CONTROLE DE VIBRAÇÕES EM DINÂMICA DE ROTORES...
65
UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE ENGENHARIA MECÂNICA DANIELLE RAPHAELA VOLTOLINI CONTROLE DE VIBRAÇÕES EM DINÂMICA DE ROTORES USANDO MANCAIS DE ROLAMENTO COMPOSTO COM MATERIAL VISCOELÁSTICO CURITIBA 2013
Transcript of CONTROLE DE VIBRAÇÕES EM DINÂMICA DE ROTORES...

UNIVERSIDADE FEDERAL DO PARANÁ
DEPARTAMENTO DE ENGENHARIA MECÂNICA
DANIELLE RAPHAELA VOLTOLINI
CONTROLE DE VIBRAÇÕES EM DINÂMICA DE ROTORES USANDO MANCAIS
DE ROLAMENTO COMPOSTO COM MATERIAL VISCOELÁSTICO
CURITIBA
2013

DANIELLE RAPHAELA VOLTOLINI
CONTROLE DE VIBRAÇÕES EM DINÂMICA DE ROTORES USANDO MANCAIS DE ROLAMENTO COMPOSTO COM MATERIAL VISCOELÁSTICO
Monografia apresentada à disciplina de Trabalho de Fim de Curso como requisito parcial à conclusão do Curso de Engenharia Mecânica, Setor de Tecnologia, Universidade Federal do Paraná. Orientador: Prof. Carlos A. Bavastri, Dr. Eng.
CURITIBA 2013

Aos meus pais, Joselito e Lilian. Aos meus avós, Maria Edith e Laurentino.
Ao meu companheiro e amigo, Lucas. Aos meus amigos Anna e Jhonatan.
Pelo apoio, compreensão e força nas horas mais difíceis e importantes dessa longa trajetória.
AGRADECIMENTOS
Ao professor Carlos Alberto Bavastri, mais que um orientador, um
segundo pai, que me dedicou incontáveis horas transmitindo uma parte do seu
vasto conhecimento, acreditando em mim e sempre ficando ao meu lado, como
um verdadeiro mestre.
Ao professor Eduardo Márcio de Oliveira Lopes, pelas disciplinas
cursadas, dúvidas sanadas e colaboração na minha formação.
Ao colega de iniciação científica, Junior Cesar Bortolotto, pelas
dicas e apoio.
Aos engenheiros Rodrigo Bubniak Silvério e Francisco José
Doubrawa Filho, por toda ajuda teórica que me prestaram.
Ao PRH-24, pelo auxílio financeiro.

"Tudo o que temos de decidir é o que fazer com o
tempo que nos é dado."
Gandalf – O Senhor dos Anéis
RESUMO
A grande demanda por equipamentos rotativos como turbinas, compressores, motores elétricos, geradores de energia em geral, equipamentos largamente utilizados em todos os níveis na indústria do petróleo, obrigam os fabricantes a buscar soluções otimizadas em carcaças reduzidas. Para se conseguir grandes potências, geralmente estas soluções vêm acompanhadas do aumento substancial da rotação de trabalho desses equipamentos. Em resposta a essas medidas, podem surgir grandes cargas de inércia, resultando em problemas como deformação no eixo, elevados níveis de vibração e instabilidade dinâmica, conduzindo o sistema a falhas imprevistas, principalmente em mancais compostos com rolamento. Em alguns casos, necessita-se operar com o equipamento acima das primeiras velocidades críticas, levando o rotor a apresentar órbitas com grande amplitude ao passar pelas mesmas, causando elevada solicitação nos mancais. Mancais hidrodinâmicos são utilizados nesses casos, uma vez que estes mancais introduzem um elevado amortecimento sobre o rotor favorecendo o controle de vibrações. Além disso, permitem ampliar a região de comportamento estável de máquinas rotativas. Alternativamente, estuda-se aplicar materiais viscoelásticos (MVE), em especial em mancais de rolamento, em virtude a sua grande capacidade em dissipar energia vibratória. Devido ao avanço tecnológico das ultimas décadas, atualmente estes materiais são amplamente utilizados em controle de vibrações. Logo, podem ser empregados como uma forma de introduzir rigidez e elevado amortecimento nas partes não rotativas dos mancais de equipamentos dinâmicos. Este trabalho tem como objetivo montagem experimental para o estudo do comportamento dinâmico de rotores compostos de mancais com MVE, além de contribuir na calibração do modelo numérico que está sendo desenvolvido pelo grupo de pesquisa. Para tal, é utilizado um rotor didático comercial Rotorkits da Bently Nevada, montado sobre mancais de rolamento de esferas cujos suportes foram adaptados para permitir alocar as mantas de MVE. Ensaios foram realizados com o rotor com e sem o MVE em rotações acima da primeira rotação crítica, tanto para comparação da redução da resposta ao desbalanceamento, bem como para a calibração do modelo numérico. Palavras-chave: Dinâmica de Rotores. Isolamento. Material Viscoelástico. Mancais de rolamento.

ABSTRACT
The great demand for rotating equipment such as turbines, compressors, electric motors, power generators in general, equipment widely used at all levels in the petroleum industry, require manufacturers to seek solutions optimized carcass reduced. To achieve great powers, usually these solutions are accompanied by a substantial increase in operating speed of the equipment. In response to these measures, there may be large inertia loads resulting in problems such as deformation axis, elevated levels of vibration and dynamic instability, leading to unexpected system failures, particularly in rolling bearings compounds. In some cases, need to operate with equipment above the first critical speed, causing the rotor to provide the large amplitude orbits pass through the same, causing high request bearings. Hydrodynamic bearings are used in such cases, since these introduce high damping bearings on the rotor favoring the control of vibrations. Also, allow you to extend the region of stable behavior of rotating machines. Alternatively, studies apply viscoelastic materials (VEM), particularly in rolling bearings, due to its high capacity to dissipate vibrational energy. Due to the technological advances of the last decades, these materials are currently widely used in vibration control. They can therefore be employed as a way of introducing high stiffness and damping in the non-rotating parts of the bearing dynamic equipment. This paper aims to experimental setup to study the dynamic behavior of rotors compounds bearing with VEM, and contribute in the calibration of the numerical model that is being developed by the research group. For such a rotor is used textbook shopping Rotorkits of Bently Nevada, mounted on bearings ball bearing whose holders have been adapted to allow placing the blankets VEM. Assays were performed with and without the rotor in revolutions VEM above the first critical rotation, both compared to the reduction of the unbalance response and to calibrate the numerical model. Key words: Dynamics of Rotors. Isolation. Viscoelastic Material. Roller bearings.
LISTA DE ILUSTRAÇÕES
FIGURA 1 - EFEITO DO AMORTECIMENTO EM UMA FRF .......................... 17
FIGURA 2 - NEUTRALIZADOR DINÂMICO SEM AMORTECIMENTO ........... 18
FIGURA 3 - NEUTRALIZADOR DINÂMICO COM AMORTECIMENCIMENTO 19
FIGURA 4 - A) ISOLAMENTO ATIVO E B) ISOLAMENTO PASSIVO ............. 20
FIGURA 5 - TRANSMISSIBILIDADE ............................................................... 21
FIGURA 6 - NOMOGRAMA TÍPICO – ZONAS DE TRABALHO ...................... 24
FIGURA 7 - MODELO DE MAXWELL .............................................................. 24
FIGURA 8 - MODELO DE VOIGT .................................................................... 25
FIGURA 9 - NOMOGRAMA TÍPICO ................................................................ 28
FIGURA 10 - MODELO DO DISCO ................................................................. 31
FIGURA 11 - SISTEMA DE COORDENADAS PARA O DISCO RÍGIDO
ROTACIONANDO EM TORNO DE UM EIXO FLEXÍVEL ................................ 32
FIGURA 12 - COORDENADAS DO CENTRO GEOMÉTRICO C E UM PONTO
ARBITRÁRIO B NO EIXO ................................................................................ 38
FIGURA 13 – MODELO LOCAL DE ELEMENTOS FINITOS DO EIXO ........... 41
FIGURA 14 - MODELO DE MANCAL COM MVE ............................................ 45
FIGURA 15 - CORPO SOB COMPRESSÃO ................................................... 47
FIGURA 16 - ESQUEMA GENÉRICO DA MALHA .......................................... 48
FIGURA 17 - MATRIZES GLOBAIS ................................................................. 49
FIGURA 18 - A) DIAGRAMA DE CAMPBELL, B) DIAGRAMA DE CAMPBELL
INTERNO ......................................................................................................... 54
FIGURA 19 - POSICIONAMENTO PROXIMITY .............................................. 55
FIGURA 20 - ENTRADA DOS PROBES .......................................................... 55
FIGURA 21 - CONFIGURAÇÃO DO ROTORKIT ............................................. 56
FIGURA 22 - MANCAL RÍGIDO ....................................................................... 57
FIGURA 23- PULSE ......................................................................................... 57
FIGURA 24 - SETOR DE MVE ......................................................................... 58
FIGURA 25 - ESQUEMA DA MONTAGEM DOS SETORES NO ROLAMENTO
......................................................................................................................... 59
FIGURA 26 - MANCAL COM MVE ................................................................... 59
FIGURA 27 - ROTORDIN v9.0 ......................................................................... 60

FIGURA 28 - MODELO EM ELEMENTOS FINITOS DO ROTOR ESTUDADO
......................................................................................................................... 61
FIGURA 29 - ANÁLISE ESTRUTURAL REALIZADA NO ANSYS® ................. 61
FIGURA 30 - RESPOSTA EM FREQUÊNCIA ................................................. 62
LISTA DE TABELAS
TABELA 1 - RESPECTIVOS GRAUS DE LIBERDADE PARA OS
DIFERENTES TIPOS DE ELEMENTOS .......................................................... 49
TABELA 2 - MANTAS DE MATERIAL VISCOELÁSTICO ................................ 58
TABELA 3 - DESLOCAMENTOS ..................................................................... 61
TABELA 4 - FORÇAS ...................................................................................... 62
SUMÁRIO
1. Introdução ...................................................................................................................................... 13
1.1. Apresentação do problema e seu contexto ............................................................... 13
1.2. Objetivos ................................................................................................................... 14
2. Revisão bibliográfica ...................................................................................................................... 15
2.1. Controle de Vibrações ............................................................................................... 15
2.1.1. Tipos de controle ................................................................................................ 15
2.1.1.1. Controle de frequências naturais ............................................................... 16
2.1.1.2. Introdução de amortecimento.................................................................... 17
2.1.1.3. Neutralizadores dinâmicos ......................................................................... 18
2.1.1.4. Isolamento .................................................................................................. 19
2.2. Materiais Viscoelásticos ............................................................................................ 21
2.2.1. Modelos .............................................................................................................. 24
2.2.2. Modelo de derivadas fracionárias ...................................................................... 25
2.3. Dinâmica de rotores .................................................................................................. 30
2.3.1. Disco ................................................................................................................... 30
2.3.2. Eixo: .................................................................................................................... 37
2.3.2.1. Energia cinética ........................................................................................... 37
2.3.2.2. Energia potencial ........................................................................................ 38
2.3.3. Mancal ................................................................................................................ 45
2.3.3.1. Formulação Matricial das Equações do Mancal ......................................... 48
2.3.4. Montagem das matrizes globais ......................................................................... 48
2.4. Resolução do sistema de equações dinâmicas .......................................................... 49
2.4.1. Modelo Viscoelástico .......................................................................................... 50
2.4.1.1. Problema de Autovalores ........................................................................... 50
2.4.1.2. Diagrama de Campbell ................................................................................ 53
3. Materiais e Métodos ...................................................................................................................... 54
3.1. Procedimento Experimental ...................................................................................... 54
3.2. Simulação Numérica ................................................................................................. 59
4. Análise dos Resultados ................................................................................................................... 62
5. Discussões ...................................................................................................................................... 63
6. Conclusão ....................................................................................................................................... 64
REFERÊNCIAS BIBLIOGRÁFICAS ............................................................................................................ 65

