se acompanhada de fundamentação teórica e pesquisa experimental. A dispensa do desenvolvimento do hardware de IHM, como diversos tipos de botões de acionamento rotativos, displays e gabinetes complexos, viabiliza a execução de projetos de desenvolvimento com custos e prazos relativamente reduzidos.

13
1.2 DEFINIÇÃO DO PROBLEMA
Seria possível desenvolver um gerador de audiofrequência de custo abaixo das principais opções do mercado, utilizando componentes eletrônicos disponíveis nas lojas de componentes eletrônicos do mercado catarinense ?
Este trabalho envolverá a busca pelo desenvolvimento de um instrumento de bancada eletrônica com IHM embarcada em PCs ou dispositivos móveis (tablets e smartphones). A escolha por utilizar somente componente do mercado catarinense é que desta forma o usuário terá uma substituição de peças muito facilitada.
O foco será em um gerador de funções simples, portátil a pilhas ou bateria, robusto e de custo acessível, com comunicação via Bluetooth. O projeto envolverá o desenvolvimento de um programa para a plataforma Android na linguagem Java, que servirá de IHM e controle do gerador de sinais. Envolverá também o desenvolvimento de uma placa de circuito impresso (PCI) original para o protótipo, montagem e testes do protótipo de gerador de sinais em osciloscópio de referência de bancada eletrônica.
Detalhes sobre os requisitos do protótipo podem ser encontrados na seção 3.1. Especificações finais e resultados alcançados estão disponíveis nas páginas 72 e 73.
1.3 OBJETIVOS
O objetivo geral deste trabalho será desenvolver um protótipo de um gerador de funções básico e uma interface homem-máquina virtual, embarcada em plataforma Android.
Os objetivos específicos são:
a) projetar esquemático e layout para o hardware;
14 b) desenvolver firmware de controle do gerador;
c) especificar o software de interface com o usuário;
d) construir protótipo de gerador de sinais;
e) testar protótipo com osciloscópio.

15
2 FUNDAMENTAÇÃO TEÓRICA
2.1 LINGUAGEM DE PROGRAMAÇÃO DA IHM
A principal fonte de informação para esta etapa da fundamentação teórica foi DEITEL, 2010. Uma vez determinado que a IHM poderá rodar em dispositivos móveis (smartphones e tablets), a linguagem Java é, por definição, possivelmente a melhor opção, pois foi desenvolvida desde o início para ter portabilidade para rodar em qualquer SO (sistema operacional).
Segundo DEITEL, 2010, Java teve início em 1991, por um profissional da empresa Sun Microsystems, e ficou “esquecida” até 1993. A partir deste ano, a linguagem Java pegou carona na explosão de popularidade experimentada pela WWW, como linguagem de programação para desenvolvimento de interatividade e animações, junto aos navegadores. A linguagem Java tem demonstrado sobrevivência até os dias atuais, em um ambiente em constante mudança.
Outro motivo para se escolher Java é que esta linguagem é mais indicada para programação orientada a objeto. Segundo DEITEL, 2010, o Java é a linguagem de programação orientada a objeto mais utilizada em todo o mundo. A programação orientada a objeto funciona de forma semelhante a como as pessoas descrevem objetos no mundo real, sendo mais prática principalmente para programas que utilizam muitos recursos gráficos. Isso é bem diferente da programação orientada à ação, como a linguagem C, que é procedural.
DETEL, 2010, sugere atenção a diversos detalhes importantes de portabilidade, sendo que a mais importante talvez seja utilizar os Java APIs, disponíveis no site java.sun.com/javase/downloads, seção addicionalresources. No entanto, DELTEL, 2010, alerta que a portabilidade absolutamente total, mesmo em Java, é praticamente um sonho impossível.

16
2.2 SISTEMA OPERACIONAL ALVO DA IHM
Segundo ABLESON, 2012, a disputa mundial pelo mercado de SO para smartphones é dividida entre poucos: Windowsmobile (Microsoft), Android (Google) e iOS (Apple).
De acordo com a revista EXAME, 2014, no segundo trimestre do ano de 2014, o SO android deteve um marketshare mundial de 85 %. O mesmo tende a ocorrer entres tablets. Não cabe aqui descrever porque o SO android é escolhido pela maioria, mas sim optar por desenvolver a IHM do protótipo voltado para o SO que se apresenta no momento como o mais popular e promissor em todo o mundo, ou seja, o Android.
Quanto aos tablets, sabe-se que o Android também possui uma boa e crescente fatia do marketshare. Desktops e laptops já possuem emuladores de SO android e a equipe do projeto Android–x86 desenvolve desde 2011 um SO android próprio para a plataforma x86.
Segundo DETEL, 2010, uma desvantagem do Android é que novas versões são lançadas freqüentemente, mas isso é comum a muitos SOs. Por isso, o desenvolvedor em android pode precisar estar preparado para fazer atualização das versões dos seus softwares, acompanhando as novas versões do Android.
Algumas boas referências em português sobre o SO android são WINGERT, 2011, pelo SENAI e DEROSA, 2012, pelo IFSC.
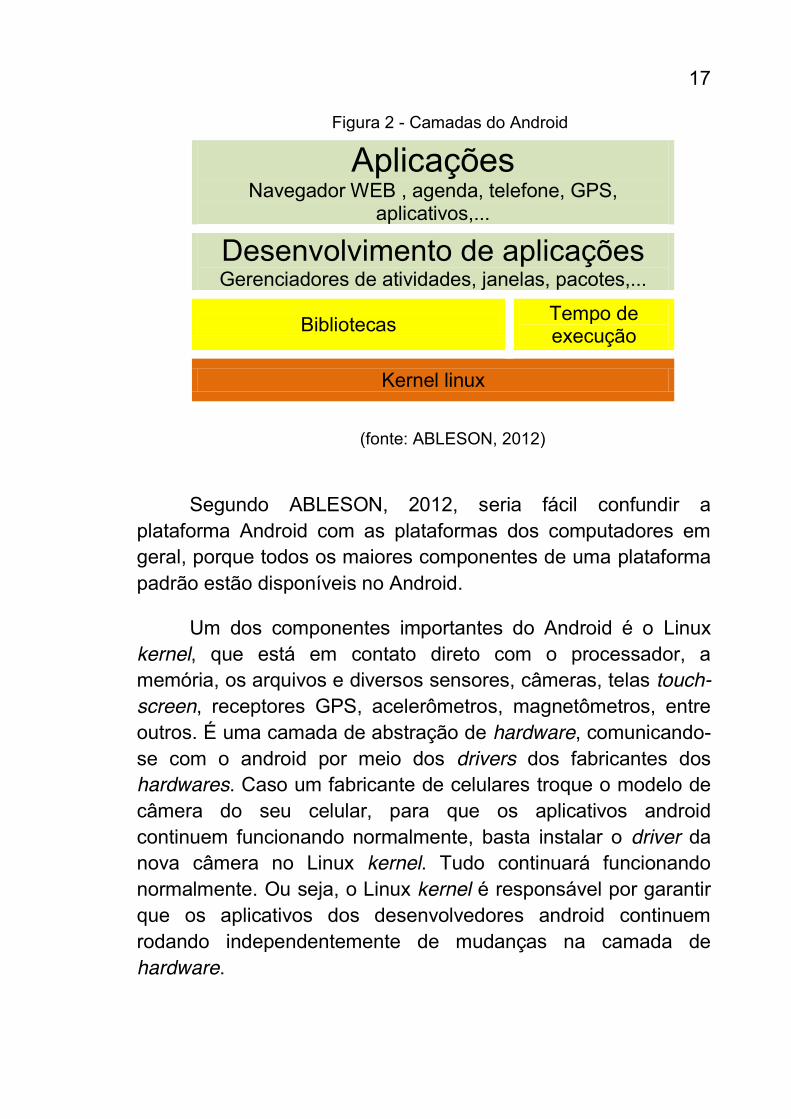
A plataforma Android envolve, resumidamente, quatro camadas principais: aplicações, desenvolvimento de aplicações, kernellinux e bibliotecas/tempo de execução. A camada kernel Linux é a de mais baixo nível. O programador em linguagens de alto nível só tem acesso as duas camadas superiores.
17
Figura 2 - Camadas do Android
Aplicações Navegador WEB , agenda, telefone, GPS,
aplicativos,...
Desenvolvimento de aplicações Gerenciadores de atividades, janelas, pacotes,...
Bibliotecas Tempo de execução
Kernel linux
(fonte: ABLESON, 2012)
Segundo ABLESON, 2012, seria fácil confundir a plataforma Android com as plataformas dos computadores em geral, porque todos os maiores componentes de uma plataforma padrão estão disponíveis no Android.
Um dos componentes importantes do Android é o Linux kernel, que está em contato direto com o processador, a memória, os arquivos e diversos sensores, câmeras, telas touch-screen, receptores GPS, acelerômetros, magnetômetros, entre outros. É uma camada de abstração de hardware, comunicando-se com o android por meio dos drivers dos fabricantes dos hardwares. Caso um fabricante de celulares troque o modelo de câmera do seu celular, para que os aplicativos android continuem funcionando normalmente, basta instalar o driver da nova câmera no Linux kernel. Tudo continuará funcionando normalmente. Ou seja, o Linux kernel é responsável por garantir que os aplicativos dos desenvolvedores android continuem rodando independentemente de mudanças na camada de hardware.

18 No SO Android, há também uma virtual machine (VM), que
devido a problemas de licenciamento, não foi possível colocar uma máquina Java original no android, por isso o Google optou pela Dalvik VM. Isso traz uma desvantagem, que é a possibilidade de haver alguma incompatibilidade entre códigos Java e a plataforma android.
2.3 MICROCONTROLADOR ATMEGA328P
Segundo LIMA, 2012, atualmente, os sistemas microcontrolados, ou embarcados, estão fortemente presentes em inúmeros eletrônicos do nosso dia a dia. Forno de microondas, automóveis, impressoras, celulares, máquinas fotográficas, sistemas de som, monitores, entre muitos outros equipamentos contém microcontroladores no seu controle.
As principais características do microcontrolador ATMEGA328P da família AVR, segundo o fabricante ATMEL, podem ser verificadas no anexo B. Além desta fonte de informação principal, uma pesquisa na WEB pode encontrar mais informações, inclusive em português. Segundo LIMA, 2012, o ATMEGA328P executa a maioria das instruções em 1 ou 2 ciclos de clock, opera em tensões desde 1,8 V até 5,5 V, com velocidades de até 20 MHz. Possui também memória flash programável in-system de 32 kB, 2 kB de SRAM e 1 kB de EEPROM.
Figura 3 – Diagrama de um microcontrolador típico
(fonte: LIMA, 2012)
19 O microcontrolador ATMEGA328P também possui gerador
PWM, temporizadores/contadores, 23 pinos de I/O de uso geral, interface serial USART e SPI, interrupções internas e externas. Assim, este componente possui recursos suficientes para gerenciar a comunicação com o módulo Bluetooth, gerar formas de onda e controlar a amplitude de saída do protótipo a ser desenvolvido. Além disso, o ATMEGA328P é um dos poucos disponíveis no mercado de Santa Catarina, não restando, liberdade de escolha de outros microcontroladores que fossem mais poderosos quanto à freqüência de operação ou quantidade de pinos de uso geral.
Quanto à programação da USART, programação dos contadores/temporizadores, PWM e diversos outros tópicos de programação, importantes sobre o microcontrolador ATMEGA328P, o livro de referência LIMA, 2012, e o datasheet ATMEL, 2014, foram as principais fontes de informação.
2.4 VOLTAGE CONTROLED AMPLIFIER (VCA)
Para controle de amplitude de um gerador de sinais analógico, pode-se utilizar um potenciômetro de baixo ruído com cabo blindado na entrada do amplificador de saída. Porém, como o protótipo a ser desenvolvido possui IHM virtualizada no dispositivo Android, deve-se buscar fundamentação teórica para desenvolvimento de um amplificador de ganho programável (AGP). Uma possibilidade é utilizar VCAs.
Conforme ELLIOT, 2012, é comum, na eletrônica aplicada a circuitos de áudio, o uso de VCAs, especialmente em compressores/limitadores ou expansores de áudio. Estes são circuitos de atuação automática utilizados, por exemplo, para proteção de auto-falantes, ao limitar a amplitude de saída. Outra aplicação possível para VCAs é amplificar os sinais sonoros mais fracos para que tenham aproximadamente a mesma intensidade dos sinais mais fortes (expansores), segundo

