Caracterização do Tráfego Ferroviário e dos seus ... · em Pontes de Pequeno Vão . ... 81...
183
Caracterização do Tráfego Ferroviário e dos seus Efeitos em Pontes de Pequeno Vão Ricardo Miguel da Costa Marques Pimentel Dissertação apresentada à Faculdade de Engenharia da Universidade do Porto para obtenção do grau de Mestre em Estruturas de Engenharia Civil, realizada sob a orientação dos Professores Rui Calçada e Raimundo Delgado Porto, Maio de 2008
Transcript of Caracterização do Tráfego Ferroviário e dos seus ... · em Pontes de Pequeno Vão . ... 81...
Caracterização do Tráfego Ferroviário e dos seus Efeitos
em Pontes de Pequeno Vão
Ricardo Miguel da Costa Marques Pimentel
Dissertação apresentada à Faculdade de Engenharia da Universidade do Porto
para obtenção do grau de Mestre em Estruturas de Engenharia Civil,
realizada sob a orientação dos Professores Rui Calçada e Raimundo Delgado
Porto, Maio de 2008

Aos meus Pais


“The important thing is not to stop questioning.”
Albert Einstein

ÍNDICE GERAL
RESUMO............................................................................................................................... i
ABSTRACT......................................................................................................................... iii
AGRADECIMENTOS .........................................................................................................v
CAPÍTULO 1 - INTRODUÇÃO .........................................................................................1
CAPÍTULO 2 – METODOLOGIAS DE OBSERVAÇÃO DINÂMICA DE PONTES
..............................................................................................................................................17
CAPÍTULO 3 – EQUIPAMENTOS PARA MONITORIZAÇÃO DE ESTRUTURAS
DE ENGENHARIA CIVIL................................................................................................59
CAPÍTULO 4 – METODOLOGIAS EXPERIMENTAIS PARA CARACTERIZA-
ÇÃO DO TRÁFEGO FERROVIÁRIO............................................................................91
CAPÍTULO 5 – APLICAÇÃO À PONTE FERROVIÁRIA DE CANELAS .............123
CAPÍTULO 6 – CONCLUSÕES E DESENVOLVIMENTOS FUTUROS ................153
REFERÊNCIAS BIBLIOGRÁFICAS............................................................................159

RESUMO
O principal objectivo da presente dissertação prende-se com a caracterização do tráfego
ferroviário e dos seus efeitos em pontes de pequeno vão.
O trabalho inicia-se com uma pequena introdução onde são apresentados alguns trabalhos
representativos da investigação realizada na área. São referidos alguns estudos realizados,
e é descrita sumariamente a evolução da caracterização do tráfego por aplicação de
metodologias experimentais em pontes, desde os seus primórdios, no âmbito do tráfego
rodoviário até à sua mais recente aplicação ao tráfego ferroviário.
São descritos os principais procedimentos associados à realização de campanhas
experimentais em pontes ferroviárias tendo em especial atenção alguns aspectos de
natureza específica destas estruturas. De seguida são apresentados de uma forma
essencialmente descritiva as principais aplicações natureza experimental mais empregues
actualmente em pontes.
Atendendo ao âmbito essencialmente experimental do presente trabalho, realizou-se uma
breve resenha sobre os principais equipamentos utilizados na monitorização de estruturas.
São apresentados os princípios básicos do algoritmo “B-WIM” (Bridge Weigh-In-Motion)
implementado no âmbito deste trabalho, descrevendo-se os princípios inerentes ao método
bem como a sua implementação numérica. É também apresentado um exemplo numérico
simples que permitiu validar o algoritmo implementado e identificar as suas limitações
bem como a sua dependência face às propriedades dinâmicas das estruturas e aos efeitos
dinâmicos devidos à acção do tráfego.
O algoritmo desenvolvido foi aplicado à ponte ferroviária de Canelas, uma ponte mista do
tipo “filler-beam” situada na Linha do Norte. A campanha experimental permitiu não só a
obtenção das características de tráfego ferroviário circulante naquele troço de linha como
também a identificação das propriedades dinâmicas da estrutura e a avaliação dos efeitos
dinâmicos devido à acção do tráfego, factores relevantes para a própria implementação do
algoritmo B-WIM
i

ABSTRACT
The main goal of the present work is the characterization of traffic ant its effects on short
span bridges.
The work starts with a small introduction where some work in this domain is presented.
Some investigation projects are presented as well as the evolution of the characterization of
traffic by means of experimental methods on bridges, since its beginning in road traffic
until its latest application on railway traffic.
The main proceedings associated with experimental work in railway bridges are presented
taking into account the specific issues of these structures. A summary of the main
experimental applications on bridges is also presented.
Taking into account that the main scope of the present work is related to experimental
methodologies, a brief summary of the main equipments used in structural monitoring was
made.
The main principles of a B-WIM (Bridge Weigh-In-Motion) algorithm that was
implemented in the scope of this work are explained, as well as its numerical
implementation. The validation of the algorithm was made by means of a simple numerical
example which allowed not only the validation of the developed numerical tools as well to
identify the algorithm’s limitations as well as its dependency relative to the dynamic
characteristics of the structures and to the dynamic effects caused by railway traffic.
The algorithm was applied to the Canelas Bridge, a small span bridge with a composite
steel-concrete deck, located at the Northern Line of the Portuguese railways, which
enabled not only to create a database with the characteristics of the real traffic in that
railway line section, but also to assess the dynamic properties of the bridge and the
dynamic effects in terms of amplification factors relative to displacements and also the
induced strains and accelerations of the structure.
iii

AGRADECIMENTOS
Ao terminar este trabalho, gostaria de deixar expresso o meu profundo e sincero
agradecimento a todos que de alguma forma contribuíram para a sua concretização, em
particular:
- Ao Professor Rui Calçada, pela atenção, disponibilidade e motivação demonstrada ao
longo de todo o trabalho. As suas qualidades tanto no plano profissional como no
plano pessoal tornaram não só mais fácil como agradável o desenvolvimento da
presente dissertação;
- Ao Professor Raimundo Delgado, pelos ensinamentos transmitidos e pelos
comentários e observações inteligentes colocados no decorrer do presente trabalho. O
seu entusiasmo foi sempre contagiante ao longo de todo o meu percurso académico;
- À RAVE - Rede Ferroviária de Alta Velocidade - pelo apoio concedido no âmbito do
protocolo de colaboração RAVE & FEUP;
- À Eng. Ana Isabel Silva e ao Sr. Mário Berardo da REFER pelo apoio prestado;
- À empresa Fibersensing, com particular referência ao Dr. Luís Ferreira, à Engª
Cristina Barbosa e ao Sr. Nuno Costa pelo apoio fundamental na realização das
campanhas experimentais
- Ao Sr. Valdemar e ao André, pelo brio, compreensão e paciência demonstrados ao
longo das campanhas experimentais desenvolvidas;
- Aos amigos e colegas de trabalho Bruno Zuada, Bruno Quelhas, Cristina Ribeiro,
Diogo Ribeiro, Fernando Bastos, Hélder Figueiredo, José Rui, José Santos, Mário
Marques, Nuno Santos, Ricardo Monteiro, Romeu Simões e Sérgio Neves pelo bom
ambiente proporcionado no decurso do Mestrado;
- Aos amigos de longa data Inês Lourenço, Bruno Lucena, João Nuno e Joana Torres,
Marco Santos e Vítor Alves pelo apoio que sempre me proporcionaram ao longo
deste percurso;
- À Ana, pela compreensão apoio e encorajamento dado ao longo do trabalho e,
sobretudo, pela paciência demonstrada nas horas de maior ausência;
- Aos meus pais, a quem devo tudo, desde os ensinamentos, oportunidades e carinho
que sempre me proporcionaram até ao exemplo de vida que sempre demonstraram.
v

ÍNDICE DE TEXTO
ÍNDICE GERAL................................................................................................................ vii
RESUMO............................................................................................................................... i
ABSTRACT......................................................................................................................... iii
AGRADECIMENTOS .........................................................................................................v
ÍNDICE DE TEXTO ......................................................................................................... vii
CAPÍTULO 1 - INTRODUÇÃO .........................................................................................1
1.1 - Enquadramento ....................................................................................................................................1
1.2 - Investigações anteriores .......................................................................................................................3
1.3 - Objectivos e conteúdo da Tese...........................................................................................................14
CAPÍTULO 2 – METODOLOGIAS DE OBSERVAÇÃO DINÂMICA DE PONTES
..............................................................................................................................................17
2.1 - Introdução...........................................................................................................................................17
2.2 - Planeamento, preparação e execução dos trabalhos........................................................................18
2.2.1 - Objectivos......................................................................................................................................18
2.2.2 - Planeamento ..................................................................................................................................19
2.2.2.1 - Análise preliminar ................................................................................................................19
2.2.2.2 - Reconhecimento do local de monitorização.........................................................................20
2.2.2.3 - Definição do sistema de monitorização a utilizar.................................................................20
2.2.3 - In Situ ............................................................................................................................................22
2.2.4 - Aquisição e processamento de sinal ..............................................................................................23
2.2.4.1 - Frequência de amostragem e tempo de aquisição.................................................................24
2.2.4.2 - Resolução, campo de medida e ganho..................................................................................25
2.2.4.3 - Erros .....................................................................................................................................26
2.2.4.4 - Processamento de sinal.........................................................................................................30
vii
2.3 - Identificação das propriedades dinâmicas das estruturas .............................................................. 37
2.3.1 - Métodos estocásticos no domínio da frequência ........................................................................... 41
2.3.1.1 - Método básico no domínio da frequência (BFD) ................................................................. 41
2.3.1.2 - Método de decomposição no domínio da frequência (FDD)................................................ 42
2.3.1.3 - Método de decomposição no domínio da frequência – versão melhorada (EFDD) ............. 42
2.3.2 - Métodos estocásticos no domínio do tempo.................................................................................. 43
2.3.3 - Determinação dos coeficientes de amortecimento......................................................................... 43
2.3.3.1 - Método da meia potência ..................................................................................................... 43
2.3.3.2 - Método do decremento logarítmico ..................................................................................... 44
2.4 - Avaliação experimental dos efeitos dinâmicos de cargas de tráfego ferroviário........................... 46
2.4.1 - Coeficientes para avaliação da amplificação dinâmica (DA, DAF, I)........................................... 46
2.4.1.1 - Avaliação do factor de amplificação dinâmica por via experimental................................... 48
2.4.2 - Níveis máximos de aceleração ...................................................................................................... 49
2.5 - Calibração e validação de modelos numéricos................................................................................. 52
2.5.1 - Introdução...................................................................................................................................... 52
2.5.2 - Correlação e comparação entre resultados experimentais e modelos numéricos .......................... 53
2.5.3 - Métodos para ajuste de modelos de elementos finitos................................................................... 55
2.6 - Avaliação do estado de conservação das estruturas com base em ensaios dinâmicos .................. 56
CAPÍTULO 3 – EQUIPAMENTOS PARA MONITORIZAÇÃO DE ESTRUTURAS
DE ENGENHARIA CIVIL............................................................................................... 59
3.1 - Introdução........................................................................................................................................... 59
3.2 - Parâmetros caracterizadores do comportamento dos transdutores .............................................. 60
3.2.1 - Características de performance dos transdutores........................................................................... 60
3.2.1.1 - Sensibilidade e resolução ..................................................................................................... 60
3.2.1.2 - Gama de medição e linearidade ........................................................................................... 60
3.2.1.3 - Histerese............................................................................................................................... 61
3.2.1.4 - Exactidão e repetibilidade .................................................................................................... 61
3.2.1.5 - Estabilidade.......................................................................................................................... 61
3.2.1.6 - Tempo de resposta e resposta em frequência ....................................................................... 61
3.2.2 - Outros parâmetros ......................................................................................................................... 62
3.2.2.1 - Durabilidade......................................................................................................................... 62
3.2.2.2 - Custo .................................................................................................................................... 62
3.2.2.3 - Requisitos de instalação ....................................................................................................... 62
viii
3.2.2.4 - Requisitos ao nível da aquisição de dados ...........................................................................62
3.3 - Sistemas clássicos................................................................................................................................63
3.3.1 - Transdutores de deformação..........................................................................................................63
3.3.1.1 - Extensómetros eléctricos de resistência ...............................................................................63
3.3.1.2 - Extensómetros acústicos ou de corda vibrante .....................................................................70
3.3.2 - Transdutores de deslocamento.......................................................................................................71
3.3.2.1 - Transdutores de deslocamento resistivos .............................................................................71
3.3.2.2 - Transdutores de deslocamento de indutância variável (LVDT) ...........................................72
3.3.3 - Transdutores de velocidade ...........................................................................................................74
3.3.3.1 - Transdutores baseados em sensores do tipo “force-balance” ...............................................74
3.3.3.2 - Sensores Laser......................................................................................................................75
3.3.4 - Transdutores de aceleração............................................................................................................76
3.3.4.1 - Acelerómetros piezoeléctricos .............................................................................................76
3.3.4.2 - Acelerómetros piezoresistivos..............................................................................................79
3.3.4.3 - Acelerómetros capacitivos ...................................................................................................79
3.3.4.4 - Acelerómetros do tipo “force-balance” ou do tipo servo .....................................................80
3.4 - Novas tecnologias de instrumentação ...............................................................................................81
3.4.1 - Sensores de fibra óptica.................................................................................................................81
3.4.1.1 - Conceitos Gerais ..................................................................................................................82
3.4.1.2 - Fibras ópticas como sensores ...............................................................................................85
3.4.2 - Fotografia digital ...........................................................................................................................89
3.4.3 - Sensores MEMS ............................................................................................................................89
CAPÍTULO 4 – METODOLOGIAS EXPERIMENTAIS PARA CARACTERIZA-
ÇÃO DO TRÁFEGO FERROVIÁRIO............................................................................91
4.1 - Introdução...........................................................................................................................................91
4.2 - Estruturas Adequadas à Aplicação de Algoritmos de Pesagem Em Movimento ..........................92
4.3 - Algoritmo “B-WIM” ..........................................................................................................................92
4.3.1 - Pré-processamento.........................................................................................................................93
4.3.2 - Geometria e propriedades cinemáticas do comboio ......................................................................93
4.3.3 - Cargas por eixo – Algoritmo de Moses (1979)..............................................................................94
4.4 - Determinação da linha de influência de uma estrutura por via experimental ..............................98
4.4.1 - “Matrix Type Method” (Quilligan, 2003)......................................................................................99
4.4.2 - Forma geral do “Matrix type method”.........................................................................................100
ix
4.5 - Implementação automática em Matlab .......................................................................................... 103
4.5.1 - Pré-processamento....................................................................................................................... 103
4.5.2 - Geração da linha de influência .................................................................................................... 104
4.5.3 - Algoritmo B-WIM....................................................................................................................... 106
4.6 - Validação por intermédio de um exemplo numérico..................................................................... 107
4.6.1 - Descrição da estrutura ................................................................................................................. 107
4.6.2 - Frequências naturais e modos de vibração .................................................................................. 108
4.6.3 - Análise dinâmica ......................................................................................................................... 109
4.6.3.1 - Amortecimento................................................................................................................... 109
4.6.3.2 - Comboio e gama de velocidades........................................................................................ 110
4.6.4 - Evolução temporal das respostas................................................................................................. 110
4.6.5 - Definição dos nós de controlo para a aplicação do algoritmo ..................................................... 111
4.6.6 - Pré-processamento....................................................................................................................... 113
4.6.7 - Geração da linha de influência .................................................................................................... 115
4.6.8 - Caracterização do tráfego ............................................................................................................ 116
4.7 - Avaliação dos efeitos dinâmicos ...................................................................................................... 117
4.8 - Aspectos Regulamentares Relativos à Classificação do TrÁfego Ferroviário............................. 120
CAPÍTULO 5 – APLICAÇÃO À PONTE FERROVIÁRIA DE CANELAS ............ 123
5.1 - Introdução......................................................................................................................................... 123
5.2 - Descrição da ponte............................................................................................................................ 124
5.3 - Investigações Anteriores .................................................................................................................. 126
5.4 - Sistema de Monitorização Adoptado .............................................................................................. 127
5.4.1 - Objectivos.................................................................................................................................... 127
5.4.2 - Instrumentação e sistemas de aquisição utilizados ...................................................................... 127
5.4.2.1 - Ensaio para identificação das características dinâmicas da estrutura ................................. 127
5.4.2.2 - Ensaio para caracterização do tráfego ferroviário e avaliação dos efeitos dinâmicos ........ 131
5.5 - Identificação experimental das Características Dinâmicas da Estrutura ................................... 135
5.5.1 - Procedimento do ensaio............................................................................................................... 136
5.5.2 - Pré-processamento dos resultados ............................................................................................... 136
5.5.3 - Frequências naturais e modos de vibração .................................................................................. 137
5.5.4 - Amortecimento............................................................................................................................ 139
5.6 - Caracterização do Tráfego Ferroviário.......................................................................................... 140
5.6.1 - Pré-processamento....................................................................................................................... 140
5.6.2 - Calibração da linha de influência ................................................................................................ 142
5.6.3 - Características do tráfego ferroviário .......................................................................................... 144
x
xi
5.7 - Avaliação dos Efeitos Dinâmicos.....................................................................................................147
5.7.1 - Coeficientes de amplificação dinâmica .......................................................................................147
5.7.2 - Níveis de aceleração ....................................................................................................................151
CAPÍTULO 6 – CONCLUSÕES E DESENVOLVIMENTOS FUTUROS ................153
6.1 - CONCLUSÕES GERAIS ................................................................................................................153
6.2 - PERSPECTIVAS DE DESENVOLVIMENTOS FUTUROS.......................................................156
REFERÊNCIAS BIBLIOGRÁFICAS............................................................................159

CAPÍTULO 1
INTRODUÇÃO
1.1 - ENQUADRAMENTO
Do ponto de vista económico, social e ecológico, os transportes ferroviários são uma
escolha mais sensata, quando comparados com os transportes rodoviários. Este facto
verifica-se, tanto no que concerne ao movimento de pessoas, quanto no que se refere ao
transporte de mercadorias.
Os transportes ferroviários têm vindo a acompanhar o desenvolvimento dos restantes
meios de transporte, no que respeita ao transporte de pessoas, nomeadamente com a
introdução das vias ferroviárias de alta velocidade. No entanto, é também uma realidade
que, a nível europeu, tem-se verificado uma crescente e preocupante perda de
competitividade deste tipo de transporte, ao nível do transporte de mercadorias.
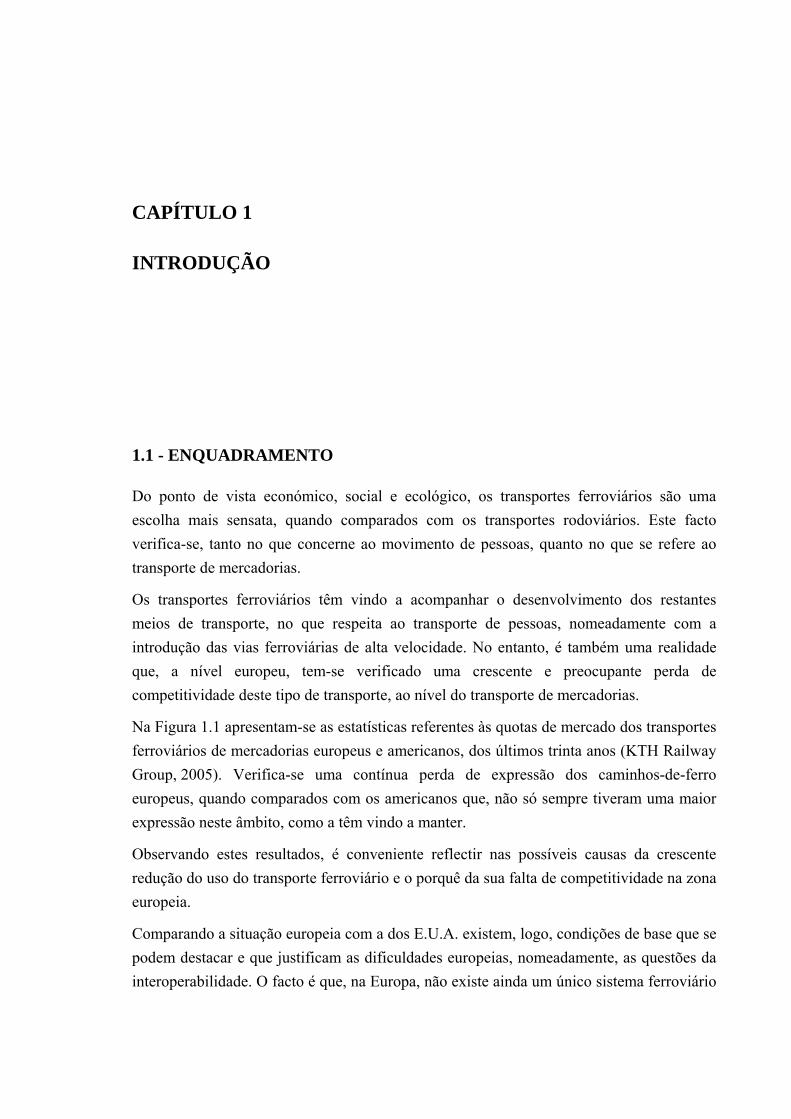
Na Figura 1.1 apresentam-se as estatísticas referentes às quotas de mercado dos transportes
ferroviários de mercadorias europeus e americanos, dos últimos trinta anos (KTH Railway
Group, 2005). Verifica-se uma contínua perda de expressão dos caminhos-de-ferro
europeus, quando comparados com os americanos que, não só sempre tiveram uma maior
expressão neste âmbito, como a têm vindo a manter.
Observando estes resultados, é conveniente reflectir nas possíveis causas da crescente
redução do uso do transporte ferroviário e o porquê da sua falta de competitividade na zona
europeia.
Comparando a situação europeia com a dos E.U.A. existem, logo, condições de base que se
podem destacar e que justificam as dificuldades europeias, nomeadamente, as questões da
interoperabilidade. O facto é que, na Europa, não existe ainda um único sistema ferroviário
Capítulo 1
integrado, sendo os problemas de compatibilidade entre os sistemas eléctricos, bitola, tipo
de carril, sinalização e sistemas de segurança ainda muito comuns. Por outro lado, a falta
de regulamentação existente no transporte rodoviário de mercadorias, torna-o mais
competitivo do ponto de vista monetário e temporal, quando comparado com o ferroviário. C
ota
de m
erca
do [%
ton
s.km
]
Figura 1.1 – Evolução das quotas de mercado no que respeita ao tráfego ferroviário de mercadorias
na Europa, Suécia e nos E.U.A. (KTH Railway Group, 2005)
No que respeita à competitividade económica dos veículos ferroviários, existe ainda outro
factor preponderante que está relacionado com as cargas que estes transportes podem
comportar. Comparando novamente a situação americana com a europeia, verifica-se que a
carga máxima por eixo permitida nos E.U.A. cifra-se entre as 30 e as 35,7 toneladas,
enquanto que a carga máxima mais comum, nos países europeus, situa-se em apenas 22,5
toneladas. Curiosamente, as cargas máximas permitidas aos veículos rodoviários europeus
são superiores aos americanos (James, 2003).
Neste contexto, assume especial interesse o desenvolvimento de metodologias
experimentais que permitam a aferição dos efeitos reais do tráfego nas estruturas
ferroviárias, de modo a que futuramente seja possível, de uma forma justificada, aumentar
as cargas máximas permitidas, bem como as velocidades de circulação, sem necessidade de
grandes investimentos nas infraestruturas.
As recentes mudanças ao nível da gestão dos transportes ferroviários em alguns dos países
europeus, nomeadamente com a separação das entidades gestoras das infraestruturas das
empresas operadoras potenciaram também a necessidade de exercer um controlo das
primeiras sobre as segundas, revelando-se desta forma muito interessante o
desenvolvimento de metodologias de avaliação das características reais do tráfego
ferroviário.
2
Introdução
Por outro lado, ao nível da engenharia de estruturas, este controlo das características de
tráfego poderá ser interessante pois permite um conhecimento mais detalhado desta acção
preponderante nas estruturas ferroviárias.
Este melhor conhecimento da acção do tráfego ferroviário, revela-se de especial interesse
para a avaliação de estruturas já existentes. Muitas das pontes ferroviárias têm um período
espectável de vida bastante largo, muito superior aos dos veículos ferroviários, sendo por
isso importante o controlo da segurança das estruturas face a variações das características
da acção bem como dos seus efeitos.
1.2 - INVESTIGAÇÕES ANTERIORES
A observação de estruturas desde sempre encontrou-se presente na construção de estruturas
de engenharia civil, não só para garantia de segurança das mesmas mas também como
fonte de ensinamento para construção de obras futuras. Estas actividades foram-se
desenvolvendo ao longo dos tempos acompanhando a evolução das tecnologias de
construção tendo chegado ao conceito actual da monitorização. Refira-se que a
monitorização é a área que se encontra em maior desenvolvimento no domínio da
engenharia civil, condicionando também o desenvolvimento das restantes áreas através das
informações que fornece.
Na literatura actual, a monitorização encontra-se dividida em monitorização estática e
dinâmica, podendo esta ser contínua ao longo do período de vida da estrutura ou realizada
durante curtos espaços de tempo.
No caso das pontes ferroviárias, na fase de operação, a monitorização dinâmica é aquela
que é mais correntemente utilizada, sendo os ensaios estáticos, normalmente aplicados em
fases de recepção da obra ou em pontes com características muito especiais como é o caso
das pontes de grande vão.
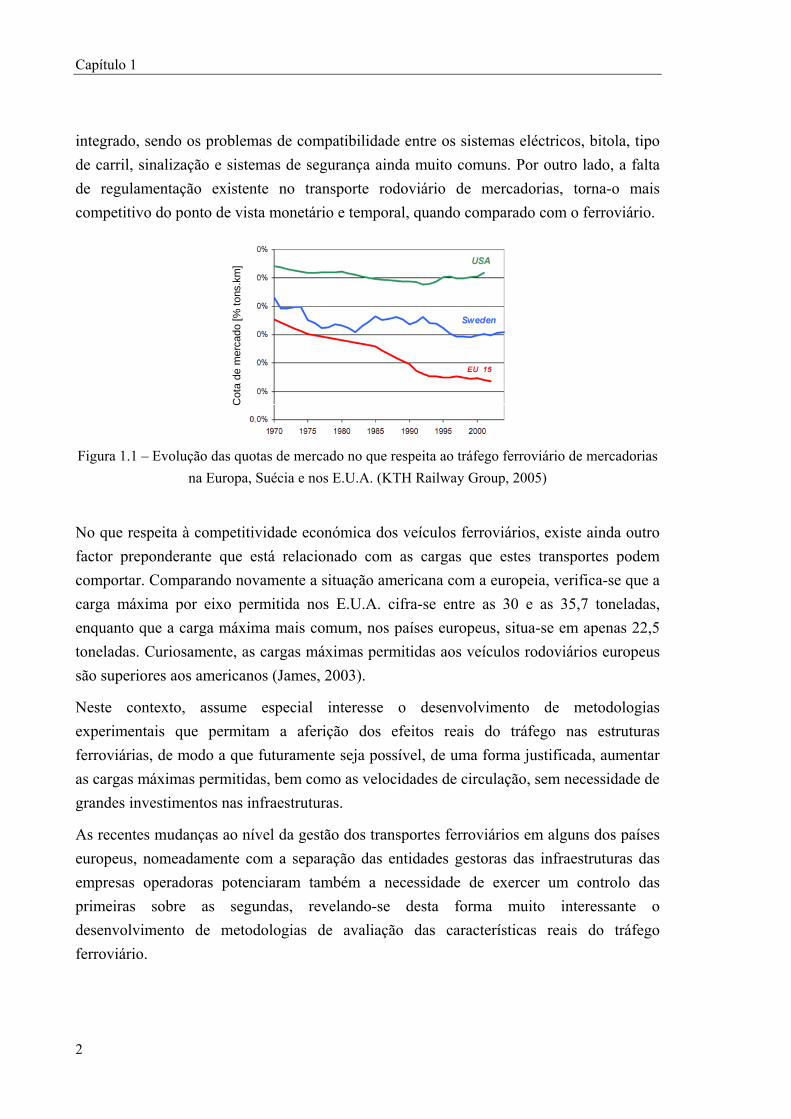
O interesse no comportamento dinâmico de pontes ferroviárias é reconhecido desde
meados do século XIX. Este interesse surgiu após o colapso de alguma pontes ferroviárias
em Inglaterra sendo constituída uma comissão mandatada pela Rainha com o objectivo de
estudar o tema das amplificações dinâmicas em pontes. Refira-se que desde estes primeiros
tempos a observação de estruturas esteve presente (Figura 1.2).
3
Capítulo 1
Figura 1.2 – Ensaio de uma viga treliçada metálica em Inglaterra para uma ponte ferroviária a ser
construída na Índia (séc. XIX) (Mufti, 2001)
Nos tempos mais recentes, tem-se verificado uma cada vez mais intensa aplicação da
monitorização às estruturas ferroviárias. Importa referir a relevância, neste âmbito, do
aparecimento das linhas de alta velocidade na Europa, bem como dos processos de
requalificação e modernização das linhas ferroviárias tradicionais de forma a poder
albergar comboios mais modernos, com maiores velocidades e maiores exigências a nível
de conforto.
Neste âmbito, torna-se imperativo referir o projecto de modernização da West Coast Main
Line (WCML), linha construída em 1860 e que estabelece a ligação entre Londres e a
Escócia (Norris, 2005).
A operação de uma nova geração de comboios com eixos motores igualmente espaçados
ao longo do comboio tem vindo a causar vibrações excessivas nas pontes ferroviárias. Este
facto pode provocar danos severos quer nas próprias pontes quer na via ferroviária,
causando esforços excessivos nos elementos estruturais e instabilidade ao nível do balastro.
Com este conhecimento em mente e tendo em vista a chegada dos novos comboios
BR Class 390 (Figura 1.3), comboios pendulares com eixos motores igualmente espaçados
ao longo do comboio, a Network Rail, entidade gestora dos caminhos-de-ferro ingleses,
dirigiu um conjunto de estudos de forma a investigar a magnitude e consequências deste
fenómeno no âmbito do projecto de modernização WCML. Nestes estudos foram
realizadas campanhas de monitorização em aproximadamente 150 estruturas, sendo ainda
analisadas numericamente 350 estruturas, permitindo a avaliação do risco para mais de
2000 estruturas.
4
Introdução
Figura 1.3 – Comboio BR Class 390 (http://www.old-dalby.com/)
Importa referir que nas pontes ferroviárias os riscos dividem-se em duas áreas distintas
mas dependentes. Por um lado existe o risco inerente às próprias pontes nomeadamente ao
nível da resistência e deformações, por outro lado, existe o risco associado à via muito
condicionada pelo comportamento das estruturas que lhes dão suporte.
No âmbito deste trabalho, Norris (2005) identifica os requisitos que as estruturas
necessitam de satisfazer para garantir um comportamento adequado como sendo:
i) Resistência adequada de forma a suportar os efeitos dinâmicos devidos ao tráfego;
ii) Rigidez apropriada para garantir o cumprimento dos critérios de segurança da via
ferroviária;
iii) Resposta dinâmica adequada garantindo que as vibrações (acelerações e
deslocamentos) não coloquem em risco a estabilidade do balastro,
iv) sendo estes requisitos essencialmente condicionados pelos seguintes parâmetros:
v) Características das pontes que influenciam a sua resposta dinâmica (massa, rigidez e
amortecimento);
vi) Características dos veículos ferroviários (cargas por eixo, espaçamento dos eixos,
suspensões, etc.)
vii) Velocidades de circulação.
Como já foi referido anteriormente, o aparecimento das linhas ferroviárias de alta
velocidade, com novas exigências ao nível do comportamento das estruturas, conduziu a
um aumento do número de campanhas de monitorização. Neste âmbito refira-se os
5
Capítulo 1
trabalhos de Xia et al. (2003 e 2005), Van Bogaert (2006) e Kwark et al. (2004), entre
outros.
Na China, a linha ferroviária entre Qin(huangdao)-Shen(yang) inclui um troço de 83 km
para tráfego de alta velocidade (300 km/h). Durante o período de desenvolvimento desta
linha o ministro dos caminhos-de-ferro chineses organizou, em conjunto com a “Academy
of Railway Sciences” e diversas universidades, estudos no âmbito do comportamento
dinâmico de pontes ferroviárias para linhas de alta velocidade, incluindo análises teóricas,
simulações numéricas e campanhas de monitorização. Neste âmbito refira-se os diversos
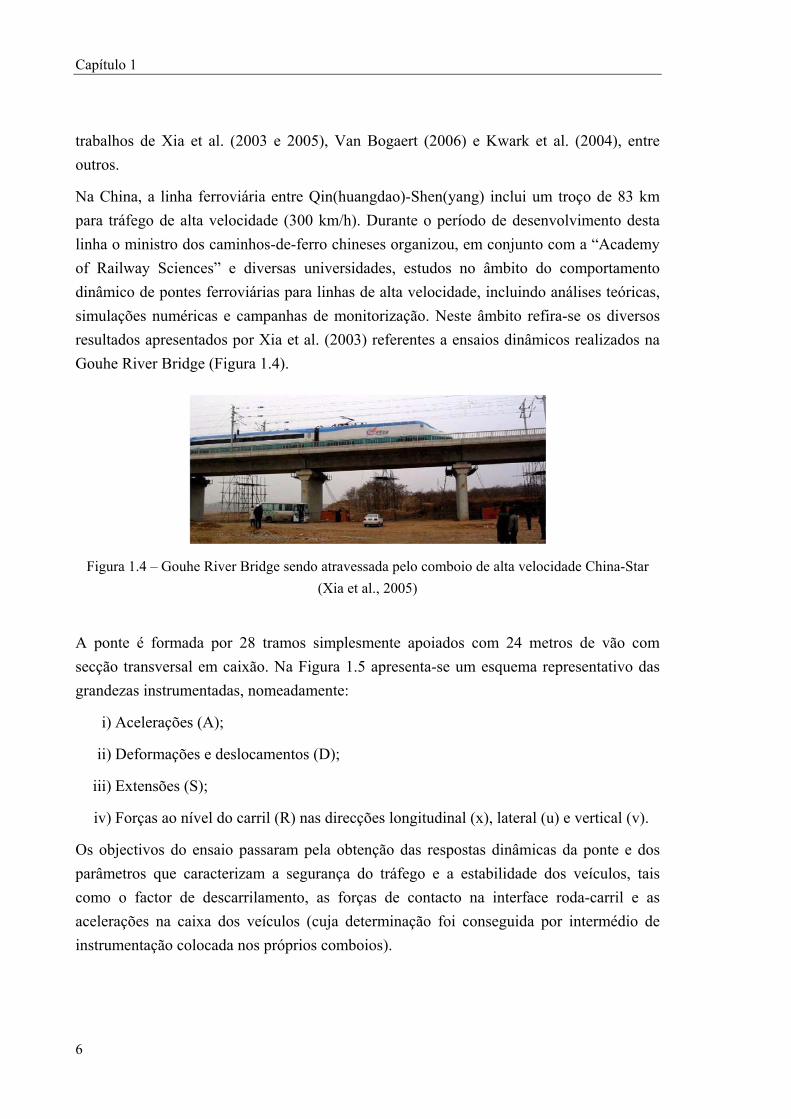
resultados apresentados por Xia et al. (2003) referentes a ensaios dinâmicos realizados na
Gouhe River Bridge (Figura 1.4).
Figura 1.4 – Gouhe River Bridge sendo atravessada pelo comboio de alta velocidade China-Star
(Xia et al., 2005)
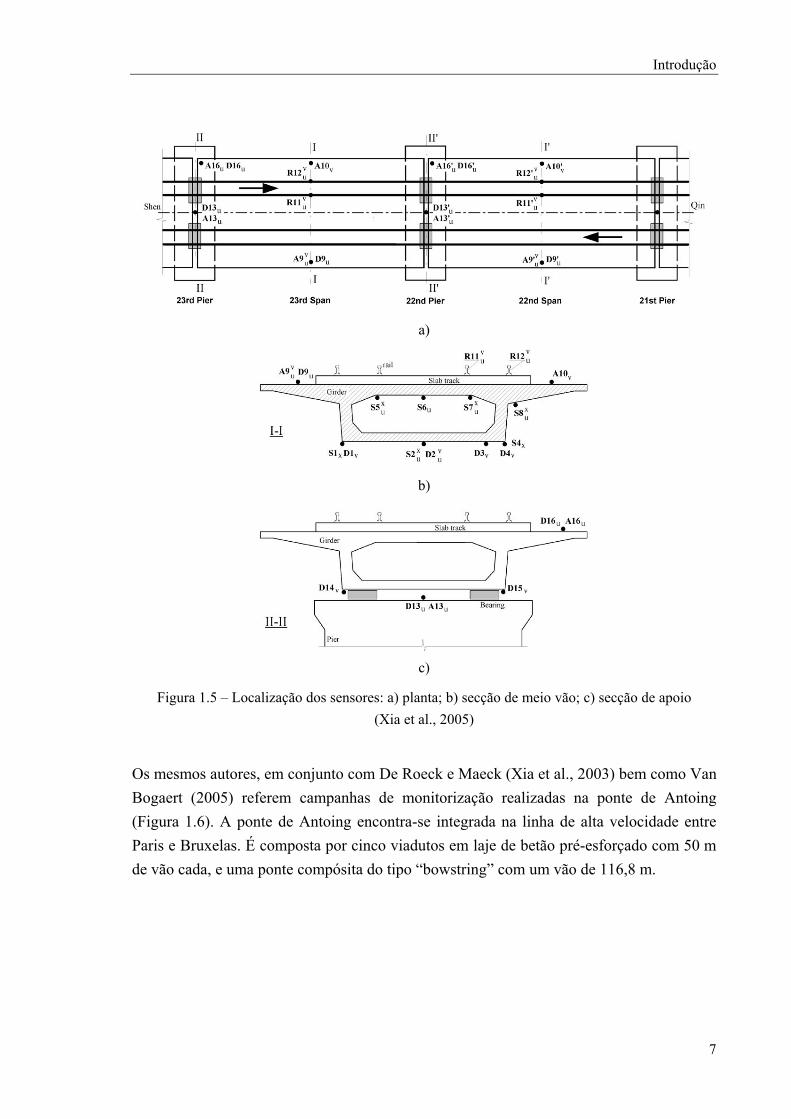
A ponte é formada por 28 tramos simplesmente apoiados com 24 metros de vão com
secção transversal em caixão. Na Figura 1.5 apresenta-se um esquema representativo das
grandezas instrumentadas, nomeadamente:
i) Acelerações (A);
ii) Deformações e deslocamentos (D);
iii) Extensões (S);
iv) Forças ao nível do carril (R) nas direcções longitudinal (x), lateral (u) e vertical (v).
Os objectivos do ensaio passaram pela obtenção das respostas dinâmicas da ponte e dos
parâmetros que caracterizam a segurança do tráfego e a estabilidade dos veículos, tais
como o factor de descarrilamento, as forças de contacto na interface roda-carril e as
acelerações na caixa dos veículos (cuja determinação foi conseguida por intermédio de
instrumentação colocada nos próprios comboios).
6
Introdução
a)
b)
c)
Figura 1.5 – Localização dos sensores: a) planta; b) secção de meio vão; c) secção de apoio
(Xia et al., 2005)
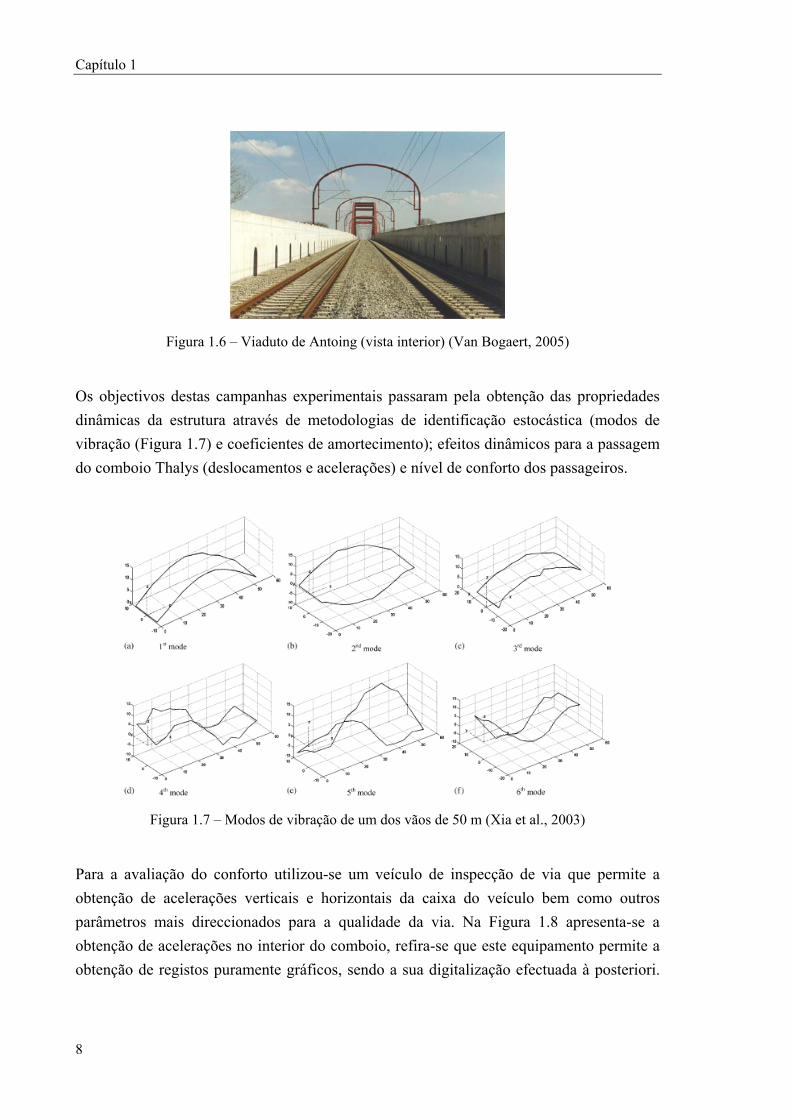
Os mesmos autores, em conjunto com De Roeck e Maeck (Xia et al., 2003) bem como Van
Bogaert (2005) referem campanhas de monitorização realizadas na ponte de Antoing
(Figura 1.6). A ponte de Antoing encontra-se integrada na linha de alta velocidade entre
Paris e Bruxelas. É composta por cinco viadutos em laje de betão pré-esforçado com 50 m
de vão cada, e uma ponte compósita do tipo “bowstring” com um vão de 116,8 m.
7
Capítulo 1
Figura 1.6 – Viaduto de Antoing (vista interior) (Van Bogaert, 2005)
Os objectivos destas campanhas experimentais passaram pela obtenção das propriedades
dinâmicas da estrutura através de metodologias de identificação estocástica (modos de
vibração (Figura 1.7) e coeficientes de amortecimento); efeitos dinâmicos para a passagem
do comboio Thalys (deslocamentos e acelerações) e nível de conforto dos passageiros.
Figura 1.7 – Modos de vibração de um dos vãos de 50 m (Xia et al., 2003)
Para a avaliação do conforto utilizou-se um veículo de inspecção de via que permite a
obtenção de acelerações verticais e horizontais da caixa do veículo bem como outros
parâmetros mais direccionados para a qualidade da via. Na Figura 1.8 apresenta-se a
obtenção de acelerações no interior do comboio, refira-se que este equipamento permite a
obtenção de registos puramente gráficos, sendo a sua digitalização efectuada à posteriori.
8
Introdução
Este veículo foi acoplado ao comboio Thalys, permitindo a sua circulação sobre a ponte a
velocidades até 300 km/h.
Figura 1.8 – Obtenção de registos de acelerações (Van Bogaert, 2005)
O dimensionamento de pontes ferroviárias tem conhecido grandes desenvolvimentos no
que respeita ao conhecimento do seu comportamento dinâmico bem como no que se refere
ao comportamento dos materiais. No entanto poucos estudos têm sido efectuados para a
correcta avaliação das cargas do tráfego ferroviário e dos seus efeitos. Por esta razão,
cargas de tráfego, factores de segurança e factores de amplificação dinâmica usados
correntemente podem ser questionados.
A monitorização das acções de tráfego é já uma prática comum no que respeita ao tráfego
rodoviário. Este facto deve-se à grande expansão do tráfego rodoviário de mercadorias na
segunda parte do século XX. Verificou-se que o crescente aumento das cargas
transportadas por estes veículos conduzia à deterioração dos pavimentos e pontes surgindo
por este motivo a necessidade de controlar essas mesmas cargas. Inicialmente o controlo
era exercido através de sistemas de pesagens estáticos. Apesar da sua elevada precisão, o
reduzido número de veículos pesados bem como os atrasos causados pelo processo
despoletaram o interesse nos métodos de pesagem dinâmica “Weigh-In-Motion” (WIM).
Para além de facilitar o cumprimento das leis rodoviárias, a aplicação de sistemas WIM a
vias rodoviárias tem demonstrado uma grande utilidade no que respeita ao estudo do
comportamento das pontes (O'Brien et al., 1998) e dos pavimentos (Caprez, 1998). No
caso concreto das pontes, refira-se o contributo do WIM para a definição de coeficientes de
amplificação dinâmica, avaliação de fenómenos de fadiga e na definição de modelos de
carga.
Kirkegaard et al. (1998), no seu estudo sobre pontes rodoviárias com vãos que variam de 5
a 35 metros, refere que os procedimentos para avaliação da amplificação dinâmica
preconizados pelo regulamento Dinamarquês e outras normas de diversos países Europeus
9
Capítulo 1
são demasiado conservativos, devendo-se este facto essencialmente aos casos de carga
considerados. O autor sugere que devem ser investigados diferentes tipos de pontes com
recurso a sistemas WIM, analisando vários cenários de carga bem como diferentes formas
de modelação numérica para que seja possível alargar estas conclusões para outros tipos de
estruturas. Conclui-se portanto que melhores estimativas das cargas rodoviárias fornecidas
por sistemas WIM, bem como melhores formas de modelação dinâmica podem conduzir a
estruturas mais esbeltas bem como evitar trabalhos de reforço em pontes já existentes, para
suportar tráfego rodoviário pesado.
Nas pontes metálicas e compósitas, o devido controlo do fenómeno da fadiga é de extrema
importância. O Estado Limite Último de Fadiga, está relacionado com a deterioração dos
materiais estruturais perante a aplicação de cargas repetidas, como é o caso das cargas de
tráfego rodoviário e ferroviário. Extensivos estudos neste âmbito têm demonstrado a
elevada sensibilidade da durabilidade das estruturas face às características de tráfego
(Jacob, 1998). A implementação de sistemas “Weigh-In-Motion” de uma forma contínua
permite a obtenção de registos das cargas de tráfego com elevada precisão fornecendo
dados de entrada reais para a análise da fadiga. Laman e Nowak (1996) e Szerszen et al.
(1999) são exemplos de autores que já implementaram este tipo de abordagem no estudo
da fadiga em pontes metálicas.
Uma outra aplicação relativamente recente deste tipo de sistemas refere-se ao modelo de
carga para tráfego rodoviário do Eurocódigo 1, Parte 2, cuja calibração resultou de
estatísticas de tráfego oriundas de vários pontos de pesagem WIM (O'Brien et al., 1996).
A nível Europeu, destaque-se a investigação realizada pela comissão COST323 e pelo
projecto financiado pela União Europeia WAVE (“Weigh-In-Motion of Axles and
Vehicles for Europe”).
A comissão COST323 foi constituída por diversos países Europeus, coordenando e
facilitando a cooperação entre países no que se refere a programas de investigação
nacionais entre o ano de 1993 e 1998, as actividades desta organização incluíram:
i) Análise das necessidades de WIM na Europa;
ii) Teste de sistemas WIM existentes e novos protótipos;
iii) Trabalhos preliminares para o desenvolvimento de documentos normativos para o
WIM;
iv) Acordos para mecanismos e protocolos que permitam a constituição de uma base de
dados WIM Europeia;
10
Introdução
v) Organização de conferências internacionais sobre os temas expostos, nomeadamente
a “First European Conference On Weigh-In-Motion Of Road Vehicles” realizada em
Zurique (1995) e a “European Conference On Weigh-In-Motion Of Road Vehicles”
realizada em Lisboa (1998).
O projecto WAVE, foi um projecto de investigação financiado pela União Europeia
realizado entre 1996 e 1998. Muitos dos intervenientes no projecto estavam ligados
também à comissão COST323, sendo que alguns dos trabalhos foram realizados em
conjunto. Os objectivos deste projecto eram:
i) Melhoria da precisão dos sistemas WIM;
ii) Desenvolvimento de procedimentos para criação de bases de dados WIM;
iii) Análise da performance dos sistemas WIM em climas frios;
iv) Desenvolvimento de tecnologias WIM em fibra óptica.
Um caso particular do “Weigh-In-Motion” é o B-WIM (“Bridge Weigh-In-Motion”). Os
conceitos inerentes a este tipo de sistemas remontam à década de 70 (Moses, 1979). Estes
sistemas distinguem-se dos tradicionais sistemas WIM pelo facto de a deformação que
permite a pesagem dos veículos é medida em pontes e não nos pavimentos. As vantagens
do B-WIM relativamente ao WIM resultam do facto das cargas serem pesadas ao longo de
um comprimento (o vão da ponte) mais extenso do que os sistemas baseados em sensores
de pavimento. Adicionalmente, as pontes permitem filtrar efeitos dinâmicos que resultam
das suspensões dos veículos e irregularidades do piso. Nos sistemas WIM de pavimento,
estes efeitos podem provocar a obtenção de cargas sobrestimadas em mais de 15% (Jacob e
O’Brien, 1996).
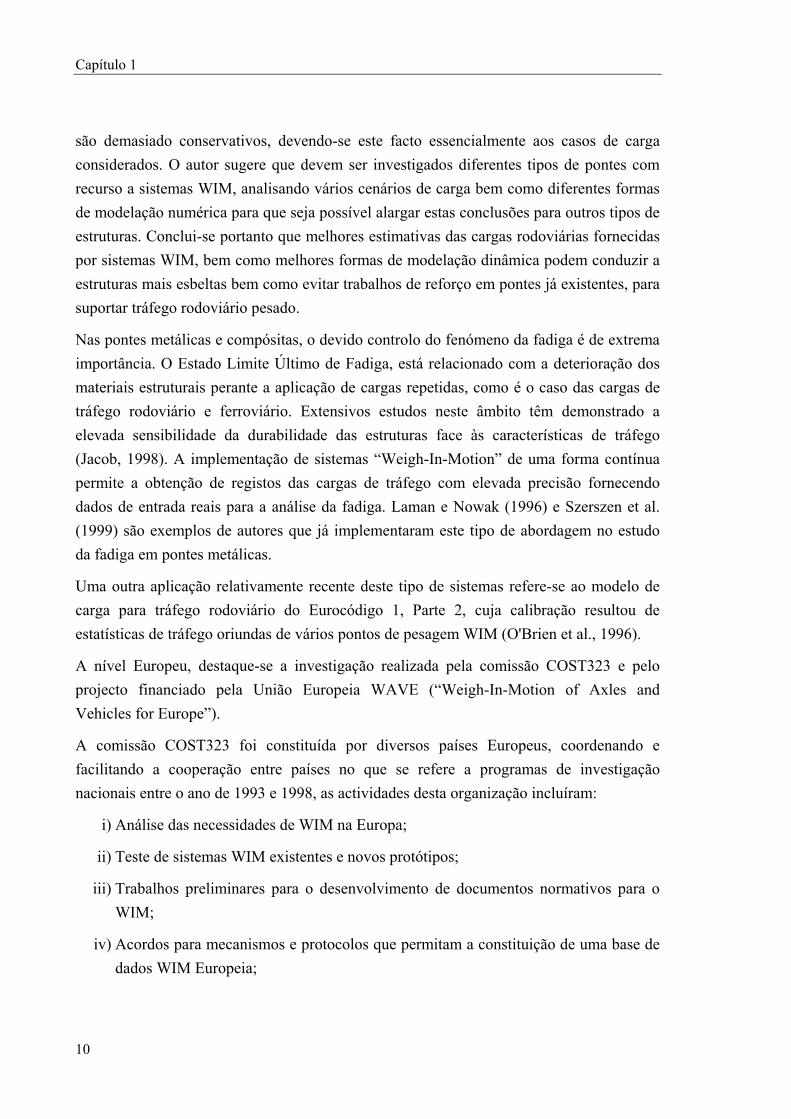
Tendo o B-WIM surgido primeiro nos E.U.A (Moses, 1979), foi na Austrália, na década de
80, que a sua implementação prática iniciou a sua expansão nomeadamente através do
sistema “Culway” (Figura 1.9) desenvolvido por Peters (Tierney et al., 1996), no final da
década de 90 já existiam mais de 100 sistemas do tipo instalados nas estradas Australianas
com elevado sucesso. As principais preocupações a nível de desenvolvimento do sistema
têm passado pela precisão, calibração e redução dos trabalhos de manutenção.
11
Capítulo 1
Figura 1.9 – Sistema B-WIM Australiano (“Culway”) (Tierney et al., 1996)
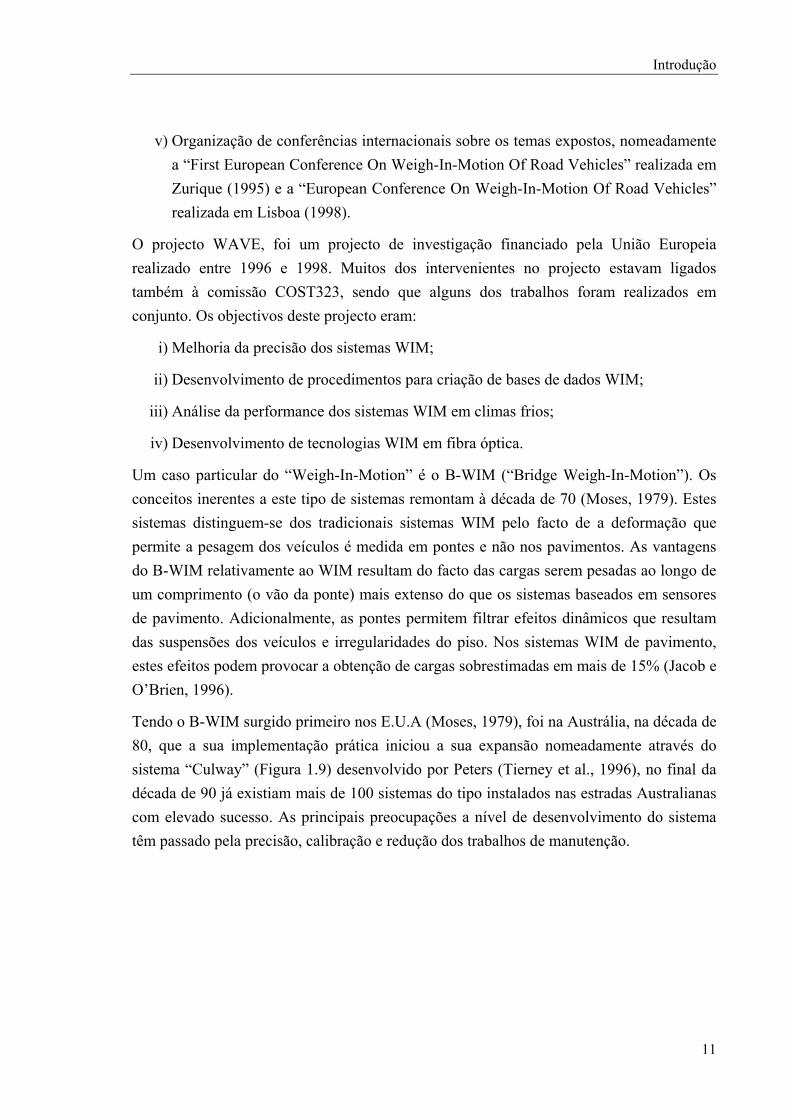
A aplicação de sistemas B-WIM a pontes ferroviárias é muito recente, tendo os primeiros
exemplos surgido na Suécia. Com o intuito de ampliar os conhecimentos acerca das acções
de tráfego ferroviário e seus efeitos, Karoumi et al. (2005) monitorizaram uma ponte
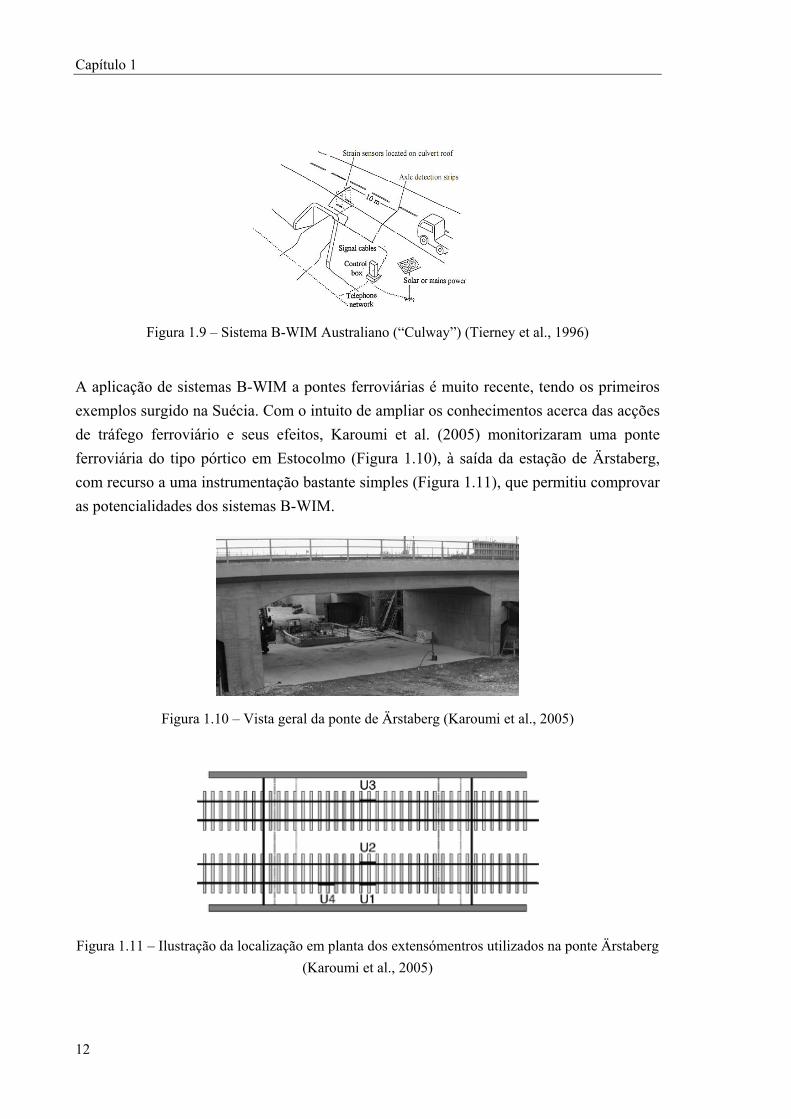
ferroviária do tipo pórtico em Estocolmo (Figura 1.10), à saída da estação de Ärstaberg,
com recurso a uma instrumentação bastante simples (Figura 1.11), que permitiu comprovar
as potencialidades dos sistemas B-WIM.
Figura 1.10 – Vista geral da ponte de Ärstaberg (Karoumi et al., 2005)
Figura 1.11 – Ilustração da localização em planta dos extensómentros utilizados na ponte Ärstaberg
(Karoumi et al., 2005)
12
Introdução
O algoritmo B-WIM implementado permitiu a avaliação de alguns parâmetros que
caracterizam o tráfego ferroviário, nomeadamente:
i) número de eixos do comboio;
ii) posição de cada eixo;
iii) carga estática por eixo;
iv) velocidade e aceleração do comboio;
v) aceleração devida à passagem dos comboios.
Um outro aspecto referente à caracterização do tráfego ferroviário prende-se com o perfil
das rodas dos comboios. Esveld (2001) refere que os maiores efeitos dinâmicos nas vias
ferroviárias advêm dos defeitos das rodas dos comboios. Skarlatos et al. (2004) referem
que um dos maiores problemas de operação dos transportes ferroviários está precisamente
nas irregularidades das rodas e dos carris, estando estas directamente relacionadas entre si.
Descontinuidades das rodas, excentricidades nos eixos dos comboios bem como
poligonalização e encurvadura do carril causam problemas graves ao nível da manutenção
de toda a infraestrutura ferroviária.
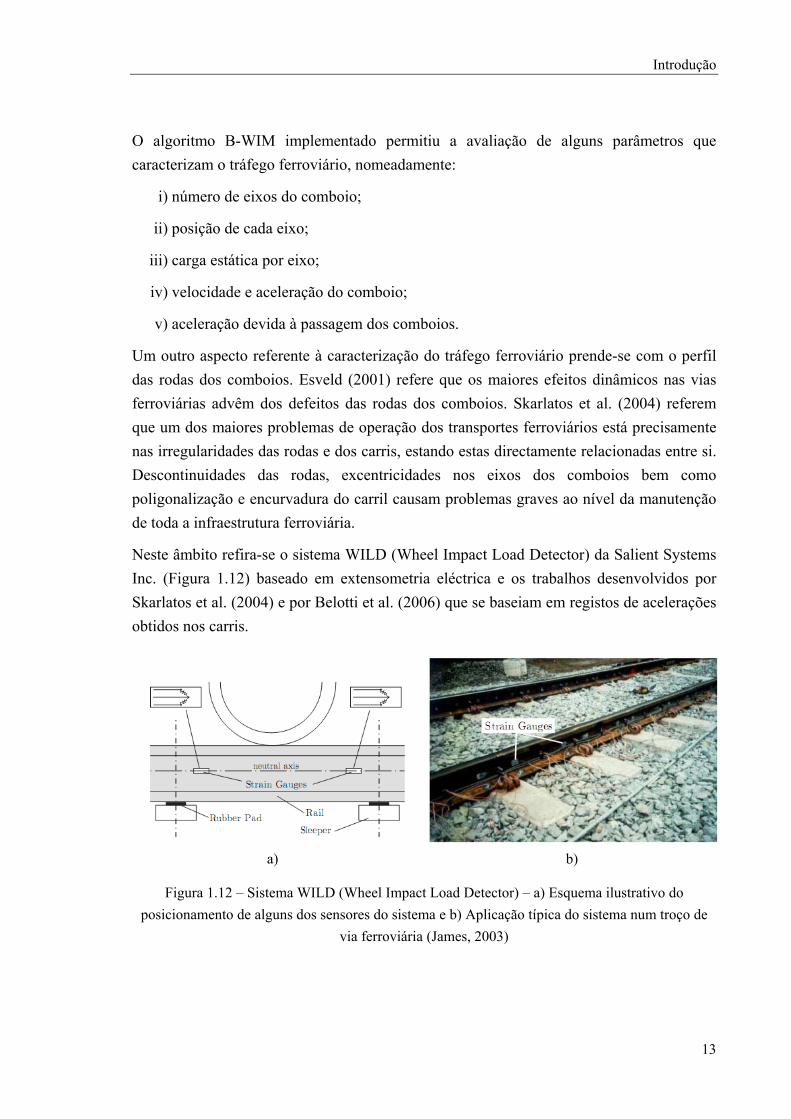
Neste âmbito refira-se o sistema WILD (Wheel Impact Load Detector) da Salient Systems
Inc. (Figura 1.12) baseado em extensometria eléctrica e os trabalhos desenvolvidos por
Skarlatos et al. (2004) e por Belotti et al. (2006) que se baseiam em registos de acelerações
obtidos nos carris.
a) b)
Figura 1.12 – Sistema WILD (Wheel Impact Load Detector) – a) Esquema ilustrativo do
posicionamento de alguns dos sensores do sistema e b) Aplicação típica do sistema num troço de
via ferroviária (James, 2003)
13
Capítulo 1
1.3 - OBJECTIVOS E CONTEÚDO DA TESE
A escolha do tema da presente tese resultou do interesse que o desenvolvimento de
metodologia experimentais para o estudo do comportamento dinâmico de pontes sob acção
do tráfego ferroviário tem vindo a suscitar, quer devido à crescente implementação das
redes ferroviárias de alta velocidade quer na busca da optimização das redes ferroviárias
tradicionais.
Com este trabalho pretendeu-se dar continuidade aos trabalhos de investigação realizados
no âmbito da monitorização dinâmica de pontes, focando uma vertente ainda pouco
explorada no nosso país que se prende com a caracterização experimental do tráfego
ferroviário através da implementação de algoritmos B-WIM.
Existindo já uma vasta experiência no domínio do tráfego rodoviário, a aplicação destas
ferramentas na caracterização do tráfego ferroviário é muito recente. O interesse advém
por um lado, devido à ainda relativa falta de conhecimento da acção do tráfego ferroviário
real nas estruturas, e, também do recente interesse das entidades gestoras das
infraestruturas em possuírem mecanismos de fiscalização sobre as operadoras. Este
fenómeno é ainda recente pois em muitos países, nomeadamente em Portugal, apenas
recentemente se separou a gestão das infraestruturas das operadoras.
Uma correcta aplicação de algoritmos B-WIM implica também um prévio conhecimento
das características dinâmicas das estruturas, como tal, não sendo objectivo fulcral da
presente dissertação, foram também realizados ensaios dinâmicos com o objectivo de
efectuar uma identificação modal da estrutura em estudo.
A estrutura da presente dissertação surge como consequência dos objectivos enunciados e
do percurso realizado para os atingir. O texto foi organizado em seis capítulos, nos
parágrafos que se seguem é efectuada uma descrição sumária de cada um desses capítulos.
No Capitulo 1 efectua-se o enquadramento da tese, são apresentados alguns trabalhos
representativos da investigação realizada na área e apresenta-se os objectivos da
dissertação, bem como uma descrição sumária dos capítulos que a compõem.
No Capítulo 2 são apresentadas as correntes metodologias de observação dinâmica de
pontes. Numa primeira secção, são apresentados os principais procedimentos associados à
realização de campanhas experimentais em pontes ferroviárias tendo em especial atenção
alguns aspectos de natureza especifica destas estruturas. De seguida são apresentados de
uma forma essencialmente descritiva aplicações de natureza experimental em estruturas:
Identificação Experimental das Propriedades dinâmicas de estruturas; Avaliação de efeitos
dinâmicos; Actualização de modelos de elementos finitos (“Model Updating”);
14
Introdução
15
Identificação do estado de conservação de estruturas com base em ensaios dinâmicos e
Caracterização das acções por via experimental.
No Capítulo 3, e tendo em conta a elevada índole experimental do trabalho, são
apresentados os principais equipamentos que podem ser utilizados na monitorização de
estruturas. Neste capítulo é dada particular atenção aos equipamentos que foram
efectivamente utilizados na aplicação experimental realizada no decorrer da dissertação,
nomeadamente os sensores de fibra óptica.
No Capítulo 4 é apresentado o algoritmo B-WIM implementado, descrevendo-se os
princípios inerentes ao método bem como a sua implementação numérica. Neste capítulo é
também apresentado um exemplo numérico simples que permitiu validar o algoritmo
implementado e identificar as suas limitações.
No Capítulo 5 é apresentada a aplicação do algoritmo B-WIM à ponte ferroviária de
Canelas, uma ponte mista do tipo “filler-beam”situada na Linha do Norte. As campanhas
experimentais realizadas permitiram não só a obtenção das características de tráfego
ferroviário circulante naquele troço de linha como também a identificação das
propriedades dinâmicas da estrutura e a avaliação dos efeitos dinâmicos devido à acção do
tráfego, factores relevantes para a própria implementação do algoritmo B-WIM.
Por último, no Capítulo 6, são apresentadas as conclusões gerais do trabalho desenvolvido,
bem como as perspectivas relativas ao seu desenvolvimento futuro.


