Capítulo 2 Teoria Clássica das Placas Finas
33
Teoria Clássica das Placas Finas 2.1 Capítulo 2 Teoria Clássica das Placas Finas 2.1 Introdução As placas são elementos estruturais limitados por duas superfícies planas distanciadas entre si de uma grandeza designada por espessura. No caso da dimensão da espessura ser muito menor que as dimensões das superfícies planas limitantes, as placas são designadas por placas finas. O plano equidistante das superfícies planas externas é designado por plano médio da placa. No caso das placas finas é possível estabelecer a chamada Teoria Clássica das Placas Finas 1,2, 3, 4 , desenvolvida por Lagrange em 1811, para a qual são consideradas válidas as chamadas hipóteses de Kirchhoff. Considere-se o sistema de eixos coordenadas Ox 1 x 2 x 3 representado na figura 2.1, o qual é definido de tal modo que o plano Ox 1 x 2 seja 1 Timoshenko S. and Woinowsky-Krieger, Theory of Plates and Shells ,McGraw-Hill. 2 Mansfield, E, The Bending and Stretching of Plates, Pergamon Press. 3 Courbon, Plaques Minces Elastiques, Eyrolles - Paris. 4 Ugural, A.C., Stresses in Plates and Shells , McGraw-Hill Book Comp., 1981.
Transcript of Capítulo 2 Teoria Clássica das Placas Finas

Teoria Clássica das Placas Finas 2.1
Capítulo 2
Teoria Clássica das Placas Finas
2.1 Introdução
As placas são elementos estruturais limitados por duas superfícies planas
distanciadas entre si de uma grandeza designada por espessura. No caso da dimensão da
espessura ser muito menor que as dimensões das superfícies planas limitantes, as placas são
designadas por placas finas. O plano equidistante das superfícies planas externas é
designado por plano médio da placa.
No caso das placas finas é possível estabelecer a chamada Teoria Clássica das
Placas Finas 1,2, 3, 4, desenvolvida por Lagrange em 1811, para a qual são consideradas
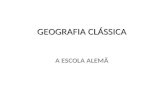
válidas as chamadas hipóteses de Kirchhoff. Considere-se o sistema de eixos coordenadas
Ox1 x2 x3 representado na figura 2.1, o qual é definido de tal modo que o plano Ox1 x2 seja
1 Timoshenko S. and Woinowsky-Krieger, Theory of Plates and Shells ,McGraw-Hill.
2 Mansfield, E, The Bending and Stretching of Plates, Pergamon Press.
3 Courbon, Plaques Minces Elastiques, Eyrolles - Paris.
4 Ugural, A.C., Stresses in Plates and Shells , McGraw-Hill Book Comp., 1981.

Teoria Clássica das Placas Finas 2.2
coincidente com o plano médio da placa antes da deformação e o eixo Ox3 seja normal ao
plano médio da placa.
O
p
e
x1
x2
x3
x1
x3
As hipóteses de Kirchhoff que são consideradas válidas para placas finas, com
isotropia total e submetidas a acções normais ao plano médio, são:
(i) A superfície média da placa é plana e indeformável, ou seja, as deformações no plano
Ox1 x2 são nulas:
ε11 = ε22 = ε12 = 0 para x3 = 0 2.1
(ii) Os pontos pertencentes à normal ao plano médio da placa antes da deformação
permanecem na normal à superfície média flectida.
(iii) A tensão na direcção normal ao plano médio, σ33 é irrelevante quando comparada com
as tensões σ11 e σ22 pelo que se considera:
σ33 ≅ 0 2.2
Figura 2.1: Sistema de Eixos de Referência.

Teoria Clássica das Placas Finas 2.3
O tensor das tensões toma neste caso a forma seguinte:
=
02313
232212
131211
ij
σσσσσσσσ
σ 2.3
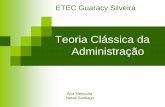
como se mostra na figura 2.2 num ponto a uma distância x3 do plano médio, para um
elemento de dimensões infinitamente pequenas, dx1 dx2 e de altura igual à espessura, sendo
σ11 = σ22= σ12 = 0 para pontos sobre a superfície média da placa, de acordo com a hipótese
(i) de Kirchhoff.
eσ11
σ13
σ21 σ12
σ23
σ22
ox1
x2
x3 xd 1
x3
xd 2
Figura2.2:Estado de Tensão num Ponto
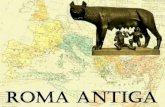
Tendo em conta a hipótese (ii) os deslocamentos, u1 e u2, de um ponto P da placa, situado a
uma distância x 3do plano médio, podem ser calculados a partir do deslocamento
transversal ω (x1,x2) do ponto contido na normal que passa pelo ponto e situado na
superfície média. Entendendo-se por deslocamento transversal o deslocamento sofrido por
um ponto do plano médio na direcção normal ao plano médio. Na figura 2.3 representa-se, a

Teoria Clássica das Placas Finas 2.4
deformada de um segmento linear sobre a normal à superfície média e o campo de
deslocamentos, no plano Ox1 x3, para o ponto P cuja posição é sobre a normal ao plano
médio antes de deformado. A consideração da hipótese (ii) implica que as componentes do
vector de deslocamentos,PP´ que se podem designar por{u1, u2, u3} T, sejam:
( ) ωωω
φω
φ ==∂∂
−=−=∂∂
−=−= 2132
32321
3131 x,xu;x
xxu;x
xxu 2.4
Os deslocamentos u1 e u2 dependem só da distância do ponto P ao plano médio, x3
e do deslocamento transversal, ω(x1,x2), da superfície média como resulta das
considerações feitas.
φ 1
φ1
φ2
φ2
x1
x 3
x2
x;
x 22
11 ∂
∂=
∂∂
=ω
φω
φ
x3
ω
ω
P
P´
P´
Figura 2.3: Deslocamentos no Ponto P e no Plano Ox1x3.
As deformações no plano Ox1 x2 a uma distância x3 do plano médio da placa
atendendo às expressões (2.4) e (1.8) são:

