Comportamento Assintótico e Sincronização Robusta de ...
66
Comportamento Assintótico e Sincronização Robusta de Equações Diferenciais não Lineares MÁRCIO FUZETO GAMEIRO Orientador: HILDEBRANDO MUNHOZ RODRIGUES Dissertação apresentada ao Instituto de Ciências Matemáticas e de Computação da Universidade de São Paulo, ICMC-USP, co- mo parte dos requisitos para a obtenção do título de "Mestre em Ciências na Área de Matemática". São Carlos Fevereiro de 1999 'Este Trabalho teve suporte financeiro da FAPESP.
Transcript of Comportamento Assintótico e Sincronização Robusta de ...

Comportamento Assintótico e Sincronização Robusta de Equações
Diferenciais não Lineares
MÁRCIO FUZETO GAMEIRO
Orientador: HILDEBRANDO MUNHOZ RODRIGUES
Dissertação apresentada ao Instituto de
Ciências Matemáticas e de Computação da
Universidade de São Paulo, ICMC-USP, co-
mo parte dos requisitos para a obtenção do
título de "Mestre em Ciências na Área de
Matemática".
São Carlos
Fevereiro de 1999
'Este Trabalho teve suporte financeiro da FAPESP.

AGRADECIMENTOS
Agradeço em especial ao Hildebrando, não só pela orientação, mas prin-
cipalmente pela amizade e dedicação.
Agradeço ao Professor Gaspar pela ajuda na revisão.
Agradeço aos colegas de curso, aos professores e funcionários do ICMC e,
de uma forma geral, a todos que de alguma maneira contribuíram para
a realização deste trabalho.

Resumo
Neste trabalho apresentaremos algumas condições suficientes para dissipativi-
dade e sincronização de sistemas de equações diferenciais não lineares da forma
{ ;,', --.- f (t, z, x + m(t), 71)
onde z = (x, y) E Ift.3 x IR' = IR", w = (u, v) E R3 x IR" = IR" e -Yb 'Y2 E r c R', com m(t) e rh(t) continuas e limitadas. Veremos, também, algumas aplicações
deste tipo de sincronização a sistemas de comunicação.

Abstract
In this work we give some sufficient conditions for dissipativeness and synchro-
nization of systems of nonlinear differential equations of the form
{
i = f(t, z, x + m(t), 71)
ti) = f(t, w, x + ih(t), 72)
where z = (x, y) E IR' X IRn -- 3 = lan , W = ('l , v ) E Ias x IRn- 8 = IRn and 71, 72 E
r c Ir, with m(t) and th(t) continuous and bounded. We also present some
applications of this type of synchronization to communication systems.

Sumário
Introdução 1
1 Dissipatividade e Sincronização 5
1.1 Dissipatividade Uniforme 5
1.2 Sincronização 13
1.3 Aplicações 20
1.4 Exemplos Adicionais 54
Referências Bibliográficas 59
1

Introdução
O objetivo deste trabalho é desenvolver métodos matemáticos para estudar sin-cronização em sistemas acoplados. Vamos considerar dois sistemas de equações diferenciais acoplados, que dependem de parâmetros, e mostrar que se os parâmetros forem suficientemente próximos, então dada qualquer solução do primeiro sistema e qualquer solução do segundo sistema, a diferença entre as duas soluções fica peque-na quando o tempo vai para o infinito. Se os parâmetros forem idênticos, então a diferença entre as soluções tende a zero exponencialmente.
Iremos considerar um tipo de acoplamento parcial, onde o primeiro sistema é de-sacoplado do segundo, e somente o segundo sistema depende do primeiro. Este tipo de sincronização foi tratado inicialmente por Pecora e Carroll em [21] e denominado por estes de Sincronização Master-Slave.
O fenômeno de sincronização tem sido largamente estudado, principalmente em áreas aplicadas. Entre as muitas aplicações podemos citar, por exemplo, osciladores mecânicos e elétricos acoplados, estudados por Afraimovich, Verichev e Rabinovich em [3]; Anishenko, Vadiva.sova, Postnov e Safonova em [5]; Carroll e Pecora em [7]; Chua, Itoh, Kocarev e Eckert em [9]; Chua, Belykh, Verichev e Kocarev em [8]; entre outros. Outra área de aplicações é em Sistemas de Lasers, estudado pelo Prof. R. Roy e seu grupo, como mostrado em Fabiny, Colet e Roy em [12]; Gills, Iwata e Roy em [13]; Gills, Roy, Murphy e Maier em [14]. Aplicações a Sistemas de Comunicação são tratadas por Cuomo e Oppenheim em [10] e 'Presser e Worfolk em [25].
1

Cuomo e Oppenheim em [10] e Tresser em Worfolk em [25] propõem o uso de Sincronização Master-Slave em sistemas caóticos para criptografia de mensagens conforme descrito no exemplo a seguir.
Suponhamos ter uma mensagem a ser transmitida, que será uma função contínua e limitada m: IR —> IR. Consideremos o sistema de Lorenz
{
i = —cx + o-y
Y = rx — y — xz
i = —hz +xy
(1)
que apresenta comportamento caótico. A partir desse sistema construímos dois sistemas chamados Master e Slave respectivamente. O primeiro sistema (Master) será usado para codificar a mensagem e o segundo (Slave) será usado para decodificar a mensagem recebida.
O primeiro sistema é construído da seguinte forma
{
X = —crx +cy
Y = r (x + rn(t))—y — z (x + rn(t))
i• = —bz +y(x +rn(t))
E o segundo como segue
{
á = —o-u + et
ii = r(x(t) + rn(0)—v — w(x(t) + rn(t))
lb = —bw + v(x(t)+ rn(t))
(2)
(3)
onde x(t) é uma solução qualquer de (2).
2

Cuomo e Oppenheim em [10] afirmam que os sistemas (2) e (3) sincronizam. Assim estes sistemas podem ser usados para criptografia de mensagens, da seguinte forma: Com a mensagem m(t), construímos o sistema (2), então resolvemos este sistema, com qualquer condição inicial, e obtemos uma solução (x(t), y(t), z(t)). Então somamos x(t) a m(t), e enviamos a mensagem codificada x(t) + m(t). O receptor da mensagem codificada, x(t) + m(t), usa esta mensagem para construir o sistema (3). Então, após resolver o sistema (3), fazemos md(t) = x(t)+ m(t) — u(t). Como os sistemas (2) e (3) sincronizam, temos que a mensagem decodificada md(t) se aproxima da mensagem original m(t), para t grande.
Neste trabalho iremos abordar este tipo de aplicação, porém com algumas al-terações, como descreveremos a seguir.
Em aplicações práticas, os parâmetros representam algum componente físico, co-mo um resistor em um circuito elétrico por exemplo. Desta forma os parâmetros das equações (2) e (3) serão próximos, mas não exatamente iguais. Assim é importante que a sincronização seja robusta à pequenas variações nos parâmetros.
A mensagem a ser enviada x(t)+7n(t) pode sofrer alguma perturbação durante a transmissão. Sendo assim, no sistema (3) devemos colocar x(t) + fit(t), onde m(t) e riz.(t) são próximas. Na prática, as mensagens podem assumir valores apenas dentro de um certo intervalo. Portanto podemos supor que existe uma constante K > O tal que toda mensagem considerada tem norma menor ou igual a K.
As idéias acima podem ser generalizadas considerando-se sistemas da forma
= f (t, z, x + m(t), 71) (4)
= f (t, w, x + fit(t), 72)
onde z = (x , y) E rts x rtn-s = Rft, w = (u, v) E IR x = Ir, 71,t2 E r c iam e m, rit E CIAR, IR?), onde CK(IR, Ri denota o espaço de Banach das funções
: IR continuas e limitadas, com Hal' = suptER ila(t)11, e tal que liali K. Neste trabalho iremos estudar sistemas da forma acima. A estratégia para provar
3

a sincronização para o sistema (4) consiste primeiro em provar que o sistema é uniformemente dissipativo, ou seja, que existe um conjunto limitado E, independente dos parâmetros, tal que toda solução de (4) entra em B em tempo finito e não sai mais dele, para os parâmetros variando em alguma região. Isto é feito usando-se funções tipo Liapunov associadas ao sistema (4). Após provada a dissipatividade, usamos desigualdades integrais e estimativas exponenciais para provar a sincronização dentro do conjunto limitado E.
No Capitulo 1 apresentaremos alguns resultados que garantem a dissipatividade e a sincronização do sistema (4). Neste Capitulo apresentaremos também algumas aplicações à sistemas de comunicação.
4

Capítulo 1
Dissipatividade e Sincronização
Neste capítulo veremos alguns resultados sobre dissipatividade e sincronização e, veremos também, algumas aplicações a sistemas de comunicação.
Durante todo este capitulo, A denotará um subconjunto de E, onde E é um espaço de Banach e 1' denotará um subconjunto de IR'.
1.1 Dissipatividade Uniforme
Seja f E C(IR x x A, R") Lipschitz em limitados com relação a x E IR", isto é, para cada E A e cada conjunto limitado B c R x R", existe uma constante
> O tal que
xl, - f(t, x2, /-11x1 - x211, V(t, (t, x2) E B. (1.1)
Consideremos a equação
5

= f (t, x, A). (1.2)
Denotaremos por J (to, xo, A) = (t- (to, xo, A), ti- (to , xo , A)) o intervalo maximal de existência da solução x(t, to, xo, À) da equação (1.2) com condição inicial x(to ) = xo.
O teorema seguinte nos dá condições suficientes para que as soluções da equação (1.2) sejam uniformemente limitadas.
Teorema 1.1.1. SejaV : IR x IR" x A -+ IR uma função de classe C1 . Suponhamos que existam funções contínuas a,b,c : IRn -+ IR limitadas inferiormente, tais que, para todos (t, x, À) E IR x IR" x A, temos
a(x) V (t, x, b(x)
—V(t, x, A) c(x)
onde
a ii(t,x, A) := —a v(t,x, A) +V(t, x, f (t, x, A).
at ax
Vamos assumir também que:
(i) a(x) -+ +oo quando lixil -3 +oo.
(ii) Existe p> O, tal que o conjunto
Cp := {x E Ir : c (x p}
é não vazio e limitado em .
6

