
CONTROLE DE ATUADOR PNEUMÁTICO APLICADO EM …conemi.org.br/download/TT28_XIV_CONEMI-001.pdf ·...
19
Construindo Hoje a Engenharia do Amanhã Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial CONTROLE DE ATUADOR PNEUMÁTICO APLICADO EM MÁQUINA PARA ENXERTIA DE PLANTAS Evandro Bertoldi (1) ([email protected]), Everton Bertoldi (2) ([email protected]), Nara Liege Barbieri (3) ([email protected]) (1) Universidade Regional do Noroeste do Estado do Rio Grande do Sul (UNIJUÍ); Departamento de Engenharia Mecânica (2) Universidade de Passo Fundo (UPF); Departamento de Engenharia de Produção Mecânica (3) Universidade de Passo Fundo (UPF); Departamento de Agronomia RESUMO: Atuador pneumático é um dispositivo mecânico, que por meio de movimentos lineares transformam energia cinética em energia mecânica, deslocando-se numa trajetória linear. Os atuadores pneumáticos são limpos, de baixo custo, fácil manutenção, fácil instalação, controlabilidade média, alta confiabilidade e larga aplicação. Entretanto, possuem dificuldades de controle que podem ser compensadas através da modelagem matemática. O sistema dinâmico a ser modelado e controlado trata-se de um atuador pneumático sem haste aplicado em máquina para enxertia de plantas. Tem-se como objetivo, o controle de movimento do atuador pneumático, obtendo-se a posição desejada do carro, massa acoplada. Desenvolveu-se uma solução de controle para o problema de modelagem do sistema dinâmico através da metodologia descrita em Virvalo (apud Vieira, 1998), a partir da aplicação da função de 3ª ordem, e através das variáveis que envolvem o atuador pneumático, formulação do modelo matemático, determinação da função de transferência, cálculos de desenvolvimento do controlador, análises do comportamento do controlador e simulação computacional. A partir do desenvolvimento do controle do atuador pneumático, evidencia-se a necessidade de um sistema de controle dinâmico caso o projeto exigir precisão e variações de parâmetros. Verifica-se que com a utilização das ferramentas de análise de controle, podem-se melhorar os resultados de sistemas dinâmicos. PALAVRAS-CHAVE: Sistemas Dinâmicos, Atuador Pneumático, Controle, Modelagem. PNEUMATIC ACTUADOR CONTROL APPLIED ON GRAFTING PLANTS MACHINE ABSTRACT: Peumatic actuator is a mechanic device, which by linear movements transforms kinetic energy into mechanic energy, moving in a linear trajectory. The pneumatic actuators are clean, low cost, easy maintenance, easy installation, average controlling, high reliability and large applying. However, there are controlling difficulties that can be compensated by math modeling. The dynamic system to be modeled and controlled is about a pneumatic actuator without rod applied on a crafting plant machine. The aim is the movement control of the pneumatic actuator, obtaining the desired position of the car, attached mass. It was developed a control solution for the modeling problem of the dynamic system through the described methodology in Virvalo (apud Vieira, 1998), from the 3ª order function application, and through the variables that involve the pneumatic actuator, math modeling formulation, determination of transferring function , developing controller calculation, control behavior analysis and computational simulation. From the development of the pneumatic actuator control, is evident the need of a dynamic control system if the design demands precision and parameter variables. Using the control analysis tools, the dynamic system results can be improved. KEYWORDS: Dynamic System, Pneumatic Actuator, Control, Modeling.
Transcript of CONTROLE DE ATUADOR PNEUMÁTICO APLICADO EM …conemi.org.br/download/TT28_XIV_CONEMI-001.pdf ·...

Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
CONTROLE DE ATUADOR PNEUMÁTICO APLICADO EM MÁQUINA PARA ENXERTIA DE PLANTAS
Evandro Bertoldi (1) ([email protected]), Everton Bertoldi (2) ([email protected]),
Nara Liege Barbieri (3) ([email protected])
(1) Universidade Regional do Noroeste do Estado do Rio Grande do Sul (UNIJUÍ); Departamento de Engenharia Mecânica (2) Universidade de Passo Fundo (UPF); Departamento de Engenharia de Produção Mecânica
(3) Universidade de Passo Fundo (UPF); Departamento de Agronomia
RESUMO: Atuador pneumático é um dispositivo mecânico, que por meio de movimentos lineares transformam energia cinética em energia mecânica, deslocando-se numa trajetória linear. Os atuadores pneumáticos são limpos, de baixo custo, fácil manutenção, fácil instalação, controlabilidade média, alta confiabilidade e larga aplicação. Entretanto, possuem dificuldades de controle que podem ser compensadas através da modelagem matemática. O sistema dinâmico a ser modelado e controlado trata-se de um atuador pneumático sem haste aplicado em máquina para enxertia de plantas. Tem-se como objetivo, o controle de movimento do atuador pneumático, obtendo-se a posição desejada do carro, massa acoplada. Desenvolveu-se uma solução de controle para o problema de modelagem do sistema dinâmico através da metodologia descrita em Virvalo (apud Vieira, 1998), a partir da aplicação da função de 3ª ordem, e através das variáveis que envolvem o atuador pneumático, formulação do modelo matemático, determinação da função de transferência, cálculos de desenvolvimento do controlador, análises do comportamento do controlador e simulação computacional. A partir do desenvolvimento do controle do atuador pneumático, evidencia-se a necessidade de um sistema de controle dinâmico caso o projeto exigir precisão e variações de parâmetros. Verifica-se que com a utilização das ferramentas de análise de controle, podem-se melhorar os resultados de sistemas dinâmicos. PALAVRAS-CHAVE: Sistemas Dinâmicos, Atuador Pneumático, Controle, Modelagem. PNEUMATIC ACTUADOR CONTROL APPLIED ON GRAFTING PLAN TS MACHINE
ABSTRACT: Peumatic actuator is a mechanic device, which by linear movements transforms kinetic energy into mechanic energy, moving in a linear trajectory. The pneumatic actuators are clean, low cost, easy maintenance, easy installation, average controlling, high reliability and large applying. However, there are controlling difficulties that can be compensated by math modeling. The dynamic system to be modeled and controlled is about a pneumatic actuator without rod applied on a crafting plant machine. The aim is the movement control of the pneumatic actuator, obtaining the desired position of the car, attached mass. It was developed a control solution for the modeling problem of the dynamic system through the described methodology in Virvalo (apud Vieira, 1998), from the 3ª order function application, and through the variables that involve the pneumatic actuator, math modeling formulation, determination of transferring function , developing controller calculation, control behavior analysis and computational simulation. From the development of the pneumatic actuator control, is evident the need of a dynamic control system if the design demands precision and parameter variables. Using the control analysis tools, the dynamic system results can be improved.
