CONTROLE DE UM PROCESSO MULTIVARIAVEL EM UMA … · control a multivariable process in an...
6
CONTROLE DE UM PROCESSO MULTIVARI ´ AVEL EM UMA PLANTA DID ´ ATICA INDUSTRIAL UTILIZANDO REDES NEURAIS. Arthur Hirata Bertachi, Lyvia Regina Biagi Silva, Rodrigo Rodrigues Sumar, Bruno Augusto Ang´ elico, Alessandro Goedtel Universidade Tecnol´ogica Federal do Paran´a - UTFPR Programa de P´os-Gradua¸ c˜ ao em Engenharia El´ etrica Av. Alberto Carazzai, 1640, Corn´ elioProc´opio,Paran´a,Brasil. Email: [email protected], [email protected], [email protected], [email protected], [email protected] Abstract— This paper proposes the implementation of a controller based on artificial neural networks to control a multivariable process in an industrial didatic plant using MATLAB and OLE for Process Control protocol. The control strategy is validated through practical experiments and the results are compared with a classical PI controller. Keywords— Intelligent Control in Automation and Robotics, Neural Networks, Multivariable Control, Indus- trial Didatic Plant. Resumo— Neste trabalho ´ e proposta a aplica¸c˜ ao de um controlador baseado em redes neurais artificiais para controle um processo multivari´avel em uma planta did´ atica industrial utilizando o software MATLAB e protocolo OLE for Process Control. A estrat´ egia de controle foi validada atrav´ es de experimentos pr´aticos e os resultados s˜ao comparados com um controlador PI cl´assico. Keywords— Controle Inteligente em Automa¸c˜ao e Rob´otica, Redes Neurais, Controle Multivari´avel, Planta Did´aticaIndustrial. 1 Introdu¸c˜ ao A teoria de controle para sistemas multivari´ aveis encontra v´ arias aplica¸ c˜ oes em diversas ´ areas, en- tre elas a rob´ otica, processos industriais, m´ aqui- nas el´ etricas, tecnologia espacial, processos qu´ ı- micos, entre outros. Na pr´ atica, a maioria dos sistemas possuem caracter´ ısticas multivari´ aveis e n˜ ao-lineares. Tais sistemas apresentam uma difi- culdade de controle devido ao acoplamento exis- tente entre seus valores de entradas e sa´ ıdas (Ge e Wang, 2004). Uma das maneiras mais simples de se con- trolar os sistemas MIMO (Multiple-Input Multi- ple Output ) consiste na a utiliza¸ c˜ ao de controla- dores PID (Proporcional Integral Derivativo) indi- viduais para cada vari´ avel a ser controlada (con- trole multi-loop ). Para se obter bons resultados ´ e necess´ ario que as vari´ aveis n˜ ao sejam acopladas (o que raramente ocorre) e os controladores PID sejam bem sintonizados,(Maciejowski, 1989) apud (Duarte et al., 2001). Nos ´ ultimos anos pesquisadores desenvolve- ram trabalhos relacionados com estrat´ egias de controle para sistemas MIMO utilizando-se de sis- temas inteligentes. A aplica¸ c˜ ao de Redes Neu- rais Artificiais (RNAs) e sistemas Fuzzy ocorrem devido ao fato de ambos se comportarem como aproximadores universais de fun¸c˜ oes (Lin e Lian (2009); Peng e Dubay (2012)). Neste trabalho ´ e proposto um controlador ba- seado em uma RNA para controlar um processo MIMO envolvendo n´ ıvel e temperatura. A RNA ser´ a treinada ` a partir dos dados coletados de en- saios que utilizam-se da estrat´ egia de controle multi-loop para controlar o processo. Ap´ os a rede ser treinada, o controlador baseado em RNA atua sobre o processo buscando levar em conta as n˜ ao- linearidades do processo e garantir uma melhor resposta do sistema. O trabalho est´ a organizado da seguinte ma- neira: A Se¸ c˜ ao 2 apresenta uma breve abordagem sobre controle multivari´ avel. Na Se¸c˜ ao 3 ´ e apre- sentada a planta did´ atica industrial e o processo multivari´ avel desenvolvido neste trabalho. Na Se- ¸c˜ ao 4 ´ e abordado o controle do processo multiva- ri´ avel, a coleta dos dados e o treinamento da rede neural. Porfim, nasSe¸c˜ oes 5 e 6, s˜ ao apresentados os resultados e as conclus˜ oes deste trabalho. 2 Controle Multivari´ avel O objetivo dos sistemas de controle ´ e fazer com que um dado conjunto de vari´ aveis de um pro- cesso se comporte de uma maneira espec´ ıfica no dom´ ınio do tempo ou da frequˆ encia. Atrav´ es da a¸c˜ ao das vari´ aveis manipuladas, estas devem agir sobre o processo escolhido, com o interesse de con- trolar o comportamento das vari´ aveis do processo (Albertos e Antonio, 2003). Considerando que o processo a ser controlado seja linear, existem ferramentas e t´ ecnicas que fa- cilitam a sua modelagem. Entretanto, quando o processo possui caracter´ ısticas n˜ ao-lineares, obter o modelo matem´ atico que descreve este sistema se torna mais dif´ ıcil (Soloway e Haley, 1996). Para processos industriais, o modelo pode ser obtido a partir do tratamento das medidas coletadas a par-
-
Upload
phungduong -
Category
Documents
-
view
232 -
download
0
Transcript of CONTROLE DE UM PROCESSO MULTIVARIAVEL EM UMA … · control a multivariable process in an...