CAPÍTULO 2
METODOLOGIAS DE OBSERVAÇÃO DINÂMICA DE PONTES
2.1 - INTRODUÇÃO
Equation Section 2A observação de estruturas desde sempre se encontrou presente na sua
construção, não só como garantia de segurança das mesmas mas, também, como fonte de
ensinamentos para a construção de obras futuras. Estas actividades foram-se
desenvolvendo ao longo dos tempos, acompanhando a evolução das tecnologias de
construção tendo chegado ao conceito actual de monitorização. Refira-se que a
monitorização é uma área que se encontra em grande desenvolvimento no domínio da
engenharia civil, condicionando também o desenvolvimento das restantes áreas, através
das informações que fornece.
Da implementação de sistemas de monitorização advêm vantagens, como o aumento de
segurança através de sistemas de alarme, a redução dos tempos de execução, tendo em
conta um maior controlo do faseamento construtivo, a redução dos custos de manutenção e
o melhor conhecimento do comportamento das estruturas. A monitorização acarreta, no
entanto, custos elevados e pode perturbar os trabalhos de construção.
Neste capítulo, procura-se expor os principais procedimentos associados à realização de
campanhas experimentais em pontes ferroviárias, tendo em especial atenção alguns
aspectos de natureza específica destas estruturas. De seguida, são apresentados de uma
forma essencialmente descritiva, as principais aplicações de natureza experimental em
estruturas: identificação experimental das propriedades dinâmicas de estruturas; avaliação
de efeitos dinâmicos; actualização de modelos de elementos finitos (“Model Updating”);
identificação do estado de conservação de estruturas, com base em ensaios dinâmicos e
caracterização das acções por via experimental.
Capítulo 2
2.2 - PLANEAMENTO, PREPARAÇÃO E EXECUÇÃO DOS TRABALHOS
2.2.1 - Objectivos
O objectivo principal da monitorização dinâmica de pontes ferroviárias é o de adquirir um
melhor conhecimento da sua resposta face à acção do tráfego. Ensaios dinâmicos permitem
aos engenheiros uma possibilidade de comparar e relacionar respostas dinâmicas reais
obtidas experimentalmente e respostas calculadas numericamente através de análises
dinâmicas.
Um modelo numérico para análises dinâmicas devidamente calibrado e validado, por
intermédio de resultados experimentais, pode ser utilizado para prever, com precisão e
confiança, o comportamento da estrutura perante diferentes cenários de carga. Este
conhecimento mais preciso traz benefícios, no que respeita ao entendimento da segurança e
fiabilidade da estrutura e tem também o potencial de reduzir os requisitos associados ao
reforço de pontes existentes (UIC, 2007).
Na monitorização dinâmica de estruturas tem surgido mais recentemente o interesse na
detecção de danos e avaliação do estado de conservação das estruturas por intermédio da
avaliação das alterações das propriedades dinâmicas das pontes ao longo do seu período
útil de vida.
De uma forma objectiva pode-se enumerar as diversas razões para a realização de estudos
experimentais dinâmicos, como sendo (Salawu e Williams, 1993):
i) Obtenção de bases de dados relativas ao comportamento dinâmico de estruturas
semelhantes. Esta base de dados pode ser utilizada para prever o comportamento de
novas estruturas.
ii) Validação de modelos numéricos. Os modelos numéricos de estruturas reais
envolvem pressupostos, especialmente no que se refere às condições de apoio. A
evolução das estruturas conduz também a sistemas estruturais dificultando o seu
entendimento e, consequentemente, o desenvolvimento de modelos numéricos que
permitam uma correcta estimativa da resposta dinâmica. A comparação e correlação
entre o comportamento dinâmico previsto por modelos e o verificado em campanhas
experimentais permite um melhor conhecimento das pontes, conduzindo a uma
avaliação mais correcta dos factores de segurança e, normalmente, a
dimensionamentos mais económicos.
18
Metodologias de observação dinâmica de pontes
iii) Para avaliar a segurança de estruturas existentes, com vista a aplicação de acções
diferentes daquelas para as quais a estrutura foi dimensionada. Este facto é de
particular interesse nas pontes ferroviárias, tendo em conta a evolução do tráfego no
que se refere a cargas por eixo e velocidade de circulação.
iv) Avaliação do estado de conservação das estruturas. As alterações resultantes de
fenómenos de deterioração da estrutura conduzem à alteração das suas propriedades
(massa, rigidez e amortecimento), modificando-se consequentemente o seu
comportamento dinâmico. A monitorização regular das propriedades dinâmicas da
estrutura (frequências naturais de vibração e respectivas configurações modais,
coeficientes de amortecimento) permite estimar o nível de dano global das pontes.
2.2.2 - Planeamento
2.2.2.1 - Análise preliminar
Após a definição dos objectivos da campanha de monitorização a realizar, deve-se
proceder a uma pesquisa da informação existente referente à estrutura, com vista à
definição do sistema de monitorização. Esta análise deve incluir:
i) Desenhos e cálculos de projecto, memória descritiva, modelos numéricos
desenvolvidos em fase de projecto;
ii) Arquivos referentes à fase de construção da ponte e, em caso de existência, relativos
a obras de manutenção ou reparação;
iii) Relatórios de inspecção com a descrição do estado de conservação da estrutura;
iv) Detalhes relativos à via existente sobre a ponte: altura de balastro, bitola, tipo de
carril;
v) Informação relativa ao tráfego ferroviário: características dos veículos, velocidades e
respectivos horários;
vi) Requisitos por parte das entidades responsáveis pela exploração da linha ferroviária
para a realização de ensaios;
vii) Detalhes relativos a equipamentos eléctricos, de sinalização e telecomunicações que
possam ser afectados ou afectar os equipamentos utilizados na monitorização.
A partir da informação recolhida deverá ser realizada uma análise dinâmica preliminar da
estrutura, de forma a obter uma noção da resposta dinâmica da ponte. Com vista à
19
Capítulo 2
realização deste objectivo deve-se criar ou adoptar um modelo numérico da estrutura. A
análise deve incluir as acções esperadas para a estrutura e permitir a obtenção de:
frequências naturais e respectivas configurações modais; localização dos pontos sujeitos
aos máximos efeitos dinâmicos e/ou pontos de particular interesse; avaliação de possíveis
efeitos de ressonância; séries temporais relativas à resposta dinâmica em termos de
acelerações e deslocamentos para pontos críticos da estrutura e potenciais pontos de
instrumentação para passagens de veículos, com as características do tráfego circulante na
linha ferroviária.
2.2.2.2 - Reconhecimento do local de monitorização
Antes da definição do sistema de monitorização a implementar, deverá sempre existir uma
visita ao local de forma a confirmar as informações recolhidas sobre a estrutura, bem como
identificar condicionantes em termos da acessibilidade à estrutura. Nesta fase, e com base
na análise preliminar, deve-se perspectivar os possíveis pontos de monitorização e avaliar
as respectivas inerências: comprimento de cabos, tipos de sensores a utilizar, localização
do sistema de aquisição, etc. Outro aspecto relevante na monitorização de pontes
ferroviárias prende-se com a segurança. Nesta etapa devem-se prever possíveis medidas de
segurança que possam ser necessárias como, por exemplo, a necessidade de afrouxamento
ou interrupção do tráfego para a instalação de equipamentos, sinalização relativa à
execução dos trabalhos, meios de comunicação relevantes, etc.
2.2.2.3 - Definição do sistema de monitorização a utilizar
Através da informação obtida na fase preliminar e tendo em conta os objectivos da
campanha de monitorização deve-se proceder, então, à selecção do sistema de
monitorização.
Um sistema de medição pode dividir-se essencialmente em três componentes, sendo elas a
rede de sensores, o condicionamento de sinal e os sistemas de registo e/ou armazenagem
da informação. A componente relativa aos sensores está relacionada com a transformação
de uma grandeza física em que se exprime a resposta dos sistemas (extensão,
deslocamento, velocidade ou aceleração) num sinal eléctrico ou óptico proporcional a essa
grandeza. A componente de condicionamento de sinal está associada ao facto de o sinal de
saída dos transdutores não se encontrar numa forma apropriada para ser medida e
processada directamente sendo necessário condicioná-lo adequadamente. As funções dos
condicionadores de sinal dependem muito do tipo de transdutor mas envolvem,
20
Metodologias de observação dinâmica de pontes
usualmente, a geração de sinais de excitação e a amplificação e filtragem dos sinais de
resposta. A última componente da cadeia de medição corresponde aos sistemas de registo e
armazenagem da informação, onde é realizada a conversão analógica/digital do sinal e são
armazenados os registos.
Sendo os sistemas de monitorização abordados de uma forma mais pormenorizada no
Capitulo 3 do presente trabalho, referem-se, na Tabela 2.1, alguns dos critérios a serem
considerados para a escolha do sistema a implementar.
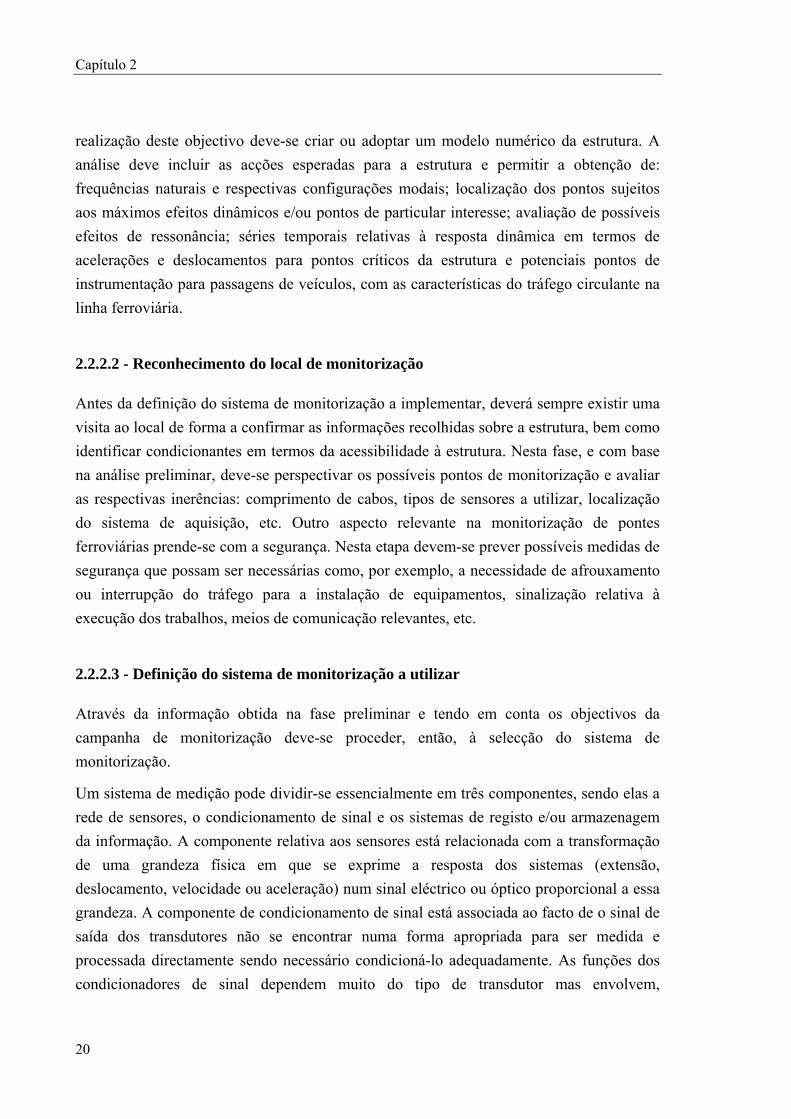
Tabela 2.1 – Características a serem consideradas para a definição de um plano de monitorização
(adaptado de UIC, 2007)
Quantidade a medir resolução e acuidade requeridas;
gama de medição;
grandezas de interferência.
Características do sinal de saída grandeza de saída (d.d.p, intensidade de corrente, comprimento de onda);
tipo de sinal;
código (analógico ou digital);
nível de ruído;
impedância;
erros;
estabilidade e eventuais tendências;
tempo de resposta.
Características da fonte de alimentação disponibilidade e fiabilidade da fonte de alimentação;
tipo de fonte, potência requerida;
frequência (fonte de corrente alterna).
Características ambientais interferências electromagnéticas;
descargas eléctricas;
temperatura e respectivas variações;
pressão atmosférica e humidade;
nível das águas (se for o caso).
Outras condicionantes custos de aquisição, manutenção e substituição de equipamentos;
custos inerentes à instalação, teste e calibração dos equipamentos;
requisitos de montagem e instalação do sistema;
limitações ao nível de comprimentos máximos de cabos;
condicionantes relativas à ligação dos sensores à estrutura;
peso e tamanho do sistema (dificuldades ao nível do transporte);
tempo de vida útil dos equipamentos.
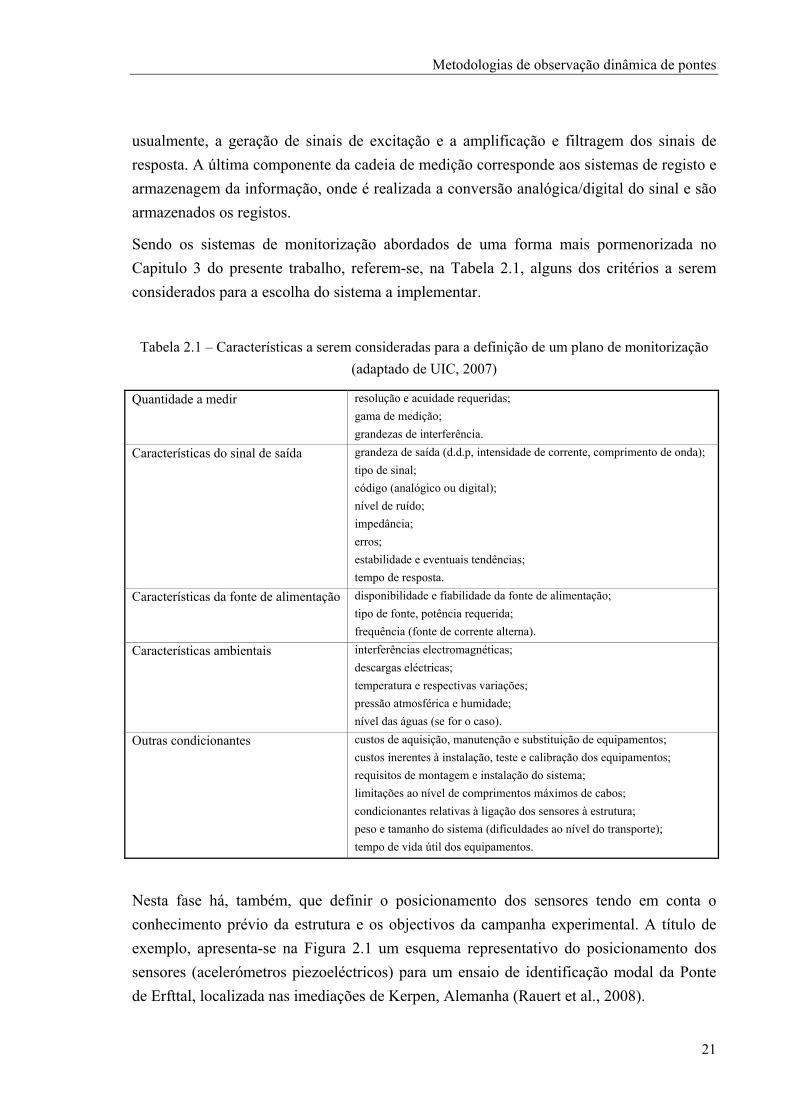
Nesta fase há, também, que definir o posicionamento dos sensores tendo em conta o
conhecimento prévio da estrutura e os objectivos da campanha experimental. A título de
exemplo, apresenta-se na Figura 2.1 um esquema representativo do posicionamento dos
sensores (acelerómetros piezoeléctricos) para um ensaio de identificação modal da Ponte
de Erfttal, localizada nas imediações de Kerpen, Alemanha (Rauert et al., 2008).
21
Capítulo 2
a)
b)
Figura 2.1 – Esquema representativo do posicionamento dos acelerómetros para um ensaio de
identificação modal da ponte de Erfttal: a) Vista da estrutura e b) Planta relativa ao posicionamento
dos sensores (Rauert et al., 2008)
2.2.3 - In Situ
A realização de ensaios dinâmicos em pontes ferroviárias envolve questões particulares
que importa referir.
Uma questão refere-se à segurança: os ensaios são normalmente realizados em situações de
livre circulação do tráfego ferroviário, sendo necessário garantir em todos os momentos a
segurança dos intervenientes no ensaio, bem como dos passageiros dos veículos
ferroviários. Por estas razões, devem permanecer pessoas responsáveis por verificar a
aproximação de comboios e, todos os intervenientes que circulem nas imediações da via
devem estar devidamente sinalizados. Se for necessário instalar equipamentos sobre a via,
22
Metodologias de observação dinâmica de pontes
deve ser programado, em conjunto com a entidade responsável, afrouxamento ou mesmo
interrupção do tráfego ferroviário.
Outro aspecto relevante prende-se com a variabilidade, ao longo do tempo, das
propriedades da via suportada pela estrutura. Como já foi referido anteriormente, a via
ferroviária tem uma elevada influência no comportamento da estrutura. Como tal, no
período de realização de ensaios deve ser realizado um novo levantamento que permita
identificar a alteração de características como altura e nível de degradação/contaminação
do balastro, alinhamento da via e perfil de irregularidades do carril.
Finalmente, refira-se ainda a questão da alimentação eléctrica, atendendo à localização das
estruturas ferroviárias em locais de difícil acesso e onde nem sempre existe acesso à rede
eléctrica. A alimentação pode, então, ser realizada através da utilização de baterias ou
geradores. No caso dos geradores deve existir sempre o cuidado de realizar a ligação à
terra, por forma a que o circuito eléctrico do sistema de monitorização fique devidamente
referenciado.
2.2.4 - Aquisição e processamento de sinal
Os sinais de saída dos transdutores, utilizados na monitorização de estruturas de
engenharia civil são, na grande maioria dos casos, do tipo analógico e apresentam
características muito diversas. Os sistemas de aquisição têm, então, o papel de transformar
o sinal de saída dos transdutores num sinal digital, adequado para a interpretação da
resposta estrutural.
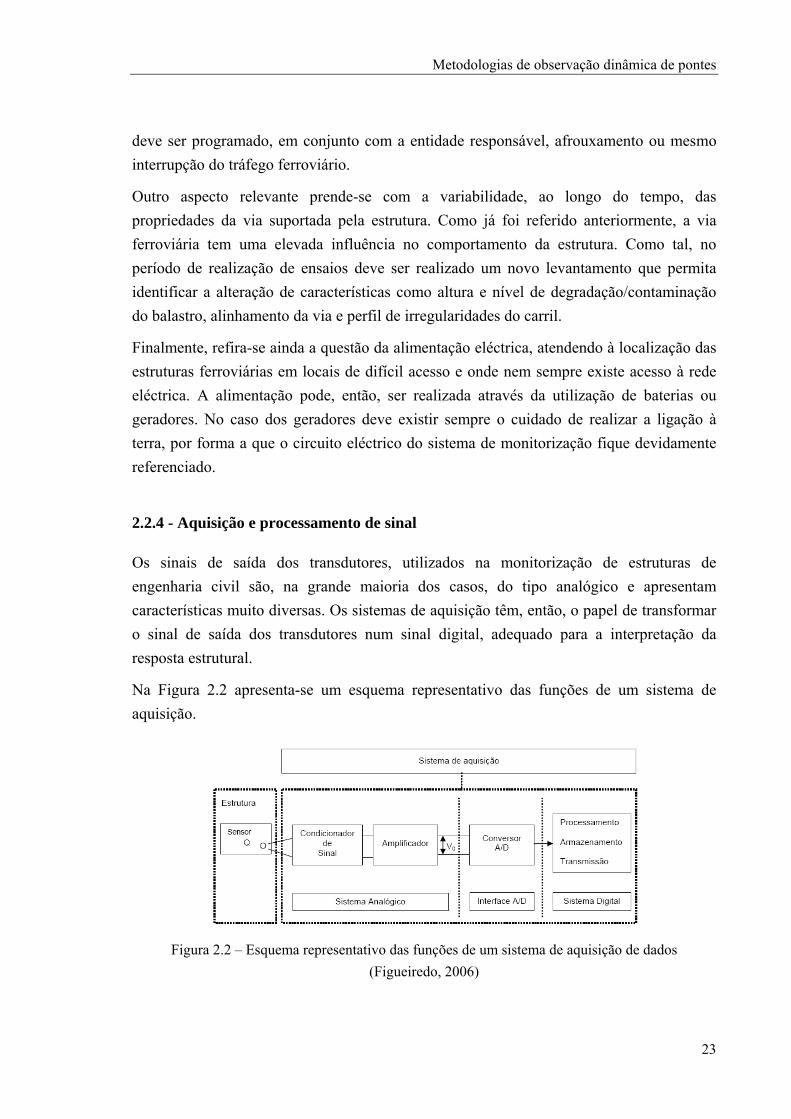
Na Figura 2.2 apresenta-se um esquema representativo das funções de um sistema de
aquisição.
Figura 2.2 – Esquema representativo das funções de um sistema de aquisição de dados
(Figueiredo, 2006)
23
Capítulo 2
A primeira tarefa trata-se do condicionamento de sinal em que o sinal analógico é
transformado para que possa ser interpretado pelos restantes elementos do sistema de
aquisição. São comuns, nesta fase, operações de linearização de resposta (os sinais de saída
de vários transdutores apresentam relações não lineares com a grandeza de resposta);
amplificação ou atenuação de sinal; conversão de uma grandeza noutra (conversão
tensão/corrente, conversão da variação de resistência eléctrica em tensão ou corrente);
compleição dos circuitos em ponte; aplicação de filtros anti-aliasing; etc.
A seguinte fase corresponde à conversão analógica/digital do sinal, na qual os sinais
contínuos analógicos, provenientes dos transdutores, são digitalizados, isto é, são
transformados em séries discretas no tempo e na amplitude, por processos de amostragem e
quantização, respectivamente. Estas séries devem descrever o sinal analógico com
suficiente precisão em termos de frequência, amplitude e fase (Rodrigues, 2005).
Os sinais digitais de saída podem, então, ser armazenados e/ou processados na própria
unidade ou então transmitidos directamente para um computador pessoal como é comum
nas placas de aquisição integradas em PC’s por ligação USB ou interface PCI.
2.2.4.1 - Frequência de amostragem e tempo de aquisição
A frequência de amostragem representa a velocidade com que o conversor analógico-
digital digitaliza o sinal, ou seja, o sinal é amostrado de uma forma igualmente espaçada no
tempo, dependendo este espaçamento da frequência de amostragem.
O problema é, então, escolher a frequência ideal de amostragem de forma a descrever a
resposta estrutural de forma adequada. Esta deve ser suficientemente elevada para o
conhecimento da resposta dentro da gama de frequências de interesse, não devendo ser, no
entanto, exageradamente elevada pois as frequências muito elevadas de amostragem têm
custos mais elevados ao nível do armazenamento e tratamento da informação.
Neste domínio é necessário ter em conta o teorema de amostragem de Shannon, segundo o
qual a frequência de amostragem sf deve ser no mínimo igual ao dobro da frequência
máxima máxf que se pretende avaliar no sinal (frequência de Nyquist - Nf ).Equation Chapter 2 Section 2
2máx
s N
ff f (2.1)
Para além da frequência de amostragem, a definição do tempo de aquisição é também
relevante.
24
Metodologias de observação dinâmica de pontes
No que respeita à análise de fenómenos transientes, como é o caso da passagem de um
comboio sobre uma estrutura, o tempo de aquisição deve ser suficiente para que seja
possível captar a aproximação e passagem dos eixos do comboio, bem como a resposta em
regime livre da estrutura após o saída dos últimos eixos do comboio.
O parâmetro tempo de aquisição é, no entanto, mais preponderante na realização de
ensaios de vibração ambiental para identificação das propriedades dinâmicas das
estruturas. Neste caso, devem-se garantir tempos de aquisição suficientemente longos de
modo a minimizar os efeitos dos erros de “leakage” (ver secção 2.2.4.3). Uma regra prática
normalmente aplicada é a de considerar um tempo de aquisição ( t ) superior a 1000 vezes o
período esperado do modo de vibração da estrutura com a frequência mais
baixa (T )(UIC, 2007):
(2.2) 1000t T
2.2.4.2 - Resolução, campo de medida e ganho
A resolução e o campo de medida estão directamente relacionados com o processo de
quantização.
A resolução de um sistema de aquisição é a menor quantidade de sinal que o sistema de
aquisição consegue detectar, sendo normalmente expressa pelo número de bits ( )
disponíveis no seu conversor analógico-digital. Este número indica o número de intervalos
( ) em que o sistema consegue dividir o sinal eléctrico (equação
n
N (2.3)). O valor analógico
é arredondado para o valor mais próximo da escala discreta definida pela resolução.
2nN (2.3)
O campo de medida representa o valor máximo e mínimo que o sistema de aquisição
consegue medir. São comuns nos sistemas de aquisição campos de medida de -5 a +5 V e
de -10 a +10V.
Na maioria dos sistemas de aquisição é possível ajustar o campo de medida, como tal, este
deve ser definido de acordo com os valores expectáveis da grandeza a medir devendo ser
suficientemente grande para que não ocorram fenómenos de saturação de sinal e
suficientemente curto para que se possa usufruir da resolução do sistema. Ao considerar-se
campos de medida muito superiores aos valores máximos resultantes dos processos de
medição, está-se a aproveitar apenas algumas divisões resultantes da resolução do sistema,
tendo-se como tal uma baixa precisão na medição.
25
Capítulo 2
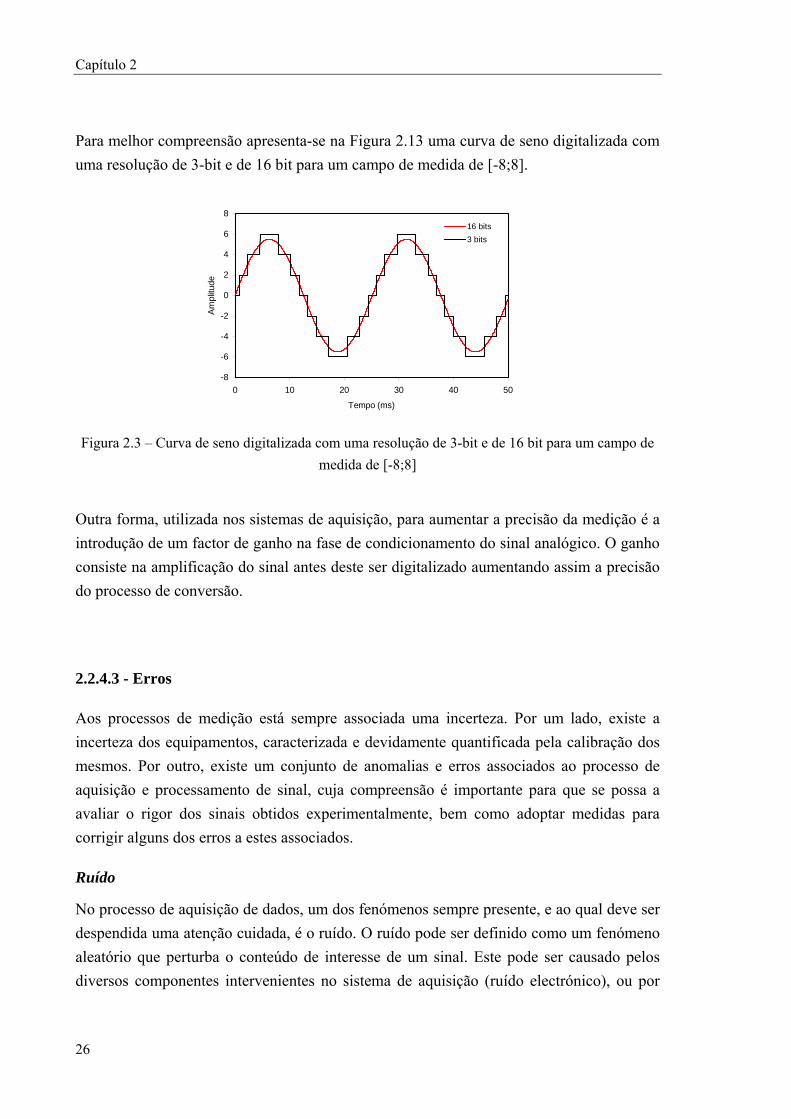
Para melhor compreensão apresenta-se na Figura 2.13 uma curva de seno digitalizada com
uma resolução de 3-bit e de 16 bit para um campo de medida de [-8;8].
-8
-6
-4
-2
0
2
4
6
8
0 10 20 30 40 50
Tempo (ms)
Am
plitu
de
16 bits
3 bits
Figura 2.3 – Curva de seno digitalizada com uma resolução de 3-bit e de 16 bit para um campo de
medida de [-8;8]
Outra forma, utilizada nos sistemas de aquisição, para aumentar a precisão da medição é a
introdução de um factor de ganho na fase de condicionamento do sinal analógico. O ganho
consiste na amplificação do sinal antes deste ser digitalizado aumentando assim a precisão
do processo de conversão.
2.2.4.3 - Erros
Aos processos de medição está sempre associada uma incerteza. Por um lado, existe a
incerteza dos equipamentos, caracterizada e devidamente quantificada pela calibração dos
mesmos. Por outro, existe um conjunto de anomalias e erros associados ao processo de
aquisição e processamento de sinal, cuja compreensão é importante para que se possa a
avaliar o rigor dos sinais obtidos experimentalmente, bem como adoptar medidas para
corrigir alguns dos erros a estes associados.
Ruído
No processo de aquisição de dados, um dos fenómenos sempre presente, e ao qual deve ser
despendida uma atenção cuidada, é o ruído. O ruído pode ser definido como um fenómeno
aleatório que perturba o conteúdo de interesse de um sinal. Este pode ser causado pelos
diversos componentes intervenientes no sistema de aquisição (ruído electrónico), ou por
26
Metodologias de observação dinâmica de pontes
influência de factores externos, como a frequência da rede de distribuição de energia
eléctrica, cuja influência se traduz no aparecimento de uma oscilação periódica de 50 Hz
não referente a vibrações das estruturas.
O ruído pode ser ainda fruto de vibrações reais, não interessantes para o estudo, mas que
podem ser captadas devido à sensibilidade em, altas frequências, de alguns equipamentos.
Neste âmbito, é comum o aparecimento de vibrações devido ao ruído sonoro em sinais
captados por acelerómetros com sensibilidades significativas para altas frequências.
Como tal, a avaliação da relação sinal/ruído é sempre de particular importância,
especialmente em ensaios de vibração ambiental aos quais estão sempre associados baixos
níveis de vibração. Os principais factores que influenciam o aparecimento de ruído
prendem-se com a sensibilidade dos sensores, a arquitectura dos sistemas de aquisição (em
particular na componente de introdução de factores de ganho).
Uma forma de minimizar o efeito do ruído pós-aquisição de dados consiste na aplicação de
filtros digitais elimina-banda, em torno das bandas em frequência onde o ruído é mais
preponderante, isto é apenas possível quando estas bandas se encontram bem definidas.
Tendências
O aparecimento de tendências, que se traduzem em variações lentas nos sinais, é também
um fenómeno comum e cuja interpretação deve ser realizada com o devido cuidado. Estas
tendências podem ser devidas à influência de outras grandezas nos sensores como os
efeitos de temperatura ou devido ao mau funcionamento dos equipamentos. No entanto, em
alguns casos, estas podem ter um significado físico importante, como é o caso verificado
em sensores de aceleração que tenham sensibilidades até DC, podendo estas tendências
estar associadas a componentes estáticas da resposta.
Para a eliminação de tendências não desejadas é habitual a aplicação de filtros do tipo
passa-alto com uma frequência de corte próxima de zero ou, em casos mais simples,
através da subtracção de uma curva obtida através da interpolação da série temporal.
Saturação de sinais
Por incorrecta definição do campo de medida, face às amplitudes de resposta expectáveis,
ou por falta da correcção da linha de base dos aparelhos (fenómeno comum em
acelerómetros), o problema da saturação de sinal (resposta dada pelo equipamento fora do
seu campo de medida) pode ocorrer, tendo como consequência a perda de informação
durante determinados períodos de tempo. Este é um tipo de ocorrência facilmente
27
Capítulo 2
perceptível por mera observação dos registos temporais, mas que não tem qualquer tipo de
forma de correcção ou atenuação.
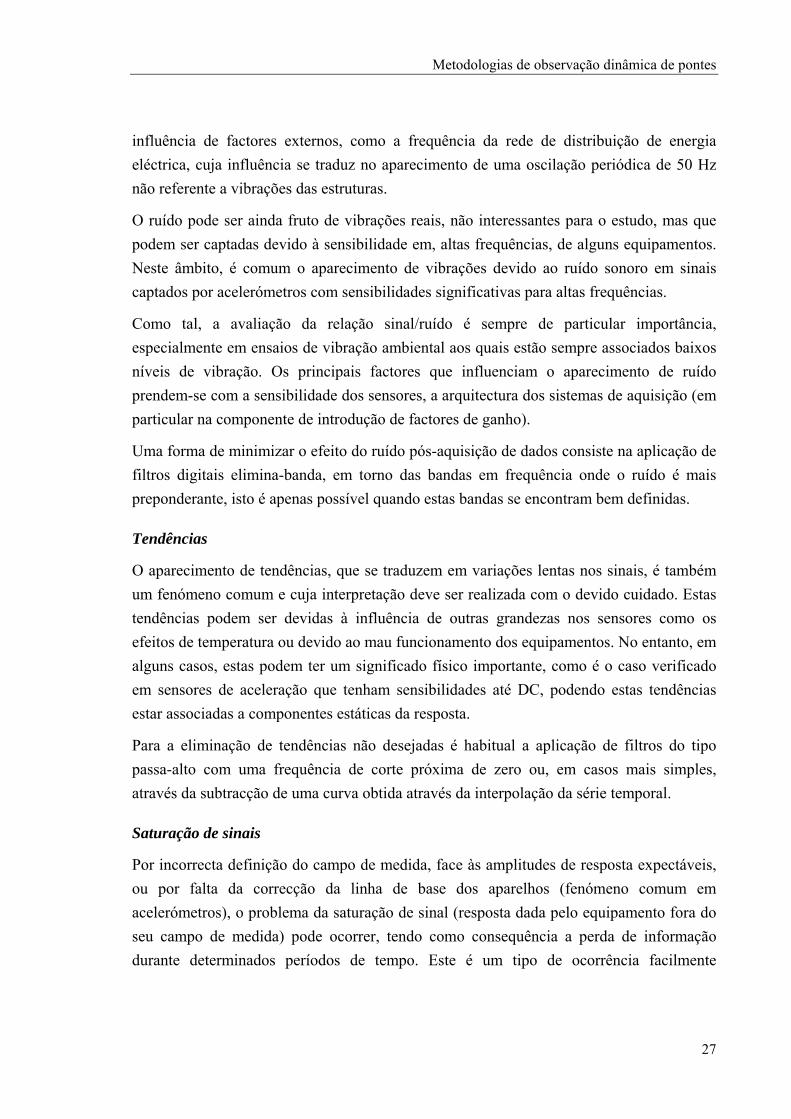
Erros de escorregamento (“leakage”)
A análise de sinais no domínio da frequência envolve, normalmente, a aplicação da
transformada discreta de Fourier (DFT), sendo que esta é aplicada habitualmente através
do algoritmo FFT (Fast Fourier Transform). Tendo em conta que a transformada discreta
de Fourier se baseia na repetição periódica do sinal, é necessário ter em consideração as
zonas de fronteira do mesmo. Se o sinal, limitado no domínio do tempo, não tiver um
conteúdo periódico, com um número inteiro de ciclos, o sinal, infinito no domínio do
tempo assumido para o cálculo da FFT, é distorcido dando origem aos erros de leakage.
Estes erros devem-se ao facto de apenas ser possível a obtenção de sinais num intervalo de
tempo finito e, também, à existência de descontinuidades no sinal periodizado, como
consequência, no cálculo das transformadas de Fourier parte da energia associada a uma
frequência específica distribui-se pelas frequências vizinhas. Por forma a minimizar os
efeitos deste tipo de erros pode-se aumentar os tempos de observação, aplicar “janelas de
dados” (ver secção 2.2.4.4) e eliminar possíveis descontinuidades existentes nos registos
temporais (Caetano, 1992).
28
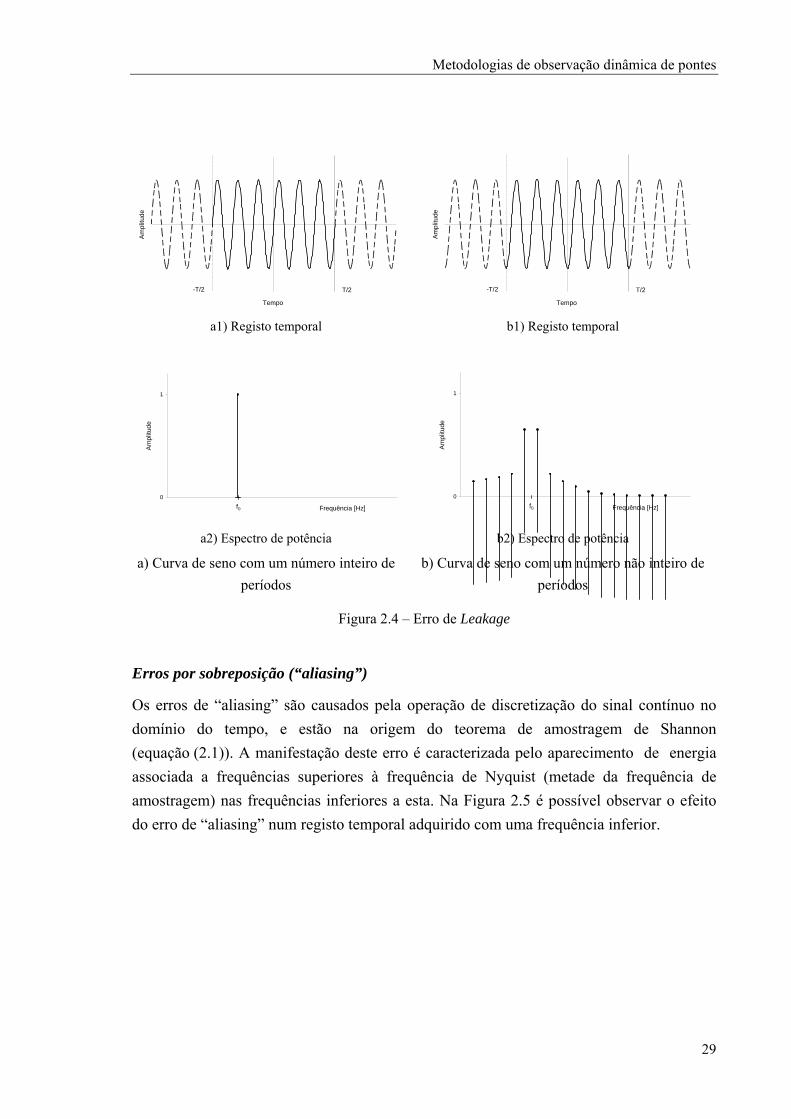
Metodologias de observação dinâmica de pontes
Tempo
Am
plit
ude
-T/2 T/2
Tempo
Am
plitu
de
-T/2 T/2
a1) Registo temporal b1) Registo temporal
0
1
Frequência [Hz]
Am
plitu
de
f0
0
1
Frequência [Hz]
Am
plit
ude
f0
a2) Espectro de potência b2) Espectro de potência
a) Curva de seno com um número inteiro de
períodos
b) Curva de seno com um número não inteiro de
períodos
Figura 2.4 – Erro de Leakage
Erros por sobreposição (“aliasing”)
Os erros de “aliasing” são causados pela operação de discretização do sinal contínuo no
domínio do tempo, e estão na origem do teorema de amostragem de Shannon
(equação (2.1)). A manifestação deste erro é caracterizada pelo aparecimento de energia
associada a frequências superiores à frequência de Nyquist (metade da frequência de
amostragem) nas frequências inferiores a esta. Na Figura 2.5 é possível observar o efeito
do erro de “aliasing” num registo temporal adquirido com uma frequência inferior.
29
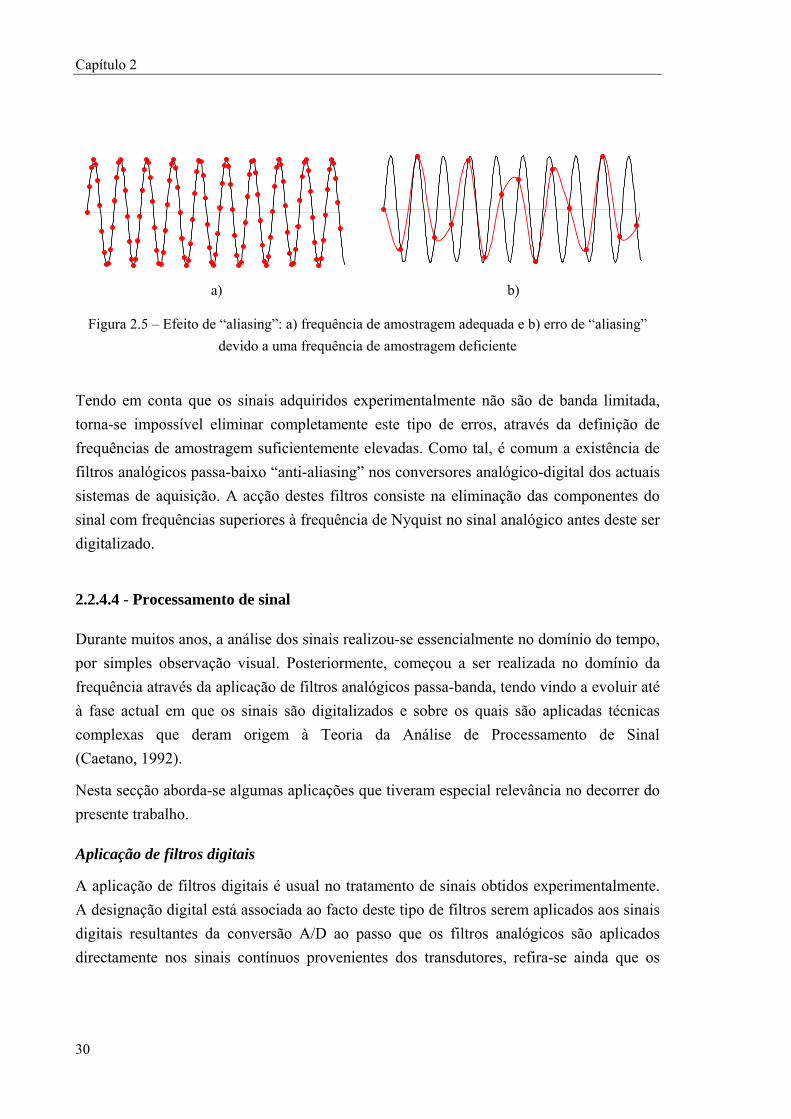
Capítulo 2
0 3
0 3
a) b)
Figura 2.5 – Efeito de “aliasing”: a) frequência de amostragem adequada e b) erro de “aliasing”
devido a uma frequência de amostragem deficiente
Tendo em conta que os sinais adquiridos experimentalmente não são de banda limitada,
torna-se impossível eliminar completamente este tipo de erros, através da definição de
frequências de amostragem suficientemente elevadas. Como tal, é comum a existência de
filtros analógicos passa-baixo “anti-aliasing” nos conversores analógico-digital dos actuais
sistemas de aquisição. A acção destes filtros consiste na eliminação das componentes do
sinal com frequências superiores à frequência de Nyquist no sinal analógico antes deste ser
digitalizado.
2.2.4.4 - Processamento de sinal
Durante muitos anos, a análise dos sinais realizou-se essencialmente no domínio do tempo,
por simples observação visual. Posteriormente, começou a ser realizada no domínio da
frequência através da aplicação de filtros analógicos passa-banda, tendo vindo a evoluir até
à fase actual em que os sinais são digitalizados e sobre os quais são aplicadas técnicas
complexas que deram origem à Teoria da Análise de Processamento de Sinal
(Caetano, 1992).
Nesta secção aborda-se algumas aplicações que tiveram especial relevância no decorrer do
presente trabalho.
Aplicação de filtros digitais
A aplicação de filtros digitais é usual no tratamento de sinais obtidos experimentalmente.
A designação digital está associada ao facto deste tipo de filtros serem aplicados aos sinais
digitais resultantes da conversão A/D ao passo que os filtros analógicos são aplicados
directamente nos sinais contínuos provenientes dos transdutores, refira-se ainda que os
30
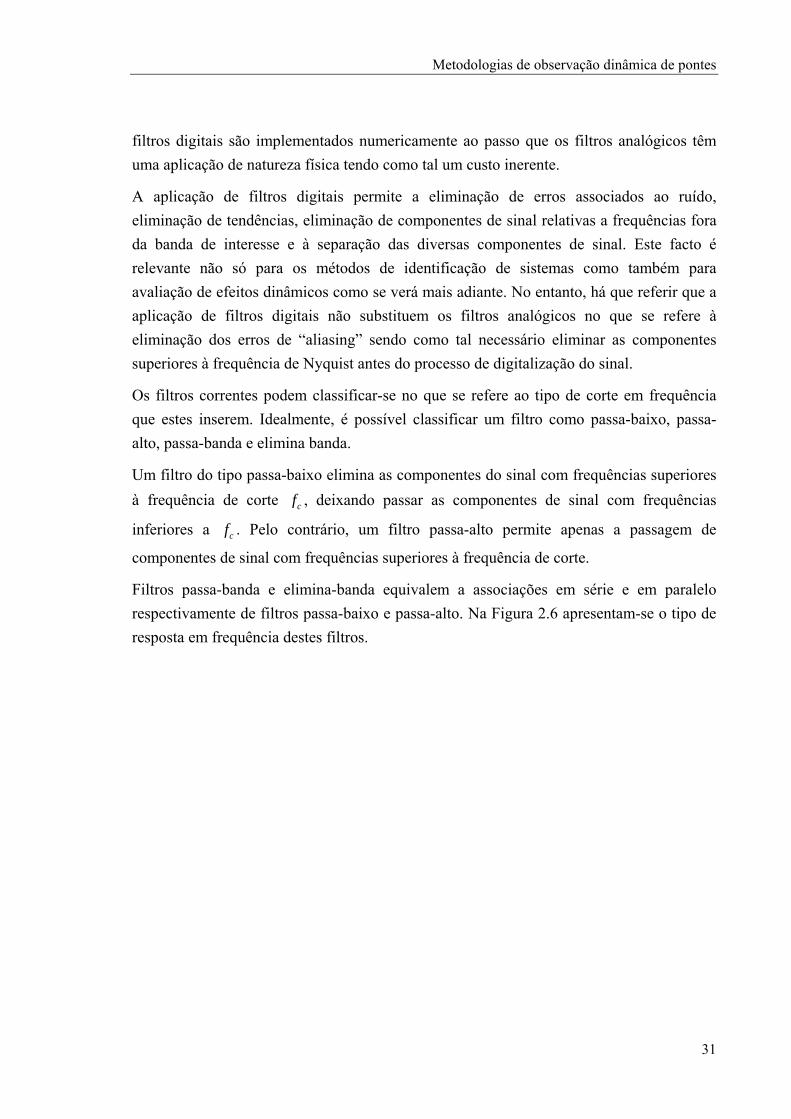
Metodologias de observação dinâmica de pontes
filtros digitais são implementados numericamente ao passo que os filtros analógicos têm
uma aplicação de natureza física tendo como tal um custo inerente.
A aplicação de filtros digitais permite a eliminação de erros associados ao ruído,
eliminação de tendências, eliminação de componentes de sinal relativas a frequências fora
da banda de interesse e à separação das diversas componentes de sinal. Este facto é
relevante não só para os métodos de identificação de sistemas como também para
avaliação de efeitos dinâmicos como se verá mais adiante. No entanto, há que referir que a
aplicação de filtros digitais não substituem os filtros analógicos no que se refere à
eliminação dos erros de “aliasing” sendo como tal necessário eliminar as componentes
superiores à frequência de Nyquist antes do processo de digitalização do sinal.
Os filtros correntes podem classificar-se no que se refere ao tipo de corte em frequência
que estes inserem. Idealmente, é possível classificar um filtro como passa-baixo, passa-
alto, passa-banda e elimina banda.
Um filtro do tipo passa-baixo elimina as componentes do sinal com frequências superiores
à frequência de corte cf , deixando passar as componentes de sinal com frequências
inferiores a cf . Pelo contrário, um filtro passa-alto permite apenas a passagem de
componentes de sinal com frequências superiores à frequência de corte.
Filtros passa-banda e elimina-banda equivalem a associações em série e em paralelo
respectivamente de filtros passa-baixo e passa-alto. Na Figura 2.6 apresentam-se o tipo de
resposta em frequência destes filtros.
31
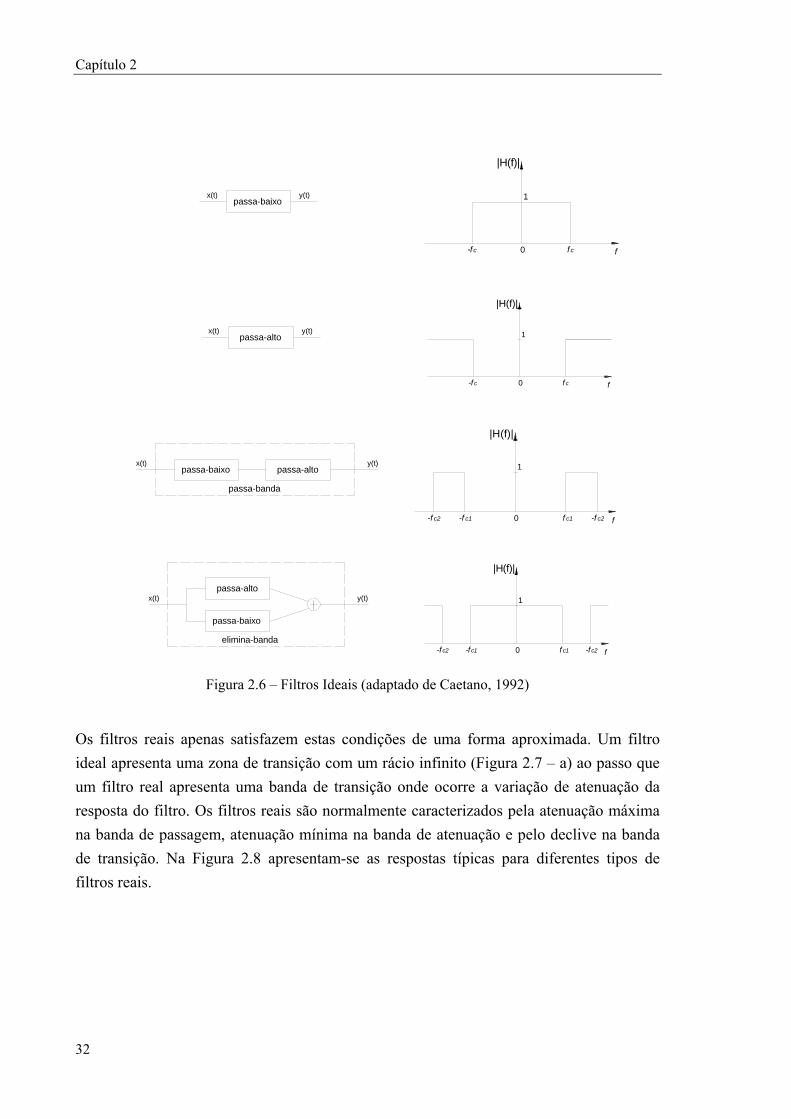
Capítulo 2
passa-baixox(t) y(t)
|H(f)|
0
1
f c-f c f
passa-altox(t) y(t)
f
|H(f)|
0
1
f c-f c
passa-altoy(t)
passa-baixox(t)
passa-banda
f
|H(f)|
0
1
f c1-f c1-f c2 -f c2
passa-altoy(t)
passa-baixo
x(t)
elimina-banda
f
|H(f)|
0
1
f c1-f c1-f c2 -f c2
Figura 2.6 – Filtros Ideais (adaptado de Caetano, 1992)
Os filtros reais apenas satisfazem estas condições de uma forma aproximada. Um filtro
ideal apresenta uma zona de transição com um rácio infinito (Figura 2.7 – a) ao passo que
um filtro real apresenta uma banda de transição onde ocorre a variação de atenuação da
resposta do filtro. Os filtros reais são normalmente caracterizados pela atenuação máxima
na banda de passagem, atenuação mínima na banda de atenuação e pelo declive na banda
de transição. Na Figura 2.8 apresentam-se as respostas típicas para diferentes tipos de
filtros reais.
32
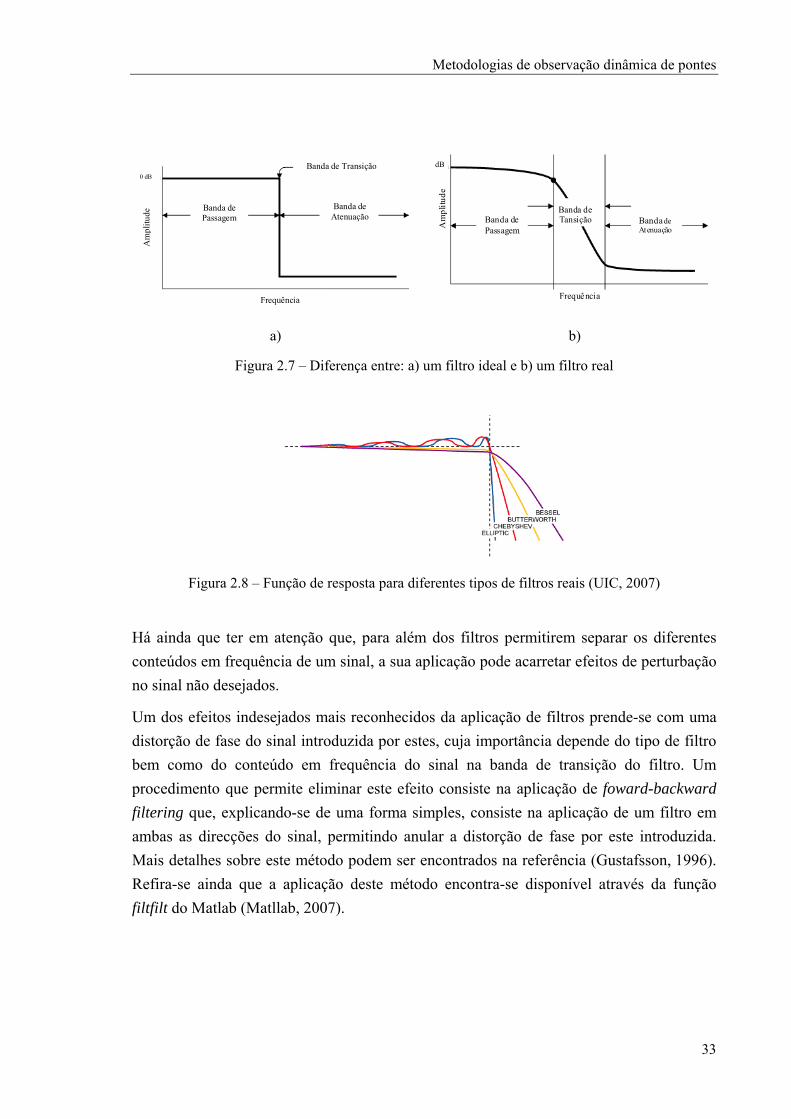
Metodologias de observação dinâmica de pontes
Frequência
Am
plitu
de Banda de
Atenuação Banda de Passagem
Banda de Transição 0 dB
Am
pli
tud
e
Frequência
Banda de Atenuação
Banda dePassagem
Banda de Tansição
dB
a) b)
Figura 2.7 – Diferença entre: a) um filtro ideal e b) um filtro real
Figura 2.8 – Função de resposta para diferentes tipos de filtros reais (UIC, 2007)
Há ainda que ter em atenção que, para além dos filtros permitirem separar os diferentes
conteúdos em frequência de um sinal, a sua aplicação pode acarretar efeitos de perturbação
no sinal não desejados.
Um dos efeitos indesejados mais reconhecidos da aplicação de filtros prende-se com uma
distorção de fase do sinal introduzida por estes, cuja importância depende do tipo de filtro
bem como do conteúdo em frequência do sinal na banda de transição do filtro. Um
procedimento que permite eliminar este efeito consiste na aplicação de foward-backward
filtering que, explicando-se de uma forma simples, consiste na aplicação de um filtro em
ambas as direcções do sinal, permitindo anular a distorção de fase por este introduzida.
Mais detalhes sobre este método podem ser encontrados na referência (Gustafsson, 1996).
Refira-se ainda que a aplicação deste método encontra-se disponível através da função
filtfilt do Matlab (Matllab, 2007).
33
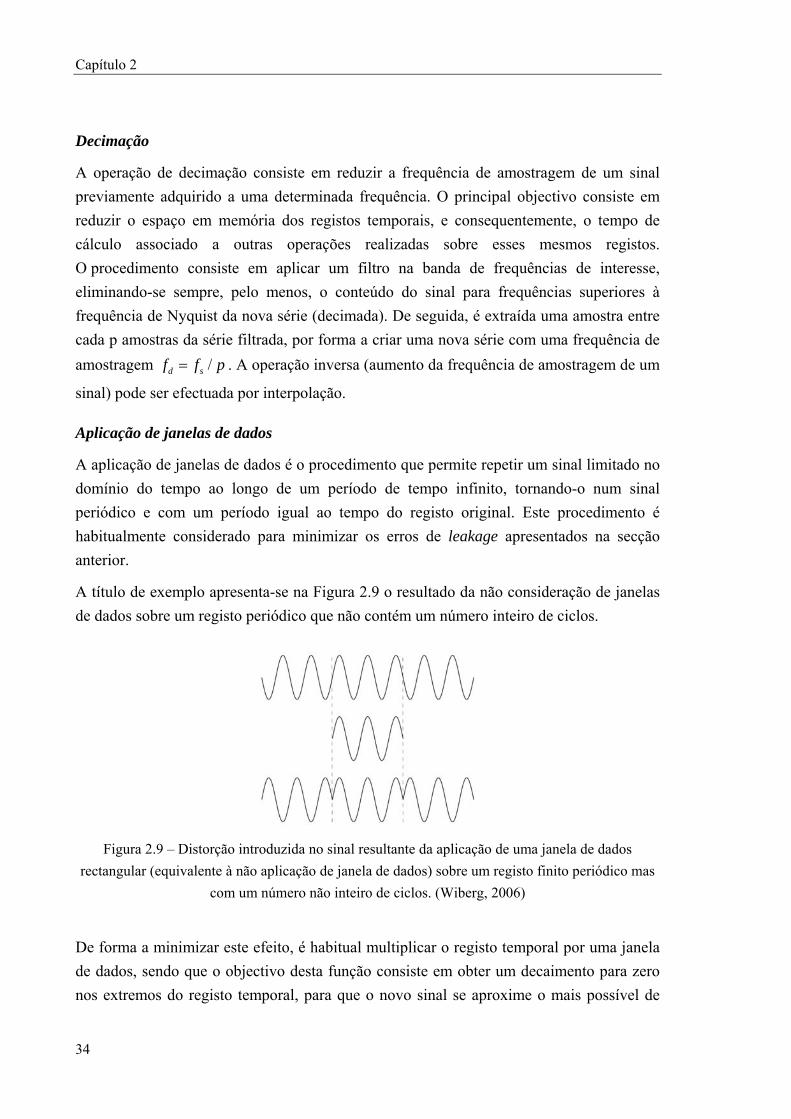
Capítulo 2
Decimação
A operação de decimação consiste em reduzir a frequência de amostragem de um sinal
previamente adquirido a uma determinada frequência. O principal objectivo consiste em
reduzir o espaço em memória dos registos temporais, e consequentemente, o tempo de
cálculo associado a outras operações realizadas sobre esses mesmos registos.
O procedimento consiste em aplicar um filtro na banda de frequências de interesse,
eliminando-se sempre, pelo menos, o conteúdo do sinal para frequências superiores à
frequência de Nyquist da nova série (decimada). De seguida, é extraída uma amostra entre
cada p amostras da série filtrada, por forma a criar uma nova série com uma frequência de
amostragem /d sf f p . A operação inversa (aumento da frequência de amostragem de um
sinal) pode ser efectuada por interpolação.
Aplicação de janelas de dados
A aplicação de janelas de dados é o procedimento que permite repetir um sinal limitado no
domínio do tempo ao longo de um período de tempo infinito, tornando-o num sinal
periódico e com um período igual ao tempo do registo original. Este procedimento é
habitualmente considerado para minimizar os erros de leakage apresentados na secção
anterior.
A título de exemplo apresenta-se na Figura 2.9 o resultado da não consideração de janelas
de dados sobre um registo periódico que não contém um número inteiro de ciclos.
Figura 2.9 – Distorção introduzida no sinal resultante da aplicação de uma janela de dados
rectangular (equivalente à não aplicação de janela de dados) sobre um registo finito periódico mas
com um número não inteiro de ciclos. (Wiberg, 2006)
De forma a minimizar este efeito, é habitual multiplicar o registo temporal por uma janela
de dados, sendo que o objectivo desta função consiste em obter um decaimento para zero
nos extremos do registo temporal, para que o novo sinal se aproxime o mais possível de
34
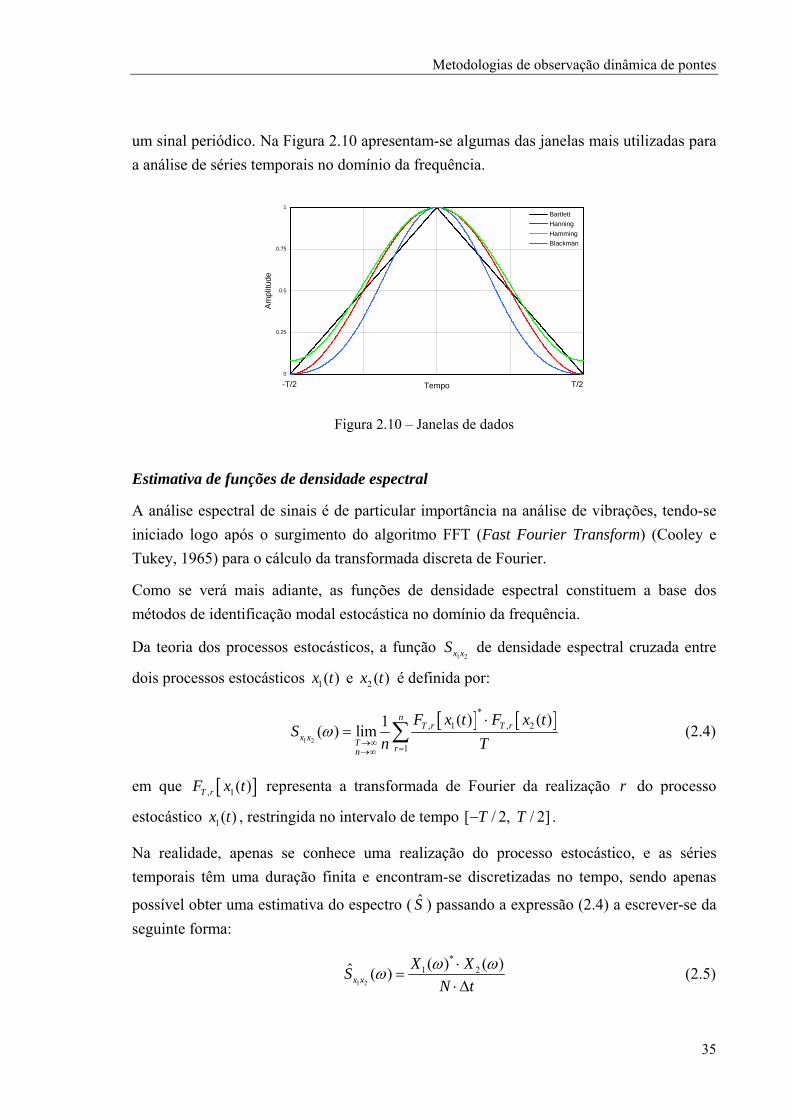
Metodologias de observação dinâmica de pontes
um sinal periódico. Na Figura 2.10 apresentam-se algumas das janelas mais utilizadas para
a análise de séries temporais no domínio da frequência.
0
0.25
0.5
0.75
1
Tempo
Am
plitu
de
Bartlett
Hanning
Hamming
Blackman
-T/2 T/2
Figura 2.10 – Janelas de dados
Estimativa de funções de densidade espectral
A análise espectral de sinais é de particular importância na análise de vibrações, tendo-se
iniciado logo após o surgimento do algoritmo FFT (Fast Fourier Transform) (Cooley e
Tukey, 1965) para o cálculo da transformada discreta de Fourier.
Como se verá mais adiante, as funções de densidade espectral constituem a base dos
métodos de identificação modal estocástica no domínio da frequência.
Da teoria dos processos estocásticos, a função 1 2x xS de densidade espectral cruzada entre
dois processos estocásticos 1( )x t e 2 ( )x t é definida por:
1 2
*
, 1 , 2
1
( ) ( )1( ) lim
nT r T r
x x Trn
F x t F x tS
n T
(2.4)
em que , 1( )T rF x t
1( )
representa a transformada de Fourier da realização do processo
estocástico
r
x t , restringida no intervalo de tempo [ / 2, / 2]T T .
Na realidade, apenas se conhece uma realização do processo estocástico, e as séries
temporais têm uma duração finita e encontram-se discretizadas no tempo, sendo apenas
possível obter uma estimativa do espectro ( ) passando a expressão S (2.4) a escrever-se da
seguinte forma:
1 2
*1 2( ) ( )ˆ ( )x x
X XS
N t
(2.5)
35
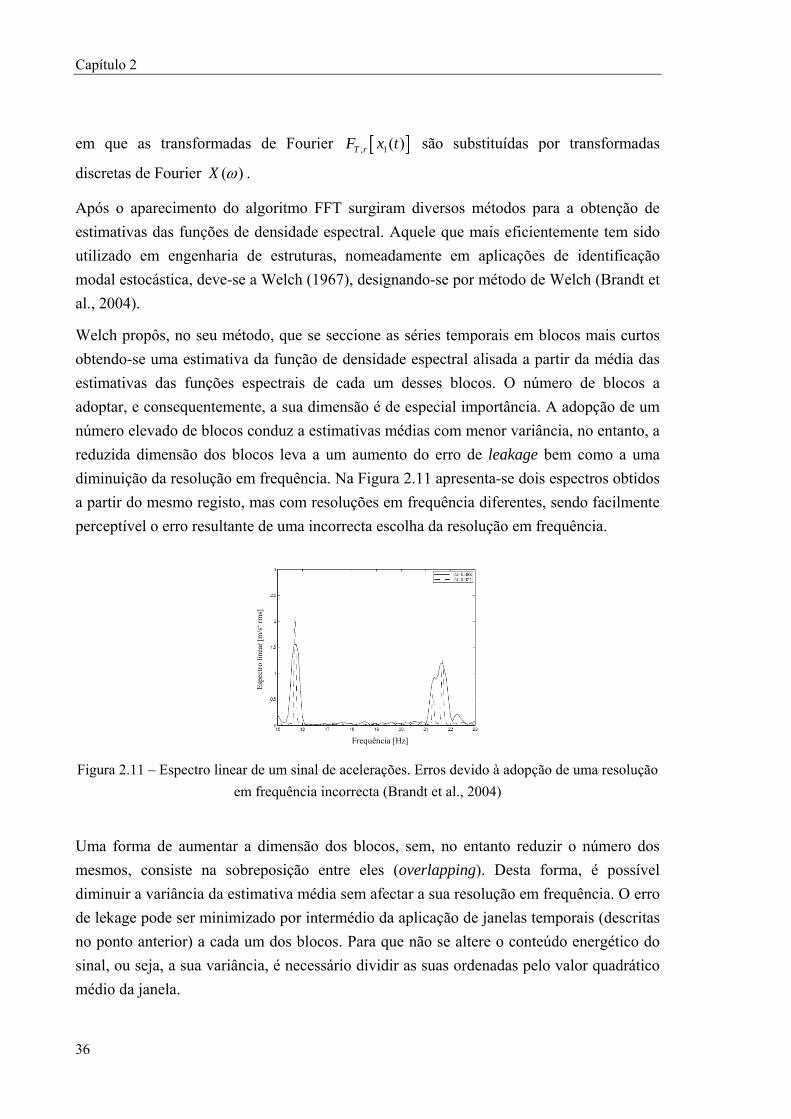
Capítulo 2
em que as transformadas de Fourier , 1( )T rF x t são substituídas por transformadas
discretas de Fourier ( )X .
Após o aparecimento do algoritmo FFT surgiram diversos métodos para a obtenção de
estimativas das funções de densidade espectral. Aquele que mais eficientemente tem sido
utilizado em engenharia de estruturas, nomeadamente em aplicações de identificação
modal estocástica, deve-se a Welch (1967), designando-se por método de Welch (Brandt et
al., 2004).
Welch propôs, no seu método, que se seccione as séries temporais em blocos mais curtos
obtendo-se uma estimativa da função de densidade espectral alisada a partir da média das
estimativas das funções espectrais de cada um desses blocos. O número de blocos a
adoptar, e consequentemente, a sua dimensão é de especial importância. A adopção de um
número elevado de blocos conduz a estimativas médias com menor variância, no entanto, a
reduzida dimensão dos blocos leva a um aumento do erro de leakage bem como a uma
diminuição da resolução em frequência. Na Figura 2.11 apresenta-se dois espectros obtidos
a partir do mesmo registo, mas com resoluções em frequência diferentes, sendo facilmente
perceptível o erro resultante de uma incorrecta escolha da resolução em frequência.
Esp
ectr
o li
near
[m
/s2 r
ms]
Frequência [Hz]Frequência [Hz]
Figura 2.11 – Espectro linear de um sinal de acelerações. Erros devido à adopção de uma resolução
em frequência incorrecta (Brandt et al., 2004)
Uma forma de aumentar a dimensão dos blocos, sem, no entanto reduzir o número dos
mesmos, consiste na sobreposição entre eles (overlapping). Desta forma, é possível
diminuir a variância da estimativa média sem afectar a sua resolução em frequência. O erro
de lekage pode ser minimizado por intermédio da aplicação de janelas temporais (descritas
no ponto anterior) a cada um dos blocos. Para que não se altere o conteúdo energético do
sinal, ou seja, a sua variância, é necessário dividir as suas ordenadas pelo valor quadrático
médio da janela.
36
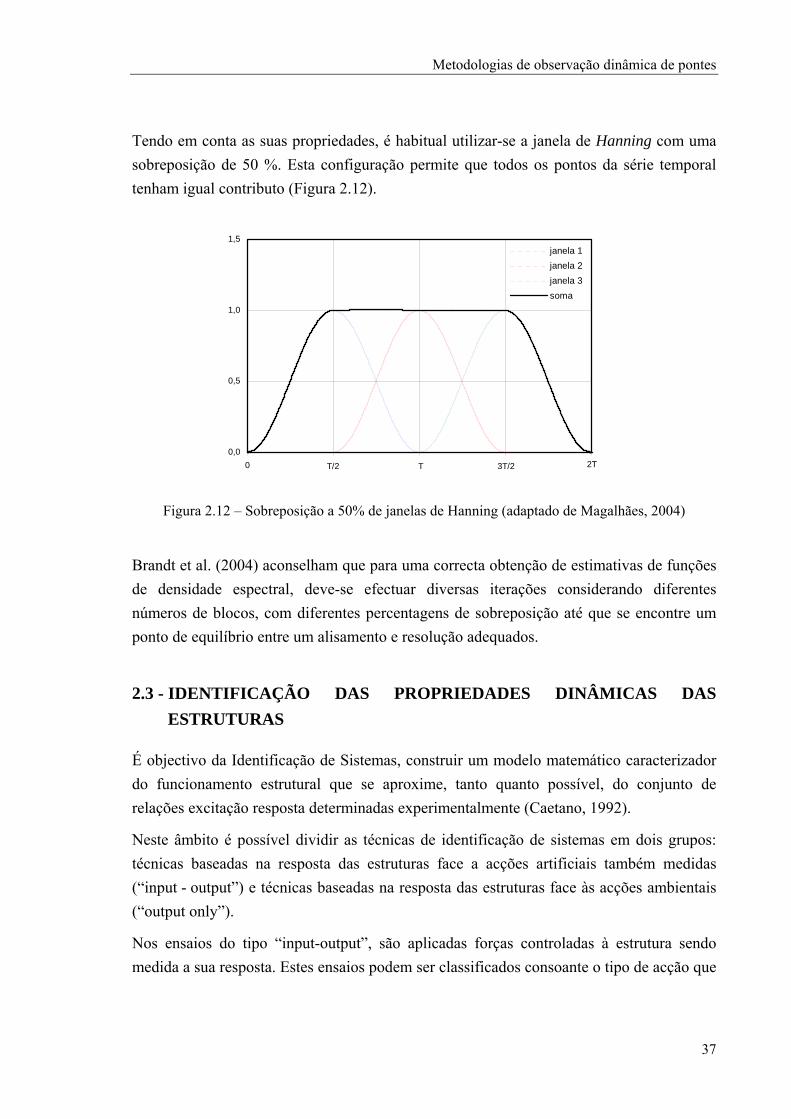
Metodologias de observação dinâmica de pontes
Tendo em conta as suas propriedades, é habitual utilizar-se a janela de Hanning com uma
sobreposição de 50 %. Esta configuração permite que todos os pontos da série temporal
tenham igual contributo (Figura 2.12).
0,0
0,5
1,0
1,5
0 512 1024 1536 2048
janela 1
janela 2
janela 3
soma
T/2 T 3T/2 2T
Figura 2.12 – Sobreposição a 50% de janelas de Hanning (adaptado de Magalhães, 2004)
Brandt et al. (2004) aconselham que para uma correcta obtenção de estimativas de funções
de densidade espectral, deve-se efectuar diversas iterações considerando diferentes
números de blocos, com diferentes percentagens de sobreposição até que se encontre um
ponto de equilíbrio entre um alisamento e resolução adequados.
2.3 - IDENTIFICAÇÃO DAS PROPRIEDADES DINÂMICAS DAS
ESTRUTURAS
É objectivo da Identificação de Sistemas, construir um modelo matemático caracterizador
do funcionamento estrutural que se aproxime, tanto quanto possível, do conjunto de
relações excitação resposta determinadas experimentalmente (Caetano, 1992).
Neste âmbito é possível dividir as técnicas de identificação de sistemas em dois grupos:
técnicas baseadas na resposta das estruturas face a acções artificiais também medidas
(“input - output”) e técnicas baseadas na resposta das estruturas face às acções ambientais
(“output only”).
Nos ensaios do tipo “input-output”, são aplicadas forças controladas à estrutura sendo
medida a sua resposta. Estes ensaios podem ser classificados consoante o tipo de acção que
37
Capítulo 2
é aplicada, existindo essencialmente três tipos de acção utilizada: fixação de um excitador
à estrutura, acções impulsivas(martelo de impulsos) e os “pulback tests”.
Do ponto de vista teórico, a utilização de excitadores na identificação de sistemas é sem
dúvida a de maior interesse, pois permite excitar as estruturas, de uma forma controlada,
numa vasta gama de frequências. No entanto, tendo em conta a dimensão das estruturas de
engenharia civil e sendo as frequências de interesse geralmente baixas, torna-se difícil para
este tipo de equipamentos excitar as estruturas de uma forma eficiente na gama de
frequências de interesse. Diferentes equipamentos deste tipo, bem como os métodos de
identificação associados à suas utilização podem ser encontrados em Caetano (2002).
A título de exemplo, apresenta-se na Figura 2.13, um protótipo de um vibrador
desenvolvido especificamente para a aplicação a pontes ferroviárias, apresentado
recentemente por Skoczynski et al. (2007). Na figura é possível observar um esquema da
estrutura que permite a transferência de forças entre o excitador e os carris, a estrutura
permite a aplicação das forças em diferentes posições relativamente à via (Figura
2.13 - b)). Foram realizados testes em laboratório e através da instalação de dinamómetros
no equipamento foi possível obter as forças geradas por este como função da frequência.
Na Figura 2.13 – d) apresentam-se os resultados para a situação em que o excitador está
posicionado na extremidade da estrutura de suporte sendo patente a dificuldade em gerar
forças significativas para frequências baixas.
38
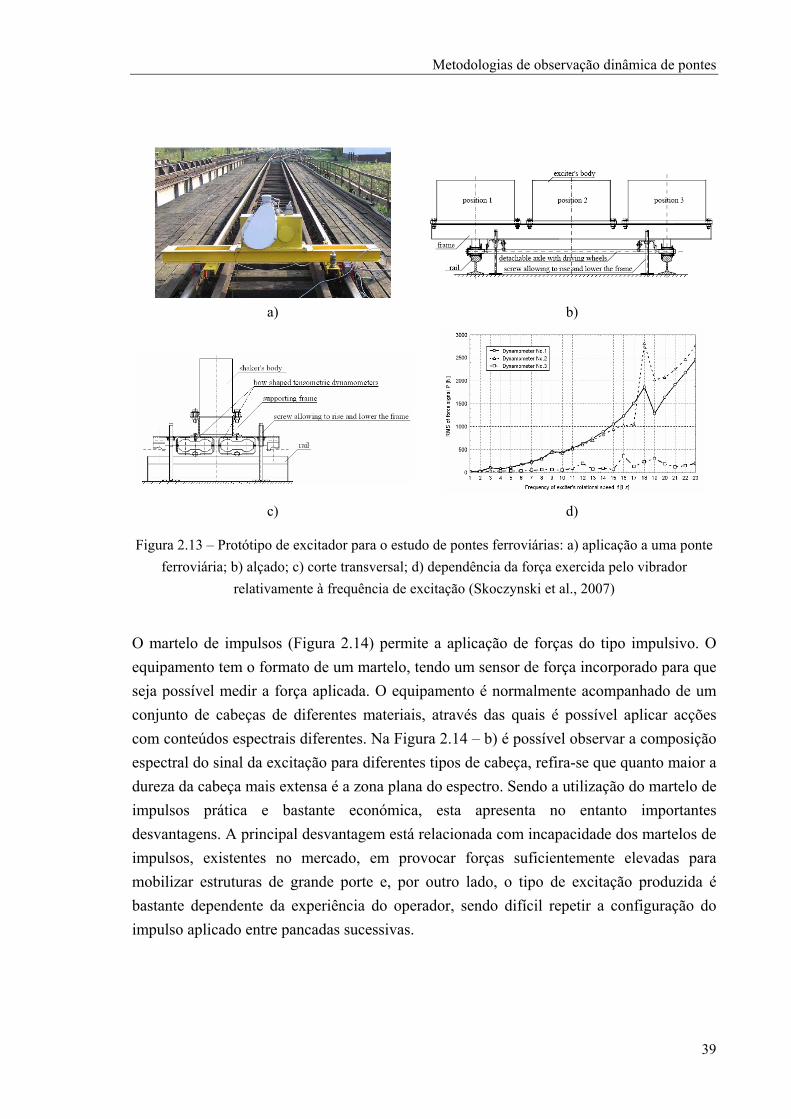
Metodologias de observação dinâmica de pontes
a) b)
c) d)
Figura 2.13 – Protótipo de excitador para o estudo de pontes ferroviárias: a) aplicação a uma ponte
ferroviária; b) alçado; c) corte transversal; d) dependência da força exercida pelo vibrador
relativamente à frequência de excitação (Skoczynski et al., 2007)
O martelo de impulsos (Figura 2.14) permite a aplicação de forças do tipo impulsivo. O
equipamento tem o formato de um martelo, tendo um sensor de força incorporado para que
seja possível medir a força aplicada. O equipamento é normalmente acompanhado de um
conjunto de cabeças de diferentes materiais, através das quais é possível aplicar acções
com conteúdos espectrais diferentes. Na Figura 2.14 – b) é possível observar a composição
espectral do sinal da excitação para diferentes tipos de cabeça, refira-se que quanto maior a
dureza da cabeça mais extensa é a zona plana do espectro. Sendo a utilização do martelo de
impulsos prática e bastante económica, esta apresenta no entanto importantes
desvantagens. A principal desvantagem está relacionada com incapacidade dos martelos de
impulsos, existentes no mercado, em provocar forças suficientemente elevadas para
mobilizar estruturas de grande porte e, por outro lado, o tipo de excitação produzida é
bastante dependente da experiência do operador, sendo difícil repetir a configuração do
impulso aplicado entre pancadas sucessivas.
39
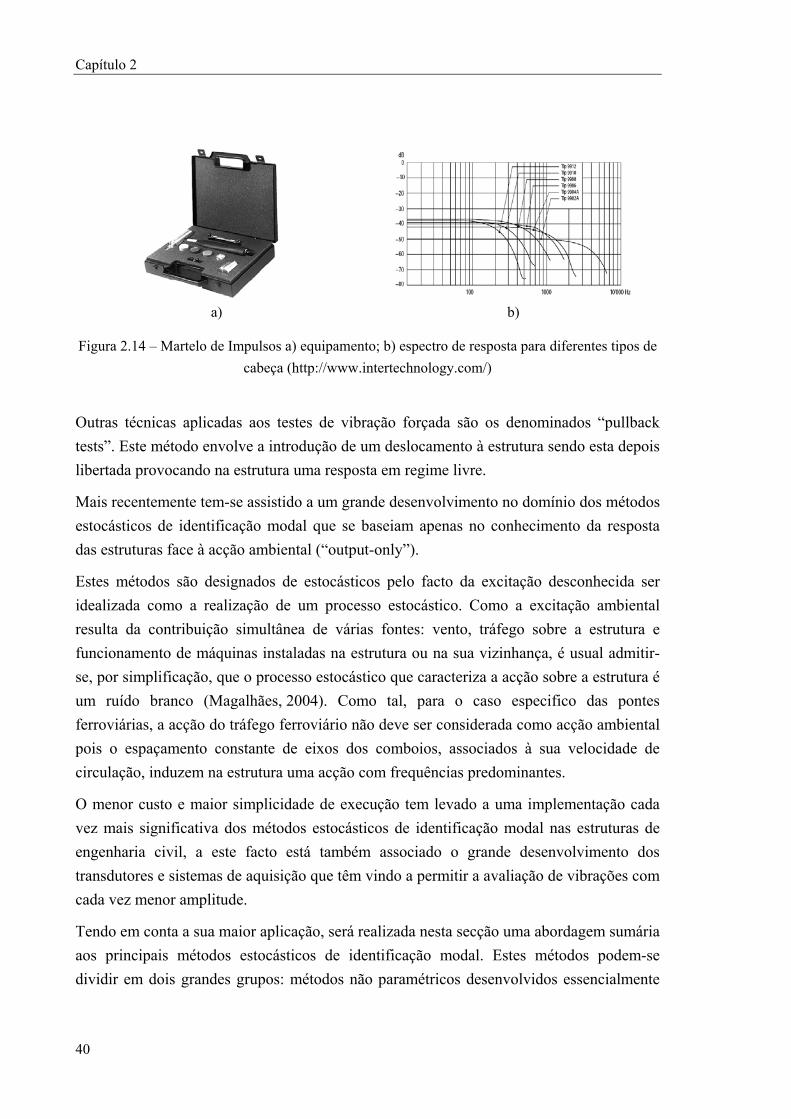
Capítulo 2
a) b)
Figura 2.14 – Martelo de Impulsos a) equipamento; b) espectro de resposta para diferentes tipos de
cabeça (http://www.intertechnology.com/)
Outras técnicas aplicadas aos testes de vibração forçada são os denominados “pullback
tests”. Este método envolve a introdução de um deslocamento à estrutura sendo esta depois
libertada provocando na estrutura uma resposta em regime livre.
Mais recentemente tem-se assistido a um grande desenvolvimento no domínio dos métodos
estocásticos de identificação modal que se baseiam apenas no conhecimento da resposta
das estruturas face à acção ambiental (“output-only”).
Estes métodos são designados de estocásticos pelo facto da excitação desconhecida ser
idealizada como a realização de um processo estocástico. Como a excitação ambiental
resulta da contribuição simultânea de várias fontes: vento, tráfego sobre a estrutura e
funcionamento de máquinas instaladas na estrutura ou na sua vizinhança, é usual admitir-
se, por simplificação, que o processo estocástico que caracteriza a acção sobre a estrutura é
um ruído branco (Magalhães, 2004). Como tal, para o caso especifico das pontes
ferroviárias, a acção do tráfego ferroviário não deve ser considerada como acção ambiental
pois o espaçamento constante de eixos dos comboios, associados à sua velocidade de
circulação, induzem na estrutura uma acção com frequências predominantes.
O menor custo e maior simplicidade de execução tem levado a uma implementação cada
vez mais significativa dos métodos estocásticos de identificação modal nas estruturas de
engenharia civil, a este facto está também associado o grande desenvolvimento dos
transdutores e sistemas de aquisição que têm vindo a permitir a avaliação de vibrações com
cada vez menor amplitude.
Tendo em conta a sua maior aplicação, será realizada nesta secção uma abordagem sumária
aos principais métodos estocásticos de identificação modal. Estes métodos podem-se
dividir em dois grandes grupos: métodos não paramétricos desenvolvidos essencialmente
40
Metodologias de observação dinâmica de pontes
no domínio da frequência e métodos paramétricos no domínio do tempo. Uma descrição
mais detalhada dos seguintes métodos pode ser encontrada em Magalhães (2004) e em
Rodrigues (2005).
2.3.1 - Métodos estocásticos no domínio da frequência
De seguida apresentam-se os três métodos estocásticos no domínio da frequência mais
utilizados actualmente.
2.3.1.1 - Método básico no domínio da frequência (BFD)
O método básico no domínio da frequência (BFD), também designado na literatura por
método de selecção de picos (“Peak-Picking”) foi o primeiro método a ser usado para a
identificação de estruturas, com base na medição da sua resposta a acções ambientais. As
primeiras aplicações deste método remontam às décadas de 60 e 70 nomeadamente nos
trabalhos de Crawford e Ward (1964) e Trifunac (1972) em edifícios e de McLamore e
Hart (1971) e Abdel-Ghaffar (1978) em pontes. No entanto, este método sistematizado
apenas na década de 90 no âmbito dos trabalhos de Felber (1993).
O método básico no domínio da frequência é um método designado de um grau de
liberdade, como tal, baseia-se na hipótese de que para frequências próximas das
frequências naturais da estrutura, a sua resposta dinâmica é essencialmente condicionada
pela contribuição do modo ressonante. Assumindo a validade desta condição, o
comportamento da estrutura nas vizinhanças das frequências de ressonância pode ser
simulado através de um oscilador de um grau de liberdade com a mesma frequência e o
mesmo coeficiente de amortecimento
kw
k do modo de vibração (Magalhães, 2004). k
Neste método, as frequências naturais são obtidas através dos picos dos espectros de
potência das acelerações medidas na estrutura. Por forma a simplificar a análise, é usual
calcular um espectro médio normalizado (ANPSD) que contém informação relativa ao
conteúdo espectral de todos os pontos instrumentados.
Os modos de vibração são determinados por intermédio do cálculo de funções complexas
de transferência entre os pontos instrumentados de referência e os pontos móveis. No que
se refere aos coeficientes de amortecimento estes são determinados pelo método da meia
potência que se apresenta na sub-secção 2.3.3.
41
Capítulo 2
As principais desvantagens deste método residem na impossibilidade de identificar modos
de vibração com frequências próximas e a imprecisão na determinação dos coeficientes de
amortecimento resultantes da aplicação do método da meia potência.
2.3.1.2 - Método de decomposição no domínio da frequência (FDD)
O método de decomposição no domínio da frequência (FDD) foi desenvolvido por
Brincker et al. (2000) tendo como principal objectivo a eliminação ou atenuação das
desvantagens associadas ao método básico no domínio da frequência (BFD) sem afectar as
suas vantagens, nomeadamente, a sua simplicidade e facilidade de aplicação.
Este método baseia-se na decomposição da matriz dos espectros de resposta da estrutura
em valores singulares (SVD). Desta operação resulta um conjunto de funções de densidade
espectral de potência correspondentes a sistemas de um grau de liberdade que apresentam
as mesmas frequências e os mesmos coeficientes de amortecimento dos modos de vibração
da estrutura.
Este método permite a obtenção de melhores resultados nas estruturas que apresentam
modos de vibração com frequências próximas.
2.3.1.3 - Método de decomposição no domínio da frequência – versão melhorada
(EFDD)
A versão melhorada do método de decomposição no domínio da frequência (EFDD)
corresponde a um melhoramento introduzido mais tarde por Brincker et al. (2001) ao
método FDD que permite a obtenção mais precisa dos coeficientes de amortecimento.
Neste método, tendo em conta o facto da função de auto-correlação da resposta de um
oscilador de um grau de liberdade, sujeito a uma excitação do tipo ruído branco ser
proporcional à sua resposta em vibração livre, é possível identificar os parâmetros modais
da estrutura a partir das funções de auto-correlação usando conceitos simples da dinâmica
clássica (Magalhães, 2004). As funções de auto-correlação podem ser obtidas por
intermédio da aplicação da FFT inversa às funções de densidade espectral de potência
resultantes da decomposição da matriz dos espectros de resposta da estrutura em valores
singulares (SVD) (método FDD).
42
Metodologias de observação dinâmica de pontes
2.3.2 - Métodos estocásticos no domínio do tempo
Os métodos paramétricos no domínio do tempo envolvem a escolha de um modelo
matemático para idealizar o comportamento dinâmico da estrutura. Os modelos mais
utilizados actualmente nestas aplicações são: os modelos estocásticos de estado no domínio
do tempo, os modelos ARV (modelos vectoriais auto-regressivos) e os modelos ARMAV
(modelos vectoriais auto-regressivos com média móvel).
Nos métodos paramétricos, os resultados são obtidos, adaptando os parâmetros modais dos
modelos utilizados, por forma a que estes se ajustem o mais possível aos resultados
experimentais. Refira-se que estes métodos podem ser aplicados directamente sobre as
séries temporais, ou sobre as funções de correlação de resposta que podem ser obtidas
através da sua definição (função de covariância), por intermédio da aplicação da FFT
inversa às funções de densidade espectral de potência, ou por intermédio do método do
decremento aleatório.
2.3.3 - Determinação dos coeficientes de amortecimento
Associados aos diversos métodos de identificação modal existem diferentes métodos de
determinação do coeficiente de amortecimento. Os métodos mais conhecidos são o método
da meia potência, considerado no âmbito dos métodos BFD e FDD e o método do
decremento logarítmico considerado no âmbito do método EFDD e em registos de resposta
em regime livre.
2.3.3.1 - Método da meia potência
O método da meia potência (Clough e Penzien, 1993) baseia-se na análise funções de
densidade espectral de resposta. Para a aplicação deste método é necessário seleccionar, no
espectro médio normalizado das respostas da estrutura, o pico de ressonância (com uma
frequência natural i correspondente ao modo ) e a partir deste, identificar os dois pontos i
1f e 2f com ordenada espectral igual a metade da ordenada máxima (Figura 2.15). O
coeficiente de amortecimento pode então ser estimado a partir da seguinte expressão:
2
2 1i
1f f
f f
(2.6)
Este método não fornece estimativas com um grau de precisão adequada, sendo habitual a
obtenção de coeficientes de amortecimento sobrestimados. Tal deve-se, sobretudo aos
43
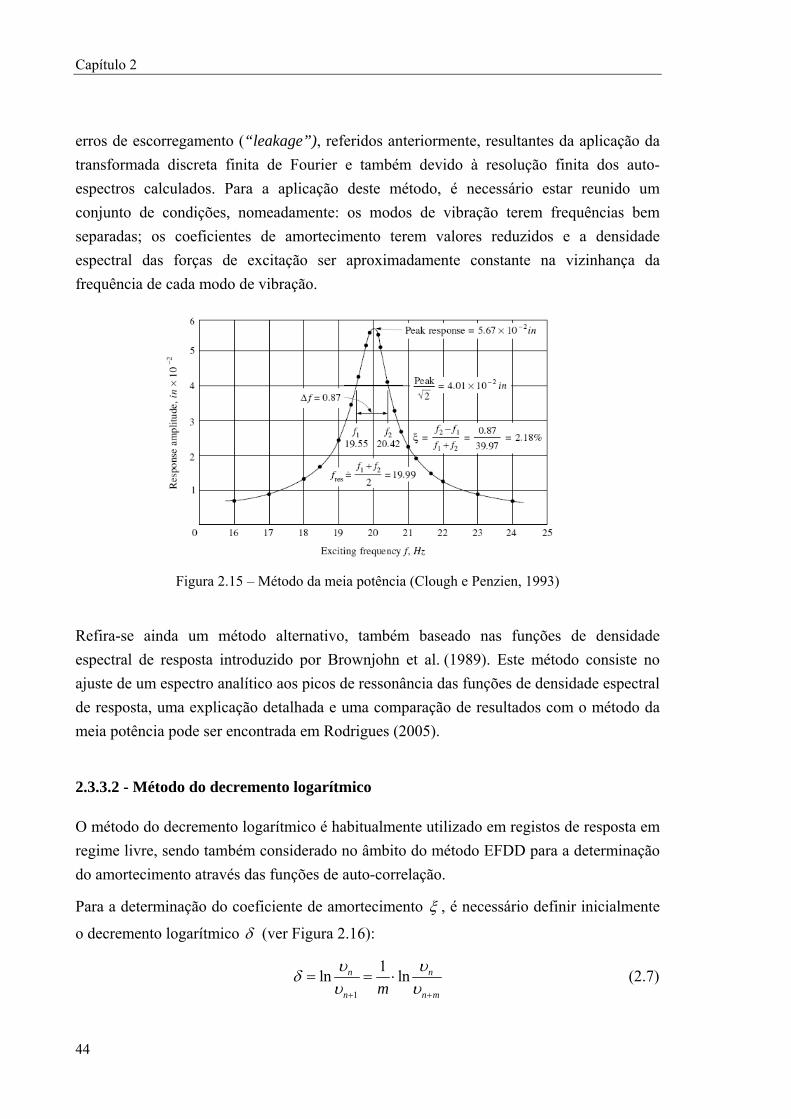
Capítulo 2
erros de escorregamento (“leakage”), referidos anteriormente, resultantes da aplicação da
transformada discreta finita de Fourier e também devido à resolução finita dos auto-
espectros calculados. Para a aplicação deste método, é necessário estar reunido um
conjunto de condições, nomeadamente: os modos de vibração terem frequências bem
separadas; os coeficientes de amortecimento terem valores reduzidos e a densidade
espectral das forças de excitação ser aproximadamente constante na vizinhança da
frequência de cada modo de vibração.
Figura 2.15 – Método da meia potência (Clough e Penzien, 1993)
Refira-se ainda um método alternativo, também baseado nas funções de densidade
espectral de resposta introduzido por Brownjohn et al. (1989). Este método consiste no
ajuste de um espectro analítico aos picos de ressonância das funções de densidade espectral
de resposta, uma explicação detalhada e uma comparação de resultados com o método da
meia potência pode ser encontrada em Rodrigues (2005).
2.3.3.2 - Método do decremento logarítmico
O método do decremento logarítmico é habitualmente utilizado em registos de resposta em
regime livre, sendo também considerado no âmbito do método EFDD para a determinação
do amortecimento através das funções de auto-correlação.
Para a determinação do coeficiente de amortecimento , é necessário definir inicialmente
o decremento logarítmico (ver Figura 2.16):
1
1ln lnn
n nmn
m
(2.7)
44
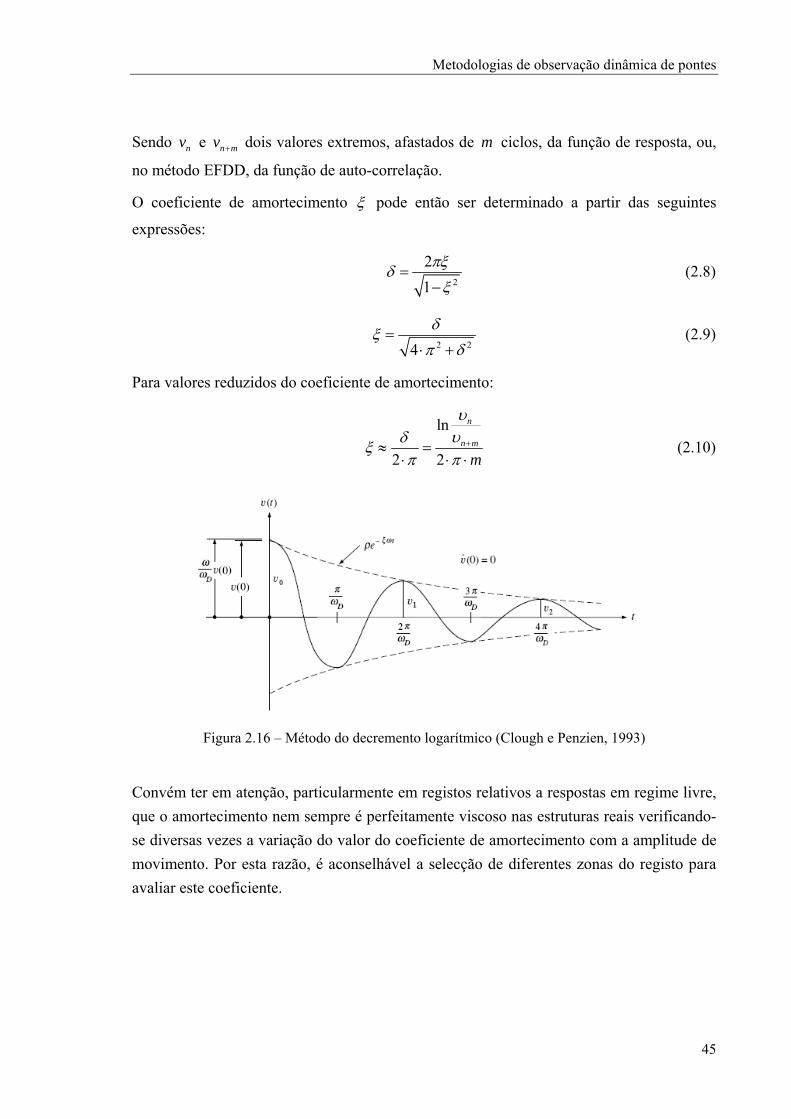
Metodologias de observação dinâmica de pontes
Sendo e dois valores extremos, afastados de m ciclos, da função de resposta, ou,
no método EFDD, da função de auto-correlação.
nv n mv
O coeficiente de amortecimento pode então ser determinado a partir das seguintes
expressões:
2
2
1
(2.8)
2 24
(2.9)
Para valores reduzidos do coeficiente de amortecimento:
ln
2 2
n
n m
m
(2.10)
Figura 2.16 – Método do decremento logarítmico (Clough e Penzien, 1993)
Convém ter em atenção, particularmente em registos relativos a respostas em regime livre,
que o amortecimento nem sempre é perfeitamente viscoso nas estruturas reais verificando-
se diversas vezes a variação do valor do coeficiente de amortecimento com a amplitude de
movimento. Por esta razão, é aconselhável a selecção de diferentes zonas do registo para
avaliar este coeficiente.
45
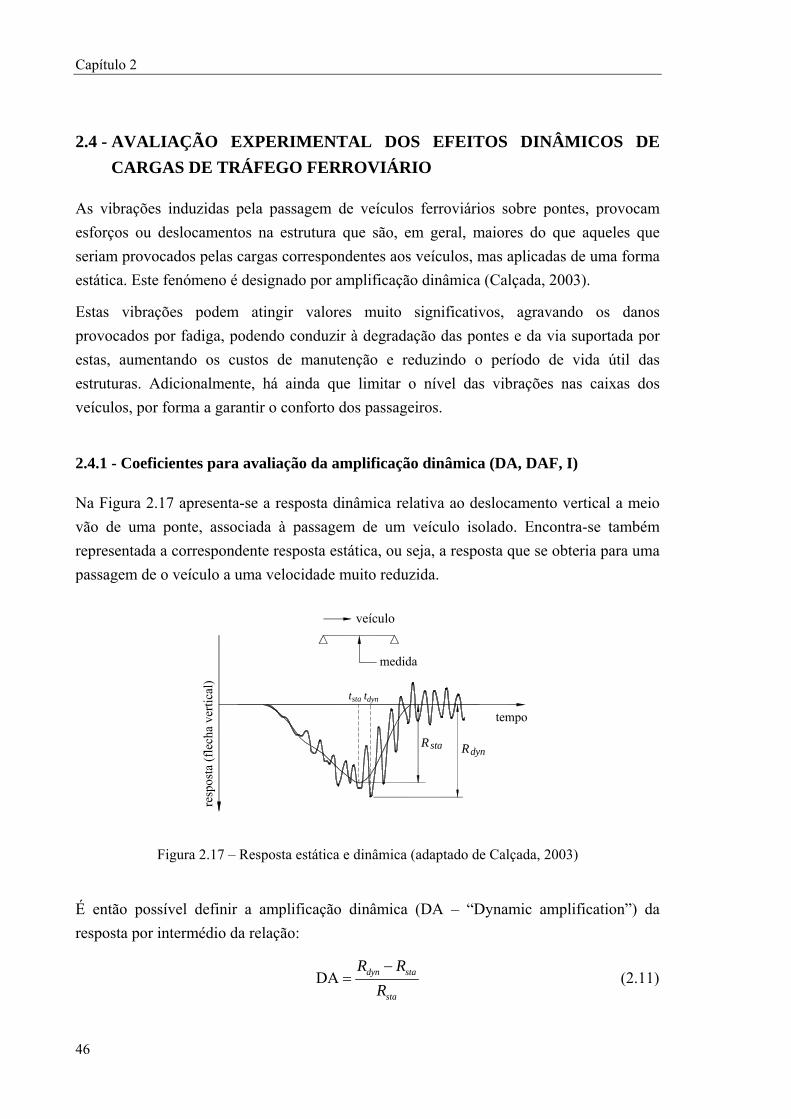
Capítulo 2
2.4 - AVALIAÇÃO EXPERIMENTAL DOS EFEITOS DINÂMICOS DE
CARGAS DE TRÁFEGO FERROVIÁRIO
As vibrações induzidas pela passagem de veículos ferroviários sobre pontes, provocam
esforços ou deslocamentos na estrutura que são, em geral, maiores do que aqueles que
seriam provocados pelas cargas correspondentes aos veículos, mas aplicadas de uma forma
estática. Este fenómeno é designado por amplificação dinâmica (Calçada, 2003).
Estas vibrações podem atingir valores muito significativos, agravando os danos
provocados por fadiga, podendo conduzir à degradação das pontes e da via suportada por
estas, aumentando os custos de manutenção e reduzindo o período de vida útil das
estruturas. Adicionalmente, há ainda que limitar o nível das vibrações nas caixas dos
veículos, por forma a garantir o conforto dos passageiros.
2.4.1 - Coeficientes para avaliação da amplificação dinâmica (DA, DAF, I)
Na Figura 2.17 apresenta-se a resposta dinâmica relativa ao deslocamento vertical a meio
vão de uma ponte, associada à passagem de um veículo isolado. Encontra-se também
representada a correspondente resposta estática, ou seja, a resposta que se obteria para uma
passagem de o veículo a uma velocidade muito reduzida.
resp
osta
(fl
echa
ver
tica
l)
camião
R sta
medida
dynR
tempo
tsta dynt
veículo
Figura 2.17 – Resposta estática e dinâmica (adaptado de Calçada, 2003)
É então possível definir a amplificação dinâmica (DA – “Dynamic amplification”) da
resposta por intermédio da relação:
DA dyn sta
sta
R R
R
(2.11)
46
Metodologias de observação dinâmica de pontes
ou
DA 1dyn
sta
R
R (2.12)
sendo dynR e staR os valores máximos de resposta dinâmica e estática respectivamente. A
amplificação traduz o peso da componente dinâmica da resposta relativamente à resposta
estática.
Com o mesmo significado, é frequentemente utilizado na literatura o factor de impacto
(I - “Impact Factor”), ou simplesmente impacto. Este factor é frequentemente expresso sob
a forma de percentagem:
(%) 1 100dyn
sta
RI
R
(2.13)
No entanto, do ponto de vista do dimensionamento e avaliação de pontes, de forma a
conservar o carácter estático da sua análise, torna-se mais interessante a consideração de
outro coeficiente designado por factor de amplificação dinâmica (DAF – “Dynamic
Amplification Factor”):
DAF dyn
sta
R
R (2.14)
sendo a relação entre o DA e o DAF dada por:
DAF (1 DA) (2.15)
Alternativamente, o DAF poderá ser avaliado por intermédio da seguinte relação:
DAF sta dyn
sta
R R
R
(2.16)
em que dynR representa o valor máximo da série contendo apenas a componente dinâmica
da resposta.
Tendo em conta que os valores máximos das duas séries ( staR e dynR ) não ocorrem em
geral para o mesmo instante, como se pode observar na Figura 2.17, tem-se que o valor de
obtido pela expressão DAF (2.16) fornece em geral uma estimativa superior ao
obtido pela expressão
DAF
(2.14).
47
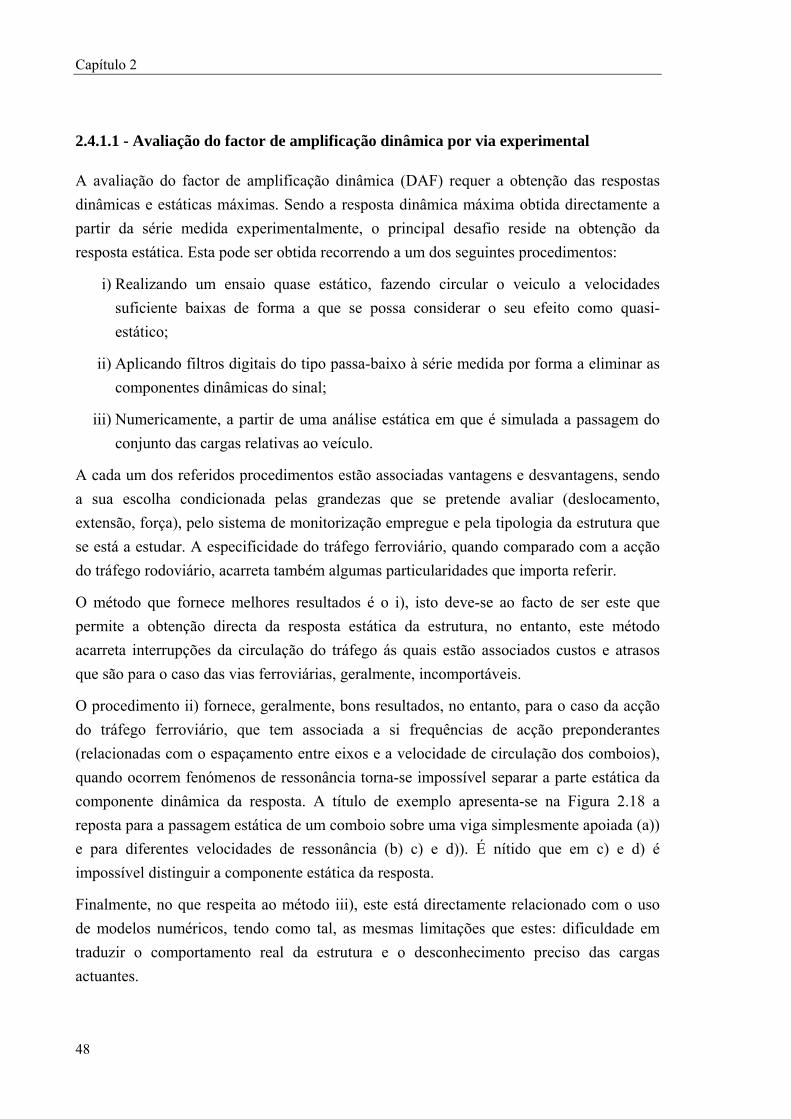
Capítulo 2
2.4.1.1 - Avaliação do factor de amplificação dinâmica por via experimental
A avaliação do factor de amplificação dinâmica (DAF) requer a obtenção das respostas
dinâmicas e estáticas máximas. Sendo a resposta dinâmica máxima obtida directamente a
partir da série medida experimentalmente, o principal desafio reside na obtenção da
resposta estática. Esta pode ser obtida recorrendo a um dos seguintes procedimentos:
i) Realizando um ensaio quase estático, fazendo circular o veiculo a velocidades
suficiente baixas de forma a que se possa considerar o seu efeito como quasi-
estático;
ii) Aplicando filtros digitais do tipo passa-baixo à série medida por forma a eliminar as
componentes dinâmicas do sinal;
iii) Numericamente, a partir de uma análise estática em que é simulada a passagem do
conjunto das cargas relativas ao veículo.
A cada um dos referidos procedimentos estão associadas vantagens e desvantagens, sendo
a sua escolha condicionada pelas grandezas que se pretende avaliar (deslocamento,
extensão, força), pelo sistema de monitorização empregue e pela tipologia da estrutura que
se está a estudar. A especificidade do tráfego ferroviário, quando comparado com a acção
do tráfego rodoviário, acarreta também algumas particularidades que importa referir.
O método que fornece melhores resultados é o i), isto deve-se ao facto de ser este que
permite a obtenção directa da resposta estática da estrutura, no entanto, este método
acarreta interrupções da circulação do tráfego ás quais estão associados custos e atrasos
que são para o caso das vias ferroviárias, geralmente, incomportáveis.
O procedimento ii) fornece, geralmente, bons resultados, no entanto, para o caso da acção
do tráfego ferroviário, que tem associada a si frequências de acção preponderantes
(relacionadas com o espaçamento entre eixos e a velocidade de circulação dos comboios),
quando ocorrem fenómenos de ressonância torna-se impossível separar a parte estática da
componente dinâmica da resposta. A título de exemplo apresenta-se na Figura 2.18 a
reposta para a passagem estática de um comboio sobre uma viga simplesmente apoiada (a))
e para diferentes velocidades de ressonância (b) c) e d)). É nítido que em c) e d) é
impossível distinguir a componente estática da resposta.
Finalmente, no que respeita ao método iii), este está directamente relacionado com o uso
de modelos numéricos, tendo como tal, as mesmas limitações que estes: dificuldade em
traduzir o comportamento real da estrutura e o desconhecimento preciso das cargas
actuantes.
48
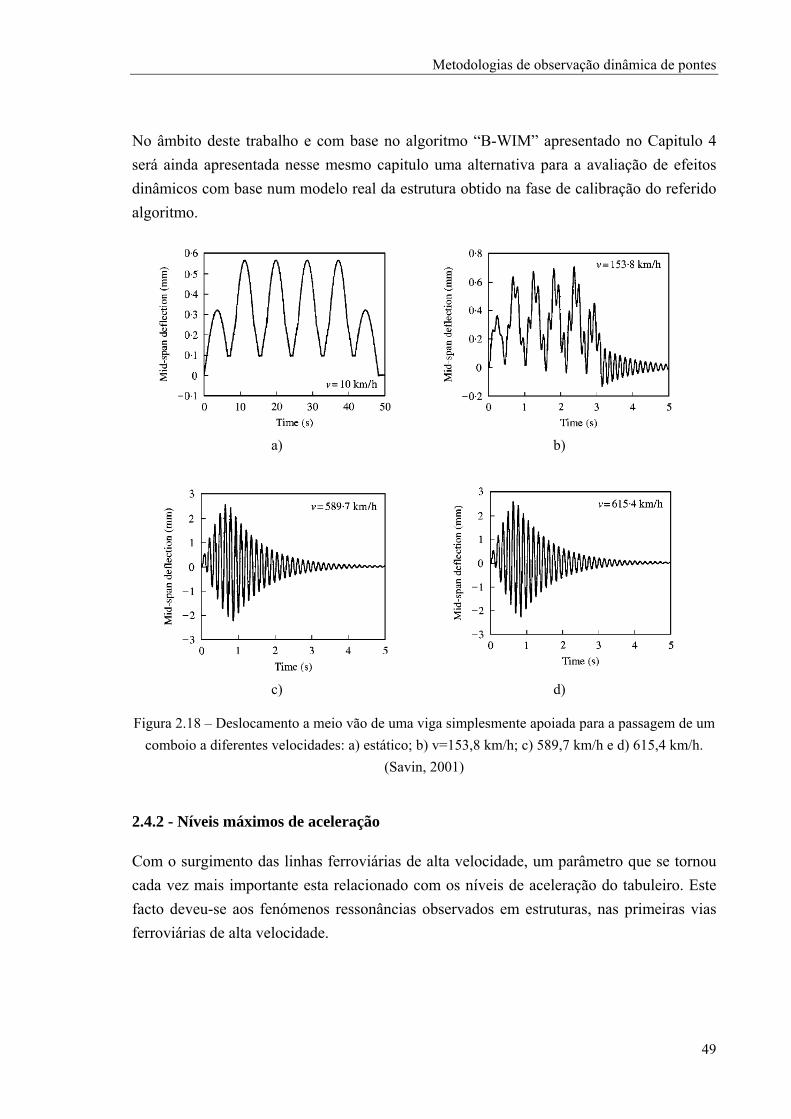
Metodologias de observação dinâmica de pontes
No âmbito deste trabalho e com base no algoritmo “B-WIM” apresentado no Capitulo 4
será ainda apresentada nesse mesmo capitulo uma alternativa para a avaliação de efeitos
dinâmicos com base num modelo real da estrutura obtido na fase de calibração do referido
algoritmo.
a) b)
c) d)
Figura 2.18 – Deslocamento a meio vão de uma viga simplesmente apoiada para a passagem de um
comboio a diferentes velocidades: a) estático; b) v=153,8 km/h; c) 589,7 km/h e d) 615,4 km/h.
(Savin, 2001)
2.4.2 - Níveis máximos de aceleração
Com o surgimento das linhas ferroviárias de alta velocidade, um parâmetro que se tornou
cada vez mais importante esta relacionado com os níveis de aceleração do tabuleiro. Este
facto deveu-se aos fenómenos ressonâncias observados em estruturas, nas primeiras vias
ferroviárias de alta velocidade.
49
Capítulo 2
Estudos realizados pela SNCF permitiram medir acelerações que atingiram 1 g na linha
Paris-Lyon. A mesma entidade conclui que para acelerações que ultrapassassem 0,7 g
poderiam ocorrer fenómenos de instabilidade de balastro (Zacher e Baessler, 2005).
Com base nos estudos realizados pelo comité de peritos ERRI D214, que incluíram ensaios
realizados numa plataforma vibratória de teste de balastro, foram definidos limites
máximos para os valores admissíveis de aceleração do tabuleiro das pontes ferroviárias.
Estes limites encontram-se actualmente preconizados nos documentos normativos
EN1991-2 (2003) e EN1990-AnnexA2 (2005). Os valores preconizados são:
Pontes com via balastrada – 0,35 g
Pontes com via não balastrada – 0,70 g
Estes limites devem ser cumpridos para uma gama de frequências limitada definida
também na EN1990-AnnexA2:
max 0 2n max 30 Hz; 1,5n ; n (2.17)
em que é a frequência do primeiro modo de vibração e é a frequência do terceiro
modo de vibração.
0n 2n
Este critério tem-se revelado demasiado condicionante no dimensionamento de novas
estruturas, conduzindo, muitas das vezes, a soluções pouco económicas. Por outro lado a
definição de um limite de 30 Hz a considerar para as análises não é ainda consensual.
Neste âmbito, refira-se os trabalhos de investigação desenvolvidos no laboratório BAM
(Federal Institute for Material Research and Testing), que incluíram ensaios numa plataforma
de teste de balastro com menores dimensões que a utilizada nas investigações do comité
ERRI D214 mas que permitiu a análise do comportamento do balastro para frequências
superiores (até 60 Hz) (Baessler e Rücker, 2005 e Zacher e Baessler, 2005). Estes ensaios
permitiram a validação de modelos numéricos (Figura 2.19) através dos quais foi possível
extrapolar os resultados para frequências superiores. Ficou demonstrado que o valor máximo
da função de transferência entre a aceleração da base da plataforma de teste e a aceleração na
travessa é máxima para uma frequência de 60 Hz (Figura 2.20). Estes estudos poderão
conduzir a uma revisão futura da gama de frequências para análise preconizada na EN1990-
AnnexA2.
50
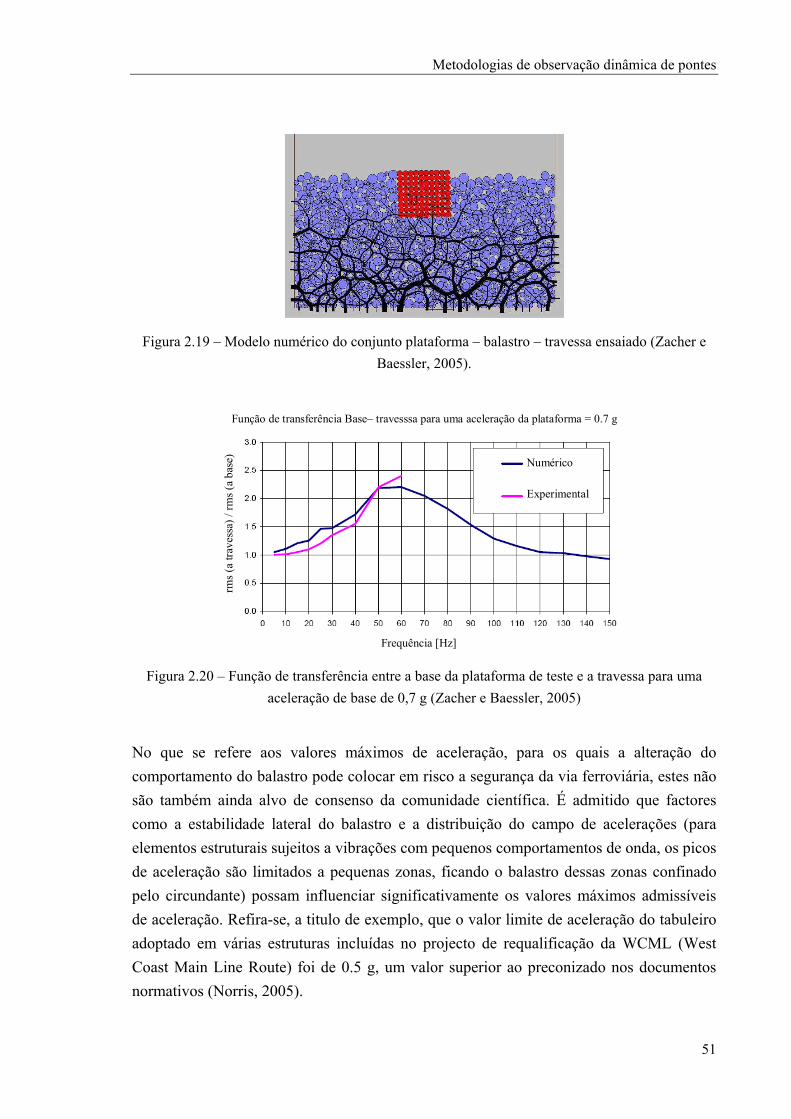
Metodologias de observação dinâmica de pontes
Figura 2.19 – Modelo numérico do conjunto plataforma – balastro – travessa ensaiado (Zacher e
Baessler, 2005).
Função de transferência Base– travesssa para uma aceleração da plataforma = 0.7 g
rms
(a tr
aves
sa)
/ rm
s (a
bas
e)
Numérico
Experimental
Frequência [Hz]
Figura 2.20 – Função de transferência entre a base da plataforma de teste e a travessa para uma
aceleração de base de 0,7 g (Zacher e Baessler, 2005)
No que se refere aos valores máximos de aceleração, para os quais a alteração do
comportamento do balastro pode colocar em risco a segurança da via ferroviária, estes não
são também ainda alvo de consenso da comunidade científica. É admitido que factores
como a estabilidade lateral do balastro e a distribuição do campo de acelerações (para
elementos estruturais sujeitos a vibrações com pequenos comportamentos de onda, os picos
de aceleração são limitados a pequenas zonas, ficando o balastro dessas zonas confinado
pelo circundante) possam influenciar significativamente os valores máximos admissíveis
de aceleração. Refira-se, a titulo de exemplo, que o valor limite de aceleração do tabuleiro
adoptado em várias estruturas incluídas no projecto de requalificação da WCML (West
Coast Main Line Route) foi de 0.5 g, um valor superior ao preconizado nos documentos
normativos (Norris, 2005).
51
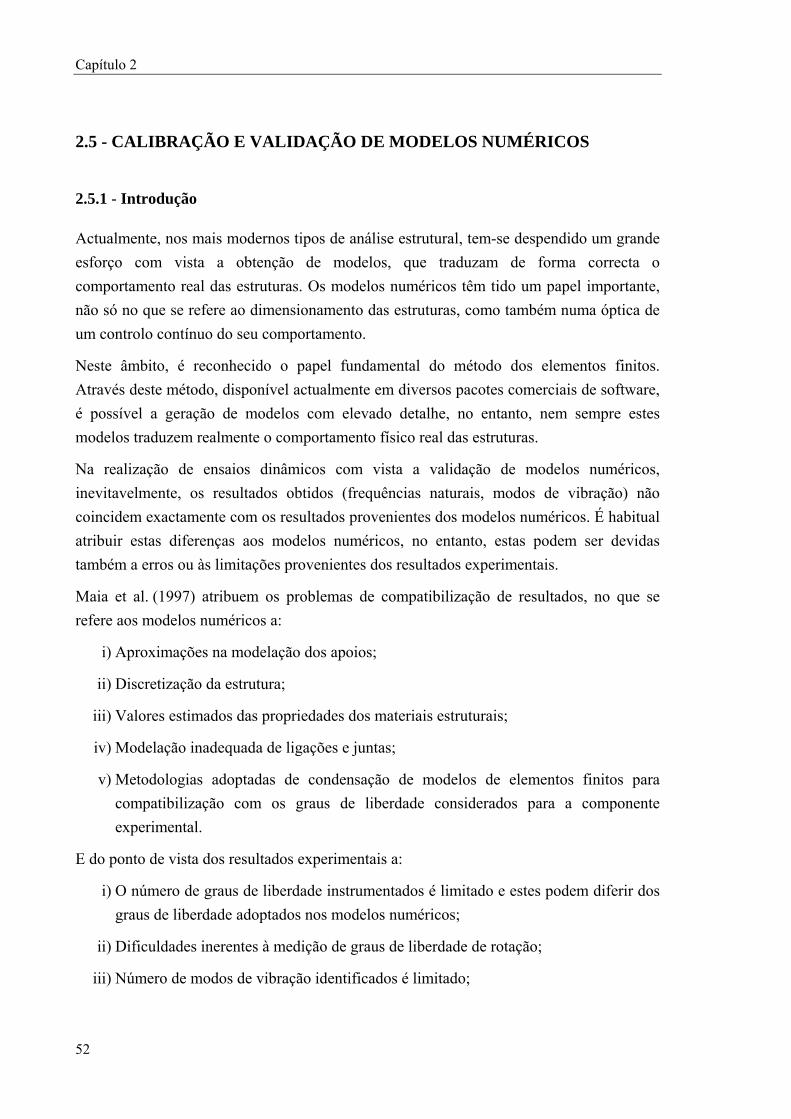
Capítulo 2
2.5 - CALIBRAÇÃO E VALIDAÇÃO DE MODELOS NUMÉRICOS
2.5.1 - Introdução
Actualmente, nos mais modernos tipos de análise estrutural, tem-se despendido um grande
esforço com vista a obtenção de modelos, que traduzam de forma correcta o
comportamento real das estruturas. Os modelos numéricos têm tido um papel importante,
não só no que se refere ao dimensionamento das estruturas, como também numa óptica de
um controlo contínuo do seu comportamento.
Neste âmbito, é reconhecido o papel fundamental do método dos elementos finitos.
Através deste método, disponível actualmente em diversos pacotes comerciais de software,
é possível a geração de modelos com elevado detalhe, no entanto, nem sempre estes
modelos traduzem realmente o comportamento físico real das estruturas.
Na realização de ensaios dinâmicos com vista a validação de modelos numéricos,
inevitavelmente, os resultados obtidos (frequências naturais, modos de vibração) não
coincidem exactamente com os resultados provenientes dos modelos numéricos. É habitual
atribuir estas diferenças aos modelos numéricos, no entanto, estas podem ser devidas
também a erros ou às limitações provenientes dos resultados experimentais.
Maia et al. (1997) atribuem os problemas de compatibilização de resultados, no que se
refere aos modelos numéricos a:
i) Aproximações na modelação dos apoios;
ii) Discretização da estrutura;
iii) Valores estimados das propriedades dos materiais estruturais;
iv) Modelação inadequada de ligações e juntas;
v) Metodologias adoptadas de condensação de modelos de elementos finitos para
compatibilização com os graus de liberdade considerados para a componente
experimental.
E do ponto de vista dos resultados experimentais a:
i) O número de graus de liberdade instrumentados é limitado e estes podem diferir dos
graus de liberdade adoptados nos modelos numéricos;
ii) Dificuldades inerentes à medição de graus de liberdade de rotação;
iii) Número de modos de vibração identificados é limitado;
52
Metodologias de observação dinâmica de pontes
iv) Erros associados ao processo de medição;
v) Erros associados aos métodos de identificação.
A actualização de modelos de elementos finitos pode ser realizada com diferentes níveis de
complexidade, estes podem ser modificados com base apenas na sensibilidade e
experiência do engenheiro, ou podem-se adoptar algoritmos matemáticos complexos que
permitem a realização da actualização automaticamente.
Actualmente, os procedimentos mais avançados de actualização de elementos finitos
podem incluir duas fases distintas: uma fase de preparação e outra relativa à própria
aplicação de algoritmos de actualização de modelos numéricos.
2.5.2 - Correlação e comparação entre resultados experimentais e modelos numéricos
Antes da aplicação propriamente dita dos algoritmos de actualização, há que lidar com as
incompatibilidades entre a informação experimental e a informação proveniente dos
modelos numéricos. Estas incompatibilidades devem-se essencialmente ao número
incompleto de modos de vibração identificados experimentalmente e ao número limitado
de graus de liberdade instrumentados. Estas incompatibilidades podem ser amenizadas
adoptando uma ou a combinação das seguintes alternativas (Maia et al., 1997):
i) Redução dos modelos de elementos finitos por condensação dos graus de liberdade
não medidos;
ii) Expansão dos resultados resultantes da identificação modal.
A primeira alternativa deve ser, sempre que possível, evitada, pois é difícil que esta não
afecte as propriedades modais e espaciais da estrutura. No entanto, quando a informação
experimental é escassa, nem sempre é possível compatibilizar os dados apenas por
expansão dos resultados experimentais.
No que se refere à redução de modelos de elementos finitos, os principais métodos são o
método estático de Guyan (Guyan, 1965) , método de condensação dinâmica (Paz, 1984),
método SEREP (Sytem equivalent Reduction Expansion Process) (O'Callahan et al., 1989)
e o método IRS (Improved Reduction System) (O'Callahan, 1989).
Tendo em conta as suas vantagens, face à redução de modelos, existe uma grande
variedade de métodos para expansão da informação experimental. Estes métodos podem-se
dividir essencialmente em três categorias. Uma alternativa reside na simples interpolação
dos dados experimentais, obtendo-se uma função contínua que, por sua vez permite a
obtenção das coordenadas modais nos restantes nós do modelo numérico. Outra
53
Capítulo 2
alternativa, baseia-se na consideração da informação dos modelos numéricos, relativa às
matrizes de massa e de rigidez na interpolação do modelo experimental. Finalmente é
também frequente admitir que um determinado modo de vibração identificado
experimentalmente pode resultar da combinação linear dos modos analíticos previstos no
modelo numérico, não considerando assim as coordenadas modais do modelo
experimental, na sua expansão.
Depois de compatibilizar os dados numéricos e experimentais, a primeira tarefa consiste
em determinar o seu nível de aproximação. Neste âmbito refira-se a existência de diversos
parâmetros que permitem a comparação entre modelos (numérico e experimental) a
diferentes níveis. Neste âmbito, refira-se os índices MAC e COMAC, reconhecidamente os
mais aplicados.
O índice MAC (Modal Assurance Criterion) (expressão (2.18)) introduzido por Allemang e
Brown (1982), é um índice escalar que varia entre 0 e 1, e que mede a correlação, neste
contexto, entre configurações modais numéricas e experimentais. Valores próximos de 1
indicam uma boa correlação. Refira-se que este parâmetro é considerado no método EFDD
descrito sumariamente na secção 2.3, servindo como critério, na escolha dos pontos na
vizinhança de ressonância dos auto-espectros considerados, para a obtenção das funções de
auto-correlação.
2*
1
* *
1 1
n
EXP NUMi ii
n n
EXP EXP NUM NUMi i ii i
MAC
i
(2.18)
em que EXP e NUM são os vectores relativos às configurações modais experimental e
numéricas, respectivamente, e n o número total de graus de liberdade considerados na
correlação.
O parâmetro MAC fornece uma informação global relativa à correlação entre modos, no
entanto existe uma variabilidade espacial (entre graus de liberdade) desta correlação que o
mesmo não permite avaliar. Para avaliar a correlação associada aos diversos graus de
liberdade existe um outro parâmetro designado por COMAC (Coordinate Modal Assurance
Criterion) (eq. (2.19)) introduzido por Lieven e Ewins (1988).
54
Metodologias de observação dinâmica de pontes
2
1
2 2
1 1
( , )
s
s s
mi i
EXP NUMj jj
i i m mi i
EXP NUMj jj j
COMAC ANA EXP
(2.19)
em que sm representa o número total de modos considerados na análise e j o j -ésimo par
de modos e representa o grau de liberdade em questão. i
2.5.3 - Métodos para ajuste de modelos de elementos finitos
As técnicas de ajuste de modelos de elementos finitos dividem-se essencialmente em três
tipos:
i) Métodos baseados em funções de resposta em frequência;
ii) Métodos directos baseados em parâmetros modais e;
iii) Métodos iterativos baseados em parâmetros modais.
No que se refere aos métodos (i), estes são baseados na comparação entre as funções de
resposta em frequência obtidas experimentalmente e as obtidas através dos modelos
numéricos. Este tipo de método não é, no entanto, aplicado habitualmente em estruturas de
engenharia civil, devido à dificuldade em excitar este tipo de estruturas convenientemente,
para a obtenção das funções de resposta em frequência (FRF’s).
Os métodos directos baseados em parâmetros modais (ii) surgiram nos finais da década de
1970, sendo os principais métodos utilizados nos primórdios da actualização de modelos
de elementos finitos, sendo ainda utilizados e melhorados nos dias de hoje. Estes métodos
envolvem o ajuste directo dos elementos das matrizes de massa e de rigidez tendo em
consideração restrições como a sua simetria e ortogonalidade. Como principais vantagens,
estes métodos requerem menos tempo de cálculo pois não requerem iterações e permitem
obter modelos numéricos que reproduzam os resultados experimentais, no entanto, .este
tipo de métodos podem conduzir a modelos não reais.
Os métodos iterativos (iii) são actualmente os mais populares e aqueles que se mostram
mais adequados para a actualização de modelos de estruturas de engenharia civil . Estes
métodos baseiam-se no aumento da correlação entre os modelos numéricos e
experimentais de uma forma iterativa. Nestes métodos está inerente uma fase de escolha e
domínio dos parâmetros do modelos numéricos a serem modificados, proporcionando um
55
Capítulo 2
controlo das alterações introduzidas aos modelos, permitindo garantir a manutenção do
significado físico dos mesmos.
Informação detalhada relativa aos diversos métodos para ajuste de modelos de elementos
finitos podem ser encontrados no livro de Friswell e Mottershead (1995), e também no
recente trabalho de Jaishi (2005).
2.6 - AVALIAÇÃO DO ESTADO DE CONSERVAÇÃO DAS ESTRUTURAS
COM BASE EM ENSAIOS DINÂMICOS
Um dos principais objectivos dos sistemas de monitorização é a detecção de danos
estruturais. As técnicas de detecção de pequenos danos estruturais e anomalias são
preponderantes na tomada de decisões, em relação à realização de eventuais trabalhos de
manutenção e reparação.
Existem diversas metodologias para a detecção de danos, nomeadamente (Cunha et
al., 2001; Yan et al., 2004):
i) Métodos de energia de deformação, nos quais se procura estimar a variação de
energia de deformação acumulada em cada elemento estrutural, por intermédio da
variação das curvaturas dos modos de vibração, introduzindo muitas das vezes o
conceito de índice de dano;
ii) Métodos de flexibilidade, baseados na variação temporal de matrizes de flexibilidade
quantificadas a partir dos parâmetros modais identificados;
iii) Métodos baseados em modelos de elementos finitos, nos quais a detecção do dano é
alcançada através do estabelecimento de uma correlação entre parâmetros modais
identificados, calculados antes e após a ocorrência de dano.
As metodologias baseadas na energia de deformação, são realizadas na maioria das vezes,
com base nos resultados de ensaios de vibração ambiental de pontes. Estes ensaios
permitem caracterizar as propriedades de massa, rigidez e amortecimento das estruturas, a
partir da obtenção de estimativas bastante rigorosas dos parâmetros modais, ou seja,
frequências, modos de vibração e coeficientes de amortecimentos modais. A presença de
danos conduz a uma alteração dos parâmetros modais das estruturas.
Com base neste conceito foi desenvolvido o Método do Índice de Dano, que permite
realizar a detecção e localização de danos estruturais a partir das configurações modais
antes e após a ocorrência de danos (Oshima et al., 2004). Este método, muito utilizado em
aplicações práticas, baseia-se no facto da presença de danos estar relacionada com a
56
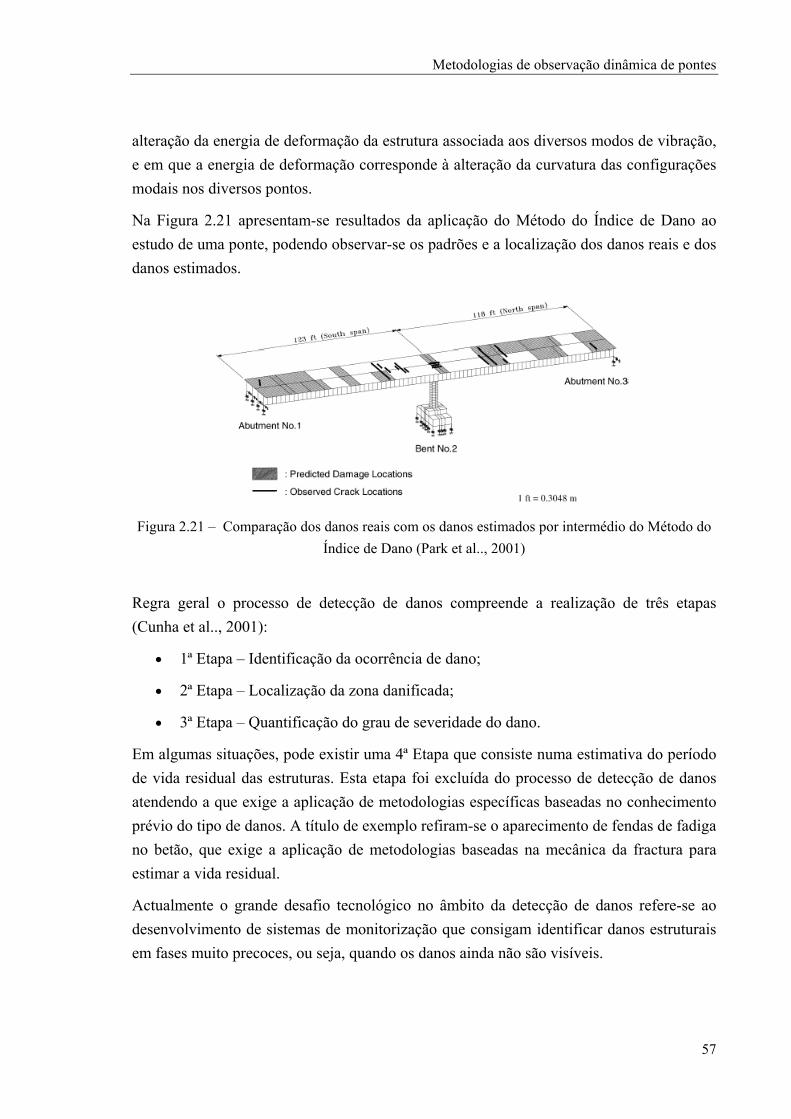
Metodologias de observação dinâmica de pontes
57
alteração da energia de deformação da estrutura associada aos diversos modos de vibração,
e em que a energia de deformação corresponde à alteração da curvatura das configurações
modais nos diversos pontos.
Na Figura 2.21 apresentam-se resultados da aplicação do Método do Índice de Dano ao
estudo de uma ponte, podendo observar-se os padrões e a localização dos danos reais e dos
danos estimados.
Figura 2.21 – Comparação dos danos reais com os danos estimados por intermédio do Método do
Índice de Dano (Park et al.., 2001)
Regra geral o processo de detecção de danos compreende a realização de três etapas
(Cunha et al.., 2001):
1ª Etapa – Identificação da ocorrência de dano;
2ª Etapa – Localização da zona danificada;
3ª Etapa – Quantificação do grau de severidade do dano.
Em algumas situações, pode existir uma 4ª Etapa que consiste numa estimativa do período
de vida residual das estruturas. Esta etapa foi excluída do processo de detecção de danos
atendendo a que exige a aplicação de metodologias específicas baseadas no conhecimento
prévio do tipo de danos. A título de exemplo refiram-se o aparecimento de fendas de fadiga
no betão, que exige a aplicação de metodologias baseadas na mecânica da fractura para
estimar a vida residual.
Actualmente o grande desafio tecnológico no âmbito da detecção de danos refere-se ao
desenvolvimento de sistemas de monitorização que consigam identificar danos estruturais
em fases muito precoces, ou seja, quando os danos ainda não são visíveis.

