
Circuitos de Acionamento - Inversores e Conversores
79
-
Upload
helder-tiago -
Category
Documents
-
view
118 -
download
1
Transcript of Circuitos de Acionamento - Inversores e Conversores
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 1/79
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 2/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 1
UNIDADE
SEMICONDUTORESDE
POTÊNCIAProf. Corradi
Sumário
OBJETIVOS DA UNIDADE ............................................................................................... 2
INTRODUÇÃO................................................................................................................... 2
SEMICONDUTORES DE POTÊNCIA ............................................................................... 1
DIODOS DE POTÊNCIA .......................................................................................................... 1
SCRS (TIRISTORES)............................................................................................................. 2
TRANSISTOR DE UNIJUNÇÃO ( UJT - U NIJUNCTION T RANSISTOR ) .......................................... 3
DIAC................................................................................................................................... 4
TRIAC ................................................................................................................................ 4TRANSISTORES BIPOLARES DE POTÊNCIA E DARLINGTONS .................................................... 5
MOSFET DE POTÊNCIA ....................................................................................................... 5
TIRISTORES G ATE -TURN -OFF ( GTO ) .................................................................................. 6
IGBTS ( INSULATED G ATE BIPOLAR TRANSISTORS ).............................................................. 7
MCTS ( MOS-CONTROLED THYRISTOR ) .............................................................................. 7
COMPARAÇÃO ENTRE AS CHAVES CONTROLADAS.................................................................. 7
EXERCÍCIOS..................................................................................................................... 9
1
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 3/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 2
Objetivos da unidade
Nesta unidade você vai estudar alguns dos semicondutores mais utilizados para controlede potência. Você terá uma visão geral e uma comparação entre os semicondutores para
chaveamento mais utilizados.
Esta unidade pretende capacitá-lo para :
• identificar quais são os principais tipos de semicondutores de potência
e
• selecionar um semicondutor de potência para determinada aplicação em eletrônicade potência.
Introdução
A evolução da eletrônica e em especial da física dos semicondutores permitiu, entreoutras coisas, a construção de semicondutores mais rápidos e de controle mais fácil.
Alguns destes semicondutores serão estudados na presente unidade
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 4/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 1
Semicondutores de potência
São entendidos como semicondutores de potência, semicondutores utilizados para acionamento econtrole de cargas (resistências de aquecimento, motores elétricos, indutores em fonteschaveadas, lâmpadas, etc..), compreendendo :
Diodos de potência, SCRs ( Silicon Controlled Rectifier - Retificador Controlado de Silício ),
GTOs ( Gate Turn Off Thyristor - tiristor com desligamento pela porta ),
DIACs ( Diode Alternate Current - diodo de corrente alternada,
TRIACs (Triode Alternate Current - triodo de corrente alternada),
Transistores de potência,
MOSFETs de Potência (Metal-Oxide-Semiconductor Field Efect Transistor - transistor deefeito de campo feito com tecnologia Metal-Óxido-Semicondutor),
IGBTs ( Insulated Gate Bipolar Transistor - transistor bipolar com a porta isolada ) e
MCTs ( Metal Oxide Semiconductor Thyristor - tiristor controlado por tecnologia Metal-Óxido-Semicondutor ).
Diodos de potência
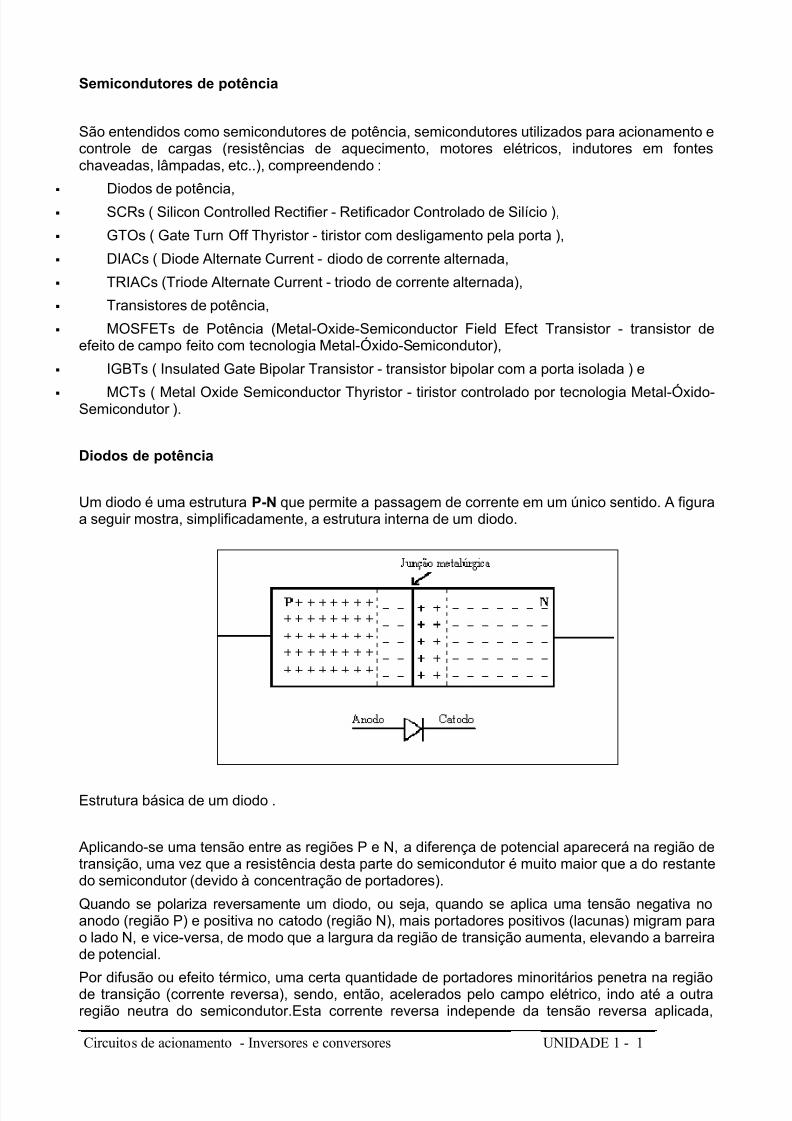
Um diodo é uma estrutura P-N que permite a passagem de corrente em um único sentido. A figuraa seguir mostra, simplificadamente, a estrutura interna de um diodo.
Estrutura básica de um diodo .
Aplicando-se uma tensão entre as regiões P e N, a diferença de potencial aparecerá na região detransição, uma vez que a resistência desta parte do semicondutor é muito maior que a do restantedo semicondutor (devido à concentração de portadores).
Quando se polariza reversamente um diodo, ou seja, quando se aplica uma tensão negativa noanodo (região P) e positiva no catodo (região N), mais portadores positivos (lacunas) migram parao lado N, e vice-versa, de modo que a largura da região de transição aumenta, elevando a barreirade potencial.
Por difusão ou efeito térmico, uma certa quantidade de portadores minoritários penetra na regiãode transição (corrente reversa), sendo, então, acelerados pelo campo elétrico, indo até a outraregião neutra do semicondutor.Esta corrente reversa independe da tensão reversa aplicada,
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 5/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 2
variando, basicamente, com a temperatura.
Se o campo elétrico na região de transição for muito intenso, os portadores em trânsito obterãogrande velocidade e, ao se chocarem com átomos da estrutura, produzirão novos portadores, osquais, também acelerados, produzirão um efeito de avalanche. Dado o aumento na corrente, semredução significativa da tensão da junção, produz-se um pico de potência que destrói osemicondutor.
Uma polarização direta leva ao estreitamento da região de transição e à redução da barreira depotencial. Quando a tensão aplicada superar o valor natural da barreira, cerca de 0,7V paradiodos de Si, os portadores negativos do lado N serão atraídos pelo potencial positivo do anodo evice-versa, levando o semicondutor à condução.
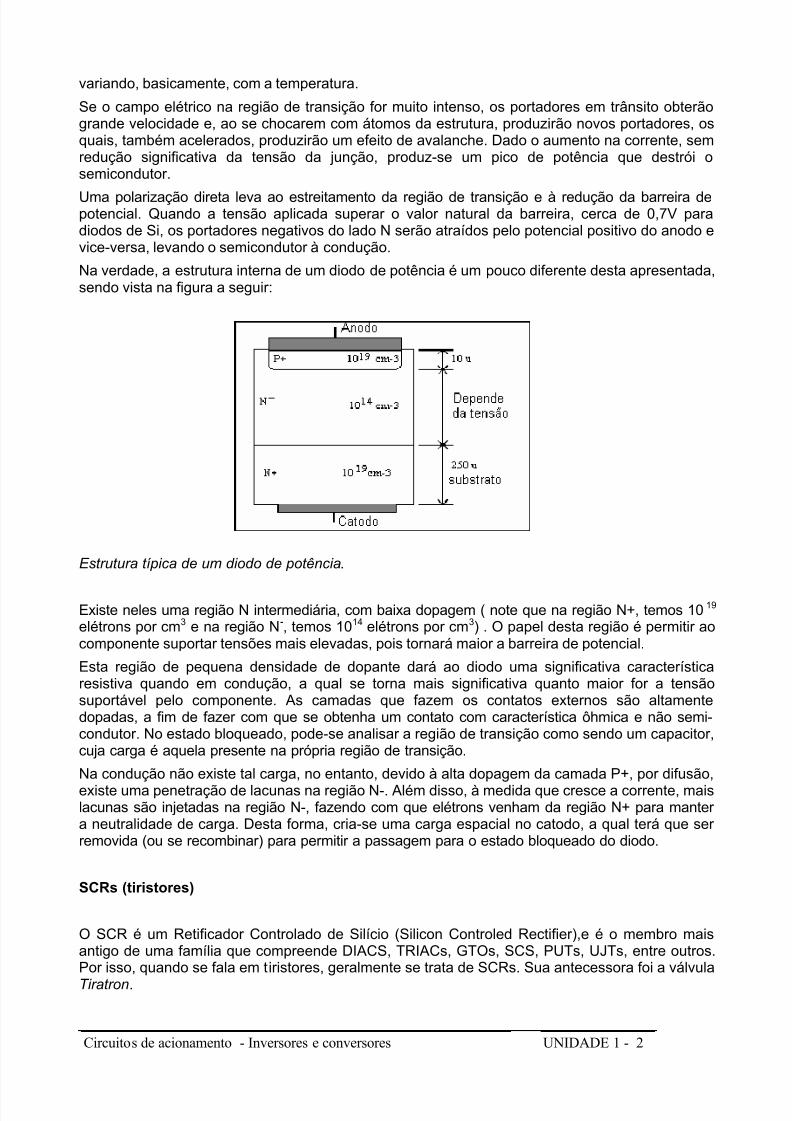
Na verdade, a estrutura interna de um diodo de potência é um pouco diferente desta apresentada,sendo vista na figura a seguir:
Estrutura típica de um diodo de potência.
Existe neles uma região N intermediária, com baixa dopagem ( note que na região N+, temos 1019 elétrons por cm3 e na região N-, temos 1014 elétrons por cm3) . O papel desta região é permitir aocomponente suportar tensões mais elevadas, pois tornará maior a barreira de potencial.
Esta região de pequena densidade de dopante dará ao diodo uma significativa característicaresistiva quando em condução, a qual se torna mais significativa quanto maior for a tensãosuportável pelo componente. As camadas que fazem os contatos externos são altamentedopadas, a fim de fazer com que se obtenha um contato com característica ôhmica e não semi-condutor. No estado bloqueado, pode-se analisar a região de transição como sendo um capacitor,cuja carga é aquela presente na própria região de transição.
Na condução não existe tal carga, no entanto, devido à alta dopagem da camada P+, por difusão,existe uma penetração de lacunas na região N-. Além disso, à medida que cresce a corrente, maislacunas são injetadas na região N-, fazendo com que elétrons venham da região N+ para manter a neutralidade de carga. Desta forma, cria-se uma carga espacial no catodo, a qual terá que ser removida (ou se recombinar) para permitir a passagem para o estado bloqueado do diodo.
SCRs (tiristores)
O SCR é um Retificador Controlado de Silício (Silicon Controled Rectifier),e é o membro maisantigo de uma família que compreende DIACS, TRIACs, GTOs, SCS, PUTs, UJTs, entre outros.Por isso, quando se fala em tiristores, geralmente se trata de SCRs. Sua antecessora foi a válvulaTiratron.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 6/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 3
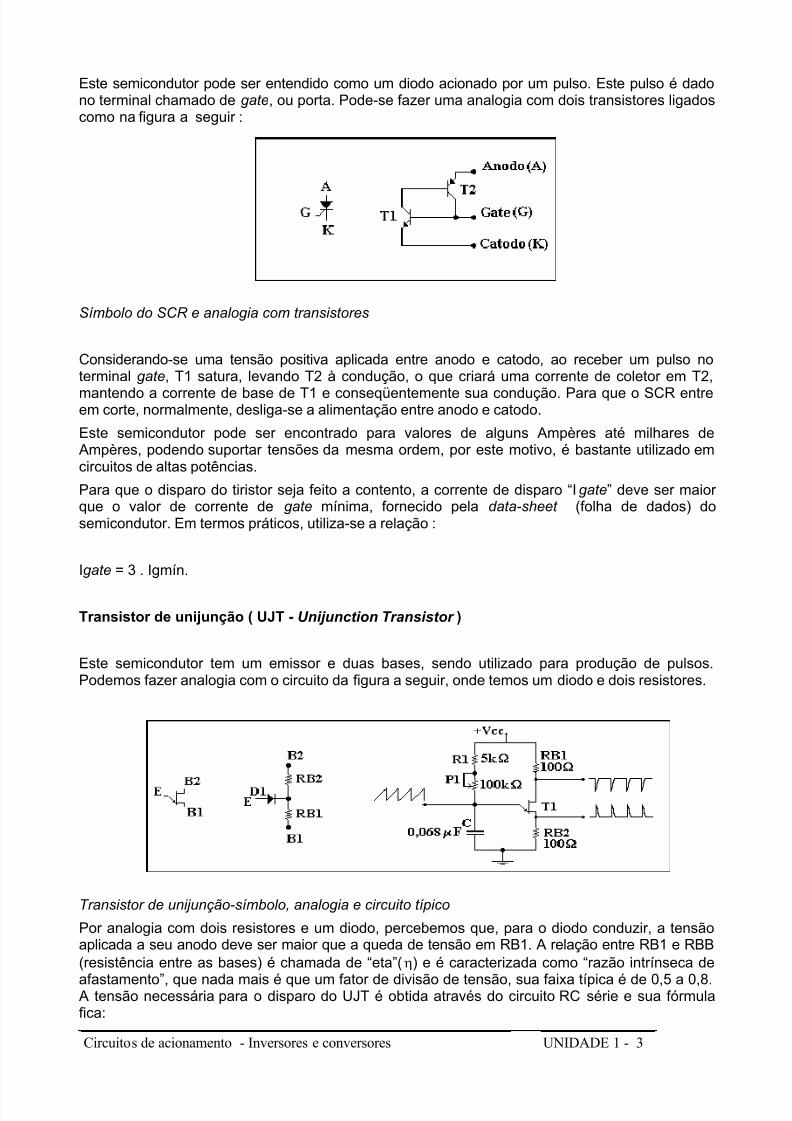
Este semicondutor pode ser entendido como um diodo acionado por um pulso. Este pulso é dadono terminal chamado de gate, ou porta. Pode-se fazer uma analogia com dois transistores ligadoscomo na figura a seguir :
Símbolo do SCR e analogia com transistores
Considerando-se uma tensão positiva aplicada entre anodo e catodo, ao receber um pulso noterminal gate, T1 satura, levando T2 à condução, o que criará uma corrente de coletor em T2,
mantendo a corrente de base de T1 e conseqüentemente sua condução. Para que o SCR entreem corte, normalmente, desliga-se a alimentação entre anodo e catodo.
Este semicondutor pode ser encontrado para valores de alguns Ampères até milhares deAmpères, podendo suportar tensões da mesma ordem, por este motivo, é bastante utilizado emcircuitos de altas potências.
Para que o disparo do tiristor seja feito a contento, a corrente de disparo “I gate” deve ser maior que o valor de corrente de gate mínima, fornecido pela data-sheet (folha de dados) dosemicondutor. Em termos práticos, utiliza-se a relação :
Igate = 3 . Igmín.
Transistor de unijunção ( UJT - Unijunction Transistor )
Este semicondutor tem um emissor e duas bases, sendo utilizado para produção de pulsos.Podemos fazer analogia com o circuito da figura a seguir, onde temos um diodo e dois resistores.
Transistor de unijunção-símbolo, analogia e circuito típico
Por analogia com dois resistores e um diodo, percebemos que, para o diodo conduzir, a tensãoaplicada a seu anodo deve ser maior que a queda de tensão em RB1. A relação entre RB1 e RBB(resistência entre as bases) é chamada de “eta”(η) e é caracterizada como “razão intrínseca de
afastamento”, que nada mais é que um fator de divisão de tensão, sua faixa típica é de 0,5 a 0,8.A tensão necessária para o disparo do UJT é obtida através do circuito RC série e sua fórmulafica:
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 7/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 4
VB1 = Vcc . (RB1) / (RB1 +RB2) = Vcc . (RB1 / RBB) = η . Vcc
O período da oscilação é dado por :
T = R . C . ln . [1 / (1-η)]
DIAC
O DIAC é um semicondutor bastante utilizado na proteção de circuitos e no disparo de TRIACs. Aseguir se encontra seu símbolo, bem como uma analogia com diodos Zener :
Símbolo do DIAC e analogia com dois diodos Zener
O DIAC conduz quando recebe uma tensão maior que sua tensão de trabalho, sendo ela positivaou negativa.
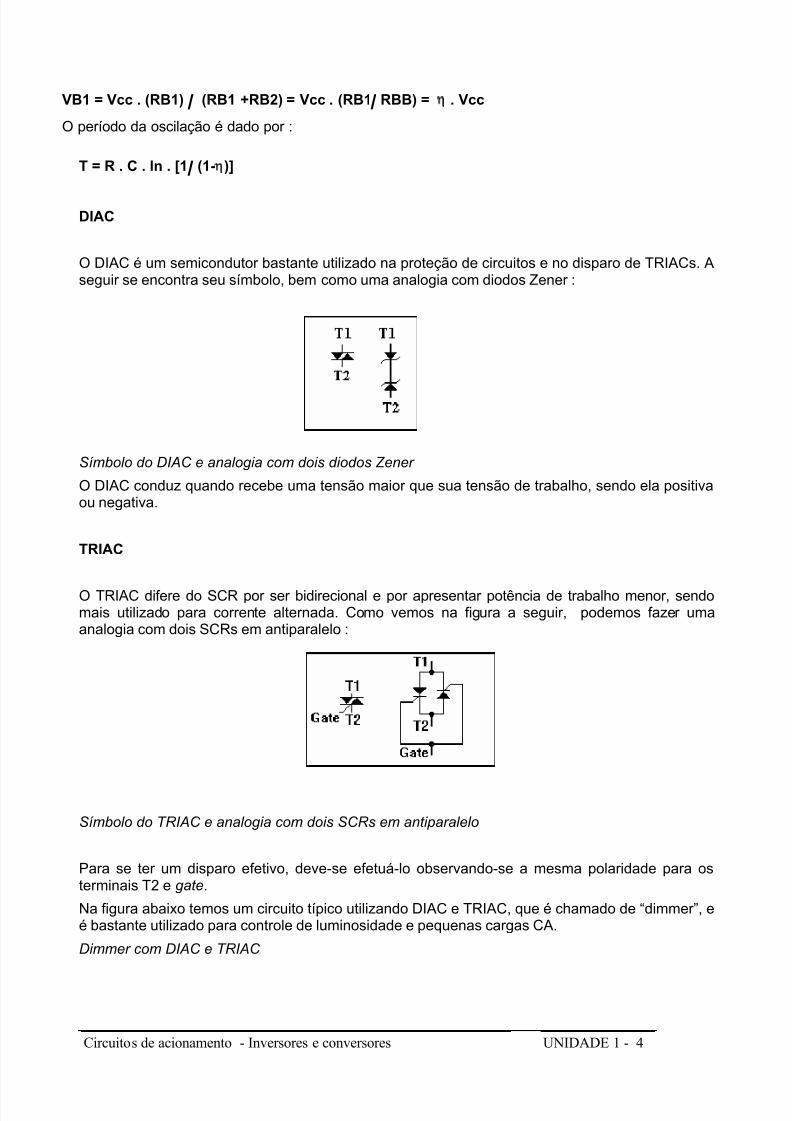
TRIAC
O TRIAC difere do SCR por ser bidirecional e por apresentar potência de trabalho menor, sendomais utilizado para corrente alternada. Como vemos na figura a seguir, podemos fazer umaanalogia com dois SCRs em antiparalelo :
Símbolo do TRIAC e analogia com dois SCRs em antiparalelo
Para se ter um disparo efetivo, deve-se efetuá-lo observando-se a mesma polaridade para osterminais T2 e gate.
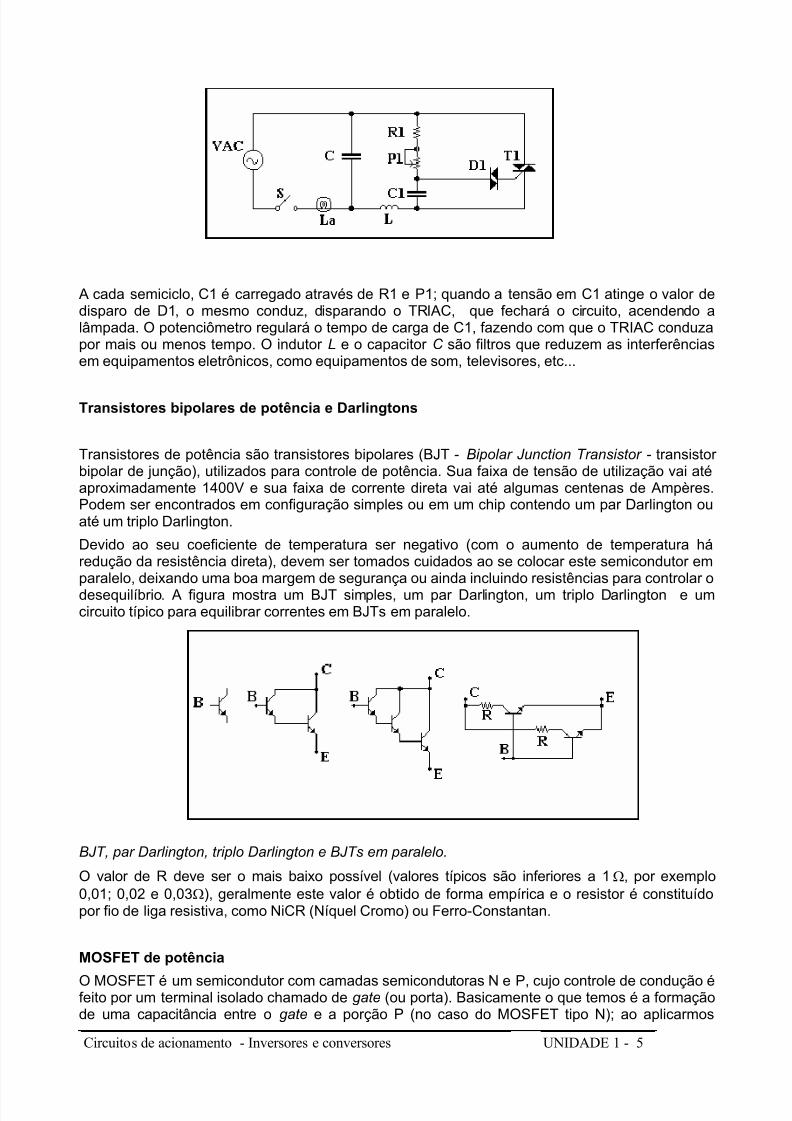
Na figura abaixo temos um circuito típico utilizando DIAC e TRIAC, que é chamado de “dimmer”, eé bastante utilizado para controle de luminosidade e pequenas cargas CA.
Dimmer com DIAC e TRIAC
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 8/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 5
A cada semiciclo, C1 é carregado através de R1 e P1; quando a tensão em C1 atinge o valor dedisparo de D1, o mesmo conduz, disparando o TRIAC, que fechará o circuito, acendendo alâmpada. O potenciômetro regulará o tempo de carga de C1, fazendo com que o TRIAC conduzapor mais ou menos tempo. O indutor L e o capacitor C são filtros que reduzem as interferênciasem equipamentos eletrônicos, como equipamentos de som, televisores, etc...
