Descrição dinâmica de ondaseletrica.ufpr.br/p/_media/professores:patricio:te220:aula_12... ·...
21
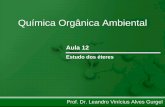
Suporte rígido Elasticidade, k Massa, m Palheta Amortecimento, b móvel 1 Descrição dinâmica de ondas Analogias eletromecânicas. Lembrando o oscilador forçado, tínhamos Fonte
Transcript of Descrição dinâmica de ondaseletrica.ufpr.br/p/_media/professores:patricio:te220:aula_12... ·...
Suporte rígido
Elasticidade, k
Massa, m
Palheta
Amortecimento, b
móvel
1
Descrição dinâmica de ondas Analogias eletromecânicas.
Lembrando o oscilador forçado, tínhamos
Fonte
2
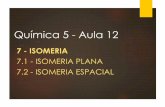
Descrição dinâmica de ondas Analogias eletromecânicas.
3
Descrição dinâmica de ondas Equações dinâmicas.
Vamos começar estudando o caso de osciladores acoplados
(mecânicos ou elétricos, lembrar as analogias entre as variáveis
consideradas para descrever o movimento)
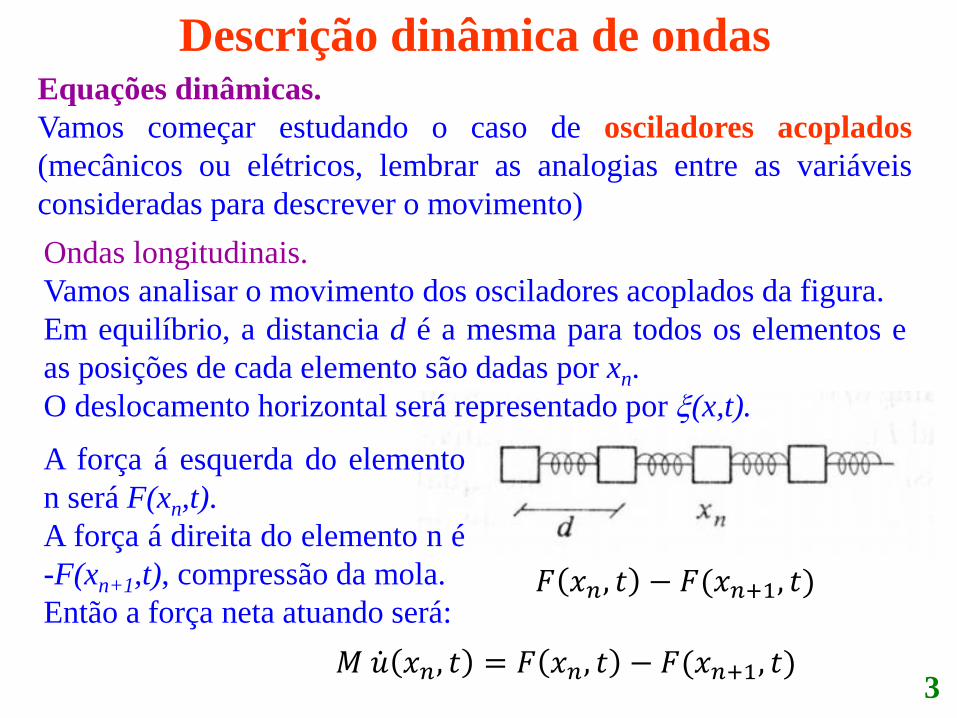
Ondas longitudinais.
Vamos analisar o movimento dos osciladores acoplados da figura.
Em equilíbrio, a distancia d é a mesma para todos os elementos e
as posições de cada elemento são dadas por xn.
O deslocamento horizontal será representado por (x,t).
𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡)
A força á esquerda do elemento
n será F(xn,t).
A força á direita do elemento n é
-F(xn+1,t), compressão da mola.
Então a força neta atuando será:
𝑀 ሶ𝑢 𝑥𝑛, 𝑡 = 𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡)
4
Descrição dinâmica de ondas A força F(xn+1,t) = k [(xn ,t) - (xn+1 ,t)] é decorrente da constante k
e da compressão (xn ,t) - (xn+1 ,t) da mola entre os elementos n e
n+1.
