CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL … · Além dos recursos apresentados anteriormente...
26
_____________________________________________________________ Faculdade de Tecnologia de Garça “Deputado Julio Julinho Marcondes de Moura” CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL MAURICIO DE SOUZA BANDEIRA ESTACIONAMENTO AUTOMATIZADO SISTEMA PARA GERENCIAMENTO E OTIMIZAÇÃO DE VAGAS DE ESTACIONAMENTO Garça 2017
Transcript of CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL … · Além dos recursos apresentados anteriormente...

_____________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Julio Julinho Marcondes de
Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
MAURICIO DE SOUZA BANDEIRA
ESTACIONAMENTO AUTOMATIZADO
SISTEMA PARA GERENCIAMENTO E OTIMIZAÇÃO
DE VAGAS DE ESTACIONAMENTO
Garça 2017

2
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
MAURICIO DE SOUZA BANDEIRA
SISTEMA PARA GERENCIAMENTO E OTIMIZAÇÃO
DE VAGAS EM ESTACIONAMENTO
Trabalho apresentado à Faculdade de
Tecnologia de Garça – FATEC, como
requisito para a conclusão do Curso de
Tecnologia em Mecatrônica Industrial.
Data de Aprovação: / /
Prof. Dr. José Antônio Poletto Filho
___________________________________
Prof. Me. Edson Mancuzo
___________________________________
Prof. Grad. Yuji Yamamoto
Garça 2017

3
SUMÁRIO
SUMÁRIO ........................................................................................................................................................ 3
Resumo: ........................................................................................................................................................... 4
Abstract: Nowaday: ........................................................................................................................................ 4
1.INTRODUÇÃO ............................................................................................................................................. 5
1.1-OBJETIVOS .......................................................................................................................................... 6
1.2 OBJETIVO ESPECÍFICO. .................................................................................................................. 6
2 DESENVOLVIMENTO ................................................................................................................................ 6
2.1 REFERENCIAL TEÓRICO ................................................................................................................. 7
2.2 MÉTODOLOGIA ................................................................................................................................. 13
2.3 RESULTADOS ................................................................................................................................... 15
2.4 DISCUSSÕES .................................................................................................................................... 16
3 CONSIDERAÇÕES FINAIS ..................................................................................................................... 16
ANEXO ........................................................................................................................................................... 17
PROGRAMA .............................................................................................................................................. 17
4 REFERÊNCIAS ......................................................................................................................................... 22

SISTEMA PARA GERENCIAMENTO E OTIMIZAÇÃO
DE VAGAS EM ESTACIONAMENTO
Mauricio de Souza Bandeira
Resumo: Um dos grandes desafios da atualidade é o de encontrar vagas para
estacionamento de carros. Este desafio provocou a ideia do desenvolvimento de um
sistema alternativo de monitoramento de vagas de estacionamentos em locais de grande
movimentação. O principal objetivo que norteou o desenvolvimento deste sistema foi o de
buscar uma alternativa de solução para o problema. Este trabalho se iniciou com um
projeto sistemático de um estacionamento e posteriormente, desenvolveu-se um projeto
do produto propriamente dito. A motivação dessa pesquisa foi a busca pela inovação na
prática de se estacionar veículos particulares. Buscou-se uma solução tecnológica viável
para auxiliar no descongestionamento dos grandes centros urbanos, pois, também,
acredita-se que este modelo será uma grande tendência do mercado, pois, proporciona
rapidez e segurança. Para este propósito, utilizou-se um Arduino, que é uma plataforma
de prototipagem eletrônica baseada na flexibilidade e fácil utilização entre software e
hardware de código aberto, Sensor Infravermelho para identificação de veículos e Display
de LCD para a informação ao usuário sobre as vagas existentes ou não. Uma vez que se
conseguiu diminuir o tempo de procura por vagas no estacionamento pode-se dizer que o
objetivo deste trabalho foi alcançado.
Palavras chave: Arduino Mega. Sensor Infravermelho. Display LCD
Abstract: Nowaday: One of the great challenges to is finding spaces for cars in the
parking lot. This challenge provoked the idea of developing an alternative system to
monitoring parking lots in high traffic areas. The main objective that guided the
development of this system was to seek an alternative solution to the problem. This work
began with a systematic design of a parking lot and, later a product design was developed.
The motivation of this research was to search for innovation in the practice of parking
private vehicles. A feasible technological solution was sought to help in the decongestion
of the large urban centers, because, also, it is believed that this model will be a great

