Curvas
22
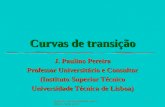
Capítulo 4 Curvas A noção de curva é bastante familiar. Se pedirmos para que se dê um exemplo de uma curva, certamente todos terão em mente alguns subconjuntos de R 2 ou R 3 como por exemplo uma circunferência, uma elipse ou uma recta. Sob o ponto de vista intuitivo, uma curva será um conjunto de pontos que se pode descrever com um único parâmetro. A definição que iremos introduzir define curva não como um subconjunto de R 2 ou R 3 mas sim como uma função. O conjunto de pontos de R 2 ou R 3 será designado por traço da curva. Claro que duas curvas distintas podem ter o mesmo traço. Definição 43 Uma curva de R n é uma função α : I ⊆ R → R n t → α(t) em que I é um intervalo de R. O contradomínio de α diz-se traço ou trajectória da curva. Uma curva α diz-se uma curva simples se e só se ∀t 1 ,t 2 ∈ int(I ),α(t 1 ) = α(t 2 ). Diz-se uma curva fechada se e só se α(a)= α(b). Exemplo 65 α : [0, 2π] → R 2 t → (2 cos t, 2 sin t) Como facilmente se constata, o traço da curva α é uma circunferência de centro na origem e raio 2. tr(α)= (x, y) ∈ R 2 : x 2 + y 2 =4
-
Upload
jamerson-ramos -
Category
Documents
-
view
4 -
download
0
Transcript of Curvas

Capítulo 4
Curvas
A noção de curva é bastante familiar. Se pedirmos para que se dê umexemplo de uma curva, certamente todos terão em mente alguns subconjuntosde R
2 ou R3 como por exemplo uma circunferência, uma elipse ou uma recta.
Sob o ponto de vista intuitivo, uma curva será um conjunto de pontos que sepode descrever com um único parâmetro. A definição que iremos introduzirdefine curva não como um subconjunto de R
2 ou R3 mas sim como uma
função. O conjunto de pontos de R2 ou R
3 será designado por traço dacurva. Claro que duas curvas distintas podem ter o mesmo traço.
Definição 43 Uma curva de Rn é uma função
α : I ⊆ R → Rn
t 7→ α(t)
em que I é um intervalo de R. O contradomínio de α diz-se traço outrajectória da curva. Uma curva α diz-se uma curva simples se e sóse ∀t1, t2 ∈ int(I), α(t1) 6= α(t2). Diz-se uma curva fechada se e só seα(a) = α(b).
Exemplo 65α : [0, 2π] → R
2
t 7→ (2 cos t, 2 sin t)
Como facilmente se constata, o traço da curva α é uma circunferência decentro na origem e raio 2.
tr(α) ={
(x, y) ∈ R2 : x2 + y2 = 4
}

96 Cap. 4: Curvas
2
2
1
1
0
-1
0
-2
-1-2
Figura 4.1: Representação geométrica de uma circunferência

97
A curva α é uma curva simples uma vez que ∀t1, t2 ∈ int([0, 2π]) =]0, 2π[ , α(t1) 6= α(t2). É uma curva fechada uma vez que α(0) = α(2π).
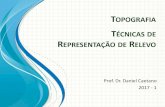
Exemplo 66α : R → R
2
t 7→ (2 cos t, 2 sin t, 3t)
Neste exemplo, o traço da curva α a hélice cuja projecção no plano xy é
-2-2
-1-1
000
11
4
22
8
12
16
Figura 4.2: Representação geométrica de uma hélice
a circunferência de centro na origem e raio 2. À medida que t percorreintervalos de amplitude 2π o traço de α descreve uma volta completa emtorno do eixo dos zz e a coordenada z aumenta 6π unidades.
Definição 44 Seja α : I ⊆ R → Rn uma curva. O vector α′(t0), se exis-
tir, designa-se por vector velocidade da curva α no instante t0. Quandoα′(t0) 6= 0 este vector define a direcção da tangente ao traço da curva no

