Desempenho de Sistemas de Controle · 2014-09-16 · Controle de Sistemas – Professor Renato...
33
Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas
Transcript of Desempenho de Sistemas de Controle · 2014-09-16 · Controle de Sistemas – Professor Renato...

Controle de Sistemas Desempenho de Sistemas de Controle
Renato Dourado Maia
Universidade Estadual de Montes Claros
Engenharia de Sistemas

Controle de Sistemas – Professor Renato Dourado Maia
Resposta Transitória de Sistemas de Ordem Superior
A resposta ao degrau de um sistema de ordem superior será uma combinação de respostas de fatores de primeira ordem e de fatores de segun-da ordem:
1
1
0 ,21 1
( ) ( )1
ii
tn nt
i i d i ii i n i
ey t A Ae A sen tα
σ ω θζ
−−
= = +
= + + +−
∑ ∑
Até agora falamos apenas em polos... Mas e o efeito dos zeros?
O efeito dos zeros da função de transferência sobre a resposta transitória é atenuar o efeito dos polos em suas proximidades,
influenciando os coeficientes Ai(frações parciais).
16/09/2014 2/33

Controle de Sistemas – Professor Renato Dourado Maia
Resposta Transitória de Sistemas de Ordem Superior
Polos aparentemente dominantes podem ter o seu efeito na resposta transitória
reduzido pela presença de zeros em sua proximidade!!!
16/09/2014 3/33

Controle de Sistemas – Professor Renato Dourado Maia
Resposta Transitória de Sistemas de Ordem Superior
plano s
Resposta forçada Resposta natural
Resposta no domínio do tempo
Transformada da saída
Pólo da entrada Zero do sistema Pólo do sistema
plano s plano s plano s
16/09/2014 4/33

Controle de Sistemas – Professor Renato Dourado Maia
Resposta Transitória de Sistemas de Ordem Superior
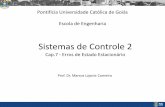
Exemplo
2
1 2 2( 0,5( )
2 5 )5)(G s
ss s+ ++=
2
2 2 2
5( )( 2( 5
( 0 4))
.)0,5s
G ss s
s ++
=+ +
21 2( ) 1 (4,899 78,46 )
10
0,2,, 50 01 3
tt ey t e sen t
−− + +−= °
−
22 2( ) 1 (4,899 78,46 )
10
0, 2,, 42 60 6
tt ey t e sen t
−− − ++= °
−
16/09/2014 5/33

Controle de Sistemas – Professor Renato Dourado Maia
Resposta Transitória de Sistemas de Ordem Superior
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t
y(t)
Efeito de um Zero na Resposta de um Sistema de Terceira Ordem
Segunda OrdemTerceira ordem com pólo em -0.5Terceira ordem com pólo em -0.5 e zero em -0.4
Script em Matlab: M_6_DesempenhoSistemasProg1.m
16/09/2014 6/33

Controle de Sistemas – Professor Renato Dourado Maia
Estimação do Fator de Amortecimento Para se estimar o fator de amortecimento, deve-
se medir a ultrapassagem percentual e utilizar a equação deduzida na aula passada:
210. 10 eU P ζ ζπ− −=
16/09/2014 7/33

Controle de Sistemas – Professor Renato Dourado Maia
Ultrapassagem Percentual e Tempo de Pico Normalizado versus Relação de Amortecimento
Ultr
apas
sage
m M
áxim
a Pe
rcen
tual
Coeficiente de Amortecimento
Ultrapassagem Percentual
Estimação do Fator de Amortecimento
16/09/2014 8/33

Controle de Sistemas – Professor Renato Dourado Maia
Localização dos Polos e Resposta Transitória
Respostas ao Impulso para Diferentes Localizações dos Polos
16/09/2014 9/33

Controle de Sistemas – Professor Renato Dourado Maia
Sinais de Teste Forma de onda Nome
Interpretação física
Função do tempo
Transformada de Laplace
Degrau Posição constante
Rampa
Parábola
Velocidade constante
Aceleração constante
16/09/2014 10/33