KEYWORDS: Dynamic System, Pneumatic Actuator, Control, Modeling.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 2
1. INTRODUÇÃO
Atuador pneumático é um dispositivo mecânico, que por meio de movimentos lineares
transformam energia cinética gerada pelo ar pressurizado e em expansão, em energia mecânica,
deslocando-se numa trajetória linear. Nos últimos anos a pneumática vem ganhando espaço e se
tornou uma das principais tecnologias de automação da indústria e sua aplicação se encontra em
diversos setores.
Existe um grande potencial de aplicações dos atuadores pneumáticos nas indústrias de
processo, na manipulação e movimentação de material, robótica, máquinas de indústrias
alimentícias, linhas de montagem e pequenas máquinas e sistemas automáticos utilizados em
diferentes tarefas (PERONDI, 2002).
Os sistemas pneumáticos têm sido largamente utilizados na indústria, onde seu uso mais
comum é em situações nas quais o movimento apresenta pontos discretos de paradas nas
extremidades do seu curso. Exemplos e estudos destas aplicações podem ser encontrados em
Bollmann (1996) e Bolton (1997).
O uso de acionamentos pneumáticos possui diversas vantagens, podendo ser citados: custo
benefício, melhoria considerável em um sistema com um pequeno custo de implementação e de
manutenção; rapidez de resposta, tanto no movimento de um sistema pneumático, como no aumento
do ritmo de trabalho; robustez do sistema, pouca ou nenhuma interferência por vibrações, umidade,
poeira ou corrosão; fácil manutenção, troca rápida do sistema caso apresente defeito; tecnologia
limpa, que não polui o meio ambiente; e de boa relação peso/potência (MORGADO, 2011).
Entretanto, há muitas dificuldades no controle clássico linear de atuadores pneumáticos,
causadas pela compressibilidade do ar, pela relação não linear da vazão nos orifícios de controle e
pelo atrito nos atuadores (GUENTHER et al., 2006). A modelagem matemática é complexa quando
comparada a outros tipos de acionamentos, pois o ar é bastante compressível e a vazão mássica nos
orifícios de controle da servoválvula é uma relação não linear da pressão e do sinal de controle
(BAVARESCO, 2007).
Dessa forma, a modelagem matemática é muito importante para entendimento e previsão do
comportamento dinâmico de atuadores pneumáticos e pode contribuir para a adequada aplicação e
desempenho em sistemas automáticos, principalmente na definição de estratégias de controle.
O sistema dinâmico a ser modelado e controlado trata-se de um atuador pneumático sem
haste aplicado em uma máquina para enxertia de plantas, para movimentar a mesma no sentido
horizontal, posicionando o atuador de acordo com o comprimento de corte desejado.
Tem-se como principal objetivo o controle de movimento de um atuador pneumático
obtendo-se a posição desejada do carro, massa acoplada, no sentido horizontal, para fazer o corte de
enxertia em plantas, a partir da apresentação do sistema dinâmico a ser modelado, formulação do
modelo matemático, determinação da função de transferência em malha aberta e fechada, feedback,

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 3
determinação das variáveis que envolvem o atuador pneumático, cálculos de desenvolvimento do
controlador e análises do comportamento do controlador de acordo com a metodologia descrita em
Virvalo (apud Vieira, 1998).
2. SISTEMA DINÂMICO A SER MODELADO
Um servoposicionador pneumático composto por servoválvula de controle e cilindro atuador
é um sistema que permite posicionar uma carga em um determinado ponto do curso do atuador ou
seguir uma trajetória variável em função do tempo, ao contrário da pneumática convencional, que
restringe o posicionamento do atuador linear a pontos discretos bem definidos. Esse sistema é
formado pelo atuador pneumático e o sistema de controle (BAVARESCO, 2007).
O desenvolvimento do controle baseou-se no atuador pneumático sem haste, no qual possui
seu êmbolo conectado a um cursor que movimenta a carga acoplada. O atuador é o elemento que
aplica a força sobre a carga para levá-lo a posição desejada. Na Figura 1 é ilustrado um atuador
pneumático sem haste (BAVARESCO, 2007).
FIGURA 1. Atuador pneumático sem haste.
De acordo com Bavaresco (2007), a engenharia de controle se baseia na modelagem
matemática de sistemas de diversas naturezas, analisando o seu comportamento dinâmico, e usando
a teoria de controle para calcular os parâmetros de um controlador que faça o sistema evoluir da
forma desejada.
Na literatura científica encontram-se modelos matemáticos (GUENTHER et al., 2006;
GYEVIKI et al., 2005; KARPENKO e SEPEHRI, 2004; VIEIRA, 1998; VALDIERO,
ANDRIGUETTO E CARLOTTO, 2005) que descrevem o comportamento dinâmico de atuadores
pneumáticos e suas características não lineares. O atuador pneumático é o conjunto servoválvula de
controle direcional e cilindro pneumático atuador. A Figura 2 representa de forma esquemática um
atuador pneumático (BAVARESCO, 2007).