20
ELLIOT, 2012. Esta última aplicação pode nivelar o volume dos instrumentos musicais de uma banda de música, corrigindo automaticamente as variações na “agressividade” e regulagens de intensidade em que cada músico ajusta seu instrumento. Geralmente estes circuitos funcionam de forma automática.
A idéia inovadora neste trabalho seria controlar a amplitude de saída através de um circuito VCA modificado, com o controle de ganho através de um sinal PWM gerado por um microcontrolador.
ELLIOT, 2012, apresenta uma ótima revisão de tecnologias para VCAs, a qual foi utilizada como ponto de partida para esta etapa do trabalho. Alguns conceitos técnicos relacionados com VCAs, são utilizados por ELLIOT, 2012:
a) tracking: é importante para VCAs estéreo, pois indica o quanto dois VCAs independentes conseguem operar em sincronia. Para este trabalho, este conceito não é importante, pois o gerador a ser desenvolvido terá somente um canal;
b) offset DC: dependendo da tecnologia utilizada no VCA, este pode contaminar o sinal de áudio CA com um pequeno nível de tensão contínua. Este fator técnico é importante para este trabalho, pois significa um offset CC inconveniente na saída do gerador de sinais, o que pode ser indesejável em baixas amplitudes de saída, caso não seja corrigido;
c) tempo de ataque: pode ser muito importante para sinais de áudio, pois indica o intervalo de tempo entre um evento que o VCA precisa atuar e o início de sua atuação propriamente dita. VCAs com baixo tempo de ataque não funcionarão bem em sinais muito dinâmicos em termos de amplitude. Por exemplo, instrumentos de percussão têm como característica básica a variação abrupta da
21 amplitude. Para estes instrumentos, um VCA precisa ter baixo tempo de ataque. Também é chamado de velocidade de resposta. Neste trabalho, este fator tem importância mínima, pois a amplitude de pico a pico de entrada será sempre fixa. As variações na amplitude de saída são determinadas pelo usuário e, portanto, variam muito lentamente.
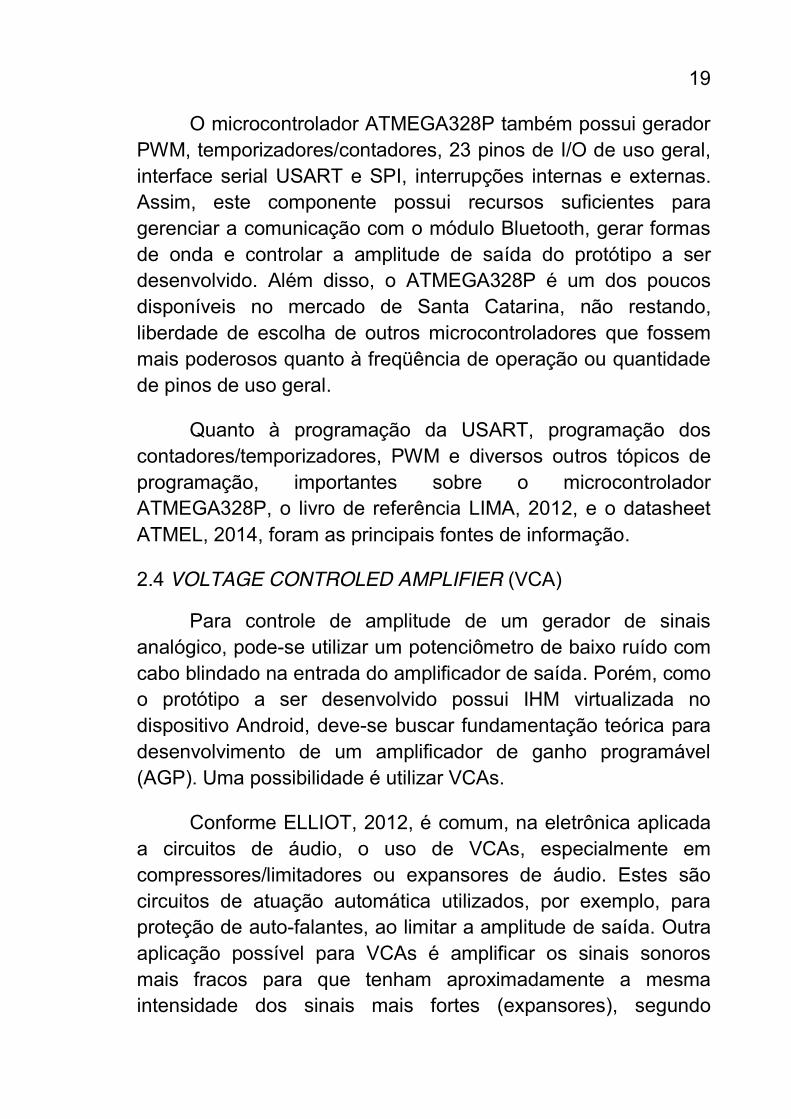
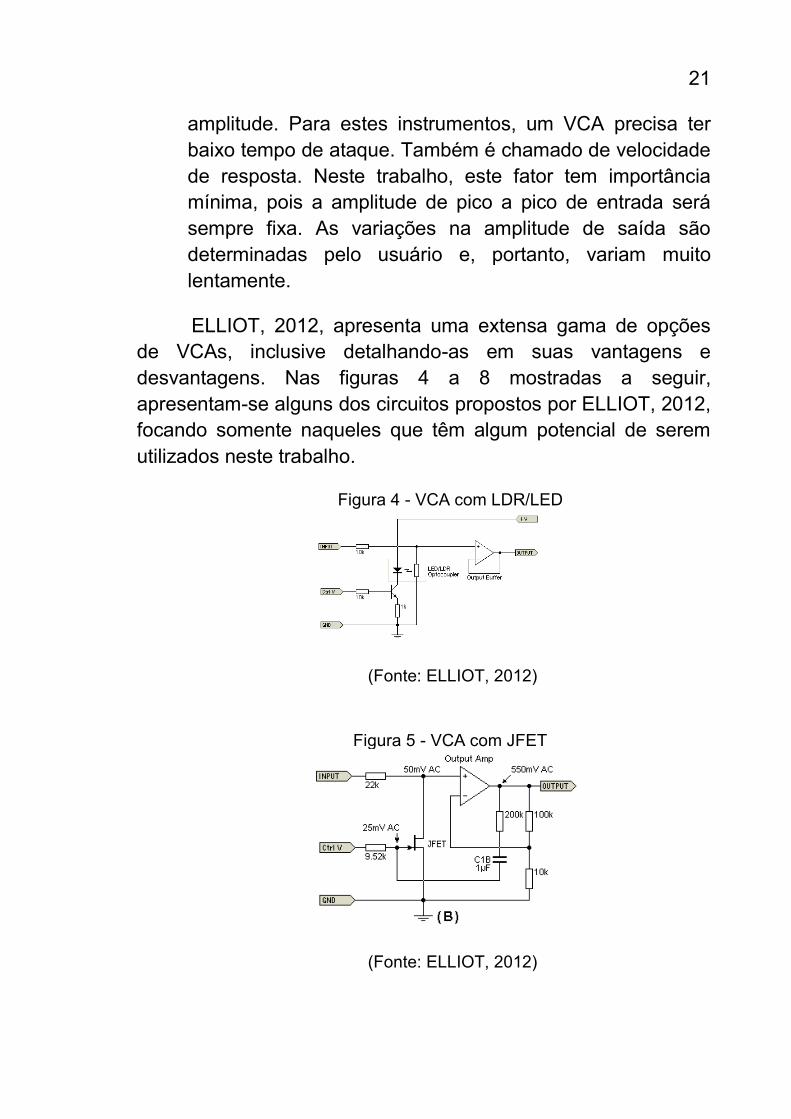
ELLIOT, 2012, apresenta uma extensa gama de opções de VCAs, inclusive detalhando-as em suas vantagens e desvantagens. Nas figuras 4 a 8 mostradas a seguir, apresentam-se alguns dos circuitos propostos por ELLIOT, 2012, focando somente naqueles que têm algum potencial de serem utilizados neste trabalho.
Figura 4 - VCA com LDR/LED
(Fonte: ELLIOT, 2012)
Figura 5 - VCA com JFET
(Fonte: ELLIOT, 2012)
22
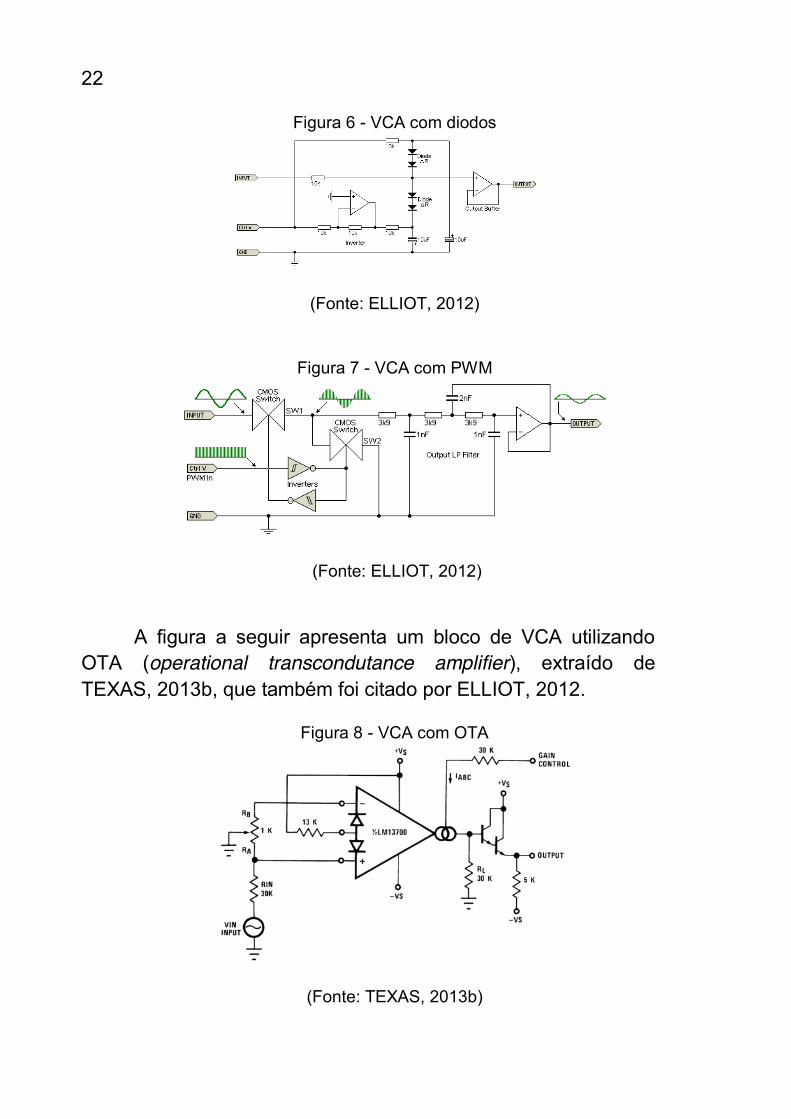
Figura 6 - VCA com diodos
(Fonte: ELLIOT, 2012)
Figura 7 - VCA com PWM
(Fonte: ELLIOT, 2012)
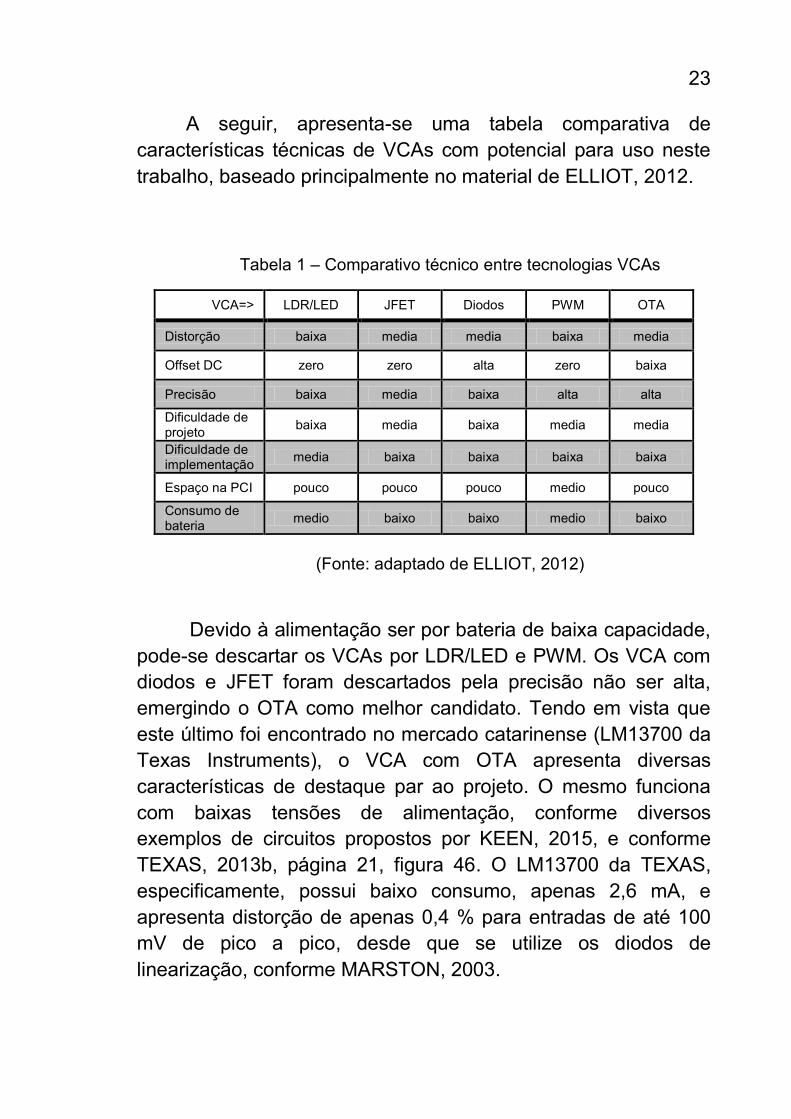
A figura a seguir apresenta um bloco de VCA utilizando OTA (operational transcondutance amplifier), extraído de TEXAS, 2013b, que também foi citado por ELLIOT, 2012.
Figura 8 - VCA com OTA
(Fonte: TEXAS, 2013b)
23
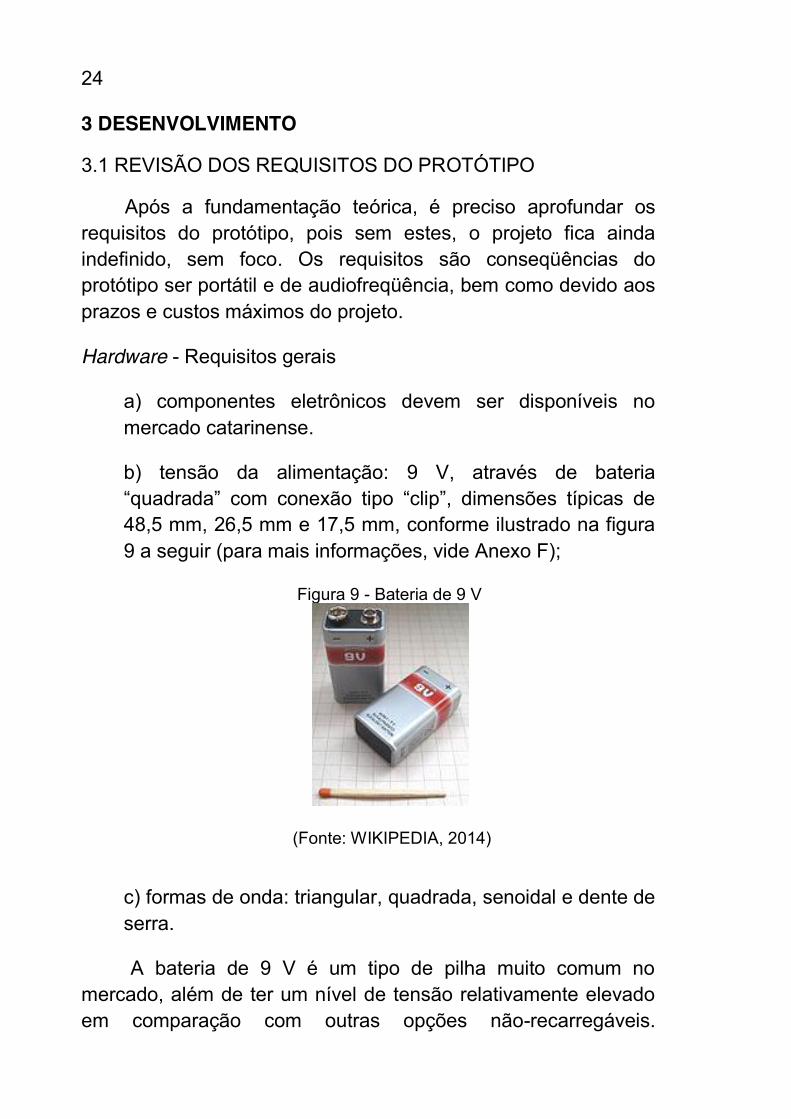
A seguir, apresenta-se uma tabela comparativa de características técnicas de VCAs com potencial para uso neste trabalho, baseado principalmente no material de ELLIOT, 2012.
Tabela 1 – Comparativo técnico entre tecnologias VCAs
(Fonte: adaptado de ELLIOT, 2012)
Devido à alimentação ser por bateria de baixa capacidade, pode-se descartar os VCAs por LDR/LED e PWM. Os VCA com diodos e JFET foram descartados pela precisão não ser alta, emergindo o OTA como melhor candidato. Tendo em vista que este último foi encontrado no mercado catarinense (LM13700 da Texas Instruments), o VCA com OTA apresenta diversas características de destaque par ao projeto. O mesmo funciona com baixas tensões de alimentação, conforme diversos exemplos de circuitos propostos por KEEN, 2015, e conforme TEXAS, 2013b, página 21, figura 46. O LM13700 da TEXAS, especificamente, possui baixo consumo, apenas 2,6 mA, e apresenta distorção de apenas 0,4 % para entradas de até 100 mV de pico a pico, desde que se utilize os diodos de linearização, conforme MARSTON, 2003.
VCA=> LDR/LED JFET Diodos PWM OTA
Distorção baixa media media baixa media
Offset DC zero zero alta zero baixa
Precisão baixa media baixa alta alta
Dificuldade de projeto baixa media baixa media media
Dificuldade de implementação media baixa baixa baixa baixa
Espaço na PCI pouco pouco pouco medio pouco
Consumo de bateria medio baixo baixo medio baixo
24
3 DESENVOLVIMENTO
3.1 REVISÃO DOS REQUISITOS DO PROTÓTIPO
Após a fundamentação teórica, é preciso aprofundar os requisitos do protótipo, pois sem estes, o projeto fica ainda indefinido, sem foco. Os requisitos são conseqüências do protótipo ser portátil e de audiofreqüência, bem como devido aos prazos e custos máximos do projeto.
Hardware - Requisitos gerais
a) componentes eletrônicos devem ser disponíveis no mercado catarinense.
b) tensão da alimentação: 9 V, através de bateria “quadrada” com conexão tipo “clip”, dimensões típicas de 48,5 mm, 26,5 mm e 17,5 mm, conforme ilustrado na figura 9 a seguir (para mais informações, vide Anexo F);
Figura 9 - Bateria de 9 V
(Fonte: WIKIPEDIA, 2014)
c) formas de onda: triangular, quadrada, senoidal e dente de serra.
A bateria de 9 V é um tipo de pilha muito comum no mercado, além de ter um nível de tensão relativamente elevado em comparação com outras opções não-recarregáveis.