CAPÍTULO 3
EQUIPAMENTOS PARA MONITORIZAÇÃO DE ESTRUTURAS
DE ENGENHARIA CIVIL
3.1 - INTRODUÇÃO
Os sistemas de monitorização aplicados às estruturas de Engenharia Civil, desde os mais
clássicos aos mais inovadores, são constituídos por três blocos funcionais: i) o bloco de
entrada, constituído pelos transdutores que realizam as medições; ii) o bloco de
transmissão, constituído pelos elementos de transmissão e condicionamento de sinal (cabos
de ligação, fontes de alimentação, amplificadores, filtros, etc.) e iii) o bloco de saída
constituído pelos elementos que permitem a apresentação dos resultados da medição, de
modo analógico ou digital (Sarmento, 1997).
No que se refere ao bloco de entrada, a escolha de um transdutor: depende da grandeza a
medir, da acuidade exigida, do tipo de observação (duração, condições do meio ambiente,
etc.), da geometria da estrutura, entre outros factores. Alampalli e Ettouney (2004)
mencionam desenvolvimentos recentes ao nível dos transdutores, no que respeita, ao seu
período de vida útil, custo inicial e de manutenção, facilidade de utilização e obtenção de
sinais com menor ruído.
O bloco de transmissão de um sistema de monitorização tem também recebido importantes
desenvolvimentos, nomeadamente no que respeita ao aparecimento dos sistemas “wireless”
e a aplicação de fibra óptica.
Refira-se ainda que os sistemas de aquisição têm acompanhado os avanços tecnológicos ao
nível dos sensores, dos elementos de transmissão e do tratamento de dados.
Capítulo 3
Neste capítulo serão descritos alguns dos equipamentos mais utilizados no que respeita à
monitorização de estruturas de engenharia civil.
3.2 - PARÂMETROS CARACTERIZADORES DO COMPORTAMENTO
DOS TRANSDUTORES
Tendo sido já abordados no Capítulo 2 os parâmetros relativos ao processo de aquisição de
sinal, torna-se relevante a apresentação dos parâmetros caracterizadores do comportamento
dos sensores utilizados na monitorização de estruturas, antes da efectiva apresentação dos
mesmos.
3.2.1 - Características de performance dos transdutores
As características relativas à performance dos transdutores são as que descrevem o
comportamento destes em condições normais de operação.
3.2.1.1 - Sensibilidade e resolução
As definições de sensibilidade e resolução de um sensor são muitas das vezes confundidas.
No entanto, apesar de relacionadas, estas características têm diferentes significados. A
sensibilidade caracteriza a relação entre a variação da grandeza medida com o sinal de
saída do transdutor, ao passo que a resolução representa o valor mínimo de variação da
grandeza medida, mensurável pelo sensor.
3.2.1.2 - Gama de medição e linearidade
A gama de medição de um sensor corresponde à diferença entre o valor máximo e mínimo
que este permite medir. Linearidade corresponde à percentagem referente à componente da
gama de medição, em que a relação entre o sinal de saída do transdutor e o sinal de entrada
é linear. O desvio da resposta do sensor relativamente à recta da fase linear é mencionado
como erro de não linearidade.
60
Equipamentos para monitorização de estruturas de engenharia civil
3.2.1.3 - Histerese
A histerese de um sensor corresponde ao desvio máximo entre duas leituras do mesmo
valor, sendo que uma é realizada partindo do zero e a outra partindo do valor máximo da
escala do sensor.
3.2.1.4 - Exactidão e repetibilidade
A exactidão refere-se à proximidade entre o valor real de uma grandeza e o valor medido
pelo sensor. Repetibilidade refere-se à proximidade entre sucessivas respostas de um
sensor, respeitantes à avaliação da mesma medida em condições idênticas para o processo
de medição. Estes dois parâmetros são do tipo estático e são indicativos da qualidade do
sensor.
3.2.1.5 - Estabilidade
A estabilidade de um sensor está relacionada com a capacidade do mesmo em manter as
suas propriedades ao longo da sua utilização. Esta propriedade é geralmente influenciada
por factores externos ao sensor, como variações de temperatura, humidade, interferências
electromagnéticas, etc. De forma a manter a confiança dos valores obtidos, é muita das
vezes necessário monitorizar estes factores de modo a compensar a resposta do sensor.
3.2.1.6 - Tempo de resposta e resposta em frequência
Do ponto de vista da monitorização dinâmica de estruturas, assumem especial relevância
os parâmetros relativos ao tempo de resposta dos sensores e à resposta em frequência.
O tempo de resposta indica a rapidez com que um sensor responde às alterações da
grandeza a medir. Esta característica é relevante quando se estão a utilizar diferentes tipos
de transdutores, e a sincronização entre eles é importante para as aplicações em causa.
No que respeita à resposta em frequência de um sensor, esta é dada por duas relações entre
o sinal de entrada de um sensor e o sinal de saída. A primeira corresponde à relação entre a
amplitude da razão entre o sinal de entrada e o sinal de saída, com a frequência do sinal de
entrada. A segunda relaciona a frequência do sinal de entrada com a fase entre os sinais de
entrada e de saída.
61
Capítulo 3
3.2.2 - Outros parâmetros
3.2.2.1 - Durabilidade
A durabilidade pode ser expressa como o tempo mínimo, ou o número mínimo de
excursões, fora da gama da medição de um sensor, em que este funciona sem deterioração
da sua performance (Aktan et al., 2002). Este parâmetro está associado não só ao sensor
como também à aplicação em que este é utilizado, e as medidas de protecção consideradas.
3.2.2.2 - Custo
O custo de um transdutor engloba não só o custo do equipamento propriamente dito, mas
também o custo de instalação, manutenção e operação (requisitos relativos à aquisição de
sinal).
O custo não deve ser o parâmetro condicionante na escolha do sensor, no entanto, estando
normalmente indexado às suas características de performance, deve-se procurar um relação
ajustada entre o custo e as necessidades para a aplicação em vista.
3.2.2.3 - Requisitos de instalação
O tipo de instalação de um sensor está directamente relacionado com o parâmetro custo.
Transdutores que requeiram mão-de-obra especializada e cuja instalação envolva períodos
de tempo significativos serão necessariamente mais dispendiosos. Este parâmetro é
relevante no âmbito de planos de monitorização de grande magnitude, onde o não
acautelamento deste factor poderá levar a atrasos significativos nos trabalhos.
3.2.2.4 - Requisitos ao nível da aquisição de dados
A variabilidade existente ao nível dos transdutores existe também no que respeita aos
equipamentos de aquisição de sinal (condicionamento de sinal, cabos, fontes de
alimentação, etc.). Como tal, é imperativo a compatibilização dos sensores a utilizar com
os equipamentos existentes, por forma a minimizar custos e a evitar problemas de
compatibilização dos resultados (sincronização temporal de registos, frequências de
aquisição, etc.).
62
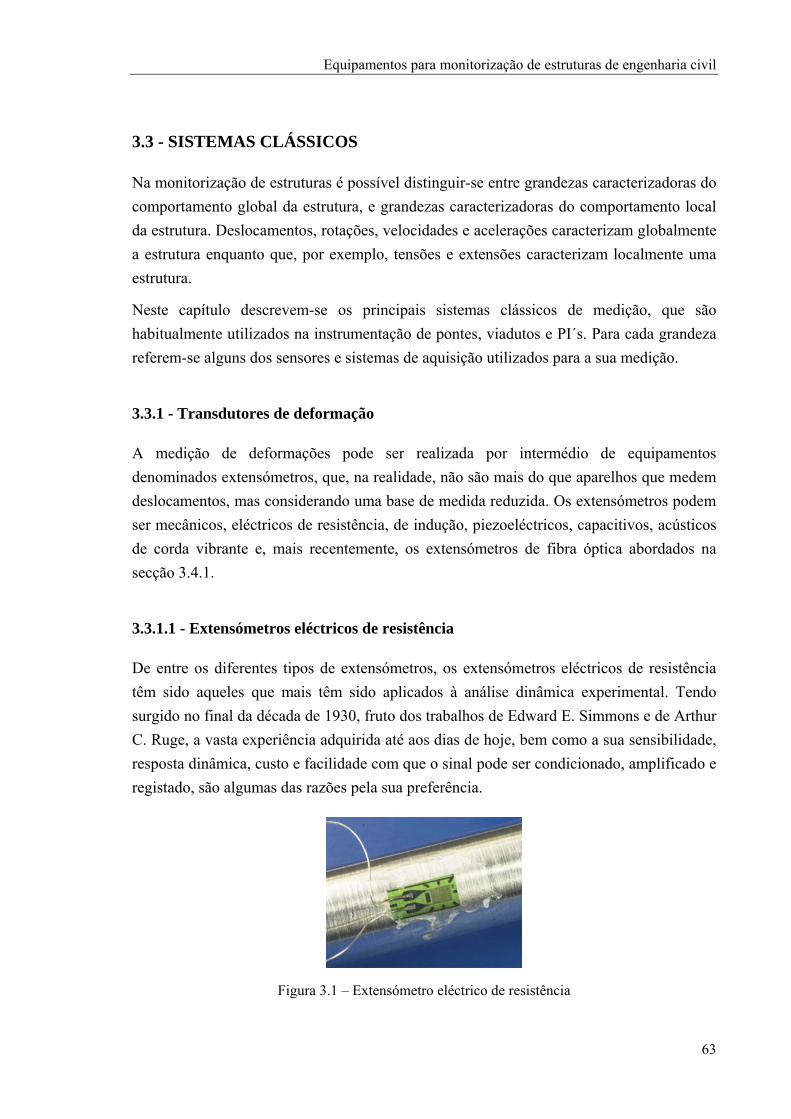
Equipamentos para monitorização de estruturas de engenharia civil
3.3 - SISTEMAS CLÁSSICOS
Na monitorização de estruturas é possível distinguir-se entre grandezas caracterizadoras do
comportamento global da estrutura, e grandezas caracterizadoras do comportamento local
da estrutura. Deslocamentos, rotações, velocidades e acelerações caracterizam globalmente
a estrutura enquanto que, por exemplo, tensões e extensões caracterizam localmente uma
estrutura.
Neste capítulo descrevem-se os principais sistemas clássicos de medição, que são
habitualmente utilizados na instrumentação de pontes, viadutos e PI´s. Para cada grandeza
referem-se alguns dos sensores e sistemas de aquisição utilizados para a sua medição.
3.3.1 - Transdutores de deformação
A medição de deformações pode ser realizada por intermédio de equipamentos
denominados extensómetros, que, na realidade, não são mais do que aparelhos que medem
deslocamentos, mas considerando uma base de medida reduzida. Os extensómetros podem
ser mecânicos, eléctricos de resistência, de indução, piezoeléctricos, capacitivos, acústicos
de corda vibrante e, mais recentemente, os extensómetros de fibra óptica abordados na
secção 3.4.1.
3.3.1.1 - Extensómetros eléctricos de resistência
De entre os diferentes tipos de extensómetros, os extensómetros eléctricos de resistência
têm sido aqueles que mais têm sido aplicados à análise dinâmica experimental. Tendo
surgido no final da década de 1930, fruto dos trabalhos de Edward E. Simmons e de Arthur
C. Ruge, a vasta experiência adquirida até aos dias de hoje, bem como a sua sensibilidade,
resposta dinâmica, custo e facilidade com que o sinal pode ser condicionado, amplificado e
registado, são algumas das razões pela sua preferência.
Figura 3.1 – Extensómetro eléctrico de resistência
63
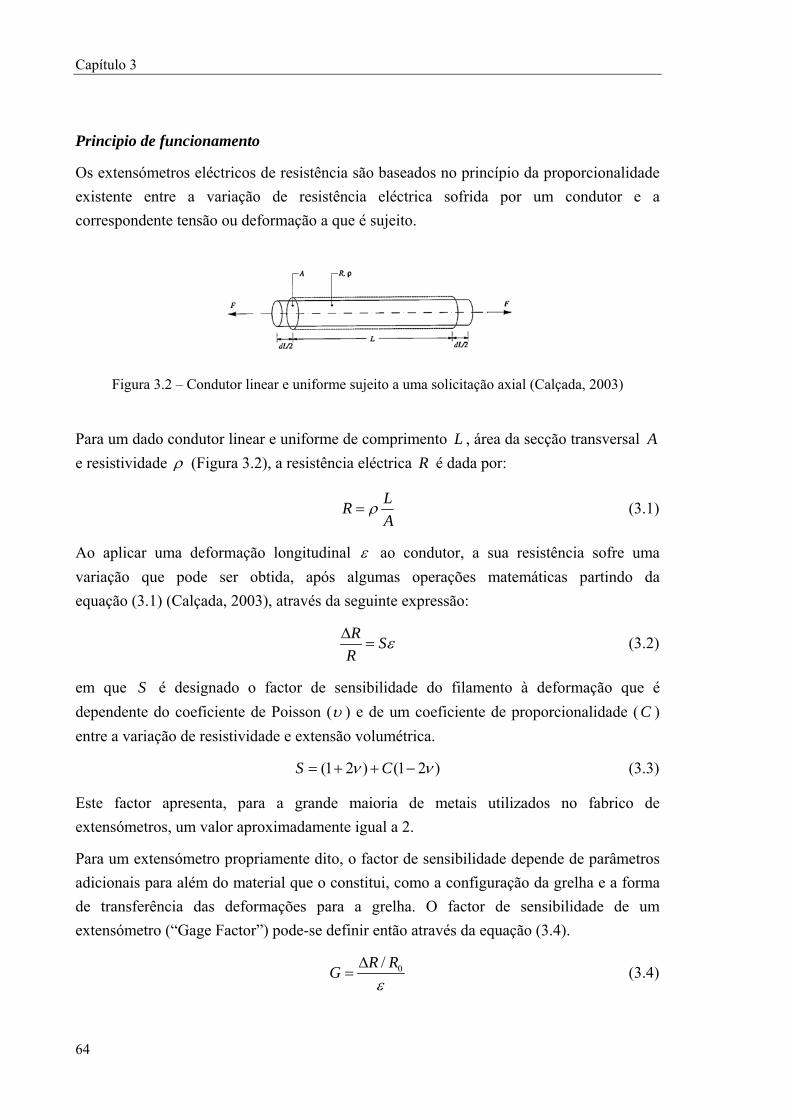
Capítulo 3
Principio de funcionamento
Os extensómetros eléctricos de resistência são baseados no princípio da proporcionalidade
existente entre a variação de resistência eléctrica sofrida por um condutor e a
correspondente tensão ou deformação a que é sujeito.
Figura 3.2 – Condutor linear e uniforme sujeito a uma solicitação axial (Calçada, 2003)
Para um dado condutor linear e uniforme de comprimento , área da secção transversal
e resistividade
L A
(Figura 3.2), a resistência eléctrica R é dada por:Equation Chapter 3 Section 3
L
RA
(3.1)
Ao aplicar uma deformação longitudinal ao condutor, a sua resistência sofre uma
variação que pode ser obtida, após algumas operações matemáticas partindo da
equação (3.1) (Calçada, 2003), através da seguinte expressão:
R
SR
(3.2)
em que é designado o factor de sensibilidade do filamento à deformação que é
dependente do coeficiente de Poisson (
S
) e de um coeficiente de proporcionalidade (C )
entre a variação de resistividade e extensão volumétrica.
(1 2 ) (1 2 )S C (3.3)
Este factor apresenta, para a grande maioria de metais utilizados no fabrico de
extensómetros, um valor aproximadamente igual a 2.
Para um extensómetro propriamente dito, o factor de sensibilidade depende de parâmetros
adicionais para além do material que o constitui, como a configuração da grelha e a forma
de transferência das deformações para a grelha. O factor de sensibilidade de um
extensómetro (“Gage Factor”) pode-se definir então através da equação (3.4).
0/R RG
(3.4)
64
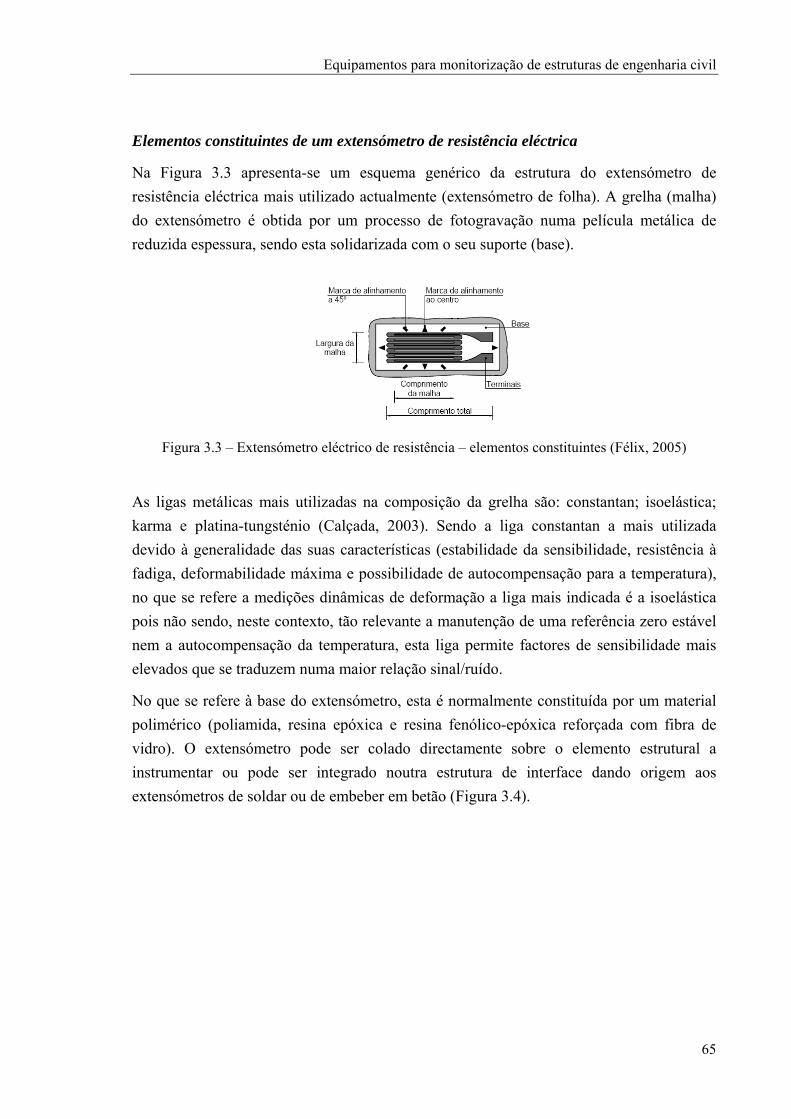
Equipamentos para monitorização de estruturas de engenharia civil
Elementos constituintes de um extensómetro de resistência eléctrica
Na Figura 3.3 apresenta-se um esquema genérico da estrutura do extensómetro de
resistência eléctrica mais utilizado actualmente (extensómetro de folha). A grelha (malha)
do extensómetro é obtida por um processo de fotogravação numa película metálica de
reduzida espessura, sendo esta solidarizada com o seu suporte (base).
Figura 3.3 – Extensómetro eléctrico de resistência – elementos constituintes (Félix, 2005)
As ligas metálicas mais utilizadas na composição da grelha são: constantan; isoelástica;
karma e platina-tungsténio (Calçada, 2003). Sendo a liga constantan a mais utilizada
devido à generalidade das suas características (estabilidade da sensibilidade, resistência à
fadiga, deformabilidade máxima e possibilidade de autocompensação para a temperatura),
no que se refere a medições dinâmicas de deformação a liga mais indicada é a isoelástica
pois não sendo, neste contexto, tão relevante a manutenção de uma referência zero estável
nem a autocompensação da temperatura, esta liga permite factores de sensibilidade mais
elevados que se traduzem numa maior relação sinal/ruído.
No que se refere à base do extensómetro, esta é normalmente constituída por um material
polimérico (poliamida, resina epóxica e resina fenólico-epóxica reforçada com fibra de
vidro). O extensómetro pode ser colado directamente sobre o elemento estrutural a
instrumentar ou pode ser integrado noutra estrutura de interface dando origem aos
extensómetros de soldar ou de embeber em betão (Figura 3.4).
65
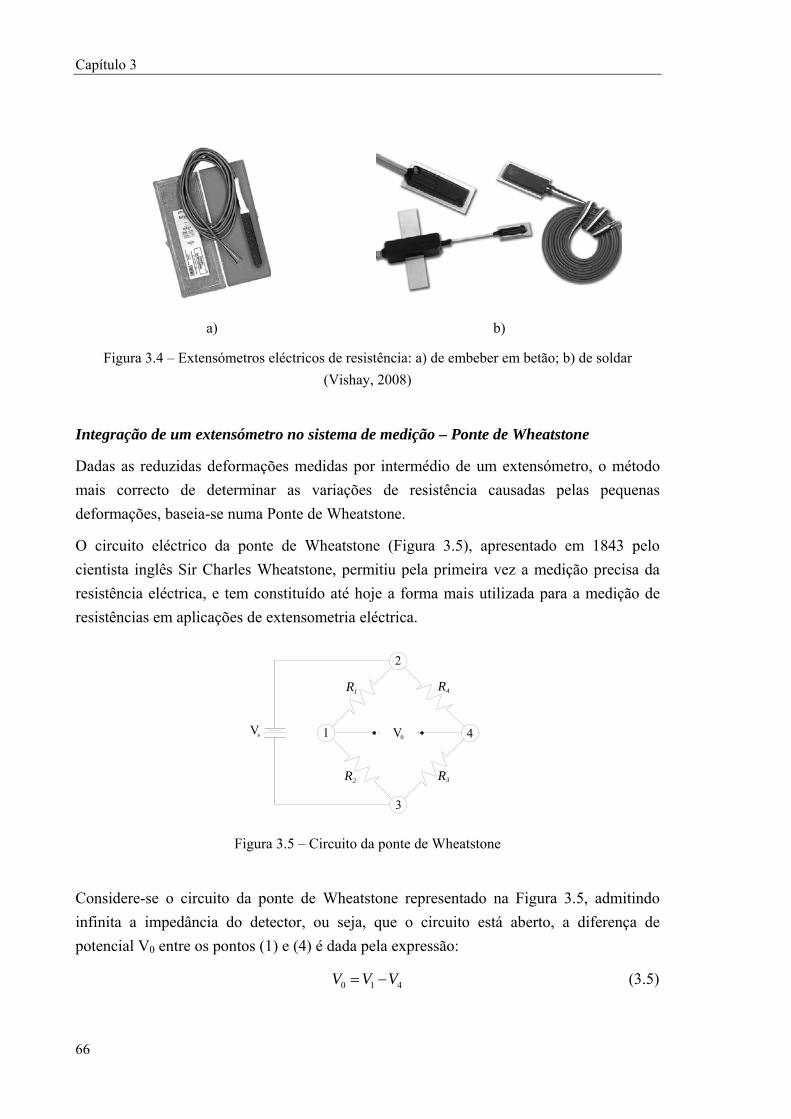
Capítulo 3
a) b)
Figura 3.4 – Extensómetros eléctricos de resistência: a) de embeber em betão; b) de soldar
(Vishay, 2008)
Integração de um extensómetro no sistema de medição – Ponte de Wheatstone
Dadas as reduzidas deformações medidas por intermédio de um extensómetro, o método
mais correcto de determinar as variações de resistência causadas pelas pequenas
deformações, baseia-se numa Ponte de Wheatstone.
O circuito eléctrico da ponte de Wheatstone (Figura 3.5), apresentado em 1843 pelo
cientista inglês Sir Charles Wheatstone, permitiu pela primeira vez a medição precisa da
resistência eléctrica, e tem constituído até hoje a forma mais utilizada para a medição de
resistências em aplicações de extensometria eléctrica.
2
3
41
R1 R
2R
4
R3
V0+-Vs
Figura 3.5 – Circuito da ponte de Wheatstone
Considere-se o circuito da ponte de Wheatstone representado na Figura 3.5, admitindo
infinita a impedância do detector, ou seja, que o circuito está aberto, a diferença de
potencial V0 entre os pontos (1) e (4) é dada pela expressão:
0 1V V V4 (3.5)
66
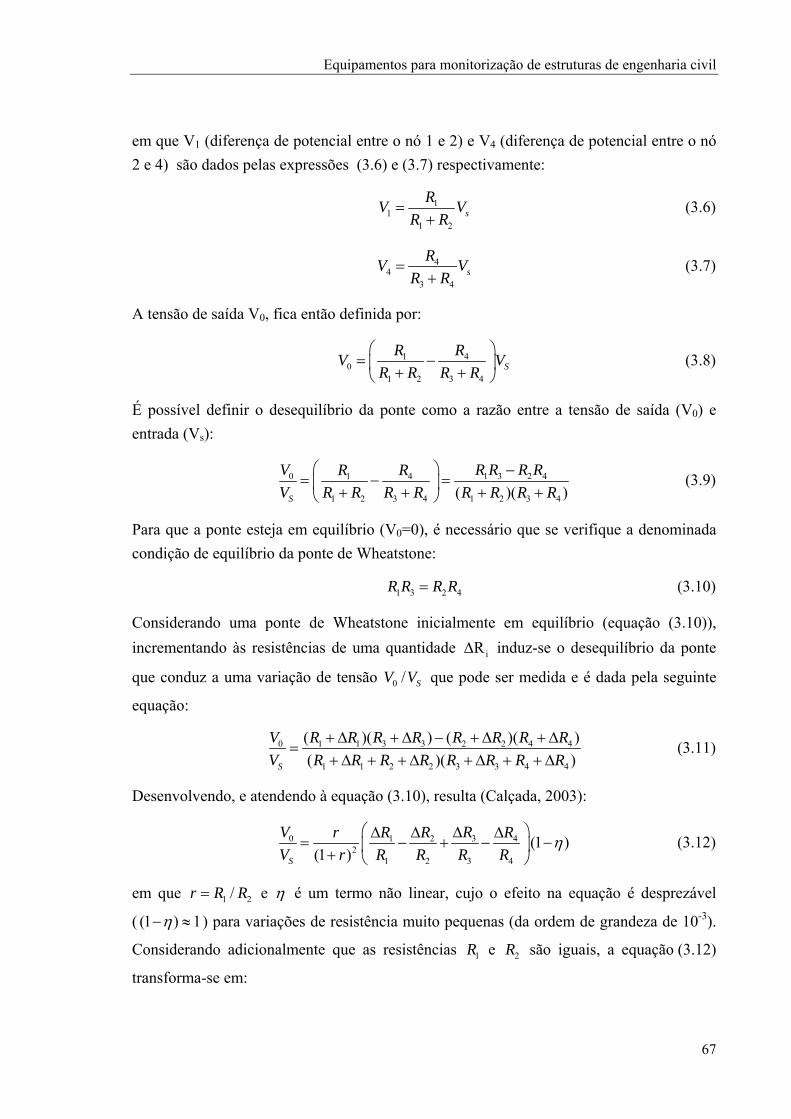
Equipamentos para monitorização de estruturas de engenharia civil
em que V1 (diferença de potencial entre o nó 1 e 2) e V4 (diferença de potencial entre o nó
2 e 4) são dados pelas expressões (3.6) e (3.7) respectivamente:
11
1 2s
RV
R R
V (3.6)
44
3 4s
RV
R R
V (3.7)
A tensão de saída V0, fica então definida por:
1 40
1 2 3 4S
R RV
R R R R
V (3.8)
É possível definir o desequilíbrio da ponte como a razão entre a tensão de saída (V0) e
entrada (Vs):
0 1 4
1 2 3 4 1 2 3 4( )(S
V RR R
V R R R R R R R R
1 3 2 4
)
R R R (3.9)
Para que a ponte esteja em equilíbrio (V0=0), é necessário que se verifique a denominada
condição de equilíbrio da ponte de Wheatstone:
1 3 2 4R R R R (3.10)
Considerando uma ponte de Wheatstone inicialmente em equilíbrio (equação (3.10)),
incrementando às resistências de uma quantidade iR induz-se o desequilíbrio da ponte
que conduz a uma variação de tensão que pode ser medida e é dada pela seguinte
equação:
0 / SV V
0 1 1 3 3 2 2 4
1 1 2 2 3 3 4 4
( )( ) ( )(
( )(S
V R R R R R R R R
V R R R R R R R R
4 )
) (3.11)
Desenvolvendo, e atendendo à equação (3.10), resulta (Calçada, 2003):
0 31 2 42
1 2 3 4
(1 )(1 )S
V RR R Rr
V r R R R R
2
(3.12)
em que e 1 /r R R é um termo não linear, cujo o efeito na equação é desprezável
( (1 ) 1 ) para variações de resistência muito pequenas (da ordem de grandeza de 10-3).
Considerando adicionalmente que as resistências 1R e 2R são iguais, a equação (3.12)
transforma-se em:
67
Capítulo 3
0 1 2 4
1 2 3 4
1
4S
V R3R R
V R R R R
R (3.13)
Atendendo ainda à definição de factor de sensibilidade do extensómetro (equação (3.4)), a
equação (3.13) pode ser reescrita na seguinte forma:
01 2 3 44S
V G
V (3.14)
Esta equação assume que todas as resistências na ponte são materializadas por
extensómetros. No entanto, na grande maioria das aplicações práticas, apenas algumas das
resistências funcionam como extensómetros, sendo os restantes braços da ponte
constituídos por resistências que apenas completam a ponte. As formas mais comuns de
montagem de montagem de extensómetros no circuito da ponte de Wheatstone são:
i) Quarto de ponte (R1 activa);
ii) Meia ponte (R1 e R2 activas);
iii) Duplo quarto ou diagonal (R1 e R3 activas);
iv) Ponte completa (R1, R2, R3 e R4 activas).
Efeito das variações de temperatura nos extensómetros de resistência
Durante o período de medição, um extensómetro poderá ser submetido a variações de
temperatura que, por sua vez, provocam também variações de resistência. Nestas situações
há que evitar este fenómeno ou garantir a distinção entre as variações de resistência
provocadas pelas variações de temperatura das devidas à deformação mecânica.
A sensibilidade à temperatura destes transdutores deve-se essencialmente a dois factores:
i) à diferença entre os coeficientes de dilatação térmica do material que compõe a
grelha do extensómetro ( ) e do material que constitui a peça instrumentada ( );
ii) à variação da resistência do extensómetro devida à variação do coeficiente de
resistividade do material que constitui a grelha do extensómetro, em função da
temperatura.
Considerando estes dois factores, a variação relativa de resistência provocado por uma
variação de temperatura T é dada por:
T
RK T T
R
(3.15)
68
Equipamentos para monitorização de estruturas de engenharia civil
que, considerando um intervalo limitado de temperatura, em que os parâmetros , , e
são constantes, origina uma extensão aparente dada por: K
' TK
(3.16)
Neste âmbito surgiram os extensómetros auto-compensados. Neste tipo de extensómetro a
composição química da liga que compõe a grelha é ajustada ao material sobre o qual este
vai ser aplicado, de forma a que se anule a extensão aparente ' .
Outra forma de compensação da temperatura consiste na utilização de um extensómetro
compensador da temperatura integrado no sistema de medição. Este extensómetro
compensador deve ser aplicado num ponto do objecto de teste não sujeito a deformações
mecânicas, experimentando, no entanto, as mesmas variações de temperatura que o
extensómetro activo. Desta forma pode-se realizar uma montagem em meia-ponte com o
extensómetro activo na posição R1 e o extensómetro compensador na posição R2, sendo o
sinal de saída da ponte dado por:
1 2i mec ter ter (3.17)
Influência da resistência dos cabos de ligação
Os resultados das medições dos extensómetros eléctricos de resistência são também
afectados pela resistência dos cabos de ligação. Este fenómeno é particularmente
importante quando existe um grande comprimento dos cabos, situação bastante comum em
actividades de monitorização em estruturas de engenharia civil. Refira-se ainda que este
facto pode ainda ser agravado pelo efeito da variação de temperatura
Para a redução deste fenómeno perturbador, é comum a utilização de extensómetros com
três condutores (Figura 3.6) integrando-os no circuito da Ponte de Wheatstone no formato
apresentado na Figura 3.7. Ao estar dotado de um terceiro condutor (L2), ligado ao
voltímetro, o efeito da resistência dos cabos de ligação pode ser minimizado. Isto deve-se à
elevada resistência de entrada do voltímetro que faz com que o condutor L2 seja precorrido
por uma corrente praticamente nula levando a que a queda de tensão na sua resistência seja
pouco significativa.
69
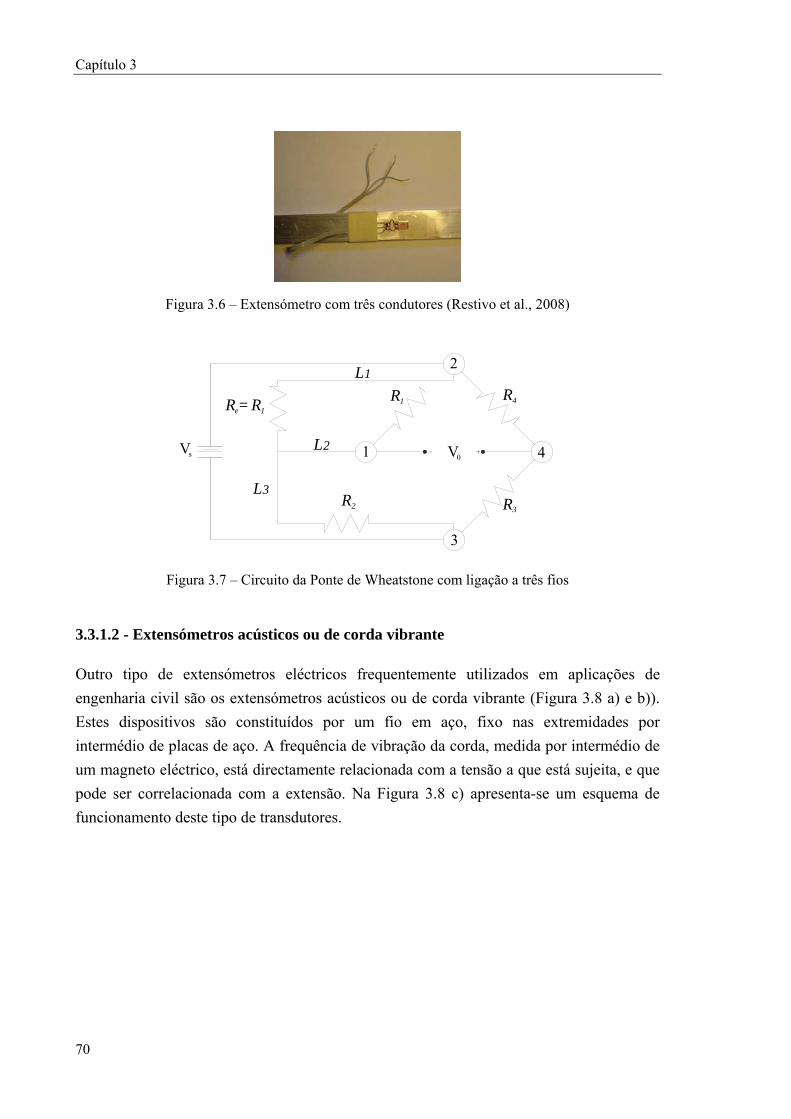
Capítulo 3
Figura 3.6 – Extensómetro com três condutores (Restivo et al., 2008)
2
3
41
R1 R
2R
4
R3
V0+-Vs
R1Re=
L1
L2
L3
Figura 3.7 – Circuito da Ponte de Wheatstone com ligação a três fios
3.3.1.2 - Extensómetros acústicos ou de corda vibrante
Outro tipo de extensómetros eléctricos frequentemente utilizados em aplicações de
engenharia civil são os extensómetros acústicos ou de corda vibrante (Figura 3.8 a) e b)).
Estes dispositivos são constituídos por um fio em aço, fixo nas extremidades por
intermédio de placas de aço. A frequência de vibração da corda, medida por intermédio de
um magneto eléctrico, está directamente relacionada com a tensão a que está sujeita, e que
pode ser correlacionada com a extensão. Na Figura 3.8 c) apresenta-se um esquema de
funcionamento deste tipo de transdutores.
70
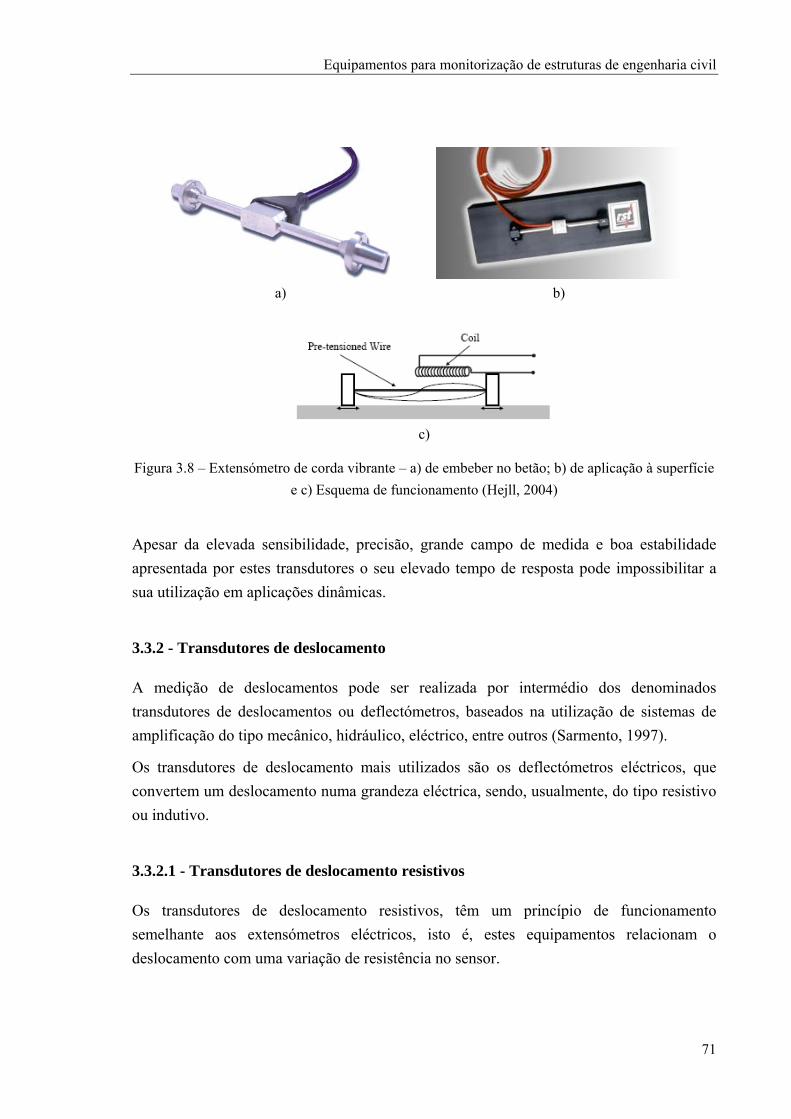
Equipamentos para monitorização de estruturas de engenharia civil
a) b)
c)
Figura 3.8 – Extensómetro de corda vibrante – a) de embeber no betão; b) de aplicação à superfície
e c) Esquema de funcionamento (Hejll, 2004)
Apesar da elevada sensibilidade, precisão, grande campo de medida e boa estabilidade
apresentada por estes transdutores o seu elevado tempo de resposta pode impossibilitar a
sua utilização em aplicações dinâmicas.
3.3.2 - Transdutores de deslocamento
A medição de deslocamentos pode ser realizada por intermédio dos denominados
transdutores de deslocamentos ou deflectómetros, baseados na utilização de sistemas de
amplificação do tipo mecânico, hidráulico, eléctrico, entre outros (Sarmento, 1997).
Os transdutores de deslocamento mais utilizados são os deflectómetros eléctricos, que
convertem um deslocamento numa grandeza eléctrica, sendo, usualmente, do tipo resistivo
ou indutivo.
3.3.2.1 - Transdutores de deslocamento resistivos
Os transdutores de deslocamento resistivos, têm um princípio de funcionamento
semelhante aos extensómetros eléctricos, isto é, estes equipamentos relacionam o
deslocamento com uma variação de resistência no sensor.
71
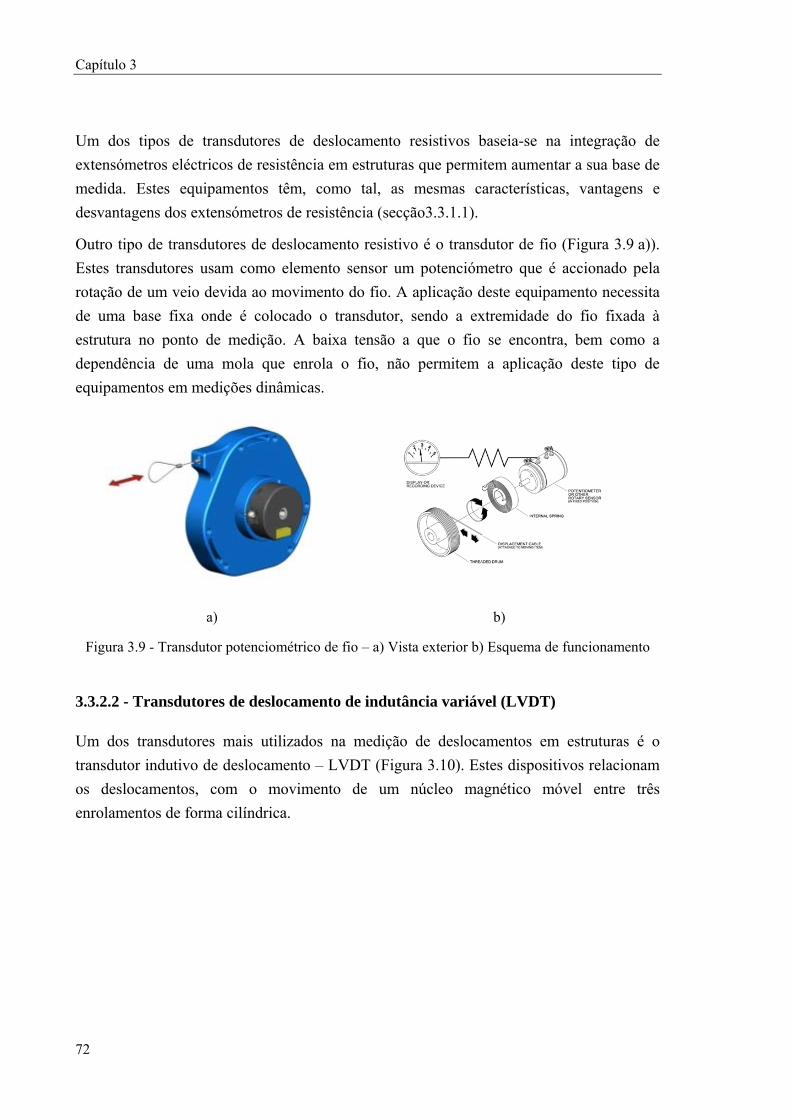
Capítulo 3
Um dos tipos de transdutores de deslocamento resistivos baseia-se na integração de
extensómetros eléctricos de resistência em estruturas que permitem aumentar a sua base de
medida. Estes equipamentos têm, como tal, as mesmas características, vantagens e
desvantagens dos extensómetros de resistência (secção3.3.1.1).
Outro tipo de transdutores de deslocamento resistivo é o transdutor de fio (Figura 3.9 a)).
Estes transdutores usam como elemento sensor um potenciómetro que é accionado pela
rotação de um veio devida ao movimento do fio. A aplicação deste equipamento necessita
de uma base fixa onde é colocado o transdutor, sendo a extremidade do fio fixada à
estrutura no ponto de medição. A baixa tensão a que o fio se encontra, bem como a
dependência de uma mola que enrola o fio, não permitem a aplicação deste tipo de
equipamentos em medições dinâmicas.
a) b)
Figura 3.9 - Transdutor potenciométrico de fio – a) Vista exterior b) Esquema de funcionamento
3.3.2.2 - Transdutores de deslocamento de indutância variável (LVDT)
Um dos transdutores mais utilizados na medição de deslocamentos em estruturas é o
transdutor indutivo de deslocamento – LVDT (Figura 3.10). Estes dispositivos relacionam
os deslocamentos, com o movimento de um núcleo magnético móvel entre três
enrolamentos de forma cilíndrica.
72

