
DEEC/ IST Isabel Lourtie Sistemas e Sinais Transformada de Laplace TRANSFORMADA DE LAPLACE...
45
DEEC/ IST Isabel Lourtie Sistemas e Sinais Transformada de Laplace TRANSFORMADA DE LAPLACE Motivação. Definição: expressão algébrica e região de convergência. Propriedades da região de convergência. Transformada inversa. Propriedades da transformada de Laplace. Representação de SLITs contínuos usando a transformada de Laplace. Propriedades dos SLITs e sua relação com a região de convergência da função de transferência.
-
Upload
agatha-maria-fernanda-campelo-gesser -
Category
Documents
-
view
276 -
download
1
Transcript of DEEC/ IST Isabel Lourtie Sistemas e Sinais Transformada de Laplace TRANSFORMADA DE LAPLACE...
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
TRANSFORMADA DE LAPLACE
Motivação. Definição: expressão algébrica e região de convergência. Propriedades da região de convergência. Transformada inversa. Propriedades da transformada de Laplace. Representação de SLITs contínuos usando a transformada de Laplace. Propriedades dos SLITs e sua relação com a região de convergência da função de transferência.

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
thTL
Motivação
stetx th ?ty
SLIT
sts
ts
edeh
deh
dtxh
txthty
sH
stst esHtyetx
dtetxsX st dsesYj
ty stj
j
21
tx txthty convolução
sX sXsHsY produto
TL TL-1
js

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Definição jsdtetxsXtx st
;
Exponencial direita
R;1 tuetx t
1
tx
t
0
0
1lim1
0
01
ts
t
ts
tsstt
ess
e
dtedtetuesX
0 para sRe
)Re(;1
1 ss
tue t
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
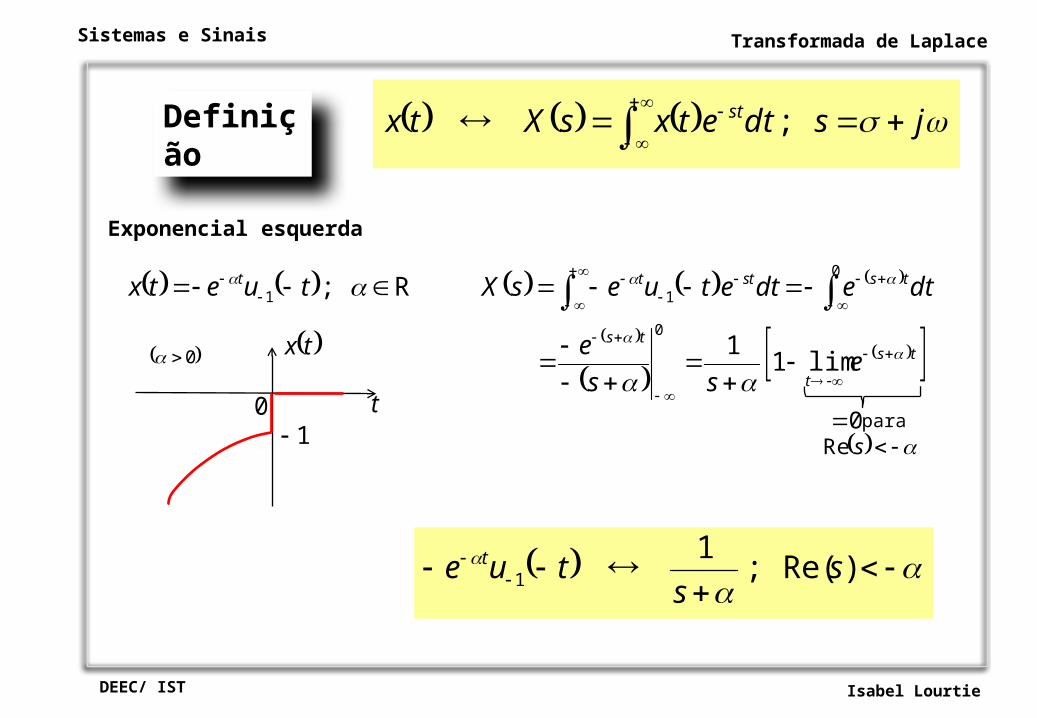
Definição jsdtetxsXtx st
;
0 para sRe
)Re(;1
1 ss
tue t
Exponencial esquerda
R;1 tuetx t
1
tx
t
0
0
ts
t
ts
tsstt
ess
e
dtedtetuesX
lim110
0
1