CONTROLE DE UM PROCESSO MULTIVARIAVEL EM UMA PLANTA DIDATICAINDUSTRIAL UTILIZANDO REDES NEURAIS.
Arthur Hirata Bertachi, Lyvia Regina Biagi Silva, Rodrigo Rodrigues Sumar, BrunoAugusto Angelico, Alessandro Goedtel
Universidade Tecnologica Federal do Parana - UTFPRPrograma de Pos-Graduacao em Engenharia Eletrica
Av. Alberto Carazzai, 1640, Cornelio Procopio, Parana, Brasil.
Email: [email protected], [email protected], [email protected],
[email protected], [email protected]
Abstract— This paper proposes the implementation of a controller based on artificial neural networks tocontrol a multivariable process in an industrial didatic plant using MATLAB and OLE for Process Controlprotocol. The control strategy is validated through practical experiments and the results are compared with aclassical PI controller.
Keywords— Intelligent Control in Automation and Robotics, Neural Networks, Multivariable Control, Indus-trial Didatic Plant.
Resumo— Neste trabalho e proposta a aplicacao de um controlador baseado em redes neurais artificiais paracontrole um processo multivariavel em uma planta didatica industrial utilizando o software MATLAB e protocoloOLE for Process Control. A estrategia de controle foi validada atraves de experimentos praticos e os resultadossao comparados com um controlador PI classico.
Keywords— Controle Inteligente em Automacao e Robotica, Redes Neurais, Controle Multivariavel, PlantaDidatica Industrial.
1 Introducao
A teoria de controle para sistemas multivariaveisencontra varias aplicacoes em diversas areas, en-tre elas a robotica, processos industriais, maqui-nas eletricas, tecnologia espacial, processos quı-micos, entre outros. Na pratica, a maioria dossistemas possuem caracterısticas multivariaveis enao-lineares. Tais sistemas apresentam uma difi-culdade de controle devido ao acoplamento exis-tente entre seus valores de entradas e saıdas (Gee Wang, 2004).
Uma das maneiras mais simples de se con-trolar os sistemas MIMO (Multiple-Input Multi-ple Output) consiste na a utilizacao de controla-dores PID (Proporcional Integral Derivativo) indi-viduais para cada variavel a ser controlada (con-trole multi-loop). Para se obter bons resultadose necessario que as variaveis nao sejam acopladas(o que raramente ocorre) e os controladores PIDsejam bem sintonizados,(Maciejowski, 1989) apud(Duarte et al., 2001).
Nos ultimos anos pesquisadores desenvolve-ram trabalhos relacionados com estrategias decontrole para sistemas MIMO utilizando-se de sis-temas inteligentes. A aplicacao de Redes Neu-rais Artificiais (RNAs) e sistemas Fuzzy ocorremdevido ao fato de ambos se comportarem comoaproximadores universais de funcoes (Lin e Lian(2009); Peng e Dubay (2012)).
Neste trabalho e proposto um controlador ba-seado em uma RNA para controlar um processoMIMO envolvendo nıvel e temperatura. A RNAsera treinada a partir dos dados coletados de en-
saios que utilizam-se da estrategia de controlemulti-loop para controlar o processo. Apos a redeser treinada, o controlador baseado em RNA atuasobre o processo buscando levar em conta as nao-linearidades do processo e garantir uma melhorresposta do sistema.
O trabalho esta organizado da seguinte ma-neira: A Secao 2 apresenta uma breve abordagemsobre controle multivariavel. Na Secao 3 e apre-sentada a planta didatica industrial e o processomultivariavel desenvolvido neste trabalho. Na Se-cao 4 e abordado o controle do processo multiva-riavel, a coleta dos dados e o treinamento da redeneural. Por fim, nas Secoes 5 e 6, sao apresentadosos resultados e as conclusoes deste trabalho.