Seja r > O suficientemente grande de forma que
r> sup b(r xECF,
Seja Ar := {x E Rn : a(r) < r}. Então as seguintes conclusões valem para a equação (1.2):
(a) Dados to E R, zo E R" e A E A, temos que t±(to, zo, À) = +oo e existe t1 > to, tal que, para todo t > ti , z(t,to, to, À) pertence ao conjunto limitado Ar.
(b) Se r(t) é uma solução de (1.2) definida para todo t E R, com suptER Ilx(t)11 < +oo, entclo x(t) E itr para todo t E R.
Demonstração: (a) Dados to E R, zo E R" e À E A, mostremos primeiro que t±(to ,x0 ,À)= +oo. De fato, suponhamos que t±(to, x o, À) < +oo. Então temos que Ilx(t, to, xo, À) II +oo quando t -4 t+ (to , zo , À). Assim existe O < 7- < t+ (t0 X0) À) tal que r(t,to,ro,À) 0 C,,, para todo T < t < t+ (to, zo, À). Segue então que c(x(t, to, xo, A))> p para todo T < t < t+ (to, Xo, À). Assim
r(t, to, zo, ,‘), À) a' c(x(t, to, zo, ,‘)) > P
logo
I. 7 (t, r(t, to, zo, À), À) < — p < O
para todo /- < t < t+ (to, zo, À). Desta forma a função t 14 V (t, (t, to , zo , À), À) é decrescente para r < t < t+ (to, zo,À), o que é um absurdo, pois ljx(t, to, xo,À)0 -4 +oo quando t t+ (to, zo, À). Portanto t+ (to , xo, À) = +oo.
Mostremos agora que existe t1 > to tal que x(t i ,t0 ,x0 ,À) E Cp. Suponhamos que não. Então para todo t > to temos que x(t,t0 , x0 , À) S C,,, o que implica c(x(t, to, xo, À)) > p. Assim
7

(t, x(t, to, x0, À), À) c(x(t, to, x0, À)) > p
e então
(t, x(t, to, xo, À), < — p < O.
Isso implica que t V (t,x(t,to,x0 , À), À) é uma função decrescente de t. Como V (t, x(t, to, xo, À), À) a (x(t, to, xo, À)) e a é limitada inferiormente, temos que t V(t, x(t, to, xo, À), À) é limitada inferiormente. Portanto temos que existe e é finito o limite
teco V (t, x(t, xo, À), À).
Então temos que para todo t > to, existe st E (t,t + 1) tal que
V (t + 1, x(t + 1, to, xo, À), — V (t, x(t, to, xo, À), = 1.7 (st, x(st, to, xo, À) < —P.
Fazendo t +cio obtemos uma contradição, pois o lado esquerdo da desigual- dade acima tende a zero. Portanto existe t1 > to tal que
x(ti, to, Xo, À) E Cp.
Vamos mostrar agora que x(t, t0, x0, A) E A,. para todo t > ti. Suponhamos que não. Então existe t2 > h tal que x(t2 , to, xo, À) Ø Ar e assim
V (t2 , x(t2, to xo, A), a(x(t2, to xo, A))> r. (1.3)
Como x(t i , to, xo, À) E Cp, temos que
8

V (th x(th xo, À), À) S. b(x(ti, xo, À)) < r. (1.4)
Assim de (1.3) e (1.4) segue que existe r E (t1, t2) tal que
V(r, x(r, to xo À), = r
e
V (r, x(r, to, xo, À), À) > r, Vt E (r, t2)-
Como, para x E C4,, temos que V(t, x, À) < b(x) c r, segue que x(t, to, xe, À) 0 Cp, para t E (r,t2 ). Portanto c(x(t, to, xo, À)) > p para todo t E (r,t2 ). Logo
-fr(t, x(t, to, xo, À), À) c(x(t, to , xo A))> P
e assim
(t, X(t, to, xo, 4A) < Vt E (r,t2),
o que implica que t E (r,t2) 1—> V(t,x(t, to, x,À), À) é uma função decrescente de t. Mas isso é uma contradição, pois V(r, x(r, to, xo , À), À) = r e V (t2, x(t2 , to, xo, À), À) > r. Portanto.temos que
x(t, to, xe, À) E ,4,, Vt >
(b) Suponhamos que x(t) é urna solução de (1.2) definida para todo t E IR e tal
que suptER ilx(t)li < +cc. Mostremos que x(t) E Ar para todo t E IR. De fato, suponhamos que exista r E IR tal que x(r) 0 4. Então temos que x(t) 0 Cp para
9

todo t < 7, pois se x(s) E para algum $ < r teríamos, pela demonstração do item (a), que x(t) E A1. para todo t> s, o que contradiz o fato de que x(7) Ø À,..
Portanto —17"(t, x(t), À) > c(x(t)) > p e assim 1.7(4 x(t), À) < —p, para todo t < 7.
Então para todo t < 7, existe st E (t — 1,t) tal que
V (t, x(t), À) — V(t — 1, x(t — 1), À) = (st, x(st ), À) —p.
Isso implica que
e
e assim
V (r, x(r) , À) +p S V(r - x(r - 1),À)
V('r- x(r -1), À) + p SV(r — 2, x(r — 2), À)
V(7, x(7), À) -I- 2p S V(7 — 2, x(7 — 2), À).
Prosseguindo indutivamente obtemos
V(7, x(7), À) np V(7 — n, x(7 — n), À).
Da desigualdade acima segue que V(7 —n, x (7 —n), À) —> +oo, quando n —> +oo, o que é uma contradição, pois V(t, x(t), À) < b(x(t)) e como suptat ilx(t)11 < +00, segue que b(x(t)) é limitada, o que implica V(t, x(t), À) limitada. Portanto
X(t) E .Ár, Vt E R.
Observação 1.1.1. No Teorema 1.1.1 se tivermos que c(x) —> +oo quando 114 —> +o°, então a hipótese (ii) estará satisfeita.
10

Exemplo 1.1.1 (Equações de Lorenz). Consideremos o sistema de Lorenz
{
± = —o-x + cry y = rx — y — xz Z = —bx + xy
(1.5)
Seja À := (o-, r, b) e seja
A := { (o-, r, b) E iFt.3 : < a < am, rm <r<rM e
onde O < a,,, < am, O < r„, < rm e O < < bm.
Fazendo u := y, z) E rt,3, e
f (u, À) := (—o-x + o-y, rx — y — xz, —bz + xy),
tomemos a seguinte função de Liapunov
V(x, y, z, À) = x2 + 1-7—y2 + — (r + 1))2. 2r 2r 2r
Então temos que
V(x, y, z, = x2 + + (.z — (r + 1))2 ‘
2+X2 ey2 2 1:rt(Z - (r + 1))2 = 1 x2 4_ tsi_n2 4_ (z2 - 2(r + 1)z + (r + 1)2) 2rm ' 2rm ' 2rm
_L x2 4_ 4_ ara_n2 ara_ ( z2 _ 2(r +1)1z1+ (r + 1)2) 2rm 2rm d 2rm
_L .x2 4_ aa_n2 4_ /a (z2 2(rm 1)1ZI (Tm -I- 1)2) =: a(x,y, Z). 2rm ' 2rm 2rm
11

Ainda
V(x, y, z, À) = 2.4x2 ± ti y2 + tf. (r + 1))2 <
2:..„2 x2 _i_ e_y2 (r + 1))2 = (z2 2(r + 1)z + (r + 1)2)
2r (z2 + 2(r + 1)1z1 + (r + 1)2)
en- (z2 + 2(rm + 1)1z1 + (rm + 1)2) =
(IZI ((ri.,+ 1))2 b(x , y , z).
Temos também que
V(x, y, z, À) = t.x(—crx + cry) + y(rx — y — xz) +(z — (r + 1)) (—bz + xy) =-• —f.x2 + xy — y2 + crxy — ,z2 + fl,b7(r + 1)z — 4". (r + 1)xy =
ty2 Z2 + (*:(7. + 1)z.
Assim
—V(x, y, z, À) = .7:x2 + y2 + ¶ z2 — (r + 1)z >
e x2 + y2 + z2 £Afts,. (rm + 1)1z1rM = graxa ± riva,2 fariSri,rm (z2 cemnibbffernim (rm + 1)1zI) = Tm TAr7
Lrm-X2 chay2 embm nirmrr': (r + 1)) (2̀ízil—m—fri-embb Jr. (rm + 1)) = Tm m 2amb
2 Tm T
2
zusti2 gatro, (I zi aMbMr" fr 2 rM
— (EM-kat r 1))2 =: c(x , y , z). Tm ru I 2.7„,b,„r„, M tr„,b,„
Claramente as funções a, b e c satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado B c IR3 tal que se (x(t), y(t), z(t)) é uma solução da equação (1.5), então existe t1 tal que (x(t), y(t), z(t)) E B para todo t > ti.
12

120-,
100-,
80,.
60N
N
40,
20.
O-,
-20 100
< >
-100 _40 _ao -20 -10 O 10 20 30 40
Y x
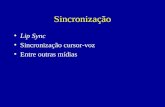
Figura 1.1: Estimativa do Atrator de Lorenz
Na Figura 1.1 mostramos um esboço do atrator de Lorenz e da região de limi-tação.
1.2 Sincronização
Sejam f, g E COR x IR" x IR" x A, Fr) satisfazendo a condição de Lipsehitz em limitados (1.1) com relação a (x, y) E IR" x llr. Consideremos o sistema
13

{± f (t, x, y, Ai)
g(t,x, y, A2) (1.6)
Definição 1.2.1. Dizemos que (1.6) sincroniza (globalmente) se dado E > O, existe 5> O, tal que, se IN - jj <5, então para todos to E IR, e (xo, Yo) E Rn x Rn temos que
limsupfly(t,to,xo,yo, Ài,À2) X(ty tO2 YO, Ah A2)11 < E. t->-1-03
Teorema 1.2.1. Suponhamos que:
(i) Existe um conjunto limitado E C Rn tal que, para todos to E /R, (ra, Yo) E Rn X Rn e AI, À2 E A, a solução (x(t, ta, xa, Yo, Ai, )z), y(t, to, xa, Yo, Ai, )z)) do sistema (1.6) satisfaz: tito,xo,Yo,A17 À2) = +00 e existe ti > to tal que
(X(t,i(:), X02 YO2 Ah A2), y(t, to, ro, YO2 AI; À2)) E B x E,
para todo t> ti.
(ii) Existe uma função contínua F : R x Rn x Rn x A -> .C(Rn) tal que, para todos t E /R, (x, y) E Rn X R" e À E A, temos g(t,x, y, À) - f (t,x, y)) = F (t, x, y, )t)(y -
(iii) Existi uma constante k > O tal que, para todos to E R, (xo, Yo) E Rn x Rn e),1,),2EA, existem a>0eM>0 tal que F(t,x(t),y(t),À2) de-fine um operador de evolução T(t, s, A2), com IIT(t, s, A2)11 < Mc-°@-$) e
ftt, IIT(t, s, Az)lids < k para todos t i < s <t, onde x(t) := x(t,to,x0,Y0, Ai, A2) e y(t) := y(t, to, ro, Yo, AI; )2)•
(iv) Existe uma função H: R+ -> IFt.4., contínua em O E IR.+, com H(0) = O, tal que, para todos Ai, À2 E A, xEBetE R, temos
Ilf (t, x, y) À2) f (t,x,y, AIA 11(11À2 — Adi).
14