5
tendency of the market, because, it provides speed and security. For this purpose, an
Arduino was used, which is an electronic prototyping platform based on the flexibility and
easy use between software and hardware of open source, Infrared Sensor for vehicle
identification and LCD Display for the information to the user on the existing vacancies or
not. Since it was possible to reduce the time of searching for parking spaces, it can be said
that the objective of this work was achieved.
1. INTRODUÇÃO
Nos dias atuais, um dos grandes desafios é encontrar vaga para estacionar em
centros urbanos de grandes cidades, assim como em supermercados, shoppings centers
e também não muito diferente de outros locais também hoje se deve ter uma atenção
estacionamentos de grandes empresas, tudo isso devido ao aumento da frota de veículos,
o que acarreta a demora em encontrar vagas disponíveis.
Segundo (CHAVES, 2010) um bom estacionamento é a porta da frente, a primeira
recepção aos clientes. Segundo o banco de dados do DENATRAN (2016), em março de
2016 a frota brasileira era composta por 90.392.168 veículos licenciados, com suas
identificações extraídas do CRV - Certificado de Registro do Veículo (Siscorp 2016).
Estatística do Denatran, Departamento Nacional de Trânsito, no final de 2016 a frota
brasileira ultrapassou a casa dos 92 milhões de veículos, representando um crescimento
de 46% em dez anos e também onde segundo dados de 2016, feito pela Sindipeças e
Abipeças, indica que a frota circulante de veículos aumentou 3,7% em comparação a
2015, registrando assim 92 milhões de unidades circulantes, entre automóveis, veículos
comerciais leves e pesados. Com este aumento da frota cria-se um trafego intenso, pois a
circulação excessiva de veículos em busca de uma vaga para estacionar acarreta prejuízo
financeiro para os condutores uma vez que ao se procurar uma vaga para estacionar
estamos consumindo combustível desnecessário e também contribuindo para o aumento
da poluição do ar e sonora. Com isso se faz crescer a demanda por opções de
estacionamento capaz de diminuir problemas de uma forma correta e segura, e assim
reduzir o tempo para encontrar uma vaga de estacionamento. Diante do problema,
possíveis soluções surgem cada vez mais inovadoras.

6
O sistema de gerenciamento para estacionamento pode ser uma das soluções
tecnológicas para o problema tendo como uma de suas vantagens a possibilidade de ser
implantado os sistemas de pagamento eletrônico como ConectCar, Sem Parar, Passe
Expresso e entre outros dispositivos de cobranças.
1.1 OBJETIVOS
Este trabalho tem a finalidade de apresentar um projeto que venha facilitar a vida
dos condutores de veículos de grandes e médias cidades na busca por vagas em
estacionamentos privados uma vez que a frota de veículos teve um aumento significativo,
de maneira que a disponibilidade de vagas não conseguiu acompanhar fazendo com que
a quantidade de vagas acabou ficando escassa em alguns lugares.
1.2 OBJETIVO ESPECÍFICO.
Os objetivos desse projeto são:
- Desenvolver programa em C;
- Construir uma maquete;
- Otimizar a utilização de vagas em estacionamento;
- Facilitar o ato do motorista de estacionar seu veículo;
- Reduzir o tempo despendido para estacionar o veiculo;
- Verificar o status das vagas pelo sistema;
2. DESENVOLVIMENTO
Para desenvolver o protótipo se fez necessario conhecer as dificuldades na busca
por vagas de estacionamentos públicos como zona azul e este sendo um dos locais que
mais se necessita de vagas e também locais particulares uma vez que não há

7
fiscalização ou ela sendo feita de uma maneira errada em ambos exemplos torna o
problema ainda maior.
2.1 REFERÊNCIAL TEÓRICO
Para desenvolver o projeto foi necessário proceder um aprofundamento teórico
sobre alguns ítens da mecatrônica industrial para orientar o projeto de pesquisa. Irei
abordar o microcontrolador Arduino Mega, Sensor Infravermelho e o Display de LCD.
Arduino é uma plataforma eletrônica de código aberto baseado em hardware e
software easy to use, ele é destinado a qualquer tipo de projeto interativo. É capazes de
ler entradas digitais ou analógicas, a luz de um sensor entre outras e transforma-los em
uma saída, como exemplo ligando um motor, ativando um led, etc..., para fazer tudo isso
é usado a linguagem de programação do Arduíno com base na fiação e do software do
Arduíno (IDE) com base em processamento (ARDUINO, 2015).
Basicamente, consiste em um microcontrolador acoplado em uma placa eletrônica
que faz a interface entre as entradas e saídas para o mundo externo. Com isso é possível
ativar um motor, ler um sinal elétrico proveniente de sensores, tratar os dados
provenientes do mesmo e exibi-los por diversas interfaces de saída (ARDUINO, 2015).
No presente trabalho será utilizado a placa Arduino Mega 2560 que possui
recursos interessantes para prototipagem e projetos mais elaborados. Baseada no
microcontrolador ATmega 2560, possui 54 pinos de entradas e saídas digitais onde 15
destes podem ser utilizados como saídas PWM. Possui 16 entradas analógicas, 4 portas
de comunicação serial. Além da quantidade de pinos, ela conta com maior quantidade de
memória que Arduino Uno, sendo uma ótima opção para projetos que necessitem de
muitos pinos de entradas e saídas além de memória de programa com maior capacidade.
A seguir serão apresentadas as suas características construtivas, passando pelos
principais recursos que essa placa apresenta. (SOUZA, 2014).
Alimentação da placa Arduino Mega
A alimentação da placa Arduino Mega, como ocorre na Arduino Uno pode ser feita
tanto pela USB, como por uma alimentação externa.