Transistores bipolares de potência e Darlingtons
Transistores de potência são transistores bipolares (BJT - Bipolar Junction Transistor - transistor bipolar de junção), utilizados para controle de potência. Sua faixa de tensão de utilização vai atéaproximadamente 1400V e sua faixa de corrente direta vai até algumas centenas de Ampères.Podem ser encontrados em configuração simples ou em um chip contendo um par Darlington ouaté um triplo Darlington.
Devido ao seu coeficiente de temperatura ser negativo (com o aumento de temperatura háredução da resistência direta), devem ser tomados cuidados ao se colocar este semicondutor emparalelo, deixando uma boa margem de segurança ou ainda incluindo resistências para controlar odesequilíbrio. A figura mostra um BJT simples, um par Darlington, um triplo Darlington e umcircuito típico para equilibrar correntes em BJTs em paralelo.
BJT, par Darlington, triplo Darlington e BJTs em paralelo.
O valor de R deve ser o mais baixo possível (valores típicos são inferiores a 1Ω, por exemplo0,01; 0,02 e 0,03Ω), geralmente este valor é obtido de forma empírica e o resistor é constituídopor fio de liga resistiva, como NiCR (Níquel Cromo) ou Ferro-Constantan.
MOSFET de potência
O MOSFET é um semicondutor com camadas semicondutoras N e P, cujo controle de condução éfeito por um terminal isolado chamado de gate (ou porta). Basicamente o que temos é a formaçãode uma capacitância entre o gate e a porção P (no caso do MOSFET tipo N); ao aplicarmos
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 9/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 6
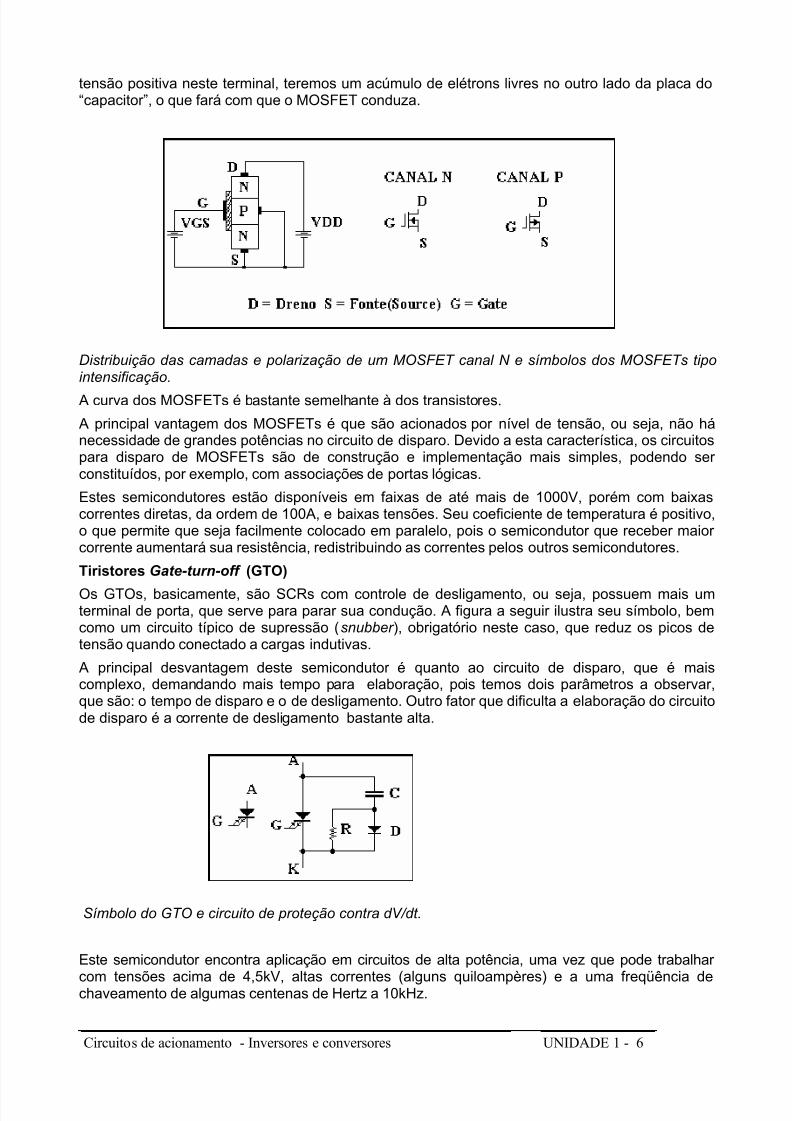
tensão positiva neste terminal, teremos um acúmulo de elétrons livres no outro lado da placa do“capacitor”, o que fará com que o MOSFET conduza.
Distribuição das camadas e polarização de um MOSFET canal N e símbolos dos MOSFETs tipointensificação.
A curva dos MOSFETs é bastante semelhante à dos transistores.
A principal vantagem dos MOSFETs é que são acionados por nível de tensão, ou seja, não hánecessidade de grandes potências no circuito de disparo. Devido a esta característica, os circuitospara disparo de MOSFETs são de construção e implementação mais simples, podendo ser constituídos, por exemplo, com associações de portas lógicas.
Estes semicondutores estão disponíveis em faixas de até mais de 1000V, porém com baixascorrentes diretas, da ordem de 100A, e baixas tensões. Seu coeficiente de temperatura é positivo,o que permite que seja facilmente colocado em paralelo, pois o semicondutor que receber maior corrente aumentará sua resistência, redistribuindo as correntes pelos outros semicondutores.
Tiristores Gate-turn-off (GTO)
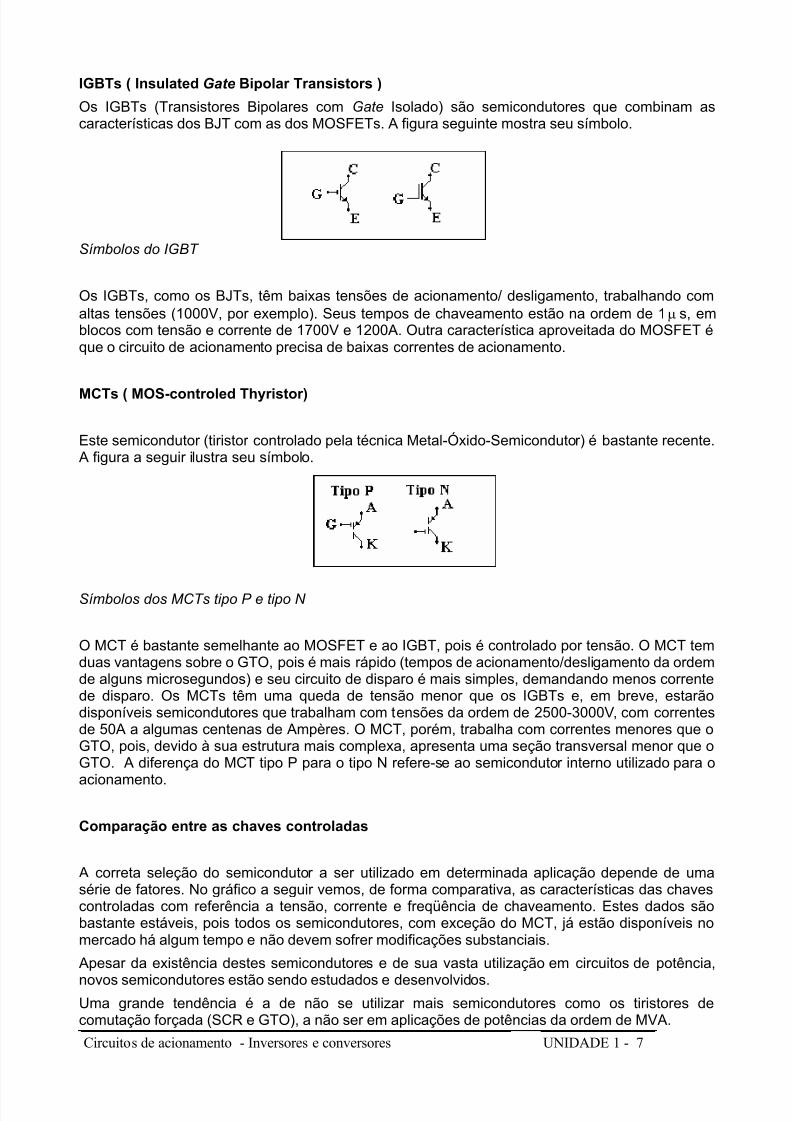
Os GTOs, basicamente, são SCRs com controle de desligamento, ou seja, possuem mais umterminal de porta, que serve para parar sua condução. A figura a seguir ilustra seu símbolo, bemcomo um circuito típico de supressão (snubber ), obrigatório neste caso, que reduz os picos detensão quando conectado a cargas indutivas.
A principal desvantagem deste semicondutor é quanto ao circuito de disparo, que é maiscomplexo, demandando mais tempo para elaboração, pois temos dois parâmetros a observar,que são: o tempo de disparo e o de desligamento. Outro fator que dificulta a elaboração do circuitode disparo é a corrente de desligamento bastante alta.
Símbolo do GTO e circuito de proteção contra dV/dt.
Este semicondutor encontra aplicação em circuitos de alta potência, uma vez que pode trabalhar
com tensões acima de 4,5kV, altas correntes (alguns quiloampères) e a uma freqüência dechaveamento de algumas centenas de Hertz a 10kHz.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 10/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 7
IGBTs ( Insulated Gate Bipolar Transistors )
Os IGBTs (Transistores Bipolares com Gate Isolado) são semicondutores que combinam ascaracterísticas dos BJT com as dos MOSFETs. A figura seguinte mostra seu símbolo.
Símbolos do IGBT
Os IGBTs, como os BJTs, têm baixas tensões de acionamento/ desligamento, trabalhando comaltas tensões (1000V, por exemplo). Seus tempos de chaveamento estão na ordem de 1µ s, emblocos com tensão e corrente de 1700V e 1200A. Outra característica aproveitada do MOSFET éque o circuito de acionamento precisa de baixas correntes de acionamento.
MCTs ( MOS-controled Thyristor)
Este semicondutor (tiristor controlado pela técnica Metal-Óxido-Semicondutor) é bastante recente.A figura a seguir ilustra seu símbolo.
Símbolos dos MCTs tipo P e tipo N
O MCT é bastante semelhante ao MOSFET e ao IGBT, pois é controlado por tensão. O MCT temduas vantagens sobre o GTO, pois é mais rápido (tempos de acionamento/desligamento da ordemde alguns microsegundos) e seu circuito de disparo é mais simples, demandando menos correntede disparo. Os MCTs têm uma queda de tensão menor que os IGBTs e, em breve, estarãodisponíveis semicondutores que trabalham com tensões da ordem de 2500-3000V, com correntesde 50A a algumas centenas de Ampères. O MCT, porém, trabalha com correntes menores que oGTO, pois, devido à sua estrutura mais complexa, apresenta uma seção transversal menor que oGTO. A diferença do MCT tipo P para o tipo N refere-se ao semicondutor interno utilizado para o
acionamento.
Comparação entre as chaves controladas
A correta seleção do semicondutor a ser utilizado em determinada aplicação depende de umasérie de fatores. No gráfico a seguir vemos, de forma comparativa, as características das chavescontroladas com referência a tensão, corrente e freqüência de chaveamento. Estes dados sãobastante estáveis, pois todos os semicondutores, com exceção do MCT, já estão disponíveis nomercado há algum tempo e não devem sofrer modificações substanciais.
Apesar da existência destes semicondutores e de sua vasta utilização em circuitos de potência,
novos semicondutores estão sendo estudados e desenvolvidos.Uma grande tendência é a de não se utilizar mais semicondutores como os tiristores decomutação forçada (SCR e GTO), a não ser em aplicações de potências da ordem de MVA.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 11/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 8
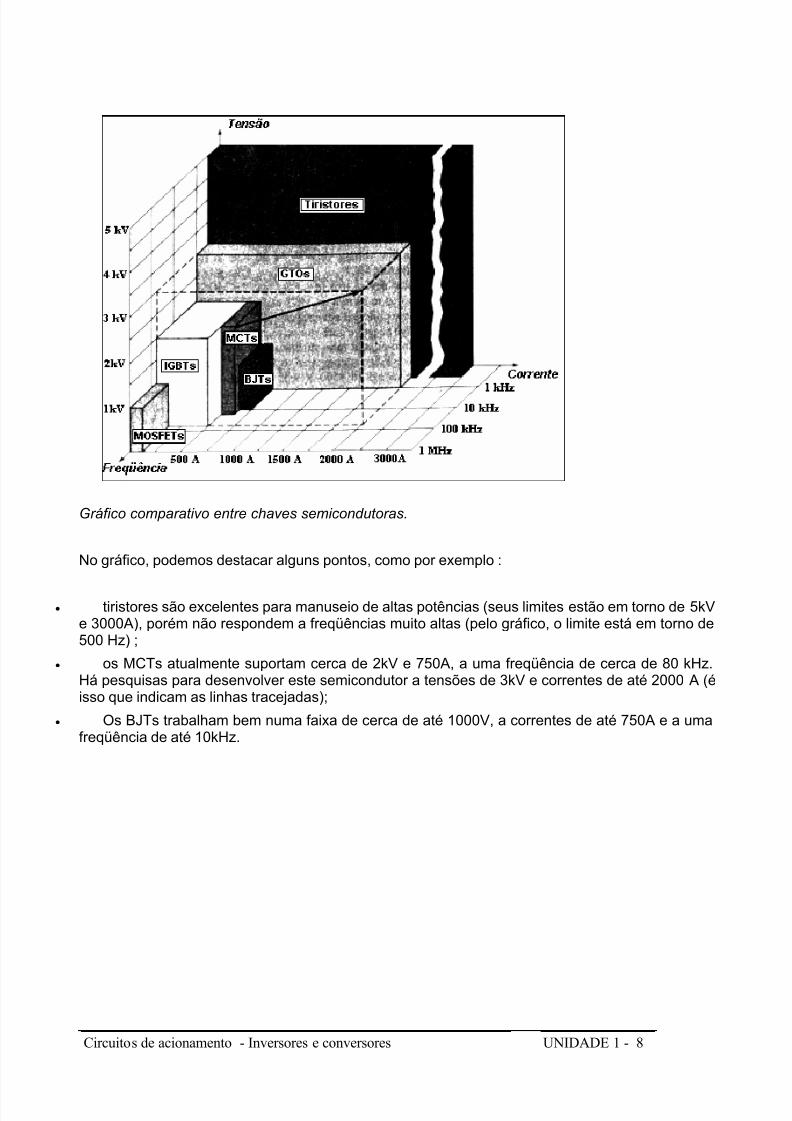
Gráfico comparativo entre chaves semicondutoras.
No gráfico, podemos destacar alguns pontos, como por exemplo :
• tiristores são excelentes para manuseio de altas potências (seus limites estão em torno de 5kVe 3000A), porém não respondem a freqüências muito altas (pelo gráfico, o limite está em torno de500 Hz) ;
• os MCTs atualmente suportam cerca de 2kV e 750A, a uma freqüência de cerca de 80 kHz.Há pesquisas para desenvolver este semicondutor a tensões de 3kV e correntes de até 2000 A (éisso que indicam as linhas tracejadas);
• Os BJTs trabalham bem numa faixa de cerca de até 1000V, a correntes de até 750A e a umafreqüência de até 10kHz.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 12/79
Circuitos de acionamento - Inversores e conversores UNIDADE 1 - 9
Faça agora os exercícios propostos para esta unidade.
Exercícios
1) Até que freqüência se recomenda a utilização de BJTs ?
a) ( ) 100 Hz
b) ( ) 100 kHz
c) ( ) 10 kHz
d) ( ) 1 kHz
2) Para um circuito de potência, operando à freqüência de chaveamento de 12 kHz e a umacorrente de saída de 100 A, levando em conta que preciso de um sistema de disparo simples, osemicondutor mais indicado é :
a) ( ) Triac
b) ( ) GTO
c) ( ) IGBT
d) ( ) BJT
3) Em um inversor de freqüência, o chaveamento dos semicondutores de potência é feito a 20kHz. Sabendo que a tensão manipulada é de 300 V e a corrente de 200 A, qual é o semicondutor mais indicado ?
4) Se você tem acesso à internet, visite alguns sites sobre semicondutores de potência,responda às questões e as envie por e-mail para o seu tutor :
a) Quais são os produtos oferecidos ?
b) Os dados dos componentes podem ser obtidos na própria página ou somente viadownload ?
c) Existe representante no Brasil?
Endereços :
www.halbar.com/powerex.htm
www.semikron.com
www.irf.com
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 13/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 1
UNIDADE
VARIAÇÃO DE
VELOCIDADE EMPROCESSOSINDUSTRIAIS
Prof. Corradi
Sumário
OBJETIVOS DA UNIDADE ........................................................................................................................ 2
INTRODUÇÃO ............................................................................................................................................ 3
VARIAÇÃO MECÂNICA DE VELOCIDADE.............................................................................................. 1
POLIAS FIXAS................................................................................................................................................. 1POLIAS CÔNICAS ............................................................................................................................................ 2MOTORREDUTORES ....................................................................................................................................... 2VARIADORES HIDRÁULICOS............................................................................................................................. 3
EMBREAGENS ELETROMAGNÉTICAS ................................................................................................................ 3VARIAÇÃO ELÉTRICA/ELETRÔNICA DE VELOCIDADE....................................................................... 4
EXERCÍCIOS .............................................................................................................................................. 5
2
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 14/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 2
Objetivos da unidade
Esta unidade tem como objetivo principal mostrar alguns dos principais métodos de
variação de velocidade em processos industriais.
Ao final desta unidade, você será capaz de :
• identificar os principais métodos de variação de velocidade em processos industriais.
• comparar estes métodos entre si.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 15/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 3
Introdução
O controle de velocidade de motores é uma necessidade que surgiu, praticamente, junto com a
construção das primeiras máquinas que utilizavam motores. Motores elétricos trifásicos e
motores CC são amplamente utilizados em sistemas de transporte, bobinagem (papel, tecidos,
metais, etc...), elevadores, bombas, compressores, ventiladores e exaustores, sistemas de
robótica, misturadores, entre outros.
De modo genérico, os termos Conversor e Inversor são amplamente utilizados quando nos
referimos a controle de velocidade de motores, sejam estes de Corrente Contínua (CC) ou
Alternada (CA). Na maioria das vezes, o termo Conversor se aplica a um equipamento que
aciona motores CC e o termo Inversor se aplica a equipamentos que acionam motores CA.
Na atualidade, praticamente todas as aplicações industriais podem ser efetuadas utilizando-se
motores de indução trifásicos ( MIT). O grande trunfo dos motores CC residia na precisão que
se podia obter no controle de sua velocidade ( algo em torno de 0,01% ); esta precisão podeser obtida, hoje em dia, utilizando-se MIT com controle vetorial, que se viabilizou devido à
evolução da eletrônica. Deste modo, percebemos que os caros motores CC têm seus dias
contados.
Vários métodos para variação de velocidade em sistemas que utilizam motores elétricos foram
desenvolvidos - a seguir citaremos alguns dos mais utilizados.

5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 16/79
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 17/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 1
Variação mecânica de velocidade
Os dispositivos mecânicos para variação de velocidade ainda são utilizados nas indústrias;
geralmente, são aplicados onde há uma limitada faixa de variação de velocidade, demanda de
baixo custo ou necessidade de aumento do torque disponível no eixo do motor. Alguns
exemplos são :
Polias fixas
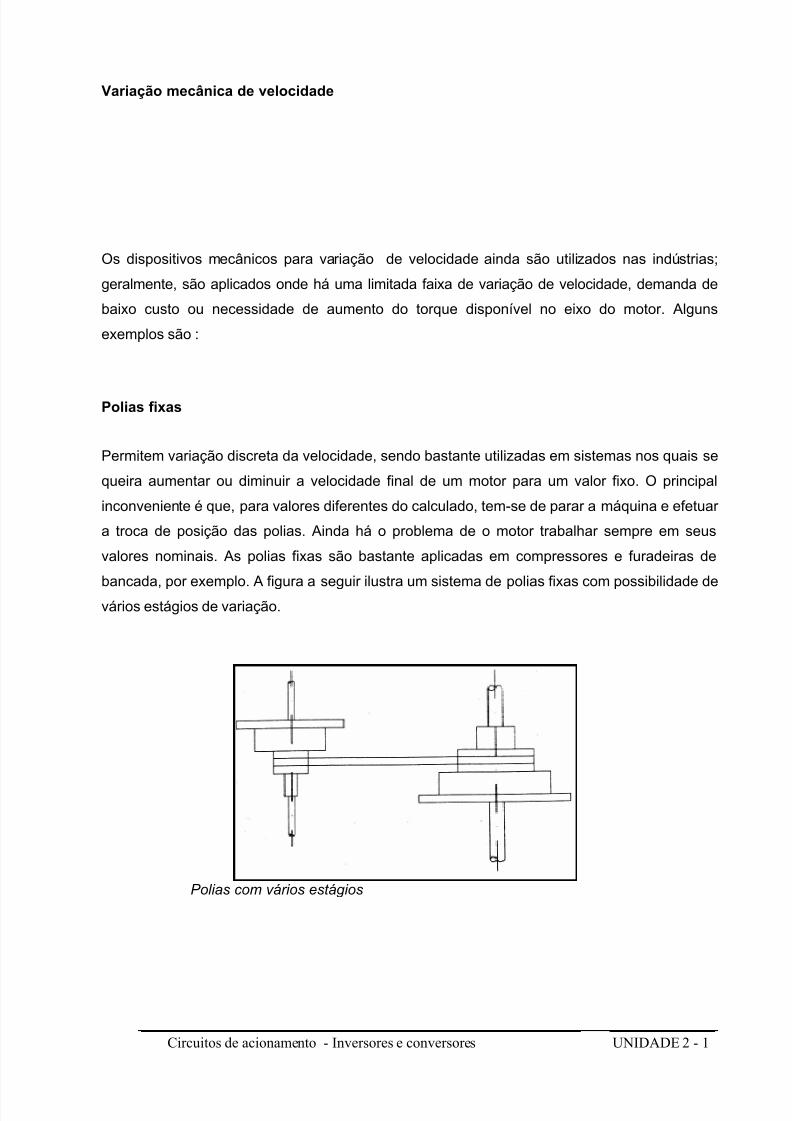
Permitem variação discreta da velocidade, sendo bastante utilizadas em sistemas nos quais se
queira aumentar ou diminuir a velocidade final de um motor para um valor fixo. O principal
inconveniente é que, para valores diferentes do calculado, tem-se de parar a máquina e efetuar
a troca de posição das polias. Ainda há o problema de o motor trabalhar sempre em seus
valores nominais. As polias fixas são bastante aplicadas em compressores e furadeiras de
bancada, por exemplo. A figura a seguir ilustra um sistema de polias fixas com possibilidade devários estágios de variação.