Então dados to E 1R, (xo,Yo) E Rn X Rn e À1, À2 E A temos que
x(t)II 5 — + kH(I1À2 — Ai II)
para todo t > 4, onde x(t) := x(t, to, xo,Yo, À, A2), Y(t) := Y (t , to, xo, Y0, 1\ 1,1\2),
X1 := x(ti) e := Y(t1)-
Demonstração: Dados to E /R, (xo, yo) E Rn X Rn e AI, A2 E A, seja z(t) := y(t) — x(t).
Temos•que
y — = g(t, x, y, A2) f (t, Al) = = g(t, x,y, A2) f (t, x, Y, A2) f (t, x, y, A2) f (t, Al) = = F (t, x, y, A2) — x) + (f (t, x, y, A2) f (t, x, y, AI)) •
Então
.i(t) = F (t, x (t), y(t), À2)Z(t) (f (t, x (t), y (t), A2 ) — f , x(t), y(t), Ai)) .
Considetemos o problema de valor inicial
{
lb = F (t, x (t), y(t), A2) w + (f (t , x (t), Y(t), A2) — f (t, x(t), y(t), Ai)) (1.7)
w(t i ) = z(ti) =y' — xi
Seja T(t, s, À2) o operador de evolução de ia = F (t, x (t), y(t), Ma. Então a solução da equação (1.7) é dada por
15

w (t) = T(t,t1, A2)w (ti) + f T(t, tr, A2) (f (t, x(t), Y(t), A2) f (t, (t),y(t), À1 ))dr.
Como (t, s, À2)11 Me-0(t-8), ftt,IIT(t, s, A2) lids < k e Ilf (t, x(t), Y(t), A2) —
f (t, x(t), (t), A1)11 S H (1l A2 — A111), Para ti S s S t, segue que
¡Int) ti; A2S(t1)11+
ft: 'Int) TI A2)11 ilf z(t),y(t), A2) — f (t, x (t) , y(t), À1 )Ijdr
H(11À2 — A111) fit, ¡Int 1-7 A2)Ildl"
- Ile-a(t-td + kH(IIÀ2 — A111)-
Portanto temos que
IIy(t) r(t)11 — xijle-°("I) +kHalÀ2 —
para todo t > t i .
Teorema 1.2.2. Suponhamos que:
(i) Existe um conjunto limitado 8 C IR" tal que, para todos to E IR, (x0, yo) E IRIZ X Ir e Ai, A2E _ A _, a solução (x(t,to,ro,Y07 À17 A2), Y(t7 to, X0) yO, AI; A2)) do sistema (1.6) satisfaz: t÷(to,xo,Yo, Al) A2) = +00 e existe ti > to tal que
(x(t, to, x0) YO, Al.) A2), y(t,to, x0, yo,À1, À2)) E 8 x
para todo t > t l .
(ii) Existe uma função V : IR x IR" x A IR, de classe C', e existem constantes positivas k l , p, al a2 e fi > 1, tais que
y—x, À)+(VW (t, y—x, À), g(t, x, y, À) —f(t, x, y, À)) —pV (t, y —x , À),
16

— xila V(t, y — x, À) 5 «211Y - AI°
e
II VV(t, y — x,
para todos (x, y)E13x/3,tEIR.eAEA, onde
OV VV(t, x, À) = (t, x, À), (t, x, À))
oxi aXn
e VV(t, y — x, À) = VV(t, z, À) I.._2.
(iii) Existe urna função H1 : IR.1. -4 RA-, contínua em O E ELF, com H1(0) =O, tal que, para todos A1,À2EA,xE13etEIR, temos
lif(t, x, y, A2) f (t, X, y, A1)11 Hl (11A2 A1l1)•
Então dados to E IR, (xo, Yo) E IR" x e AI, A2 E A temos que
- x(t)II Mb' - + kH(11A2 - Adi)
para todo t ti , onde x(t) := x(t,to, xo, Yo, À2), y(t) := a := plfi,k:=( pk,+)1113 , M:= (a2/ai)"fi e H : IR+ -4 IR+
é dada por H(r) := (Hl (r)) 1/13.
Demonstração: Dados to E IR, (xo, Yo) E Rn X IR" e A1, Az E A, temos que
— = g(t, x, y, A2) — f (t,x, y, AI) =-
= (9(t, x, y, A2) — f (t, x, y, A2)) + Cf (t, X, y, A2) f (t, x, y, AI)).
(1.8)
(1.9)
A derivada de V(t, y — x, A2) ao longo das soluções do sistema acima é dada por
17

y — x, À2) = AV (t, y — x, À2) (VV(t, y — x, 2), g(ty x, y, À2) f (t, x, y, A2)) y — x, A2), f (t, x, y, 1\2) f (t, x, y, AI)).
Assim
(t , y(t) — x(t), A2) = &V(7", y(t) — x(t), À2) ir=t
+(VV (t, y(t) — x(t), À2), g (t, x(t), y(t), A2) f (t)X(t), y(t), A2))
+(VV(t, y(t) — (t), A2), f (t, x(t), y(t), A2) f (t, x (t), (t), Ai)).
Para t > t1 temos que (x(t), y(t)) E .8 x 8, então
V (r, y(t) — (t), A2) =t
+(VV(t, y(t) — x(t), A2) g (t, x (t), (t), A2; f (t, x(t), Y(t), 1\ 2) ) —PV (t7 Y(t) x(t), À2)
e
(VV(t, y(t) — x(t), A2), f (t? X(t), y(t), A2) — f (t, x(t), y(t), AI) ) I pv (t, y(t) — x(t), A2) f(t, X(t), y(t), A2) f (t, x (t), y (t) , Ai)
5 k1i4(11À2 — Aill).
Portanto
(t, y(t) — x(t), A2) —pV (t, y(t) — x(t), A2) ± ki1/1(11À2 À111)•
Logo
ePtV(t, y(t) — x(t), À2) pePtV (t, y(t) — (t), A2) S kiePtHi (1l A2 — A111)
18

e assim
(e(417(t, y(t) - x(t), A2)) 5 kiesHi(11À2 — MD.
Integrando esta última desigualdade de t1 a t obtemos
f t e —d (64"V (r,y(r) - x(7 ), A2)) dr 5 kiHi. (iPa - II) f er, dr,
t1 dr
e assim
ePtV (t, y (t) - x (t), A2) S ePti V (ti, Y(ti) - x(ti), A2) + HIÜIÀ2 - II) (et - ePtI) 5 ePti V (ti , y(ti) - x(ti), A2) + (11)'2 - II) ePt•
De onde segue que
17(t, y(t) - ,r(t), A2) S 6-19(t-ti)17(th Y(t1) X(t1)) A2) ± iii-111(11A2 - A111).
Assim de (1.8) segue que
ceilly(t)-x(t)11° v(t,y(t)- x(t),À2) < e-P(t-ti)V(th Y(t1) X(t1), A2) ± Al II)
a2CP(t-ti)liy(4) - x(ti)ils + - ID•
Então temos que
Ily(0 - x(011 <
1- ese-P(t-ti)Hy(4) - x(4)11° [ze-p(t-t1)11Y(tI) —
+ - II/ 1/fl
Adi)] 1/0 vp
ki,41/1(liA2 = Me-a(t-t011y(t1) — kHa1À2 —
19

onde usamos que (a + b)'IP < aVP + P, para a, b>0ep> 1.
Portanto temos que
11Y(t) x(t)11 MIIYI - k11- 01À2 À111)
para todo t > ti.
Corolário 1.2.1. Se o sistema (1.6) satisfaz as condições do Teorema 1.2.1 ou do Teorema 1.2.2, então o sistema (1.6) sincroniza.
Demonstração: Dado e > O, como H : IR+ -) Ift+ é contínua em O E IR+, com H(0) = O, existe .5 > O tal que se IN -4 <1 então H(11A2 - A111) < á. Assim se 11A2 -À' < .5, dados to E IR e (xo, Yo) E Rn X Rn, seja r > t1 tal que e-a(t—ti) < 217, para todo t > r. Então
IlY(t) to) x0, yO) Al.) )'2) X(t ) t02 2:0) YO3 Al) )'2) II <
Me-a(t-gd + kil(11A2 - A111) < M2+1 k =
para todo t > r. Portanto o sistema (1.6) sincroniza.
1.3 Aplicações
Nesta seção veremos algumas aplicações de sincronização de equações diferenciais à comunicações. Mais especificamente, veremos algumas aplicações à. criptografia de mensagens. A mensagem a ser criptografada será uma função m(t) contínua e limitada.
20

Mais precisamente, seja f E C(IR, x 1R x IRE x r, IR") satisfazendo a condição de Lipschitz em limitados (1.1) com relação a (x, y) E IR," x IR?, onde s < n. Seja rn, fiz. E CK (R, IRE). Consideremos o sistema
= f (t, z, x + rn(t), 71)
= f(t, w, x + fiz (t), 72) (1.10)
onde z = (x, y) E RE X En-8 = R" e w = (u, v) E RE x an-8 = IR".
Suponhamos que m(t) é a mensagem a ser criptografada e que o sistema (1.10) sincroniza. Então resolvemos a primeira equação (que é independente da segun-da) com qualquer condição inicial. A seguir construímos a mensagem criptografada m(t) fazendo m(t) = m(t) + x(t). Então enviamos a mensagem criptografada rne(t). Na transmissão poderá ocorrer alguma perturbação (pequena) na mensagem enviada. Por isso a mensagem recebida será rn,(t) =i(t) x(t), onde m(t) e w(t) são próximas. O receptor usa a mensagem recebida rn,(t) = ti(t) x(t) para construir a segunda equação. Então resolve-se a segunda equação, com qual-quer condição inicial, e a seguir constrói-se a mensagem decodificada rnd(t), fazendo rnd(t) = rai.(t) — u(t). Então, como o sistema (1.10) sincroniza, para 71 e 72 sufi-cientemente próximos, temos que w(t) e z(t) estão próximos para t grande. Assim u(t) se aproxima de x(t), e então rnd(t) se aproxima de rn(t), para tempos grandes.
A seguir veremos alguns exemplos deste tipo de aplicação.
Exemplo 1.3.1 (Equações de Lorenz). Consideremos o sistema de Lorenz
{
X = —o-x + o-y
y = rx — y — xz i = —bz + xy
Sejam m, fiz. E CK (IR, IR). A partir do sistema acima construímos os sistemas
21