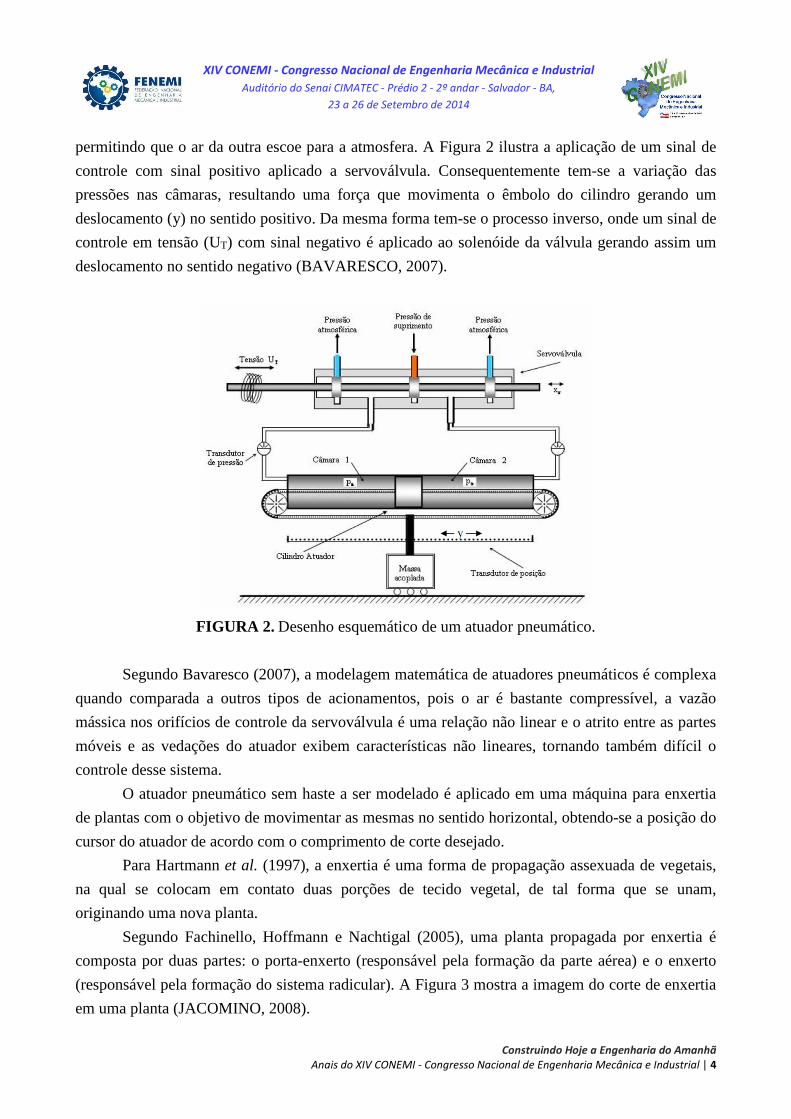
Durante a operação, o ar comprimido é fornecido a servoválvula a uma dada pressão de
suprimento regulada. Com o objetivo de seguir as referências e a partir dos sinais das malhas de
realimentação, o controlador gera uma tensão de controle (UT), que energiza as bobinas dos
solenóides da servoválvula e produz um deslocamento (xv) do carretel. O carretel, ao ser deslocado,
gera orifícios de passagem, fornecendo o ar comprimido para uma das câmaras do cilindro e
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 4
permitindo que o ar da outra escoe para a atmosfera. A Figura 2 ilustra a aplicação de um sinal de
controle com sinal positivo aplicado a servoválvula. Consequentemente tem-se a variação das
pressões nas câmaras, resultando uma força que movimenta o êmbolo do cilindro gerando um
deslocamento (y) no sentido positivo. Da mesma forma tem-se o processo inverso, onde um sinal de
controle em tensão (UT) com sinal negativo é aplicado ao solenóide da válvula gerando assim um
deslocamento no sentido negativo (BAVARESCO, 2007).
FIGURA 2. Desenho esquemático de um atuador pneumático.
Segundo Bavaresco (2007), a modelagem matemática de atuadores pneumáticos é complexa
quando comparada a outros tipos de acionamentos, pois o ar é bastante compressível, a vazão
mássica nos orifícios de controle da servoválvula é uma relação não linear e o atrito entre as partes
móveis e as vedações do atuador exibem características não lineares, tornando também difícil o
controle desse sistema.
O atuador pneumático sem haste a ser modelado é aplicado em uma máquina para enxertia
de plantas com o objetivo de movimentar as mesmas no sentido horizontal, obtendo-se a posição do
cursor do atuador de acordo com o comprimento de corte desejado.
Para Hartmann et al. (1997), a enxertia é uma forma de propagação assexuada de vegetais,
na qual se colocam em contato duas porções de tecido vegetal, de tal forma que se unam,
originando uma nova planta.
Segundo Fachinello, Hoffmann e Nachtigal (2005), uma planta propagada por enxertia é
composta por duas partes: o porta-enxerto (responsável pela formação da parte aérea) e o enxerto
(responsável pela formação do sistema radicular). A Figura 3 mostra a imagem do corte de enxertia
em uma planta (JACOMINO, 2008).

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 5
FIGURA 3. Corte de enxertia em uma planta.
De acordo com estudos, os principais motivos do uso da enxertia são as doenças de plantas.
Certas copas produzem bons frutos, mas suas raízes morrem com o ataque de doenças
(http://www.cultivando.com.br/termos_tecnicas_multiplicando_enxertia.html).
Na sua primeira concepção, conforme ilustrado nas Figuras 4 e 5, a máquina para enxertia
de plantas era composta por uma alavanca (01), com a função de movimentar o punção de corte
(02) através do movimento manual do operador, por meio de um mecanismo (03) que por sua vez
tinha a função de transmitir a força para o punção. O punção de corte é intercambiável, ou seja, é
possível usar diferentes tipos de punção de acordo com o tipo de corte, que podem ser de formatos
tipo “ômega” ou “v”. As plantas eram fornecidas para a máquina de enxertia manualmente, e após
cortados os enxertos radicular e aéreo também eram unidos manualmente. A estrutura (04), o apoio
da máquina (05), e as proteções dos mecanismos e proteções próximas à região do corte (06), que
tem a função de evitar que o operador coloque a mão no mecanismo e na ferramenta de corte
durante a operação, eram fabricados de chapas de aço (BERTOLDI, LOCATELLI e VALDIERO,
2013).