Polias com vários estágios
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 18/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 2
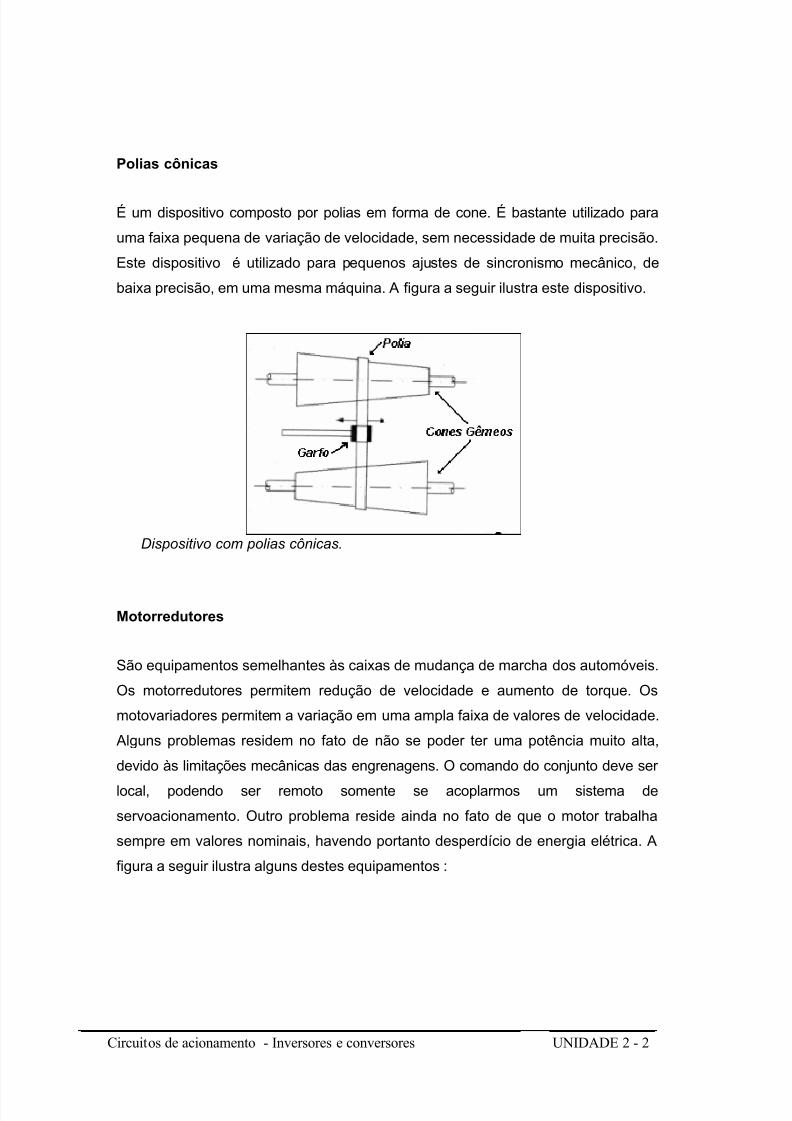
Polias cônicas
É um dispositivo composto por polias em forma de cone. É bastante utilizado para
uma faixa pequena de variação de velocidade, sem necessidade de muita precisão.
Este dispositivo é utilizado para pequenos ajustes de sincronismo mecânico, de
baixa precisão, em uma mesma máquina. A figura a seguir ilustra este dispositivo.
Dispositivo com polias cônicas.
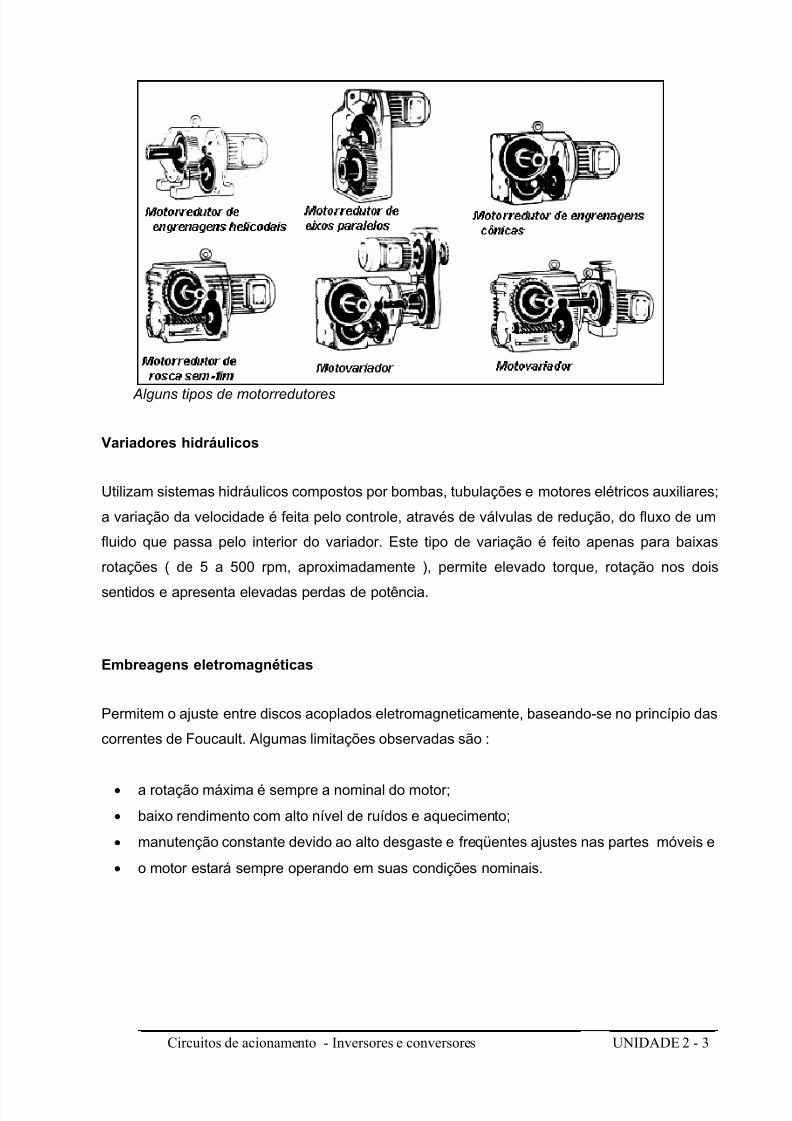
Motorredutores
São equipamentos semelhantes às caixas de mudança de marcha dos automóveis.
Os motorredutores permitem redução de velocidade e aumento de torque. Os
motovariadores permitem a variação em uma ampla faixa de valores de velocidade.
Alguns problemas residem no fato de não se poder ter uma potência muito alta,
devido às limitações mecânicas das engrenagens. O comando do conjunto deve ser
local, podendo ser remoto somente se acoplarmos um sistema de
servoacionamento. Outro problema reside ainda no fato de que o motor trabalha
sempre em valores nominais, havendo portanto desperdício de energia elétrica. A
figura a seguir ilustra alguns destes equipamentos :
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 19/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 3
Alguns tipos de motorredutores
Variadores hidráulicos
Utilizam sistemas hidráulicos compostos por bombas, tubulações e motores elétricos auxiliares;
a variação da velocidade é feita pelo controle, através de válvulas de redução, do fluxo de um
fluido que passa pelo interior do variador. Este tipo de variação é feito apenas para baixas
rotações ( de 5 a 500 rpm, aproximadamente ), permite elevado torque, rotação nos dois
sentidos e apresenta elevadas perdas de potência.
Embreagens eletromagnéticas
Permitem o ajuste entre discos acoplados eletromagneticamente, baseando-se no princípio das
correntes de Foucault. Algumas limitações observadas são :
• a rotação máxima é sempre a nominal do motor;
• baixo rendimento com alto nível de ruídos e aquecimento;
• manutenção constante devido ao alto desgaste e freqüentes ajustes nas partes móveis e
• o motor estará sempre operando em suas condições nominais.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 20/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 4
Variação elétrica/eletrônica de velocidade
Estes métodos se resumem em dois tipos :
Variação elétrica : é feita no próprio motor, por meio da variação das características
do mesmo. Temos como exemplo o motor de rotor bobinado, ou de anéis, e o motor
do tipo Dahlander.
Variação eletrônica : é conduzida por um elemento externo ao motor, ou seja, um
circuito eletrônico, como um inversor de freqüência ou um conversor CA/CC.
Na próxima unidade trataremos mais detalhadamente estas variações.
Faça agora os exercícios propostos para esta unidade.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 21/79
Circuitos de acionamento - Inversores e conversores UNIDADE 2 - 5
Exercícios
1) Coloque “V” se a informação for verdadeira e “F” se for falsa.
a) ( ) Um sistema com motorredutores pode ser utilizado para se aumentar a
velocidade nominal de um motor elétrico.
b) ( ) A variação de velocidade com sistema de polias cônicas permite variação
contínua da velocidade, sendo especialmente indicado para furadeiras de bancada.
c) ( ) A variação de velocidade utilizando sistemas elétricos exige utilização de
equipamentos como inversores e conversores, por exemplo.
d) ( ) Uma das vantagens de se utilizar motorredutores é que se consegue
aumentar o torque fornecido ao sistema.
2) Quais são as principais vantagens de se utilizar métodos eletrônicos para variação de
velocidade ?
3) Se você tiver acesso à Internet, visite alguns sites sobre motorredutores, responda às
questões a seguir e as envie por e-mail para seu tutor:
a) Quais são os produtos oferecidos ?
b) Existe representante no Brasil?
Endereços :
www.sew.ind.br
http;//moliner.com
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 22/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 1
UNIDADE
VARIAÇÃO DE
VELOCIDADE COMMOTORES DECORRENTE CONTÍNUA
Prof. Corradi
Sumário
OBJETIVOS DA UNIDADE ........................................................................................................ 2
INTRODUÇÃO ............................................................................................................................ 3
MOTORES E GERADORES CC ................................................................................................ 1
CONSTRUÇÃO ............................................................................................................................... 1EQUAÇÕES BÁSICAS DE FUNCIONAMENTO ...................................................................................... 1VARIAÇÃO DE VELOCIDADE ............................................................................................................ 2QUADRANTES DE FUNCIONAMENTO................................................................................................ 3 Acionamento em um quadrante .................................................................................................. 5 CIRCUITOS TÍPICOS PARA CONTROLE DE VELOCIDADE DE MOTORES CC.......................................... 5Controle de Velocidade sem realimentação................................................................................ 6 Controle de velocidade com realimentação ................................................................................ 7
EXERCÍCIOS .............................................................................................................................. 9
3
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 23/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 2
Objetivos da unidade
Esta unidade tem como objetivo apresentar alguns métodos de controle de velocidade
com motores de corrente contínua.
Ao término desta unidade, você será capaz de :
• identificar circuitos de variação de velocidade com Motores CC.
• analisar quais são as possibilidades de variação de velocidade com um motor CC.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 24/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 3
Introdução
Inicialmente, abordaremos algumas características de máquinas CC, cujo conhecimento é
necessário à compreensão de seu funcionamento e de como se pode realizar seu controle de
velocidade, e, a seguir, estudaremos os equipamentos utilizados no controle de torque e
velocidade destas máquinas. Não iremos nos aprofundar muito neste tema, visto que o
acionamento com máquinas CC está caindo em desuso.

5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 25/79
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 26/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 1
Motores e geradores CC
Uma máquina é um motor quando transforma energia elétrica em energia mecânica, e é um
gerador quando faz o processo inverso. Do ponto de vista construtivo, o gerador e o motor CC
são iguais, sendo que a máquina CC pode ser usada como motor ou gerador, dependendo do
tipo de transformação que realiza.
Construção
As máquinas CC são compostas por duas partes principais : a armadura (ou rotor) que é a
parte girante e o campo ( ou estator ) que é a parte fixa. O estator ou campo é formado por
um ímã permanente que não permite, em alguns casos, o controle do fluxo magnético, sendo
que o controle do motor é, então, feito pelo controle do campo no rotor. Os materiais utilizados
no motor devem ser de boa condutibilidade magnética, pois vão conduzir fluxo magnético.
Equações básicas de funcionamento
O funcionamento de um gerador CC baseia-se na Lei de Faraday, ou seja, quando um
condutor elétrico é submetido a um campo magnético variável, surge nele uma tensão induzida
( E ), a qual é diretamente proporcional à intensidade deste campo ( φ ), e à velocidade com
que está variando ( n ). Esta tensão tem ainda uma relação direta com as características
construtivas da máquina, representadas pela constante k. Deste modo, podemos escrever a
seguinte equação :
E = k . n . φ (1)
Em um gerador, a tensão fornecida à carga, ou seja, a tensão de armadura ( Va ) depende da
força eletromotriz gerada ( E ) e da resistência de armadura multiplicada pela sua corrente (
Ra . Ia ), ou seja :
Va = E – Ra.Ia (2)
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 27/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 2
Estas equações são válidas tanto para o gerador CC quanto para o motor CC, permitindo
isolar e obter, matematicamente, o valor da velocidade n :
Va = k . n . φ – Ra.Ia k . n . φ = Va + Ra.Ia
O torque ou conjugado ( M ) em uma máquina CC é função direta de suas características
intrínsecas ( k ), do fluxo magnético gerado pelo campo (φ) e da corrente de armadura (
Ia ) :
M = k. φ. Ia (4)
Variação de Velocidade
Como vimos na equação ( 3 ), para podermos variar a velocidade de uma máquina CC,
podemos variar :
• a tensão de armadura - Va
• a resistência do circuito de armadura - Ra
• o fluxo - φ ( alterando-se a corrente de excitação no campo )
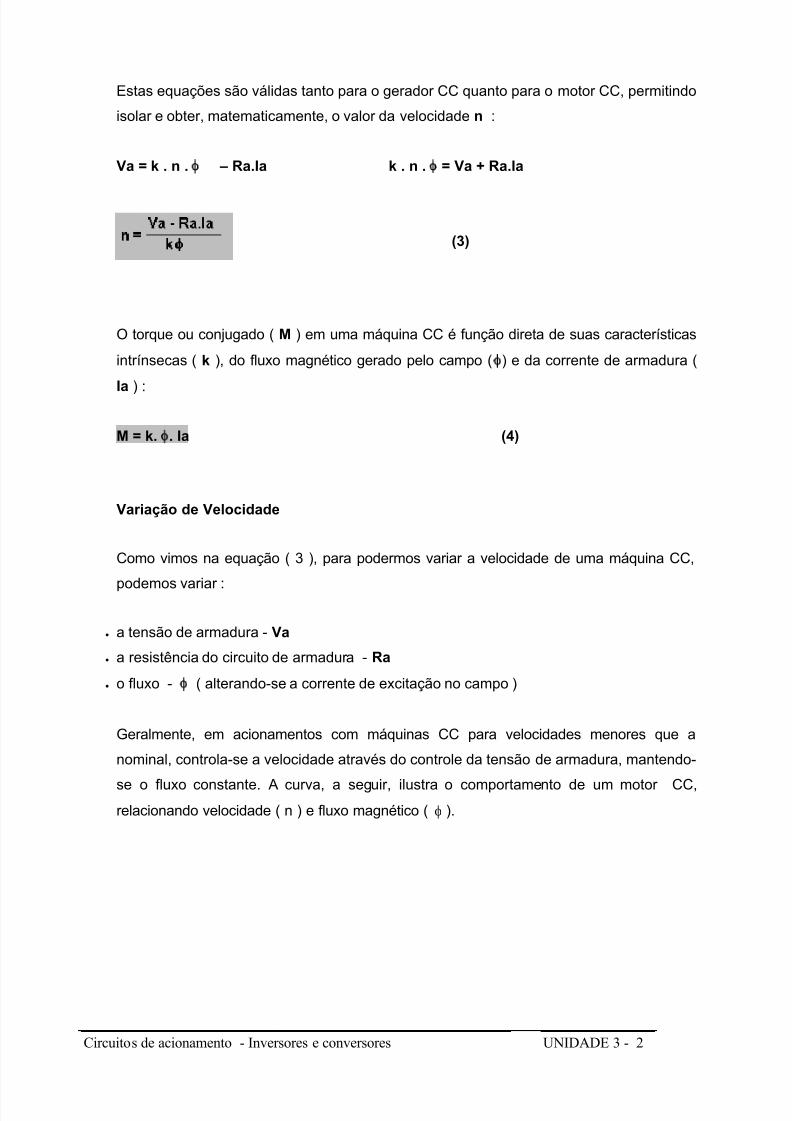
Geralmente, em acionamentos com máquinas CC para velocidades menores que a
nominal, controla-se a velocidade através do controle da tensão de armadura, mantendo-
se o fluxo constante. A curva, a seguir, ilustra o comportamento de um motor CC,relacionando velocidade ( n ) e fluxo magnético ( φ ).
(3)
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 28/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 3
Fluxo magnético X Velocidade de rotação da máquina CC
Acima da velocidade nominal, a tensão de armadura é mantida constante e reduz-se o fluxo,
enfraquecendo com isso o campo.
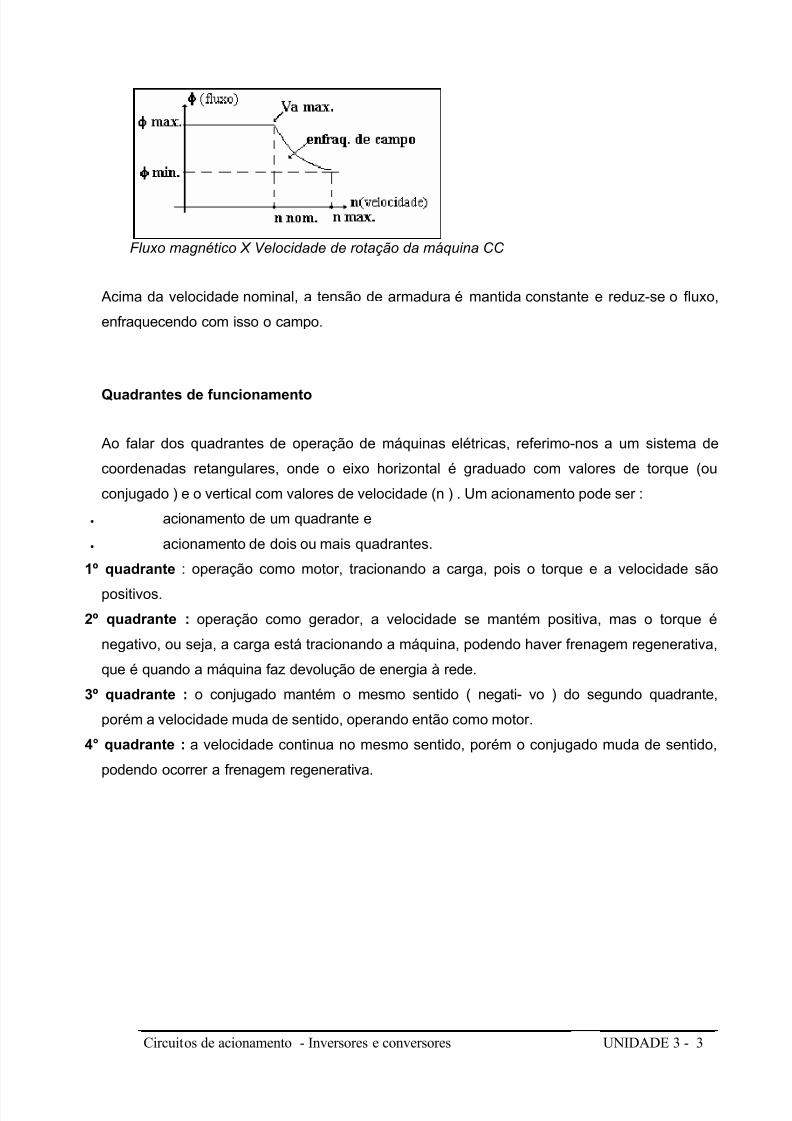
Quadrantes de funcionamento
Ao falar dos quadrantes de operação de máquinas elétricas, referimo-nos a um sistema de
coordenadas retangulares, onde o eixo horizontal é graduado com valores de torque (ou
conjugado ) e o vertical com valores de velocidade (n ) . Um acionamento pode ser :
• acionamento de um quadrante e
• acionamento de dois ou mais quadrantes.
1º quadrante : operação como motor, tracionando a carga, pois o torque e a velocidade são
positivos.
2º quadrante : operação como gerador, a velocidade se mantém positiva, mas o torque é
negativo, ou seja, a carga está tracionando a máquina, podendo haver frenagem regenerativa,
que é quando a máquina faz devolução de energia à rede.
3º quadrante : o conjugado mantém o mesmo sentido ( negati- vo ) do segundo quadrante,
porém a velocidade muda de sentido, operando então como motor.
4° quadrante : a velocidade continua no mesmo sentido, porém o conjugado muda de sentido,
podendo ocorrer a frenagem regenerativa.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 29/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 4
Pela figura a seguir, podemos analisar o funcionamento da Máquina CC por quadrantes :
Quadrantes de funcionamento de uma máquina elétrica rotativa.
Para grandes sistemas, como os trens metropolitanos ( metrôs ) e outros onde há
possibilidade de aproveitamento de energia, é imperativa a possibilidade de trabalho nos
quatro quadrantes.
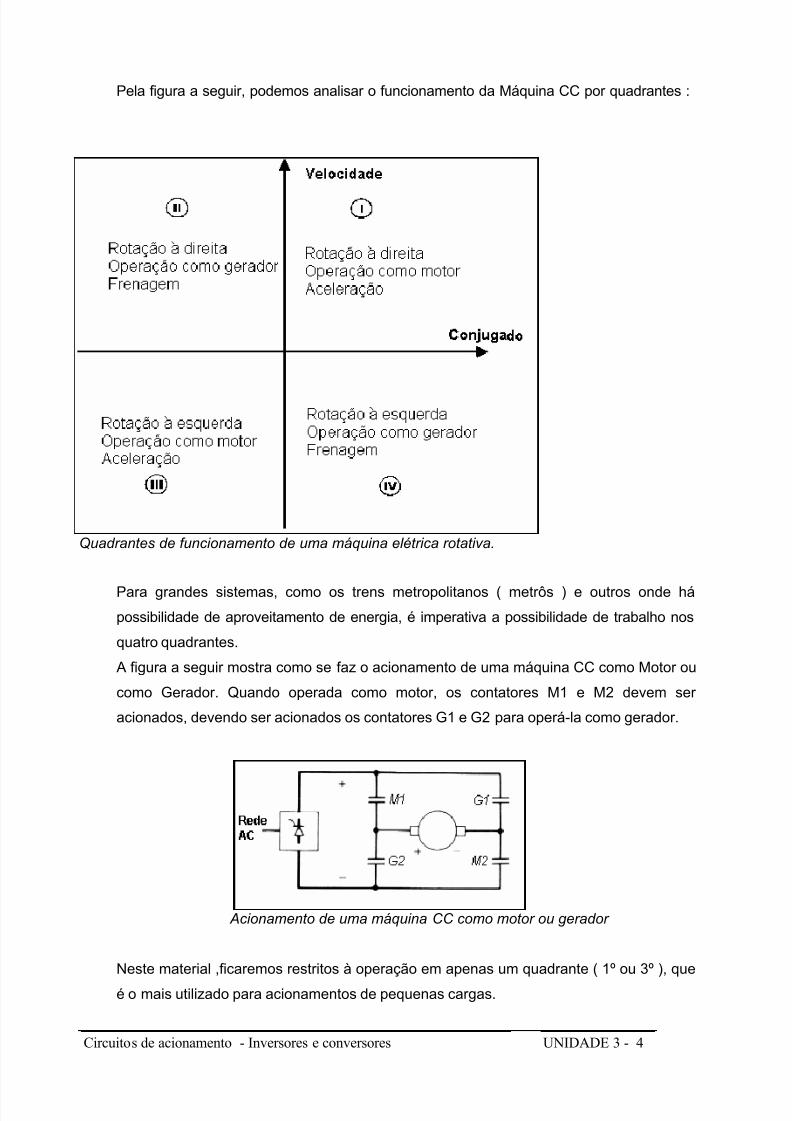
A figura a seguir mostra como se faz o acionamento de uma máquina CC como Motor ou
como Gerador. Quando operada como motor, os contatores M1 e M2 devem ser
acionados, devendo ser acionados os contatores G1 e G2 para operá-la como gerador.
