Realimentação de estados Estimadores de estados (C. T. Chen, Capítulo 8) Sistemas Lineares.

Descrição Matemática de Sistemas
(C. T. Chen, Capítulo 2)
Sistemas Lineares

Sistemas: SISO (Single Input, Single Output): MIMO (Multiple Input, Multiple Output): SIMO (Single Input, Multiple Output):
Supõe-se que a resposta a uma dada entrada é única. Esta relação única entre entrada e saída, excitação e resposta, causa e efeito, é essencial.

Descrição matemática de sistemas• Um sistema é dito de tempo contínuo se aceita sinais de tempo contínuo
como entrada e gera sinais de tempo contínuo na saída. Entra ou, e sai ou , sendo (´ significa transposto). varia de - a +, em passo infinitesimal.
• Um sistema é dito de tempo discreto se aceita sinais de tempo discreto como entrada e gera sinais de tempo discreto na saída. Entra ou , e sai ou , sendo . Todos os sinais têm o mesmo tempo de amostragem , e é um inteiro variando de - a +.
• Um sistema é chamado sem memória se sua saída em depende somente da entrada atual (em ).
• Um sistema é chamado com memória se a saída em depende da entrada atual, passada e futura.
• Um sistema é chamado de causal (ou não antecipatório), se a saída atual depende apenas de entradas passadas e atuais (nada de futuras).
• Nenhum sistema físico é não causal.

Descrição matemática de sistemas
• Até que tempo passado a entrada passada afetará a saída atual?
• Geralmente, é até -.• Seguir as entradas desde - até o tempo
atual, se não impossível, é muito inconveniente.
• O conceito de estado permite lidar com este problema.

Definição de estado• O estado de um sistema no tempo é a
informação em que, junto com a entrada , para , determina unicamente a saída ) para todo .
• Conhecendo-se , não é mais necessário conhecer os valores de para .
• As variáveis que compõem o vetor são chamadas variáveis de estado. Assim, pode-se considerar o estado inicial simplesmente como um conjunto de condições iniciais, que sumariza o efeito da entrada passada na saída futura.

Descrição matemática de sistemas

Descrição matemática de sistemas
• Utilizando o estado em , pode-se expressar a entrada e a saída do sistema como
• Isto significa que a saída é parcialmente excitada pelo estado inicial em e parcialmente excitada pelo sinal de entrada em e após . Logo, não há como conhecer a saída sem conhecer a entrada e o estado (inicial). Em outras palavras, tem-se um par entrada-estado/saída, e não somente entrada/saída.
𝒙(𝑡 0)𝒖 (𝑡 ) , 𝑡≥ 𝑡0
}→ 𝑦 (𝑡 ) ,𝑡 ≥𝑡 0(2.1)

Descrição matemática de sistemas
• Um sistema é agrupado (concentrado) (lumped) se o número de variáveis de estado é finito.
• Um sistema é distribuído se seu estado tem infinitas variáveis.

Sistemas lineares
• Um sistema é chamado de sistema linear, se para todo e dois conjuntos estado-entrada-saída quaisquer

Sistemas lineares
• Combinando as propriedades anteriores, obtém-se a propriedade de superposição

Sistemas lineares
• A saída é chamada de resposta à entrada zero quando
• A saída é chamada de resposta ao estado zero quando
• Resposta = resposta à entrada zero + resposta ao estado zero
(Devido à propriedade da aditividade)
(Note-se que isto não ocorre para sistemas não lineares)

Sistemas lineares• Descrição entrada-saída. Desenvolve-se uma
equação matemática para descrever a resposta ao estado zero de sistemas lineares (implicitamente, o estado inicial e assumido como zero).
• Considere-se o seguinte sinal pulso.

Sistemas lineares
• A entrada pode ser aproximada por uma sequência de impulsos.

Sistemas lineares
• A saída no tempo excitada pelo pulso no tempo é
• Depois

Sistemas lineares
• Quando delta aproxima-se de zero, obtém-se
• Um sistema é relaxado em se seu estado inicial em é 0.
• Então, todo sistema linear que é causal e relaxado em pode ser descrito como

Caso multivariável

Descrição no espaço de estados
• Todo sistema linear agrupado pode ser descrito por um conjunto de equações da forma

Sistemas LTI
• Sistema lineares invariantes no tempo (LTI)

Sistemas LTI
• A descrição entrada-saída fica
• Esta é a chamada integral de convolução, e representa a descrição do sistema LTI no domínio do tempo.