{{
± = —crix + criy ü = ri(x +m(t))—y — z(x +m(t)) i = —1)1z + y(x +m(t))
ii. = —cr2u + a2v V = r2(x + fft(t))—v — tv(x + fiz(t)) ti) = —b2w + v(x + riz(t))
(1.12)
(1.13)
onde (cri, ri, bi), (cra, ra, b2) E e
:= {(cr,r, b) IR3 : < < om, rn,<r < rm e
com O < o-m, O rn, < rm e O < < bm. Sejam A = x CK(IR, TO e = (7, m(t)) E A, onde 7 = (cr,r,b) E 1".
Mostremos, primeiro, que os sistemas (1.12) e (1.13) satisfazem as condições do Teorema 1.1.1.
Para o sistema (1.12) consideremos a seguinte função de Liapunov
onde A1 = (cri, ri, bi, m(t)).
Então temos que
Vi(x, y, z, AI) = X2 + aly2 + o-1 (z — n)2 > X2 + — n)2 =
x2 + CmY2 + cr,,,(z2 — 2nz + n2) > x2 + cr„,y2 + an,(z2 — 2rmizi + = 2:2 + cr„,y2 + o-„,(1z1 — rm)2 + — rm2) =: (x, y, z).
22

14(x, y, z, Ai) = x.2 + ai y2 + (z — n)2 < x2 + amy2 + CM (Z — n)2 =
x2 + a my2 + a m (z2 — 2nz + n2) < x2 -I- my2 am(z2 + 2r /giz' r1?) = x2 + m ± am az' + r /t)2 bi (x, y, z).
Temos também que
1:4(x, y, z, Al ) = 2x (—aix + aiy) + 20iY (ri (x + rrb(0) — y — z(x + rrb(t)))± 2a1(z — n)(—biz+ y(x+rn(t))) —2a1x2 + 2a1xy + 2air iy(x + m(t)) — 2uly2 — 2aiyz(x + m(t)) —2a1b1z(z — + 2u1y(z — + m(t)) = —2a1x2 + 2cr1xy + 2cri ny (x + m(t)) — 2a' y2 — 2aiyz(x + m(t)) —2a1 b1z2 + 2cr1b1nz+ 2alyz(x + m(t)) — 2a ir (x + m(t)) —2a1x2 + 2cr1xy — 2a1y2 — 2a1b1z2 + 2a1b1nz.
Assim
Ai) = 2cr1x2 — 2a1xy +2uly2 + 2aibiz2 — 2cribinz = cr1x2 a1x2 _ 2a1xy +uly2 +0"iY2 + 2a1b1z2 — 2a1b1nz =
a1 x2 + (x — y)2 ± ai y2 + 2cr1b1z2 — 2aibinz > a„,x2 a 2 + 2ambmz2 — 2ambmrmizl =: ci(x, y, z).
As funções ai, b e ci obviamente satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado Bi C IR.3 tal que se (x(t), y(t), z(t)) é uma solução do sistema (1.12), então existe ti tal que (x(t),y(t),z(t)) E BI para todo t > ti.
23

De forma análoga, para o sistema (1.13) consideremos a seguinte função de Lia-punov
V2(26, V, 2D, A2) = U2 ± 0-2V2 (72(W — 1-2)22
onde À2 = (o-2, r2, b2, fil(t)).
Então temos que
V2 (14 W, A2) = U2 ± 0-2V2 0-2(W r2)2 >
U2 ± 0-n02 ± 0",n(W — r2)2 = u2 ± 0.7702 ± uni(w2 _ 2r2w + r22) > u2 + crrav2 + o-„,(w2 — 2rm I w + rn,2) = u2 + crv2 + o-Tn(Iw I — rm)2 4- o-,,,(r,,,2 — rm2) =: a2(u, v, w).
172 (U, V, W, A2) =
u2 + crmv2 + crm(w — r2)2 = u2 + o-mv2 + o-m(w2 — 2r2w + r22) < u2 + crmv2 + crm(w2 + 2rml w I + rm2) = u2 + o-mv2 + o-m( lw I + rm)2 =: b2 (u, v, w).
Temos também que
W, A2) = 2u ( —o-2u + cr2v) + 2cr2v (7.2 (x + fh(t)) — v — w (x + 771(t)))+
20-2(w r2) —b2w + v (x + 7h(t))) = —2o-2u2 + 2c2uv + 2c2r2v(x + rn(t)) — 2cr2v2 — 2cr2vw + rn(t)) —2cr2b2w (w — r2) + 2o-2v (w — r2) (x + 771(t)) = —2o-2u2 + 2cr2uv + 2o-2r2v (x + fh(t)) — 2cr2v2 — 2cr2vw (x + r71(t)) —2o-2b2w2 + 2o-2b2r2w + 2o-2vw + 771(t)) — 2o-2r2v (x + 771.(t)) = —2cr2u2 + 2cr2uv — 2cr2v2 — 2cr2b2w2 + 20-2b2r2w•
24

Assim
(11, V, 2V, .À2) = 2a2112 — 20"21.W + 20.2V2 -1- 20.2b2W2 20.2b2r2W =
0.2112 0.2112 20.211V 0.2V2 0.2V2 20.2b2W2 20.2b2V2W =
0.2112 ± 0.2(n — 91)2 ± 0.2V2 ± 20.2b2W2 — 20.2b2V2W >
a,„u2 + av2 + 2arabn,w2 — 2ambAirm w I c2 (u, v, w).
Novamente, as funções az, bz e cz satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado 82 C IR3 tal que se (u(t), v(t), w(t)) é uma solução do sistema (1.13), então existe tz tal que (u(t), v(t), w(t)) E 132 para todo t > tz.
Sejam 13 = B U /32 e t3 = max{ti, tz}. Então para toda solução (x(t), y(t), z(t)) de (1.12) e toda solução (u(t), v(t), w(t)) de (1.13), temos que
(x(t), y(t), z(t)), (u(t), v(t), w (t))) E /3 x 13
para t> t3 .
Portanto os sistemas (1.12) e (1.13) satisfazem a condição (i) do Teorema 1.2.2. Mostremos então que estes sistemas satisfazem as demais condições do Teorema 1.2.2. Sejam
(—az + ay f (x, y, z,u, v, w, À) = r(x ± rn(t)) — y — z (x + m(t))
—bz + y(x + m(t))
(—au + av
g (x , y, z , 14, v , w , À) = r(x +m(t)) —v — w(x +m(t)) •
—bw H-• v(x + m(t))
25

FazendoX=u— x, Y=v—yeZ=w—ztemos
(—crX + crY tu, y, z, u, v, , A) — f (x, y, z, u, v, tu, A) = —y— z(x+sTi(t)) •
—bZ + Y (x + na(0)
Então temos o seguinte sistema
{
).‘ •= —crX + crY
Y = —37 — z(x + m(0)
Z= —bZ + Y (x + m(0)
(1.14)
Para este sistema consideremos a seguinte função de Liapunov
V(X, Y, Z, A) = 2X2 + crY2 + crZ2.
Então temos que
V(X, Y, Z, A) a2 (X2 + Y2 ± Z2) = a2 ii (X, Z)112
e
V(X, Y, Z, A) ai (X2 +Y2 + Z2) = II (X, Y, Z)112,
onde al = inin{2, an } e a2 = max{2, CAIE Portanto a condição (1.8) do Teorema 1.2.2 está verificada.
Ihmos também que
II VV(X, Y, Z, = 11(4X, 2crY, 2crZ)II 20211(X, Y, Z)II 2a2B
onde B > O é tal que 11(x, y, z)II < B para (x, y, z) E B. Portanto a condição (1.9) do Teorema 1.2.2 está satisfeita.
26

Temos ainda que
= 4X (—a X + ai') +2aY — Z (x m(t)))+ 2a Z (—bZ +Y (x + m(t))) = —4a X2 + 4a XY — 2aY2 — 2aY Z (x + m(t)) —2abZ2 + 2aY Z (x + m(t)) = —4a X2 — 2aY2 — 2abZ2 + 4a XY.
Seja p> 0 tal que p < 2an„, p < 214,„ e p < p_, onde O <p < p+ são as duas raizes da equação E2 - (2+ 2am)e + 2a = O. Então
— Y, Z,A)+pV(X,Y,Z, ),)) = 2(2a— p)X2+a(2—p)Y2+a(2b—p)Z2 -4aXY.
Vamos mostrar, pelo critério de Sylvester, que — y, Z, À) ±pV(X,Y, Z, À)) é definida positiva. Para tanto precisamos mostrar que 2(2a — p) > O, 2(2a — Aa(2—p) — 4a2 > O e a(2b — p) (2(2a — p)a(2 — — 4a2 ) > O.
Como p < 2an„, ternos que 2(2a — > 2(2aff, — p) > O. E como p < p_, temos que
2(2a — p)a (? — p)— 4a2 = 2a(p2 — (2 + 2a)p + 2a) 2a (p2 — (2 +2a p 2a) > 0.
Além disso como p < 2b„„ temos que a(2b — > a(2b — p) > O e assim a(2b — p)(2(2a — p)a(2 — p) — 42) > O. Portanto pelo critério de Sylvester temos que
— (V(X, Y, Z, + pV (X ,Y, Z, A)) O
e assim
27

if (X, Y, Z, À) < -pV (X, Y, Z, À).
Portanto a condição (ii) do Teorema 1.2.2 está satisfeita. Vamos então verificar a condição (iii). Temos que
f (x, y, z, ti> 14 tV3 A2) "-" f (x, IV3 À1) =
((r2 — ri)x + r277/(t) — ri/n(0 — (fit(t) — m(t))z) =
—(b2 — bOz + frii(t) in(0)Y
(—(a2 — al)x + (a2 - al)Y (r2 — rOx + (r2 — ri)fit(t) + (712.(t) — m(t))ri — (772.(t) — m(t))z
— (b2 — bi)z + fril(t) — m(t))Y
Assim segue que
Ilf (x, y, z,u,v,w,À2) f (x, y, z, u, v, w,À1)11 Ia2 —0i11X1 + Ia2 —oiIy + Ir2 — rilixi + Ir2 — riJIIfihII
— milri + — mll + Ib2 — bijzj + — millyl 10'2 — lB + 10.2 — ad/3+ 17-2 — IB + Ir2 — IK
+11711, milrm + ¡lã/ — +j1)2 - + Hitt - milB = 2B1a2 — + (K + 1r2 — ril + B1b2 —b,I + (rm + 2B)11772. — mil.
Então a condição (iii) do Teorema 1.2.2 está satisfeita.
Portanto os sistemas (1.12) e (1.13) satisfazem as condições do Teorema 1.2.2, e assim pelo Corolário 1.2.1, temos que os sistemas (1.12) e (1.13) sincronizam.
28