FIGURA 4. Projeto da máquina manual para enxertia de plantas.
FIGURA 5. Maquete da máquina manual para enxertia de plantas.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 6
A máquina para enxertia de plantas, ilustrado na Figura 6, no qual o atuador pneumático sem
haste a ser controlado (04) é aplicado, compõe-se de um atuador pneumático (01), que tem a função
de movimentar o punção de corte (02) através do movimento do cilindro, por meio de ar
comprimido, que por sua vez tem a função de transmitir a força para o punção. O acionamento do
sistema pneumático é através de uma válvula pneumática (03). O punção de corte é intercambiável,
ou seja, é possível usar diferentes tipos de punção de acordo com o tipo de corte. As plantas são
fornecidas para a máquina de enxertia de maneira automatizada através de um atuador pneumático
(04) e após cortados os enxertos radicular e aéreo, os mesmos são unidos na máquina de enxertia. A
estrutura (05) e o apoio da máquina (06) são fabricados pelo processo de fundição, e as proteções
dos mecanismos e proteções próximas a região do corte (07), que tem a função de evitar que o
operador coloque a mão no mecanismo e na ferramenta de corte durante a operação, são fabricados
de plástico.
FIGURA 6. Projeto da máquina automatizada para enxertia de plantas.
3. MATERIAIS E MÉTODOS
3.1 Modelagem do sistema dinâmico
A modelagem constitui-se, basicamente, na obtenção de um conjunto de equações que
representa o funcionamento do sistema real. A modelagem matemática, além de auxiliar a
aprofundar o conhecimento sobre a natureza dos fenômenos físicos envolvidos, fornece
informações úteis ao projeto de controladores.
De acordo com Perondi (2002), os sistemas físicos reais possuem infinitos graus de
liberdade e tem uma natureza essencialmente não linear. Para a viabilização da obtenção de um
modelo teórico que seja implementável em um algoritmo de simulação ou no projeto de um
controlador, muitos efeitos físicos devem ser desprezados ou parcialmente considerados. Isto se
deve à complexidade dos fenômenos envolvidos e pela dificuldade de levantar os dados necessários.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 7
A seguir apresentam-se a determinação dos parâmetros do modelo de 3ª ordem, a
formulação do modelo matemático, a determinação da função de transferência em malha aberta e
fechada (feedback) e as análises do comportamento do controlador.
O atuador pneumático a ser modelado e controlado apresenta-se na Tabela 1 a partir do
modelo, fabricante e principais dimensões (BAVARESCO, 2007).
TABELA 1. Atuador pneumático a ser controlado.
Componente Fabricante Código Catálogo Especificações Cilindro pneumático sem haste Rexroth 502 602 020 0 Curso: 500mm
Diâmetro: 25mm
3.1.1 Determinação dos parâmetros do modelo de 3ª ordem
O modelo matemático apresentado a seguir baseou-se em de Virvalo (apud Vieira, 1998).
Este é um modelo tradicionalmente utilizado no estudo de atuadores hidráulicos e que representam
de maneira simplificada os atuadores pneumáticos, tendo em vista a compressibilidade do ar e o
comportamento não linear das vazões mássicas nos orifícios da servoválvula. Este modelo consiste
de um bom ponto de partida para o estudo do comportamento dinâmico do atuador, facilita a
aplicação de técnicas de controle e pode ser escrito conforme Equação 1.
ẏ� = y�
ẏ� = y�
ẏ� =−ω� y� − 2ξωy� +K�ω
� U� (1)
onde y1 = y é a posição do êmbolo do atuador pneumático, y2 = y’ é a velocidade, y3 = y’’ é a
aceleração, ωn e ξ são respectivamente a frequência natural e a taxa de amortecimento do
movimento do sistema, Kq é o de ganho de velocidade da malha aberta e UT é o sinal de controle em
tensão aplicado a servoválvula. Neste modelo, o ganho de velocidade em malha aberta pode ser
calculado através da Equação 2.
�� =�� ����
23�� �����
(2)
sendo Qn a vazão volumétrica normal da válvula, Patm a pressão atmosférica, PS a pressão de
suprimento e UT máx a tensão máxima de entrada na válvula.
A entrada do sistema será o UT, necessário para o deslocamento, que abrirá a mesma e
deslocará o embolo do atuador pneumático, e este por sua vez movimentará o carro. A velocidade
de deslocamento pode ser variada, alternando-se a tensão de entrada de 0 a 10 V. Será controlada a
posição do carro através de sensores e o valor obtido será comparado com valores de referência. A
saída do sistema será o erro gerado da posição, deslocamento (Y(S)), do carro que será comparado

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 8
com o valor de referência até que seja obtida a posição desejada do carro para fazer o corte de
enxertia na planta.
Na Tabela 2 são mostrados os parâmetros utilizados nas simulações do atuador pneumático
Rexroth modelo 502 602 020 0 descrito anteriormente (BAVARESCO, 2007).
TABELA 2. Parâmetros do atuador pneumático Rexroth modelo 502 602 020 0.
Parâmetro Descrição Obtenção γ = 1,4 Relação entre os calores específicos do ar Literatura
A = 4,91x10-4 m2 Área do êmbolo do atuador Catálogo M = 0.5 kg Massa inercial do cilindro Medido
PS = 6x105 Pa Pressão de suprimento Medido Patm = 1x105 Pa Pressão atmosférica Literatura
VA0 = 1.25x10-4 m3 Volume morto na câmara 1 do cilindro Medido VB0 = 1.25x10-4 m3 Volume morto na câmara 2 do cilindro Medido
L = 0.5 m Comprimento do curso do atuador Catálogo ξ = 0.4 Taxa de amortecimento Literatura
Qn = 0.012 m3/s Vazão volumétrica normal da válvula Catálogo UT máx =10 V Tensão máxima de entrada na válvula Catálogo
Para o atuador pneumático em estudo, definiu-se 60 rad/s para a ωn conforme ilustrado na
Figura 7. Pode-se verificar que na região das extremidades do curso do cilindro, a freqüência
natural é significativamente maior do que na região central.