Sistemas LTI
• Função de transferência dos sistemas LTI

Sistemas LTI
• A função de transferência do sistema é a transformada de Laplace da resposta impulsiva (resposta ao impulso).
• A resposta impulsiva é a transformada inversa de Laplace da função de transferência.

Sistemas LTI
• Para um sistema de p entradas e q saídas

Sistemas LTI
A função de transferência do sistema de retardo é uma função de transferência irracional porque se trata de um sistema distribuído.Se o sistema LTI é agrupado, então sua função de transferência será uma função racional.

Sistemas LTI

Sistemas LTI
• Toda função de transferência racional pode ser expressa por
ˆ ( ) ( ) / ( )g s N s D s

Sistemas LTI
• Uma função de transferência racional imprópria amplificará ruídos de alta freqüência.
• Portanto, esta função de transferência raramente é utilizada em aplicações práticas.

Sistemas LTI
• Definição:

Sistemas LTI

Equação no espaço de estados
• Todo sistema linear agrupado invariante no tempo, pode ser descrito por
a partir de onde se pode obter a matriz de transferência
caso .

Linearização
• Muitos sistemas físicos são não lineares e variantes no tempo. Alguns deles podem ser descritos pela equação diferencial não linear
• Considere-se

Linearização
• Então o sistema pode ser expandido

Linearização
• Omitindo a ordens altas de e x u

Exemplo 1
Não lineares, e sem possibilidade de linearizar com erro pequeno.
Linear
Será considerado apenas o atrito viscoso (, sendo o coeficiente de atrito viscoso).

Exemplo 1
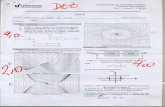
Figura 2.10 Característica da mola (não linear).
Porém, se o deslocamento for limitado ao intervalo , então a mola pode ser considerada como linear, com boa aproximação, e a força por ela exercida será , sendo a constante da mola.

Exemplo 1
Pela Lei de Newton:
, sendo e .
Aplicando a transformada de Laplace, assumindo condições iniciais nulas, obtém-se
,
o que resulta na descrição entrada-saída do sistema
e na sua função de transferência

Exemplo 1
Se e , a função de transferência do sistema se torna
sua resposta ao impulso do sistema será
=
e sua descrição por convolução será

Exemplo 1
Quanto à descrição deste mesmo sistema no espaço de estados, sejam as variáveis de estado
Daí, a partir de (2.22) podemos escrever
Daí, se obtém a descrição no espaço de estados do sistema, que é

Exemplo 2

Exemplo 3


Exemplo

Exemplo

Exemplo

Linearização de um sistema de nível


Sistemas de tempo discreto
• Assume-se que o período de amostragem T é igual para todo sistema de tempo discreto.
• Muitos conceitos aplicados a sistemas de tempo contínuo se aplicam a sistemas de tempo discreto. Porém, alguns conceitos variam.
• Por exemplo, em sistemas contínuos um sistema de retardo é distribuído, mas em sistemas discretos o sistema de retardo é agrupado se o retardo é um inteiro múltiplo de T.

Sistemas de tempo discreto
• Descrição entrada saída. Seja a seqüência impulso
• Seguindo um procedimento similar ao utilizado em sistemas contínuos, obtém-se a descrição entrada saída
para sistemas relaxados em e causais.

Sistemas de tempo discreto
• Seja a transformada Z
• Depois

Sistemas de tempo discreto
• Exemplo de um sistema de tempo discreto distribuído

Sistemas de tempo discreto
• Uma função de transferência racional discreta pode ser própria ou imprópria. Se é imprópria como
• Obtém-se um sistema não causal.• O resultado é distinto em sistemas de tempo contínuo,
onde uma função de transferência racional imprópria pode ser de um sistema causal.

Para , dependendo de como a derivada é calculada, o sistema discreto pode ser causal ou não.

Sistemas de tempo discreto
• Equações no espaço de estados


Exemplo• Considere uma conta de poupança com rendimento
diário de r=0.015%• u[k] é a quantia depositada no dia k • y[k] é a quantia total ao final do dia k• Considere um depósito de R$ 1 no início do
primeiro dia, e nada nos demais dias, ou seja, u[k]=[1 0 0 ...]. Daí, y[0]=u[0]=1, e y[1]=0,00015+1=1,00015
• , donde se conclui que

Modelos do exemplo