2 Controle Multivariavel
O objetivo dos sistemas de controle e fazer comque um dado conjunto de variaveis de um pro-cesso se comporte de uma maneira especıfica nodomınio do tempo ou da frequencia. Atraves daacao das variaveis manipuladas, estas devem agirsobre o processo escolhido, com o interesse de con-trolar o comportamento das variaveis do processo(Albertos e Antonio, 2003).
Considerando que o processo a ser controladoseja linear, existem ferramentas e tecnicas que fa-cilitam a sua modelagem. Entretanto, quando oprocesso possui caracterısticas nao-lineares, obtero modelo matematico que descreve este sistema setorna mais difıcil (Soloway e Haley, 1996). Paraprocessos industriais, o modelo pode ser obtido apartir do tratamento das medidas coletadas a par-

tir de uma realizacao experimental. O modelo fi-nal e uma forma do conhecimento da relacao exis-tente entre os sinais de entrada e de saıda, carac-terizada no processo fısico pela funcao de transfe-rencia (Coelho e Coelho, 2004).
O controle descentralizado objetiva controlarplantas multivariaveis atraves de uma decompo-sicao em malhas de controle SISO (Single-InputSingle-Output). Tal abordagem apresenta comovantagem a facil implementacao e sintonia do con-trolador se existir um numero suficiente de senso-res e atuares inseridos no processo. Esta aborda-gem, tambem conhecida como multi-loop, pode-setornar uma solucao atraente. Entretanto, podenao funcionar para sistemas que possuam suasvariaveis fortemente acopladas (Albertos e Anto-nio, 2003).
Devido as suas nao-linearidades, na maioriados casos os sistemas MIMOS sao de difıcil mo-delagem. Essa dificuldade e refletida no controledo sistema. Devido a isso, a utilizacao de estra-tegias de controle com algum grau de inteligen-cia vem sendo consideradas (Duarte et al., 2001).Um dos problemas da utilizacao de sistemas Fuzzypara o controle de sistemas MIMO e que o numerode regras de controle e esforco computacional au-menta exponencialmente com o acrescimo de va-riaveis envolvidas no processo (Lin e Lian, 2009).
As RNAs tem sido bastante exploradas naidentificacao de sistemas dinamicos nao-lineares,devido a habilidade de aproximar complexos ma-peamentos nao lineares (Azevedo et al., 2000). EmDuarte et al. (2001) o controle de um processoMIMO e realizado atraves de tres RNAs: umarede para o controlador, outra rede como preditore a ultima e utilizada como identificadora. Os re-sultados obtidos neste trabalho se mostraram taobons quanto outros resultados obtidos por outrastecnicas de controle.
3 Planta Didatica Industrial
A planta didatica industrial SMAR PD-3 foi de-senvolvida para representar de forma simples e ob-jetiva a operacao de diversas malhas de controleque podem ser implementadas em uma planta in-dustrial real. Utilizando os mesmo instrumentosde campo e aplicativos de software para configu-racao e operacao que sao desenvolvidos para apli-cacoes em larga escala (SMAR, 2012). A Figura1 mostra a planta didatica instalada nos labora-torios da UTFPR, campus Cornelio Procopio.
As malhas de controle da planta didatica bus-cam reproduzir caracterısticas de processos fabris.O fabricante fornece algumas estrategias de con-trole previamente implementadas nos controlado-res da planta. Tais controladores estao inseridosem uma rede de comunicacao industrial, a redeProfibus (Silva et al., 2012).
Com o auxılio da tecnologia OPC e da toolbox
Figura 1: Planta Didatica SMAR PD-3.
do MATLAB (OPCtool), e possıvel acessar todasas TAGs internas da rede Profibus. Dessa ma-neira, pode-se controlar o percentual de aberturadas valvulas, os status das bombas, coletar valoresde transmissores de maneira periodica, entre ou-tras possibilidades. Portanto, e possıvel desenvol-ver novas malhas de controles anteriormente naoabordadas pelo fabricante, e, aplicar algoritmosde controle mais abrangentes do que as estrate-gias de controle envolvendo programacao Ladder.Entretanto, toda a programacao e restricoes sal-vas internamente na memoria do controlador daplanta continuam atuando sobre o processo. De-vido a este fato, deve-se conhecer tais restricoespara que nao ocorra acoes inesperadas durante osensaios.
Neste trabalho, sera abordado o controle deum processo MIMO anteriormente nao implemen-tado pelo fabricante da planta didatica industrial.
O objetivo deste trabalho consiste em contro-lar ao mesmo tempo o nıvel do tanque e a tempe-ratura do fluıdo dentro do tanque 1 apresentadona Figura 1.
Entretanto, ha uma restricao de funciona-mento imposta pelo fabricante do equipamento,visando a seguranca contra possıveis danos aosinstrumentos. Para que nao haja danos nas re-sistencias de aquecimento, essas so podem ser aci-onadas quando o nıvel do tanque atingir o limitemınimo de aproximadamente 95%. Caso contra-rio, o acionamento das resistencias e inibido auto-maticamente. Portanto, para realizar o controlede temperatura e nıvel de maneira simultanea, onıvel medido no tanque 1 deve ser de pelo menos95%.
