Construção de um Dispositivo Amortecedor Magnetoreológico ... · Autor desconhecido . ii...
54
Construção de um Dispositivo Amortecedor Magnetoreológico para uma Suspensão Activa Eduarda Lectícia Martins da Costa Dissertação para obtenção do Grau de Mestre em Engª Electrotécnica e de Computadores Júri Presidente: Prof. Gil Domingos Marques. Orientador: Prof. Paulo José da Costa Branco. Co-Orientador: Prof. Joaquim António Fraga Gonçalves Dente. Vogal: Prof. Duarte de Mesquita e Sousa. Abril 2008
Transcript of Construção de um Dispositivo Amortecedor Magnetoreológico ... · Autor desconhecido . ii...
Construção de um Dispositivo Amortecedor Magnetoreológico para uma Suspensão Activa
Eduarda Lectícia Martins da Costa
Dissertação para obtenção do Grau de Mestre em Engª Electrotécnica e de Computadores
Júri Presidente: Prof. Gil Domingos Marques. Orientador: Prof. Paulo José da Costa Branco. Co-Orientador: Prof. Joaquim António Fraga Gonçalves Dente. Vogal: Prof. Duarte de Mesquita e Sousa.
Abril 2008

Construção de um Amortecedor Magneto-Reológico
para uma Suspensão Activa
Eduarda Lectícia Martins da Costa

i
Não diga à Deus que você tem um grande problema,
Mas diga ao problema, o tamanho do seu Deus.
Autor desconhecido

ii
Agradecimentos
Este trabalho não se teria realizado se eu não tivesse vida, saúde, esperança e bom ânimo, por isso
primeiro agradeço à Deus Pai Criador, autor e consumador da minha vida.
Aos meus pais João Neto e Sebastiana Neto e às minhas irmãs Gisela da Costa e Maria da Costa
pelo apoio, e confiança que depositaram em mim, deixando-me sair de casa e vir para uma terra
distante, acreditando que um dia estaria a redigir esta dissertação.
Àquele que com muita simpatia e abertura me orientou, professor Paulo Branco o meu especial
agradecimento, pelo apoio incondicional e por saber me transmitir o conhecimento em todos os
aspectos que envolveram esta dissertação. Ao professor António Dente, pela sua participação
constante, com críticas e sugestões que serviram para o melhor avanço deste trabalho.
À Total E&P Angola, pela concepção da bolsa de estudos, que garantiu todo o apoio financeiro para o
meu sustento, e que acreditou nas minha capacidades para a conclusão deste curso.
À Eileen Suazo da Lord Corporation, pela disponibilidade e prontidão na resposta à algumas
questões relacionadas com o fluido magnetoreológico.
Aos meus colegas José Miguel, Rui Silva e Bruno Lopes, pela companhia e conversas descontraídas
durante os momentos que passamos no laboratório, a estes e aos amigos Amado Kiesse, Eugénio
Fernandes, Mohamed Neto e Sebastião Timóteo agradeço ainda pelo esforço que fizeram quando
precisei de força masculina para os ensaios, por se terem disponibilizado para levantar os pesos. Ao
Eduardo Luila pela paciência e pelas dicas que me deu.
Por último, mas não menos importante aos meus amigos e irmãos (da escolinha e da igreja) por se
terem tornado numa família para mim e por estarem presentes em todos os momentos.
À todos, o meu muito obrigada!

iii
Resumo
O desenvolvimento e progresso da tecnologia tem levado vários investigadores e engenheiros a
estudar as aplicações de fluidos electroactivos, com o objectivo de serem utilizados na construção de
dispositivos que possam ser empregues no controlo de vibrações, utilizando-os em suspensões
activas e semi-activas para sistemas de amortecimento. Estes fluidos são pois caracterizados por
apresentarem a sua viscosidade dependente do campo eléctrico (fluido electroreológico -ER) ou do
campo magnético (fluido magnetoreológico - MR) aplicado sobre o fluido.
Este trabalho apresenta o estudo teórico e experimental de um dispositivo de amortecimento baseado
em um fluido magnetoreológico, construído e testado no Laboratório de Máquinas Eléctricas do IST.
O dispositivo estudado consistiu num cilindro oco, cujo interior alberga um êmbolo e é preenchido por
fluido magnetoreológico. O êmbolo apresenta um enrolamento por onde pode circular uma corrente
eléctrica com o objectivo de se criar um campo magnético e assim ter-se a possibilidade de comandar
a viscosidade do fluido situado entre o êmbolo e o cilindro (entreferro).
Depois de um estudo das propriedades do fluido, é feita uma descrição do desenho do dispositivo
construído. Um modelo matemático foi criado com objectivo de se estudar as características do
dispositivo, foram ainda efectuados ensaios experimentais em regime estacionário e permanente,
tendo sido possível através destes analisar o comportamento do dispositivo construído.
Os resultados teóricos e experimentais indicam a robustez do fluido magnetoreológico e a sua
eficácia quando empregue neste tipo de dispositivos, visto que com correntes muito reduzidas é
possível obter-se forças de amortecimento elevadas.
Palavras-chave:
Fluido electroactivo, fluido magnetoreológico, viscosidade, amortecedor magnetoreológico.

iv
Abstract
The development and progress of technology have taken some investigators and engineers to study
the application of electroactives fluids, with the objective to apply them in the construction of devices
that can be applied in vibrations control, using them in actives and semi-actives suspensions for
damping systems. These fluids are characterized by presenting its viscosity dependent of the electric
field (electrorheological fluid - ER) or of the magnetic field (magnetorheological fluid - MR) applied on
the fluid.
This work presents the theoretical and experimental study of a damping device based on
magnetorheological fluid, constructed and tested in the Electric Machines Laboratory of the IST.
The studied device consisted of a hollow cylinder, whose interior lodges a piston and is filled by
magnetorheological fluid. The piston presents a coil where can circulate an electric current with the
purpose of creating a magnetic field and thus to have the possibility to command the viscosity of the
fluid situated between the piston and the cylinder (gap).
After a study of the properties of the fluid, it’s done a description of the constructed device. A
mathematical model was created with objective of studying the characteristics of the device, also had
been done experimental assays in stationary and permanent regimen, having been possible through
these analyzing the behavior of the constructed device.
The theoretical and experimental results indicate the robustness of MR fluid and its effectiveness
when applied in this type of devices, since with current very reduced it is possible to get high damping
forces.
Key Words:
Electroactive fluid, magnetorheological fluid, viscosity, magnetorheological damper.

v
Índice
AGRADECIMENTOS.......................................................................................................................................... II
RESUMO ............................................................................................................................................................ III
ABSTRACT .........................................................................................................................................................IV
LISTA DE FIGURAS………………………………………………………………… ………………………VI
LISTA DE TABELAS………………………………………………………………………………………...VIII
SÍMBOLOS..........................................................................................................................................................IX
1 INTRODUÇÃO ............................................................................................................................................ 1
1.1 DISPOSITIVOS AMORTECEDORES COM FLUIDO MAGNETOREOLÓGICO................................................... 1 1.2 PERSPECTIVA HISTÓRICA ....................................................................................................................... 4 1.3 OBJECTIVOS ............................................................................................................................................ 5
2 CARACTERIZAÇÃO DO FLUIDO ELECTROACTIVO MAGNETOREOLÓGICO .......................... 6
2.1 PROPRIEDADES REOLÓGICAS ................................................................................................................. 6 2.2 PROPRIEDADES MAGNÉTICAS ............................................................................................................... 11
3 DISPOSITIVO AMORTECEDOR MAGNETOREOLÓGICO CONSTRUÍDO .................................. 14
3.1 CIRCUITO MAGNÉTICO........................................................................................................................... 14 3.2 ATRIBUIÇÃO DO NÚMERO DE ESPIRAS .................................................................................................. 16 3.3 ACOPLAMENTO ELECTROMECÂNICO DO SISTEMA................................................................................. 17 3.4 DIMENSIONAMENTO DO AMORTECEDOR ............................................................................................... 19
4 MODELIZAÇÃO DO DISPOSITIVO AMORTECEDOR...................................................................... 21
4.1 ACOPLAMENTO ELECTROMECÂNICO ATRAVÉS DO FLUIDO MAGNETOREOLÓGICO ............................... 22 4.2 REGIME ESTACIONÁRIO ......................................................................................................................... 30
5 ENSAIOS EXPERIMENTAIS .................................................................................................................. 33
5.1 CAMPO MAGNÉTICO AO LONGO DO ORIFÍCIO ANULAR .......................................................................... 33 5.2 REGIME ESTACIONÁRIO ......................................................................................................................... 34 5.3 REGIME PERMANENTE ........................................................................................................................... 36 5.4 POTÊNCIA DISSIPADA ............................................................................................................................ 38
5.4.1 Potência devido ao movimento do amortecedor............................................................................ 38 5.4.2 Potência devido ao efeito de Joule no circuito magnético ............................................................ 39 5.4.3 Resultados da potência total dissipada pelo amortecedor ............................................................ 39
6 CONCLUSÕES E RECOMENDAÇÕES ............................................................................................... 41
7 GLOSSÁRIO ............................................................................................................................................. 42
8 REFERÊNCIAS BIBLIOGRÁFICAS...................................................................................................... 43