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Definição
)Re(;1
1 ss
tue t
1 tx
t
0
0 sRe
sIm
)Re(;1
1 ss
tue t
1
tx
t
0
0 sRe
sIm
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
sRe
sIm
1
tue t1
2TL tue t
1TL
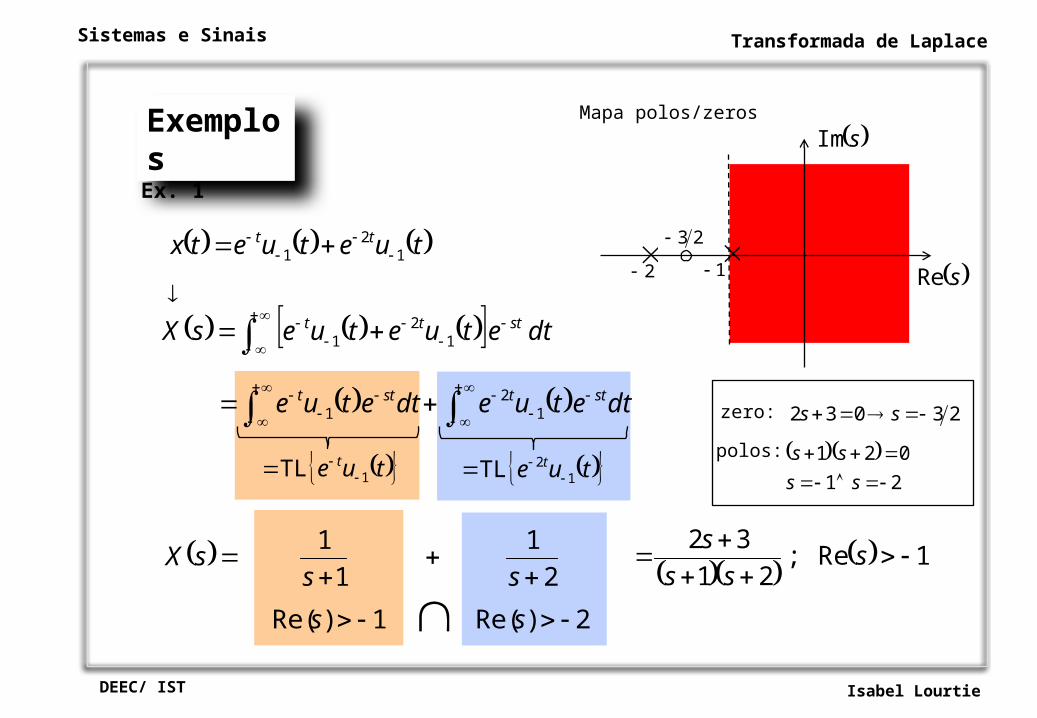
Exemplos
Ex. 1
tuetuetx tt1
21
dtetuedtetue
dtetuetuesX
sttstt
sttt
12
1
12
1
2
11
1
ss
sX
2)Re(1)Re( ss
1Re;21
32
sss
s
Mapa polos/zeros
2
23
zero: 23032 ss
21021
sssspolos:

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
2Re3Replano
24
322
sss
sssX
Exemplos
Ex. 2
tuetuettx tt
12
13 422
ss
tue
ss
tue
st
t
t
Re;1
Re;1plano;1
1
1
Tabela
tuetuetsX tt
12
13 TL4TL2TL2
2Re3;23222
2
ssssssX sRe
sIm
3 2
Mapa polos/zeros
1
j
j

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Exemplos
Ex. 3
tuetuetx tt1
21
3 42
tuetuesX tt1
21
3 TL4TL2
ss
tue
ss
tue
t
t
Re;1
Re;1
1
1
Tabela
2Re3Re
24
32
ss
sssX
não tem transformada de Laplace tx

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
P1 A RC é constituída por faixas do plano s paralelas ao eixo imaginário.
P2 A RC não contém polos.
Propriedades da Região de Convergência (RC)
P3 Se for de duração finita e se existir pelo menos um valor de para o qual a transformada de Laplace converge, então a RC é o próprio plano , exceptuando eventualmente as rectas ou . sRe sRe
tx s
s

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades da Região de Convergência (RC)
P4
Re(s)
Im(s)
Se for um sinal direito e se a recta pertencer à RC, então todos os valores de tais que também pertencem à RC. tx 0Re s
s 0Re s
Re(s)
Im(s)
P5 Se for um sinal esquerdo e se a recta pertencer à RC, então todos os valores de tais que também pertencem à RC.
tx 0Re ss 0Re s

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades da Região de Convergência (RC)
P6
Re(s)
Im(s)
Se for um sinal bilateral e se a recta pertencer à RC, então a RC é uma faixa do plano que contém a recta .
tx 0Re ss 0Re s
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
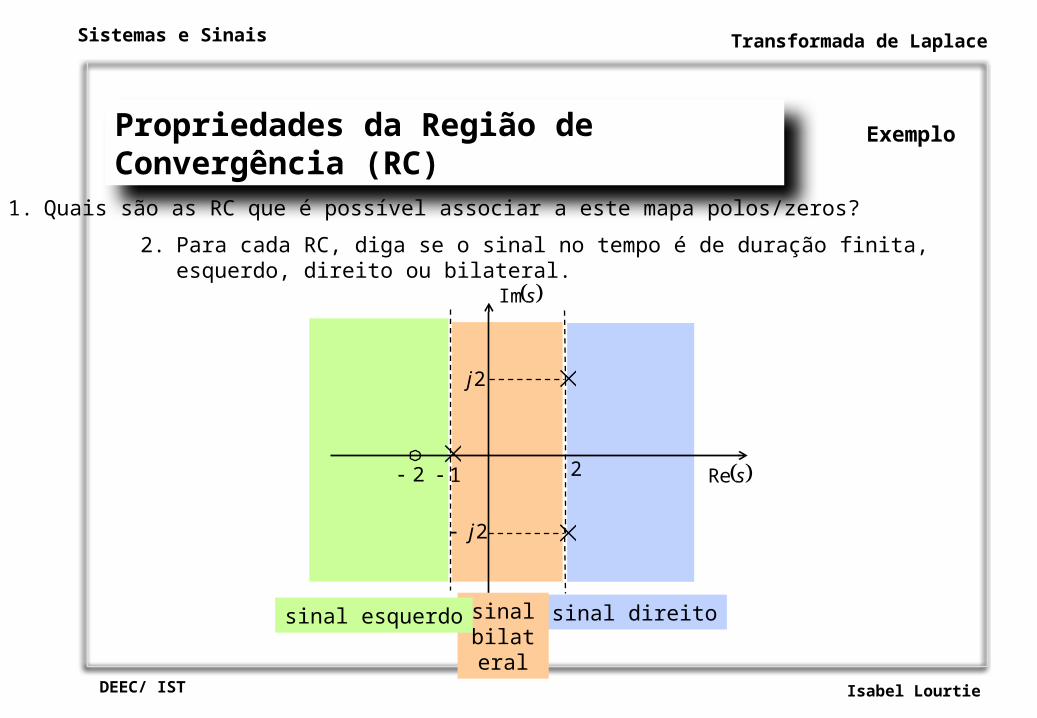
Propriedades da Região de Convergência (RC) Exemplo
2j
sRe
sIm
212
2j
1. Quais são as RC que é possível associar a este mapa polos/zeros?
2. Para cada RC, diga se o sinal no tempo é de duração finita, esquerdo, direito ou bilateral.
sinal direitosinalbilateral
sinal esquerdo