Em Lopes et al. (2012), um estudo relacio-nado ao controle de nıvel em uma planta similar autilizada neste trabalho, concluiu que tal processopode ser considerado nao linear com dinamica as-simetrica. Ou seja, a resposta a um estımulo dotipo degrau na entrada possui um crescimento ra-pido no inıcio e lento proximo a regiao de estadoestacionario. Tal caracterıstica torna a modela-gem utilizando tecnicas baseadas na curva de rea-

cao nao fidedignas ao processo real. Devido a isso,o processo de sintonia de controladores PID tam-bem e prejudicado, pois sao baseados no modelomatematico que descreve o processo. Consequen-temente, o controlador pode apresentar resultadosinsatisfatorios durante o controle do processo.
4 Controle de um Processo Multivariavelutilizando RNAs
4.1 Redes Neurais Artificiais
Redes neurais artificiais sao modelos computacio-nais inspirados no sistema nervoso de seres vivos.Possuem a capacidade de aquisicao e manutencaodo conhecimento e podem ser definidas como umconjunto de unidades de processamento, carateri-zadas por neuronios artificiais (Silva et al. (2010);Haykin (2009)).
As redes Percepton Multicamadas (PMC), di-ferentemente do Perceptron simples, proposto porRosenblatt (1958), possuem alem da camada deentrada, uma ou mais camadas escondidas e umacamada de saıda. O processo de treinamento destarede e supervisionado e baseado no algoritmo co-nhecido como backpropagation. O treinamentoconsiste em duas etapas distintas: a etapa forwarde a etapa backward.
Na etapa forward os dados de entrada saoapresentados a rede e sao propagados ate os neuro-nios de saıda, que produzem os resultados da rede.Em seguida, estes resultados sao comparados comos resultados desejados. A diferenca entre os re-sultados obtidos e os resultados desejados sao uti-lizados na etapa backward, onde as matrizes depesos sinapticos sao atualizadas com o objetivo detornar a saıda da rede cada vez mais proxima dasaıda desejada (Silva et al. (2010); Haykin (2009)).
Devido a sua capacidade de mapear proces-sos por intermedio de exemplos, as redes PMCse tornam candidatas a muitas aplicacoes em queas unicas informacoes disponıveis se resumem auma colecao de dados de entrada e saıda (Silvaet al., 2010).
Desta forma, utiliza-se um controlador base-ado em redes neurais para operar tal processo, poiso mesmo nao necessita de um modelo matematicopreviamente conhecido da planta. Utiliza-se umarede PMC devido a sua capacidade de se com-portar como aproximadora universal de funcoes.Atraves de dados coletados, a PMC sera treinadade maneira off-line e os valores de pesos sinap-ticos obtidos apos o treinamento serao utilizadospara realizar o controle do processo utilizando osoftware MATLAB juntamente com a tecnologiaOPC.
4.2 Coleta e Tratamento dos Dados
Para realizar a coleta dos dados, foi utilizada a ar-quitetura de controle conhecida como multi-loop,
conforme ilustra a Figura 2. Cada variavel a sercontrolada possui um controlador PID exclusivo,cada qual com seus respectivos valores de ganho,setpoint e a acao de controle.
Figura 2: Arquitetura de controle para um pro-cesso multivariavel baseada em dois controladoresPID em paralelo.
Atraves de ensaios em malha aberta, foramencontradas as funcoes de transferencias que des-crevem de maneira individual os processos de nı-vel e temperatura. As Equacoes 1 e 2 representamas funcoes de transferencias do sistema de nıvel etemperatura, respectivamente.
G1(s) =3, 1404
200, 43 · s+ 1· e−10,22·s (1)
G2(s) =0, 04277
131, 1 · s+ 1· e−36·s (2)
Apos a identificacao dos sistemas, foram re-alizadas as sintonias dos controladores da Figura2 por metodos apresentados por Carmo (2006).Opta-se pela escolha de controladores do tipo PI.A partir disto, foram realizados diversos ensaiosno processo proposto, afim de coletar dados paraserem utilizados no treinamento da RNA.
Por se tratar de um sistema dinamico, a coletados dados foi realizada em tempo real via OPC.Atraves de varios ensaios para diferentes valoresde setpoint de temperatura e nıvel, foram coleta-dos dados instantaneos das variaveis de entrada eseus respectivos valores de saıdas.