Acionamento de uma máquina CC como motor ou gerador
Neste material ,ficaremos restritos à operação em apenas um quadrante ( 1º ou 3º ), que
é o mais utilizado para acionamentos de pequenas cargas.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 30/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 5
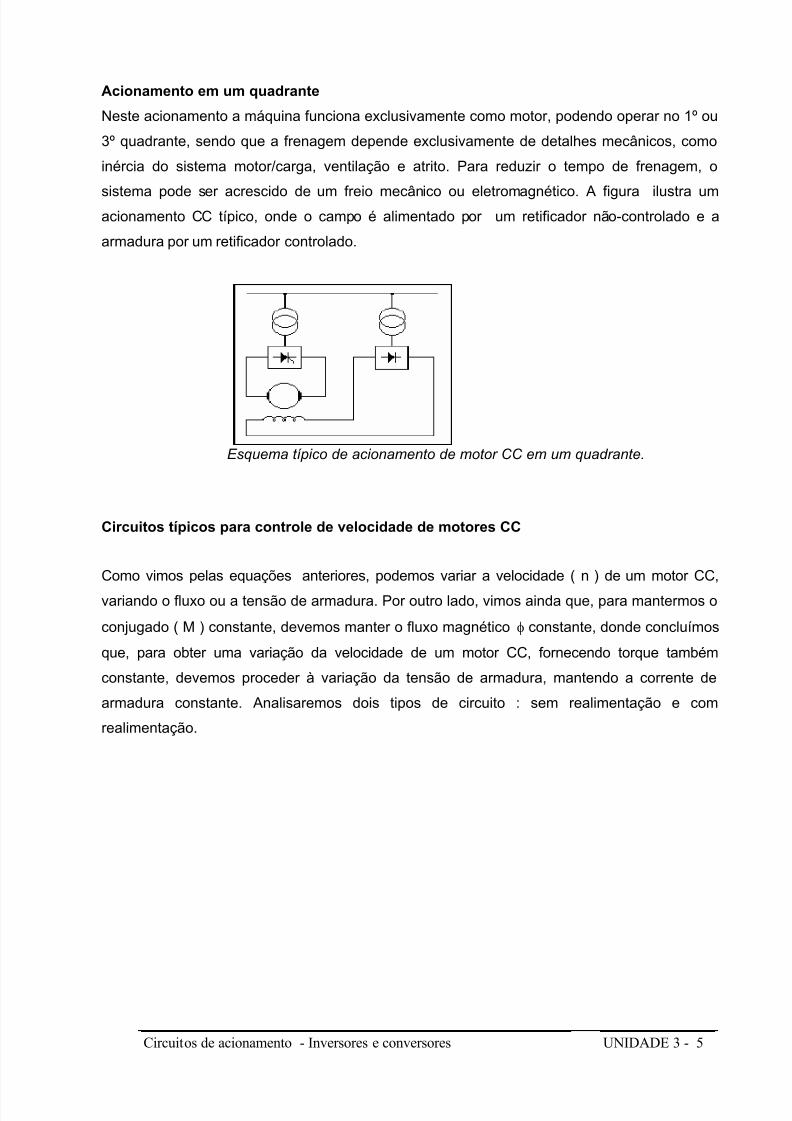
Acionamento em um quadrante
Neste acionamento a máquina funciona exclusivamente como motor, podendo operar no 1º ou
3º quadrante, sendo que a frenagem depende exclusivamente de detalhes mecânicos, como
inércia do sistema motor/carga, ventilação e atrito. Para reduzir o tempo de frenagem, o
sistema pode ser acrescido de um freio mecânico ou eletromagnético. A figura ilustra umacionamento CC típico, onde o campo é alimentado por um retificador não-controlado e a
armadura por um retificador controlado.
Esquema típico de acionamento de motor CC em um quadrante.
Circuitos típicos para controle de velocidade de motores CC
Como vimos pelas equações anteriores, podemos variar a velocidade ( n ) de um motor CC,
variando o fluxo ou a tensão de armadura. Por outro lado, vimos ainda que, para mantermos o
conjugado ( M ) constante, devemos manter o fluxo magnético φ constante, donde concluímos
que, para obter uma variação da velocidade de um motor CC, fornecendo torque também
constante, devemos proceder à variação da tensão de armadura, mantendo a corrente de
armadura constante. Analisaremos dois tipos de circuito : sem realimentação e com
realimentação.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 31/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 6
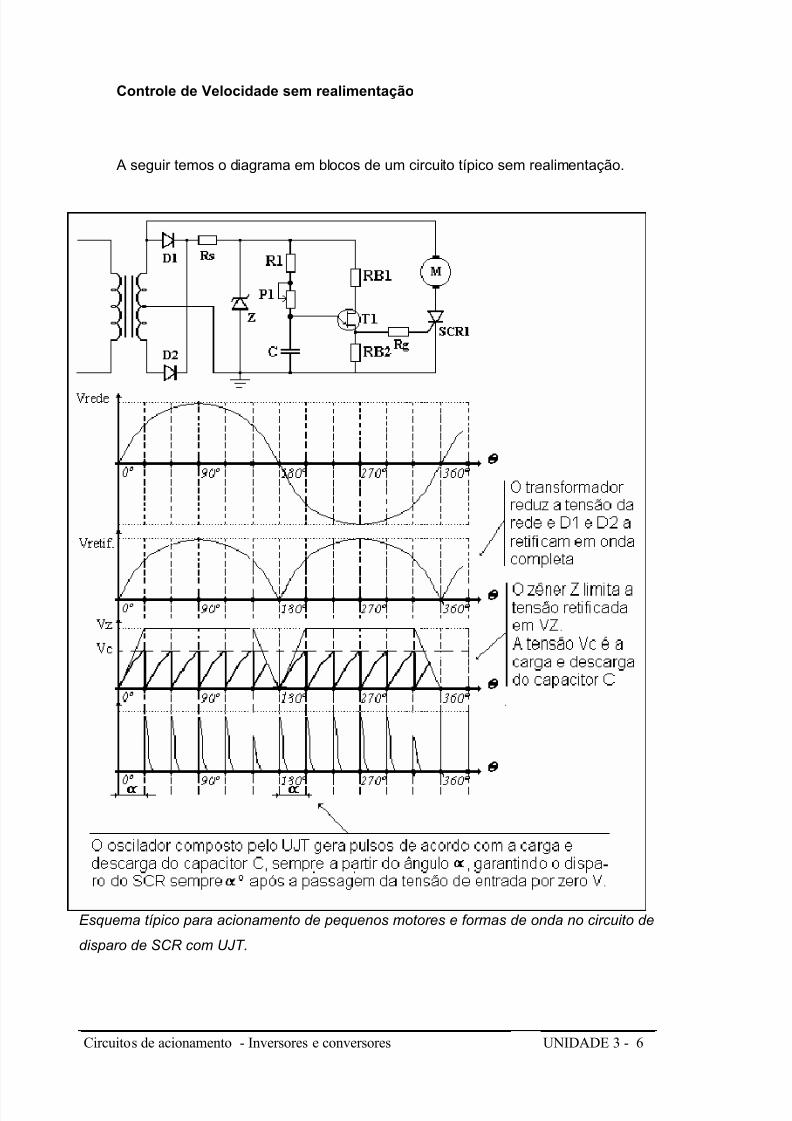
Controle de Velocidade sem realimentação
A seguir temos o diagrama em blocos de um circuito típico sem realimentação.
Esquema típico para acionamento de pequenos motores e formas de onda no circuito de
disparo de SCR com UJT.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 32/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 7
Este circuito geralmente é utilizado para controle de pequenos motores CC, que podem ser
alimentados por um transformador, ou ainda pode ser utilizado para variar a velocidade de um
motor universal ( furadeiras, lixadeiras e serras manuais ), sendo alimentado pela rede. Neste
caso, deve ser previsto um transformador de acoplamento entre o UJT e o gate do SCR .
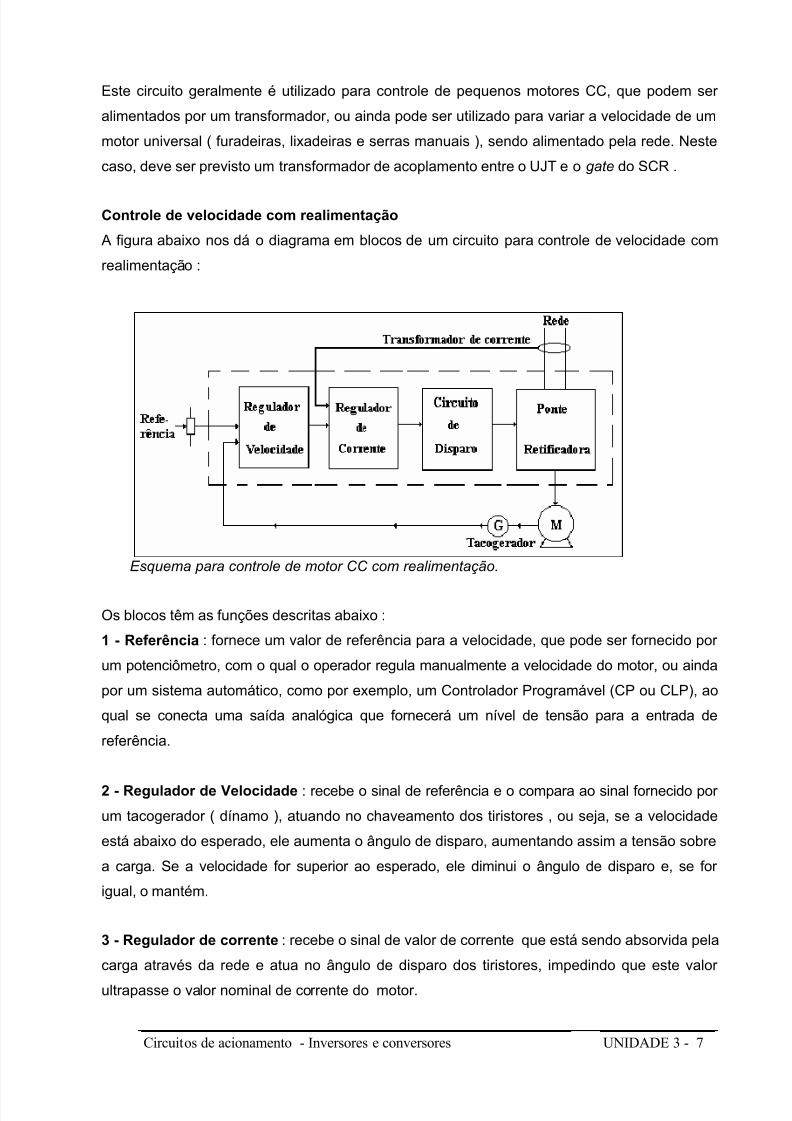
Controle de velocidade com realimentação
A figura abaixo nos dá o diagrama em blocos de um circuito para controle de velocidade com
realimentação :
Esquema para controle de motor CC com realimentação.
Os blocos têm as funções descritas abaixo :
1 - Referência : fornece um valor de referência para a velocidade, que pode ser fornecido por
um potenciômetro, com o qual o operador regula manualmente a velocidade do motor, ou ainda
por um sistema automático, como por exemplo, um Controlador Programável (CP ou CLP), ao
qual se conecta uma saída analógica que fornecerá um nível de tensão para a entrada de
referência.
2 - Regulador de Velocidade : recebe o sinal de referência e o compara ao sinal fornecido por
um tacogerador ( dínamo ), atuando no chaveamento dos tiristores , ou seja, se a velocidade
está abaixo do esperado, ele aumenta o ângulo de disparo, aumentando assim a tensão sobre
a carga. Se a velocidade for superior ao esperado, ele diminui o ângulo de disparo e, se for
igual, o mantém.
3 - Regulador de corrente : recebe o sinal de valor de corrente que está sendo absorvida pela
carga através da rede e atua no ângulo de disparo dos tiristores, impedindo que este valor
ultrapasse o valor nominal de corrente do motor.

5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 33/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 8
4 - Circuito de disparo : efetua o disparo dos tiristores de acordo com a realimentação
de velocidade e corrente.
5 - Ponte Retificadora : é composta por tiristores que retificam a tensão CA da rede de
acordo com os pulsos fornecidos pelo circuito de disparo.
Faça agora os exercícios propostos para esta unidade.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 34/79
Circuitos de acionamento - Inversores e conversores UNIDADE 3 - 9
Exercícios
1) Coloque “V” se a informação for verdadeira e “F” se for falsa.
a) ( ) A velocidade de rotação de um motor CC depende somente da tensão
aplicada na armadura.
b) ( ) Para se ultrapassar a velocidade nominal, é necessário ultrapassar também a
tensão nominal aplicada à armadura do motor CC, o que pode provocar a queima dos
enrolamentos da armadura.
c) ( ) Aumentando-se o valor do fluxo magnético no campo (φ), aumenta-se a
velocidade do motor CC.
d) ( ) Não é possível aumentarmos a velocidade de um motor CC além de sua
velocidade nominal, sem reduzir o fluxo magnético no campo.
e) ( ) A função do bloco de regulagem de corrente é a de fazer com que o circuito
de controle não permita que o motor queime por sobrecarga.
2) Qual é a principal característica de um sistema de variação de velocidade sem
realimentação ?
3) Se você tem acesso à internet, tente achar informações sobre conversores CA/CC.
Quais produtos são oferecidos por fabricantes como : Siemens, Telemecanique e WEG ? Envie
um e-mail para o tutor com uma descrição sucinta destes produtos.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 35/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 1
UNIDADE
VARIAÇÃO DE
VELOCIDADE COMMOTORES DE CORRENTEALTERNADA
PROF. CORRADI
Sumário
OBJETIVO DA UNIDADE........................................................................................................... 2
INTRODUÇÃO ............................................................................................................................ 3
VARIAÇÃO DE VELOCIDADE COM MOTORES DE CORRENTE ALTERNADA.................... 1
VARIAÇÃO DE VELOCIDADE COM MOTOR ASSÍNCRONO DE ANÉIS...................................................... 1MOTOR ASSÍNCRONO COM ROTOR EM GAIOLA DE ESQUILO ............................................................. 1Variação do número de pólos ..................................................................................................... 2 Variação do escorregamento ...................................................................................................... 2 Variação da freqüência da tensão de alimentação ..................................................................... 2
CLASSIFICAÇÃO DOS INVERSORES DE FREQÜÊNCIA....................................................... 3
INVERSORES DIRETOS - CICLOCONVERSORES ................................................................................ 3INVERSORES INDIRETOS ................................................................................................................ 4Inversor com fonte de tensão por Modulação de Largura de Pulso ( PWM-VSI - Pulse WidthModulation - Voltage Source Inverter)......................................................................................... 4Inversor com fonte de tensão tipo onda quadrada ( square-wave VSI ), com retificação por tiristores....................................................................................................................................... 5 Inversor com fonte de corrente ( CSI - Current Source Inverter ) com retificação por tiristores. 5 COMPARAÇÃO ENTRE INVERSORES DE FREQÜÊNCIA INDIRETOS ...................................................... 6
EXERCÍCIOS .............................................................................................................................. 7
4
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 36/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 2
Objetivo da unidade
Esta unidade tem por objetivo apresentar os principais métodos de variação de velocidade,
utilizando motores de Corrente Alternada.
Ao final desta unidade, você será capaz de identificar os principais métodos de variação de
velocidade de motores CA, podendo selecionar o método mais adequado para cada
aplicação.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 37/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 3
Introdução
O Motor de Indução Trifásico (MIT) ganhou mercado devido a algumas características que o
tornam superior aos motores CC; podemos destacar algumas, como :
• não requer manutenção do conjunto escovas/comutador;
• possui tamanho e peso reduzidos para uma mesma potência nominal e
• não necessita de fonte CC.
Uma barreira para a utilização do MIT consistia na dificuldade para se variar sua velocidade,
uma vez que no motor CC, como já foi visto, basta variar a tensão da fonte de alimentação.
Devido aos avanços da eletrônica, hoje já se consegue variar a velocidade do MIT com
circuitos simples e confiáveis.

5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 38/79
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 39/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 1
Variação de velocidade com motores de corrente alternada
Existem alguns métodos em que a variação de velocidade é feita no próprio motor, com
alterações desuas características. Estas variações, no entanto, não são muito flexíveis ( no
caso do motor Dahlander ) ou exigem gastos com manutenção ( como é o caso do motor de
anéis ), servindoapenas a propósitos específicos, como veremos a seguir.
Variação de velocidade com motor assíncrono de anéis
O motor de anéis é bastante utilizado em sistemas que necessitam de alto torque, como pontes
rolantes, guindastes e outros. A velocidade do campo girante é mantida constante, sendo a
velocidade do rotor ajustada através de :
• variação da resistência rotórica, feita por meio da conexão de resistores inseridos em
série com o estator;• variação da tensão do estator, feita com um inversor de freqüência e
• variação de ambas simultaneamente.
Estas variações têm como conseqüência o aumento das perdas de potência no rotor, o que
limita esta aplicação.
Motor assíncrono com rotor em gaiola de esquilo
Para variação de velocidade do MIT, devemos observar a sua equação de velocidade, que nos
dá três possibilidades de variação :
n =(120.f.(1-s))
p (1)
onde : f = freqüência
p = número de pólos
s = escorregamento
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 40/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 2
Variação do número de pólos
É conseguida com motores especiais chamados Dahlander , que são motores
construídos especialmente para variação do número de pólos, geralmente com
duas ou quatro velocidades múltiplas. Praticamente, não há perdas de potência se
compararmos estes motores com os outros sistemas de variação de velocidadecitados, porém, há pouca possibilidade de variação, limitando-se a duas ou quatro
velocidades.
Variação do escorregamento
É conseguida através da variação da tensão rotórica. Consegue-se com isso uma
redução de velocidade no motor. Os principais problemas que ocorrem são relativos
ao aumento das perdas e à diminuição no conjugado ( para 70% da tensão
nominal, temos uma redução de 50% no conjugado nominal). Estas limitaçõesreduzem as aplicações basicamente à :
• partida lenta de máquinas através de chaves compensadoras ou “soft-starter” (
partida suave ) e
• regulação de velocidade de ventiladores e bombas.
O soft-starter é um equipamento com um circuito eletrônico, que faz a mesma
função da chave compensadora com auto-transformador, ou seja, através dochaveamento de semicondutores, é aplicada uma tensão reduzida ao motor,
limitando os picos de corrente em sua partida. Uma vez em regime de
funcionamento contínuo, o soft-starter é desconectado do circuito através de um
circuito de comando ( com contatores ).
Variação da freqüência da tensão de alimentação
O mais eficiente método de variação e controle de velocidade de MIT, com menores
perdas e faixa mais ampla de variação (permi-te alcançar - com relativa perda de
torque - até 5 vezes a velocidade nominal do motor ), consiste na aplicação ao
motor de uma fonte de tensão com freqüência variável.
Pelo equacionamento do MIT, podemos relacionar o conjugado desenvolvido ( C ),
ao fluxo magnético ( φm ) e à corrente rotórica ( I rotor ) :
C = φm . I rotor (02)
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 41/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 3
Por sua vez, o fluxo magnético é diretamente proporcional à tensão aplicada no estator ( V1 ) e
inversamente proporcional à freqüência desta tensão ( f1 ), do que obemos então a relação :
φm =V1 (03 )
f1
Concluímos, então, que, para podermos variar a velocidade do MIT, mantendo o conjugado
constante, devemos manter constante a relação tensão/freqüência. Como esta relação é um
número, ou seja, é um valor escalar, o inversor que utiliza este princípio ( o de manter a relação
V/Hz constante ) é chamado de inversor escalar .
Classificação dos inversores de freqüência
Um inversor de freqüência converte a tensão da rede de alimentação, que tem amplitude e
freqüência fixas, em outra tensão com amplitude e freqüência variáveis. Esta conversão pode
ser feita de modo direto, utilizando-se Cicloconversores ou de modo indireto, utilizando-se
inversores com Circuito Intermediário.
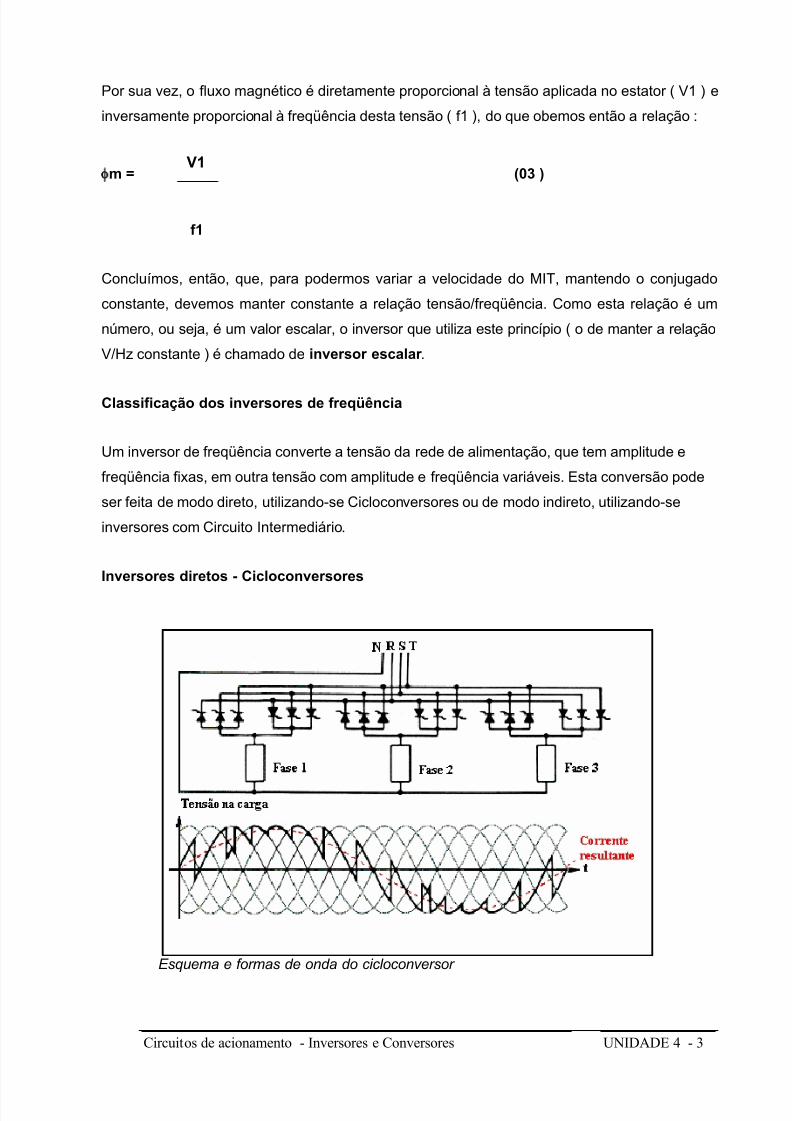
Inversores diretos - Cicloconversores
Esquema e formas de onda do cicloconversor
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 42/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 4
O inversor direto é constituído por um circuito em que a tensão da rede é comutada por 6 pontes
trifásicas, que alimentam cada uma das fases da carga, ou seja, cada fase é conectada a duas
pontes em antiparalelo (na figura temos pontes monofásicas), sendo que cada ponte trabalha com
um semiciclo da tensão senoidal, de forma que a tensão aplicada à carga é resultado do recorte
das tensões trifásicas de alimentação. A corrente resultante na carga terá sua freqüênciadiscretamente alterada, produzindo o efeito desejado.
Este conversor só é aplicado para freqüências de 0 a 20Hz, pois, a partir desta freqüência, a
corrente resultante terá uma distorção excessiva, fugindo do formato senoidal. Algumas
aplicações :
• laminadores de tubo, com motores síncronos a baixa velocidade (12 a 20 rpm );
• refundição de escórias, onde freqüências de 0 a 10 Hz são necessárias e
• moinhos de cimento, com motores síncronos de baixa rotação ( velocidade até 15 rpm ), com
elevado número de pólos.
Inversores indiretos
Discutiremos, a seguir, algumas das configurações mais utilizadas para inversores indiretos.
Basicamente, temos três tipos de inversores de freqüência indiretos, os quais são classificados de
acordo com as etapas de retificação e inversão que utilizam :
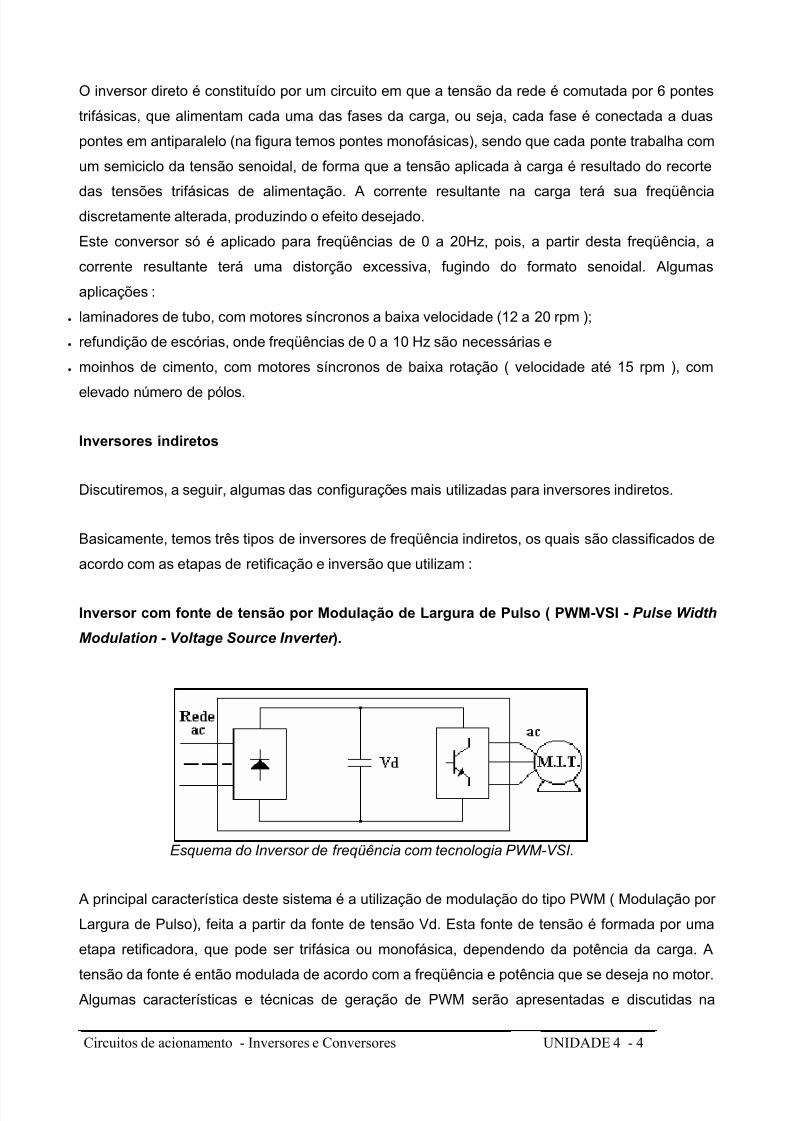
Inversor com fonte de tensão por Modulação de Largura de Pulso ( PWM-VSI - Pulse Width
Modulation - Voltage Source Inverter ).