1. Introdução
O trabalho de fim de curso apresentado propõe uma montagem
experimental para testes e validação da metodologia existente para o controle
de vibrações em estruturas girantes, rotores, utilizando mancais de rolamento
com mantas de materiais viscoelásticos como elemento de isolamento na sua
parte externa. Para tal fim, uma revisão bibliográfica e uma verificação dos
códigos numéricos existentes desta metodologia foi motivo deste trabalho.
Como parte experimental, verificou-se a resposta de um mancal ao
desbalanceamento antes e depois da aplicação do isolamento, de modo a
comprovar a efetividade do controle.
1.1. Apresentação do problema e seu contexto
Equipamentos rotativos representam a maior e mais importante classe
de máquinas utilizadas nas mais diversas áreas de aplicação, contemplando o
transporte, transformação, produção, geração de energia e tudo mais que
descreva movimento alternativo, rotativo ou oscilatório.
Dessa forma, verifica-se a importância de se conhecer o
comportamento dinâmico desses sistemas, e como Muszynska (2005, Prefácio)
“esses comportamentos englobam uma vasta variedade de fenômenos físicos,
e todos podem interferir no funcionamento adequado das máquinas podendo
até levar a falhas catastróficas se não corretamente identificadas e corrigidas”.
Atualmente, principalmente no segmento de geração de energia,
exigem-se potências cada vez maiores, que podem ser obtidas mediante o
acréscimo substancial da rotação de operação desses equipamentos. Porém
essa solução implica na elevação das cargas inerciais além do risco de
grandes deformações nos eixos, bem como elevados níveis de rotação e
instabilidades dinâmicas.
Muitas vezes, para chegar a essas elevadas rotações, é necessário
que o equipamento seja acelerado, passando por uma ou mais velocidades
críticas, levando o rotor a apresentar órbitas com grande amplitude, o que
resulta numa considerável solicitação nos mancais.
Mancais rolamentados sofrem visivelmente com esses problemas,
levando o sistema, como já foi dito, a falhas imprevistas, acarretando em
paradas não programadas de equipamento, onerando os custos de
manutenção ou a desgastes prematuros dos mesmos.
Alternativamente, pode-se optar pela instalação de mancais
hidrodinâmicos em detrimento dos mancais de rolamento, uma vez que aquele
introduz um elevado amortecimento sobre o rotor, promovendo o controle de
vibrações e ampliando a região de estabilidade do sistema. Porém, esse
sistema não é economicamente viável em aplicações de pequeno porte, sendo
alternativa apenas em sistemas de grande porte, como em geração de energia,
por exemplo.
Dessa forma, verifica-se que a inserção de amortecimento é benéfica
para sistemas girantes. Como alternativa de baixo custo estuda-se a aplicação
de materiais viscoelásticos (MVE) em mancais de rolamento, como material
resiliente, introduzindo assim amortecimento ao sistema. Isso é possível devido
à capacidade que MVEs tem de dissipar energia vibratória, capacidade essa
que conferiu a esses materiais a sua larga aplicação em problemas de controle
de vibrações.
Por outro lado, o conhecimento preciso das propriedades associadas a
esses materiais é fundamental, bem como a correta forma de modelar rotores
simples apoiados sobre materiais elastomêricos ou ainda com mancais
compostos por esses materiais. Esse modelo foi proposto por esse grupo de
pesquisa e desenvolvido por Ferreira (2004).
1.2. Objetivos
Conforme já mencionado, trabalhados já foram realizados no cômputo
teórico, sem o desenvolvimento de um modelo experimental. Naquele trabalho
foi apenas utilizado um modelo de derivadas fracionárias com quatro
parâmetros para o material resiliente, porém não foi realizada a parte
experimental. Então, uma tese mais recente, cuja orientação é a mesma desse
presente trabalho, aborda a parte experimental de um rotor com mancais
híbridos – rolamento de esferas e material viscoelástico - a fim de calibrar os
modelos numéricos.
O objetivo deste trabalho de fim de curso é a montagem, calibração do
sistema de medição e validação de modelos numéricos proposto em trabalhos
anteriores, e em andamento, de um sistema girante com mancais híbridos –
rolamentos de esfera e material viscoelástico.
Para tal foram realizados ensaios de resposta ao desbalanceamento
para o rotor com as mesmas configurações geométricas com mancais com e
sem MVE.
Uma verificação dos códigos numéricos existentes, na sua totalidade,
foi um objetivo secundário deste trabalho.
2. Revisão bibliográfica
2.1. Controle de Vibrações
Dentro de um ambiente industrial encontramos inúmeras fontes de
vibração, tanto interna quanto externamente. Internamente temos
equipamentos rotativos como motores elétricos, compressores e máquinas
alternativas, temos ainda equipamentos leves de transporte, como
empilhadeiras, equipamentos de impacto, entre tantos outros. Externamente
temos o tráfego tanto terrestre (veículos e trens) quanto aéreo.
É consenso que, independente da fonte, vibrações levam a danos
estruturais. Dentre esses danos cita-se o desgaste em mancais, a formação de
trincas, o afrouxamento de parafusos e fraturas de juntas soldadas.
Segundo Rao (2008, p.305), em alguns casos podemos eliminar a
vibração com base na análise teórica, porém essa solução implica em custos
demasiadamente altos.
2.1.1. Tipos de controle
Em virtude da necessidade do controle de vibrações através de
métodos de baixo custo relativo, muitas formas foram desenvolvidas para
atender essa demanda.
Segundo RAO (2008, p.307), “a primeira coisa a ser explorada no
controle de vibrações é tentar alterar a fonte de vibração de modo que ela
produza menos vibração”. Porém, obviamente, em alguns casos esse tipo de
solução não é viável, uma vez que se pode não controlar a excitação (fonte).
Por exemplo, em equipamentos rotativos que apresentem desbalanceamento,
existem metodologias simples para reduzir a fonte de excitação, mas
dificilmente esta fonte será eliminada por completo.
Nos casos onde não se consegue agir sobre a fonte, adota-se o
emprego de métodos para o controle de vibrações, como o controle das
frequências naturais do sistema, inserção de elemento de amortecimento ou
dissipação de energia, redução na transmissão das forças de excitação
mediante a utilização de isoladores ou neutralizadores dinâmicos.
2.1.1.1. Controle de frequências naturais
Deseja-se sempre evitar ao máximo que um sistema opere com uma
frequência de excitação igual à sua frequência natural, uma vez que nesse
caso o sistema passaria a trabalhar em ressonância. Esse fenômeno está
relacionado com o aumento substancial dos deslocamentos/deformações, fato
esse que implica em cargas não previstas em projeto, levando a falhas
prematuras.
Dessa forma, com base na equação mais simples de cálculo de
frequência natural (Ωn = √k m⁄ ), para se deslocar a frequência natural, devem-
se alterar os parâmetros de massa ou rigidez do sistema a se controlar.
Segundo RAO (2008, p.318), muitas vezes não se pode alterar a
massa do sistema, pois essa pode ser a característica desejada em operação,
como no caso dos volantes de inércia, por exemplo. Nesses casos o
aconselhado é alterar a rigidez do componente, de modo à dessintonizar a
frequência natural, para que essa não mais coincida com a frequência de
excitação.
Por outro lado, quando a excitação é do tipo banda larga de
frequências, ou a densidade modal do sistema a controlar é elevada, este tipo
de controle não pode ser aplicado, correndo-se o risco de novos problemas de
falhas.
2.1.1.2. Introdução de amortecimento
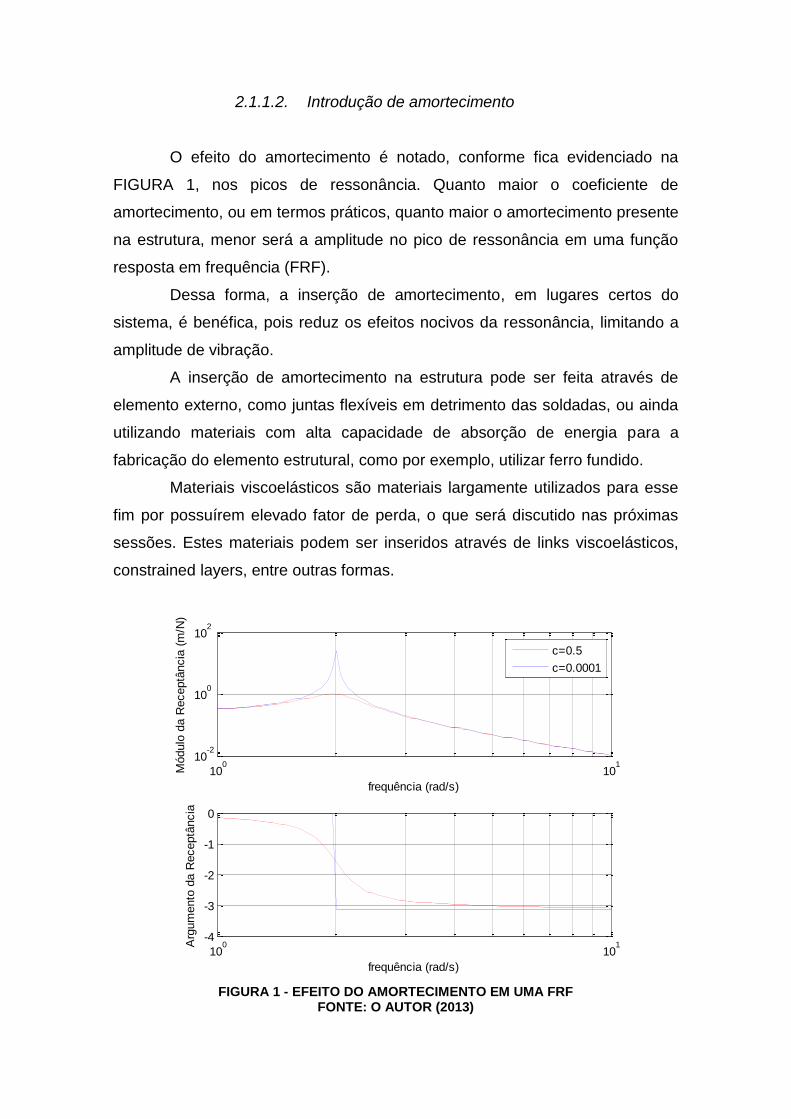
O efeito do amortecimento é notado, conforme fica evidenciado na
FIGURA 1, nos picos de ressonância. Quanto maior o coeficiente de
amortecimento, ou em termos práticos, quanto maior o amortecimento presente
na estrutura, menor será a amplitude no pico de ressonância em uma função
resposta em frequência (FRF).
Dessa forma, a inserção de amortecimento, em lugares certos do
sistema, é benéfica, pois reduz os efeitos nocivos da ressonância, limitando a
amplitude de vibração.
A inserção de amortecimento na estrutura pode ser feita através de
elemento externo, como juntas flexíveis em detrimento das soldadas, ou ainda
utilizando materiais com alta capacidade de absorção de energia para a
fabricação do elemento estrutural, como por exemplo, utilizar ferro fundido.
Materiais viscoelásticos são materiais largamente utilizados para esse
fim por possuírem elevado fator de perda, o que será discutido nas próximas
sessões. Estes materiais podem ser inseridos através de links viscoelásticos,
constrained layers, entre outras formas.
FIGURA 1 - EFEITO DO AMORTECIMENTO EM UMA FRF FONTE: O AUTOR (2013)
100
101
10-2
100
102
frequência (rad/s)
Módulo
da R
eceptâ
ncia
(m
/N)
c=0.5
c=0.0001
100
101
-4
-3
-2
-1
0
frequência (rad/s)
Arg
um
ento
da R
eceptâ
ncia
2.1.1.3. Neutralizadores dinâmicos
Neutralizadores dinâmicos, ou também chamados de absorvedores de
vibração, são sistemas ressonantes secundários ligados rigidamente ao
sistema primário, que é o sistema a ser controlado. Esse sistema secundário
pode ser um simples massa-mola, ou pode ainda ter amortecimento, e a função
dele é injetar impedância mecânica sobre o sistema a controlar em uma faixa
de frequência onde este possui valores baixos.
No casso de ser um sistema mecânico massa-mola, o neutralizador é
projetado de modo que a sua frequência natural seja igual à frequência natural
do sistema primário, e a massa seja uma porcentagem da massa do sistema
primário.
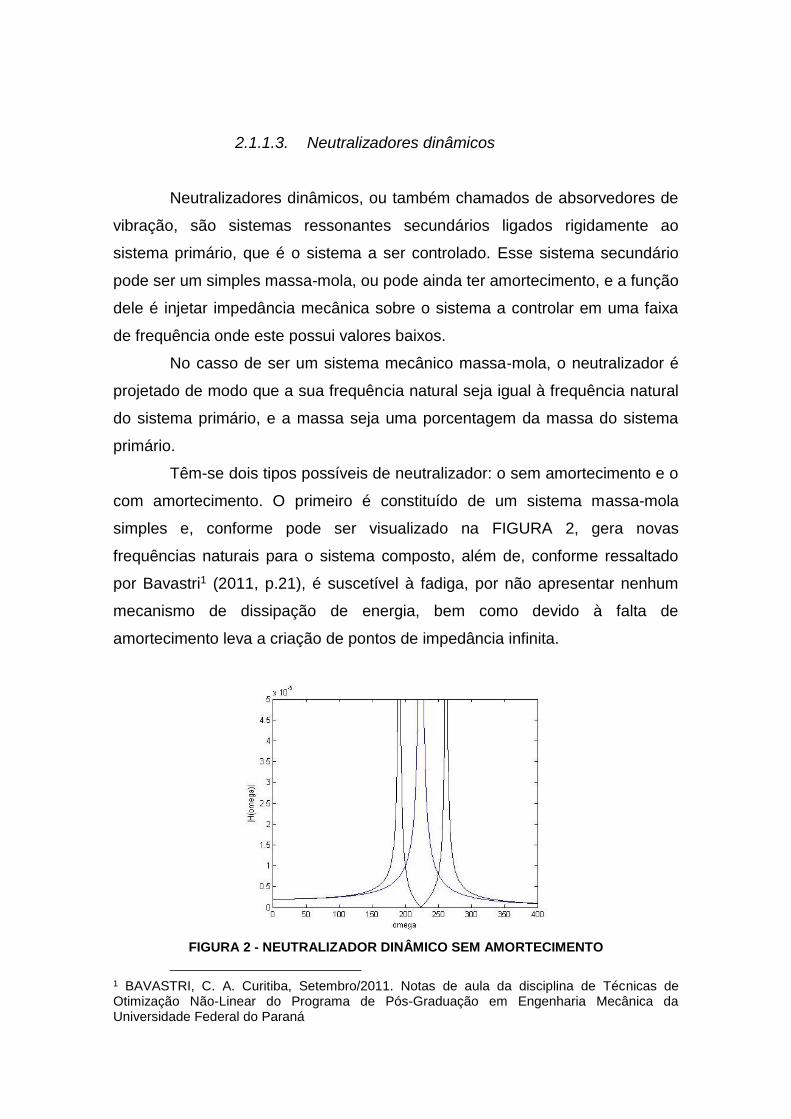
Têm-se dois tipos possíveis de neutralizador: o sem amortecimento e o
com amortecimento. O primeiro é constituído de um sistema massa-mola
simples e, conforme pode ser visualizado na FIGURA 2, gera novas
frequências naturais para o sistema composto, além de, conforme ressaltado
por Bavastri1 (2011, p.21), é suscetível à fadiga, por não apresentar nenhum
mecanismo de dissipação de energia, bem como devido à falta de
amortecimento leva a criação de pontos de impedância infinita.
FIGURA 2 - NEUTRALIZADOR DINÂMICO SEM AMORTECIMENTO
1 BAVASTRI, C. A. Curitiba, Setembro/2011. Notas de aula da disciplina de Técnicas de Otimização Não-Linear do Programa de Pós-Graduação em Engenharia Mecânica da Universidade Federal do Paraná
FONTE: BAVASTRI1 (2011)
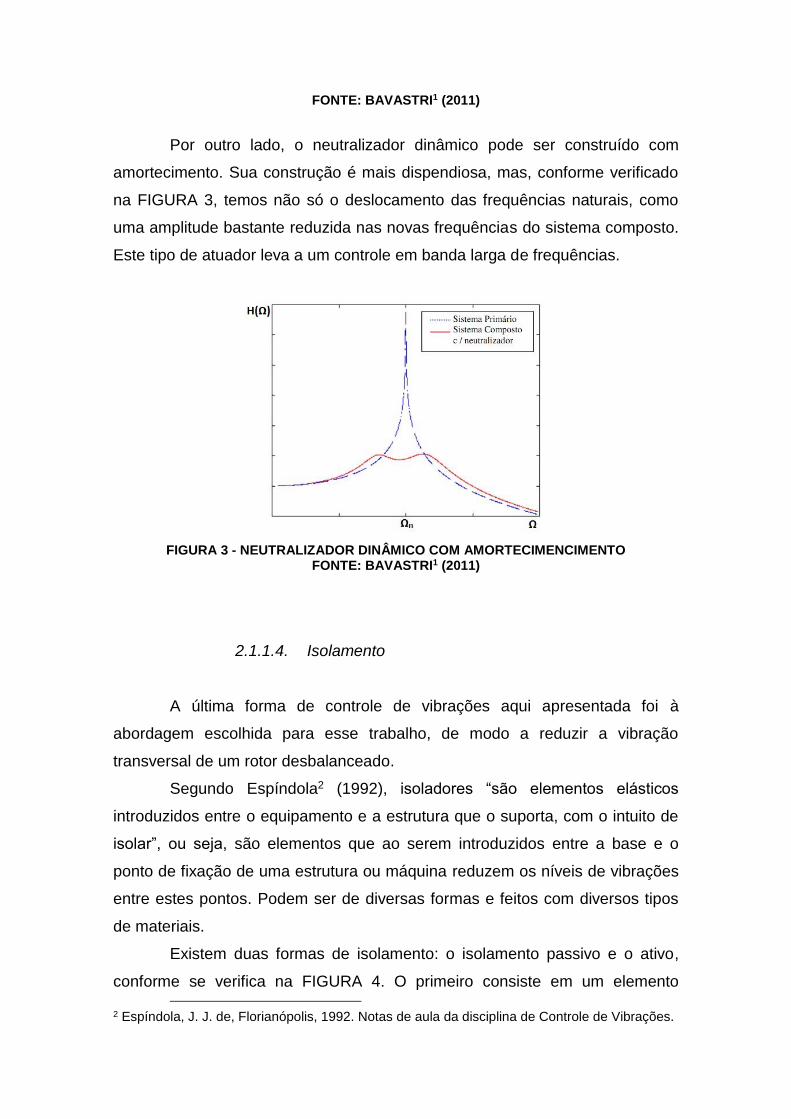
Por outro lado, o neutralizador dinâmico pode ser construído com
amortecimento. Sua construção é mais dispendiosa, mas, conforme verificado
na FIGURA 3, temos não só o deslocamento das frequências naturais, como
uma amplitude bastante reduzida nas novas frequências do sistema composto.
Este tipo de atuador leva a um controle em banda larga de frequências.
FIGURA 3 - NEUTRALIZADOR DINÂMICO COM AMORTECIMENCIMENTO FONTE: BAVASTRI1 (2011)
2.1.1.4. Isolamento
A última forma de controle de vibrações aqui apresentada foi à
abordagem escolhida para esse trabalho, de modo a reduzir a vibração
transversal de um rotor desbalanceado.
Segundo Espíndola2 (1992), isoladores “são elementos elásticos
introduzidos entre o equipamento e a estrutura que o suporta, com o intuito de
isolar”, ou seja, são elementos que ao serem introduzidos entre a base e o
ponto de fixação de uma estrutura ou máquina reduzem os níveis de vibrações
entre estes pontos. Podem ser de diversas formas e feitos com diversos tipos
de materiais.
Existem duas formas de isolamento: o isolamento passivo e o ativo,
conforme se verifica na FIGURA 4. O primeiro consiste em um elemento
2 Espíndola, J. J. de, Florianópolis, 1992. Notas de aula da disciplina de Controle de Vibrações.
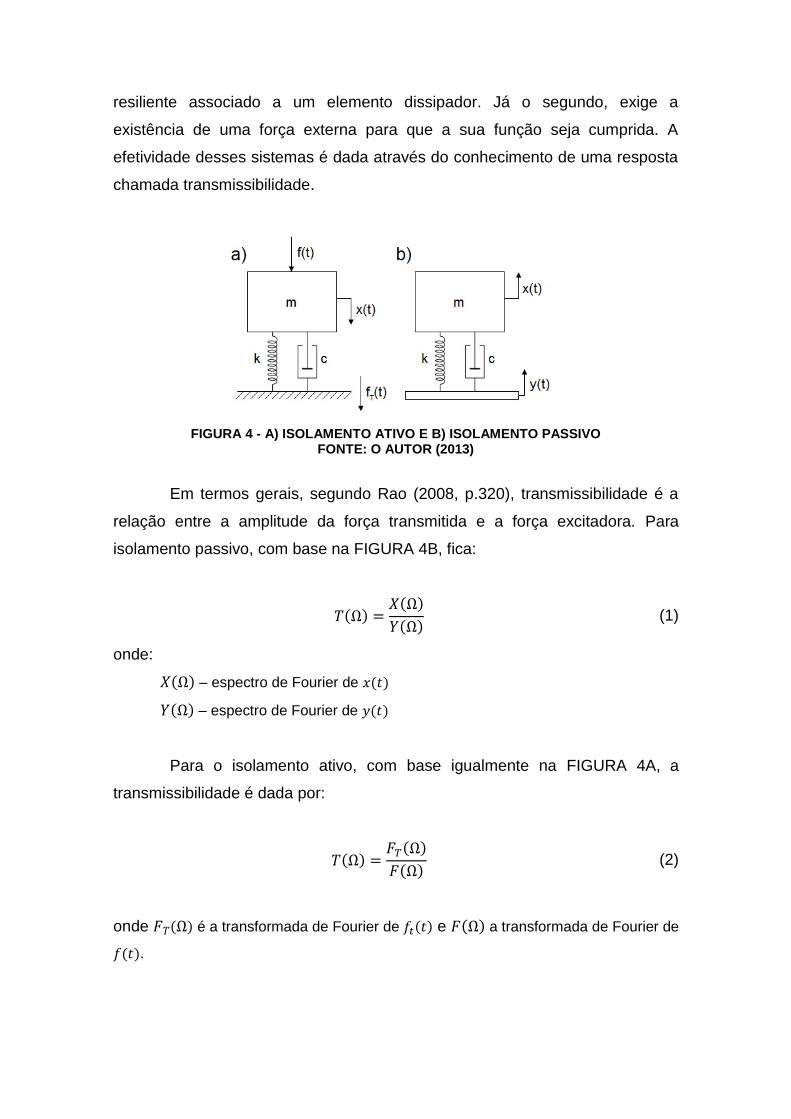
resiliente associado a um elemento dissipador. Já o segundo, exige a
existência de uma força externa para que a sua função seja cumprida. A
efetividade desses sistemas é dada através do conhecimento de uma resposta
chamada transmissibilidade.
FIGURA 4 - A) ISOLAMENTO ATIVO E B) ISOLAMENTO PASSIVO FONTE: O AUTOR (2013)
Em termos gerais, segundo Rao (2008, p.320), transmissibilidade é a
relação entre a amplitude da força transmitida e a força excitadora. Para
isolamento passivo, com base na FIGURA 4B, fica:
𝑇(Ω) =𝑋(Ω)
𝑌(Ω) (1)
onde:
𝑋(Ω) – espectro de Fourier de 𝑥(𝑡)
𝑌(Ω) – espectro de Fourier de 𝑦(𝑡)
Para o isolamento ativo, com base igualmente na FIGURA 4A, a
transmissibilidade é dada por:
𝑇(Ω) =𝐹𝑇(Ω)
𝐹(Ω) (2)
onde 𝐹𝑇(Ω) é a transformada de Fourier de 𝑓𝑡(𝑡) e 𝐹(Ω) a transformada de Fourier de
𝑓(𝑡).
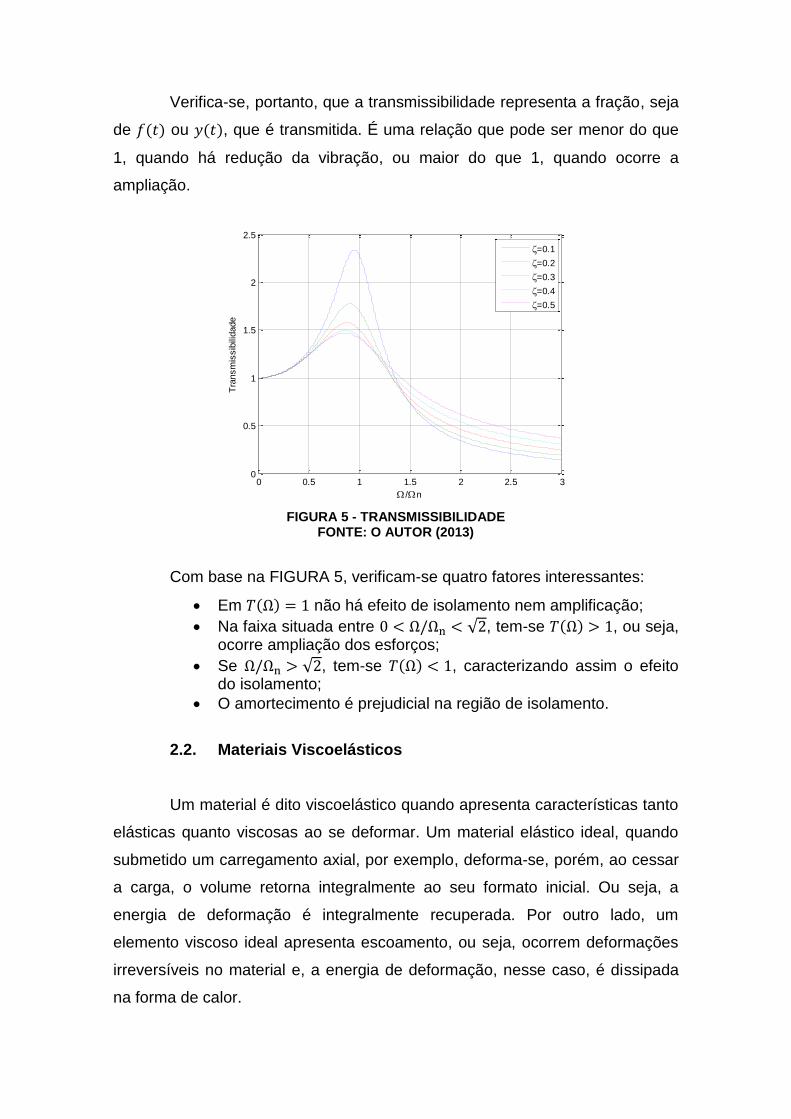
Verifica-se, portanto, que a transmissibilidade representa a fração, seja
de 𝑓(𝑡) ou 𝑦(𝑡), que é transmitida. É uma relação que pode ser menor do que
1, quando há redução da vibração, ou maior do que 1, quando ocorre a