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
02
Transformada de Laplace inversa Funções racionais
1Re;31
2
s
ssssX
1º Expansão em fracções simples de X(s)
31312
sB
sA
ssssX
313
ss
BAsBA
31
032
BA
BABA
1Re;3
31
1
sss
sX

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
3Re s 1Re s
Transformada de Laplace inversa Funções racionais
2º Identificação da RC associada a cada uma das fracções
1Re;3
31
1
sss
sX
sIm
sRe 3 1
3º Determinação, por simples inspecção, da transformada de Laplace inversa de cada um dos termos
tuetuetx tt1
31 3

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
3Re s
Transformada de Laplace inversa Funções racionais
E se…
obtém-se…
tuetuetx tt1
31 3
1Re s
1Re3;3
31
1
sss
sX
sIm
sRe 3 1

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
YR
3Re; s
P1: Linearidade
sXtx
sXtx22
11
Se
2
1
RRCRRC
então sbXsaXtbxtax 2121 21 RRRC
Propriedades da transformada de Laplace
Ex.
2Re;2
111
s
ssXtx
2Re;32
122
s
sssXtx
txtxty 21 3
132
232
1332
12
1
sss
sss
ssss
sY
2
21 RR
sRe3
sIm
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades da transformada de Laplace
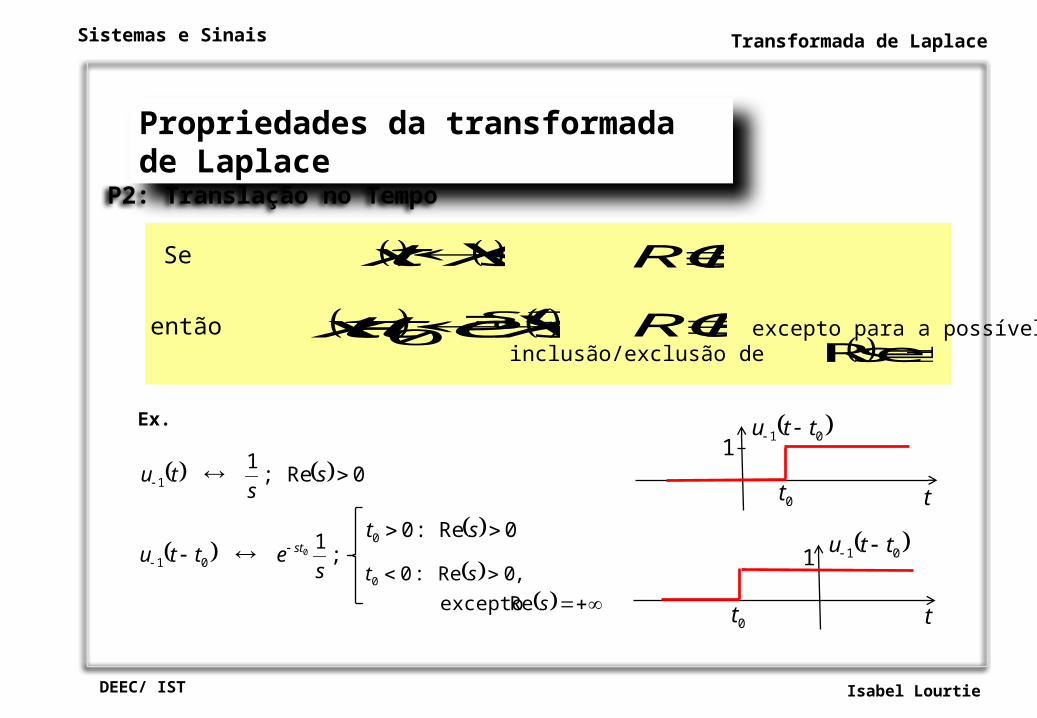
P2: Translação no Tempo
sXtx Se RRC
então sXettx st00
RRC excepto para a possível inclusão/exclusão de sRe
Ex.
0Re;11 s
stu
;10
01 settu st
0Re:00 st
t
01 ttu 1
0t
s
stReexcepto,0Re:00
t
01 ttu
0t
1

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
P3: Translação no Domínio da Transformada
sXtx Se RRC
então 00 ssXtxe ts 0Re sRRC
Propriedades da transformada de Laplace
Ex.
0Re;1111 s
ssXtutx
;1
001212
0
ssssXsXtuetx ts
00 ReRe0Re ssss

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
P4: Mudança de Escala
Propriedades da transformada de Laplace
sXtx Se RRC
então
asX
aatx 1
aRRC
Ex.
2Re;2
111
21
ss
sXtuetx t
;6
1
23
131
3313 1212
sssXsXtxtx 6Re2
3Re
ss
tue
tuet
t
16
16 3