98 Cap. 4: Curvas
ponto α(t0). Ao escalar v(t0) = ‖α′(t0)‖ é usual chamar velocidade escalar
no instante t0. Uma curva diz-se curva regular se e só se α é uma funçãovectorial de classe C1 e além disso
α′(t) 6= 0,∀t ∈ I.
Um ponto α(t0) tal que α′(t0) = 0 diz-se ponto singular. Nesse casodizemos que a curva α tem uma singularidade no instante t = t0.
Seja (x, y) ∈ R2. Designemos por ρ a distância de (x, y) à origem e por θ
o ângulo do vector posição com o eixo dos xx medido no sentido positivo talcomo a figura 4.3 ilustra. ρ e θ relacionam-se com as coordenadas cartesianas
Figura 4.3: Coordenadas Polares
do modo seguinte:{
x = ρ cos θ
y = ρ sin θ
onde{
ρ =√
x2 + y2
tan θ = y
x
com ρ ≥ 0 e 0 ≤ θ ≤ 2π. Consideremos a transformação que a cada ponto(ρ, θ) do plano ρθ faz corresponder um ponto (ρ cos θ, ρ sin θ) do plano xy.As coordenadas polares são muito usadas para descrever traços de curvas.Por exemplo, a circunferência de centro na origem e raio 2 fica descrita emcoordenadas polares pela equação,
ρ = 2, 0 ≤ θ ≤ 2π

99
Vejamos outros exemplos usando coordenadas polares
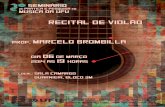
Exemplo 67 A equaçãoρ = 1 + cos θ
com θ ∈ [0, 2π] descreve o traço da curva
α : [0, 2π] → R2
θ 7→ ((1 + cos θ) cos θ, (1 + cos θ) sin θ)
que se designa por cardióide. Ambas as componentes de α são funções de
-0,5
2
0
-1
1,5
1
0,5
10,50
Figura 4.4: Representação geométrica de um cardióide
classe C1 logo α é uma função de classe C1. O vector velocidade no instantet é
α′(θ) =(
− sin θ cos θ − (1 + cos θ) sin θ,− sin2 θ + (1 + cos θ) cos θ)

100 Cap. 4: Curvas
Os pontos singulares são os pontos (x0, y0) tal que α′(θ0) = 0 isto é, ospontos que verificam
{
− sin θ cos θ − (1 + cos θ) sin θ = 0− sin2 θ + (1 + cos θ) cos θ = 0
m{
− sin θ (1 + 2 cos θ) = 0− sin2 θ + (1 + cos θ) cos θ = 0
m{
− sin θ = 0 ∨ (1 + 2 cos θ) = 0− sin2 θ + (1 + cos θ) cos θ = 0
m{
sin θ = 0(1 + cos θ) = 0
⇐⇒ θ = π
Logo α(π) = (0, 0) é o único ponto singular. Dizemos que a curva α temuma singularidade no instante θ = π.
Exemplo 68 Seja α : I ⊆ R → Rn uma curva cujo traço descreve o mo-
vimento de um ponto P de uma circunferência de raio R quando esta rolaao longo de uma linha recta. O traço desta curva designa-se por ciclóide.
Supondo que escolhemos como parâmetro para descrever a curva o ângulode rotação θ e que θ = 0 quando P está na origem, a curva fica definidapor r(θ) = (R (θ − sin θ) , R (1− cos θ)), θ ∈ R . Na figura seguinte podemosvisualizar o traço de uma ciclóde com R = 2 para 0 ≤ θ ≤ 2π. Uma dasprimeiras pessoas a estudar a ciclóide foi Galileu, que propôs a forma de umaciclóide para a construção dos arcos de pontes. É também frequente usar aciclóide para a definição de um troço de estrada que liga duas vias em linhasrectas.
4.1 Função Comprimento
Podemos definir o comprimento da trajectória de uma dada curva como olimite do comprimento das poligonais inscritas. Esta ideia intuitiva leva-nosà seguinte definição