Nas Figuras (1.2) e (1.3) temos algumas simulações mostrando a sincronização dos sistemas (1.12) e (1.13). Nestas simulações foram usados os seguintes valores para os parâmetros e condições iniciais respectivamente: ui = 10, r1 = 28, b1 = 8/3, cr2 = 10 + 1/100, r2 = 28 + 1/100, b2 = 8/3 + 1/100, m(t) = 3 cos(5t), tiz(t) = 3 cos(5t) + (1/100) sen(t), x(0) = 1, y(0) = 30, z(0) = —10, u(0) = —5, v(0) = —20 e w(0) = 20.
100
80
60
40
20
5 10 15 20 25 30
(a) ix(t)-u(t)i-Fly(t)-v(t)j-Fiz(t)-w(01 (b) (x(t), y(t)) = (tt(t), v(0) = - - -
Figura 1.2: Sincronização do Sistema de Lorenz
29

(a) m(t) = s(t) +m(t) = - - - (b) rn(t) = ind(t) = - - -
Figura 1.3: Codificação de Mensagens com o Sistema de Lorenz
Exemplo 1.3.2. Consideremos o sistema
{
± = —a x + cy ú = h(t)x — y — x .z .*=—bz+xy
(1.15)
onde h : IR -4 IR é contínua e limitada. Observemos que para h(t) r temos o sis-tema de Lorenz (1.11). Sejam m, fiz. E CK(111, R3), onde m(t) = (mi (t) , m2 (t) , m3 (t)) e fit(t) = (t), 1712 (t), 7713 (t)) . Contruimos então os seguintes sistemas
{
± = —c i x + 0-1Y
.* = —b 1.z ± (x + rni(t)) (Y + m2(t))
(1.16)
30

{
ti = —a2u+ a2v b = h(t)(x + ?hl (t)) — v•— (x + riti(t)) (z + fha (0)
á = —b2w + (x + /741(0) (Y + ?fia (0)
(1.17)
onde (ai, bi), (o-2,!,2) E r e
r {(a,b) ER2 :a„, < a <am e b,,,<b < bm },
com 1 <Um < am e O < bff, < bm. Poderíamos pedir apenas que an, > O, mas isto
será feito num trabalho futuro. Sejam A = r x CKOR,R3) e À = (7, rn(t)) E A,
onde 7 = (a, b) E r.
Mostremos, primeiro, que os sistemas (1.16) e (1.17) satisfazem as condições do
Teorema 1.1.1.
Seja L > O tal que Ih(t)1 < L e seja M = max{L,K}. Para o sistema (1.16)
consideremos a seguinte função de Liapunov
V]. (X? Y,Ai) = M(201 + 1) + 1 2
± 1 (
M2 (2b1 ± 1) \ X2 M m )
onde A1 = /4, rn(0) •
Então temos que
(x, z, Ai) = )2 2m2(2b1.4.1) z ± [m2(261+112) >
bt 2M2(26:+1) izi [ M2(26m+1)1 2) = b
bm M(26,n+1) 2 1 2 1 (Ii M2(26m+1)) 2+ ambm X ± my m ZI bm
M(261+1) X I 2 •- 1.2 _E 1 (z M2(261+1)
M(2bm+1) z2 Til y2 ± ml (z2 ombm
M(2bm-F1)x2 kr. y2 ± ml ( z 2 ombm
m3 (2±// ri±j.) _ m3 ebb_V) 2
bm =: ai (x, y, z). 2
31

vi ( x, y, z, Ai) = M(261-1-1) x2 ± i.y2 4., mi (z Mi M 2 (2bi -1-1) ) 2 <
bi M(2bm -1-1) x2 ± ml y2 ± m
o mi% 1 ( 2 Z 2 m2(2bbii +1) z + [m2(2bb,11-1)]2)
m2(2bm+i) izi ± [ bm ) m(2bm+i) x2 ± mi y2 + m ( ombrn bm I
1 z2 ± 2 2(2bm+1)12 m
, m2(2bm+1)) 2 =: bi(x, Y, z). m(2bm+i)x2 Um bm
+ ml y2 ± mi (IZI + bm
Temos também que
1.71(x, Y, z, )i) = 2M(2bi +1) x ( ai x ± 0. 1 bi
7,27 y (h (t) (x + mi (t)) — y — (x + mi (t)) (z + m3(t)))+ 2 (z M2(2b1 +1)) (_bi Z ± (X + Mi (t)) (y + rn2(t))) = m bi
2m(2b1 +1) x2 ± 2/14.(2bi +1) xy ___ 4y2 + A4yh(t)(x + mi (t)) bi bi _ ,4 y (x ± mi (0) ( z ± m3(t)) _ wz ( z m2(2bbii-i-1)) +
h (z m2(2bbi1 +0 ) (x + mi (t)) (y + in2(t)) = 2M(21;e1 +1) x2 ___ . y2 + 7127 h(t)x y 4- kh(t)mi (t)y bi
— -4m3(t)xy — i+f mi (t)m3(t)y — 21,Lf z2 + —m2 rn2(t)x.z+
hm, (t)m2(t)z + 2M(2b1 + 1)z 2m(2b1 +1) b1
m2(t)x
2 /11"(2bbi 1 +1) m1 (t)y 2M(2:1 +1) m1 (t)m2 (t).
Assim
32

y , z , At ) = 2M(2:11-1-1) x2 ± hy2 h(t)xy — tf h(t)trt i (t)y+ Ima (t)xy + hirtt (t)m3 (t)y + 2,4 z2 — kr% (t)xz
2m(zbini+Orn2(t)x+ —r2itn1 (t)m2 (t)z — 2M(2b1 + 1)z + 2M(261-1-1) (t) y 2m(2b51+i)rni (t)rn2(t) >
2M(2111-1-1) x2 ± hy2 ± e. x2 _ bi tElflyi
2K' ii .24(11y1_ ?JIA l xi 2AR;
—2M(2b1 + 1)1.21 2M(261:1-1-1)K x 2M(2611-1)K lyi 2M(2bi 4-1)K2 > 6
2 eX2 114-y2 +11,-122 + (Nr4Mixl — 71A71y1) +
2M2r -1-1))iy i (9IX I — SIZI) — (4M+ (b n+1) > 2: 2m2(b2161-1-1) ix (2M ± 2M(2b1 + 1)) izi 2m3
tif x2 ± by2 z2 2M2 (bm2bm +1) i x i (4m. 2M2 (bni2bm +1)) iyi
amtbm+n —(2M ± 2M(2bm + 1)) I zi ci(x, y, z).
As funções ah bt e ci obviamente satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado BI C IR.3 tal que se (x(t), y(t),z(t)) é uma solução do sistema (1.16), então existe t1 tal que (x(t), y(t),z(t)) E Bi para todo t > ti.
De forma análoga, para o sistema (1.17) consideremos a seguinte função de Lia-punov
V2 (U, V W A2) = u2 a2v2 w2,
onde À2 = (Cr27 b2, fil(t)).
Seja BI > O tal que 11(x, y,z)11 < BI para (x, y, z) E Bi. Então temos que
33

V2(U, V, W, A2) = u2 0.2v2 ▪ w2 >
U2 7niv2 ▪ w2 =: a2 (u, v, w).
V2(U, V, W, ,\2) = u2 cr2v2 ▪ w2 <
u2 amv2 ▪ w2 =: b2(U, V, W).
Temos também que
1'f2(U, V, W, A2) = 2u( — o-2u + o-2v) + 20-2v (h(t) (x + i 1 (t)) — v — (x + (t)) (z + 7723(t))) +
2w (—b2w + (x + (t)) (Y + fii2(t))) =
— 2Cr2U2 20.2V2 2b2w2 20"211V 2a2Vh(t)(X 4- MI (t))
—2a2v(x + 774 (t))(z +m3(0) + 2w(x + frii(t)) (y + mz(t)) = —(72u2 — a2v2 — 2b2w2 — 0.2(u — v)2 + 2a2vh(t)(x + (t)) —2o2v (x + 77/1 (t)) (z + m3(t)) + 2w (x + (t)) (y + 7712(t)) •
Assim
—1.72(u,v, w, A2) = o-2u2 + cr2v2 + 2b2w2 + cr2(u — v)2+ 2a2v(x + rnd (t)) (z + 771,3(t)) — 2a2vh(t) (x + r7/1 (t)) —2w (x + 7'74 (t)) (Y + faz(t)) ?- o-2u2 + a2v2 + 2b2w2 + o-2 (u — v)2 —2a2 (BI + K)(L + B1 + K)Ivi — 2(B1+ 1021wl 7mu2 + 7mv 2 +2bmw2 — 2(B1 + K)2 Iwl —20-m(B1 + K)(L + B1 + K)iv =: c2(u, v, w).
Novamente, as funções a2, b2 e c2 satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado B2 C IR3 tal que se (u(t),v(t),w(t)) é uma
34

solução do sistema (1.17), então existe t2 tal que (u(t), v(t), w(t)) E E2 para todo t > t2.
Sejam E = Ei U 52 e t3 = max{ti,t2}. Então para toda solução (x(t), y(t),z(t)) de (1.16) e toda solução (u(t), v(t), w(t)) de (1.17), temos que
((x(t), y(t), z(t)), (u(t), v(t), w(t))) EExE
para t > t3.
Portanto, os sistemas (1.16) e (1.17) satisfazem a condição (i) do Teorema 1.2.1.
Mostremos que estes sistemas satisfazem as demais condições do Teorema 1.2.1. Sejam
(—o-x + ay
f(x, y, z, u, v, w, À) = h(t)(x + Int (t)) — y — (x + Int (t)) (z ± 'n3 (t)) —bz + (x + mi(t))(y + Inz(t))
(—cru + av g (x, y, z, u, v, w, À) = h(t)(x + mi (t)) — v — (x + mi (t)) (z + ma (t)) •
—bw + (x + mi(t)) (y + Tri2 (t))
Então temos que
g(x,y,z,u,v,w, À) — f (x,y, z, u, v, w, À) = —a
O O
() a —1 O
O O
—b
u — x v — y •
35

Portanto os sistemas (1.16) e (1.17) satisfazem a condição (ii) do Teorema 1.2.1 com
—a a (O
F(t, x, y, z, u, v, w, À) = O —1 O =: A(7)•
O O —b
Sejam 14(7) = —1, ita('y) = —b e p3 ey) = —a os autovalores de A(7). Então, como o> 1, temos que existe uma matriz Pey) invertível, tal que
( u1(7) 0 O
Pey)-1A(7)P(7)= O 122 (7) O =: C(7)
O O 113(7)
onde P(7) é dada por
(1 cr O
P(7)= O a-1 O •
0 0 1
Seja S(t,s, À) o operador de evolução definido por C(7). Então temos que
epi etXt-s)
S(t, s, = O O
eP2(7)(t-3) O
O
o
Então temos, da equivalência de normas, que existe uma constante )31 > O tal que
36