FIGURA 7. Gráfico do comportamento da frequência natural em função da posição do êmbolo do
cilindro.
Utilizando-se os dados da Tabela 2 e a Equação 2, pode-se calcular o ganho de velocidade
em malha aberta conforme mostrado na Equação 3.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 9
!" =
#, #%&'(
)* %*%#
+,-
&(*.*%#+,- *%#/
= (*%#01'(
). /(()
3.1.2 Formulação do modelo matemático em equações diferenciais
Conforme descrito anteriormente, o modelo matemático adotado neste trabalho foi o modelo
de 3ª ordem proposto por Virvalo (apud Vieira, 1998). Este modelo é descrito através de variáveis
de estado conforme Equação 1.
De acordo com a aplicação das leis do equilíbrio, obtêm-se a Equação 4 apresentada a
seguir.
y3 2ξωӱ ω� ẏ � K�ω
� U� (4)
Observando a Equação 4, podem-se obter as variáveis da função conforme apresentado na
Tabela 3.
TABELA 3. Variáveis da função aplicando as leis de equilíbrio.
Variáveis Descrição y1 = y Posição do êmbolo do atuador pneumático y2 = y’ Velocidade y3 = y” Aceleração
3.1.3 Determinação da função de transferência da malha aberta
O controle em malha aberta consiste em aplicar um sinal de controle pré-determinado,
esperando-se que ao final de um determinado tempo a variável controlada atinja um determinado
valor ou apresente um determinado comportamento. Neste tipo de sistema de controle não são
utilizadas informações sobre evolução do processo para determinar o sinal de controle a ser
aplicado em um determinado instante, ou seja, o sinal de controle não é calculado a partir de uma
medição do sinal de saída. A Figura 8 mostra o diagrama de um sistema de controle em malha
aberta (BAVARESCO, 2007).
FIGURA 8. Diagrama de um sistema de controle em malha aberta.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 10
Obtém-se a função de transferência do sistema dinâmico, atuador pneumático, a partir da
aplicação da transformada de Laplace na Equação 4. A modelagem em malha aberta não
retroalimenta o controlador, e as variações ocorrentes de forças externas podem afetar o sistema.
Dessa forma apresenta-se a função de transferência em malha aberta através da Equação 5.
S�Y�7 2ξωS�Y�7 ω
� SY�7 �K�ω� U��7
�S� 2ξωS� ω
� S Y�7 �K�ω� U��7
F. T. � Y�7
U��7
�K�ω
�
�S� 2ξωS ω� S
� G�7 �5
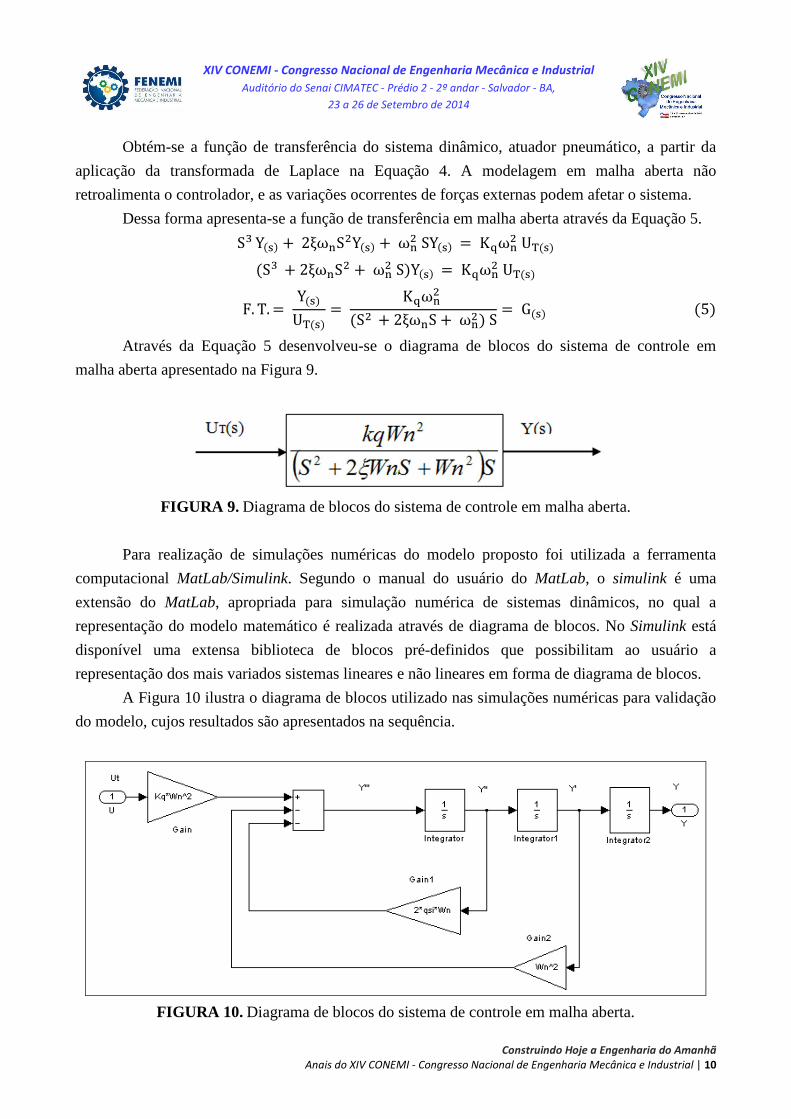
Através da Equação 5 desenvolveu-se o diagrama de blocos do sistema de controle em
malha aberta apresentado na Figura 9.