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
YR
2Re; s
Propriedades da transformada de Laplace
P5: Convolução
sXtx
sXtx22
11
Se
2
1
RRCRRC
então sXsXtxtx 2121 21 RRRC
Ex.
2Re;21
11
ssssXtx
1Re;1
122
s
ssXtx
txtxty 21
1
21 RR
2
11
121
sss
ssY
sRe2
sIm

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
P6: Diferenciação no Domínio do Tempo
sXtx Se RRC
então ssXdt
tdx RRC
Propriedades da transformada de Laplace
Ex. 1
0Re;11 s
stu
studtdt plano;11
Ex. 2
2Re;2
ss
ssX
tuess
t1
22Re;2
1
ttuetetuetuedtdtx tttt
1
221
21
2 22
Tabela:
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
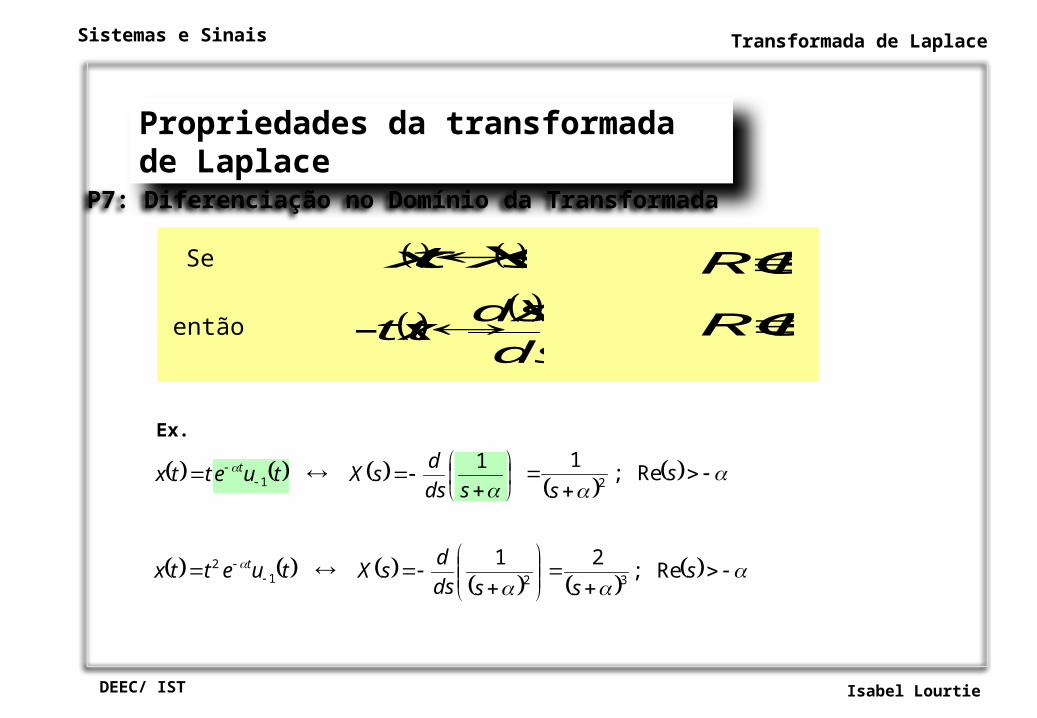
sdsdsXtuettx t 1
1
Ex.
Propriedades da transformada de Laplace
P7: Diferenciação no Domínio da Transformada
sXtx Se RRC
então ds
sdXttx RRC
s
sRe;1
2
sssds
dsXtuettx t Re;21321
2

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
P8: Integração no Domínio do Tempo
sXtx Se RRC
então sXs
dxt 1
0Re sRRC
Propriedades da transformada de Laplace
Nota: pela propriedade da convolução
0Re;1)(1 sRRCs
sXtutxdx X
t
Ex.
0Re;11 s
sdtu
t st plano;1

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Diferenciação no domínio da transformada Translação no domínio da transformada
Translação no tempo
Exemplos
Ex. 1 Sabendo que , determine a transformada de Laplace de tuetx t 13
55 2 txetty tj
55 22
txettwety tjtj
tuetx t 13
ttxtz
555
txttztw
3Re;3
1
s
ssX
3Re;3
12
s
ssX
dsdsZ
;3
12
55
sesZesW ss
ss Re.excl3Re
;
3212 2
25
jsejsWsY js
ss Re.excl3Re

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Translação no tempo
Diferenciação no tempoExemplos
Ex. 2 Sabendo que , determine o sinal . ty 2Re;2
3
ss
sesY s
2Re;2
1
s
ssX
2Re;2
ss
sssXsZ
2Re;2
133
ss
sesZesY ss
tuetx t1
2
ttue
tetuetxdtdtz
t
tt
12
21
2
2
2
332
3
132
ttue
tzty
t
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades da transformada de Laplace
P9: Teorema do Valor Inicial
Se para e se não contiver impulsos ou singularidades de ordem superior na origem , o limite de quando por valores positivos é
ssXxs
lim0
0tx 0t tx 0t tx 0t
P10: Teorema do Valor Final
Se para e se convergir para um valor constante quando , então
ssXtxst 0limlim
0tx 0t txt