Em função da velocidade pode ser escrito (considerando C=1/k):
𝐶 ሶ𝐹 𝑥𝑛+1, 𝑡 = 𝑢 𝑥𝑛, 𝑡 − 𝑢(𝑥𝑛+1, 𝑡)
Fazemos agora a transição a uma linha de transmissão contínua
(como uma mola, fluido ou sólido com uma distribuição de massa)
d0 (mantendo = M/d constante).
Desta forma, u(x,t) e F(x,t) passam a ser funções continuas de x, t.
No limite (d0) teremos que:
𝐹 𝑥𝑛+1, 𝑡 − 𝐹 𝑥𝑛, 𝑡
𝑑=𝜕𝐹(𝑥, 𝑡)
𝜕𝑥
𝑢 𝑥𝑛+1, 𝑡 − 𝑢 𝑥𝑛, 𝑡
𝑑=𝜕𝑢(𝑥, 𝑡)
𝜕𝑥
5
Descrição dinâmica de ondas Lembrando as duas
primeiras equações:𝐶 ሶ𝐹 𝑥𝑛+1, 𝑡 = 𝑢 𝑥𝑛, 𝑡 − 𝑢(𝑥𝑛+1, 𝑡)
e considerando as
duas últimas:
𝐹 𝑥𝑛+1, 𝑡 − 𝐹 𝑥𝑛, 𝑡
𝑑=𝜕𝐹(𝑥, 𝑡)
𝜕𝑥𝑢 𝑥𝑛+1, 𝑡 − 𝑢 𝑥𝑛, 𝑡
𝑑=𝜕𝑢(𝑥, 𝑡)
𝜕𝑥
𝑀 ሶ𝑢 𝑥𝑛, 𝑡 = 𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡)
Obtemos as importantes equações (chamadas de campo):
𝜅𝜕𝐹
𝜕𝑡= −
𝜕𝑢(𝑥, 𝑡)
𝜕𝑥
𝜇𝜕𝑢
𝜕𝑡= −
𝜕𝐹(𝑥, 𝑡)
𝜕𝑥
Onde é a inversa da capacitância por unidade de comprimento e
é a massa por unidade de comprimento (ambas constantes)
6
Descrição dinâmica de ondas
Derivando a primeira equação respeito de x e a segunda respeito
de t podemos eliminar uma das variáveis e obtemos a já conhecida
equação de onda:
𝜅𝜕2𝐹(𝑥, 𝑡)
𝜕𝑡2= −
𝜕2𝑢(𝑥, 𝑡)
𝜕𝑥𝜕𝑡𝜇𝜕2𝑢(𝑥, 𝑡)
𝜕𝑡𝜕𝑥= −
𝜕2𝐹(𝑥, 𝑡)
𝜕𝑥2
Onde v2=1/ que já foi obtido para o caso geral de ondas.
𝜇𝜕𝑢
𝜕𝑡=−𝜕𝐹(𝑥, 𝑡)
𝜕𝑥𝜅𝜕𝐹
𝜕𝑡=−𝜕𝑢(𝑥, 𝑡)
𝜕𝑥
𝜕2𝐹(𝑥, 𝑡)
𝜕𝑥2= 𝜅𝜇
𝜕2𝐹(𝑥, 𝑡)
𝜕𝑡2=
1
𝑣2𝜕2𝐹(𝑥, 𝑡)
𝜕𝑡2
7
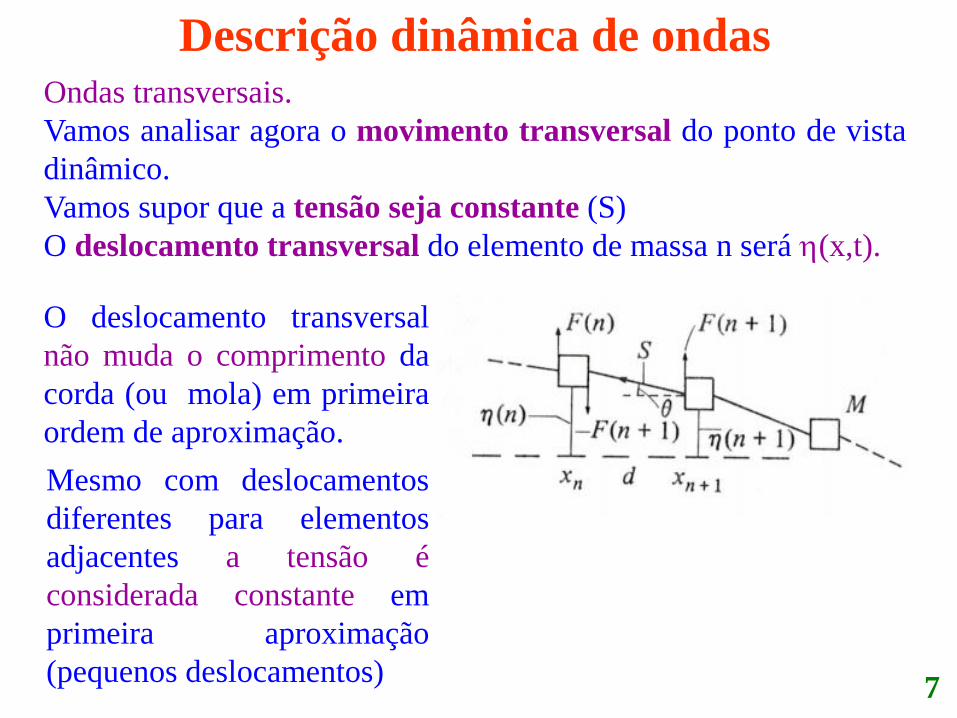
Descrição dinâmica de ondas Ondas transversais.