vi
Lista de Figuras
Figura 1 – Modos de funcionamento do fluído magnetoreológico: a) Modo directo, b) Modo válvula, c)
Modo aperto...................................................................................................................................... 1
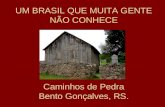
Figura 2 – Amortecedor sísmico construído no modo directo [1]. ........................................................... 2
Figura 3 – Amortecedor construído em modo válvula [1]........................................................................ 2
Figura 4 – a) Amortecedor magnetoreológico construído em modo aperto, b) aplicação do
amortecedor em prótese. ................................................................................................................. 3
Figura 5 – Amortecedor construído em modo aperto.............................................................................. 3
Figura 6 – Aplicação de um amortecedor rotativo construído em modo aperto. .................................... 4
Figura 7 – Fluido magnetoreológico; (a) sem campo magnético aplicado, (b) quando o fluido é
submetido a um campo magnético H. .............................................................................................. 7
Figura 8 – Propriedades reológicas de um fluido electroactivo do tipo Magnetoreológico. .................... 8
Figura 9 – Tensão de cisalhamento vs taxa de cisalhamento. ............................................................... 9
Figura 10 – Característica electromecânica tensão de cisalhamento x campo magnético do fluido
MRF-122-2EG obtida a partir do manual do fluido (Anexo) fornecido pelo fabricante. ................. 10
Figura 11 – Variação da viscosidade com a temperatura sem a aplicação de campo magnético ....... 11
Figura 12 – Curva B(H) do fluido magnetoreológico MRF-122EG usado neste trabalho obtida a partir
do manual do fluido (Anexo) fornecido pelo fabricante.. ................................................................ 12
Figura 13 – curva de magnetização intrínseca do fluido magnetoreológico MRF-122EG usado neste
trabalho........................................................................................................................................... 13
Figura 14 – Dispositivo amortecedor com representação das coordenadas cilíndricas e o respectivo
percurso efectuado linhas de campo magnético............................................................................ 15
Figura 15 – Acoplamento do dispositivo amortecedor magnetoreológico ao motor de corrente
contínua. ......................................................................................................................................... 17
Figura 16 – Representação das componentes da velocidade linear. ................................................... 18
Figura 17 – Dimensões (em mm) atribuídas ao amortecedor. 1) Cilindro exterior, 2) Êmbolo ou pistão,
3) Tampas, 4) Eixo. ........................................................................................................................ 19
Figura 18 – Linhas do campo magnético. Resultado da simulação do circuito magnético no FEEM. .20
Figura 19 – Componentes do dispositivo amortecedor. ........................................................................ 21
Figura 20 – Esquema do dispositivo electromecânico considerado com as respectivas coordenadas
cilíndricas........................................................................................................................................ 22
Figura 21 – Representação de um elemento de volume do fluido centrado em r e submetido a duas
tensões de cisalhamento em 2
rr
∆− e
2
rr
∆+ . ............................................................................. 24
Figura 22 – Perfil da velocidade zv do fluido através do entreferro. .................................................... 26
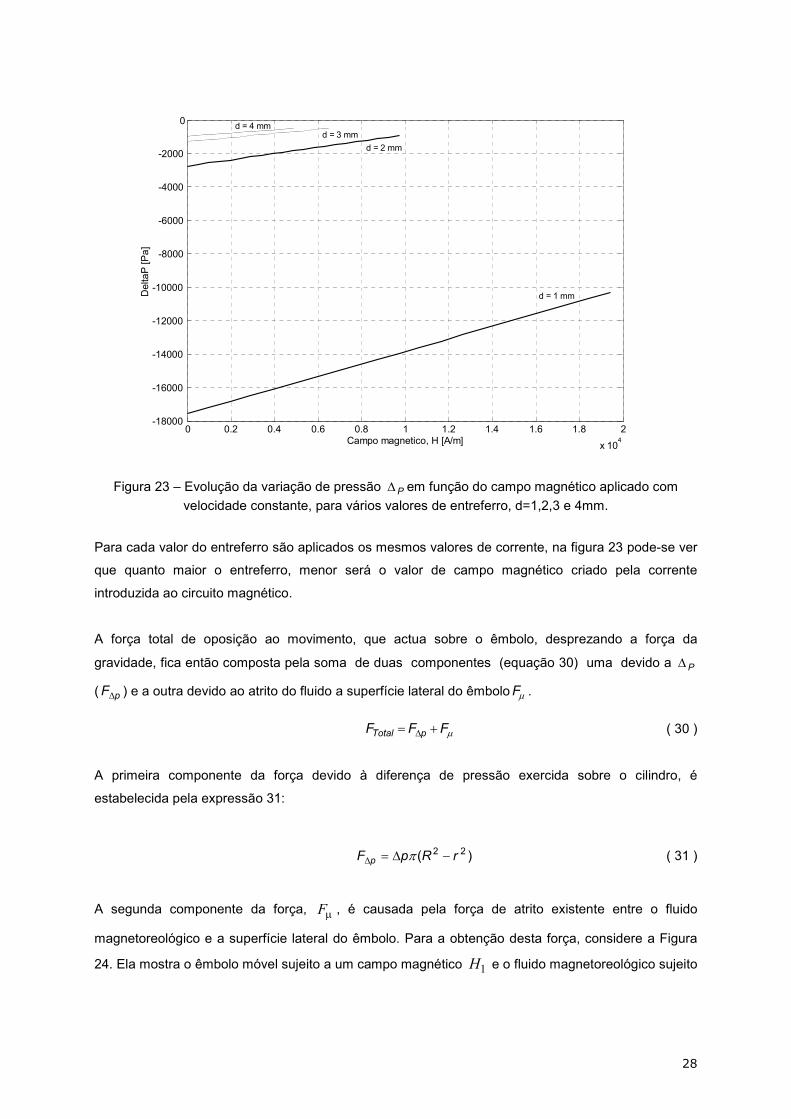
Figura 23 – Evolução da variação de pressão P∆ em função do campo magnético aplicado com
velocidade constante, para vários valores de entreferro, d=1,2,3 e 4mm. .................................... 28
Figura 24 – Êmbolo sujeito ao campo magnético H1 e fluido sujeito ao campo magnético H2............. 29
vii
Figura 25 – Curva força total resistente ao movimento do êmbolo em função da corrente aplicada. .. 30
Figura 26 – Curva Força x corrente para diferentes valores do coeficiente de atrito cη entre o fluido e a
superfície do êmbolo. ..................................................................................................................... 31
Figura 27 - Curva Força x corrente para diferentes tamanhos de entreferro........................................ 32
Figura 28 – Distribuição do campo magnético ao longo do entreferro na direcção longitudinal z,
l1=1cm............................................................................................................................................. 34
Figura 29 - Ensaio experimental em regime estacionário, vc=0, para entreferro d=1mm e d=2mm..... 35
Figura 30 – Curva F(vz) para o entreferro d =1mm. .............................................................................. 36
Figura 31 – Gráfico Força (vz) quando d=2mm. .................................................................................... 37
Figura 32 – Evolução da potência em função da velocidade linear do amortecedor com entreferro
d=1mm............................................................................................................................................ 40

viii
Lista de Tabelas
Tabela 1 – Propriedades reológicas do fluido MRF-122EG.................................................................. 10
Tabela 2 – Variação da força magneto motriz com o tamanho do entreferro. ...................................... 16
Tabela 3 – Valores dos parâmetros utilizados para traçar o perfil de velocidade................................. 27
Tabela 4 – Evolução de B e H ao longo de z. Avaliação correspondente a zona activa de altura
l1=1cm quando g=1mm................................................................................................................... 33
Tabela 5 – Variação da potência por efeito de joule com a corrente. ................................................... 39

ix
Símbolos
τ Tensão de cisalhamento.
0τ Tensão de cisalhamento inicial ou tensão mínima de escoamento.
.
γ Taxa de cisalhamento.
l Altura do êmbolo.
v Velocidade linear do amortecedor (êmbolo).
R Raio, distância do centro do motor ao braço que o liga ao amortecedor.
ρ Densidade do fluido magnetoreológico.
p∇− Componente da força resultante de gradientes de pressões internas no fluido.
cQ Caudal deslocado pelo êmbolo.
p∆ Diferença de pressão exercida sobre o êmbolo.
pF∆ Força devido à diferença de pressão exercida sobre o êmbolo.
1H Campo magnético sobre o êmbolo.
22T Tensor de Maxwell.
i Corrente eléctrica que circula pelo circuito magnético.
H Amplitude do campo magnético aplicado.
N Número de enrolamentos da bobine electromagnética.
ω Velocidade angular.
zr ,,θ Coordenadas cilíndricas do amortecedor.
g Aceleração de gravidade.
µ Viscosidade do fluido magnetoreológico.
p∆ Diferença de pressão entre as extremidades do canal.
cv Velocidade linear do êmbolo.
TotalF Força total sobre o êmbolo.
µF Força de atrito existente entre o fluido magnetoreológico e a superfície lateral do êmbolo.
2H Fluido Magneto-Reológico.
2µ
Permeabilidade magnética do fluido magnetoreológico.
cη Coeficiente de atrito entre a superfície de aço do êmbolo e o fluido magnetoreológico.
d Largura do entreferro.
ε Deformação de cisalhamento.

1
1 Introdução
A nova geração de sistemas de suspensão activa para veículos automotores baseiam-se em fluidos
electroactivos nomeadamente os fluidos Electroreológicos (ER) e fluidos Magnetoreológicos (MR).
Estes fluidos podem ter a sua viscosidade alterada, quando sobre eles é aplicado uma intensidade do
campo eléctrico (electroreológico) ou do campo magnético (magnetoreológico) sobre eles aplicado.
Nos últimos anos tem havido um grande interesse nas aplicações do fluido magnetoreológico em
sistemas de amortecimento devido à sua rápida resposta à atenuação de vibrações (~ ms) e à
variação da sua viscosidade quando submetido a um campo magnético. Estes sistemas têm sido
empregues principalmente em acentos de camiões, como suspensão em veículos automóveis, em
sistemas de travagem e em outras aplicações não relacionadas a veículos automóveis como, por
exemplo, para estabilizar edifícios durante os terramotos, em máquinas de lavar roupa, assim como
em próteses para os membros inferiores.
1.1 Dispositivos amortecedores com fluido magnetoreológico
A utilização de um fluido magnetoreológico em amortecedores varia com os objectivos que se
pretende com relação à sua aplicação e está também associada ao modo de funcionamento do fluido.
De acordo a utilização do fluido em dispositivos, este é geralmente classificado com três modos de
funcionamento: modo directo (figura 1a), modo válvula (figura 1b) ou modo aperto (figura 1c).
a) b) c)
Figura 1 – Modos de funcionamento do fluído magnetoreológico: a) Modo directo, b) Modo válvula, c) Modo aperto.
O primeiro modo designado por “Modo Directo” é o método de amortecimento por fluido
magnetoreológico no qual o fluido encontra-se entre duas superfícies paralelas e uma das superfícies
paralelas é deslocada em relação a outra por uma força externa (as superfícies permanecem
paralelas). Este modo de funcionamento tem sido aplicado maioritariamente em engenharia civil na

2
atenuação de vibrações sísmicas em estruturas, sendo estes amortecedores desenhados para
suportar até uma força máxima de amortecimento de 200.000 N (20-ton).
Os dispositivos de amortecimento sismicos usam uma geometria simples na qual o cilindro exterior é
parte do circuito magnético como mostra a figura 2. O movimento do êmbolo provoca o fluxo do fluido
atraves de toda a região anular (espaço compreendido entre o diâmetro exterior do êmbolo e o
diâmetro interior do cilindro exterior). A bobina electromagnética é dividida em três secções ao longo
do êmbolo, é através da bobina que se faz circular uma corrente eléctrica com o objectivo de se criar
um campo magnético que comanda a viscosidade do fluido no espaço anular.
Figura 2 – Amortecedor sísmico construído no modo directo [1].
No “Modo Válvula” o fluido encontra-se entre duas placas fixas paralelas e é exercida uma
diferença de pressão exterior sobre o fluido. Diz-se que um dispositivo magnetoreológico opera em
modo válvula quando é aplicado um campo magnético para comandar o fluxo do fluido de um
reservatório para outro. Este modo de funcionamento é mais usado em embraiagens e travões, mas
actualmente fazem-se suspensões de assentos para veículos pesados introduzidas no mercado pela
Lord Coorporation, sendo ainda usado como suspensão nos veículos automóveis, ver figura 3.
Figura 3 – Amortecedor construído em modo válvula [1].
O amortecedor rotativo da figura 4, também foi concebido para funcionar em modo válvula. O
amortecedor é constituído de um cilindro giratório preenchido com fluido magnetoreológico ao qual
são ligados dois canais por onde circula o fluido. Neste amortecedor, a pressão do fluido actua como