Esquema do Inversor de freqüência com tecnologia PWM-VSI.
A principal característica deste sistema é a utilização de modulação do tipo PWM ( Modulação por
Largura de Pulso), feita a partir da fonte de tensão Vd. Esta fonte de tensão é formada por uma
etapa retificadora, que pode ser trifásica ou monofásica, dependendo da potência da carga. A
tensão da fonte é então modulada de acordo com a freqüência e potência que se deseja no motor.Algumas características e técnicas de geração de PWM serão apresentadas e discutidas na
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 43/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 5
próxima unidade.
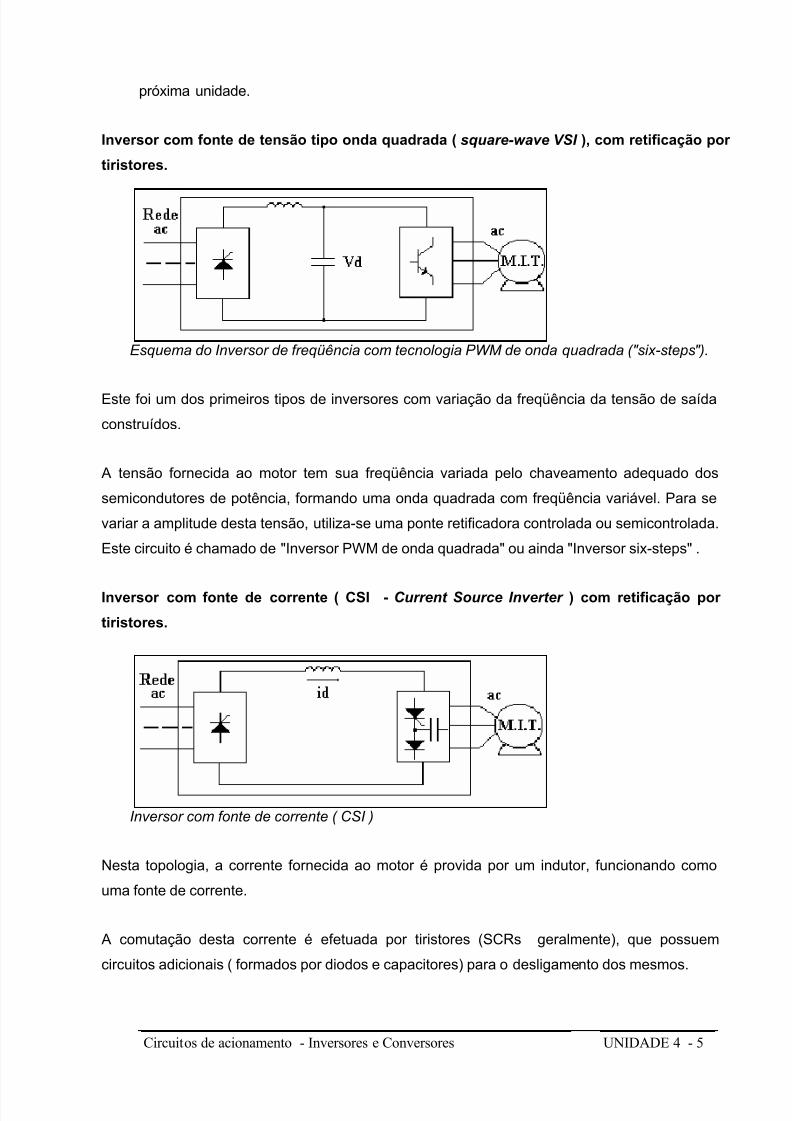
Inversor com fonte de tensão tipo onda quadrada ( square-wave VSI ), com retificação por
tiristores.
Esquema do Inversor de freqüência com tecnologia PWM de onda quadrada ("six-steps").
Este foi um dos primeiros tipos de inversores com variação da freqüência da tensão de saída
construídos.
A tensão fornecida ao motor tem sua freqüência variada pelo chaveamento adequado dos
semicondutores de potência, formando uma onda quadrada com freqüência variável. Para se
variar a amplitude desta tensão, utiliza-se uma ponte retificadora controlada ou semicontrolada.
Este circuito é chamado de "Inversor PWM de onda quadrada" ou ainda "Inversor six-steps" .
Inversor com fonte de corrente ( CSI - Current Source Inverter ) com retificação por
tiristores.
Inversor com fonte de corrente ( CSI )
Nesta topologia, a corrente fornecida ao motor é provida por um indutor, funcionando como
uma fonte de corrente.
A comutação desta corrente é efetuada por tiristores (SCRs geralmente), que possuem
circuitos adicionais ( formados por diodos e capacitores) para o desligamento dos mesmos.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 44/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 6
Esta configuração foi bastante utilizada no passado, uma vez que os semicondutores não
suportavam grandes valores de correntes; com o desenvolvimento dos transistores de potência,
MOSFETs e IGBTs, esta configuração se viu restrita a aplicações de potências muito elevadas.
Um dos principais problemas desta configuração é que o inversor deve ser construídoespecificamente para um tipo de carga, com pouca mobilidade de troca posterior à instalação.
Comparação entre inversores de freqüência indiretos
Existe uma tendência mercadológica muito grande a se utilizar os inversores tipo PWM-VSI ,
devido à sua fácil adaptabilidade a quaisquer tipos de motores de indução.
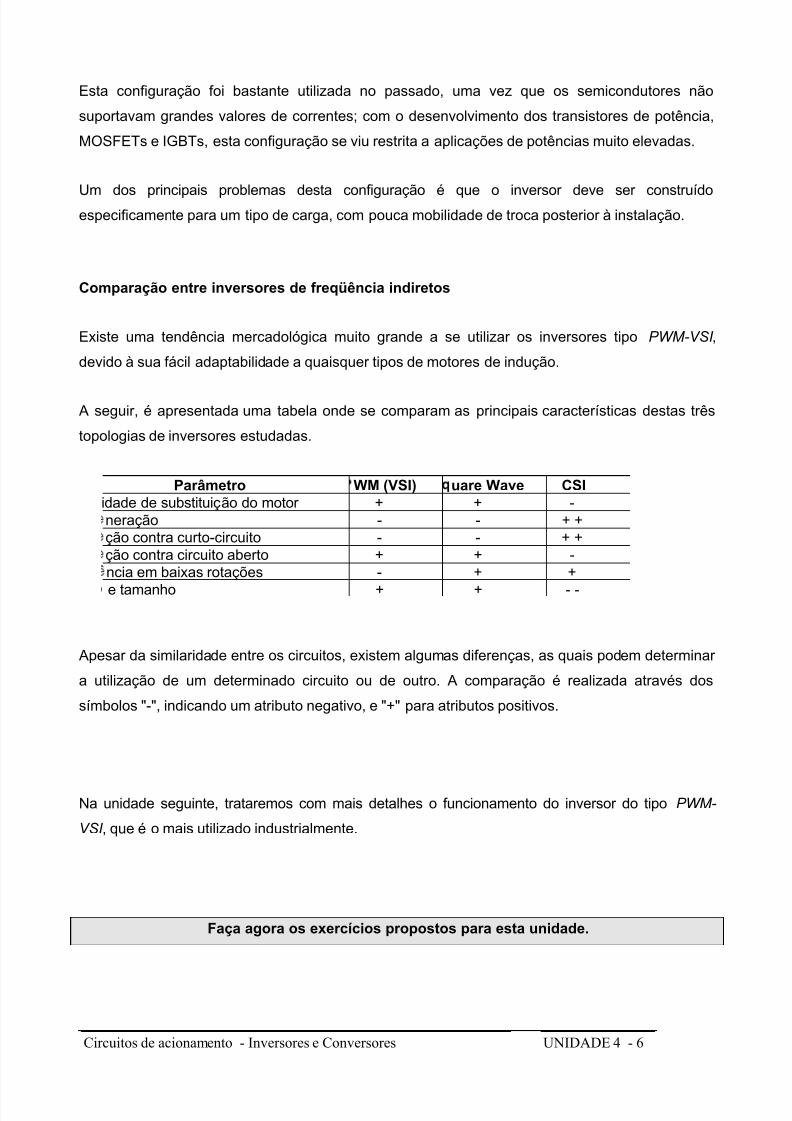
A seguir, é apresentada uma tabela onde se comparam as principais características destas três
topologias de inversores estudadas.
Parâmetro WM (VSI) uare Wave CSIidade de substituição do motor + + -neração - - + +ção contra curto-circuito - - + +ção contra circuito aberto + + -ncia em baixas rotações - + +
e tamanho + + - -
Apesar da similaridade entre os circuitos, existem algumas diferenças, as quais podem determinar
a utilização de um determinado circuito ou de outro. A comparação é realizada através dos
símbolos "-", indicando um atributo negativo, e "+" para atributos positivos.
Na unidade seguinte, trataremos com mais detalhes o funcionamento do inversor do tipo PWM-
VSI , que é o mais utilizado industrialmente.
Faça agora os exercícios propostos para esta unidade.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 45/79
Circuitos de acionamento - Inversores e Conversores UNIDADE 4 - 7
Exercícios
1) Aplicações típicas para o motor assíncrono de anéis são :
a) ( ) Pontes rolantes.
b) ( ) Trens metropolitanos ( metrô ).
c) ( ) Ventiladores e exaustores residenciais.
2) Posso substituir um inversor de freqüência por um
soft-starter ? Por quê?
3) Na automação de um processo industrial é necessário que se substitua o
acionamento mecânico existente por um elétrico. Um dos fatores limitantes é o espaço
disponível, que é reduzido. Qual tipo de circuito você sugere que se utilize?
4) Se você tem acesso a internet, faça uma busca e liste pelo menos 3 endereçosvirtuais de fabricantes de inversores e pelo menos um produto de cada.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 46/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 1
UNIDADE
INVERSORESPWM
Prof. Corradi
Sumário
Objetivo da unidade .................................................................................................................. 2
Introdução.................................................................................................................................. 3
Inversores PWM ........................................................................................................................ 1
Inversor Six-steps ( seis-passos ) ........................................................................................... 1
Técnicas de Modulação por Largura de Pulso (PWM)........................................................... 6
Por que utilizar PWM ? ............................................................................................................. 7
Natural Sampling ( Amostragem natural )............................................................................... 7
Regular Sampling ( amostragem regular ) .............................................................................. 9
Current controlled PWM ( PWM controlada por corrente ).................................................. 10
Exercícios ................................................................................................................................ 12
5
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 47/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 2
Objetivo da unidade
Esta unidade tem por objetivo o estudo do funcionamento de inversores estáticos,
ressaltando a forma como podem ser geradas as tensões trifásicas, utilizando tecnologia
PWM.
Ao final desta unidade, você será capaz de identificar algumas das principais formas de
geração de tensões trifásicas, utilizando a tecnologia PWM.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 48/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 3
Introdução
Nesta unidade, analisaremos alguns aspectos de funcionamento do inversor tipo PWM-VSI ,
que é o mais utlizado para aplicações industriais de baixa e média potência. Como visto na
unidade 4, neste inversor, temos a geração de correntes trifásicas a partir de modulação por
largura de pulso.
A seguir veremos como é feita a geração destas correntes, utilizando diversas técnicas.

5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 49/79
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 50/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 1
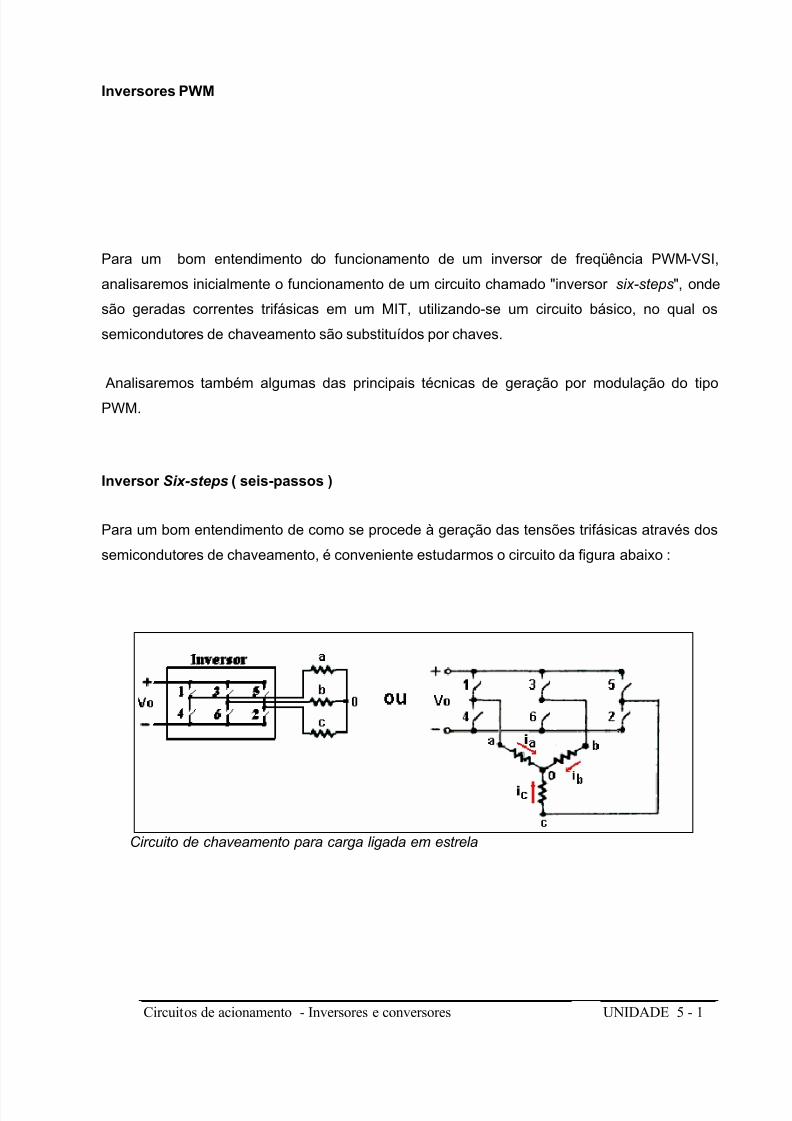
Inversores PWM
Para um bom entendimento do funcionamento de um inversor de freqüência PWM-VSI,
analisaremos inicialmente o funcionamento de um circuito chamado "inversor six-steps", onde
são geradas correntes trifásicas em um MIT, utilizando-se um circuito básico, no qual os
semicondutores de chaveamento são substituídos por chaves.
Analisaremos também algumas das principais técnicas de geração por modulação do tipo
PWM.
Inversor Six-steps ( seis-passos )
Para um bom entendimento de como se procede à geração das tensões trifásicas através dos
semicondutores de chaveamento, é conveniente estudarmos o circuito da figura abaixo :
Circuito de chaveamento para carga ligada em estrela
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 51/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 2
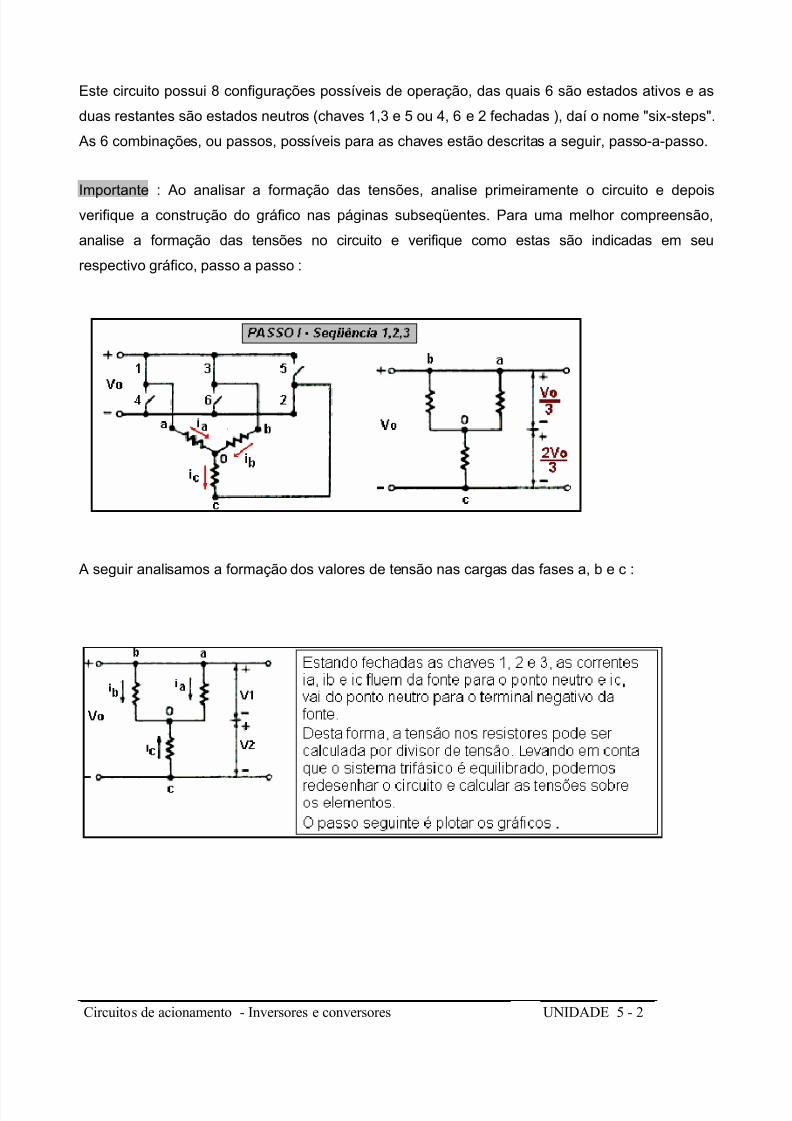
Este circuito possui 8 configurações possíveis de operação, das quais 6 são estados ativos e as
duas restantes são estados neutros (chaves 1,3 e 5 ou 4, 6 e 2 fechadas ), daí o nome "six-steps".
As 6 combinações, ou passos, possíveis para as chaves estão descritas a seguir, passo-a-passo.
Importante : Ao analisar a formação das tensões, analise primeiramente o circuito e depoisverifique a construção do gráfico nas páginas subseqüentes. Para uma melhor compreensão,
analise a formação das tensões no circuito e verifique como estas são indicadas em seu
respectivo gráfico, passo a passo :
A seguir analisamos a formação dos valores de tensão nas cargas das fases a, b e c :
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 52/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 3
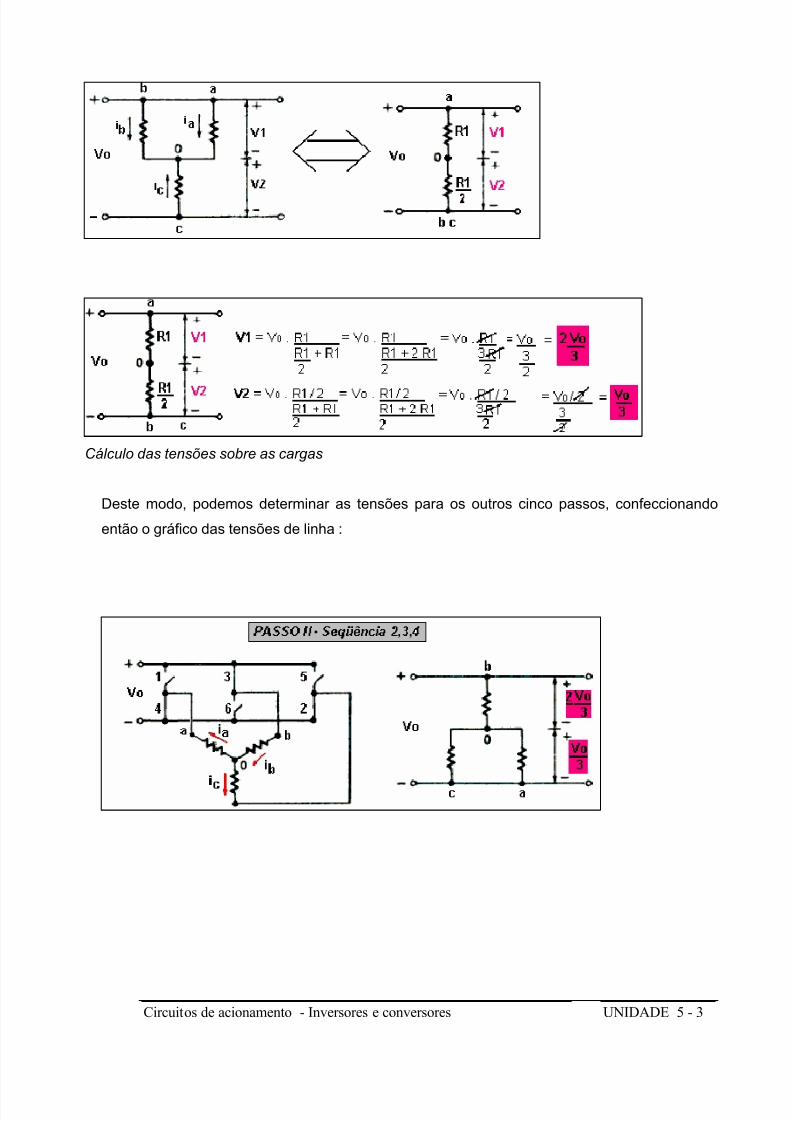
Cálculo das tensões sobre as cargas
Deste modo, podemos determinar as tensões para os outros cinco passos, confeccionando
então o gráfico das tensões de linha :
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 53/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 4
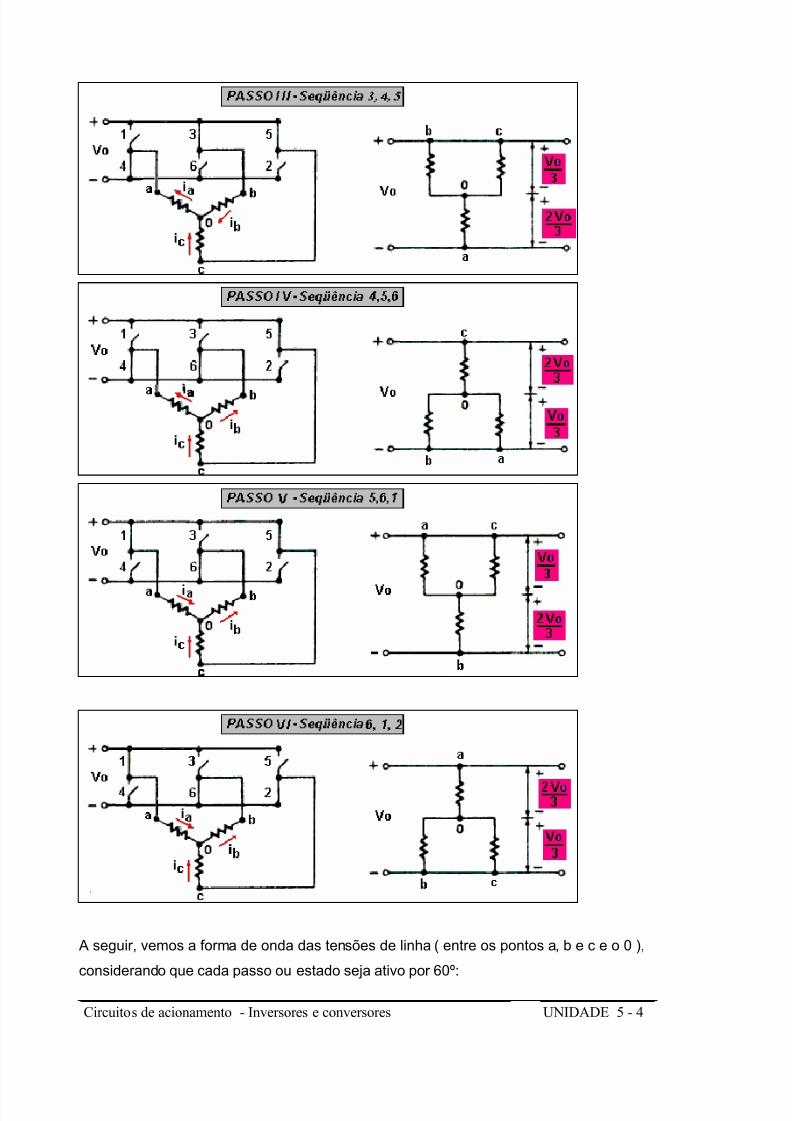
A seguir, vemos a forma de onda das tensões de linha ( entre os pontos a, b e c e o 0 ),
considerando que cada passo ou estado seja ativo por 60º:
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 54/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 5
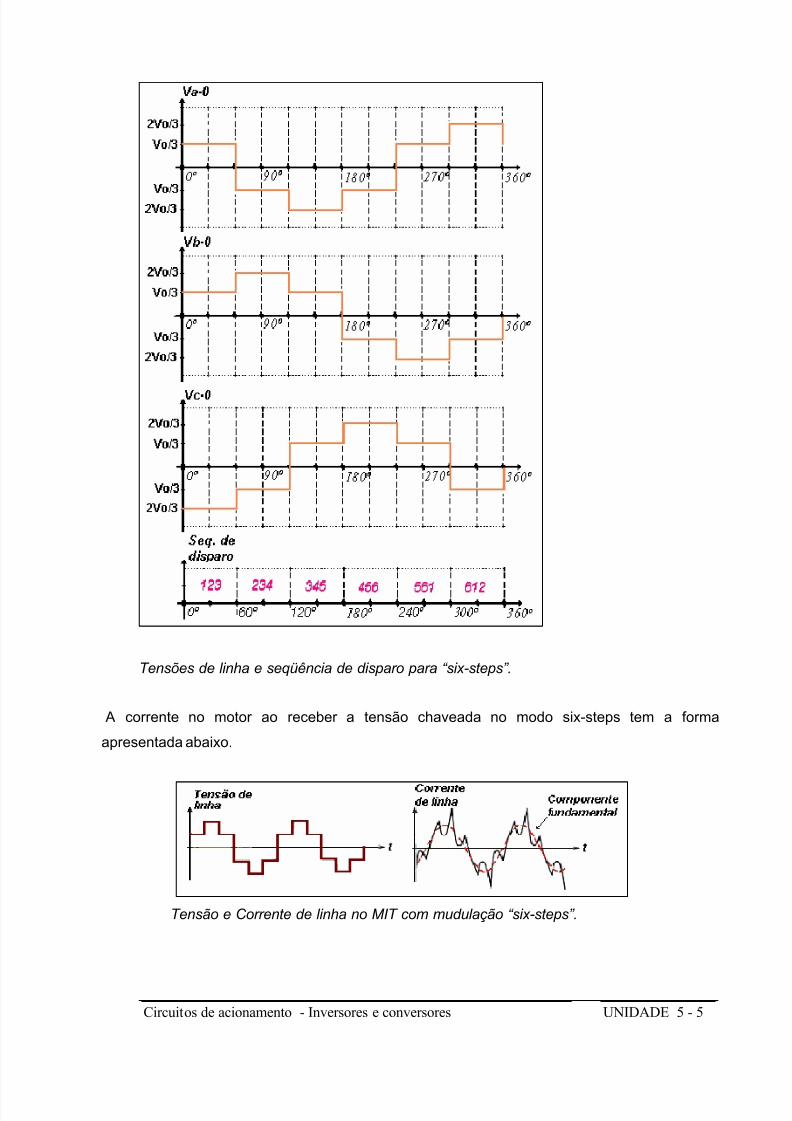
Tensões de linha e seqüência de disparo para “six-steps”.