25
Evidentemente, que o uso de recarregáveis de lítio poderá ser uma melhoria futura, desde que o circuito suporte a menor tensão da mesma.
Como exemplo de faixa de operação de tensão de alimentação, pode-se citar a tensão da bateria modelo Duralock da marca Duracell, um fabricante de referência, oscila entre 9,5 V e 6,7 V, aproximadamente. Para mais informações, ver anexo F.
Considerou-se 7 V como tensão limite inferior para o funcionamento normal do protótipo, tendo em vista as dificuldades enormes que surgiriam abaixo desta tensão, devido a falha na regulação da tensão de referência de 5 V, que acarretaria diversas outras conseqüências como erros no controle da amplitude de saída e até o travamento do microcontrolador e do módulo Bluetooth. Limitar a alimentação em valores acima de 7 V não é um desperdício grave de energia da bateria, porque resta pouca carga da bateria abaixo desta tensão.
As formas de ondas escolhidas estão entre as mais comuns em geradores de sinais. A escolha de se restringir ao mercado catarinense se justifica pela redução de custos e prazos em caso de manutenção.
Softwares - Interface homem-máquina (IHM)
a) para dispositivos móveis (tablets e smartphones);
b) aparência de uso intuitivo e fácil;
c) comunicação com hardware via Bluetooth;
d) botões virtuais: seletor de formas de onda, seletor de amplitude, seletor de freqüência;
e) displays virtuais: freqüência e amplitude.

26
Hardware - Amplificador de saída
a) amplitude de saída: de 400 mVpp a 6000 mVpp;
b) resistência de carga: resistiva, de 600 Ω a infinita;
c) faixa de operação: audiofreqüência, de 80 Hz a 4.000 Hz;
d) outras características: proteção contra curto-circuito.
A faixa de freqüência é compatível com a voz humana, e assim o gerador poderá ser utilizado para levantar resposta de freqüência de componentes e circuitos da telefonia, conforme objetivos iniciais deste trabalho. O valor de resistência mínima estipulado em 600 Ω é o menor valor encontrado para impedâncias de entrada de amplificadores de áudio, conforme MONTEIRO, 2015. A amplitude máxima de saída foi definida em 6000 mV em função da pretensão do autor deste trabalho de se utilizar o gerador também em outras aplicações para além da telefonia. Este valor máximo pode ser reduzido por software sem maiores dificuldades.
Hardware - Circuito gerador de formas de ondas
a) microcontrolado, com software específico.
O uso de um componente microcontrolado se justifica pela necessidade de tratar as informações seriais de um módulo Bluetooth que será utilizado para receber as configurações de freqüência, forma de onda e amplitude do dispositivo Android (smartphone). Este também será aproveitado para gerar as formas de onda ponto a ponto e controlar a amplitude de saída.
Dando continuidade ao detalhamento dos requisitos, a corrente máxima contínua que o amplificador de saída deverá entregar a carga é 5 mA, considerando o pior caso que é a forma

27
de onda quadrada com amplitude de 6 Vpp e a saída em curto-circuito. A equação 1 abaixo mostra este cálculo.
𝐼𝑚𝑎𝑥 = 𝑉𝑚𝑎𝑥𝑅𝑚 í𝑛
= 3600
= 5 𝑚𝐴 [1]
Ao definir uma bateria como fonte de energia, o ideal seria que o circuito suportasse toda a faixa de variação de tensão da mesma, que os resistores tenham os maiores valores possíveis e que, tanto as topologias dos circuitos, quanto os circuitos integrados, sejam de baixo consumo de corrente. Convém que os capacitores sejam low leakage. O ideal é utilizar circuitos integrados low voltage e low power, se possível. Porém, muitos destes requisitos foram impossíveis de serem atendidos na época em que o protótipo foi projetado, ao se restringir a busca por componentes no mercado catarinense.
3.2 DIAGRAMA DE BLOCOS DO HARDWARE
Considerando o que foi pesquisado na fundamentação teórica, definiu-se algumas tecnologias a serem utilizadas no protótipo, conforme a figura 10 a seguir.
Figura 10 - tecnologias utilizadas na IHM
(Fonte: autoria própria)
Considerando os requisitos do protótipo até o momento, pode-se definir uma primeira versão do diagrama de blocos do

28
gerador de funções. Optou-se por aproveitar o microcontrolador para gerar as formas de ondas digitalmente com o maior número de bits possíveis, possibilitando liberdade para que formas de ondas possam ser definidas apenas através do firmware, para além das formas de ondas padrão de geradores de funções não-arbitrários. Esta liberdade é mais difícil de ser alcançada, por exemplo, quando se utiliza circuitos osciladores totalmente analógicos, pois estes são comparativamente mais limitados na versatilidade de formas de ondas.
Figura 11 - Diagrama resumido do hardware
(Fonte: autoria própria)
Com relação ao diagrama anterior, figura 11, cada vez que o usuário alterar valores de freqüência, amplitude ou forma de onda na IHM do dispositivo Android, o mesmo enviará dados, para o módulo Bluetooth do gerador de audiofreqüência, automaticamente após 2,5 segundos sem alterações. O microcontrolador receberá estes dados e converterá em sinal PWM de controle de ganho e sequência de pontos para formação da onda. O dispositivo Android somente se comunicará novamente quando o usuário efetuar uma nova alteração válida em qualquer dos parâmetros configuráveis.
Seguindo o detalhamento geral de funcionamento, seguindo na figura 11, as formas de onda serão geradas da
29
seguinte maneira: o microcontrolador gera valores binários correspondentes aos níveis de tensão para geração das formas de onda ponto a ponto, o conversor DA converte estes valores digitais em níveis analógicos e, finalmente, o amplificador de ganho programável controla a amplitude de saída. A freqüência e as formas de onda, portanto, são parâmetros controlados diretamente pelo microcontrolador. A freqüência da onda é determinada pela velocidade com que o microcontrolador atualiza os valores binários correspondentes a cada ponto da forma de onda. Posteriormente, no momento dos testes com osciloscópio, pode-se confirmar ótima estabilidade de freqüência devido a este princípio de geração de formas de onda.
O pré-amplificador de ganho programável será controlado por dois sinais PWM, através de um circuito que converte o percentual de ciclo ativo PWM em corrente que será injetada nos pinos de controle do LM13700. O amplificador de saída é necessário para se obter 600 Ω de impedância de saída e amplitude de 6000 mV, conforme requisitos do projeto.
3.3 MÓDULO BLUETOOTH
Optou-se por utilizar um pequeno módulo Bluetooth totalmente pronto, HC-05, disponível no mercado catarinense, em lojas na WWW. No anexo A, pode-se encontrar uma foto e mais informações a respeito deste módulo Bluetooth.
Dos seis pinos de conexão do módulo, dois deles são TX e RX para UART, que serão conectados ao microcontrolador, suportando velocidades desde 4800 a 1.382.400 baud rates. A tensão de alimentação é 5 V e o nível lógico 1 nas vias de dados é 3,3 V. O consumo é 35 mA despareado e 10 mA pareado.
Para parear o HC-05 com um celular android, basta dar permissão para ativar o Bluetooth, selecionar o dispositivo com o nome HC-05 e digitar a senha 1234. Esta é a configuração de fábrica do módulo HC-05.

30
3.4 MICROCONTROLADOR
Um bom ponto de partida, em relação ao detalhamento de um projeto microcontrolado, é a definição das conexões do microcontrolador com os demais blocos de circuitos do protótipo, pois o microcontrolador ocupa uma posição central neste protótipo a ser desenvolvido.
A figura 12, a seguir, apresenta a pinagem do microcontrolador ATMEGA328P, conforme ATMEL, 2014.
Figura 12 - Pinagem do ATMEGA328P (package dual in-line)
(Fonte: ATMEL, 2014)
Já que se pretende que o microcontrolador gere as formas de onda ponto a ponto, faz-se necessário um clock elevado, dentro dos limites definidos pelo fabricante. Assim, será utilizado o clock interno do microcontrolador com prescaler unitário, o que siginifica uma freqüência de clock de 8 MHz aproximadamente. Os pinos 17 a 19 são as vias para comunição SPI, por onde o microcontrolador receberá a gravação do código C na própria PCI, ou seja, será utilizado o conceito de in-system programming.

31 O microcontrolador ATMEGA328P não possui saída
analógica, portanto será utilizado um conversor DA externo. Considerou-se que 11 bits seriam suficientes para gerar as formas de onda com baixo erro de quantização. Normalmente geradores digitais utilizam de 10 a 16 bits. Como diversos pinos das portas PB já estão reservados para o cristal e SPI, optou-se por utilizar 11 pinos das portas PD e PC.
Os pinos 2 e 3 (TX e RX da UART) serão dedicados para a comunicação via UART com o módulo Bluetooth, e o pino 1 será dedicado ao RESET, útil para debug pelo menos durante a fase de prototipagem.
A figura a seguir resume as definições iniciais de ocupação das portas do microcontrolador. Foi definido também 2 pinos para saída PWM de controle da amplitude (AGP). Com estas definições, a questão da destinação dos pinos do microcontrolador fica concluída.
Figura 13 – Uso dos pinos do ATMEGA328
(Fonte: adaptado de ATMEL, 2014)
3.5 CONVERSOR DA (DIGITAL-ANALÓGICO)
Ao invés de utilizar um circuito integrado específico, reduziu-se custos na conversão DA utilizando simplesmente
Conversor DA
SPI para gravação do código Conversor DA
Conversor DA
Saída PWM TC1
UART p/ módulo HC-05

32
resistores em rede R2R de 11 bits conectados diretamente nos pinos do ATMEGA, conforme mostrado na figura 14 a seguir.
Devido ao valor relativamente elevado dos resistores da rede R2R, com R ≈ 5 kΩ, o consumo de corrente deste bloco será baixo. Considerando o equivalente thevenin desta rede R2R, conforme equações de WOLKE, 2013, o consumo será no máximo em torno de 1 mA. Não foram utilizados resistores de precisão devido a dificuldades de encontrá-los no mercado catarinense em versão SMD.
Figura 14 - Rede R2R 11 bits
(Fonte: adaptado de WOLKE, 2013)
Como não foi encontrado resistor de exatos 5 kΩ no mercado catarinense, foi necessária uma associação série de 4k7 com 330 Ω, resultando em erro pouco abaixo de 1 %. O circuito foi simulado e apresentou saída analógica coerente com os valores binários selecionados nas entradas digitais.
3.6 CIRCUITO DE TENSÃO DE REFERÊNCIA
Todo conversor DA deve possuir uma tensão de referência, que neste caso será o nível alto de tensão de saída dos pinos do microcontrolador. A idéia inicial desta referência