3
uma força de resistência à rotação. Este amortecedor foi introduzido por J. H. Kim e tem sido usado
como prótese colocada acima do joelho [2].
a) b)
Figura 4 – a) Amortecedor magnetoreológico construído em modo aperto, b) aplicação do amortecedor em prótese.
O terceiro modo de funcionamento é o “Modo aperto” onde o fluido MR é colocado entre dois pratos
magnéticos que são verticalmente pressionados com respeito um ao outro e a amplitude das
vibrações amortecidas é limitada pela distância entre os pratos. Na figura 5 encontra-se um pequeno
amortecedor vibrador controlável por fluido magnetoreológico, construído com base neste modo de
funcionamento, o qual vem sendo usado em aplicações industriais para controlo activo de
amortecimento em tempo real (Carlson, Catanzarite and St.Clair, 1995) [1]. Este modo é adequado
em alguns amortecedores de vibrações de pequenas amplitudes de ± 3 mm e para suportar forças de
amortecimento de 0 à ± 125 N.
Figura 5 – Amortecedor construído em modo aperto.
Os SFDs (Squeeze Film Damper) [3], são amortecedores projectados em modo aperto, proporcionam
um amortecimento viscoso às estruturas rotativas, permitindo uma redução na amplitude das
vibrações e permite um isolamento seguro dos outros componentes da estrutura em que se
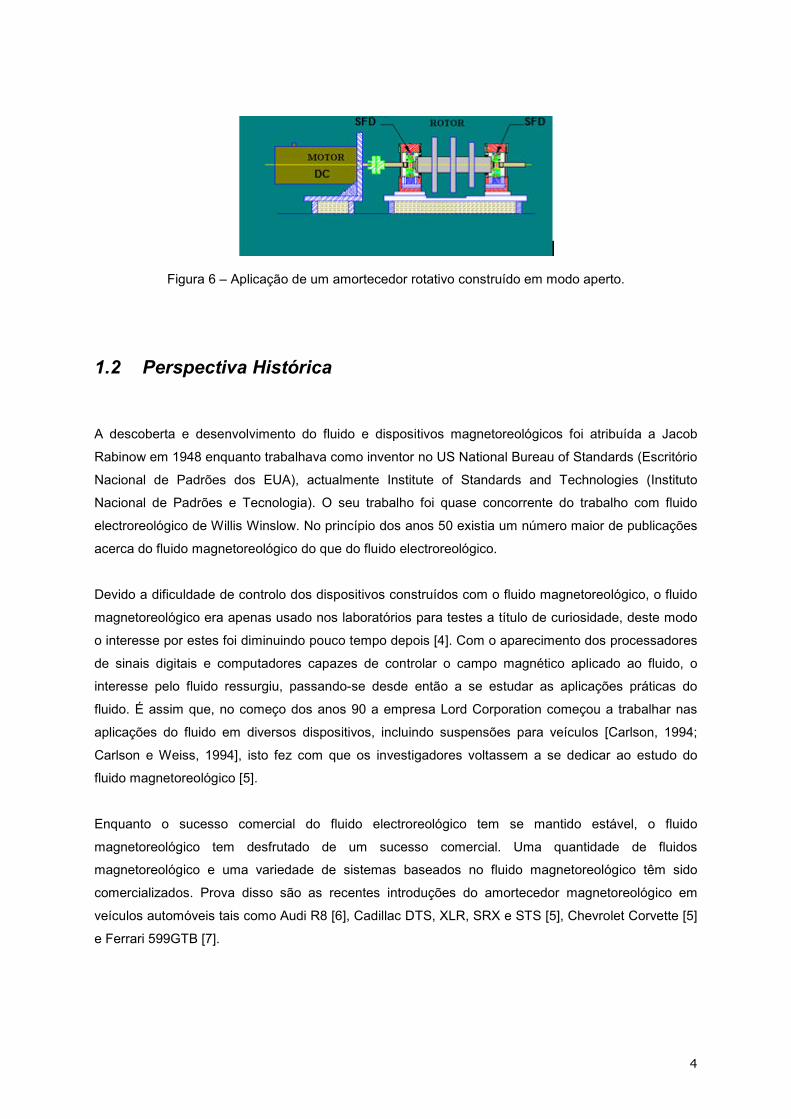
encontram inseridos (ver figura 6). São usados geralmente nos motores de jacto dos aviões.
4
Figura 6 – Aplicação de um amortecedor rotativo construído em modo aperto.
1.2 Perspectiva Histórica
A descoberta e desenvolvimento do fluido e dispositivos magnetoreológicos foi atribuída a Jacob
Rabinow em 1948 enquanto trabalhava como inventor no US National Bureau of Standards (Escritório
Nacional de Padrões dos EUA), actualmente Institute of Standards and Technologies (Instituto
Nacional de Padrões e Tecnologia). O seu trabalho foi quase concorrente do trabalho com fluido
electroreológico de Willis Winslow. No princípio dos anos 50 existia um número maior de publicações
acerca do fluido magnetoreológico do que do fluido electroreológico.
Devido a dificuldade de controlo dos dispositivos construídos com o fluido magnetoreológico, o fluido
magnetoreológico era apenas usado nos laboratórios para testes a título de curiosidade, deste modo
o interesse por estes foi diminuindo pouco tempo depois [4]. Com o aparecimento dos processadores
de sinais digitais e computadores capazes de controlar o campo magnético aplicado ao fluido, o
interesse pelo fluido ressurgiu, passando-se desde então a se estudar as aplicações práticas do
fluido. É assim que, no começo dos anos 90 a empresa Lord Corporation começou a trabalhar nas
aplicações do fluido em diversos dispositivos, incluindo suspensões para veículos [Carlson, 1994;
Carlson e Weiss, 1994], isto fez com que os investigadores voltassem a se dedicar ao estudo do
fluido magnetoreológico [5].
Enquanto o sucesso comercial do fluido electroreológico tem se mantido estável, o fluido
magnetoreológico tem desfrutado de um sucesso comercial. Uma quantidade de fluidos
magnetoreológico e uma variedade de sistemas baseados no fluido magnetoreológico têm sido
comercializados. Prova disso são as recentes introduções do amortecedor magnetoreológico em
veículos automóveis tais como Audi R8 [6], Cadillac DTS, XLR, SRX e STS [5], Chevrolet Corvette [5]
e Ferrari 599GTB [7].

5
1.3 Objectivos
São objectivos deste trabalho:
• Construção de um protótipo experimental de um dispositivo de amortecimento baseado num
fluido magnetoreológico.
• Estudo do funcionamento do dispositivo de amortecimento através da sua modelização
electromecânica.
• Caracterização do protótipo construído em termos funcionais, a partir de ensaios
experimentais efectuados.