FIGURA 9. Diagrama de blocos do sistema de controle em malha aberta.
Para realização de simulações numéricas do modelo proposto foi utilizada a ferramenta
computacional MatLab/Simulink. Segundo o manual do usuário do MatLab, o simulink é uma
extensão do MatLab, apropriada para simulação numérica de sistemas dinâmicos, no qual a
representação do modelo matemático é realizada através de diagrama de blocos. No Simulink está
disponível uma extensa biblioteca de blocos pré-definidos que possibilitam ao usuário a
representação dos mais variados sistemas lineares e não lineares em forma de diagrama de blocos.
A Figura 10 ilustra o diagrama de blocos utilizado nas simulações numéricas para validação
do modelo, cujos resultados são apresentados na sequência.
FIGURA 10. Diagrama de blocos do sistema de controle em malha aberta.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 11
3.1.4 Análise do comportamento do sistema em malha aberta
O primeiro passo para a análise do comportamento do sistema é determinar os “zeros” e
calcular os “polos” do sistema, através da fórmula de báscara. Dessa forma tem-se:
• Zeros: nenhum;
• Polos: 3 pólos (S’, S’’ e S’’’).
Obtendo-se assim, a Equação 6 a seguir:
�S� + 2ξωS +ω�)S = 0 (6)
=′ = 0
(S� + 2.0,4.60. S + 60�) = 0
(S� + 48. S + 3600) = 0
E aplicando a báscara na Equação 6, encontram-se os polos conforme abaixo:
SBB =−48 + 110D2 = −24 +55D
SBBB =−48 − 110D2 = −24 −55D A partir do cálculo dos polos percebe-se que o sistema é não estável, pois não possui todos
os polos negativos.
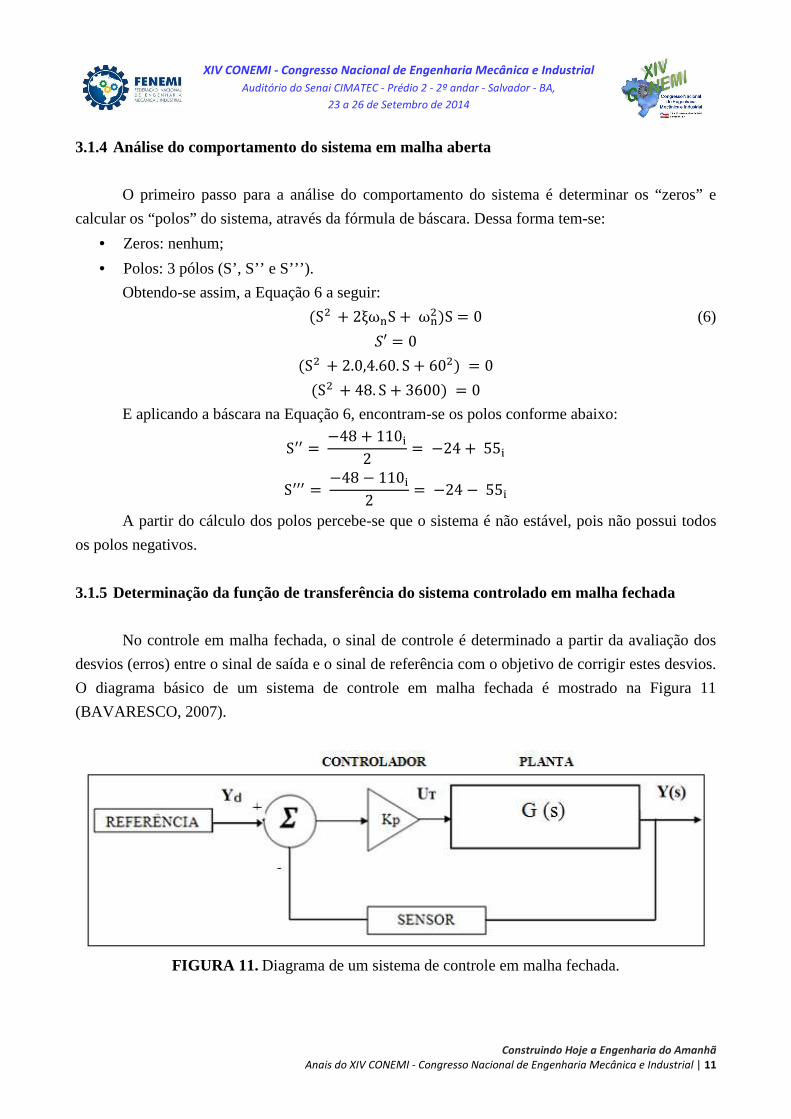
3.1.5 Determinação da função de transferência do sistema controlado em malha fechada
No controle em malha fechada, o sinal de controle é determinado a partir da avaliação dos
desvios (erros) entre o sinal de saída e o sinal de referência com o objetivo de corrigir estes desvios.
O diagrama básico de um sistema de controle em malha fechada é mostrado na Figura 11
(BAVARESCO, 2007).
FIGURA 11. Diagrama de um sistema de controle em malha fechada.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 12
A modelagem em malha fechada retroalimenta o controlador e as variações ocorrentes de
forças externas que possam afetar o sistema são controladas.
Dessa forma apresenta-se a função de transferência em malha fechada (G1) através da
Equação 7.
G� = K�ω� (S� + 2ξωS +ω�)S
Y(7)YE = KFG�1 +KFG�
Y(7)YE =
KF G K�ω� (S� + 2ξωS +ω�)SH1 +KF G K�ω� (S� + 2ξωS +ω�)SH
Aplicando-se o mínimo, múltiplo, comum (M.M.C), tem-se:
Y(7)YE = KFIK�ω�J(S� + 2ξωS +ω�)S +KF(K�ω�)(7)
Através da Equação 7 desenvolveu-se o diagrama de blocos do sistema de controle em
malha fechada apresentado na Figura 12.
FIGURA 12. Diagrama de blocos do controle proporcional por realimentação.