Vamos analisar agora o movimento transversal do ponto de vista
dinâmico.
Vamos supor que a tensão seja constante (S)
O deslocamento transversal do elemento de massa n será (x,t).
O deslocamento transversal
não muda o comprimento da
corda (ou mola) em primeira
ordem de aproximação.
Mesmo com deslocamentos
diferentes para elementos
adjacentes a tensão é
considerada constante em
primeira aproximação
(pequenos deslocamentos)

8
Descrição dinâmica de ondas A componente vertical da tensão depende da inclinação no ponto
considerado.
Da mesma forma que anteriormente definimos a força transversal
que atua sobre o lado esquerdo do elemento n como F(xn,t) e sobre
o lado esquerdo do elemento n+1 como F(xn+1,t).
Desconsiderando a massa da
mola, a força de reação no
elemento n da mola será:
-F(xn+1,t) (mesma magnitude
mas em direção oposta, ver
figura)
Portanto a força resultando sobre o elemento n será:
𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡)
𝑀 ሶ𝑢 𝑥𝑛, 𝑡 = 𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡)
9
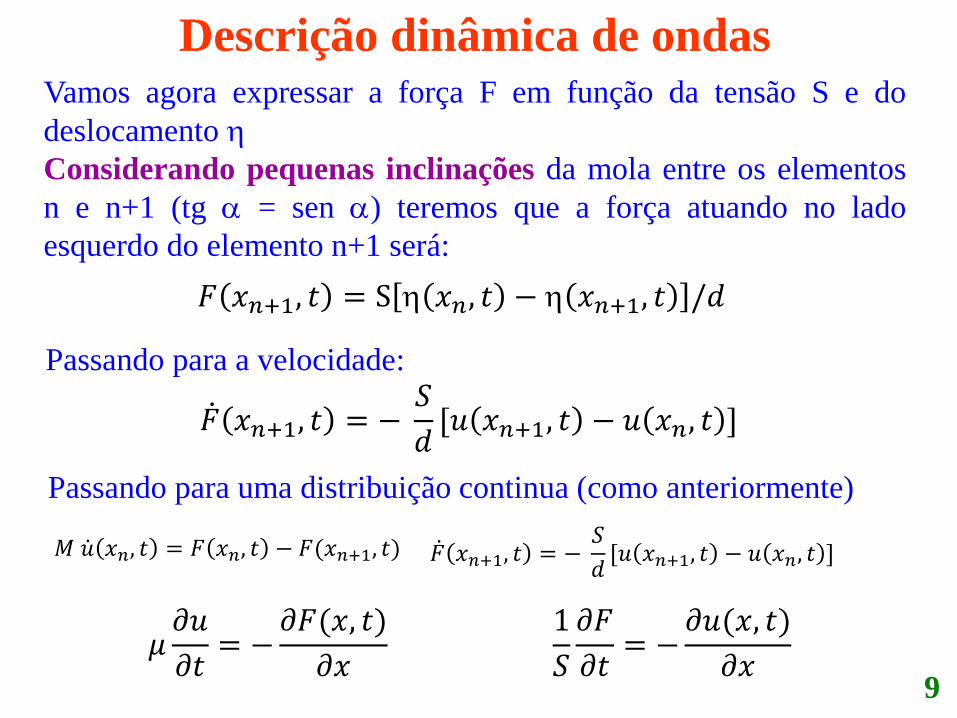