ampliação.
FIGURA 5 - TRANSMISSIBILIDADE FONTE: O AUTOR (2013)
Com base na FIGURA 5, verificam-se quatro fatores interessantes:
Em 𝑇(Ω) = 1 não há efeito de isolamento nem amplificação;
Na faixa situada entre 0 < Ω/Ωn < √2, tem-se 𝑇(Ω) > 1, ou seja, ocorre ampliação dos esforços;
Se Ω/Ωn > √2, tem-se 𝑇(Ω) < 1, caracterizando assim o efeito do isolamento;
O amortecimento é prejudicial na região de isolamento.
2.2. Materiais Viscoelásticos
Um material é dito viscoelástico quando apresenta características tanto
elásticas quanto viscosas ao se deformar. Um material elástico ideal, quando
submetido um carregamento axial, por exemplo, deforma-se, porém, ao cessar
a carga, o volume retorna integralmente ao seu formato inicial. Ou seja, a
energia de deformação é integralmente recuperada. Por outro lado, um
elemento viscoso ideal apresenta escoamento, ou seja, ocorrem deformações
irreversíveis no material e, a energia de deformação, nesse caso, é dissipada
na forma de calor.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
/n
Tra
nsm
issib
ilidade
=0.1
=0.2
=0.3
=0.4
=0.5
A viscoelasticidade é, portanto, a combinação entre a dissipação de
uma parcela da energia de deformação e a recuperação da restante.
Segundo Cruz (2004, p. 34), materiais viscoelásticos apresentam a
tensão como uma função da deformação, taxa de deformação, das derivadas
de ordem superior da deformação e das derivadas temporais da tensão. Essa
relação é dada através da equação constitutiva, ou, ainda, chamada de
equação reológica de estado. Na teoria de viscoelasticidade linear esta relação
é expressa através da equação (3).
𝜎(𝑡) + ∑ 𝑏𝑚𝑑𝑚𝜎(𝑡)
𝑑𝑡𝑚= 𝐸0휀(𝑡) +∑𝐸𝑛
𝑑𝑛휀(𝑡)
𝑑𝑡𝑛
𝑁
𝑛=1
𝑀
𝑚=1
(3)
onde:
𝜎(𝑡) – tensão
휀(𝑡) – deformação
𝑏𝑚, 𝐸𝑜 , 𝐸𝑛 – parâmetros do material
𝑀,𝑁 – números inteiros.
A equação (3) pode ser entendida de maneira mais simples quando
relacionada a diversos modelos desenvolvidos, normalmente combinando
molas e amortecedores, como o modelo de Kelvin-Voigt ou o modelo de
Maxwell, entre outros, conforme pode ser visto em Cruz (2004, p. 146).
Aplicando a transformada de Fourier na equação (3) é possível achar o
módulo de elasticidade unidirecional que relaciona a tensão com a deformação,
como pode ser visto na equação (4),
𝐸𝑐(Ω) =𝜎(Ω)
휀(Ω)=𝐸0 + ∑ 𝐸𝑛(𝑖Ω)
𝑛𝑁𝑛=1
1 + ∑ 𝑏𝑚(𝑖Ω)𝑚𝑀𝑚=1
(4)
onde:
𝜎(Ω) – transformada de Fourier da tensão
휀(Ω) – transformada de Fourier da deformação
Ω – frequência circular
O termo à esquerda da equação (4), 𝐸𝑐, é conhecido como módulo
complexo de elasticidade, e pode ser expresso, também, pela seguinte
equação:
𝐸𝑐(Ω) = 𝐸(Ω) + 𝑖𝐸′(Ω) (5)
Na equação (5), o módulo complexo é expresso em termos de 𝐸(Ω) e
𝐸′(Ω). O primeiro termo representa o módulo de armazenagem, ou seja, o
comportamento elástico do material, denominado do módulo dinâmico de
elasticidade, enquanto que o segundo termo representa o módulo de perda, ou
ainda, o comportamento viscoso do material. A parte imaginária da equação (5)
representa a capacidade que o material possui de dissipar energia mecânica, e
pode ser expressa em termos do fator de perda do material, dado pela equação
(6).
𝜂(Ω) =𝐸′(Ω)
𝐸(Ω) (6)
Com base na equação (5) e no que foi acima explicitado, verifica-se
que, por exemplo, materiais metálicos apresentam baixíssimo módulo de
perda, ou seja, apresentam baixíssimo amortecimento. Dessa forma pode-se
expressar o seu módulo de elasticidade apenas pela parte real. Já materiais
com alto amortecimento, como no caso dos materiais viscoelásticos, a parte
imaginaria é da ordem da parte real, devendo-se assim considerar a equação
(5) completa.
Por outro lado, pode-se escrever a equação (5) da seguinte forma
simplificada:
𝐸𝑐(Ω) = 𝐸(Ω)(1 + 𝑖𝜂(Ω)) (7)
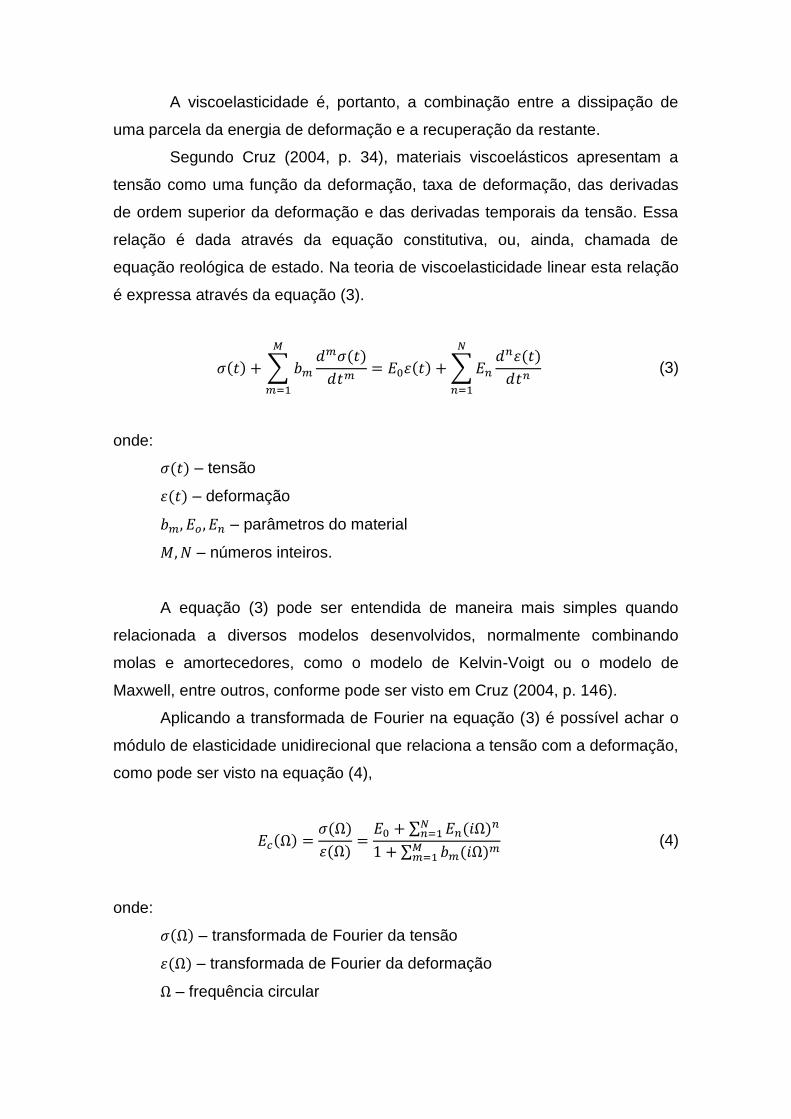
A equação (7) pode ser expressa graficamente através do nomograma,
FIGURA 6, que é um gráfico onde se têm a curva do módulo dinâmico de
elasticidade ou de cisalhamento e o fator de perda em função da frequência.
Pode-se verificar o comportamento dos materiais viscoelásticos através
da análise da FIGURA 6. Segundo Espíndola (1990), a Zona II é chamada de
região de transição, e é largamente utilizada no projeto de neutralizadores
viscoelásticos por apresentar alto amortecimento. A Zona I possui baixo fator
de perda e baixa rigidez (praticamente constante), dessa maneira é largamente
utilizado no projeto de isoladores, devido a sua elevada estabilidade estrutural.
Por fim, a Zona III, com alta rigidez e baixo fator de perda não possui aplicação
em engenharia.
FIGURA 6 - NOMOGRAMA TÍPICO – ZONAS DE TRABALHO
FONTE: BAVASTRI1
2.2.1. Modelos
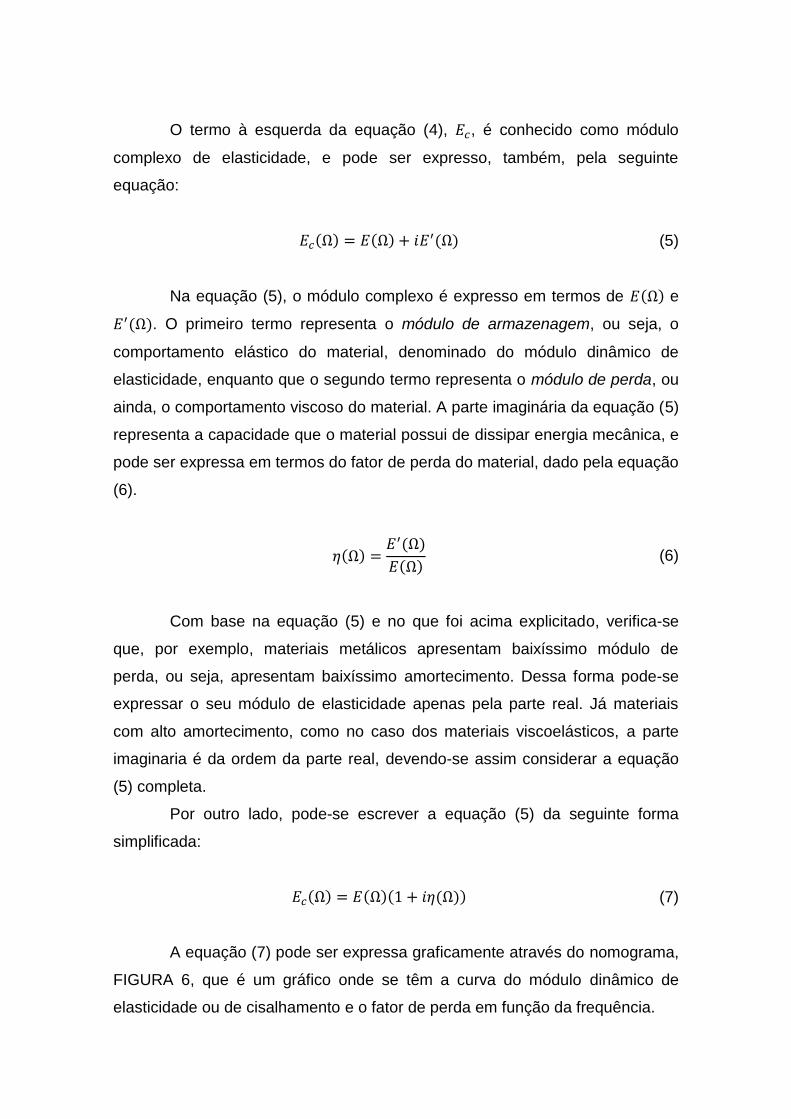
Segundo Ferry (1980, p.15), casos como o estudado, onde a rigidez
depende do tempo, ou da frequência, podem ter o comportamento simulado
através de modelos mecânicos com um número suficiente de elementos
elásticos (molas) e elementos viscosos (amortecedores). Como exemplo os
modelos abaixo:
FIGURA 7 - MODELO DE MAXWELL FONTE: BAVASTRI1 (2011)
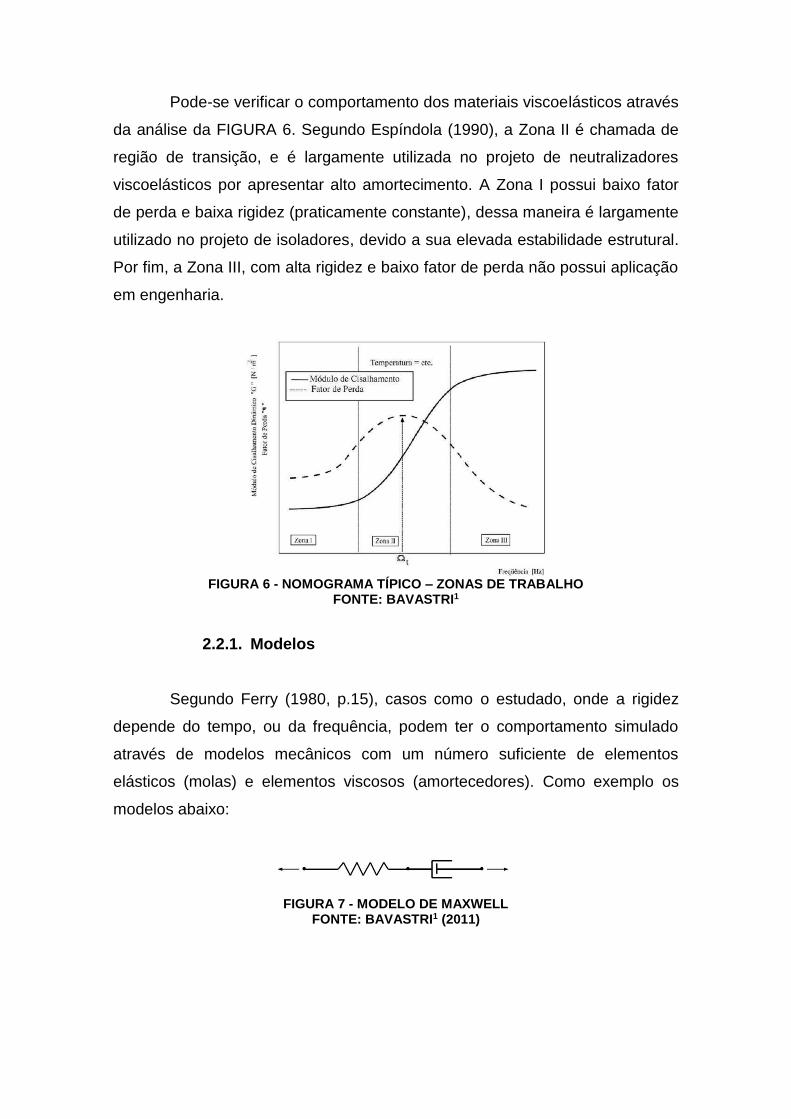
FIGURA 8 - MODELO DE VOIGT FONTE: BAVASTRI1 (2011)
Cada um dos modelos apresentados acima possui uma equação
reológica de tensão-deformação, sendo esses casos particulares da equação
(3). Esse trabalho não abordará esses outros modelos, dessa forma, para
maiores esclarecimentos recomenda-se consultar Ferry (1980) ou Cruz (2004).
2.2.2. Modelo de derivadas fracionárias
Como foi dito no item anterior, existem modelos que simplificam a
equação constitutiva, truncando os somatórios para apenas alguns poucos
valores de M e N, porém esses modelos são muito precários, não descrevendo
bem o comportamento de materiais viscoelásticos para uma ampla faixa de
frequências e para uma dada temperatura. Para se alcançar uma maior
precisão, devem-se utilizar no modelo uma quantidade elevada de coeficientes,
o que, segundo Cruz (2004, p. 38), o torna extremamente dispendioso do ponto
de vista computacional.
A fim de minimizar o problema do tempo computacional, utiliza-se outro
modelo constitutivo em viscoelasticidade linear unidimensional, baseado em
derivadas de ordem fracionária, conforme Cruz (2004, p. 39). A equação (8)
mostra este modelo que é dado por
𝜎(𝑡) + ∑ 𝑏𝑚𝐷𝑘𝑚𝜎(𝑡) = 𝐸0휀(𝑡) +∑𝐸𝑛𝐷
𝛼𝑛휀(𝑡)
𝑁
𝑛=1
𝑀
𝑚=1
(8)
onde:
𝑏𝑚, 𝑘𝑚, 𝐸𝑜 , 𝐸𝑛 e 𝛼𝑛 – parâmetros do material
𝐷𝑘𝑚 e 𝐷𝛼𝑛 – derivadas de ordem fracionária 𝑘𝑚 e 𝛼𝑛
Essas derivadas de ordem fracionária são dadas, por exemplo, para
uma variação de 0 < 𝛼𝑛 < 1, por:
𝐷𝛼𝑛[𝑓(𝑡)] =1
Γ(1 − 𝛼𝑛)
𝑑
𝑑𝑡∫
𝑓(𝜉)
(𝑡 − 𝜉)𝛼𝑛𝑑𝜉
𝑡
0
(9)
Levando a equação (8) para o domínio da frequência, a transformada de
Fourier da derivada de ordem fracionária é dada por:
ℱ{𝐷𝛼𝑛[𝑓(𝑡)]} = (𝑖Ω)𝛼𝑛ℱ[𝑓(𝑡)] = (𝑖Ω)𝛼𝑛𝐹(Ω) (10)
𝜎(Ω) + ∑ 𝑏𝑚. (𝑖Ω)𝑘𝑚
𝑀
𝑚=1
𝜎(Ω) = 𝐸0. 휀(Ω) +∑𝐸𝑛
𝑁
𝑛=1
. (𝑖Ω)𝛼𝑛휀(Ω) (11)
Assim, a equação (11) expressa à relação tensão-deformação no
domínio da frequência. Ainda, colocando em evidência a tensão e a
deformação em ambos os lados da equação (11), é possível obter o módulo de
elasticidade.
𝜎(Ω) [1 + ∑ 𝑏𝑚. (𝑖Ω)𝑘𝑚
𝑀
𝑚=1
] = 휀(Ω) [𝐸0 +∑𝐸𝑛
𝑁
𝑛=1
. (𝑖Ω)𝛼𝑛] (12)
𝐸𝑐(Ω) =𝜎(Ω)
휀(Ω)=[𝐸0 +∑ 𝐸𝑛
𝑁𝑛=1 (𝑖Ω)𝛼𝑛]
[1 + ∑ 𝑏𝑚(𝑖Ω)𝑘𝑚𝑀𝑚=1 ]
(13)
A equação (13) representa o módulo de elasticidade do material que,
assim como já foi visto, é complexo e função da frequência, para uma dada
temperatura. O módulo complexo da elasticidade pode ser então expresso pela
equação (5). Assim como no modelo reológico, o módulo complexo pode ser
descrito pelo fator de perda 𝜂(Ω), conforme a equação (7).
Segundo Pritz (1995, p. 108), comparações entre os resultados obtidos
experimentalmente e aqueles obtidos com o modelo de derivadas fracionárias,
considerando apenas poucos elementos da equação (11), revelam uma boa
concordância. No caso em que 𝑀 = 𝑁 = 1, e fazendo considerações adicionais
sem que as restrições termodinâmicas do material sejam violadas, como adotar
o modelo de quatro parâmetros (𝑘 = 𝛼), o módulo complexo pode ser
representado por:
𝐸𝑐(Ω) =𝜎(Ω)
휀(Ω)=[𝐸0 + 𝐸1(𝑖Ω)
𝛼]
[1 + 𝑏1(𝑖Ω)𝛼] (14)
De forma similar pode-se obter o módulo complexo de cisalhamento do
material através de:
𝐺𝑐(Ω) =𝜏(Ω)
𝛾(Ω)=[𝐺0 + 𝐺1(𝑖Ω)
𝛼]
[1 + 𝑏1(𝑖Ω)𝛼] (15)
ou:
𝐺𝑐(Ω) = 𝐺(Ω)[1 + 𝑖𝜂𝐺(Ω)] (16)
onde:
𝐺(Ω) – módulo de armazenamento ao cisalhamento do material (módulo
dinâmico de cisalhamento)
A equação (15) pode ser apresentada de outra forma, uma vez que 𝑏 =
𝑏11
𝛼 e 𝐺∞ =𝐺1
𝑏1:
𝐺𝑐(Ω) =𝜏(Ω)
𝛾(Ω)=[𝐺0 + 𝐺∞(𝑖𝑏Ω)
𝛼]
[1 + (𝑖𝑏Ω)𝛼] (17)
Chegando-se ao modelo de derivadas fracionárias com quatro
parâmetros: 𝐺0, 𝐺∞, 𝑏 e 𝛼, onde 𝐺0 = limΩ→0
𝐺𝑐(Ω), ou seja, é a assíntota inferior
da curva do módulo complexo de cisalhamento e 𝐺∞ = limΩ→∞
𝐺𝑐(Ω), ou seja, é a
assíntota superior. Já 𝑏 tem dimensão de tempo e é conhecido como constante
de relaxação do material enquanto que 𝛼 é uma constante adimensional.
Segundo Pritz (1996, p. 111), a tangente de 𝛼 corresponde a tangente à curva
no ponto de inflexão que, por sua vez, coincide com o ponto de máxima
amplitude do fator de perda, como pode ser observado na FIGURA 9.
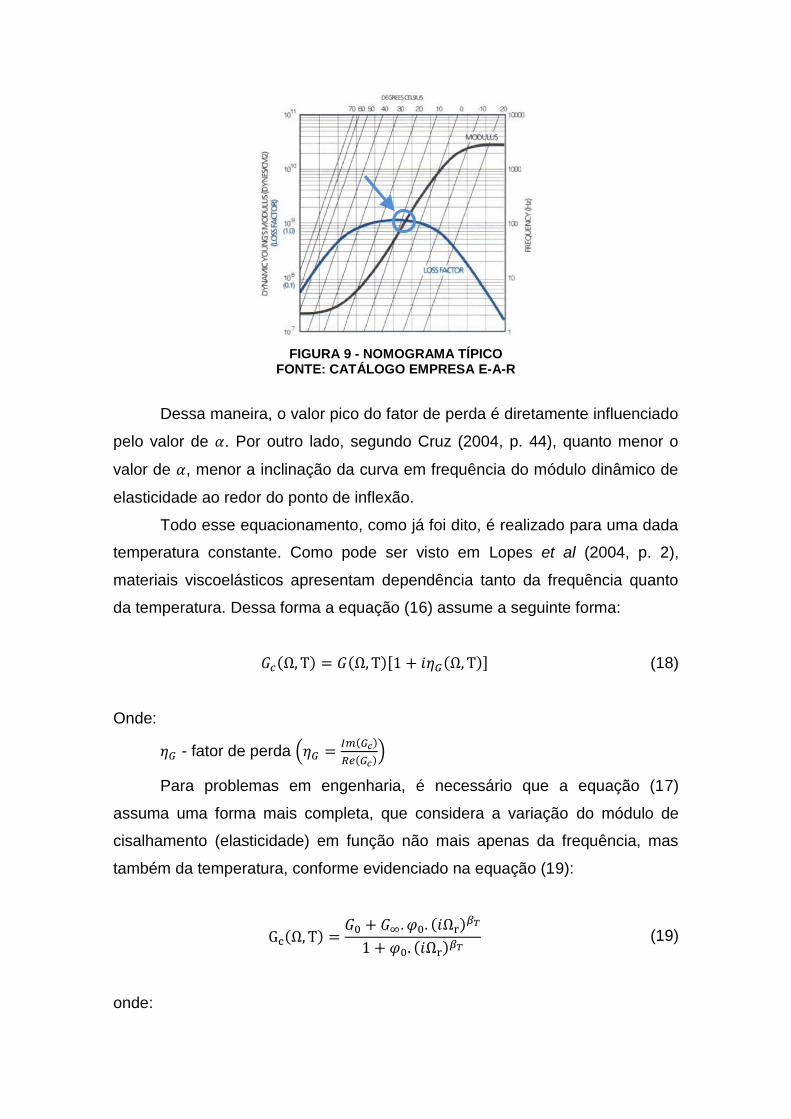
FIGURA 9 - NOMOGRAMA TÍPICO FONTE: CATÁLOGO EMPRESA E-A-R
Dessa maneira, o valor pico do fator de perda é diretamente influenciado
pelo valor de 𝛼. Por outro lado, segundo Cruz (2004, p. 44), quanto menor o
valor de 𝛼, menor a inclinação da curva em frequência do módulo dinâmico de
elasticidade ao redor do ponto de inflexão.
Todo esse equacionamento, como já foi dito, é realizado para uma dada
temperatura constante. Como pode ser visto em Lopes et al (2004, p. 2),
materiais viscoelásticos apresentam dependência tanto da frequência quanto
da temperatura. Dessa forma a equação (16) assume a seguinte forma:
𝐺𝑐(Ω, T) = 𝐺(Ω, T)[1 + 𝑖𝜂𝐺(Ω, T)] (18)
Onde:
𝜂𝐺 - fator de perda (𝜂𝐺 =𝐼𝑚(𝐺𝑐)
𝑅𝑒(𝐺𝑐))
Para problemas em engenharia, é necessário que a equação (17)
assuma uma forma mais completa, que considera a variação do módulo de
cisalhamento (elasticidade) em função não mais apenas da frequência, mas
também da temperatura, conforme evidenciado na equação (19):
Gc(Ω, T) =𝐺0 + 𝐺∞. 𝜑0. (𝑖Ωr)
𝛽𝑇
1 + 𝜑0. (𝑖Ωr)𝛽𝑇 (19)
onde:
𝛽𝑇 – parâmetro da derivada fracionária
𝜑0 – equivale a 𝑏𝛽𝑇 = 𝜑0
Ω𝑟 – frequência reduzida
A variável chamada frequência reduzida é capaz de agrupar as variáveis
Ω e T em uma única variável, usando a hipóteses que estes materiais possuem
uma dependência inversamente proporcional, a menos de um fator de escala,
entre a variação do módulo de elasticidade com a frequência e a temperatura.
Segundo as hipóteses consideradas, as curvas de módulo de
cisalhamento em função da frequência seriam deslocadas horizontalmente se
medidas a diferentes temperaturas. A relação entre o deslocamento das curvas
(𝛼𝑇(𝑇)) de acordo com a temperatura e a frequência (Ω) é dado pela
frequência reduzida (Ω𝑟), conforme visto na equação (18).
Ωr = αT(T). Ω (20)
A dependência contínua com a temperatura pode ser estabelecida
através de uma expressão empírica dada pela equação (21), consistente com
dados experimentais e conhecidos como Williams-Landel-Ferry (WLF), como
pode ser visto em Lopes (1998, pag. 24):
log10 αT(T) =−θ1(T − T0)
θ2 + (T − T0) (21)
onde:
αT(T) – deslocamento das curvas de módulo de
cisalhamento/elasticidade de acordo com a temperatura
θ1 e θ2 – parâmetros característicos do material
T0 – temperatura de referência em Kelvin
Como pode ser visto no modelo da equação (19), para se conhecer a
propriedade física de módulo de cisalhamento complexo em função das
frequências e da temperatura precisam-se de sete parâmetros, os quatro
mencionados acima mais θ1, θ2 e T0, oriundos da equação (21) e relacionados
com a equação (19) através da equação (20).
2.3. Dinâmica de rotores
Os elementos básicos de um rotor são: disco, eixo e os mancais, além
da massa desbalanceada. Os mancais são parte do sistema que sustentam o
rotor, eixo e discos, além de conferir ao sistema rigidez e amortecimento
adequado.
Esforços sobre um rotor pode advir de desbalanceamentos – excitação
síncrona (Ω = Ωrpm) – instabilidade de mancais hidrodinâmicos – excitação
assíncrona – ou se a excitação pela base a uma frequência qualquer (Ω ≠
Ωrpm) .
Para caracterizar esses elementos é necessário usar expressões da
energia cinética, considerando o eixo como um elemento flexível, os discos
como corpos rígidos e acrescentando uma massa desbalanceada, conforme
modelado por Lalanne e Ferraris (1990, p. 1). Com isso, utilizar-se-á a Equação
de Lagrange da seguinte forma:
d
dt(∂T
∂qi) −
∂T
∂qi+∂U
∂qi= Fqi (22)
onde:
𝑖 – número de graus de liberdade (1 ≤ 𝑖 ≤ 𝑁)
qi – coordenadas generalizadas independentes
Fqi – forças generalizadas
2.3.1. Disco
O disco da FIGURA 10 é assumido como rígido e, segundo Ferreira
(2004, p. 6), isso é possível uma vez que as deformações do disco são muito
pequenas, podendo ser desprezadas sem aumento substancial no erro da
solução.