11,9(4 8, À) II _< (epi (7)(t-s) ess2 (7)(t-s) ess3(7)(t-8)) < 3p1e,
onde a = min7c (7), —µ2 (7), —µ3(7)} = min{1, 11 /2„}.
Denotando por T (t, s, À) o operador de evolução definido por A(7), temos que
T (t, s, À) = P(7)S (t, s, A)P (7)-1 .
E assim
IIT(t, 8, )011 IIP(7)11 111:1(7)-111 II5(t, 8, )1/4 )11 3MIIP(7)1111P(7)-111e-a(t-3).
Como r é compacto, temos que existe fl2 = max.,Er {II P (7)11 IIP(7)-111}. Portanto temos que
IIT(t, 8, A)11 < pe—act—s),
onde fi = 3P1P2. Desta forma segue que
E A) ilds f fie-a(t-s)ds = ge-at (eat _ cedi) < g
Portanto a condição (iff) do Teorema 1.2.1 está satisfeita.
Vamos então verificar a condição (iv). Temos que
37

f u, v, w, A2) f z, u, v, w, =
(—(a2 — cii)x + (c72 — cii)Y
h Will]. (t) — h(t)mi (t) — Rx + fill (t)) (z + fias (0) — (x + mi (t)) (z ± m3(t))1 — —(b2 — bi)z + (x + 7711(0) (Y + fit2 (t)) — (x + mi (t)) (y + m2(t))
-(a2 — ai )x + (aa — ai)Y (ifil(t) — mi (t)) (11(t) — z) — Rift3(t) — m3(t))x + Mi(t)#t3(t) — mi (t)rra3(t)]
—(b2 — bi)z + (fiza(t) — rn2(t))x + (Mi(t) — mi(t))y + mi (07712(t) — mi(t)m2(t)
(—(a2 — cii)x+ ((Ta — cii)Y
(7711(t) — mi (t)) (h(t) — z — 7713 (t)) — (m3(t) — m3 (t)) (x + mi (t)) . —(b2 — bi)z + (Mi (t) — mi (t)) (y + M2(t)) + (M2(t) — m2(t)) (x + mi (t))
Seja B O tal que II (x, y, < B para (x, y, z) E B. Então temos que
z, u, v, w, A2) - f (x, y, z, u, v, w, A1)11 102 — aiIx + 1(72 — lyl + Iüti — miii ih(t) — z — fra3(t)1+
IN — m311 lx + mat)i + ib2 — lz1+ nli I + *hW I + 117712 — ma 11 lx + (t) I
102 —a1 B + icr2 — ajIB + — m1 Cri + B + K)+
— m311(B + + —(1W+
— li(B + + — mzil(B + = 24(72 —ad + E1,2 — bil + (L + 2E + — II+
(E ± — m211 + (E+ — m311.
38

Portanto a condição (iv) do Teorema 1.2.2 está satisfeita.
Portanto os sistemas (1.16) e (1.17) satisfazem as condições do Teorema 1.2.1, e então, pelo Corolário 1.2.1, temos que estes sistemas sincronizam.
Nas Figuras 1.4 e 1.5 temos algumas simulações mostrando a sincronização dos sistemas (1.16) e (1.17). Nestas simulações foram usados os seguintes valores para os parâmetros e condições iniciais respectivamente: cri = 10, bi = 8/3, cr2 = 10+1/100, b2 = 8/3 + 1/100, h(t) = 18 arctan (t), mi (t) = 6 sen (5t), m2 (t) = 3 cos (2t) , ma(t) = 4 sen(3t), ria' (t) = 6 sen (5t) + (1/100) sen (3t), ?722(t) = 3 cos (2t) + (1/100) cos (4t), rfi.3(t) = 4 sen(3t) + (1/100) sen(t), x(0) = 15, y(0) = —20, z(0) = —10, u(0) = —20, v(0) = —15 e w(0) = 20.
70
60
50
40
30
20
10
5 10 15 20 25 30
(a) is(o-t4oi+Iy(t)-v(01-i-jz(t)-w(t)1 (b) (x(t), r(0) = —, (u(t), v(t)) = - - -
Figura 1.4: Sincronização do Sistema (1.15)
39

(a) mi (t) = z(t) + (t) = - - - (t) mi(t) = mid(0 = - - -
Figura 1.5: Codificação de Mensagens com o Sistema (1.15)
Exemplo 1.3.3 (Equações do tipo Duffing Excitadas). Consideremos a equação
= y = —wx — cy — q(h(x))3 — rh(x) cos(t)
(1.18)
onde h: IR, —> IR é limitada e Lipschitz em limitados. Sejam rn, r7R. E CK(IR, Consideremos os seguintes sistemas
= y = — ciy — q1 (11(x + m(t)))
3 — r ih(x + rn(t)) cos(t)
(1.19)
riL = V
= —W271 — C2V — q2 (h (X ± 772 (t)))3 — r2h(x + rii(t)) cos(t)
(1.20)
40

onde (uh, ci., 41, n.), (toa, C2)42, r2) E r e
r := 00, c, q, r) R4 : com < to < com, < c < cm, qm S q<qM e rifi < r < rm} ,
com 0 <com < com, 0 < Cm < em, O <q„, < qm e O < rn, < rm. Vamos assumir que com > 52.e. Também neste caso poderíamos omitir esta restrição, mas isto será feito num trabalho futuro. Sejam A = r x CK011..,1R) e A = (7,771(0) E A, onde
= (to, c, q, r) E r.
Mostremos que os sistemas (1.19) e (1.20) satisfazem as condições do Teorema 1.1.1.
Seja L > 0 tal que ih(x)i < L. Para o sistema (1.19) consideremos a seguinte função de Liapunov
1/1(x, y, À1) = (2£01 + c)x2 + 2y2 + 2cixY,
onde .À1 = (uh, el., 41, rt, n'i(t))•
Então temos que
14(x , y, At) = (2co1 c)x2 2y2 + 2cixy > (2col + c)x2 + 2y2 — cYx2 — y2 >
2tx2 + y2 =: a (x, y).
3 /4.(x, y, À1) = (2co1 + c?.)x2 + 2y2 + 2c1xy <
(2toi + c)x2 + 2y2 + 5_ (24,44 + c2m )x2 + 2y2 + 2cm ixi ly =: bi(x, y).
Temos também que
41

3 (4y + 24x) — c1y —q1 (h(x + nt(t))) — h(x (t)) cos(t)] = -2C1W1X2 - 24y2 — 44y (h(x +7n(t)))
3 — 4nyh(x + m(t)) cos(t)
—2clqix (h (x + rn(t)))3 — 24rixh(x + rn(t)) cos(t).
= (2(2wi + c)x + 24Y)Y+
Assim
-17i (X, y, = 24w1 x2 + 2ciy2 + 4qiy (h(x + rn(t)))3 + 4riyh(x.+ rn (t)) cosffl+
2ciqix (h(x + rn(t)))3 + 24rixh(x + rn(t)) cos(t)
2cio.1x2 + 24y2 — 44L3Iyi — 4riLlY1— 2441L3ixi — 24nLixl 2cniw„,x2 + 2c,02 — 2c m L(qm L2 + r m)1x1 —4L(qm L2 + r m)Iyl =: ci(x,y).
Claramente as funções ah b1 e c1 satisfazem as condições do Teorema 1.1,1, portanto existe um conjunto limitado Bi C lR2 tal que se (x(t), y(t)) é uma solução do sistema (1.19), então existe t1 tal que (x(t), y(t)) E Bi para todo t > ti.
De forma análoga, para o sistema (1.20) consideremos a seguinte função de Lia-punov
14 (U) V, d\ ."—= (20)2 + 4)142 2V2 2V2VV,
onde À2 = (wz, q2, r2, 77/(t))-
Então temos que
112(24, 22, )2) = (2W2 C)U2 2v2 + 2c2uv >
(2w2 + c)u2 + 2v2 — du2 — v2 > 2w,u2 + v2 =: n2(u, v).
42

V2 (ti, V, A2) = (20)2 ± d)U2 2V2 2C2UV < (2412 d)U2 2V2 2c2luilvi (2r.om + c2m)u2 + 2v2 + 2c mluilvl =: b2(u, v).
Temos também que
'1'2(u, V, A2) = (2(2W2 d)li 2C2V) V+
(4v + 2c2u) [—w2u — c2v — q2 (h.(x + rn(t)) )3 - r2h(x + th(t)) cos(t)] = —2c2w2u2 — 2c,2v2 — 4q2v (h (x + rrri(t))) 3 - 4r2vh(x + (t)) cos(t)
—2c2q2u (x + ih(t))) 3 - 2c2r2uh(x + (hW) cos(t).
Assim
-12 (u, v, A2) = 2c2w2u2 2C2V2 4q2v(h(x + th(t)))3 + 4r2vh(x + rri(t)) cos(t)±
2c2q2u (h(x + th(t)))3 + 2c2r2uh(x + th(t)) cos(t)
2c2w2u2 + 2c2v2 — 4q2L3Ivi — 4r2Livi — 2c2q2L3lui — 2c2r2Llul 2c,„wynu2 + 2c,„v2 — 2cm L(qm L2 + rm)lul —4L(q m L2 + rm)Ivi =: c2(u, v).
Claramente as funções a2, b2 e c2 satisfazem as condições do Teorema 1.1:1, portanto existe um conjunto limitado 132 C IR2 tal que se (u(t),v(t)) é uma solução do sistema (1.20), então existe t2 tal que (u(t),v(t)) E 82 para todo t > tz.
Sejam B = 8 U /32 e t3 = max{ti,t2}. Então para toda solução (x(t), y(t)) de (1.19) e toda solução (u(t),v(t)) de (1.20), temos que
((x(t), y(t)), (u(t),v(t))) E 8 x 8
para t > t3.
43