Descrição dinâmica de ondas Vamos agora expressar a força F em função da tensão S e do
deslocamento
Considerando pequenas inclinações da mola entre os elementos
n e n+1 (tg = sen ) teremos que a força atuando no lado
esquerdo do elemento n+1 será:
𝐹 𝑥𝑛+1, 𝑡 = S 𝑥𝑛, 𝑡 − 𝑥𝑛+1, 𝑡 /𝑑
Passando para a velocidade:
ሶ𝐹 𝑥𝑛+1, 𝑡 = −𝑆
𝑑[𝑢 𝑥𝑛+1, 𝑡 − 𝑢 𝑥𝑛, 𝑡 ]
Passando para uma distribuição continua (como anteriormente)
𝑀 ሶ𝑢 𝑥𝑛, 𝑡 = 𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡) ሶ𝐹 𝑥𝑛+1, 𝑡 = −𝑆
𝑑[𝑢 𝑥𝑛+1, 𝑡 − 𝑢 𝑥𝑛, 𝑡 ]
𝜇𝜕𝑢
𝜕𝑡= −
𝜕𝐹(𝑥, 𝑡)
𝜕𝑥
1
𝑆
𝜕𝐹
𝜕𝑡= −
𝜕𝑢(𝑥, 𝑡)
𝜕𝑥

10
Descrição dinâmica de ondas Estas equações são as mesmas obtidas anteriormente para o
deslocamento longitudinal substituindo k por 1/S portanto:
𝜕2𝐹(𝑥, 𝑡)
𝜕𝑥2=𝜇
𝑆
𝜕2𝐹(𝑥, 𝑡)
𝜕𝑡2=
1
𝑣2𝜕2𝐹(𝑥, 𝑡)
𝜕𝑡2
11
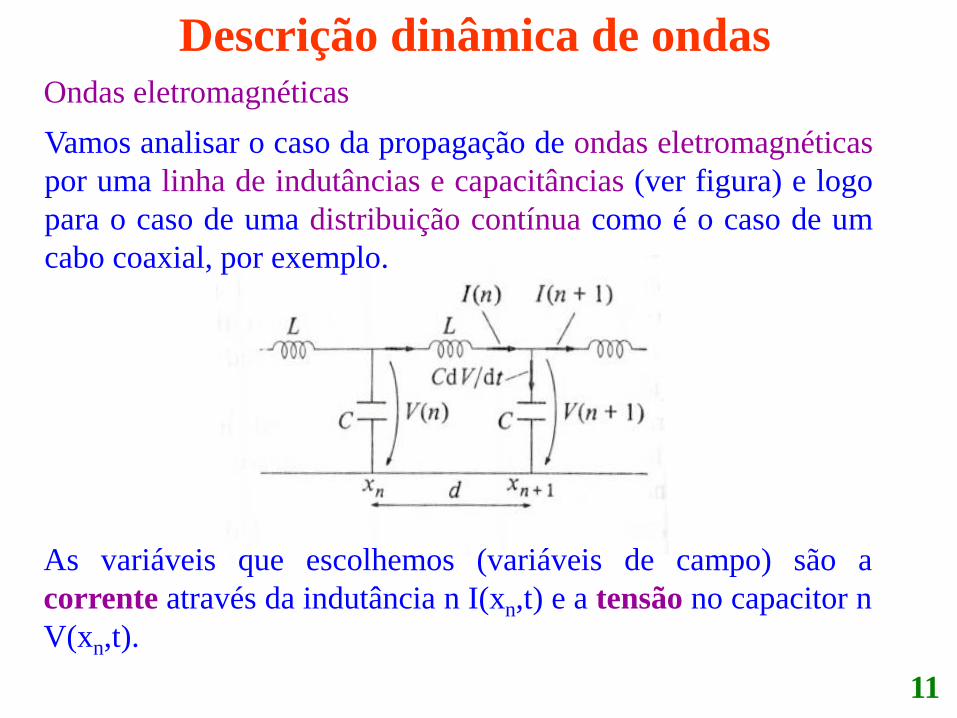
Descrição dinâmica de ondas Ondas eletromagnéticas
Vamos analisar o caso da propagação de ondas eletromagnéticas
por uma linha de indutâncias e capacitâncias (ver figura) e logo
para o caso de uma distribuição contínua como é o caso de um
cabo coaxial, por exemplo.