Equipamentos para monitorização de estruturas de engenharia civil
a) b)
Figura 3.10 – LVDT: a) vista exterior (http://www.macrosensors.com/) e b)Estrutura básica
(Félix, 2005)
Figura 3.11 – Princípio de funcionamento de um LVDT (http://www.macrosensors.com/)
73
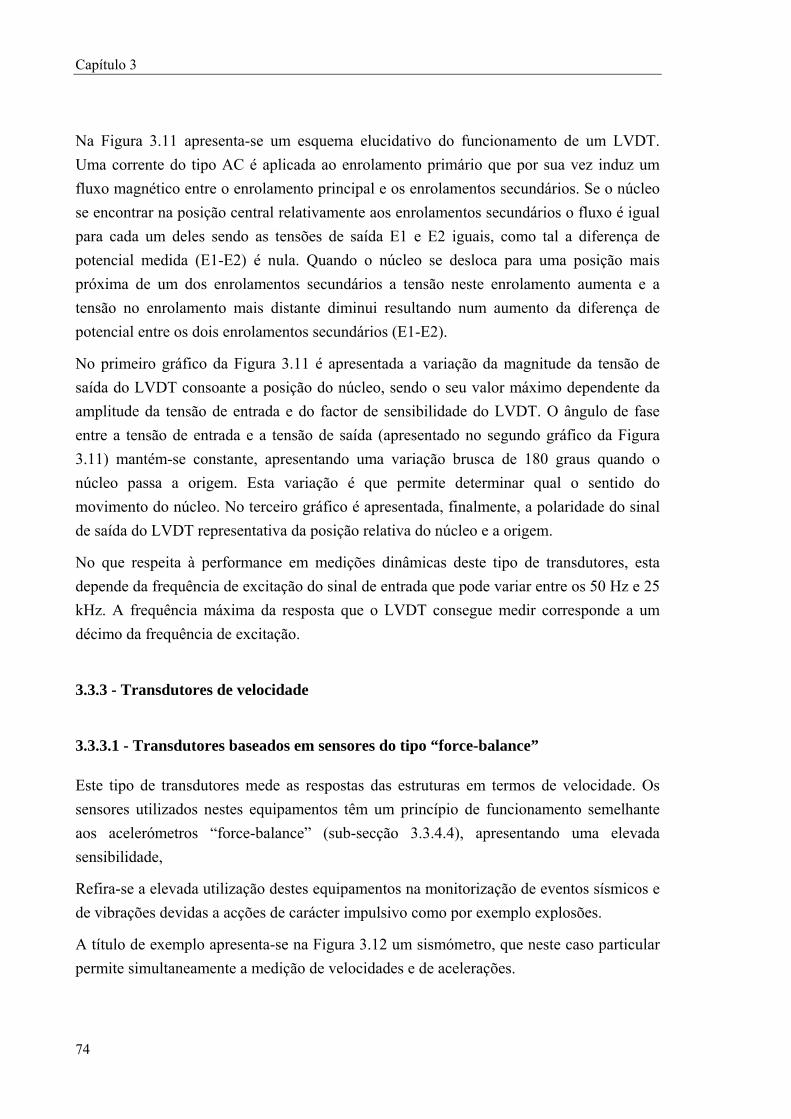
Capítulo 3
Na Figura 3.11 apresenta-se um esquema elucidativo do funcionamento de um LVDT.
Uma corrente do tipo AC é aplicada ao enrolamento primário que por sua vez induz um
fluxo magnético entre o enrolamento principal e os enrolamentos secundários. Se o núcleo
se encontrar na posição central relativamente aos enrolamentos secundários o fluxo é igual
para cada um deles sendo as tensões de saída E1 e E2 iguais, como tal a diferença de
potencial medida (E1-E2) é nula. Quando o núcleo se desloca para uma posição mais
próxima de um dos enrolamentos secundários a tensão neste enrolamento aumenta e a
tensão no enrolamento mais distante diminui resultando num aumento da diferença de
potencial entre os dois enrolamentos secundários (E1-E2).
No primeiro gráfico da Figura 3.11 é apresentada a variação da magnitude da tensão de
saída do LVDT consoante a posição do núcleo, sendo o seu valor máximo dependente da
amplitude da tensão de entrada e do factor de sensibilidade do LVDT. O ângulo de fase
entre a tensão de entrada e a tensão de saída (apresentado no segundo gráfico da Figura
3.11) mantém-se constante, apresentando uma variação brusca de 180 graus quando o
núcleo passa a origem. Esta variação é que permite determinar qual o sentido do
movimento do núcleo. No terceiro gráfico é apresentada, finalmente, a polaridade do sinal
de saída do LVDT representativa da posição relativa do núcleo e a origem.
No que respeita à performance em medições dinâmicas deste tipo de transdutores, esta
depende da frequência de excitação do sinal de entrada que pode variar entre os 50 Hz e 25
kHz. A frequência máxima da resposta que o LVDT consegue medir corresponde a um
décimo da frequência de excitação.
3.3.3 - Transdutores de velocidade
3.3.3.1 - Transdutores baseados em sensores do tipo “force-balance”
Este tipo de transdutores mede as respostas das estruturas em termos de velocidade. Os
sensores utilizados nestes equipamentos têm um princípio de funcionamento semelhante
aos acelerómetros “force-balance” (sub-secção 3.3.4.4), apresentando uma elevada
sensibilidade,
Refira-se a elevada utilização destes equipamentos na monitorização de eventos sísmicos e
de vibrações devidas a acções de carácter impulsivo como por exemplo explosões.
A título de exemplo apresenta-se na Figura 3.12 um sismómetro, que neste caso particular
permite simultaneamente a medição de velocidades e de acelerações.
74
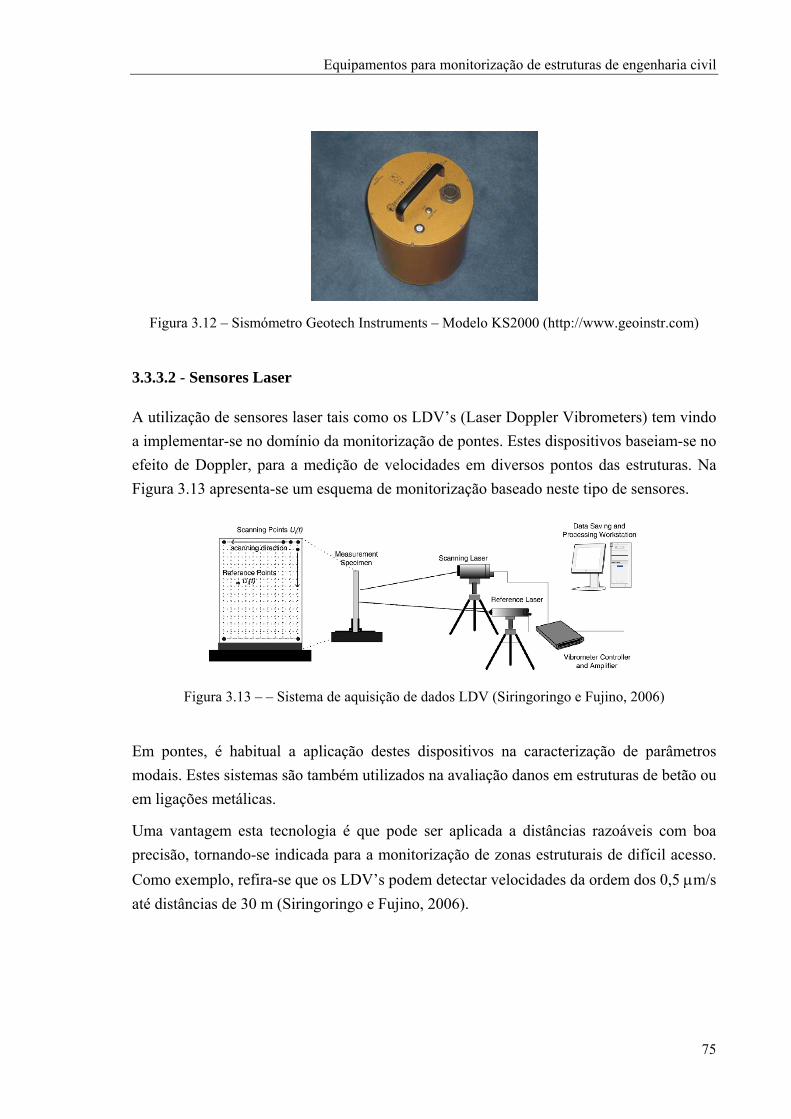
Equipamentos para monitorização de estruturas de engenharia civil
Figura 3.12 – Sismómetro Geotech Instruments – Modelo KS2000 (http://www.geoinstr.com)
3.3.3.2 - Sensores Laser
A utilização de sensores laser tais como os LDV’s (Laser Doppler Vibrometers) tem vindo
a implementar-se no domínio da monitorização de pontes. Estes dispositivos baseiam-se no
efeito de Doppler, para a medição de velocidades em diversos pontos das estruturas. Na
Figura 3.13 apresenta-se um esquema de monitorização baseado neste tipo de sensores.
Figura 3.13 – – Sistema de aquisição de dados LDV (Siringoringo e Fujino, 2006)
Em pontes, é habitual a aplicação destes dispositivos na caracterização de parâmetros
modais. Estes sistemas são também utilizados na avaliação danos em estruturas de betão ou
em ligações metálicas.
Uma vantagem esta tecnologia é que pode ser aplicada a distâncias razoáveis com boa
precisão, tornando-se indicada para a monitorização de zonas estruturais de difícil acesso.
Como exemplo, refira-se que os LDV’s podem detectar velocidades da ordem dos 0,5 m/s
até distâncias de 30 m (Siringoringo e Fujino, 2006).
75
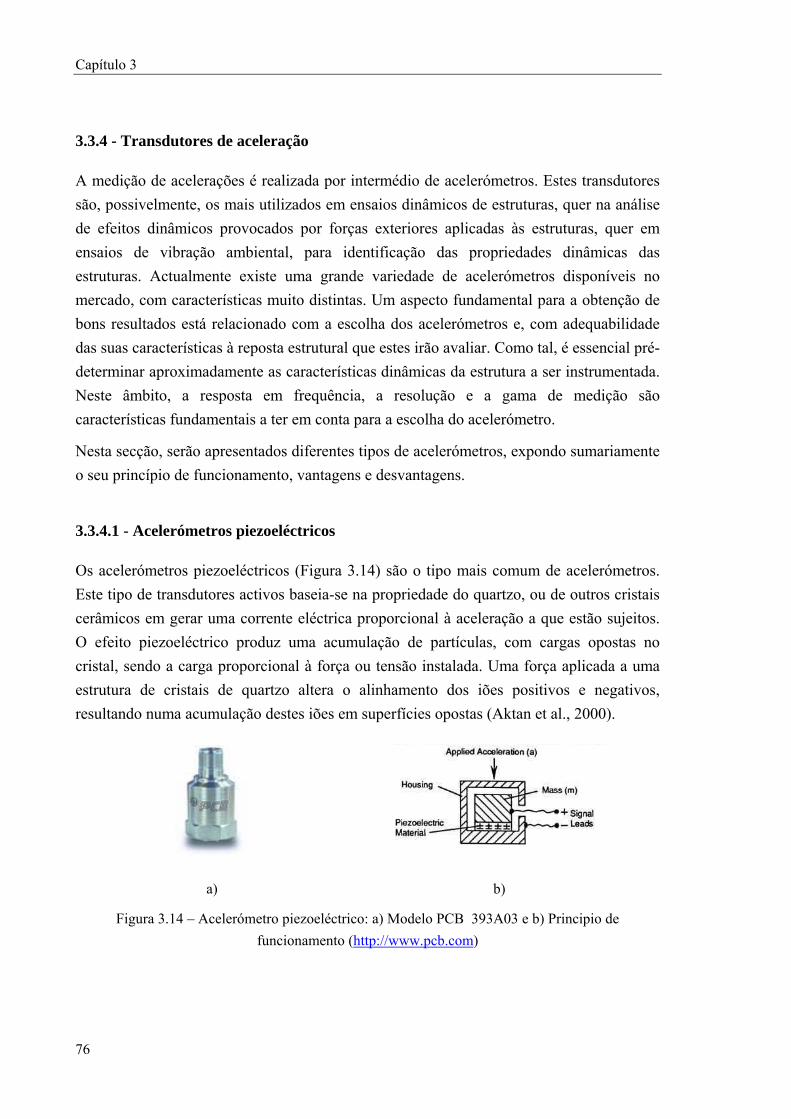
Capítulo 3
3.3.4 - Transdutores de aceleração
A medição de acelerações é realizada por intermédio de acelerómetros. Estes transdutores
são, possivelmente, os mais utilizados em ensaios dinâmicos de estruturas, quer na análise
de efeitos dinâmicos provocados por forças exteriores aplicadas às estruturas, quer em
ensaios de vibração ambiental, para identificação das propriedades dinâmicas das
estruturas. Actualmente existe uma grande variedade de acelerómetros disponíveis no
mercado, com características muito distintas. Um aspecto fundamental para a obtenção de
bons resultados está relacionado com a escolha dos acelerómetros e, com adequabilidade
das suas características à reposta estrutural que estes irão avaliar. Como tal, é essencial pré-
determinar aproximadamente as características dinâmicas da estrutura a ser instrumentada.
Neste âmbito, a resposta em frequência, a resolução e a gama de medição são
características fundamentais a ter em conta para a escolha do acelerómetro.
Nesta secção, serão apresentados diferentes tipos de acelerómetros, expondo sumariamente
o seu princípio de funcionamento, vantagens e desvantagens.
3.3.4.1 - Acelerómetros piezoeléctricos
Os acelerómetros piezoeléctricos (Figura 3.14) são o tipo mais comum de acelerómetros.
Este tipo de transdutores activos baseia-se na propriedade do quartzo, ou de outros cristais
cerâmicos em gerar uma corrente eléctrica proporcional à aceleração a que estão sujeitos.
O efeito piezoeléctrico produz uma acumulação de partículas, com cargas opostas no
cristal, sendo a carga proporcional à força ou tensão instalada. Uma força aplicada a uma
estrutura de cristais de quartzo altera o alinhamento dos iões positivos e negativos,
resultando numa acumulação destes iões em superfícies opostas (Aktan et al., 2000).
a) b)
Figura 3.14 – Acelerómetro piezoeléctrico: a) Modelo PCB 393A03 e b) Principio de
funcionamento (http://www.pcb.com)
76
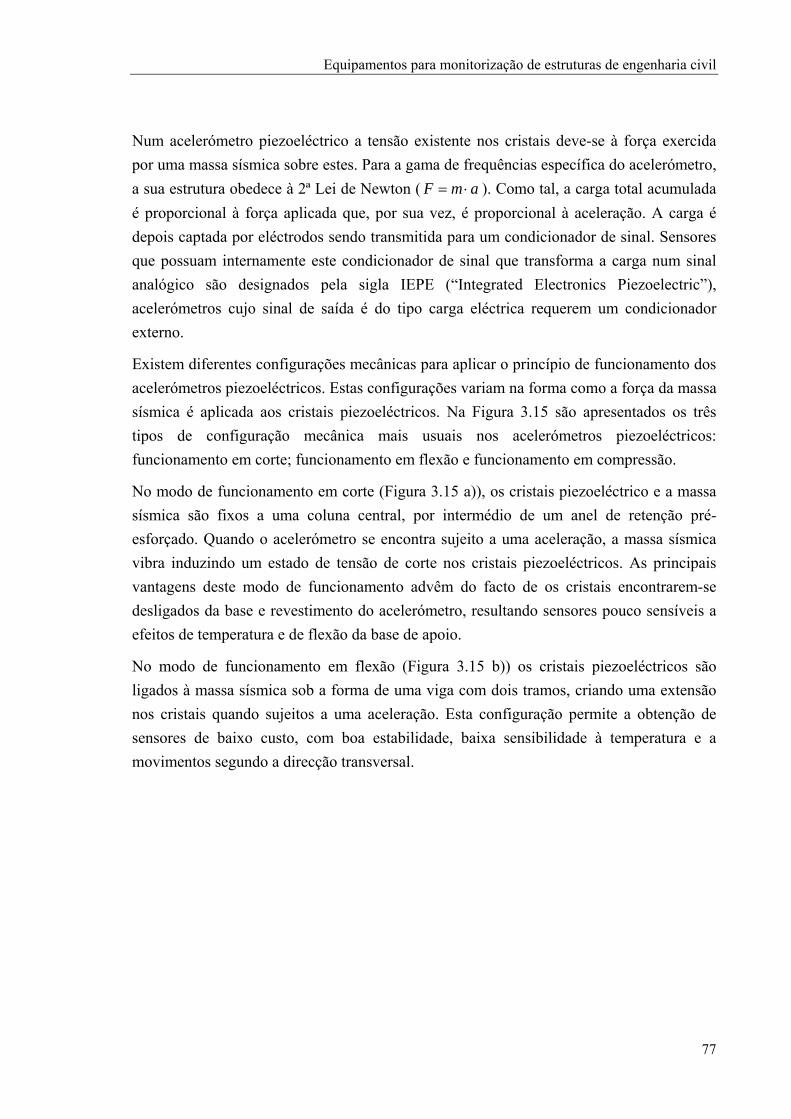
Equipamentos para monitorização de estruturas de engenharia civil
Num acelerómetro piezoeléctrico a tensão existente nos cristais deve-se à força exercida
por uma massa sísmica sobre estes. Para a gama de frequências específica do acelerómetro,
a sua estrutura obedece à 2ª Lei de Newton ( F m a ). Como tal, a carga total acumulada
é proporcional à força aplicada que, por sua vez, é proporcional à aceleração. A carga é
depois captada por eléctrodos sendo transmitida para um condicionador de sinal. Sensores
que possuam internamente este condicionador de sinal que transforma a carga num sinal
analógico são designados pela sigla IEPE (“Integrated Electronics Piezoelectric”),
acelerómetros cujo sinal de saída é do tipo carga eléctrica requerem um condicionador
externo.
Existem diferentes configurações mecânicas para aplicar o princípio de funcionamento dos
acelerómetros piezoeléctricos. Estas configurações variam na forma como a força da massa
sísmica é aplicada aos cristais piezoeléctricos. Na Figura 3.15 são apresentados os três
tipos de configuração mecânica mais usuais nos acelerómetros piezoeléctricos:
funcionamento em corte; funcionamento em flexão e funcionamento em compressão.
No modo de funcionamento em corte (Figura 3.15 a)), os cristais piezoeléctrico e a massa
sísmica são fixos a uma coluna central, por intermédio de um anel de retenção pré-
esforçado. Quando o acelerómetro se encontra sujeito a uma aceleração, a massa sísmica
vibra induzindo um estado de tensão de corte nos cristais piezoeléctricos. As principais
vantagens deste modo de funcionamento advêm do facto de os cristais encontrarem-se
desligados da base e revestimento do acelerómetro, resultando sensores pouco sensíveis a
efeitos de temperatura e de flexão da base de apoio.
No modo de funcionamento em flexão (Figura 3.15 b)) os cristais piezoeléctricos são
ligados à massa sísmica sob a forma de uma viga com dois tramos, criando uma extensão
nos cristais quando sujeitos a uma aceleração. Esta configuração permite a obtenção de
sensores de baixo custo, com boa estabilidade, baixa sensibilidade à temperatura e a
movimentos segundo a direcção transversal.
77
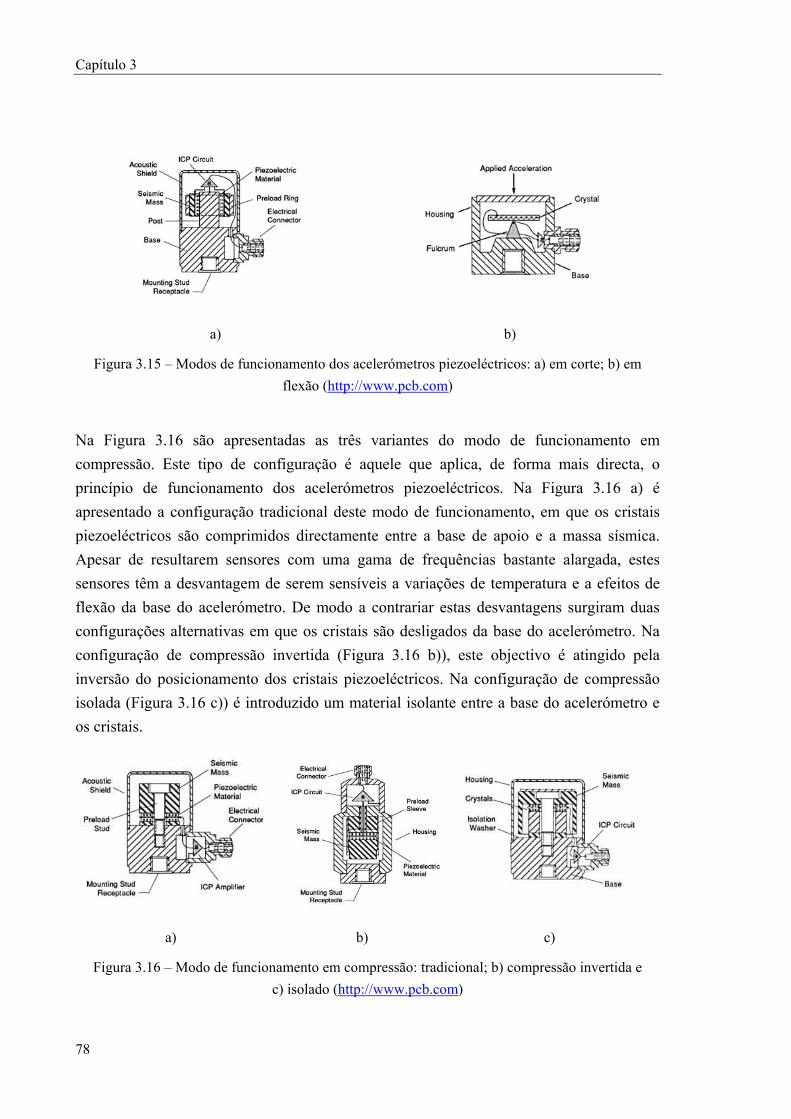
Capítulo 3
a) b)
Figura 3.15 – Modos de funcionamento dos acelerómetros piezoeléctricos: a) em corte; b) em
flexão (http://www.pcb.com)
Na Figura 3.16 são apresentadas as três variantes do modo de funcionamento em
compressão. Este tipo de configuração é aquele que aplica, de forma mais directa, o
princípio de funcionamento dos acelerómetros piezoeléctricos. Na Figura 3.16 a) é
apresentado a configuração tradicional deste modo de funcionamento, em que os cristais
piezoeléctricos são comprimidos directamente entre a base de apoio e a massa sísmica.
Apesar de resultarem sensores com uma gama de frequências bastante alargada, estes
sensores têm a desvantagem de serem sensíveis a variações de temperatura e a efeitos de
flexão da base do acelerómetro. De modo a contrariar estas desvantagens surgiram duas
configurações alternativas em que os cristais são desligados da base do acelerómetro. Na
configuração de compressão invertida (Figura 3.16 b)), este objectivo é atingido pela
inversão do posicionamento dos cristais piezoeléctricos. Na configuração de compressão
isolada (Figura 3.16 c)) é introduzido um material isolante entre a base do acelerómetro e
os cristais.
a) b) c)
Figura 3.16 – Modo de funcionamento em compressão: tradicional; b) compressão invertida e
c) isolado (http://www.pcb.com)
78
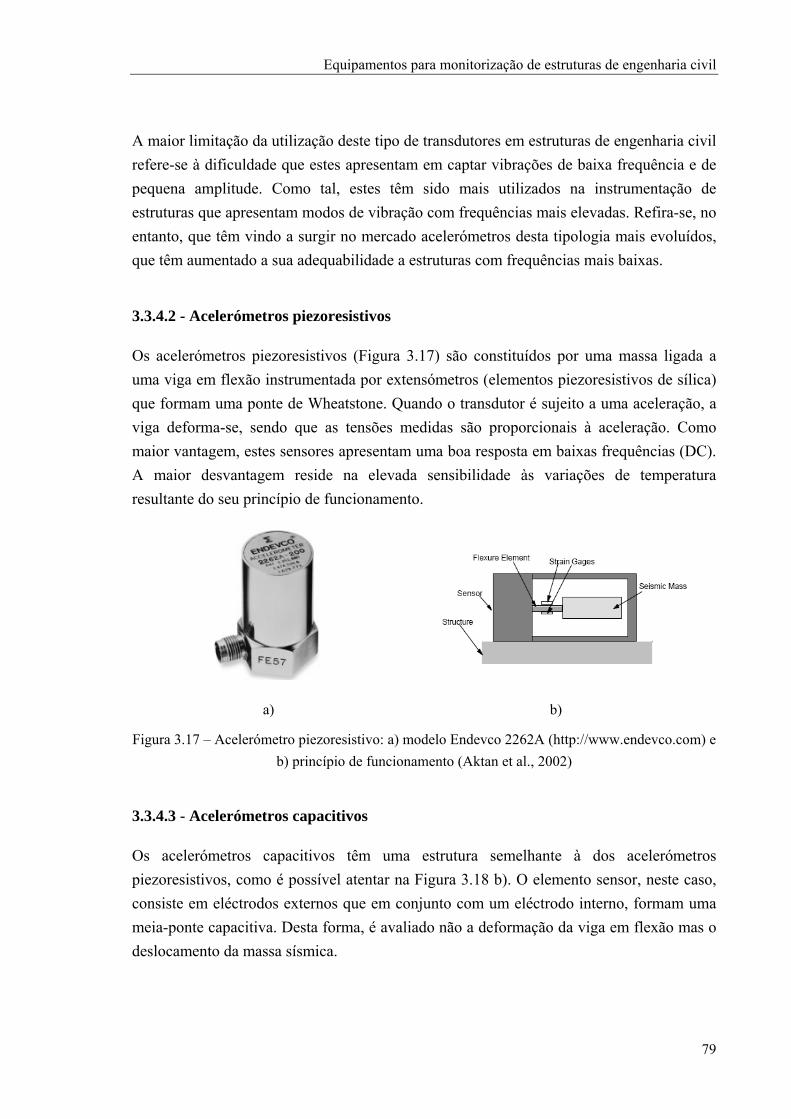
Equipamentos para monitorização de estruturas de engenharia civil
A maior limitação da utilização deste tipo de transdutores em estruturas de engenharia civil
refere-se à dificuldade que estes apresentam em captar vibrações de baixa frequência e de
pequena amplitude. Como tal, estes têm sido mais utilizados na instrumentação de
estruturas que apresentam modos de vibração com frequências mais elevadas. Refira-se, no
entanto, que têm vindo a surgir no mercado acelerómetros desta tipologia mais evoluídos,
que têm aumentado a sua adequabilidade a estruturas com frequências mais baixas.
3.3.4.2 - Acelerómetros piezoresistivos
Os acelerómetros piezoresistivos (Figura 3.17) são constituídos por uma massa ligada a
uma viga em flexão instrumentada por extensómetros (elementos piezoresistivos de sílica)
que formam uma ponte de Wheatstone. Quando o transdutor é sujeito a uma aceleração, a
viga deforma-se, sendo que as tensões medidas são proporcionais à aceleração. Como
maior vantagem, estes sensores apresentam uma boa resposta em baixas frequências (DC).
A maior desvantagem reside na elevada sensibilidade às variações de temperatura
resultante do seu princípio de funcionamento.
a) b)
Figura 3.17 – Acelerómetro piezoresistivo: a) modelo Endevco 2262A (http://www.endevco.com) e
b) princípio de funcionamento (Aktan et al., 2002)
3.3.4.3 - Acelerómetros capacitivos
Os acelerómetros capacitivos têm uma estrutura semelhante à dos acelerómetros
piezoresistivos, como é possível atentar na Figura 3.18 b). O elemento sensor, neste caso,
consiste em eléctrodos externos que em conjunto com um eléctrodo interno, formam uma
meia-ponte capacitiva. Desta forma, é avaliado não a deformação da viga em flexão mas o
deslocamento da massa sísmica.
79
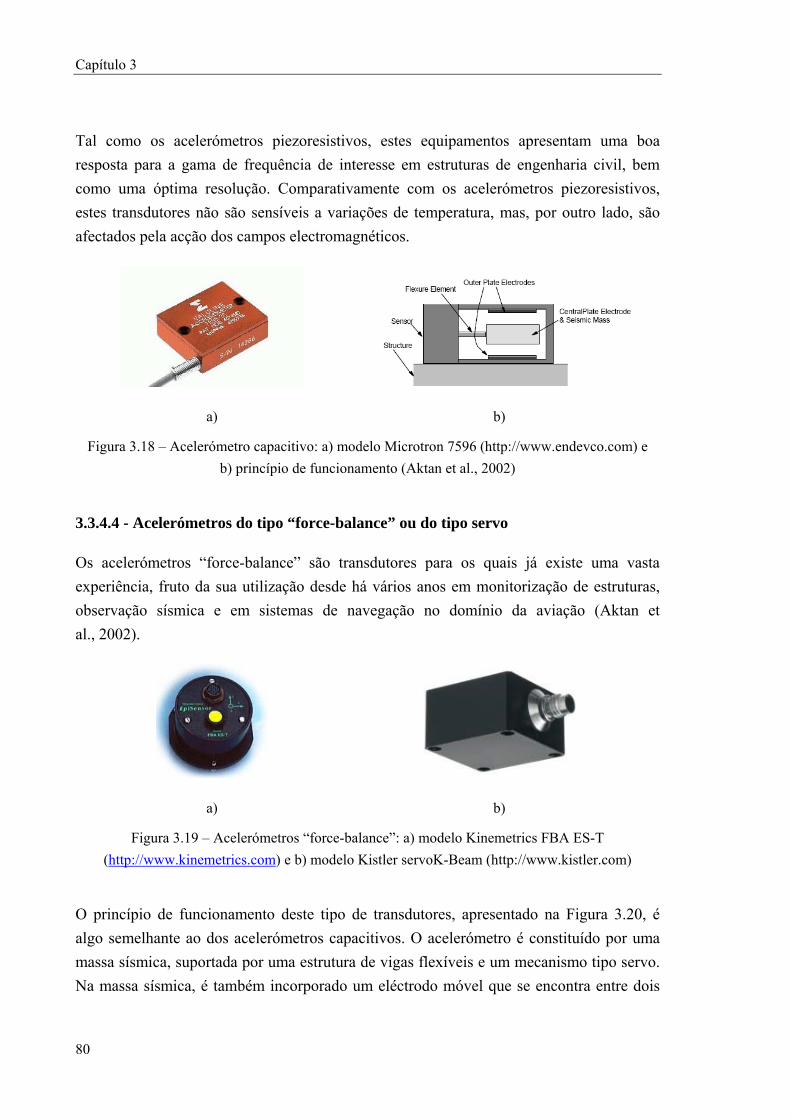
Capítulo 3
Tal como os acelerómetros piezoresistivos, estes equipamentos apresentam uma boa
resposta para a gama de frequência de interesse em estruturas de engenharia civil, bem
como uma óptima resolução. Comparativamente com os acelerómetros piezoresistivos,
estes transdutores não são sensíveis a variações de temperatura, mas, por outro lado, são
afectados pela acção dos campos electromagnéticos.
a) b)
Figura 3.18 – Acelerómetro capacitivo: a) modelo Microtron 7596 (http://www.endevco.com) e
b) princípio de funcionamento (Aktan et al., 2002)
3.3.4.4 - Acelerómetros do tipo “force-balance” ou do tipo servo
Os acelerómetros “force-balance” são transdutores para os quais já existe uma vasta
experiência, fruto da sua utilização desde há vários anos em monitorização de estruturas,
observação sísmica e em sistemas de navegação no domínio da aviação (Aktan et
al., 2002).
a) b)
Figura 3.19 – Acelerómetros “force-balance”: a) modelo Kinemetrics FBA ES-T
(http://www.kinemetrics.com) e b) modelo Kistler servoK-Beam (http://www.kistler.com)
O princípio de funcionamento deste tipo de transdutores, apresentado na Figura 3.20, é
algo semelhante ao dos acelerómetros capacitivos. O acelerómetro é constituído por uma
massa sísmica, suportada por uma estrutura de vigas flexíveis e um mecanismo tipo servo.
Na massa sísmica, é também incorporado um eléctrodo móvel que se encontra entre dois
80
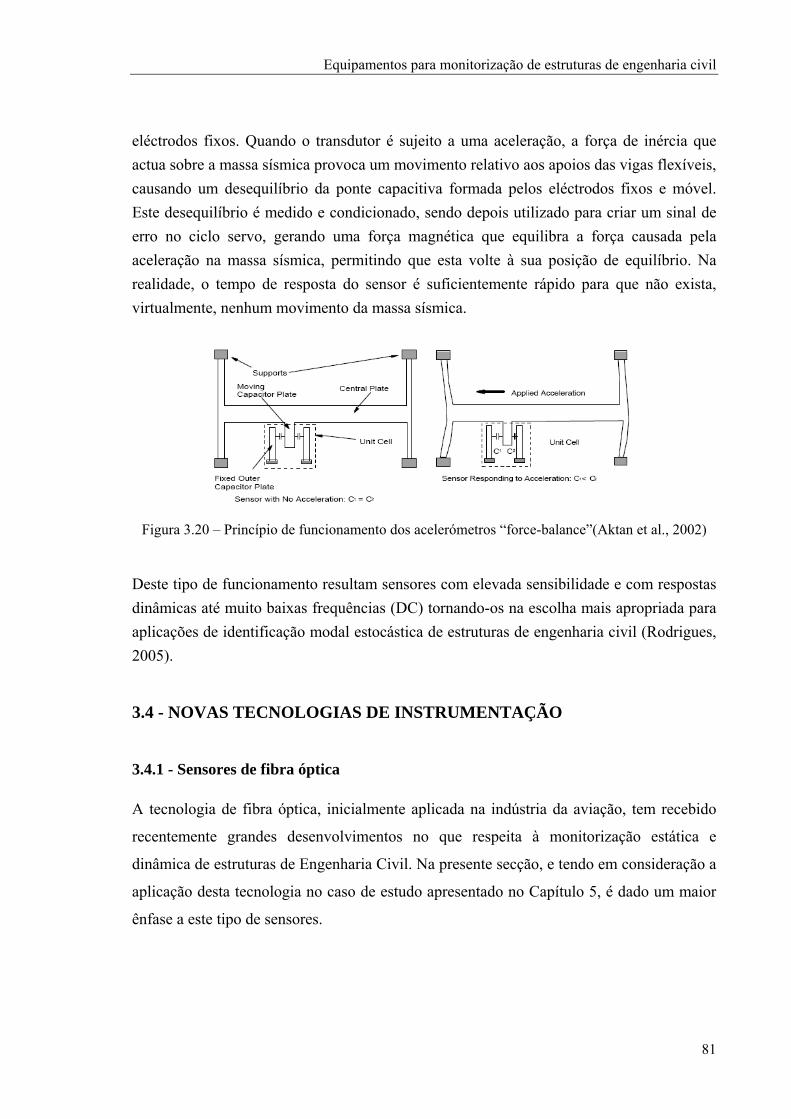
Equipamentos para monitorização de estruturas de engenharia civil
eléctrodos fixos. Quando o transdutor é sujeito a uma aceleração, a força de inércia que
actua sobre a massa sísmica provoca um movimento relativo aos apoios das vigas flexíveis,
causando um desequilíbrio da ponte capacitiva formada pelos eléctrodos fixos e móvel.
Este desequilíbrio é medido e condicionado, sendo depois utilizado para criar um sinal de
erro no ciclo servo, gerando uma força magnética que equilibra a força causada pela
aceleração na massa sísmica, permitindo que esta volte à sua posição de equilíbrio. Na
realidade, o tempo de resposta do sensor é suficientemente rápido para que não exista,
virtualmente, nenhum movimento da massa sísmica.
Figura 3.20 – Princípio de funcionamento dos acelerómetros “force-balance”(Aktan et al., 2002)
Deste tipo de funcionamento resultam sensores com elevada sensibilidade e com respostas
dinâmicas até muito baixas frequências (DC) tornando-os na escolha mais apropriada para
aplicações de identificação modal estocástica de estruturas de engenharia civil (Rodrigues,
2005).
3.4 - NOVAS TECNOLOGIAS DE INSTRUMENTAÇÃO
3.4.1 - Sensores de fibra óptica
A tecnologia de fibra óptica, inicialmente aplicada na indústria da aviação, tem recebido
recentemente grandes desenvolvimentos no que respeita à monitorização estática e
dinâmica de estruturas de Engenharia Civil. Na presente secção, e tendo em consideração a
aplicação desta tecnologia no caso de estudo apresentado no Capítulo 5, é dado um maior
ênfase a este tipo de sensores.
81
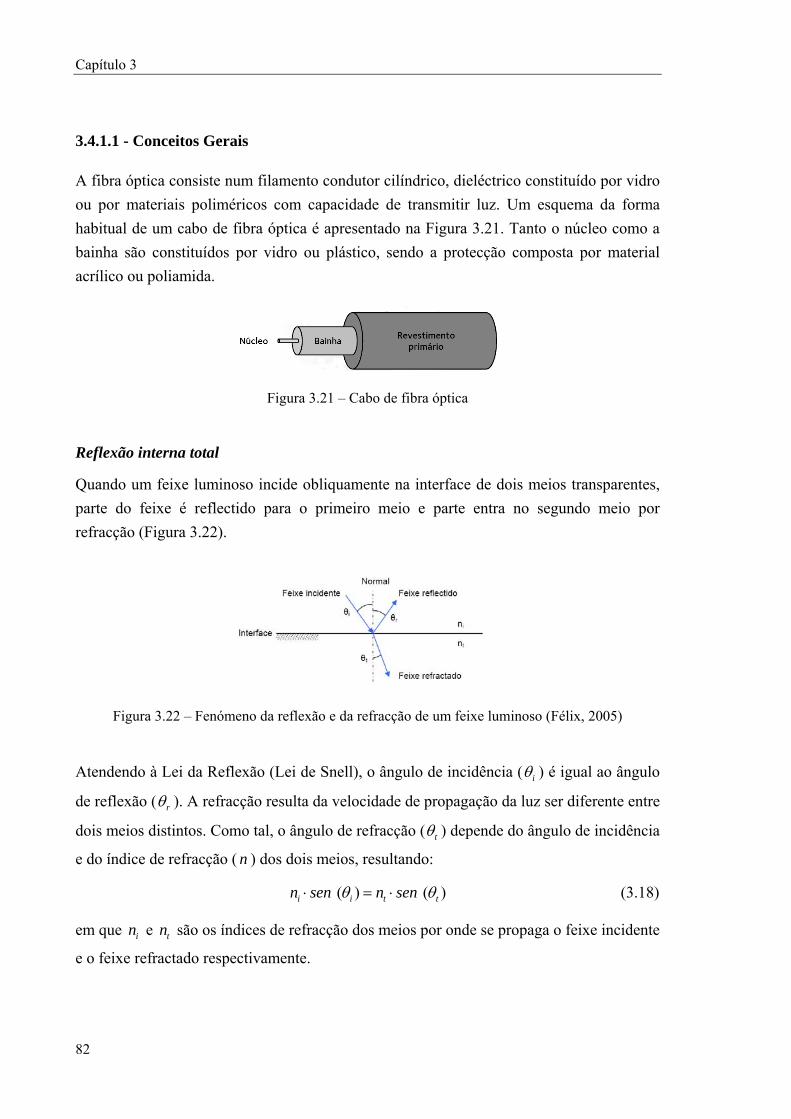
Capítulo 3
3.4.1.1 - Conceitos Gerais
A fibra óptica consiste num filamento condutor cilíndrico, dieléctrico constituído por vidro
ou por materiais poliméricos com capacidade de transmitir luz. Um esquema da forma
habitual de um cabo de fibra óptica é apresentado na Figura 3.21. Tanto o núcleo como a
bainha são constituídos por vidro ou plástico, sendo a protecção composta por material
acrílico ou poliamida.
Figura 3.21 – Cabo de fibra óptica
Reflexão interna total
Quando um feixe luminoso incide obliquamente na interface de dois meios transparentes,
parte do feixe é reflectido para o primeiro meio e parte entra no segundo meio por
refracção (Figura 3.22).
Figura 3.22 – Fenómeno da reflexão e da refracção de um feixe luminoso (Félix, 2005)
Atendendo à Lei da Reflexão (Lei de Snell), o ângulo de incidência ( i ) é igual ao ângulo
de reflexão ( r ). A refracção resulta da velocidade de propagação da luz ser diferente entre
dois meios distintos. Como tal, o ângulo de refracção ( t ) depende do ângulo de incidência
e do índice de refracção ( ) dos dois meios, resultando: n
( ) ( )i i tn sen n sen t (3.18)
em que e são os índices de refracção dos meios por onde se propaga o feixe incidente
e o feixe refractado respectivamente.
in tn
82