4.1 Função Comprimento 101
121086420
4
0
3
2
1
Figura 4.5: Traço de uma ciclóide

102 Cap. 4: Curvas
Definição 45 Seja α : I = [a, b] ⊆ R → Rn uma curva. O comprimento do
traço da curva é
L =
b∫
a
‖α′(t)‖ dt
O comprimento do traço da curva é uma propriedade global e não dependeda parametrização usada. A demonstração formal é apresentada posterior-mente quando estudarmos os integrais de linha. Por ser uma propriedadeque não depende da parametrização é usual referir o comprimento da curvaem vez de comprimento do traço da curva.
Definição 46 Seja t0 um instante qualquer fixo. A função comprimento
de α é a função h : I = [a, b] → R definida por
h(t) =
t∫
t0
‖α′(τ)‖ dτ
Se associarmos ao traço da curva a trajectória de uma partícula, podemosafirmar que s = h(t) representa o comprimento da trajectória percorrida pelapartícula entre os instantes t0 e t. Observe-se que
ds
dt= h′(t) = ‖α′(t)‖ = v(t)
o que significa que h aplica bijectivamente I num intervalo J .
Exemplo 69 Seja α : [−1, 1] ⊆ R → R2 tal que α(t) = (t, t2). Calculemos
agora o comprimento da trajectória de α. Ora α′(t) = (1, 2t) e portanto

4.1 Função Comprimento 103
‖α′(t)‖ =√
1 + 4t2. Logo
L =
b∫
a
‖α′(t)‖ dt
=
1∫
−1
√
1 + (2t)2dt
=1
2
(
t
√
1 + (2t)2 +1
2ln
(
2t +
√
1 + (2t)2
)∣
∣
∣
∣
1
−1
)
=1
2
(
2√
5 +1
2ln
2 +√
5
−2 +√
5
)
=√
5 +1
2ln
(
2 +√
5)
Exemplo 70 Seja α : [0, 1] ⊆ R → R3 tal que α(t) = (
√2t, et, e−t). Calcu-
lemos o comprimento do traço de α. Ora α′(t) = (√
2, et,−e−t) e
‖α′(t)‖ =√
2 + e2t + e−2t
=
√
(et + e−t)2
= et + e−t
Portanto
L =
b∫
a
‖α′(t)‖ dt
=
1∫
0
(
et + e−t)
dt
= et − e−t∣
∣
1
0
= e− 1
e
Exemplo 71 Seja α : [0, 1] → R3 tal que α(t) = (2 cos t, 2 sin t, t) cujo traço
é uma hélice. Calculemos o comprimento do traço de α. Consideremos o

104 Cap. 4: Curvas
instante fixo t0 = 0. Como α′(t) = (−2 sin t, 2 cos t, 1)
L =
t∫
0
‖α′(τ)‖ dτ
=
t∫
0
(
et + e−t)
dt
= et − e−t∣
∣
1
0
= e− 1
e
4.2 Reparametrização
Definição 47 Seja α : I ⊆ R → Rn uma curva e h : J → I uma função real
de variável real contínua e bijectiva definida no intervalo J . A curva
β = α ◦ h : J ⊆ R → Rn
diz-se uma reparametrização de α. Como se observa, o traço de β é omesmo que o traço de α.
Exemplo 72 Seja α : [−1, 1] ⊆ R → R2 tal que α(t) = (t, t2). A curva
β : [−1, 1] ⊆ R → Rn tal que β(t) = (−t, t2) reparametriza α. De facto
β = α ◦ h em que
h : [−1, 1] → [−1, 1]
tal que h(t) = −t é uma função contínua e bijectiva. Observe-se que o traçode α e de β é o troço de parábola
{
(x, y) ∈ R2 : −1 ≤ x ≤ 1 ∧ y = x2
}
mas percorrido em sentido oposto.
Exemplo 73 Seja α : [0, 2π] → R2 tal que α(t) = (2 cos t, 2 sin t) cujo traço
é uma circunferência. Repametrizemos usando a função comprimento. Con-