8
Além dos recursos apresentados anteriormente a placa conta com um circuito para
comutar a alimentação automaticamente entre a tensão da USB e a tensão da fonte
externa. Caso haja uma tensão no conector DC e a USB é conectada, a tensão de 5V
será proveniente da fonte externa e USB servirá apenas para comunicação com o PC.
- IOREF - Fornece uma tensão de referência para que shields possam selecionar o
tipo de interface apropriada, dessa forma shields que funcionam com a placas Arduino
que são alimentadas com 3,3V podem ser adaptar para ser utilizados em 5V e vice-versa.
- RESET - pino conectado a pino de RESET do microcontrolador. Pode ser
utilizado para um reset externo da placa Arduino.
- 3,3 V - Fornece tensão de 3,3V para alimentação de shield e módulos externos.
Corrente máxima de 50 mA.
- 5 V - Fornece tensão de 5 V para alimentação de shields e circuitos externos.
- GND - pinos de referencia, ground, terra.
- VIN - pino para alimentar a placa através de shield ou bateria externa. Quando a
placa é alimentada através do conector Jack a tensão da fonte estará nesse pino.
(MARCIO FREITAS)
Como interface USB para comunicação com o computador, há na placa um
microcontrolador ATMEL ATMEGA16U2, responsável pela forma transparente como
funciona a placa ARDUINO MEGA 2560, possibilitando o upload do código binário gerado
após a compilação do programa feito pelo usuário. Possui um conector ICSP para
gravação de firmware através de um programador ATMEL, para atualizações futuras.
Nesse microcontrolador também estão conectados dois leds (TX, RX), controlados
pelo software do microcontrolador, que indicam o envio e recepção de dados da placa
para o computador. Ele possui um cristal externo de 16 MHz. É interessante notar a
conexão entre este microcontrolador com o ATMEL ATMEGA2560 onde é feita pelo canal
serial desses microcontroladores. Outro ponto interessante que facilita o uso da placa
Arduino é a conexão do pino 13 do ATMEGA16U2 ao circuito de RESET do
ATMEGA2560, possibilitando a entrada no modo bootloader automaticamente quando é
pressionado o botão Upload na IDE. Essa características não acontecia nas primeiras
placas Arduino onde era necessário pressionar o botão de RESET antes de fazer o
Upload na IDE. (SOUZA, 2014).

9
Microcontrolador da placa Arduino Mega 2560
O microcontrolador utilizado na Arduino Mega 2560 é o ATMEL Atmega 2560, um
microcontrolador de 8 bits de arquitetura RISC avançada. Esse microcontrolador possui
mais recursos comparando ao Atmega 328 do Arduino Uno. Ele conta com 256 KB de
Flash (mais 8 KB são utilizados para o bootloader), 8 KB de RAM e 4 KB de EEPROM.
Chega 16 MIPS, operando em 16 MHz. Possui multiplicador por Hardware e diversos
periféricos que aumentam as possibilidades da plataforma Arduino baseada em Atmel
ATMEGA, dentre as quais pode-se destacar 4 canais de comunicação serial, 16 entradas
analógicas e 15 saídas PWM. Possui ainda comunicação SPI, I2C e 6 pinos de
interrupções externas (SOUZA, 2014).
Pinos de entradas e Saídas da placa Arduino Mega 2560
A placa Arduino Mega 2560 possui 54 pinos de entradas e saídas digitais que
podem ser utilizadas como entrada ou saída conforme a necessidade de seu projeto,
através das funções pinMode, digitalWrite, e digitalRead. Os pinos operam com tensão de
5V e podem fornecer ou drenar até 40 mA. Cada pino possui resistor de pull-up interno
que pode ser habilitado por software.
Comunicação Serial – Serial 0 (RX) e 1 (TX); Serial 1: 19 (RX) e 18 (TX); Serial 2:
17 (RX) e 16 (TX); Serial 3: 15 (RX) e14 (TX). Os pinos 0 e 1 estão conctados aos pinos
do ATmega16U2 responsável pela comunicação USB.
Interrupções externas - 2 (interrupt 0), 3 (interrupt 1), 18 (interrupt 5), 19 (interrupt
4), 20 (interrupt 3), and 21 (interrupt 2). Estes pinos podem ser configurados para disparo
da interupção tanto na borda de subida ou descida, ou em niveis lógicos alto ou baixo,
conforme a necessidade do projeto.
PWM: os pinos 2 a 13 e 44 a 46 podem ser utilizados como saídas PWM. O sinal
PWM possui 8 bits de resolução e é implemetado com a função analogWrite.
Comunicação SPI: Pinos: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS). A
comunicação SPI pode se manipulada pela função SPI library. Estes pinos estão ligados
ao conector ICSP.
Comunicação I2C: (TWI): pinos 20 (SDA) and 21 (SCL).