FIGURA 10 - MODELO DO DISCO
FONTE: O AUTOR (2013)
Conforme evidenciado na FIGURA 10, tem-se um disco com raio
interno r, raio externo R, espessura h e densidade 𝝆𝑫. Pode-se, então, calcular
a massa e as inércias de massa do disco em função desses termos:
𝑀𝐷 = 𝜋(𝑅2 − 𝑟2). ℎ. 𝜌𝐷 (23)
𝐼𝐷𝑥 = 𝐼𝐷𝑧 =1
12𝑀𝐷(3𝑅
2 + 3𝑟2 + ℎ2) (24)
𝐼𝐷𝑦 =1
2𝑀𝐷(𝑅
2 + 𝑟2) (25)
Dessa forma, tem-se que a matriz de inércia do elemento de disco é
simétrica e composta por:
[𝐼𝐷] = [
𝐼𝐷𝑥 0 00 𝐼𝐷𝑦 0
0 0 𝐼𝐷𝑧
] (26)
Uma vez que se assume o disco como um corpo rígido, tem-se apenas
energia cinética associada a este elemento. Para o seu cálculo, é necessário
considerar, conforme Lalanne e Ferraris (1990, p. 1), o sistema de
coordenadas inercial fixo 𝑅0(𝑋, 𝑌, 𝑍) e o sistema móvel 𝑅(𝑥, 𝑦, 𝑧) com origem no
centro do disco, conforme FIGURA 11. As coordenadas (𝑥, 𝑦, 𝑧) relacionam-se
com (𝑋, 𝑌, 𝑍) através dos ângulos (𝜓, 𝜃, 𝜑). Ou seja, primeiro rotaciona-se 𝜓
em torno do eixo 𝑍. Depois de aplicada essa rotação, determina-se um novo
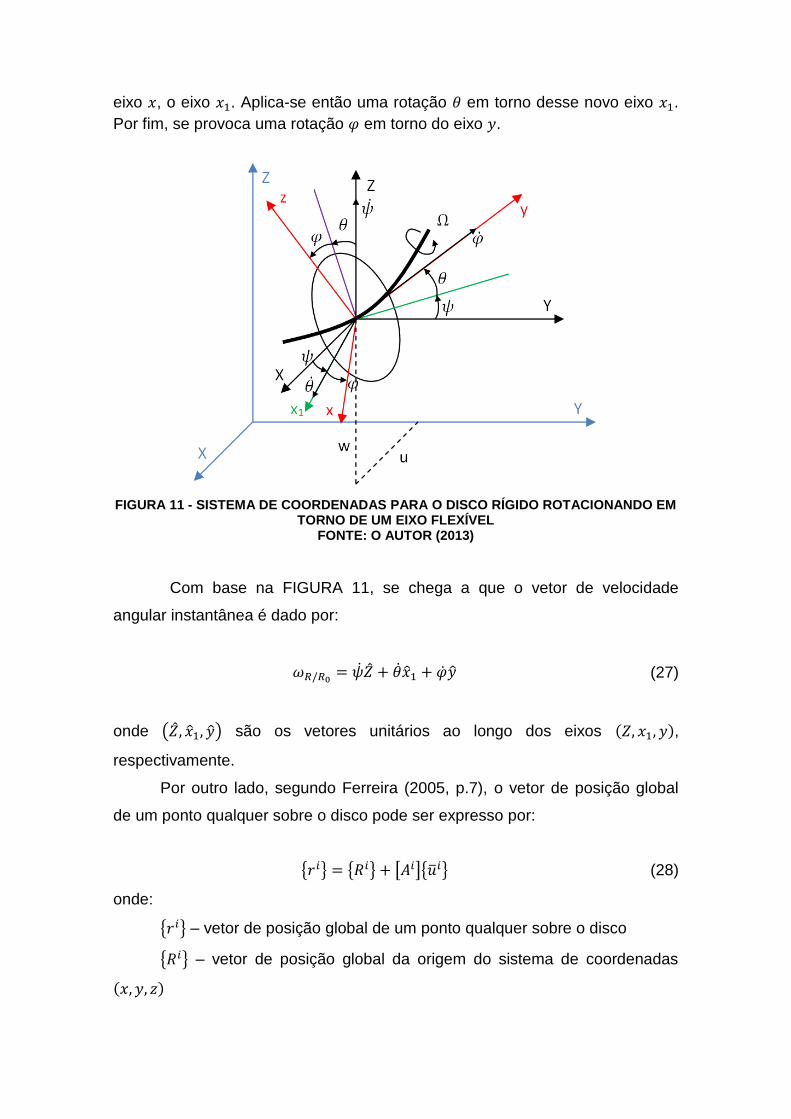
eixo 𝑥, o eixo 𝑥1. Aplica-se então uma rotação 𝜃 em torno desse novo eixo 𝑥1.
Por fim, se provoca uma rotação 𝜑 em torno do eixo 𝑦.
FIGURA 11 - SISTEMA DE COORDENADAS PARA O DISCO RÍGIDO ROTACIONANDO EM
TORNO DE UM EIXO FLEXÍVEL FONTE: O AUTOR (2013)
Com base na FIGURA 11, se chega a que o vetor de velocidade
angular instantânea é dado por:
𝜔𝑅/𝑅0 = ���� + ����1 + ���� (27)
onde (��, ��1, ��) são os vetores unitários ao longo dos eixos (𝑍, 𝑥1, 𝑦),
respectivamente.
Por outro lado, segundo Ferreira (2005, p.7), o vetor de posição global
de um ponto qualquer sobre o disco pode ser expresso por:
{𝑟𝑖} = {𝑅𝑖} + [𝐴𝑖]{��𝑖} (28)
onde:
{𝑟𝑖} – vetor de posição global de um ponto qualquer sobre o disco
{𝑅𝑖} – vetor de posição global da origem do sistema de coordenadas
(𝑥, 𝑦, 𝑧)