Equipamentos para monitorização de estruturas de engenharia civil
Considerando dois meios transparentes em que , para valores crescentes de in n t i ,
aumentam também os valores de t , podendo-se atingir um ângulo incidente crítico c
para o qual 90ºt ( tsen 1 ):
1 tc
i
nsen
n
(3.19)
Para ângulos de incidência cujo valor é superior a c , toda a energia incidente é reflectida
sendo este fenómeno denominado por reflexão interna total, assentando o processo da
condução da luz nas fibras ópticas neste facto (Félix, 2005). Tal é conseguido devido ao
maior índice de refracção do núcleo face à bainha e, pela imposição de um ângulo máximo,
para o cone de raios à entrada da fibra que se propagam no núcleo, garantido que os
ângulos incidentes na interface entre o núcleo e a bainha são superiores a t .
Desta forma é possível definir abertura numérica (AN) de uma fibra óptica, que representa
a quantidade de luz que pode ser captada por esta. Considerando o índice de refracção do
ar igual à unidade, AN é dada por:
2 ( )máx f bAN sen n n 2 (3.20)
em que máx é definido como ângulo de aceitação e representa o maior ângulo de
incidência que um raio pode ter, para que ocorra reflexão interna total e, fn e são os
índices de incidência para o núcleo e para a bainha da fibra óptica, respectivamente.
bn
Tipos de fibras ópticas
Existem dois tipos de configurações para as fibras ópticas: monomodo e multimodo.
Nas fibras monomodo (Figura 3.23 a)), o diâmetro do núcleo não ultrapassa alguns
microns, havendo apenas um modo de propagação em que a onda se propaga somente no
modo axial. Este tipo de fibras, comparadas com as fibras multimodo tem reduzidas perdas
de sinal, permitindo elevadas taxas de transmissão e resoluções, necessitando, no entanto
de fontes laser especiais.
As fibras multimodo apresentam um diâmetro do núcleo bastante superior (50 a 100 m),
sendo que neste tipo de fibras a propagação das ondas obedece às leis da óptica
geométrica, ocorrendo reflexões internas totais na interface entre o núcleo e a bainha.
Existem dois tipos de configuração para as fibras multimodo: fibras de índice descontínuo
e fibras de índice gradual.
83
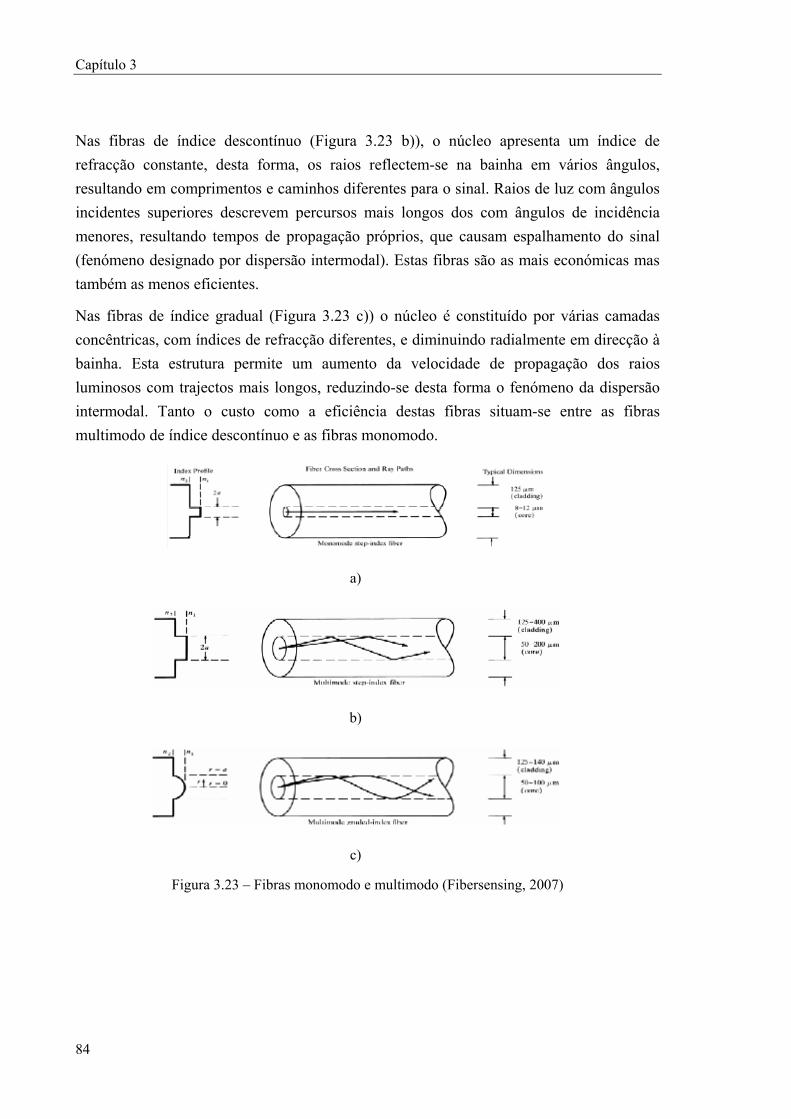
Capítulo 3
Nas fibras de índice descontínuo (Figura 3.23 b)), o núcleo apresenta um índice de
refracção constante, desta forma, os raios reflectem-se na bainha em vários ângulos,
resultando em comprimentos e caminhos diferentes para o sinal. Raios de luz com ângulos
incidentes superiores descrevem percursos mais longos dos com ângulos de incidência
menores, resultando tempos de propagação próprios, que causam espalhamento do sinal
(fenómeno designado por dispersão intermodal). Estas fibras são as mais económicas mas
também as menos eficientes.
Nas fibras de índice gradual (Figura 3.23 c)) o núcleo é constituído por várias camadas
concêntricas, com índices de refracção diferentes, e diminuindo radialmente em direcção à
bainha. Esta estrutura permite um aumento da velocidade de propagação dos raios
luminosos com trajectos mais longos, reduzindo-se desta forma o fenómeno da dispersão
intermodal. Tanto o custo como a eficiência destas fibras situam-se entre as fibras
multimodo de índice descontínuo e as fibras monomodo.
a)
b)
c)
Figura 3.23 – Fibras monomodo e multimodo (Fibersensing, 2007)
84
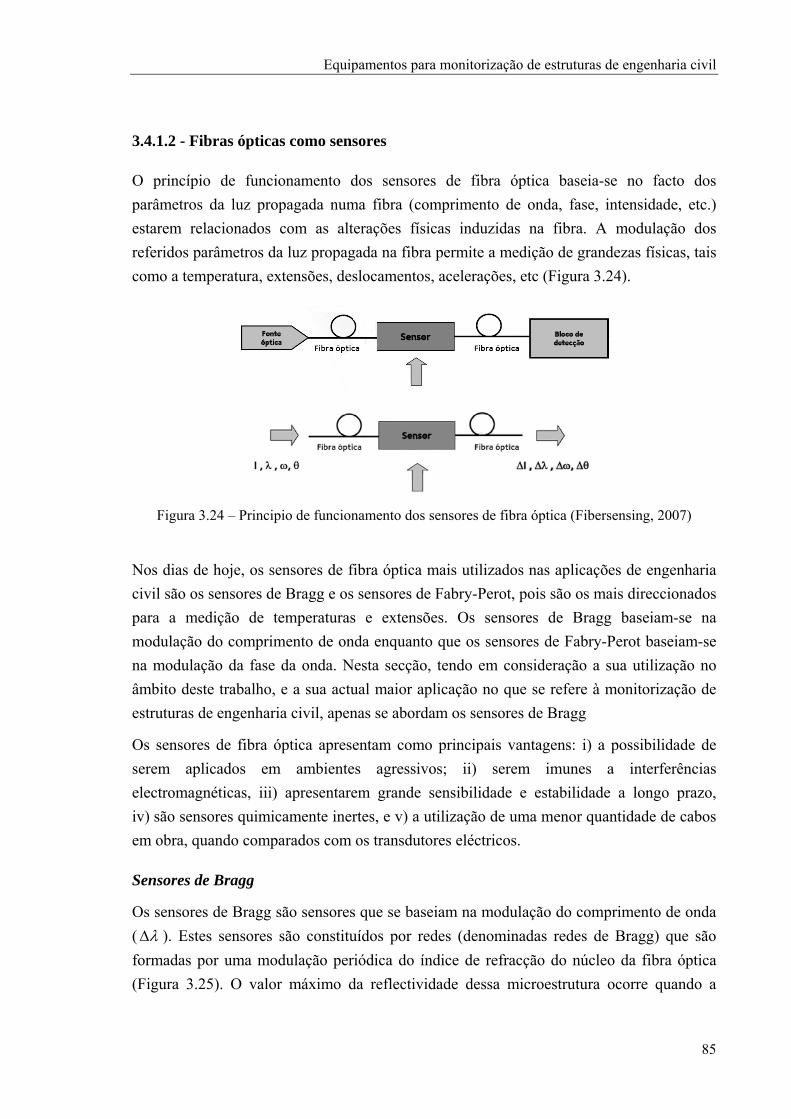
Equipamentos para monitorização de estruturas de engenharia civil
3.4.1.2 - Fibras ópticas como sensores
O princípio de funcionamento dos sensores de fibra óptica baseia-se no facto dos
parâmetros da luz propagada numa fibra (comprimento de onda, fase, intensidade, etc.)
estarem relacionados com as alterações físicas induzidas na fibra. A modulação dos
referidos parâmetros da luz propagada na fibra permite a medição de grandezas físicas, tais
como a temperatura, extensões, deslocamentos, acelerações, etc (Figura 3.24).
Figura 3.24 – Principio de funcionamento dos sensores de fibra óptica (Fibersensing, 2007)
Nos dias de hoje, os sensores de fibra óptica mais utilizados nas aplicações de engenharia
civil são os sensores de Bragg e os sensores de Fabry-Perot, pois são os mais direccionados
para a medição de temperaturas e extensões. Os sensores de Bragg baseiam-se na
modulação do comprimento de onda enquanto que os sensores de Fabry-Perot baseiam-se
na modulação da fase da onda. Nesta secção, tendo em consideração a sua utilização no
âmbito deste trabalho, e a sua actual maior aplicação no que se refere à monitorização de
estruturas de engenharia civil, apenas se abordam os sensores de Bragg
Os sensores de fibra óptica apresentam como principais vantagens: i) a possibilidade de
serem aplicados em ambientes agressivos; ii) serem imunes a interferências
electromagnéticas, iii) apresentarem grande sensibilidade e estabilidade a longo prazo,
iv) são sensores quimicamente inertes, e v) a utilização de uma menor quantidade de cabos
em obra, quando comparados com os transdutores eléctricos.
Sensores de Bragg
Os sensores de Bragg são sensores que se baseiam na modulação do comprimento de onda
( ). Estes sensores são constituídos por redes (denominadas redes de Bragg) que são
formadas por uma modulação periódica do índice de refracção do núcleo da fibra óptica
(Figura 3.25). O valor máximo da reflectividade dessa microestrutura ocorre quando a
85
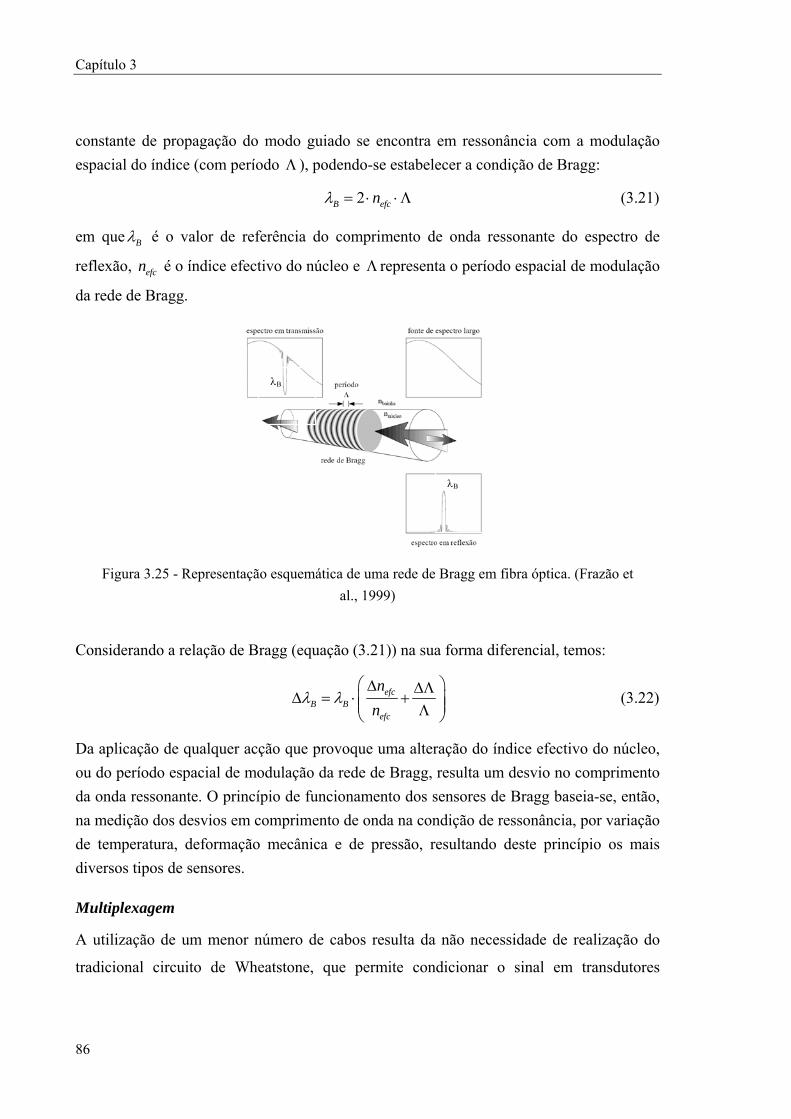
Capítulo 3
constante de propagação do modo guiado se encontra em ressonância com a modulação
espacial do índice (com período ), podendo-se estabelecer a condição de Bragg:
2B efcn (3.21)
em que B é o valor de referência do comprimento de onda ressonante do espectro de
reflexão, é o índice efectivo do núcleo e efcn representa o período espacial de modulação
da rede de Bragg.
B
B
Figura 3.25 - Representação esquemática de uma rede de Bragg em fibra óptica. (Frazão et
al., 1999)
Considerando a relação de Bragg (equação (3.21)) na sua forma diferencial, temos:
efcB B
efc
n
n
(3.22)
Da aplicação de qualquer acção que provoque uma alteração do índice efectivo do núcleo,
ou do período espacial de modulação da rede de Bragg, resulta um desvio no comprimento
da onda ressonante. O princípio de funcionamento dos sensores de Bragg baseia-se, então,
na medição dos desvios em comprimento de onda na condição de ressonância, por variação
de temperatura, deformação mecânica e de pressão, resultando deste princípio os mais
diversos tipos de sensores.
Multiplexagem
A utilização de um menor número de cabos resulta da não necessidade de realização do
tradicional circuito de Wheatstone, que permite condicionar o sinal em transdutores
86
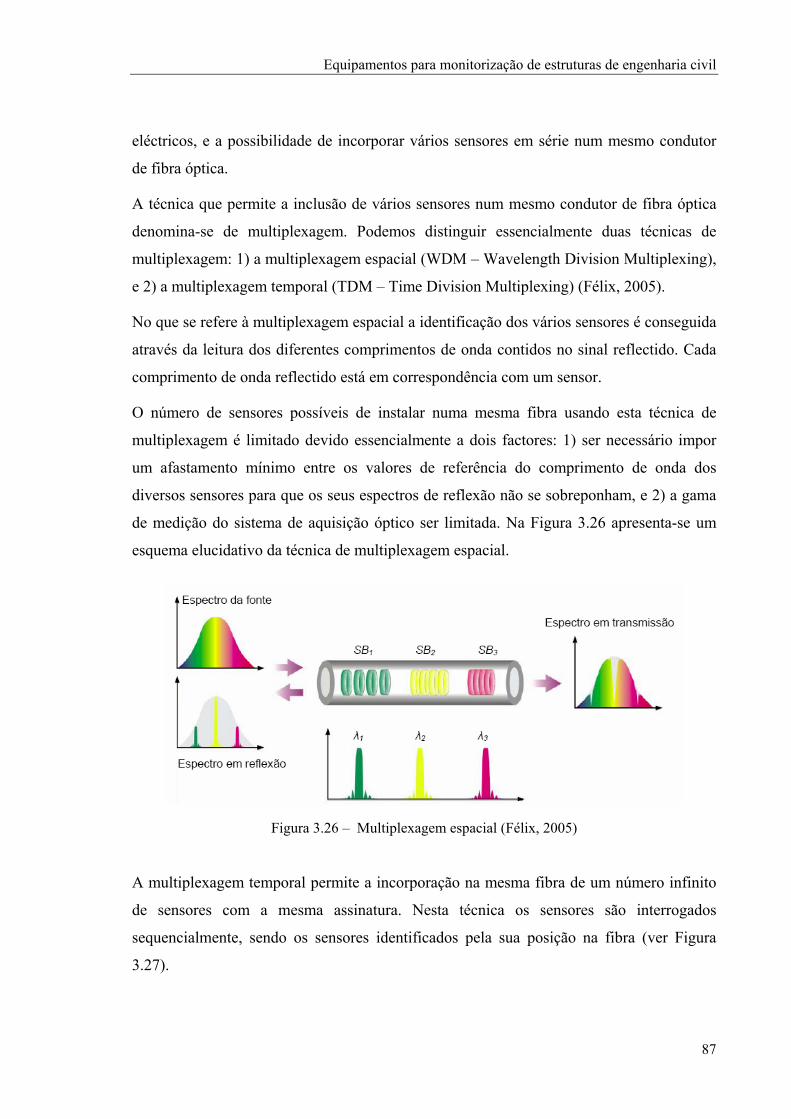
Equipamentos para monitorização de estruturas de engenharia civil
eléctricos, e a possibilidade de incorporar vários sensores em série num mesmo condutor
de fibra óptica.
A técnica que permite a inclusão de vários sensores num mesmo condutor de fibra óptica
denomina-se de multiplexagem. Podemos distinguir essencialmente duas técnicas de
multiplexagem: 1) a multiplexagem espacial (WDM – Wavelength Division Multiplexing),
e 2) a multiplexagem temporal (TDM – Time Division Multiplexing) (Félix, 2005).
No que se refere à multiplexagem espacial a identificação dos vários sensores é conseguida
através da leitura dos diferentes comprimentos de onda contidos no sinal reflectido. Cada
comprimento de onda reflectido está em correspondência com um sensor.
O número de sensores possíveis de instalar numa mesma fibra usando esta técnica de
multiplexagem é limitado devido essencialmente a dois factores: 1) ser necessário impor
um afastamento mínimo entre os valores de referência do comprimento de onda dos
diversos sensores para que os seus espectros de reflexão não se sobreponham, e 2) a gama
de medição do sistema de aquisição óptico ser limitada. Na Figura 3.26 apresenta-se um
esquema elucidativo da técnica de multiplexagem espacial.
Figura 3.26 – Multiplexagem espacial (Félix, 2005)
A multiplexagem temporal permite a incorporação na mesma fibra de um número infinito
de sensores com a mesma assinatura. Nesta técnica os sensores são interrogados
sequencialmente, sendo os sensores identificados pela sua posição na fibra (ver Figura
3.27).
87

Capítulo 3
A identificação da posição é realizada medindo-se o tempo que um impulso luminoso
demora desde a sua emissão, até à recepção no sistema de interrogação e após ter sido
reflectido no sensor. Esta técnica tem como limitação a redução da frequência de
amostragem, não sendo por isso aplicável em ensaios dinâmicos.
Figura 3.27 – Multiplexagem temporal (Félix, 2005)
A multiplexagem pode-se aplicar em série, em paralelo (Figura 3.28) e de uma forma
híbrida (Figura 3.29).
Figura 3.28 – Multiplexagem em série e em paralelo (Félix, 2005)
88
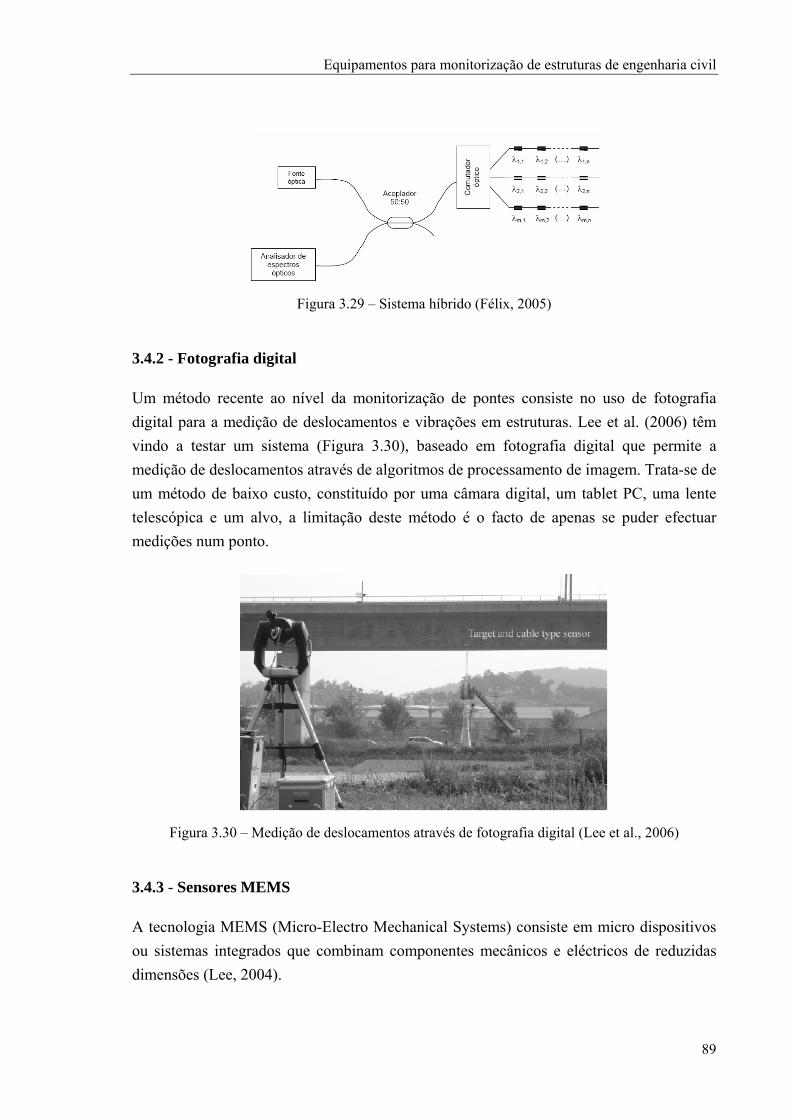
Equipamentos para monitorização de estruturas de engenharia civil
Figura 3.29 – Sistema híbrido (Félix, 2005)
3.4.2 - Fotografia digital
Um método recente ao nível da monitorização de pontes consiste no uso de fotografia
digital para a medição de deslocamentos e vibrações em estruturas. Lee et al. (2006) têm
vindo a testar um sistema (Figura 3.30), baseado em fotografia digital que permite a
medição de deslocamentos através de algoritmos de processamento de imagem. Trata-se de
um método de baixo custo, constituído por uma câmara digital, um tablet PC, uma lente
telescópica e um alvo, a limitação deste método é o facto de apenas se puder efectuar
medições num ponto.
Figura 3.30 – Medição de deslocamentos através de fotografia digital (Lee et al., 2006)
3.4.3 - Sensores MEMS
A tecnologia MEMS (Micro-Electro Mechanical Systems) consiste em micro dispositivos
ou sistemas integrados que combinam componentes mecânicos e eléctricos de reduzidas
dimensões (Lee, 2004).
89
Capítulo 3
90
O desenvolvimento desta tecnologia tem permitido o aparecimento de uma nova geração
de sensores baseados em chips que permitem não só actividades de monitorização, tais
como a medição de velocidades e acelerações, como também a realização de actividades de
controlo. Estes dispositivos apresentam inúmeras vantagens, tais como: i) baixo custo; ii)
maior sensibilidade e rapidez e iii) sensores mais compactos.
Na Figura 3.26 apresenta-se, a título de exemplo, um protótipo de um sistema de
monitorização inteligente baseado nesta tecnologia e vocacionado para a medição de
acelerações, denominado de RIMS.
Figura 3.26 – Sistema RIMS (Lee, 2004)
CAPÍTULO 4
METODOLOGIAS EXPERIMENTAIS PARA
CARACTERIZAÇÃO DO TRÁFEGO FERROVIÁRIO
4.1 - INTRODUÇÃO
No presente capítulo é apresentado o algoritmo “Bridge Weigh-in-Motion” (B-WIM)
implementado no âmbito desta dissertação, sendo descritos os principais princípios
inerentes ao método aplicado, bem como a sua implementação computacional no programa
Matlab (Matlab, 2007).
A precisão do algoritmo implementado é fortemente afectada pela determinação da linha
de influência da estrutura. Tendo em conta a dificuldade em obter uma estimativa rigorosa
da linha de influência por via de métodos numéricos, esta, deve ser obtida de forma
experimental. Neste contexto é apresentado também um método de calibração da linha de
influência, que se baseia na passagem de um determinado veículo cujas características são
conhecidas.
Tendo em conta o esforço e os custos inerentes à execução de campanhas experimentais,
foi realizada uma primeira validação do algoritmo implementando, por intermédio de um
exemplo numérico simples, que também teve o objectivo de identificar as suas limitações.
Finalmente é introduzida a pré-norma europeia prEN 15528 (CEN, 2007) que é relativa à
classificação do tráfego e das vias ferroviárias.
Capítulo 4
4.2 - ESTRUTURAS ADEQUADAS À APLICAÇÃO DE ALGORITMOS DE
PESAGEM EM MOVIMENTO
As características das estruturas para as quais se prevê a aplicação de algoritmos “B-WIM”
são de particular importância para a obtenção de bons resultados. Neste âmbito refiram-se
o vão e as propriedades dinâmicas da estrutura.
No caso do tráfego rodoviário, estas ferramentas têm sido aplicadas em pontes de pequeno
vão. Este facto deve-se à natureza dos algoritmos “B-WIM”. Estes algoritmos são, na sua
essência, algoritmos de optimização, em que se minimiza uma determinada função, em
ordem aos parâmetros caracterizadores dos veículos, sejam eles velocidades, distâncias
entre eixos e cargas. Se o número de cargas presentes no tabuleiro da ponte for elevado,
poderão resultar soluções não reais para os processos de optimização. Numa ponte de
pequeno vão existe sempre um número reduzido de cargas simultaneamente presentes no
tabuleiro.
Por outro lado, as características dinâmicas das estruturas são também relevantes. Para que
se possam obter bons resultados, os efeitos dinâmicos decorrentes da passagem de tráfego
devem ser reduzidos e/ou filtráveis, ou seja, a resposta dinâmica da estrutura deve-se
encontrar em bandas de frequências suficientemente afastadas das frequências associadas à
acção do tráfego, resultantes da combinação entre as velocidades e os espaçamentos entre
eixos dos veículos. Nestas situações é possível isolar as respostas estáticas por intermédio
da aplicação de filtros digitais. Neste âmbito, as pontes de pequeno vão apresentam
também propriedades adequadas, pois apresentam normalmente frequências naturais
elevadas, suficientemente afastadas das frequências da acção do tráfego para uma vasta
gama de velocidades.
A única desvantagem deste tipo de estruturas, que não deixa de ser uma consequência das
suas vantagens, prende-se com os baixos níveis de deformação que estas apresentam.
Sendo, muitas das vezes, difícil avaliar as deformações deste tipo de pontes com um rigor
elevado.
4.3 - ALGORITMO “B-WIM”
Para a caracterização do tráfego ferroviário foi implementado um algoritmo “B-WIM” em
Matlab. O algoritmo desenvolvido no âmbito deste trabalho, tendo em conta os objectivos
do mesmo, é do tipo unidimensional, e parte do pressuposto do conhecimento das medidas
de deformação em dois pontos localizados no carril sobre a ponte e um ponto do tabuleiro.
92
Metodologias experimentais para caracterização do tráfego ferroviário
A escolha de um algoritmo do tipo unidimensional deve-se ao facto de, ao contrário do que
acontece no tráfego rodoviário, no tráfego ferroviário o caminho das cargas é
perfeitamente conhecido e definido pela geometria da via.
4.3.1 - Pré-processamento
Numa primeira fase, é necessário realizar o processamento de sinal adquirido pelo sistema
de aquisição. Nesta fase, são realizadas operações de leitura das séries temporais,
eliminação de tendências, aplicação de filtros e, se necessário, realização de operações de
decimação de sinal.
A aplicação de filtros é de particular importância para este sistema. De forma a obter uma
boa estimativa das cargas estáticas ferroviárias, é necessário isolar a reposta estática da
estrutura. Neste âmbito, é importante o conhecimento prévio do comportamento dinâmico
da estrutura, para que seja possível definir um filtro adequado.
O mesmo filtro considerado para as deformações da ponte, tendo em conta as propriedades
dinâmicas do carril, não pode ser utilizado para as suas deformações. Como tal,
considerando a importância do sincronismo entre os registos de deformação do carril e da
ponte, é necessário utilizar métodos de aplicação de filtros do tipo foward-backward
filtering.
4.3.2 - Geometria e propriedades cinemáticas do comboio
Diversos autores mostraram que é possível identificar a geometria e a velocidade dos
comboios, usando apenas informações relativas à deformação da ponte.
No entanto, a precisão obtida em termos de posições dos eixos não é elevada, sendo que
em grande parte das situações apenas é possível proceder à identificação dos bogies e não
dos eixos do comboio. Tal deve-se ao facto do comprimento da linha de influência da
ponte ser demasiado extenso quando comparado com a distância entre eixos do bogie.
De modo a ultrapassar esta dificuldade, concluiu-se que os registos das deformações da
ponte não são os indicados para obter uma precisão conveniente na estimativa da
geometria do comboio. Foram então utilizados registos de deformação em dois pontos do
carril. Sendo o comprimento da linha de influência, em termos de deformação do carril,
curto, é possível identificar os picos correspondentes à passagem de cada um dos eixos do
comboio. Na Figura 4.1 é apresentado um exemplo dos registos de deformação do carril
para a passagem de três bogies de um comboio Alfa Pendular. Conhecida a distância entre
93
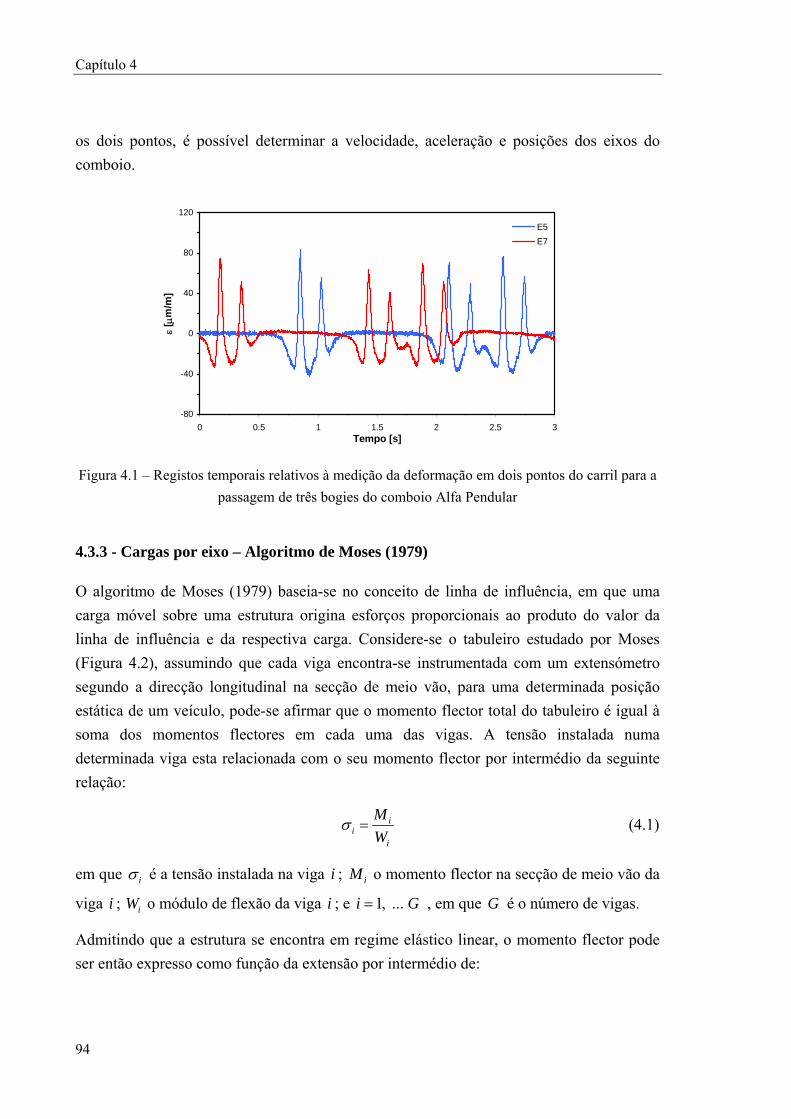
Capítulo 4
os dois pontos, é possível determinar a velocidade, aceleração e posições dos eixos do
comboio.
-80
-40
0
40
80
120
0 0.5 1 1.5 2 2.5 3Tempo [s]
[
m/m
]
E5
E7
Figura 4.1 – Registos temporais relativos à medição da deformação em dois pontos do carril para a
passagem de três bogies do comboio Alfa Pendular
4.3.3 - Cargas por eixo – Algoritmo de Moses (1979)
O algoritmo de Moses (1979) baseia-se no conceito de linha de influência, em que uma
carga móvel sobre uma estrutura origina esforços proporcionais ao produto do valor da
linha de influência e da respectiva carga. Considere-se o tabuleiro estudado por Moses
(Figura 4.2), assumindo que cada viga encontra-se instrumentada com um extensómetro
segundo a direcção longitudinal na secção de meio vão, para uma determinada posição
estática de um veículo, pode-se afirmar que o momento flector total do tabuleiro é igual à
soma dos momentos flectores em cada uma das vigas. A tensão instalada numa
determinada viga esta relacionada com o seu momento flector por intermédio da seguinte
relação:Equation Chapter 4 Section 4
ii
i
M
W (4.1)
em que i é a tensão instalada na viga i ; iM o momento flector na secção de meio vão da
viga i ; o módulo de flexão da viga ; e iW i 1, ... i G , em que é o número de vigas. G
Admitindo que a estrutura se encontra em regime elástico linear, o momento flector pode
ser então expresso como função da extensão por intermédio de:
94
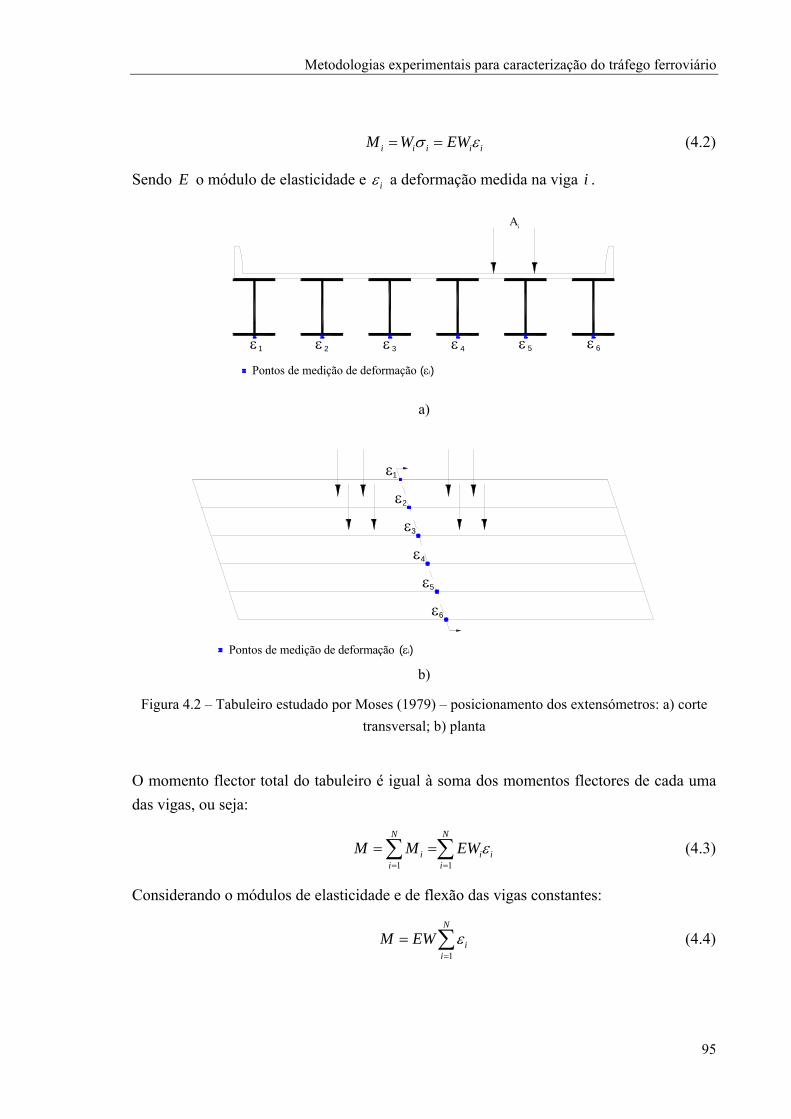
Metodologias experimentais para caracterização do tráfego ferroviário
i i i i iM W EW (4.2)
Sendo o módulo de elasticidade e E i a deformação medida na viga i .
Ai
1 2 3 4 5 6
Pontos de medição de deformação (i)
a)
1
2
3
4
5
6
Pontos de medição de deformação (i) b)
Figura 4.2 – Tabuleiro estudado por Moses (1979) – posicionamento dos extensómetros: a) corte
transversal; b) planta
O momento flector total do tabuleiro é igual à soma dos momentos flectores de cada uma
das vigas, ou seja:
1 1
N N
ii i
i iM M EW
(4.3)
Considerando o módulos de elasticidade e de flexão das vigas constantes:
1
N
ii
M EW
(4.4)
95
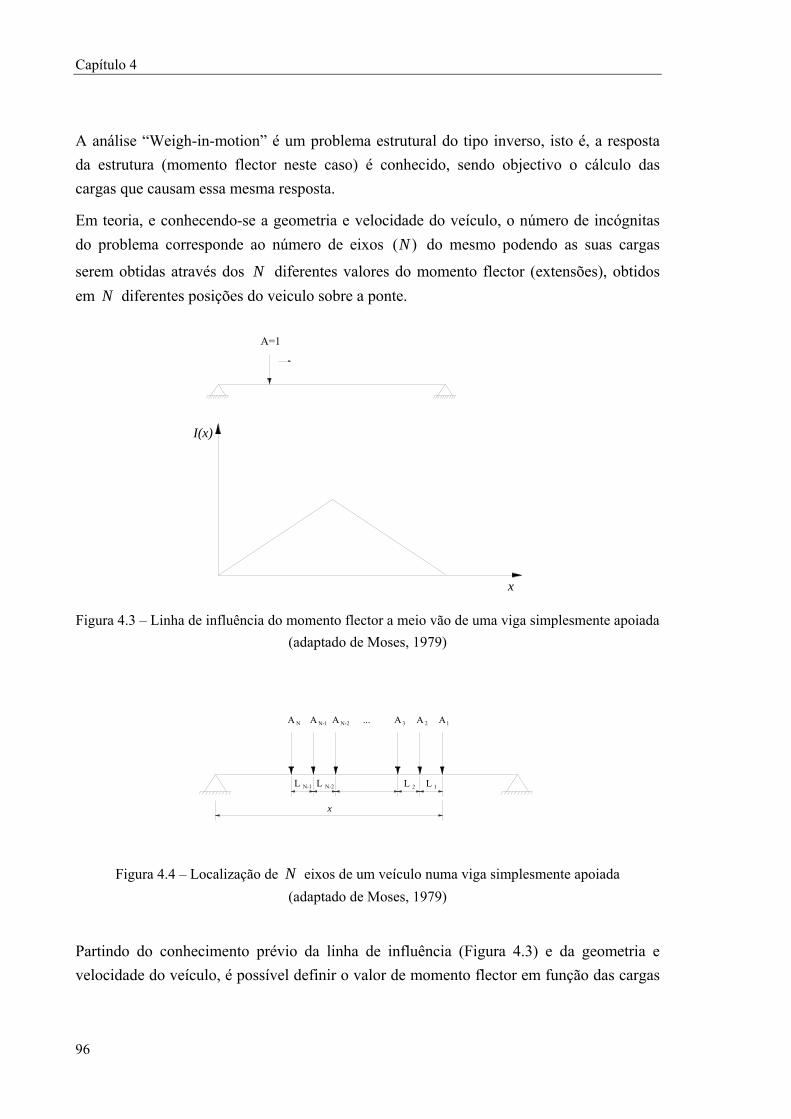
Capítulo 4
A análise “Weigh-in-motion” é um problema estrutural do tipo inverso, isto é, a resposta
da estrutura (momento flector neste caso) é conhecido, sendo objectivo o cálculo das
cargas que causam essa mesma resposta.
Em teoria, e conhecendo-se a geometria e velocidade do veículo, o número de incógnitas
do problema corresponde ao número de eixos do mesmo podendo as suas cargas
serem obtidas através dos diferentes valores do momento flector (extensões), obtidos
em diferentes posições do veiculo sobre a ponte.
( )N
N
N
x
I(x)
A=1
Figura 4.3 – Linha de influência do momento flector a meio vão de uma viga simplesmente apoiada
(adaptado de Moses, 1979)
A1A 2A 3A N-2A N-1A N ...
L N-1 L N-2 L 2 L 1
x
Figura 4.4 – Localização de eixos de um veículo numa viga simplesmente apoiada
(adaptado de Moses, 1979)
N
Partindo do conhecimento prévio da linha de influência (Figura 4.3) e da geometria e
velocidade do veículo, é possível definir o valor de momento flector em função das cargas
96

Metodologias experimentais para caracterização do tráfego ferroviário
actuantes e da localização da primeira carga x para o caso genérico apresentado na Figura
4.4 por intermédio da seguinte expressão:
1 2 1 3 1 2
1
1 2 11 1
( ) ( ) ( ) [ ( )]
... [ ( ... )]N i
N N ii j
M x A I x A I x L A I x L L
A I x L L L A I x L
j
(4.5)
Por meio da Equação (4.5), e escolhendo posições diferentes para o primeiro eixo do
veículo fica-se com equações que permitem a obtenção das
incógnitas Tendo em conta que a informação relativa à deformação da
estrutura é avaliada de forma contínua durante a passagem do veículo, é conhecido um
número de posições muito superior a . Esta informação redundante pode ser usada para
obter um número elevado de diferentes pesagens para os mesmos eixos obtendo-se como
resultado final a média destas, reduzindo-se os erros provenientes de ruído, efeitos
dinâmicos não filtrados ou de outras fontes. Este princípio de redundância está na origem
do algoritmo de optimização que é descrito de seguida.
N
1 2, , ... ,NX X X
1 2, , ... .NA A A
N
N
N
Considerando uma determinada amostragem para a passagem de um veículo sobre uma
estrutura, é possível definir o momento flector como função do tempo ou do número de
leituras. Da mesma forma, conhecendo a velocidade e o espaçamento entre eixos, é
possível definir a linha de influência para cada eixo como função do tempo. Considerando
o princípio de sobreposição de efeitos o momento flector estático teórico é dado por:
1
( ) ( )N
Tk k i i k
i
M t A I
t (4.6)
em que ( )Tk kM t representa o momento flector na secção de estudo no instante de tempo ; kt
( )i kI t
i
representa a ordenada da linha de influência para o momento flector causado pelo
eixo no instante de tempo . kt
Neste método é considerada a variável tempo e não a localização do veículo, visto que os
registos de deformação obtidos pela monitorização da estrutura são função do tempo.
Identificando o valor de momento flector obtido na leitura como k MkM , é possível definir
a função desvio quadrático entre o valor teórico e o valor medido de momento flector
através da expressão:
E
(4.7) 1
( ) ( )T
M Tk
k
E M t M t
k
sendo T o número total de instantes de tempo para a passagem do veículo.
97
Capítulo 4
O valor mínimo da função pode ser obtido igualando as derivadas parciais de em
relação a cada uma das cargas
E E
jA a zero, isto é:
1 1
2 ( ) ( ) (K N
Mi i k K k j k
k ij
EA I t M t I t
A
) 0 (4.8)
Rearranjando a equação (4.8), resulta:
(4.9) 1 1 1
( ) ( ) ( ) ( )T N K
Mi i k j k K k j k
k i k
A I t I t M t I t
correspondendo a equações que podem ser organizadas na seguinte forma matricial: N
F A M (4.10)
em que:
(4.11) 1
( ) ( )K
ij i k j kk
F F I t I t
1
( ) ( )K
Mj k
kj kM M M t I
t (4.12)
A matriz F é a matriz das linhas de influência de momentos, M é o vector dos valores
medidos de momentos flectores e o número total de leituras consideradas no cálculo. A
resolução deste sistema de equações permite determinar o vector de cargas por eixo
inicialmente desconhecidas
K
jA A .
A obtenção do vector A é efectuada através da inversão da matriz F
O determinante da matriz F fornece uma indicação do condicionamento do sistema de
equações (4.10), ou seja, indica se pequenos erros nos seus coeficientes afectam muito a
solução final.
4.4 - DETERMINAÇÃO DA LINHA DE INFLUÊNCIA DE UMA
ESTRUTURA POR VIA EXPERIMENTAL
A linha de influência pode ser traduzida por um gráfico cujas ordenadas representam o
valor de um efeito (esforço, deslocamento ou reacção) da actuação de uma carga móvel
unitária, num dado local da estrutura, em função da posição x.
98
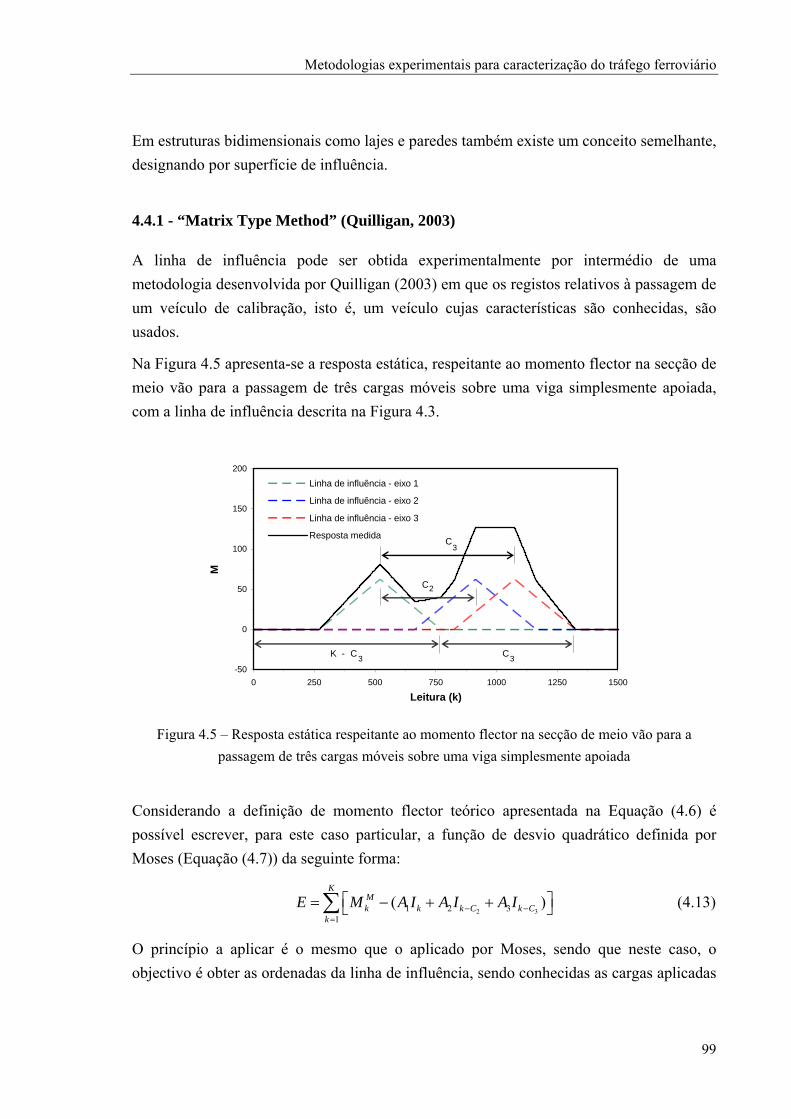
Metodologias experimentais para caracterização do tráfego ferroviário
Em estruturas bidimensionais como lajes e paredes também existe um conceito semelhante,
designando por superfície de influência.
4.4.1 - “Matrix Type Method” (Quilligan, 2003)
A linha de influência pode ser obtida experimentalmente por intermédio de uma
metodologia desenvolvida por Quilligan (2003) em que os registos relativos à passagem de
um veículo de calibração, isto é, um veículo cujas características são conhecidas, são
usados.
Na Figura 4.5 apresenta-se a resposta estática, respeitante ao momento flector na secção de
meio vão para a passagem de três cargas móveis sobre uma viga simplesmente apoiada,
com a linha de influência descrita na Figura 4.3.
-50
0
50
100
150
200
0 250 500 750 1000 1250 1500
Leitura (k)
M
Linha de influência - eixo 1
Linha de influência - eixo 2
Linha de influência - eixo 3
Resposta medidaC
3
C 3
C 3
K -
C 2
Figura 4.5 – Resposta estática respeitante ao momento flector na secção de meio vão para a
passagem de três cargas móveis sobre uma viga simplesmente apoiada
Considerando a definição de momento flector teórico apresentada na Equação (4.6) é
possível escrever, para este caso particular, a função de desvio quadrático definida por
Moses (Equação (4.7)) da seguinte forma:
21 2 3
1
(K
Mk k k C k C
k
E M A I A I A I
3) (4.13)
O princípio a aplicar é o mesmo que o aplicado por Moses, sendo que neste caso, o
objectivo é obter as ordenadas da linha de influência, sendo conhecidas as cargas aplicadas
99

Capítulo 4
pelo veículo , e . É então necessário minimizar a função em ordem às
ordenadas da linha de influência da estrutura. Este mínimo pode ser obtido igualando a
zero as derivadas parciais relativas à linha de influência.
1A 2A 3A E
Para o exemplo em questão, a derivada parcial da função E respeitante à ordenada da
linha de influência RI pode ser escrita da seguinte forma:
2 3
2 2 3
3 2 2
1 2 3 1
1 2 3
1 2 3
2
2
2
MR R R C R C
R
MR C R C R R C
MR C R C R C R
EM A I A I A I A
I
2
3
M A I A I A I A
M A I A I A I A
(4.14)
sendo 3 3( )C R K C
Rearranjando a Equação (4.14) fica-se com:
3 2 3 2 3 2
2 3 2 3
2 2 21 3 1 2 2 3 ( ) 1 2 3 2 3 ( )
1 2 1 3 1 2 3
R C R C R C C R R C C
M M MR C R C R R C R C
A A I A A I A A I A A A I A A I
A A I A A I A M A M A M
)
(4.15)
Repetindo esta equação, para cada uma das ordenadas da linha de influência, é possível
definir um sistema de 3(K C equações lineares, igual ao número de incógnitas. Repare-
se que este número de ordenadas da linha de influência depende exclusivamente da
frequência de aquisição adoptada e da velocidade do veículo. É também relevante referir
que a velocidade de circulação do veículo deve ser constante durante o processo.
4.4.2 - Forma geral do “Matrix type method”
A Equação (4.15) pode ser definida de uma forma geral para qualquer veículo de
calibração por intermédio da seguinte equação matricial:
, NN N NK C KK C K CA I M
C (4.16)
em que A é uma matriz esparsa simétrica dependente das cargas do veículo de
calibração, I o vector contendo as pretendidas ordenadas da linha de influência, e M
é o vector dependente das cargas do veículo e da grandeza medida, extensões,
deslocamentos, momentos, etc.
A diagonal principal da matriz consiste na soma dos quadrados das cargas do veículo.
Existem também um conjunto de diagonais simétricas e paralelas à diagonal principal,
100
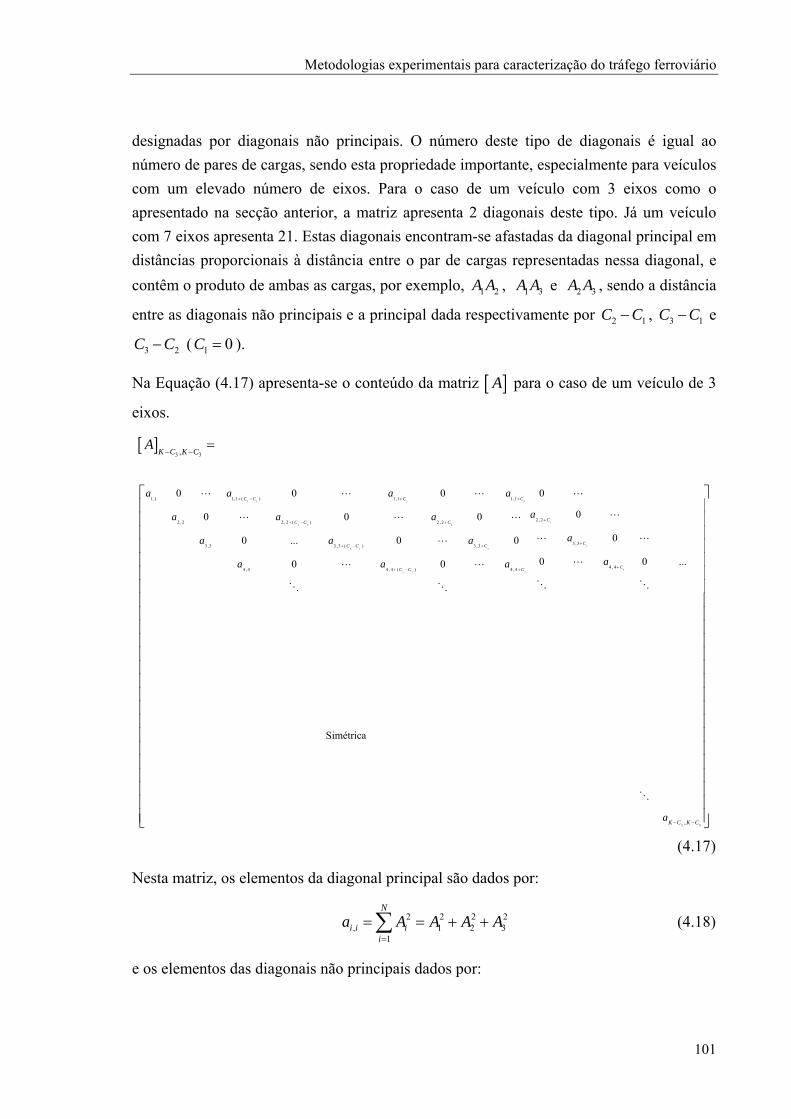
Metodologias experimentais para caracterização do tráfego ferroviário
designadas por diagonais não principais. O número deste tipo de diagonais é igual ao
número de pares de cargas, sendo esta propriedade importante, especialmente para veículos
com um elevado número de eixos. Para o caso de um veículo com 3 eixos como o
apresentado na secção anterior, a matriz apresenta 2 diagonais deste tipo. Já um veículo
com 7 eixos apresenta 21. Estas diagonais encontram-se afastadas da diagonal principal em
distâncias proporcionais à distância entre o par de cargas representadas nessa diagonal, e
contêm o produto de ambas as cargas, por exemplo, , e , sendo a distância
entre as diagonais não principais e a principal dada respectivamente por ,
1 2A A 1 3 A A 2 3 A A
2 1C C 3 1C C e
( ). 3 2C C 1 0C
Na Equação (4.17) apresenta-se o conteúdo da matriz A para o caso de um veículo de 3
eixos.
3 2 2 3
33 2 2
33 2 2
33 2 2
3 3
1,1 1,1 ( ) 1,1 1,1
2 , 22 , 2 2 , 2 ( ) 2 , 2
3 ,33 ,3 3 ,3 ( ) 3 ,3
4 , 44 , 4 4 , 4 ( ) 4 , 4
,
3 3,
0 0 0 0
00 0 0
00 ... 0 0
0 00 0
Simétrica
C C C C
CC C C
CC C C
CC C C
K C K C
K C K C
a a a a
aa a a
aa a a
aa a a
a
A
...
(4.17)
Nesta matriz, os elementos da diagonal principal são dados por:
2 2 2, 1 2
1
N
i i ii
a A A A A
23 (4.18)
e os elementos das diagonais não principais dados por:
101

Capítulo 4
(4.19) 2 2
3 3
3 2 3 2
, , 1 2
, , 1 3
, ,
i i C i C i
i i C i C i
i i C C i C C i
a a A A
a a A A
a a A
2 3A
O vector M é dependente das cargas do veículo e das grandezas medidas:
2 2
2
2
2
1 1 2 1 1
1 2 2 2 2
1 3 2 3 3
,1
1 3 2 3 3
N
N
N
N
N
M M MC C N
M M MC N
M M MC N
K C
M M MC N
A M A M A M
A M A M A M
A M A M A M
M
A M A M A M
C
C
C
C
(4.20)
O vector I contém as incógnitas do sistema, ou seja, as ordenadas da linha de influência.
A forma mais evidente de resolver a Equação (4.16) em ordem a I é por intermédio da
inversão da matriz A , ou seja:
1I A M
(4.21)
No entanto, tendo em conta as dimensões elevadas da matriz A e o facto esta ser uma
matriz simétrica positiva, torna-se interessante o uso da decomposição de Cholesky. A
decomposição de Cholesky exprime a matriz A como o produto de uma matriz triangular
R pela sua transposta:
TA R R (4.22)
A Equação (4.21) assume então a seguinte forma:
TR R I M (4.23)
Que pode ser resolvida em Matlab através do operador “\”.
\ \T
I R R M (4.24)
O operador “\”, em Matlab permite resolver o sistema por intermédio de um ajuste de
mínimos quadrados. Na realidade, o sistema pode ser resolvido directamente através da
seguinte operação:
102