10
A Arduino Mega 2560 possui 16 entradas analógicas (pinos A0 a A15), onde pode
ser feita a conversão com uma resolução de 10 bits, ou seja, o valor será convertido entre
0 e 1023. Por padrão o tensão de referência é conectada a 5V. Porém é possível mudar o
valor de referência através do pino AREF e a função analogica. (SOUZA, 2014).
Resumo da placa Arduino Mega 2560
Na figura 1 é exibido um resumo da placa do Arduino Mega 2560.
Figura 1:
Fo
nte: SOUZA, 2014.
Sensores Infravermelhos
Os sensores infravermelhos possuem em suas propriedades duas maneiras de
serem aplicados nos circuitos: Detecção por Reflexão ou Detecção por Interrupção. O
primeiro modo um emissor de radiação infravermelha emite o sinal e um objeto refletor
rebate para um receptor, sendo assim quanto mais próximo o objeto refletor maior a

11
intensidade do sinal. Já no modo Detecção por Interrupção o emissor de sinal
infravermelho e o receptor são instalado na mesma direção com sentidos opostos, com
isso os atuadores somente entram em ação quando o sinal infravermelho for interrompido
por algum objeto, nessa aplicação é sempre valido proteger ao máximo o receptor para
que nenhuma interferência indesejada ocorra (SABER ELÉTRICA, 2015).
Display de LCD
O display de LCD (Display de Cristal Líquido) de caracteres alfanuméricos, são
interfaces de comunicação visual e muito atraentes, estão presentes em quase todos
aparelhos domésticos e industriais, por serem padronizados, são de baixo custo. É um
recurso antigo, mais ou menos uns 20 anos.
Os módulos LCD são interfaces de saída muito útil em sistemas microprocessador.
Estes módulos podem ser gráficos e a caracter. Os LCD comuns (tipo caracter) são
especificados em número de linhas por colunas e geralmente estão disponíveis com 20
pinos para conexão.
Os módulos podem ser encontrados com LED backlight (com uma iluminação de
fundo) para facilitar a leitura durante a noite. Neste caso, a alimentação deste led faz-se
normalmente pelos pinos 15 e 16 para os módulos comuns e 19 e 20 para os módulos
gráficos, sendo os pinos 15 e 19 para ligação ao anodo e os pinos 16 e 20 para o catodo.
Estes módulos utilizam um controlador próprio, permitindo sua interligação com outras
placas através de seus pinos, onde deve ser alimentado o módulo e interligado o
barramento de dados e controle do módulo com a placa do usuário. Naturalmente que
além de alimentar e conectar os pinos do módulo com a placa do usuário deverá haver
um protocolo de comunicação entre as partes, que envolve o envio de bytes de instruções
e bytes de dados pelo sistema do usuário (PUHLMANN, 2015).