4.2 Reparametrização 105
sideremos o instante fixo t0 = 0. Como ‖α′(t)‖ = ‖(−2 sin t, 2 cos t)‖ = 2
h(t) =
t∫
0
‖α′(τ)‖ dτ
=
t∫
0
2dτ
= 2τ |t0= 2t
Assim podemos afirmar que h aplica bijectivamente o intervalo [0, 2π] nointervalo [0, 4π]. Assim a função inversa h−1. Deste modo β = α ◦ s−1 :[0, 4π] → R
2 tal que β(s) = (2 cos s2, 2 sin s
2) reparametriza α. Observemos
que β′(s) = (− sin s2, cos s
2) e portanto ‖β′(t)‖ = 1.
No exemplo anterior verificámos que ao reparametrizar usando a funçãocomprimento obtivemos uma curva em que o vector velocidade tem norma 1.Isto sucede sempre que a parametrização é feita usando a função comprimentoe não somente neste caso particular. De facto podemos enunciar a seguinteproposição:
Proposição 10 Seja α : I ⊆ R → Rn uma curva regular. A curva obtida
a partir de α por reparametrização usando a função comprimento de arco épercorrida com velocidade escalar constante e igual a 1.
Demonstração: Seja s função comprimento de α, s : [a, b] → R definidapor
h(t) =
t∫
t0
‖α′(τ)‖ dτ
s = h(t) representa o comprimento da trajectória percorrida pela partículaentre os instantes t0 e t e portanto h(t) ≥ 0 e h(t) = 0 sse t = t0. Uma vezque h′(t) = ‖α′(t)‖ e a curva é regular segue-se que h′(t) > 0. Deste modo oque significa que h aplica bijectivamente I num intervalo J e podemos definira reparametrização da curva α usando a função comprimento,
β = α ◦ h−1 : J → Rn

106 Cap. 4: Curvas
Calculemos agora o vector velocidade, usando a regra da cadeia
β′(s) =(
α ◦ h−1)′
(s)
= α′(h−1(s)).(h−1)′(s)
Mas como sabemos
(h−1)′(s) =1
h′(t)=
1
‖α′(t)‖Logo
β′(s) = α′(t).1
‖α′(t)‖e portanto β′(s) é um vector unitário, isto é, ‖β′(s)‖ = 1 cqd
4.3 Triedo de Frenet
Para uma dada curva definimos já o vector velocidade. Consideremos agorao vector unitário com direcção e sentido do vector velocidade, que não é maisdo que o vector velocidade se a curva estivesse parametrizada pela funçãocomprimento.
Definição 48 Seja α : I ⊆ R → Rn uma curva regular. O vector
T (t) =α ′(t)
‖α′(t)‖diz-se vector tangente unitário à trajectória de α no instante t.
Note-se que usando a definição anterior podemos escrever α ′(t) = ‖α′(t)‖T (t).Usando a notação v(t) = ‖α′(t)‖ para a velocidade escalar, podemos escrever
α ′(t) = v(t)T (t)
Definição 49 Seja α : I ⊆ R → Rn uma curva. O vector α′′(t0), se existir,
designa-se por vector aceleração no instante t0.
Definição 50 Seja α : I ⊆ R → Rn uma curva regular de classe C2 e tal
que ‖T ′(t)‖ 6= 0 . O vector
N(t) =T ′(t)
‖T ′(t)‖diz-se vector normal unitário.

4.3 Triedo de Frenet 107
Observe-se que mesmo para uma curva regular pode acontecer que ‖T ′(t)‖ =0 e nesses casos o vector normal, N(t), não está definido.
Proposição 11 Seja α : I ⊆ R → Rn uma curva regular de classe C2.
Então T (t) ⊥ N(t).
De facto, uma vez que ‖T ′(t)‖ = 1 segue-se T (t) · T (t) = 1. Derivandoambos os membros desta equação, obtemos
T ′(t) · T (t) + T (t) · T ′(t) = 0 ⇐⇒ T (t) · T ′(t) = 0
e como N(t) é o versor com direcção e sentido de T ′(t) segue-se que
T (t) ·N(t) = 0
ou seja T (t) ⊥ N(t).
Definição 51 Seja α : I ⊆ R → Rn, n = 2, 3, uma curva regular de classe
C2 e tal que ‖T ′(t)‖ 6= 0. Chamamos vector binormal ao vector
B(t) = T (t)×N(t)
Pela propriedades do produto externo, podemos afirmar que ‖B(t)‖ = 1 eque B(t) é perpendicular ao plano definido pelos vectores T (t) e N(t). Destemodo fica definido um referêncial local, isto é, {T (t), N(t), B(t)} formamuma base ortonormada de R
3. Por outras palavras, (T,N,B) constitui umtriedo directo que se denomina por triedro de Frenet.
Exemplo 74 Determinemos o triero de Frenet para a curva c ujo traço éuma hélice
α : R → R2
t 7→ (cos t, sin t, t)
Ora
T (t) =
(
−√
2
2sin t,
√2
2cos t,
√2
2
)
N(t) = (− cos t,− sin t, 0)
B(t) =
(√2
2sin t,−
√2
2cos t,
√2
2
)
Na figura 4.7 podemos observar o triedo no instante t = π4.