6
2 Caracterização do fluido electroactivo magnetoreológico
O fluido magnetoreológico consiste em um fluido composto por pequenas partículas de ferro (da
ordem dos µm) magnetizáveis, suspensas num óleo, geralmente hidrocarboneto. Ao fluido são ainda
adicionados alguns aditivos com objectivo de inibir o depósito das partículas de ferro, promover a sua
suspensão, aumentar a oleosidade, modificar a viscosidade e diminuir o desgaste. A quantidade de
ferro contido neste tipo de fluido electroactivo varia entre 20 a 40 %.
Quando exposto a um campo magnético, a viscosidade do fluido magnetoreológico altera-se,
passando de um estado líquido para outro semi-sólido. Assim, a viscosidade do fluido pode então ser
comandada pela intensidade e direcção do campo magnético aplicado.
2.1 Propriedades reológicas
As propriedades de um fluido ditas reológicas referem-se àquelas que têm influência no transporte da
quantidade de movimento num fluido, ou seja, relacionam-se com o fluxo do mesmo e também com
as deformações ocorridas neste, devido às fricções internas no fluido (denominadas tensões de
cisalhamento), nas quais uma camada de fluido apresenta uma certa resistência ao seu
deslocamento ao se mover sobre outra camada.
As propriedades reológicas estão relacionadas com a viscosidade e elasticidade do fluido. Num fluido
magnetoreológico estas propriedades dependem da concentração, densidade, tamanho e forma das
partículas de ferro, das propriedades do fluido portador, da temperatura, e do campo magnético (H)
externo a que o fluido está sujeito. O entendimento e comando destas propriedades são pois de
fundamental importância no desenvolvimento de dispositivos que usam fluidos magnetoreológicos
pois afectam directamente o seu funcionamento.
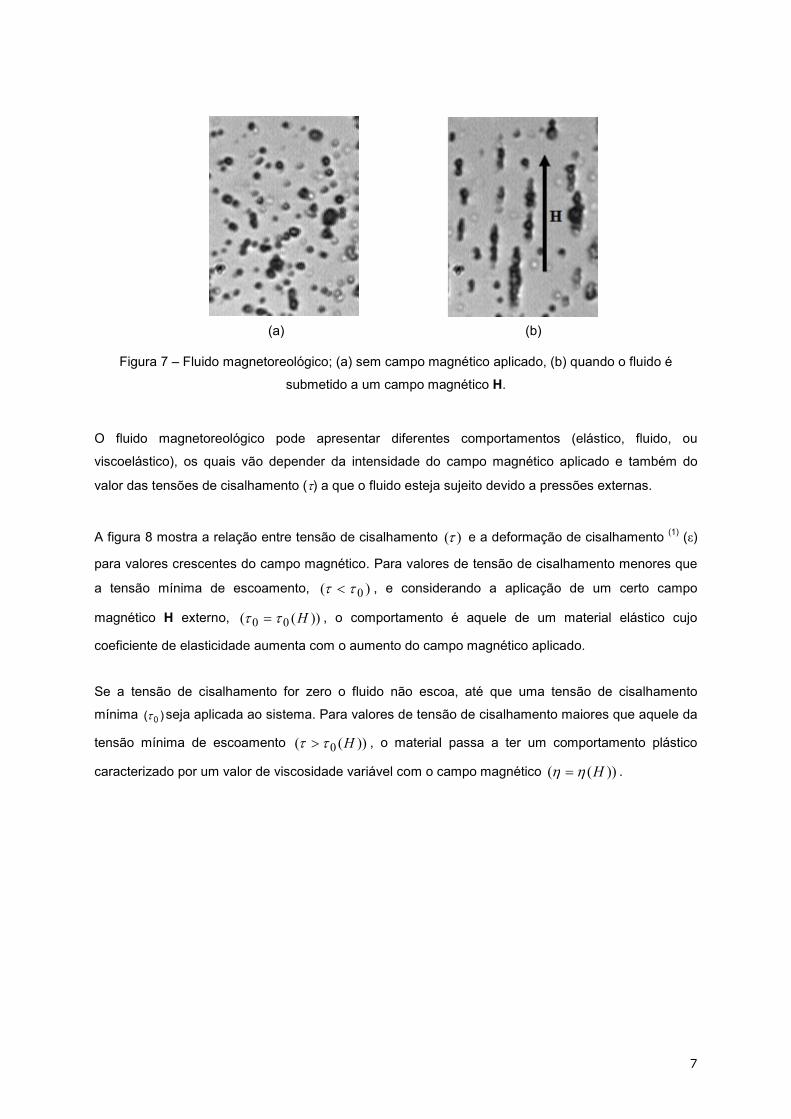
Quando o fluido magnetoreológico se encontra no estado dito normal, ou seja, o fluido não se
encontra sujeito a um campo magnético externo, as partículas de ferro ficam suspensas de forma
aleatória e o fluido apresenta um comportamento igual a um fluido dito incompressível (Figura 7a).
Quando o fluido é sujeito a um campo magnético, as partículas de ferro nele suspensas ficam
magnetizadas, de forma que estas se alinham formando uma estrutura colunar paralela ao campo
como se pode visualizar na Figura 7b, aumentando deste modo a viscosidade do fluido. Estas
estruturas colunares acabam assim por restringir o movimento das camadas do fluido na direcção
perpendicular ao campo.
7
(a) (b)
Figura 7 – Fluido magnetoreológico; (a) sem campo magnético aplicado, (b) quando o fluido é
submetido a um campo magnético H.
O fluido magnetoreológico pode apresentar diferentes comportamentos (elástico, fluido, ou
viscoelástico), os quais vão depender da intensidade do campo magnético aplicado e também do
valor das tensões de cisalhamento (τ) a que o fluido esteja sujeito devido a pressões externas.
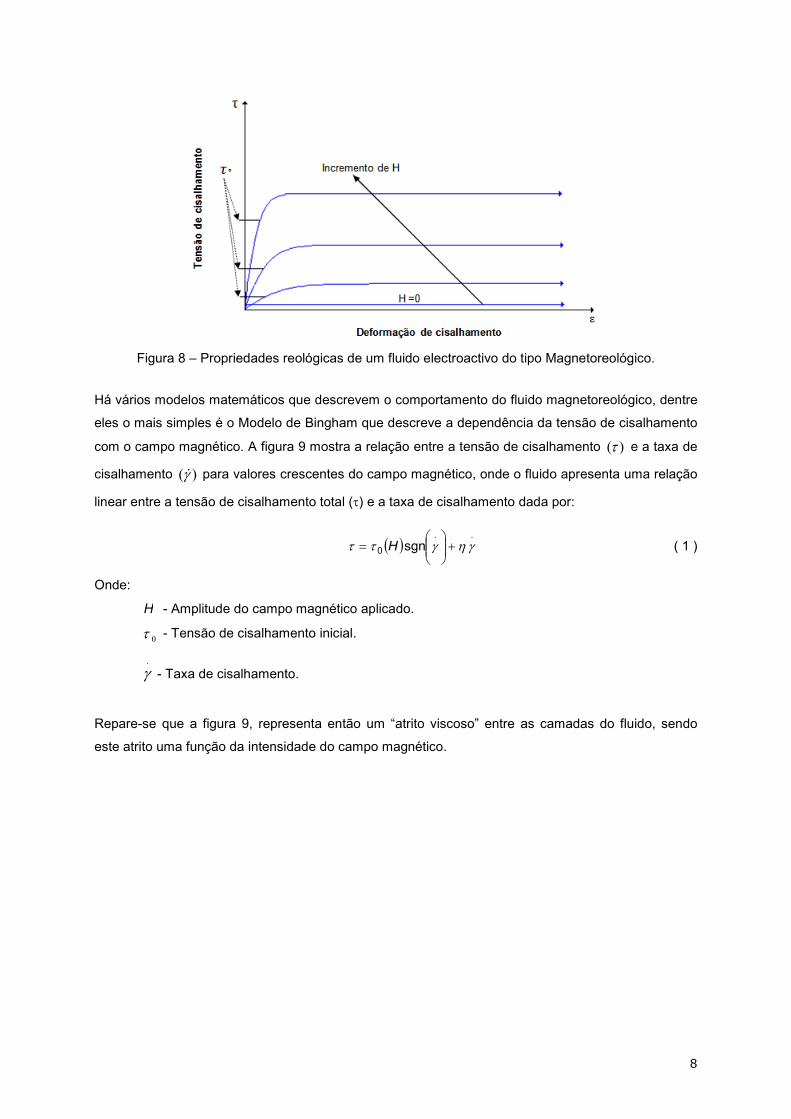
A figura 8 mostra a relação entre tensão de cisalhamento )(τ e a deformação de cisalhamento (1) (ε)
para valores crescentes do campo magnético. Para valores de tensão de cisalhamento menores que
a tensão mínima de escoamento, )( 0ττ < , e considerando a aplicação de um certo campo
magnético H externo, ))(( 00 Hττ = , o comportamento é aquele de um material elástico cujo
coeficiente de elasticidade aumenta com o aumento do campo magnético aplicado.
Se a tensão de cisalhamento for zero o fluido não escoa, até que uma tensão de cisalhamento
mínima )( 0τ seja aplicada ao sistema. Para valores de tensão de cisalhamento maiores que aquele da
tensão mínima de escoamento ))(( 0 Hττ > , o material passa a ter um comportamento plástico
caracterizado por um valor de viscosidade variável com o campo magnético ))(( Hηη = .
8
Figura 8 – Propriedades reológicas de um fluido electroactivo do tipo Magnetoreológico.
Há vários modelos matemáticos que descrevem o comportamento do fluido magnetoreológico, dentre
eles o mais simples é o Modelo de Bingham que descreve a dependência da tensão de cisalhamento
com o campo magnético. A figura 9 mostra a relação entre a tensão de cisalhamento )(τ e a taxa de
cisalhamento )(γ& para valores crescentes do campo magnético, onde o fluido apresenta uma relação
linear entre a tensão de cisalhamento total (τ) e a taxa de cisalhamento dada por:
( )..
0 sgn γηγττ +
= H ( 1 )
Onde:
H - Amplitude do campo magnético aplicado.
0τ - Tensão de cisalhamento inicial.
.
γ - Taxa de cisalhamento.
Repare-se que a figura 9, representa então um “atrito viscoso” entre as camadas do fluido, sendo
este atrito uma função da intensidade do campo magnético.

9
Figura 9 – Tensão de cisalhamento vs taxa de cisalhamento.
Vários tipos de fluido magnetoreológicos têm sido concebidos [8], cada um com características
próprias tanto quanto às suas propriedades reológicas quanto as propriedades magnéticas. Assim
cada fluido apresenta uma característica electromecânica tensão de cisalhamento x campo
magnético, a qual é obtida por ensaios laboratoriais através de um reômetro.
O fluido magnetoreológico utilizado neste trabalho apresenta a característica electromecânica tensão
de cisalhamento x campo magnético, )(Hτ , apresentada na figura 10 fornecida pelo fabricante.
Verifica-se que a tensão de cisalhamento aumenta de forma linear com o aumento do campo
magnético até um campo perto dos 100 kA/m. Este efeito na tensão de cisalhamento pode ser
explicado da seguinte maneira. Quando não há campo magnético aplicado as partículas de ferro
encontram-se afastadas umas das outras. Observa-se uma limitação da tensão porque à medida que
o campo aumenta, as partículas alinham-se permitindo a passagem das linhas do campo (zona
linear). Quando estas já se encontram alinhadas e o campo aumenta, começa a haver saturação
magnética das partículas de ferro e além disso o número de partículas ainda por se alinhar diminui.

10
Figura 10 – Característica electromecânica tensão de cisalhamento x campo magnético do fluido
MRF-122-2EG obtida a partir do manual do fluido fornecido pelo fabricante [9].
A Tabela 1 lista as duas principais propriedades reológicas do fluido, densidade ρ e viscosidade η,
ambas obtidas sem campo magnético aplicado.
Tabela 1 – Propriedades reológicas do fluido MRF-122EG
Propriedade Valor / Limites
Fluido portador Hidrocarboneto
Temperatura de operação -40ºC a +130 ºC
Densidade ( 0=H ) 2288 – 2480 Kg/m3
Viscosidade ( 0=H , 40ºC) 0,07 (±0,02) Pa.s
A viscosidade do fluido, η, é pois uma medida da resistência interna ou fricção interna ao fluxo e varia
com a temperatura. Quanto maior a temperatura no fluido menor a viscosidade. Assim, deve-se ter
em conta o intervalo da temperatura de operação do fluido no dispositivo.
Na figura 11, os valores de temperatura e respectiva viscosidade apresentados correspondem ao
intervalo de operação possível do fluido que é utilizado neste trabalho. Pode-se verificar que a após
um rápido decréscimo até aos 10ºC, a viscosidade varia ainda de forma acentuada entre os 10 e
60ºC, sendo praticamente constante até aos 130ºC. Tendo em consideração que o dispositivo
estudado neste trabalho não apresenta variações significativas na temperatura do fluido durante o
seu funcionamento, considerou-se que a viscosidade do fluido será apenas função do campo
magnético.

11
Figura 11 – Variação da viscosidade com a temperatura sem a aplicação de campo magnético
2.2 Propriedades magnéticas
O fluido magnetoreológico apresenta propriedades magnéticas que estão relacionadas com as
propriedades das partículas de ferro nele dispersas. Assim, a compreensão das propriedades
magnéticas do fluido torna-se importante para o estudo de dispositivos que usam um fluido
magnetoreológico.
A figura 12 apresenta a curva de indução magnética ou curva B(H) do fluido magnetoreológico
utilizado neste trabalho. Ao contrário da maioria dos matérias ferromagnéticos, no fluido
magnetoreológico a curva B(H) atinge a saturação para valores muito elevados de campo magnético,
pois, a curva B(H) na figura 12, leva em consideração a presença do óleo entre as partículas de ferro.

12
Figura 12 – Curva B(H) do fluido magnetoreológico MRF-122EG usado neste trabalho obtida
a partir do manual do fluido fornecido pelo fabricante [9].
Para uma melhor visualização da magnetização do fluido, analisa-se a curva de indução intrínseca ou
densidade de polarização (B-µ0H) do fluido, representada na figura 13 com µ0=4 x10-7 Tm/A. No
fluido magnetoreológico considera-se que a indução magnética é devida a dois factores, ou seja,
B = B0+BS, onde B representa a indução magnética do fluido magnetoreológico, representada na
figura 12, Bo= µ0H é a indução devido a presença de ar, logo, a indução intrínseca do fluido
magnetoreológico é Bs = B-Bo representada na figura 13, onde a curva apresenta uma região inicial
de crescimento rápido a que se segue uma região de crescimento lento designada região de
saturação.