Metodologias experimentais para caracterização do tráfego ferroviário
\I A M (4.25)
Sendo que o Matlab verifica inicialmente se a matriz é simétrica positiva, calcula a matriz
triangular R e, finalmente, resolve o sistema via ajuste por mínimos quadrados.
A consideração destes métodos numéricos, revela-se de particular importância tendo em
conta as elevadas frequências de aquisição (até 1000 Hz) que conduzem a matrizes cujas
dimensões podem atingir largos milhares de linhas e colunas. Por esta razão, é importante
evitar a inversão de matrizes que acarreta tempos de cálculo bastante elevados.
4.5 - IMPLEMENTAÇÃO AUTOMÁTICA EM MATLAB
Nesta secção é descrita a implementação do algoritmo “B-WIM” no software de
programação computacional Matlab (Matlab, 2007). Para o efeito foram desenvolvidos três
programas com vista a aplicação a pontes de pequeno vão com recurso a apenas três
sensores de deformação cuja disposição se apresenta na Figura 4.6.
E1 E2
E3
L
L2
L1
Ponte
Via...
P1P2P3P4Pi
Figura 4.6 – Posicionamento dos sensores de deformação numa ponte de pequeno vão visando a
aplicação do algoritmo”B-WIM”
4.5.1 - Pré-processamento
Na Figura 4.7 apresenta-se o diagrama de fluxo respeitante ao programa de
pré-processamento cujas funções consistem: leitura dos ficheiros provenientes da unidade
de medição utilizada; corte das séries temporais por forma a isolar os eventos respeitantes à
passagem dos comboios e, desta forma, garantir registos temporais com uma duração total
103
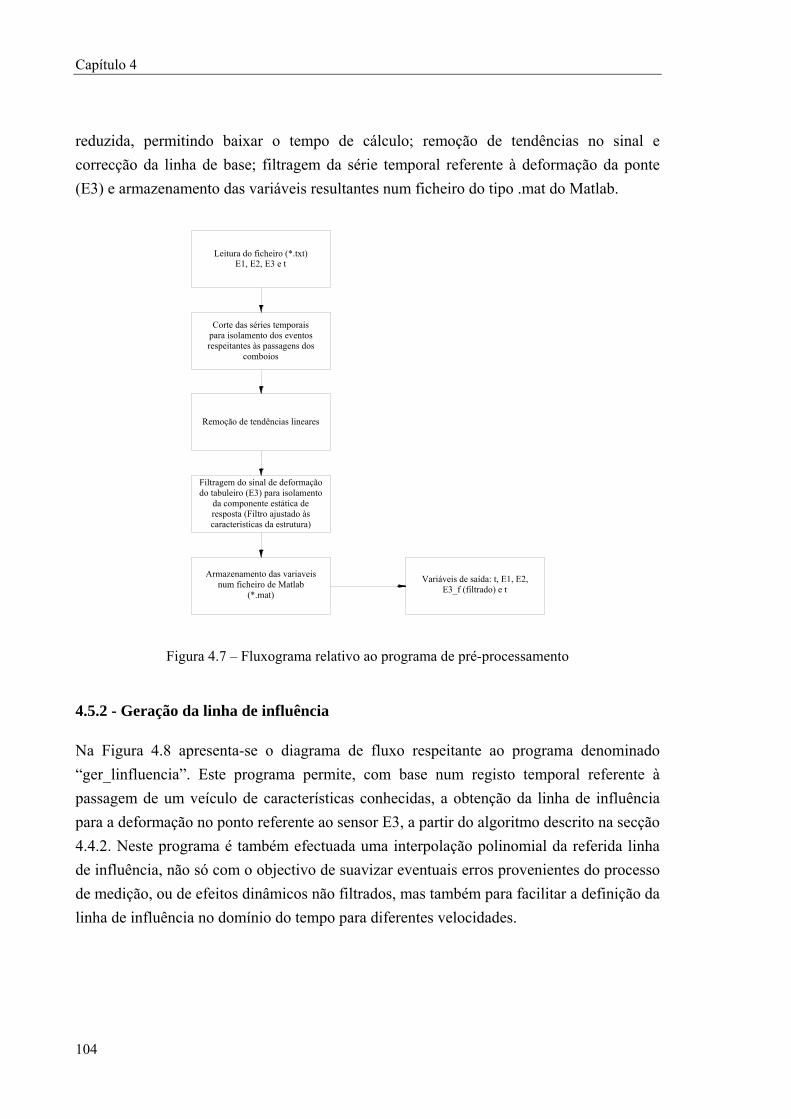
Capítulo 4
reduzida, permitindo baixar o tempo de cálculo; remoção de tendências no sinal e
correcção da linha de base; filtragem da série temporal referente à deformação da ponte
(E3) e armazenamento das variáveis resultantes num ficheiro do tipo .mat do Matlab.
Corte das séries temporaispara isolamento dos eventosrespeitantes às passagens dos
comboios
Leitura do ficheiro (*.txt)E1, E2, E3 e t
Remoção de tendências lineares
Filtragem do sinal de deformaçãodo tabuleiro (E3) para isolamento
da componente estática deresposta (Filtro ajustado àscaracteristicas da estrutura)
Armazenamento das variaveisnum ficheiro de Matlab
(*.mat)
Variáveis de saída: t, E1, E2,E3_f (filtrado) e t
Figura 4.7 – Fluxograma relativo ao programa de pré-processamento
4.5.2 - Geração da linha de influência
Na Figura 4.8 apresenta-se o diagrama de fluxo respeitante ao programa denominado
“ger_linfluencia”. Este programa permite, com base num registo temporal referente à
passagem de um veículo de características conhecidas, a obtenção da linha de influência
para a deformação no ponto referente ao sensor E3, a partir do algoritmo descrito na secção
4.4.2. Neste programa é também efectuada uma interpolação polinomial da referida linha
de influência, não só com o objectivo de suavizar eventuais erros provenientes do processo
de medição, ou de efeitos dinâmicos não filtrados, mas também para facilitar a definição da
linha de influência no domínio do tempo para diferentes velocidades.
104
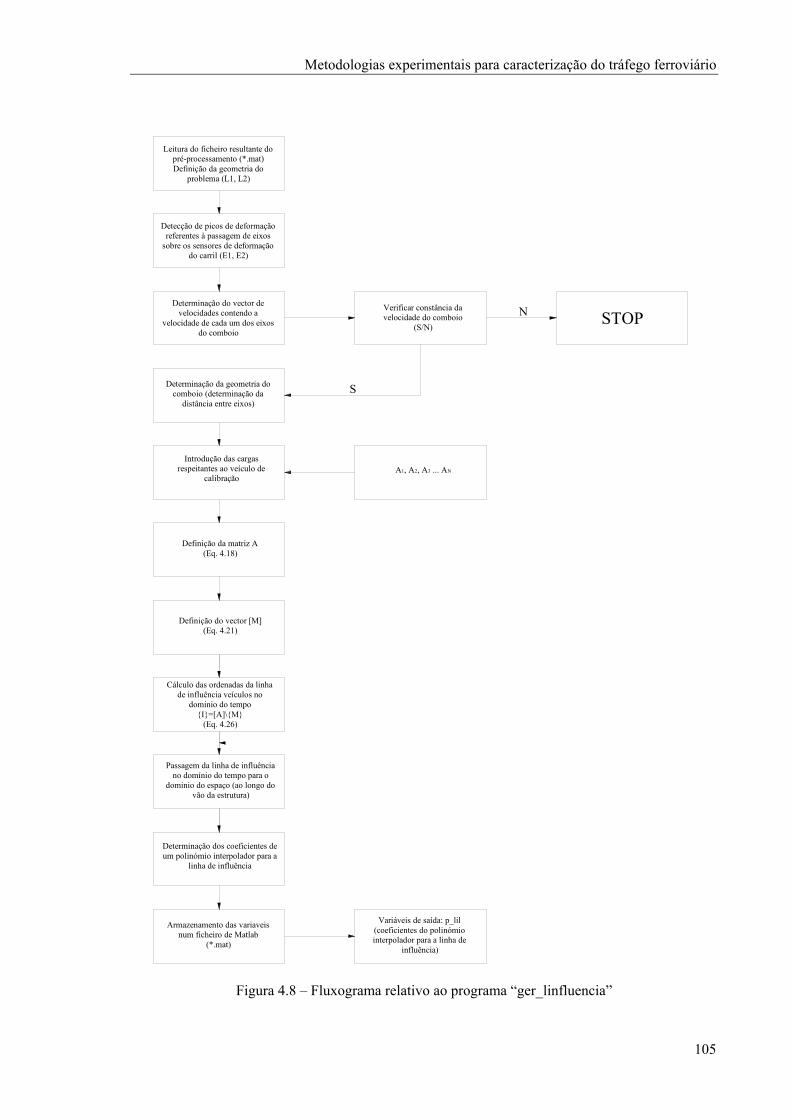
Metodologias experimentais para caracterização do tráfego ferroviário
Detecção de picos de deformaçãoreferentes à passagem de eixos
sobre os sensores de deformaçãodo carril (E1, E2)
Leitura do ficheiro resultante dopré-processamento (*.mat)Definição da geometria do
problema (L1, L2)
Determinação do vector develocidades contendo a
velocidade de cada um dos eixosdo comboio
Determinação da geometria docomboio (determinação da
distância entre eixos)
Introdução das cargasrespeitantes ao veículo de
calibraçãoA1, A2, A3 ... AN
Definição da matriz A(Eq. 4.18)
Definição do vector [M](Eq. 4.21)
Cálculo das ordenadas da linhade influência veículos no
dominio do tempo{I}=[A]\{M}
(Eq. 4.26)
Verificar constância davelocidade do comboio
(S/N)
Passagem da linha de influênciano domínio do tempo para o
dominio do espaço (ao longo dovão da estrutura)
Determinação dos coeficientes deum polinómio interpolador para a
linha de influência
Armazenamento das variaveisnum ficheiro de Matlab
(*.mat)
Variáveis de saída: p_lil(coeficientes do polinómiointerpolador para a linha de
influência)
STOP
S
N
Figura 4.8 – Fluxograma relativo ao programa “ger_linfluencia”
105
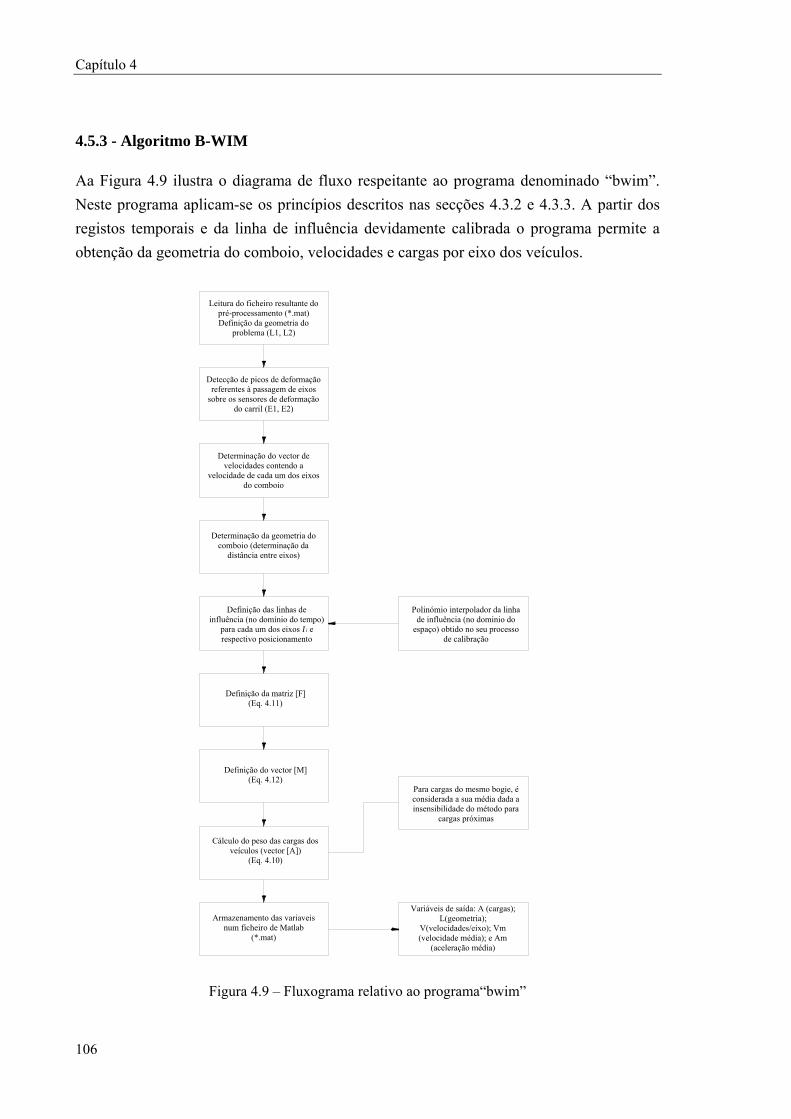
Capítulo 4
4.5.3 - Algoritmo B-WIM
Aa Figura 4.9 ilustra o diagrama de fluxo respeitante ao programa denominado “bwim”.
Neste programa aplicam-se os princípios descritos nas secções 4.3.2 e 4.3.3. A partir dos
registos temporais e da linha de influência devidamente calibrada o programa permite a
obtenção da geometria do comboio, velocidades e cargas por eixo dos veículos.
Detecção de picos de deformaçãoreferentes à passagem de eixos
sobre os sensores de deformaçãodo carril (E1, E2)
Leitura do ficheiro resultante dopré-processamento (*.mat)Definição da geometria do
problema (L1, L2)
Determinação do vector develocidades contendo a
velocidade de cada um dos eixosdo comboio
Determinação da geometria docomboio (determinação da
distância entre eixos)
Definição das linhas deinfluência (no domínio do tempo)
para cada um dos eixos I i erespectivo posicionamento
Polinómio interpolador da linhade influência (no dominio do
espaço) obtido no seu processode calibração
Definição da matriz [F](Eq. 4.11)
Definição do vector [M](Eq. 4.12)
Cálculo do peso das cargas dosveículos (vector [A])
(Eq. 4.10)
Armazenamento das variaveisnum ficheiro de Matlab
(*.mat)
Variáveis de saída: A (cargas);L(geometria);
V(velocidades/eixo); Vm(velocidade média); e Am
(aceleração média)
Para cargas do mesmo bogie, éconsiderada a sua média dada ainsensibilidade do método para
cargas próximas
Figura 4.9 – Fluxograma relativo ao programa“bwim”
106
Metodologias experimentais para caracterização do tráfego ferroviário
4.6 - VALIDAÇÃO POR INTERMÉDIO DE UM EXEMPLO NUMÉRICO
De forma a validar e identificar as limitações dos programas desenvolvidos, antes de uma
aplicação experimental, procedeu-se à sua aplicação a um exemplo numérico simples.
Neste âmbito foi desenvolvido um modelo numérico bidimensional de viga com um
elevado nível de simplicidade. Não tendo como objectivo a modelação do comportamento
real de nenhuma estrutura em particular, existiu apenas a preocupação de aproximar o
comportamento dinâmico da estrutura o mais possível do comportamento típico de uma
ponte de pequeno vão e de modelar correctamente a via ferroviária, não só para uma
correcta simulação da degradação das cargas que esta induz na viga, mas também pela
importância do comportamento do carril para a aplicação do algoritmo.
Nesta secção são apresentados os resultados relativos às análises dinâmicas respeitantes a
passagens a diferentes velocidades de um modelo de cargas conhecido correspondente ao
comboio Alfa-Pendular, sobre os quais foram aplicados os programas apresentados na
secção anterior. Sendo um problema de solução perfeitamente conhecida, este estudo
permitiu avaliar a precisão associada ao método.
Para a realização das análises dinâmicas foi utilizado o programa comercial Ansys
(ANSYS, 2005).
4.6.1 - Descrição da estrutura
Na Figura 4.10 apresenta-se a malha de elementos finitos usada para a discretização da
estrutura, formada por 208 elementos e 363 nós. A viga e os carris, foram modelados
através de elementos de viga cujas características se apresentam na Tabela 4.1. As
palmilhas foram modeladas por intermédio de elementos de mola com uma constante
kN/mm. As travessas, de betão, foram simuladas por intermédio de elementos
planos de quatro nós e o balastro foi modelado recorrendo a elementos planos de oito nós,
exceptuando o balastro entre travessas que foi modelado por intermédio de elementos de
quatro nós. Na
100k
Tabela 4.2 apresentam-se as propriedades das diversas componentes do
modelo.
107
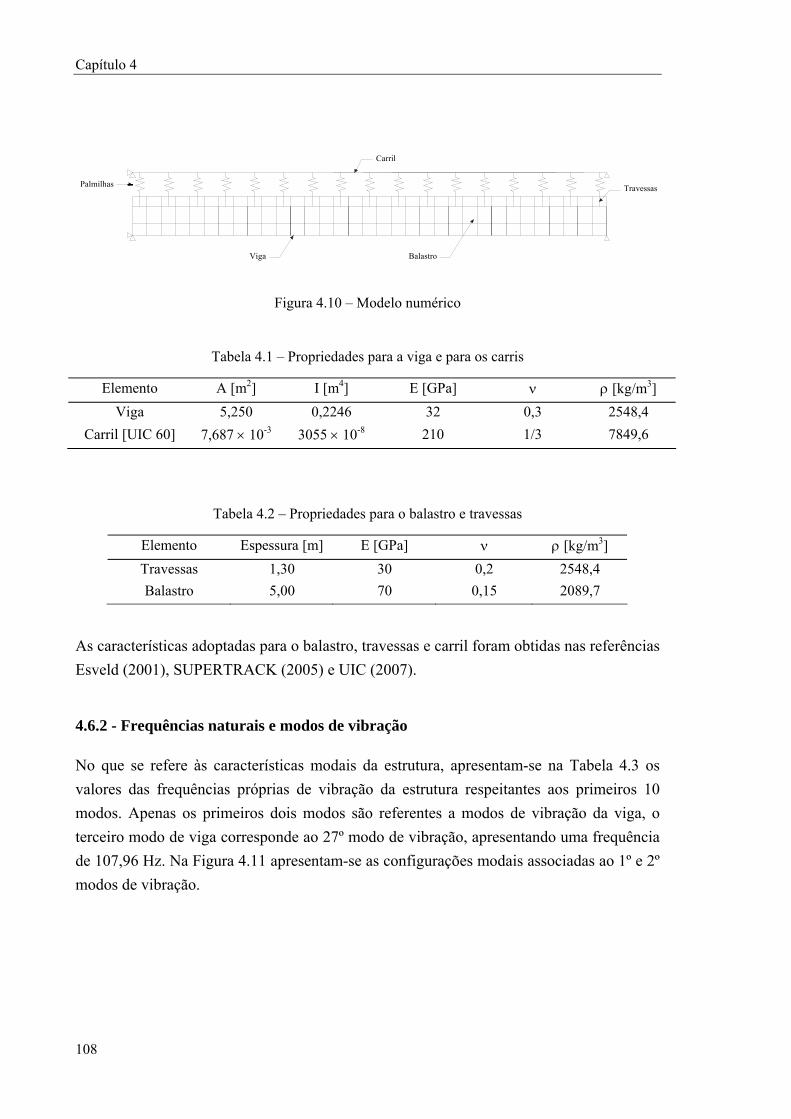
Capítulo 4
Palmilhas
Balastro
Carril
Travessas
Viga
Figura 4.10 – Modelo numérico
Tabela 4.1 – Propriedades para a viga e para os carris
Elemento A [m2] I [m4] E [GPa] [kg/m3]
Viga 5,250 0,2246 32 0,3 2548,4
Carril [UIC 60] 7,687 10-3 3055 10-8 210 1/3 7849,6
Tabela 4.2 – Propriedades para o balastro e travessas
Elemento Espessura [m] E [GPa] [kg/m3]
Travessas 1,30 30 0,2 2548,4
Balastro 5,00 70 0,15 2089,7
As características adoptadas para o balastro, travessas e carril foram obtidas nas referências
Esveld (2001), SUPERTRACK (2005) e UIC (2007).
4.6.2 - Frequências naturais e modos de vibração
No que se refere às características modais da estrutura, apresentam-se na Tabela 4.3 os
valores das frequências próprias de vibração da estrutura respeitantes aos primeiros 10
modos. Apenas os primeiros dois modos são referentes a modos de vibração da viga, o
terceiro modo de viga corresponde ao 27º modo de vibração, apresentando uma frequência
de 107,96 Hz. Na Figura 4.11 apresentam-se as configurações modais associadas ao 1º e 2º
modos de vibração.
108
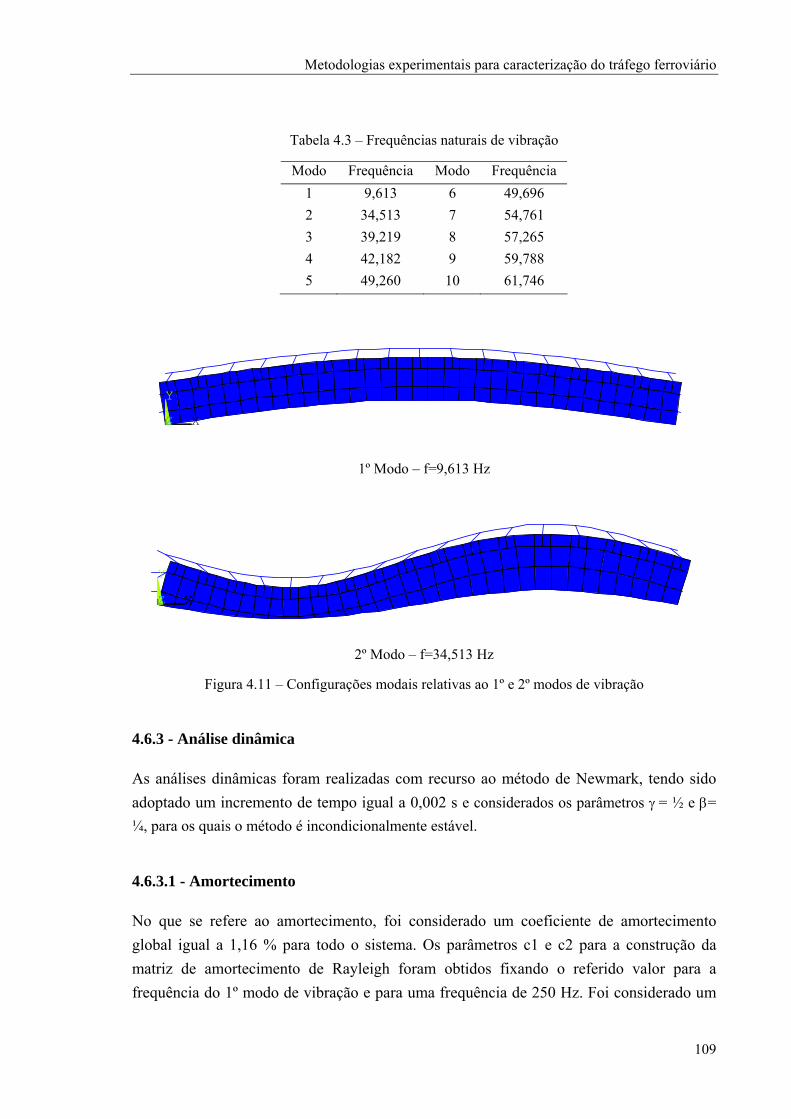
Metodologias experimentais para caracterização do tráfego ferroviário
Tabela 4.3 – Frequências naturais de vibração
Modo Frequência Modo Frequência
1 9,613 6 49,696
2 34,513 7 54,761
3 39,219 8 57,265
4 42,182 9 59,788
5 49,260 10 61,746
X
Y
Z
1º Modo – f=9,613 Hz
X
Y
Z
2º Modo – f=34,513 Hz
Figura 4.11 – Configurações modais relativas ao 1º e 2º modos de vibração
4.6.3 - Análise dinâmica
As análises dinâmicas foram realizadas com recurso ao método de Newmark, tendo sido
adoptado um incremento de tempo igual a 0,002 s e considerados os parâmetros = ½ e =
¼, para os quais o método é incondicionalmente estável.
4.6.3.1 - Amortecimento
No que se refere ao amortecimento, foi considerado um coeficiente de amortecimento
global igual a 1,16 % para todo o sistema. Os parâmetros c1 e c2 para a construção da
matriz de amortecimento de Rayleigh foram obtidos fixando o referido valor para a
frequência do 1º modo de vibração e para uma frequência de 250 Hz. Foi considerado um
109
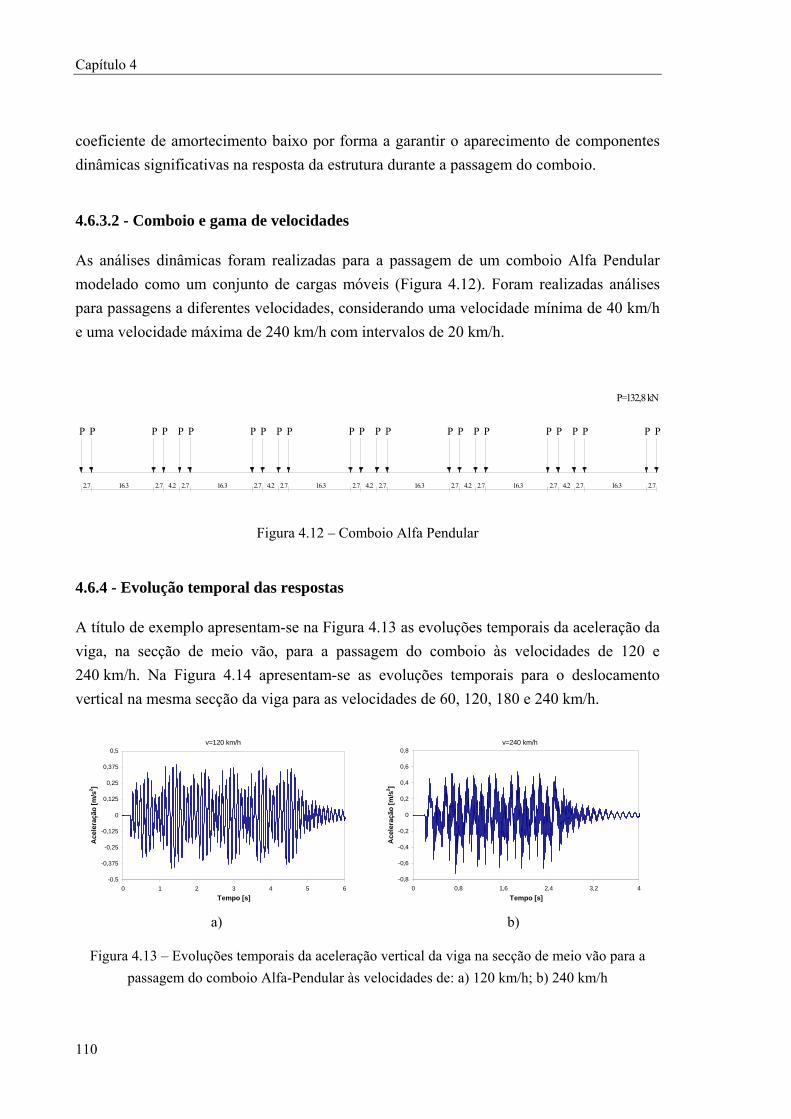
Capítulo 4
coeficiente de amortecimento baixo por forma a garantir o aparecimento de componentes
dinâmicas significativas na resposta da estrutura durante a passagem do comboio.
4.6.3.2 - Comboio e gama de velocidades
As análises dinâmicas foram realizadas para a passagem de um comboio Alfa Pendular
modelado como um conjunto de cargas móveis (Figura 4.12). Foram realizadas análises
para passagens a diferentes velocidades, considerando uma velocidade mínima de 40 km/h
e uma velocidade máxima de 240 km/h com intervalos de 20 km/h.
2.7 16.3 2.7 4.2 2.7 2.7 2.7 2.7 2.7 2.7 2.7 2.7 2.7 2.716.3 16.3 16.3 16.3 16.34.2 4.2 4.2 4.2
P P P P P P P P P P P P P P P P P P P P P P P P
P=132,8 kN
Figura 4.12 – Comboio Alfa Pendular
4.6.4 - Evolução temporal das respostas
A título de exemplo apresentam-se na Figura 4.13 as evoluções temporais da aceleração da
viga, na secção de meio vão, para a passagem do comboio às velocidades de 120 e
240 km/h. Na Figura 4.14 apresentam-se as evoluções temporais para o deslocamento
vertical na mesma secção da viga para as velocidades de 60, 120, 180 e 240 km/h.
v=120 km/h
-0,5
-0,375
-0,25
-0,125
0
0,125
0,25
0,375
0,5
0 1 2 3 4 5
Tempo [s]
Ace
lera
ção
[m
/s2 ]
6
v=240 km/h
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
0 0,8 1,6 2,4 3,2 4
Tempo [s]
Ace
lera
ção
[m
/s2 ]
a) b)
Figura 4.13 – Evoluções temporais da aceleração vertical da viga na secção de meio vão para a
passagem do comboio Alfa-Pendular às velocidades de: a) 120 km/h; b) 240 km/h
110
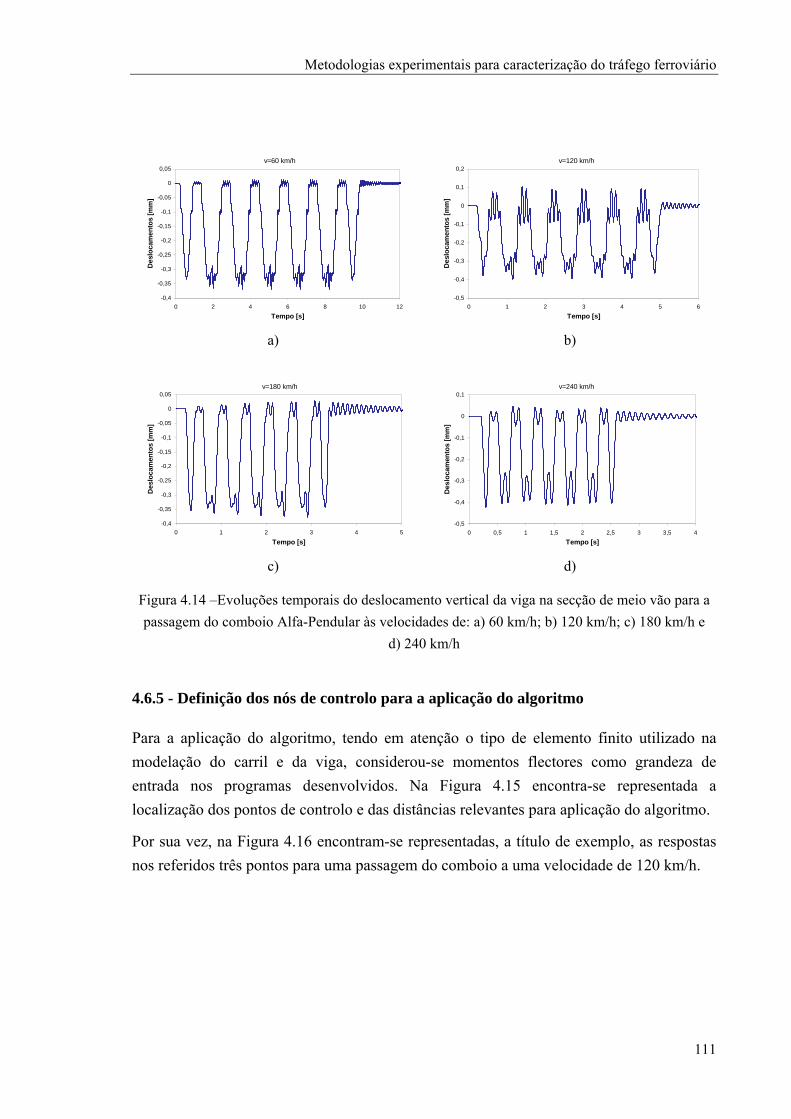
Metodologias experimentais para caracterização do tráfego ferroviário
v=60 km/h
-0,4
-0,35
-0,3
-0,25
-0,2
-0,15
-0,1
-0,05
0
0,05
0 2 4 6 8 10 1
Tempo [s]
Des
loca
men
tos
[mm
]
2
v=120 km/h
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0 1 2 3 4 5 6
Tempo [s]
Des
loca
men
tos
[mm
]
a) b)
v=180 km/h
-0,4
-0,35
-0,3
-0,25
-0,2
-0,15
-0,1
-0,05
0
0,05
0 1 2 3 4 5
Tempo [s]
Des
loca
men
tos
[mm
]
v=240 km/h
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0 0,5 1 1,5 2 2,5 3 3,5 4
Tempo [s]
Des
loca
men
tos
[mm
]
c) d)
Figura 4.14 –Evoluções temporais do deslocamento vertical da viga na secção de meio vão para a
passagem do comboio Alfa-Pendular às velocidades de: a) 60 km/h; b) 120 km/h; c) 180 km/h e
d) 240 km/h
4.6.5 - Definição dos nós de controlo para a aplicação do algoritmo
Para a aplicação do algoritmo, tendo em atenção o tipo de elemento finito utilizado na
modelação do carril e da viga, considerou-se momentos flectores como grandeza de
entrada nos programas desenvolvidos. Na Figura 4.15 encontra-se representada a
localização dos pontos de controlo e das distâncias relevantes para aplicação do algoritmo.
Por sua vez, na Figura 4.16 encontram-se representadas, a título de exemplo, as respostas
nos referidos três pontos para uma passagem do comboio a uma velocidade de 120 km/h.
111
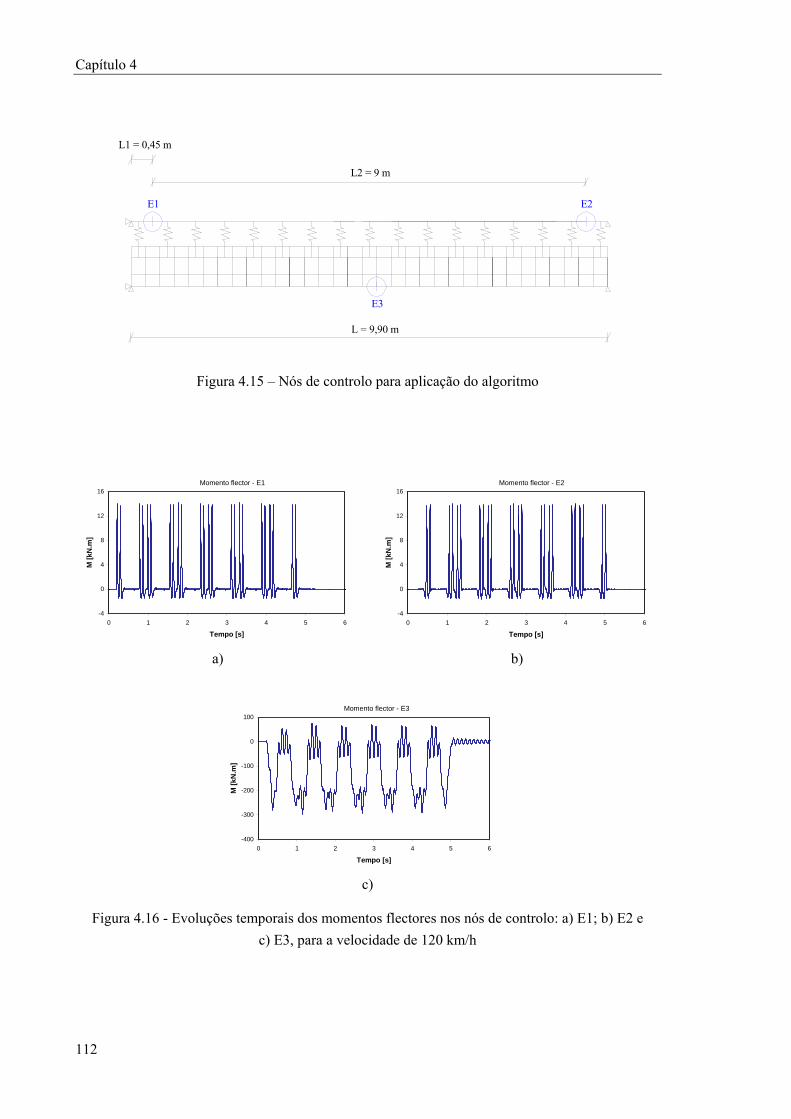
Capítulo 4
E1 E2
E3
L = 9,90 m
L1 = 0,45 m
L2 = 9 m
Figura 4.15 – Nós de controlo para aplicação do algoritmo
Momento flector - E1
-4
0
4
8
12
16
0 1 2 3 4 5 6
Tempo [s]
M [
kN.m
]
Momento flector - E2
-4
0
4
8
12
16
0 1 2 3 4 5 6
Tempo [s]
M [
kN
.m]
a) b)
Momento flector - E3
-400
-300
-200
-100
0
100
0 1 2 3 4 5 6
Tempo [s]
M [
kN
.m]
c)
Figura 4.16 - Evoluções temporais dos momentos flectores nos nós de controlo: a) E1; b) E2 e
c) E3, para a velocidade de 120 km/h
112
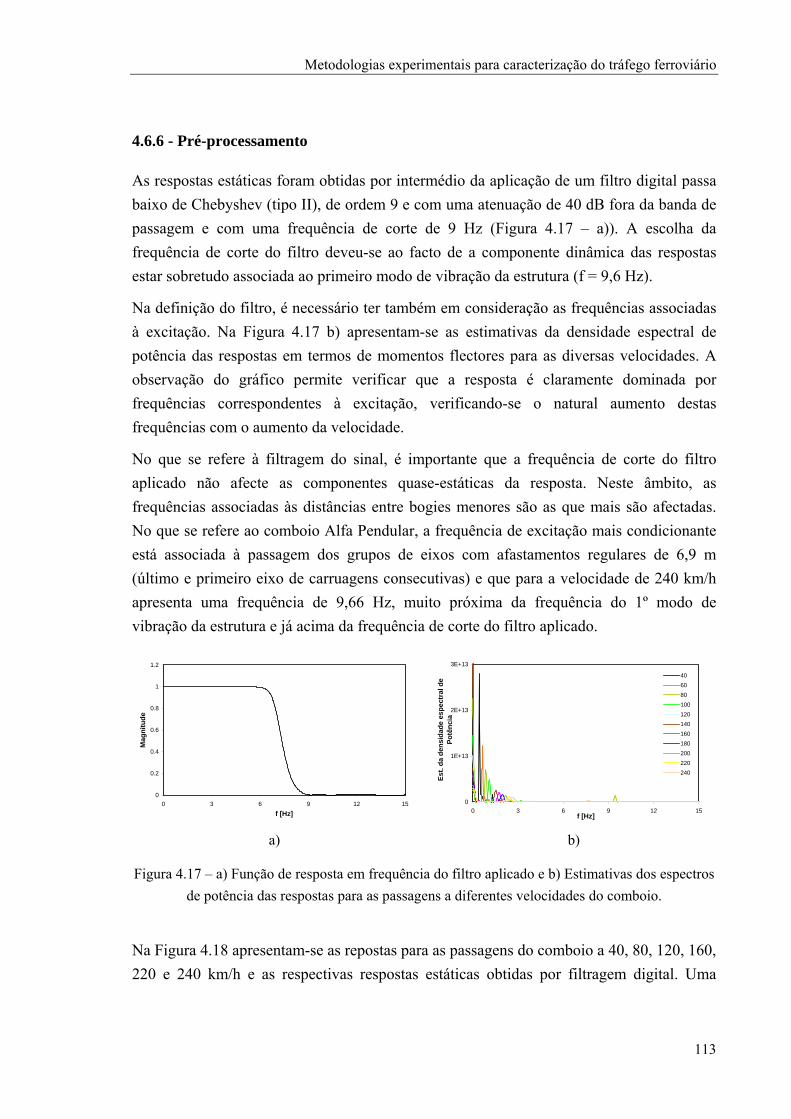
Metodologias experimentais para caracterização do tráfego ferroviário
4.6.6 - Pré-processamento
As respostas estáticas foram obtidas por intermédio da aplicação de um filtro digital passa
baixo de Chebyshev (tipo II), de ordem 9 e com uma atenuação de 40 dB fora da banda de
passagem e com uma frequência de corte de 9 Hz (Figura 4.17 – a)). A escolha da
frequência de corte do filtro deveu-se ao facto de a componente dinâmica das respostas
estar sobretudo associada ao primeiro modo de vibração da estrutura (f = 9,6 Hz).
Na definição do filtro, é necessário ter também em consideração as frequências associadas
à excitação. Na Figura 4.17 b) apresentam-se as estimativas da densidade espectral de
potência das respostas em termos de momentos flectores para as diversas velocidades. A
observação do gráfico permite verificar que a resposta é claramente dominada por
frequências correspondentes à excitação, verificando-se o natural aumento destas
frequências com o aumento da velocidade.
No que se refere à filtragem do sinal, é importante que a frequência de corte do filtro
aplicado não afecte as componentes quase-estáticas da resposta. Neste âmbito, as
frequências associadas às distâncias entre bogies menores são as que mais são afectadas.
No que se refere ao comboio Alfa Pendular, a frequência de excitação mais condicionante
está associada à passagem dos grupos de eixos com afastamentos regulares de 6,9 m
(último e primeiro eixo de carruagens consecutivas) e que para a velocidade de 240 km/h
apresenta uma frequência de 9,66 Hz, muito próxima da frequência do 1º modo de
vibração da estrutura e já acima da frequência de corte do filtro aplicado.
0
0.2
0.4
0.6
0.8
1
1.2
0 3 6 9 12 1
f [Hz]
Mag
nit
ud
e
5 0
1E+13
2E+13
3E+13
0 3 6 9 12 15f [Hz]
Est
. da
den
sid
ade
esp
ectr
al d
e P
otê
nci
a
40
60
80
100
120
140
160
180
200
220
240
a) b)
Figura 4.17 – a) Função de resposta em frequência do filtro aplicado e b) Estimativas dos espectros
de potência das respostas para as passagens a diferentes velocidades do comboio.
Na Figura 4.18 apresentam-se as repostas para as passagens do comboio a 40, 80, 120, 160,
220 e 240 km/h e as respectivas respostas estáticas obtidas por filtragem digital. Uma
113
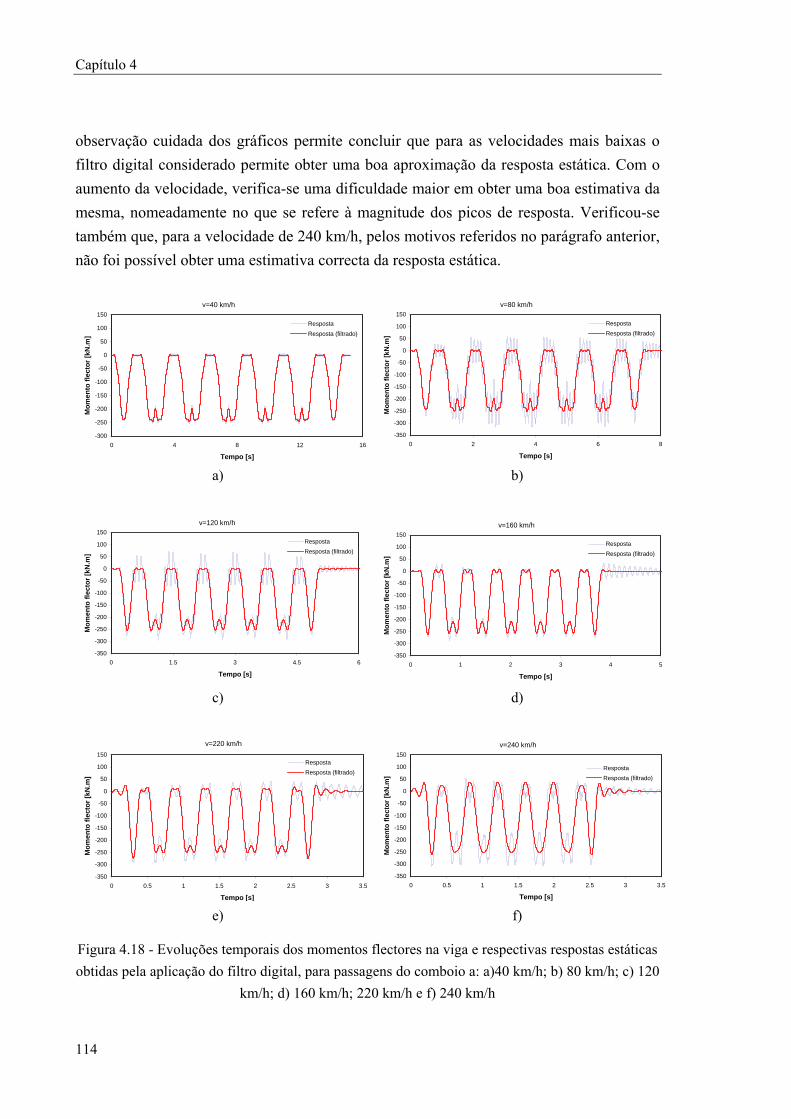
Capítulo 4
observação cuidada dos gráficos permite concluir que para as velocidades mais baixas o
filtro digital considerado permite obter uma boa aproximação da resposta estática. Com o
aumento da velocidade, verifica-se uma dificuldade maior em obter uma boa estimativa da
mesma, nomeadamente no que se refere à magnitude dos picos de resposta. Verificou-se
também que, para a velocidade de 240 km/h, pelos motivos referidos no parágrafo anterior,
não foi possível obter uma estimativa correcta da resposta estática.
v=40 km/h
-300
-250
-200
-150
-100
-50
0
50
100
150
0 4 8 12 16
v=80 km/h
-350
-300
-250
-200
-150
-100
-50
0
50
100
150
0 2 4 6
Tempo [s]
Mo
men
to f
lect
or
[kN
.m]
Resposta
Resposta (filtrado)
Tempo [s]
Mo
men
to f
lect
or
[kN
.m]
8
Resposta
Resposta (filtrado)
a) b)
v=120 km/h
-350
-300
-250
-200
-150
-100
-50
0
50
100
150
0 1.5 3 4.5 6
Resposta
Resposta (filtrado)
Tempo [s]
Mo
men
to f
lect
or
[kN
.m]
v=160 km/h
-350
-300
-250
-200
-150
-100
-50
0
50
100
150
0 1 2 3 4 5
Tempo [s]
Mo
men
to f
lec
tor
[kN
.m]
Resposta
Resposta (filtrado)
c) d)
v=220 km/h
-350
-300
-250
-200
-150
-100
-50
0
50
100
150
0 0.5 1 1.5 2 2.5 3 3.5
v=240 km/h
-350
-300
-250
-200
-150
-100
-50
0
50
100
150
0 0.5 1 1.5 2 2.5 3 3
Tempo [s]
Mo
men
to f
lect
or
[kN
.m]
Resposta
Resposta (filtrado)
Tempo [s]
.5
Resposta
Resposta (filtrado)
e) f)
Mo
men
to f
lect
or
[kN
.m]
Figura 4.18 - Evoluções temporais dos momentos flectores na viga e respectivas respostas estáticas
obtidas pela aplicação do filtro digital, para passagens do comboio a: a)40 km/h; b) 80 km/h; c) 120
km/h; d) 160 km/h; 220 km/h e f) 240 km/h
114
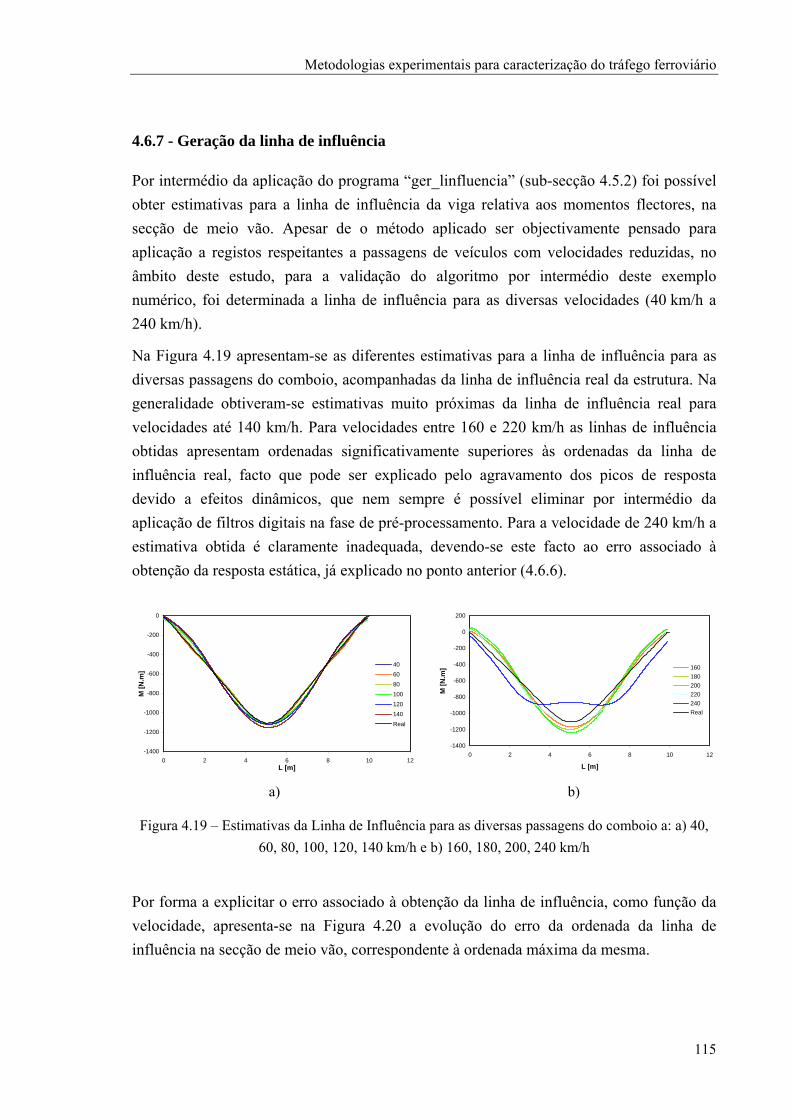
Metodologias experimentais para caracterização do tráfego ferroviário
4.6.7 - Geração da linha de influência
Por intermédio da aplicação do programa “ger_linfluencia” (sub-secção 4.5.2) foi possível
obter estimativas para a linha de influência da viga relativa aos momentos flectores, na
secção de meio vão. Apesar de o método aplicado ser objectivamente pensado para
aplicação a registos respeitantes a passagens de veículos com velocidades reduzidas, no
âmbito deste estudo, para a validação do algoritmo por intermédio deste exemplo
numérico, foi determinada a linha de influência para as diversas velocidades (40 km/h a
240 km/h).
Na Figura 4.19 apresentam-se as diferentes estimativas para a linha de influência para as
diversas passagens do comboio, acompanhadas da linha de influência real da estrutura. Na
generalidade obtiveram-se estimativas muito próximas da linha de influência real para
velocidades até 140 km/h. Para velocidades entre 160 e 220 km/h as linhas de influência
obtidas apresentam ordenadas significativamente superiores às ordenadas da linha de
influência real, facto que pode ser explicado pelo agravamento dos picos de resposta
devido a efeitos dinâmicos, que nem sempre é possível eliminar por intermédio da
aplicação de filtros digitais na fase de pré-processamento. Para a velocidade de 240 km/h a
estimativa obtida é claramente inadequada, devendo-se este facto ao erro associado à
obtenção da resposta estática, já explicado no ponto anterior (4.6.6).
-1400
-1200
-1000
-800
-600
-400
-200
0
0 2 4 6 8 10 12
-1400
-1200
-1000
-800
-600
-400
-200
0
200
0 2 4 6 8 10 1
L [m]
M [
N.m
]
40
L [m]
M [
N.m
] 60
80
100
120
140
Real
2
160
180
200
220
240
Real
a) b)
Figura 4.19 – Estimativas da Linha de Influência para as diversas passagens do comboio a: a) 40,
60, 80, 100, 120, 140 km/h e b) 160, 180, 200, 240 km/h
Por forma a explicitar o erro associado à obtenção da linha de influência, como função da
velocidade, apresenta-se na Figura 4.20 a evolução do erro da ordenada da linha de
influência na secção de meio vão, correspondente à ordenada máxima da mesma.
115
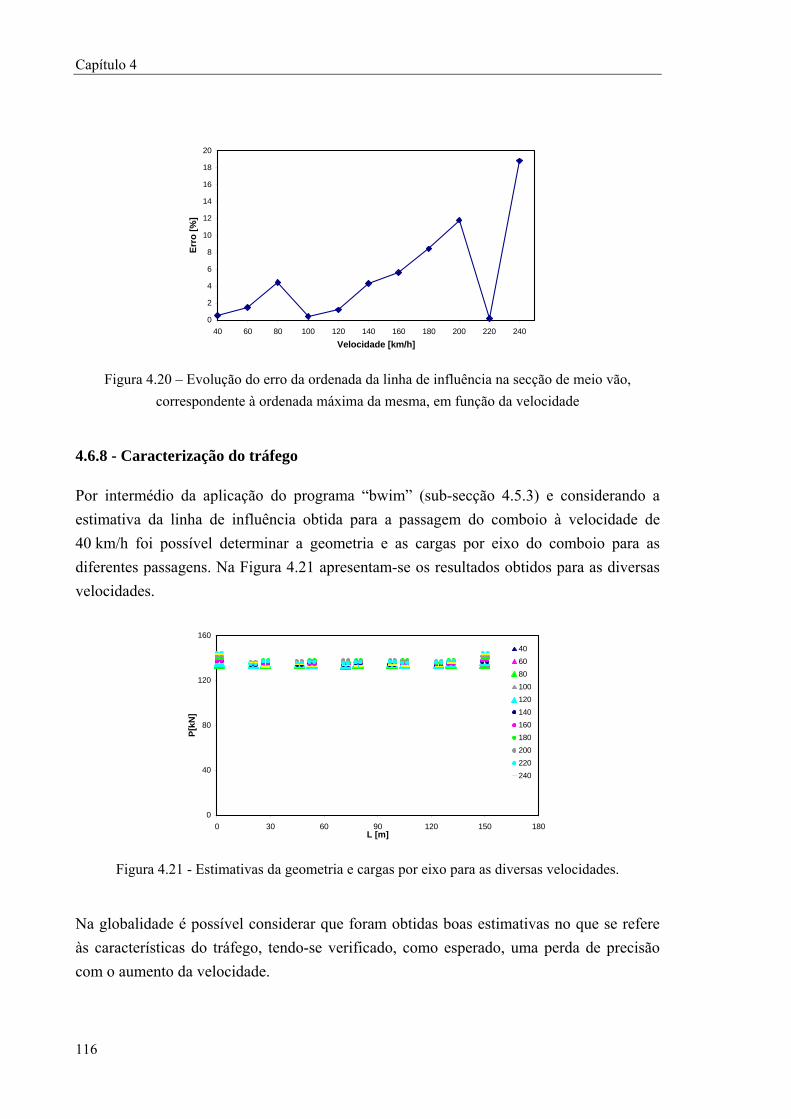
Capítulo 4
0
2
4
6
8
10
12
14
16
18
20
40 60 80 100 120 140 160 180 200 220 240
Velocidade [km/h]
Err
o [
%]
Figura 4.20 – Evolução do erro da ordenada da linha de influência na secção de meio vão,
correspondente à ordenada máxima da mesma, em função da velocidade
4.6.8 - Caracterização do tráfego
Por intermédio da aplicação do programa “bwim” (sub-secção 4.5.3) e considerando a
estimativa da linha de influência obtida para a passagem do comboio à velocidade de
40 km/h foi possível determinar a geometria e as cargas por eixo do comboio para as
diferentes passagens. Na Figura 4.21 apresentam-se os resultados obtidos para as diversas
velocidades.
0
40
80
120
160
0 30 60 90 120 150 180L [m]
P[k
N]
40
60
80
100
120
140
160
180
200
220
240
Figura 4.21 - Estimativas da geometria e cargas por eixo para as diversas velocidades.
Na globalidade é possível considerar que foram obtidas boas estimativas no que se refere
às características do tráfego, tendo-se verificado, como esperado, uma perda de precisão
com o aumento da velocidade.
116
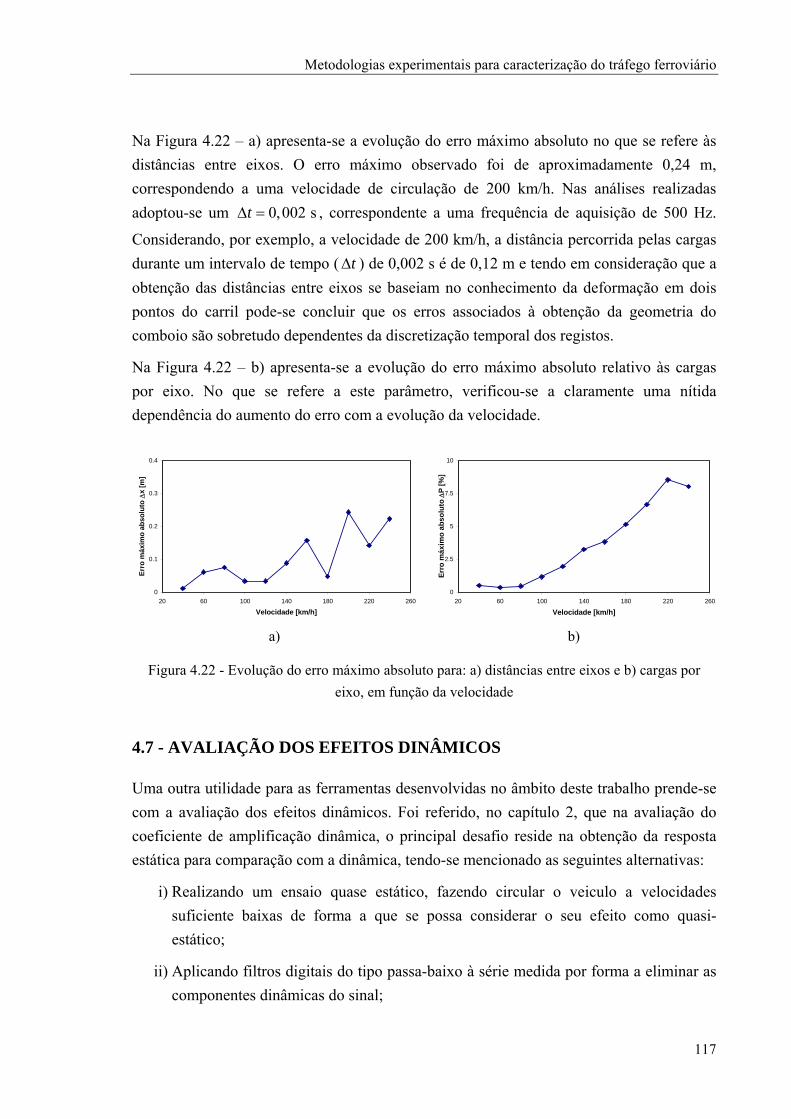
Metodologias experimentais para caracterização do tráfego ferroviário
Na Figura 4.22 – a) apresenta-se a evolução do erro máximo absoluto no que se refere às
distâncias entre eixos. O erro máximo observado foi de aproximadamente 0,24 m,
correspondendo a uma velocidade de circulação de 200 km/h. Nas análises realizadas
adoptou-se um 0,002 st , correspondente a uma frequência de aquisição de 500 Hz.
Considerando, por exemplo, a velocidade de 200 km/h, a distância percorrida pelas cargas
durante um intervalo de tempo ( t ) de 0,002 s é de 0,12 m e tendo em consideração que a
obtenção das distâncias entre eixos se baseiam no conhecimento da deformação em dois
pontos do carril pode-se concluir que os erros associados à obtenção da geometria do
comboio são sobretudo dependentes da discretização temporal dos registos.
Na Figura 4.22 – b) apresenta-se a evolução do erro máximo absoluto relativo às cargas
por eixo. No que se refere a este parâmetro, verificou-se a claramente uma nítida
dependência do aumento do erro com a evolução da velocidade.
0
0.1
0.2
0.3
0.4
20 60 100 140 180 220 260
Velocidade [km/h]
Err
o m
áxim
o a
bso
luto
x
[m]
0
2.5
5
7.5
10
20 60 100 140 180 220 260
Velocidade [km/h]
Err
o m
áx
imo
ab
so
luto
P
[%
]
a) b)
Figura 4.22 - Evolução do erro máximo absoluto para: a) distâncias entre eixos e b) cargas por
eixo, em função da velocidade
4.7 - AVALIAÇÃO DOS EFEITOS DINÂMICOS
Uma outra utilidade para as ferramentas desenvolvidas no âmbito deste trabalho prende-se
com a avaliação dos efeitos dinâmicos. Foi referido, no capítulo 2, que na avaliação do
coeficiente de amplificação dinâmica, o principal desafio reside na obtenção da resposta
estática para comparação com a dinâmica, tendo-se mencionado as seguintes alternativas:
i) Realizando um ensaio quase estático, fazendo circular o veiculo a velocidades
suficiente baixas de forma a que se possa considerar o seu efeito como quasi-
estático;
ii) Aplicando filtros digitais do tipo passa-baixo à série medida por forma a eliminar as
componentes dinâmicas do sinal;
117
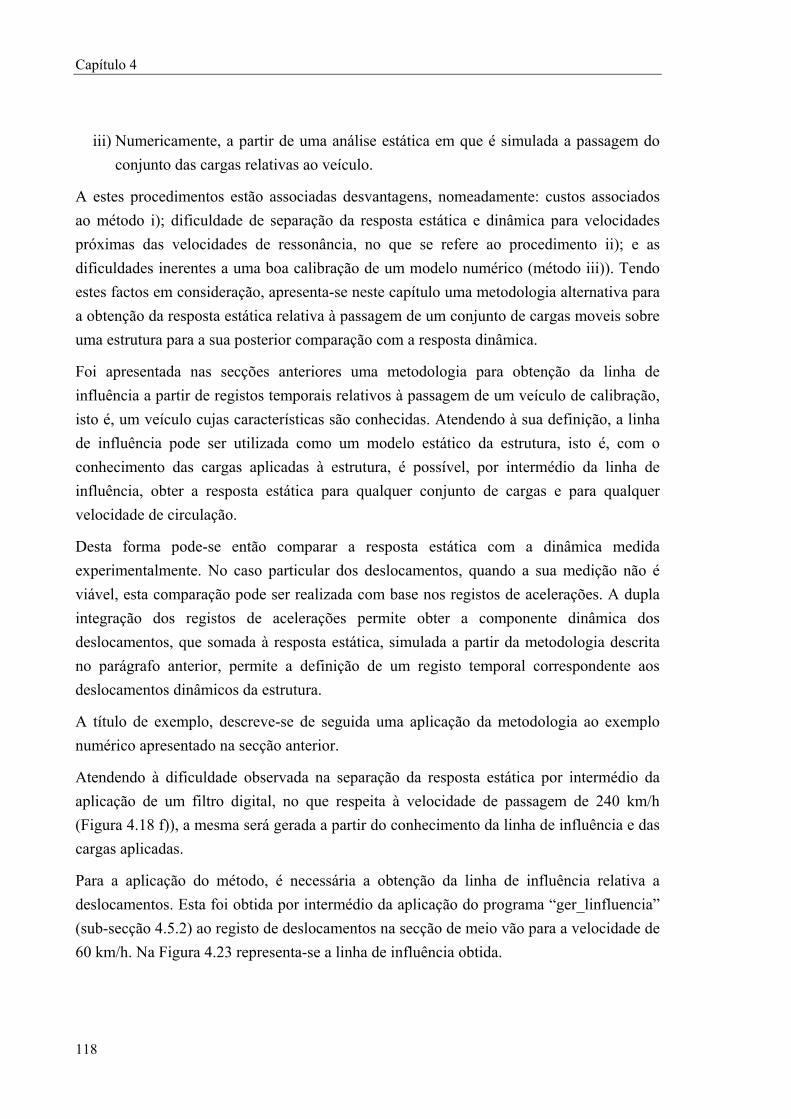
Capítulo 4
iii) Numericamente, a partir de uma análise estática em que é simulada a passagem do
conjunto das cargas relativas ao veículo.
A estes procedimentos estão associadas desvantagens, nomeadamente: custos associados
ao método i); dificuldade de separação da resposta estática e dinâmica para velocidades
próximas das velocidades de ressonância, no que se refere ao procedimento ii); e as
dificuldades inerentes a uma boa calibração de um modelo numérico (método iii)). Tendo
estes factos em consideração, apresenta-se neste capítulo uma metodologia alternativa para
a obtenção da resposta estática relativa à passagem de um conjunto de cargas moveis sobre
uma estrutura para a sua posterior comparação com a resposta dinâmica.
Foi apresentada nas secções anteriores uma metodologia para obtenção da linha de
influência a partir de registos temporais relativos à passagem de um veículo de calibração,
isto é, um veículo cujas características são conhecidas. Atendendo à sua definição, a linha
de influência pode ser utilizada como um modelo estático da estrutura, isto é, com o
conhecimento das cargas aplicadas à estrutura, é possível, por intermédio da linha de
influência, obter a resposta estática para qualquer conjunto de cargas e para qualquer
velocidade de circulação.
Desta forma pode-se então comparar a resposta estática com a dinâmica medida
experimentalmente. No caso particular dos deslocamentos, quando a sua medição não é
viável, esta comparação pode ser realizada com base nos registos de acelerações. A dupla
integração dos registos de acelerações permite obter a componente dinâmica dos
deslocamentos, que somada à resposta estática, simulada a partir da metodologia descrita
no parágrafo anterior, permite a definição de um registo temporal correspondente aos
deslocamentos dinâmicos da estrutura.
A título de exemplo, descreve-se de seguida uma aplicação da metodologia ao exemplo
numérico apresentado na secção anterior.
Atendendo à dificuldade observada na separação da resposta estática por intermédio da
aplicação de um filtro digital, no que respeita à velocidade de passagem de 240 km/h
(Figura 4.18 f)), a mesma será gerada a partir do conhecimento da linha de influência e das
cargas aplicadas.
Para a aplicação do método, é necessária a obtenção da linha de influência relativa a
deslocamentos. Esta foi obtida por intermédio da aplicação do programa “ger_linfluencia”
(sub-secção 4.5.2) ao registo de deslocamentos na secção de meio vão para a velocidade de
60 km/h. Na Figura 4.23 representa-se a linha de influência obtida.
118

Metodologias experimentais para caracterização do tráfego ferroviário
-0,0015
-0,0012
-0,0009
-0,0006
-0,0003
0
0 2 4 6 8 1L [m]
Des
loc
am
en
to [
mm
]
0
Figura 4.23 – Estimativa da linha de influência relativa a deslocamentos na secção de meio vão
obtida a partir da passagem do comboio a 60 km/h
Após a definição da linha de influência, e tendo em consideração o conhecimento da
geometria e cargas do comboio, foi possível a definição da resposta estática para a
velocidade de 240 km/h (Figura 4.24 a)). Adicionalmente, calculou-se a componente
dinâmica dos deslocamentos a partir da dupla integração do registo de acelerações,
apresentando-se a sua evolução na Figura 4.24 b).
-0,4
-0,3
-0,2
-0,1
0
0,1
0 0,5 1 1,5 2 2,5 3 3,5 4
Tempo [s]
Des
loca
men
to [
mm
]
Desloc. Estático
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 0,5 1 1,5 2 2,5 3 3,5 4
Tempo [s]
Des
loca
men
to [
mm
]
Comp. dinâmica de desloc.
a) b)
Figura 4.24 – Evoluções temporais dos deslocamentos na secção de meio vão da viga:
a) componente estática; b) componente dinâmica
Por forma a avaliar a precisão das estimativas obtidas, procedeu-se à soma da componente
estática com a componente dinâmica dos deslocamentos, obtendo-se uma estimativa dos
deslocamentos dinâmicos da estrutura (desloc. dinâmicos*), efectuando-se a sua
comparação com os deslocamentos reais na Figura 4.25, sendo possível verificar a boa
aproximação da estimativa obtida à resposta real da estrutura.
119
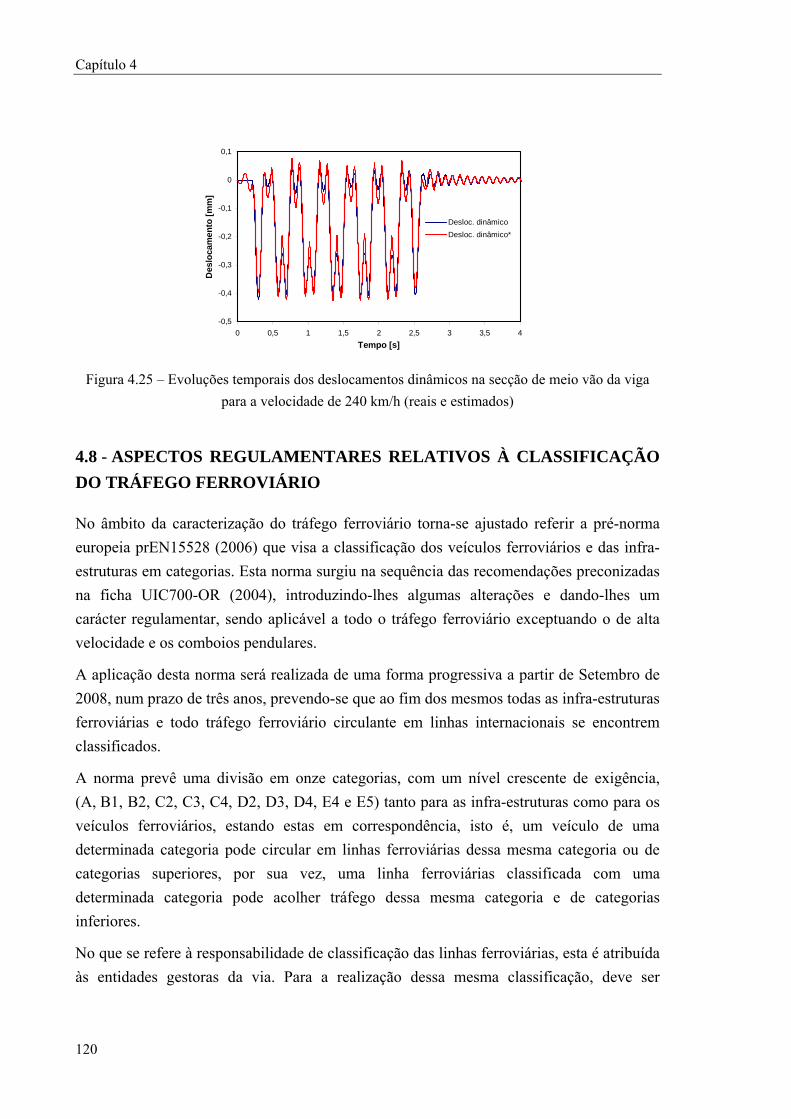
Capítulo 4
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0 0,5 1 1,5 2 2,5 3 3,5 4
Tempo [s]
Des
loca
men
to [
mm
]
Desloc. dinâmico
Desloc. dinâmico*
Figura 4.25 – Evoluções temporais dos deslocamentos dinâmicos na secção de meio vão da viga
para a velocidade de 240 km/h (reais e estimados)
4.8 - ASPECTOS REGULAMENTARES RELATIVOS À CLASSIFICAÇÃO
DO TRÁFEGO FERROVIÁRIO
No âmbito da caracterização do tráfego ferroviário torna-se ajustado referir a pré-norma
europeia prEN15528 (2006) que visa a classificação dos veículos ferroviários e das infra-
estruturas em categorias. Esta norma surgiu na sequência das recomendações preconizadas
na ficha UIC700-OR (2004), introduzindo-lhes algumas alterações e dando-lhes um
carácter regulamentar, sendo aplicável a todo o tráfego ferroviário exceptuando o de alta
velocidade e os comboios pendulares.
A aplicação desta norma será realizada de uma forma progressiva a partir de Setembro de
2008, num prazo de três anos, prevendo-se que ao fim dos mesmos todas as infra-estruturas
ferroviárias e todo tráfego ferroviário circulante em linhas internacionais se encontrem
classificados.
A norma prevê uma divisão em onze categorias, com um nível crescente de exigência,
(A, B1, B2, C2, C3, C4, D2, D3, D4, E4 e E5) tanto para as infra-estruturas como para os
veículos ferroviários, estando estas em correspondência, isto é, um veículo de uma
determinada categoria pode circular em linhas ferroviárias dessa mesma categoria ou de
categorias superiores, por sua vez, uma linha ferroviárias classificada com uma
determinada categoria pode acolher tráfego dessa mesma categoria e de categorias
inferiores.
No que se refere à responsabilidade de classificação das linhas ferroviárias, esta é atribuída
às entidades gestoras da via. Para a realização dessa mesma classificação, deve ser
120
Metodologias experimentais para caracterização do tráfego ferroviário
121
realizado um estudo do comportamento das diversas infra-estruturas (via, aterros, obras de
arte) face à acção de um conjunto de veículos de referência correspondentes às diferentes
categorias definidos pela norma.
As categorias dos veículos ferroviários devem ser determinadas analisando os esforços
causados por estes, para as diversas velocidades de circulação, num conjunto de estruturas
também definidas no documento normativo.
Finalmente, e atendendo ao âmbito do presente trabalho, refira-se a recomendação definida
na norma para o uso de sistemas de pesagem de cargas para as classes mais exigentes
(superiores a D4) de modo a garantir o seu cumprimento.