Foram escolhidos como variaveis de entradaos valores de setpoint, o erro da variavel medidaem relacao ao setpoint desejado e o erro atrasadoem quatro amostras. Como a taxa de atualizacaodos valores coletados pelo OPC e maior do que ataxa de atualizacao da planta didatica industrial,os valores lidos podem ser repetidos. Utilizando-se de um atraso de quatro amostras, observa-seque os valores de erro atual e erro atrasado nao serepetiam. A nova arquitetura de controle e apre-sentada pela Figura 3.
As variaveis de saıda escolhidas foram as acoesde controle que atuam sobre o processo. Para ocontrole de nıvel o percentual de abertura da val-vula foi considerada e no controle de temperaturao percentual de potencia fornecida para as resis-tencias de aquecimento.
Acrescentando uma amostra atrasado notempo do erro do sistema, e possıvel saber qual o

Figura 3: Arquitetura de controle para um pro-cesso multivariavel baseada em uma rede neural.
comportamento do sistema, ou seja, se o erro estaaumentando ou diminuindo em relacao a amostraanterior. Tal informacao e primordial para umbom comportamento do controlador.
Ao total foram realizados 18 ensaios, separa-dos em dois grupos: grupo A, com 12 ensaios egrupo B, com 6 ensaios. Os ensaios do grupo A fo-ram realizados variando-se o setpoint de nıvel ateque se atingisse o valor de 100% do nıvel. Nestesensaios, o sistema de temperatura e inibido devidoa restricao imposta pelo fabricante, citada anteri-ormente.
Os ensaios do grupo B foram realizados a par-tir do momento em que o valor medido de nıvelestivesse acima de 95%. Com isso, os valores desetpoint de temperatura foram variados em 1oC e2oC em relacao a temperatura ambiente, para umvalor de nıvel constante.
Ao termino dos ensaio, os dados coletados de-vem passar por um pre-processamento com a fi-nalidade de minimizar redundancias e reduzir acomplexidade dimensional dos sinais de entradada rede (Silva et al., 2010). Em media, cada en-saio realizado coletou cerca de 800 amostras ins-tantaneas das variaveis de entrada e suas respec-tivas saıdas. Os ensaios do grupo A foram sub-amostrados em 40 amostras e os ensaios do grupoB foram sub-amostrados em 60 amostras. Foi rea-lizado um processo de sub-amostragem onde 70%dos dados foram sub-amostrados no perıodo tran-sitorio do sistema e os 30% restantes foram sub-amostrados em regime estacionario. O perıodotransitorio foi privilegiado em relacao ao perıodoestacionario pois o mesmo apresenta maiores va-riacoes na variaveis medidas.
Ao total foram sub-amostradas 860 amostrasdas variaveis de entradas e seus respectivos valo-res de saıda. Os valores de entrada e de saıda dasamostras devem ser normalizados em relacao asfuncoes de ativacao utilizadas para evitar as re-gioes de saturacao das mesmas e incrementar odesempenho do treinamento (Silva et al., 2010).
4.3 Treinamento e Validacao da RNA
O PMC tem a capacidade aprender atraves deexemplos mapeando o comportamento de um pro-cesso baseando em medicoes realizadas em suasentradas e saıdas. A fase de treinamento e res-ponsavel por realizar o ajuste dos pesos sinapti-
cos atraves do treinamento baseado no algoritmobackpropagation e a fase de validacao e responsa-vel por comparar os valores de saıda da RNA jatreinada com os valores reais desejados.
Portanto, os dados coletados foram separa-dos em duas classes: treinamento e validacao. Aclasse de treinamento e composta por 704 amos-tras (80%) e a classe de validacao possui 176 amos-tras (20%). Os valores mınimos e maximos de to-das as variaveis devem fazer parte da classe detreinamento.
Foram propostas tres diferentes redes. A Ta-bela 1 mostra as principais caracterısticas ado-tadas para a fase de treinamento. Todas as re-des possuem dois neuronios em sua saıda. Cadaneuronio e responsavel por determinar qual sera aacao de controle que ira atuar nos em cada atuadordo processo. Ou seja, um neuronio ira determinarqual sera o percentual de abertura de valvula e ooutro qual sera o percentual de potencia que serafornecida as resistencias.
Tabela 1: Parametros das RNAs.Tipo Rede 1 Rede 2 Rede 3
Arquitetura PMC PMC PMCTreinamento SV SV SVAlgoritmo de BP BP BPTreinamento
Precisao 10−7 10−7 10−8
Nº de Camadas 1 1 1Escondidas
Neuronios na 15 20 18camada escondida
Neuronios na 2 2 2camada de saıda
Funcao de Ativacao Logıstica Logıstica Logısticacamada escondida
Funcao de Ativacao Logıstica Logıstica Logısticacamada de saıda
PMC - Perceptron MulticamadasSV - Supervisionado
BP - Backpropagation
Em todas as redes o processo de treinamentoadotou uma taxa de aprendizado de η = 0, 01 eo termo momentum no valor de α = 0, 8. A Ta-bela 2 apresenta uma comparacao dos resultadosobtidos apos o treinamento e tambem o resultadoapresentado em cada rede apos a fase de validacao.