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Exemplo ssXxs
lim0TVI:
ssXtxst 0limlim
TVF: 0Re;2
107
sssssX
721
107lim
2107lim
2107lim0
s
sss
ssssx
sss
52107lim
2107limlim
00
s
ssssstx
sst
tuetutxsssss
ssX t1
21 250Re;
21215
2107
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
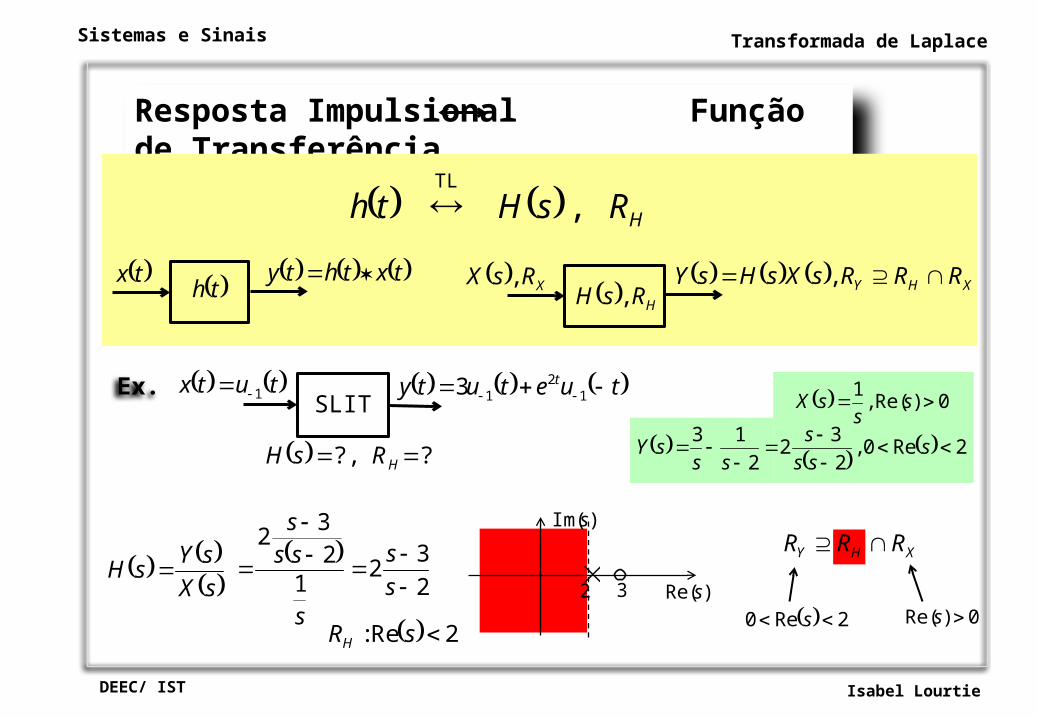
2Re: sRH
Resposta Impulsional Função de Transferência
txthty tx th XHY RRRsXsHsY , XRsX , HRsH ,
HRsHth ,TL
2Re0,232
213
ssss
sssY
0)Re(,1 s
ssX
Ex.SLIT
tutx 1 tuetuty t 12
13
??, HRsH
sXsYsH
2321
232
ss
s
sss
)Re(s
)Im(s
32
XHY RRR
2Re0 s 0)Re( s