CAPÍTULO 5
APLICAÇÃO À PONTE FERROVIÁRIA DE CANELASEQUATION CHAPTER (NEXT) SECTION 5
5.1 - INTRODUÇÃO
Neste capítulo é apresentada a aplicação do algoritmo exposto no Capitulo 4 à ponte
ferroviária de Canelas, uma ponte do tipo “filler-beam” com 6 tramos simplesmente
apoiados com vãos de 12 m. Neste âmbito, foram realizadas campanhas experimentais na
estrutura que englobaram a medição de acelerações, extensões (na ponte e na via) e
deslocamentos.
A aplicação experimental do método permitiu a obtenção das características do tráfego
ferroviário ao longo de um dia de medição, bem como a caracterização da linha de
influência da estrutura, para extensões, na secção de meio vão.
Dada a importância das características dinâmicas da ponte, na aplicação do algoritmo
B-WIM, o estudo englobou também uma identificação modal da estrutura. Os resultados
obtidos foram também comparados com estudos experimentais (Rodrigues, 2002) e
numéricos (Silva, 2008).
Finalmente, são também apresentados resultados relativos aos efeitos dinâmicos
provocados pela acção do tráfego ferroviário, nomeadamente coeficientes de amplificação
dinâmica relativos a deslocamentos e extensões e valores máximos da aceleração vertical
do tabuleiro.
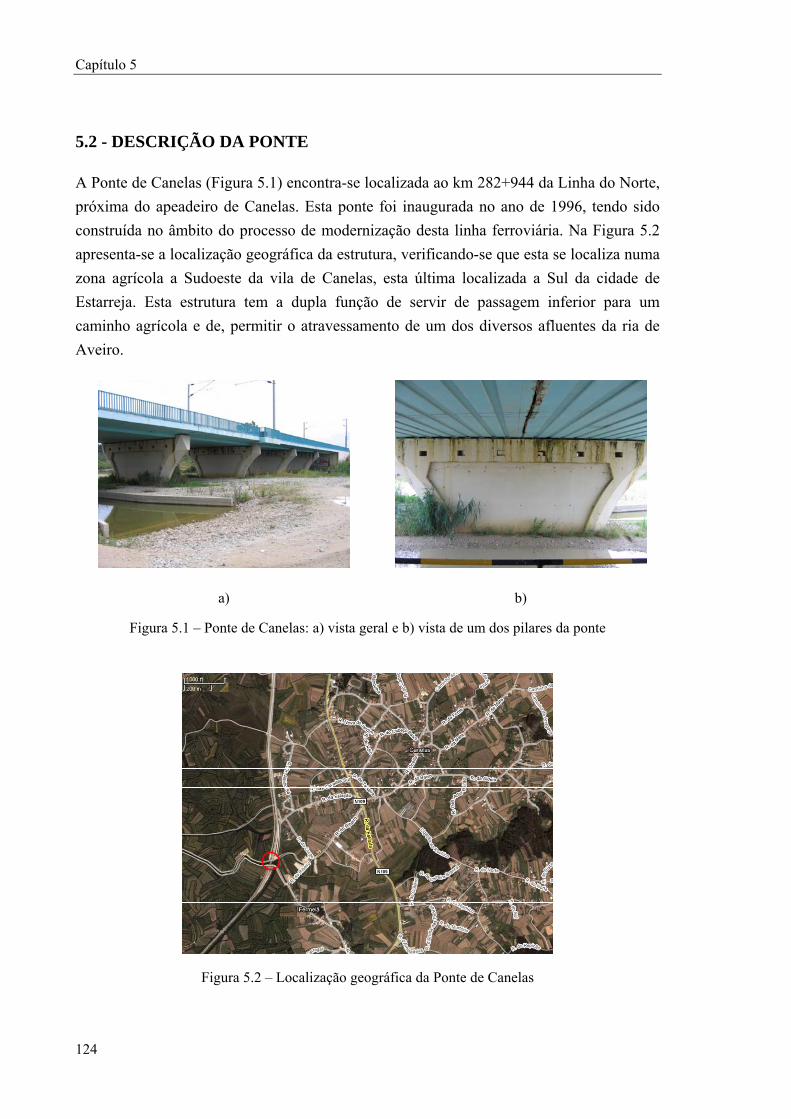
Capítulo 5
5.2 - DESCRIÇÃO DA PONTE
A Ponte de Canelas (Figura 5.1) encontra-se localizada ao km 282+944 da Linha do Norte,
próxima do apeadeiro de Canelas. Esta ponte foi inaugurada no ano de 1996, tendo sido
construída no âmbito do processo de modernização desta linha ferroviária. Na Figura 5.2
apresenta-se a localização geográfica da estrutura, verificando-se que esta se localiza numa
zona agrícola a Sudoeste da vila de Canelas, esta última localizada a Sul da cidade de
Estarreja. Esta estrutura tem a dupla função de servir de passagem inferior para um
caminho agrícola e de, permitir o atravessamento de um dos diversos afluentes da ria de
Aveiro.
a) b)
Figura 5.1 – Ponte de Canelas: a) vista geral e b) vista de um dos pilares da ponte
Figura 5.2 – Localização geográfica da Ponte de Canelas
124
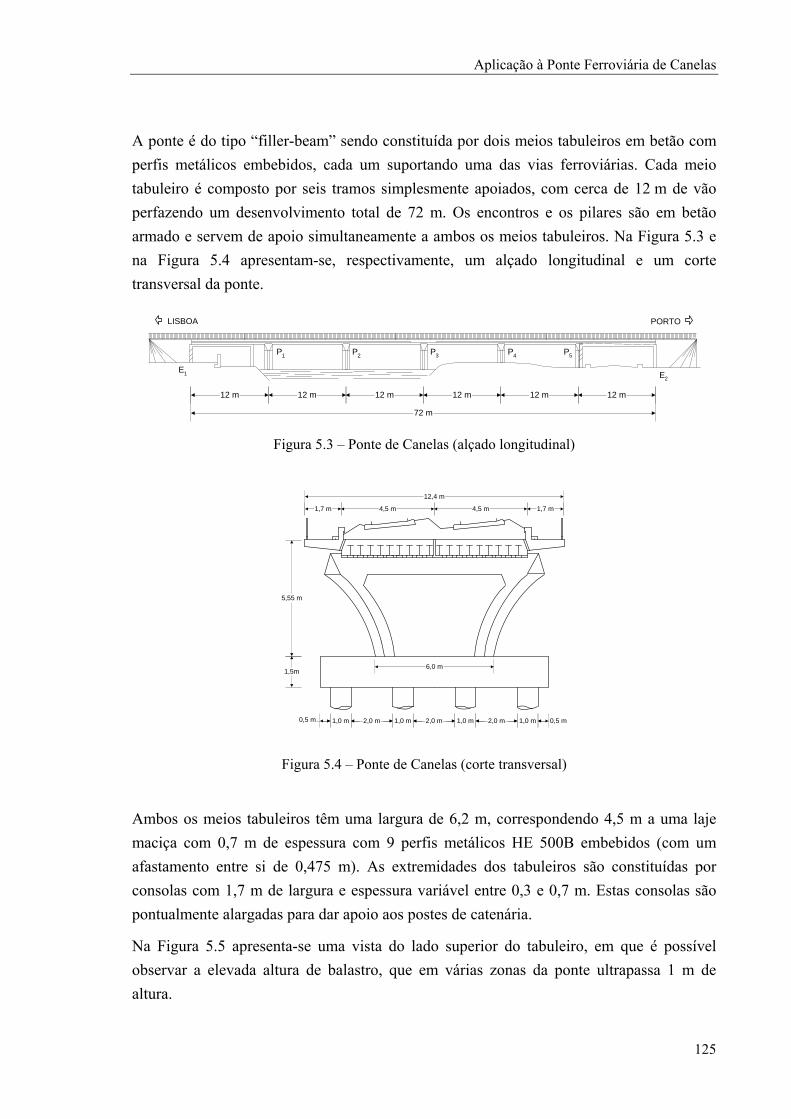
Aplicação à Ponte Ferroviária de Canelas
A ponte é do tipo “filler-beam” sendo constituída por dois meios tabuleiros em betão com
perfis metálicos embebidos, cada um suportando uma das vias ferroviárias. Cada meio
tabuleiro é composto por seis tramos simplesmente apoiados, com cerca de 12 m de vão
perfazendo um desenvolvimento total de 72 m. Os encontros e os pilares são em betão
armado e servem de apoio simultaneamente a ambos os meios tabuleiros. Na Figura 5.3 e
na Figura 5.4 apresentam-se, respectivamente, um alçado longitudinal e um corte
transversal da ponte.
LISBOA
12 m12 m 12 m12 m 12 m12 m
72 m
E1
P1 P2 P3 P4 P5
PORTO
E2
Figura 5.3 – Ponte de Canelas (alçado longitudinal)
6,0 m
5,55 m
1,5m
1,7 m 4,5 m 1,7 m4,5 m
12,4 m
0,5 m 1,0 m 2,0 m 1,0 m 2,0 m 1,0 m 2,0 m 1,0 m 0,5 m
Figura 5.4 – Ponte de Canelas (corte transversal)
Ambos os meios tabuleiros têm uma largura de 6,2 m, correspondendo 4,5 m a uma laje
maciça com 0,7 m de espessura com 9 perfis metálicos HE 500B embebidos (com um
afastamento entre si de 0,475 m). As extremidades dos tabuleiros são constituídas por
consolas com 1,7 m de largura e espessura variável entre 0,3 e 0,7 m. Estas consolas são
pontualmente alargadas para dar apoio aos postes de catenária.
Na Figura 5.5 apresenta-se uma vista do lado superior do tabuleiro, em que é possível
observar a elevada altura de balastro, que em várias zonas da ponte ultrapassa 1 m de
altura.
125
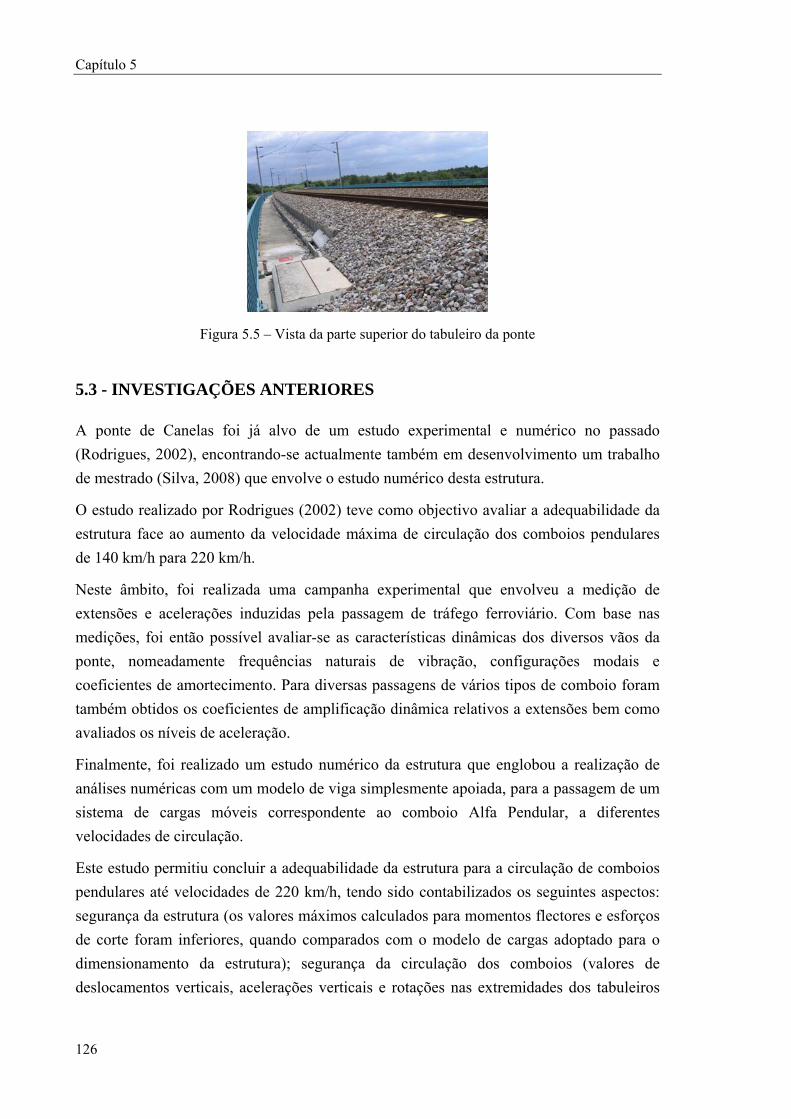
Capítulo 5
Figura 5.5 – Vista da parte superior do tabuleiro da ponte
5.3 - INVESTIGAÇÕES ANTERIORES
A ponte de Canelas foi já alvo de um estudo experimental e numérico no passado
(Rodrigues, 2002), encontrando-se actualmente também em desenvolvimento um trabalho
de mestrado (Silva, 2008) que envolve o estudo numérico desta estrutura.
O estudo realizado por Rodrigues (2002) teve como objectivo avaliar a adequabilidade da
estrutura face ao aumento da velocidade máxima de circulação dos comboios pendulares
de 140 km/h para 220 km/h.
Neste âmbito, foi realizada uma campanha experimental que envolveu a medição de
extensões e acelerações induzidas pela passagem de tráfego ferroviário. Com base nas
medições, foi então possível avaliar-se as características dinâmicas dos diversos vãos da
ponte, nomeadamente frequências naturais de vibração, configurações modais e
coeficientes de amortecimento. Para diversas passagens de vários tipos de comboio foram
também obtidos os coeficientes de amplificação dinâmica relativos a extensões bem como
avaliados os níveis de aceleração.
Finalmente, foi realizado um estudo numérico da estrutura que englobou a realização de
análises numéricas com um modelo de viga simplesmente apoiada, para a passagem de um
sistema de cargas móveis correspondente ao comboio Alfa Pendular, a diferentes
velocidades de circulação.
Este estudo permitiu concluir a adequabilidade da estrutura para a circulação de comboios
pendulares até velocidades de 220 km/h, tendo sido contabilizados os seguintes aspectos:
segurança da estrutura (os valores máximos calculados para momentos flectores e esforços
de corte foram inferiores, quando comparados com o modelo de cargas adoptado para o
dimensionamento da estrutura); segurança da circulação dos comboios (valores de
deslocamentos verticais, acelerações verticais e rotações nas extremidades dos tabuleiros
126
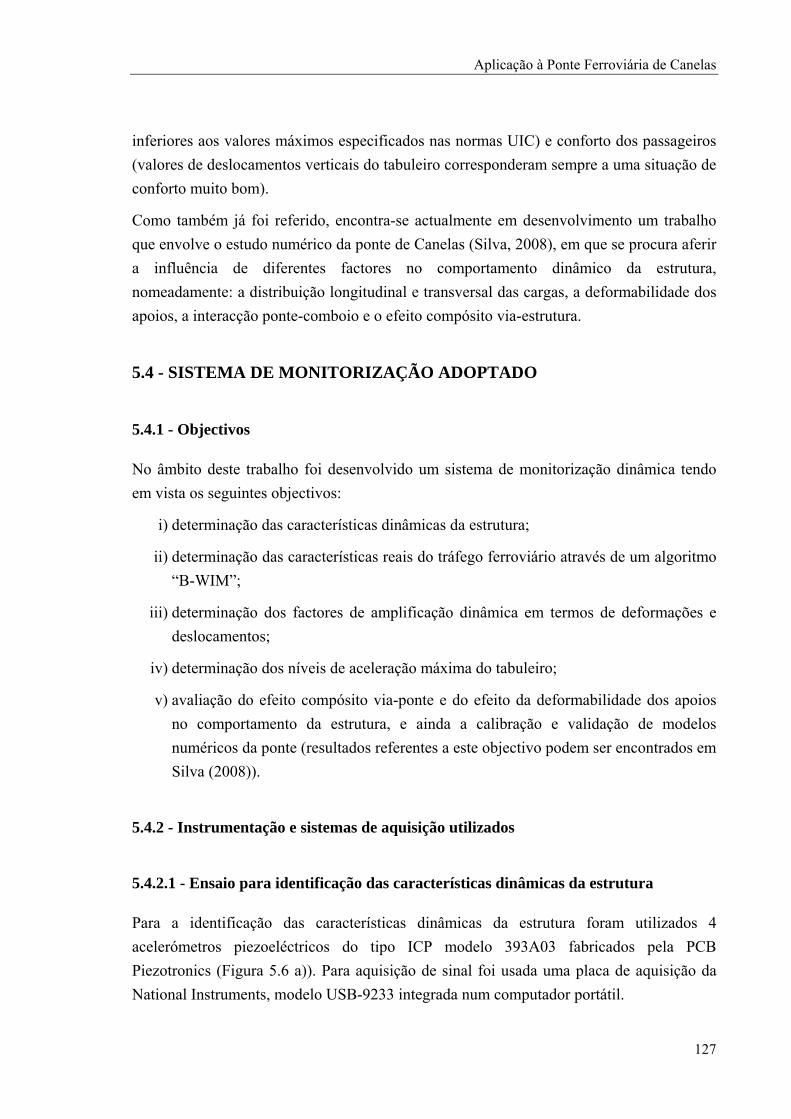
Aplicação à Ponte Ferroviária de Canelas
inferiores aos valores máximos especificados nas normas UIC) e conforto dos passageiros
(valores de deslocamentos verticais do tabuleiro corresponderam sempre a uma situação de
conforto muito bom).
Como também já foi referido, encontra-se actualmente em desenvolvimento um trabalho
que envolve o estudo numérico da ponte de Canelas (Silva, 2008), em que se procura aferir
a influência de diferentes factores no comportamento dinâmico da estrutura,
nomeadamente: a distribuição longitudinal e transversal das cargas, a deformabilidade dos
apoios, a interacção ponte-comboio e o efeito compósito via-estrutura.
5.4 - SISTEMA DE MONITORIZAÇÃO ADOPTADO
5.4.1 - Objectivos
No âmbito deste trabalho foi desenvolvido um sistema de monitorização dinâmica tendo
em vista os seguintes objectivos:
i) determinação das características dinâmicas da estrutura;
ii) determinação das características reais do tráfego ferroviário através de um algoritmo
“B-WIM”;
iii) determinação dos factores de amplificação dinâmica em termos de deformações e
deslocamentos;
iv) determinação dos níveis de aceleração máxima do tabuleiro;
v) avaliação do efeito compósito via-ponte e do efeito da deformabilidade dos apoios
no comportamento da estrutura, e ainda a calibração e validação de modelos
numéricos da ponte (resultados referentes a este objectivo podem ser encontrados em
Silva (2008)).
5.4.2 - Instrumentação e sistemas de aquisição utilizados
5.4.2.1 - Ensaio para identificação das características dinâmicas da estrutura
Para a identificação das características dinâmicas da estrutura foram utilizados 4
acelerómetros piezoeléctricos do tipo ICP modelo 393A03 fabricados pela PCB
Piezotronics (Figura 5.6 a)). Para aquisição de sinal foi usada uma placa de aquisição da
National Instruments, modelo USB-9233 integrada num computador portátil.
127
Capítulo 5
a) b)
Figura 5.6 – Equipamentos utilizados: a) acelerómetro PCB modelo 393A03 e b) placa de
aquisição NI USB-9233
As principais características dos acelerómetros e da placa de aquisição são apresentadas
nas Tabelas 5.1 e 5.2 respectivamente.
Tabela 5.1 – Principais características dos acelerómetros piezoeléctricos PCB, modelo 393A03
Sensibilidade 1000 mV/g
Gama de medição 5 V
5% 0,5 a 2000 Hz
10% 0,3 a 4000 Hz Resposta em Frequência
3dB 0,2 a 6000 Hz
Frequência de ressonância ≥ 10 kHz
Resolução (1 a 10000 Hz) 0,00001 g rms
Modo de funcionamento Corte
Tabela 5.2– Principais características da placa de aquisição NI USB-9233
Nº de canais 4
Frequência de aquisição 2 kS/s/canal a
50 kS/s/canal
Resolução 24 bits
Gama de medição -5 a +5 V
(Gama única)
Condicionamento de sinal
Condicionamento para
acelerómetros IEPE e
Filtros anti-aliasing
Os acelerómetros foram fixos à estrutura por intermédio de chapas metálicas que, por sua
vez foram coladas às vigas metálicas da ponte (Figura 5.7).
128
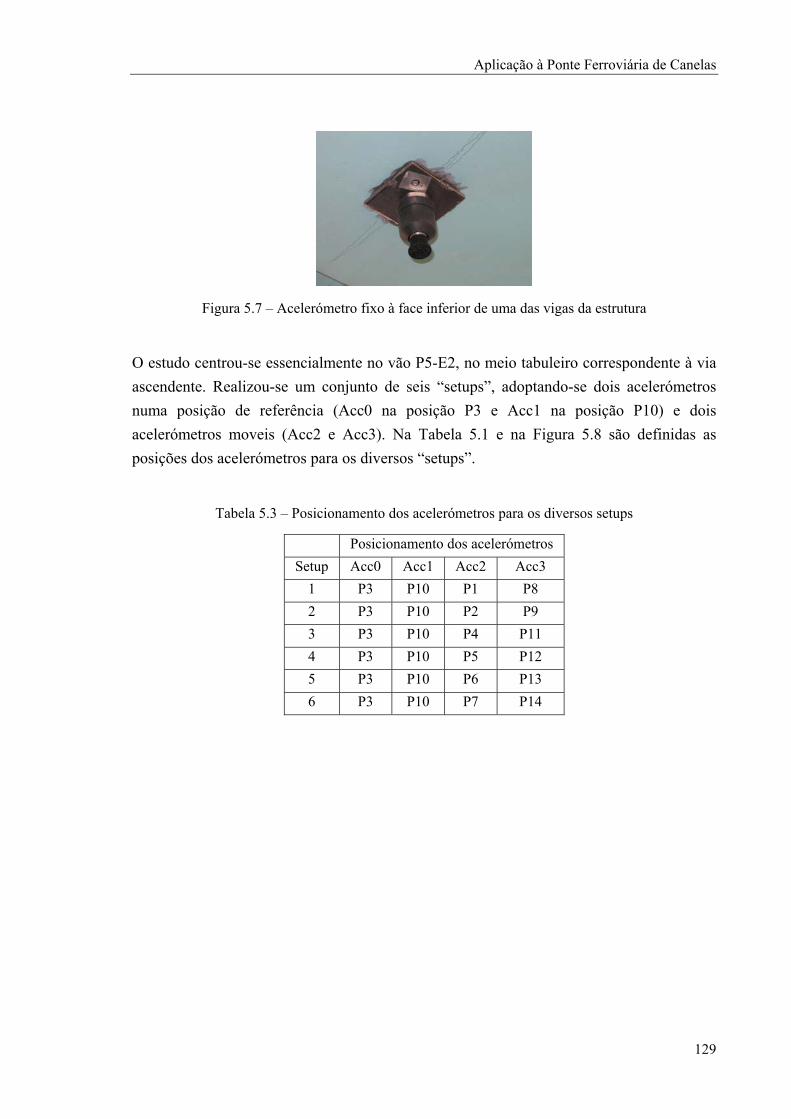
Aplicação à Ponte Ferroviária de Canelas
Figura 5.7 – Acelerómetro fixo à face inferior de uma das vigas da estrutura
O estudo centrou-se essencialmente no vão P5-E2, no meio tabuleiro correspondente à via
ascendente. Realizou-se um conjunto de seis “setups”, adoptando-se dois acelerómetros
numa posição de referência (Acc0 na posição P3 e Acc1 na posição P10) e dois
acelerómetros moveis (Acc2 e Acc3). Na Tabela 5.1 e na Figura 5.8 são definidas as
posições dos acelerómetros para os diversos “setups”.
Tabela 5.3 – Posicionamento dos acelerómetros para os diversos setups
Posicionamento dos acelerómetros
Setup Acc0 Acc1 Acc2 Acc3
1 P3 P10 P1 P8
2 P3 P10 P2 P9
3 P3 P10 P4 P11
4 P3 P10 P5 P12
5 P3 P10 P6 P13
6 P3 P10 P7 P14
129
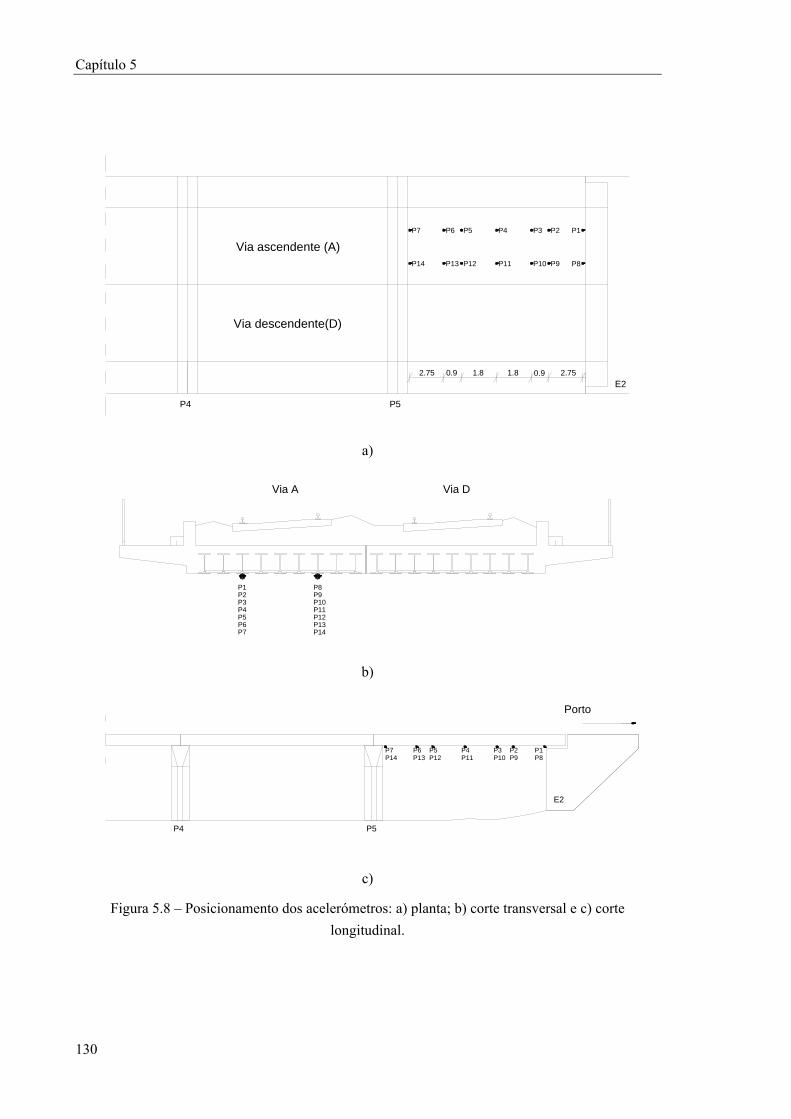
Capítulo 5
Via ascendente (A)
1.82.75 0.9 1.8 0.9 2.75
Via descendente(D)
P14
P7 P6 P5
P13 P12 P11
P4 P3 P2
P8
P1
P10 P9
P5P4
E2
a)
Via DVia A
P1P2P3P4P5P6
P8P9P10P11P12P13
P7 P14
b)
E2
P5P4
Porto
P3P10
P2P9
P1P8
P4P11
P5P12
P6P13
P7P14
c)
Figura 5.8 – Posicionamento dos acelerómetros: a) planta; b) corte transversal e c) corte
longitudinal.
130
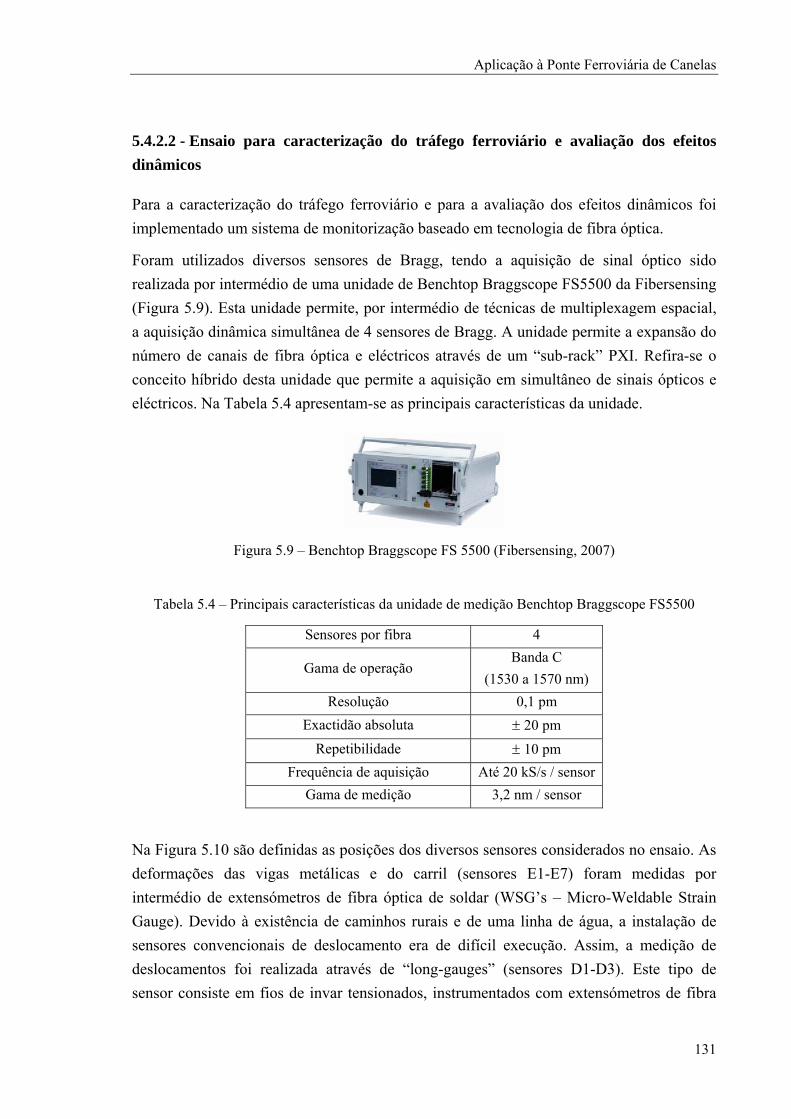
Aplicação à Ponte Ferroviária de Canelas
5.4.2.2 - Ensaio para caracterização do tráfego ferroviário e avaliação dos efeitos
dinâmicos
Para a caracterização do tráfego ferroviário e para a avaliação dos efeitos dinâmicos foi
implementado um sistema de monitorização baseado em tecnologia de fibra óptica.
Foram utilizados diversos sensores de Bragg, tendo a aquisição de sinal óptico sido
realizada por intermédio de uma unidade de Benchtop Braggscope FS5500 da Fibersensing
(Figura 5.9). Esta unidade permite, por intermédio de técnicas de multiplexagem espacial,
a aquisição dinâmica simultânea de 4 sensores de Bragg. A unidade permite a expansão do
número de canais de fibra óptica e eléctricos através de um “sub-rack” PXI. Refira-se o
conceito híbrido desta unidade que permite a aquisição em simultâneo de sinais ópticos e
eléctricos. Na Tabela 5.4 apresentam-se as principais características da unidade.
Figura 5.9 – Benchtop Braggscope FS 5500 (Fibersensing, 2007)
Tabela 5.4 – Principais características da unidade de medição Benchtop Braggscope FS5500
Sensores por fibra 4
Gama de operação Banda C
(1530 a 1570 nm)
Resolução 0,1 pm
Exactidão absoluta 20 pm
Repetibilidade 10 pm
Frequência de aquisição Até 20 kS/s / sensor
Gama de medição 3,2 nm / sensor
Na Figura 5.10 são definidas as posições dos diversos sensores considerados no ensaio. As
deformações das vigas metálicas e do carril (sensores E1-E7) foram medidas por
intermédio de extensómetros de fibra óptica de soldar (WSG’s – Micro-Weldable Strain
Gauge). Devido à existência de caminhos rurais e de uma linha de água, a instalação de
sensores convencionais de deslocamento era de difícil execução. Assim, a medição de
deslocamentos foi realizada através de “long-gauges” (sensores D1-D3). Este tipo de
sensor consiste em fios de invar tensionados, instrumentados com extensómetros de fibra
131
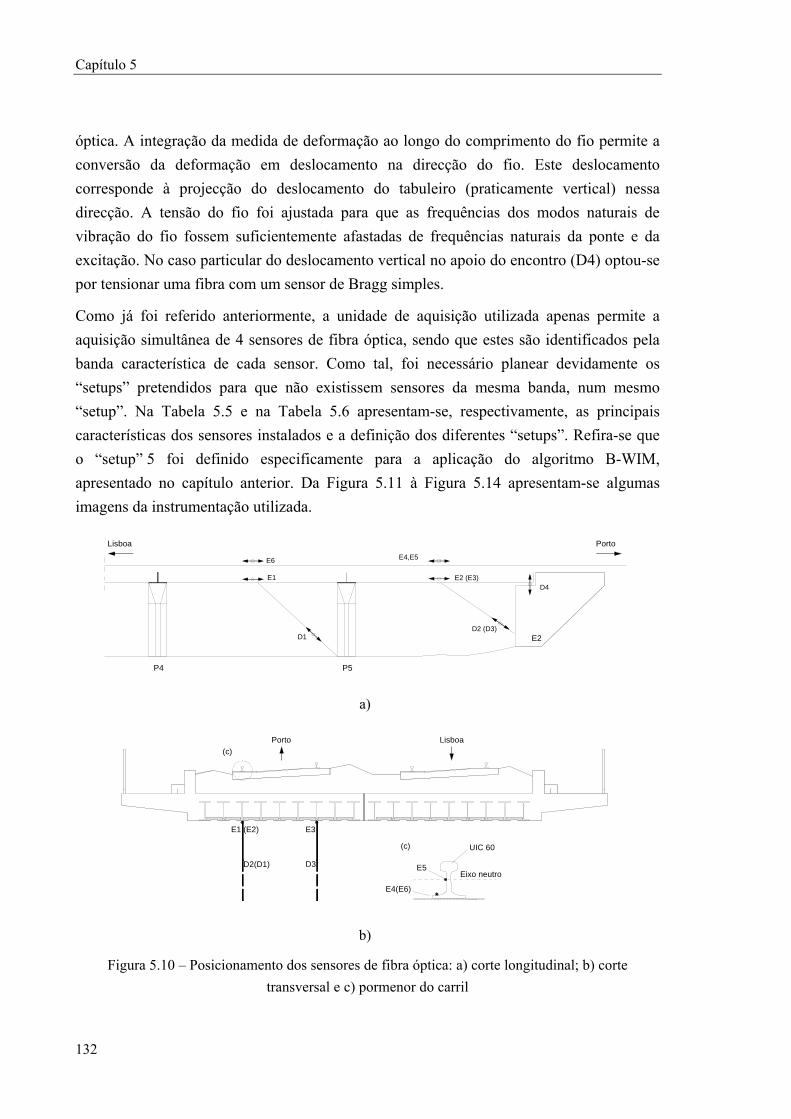
Capítulo 5
óptica. A integração da medida de deformação ao longo do comprimento do fio permite a
conversão da deformação em deslocamento na direcção do fio. Este deslocamento
corresponde à projecção do deslocamento do tabuleiro (praticamente vertical) nessa
direcção. A tensão do fio foi ajustada para que as frequências dos modos naturais de
vibração do fio fossem suficientemente afastadas de frequências naturais da ponte e da
excitação. No caso particular do deslocamento vertical no apoio do encontro (D4) optou-se
por tensionar uma fibra com um sensor de Bragg simples.
Como já foi referido anteriormente, a unidade de aquisição utilizada apenas permite a
aquisição simultânea de 4 sensores de fibra óptica, sendo que estes são identificados pela
banda característica de cada sensor. Como tal, foi necessário planear devidamente os
“setups” pretendidos para que não existissem sensores da mesma banda, num mesmo
“setup”. Na Tabela 5.5 e na Tabela 5.6 apresentam-se, respectivamente, as principais
características dos sensores instalados e a definição dos diferentes “setups”. Refira-se que
o “setup” 5 foi definido especificamente para a aplicação do algoritmo B-WIM,
apresentado no capítulo anterior. Da Figura 5.11 à Figura 5.14 apresentam-se algumas
imagens da instrumentação utilizada.
D1D2 (D3)
P4
Porto
E4,E5
E1D4
E2 (E3)
E6
Lisboa
E2
P5
a)
LisboaPorto
E3
(c)
D3D2(D1)
E1 (E2)
E4(E6)
UIC 60
E5Eixo neutro
(c)
b)
Figura 5.10 – Posicionamento dos sensores de fibra óptica: a) corte longitudinal; b) corte
transversal e c) pormenor do carril
132
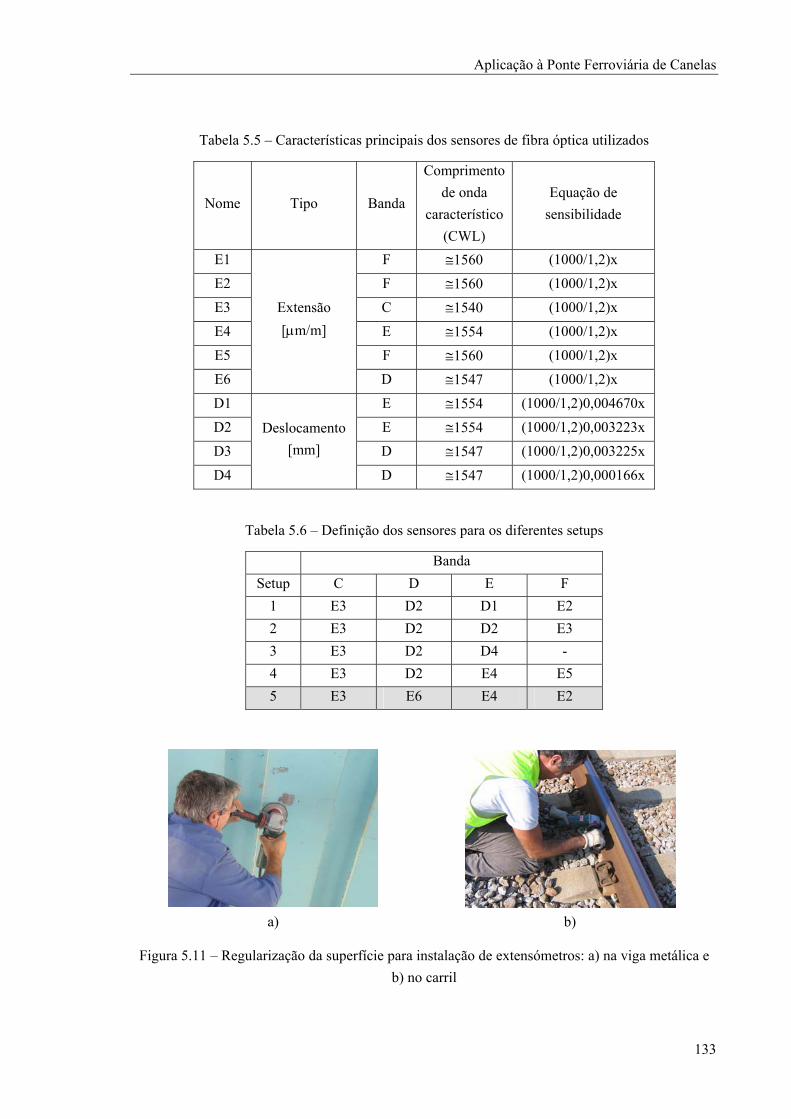
Aplicação à Ponte Ferroviária de Canelas
Tabela 5.5 – Características principais dos sensores de fibra óptica utilizados
Nome Tipo Banda
Comprimento
de onda
característico
(CWL)
Equação de
sensibilidade
E1 F 1560 (1000/1,2)x
E2 F 1560 (1000/1,2)x
E3 C 1540 (1000/1,2)x
E4 E 1554 (1000/1,2)x
E5 F 1560 (1000/1,2)x
E6
Extensão
[m/m]
D 1547 (1000/1,2)x
D1 E 1554 (1000/1,2)0,004670x
D2 E 1554 (1000/1,2)0,003223x
D3 D 1547 (1000/1,2)0,003225x
D4
Deslocamento
[mm]
D 1547 (1000/1,2)0,000166x
Tabela 5.6 – Definição dos sensores para os diferentes setups
Banda
Setup C D E F
1 E3 D2 D1 E2
2 E3 D2 D2 E3
3 E3 D2 D4 -
4 E3 D2 E4 E5
5 E3 E6 E4 E2
a) b)
Figura 5.11 – Regularização da superfície para instalação de extensómetros: a) na viga metálica e
b) no carril
133
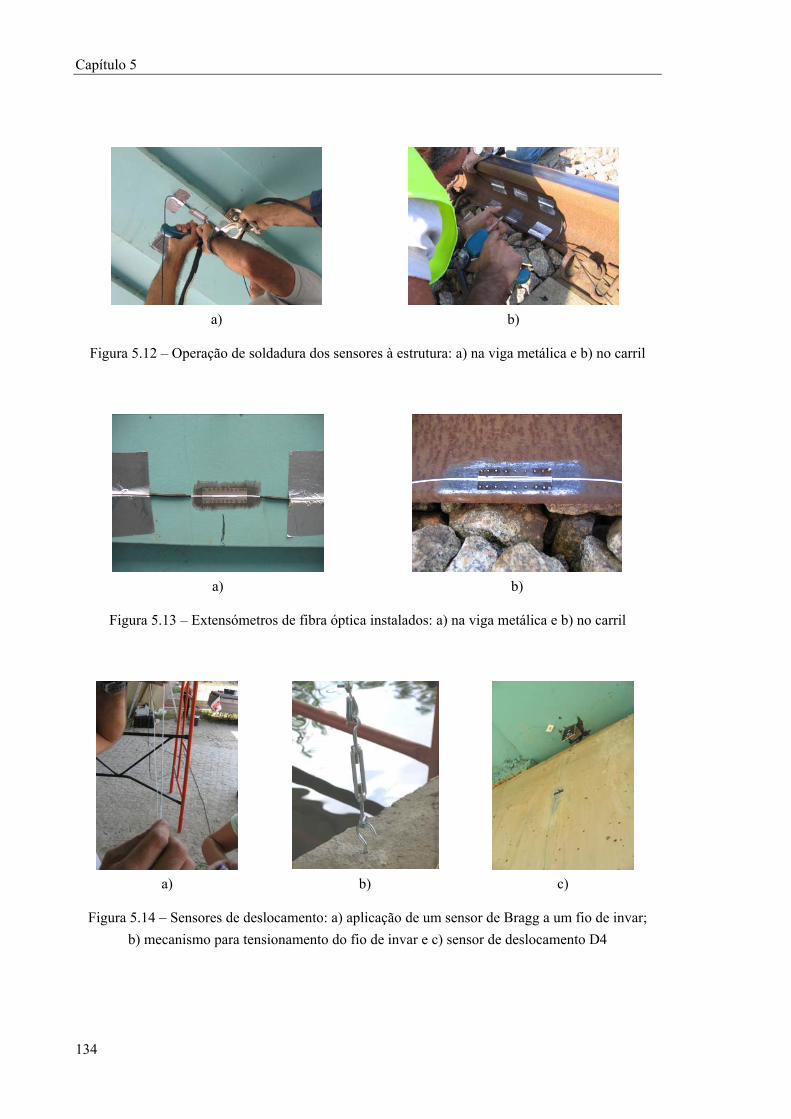
Capítulo 5
a) b)
Figura 5.12 – Operação de soldadura dos sensores à estrutura: a) na viga metálica e b) no carril
a) b)
Figura 5.13 – Extensómetros de fibra óptica instalados: a) na viga metálica e b) no carril
a) b) c)
Figura 5.14 – Sensores de deslocamento: a) aplicação de um sensor de Bragg a um fio de invar;
b) mecanismo para tensionamento do fio de invar e c) sensor de deslocamento D4
134
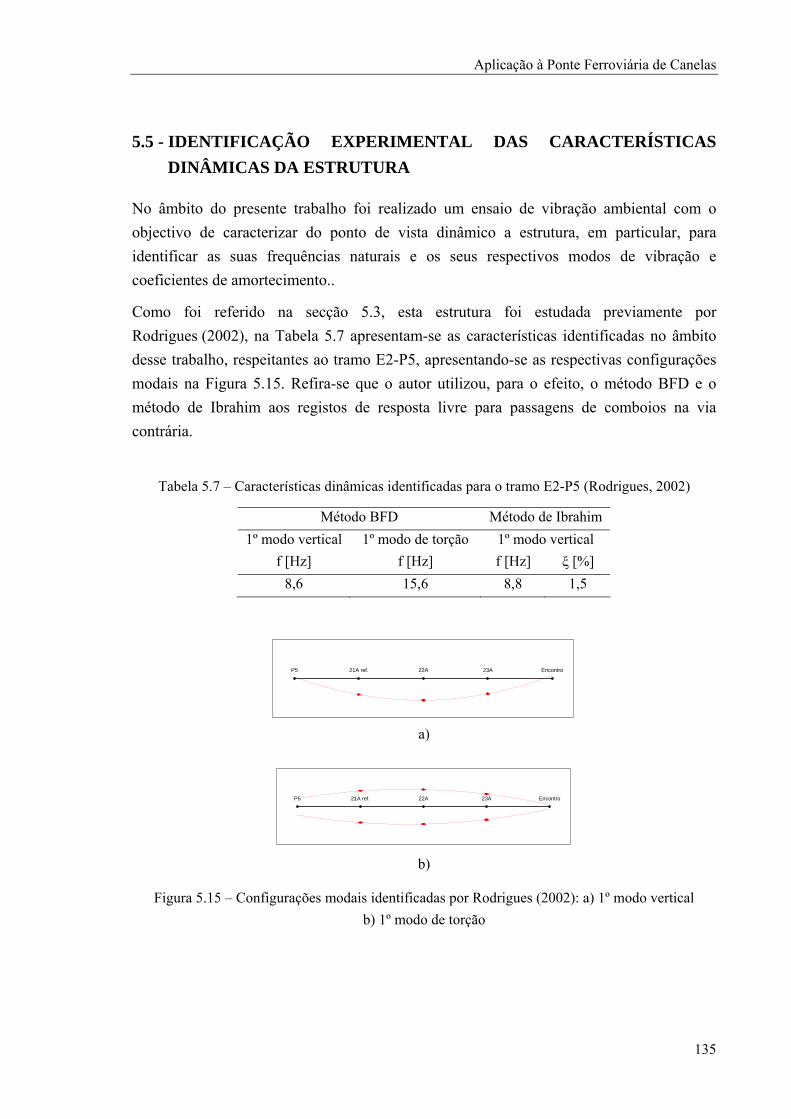
Aplicação à Ponte Ferroviária de Canelas
5.5 - IDENTIFICAÇÃO EXPERIMENTAL DAS CARACTERÍSTICAS
DINÂMICAS DA ESTRUTURA
No âmbito do presente trabalho foi realizado um ensaio de vibração ambiental com o
objectivo de caracterizar do ponto de vista dinâmico a estrutura, em particular, para
identificar as suas frequências naturais e os seus respectivos modos de vibração e
coeficientes de amortecimento..
Como foi referido na secção 5.3, esta estrutura foi estudada previamente por
Rodrigues (2002), na Tabela 5.7 apresentam-se as características identificadas no âmbito
desse trabalho, respeitantes ao tramo E2-P5, apresentando-se as respectivas configurações
modais na Figura 5.15. Refira-se que o autor utilizou, para o efeito, o método BFD e o
método de Ibrahim aos registos de resposta livre para passagens de comboios na via
contrária.
Tabela 5.7 – Características dinâmicas identificadas para o tramo E2-P5 (Rodrigues, 2002)
Método BFD Método de Ibrahim
1º modo vertical 1º modo de torção 1º modo vertical
f [Hz] f [Hz] f [Hz] ξ [%]
8,6 15,6 8,8 1,5
a)
b)
23A22A21A ref. EncontroP5
P5 Encontro21A ref. 22A 23A
Figura 5.15 – Configurações modais identificadas por Rodrigues (2002): a) 1º modo vertical
b) 1º modo de torção
135
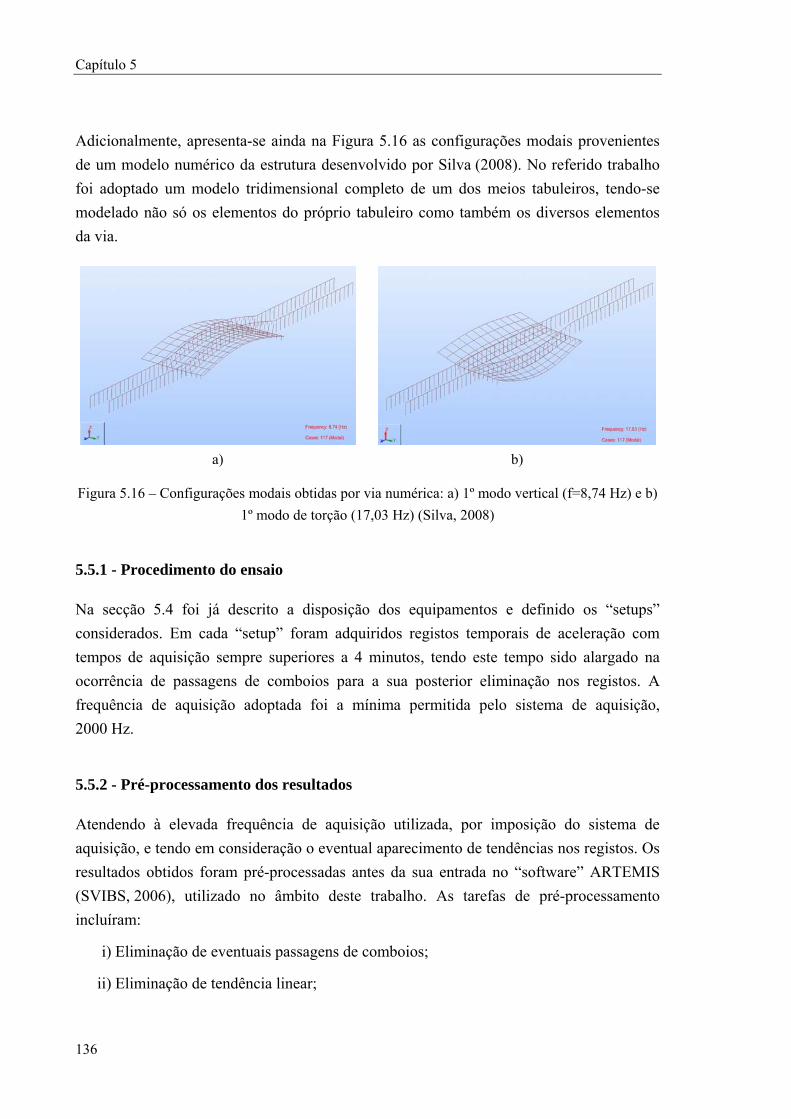
Capítulo 5
Adicionalmente, apresenta-se ainda na Figura 5.16 as configurações modais provenientes
de um modelo numérico da estrutura desenvolvido por Silva (2008). No referido trabalho
foi adoptado um modelo tridimensional completo de um dos meios tabuleiros, tendo-se
modelado não só os elementos do próprio tabuleiro como também os diversos elementos
da via.
a) b)
Figura 5.16 – Configurações modais obtidas por via numérica: a) 1º modo vertical (f=8,74 Hz) e b)
1º modo de torção (17,03 Hz) (Silva, 2008)
5.5.1 - Procedimento do ensaio
Na secção 5.4 foi já descrito a disposição dos equipamentos e definido os “setups”
considerados. Em cada “setup” foram adquiridos registos temporais de aceleração com
tempos de aquisição sempre superiores a 4 minutos, tendo este tempo sido alargado na
ocorrência de passagens de comboios para a sua posterior eliminação nos registos. A
frequência de aquisição adoptada foi a mínima permitida pelo sistema de aquisição,
2000 Hz.
5.5.2 - Pré-processamento dos resultados
Atendendo à elevada frequência de aquisição utilizada, por imposição do sistema de
aquisição, e tendo em consideração o eventual aparecimento de tendências nos registos. Os
resultados obtidos foram pré-processadas antes da sua entrada no “software” ARTEMIS
(SVIBS, 2006), utilizado no âmbito deste trabalho. As tarefas de pré-processamento
incluíram:
i) Eliminação de eventuais passagens de comboios;
ii) Eliminação de tendência linear;
136
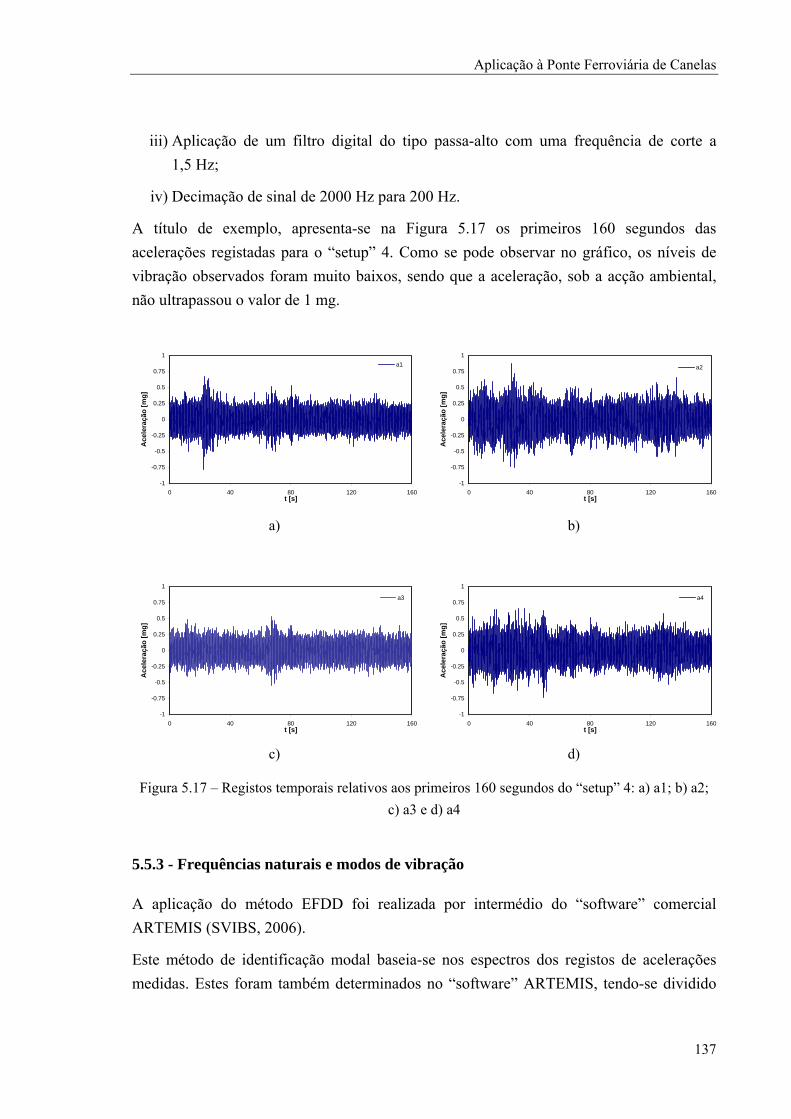
Aplicação à Ponte Ferroviária de Canelas
iii) Aplicação de um filtro digital do tipo passa-alto com uma frequência de corte a
1,5 Hz;
iv) Decimação de sinal de 2000 Hz para 200 Hz.
A título de exemplo, apresenta-se na Figura 5.17 os primeiros 160 segundos das
acelerações registadas para o “setup” 4. Como se pode observar no gráfico, os níveis de
vibração observados foram muito baixos, sendo que a aceleração, sob a acção ambiental,
não ultrapassou o valor de 1 mg.
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
0 40 80 120 160t [s]
Ace
lera
ção
[m
g]
a1
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
0 40 80 120 160t [s]
Ace
lera
ção
[m
g]
a2
a) b)
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
0 40 80 120 160t [s]
Ace
lera
ção
[m
g]
a3
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
0 40 80 120 160t [s]
Ace
lera
ção
[m
g]
a4
c) d)
Figura 5.17 – Registos temporais relativos aos primeiros 160 segundos do “setup” 4: a) a1; b) a2;
c) a3 e d) a4
5.5.3 - Frequências naturais e modos de vibração
A aplicação do método EFDD foi realizada por intermédio do “software” comercial
ARTEMIS (SVIBS, 2006).
Este método de identificação modal baseia-se nos espectros dos registos de acelerações
medidas. Estes foram também determinados no “software” ARTEMIS, tendo-se dividido
137
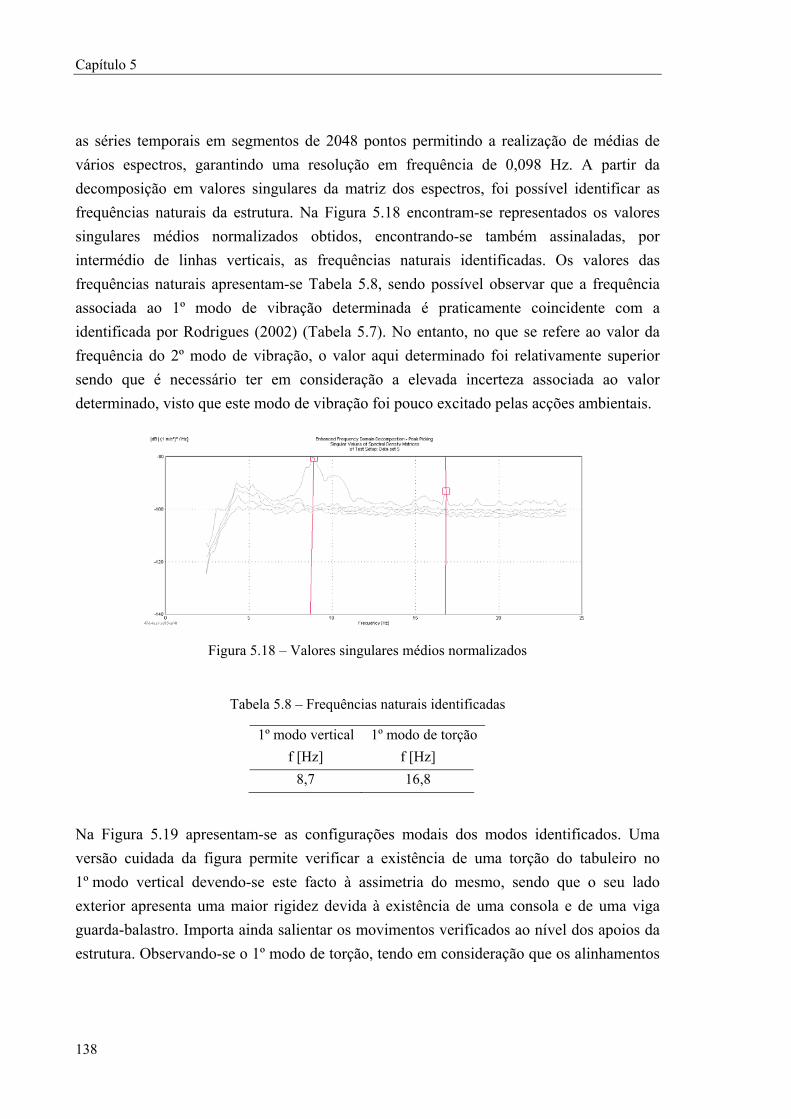
Capítulo 5
as séries temporais em segmentos de 2048 pontos permitindo a realização de médias de
vários espectros, garantindo uma resolução em frequência de 0,098 Hz. A partir da
decomposição em valores singulares da matriz dos espectros, foi possível identificar as
frequências naturais da estrutura. Na Figura 5.18 encontram-se representados os valores
singulares médios normalizados obtidos, encontrando-se também assinaladas, por
intermédio de linhas verticais, as frequências naturais identificadas. Os valores das
frequências naturais apresentam-se Tabela 5.8, sendo possível observar que a frequência
associada ao 1º modo de vibração determinada é praticamente coincidente com a
identificada por Rodrigues (2002) (Tabela 5.7). No entanto, no que se refere ao valor da
frequência do 2º modo de vibração, o valor aqui determinado foi relativamente superior
sendo que é necessário ter em consideração a elevada incerteza associada ao valor
determinado, visto que este modo de vibração foi pouco excitado pelas acções ambientais.
Figura 5.18 – Valores singulares médios normalizados
Tabela 5.8 – Frequências naturais identificadas
1º modo vertical 1º modo de torção
f [Hz] f [Hz]
8,7 16,8
Na Figura 5.19 apresentam-se as configurações modais dos modos identificados. Uma
versão cuidada da figura permite verificar a existência de uma torção do tabuleiro no
1º modo vertical devendo-se este facto à assimetria do mesmo, sendo que o seu lado
exterior apresenta uma maior rigidez devida à existência de uma consola e de uma viga
guarda-balastro. Importa ainda salientar os movimentos verificados ao nível dos apoios da
estrutura. Observando-se o 1º modo de torção, tendo em consideração que os alinhamentos
138
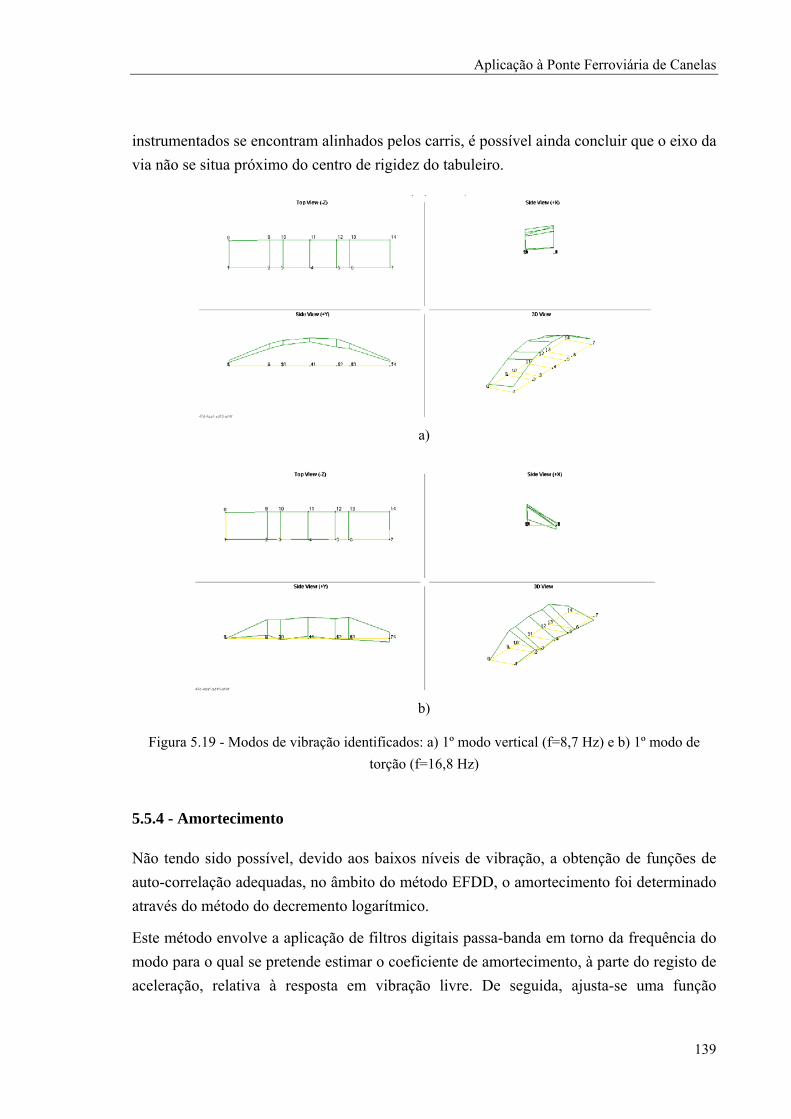
Aplicação à Ponte Ferroviária de Canelas
instrumentados se encontram alinhados pelos carris, é possível ainda concluir que o eixo da
via não se situa próximo do centro de rigidez do tabuleiro.
a)
b)
Figura 5.19 - Modos de vibração identificados: a) 1º modo vertical (f=8,7 Hz) e b) 1º modo de
torção (f=16,8 Hz)
5.5.4 - Amortecimento
Não tendo sido possível, devido aos baixos níveis de vibração, a obtenção de funções de
auto-correlação adequadas, no âmbito do método EFDD, o amortecimento foi determinado
através do método do decremento logarítmico.
Este método envolve a aplicação de filtros digitais passa-banda em torno da frequência do
modo para o qual se pretende estimar o coeficiente de amortecimento, à parte do registo de
aceleração, relativa à resposta em vibração livre. De seguida, ajusta-se uma função
139
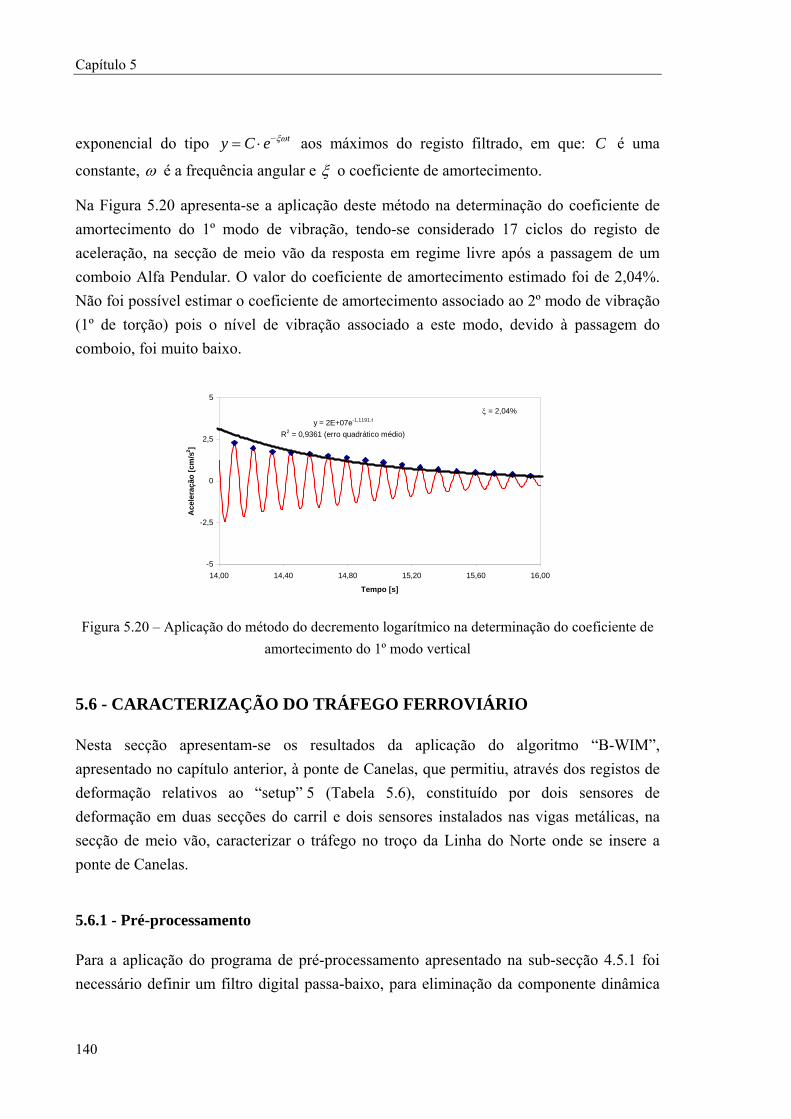
Capítulo 5
exponencial do tipo ty C e aos máximos do registo filtrado, em que: C é uma
constante, é a frequência angular e o coeficiente de amortecimento.
Na Figura 5.20 apresenta-se a aplicação deste método na determinação do coeficiente de
amortecimento do 1º modo de vibração, tendo-se considerado 17 ciclos do registo de
aceleração, na secção de meio vão da resposta em regime livre após a passagem de um
comboio Alfa Pendular. O valor do coeficiente de amortecimento estimado foi de 2,04%.
Não foi possível estimar o coeficiente de amortecimento associado ao 2º modo de vibração
(1º de torção) pois o nível de vibração associado a este modo, devido à passagem do
comboio, foi muito baixo.
y = 2E+07e-1,1191.t
R2 = 0,9361 (erro quadrático médio)
-5
-2,5
0
2,5
5
14,00 14,40 14,80 15,20 15,60 16,00
Tempo [s]
Ace
lera
ção
[cm
/s2]
= 2,04%
Figura 5.20 – Aplicação do método do decremento logarítmico na determinação do coeficiente de
amortecimento do 1º modo vertical
5.6 - CARACTERIZAÇÃO DO TRÁFEGO FERROVIÁRIO
Nesta secção apresentam-se os resultados da aplicação do algoritmo “B-WIM”,
apresentado no capítulo anterior, à ponte de Canelas, que permitiu, através dos registos de
deformação relativos ao “setup” 5 (Tabela 5.6), constituído por dois sensores de
deformação em duas secções do carril e dois sensores instalados nas vigas metálicas, na
secção de meio vão, caracterizar o tráfego no troço da Linha do Norte onde se insere a
ponte de Canelas.
5.6.1 - Pré-processamento
Para a aplicação do programa de pré-processamento apresentado na sub-secção 4.5.1 foi
necessário definir um filtro digital passa-baixo, para eliminação da componente dinâmica
140
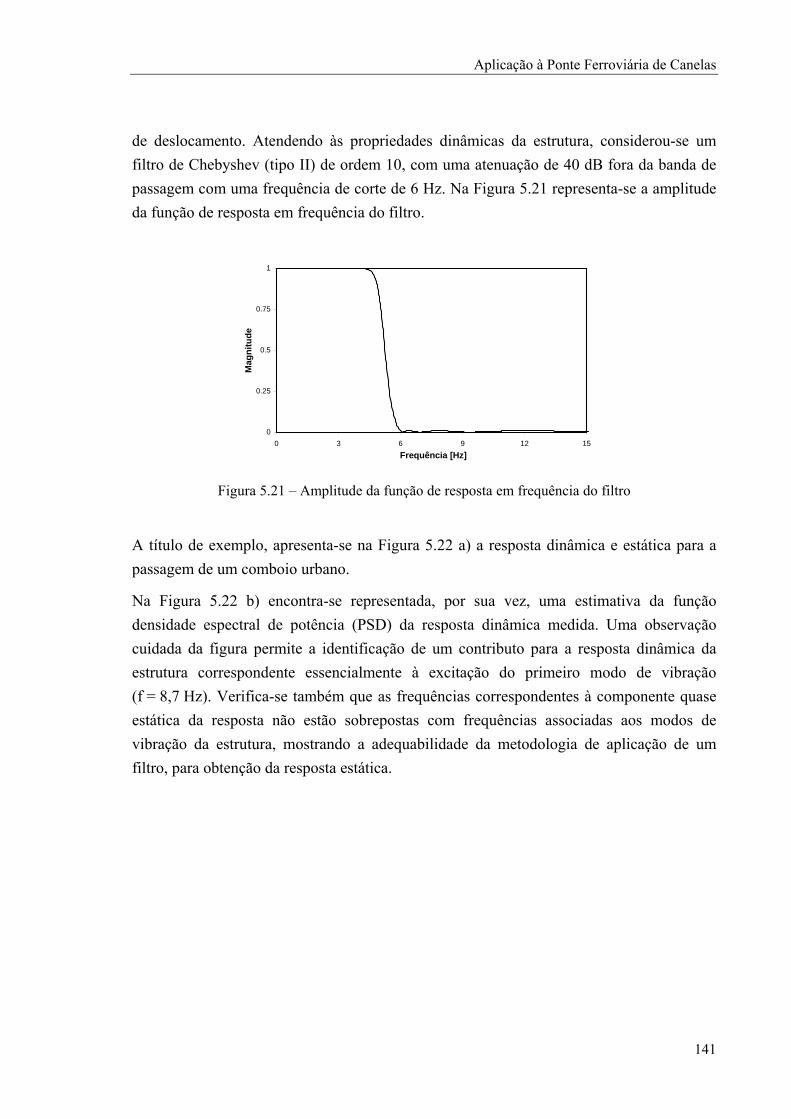
Aplicação à Ponte Ferroviária de Canelas
de deslocamento. Atendendo às propriedades dinâmicas da estrutura, considerou-se um
filtro de Chebyshev (tipo II) de ordem 10, com uma atenuação de 40 dB fora da banda de
passagem com uma frequência de corte de 6 Hz. Na Figura 5.21 representa-se a amplitude
da função de resposta em frequência do filtro.
0
0.25
0.5
0.75
1
0 3 6 9 12 1
Frequência [Hz]
Mag
nit
ud
e
5
Figura 5.21 – Amplitude da função de resposta em frequência do filtro
A título de exemplo, apresenta-se na Figura 5.22 a) a resposta dinâmica e estática para a
passagem de um comboio urbano.
Na Figura 5.22 b) encontra-se representada, por sua vez, uma estimativa da função
densidade espectral de potência (PSD) da resposta dinâmica medida. Uma observação
cuidada da figura permite a identificação de um contributo para a resposta dinâmica da
estrutura correspondente essencialmente à excitação do primeiro modo de vibração
(f = 8,7 Hz). Verifica-se também que as frequências correspondentes à componente quase
estática da resposta não estão sobrepostas com frequências associadas aos modos de
vibração da estrutura, mostrando a adequabilidade da metodologia de aplicação de um
filtro, para obtenção da resposta estática.
141
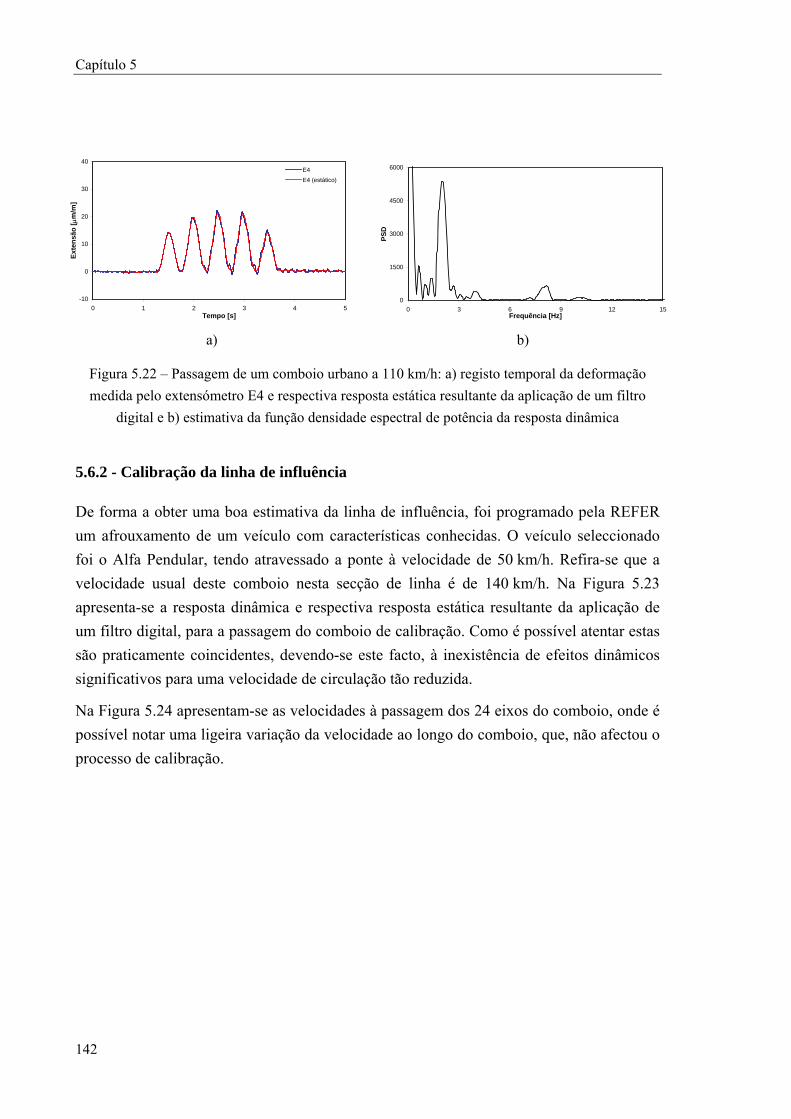
Capítulo 5
-10
0
10
20
30
40
0 1 2 3 4Tempo [s]
Ext
ensã
o [m
/m]
5
E4
E4 (estático)
0
1500
3000
4500
6000
0 3 6 9 12 15Frequência [Hz]
PS
D
a) b)
Figura 5.22 – Passagem de um comboio urbano a 110 km/h: a) registo temporal da deformação
medida pelo extensómetro E4 e respectiva resposta estática resultante da aplicação de um filtro
digital e b) estimativa da função densidade espectral de potência da resposta dinâmica
5.6.2 - Calibração da linha de influência
De forma a obter uma boa estimativa da linha de influência, foi programado pela REFER
um afrouxamento de um veículo com características conhecidas. O veículo seleccionado
foi o Alfa Pendular, tendo atravessado a ponte à velocidade de 50 km/h. Refira-se que a
velocidade usual deste comboio nesta secção de linha é de 140 km/h. Na Figura 5.23
apresenta-se a resposta dinâmica e respectiva resposta estática resultante da aplicação de
um filtro digital, para a passagem do comboio de calibração. Como é possível atentar estas
são praticamente coincidentes, devendo-se este facto, à inexistência de efeitos dinâmicos
significativos para uma velocidade de circulação tão reduzida.
Na Figura 5.24 apresentam-se as velocidades à passagem dos 24 eixos do comboio, onde é
possível notar uma ligeira variação da velocidade ao longo do comboio, que, não afectou o
processo de calibração.
142
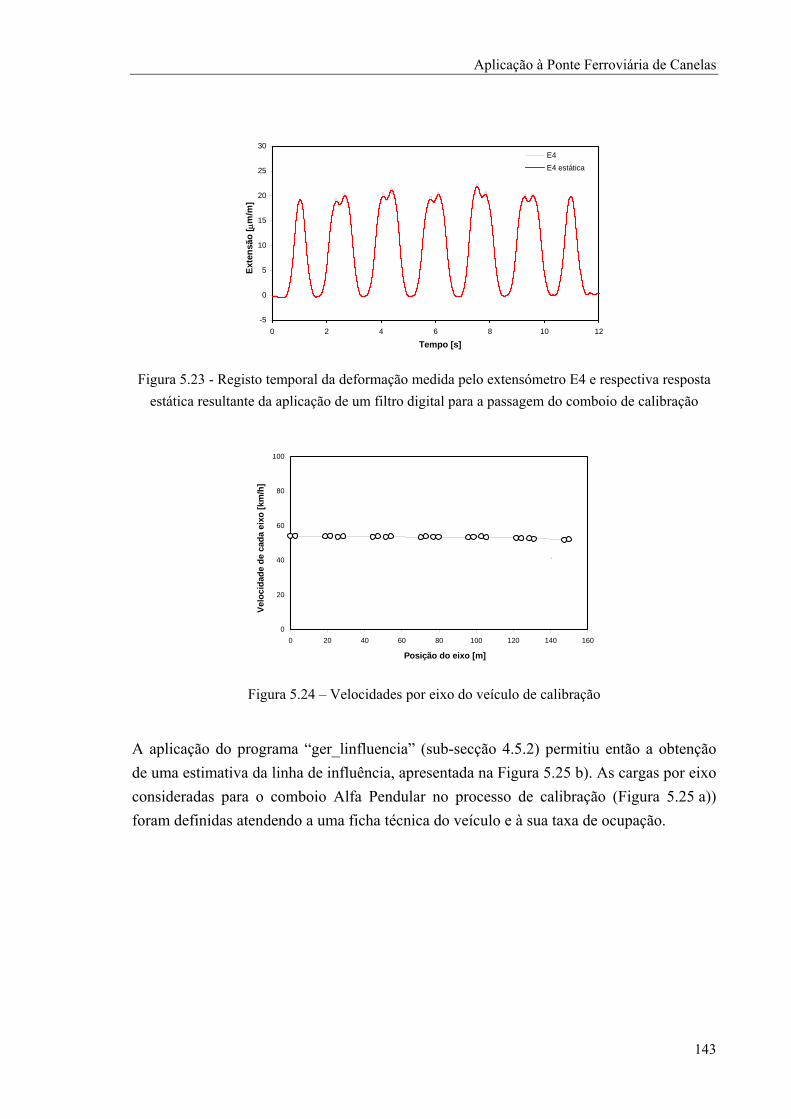
Aplicação à Ponte Ferroviária de Canelas
-5
0
5
10
15
20
25
30
0 2 4 6 8 10
Tempo [s]
Ext
ensã
o [m
/m]
12
E4
E4 estática
Figura 5.23 - Registo temporal da deformação medida pelo extensómetro E4 e respectiva resposta
estática resultante da aplicação de um filtro digital para a passagem do comboio de calibração
0
20
40
60
80
0 20 40 60 80 100 120 140 160
Posição do eixo [m]
Vel
oci
dad
e d
e ca
da
eixo
[km
/h]
100
3
Figura 5.24 – Velocidades por eixo do veículo de calibração
A aplicação do programa “ger_linfluencia” (sub-secção 4.5.2) permitiu então a obtenção
de uma estimativa da linha de influência, apresentada na Figura 5.25 b). As cargas por eixo
consideradas para o comboio Alfa Pendular no processo de calibração (Figura 5.25 a))
foram definidas atendendo a uma ficha técnica do veículo e à sua taxa de ocupação.
143
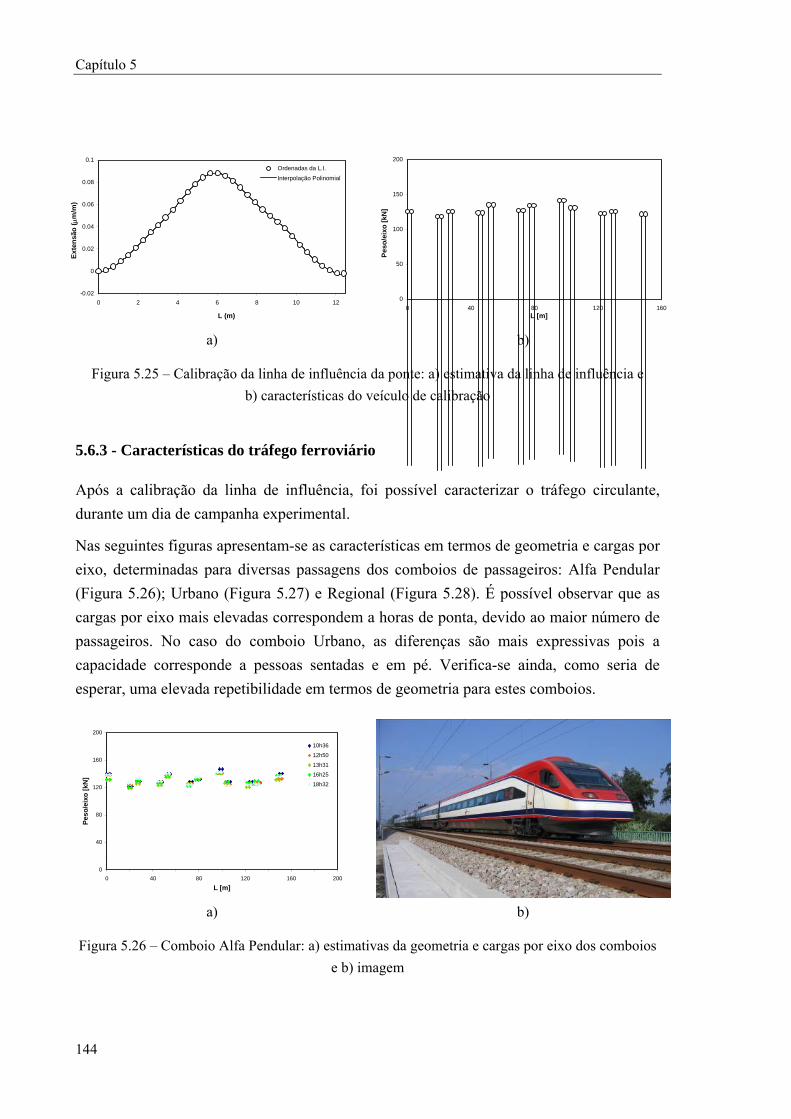
Capítulo 5
-0.02
0
0.02
0.04
0.06
0.08
0.1
0 2 4 6 8 10 12
L (m)
Ext
ensã
o (m
/m)
Ordenadas da L.I.
Interpolação Polinomial
0
50
100
150
200
0 40 80 120 160L [m]
Pes
o/e
ixo
[kN
]
a) b)
Figura 5.25 – Calibração da linha de influência da ponte: a) estimativa da linha de influência e
b) características do veículo de calibração
5.6.3 - Características do tráfego ferroviário
Após a calibração da linha de influência, foi possível caracterizar o tráfego circulante,
durante um dia de campanha experimental.
Nas seguintes figuras apresentam-se as características em termos de geometria e cargas por
eixo, determinadas para diversas passagens dos comboios de passageiros: Alfa Pendular
(Figura 5.26); Urbano (Figura 5.27) e Regional (Figura 5.28). É possível observar que as
cargas por eixo mais elevadas correspondem a horas de ponta, devido ao maior número de
passageiros. No caso do comboio Urbano, as diferenças são mais expressivas pois a
capacidade corresponde a pessoas sentadas e em pé. Verifica-se ainda, como seria de
esperar, uma elevada repetibilidade em termos de geometria para estes comboios.
0
40
80
120
160
200
0 40 80 120 160 200
L [m]
Pes
o/e
ixo
[kN
]
10h36
12h50
13h31
16h25
18h32
a) b)
Figura 5.26 – Comboio Alfa Pendular: a) estimativas da geometria e cargas por eixo dos comboios
e b) imagem
144
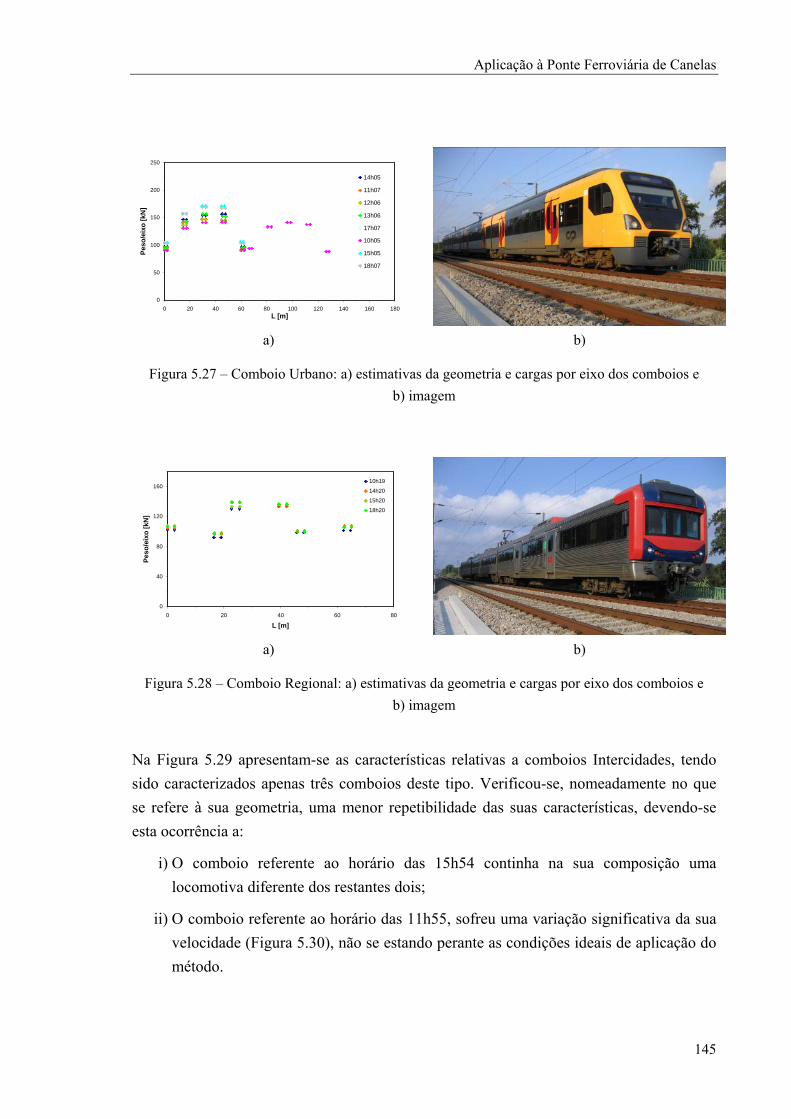
Aplicação à Ponte Ferroviária de Canelas
0
50
100
150
200
250
0 20 40 60 80 100 120 140 160 180L [m]
Pes
o/e
ixo
[kN
]
14h05
11h07
12h06
13h06
17h07
10h05
15h05
18h07
a) b)
Figura 5.27 – Comboio Urbano: a) estimativas da geometria e cargas por eixo dos comboios e
b) imagem
0
40
80
120
160
0 20 40 60 8
L [m]
Pes
o/e
ixo
[kN
]
0
10h19
14h20
15h20
18h20
a) b)
Figura 5.28 – Comboio Regional: a) estimativas da geometria e cargas por eixo dos comboios e
b) imagem
Na Figura 5.29 apresentam-se as características relativas a comboios Intercidades, tendo
sido caracterizados apenas três comboios deste tipo. Verificou-se, nomeadamente no que
se refere à sua geometria, uma menor repetibilidade das suas características, devendo-se
esta ocorrência a:
i) O comboio referente ao horário das 15h54 continha na sua composição uma
locomotiva diferente dos restantes dois;
ii) O comboio referente ao horário das 11h55, sofreu uma variação significativa da sua
velocidade (Figura 5.30), não se estando perante as condições ideais de aplicação do
método.
145
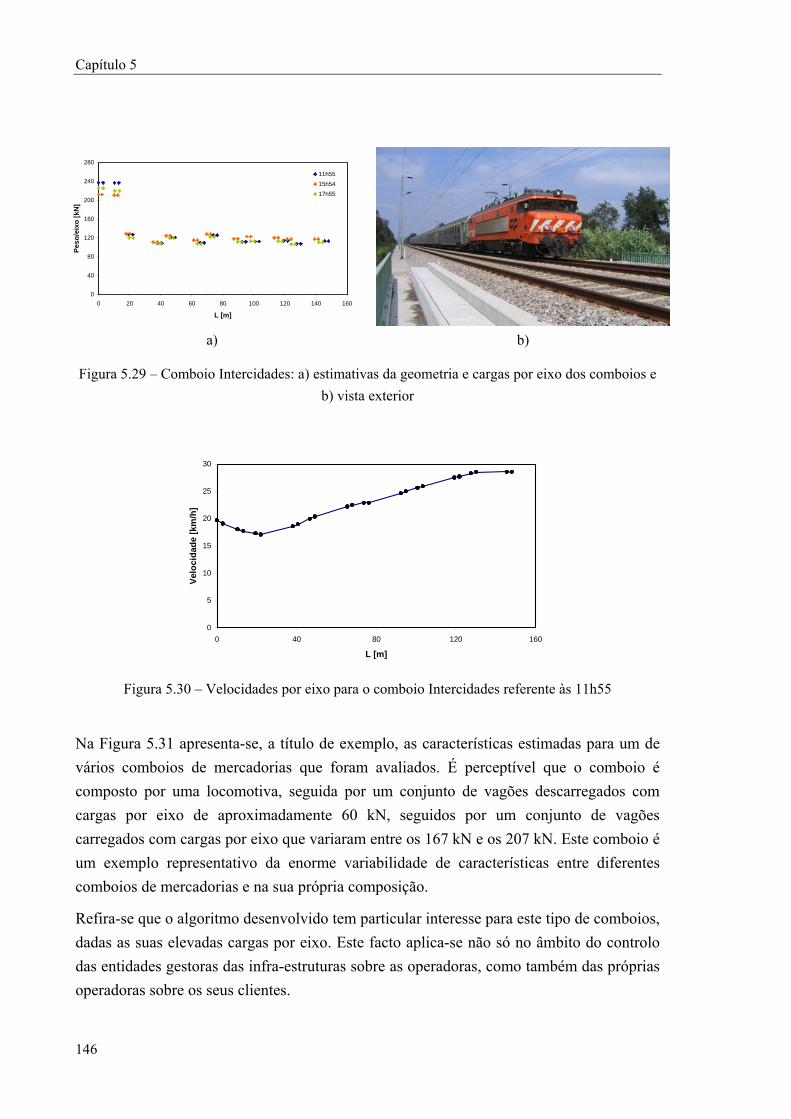
Capítulo 5
0
40
80
120
160
200
240
280
0 20 40 60 80 100 120 140 160
L [m]
Pes
o/e
ixo
[kN
]
11h55
15h54
17h55
a) b)
Figura 5.29 – Comboio Intercidades: a) estimativas da geometria e cargas por eixo dos comboios e
b) vista exterior
0
5
10
15
20
25
30
0 40 80 120 160
L [m]
Vel
oci
dad
e [k
m/h
]
Figura 5.30 – Velocidades por eixo para o comboio Intercidades referente às 11h55
Na Figura 5.31 apresenta-se, a título de exemplo, as características estimadas para um de
vários comboios de mercadorias que foram avaliados. É perceptível que o comboio é
composto por uma locomotiva, seguida por um conjunto de vagões descarregados com
cargas por eixo de aproximadamente 60 kN, seguidos por um conjunto de vagões
carregados com cargas por eixo que variaram entre os 167 kN e os 207 kN. Este comboio é
um exemplo representativo da enorme variabilidade de características entre diferentes
comboios de mercadorias e na sua própria composição.
Refira-se que o algoritmo desenvolvido tem particular interesse para este tipo de comboios,
dadas as suas elevadas cargas por eixo. Este facto aplica-se não só no âmbito do controlo
das entidades gestoras das infra-estruturas sobre as operadoras, como também das próprias
operadoras sobre os seus clientes.
146
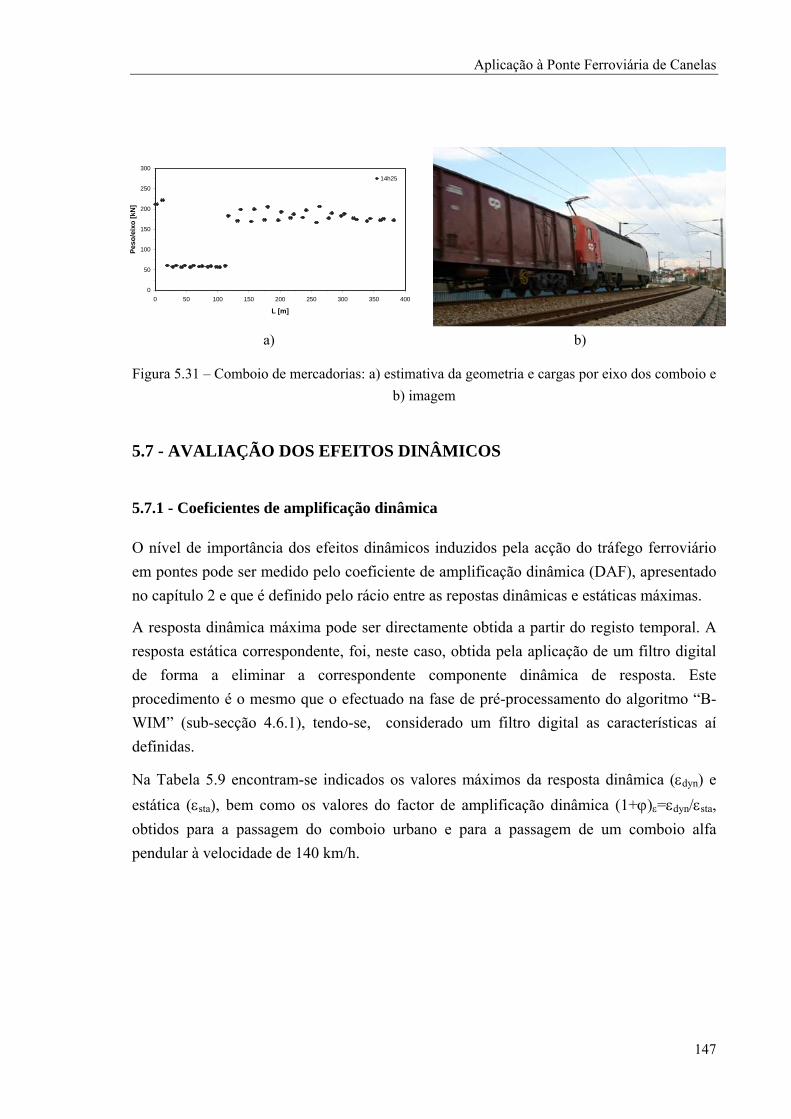
Aplicação à Ponte Ferroviária de Canelas
0
50
100
150
200
250
300
0 50 100 150 200 250 300 350 400
L [m]
Pes
o/e
ixo
[kN
]
14h25
a) b)
Figura 5.31 – Comboio de mercadorias: a) estimativa da geometria e cargas por eixo dos comboio e
b) imagem
5.7 - AVALIAÇÃO DOS EFEITOS DINÂMICOS
5.7.1 - Coeficientes de amplificação dinâmica
O nível de importância dos efeitos dinâmicos induzidos pela acção do tráfego ferroviário
em pontes pode ser medido pelo coeficiente de amplificação dinâmica (DAF), apresentado
no capítulo 2 e que é definido pelo rácio entre as repostas dinâmicas e estáticas máximas.
A resposta dinâmica máxima pode ser directamente obtida a partir do registo temporal. A
resposta estática correspondente, foi, neste caso, obtida pela aplicação de um filtro digital
de forma a eliminar a correspondente componente dinâmica de resposta. Este
procedimento é o mesmo que o efectuado na fase de pré-processamento do algoritmo “B-
WIM” (sub-secção 4.6.1), tendo-se, considerado um filtro digital as características aí
definidas.
Na Tabela 5.9 encontram-se indicados os valores máximos da resposta dinâmica (dyn) e
estática (sta), bem como os valores do factor de amplificação dinâmica (1+)=dyn/sta,
obtidos para a passagem do comboio urbano e para a passagem de um comboio alfa
pendular à velocidade de 140 km/h.
147
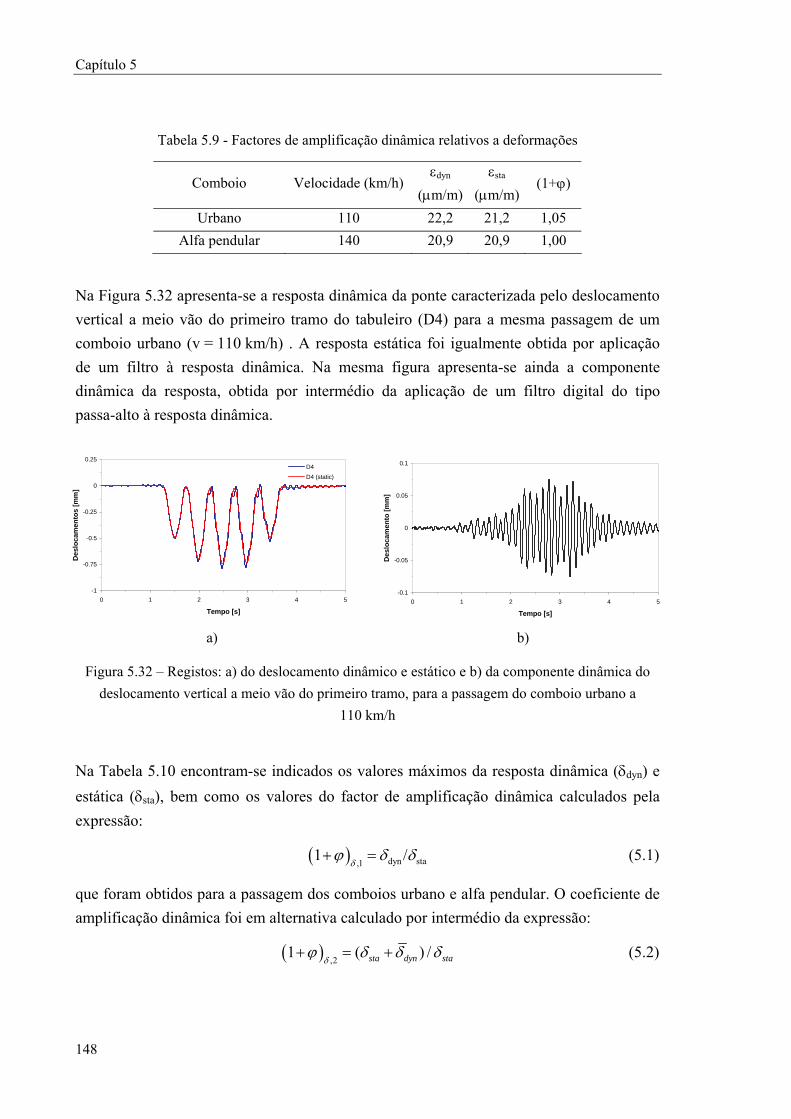
Capítulo 5
Tabela 5.9 - Factores de amplificação dinâmica relativos a deformações
Comboio Velocidade (km/h) dyn
(m/m)
sta
(m/m)(1+)
Urbano 110 22,2 21,2 1,05
Alfa pendular 140 20,9 20,9 1,00
Na Figura 5.32 apresenta-se a resposta dinâmica da ponte caracterizada pelo deslocamento
vertical a meio vão do primeiro tramo do tabuleiro (D4) para a mesma passagem de um
comboio urbano (v = 110 km/h) . A resposta estática foi igualmente obtida por aplicação
de um filtro à resposta dinâmica. Na mesma figura apresenta-se ainda a componente
dinâmica da resposta, obtida por intermédio da aplicação de um filtro digital do tipo
passa-alto à resposta dinâmica.
-1
-0.75
-0.5
-0.25
0
0.25
0 1 2 3 4 5
Tempo [s]
Des
loca
men
tos
[mm
]
D4
D4 (static)
-0.1
-0.05
0
0.05
0.1
0 1 2 3 4
Tempo [s]
Des
loca
men
to [
mm
]
5
/
a) b)
Figura 5.32 – Registos: a) do deslocamento dinâmico e estático e b) da componente dinâmica do
deslocamento vertical a meio vão do primeiro tramo, para a passagem do comboio urbano a
110 km/h
Na Tabela 5.10 encontram-se indicados os valores máximos da resposta dinâmica (dyn) e
estática (sta), bem como os valores do factor de amplificação dinâmica calculados pela
expressão:
dyn sta,11
(5.1)
que foram obtidos para a passagem dos comboios urbano e alfa pendular. O coeficiente de
amplificação dinâmica foi em alternativa calculado por intermédio da expressão:
,21 ( ) /sta dyn sta
(5.2)
148
Aplicação à Ponte Ferroviária de Canelas
em que dyn é o valor máximo da série contendo apenas a componente dinâmica da
resposta. A observação do quadro permite concluir que os coeficientes de amplificação
definidos na expressão (5.2) são superiores, pois, como os valores máximos das séries
referentes às componentes estática e dinâmica não ocorrem em geral no mesmo instante,
verifica-se que dyn sta+ dyn .
Tabela 5.10 - Factores de amplificação dinâmica relativos a deslocamentos
Comboio Velocidade (km/h) dyn
(mm)
sta
(mm) 1,1 dyn
(mm) 2,1
Urbano 110 0,788 0,744 1,06 0,075 1,10
Alfa pendular 140 0,814 0,805 1,01 0,043 1,05
A comparação das Tabelas 5.9 e 5.10 permite ainda concluir que os factores de
amplificação dinâmica em termos de deformações (1+) e deslocamentos são
praticamente idênticos.
1,1
Verificou-se ainda que, apesar de em termos de deslocamentos a meio vão, o valor máximo
ser relativa à passagem de um comboio Alfa Pendular, em termos de extensão, o valor
máximo é respeitante ao comboio urbano. Este fenómeno pode ser explicado pela
magnitude dos deslocamentos ao nível dos apoios (já referidos no ponto 5.5.3). Enquanto
as extensões são devidas apenas aos esforços na laje (momento flector e esforço
transverso), os deslocamentos são correspondentes não só aos esforços na laje como
também ao movimento de corpo rígido da laje, por deformação dos aparelhos de apoio.
O valor mais elevado das cargas dos comboios urbanos justifica a maior deformação do
tabuleiro para a passagem deste comboio. No entanto, a configuração de cargas do
comboio alfa pendular permite que se encontrem simultaneamente sobre o tabuleiro da
ponte um maior número de eixos, sendo que alguns destes se localizam sobre os apoios da
estrutura. Por esta razão, o valor mais elevado de deslocamento máximo corresponde ao
comboio Alfa Pendular, pois diz respeito não só a deslocamentos devidos a flexão do
tabuleiro, como também a deslocamentos por deformação dos apoios.
A título de exemplo, apresenta-se na Figura 5.33, os deslocamentos verticais a meio vão
(D2) e num dos apoios do primeiro tramo (D4) para a passagem de um comboio urbano,
verificando-se que estes correspondem a cerca de 25% dos primeiros.
149
Capítulo 5
-1
-0,75
-0,5
-0,25
0
0,25
0 1 2 3
Tempo [s]
Des
loca
men
to [
cm]
D2
D4
Figura 5.33 – Registos temporais do deslocamento vertical a meio vão (D2) e num dos apoios do
primeiro tramo (D4), para a passagem do comboio urbano
Os factores de amplificação dinâmica relativos a deslocamentos podem ainda ser avaliados
com base nos registos de acelerações. A série correspondente à componente dinâmica do
deslocamento pode ser obtida integrando duas vezes a série de aceleração. A tendência do
sinal que resulta da integração da componente quase estática do sinal pode ser removida
aplicando um filtro digital do tipo passa-alto aos sinais integrados. O coeficiente de
amplificação dinâmica é calculado por intermédio da expressa:
,11 /sta dyn sta (5.3)
em que ,1dyn é o valor máximo da série contendo apenas a componente dinâmica da
resposta obtida por dupla integração da aceleração e sta o valor máximo da resposta
estática.
Na Figura 5.34 apresenta-se o registo de aceleração correspondente à passagem de um
comboio urbano à velocidade de 80 km/h, bem como o registo relativo à componente
dinâmica do deslocamento. O factor de amplificação obtido por este método foi então de
1,07, valor ligeiramente superior relativamente ao apresentado na Tabela 5.10.
150
Aplicação à Ponte Ferroviária de Canelas
-0.25
-0.125
0
0.125
0.25
0 2 4 6 8 10
Tempo [s]
Ace
lera
ção
[m
/s2 ]
-0.06
-0.03
0
0.03
0.06
0 2 4 6 8 10
Tempo [s]
Des
loca
men
to [
mm
]
a) b)
Figura 5.34 – Registos temporais: a) da aceleração e b) da componente dinâmica do deslocamento
vertical a meio vão do primeiro tramo, para a passagem do comboio urbano a 80 km/h
5.7.2 - Níveis de aceleração
Conforme referido, não foi possível a obtenção de registos de aceleração para velocidades
normais de circulação devido à existência de trabalhos de requalificação numa estação
próxima da ponte. Tendo-se já apresentado um registo relativo às acelerações relativas à
passagem de um comboio urbano, na Figura 5.34, apresentam-se na Figura 5.35 registos
relativos à passagem de um comboio Alfa Pendular (a) um comboio Intercidades (b) e um
comboio de mercadorias (c) a velocidades inferiores a 80 km/h. Verificou-se que os níveis
de aceleração encontram-se abaixo do limite de 0,35 g preconizado nos documentos
normativos EN1991-2 (2003) e EN1990-AnnexA2 (2005).
151
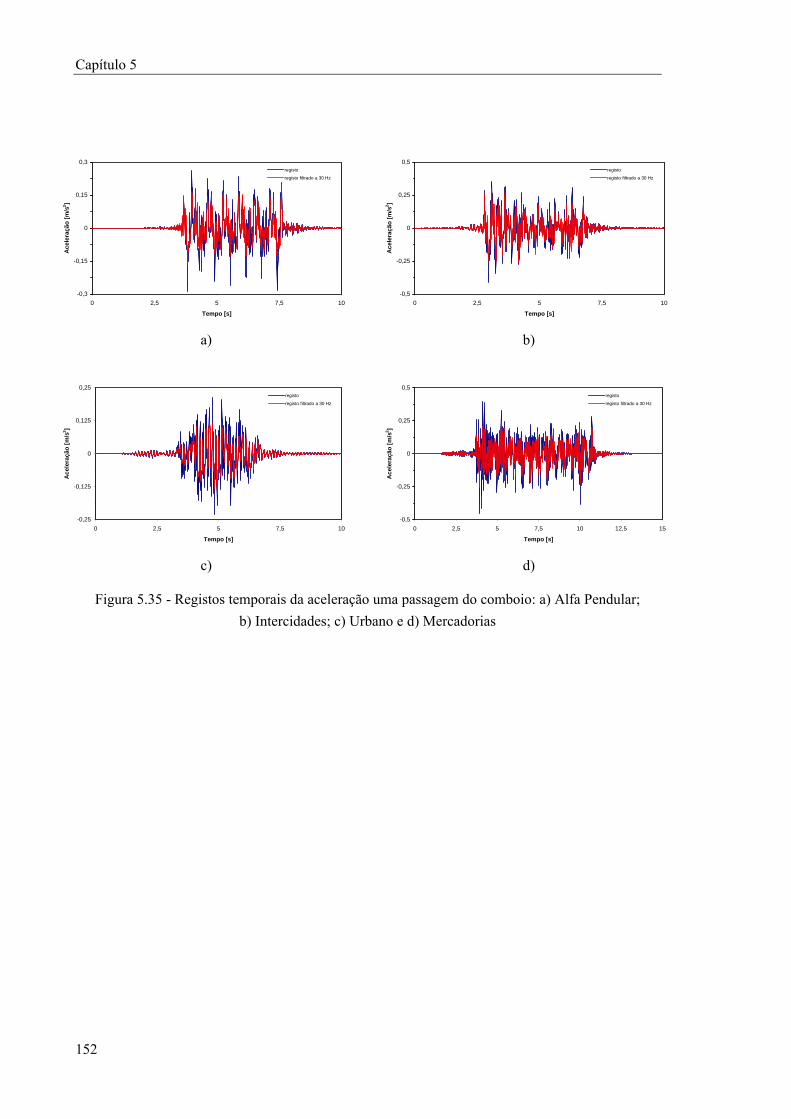
Capítulo 5
152
-0,3
-0,15
0
0,15
0,3
0 2,5 5 7,5 10
Tempo [s]
Ac
ele
raçã
o [
m/s
2]
registo
registo filtrado a 30 Hz
-0,5
-0,25
0
0,25
0,5
0 2,5 5 7,5 10
Tempo [s]
Ac
ele
raçã
o [
m/s
2]
registo
registo filtrado a 30 Hz
a) b)
-0,25
-0,125
0
0,125
0,25
0 2,5 5 7,5
Tempo [s]
Ac
ele
raçã
o [
m/s
2]
10
registo
registo filtrado a 30 Hz
-0,5
-0,25
0
0,25
0,5
0 2,5 5 7,5 10 12,5 15
Tempo [s]
Ac
ele
raçã
o [
m/s
2]
registo
registo filtrado a 30 Hz
c) d)
Figura 5.35 - Registos temporais da aceleração uma passagem do comboio: a) Alfa Pendular;
b) Intercidades; c) Urbano e d) Mercadorias
CAPÍTULO 6
CONCLUSÕES E DESENVOLVIMENTOS FUTUROS
6.1 - CONCLUSÕES GERAIS
A presente dissertação teve como principal objectivo a caracterização do tráfego
ferroviário e dos seus efeitos em pontes de pequeno vão.
Com esse objectivo procurou-se expor, numa primeira fase, os principais procedimentos
associados à realização de campanhas experimentais em pontes ferroviárias tendo em
especial atenção alguns aspectos de natureza especifica destas estruturas. Foram ainda
apresentados, de uma forma essencialmente descritiva as principais aplicações de natureza
experimental em estruturas, nomeadamente: identificação experimental das propriedades
dinâmicas de estruturas; avaliação de efeitos dinâmicos; actualização de modelos de
elementos finitos (“Model Updating”); identificação do estado de conservação de
estruturas com base em ensaios dinâmicos.
Tendo em consideração o âmbito essencialmente experimental do presente trabalho, foram
analisados diversos equipamentos utilizados na monitorização de estruturas, tendo-se
verificado a particular adequabilidade dos sensores de fibra óptica, atendendo às suas
vantagens, designadamente: i) a possibilidade de serem aplicados em ambientes
agressivos; ii) serem imunes a interferências electromagnéticas, iii) apresentarem grande
sensibilidade e estabilidade a longo prazo, e iv) a utilização de uma menor quantidade de
cabos em obra, quando comparados com os transdutores eléctricos.
Neste trabalho foi apresentado o desenvolvimento e aplicação de um sistema de
monitorização da acção do tráfego ferroviário em pontes.
Capítulo 6
Este tipo de estas ferramentas têm sido aplicadas em pontes de pequeno vão devendo-se
este facto à natureza dos algoritmos “B-WIM”. Estes algoritmos são, na sua essência,
algoritmos de optimização em que se minimiza uma determinada função em ordem aos
parâmetros caracterizadores dos veículos, sejam eles velocidades, distâncias entre eixos e
cargas. Se o número de cargas presentes no tabuleiro da ponte for elevado, poderão resultar
soluções não reais para os processos de optimização. Numa ponte de pequeno vão existe
sempre um número reduzido de cargas simultaneamente no tabuleiro.
Por outro lado, as características dinâmicas das estruturas são também relevantes. Para que
se possam obter bons resultados, os efeitos dinâmicos decorrentes da passagem de tráfego
devem ser reduzidos e/ou filtráveis, ou seja, a resposta dinâmica deve-se encontrar em
bandas de frequências suficientemente afastadas das frequências associadas à acção do
tráfego, resultantes da combinação entre as velocidades e os espaçamentos entre eixos dos
veículos. Nestas situações é possível isolar as respostas estáticas por intermédio da
aplicação de filtros digitais.
Foi já demonstrado por diversos autores a possibilidade de identificar a geometria e a
velocidade dos comboios usando apenas informações relativas à deformação da ponte, no
entanto, a precisão obtida em termos de posições dos eixos não é elevada, sendo que em
grande parte das situações apenas é possível proceder à identificação dos bogies e não dos
eixos do comboio. Tal deve-se ao facto do comprimento da linha de influência da ponte ser
demasiado grande quando comparado com a distância entre eixos do bogie.
De modo a ultrapassar esta dificuldade, concluiu-se que os registos das deformações da
ponte não são os indicados para obter uma precisão conveniente na estimativa da
geometria do comboio. Foram então utilizados registos de deformação em dois pontos do
carril. Sendo o comprimento da linha de influência em termos de deformação do carril
curto, é possível identificar os picos correspondentes à passagem de cada um dos eixos do
comboio.
Neste âmbito, foi implementado um algoritmo “B-WIM” em Matlab, que se baseia na
medição de deformações em apenas três pontos, dois localizados em diferentes secções da
via e um numa secção do tabuleiro da ponte. Desta forma, foi possível associar as
vantagens relativas da medição de deformação nos carris, para identificação da geometria
do comboio com as vantagens da medição de deformação na ponte para a obtenção das
cargas por eixo dos comboios.
Atendendo à dependência do algoritmo implementado relativamente à linha de influência
da estrutura, foi aplicada uma metodologia experimental para a sua obtenção em que os
154
Conclusões e desenvolvimentos futuros
registos relativos à passagem de um veículo de calibração, isto é, um veículo cujas
características são conhecidas, são usados.
De forma a validar e identificar as limitações dos programas desenvolvidos antes de uma
aplicação no caso experimental, procedeu-se à sua aplicação a um exemplo numérico
simples. Este exemplo permitiu aferir a dependência dos resultados face às características
dinâmicas das estruturas bem como aos efeitos dinâmicos provocados pela acção do
tráfego. Verificou-se também que, para velocidades mais elevadas, a aproximação das
frequências de excitação relativamente às frequências naturais da estrutura, dificulta o
processo de separação da componente estática e dinâmica da resposta, podendo conduzir a
resultados com menor precisão. Torna-se então relevante a escolha de estruturas
localizadas em troços de linha ferroviária com velocidades de circulação adequadas à
aplicação desta metodologia.
Refira-se também, tendo em consideração a evolução temporal da deformação do carril, a
necessidade de adoptar elevadas frequências de aquisição, para uma correcta identificação
da geometria e velocidade do comboio.
Com vista a aplicação do algoritmo, foram realizadas campanhas experimentais na ponte
de Canelas na linha do Norte da REFER. que englobaram a medição de acelerações,
extensões (na ponte e na via) e deslocamentos. As acelerações e deslocamentos medidos
tiveram como principais objectivos a identificação das características dinâmicas da
estrutura bem como a avaliação dos efeitos dinâmicos devidos à acção do tráfego
ferroviário que permitiram aferir a adequabilidade da estrutura para a aplicação do
algoritmo. As deformações medidas permitiram a aplicação do algoritmo bem como a
avaliação dos efeitos dinâmicos associados a esta grandeza.
Com base num algoritmo de “B-WIM” implementado foi possível determinar a geometria,
velocidade e cargas por eixo dos comboios. Para o efeito foi também necessário efectuar a
calibração prévia da linha de influência da ponte, o que envolveu um ensaio com um
veículo de calibração que passou na ponte a velocidade reduzida.
A aplicação do algoritmo “B-WIM” de forma contínua na ponte permitirá a monitorização
das características do tráfego real na estrutura, aspecto relevante não só para a ponte de
Canelas mas para as restantes infra-estruturas situadas na mesma secção da linha. A
monitorização permitirá também ao dono da infra-estrutura proceder ao controlo das
operadoras, especialmente das de transporte de mercadorias. Ainda no que se refere ao
tráfego de mercadorias, refira-se também o interesse das operadoras no controlo dos seus
clientes.
155
Capítulo 6
Neste âmbito, mencione-se ainda a pré-norma europeia prEN 15528 que prevê, a curto
prazo, a categorização todo o tráfego ferroviário circulante em linhas internacionais,
mostrando-se este tipo de sistemas como uma opção para a realização da tarefa.
6.2 - PERSPECTIVAS DE DESENVOLVIMENTOS FUTUROS
No seguimento do trabalho exposto, apresentam-se algumas sugestões com vista a
possíveis desenvolvimentos futuros, no âmbito do comportamento dinâmico de pontes de
pequeno vão:
i) o desenvolvimento de metodologias numéricas para a modelação dinâmica de pontes
ferroviárias de pequeno vão, que tenham em conta a complexidade do sistema
comboio-via-ponte
ii) a aplicação de técnicas de actualização de modelos de elementos finitos na
calibração das modelações numéricas
iii) a realização de estudos de simulação numérica da resposta dinâmica para cenários de
tráfego de comboios de alta velocidade
iv) o estudo de soluções de mitigação das vibrações e
v) o estabelecimento de recomendações para o projecto/reforço deste tipo de pontes
No que se refere ao algoritmo implementado, o seu interesse tem revelado a possibilidade
de desenvolvimento de um sistema comercial para a sua aplicação.
Na Figura 6.1 é apresentada uma solução estudada para aplicação em nas 2 vias com base
na utilização de apenas 8 sensores de fibra óptica. O sistema permitirá não só o controlo
das operadoras por parte da entidade responsável pela infra-estrutura como também o
controlo das próprias operadoras de tráfego de mercadorias sobre os seus clientes.
Ainda no que se refere às características do tráfego ferroviário saliente-se o interesse no
desenvolvimento de metodologias experimentais para a averiguação de defeitos nos eixos
dos comboios.
156
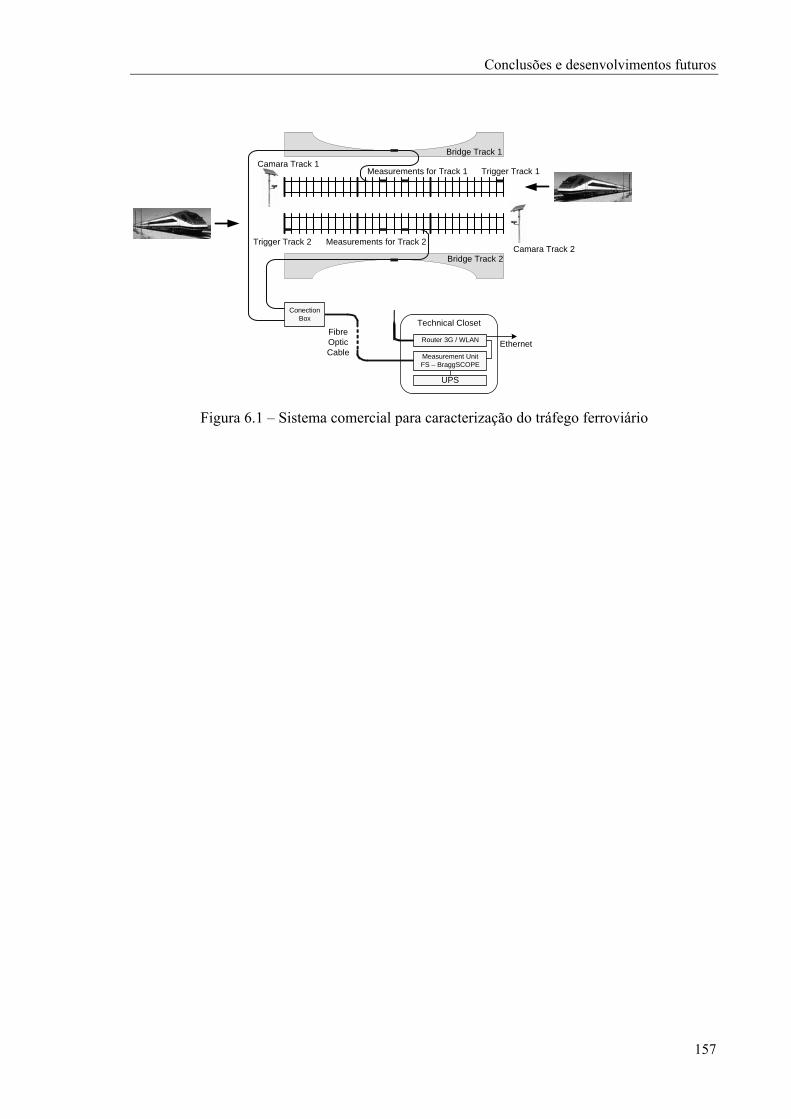
Conclusões e desenvolvimentos futuros
157
Technical Closet
Ethernet
UPS
Measurement UnitFS – BraggSCOPE
Router 3G / WLAN
Conection Box
Measurements for Track 1
Trigger Track 2
Trigger Track 1Camara Track 1
Bridge Track 1
Bridge Track 2
Fibre OpticCable
Camara Track 2Measurements for Track 2
Figura 6.1 – Sistema comercial para caracterização do tráfego ferroviário