33
recaiu naturalmente sobre o próprio microcontrolador ATMEGA328, pois este possui uma tensão interna de referência de 1,1 V. Porém, esta tensão não é precisa o suficiente.
Assim, a tensão de referência deverá ser a própria tensão de alimentação digital do microcontrolador.
O próximo candidado mais viável economicamente é o diodo zener. No entanto, para o zener ter um baixo consumo de corrente, este deve ser de baixa potência. Desafortunadamente, houve dificuldades em encontrar zener de baixa potência no mercado catarinense.
Assim, optou-se pelo regulador de tensão LM317L, com encapsulamento TO-92. É um regulador com saída ajustável por meio de dois resistores. A capacidade é de 100 mA, suficiente para este protótipo, tendo em vista que alimentará somente o módulo Bluetooth, o microcontrolador e o conversor DAC, totalizando no mínimo 31 mA e máximo 63 mA.
Figura 15 – LM317L
(Fonte: autoria própria)
A tensão de referência será projetada em 5 V, devido ao módulo HC-05 necessitar desta tensão para alimentação ideal.
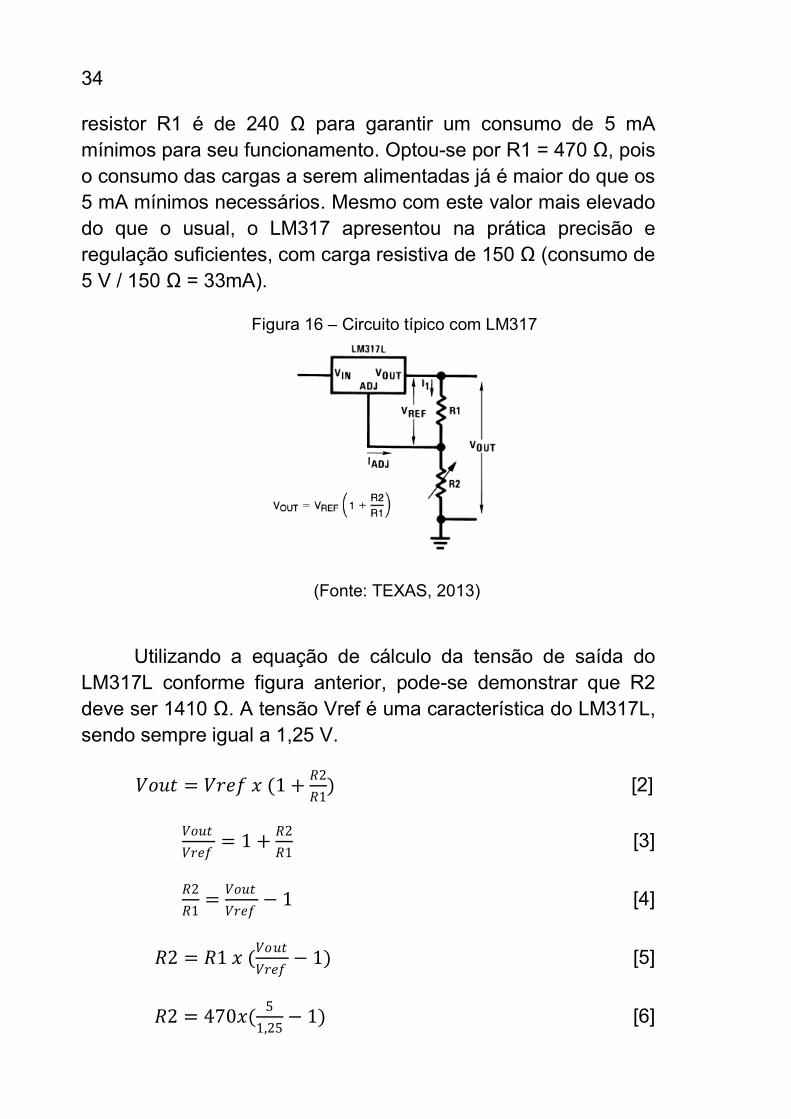
Utilizou-se o circuito padrão do datasheet do LM317, conforme figura 16 a seguir (TEXAS, 2013a). Usualmente, o
34
resistor R1 é de 240 Ω para garantir um consumo de 5 mA mínimos para seu funcionamento. Optou-se por R1 = 470 Ω, pois o consumo das cargas a serem alimentadas já é maior do que os 5 mA mínimos necessários. Mesmo com este valor mais elevado do que o usual, o LM317 apresentou na prática precisão e regulação suficientes, com carga resistiva de 150 Ω (consumo de 5 V / 150 Ω = 33mA).
Figura 16 – Circuito típico com LM317
(Fonte: TEXAS, 2013)
Utilizando a equação de cálculo da tensão de saída do LM317L conforme figura anterior, pode-se demonstrar que R2 deve ser 1410 Ω. A tensão Vref é uma característica do LM317L, sendo sempre igual a 1,25 V.
𝑉𝑜𝑢𝑡 = 𝑉𝑟𝑒𝑓 𝑥 (1 + 𝑅2𝑅1
) [2]
𝑉𝑜𝑢𝑡𝑉𝑟𝑒𝑓
= 1 + 𝑅2𝑅1
[3]
𝑅2𝑅1
= 𝑉𝑜𝑢𝑡𝑉𝑟𝑒𝑓
− 1 [4]
𝑅2 = 𝑅1 𝑥 (𝑉𝑜𝑢𝑡𝑉𝑟𝑒𝑓
− 1) [5]
𝑅2 = 470𝑥( 51,25
− 1) [6]
35
𝑅2 = 1410 Ω [7]
O circuito foi simulado e também montado em matriz de contatos, apresentando tensão de saída estável e precisa em 5 V em ambos os casos, em faixa de carga compatível com as correntes necessárias ao protótipo.
No entanto, no regulador funcionando com o circuito completo, ocorreu intensa oscilação na tensão de saída, 100 mV de pico a pico, propagando ruídos consideráveis para o sinal de saída do gerador. Isto foi minimizado com um capacitor de 100 µF na saída do regulador LM317, quando então observou-se grande redução do ruído na saída do gerador. Também foi inserido um diodo 1N4002 entre os pinos Vin e Vout, conforme recomendado na figura 18 da referência TEXAS, 2013a, para proteção do LM317.
3.7 AMPLIFICADOR DE SAÍDA
Considerou-se, nesta fase do projeto, que devido a alimentação ser por bateria de baixa capacidade, é importante que o amplificador de saída tenha baixo consumo na ausência de cargas e que seja eficiente.
Verificou-se que os geradores de sinais de bancada comerciais são protegidos contra curto-circuito pela própria impedância de saída destes. Ou seja, quando se diz que um gerador possui impedância de saída de 50 Ω, significa que quando seus terminais de saída são curto-circuitados, na realidade ainda persistirá uma carga de 50 Ω, o que evita danos ao próprio amplificador.
Assim, neste protótipo será colocado um resistor de 600 Ω em série com a saída do amplificador, protegendo-o de forma simples e com baixo custo, contra curto-circuito acidental na saída, tendo em vista que em equipamentos de áudio esta é a impedância de entrada padrão, conforme MONTEIRO, 2015.

36
Uma opção simples seria utilizar AMPOPs como amplificadores de saída. Um dos melhores AMPOPs disponíveis no mercado catarinense são os da família TL07x (TL071, TL072 e TL074). No datasheet do TL07x, TEXAS, 2014, pode-se perceber que as informações de desempenho do componente são apresentadas para cargas de 2 kΩ ou 10 kΩ. No anexo E, há uma tabela mostrando claramente o aumento na perda de swing do TL07x para carga de 2 kΩ.
Na prática, uma pesquisa experimental evidenciou que o amplificador de saída do gerador a ser desenvolvido não poderia ser simplesmente com um TL07x. Foi verificado que o TL074 perde swing e slew-rate com cargas abaixo de 2 kΩ, principalmente se alimentados com baixa tensão e com saídas próximas dos níveis de tensão de alimentação. Isso resultaria em distorção nas formas de ondas quadradas em altas frequências. Por todos estes fatores, faz-se necessário a busca de outra opção ao uso de AMPOP como amplificador de saída, neste trabalho.
Estas limitações são claramente confirmadas e detalhadas em MANCINI, 2001, onde o próprio fabricante do TL07x divulga o desempenho limitado deste AMPOP em baixa tensão de alimentação. Por trás disso está a diferença entre AMPOPs de uso geral e AMPOPs de uso específico, como os AMPOPs rail-to-rail desenvolvidos pelos fabricantes quando ocorreu aumento de interesse por eletrônicos portáteis alimentados em baixa tensão. Infelizmente, AMPOPs rail-to-rail não são facilmente disponíveis no mercado catarinense, e mesmo que fossem, ainda assim poderia persistir a questão da impedância de saída. Segue citação da referência MANCINI, 2001, sobre este assunto.
Three of the old generation op amps, LM358, TL07X, and TLC272 had output voltage spans of 2.3 V to 3.75 V. This performance does not justify the ideal op amp assumption that was made in the beginning of this application note unless the output voltage swing is severely limited. Limited output- or input-voltage swing is one of the

37
worst deficiencies a single-supply op amp can have because the limited voltage swing limits the circuit’s dynamic range. (MANCINI, 2001, pág. 05)
Está claramente citado que existem perdas de tensão entre 2,3 V e até 3,75 V no uso de AMPOPs antigos, onde o TL07x está inserido.
Para minimizar as limitações de swing do TL07x e também reduzir a impedância de saída, buscou-se uma solução antiga, mas ainda útil: amplificadores transistorizados. Existem muitas possibilidades para amplificadores transistorizados, considerando as classes. De acordo com Wayne Storr, criador do site electronic tutorials, STORR, 2015, a tabela a seguir apresenta as classes dos amplificadores.
Tabela 2 – Classes de amplificadores Classe Comentários
A Baixa eficiência (~30%), alta fidelidade, ganho de tensão elevado.
B Boa eficiência (~70%), fidelidade média, ganho de tensão baixo.
C Ótima eficiência (~80%), fidelidade ruim, ganho de tensão alto.
D Excelente eficiência (~95%), alta fidelidade, projeto complexo
F, G, I, S e T
Outros tipos de amplificadores mais complexos e menos usados em projetos simples
(Fonte: adaptado de STORR, 2015)
Foram descartados os amplificadores classes D até T por serem complexos para se projetar e o amplificador classe C por ter fidelidade ruim, incompatível com um gerador de funções.
O amplificador classe B possivelmente é o melhor candidato para o projeto, pois aponta para um bom equilíbrio entre eficiência e fidelidade. Além disso, este tipo de amplificador é uma tecnologia muito madura e bem documentada, como por exemplo em MARKUS, 2000 e 2005, SEDRA, 2007 e BOYLESTAD, 2012, o que simplificou o seu projeto.

38
O amplificador transistorizado classe B, na sua forma mais simples, possui razoável distorção crossover, o que foi minimizada com realimentação negativa do AMPOP TL07xBC da Texas Instruments, de baixo offset, disponível em muitas lojas de componentes eletrônicos no mercado catarinense. O AMPOP também é útil para reduzir derivas e não linearidades típicas de amplificadores a transistor (ECIRCUITCENTER, 2014). Foi verificado que um gerador de sinais comercial, de fabricação nacional, utiliza saída push-pull transistorizada com realimentação negativa à AMPOP, exatamente como está sendo proposto neste trabalho. Para obtenção de 6 Vpp no sinal de saída, foi utilizado saída push-pull transistorizada em ponte completa, conforme figura 17 a seguir.
Figura 17 - Amplificador de saída transistorizado
(Fonte: adaptado de MARKUS, 2000, 2005 e ECIRCUITCENTER, 2014)

39
Com o circuito da figura 17 obteve-se resultados satisfatórios, a saber:
a) conforme necessidades levantadas nos requisitos do projeto, elevado swing de saída, teoricamente para o dobro do que seria possível com uma saída em apenas meia ponte;
b) duplicação do slew-rate, pois dois circuitos complementares trabalham simultaneamente (ponte completa ou ponte H), sempre em oposição de fase.
A tabela a seguir resume os resultados experimentais de um teste CC realizado com o amplificador em matriz de contatos, constando a medição da amplitude de saída três vezes, em condições de repetitividade. Os resultados confirmam as expectativas de swing de saída.
Tabela 3 – Swing do amplificador de saída Swing na carga Carga 10 kΩ
Máxima tensão (V) 5,86 5,85 5,84 Mínima tensão (V) -5,86 -5,86 -5,86
Observações: * As tensões foram medidas entre os dois terminais de saída do amplificador. ** A tensão da bateria manteve-se entre 8,35 V e 8,01 V.
(Fonte: autoria própria)
Na tabela acima foi utilizado carga de 10 kΩ, pois desejava-se saber o máximo de amplitude de pico a pico possível. No caso de carga de 600 Ω, evidentemente que os resultados devem ser divididos por 2, devido ao divisor de tensão entre a impedância de saída do amplificador e a carga. Portanto, esta queda de amplitude de saída é normal.
Com esta pesquisa experimental, concluiu-se que a amplitude de saída é de ± 5,8 V. Mesmo com a bateria em 7 V, a saída terá swing de ± 4,8 V, o que ainda está dentro do requisito do projeto que é ± 3 V (6 Vpp).