A corrente no motor ao receber a tensão chaveada no modo six-steps tem a forma
apresentada abaixo.
Tensão e Corrente de linha no MIT com mudulação “six-steps”.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 55/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 6
As tensões de linha aplicadas ao motor resultam em formas de onda bem próximas de senóides.
Controlando-se a velocidade de chaveamento, teremos tensões trifásicas com freqüência
controlada.
Para variar o valor da tensão de saída, um recurso já ultrapassado é o de se fazer variar a tensão
do "link DC", utilizando-se um retificador controlado ao invés da ponte de diodos. Atualmente,
utilizam-se técnicas de modulação para se obter o valor da tensão de saída variável juntamente
com a freqüência; a seguir, verificaremos, em linhas gerais, o funcionamento de algumas destas
técnicas.
Técnicas de Modulação por Largura de Pulso (PWM)
A Modulação por Largura de Pulso ( em inglês, P ulse W idth M odulation ) foi primeiramente
desenvolvida e aplicada em inversores estáticos em meados de 1960, quando se dispunha de
chaves eletrônicas relativamente lentas e o transistor ainda era um componente novo, não
apresentando ainda boas características para chaveamento.
Desde então, foram desenvolvidas várias técnicas para implementação de PWM, de modo a
aproveitar o desenvolvimento tecnológico da eletrônica, quer seja no aperfeiçoamento dossemicondutores de chaveamento (dos GTOs e SCRs aos MOSFETs de potência, IGBTs e MCTs)
quer seja no aumento da faixa de integração (componentes LSI-Large Scale Integration e VLSI-
Very Large Scale Integration), permitindo a existência de circuitos mais complexos em um volume
menor.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 56/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 7
Por que utilizar PWM ?
Para resolver o problema da variação do valor da tensão ( a idéia é manter a relação V/f
constante ), fazendo com que os degraus do six-steps tenham duração variável ( duty-cicle , ou
ciclo de trabalho, variável ), teremos no motor um valor menor ou maior de tensão, dependendodo período que os semicondutores de chaveamento permanecem ligados. A figura a seguir
ilustra a forma de onda de tensão aplicada ao motor e a componente fundamental de corrente (
tracejada ), resultante da ação da indutância do motor .
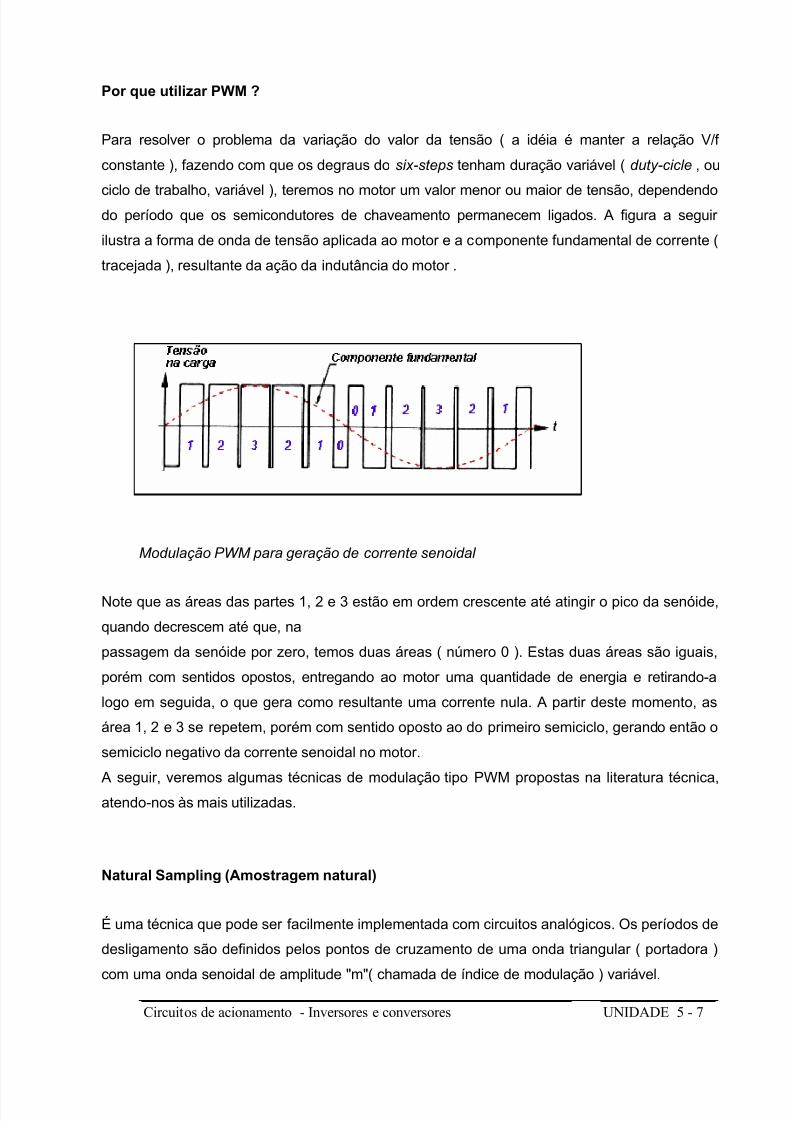
Modulação PWM para geração de corrente senoidal
Note que as áreas das partes 1, 2 e 3 estão em ordem crescente até atingir o pico da senóide,
quando decrescem até que, na
passagem da senóide por zero, temos duas áreas ( número 0 ). Estas duas áreas são iguais,
porém com sentidos opostos, entregando ao motor uma quantidade de energia e retirando-a
logo em seguida, o que gera como resultante uma corrente nula. A partir deste momento, as
área 1, 2 e 3 se repetem, porém com sentido oposto ao do primeiro semiciclo, gerando então o
semiciclo negativo da corrente senoidal no motor.
A seguir, veremos algumas técnicas de modulação tipo PWM propostas na literatura técnica,atendo-nos às mais utilizadas.
Natural Sampling (Amostragem natural)
É uma técnica que pode ser facilmente implementada com circuitos analógicos. Os períodos de
desligamento são definidos pelos pontos de cruzamento de uma onda triangular ( portadora )
com uma onda senoidal de amplitude "m"( chamada de índice de modulação ) variável.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 57/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 8
O número de ondas triangulares existentes por período da onda senoidal define o número de
pulsos resultantes na saída. Na relação a seguir, podemos definir o índice da portadora "n" :
n =número de triângulos da portadora
ciclo da senóide
A seguir podemos visualizar uma senóide na freqüência de 60 Hz sendo amostrada por uma ondatriangular. Podemos calcular a freqüência de chaveamento multiplicando "n" pela freqüência dasenóide, neste caso, obteremos aproximadamente 1 kHz.
Esta freqüência de chaveamento, em alguns inversores mais modernos, pode ser variada em
função da aplicação do conjunto inversor-motor-carga.
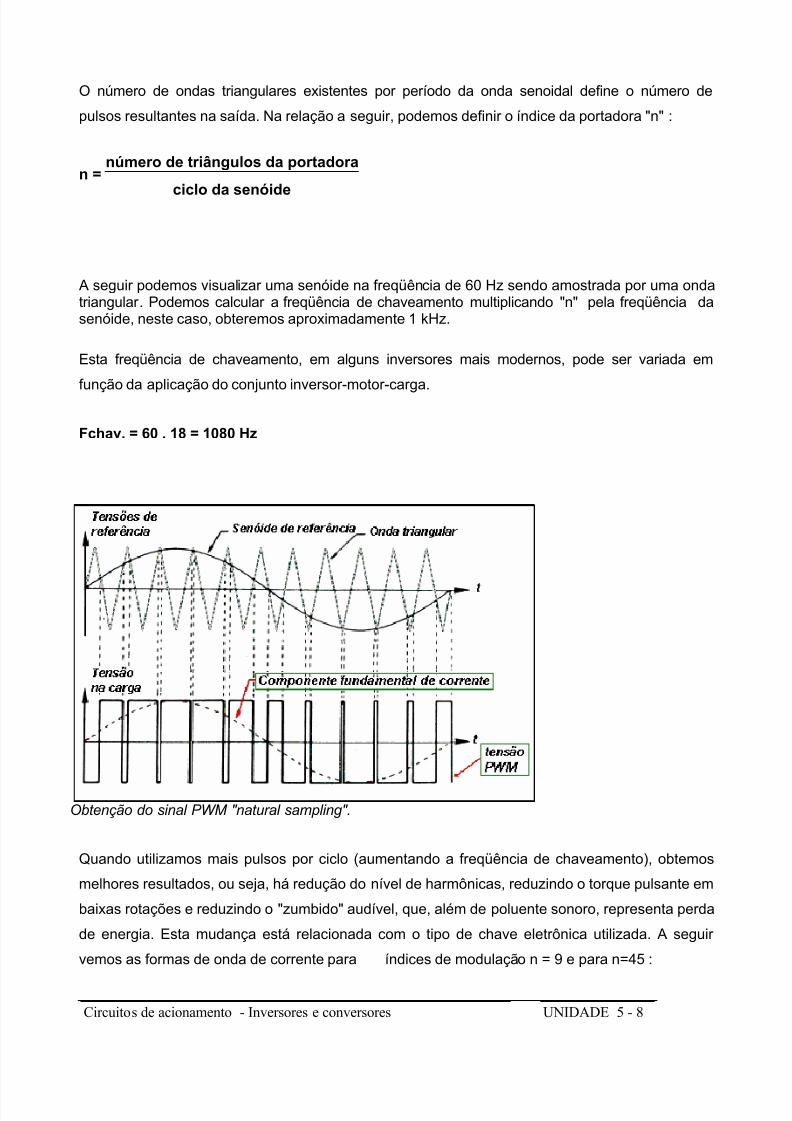
Fchav. = 60 . 18 = 1080 Hz
Obtenção do sinal PWM "natural sampling".
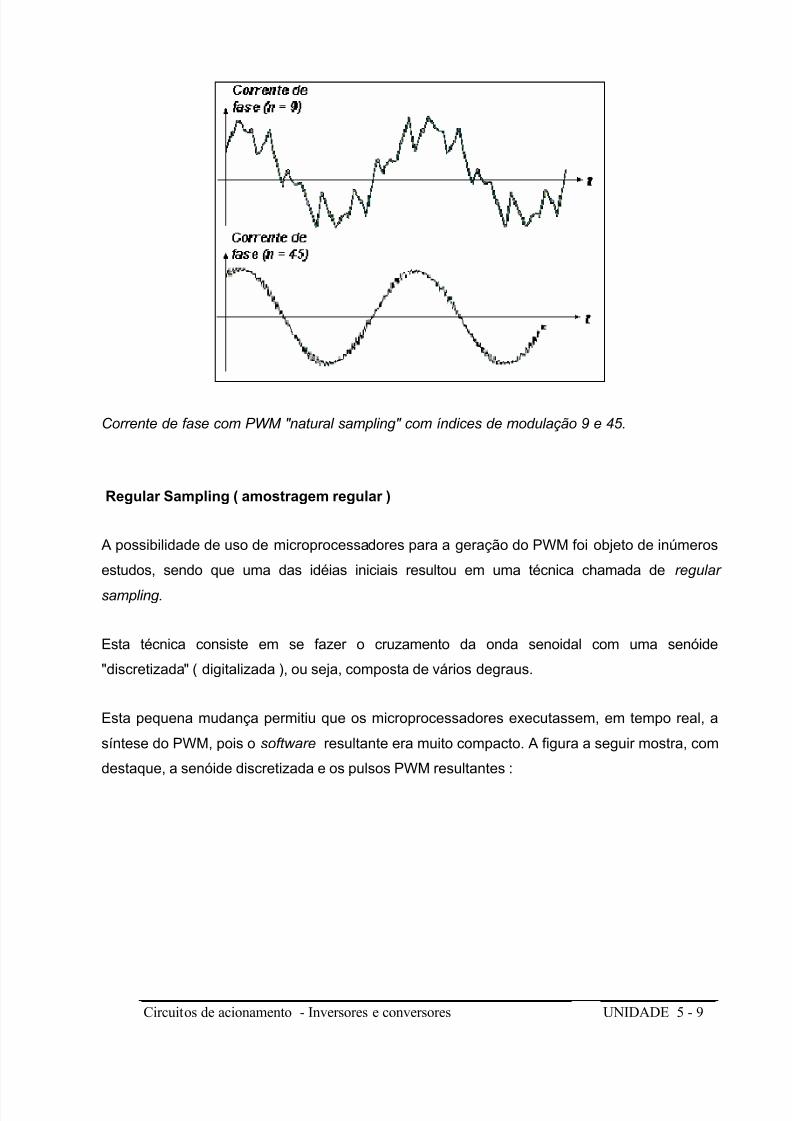
Quando utilizamos mais pulsos por ciclo (aumentando a freqüência de chaveamento), obtemos
melhores resultados, ou seja, há redução do nível de harmônicas, reduzindo o torque pulsante em
baixas rotações e reduzindo o "zumbido" audível, que, além de poluente sonoro, representa perda
de energia. Esta mudança está relacionada com o tipo de chave eletrônica utilizada. A seguir
vemos as formas de onda de corrente para índices de modulação n = 9 e para n=45 :
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 58/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 9
Corrente de fase com PWM "natural sampling" com índices de modulação 9 e 45.
Regular Sampling ( amostragem regular )
A possibilidade de uso de microprocessadores para a geração do PWM foi objeto de inúmeros
estudos, sendo que uma das idéias iniciais resultou em uma técnica chamada de regular
sampling.
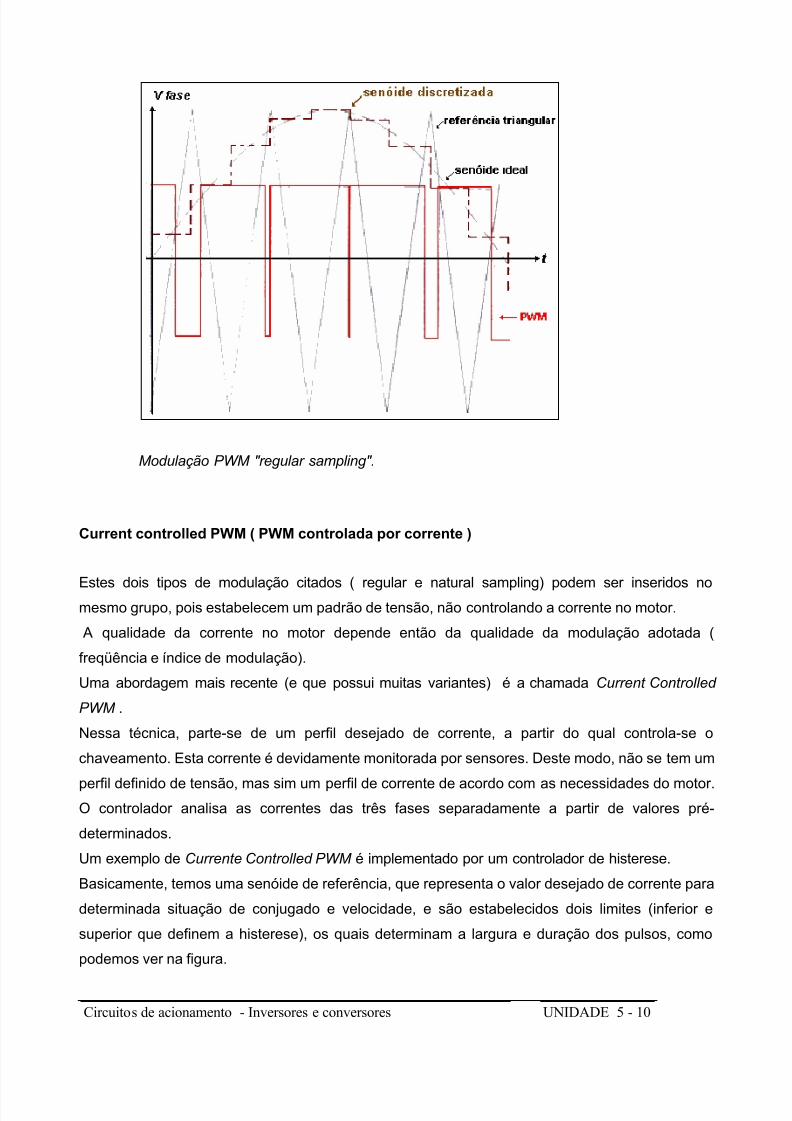
Esta técnica consiste em se fazer o cruzamento da onda senoidal com uma senóide
"discretizada" ( digitalizada ), ou seja, composta de vários degraus.
Esta pequena mudança permitiu que os microprocessadores executassem, em tempo real, a
síntese do PWM, pois o software resultante era muito compacto. A figura a seguir mostra, com
destaque, a senóide discretizada e os pulsos PWM resultantes :
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 59/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 10
Modulação PWM "regular sampling".
Current controlled PWM ( PWM controlada por corrente )
Estes dois tipos de modulação citados ( regular e natural sampling) podem ser inseridos nomesmo grupo, pois estabelecem um padrão de tensão, não controlando a corrente no motor.
A qualidade da corrente no motor depende então da qualidade da modulação adotada (
freqüência e índice de modulação).
Uma abordagem mais recente (e que possui muitas variantes) é a chamada Current Controlled
PWM .
Nessa técnica, parte-se de um perfil desejado de corrente, a partir do qual controla-se o
chaveamento. Esta corrente é devidamente monitorada por sensores. Deste modo, não se tem um
perfil definido de tensão, mas sim um perfil de corrente de acordo com as necessidades do motor.O controlador analisa as correntes das três fases separadamente a partir de valores pré-
determinados.
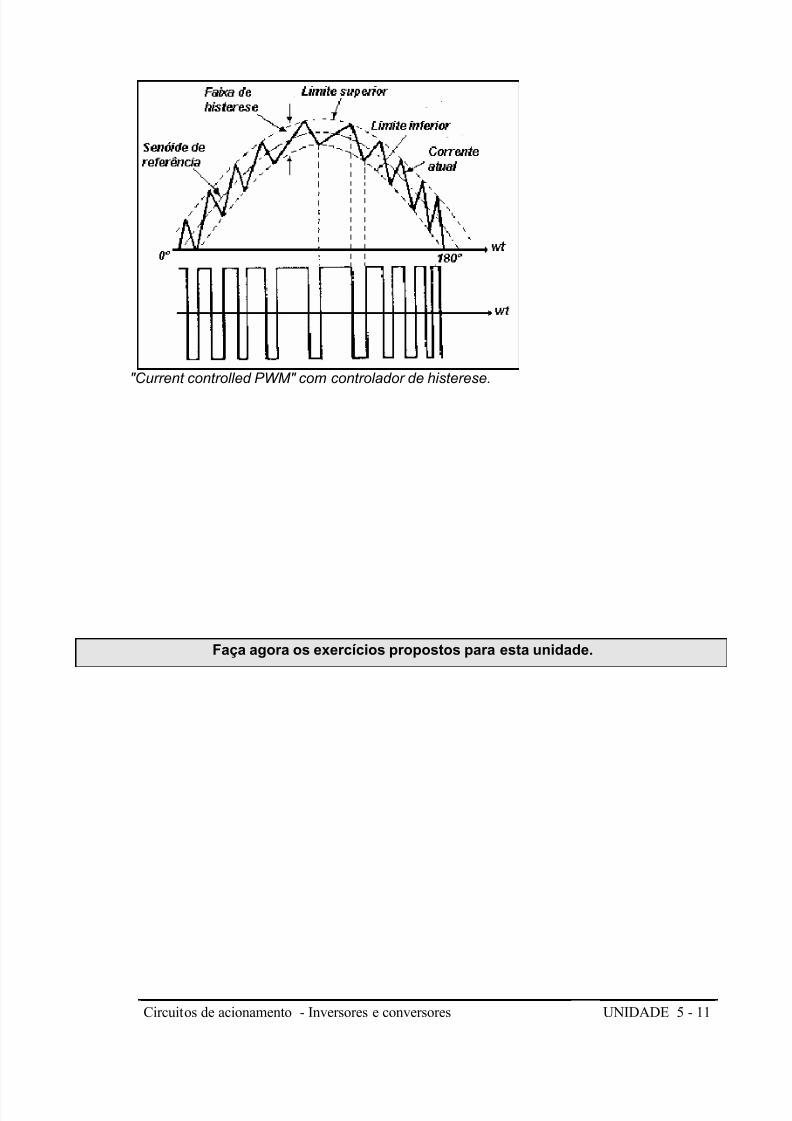
Um exemplo de Currente Controlled PWM é implementado por um controlador de histerese.