Teoria Clássica das Placas Finas 2.5
xxx
xx
xx
21
2
31222
2
32221
2
311 ∂∂ω∂−=ε
∂ω∂−=ε
∂ω∂−=ε ;; 2.5
Na superfície média a coordenada x3 = 0 e portanto é:
ε11 = ε22 = ε21 = 0
o que implica que a superfície média seja uma superfície neutra, uma vez que não sofre
qualquer deformação.
As deformações nos planos paralelos ao plano Ox1 x2 variam linearmente ao longo
da espessura da placa o que está de acordo com as hipóteses de Kirchhoff atrás referidas.
Note-se que de acordo com o campo de deslocamentos definido, as deformações ε23 e ε13
são nulas, esta situação não é totalmente consistente com a realidade, no entanto estas
deformações poderão ser calculadas a partir dos esforços unitários, como se verá
posteriormente. O campo de deslocamentos resultante da consideração das Hipóteses de
Kirchhoff apresenta esta incongruência nas deformações de corte.
A Lei de Hooke generalizada para materiais isotrópicos com comportamento
linear elástico, estabelece uma relação entre as tensões e deformações no plano Ox1 x2 com
a forma seguinte:
−−
−−
+=
εεε
ννν
νν
ν
νσσσ
12
22
11
12
22
11
10001
11
0111
1E
2.6
sendo E o modulo de Young e ν o coeficiente de Poisson.
Tendo em conta as equações (2.5) e (2.6) é possível relacionar as tensões com os
deslocamentos transversais do seguinte modo:

Teoria Clássica das Placas Finas 2.6
∂∂∂
+−==
∂∂+
∂∂
−−=
∂∂+
∂∂
−−=
xx
x1E
xxx1
Exx
x1E
21
2
32112
21
2
22
2
3222
22
2
21
2
3211
ων
σσ
ων
ω
νσ
ων
ω
νσ
2.7
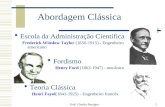
As tensões σ11, σ22 e σ12 variam linearmente ao longo do eixo dos x3 x3 como se
representa na figura 2.4, sendo nulas para x3= 0, como seria de esperar tendo em conta a
hipótese de Kirchhoff (i).
2.2 Esforços Generalizados e Curvaturas
Na análise de placas à flexão, é conveniente considerar os esforços unitários que
são: os momentos flectores unitários, M11 e M22, o momento torsor unitário, M12 e os
esforços transversos unitários, T1 e T2.
O momento flector unitário M11 é o momento resultante por unidade de
comprimento da direcção Ox1, das tensões normais σ11 ao longo da espessura da placa, ou
seja :
3311
2/e
2/e11 dxxM σ∫=
− 2.8
De modo semelhante se definem momentos unitários, M22e M12 ou seja:
3322
2/e
2/e22 dxxM σ∫=
− e 3312
2/e
2/e12 dxxM σ∫=
− 2.9-2.10
Os esforços transversos unitários calculam-se a partir das tensões σ13 e σ23 do
seguinte modo:
323
2/e
2/e2313
2/e
2/e1 dxTedxT σσ ∫=∫=
−− 2.11

Teoria Clássica das Placas Finas 2.7
O
x1
x2
x3
σ12σ22σ11
Figura 2.4: Distribuição de tensões ao longo da espessura da placa.
Integrando as expressões (2.8) a (2.10) para os momentos unitários, tendo em conta as
equações (2.7) que definem as tensões em termos do deslocamento transversal ω, obtém-se:
∂∂∂−−=
∂∂+
∂∂−=
∂∂+
∂∂−=
xx
)1(DM
xxDM
xxDM
21
2
12
21
2
22
2
22
22
2
21
2
11
ων
ων
ω
ων
ω
2.12
sendo D = E e3/12 (1 - ν2), o modulo de rigidez à flexão da placa. Note-se que a simetria
do tensor das tensões σ12 = σ21 implica que seja: M21 = M12.
As segundas derivadas do deslocamento transversal, ω,
xx e x,x 2122
222
12 ∂∂∂∂∂∂∂ ωωω , é possível demonstrar que são as curvaturas da

Teoria Clássica das Placas Finas 2.8
superfície média flectida 1, no caso de se admitir que a inclinação da superfície média
flectida em qualquer direcção é pequena de tal modo que o seu quadrado é pequeno quando
comparado com a unidade. As curvaturas podem ser designadas por χ11, χ22 e χ12
respectivamente. Portanto as equações (2.12) podem ser escritas com a forma seguinte:
−−=
χχχ
νν
ν
12
22
11
12
22
11
1000101
DMMM
2.13
em função das curvaturas da superfície média flectida.
Os esforços unitários, M11, M22, M12, resultantes das tensões estão representados
na figura 2.5.
Os esforços no plano médio são M11, M22, M12, T1 e T2, como se indicou. As
tensões σ11, σ22 e σ12 podem ser calculadas a partir dos momentos tendo em conta as
equações (2.7) e (2.12) e são determinadas a partir das seguintes expressões:
eee 333xM12;xM12;xM12 312
12322
22311
11 −=−=−= σσσ
Na face superior da placa corresponde a um valor de x3 = e / 2, as tensões σ11e σ22
são tensões de compressão no caso dos momentos flectores serem positivos e têm como
valores ee 22M6 e M6 22
2211
11 −=−= σσ , estes são um dos valores extremos das tensões
normais ao longo da espessura da placa .
1 x
x1
x21
2
1
2 2/3
21
2
11 ∂∂−≈
∂∂+
∂∂−
=ω
ω
ω
χ