108 Cap. 4: Curvas
-0,200,20,40,60,811,2
0
0,5
1
1,50
0,5
1
1,5
2
Triedo de Frenet
Figura 4.6: Triedo de Frenet no instante t = π4

4.4 Aceleração Tangencial e aceleração Normal 109
4.4 Aceleração Tangencial e aceleração Normal
Seja α : I ⊆ R → Rn uma curva. Admitamos que α admite segunda derivada.
Calculemos agora α′′(t). Ora
α′′(t) =d
dt(α′(t))
=d
dt(v(t)T (t))
=d
dt(v(t)) T (t) +
d
dt(T (t)) v(t)
mas ddt
(T (t)) = T ′(t) = ‖T ′(t)‖N(t), logo
α′′(t) = v′(t)T (t) + ‖T ′(t)‖ v(t)N(t) (4.1)
e portanto conclui-se então que a aceleração pode ser decomposta numa com-ponente tangencial e numa componente normal que representamos na formaseguinte
α′′(t) = aT (t) + aN(t)
onde aT (t) representa a aceleração tangencial e aN(t) a aceleração nor-
mal. Em termos físicos a componente tangencial mede a variação da veloci-dade escalar e a componente normal mede a variação da direcção do vectorvelocidade. Do exposto podemos afirmar que
aT (t) = (α′′(t) · T (t)) T (t)
eaN(t) = (α′′(t) ·N(t)) N(t) (4.2)
mas como T (t) = α ′(t)‖α′(t)‖
,
α′′(t) · T (t) = α′′(t) · α ′(t)
‖α′(t)‖segue-se que
aT (t) =
(
α′′(t) · α ′(t)
‖α′(t)‖2
)
α ′(t)
eaN(t) = α′′(t)− aT (t)
Deste modo é possível calcular a aceleração tangencial e a aceleração normalsem ser necessário o cálculo dos vectores T (t) e N(t).

110 Cap. 4: Curvas
4.5 Curvatura e Torsão
Proposição 12 Seja β : I ⊆ R → Rn uma curva regular de classe C2
parametrizada pela função comprimento. Então
T (s) = β′(s)
e se ‖β′′(s)‖ 6= 0
N(s) =β′′(s)
‖β′′(s)‖Vimos, na proposição 10, que se a curva está parametrizada pela função
comprimento então ‖β′(s)‖ = 1 e portanto
T (s) =β′(s)
‖β′(s)‖ = β′(s) (4.3)
logo
N(s) =β′′(s)
‖β′′(s)‖ (4.4)
Observe-se que ‖β′′(s)‖ pode ser um número real qualquer não positivo.Como veremos o valor de ‖β′′(s)‖ determina em parte o aspecto da curva.Daí a seguinte definição
Definição 52 Seja β : I ⊆ R → Rn uma curva regular de classe C2 para-
metrizada pela função comprimento. Então
k(s) = ‖β′′(s)‖designa-se por curvatura da curva em s. Se ‖β′′(s)‖ 6= 0 o inverso da cur-vatura designa-se por raio de curvatura. Alternativamente e considerando4.3 e 7.1, podemos escrever
T ′(s) = k(s)N(s)
Exemplo 75 Seja β : [0, 2Cπ] → R2 tal que β(s) = (C cos s
C, C sin s
C) a pa-
rametrização pela função comprimento da circunferência de centro na origeme raio C, C uma constante positiva. Observemos que β′(s) = (− sin s
C, cos s
C)
e portanto β′′(s) = (− 1C
cos s2,− 1
Csin s
2). A curvatura é
k(s) = ‖β′′(s)‖ =1
C
ou seja a curvatura da circunferência de centro na origem e raio C é cons-tante e igual a 1
C. Evidentemente que o raio de curvatura é C.