12
Tabela de pinagem dos modulos Lcd
Na Tabela 1 é exibido a pinagem dos modulos LCD.
Tabela 1 Descrição dos pinos de interface de conexão.
Fonte: /PUHLMANN, HENRIQUE 2015.
Existe estacionamento completamente autônomo em que o usuário deixa o carro
em uma plataforma e um sistema automático estaciona o veiculo no interior da edificação,
bem como trazendo-o de volta ao usuário no momento em que este assim o requisitar
(ALLEN, 2002).
A metodologia utilizada foi de desenvolver um protótipo para expor a ideia e
utilizando os recursos da Mecatrônica para realizar o gerenciamento das vagas. Com isso
entendeu-se que inicialmente um prototipo bem desenvolvido possa ser utilizada como
uma alternativa, adequada e eficiente para transmitir a ideia do que venha ser um sistema
de gerenciamento de vagas, contendo as funções previstas para o mesmo. A
visualização das principais funções proporcionará aos interessados podendo ser
profissionais da area ou leigos uma oportunidade de presenciar antecipadamente, a
dinâmica das funções de um caso real.
Esta alternativas oferecem benefícios tangíveis e intangíveis em comum. Entre os
intangíveis estão um maior conforto proporcionando aos visitantes de um shopping na
tarefa de estacionar, e a disseminação da imagem de modernidade que um sistema deste
tipo agrega ao shopping. Já os tangíveis consistem no aumento de receita proporcionado
13
pela capacidade de receber mais clientes em menos tempo, e atrair outros clientes
interessados no que se diz respeito no em conforto ao estacionar. Modelo este que
também pode ser oferecido pelas empresas particulares a seus colaboradores.
A automação é considerada qualquer sistema apoiado em computadores que vise
substituir tarefas de trabalho humano e/ou que vise soluções rápidas e econômicas para
as indústrias e os serviços modernos (CASTRUCCI & BOTTURA, 2006).
2.2 MÉTODOLOGIA
A metodologia utilizada neste projeto consta na composição de diversas etapas, as
quais foram testadas e implementadas de forma gradual para melhor análise de possíveis
erros e melhor organização. Para implementação do mesmo foi necessário a análise dos
componentes que farão o gerenciamento e correto funcionamento do protótipo do
estacionamento, este projeto está fundamentado em dois elementos: Sistemas
Automáticos e Plataforma de Prototipagem Eletrônica Arduino.
Tendo por meta a construção da maquete podemos estimular uma nova
mentalidade acercada de tecnologia no trafego de estacionamentos particulares e
aplicação de ferramentas de controle e automação no gerenciamento de um
estacionamento num protótipo. A ideia é de reduzir a busca por vagas pois quanto menos
tempo um carro tomar desde a entrada no estacionamento até a ocupação de sua vaga,
menos ele contribui para o congestionamento e portanto melhor é a vazão proporcionada
pelo sistema.
Aplicando ferramentas de controle e automação no gerenciamento de um
estacionamento num protótipo construído, projetando e implementando mecanismos,
eficientes no aspecto de segurança e facilitando o ato de estacionar por meio de um
sistema integrado que utilize sensores, circuitos lógicos que se comunique entre si.
Na entrada será instalado um sensor para contar os veiculos que irão entrar e outro
na saída para a contagem dos veiculos que irão sair, além dos sensores instalados em
cada cada vaga que serão responsaveis por detectar os veiculos que estiverem
estacionados envindo o sinal para o controlador, e dois leds na vaga um na cor verde
indicando vaga livre e outro na cor vermelho indicando vaga ocupada. Todos os sensores
e leds terão comunicação direta com o comando central que será no caso o arduino,

14
equipamento este responsável pela atualização e pelo processamento de cada vaga, o
mesmo envia para tela (display) a quantidade de vagas disponiveis.
Este modelo de estacionamento é mais caro que um estacionamento comum, pois
através de observações percebeu-se que os custos de manutenção e projeto estão entre
os requisitos mais importante permitindo concluir que há mais preocupação com os custos
do que com a estética, mas sua facilidade no uso, seu rápido e eficiente funcionamento,
torna ele bastante rentável, não sendo exagerado que não retornaria o montante de
capital investido, podendo ser visto como um bom negócio, proporcionando mais
segurança e comodidade.
O objetivo é facilitar o ato do motorista de estacionar seu veiculo. Isso é possível
por meio de um sistema integrado que utilize sensores, controlador arduino, circuitos
lógicos, display de lcd tudo isso comunicando entre si e com os usuários do
estacionamento.
Esta ideia proporciona uma maior facilidade agregando algo diferenciado facilitando
o fluxo dos veículos.
O controle sobre o número de vagas ocupadas ou disponíveis é em tempo real
mostrando assim uma inovação e respeito ao bem estar aos usuarios, o sistema é
autossustentável tornando mais eficiente pela busca por vagas. Assim outra vantagem é
que, com menos tempo gasto com a procura por vagas, menos tempo o motor fica ligado,
consequentemente, menos gases serão jogado no meio ambiente contribuindo com a
diminuição da poluição do ar.
Para este projeto foi necessário cadastrar todas as vagas no programa do
controlador, pois só assim o controlador terá uma dinamica dos status de todas as vagas,
como um método de entrada para a informação de quantas vagas estão ocupadas, e um
método de como levar estas informações até o usuário, que pode ser um cliente de um
estabelecimento comercial ou no caso de uma empresa (indústria) a seus colaboradores.
O principio de funcionamento do protótipo é um modelo computacional matricial. O
projeto utiliza a plataforma open source Arduino contabilizar as vagas disponíveis, através
de uma rede de sensores como dito anteriormente, instalados na entrada e saída dos
estacionamento e em cada uma das vagas uma vez que detectam a presença do veiculo
e em seguida através de um sistema de comunicação, as vagas são identificadas por