13
Figura 13 – curva de magnetização intrínseca do fluido magnetoreológico MRF-122EG usado neste trabalho
O fluido magnetoreológico exibe assim propriedades magnéticas aproximadamente lineares até um
campo aplicado próximo de 100kA/m.

14
3 Dispositivo amortecedor magnetoreológico
construído
3.1 Circuito magnético
O objectivo principal no desenho do circuito magnético é fazer-se um circuito que conduza as linhas
do campo magnético para que estas passem pela região activa do fluido MR (entreferro). Para isto,
escolheu-se o aço, que tem uma permeabilidade magnética elevada.
A optimização do desenho do circuito magnético é a maximização do campo H, no entreferro e
minimização das perdas de energia no aço e nas regiões não activas (parte do fluido onde não
circulam as linhas de campo) do fluido. A quantidade de aço também deve ser minimizada. Pretende-
se determinar o campo magnético Hd no entreferro. Para efeitos de cálculos são feitas algumas
simplificações:
1) Circuito linear
• Permeabilidade magnética não varia em função do campo.
2) Permeabilidade magnética relativa do aço muito elevada;
• Intensidade do campo no aço é nula.
• Despreza-se a dispersão no aço.
3) Entreferro d entre o êmbolo e a parede interior do cilindro, com um valor muito pequeno
(d<<R).
• Efeito de bordas nulo, nas extremidades do êmbolo )( 121 dlll >>++ .
Na figura 14 apresenta-se uma imagem em corte longitudinal do dispositivo amortecedor construído
onde se pode ver o percurso (a tracejado) das linhas de campo magnético, o entreferro d é
preenchido pelo fluído magnetoreológico. Atendendo à simetria geométrica do circuito, é possível o
seu estudo utilizando apenas metade do circuito. Os fluxos que circulam em cada um dos segmentos
laterais são iguais e correspondem a metade do fluxo que passa pelo segmento central. As zonas à
cinzento são feitas em aço e representam o cilindro exterior e a parte central representa o êmbolo do
dispositivo ligado a um eixo.

15
d
R
r
θ
zr
rr
θv
cv
1l
1l
2l
Figura 14 – Dispositivo amortecedor com representação das coordenadas cilíndricas e o respectivo
percurso efectuado linhas de campo magnético.
Usando a lei de Kirchoff para os circuitos magnéticos:
∫= lHdNi ( 2 )
Ou
∑= liHNi ( 3 )
Da expressão 2 ou 3 resulta:
dHllRHNi daço 2))2(22( 21 ×+++×= ( 4 )
Onde:
l - é o percurso efectuado pelas linhas de campo magnético.
dH - é o campo magnético no entreferro.
açoH - é o campo magnético no aço.
d – é a largura do entreferro.
Considerando a permeabilidade do aço muito elevada, 01 =⇒>> açoaço Hµ ;
dHNi g ××= 2 ( 5 )
Logo, o campo magnético fica definido por:
d
iNHg 2
×= ( 6 )

16
Como o objectivo do circuito magnético é maximizar o campo magnético no entreferro, observando a
expressão 6 tem-se três hipóteses para se alcançar este objectivo:
1ª Um entreferro pequeno
2ª Um elevado número de espiras
3ª Uma corrente elevada
Das três hipóteses encontradas a mais viável é a primeira, um entreferro pequeno, as outras duas
apresentam desvantagens porque um número de espiras muito elevado torna o amortecedor muito
pesado e aumenta a resistência dos enrolamentos, o que leva a um aumento das perdas de Joule e
uma corrente elevada pode também ser prejudicial devido o aquecimento por efeito de Joule.
3.2 Atribuição do número de espiras
Para a escolha do número de espiras fixa-se um valor de campo magnético no limiar da zona linear
da curva B(H) do fluido magnetoreológico, figura 13, este valor é 100kA/m, assim, segundo a
expressão 5 para um entreferro de 1 mm, tem-se iN × =200Aesp. Deste modo, limitando a operação
do fluido na zona linear, a força magnetomotriz ( iN× ), depende apenas da corrente e do número de
espiras.
Escolheu-se um entreferro de 1mm, devido a facilidade de movimento do êmbolo no interior do
cilindro exterior fixo. Um entreferro menor, faz com que a força de atrito entre o fluido e as paredes
dos cilindros seja maior, dificultando o movimento do êmbolo.
A corrente a aplicar ao circuito é uma corrente constante, e segundo conclusões do ponto anterior
(3.1), esta não pode ser elevada. Na tabela 2 apresentam-se pares de valores possíveis para a
corrente e o número de espiras que garantem um valor máximo para o campo magnético de
100kA/m.
Tabela 2 – Variação da força magneto motriz com o tamanho do entreferro.
N i
400 0,5
200 1
133 1,5
100 2

17
De acordo o volume disponível na região do êmbolo, onde se pode enrolar a bobine do circuito
magnético, na tabela 2 escolheu-se o par, N=200esp e i=1A. É fácil ver, na tabela 2, que quanto
maior o número de espiras menor o valor da corrente, para um valor do campo Hd constante.
3.3 Acoplamento electromecânico do sistema
O sistema é constituído pelo amortecedor e pelo motor de corrente contínua ligados por um braço. A
montagem do sistema deve permitir a obtenção de valores característicos de um amortecedor. Deste
modo, de acordo as condições encontradas no laboratório, utiliza-se um motor para fornecer uma
força exterior e fazer mover o êmbolo longitudinalmente ao longo do cilindro exterior fixo, isto é
possível acoplando o amortecedor ao eixo do motor conforme a figura 15.
Figura 15 – Acoplamento do dispositivo amortecedor magnetoreológico ao motor de corrente contínua.
Com a montagem apresentada na figura 15, é possível calcular-se a velocidade linear do
amortecedor a partir da velocidade angular do motor. A velocidade linear, 'Rv ×=ω , obtida a partir da
velocidade angular do motor é uma velocidade tangencial a circunferência descrita pela rotação do
motor, assim sendo, considera-se que a velocidade linear do amortecedor é a componente da
velocidade na direcção do eixo z, conforme a figura 16.

18
)( αsenvvz ×= ( 7 )
Figura 16 – Representação das componentes da velocidade linear.
Onde:
v - Velocidade linear do motor.
zv - Velocidade linear do amortecedor.
ω - Velocidade angular 'R - Raio, distância do centro do motor ao ponto onde é ligado o braço que o liga o motor ao
amortecedor.
α – Segundo as regras trigonométricas é igual a (90º- β).
Como se pode observar na figura 16, a velocidade linear do dispositivo amortecedor, não é constante,
varia com o ângulo β, mas neste trabalho a velocidade do amortecedor será considerada constante,
sendo a média dos valores medidos em cada ponto, através de um taquímetro de contacto colocado
no eixo do motor e que mede a velocidade angular do mesmo.
Para além da velocidade outro parâmetro importante conhecer no amortecedor é a força. Esta é
calculada de forma indirecta considerando ser igual a força desenvolvida pelo motor. A força do motor
é calculada a partir do binário, que é facilmente obtido por se conhecer a característica Binário –
Velocidade do motor utilizado que é:
iKT m ×= ( 8 )
Com:
T – Binário motor
mK – Parâmetro característico do motor, 7,0=mK , é obtido a partir da curva Binário x Corrente
obtida através de ensaios experimentais.
i – Corrente no induzido da máquina de corrente contínua.

19
A corrente no induzido é medida directamente através do osciloscópio, logo o binário é conhecido
através da expressão 8. Sabe-se que o binário motor é a medida do esforço necessário para fazer
girar um eixo, e é dado pela seguinte equação básica:
'RFT ×= ( 9 )
A força F , que o motor transmite ao amortecedor depende do raio 'R . Por razões de construção,
relacionadas com a distância disponível (4cm) em que o êmbolo se pode mover livremente no interior
do cilindro, de um extremo para outro, este raio 'R é igual a 2cm. A partir da expressão 9 se obtém o
valor da força, deste modo é possível retirar os parâmetros característicos do amortecedor (Força e
Velocidade).
'R
TF = ( 10)
Tal como a velocidade, o binário também desenvolve uma força tangencial, logo, a componente da
força que faz mover o amortecedor )( αsenFFz ×= .
3.4 Dimensionamento do amortecedor
Conhecidos os valores da corrente, do entreferro e o número de espiras as dimensões do
amortecedor são impostas e podem ser vistas na figura 17.
Figura 17 – Dimensões (em mm) atribuídas ao amortecedor. 1) Cilindro exterior, 2) Êmbolo ou pistão, 3) Tampas, 4) Eixo.
Com todos os dados reunidos até agora é possível fazer-se uma simulação para verificar os valores
de campo magnético produzido pelo circuito, e verificar se corresponde ao valor dentro da zona linear

20
da curva B(H). Para este efeito, se utiliza o programa de simulação FEMM (Finite Element Method
Magnetics) cujo objectivo é a resolução de problemas de electromagnetismo.
A figura 18, é a representação do resultado da simulação do circuito magnético dimensionado. As
regiões a cinzento representam o cilindro e o êmbolo, feitos em aço, as regiões em branco são
preenchidas pelo fluido magnetoreológico.
Figura 18 – Linhas do campo magnético. Resultado da simulação do circuito magnético no FEEM.
Na figura 18, constata-se que o campo magnético é nulo em qualquer ponto fora do núcleo de aço,
com excepção a uma pequena dispersão observada na figura devido ao efeito de bordas, mas que
pode ser desprezada considerando que a altura do êmbolo é muito maior que o entreferro (3cm>>
1mm). Todo o fluxo induzido pela corrente i, circula no interior do volume de aço.
O valor de campo magnético produzido quando aplicada uma corrente máxima constante de 1 A ao
circuito magnético, é de 98kA/m, este valor é próximo aos 100kA/m previstos, logo, as dimensões
atribuídas são aceitáveis, para a gama de valores de corrente pretendidas.

21
4 Modelização do dispositivo amortecedor
O dispositivo estudado (Figura 19a) consiste num êmbolo móvel que se encontra no interior de um
recipiente cilíndrico fixo (Figura 19b), o qual é preenchido com um fluido electroactivo do tipo
magnetoreológico. Tanto o êmbolo quanto as paredes laterais do recipiente são feitas de aço, sendo
que, como mostra a Figura 19c, o êmbolo apresenta um encaixe central onde está inserida uma
bobina.
O fio condutor da bobina passa através de um orifício elaborado no centro do eixo do êmbolo (Figura
19d), permitindo assim a sua ligação à fonte de corrente, além do orifício ter sido posteriormente
preenchido com silicone de modo a impedir fugas de fluido por ele.
As partes inferior e superior do recipiente cilíndrico encontram-se vedadas por uma tampa de acrílico
transparente (Figura 19e), contendo um orifício por onde passa o eixo do êmbolo e que contém dois
anéis vedantes cada um por forma a impedir a fuga de fluido.
(a) (b) (c)
(d) (e)
Figura 19 – Componentes do dispositivo amortecedor.