Tabela 2: Desempenho das RNAs apos fases detreinamento e validacao.
Tipo Rede 1 Rede 2 Rede 3
Quant. Epocas 6447 6275 31762
EQM 2, 6 · 10−3 2, 7 · 10−3 1, 6 · 10−3
Erro Medio (%)Saıda 1 3,1533 3,2510 2,0178Saıda 2 3,1308 3,2888 2,3666
EQM - Erro Quadratico Medio
A rede que apresentou o melhor resultado foia Rede 3. Apesar de nao ser a rede que possui omaior numero de neuronios, e a rede que apresen-tou a maior precisao apos de treinamento e o me-nor erro relativo entre as saıdas obtidas em relacaoas saıdas desejadas. Porem, a rede 3 necessitou de
cerca de 30 mil epocas de treinamento para con-vergir, enquanto as demais apresentaram um valoraproximadamente cinco vezes menor. Entretanto,como o treinamento foi realizado off-line, tal fatonao tem influencia direta no controle do processo.Considera-se o erro medio apresentado na fase devalidacao como o criterio mais importante paraavaliar qual e o melhor treinamento.
5 Resultados Experimentais
Utilizando-se das matrizes de pesos sinapticos ob-tidas pelo treinamento da Rede 3, o controladorbaseado em RNA foi implementado no softwareMATLAB. As mesmas variaveis de entrada cole-tadas para o treinamento da rede devem ser cole-tadas em tempo real para o controle do processo.Um ponto importante para que o controlador fun-cione da maneira esperada e normalizar os dadoscom os mesmos coeficientes adotados na fase detratamento dos dados.
As variaveis coletadas devem ser organizadasem uma matriz da mesma maneira como foramna fase de coleta e tratamento dos dados. O con-trolador multiplica essa matriz pelas matrizes depesos sinapticos ajustadas na fase de treinamentoe retorna uma matriz contendo os valores normali-zados das variaveis de controle que atuam no pro-cesso.
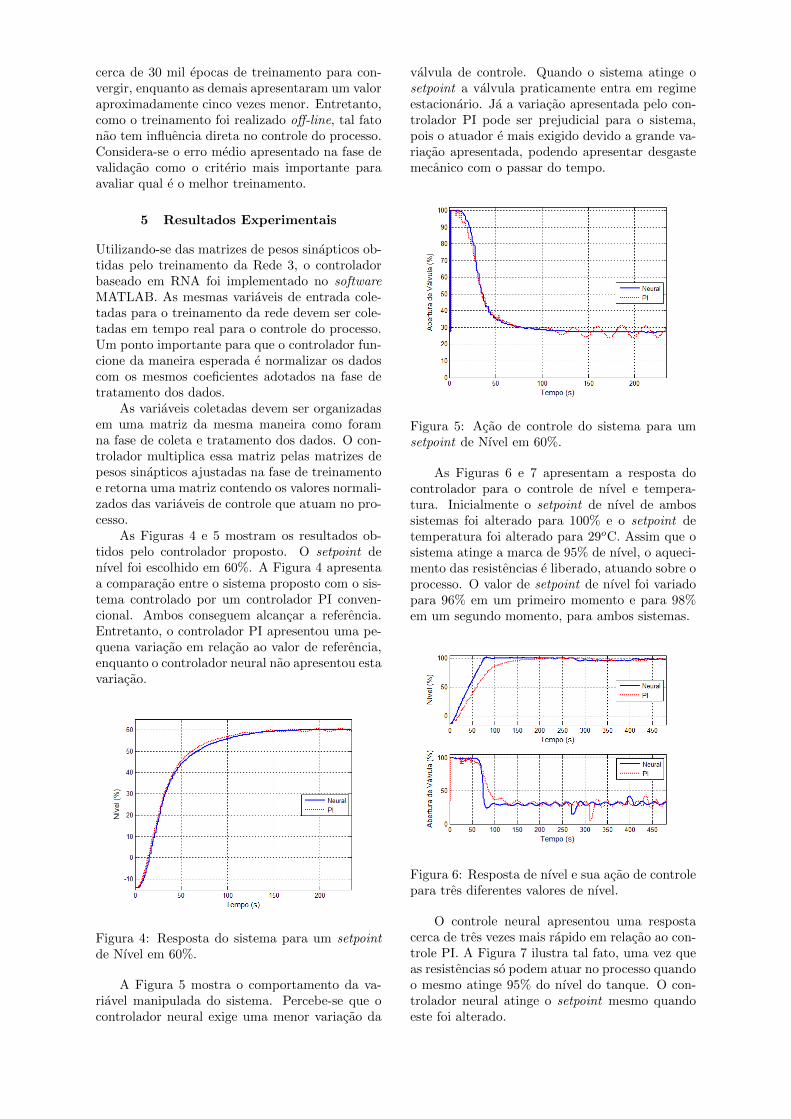
As Figuras 4 e 5 mostram os resultados ob-tidos pelo controlador proposto. O setpoint denıvel foi escolhido em 60%. A Figura 4 apresentaa comparacao entre o sistema proposto com o sis-tema controlado por um controlador PI conven-cional. Ambos conseguem alcancar a referencia.Entretanto, o controlador PI apresentou uma pe-quena variacao em relacao ao valor de referencia,enquanto o controlador neural nao apresentou estavariacao.