Teoria Clássica das Placas Finas 2.9
θ2222 ,MM =θ1111 ,MM =
θ1212 ,M
Figura 2.5: Representação de Momentos.
2.3 Equações de equilíbrio. Equação de Lagrange.
As equações de equilíbrio podem ser estabelecidas em termos dos esforços
unitários que resultam das tensões actuantes num elemento paralelepipédico da placa de
dimensões dx1, segundo Ox1, dx2 segundo Ox2 e sendo segundo Ox3 considerada uma
dimensão igual à espessura da placa. O estado de tensão no referido elemento tem as
componentes que foram representadas anteriormente na figura 2.2 às quais correspondem
esforços unitários definidos de acordo com as expressões (2.8-2.11). Considere-se um
elemento ABCD de dimensões dx1, dx2 no plano médio do elemento paralelepipédico, os
esforços unitários actuantes neste elemento e relevantes para efeitos de equilíbrio estático
de esforços estão representados na figura 2.6.

Teoria Clássica das Placas Finas 2.10
A
B D
C
O)x,x(p 21
x1
x2 x3
M11
M22
M 12
M21
M111
T1
T2
M122
M121 T1
2
M112
T11
Figura 2.6: Esforços Unitários num Elemento do Plano Médio dx1, dx2.
Na figura 2.6 os esforços, M111, T1
1, M121, M1
12, M122 e T1
2, são definidos do
seguinte modo:
∂∂
+=
∂∂
+=
∂
∂+=
∂
∂+=
∂
∂+=
∂
∂+=
xdxTTT xd
xTTT
xdx
MMM xdx
MMM
xdx
MMM xdx
MMM
22
22
121
1
11
11
22
2121
1211
1
1212
112
22
2222
1221
1
1111
111
Para se obterem as forças que actuam sobre o elemento de dimensões
infinitésimais têm de multiplicar-se os esforços unitários pelo comprimento do lado
elemento de área em que actuam. As equações de equilíbrio estático a considerar são três:
equilíbrio de momentos em relação aos eixos Ox1 e Ox2 e equilíbrio de forças segundo o
eixo Ox3.

Teoria Clássica das Placas Finas 2.11
A equação de equilíbrio de momentos em relação ao eixo Ox2 é:
0xdxdTxdxdx
MMxdMxdxdx
MMxdM 211122
212112121
1
1111211 =+
∂
∂+−+
∂
∂+−
simplificando esta equação, obtém-se:
Tx
Mx
M1
2
21
1
11 =∂
∂+
∂∂
2.14
De modo análogo se obtém a equação de equilíbrio de momentos em relação ao
eixo Ox1 que é:
Tx
Mx
M2
1
12
2
22 =∂
∂+
∂∂
2.15
Finalmente considerando o equilíbrio de forças na direcção do eixo Ox3 e
admitindo que são irrelevantes os infinitésimos de ordem superior à primeira, obtém-se:
)x,x(pxT
xT
212
2
1
1 −=∂∂
+∂∂
2.16
onde p(x1, x2) representa a resultante das acções externas, por unidade de superfície,
normais ao plano médio no elemento dx1× dx2.
Substituindo as equações (2.14) e (2.15) na equação (2.16) obtém-se:
)x,x(px
Mx
Mxx
Mx
Mx
211
12
2
22
22
12
1
11
1
−=
∂
∂+
∂∂
∂∂
+
∂
∂+
∂∂
∂∂
2.17
que é a equação de equilíbrio num ponto de uma placa rectangular submetida à acção de
forças normais ao plano médio. Note-se que os esforços unitários M11, M22, M12 são

Teoria Clássica das Placas Finas 2.12
independentes entre si e que os esforços Transversos unitários T1 e T2 dependem dos
momentos flectores e torsor unitários.
Os esforços unitários M11, M22 e M12 podem ser calculados a partir dos
deslocamentos transversais ω , recorrendo às expressões (2.12) e nesse caso a equação de
equilíbrio (2.17) toma a forma seguinte:
D)x,x(p
xxx2
x21
42
4
22
21
4
41
4
−=∂∂+
∂∂∂+
∂∂ ωωω
2.18
Esta equação (2.18) é conhecida por Equação de Lagrange e pode escrever-se
duma maneira mais concisa do seguinte modo:
D)x,x(p 21−=∇∇ω
2.19
onde o símbolo ∇designa o Laplaciano, xx 2
221 ∂
∂+
∂∂
.
Substituindo nas equações de equilíbrio de momentos (2.14) e (2.15) as expressões
(2.12) para os momentos unitários, obtém-se para os esforços transversos unitários as
expressões seguintes:
( )ωωω
∇∂∂
−=
∂∂+
∂∂
∂∂
−=x
Dxxx
DT1
22
2
21
2
11
e (2.20)
( )ωωω
∇∂
∂−=
∂∂+
∂∂
∂∂
−=x
Dxxx
DT2
22
2
21
2
22
Sendo conhecida a solução da Equação de Lagrange é possível calcular os
esforços unitários a partir das expressões (2.12) e (2.20). A solução da referida equação para
o domínio da placa vai depender das condições de contorno.
2.4 Condições de Contorno