4.5 Curvatura e Torsão 111
Exemplo 76 Consideremos a recta de equação y = mx+b. Seja β : R → R2
tal que a parametrização pela função comprimento,
β(s) = (s√
1 + m2,
s√1 + m2
m + b)
Observemos que
β′(s) = (1√
1 + m2,
1√1 + m2
m)
e portanto ‖β′′(s)‖ = 1. O vector aceleração é o vector nulo, β′′(s) = (0, 0),logo a curvatura de uma recta é 0.
Definição 53 Seja β : I ⊆ R → Rn , n = 2, 3, uma curva regular de classe
C3 parametrizada pela função comprimento. Então
τ(s) = B′(s) ·N(s)
designa-se por torsão da curva em s. Alternativamente podemos escreverque τ(s) é o único escalar tal que
B′(s) = τ(s)N(s)
A curvatura e torsão são características intrínsecas das curvas e determi-nam de modo único o aspecto geométrico do traço da curva. No entanto quera curvatura quer a torsão podem ser de cálculo difícil pois as definições pres-supõem que se conhece a parametrização pela função comprimento. Vamosagora encontrar fórmulas para a curvatura e torsão para uma curva a partirde uma parametrização qualquer.
Seja α : I ⊆ R → Rn , n = 2, 3, uma curva regular de classe C3 parametri-
zada não necessária mente pela função comprimento e seja T (s) o vector tan-gente unitário calculado a partir da parametrização pela função comprimento.Então pela definição de curvatura , k(s) = ‖β′′(s)‖ = ‖T ′(s)‖. Usando agoraa derivada da função composta a atendendo a que ‖s′(t)‖ = ‖α′(t)‖ = v(t)
T ′(t) = T ′(s(t))s′(t)
e portanto
‖T ′(t)‖ = ‖T ′(s(t))s′(t)‖= ‖T ′(s(t))‖ ‖s′(t)‖= k(s(t))v(t)

112 Cap. 4: Curvas
Logo
k(t) =‖T ′(t)‖
v(t)=‖T ′(t)‖‖α′(t)‖ (4.5)
Podemos ainda deduzir uma outra expressão para a curvatura que não en-volve o vector T (t).
Proposição 13 Seja α : I ⊆ R → Rn , n = 2, 3, uma curva regular duas ve-
zes derivável, parametrizada não necessária mente pela função comprimento.A curvatura é dada por
k(t) =‖α ′(t)× α ′′(t)‖
‖α′(t)‖3
Demonstração: Partindo da expressão 4.1 que permite decompor o vectoraceleração temos que
α′′(t) = v′(t)T (t) + v(t)T ′(t)
segue-se pois que
α ′(t)× α′′(t) = α ′(t)× [v′(t)T (t) + v(t)T ′(t)]
e atendendo a que α ′(t) = v(t)T (t) e a que T (t)× T (t) = 0 temos
α ′(t)× α′′(t) = v2(t) [T (t)× T ′(t)]
logo‖α ′(t)× α′′(t)‖ = v2(t) ‖T (t)× T ′(t)‖
e como T e T ′ são ortogonais, ‖T (t)× T ′(t)‖ = ‖T (t)‖ ‖T ′(t)‖ = ‖T ′(t)‖
‖α ′(t)× α′′(t)‖ = v2(t) ‖T ′(t)‖
logo
‖T ′(t)‖ =‖α ′(t)× α′′(t)‖
v2(t)
e usando 4.5 segue-se que
k(t) =‖α ′(t)× α′′(t)‖
v3(t)(4.6)