Figura 4: Resposta do sistema para um setpointde Nıvel em 60%.
A Figura 5 mostra o comportamento da va-riavel manipulada do sistema. Percebe-se que ocontrolador neural exige uma menor variacao da
valvula de controle. Quando o sistema atinge osetpoint a valvula praticamente entra em regimeestacionario. Ja a variacao apresentada pelo con-trolador PI pode ser prejudicial para o sistema,pois o atuador e mais exigido devido a grande va-riacao apresentada, podendo apresentar desgastemecanico com o passar do tempo.
Figura 5: Acao de controle do sistema para umsetpoint de Nıvel em 60%.
As Figuras 6 e 7 apresentam a resposta docontrolador para o controle de nıvel e tempera-tura. Inicialmente o setpoint de nıvel de ambossistemas foi alterado para 100% e o setpoint detemperatura foi alterado para 29oC. Assim que osistema atinge a marca de 95% de nıvel, o aqueci-mento das resistencias e liberado, atuando sobre oprocesso. O valor de setpoint de nıvel foi variadopara 96% em um primeiro momento e para 98%em um segundo momento, para ambos sistemas.
Figura 6: Resposta de nıvel e sua acao de controlepara tres diferentes valores de nıvel.
O controle neural apresentou uma respostacerca de tres vezes mais rapido em relacao ao con-trole PI. A Figura 7 ilustra tal fato, uma vez queas resistencias so podem atuar no processo quandoo mesmo atinge 95% do nıvel do tanque. O con-trolador neural atinge o setpoint mesmo quandoeste foi alterado.
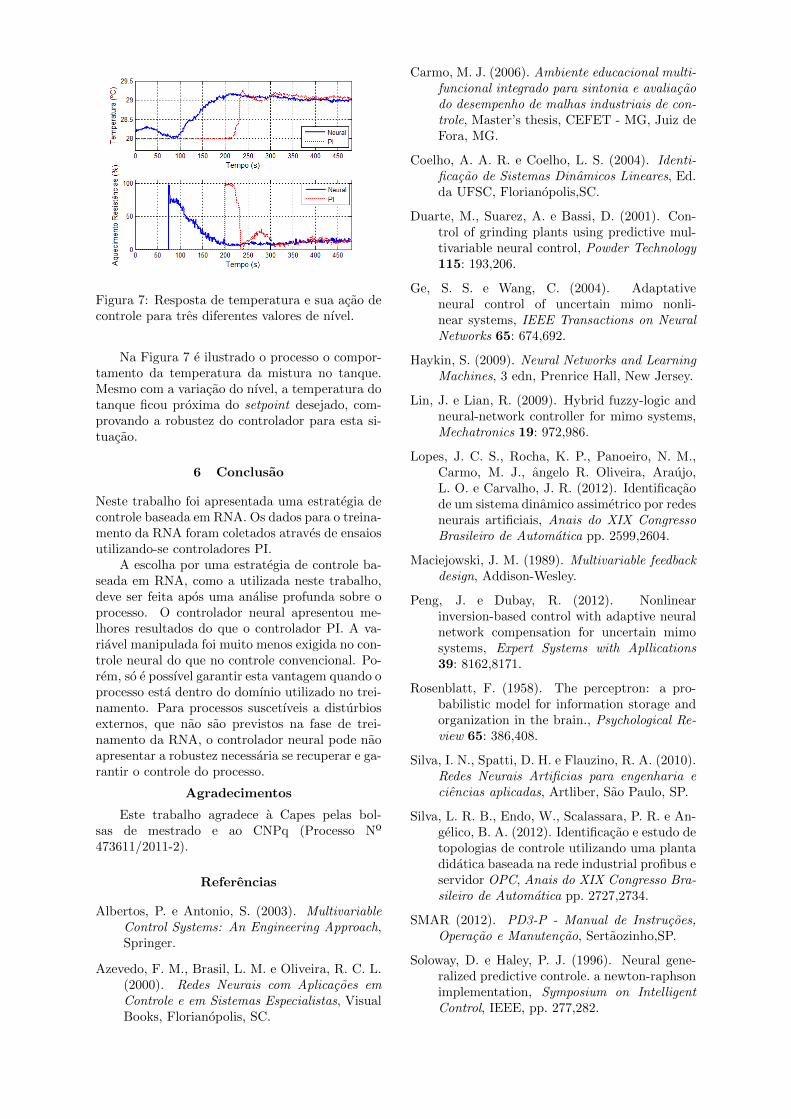
Figura 7: Resposta de temperatura e sua acao decontrole para tres diferentes valores de nıvel.