Controle de Sistemas – Professor Renato Dourado Maia
Sistema de rastreamento
Foguete acelerador
Satélite orbitando com velocidade constante
Satélite em órbita geoestacionária
Sinais de Teste
Degrau
Rampa
Parábola
16/09/2014 11/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário
Tempo Tempo de
Assentamento Tempo de
Pico
Tempo de Subida
Ultra- passagem
16/09/2014 12/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Entrada
Saída 1
Saída 2
Tempo
Tempo
Saída 2
Saída 1
Entrada
Saída 3
(a) Degrau.
(b) Rampa.
16/09/2014 13/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Considere o sistema a seguir:
( )G s
Para H(s)=1, o “erro” é dado por:
( )H s
( )R s ( )Y s( )aE s
1( ) ( ) ( ) ( ) ( )1 ( )aE s R s Y s E s R s
G s= − = =
+
+ -
16/09/2014 14/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Ganho DC: o ganho DC de uma função de trans-
ferência estável, sem polos na origem, é definido por:
Tipo do Sistema: o tipo do sistema em malha fe-chada é definido pelo número de integradores, ou polos em s = 0, da função de transferência em malha aberta, G(s) (sistema tipo 0: não há inte-grador, etc.).
0 lim ( ) (0)
sGanho DC G s G
→=
16/09/2014 15/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Para uma entrada tipo degrau unitário:
1 1( )1 ( )
E sG s s
=+
Aplicando-se o Teorema do Valor Final:
0 00
1 1 1( ) lim ( ) lim1 ( ) 1 lim ( ) 1s s s
s pse e E s
KG s G s→ →→
= ∞ = = = =+ + +
Constante de Erro de Posição
0lim ( ) (0)sp G sK G→
=
Sistema Tipo 0: 1
1 ssp Ganho DC eGanho D
KC
= ⇒ =+
16/09/2014 16/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Para uma entrada tipo rampa unitária:
2
1 1( )1 ( )
E sG s s
=+
Aplicando-se o Teorema do Valor Final:
0 00
1 1 1( ) lim ( ) lim( ) lim ( ) 1ss s s
s v
e e E ss sG s sG s K→ →
→
= ∞ = = = =+ +
Constante de Erro de Velocidade
0lim ( )svK sG s→
Sistema Tipo 0: 0 sv seK = ⇒ = ∞ Sistema Tipo 1: 1
ssv
eK
=
16/09/2014 17/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Para uma entrada tipo parábola unitária:
3
1 1 1( )1 ( ) s
asE s e
G s Ks= ⇒ =
+
Constante de Erro de Aceleração 2
0lim ( )
sa sK s G→
Sistema Tipo 0 ou 1: 0 sa seK = ⇒ = ∞ Sistema Tipo 2: 1
ssa
eK
=
16/09/2014 18/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário
Tipo 0 Tipo 1 Tipo 2
Entrada Expressão do
erro estacionário
Constante de erro
estacionário
Constante de erro
estacionário
Constante de erro
estacionário Erro Erro Erro
Degrau,
Rampa,
Parábola,
Constante
Constante
Constante
16/09/2014 19/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Os sistemas de controle são geralmente caracte-
rizados pelo seu tipo e pelas constantes de erro Kp, Kv e Ka. Em particular, as constantes de erro expressam numericamente a capacidade de redu-ção do erro em estado estacionário: quanto maiores, melhor é o desempenho do sistema em estado estacionário, mas não obrigatoriamente no período transitório.
16/09/2014 20/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário ( )G s( )R s ( )Y s
( )aE s
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
t
y(t)
Efeito de Kp na Resposta Transitória
K = 10K = 20K = 50K = 100K = 200K = 400
( 2)
( ))(
6sKG s
s+=
+
11 ( )p
sseGaK nho DC
=+ =
(0) 12p GK K= =
1 121 12 12sse
K K= =
+ +
Script em Matlab: M_6_DesempenhoSistemasProg2.m
16/09/2014 21/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Considere, agora, o sistema a seguir:
( )G s
Para H(s)≠1, K1 pode ser visto como um conversor de unidades (velocidade para tensão, por exemplo).
( )H s
( )R s ( )Y s( )aE s
1K
2( )1
KH ssτ
=+
K2 é um fator de conversão de unidades: mV/rpm, no caso de um tacogerador, por exemplo.
+ -
16/09/2014 22/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário
1
1
1
( )( ) ( ) ( ) ( ) ( )1 ( ) (
( )
)1 ( ) ( ) ( ) ( )
1 ( ) ( )1 ( ) ( ) ( )
1 ( ) ( )
G sE s R s Y s R s R sG s H s
G s H s G s R sG s H s
H s G s R sG s H s
K
K
K
− = −+
+ −=
++ −
=+
( )G s
( )H s
( )R s ( )Y s( )aE s
1K + -
K1 = K2
1
1( ) ( )1 ( )
EGK
s R ss
=+
1
11 (0)sse
GK=
+
( ) 1R s s=
16/09/2014 23/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Considere, agora, uma entrada de perturbação:
Controlador Processo
a Controlar
O sistema agora possui duas entradas, R(s) e D(s), e cada uma delas tem a sua contribuição para a saída C(s) e,
consequentemente, para o erro em estado estacionário. Por linearidade, é possível calcular cada uma das saídas e das
contribuições para o erro em estado estacionário.
16/09/2014 24/33