[𝐴𝑖] – matriz de transformação (3x3)
{��𝑖} – vetor de posição de um ponto qualquer em relação à origem do
sistema (𝑥, 𝑦, 𝑧)
Utilizando-se os mesmo ângulos de Euler (𝜓, 𝜃, 𝜑) anteriormente
utilizados, pode-se novamente, girar o sistema (𝑥, 𝑦, 𝑧) em um ângulo 𝜓 em
torno de 𝑍, resultando na seguinte matriz de transformação [𝐴𝜓]:
[𝐴𝜓] = [cos𝜓 sin𝜓 0−sin𝜓 cos𝜓 00 0 1
] (29)
Agora, girando-se o sistema (𝑥, 𝑦, 𝑧) em um ângulo 𝜃 em torno do exo 𝑋,
resultando na matriz de transformação [𝐴𝜓]:
[𝐴𝜃] = [1 0 00 cos 𝜃 sin 𝜃0 − sin 𝜃 cos 𝜃
] (30)
E finalmente, rotaciona-se o sistema (𝑥, 𝑦, 𝑧) em um ângulo 𝜑 em torno
do exo 𝑌, resultando na matriz de transformação [𝐴𝜃]:
[𝐴𝜑] = [cos 𝜑 0 − sin𝜑0 1 0
sin𝜑 0 cos𝜑] (31)
Utilizando as matrizes de transformação das equações (29), (30) e (31),
define-se os vetores unitários {𝑖1}, {𝑗} e {��}, onde {𝑖1} é o vetor unitário na
direção 𝑥1, {𝑗} é o vetor unitário na direção 𝑦 e {��} é o vetor unitário na direção
𝑍. Escrevendo os componentes desses vetores unitários no sistema de
referência (𝑥, 𝑦, 𝑧), tem-se:
{𝑖1} = [cos𝜑 0 − sin𝜑0 1 0
sin𝜑 0 cos𝜑] {100} = {
cos𝜑0
sin𝜑} (32)

{𝑗} = {010} (33)
{��} = [cos 𝜑 0 − sin𝜑0 1 0
sin𝜑 0 cos𝜑] [1 0 00 cos 𝜃 sin 𝜃0 − sin 𝜃 cos 𝜃
] {001} = {
− sin𝜑 cos 𝜃sin 𝜃
cos𝜑 cos 𝜃} (34)
Agora se pode escrever o vetor velocidade angular instantânea do disco
em função do sistema de referências 𝑅, utilizando-se os vetores das equações
(32), (33) e (34).
{��} = �� {− sin 𝜑 cos 𝜃
sin 𝜃cos𝜑 cos 𝜃
} + �� {
cos 𝜑0
sin𝜑} + �� {
010} (35)
{��} = [− sin𝜑 cos 𝜃 cos𝜑 0
sin 𝜃 0 1cos𝜑 cos 𝜃 sin𝜑 0
]{��
����
} (36)
{��} = {
𝜔𝑥𝜔𝑦𝜔𝑧} = {
−�� sin 𝜑 cos 𝜃 + �� cos𝜑
�� sin 𝜃 + ��
�� cos 𝜑 cos 𝜃 + �� sin𝜑
} (37)
Com isso, a energia cinética do disco ao redor do centro de massa O,
segundo Ferreira (2005, p. 11), é dado por:
𝑻𝑫𝑹⁄=𝟏
𝟐 {��𝑅/𝑅0}
𝐓[𝐈𝐃]{��𝑅/𝑅0} =
𝟏
𝟐 {𝜔𝑥 𝜔𝑦 𝜔𝑧} [
𝐼𝐷𝑥 0 00 𝐼𝐷𝑦 0
0 0 𝐼𝐷𝑧
] {
𝜔𝑥𝜔𝑦𝜔𝑧} (38)
𝑇𝐷𝑅⁄=1
2 (𝐼𝐷𝑥𝜔𝑥
2 + 𝐼𝐷𝑦𝜔𝑦2 + 𝐼𝐷𝑧𝜔𝑧
2) (39)
e, considerando no centro de massa do disco, acrescenta-se
𝑇𝑂𝑅0⁄
=1
2 MD(u
2 + w2) (40)
Dessa forma, a energia cinética total do disco será dada pela soma das
equações (39) e (40), ou seja, da energia cinética do disco ao redor do ponto O
e no centro de massa do disco, a ver:
𝑻𝑫 =𝟏
𝟐 𝐌𝐃(��
𝟐 + ��𝟐) +𝟏
𝟐 (𝐼𝐷𝑥𝝎𝒙
𝟐 + 𝐼𝐷𝑦𝝎𝒚𝟐 + 𝐼𝐷𝒛𝝎𝒛
𝟐) (41)
Algumas simplificações podem ser realizadas na equação (41):
Trabalhar com um disco simétrico (𝐼𝐷𝑥 = 𝐼𝐷𝒛); Os ângulos 𝜃 e 𝜓 são pequenos, por linearidade;
A velocidade angular é praticamente constante (�� = Ω = 𝑐𝑡𝑒).
Dessa forma, a equação (41) fica:
𝑇𝐷 =1
2 MD(u
2 + w2) +1
2 𝐼𝐷𝑥(��
2 + ��2) +1
2𝐼𝐷𝑦(Ω
2 + 2Ω��𝜃) (42)
Para maiores detalhes sobre as simplificações impostas consultar
Ferreira (2205, p. 12).
Analisando a equação (42) verifica-se que o termo 𝟏
𝟐𝑰𝐷𝒚Ω
2 é constante,
representando a energia de rotação do disco. Por outro lado, o termo 𝑰𝐷𝒚𝛀��𝜽
representa o efeito giroscópico associado ao disco, ou seja, a força de Coriolis
do disco.
O desenvolvimento numérico desse trabalho foi baseado na forma
matricial, uma vez a resolução do problema é realizada utilizando o Método dos
Elementos Finitos. Considera-se, então, o rotor com quatro graus de liberdade,
sendo dois de deslocamento e dois de giros. Dessa forma, para um nó
qualquer 𝑖, tem-se o seguinte vetor de deslocamento nodal:
{𝑞𝑖} = {𝑢𝑖 𝑤𝑖 𝜃𝑖 𝜓𝑖}𝑇 (43)
onde:
𝑢𝑖 – deslocamento na direção 𝑋
𝑤𝑖 – deslocamento na direção 𝑍

𝜃𝑖 – giro em torno do eixo 𝑋
𝜓𝑖 – giro em torno do eixo 𝑍
Conforme Lalanne e Ferarris (1990, p. 50), a aplicação da equação de
Lagrange na equação (42) resulta em:
𝑑
𝑑𝑡(𝜕𝑇𝐷𝜕��𝑖
) −𝜕𝑇𝐷𝜕𝑞𝑖
= 𝐹𝑞𝑖 (44)
𝑑
𝑑𝑡{𝜕
𝜕��𝑖[1
2 MD(u
2 + w2) +1
2 𝐼𝐷𝑥(��
2 + ��2) +1
2𝐼𝐷𝑦(Ω
2 + 2Ω��𝜃)]}
−𝜕
𝜕𝑞𝑖[1
2 MD(u
2 + w2) +1
2 𝐼𝐷𝑥(��
2 + ��2) +1
2𝐼𝐷𝑦(Ω
2 + 2Ω��𝜃)]
= [𝑀𝐷]{��𝑖} + Ω[𝐺𝐷]{��𝑖}
(45)
Considerando que o disco influencia apenas o nó no qual está
posicionado, ou seja, sua espessura não é significativa em relação ao diâmetro
do eixo, a participação do disco na matriz de massa é dada por:
[𝑀𝐷] = [
𝑀𝐷 0 0 00 𝑀𝐷 0 00 0 𝐼𝐷𝑥 00 0 0 𝐼𝐷𝑥
] (46)
Enquanto que a matriz [𝐺𝐷] representa o efeito giroscópico do disco, sendo
expresso por:
[𝐺𝐷] = Ω
[ 0 0 0 00 0 0 00 0 0 −𝐼𝐷𝑦0 0 𝐼𝐷𝑦 0 ]
(47)
Dessa forma, a equação (42) pode ser escrita na forma matricial como
segue:

𝑑
𝑑𝑡(𝜕𝑇𝐷𝜕��𝑖
) −𝜕𝑇𝐷𝜕𝑞𝑖
= [
𝑀𝐷 0 0 00 𝑀𝐷 0 00 0 𝐼𝐷𝑥 00 0 0 𝐼𝐷𝑥
]
{
��𝑖��𝑖��𝑖��𝑖}
+ Ω
[ 0 0 0 00 0 0 00 0 0 −𝐼𝐷𝑦0 0 𝐼𝐷𝑦 0 ]
{
��𝑖��𝑖��𝑖��𝑖}
(48)
2.3.2. Eixo:
O eixo é aproximado como uma viga de seção circular, não podendo
ser considerado rígido, portanto apresentará não só energia cinética, mas
também energia potencial.
2.3.2.1. Energia cinética
O cálculo da energia cinética para o eixo é similar ao apresentado para
o disco, porém considera-se:
MD ∼ ME = ρS (49)
𝐼𝐷𝑥 ∼ 𝐼𝐸𝑥 = ρI (50)
𝐼𝐷𝑦 ∼ 𝐼𝐸𝑦 = ρI (51)
onde:
ρ é densidade constante do eixo,
S é área da seção transversal (𝑆 = 𝜋𝑑2 4⁄ ) e
I é momento de inércia de segunda ordem (𝐼 = 𝜋𝑑4 64⁄ ).
Com isso, diz-se que a energia cinética do eixo é uma extensão da
energia cinética do disco para um elemento de comprimento 𝐿:
𝑇𝐸 =ρS
2 ∫ (u2 + w2)dy
L
0
+ρI
2 ∫ (��2 + ��2)dy
L
0
+ ρILΩ2 + 2ρIΩ∫ ��𝜃dyL
0
(52)
Analisando a equação (52) observa-se que a primeira integral é a
clássica equação da energia cinética e a segunda integral é o efeito secundário
da inércia de rotação. O termo ρILΩ2 é constante, não influenciando na
equação, e a última integral representa o efeito giroscópico, tal qual no disco.
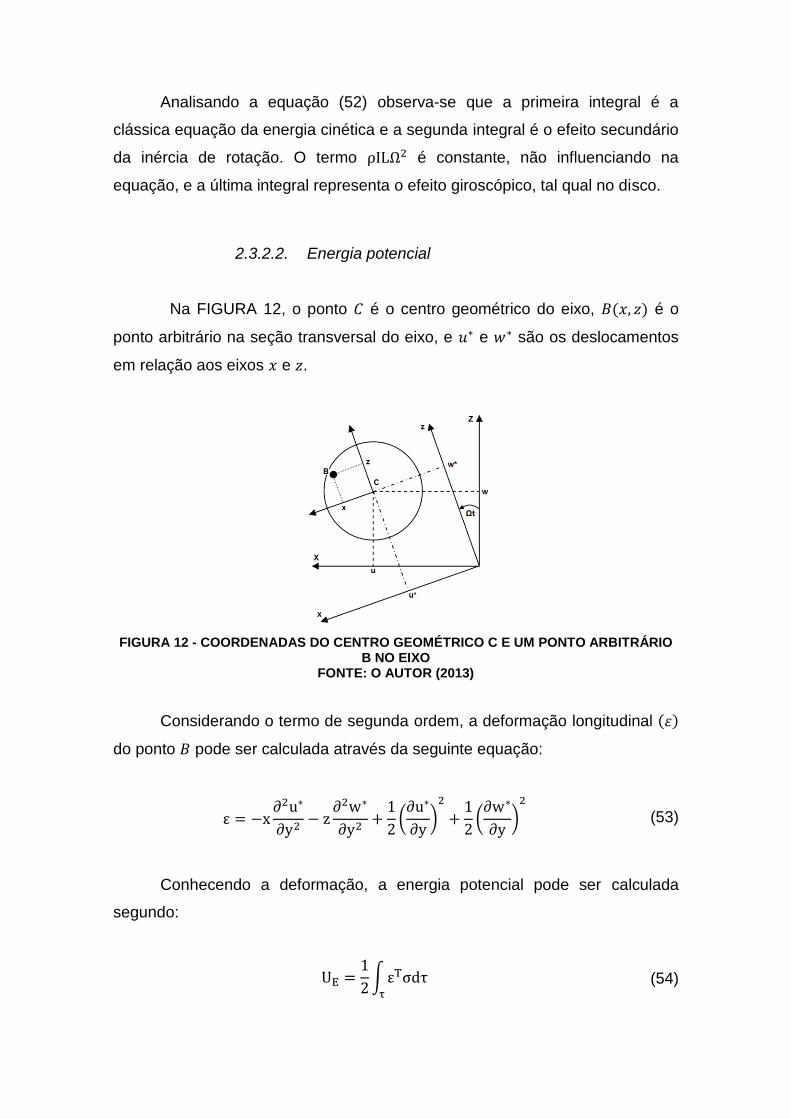
2.3.2.2. Energia potencial
Na FIGURA 12, o ponto 𝐶 é o centro geométrico do eixo, 𝐵(𝑥, 𝑧) é o
ponto arbitrário na seção transversal do eixo, e 𝑢∗ e 𝑤∗ são os deslocamentos
em relação aos eixos 𝑥 e 𝑧.
FIGURA 12 - COORDENADAS DO CENTRO GEOMÉTRICO C E UM PONTO ARBITRÁRIO B NO EIXO
FONTE: O AUTOR (2013)
Considerando o termo de segunda ordem, a deformação longitudinal (휀)
do ponto 𝐵 pode ser calculada através da seguinte equação:
ε = −x∂2u∗
∂y2− z
∂2w∗
∂y2+1
2(∂u∗
∂y)2
+1
2(∂w∗
∂y)2
(53)
Conhecendo a deformação, a energia potencial pode ser calculada
segundo:
UE =1
2∫εTσdτ
τ
(54)

onde 𝑇 é o símbolo de matriz transposta. Sabe-se que em comportamento
linear o produto entre a deformação e o módulo de elasticidade é a tensão
normal (𝜎 = 휀𝐸). Assim, a energia potencial pode ser escrita como:
UE =E
2∫(εl
2 + 2εlεnl + εnl2 )dτ
τ
(55)
onde:
εl é termos lineares da deformação ε e
εnl é termos não lineares da deformação ε.
Como nesse trabalho se trabalhará apenas com eixos de seção simétrica, o
segundo termo da integral da equação (55) pode ser anulado. Dessa forma, a equação
da energia potencial fica:
UE =E
2∫∫(−x
∂2u∗
∂y2− z
∂2w∗
∂y2)
2
S
L
0
dSdy (56)
UE =E
2∫∫[x2 (
∂2u∗
∂y2)
2
+ z2 (∂2w∗
∂y2)
2
+ 2xz∂2u∗
∂y2∂2w∗
∂y2]
S
L
0
dSdy
(57)
Inspecionando a equação (57) observa-se que, devido que só serão
considerados neste trabalho eixos simétricos, o último termo da integral é nulo. Por
outro lado, sabe-se que:
IEx = ∫z2dS
S
IEz = ∫x2dS
S
(58)
Substituindo as equações (58) em (57), a energia potencial resulta em:

UE =E
2∫[IEz (
∂2u∗
∂y2)
2
+ IEx (∂2w∗
∂y2)
2
]
L
0
dy
(59)
Com base na FIGURA 12, pode-se expressar u∗ e w∗ em termos de 𝑢 e 𝑤,
através de uma transformação de coordenadas como em Lalanne e Ferraris (1990, p.
6):
u∗ = u cosΩt − wsinΩtw∗ = usin Ωt + wcosΩt
(60)
Assim, a equação (59) pode ser rescrita como:
UE =E
2∫ [IEz (cosΩt
∂2u
∂y2− sinΩt
∂2w
∂y2)
2L
0
+ IEx (sinΩt∂2u
∂y2+ cosΩt
∂2w
∂y2)
2
] dy
(61)
Com o eixo simétrico (IEz = IEx = IE), a energia potencial do eixo,
desconsiderando os efeitos das forças axiais, fica:
UE =EIE2∫ [(
∂2u
∂y2)
2
+ (∂2w
∂y2)
2
]
L
0
dy
(62)
Conforme Lalanne e Ferraris (1990, p.51), é possível obter a forma matricial
utilizando a FIGURA 13 como base, ou seja, o eixo modelado segundo o Método dos
Elementos Finitos com quatro deslocamentos (𝑢1, 𝑤1, 𝑢2, 𝑤2) e quatro inclinações
(𝜓1, 𝜃1, 𝜓2, 𝜃2) para um elemento de tamanho 𝐿 com dois nós (①,②).
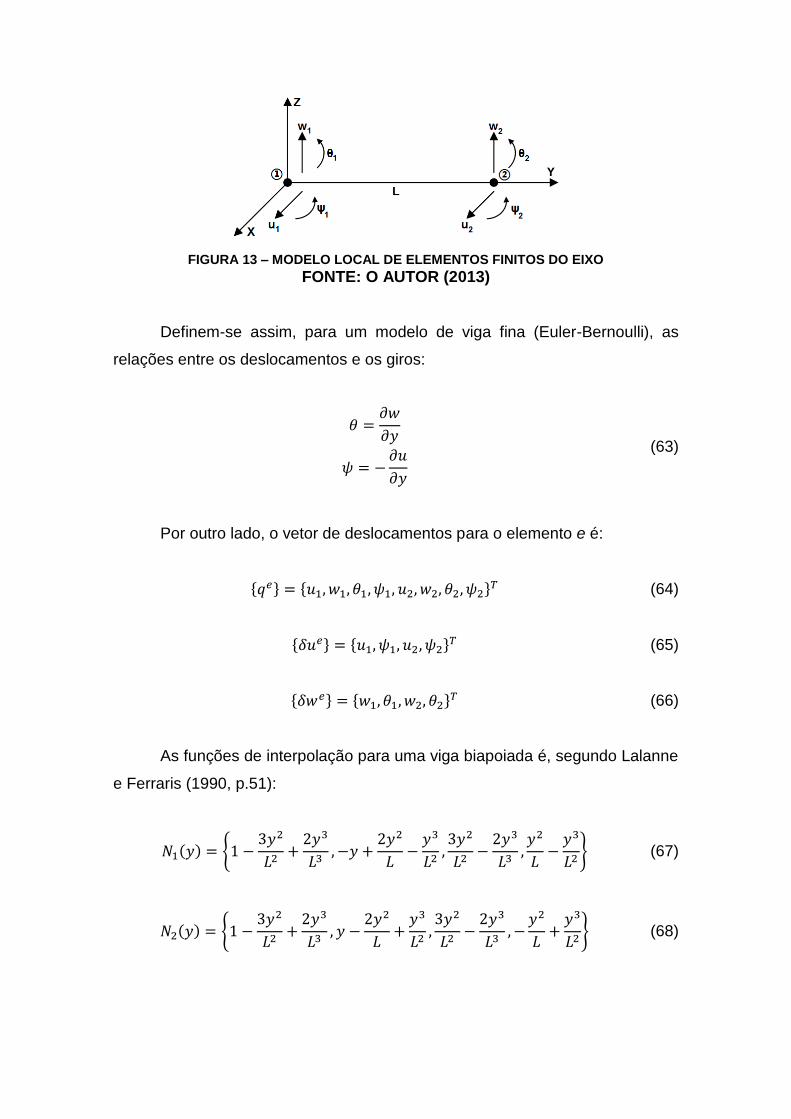
FIGURA 13 – MODELO LOCAL DE ELEMENTOS FINITOS DO EIXO
FONTE: O AUTOR (2013)
Definem-se assim, para um modelo de viga fina (Euler-Bernoulli), as
relações entre os deslocamentos e os giros:
𝜃 =𝜕𝑤
𝜕𝑦
𝜓 = −𝜕𝑢
𝜕𝑦
(63)
Por outro lado, o vetor de deslocamentos para o elemento e é:
{𝑞𝑒} = {𝑢1, 𝑤1, 𝜃1, 𝜓1, 𝑢2, 𝑤2, 𝜃2, 𝜓2}𝑇 (64)
{𝛿𝑢𝑒} = {𝑢1, 𝜓1, 𝑢2, 𝜓2}𝑇 (65)
{𝛿𝑤𝑒} = {𝑤1, 𝜃1, 𝑤2, 𝜃2}𝑇 (66)
As funções de interpolação para uma viga biapoiada é, segundo Lalanne
e Ferraris (1990, p.51):
𝑁1(𝑦) = {1 −3𝑦2
𝐿2+2𝑦3
𝐿3, −𝑦 +
2𝑦2
𝐿−𝑦3
𝐿2,3𝑦2
𝐿2−2𝑦3
𝐿3,𝑦2
𝐿−𝑦3
𝐿2} (67)
𝑁2(𝑦) = {1 −3𝑦2
𝐿2+2𝑦3
𝐿3, 𝑦 −
2𝑦2
𝐿+𝑦3
𝐿2,3𝑦2
𝐿2−2𝑦3
𝐿3, −𝑦2
𝐿+𝑦3
𝐿2} (68)

E sabe-se que a relação entre as equações (67) e (68) com (65) e (66)
resultam em:
𝑢 = 𝑁1(𝑦)𝛿𝑢
𝑤 = 𝑁2(𝑦)𝛿𝑤 (69)
Como já visto, a energia cinética do eixo é expressa pela equação (52),
utilizando as equações (63) e (69), tem-se a energia cinética expressa na forma
compacta que segue:
𝑇𝐸 =ρS
2 ∫ (δuTN1
TN1δu + δw
TN2TN2δw) dy
L
0
+ρI
2 ∫ (δuT
dN1T
dy
dN1dy
δu + δwTdN2
T
dy
dN2dy
δw) dyL
0
− 2ρIΩ∫ δuTdN1
T
dy
dN2dy
δwdyL
0
+ ρILΩ2
(70)
𝑇𝐸 =ρS
2 (δuT∫ N1
TN1dyδu + δwT∫ N2
TN2dyδwL
0
L
0
)
+ρI
2 (δuT∫
dN1T
dy
dN1dy
dyδu + δwT∫dN2
T
dy
dN2dy
L
0
dyL
0
δw)
− 2ρIΩδuT∫dN1
T
dy
dN2dy
dyδwL
0
+ ρILΩ2
(71)
Substituindo as funções de interpolação das equações (67) e (68) e suas
derivadas na equação (71), e já resolvendo a integral, tem-se:
𝑇𝐸 =1
2δuTM1δu +
1
2 δwTM2δw +
1
2δuTM3δu +
1
2δwTM4δw + Ωδu
TM5δw
+ ρILΩ2
(72)
na qual:
M1 e M2 são as clássicas matrizes de massa,
M3 e M4 representam a influência do efeito secundário da inércia de rotação e
M5 é a matriz giroscópica.
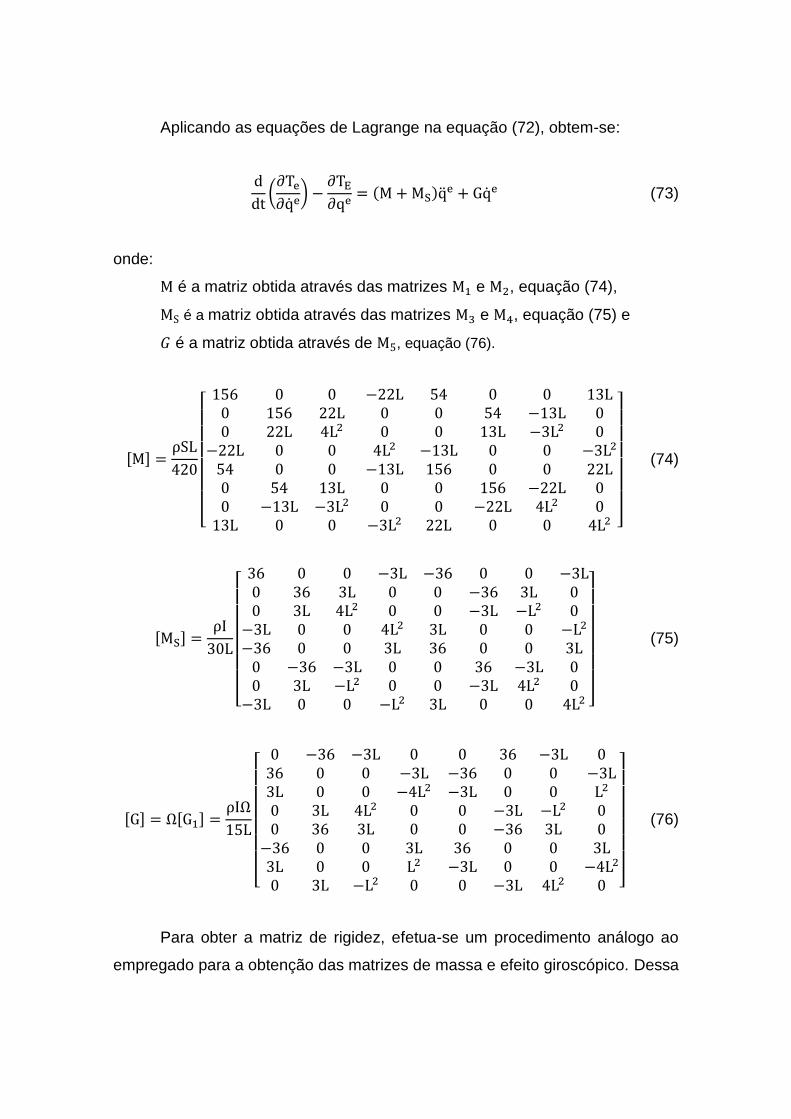
Aplicando as equações de Lagrange na equação (72), obtem-se:
d
dt(∂Te∂qe
) −∂TE∂qe
= (M +MS)qe + Gqe (73)
onde:
M é a matriz obtida através das matrizes M1 e M2, equação (74),
MS é a matriz obtida através das matrizes M3 e M4, equação (75) e
𝐺 é a matriz obtida através de M5, equação (76).
[M] =ρSL
420
[ 156 0 0 −22L 54 0 0 13L0 156 22L 0 0 54 −13L 00 22L 4L2 0 0 13L −3L2 0
−22L 0 0 4L2 −13L 0 0 −3L2
54 0 0 −13L 156 0 0 22L0 54 13L 0 0 156 −22L 00 −13L −3L2 0 0 −22L 4L2 013L 0 0 −3L2 22L 0 0 4L2 ]
(74)
[MS] =ρI
30L
[ 36 0 0 −3L −36 0 0 −3L0 36 3L 0 0 −36 3L 00 3L 4L2 0 0 −3L −L2 0−3L 0 0 4L2 3L 0 0 −L2
−36 0 0 3L 36 0 0 3L0 −36 −3L 0 0 36 −3L 00 3L −L2 0 0 −3L 4L2 0−3L 0 0 −L2 3L 0 0 4L2 ]
(75)
[G] = Ω[G1] =ρIΩ
15L
[ 0 −36 −3L 0 0 36 −3L 036 0 0 −3L −36 0 0 −3L3L 0 0 −4L2 −3L 0 0 L2
0 3L 4L2 0 0 −3L −L2 00 36 3L 0 0 −36 3L 0−36 0 0 3L 36 0 0 3L3L 0 0 L2 −3L 0 0 −4L2
0 3L −L2 0 0 −3L 4L2 0 ]
(76)
Para obter a matriz de rigidez, efetua-se um procedimento análogo ao
empregado para a obtenção das matrizes de massa e efeito giroscópico. Dessa
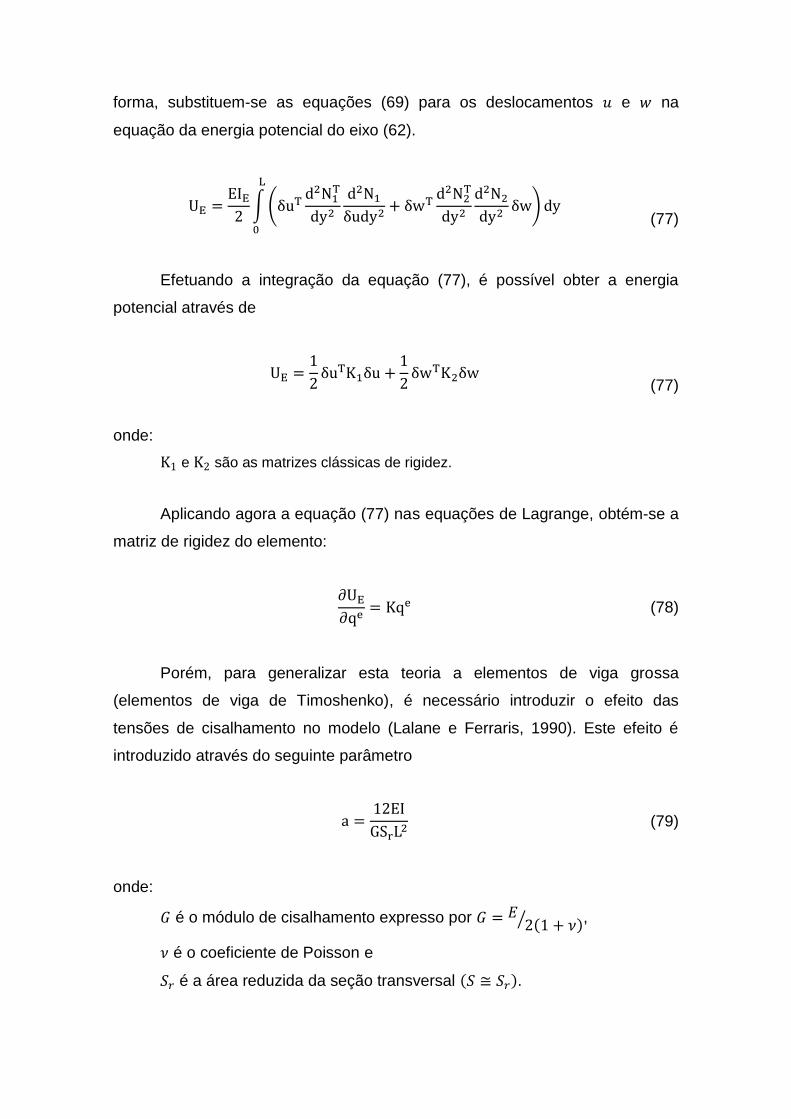
forma, substituem-se as equações (69) para os deslocamentos 𝑢 e 𝑤 na
equação da energia potencial do eixo (62).
UE =EIE2∫(δuT
d2N1T
dy2d2N1δudy2
+ δwTd2N2
T
dy2d2N2dy2
δw)
L
0
dy
(77)
Efetuando a integração da equação (77), é possível obter a energia
potencial através de
UE =1
2δuTK1δu +
1
2δwTK2δw
(77)
onde:
K1 e K2 são as matrizes clássicas de rigidez.
Aplicando agora a equação (77) nas equações de Lagrange, obtém-se a
matriz de rigidez do elemento:
∂UE∂qe
= Kqe (78)
Porém, para generalizar esta teoria a elementos de viga grossa
(elementos de viga de Timoshenko), é necessário introduzir o efeito das
tensões de cisalhamento no modelo (Lalane e Ferraris, 1990). Este efeito é
introduzido através do seguinte parâmetro
a =12EI
GSrL2 (79)
onde:
𝐺 é o módulo de cisalhamento expresso por 𝐺 = 𝐸 2(1 + 𝜈)⁄ ,
𝜈 é o coeficiente de Poisson e
𝑆𝑟 é a área reduzida da seção transversal (𝑆 ≅ 𝑆𝑟).
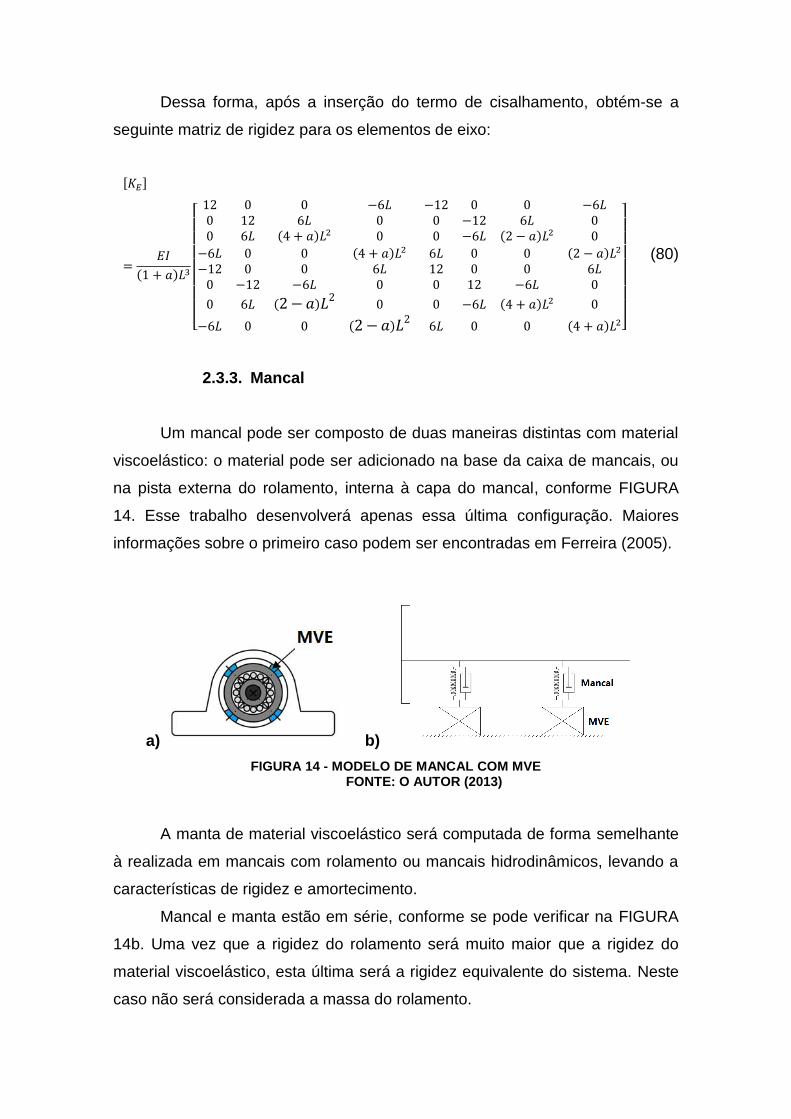
Dessa forma, após a inserção do termo de cisalhamento, obtém-se a
seguinte matriz de rigidez para os elementos de eixo:
[𝐾𝐸]
=𝐸𝐼
(1 + 𝑎)𝐿3
[ 12 0 0 −6𝐿 −12 0 0 −6𝐿0 12 6𝐿 0 0 −12 6𝐿 00 6𝐿 (4 + 𝑎)𝐿2 0 0 −6𝐿 (2 − 𝑎)𝐿2 0
−6𝐿 0 0 (4 + 𝑎)𝐿2 6𝐿 0 0 (2 − 𝑎)𝐿2
−12 0 0 6𝐿 12 0 0 6𝐿0 −12 −6𝐿 0 0 12 −6𝐿 0
0 6𝐿 (2− 𝑎)𝐿2 0 0 −6𝐿 (4 + 𝑎)𝐿2 0
−6𝐿 0 0 (2− 𝑎)𝐿2 6𝐿 0 0 (4 + 𝑎)𝐿2]
(80)
2.3.3. Mancal
Um mancal pode ser composto de duas maneiras distintas com material
viscoelástico: o material pode ser adicionado na base da caixa de mancais, ou
na pista externa do rolamento, interna à capa do mancal, conforme FIGURA
14. Esse trabalho desenvolverá apenas essa última configuração. Maiores
informações sobre o primeiro caso podem ser encontradas em Ferreira (2005).
a) b)
FIGURA 14 - MODELO DE MANCAL COM MVE FONTE: O AUTOR (2013)
A manta de material viscoelástico será computada de forma semelhante
à realizada em mancais com rolamento ou mancais hidrodinâmicos, levando a
características de rigidez e amortecimento.
Mancal e manta estão em série, conforme se pode verificar na FIGURA
14b. Uma vez que a rigidez do rolamento será muito maior que a rigidez do
material viscoelástico, esta última será a rigidez equivalente do sistema. Neste
caso não será considerada a massa do rolamento.
Conforme já foi apresentado nas seções 2.2.2, pode-se obter os valores
de rigidez e amortecimento conhecendo os parâmetros do modelo de derivadas
fracionárias do material. A partir destes parâmetros, utiliza-se a equação (18)
para obter o módulo de cisalhamento complexo do material viscoelástico
dependente da frequência Ω.
Neste trabalho, como já foi dito, as mantas de MVE são inseridas entre a
carcaça do mancal e a pista externa do rolamento. Para simplificar o modelo só
serão consideradas as parcelas 𝑥𝑥 e 𝑧𝑧 da rigidez e amortecimento.
Desprezando a rigidez associada à torção em 𝜓 e 𝜃 (𝑍 e 𝑋,
respectivamente), a matriz de rigidez local do material viscoelástico é:
[𝐹𝑢𝐹𝑤] = − [
��𝑥𝑥 0
0 ��𝑧𝑧] {𝑢𝑤} (81)
A rigidez que proporcionam os setores viscoelásticos é uma combinação
de estado de carga de tração-compressão com estados de cargas de
cisalhamento.
Para solicitações de cargas na qual o material está exposto a tração-
compressão, a rigidez é representada pelo módulo de cisalhamento, enquanto
que se o estado de carga é cisalhamento, a rigidez é representada pelo módulo
de elasticidade. Assim, os valores de rigidez são dados por:
��𝑥𝑥 = 𝐿𝑔𝑒𝑜𝑚𝐺𝑠(Ω) (82)
��𝑥𝑥 = 𝐿𝑔𝑒𝑜𝑚𝐸𝑠(Ω) (83)
onde 𝐿𝑔𝑒𝑜𝑚 = 𝐴 ℎ⁄ , sendo 𝐴 a área carregada e ℎ a espessura da manta de
material viscoelástico e 𝐸𝑠 = 𝐸𝑐 PF é o módulo de elasticidade aparente do setor
de material, que é o módulo de elasticidade complexo multiplicado pelo fator de
forma do setor (Nashif, 1985). O mesmo vale para o módulo de cisalhamento
aparente. Como pode ser visto naquela referência, o fator de forma depende da
relação área livre sobre área carregada, e quanto menor é esta relação maior é
este fator, fazendo com que o módulo de elasticidade aparente seja maior,
tornando o setor de material mais rígido. Os modelos para ambos fatores de
forma, compressão e cisalhamento, encontram-se em Nashif (1985).
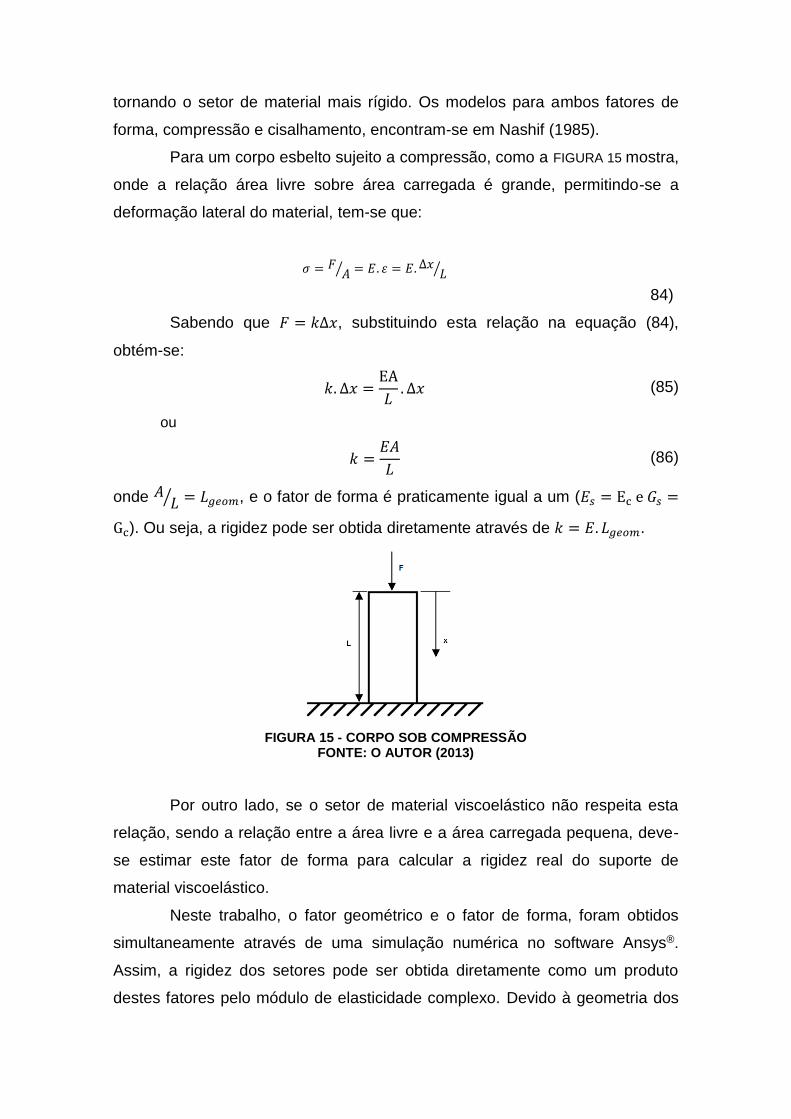
Para um corpo esbelto sujeito a compressão, como a FIGURA 15 mostra,
onde a relação área livre sobre área carregada é grande, permitindo-se a
deformação lateral do material, tem-se que:
𝜎 = 𝐹𝐴⁄ = 𝐸. 휀 = 𝐸. Δ𝑥 𝐿⁄ (
84)
Sabendo que 𝐹 = 𝑘Δ𝑥, substituindo esta relação na equação (84),
obtém-se:
𝑘. Δ𝑥 =EA
𝐿. Δ𝑥 (85)
ou
𝑘 =𝐸𝐴
𝐿 (86)
onde 𝐴 𝐿⁄ = 𝐿𝑔𝑒𝑜𝑚, e o fator de forma é praticamente igual a um (𝐸𝑠 = Ec e 𝐺𝑠 =
Gc). Ou seja, a rigidez pode ser obtida diretamente através de 𝑘 = 𝐸. 𝐿𝑔𝑒𝑜𝑚.
FIGURA 15 - CORPO SOB COMPRESSÃO FONTE: O AUTOR (2013)
Por outro lado, se o setor de material viscoelástico não respeita esta
relação, sendo a relação entre a área livre e a área carregada pequena, deve-
se estimar este fator de forma para calcular a rigidez real do suporte de
material viscoelástico.
Neste trabalho, o fator geométrico e o fator de forma, foram obtidos
simultaneamente através de uma simulação numérica no software Ansys®.
Assim, a rigidez dos setores pode ser obtida diretamente como um produto
destes fatores pelo módulo de elasticidade complexo. Devido à geometria dos