As variáveis que escolhemos (variáveis de campo) são a
corrente através da indutância n I(xn,t) e a tensão no capacitor n
V(xn,t).
12
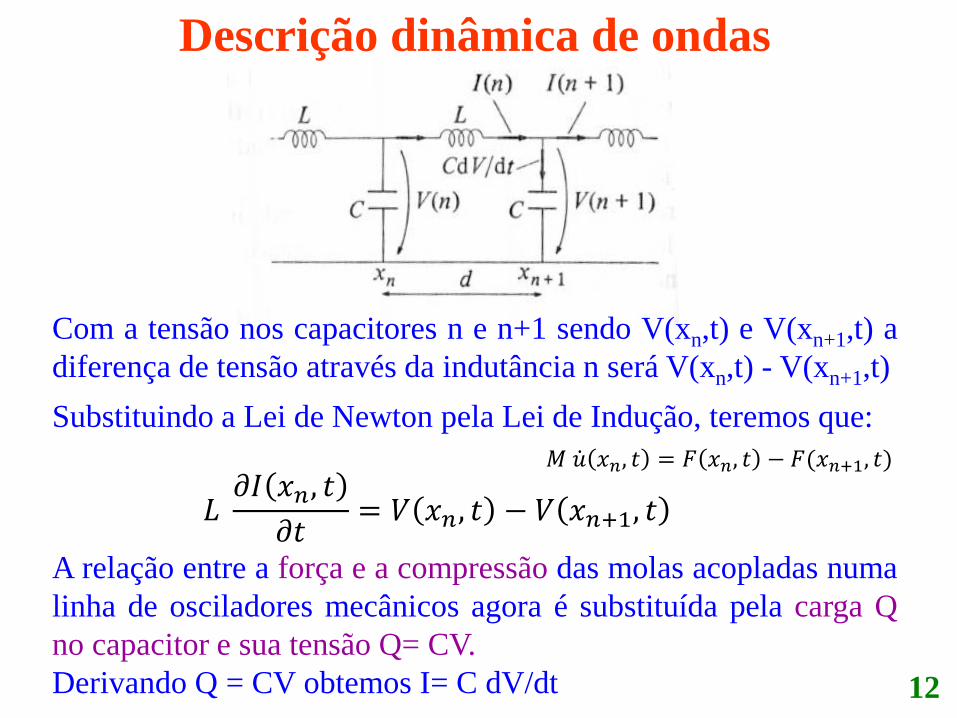
Descrição dinâmica de ondas
Com a tensão nos capacitores n e n+1 sendo V(xn,t) e V(xn+1,t) a
diferença de tensão através da indutância n será V(xn,t) - V(xn+1,t)
Substituindo a Lei de Newton pela Lei de Indução, teremos que:
𝐿𝜕𝐼 𝑥𝑛, 𝑡
𝜕𝑡= 𝑉 𝑥𝑛, 𝑡 − 𝑉 𝑥𝑛+1, 𝑡
A relação entre a força e a compressão das molas acopladas numa
linha de osciladores mecânicos agora é substituída pela carga Q
no capacitor e sua tensão Q= CV.
Derivando Q = CV obtemos I= C dV/dt
𝑀 ሶ𝑢 𝑥𝑛, 𝑡 = 𝐹 𝑥𝑛, 𝑡 − 𝐹(𝑥𝑛+1, 𝑡)
13
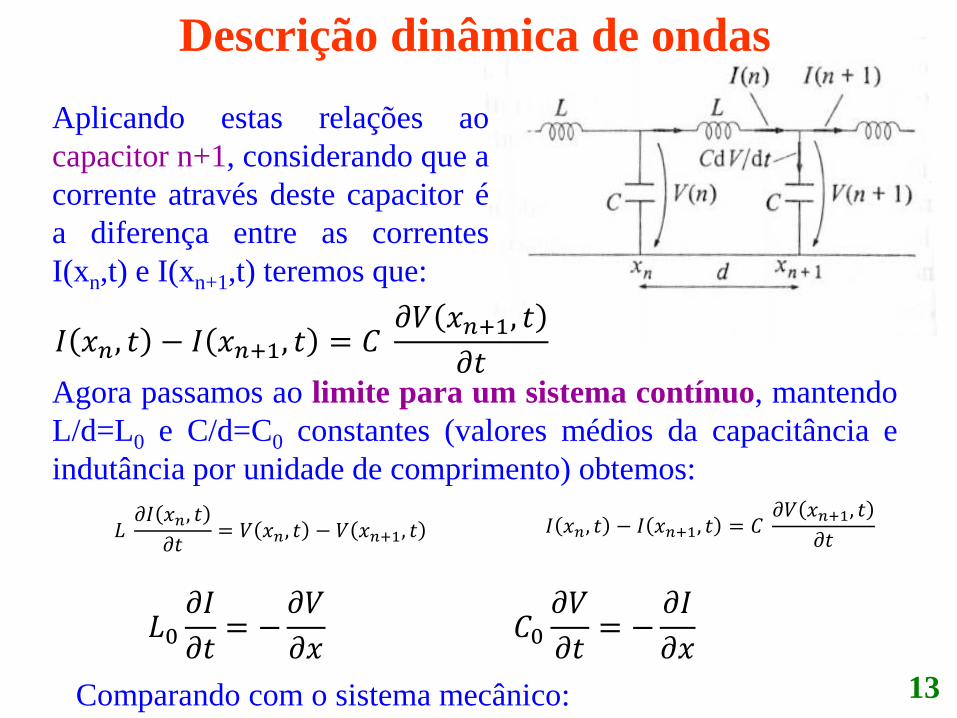
Descrição dinâmica de ondas
Aplicando estas relações ao
capacitor n+1, considerando que a
corrente através deste capacitor é
a diferença entre as correntes
I(xn,t) e I(xn+1,t) teremos que:
𝐼 𝑥𝑛, 𝑡 − 𝐼 𝑥𝑛+1, 𝑡 = 𝐶𝜕𝑉 𝑥𝑛+1, 𝑡
𝜕𝑡Agora passamos ao limite para um sistema contínuo, mantendo
L/d=L0 e C/d=C0 constantes (valores médios da capacitância e
indutância por unidade de comprimento) obtemos:
𝐿0𝜕𝐼
𝜕𝑡= −
𝜕𝑉
𝜕𝑥𝐶0
𝜕𝑉
𝜕𝑡= −
𝜕𝐼
𝜕𝑥
Comparando com o sistema mecânico:
𝐼 𝑥𝑛, 𝑡 − 𝐼 𝑥𝑛+1, 𝑡 = 𝐶𝜕𝑉 𝑥𝑛+1, 𝑡
𝜕𝑡𝐿𝜕𝐼 𝑥𝑛, 𝑡
𝜕𝑡= 𝑉 𝑥𝑛, 𝑡 − 𝑉 𝑥𝑛+1, 𝑡
14