40 Ainda faz-se necessário realizar testes CA, variando
formas de onda, amplitude e frequência. Estes testes, e eventuais ajustes, serão feitos diretamente na PCB a ser montada.
3.8 AMPLIFICADOR DE GANHO PROGRAMÁVEL (AGP)
Apresenta-se a seguir uma tabela comparativa das tecnologias de VCAs (voltage controled amplifiers) estudadas na fundamentação teórica, considerando variáveis de mercado custo e disponibilidade, para contribuir ainda mais na decisão acertada da tecnologia mais conveniente.
Tabela 4 – comparativo mercadológico entre as tecnologias VCAs
VCA Custo Disponibilidade de componentes
LDR E LED baixo média JFET baixo média
Diodos baixo alta PWM médio média OTA baixo média
(Fonte: autoria própria)
Considerando os estudos de aprofundamento nestes tipos de VCAs realizado na etapa de fundamentação teórica e a tabela 4 anterior, foi escolhido o VCA do tipo OTA como a melhor opção para o protótipo a ser desenvolvido. Foi encontrado o LM13700, no mercado catarinense em encapsulamento SMD. Este foi simulado em software específico, conforme figura 8.
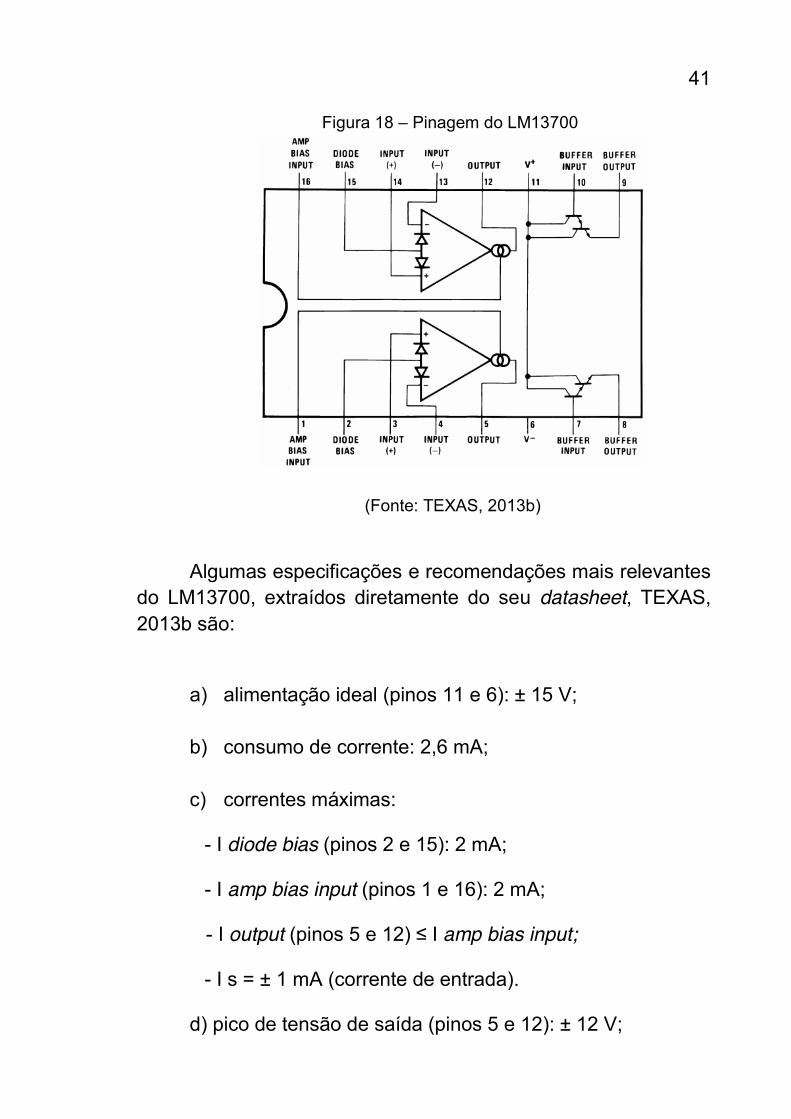
O LM13700 é um amplificador operacional de transcondutância duplo com diodos de linearização e buffer Darlington transistorizado, conforme anexo C e figura 18. Para aplicações de precisão, não é recomendado o uso do buffer devido a típica imprecisão no ganho de corrente de transistores bipolares. Por este motivo, os buffers do LM13700, acessíveis nos pinos 7 a 10, não foram utilizados neste trabalho.
41
Figura 18 – Pinagem do LM13700
(Fonte: TEXAS, 2013b)
Algumas especificações e recomendações mais relevantes do LM13700, extraídos diretamente do seu datasheet, TEXAS, 2013b são:
a) alimentação ideal (pinos 11 e 6): ± 15 V;
b) consumo de corrente: 2,6 mA;
c) correntes máximas:
- I diode bias (pinos 2 e 15): 2 mA;
- I amp bias input (pinos 1 e 16): 2 mA;
- I output (pinos 5 e 12) ≤ I amp bias input;
- I s = ± 1 mA (corrente de entrada).
d) pico de tensão de saída (pinos 5 e 12): ± 12 V;
42 e) slew-rate: 50 V/µs (com alimentação ± 15V).
Seria ideal que o LM13700 substituísse diretamente o AMPOP do amplificador de saída, mas o swing de saída deste OTA é de apenas ± 0,5 V quando alimentado com a bateria em carga mínima de 7 V. Percebe-se, mais uma vez, que um fator dificultador do projeto é a baixa tensão de alimentação disponível de apenas 7 V.
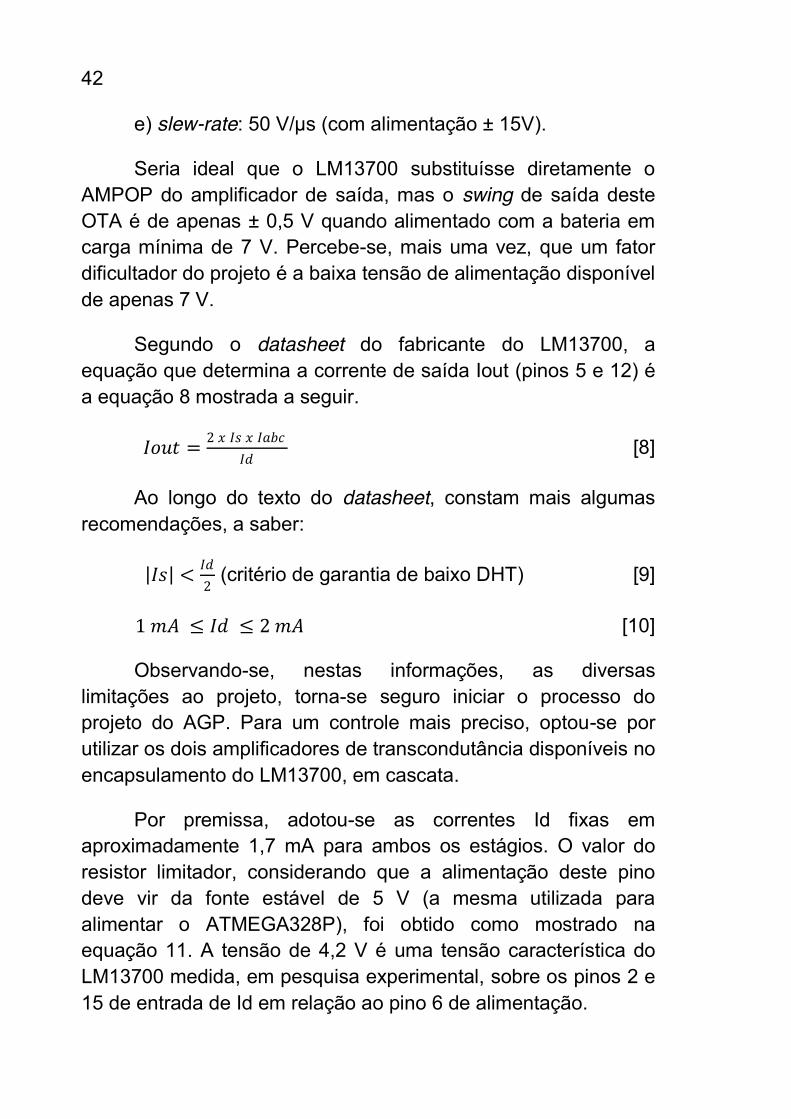
Segundo o datasheet do fabricante do LM13700, a equação que determina a corrente de saída Iout (pinos 5 e 12) é a equação 8 mostrada a seguir.
𝐼𝑜𝑢𝑡 = 2 𝑥 𝐼𝑠 𝑥 𝐼𝑎𝑏𝑐𝐼𝑑
[8]
Ao longo do texto do datasheet, constam mais algumas recomendações, a saber:
𝐼𝑠 < 𝐼𝑑2
(critério de garantia de baixo DHT) [9]
1 𝑚𝐴 ≤ 𝐼𝑑 ≤ 2 𝑚𝐴 [10]
Observando-se, nestas informações, as diversas limitações ao projeto, torna-se seguro iniciar o processo do projeto do AGP. Para um controle mais preciso, optou-se por utilizar os dois amplificadores de transcondutância disponíveis no encapsulamento do LM13700, em cascata.
Por premissa, adotou-se as correntes Id fixas em aproximadamente 1,7 mA para ambos os estágios. O valor do resistor limitador, considerando que a alimentação deste pino deve vir da fonte estável de 5 V (a mesma utilizada para alimentar o ATMEGA328P), foi obtido como mostrado na equação 11. A tensão de 4,2 V é uma tensão característica do LM13700 medida, em pesquisa experimental, sobre os pinos 2 e 15 de entrada de Id em relação ao pino 6 de alimentação.
43 𝑅𝑑 = 𝑉𝑟𝑒𝑓 −𝑉𝑑
𝐼𝑑= 5,0−4,2
1,7 𝑚𝐴≅ 470 Ω [11]
Desta forma, tem-se uma limitação da corrente de entrada Is1 e Is2 dos amplificadores, devido ao critério de baixo DHT (equação 9).
𝐼𝑠 ≤ 𝐼𝑑/2 [12]
𝐼𝑠 ≤ 1,7 𝑚𝐴/2 [13]
𝐼𝑠 ≤ 0,85 𝑚𝐴 (limite de corrente de entrada) [14]
Para concluir o projeto do AGP, ainda fez-se necessário obter o equivalente Thevenin da rede R2R, o que foi desenvolvido seguindo tutorial de WOLKE, 2013.
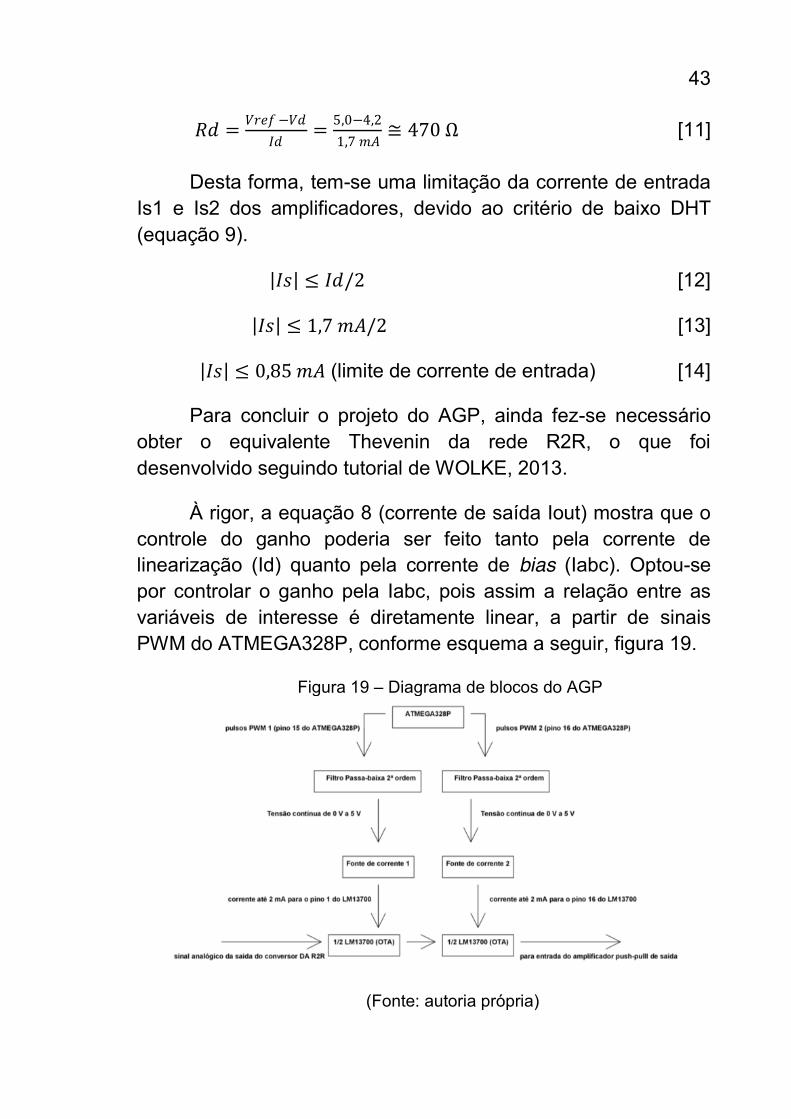
À rigor, a equação 8 (corrente de saída Iout) mostra que o controle do ganho poderia ser feito tanto pela corrente de linearização (Id) quanto pela corrente de bias (Iabc). Optou-se por controlar o ganho pela Iabc, pois assim a relação entre as variáveis de interesse é diretamente linear, a partir de sinais PWM do ATMEGA328P, conforme esquema a seguir, figura 19.
Figura 19 – Diagrama de blocos do AGP
(Fonte: autoria própria)

44 A figura 20 a seguir mostra o projeto eletrônico dos dois
estágios do AGP.
Figura 20 – Projeto do AGP (dois estágios)
(Fonte: adaptado de TEXAS, 2013b)
Os resistores de 0,1 Ω são apenas jumpers. Os resistores R56 e R73 são limitadores das correntes Id. VAT é a tensão de referência de 5 V do protótipo, também utilizada para alimentar o ATMEGA328P e outros blocos. O capacitor C4 faz o desacoplamento da componente contínua da saída do conversor DA R2R. Icontrol1 e Icontrol2 são as correntes de controle de saída das fontes de correntes explicadas na sequência. R26 foi colocado entre o primeiro e segundo estágio para que houvesse uma tensão mensurável facilmente pelo osciloscópio, pois caso contrário seria necessário uma ponteira de corrente e a interrupção da trilha cada vez que quisesse medir a saída do primeiro estágio.
Foram desenvolvidas duas fontes de corrente de precisão programáveis iguais. Tendo em vista que foi possível uma frequência PWM em torno de 15 kHz com boa resolução, bastou passar os pulsos PWM por um filtro passa-baixa RC de segunda ordem com frequência de corte de 1 kHz para se obter uma tensão contínua proporcional ao ciclo ativo. Em sequência, utilizou-se um circuito conversão tensão-corrente de precisão com AMPOP e transistor bipolar. A figura 21 a seguir mostra o circuito que foi desenvolvido.

45
Figura 21 – Esquema elétrico do conversor PWM-corrente
(fonte: autoria própria)
Os componentes R61, C20, R62 e C23, à esquerda, formam um filtro passa-baixa de segunda ordem, suficiente para obter um nível de tensão quase-contínuo, proporcional ao percentual do ciclo ativo PWM gerado pelo microcontrolador (PWM1). Q1 é um driver de corrente para saída, de 0 mA e 2 mA, controlada precisamente pela tensão de saída do filtro, com auxílio da tensão de referência de 3,8 V. R65 e R66 fazem com que a tensão na entrada não-inversora do AMPOP seja a média entre 3,8 V e a tensão de saída do filtro, contribuindo para que grande parte do range do sinal PWM seja utilizado para controlar a corrente de saída do driver.
Devido ao uso do AMPOP TL072 em realimentação negativa, R67 e R68 fazem com que a tensão no emissor de Q1 seja precisamente igual ao dobro da tensão da entrada não-inversora. Desde que VAT seja uma tensão constante, e de fato é, fixa em 5 V, a corrente de saída é inevitavelmente igual ao definido na equação 15 abaixo.
𝐼𝑐𝑜𝑛𝑡𝑟𝑜𝑙 1 = 𝑉𝐴𝑇 −𝑉𝑒𝑚𝑖𝑠𝑠𝑜𝑟𝑄 1
𝑅69 [15]

46 Em software específico, blocos dos circuitos do AGP foram
testados e os resultados foram o controle estável e repetível da amplitude de saída em função do ciclo ativo de controle (PWM). Foi montado o circuito em matriz de contatos, obtendo-se resultados equivalentes, e então esta etapa do projeto foi considerada finalizada.
Foram montadas duas destas fontes de corrente, conforme figura 21, uma para cada estágio do LM13700. Suas entradas foram conectadas nos pinos 15 e 16 do ATMEGA328P. Suas saídas foram conectadas nas entradas Iabc dos amplificadores de transcondutância (pinos 1 e 16 do LM13700). Por pesquisa experimental, verificou-se adequada a precisão e repetitividade, após ajustes de resistores.
3.9 INTERFACE HOMEM-MÁQUINA (IHM)
Inicialmente foi enviado ao programador um fluxograma desejável, que representava o funcionamento lógico do aplicativo passo a passo, bem como a aparência gráfica da IHM.
Para redução de custos e prazos, após troca de informações com o programador contratado, definiu-se uma IHM o mais simples e fácil de programar possível, mas ainda atendendo os requisitos do projeto. O resultado final está na figura que se segue.
Figura 22 – aplicativo android
(Fonte: autoria própria)

47
O funcionamento é simples. O usuário clica no parâmetro que deseja alterar ou aplicar e as alterações são enviadas ao hardware do gerador de funções automaticamente após 2,5 segundos da última alteração, além de mostrar uma mensagem “communication ok”. Para alterar frequência ou amplitude, deve-se clicar no campo desejado, quando então é mostrado um teclado virtual para digitação. Caso o valor esteja fora do range do hardware, uma mensagem “out of range” é mostrada na tela e a alteração não é enviada ao hardware. Se ocorrer despareamento, uma mensagem “communication failed” é mostrada e o aplicativo é automaticamente fechado. O aplicativo android só envia dados novamente cada vez que o usuário realiza uma nova alteração válida.
O aplicativo, quando se comunica com o protótipo, envia 256 bytes, nesta sequência:
a) primeiro byte: unidade e dezena da amplitude; b) segundo byte: centena e milhar da amplitude; c) terceiro byte: unidade e dezena da freqüência; d) quarto byte: centena e milhar da freqüência; e) quinto byte: forma de onda; f) demais 251 bytes: reservados.
Foi realizada uma pesquisa experimental utilizando o aplicativo Android desenvolvido para se comunicar com um arduino Uno, contendo um shield Bluetooth. O UNO utiliza o ATMEGA328P e o shield utiliza o mesmo módulo Bluetooth do protótipo (HC-05). Portanto, o código Java do aplicativo da IHM pode ser rapidamente testado e debugado, mesmo antes do hardware do protótipo ser construído. A comunicação UART ocorreu dentro da configuração mais usual: 9600 Bauds, palavra de 8 bits, sem paridade e 1 bit de parada.