4.5 Curvatura e Torsão 113
cqdVejamos agora que o traço de uma curva é uma recta se e só se a curvatura
é constante e igual a zero, o que justifica a ideia intuitiva de que a curvaturamede o afastamento da curva em relação à recta tangente.
Suponhamos que a curva é uma recta e é parametrizada pela funçãocomprimento β : R → R
3 definida por β(s) = P + su, onde u é o versordirector da recta e P um ponto da recta. Então β′(s) = u e β′′(s) = 0 peloque k(s) = 0,∀s ∈ R.
Suponhamos agora que k(s) = 0,∀s ∈ R. Então ‖T ′(s)‖ = ‖β′′(s)‖ = 0e por isso T (s) é um vector constante, ou seja, T (s) = β′(s) = T0. Porintegração obtemos
β(s) =
s∫
0
β′(t)dt
logoβ(s) = T0s + C, s ∈ R
onde C = (c1, c2, c3) é constante. Logo o traço de β é uma recta. Com oexposto demonstrámos a seguinte proposição
Proposição 14 Seja α : I ⊆ R → Rn , uma curva regular. O traço da
curva é uma recta se e só se a curvatura for nula em todos os pontos.
Exemplo 77 Determinar a curvatura da parábola y = x2 e estudar o modocomo varia a curvatura. Consideremos a parametrização da parábola, α :R → R
2 definida por α(t) = (t, t2). Segue-se que α′(t) = (1, 2t) e α′′(t) =(0, 2) . Deste modo
‖α ′(t)× α′′(t)‖ = ‖(1, 2t)× (0, 2)‖= ‖(0, 0, 2)‖= 2
Como v(t) = ‖(1, 2t)‖ =√
1 + 4t2 segue-se que
k(t) =2
(√1 + 4t2
)3 (4.7)
Pela observação do gráfico da função k facilmente se verifica que a curvaturanão se anula. É máxima para t = 0, isto é na origem a curvatura é máximae vale 2. A curvatura tende para zero quando t −→ ±∞. Geometricamenteisto significa que a parábola se assemelha a uma recta quando t −→ ±∞.

114 Cap. 4: Curvas
2
0
1,5
1
-2
0,5
0
-4 2
t
4
Figura 4.7: Curvatura da parábola y = x2

4.5 Curvatura e Torsão 115
Vejamos agora como calcular a curvatura quando a parametrização deque dispomos não é a parametrização pela função comprimento. Considere-mos primeiramente um caso particular, o caso em que o traço da curva estácontido num plano.
Proposição 15 Seja α : I ⊆ R → Rn , n = 2, 3, uma curva regular de
classe C3. O traço da curva está contido num plano se e só se a torsão fornula em todos os pontos.
Demonstração: Consideremos uma curva contida num plano P , da qualconhecemos a parametrização pela função comprimento. Então os vectoresT (s) e N(s) geram um plano plano paralelo a P que contém a origem. Logoo vector binormal, B(s) = T (s) × N(s) , é constante. Assim B ′(s) = 0.Como a torsão se pode definir por B ′(s) = τ(s)N(s) segue-se que τ(s) = 0.
Suponhamos agora que τ(s) = 0 para todo o s. Então B ′(s) = τ(s)N(s) =0 e portanto o vector binormal é um vector constante B (s) = B0. Para con-cluir que o traço da curva está num plano basta verificar que o produtointerno entre o vector posição e o vector binormal é constante, ou seja, que
β(s) ·B0 = C
Consideremos a função real de variável real definida por f(s) = β(s) · B0.Para mostrar que β(s) ·B0 = C basta mostrar que f ′(s) = 0. Ora
f ′(s) = β′(s) ·B0
= T (s) ·B0
= 0
uma vez que o vector binormal é ortogonal ao vector tangente. Assim
f ′(s) = 0 ⇒ f(s) = C
logo o traço da curva está contido no plano
(X − β(0)) ·B0 = 0
em que X = (x, y, z) cqdNo caso de a curva não ser uma curva plana, isto é, no caso de
‖α ′(t)× α′′(t)‖ 6= 0
a torsão pode ser calculada usando a proposição seguinte que frequentementeé usada como definição de torsão:

116 Cap. 4: Curvas
Proposição 16 Seja α : I ⊆ R → Rn , n = 2, 3, uma curva regular de
classe C3. A torsão é dada por
τ(t) =α ′′′(t)× α′′(t) · α ′(t)
‖α ′(t)× α′′(t)‖2
Exercício 14 Seja a > 0, b > 0 e c =√
a2 + b2. Considere a hélice parame-trizada pela função comprimento
α : [0, 2πc] → R2
s 7→(
a cos sc, a sin s
c, b s
c
)
Mostre que a torsão é constante e que τ(s) = − bc2
.
Exercício 15 Calcule a torsão da hélice parametrizada por
α : [0, +∞] → R2
t 7→ (cos t, sin t, t2)
Observação: Muitos autores definem torsão como sendo o simétrico de τ ,isto é, B′(s) = −τ(s)N(s).