u — x
Portanto os sistemas (1.19) e (1.20) satisfazem a condição (i) do Teorema 1.2.1. Mostremos que estes sistemas satisfazem as demais condições do Teorema 1.2.1. Sejam
f (x, y, u, v, À) = 11
—wx — cy — q (x + m(t))) — rii(x + m(t)) cos(t)
e
g (x, y , u, v , = 3 - CV - q (h (X -I- m(t))) — ria(x + m(t)) cos(t)
Então temos que
g(x,y,u,v, À) — f (x, y, u, v, À) —
Portanto os sistemas (1.19) e (1.20) satisfazem a condição (ü) do Teorema 1.2.1 com
F(t, x, y, u, v, À) =
Sejam pi (7) — -c±V;2-44) e p2(7) = -'1/4i2-44) os autovalores de A(7). Como > T̀2 , segue que os autovalores são distintos e têm parte real negativa. Assim
a condição (üi) do Teorema 1.2.1 se verifica de forma análoga ao Exemplo 1.3.2, tomando
a = min{ — Re (.11 (7)) Re Otz (7)) = 7E1'
Vamos agora verificar a condição (iv). Temos que
44

f (x, y, u, v, À2) f (x, y, u, v, AI) =-•
(—(cia — codx — + fit(t)))3 - ql (h (X ± rre(t)))3] +
(—(c02 — oh )x — (q2 — qi.) (h (x + rit(t)))3 — [ (h (x + fit(t)))3 — (1/(x + rn(t)))3] 0. -'
(—(C2 — al)!, — (r2 — ri)h(x + fit(t)) cos(t)° — (h(x + fri(t)) — h (x + rn(t))) ri cos(t) -
(— (h (x + rit(t)) — h (x + rn(t))) Rh (x + fit(t))) 2 ± (h (X ± rn(t))) 2] qi. ±
O
(— (it(x + fit(t)) — h (x + rn(t)))1t(x + fit(t))h(x + rn(t))qi
(
o
— (c02 — uh) x — (c2 — ci.)Y — (q2 — qi.) (h (x + 771(t)) )
O
(_(r2 — + fit(t)) cos(t) — (Ii(x + fit(e) — + m(t)) )ri cos(t))
o
(—(c2 — cay — (r2h(x + fit(t)) — h(x + rn(t))) cos(0) =
o
o
45

Temos que o conjunto
C = {x + a(t): (x,y) el3eaE CK(IR,R)}
é limitado. Como h é Lipschitz em limitados, seja T a constante de Lipschitz para h em C. Seja também B > O tal que il(x, y)li < B para (x, y) € 5. Então temos que
ilf (x, y, u, V, À2) — f (x, y, u, v, Ai) h(x + fiz.(t)) — h(x + m(t))1L2qm + I + fiz.(t)) — h(x + m(t)) IL2qm+
ih(x + ftt(t)) — h(x + m(t)) I rqm +1(02 — w1jjxj + I c2 — iYi+
I q2 (ar + ir2 - + ih(x + tit(t)) — h(x + m(t))1rm 7-(3L2qm + rm)IIM ± 1(02 — W11B ± 102 — ciiB ± 1q2 q1)1L3 1/.2 — rdL.
Portanto a condição (iv) do Teorema 1.2.2 está satisfeita.
Portanto os sistemas (1.19) e (1.20) satisfazem as condições do Teorema 1.2.1, e então, pelo Corolário 1.2.1, temos que estes sistemas sincronizam.
Nas Figuras 1.6 e 1.7 temos algumas simulações mostrando a sincronização dos sistemas (1.19) e (1.20). Nestas simulações foram usados os seguintes valores para os parâmetros e condições iniciais respectivamente: col = 1, c1 = 1, q1 = 50, r1 = 150, coz = 1 + 1/1000, c2 = 1 + 1/1000, q2 = 50 + 1/1000, r2 = 150 + 1/1000, h(t) = arctan(t), m(t) = sen(5t), r7t(t) = sen(5t) + (1/1000) cos(2t), x(0) = 20, y(0) = 35, u(0) = 30 e v(0) = —25.
46

10 20 30 40
70
60
50
40
30
20
10
(a) Ix(t) - u(t)I +1y(t) - v(t)I (b) (r(t),y(t)) = (u(t),v(t))=-
Figura 1.6: Sincronização do Sistema (1.18)
(a) m(t) = x(t) + m(t) = - - -
10
8
6
AIA ALAM II Y'ln,YVT1771,TT
2 't
(b) m(t) = md(t)
Figura 1.7: Codificação de Mensagens com o Sistema (1.18)
47

Exemplo 1.3.4. Consideremos a equação
{
X = —cex + ah(y)cos(t)
Y = —ay — wy3 — bh(x) cos(t) (1.21)
onde h: R -4 R é limitada e Lipschitz em limitados. Sejam m,tet E CK(IR,1R2), dadas por m(t) = (mi (t), m2(t)) e rigt) = (frti(t),7n2(t)) . Consideremos os seguintes sistemas
{{
i = —aix + aih(y + rn2(t)) cos(t)
Y = —ai Y — wiy3 — bi h (x + mi (t)) cos(t)
ti = —a2u + a2h(y + r72.2(t)) cos(t) /5 = —o-2v — w2v3 — b2 h(x + ?kW) cos(t)
(1.22)
(1.23)
onde (ah o"i, ah, ai, bi), (a2, (72, wz, a2 b2) E Feféoconjuntodos'y = (a, o-, to, a, b) E 1R5 tais que O < ce,„ < a < am, O < < < O < com < < com, O < a,.„ < a< am eO<bm <b <bm. Sejam A = x R2) e À = (7, m(0) EA.
Mostremos que os sistemas (1.22) e (1.23) satisfazem as condições do Teorema 1.1.1.
Seja L > O tal que Ih(x)1 < L. Para o sistema (1.22) consideremos a seguinte função de Liapunov
Vi(x , y , = X2 + Y2,
onde A1 = o"i, uh, ai, ri(t))-
48

Então temos que
14(x, y, = x2 + y2 =: cii(x ,Y) •
1/4 (x , y , = x2 + y2 =: (x, y).
Temos também que
= 2x ( —ceix + alla(y+ m2(t))cos(t))+ 2y (—aly — ony3 — bih(x + (t)) cos(t)) = —2aix2 + 2aixh(y + m2(t)) cos(t) — 20"1Y2 —2wi Y4 — 2/Uh(x + (t)) cos(t).
Assim
44(x, Y, Ai) = 2ceix2 — 2ctixh(y + m2(t)) cos(t) + 20"19+ 2w1y4 + 21nyh(x + mi(t)) cos(t) ?_ 2ceix2 + 2aly2 + 2wiy4 — 2aiLlx1 — 2c4„x2 2a- y2 + 204,04 — 2amL lx I — 2bAILlyi =: (x, y)•
Claramente as funções ai, 1h e ci satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado BI C lR2 tal que se (x(t), y(t)) é uma solução do sistema (1.22), então existe t1 tal que (x(t),y(t)) E Si para todo t > ti.
De forma análoga, para o sistema (1.23) consideremos a seguinte função de Lia-punov
V2(24 V, A2) = 242 ± V2,
onde A2 = (aa, cfa, (02, a-2, b2,1h(t)).
49

Então temos que
V2(24, V, )'2) = + V2 =: aa(u, v).
V2(1, V, A2) = td2 2/2 =: b2(u, v).
Temos também que
17.2(u, v, A2) = 2u (—aau + ct2h(y + r7t2(t)) cos(t))+ 2v (—cfav — wavs — b2h(x 772.1(t)) cos (t)) = —2a2u2 + 2a2uh(y + r7i2(t)) cos(t) — 2u2v2 —2cv2v4 — 2b2vh(x + ?hl (t)) cos(t).
Assim
—17.2 (V, V, A2) = 2a2u2 — 2a2uh(y + ftia(t))cos(t) + 2u2v2+ 212/2v4 + 2b2vh(x + ril l (t)) cos (t) 2a2u2 + 2522)2 + 2cv2v4 — 2a2Llul — 2b2Livj > 2au2 + 2u,,v2 + 2w,,v4 — 2amLlul — 2bm.L I v =: (u, v).
Claramente as funções aa, 192 e ca satisfazem as condições do Teorema 1.1.1, portanto existe um conjunto limitado /32 C IR2 tal que se (u(t), v(t)) é uma solução do sistema (1.23), então existe ta tal que (u(t), v(t)) E Ba para todo t >
Sejam 8 = 8 U 82 e ta = max{ti, ta}. Então para toda solução (x(t), y(t)) de (1.22) e toda solução (u(t), v (t)) de (1.23), temos que
((x(t), y(t)), (u(t), v(t))) E .8 x
para t > ta.
50

Portanto os sistemas (1.22) e (1.23) satisfazem a condição (i) do Teorema 1.2.1. Mostremos que estes sistemas satisfazem as demais condições do Teorema 1.2.1. Sejam
f (x,y,u,v, ) = ( —ca + ah(y + m2(0) cos(t) )
A —ay — ofy3 — bh(x + mi (0) cos(t)
e
—ou + ah(y + m2(0) cos(t) g(x,y, u, v, A) = —av — wv3 — bh(x + mi(t)) cos(t) .
Então temos que
(
—a O u — x)
O —c — of(y2 + yv + v2)) (v — y .
Portanto os sistemas (1.22) e (1.23) satisfazem a condição (ii) do Teorema 1.2.1 com
(—a O F(t, x, y, u, v, À) = O --c—of(y2 +yv+v2 ) .
Mostremos agora que os sistemas (1.22) e (1.23) satisfazem a condição (iii) do Teorema 1.2.1.
De fato, dadas (x(t), y(t)) e (u(t), v(t)) soluções de (1.22) e (1.23), respectiva-mente, seja t1 como no item (i) do Teorema 1.2.1. Então dados t1 < a < t, vamos estimar o operador de evolução T(t, s, À) gerado por
51