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
tuetuety tt
12
12 34
31
tuetuety tt1
211 3
431
2Re;21
21
sss
ssY
Resposta no Tempo
XHY RRR
sXsHsY
Exemplo
HRsH , tx ?ty
1Re;12
ssssH
tuetx t1
21 1. 2Re;
21
1
ss
sX
tuetx t 12
22.
2Re;2
12
s
ssX
2Re1;21
22
sss
ssY
2Re1;23
4
13
12
s
sssY
2Re;2
34
13
11
s
sssY
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
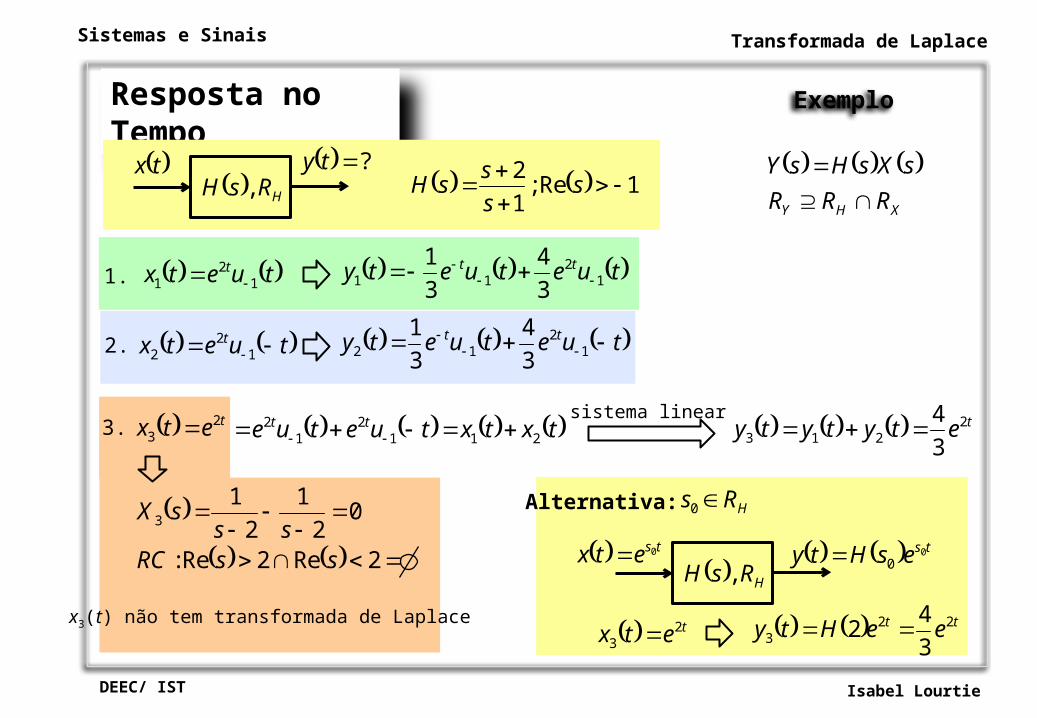
tetx 23 tt eeHty 22
3 342 x3(t) não tem transformada de Laplace
Resposta no Tempo
XHY RRR
sXsHsY
Exemplo
HRsH , tx ?ty
1Re;12
ssssH
tuetuety tt1
211 3
431
tuetx t
12
1 1.
tuetuety tt
12
12 34
31 tuetx t 1
222.
tetx 23 3. txtxtuetue tt
2112
12 tetytyty 2
213 34
sistema linear
HRsH , tsetx 0 tsesHty 0
0
Alternativa: HRs 0
2Re2Re:
02
12
13
ssRCss
sX
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
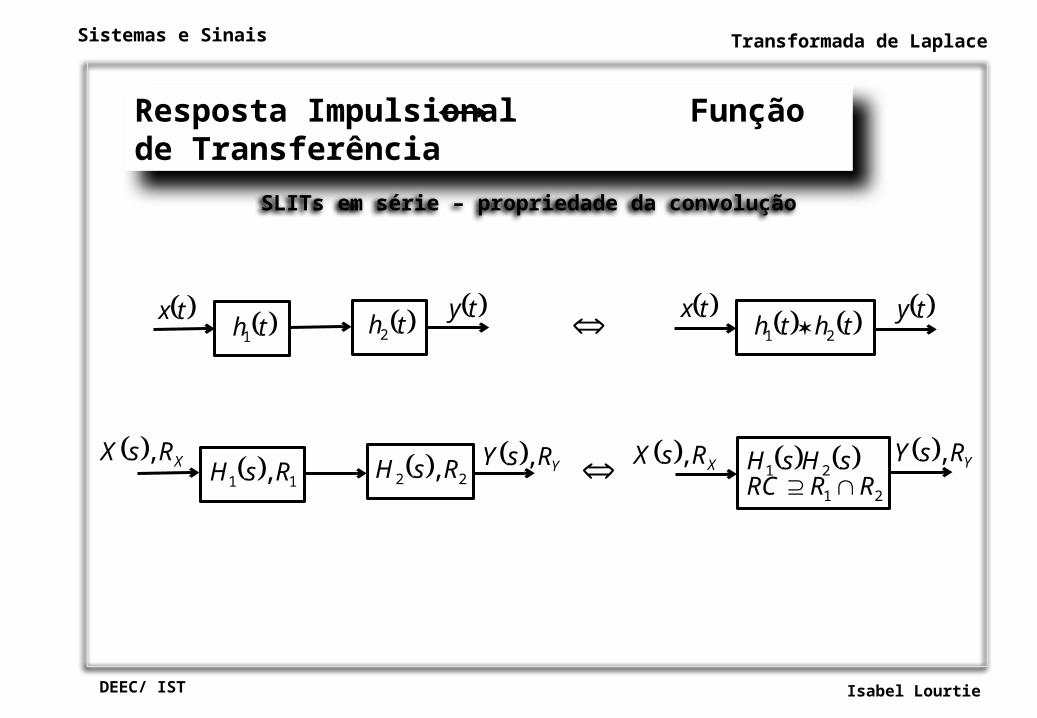
SLITs em série – propriedade da convolução
Resposta Impulsional Função de Transferência
ty tx th2 th1 thth 21 tx ty
XRsX , 11 , RsH 22 , RsH YRsY , 21
21RRRC
sHsH
XRsX , YRsY ,

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Resposta Impulsional Função de Transferência
SLITs em paralelo – propriedade da linearidade
thth 21 tx ty ty tx
th2
th1
11 , RsH
22 , RsH
XRsX , YRsY , 21
21RRRCsHsH
XRsX , YRsY ,
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
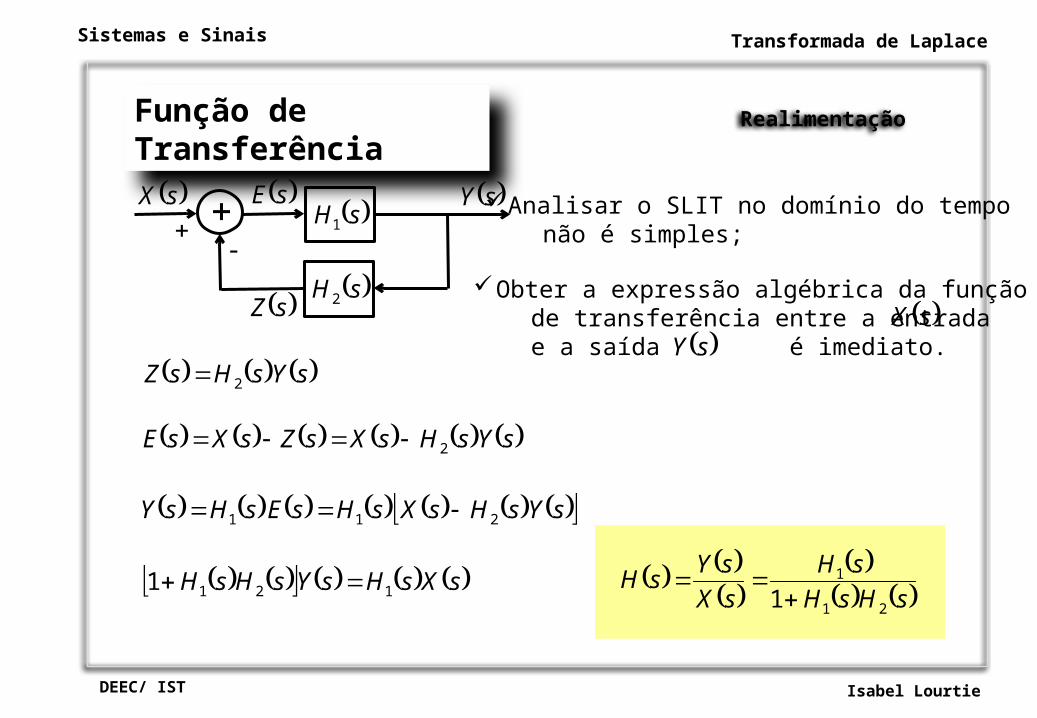
Função de Transferência Realimentação
Analisar o SLIT no domínio do tempo não é simples;
Obter a expressão algébrica da função de transferência entre a entrada e a saída é imediato.
sX sY
sZ
sE sX sY sH1
sH 2
sYsHsZ 2
sYsHsXsZsXsE 2
sYsHsXsHsEsHsY 211
sXsHsYsHsH 1211
sHsH
sHsXsYsH
21
1
1