48
3.10 MONTAGEM DO PROTÓTIPO
Após as definições do projeto de hardware, iniciou-se a etapa de projeto da PCI. Primeiramente realiza-se um teste de todos os encapsulamentos, onde os mesmos são impressos em escala 100% e comparados com os componentes reais, conforme ilustra a figura 23 a seguir.
Figura 23 – Teste dos encapsulamentos
(Fonte: autoria própria)
Utilizando o tutorial da referência PETRY, 2015 e um software específico para projeto de layout de PCI, foi desenvolvido o CAD mostrado na figura 24 a seguir.
ATMEGA328P
TL072
LM13700
Transistores e LM317L

49
Figura 24 – Layout PCI (lado dos componentes)
(Fonte: autoria própria)
Os posicionamentos dos componentes foram estudados para atender os requisitos de dimensões reduzidas do projeto, além de diversos outros requisitos importantes a PCIs em geral. Foi implementado um barramento in-system programming para gravação do microcontrolador diretamente na placa. As dimensões finais da placa são 128 mm x 63 mm.
Este projeto de PCI foi ajustado para atender os requisitos da prototipadora do IFSC, e finalmente os arquivos GERBER foram enviados para confecção. O resultado final pode ser visto na figura 25 a seguir, após spray de verniz protetor especial incolor, que não afeta a soldabilidade da PCI.
Figura 25 – PCI fabricada por prototipadora
(Fonte: autoria própria)
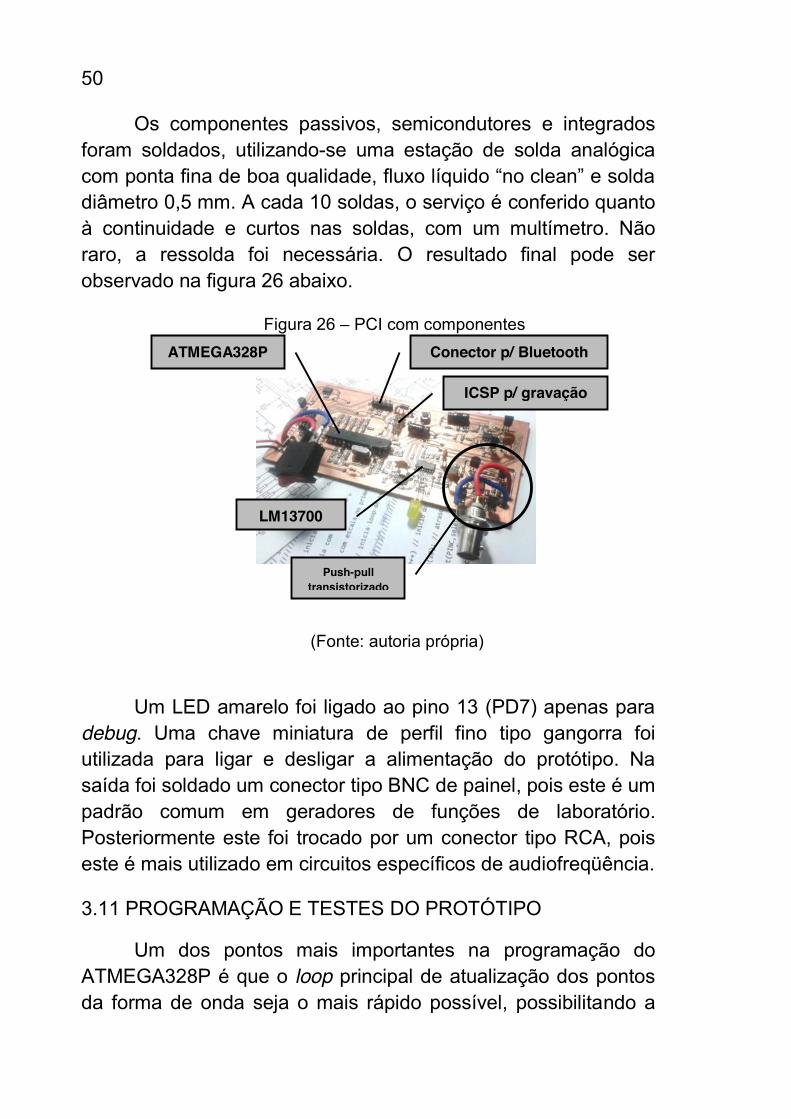
50 Os componentes passivos, semicondutores e integrados
foram soldados, utilizando-se uma estação de solda analógica com ponta fina de boa qualidade, fluxo líquido “no clean” e solda diâmetro 0,5 mm. A cada 10 soldas, o serviço é conferido quanto à continuidade e curtos nas soldas, com um multímetro. Não raro, a ressolda foi necessária. O resultado final pode ser observado na figura 26 abaixo.
Figura 26 – PCI com componentes
(Fonte: autoria própria)
Um LED amarelo foi ligado ao pino 13 (PD7) apenas para debug. Uma chave miniatura de perfil fino tipo gangorra foi utilizada para ligar e desligar a alimentação do protótipo. Na saída foi soldado um conector tipo BNC de painel, pois este é um padrão comum em geradores de funções de laboratório. Posteriormente este foi trocado por um conector tipo RCA, pois este é mais utilizado em circuitos específicos de audiofreqüência.
3.11 PROGRAMAÇÃO E TESTES DO PROTÓTIPO
Um dos pontos mais importantes na programação do ATMEGA328P é que o loop principal de atualização dos pontos da forma de onda seja o mais rápido possível, possibilitando a
ATMEGA328P
Conector p/ Bluetooth
ICSP p/ gravação
Push-pull transistorizado
LM13700
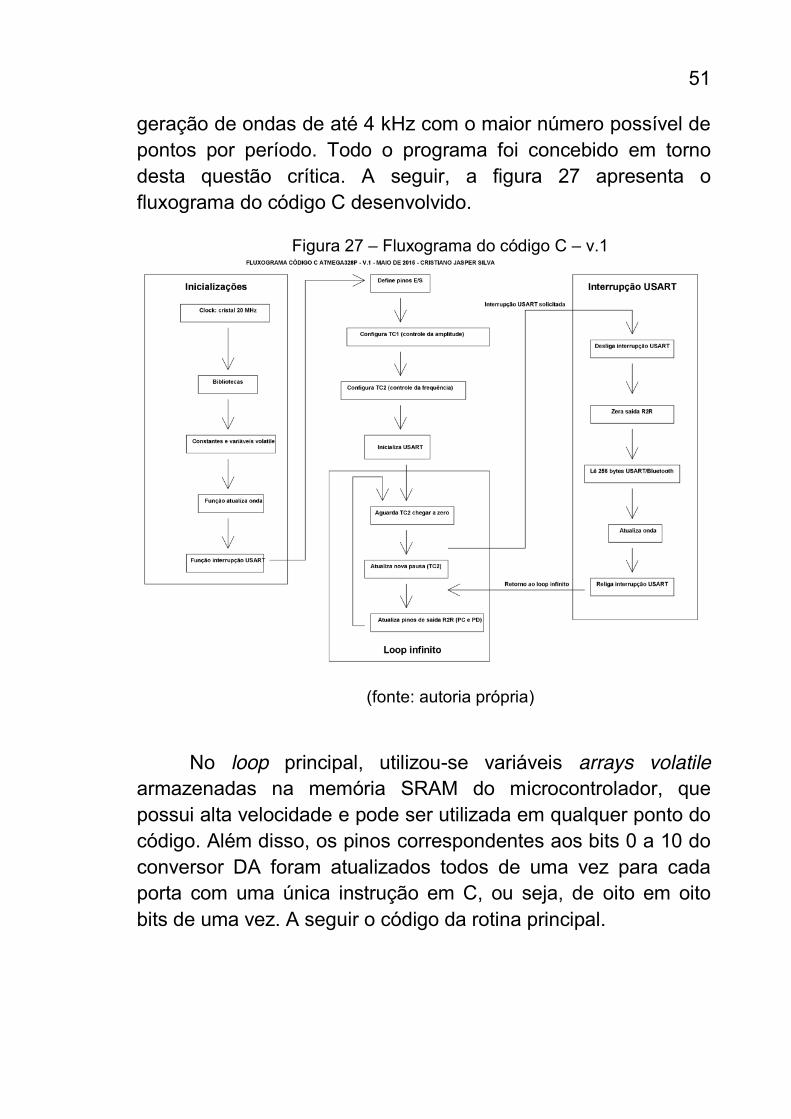
51
geração de ondas de até 4 kHz com o maior número possível de pontos por período. Todo o programa foi concebido em torno desta questão crítica. A seguir, a figura 27 apresenta o fluxograma do código C desenvolvido.
Figura 27 – Fluxograma do código C – v.1
(fonte: autoria própria)
No loop principal, utilizou-se variáveis arrays volatile armazenadas na memória SRAM do microcontrolador, que possui alta velocidade e pode ser utilizada em qualquer ponto do código. Além disso, os pinos correspondentes aos bits 0 a 10 do conversor DA foram atualizados todos de uma vez para cada porta com uma única instrução em C, ou seja, de oito em oito bits de uma vez. A seguir o código da rotina principal.

52 while (1) // loop infinito (daqui só sai para interrupção USART
while (TCNT2!=0) // fica parado aqui até que zere o registrador !!!
TCNT2 = wavepause[i]; // atualiza valor de pausa
PORTC = wavebit0to5[i]; // joga forma de onda para a saída
PORTD = wavebit6to10[i]; // joga forma de onda para a saída
i=i+step;
// fim do while (1)
Após as inicializações e preparações, o microcontrolador permanece “preso” no loop infinito, só saindo para atender a interrupção USART, que por sua vez ocorre quando a IHM envia dados, via Bluetooth, para atualização dos arrays da forma de onda, seja em frequência, amplitude ou formato da onda (senoidal, quadrada, dente de serra ou triangular).
No loop infinito, primeiro o microcontrolador fica em um while vazio durante o intervalo de tempo até que zere o contador TC2, pois este contador recebe o vetor wavepause para iniciar contagens de tempo igual ao período da onda dividido pelo número de pontos por período. Depois, o microcontrolador escreve dois arrays de oito bits com os valores binários correspondentes nas portas C e D do ATMEGA328P ligados à rede R2R. Após esta rápida sequência, o microcontrolador retorna a while do TC2, e fica nesta repetição indefinidamente. A constante step deve ser igual a 256 dividido pelo número de pontos e serve para que i seja uma variável circular. Em nosso caso definiu-se 64 pontos por período, e assim a variável step é igual a 256 / 64 = 4.

53 O fluxograma foi implementado no Atmel Studio 6.2, o
código foi gravado com auxílio do software AVR BURN-O-MAT e a placa de gravação USBASP (ver figura a seguir).
Figura 28 – Gravador USBASP
(Fonte: autoria própria)

54
4 RESULTADOS
Após a programação indicar bom funcionamento no Arduino UNO, o código C foi gravado no microcontrolador do protótipo e foi realizado um teste com multímetro diretamente na saída da rede R2R, programando o microcontrolador para gerar uma frequência bastante baixa. Assim, antes de levar o protótipo para pesquisa experimental com osciloscópio, que demandava tempo e logística, observou-se qualitativamente as oscilações na tensão de saída do gerador, com auxílio de um multímetro digital. A tensão na saída do gerador apresentou coerência com o que se espera das formas de onda quadrada, triangular, dente de serra e senoidal.
Alguns cálculos matemáticos foram implementados no firmware para converter os valores de frequência e amplitude, digitados pelo usuário na IHM, em parâmetros de controle do ciclo ativo PWM responsável pela amplitude de saída, bem como variáveis do TC2 de controle das pausas entre os pontos da forma de onda. Utilizando matemática básica e as referências ATMEL, 2014 e LIMA, 2012, estes objetivos foram realizados. O espaço de memória ocupado pelo arquivo hexa do firmware é de aproximadamente 7,65 kBytes, o que representa 23,9% do total da memória de programação do ATMEGA328P.
O desempenho das fontes de corrente logo foi verificado, até mesmo pela necessidade de se fazer uma primeira verificação e confirmação de funcionamento adequado. As fontes de corrente apresentaram os resultados resumidos na tabela 5 a seguir, após diversos ajustes nos resistores e no firmware. VRsense corresponde à tensão sobre o resistor série de 560 Ω da fonte de corrente (ver figura 21).

55
Tabela 5 – Verificação das fontes de corrente Fonte de corrente PWM (%) VRsense (V) Icontrol (mA)
Primeiro estágio
22,4 1,12 2,0 58,2 0,56 1,0 96,9 0,01 0,02
Segundo estágio
24,8 1,12 2,0 59,7 0,56 1,0 96,7 0,02 0,03
(Fonte: autoria própria)
Utilizando osciloscópio TBS-1062 da Tektronix, foram coletadas as formas de ondas na saída do gerador, conforme figuras a seguir. As primeiras formas de onda estavam com diversos erros, mas com ajustes no firmware e no hardware, os erros foram corrigidos.
As formas de onda estão apresentadas nas páginas seguintes, na seguinte sequência:
a) sem carga na saída do gerador (Rcarga = ∞):
- quatro aquisições de formas de onda dente de serra (extremos de amplitude e freqüência); - quatro aquisições de forma de onda quadrada (extremos de amplitude e freqüência); - quatro aquisições de forma de onda triangular (extremos de amplitude e freqüência); - quatro aquisições de forma de onda senoidal (extremos de amplitude e freqüência).
b) com carga na saída do gerador (Rcarga = 680 Ω):
- idem à sequência com Rcarga = ∞.