Teoria Clássica das Placas Finas 2.13
2.4.1 Reacções de Apoio
O deslocamento transversal ω deve satisfazer a equação de Lagrange e as
condições ao limite sobre o contorno da placa. Antes de se considerarem as condições de
contorno propriamente ditas devem calcular-se as reacções que têm de ser consideradas na
presença e na ausência de ligações ao exterior. Considere-se um elemento infinitésimal de
dimensão dx1 no contorno da placa como se representa na figura 2.7 de tal modo que a
direcção normal ao contorno, no elemento infinitésimal considerado, tenha a direcção do
eixo dos x2 x2; os esforços actuantes no elemento são os seguintes: M22dx1 resultante das
tensões σ22; M12dx1 resultante das tensões σ12 e T2 dx1 resultante das tensões σ13.
Estes esforços vão tender a ser equilibrados por esforços de reacção que são em geral
momentos flectores e forças na direcção normal ao plano médio da placa. No caso do apoio
não poder desenvolver momentos flectores que equilibrem o momento flector Mn, o
momento normal à faceta, tem de ser considerado igual a zero ou igual ao momento
aplicado caso exista.
O binário representado na figura 2.7b, ± M'12, é capaz de equilibrar o momento
torsor M21dx1 considerado na figura 2.7a, o qual actua num elemento do contorno de
comprimento dx1, desde que seja:
MM 12121 =
Supondo que a placa está apoiada ao longo do contorno num apoio tal que não
possa produzir uma reacção de apoio que seja um momento torsor, este pode ser substituído
por uma distribuição de forças ao longo do contorno do tipo representado na figura 2.7b,
M121 M1
21, etc..

Teoria Clássica das Placas Finas 2.14
O
(a)
(b)
x1
x2 x3
xdM, 12121σ xdx
MM,xdx
11
21211
1
2121 ∂
∂+
∂∂
+ σσ
xd 1 xd 1
dxT 12 dxT 12
dxT 12− dxT 12−
xdx
MM 1
1
1211
21 ∂∂
−−M1
21−
xdx
MM 11
1211
21 ∂∂
+M1
21
Figura 2.7: Distribuição das Tensões nos Bordos.
Considerando um elemento contínuo ao anteriormente referido, nele actua um
momento torsor:
xdxdx
MM 111
2121
∂
∂+
o qual pode ser equilibrado por um binário de forças do tipo representado na figura 2.7. As
forças M121 e dx
xMM 1
1
1211
21 ∂∂
−− que actuam segundo o lado comum aos 2 elementos
infinitésimais adjacentes, eliminam-se em parte, dando origem a uma força dirigida para
cima de grandezas dxx
M1
1
121
∂∂ , no caso do incremento dx
xM
11
121
∂∂ ser positivo.
A consideração dos momentos equilibrados atrás referidos só provoca alterações
ao comportamento estático da placa na vizinhança do contorno.
Portanto as reacções verticais por unidade de comprimento do contorno não
são iguais ao esforço cortante T1 ou T2, mas são iguais à soma destes esforços com a
variação dos momentos torsores, ou seja:

Teoria Clássica das Placas Finas 2.15
xMTR e
xMTR
1
2122
2
2111 ∂
∂+=
∂∂
+= 2.21
Estas reacções podem exprimir-se, em função das derivadas de ω atendendo às
expressões (2.5) e (2.20), do seguinte modo:
∂∂
∂−+∂∂−=
xx)2(
xDR 2
21
3
31
3
1ω
νω
∂∂
∂−+∂∂−=
xx)2(
xDR
221
3
32
3
2ω
νω
2.22
Nas placas rectangulares o contorno não é contínuo e apresenta arestas; na
vizinhança destas arestas há uma variação brusca do momento torsor, como se representa
na figura 2.8.
A-ε
V
A+εA
M1´´
M 2´´
Figura 2.8 Momento torsor nas Arestas

Teoria Clássica das Placas Finas 2.16
Quando o momento torsor varia bruscamente de direcção num ponto A, como se
representa na referida figura, desde um valor M"1 até um valor M"2, no elemento
infinitésimal compreendido entre A - ε e A + ε, a força de substituição tem valor seguinte:
[ ] [ ] MMMMdxx
Mdxx
MV 1221AA21
AA2
A
A 2
121
A
A 1
12 ´´´´ −=+=∫∂
∂+∫
∂∂
= ε−ε+
ε−
ε+
2.23
Portanto num canto da placa existirá uma força de substituição dada por (2.23), se o ângulo
for recto M´´2 é igual a M´´1 e de sentido contrário, portanto a reacção concentrada a ser
considerada no canto é:
∂∂
∂−=−=xx
D)1(2M2R21
2
12vω
ν 2.24
Esta força de reacção é negativa, dirigida para baixo devendo ser transmitida pelo
apoio para evitar que a placa levante no canto, é o resultado da existência da força de
levantamento V.
2.4.2 Condições de Fronteira Propriamente Ditas
2.4.2.1 Bordo simplesmente apoiado
Para as condições de bordo simplesmente apoiado, o movimento segundo o eixo
dos x3 x3, está impedido, podendo no entanto rodar livremente. A notação gráfica mais
usual para este tipo de apoio em placas é a que se representa nas figuras 2.9.
As condições de contorno simplesmente apoiado são:
ω= 0 e Mn= Maplicado