22
4.1 Acoplamento electromecânico através do fluido magnetoreológico
A figura 20 apresenta uma imagem em corte do dispositivo amortecedor com a indicação das
respectivas coordenadas cilíndricas ( )zr ,,θ . O êmbolo desloca-se a uma velocidade linear cv ao
longo da direcção z− no interior do recipiente cilíndrico fixo preenchido com o fluido
magnetoreológico. Tanto o êmbolo quanto as paredes laterais do recipiente cilíndrico são feitas de
aço e apresentadas pelas regiões sombreadas a cinzento, sendo as duas tampas representadas
pelas regiões com ranhuras a branco.
O êmbolo apresenta ainda um encaixe central (regiões preenchidas com reticulado, figura 20), no
qual está inserida uma bobina com N espiras e que pode ser percorrida por uma corrente i. Com esta
geometria constrói-se um circuito cujo fluxo magnético irá seguir preferencialmente o caminho
indicado pela linha tracejada indicada na figura 20. Assumindo-se infinita a permeabilidade magnética
do aço, o entreferro d entre o êmbolo e a parede do recipiente cilíndrico com um valor muito pequeno
quando comparado com o raio de curvatura dos cilindros ( Rd << ), desprezando-se ainda os efeitos
de borda nas extremidades do êmbolo )( 121 dlll >>++ , considera-se que o circuito magnético
estabelece um campo magnético H uniforme e constante na direcção radial r− ao longo do
entreferro, rHHr
= .
d
R
r
θ
zr
rr
θv
cv
1l
1l
2l
Figura 20 – Esquema do dispositivo electromecânico considerado com as respectivas coordenadas cilíndricas.
A região do dispositivo electromecânico designada por “activa” corresponde àquela caracterizada
pelos dois comprimentos na figura 20. Esta região consistirá numa representação anular do
sistema, a qual se fecha na direcção θ . Além do mais, sendo o dispositivo simétrico em relação ao

23
eixo z− , admite-se que as propriedades do sistema não variam apenas nas direcções z− e θ− , ou
seja:
.0=∂∂
=∂∂
θz ( 11 )
O fluido magnetoreológico é considerado homogéneo e incompressível, logo
0=•∇ v ( 12)
Como o êmbolo se desloca apenas na direcção z− , considera-se ainda que as componentes angular
e radial da velocidade do fluido são nulas,
0=θv e 0=rv ( 13 )
Após as considerações anteriores, procura-se estabelecer o valor da densidade de força total totalF a
actuar em cada volume elementar do fluido magnetoreológico, para tal, usa-se a equação de Navier-
Stokes que descreve o escoamento de um fluido Newtoniano, considerando que as mudanças no
momento de um volume infinitesimal do fluido é simplesmente a soma das forças devido à
viscosidade do fluido (fricção entre as partículas do fluido e entre o fluido e a superfície do êmbolo e
superfície interna do cilindro exterior), mudanças de pressão, gravidade e outras forças que actuam
no interior do fluido como, por exemplo, as forças devido à campos (eléctrico ou magnéticos)
aplicados. Esta equação é uma aplicação da segunda lei de Newton para os fluidos. Deste modo, a
densidade de força que irá provocar uma variação de quantidade de movimento fica definida pela
relação:
)( 2vFgF ∇++∇−= µρ Htotal p ( 14 )
como sendo o resultado da soma das seguintes componentes:
- o termo gρ refere-se à densidade de força de origem gravítica;
- o segundo termo, p∇− , diz respeito à componente da força resultante de gradientes de
pressões internas no fluido, e;
- o último termo, vF 2∇µ+H , refere-se à densidade de força total relacionada com às tensões
de cisalhamento que aparecem no interior do fluido devido à sua viscosidade. Este termo é
dividido em duas parcelas: a primeira, designada por HF , corresponde à relação constitutiva
do fluido, a qual é caracterizada por esforços de cisalhamento entre camadas do fluido cuja
intensidade é função do campo magnético H aplicado (fluido não-newtoniano); a segunda
parcela, v2∇µ , corresponde à densidade de força que aparece quando o campo H é nulo e
é igual à relação apresentada por um fluido newtoniano onde, µ é a viscosidade do fluido
sem campo magnético aplicado.

24
Para a obtenção da componente HF , considere-se a figura 21 onde se representa um elemento de
volume do fluido que se encontra centrado em r e submetido a duas tensões de cisalhamento em
2
rr
∆− e
2
rr
∆+ .
Figura 21 – Representação de um elemento de volume do fluido centrado em r e submetido a duas
tensões de cisalhamento em 2
rr
∆− e
2
rr
∆+ .
A força resultante volF no elemento de volume devido às tensões de cisalhamento é igual a:
zr
rzr
rFvol ∆∆∆
+−∆∆∆
−= θτθτ )2
()2
( ( 15)
Realizando a expansão em série de Taylor de volF e considerando apenas os termos até à primeira
derivada, tem-se:
zr
rrz
r
rrFvol ∆∆
∆∂∂
+−∆∆∆
∂∂
+≈ θτ
τθτ
τ2
)(2
)( ( 16)
zrr
Fvol ∆∆∆∂∂
≈ θτ
( 17)
Dividindo ambos os lados da expressão 17 por zr ∆θ∆∆ , obtém-se então uma aproximação para a
força por unidade de volume definida por:
d
H
rH)(ττ
≈∂
∂=F ( 18 )
onde )(Hτ é a característica electromecânica do fluido magnetoreológico.

25
Com cada componente da densidade de força definida e considerando o funcionamento do sistema
em regime estacionário, a componente z da equação de momento (equação 14) assume a forma
dada por:
( )0
2
2
=∂
∂++
∂∂
−−r
v
d
H
z
pg zµ
τρ ( 19 )
Tomando a derivada parcial desta expressão relativamente a z− e aplicando a hipótese anterior de
que 0=∂∂ zv z , verifica-se a seguinte relação:
02
2
=∂
∂
z
p ( 20 )
ou seja, o valor de z
p
∂∂ é constante. Neste caso, o seu valor pode ser aproximado pela forma
l
p
z
p ∆−≈
∂∂ ( 21 )
onde p∆ é a diferença de pressão entre as extremidades do canal de comprimento 212 lll += ,
( ) ( )lppp −=∆ 0 ( 22 )
Substituindo 21 em 19 e reagrupando a equação resultante, obtém-se a seguinte equação diferencial
para o perfil da velocidade zv do fluido:
( )d
H
l
pg
dr
vd z
µτ
µµρ
−∆
−=2
2
( 23 )
Resolvendo esta equação diferencial, o perfil da velocidade zv do fluido assume a forma dada pela
equação quadrática:
( )21
2
2
1)( CrCr
d
H
l
pgrv z ++
−
∆−=
τρ
µ ( 24 )
na qual as constantes de integração C1 e C2 são obtidas das seguintes condições de fronteira:
0.v d,Rr em
,vv R,r em
z
cz
=+=
==
O emprego destas duas condições de fronteira na determinação das constantes C1 e C2 conduz
assim ao seguinte perfil para a velocidade zv do fluido:

26
( )))()2((
2
1)()( 2 dRRrdRr
d
H
l
pgrdR
d
vrv c
z +++−
−
∆−+−+=
τρ
µ ( 25)
A figura 22 apresenta a evolução do perfil de velocidade zv (r) para um valor de cv e P∆ constante
( cv =2cm/s), enquanto o campo magnético (H) aumenta, alterando a viscosidade do fluido.
Figura 22 – Perfil da velocidade zv do fluido através do entreferro.
O perfil apresentado na figura 22 representa a velocidade em cada ponto do entreferro d=1mm, tendo
em conta as condições de fronteira onde se considera que, junto ao êmbolo o fluido move-se com
velocidade igual à velocidade do êmbolo e junto às paredes do cilindro exterior fixo, o fluido tem
velocidade nula, porque o cilindro externo não se move. Deste modo, o fluido não apresenta
velocidade constante através do entreferro. Verifica-se ainda na figura 22 que quanto maior a
intensidade do magnético menor a velocidade do fluido, sendo esta redução da velocidade associada
ao aumento da viscosidade do fluido.
A tabela 3, apresenta os valores dos parâmetros utilizados no traçado do perfil velocidade.

27
Tabela 3 – Valores dos parâmetros utilizados para traçar o perfil de velocidade.
Parâmetro Valor
Raio do êmbolo, R 4 cm
Largura do entreferro, d 1 mm
Viscosidade do fluido 0.007 Pa.s
Variação de pressão, ∆P 4.104 Pa
Velocidade linear do Êmbolo, vc 2 cm/s
Densidade do fluido, ρ 2800 Kg/m3
O caudal Q existente na região activa entre o êmbolo e o recipiente cilíndrico pode então ser obtido
através da integração da equação 26 onde ρ representa a densidade do fluido:
)2( rdrvdAvdQ zz πρρ == ( 26)
ao longo do entreferro de comprimento d, resultando em
∫+
×=dR
Rz drvrQ ) (2πρ ( 27)
Tendo por hipótese não haver acumulação de fluido, este caudal deve ser igual ao caudal deslocado
pelo movimento do êmbolo, cQ , quando este apresenta uma velocidade cv :
)( onde )(2 22cc
dR
Rzccc rRAdrvrvAQ −=×== ∫
+ππρρ ( 28)
Considerando a velocidade do êmbolo cv como a variável independente, a expressão (28) pode ser
resolvida de modo a se obter a diferença de pressão P∆ exercida sobre o êmbolo. A equação (29)
mostra então a relação para P∆ , sendo uma função da velocidade do fluido e do campo magnético
aplicado.
( )( )( )Rdd
rRvdRvvdHRdgdRHdgdlp ccc
2
(12124)(22)(3
2222334
+
−+−−−+−=∆
µµµτρτρ ( 29 )
A figura 23, apresenta a evolução da variação de pressão entre as extremidades do êmbolo em
função do campo magnético, para diferentes valores do entreferro d, com a velocidade do êmbolo cv ,
constante e igual a 2cm/s.
28
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
Campo magnetico, H [A/m]
DeltaP [P
a]
d = 1 mm
d = 2 mm
d = 3 mmd = 4 mm
Figura 23 – Evolução da variação de pressão P∆ em função do campo magnético aplicado com
velocidade constante, para vários valores de entreferro, d=1,2,3 e 4mm.
Para cada valor do entreferro são aplicados os mesmos valores de corrente, na figura 23 pode-se ver
que quanto maior o entreferro, menor será o valor de campo magnético criado pela corrente
introduzida ao circuito magnético.
A força total de oposição ao movimento, que actua sobre o êmbolo, desprezando a força da
gravidade, fica então composta pela soma de duas componentes (equação 30) uma devido a P∆
( pF∆ ) e a outra devido ao atrito do fluido a superfície lateral do êmbolo µF .
µFFF pTotal += ∆ ( 30 )
A primeira componente da força devido à diferença de pressão exercida sobre o cilindro, é
estabelecida pela expressão 31:
)( 22 rRpF p −∆=∆ π ( 31 )
A segunda componente da força, µF , é causada pela força de atrito existente entre o fluido
magnetoreológico e a superfície lateral do êmbolo. Para a obtenção desta força, considere a Figura
24. Ela mostra o êmbolo móvel sujeito a um campo magnético 1H e o fluido magnetoreológico sujeito