Basicamente, temos uma senóide de referência, que representa o valor desejado de corrente para
determinada situação de conjugado e velocidade, e são estabelecidos dois limites (inferior e
superior que definem a histerese), os quais determinam a largura e duração dos pulsos, como
podemos ver na figura.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 60/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 11
"Current controlled PWM" com controlador de histerese.
Faça agora os exercícios propostos para esta unidade.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 61/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 12
Exercícios
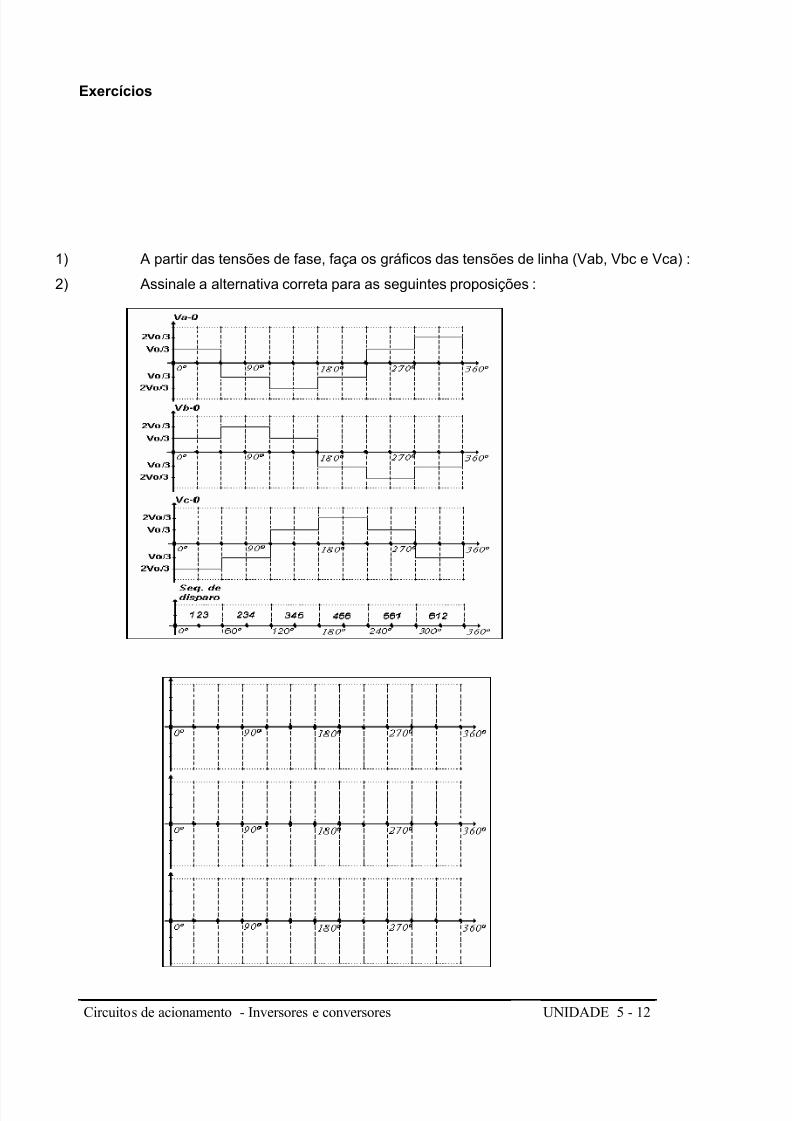
1) A partir das tensões de fase, faça os gráficos das tensões de linha (Vab, Vbc e Vca) :
2) Assinale a alternativa correta para as seguintes proposições :
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 62/79
Circuitos de acionamento - Inversores e conversores UNIDADE 5 - 13
1) A utilização de um índice de portadora maior implica em :
a) ( ) Aumento das perdas por corrente de magnetização no motor.
b) ( ) Utilização de semicondutores de chaveamento mais lentos.
c) ( ) Melhor resposta do motor, com redução do nível de harmônicasgeradas.
2) A geração de PWM com circuitos microprocessados é possível quando se utiliza :
a) ( ) Modulação PWM tipo six-steps.
b) ( ) Discretização da tensão senoidal.
c) ( ) Freqüências de chaveamento maiores que 2 kHz.
3) O aumento da velocidade de um MIT acima de seus valores nominais implica
em :
a) ( ) Aumento de torque.
b) ( ) Redução de fluxo magnético, com conseqüente redução de torque.
c) ( ) Aumento da tensão nominal, com aumento das perdas no rotor.
4) Um inversor com controle escalar, aplicado a um motor para 220 V e uma
freqüência nominal de 50 Hz, deve apresentar os seguintes valores de tensão para as
freqüências :
a) ( ) 25 Hz - 100 V; 30 Hz - 132 V
b) ( ) 25 Hz - 110 V; 60 Hz - 220 V
c) ( ) 60 Hz - 264 V; 100 Hz - 440 V
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 63/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 1
UNIDADE
CARACTERÍSTICASGERAIS DOS
INVERSORES PROF. CORRADI
Sumário
OBJETIVO DA UNIDADE........................................................................................................... 2
INTRODUÇÃO ............................................................................................................................ 3
CARACTERÍSTICAS GERAIS DOS INVERSORES.................................................................. 1
CIRCUITOS POR MALHA ABERTA E POR MALHA FECHADA ................................................................. 2CONSIDERAÇÕES PARA CONEXÃO DE INVERSORES A UM MIT.......................................................... 4Limitação de potência ................................................................................................................. 4Curva característica de conjugado X velocidade ........................................................................ 4Sugestões de ordem prática ....................................................................................................... 6 CONTROLE VETORIAL DE INVERSORES PWM (IDÉIA GERAL) ............................................................ 6PARAMETRIZAÇÃO DE INVERSORES................................................................................................ 7ALGUMAS FUNÇÕES ESPECIAIS DOS INVERSORES COMERCIAIS ....................................................... 8Ciclo automático.......................................................................................................................... 9Multi-speed ( múltiplas velocidades ) .......................................................................................... 9
Skip Frequency ( rejeição de freqüências críticas )................................................................... 10 Partida com o motor girando ( Flying start ) .............................................................................. 10 Rampa "S"................................................................................................................................. 10
EXERCÍCIOS ............................................................................................................................ 12
6
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 64/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 2
Objetivo da unidade
Esta unidade tem por objetivo apresentar características comuns à maioria dos inversores de
freqüência disponíveis no mercado.
Ao final desta unidade, você será capaz de identificar algumas funções especiais, parâmetros de
inversores e problemas com este tipo de acionamento, analisando :
o comportamento do motor com inversor de freqüência;
os principais parâmetros de um inversor de freqüência;
algumas funções especiais dos inversores comerciais.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 65/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 3
Introdução
A seguir, vamos ilustrar algumas configurações básicas, aplicáveis por praticamente todos os
fabricantes de inversores .
A parametrização de inversores, por ser específica para cada fabricante, será tratada
presencialmente.

5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 66/79
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 67/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 1
Características gerais dos inversores
Trataremos nesta unidade de alguns circuitos típicos e das características encontradas na
maioria dos inversores disponíveis no mercado. De uma maneira geral, todo equipamento
disponível atualmente prevê uma série de facilidades programáveis através de painel no
próprio equipamento ou, em alguns casos, via software, prevendo também conexões com
outros dispositivos, como por exemplo, CLPs (Controladores Lógicos Programáveis ).
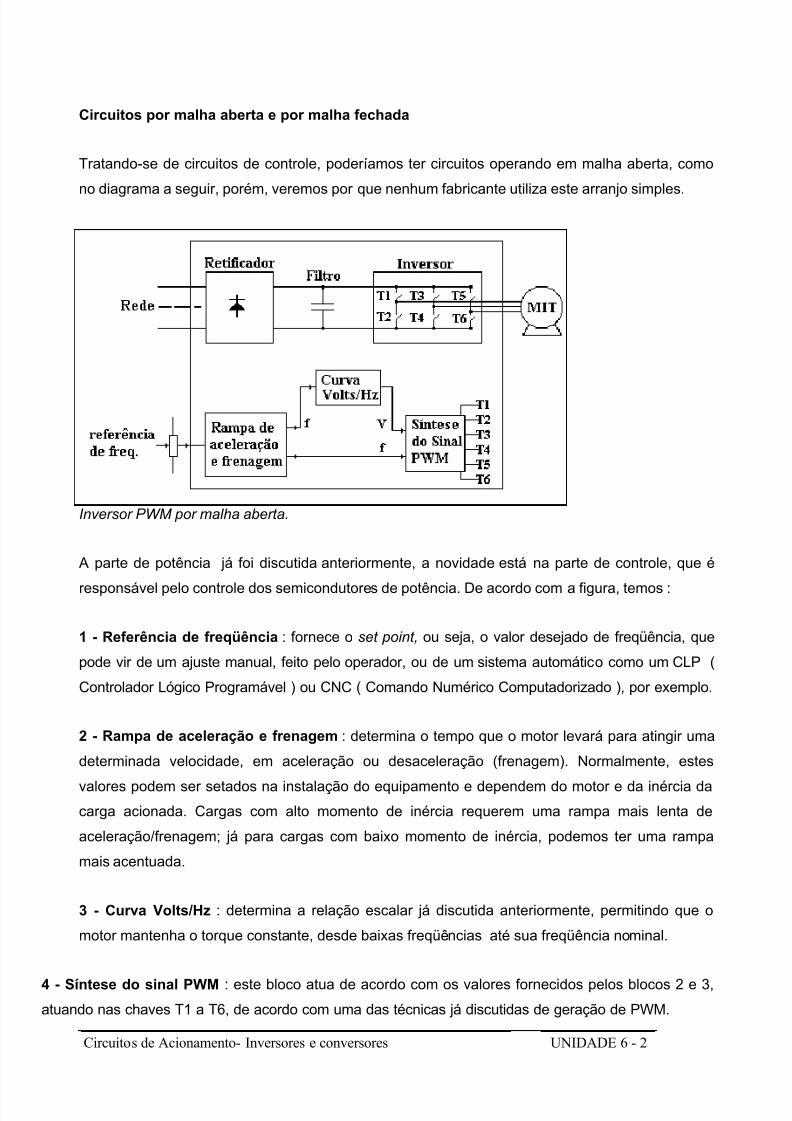
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 68/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 2
Circuitos por malha aberta e por malha fechada
Tratando-se de circuitos de controle, poderíamos ter circuitos operando em malha aberta, como
no diagrama a seguir, porém, veremos por que nenhum fabricante utiliza este arranjo simples.
Inversor PWM por malha aberta.
A parte de potência já foi discutida anteriormente, a novidade está na parte de controle, que é
responsável pelo controle dos semicondutores de potência. De acordo com a figura, temos :
1 - Referência de freqüência : fornece o set point, ou seja, o valor desejado de freqüência, que
pode vir de um ajuste manual, feito pelo operador, ou de um sistema automático como um CLP (
Controlador Lógico Programável ) ou CNC ( Comando Numérico Computadorizado ), por exemplo.
2 - Rampa de aceleração e frenagem : determina o tempo que o motor levará para atingir uma
determinada velocidade, em aceleração ou desaceleração (frenagem). Normalmente, estes
valores podem ser setados na instalação do equipamento e dependem do motor e da inércia dacarga acionada. Cargas com alto momento de inércia requerem uma rampa mais lenta de
aceleração/frenagem; já para cargas com baixo momento de inércia, podemos ter uma rampa
mais acentuada.
3 - Curva Volts/Hz : determina a relação escalar já discutida anteriormente, permitindo que o
motor mantenha o torque constante, desde baixas freqüências até sua freqüência nominal.
4 - Síntese do sinal PWM : este bloco atua de acordo com os valores fornecidos pelos blocos 2 e 3,
atuando nas chaves T1 a T6, de acordo com uma das técnicas já discutidas de geração de PWM.
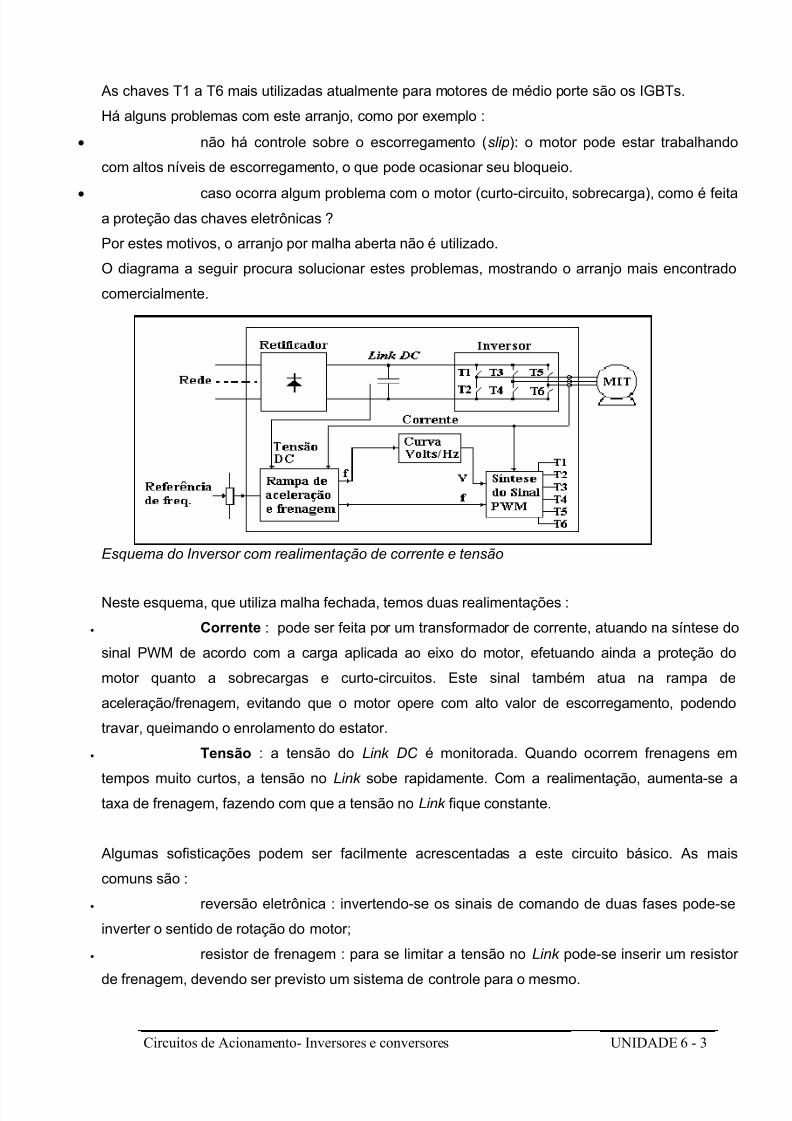
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 69/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 3
As chaves T1 a T6 mais utilizadas atualmente para motores de médio porte são os IGBTs.
Há alguns problemas com este arranjo, como por exemplo :
• não há controle sobre o escorregamento (slip): o motor pode estar trabalhando
com altos níveis de escorregamento, o que pode ocasionar seu bloqueio.
• caso ocorra algum problema com o motor (curto-circuito, sobrecarga), como é feitaa proteção das chaves eletrônicas ?
Por estes motivos, o arranjo por malha aberta não é utilizado.
O diagrama a seguir procura solucionar estes problemas, mostrando o arranjo mais encontrado
comercialmente.
Esquema do Inversor com realimentação de corrente e tensão
Neste esquema, que utiliza malha fechada, temos duas realimentações :
• Corrente : pode ser feita por um transformador de corrente, atuando na síntese do
sinal PWM de acordo com a carga aplicada ao eixo do motor, efetuando ainda a proteção do
motor quanto a sobrecargas e curto-circuitos. Este sinal também atua na rampa de
aceleração/frenagem, evitando que o motor opere com alto valor de escorregamento, podendo
travar, queimando o enrolamento do estator.
• Tensão : a tensão do Link DC é monitorada. Quando ocorrem frenagens em
tempos muito curtos, a tensão no Link sobe rapidamente. Com a realimentação, aumenta-se ataxa de frenagem, fazendo com que a tensão no Link fique constante.
Algumas sofisticações podem ser facilmente acrescentadas a este circuito básico. As mais
comuns são :
• reversão eletrônica : invertendo-se os sinais de comando de duas fases pode-se
inverter o sentido de rotação do motor;
• resistor de frenagem : para se limitar a tensão no Link pode-se inserir um resistor
de frenagem, devendo ser previsto um sistema de controle para o mesmo.
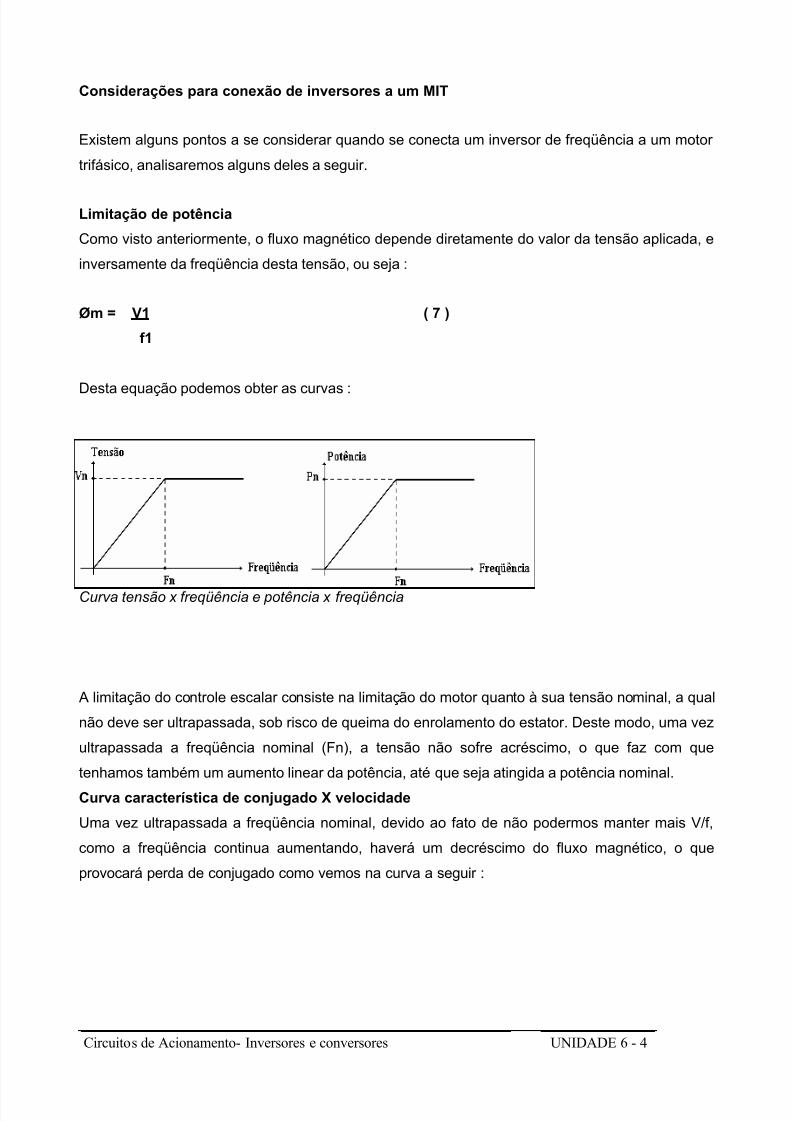
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 70/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 4
Considerações para conexão de inversores a um MIT
Existem alguns pontos a se considerar quando se conecta um inversor de freqüência a um motor
trifásico, analisaremos alguns deles a seguir.
Limitação de potência
Como visto anteriormente, o fluxo magnético depende diretamente do valor da tensão aplicada, e
inversamente da freqüência desta tensão, ou seja :
Øm = V1 ( 7 )
f1
Desta equação podemos obter as curvas :
Curva tensão x freqüência e potência x freqüência
A limitação do controle escalar consiste na limitação do motor quanto à sua tensão nominal, a qual
não deve ser ultrapassada, sob risco de queima do enrolamento do estator. Deste modo, uma vez
ultrapassada a freqüência nominal (Fn), a tensão não sofre acréscimo, o que faz com que
tenhamos também um aumento linear da potência, até que seja atingida a potência nominal.
Curva característica de conjugado X velocidade
Uma vez ultrapassada a freqüência nominal, devido ao fato de não podermos manter mais V/f,
como a freqüência continua aumentando, haverá um decréscimo do fluxo magnético, o que
provocará perda de conjugado como vemos na curva a seguir :
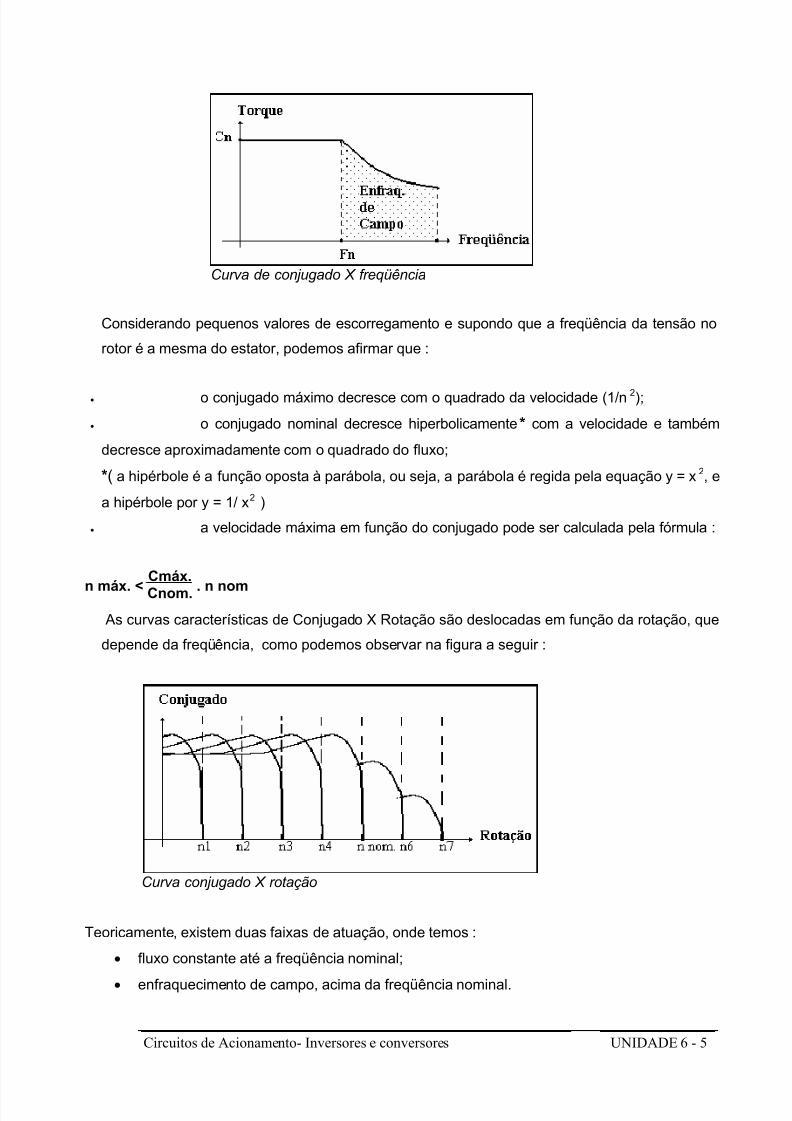
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 71/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 5
Curva de conjugado X freqüência
Considerando pequenos valores de escorregamento e supondo que a freqüência da tensão no
rotor é a mesma do estator, podemos afirmar que :
• o conjugado máximo decresce com o quadrado da velocidade (1/n2);
• o conjugado nominal decresce hiperbolicamente* com a velocidade e também
decresce aproximadamente com o quadrado do fluxo;
*( a hipérbole é a função oposta à parábola, ou seja, a parábola é regida pela equação y = x 2, e
a hipérbole por y = 1/ x2 )
• a velocidade máxima em função do conjugado pode ser calculada pela fórmula :
n máx. <Cmáx.Cnom. . n nom
As curvas características de Conjugado X Rotação são deslocadas em função da rotação, que
depende da freqüência, como podemos observar na figura a seguir :
Curva conjugado X rotação
Teoricamente, existem duas faixas de atuação, onde temos :
• fluxo constante até a freqüência nominal;
• enfraquecimento de campo, acima da freqüência nominal.