Teoria Clássica das Placas Finas 2.17
sendo ω o deslocamento transversal e Mn o momento que provoca uma rotação normal no
bordo simplesmente apoiado.
Em termos analíticos estas condições de contorno para a placa rectangular da
figura 2.9 e para os lados paralelos ao eixo dos x1 x1, AB e CD ,são as seguintes na ausência
de momentos exteriores aplicados:
u3 = ω = 0 e M2 = 0 2.25
e para os lados paralelos ao eixo dos x2 x2, AC e BD, na ausência de momentos exteriores
aplicados são:
u3 = ω = 0 e M1 = 0 2.26
O
A B
O=C D
MtMn
x1
x2
x2
x2
Figura 2.9: Bordo Simplesmente Apoiado
Considerar M2 = 0 ao longo de AB e CD, se se tiver em conta que ω = 0 ao longo
de AB e CD, é equivalente a considerar que:

Teoria Clássica das Placas Finas 2.18
0x2
2
2
=∂∂ ω
2.27
Ao longo do lado AC e BD, considerar que M1 é igual a zero , implica que seja:
0x2
1
2
=∂∂ ω
2.28
As condições (2.25) e (2.26) resumem-se portanto à condição u3 = ω = 0 e às
condições (2.27) e (2.28), no caso das placas de bordos ortogonais paralelos aos eixos
coordenados.
2.4.2.2. Bordo perfeitamente encastrado
No bordo perfeitamente encastrado os deslocamentos e as inclinações têm valor
nulo e um dos modos de representação do bordo é o que se indica na figura 2.10. A placa
representada nesta figura é considerada rectangular com os lados paralelos aos eixos
coordenados.
As condições de fronteira ao longo dos lados AB e CD, paralelos ao eixo dos
1x ,são representadas através das seguintes igualdades:
ω = 0 e 0x2
=∂
ω∂ 2.29
e ao longo dos lados AC e BD traduzem-se do seguinte modo:
ω = 0 e 0x1
=∂
ω∂ 2.30
Tendo em conta que a equação de Lagrange é em termos de ω, as equações
anteriores que representam as condições de contorno são um complemento da referida
equação.

Teoria Clássica das Placas Finas 2.19
2.4.2.3. Bordo Livre.
Se a placa tiver um ou mais lados livres, em todos os pontos do bordo livre devem
de ser nulos os momentos flectores M11 ou M22 e as reacções R1 e R2. Estes esforços serão
não nulos caso exista algum esforço ou momentos aplicados no bordo, nesse caso serão
iguais a uma função de x1 ou x2 conhecida. No caso de bordo livre sem cargas aplicadas e
paralelo a um dos eixos coordenados, as condições de contorno exprimem-se
analiticamente do seguinte modo:
R1 = 0 e M11 = o para x1 = 0
R2 = 0 e M22 = 0 para x2 = 0 2.31
As condições anteriores em termos dos deslocamentos ω, são para x1 = 0:
0xx
)2(x
e 0xx
D221
3
21
3
22
2
21
2
=
∂∂
∂−+∂∂=
∂∂+
∂∂−
ων
ωων
ω 2.32
Bordos Encastrados
Figura 2.10 : Placa com Bordos Encastrados

Teoria Clássica das Placas Finas 2.20
A deformada ω deve satisfazer simultaneamente a equação de equilíbrio ou seja a
equação de Lagrange (2.18) e as condições de fronteira (2.31) e (2.32).
2.5. Flexão Pura de Placas Rectangulares
2.5.1 Determinação da Equação da Deformada
A placa rectangular representada na figura 2.11 tem espessura constante, e, e está
submetida à acção de momentos uniformemente distribuídos ao longo dos bordos paralelos
aos eixos dos x2 x2 e dos x1x1. Os momentos por unidade de comprimento são
respectivamente M1 e M2.
A placa sob a acção dos momentos M1 e M2, como se representa na figura 2.11,
fica submetida à flexão nos planos x1 x3 e x2 x3. O plano médio Ox1 x2, assim como
qualquer plano paralelo a este, transforma-se numa superfície de dupla curvatura, após a
ocorrência de deformação.
AB
D
x1
x2
CM2
M1
M1
M2
Figura 2.11: Placa Rectangular em Flexão Pura.
Para esta solicitação os esforços transversos unitários são nulos em qualquer
ponto da placa. Podem considerar-se também momentos torsores M12 aplicados ao longo do
contorno da placa como se representa na figura 2.12.

Teoria Clássica das Placas Finas 2.21
AB
D x 1
x2
C
M12
M12
Figura 2.12:Placa Rectangular Submetida à Torção.
As tensões σ1 σ2 e σ12 na face superior da placa, para uma placa submetida à acção
dos momentos M1, M2 e M12, são neste caso constantes e são, em qualquer ponto da placa
pertencente à faceta superior que está à compressão, iguais a:
eee 2
1212212
222
11
M6 e M6,M6−==−=−= σσσσ 2.33
As curvaturas normais do plano médio em relação aos eixos dos x1 x1 e dos x2
x2 e o empenamento são determinadas a partir da Lei de Hooke generalizada 2.12. Essas
curvaturas são:
( ) ( ) ( )ν
ω
ν
νω
ν
νω2
12
21
2
212
22
2
221
21
2
1DM
xx e
1DMM
x ,
1DMM
x −=
∂∂∂
−−
=∂∂
−−
=∂∂ 2.34
Atendendo a que M1, M2 e M12 são constantes e escolhendo a origem das
coordenadas no ponto de coordenadas x1 = 0 e x2 = 0, no plano médio Ox1 x2, a equação
da deformada obtida por integração das equações 2.34, é:
( ) ( ) ( ) xx1DM
2x
1DMM
2x
1DMM
21212
22
212
21
221
νν
ν
ν
νω
−+
−−
+−
−= 2.35
No caso particular de ser M12 = 0 e M1 = M2 = M obtêm-se:

Teoria Clássica das Placas Finas 2.22
( )xx)1( D2M 2
221 +
+=
νω
2.36
e a superfície média flectida é neste caso, um paraboloide de revolução, que no caso de ω
ser muito pequeno, se pode considerar uma esfera de raio:
R=M
)1(D ν+ 2.37
podendo então dizer-se que a flexão é esférica. A inconsistência destes resultados resultam
só da consideração de expressões aproximadas para as curvaturas.
2.5.2 Determinação das Direcções Principais de Flexão
Para determinar o momento flector M e o momento torsor, Mt, por unidade de
comprimento numa secção normal ao plano médio, figura 2.13, orientada de tal modo que a
normal faça um ângulo θ com o sentido positivo do eixo dos x1 x1, basta considerar o
equilíbrio de momentos no elemento triangular ABC da placa. As dimensões deste
elemento são: BC = ds, AB = ds senθ e AC = ds cosθ. Obtém-se assim a equação vectorial:
θθ sen)jMiM()cosjMiM(jMiM 122112t +−++−=+ 2.38
Atendendo a que:
θθ senjcosii −=
θθ cosjensij += 2.39
a equação (2.38) é equivalente às equações seguintes:

Teoria Clássica das Placas Finas 2.23
x2
x1
M12M2
M12
M1
C
AB
M
Mt
x1
x2
O
jj'
i
i'θ
x'1x'2
Figura 2.13.: Orientação dos Sistemas de Eixos
M = M1 cos2 θ + M2 sen2 θ + 2 M12 sen θ cos θ
Mt = (M1 - M2) sen θ cos θ - M12 (cos2 θ - sen2 θ) 2.40
Existem duas direcções principais para as quais o momento torsor Mt é nulo e que
são definidas, partindo da equação (2.40) fazendo Mt = 0 e tendo em conta que:
sen θ cos θ = ½ sen2θ e cos2θ - sen2θ = cos2 θ
Nestas condições a equação (2.40) toma a forma:
MMM22gtan
21
12
−=θ
2.41
Os momentos flectores principais correspondentes são as raízes da equação
seguinte:
( ) ( ) 0MMMMMMM 2122121
2 =−++− 2.42
Os momentos principais são:

Teoria Clássica das Placas Finas 2.24
( )
−
+±+=2
MMMMM21M 1122
2212
2/1
2211 2.43
No caso do momento torsor aplicado, M12, ser igual a zero, as direcções
principais correspondem aos ângulos θ = 0 e θ = π/2, ou sejam as direcções paralelas aos
eixos dos x1 x1 e dos x2 x2 considerados são direcções principais. Os momentos flectores
principais são neste caso particular M1 e M2 sendo M12 = 0.
As direcções principais dos momentos correspondem às direcções principais do
tensor das curvaturas e portanto às direcções principais de flexão correspondem curvaturas
principais da superfície média flectida.
2.6. Trabalho Virtual das Tensões e Energia de Deformação
O trabalho virtual das tensões σij numa deformação virtual εij tem por expressão:
dV)222(dVT 23231313121222332222V
1111ijV ij εσεσεσεσεσεσεσδ +++++∫=∫=
ou no caso das placas 2.44
dVxx
M2x
Mx
Mxe12T
21
2
1222
2
2221
2
11V
233
∂∂
∂+∂∂+
∂∂
∫=ϖϖϖ
δ
sendo ϖ o deslocamento virtual e sendo o integral é estendido ao volume da placa,V.
No caso da placa estar sujeita a acções externas normais ao plano médio, as
deformações neste caso são devidas ao efeito de flexão, a placa pode ser tratada como um
estado plano de tensão. A equação (2.44) pode ser modificada, tendo em conta as equações
(2.5) e (2.7) e integrando ao longo da espessura, por forma a obter equação seguinte:

Teoria Clássica das Placas Finas 2.25
( ) dSxxxx
2xxxx
1xxxx
DT S21
2
21
2
22
2
21
2
22
2
21
2
22
2
21
2
22
2
21
2
∫
∂∂
∂∂∂
∂−∂∂
∂∂+
∂∂
∂∂−−
∂∂+
∂∂
∂∂+
∂∂=
ωωωωωων
ωωωωδ
2.45
onde δω=ω , representa o deslocamento virtual.
O trabalho virtual das forças exteriores deve igualar o trabalho virtual de
deformação, δT, como resulta do chamado Teorema dos Trabalhos Virtuais. O trabalho
virtual das forças exteriores é:
xdxd)x,x(pT 212S
1 ωδ ∫= 2.46
A energia de deformação da placa é:
dV)222(21dV
21U 23231313121222332222
V1111ijV ij εσεσεσεσεσεσεσ +++++∫=∫= 2.47
Integrando ao longo da espessura, tratando a placa como um estado plano de
tensão e tendo em conta as definições (2.5) e (2.7), obtém-se:
dSxxxx
)1(2xx2
DU S21
2 2
22
2
21
2
22
2
21
2 2
∫
∂∂
∂−∂∂
∂∂−−
∂∂+
∂∂=
ωωων
ωω 2.48
A energia potencial total, ∏, é a soma da energia de deformação interna,U, com a
energia potencial devida às forças exteriores,T, ou seja:
( ) xdxdx,x)x,x(pU 21212S 1 ω∫−=∏ 2.49
Minimizando a energia potencial total, δΠ = 0, obtém-se:

Teoria Clássica das Placas Finas 2.26
2.50 Aplicando o teorema de Green ao integral de superfície contido nesta expressão e
considerando que o contorno é definido por segmentos ortogonais paralelos aos eixos
coordenados, obtém -se:
2.51
Tendo em conta as equações (2.12), a equação (2.51) toma a forma:
( ) −∫∂
∂+∫
∂∂
−∫ −∇ xdx
)(MDxd
x)(
MDxdxdpD 1C 2
222C 1
1121S2 δωδω
δωω
−∫∂
∂+∫
∂∂
− xdx
)(MDxd
x)(
MD 1C 1
122C 2
12δωδω
( ) ( ) ( ) ( ) ( )2 2 2 22 2 2 2
2 2 2 2 2 2S1 2 1 2 2 1 1 2 1 2
1 2 1 2S
( )D (1 ) 2 dSx x x x x x x x x x
p p( , ) d d 0x x x x
δω δω δω δω ω ω ω δω∂ ∂ ∂ ∂∂ ∂ ∂ ∂∇ω + − − ν + − − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
− δω =
∫
∫
( ) ( )−
∂∂
∫
∂∂
∂−+∂
∂∫
∂∂+
∂∂− xd
xxx)1(Dxd
xxxD 2
2C 21
2
22C
21
2
22
2 δωων
δωων
ω
( ) ( )−
∂∂
∫
∂∂+
∂∂+∫ −∇ xd
xxxDxdxdpD 1
1C22
2
21
2
21S2 δωω
νω
δωω
( )−∫
∂∂
∂+∂∂+
∂∂
∫
∂∂
∂−− xdxxx
Dxdxxx
)1(D 2C
212
3
32
3
11C 21
2
δωω
νωδωω
ν
−∫
∂∂
∂−+∫
∂∂
∂+∂∂− xd
xx)1(Dxd
xxxD 1
C 221
3
2C
221
3
31
3
δωω
νδωω
νω
0xdxx
)1(D 1C
221
3
=∫
∂∂
∂−− δωω
ν

Teoria Clássica das Placas Finas 2.27
xdx
Mx
MD 1C 1
12
2
22 δω∫
∂
∂+
∂∂
−
2.52
0xdx
Mx
MD 2C 2
12
1
11 =∫
∂
∂+
∂∂
+ δω
Fazendo uso das equações de equilibro (2.14) e (2.15) a equação anterior toma a forma:
( ) −∫∂
∂+∫
∂∂
−∫ −∇ xdx
)(Mxd
x)(
MxdxdpD 12
2221
1121S2 δωδω
δωω
0xdTxdT
xdx
)(Mxd
x)(
M
1112
11
1222
12
=∫+∫−
−∂
∂∫+
∂∂
∫−
δωδω
δωδω
2.53
ou ainda:
( ) −∫∂
∂+∫
∂∂
−∫ −∇ xdx
)(Mxd
x)(
MxdxdpD 12
2221
1121S2 δωδω
δωω
0xd x
MT xd x
MT 22
1221
1
121 =∫
∂
∂+−
∂
∂+∫+ δωδω
donde se infere que por minimização da energia potencial se obtém a equação de Lagrange
que resulta de se igualar a zero o integrando do integral estendido à superfície e um
conjunto de condições de fronteira que resultam da anulação dos integrandos dos integrais
estendidos ao contorno da placa.
A teoria das placas referida é suficientemente precisa para fins práticos no caso
das placas serem finas. Na vizinhança de esforços transversos concentrados, junto de cantos
e de orifícios de diâmetro com uma dimensão da ordem de grandeza da espessura da placa

Teoria Clássica das Placas Finas 2.28
esta teoria mostra-se pouco precisa sendo necessário considerar uma teoria exacta 1 de
placas.
2.7. Aplicação da Teoria de Placas Finas a Placas Ortotrópicas
O sistema de eixos a ser considerado é um sistema de eixos Oxyz definido por
forma a considerar-se o plano Oxy coincidente com o plano médio e o eixo dos zz normal a
esse plano como foi referido na Teoria das Placas Finas. Note-se que: x = x1, y = x2 e z =
x3.
O campo de deslocamentos, {u = u1, v = u2, w = u3} e deformações {εxx= ε11,
εyy=ε22, εxy = ε12}, considera-se definido de modo análogo ao considerado na Teoria de
Flexão de Placas Finas isotrópicas, ou seja:
[ ] [ ])y,x(;y/z;x/zw,v,u TT ωωω ∂∂−∂∂−=
[ ] [ ]xy/z;y/z;x/z,, 22222 Txyyyxx
T∂∂∂−∂∂−∂∂−= ωωωεεε
As relações tensões - deformações ainda se regem pela Lei de Hooke, no caso de
existir ortotropia do material e no caso de os eixos materiais coincidirem com os eixos de
referência, esta Lei toma a forma:
)(1
Eyy21xx
1221
1xx ενε
ννσ +
−=
)(1
Exx21yy
1221
1yy ενε
ννσ +
−=
εσ xy12xy G=
1 Love ,J. H. , The Mathematical Theory of Elasticity , 1927