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Equação Diferencial Função de Transferência
tySLIT
tx
M
kk
k
k
N
kk
k
k txdtdbty
dtda
00
M
kk
k
k
N
kk
k
k txdtdbty
dtda
00
TLTL
M
kk
k
k
N
kk
k
k txdtdbty
dtda
00
TLTLLinearidade
Diferenciação no tempo sXsbsYsa kM
kk
N
k
kk
00
sXsbsYsa kM
kk
N
k
kk
00
N
k
kk
kM
kk
sa
sb
sXsYsH
0
0

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
3
1
ssX
sYsH
Equação Diferencial Função de Transferência
tySLIT
tx
M
kk
k
k
N
kk
k
k txdtdbty
dtda
00
N
k
kk
kM
kk
sa
sbsH
0
0
A equação diferencial não dá informação sobre a região de convergência de . sH
É necessário informação adicional, nomeadamente sobre a estabilidade ou causalidade do SLIT, para inferir a região de convergência de . sH
E a região de convergência de ? sH
Ex.SLIT
tx ty txtytydtd
3
sXsYssY 3
TL

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades dos SLITs SLIT causal: 0,0 tht
1. th de duração limitada com 0iT
t
th
iT fT
A região de convergência de é todo o plano incluindo a recta
sHs sRe
Ex. 1
0;Re0;Re
excluindoplano;0
00
0
tsts
sesHttth st
t
th
00 tsistema causal:
0tt
HRs Re
00 t
0tt
sistema não causal: HRs Re

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades dos SLITs SLIT causal: 0,0 tht
1. th de duração limitada com 0iT
t
th
iT fT
A região de convergência de é todo o plano incluindo a recta
sHs sRe
Ex. 2 fi TtuTtuth 11
0e0;Re0e0;Re0e0;Re
excluindoplano;1
fi
fi
fi
sTsT
TTsTTsTTs
ss
eesH fi
t
th
sistema causal: HRs Re
iT fT
1
sistema não causal: HRs Re
iT fTiT fTsistema não causal: HRs Re

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades dos SLITs SLIT causal: 0,0 tht
1. th de duração limitada com 0iT
t
th
iT fT
A região de convergência de é todo o plano incluindo a recta
sHs sRe
ssRH Reexcluindoplano:
sRe
sIm
ssXsYsH
sistema não causal
Ex. 3 txdtdty
SLIT tx
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
2Re s
ss
Reexcl. plano
21
sss
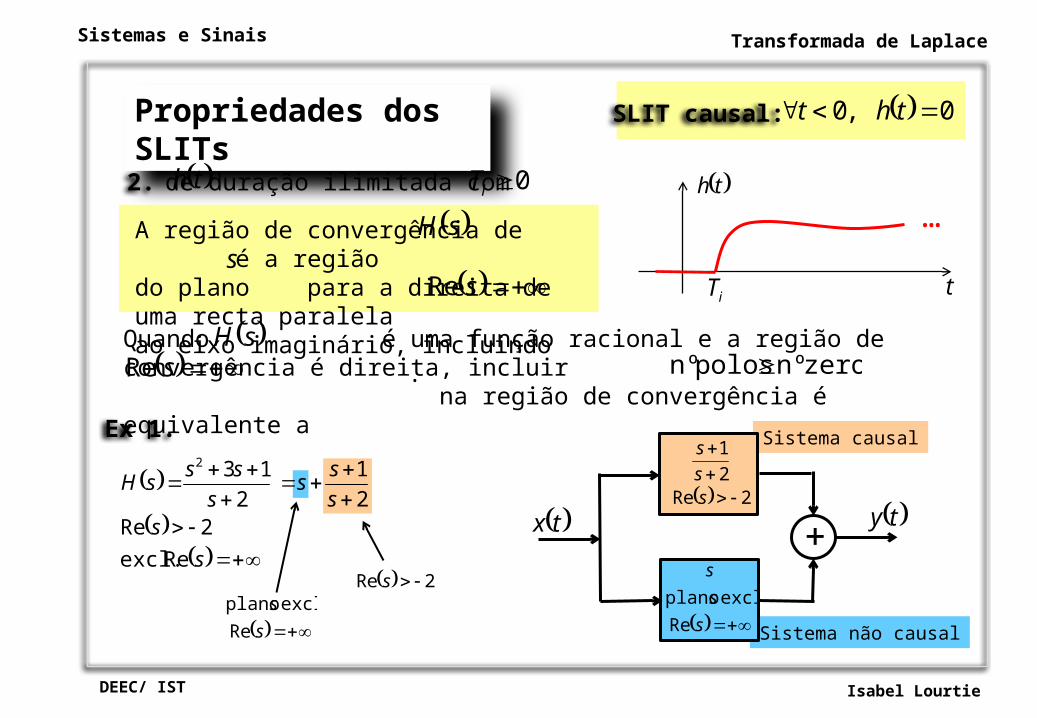
Propriedades dos SLITs SLIT causal: 0,0 tht
A região de convergência de é a região do plano para a direita de uma recta paralela ao eixo imaginário, incluindo .
sHs
sRe
2. th de duração ilimitada com 0iT
t
th
iT
…
Quando é uma função racional e a região de convergência é direita, incluir na região de convergência é equivalente a .
sH sRe zeros nº polosnº
Sistema não causal
Sistema causalEx 1.
ss
ssssH
Re excl. 2Re
2132
2Re21
sss
tx ty
sss
Reexcl. plano