Controle de Sistemas – Professor Renato Dourado Maia
Erro em Estado Estacionário Para o sistema a seguir, calcular a componente
do erro em estado estacionário devida a uma perturbação em degrau unitário.
Controlador G1(s)
Processo G2(s)
Solução: -1/1000
16/09/2014 25/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Um índice de desempenho é uma medida quanti-
tativa do desempenho de um sistema, e é esco-lhido de modo que seja colocada ênfase nas es-pecificações consideradas importantes.
Os índices de desempenho mais utilizados são: ISE, ITAE, IAE, e ITSE.
16/09/2014 26/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho ITAE – Integral do erro absoluto vezes o tempo:
reduz a contribuição exagerada do erro nos pri-meiros instantes, e enfatiza erro presente na res-posta em estado estacionário.
IAE – Integral do erro absoluto:
ITSE – Integral do erro ao quadrado vezes o tem-po:
0( )
Tt e tI A dT E t= ∫
0( )
Te tI dAE t= ∫
2
0( )
Tte tITSE dt= ∫
16/09/2014 27/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Normalmente, o limite superior T de integração é
escolhido como sendo o tempo de acomodação, ou assentamento.
Dentre os índices vistos, o mais seletivo é o ITAE, visto que seu valor mínimo é facilmente identifi-cável em função da variação do coeficiente de a-mortecimento, ζ.
Um sistema de controle é dito ser ótimo quando o índice de desempenho selecionado é minimiza-do.
16/09/2014 28/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Índices para sistema de 2ª ordem, com entrada em degrau unitário
16/09/2014 29/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Para a função: 0
11 1 0
( ) n nn
bT ss b s b s b−
−
=+ + + +
Considerando entrada em degrau unitário:
16/09/2014 30/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Respostas ao Degrau para Valores Ótimos do ISE
Tempo Normalizado
Res
post
a N
orm
aliz
ada
16/09/2014 31/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Respostas ao Degrau para Valores Ótimos do IAE
Res
post
a N
orm
aliz
ada
Tempo Normalizado
16/09/2014 32/33

Controle de Sistemas – Professor Renato Dourado Maia
Índices de Desempenho Respostas ao Degrau para Valores Ótimos do ITAE
Res
post
a N
orm
aliz
ada
Tempo Normalizado
16/09/2014 33/33