29
a um campo 2H . Pelo tensor de Maxwell verifica-se que a pressão na superfície do êmbolo fica dada
por:
Figura 24 – Êmbolo sujeito ao campo magnético H1 e fluido sujeito ao campo magnético H2.
211
22222 2
1
2
1T HH µµ −= ( 32 )
Considerando 21 HH << , a pressão T22 fica aproximada por:
22222 2
1T Hµ≈ ( 33 )
A força de atrito sobre o êmbolo devido à pressão 22T é função do coeficiente de atrito cη entre a
superfície de aço do êmbolo e o fluido magnetoreológico, e relacionam-se pela expressão 34.
)2.(2
1)2(F 2
2222 RlHRlT cc πµηπηµ
== ( 34 )
Como o valor do campo magnético 2H é aproximado por dNiH 22 = , a sua substituição em 34
resulta na equação final (equação 35) para a força de atrito sobre o êmbolo:
222
2
.4
F id
RlNcµη
πµ
= ( 35 )
A força total resistente ao movimento do êmbolo fica então estabelecida pela equação 36.
222
222 .
4)( i
d
RlNrRpF cTotal µη
ππ
+−∆= ( 36 )
A figura 25 apresenta um conjunto de curvas de FTotal em função da velocidade cv do êmbolo para
vários valores de corrente i.

30
Figura 25 – Curva força total resistente ao movimento do êmbolo em função da corrente aplicada.
A força aumenta de forma quadrática com a corrente, isto é, quanto maior for a corrente aplicada ao
circuito maior será a força necessária para fazer mover o êmbolo, isto deve-se ao aumento da
viscosidade do fluido quando sobre ele é aplicado um campo magnético.
4.2 Regime estacionário
Este é um regime particular de funcionamento do sistema onde o êmbolo encontra-se sujeito a uma
carga de valor constante 1F , estando no entanto parado em equilíbrio com 0=cv e estando o fluido,
com uma velocidade nula, 0=zv . Com estas condições de funcionamento do sistema, a força no
êmbolo, a qual deve equilibrar a força 1F exercida pela carga, assume a forma quadrática dada pela
equação 37.
)()()(
.4
2222
222
2
rRglHd
lrRi
d
RlNF cTotal −+
−+
= πρτ
πµη
π ( 37)
Admitindo que o fluido magnetoreológico funciona na região linear da curva )(Hτ , o valor de )(Hτ
pode ser aproximado pela relação linear:

31
( ) KHH =τ ( 38)
Onde K é o declive da zona linear da curva ( )Hτ . Substituindo esta relação na equação 37 e sendo o
campo magnético no entreferro aproximado por
d
NiH
2= ( 39 )
onde foi considerada apenas a relutância magnética do entreferro d entre o cilindro fixo e o êmbolo, a
equação 37 pode ser reescrita na forma 40.
)(2
)(.
4
222
222
22
2
rRglid
KNlrRi
d
RlNF cTotal −+
−+
= πρ
πµη
π
( 40 )
As curvas da figura 26 mostram como a relação Ftotal x corrente varia com o valor do coeficiente de
atrito cη entre o fluido magnetoreológico e a superfície do êmbolo.
Figura 26 – Curva Força x corrente para diferentes valores do coeficiente de atrito cη entre o fluido e a
superfície do êmbolo.

32
Para um coeficiente de atrito nulo, 0=cη , a relação entre a força e a corrente é linear e para valores
diferentes de zero, 0≠cη , a força aumenta de forma quadrática com o aumento da corrente, e este
aumento é maior quanto maior for o coeficiente de atrito. Isto implica que, quanto maior o atrito
existente entre o fluido e a superfície do êmbolo maior a força que se opõe ao movimento do êmbolo.
A partir da equação 40, é ainda possível observar a influência do tamanho do entreferro sobre a
força, quando se faz variar a mesma variando o valor de corrente aplicada. Para este efeito é traçada
curva da figura 27.
Figura 27 - Curva Força x corrente para diferentes tamanhos de entreferro.
Observa-se na figura 27 que a força será tanto maior quanto menor for o tamanho do entreferro, isto
deve-se ao facto de que, a força de atrito sobre o êmbolo aumenta com o aumento do campo
magnético, e para o mesmo valor de corrente o campo magnético é maior para valores de entreferro
menores, logo, para menores tamanhos de entreferro se obtém maiores forças
.

33
5 Ensaios experimentais
Para a realização dos ensaios experimentais foi construído o protótipo de um dispositivo amortecedor
descrito no capítulo 3. Os ensaios experimentais foram realizados no Laboratório de Máquinas
Eléctricas do IST.
5.1 Campo magnético ao longo do orifício anular
Após o dimensionamento do circuito, passou-se então a fase de construção e testes do dispositivo
construído. Nesta última etapa (testes) verificou-se que a corrente máxima que ainda permite o
movimento do êmbolo é a corrente i=0,2 A, passando o intervalo de variação da corrente utilizada a
ser de 0 à 0,2 A.
Com o intuito de se verificar a eficiência do campo magnético no entreferro, neste ponto estuda-se a
evolução do campo magnético ao longo do orifício anular (entreferro). A corrente máxima que ainda
permite um movimento do amortecedor para um entreferro de 1mm é de 0,2A. Deste modo a tabela 4
apresenta os valores de campo para as correntes utilizadas nos ensaios, o valor z, corresponde a
altura do entreferro (1cm).
Tabela 4 – Evolução de B e H ao longo de z. Avaliação correspondente a zona activa de altura l1=1cm quando g=1mm.
i = 0,1 A i = 0,15A i = 0,2A z[cm]
B[T] H[A/m] B[T] H[A/m] B[T] H[A/m]
0 0,03869 9811,92 0,05839 14702 0,07857 19571,5
0,1 0,03837 9733,02 0,05793 14588,4 0,07797 19429,6
0,2 0,03806 9654,92 0,05747 14476,1 0,07738 19289,1
0,3 0,03775 9577,63 0,05702 14364,9 0,7679 19150,1
0,4 0,03776 9579,68 0,05703 14368,1 0,07681 19154,7
0,5 0,03777 9582,54 0,057 14372,4 0,07684 19160,6
0,6 0,0377 9586,22 0,05707 14377,9 0,07687 19167,9
0,7 0,0378 9590,38 0,0571 14383,8 0,0769 19175,1
0,8 0,03782 9594,28 0,05711 14387,4 0,0769 19175,3
0,9 0,0402 10277,9 0,06126 15404 0,08255 20513,2
1 0,02619 6663,62 0,03954 10026,6 0,05323 13431,1

34
A figura 28 apresenta o valor do campo H em cada ponto da zona activa (Figura 20, l1=1cm), com
espaçamentos de 1mm.
Figura 28 – Distribuição do campo magnético ao longo do entreferro na direcção longitudinal z, l1=1cm.
O resultado da simulação do circuito magnético aponta um valor médio do campo variável para cada
valor de corrente, como era esperado tendo em conta a expressão 6, o campo magnético é tanto
maior quanto maior for a corrente que circula pelo circuito.
Verifica-se também que com excepção ao decréscimo do campo observado quando z=1cm, o campo
magnético tem um valor constante ao longo do entreferro, o que implica que se faz um bom
aproveitamento da região activa do amortecedor.
5.2 Regime estacionário
A figura 29 apresenta a relação experimental, iFTotal × , entre a força exercida sobre o êmbolo e a
corrente que circula no circuito magnético, para valores de entreferro d =1mm e d=2mm. Verifica-se
que a curva obtida segue uma relação quadrática conforme previsto anteriormente.
Os valores apresentados na figura 29 são obtidos da seguinte maneira: são colocados pesos sobre o
amortecedor (êmbolo), estes pesos variam de 0 à 25 Kg. A partir de um certo peso (2Kg) colocado

35
sobre o êmbolo, o êmbolo começa a deslocar-se para baixo devido ao peso a que fica submetido e à
acção da força de gravidade (equação 41), é neste momento que é colocada gradualmente (através
da fonte de corrente) uma corrente ao circuito magnético com o objectivo de interromper o movimento
do êmbolo, através da variação de viscosidade do fluido. Deste modo, a força que actua sobre o
êmbolo é calculada pela expressão 41 onde 2/10 smg ≈ :
gmF ×= ( 41)
E a corrente é directamente medida a partir de um amperímetro.
A partir da figura 29, é possível encontrar o coeficiente de atrito entre o fluido e a parede do êmbolo,
adaptando a expressão da força total (expressão 36) à equação obtida, a partir de uma aproximação
quadrática ao conjunto de dados experimentais obtidos, obteve-se uma estimativa para o valor do
coeficiente de atrito cη igual a 06.0=ηc .
Figura 29 - Ensaio experimental em regime estacionário, vc=0, para entreferro d=1mm e d=2mm.
Verifica-se também na figura 29 que para um entreferro maior, maior é a corrente de comando, isto
ocorre porque para um mesmo valor de corrente, menor é o campo magnético criado no entreferro
quando este é maior, logo, menor a viscosidade em relação a quando se tem um entreferro menor.

36
5.3 Regime permanente
Para os ensaios em regime permanente os procedimentos seguidos foram os referidos no ponto 3.3,
onde a velocidade linear do amortecedor é calculada a partir da velocidade angular do motor e a força
é medida indirectamente através do binário motor, considerando que a força desenvolvida pelo motor
é a mesma que faz mover o êmbolo do amortecedor.
As figuras 30 e 31 apresentam as curvas características do dispositivo amortecedor construído, para
valores de entreferro d=1mm e d=2mm, respectivamente. Para o entreferro de 2mm a gama de
correntes utilizadas é um pouco maior. Os valores de força e velocidade negativos apresentados,
correspondentes ao movimento descendente do êmbolo e os valores positivos ao movimento
ascendente.
Figura 30 – Curva F(vz) para o entreferro d =1mm.