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades dos SLITs SLIT causal: 0,0 tht
A região de convergência de é a região do plano para a direita de uma recta paralela ao eixo imaginário, incluindo .
sHs
sRe
2. th de duração ilimitada com 0iT
t
th
iT
…
Quando é uma função racional e a região de convergência é direita, incluir na região de convergência é equivalente a .
sH sRe zeros nº polosnº
Ex 2.
)Re(s
)Im(s
Sistema não causal
)Re(s
)Im(s
Sistema causal
)Re(s
)Im(s
Sistema não causal

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
condição necessária para que o sistema seja estável
1
dteeth tjt
js
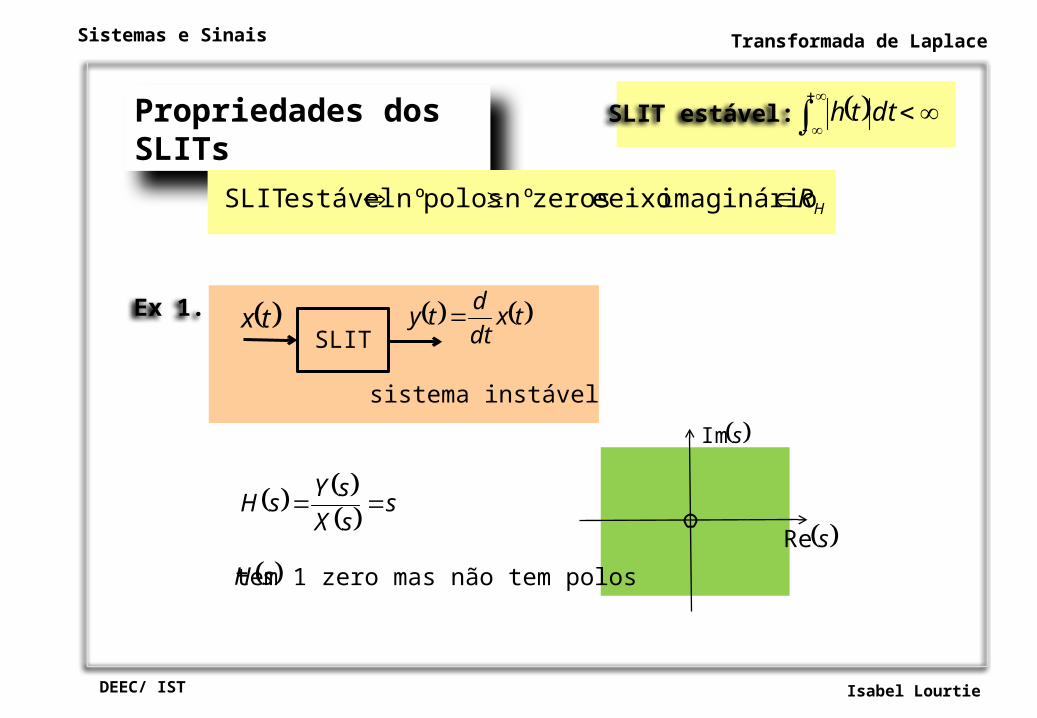
Propriedades dos SLITs SLIT estável:
dtth
dtethsH st
dteeth tjt
dteth t
Para , i.e., 0 js
dtthjH quando o SLIT é estável.
HR imaginário eixo
HR imaginário eixo e zeros nº polos nºestável SLIT
Para racional, a condição anterior é também condição suficiente desde que ,i.e.
sH zeros nº polos nº
DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
tem 1 zero mas não tem polos sH
sistema instável
Propriedades dos SLITs SLIT estável:
dtth
HR imaginário eixo e zeros nº polos nºestável SLIT
Ex 1. txdtdty
SLIT tx
sRe
sIm
ssXsYsH

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades dos SLITs SLIT estável:
dtth
HR imaginário eixo e zeros nº polos nºestável SLIT
Ex 2.
)Re(s
)Im(s
Sistema estável
)Re(s
)Im(s
Sistema instável
)Re(s
)Im(s
Sistema instável

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
3Re s
Propriedades dos SLITs
3Re s
SLIT causal
sRe
sIm
3 sRe
sIm
3
SLIT estável
Exemplo:
SLIT tx ty txtyty
dtd
3 3
1
ssX
sYsH
equação diferencial função de transferência

DEEC/ IST Isabel Lourtie
Sistemas e Sinais Transformada de Laplace
Propriedades dos SLITs
Exemplo tySLITcausal
tx
Valor final da resposta à entrada escalão unitário: 5lim
tyt
Função de transferência do sistema:
1. Sistema causal: 1Re: sRH
2. Mapa polos/zeros: 222
112
2
sssK
jsjssKsH
Mapa polos/zeros
sRe
sIm
1
j
j
2
3. Teorema do valor final: 55221limlimlim
00
KK
sssHssYty
sst
1Re;22
25 2
s
ssssH


