Descrição dinâmica de ondas
𝐿0𝜕𝐼
𝜕𝑡= −
𝜕𝑉
𝜕𝑥
𝐶0𝜕𝑉
𝜕𝑡= −
𝜕𝐼
𝜕𝑥𝜅𝜕𝐹
𝜕𝑡= −
𝜕𝑢(𝑥, 𝑡)
𝜕𝑥
𝜇𝜕𝑢
𝜕𝑡= −
𝜕𝐹(𝑥, 𝑡)
𝜕𝑥
No caso de um cabo coaxial, e para uma linha de transmissão em
paralelo os valores de C0 e L0 podem ser obtidos dos parâmetros
geométricos.
Vamos ver agora, para o caso de ondas harmônicas, as equações
para as amplitudes complexas.

15
Descrição dinâmica de ondas
Equações para as amplitudes complexas.
A forma de introduzir as amplitudes complexas será da forma
convencional (como feito anteriormente).
Consideremos as equações de campo obtidas:
𝜅𝜕𝐹
𝜕𝑡= −
𝜕𝑢(𝑥, 𝑡)
𝜕𝑥𝜇𝜕𝑢
𝜕𝑡= −
𝜕𝐹(𝑥, 𝑡)
𝜕𝑥
Vamos definir as amplitudes complexas da velocidade e da força
como u(x,) e F(x,), sendo assim (para o caso harmônico)
teremos:
−𝑖𝜇𝑢(𝑥, 𝜔) = −𝑑𝐹(𝑥, 𝜔)
𝑑𝑥−𝑖𝐹(𝑥, 𝜔) = −
𝑑𝑢(𝑥, 𝜔)
𝑑𝑥
𝑢(𝑥, 𝜔) =1
𝑖𝜔𝜇
𝑑𝐹(𝑥, 𝜔)
𝑑𝑥𝐹(𝑥, 𝜔) =
1
𝑖𝜔𝜅
𝑑𝑢(𝑥, 𝜔)
𝑑𝑥
16
Descrição dinâmica de ondas Como sabemos, a amplitude complexa da segunda derivada de
F(x,t) é:−2𝐹(𝑥, 𝜔)
Assim, a equação de onda𝜕2𝐹(𝑥, 𝑡)
𝜕𝑥2=
1
𝑣2𝜕2𝐹(𝑥, 𝑡)
𝜕𝑡2
leva à seguinte equação para a amplitude complexa:
𝑑2𝐹(𝑥, 𝜔)
𝑑𝑥2+ 𝑘2𝐹(𝑥,𝜔) = 0 𝑜𝑛𝑑𝑒 𝑘 =
𝜔
𝑣
Equação diferencial linear de segunda ordem, homogênea de
coeficientes constantes (a mesma do oscilador harmônico, só que
aqui com derivadas espaciais no lugar de temporais).