56
Figura 29 – Dente de serra. Carga = ∞.
(Fonte: autoria própria)
As formas de onda, em geral, mostram resultados limitados em relação ao que se espera de um instrumento de teste, o que poderá ser melhorado se: (1) o ruído for minimizado, (2) a distorção for solucionada e (3) os spikes forem minimizados.
A figura 29 evidencia que as mínimas e máximas freqüências obtidas, são respectivamente 8 Hz e 4400 Hz, além dos requisitos iniciais, e podendo ser limitadas para a faixa desejada através do software da IHM. Observa-se que estes extremos de freqüência são iguais para todos os casos, com carga e sem carga. Quanto aos extremos de amplitude, não se observa o mesmo comportamento, dificultando uma padronização, pois as distorções influenciam as formas de onda

57
de maneiras distintas e a relação sinal/ruído desfavorável em baixas amplitudes dificultam medições precisas.
Figura 30 – Quadrada. Carga = ∞.
(Fonte: autoria própria)
Em relação à figura 30 anterior, percebe-se agora spikes mais freqüentes e mais elevados. As formas de onda em alta freqüência, tanto na mínima quanto na máxima amplitude, apresentam elevada distorção. O ruído afeta a forma de onda mais fortemente em baixas amplitudes (piora a relação sinal/ruído). Pode-se estimar um ruído de 50 mV a 100 mV de pico a pico. Observa-se que a máxima amplitude na aquisição inferior direita atingiu 6500 mV de pico a pico, o que está aproximadamente 10 % acima do máximo definido pelo requisito, podendo ser limitado a 6000 mV tanto por hardware quanto por software. Quanto à amplitude mínima, observa-se em torno de 600 mV na aquisição inferior esquerda. As aquisições superiores são inválidas no sentido de se obter amplitudes, pois as
58
distorções e ruídos impedem medições confiáveis. Porém, os limites das freqüências continuam sendo 8 Hz e 4400 Hz.
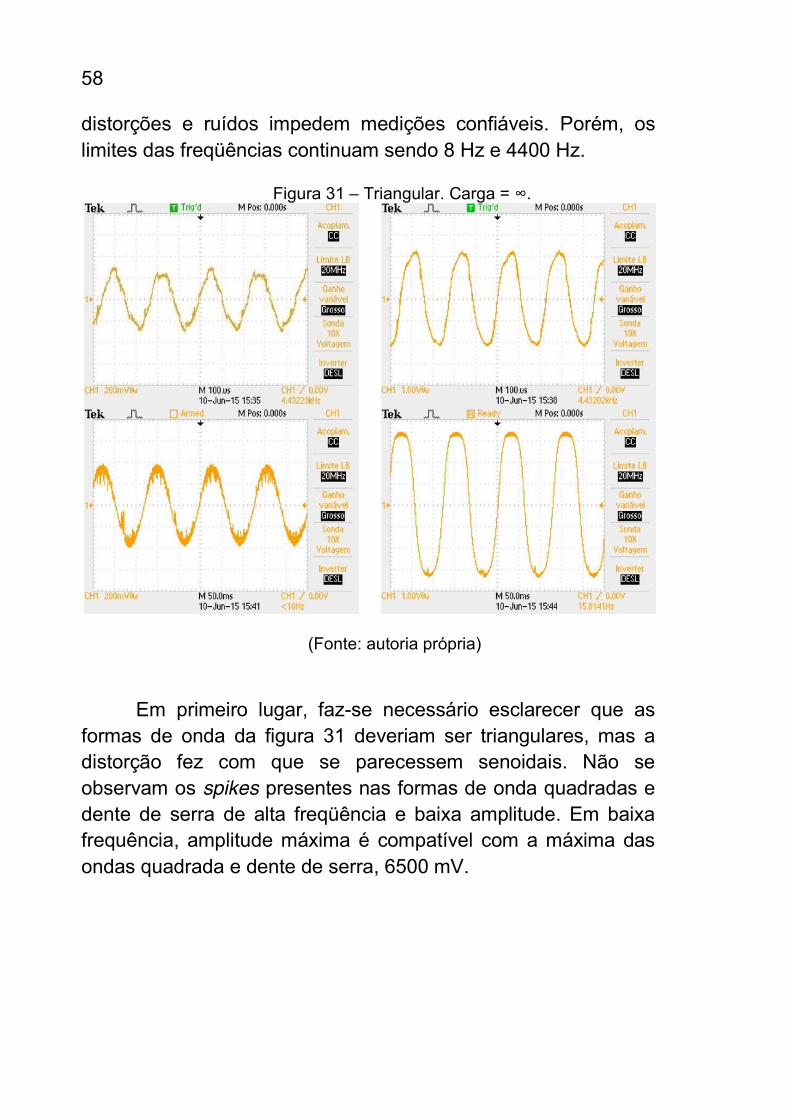
Figura 31 – Triangular. Carga = ∞.
(Fonte: autoria própria)
Em primeiro lugar, faz-se necessário esclarecer que as formas de onda da figura 31 deveriam ser triangulares, mas a distorção fez com que se parecessem senoidais. Não se observam os spikes presentes nas formas de onda quadradas e dente de serra de alta freqüência e baixa amplitude. Em baixa frequência, amplitude máxima é compatível com a máxima das ondas quadrada e dente de serra, 6500 mV.

59
Figura 32 – Senoidal. Carga = ∞.
(Fonte: autoria própria)
Nas formas de onda senoidais anteriores, figura 32, percebe-se os mesmos comportamentos das demais formas de onda, não acrescentando muitas novidades ao estudo do comportamento do gerador desenvolvido. Observa-se os mesmos extremos de freqüência, e observa-se novamente a amplitude máxima, ao menos em baixa freqüência, em torno de 6500 mV. Ruídos e distorções presentes de forma equivalente.
As próximas figuras, de 33 a 36, apresentam a saída do gerador de sinais desenvolvido, com um resistor de 680 Ω de carga.

60
Figura 33 – Dente de serra. Carga = 680 Ω.
(Fonte: autoria própria)
Percebe-se, de imediato na figura 33, uma queda na amplitude de saída, corresponde a pouco mais que 50 % do valor da amplitude quando na ausência de carga (Rcarga = ∞). A amplitude máxima de pico a pico na freqüência mínima de 8 Hz é de 3700 mV aproximadamente, representando um pouco acima de ½ da máxima amplitude das figuras anteriores. Isto concorda com a teoria, tendo em vista que foram colocados dois resistores de 150 Ω entre cada um dos terminais do conector de saída e o amplificador push-pull de saída, para evitar danos em caso de curto-circuito, totalizando uma impedância de saída de 600 Ω. Ou seja, o equivalente thevenin da saída do gerador é uma fonte CA ideal em série com um resistor de 600 Ω.
61
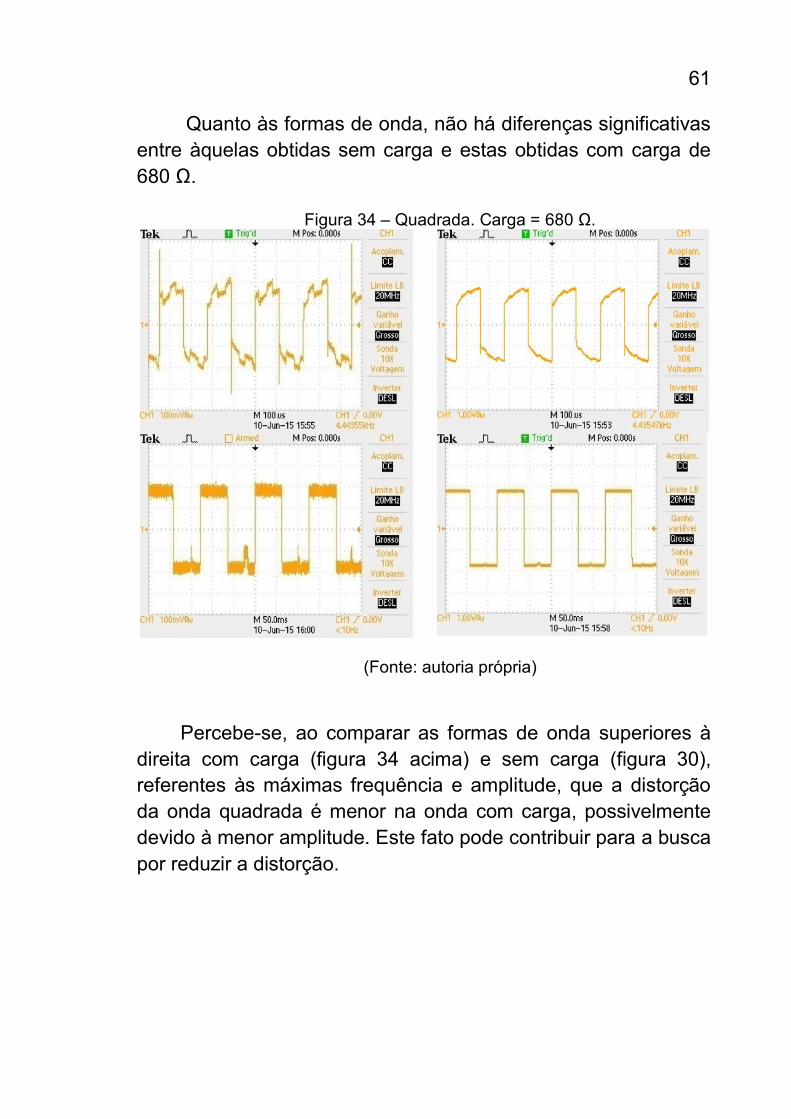
Quanto às formas de onda, não há diferenças significativas entre àquelas obtidas sem carga e estas obtidas com carga de 680 Ω.
Figura 34 – Quadrada. Carga = 680 Ω.
(Fonte: autoria própria)
Percebe-se, ao comparar as formas de onda superiores à direita com carga (figura 34 acima) e sem carga (figura 30), referentes às máximas frequência e amplitude, que a distorção da onda quadrada é menor na onda com carga, possivelmente devido à menor amplitude. Este fato pode contribuir para a busca por reduzir a distorção.

62
Figura 35 – Triangular. Carga = 680 Ω.
(Fonte: autoria própria)
De modo similar às formas de onda sem carga, novamente, as formas de onda mostradas na figura 35 acima deveriam ser triangulares, mas a distorção fez com que se parecessem senoidais. A exceção é a forma de onda de mínima amplitude e máxima freqüência (aquisição superior esquerda).
63
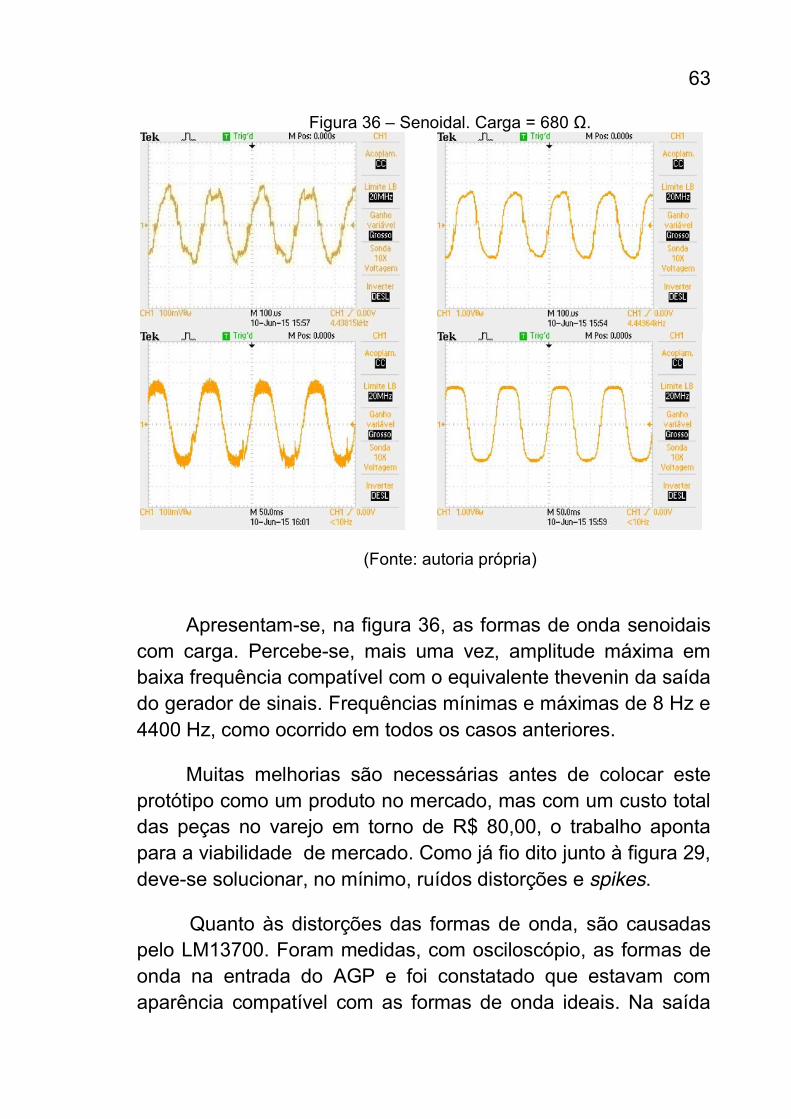
Figura 36 – Senoidal. Carga = 680 Ω.
(Fonte: autoria própria)
Apresentam-se, na figura 36, as formas de onda senoidais com carga. Percebe-se, mais uma vez, amplitude máxima em baixa frequência compatível com o equivalente thevenin da saída do gerador de sinais. Frequências mínimas e máximas de 8 Hz e 4400 Hz, como ocorrido em todos os casos anteriores.
Muitas melhorias são necessárias antes de colocar este protótipo como um produto no mercado, mas com um custo total das peças no varejo em torno de R$ 80,00, o trabalho aponta para a viabilidade de mercado. Como já fio dito junto à figura 29, deve-se solucionar, no mínimo, ruídos distorções e spikes.
Quanto às distorções das formas de onda, são causadas pelo LM13700. Foram medidas, com osciloscópio, as formas de onda na entrada do AGP e foi constatado que estavam com aparência compatível com as formas de onda ideais. Na saída

64
do primeiro estágio, alguma distorção foi percebida. Na saída do segundo estágio, a distorção foi ainda maior. Portanto, faz-se necessário aprimorar o circuito, medir todas as tensões e correntes, reproduzir o mesmo circuito em matriz de contatos para testes comparativos e realizar modificações até se conseguir localizar o problema.
Há ruídos de muito alta freqüência (alguns MHz) e também de baixa freqüência. Quanto a isso, faz-se necessário testar capacitores e indutores de filtragem. Pode reduzir ruídos, a colocação de capacitores, junto aos circuitos integrados, nas trilhas por onde passam as tensões de referência, controles e alimentação.
Chama a atenção a alta reprodutibilidade e estabilidade da frequência, que é resultado do fato de as formas de ondas serem geradas digitalmente pelo microcontrolador.
O consumo de corrente está alto, em torno de 45 mA. Somente o circuito do ATMEGA328P, incluindo o conversor DA R2R, está consumindo 25 mA. O módulo Bluetooth consome 10 mA quando pareado. Todo o circuito analógico está consumindo 10 mA, quando sem carga. Como desenvolvimento futuro pretende-se reduzir o consumo de corrente, principalmente no ATMEGA328P e no módulo Bluetooth, para elevar a durabilidade da bateria de 9 V.
A tabela 6, a seguir, resume as especificações técnicas finais do protótipo de gerador de sinais desenvolvido.