REFERÊNCIAS BIBLIOGRÁFICAS
Abdel-Ghaffar, A.M. - Vibration Studies and Tests of a Suspension Bridge. Earthquake Engineering and Structural Dynamics. 6:(1978). p. 473-496.
Aktan, A. E.; Catbas, F. N.; Grimmelsman, K. A.; Tsikos, C. J. - Issues in Infrastructure Health Monitoring for Management. Journal of Engineering Mechanics. 126:7 (2000). p. 711-724.
Aktan, A. Emin; Catbas, F. Necati; Grimmelsman, Kirk A.; Pervizpour, Mesut - Development of a Model Health monitoring guide for major bridges. Federal Highway Administration Research and Development, 2002.
Alampalli, S.; Ettouney, M. - Observations, recommendations and items of interest to health monitoring community. In: Proceedings of the 2nd European Workshop on Structural Health Monitoring, Munich, Germany, 2004.
Allemang, R. J.; Brown, D. L. - A Correlation Coefficient for Modal Vector Analysis. In: IMAC I, Orlando, USA 1982.
ANSYS - Release 10.0 Documentation for ANSYS. 2005.
Baessler, M.; Rücker, W. - New results on the behaviour of ballasted tracks on bridge decks. In: EURODYN 2005 Rotterdam, 2005.
Belotti, Vittorio; Crenna, Francesco; Michelini, Rinaldo C.; Rossi, Giovanni B. - Wheel-flat diagnostic tool via wavelet transform. Mechanical Systems and Signal Processing. 20:8 (2006). p. 1953-1966.
Brandt, A.; Lago, T.; Ahlin, K. - Summary of Spectrum Estimators for Vibration Signals and Their Errors. In: IMAC XXII, Deaborn, USA, 2004.
Brincker, R.; Ventura, C.; Andersen, P. - Damping Estimation by Frequency Domain Decomposition. In: IMAC XIX, Kissimmee, USA, 2001.
Brincker, R.; Zhang, L.; Andersen, P. - Modal identification of output-only systems using frequency domain decomposition. In: IMAC XVIII, San Antonio, USA, 2000.
Brownjohn, J.; A.Dumanoglu; Svern, R.; Blackeborough, A. - Ambient Vibration Survey of the Bospurus Suspension Brdge. Earthquake Engineering and Structural Dynamics. 18:(1989). p. 263-283.
Caetano, E. - Identificação experimental de parâmetros dinâmicos em sistemas estruturais. FEUP, 1992.
Referências bibliográficas
Calçada, R. - Efeitos dinâmicos em pontes resultantes do tráfego ferroviário a alta velocidade. FEUP, 1995.
Calçada, Rui Artur Bártolo - Avaliação experimental e numérica de efeitos dinâmicos de cargas de tráfego em pontes rodoviárias. Porto: FEUP, 2001.
Calçada, Rui Artur Bártolo - Avaliação experimental e numérica de efeitos dinâmicos de cargas de tráfego em pontes rodoviárias. FEUP, 2001.
Caprez, Markus - WIM Application To Pavements. In: COST 323, Weigh in Motion of Road Vehicles, 2nd European Conference, Lisbon, 1998.
CEN - prEN 15528 - Classification of lines.Corresponding load limits for railway vehicles and payload for freight wagons. 2007.
Clough, R.; Penzien, J. - Dynamics of Structures. 1993.
Cooley, J. W.; Tukey, J. W. - An algorithm for the machine calculation of complex Fourier series. Math. Comput. 19:(1965). p. 297–301.
Crawford, R.; Ward, H.S. - Determination of the Natural Periods of Buildings. Bulletin of the Seismological Society of America. Vol. 54:Nº 6 (1964). p. 1743-1756.
Cunha, A.; Caetano, E.; R. Calçada, R. - Observação do comportamento dinâmico de pontes. Da fase construtiva à monitorização a longo prazo. In: Seminário Segurança e Reabilitação das Pontes em Portugal, FEUP, Porto, 2001.
EN1990-AnnexA2 - Basis of Structural Design - Annex A2: Applications for bridges (normative). Final PT Draft. 2005.
EN1991-2 - Actions on Structures – Part 2: General Actions – Traffic loads on bridges". 2003.
Esveld, Coenraad - Modern Railway Track. Zaltbommel: MRT-Productions, 2001.
Felber, A. - Development of a Hybrid Bridge Evaluation System. University of British Columbia (UBC), 1993.
Félix, Carlos Manuel da Silva - Monitorização e análise do comportamento de obras de arte. PhD. 2005.
Figueiredo, E. - Monitorização e avaliação do comportamento de obras de arte. FEUP, 2006.
Frazão, O.; Araújo, F. M.; Dias, I.; Ferreira, L. A.; Santos, J. L. - Sensores de Bragg em Fibra Óptica. In: JETC99 - Jornadas de Engenharia de Telecomunicações e Computadores, Lisboa, 1999.
Friswell, M. I.; Mottershead, J. E. - Finite Element Model Updtaing in Structural Dynamics. Swansea, U.K.: 1995.
Gustafsson, F. - Determining the initial states in forward-backward filtering. IEEE Transactions on Signal Processing. 44:4 (1996). p. 998-992.
Guyan, R.J. - Reduction of Stiffness and Mass Matrices. AIAA Journal. 3:2 (1965). p. 280.
Jacob, Bernard - Application Of Weigh In Motion Data To Fatigue Of Road Bridges. In: COST 323, Weigh in Motion of Road Vehicles, 2nd European Conference, Lisbon, 1998.
160
Referências bibliográficas
Jacob, Bernard A.; O’Brien, Eugene J. - WAVE- A European Project On Weigh-In-Motion. In: National Traffic Data Acquisition Conference, Albuquerque, New Mexico, 1996.
Jaishi, Bijaya - Finite Eelement Model Updating of Civil Engineering Structures Under Operational Conditions. PhD. Fuzhou University, 2005.
James, Gerard - Analysis of Traffic Load Effects on Railway Bridges. PhD. Royal Institute of Technology, 2003.
Karoumi, R.; Wiberg, J.; Liljencrantz, A. - Monitoring traffic loads and dynamic effects using an instrumented railway bridge. Engineering Structures. 27:12 (2005). p. 1813-1819.
Kirkegaard, P.; Nielsen, S.; Enevoldsen, I. - Dynamic Vehicle Impact For Safety Assessment Of Bridges. In: COST 323, Weigh in Motion of Road Vehicles, 2nd European Conference, Lisbon, 1998.
KTH Railway Group - Efficient train systems for freight transport (Summary). KTH Railway Group, Stockholm, 2005.
Kwark, J. W.; Choi, E. S.; Kim, Y. J.; Kim, B. S.; Kim, S. I. - Dynamic behavior of two-span continuous concrete bridges under moving high-speed train. Computers & Structures. 82:4-5 (2004). p. 463-474.
Laman, Jeffrey A.; Nowak, Andrzej S. - Fatigue-Load Models for Girder Bridges. Journal of Structural Engineering. 122:7 (1996). p. 726-733.
Lee, J. - Use Of MEMS Sensors in Structural Engineering. Advanced Structural Dynamics And Smart Structures. (2004). p.
Lee, J.W.; Oh, J.S.; Park, M.K.; Kwon, S.D.; Kwark, J.W. - Bridge Displacement Measurement System Using Image Processing. In: IABMAS 2006, Porto, Portugal, 2006.
Lieven, N. A.; Ewins, D. J. - Spatial Correlation of Mode Shapes: The Coordinate Modal Assurance Criterion (COMAC). In: IMAC VI, Kissimmee, USA, 1988.
Magalhães, Filipe Manuel Rodrigues Leite de - Identificação modal estocástica para validação experimental de modelos numéricos. FEUP, 2004.
Maia, N.M.M.; Silva, J.M.M.; He, J.; Lieven, N.A.J.; Lin, R.M.; Skingle, G. W.; To, W.; Urugueira, A.P.V. - Theoretical and Experimental Modal Analysis. Baldock: Research Studies Press, 1997.
Matlab - MATLAB Programming Fundamentals. 2007.
Matllab - Signal Processing Toolbox User's Guide. 2007.
McLamore, V.R.; Hart, Gary C. - Ambient Vibration of Two Suspension Bridges. Journal of the Structural Division. 97:10 (1971). p. 2567-2582
Moses, F. - "Weigh-In-Motion System using Instrumented Bridges". ASCE Transportation Engineering Journal. 105:TE3 (1979). p. 233-249.
Mufti, Aftab - Guidelines for structural health monitoring. Winnipeg, Manitoba: ISIS Canada Corporation, 2001.
161

Referências bibliográficas
Norris, Paul - Recent Advances In The Understanding Of Bridge Dynamic Behaviour On The West Coast Main Line Route Modernization Project. In: Dynamics Of High-Speed Railway Bridges, Porto, 2005.
O'Brien, E.J.; Bailey, S.F.; O'Connor, A.J.; Enevoldsen, I.; A.Znidaric - Bridge Application of Weigh-In-Motion. In: COST 323, Weigh in Motion of Road Vehicles, 2nd European Conference, Lisbon, 1998.
O'Callahan, J. - A Proceadure For An Improved Reduction System (IRS). In: Proceedings of the 7th International Modal Analysis Conference (IMAC VII), Las Vegas, Nevada, U.S.A, 1989.
O'Callahan, J.; Avitable, P.; Riemer, R. - System Equivalent Reduction Expansion Process. In: Proceedings of the 7th International Modal Analysis Conference (IMAC VII), Las Vegas, Nevada, U.S.A, 1989.
Oshima, T.; Takeda, T.; Beskhyroun, S.; Yasue, S.; Tamba, I. - Structural health monitoring for life cycle management (LCM) of bridges. In: Proceedings of the 2nd European Workshop on Structural Health Monitoring, Munich, Germany, 2004.
Park, S.; Stubbs, N.; Bolton, R.; Choi, S.; Sikorsky, C. - Field Verification of the Damage Index Method in a Concrete Box-Girder Bridge via Visual Inspection. Computer-Aided Civil and Infrastructure Engineering. nº 16 (2001). p. 58-70.
Paz, M. - Dynamic Condensation. AIAA Journal. 22:5 (1984). p. 724-727.
prEN15528 - "Classification of lines.Corresponding load limits for railway vehicles and payload for freight wagons". 2006.
Quilligan, Michael - Bridge Weigh-In-Motion - Development of a 2-D Multi-Vehicle Algorithm. Royal Institute of Technology, 2003.
Rauert, T.; Hoffmeister, B.; Cantieni, R.; Brehm, M.; Zabel, V. - Experimental Modal Analysis of a Twin Composite Filler Beam Railway Bridge for High-Speed Trains with Continuous Ballast. In: IABSE 2008, Helsinki, Finland, 2008.
Restivo, M.T.; Almeida, F.G. de; Chouzal, M.F.; Mendes, J.G.; Lopes, A.M. - Laboratórios de Instrumentação para Medição. Porto, Portugal: Editora UP, 2008.
Rodrigues, Jorge - Dynamic Behaviour of Canelas Bridge Under Railway Traffic. In: Structural Dynamics - EURODYN 2002, Munich, 2002.
Rodrigues, Jorge - Identificação modal estocástica métodos de análise e aplicações em estruturas de engenharia civil. Universidade do Porto, 2005.
Salawu, O. S.; Williams, C. - Review of full-scale dynamic testing of bridge structures. Engineering Structures. 17:2 (1995). p. 113-121.
Sarmento, Ana Maria - A experimentação como metodologia de interpretação do comportamento de estruturas de betão. PhD. 1997.
Savin, E. - Dynamic Amplification Factor and Response Spectrum for the evaluation of vibrations of beams. Journal of Sound and Vibration. 248:2 (2001). p. 267-288.
Silva, Carlos - "Comportamento dinâmico de pontes de pequeno vão". Faculdade de Engenharia da Universidade do Porto, 2008 (a ser submetida).
162
Referências bibliográficas
Siringoringo, Dionysius M.; Fujino, Yozo - Experimental study of laser Doppler vibrometer and ambient vibration for vibration-based damage detection. Engineering Structures. 28:13 (2006). p. 1803-1815.
Skarlatos, Dimitris; Karakasis, Kleomenis; Trochidis, Athanassios - Railway wheel fault diagnosis using a fuzzy-logic method. Applied Acoustics. 65:10 (2004). p. 951-966.
Skoczynski, W.; Roszkowski, A.; Bien, J.; Zwolski, J. - Prototype of exciter for railway bridge testing In: EVACES, Porto, 2007.
SUPERTRACK, Sustained Performance of Railway Tracks - - Numerical simulation of train-track dynamics – Final Report. Sweden: 2005.
SVIBS - Manual for ARTeMIS Extractor Pro. (2006). p.
Szerszen, Maria M.; Nowak, Andrzej S.; Laman, Jeffrey A. - Fatigue reliability of steel bridges. Journal of Constructional Steel Research. 52:1 (1999). p. 83-92.
Tierney, Oliver F.; O’Brien, Eugene J.; Peters, R.J. - The Accuracy of Australian and European Culvert Weigh-in-Motion Systems. In: National Traffic Data Acquisition Conference, Albuquerque, New Mexico, 1996.
Trifunac, M.D. - Comparison between Ambient and Forced Vibration Experiments. International Journal of Earthquake Engineering and Struct. Dynamics. 1:(1972). p. 133-150.
UIC700-OR - Classification of lines - Resulting load limits for wagons. 2004.
UIC - Design of new lines for speeds of 300-350 km/h. State of the art. First Report. 2007.
UIC - Guidelines for railway bridges dynamic measurements and calculations. Paris: Railway Technical Publications, 2007.
Van Bogaert, Philippe - Experimental verifications of vibration and fatigue conduct of viaducts and large span bridges, crossed by high-speed trains. In: Dynamics of High-speed Railway Bridges, Porto, 2005.
Welch, P. - The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Transactions on Audio and Electroacoustics. 15:2 (1967). p. pp. 70-73.
Wiberg, Johan - Bridge Monitoring to Allow for Reliable Dynamic FE Modelling. Licentiate. Royal Institute of Technology, 2006.
Xia, H.; De Roeck, G.; Zhang, N.; Maeck, J. - Experimental analysis of a high-speed railway bridge under Thalys trains. Journal of Sound and Vibration. 268:1 (2003). p. 103-113.
Xia, H.; Zhang, N.; Gao, R. - Experimental analysis of railway bridge under high-speed trains. Journal of Sound and Vibration. 282:1-2 (2005). p. 517-528.
Yan, L.; Fraser, M.; Elgamal, A.; Conte, J. P. - Applications of Neural Networks in Structural Health Monitoring. In: Proc. of the 3rd China-Japan-US Symposium on Structural Health Monitoring and Control, Dalian, China, 2004.
Zacher, M.; Baessler, M. - Dynamic Behaviour of Ballast on Railway Bridges. In: Dynamics Of High-Speed Railway Bridges, Porto, 2005.
163