15
meio de um número, o micro controlador comunica ao display a quantidade de vagas
disponiveis na entrada do estacionamento.
Este produto tem ciclo de vida que se inicia no período de sua idealização ou seja,
a instalação do até seu descarte. Dentro do ciclo de vida deste produto se destaca
algumas etapas como: projeto, montagem, manutenção e seu descarte.
Este modelo poderá ser uma nova tendência de mercado, pois além de
proporcionar maior segurança e mais rapidez também pode ser integrado, sistema de
acesso diferenciado, como Conectar, Sem Parar e Auto Expresso em estacionamentos
pagos.
O Arduino foi utilizado para demonstrar e simular a ideia de um estacionamento
otimizado com uma quantidade pequena de vagas, onde para uma aplicação em um
estacionamento com quantidade elevada de vagas como um supermercado ou shopping
center ele não é muito recomendado devido sua limitação com relação as portas de
entradas e saídas para isso podemos utilizar outros equipamentos como CLP (Comando
Logico Programavel) pois alguns modelos possuem mais de 150 portas de entradas e
saidas e também com boa velocidade processamento, assim também nesta mesma linha
para a detectar os veículos pode se utilizar de outros modelos de sensores como o sensor
Ultrasonico que atua em angolos, mas isso como outra alternativa para detectar os
veiculos que nos quais irão ocupar as vagas.
Neste prototipo foi colocado vagas especiais pelo motivo da existencia de leis
federais que aborda a quantidade de vagas que se deve oferecer para cadeirantes e
idosos em relação a proporção de vagas comum que se oferece, assim deste modo foi
colocado como vagas especiais para a simulação.
2.3 RESULTADOS
O sistema de gerenciamento de vagas foi realizado com a utilização de um
Microcontrolador Arduino Mega, Sensores Infravermelho para detectar se a vaga esta
ocupada ou não é o display de LCD para indicação das vagas como orientação aos
usuários das vagas, sendo assim uma vez que o usuário chegar na entrada do
estacionamento ele irá solicitar através de um botão qual vaga ele deseja.