Sua solução geral é:𝐹 𝑥,𝜔 𝐴𝑒𝑖𝑘𝑥 + 𝐵𝑒−𝑖𝑘𝑥
Onde A e B são constantes complexas!

17
Descrição dinâmica de ondas
Esta solução (para a amplitude complexa da força) representa duas
ondas, uma se deslocando para a direita e outra para a esquerda.
𝐹 𝑥,𝜔 𝐴𝑒𝑖𝑘𝑥 + 𝐵𝑒−𝑖𝑘𝑥
Da mesma forma obtemos a solução para a amplitude complexa da
velocidade. A partir das equações de campo......até..........
𝑢 𝑥,𝜔 = −1
𝑖𝜇
𝑑𝐹 𝑥,𝜔
𝑑𝑥=1
𝑍[𝐴𝑒𝑖𝑘𝑥 − 𝐵𝑒−𝑖𝑘𝑥]
Aqui Z v (k=/v e v= 1/(k)1/2 ) é a impedância da onda que
pode ser interpretada como a razão entre a amplitude complexa da
força e a da velocidade, na onda se deslocando na direção positiva
de x. Z é um número real.
A e B podem ser calculadas a partir de valores conhecidos dos
valores complexos F e u em um ponto x.

18
Descrição dinâmica de ondas
Por exemplo, em termos de F(0,) e u(0,) determinamos A e B a
partir de F(0,) = A+B e u(0,) =1/Z (A-B).
Tendo obtido as funções amplitude complexa para F e u
𝐹 𝑥,𝜔 𝐹0𝑒𝑖𝜙(𝑥)
𝑢 𝑥,𝜔 𝑢0𝑒𝑖𝛽(𝑥)
as funções de onda reais são:
𝐹 𝑥, 𝑡 = 𝐹0cos[𝜔𝑡 − 𝜙 𝑥 ]
𝑢 𝑥, 𝑡 = 𝑢0cos[𝜔𝑡 − 𝛽 𝑥 ]
Exemplo: Vamos aplicar este procedimento ao estudo da
oscilação forçada de uma mola real, considerando sua massa
19
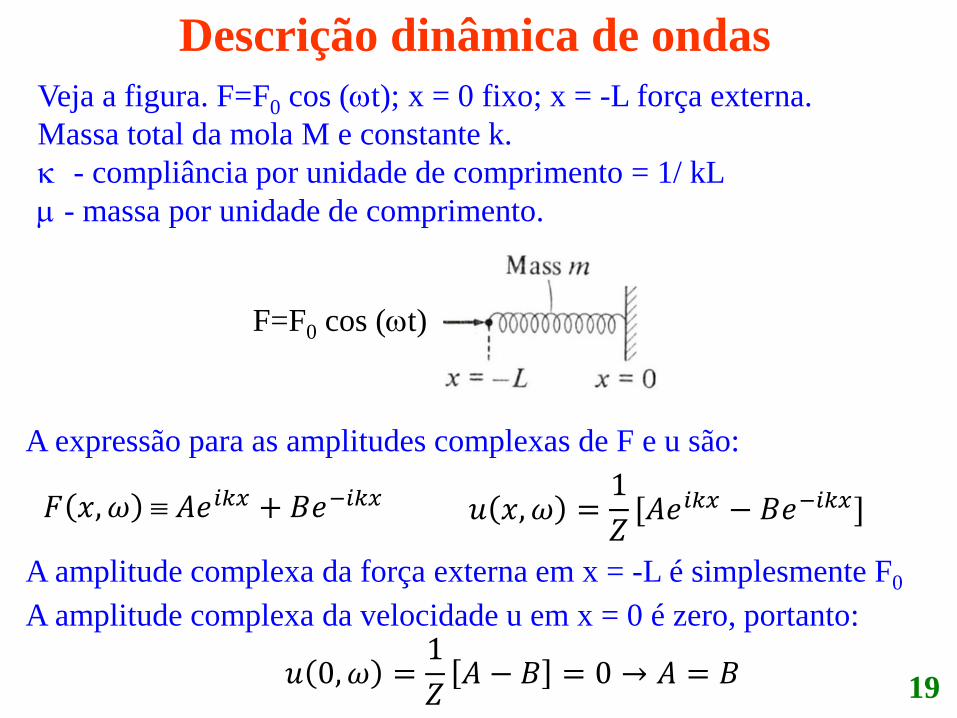
Descrição dinâmica de ondas
Veja a figura. F=F0 cos (t); x = 0 fixo; x = -L força externa.