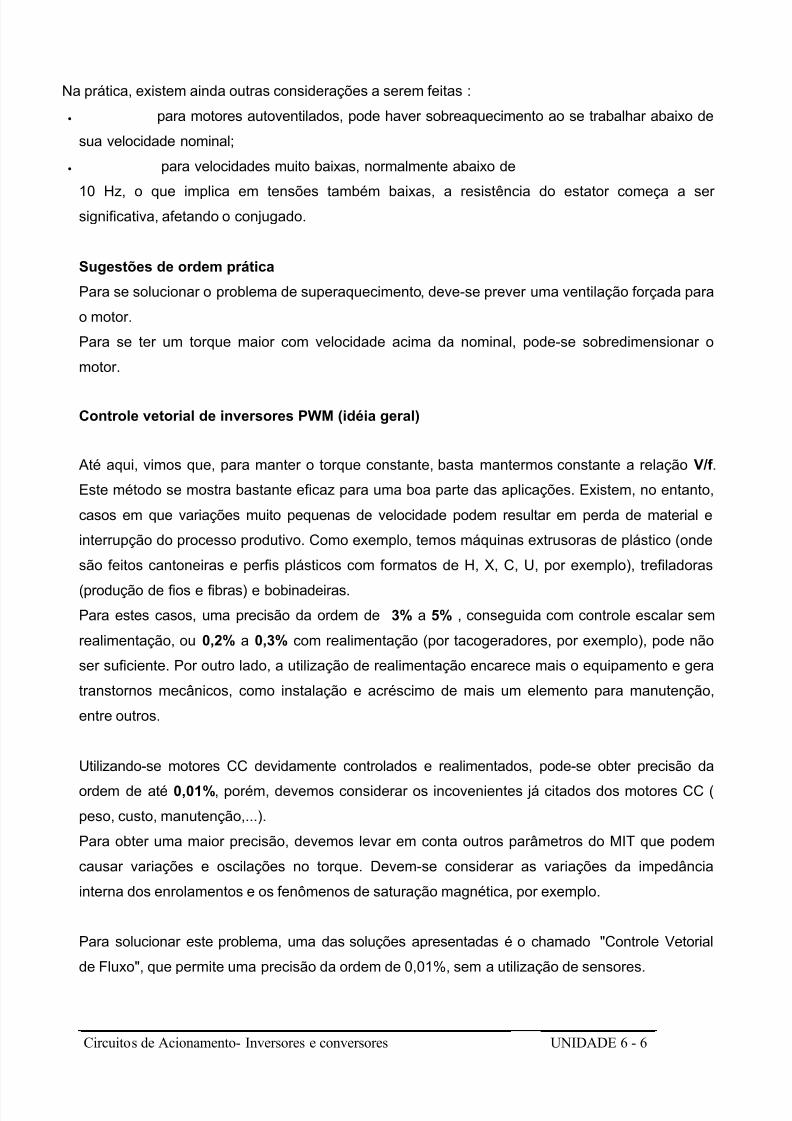
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 72/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 6
Na prática, existem ainda outras considerações a serem feitas :
• para motores autoventilados, pode haver sobreaquecimento ao se trabalhar abaixo de
sua velocidade nominal;
• para velocidades muito baixas, normalmente abaixo de
10 Hz, o que implica em tensões também baixas, a resistência do estator começa a ser significativa, afetando o conjugado.
Sugestões de ordem prática
Para se solucionar o problema de superaquecimento, deve-se prever uma ventilação forçada para
o motor.
Para se ter um torque maior com velocidade acima da nominal, pode-se sobredimensionar o
motor.
Controle vetorial de inversores PWM (idéia geral)
Até aqui, vimos que, para manter o torque constante, basta mantermos constante a relação V/f .
Este método se mostra bastante eficaz para uma boa parte das aplicações. Existem, no entanto,
casos em que variações muito pequenas de velocidade podem resultar em perda de material e
interrupção do processo produtivo. Como exemplo, temos máquinas extrusoras de plástico (onde
são feitos cantoneiras e perfis plásticos com formatos de H, X, C, U, por exemplo), trefiladoras
(produção de fios e fibras) e bobinadeiras.Para estes casos, uma precisão da ordem de 3% a 5% , conseguida com controle escalar sem
realimentação, ou 0,2% a 0,3% com realimentação (por tacogeradores, por exemplo), pode não
ser suficiente. Por outro lado, a utilização de realimentação encarece mais o equipamento e gera
transtornos mecânicos, como instalação e acréscimo de mais um elemento para manutenção,
entre outros.
Utilizando-se motores CC devidamente controlados e realimentados, pode-se obter precisão da
ordem de até 0,01%, porém, devemos considerar os incovenientes já citados dos motores CC (
peso, custo, manutenção,...).
Para obter uma maior precisão, devemos levar em conta outros parâmetros do MIT que podem
causar variações e oscilações no torque. Devem-se considerar as variações da impedância
interna dos enrolamentos e os fenômenos de saturação magnética, por exemplo.
Para solucionar este problema, uma das soluções apresentadas é o chamado "Controle Vetorial
de Fluxo", que permite uma precisão da ordem de 0,01%, sem a utilização de sensores.
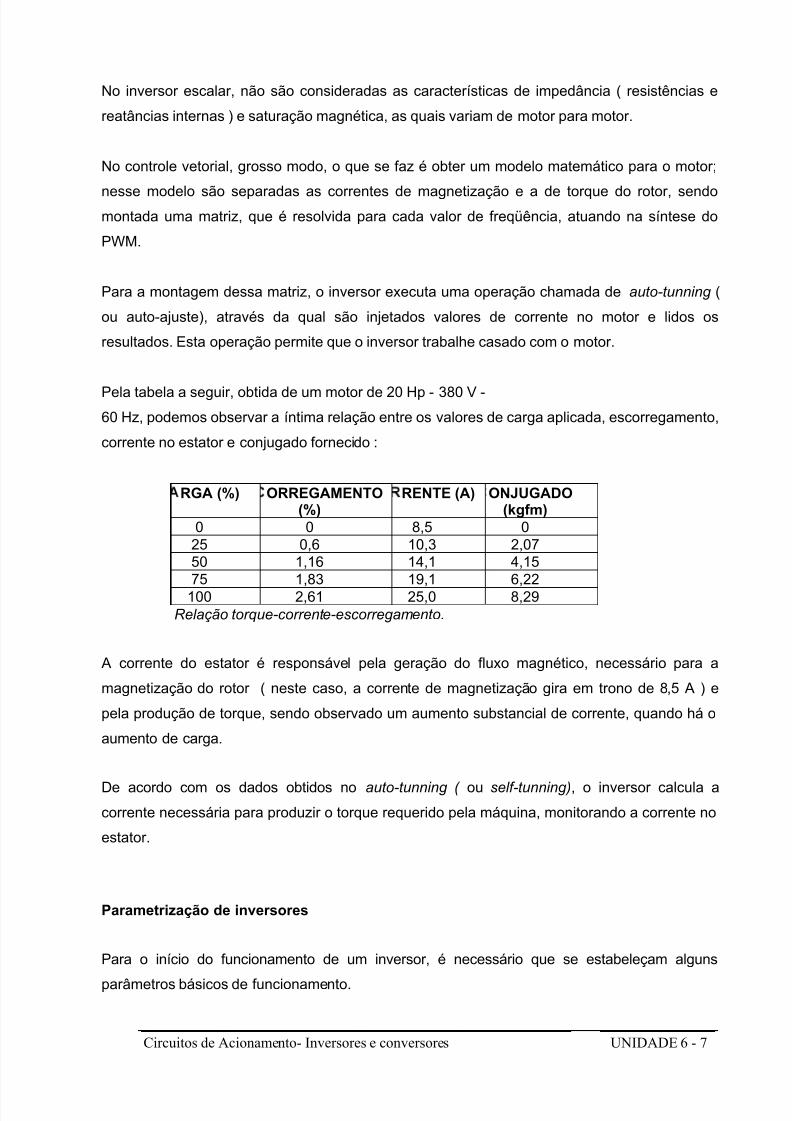
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 73/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 7
No inversor escalar, não são consideradas as características de impedância ( resistências e
reatâncias internas ) e saturação magnética, as quais variam de motor para motor.
No controle vetorial, grosso modo, o que se faz é obter um modelo matemático para o motor;
nesse modelo são separadas as correntes de magnetização e a de torque do rotor, sendomontada uma matriz, que é resolvida para cada valor de freqüência, atuando na síntese do
PWM.
Para a montagem dessa matriz, o inversor executa uma operação chamada de auto-tunning (
ou auto-ajuste), através da qual são injetados valores de corrente no motor e lidos os
resultados. Esta operação permite que o inversor trabalhe casado com o motor.
Pela tabela a seguir, obtida de um motor de 20 Hp - 380 V -60 Hz, podemos observar a íntima relação entre os valores de carga aplicada, escorregamento,
corrente no estator e conjugado fornecido :
RGA (%) ORREGAMENTO(%)
RENTE (A) ONJUGADO(kgfm)
0 0 8,5 025 0,6 10,3 2,0750 1,16 14,1 4,1575 1,83 19,1 6,22100 2,61 25,0 8,29
Relação torque-corrente-escorregamento.
A corrente do estator é responsável pela geração do fluxo magnético, necessário para a
magnetização do rotor ( neste caso, a corrente de magnetização gira em trono de 8,5 A ) e
pela produção de torque, sendo observado um aumento substancial de corrente, quando há o
aumento de carga.
De acordo com os dados obtidos no auto-tunning ( ou self-tunning), o inversor calcula a
corrente necessária para produzir o torque requerido pela máquina, monitorando a corrente no
estator.
Parametrização de inversores
Para o início do funcionamento de um inversor, é necessário que se estabeleçam alguns
parâmetros básicos de funcionamento.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 74/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 8
A determinação destes parâmetros pode ser feita de modo analógico (por meio de chaves e/ou
potenciômetros ), quando então o inversor é chamado de "inversor analógico". Se a
parametrização é feita por meio de uma interface com display alfa-numérico, ou via
microcomputador, o mesmo é chamado de "inversor digital".
Estes parâmetros geralmente vêm pré-ajustados de fábrica, permitindo que se ligue o conjunto
inversor-motor, sem carga, para verificação das conexões e do funcionamento. Após este
momento, deve-se adequá-los à situação real de funcionamento do conjunto motor-carga. Os
principais parâmetros a serem ajustados são:
• Freqüência mínima : é o limite inferior de freqüência do inversor.
• Freqüência máxima : é o limite superior de freqüência do inversor.
• Tempo de aceleração : é o tempo que o inversor leva para atingir a freqüência máxima,partindo do repouso.
• Tempo de desaceleração : é o tempo que o inversor leva para atingir a freqüência
mínima, partindo do ponto de freqüência máxima.
• Corrente máxima : é a corrente máxima que o inversor deve fornecer ao motor antes de
entrar em proteção térmica devido a sobreaquecimento.
Além destes parâmetros, podem existir muitos outros a serem setados de acordo com o Manual
de Instalação do equipamento. Tais parâmetros são implementados via software e são oferecidos
de acordo com o fabricante.
Importante : a parametrização incorreta do inversor pode implicar no mau aproveitamento de
todos os recursos do equipamento e no seu mau funcionamento.
Por exemplo, para cargas de alta inércia, o tempo das rampas de aceleração e desaceleração
não pode ser muito baixo, o que implicaria em sobrecarga para o inversor, causando seu
desligamento ou até, em casos mais graves, sua queima.
Devido a este aspecto, muitas vezes se recorre à assistência técnica do fornecedor para uma
melhor adequação do inversor a cada caso específico.
Algumas funções especiais dos inversores comerciais
Praticamente, todos os inversores disponíveis hoje no mercado são microprocessados, o que
permite que sejam implementadas algumas funções especiais, bastando para isso algumas linhas
a mais de programa e uma interface para acesso à programação.
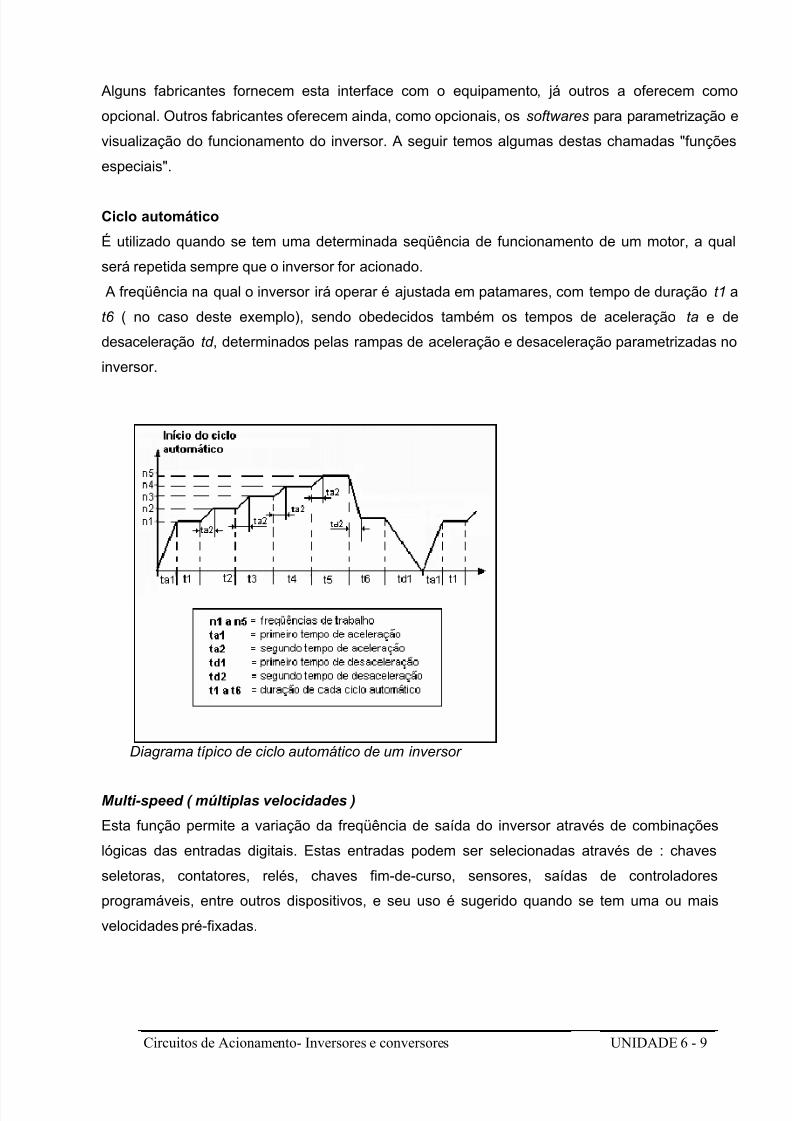
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 75/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 9
Alguns fabricantes fornecem esta interface com o equipamento, já outros a oferecem como
opcional. Outros fabricantes oferecem ainda, como opcionais, os softwares para parametrização e
visualização do funcionamento do inversor. A seguir temos algumas destas chamadas "funções
especiais".
Ciclo automático
É utilizado quando se tem uma determinada seqüência de funcionamento de um motor, a qual
será repetida sempre que o inversor for acionado.
A freqüência na qual o inversor irá operar é ajustada em patamares, com tempo de duração t1 a
t6 ( no caso deste exemplo), sendo obedecidos também os tempos de aceleração ta e de
desaceleração td , determinados pelas rampas de aceleração e desaceleração parametrizadas no
inversor.
Diagrama típico de ciclo automático de um inversor
Multi-speed ( múltiplas velocidades )
Esta função permite a variação da freqüência de saída do inversor através de combinações
lógicas das entradas digitais. Estas entradas podem ser selecionadas através de : chaves
seletoras, contatores, relés, chaves fim-de-curso, sensores, saídas de controladores
programáveis, entre outros dispositivos, e seu uso é sugerido quando se tem uma ou mais
velocidades pré-fixadas.
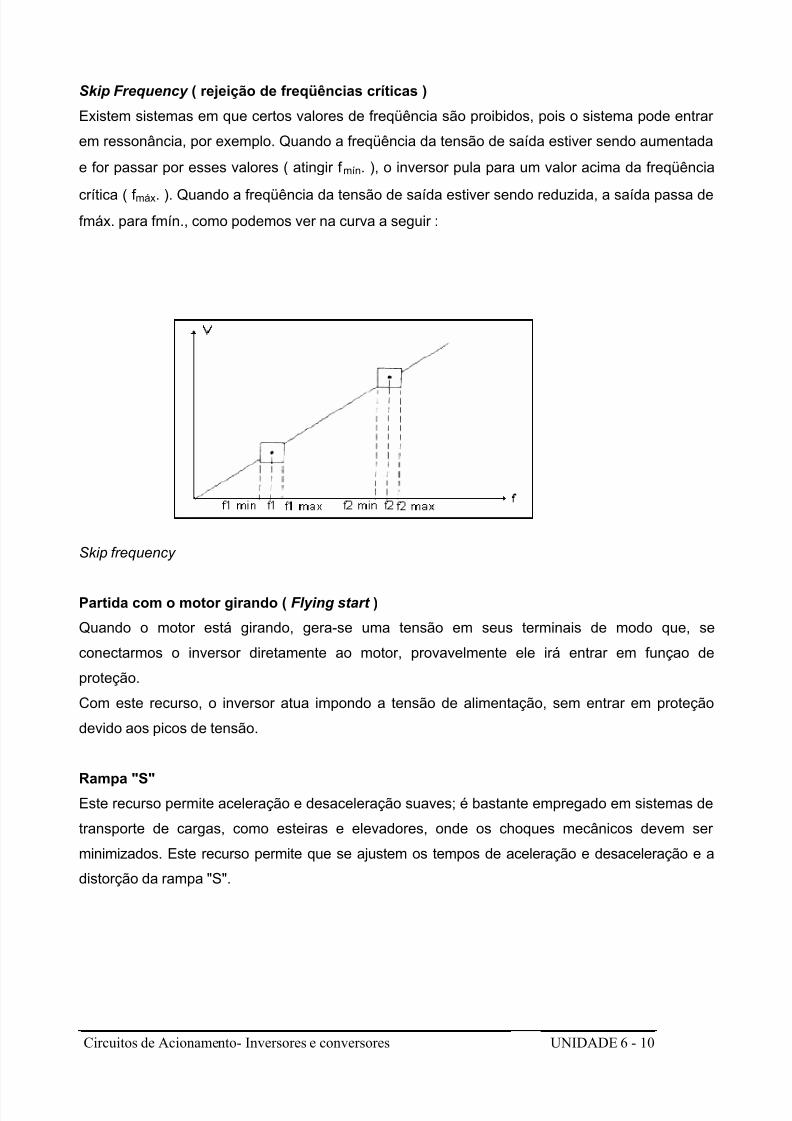
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 76/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 10
Skip Frequency ( rejeição de freqüências críticas )
Existem sistemas em que certos valores de freqüência são proibidos, pois o sistema pode entrar
em ressonância, por exemplo. Quando a freqüência da tensão de saída estiver sendo aumentada
e for passar por esses valores ( atingir f mín. ), o inversor pula para um valor acima da freqüência
crítica ( f máx. ). Quando a freqüência da tensão de saída estiver sendo reduzida, a saída passa defmáx. para fmín., como podemos ver na curva a seguir :
Skip frequency
Partida com o motor girando ( Flying start )
Quando o motor está girando, gera-se uma tensão em seus terminais de modo que, se
conectarmos o inversor diretamente ao motor, provavelmente ele irá entrar em funçao de
proteção.
Com este recurso, o inversor atua impondo a tensão de alimentação, sem entrar em proteção
devido aos picos de tensão.
Rampa "S"Este recurso permite aceleração e desaceleração suaves; é bastante empregado em sistemas de
transporte de cargas, como esteiras e elevadores, onde os choques mecânicos devem ser
minimizados. Este recurso permite que se ajustem os tempos de aceleração e desaceleração e a
distorção da rampa "S".
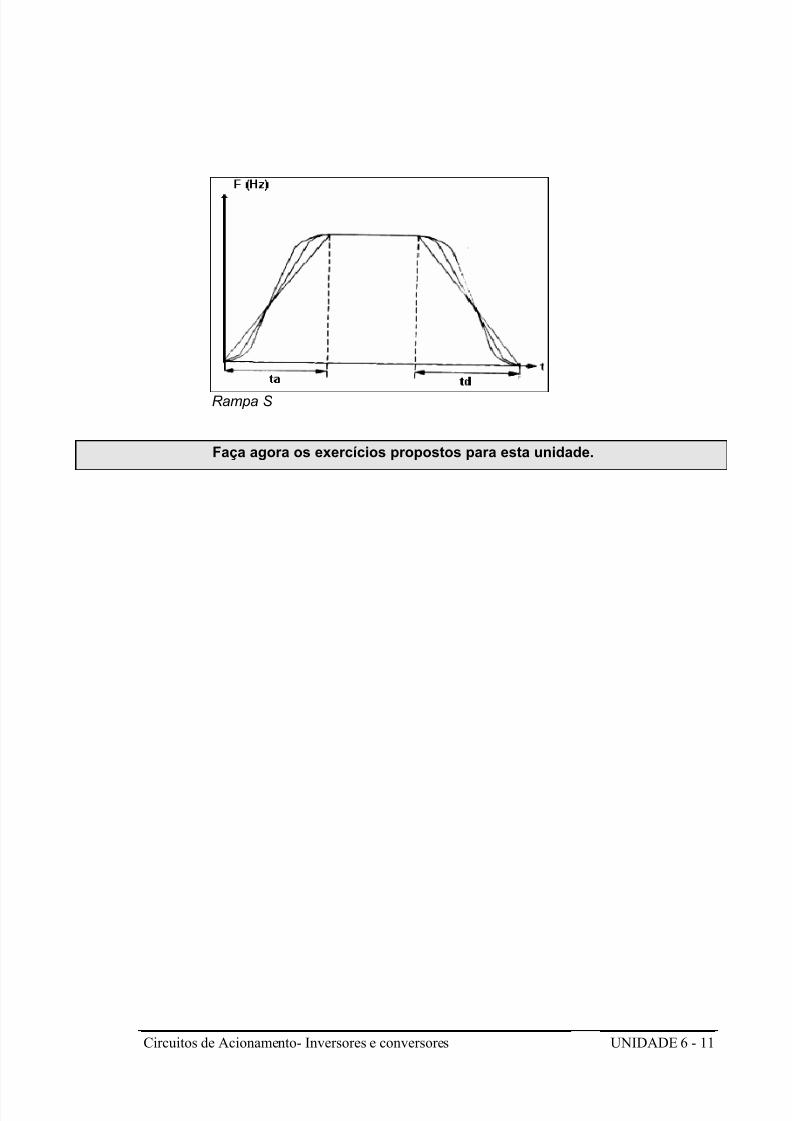
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 77/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 11
Rampa S
Faça agora os exercícios propostos para esta unidade.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 78/79
Circuitos de Acionamento- Inversores e conversores UNIDADE 6 - 12
Exercícios
1) Um motor de indução trifásico assíncrono, cuja freqüência nominal é de 60 Hz, trabalha por
um longo período de tempo a 20 Hz. Após algum tempo de trabalho, qual destes problemas
pode ser encontrado no motor ?
a) ( ) Destruição das palhetas do ventilador interno, que são de plástico.
b) ( ) Falta de precisão de velocidade.
c) ( ) Queima do enrolamento do estator por sobreaquecimento, devido à falta de
ventilação.
d) ( ) Travamento do rotor devido a desgaste precoce em seus mancais de sustentação.
2) Para solucionarmos o problema do acionamento da questão anterior, aponte qual é a
alternativa economicamente mais viável, levando em conta que o motor tem uma potência
de 100 Hp.
a) ( ) Sobredimensionamento do motor, ou seja, pedir ao fabricante um motor especial.
b) ( ) Acoplamento de um ventilador externo.
c) ( ) Utilização de um motorredutor acoplado ao sistema.
5/12/2018 Circuitos de Acionamento - Inversores e Conversores - slidepdf.com
http://slidepdf.com/reader/full/circuitos-de-acionamento-inversores-e-conversores-55a23712d7ff8 79/79


