16
Foram realizados testes simulando as condições de um estacionamento em
formato de uma maquete. Construída em madeira onde instalado os sensores nas vagas,
tive dificuldades na produção da maquete, onde fiz a utilização de uma serra tico tico, cola
quente, nesta etapa também encontramos algumas dificuldades na programação do
Arduino.
Neste protótipo o Arduino Mega demonstra a ideia do sistema de gerenciamento e
otimização de vagas. Para uma aplicação em um estacionamento de maior número de
vagas ele não é muito recomendado devido sua limitação com as entradas e saídas, para
isso se pode fazer uso de CLPs pois alguns modelos têm mais de 150 entradas/saídas.
Foram realizados inúmeros testes onde foi simulado o ato de estacionar utilizando
carros de brinquedo, colocando nas vagas para observar se o gerenciamento estava
ocorrendo de forma aceitável e obtendo resultados significativos.
Onde que uma vez pronto o protótipo se fez testes e os resultados foram
satisfatórios.
2.4 DISCUSSÕES
Há muitos transtornos causados pela falta do gerenciamento e otimização de
vagas, como a demora na busca da vaga, o aumento do consumo de combustíveis e da
emissão de gases poluentes entre outros, hoje em dia há muitas soluções para
resolverem esse problema e uma delas é o gerenciamento e otimização de vagas.
Este trabalho não pretendeu esgotar o tema do assunto, mas sim contribuir com
propostas futuras.
3 CONSIDERAÇÕES FINAIS
Esse projeto contribuiu para mostrar uma maneira de se solucionar o problema de
forma rápida, eficaz, e também a diminuir o tempo pela busca da vaga disponível,
reduzindo o consumo de combustível e a emissão dos gases poluentes.
17
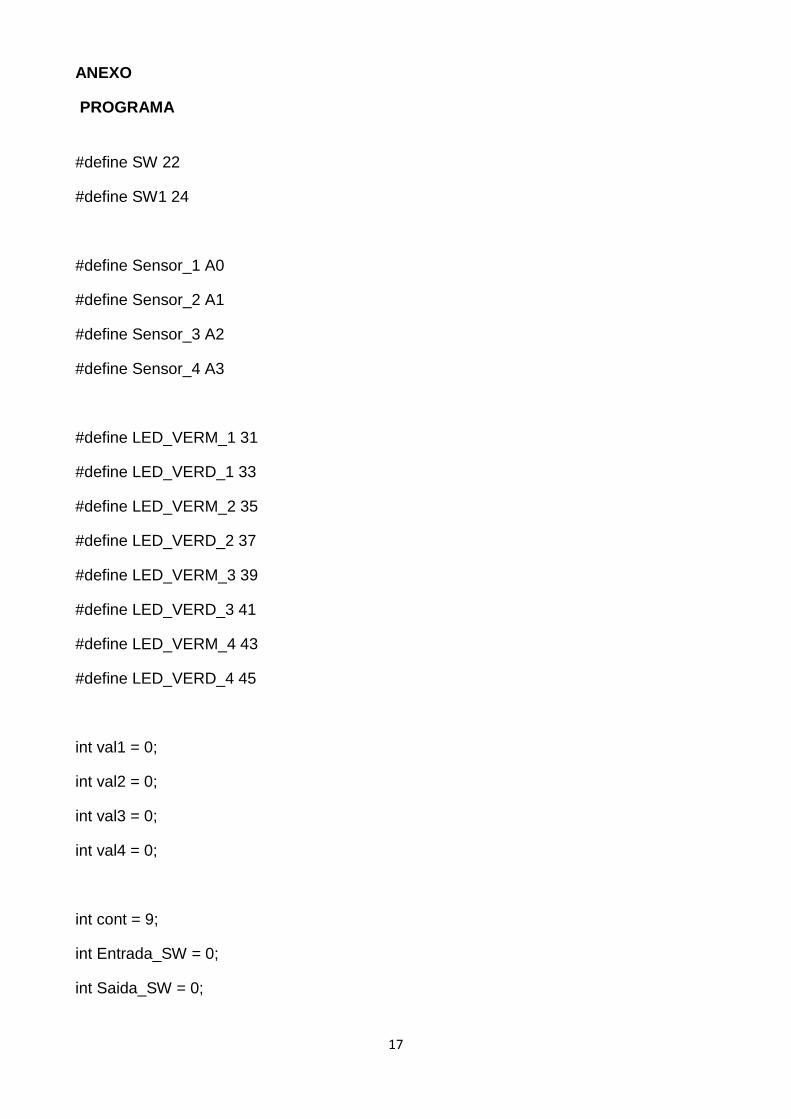
ANEXO
PROGRAMA
#define SW 22
#define SW1 24
#define Sensor_1 A0
#define Sensor_2 A1
#define Sensor_3 A2
#define Sensor_4 A3
#define LED_VERM_1 31
#define LED_VERD_1 33
#define LED_VERM_2 35
#define LED_VERD_2 37
#define LED_VERM_3 39
#define LED_VERD_3 41
#define LED_VERM_4 43
#define LED_VERD_4 45
int val1 = 0;
int val2 = 0;
int val3 = 0;
int val4 = 0;
int cont = 9;
int Entrada_SW = 0;
int Saida_SW = 0;

18
// Configuracao do display LCD
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
void setup() {
Serial.begin(9600);
pinMode(SW,INPUT_PULLUP);
pinMode(SW1,INPUT_PULLUP);
pinMode(Sensor_1,INPUT_PULLUP);
pinMode(Sensor_2,INPUT_PULLUP);
pinMode(Sensor_3,INPUT_PULLUP);
pinMode(Sensor_4,INPUT_PULLUP);
pinMode(LED_VERM_1, OUTPUT);
pinMode(LED_VERD_1, OUTPUT);
pinMode(LED_VERM_2, OUTPUT);
pinMode(LED_VERD_2, OUTPUT);
pinMode(LED_VERM_3, OUTPUT);
pinMode(LED_VERD_3, OUTPUT);
pinMode(LED_VERM_4, OUTPUT);
pinMode(LED_VERD_4, OUTPUT);
digitalWrite(LED_VERD_1, HIGH);
digitalWrite(LED_VERD_2, HIGH);
digitalWrite(LED_VERD_3, HIGH);
digitalWrite(LED_VERD_4, HIGH);