suportes de material viscoelástico, ambos os fatores que multiplicam o módulo
de elasticidade são o mesmo. Para tal foi desenvolvido o modelo em 3D do
eixo e os setores de MVE, e realizada uma análise estrutural estática, no qual
foi aplicado um deslocamento na direção y prescrita, na forma de rampa.
2.3.3.1. Formulação Matricial das Equações do Mancal
Com a adição de MVE nos mancais, a matriz de amortecimento do
mesmo pode ser desprezada, assim como a matriz de rigidez, pois a rigidez da
manta é muito menor (modelo em série). Em contrapartida, a matriz de rigidez
do sistema será complexa em decorrência dos coeficientes complexos 𝑘𝑥𝑥 e
𝑘𝑧𝑧, ambos iguais, além de ser dependentes da frequência. Assim, a matriz de
rigidez é dada por:
𝐾𝑚 = [
𝐿𝐴𝑁𝑆𝑌𝑆𝐸(Ω)[1 + 𝑖𝜂𝐺(Ω)] 0 0 0
0 𝐿𝐴𝑁𝑆𝑌𝑆𝐸(Ω)[1 + 𝑖𝜂𝐺(Ω)] 0 00 0 0 00 0 0 0
] (87)
2.3.4. Montagem das matrizes globais
Seguindo a metodologia clássica de elementos finitos, a obtenção das
matrizes globais de massa (M), rigidez (K) e efeito giroscópico (G) é obtida
através da sobreposição das matrizes de cada elemento da malha, conforme
verificado na FIGURA 16.
FIGURA 16 - ESQUEMA GENÉRICO DA MALHA FONTE: FERREIRA (2004)
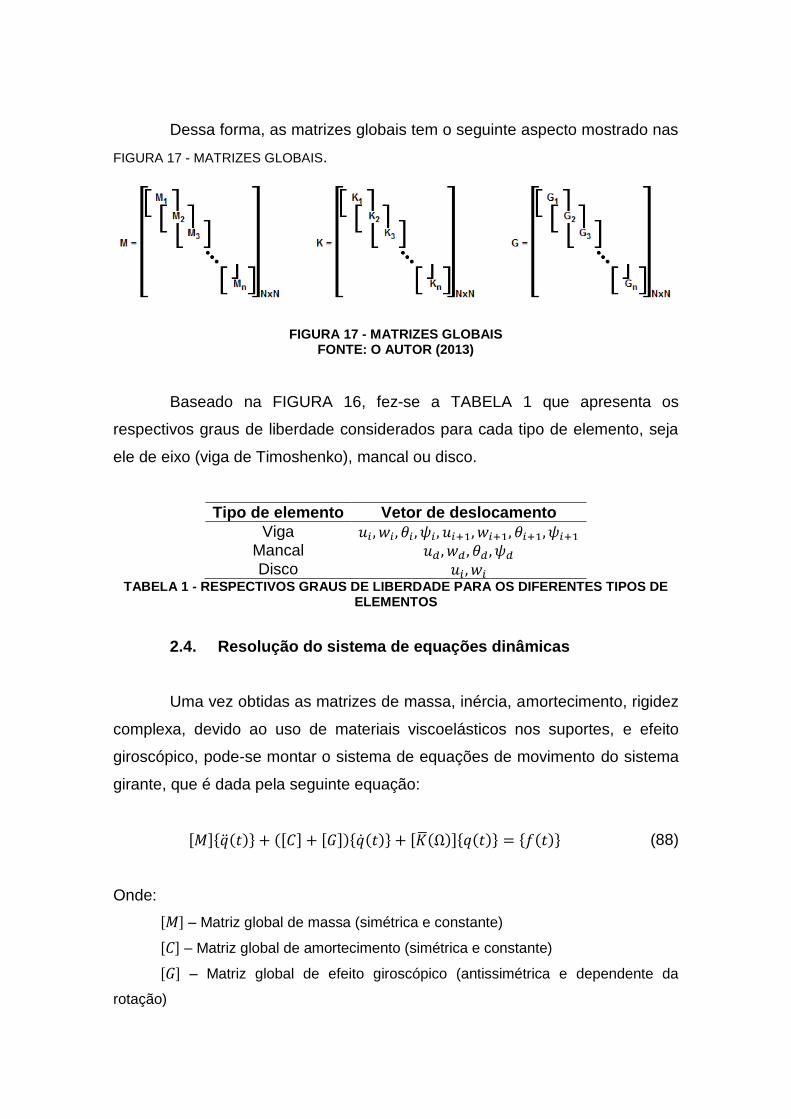
Dessa forma, as matrizes globais tem o seguinte aspecto mostrado nas
FIGURA 17 - MATRIZES GLOBAIS.
FIGURA 17 - MATRIZES GLOBAIS FONTE: O AUTOR (2013)
Baseado na FIGURA 16, fez-se a TABELA 1 que apresenta os
respectivos graus de liberdade considerados para cada tipo de elemento, seja
ele de eixo (viga de Timoshenko), mancal ou disco.
Tipo de elemento Vetor de deslocamento
Viga 𝑢𝑖 , 𝑤𝑖, 𝜃𝑖 , 𝜓𝑖 , 𝑢𝑖+1, 𝑤𝑖+1, 𝜃𝑖+1, 𝜓𝑖+1 Mancal 𝑢𝑑 , 𝑤𝑑 , 𝜃𝑑 , 𝜓𝑑 Disco 𝑢𝑖 , 𝑤𝑖
TABELA 1 - RESPECTIVOS GRAUS DE LIBERDADE PARA OS DIFERENTES TIPOS DE ELEMENTOS
2.4. Resolução do sistema de equações dinâmicas
Uma vez obtidas as matrizes de massa, inércia, amortecimento, rigidez
complexa, devido ao uso de materiais viscoelásticos nos suportes, e efeito
giroscópico, pode-se montar o sistema de equações de movimento do sistema
girante, que é dada pela seguinte equação:
[𝑀]{��(𝑡)} + ([𝐶] + [𝐺]){��(𝑡)} + [��(Ω)]{𝑞(𝑡)} = {𝑓(𝑡)} (88)
Onde:
[𝑀] – Matriz global de massa (simétrica e constante)
[𝐶] – Matriz global de amortecimento (simétrica e constante)
[𝐺] – Matriz global de efeito giroscópico (antissimétrica e dependente da
rotação)
[��(Ω)] – Matriz global de rigidez (simétrica e complexa – dependente da
frequência e temperatura)
{𝑞(𝑡)} – Vetor de coordenadas generalizadas (dimensão 4(𝑛 + 1)𝑥1)
{𝑓(𝑡)} – Vetor de forças generalizadas
Devido à limitações quanto a tempo e detalhamento do trabalho, este trabalho
apresentará a resolução do sistema de equações de movimento apenas para o
modelo viscoelástico. Para estudos sobre o modelo viscoso, e a comparação entre o
mesmo e o modo viscoelástico, recomenda-se a leitura de Ferreira (2004).
2.4.1. Modelo Viscoelástico
Reescrevendo a equação (88):
[𝑀]{��(𝑡)} + ([𝐶] + [𝐺(Ω𝑟𝑝𝑚)]){��(𝑡)} + [��(Ω)]{𝑞(𝑡)} = {𝑓(𝑡)} (89)
e aplicando-se a transformada de Fourier, obtém-se a equação de movimento
no domínio da frequência.
(−Ω2[𝑀] + 𝑖Ω([𝐶] + [𝐺(Ω𝑟𝑝𝑚)]) + [��(Ω)]){𝑄(Ω)} = {𝐹(Ω)} (90)
Na equação (90), o termo correspondente a matriz de rigidez, como já
foi mencionado, é complexo, e por isso já contempla os efeitos tanto de rigidez
quanto de amortecimento nos mancais.
[��(Ω)] = [𝐾(Ω)](1 + 𝑖[𝜂(Ω)]) (91)
2.4.1.1. Problema de Autovalores
Considera-se, inicialmente, que:
{𝑓(𝑡)} = {0}
{𝑞(𝑡)} = {𝜙}𝑒𝑠𝑡 = {𝜙}𝑒𝑖Ω𝑡 (92)
Substituindo as equações (92) na equação (90), temos:
{𝑠2}[𝑀] + {𝑠}([𝐶] + [𝐺(Ω𝑟𝑝𝑚)]) + [��(Ω)] = {0} (93)
A solução para a equação (93) é obtida através de um problema de
autovalores complexo, conforme expresso abaixo:
𝑑𝑒𝑡 [{𝑠2}[𝑀] + {𝑠}([𝐶] + [𝐺(Ω𝑟𝑝𝑚)]) + [��(Ω)]] = {0} (94)
Esse problema de autovalores poderá ser resolvido através da
metodologia proposta por Ewins (1984) e Espíndola2 (1990) na qual é realizada
uma transformação das coordenadas generalizadas para o espaço de estado.
Como isso, um novo vetor de coordenadas 𝑦(𝑡) é definido, com ordem 2𝑛𝑥1,
da seguinte forma:
𝑦(𝑡) = {𝑞(𝑡)⋯��(𝑡)
} (95)
��(𝑡) = {��(𝑡)⋯��(𝑡)
} (96)
Lança-se mão de um artifício matemático de modo a transformar o
sistema de equações de coordenadas generalizadas:
[𝑀]{��(𝑡)} − [𝑀]{��(𝑡)} = 0 (97)
Assim, o sistema de equações formado por (89) e (97) fica:
{[𝑀]{��(𝑡)} + ([𝐶] + [𝐺(Ω𝑟𝑝𝑚)]){��(𝑡)} + [��(Ω)]{𝑞(𝑡)} = {𝑓(𝑡)}
[𝑀]{��(𝑡)} − [𝑀]{��(𝑡)} = 0 (98)
Na forma matricial:

[𝐶 + 𝐺(Ω𝑟𝑝𝑚) ⋮ 𝑀
⋯ ⋮ ⋯𝑀 ⋮ 0
]
2𝑛𝑥2𝑛
��(𝑡) + [��(Ω) ⋮ 0⋯ ⋮ ⋯0 ⋮ −𝑀
]
2𝑛𝑥2𝑛
𝑦(𝑡) = {𝑓(𝑡)⋯0}
2𝑛𝑥1
(99)
Ou, na forma simplificada:
𝐴��(𝑡) + 𝐵𝑦(𝑡) = {𝐹𝑦(𝑡)} (100)
Supondo a solução homogênea no espaço de estado, tem-se:
𝑦(𝑡) = 𝜃𝑒𝑠𝑡 (101)
Onde:
𝜃 = [𝜙 … 𝑠𝜙]𝑇 = [𝜙 … −𝜆𝜙]𝑇
Substituindo na equação (100), tem-se uma relação possível de se
encontrar a solução:
[𝑠𝐴 + 𝐵]𝜃 = 0 (102)
Pode-se fazer 𝜆 = −𝑠 na equação acima, que representa o problema
de autovalores, obtendo-se:
𝐵𝜃 = 𝜆𝐴𝜃 (102)
Na equação (102), 𝜃 chamado de autovetor à direita. Considerando
que as matrizes A e/ou B são não simétricas, é necessária a resolução do
problema de autovalores adjunto, ou seja, à esquerda, utilizando uma variável
𝜓, como abaixo:
𝐵𝑇𝜓 = 𝜆𝐴𝑇𝜓 (103)
Novamente, devido o restrito espaço, optou-se por apenas indicar a
bibliografia que foi utilizada no estudo da ortogonalidade sendo esta Espíndola2
(1990).
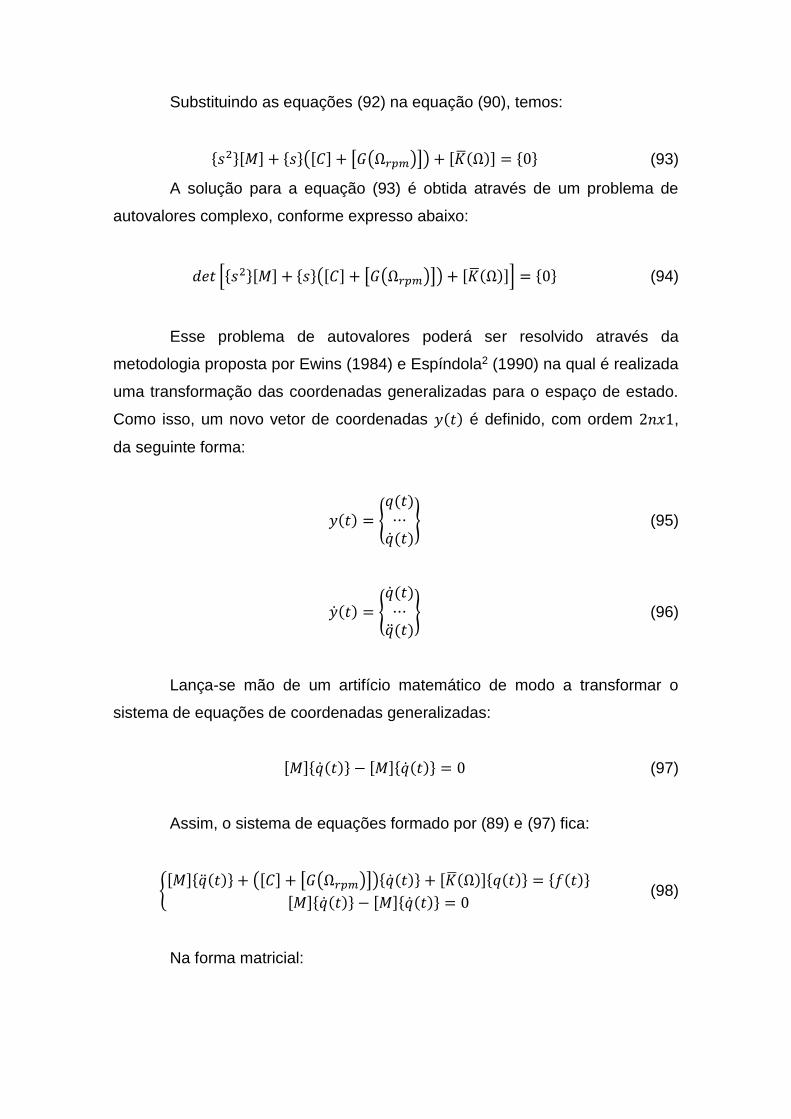
2.4.1.2. Diagrama de Campbell
Em sistemas girantes, como o aqui estudado, as características,
mediante uma excitação qualquer, podem ser estudadas através do chamado
Diagrama de Campbell, que é a representação gráfica da resolução do
problema de autovalores para cara rotação Ω𝑟𝑝𝑚.
Para uma resposta ao desbalanceamento, por exemplo, a resposta do
sistema é facilmente obtida traçando uma reta a 45º (Ω = Ω𝑟𝑝𝑚) no Digrama de
Campbell. Os valores obtidos são chamados rotações críticas, ou seja, quando
a velocidade de rotação é igual à frequência de excitação, ocorre a
amplificação da órbita do eixo, o que pode ser extremamente danoso ao
equipamento.
Porém, devido à adição de material viscoelástico nos mancais, a matriz
A que contém o efeito giroscópico é função da rotação (Ω𝑟𝑝𝑚), enquanto que a
matriz B é complexa e função da frequência (Ω) devido à matriz de rigidez. Ou
seja, o problema de autovalores é função da rotação e da frequência.
Para resolver, então, o problema e montar o Diagrama de Campbell, é
necessário fixar uma rotação constante e resolver o chamado Diagrama de
Campbell Auxiliar (autovalores em função da frequência). Essa metodologia foi
apresentada por Espíndola2 (1990), e propõe que se use uma coordenada Ω𝑗
para compor o diagrama. Assim, resolve-se o problema, traça-se uma reta a
45º, cruzando as frequências naturais (FIGURA 18B), de onde são extraídas as
frequências naturais para uma dada rotação Ω𝑟𝑝𝑚. Esse processo é repetido
para todas as rotações desejadas, resultando em um diagrama de Campbell
final (FIGURA 18A), e a partir desse diagrama é possível determinar as
características dinâmicas do rotor estudado.
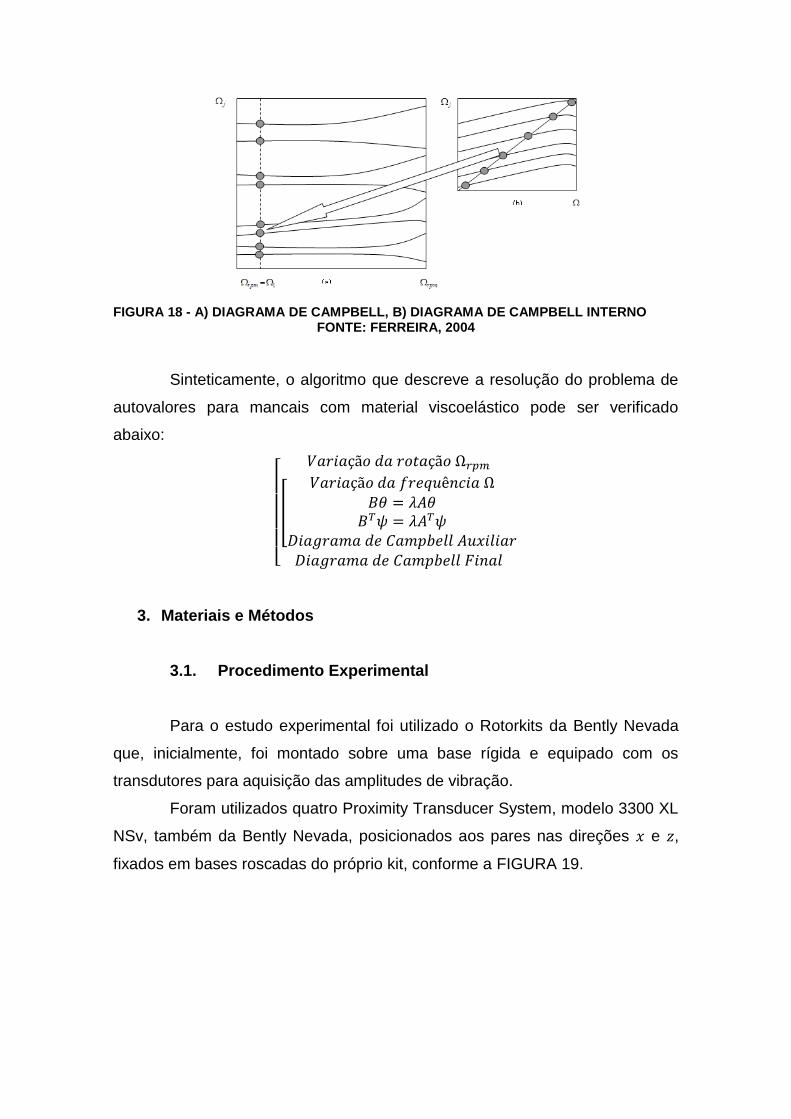
FIGURA 18 - A) DIAGRAMA DE CAMPBELL, B) DIAGRAMA DE CAMPBELL INTERNO FONTE: FERREIRA, 2004
Sinteticamente, o algoritmo que descreve a resolução do problema de
autovalores para mancais com material viscoelástico pode ser verificado
abaixo:
[
𝑉𝑎𝑟𝑖𝑎çã𝑜 𝑑𝑎 𝑟𝑜𝑡𝑎çã𝑜 Ω𝑟𝑝𝑚
[
𝑉𝑎𝑟𝑖𝑎çã𝑜 𝑑𝑎 𝑓𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎 Ω𝐵𝜃 = 𝜆𝐴𝜃𝐵𝑇𝜓 = 𝜆𝐴𝑇𝜓
𝐷𝑖𝑎𝑔𝑟𝑎𝑚𝑎 𝑑𝑒 𝐶𝑎𝑚𝑝𝑏𝑒𝑙𝑙 𝐴𝑢𝑥𝑖𝑙𝑖𝑎𝑟𝐷𝑖𝑎𝑔𝑟𝑎𝑚𝑎 𝑑𝑒 𝐶𝑎𝑚𝑝𝑏𝑒𝑙𝑙 𝐹𝑖𝑛𝑎𝑙
3. Materiais e Métodos
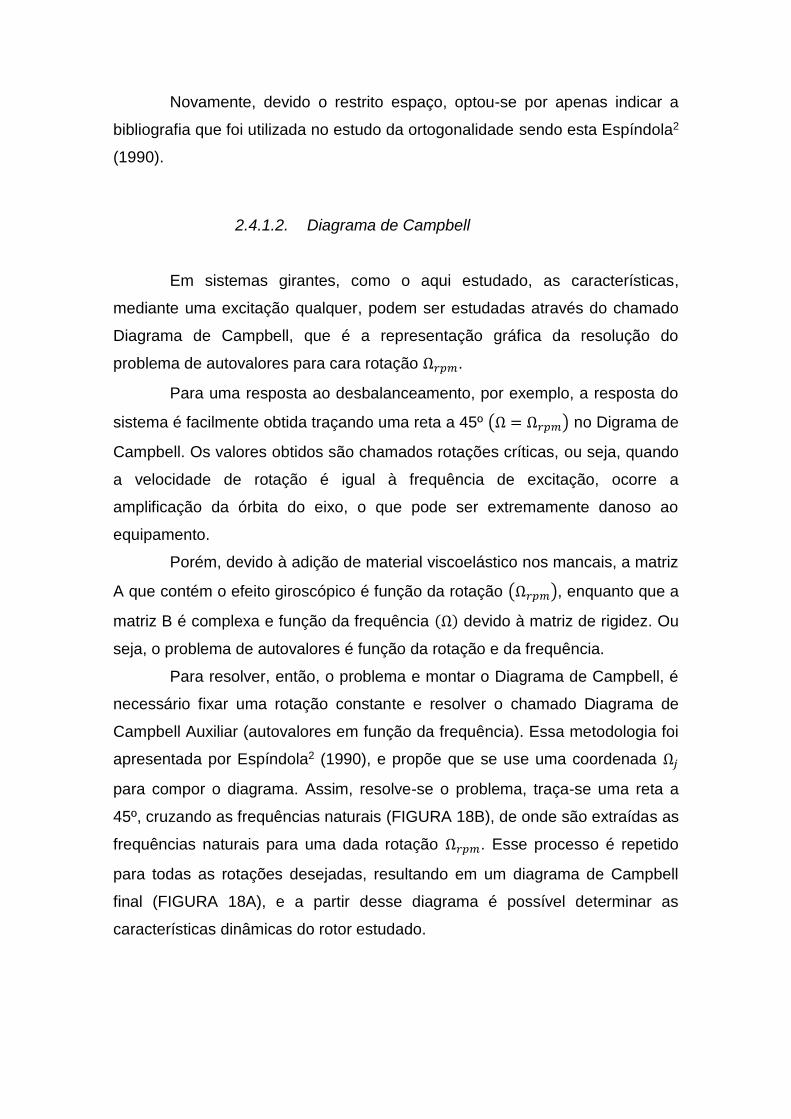
3.1. Procedimento Experimental
Para o estudo experimental foi utilizado o Rotorkits da Bently Nevada
que, inicialmente, foi montado sobre uma base rígida e equipado com os
transdutores para aquisição das amplitudes de vibração.
Foram utilizados quatro Proximity Transducer System, modelo 3300 XL
NSv, também da Bently Nevada, posicionados aos pares nas direções 𝑥 e 𝑧,
fixados em bases roscadas do próprio kit, conforme a FIGURA 19.
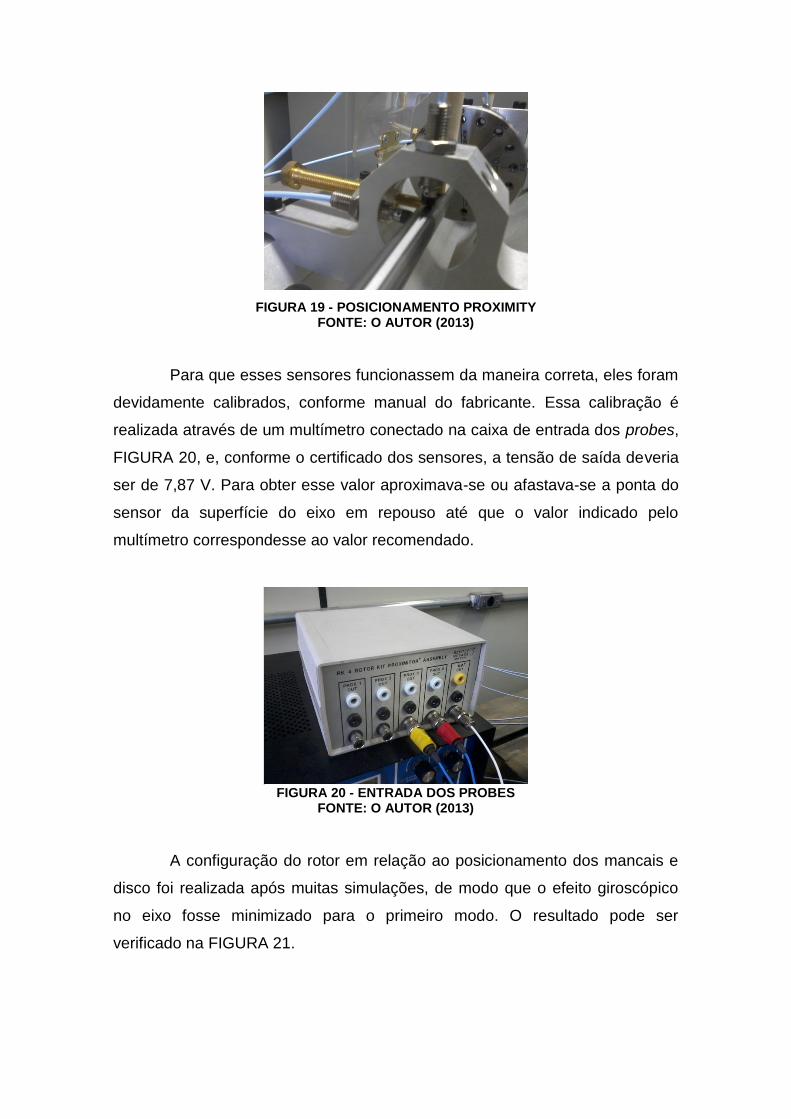
FIGURA 19 - POSICIONAMENTO PROXIMITY FONTE: O AUTOR (2013)
Para que esses sensores funcionassem da maneira correta, eles foram
devidamente calibrados, conforme manual do fabricante. Essa calibração é
realizada através de um multímetro conectado na caixa de entrada dos probes,
FIGURA 20, e, conforme o certificado dos sensores, a tensão de saída deveria
ser de 7,87 V. Para obter esse valor aproximava-se ou afastava-se a ponta do
sensor da superfície do eixo em repouso até que o valor indicado pelo
multímetro correspondesse ao valor recomendado.
e FIGURA 20 - ENTRADA DOS PROBES
FONTE: O AUTOR (2013)
A configuração do rotor em relação ao posicionamento dos mancais e
disco foi realizada após muitas simulações, de modo que o efeito giroscópico
no eixo fosse minimizado para o primeiro modo. O resultado pode ser
verificado na FIGURA 21.
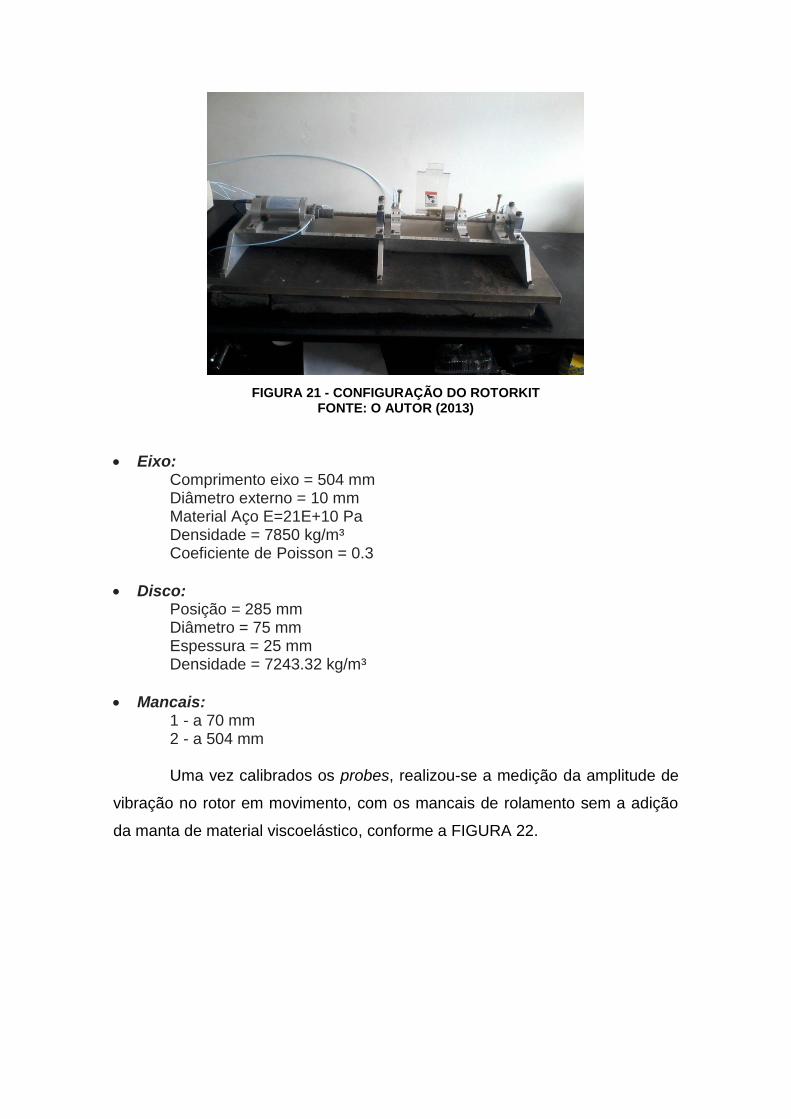
FIGURA 21 - CONFIGURAÇÃO DO ROTORKIT FONTE: O AUTOR (2013)
Eixo: Comprimento eixo = 504 mm Diâmetro externo = 10 mm Material Aço E=21E+10 Pa Densidade = 7850 kg/m³ Coeficiente de Poisson = 0.3
Disco: Posição = 285 mm Diâmetro = 75 mm Espessura = 25 mm Densidade = 7243.32 kg/m³
Mancais: 1 - a 70 mm 2 - a 504 mm
Uma vez calibrados os probes, realizou-se a medição da amplitude de
vibração no rotor em movimento, com os mancais de rolamento sem a adição
da manta de material viscoelástico, conforme a FIGURA 22.
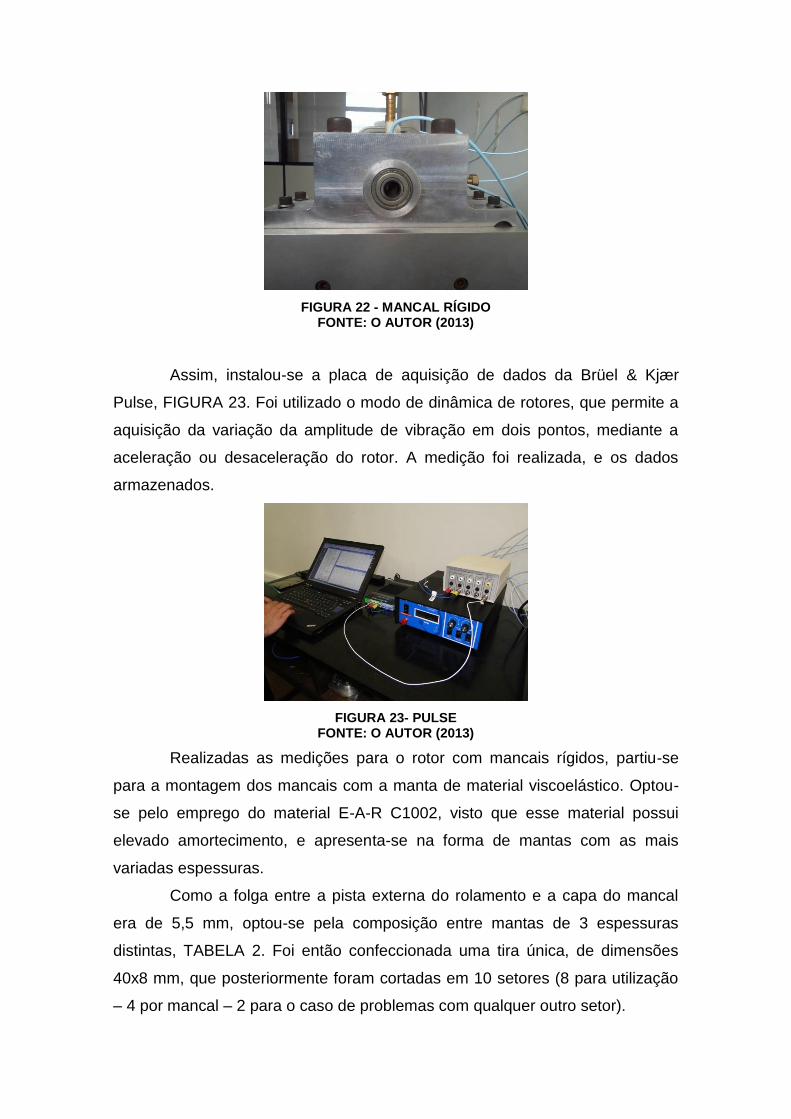
FIGURA 22 - MANCAL RÍGIDO FONTE: O AUTOR (2013)
Assim, instalou-se a placa de aquisição de dados da Brüel & Kjær
Pulse, FIGURA 23. Foi utilizado o modo de dinâmica de rotores, que permite a
aquisição da variação da amplitude de vibração em dois pontos, mediante a
aceleração ou desaceleração do rotor. A medição foi realizada, e os dados
armazenados.
FIGURA 23- PULSE FONTE: O AUTOR (2013)
Realizadas as medições para o rotor com mancais rígidos, partiu-se
para a montagem dos mancais com a manta de material viscoelástico. Optou-
se pelo emprego do material E-A-R C1002, visto que esse material possui
elevado amortecimento, e apresenta-se na forma de mantas com as mais
variadas espessuras.
Como a folga entre a pista externa do rolamento e a capa do mancal
era de 5,5 mm, optou-se pela composição entre mantas de 3 espessuras
distintas, TABELA 2. Foi então confeccionada uma tira única, de dimensões
40x8 mm, que posteriormente foram cortadas em 10 setores (8 para utilização
– 4 por mancal – 2 para o caso de problemas com qualquer outro setor).
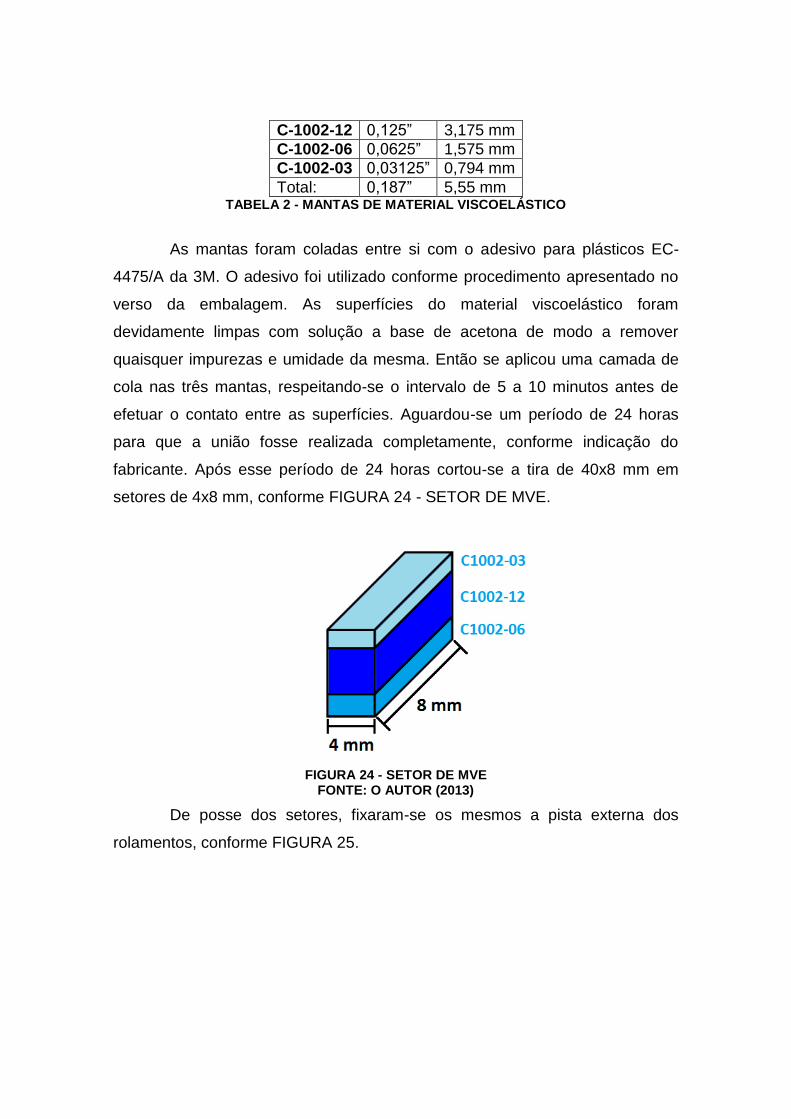
C-1002-12 0,125” 3,175 mm
C-1002-06 0,0625” 1,575 mm
C-1002-03 0,03125” 0,794 mm
Total: 0,187” 5,55 mm TABELA 2 - MANTAS DE MATERIAL VISCOELÁSTICO
As mantas foram coladas entre si com o adesivo para plásticos EC-
4475/A da 3M. O adesivo foi utilizado conforme procedimento apresentado no
verso da embalagem. As superfícies do material viscoelástico foram
devidamente limpas com solução a base de acetona de modo a remover
quaisquer impurezas e umidade da mesma. Então se aplicou uma camada de
cola nas três mantas, respeitando-se o intervalo de 5 a 10 minutos antes de
efetuar o contato entre as superfícies. Aguardou-se um período de 24 horas
para que a união fosse realizada completamente, conforme indicação do
fabricante. Após esse período de 24 horas cortou-se a tira de 40x8 mm em
setores de 4x8 mm, conforme FIGURA 24 - SETOR DE MVE.
FIGURA 24 - SETOR DE MVE FONTE: O AUTOR (2013)
De posse dos setores, fixaram-se os mesmos a pista externa dos
rolamentos, conforme FIGURA 25.
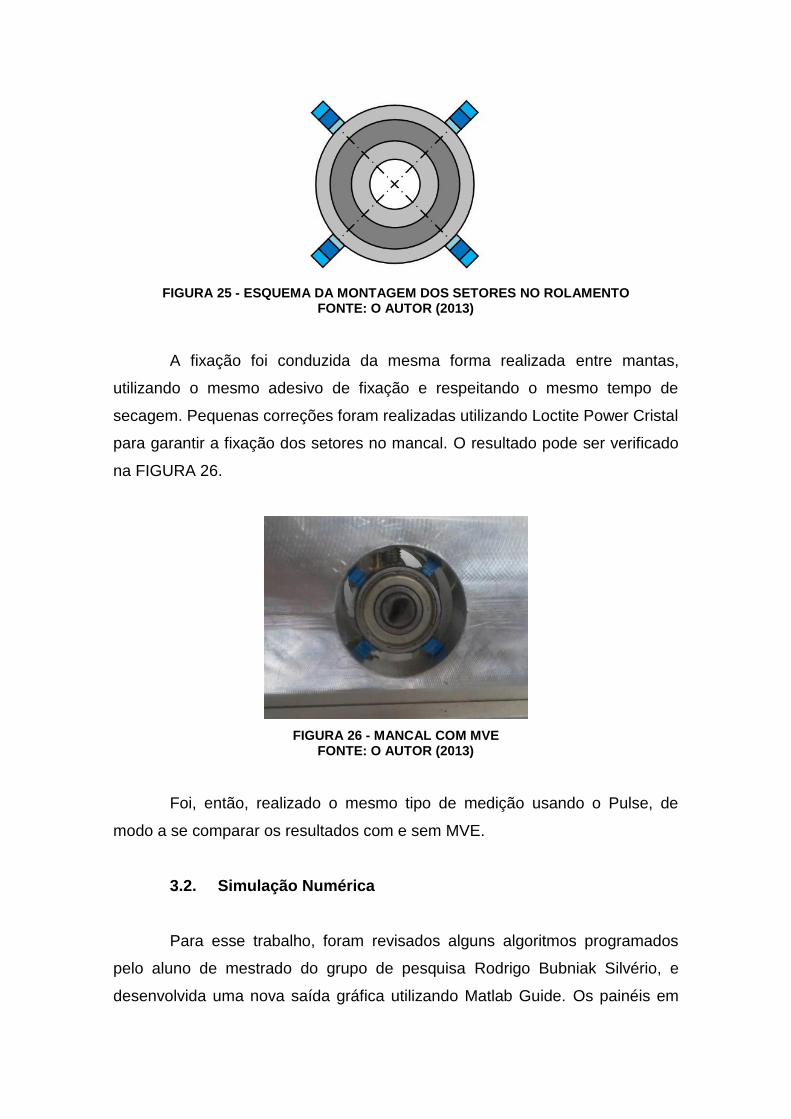
FIGURA 25 - ESQUEMA DA MONTAGEM DOS SETORES NO ROLAMENTO FONTE: O AUTOR (2013)
A fixação foi conduzida da mesma forma realizada entre mantas,
utilizando o mesmo adesivo de fixação e respeitando o mesmo tempo de
secagem. Pequenas correções foram realizadas utilizando Loctite Power Cristal
para garantir a fixação dos setores no mancal. O resultado pode ser verificado
na FIGURA 26.
FIGURA 26 - MANCAL COM MVE FONTE: O AUTOR (2013)
Foi, então, realizado o mesmo tipo de medição usando o Pulse, de
modo a se comparar os resultados com e sem MVE.
3.2. Simulação Numérica
Para esse trabalho, foram revisados alguns algoritmos programados
pelo aluno de mestrado do grupo de pesquisa Rodrigo Bubniak Silvério, e
desenvolvida uma nova saída gráfica utilizando Matlab Guide. Os painéis em
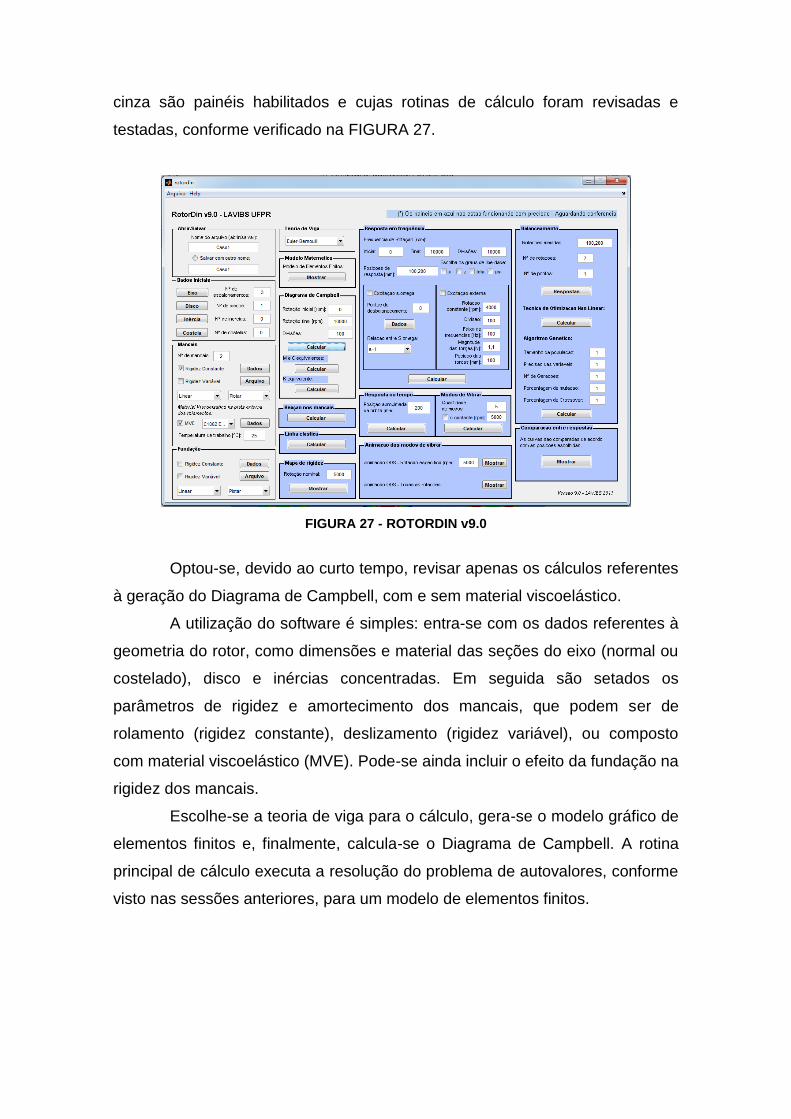
cinza são painéis habilitados e cujas rotinas de cálculo foram revisadas e
testadas, conforme verificado na FIGURA 27.
FIGURA 27 - ROTORDIN v9.0
Optou-se, devido ao curto tempo, revisar apenas os cálculos referentes
à geração do Diagrama de Campbell, com e sem material viscoelástico.
A utilização do software é simples: entra-se com os dados referentes à
geometria do rotor, como dimensões e material das seções do eixo (normal ou
costelado), disco e inércias concentradas. Em seguida são setados os
parâmetros de rigidez e amortecimento dos mancais, que podem ser de
rolamento (rigidez constante), deslizamento (rigidez variável), ou composto
com material viscoelástico (MVE). Pode-se ainda incluir o efeito da fundação na
rigidez dos mancais.
Escolhe-se a teoria de viga para o cálculo, gera-se o modelo gráfico de
elementos finitos e, finalmente, calcula-se o Diagrama de Campbell. A rotina
principal de cálculo executa a resolução do problema de autovalores, conforme
visto nas sessões anteriores, para um modelo de elementos finitos.
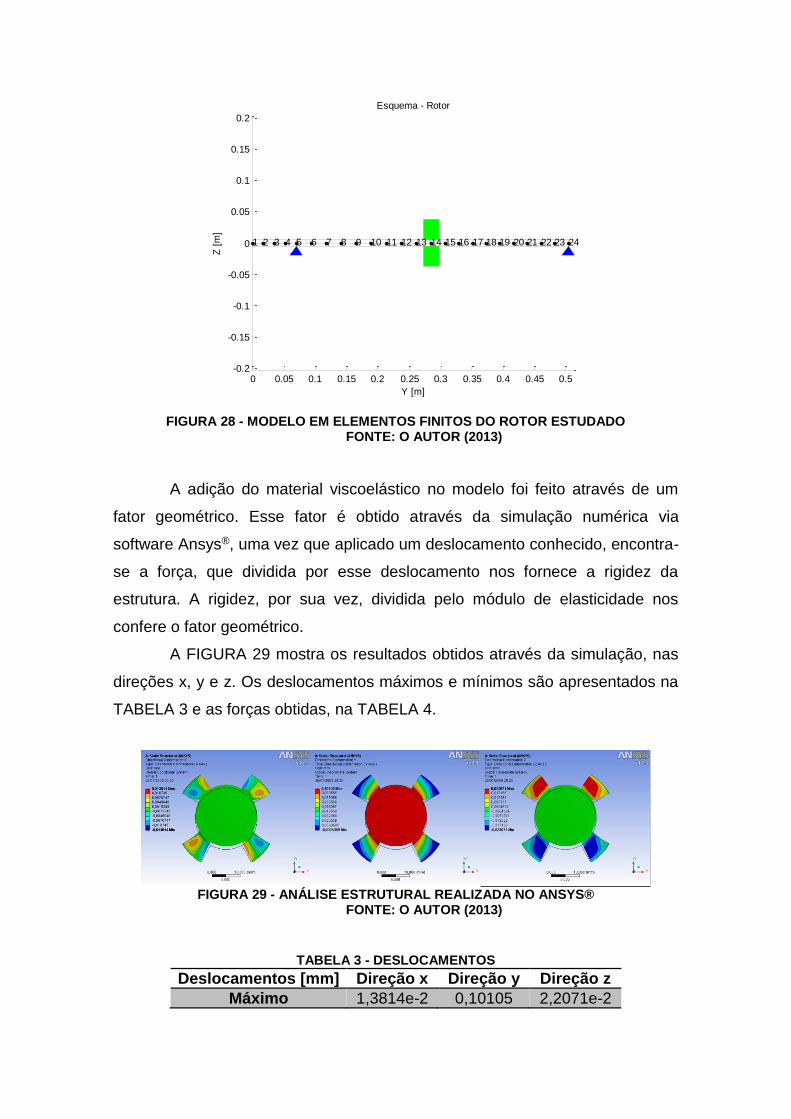
FIGURA 28 - MODELO EM ELEMENTOS FINITOS DO ROTOR ESTUDADO FONTE: O AUTOR (2013)
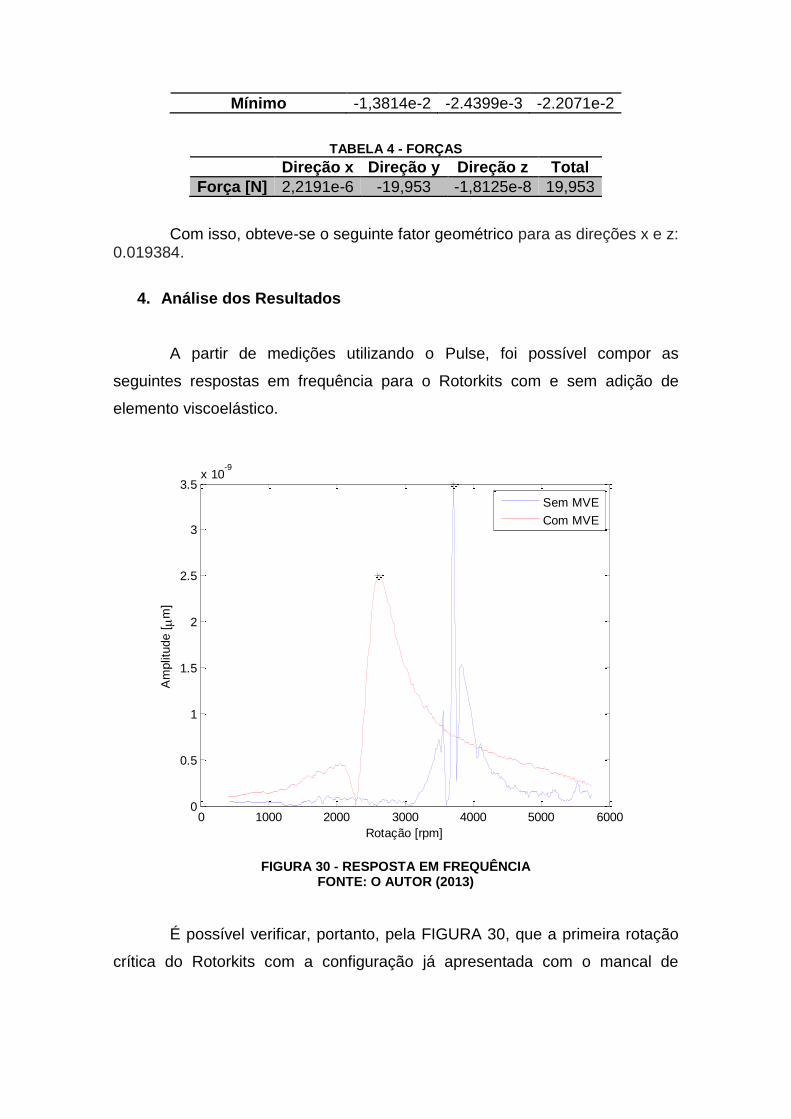
A adição do material viscoelástico no modelo foi feito através de um
fator geométrico. Esse fator é obtido através da simulação numérica via
software Ansys®, uma vez que aplicado um deslocamento conhecido, encontra-
se a força, que dividida por esse deslocamento nos fornece a rigidez da
estrutura. A rigidez, por sua vez, dividida pelo módulo de elasticidade nos
confere o fator geométrico.
A FIGURA 29 mostra os resultados obtidos através da simulação, nas
direções x, y e z. Os deslocamentos máximos e mínimos são apresentados na
TABELA 3 e as forças obtidas, na TABELA 4.
FIGURA 29 - ANÁLISE ESTRUTURAL REALIZADA NO ANSYS®
FONTE: O AUTOR (2013)
TABELA 3 - DESLOCAMENTOS
Deslocamentos [mm] Direção x Direção y Direção z
Máximo 1,3814e-2 0,10105 2,2071e-2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Esquema - Rotor
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Y [m]
Z [
m]
Mínimo -1,3814e-2 -2.4399e-3 -2.2071e-2
TABELA 4 - FORÇAS
Direção x Direção y Direção z Total
Força [N] 2,2191e-6 -19,953 -1,8125e-8 19,953
Com isso, obteve-se o seguinte fator geométrico para as direções x e z: 0.019384.
4. Análise dos Resultados
A partir de medições utilizando o Pulse, foi possível compor as
seguintes respostas em frequência para o Rotorkits com e sem adição de
elemento viscoelástico.
FIGURA 30 - RESPOSTA EM FREQUÊNCIA FONTE: O AUTOR (2013)
É possível verificar, portanto, pela FIGURA 30, que a primeira rotação
crítica do Rotorkits com a configuração já apresentada com o mancal de
0 1000 2000 3000 4000 5000 60000
0.5
1
1.5
2
2.5
3
3.5x 10
-9
Rotação [rpm]
Am
plit
ude [
m]
Sem MVE
Com MVE
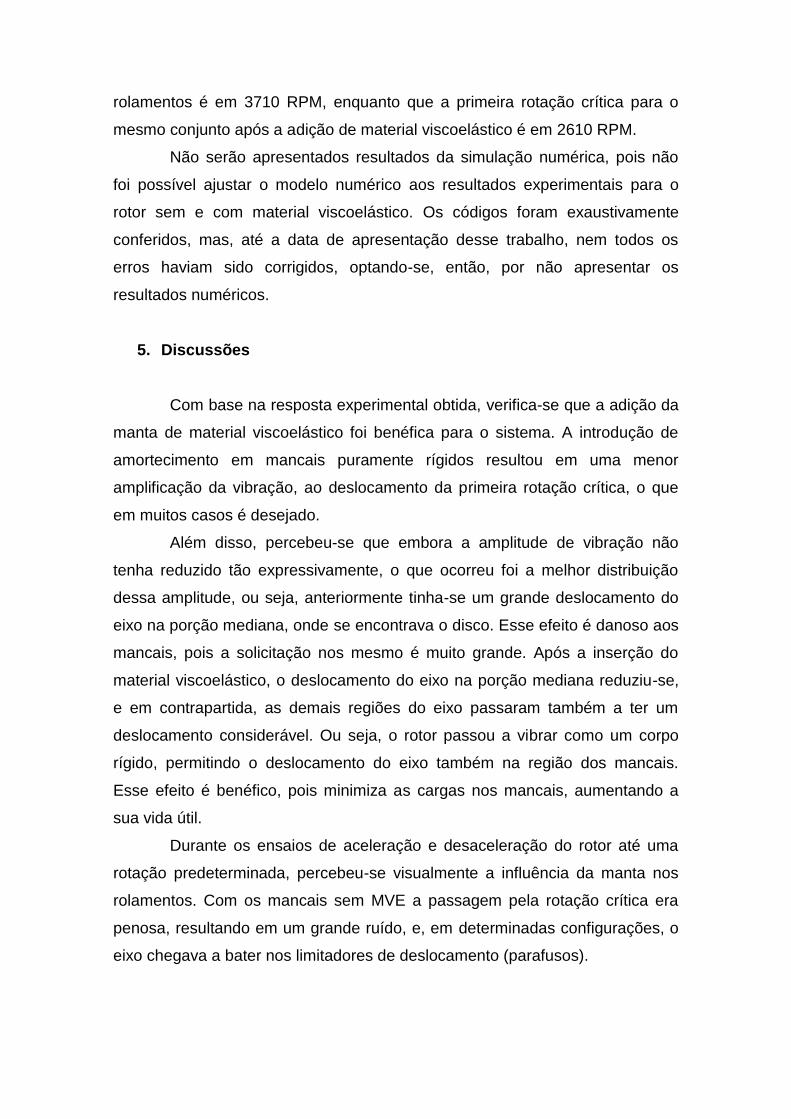
rolamentos é em 3710 RPM, enquanto que a primeira rotação crítica para o
mesmo conjunto após a adição de material viscoelástico é em 2610 RPM.
Não serão apresentados resultados da simulação numérica, pois não
foi possível ajustar o modelo numérico aos resultados experimentais para o
rotor sem e com material viscoelástico. Os códigos foram exaustivamente
conferidos, mas, até a data de apresentação desse trabalho, nem todos os
erros haviam sido corrigidos, optando-se, então, por não apresentar os
resultados numéricos.
5. Discussões
Com base na resposta experimental obtida, verifica-se que a adição da
manta de material viscoelástico foi benéfica para o sistema. A introdução de
amortecimento em mancais puramente rígidos resultou em uma menor
amplificação da vibração, ao deslocamento da primeira rotação crítica, o que
em muitos casos é desejado.
Além disso, percebeu-se que embora a amplitude de vibração não
tenha reduzido tão expressivamente, o que ocorreu foi a melhor distribuição
dessa amplitude, ou seja, anteriormente tinha-se um grande deslocamento do
eixo na porção mediana, onde se encontrava o disco. Esse efeito é danoso aos
mancais, pois a solicitação nos mesmo é muito grande. Após a inserção do
material viscoelástico, o deslocamento do eixo na porção mediana reduziu-se,
e em contrapartida, as demais regiões do eixo passaram também a ter um
deslocamento considerável. Ou seja, o rotor passou a vibrar como um corpo
rígido, permitindo o deslocamento do eixo também na região dos mancais.
Esse efeito é benéfico, pois minimiza as cargas nos mancais, aumentando a
sua vida útil.
Durante os ensaios de aceleração e desaceleração do rotor até uma
rotação predeterminada, percebeu-se visualmente a influência da manta nos
rolamentos. Com os mancais sem MVE a passagem pela rotação crítica era
penosa, resultando em um grande ruído, e, em determinadas configurações, o
eixo chegava a bater nos limitadores de deslocamento (parafusos).
Após a inserção do MVE, a passagem pela rotação crítica tornou-se
imperceptível. Não mais houve ruído, nem amplificação visível da órbita do
eixo.
6. Conclusão
Outras configurações devem ser testadas para garantir a eficiência da
metodologia, mas os resultados mostraram-se promissores, principalmente
quando o equipamento precisa operar próximo a uma de suas rotações críticas.
Esse é o caso de muitos equipamentos elétricos de grande porte, como
motores e geradores verticais.
Os resultados numéricos não foram conclusivos, uma vez que a
implementação do algoritmo não pode ser finalizada. O próximo passo é ajustar
o modelo numérico para que esse seja fiel ao experimental.
REFERÊNCIAS BIBLIOGRÁFICAS
CRUZ, G. A. M. Projeto ótimo de neutralizadores viscoelásticos baseado no modelo a derivadas fracionárias. 168 f. Tese (Doutorado em Engenharia Mecânica) – Universidade Federal de Santa Catarina, Florianópolis, 2004. EWINS, D.J. Modal Testing Theory and Pratice. Research Studies Press. 1984, England. ESPÍNDOLA, J.J de, Controle de Vibrações, Programa de Pós Graduação em Engenharia Mecânica, UFSC, 1990. FERREIRA, E. M. da S. Modelos de rotores dinâmicos com mancais flexíveis utilizando material viscoelástico. Dissertação (Mestrado em Engenharia Mecânica) – Setor de Tecnologia, Universidade Federal do Paraná, Curitiba, 2004. FERRY, J. D. Viscoelastic properties of polymers. 3th edition. New York: John Wiley & Sons, 1980. LALANNE, M., FERRARIS, G. Rotordynamics prediction in Engineering. New York: John Wiley & Sons, 1990. LOPES, E. M. de O. et al. Caracterização dinâmica integrada de elastômeros por derivadas generalizadas. Trabalho apresentado no 2º Congresso Nacional de Engenharia Mecânica, 2004. LOPES, E. M. de O. On the experimental response of structures with elastomeric materials. 192 f. Thesis (Doctor of Philosophy) – University of Wales Cardiff, 1998. MUSZYNSKA, A. Rotordynamics. Boca Raton, FL, USA: Taylor & Francis Group, 2005. NASHIF, A. D., JONES, D. I. G. HENDERSON, J. P. Vibration Damping. John Wiley & Sons, 1985. PRITZ, T. Analysis of four-parameter fraction derivative model of real solid materials. Journal of Sound and Vibration. 1996, p. 103-115. RAO, S. S. Vibrações Mecânicas. 4ª edição. São Paulo: Pearson Prentice Hall, 2008.