Massa total da mola M e constante k.
- compliância por unidade de comprimento = 1/ kL
- massa por unidade de comprimento.
𝐹 𝑥,𝜔 𝐴𝑒𝑖𝑘𝑥 + 𝐵𝑒−𝑖𝑘𝑥
A expressão para as amplitudes complexas de F e u são:
𝑢 𝑥,𝜔 =1
𝑍[𝐴𝑒𝑖𝑘𝑥 − 𝐵𝑒−𝑖𝑘𝑥]
A amplitude complexa da força externa em x = -L é simplesmente F0
A amplitude complexa da velocidade u em x = 0 é zero, portanto:
𝑢 0,𝜔 =1
𝑍𝐴 − 𝐵 = 0 → 𝐴 = 𝐵
F=F0 cos (t)
20
Descrição dinâmica de ondas Assim:
𝐹 𝑥,𝜔 = 𝐴𝑒𝑖𝑘𝑥 + 𝐵𝑒−𝑖𝑘𝑥 = 2𝐴 𝑐𝑜𝑠(𝑘𝑥)
Utilizando a outra condição de contorno F(-L)=F0 obtemos:
𝐹0 = 2𝐴 𝑐𝑜𝑠(𝑘𝐿) 𝐴 =𝐹0
2 𝑐𝑜𝑠(𝑘𝐿)
Assim:
𝐹 𝑥,𝜔 =𝐹0
cos(𝑘𝐿)𝑐𝑜𝑠(𝑘𝑥)
𝑢 𝑥, 𝜔 = 𝑖𝐹0
𝑍 cos(𝑘𝐿)𝑠𝑖𝑛(𝑘𝑥)
Vamos analisar a solução encontrada
21
Descrição dinâmica de ondas 𝐹 𝑥, 𝜔 =
𝐹0cos(𝑘𝐿)
𝑐𝑜𝑠(𝑘𝑥)𝑢 𝑥, 𝜔 = 𝑖𝐹0
𝑍 cos(𝑘𝐿)𝑠𝑖𝑛(𝑘𝑥)
Qual a velocidade no extremo x = -L? 𝑢 −𝐿,𝜔 = −𝑖𝐹0𝑍𝑡𝑔(𝑘𝐿)
Qual o deslocamento no extremo x = -L?
Lembrando que u(x,) = -i(x,) temos que: 𝜉 −𝐿,𝜔 =𝐹0𝑍𝜔
𝑡𝑔(𝑘𝐿)
No limite de =0 (em x=-L), podemos substituir tg (kL) por kL
(k=/v=()1/2 ), portanto:
𝜉 −𝐿,𝜔 ≅𝐹0𝐿
𝑍𝑣=
𝐹0𝐿
𝜇𝑣2= 𝐹0𝐿𝜅 =
𝐹0𝑘
que é a deformação
estática da mola!A medida que a frequência aumenta a amplitude aumenta em
direção à ressonância (com amplitude infinita) quando kL=/2
A frequência de ressonância é dada por:
𝜔0 = 𝑘𝑣 =𝜋
2
𝑣
𝐿=𝜋
2
1
𝜇𝜅𝐿2=𝜋
2
𝑘
𝑀=
𝑘
𝑀𝑒𝑜𝑛𝑑𝑒 𝑀𝑒 =
4
𝜋2𝑚 ≅ 0,405𝑚
A mesma frequência que para o caso ideal mas com 40% da
massa, fixa no extremo -L