19
lcd.begin(16, 2);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Seja Bem Vindo!");
lcd.setCursor(1,1);
lcd.print("Temos Vagas!");
delay(1000);
//lcd.clear();
}
void loop() {
Entrada_SW = digitalRead(SW);
Saida_SW = digitalRead(SW1);
val1 = analogRead(Sensor_1);
val2 = analogRead(Sensor_2);
val3 = analogRead(Sensor_3);
val4 = analogRead(Sensor_4);
if(Entrada_SW != 1)
{
cont--;
lcd.clear();
lcd.print("Temos Vagas!");
lcd.setCursor(6,0);
lcd.print(cont);
delay(300);

20
if(cont == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print("<<<<<LOTADO>>>>>");
delay(300);
cont = 8 ;
}
}
if(Saida_SW != 1)
{
cont++;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Temos Vagas!");
lcd.setCursor(6,0);
lcd.print(cont);
delay(300);
if(cont == 8)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Temos Vaga!");
delay(300);
cont = 0 ;

21
}
}
if (val1 > 400) {
digitalWrite(LED_VERM_1, HIGH);
digitalWrite(LED_VERD_1, LOW);
delay(100);
} else {
digitalWrite(LED_VERM_1, LOW);
digitalWrite(LED_VERD_1, HIGH);
delay(100);
}
if (val2 > 400) {
digitalWrite(LED_VERM_2, HIGH);
digitalWrite(LED_VERD_2, LOW);
delay(100);
} else {
digitalWrite(LED_VERM_2, LOW);
digitalWrite(LED_VERD_2, HIGH);
delay(100);
}
if (val3 > 400) {
digitalWrite(LED_VERM_3, HIGH);
digitalWrite(LED_VERD_3, LOW);
delay(100);
} else {
digitalWrite(LED_VERM_3, LOW);
digitalWrite(LED_VERD_3, HIGH);

22
delay(100);
}
if (val4 > 400) {
digitalWrite(LED_VERM_4, HIGH);
digitalWrite(LED_VERD_4, LOW);
delay(100);
} else {
digitalWrite(LED_VERM_4, LOW);
digitalWrite(LED_VERD_4, HIGH);
delay(100);
}
}
4 REFERÊNCIAS
ARDUINO. Disponível em: <https://www.arduino.cc/>. Acesso em: 01 out. 2015.
ARDUINO SHIELDS. Disponível em: <http://www.arduino.cc/en/Main/arduinoShields>.
Acesso em: 01 out. 2015.
BRAGA, NewtonC.(Inst.)http://www.newtoncbraga.com.br/index.php/artigos/49-
curiosidades/4916
CHAVES, G. C. 2010. Estacionamento – um negócio da China! (E do Brasil, dos EUA, da
Índia...).G9Investimentosdisponívelem: <http://g9investimentos.com.br/artigos/ler/75.html>
ace
DAVIDE, Gomba Disponível em: http://blog.arduino.cc/2011/01/05/nice-drawings-of-the-
arduino-uno-and-mega-2560/ Acesso em 5 jan.2011. ssado em: 10 Mai. 2014;
DOCPLAY,http://docplayer.com.br/8296605-Deteccao-de-vagas-e-estacionamento-
autonomo-de-veiculos.html
MARCIO FREITAS, Carlos Disponível em :https://www.embarcados.com.br/controlador-
logico-programavel-clp-parte-2/ Acesso 03 fev. 2014.
PSA D. 2012. Eco Parking. São Paulo, v.1, n.1, p. 5-9, 2013;

23
PUHLMANN, (2015), Disponível em: https://www.embarcados.com.br/modulo-de-display-
lcd/ Acesso em 5 maio 2015.
SABER ELETRICA, Disponível em: https://www.sabereletrica.com.br/sensor-
infravermelho-funcionamento/ Acesso, 2015.
SINDIPEÇAS,Disponivelem:http://www.sindipecas.org.br/sindinews/Economia/2017/R_Fro
ta_Circulante_2017.pdf Acesso em maio2017.
SISCORP,disponívelem:http://www.siscorp.com.br/dados_mercado/arquivos_modelo/PER
FIL%20DA%20FROTA%20DE%20VE%C3%8DCULOS%20BRASILEIRA.pdf Acesso em
mar.2016.
SOUZA, (2014), Disponível em:https://www.embarcados.com.br/arduino-mega-2560/
Acesso em 28 mar.2016.
UNICAMP, ftp://ftp.dca.fee.unicamp.br/pub/docs/ea079/complementos/Lcd.pdf
WEG Disponível em: http://ecatalog.weg.net/files/wegnet/WEG-controladores-logicos-
programaveis-clps-10413124-catalogo-portugues-br.pdf Acesso em dez.2015

24