Na Figura 7 e ilustrado o processo o compor-tamento da temperatura da mistura no tanque.Mesmo com a variacao do nıvel, a temperatura dotanque ficou proxima do setpoint desejado, com-provando a robustez do controlador para esta si-tuacao.
6 Conclusao
Neste trabalho foi apresentada uma estrategia decontrole baseada em RNA. Os dados para o treina-mento da RNA foram coletados atraves de ensaiosutilizando-se controladores PI.
A escolha por uma estrategia de controle ba-seada em RNA, como a utilizada neste trabalho,deve ser feita apos uma analise profunda sobre oprocesso. O controlador neural apresentou me-lhores resultados do que o controlador PI. A va-riavel manipulada foi muito menos exigida no con-trole neural do que no controle convencional. Po-rem, so e possıvel garantir esta vantagem quando oprocesso esta dentro do domınio utilizado no trei-namento. Para processos suscetıveis a disturbiosexternos, que nao sao previstos na fase de trei-namento da RNA, o controlador neural pode naoapresentar a robustez necessaria se recuperar e ga-rantir o controle do processo.
Agradecimentos
Este trabalho agradece a Capes pelas bol-sas de mestrado e ao CNPq (Processo Nº473611/2011-2).
Referencias
Albertos, P. e Antonio, S. (2003). MultivariableControl Systems: An Engineering Approach,Springer.
Azevedo, F. M., Brasil, L. M. e Oliveira, R. C. L.(2000). Redes Neurais com Aplicacoes emControle e em Sistemas Especialistas, VisualBooks, Florianopolis, SC.
Carmo, M. J. (2006). Ambiente educacional multi-funcional integrado para sintonia e avaliacaodo desempenho de malhas industriais de con-trole, Master’s thesis, CEFET - MG, Juiz deFora, MG.
Coelho, A. A. R. e Coelho, L. S. (2004). Identi-ficacao de Sistemas Dinamicos Lineares, Ed.da UFSC, Florianopolis,SC.
Duarte, M., Suarez, A. e Bassi, D. (2001). Con-trol of grinding plants using predictive mul-tivariable neural control, Powder Technology115: 193,206.
Ge, S. S. e Wang, C. (2004). Adaptativeneural control of uncertain mimo nonli-near systems, IEEE Transactions on NeuralNetworks 65: 674,692.
Haykin, S. (2009). Neural Networks and LearningMachines, 3 edn, Prenrice Hall, New Jersey.
Lin, J. e Lian, R. (2009). Hybrid fuzzy-logic andneural-network controller for mimo systems,Mechatronics 19: 972,986.
Lopes, J. C. S., Rocha, K. P., Panoeiro, N. M.,Carmo, M. J., angelo R. Oliveira, Araujo,L. O. e Carvalho, J. R. (2012). Identificacaode um sistema dinamico assimetrico por redesneurais artificiais, Anais do XIX CongressoBrasileiro de Automatica pp. 2599,2604.
Maciejowski, J. M. (1989). Multivariable feedbackdesign, Addison-Wesley.
Peng, J. e Dubay, R. (2012). Nonlinearinversion-based control with adaptive neuralnetwork compensation for uncertain mimosystems, Expert Systems with Apllications39: 8162,8171.
Rosenblatt, F. (1958). The perceptron: a pro-babilistic model for information storage andorganization in the brain., Psychological Re-view 65: 386,408.
Silva, I. N., Spatti, D. H. e Flauzino, R. A. (2010).Redes Neurais Artificias para engenharia eciencias aplicadas, Artliber, Sao Paulo, SP.
Silva, L. R. B., Endo, W., Scalassara, P. R. e An-gelico, B. A. (2012). Identificacao e estudo detopologias de controle utilizando uma plantadidatica baseada na rede industrial profibus eservidor OPC, Anais do XIX Congresso Bra-sileiro de Automatica pp. 2727,2734.
SMAR (2012). PD3-P - Manual de Instrucoes,Operacao e Manutencao, Sertaozinho,SP.
Soloway, D. e Haley, P. J. (1996). Neural gene-ralized predictive controle. a newton-raphsonimplementation, Symposium on IntelligentControl, IEEE, pp. 277,282.