37
Figura 31 – Gráfico F(vz) quando d=2mm.
A intensidade do campo magnético no fluido magnetoreológico depende da corrente que é aplicada
aos enrolamentos do amortecedor. Deste modo, quanto maior a corrente de entrada, maior será o
campo magnético gerado no fluido. Sendo a força gerada pelo fluido o resultado da mudança na
viscosidade do fluido que por sua vez deve-se a mudança no campo magnético, pode-se então
concluir que a força de amortecimento aumenta com o aumento da corrente.
A partir da curva F(vz) é possível tirar-se o coeficiente de amortecimento ββββ, que é a constante de
proporcionalidade entre a força de amortecimento que se opõe ao deslocamento do amortecedor e a
velocidade do êmbolo do amortecedor, β = dF/dv. As curvas F(vz) são lineares, logo, o coeficiente de
amortecimento é constante.
Na figura 30 e 31, tem-se a curva característica de um amortecedor, onde a força e a velocidade têm
uma relação linear. A viscosidade muda de acordo a intensidade do campo magnético aplicada por
isso o coeficiente de amortecimento pode ser controlado ajustando a corrente do circuito magnético.
Dos resultados experimentais, pode-se obter um valor do coeficiente de amortecimento de 94,25Ns/m
para o entreferro d=1mm e 30Ns/m para o entreferro d =2mm, o coeficiente de amortecimento é
maior para o entreferro d=2mm, porque para um mesmo valor de força aplicada ao amortecedor a
velocidade é tanto maior quanto maior for o entreferro.
Devido ao método de medidas utilizado, os resultados apresentados nas figuras 30 e 31 apresentam
algum erro não quantificado, visto que, a força foi calculada a partir da característica binário-
velocidade do motor a funcionar a velocidade nominal e durante os ensaios o motor trabalhou muito
abaixo dos seus valores nominais, devido a resistência oferecida pelo amortecedor. Comparando
estes resultados com os resultados obtidos a partir do modelo electromecânico do amortecedor

38
simulado conclui-se que embora estes resultados tenham algum erro associado, este não é muito
significativo.
5.4 Potência dissipada
No estudo de dispositivos amortecedores o estudo da potência é de grande importância, porque a
função do amortecedor é transformar a energia mecânica do movimento em energia térmica. No seu
dimensionamento é importante o conhecimento dos valores de potência atingidos pelo mesmo porque
potências fora dos intervalos admitidos provocam danos ao equipamento através do aquecimento a
que este fica sujeito. Neste tipo de amortecedor em particular é necessário trabalhar-se dentro de um
intervalo de temperatura que garante as qualidades e propriedades do fluido (viscosidade), não
devendo estes serem ultrapassados.
A potência dissipada pelo amortecedor magnetoreológico deve-se a dois factores: ao movimento
longitudinal de amortecimento e as perdas por efeito de Joule no circuito magnético.
5.4.1 Potência devido ao movimento do amortecedor
Havendo um movimento do êmbolo no interior do cilindro, há uma variação de energia por unidade de
tempo, isto é, há uma potência dissipada. A potência é definida por:
t
WPv =
( 42)
Onde W é o trabalho que corresponde a energia consumida ao longo de um percurso:
αcos' ××= dFW ( 43)
d’ – é a distância percorrida pelo êmbolo.
Substituindo 43 em 42:
t
dFPv
αcos' ××=
( 44)
α é o ângulo formado entre o ponto de aplicação da força e a direcção do movimento. Neste caso é
o ângulo entre o braço que liga o motor ao amortecedor e o seu valor é de 17º. Sabendo que a
velocidade é o espaço percorrido por unidade de tempo:

39
t
dvz
'
=
( 45)
Substituindo a expressão 45 na 44, tem-se:
αcos××= zzv vFP ( 46)
Como a velocidade e a força estão em fase, a expressão 51 transforma-se em:
MMv vFP ×= ( 47 )
5.4.2 Potência devido ao efeito de Joule no circuito magnético
Como os enrolamentos são constituídos de fios de cobre há dissipação de potência na forma de calor
por efeito Joule, que surge pela passagem de uma corrente, i, por um condutor de determinada
resistência, r. Essa potência é determinada pela expressão:
2irPJ ×=
( 48 )
A resistência aos terminais do enrolamento foi medida com um ohmímetro, e é igual a 4Ω. Sendo
constante a resistência dos enrolamentos, as perdas de Joule dependem da corrente que é aplicada
ao circuito, conforme a tabela 5.
Tabela 5 – Variação da potência por efeito de joule com a corrente.
I [A] P [W]
0,1 0,4
0,2 0,8
0,3 1,2
0,4 1,6
5.4.3 Resultados da potência total dissipada pelo amortecedor
A potência total é a soma das duas potências, por efeito de joule e devido ao movimento do
amortecedor:
JvT PPP +=
( 49)
Sendo as correntes utilizadas muito pequenas, pode-se desprezar a potência por efeito de Joule e
ter-se apenas em consideração a potência devido ao movimento do amortecedor.

40
A figura 32 apresenta valores de potência em função da velocidade do amortecedor, para valores
constantes de corrente i=0 A; 0,1 A ; 0,15 A e 0,2 A.
Figura 32 – Evolução da potência em função da velocidade linear do amortecedor com entreferro d=1mm.
Dos ensaios efectuados verifica-se que a potência varia com a velocidade independentemente da
corrente aplicada. Também se pode ainda concluir que quanto maior a corrente introduzida no circuito
magnético maior é a potência, porque uma maior corrente obriga a que se exerçam forças maiores de
amortecimento devido a elevação da viscosidade. A potência será maior quanto maior for a
velocidade.
A potência máxima dissipada pelo amortecedor é quando este atinge a velocidade de 1,35 cm/s com
i=0,15A o que corresponde a 4,26 W.

41
6 Conclusões e recomendações
Este trabalho baseou-se na construção e estudo do protótipo de um amortecedor magnetoreológico
que funciona em modo directo. Neste tipo de amortecedor, o amortecimento é gerado pela dificuldade
de passagem do fluido através do entreferro. O circuito magnético é responsável por controlar o
movimento do amortecedor através da variação da viscosidade do fluido que é regulada pela
intensidade do campo magnético.
O tamanho do entreferro é de fundamental importância na construção deste tipo de dispositivo, visto
que a eficácia do amortecedor depende muito do tamanho entreferro, por isso, após a realização de
ensaios com um entreferro de 1mm foi possível aumentar o entreferro para 2mm e deste modo, fez-
se um estudo comparativo dos dois casos. Quanto menor for o entreferro menor o consumo de
energia, podendo-se ter um campo magnético na ordem dos 20kA/m com uma corrente de 0,2A ao
passo que para o entreferro de 2mm este valor de campo magnético se obtém com uma corrente de
0,4A. Portanto, para uma mesma corrente aplicada, o fluido magnetoreológico oferece maior
resistência ao movimento do êmbolo quando o entreferro for menor.
Segundo resultados experimentais, conclui-se que com um pequeno protótipo, como o que foi
construído, se pode amortecer vibrações de força até 350N com uma corrente de 0,2 A para o
entreferro de 1mm e com uma corrente de 0,3 para o entreferro de 2mm.
Recomendo que para aumentar o caudal de uma extremidade do cilindro para a outra, sem prejudicar
o tamanho do entreferro, sejam feitos alguns furos no êmbolo permitindo assim um melhor
escoamento do fluido e deste modo menor será a pressão no interior do cilindro e maior a facilidade
do movimento do êmbolo.
Com o fim de se vencer a pressão que se cria dentro do cilindro, também é solução fazer-se um
cilindro exterior mais comprido permitindo com que haja uma maior liberdade no espaço a ser
percorrido pelo êmbolo, e fazer-se furos na tampa para passagem do ar sem que o fluido transborde.
Esta solução apenas é aplicável para ensaios experimentais do amortecedor.
A utilização de um melhor método de recolha de dados (instrumentos de medida), a fim se obter
melhores resultados ajuda a ter dados com maior precisão.

42
7 Glossário
Deformação de
cisalhamento
É a deformação que sofre um determinado material, devido às tensões de
cisalhamento a que está sujeito.
Fluido não
newtoniano
É um fluido cuja viscosidade varia de acordo com o grau de deformação
aplicado. Como consequência, fluidos não newtoniano podem não ter uma
viscosidade bem definida. Ao contrário dos fluidos newtonianos, os fluidos
não-newtonianos não apresentam uma relação linear entre a tensão de
cisalhamento e a taxa de cisalhamento. Este tipo de fluido não obedece a
lei de Newton da viscosidade.
Fluido newtoniano Fluido que obedece a lei de Newton da viscosidade
Reologia Reologia é o estudo da deformação (sólidos) e do fluxo (fluidos) da matéria
devido a acção de uma força (tensão de cisalhamento).
Taxa de
cisalhamento
É o gradiente de velocidade de cisalhamento por uma determinada
distância.
Tensão de
cisalhamento
Quantidade de força (tensão) aplicada em uma determinada área de um
fluido. A força F, aplicada em uma determinada área A, de um fluido em
contacto com um plano estacionário é a tensão de cisalhamento,
matematicamente definida por:
A
F=τ
Tensão de
deformação inicial
Tensão mínima exigida para que um material comece a fluir.
Viscosidade É o termo que descreve as propriedades de escoamento de um fluido, ou
seja, o atrito das camadas internas dentro do fluido que impõe resistência a
fluir. Também é definido como a medida da resistência interna ou fricção
interna de uma substância ao fluxo, quando submetida a uma tensão
(força). Quanto mais viscosa a massa, mais difícil de escoar e maior o seu
coeficiente de viscosidade.

43
8 Referências Bibliográficas
[1] Mark R. Jolly, Jonathan W. Bender, J. David Carlson, “Properties and Applications of
Commercial Magnetorheological Fluids”, Lord Corporation.
[2] Jung-Hoon Kim, Jun-Ho Oh, “Development of an Above Knee Prosthesis using MR Damper and
Leg Simulator”, Proceedings of the 2001 IEEE International Conference on Robotics & Automation
Seoul, Korea. May 21-26, 2001.
[3] Rotordynamics & Squeeze Film Damper.
[4] http://www.lord.com/tabid/2952/Default.aspx
[5] “Lord Corporation Magnetorheological (MR) Fluid for Automotive Damping Systems. Presentation
to the IIR Suspension and Damping Conference”.
[6] http://delphi.com/news/pressReleases/pressReleases_2006/pr_2006_11_30_001/.
[7] http://www.supercars.net/cars/3347.html
[8] J. David Carllson, “What makes a good MR fluid?”, presented at the 8th International Conference
on Electrorheological (ER) Fluids and Magnetorheological (MR) Suspensions, Nice, July 9-13, 2001.
[8] Mark R. Jolly, Jonathan W. Bender, and J. David Carlson, “Properties and Applications of
Commercial Magnetorheological Fluids”, Thomas Lord Research Center.
[9] www.lord.com
[10] Sadok Sassi, Khaled Cherif, Lotfi Mezghani, Marc Thomas, Asma Kotrane, “An innovative
magnetorheological damper for automotive suspension: from design to experimental characterization”,
2005.