3.1.6 Análise do comportamento do sistema em malha fechada
Para a análise do comportamento do sistema em malha fechada, calcula-se os polos da
função de transferência em malha fechada adotando valores para os ganhos do controlador
proporcional (Kp). Dessa forma tem-se:
• Zeros: nenhum.
Obtendo-se assim, a Equação 8 a seguir:
S� + 2ξωS� +ω� S + KF(K�ω�) = 0 (8)
a� = 0

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 13
a� � 48
a� � 3600
aM � 1,08. KF
Através do software MatLab, desenvolveu-se um programa para o cálculo dos polos da
função de 3ª ordem, obtendo-se os seguintes valores:
Para um Kp = 20, tem-se:
S′ = −23.99719979092651 + 54.98968642834749D SBB = −23.99719979092651 − 54.98968642834749D
SBBB = −0.00560041814699
Para um Kp = 30, tem-se:
S′ = −23.99549945997167 +54.98894466020621D SBB = −23.99549945997167 −54.98894466020621D
SBBB = −0.00900108005666 O sistema dinâmico é estável se e, somente se, todos os polos possuírem parte real negativa.
Dessa forma, através dos cálculos dos polos em malha fechada, observa-se que o sistema é estável.
3.2 Análise e projeto do controlador
O objetivo do controle é modificar a dinâmica original de malha aberta do sistema de forma
que seu comportamento seja adequado para a realização das suas tarefas. Para tanto, é geralmente
necessário obter um sistema em malha fechada com uma larga banda de passagem e um pequeno
erro de posicionamento. É imprescindível, portanto, que a influência das não linearidades e
incertezas sobre a resposta do sistema seja suficientemente pequena. As duas principais tarefas de
controle de servoposicionadores são o controle de posição e seguimento de trajetória (PERONDI,
2002).
A comparação do valor atual da variável de saída de uma planta com um valor de referência
desejado gera um sinal de erro. Este sinal de erro produz um sinal de controle que deverá agir no
sentido de tornar este erro nulo ou próximo de zero. Isto é chamado de ação de controle.
A seguir apresenta-se a análise e projeto do controlador a ser utilizada para o controle do
atuador pneumático a partir do planejamento da trajetória, aplicação do método do lugar das raízes e
simulação computacional.
3.2.1 Planejamento da trajetória
Neste caso, o problema de controle passa a ser o de fazer com que o êmbolo do atuador
execute uma determinada trajetória ao longo do tempo. O desempenho do movimento do carro,
massa acoplada, depende do planejamento e da programação adequada da trajetória do atuador

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 14
pneumático que compõe sua movimentação. Esta trajetória deve estar em sintonia de forma que o
atuador tenha sua ação sem prejudicar o desempenho da massa acoplada.
A vantagem do seguimento de trajetória é a possibilidade de impor velocidade, aceleração e
sua derivada primeira no tempo durante a transição de uma posição inicial para outra desejada
(SCAVARDA e THOMASSET, 1996).
Para o controle do atuador pneumático em estudo, adotou-se o sistema de trajetória senoidal,
com amplitude de 0,1 e frequência de 2π/20.
3.2.2 Aplicação do método do lugar das raízes
Os modelos lineares de 3ª ordem têm dois polos que, com uma realimentação proporcional,
são oscilatórios e com amortecimento que diminui à medida que o kp aumenta, e que se dirigem
para o semiplano complexo direito à medida que o ganho de realimentação cresce (PERONDI,
2002).
A técnica do lugar das raízes trata-se de um método gráfico para plotar o lugar das raízes no
plano “s” correspondente à variação de um parâmetro do sistema. Este método fornece uma medida
da sensibilidade das raízes do sistema a uma variação do parâmetro em consideração. Também
permite avaliar o ajuste de parâmetros do sistema de forma a se obter uma resposta satisfatória no
que diz respeito ao lugar geométrico das raízes (PERONDI, 2002).
O princípio básico desse método é a relação existente entre os polos da função de
transferência em malha fechada e os polos e zeros da função de transferência em malha aberta e o
seu ganho. A técnica do lugar das raízes possui as seguintes vantagens:
• A solução exata e detalhada dos regimes transitórios e permanentes pode ser obtida
facilmente. Isto devido ao fato de os polos de malha fechada ser diretamente obtidos do
lugar geométrico das raízes;
• Soluções aproximadas podem ser obtidas com uma considerável redução de trabalho,
quando soluções exatas não são requeridas.
Para a aplicação da técnica do lugar das raízes utilizou-se a ferramenta computacional
MatLab/Rlocus no qual conseguiu-se plotar o lugar das raízes no plano s. Nas Figuras 13, 14 e 15
apresentam-se o lugar geométrico das raízes.
Nota-se que a medida que os polos de deslocam para a esquerda, maior é a frequência do
sistema e menor o erro. Para que o sistema seja estável, todos os polos devem ter parte real
negativa. Os valores para o ganho devem parecer no lado esquerdo da origem.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 15
FIGURA 13. Lugar das raízes no plano s obtidos no software MatLab a partir do Rlocus.
FIGURA 14. Lugar geométrico das raízes no modelo de 3ª ordem.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 16
FIGURA 15. Lugar geométrico das raízes no modelo de 3ª ordem representando o ganho.
3.2.3 Matriz de transformação para o sistema de referência da base
Realizou-se a simulação computacional de acordo com os dados e cálculos do atuador
pneumático descritos anteriormente através da ferramenta computacional MatLab.
A partir das Figuras 16 e 17 pode-se observar o comportamento do controle com kp igual a
20. Verifica-se que a tensão de entrada não excedeu 10 V com kp de 20, obtendo-se assim um erro
menor que 0,05 m.
FIGURA 16. Comportamento da tensão de entrada na servoválvula.
0 2 4 6 8 10 12 14 16 18 20-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 17
FIGURA 17. Comportamento do controle do atuador pneumático.