F (t, x(t), y(t), u(t), v (t), = (-a
0 -a - (t)2 + y(t)v(t) + v(t)2 )
Seja w(t) = y(t)2 + y(t)v(t) + v(t)2 > O. Então temos o seguinte sistema
{ = -aY - ukp(t)Y
Seja
Tu T12 (t, a, A) T (t, 8, A) =
Então temos que Tn(t,s, A) = e-4"), 712(48,A) O e T21 (t, $, A) E O. Para T22 (t, 8, A) temos
T22 (i, , = ef :(-e'v'fr ))dr = e-e( t- s ) f: ww(r )dr <
pois cp(r) O, e assim -ist unp(r)dr O.
Então temos, da equivalência de normas, que existe M > O tal que
IIT(4 8,A)11 < —M2 (e-a(t-s) e-e(t-s)) <
onde p = min{a.„„ an } .
()1121(t, s, A) T22 (i, S , A) .
Segue então que
52

ilT(t, s , <í Me ) ds < —M ti t,
Portanto a condição (iii) do Teorema 1.2.1 está satisfeita
A condição (iv) do Teorema 1.2.1 se verifica de forma análoga ao Exemplo 1.3.3.
Portanto os sistemas (1.22) e (1.23) satisfazem todas as condições do Teorema 1.2.1, e então, pelo Corolário 1.2.1, temos que estes sistemas sincronizam.
Nas Figuras 1.8 e 1.9 temos algumas simulações mostrando a sincronização dos sistemas (1.22) e (1.23). Nestas simulações foram usados os seguintes valores para os parâmetros e condições iniciais respectivamente: coi = 1, ai = 1, ai = 1, b1 = 10, e1 = 12, wz = 1 + 1/1000, a2 = 1 + 1/1000, az = 1 + 1/1000, b2 = 10 + 1/1000,
= 12 + 1/1000, h(t) = arctan(t), (t) = cos(4t), m2(t) = 5 sen(t), = cos(4t) + (1/1000) sen(t), 71i2(t) = 5 sen(t) + (1/1000) cos(t), x(0) = 2, y(0) = -3, u(0) = 5 e v(0) = 1/2.
10 15 20 25 30
(a) lx(t) - v(01+ lu(t) - v(t)I (b) (r(t),y(t)) = (11(0,v(0) =---
Figura 1.8: Sincronização do Sistema (1.21)
53

iÁIAAAA
O
II fi
(a) mi(t) x(t) + mi(t) = - - - (b) (t) mid(t) = - - -
Figura 1.9: Codificação de Mensagens com o Sistema (1.21)
1.4 Exemplos Adicionais
Nesta seção apresentaremos mais alguns exemplos de sistemas de equações que, acreditamos, sincronizam. Mostraremos também algumas simulações que reforçam esta idéia. Contudo não provaremos a sincronização para estes exemplos. Isto será feito num trabalho futuro.
Exemplo
Sejam
1.4.1 (Equações
m, fiz. E CK(R,R).
= y
= —coix —
de Duffing). Consideremos a equação
= y = —um — cy — q cos(11t)x — fix3
(1.24)
(1.25)
Consideremos os seguintes sistemas
ctY — q1cos(SZit)(x 4- in(t)) — + ni(t)) 3
54

it = v á = —co2u — c2v — q2 cos(f22t)(x + ft t(t)) — )32(x + frt(0) 3
(1.26)
onde (col,chqi,fi1,ni),(0)2,02,4,2,fiz,ç22) Er er éo conjunto dos 7 = (co , c, q o 3 ,S-2) E
O <,6<fi<fime 0<f2„,<S2<f2m.
Nas Figuras 1.10 e 1.11 temos algumas simulações mostrando a sincronização dos sistemas (1.25) e (1.26). Nestas simulações foram usados os seguintes valores para os parâmetros e condições iniciais respectivamente: col. = 5, q = 50, b1 = 8, c1 = 3, ni = co2 = 5 + 1/1000, q2 = 50 + 1/1000, b2 = 8 + 1/1000, c2 = 3 + 1/1000, Ç22 = + 1/1000, m(t) = sen(5t) , = sen(5t) + (1/1000) cos(t), x(0) = 2, y(0) = 10, u(0) = —2 e v(0) = —10.
(a) jx(t) - u(t) ¡ ly(t) - (b) (x(t), it(t)) = (u(t),v(t)) = - - -
Figura 1.10: Sincronização do Sistema de Duffing
55

(a) m(t)=—, z(t)-i-ngo= - - - (1)) m(t) md(t) - -
Figura 1.11: Codificação de Mensagens com o Sistema de Dufilng
Exemplo 1.4.2 (Equações de Chua). Consideremos o sistema
{
± = —ar + ay — ah(x)
ü=x—y+z
z= —í3!, — thz
(1.27)
onde h : IR —> IR é dada por
h(x) = —bx + b ; a (1x +11 — lx — 11) ,
com a> b> Oeb<1.
Sejam na, ria E CK(IR, IR). Consideremos os seguintes sistemas
{
± = —aix + aty — aihi (x + na(t))
y=(x+rn(t))—y+z
.i = -As - ¡luz (1.28)
56

10 15 20 25 30
{
ú= —a2u + a2v — a2h2(x + fh(t)) V = (x + rh(t)) — v + w ti) = —)32y — paw
(1.29)
onde 111(x) = —bi x+ kir (1x +11-1x — 11), h2(x) = —b2 x + (1x +11-1x — 11), (a2, fia, 142, a2, b2) Ereréo conjunto dos ry = (a, )3, µ, a, b) e 115
tais que O < a„, < < am, O < )3,„ < < )3m, O < µ,,,, < < pm, O < b„, < b < bm < 1 e bm < 2m < a < am.
Nas Figuras 1.12 e 1.13 temos algumas simulações mostrando a sincronização dos sistemas (1.28) e (1.29). Nestas simulações foram usados os seguintes valores para os parâmetros e condições iniciais respectivamente: al = 7, PI = 100, = 1/2,
= 8/7, b1 = 5/7, a2 = 7 + 1/100, )32 = 100 + 1/100, g2 = 1/2 + 1/100, a2 = 8/7+ 1/100, b2 = 5/7+ 1/100, m(t) = 7sen(5t), th(t) = 7sen(5t) + (1/100) cos(t), x(0) = —15, y(0) = —9, z(0) = 8, u(0) = —7, v(0) = —8 e w(0) = 0.
(a) jx(t)-u(t)14-iy(t)-v(t)11-1z(t)-10(01 (b) (z(t), y(t)) = (u(t), v(0) = - - -
Figura 1.12: Sincronização do Sistema de Chua
57

-4
4
(a) m(t) = x(t)± m(t) = - - - (b) m(t) = md(t) = - - -
Figura 1.13: Codificação de Mensagens com o Sistema de Cima
58

Referências Bibliográficas
[1] AFRAIMOVICH, V. S., RODRIGUES, H. M., Uniform Dissipativeness and Syn-chronization on Nonautonomous Equations, Equadiff95, International Confer-ence on Differential Equations, World Scientific, p. 3-17, (1998).
[2] AFRAIMOVICH, V. S., RODRIGUES, H. M., Uniform Ultimate Bounded-ness and Synchronization for Nonautonomous Equations, Technical Report, CDSNS9.4-202, Center for Dynamical Systems and Nonlinear Studies, Geor-gia Institute of Technology, Atlanta, (1994).
[3] AFRAIMOVICH, V. S., VERICHEV, N. N., RABINOVICH, M. I., Stochas-tic Synchronization of Oscillation In Dissipative Systems, Izvestiya Vysshikh Uchebnykh Zavedenii, Radiofizika, v. 29, n. 9, p. 1050-1060, (1986). [Sov. Ra-diophys. Bo1.29 (1986), 795].
[4] AMANN, H., Ordinary Differential Equations: An Introduction to Nonlinear Analysfs, Walter de Gruyter, New York, (1990).
[5] ANISHENKO, V. S., VADIVASOVA, T. E., POSTNOV, D. E., SAFONOVA, M. A., Synchronization of chaos, International Journal of Bifurcation and Chaos, v. 2, n. 3, p. 633-644, (1992).
[6] RELLMAN, R., Introduction to Matriz Analysis, McGraw-Hill, New York, (1960).
[7] CAFtROLL, T. L., PECORA, L. M., Synchronizing Nonautonomous Chaotic Circuits, IEEE 7Yansactions on Circuits and Systems, n. 38, p. 453-456, (1991).
59

[8] CRUA, L. O., BELYKH, V. N., VERICHEV, N. N., KOCAREV, J., On Chaotic Synchronization in a Linear Array of Chua's Circuits, Memorandum n. UCB/ERL M93/11, Eletronics Research Laboratory, College of Engineering, University of California, Berkeley, (1993).
[9] CRUA, L. O., ITOH, M., KOCAREV, L., ECKERT, K., Chaos Synchronization in Chuas's Circuit, Journal of Circuits, Systems and Computers, v. 3, n. 1, p. 93-108, (1993).
[10] Cuomo, K. M., OPPENHEIM, A. V., Chaotic Signals and Systems for Com-munications, ICASSP, (1993).
[11] Cuomo, K. M., OPPENHEIM, A. V., Circuit Implementation of Synchronized Chaos with Applications to Communication, Physical Review Letters, n. 71, p. 65-69, (1993).
[12] FABINY, L., COLET, P., ROY, R., Coherence and Phase Dynamics of Spatially Coupled Solid-State Lasers, Physical Review A, v. 47, n. 5, (1993).
[13] Gilas, Z., IWATA, C., RAY, R., Tracking Unstable Steady States: Extending the Stability Regime of a Multimode Laser System, Physical Review A, v. 69, n. 22, (1992).
[14] GILLS, Z., ROY, R., MURPHY, T. W. JR., MAIER, T. D., Dynamical Con-trol of a Chaotic Laser, Physical Review Letters, v. 68, n. 9, p. 1259-1262, (1992).
[15] GUCKENHEIMER, J., HOLMES, P., Nonlinear Oscilations, Dynami cal Systems and Bifurcations of Vector Fields, Springer-Verlag, New York, (1983).
[16] HAHN, W., Stability of Motion, Springer-Verlag, Berlin, (1967).
[17] HALE, J. K., Ordinary Differential Equations, Robert E. Krieger Publishing Company, Inc., New York, (1980).
[18] HAFtTMAN, P., Ordinary Differential Equations, Birkhãuser, Boston, (1982).
60

[19] ITOH, M., WU, C. W., CHUA, L. O., Communication Systems via Chaotic Signals from a Reconstruction Viewpoint, /nternationa/ Journal of Bifurcation and Chaos, n. 2, v. 7, p. 275-286, (1997).
[20] LORENZ, E. N., Deterministic Nonperiodic Flow, Journal of the Atmospheric Sciences, v. 20, p. 130-141, (1963).
[21] PECORA, L. M., CARROLL, T. L., Synchronization in Chaotic Systems, Phys-ical Review Letters, v. 64, p. 821-824, (1990).
[22] PECORA, L. M., CARROL, T. L., JOHNSON, G. A., MAR, D. J., HEAGY, J. F., Chaos, n. 7, v. 4, p. 520-543, (1997).
[23] RODFUGUES, H. M., Abstract Methods for Synchronization and Applications, Applicable Analysis, v. 62, p. 263-296, (1996).
[24] RODFUGUES, H. M., Uniform Ultimate Boundedness and Synchronization, Technical Report CDSNS94, Center for Dynamical Systems and Nonlinear Studies, Georgia Instante of Technology, Atlanta, (1994).
[25] TRESSER, C., WORFOLK, P. A., Resynchronizing Dynamical Systems, Physics Letters A, n. 229, p. 293-298, (1997).
[26] YANG, T., CHUA, L. O., Impulsive Stabilization for Control and Synchroniza-tion of Chaotic Systems: Theory and Application to Secure Communication, IEEE Transactions on Circuits and Systems, v. 44, n. 10, p. 976-988, (1997).
61