65
Tabela 6 – Especificações do gerador desenvolvido
Mostrador de freqüência: 5 dígitos, em Hz
Mostrador de amplitude: 4 dígitos, em mV
Funções: Quadrada, triangular, senoidal e dente de serra
Alimentação: 9 V
Consumo: 45 mA (pareado) a 70 mA (despareado)
Proteção contra curto-circuito acidental na saída: Sim
Impedância de saída: 600 Ω
Conector de saída: Dois RCA em paralelo
Interface homem-máquina (IHM): Virtualizada em smartphone Samsung
Conexão com IHM: Wireless, via Bluetooth
Faixa de freqüência: 8 Hz a 4400 Hz
Faixa de amplitude: 600 mV a 6500 mV
(fonte: autoria própria)
A tabela 7 a seguir resume os requisitos iniciais do trabalho e os resultados finais alcançados, tornando possível a avaliação da eficiência da execução do projeto como um todo.
66
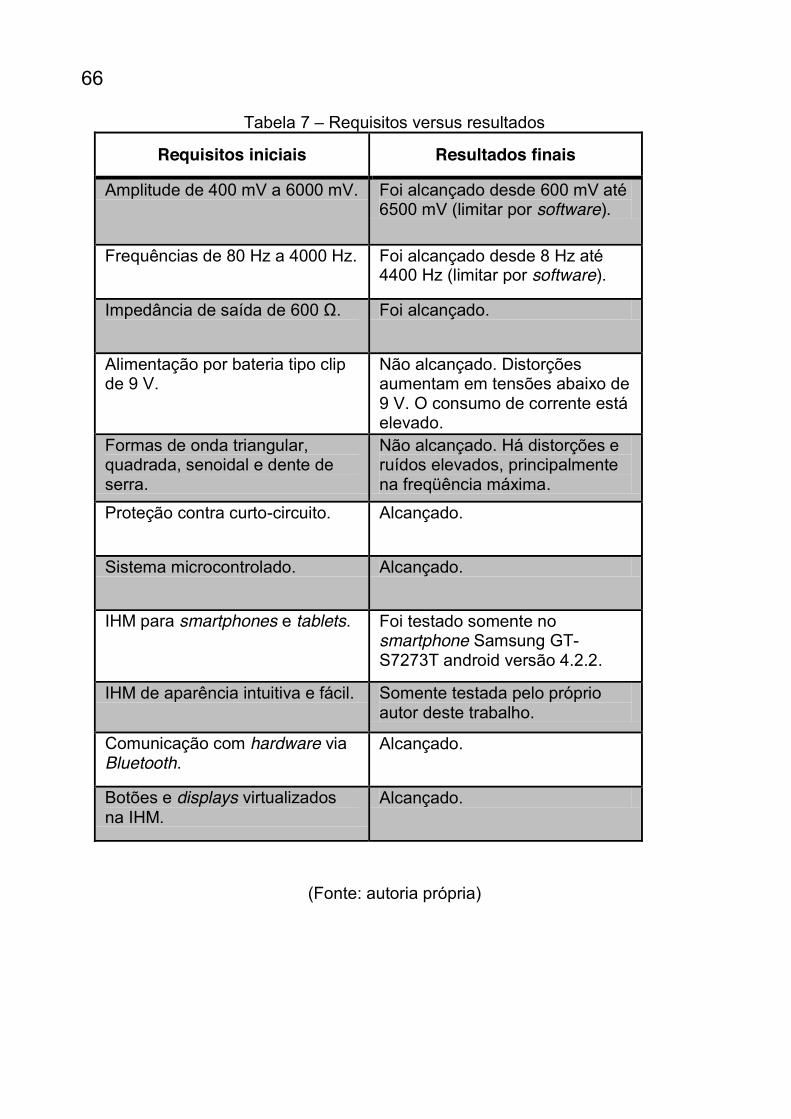
Tabela 7 – Requisitos versus resultados
Requisitos iniciais Resultados finais
Amplitude de 400 mV a 6000 mV. Foi alcançado desde 600 mV até 6500 mV (limitar por software).
Frequências de 80 Hz a 4000 Hz. Foi alcançado desde 8 Hz até 4400 Hz (limitar por software).
Impedância de saída de 600 Ω.
Foi alcançado.
Alimentação por bateria tipo clip de 9 V.
Não alcançado. Distorções aumentam em tensões abaixo de 9 V. O consumo de corrente está elevado.
Formas de onda triangular, quadrada, senoidal e dente de serra.
Não alcançado. Há distorções e ruídos elevados, principalmente na freqüência máxima.
Proteção contra curto-circuito. Alcançado.
Sistema microcontrolado. Alcançado.
IHM para smartphones e tablets. Foi testado somente no smartphone Samsung GT-S7273T android versão 4.2.2.
IHM de aparência intuitiva e fácil. Somente testada pelo próprio autor deste trabalho.
Comunicação com hardware via Bluetooth.
Alcançado.
Botões e displays virtualizados na IHM.
Alcançado.
(Fonte: autoria própria)

67
5 CONCLUSÕES
Foi apresentado na etapa inicial deste trabalho, os objetivos detalhados do projeto e fundamentação teórica, sendo que estes foram norteadores do trabalho.
Nos capítulos posteriores, foram sendo desenvolvidas as etapas de um projeto eletrônico típico: diagrama de blocos, seleção de componentes, detalhamento e testes dos blocos em simulação e/ou matriz de contatos, e finalmente projeto e montagem da PCI.
Em diversos momentos, utilizou-se o Arduino como um kit de desenvolvimento para debugar o firmware, o que foi de grande utilidade. O Arduino também foi utilizado para conferir a configuração da UART do módulo Bluetooth, através de comandos AT. Realizar um projeto com kit de desenvolvimento promove grande economia de tempo.
A montagem de uma primeira versão de placa com componentes SMD apresenta vantagens e desvantagens. As principais vantagens são que possivelmente bastará somente mais uma versão da placa para se atingir a versão final e as dimensões da primeira versão representam aproximadamente a versão final. As desvantagens são maior tempo, maior perícia e dificuldades para soldar os componentes, para realizar medições e alterações na placa.
Desde que utilizando certas ferramentas e insumos usuais em montagens SMD não automatizadas, tais como solda 0,5 mm, ferro de solda com ponta fina, lupa, fluxo líquido e malha dessoldadora, havendo paciência é possível construir um protótipo SMD. Evidentemente que circuitos integrados com pinos não facilmente acessíveis demandam estações de solda específicas.

68 Retornando à questão da bateria, ocorreram discrepâncias
entre a pesquisa experimental e as informações do fabricante. O tempo de duração da bateria de 9 V foi inferior ao previsto pelas curvas de descarga. Foram utilizadas baterias de dois modelos diferentes e ambas apresentaram resultados decepcionantes. É possível que isto tenha ocorrido devido a falsificações das baterias, lotes com problemas ou ainda prazos de validade vencidos.
Realmente, é normal o consumo de corrente de um microcontrolador se elevar com o aumento da tensão de alimentação, porém, não esperava-se tanto quanto 27 mA. Isto pode ser devido a algum problema na solda da placa por baixo do ATMEGA328P ou em alguma outra região próxima do mesmo, o que poderia ser definido com uma segunda versão da placa, soldada com maior cuidado.
Quanto à IHM, a contratação de um profissional em programação Java economizou bastante tempo no desenvolvimento do projeto, além de exigir do pesquisador habilidades de diálogo e negociação. Isto é útil para exercitar a gestão de projetos.
Muitas melhorias no projeto atual e aproveitamento dos conhecimentos adquiridos são possíveis. Algumas melhorias seriam de solução relativamente rápida, outras exigiriam uma reformulação completa. Porém, reduzir o consumo de corrente, possibilitar que o usuário possa criar novas formas de ondas, entre outras melhorias, sugere-se uma reformulação do projeto.
Ao analisar este trabalho como um todo, o resultado final é animador, pois, apesar de ser um primeiro passo, tornou-se evidente a possibilidade de desenvolvimento de instrumentos antes somente possíveis por fabricantes especialistas, com recursos para fabricação de gabinetes complexos, botões e

69
displays. Finalmente, chegou a era do do it yourself (DIY) dos instrumentos da eletrônica !

70
6 REFERÊNCIAS
ABLESON, W. Frank. Android em ação.Tradução de Eduardo Kraszczuk e Edson Furmankiewicz.,3ª edição, Rio de Janeiro: Editora Elsevier, 2012. 622 páginas
ATMEL, 8-bit microcontroller with 4/8/16/32 kbytes in-system programmable flash datasheet, 2014, http://www.atmel.com/images/Atmel-8271-8-bit-AVR-Microcontroller-ATmega48A-48PA-88A-88PA-168A-168PA-328-328P_datasheet_Complete.pdf
BOYLESTAD, Robert; Nashelsky, Louis, Dispositivos Eletrônicos e teoria de circuitos, 11a Edição, Editora Pearson, 2012, 936 páginas
DEITEL, Harvey M.; DEITEL, Harvey M. Java: como programar. 8ª Edição, Editora Pearson Prentice Hall, 2010
DEROSA, Gionani Madalena, Desenvolvimento de um sistema para acionamento de cargas e sensoriamos de um ambiente residencial com dispositivo Android [monografia], Defesa de trabalho de conclusão de curso, Instituto Federal de Santa Catarina, Florinópolis, 2012
ECIRCUITCENTER, push-pull output stage, http://www.ecircuitcenter.com/Circuits/pushpull/pushpull.htm, acessadoem 01/01/2015
ELLIOT, VCA techniques, 2012, http://sound.westhost.com/articles/vca-techniques.html, acessado em 01/01/2015
EXAME, Android abasteceu 85 % do mercado de smartphones, http://exame.abril.com.br/tecnologia/noticias/android-abasteceu-
71
85-do-mercado-mundial-de-smartphones, acessado em 22/2/2015
KEEN, R.G., Applications of an OTA corrent controlled amplifier, http://www.geofex.com/Article_Folders/VCA%20Applications.pdf, acessado em 02/02/2015
LECHETA, Ricardo R. Google Android: aprenda a criar aplicações para dispositivos móveis com o Android SDK. 3ª edição, Editora São Paulo: Novatec, 2013, 608 páginas
LIMA, Charles Borges de. AVR e Arduino: técnicas de projeto / Charles Borges de Lima, Marco Valério Miorim Villaça, 2ª Edição, Editora dos Autores, 2012, 632 páginas
MALVINO, Albert Paul; Bates, David J., Eletrônica Vol.2, 7ª Edição, Editora McGraw Hill – Bookman, 2008, 576 páginas
MANCINI, Ron, Single-supply op-amp design techniques, 2001, http://www.ti.com/lit/an/sloa030a/sloa030a.pdf, acessado em 12/02/2015
MARKUS, Otávio, Sistemas Analógicos – Circuitos com Diodos e Transistores, 8ª edição, editora Érica, 374 páginas
MARKUS, Otávio, Teoria e Desenvolvimento de Circuitos Eletrônicos, Editora Érica, 2005, 464 páginas
MARSTON, Ray, Understanding and using OTA Op-Amp IC, 2003, http://www.nutsvolts.com/uploads/magazine_downloads/11/May%202003%20Ray%20Marston%20-%20Understanding%20And%20Using%20OTA%20OP-Amps.pdf, acessado em 12/02/2015
MONTEIRO, Rui, Amplificadores passo a passo, 2015, http://www.studior.com.br/beaba.htm, acessado em 12/02/2015

72
PETRY, Clóvis Antônio, Tutorial do Proteus – parte B - PCB, http://professorpetry.com.br/Bases_Dados/Apostilas_Tutoriais/Tutorial_Proteus_PCB.pdf, acessado em 26/02/2015
SEDRA, Adel S.; Smith, Kennedy C., Microeletrônica, 5ª edição, Editora Prentice Hall, 2007, 864 páginas
STORR, Wayne, Electronic Tutorials, http://www.electronics-tutorials.ws/amplifier/amplifier-classes.html, acessado em 31/12/2014
TEXAS, LM317L-N 3-terminal adjustable regulator, 2013a, http://www.ti.com/lit/ds/symlink/lm317l-n.pdf, acessado em 12/02/2015
TEXAS, LM13700 – Dual operational transcondutance amplifier with linearizing diodes and buffer, 2013b, http://www.ti.com/lit/ds/symlink/lm13700.pdf, acessado em 12/02/2015
TEXAS, TL07x – low-noise JFET input operational amplifier, 2014, http://www.ti.com/lit/ds/symlink/tl074.pdf, acessado em 12/02/2015
WIKI, List of battery sizes, http://en.wikipedia.org/wiki/List_of_battery_sizes, acessado em 31/12/2014
WINGERT, Deivis. Sistema inteligente de monitoramento móvel de estacionamento: Um estudo sobre modelagem e desenvolvimento de sistemas utilizando a plataforma Google Android. Florianópolis, 2011. TCC de Graduação - Curso Superior de Análise e Desenvolvimento de Sistemas
WOLKE, Alan, Tutorial: Digital do analog conversion – The R-2R DAC, 2013, http://www.tek.com/blog/tutorial-digital-analog-conversion-%E2%80%93-r-2r-dac, acessado em 12/02/2015

73
7 ANEXO A – MÓDULO BLUETOOTH

74
8 ANEXO B – ATMEGA328P

75
9 ANEXO C – LM13700

76

77
10 ANEXO D – USBASP

78
11 ANEXO E – TL074
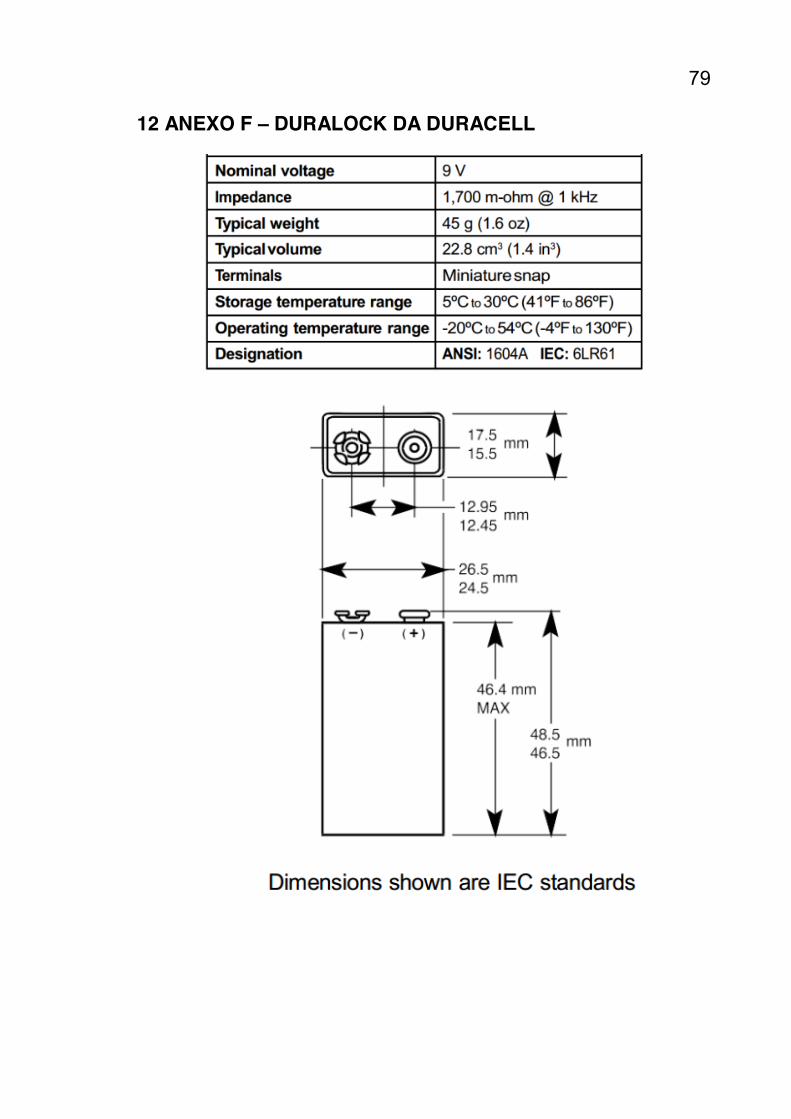
79
12 ANEXO F – DURALOCK DA DURACELL

80