Teoria Clássica das Placas Finas 2.29
Fazendo uso das expressões das deformações em termos dos deslocamentos, a Lei
de Hooke toma a forma:
∂∂+
∂∂
−=
yx1E
2
2
212
2
1221
1xx
ων
ω
ννσ
∂∂+
∂∂
−=
xy1E
2
2
122
2
1221
2yy
ων
ω
ννσ
yxG
2
12xy ∂∂∂=
ωσ
Os esforços unitários de flexão determinam-se a partir das tensões do seguinte modo:
dzyx
z1EdzzM 2
2
212
22e
2/e
2
1221
12/e
2/exxxx
∂∂+
∂∂
∫−
−=∫=−−
ων
ω
ννσ
dzxy
z1EdzzM 2
2
122
22e
2/e
2
1221
22/e
2/eyyyy
∂∂+
∂∂
∫−
−=∫=−−
ων
ω
ννσ
dzyx
zGdzzM22e
2/e
212
2/e
2/exyxy
∂∂∂
∫−=∫=−−
ωσ
Procedendo às integrações envolvidas, obtém-se:
( )νν
ων
ω
2112
31
12
2
212
2
1xx 112eED onde
yxDM
−=
∂∂+
∂∂−=
( )νν
ων
ω
2112
32
22
2
122
2
2yy 112eED onde
xyDM
−=
∂∂+
∂∂−=

Teoria Clássica das Placas Finas 2.30
12eGD onde
yxDM
312
3
2
3yy =∂∂
∂−=ω
As equações de equilíbrio de esforços são:
TyM
xM
xxyxx =
∂∂
+∂
∂
TxM
yM
yxyyy =
∂∂
+∂
∂
)y,x(pyT
xT yx −=
∂∂
+∂
∂
Eliminando Tx e Ty na 3ª equação fazendo uso da 1ª e 2ª equações, obtém-se a
equação de equilíbrio de forças segundo o eixo dos zz em termos dos momentos unitários
de flexão e torção, ou seja:
)y,x(pyM
yxM2
xM
2xx
2xy
2
2xx
2
−=∂
∂+∂∂
∂+∂
∂
Substituindo nesta equação os momentos flectores em função das curvaturas
obtém-se:
)y,x(py
Dyx
´D2x
D 4
4
222
4
34
4
1 =∂∂+
∂∂∂+
∂∂ ωωω
onde D3 = D´3 + ν12D1 = D´3 + ν21 D2. Está determinada a equação de Lagrange para
placas ortotrópicas. As condições de fronteira são definidas de modo análogo às condições
de fronteira consideradas no caso das placas isotrópicas.

Teoria Clássica das Placas Finas 2.31
Problemas Propostos
1. Mostre que as curvaturas se relacionam com os momentos unitários através das
seguintes expressões:
( )( )
)1(DD´ onde´D/M)1(
´D/MM
´D/MM
2
1212
112222
221111
ν
νχ
νχ
νχ
−=
+=
−=
−=
2. Mostre que a forma da deformada de uma placa com valores constantes da curvatura é:
x21
xxx21 2
22221122111 χχχω ++=
com um movimento de corpo rígido da forma (Ax1 + Bx2 + C)
3. Considere os sistemas de eixos representados na figura e mostre que as curvaturas no
sistema de eixos OXYZ se relacionam com as curvaturas no sistema de eixos Oxyz do
seguinte modo:
O x
X
Y
y
φ
φ

Teoria Clássica das Placas Finas 2.32
φχφφχφχχ sencossen2cos 2yyxy
2xxXX ++=
φχφφχφχχ coscossen2sen 2yyxy
2xxYY +−=
( ) )sencos(cossen 22xyyyxxXY φφχφφχχχ −+−=
Note-se que OZ = Oz . Pode fazer uso da expressão da deformada referida na questão 2.
4. Mostre que são invariantes das curvaturas as grandezas:
( )χχ yyxx21
+ ;
−+
2yyxx
22xy
χχχ ;- χχχ −yyxx
2
xy
5. Mostre que o momento torsor máximo para uma placa rectangular é:
( )
−+=
2MM
MMyx
22xy
2/1
T max
6. Mostre que:
MMM
yyxx
xy
yyxx
xy
−=
− χχ
χ
7. Considere uma placa rectangular sujeita a um estado de flexão pura. Os momentos
aplicados são M1 e M2 sendo M12 = 0. Determine a energia de deformação da placa em
termos do deslocamento transversal ω.
Resposta:
∂∂
∂∂+
∂∂+
∂∂=
yx2
yxDA
21U 2
2
2
2
2
22
2
22
ωων
ωω
8. Considere o sistema de coordenadas oblíquas representado na figura.

Teoria Clássica das Placas Finas 2.33
a) Deduza a equação de equilíbrio de forças segundo o eixo normal ao plano Ox*y*, tendo
em conta que as coordenadas x*e y* se relacionam com as coordenadas x e y do
seguinte modo:
φ=φ+= sen/yyegcotyxx **
Ox
y
φ
x*
y*
P y*
x, x*
b) Deduza a equação de Lagrange no sistema de eixos Ox*y*.
9. Considere uma placa de espessura variável segundo a direcção do eixo dos yy, como se
representa na figura, de acordo com uma lei do tipo:
tt
b3a e espessura a representa t onde ett
0
1a3y0 ln/
π=α= απ
a
z, Wx
t1y
O
to
b
e determine a equação de Lagrange nestas condições.