4. RESULTADOS E CONCLUSÕES
O controle do movimento do atuador pneumático sem haste, no qual por meio de
movimentos lineares transforma energia cinética em mecânica, permitiu obter a posição desejada do
carro, massa acoplada, no sentido horizontal, para fazer o corte de enxertia em plantas,
possibilitando a especificação dos parâmetros do atuador pneumático a ser modelado e controlado,
dedução e aplicação das equações para a realização dos cálculos e posteriores simulações.
Além disso, a modelagem do atuador pneumático permitiu conhecer seu grande potencial de
aplicações em diversos setores e verificar diversas vantagens do seu uso. Permitiu também
aperfeiçoar o projeto de uma máquina para enxertia de plantas através da sua automatização.
A partir da metodologia utilizada na modelagem e controle do atuador pneumático,
conseguiu-se obter um melhor entendimento no que diz respeito à modelagem matemática e análise
do comportamento do sistema por meio de gráficos, conseguindo-se assim, desenvolver um sistema
de controle. Através da metodologia conseguiu-se desenvolver uma solução de controle para o
problema de modelagem do sistema dinâmico a partir da aplicação da função de 3ª ordem, e através
das variáveis que envolvem o atuador pneumático, formulação do modelo matemático,
determinação da função de transferência, cálculos de desenvolvimento do controlador, análises do
comportamento do controlador e simulação computacional.
Através desse desenvolvimento, evidencia-se a necessidade de um sistema de controle
dinâmico caso o projeto exigir precisão e variações de parâmetros. Também se conseguiu verificar
que, com a utilização das ferramentas de análise de controle, podem-se melhorar através de
simulações, os resultados de sistemas dinâmicos aplicados em uma determinada máquina ou
dispositivo, neste caso a máquina de enxertia de plantas.
0 2 4 6 8 10 12 14 16 18 20-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
___ Trajetória desejada
___ Trajetória com controlador
___ Erro

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 18
Conseguiu-se visualizar os resultados do sistema e analisar qual a melhor estratégia a ser
adotada para melhorar os resultados dos controladores, mesmo que na verdade o sistema não seja
tão simples como foi modelado. Por fim, constatou-se que o sistema estudado é estável, sabendo-se
que um sistema dinâmico é estável se e, somente se, todos os polos possuírem parte real negativa.
REFERÊNCIAS
BAVARESCO, D. Modelagem Matemática e Controle de um Atuador Pneumático. Dissertação
de Mestrado em Modelagem Matemática - Universidade Regional do Noroeste do Estado do Rio
Grande do Sul, Ijuí, 107f, 2007.
BERTOLDI, E.; LOCATELLI, G.; VALDIERO, A. C. Desenvolvimento de Máquina para
Enxertia de Plantas. Anais do XXV Congresso Regional de Iniciação Científica e Tecnológica em
Engenharia (CRICTE), UPF, Passo Fundo, RS, 2013.
BOLLMANN, A. Fundamentos da Automação Industrial Pneutrônica, Projetos de Comandos
Binários Eletropneumáticos. ABHP – Associação Brasileira de Hidráulica e Pneumática, 1996.
BOLTON, W. Pneumatic and Hydraulic Systems. Butterworth-Heinemann, Linacre House,
Jordan Hill, Oxford, U. K., 1997.
CULTIVANDO. Multiplicando plantas por enxertia. Disponível em:
<http://www.cultivando.com.br/termos_tecnicas_multiplicando_enxertia.html>. Acesso em: 22 ago.
2014.
FACHINELLO, J. C.; HOFFMANN, A.; NACHTIGAL, J. C. Propagação de plantas frutíferas.
Embrapa, 2005.
GUENTHER, R.; PERONDI, E. C.; DE PIERI, E. R.; VALDIERO, A. C. Cascade Controlled
Pneumatic Positioning System with LuGre Model Based Friction Compensation. Jornal of the Braz.
Soc. of Mech. Sci. & Eng., Vol. 28, No. 1, pp. 48-57, January-March 2006.
GYEVIKI, J.; CSISZAR, A. and ROZSAHEGYI, K. Sliding Modes Application in Pneumatic
Positioning. IEEE International Conference on Mechatronics, Taipei, Taiwan, pp. 964-969, 2005.
HARTMANN, H. T.; KESTER, D. E.; DAVIES, Jr. F. T.; GENEVE, R.L. Plant Propagation:
Principies and Practises. Simon & Schuster, p.770, 1997.
JACOMINO, A. P. Slides da aula de plantas frutíferas. Esalq - USP, 2008.
KARPENKO, M.; SEPEHRI, N. Design and experimental evaluation of a nonlinear position
controller for a pneumatic actuator with friction. In Proceedings of the American Control
Conference, Vol. 6, pp. 5078-5083, July 2004.
MORGADO, F. D. J. Modelagem e Controle de Músculo Pneumático. Dissertação de Mestrado
em Engenharia Mecânica - Instituto Militar de Engenharia, Rio de Janeiro, 80f, 2011.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial | 19
PERONDI, E. A. Controle Não-Linear em Cascata de um Servoposicionador Pneumático com
Compensação de Atrito. Tese de Doutorado em Engenharia Mecânica - Universidade Federal de
Santa Catarina, Brasil, 182f, 2002.
SCAVARDA, S.; THOMASSET, D. Modeling and Control of Electropneumatic Systems: Na
Overview of Recent French Contributions. International Conference on Control 96, UKACC, Vol.
2, pp. 1462-1467, setembro 1996.
VALDIERO, A. C.; ANDRIGHETTO,P. L.; CARLOTTO, L. Dynamic modeling and friction
parameters estimation to pneumatic actuators. Proceedings of the International Symposium on
Multibody Systems and Mechatronics (MUSME), March 2005.
VIEIRA, A. D. Análise Teórico Experimental de um Servoposicionador Pneumático.
Dissertação de Mestrado em Engenharia Mecânica - Universidade Federal de Santa Catarina, Brasil,
1998.


















